La posizione del punto P nel piano può essere definita in due … · 2013-11-07 · • Moto...
22
Il moto nel piano: coordinate cartesiane e coordinate polari La posizione del punto P nel piano può essere definita in due modi: - COORDINATE CARTESIANE x(t) y(t) - COORDINATE POLARI Come passare da un tipo di coordinate ad un altro? 28 ) ( ˆ ) ( t t r ) ( sin ) ( ) ( ) ( cos ) ( ) ( t t r t y t t r t x ) ( ) ( ) ( tan ) ( ) ( ) ( 2 2 t x t y t t y t x t r y x P (t) x(t) y(t)
Transcript of La posizione del punto P nel piano può essere definita in due … · 2013-11-07 · • Moto...

Il moto nel piano: coordinate cartesiane e coordinate polari
La posizione del punto P nel piano può essere definita in due modi:
- COORDINATE CARTESIANE x(t) y(t)
- COORDINATE POLARI
Come passare da un tipo di coordinate ad un altro?
28
)(ˆ)( ttr
)(sin)()(
)(cos)()(
ttrty
ttrtx
)(
)()(tan
)()()( 22
tx
tyt
tytxtr
y
x
P
(t)
x(t)
y(t)

Il moto nel piano: coordinate cartesiane e coordinate polari
La posizione del punto P nel piano può anche essere definita con il raggio
vettore. Mentre nei moti rettilinei abbiamo potuto trascurare la natura vettoriale
di spostamento velocità e accelerazione, nei moti sul piano, dobbiamo
considerare tali grandezze come vettori.
29
y
x
P
(t)
x(t)
y(t)
)(trOP
RAGGIO VETTORE
yx
yx
utyutx
trtrtr
)()(
)()()(
ry
rx

Il moto nel piano: spostamento e velocità
30
y
x
P(t)
P(t+Dt)
Dr
O
Spostamento:
Velocità vettoriale:
Per dr diventa tangente alla
traiettoria e in modulo diventa pari allo
spostamento infinitesimo ds:
Il vettore velocità individua con la sua
direzione e il suo verso la direzione e il
verso del moto e con il suo modulo
individua la velocità istantanea con cui è
percorsa la traiettoria
dt
rd
t
rv
t
D
D
D 0lim
0Dt
)()(
)()(
trttrr
rtrttr
DD
DD
y
x
P(t)
P(t+Dt)
O
TT
T
uvudt
dsv
udsrd
v

Il moto nel piano: componenti della velocità
31
y
x
P(t)
O
Componenti cartesiane
Poiché
vx e vy sono le componenti cartesiane della
velocità del punto P.
vx e vy dipendono dalla posizione degli
assi.
yyxxyx
yx
uvuvudt
dyu
dt
dx
dt
rdv
uyuxr
vx
vy
22yx vvv
v

Il moto nel piano: componenti della velocità
32
Componenti polari
vr e v sono le componenti polari radiale e trasversa. La
componente radiale dipende dalle variazioni del modulo del
raggio vettore; la componente trasversa dipende dalle
variazioni di direzione del raggio vettore.
O
v
v
vr
u
dt
dru
dt
drvvv rr
Il moto nel piano: accelerazione
33
2
2
dt
rd
dt
vda
dt
rdvessendo
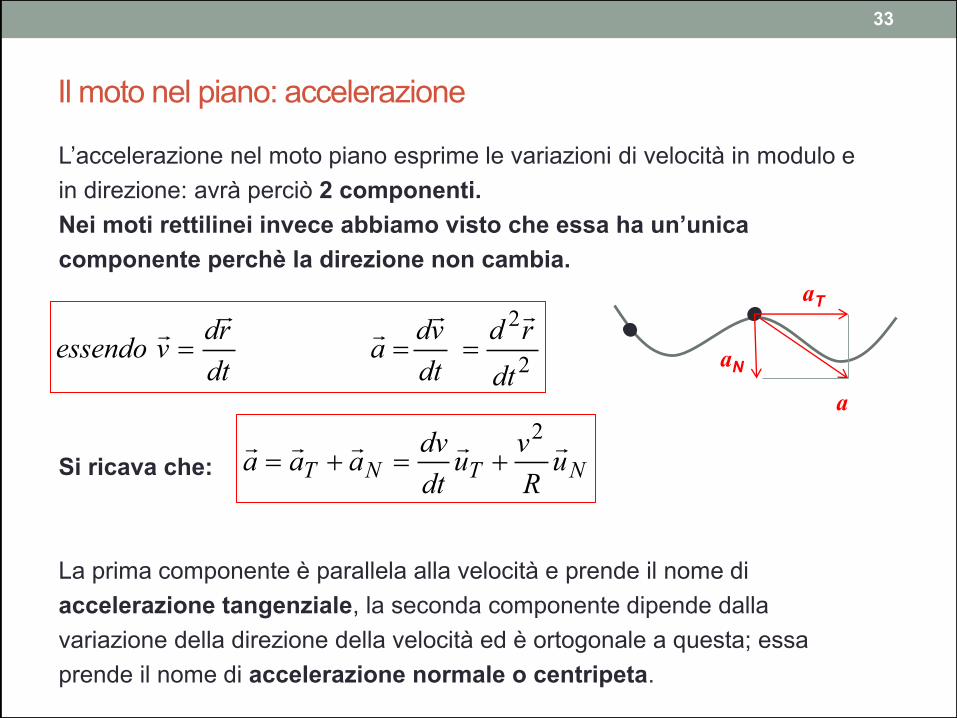
L’accelerazione nel moto piano esprime le variazioni di velocità in modulo e
in direzione: avrà perciò 2 componenti.
Nei moti rettilinei invece abbiamo visto che essa ha un’unica
componente perchè la direzione non cambia.
Si ricava che:
La prima componente è parallela alla velocità e prende il nome di
accelerazione tangenziale, la seconda componente dipende dalla
variazione della direzione della velocità ed è ortogonale a questa; essa
prende il nome di accelerazione normale o centripeta.
NTNT uR
vu
dt
dvaaa
2
aT
aN
a

Il moto nel piano: componenti dell’accelerazione nei diversi moti
34
Vediamo quali sono le componenti
• Moto rettilineo uniforme aN = 0 aT = 0
• Moto rettilineo uniformemente accelerato aN = 0 aT ≠ 0
• Moto curvilineo aN ≠ 0 aT ≠ 0
• Moto curvilineo uniforme aN ≠ 0 aT = 0
NTNT uR
vu
dt
dvaaa
2
aT
aN
a

Composizione di due moti rettilinei
35
Consideriamo una pallina che rotola su un piano con velocità costante. Quando
il piano del tavolo finisce la pallina comincia a cadere a terra.
Vogliamo determinare con quale velocità toccherà terra e a quale distanza
rispetto al limite del tavolo la pallina toccherà terra.
vx

Composizione di due moti rettilinei
36
Consideriamo una pallina che rotola su un piano con velocità costante. Quando
il piano del tavolo finisce la pallina comincia a cadere a terra.
Vogliamo determinare con quale velocità toccherà terra e a quale distanza
rispetto al limite del tavolo la pallina toccherà terra.
vx
y
x 0 xf
y0

Composizione di due moti rettilinei: tempo di caduta
37
Se la pallina, da ferma, cadesse dall’altezza del tavolo, essendo la sua
accelerazione costante e pari a g e il moto avverrebbe lungo un’unica direzione,
quella verticale (asse y) in modo uniformemente accelerato.
vx
y
x 0 xf
Il tempo che essa
impiegherebbe per cadere
sarebbe dato da:
g
yt 02
y0

Composizione di due moti rettilinei: velocità durante la caduta
38
Tuttavia la pallina non cade da ferma, bensì ha una componente di velocità
lungo l’asse orizzontale (asse x). Questo fa sì che le due velocità (orizzontale e
verticale) debbano essere composte per poter individuare la velocità finale
(direzione, verso e modulo) .
vx
y
x 0 xf
La velocità con cui si
muove la pallina dopo aver
lasciato il tavolo è:
In modulo:
yx vvv
y0 vy v
22
2 )(gtt
sv
D
D
Quindi la velocità varia al variare del tempo.

Composizione di due moti rettilinei: spostamento massimo
39
La distanza dal limite del tavolo in cui la pallina toccherà terrà è la componente
orizzontale dello spostamento che sarà determinata a partire dalla componente
orizzontale della velocità e del tempo impiegato durante la caduta:
vx
y
x 0 xf
g
yvxtvxx xxf
000
2
y0
Moto circolare
40
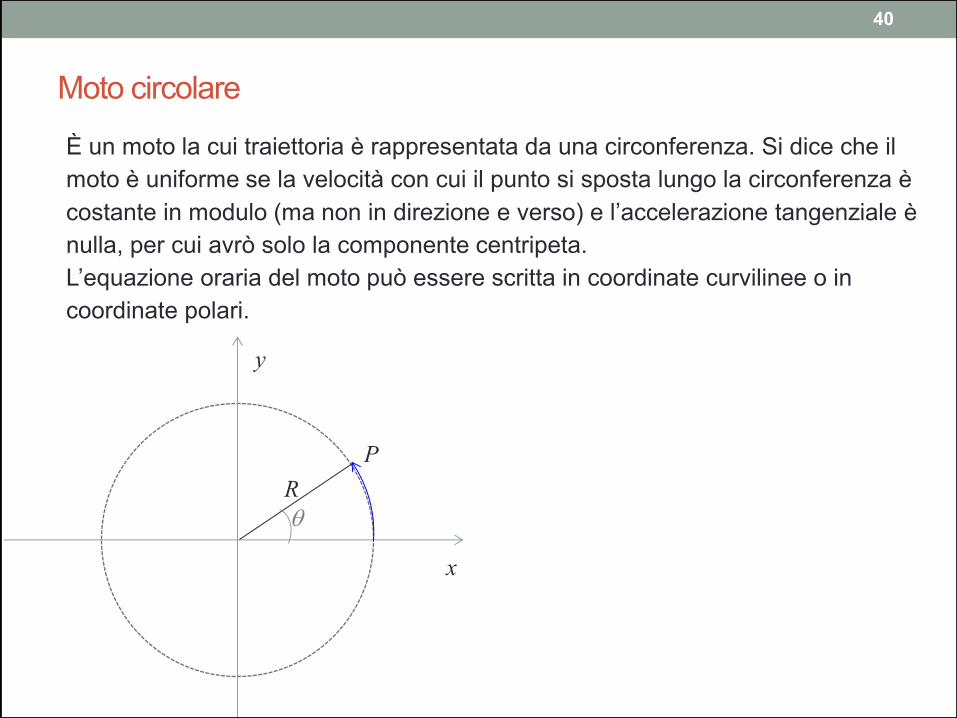
È un moto la cui traiettoria è rappresentata da una circonferenza. Si dice che il
moto è uniforme se la velocità con cui il punto si sposta lungo la circonferenza è
costante in modulo (ma non in direzione e verso) e l’accelerazione tangenziale è
nulla, per cui avrò solo la componente centripeta.
L’equazione oraria del moto può essere scritta in coordinate curvilinee o in
coordinate polari.
x
y
P
R

Moto circolare: velocità
41
Geometricamente l’arco di circonferenza percorso è:
Il vettore velocità è tangente alla traiettoria e il suo modulo è pari alla velocità
istantanea.
Poiché la velocità istantanea è: v = ds/dt
Allora dove w è la velocità angolare; esprime il rapporto tra
l’angolo descritto dal punto in movimento e il tempo impiegato per descriverlo.
x
y
P
R
RRdt
dv w
dRds
s
RvR
v
R
v
dt
ds
RdtR
ds
dt
d
ww
w
11

Moto circolare: accelerazione
42
Il vettore accelerazione è composto dai due vettori uno tangente alla traiettoria e
uno normale alla traiettoria.
La componente normale alla traiettoria dipende dalla velocità istantanea con cui
viene percorsa la traiettoria e dalla sua curvatura (R).
x
y
P
R s
RR
vau
R
vaa NNN
222
w moduloin

Moto circolare: accelerazione angolare
43
x
Se il moto è circolare ma non uniforme:
Possiamo definire una grandezza nuova che è l’accelerazione angolare:
Da cui l’accelerazione vettoriale può essere scritta come:
NTNT uR
vu
dt
dvaaa
2
RR
va
Ra
R
a
dt
dv
Rdt
d
N
T
T
22
1
w
w
NTNT uRuRaaa)()( 2w

Moto circolare uniforme: equazione oraria
44
L’equazione oraria del moto può essere scritta in coordinate curvilinee o in
coordinate polari.
coordinate curvilinee:
coordinate polari:
x
y
P
R
)()(
)()(
00
00
ttt
ttvsts
w
Il moto circolare è un moto periodico perciò
il punto ripassa nelle stesse posizioni ad
intervalli di tempo fissi.
Si definisce PERIODO l’intervallo di tempo
impiegato dal punto per coprire una
circonferenza; si definisce FREQUENZA il
numero di giri compiuti in un intervallo di
tempo unitario.
w
w
22
22
R
vf
v
RP

Moto circolare uniforme: coordinate del punto in movimento
45
La posizione del punto in funzione del tempo può essere determinata se sono note
le coordinate del punto al passare del tempo:
ma quindi
x
y
P
0
R
)()(
)cos()(
0
0
tsenRty
tRtx
w
w
)()(
)(cos)(
tsenRty
tRtx
)()( 00 ttt w

Moto parabolico
46
Analizziamo ora il moto nel vuoto di un punto P lanciato dall’origine O con
velocità iniziale v0 formante un angolo con l’asse orizzontale, x.
Vogliamo determinare:
1) Traiettoria
2) Posizione G in cui il punto ricade sull’asse x (GITTATA)
3) Massima altezza raggiunta
Nel punto in O:
Accelerazione a = g = -g uy
Posizione: r = 0
Velocità: v = v0
Istante iniziale: t0 = 0 s
v0
O G
Moto parabolico: velocità
47
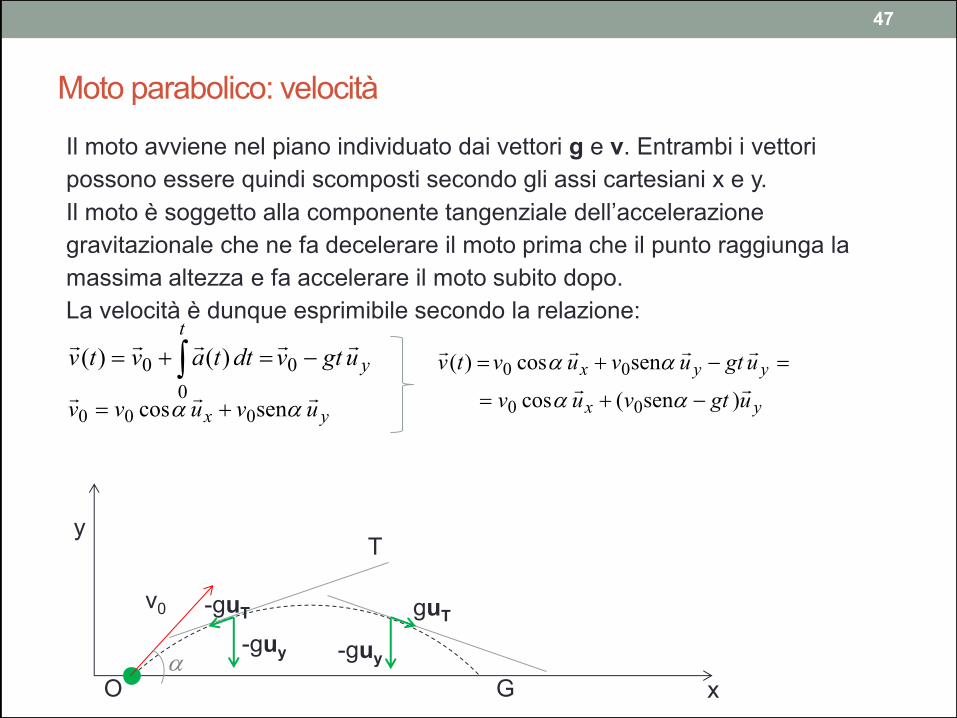
Il moto avviene nel piano individuato dai vettori g e v. Entrambi i vettori
possono essere quindi scomposti secondo gli assi cartesiani x e y.
Il moto è soggetto alla componente tangenziale dell’accelerazione
gravitazionale che ne fa decelerare il moto prima che il punto raggiunga la
massima altezza e fa accelerare il moto subito dopo.
La velocità è dunque esprimibile secondo la relazione:
-guy
O G
-guT
T
guT
-guy
y
x
y
t
ugtvdttavtv
0
0
0 )()(
v0
yx uvuvv
sencos 000 yx
yyx
ugtvuv
ugtuvuvtv
)sen(cos
sencos)(
00
00

Moto parabolico: spostamento
48
Possiamo scrivere le leggi orarie dei moti proiettati:
Se per diversi istanti di tempo andiamo a tracciare le posizioni così calcolate
sul diagramma cartesiano, otteniamo la traiettoria del punto e vediamo che
essa è una parabola. Possiamo anche determinarlo matematicamente
ricavando il tempo dall’equazione 1 e sostituendolo nell’equazione 2.
Si ottiene:
)2(2
1)()1(cos)( 2
00 gttsenvtytvtx
2
220 cos2
tan)( xv
gxty
0
0.2
0.4
0.6
0 2 4 6 8
y
x

Moto parabolico: gittata
49
Calcoliamo ora la gittata ossia la distanza da O in cui il punto tocca l’asse delle
x. In questo punto la coordinata y della posizione è nulla. Pertanto dobbiamo
porre y(x) = 0.
Abbiamo due soluzioni: per x=0 e per :
Da cui ricaviamo che l’altezza massima raggiunta è:
N.B. Si calcola che l’angolo di lancio per il quale la gittata è massima è un
angolo di 45° (/4)
0cos2
tan)( 2
220
xv
gxxy
0
0.2
0.4
0.6
0 2 4 6 8
y
x
xM MG xg
vx 2
tancos2 220
g
senvyM
2
220