
Introdurremo tutte le grandezze in modo vettorialebracco/dida/FGI04-cinematica.pdf · Un corpo si...
21
1 G. Bracco - Appunti di Fisica Generale 1 Introdurremo tutte le grandezze in modo vettoriale e specializzeremo ai casi più semplici(es. unidimensionale). Utilizzeremo sempre questo approccio poiché evita di dover introdurre nuovamente le stesse grandezze quando si tratteranno i moti in due o tre dimensioni Iniziamo a fare l’approssimazione di punto materiale, ovvero un corpo di dimensioni trascurabili rispetto alle dimensioni tipiche del problema Es. nel moto della Terra attorno al Sole, la Terra può essere considerata un punto materiale (se si trascura la sua rotazione) G. Bracco - Appunti di Fisica Generale 2 Definito un punto origine O ed un sistema di riferimento ortogonale il vettore posizione può essere scomposto nelle tre componenti x y z r = x î + y ĵ + z k con î ĵ k versori dei tre assi le componenti hanno dimensione di una lunghezza mentre i versori sono adimensionali e si possono usare per tutte le GF vettoriali Vettore posizione La posizione di un punto materiale M è individuata da un vettore detto vettore posizione. • O M r r = OM ^ ^
-
Upload
vuongxuyen -
Category
Documents
-
view
212 -
download
0
Transcript of Introdurremo tutte le grandezze in modo vettorialebracco/dida/FGI04-cinematica.pdf · Un corpo si...

1
G. Bracco - Appunti di Fisica Generale
1
Introdurremo tutte le grandezze in modo vettorialee specializzeremo ai casi più semplici(es. unidimensionale).
Utilizzeremo sempre questo approccio poiché evitadi dover introdurre nuovamente le stesse grandezzequando si tratteranno i moti in due o tre dimensioni
Iniziamo a fare l’approssimazione di punto materiale,ovvero un corpo di dimensioni trascurabili rispetto alledimensioni tipiche del problemaEs. nel moto della Terra attorno al Sole, la Terra puòessere considerata un punto materiale (se si trascura lasua rotazione)
G. Bracco - Appunti di Fisica Generale
2
Definito un punto origine O ed un sistema di riferimento ortogonale il vettore posizione può essere scomposto nelletre componenti x y z
r = x î + y ĵ + z k con î ĵ k versori dei tre assi
le componenti hanno dimensione di una lunghezza mentrei versori sono adimensionali e si possono usare per tutte leGF vettoriali
Vettore posizione
La posizione di un punto materiale M è individuata da un vettore detto vettore posizione.
•O M
r r = OM
^ ^

2
G. Bracco - Appunti di Fisica Generale
3
Un corpo si muove sulla traiettoria bidimensionale al variare del tempox= -0.31 t2+ 7.2 t+28y= 0.22 t2 - 9.1 t+30
Questa è la rappresentazione parametricadella curva (traiettoria), il parametro è iltempo t
P=(f(t),g(t)) con
f(t)= -0.31 t2+ 7.2 t+28 eg(t)= 0.22 t2 - 9.1 t+30
essa dà luogo al seguente grafico
e x y sono le componenti del vettore posizione P
G. Bracco - Appunti di Fisica Generale
4
Se la traiettoria è tridimensionale ci sarà una componente in piùe la rappresentazione parametrica della curva (traiettoria)diventerà
P=(f(t),g(t),h(t)) caso generale tridimensionale
Osservazioni:
•il caso unidimensionale può essere pensato come P=(f(t), 0 , 0)•il caso bidimensionale può essere pensato come P=(f(t), g(t) , 0)
Quindi useremo il caso bidimensionale essendo di più facile rappresentazione e per il quale è semplice la generalizzazione al caso tridimensionale (c’è la terza componente).
3
G. Bracco - Appunti di Fisica Generale
5
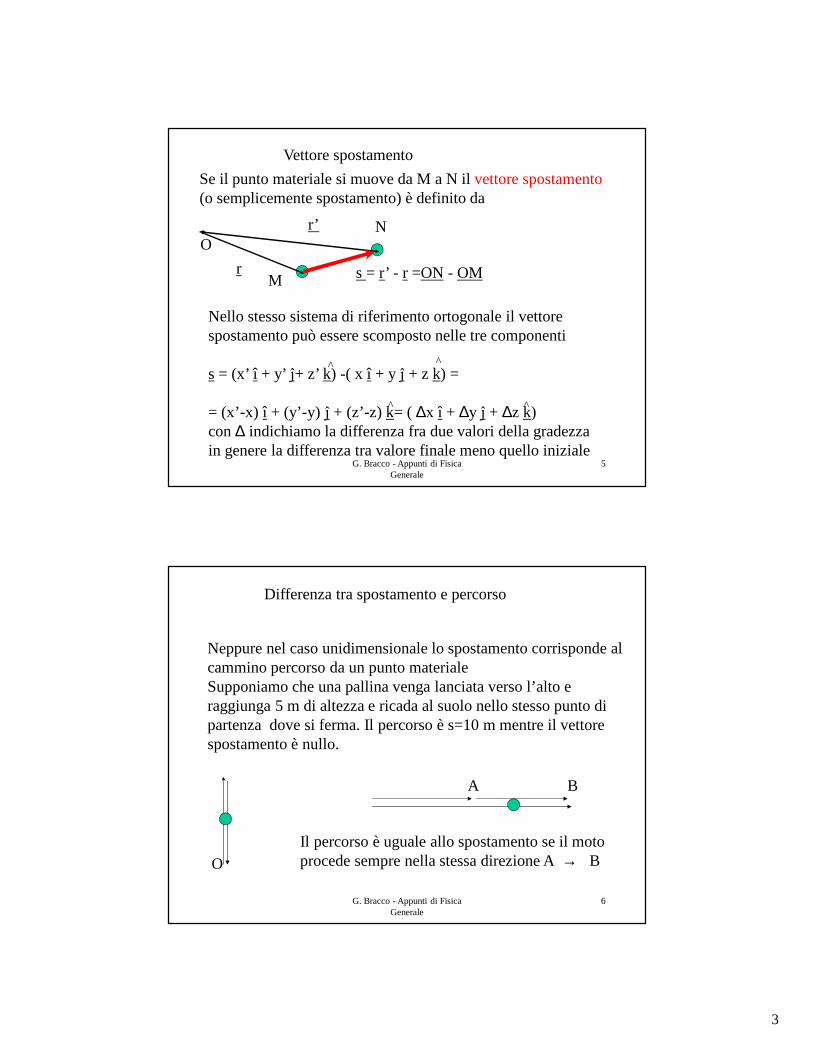
Vettore spostamento
Se il punto materiale si muove da M a N il vettore spostamento(o semplicemente spostamento) è definito da
•O
M
Nello stesso sistema di riferimento ortogonale il vettore spostamento può essere scomposto nelle tre componenti
s = (x’ î + y’ ĵ+ z’ k) -( x î + y ĵ + z k) =
= (x’-x) î + (y’-y) ĵ + (z’-z) k= ( ∆x î + ∆y ĵ + ∆z k) con ∆ indichiamo la differenza fra due valori della gradezzain genere la differenza tra valore finale meno quello iniziale
r s = r’ - r =ON - OM
Nr’
^ ^
^^
G. Bracco - Appunti di Fisica Generale
6
Differenza tra spostamento e percorso
Neppure nel caso unidimensionale lo spostamento corrisponde alcammino percorso da un punto materialeSupponiamo che una pallina venga lanciata verso l’alto e raggiunga 5 m di altezza e ricada al suolo nello stesso punto di partenza dove si ferma. Il percorso è s=10 m mentre il vettore spostamento è nullo.
O
A B
Il percorso è uguale allo spostamento se il moto procede sempre nella stessa direzione A → B

4
G. Bracco - Appunti di Fisica Generale
7
traiettoria bidimensionalex= -0.31 t2+ 7.2 t+28y= 0.22 t2 - 9.1 t+30
il vettore spostamento s = ∆Pèla differenza fra due vettoriposizione, nel caso disegnatofra la posizione per t=0 se per t= 20 s.Il modulo dello spostamentoe’ minore del percorso
s
G. Bracco - Appunti di Fisica Generale
8
Velocità media
Definiamo velocità medias
vm = ----- con s lo spostamento∆t che il punto materiale
compie nell’intervallo di tempo ∆t=tf-ti.Essendo il prodotto di un vettore (s)per uno scalare (1/ ∆t), la velocità media è un vettore. Unità: m/s Le sue componenti sono
s/∆t = ((x’ î + y’ ĵ+ z’ k) -( x î + y ĵ + z k))/ ∆t =
= ((x’-x) î + (y’-y) ĵ + (z’-z) k) / ∆t= ( ∆x/ ∆t î + ∆y/ ∆t ĵ + ∆z/ ∆t k)
^ ^
^ ^
s

5
G. Bracco - Appunti di Fisica Generale
9
( ∆x/ ∆t î + ∆y/ ∆t ĵ + ∆z/ ∆t k) = ( vmx î + vmy ĵ + vmz k)
con vmx =∆x/ ∆t la componente della velocità medialungo l’asse x, etc.
^ ^
A seconda dell’intervallo di tempo la velocità media cambia, inoltre non c’è informazione sul moto istante per istante.
Si procede quindi con un processo di limite per intervalli di tempo via via più piccoli per ottenere la rapidità di variazionedella posizione del corpo
s ∆xv = lim ------- velocità (istantanea) vx = lim ---------
∆t→0 ∆t ∆t→0 ∆t
G. Bracco - Appunti di Fisica Generale
10
Questo rappresenta il limite di un rapporto incrementaletra il vettore posizione (s = ∆P) ed il tempo
∆P ∆xv = lim ------- velocità (istantanea) vx = lim ---------
∆t→0 ∆t ∆t→0 ∆t
dPQuindi v= --- è la derivata della posizione rispetto al tempo
dt
Se nella rappresentazione parametrica della traiettoria si conoscono le funzioni del tempo P=(f(t),g(t))
dx df dy dgvx= ---- = ---- e vy= ---- = ----
dt dt dt dt

6
G. Bracco - Appunti di Fisica Generale
11
La velocità è un vettore che è sempre tangente alla traiettorianell’istante in cui viene calcolata
Quindi istante per istante ci indica dove andrà il corpo nell’istantesuccessivo. Quindi se conosco la velocità posso ricostruire latraiettoria, è sufficiente conoscere la condizione iniziale dipartenza, infatti dalla definizione
dP= v dt ovvero, usando incrementi finiti,
∆P=v∆t → Pf-Pi=v (tf-ti) → Pf= Pi + v (tf-ti)
questo suggerisce un modo per ricavare la traiettoria in modonumerico
G. Bracco - Appunti di Fisica Generale
12
•Dividiamo l’intervallo temporale in n parti (nel nostro caso 4)•Calcoliamo la velocità negli istanti 0,1,…,n: v0 ,v1 ,…,vn
e sommiamo sui vari sottointervalli la quantità Pj-Pj-1 = v (tj-tj-1) con j=0,…,n-1 otteniamo
Pf= Pi +Σj vj (tj-tj-1) dove l’indice di sommatoria j=0,..,n-1
se nei vari sottointervalli la velocità non cambia molto (quindinel sottointervallo la velocità media ~ velocità istantanea) Pf
sarà un punto prossimo a quello finale della traiettoria.
P1 P2
P3
0 ≡ ti 1 2 3 4 ≡ tf
t
Pi ≡ P0
Pf ≡ P4

7
G. Bracco - Appunti di Fisica Generale
13
Il processo diviene esatto se passiamo al limite per sottointervallitendenti a zero.La sommatoria diviene un integrale
⌠ f ⌠ t
Pf= Pi + v (t’) dt’ o per t<t f Pf(t)= Pi + v (t’) dt’
⌡i ⌡ti
Partiamo dal nostro esempio di traiettoria bidimensionalex= (-0.31 t2+ 7.2 t+28) m → vx=(-0.62 t + 7.2) m/sy= (0.22 t2 - 9.1 t+30) m → vy= (0.44 - 9.1) m/s
e al variare di dt vediamo come migliora l’approssimazione.Animazione: linea (dt).
G. Bracco - Appunti di Fisica Generale
14
Passando alle componenti
⌠ f ⌠ f
xf= xi + vx (t) dt yf= yi + vy (t) dt
⌡i ⌡i
Quindi ogni componente è indipendente dalle altre.
Dalla conoscenza della velocità, tramite un’integrazione si ricava il vettore posizione in funzione del tempo finale.
8
G. Bracco - Appunti di Fisica Generale
15
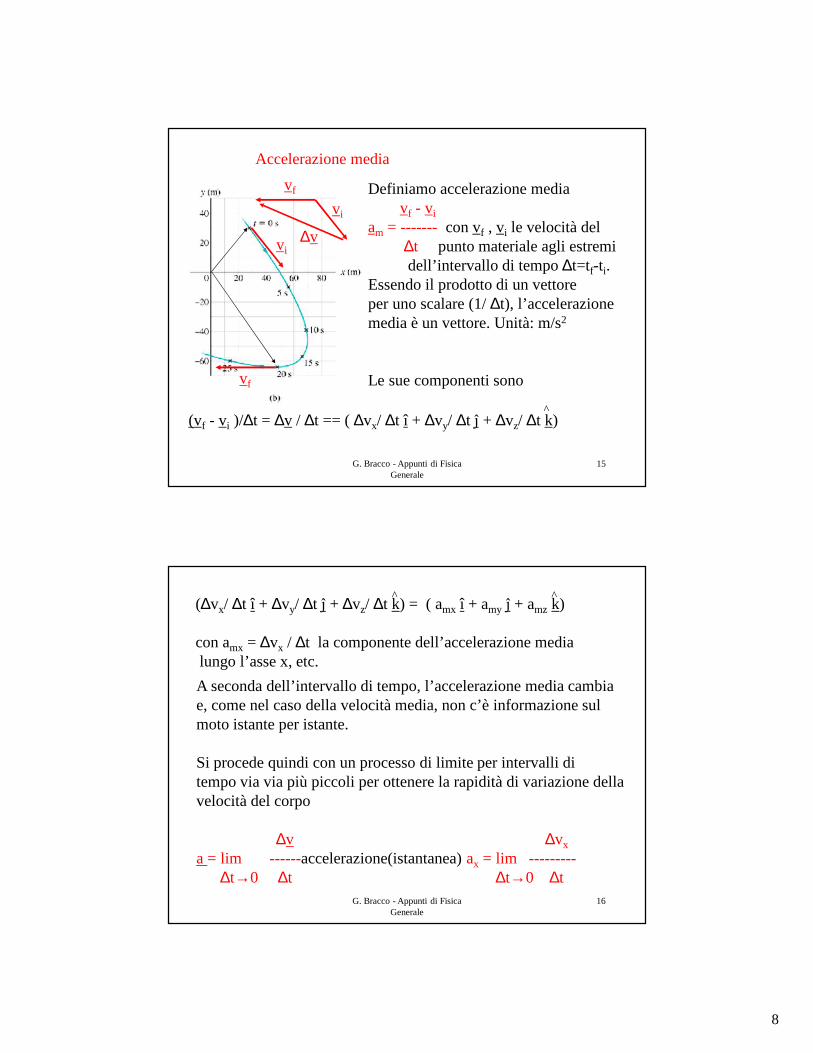
Accelerazione media
Definiamo accelerazione mediavf - vi
am = ------- con vf , vi le velocità del∆t punto materiale agli estremidell’intervallo di tempo ∆t=tf-ti.
Essendo il prodotto di un vettore per uno scalare (1/ ∆t), l’accelerazionemedia è un vettore. Unità: m/s2
Le sue componenti sono
(vf - vi )/∆t = ∆v / ∆t == ( ∆vx/ ∆t î + ∆vy/ ∆t ĵ + ∆vz/ ∆t k) ^
vf
vi∆v
vi
vf
G. Bracco - Appunti di Fisica Generale
16
(∆vx/ ∆t î + ∆vy/ ∆t ĵ + ∆vz/ ∆t k) = ( amx î + amy ĵ + amz k)
con amx = ∆vx / ∆t la componente dell’accelerazione medialungo l’asse x, etc.
^ ^
A seconda dell’intervallo di tempo, l’accelerazione media cambiae, come nel caso della velocità media, non c’è informazione sul moto istante per istante.
Si procede quindi con un processo di limite per intervalli di tempo via via più piccoli per ottenere la rapidità di variazione dellavelocità del corpo
∆v ∆vx
a = lim ------accelerazione(istantanea) ax = lim ---------∆t→0 ∆t ∆t→0 ∆t

9
G. Bracco - Appunti di Fisica Generale
17
Questo rappresenta il limite di un rapporto incrementaletra il vettore velocità (∆v) ed il tempo
∆v ∆vx
a = lim ------- accelerazione ax = lim ---------∆t→0 ∆t ∆t→0 ∆t
dv d2PQuindi a= ---= --- è la derivata della velocità rispetto al tempo e la
dt dt2 derivata seconda della posizione rispetto al tempoOsservazione: le cause del moto (forze) sono legate all’accelerazioneperciò non si definiscono derivate della posizione di ordine superiore!
Se nella rappresentazione parametrica della traiettoria si conoscono le funzioni del tempo P=(f(t),g(t))
df dg d df d2f d2gvx= ---- vy= ---- ax=-- ( ---- )= ----- ay= -----
dt dt dt dt dt2 dt2
G. Bracco - Appunti di Fisica Generale
18
Abbiamo visto che la velocità è un vettore sempre tangente alla traiettoria, l’accelerazione è invece rivolta verso la concavità della traiettoria nell’istante in cui viene calcolata
Quindi ci indica come la velocità verrà modificatanell’istante successivo. Quindi se conosco l’accelerazione posso calcolare la velocità (conoscendo la velocità iniziale) e da questa latraiettoria (conoscendo la condizione iniziale di partenza)infatti dalla definizione
dv= a dt ovvero, usando incrementi finiti,
∆v=a∆t → vf-vi=a (tf-ti) → vf= vi + a (tf-ti)
in modo analogo a quanto fatto con la velocità per ricavare la traiettoria numericamente
10
G. Bracco - Appunti di Fisica Generale
19
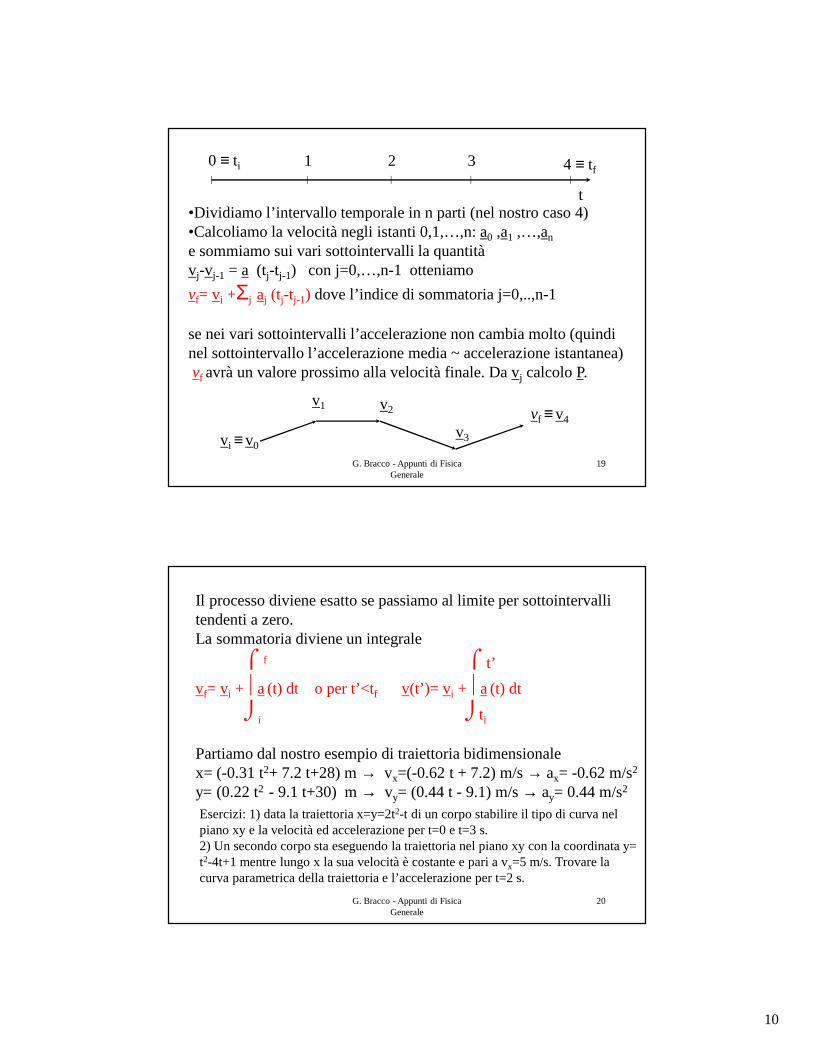
•Dividiamo l’intervallo temporale in n parti (nel nostro caso 4)•Calcoliamo la velocità negli istanti 0,1,…,n: a0 ,a1 ,…,an
e sommiamo sui vari sottointervalli la quantità vj-vj-1 = a (tj-tj-1) con j=0,…,n-1 otteniamo
vf= vi +Σj aj (tj-tj-1) dove l’indice di sommatoria j=0,..,n-1
se nei vari sottointervalli l’accelerazione non cambia molto (quindinel sottointervallo l’accelerazione media ~ accelerazione istantanea)vf avrà un valore prossimo alla velocità finale. Da vj calcolo P.
v1 v2
v3
0 ≡ ti 1 2 3 4 ≡ tf
t
vi ≡ v0
vf ≡ v4
G. Bracco - Appunti di Fisica Generale
20
Il processo diviene esatto se passiamo al limite per sottointervallitendenti a zero.La sommatoria diviene un integrale
⌠ f ⌠ t’
vf= vi + a (t) dt o per t’<tf v(t’)= v i + a (t) dt
⌡i ⌡ti
Partiamo dal nostro esempio di traiettoria bidimensionalex= (-0.31 t2+ 7.2 t+28) m → vx=(-0.62 t + 7.2) m/s → ax= -0.62 m/s2
y= (0.22 t2 - 9.1 t+30) m → vy= (0.44 t - 9.1) m/s → ay= 0.44 m/s2
Esercizi: 1) data la traiettoria x=y=2t2-t di un corpo stabilire il tipo di curva nel piano xy e la velocità ed accelerazione per t=0 e t=3 s.2) Un secondo corpo sta eseguendo la traiettoria nel piano xy con la coordinata y= t2-4t+1 mentre lungo x la sua velocità è costante e pari a vx=5 m/s. Trovare la curva parametrica della traiettoria e l’accelerazione per t=2 s.
11
G. Bracco - Appunti di Fisica Generale
21
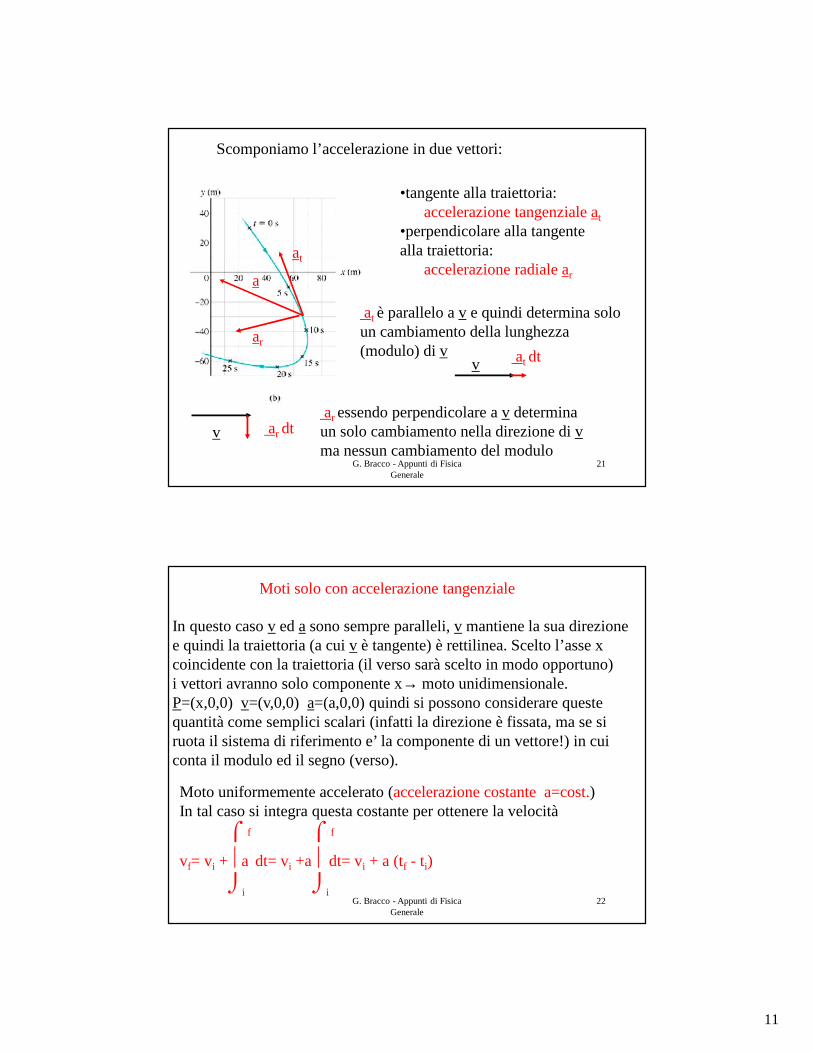
Scomponiamo l’accelerazione in due vettori:
at
ar
a
•tangente alla traiettoria: accelerazione tangenziale at
•perpendicolare alla tangente alla traiettoria:
accelerazione radiale ar
at è parallelo a v e quindi determina soloun cambiamento della lunghezza(modulo) di v
ar essendo perpendicolare a v determinaun solo cambiamento nella direzione di vma nessun cambiamento del modulo
v at dt
v ar dt
G. Bracco - Appunti di Fisica Generale
22
Moti solo con accelerazione tangenziale
In questo caso v ed a sono sempre paralleli, v mantiene la sua direzionee quindi la traiettoria (a cui v è tangente) è rettilinea. Scelto l’asse x coincidente con la traiettoria (il verso sarà scelto in modo opportuno) i vettori avranno solo componente x→ moto unidimensionale.P=(x,0,0) v=(v,0,0) a=(a,0,0) quindi si possono considerare questequantità come semplici scalari (infatti la direzione è fissata, ma se si ruota il sistema di riferimento e’ la componente di un vettore!) in cuiconta il modulo ed il segno (verso).
Moto uniformemente accelerato (accelerazione costante a=cost.)In tal caso si integra questa costante per ottenere la velocità
⌠ f ⌠ f
vf= vi + a dt= vi +a dt= vi + a (tf - ti)
⌡i ⌡i

12
G. Bracco - Appunti di Fisica Generale
23
Si integra ancora per ottenere la posizione (supponiamo moto lungo x)
⌠ f ⌠ f
xf= xi + v(t) dt= xi + (vi + a (t - ti)) dt=
⌡i ⌡i
= xi + vi (tf - ti)+½ a (tf - ti)2
Sono possibili delle ovvie semplificazioni :•se scelgo l’origine nel punto iniziale xi =0•se scelgo l’origine dei tempi nell’istante iniziale ti =0
Quindi xf =v tf +½ a tf2 e facendo cadere il pedice fx =v t +½ a t2
(però bisogna ricordarsi che sono state fatte queste assunzioni)vediamo delle utili formule che derivano da questo risultato
G. Bracco - Appunti di Fisica Generale
24
1D: a=cost moto rettilineo uniformemente accelerato1) v = v0+at (v0 velocità iniziale a t=0, v velocità al tempo t)2) x-x0 = v0t+½at2 (x0 posizione iniziale a t=0, x posizione al tempo t)
ricaviamo il tempo t dalla seconda equazione t=(v-v0)/ae messo nella terza (x-x0 )= v0 (v-v0)/a +½a((v-v0)/a)2
a(x-x0 )= v0 (v-v0) +½(v-v0) 2 = v0 v-v0 2 +½(v 2 +v0
2-2v0 v)=½(v 2 -v0 2)
3) v 2 =v0 2+2 a(x-x0 )
x-x0 = ½ v0t+½ (v0+at)t = ½ v0t+½ vt = ½ (v0+v)t dove ½ (v0+v) = vel. media 4) x-x0 == ½ (v0+v)t
v0 = v - at , x-x0 = (v - at )t+½at2 = vt- ½at2 in funzione della vel. Finale
5) x-x0 = vt- ½at2

13
G. Bracco - Appunti di Fisica Generale
25
In 2D: per avere un moto in 2D occorre che a e v0 non siano paralleli In particolare per la caduta dei gravi l’accelerazione è verticale e seil moto ha una componente della velocità orizzontale esso avviene indue dimensioni. Dal punto di vista cinematico abbiamo visto che essopuò essere trattato in modo indipendente lungo le due direzioni.
Nota: dal punto di vista dinamico questo potrebbe non essere vero:ad es. se le accelerazioni (legate alle forze come vedremo in seguito)dipendono dal modulo della velocità, la componente del moto x (o y)sarà legata alla componente y (o x).
In generale il moto è di tipo parabolico essendo l’accelerazione costante
Esercizio: ricavare le seguenti quantità legate al moto di un proiettileGittata R= (v0
2 /g) sin (2 θ0) e massima quota h= (v0 sin (θ0)) 2 /(2g)(g acc. di gravità, v0= vel. Iniziale, θ0 angolo di tiro)
G. Bracco - Appunti di Fisica Generale
26
Moti solo con accelerazione radiale
In questo caso v ed a sono sempre perpendicolari, il modulo di v rimanecostante ma v cambia sempre la sua direzione. Se supponiamo che anche a sia costantein modulo, la traiettoria è una circonferenza ed il moto è circolare uniforme. Scegliamo il piano xy coincidente con quello della traiettoria.
I vettori avranno solo componente xy→ moto bidimensionale.P=(x,y,0) v=(vx, vy,0) a=(ax, ay,0)
cerchiamo di trovare il legame fra il modulo di a e di v.
14
G. Bracco - Appunti di Fisica Generale
27
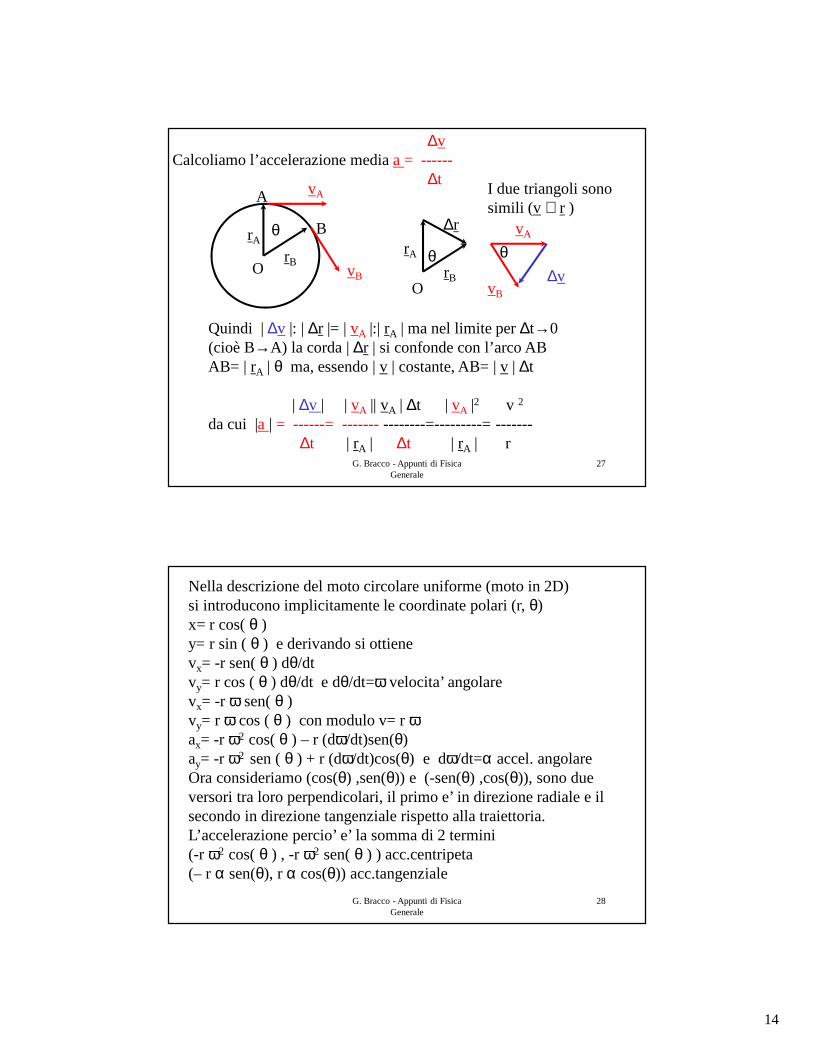
∆vCalcoliamo l’accelerazione mediaa = ------
∆t
O
A
B
vA
vB
I due triangoli sonosimili (v ⊥ r )
vA
vB
Quindi | ∆v |: | ∆r |= | vA |:| rA | ma nel limite per ∆t→0(cioè B→A) la corda | ∆r | si confonde con l’arco ABAB= | rA | θ ma, essendo | v | costante, AB= | v | ∆t
| ∆v | | vA || vA | ∆t | vA |2 v 2
da cui |a | = ------= ------- --------=---------= -------∆t | rA | ∆t | rA | r
O∆v
rA
rB
∆r
rA
rB
θ
θ θ
G. Bracco - Appunti di Fisica Generale
28
Nella descrizione del moto circolare uniforme (moto in 2D)si introducono implicitamente le coordinate polari (r, θ)x= r cos( θ )y= r sin ( θ ) e derivando si ottienevx= -r sen( θ ) dθ/dtvy= r cos ( θ ) dθ/dt e dθ/dt=ω velocita’ angolarevx= -r ω sen( θ ) vy= r ω cos ( θ ) con modulo v= r ωax= -r ω2 cos( θ ) – r (dω/dt)sen(θ)ay= -r ω2 sen ( θ ) + r (dω/dt)cos(θ) e dω/dt=α accel. angolareOra consideriamo (cos(θ) ,sen(θ)) e (-sen(θ) ,cos(θ)), sono due versori tra loro perpendicolari, il primo e’ in direzione radiale e il secondo in direzione tangenziale rispetto alla traiettoria.L’accelerazione percio’ e’ la somma di 2 termini(-r ω2 cos( θ ) , -r ω2 sen( θ ) ) acc.centripeta(– r α sen(θ), r α cos(θ)) acc.tangenziale
15
G. Bracco - Appunti di Fisica Generale
29
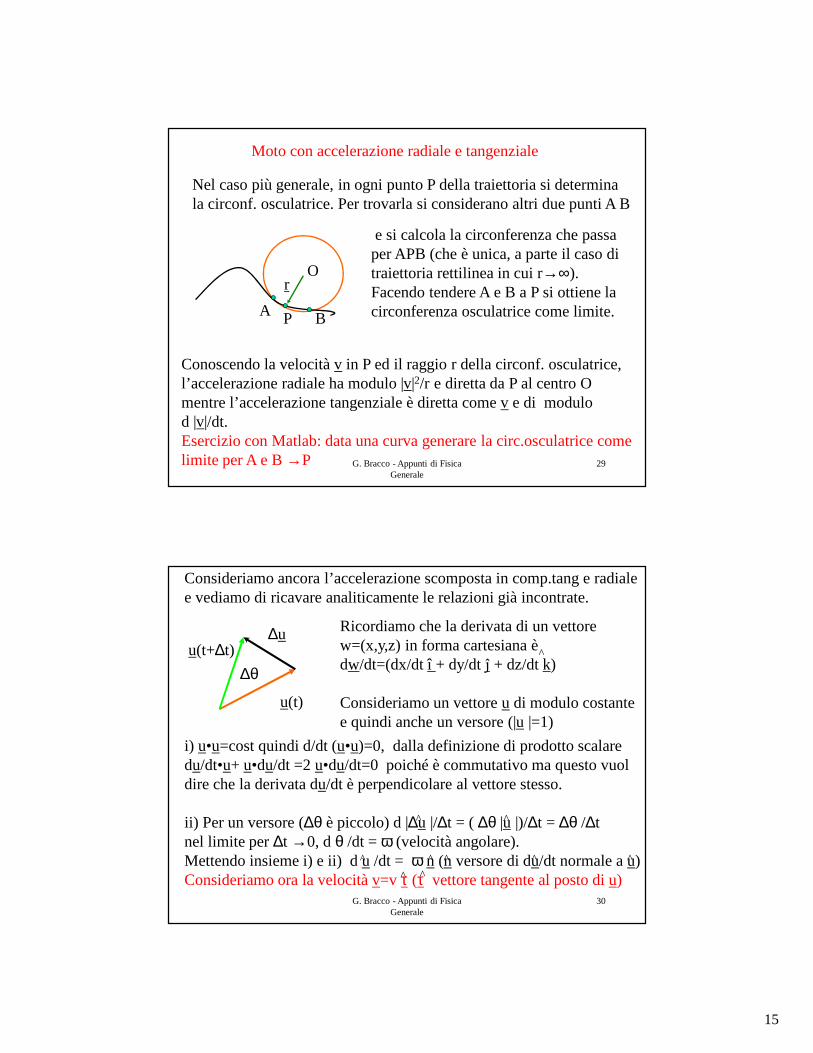
Nel caso più generale, in ogni punto P della traiettoria si determinala circonf. osculatrice. Per trovarla si considerano altri due punti A B
A BP
e si calcola la circonferenza che passa per APB (che è unica, a parte il caso ditraiettoria rettilinea in cui r→∞).Facendo tendere A e B a P si ottiene lacirconferenza osculatrice come limite.
Conoscendo la velocità v in P ed il raggio r della circonf. osculatrice, l’accelerazione radiale ha modulo |v|2/r e diretta da P al centro Omentre l’accelerazione tangenziale è diretta come v e di modulo d |v|/dt.Esercizio con Matlab: data una curva generare la circ.osculatrice comelimite per A e B →P
Moto con accelerazione radiale e tangenziale
rO
G. Bracco - Appunti di Fisica Generale
30
∆θ
u(t)
u(t+∆t)
Consideriamo ancora l’accelerazione scomposta in comp.tang e radiale e vediamo di ricavare analiticamente le relazioni già incontrate.
Ricordiamo che la derivata di un vettore w=(x,y,z) in forma cartesiana èdw/dt=(dx/dt î + dy/dt ĵ + dz/dt k)
Consideriamo un vettore u di modulo costantee quindi anche un versore (|u |=1)
i) u•u=cost quindi d/dt (u•u)=0, dalla definizione di prodotto scalaredu/dt•u+ u•du/dt =2 u•du/dt=0 poiché è commutativo ma questo vuol dire che la derivata du/dt è perpendicolare al vettore stesso.
ii) Per un versore (∆θ è piccolo) d |∆u |/∆t = ( ∆θ |u |)/∆t = ∆θ /∆tnel limite per ∆t →0, d θ /dt = ω (velocità angolare). Mettendo insieme i) e ii) d u /dt = ω n (n versore di du/dt normale a u)Consideriamo ora la velocità v=v τ (τ vettore tangente al posto di u)
∆u^
^ ^
^ ^ ^^^
^ ^
16
G. Bracco - Appunti di Fisica Generale
31
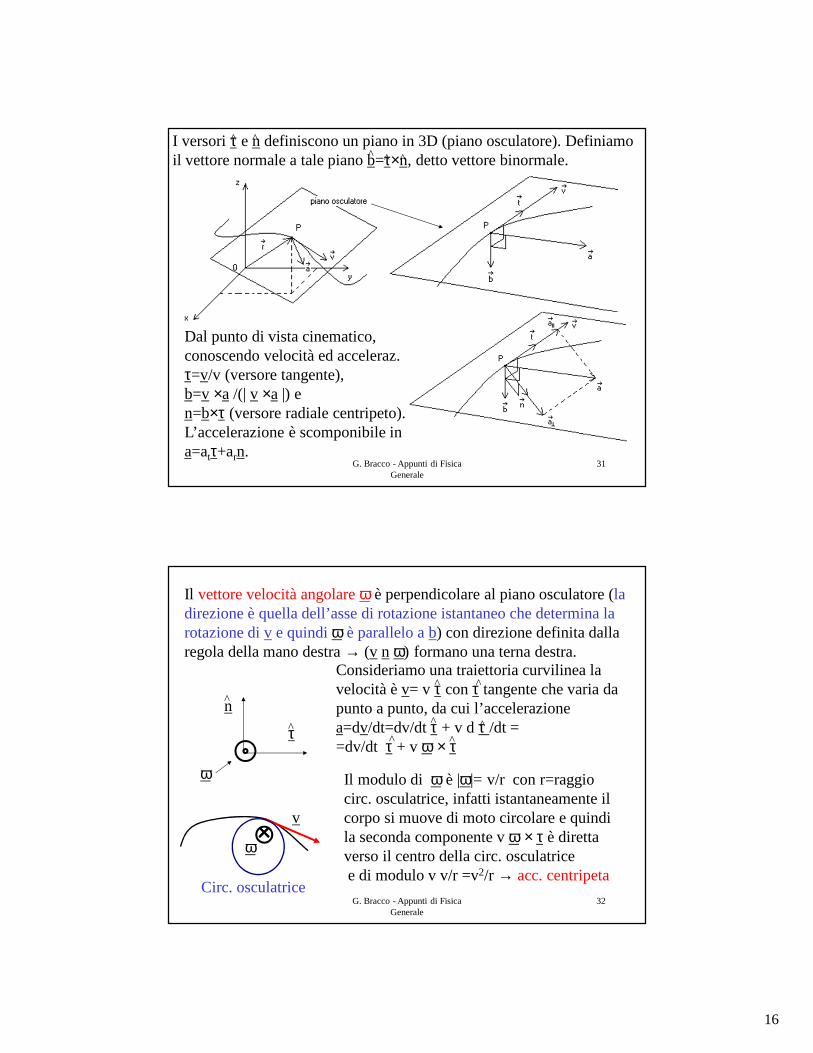
I versori τ e n definiscono un piano in 3D (piano osculatore). Definiamo il vettore normale a tale piano b=τ×n, detto vettore binormale.
^ ^^ ^ ^
Dal punto di vista cinematico, conoscendo velocità ed acceleraz. τ=v/v (versore tangente), b=v ×a /(| v×a |) e n=b×τ (versore radiale centripeto).L’accelerazione è scomponibile in a=atτ+arn.
G. Bracco - Appunti di Fisica Generale
32
Il vettore velocità angolare ω è perpendicolare al piano osculatore (la direzione è quella dell’asse di rotazione istantaneo che determina la rotazione di v e quindi ω è parallelo a b) con direzione definita dalla regola della mano destra → (v n ω) formano una terna destra.
τ
n
ω
Consideriamo una traiettoria curvilinea la velocità è v= v τ con τ tangente che varia da punto a punto, da cui l’accelerazionea=dv/dt=dv/dt τ + v d τ /dt ==dv/dt τ + v ω × τ
^
^
^
^
Il modulo di ω è |ω|= v/r con r=raggio circ. osculatrice, infatti istantaneamente il corpo si muove di moto circolare e quindi la seconda componente v ω × τ è diretta verso il centro della circ. osculatricee di modulo v v/r =v2/r → acc. centripeta
××××ω
Circ. osculatrice
v
^
^
^
^

17
G. Bracco - Appunti di Fisica Generale
33
Questo modo di procedere deriva dalla rappresentazione intrinseca della traiettoria: definiamo una coordinata curvilinea sche misura la distanza (rettificata) da un punto origine O (→ somma dei tratti tangenti infinitesimi che misurano i cammini percorsi con segno + se nella direzione positiva) e quindi la rappresentazione parametrica della curva diviene
Os
r= r(s) ovvero x=x(s) y=y(s) z=z(s)precedentemente con la rappresentazione cartesiana t era un parametro particolare, il tempo, ora s è una distanza.
Alla rappresentazione intrinseca r= r(s) ovvero x=x(s) y=y(s) z=z(s)aggiungiamo come varia s nel tempo s=s(t) (legge oraria)in tal modo si è separata la dipendenza geometrica da quella temporale.
G. Bracco - Appunti di Fisica Generale
34
Os
O s
→
Il vettore tangente alla curva sarà dr/ds=(dx/ds, dy/ds, dz/ds)= u (= τ) e si può dimostrare che questo è il versore (nel limite la corda drdiviene uguale all’arco ds) tangente alla traiettoria.Perciò la velocità v=dr/dt=(dr/ds) (ds/dt) si separa nel versore tangentee nel modulo v=v u = ds/dt u (rappresentazione intrinseca della velocità)l’accelerazione da quanto visto prima è a=dv/dt=dv/dt u + v du/dt ==at u + v ω × u = d2s/dt2 u + (ds/dt)2/r n dove il versore n è stato definito prima ed r è il raggio della circ. osculatrice nel piano definito dai due versori (r definisce il raggio di curvaturadella traiettoria, 1/r è detta curvatura)
^
^ ^
^ ^
^ ^ ^ ^
Rettificazione della curva

18
G. Bracco - Appunti di Fisica Generale
35
Queste relazioni permettono di classificare i motiv= ds/dt u a=d2s/dt2 u + (ds/dt)2/r n
basandoci sull’equazione orariamoti con ds/dt=costante moti uniformi moti con d2s/dt2=costante moti uniformemente accelerati
basandoci sulla geometria della traiettoria
moti rettilinei r → ∞ (curvatura=0)moti circolari r=cost
La trattazione cartesiana e quella intrinseca sono equivalenti, inoltre si possono usare altre rappresentazioni basate su differenti tipi di coordinate le più usate, oltre a quella cartesiana, sono: polare in 2D, sferica e cilindrica in 3D
^^ ^
G. Bracco - Appunti di Fisica Generale
36
Esempio: come abbiamo visto nella descrizione del moto circolare uniforme (moto in 2D) si introducono le coordinate polari (r, θ)x= r cos( θ )y= r sin ( θ ) ciò era particolarmente comodo perché r=cost. e ilmoto viene descritto solo da θ (legato all’ascissa curvilinea s=r θma r=cost e si tien conto automaticamente di questo vincolo)
questo premette di introdurre variabili angolari per descrivere il motoanziché variabili lineariposizione x → θ posizione angolarevelocità dx/dt = v → dθ/dt = ω velocità angolareaccel.tangenziale dv/dt = a → dω/dt = α accelerazione angolareovviamente le quantità sono collegate dalle seguenti relazionix= r θ v= r ω at= r α e per le variabili angolari esistono relazioni analoghe a quelle viste per x,v,a ad esempioθ=(1/2) α t2+ ω 0 t+ θ0.

19
G. Bracco - Appunti di Fisica Generale
37
Moto circolare uniforme e moto armonico
Consideriamo il moto di un punto su una circonferenzadi raggio r. La velocità sia in modulo constante.Scegliamo un sistema di riferimento xy sul piano dellatraiettoria con origine nel centro della circonferenzaLe equazioni nel tempo che descrivono la traiettoria sono
x= r cos(ωt + φ)y= r sin (ωt + φ)
x2 + y2 = r2 (quadrato del modulo vettore posizione)
la costante ω (unità rad/s) è detta velocità angolarementre φ la fase iniziale.
θ
G. Bracco - Appunti di Fisica Generale
38
Il moto può anche essere descritto dalla variabile angolare θ (angolo rispetto asse x) che varia nel tempo,l’arco descritto è dato da r θ(t)x= r cos(θ(t)) y= r sin (θ(t)) Assumendo un moto a velocita’ angolare costanteθ=ωt + φ. La velocità del moto sarà (• indica la derivata rispetto al tempo)
x= -r sin(θ(t)) θ(t) = -r ωsin(ωt + φ)y= r cos (θ(t)) θ(t) = r ωcos(ωt + φ)
da cui θ(t)= ω. Ma x2 + y2 = v2 (quadrato del modulo vettore velocità)da cui |v| = r ωe quindi anche v e’ costante.
θ
• •
• •
•
• •
20
G. Bracco - Appunti di Fisica Generale
39
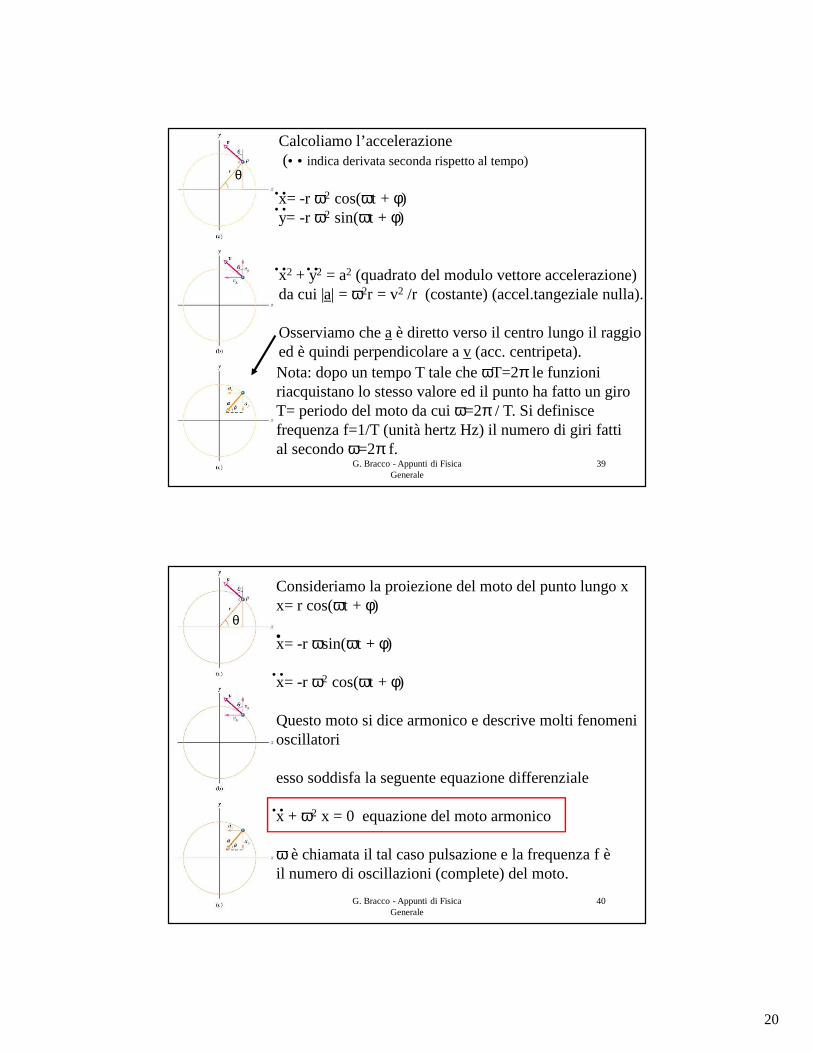
Calcoliamo l’accelerazione(• • indica derivata seconda rispetto al tempo)
x= -r ω2 cos(ωt + φ)y= -r ω2 sin(ωt + φ)
x2 + y2 = a2 (quadrato del modulo vettore accelerazione)da cui |a| = ω2r = v2 /r (costante) (accel.tangeziale nulla).
Osserviamo che a è diretto verso il centro lungo il raggioed è quindi perpendicolare a v (acc. centripeta).
θ• •• •
• • • •
Nota: dopo un tempo T tale che ωT=2π le funzioni riacquistano lo stesso valore ed il punto ha fatto un giroT= periodo del moto da cui ω=2π / T. Si definiscefrequenza f=1/T (unità hertz Hz) il numero di giri fattial secondo ω=2π f.
G. Bracco - Appunti di Fisica Generale
40
Consideriamo la proiezione del moto del punto lungo xx= r cos(ωt + φ)
x= -r ωsin(ωt + φ)
x= -r ω2 cos(ωt + φ)
Questo moto si dice armonico e descrive molti fenomenioscillatori
esso soddisfa la seguente equazione differenziale
x + ω2 x = 0 equazione del moto armonico
ω è chiamata il tal caso pulsazione e la frequenza f èil numero di oscillazioni (complete) del moto.
θ
• •
•
• •

21
G. Bracco - Appunti di Fisica Generale
41
Osservazione
Le equazioni che descrivono la traiettoria del motocircolare possono essere scritte come
x= r cos(ωt + φ)y= r cos (ωt + φ + ½ π)= r sin (ωt + φ) od anche
x= r sin(ωt + φ)y= r sin(ωt + φ + ½ π)
quindi il moto circolare può anche essere pensato come la sovrapposizione di due moti armonici lungo x e lungo y di uguale ampiezza e pulsazionema sfasati di ½ π.
θ













![Lez-scmat-cinematica.ppt [modalità compatibilità]personalpages.to.infn.it/.../Lez-scmat-cinematica.pdf · A. Romero Fisica I - Cinematica 2 Alcuni concetti fondamentali: 1) EVENTO](https://static.fdocumenti.com/doc/165x107/5ba4d6ed09d3f247428b9b07/lez-scmat-modalita-compatibilitapersonalpagestoinfnitlez-scmat-cinematicapdf.jpg)



