Introduzione al corso · 2015. 5. 24. · Argomenti del corso Il corso è orientato al controllo...
32
Fondamenti di robotica Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani ([email protected])
Transcript of Introduzione al corso · 2015. 5. 24. · Argomenti del corso Il corso è orientato al controllo...
-
Fondamenti di roboticaFondamenti di robotica
Introduzione al corso
Prof. Gianantonio Magnani ([email protected])
-
Fondamenti di robotica - Introduzione - G. Mgnani [2]
Robotica avanzata e industrialeRobotica avanzata e industriale
Robotica• studia le macchine che possano sostituire l’uomo nell’esecuzione di un compito, sia in termini di attività fisica che decisionale.• studia la connessione intelligente tra percezione e azione
Si distingue tra:Robotica avanzata• applicazioni in ambiente ostile (spaziale, sottomarino, nucleare, militare…)• servizio (applicazioni domestiche, assistenza medica, robotica per protesi mediche, intrattenimento, agricoltura, education, …)• tecnologia non ancore matura
Robotica industriale• applicazioni dei robot in ambito industriale• tecnologia matura e affidabile
-
Fondamenti di robotica - Introduzione - G. Mgnani [3]
Il robot industrialeIl robot industrialeIl robot è un manipolatore multifunzionale riprogrammabile, progettato per muovere materiali, parti, attrezzi o dispositivi specialistici attraverso movimenti programmati variabili, per l’esecuzione di una varietà di compiti(Robot Institute of America, 1980)
Componente di qualità dei sistemi di produzione automatizzati(soft automation vs. hard automation)
Comunanze nelle funzioni di controllo, nel software e nel hardware con diversi altri componenti dei sistemi di produzione … COMAU SpA
-
Fondamenti di robotica - Introduzione - G. Mgnani [4]
Il robot industrialeIl robot industrialeIl robot si compone di:
Struttura meccanica: catena meccanica, attuatorie sensori
Unità di governo
CO
MA
U SpA
COMAU SpA
-
Fondamenti di robotica - Introduzione - G. Mgnani [5]
Il sistema meccanicoIl sistema meccanicoLa catena meccanica è costituito da una serie di corpi rigidi (link) connessi da giunti
Un’estremità della catena (primo link) è costituita dalla BASE, di norma fissata terra.
All’ultimo link (flangia terminale) si collega l’END EFFECTOR (pinza, strumento di lavoro) o organo terminale
Ogni giunto è un grado di libertà del robot
Nella catena meccanica si individua una struttura portante che garantisce il posizionamento ed un POLSO che fornisce i gradi di libertà di orientamento dell’EE
-
Fondamenti di robotica - Introduzione - G. Mgnani [6]
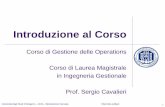
La catena meccanicaLa catena meccanica
Terminologia essenziale7 gradi di libertà o mobilità (7 dof)
polso
spalla
braccio
link
base
link
flangia
giunto dirotazione
giunto
-
Fondamenti di robotica - Introduzione - G. Mgnani [7]
Strutture portantiStrutture portantiManipolatore cartesiano
• Tre giunti prismatici• Ad ogni grado di libertà ai giunti corrisponde un grado di libertà cartesiano• Molto rigido meccanicamente
Manipolatore a portale
• Per la manipolazione di oggetti di peso rilevante
I disegni sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [8]
Strutture portantiStrutture portantiManipolatore cilindrico
• Un giunto rotoidale e due prismatici• Coordinate cilindriche• Buona rigidezza meccanica
Manipolatore sferico
• Due giunti rotoidali ed uno prismatico• Coordinate sferiche
• Discreta rigidezza meccanica
I disegni sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [9]
Strutture portantiStrutture portantiManipolatore SCARA
• Due giunti rotoidali e uno prismatico• Rigido a carichi verticali e cedevole a carichi orizzontali• “Selective Compliance Assembly Robot Arm”
Manipolatore antropomorfo
• Tre giunti rotoidali• Struttura destra
• Rigidezza meccanica variabile con la configurazione
I disegni sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [10]
Polso sfericoPolso sferico
3 gradi di libertà di rotazioneAssi di rotazione che si intersecano in un solo punto
flangia
utensile pinza
-
Fondamenti di robotica - Introduzione - G. Mgnani [11]
Esempi di robot industrialiEsempi di robot industrialiAdeptOne XL
• Struttura SCARA• Quattro giunti• Portata 12 Kg• Ripetibilità: 0.025÷0.038 mm
COMAU SMART S2
• Struttura antropomorfa• Sei giunti
• Portata 16 Kg• Ripetibilità: 0.1 mm
Gli esempi sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [12]
Esempi di robot industrialiEsempi di robot industrialiABB IRB 4400
• Struttura antropomorfa con parallelogramma• Sei giunti• Portata 60 Kg• Ripetibilità: 0.07÷0.1 mm
Unità lineare Kuka KL 250 con robot KR 15/2• Struttura antropomorfa montata su slitta con
installazione a portale • Sei giunti + giunto lineare
• Portata 25 Kg• Ripetibilità: 0.1 mm
Gli esempi sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [13]
Esempi di robot industrialiEsempi di robot industrialiRobotics Research K-1207i
• Struttura antropomorfa• Sette giunti • Giunto addizionale rotoidale: aumenta destrezza e consente di ripiegare
FANUC I-21i
• Struttura antropomorfa• Sei giunti
• Sensore di forza• Sistema di visione 3D
Gli esempi sono tratti dal testo:L.Sciavicco, B.SicilianoRobotica industriale – Modellistica e controllo di robot manipolatori (2a ed.)Mc Graw-Hill, 2000
-
Fondamenti di robotica - Introduzione - G. Mgnani [14]
Componenti dei robot industrialiComponenti dei robot industriali
Integrati nella o applicati alla catena meccanica
• attuatori (motori elettrici, riduttori)
• sensori propriocettivi (di posizione dei motori e raramente dei link)
• sensori eterocettivi (di visione, forza, prossimità, distanza)
• organo terminale (end-effectortor) - es. pinze di presa e di saldatura a punti, saldatore ad arco, pistole di verniciatura, spalmatori, ecc
-
Fondamenti di robotica - Introduzione - G. Mgnani [15]
Applicazioni tipiche (COMAU Applicazioni tipiche (COMAU SpASpA))
Saldatura a Punti
Saldatura ad arco
Assemblaggio
Movimentazione
Carico – Scarico Macchine
Sigillatura - Siliconatura
Automazione Linee Interpresse
Lavorazione
File comau
-
Fondamenti di robotica - Introduzione - G. Mgnani [16]
Il sistema di controlloIl sistema di controlloE’ un sistema elettronico - informatico complesso e sofisticato.
Funzioni principali:• Interfaccia con l’operatore (MMI)• Programmazione dei compiti• Pianificazione delle traiettorie• Controllo in tempo reale del moto dei giunti• Immagazzinamento dati• Gestione dell’interazione con altre macchine• Diagnostiche, gestione malfunzionamenti
Hardware • Unità di elaborazione e controllo (multi-microprocessore)• Elettronica di potenza• Dispositivo d’interfaccia uomo macchina e programmazione (teach pendant)• Interfacce di I/O e comunicazione
-
Fondamenti di robotica - Introduzione - G. Mgnani [17]
ProgrammazioneProgrammazioneI compiti dei robot si programmano con linguaggi simili a quelli usati per i computerPossono essere fornite interfacce specifiche per applicazioni frequenti (es. saldatura, verniciatura)Ambiente di programmazione integrata (teaching-by-doing con comando manuale)
Sistemi di coordinate• giunto• terna base (cartesiane) • utensile (tool) (cartesiane)
Tipi di movimenti• punto a punto nei giunti• punto a punto nello spazio operativo• secondo traiettorie lineari, circolari o interpolate
-
Fondamenti di robotica - Introduzione - G. Mgnani [18]
ProgrammazioneProgrammazioneEsempio di programma
PROGRAM pezzoVAR riposo, trasp, tavola, scarto : POSITIONBEGIN CYCLE
MOVE TO riposoOPEN HAND 1WAIT FOR $DIN(1) = ON % trasportatore prontoMOVE TO traspCLOSE HAND 1IF $DIN(2) = OFF THEN % se il pezzo è buono
MOVE TO tavolaELSE
MOVE TO scaricoENDIFOPEN HAND % depone il pezzo su tavola o in cont. scarti
END pezzo
Il robot prende un pezzo dal nastro trasportatore e lo trasferisce o su una tavola o nel contenitore di scarto a seconda di $DIN(2)
-
Fondamenti di robotica - Introduzione - G. Mgnani [19]
Argomenti del corsoArgomenti del corso
Il corso è orientato al controllo dei robot industrialiGli argomenti corrispondono alle principali funzioni di controllo
• Cinematica (diretta ed inversa)
• Cinematica differenziale e statica
• Pianificazione di traiettorie
• Dinamica (casi semplici + laboratorio informatizzato / simulazione)
• Controllo• “livello servo” (controllo del moto dei singoli giunti)(laboratorio informatizzato / simulazione, progetto completo di un servomeccanismo)• controllo multivariabile e con sensori eterocettivi (cenni)
-
Fondamenti di robotica - Introduzione - G. Mgnani [20]
CinematicaCinematica
Studio analitico del moto della catena (dell'organo terminale) indipendentemente dalle forze / coppie che lo determinano.
Legame tra le variabili di giunto e posizione e orientamento dell'end-effector
cinematica diretta
cinematica inversa
Inversione cinematica⇒ elemento centrale di un controllore⇒ presenta diverse problematiche (soluzione non unica, punti singolari)
[ ]′= nqqq ...21q ),,,,,( γβαzyxP=P
-
Fondamenti di robotica - Introduzione - G. Mgnani [21]
Cinematica diretta: esempioCinematica diretta: esempio
( ) ( )( ) ( )21211
21211
sinsin
coscos
qqlqly
qqlqlx
++=
++=
x
y
q1
q2
Per manipolatori a più gradi di libertà occorrono procedimenti sistematici per ricavare le equazioni della cinematica diretta.
-
Fondamenti di robotica - Introduzione - G. Mgnani [22]
Cinematica differenzialeCinematica differenziale
Studia il legame tra le velocità dei giunti e la “velocità” dell‘organo terminale
cinematica differenziale [ ]
′= nqqq &&&& ...21q ωp,&
1q&p&
Il legame è espresso da una matrice, detta Jacobiano del manipolatore
-
Fondamenti di robotica - Introduzione - G. Mgnani [23]
StaticaStaticaEsprime il legame tra un vettore di forze F applicate all’end effector e il corrispondente vettore di coppie generalizzate τ che tiene in equilibrio il sistema.
x
y
q1
q2
Fa
( ) ( )( )( ) a
a
FqqlFqqlql
2122
212111
sinsinsin
+−=++−=
ττ
[ ]′= zyxzyx FFF τττF[ ]′= − nn τττττ 1321 ...τ
-
Fondamenti di robotica - Introduzione - G. Mgnani [24]
DinamicaDinamica
Legame analitico tra le forze / coppie applicate ai giunti (della catena) e il moto della catena.
dinamica direttaτ(t) q(t)
dinamica inversa
coppie generalizzate
dinamica diretta: interesse per simulazionedinamica inversa: interesse per controllo
[ ]′= − nn τττττ 1321 ...τ
La derivazione del modello dinamico è operazione molto complessa(tecniche automatiche e/o elaborazione simbolica)
-
Fondamenti di robotica - Introduzione - G. Mgnani [25]
Pianificazione della traiettoriaPianificazione della traiettoria
Obiettivo:calcolare i movimenti (leggi di moto) dei giunti (q(t)) affinché
⇒ l’organo terminale segua traiettorie desiderate nello spazio di lavoro⇒ il robot si muova in modo regolare smooth
Generare (calcolare):⇒ leggi di moto compatibili con i limiti di velocità e accelerazione dei motori, di durata minima o compatibile con le esigenze operative⇒ traiettorie rettilinee, circolari, interpolanti ...
-
Fondamenti di robotica - Introduzione - G. Mgnani [26]
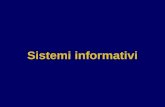
Architettura di controllo del movimentoArchitettura di controllo del movimentoControllo del movimento
Si adotta un’architettura costituita da tre moduli:
Inversione cinematica Controllo d'asse
Generazione dellatraiettoria
xd qd
q
τ
-
Fondamenti di robotica - Introduzione - G. Mgnani [27]
Controllo indipendente dei giuntiControllo indipendente dei giunti
q2
τ2qd2
qn
τnqdn
R1
q1
τ1qd1
R2
Rn
Il controllo d’asse nei controllori roboticiindustriali tipicamente prevede che ciascuna coordinata di giunto venga controllata indipendentemente(servomeccanismo di posizione)
I singoli problemi di controllo sono assimilabili a quelli del controllo di servomeccanismi, il che giustifica l’approfondimento che sarà fatto su questo argomento.
-
Fondamenti di robotica - Introduzione - G. Mgnani [28]
Controllo indipendente dei giuntiControllo indipendente dei giunti
I servomeccanismo di posizione si trovano in una varietà di macchine per produrre:
⇒ macchine utensili (frese, torni, rettifiche, taglio laser, produzione stampi, piegatura e foratura lamiere, ecc)⇒ macchine lavorazione legno, pietre, alluminio …⇒ macchine tessili, per imballaggio, stampa …⇒ macchine di movimentazione (transfer)e sono realizzati con la stessa componentistica di quelli robotici
Comunanze anche con sistemi avionici e di difesa, informatici, consumer, automobilistici, ferroviari, ecc
Ampia tematica ⇒ “motion control”
-
Fondamenti di robotica - Introduzione - G. Mgnani [29]
Similitudine con le macchine utensiliSimilitudine con le macchine utensili
Macchine utensili a 5 assi
-
Fondamenti di robotica - Introduzione - G. Mgnani [30]
I testiI testi
Testo di riferimento Testo per la parte di controllo del moto (in alternativa)
Introduzione SS Cap.1 (leggere)Cinematica SS Cap. 2 esclusi 2.6, 2.8.3, 2.9.2, 2.11
Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/magnani/fondamenti di robotica
http://www.elet.polimi.it/upload/magnani/fondamenti
-
Fondamenti di robotica - Introduzione - G. Mgnani [31]
Aspetti organizzativiAspetti organizzativi
• Calendario e argomenti da fare / non fare sulla pagina web
• Laboratori in aula informatizzata
• Uso del robot Comau Smart 3S in laboratorio (a richiesta, salvo verifica per motivi di sicurezza)
Modalità d’esame
• Esame scritto con domande ed esercizi (vietato l’utilizzo di dispositivi elettronici, incluse calcolatrici)
• A richiesta: un prova intermedia – non obbligatoria – sulla prima parte del corso. Chi fa la prova intermedia al primo appello fa l’esame solo sulla seconda parte
-
Fondamenti di robotica - Introduzione - G. Mgnani [32]
LINKLINK
www.bias.it (link utili - associazioni del mondo della strumentazione e del controllo – titoli di riviste del settore) www.controleng.com (informazioni su prodotti) www.manufacturing.net www.opifici.com (link utili - associazioni dei costruttori di macchine) www.anipla.it Anipla www.siri.it Siri Società (associazione) italiana robotica www.vnu.it Altre riviste del settore Siti di costruttori: comau, fanucrobotics, abbrobotics, kuka, reis, staubli pagina www.elet.polimi.it/upload/magnani/ (seguire SIMECS)
Robotica avanzata e industrialeIl robot industrialeIl robot industrialeIl sistema meccanicoLa catena meccanicaStrutture portantiStrutture portantiStrutture portantiPolso sfericoEsempi di robot industrialiEsempi di robot industrialiEsempi di robot industrialiComponenti dei robot industrialiApplicazioni tipiche (COMAU SpA)Il sistema di controlloProgrammazioneProgrammazioneArgomenti del corsoCinematicaCinematica diretta: esempioCinematica differenzialeStaticaDinamicaPianificazione della traiettoriaArchitettura di controllo del movimentoControllo indipendente dei giuntiControllo indipendente dei giuntiSimilitudine con le macchine utensiliI testiAspetti organizzativiLINK