I¸te de Astronomie · I¸te∗ de Astronomie Actualizare: libraria SOFA, ˆın curs de...
51
It ¸e ∗ de Astronomie Actualizare: libr˘ aria SOFA, ˆ ın curs de actualizare Octavian G. Mustafa † e-mail address: [email protected] Prefat ¸˘ a ˆ In aceast˘ a lucrare prezent˘ am diverse aspecte ale mis ¸c˘ arilor ceres ¸ti, ˆ ın cazul nerelativist. O serie de calcule numerice, scrise ˆ ın limbajul de progra- mare C s ¸i bazate pe algoritmii SOFA ai Uniunii Astronomice Internat¸ionale, completeaz˘ a discut ¸ia defat¸˘ a. Pentru vizualiz˘ ari, folosim ALADIN, Sky & Telescope, Interactive Sky Chart. Cuprins Primul proiect de astronomie ........................................... 2 Sisteme de coordonate .................................................. 9 Matricea de rotat ¸ie .................................................... 28 Mi¸ sc˘ ari perturbate ..................................................... 34 Surse bibliografice ..................................................... 47 * S˘ a zic. . . threads ? † Acest eseu nu a fost raportat vreunui referent. ˆ In consecint ¸˘ a, cont ¸inutul s˘au trebuie considerat “ca atare.” ˆ In particular, utilizarea instruct ¸iunilor care urmeaz˘a se face pe r˘aspundereadumneavoastr˘ a. Autorul v˘a a¸ steapt˘ a comentariile la adresa de e-mail de mai sus ¸ siv˘amult ¸ume¸ ste anticipat pentru efortul depus. 1
Transcript of I¸te de Astronomie · I¸te∗ de Astronomie Actualizare: libraria SOFA, ˆın curs de...
-
Iţe∗ de Astronomie
Actualizare: librăria SOFA, ı̂n curs de actualizare
Octavian G. Mustafa†
e-mail address: [email protected]
Prefaţă
În această lucrare prezentăm diverse aspecte ale mişcărilor cereşti, ı̂n
cazul nerelativist. O serie de calcule numerice, scrise ı̂n limbajul de progra-
mare C şi bazate pe algoritmii SOFA ai Uniunii Astronomice Internaţionale,
completează discuţia de faţă. Pentru vizualizări, folosim ALADIN, Sky &
Telescope, Interactive Sky Chart.
Cuprins
Primul proiect de astronomie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Sisteme de coordonate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Matricea de rotaţie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Mişcări perturbate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Surse bibliografice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
∗Să zic. . . threads?†Acest eseu nu a fost raportat vreunui referent. În consecinţă, conţinutul său trebuie
considerat “ca atare.” În particular, utilizarea instrucţiunilor care urmează se face perăspunderea dumneavoastră. Autorul vă aşteaptă comentariile la adresa de e-mail de maisus şi vă mulţumeşte anticipat pentru efortul depus.
1
-
1 Primul proiect de astronomie
Deasupra noastră este bolta ı̂nstelată. Presupunând că nu plouă1 şi nici nueste ı̂nnorat, putem observa pe ea triunghiul de vară [51], format din steleleVega, Deneb şi Altair.
Informaţia cu care astronomii le localizează se bazează pe ascensiunea2
(α, alpha, RA) şi declinaţia3 (δ, delta) stelelor la un moment dat — epoca4
(J2000.0) —, citite dintr-un catalog de stele:
FK6| HIP | Nume | alpha | delta |steaua
No.| No. | | h m s | 0 ’ " |
-----------------------------------------------------------
699|91262 |alpha Lyr|18 36 56.336939|+38 47 01.2833 |Vega
-----------------------------------------------------------
777|102098|alpha Cyg|20 41 25.914917|+45 16 49.21305|Deneb
-----------------------------------------------------------
745|97649 |alpha Aql|19 50 46.99855 |+08 52 05.9563 |Altair
unde “h m s” din coloana a patra ı̂nseamnă ore minute secunde şi “0 ’"” din coloana a cincea reprezintă grade arcminute arcsecunde. În modobligatoriu, gradele au semn.
Datele anterioare se găsesc ı̂n FK6 (FK5 + Hipparcos), vezi [23], şi mo-mentan nu ne spun nimic.
Putem vizualiza din casă triunghiul de vară folosind fie unul din servicii-le5 gratuite AstroViewer [4] — ca ı̂n Figura 1 — şi6 Interative Sky Chart —Figura 2 —, fie aplicaţia Aladin [2] — Figura 3 —.
La prima ı̂ncercare, fireşte, este imposibil să identificăm7 triunghiul devară. Ce se poate observa, totuşi8, este că bolta cerească se roteşte pe parcur-sul ı̂ntregii nopţi ı̂n jurul unui punct fix, situat la cca. 10 de steaua Polaris9,cf. [30, p. 17], [44, p. 19].
1Ceea ce s-a ı̂ntâmplat, din păcate, ı̂n seara zilei de 13 iunie 2013 la Craiova, cândam pregătit ilustraţiile următoare.
2În limba engleză, right ascension, [30, p. 18].3În limba engleză, declination, [31, p. 65].4În limba engleză, epoch, [33, p. 228].5Este nevoie să instalaţi Java [29] ı̂n prealabil!6Trebuie să vă ı̂nregistraţi ca utilizator al revistei Sky & Telescope.7Vezi [34, p. 113].8Dacă avem răbdare. . .9Adică, Steaua Polară. În fapt, steaua α Ursae Minoris, cf. [7, p. 63]. Atenţie, ne
aflăm ı̂n emisfera nordică.
2
-
Acest fenomen este ilustrat ı̂n Figurile 4, 5. Suntem ı̂n Craiova (punc-tul C din Figura 4), adică avem coordonatele geografice10 44022′0′′ latitu-dine nordică şi 23049′0′′ longitudine estică. La dreapta noastră se găseşte —punctul G din Figura 4 — localitatea Greenwich, având 51028′45′′ latitudinenordică şi 000′0′′ longitudine estică.
În discuţia de faţă, Pământul se reprezintă printr-o sferă care se roteşteı̂n jurul axei polilor (Nord – Sud), ı̂nspre Est, şi al cărei ecuator — cerculorizontal din Figura 4 — rămâne mereu ı̂ntr-un plan fix ce trece prin cen-trul Soarelui, un soare fictiv numit Soarele mediu11. Micul cerc centrat ı̂nC constituie orizontul nostru ı̂n timp ce deasupra capului, ı̂n nemărginireaı̂ntunecată, avem zenitul (punct imaginar). Steaua Polară ne va apărea ı̂ntr-oparte, aflată ı̂n prelungirea dreptei CN .
Putem constitui două solide rigide: Pământul — de care este ataşat so-lidar [36, p. 207] oraşul Craiova — şi un schelet care leagă ı̂ntre ele stelelePolaris şi X (din Figura 5), Soarele mediu şi axa imaginară N – S a polilortereştri. Durata unei nopţi de vară este suficient de mică pentru a nu seproduce deplasări relative ı̂ntre componentele scheletului. Aşa cum ştim dincinematică [36, p. 44], axele instantanee ale mişcărilor relative12 coincid darau orientări opuse. Mai precis, cineva legat de steaua X — aproximată cu unpunct material, deci lipsită de rotaţii proprii — va vedea Pământul rotindu-se către Est pe când cineva din Craiova va avea senzaţia că steaua X semişcă de la Est spre Vest. Dreapta imaginară [36, p. 250] care corespundeacestor axe instantanee poate fi identificată cu oricare dintre axele punctatedin Figura 5. Cum raportul dintre distanţa de la punctul C la axa polilortereştri şi distanţa de la C la steaua Polaris este practic nul, cele două axepot fi confundate. De aici apare senzaţia că Steaua Polară stă pe loc iar boltacerească se ı̂nvârte ı̂n jurul ei.
Primul nostru proiect de astronomie practică s-a ı̂ncheiat13: am căutattriunghiul de vară — dacă locul de observaţie nu este balconul apartamen-tului, ci terasa Observatorului Astronomic “Amiral Vasile Urseanu” [40] dinBucureşti, atunci planul de studiu iniţial ar putea fi ı̂ndeplinit prin amabi-litatea astronomului de serviciu — şi am descoperit că stelele se mişcă ı̂njurul lui Polaris. Cât despre figuri, ultimele două au fost realizate thanks toInkscape [27].
10După Wikipedia [14]. Alte surse, deşi bazate pe acelaşi model (WGS84), prezintădiferenţe de până la un grad [16].
11 În limba engleză, mean Sun [31, p. 380].12Calculele de cinematică trebuie raportate la un sistem fix de coordonate, d.ex. sistemul
ICRF [31, p. 159].13 În zorii zilei. . .
3
-
Poze I
Figura 1
4
-
Figura 2
5
-
18:0020:0022:0024:00
+15:00
+00:00
-15:00
16:00
+30:00
+45:00
DSS colored
10°60.94° x 81.27°
N
EPowered by Aladin
Figura 3
6
-
N N
Zenit
S
S
N
GE
CV
Polaris
Terra
Soarele mediu
Ecuator
(S. Newcomb)
Figura 4
7
-
N
C
Acum
N
C
Peste mai multe ore...
EV V E
Polaris Polaris
Steaua X
Steaua X
Figura 5
8
-
2 Sisteme de coordonate
Sfera cerească — numele matematic al boltei ı̂nstelate — este o sferă i-maginară, centrată ı̂n centrul de masă al Pământului [35, p. 24], pe careproiectăm stelele ı̂ndepărtate, cf. [15, p. 6]. Din punct de vedere practic,centrul sferei cereşti poate fi chiar observatorul fenomenelor astronomice —vezi Figura 7 —, ı̂n timp ce raza sferei nu se precizează, vezi [30, p. 16].Cum datele cu care vom opera sunt măsuri de unghiuri, această rază nu vafi folosită.
Micul cerc centrat ı̂n C din Figura 4 este transpus ı̂n cercurile orizontaleNESV Q şi NSQV din Figurile 7, 8. Aşa cum ştim deja, aceste cercuri de-semnează orizontul observatorului, iar punctul N reprezintă nordul geografic.Perpendiculara14 pe planul orizontal, dusă prin centrul Eu al sferei cereşti, ointersectează pe aceasta la zenit — chiar deasupra capului —, respectiv lanadir. Polul nord ceresc (situat pe axa de rotaţie terestră), se aproximeazăcu steaua Polaris.
Un observator oarecare, dorind să urmărească mişcarea aparentă a stele-lor, apelează la cel mai simplu dintre sistemele de coordonate astronomice,şi anume la sistemul orizontal15 din Figura 8, pentru a descrie poziţia unuicorp ceresc pe sferă. Astfel, unghiul la centru care corespunde arcului micvertical QX constituie altitudinea16 ori elevaţia17 astrului X . Complemen-tara altitudinii, dată de arcul mic vertical dintre zenit şi stea, este distanţazenitală. Secţiunea orizontală care trece prin X a sferei cereşti reprezintă uncerc numit paralel de altitudine.
Cercul mare NS, care trece prin zenit, desemnează meridianul locului:semicercul său superior corespunde arcului NCS din Figura 4. Arcul micorizontal SQ constituie azimutul18 stelei X : el se calculează pornind de lapartea sudică a meridianului local către Vest. Există o serie de dispute pri-vind punctul ı̂n raport cu care se va măsura azimutul, e.g., [33, pg. 91–93],drept pentru care acesta trebuie precizat ı̂ntotdeauna.
Pe parcursul rotaţiei lor — aparente, de la Est către Vest — ı̂n jurulstelei Polaris, aştrii cereşti traversează alternativ meridianul local prin douăpoziţii. Atunci când, ı̂ntr-una din aceste poziţii, elevaţia stelei este maximă(vezi Figura 7) spunem că ea a ajuns la culminaţie (superioară19) ori tranzit.
Acest fenomen se observă cu uşurinţă la stelele circumpolare, care nu
14Trasată folosind firul cu plumb, vezi [44, p. 17].15Saualt-azimutal, cf. [44, p. 20].16 În limba engleză, altitude, [30, p. 16].17 În limba engleză, elevation, [30, ibid.].18 În limba engleză, azimuth, [33, p. 5]. Notat de obicei cu A.19 În limba engleză, upper culmination, [30, p. 19].
9
-
apun20 niciodată. În Figura 7, steaua Y este circumpolară iar un exem-plu vizibil din Craiova este oferit de Kochab (β Ursae Minoris). Pentru a-lvizualiza, folosim aplicaţia Aladin. Mai precis, ca ı̂n Figura 10, selectămepoca J2000 — vezi elipsa roşie de la meniul Frame —, apoi tastăm cuvântulkochab ı̂n fereastra Location din elipsa mare. După apăsarea butonuluiEnter din tastatură, rezultatul va fi vizibil ı̂n fereastra centrală programului.Cu ajutorul butonului zoom — elipsa roşie din Figura 11 — reglăm mărimeaimaginii astrului.
Reamintesc faptul că am definit un schelet rigid la pagina 3 pentru aexplica rotaţia aparentă a stelelor. Axa verticală N – S din Figura 6 faceparte din scheletul rigid. Atunci, ı̂n rotaţia lor faţă de ea, punctele materialeCraiova şi Steaua X descriu cercuri situate ı̂n plane paralele, cf. [36, p.248], perpendiculare pe axă. Pentru a exploata această remarcă, ı̂n Figura9, introducem cercul mare CARV obţinut prin intersectarea sferei cereşti cuplanul care trece prin Eu şi este perpendicular pe dreapta imaginară dusăprin punctele Eu şi Polaris. Cercul CARV desemnează ecuatorul ceresc21.
Traiectoria aparentă a stelei X — aflată, aşadar, ı̂ntr-un plan paralel cuecuatorul ceresc [9, p. 151] — este dată de cercul numit paralel de declinaţie.Unghiul la centru corespunzător arcului mic trecând prin Steaua X şi R con-stituie declinaţia stelei X . Am ı̂ntâlnit-o ı̂n fragmentul de catalog stelar dela pagina 2. Cercul care trece prin Polaris, Steaua X şi R se numeşte cerculorar 22 sau colura23 astrului X .
Pentru a putea descrie poziţia unui punct X de pe sfera cerească folosinddeclinaţia, avem nevoie de ı̂ncă o cantitate unghiulară a cărei (eventuală)variaţie pe parcursul unei nopţi de observaţii astronomice să fie ignorabilă.În acest scop, introducem ı̂n discuţie un element geometric — la fel ca Soarelemediu — pe care să-l putem lega de scheletul rigid de la pagina 3. El estepunctul vernal, notat �, şi reprezintă primul punct al lui Aries (constelaţiaBerbecului). Complexitatea dinamicii terestre face ca acest punct să aibă odeplasare24 către Vest — tot aşa cum, ı̂n Figura 4, Craiova se deplasa cătreEst — de circa 0s.008 4/zi, unde s desemnează secunde solare medii, cf. [49,p. 5].
La fel ca steaua X , punctul � descrie pe bolta cerească, deasupra noastră,un cerc perpendicular pe dreapta dusă prin punctele Eu şi Polaris — numită
20Apus, răsărit. În limba engleză, rising, setting, [33, p. 101].21 În limba engleză, celestial equator, [15, p. 8].22 În limba engleză, hour circle.23 În limba engleză, colure. Se foloseşte ı̂n expresiile colura echinocţială, respectiv colura
solstiţială pentru a ne putea referi la poziţii fundamentale pe sfera celestă [13].24Variaţia se datorează (̂ın special) precesiei, respectiv nutaţiei [39] ecuatorului ceresc,
punctul � găsindu-se — ı̂n zilele noastre — ı̂n constelaţia Peştilor [15, p. 10].
10
-
şi axa polilor cereşti —. Acest cerc coincide, evident, cu ecuatorul ceresc.În Figura 9, tranzitul punctului vernal este CA. Unghiul la centru, măsuratcătre Vest — sensul acelor de ceasornic pentru cineva aşezat ı̂n Eu şi ı̂ndrep-tat cu faţa spre Sud, vezi Figura 7 —, dat de arcul mic CAR desemneazăunghiul orar 25 al stelei X .
Unghiul la centru, măsurat către Est — sens invers acelor de ceasornic—, reprezentat de arcul mic al ecuatorului ceresc pe care ı̂l determină, ı̂nFigura 9, primul punct al lui Aries cu intersecţia R dintre colură şi ecuatoreste ascensiunea astrului X . Am ı̂ntâlnit-o, de asemeni, la pagina 2.
Sistemul de coordonate din Figura 9, care localizează steaua X pe sferacerească folosind ascensiunea şi declinaţia acesteia, constituie sistemul ecua-torial.
Soarele, ı̂n mişcarea sa aparentă de la Est către Vest pe sfera cerească,descrie un cerc mare numit ecliptică26 [19] şi reprezentat ı̂n Figura 13. Po-lii eclipticei (punctele de intersecţie cu sfera cerească ale normalei la planuleclipticei duse prin centrul sferei cereşti) poartă denumirea de poli ecliptici.Săgeata de pe dreapta care trece prin punctele Eu şi K indică nordul ecliptic.Coordonatele ecuatoriale ale nordului ecliptic sunt — la epoca J2000.0 —
α = 18h0m0s.00, δ = +66033′38′′.55,
cf. [21], de unde δ ∼ +660.6 [49, p. 13]. Punctul K se găseşte ı̂n constelaţiaDragonului (Draco) [18].
Chiar dacă ı̂n centrul sferei celeste am aşezat observatorul — sistem to-pocentric [33, p. 410] —, raportarea poziţiei aştrilor cereşti la un sistem decoordonate bazat pe ecliptică ţine mai degrabă de studiul mişcării planetelorı̂n jurul Soarelui [30, pg. 20, 21].
Ecliptica şi ecuatorul ceresc se ı̂ntâlnesc ı̂n două puncte numite echi-nocţii27. Punctul � din Figura 13 (deja ı̂ntâlnit, şi anume punctul vernal)reprezintă echinocţiul de primăvară — Soarele pătrunde ı̂n emisfera nordicădupă trecerea prin � —. Diametral opus lui avem echinocţiul autumnal asau primul punct al Librei (constelaţia Balanţei) [9, p. 150]. El este situatastăzi ı̂n constelaţia Fecioarei [22]. Dreapta determinată de echinocţii con-stituie linia nodurilor . Diametrul ecuatorului ceresc perpendicular pe linianodurilor ı̂ntâlneşte sfera cerească ı̂n cele două solstiţii28, cf. [30, p. 20].
25 În limba engleză, hour angle, [44, pg. 21]. Notat de obicei cu H, HA.26 În limba engleză, ecliptic.27Adică, noaptea–egală–cu–ziua.28Adică, opriri-de-soare. În limba engleză, stand-still (sing.). Declinaţia Soarelui, res-
pectiv elevaţia sa ajung aici la valori extreme: după trecerea (datei) solstiţiului de vară,elevaţia (zilnică) a Soarelui scade continuu. Terminologia evidenţiază faptul că raportarea
11
-
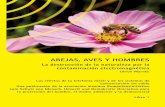
Variaţiile unghiulare ale planelor orbitale ı̂n care evoluează planetele prin-cipale ale Sistemului Solar fiind mici, astronomii surprind uneori ecliptica pecer, vezi Figura 12 — preluată din [20] —.
Unghiul format de planul eclipticei cu planul ecuatorului celest poartănumele de oblicitatea29 eclipticei. Valoarea curentă a oblicităţii este
ε ≡ εJ2000 = 8.438 140 6× 104 ′′ (arcsecunde) (1)∼ 23026′21′′.406,
cf. [10]. O valoare “lucrativă” a oblicităţii este
εJ2000 = 230.439 28 (2)
= 23026′21′′.408, (3)
vezi [47, p. 2].
Calcule de unghiuri
Este binecunoscut faptul că astronomia presupune calcule numerice va-riate. Chiar dacă, ı̂n discuţia de până acum, au intervenit numai transfor-mări/aproximări de unghiuri, caracterul repetitiv al acestui tip de activitatereclamă ı̂ntrebuinţarea unor programe de calculator.
Folosim sistemul de operare Windows XP Professional SP 3, cu drepturide administrator.
Programul AstroKit1 [43] reprezintă un transformator de unghiuri cuprecizie medie. El dispune de meniul Intrare cu opţiunile ==>,
-
Reamintindu-ne coordonatele geografice ale oraşului Craiova — de la pa-gina 3 —, utilizăm opţiunea ==> a programului AstroKit1, vezi Figura 15,pentru a realiza o transformare de tipul (3) =⇒ (2). Rezultatul — afişat ı̂nelipsa de culoare roşie — este obţinut apăsând butonul >>> din elipsa verde.Pentru a reveni la meniu, apelăm la butonul Inapoi din elipsa albastru-deschis.
Folosind opţiunea >> din elipsa verde. Putem relua calculele folosind butonulResetare din elipsa albastru-deschis.
Uniunea Astronomică Internaţională — IAU — pune la dispoziţia publi-cului larg un set de funcţii, scrise ı̂n limbajul de programare C, cu care se potrealiza manevre precise cu datele astronomice: aceste rutine sunt grupate ı̂nbiblioteca SOFA [45].
Codul-sursă al bibliotecii SOFA este voluminos, ceea ce face necesarătransformarea lui ı̂ntr-o bibliotecă dinamică30 Windows ı̂nainte să-l folosim.O variantă a acestei transformări, realizată ı̂n cadrul mediului de dezvoltareMicrosoft Visual Studio 2010 Ultimate (VS) [38], se găseşte la adresa [46].Ea se compune din
citeste.txt
libraria_sofa_ian2014.dll
libraria_sofa_ian2014.lib
readme.txt
sofa.h
sofam.h
Cele şase fişiere ale transformării trebuie adăugate oricărui proiect VS ı̂n carefolosim funcţii ori constante din SOFA.
Un exemplu de manevrare a datelor cu SOFA este dat de ı̂ncercarea dea răspunde la ı̂ntrebarea: câte grade are unghiul π
12? Pentru aceasta, folo-
sim funcţia iauA2af, vezi [50, p. 19], a bibliotecii. Din fereastra SolutionExplorer a noului proiect VS — construit ca Empty Project —, inserămı̂n acesta31 fişierele sofa.h şi sofam.h la rubrica Header Files, fişierelelibraria_sofa_ian2014.dll şi libraria_sofa_ian2014.lib la rubrica Resource Files, respectiv fişierul calcul.c, listat ı̂n continuare, la rubricaSource Files.
calcul.c
1 #include
30 În limba engleză, dynamic link library — dll —, vezi [17].31Via Add/Existing Item.
13
-
2 #include
3
4 #include "sofa.h"
5 #include "sofam.h"
6
7 int main(){
8 double test = DPI/12; //din "sofam.h"
9 char semn = ’ ’;
10 int valori[] = {0,0,0,0};
11
12 iauA2af(9,test ,&semn ,valori);
13 pr int f (
14 "Rezultat: "
15 "semn %c, "
16 "grade %d"
17 "\narcminute %d"
18 "\narcsecunde %d"
19 "\nzecimale (fractiuni) %d",
20 semn ,
21 valori[0],
22 valori[1],
23 valori[2],
24 valori [3]
25 );
26
27 pr int f ("\nTastati o litera pentru a iesi: ");
28
29 getch();
30 return 0;
31 }
Rezultatul — afişat ı̂n consolă — este prezentat ı̂n Figura 17. Programulse ı̂ncheie de ı̂ndată ce apăsăm pe tasta Enter.
♣♣♣
Să revenim la sistemul de coordonate ecuatorial din Figura 9. Până acum,diverse coordonate ale astrului X au fost exprimate fie ı̂n ore şi fracţiuni aleacestora, fie ı̂n grade şi subdiviziunile corespunzătoare. Care este ı̂nsă legă-tura dintre cele două mărimi?
Pentru a răspunde la această ı̂ntrebare, reamintesc că printre cele maivechi metode de a măsura timpul se află ceasul cu apă persan — un tip declepsidră [12] —, a cărui funcţionare poate fi sintetizată astfel: cineva aşează
14
-
pe suprafaţa apei dintr-un vas un bol cu un orificiu de dimensiuni mici. Pemăsură ce apa din vas pătrunde ı̂n bol — ı̂n mod aproape uniform —, acestaı̂ncepe să se scufunde. Atunci când s-a scufundat complet, un supraveghetorı̂l goleşte şi se reia procesul. O golire a vasului ı̂nseamnă o oră. Este naturalsă ne gândim la un procedeu asemănător şi să căutăm pe cerul nopţii evidenţeale unor fenomene repetitive. Astfel, alegem o stea Y vizibilă cu ochiul liber şiı̂i observăm evoluţia [30, p. 18]: perioada dintre două tranzituri consecutiveale acesteia poartă numele de zi siderală32. Pentru a uniformiza definiţia33,dat fiind că ascensiunea α a stelelor faţă de echinocţiul vernal de la o epocădată este ı̂ntabulată, spunem că ziua siderală desemnează perioada dintredouă tranzituri consecutive ale punctului � [15, p. 11].
Unghiul descris de � ı̂ntr-o zi siderală (3600) este ı̂mpărţit ı̂n 24 de părţiegale, şi anume orele siderale. Au loc transformările
10 =24h(ore siderale)
360=
24× 60m(minute siderale)360
=144m
36= 4m,
1′(arcminut) =10
60=
4m
60=
4× 60s(secunde siderale)60
= 4s
şi
1′′(arcsecundă) =1′
60=
4s
60=
1s
15∼ 0s.066 7.
Reciproc,
1h(oră siderală) =3600
24= 150,
1m(minut sideral) =1h(oră siderală)
60=
150
60=
15× 60′60
= 15′
şi
1s(secundă siderală) =1m(minut sideral)
60=
15′
60=
15× 60′′60
= 15′′.
Introducem timpul sideral local34, măsurat ı̂n unităţi “h m s”, sub formaunui unghi, şi anume unghiul orar 35 al echinocţiului vernal corespunzând unei
32 În limba engleză, sidereal day.33Fiind circumpolar, vezi Figura 7, astrul Y nu poate fi utilizat ı̂n emisfera sudică.34 În limba engleză, local sidereal time (LST).35Precizat la pagina 11.
15
-
epoci date (B1950.0, J2000.0). Transformările anterioare oferă răspunsul laı̂ntrebarea de la ı̂nceputul subsecţiunii de faţă.
Are loc, de asemeni, formula
θ = θ0 − L, (4)
unde θ desemnează timpul sideral local, θ0 timpul sideral la Greenwich iar Llongitudinea geografică a locului [33, p. 92]. Cantitatea L va fi consideratăpozitivă la Vest de meridianul 00 şi negativă ı̂n caz contrar.
Reluând ideea clepsidrei de pe bolta ı̂nstelată, ziua solară locală constituieperioada dintre două tranzituri ale Soarelui aparent36. Durata ı̂n cauză esteı̂mpărţită ı̂n ore, minute şi secunde solare după formula
1h = 60m = 3 600s.
În particular, ziua solară are 24× 60× 60 = 86 400 secunde solare.În mod analog, timpul solar local37 este unghiul orar al Soarelui aparent.
Fenomen observabil cu ajutorul ceasului cu apă persan, ora solară localăvariază, fiind necesară introducerea timpului solar mediu38, adică a unghiuluiorar al Soarelui mediu [33, p. 411]. Pentru a uniformiza procedeul39, timpuluisolar mediu ı̂i adăugăm 1800 — 12h — pe ecuatorul mediu, adică ı̂ncepemnumărarea sa de la miezul nopţii. Această cantitate reprezintă timpul civil40.Timpul civil al meridianului 00 — Greenwich — este timpul universal41 [33,ibid.].
În sfârşit, dacă adăugăm la valoarea timpului universal corecţiile datoratemişcării polilor geografici [41, p. 123 şi urm.] vom obţine timpul notat UT1.O rotunjire a sa — prin secunde de salt42 care sunt introduse, după 1972, cf.[6, p. 13], pentru a rămâne la o eroare mai mică de 0s.9 [41, p. 179] — estetimpul universal coordonat43. UTC poate fi găsit on-line la adresa [52].
36Cel pe care ı̂l vedem pe cer, mişcându-se de la Est către Vest, şi al cărui tranzit seproduce “la prânz”.
37 În limba engleză, true solar time.38 În limba engleză, mean solar time.39După 1925.40 În limba engleză, civil time.41 În limba engleză, universal time (UT).42 În limba engleză, leap second (sing.).43 În limba engleză, coordinated universal time (UTC). La Craiova, timpul zonal este
UTC + 2, respectiv (dacă “am dat ceasul ı̂nainte” vara) UTC+ 3. Pentru a ı̂nţelege tim-pul zonal, ı̂mpărţim timpul civil ı̂n 24 de zone de timp, corespunzând unei diferenţe de 150
ı̂n longitudine geografică [44, p. 40]. În fiecare zonă de timp fixăm o valoare (constantă) aorei. Aceasta este ora zonei (zonală). Timpul “obişnuit” reprezintă timp zonal, de aceeael nu va coincide cu timpul indicat de un cadran solar.
16
-
În prezent, pentru calculele astronomice precise sunt utilizate, ı̂n loculechinocţiului �, respectiv al polului nord ceresc, elementele ICRS44 intitula-te CIO — originea cerească intermediară —, respectiv CIP — polul cerescintermediar —, cf. [5, pg. 7, 9]. Fiind determinat prin analize de cinematică[41, p. 21], CIO nu poate fi interpretat geometric. Coordonatele desemnatede aceste cantităţi sunt intermediare ı̂ntre seturile de valori convenţionale şicele instantanee — serii de timp —, vezi [41, p. 166]. De asemeni, ı̂n formula(4), θ0 se ı̂nlocuieşte cu ERA
45 [5, p. 2].Au loc relaţiile
24h timp sideral ∼ 23h56m04s.090 530 (83 . . .) timp solar mediu,
vezi [44, p. 39], adică — [33, p. 87], [3, p. 361, ec. (18)] —
1s timp sideral ∼ 0s.997 269 566 329 084 UT1
la epoca J2000.0. Diferenţa46 DUT = UT1 − UTC este ı̂ntabulată de IERS,cf. [41, p. 179], şi este disponibilă on-line [26].
Legătura cu secunda “obişnuită” — bazată pe atomul de Cs 133 (Cesiu)— are, ı̂n prezent, expresia
24h timp solar mediu ∼ 86 400s.002 unităţi SI,
cf. [32].
44Adică, International Celestial Reference System, [5, p. 4].45 În limba engleză, Earth Rotation Angle. Este o funcţie liniară de UT1, măsurată ı̂n
lungul ecuatorului de pol CIP, vezi [41, pg. 175, 52].46Notaţie SOFA, [6, p. 19].
17
-
Poze II
N N
Zenit
S
S
N
CEV
Terra
N
Steaua X
Craiova
Axa polilor
Figura 6
18
-
PolarisSteaua Y
Steaua X
Eu
Zenit
Nadir
N
S
E
V
Culminatie,
Q
Elevatie,
Polaris
Figura 7
19
-
Zenit
Nadir
Altitudine
Eu
Steaua X
N S
VQAz
imut
Paralel de altitudine
S
Q
Figura 8
20
-
N
V
S
Zenit
Eu
Steaua X
Polaris
Primul punct al lui Aries
Lat
itud
ine
Ung
hiul
ora
r
CA
CA
Primul punct al lui Aries
R
R
Ascen
siune
a
R
Declinatie,
Paralel de declinatie,
Colura stelei X
Figura 9
21
-
Figura 10
22
-
Figura 11
23
-
Saturn
Marte
Venus
Regulus (alpha Leo)
Mercur
O fotografie de Jia Hao
Figura 12
24
-
Eu
Polaris
CA
K
Steaua X
Longitudine
Latitudine
Ecuatorul ceresc
Ecliptica
Q
Q
Figura 13
25
-
Figura 14
Figura 15
26
-
Figura 16
Figura 17
27
-
3 Matricea de rotaţie
Rotaţiile, ı̂n spaţiul fizic47 (SF), sunt rotaţii ı̂n jurul unei axe fixe (Euler),cf. [24, p. 156].
O asemenea axă este dreapta OD, de direcţie e, din Figura 19. Reamin-tesc notaţia dreptei OD, şi anume ∆ = ∆(O,−→e ) — [36, p. 209] —, unde−→e ∈ TOR3, −→e ∈ e. Ce ı̂nseamnă să rotim spaţiul ı̂n jurul dreptei ∆?
Lucrăm ı̂n raport cu reperul canonic R = (O,−→B ), unde B = {i, j, k} [36,p. 14]. Răspunsul la ı̂ntrebare presupune găsirea matricei A = (aij)1≤i,j≤3— [36, p. 312], [37, p. 39] — astfel ı̂ncât
i1j1k1
= A
ijk
.
Pentru simplitate, direcţia e este un versor cu cosinuşii directori48 (ei)i,adică
e = e1 · i+ e2 · j + e3 · k,3
∑
i=1
e2i = 1. (5)
Introducem planul PL perpendicular pe dreapta OD. Acesta va inter-secta axele de coordonate ale reperului ı̂n punctele A, B, C. Rotaţia SF ı̂njurul axei OD este, de fapt, o rotaţie de unghi φ ı̂n jurul punctului D, ı̂nplanul PL. Vezi Figura 18.
Etapele rotaţiei sunt ilustrate ı̂n Figura 20 — de sus ı̂n jos —. Astfel,ı̂ncepem prin a descompune vectorul
−→i după două direcţii ortogonale, una
dintre acestea (notată cu i‖) fiind coliniară cu e. Au loc relaţiile
i‖=
(
e · i)
e = e1 · eşi
i⊥= i− i ‖ =
(
1− e21
)
i− e1e2j − e1e3k,de unde deducem că
i⊥
j⊥
k⊥
=
1− e21
−e1e2 −e1e3−e1e2 1− e22 −e2e3−e1e3 −e2e3 1− e23
ijk
(6)
= (I3 − e⊗ e)
ijk
.
47Al mecanicii clasice [36, p. 8].48 În limba engleză, direction cosine (sing.), [24, p. 136].
28
-
Aici, “⊗” este produsul tensorial [36, p. 232].Apoi, rotim vectorul
−→i
⊥cu unghiul φ ı̂n sens trigonometric şi ı̂l descom-
punem după direcţiile i⊥şi e × i⊥. Cele două direcţii corespund dreptelor
DP şi DQ. Ajungem la
i⊥rotit
=∣
∣
∣i⊥rotit
∣
∣
∣
cos φ · i⊥
∣
∣
∣i⊥∣
∣
∣
+ sinφ · e× i⊥
∣
∣
∣e× i⊥
∣
∣
∣
. (7)
Vezi şi [24, p. 162].Dar
e× i⊥ = e×(
i− i ‖)
= e×(
i− e1e)
= e× i
(vezi (5)) = e3j − e2k. (8)
De asemeni, vectorii e şi i⊥fiind perpendiculari, observăm că
∣
∣
∣i⊥rotit
∣
∣
∣=
∣
∣
∣i⊥∣
∣
∣(rotaţie! Vezi [37, p. 43].)
= |e| ·∣
∣
∣i⊥∣
∣
∣=
∣
∣
∣e× i⊥
∣
∣
∣. (9)
Introducându-l pe (9) ı̂n (7) ajungem la
i⊥
rotit= cosφ · i⊥ + sin φ ·
(
e× i⊥)
, (10)
respectiv la — via (6) —
∣
∣
∣i⊥
rotit
∣
∣
∣=
∣
∣i− e1e∣
∣ =
√
(1− e21)2+ e2
1(e2
2+ e2
3) =
√
(1− e21)2+ e2
1(1− e2
1)
=√
1− e21.
În cea de-a treia etapă a calculului compunem vectorii−→i
‖,−→i
⊥
rotit∈ TOR3,
unde−→i⊥
rotit∈ i⊥
rotit. Ţinând seama de (10), ajungem la
i1 = e1 · e+ cos φ · i⊥ + sinφ ·(
e× i⊥)
(pe baza (6), (8)) = a11i+ a12j + a12k,
unde
a11 = cosφ+ e2
1(1− cos φ) ,
a12 = e3 sinφ+ e1e2 (1− cosφ) ,a13 = −e2 sin φ+ e1e3 (1− cosφ) .
29
-
În mod analog,
a21 = −e3 sin φ+ e1e2 (1− cosφ) ,a22 = cosφ+ e
2
2(1− cos φ) ,
a23 = e1 sinφ+ e2e3 (1− cosφ)
şi
a31 = e2 sinφ+ e1e3 (1− cosφ) ,a32 = −e1 sin φ+ e2e3 (1− cosφ) ,a33 = cosφ+ e
2
3(1− cos φ) ,
cf. [31, p. 50].
30
-
Poze III
D
A
B
C
1C
1A
1B
Figura 18
31
-
i j
k
x
y
z
O
e
A
B
C
D
PL
Figura 19
32
-
PL
PL
PL
D
D
D
i
i
i
A
A
A
O
O
O
i
i
i
i
i
i
i
i
i rotiti
rotiti
rotiti
i1
e
e
e
PQ
R
Figura 20
33
-
4 Mişcări perturbate
Mişcarea unei planete (M,m) ı̂n jurul Soarelui (O,m0) — imobil aprioric—, sub acţiunea atracţiei gravitaţionale newtoniene49, are loc ı̂ntr-un plan fix,notat PO ı̂n Figura 21. Vezi [36, p. 135 şi urm.]. Ce se ı̂ntâmplă ı̂nsă dacă,
ı̂n afara forţei de atracţie universală, intervine şi perturbaţia necunoscută−→F ?
k
y
O e
x
z
r
c
f
i
n
c n
PO
Figura 21
În cadrul formulelor din [37, pg. 2–9], transpunem analiza din [42, p. 29şi urm.] a influenţei acestei perturbaţii asupra parametrilor mişcării corpului
ceresc M . Astfel, raportată la sistemul de referinţă inerţial R = (O,−→B ), cuB = {i, j, k}, mişcarea particulei (M,m) este descrisă de sistemul diferenţial
{ .r = v.v = − µ
r3· r + F,
(11)
unde−→F ∈ TMR3,
−→F ∈ F , constituie forţa perturbatoare. Aici, µ = γ ·m0 > 0,
unde γ desemnează constanta atracţiei gravitaţionale50.
49Dacă am lucra post-newtonian (PPN), ar trebui luate ı̂n considerare elemente rela-tiviste [34, p. 107], [31, p. 173].
50 În astronomia clasică, dacă vom considera ziua solară medie, masa Soarelui, respectivsemiaxa mare a orbitei terestre drept unităţi de măsură pentru timp, masă şi distanţă,
34
-
Îi asociem sistemului (11) tripleta51 C = {c, r, α} dată de relaţiile
r × v = c, c× r = α.
Aceasta alcătuieşte o bază de sens direct [36, p. 29] a spaţiului vectorial TR3,având determinantul matricei de schimbare de baze
(c, r, α) = |c× r|2 = α2 > 0, α = |α|.
Evident, c, α ∈ C∞(R, TR3) [36, p. 17].Sistemul de vectori C este unul ortogonal, cu formulele
c× r = α,rr2
× α = c,α× c
c2= r.
(12)
Introducem, de asemeni, vectorul e ∈ C∞(R, TR3) astfel ı̂ncât — [37, p.5] —
µ
(
e+r
r
)
= v × c. (13)
Într-o mişcare neperturbată (F ≡ 0), vectorii c şi e sunt constante demişcare [24, p. 105]. Aici, ı̂nsă, ne interesează calculul mărimilor
.c,
.c,
.e şi
.e
ı̂n raport cu sistemul C.Astfel, folosind (11),
.c =
.r × v + r ×
.v = r ×
.v
= r ×(
− µr3
· r + F)
= r × F . (14)
De asemeni, avem
d
dt
(
r
r
)
=(r×
.r)× rr3
=(r × v)× r
r3=
c× rr3
(15)
şi
.v × c =
(
− µr3
· r + F)
× c = µc× rr3
+ F × c. (16)
mărimea µ va deveni constanta lui Gauss k [35, p. 153]. Avem k = 0.017 202 098 95 (IAU,1976), cf. [15, p. 146]. În 2012, IAU a recomandat să nu se mai folosească mărimea k [25,p. 3, recomandarea 3].
51 În cazul unei mişcări plane, versorii sistemului C corespund familiei {k, ρ, ε}, utilizatăla transcrierea ı̂n coordonate polare a elementelor cinematice r, v, a, cf. [36, p. 37].
35
-
Din (13) rezultă că — via (14), (15), (16) —
µ.e =
.v × c+ v ×
.c −µ d
dt
(
r
r
)
=
(
µc× rr3
+ F × c)
+ v × (r × F )− µc× rr3
= F × c+ v × (r × F ). (17)
Formula vitezei
Fiind perpendicular pe c, vectorul v admite reprezentarea
v = Ar +Bα, unde A,B ∈ C∞(R,R).
Pentru a determina formula coeficientului B plecăm fie de la
c = r × v = r × (Bα) = Br × (c× r)= B
[
r2c− (r · c)r]
= Br2 · c,
fie de la — vectorii r şi α sunt perpendiculari —
v · α = Bα2
= (c× r) · v = (c, r, v) = (r, v, c) = c2
şi obţinem
B =c2
α2= r−2. (18)
În mod analog, avem A = r·vr2. Din formula (13) rezultă că
(v × c) · vµ
= 0
= e · v + r · vr
= e · v + Ar,
adică
A = −e · vr
. (19)
Vectorul e se găseşte ı̂n planul generat de sistemul {r, α}, ceea ce nepermite introducerea unghiului f pe baza formulelor
e · r = er cos f, e · α = eα cos(
f +π
2
)
= −eα sin f. (20)
36
-
La fel ca ı̂n [37, p. 6], o consecinţă a formulei (13) este estimarea
r =c2/µ
1 + e cos f. (21)
Revenind la formula (19) — avem α = cr —,
−Ar = e · v= e ·
(
Ar +α
r2
)
= Aer cos f − ecrsin f,
de unde — via (21) — găsim o expresie convenabilă a coeficientului A:
A =ec sin f
r2(1 + e cos f)=
µ2
c3e sin f(1 + e cos f)
=µe
crsin f. (22)
♣♣♣
Descompunem forţa−→F după cum urmează
F = Fcc
c+ Fr
r
r+ Fα
α
α.
De asemeni, introducem formula vitezei ı̂n relaţia (17) şi ţinem seama decalculul următor:
v × (r × F ) = (v · F )r − (v · r)F=
[
A(r · F ) +B(α · F )]
r − Ar2F .
Se ajunge la — reamintesc (18) —
µ.e = F × c− Ar2F +
(
AFrr +Fαα
r2
)
r
= F × c− Ar2F +(
AFrr +cFαr
)
r. (23)
Pe baza (12), avem
F × c = Frr(r × c) + Fα
α(α× c)
= −Frrα +
cFαr
r. (24)
37
-
Combinând (23), (24), obţinem
µ.e = 2
cFαr
r − Frrα +
(
−Ar2F + AFrrr)
= 2cFαr
r − Frrα +
(
−Ar2Fααα− Ar2Fc
cc
)
=2cFαr
r −(
Frr
+ArFαc
)
α− Ar2Fcc
c. (25)
Apoi, pe baza formulei (22) a coeficientului A şi a estimării (21), avem
µ.e e = µ
.e · e
=2cFαr
(e · r)−(
Frr
+ArFαc
)
(α · e)
=2cFαr
(er cos f)−(
Frr
+ArFαc
)
(−αe sin f)
= 2ceFα cos f +
(
Frr
+ArFαc
)
(cre sin f)
= 2ceFα cos f +
[
Frr
+(µe
crsin f
) rFαc
]
(cre sin f)
= 2ceFα cos f + ceFr sin f +µe2Fαr
csin2 f
= 2ceFα cos f + ceFr sin f + ce2
sin2 f
1 + e cos fFα
= ceFr sin f + ceFα
(
2 cos f + e1− cos2 f1 + e cos f
)
= ceFr sin f + ceFαe + 2 cos f + e cos2 f
1 + e cos f,
respectiv
µ
c
.e = Fr sin f + Fα
e+ 2 cos f + e cos2 f
1 + e cos f. (26)
Să revenim la (14). Deducem că
.c = r × F = r ×
(
Fααα+
Fccc
)
=Fαα(r2c)− Fc
cα
=rFαc
c− Fccα, (27)
38
-
respectiv
.c c =
.c · c = Fαrc,
de unde
.c = rFα. (28)
Estimarea mărimilor.c,
.c,
.e şi
.e s-a ı̂ncheiat.
Mai departe, introducem vectorul n = k× c şi notăm cu i unghiul formatde vectorii c şi k — numit ı̂nclinaţie52, vezi [42, p. 25] —:
n = c sin i, c · k = c cos i. (29)
Dreapta ∆ = ∆(O,−→n ) [36, p. 209], unde −→n ∈ TOR3, −→n ∈ n, constituie linianodurilor 53 [42, ibid.].
Notăm cu Ω unghiul54 direcţiilor n şi i, respectiv cu ω unghiul făcut devectorii n şi e. Astfel, ţinând seama de (20), au loc relaţiile
{
n · i = n cosΩ,n · j = n sinΩ,
{
n · e = ne cosω,n · r = nr cos(ω + f). (30)
De asemeni, unghiul ̟ = Ω + ω desemnează longitudinea pericentrului [48,p. 99].
Ne interesează calculul mărimilor.
i,.
Ω şi.ω ı̂n raport cu sistemul C.
Plecând de la (29), via (28), (27), avem
.c · k =
(
c · k)·= (c cos i)·
=.c cos i− c sin i di
dt= rFα cos i −
.
i c sin i, (31)
respectiv
.c · k = rFα
c(c · k)− Fc
c(α · k) = rFα cos i−
Fcc(α · k). (32)
Însă,
α · k = (c, r, k) = (k, c, r) = (k × c) · r= n · r = nr cos(ω + f) = cr sin i cos(ω + f). (33)
52 În limba engleză, inclination.53 În limba engleză, line of nodes. Am ı̂ntâlnit această expresie la pagina 11.54Cărţile clasice de mecanică cerească folosesc simboluri speciale, e.g., ��, pentru a se
referi la acest unghi [35, p. 145].
39
-
Introducem estimarea (33) ı̂n (32) şi, comparând rezultatul cu (31), ob-ţinem formula — sin i 6= 0 —
.
i =rFcc
cos(ω + f). (34)
Conform (30), (29), n · i = n cosΩ = c sin i cosΩ. Dar
n · i = (k, c, i) = −(c, k, i) = −c · (k × i)= −c · j, (35)
de unde
(n · i)· = −.c · j = −rFα
c(c · j) + Fc
c(α · j)
=rFαc
(n · i) + Fcc(α · j)
= rFα sin i cosΩ +Fcc(α · j). (36)
Formula lui α
Dat fiind că direcţiile n şi c× n sunt coplanare cu r, are loc identitatea
r = r
[
cos(ω + f)n
n+ sin(ω + f)
c× n|c× n|
]
, (37)
cu |c× n| = cn = c2 sin i.De asemeni,
c× n = c× (k × c) = c2k − c cos i c, c× (c× n) = −c2n.
Ajungem la
α = c× r=
r cos(ω + f)
c sin i(c× n) + r sin(ω + f)
c2 sin i[c× (c× n)]
=r
sin i
[
c cos(ω + f) k − cos(ω + f) cos i c− sin(ω + f) n]
.
♣♣♣
40
-
Are loc relaţia — reamintesc (35), (30) —
α · j = −r cos(ω + f) cos isin i
(c · j)− r sin(ω + f)sin i
(n · j)
=r cos(ω + f) cos i
sin i(n · i)− r sin(ω + f)
sin i(n · j)
=r cos(ω + f) cos i
sin i· n cosΩ− r sin(ω + f)
sin i· n sinΩ
= rc [cos(ω + f) cosΩ cos i− sin(ω + f) sinΩ]. (38)Introducând formula (38) ı̂n (36), deducem că
(n · i)· = rFα sin i cosΩ+ rFc[cos(ω + f) cosΩ cos i− sin(ω + f) sinΩ]. (39)
Pe de altă parte,
(n · i)· = .c sin i cosΩ + c cos i didt
cosΩ− c sin i sin Ω.
Ω
(vezi (28)) = rFα sin i cosΩ+.
i c cos i cosΩ− c sin i sinΩ.
Ω
(vezi (34)) = rFα sin i cosΩ + rFc cos(ω + f) cosΩ cos i
− c sin i sin Ω.
Ω . (40)
Comparând estimările (39), (40), stabilim că — sinΩ 6= 0 —.
Ω =rFc sin(ω + f)
c sin i. (41)
Vectorul c este perpendicular pe direcţiile n şi e. Atunci,
n× e = |n× e| · n× e|n× e| = |n× e| ·c
c=
ne sinω
cc
(vezi (29)) = e sin i sinω c.
Cum n× e = (k × c)× e = (k · e)c, obţinemk · e = e sin i sinω. (42)
Apoi,
(k · e)· = k ·.e
(vezi (25)) =2cFαµr
(k · r)− 1µ
(
Frr
+ArFαc
)
(k · α)− Ar2Fcµc
(k · c)
=2cFαµr
(k · r)− 1µ
(
Frr
+ArFαc
)
(k · α) (43)
− Ar2Fcµ
cos i.
41
-
Pe baza expresiei (37) deducem că
k · r = r sin(ω + f)c2 sin i
[k · (c× n)]
=r sin(ω + f)
c2 sin i[k · (c2k − c cos i c)]
(vezi (29)) =r sin(ω + f)
c2 sin i[c2 − c cos i (c · k)] = r sin(ω + f)
sin isin2 i
= r sin(ω + f) sin i. (44)
În mod analog,
k · α = k ·[
r cos(ω + f)
c sin i(c2k − c cos i c) + sin(ω + f)
c2 sin i(−c2n)
]
= k · r cos(ω + f)c sin i
(c2k − c cos i c) = rc cos(ω + f) sin i. (45)
Inserând estimările (44), (45) ı̂n (43), se ajunge la
µ(k·.e) = 2cFα sin(ω + f) sin i− (cFr + Ar2Fα) cos(ω + f) sin i
− Ar2Fc cos i.
Pe de altă parte,
µ(k·.e) = µ(k · e)·
(vezi (42)) = µ(.e sin i sinω + e cos i
di
dtsinω + e sin i cosω
.ω)
(vezi (26)) = c sin i sinω
(
Fr sin f + Fαe+ 2 cos f + e cos2 f
1 + e cos f
)
(vezi (34)) +µerFc
ccos(ω + f) cos i sinω + µe sin i cosω
.ω.
Combinând seturile de formule anterioare, ajungem la
.ω =
1
e sin i sinω(termeni · Fα + termeni · Fr + termeni · Fc)
=1
e sin i sinω(Tα · Fα + Tr · Fr + Tc · Fc) , (46)
unde
Tr =1
e sin i cosω
(
− cµcos(ω + f) sin i− c
µsin i sinω sin f
)
= − cµe
cos f,
42
-
respectiv
Tc =1
e sin i cosω
(
−Ar2
µcos i− er
ccos i sinω cos(ω + f)
)
(vezi (22)) =1
sin i cosω
(
−r sin fc
cos i− rccos i sinω cos(ω + f)
)
= − r cos ic sin i cosω
(sin f + sinω cos(ω + f))
= − r cot ic cosω
[
sin f + sinω cosω cos f + (cos2 ω − 1) sin f]
= −rccot i sin(ω + f)
şi — reamintesc (21) —
Tα =1
e sin i cosω
(
2c
µsin(ω + f) sin i− Ar
2
µcos(ω + f) sin i
− cµsin i sinω
e+ 2 cos f + e cos2 f
1 + e cos f
)
=1
e cosω
(
2c
µsin(ω + f)− er
csin f cos(ω + f)− c
µsinω
× e+ 2 cos f + e cos2 f
1 + e cos f
)
=1
e cosω
(
2c
µsin(ω + f)− ec
µ
sin f cos(ω + f)
1 + e cos f− c
µsinω
× e+ 2 cos f + e cos2 f
1 + e cos f
)
=c
µe cosω(1 + e cos f)[2 sin(ω + f)(1 + e cos f)− e sin f cos(ω + f)
− sinω(e+ 2 cos f + e cos2 f)]
=c
µe cosω(1 + e cos f)(2 sin f cosω + e sin f cos f cosω)
=c sin f
µe cosω
2 + e cos f
1 + e cos f=
c sin f
µe
(
1 +µr
c2
)
=sin f
µec(c2 + µr).
Estimarea mărimilor.
i,.
Ω şi.ω s-a ı̂ncheiat.
În continuare, presupunem că e ∈ (0, 1) şi introducem cantităţile a, n, u,T ∈ C∞(R,R) — atunci când nu este pericol de confuzie, vezi (29) — prinintermediul formulelor [37, p. 12]
c2 = µa(1− e2), n =√µ
a3/2(47)
43
-
şi
r = a(1− e cosu), r .r= √µae sin u, (48)
respectiv
n(t− T ) = u− e sin u. (49)
Ne interesează calculul mărimilor.a,
.n,
.u şi
.
T ı̂n sistemul C.Prin derivarea ı̂n raport cu t a primeia dintre relaţiile (47), avem
.a =
1
µ(1− e2) (2c.c +2µae
.e) =
a
c2(2c
.c +2µae
.e)
=a
c2
[
2rcFα + 2aec
(
Fr sin f + Fαe + 2 cos f + e cos2 f
1 + e cos f
)]
=a
c2
[
2c3/µ
1 + e cos fFα + 2aec
(
Fr sin f + Fαe + 2 cos f + e cos2 f
1 + e cos f
)]
=a
c2
[
2ca(1− e2)1 + e cos f
Fα + 2aec
(
Fr sin f + Fαe + 2 cos f + e cos2 f
1 + e cos f
)]
=2a2
c
[
1− e21 + e cos f
Fα + e
(
Fr sin f + Fαe+ 2 cos f + e cos2 f
1 + e cos f
)]
=2a2
c
[
eFr sin f + Fα
(
1− e21 + e cos f
+ e · e+ 2 cos f + e cos2 f
1 + e cos f
)]
=2a2
c[eFr sin f + Fα(1 + e cos f)]
= 2a2(
eFrc
sin f +cFαµr
)
. (50)
Evident,.n = −3
2
√µa−5/2
.a = −3n
2a
.a, de unde
.n = −3an
(
eFrc
sin f +cFαµr
)
.
Formula lui sin fPlecând de la
r =c2/µ
1 + e cos f=
a(1− e2)1 + e cos f
= a(1− e cosu),
obţinem
cos f =cosu− e1− e cosu, sin f =
√
1− cos2 f =√1− e2 sin u
1− e cosu, (51)
44
-
cf. [15, p. 134], respectiv55
cosu =cos f + e
1 + e cos f, sin u =
√1− e2 sin f
1 + e cos f. (52)
♣♣♣
Conform (48), avemõae
rsin u =
.r = [a(1− e cosu)]·
=.ar
a− a .e cosu+ ae sin u .u
(vezi (52)) =.ar
a+
−a .e (e+ cos f) + ae .u√1− e2 sin f
1 + e cos f
=.ar
a+
−a .e (e+ cos f) + ae .u√1− e2 sin f
a(1− e2)r−1
=.ar
a+
r
1− e2[
− .e (e+ cos f) + e .u√1− e2 sin f
]
.
De asemeni,õae
rsin u =
õae
r
√1− e2 sin f
a(1− e2)r−1 = e√
µ
a(1− e2) sin f,
de unde
.u sin f =
1
r
√
µ
asin f −
√1− e2ae
.a +
e+ cos f
e√1− e2
.e.
Relaţia anterioară poate fi reorganizată sub forma
a
(
r.u
a− n
)
sin f = r
(
−√1− e2ae
.a +
e+ cos f
e√1− e2
.e
)
(53)
Derivăm identitatea (49) ı̂n raport cu timpul t. Astfel, avem
.n (t− T ) + n(1−
.
T ) = (1− e cosu) .u − .e sin u=
r
a
.u − .e sin u,
55Prima dintre estimările (52) ne permite să reorganizăm ecuaţia (26) drept
µ
c
.
e = Fr sin f + Fα(cosu+ cos f).
Vezi [15, p. 327].
45
-
respectiv
n.
T =.n (t− T ) +
(
n− r.u
a
)
+.e sin u
= −3n2a
.a (t− T ) +
(
n− r.u
a
)
+.e√1− e2 sin f
1 + e cos f
şi
n.
T · e√1− e2
sin f = − 3ne2a
√1− e2
.a (t− T ) sin f
(vezi (53)) +er
a√1− e2
(√1− e2ae
.a − e+ cos f
e√1− e2
.e
)
+e sin2 f
1 + e cos f
.e
= −3ne(t− T )2a
√1− e2
.a sin f +
r
a2.a − e+ cos f
1 + e cos f
.e
+e sin2 f
1 + e cos f
.e
= −3ne(t− T )2a
√1− e2
.a sin f +
r
a2.a − .e cos f
(vezi (47)) = −3µe(t− T )2a2c
.a sin f +
r
a2.a − .e cos f.
Ajungem la
µe
ac
.
T sin f = −3µe(t− T )2a2c
.a sin f +
r
a2.a − .e cos f,
respectiv la
µe.
T sin f =
[
rc− 32(t− T ) sin f
] .a
a− .e cos f. (54)
Estimarea mărimilor.a,
.n,
.u şi
.
T s-a ı̂ncheiat.Relaţiile (41), (34), (26), (46), (50) şi (54) alcătuiesc ecuaţiile planetare
ale lui Lagrange [15, ibid.].
VA URMA
46
-
Surse bibliografice
[1] Alpha Arietis,
http://en.wikipedia.org/wiki/Alpha_Arietis
[2] ALADIN,
http://aladin.u-strasbg.fr/
[3] Aoki, S.; Guinot, B.; Kaplan, G. H.; Kinoshita, H.; McCarthy, D. D.;
Seidelmann, P. K., The new definition of universal time, Astron. As-
trophys. 105 (1982), 359–361
[4] AstroViewer,
http://www.astroviewer.com/interactive-night-sky-map.php
[5] Bangert, J.; Brouw, W.; Calabretta, M.; Gontier, A. M.; Hohenkerk, C.;
Jin, W. J.; Malkin, Z.; McCarthy, D.; Percival, J.; Wallace, P., SOFA
tools for Earth attitude,
http://www.iausofa.org/2013_1202_C/sofa/sofa_pn.pdf
[6] Bangert, J.; Calabretta, M.; Gontier, A. M.; Hobbs, G.; Hohenkerk, C.;
Jin, W. J.; Malkin, Z.; McCarthy, D.; Percival, J.; Wallace, P., SOFA
time scale and calendar tools,
http://www.iausofa.org/2013_1202_C/sofa/sofa_ts_c.pdf
[7] Beutler, G., Methods of celestial mechanics. Vol. I: Physical, mathe-
matical and numerical principles, Springer-Verlag, Berlin, 2005
[8] Boccaletti, D.; Pucacco, G., Theory of orbits. Vol. 1: Integrable systems
and non-perturbative methods, Springer-Verlag, Berlin, 2010
[9] Casey, J., A treatise on spherical trigonometry, and its application to
geodesy and astronomy, with numerous examples, Longmans, Green
& Co., London, 1889
[10] CBEs: Current best estimates (astronomical constants),
http://maia.usno.navy.mil/NSFA/NSFA_cbe.html#Eps02009
[11] Clasificarea Bayer,
http://en.wikipedia.org/wiki/Bayer_designation
47
-
[12] Clepsydra,
http://en.wikipedia.org/wiki/Water_Clock
[13] Colure,
http://en.wikipedia.org/wiki/Colure
[14] Craiova,
http://en.wikipedia.org/wiki/Craiova
[15] Danby, J. M. A., Fundamentals of celestial mechanics, Willmann-Bell,
Richmond, 2003
[16] Date and time: Craiova,
http://dateandtime.info/
citycoordinates.php?id=680332
[17] DLL: cum construim o bibliotecă,
http://msdn.microsoft.com/en-us/library/
ms235636%28v=vs.100%29.aspx
[18] Dragonul,
http://ro.wikipedia.org/wiki/
Dragonul_%28constela%C8%9Bie%29
[19] Ecliptic,
http://ssd.jpl.nasa.gov/?glossary&term=ecliptic
[20] Ecliptica: o fotografie de Jia Hao,
http://apod.nasa.gov/apod/ap100731.html
[21] Ecliptic pole,
http://en.wikipedia.org/wiki/Ecliptic_pole
[22] Equinox,
http://en.wikipedia.org/wiki/Equinox
[23] FK6: Fundamental Katalog,
http://wwwadd.zah.uni-heidelberg.de/datenbanken/fk6/
index.php.en
[24] Goldstein, H.; Poole, C.; Safko, J., Classical mechanics. Third edition,
Addison Wesley, San Francisco, 2002
48
-
[25] IAU: Rezoluţia B2 (2012),
http://www.iau.org/static/resolutions/IAU2012_English.pdf
[26] IERS Bulletin A,
http://datacenter.iers.org/web/guest/eop/-/somos/5Rgv/
latest/6
[27] Inkscape,
http://inkscape.org/doc/index.php?lang=en
[28] Interactive Sky Chart,
http://www.skyandtelescope.com/s?action=login
[29] Java,
http://www.java.com/en/
[30] Karttunen, H.; Kröger, P.; Oja, H.; Poutanen, M.; Donner, K. J., Fun-
damental astronomy, Springer-Verlag, Berlin, 2007
[31] Kovalevsky, J.; Seidelmann, P.K., Fundamentals of astrometry, Cam-
bridge Univ. Press, Cambridge, 2004
[32] Leap seconds,
http://tycho.usno.navy.mil/leapsec.html
[33] Meeus, J., Astronomical algorithms, Willmann-Bell, Richmond, 2009
[34] Milani, A.; Gronchi, G. F., Theory of orbit determination, Cambridge
Univ. Press, Cambridge, 2010
[35] Moulton, F. R., An introduction to celestial mechanics, Dover, New
York, 1970
[36] Mustafa, O. G., Elemente de mecanica punctului material şi a solidului
rigid, EDP, Bucureşti, 2006. On-line la adresa:
https://www.dropbox.com/s/5cfmp5zl3ess15m/mechanics.pdf
[37] Mustafa, O. G., Problema plană a n puncte materiale: introducere ı̂n
conjectura lui D.G. Saari, DAL, 2009. On-line la adresa:
https://www.dropbox.com/sh/gi3yyjt1rsq58vl/cvXhzabWKW/
Tutorials/Conjectura_lui_Saari.pdf
49
-
[38] Mustafa, O. G., Note de laborator: C++. Vers. 2.0, DAL, 2012. On-line
la adresa:
https://www.dropbox.com/sh/gi3yyjt1rsq58vl/6R_nE49U9j
[39] Nutation,
http://ssd.jpl.nasa.gov/?glossary&term=nutation
[40] Observatorul astronomic “Amiral Vasile Urseanu”,
http://www.astro-urseanu.ro/contact.html
[41] Petit, G.; Luzum, B., IERS Conventions (2010), IERS Technical Note
No. 36,
http://www.iers.org/sid_BD32D79EB265A15ECBB685C787392A31/
IERS/EN/Publications/TechnicalNotes/tn36.html
[42] Pollard, H., Mathematical introduction to celestial mechanics, Pren-
tice-Hall, Englewood Cliffs, New Jersey, 1966
[43] Programe_C++_2,
https://www.dropbox.com/sh/gi3yyjt1rsq58vl/6R_nE49U9j
[44] Roy, A. E., Orbital motion, IOP Publishing, Bristol, 2005
[45] SOFA: Standards of fundamental astronomy,
http://www.iausofa.org/current_C.html
[46] SOFA ca DLL,
https://www.dropbox.com/sh/gi3yyjt1rsq58vl/fmzQJca5fn/
Tutorials/Astronomie/Libraria_SOFA_ca_DLL
[47] Standish, E. M., Keplerian elements for approximate positions of ma-
jor planets,
http://ssd.jpl.nasa.gov/txt/aprx_pos_planets.pdf
[48] Szebehely, V. G., Adventures in celestial mechanics. A first course in
the theory of orbits, Univ. Texas Press, Austin, 1991
[49] Tatum, J. B., Sfera cerească,
http://astrowww.phys.uvic.ca/~tatum/celmechs/celm6.pdf
[50] The SOFA software libraries,
http://www.iausofa.org/2012_0301_C/sofa/manual.pdf
50
-
[51] Triunghiul de vară,
http://en.wikipedia.org/wiki/Summer_triangle
[52] UTC,
http://www.usno.navy.mil/USNO/time/master-clock/
usno-master-clock
[53] Valtonen, M.; Karttunen, H., The three-body problem, Cambridge
Univ. Press, Cambridge, 2006
51