10-Complementi Al Problema Cinematico e Statico Delle Travature
Università degli Studi Roma Tre
Facoltà di IngegneriaCorso di laurea in Ingegneria Civile
Indirizzo Costruzioni Civili
Prova finale
Calcolo di travature reticolari in ambiente
MATLAB
Relatore:Prof. Claudio Valente
Correlatore:Ing. Stefano Gabriele
Candidato:Mattia Campolese
Anno Accademico: 2006-2007
SommarioIntroduzione.......................................................................................................2
Le strutture reticolari.........................................................................................................2Geometria.................................................................................................................................................3
Analisi strutturale..............................................................................................4Sistemi isostatici................................................................................................................4
Metodo dei nodi........................................................................................................................................4Sistemi iperstatici..............................................................................................................5
Metodo degli spostamenti........................................................................................................................5Soluzione manuale con il metodo degli spostamenti.......................................................11
Dati.........................................................................................................................................................11Equazioni di equilibrio...........................................................................................................................12Calcolo deformazioni.............................................................................................................................13Soluzione della matrice degli spostamenti.............................................................................................15
Implementazione MATLAB............................................................................17L'applicazione CAMP2000..............................................................................................18
Il preprocessore......................................................................................................................................18Il kernel...................................................................................................................................................24Il postprocessore.....................................................................................................................................29Esempio dimostrativo.............................................................................................................................32
Soluzione automatica con il metodo degli spostamenti...................................................38Preparazione dei dati..............................................................................................................................38Calcolo in MATLAB..............................................................................................................................39Calcolo in SAP2000...............................................................................................................................42
Applicazioni....................................................................................................43Confronto tra diverse travature........................................................................................43
Howe......................................................................................................................................................43Pratt........................................................................................................................................................47Polonceau [1]..........................................................................................................................................50Polonceau [2]..........................................................................................................................................53Confronto tra la Howe e la Pratt.............................................................................................................56Confronto tra le due Polonceau..............................................................................................................58Confronto globale...................................................................................................................................59
Capriata metallica per capannone industriale..................................................................60Proprietà della capriata...........................................................................................................................61Modellazione statica: scelta dei vincoli..................................................................................................63Spostamenti teorici.................................................................................................................................68Spostamenti reali....................................................................................................................................73
Appendice........................................................................................................77Contenuto del pacchetto software....................................................................................77Schermate preprocessore.................................................................................................80Codice sorgente script MATLAB....................................................................................82
Riferimenti bibliografici..................................................................................92Ringraziamenti................................................................................................93
1
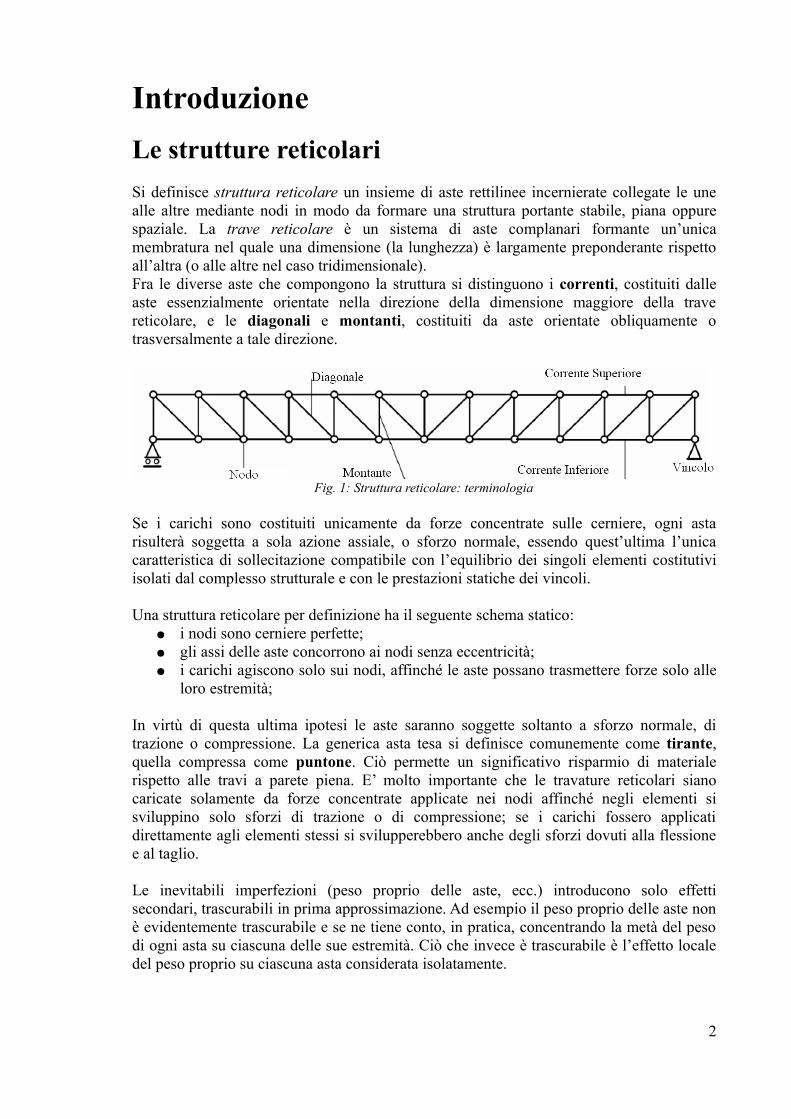
IntroduzioneLe strutture reticolariSi definisce struttura reticolare un insieme di aste rettilinee incernierate collegate le une alle altre mediante nodi in modo da formare una struttura portante stabile, piana oppure spaziale. La trave reticolare è un sistema di aste complanari formante un’unica membratura nel quale una dimensione (la lunghezza) è largamente preponderante rispetto all’altra (o alle altre nel caso tridimensionale).Fra le diverse aste che compongono la struttura si distinguono i correnti, costituiti dalle aste essenzialmente orientate nella direzione della dimensione maggiore della trave reticolare, e le diagonali e montanti, costituiti da aste orientate obliquamente o trasversalmente a tale direzione.
Se i carichi sono costituiti unicamente da forze concentrate sulle cerniere, ogni asta risulterà soggetta a sola azione assiale, o sforzo normale, essendo quest’ultima l’unica caratteristica di sollecitazione compatibile con l’equilibrio dei singoli elementi costitutivi isolati dal complesso strutturale e con le prestazioni statiche dei vincoli.
Una struttura reticolare per definizione ha il seguente schema statico:● i nodi sono cerniere perfette;● gli assi delle aste concorrono ai nodi senza eccentricità;● i carichi agiscono solo sui nodi, affinché le aste possano trasmettere forze solo alle
loro estremità;
In virtù di questa ultima ipotesi le aste saranno soggette soltanto a sforzo normale, di trazione o compressione. La generica asta tesa si definisce comunemente come tirante, quella compressa come puntone. Ciò permette un significativo risparmio di materiale rispetto alle travi a parete piena. E’ molto importante che le travature reticolari siano caricate solamente da forze concentrate applicate nei nodi affinché negli elementi si sviluppino solo sforzi di trazione o di compressione; se i carichi fossero applicati direttamente agli elementi stessi si svilupperebbero anche degli sforzi dovuti alla flessione e al taglio.
Le inevitabili imperfezioni (peso proprio delle aste, ecc.) introducono solo effetti secondari, trascurabili in prima approssimazione. Ad esempio il peso proprio delle aste non è evidentemente trascurabile e se ne tiene conto, in pratica, concentrando la metà del peso di ogni asta su ciascuna delle sue estremità. Ciò che invece è trascurabile è l’effetto locale del peso proprio su ciascuna asta considerata isolatamente.
2
Fig. 1: Struttura reticolare: terminologia
Una generica struttura tridimensionale o piana si identifica per sua stessa definizione con un sistema di corpi rigidi vincolati mutuamente e con l’esterno. Tuttavia è comodo considerare invertiti i ruoli dei nodi e delle aste: riguardare cioè i primi come corpi puntiformi, ciascuno dotato di 2 (o 3 nello spazio) gradi di libertà, e le seconde come vincoli interni semplici che controllano la distanza relativa tra i due nodi.
Geometria
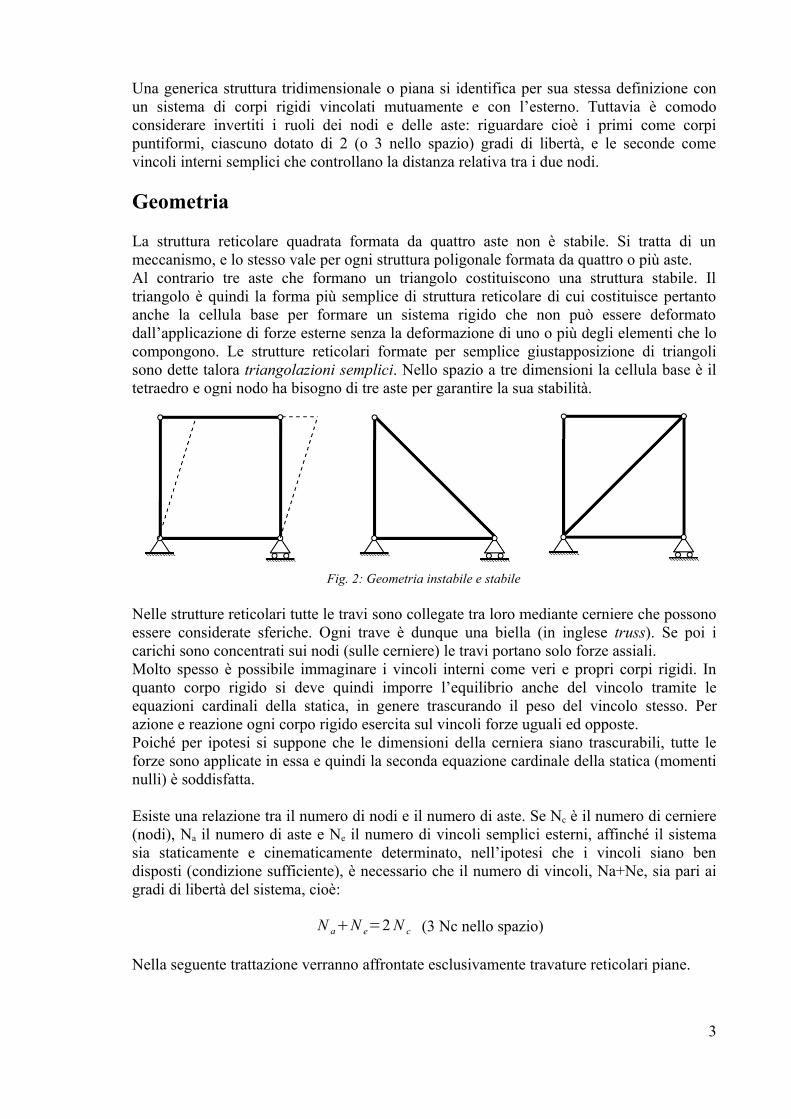
La struttura reticolare quadrata formata da quattro aste non è stabile. Si tratta di un meccanismo, e lo stesso vale per ogni struttura poligonale formata da quattro o più aste.Al contrario tre aste che formano un triangolo costituiscono una struttura stabile. Il triangolo è quindi la forma più semplice di struttura reticolare di cui costituisce pertanto anche la cellula base per formare un sistema rigido che non può essere deformato dall’applicazione di forze esterne senza la deformazione di uno o più degli elementi che lo compongono. Le strutture reticolari formate per semplice giustapposizione di triangoli sono dette talora triangolazioni semplici. Nello spazio a tre dimensioni la cellula base è il tetraedro e ogni nodo ha bisogno di tre aste per garantire la sua stabilità.
Nelle strutture reticolari tutte le travi sono collegate tra loro mediante cerniere che possono essere considerate sferiche. Ogni trave è dunque una biella (in inglese truss). Se poi i carichi sono concentrati sui nodi (sulle cerniere) le travi portano solo forze assiali.Molto spesso è possibile immaginare i vincoli interni come veri e propri corpi rigidi. In quanto corpo rigido si deve quindi imporre l’equilibrio anche del vincolo tramite le equazioni cardinali della statica, in genere trascurando il peso del vincolo stesso. Per azione e reazione ogni corpo rigido esercita sul vincoli forze uguali ed opposte.Poiché per ipotesi si suppone che le dimensioni della cerniera siano trascurabili, tutte le forze sono applicate in essa e quindi la seconda equazione cardinale della statica (momenti nulli) è soddisfatta.
Esiste una relazione tra il numero di nodi e il numero di aste. Se Nc è il numero di cerniere (nodi), Na il numero di aste e Ne il numero di vincoli semplici esterni, affinché il sistema sia staticamente e cinematicamente determinato, nell’ipotesi che i vincoli siano ben disposti (condizione sufficiente), è necessario che il numero di vincoli, Na+Ne, sia pari ai gradi di libertà del sistema, cioè:
N aN e=2 N c (3 Nc nello spazio)
Nella seguente trattazione verranno affrontate esclusivamente travature reticolari piane.
3
Fig. 2: Geometria instabile e stabile

Analisi strutturaleSistemi isostaticiIl problema statico delle strutture reticolari consiste nel calcolo dello sforzo normale in tutte le aste. Tale calcolo è possibile servendosi delle sole equazioni di equilibrio.Tutte le travi sono bielle caricate agli estremi: ogni trave sopporta solo carico assiale costante lungo la trave. Si noti che questa semplice osservazione permette di affermare che le equazioni cardinali della statica sono già automaticamente soddisfatte per ogni asta isolata, qualunque sia il valore delle azioni assiali. In realtà ciò che resta da fare è imporre l’equilibrio dei perni delle cerniere, cioè dei vincoli interni.
Il primo passo nell’analisi di una struttura reticolare è isolarne una parte e considerare il sistema di forze agente su di essa. Se alcune forze sono note, è possibile calcolare le altre mediante le equazioni cardinali della statica, dato che la porzione in esame dovrà risultare in equilibrio. L’estensione della porzione di struttura scelta per lo studio dell’equilibrio non è vincolata in alcun modo. Potrebbe essere limitata ad un singolo nodo o ad un insieme composto da diversi elementi e nodi. Il sistema di forze considerato consiste non solamente di ciascuna forza esterna applicata alla parte in esame, ma anche delle forze interne alla struttura.
Una tecnica per la soluzione di strutture reticolari isostatiche è il metodo dei nodi.
Metodo dei nodi
In diverse geometrie di travature è possibile risolvere lo stato di sollecitazione operando per nodi successivi. Tale procedimento richiede di individuare un nodo semplice o canonico, definito come nodo in cui convergono due aste e di risolverlo mediante le due equazioni di equilibrio del nodo stesso. Si procede quindi nell’isolare un nodo della struttura reticolare tagliando le aste che vi convergono. Si esplicitano quindi gli sforzi normali trasmessi dalle aste al nodo e le eventuali forze esterne. Si scrivono infine le equazioni di equilibrio per il nodo in esame.Poiché le forze sono convergenti al nodo, l’equazione di equilibrio dei momenti rispetto al nodo stesso è – come detto prima – identicamente soddisfatta. Nel caso piano si hanno pertanto a disposizione per ogni nodo solo le rimanenti due equazioni di equilibrio:
∑ F x ,nodo=0 ;∑ F y ,nodo
Si procede in sequenza, scrivendo l’equilibrio di un primo nodo e poi, servendosi dei risultati ottenuti, di un secondo e così di seguito. Tuttavia poiché si hanno a disposizione solo due equazioni di equilibrio per nodo, è necessario disporre di almeno un nodo a cui sono collegate solo due aste, in modo da avere in partenza due sole incognite. Successivamente si procederà utilizzando di volta in volta nodi per i quali si abbiano due sole incognite.
4
Sistemi iperstaticiNei sistemi iperstatici la sovrabbondanza di vincoli rende necessario l'utilizzo di equazioni di congruenza in aggiunta a quelle di equilibrio. Esistono due metodologie di soluzione di questi problemi: il metodo delle forze (si sostituiscono ai vincoli sovrabbondanti le loro prestazioni statiche) e il metodo degli spostamenti, più laborioso dal punto di vista computazionale ma facilmente ed efficacemente automatizzabile.
Metodo degli spostamenti
Il metodo degli spostamenti si basa sull'imposizione dell'equilibrio nei punti nodali della struttura. Per ciascun nodo sono messe a bilancio le forze esterne note e le forze interne da determinarsi che ciascun elemento convergente nel nodo esercita sul nodo stesso.Le forze esterne vengono raccolte nel vettore dei termini noti mentre quelle interne sono espresse in funzione degli spostamenti nodali (gradi di libertà) per il tramite della matrice di rigidezza K. Si è infatti nel campo elastico-lineare e si modella l'asta come una molla avente la sua rigidezza k, soggetta a forze applicate ai suoi due estremi generanti gli spostamenti (si veda fig. 3).
Dati di input
Poiché l'equilibrio è scritto nei gradi di libertà attivi (ovvero i nodi non vincolati) della struttura il primo passo consiste nell'elencazione di tutti i nodi di cui essa si compone e nell'individuazione dei nodi sede di vincolo. La posizione dei nodi nello spazio è definita dalle coordinate nodali rispetto ad un “riferimento globale” (valido per l'intera struttura).La tabella dei vincoli definisce completamente i gradi di libertà (gdl) del problema, cioè il numero di equazioni di equilibrio, esprimibili come 0 = gdl bloccato e i = gdl libero.
Il secondo passo consiste nel definire la tabella delle incidenze che collega ogni asta ai suoi due nodi di estremità. E' necessario inoltre per costruire la matrice di rigidezza una matrice che associ ad ogni asta le caratteristiche geometriche (area) e meccaniche (materiale e modulo elastico) di cui sono composte le aste.
La trasformazione del modello meccanico della struttura in modello numerico in forma matriciale è completata tramite una serie di matrici che ne stabiliscono la topologia, i vincoli e la costituzione in un riferimento globale.
Riassumendo, i dati in ingresso necessari al sistema sono:
nel numero di asten numero di nodi
npel numero di nodi per asta (negli elementi TRUSS è sempre pari a 2)
ngdl numero dei gradi di libertà per nodo (negli elementi TRUSS è sempre pari a 2)
sdof = n * ngdl gradi di libertà del sistema
5

gcoord=[X 1 Y 1
X 2 Y 2
⋯ ⋯X i Y i
⋯ ⋯X n Y n
]Matrice delle coordinate geometriche dei nodi rispetto ad un sistema di riferimento cartesiano O(X,Y).
elprop=[E1 A1
E2 A2
⋯ ⋯E i Ai
⋯ ⋯Enel Anel
]Matrice delle proprietà geometriche e dei materiali delle aste (modulo elastico e area della sezione)
nodes=[Nd1, s Nd 1,e
Nd 2,s Nd 2,e
⋯ ⋯Nd i , s Nd i , e
⋯ ⋯Nd nel , s Nd nel , e
]Matrice della connettività dei nodi, indicante per ogni asta il nodo iniziale (s) e quello terminale (e).
bcdof =[Ga
Gb
G c
⋯]
bcval=[ 000⋯]
bcdof: matrice indicante i gradi di libertà del sistema che sono vincolati e quindi assumono il corrispondente valore nullo elencato in bcval .
ff =[f 1, X
f 1,Y
f 2, X
f 2,Y
..f i , X
f i , Y
..f n , X
f n , Y
]Matrice delle forze esterne applicate ai nodi in entrambe le direzioni X e Y.
6
Costruzione della matrice di rigidezza
Si ha che la posizione delle aste nel riferimento globale (e quindi nella struttura) è completamente individuata dai nodi di estremità, infatti la lunghezza è data da:
L= X B−X A2Y B−Y A
2 con le inclinazioni pari a:
cos= 1L X B−X A sen= 1
LY B−Y A
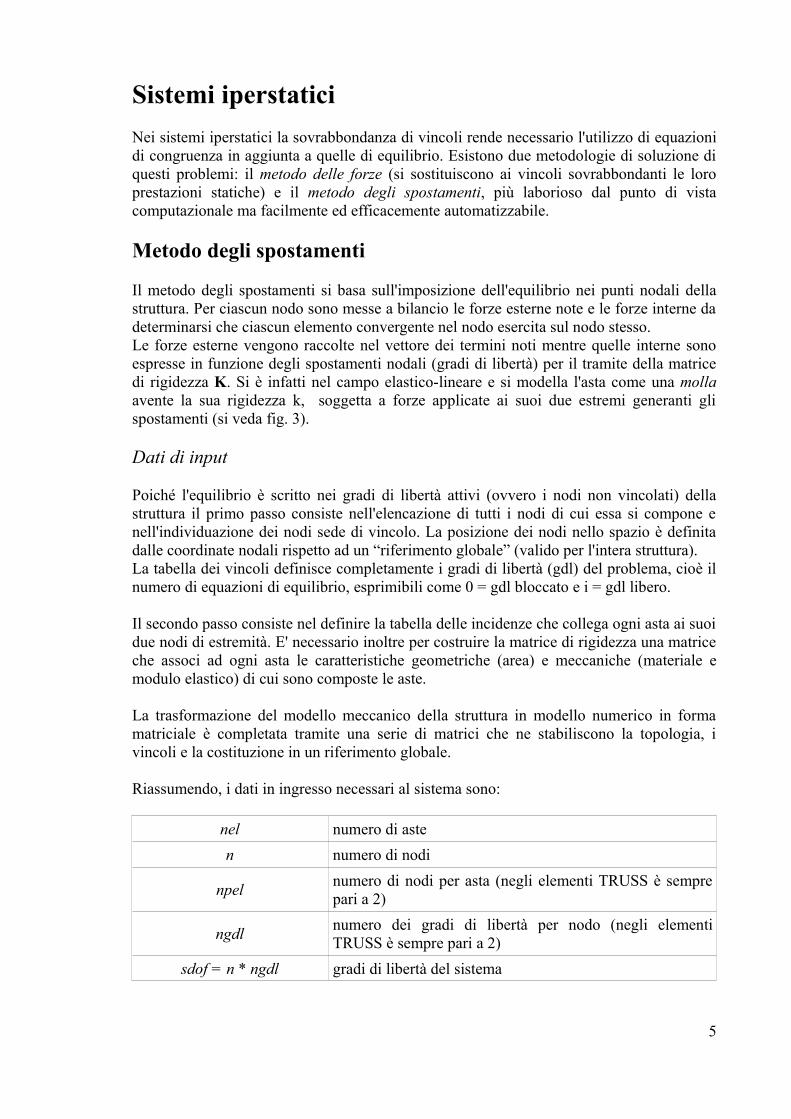
Va definita quindi una procedura automatica per l'effettiva costruzione della matrice di rigidezza. Da un punto di vista algoritmico è conveniente istituire una procedura valida per un'asta e quindi ripeterla identica per tutte quelle della struttura. Ne consegue che è necessario definire dapprima la matrice di rigidezza della singola asta rispetto ad un suo riferimento locale. Essa costituisce il legame elastico tra la variazione di configurazione conseguente allo spostamento dei nodi di estremità e le forze interne che nascono in seguito alle estremità dell'asta stessa:
f L=K L uL
Riferimento globale: assi X,Yspostamenti nodali:
sT=[u A v Au B vB ]T
forze nodali:f T=[H AV A H BV B ]
T
matrice di rigidezza globale: K
Riferimento locale: assi ξ , ζ spostamenti nodali:
sT=[AABB]T
forze nodali:f T=[N A T A N B T B]
T
matrice di rigidezza locale: KL
Considerando le regole di prodotto tra matrici si osserva che se si pone pari ad 1 la i-esima componente di spostamento in sL e tutte le altre nulle il vettore di forze interne corrisponde esattamente alla colonna i-esima di KL . Questa osservazione suggerisce anche il modo di costruire la KL. Si assegna di volta in volta un componente di spostamento unitaria e le altre nulle e si valutano le forze all'estremità dell'asta che così si generano.
Per costruire la prima colonna di KL si assegna dunque ξA = 1 e ζA = ξB = ζB = 0. L'asta è
quindi compressa con sforzo assiale di intensità N= EAL
L=EAL
A=EAL quindi la
forza in A ha lo stesso verso di ξ e NA = EA/L , mentre la forza in B ha verso opposto e NB
= - EA/L (inoltre TA = TB = 0).
7
Fig. 3: Elemento "truss" - sistemi di riferimento

Per costruire la seconda colonna di KL si assegna ξA = 1 e ξA = ξB = ζB = 0; con l'ipotesi di piccoli spostamenti l'asta ruota con moto rigido attorno a B e quindi lo stato di sollecitazione è nullo: NA = NB = TA = TB = 0. La terza e quarta colonna sono costruite allo stesso modo, in modo da ottenere la seguente matrice di rigidezza di elemento locale:
K L=EAL [ 1 0 −1 0
0 0 0 0−1 0 1 00 0 0 0] tipica di un elemento TRUSS.
Per riportare le componenti di forza e spostamento dal sistema di riferimento locale a quello globale è necessario effettuare una trasformazione di KL tramite la matrice di rotazione R:
=X cosY sin =X cosY sin []=[ cos sin
−sin cos][XY ] R=[ cos sin
−sin cos]quindi gli spostamenti nel sistema di riferimento globale sono dati da:
[A
A
B
B]=[ cos sin 0 0
−sin cos 0 00 0 cos sin0 0 −sin cos][
u A
vA
uB
vB]=[R 0
0 R][u A
vA
uB
vB]
esprimibile in forma sintetica sia per gli spostamenti che per le componenti di forza da:
sL=T uf L=T f
Essendo T=[R 00 R] una matrice ortogonale, e quindi tale che T-1 = TT, la matrice di
rigidezza dell'asta i-esima espressa nel sistema di riferimento globale è data da:
f L=K L uL⇒T i f =K L T i u⇒ f =T iT K L T i u⇒ K i=T iT K LT i assumendo u=[1000] per
ottenere esclusivamente la deformazione assiale.
8

In forma esplicita si ha:
K i= EAL [ cos2 cos sin −cos2 −cos sin
cossin sin2 −cossin −sin2−cos2 −cos sin cos2 cos sin
−cossin −sin2 cossin sin2]
Questa matrice è singolare, ovvero det Ki = 0 poiché essa si rifersce ad un elemento biella non vincolato il cui unico grado di libertà deformativo è associato alla variazione di lunghezza dell'asta, ovvero delle 4 componenti di spostamento solo una è associata alla deformazione dell'asta mentre le altre tre definiscono un movimento rigido nel piano.
Le matrici di rigidezza delle aste Ki sono partizionabili in quattro sottomatrici 2x2 di ordine pari ai gdl nodali dal seguente significato meccanico: le matrici sulla diagonale principale KAA e KBB tengono conto dell'effetto che gli spostamenti di un nodo (A o B) hanno sulle forze del nodo stesso (A o B), mentre le matrici fuori diagonale KAB e KBA = KAB
T considerano l'effetto che gli spostamenti di un nodo (A o B) hanno sulle forze dell'altro nodo (B o A):
K i=[K AA K AB
K ABT K BB]
La matrice di rigidezza dell'intera struttura Ktot è una matrice quadrata di ordine 2nx2n con n numero di nodi e 2 i gdl per nodo. Le righe sono tante quante le equazioni di equilibrio che si possono scrivere per la struttura considerata non vincolata, le colonne tante quante le componenti di spostamento complessive della struttura in assenza di vincoli. Anche la Ktot
può essere partizionata in sottomatrici 2x2 con lo stesso significato delle sottomatrici di asta:
K tot=[K 11 K 12 K13 K 14
K 22 K 23 K 24
sym K 33 K 34
K 44]
La collocazione delle Ki nella Ktot è semplice operando per sottomatrici. Procedendo asta per asta si prende la KAA e la si aggiunge sommandola di volta in volta alla Kii con indici di nodo corrispondenti, idem per la KBB. Entrambe queste sottomatrici contribuiscono alle sottomatrici della diagonale principale di Ktot. Le sottomatrici KAB e KBA contribuiscono ai termini fuori diagonale della KTOT e si trattano allo stesso modo sommandole alle KIJ con indici di nodo corrispondenti.
La KTOT è una matrice singolare in quanto non considera i vincoli. I nodi vincolati non contribuiscono alle equazioni di equilibrio e le corrispondenti righe e colonne devono pertanto essere eliminate dalla Ktot .
9

Calcolo degli spostamenti nodali
Costruita la Ktot e note le forze esterne ff è possibile calcolare la matrice degli spostamenti nodali:
D i=inv K tot ⋅ ff
ovvero un vettore 2n contenente gli spostamenti nei rispettivi gradi di libertà attivi.
Il sistema è ora risolto.
Calcoli successivi
Per ottenere gli sforzi assiali e le tensioni agenti in ogni singola asta è necessario per ogni asta calcolare il vettore delle forze di elemento:
K i[us
v s
ue
ve]
i
=[H s
V s
H e
V e]
i
ricostruendo la matrice di rigidezza d'elemento e moltiplicandola per il vettore degli spostamenti associati ai gradi di libertà dei nodi di estremità.
Gli sforzi normali e le tensioni sono quindi date da:
∣N i∣=H si 2V s
i 2
∣i∣=∣N i∣Ai
Il vettore di forze di elemento è tale che Hs = - He e Vs = - Ve, pertanto è sufficiente controllare il segno di He per determinare se gli sforzi sono di trazione o di compressione.
10
Soluzione manuale con il metodo degli spostamentiE' evidente come la procedura numerica offerta dal metodo degli spostamenti, pur essendo meno “didattica” per la comprensione della fisica del problema, possa essere efficacemente utilizzata per la soluzione statica di telai non labili. Il sistema risolvente infatti è sempre determinato dato che è possibile scrivere tante equazioni di equilibrio quanti sono i gradi di libertà della struttura.
Verrà ora risolto il seguente problema iperstatico manualmente applicando il metodo degli spostamenti:
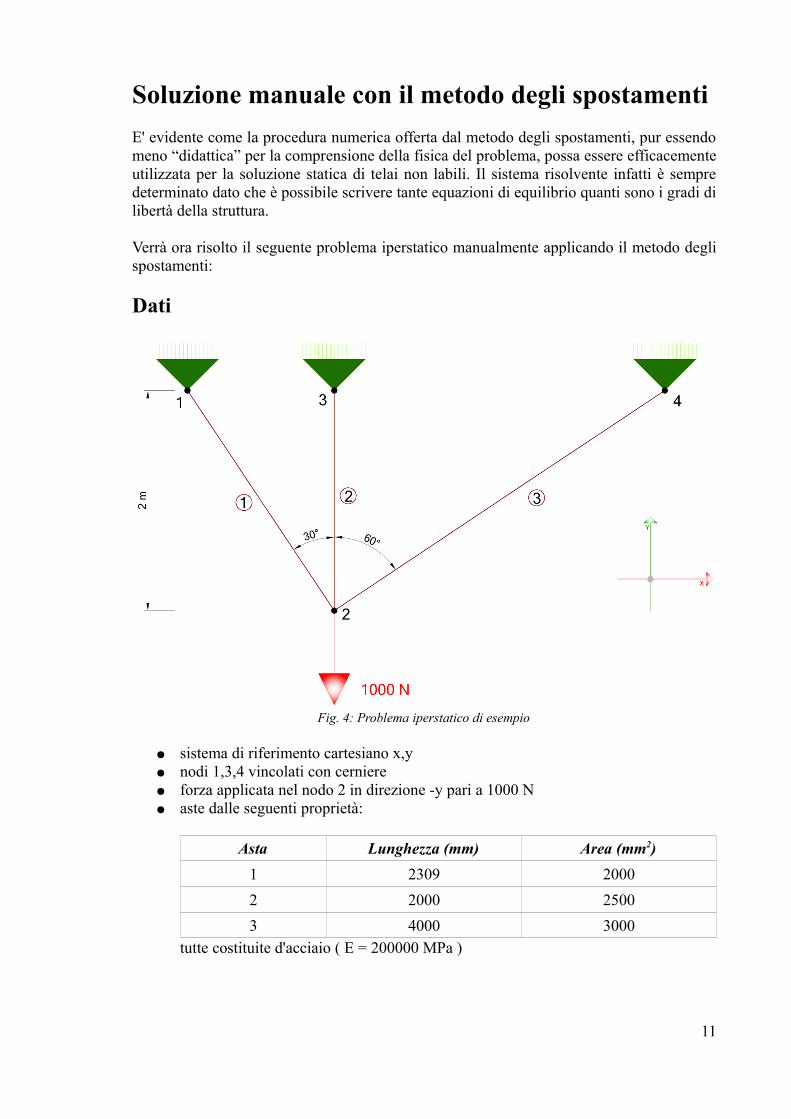
Dati
● sistema di riferimento cartesiano x,y● nodi 1,3,4 vincolati con cerniere● forza applicata nel nodo 2 in direzione -y pari a 1000 N● aste dalle seguenti proprietà:
Asta Lunghezza (mm) Area (mm2)1 2309 20002 2000 25003 4000 3000
tutte costituite d'acciaio ( E = 200000 MPa )
11
Fig. 4: Problema iperstatico di esempio
Equazioni di equilibrio
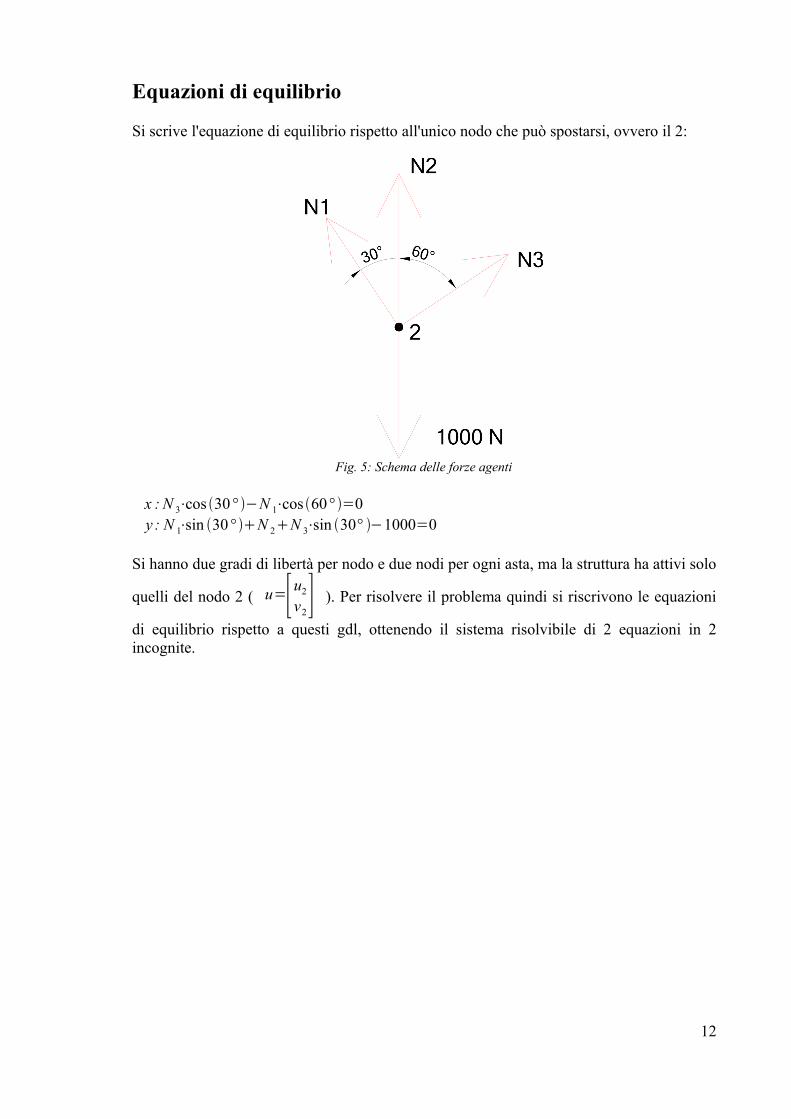
Si scrive l'equazione di equilibrio rispetto all'unico nodo che può spostarsi, ovvero il 2:
x : N 3⋅cos 30 ° −N 1⋅cos 60 ° =0y : N 1⋅sin 30 °N 2N 3⋅sin 30° −1000=0
Si hanno due gradi di libertà per nodo e due nodi per ogni asta, ma la struttura ha attivi solo
quelli del nodo 2 ( u=[u2
v2] ). Per risolvere il problema quindi si riscrivono le equazioni
di equilibrio rispetto a questi gdl, ottenendo il sistema risolvibile di 2 equazioni in 2 incognite.
12
Fig. 5: Schema delle forze agenti
Calcolo deformazioni
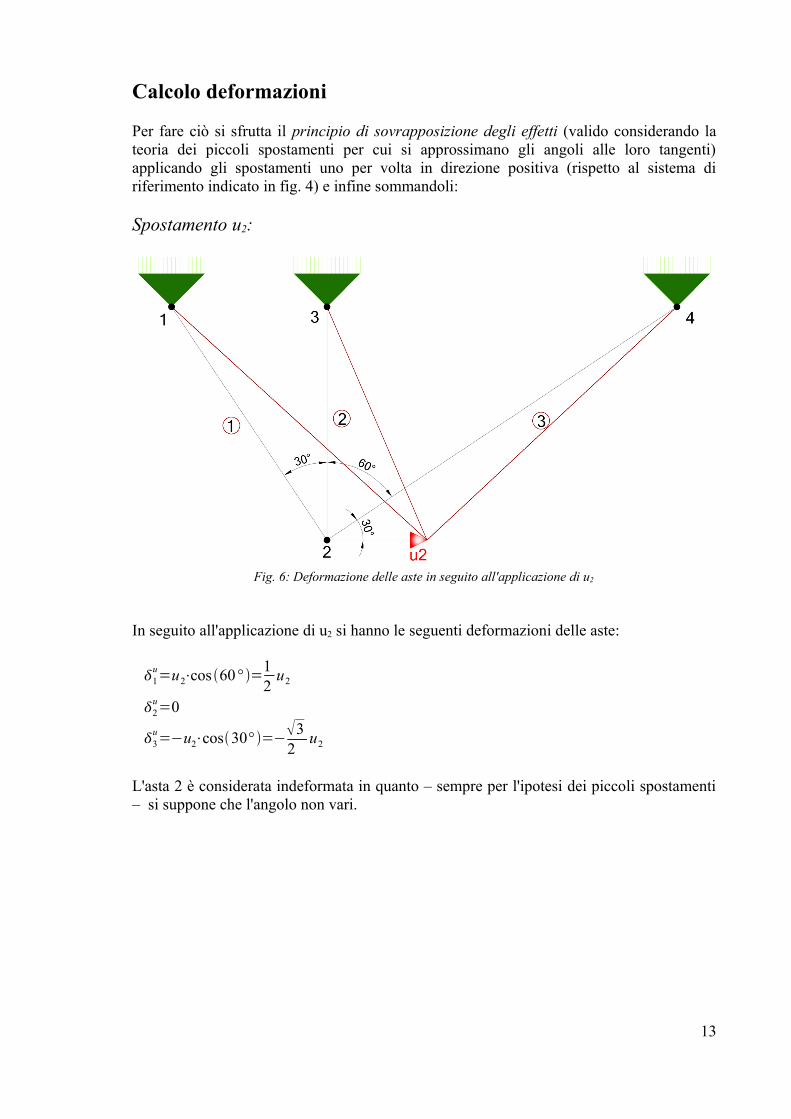
Per fare ciò si sfrutta il principio di sovrapposizione degli effetti (valido considerando la teoria dei piccoli spostamenti per cui si approssimano gli angoli alle loro tangenti) applicando gli spostamenti uno per volta in direzione positiva (rispetto al sistema di riferimento indicato in fig. 4) e infine sommandoli:
Spostamento u2:
In seguito all'applicazione di u2 si hanno le seguenti deformazioni delle aste:
1u=u2⋅cos 60 ° =1
2u2
2u=0
3u=−u2⋅cos30° =−3
2u2
L'asta 2 è considerata indeformata in quanto – sempre per l'ipotesi dei piccoli spostamenti – si suppone che l'angolo non vari.
13
Fig. 6: Deformazione delle aste in seguito all'applicazione di u2
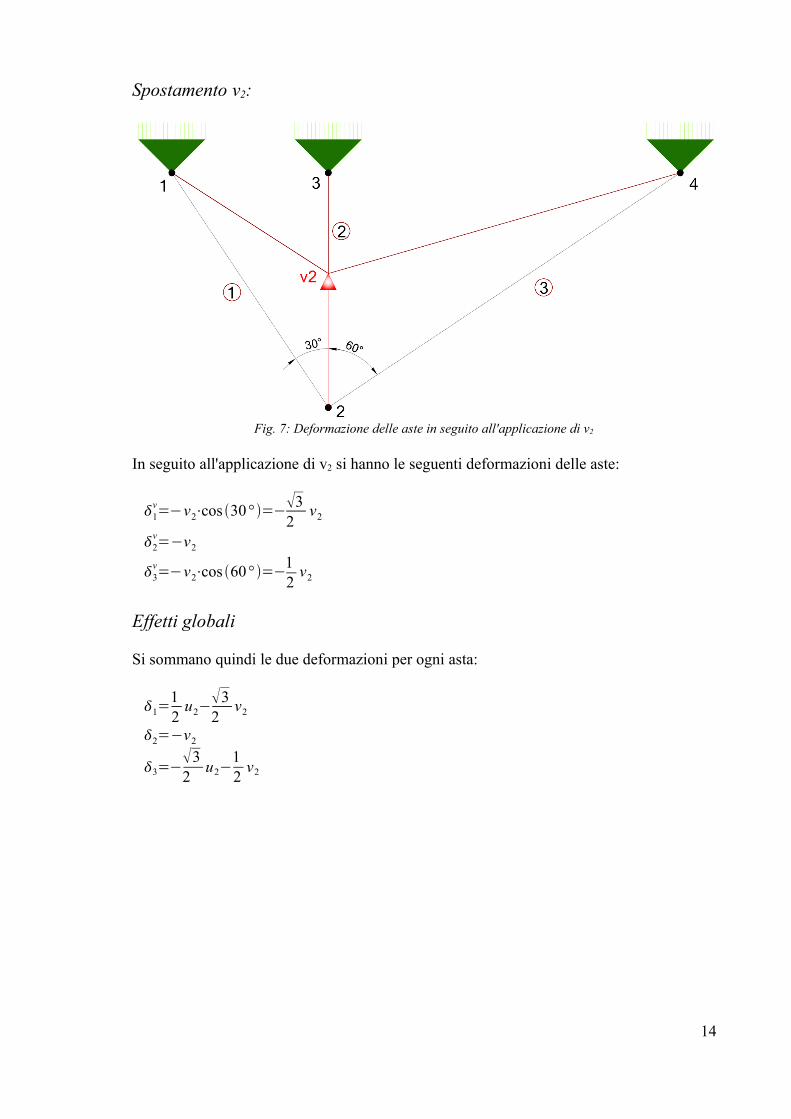
Spostamento v2:
In seguito all'applicazione di v2 si hanno le seguenti deformazioni delle aste:
1v=−v2⋅cos 30 ° =−3
2v2
2v=−v2
3v=−v2⋅cos 60 ° =−1
2v2
Effetti globali
Si sommano quindi le due deformazioni per ogni asta:
1=12
u2−32
v2
2=−v2
3=−32 u2−
12 v2
14
Fig. 7: Deformazione delle aste in seguito all'applicazione di v2

Soluzione della matrice degli spostamenti
Relazioni costitutive
A questo punto è necessario collegare le deformazioni e le forze applicate al materiale e alle caratteristiche geometriche di ogni asta:
1=L1
E A1N 1=
12
u2−32
v2
2=L2
E A2N 2=−v2
3=L3
E A3N 3=−3
2u2−
12
v2
Equazioni di equilibrio
Si sostituiscono i nuovi valori nelle equazioni di equilibrio iniziali ( K u = P ):
Essendo:
N 1=12
u2−32
v2E A1
L1
N 2=−v2
E A2
L2
N 3=−32
u2−12
v2E A3
L3
Si ha:
−32
E A3
L33
2u2
12
v2−12
E A1
L112 u2−
32
v2=0
32
E A1
L11
2u2−
32
v2−E A2
L2v2−
12
E A3
L33
2u2
12
v2−1000=0
Raccogliendo:
[−34
E A3
L3−1
4E A1
L1 ]u2[−34
E A3
L33
4E A1
L1 ]v2=0
[34
E A1
L1−3
4E A3
L3 ]u2[−34
E A1
L1−
E A2
L2−
14
E A3
L3 ]v2=1000
15
In forma matriciale:
E [−34
A3
L3−
14
A1
L1−3
4A3
L33
4A1
L1
34
A1
L1−3
4A3
L3−
34
A1
L1−
A2
L2−
14
A3
L3][u2
v2]=[ 01000]
Sostituendo i valori si ha:
200000[−34
30004000
−3 14
20004000
−34
30004000
34
20004000 3
34
20004000 3−3
430004000
−34
20004000
−25002000
−14
30004000
][u2
v2]=[ 01000]
200000[− 916
−38
−34
343
838−3 3
16−3 3
8−5
4− 3
16][u2
v2]=[ 01000]
200000[−9−2316
−33616
6−3316
−63−2316
][u2
v2]=[ 01000]
La cui soluzione è:
u2 = - 0,00015475 mmv2 = - 0,00239948 mm
16
Implementazione MATLABMATLAB (abbreviazione di Matrix Laboratory) è un ambiente per il calcolo numerico e un linguaggio di programmazione (interpretato) creato dalla MathWorks. MATLAB consente facili manipolazioni di matrici, visualizzazione di funzioni e dati, implementa algoritmi, consente la creazione di interfacce utente, e si interfaccia con altri programmi. Nonostante sia specializzato nel calcolo numerico, un toolbox opzionale interfaccia MATLAB con il motore di calcolo simbolico di Maple. MATLAB è usato da milioni di persone nell'industria, nelle università e funziona su diversi sistemi operativi, tra cui Windows, Mac OS, Linux e Unix.
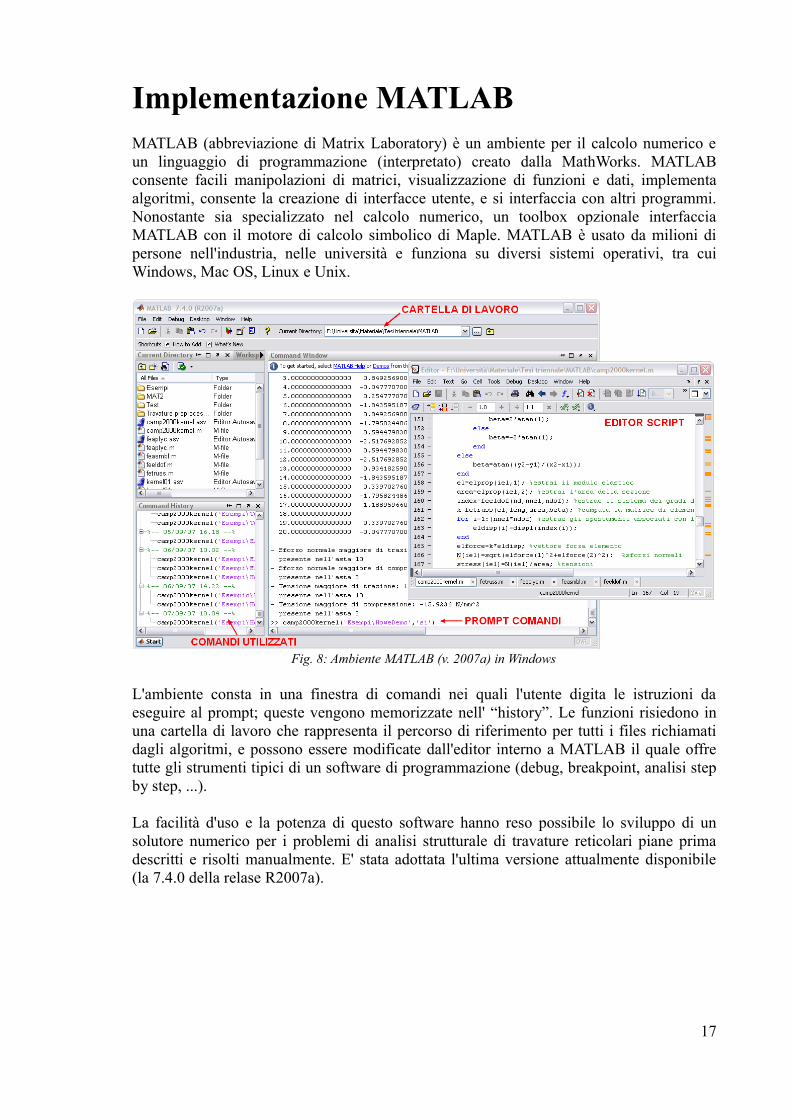
L'ambiente consta in una finestra di comandi nei quali l'utente digita le istruzioni da eseguire al prompt; queste vengono memorizzate nell' “history”. Le funzioni risiedono in una cartella di lavoro che rappresenta il percorso di riferimento per tutti i files richiamati dagli algoritmi, e possono essere modificate dall'editor interno a MATLAB il quale offre tutte gli strumenti tipici di un software di programmazione (debug, breakpoint, analisi step by step, ...).
La facilità d'uso e la potenza di questo software hanno reso possibile lo sviluppo di un solutore numerico per i problemi di analisi strutturale di travature reticolari piane prima descritti e risolti manualmente. E' stata adottata l'ultima versione attualmente disponibile (la 7.4.0 della relase R2007a).
17
Fig. 8: Ambiente MATLAB (v. 2007a) in Windows
L'applicazione CAMP2000L'implementazione è stata articolata in due fasi: inizialmente è stato sviluppato il solutore MATLAB (il kernel) e in seguito è stato sviluppato un software per facilitare l'inserimento dei dati (il preprocessore).
Il CAMP2000 infatti è un'applicazione composta da due parti:
● il preprocessore CAMP2000 sviluppato in Delphi 5 per ambienti Windows● lo script CAMP2000KERNEL sviluppato in MATLAB
Il preprocessore ha il compito di preparare i dati in ingresso al kernel (tramite l'esportazione di files testuali) il quale esegue i calcoli finali mostrando i risultati in termini di spostamenti, tensioni e forze.
Il contenuto dei files del preprocessore con le schermate ed il codice sorgente del kernel sono indicati in appendice.
Il preprocessore
La versione finale attualmente sviluppata è la 0.2.
Installazione
Lanciare il file CAMP2000_02_setup.exe:
e cliccare su Avanti ; apparirà un messaggio d'avviso da leggere prima dell'installazione (corrispondente al contenuto del file Leggimi.txt) :
18
Fig. 9: Schermata iniziale dell'installazione
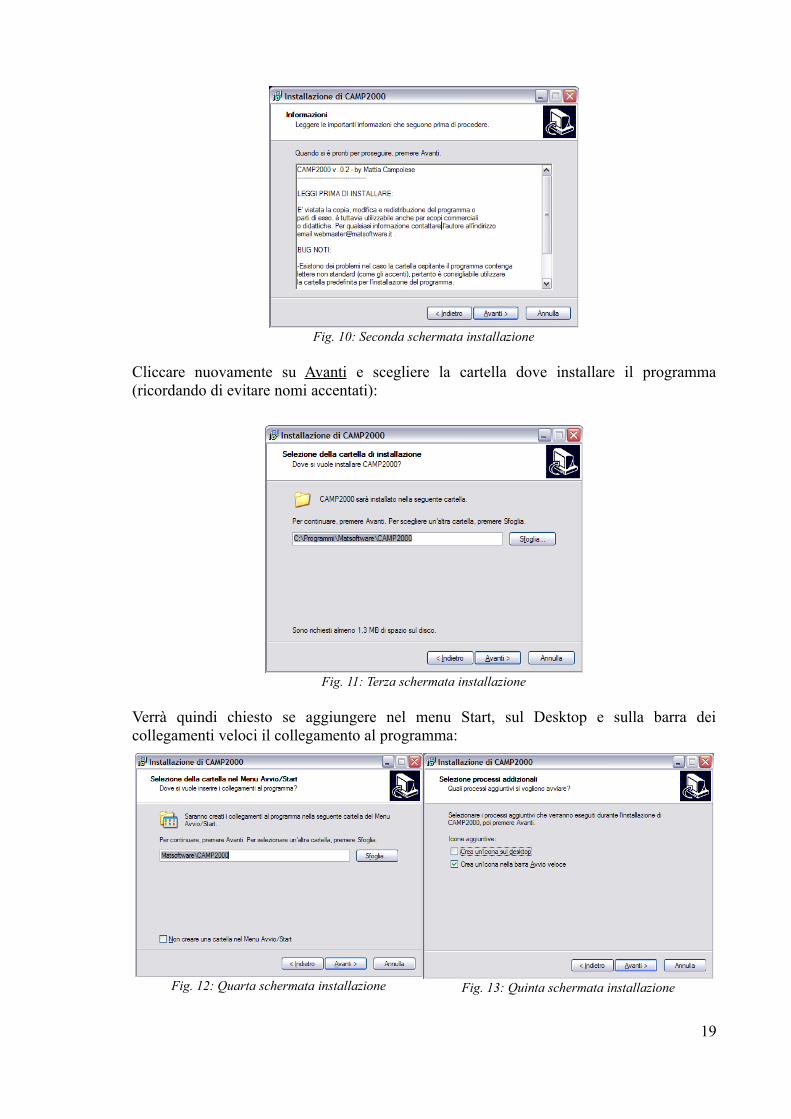
Cliccare nuovamente su Avanti e scegliere la cartella dove installare il programma (ricordando di evitare nomi accentati):
Verrà quindi chiesto se aggiungere nel menu Start, sul Desktop e sulla barra dei collegamenti veloci il collegamento al programma:
19
Fig. 10: Seconda schermata installazione
Fig. 11: Terza schermata installazione
Fig. 12: Quarta schermata installazione Fig. 13: Quinta schermata installazione
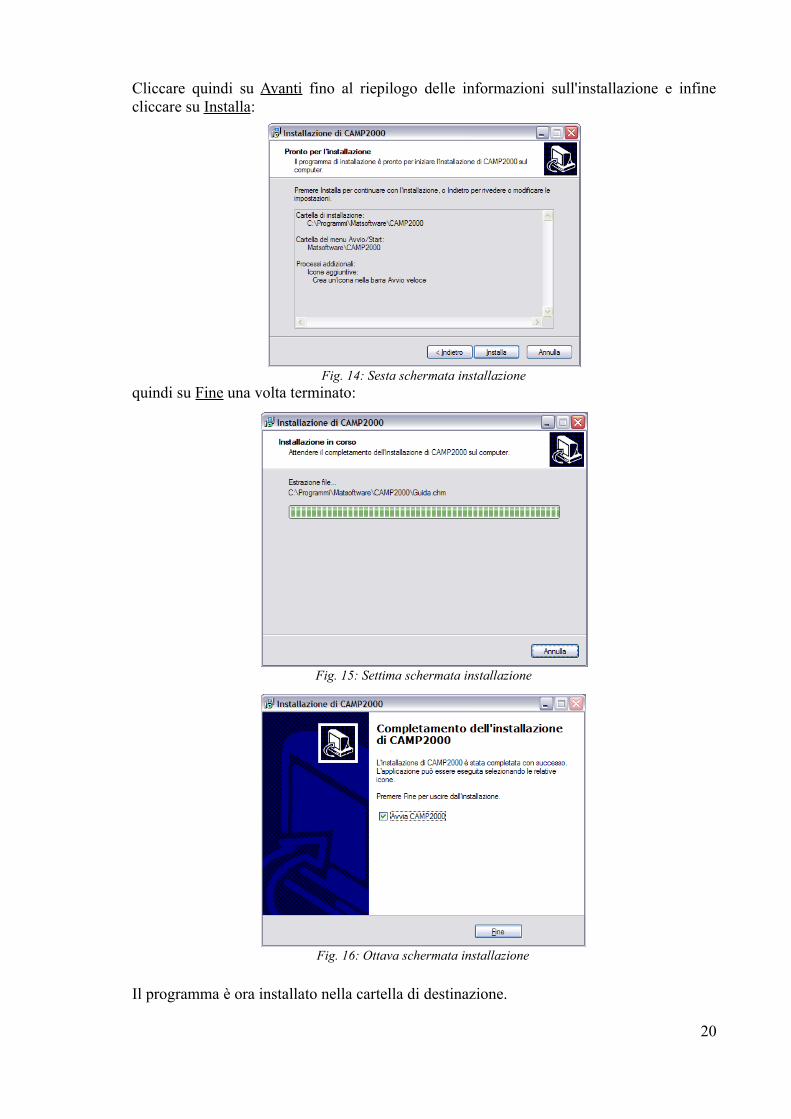
Cliccare quindi su Avanti fino al riepilogo delle informazioni sull'installazione e infine cliccare su Installa:
quindi su Fine una volta terminato:
Il programma è ora installato nella cartella di destinazione.
20
Fig. 14: Sesta schermata installazione
Fig. 15: Settima schermata installazione
Fig. 16: Ottava schermata installazione
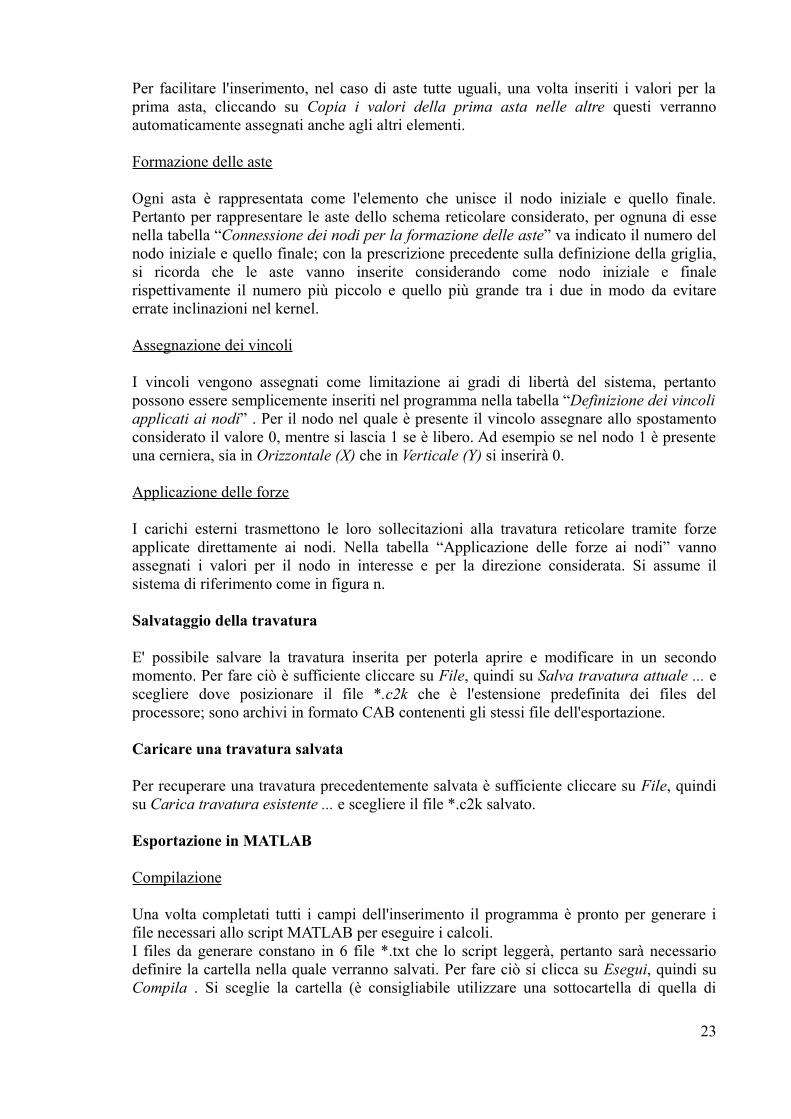
Utilizzo
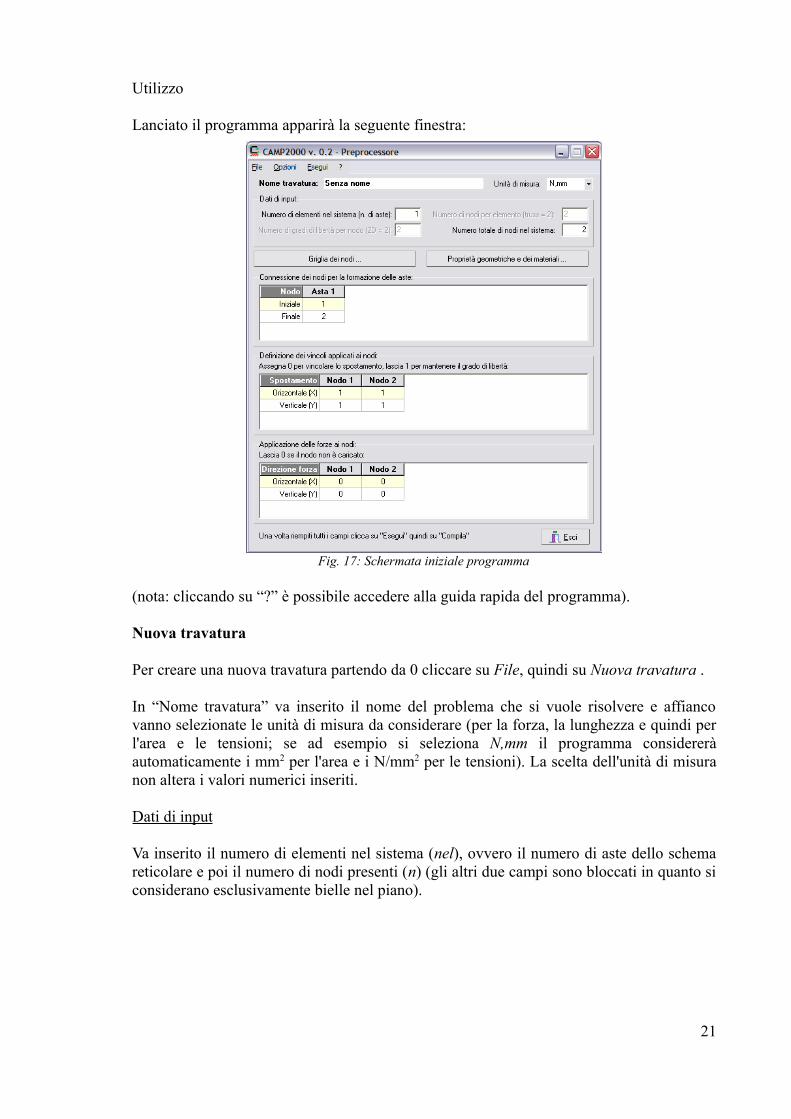
Lanciato il programma apparirà la seguente finestra:
(nota: cliccando su “?” è possibile accedere alla guida rapida del programma).
Nuova travatura
Per creare una nuova travatura partendo da 0 cliccare su File, quindi su Nuova travatura .
In “Nome travatura” va inserito il nome del problema che si vuole risolvere e affianco vanno selezionate le unità di misura da considerare (per la forza, la lunghezza e quindi per l'area e le tensioni; se ad esempio si seleziona N,mm il programma considererà automaticamente i mm2 per l'area e i N/mm2 per le tensioni). La scelta dell'unità di misura non altera i valori numerici inseriti.
Dati di input
Va inserito il numero di elementi nel sistema (nel), ovvero il numero di aste dello schema reticolare e poi il numero di nodi presenti (n) (gli altri due campi sono bloccati in quanto si considerano esclusivamente bielle nel piano).
21
Fig. 17: Schermata iniziale programma
Griglia dei nodi
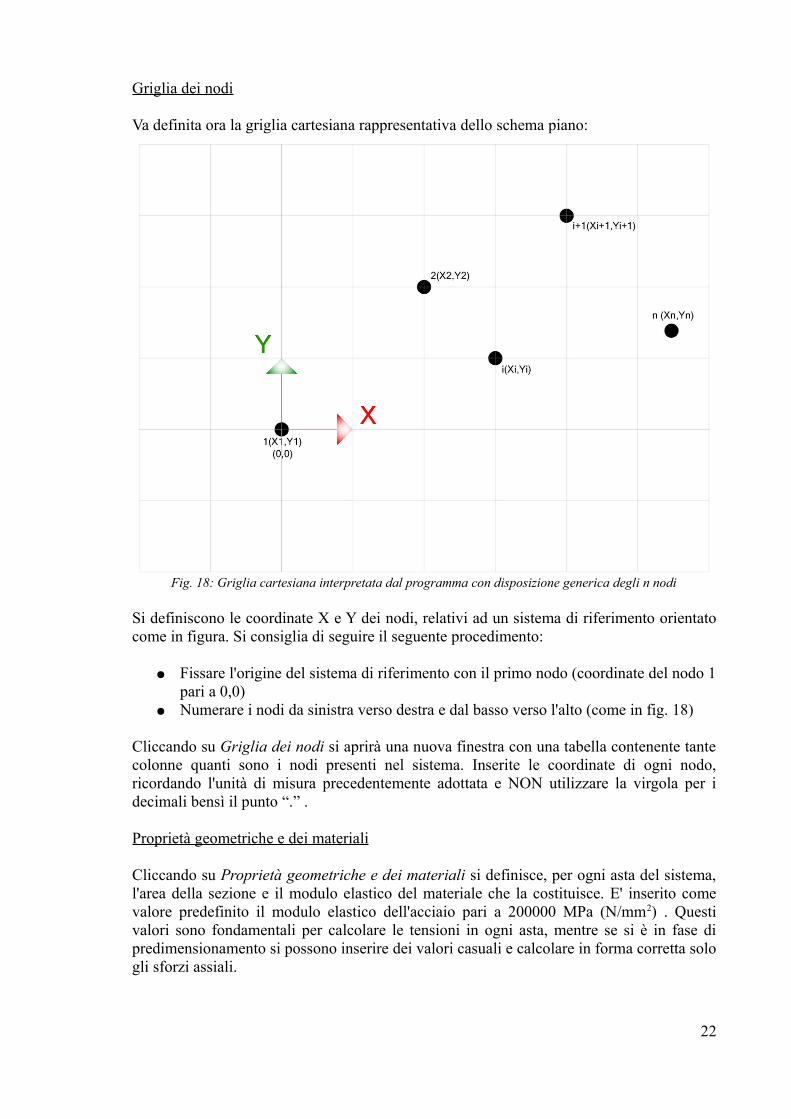
Va definita ora la griglia cartesiana rappresentativa dello schema piano:
Si definiscono le coordinate X e Y dei nodi, relativi ad un sistema di riferimento orientato come in figura. Si consiglia di seguire il seguente procedimento:
● Fissare l'origine del sistema di riferimento con il primo nodo (coordinate del nodo 1 pari a 0,0)
● Numerare i nodi da sinistra verso destra e dal basso verso l'alto (come in fig. 18)
Cliccando su Griglia dei nodi si aprirà una nuova finestra con una tabella contenente tante colonne quanti sono i nodi presenti nel sistema. Inserite le coordinate di ogni nodo, ricordando l'unità di misura precedentemente adottata e NON utilizzare la virgola per i decimali bensì il punto “.” .
Proprietà geometriche e dei materiali
Cliccando su Proprietà geometriche e dei materiali si definisce, per ogni asta del sistema, l'area della sezione e il modulo elastico del materiale che la costituisce. E' inserito come valore predefinito il modulo elastico dell'acciaio pari a 200000 MPa (N/mm2) . Questi valori sono fondamentali per calcolare le tensioni in ogni asta, mentre se si è in fase di predimensionamento si possono inserire dei valori casuali e calcolare in forma corretta solo gli sforzi assiali.
22
Fig. 18: Griglia cartesiana interpretata dal programma con disposizione generica degli n nodi
Per facilitare l'inserimento, nel caso di aste tutte uguali, una volta inseriti i valori per la prima asta, cliccando su Copia i valori della prima asta nelle altre questi verranno automaticamente assegnati anche agli altri elementi.
Formazione delle aste
Ogni asta è rappresentata come l'elemento che unisce il nodo iniziale e quello finale. Pertanto per rappresentare le aste dello schema reticolare considerato, per ognuna di esse nella tabella “Connessione dei nodi per la formazione delle aste” va indicato il numero del nodo iniziale e quello finale; con la prescrizione precedente sulla definizione della griglia, si ricorda che le aste vanno inserite considerando come nodo iniziale e finale rispettivamente il numero più piccolo e quello più grande tra i due in modo da evitare errate inclinazioni nel kernel.
Assegnazione dei vincoli
I vincoli vengono assegnati come limitazione ai gradi di libertà del sistema, pertanto possono essere semplicemente inseriti nel programma nella tabella “Definizione dei vincoli applicati ai nodi” . Per il nodo nel quale è presente il vincolo assegnare allo spostamento considerato il valore 0, mentre si lascia 1 se è libero. Ad esempio se nel nodo 1 è presente una cerniera, sia in Orizzontale (X) che in Verticale (Y) si inserirà 0.
Applicazione delle forze
I carichi esterni trasmettono le loro sollecitazioni alla travatura reticolare tramite forze applicate direttamente ai nodi. Nella tabella “Applicazione delle forze ai nodi” vanno assegnati i valori per il nodo in interesse e per la direzione considerata. Si assume il sistema di riferimento come in figura n.
Salvataggio della travatura
E' possibile salvare la travatura inserita per poterla aprire e modificare in un secondo momento. Per fare ciò è sufficiente cliccare su File, quindi su Salva travatura attuale ... e scegliere dove posizionare il file *.c2k che è l'estensione predefinita dei files del processore; sono archivi in formato CAB contenenti gli stessi file dell'esportazione.
Caricare una travatura salvata
Per recuperare una travatura precedentemente salvata è sufficiente cliccare su File, quindi su Carica travatura esistente ... e scegliere il file *.c2k salvato.
Esportazione in MATLAB
Compilazione
Una volta completati tutti i campi dell'inserimento il programma è pronto per generare i file necessari allo script MATLAB per eseguire i calcoli.I files da generare constano in 6 file *.txt che lo script leggerà, pertanto sarà necessario definire la cartella nella quale verranno salvati. Per fare ciò si clicca su Esegui, quindi su Compila . Si sceglie la cartella (è consigliabile utilizzare una sottocartella di quella di
23
lavoro di MATLAB) e il programma esporterà i files. Se questi sono già esistenti, verranno automaticamente sovrascritti.
Il preprocessore ha quindi terminato il proprio compito preparando il necessario per i calcoli da parte del kernel.
Il kernel
E' costituito dai seguenti 5 files:
● camp2000kernel.m (script principale)● feaplyc.m (funzione esterna)● feasmbl.m (funzione esterna)● feeldof.m (funzione esterna)● fetruss.m (funzione esterna)
contenuti nella sottocartella c2kmat del percorso nel quale è installato il preprocessore. Si possono quindi copiare i files nella cartella di lavoro preferita di MATLAB.
Lo script principale da lanciare è una funzione dalla seguente sintassi:
camp2000kernel(path,verbose);
con:
● path: stringa rappresentante il nome della cartella di riferimento per i files generati dal preprocessore. Può essere un percorso assoluto (ex: 'C:\Prova\Esempio71') o semplicemente il nome della sottocartella esportata se questa è contenuta nella stessa directory dello script (ex: 'Esempio71')
● verbose: stringa indicante il tipo di visualizzazione dei risultati. Per visualizzare tutti i passaggi svolti nonchè il dettaglio dei risultati scrivere “si”, altrimenti “no” per visualizzare esclusivamente gli spostamenti, le forze e le tensioni trascurando la formattazione e i passaggi intermedi.
1) Lettura dei dati in ingresso
Il kernel legge i dati necessari in ingresso da files contenuti nella cartella indicata nella variabile path, memorizzandoli nelle relative matrici:
File di origine Dati contenuti1input.txt - nel: numero di elementi nel sistema (numero di aste) [intero]
- nnel: numero di nodi per elemento [intero]- ndof: numero di gradi di libertà per nodo [intero]- nnode: numero totale di nodi nel sistema [intero]- uforza: unità di misura per la forza [stringa]- ulungh: unità di misura per la lunghezza [stringa]- uarea: unità di misura per le aree [stringa]- utens: unità di misura per le tensioni [stringa]
24
2gcoord.txt - gcoord: matrice delle coordinate geometriche dei nodi3elprop.txt - elprop: matrice delle proprietà geometriche e dei materiali delle aste4nodes.txt - nodes: matrice della connettività dei nodi per la formazione delle aste
5constraints.txt - constraints: matrice dei vincoli, scomposta in bcdof e bcval6forces.txt - ff: matrice delle forze applicate ai nodi
Una volta letti i dati dal file 1input.txt il programma calcola i gradi di libertà totali del sistema:
sdof=nnode*ndof;
e inizializza le matrici che verranno utilizzate:
ff=zeros(sdof,1); %vettore di forze del sistemakk=zeros(sdof,sdof); %matrice di rigidezza del sistemadispl=zeros(sdof,sdof); %matrice degli spostamenti di sistemaindex=zeros(nnel*ndof,1); %vettore degli indicielforce=zeros(nnel*ndof,1); %vettore di forza dell'elementoeldisp=zeros(nnel*ndof,1); %vettore della disposizione dei nodi dell'elementok=zeros(nnel*ndof,nnel*ndof); %matrice di rigidezza dell'elementostress=zeros(nel,1); %vettore delle tensioni per ogni elemento
Gli altri files sono letti dall'istruzione csvread che interpreta i file CSV (Comma Separated Values) esportati dal preprocessore. Le matrici infatti vengono salvate con i dati riga per riga, e i valori in colonna sulla stessa riga separati da virgola; ad esempio la matrice gcoord dell'esempio Demo1 è:
Contenuto file 2gcoord.txt Matrice importata in MATLAB0,00,10001000,01000,10002000,02000,1000
gcoord =
0 0 0 1000 1000 0 1000 1000 2000 0 2000 1000
2) Ciclo degli elementi
Per costruire la matrice di rigidezza della struttura ( kk ) il kernel processa ogni asta:
for iel=1:nel %cicla per il numero totale di elementi
computando la matrice di rigidezza di elemento (k) per poi assemblarla in quella generale (kk); per ogni asta quindi calcola:
– la lunghezza nella variabile lungh in base alle coordinate cartesiane dei nodi di estremità dell'asta:
25

nd(1)=nodes(iel,1); %primo nodo connesso con l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso con l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate per il primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate per il secondo nodo length=sqrt((x2-x1)^2+(y2-y1)^2); %lunghezza dell'elemento
– l'inclinazione (radianti) rispetto al sistema di riferimento globale nella variabile beta:
if (x2-x1)==0; if y2>y1; beta=2*atan(1); else beta=-2*atan(1); end else beta=atan((y2-y1)/(x2-x1)); end
Il campo di validità dell'inclinazione è −90°90 ° :
(X1,Y1 = coordinate nodo iniziale; X2,Y2 = coordinate nodo finale)
– le proprietà del materiale che costituiscono l'asta (modulo elastico nella variabile el) nonché l'area della sezione (nella variabile area) dalla matrice elprop:
el=elprop(iel,1); %estrae il modulo elastico area=elprop(iel,2); %estrae l'area della sezione
– il sistema dei gradi di libertà dell'elemento, ovvero quali gradi di libertà (da 1 a sdof) sono quelli di interesse dell'asta:
index=feeldof(nd,nnel,ndof); %estrae il sistema dei gradi di libertà dell'elemento
Questi dati sono assemblati tramite la funzione fetruss:
k=fetruss(el,length,area,beta); %computa la matrice degli elementi
26
Fig. 19: Inclinazioni possibili delle aste interpretate dal programma

che costruisce la seguente matrice:
K i= EAL [ cos2 cos sin −cos2 −cos sin
cossin sin2 −cossin −sin2−cos2 −cos sin cos2 cos sin
−cossin −sin2 cossin sin2]
(file fetruss.m):
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[k]=fetruss(el,leng,area,beta)c=cos(beta); s=sin(beta);k=(area*el/leng)*[c*c c*s -c*c -c*s;... c*s s*s -c*s -s*s;... -c*c -c*s c*c c*s;... -c*s -s*s c*s s*s];end
Una volta computata la matrice di rigidezza d'asta, questa viene aggiunta all'interno di quella globale del sistema:
kk=feasmbl(kk,k,index); %assembla la matrice di sistema inserendo quella di elemento
tramite la funzione feasmbl:
(file feasmbl.m):
function[kk]=feasmbl(kk,k,index)edof=length(index);for i=1:edof ii=index(i); for j=1:edof jj=index(j); kk(ii,jj)=kk(ii,jj)+k(i,j); endend
la quale somma il contenuto della k d'asta al contenuto già presente nella kk globale nella posizione relativa al sistema dei gradi di libertà (indicato dal vettore index) .
3) Assegnazione dei vincoli e soluzione della matrice degli spostamenti
Data la kk (ancora in forma singolare) il kernel ora applica le condizioni al contorno:
[kk,ff]=feaplyc(kk,ff,bcdof,bcval); %applicazione delle condizioni al contorno
tramite la funzione feaplyc:
27

(file feaplyc.m):
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[kk,ff]=feaplyc(kk,ff,bcdof,bcval)n=length(bcdof); %numero dei gradi di libertà vincolatisdof=size(kk); %gradi di libertà del sistemafor i=1:n c=bcdof(i); %grado di libertà vincolato for j=1:sdof kk(c,j)=bcval(i); kk(j,c)=bcval(i); end kk(c,c)=1; %per non annullare il determinante ff(c)=bcval(i); %la forza sul vincolo è assorbita tutta da essoend
la quale assegna alle righe e alle colonne della kk relative ai gdl vincolati, indicati nella matrice bcdof , i valori della matrice bcval (sempre nulli); ad esempio per il problema Demo1 si ha:
bcdof =
1 2 10
bcval =
0 0 0
Inoltre fissa a 1 i valori sulla diagonale principale onde evitare di ridurre il rango della matrice e annulla l'eventuale forza assegnata al nodo vincolato (in quanto non viene assorbita dal resto della struttura).
E' ora possibile calcolare la matrice degli spostamenti nodali nella variabile displ :
displ=kk\ff; %risoluzione della matrice per gli spostamenti dei nodi
4) Calcolo delle tensioni e delle forze nelle aste
Per ogni asta si effettua lo stesso ciclo del punto 2) per ricalcolare la matrice di rigidezza d'elemento k. In seguito si ricavano gli spostamenti relativi ad ogni asta:
for i=1:(nnel*ndof) %estrae gli spostamenti associati con l'elemento iesimo eldisp(i)=displ(index(i));end
e si ricava il vettore forza d' elemento:
elforce=k*eldisp; %vettore forza elemento
A questo punto è possibile ottenere il modulo dello sforzo normale e la tensione alla quale è soggetta l'asta:
N(iel)=sqrt(elforce(1)^2+elforce(2)^2); %sforzi normalistress(iel)=N(iel)/area; %tensioni
28

e applicare il segno a seconda se di compressione (-) o trazione (+):
if (elforce(3))<0; %controllo se sono o no di compressione stress(iel)=-stress(iel); N(iel)=-N(iel);end
5) Visualizzazione dei risultati
Nel caso fosse attivata l'opzione “verbosa” sono visualizzati per ogni asta lo sforzo normale e la tensione con indicato il sistema di riferimento scelto:
if (verbose == 'si') disp(['Asta ' int2str(iel)]); disp([' - Sforzo normale elemento: ' num2str(N(iel)) ' ' uforza]); disp([' - Tensione elemento: ' num2str(stress(iel)) ' ' utens]); end
In seguito, per ogni grado di libertà del sistema, viene indicato il relativo spostamento:
num=1:1:sdof;format longdisp([' ']);disp(['Spostamenti in ' ulungh ': (n. gdl e spostamento)']);disp([num' displ]);format short
Come ultima operazione il kernel esporta i valori degli spostamenti, forze e tensioni in tre files CSV (Spostamenti.txt, N.txt e Tensioni.txt):
% salva i risultati nella cartella dei dati di inputcsvwrite([path '\Spostamenti.txt'],displ); %spostamenticsvwrite([path '\N.txt'],'N); %sollecitazioni assialicsvwrite([path '\Tensioni.txt'],stress); %tensioni
oltre a salvare tutto l'ouptut della finestra di comando con il comando diary nel file Output.txt contenuto nella stessa cartella dello script. Se il file è già presente, il testo verrà aggiunto a quello precedente.Potrebbero esserci dei problemi di visualizzazione dei dati utilizzando il blocco note di Windows, poiché il formato nel quale vengono salvati i files è quello UNIX, pertanto è consigliabile utilizzare un editor di testo esterno per la visualizzazione.
Il postprocessore
E' costituito dal file camp2000pp.m contenuto nella sottocartella c2kmat del percorso nel quale è installato il preprocessore. Si può quindi copiare il file nella cartella di lavoro preferita di MATLAB.
Lo script principale da lanciare è una funzione dalla seguente sintassi:
camp2000pp(path);
29
con path avente lo stesso significato dello script precedente. Il postprocessore è lanciato automaticamente dal kernel se è attivata l'opzione verbosa:
if (verbose == 'si') %6) LANCIA IL POST PROCESSORE camp2000pp(path);...
1) Lettura dei dati in ingresso
Utilizzando le stesse funzioni del kernel, il postprocessore carica i seguenti files per poter costruire i grafici ed effettuare i calcoli successivi:
File di origine Dati contenuti1input.txt - nel: numero di elementi nel sistema (numero di aste) [intero]
- nnel: numero di nodi per elemento [intero]- ndof: numero di gradi di libertà per nodo [intero]- nnode: numero totale di nodi nel sistema [intero]- uforza: unità di misura per la forza [stringa]- ulungh: unità di misura per la lunghezza [stringa]- uarea: unità di misura per le aree [stringa]- utens: unità di misura per le tensioni [stringa]
2gcoord.txt - gcoord: matrice delle coordinate geometriche dei nodi3elprop.txt - elprop: matrice delle proprietà geometriche e dei materiali delle aste4nodes.txt - nodes: matrice della connettività dei nodi per la formazione delle aste
5constraints.txt - constraints: matrice dei vincoli, scomposta in bcdof e bcval6forces.txt - ff: matrice delle forze applicate ai nodi
Spostamenti.txt - displ: vettore degli spostamenti dei nodiN.txt - N: vettore delle sollecitazioni delle aste
Tensioni.txt - stress: vettore delle tensioni delle aste
2) Grafico della travatura
In seguito il postprocessore apre una finestra grafica in MATLAB rappresentando la travatura reticolare con le forze applicate, i vincoli e la numerazione delle aste in modo da poter mostrare graficamente eventuali errori di inserimento dei dati nel preprocessore.
3) Calcolo dei valori massimi
In base ai dati esportati dal kernel, il postprocessore individua i valori massimi degli spostamenti, delle sollecitazioni e delle tensioni.
Per gli spostamenti vengono distinti quelli in direzione orizzontale (1° grado di libertà del nodo) e in direzione verticale (2° grado di libertà del nodo) estraendo per i primi i valori con indice dispari dal vettore displ e per i secondi quelli con indice pari:
30

for j=1:nnode %cicla per il numero di nodi doriz(j) = displ((j*ndof)-1); dvert(j) = displ((j*ndof));end
Il valore massimo è preso considerando il valore assoluto dei due vettori:
[DHmax,NDHmax]=max(abs(doriz)); %orizzontale[DVmax,NDVmax]=max(abs(dvert)); %verticale
indicando in NDHmax e NDVmin il nodo per il quale si ha il valore DHmax e DVmax.
Per le sollecitazioni e le tensioni si calcolano i valori massimi (trazione maggiore) e minimi (compressione maggiore):
[Nmax,ANmax]=max(N); %trazione[Nmin,ANmin]=min(N); %compressione[Smax,ASmax]=max(stress); %trazione[Smin,ASmin]=min(stress); %compressione
indicando le aste per le quali si hanno i valori individuati.
4) Grafico delle sollecitazioni e delle tensioni
In seguito al calcolo dei valori massimi, il programma aprirà due finestre grafiche in ognuna delle quali è rappresentata la travatura reticolare con i vincoli applicati e sulle aste (colorate a seconda se tese o compresse) i valori (arrotondati alla cifra intera prossima) di sollecitazione e tensione corrispondente, evidenziando in grassetto i valori maggiori.
31
Fig. 20: Finestre grafiche di esempio esportate dal post-processore
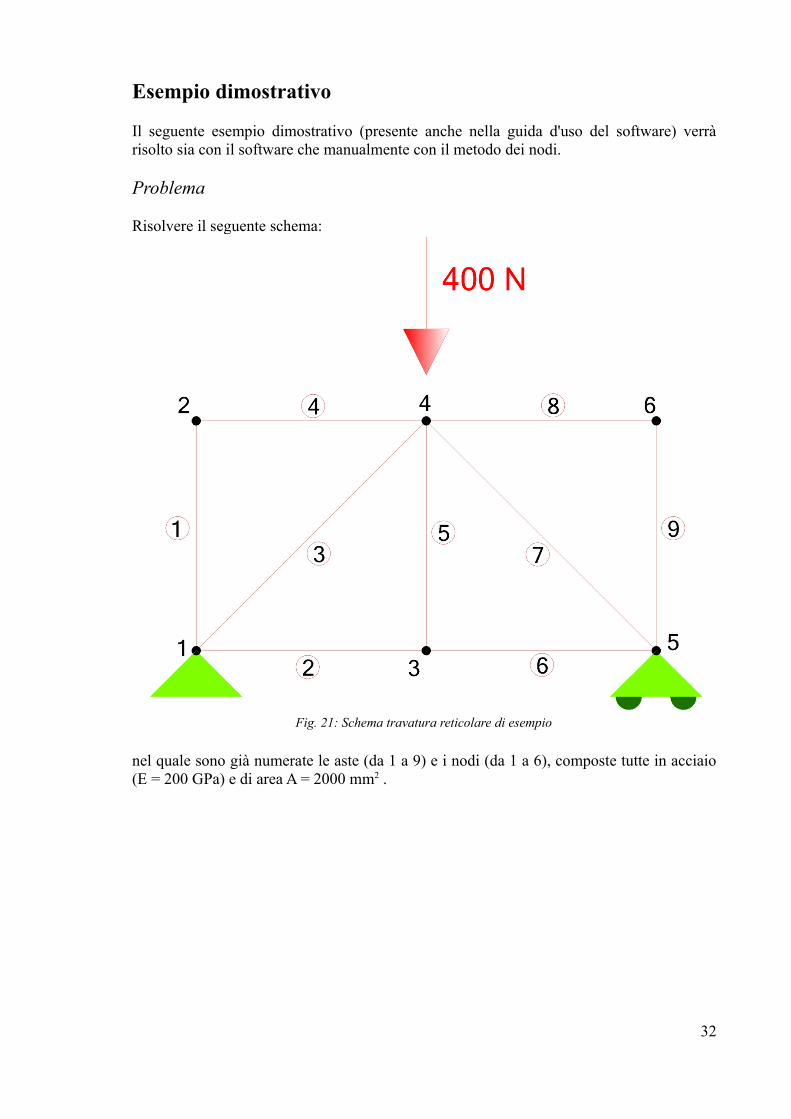
Esempio dimostrativo
Il seguente esempio dimostrativo (presente anche nella guida d'uso del software) verrà risolto sia con il software che manualmente con il metodo dei nodi.
Problema
Risolvere il seguente schema:
nel quale sono già numerate le aste (da 1 a 9) e i nodi (da 1 a 6), composte tutte in acciaio (E = 200 GPa) e di area A = 2000 mm2 .
32
Fig. 21: Schema travatura reticolare di esempio
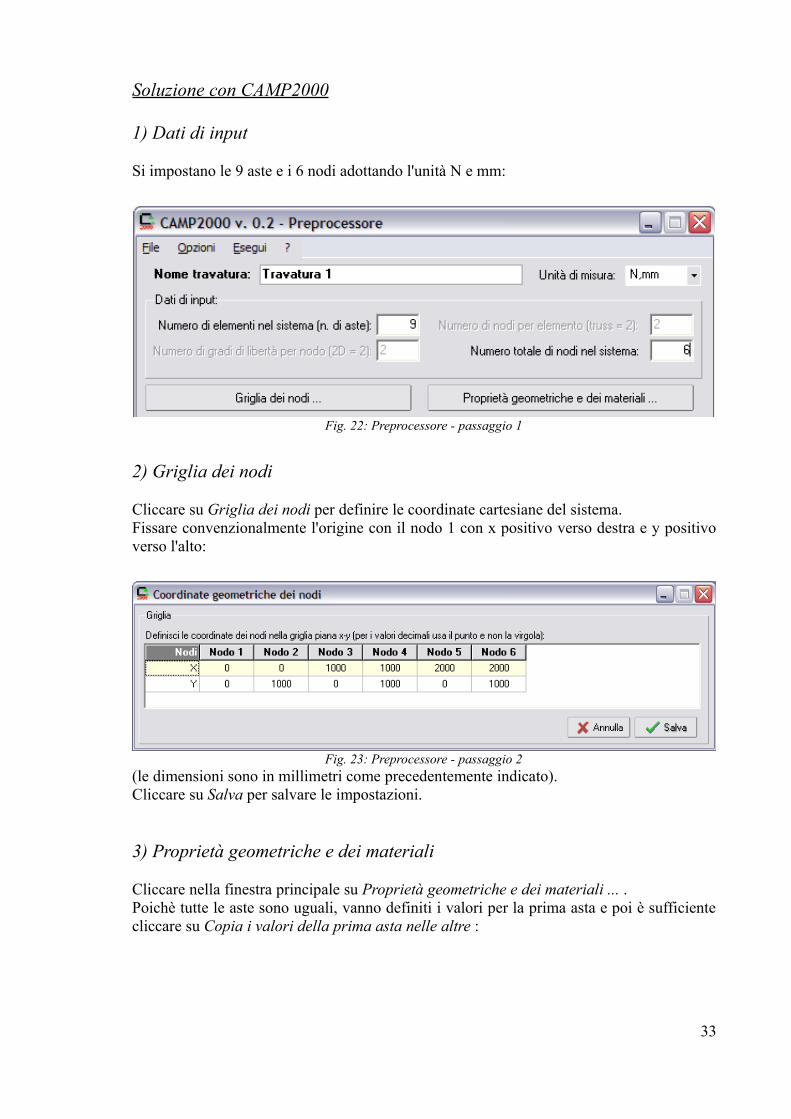
Soluzione con CAMP2000
1) Dati di input
Si impostano le 9 aste e i 6 nodi adottando l'unità N e mm:
2) Griglia dei nodi
Cliccare su Griglia dei nodi per definire le coordinate cartesiane del sistema. Fissare convenzionalmente l'origine con il nodo 1 con x positivo verso destra e y positivo verso l'alto:
(le dimensioni sono in millimetri come precedentemente indicato).Cliccare su Salva per salvare le impostazioni.
3) Proprietà geometriche e dei materiali
Cliccare nella finestra principale su Proprietà geometriche e dei materiali ... .Poichè tutte le aste sono uguali, vanno definiti i valori per la prima asta e poi è sufficiente cliccare su Copia i valori della prima asta nelle altre :
33
Fig. 22: Preprocessore - passaggio 1
Fig. 23: Preprocessore - passaggio 2
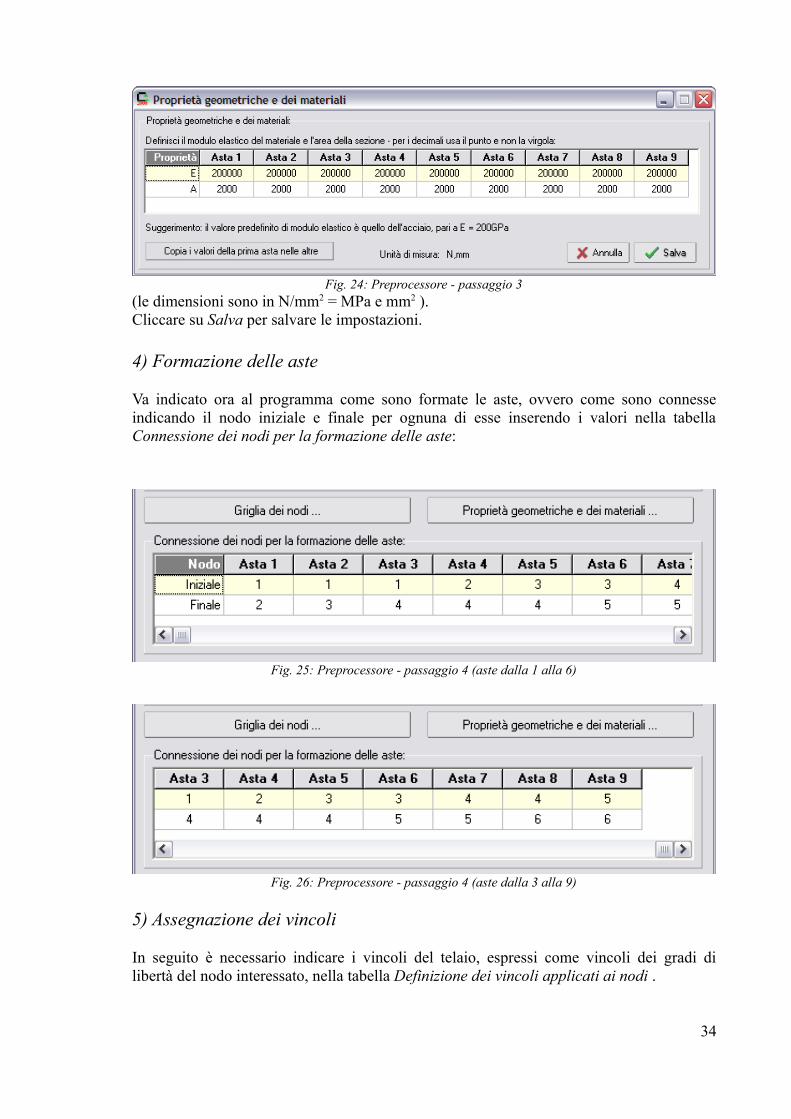
(le dimensioni sono in N/mm2 = MPa e mm2 ).Cliccare su Salva per salvare le impostazioni.
4) Formazione delle aste
Va indicato ora al programma come sono formate le aste, ovvero come sono connesse indicando il nodo iniziale e finale per ognuna di esse inserendo i valori nella tabella Connessione dei nodi per la formazione delle aste:
5) Assegnazione dei vincoli
In seguito è necessario indicare i vincoli del telaio, espressi come vincoli dei gradi di libertà del nodo interessato, nella tabella Definizione dei vincoli applicati ai nodi .
34
Fig. 24: Preprocessore - passaggio 3
Fig. 25: Preprocessore - passaggio 4 (aste dalla 1 alla 6)
Fig. 26: Preprocessore - passaggio 4 (aste dalla 3 alla 9)
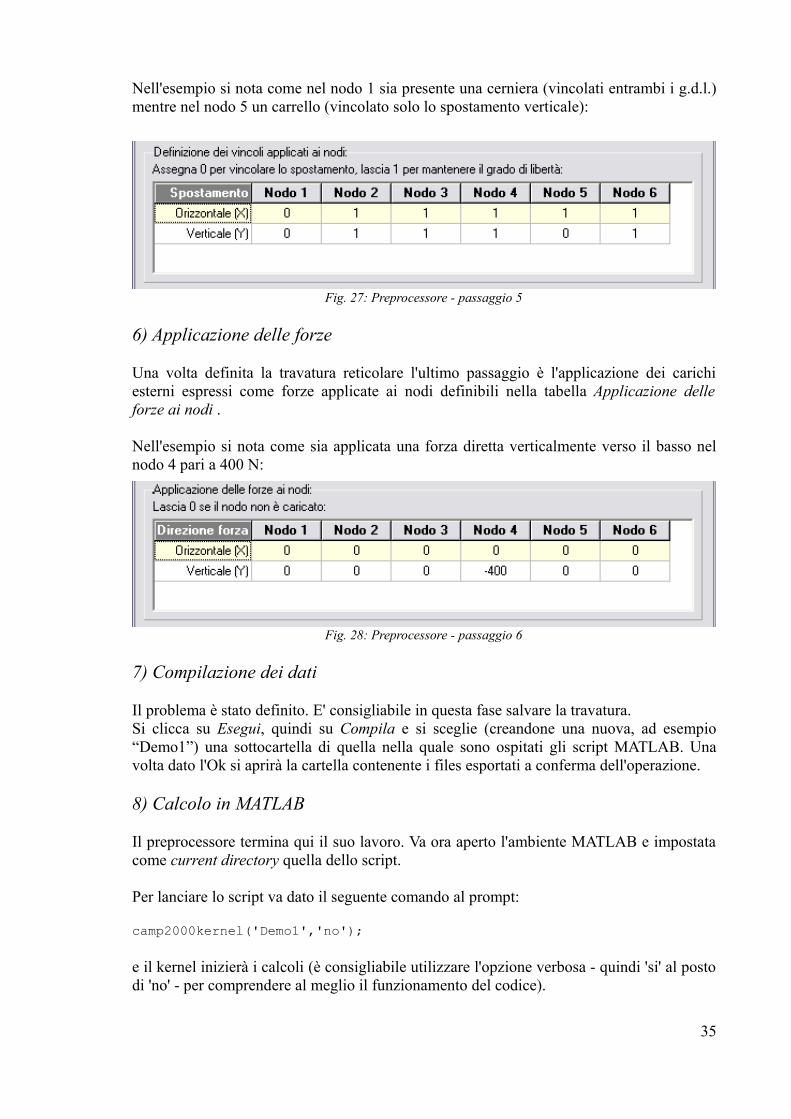
Nell'esempio si nota come nel nodo 1 sia presente una cerniera (vincolati entrambi i g.d.l.) mentre nel nodo 5 un carrello (vincolato solo lo spostamento verticale):
6) Applicazione delle forze
Una volta definita la travatura reticolare l'ultimo passaggio è l'applicazione dei carichi esterni espressi come forze applicate ai nodi definibili nella tabella Applicazione delle forze ai nodi .
Nell'esempio si nota come sia applicata una forza diretta verticalmente verso il basso nel nodo 4 pari a 400 N:
7) Compilazione dei dati
Il problema è stato definito. E' consigliabile in questa fase salvare la travatura.Si clicca su Esegui, quindi su Compila e si sceglie (creandone una nuova, ad esempio “Demo1”) una sottocartella di quella nella quale sono ospitati gli script MATLAB. Una volta dato l'Ok si aprirà la cartella contenente i files esportati a conferma dell'operazione.
8) Calcolo in MATLAB
Il preprocessore termina qui il suo lavoro. Va ora aperto l'ambiente MATLAB e impostata come current directory quella dello script.
Per lanciare lo script va dato il seguente comando al prompt:
camp2000kernel('Demo1','no');
e il kernel inizierà i calcoli (è consigliabile utilizzare l'opzione verbosa - quindi 'si' al posto di 'no' - per comprendere al meglio il funzionamento del codice).
35
Fig. 27: Preprocessore - passaggio 5
Fig. 28: Preprocessore - passaggio 6
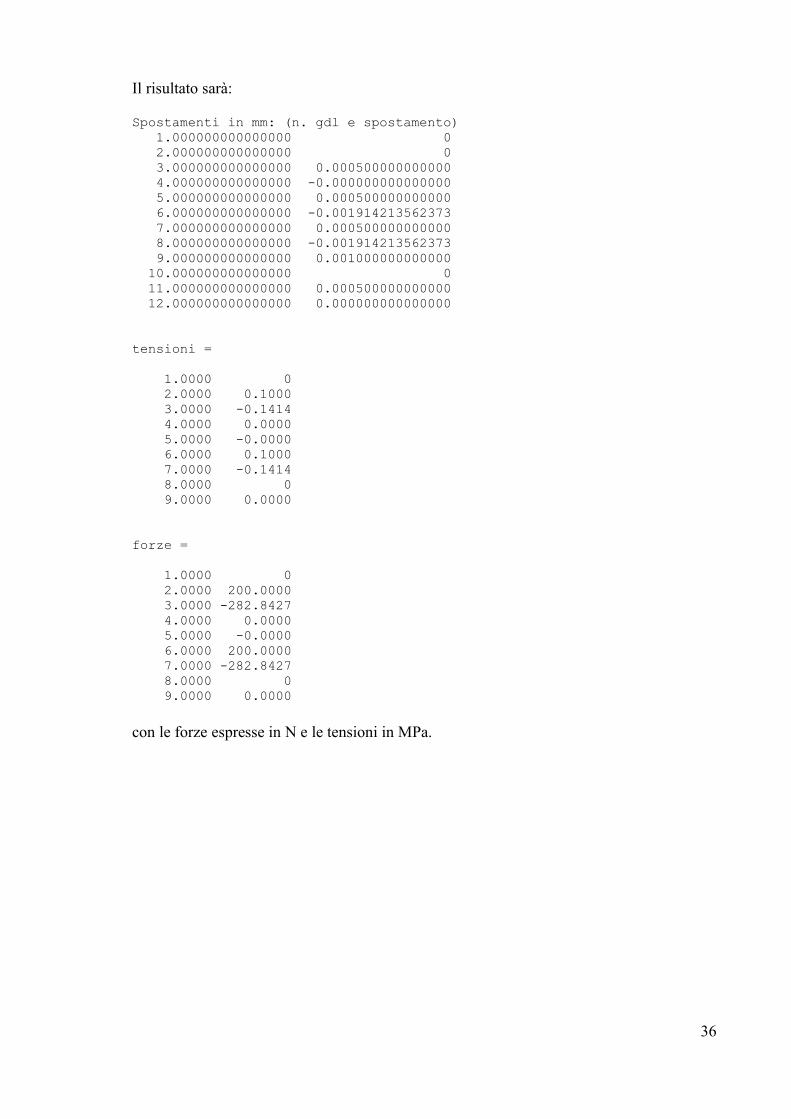
Il risultato sarà:
Spostamenti in mm: (n. gdl e spostamento) 1.000000000000000 0 2.000000000000000 0 3.000000000000000 0.000500000000000 4.000000000000000 -0.000000000000000 5.000000000000000 0.000500000000000 6.000000000000000 -0.001914213562373 7.000000000000000 0.000500000000000 8.000000000000000 -0.001914213562373 9.000000000000000 0.001000000000000 10.000000000000000 0 11.000000000000000 0.000500000000000 12.000000000000000 0.000000000000000
tensioni =
1.0000 0 2.0000 0.1000 3.0000 -0.1414 4.0000 0.0000 5.0000 -0.0000 6.0000 0.1000 7.0000 -0.1414 8.0000 0 9.0000 0.0000
forze =
1.0000 0 2.0000 200.0000 3.0000 -282.8427 4.0000 0.0000 5.0000 -0.0000 6.0000 200.0000 7.0000 -282.8427 8.0000 0 9.0000 0.0000
con le forze espresse in N e le tensioni in MPa.
36
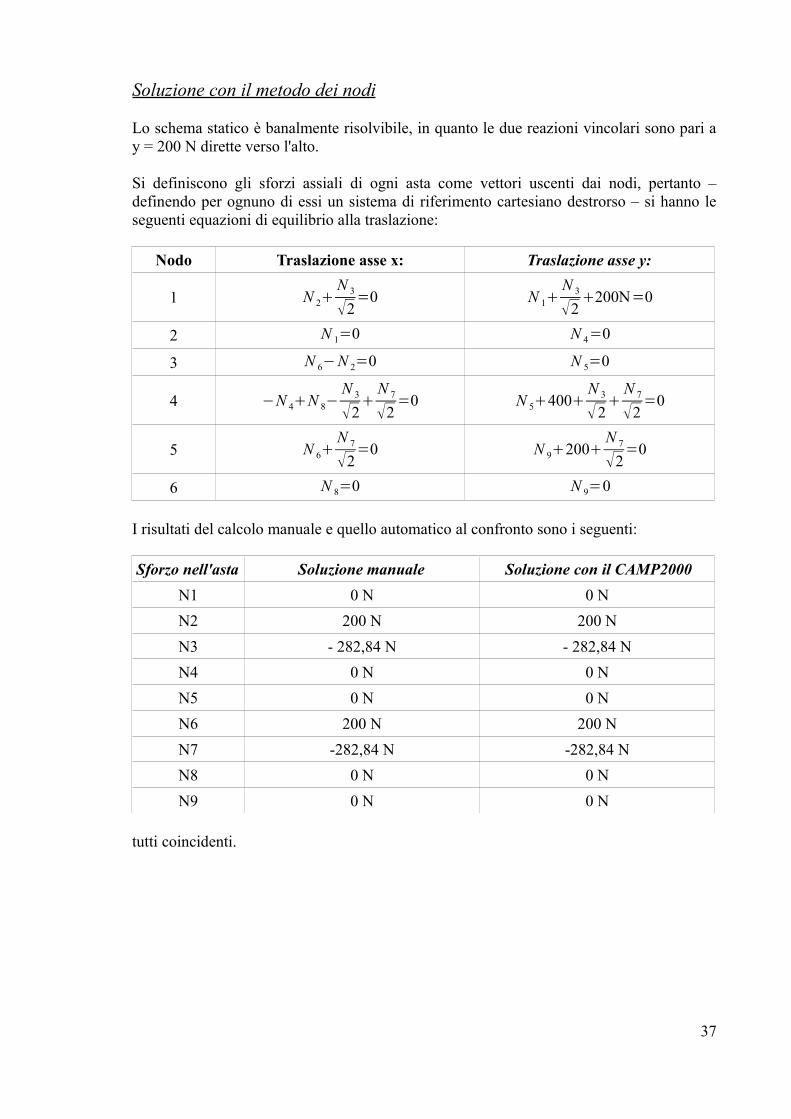
Soluzione con il metodo dei nodi
Lo schema statico è banalmente risolvibile, in quanto le due reazioni vincolari sono pari a y = 200 N dirette verso l'alto.
Si definiscono gli sforzi assiali di ogni asta come vettori uscenti dai nodi, pertanto – definendo per ognuno di essi un sistema di riferimento cartesiano destrorso – si hanno le seguenti equazioni di equilibrio alla traslazione:
Nodo Traslazione asse x: Traslazione asse y:
1 N 2N 3
2=0 N 1
N 3
2200N=0
2 N 1=0 N 4=0
3 N 6−N 2=0 N 5=0
4 −N 4N 8−N 3
2
N 7
2=0 N 5400
N 3
2
N 7
2=0
5 N 6N 7
2=0 N 9200
N 7
2=0
6 N 8=0 N 9=0
I risultati del calcolo manuale e quello automatico al confronto sono i seguenti:
Sforzo nell'asta Soluzione manuale Soluzione con il CAMP2000N1 0 N 0 NN2 200 N 200 NN3 - 282,84 N - 282,84 NN4 0 N 0 NN5 0 N 0 NN6 200 N 200 NN7 -282,84 N -282,84 NN8 0 N 0 NN9 0 N 0 N
tutti coincidenti.
37
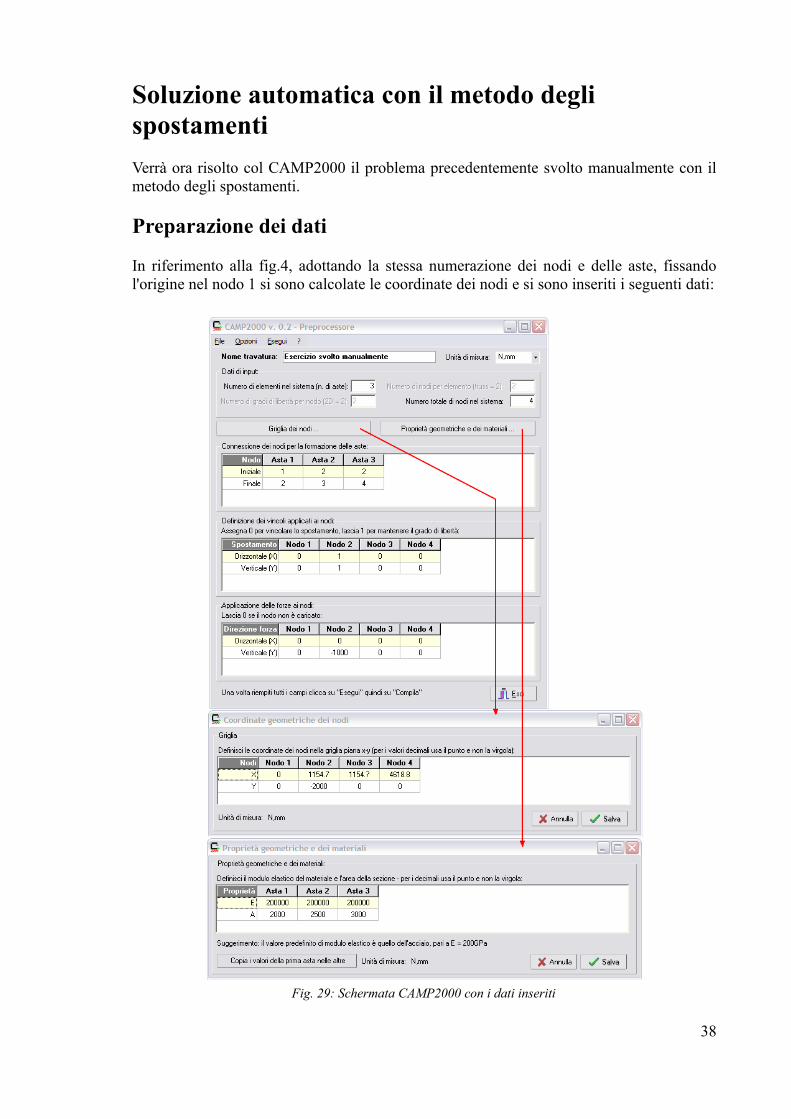
Soluzione automatica con il metodo degli spostamentiVerrà ora risolto col CAMP2000 il problema precedentemente svolto manualmente con il metodo degli spostamenti.
Preparazione dei dati
In riferimento alla fig.4, adottando la stessa numerazione dei nodi e delle aste, fissando l'origine nel nodo 1 si sono calcolate le coordinate dei nodi e si sono inseriti i seguenti dati:
38
Fig. 29: Schermata CAMP2000 con i dati inseriti
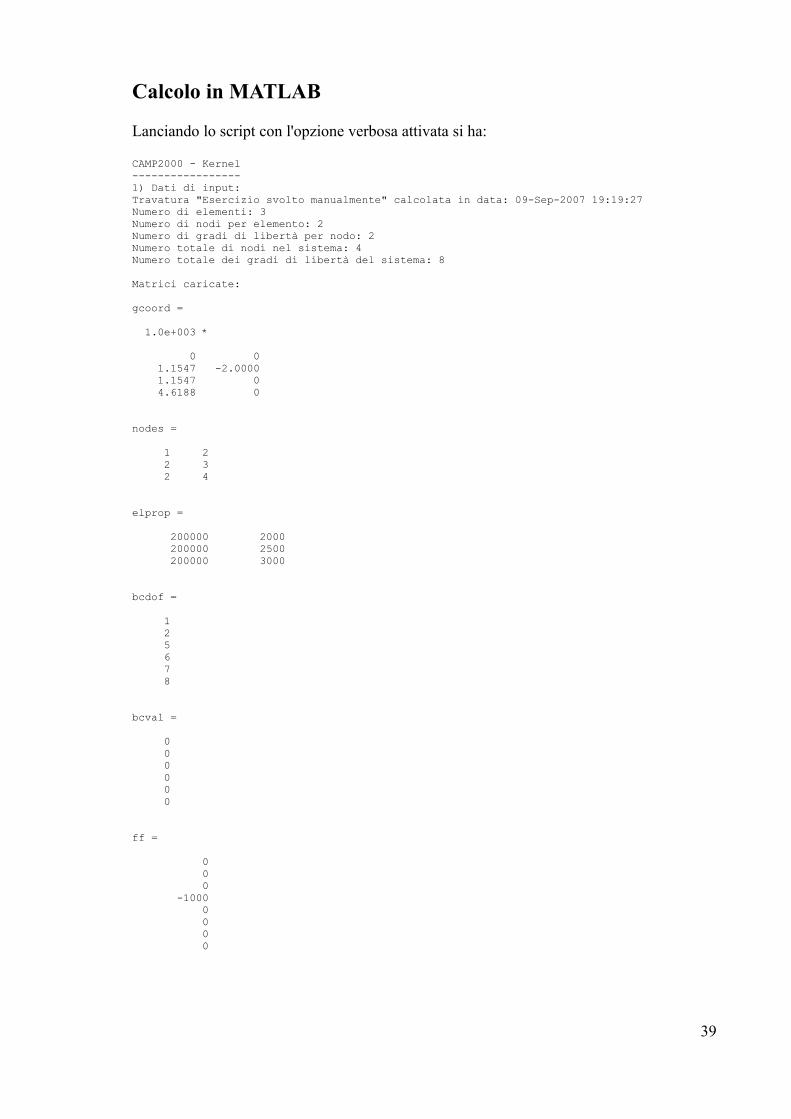
Calcolo in MATLAB
Lanciando lo script con l'opzione verbosa attivata si ha:
CAMP2000 - Kernel-----------------1) Dati di input: Travatura "Esercizio svolto manualmente" calcolata in data: 09-Sep-2007 19:19:27Numero di elementi: 3Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 4Numero totale dei gradi di libertà del sistema: 8 Matrici caricate:
gcoord =
1.0e+003 *
0 0 1.1547 -2.0000 1.1547 0 4.6188 0
nodes =
1 2 2 3 2 4
elprop =
200000 2000 200000 2500 200000 3000
bcdof =
1 2 5 6 7 8
bcval =
0 0 0 0 0 0
ff =
0 0 0 -1000 0 0 0 0
39
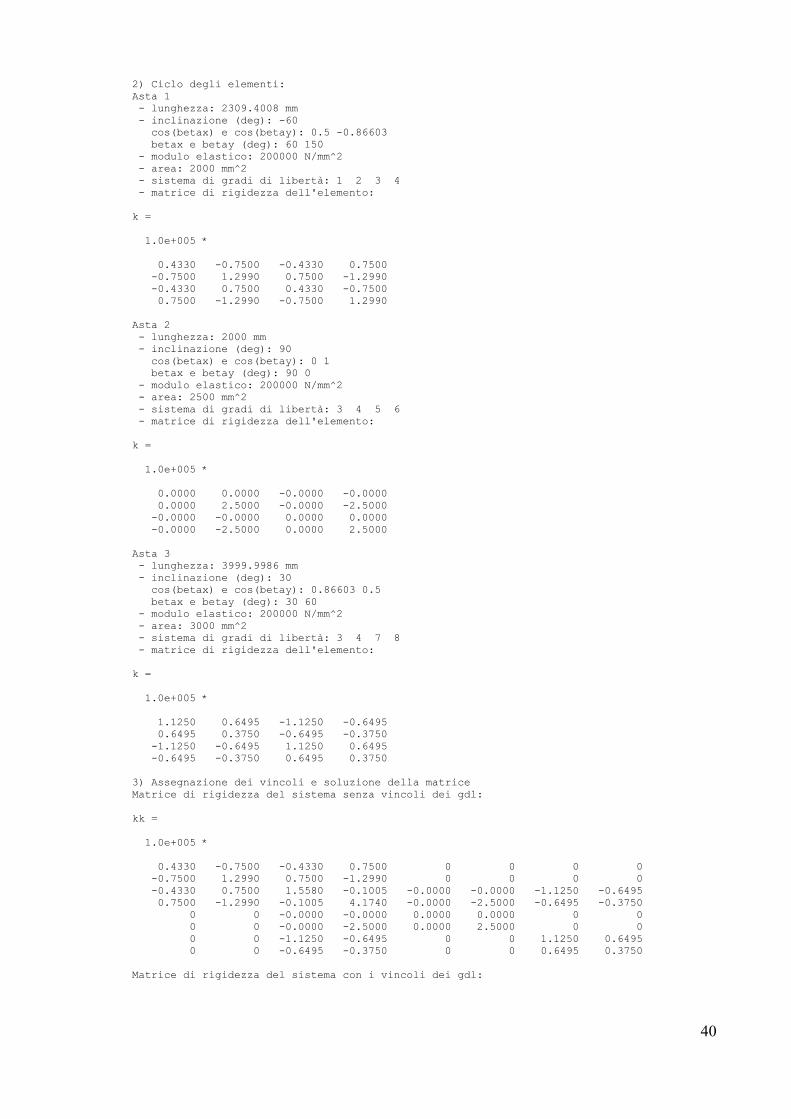
2) Ciclo degli elementi: Asta 1 - lunghezza: 2309.4008 mm - inclinazione (deg): -60 cos(betax) e cos(betay): 0.5 -0.86603 betax e betay (deg): 60 150 - modulo elastico: 200000 N/mm^2 - area: 2000 mm^2 - sistema di gradi di libertà: 1 2 3 4 - matrice di rigidezza dell'elemento:
k =
1.0e+005 *
0.4330 -0.7500 -0.4330 0.7500 -0.7500 1.2990 0.7500 -1.2990 -0.4330 0.7500 0.4330 -0.7500 0.7500 -1.2990 -0.7500 1.2990
Asta 2 - lunghezza: 2000 mm - inclinazione (deg): 90 cos(betax) e cos(betay): 0 1 betax e betay (deg): 90 0 - modulo elastico: 200000 N/mm^2 - area: 2500 mm^2 - sistema di gradi di libertà: 3 4 5 6 - matrice di rigidezza dell'elemento:
k =
1.0e+005 *
0.0000 0.0000 -0.0000 -0.0000 0.0000 2.5000 -0.0000 -2.5000 -0.0000 -0.0000 0.0000 0.0000 -0.0000 -2.5000 0.0000 2.5000
Asta 3 - lunghezza: 3999.9986 mm - inclinazione (deg): 30 cos(betax) e cos(betay): 0.86603 0.5 betax e betay (deg): 30 60 - modulo elastico: 200000 N/mm^2 - area: 3000 mm^2 - sistema di gradi di libertà: 3 4 7 8 - matrice di rigidezza dell'elemento:
k =
1.0e+005 *
1.1250 0.6495 -1.1250 -0.6495 0.6495 0.3750 -0.6495 -0.3750 -1.1250 -0.6495 1.1250 0.6495 -0.6495 -0.3750 0.6495 0.3750
3) Assegnazione dei vincoli e soluzione della matriceMatrice di rigidezza del sistema senza vincoli dei gdl:
kk =
1.0e+005 *
0.4330 -0.7500 -0.4330 0.7500 0 0 0 0 -0.7500 1.2990 0.7500 -1.2990 0 0 0 0 -0.4330 0.7500 1.5580 -0.1005 -0.0000 -0.0000 -1.1250 -0.6495 0.7500 -1.2990 -0.1005 4.1740 -0.0000 -2.5000 -0.6495 -0.3750 0 0 -0.0000 -0.0000 0.0000 0.0000 0 0 0 0 -0.0000 -2.5000 0.0000 2.5000 0 0 0 0 -1.1250 -0.6495 0 0 1.1250 0.6495 0 0 -0.6495 -0.3750 0 0 0.6495 0.3750
Matrice di rigidezza del sistema con i vincoli dei gdl:
40
kk =
1.0e+005 *
0.0000 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 1.5580 -0.1005 0 0 0 0 0 0 -0.1005 4.1740 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 0.0000 0 0 0 0 0 0 0 0 0.0000
Matrice delle forze di sistema:
ff =
0 0 0 -1000 0 0 0 0
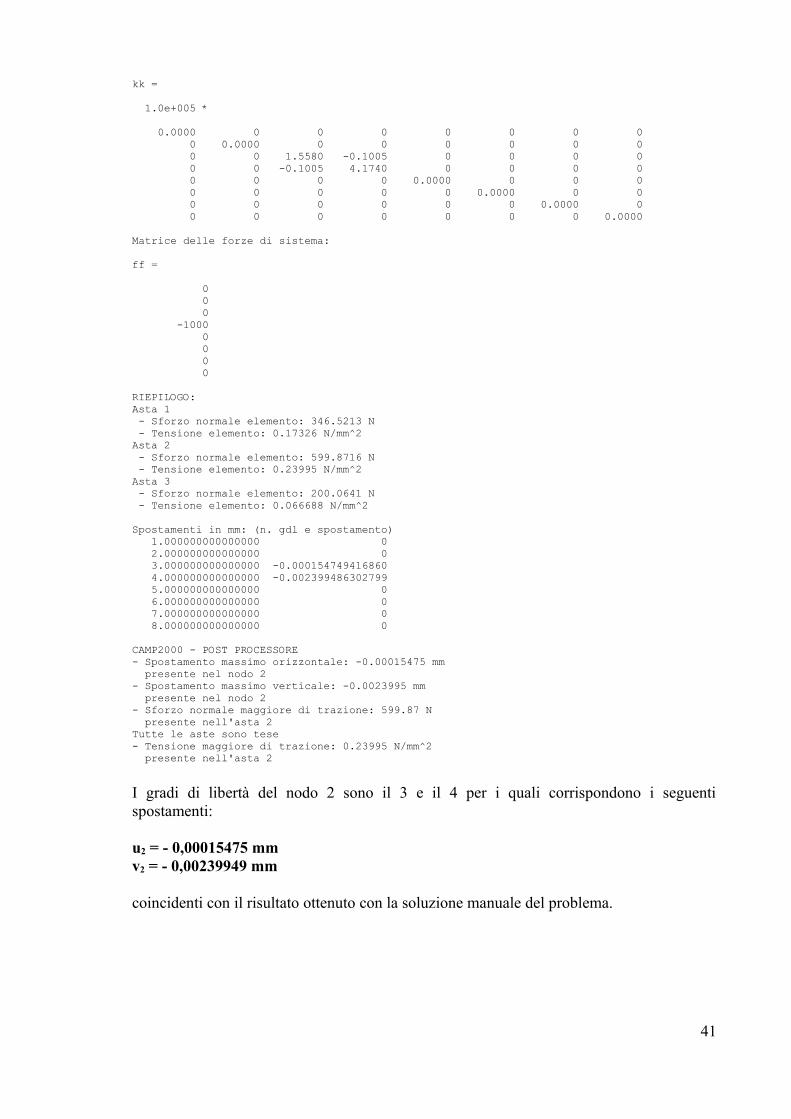
RIEPILOGO: Asta 1 - Sforzo normale elemento: 346.5213 N - Tensione elemento: 0.17326 N/mm^2Asta 2 - Sforzo normale elemento: 599.8716 N - Tensione elemento: 0.23995 N/mm^2Asta 3 - Sforzo normale elemento: 200.0641 N - Tensione elemento: 0.066688 N/mm^2 Spostamenti in mm: (n. gdl e spostamento) 1.000000000000000 0 2.000000000000000 0 3.000000000000000 -0.000154749416860 4.000000000000000 -0.002399486302799 5.000000000000000 0 6.000000000000000 0 7.000000000000000 0 8.000000000000000 0
CAMP2000 - POST PROCESSORE- Spostamento massimo orizzontale: -0.00015475 mm presente nel nodo 2- Spostamento massimo verticale: -0.0023995 mm presente nel nodo 2- Sforzo normale maggiore di trazione: 599.87 N presente nell'asta 2Tutte le aste sono tese- Tensione maggiore di trazione: 0.23995 N/mm^2 presente nell'asta 2
I gradi di libertà del nodo 2 sono il 3 e il 4 per i quali corrispondono i seguenti spostamenti:
u2 = - 0,00015475 mmv2 = - 0,00239949 mm
coincidenti con il risultato ottenuto con la soluzione manuale del problema.
41
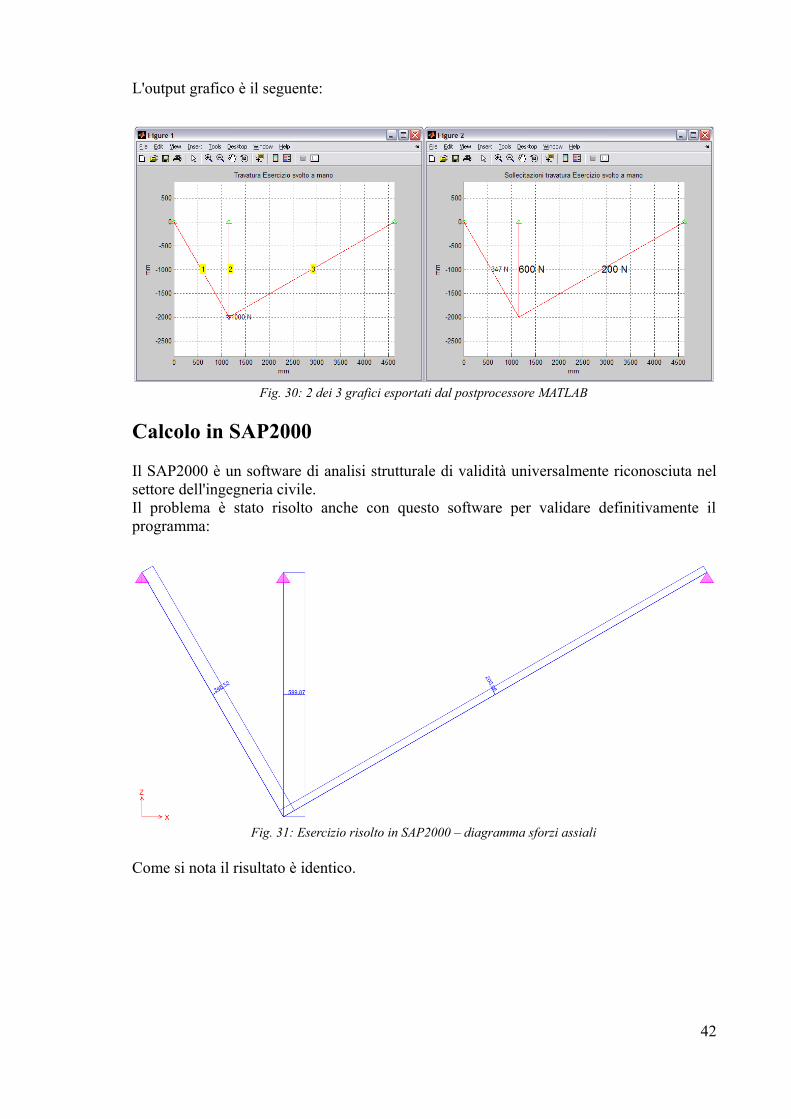
L'output grafico è il seguente:
Calcolo in SAP2000
Il SAP2000 è un software di analisi strutturale di validità universalmente riconosciuta nel settore dell'ingegneria civile.Il problema è stato risolto anche con questo software per validare definitivamente il programma:
Come si nota il risultato è identico.
42
Fig. 30: 2 dei 3 grafici esportati dal postprocessore MATLAB
Fig. 31: Esercizio risolto in SAP2000 – diagramma sforzi assiali
ApplicazioniDopo aver validato il software con opportuni esempi verrà ora utilizzato per la soluzione di alcune applicazioni pratiche. Si mostrerà quindi il vantaggio di avere a disposizione un pacchetto software dal codice aperto che fornisce all'utente una maggiore trasparenza e fiducia nei calcoli effettuati.
La prima è un confronto tra diverse tipologie di travature esistenti, soggette agli stessi carichi, aventi la stessa luce e stesso numero di “moduli”. Le travature saranno anche calcolate in SAP2000 per effettuare un ulteriore validazione. Infine verrà analizzato il caso di una travatura reticolare esistente, ovvero un capannone industriale modellato in SAP2000 e per il quale è stata effettuata una prova di carico.
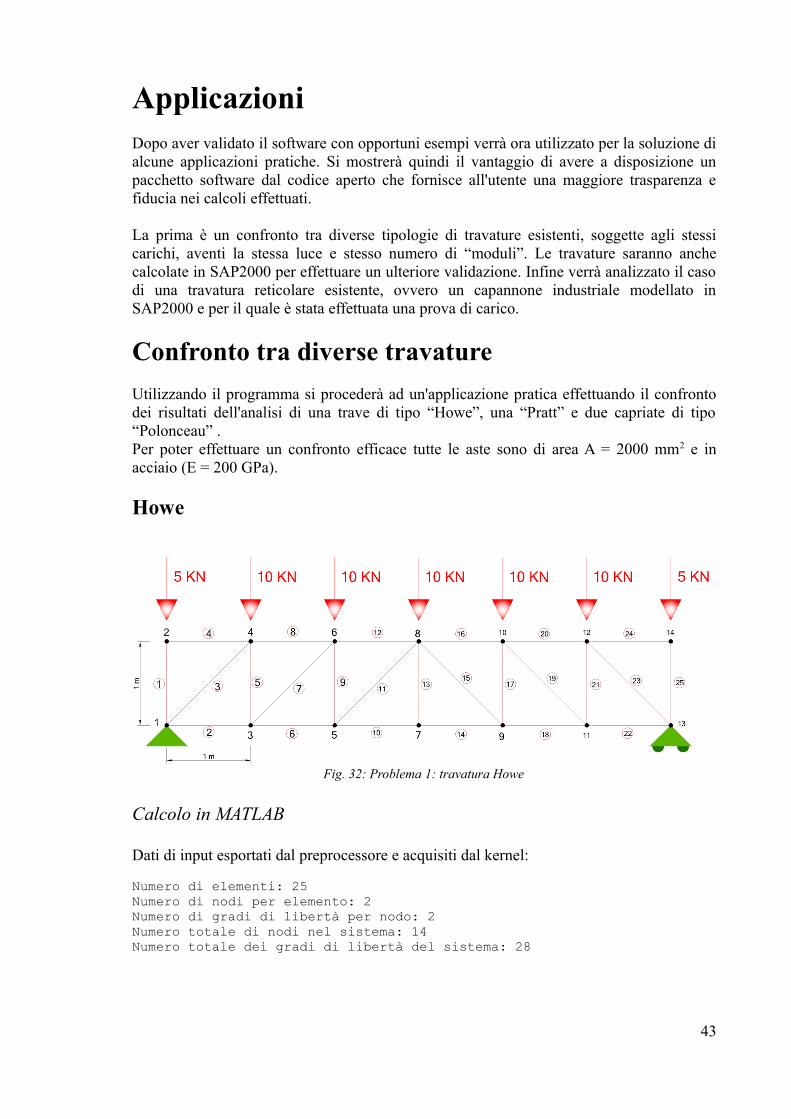
Confronto tra diverse travatureUtilizzando il programma si procederà ad un'applicazione pratica effettuando il confronto dei risultati dell'analisi di una trave di tipo “Howe”, una “Pratt” e due capriate di tipo “Polonceau” .Per poter effettuare un confronto efficace tutte le aste sono di area A = 2000 mm2 e in acciaio (E = 200 GPa).
Howe
Calcolo in MATLAB
Dati di input esportati dal preprocessore e acquisiti dal kernel:
Numero di elementi: 25Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 14Numero totale dei gradi di libertà del sistema: 28
43
Fig. 32: Problema 1: travatura Howe
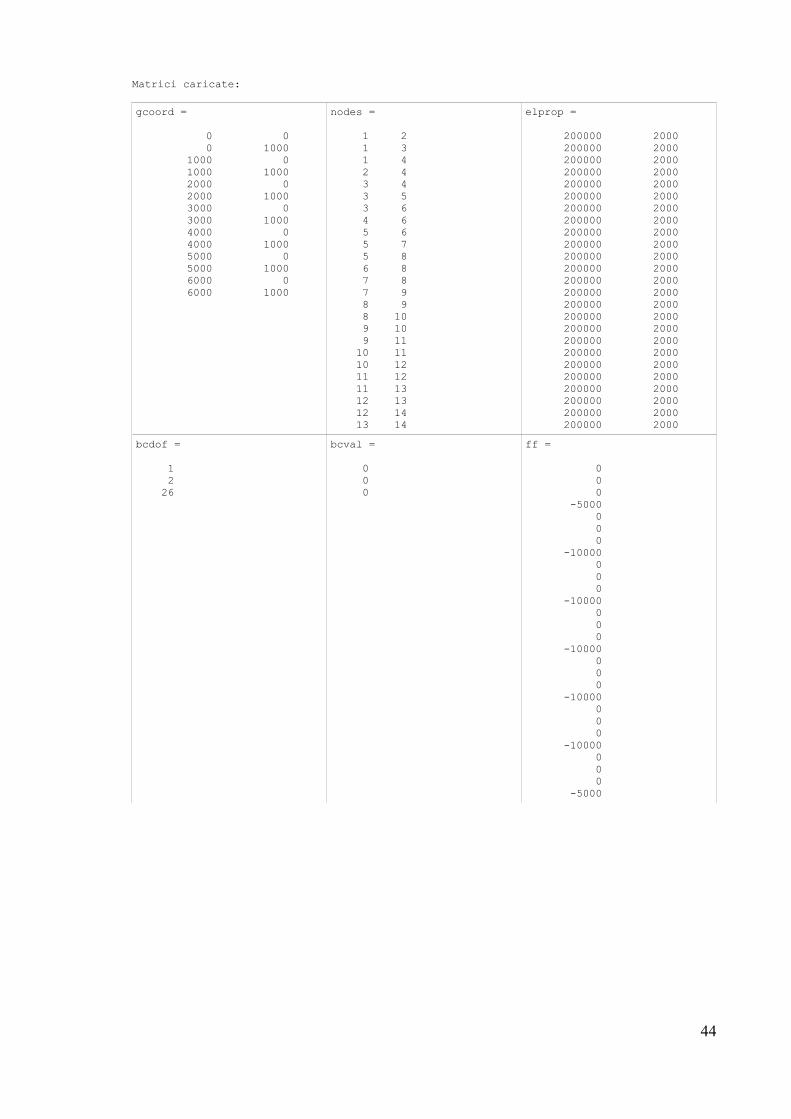
Matrici caricate:
gcoord =
0 0 0 1000 1000 0 1000 1000 2000 0 2000 1000 3000 0 3000 1000 4000 0 4000 1000 5000 0 5000 1000 6000 0 6000 1000
nodes =
1 2 1 3 1 4 2 4 3 4 3 5 3 6 4 6 5 6 5 7 5 8 6 8 7 8 7 9 8 9 8 10 9 10 9 11 10 11 10 12 11 12 11 13 12 13 12 14 13 14
elprop =
200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000
bcdof =
1 2 26
bcval =
0 0 0
ff =
0 0 0 -5000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -5000
44
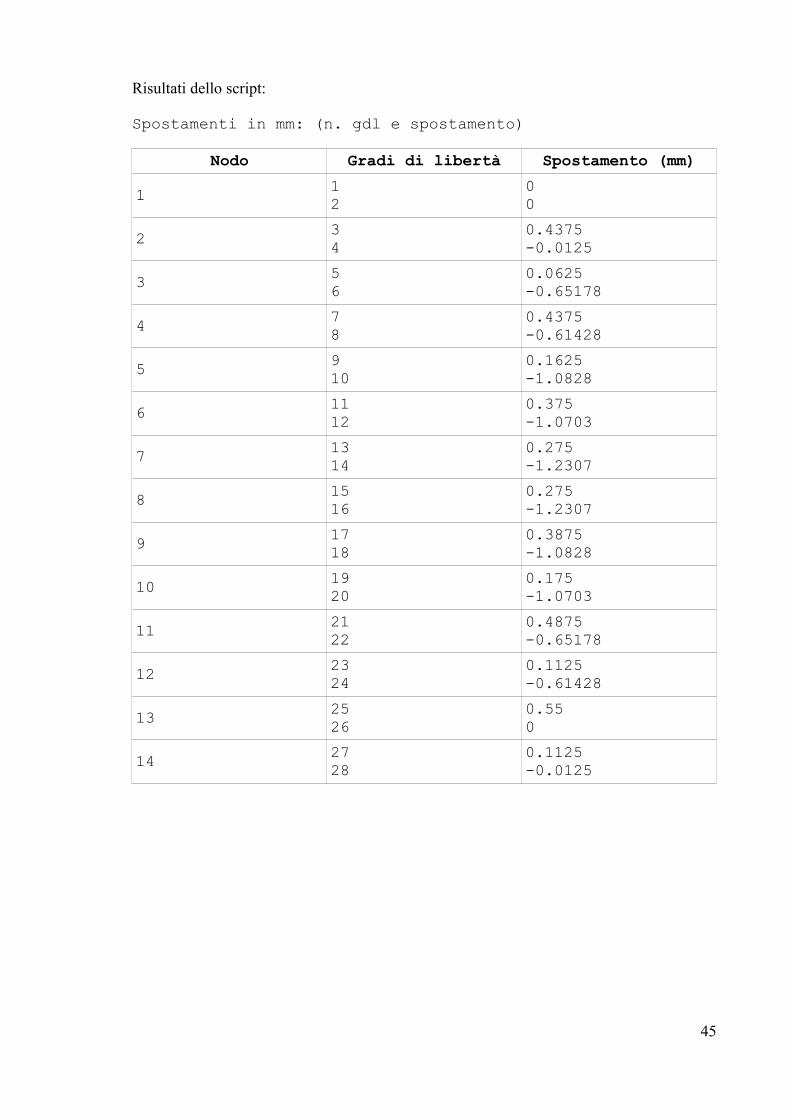
Risultati dello script:
Spostamenti in mm: (n. gdl e spostamento)
Nodo Gradi di libertà Spostamento (mm)1 1
200
2 34
0.4375-0.0125
3 56
0.0625-0.65178
4 78
0.4375-0.61428
5 910
0.1625-1.0828
6 1112
0.375-1.0703
7 1314
0.275-1.2307
8 1516
0.275-1.2307
9 1718
0.3875-1.0828
10 1920
0.175-1.0703
11 2122
0.4875-0.65178
12 2324
0.1125-0.61428
13 2526
0.550
14 2728
0.1125-0.0125
45
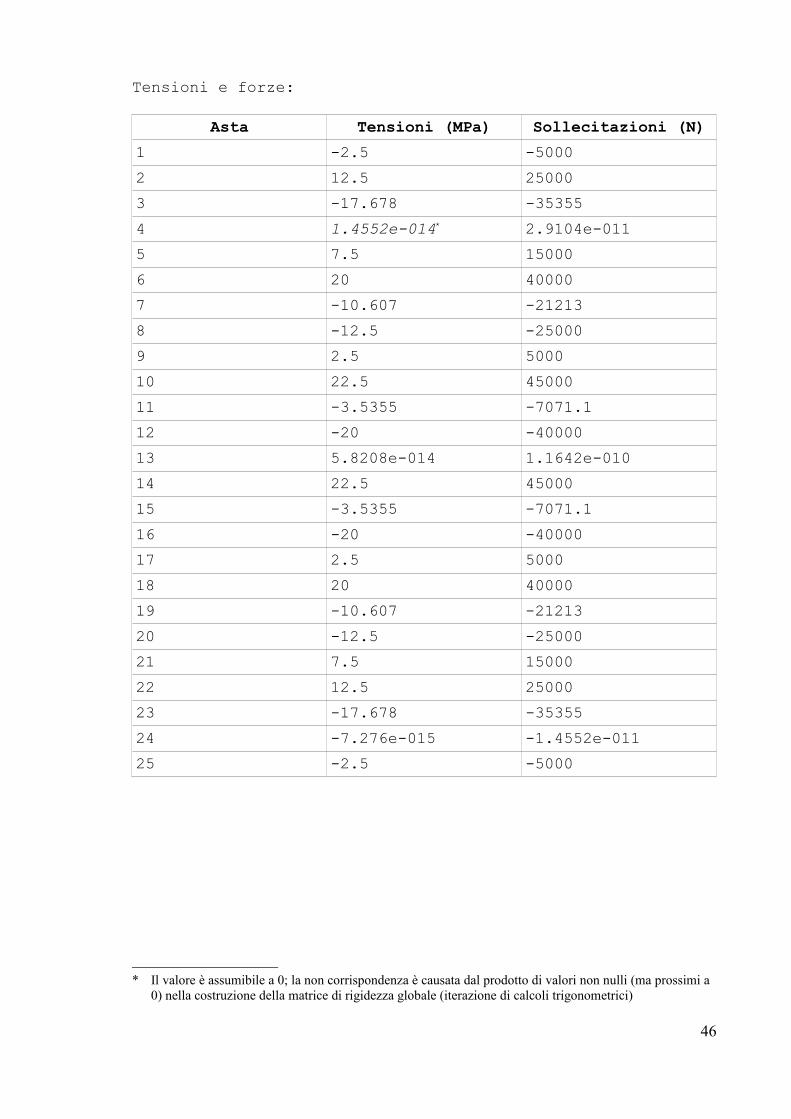
Tensioni e forze:
Asta Tensioni (MPa) Sollecitazioni (N)1 -2.5 -50002 12.5 250003 -17.678 -353554 1.4552e-014* 2.9104e-0115 7.5 150006 20 400007 -10.607 -212138 -12.5 -250009 2.5 500010 22.5 4500011 -3.5355 -7071.112 -20 -4000013 5.8208e-014 1.1642e-01014 22.5 4500015 -3.5355 -7071.116 -20 -4000017 2.5 500018 20 4000019 -10.607 -2121320 -12.5 -2500021 7.5 1500022 12.5 2500023 -17.678 -3535524 -7.276e-015 -1.4552e-01125 -2.5 -5000
* Il valore è assumibile a 0; la non corrispondenza è causata dal prodotto di valori non nulli (ma prossimi a 0) nella costruzione della matrice di rigidezza globale (iterazione di calcoli trigonometrici)
46
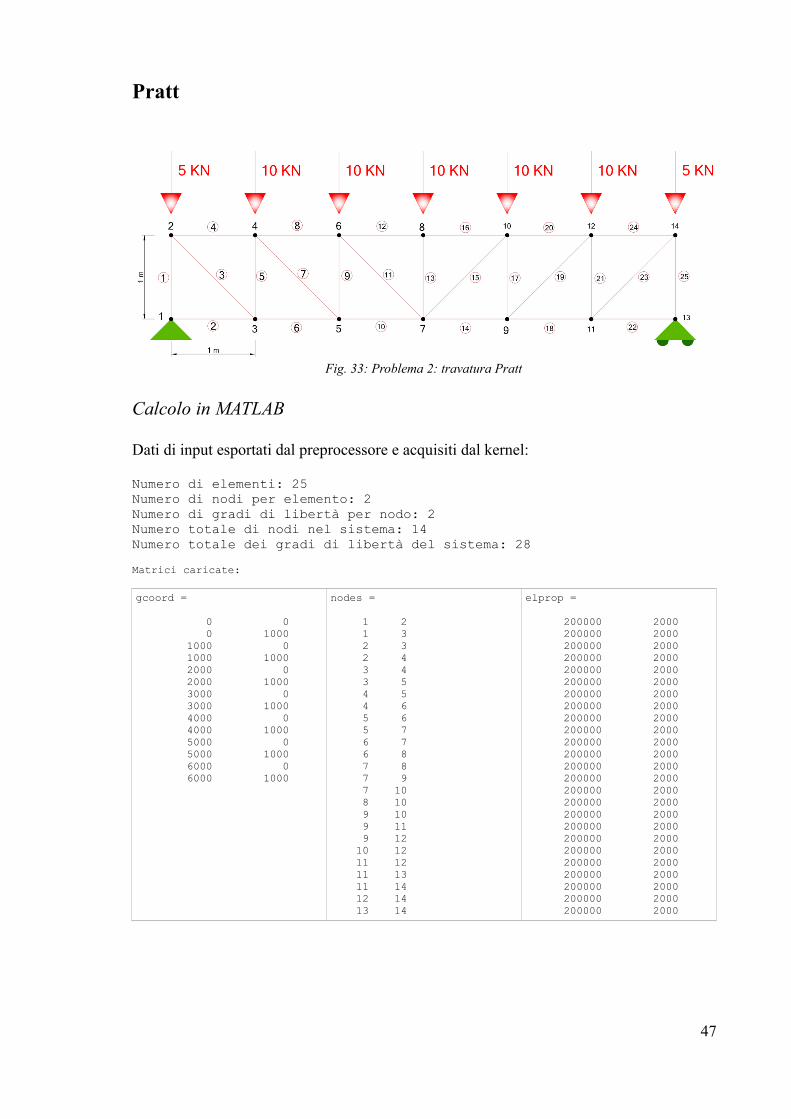
Pratt
Calcolo in MATLAB
Dati di input esportati dal preprocessore e acquisiti dal kernel:
Numero di elementi: 25Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 14Numero totale dei gradi di libertà del sistema: 28Matrici caricate:
gcoord =
0 0 0 1000 1000 0 1000 1000 2000 0 2000 1000 3000 0 3000 1000 4000 0 4000 1000 5000 0 5000 1000 6000 0 6000 1000
nodes =
1 2 1 3 2 3 2 4 3 4 3 5 4 5 4 6 5 6 5 7 6 7 6 8 7 8 7 9 7 10 8 10 9 10 9 11 9 12 10 12 11 12 11 13 11 14 12 14 13 14
elprop =
200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000
47
Fig. 33: Problema 2: travatura Pratt
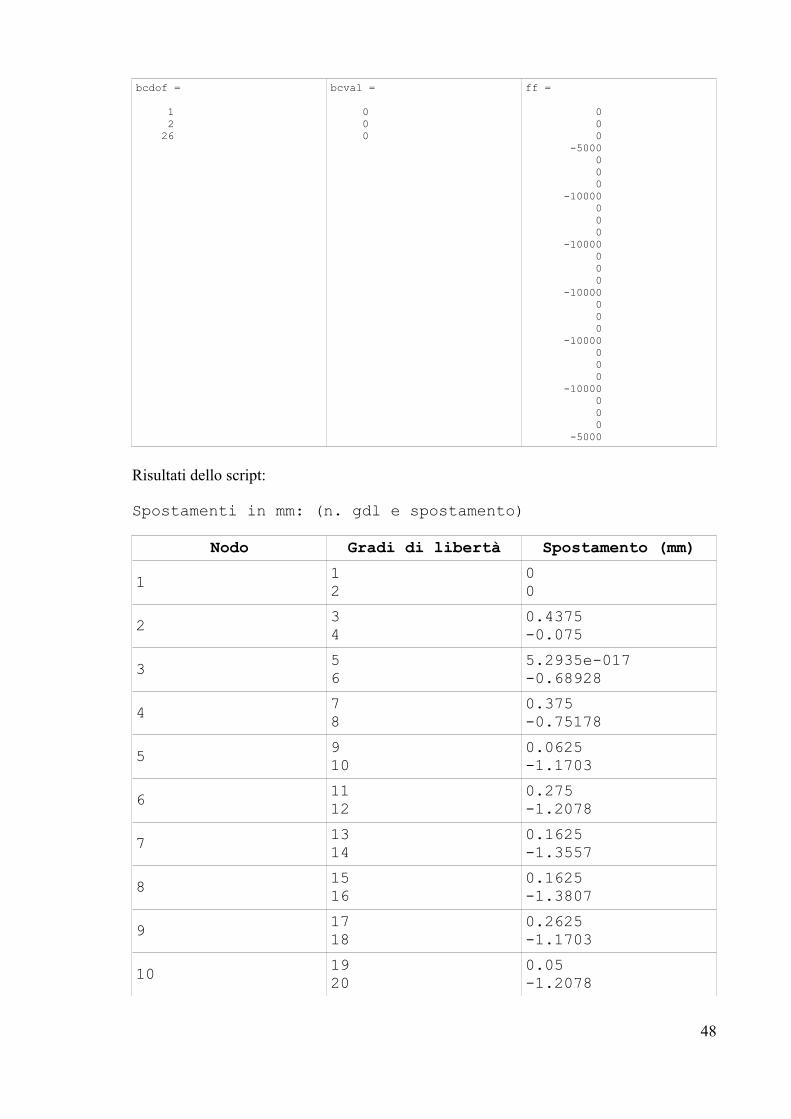
bcdof =
1 2 26
bcval =
0 0 0
ff =
0 0 0 -5000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -5000
Risultati dello script:
Spostamenti in mm: (n. gdl e spostamento)
Nodo Gradi di libertà Spostamento (mm)1 1
200
2 34
0.4375-0.075
3 56
5.2935e-017-0.68928
4 78
0.375-0.75178
5 910
0.0625-1.1703
6 1112
0.275-1.2078
7 1314
0.1625-1.3557
8 1516
0.1625-1.3807
9 1718
0.2625-1.1703
10 1920
0.05-1.2078
48
11 2122
0.325-0.68928
12 2324
-0.05-0.75178
13 2526
0.3250
14 2728
-0.1125-0.075
Tensioni e forze:
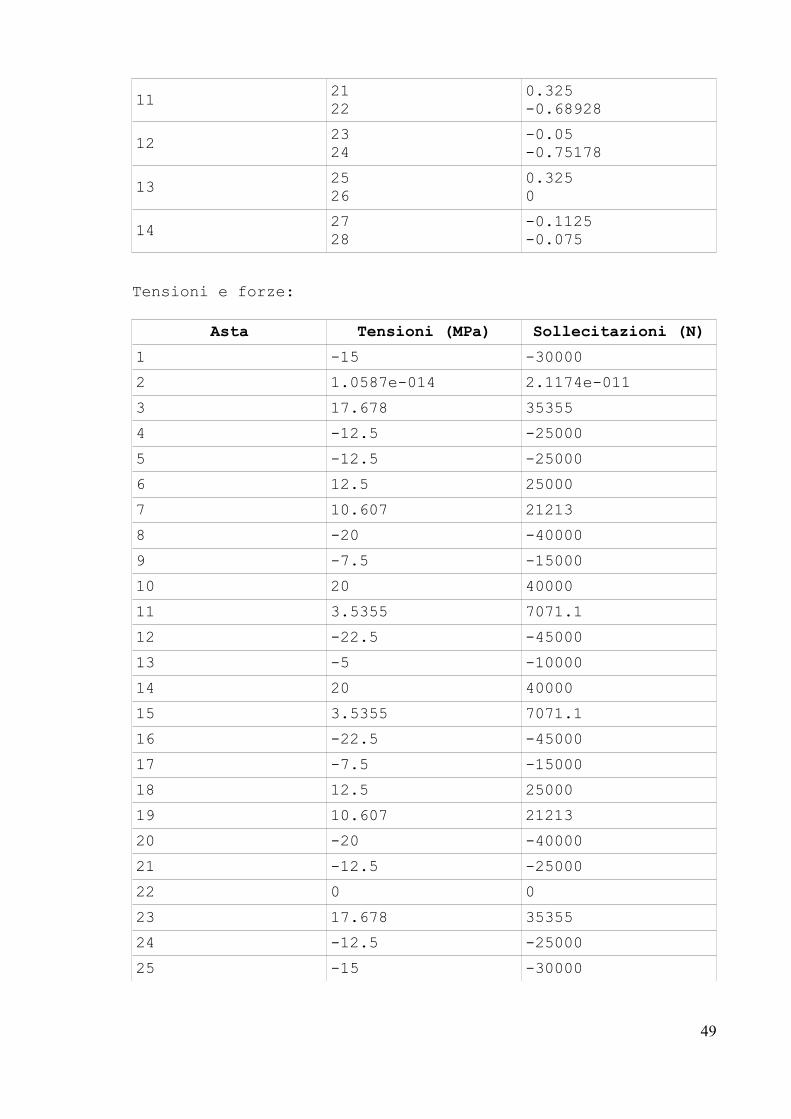
Asta Tensioni (MPa) Sollecitazioni (N)1 -15 -300002 1.0587e-014 2.1174e-0113 17.678 353554 -12.5 -250005 -12.5 -250006 12.5 250007 10.607 212138 -20 -400009 -7.5 -1500010 20 4000011 3.5355 7071.112 -22.5 -4500013 -5 -1000014 20 4000015 3.5355 7071.116 -22.5 -4500017 -7.5 -1500018 12.5 2500019 10.607 2121320 -20 -4000021 -12.5 -2500022 0 023 17.678 3535524 -12.5 -2500025 -15 -30000
49
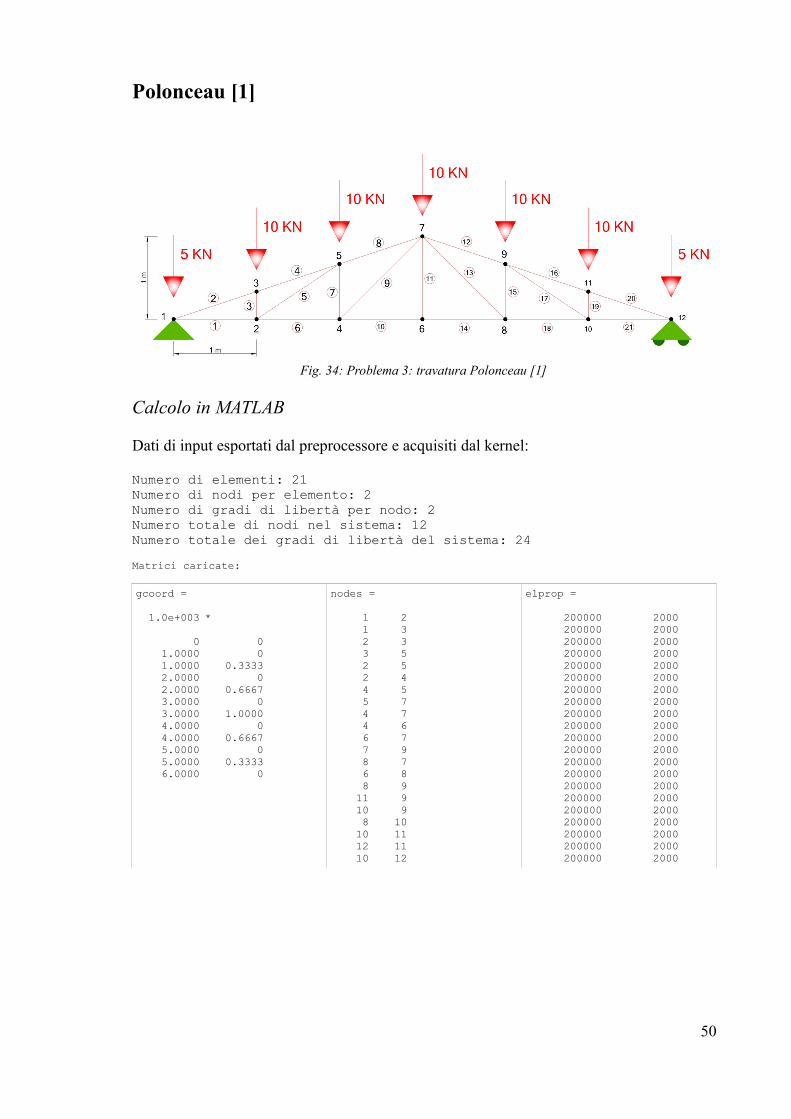
Polonceau [1]
Calcolo in MATLAB
Dati di input esportati dal preprocessore e acquisiti dal kernel:
Numero di elementi: 21Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 12Numero totale dei gradi di libertà del sistema: 24 Matrici caricate:
gcoord =
1.0e+003 *
0 0 1.0000 0 1.0000 0.3333 2.0000 0 2.0000 0.6667 3.0000 0 3.0000 1.0000 4.0000 0 4.0000 0.6667 5.0000 0 5.0000 0.3333 6.0000 0
nodes =
1 2 1 3 2 3 3 5 2 5 2 4 4 5 5 7 4 7 4 6 6 7 7 9 8 7 6 8 8 9 11 9 10 9 8 10 10 11 12 11 10 12
elprop =
200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000
50
Fig. 34: Problema 3: travatura Polonceau [1]
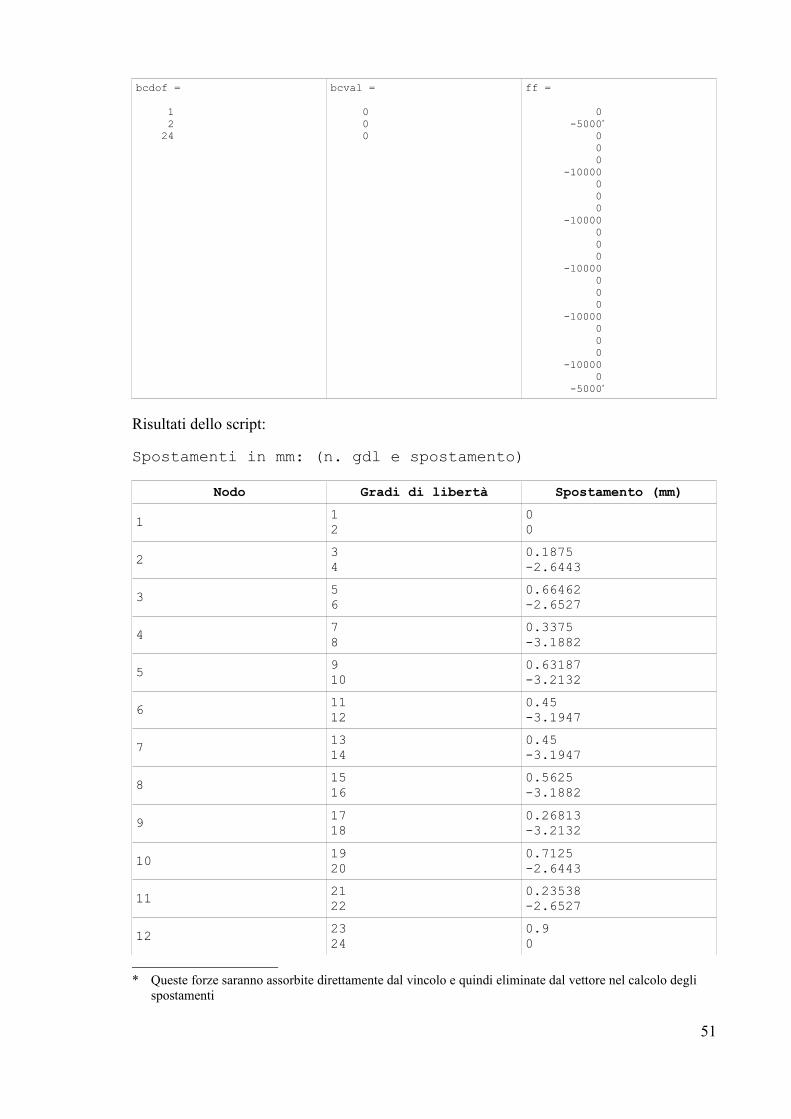
bcdof =
1 2 24
bcval =
0 0 0
ff =
0 -5000*
0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 -5000*
Risultati dello script:
Spostamenti in mm: (n. gdl e spostamento)
Nodo Gradi di libertà Spostamento (mm)1 1
200
2 34
0.1875-2.6443
3 56
0.66462-2.6527
4 78
0.3375-3.1882
5 910
0.63187-3.2132
6 1112
0.45-3.1947
7 1314
0.45-3.1947
8 1516
0.5625-3.1882
9 1718
0.26813-3.2132
10 1920
0.7125-2.6443
11 2122
0.23538-2.6527
12 2324
0.90
* Queste forze saranno assorbite direttamente dal vincolo e quindi eliminate dal vettore nel calcolo degli spostamenti
51
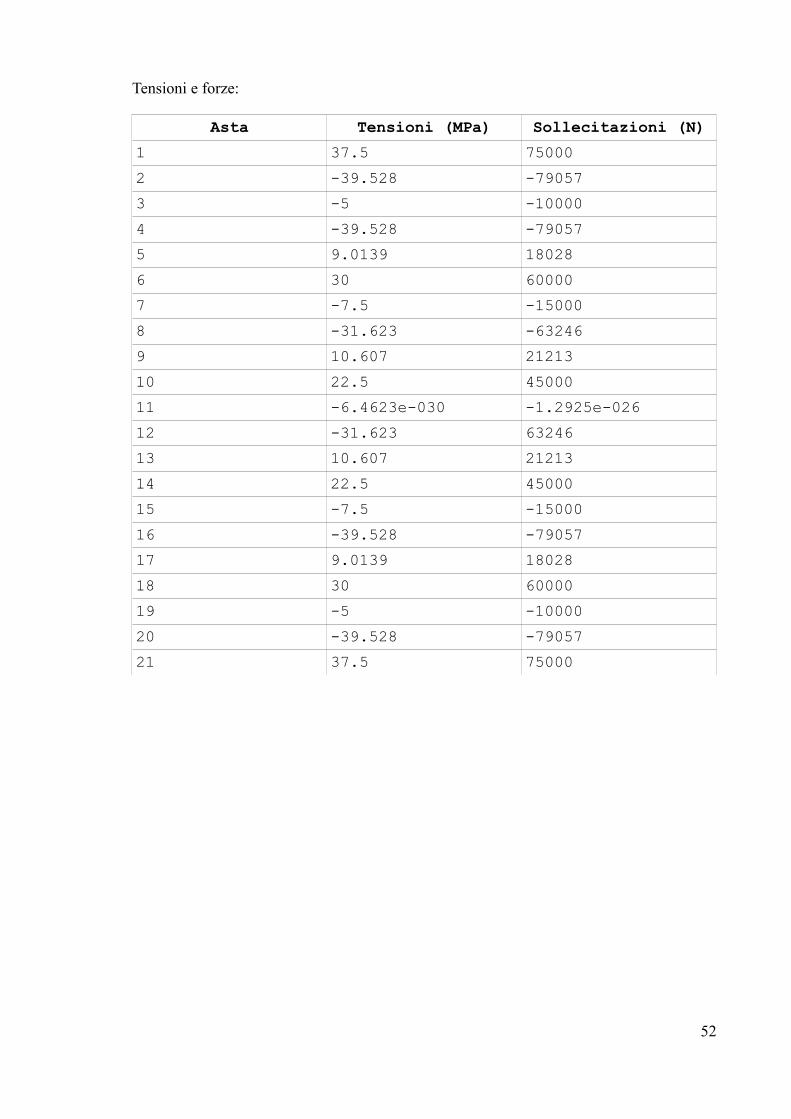
Tensioni e forze:
Asta Tensioni (MPa) Sollecitazioni (N)1 37.5 750002 -39.528 -790573 -5 -100004 -39.528 -790575 9.0139 180286 30 600007 -7.5 -150008 -31.623 -632469 10.607 2121310 22.5 4500011 -6.4623e-030 -1.2925e-02612 -31.623 6324613 10.607 2121314 22.5 4500015 -7.5 -1500016 -39.528 -7905717 9.0139 1802818 30 6000019 -5 -1000020 -39.528 -7905721 37.5 75000
52
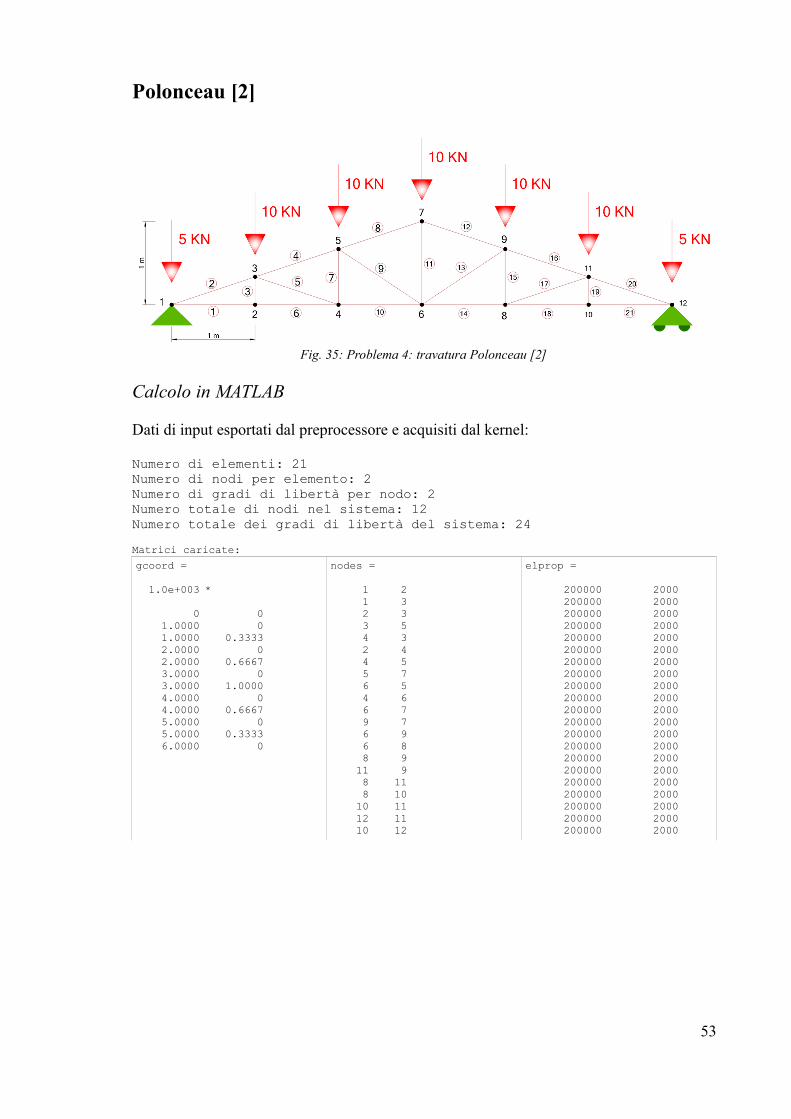
Polonceau [2]
Calcolo in MATLAB
Dati di input esportati dal preprocessore e acquisiti dal kernel:
Numero di elementi: 21Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 12Numero totale dei gradi di libertà del sistema: 24 Matrici caricate: gcoord =
1.0e+003 *
0 0 1.0000 0 1.0000 0.3333 2.0000 0 2.0000 0.6667 3.0000 0 3.0000 1.0000 4.0000 0 4.0000 0.6667 5.0000 0 5.0000 0.3333 6.0000 0
nodes =
1 2 1 3 2 3 3 5 4 3 2 4 4 5 5 7 6 5 4 6 6 7 9 7 6 9 6 8 8 9 11 9 8 11 8 10 10 11 12 11 10 12
elprop =
200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000 200000 2000
53
Fig. 35: Problema 4: travatura Polonceau [2]
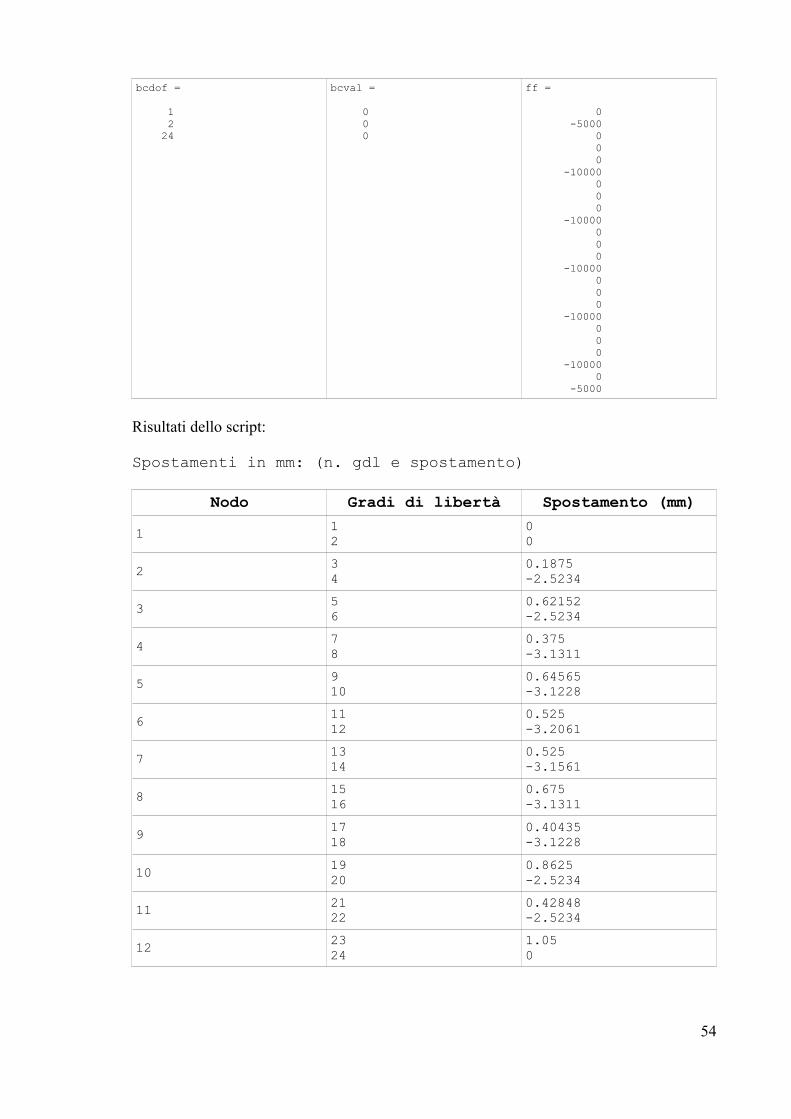
bcdof =
1 2 24
bcval =
0 0 0
ff =
0 -5000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 0 0 -10000 0 -5000
Risultati dello script:
Spostamenti in mm: (n. gdl e spostamento)
Nodo Gradi di libertà Spostamento (mm)1 1
200
2 34
0.1875-2.5234
3 56
0.62152-2.5234
4 78
0.375-3.1311
5 910
0.64565-3.1228
6 1112
0.525-3.2061
7 1314
0.525-3.1561
8 1516
0.675-3.1311
9 1718
0.40435-3.1228
10 1920
0.8625-2.5234
11 2122
0.42848-2.5234
12 2324
1.050
54
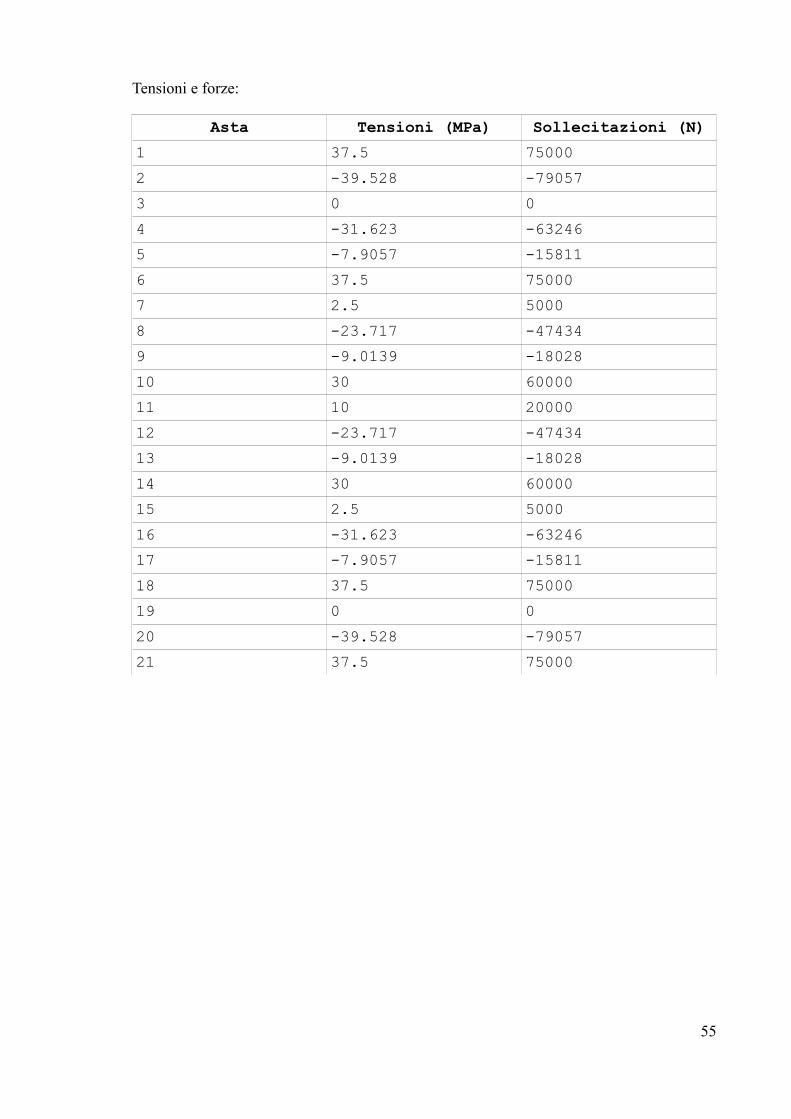
Tensioni e forze:
Asta Tensioni (MPa) Sollecitazioni (N)1 37.5 750002 -39.528 -790573 0 04 -31.623 -632465 -7.9057 -158116 37.5 750007 2.5 50008 -23.717 -474349 -9.0139 -1802810 30 6000011 10 2000012 -23.717 -4743413 -9.0139 -1802814 30 6000015 2.5 500016 -31.623 -6324617 -7.9057 -1581118 37.5 7500019 0 020 -39.528 -7905721 37.5 75000
55
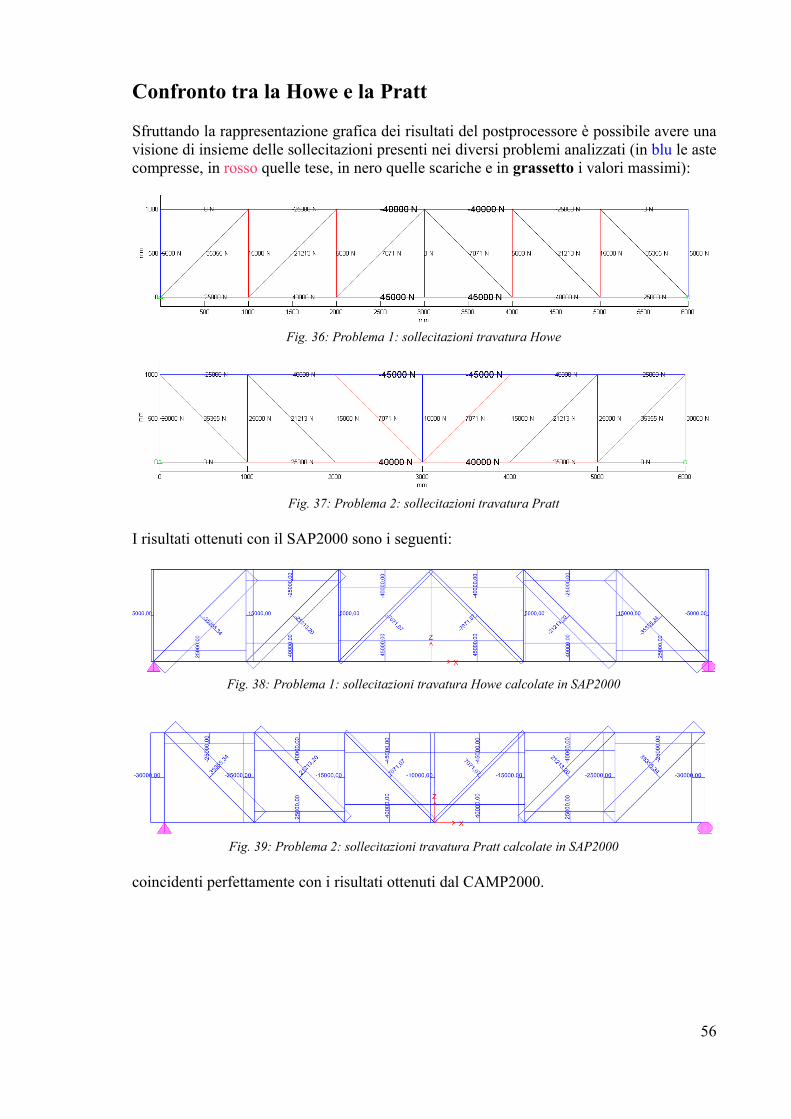
Confronto tra la Howe e la Pratt
Sfruttando la rappresentazione grafica dei risultati del postprocessore è possibile avere una visione di insieme delle sollecitazioni presenti nei diversi problemi analizzati (in blu le aste compresse, in rosso quelle tese, in nero quelle scariche e in grassetto i valori massimi):
I risultati ottenuti con il SAP2000 sono i seguenti:
coincidenti perfettamente con i risultati ottenuti dal CAMP2000.
56
Fig. 36: Problema 1: sollecitazioni travatura Howe
Fig. 37: Problema 2: sollecitazioni travatura Pratt
Fig. 38: Problema 1: sollecitazioni travatura Howe calcolate in SAP2000
Fig. 39: Problema 2: sollecitazioni travatura Pratt calcolate in SAP2000
Confrontando le due travature, differenti esclusivamente per l'inclinazione delle diagonali, si nota come:
● le sollecitazioni del corrente inferiore della Howe sono pari all'opposto di quelle del corrente superiore della Pratt, idem per il corrente superiore rispetto all'altro inferiore
● i montanti nella Howe – ad eccezione di quelli di estremità che scaricano le forze sui due vincoli – sono tutti tesi (con quello centrale scarico) mentre nella Pratt sono tutti compressi con sollecitazioni (in valore assoluto) maggiori
● le diagonali nella Howe hanno sollecitazioni uguali e opposte rispetto a quelle della Pratt (compresse invece che tese nelle seconde)
Alla luce di queste annotazioni si possono fare le seguenti considerazioni progettuali: le sollecitazioni di trazioni sono praticamente comparabili, con il valore maggiore nella Howe. La Pratt ha più aste compresse (tutti i montanti più il corrente superiore) con la sollecitazione maggiore (-45000 N) e quindi potrebbe presentare maggiori problemi di instabilità rispetto alla Howe. Qui però sono i diagonali – elementi più lunghi e quindi con maggiore lunghezza libera di inflessione – a soffrire di questo problema.
Per approfondire questo problema è necessario riprendere il modello di asta di Eulero nel
quale si ha la relazione del carico critico che produce sbandamento: N cr=2 EI
L2 .
Nei due problemi analizzati la lunghezza delle diagonali e quella dei montanti sono legate dalla seguente relazione: LD=LM⋅2Effettuando il rapporto dei carichi critici nelle due tipologie di aste si ottiene:
N CR , D
N CR ,M= EI2
2 LM2 ⋅
LM2
EI2=12
ovvero che il carico critico delle diagonali è la metà di quello dei montanti. Considerando che le aste dei correnti hanno la stessa lunghezza dei montanti, si prenda la diagonale più caricata (N = -35355 N, Howe) e il montante/corrente più caricato (N = -45000 N, Pratt). Per stabilire la condizione più gravosa si prenda il maggiore tra i due rapporti:
N D
N CR , De
N M
N CR ,M
Essendo N CR , M=2⋅N CR , D
si ha 35355N CR , D
45000 /2=22500
N CR , D
Si nota, alla luce di queste ultime considerazioni, come il fenomeno di instabilità sia più pericoloso nella Howe rispetto alla Pratt (sempre a parità di rigidezza considerando le aste tutte uguali e con le luci adottate).
57
Confronto tra le due Polonceau
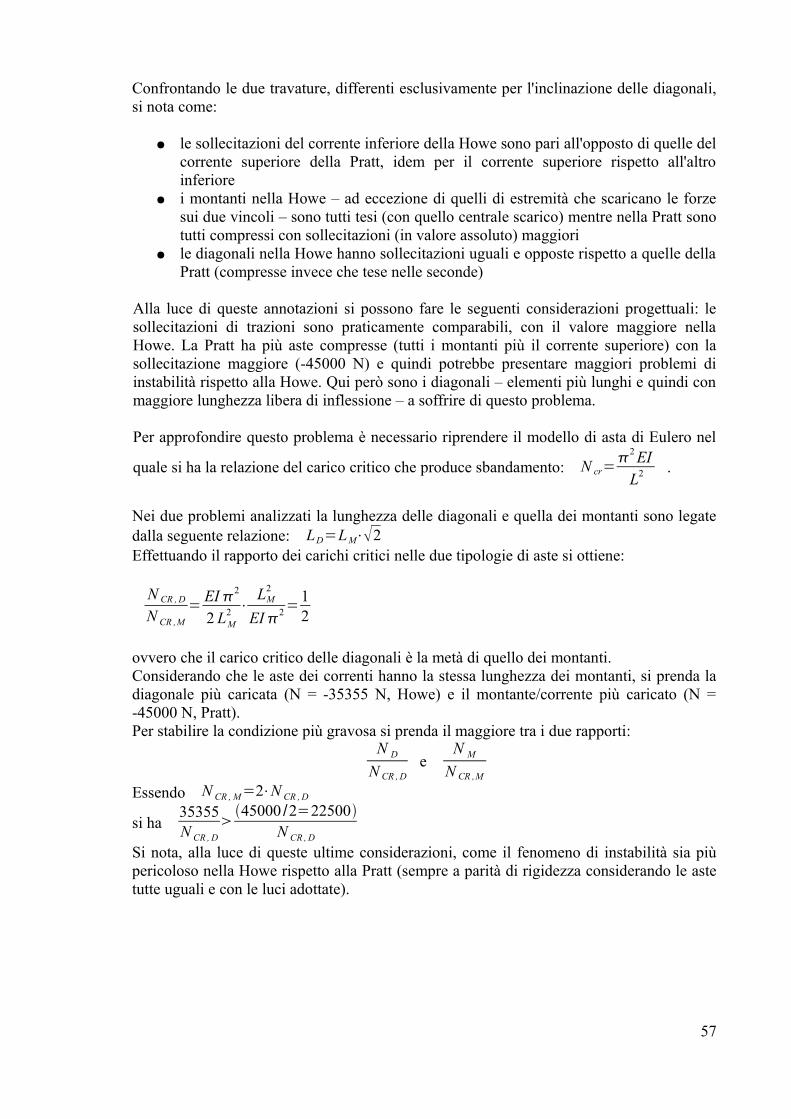
Si effettua ora il confronto tra le due Polonceau, differenti anch'esse per l'inclinazione delle diagonali, ottenute a partire dalla Howe e dalla Pratt:
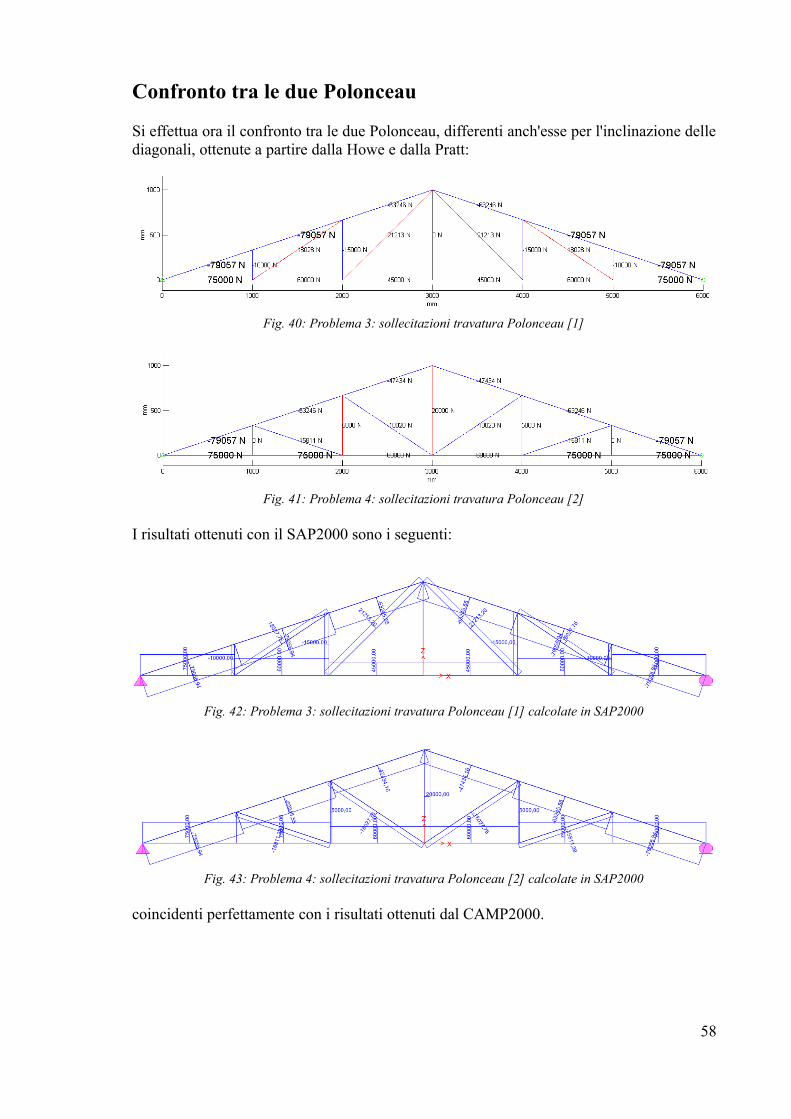
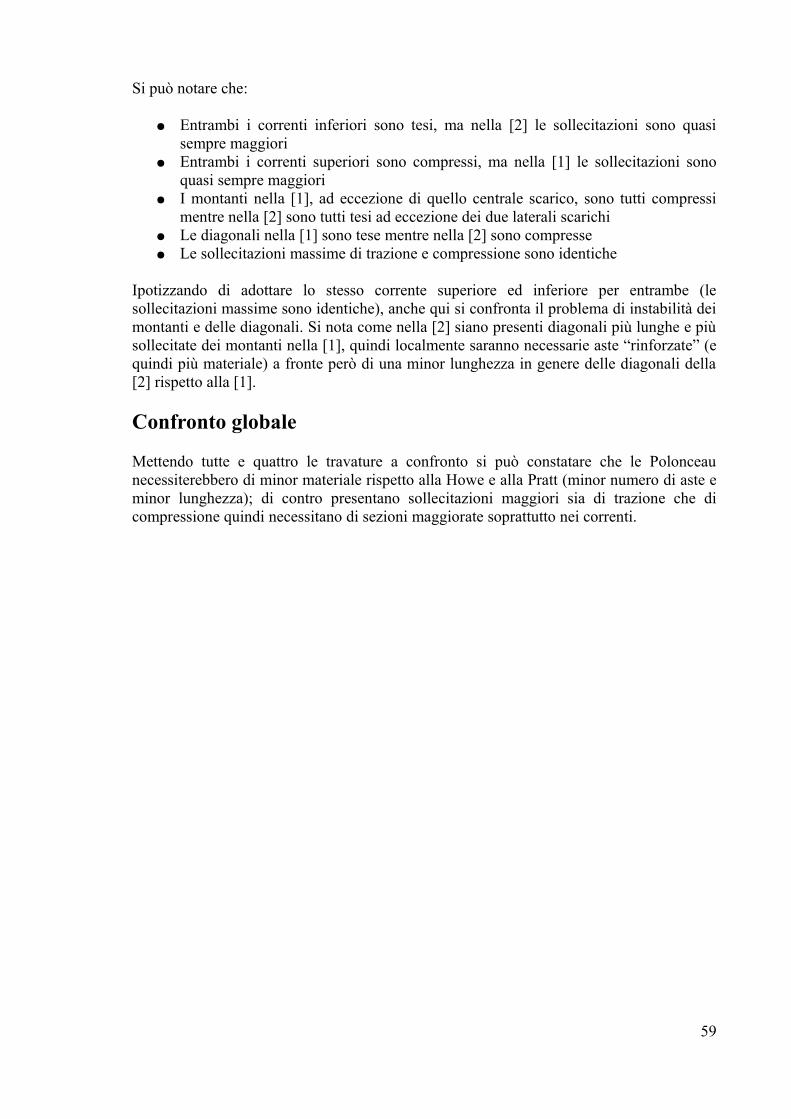
I risultati ottenuti con il SAP2000 sono i seguenti:
coincidenti perfettamente con i risultati ottenuti dal CAMP2000.
58
Fig. 40: Problema 3: sollecitazioni travatura Polonceau [1]
Fig. 41: Problema 4: sollecitazioni travatura Polonceau [2]
Fig. 42: Problema 3: sollecitazioni travatura Polonceau [1] calcolate in SAP2000
Fig. 43: Problema 4: sollecitazioni travatura Polonceau [2] calcolate in SAP2000
Si può notare che:
● Entrambi i correnti inferiori sono tesi, ma nella [2] le sollecitazioni sono quasi sempre maggiori
● Entrambi i correnti superiori sono compressi, ma nella [1] le sollecitazioni sono quasi sempre maggiori
● I montanti nella [1], ad eccezione di quello centrale scarico, sono tutti compressi mentre nella [2] sono tutti tesi ad eccezione dei due laterali scarichi
● Le diagonali nella [1] sono tese mentre nella [2] sono compresse● Le sollecitazioni massime di trazione e compressione sono identiche
Ipotizzando di adottare lo stesso corrente superiore ed inferiore per entrambe (le sollecitazioni massime sono identiche), anche qui si confronta il problema di instabilità dei montanti e delle diagonali. Si nota come nella [2] siano presenti diagonali più lunghe e più sollecitate dei montanti nella [1], quindi localmente saranno necessarie aste “rinforzate” (e quindi più materiale) a fronte però di una minor lunghezza in genere delle diagonali della [2] rispetto alla [1].
Confronto globale
Mettendo tutte e quattro le travature a confronto si può constatare che le Polonceau necessiterebbero di minor materiale rispetto alla Howe e alla Pratt (minor numero di aste e minor lunghezza); di contro presentano sollecitazioni maggiori sia di trazione che di compressione quindi necessitano di sezioni maggiorate soprattutto nei correnti.
59
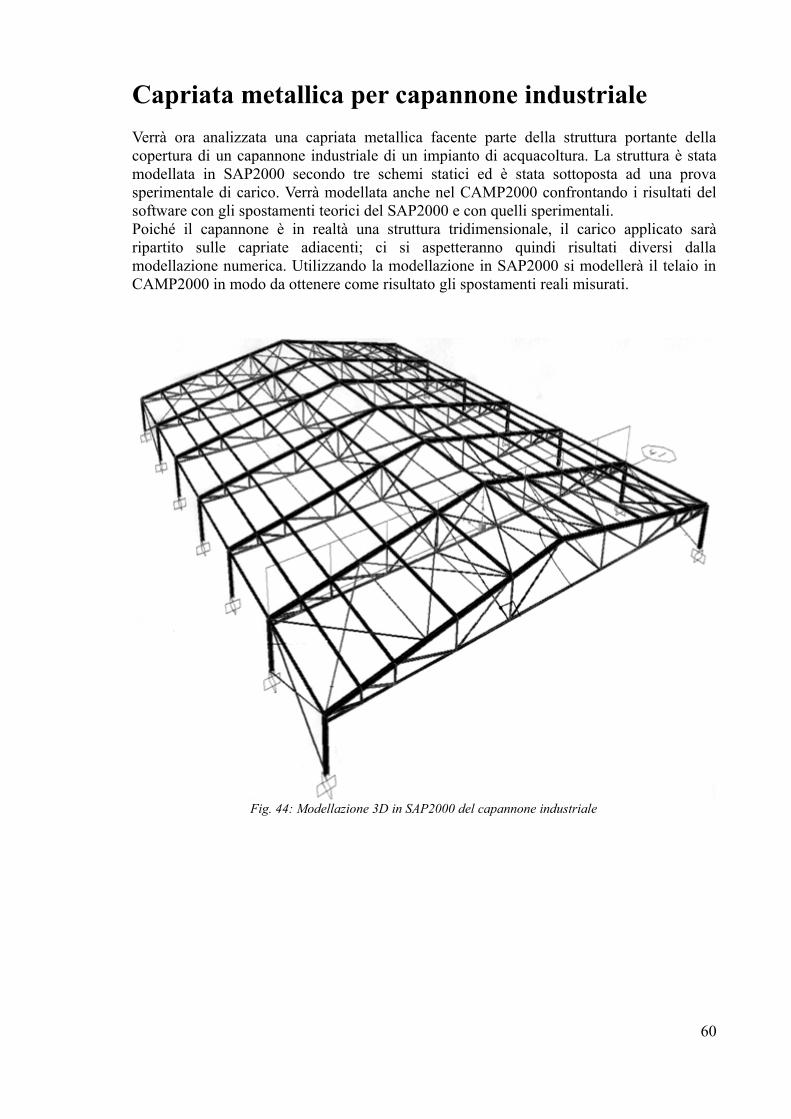
Capriata metallica per capannone industrialeVerrà ora analizzata una capriata metallica facente parte della struttura portante della copertura di un capannone industriale di un impianto di acquacoltura. La struttura è stata modellata in SAP2000 secondo tre schemi statici ed è stata sottoposta ad una prova sperimentale di carico. Verrà modellata anche nel CAMP2000 confrontando i risultati del software con gli spostamenti teorici del SAP2000 e con quelli sperimentali. Poiché il capannone è in realtà una struttura tridimensionale, il carico applicato sarà ripartito sulle capriate adiacenti; ci si aspetteranno quindi risultati diversi dalla modellazione numerica. Utilizzando la modellazione in SAP2000 si modellerà il telaio in CAMP2000 in modo da ottenere come risultato gli spostamenti reali misurati.
60
Fig. 44: Modellazione 3D in SAP2000 del capannone industriale
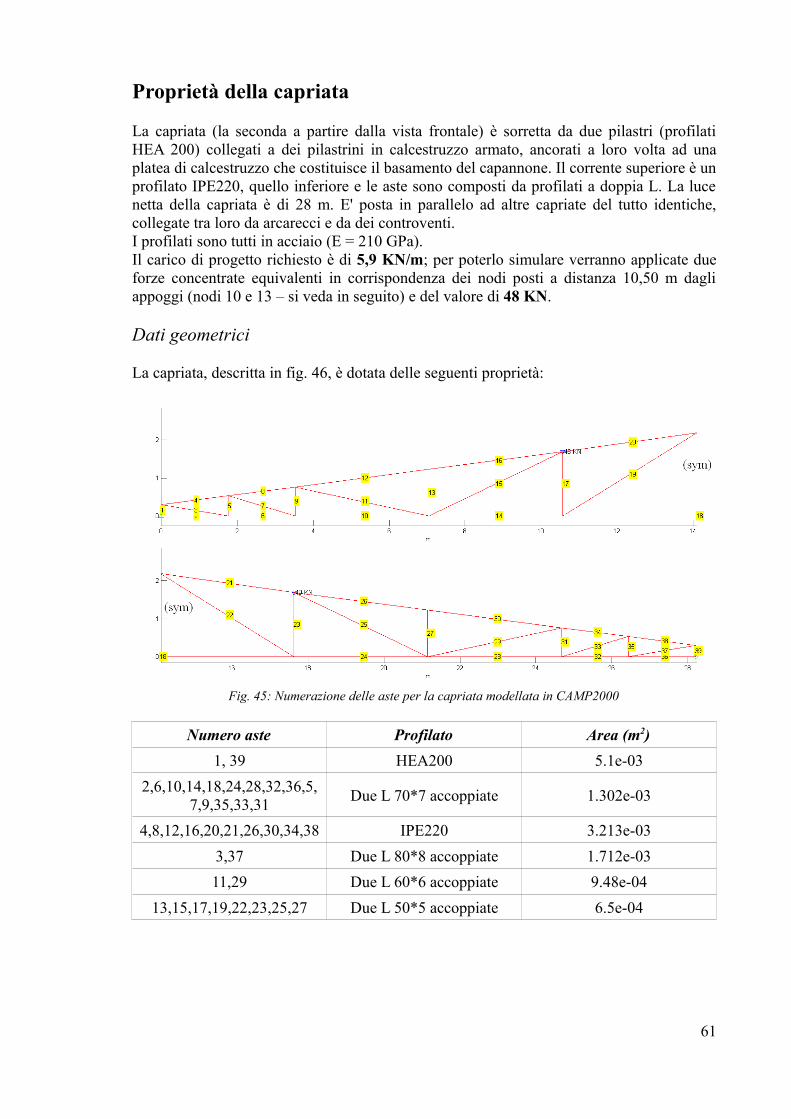
Proprietà della capriata
La capriata (la seconda a partire dalla vista frontale) è sorretta da due pilastri (profilati HEA 200) collegati a dei pilastrini in calcestruzzo armato, ancorati a loro volta ad una platea di calcestruzzo che costituisce il basamento del capannone. Il corrente superiore è un profilato IPE220, quello inferiore e le aste sono composti da profilati a doppia L. La luce netta della capriata è di 28 m. E' posta in parallelo ad altre capriate del tutto identiche, collegate tra loro da arcarecci e da dei controventi. I profilati sono tutti in acciaio (E = 210 GPa).Il carico di progetto richiesto è di 5,9 KN/m; per poterlo simulare verranno applicate due forze concentrate equivalenti in corrispondenza dei nodi posti a distanza 10,50 m dagli appoggi (nodi 10 e 13 – si veda in seguito) e del valore di 48 KN.
Dati geometrici
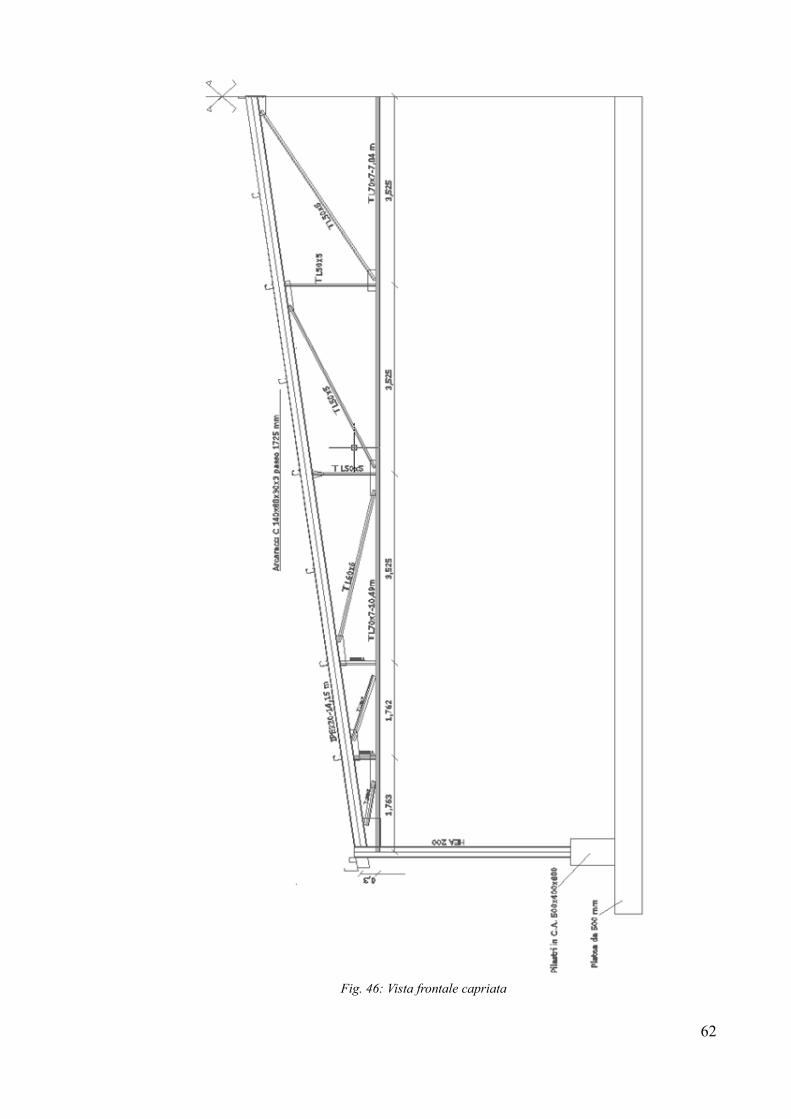
La capriata, descritta in fig. 46, è dotata delle seguenti proprietà:
Numero aste Profilato Area (m2)1, 39 HEA200 5.1e-03
2,6,10,14,18,24,28,32,36,5,7,9,35,33,31 Due L 70*7 accoppiate 1.302e-03
4,8,12,16,20,21,26,30,34,38 IPE220 3.213e-033,37 Due L 80*8 accoppiate 1.712e-0311,29 Due L 60*6 accoppiate 9.48e-04
13,15,17,19,22,23,25,27 Due L 50*5 accoppiate 6.5e-04
61
Fig. 45: Numerazione delle aste per la capriata modellata in CAMP2000
62
Fig. 46: Vista frontale capriata
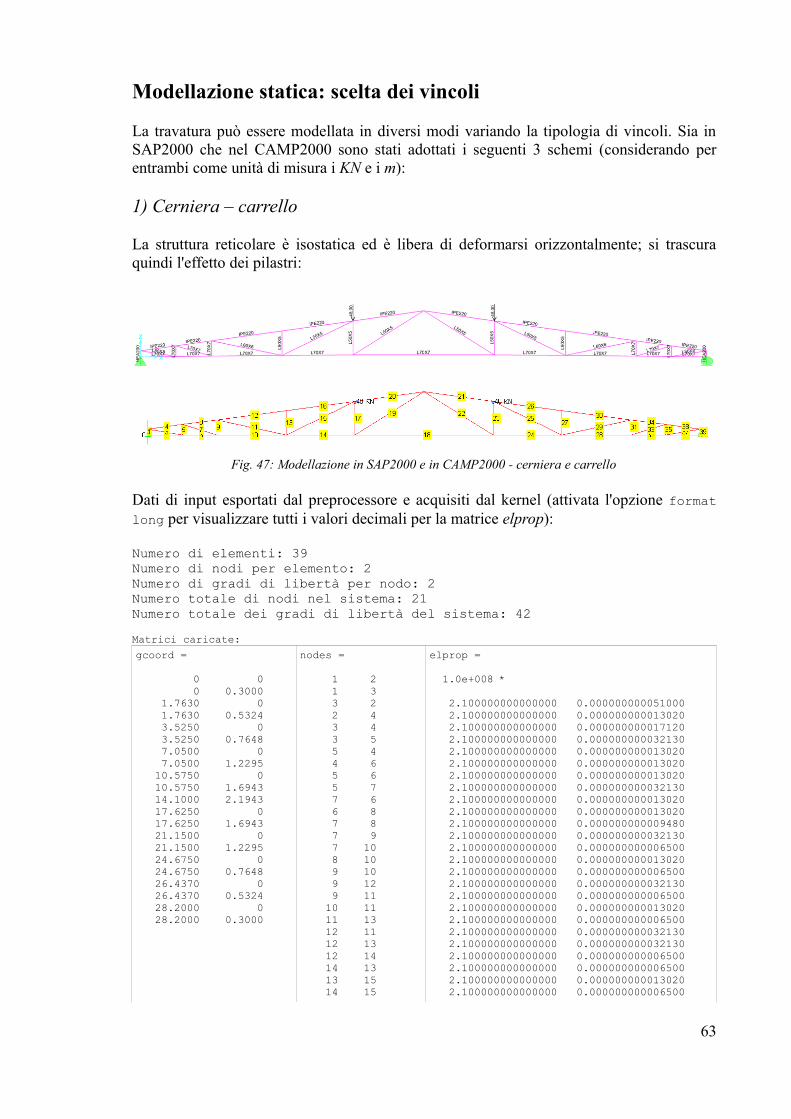
Modellazione statica: scelta dei vincoli
La travatura può essere modellata in diversi modi variando la tipologia di vincoli. Sia in SAP2000 che nel CAMP2000 sono stati adottati i seguenti 3 schemi (considerando per entrambi come unità di misura i KN e i m):
1) Cerniera – carrello
La struttura reticolare è isostatica ed è libera di deformarsi orizzontalmente; si trascura quindi l'effetto dei pilastri:
Dati di input esportati dal preprocessore e acquisiti dal kernel (attivata l'opzione format long per visualizzare tutti i valori decimali per la matrice elprop):
Numero di elementi: 39Numero di nodi per elemento: 2Numero di gradi di libertà per nodo: 2Numero totale di nodi nel sistema: 21Numero totale dei gradi di libertà del sistema: 42 Matrici caricate: gcoord =
0 0 0 0.3000 1.7630 0 1.7630 0.5324 3.5250 0 3.5250 0.7648 7.0500 0 7.0500 1.2295 10.5750 0 10.5750 1.6943 14.1000 2.1943 17.6250 0 17.6250 1.6943 21.1500 0 21.1500 1.2295 24.6750 0 24.6750 0.7648 26.4370 0 26.4370 0.5324 28.2000 0 28.2000 0.3000
nodes =
1 2 1 3 3 2 2 4 3 4 3 5 5 4 4 6 5 6 5 7 7 6 6 8 7 8 7 9 7 10 8 10 9 10 9 12 9 11 10 11 11 13 12 11 12 13 12 14 14 13 13 15 14 15
elprop =
1.0e+008 *
2.100000000000000 0.000000000051000 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000017120 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000009480 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000006500
63
Fig. 47: Modellazione in SAP2000 e in CAMP2000 - cerniera e carrello
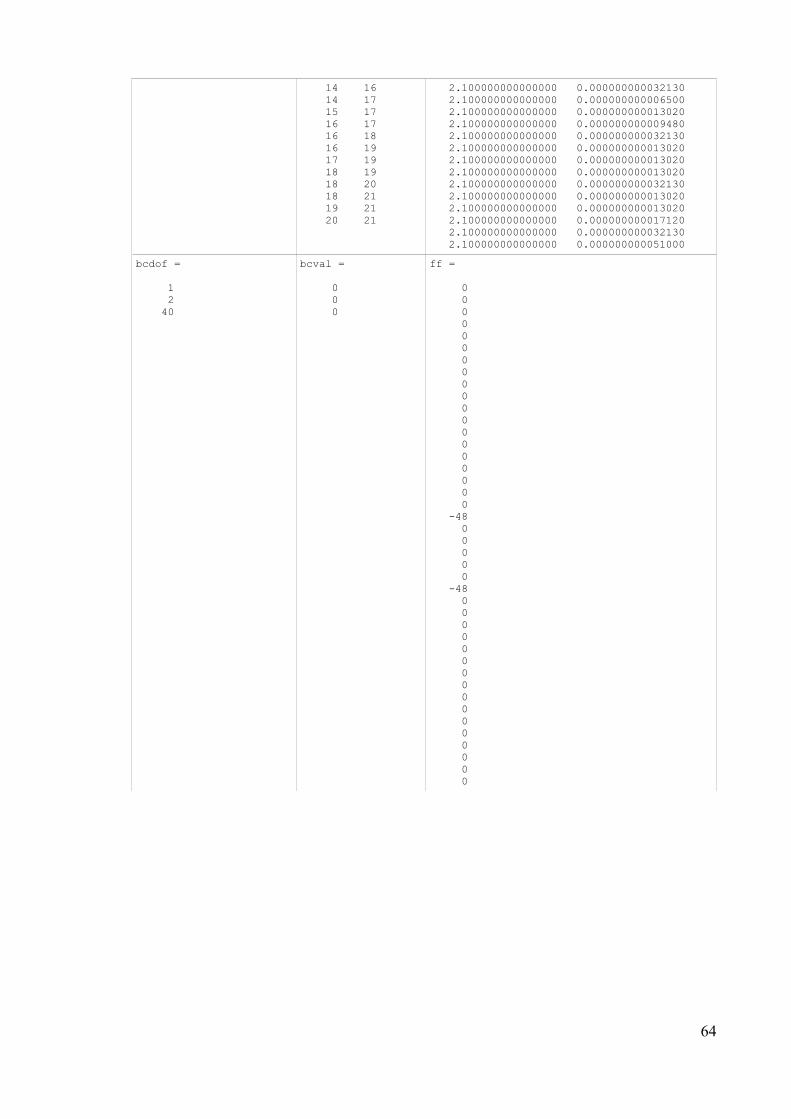
14 16 14 17 15 17 16 17 16 18 16 19 17 19 18 19 18 20 18 21 19 21 20 21
2.100000000000000 0.000000000032130 2.100000000000000 0.000000000006500 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000009480 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000013020 2.100000000000000 0.000000000017120 2.100000000000000 0.000000000032130 2.100000000000000 0.000000000051000
bcdof =
1 2 40
bcval =
0 0 0
ff =
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -48 0 0 0 0 0 -48 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
64

2) Cerniera – cerniera
Si considera ora il massimo effetto teorico dei pilastri, ovvero il totale impedimento delle deformazioni orizzontali:
I dati di input esportati dal preprocessore e acquisiti dal kernel sono identici al caso precedente, a meno ovviamente delle matrici dei vincoli:
bcdof =
1 2 39 40
bcval =
0 0 0 0
3) Presenza dei pilastri
Si considera ora il caso più prossimo a quello reale, ovvero si modellano anche i pilastri considerati incastrati alla base. Si possono avere due situazioni:
- i pilastri non sono in grado di confinare la capriata in maniera adeguata che quindi è più libera di deformarsi orizzontalmente; la modellazione in SAP2000 è la seguente:
con i rilasci dei momenti in corrispondenza della connessione capriata – pilastro.
65
Fig. 48: Modellazione in SAP2000 e in CAMP2000 - cerniera e cerniera
Fig. 49: Modellazione SAP2000 della capriata - evidenziati i rilasci dei momenti
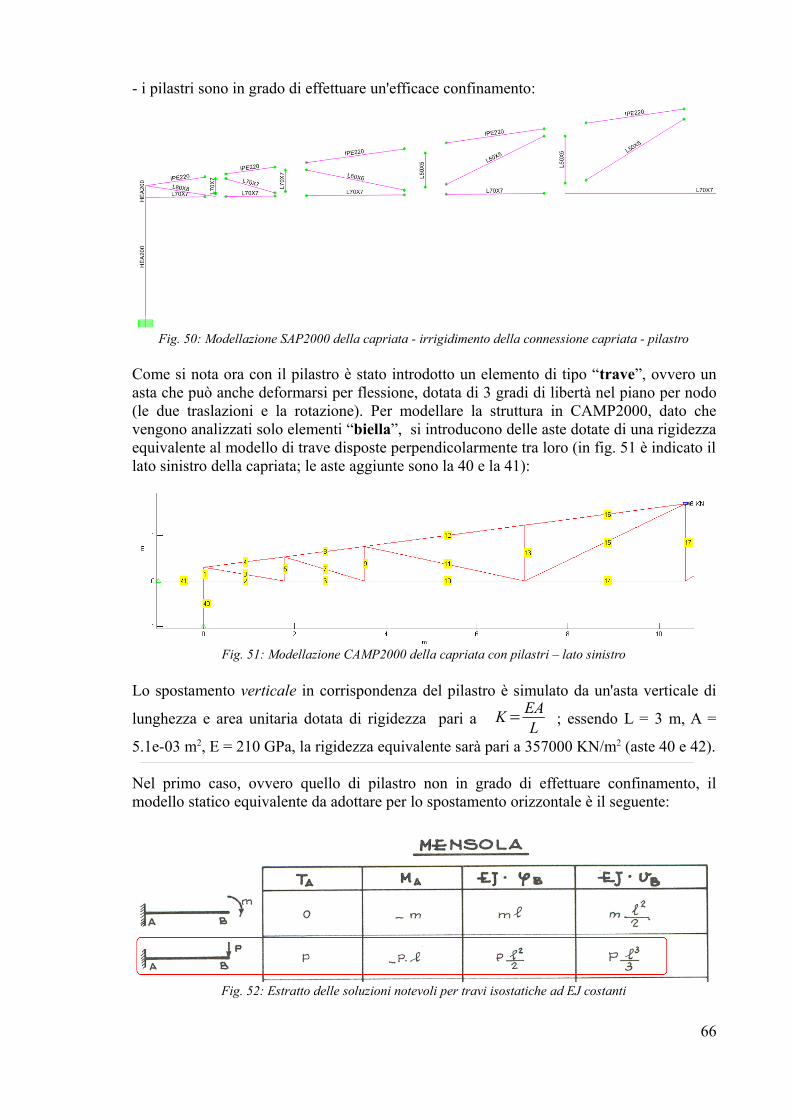
- i pilastri sono in grado di effettuare un'efficace confinamento:
Come si nota ora con il pilastro è stato introdotto un elemento di tipo “trave”, ovvero un asta che può anche deformarsi per flessione, dotata di 3 gradi di libertà nel piano per nodo (le due traslazioni e la rotazione). Per modellare la struttura in CAMP2000, dato che vengono analizzati solo elementi “biella”, si introducono delle aste dotate di una rigidezza equivalente al modello di trave disposte perpendicolarmente tra loro (in fig. 51 è indicato il lato sinistro della capriata; le aste aggiunte sono la 40 e la 41):
Lo spostamento verticale in corrispondenza del pilastro è simulato da un'asta verticale di
lunghezza e area unitaria dotata di rigidezza pari a K= EAL ; essendo L = 3 m, A =
5.1e-03 m2, E = 210 GPa, la rigidezza equivalente sarà pari a 357000 KN/m2 (aste 40 e 42).
Nel primo caso, ovvero quello di pilastro non in grado di effettuare confinamento, il modello statico equivalente da adottare per lo spostamento orizzontale è il seguente:
66
Fig. 52: Estratto delle soluzioni notevoli per travi isostatiche ad EJ costanti
Fig. 50: Modellazione SAP2000 della capriata - irrigidimento della connessione capriata - pilastro
Fig. 51: Modellazione CAMP2000 della capriata con pilastri – lato sinistro

La capriata infatti trasmette al pilastro una forza orizzontale P e la deformazione
orizzontale di quest'ultimo dipenderà dalla sua rigidezza flessionale pari a K=3EIL3 ;
dato E = 210 GPa, IHEA220=3.509e-05 m4 e L = 3,3 m, si ha K = 818.7667 KN/m2 .
Si aggiunge quindi un'asta orizzontale di area e lunghezza unitaria ed E = K (aste 41 e 43).
Nel secondo caso, ovvero con il pilastro in grado di effettuare il confinamento della capriata, va modellato il collegamento rigido. Per fare ciò si deve simulare il comportamento dell'elemento “trave” analizzando quindi lo schema statico di trave doppiamente incastrata, dotata della seguente matrice di rigidezza:
K L=[EAL
0 0 −EAL
0 0
0 12 EIL3 6 EI
L2 0 −12 EIL3 6 EI
L2
0 6 EIL2 4 EI
L0 −6 EI
L2 2 EIL
− EAL
0 0 EAL
0 0
0 −12 EIL3 −6 EI
L2 0 12 EIL3 −6 EI
L2
0 6 EIL2 2 EI
L0 −6 EI
L2 4 EIL
]con f l=[ N1 T 1 M 1 N 2 T 2 M 2 ]
T e u l=[u1 v1 1 u2 v2 2 ]
Ricordando sempre che si è in regime elastico-lineare nel quale vale il principio di sovrapposizione degli effetti, la rigidezza equivalente dell'asta orizzontale è data dalla somma delle rigidezze della trave che si oppongono alle sollecitazioni M1, M2 e T2 rispetto agli spostamenti v2, θ1*L e θ2*L; considerando i valori di E, I, L precedenti si ha:
K=12 EIL3 6 EI
L2 4 EIL2 EI
L=22925 KN
m2 (nuova rigidezza delle aste 41 e 43).
Considerando le aste aggiunte, le modifiche delle matrici delle coordinate, d'incidenza e di proprietà dell'asta sono le seguenti:
gcoord =
... ... 0 -1.0000 -1.0000 0 28.2000 -1.0000 29.2000 0
nodes =
... ... 1 22 1 23 20 24 20 25
elprop =
... ... 0.003570000000000 0.000000010000000 (1) 0.0000081876670 0.00000001 (2) 0.00022925 0.00000001 0.003570000000000 0.000000010000000 (1) 0.0000081876670 0.00000001 (2) 0.00022925 0.00000001
67
Fig. 53: Schema elemento "beam"
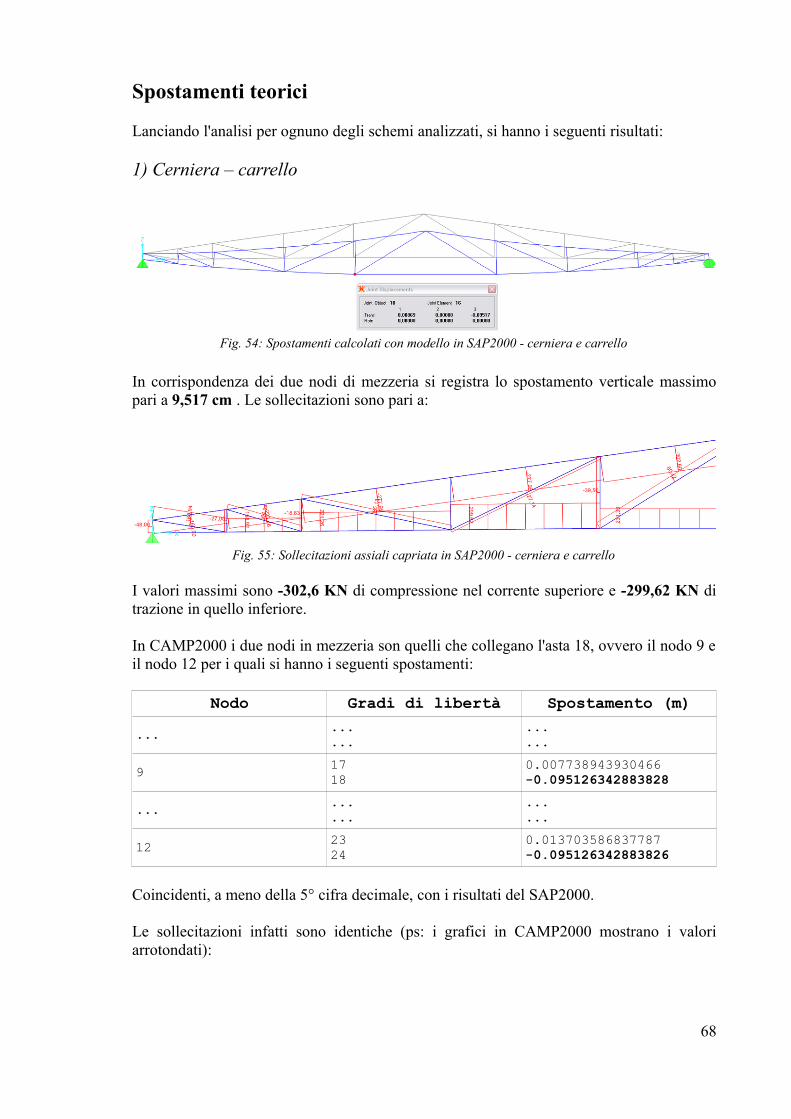
Spostamenti teorici
Lanciando l'analisi per ognuno degli schemi analizzati, si hanno i seguenti risultati:
1) Cerniera – carrello
In corrispondenza dei due nodi di mezzeria si registra lo spostamento verticale massimo pari a 9,517 cm . Le sollecitazioni sono pari a:
I valori massimi sono -302,6 KN di compressione nel corrente superiore e -299,62 KN di trazione in quello inferiore.
In CAMP2000 i due nodi in mezzeria son quelli che collegano l'asta 18, ovvero il nodo 9 e il nodo 12 per i quali si hanno i seguenti spostamenti:
Nodo Gradi di libertà Spostamento (m)... ...
.........
9 1718
0.007738943930466-0.095126342883828
... ......
...
...
12 2324
0.013703586837787-0.095126342883826
Coincidenti, a meno della 5° cifra decimale, con i risultati del SAP2000.
Le sollecitazioni infatti sono identiche (ps: i grafici in CAMP2000 mostrano i valori arrotondati):
68
Fig. 54: Spostamenti calcolati con modello in SAP2000 - cerniera e carrello
Fig. 55: Sollecitazioni assiali capriata in SAP2000 - cerniera e carrello
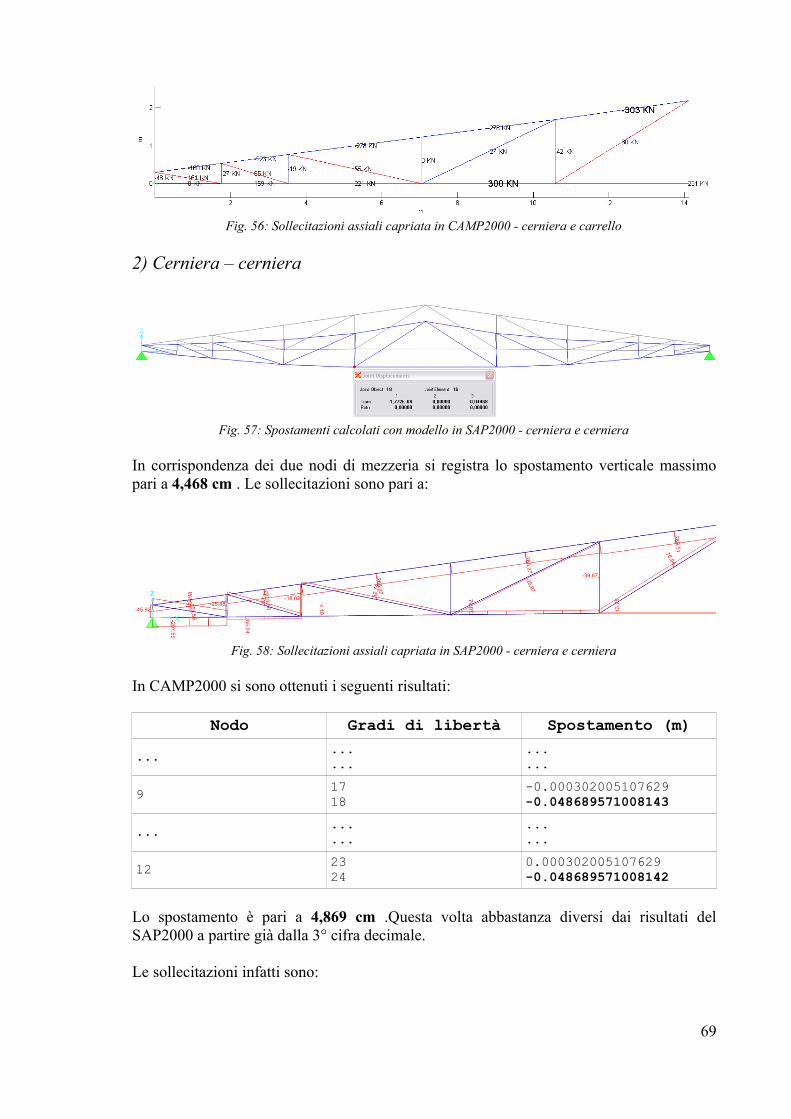
2) Cerniera – cerniera
In corrispondenza dei due nodi di mezzeria si registra lo spostamento verticale massimo pari a 4,468 cm . Le sollecitazioni sono pari a:
In CAMP2000 si sono ottenuti i seguenti risultati:
Nodo Gradi di libertà Spostamento (m)... ...
.........
9 1718
-0.000302005107629-0.048689571008143
... ......
...
...
12 2324
0.000302005107629-0.048689571008142
Lo spostamento è pari a 4,869 cm .Questa volta abbastanza diversi dai risultati del SAP2000 a partire già dalla 3° cifra decimale.
Le sollecitazioni infatti sono:
69
Fig. 56: Sollecitazioni assiali capriata in CAMP2000 - cerniera e carrello
Fig. 57: Spostamenti calcolati con modello in SAP2000 - cerniera e cerniera
Fig. 58: Sollecitazioni assiali capriata in SAP2000 - cerniera e cerniera
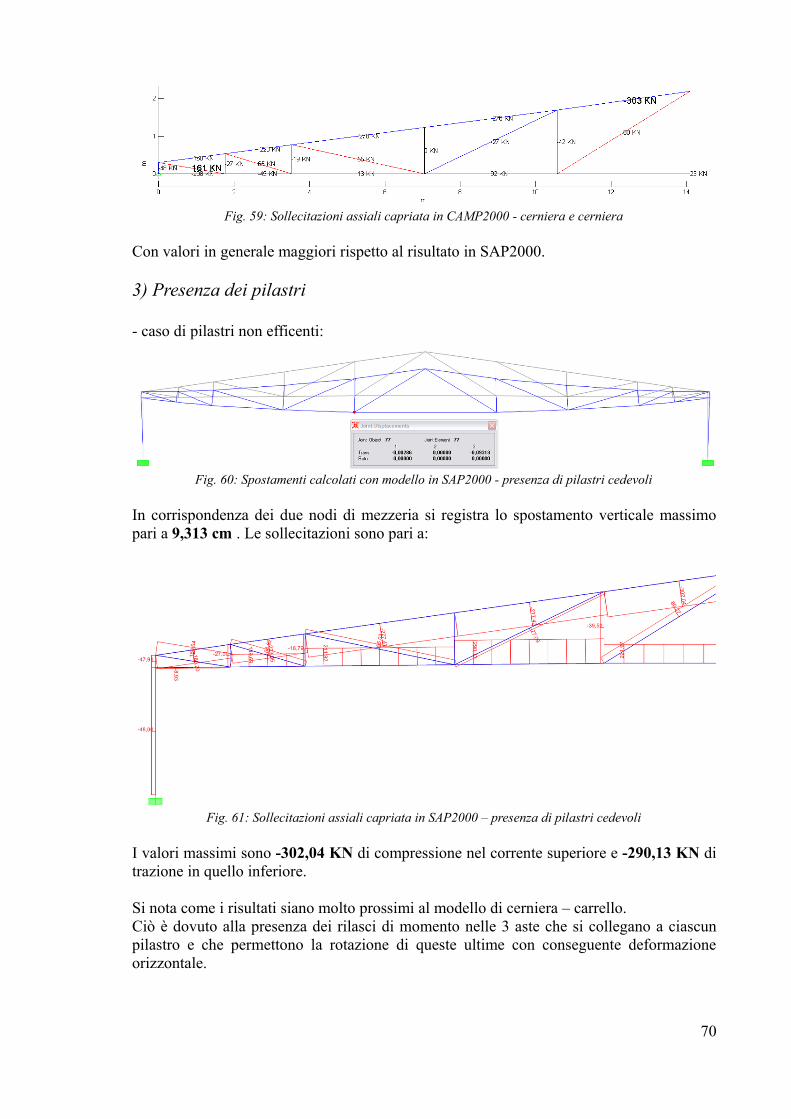
Con valori in generale maggiori rispetto al risultato in SAP2000.
3) Presenza dei pilastri
- caso di pilastri non efficenti:
In corrispondenza dei due nodi di mezzeria si registra lo spostamento verticale massimo pari a 9,313 cm . Le sollecitazioni sono pari a:
I valori massimi sono -302,04 KN di compressione nel corrente superiore e -290,13 KN di trazione in quello inferiore.
Si nota come i risultati siano molto prossimi al modello di cerniera – carrello. Ciò è dovuto alla presenza dei rilasci di momento nelle 3 aste che si collegano a ciascun pilastro e che permettono la rotazione di queste ultime con conseguente deformazione orizzontale.
70
Fig. 59: Sollecitazioni assiali capriata in CAMP2000 - cerniera e cerniera
Fig. 60: Spostamenti calcolati con modello in SAP2000 - presenza di pilastri cedevoli
Fig. 61: Sollecitazioni assiali capriata in SAP2000 – presenza di pilastri cedevoli
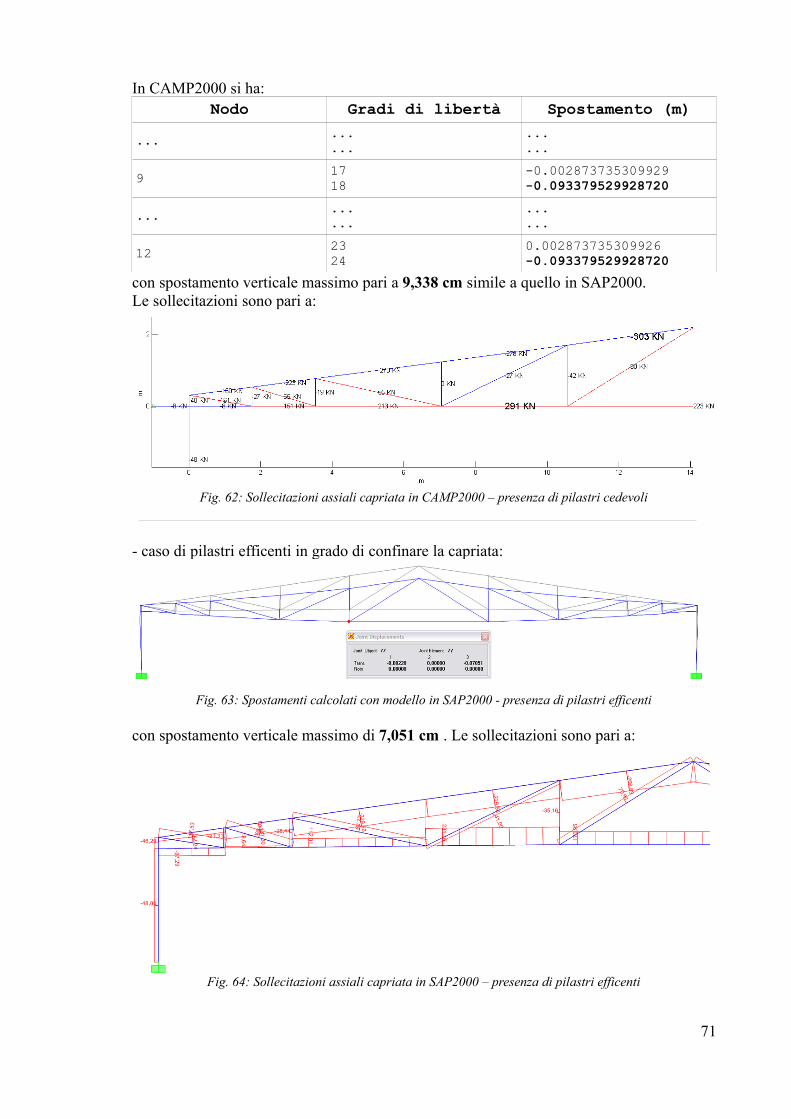
In CAMP2000 si ha:Nodo Gradi di libertà Spostamento (m)
... ......
...
...
9 1718
-0.002873735309929-0.093379529928720
... ......
...
...
12 2324
0.002873735309926-0.093379529928720
con spostamento verticale massimo pari a 9,338 cm simile a quello in SAP2000.Le sollecitazioni sono pari a:
- caso di pilastri efficenti in grado di confinare la capriata:
con spostamento verticale massimo di 7,051 cm . Le sollecitazioni sono pari a:
71
Fig. 62: Sollecitazioni assiali capriata in CAMP2000 – presenza di pilastri cedevoli
Fig. 64: Sollecitazioni assiali capriata in SAP2000 – presenza di pilastri efficenti
Fig. 63: Spostamenti calcolati con modello in SAP2000 - presenza di pilastri efficenti
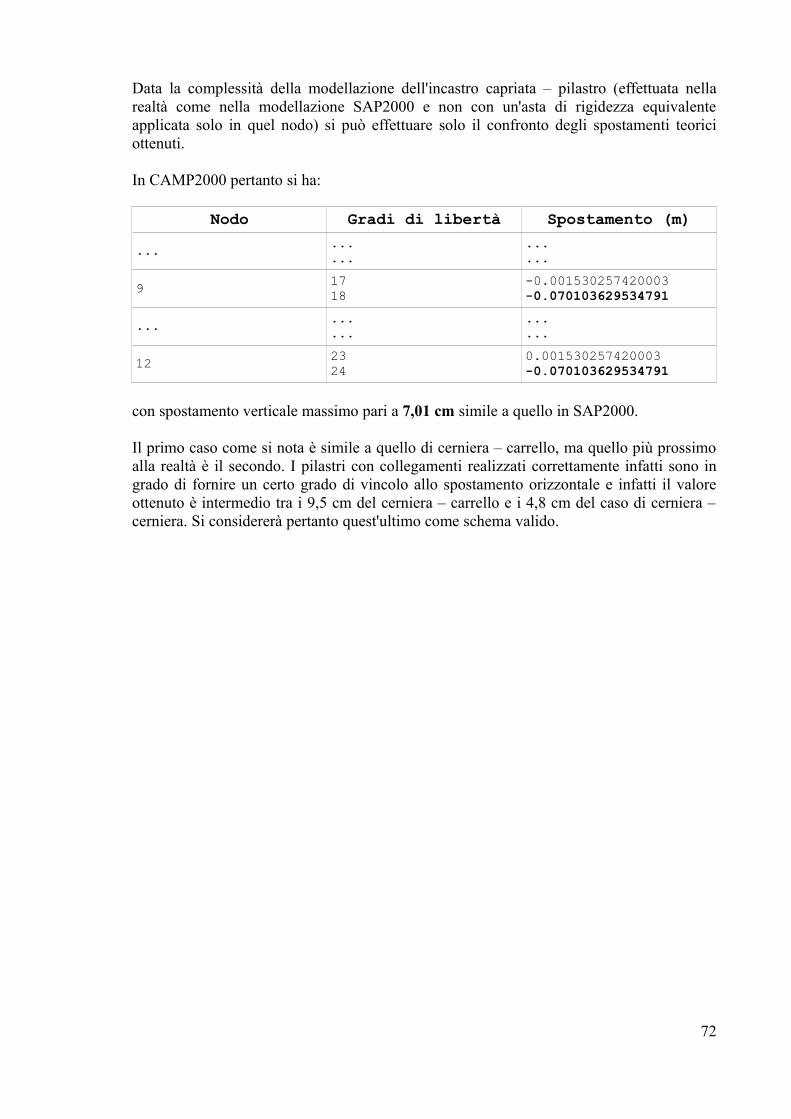
Data la complessità della modellazione dell'incastro capriata – pilastro (effettuata nella realtà come nella modellazione SAP2000 e non con un'asta di rigidezza equivalente applicata solo in quel nodo) si può effettuare solo il confronto degli spostamenti teorici ottenuti.
In CAMP2000 pertanto si ha:
Nodo Gradi di libertà Spostamento (m)... ...
.........
9 1718
-0.001530257420003-0.070103629534791
... ......
...
...
12 2324
0.001530257420003-0.070103629534791
con spostamento verticale massimo pari a 7,01 cm simile a quello in SAP2000.
Il primo caso come si nota è simile a quello di cerniera – carrello, ma quello più prossimo alla realtà è il secondo. I pilastri con collegamenti realizzati correttamente infatti sono in grado di fornire un certo grado di vincolo allo spostamento orizzontale e infatti il valore ottenuto è intermedio tra i 9,5 cm del cerniera – carrello e i 4,8 cm del caso di cerniera – cerniera. Si considererà pertanto quest'ultimo come schema valido.
72
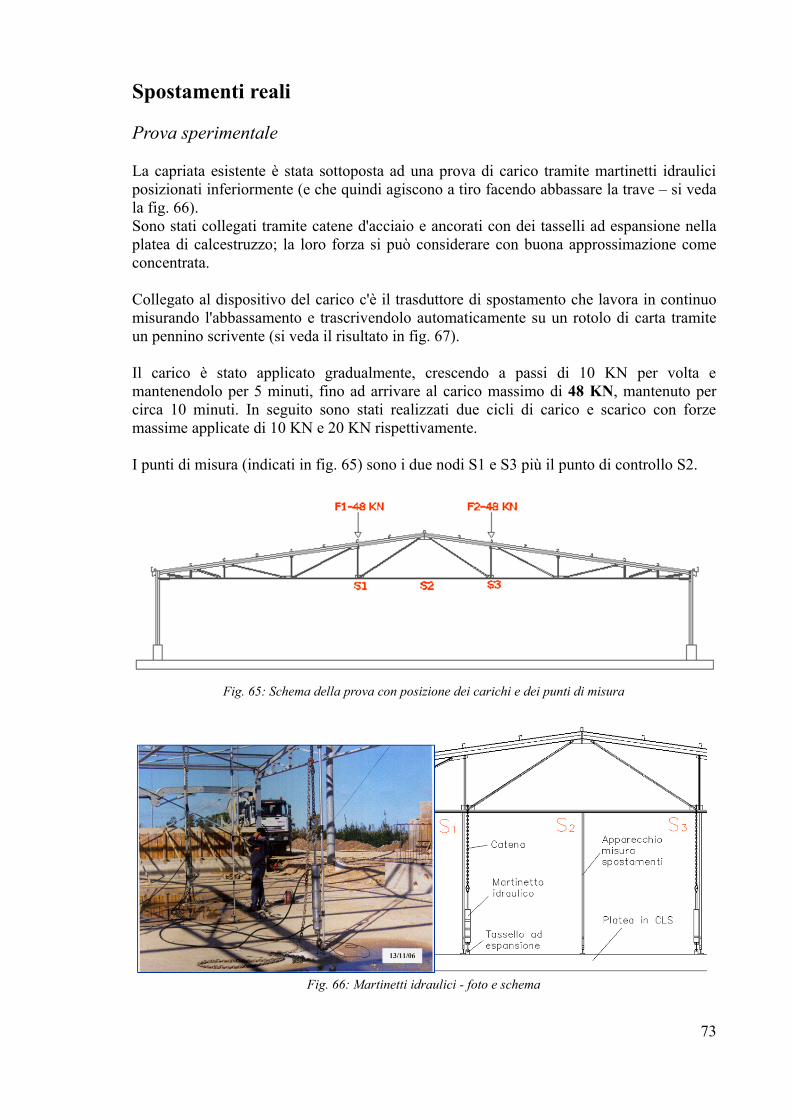
Spostamenti reali
Prova sperimentale
La capriata esistente è stata sottoposta ad una prova di carico tramite martinetti idraulici posizionati inferiormente (e che quindi agiscono a tiro facendo abbassare la trave – si veda la fig. 66). Sono stati collegati tramite catene d'acciaio e ancorati con dei tasselli ad espansione nella platea di calcestruzzo; la loro forza si può considerare con buona approssimazione come concentrata.
Collegato al dispositivo del carico c'è il trasduttore di spostamento che lavora in continuo misurando l'abbassamento e trascrivendolo automaticamente su un rotolo di carta tramite un pennino scrivente (si veda il risultato in fig. 67).
Il carico è stato applicato gradualmente, crescendo a passi di 10 KN per volta e mantenendolo per 5 minuti, fino ad arrivare al carico massimo di 48 KN, mantenuto per circa 10 minuti. In seguito sono stati realizzati due cicli di carico e scarico con forze massime applicate di 10 KN e 20 KN rispettivamente.
I punti di misura (indicati in fig. 65) sono i due nodi S1 e S3 più il punto di controllo S2.
73
Fig. 65: Schema della prova con posizione dei carichi e dei punti di misura
Fig. 66: Martinetti idraulici - foto e schema
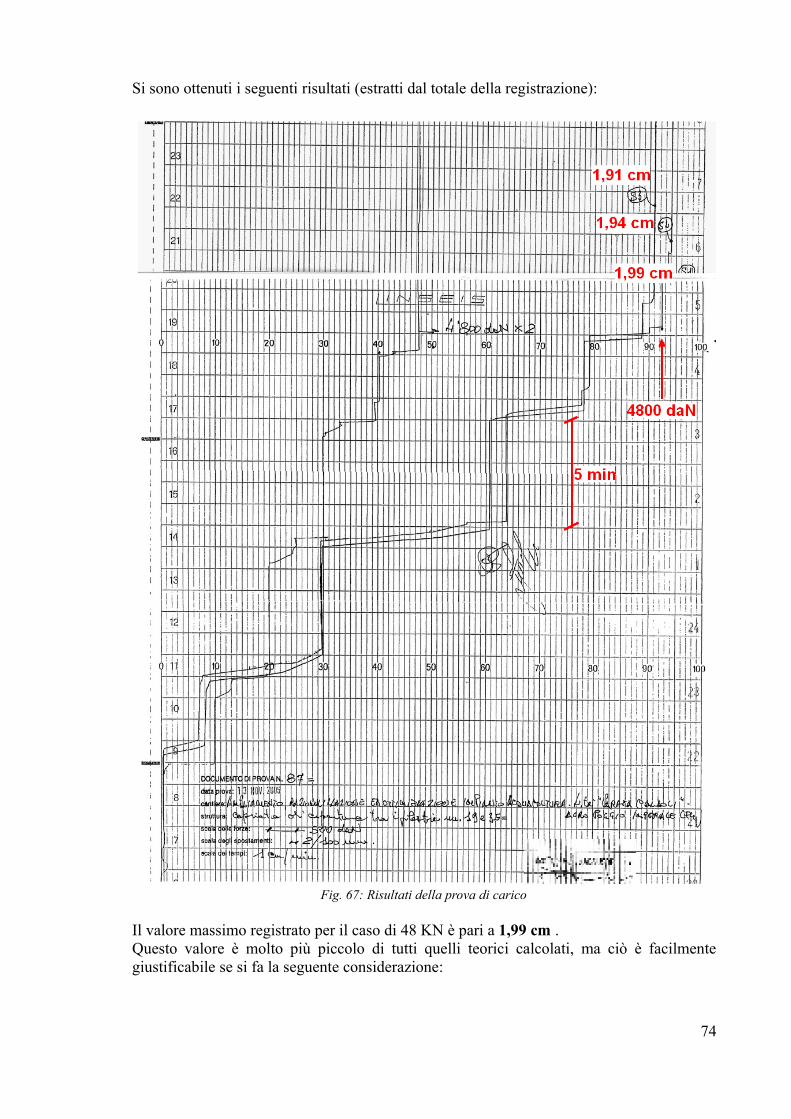
Si sono ottenuti i seguenti risultati (estratti dal totale della registrazione):
Il valore massimo registrato per il caso di 48 KN è pari a 1,99 cm . Questo valore è molto più piccolo di tutti quelli teorici calcolati, ma ciò è facilmente giustificabile se si fa la seguente considerazione:
74
Fig. 67: Risultati della prova di carico
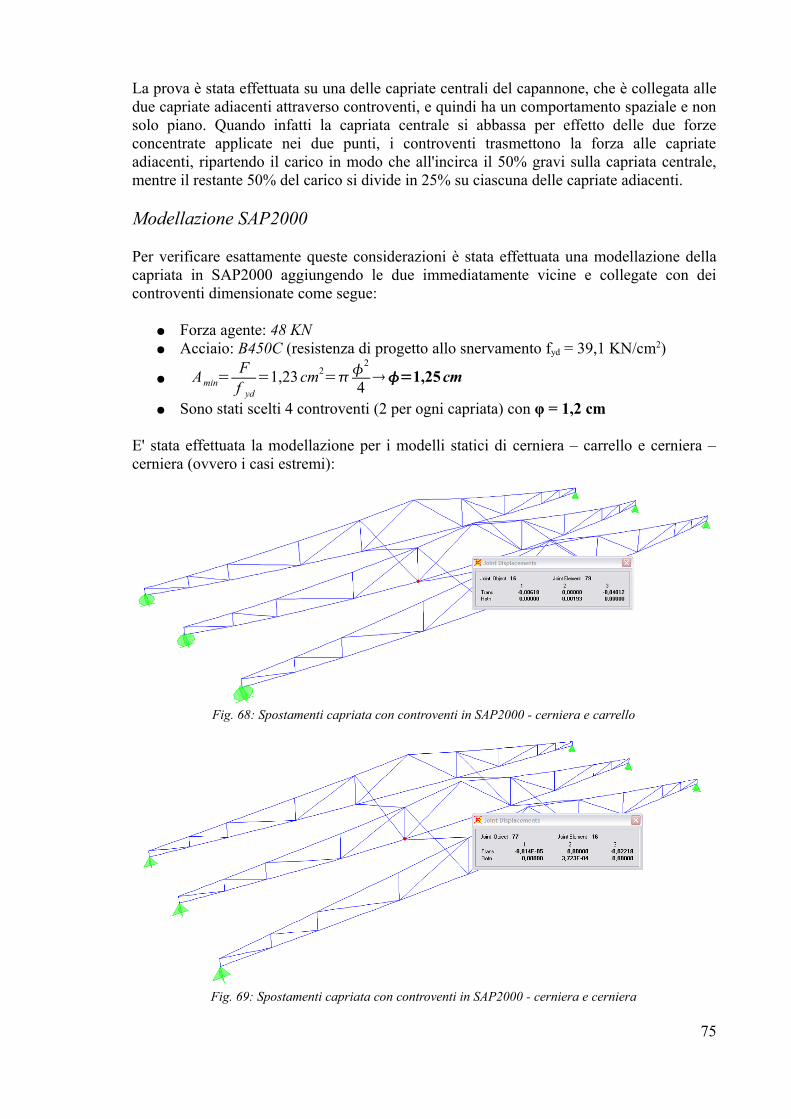
La prova è stata effettuata su una delle capriate centrali del capannone, che è collegata alle due capriate adiacenti attraverso controventi, e quindi ha un comportamento spaziale e non solo piano. Quando infatti la capriata centrale si abbassa per effetto delle due forze concentrate applicate nei due punti, i controventi trasmettono la forza alle capriate adiacenti, ripartendo il carico in modo che all'incirca il 50% gravi sulla capriata centrale, mentre il restante 50% del carico si divide in 25% su ciascuna delle capriate adiacenti.
Modellazione SAP2000
Per verificare esattamente queste considerazioni è stata effettuata una modellazione della capriata in SAP2000 aggiungendo le due immediatamente vicine e collegate con dei controventi dimensionate come segue:
● Forza agente: 48 KN● Acciaio: B450C (resistenza di progetto allo snervamento fyd = 39,1 KN/cm2)
● Amin=Ff yd
=1,23cm2=2
4=1,25cm
● Sono stati scelti 4 controventi (2 per ogni capriata) con φ = 1,2 cm
E' stata effettuata la modellazione per i modelli statici di cerniera – carrello e cerniera – cerniera (ovvero i casi estremi):
75
Fig. 68: Spostamenti capriata con controventi in SAP2000 - cerniera e carrello
Fig. 69: Spostamenti capriata con controventi in SAP2000 - cerniera e cerniera
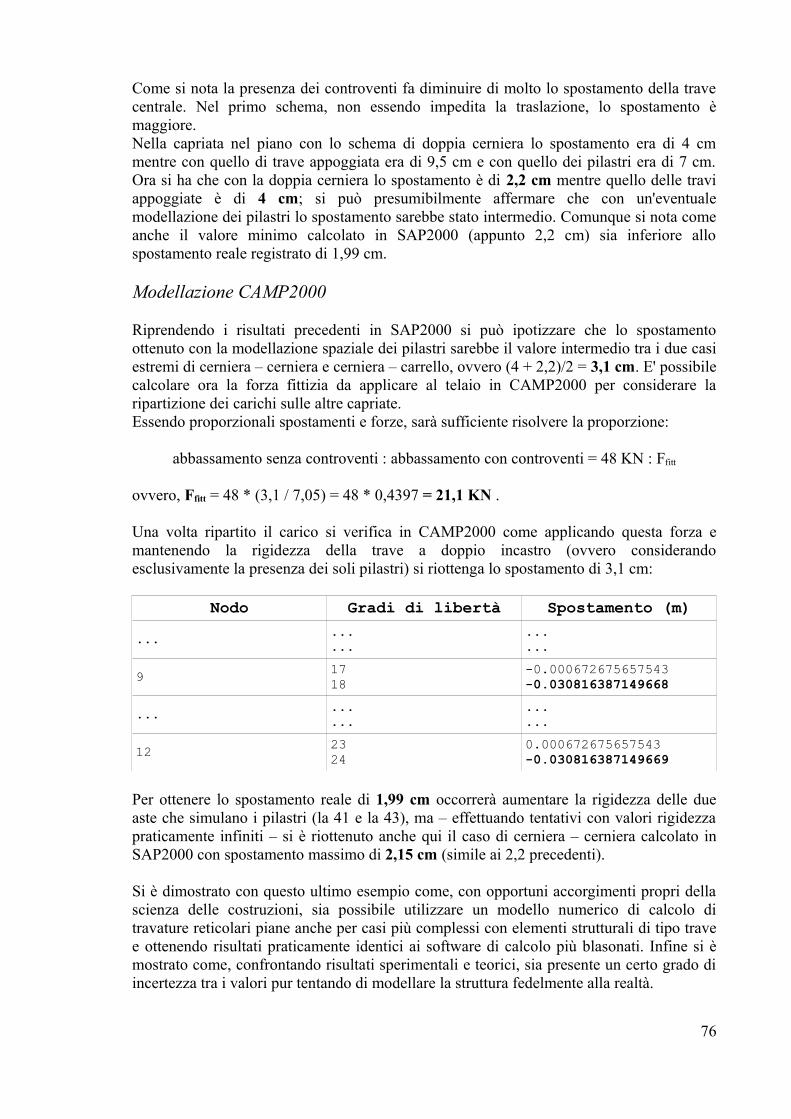
Come si nota la presenza dei controventi fa diminuire di molto lo spostamento della trave centrale. Nel primo schema, non essendo impedita la traslazione, lo spostamento è maggiore.Nella capriata nel piano con lo schema di doppia cerniera lo spostamento era di 4 cm mentre con quello di trave appoggiata era di 9,5 cm e con quello dei pilastri era di 7 cm. Ora si ha che con la doppia cerniera lo spostamento è di 2,2 cm mentre quello delle travi appoggiate è di 4 cm; si può presumibilmente affermare che con un'eventuale modellazione dei pilastri lo spostamento sarebbe stato intermedio. Comunque si nota come anche il valore minimo calcolato in SAP2000 (appunto 2,2 cm) sia inferiore allo spostamento reale registrato di 1,99 cm.
Modellazione CAMP2000
Riprendendo i risultati precedenti in SAP2000 si può ipotizzare che lo spostamento ottenuto con la modellazione spaziale dei pilastri sarebbe il valore intermedio tra i due casi estremi di cerniera – cerniera e cerniera – carrello, ovvero (4 + 2,2)/2 = 3,1 cm. E' possibile calcolare ora la forza fittizia da applicare al telaio in CAMP2000 per considerare la ripartizione dei carichi sulle altre capriate. Essendo proporzionali spostamenti e forze, sarà sufficiente risolvere la proporzione:
abbassamento senza controventi : abbassamento con controventi = 48 KN : Ffitt
ovvero, Ffitt = 48 * (3,1 / 7,05) = 48 * 0,4397 = 21,1 KN .
Una volta ripartito il carico si verifica in CAMP2000 come applicando questa forza e mantenendo la rigidezza della trave a doppio incastro (ovvero considerando esclusivamente la presenza dei soli pilastri) si riottenga lo spostamento di 3,1 cm:
Nodo Gradi di libertà Spostamento (m)... ...
.........
9 1718
-0.000672675657543-0.030816387149668
... ......
...
...
12 2324
0.000672675657543-0.030816387149669
Per ottenere lo spostamento reale di 1,99 cm occorrerà aumentare la rigidezza delle due aste che simulano i pilastri (la 41 e la 43), ma – effettuando tentativi con valori rigidezza praticamente infiniti – si è riottenuto anche qui il caso di cerniera – cerniera calcolato in SAP2000 con spostamento massimo di 2,15 cm (simile ai 2,2 precedenti).
Si è dimostrato con questo ultimo esempio come, con opportuni accorgimenti propri della scienza delle costruzioni, sia possibile utilizzare un modello numerico di calcolo di travature reticolari piane anche per casi più complessi con elementi strutturali di tipo trave e ottenendo risultati praticamente identici ai software di calcolo più blasonati. Infine si è mostrato come, confrontando risultati sperimentali e teorici, sia presente un certo grado di incertezza tra i valori pur tentando di modellare la struttura fedelmente alla realtà.
76
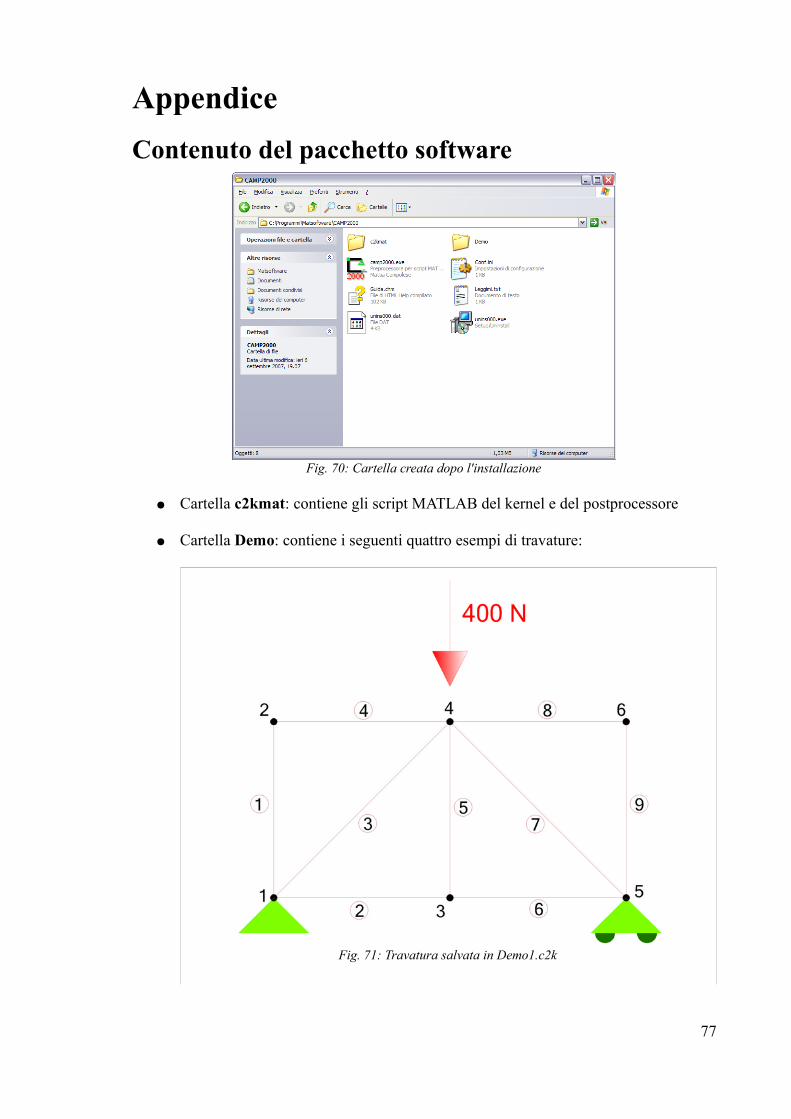
AppendiceContenuto del pacchetto software
● Cartella c2kmat: contiene gli script MATLAB del kernel e del postprocessore
● Cartella Demo: contiene i seguenti quattro esempi di travature:
77
Fig. 70: Cartella creata dopo l'installazione
Fig. 71: Travatura salvata in Demo1.c2k
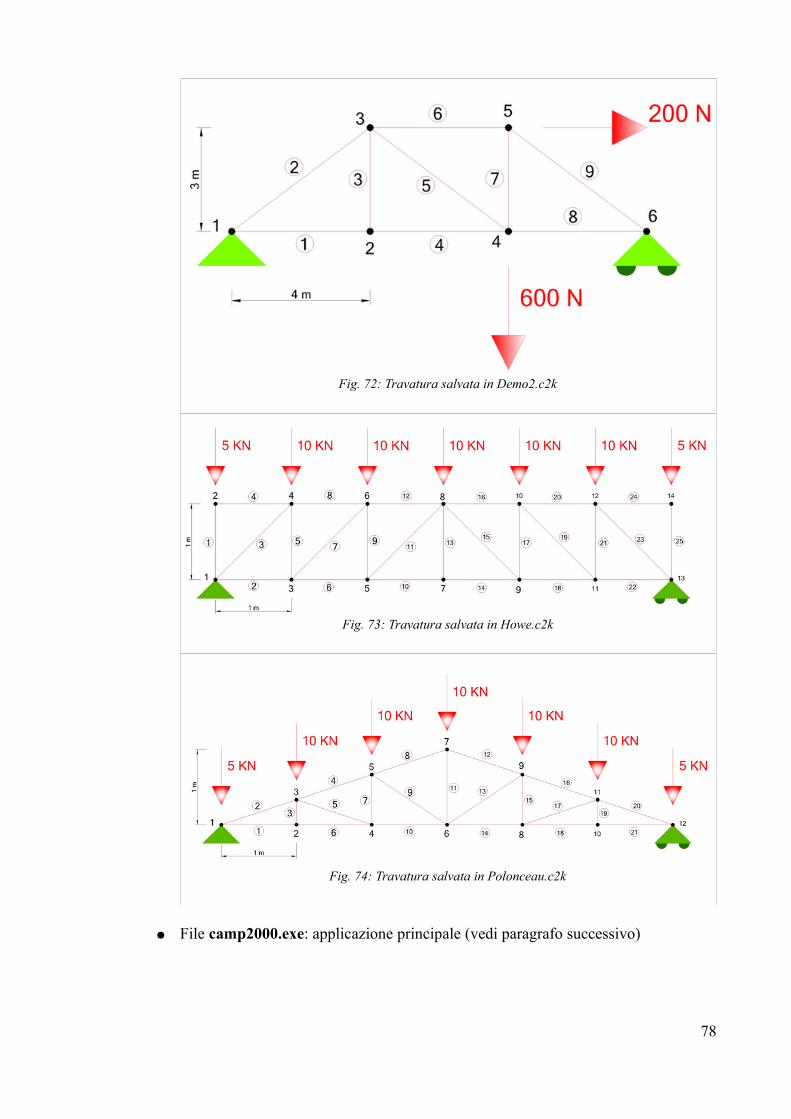
● File camp2000.exe: applicazione principale (vedi paragrafo successivo)
78
Fig. 72: Travatura salvata in Demo2.c2k
Fig. 74: Travatura salvata in Polonceau.c2k
Fig. 73: Travatura salvata in Howe.c2k
● File Conf.ini: contiene le opzioni del programma:
(esempio file Conf.ini)
%FILE DI CONFIGURAZIONE CAMP2000 - NON MODIFICARE[MATLAB]Path=C:\Programmi\MATLAB71\bin\win32\MATLAB.exeWork=C:\Programmi\MATLAB71\work[SALVATAGGI]CaricaSave=trueCaricaPath=F:\Università\Materiale\Tesi triennale\CAMP2000\Demo\SalvaSave=trueSalvaPath=F:\Università\Materiale\Tesi triennale\MATLAB\Esempi\HoweDemo
● File Guida.chm: guida all'uso del preprocessore:
● File Leggimi.txt: contiene le indicazioni da leggere prima dell'installazione:
(file Leggimi.txt)
CAMP2000 v. 0.2 - by Mattia Campolese-------------------------------------
LEGGI PRIMA DI INSTALLARE:
E' vietata la copia, modifica e redistribuzione del programma oparti di esso, è tuttavia utilizzabile anche per scopi commercialio didattiche. Per qualsiasi informazione contattare l'autore all'indirizzo email [email protected] .
BUG NOTI:
-Esistono dei problemi nel caso la cartella ospitante il programma contenga lettere non standard (come gli accenti), pertanto è consigliabile utilizzare la cartella predefinita per l'installazione del programma.
79
Fig. 75: Schermata pagina iniziale guida
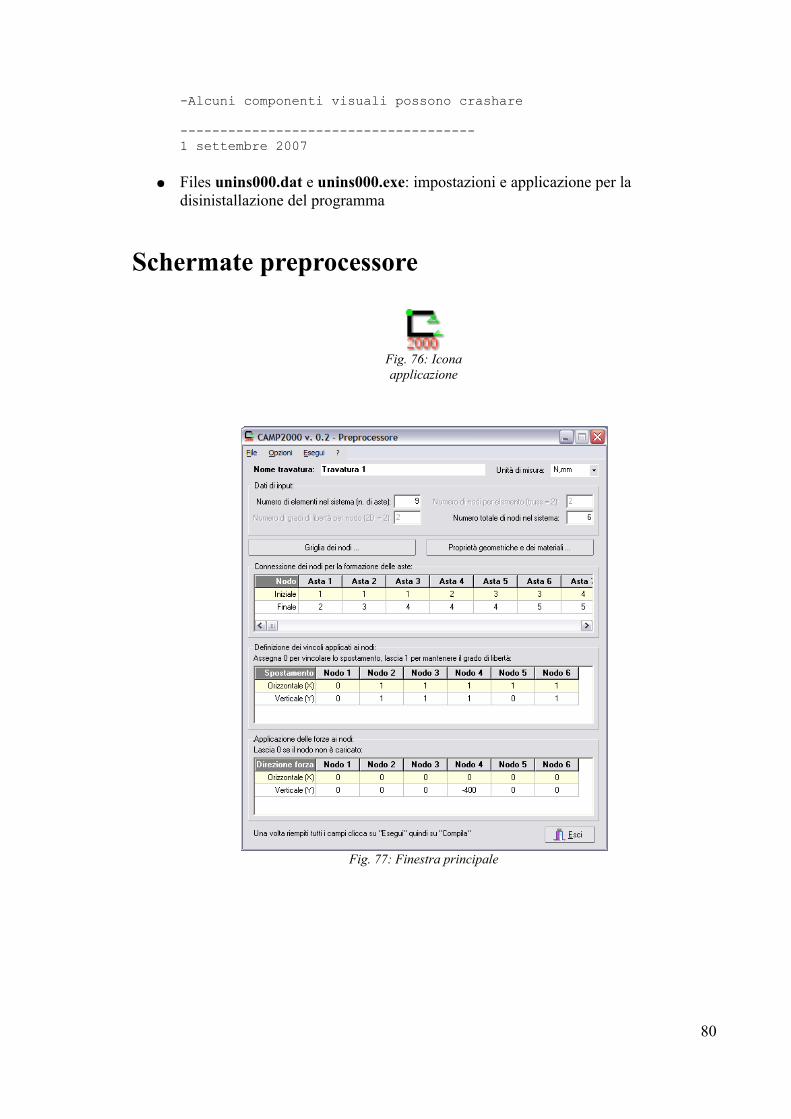
-Alcuni componenti visuali possono crashare
-------------------------------------1 settembre 2007
● Files unins000.dat e unins000.exe: impostazioni e applicazione per la disinistallazione del programma
Schermate preprocessore
80
Fig. 76: Icona applicazione
Fig. 77: Finestra principale
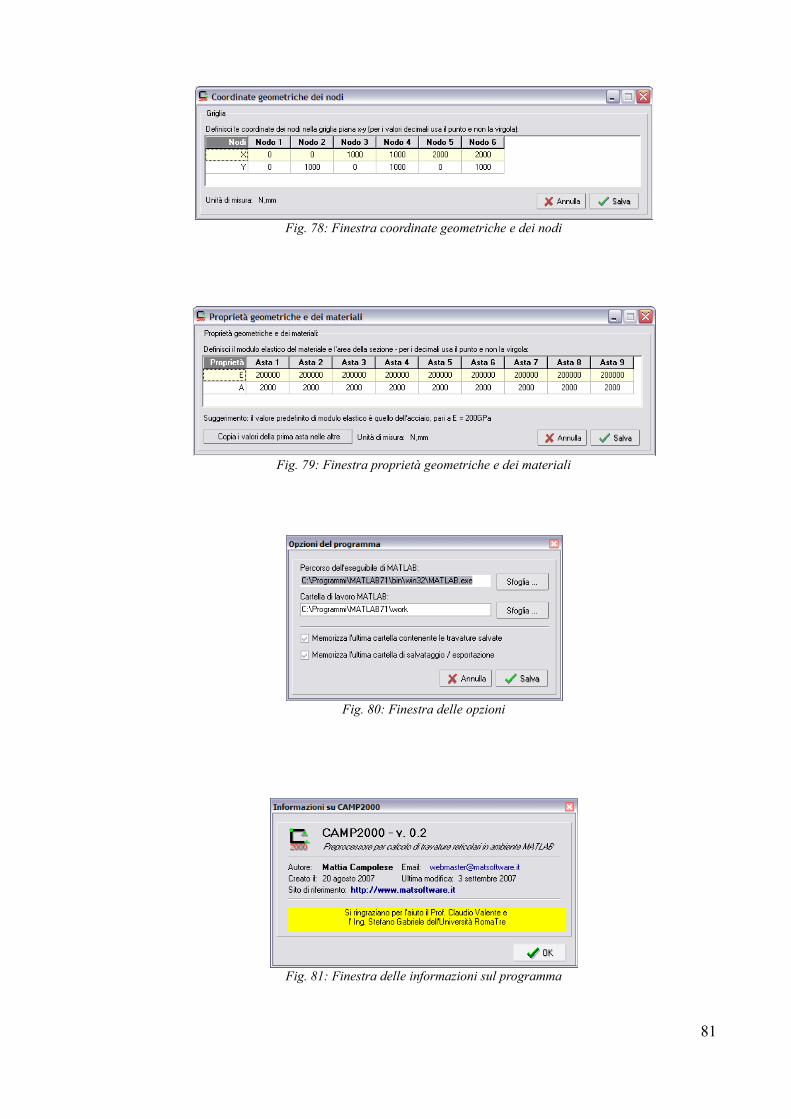
81
Fig. 78: Finestra coordinate geometriche e dei nodi
Fig. 79: Finestra proprietà geometriche e dei materiali
Fig. 80: Finestra delle opzioni
Fig. 81: Finestra delle informazioni sul programma
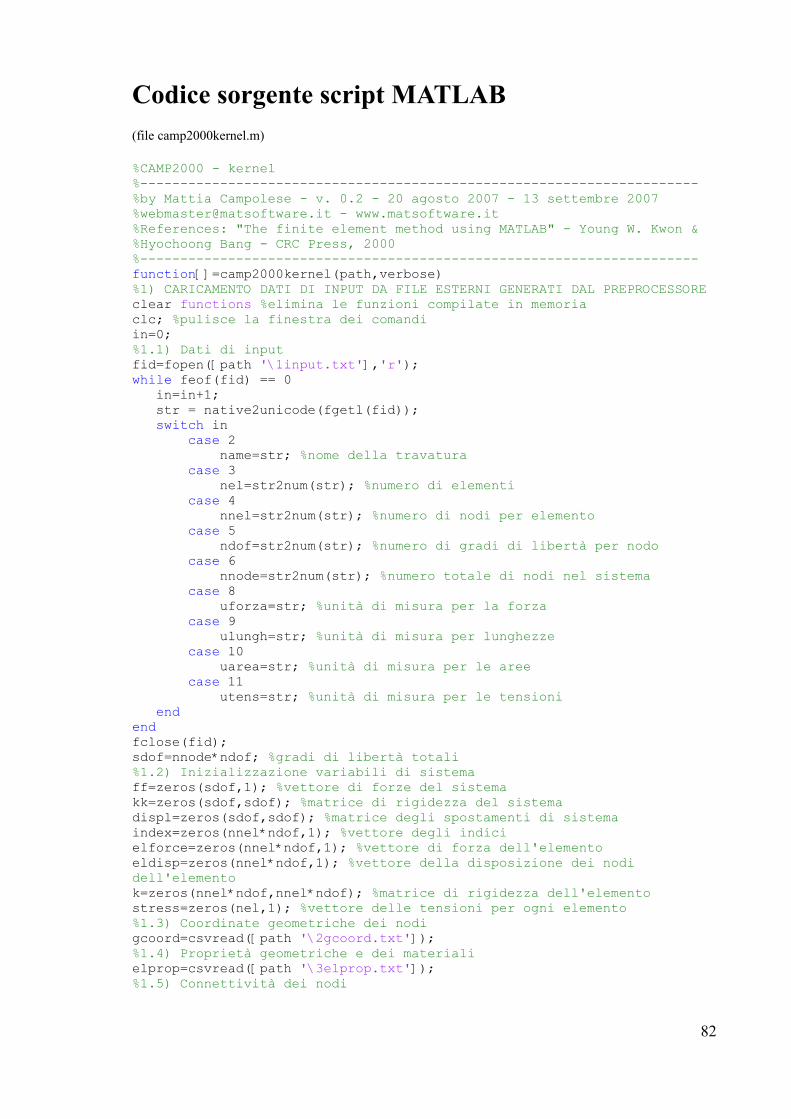
Codice sorgente script MATLAB(file camp2000kernel.m)
%CAMP2000 - kernel%----------------------------------------------------------------------%by Mattia Campolese - v. 0.2 - 20 agosto 2007 - 13 settembre 2007%[email protected] - www.matsoftware.it%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000%----------------------------------------------------------------------function[]=camp2000kernel(path,verbose)%1) CARICAMENTO DATI DI INPUT DA FILE ESTERNI GENERATI DAL PREPROCESSOREclear functions %elimina le funzioni compilate in memoriaclc; %pulisce la finestra dei comandiin=0;%1.1) Dati di inputfid=fopen([path '\1input.txt'],'r');while feof(fid) == 0 in=in+1; str = native2unicode(fgetl(fid)); switch in case 2 name=str; %nome della travatura case 3 nel=str2num(str); %numero di elementi case 4 nnel=str2num(str); %numero di nodi per elemento case 5 ndof=str2num(str); %numero di gradi di libertà per nodo case 6 nnode=str2num(str); %numero totale di nodi nel sistema case 8 uforza=str; %unità di misura per la forza case 9 ulungh=str; %unità di misura per lunghezze case 10 uarea=str; %unità di misura per le aree case 11 utens=str; %unità di misura per le tensioni end endfclose(fid);sdof=nnode*ndof; %gradi di libertà totali %1.2) Inizializzazione variabili di sistemaff=zeros(sdof,1); %vettore di forze del sistemakk=zeros(sdof,sdof); %matrice di rigidezza del sistemadispl=zeros(sdof,sdof); %matrice degli spostamenti di sistemaindex=zeros(nnel*ndof,1); %vettore degli indicielforce=zeros(nnel*ndof,1); %vettore di forza dell'elementoeldisp=zeros(nnel*ndof,1); %vettore della disposizione dei nodi dell'elementok=zeros(nnel*ndof,nnel*ndof); %matrice di rigidezza dell'elementostress=zeros(nel,1); %vettore delle tensioni per ogni elemento%1.3) Coordinate geometriche dei nodigcoord=csvread([path '\2gcoord.txt']);%1.4) Proprietà geometriche e dei materialielprop=csvread([path '\3elprop.txt']);%1.5) Connettività dei nodi
82
nodes=csvread([path '\4nodes.txt']);%1.6) Vincoli applicaticonstraints=csvread([path '\5constraints.txt']);bcdof=constraints(:,1);bcval=constraints(:,2);%1.7) Forze applicate ai nodifid=fopen([path '\6forces.txt'],'r');in=0;while feof(fid) == 0 in=in+1; str = native2unicode(fgets(fid)); ff(in)=str2num(str);endfclose(fid);if (verbose == 'si') diary Output.txt disp('CAMP2000 - Kernel'); disp('-----------------'); disp('1) Dati di input: '); disp(['Travatura "' name '" calcolata in data: ' datestr(now)]); disp(['Numero di elementi: ' int2str(nel)]); disp(['Numero di nodi per elemento: ' int2str(nnel)]); disp(['Numero di gradi di libertà per nodo: ' int2str(ndof)]); disp(['Numero totale di nodi nel sistema: ' int2str(nnode)]); disp(['Numero totale dei gradi di libertà del sistema: ' int2str(sdof)]); disp(' '); disp('Matrici caricate: '); [gcoord] [nodes] [elprop] [bcdof] [bcval] [ff] disp(' '); disp('2) Ciclo degli elementi: '); end%2) CICLO DEGLI ELEMENTIfor iel=1:nel %cicla per il numero totale di elementi nd(1)=nodes(iel,1); %primo nodo connesso con l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso con l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate per il primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate per il secondo nodo lung=sqrt((x2-x1)^2+(y2-y1)^2); %lunghezza dell'elemento %controllo sull'inclinazione dell'asta rispetto al sistema di riferimento globale: if (x2-x1)==0; if y2>y1; beta=2*atan(1); else beta=-2*atan(1); end else beta=atan((y2-y1)/(x2-x1)); end el=elprop(iel,1); %estrae il modulo elastico area=elprop(iel,2); %estrae l'area della sezione index=feeldof(nd,nnel,ndof); %estrae il sistema dei gradi di libertà dell'elemento k=fetruss(el,lung,area,beta); %computa la matrice degli elementi
83
kk=feasmbl(kk,k,index); %assembla la matrice di sistema inserendo quella di elemento if (verbose == 'si') disp(['Asta ' int2str(iel)]); disp([' - lunghezza: ' num2str(lung) ' ' ulungh]); disp([' - inclinazione (deg): ' num2str(rad2deg(beta))]); disp([' cos(betax) e cos(betay): ' num2str((x2-x1)/lung) ' ' num2str((y2-y1)/lung)]); disp([' betax e betay (deg): ' num2str(acosd((x2-x1)/lung)) ' ' num2str(acosd((y2-y1)/lung))]); disp([' - modulo elastico: ' num2str(el) ' ' utens]); disp([' - area: ' num2str(area) ' ' uarea]); disp([' - sistema di gradi di libertà: ' int2str(index)]); disp(' - matrice di rigidezza dell''elemento: '); [k] end end%3) ASSEGNAZIONE DEI VINCOLI E SOLUZIONE DELLA MATRICEif (verbose == 'si') disp('3) Assegnazione dei vincoli e soluzione della matrice'); disp('Matrice di rigidezza del sistema senza vincoli dei gdl: '); [kk]end[kk,ff]=feaplyc(kk,ff,bcdof,bcval); %applicazione delle condizioni al contornodispl=kk\ff; %risoluzione della matrice per gli spostamenti dei nodiif (verbose == 'si') disp('Matrice di rigidezza del sistema con i vincoli dei gdl:'); [kk] disp('Matrice delle forze di sistema:'); [ff] disp('RIEPILOGO: ');end%4) CALCOLO DELLE FORZE E DELLE TENSIONIfor iel=1:nel %cicla per il numero totale di elementi nd(1)=nodes(iel,1); %primo nodo connesso per l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso per l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate del primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate del secondo nodo lung=sqrt((x2-x1)^2+(y2-y1)^2); %lunghezza dell'elemento %controllo if (x2-x1)==0; if y2>y1; beta=2*atan(1); else beta=-2*atan(1); end else beta=atan((y2-y1)/(x2-x1)); end el=elprop(iel,1); %estrai il modulo elastico area=elprop(iel,2); %estrai l'area della sezione index=feeldof(nd,nnel,ndof); %estrae il sistema dei gradi di libertà per l'elemento k=fetruss(el,lung,area,beta); %computa la matrice di elemento for i=1:(nnel*ndof) %estrae gli spostamenti associati con l'elemento iesimo eldisp(i)=displ(index(i)); end elforce=k*eldisp; %vettore forza elemento N(iel)=sqrt(elforce(1)^2+elforce(2)^2); %sforzi normali
84
stress(iel)=N(iel)/area; %tensioni if (elforce(3))<0; %controllo se sono o no di compressione stress(iel)=-stress(iel); N(iel)=-N(iel); end if (verbose == 'si') disp(['Asta ' int2str(iel)]); disp([' - Sforzo normale elemento: ' num2str(N(iel)) ' ' uforza]); disp([' - Tensione elemento: ' num2str(stress(iel)) ' ' utens]); end end%5) STAMPA DEI RISULTATI (se disabilitata opzione verbosa)num=1:1:sdof;format longdisp([' ']);disp(['Spostamenti in ' ulungh ': (n. gdl e spostamento)']);disp([num' displ]);format short% salva i risultati nella cartella dei dati di inputcsvwrite([path '\Spostamenti.txt'],displ); %spostamenticsvwrite([path '\N.txt'],N'); %sollecitazioni assialicsvwrite([path '\Tensioni.txt'],stress); %tensioniif (verbose == 'si') %6) LANCIA IL POST PROCESSORE camp2000pp(path); diary off; else numm=1:1:nel; tensioni=[numm' stress] forze=[numm' N'] end
85
(file camp2000pp.m)
%CAMP2000 - Post Processore%----------------------------------------------------------------------%by Mattia Campolese - v. 0.2 - 13 settembre 2007%[email protected] - www.matsoftware.it%----------------------------------------------------------------------function[]=camp2000pp(path)%1) CARICAMENTO DATI DI INPUT DA FILE ESTERNI GENERATI DAL PREPROCESSOREin=0;disp('CAMP2000 - POST PROCESSORE');%1.1) Dati di inputfid=fopen([path '\1input.txt'],'r');while feof(fid) == 0 in=in+1; str = native2unicode(fgetl(fid)); switch in case 2 name=str; %nome della travatura case 3 nel=str2num(str); %numero di elementi case 4 nnel=str2num(str); %numero di nodi per elemento case 5 ndof=str2num(str); %numero di gradi di libertà per nodo case 6 nnode=str2num(str); %numero totale di nodi nel sistema case 8 uforza=str; %unità di misura per la forza case 9 ulungh=str; %unità di misura per lunghezze case 10 uarea=str; %unità di misura per le aree case 11 utens=str; %unità di misura per le tensioni end endfclose(fid);sdof=nnode*ndof; %gradi di libertà totali %1.2) Coordinate geometriche dei nodigcoord=csvread([path '\2gcoord.txt']);%1.3) Proprietà geometriche e dei materialielprop=csvread([path '\3elprop.txt']);%1.4) Connettività dei nodinodes=csvread([path '\4nodes.txt']);%1.5) Vincoli applicaticonstraints=csvread([path '\5constraints.txt']);bcdof=constraints(:,1);bcval=constraints(:,2);%1.6) Forze applicate ai nodifid=fopen([path '\6forces.txt'],'r');in=0;while feof(fid) == 0 in=in+1; str = native2unicode(fgets(fid)); ff(in)=str2num(str);endfclose(fid);%1.7) Spostamentidispl=csvread([path '\Spostamenti.txt']);%1.8) Forze
86
N=csvread([path '\N.txt']);%1.9) Tensionistress=csvread([path '\Tensioni.txt']);%2) GRAFICA DELLA TRAVATURA h1 = figure;hold on;%grid on;%set(gca,'Xcolor',[0.9020 0.9020 0.9020]);%set(gca,'Ycolor',[0.9020 0.9020 0.9020]);axis equal;for iel=1:nel %cicla per il numero totale di elementi nd(1)=nodes(iel,1); %primo nodo connesso con l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso con l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate per il primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate per il secondo nodo x = [x1,x2]; y = [y1,y2]; plot(x,y,'r'); averagex = (x1 + x2)/2; averagey = (y1 + y2)/2; % scegliere cosa visualizzare text(averagex,averagey,num2str(iel),'BackgroundColor','y'); %asta % text(averagex,averagey,[num2str(iel) ') ' num2str(elprop(iel,2)) ' ' uarea],'BackgroundColor','y'); %asta e area% text(averagex,averagey,[num2str(iel) ') ' num2str(elprop(iel,1)) ' ' utens],'BackgroundColor','y'); %asta e modulo elastico end %disegna il vincolo del nodofor j=1:nnode %ciclo per il numero totale dei nodi kind = 0; %variabile per definire la tipologia di nodo gdl1 = (j*ndof)-1; gdl2 = (j*ndof); x=gcoord(j,1); y=gcoord(j,2); %coordinate del nodo %controlla se il gdl del nodo j è vincolato for g=1:length(bcdof) if ((bcdof(g)==gdl1) | (bcdof(g)==gdl2)) kind = kind + 1; end end %stabilisce il tipo di vincolo switch kind case 1 %carrello plot(x,y,'og'); case 2 %cerniera plot(x,y,'^g'); endend%disegna la forza applicata al nodofor j=1:nnode %ciclo per il numero totale dei nodi f1 = (j*ndof)-1; f2 = (j*ndof); x=gcoord(j,1); y=gcoord(j,2); %coordinate del nodo %controlla se la forza è applicata al nodo %f. orizzontale if (ff(f1) ~= 0) if (ff(f1) >= 0) text(x,y,[num2str(ff(f1)) ' ' uforza]);
87
plot(x,y,'>b') else text(x,y,[num2str(ff(f1)) ' ' uforza]); plot(x,y,'<b') end end %f verticale if (ff(f2) ~= 0) if (ff(f2) >= 0) text(x,y,[num2str(ff(f2)) ' ' uforza]); plot(x,y,'^b') else text(x,y,[num2str(ff(f2)) ' ' uforza]); plot(x,y,'vb') end end endtitle(['Travatura ' name]); %titolo graficoxlabel(ulungh);ylabel(ulungh);%3) CALCOLA I VALORI MASSIMI% Distingue gli spostamenti orizzontali e verticalifor j=1:nnode %cicla per il numero di nodi doriz(j) = displ((j*ndof)-1); dvert(j) = displ((j*ndof));end% Ricerca i valori minimi e massimi di spostamenti, N e sigma e indica% l'asta corrispondente[DHmax,NDHmax]=max(abs(doriz)); %orizzontale[DVmax,NDVmax]=max(abs(dvert)); %verticale[Nmax,ANmax]=max(N); %trazione[Nmin,ANmin]=min(N); %compressione[Smax,ASmax]=max(stress); %trazione[Smin,ASmin]=min(stress); %compressionedisp(['- Spostamento massimo orizzontale: ' num2str(doriz(NDHmax)) ' ' ulungh]);disp([' presente nel nodo ' num2str(NDHmax)]);disp(['- Spostamento massimo verticale: ' num2str(dvert(NDVmax)) ' ' ulungh]);disp([' presente nel nodo ' num2str(NDVmax)]);if (Nmax > 0) disp(['- Sforzo normale maggiore di trazione: ' num2str(Nmax) ' ' uforza]); disp([' presente nell''asta ' num2str(ANmax)]);else disp('Tutte le aste sono compresse');endif (Nmin < 0) disp(['- Sforzo normale maggiore di compressione: ' num2str(Nmin) ' ' uforza]); disp([' presente nell''asta ' num2str(ANmin)]);else disp('Tutte le aste sono tese');endif (Smax > 0) disp(['- Tensione maggiore di trazione: ' num2str(Smax) ' ' utens]); disp([' presente nell''asta ' num2str(ASmax)]);endif (Smin < 0) disp(['- Tensione maggiore di compressione: ' num2str(Smin) ' ' utens]);
88
disp([' presente nell''asta ' num2str(ASmin)]);end%3) GRAFICA LE SOLLECITAZIONIh2 = figure;hold on;%grid on;axis equal;for iel=1:nel %cicla per il numero totale di elementi nd(1)=nodes(iel,1); %primo nodo connesso per l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso per l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate del primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate del secondo nodo x = [x1,x2]; y = [y1,y2]; %distingue se di tensione o compressione if (round(N(iel)) > 0) plot(x,y,'r'); end if (round(N(iel)) == 0) plot(x,y,'black'); end if (round(N(iel)) < 0) plot(x,y,'b'); end %disegna il vincolo del nodo for j=1:nnode %ciclo per il numero totale dei nodi kind = 0; %variabile per definire la tipologia di nodo gdl1 = (j*ndof)-1; gdl2 = (j*ndof); x=gcoord(j,1); y=gcoord(j,2); %coordinate del nodo %controlla se il gdl del nodo j è vincolato for g=1:length(bcdof) if ((bcdof(g)==gdl1) | (bcdof(g)==gdl2)) kind = kind + 1; end end %stabilisce il tipo di vincolo switch kind case 1 %carrello plot(x,y,'og'); case 2 %cerniera plot(x,y,'^g'); end end %applica la sollecitazione sull'asta averagex = (x1 + x2)/2; averagey = (y1 + y2)/2; %controlla se è il valore massimo di trazione if ((round(N(iel)) == round(Nmax)) | (round(N(iel)) == round(Nmin))) text(averagex,averagey,[num2str(round(N(iel))) ' ' uforza],'FontSize',14); else text(averagex,averagey,[num2str(round(N(iel))) ' ' uforza]); endendtitle(['Sollecitazioni travatura ' name]); %titolo graficoxlabel(ulungh);ylabel(ulungh); %4) GRAFICA LE TENSIONI
89
h3 = figure;hold on;%grid on;axis equal;for iel=1:nel %cicla per il numero totale di elementi nd(1)=nodes(iel,1); %primo nodo connesso per l'elemento iesimo nd(2)=nodes(iel,2); %secondo nodo connesso per l'elemento iesimo x1=gcoord(nd(1),1); y1=gcoord(nd(1),2); %coordinate del primo nodo x2=gcoord(nd(2),1); y2=gcoord(nd(2),2); %coordinate del secondo nodo x = [x1,x2]; y = [y1,y2]; %distingue se di tensione o compressione if (round(stress(iel)) > 0) plot(x,y,'r'); end if (round(stress(iel)) == 0) plot(x,y,'black'); end if (round(stress(iel)) < 0) plot(x,y,'b'); end %disegna il vincolo del nodo for j=1:nnode %ciclo per il numero totale dei nodi kind = 0; %variabile per definire la tipologia di nodo gdl1 = (j*ndof)-1; gdl2 = (j*ndof); x=gcoord(j,1); y=gcoord(j,2); %coordinate del nodo %controlla se il gdl del nodo j è vincolato for g=1:length(bcdof) if ((bcdof(g)==gdl1) | (bcdof(g)==gdl2)) kind = kind + 1; end end %stabilisce il tipo di vincolo switch kind case 1 %carrello plot(x,y,'og'); case 2 %cerniera plot(x,y,'^g'); end end %applica la sollecitazione sull'asta averagex = (x1 + x2)/2; averagey = (y1 + y2)/2; %controlla se è il valore massimo di trazione if ((round(stress(iel)) == round(Smax)) | (round(stress(iel)) == round(Smin))) text(averagex,averagey,[num2str(round(stress(iel))) ' ' utens],'FontSize',14); else text(averagex,averagey,[num2str(round(stress(iel))) ' ' utens]); endendtitle(['Tensioni travatura ' name]); %titolo graficoxlabel(ulungh);ylabel(ulungh);
90
(file feaplyc.m)
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[kk,ff]=feaplyc(kk,ff,bcdof,bcval)n=length(bcdof); %numero dei gradi di libertà vincolatisdof=size(kk); %gradi di libertà del sistemafor i=1:n c=bcdof(i); %grado di libertà vincolato for j=1:sdof kk(c,j)=bcval(i); kk(j,c)=bcval(i); end kk(c,c)=1; %per non annullare il determinante ff(c)=bcval(i); %la forza sul vincolo è assorbita tutta da essoend
(file feasmbl.m)
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[kk]=feasmbl(kk,k,index)edof=length(index);for i=1:edof ii=index(i); for j=1:edof jj=index(j); kk(ii,jj)=kk(ii,jj)+k(i,j); endend
(file feeldof.m)
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[index]=feeldof(nd,nnel,ndof)edof=nnel*ndof;k=0;for i=1:nnel start=(nd(i)-1)*ndof; for j=1:ndof k=k+1; index(k)=start+j; endend
(file fetruss.m)
%References: "The finite element method using MATLAB" - Young W. Kwon &%Hyochoong Bang - CRC Press, 2000function[k]=fetruss(el,leng,area,beta)c=cos(beta); s=sin(beta);k=(area*el/leng)*[c*c c*s -c*c -c*s;... c*s s*s -c*s -s*s;... -c*c -c*s c*c c*s;... -c*s -s*s c*s s*s];end
91
Riferimenti bibliografici“The finite element method using MATLAB” - Young W. Kwon & Hyochoong Bang - CRC Press, 2000.
“Lezioni complementi ed esercizi di scienza delle costruzioni – vol 2” - A. Samuelli Ferretti, Edizioni Ingegneria 2000.
Dispense e appunti del corso di “Meccanica della trave” del Prof. Claudio Valente presso la facoltà di Ingegneria Civile – Università RomaTre.
Dispense del corso di “Statica” del Prof. Francesco Romeo presso la Prima facoltà di Architettura – La Sapienza.
MATLAB. (4 settembre 2007). “Wikipedia, L'enciclopedia libera”. Tratto il 7 settembre 2007, 14:42 da http://it.wikipedia.org/w/index.php?title=MATLAB&oldid=10757257.
“Prove di carico sulle costruzioni” - tesi triennale Ingegneria Civile – Università Roma3 – di Gabriele Fiorentino, Anno 2005/2006
92
RingraziamentiRingrazio il professore Claudio Valente e l' Ing. Stefano Gabriele per la pazienza dedicatami nell'assistenza a questo lavoro, nonché l' Ing. Jr Fiorentino Gabriele per l'assitenza con il lavoro da lui svolto con la sua tesi.
Ringrazio tutte le persone che mi son state vicine in questi tre anni universitari e in particolare:
● la mia famiglia (Nicola Campolese, Antonella Vastano e Cinzia Campolese) e in particolare i genitori che mi hanno permesso di sostenere gli studi fuori sede qui a Roma
● i coinquilini che mi hanno sopportato in tre anni di pazzie mentali (in particolare Iura Luca, l'ing. jr informatico che mi ha dato qualche suggerimento per il programma)
● tutti gli amici/colleghi universitari (che hanno suggerito anche l'idea del nome del software nata come scherzo dopo le prime lezioni di meccanica dei materiali e delle strutture)
● tutti gli amici/amiche/qualcosadipiùcheamiche che mi hanno sempre apprezzato e sostenuto e quelli che mi hanno rimproverato quando necessario
93