IL SOLIDO DEL DE SAINT-VENANT - Portale...
73
Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE 7 IL SOLIDO DEL DE SAINT-VENANT FLESSIONE SEMPLICE Si ha flessione semplice quando agiscono sulle sezioni terminali della trave due sistemi di forze equivalenti a due coppie di verso contrario e di modulo uguale (Figura 1) Fig. 1 Le coppie appartengono ad un piano passante per l’asse della trave (piano di sollecitazione) e avente traccia s-s sulla sezione normale (asse di sollecitazione). In queste condizioni la trave si inflette, assumendo la seguente configurazione deformata (Figura 2) Fig. 2
Transcript of IL SOLIDO DEL DE SAINT-VENANT - Portale...

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
7
IL SOLIDO DEL DE SAINT-VENANT
FLESSIONE SEMPLICE
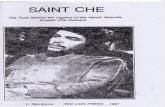
Si ha flessione semplice quando agiscono sulle sezioni terminali della trave due sistemi di
forze equivalenti a due coppie di verso contrario e di modulo uguale (Figura 1)
Fig. 1
Le coppie appartengono ad un piano passante per l’asse della trave (piano di sollecitazione) e
avente traccia s-s sulla sezione normale (asse di sollecitazione). In queste condizioni la trave si
inflette, assumendo la seguente configurazione deformata (Figura 2)
Fig. 2

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
8
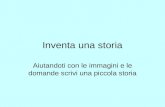
Le sezioni trasversali, come quelle delimitate dai punti A,B,C e D, restano piane. È questa l’ipotesi
fondamentale di Bernoulli-Navier:”le sezioni piane, condotte normalmente all’asse della trave,
restano tali dopo che la trave è stata inflessa” (Figura 3).
Fig. 3
La sezione verticale CD assume la posizione inclinata C’D’. I due piani π e π’ (Figura 4) che
contengono la sezione prima e dopo la deformazione, si intersecano lungo la retta n-n detta asse
neutro, in quanto lungo questa retta l’elongazione εz è nulla.
Fig. 4
Per fibre parallele all’asse neutro la εz è costante e la variazione con η (coordinata ortogonale
all’asse neutro) è lineare
ηε kz = ,
mentre le altre componenti di deformazione valgono

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
9
ηννεεε kzyx −=−==
0=== yzxzxy γγγ
mentre le relative componenti di tensione per un qualsiasi punto del solido sono
ησ Ekz = (1)
0===== yzxzxyyx τττσσ .
Con questo stato tensionale la superficie laterale del cilindro risulta scarica, mentre affinché siano
soddisfatte le condizioni globali di equilibrio, occorre che sia
∫ ==A
zdAN 0σ (2)
essendo nulla la forza assiale agente nella sezione normale;
∫ ==−A
zss dAM 0δσ (3)
poiché è nullo il momento delle forze esterne rispetto a tale asse;
∫ ==−A
zss MdAM αησ cos (4)
poiché la somma dei momenti elementari σzηdA rispetto all’asse n-n deve uguagliare la componente
Mn-n del momento esterno.
Tenuto conto della (1), la (2) diventa
∫ ==A
dAEkN 0η
e l’integrale rappresenta il momento statico della sezione rispetto all’asse neutro, ed è nullo solo se
l’asse neutro passa per il baricentro G della sezione.
Introducendo la (1) nella (3) si ha
∫ =A
dAEk 0ηδ
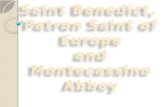
l’integrale rappresenta il momento centrifugo della sezione rispetto all’asse di sollecitazione s-s e
all’asse neutro n-n, ed è nullo quando i due assi sono coniugati rispetto all’ellisse centrale d’inerzia
della sezione (Figura 5)

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
10
Fig. 5
Con questa seconda condizione viene univocamente determinata la posizione dell’asse neutro.
Tramite la relazione (4) si può valutare la costante k:
∫ =A
MdAEk αη cos2
detto ∫=A
n dAI 2η il momento d’inerzia rispetto all’asse neutro si ha dalla (1)
ησα z
nIMEk ==
cos
da cui si ricava la seguente formula (detta formula monomia):
ηασn
k IM cos
= (5)
La (5) assicura che le tensioni σz provocate dal momento flettente M si annullano in corrispondenza
dell’asse neutro e sono costanti lungo ogni corda a questo parallela e linearmente proporzionali alla
distanza da esso.
L’asse neutro separa la sezione in due parti nelle quali si hanno tensioni di segno opposto. I valori
massimi delle tensioni si hanno nei punti più lontani dell’asse neutro. Indicate con η’ e η’’ le loro
distanze (Figura 5) si ha:
'cos'cos'W
MI
Mn
zαηασ == (6)
''cos''cos''W
MI
Mn
zαηασ ==

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
11
dove si è posto ''η
nIW = e ''''η
nIW = .
Le relazioni (6) mettono in evidenza che, a parità di M, le tensioni massima e minima sono tanto
minori quanto più sono grandi W’ e W’’. Questi prendono il nome di moduli di resistenza alla
flessione e dimensionalmente
34
][][][ L
LLIW n ===
η
Quando agisce un momento flettente con asse di sollecitazione s-s, l’asse della trave
appartiene, a deformazione avvenuta, ad un piano detto piano di flessione. La traccia di tale piano
con la sezione normale è detta asse di flessione f-f, ed è normale all’asse neutro. Quindi, applicando
un momento esterno con asse di sollecitazione s-s, la sezione ruoterà intorno all’asse neutro n-n,
inflettendosi nella direzione ortogonale ad esso, indicata dall’asse di flessione f-f (Figura 6).
Fig. 6
Come abbiamo visto, l’asse di sollecitazione in generale non è ortogonale all’asse neutro: ne
consegue che l’asse di sollecitazione e l’asse di flessione sono distinti. In questo caso si parla di
flessione deviata.
Solo nel caso particolare in cui l’asse di sollecitazione coincide con uno dei due assi principali
d’inerzia della sezione, esso risulterà ortogonale all’asse neutro. Allora, in questo caso speciale,
l’asse di sollecitazione e l’asse di flessione coincidono e la sezione si infletterà nella direzione
indicata dall’asse di sollecitazione, cioè lungo la stessa direzione in cui è applicata l’azione flettente
esterna. In questo caso si parla di flessione retta (Figura 7).

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
12
Fig. 7
Utilizzando il principio di sovrapposizione degli effetti è sempre possibile ricondursi allo studio di
due flessioni rette, supponendo il momento flettente esterno M nelle due componenti secondo gli
assi principali d’inerzia (Figura 8)
Fig. 8
Scegliendo il sistema di riferimento G,x,y diretto come gli assi principali d’inerzia, si ha che la
flessione deviata (generata dal momento flettente M), può essere studiata con due flessioni semplici
rette, caratterizzate da:
1. dal momento flettente Mx, con asse di sollecitazione coincidente con l’asse y e come asse
neutro l’asse x;
2. dal momento flettente My, con asse di sollecitazione coincidente con l’asse x e come asse
neutro l’asse y.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-FLESSIONE
13
Sommando gli effetti, la tensione in un punto vale
xI
My
IM
y
y
x
xz −=σ (formula binomia) (7)
e nel caso di flessione semplice retta (ad esempio M=Mx) si riduce all’unico termine
yI
Mx
xz =σ (formula di Navier)
Valutiamo ora la rotazione φx prodotta dalla flessione semplice retta dovuta a Mx. A tal fine
scostiamo a destra (incremento positivo) la rotazione relativa di un concio elementare di trave
(Figura 9)
Fig. 9
La rotazione tra le basi del prisma di lunghezza l vale
lEIM
x
xx =ϕ
(la quantità EIx è detta rigidità flessionale (dimensionalmente [EIx]=FL-2L4=FL2))
In conseguenza dell’effetto Poisson, la zona compressa della trave si dilata trasversalmente (come
si può vedere operando su una normale gomma per cancellare), mentre la zona tesa si contrae. La
superficie neutra si deforma secondo una superficie a doppia curvatura, detta superficie anticlastica.
La curvatura ρx vale:
x
xx
xx EI
Mlr===
ϕρ 1

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant–F.ZA NORMALE e FLESSIONE
14
IL SOLIDO DEL DE SAINT-VENANT
FORZA NORMALE E FLESSIONE
E’ il caso in cui agisce sulla trave una forza normale N applicata in un punto C, eccentrico
rispetto al baricentro G (Figura 1).
Fig. 1
Valgono le seguenti relazioni:
−=
=
xy
yx
NeMNeM
→
−=
=
NM
e
NMe
yx
xy
Il piano individuato dalla linea d’azione di N e dall’asse z del prisma è il piano di sollecitazione e la
sua traccia nel piano della sezione normale è l’asse di sollecitazione s-s.
Utilizzando il principio di sovrapposizione degli effetti risulta:
xI
My
IM
AN
y
y
x
xz −+=σ (formula trinomia)
e ricordando che 2xx AI ρ= e 2
yy AI ρ=
la formula trinomia può essere così riscritta

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant–F.ZA NORMALE e FLESSIONE
15
++= x
ey
eAN
y
x
x
yz 221
ρρσ
con una forma utile per determinare l’equazione dell’asse neutro (Figura 2), σz =0 cioè:
122 −=+ xeye
y
x
x
y
ρρ
Fig. 2
Le intersezioni con gli assi coordinati si ottengono dai sistemi
−=
=
y
x
ey
x2
0ρ
−=
=
x
y
ex
y2
0ρ
che consentono di individuare immediatamente l’asse neutro.
Si noti che tale asse (non più baricentrico come nella flessione semplice) ed il centro di
sollecitazione C, si trovano sempre da parti opposte rispetto a G.
La sollecitazione di forza normale e flessione (presso-flessione o tenso-flessione, a seconda che sia
N<0 e N>0) si chiama anche sollecitazione di forza normale eccentrica e si riduca a:
o forza normale centrata, se ex= ey=0 (in questo caso l’asse neutro diviene la retta
impropria);
o flessione semplice retta, quando C è il punto improprio di uno degli assi principali
d’inerzia (in questo caso l’asse neutro è baricentrico ed ortogonale all’asse di
sollecitazione);

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant–F.ZA NORMALE e FLESSIONE
16
o flessione semplice deviata, quando C è un qualsiasi punto improprio del piano che
contiene la sezione (in questo caso l’asse neutro è baricentrico e coniugato all’asse di
sollecitazione rispetto all’ellisse centrale d’inerzia).
Si possono ottenere delle formule monomie per la forza normale eccentrica introducendo la
distanza λn di un punto della sezione rispetto all’asse neutro (Figura 3)
Fig. 3
2
2
2
2
22 1
+
++=
y
x
x
y
y
x
x
y
n
ee
xeye
ρρ
ρρλ
che introdotta nella formula trinomia fornisce
ny
x
x
ynz Kee
AN λ
ρρλσ =
+
=
2
2
2
2
dove
2
2
2
2
+
=
y
x
x
y eeANK
ρρ .

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant–F.ZA NORMALE e FLESSIONE
17
Si può quindi procedere in due modi differenti:
1. s’impone l’equilibrio alla traslazione nella direzione z:
∫∫ ===A
nnA
z KSdAKdAN λσ
con Sn momento statico della sezione trasversale rispetto all’asse neutro, da cui nSNK = , e
quindi:
nn
z SN λσ =
2. s’impone la rotazione attorno all’asse neutro
∫∫ ===−A
nnA
nznn KIdAKdAM 2λλσ
con In momento d’inerzia della sezione trasversale rispetto all’asse neutro e Mn-n componente del
momento flettente esterno nella direzione dell’asse neutro; quindi nnn IMK −= , da cui
nn
nnz I
M λσ −=

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini De Saint Venant-FORZA ASSIALE
4
IL SOLIDO DEL DE SAINT-VENANT
FORZA ASSIALE
Fig. 1
Si faccia riferimento alla trave in Figura 1, mantenuta in equilibrio da due forze uguali ed
opposte N agenti su ciascuna delle due sezione di estremità. Poiché la trave si trova in equilibrio nel
suo insieme, lo sarà anche in ogni sua parte; effettuando un taglio normale all’asse del solido, la
tensione normale (Figura 2) che agisce nella sezione tagliata vale
AN
z =σ
Fig. 2
e risulta uniformante distribuita nella sezione di area A. Lo stato tensionale presenta dunque le
seguenti componenti:
0== yx σσ

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini De Saint Venant-FORZA ASSIALE
5
AN
z =σ
0=== yzxzxy τττ .
Impiegando le relazioni derivanti dai legami costitutivi per materiali isotropi, segue allora
Ez
yxσνεε −==
Ez
zσε =
0=++ yzxzxy γγγ
Fig. 3
Poiché ogni punto del prisma (Figura 7) subisce dilatazioni costanti e gli scorrimenti sono tutti
nulli, le sezioni che in origine erano piane si mantengono tali anche dopo la deformazione.
Un elemento prismatico di altezza dz, come quello di Figura 4, presenta un variazione di
lunghezza pari a
dzEANdz
Edzdw z
z ===σε
Fig. 4
e la variazione di lunghezza Δl del prisma di lunghezza iniziale l è

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini De Saint Venant-FORZA ASSIALE
6
∫∫ ===∆ll
EANldz
EANdwl
00.
Il lavoro interno, cioè l’energia elastica accumulata nel prisma, è fornito dal teorema di Clapeyron
EAlNAl
EdzdAL z
l
Azzi
22
0 21
21))((
21
=== ∫ ∫σεσ
con (σzdA) forza e (εzdz) spostamento
ed uguagliando il lavoro esterno
EAlNlNLe
2
21
21
=∆⋅=

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini DE SAINT VENANT
1
IL SOLIDO DEL DE SAINT-VENANT
Se un sistema di forze in equilibrio agisce su una parte ∂Ω’ della superficie ∂Ω di un solido Ω
(Figura 1), i suoi effetti si smorzano allontanandosi da ∂Ω’. Quindi la presenza del sistema di forze
praticamente non si avverte più ad una conveniente distanza, che dipende dalla forma di ∂Ω’ e dalle
sue dimensioni (postulato del De Siant-Venant).
Fig. 1
In realtà affinché esista una zona in cui l’effetto della distribuzione puntuale delle forze non si
risenta, occorre che la superficie ∂Ω’ sia piuttosto ristretta rispetto alle dimensioni del corpo. Ciò si
ottiene imponendo che il solido analizzato sia abbastanza lungo rispetto alle dimensioni delle sue
“basi” e che esso sia soggetto a forze soltanto in corrispondenza di queste (Figura 2).
Si considerano pertanto nulle
o Sia le forze di volume
o Che quelle agenti sulla superficie laterale
Fig. 2
Dal postulato del De Saint-Venant si trae che, escluse le zone più vicine alle basi, gli effetti delle
forze applicate dipendono soltanto dalle caratteristiche della sollecitazione interna e non
dall’effettiva distribuzione delle forze. Ciò si verifica superata una certa distanza dalle basi, detta
lunghezza di estinzione de. Come lunghezza di estinzione si può in linea di massima assumere la
metà della dimensione maggiore della sezione retta.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini DE SAINT VENANT
2
E’ da far notare che tutto quello che si è detto è valido se la sezione trasversale del solido ha
dimensioni tra loro comparabili, come accade per le cosiddette sezioni compatte.
Il solido che si prende in esame ha forma cilindrica, generata da una sezione piana per
traslazione normale (Figura 3), ed è composta da un materiale linearmente elastico, omogeneo ed
isotropo.
Fig. 3
Nella trattazione dei casi particolari quasi sempre si assume O≡G e gli assi di riferimento
coincidenti con gli assi principali. Tuttavia i risultati a cui si perviene sono indipendenti da queste
assunzioni.
Il problema del De Siant-Venant è un problema ai valori al contorno nelle forze (espresse in
forma globale e non locale), la cui soluzione è quindi unica a meno di uno spostamento rigido
infinitesimo. Per eliminare tale spostamento si ipotizza che un’area infinitesime nell’intorno di G sia
fissa. In questo modo tutti gli altri punti della sezione di base conservano la possibilità di deformarsi
liberamente.
Seguendo l’approccio del metodo semi-inverso si ammette che ogni elemento superficiale
parallelo all’asse z sia soggetto esclusivamente ad una tensione tangenziale parallela all’asse stesso
(Figura 4).
Fig. 4

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini DE SAINT VENANT
3
Le fibre longitudinali non si trasmettono quindi fra loro tensioni normali, ma solo tensioni
tangenziali parallele all’asse del cilindro. Ciò si realizza ponendo
0=== xyyx τσσ
Lo studio del solido del De Saint-Venant può essere ricondotto a 4 casi di sollecitazione
semplice che vengono qui di seguito esposti.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
1
IL SOLIDO DEL DE SAINT-VENANT
TAGLIO
Quando la risultante esterna delle azioni ad un estremo delle trave giace nel piano della
sezione e passa per un punto, detto centro di taglio, la trave risulta sollecitato a taglio (Figura 1).
Fig 1
Tuttavia, l’equilibrio richiede palesemente la presenza di un momento flettente M. dunque la
sollecitazione di taglio si accompagna sempre alla flessione. La trattazione analitica di questo caso
particolare del problema del De Saint-Venant è abbastanza complessa, così è stata sviluppata sin dal
1845 (Jourawski) una teoria approssimata che conduce a risultati sufficientemente accurati per le
applicazioni.
Si assume che la sezione trasversale sia dotata di un asse di simmetria verticale e che lungo ogni
corda ad esso normale sia τzy=cost. Con quest’ultima ipotesi si rinuncia alla valutazione locale delle
tensioni tangenziali, ma si assume come incognita il loro valore medio. Quest’ipotesi è
maggiormente verificata se la corda b risulta sufficientemente corta (Figura 2).

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
2
Fig. 2
Su un tronco elementare di trave agiscono le seguenti azioni (Figura 3):
Fig. 3
Estratta a sua volta la parte inferiore di questo elemento (quella annerita in figura), l’equilibrio alla
traslazione nella direzione z fornisce
( )∫∫ =++−−**
0A
zzzyA
z dAdbdzdA σστσ (1)

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
3
Fig. 4
dalla formula di Navier yIM
xz =σ si ha
TdzIydz
dzdM
Iyd
xxz ==σ
Semplificando e sostituendo questo risultato nella (1) si ottiene
∫ =−A
zyx
bydAIT 0τ
da cui
bITS
x
xzy
*
=τ (formula di
Jourawski1) Dove Sx* è il momento statico dell’area A* rispetto all’asse baricentrico x (asse neutro per la
flessione). Essendo nullo il momento statico dell’intera sezione, risulta Sx(A*)=- Sx(A-A*) e si può
introdurre la seguente convenzione per le tensioni tangenziali:
o Sx>0 allora τ entranti
o Sx<0 allora τ uscenti (Figura 5)
1 La formula fu proposta dal polacco D.J. Jourawski nel 1845 studiando la formazione di rotture orizzontali nei collegamenti in legno di alcuni ponti ferroviari tra Mosca e S. Pietroburgo.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
4
Fig. 5
Nota la composizione τzy si può calcolare la componente τzx, in base a considerazioni geometriche,
imponendo che al bordo la risultante delle tensioni sia tangente al contorno stesso (Figura 6).
Fig. 6

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
5
Deformazione dovuta al taglio e fattore di taglio Una forza tagliante non produce solo abbassamenti, ma anche l’ingobbamento della sezione
(Figura 7):
Fig. 7
Ciò è dovuto al fatto che le tensioni tangenziali τzy e quindi le deformazioni Gzyzy τγ = ,
variano lungo l’altezza della trave. In particolare, le γzy sono nulle nelle fibre estreme, dove gli
angoli si conservano retti.
Solo nel caso ideale di tensioni tangenziali costanti le sezioni non si ingobbano, risultando (Figura
8):
o AT
zy =τ
o GAT
zy =γ
Fig. 8

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
6
Nel caso più generale di tensioni variabili, l’abbassamento della sezione può essere stimato
impiegando un γ medio.
Per dare un’espressione al γm uguagliamo i seguenti lavori elementari:
dzTTdvdL me γ21
21
== ,
=
+=
+= ∫∫ dA
GdzdvdL
Azxzy
dVzxzxzyzyi
22
21
21
21
21
21 ττγτγτ
( ) ( )dAtgbS
AAT
GdzdAtg
bS
IT
Gdz
A
x
xA
x
x
αρ
α 22*
4
22
2*
2
2
112
12
+
=+
= ∫∫ ,
essendo 2xx AI ρ= .
La quantità adimensionale
( )dAtgbS
A A
x
x
αρ
χ 22*
4 11+
= ∫
è detto fattore di taglio e dipende solo dalla geometria della sezione ed assume valori sempre
maggiori di 1.
Con quanto sopra riportato, uguagliando i lavori si ottiene:
dzGATTdzT m χγ
21
21
= ,
da cui
GAT
m χγ =
Il centro di taglio
Fig. 9

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TAGLIO
7
La forza T di Figura 9, oltre alla inflessione della trave produrrà un avvitamento attorno all’asse
della trave. Di ciò è responsabile l’eccentricità di T, che genera un’azione torcente. Questo effetto
può essere evitato quando “la risultante delle forze esterne si riduce ad un’unica forza, giacente nel
piano della base libera, la cui retta d’azione passa per un punto Ct detto centro di taglio”. Allora la
distribuzione delle tensioni tangenziali τzx e τzy è da attribuirsi solo al taglio e non alla torsione.
Applicazioni
Quando una sezione è dotata di due assi di simmetria, allora il Ct coincide con il baricentro
G (Figura 10).
Fig. 10
È anche immediato il caso in cui le singole forze Fi convergono tutte nello stesso punto (Figura 11)
Fig. 11

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TORSIONE
1
IL SOLIDO DEL DE SAINT-VENANT
TORSIONE
Il solido del De Saint Venant è soggetto a torsione semplice quando i carichi applicati nelle
due sezioni di base sono equivalenti a due coppie uguali e contrarie Mt, agenti attorno all’asse
geometrico del solido (Figura 1).
Fig. 1
Si studia in questa fase il caso semplice della sezione circolare. La semplificazione deriva dal fatto
che la sezione con forma circolare durante la deformazione si conserva piana, cioè non presenta
spostamenti fuori dal proprio piano.
Ammettendo che lo scorrimento angolare γ (=γ zθ) vari linearmente lungo l’asse del cilindro,
risulta in definitiva che la cinematica del solido sia descritta semplicemente da una rotazione rigida
uniforme delle sezioni trasversali attorno all’asse geometrico (Figura 2).
Fig. 2
Essendo γ una quantità piccola, ogni generatrice del cilindro si trasforma in un’elica con piccola
inclinazione. Prendendo all’interno del solido un cilindretto elementare si ha per l’arco elementare
AA’ (Figura 3)

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TORSIONE
2
Fig. 3
ϑγ rddz = (1)
ovvero
dzdr ϑγ =
dove 1ϑϑ=
dzd
=cost è detto angolo unitario di torsione.
Impiegando il legame costitutivo γτ G= si trova
dzdGr ϑτ = (2)
cioè le tensioni tangenziali τ (=τ zθ) sono proporzionali al raggio r e dirette normalmente ad esso
(Figura 4).
Fig. 4

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TORSIONE
3
Uguagliando il momento interno prodotto dalle τ, con quello della caratteristica di sollecitazione
Mt, si ottiene una relazione per θ1
tA
MrdA =∫τ ,
con ∫A
dAτ = forza; r = braccio
inoltre
tA
MdArdzdG =∫ 2ϑ
,
quindi
p
t
GIM
dzd
=ϑ
(3)
dove ∫=A
p dArI 2è il momento d’inerzia polare della sezione rispetto a G. Infine, sostituendo la
(3) nella (1) e nella (2) si arriva alle
p
t
GIrM
=γ e p
t
IrM
=τ (4)
che forniscono lo stato di deformazione e di tensione in ogni punto della sezione.
Le componenti cartesiane della tensione tangenziale valgono
yIMr
IM
p
t
p
tzx −=−=−= ααττ sinsin
xIMr
IM
p
t
p
tzy === ααττ coscos
Le altre componenti speciali di tensione σx, σy, σz, τxy, sono tutte nulle.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini De Saint Venant-TORSIONE
4
Fig. 5 Dalla relazione (3) segue che la rotazione mutua di due facce distanti dz è
dzGIMd
p
t=ϑ ,
cossicchè, per un tronco di cilindro lungo l si ha:
lGIM
p
t=ϑ .
Il lavoro esterno vale
ptte GI
lMML 2
21
21
== ϑ ,
quello di deformazione interno
pt
AA p
t
Vi GI
lMdArGI
lMdAG
dVL 222
22
21
221
21
==== ∫∫∫ ττγ .

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
1
LA TENSIONE Ci si propone di studiare come le forze si trasmettono all’interno del corpo e di misurare, in
qualche modo, lo stato di costrizione interno che esse generano.
Aspetti statici e definizioni A titolo di esempio, si può pensare di sezionare la provetta di Figura 1 con un piano
orizzontale p (metodo delle tensioni). Il continuo, prima di essere tagliato dal piano p, si trovava
in una condizione di equilibrio sotto l’applicazione di un sistema di forze F. Questa condizione, in
generale, non è più verificata per le due metà ottenute, perché ognuna delle due esercitava, prima
del taglio, sull’altra delle sollecitazioni uguali e contrarie (una forza F), che nella condizione attuale
non sono più presenti.
Fig. 1 Il provino sezionato dal piano p non è più in equilibrio, perché ognuna delle due metà manca dell’apporto dell’altra
Invocando l’equilibrio delle parti sezionate, si può immaginare che la forza F si distribuisca
uniformemente sulle sezioni, così che la componente normale della tensione vale
AF
z =σ
Essa assume quindi il significato fisico di una densità superficiale di forza.
Dimensionalmente [sz]=FL-2 e come unità di misura si impiega il MPa (~10 Kgf cm-2), conformemente al “Sistema
Internazionale di misura-SI” (direttiva del Consiglio della Comunità Europea ’76).
Una tensione normale è positiva se di trazione, negativa se di compressione

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
2
Fig. 2 Comunque preso un punto P interno al continuo ed un piano p passante per esso,è individuata la normale n e la forza DF, in un intorno di P avente area DA
Per meglio comprendere e descrivere lo stato di tensione in un punto, cioè lo stato di costrizione
tridimensionale nell’intorno del punto (Figura 2), è conveniente introdurre il concetto di vettore
tensione, definito dal limite
AFt
An ∆∆
=→∆ 0
lim
dove DF è la forza che agisce sull’elemento d’area DA.
La nozione di tensione che qui è stata introdotta è dovuta ad Eulero (a cui si deve il metodo delle tensioni), il vettore
tensione è stato invece postulato da Cauchy.
Nella figura 3, dF è la forza applicata all’elemento infinitesimo d’area dA, individuato dalle
normale n.
Fig. 3
Ovviamente, facendo sempre stazione nel punto P, ma cambiando l’inclinazione del piano passante
per P, cioè facendo variare la direzione della normale n, cambiano tutte le grandezze in gioco e
quindi anche il vettore tensione (i piani con cui posso sezionare il continuo sono infiniti e
rappresentano una stella di piani passanti per P).
L’insieme degli infiniti vettori tensione (∞2) della stella di rette di centro P, costituisce lo stato di
tensione nel punto.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
3
Ai fini applicativi è utile riferirsi ed un intorno elementare del punto a forma di
parallelepipedo, per il quale ed ognuna delle tre giacitura (x,y,z) è possibile individuare un
particolare vettore tensione (Figura 4).
Fig. 4 Sono riportati i vettori tensione relativi alle facce del parallelepipedo di normale positiva
Ad esempio, per il generico vettore tz le componenti nel sistema di riferimento (x,y,z) sono
riportate nella figura seguente (Figura 5)
Fig. 5 La notazione tz indica che questo vettore è si è sviluppato su di un piano avente come normale z, ma il vettore ha una direzione qualsiasi nello spazio (infatti si vedono le sue componenti tzx, tzy, lungo x ed y) e non è formato solo dalla sz lungo z.
La componente normale s del vettore tz è detta normale, mentre le t vengono dette componenti
tangenziali di tensione. Convenzionalmente si adatta per gli indici la seguente notazione:
abσ dove a indica la che la tensione agisce su di un piano avente come normale a, ma è diretta
nella direzione di b.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
4
L’operazione precedente, che era stata eseguita per la direzione z, può essere ripetuta orientando la
normale secondo l’asse x e y, ottenendo:
Fig. 6
Simmetria delle tensioni tangenziali
Una caratteristica fondamentale delle tensioni tangenziali è la loro simmetria. Dal punto di
vista analitico l’equilibrio alla rotazione attorno ai tre assi (x,y,z) permette di ottenere l’espressione
delle tensioni tra loro simmetriche. A titolo di esempio imponiamo l’equilibrio alla rotazione
intorno all’asse x per il parallelepipedo elementare illustrato in figura 7.
Fig. 7
Le componenti di tensione indicate sono le sole che producono momento rispetto all’asse x, perché
a differenza delle altre hanno un braccio diverso da zero. Si ha quindi
(tyz dx dz) dy - (tzy dx dy)dz = 0

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
5
cioè
tyz = tzy
analogamente per le altre direzioni y ez
txz = tzx
txy = tyx
Le sei componenti di tensione sx , sy, sz, txy, txz, tyz, vengono dette componenti speciali di
tensione ed individuano lo stato di tensione nell’intorno di un punto.
Si noti la dualità con le componenti di deformazione.
Un elemento capace di descrivere lo stato tensionale nell’intorno di un punto P, riportando tutte le
tensioni tangenziali e normali nelle varie direzioni è il cosiddetto tensore delle tensioni:
=
zzyzx
yzyyx
xzxyx
ij
στττστττσ
σ
Espressioni della tensione normale e tangenziale per una direzione arbitraria Con riferimento al caso piano illustrato in Figura 8, si valutano le tensioni relative alla
direzione dell’asse x*, a partire dalla conoscenza delle componenti sx , sy, txy nel punto O.
Fig. 8
Moltiplicando le tensioni per le rispettive aree elementari su cui agiscono, si ottengono delle forze
elementari. Allora, isolato un elemento triangolare e detta dA l’area della faccia obliqua,

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
6
Fig. 9
le alte due facce con traccia AC e CB valgono rispettivamente, dA cosq, e dA sinq, mentre
le forze che agiscono sull’elemento triangolare sono dunque:
Fig. 10
Fig. 11
Calcolate le componenti possiamo poi imporre l’equilibrio lungo x* e y*:
SFx* = 0
sx* dA - sx dA cos 2q - txy dA sin q cos q – sy dA sin 2q - txy dA sin q cos q = 0
(1)

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
7
sx* = sx cos 2q - sy sin 2q + 2txy, sin q cos q
SFy* = 0
tx*y* dA + sx dA sin q cos q - txy dA cos2 q – sy dA sin q cos q - txy dA sin2 q = 0
(2)
tx*y* = + 1/2 (sy - sx) sin 2q + txy cos 2q
Le equazioni (1) e (2) costituiscono le espressioni della tensione normale e di quella
tangenziale al variare dell’angolo q sotteso dall’asse x*.
Tensioni e direzioni principali di tensione
Disponendo della legge di variazione della tensione normale in funzione dell’anglo q,
ci si domanda quali siano i suoi valori estremi (max e min) e lungo quali direzioni uscenti dal
punto O essi si manifestino.
Ricordando le relazioni trigonometriche
22cos1cos2 ϑϑ +
= e 2
2cos1sin 2 ϑϑ −=
è conveniente riscrivere la (1) in questo modo:
ϑτϑσσσσ
σ 2sin2cos22* xy
yxyxx +
−+
+= (3)
Imponiamo allora la condizione di estremo
0* =ϑσd
d x
che fornisce
02cos22sin)( =+−− ϑτϑσσ xyyx (4)
ovvero
yx
xytgσσ
τϑ
−=
22 (5)

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
8
quindi le direzioni cercate sono
−=
+=
yx
xy
σστ
ϑ
πϑϑ
2arctan
21
2
1
12
queste due direzioni, tra di loro ortogonali, lungo le quali la tensione normale assume i valori
massimo e minimo, si definiscono direzioni principali di tensione.
22
2
1
22 xyyxyx τ
σσσσσσ
+
−±
+=
(6)
Il confronto tra la relazione (4) e la (2) implica che lungo le direzioni principali di tensione le
tensioni tangenziali sono nulle.
Per uno stato di tensione tridimensionale si può dimostrare nel caso più generale, l’esistenza di tre
tensioni principali s1, s2, s3. A queste tensioni normali sono associate tre direzioni principali di
tensione tra di loro ortogonali.
Cerchi di Mohr
Considerando uno stato piano di tensione, la tensione normale e quella tangenziale
lungo una direzione arbitraria possono essere visualizzate mediante una rappresentazione
geometrica detta cerchio di Mohr.
Riscriviamo così la (3) e la (2)
+−
=+
−
+−
−=
ϑτϑσσσσ
σ
ϑτϑσσ
τ
2sin2cos22
2cos2sin2
*
**
xyyxyx
x
xyyx
yx
elevando al quadrato le due equazioni e sommando si ottiene
22
2**
2
* 22 xyyx
yxyx
x τσσ
τσσ
σ +
−=+
+−
posti poi

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
9
2yxa
σσ += e 2
2
2 xyyxR τ
σσ+
−=
rimane evidente l’equazione di un cerchio
22**
2* )( Ra yxx =+− τσ
nel piano (sx*, tx*y *) con centro in (a,0) e raggio R
Fig. 12
La costruzione grafica del cerchio di Mohr si articola nella seguenti fasi:
1. si introduce una scala di riduzione per le tensioni (ad es. 1 cm = 10 MPa) e le cosiddette
“convenzioni di Mohr” per le tensioni
Fig. 13
2. con il cerchio di Mohr, relativo allo stato piano di tensione nel punto O, esplicitato rispetto
all’elemento in figura
Fig. 14

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
10
Si descrivono le tensioni per tutti i modi possibili di orientare l’elementino. Ogni punto del
cerchio individua la coppia (sx*, tx*y*) associata all’angolo f. In particolare, per f = 0, si ha
il punto PV (sx, txy) e per f = 90° in senso antiorario il punto P0 (sx, -txy), che vengono
riportati nel piano P0 (s, t).
Fig. 15
congiungendo i punti PV e P0 si individua il centro del cerchio C sull’asse delle ascisse, dal
quale con raggio R = C, PV = C P0 si traccia il cerchio.
3. il punto d’intersezione P* tra la verticale condotta da PV e l’orizzontale da P0 è detto polo
delle normali.
Fig. 16
La componente normale e quella tangenziale del vettore tensione (sx*, tx*y*), relativo ad
una giacitura avente la normale inclinata dell’angolo f rispetto all’orizzontale, si ottengono
leggendo nel cerchio di Mohr le coordinate del punto P che si trova tracciando la retta per
P* inclinata di f rispetto alla verticale.

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
11
Tra le infinite giaciture della stella con centro il punto P* se ne possono ricavare alcuni notevoli
(Figura 17)
Fig. 17
Le direzioni 1 e 2 sono le direzioni principali di tensione. Risulta verificata l’ortogonalità tra le due
direzioni 1 e 2, perché il triangolo s1 P* s2 inscritto nel cerchio è impostato sul diametro massimo
del cerchio. La massima tensione normale è s1 (positiva, cioè di trazione), mentre la minima è s2
(negativa, cioè di compressione). Ovviamente a queste tensioni non si associa alcuna tensione
tangenziale.
Equazioni indefinite (o locali) di equilibrio
Le sei componenti speciali di tensione sono legate da tre equazioni differenziali che traducono
l’equilibrio alla traslazione di un qualsiasi elemento infinitesimo di volume scelto all’interno del
corpo (Figura 18).

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
12
Fig. 18
Poichè in generale le tensioni variano con il punto, occorre considerare un incremento delle stesse
nel passaggio da una faccia all’altra. Agiscono inoltre le forze di volume, le cui densità delle
componenti scalari indichiamo con X, Y, Z (dimensionalmente [X, Y, Z]=[FL-3]).
Scrivendo l’equilibrio alla traslazione, ed esempio lungo l’asse x, si ottiene
0=Σ→+xF ⇒
0=+
∂∂
++
∂
∂++
∂∂
++−−− Xdxdydzdxdydzz
dxdzdyy
dydzdxx
dxdydxdzdydz zxzx
yxyx
xxzxyxx
ττ
ττ
σσττσ
E semplificando
0=+∂∂
+∂
∂+
∂∂ X
zyxzxyxx ττσ
Analogamente, scrivendo gli equilibri lungo y e z, si ha
0=+∂
∂+
∂
∂+
∂
∂Y
zyxzyyxy τστ
0=+∂∂
+∂
∂+
∂∂ Z
zyxzyzxz σττ
In generale, per valutare l’equilibrio di un continuo, ci si deve riferire a tutti i tipi di forze che
agiscono su di esso. Nelle applicazioni correnti si analizzeranno solo le forze di tipo meccanico,
escludendo dalla trattazione fenomeni di altro genere (come ad esempio quelli chimici).

Corso di Scienza delle Costruzioni anno 2005-2006 Prof.ssa Emanuela Speranzini LA TENSIONE
13
Le forze meccaniche possono essere divise in due grandi categorie
o FORZE DI SUPERFICIE
o FORZE DI MASSA
FORZE DI SUPERFICIE
Rientrano in questa categoria le forze meccaniche che sono applicate sulla superficie esterna del
continuo e che possono essere rappresentate tramite il vettore tensione
ntf =
dove in questo caso la normale n è esterna al continuo
fdAdF =
FORZE DI MASSA
Questo tipo di forze intervengono sempre quando il corpo è immerso in un campo di accelerazioni
(come quello gravitazionale), e la loro caratteristica fondamentale è quella di essere proporzionali
alla massa del continuo. Sono distribuite con continuità all’interno del corpo e possono essere
rappresentate da un’espressione del tipo
gdmdF =
con g accelerazione di gravità e dm massa infinitesima di una parte del continuo. La forza
infinitesima ottenuta per una piccola porzione di massa può essere estesa a tutto il continuo con
un’integrazione.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
1
TRAVI AD ASSE RETTILINEO Stato di deformazione L’analisi dello stato di deformazione è ricondotto allo studio del comportamento della linea d’asse della trave considerata come struttura monodimensionale giacente nel piano. Consideriamo un elemento di trave di lunghezza dz nel riferimento Oyz. A seguito della deformazione l’elemento dz assumerà una nuova configurazione ds e subirà: Convenzioni:
rotazioni positive se antiorarie, spostamenti positivi se concordsi con il verso positivo di y (verso il basso)
a - una variazione di lunghezza
b - una variazione di direzione rispetto alla giacitura s della sezione
c - una variazione di direzione rispetto all’asse
a - Questa corrisponde ad una variazione dw dello spostamento assiale:
dzdw
dzdzds
=−
=ε
b - La variazione tra la direzione dell’elemento deformato ds e la giacitura della sezione s (ortogonali prima della deformazione) corrisponde ad una variazione dvγ della componente v secondo y:
dzdvγγ =

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
2
c - La rotazione subita dalla direzione dell’elemento deformato rispetto all’asse della trave corrisponde ad una variazione dvφ della componente di spostamento v secondo l’asse y:
dzdv ϕϕ −= dz
dvϕϕ −=
alla rotazione resta associata una curvatura:
dzvd
dzd ϕϕχ
2
−==
lo spostamento relativo totale dv fra le due sezioni esterne del tronco risulta:
γϕ dvdvdv +=
dzdv
dzdv
dzdv γϕ +=
γϕ +−=dzdv
ϕγ +=dzdv
Pertanto lo stato di deformazione della trave può essere individuato dalla conoscenza dello spostamento w, v, φ o dalle caratteristiche della deformazione ε, γ, χ legate tra loro da:
dzdw
=ε ϕγ +=dzdw
dzdϕχ =
equazioni indefinite di congruenza necessarie e sufficienti a caratterizzare la configurazione deformata.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
3
Stato di tensione Analizziamo l’equazione di un concio dz di trave genericamente caricato. Le tre condizioni di equilibrio:
→+ ) 0=+++− pdzdNNN
+ ↑) 0=−−−+ qdzdTTT
+ ) 02
2
=−++−− mdzTdzdzqdMMM
pdzdN
−=
qdzdT
−= Equazioni indefinite di equilibrio
mTdz
dM−=

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
4
TEOREMA DEI LAVORI VIRTUALI 1° FORMA: in termini di spostamenti virtuali δw, δv, δφ
( ) =+++++= ∫l
l
u MvTwNdzmvqwpL0
0
δϕδδδϕδδδ
il lavoro compiuto dalle forze e dalle coppie esterne, indicato sinteticamente, può essere portato sotto il segno di integrale
( ) [ ] =+++++= ∫∫ dzMvTwNdzddzmvqwp
ll
δϕδδδϕδδ00
( ) =
++++++++= ∫ dz
dzdM
dzdM
dzvdTv
dzdT
dzwdNw
dzdNmvqwp
l
0
δϕδϕδδδδδϕδδ
=+++
++
++
+= ∫ dz
dzdM
dzvdT
dzwdNm
dzdMvq
dzdTwp
dzdNl δϕδδδϕδδ
0
↓ ↓ ↓ = 0 = 0 = T
( ) =++=
+
++= ∫ ∫ dzMTNdz
dzdM
dzvdT
dzwdNL
l l
u0 0
δχδγδεδϕδϕδδδ
( )dzMTNl
∫ ++=0
δχδγδε
poiché dz
wdδδε = δϕδδγ +=dz
vd dz
dδϕδχ =

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
5
2° FORMA: in termini di forze virtuali δp, δq, δm. Ho una distribuzione virtuale di carico intesa come funzioni regolari ed infinitesime di z. δN0, δT0, δM0 δNl, δTl, δMl
( ) =+++++= ∫l
l
f MTvNwdzmqvpwL0
0
ϕδδδϕδδδδ
( ) ( ) =+++++= ∫∫ll
f dzMTvNwdzddzmqvpwL
00
ϕδδδϕδδδδ
( ) =
++++++++= ∫∫
ll
f dzdzMdM
dzdv
dzTdT
dzvdw
dzNdN
dzwddzmqvpwL
00
)()()()()()( ϕδδϕδδδδϕδδδδ
Supponiamo che sia soddisfatto l’equilibrio:
=
+++
++
++
+= ∫ dzM
dzdT
dzvdN
dzwdm
dzMdq
dzTdvp
dzNdwL
l
f0
)()()()()()( δϕδδδδϕδδδδδ
essendo:
0)(=
+ p
dzNd δδ
0)(=
+ q
dzTd δδ
TmdzMd δδδ
=
+
)(
Supponiamo che esista una deformazione congruente le cui caratteristiche ε, γ e χ siano legate dalle equazioni di congruenza:
dzdw
=ε ϕγ +=dzdw
dzdϕχ =
( )dzMTNLl
f ∫ ++=0
χδγδεδδ
dzMdzdN
dzdw
dzdvT
l
∫
++
+=
0
δϕδϕδ

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
6
EQUAZIONI DI LEGAME Consideriamo un tratto unitario di trave il lavoro di deformazione vale:
++=
EJM
GKT
EAN 222
21φ
Nel caso di incrementi infinitesimi infinitesimi dN,dT,dM:
dMEJMdT
GKTdN
EANd ++=φ
Il lavoro virtuale in termini di forza per unità di lunghezza:
dMdTdNLf χγεδ ++= Poiché nell’ipotesi di elasticità dΦ=δfL si ha:
dMdTdNdMEJMdT
GKTdN
EAN χγε ++=++
0=
−+
−+
− dM
EJMdT
GKTdN
EAN χγε
Affinché risulti verificata quest’ultima equazione:
0
0
0
=−
=−
=−
EJM
GKT
EAN
χ
γ
ε
EAN
=ε
GKT
=γ
EJM
=χ
E,G: Costanti che dipendono dal materiale. A,J, K:dipendono dalle caratteristiche geometriche (K fattore di taglio).
Per una sezione rettangolare: A=BH, 3
121 BHJ = , K=6/5.
Legame costitutivo tra le caratteristiche della sollecitazione e le caratteristiche della deformazione

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini Travi ad asse rettilineo
7
TRAVI INFLESSE Quando è lecito trascurare l’effetto deformativo del taglio (cioè l’influenza del taglio sulla deformazione) si parla di travi inflesse nel senso che la loro deformazione trasversale dipende esclusivamente dal momento flettente. In tal modo le equazioni indefinite di congruenza per γ=0 diventano:
dzdk
dzdv
dzdv
ϕχ
ϕ
ϕγ
==
−=
=+= 0
Le ultime due possono essere inglobate nell’unica equazione: 2
2
dzvd
−=χ
Naturalmente trascurare il taglio come deformazione non significa trascurare il taglio come sollecitazione, le equazioni di equilibrio rimangono inalterate:
Tmdz
dM
qdzdT
=+
=+ 0
Da cui risulta che l’equazione di legame risulta indeterminata:
γGKT = affinché T risulti finita, essendo γ=0, GK=∞. Prendiamo le equazioni di congruenza di legame e di equilibrio:
2
2
dzvd
−=χ , EJMk ==χ
Si ha:
EJM
dzvd
−=−= χ2
2
Dalla seconda delle equazioni di equilibrio derivando rispetto a z si ha:
qdz
vdEJ
qdzdmq
dzdm
dzvdEJ
dzd
qdzdm
dzvdEJ
dzd
dzdT
dzdm
dzMd
=
=+=+
−=+
−
=+
4
4
2
2
2
2
2
2
2
2
2
2
Ponendo m=0, se EJ=cost

TRAVI ELASTICHE
Con “trave” si indica genericamente un solido in cui è identificabile una
dimensione longitudinale decisamente prevalente su quelle trasversali.
E’ per definizione un solido che si può pensare generato dal moto di una figura
piana, eventualmente variabile sia in forma che in dimensioni, il cui baricentro G
si sposta lungo una curva semplice e regolare γ (asse della trave) e la cui normale
si mantiene diretta secondo la tangente a γ.
Fra queste concentreremo la nostra attenzione su quelle per le quali valgono le
disuguaglianze:
(1) d/l << 1, dove l è la lunghezza di γ e d la maggiore dimensione della figura
piana;
(2) d/ρ1 << 1, dove ρ1 è il più piccolo valore assunto lungo γ dai raggi principali
di curvatura;
A questo solido ci riferiremo come a “travi” con linea d’asse γ.
Su γ supporremo definito un sistema di ascisse curvilinee s. La sezione della trave
con piano ortogonale a γ in P(s)∈γ, sarà detta sezione trasversale all’ascissa s. Una
trave è quindi definita dalla sua linea d’asse γ e dalla legge di variazione della sua
sezione trasversale.
La trave è piana quando esiste un piano, detto piano medio, che contiene γ e che è
piano di simmetria geometrica per T. Le travi piane possono essere ad asse
rettilineo o curvilineo (archi).

Salvo diverse precisazioni, la trave verrà supposta costituita di un materiale
omogeneo, sia esso “indeformabile”, o “elastico” o di altra natura.
Dato il carattere per cosi’ dire “monodimensionale” del solido trave, i carichi
esterni, siano essi assegnati sotto forma di zone di volume o di superficie,
distribuite o concentrate, saranno supposti agire direttamente sui punti della linea
d’asse γ. Questa scelta prevede ovviamente che i carichi effettivamente agenti
siano stati sostituiti, secondo un qualche criterio razionale, con forze e coppie
applicate a γ e ad esse staticamente equivalenti.
Lungo γ viene poi definito un riferimento locale x, y, z , con l’origine
coincidente con il generico punto G(s)∈ γ, l’asse z diretto secondo la tangente a γ
in G(s) ed orientato verso le s crescenti, gli assi x ed y scelti coincidenti con le
direzioni principali di inerzia della sezione trasversale, ed orientati in modo tale
che la terna x, y, z risulti levogira.
Nel caso delle travi piane si orienta comunemente l’asse y, contenuto nel piano
medio, in modo che l’asse x sia uscente dal piano del disegno. Il riferimento locale
è utile anche per descrivere i carichi agenti su una trave.

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
1
LA DEFORMAZIONE (Teoria lineare)
L’applicazione delle azioni esterne (forze e spostamenti impressi) produce, in generale,
variazioni di forma e di volume nel corpo.
Per misurare la variazione di lunghezza si può ricorrere ad un dispositivo di prova del tipo
riportato in Figura 1.
Fig. 1
Si definisce coefficiente di dilatazione lineare il rapporto tra la variazione di lunghezza e la
lunghezza iniziale:
finalefinale
inizialefinale
ll
lll ∆
=−
=ε
e è una quantità adimensionale per e > 0 corrisponde un allungamento per e < 0 corrisponde un accorciamento
La deformazione del tratto AB della barretta in questo caso è costante; tuttavia, in condizioni
più generali, essa può variare con il punto ed in tale caso fornisce una misura locale della
deformazione. Considerando allora l’intorno di un punto in un solido tridimensionale, questo, a
seguito della deformazione, può subire variazioni di lunghezza lungo tre direzioni inizialmente tra
loro ortogonali, x, y, z (per le quali si possono valutare ex, ey, ez,) e contemporaneamente
possono risultare alterati gli angoli tra queste direzioni.

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
2
Fig. 2
La variazione angolare di due direzioni, inizialmente ortogonali, è misurata dal coefficiente di
scorrimento angolare, così definito:
finaleab ϑπγ −=2
Fig. 3
Anche il coefficiente di scorrimento angolare è una grandezza adimensionale e per convenzione
si indica:
gab> 0 comporta una diminuzione dell’angolo iniziale gab< 0 comporta una incremento
Nel caso tridimensionale si possono definire, in ciascun punto, tre coefficienti gxy, gxz, gyz.
Nella teoria lineare della deformazione si suppone che i coefficienti di dilatazione lineare e quelli di
scorrimento angolare siano quantità molto piccole.

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
3
Relazioni spostamenti-deformazioni Lo spostamento s(P) di un punto P è rappresentato dal vettore che unisce la posizione del
punto occupata nella configurazione iniziale con quella nella configurazione finale (Figura 4).
Poiché, in generale, lo spostamento varia da punto a punto, occorre considerare elementi lineari di
lunghezza infinitesima. Comunque, per facilitare l’esposizione, conviene considerare dei segmenti
di lunghezza sufficientemente piccola Dx, ma non infinitesima, per poi passare ad essa tramite
l’operazione di limite.
Si faccia quindi riferimento ai punti A e B situati lungo la direzione x, che in seguito alla
deformazione assumono la posizione A’ e B’.
Fig. 4
Il punto A subisce lo spostamento u, il punto B lo spostamento u+Du, comprensivo dello
spostamento u del punto A e dell’incremento (positivo) di spostamento Du che si matura lungo il
segmento Dx. Per la definizione del coefficiente lineare di deformazione ex si ha:
( ) ( )[ ]xu
xu
xxuuux
ABABBA
xxxx ∂∂
=∆∆
=∆
∆−∆++−∆=
−=
→∆→∆→∆ 000limlim''limε
Se si indica con v(x,y,z) e w(x,y,z) le altre due componenti scalari dello spostamento, analogamente
si trova
yv
y ∂∂
=ε e zw
z ∂∂
=ε
Per ricavare l’espressione spostamenti-deformazioni relativa al coefficiente di dilatazione
angolare si osservi in Figura 5 che quando ci si muove verticalmente lo spostamento u diviene
dyyuu∂∂
+ e l’inclinazione dell’elemento infinitesimo inizialmente verticale vale yu∂∂ . Similmente il
segmento orizzontale forma l’angolo xv∂
∂ con la sua direzione originale.

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
4
Fig. 5
Essendo
( )''2
yxangoloxy −=πγ
risulta
xv
yu
xy ∂∂
+∂∂
=γ
e analogamente si trova
xw
zu
xz ∂∂
+∂∂
=γ e yw
zv
yz ∂∂
+∂∂
=γ
I sei coefficienti ex, ey, ez, gxy, gxz, gyz sono detti componenti speciali di deformazione.
Espressioni del coefficiente di dilatazione lineare e di scorrimento angolare per
direzioni arbitrarie Una volta note le componenti speciali di deformazione in un determinato punto, si può
valutare il coefficiente di dilatazione lineare ex* lungo una direzione qualsiasi della stella con
centro il punto stesso, ed il coefficiente di scorrimento angolare gx*y* relativo a due direzioni
ortogonali. Per semplicità nel seguito verrà sviluppato il caso piano di deformazione, supponendo
diverse da zero nel punto O (origine del sistema di riferimento x,y) le componenti ex, ey, gxy
(Figura 6).

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
5
Fig. 6
A partire dalla conoscenza di queste tre componenti, ci si propone di determinare lo spostamento
relativo del punto A, posizionato nell’intorno del punto O, lungo la generica direzione x*.
Considerando il punto O fisso si hanno i seguenti contributi:
1. spostamento elementare prodotto da ex(AA’) → du=exdx (Figura 7)
Fig. 7
2. spostamento elementare prodotto da ey (A’A’’) → dv=eydy (Figura 8)
Fig. 8

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
6
3.
( )
( )
≈+=
≈+=
dydvdydu
dxdudxdv
xyxy
xyxy
γγ
γγ21
21'
21
21'
Fig. 9
essendo le componenti di deformazione quantità infinitesime.
Quindi riassumendo i tre punti si osservi la Figura 10:
Fig. 10
La differenza tra gli angoli prima e dopo la deformazione misurata da gxy viene ripartita, in modo simmetrico (½gxy +
½ gxy) e non seguendo la definizione precedente,
+=
∂∂
+∂∂
= βαγzv
yu
xynella somma di due archi differenti, in
quanto ci si riconduce da una all’altra situazione aggiungendo una rotazione rigida infinitesima che non altera la
deformazione pura dell’elemento.

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
7
Proiettando questi spostamenti sull’asse x* si trova lo spostamento elementare du* del punto A
lungo x*:
du*=ducosq +dvsinq+du’cosq+dv’sinq=
=exdxcosq+eydysinq+1/2gxydycosq+1/2gxydxsinq=
=exdx*cos2q+eydx*sin2q+gxydx*sinqcosq
e ricordando la definizione del coefficiente di dilatazione lineare xu
x ∂∂
=ε si ottiene la seguente
espressione:
ex*=excos2q+eysin2q+gxysinqcosq
(1)
che fornisce il coefficiente di dilatazione lineare del punto O relativo alla direzione dell’asse x* in
funzione dell’angolo q sotteso dall’asse stesso (Figura 11).
Fig. 11
Per definizione il coefficiente di scorrimento angolare relativo ai nuovi assi x* e y* è:
gx*y*=a+b
sostituendo si ottiene la seguente espressione:
gx*y*= -2(ex-ey)sinqcosq+gxy(cos2q- sin2q) (2)
che fornisce il coefficiente di scorrimento angolare nel punto O, relativo alle due direzioni
ortogonali individuate dagli assi x* e y*, in funzione dell’angolo q sotteso dall’asse x*.
Il segno meno caratterizza le componenti degli spostamenti che sono opposte a y*

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
8
DEFORMAZIONI E DIREZIONI PRINCIPALI DI DEFORMAZIONE
Disponendo della legge di variazione del coefficiente di dilatazione lineare ex* in funzione
dell’angolo q, ci si domanda quali siano i suoi valori estremi (massimo e minimo) e lungo quali
direzioni uscenti dal punto O essi si manifestino.
Ricordando le relazioni trigonometriche
2
2cos1cos2 ϑϑ +=
22cos1sin 2 ϑϑ −
=
ϑϑϑ cossin22sin = ϑϑϑ 22 sincos2cos −=
è conveniente riscrivere la (1) e la (2) in questo modo:
22sin
22cos1
22cos1
*ϑγϑεϑεε xyyxx +
−
+
+
=
ϑγ
ϑεεεε
2sin2
2cos22
xyyxyx +−
++
= (3)
( ) ϑγϑεεγ 2cos2sin** xyyxyx +−−= (4)
Imponiamo allora la condizione di estremo per la relazione (3)
0* =ϑεd
d x
ottenendo
( ) 02cos2sin =+−− ϑγϑεε xyyx (5)
ovvero
ϑεε
γϑϑ 2
2cos2sin tg
yx
xy =−
=
qundi le direzioni cercate sono fornite dalla relazione
( ) πεε
γϑ karctg
yx
xy +−
=2 ,...2,1,0 ±±=k
che per πϑ <≤0 fornisce
( )
+=
−=
221
12
1
πϑϑεε
γϑ
yx
xyarctg

Corso di Scienza delle Costruzioni a.a. 2005-‘06 Prof. Emanuela Speranzini LA DEFORMAZIONE
9
Queste due direzioni tra di loro ortogonali, lungo le quali il coefficiente di dilatazione lineare
assume i valori massimo e minimo, si definiscono direzioni principali.
Introducendo le seguenti relazioni trigonometriche
ϑ
ϑϑ21
22sin2tg
tg+±
= ϑ
ϑ21
12cos2tg+±
=
insieme alla (5), nella (3) si calcolano i valori estremi di ex*:
( ) xyyxyx 22
2
1
21
2γεε
εεεε
+−±+
=
Le componenti di deformazione e1 e e2 vengono dette deformazioni principali. Il confronto tra la
(4) e la (5) implica
g12=0
cioè per le direzioni principali risulta nullo lo scorrimento angolare. In altre parole, le direzioni
principali individuano quelle direzioni che si mantengono ortogonali dopo la deformazione. Per uno
stato di deformazione tridimensionale si può dimostrare, nel caso più generale, l’esistenza di tre
deformazioni principali e1, e2, e3. A queste componenti di deformazione sono associate tre
direzioni principali di deformazione tra di loro ortogonali.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
1
IL LEGAME COSTITUTIVO
Nei capitoli precedenti sono stati introdotti i concetti di deformazione e di tensione,
descrivendo rispettivamente gli aspetti cinematici e statici del problema elastico, indipendentemente
da tipo di materiale che costituisce il corpo.
Le proprietà meccaniche del materiale, ad un livello puramente fenomenologico-sperimentale,
vengono descritte dai legami costitutivi, cioè dalle relazioni tensioni-deformazioni.
Un materiale è detto omogeneo se i legami costitutivi non dipendono dal punto; isotropo se
non dipendono dalla direzione uscente dal punto (cioè se il materiale dà la stessa risposta tensionale
indipendentemente dalla direzione in cui viene deformato).
Diagrammi sperimentali tensione-deformazione I diagrammi sperimentali tensione-deformazione variano notevolmente da materiale a
materiale. A titolo di esempio, consideriamo un’esperienza classica che consiste nel sollecitare un
provino di acciaio dolce con una forza F variabile e nel misurare la conseguente variazione Δl della
lunghezza iniziale.
Fig. 1
L’intensità della forza F viene aumentata gradualmente e lentamente dal valore nullo a quello
finale, in modo da non innescare effetti inerziali (modalità quasi statica di applicazione del carico).
La tensione e la deformazione si ottengono nel modo già visto:
0A
F=σ
inizialell∆
=ε
e sono diagrammate in Figura 2:

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
2
Fig. 2
Diagramma σ-ε del provino soggetto a trazione
Se si teine conto dell’effettiva contrazione dell’area A0, importante oltre una certa deformazione, la
curva rappresentativa è quella tratteggiata.
CURVA NOMINALE TENSIONI-DEFORMAZIONI
o Il tratto OA descrive la fase elastico-lineare ed il punto A è detto limite di
proporzionalità. In questo tratto la deformazione è direttamente proporzionale alla
tensione. Il carico e lo scarico avvengono lungo lo stesso percorso rettilineo, con
assenza di deformazioni residue. Il processo è quindi completamente reversibile.
o Nel tratto AB il comportamento è ancora elastico, con assenza di deformazioni
residue allo scarico, ma non si svolge più linearmente.
o Nel tratto BC si ha lo snervamento: un notevole incremento di deformazione a
tensioni quasi costanti (questo fenomeno è assente nei materiali fragili). Il punto C è
detto limite di snervamento.
o Il tratto CDE descrive la fase plastica. Superata la fase dell’incrudimento (punto D)
inizia quella della strizione, che termina con la rottura (punto E) e quindi con la
completa separazione del provino in due parti.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
3
La linea OA, per tutti i materiali reali si può ritenere rettilinea, con limitazioni riguardanti la
lunghezza e il tipo di materiale. Su questa idealizzazione è basata la legge dell’elasticità lineare
(detta legge di Hooke1):
εσ E=
La costante elastica E è nota come modulo di elasticità normale o modulo di Young2 ed ha le
dimensioni di una tensione. Geometricamente equivale alla tangente dell’angolo, formato dal
segmento OA e dall’asse ε, nel sistema di riferimento σ-ε (Figura 3).
Fig. 3
dal punto di vista fisico, E, misura la rigidezza di un materiale.
A titolo di esempio si riportano nella Tabella 1 i valori di E per alcuni materiali di uso corrente:
1 Il fisico inglese Robert Hooke (1635-1702) studiò l’utilizzo delle molle elastiche nella costruzione di orologi, che sino
al suo tempo utilizzavano il pendolo e quindi l’energia potenziale dovuta al peso. Lo studio delle molle, che
consentivano di immagazzinare energia elastica, gli fece formulare la legge dell’elasticità linare. Nel 1676 secondo il
costume in voga all’epoca, pubblicò l’anagramma: CEIIINOSSSTTUV, che qualche tempo dopo svelò: UT (ex)
TENSIO SIC VIS. Ciò esprime in latino la proporzionalità tra la forza (VIS) e l’estensione (exTENSIO)
2 Thomas Young (1773-1829)

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
4
MATERIALE E [N mm-2]
Acciaio 206.000-210.000
Alluminio e duralluminio 70.000
Bronzo 99.000
Calcestruzzo cementizio 25.000-42.000
Caucciù 1-8
Ghisa grigia 85.000-115000
Ghisa malleabile 160.000-170.000
Legno 10.000
Ottone 103.000
Piombo 17.000
Un altro diagramma σ-ε di notevole importanza è quello rappresentativo di un materiale
fragile (Figura 4). Anche in questo caso, la legge di Hooke viene sperimentalmente confermata solo
per sollecitazioni convenientemente limitate (tratto OA).
Fig. 4

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
5
Il coefficiente di Poisson
Un concio unitario di materiale omogeneo, isotropo, elastico-lineare, soggetto ad una
trazione uniforme σ, si deforma di una quantità ε = σ/E nella direzione della σ, ma subisce anche
una contrazione trasversale pari a –υε (Figura 5). La costante υ, che è il rapporto tra la
deformazione trasversale e quella longitudinale, è detta coefficiente di Poisson o di deformazione
trasversale. Per materiali reali solitamente si ha 0< υ<0.5.
Fig. 5
Per un materiale elastico-lineare omogeneo ed isotropo le costanti elastiche sono 2: E e υ.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
6
Il modulo di elasticità tangenziale
Quando il concio è sollecitato da tensioni tangenziali τ, si deforma come illustrato in Figura
6, dove γ = τ/G. La costante G è detta modulo di elasticità tangenziale.
Fig. 6
Geometricamente equivale alla tangente dell’angolo, formato dal segmento OA e dall’asse γ, nel
sistema di riferimento τ - γ (Figura 7).
Fig. 7
Tra il modulo di elasticità normale E e quello tangenziale G, vale la seguente relazione:
)1(2 ν+=
EG
la cui dimostrazione non verrà trattata in questa sede.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini IL LEGAME COSTITUTIVO
7
Infine, assemblando i risultati già presentati, si ottiene il legame costitutivo per i materiali
isotropi nel caso tridimensionale
( )( )
( )( )
( )( )
yzyz
xzxz
xyxy
yxzz
zxyy
zyxx
G
G
G
E
E
E
τγ
τγ
τγ
σσνσε
σσνσε
σσνσε
1
1
1
1
1
1
=
=
=
+−=
+−=
+−=
Si noti dalle ultime tre equazioni come a tensioni tangenziali nulle corrispondano scorrimenti
angolari nulli e viceversa. Ciò permette di concludere che per materiali isotropi le direzioni
principali di tensione e di deformazione coincidono.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
1
LAVORO ED ENERGIA
In meccanica l’energia è definita come la capacità di compiere lavoro.
Il lavoro delle forze esterne Consideriamo una forza applicata ad un corpo che, in modo quasi statico, viene fatta variare
da zero ad un valore massimo f* (Figura 1). In seguito all’applicazione della forza si genererà nel
corpo un campo di spostamenti. Indichiamo con u la componente di spostamento nella direzione
della forza stessa. Il lavoro compiuto dalla forza esterna può essere calcolato con il seguente
integrale
''*
0∫=u
dufL
Fig. 1
Nell’ipotesi di comportamento lineare si ha
**
''
uf
uf=
e quindi l’integrale fornisce
**21''
**''
**''
*
0
*
0
*
0
ufduuufduu
ufdufL
uuu
∫∫∫ ==
==
Questa espressione, che può essere graficamente interpretata come l’area del triangolo in Figura 1,
traduce il Teorema di Clapeyron. Nell’ipotesi di un corpo elastico-lineare e conservativo

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
2
(energeticamente isolato dall’esterno), il lavoro compiute da forze, che crescono gradualmente dal
valore nullo al valore finale, è la metà di quello che compirebbe se, mentre si producono gli
spostamenti, le forze fossero presenti in tutto il loro valore finale dall’inizio della trasformazione.
L’energia elastica di deformazione e il potenziale elastico Il lavoro esterno per un corpo conservativo è tutto immagazzinato nel corpo sotto forma di
energia elastica di deformazione. Questa energia internamente accumulata è totalmente
recuperabile rimuovendo (in modo quasi elastico) il carico esterno.
Per definire l’energia interna di deformazione si consideri un elemento infinitesimo soggetto
alla tensione normale σx (Figura 2).
Fig. 2
In questo caso la forza e lo spostamento valgono rispettivamente
dydzxσ dxxε
Se il materiale è linearmente elastico (Figura 3) e la tensione viene fatta variare con le
modalità già descritte (da un valore nullo a quello finale) si può applicare il teorema di Clapeyron
per valutare il lavoro elementare
Fig. 3
L’area OCA rappresenta l’energia complementare. Per materiali lineari elastici le due aree OCA e OAB sono uguali.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
3
dVdU xxεσ21
= (Th. di Clapeyron)
con dV=dxdydz il volume elementare
Il ragionamento può essere ripetuto nel caso delle tensioni tangenziali τzx (Figura 4):
Fig. 4
In questo caso la forza e gli spostamenti valgono
dxdyxzτ dzxzγ21
dydzxzτ dxxzγ21
ed il lavoro elementare risulta
dVdU xzxzγτ21
=
considerando tutti i contributi al lavoro elementare prodotti dalle 6 componenti speciali di tensione
e per le 6 componenti speciali di deformazione si può scrivere
dVdU zyzyxzxzxyxyzzyyxx )(21 γτγτγτεσεσεσ +++++=
l’energia di deformazione immagazzinata in un corpo elastico per unità di volume o densità di
energia di deformazione o anche potenziale elastico, vale:
)(21
zyzyxzxzxyxyzzyyxxdVdU γτγτγτεσεσεσ +++++==Φ
Un materiale che ammette un potenziale elastico è detto iperelastico.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
4
I teoremi di Betti e di Castigliano
Il principio di sovrapposizione degli effetti relativo alle soluzioni di strutture elastiche
lineari, ci consente di sommare le soluzioni parziali, prodotte dai singoli sistemi di forze iF , per
ottenere la soluzione globale (Figura 5).
Fig. 5
Per effetti si intendono gli spostamenti, le deformazioni, le caratteristiche della sollecitazione
interna e le tensioni.
Il principio di sovrapposizione degli effetti è valido nelle ipotesi di
1. vincoli bilaterali e lisci
2. materiale elastico lineare
3. spostamenti e deformazioni infinitesimi
Il teorema di Betti (o di reciprocità)
Sia valido il principio di sovrapposizione degli effetti e il sistema considerato sia
conservativo (cioè energeticamente isolato con l’esterno). Per la medesima struttura indichiamo con
aF e as le forze e i corrispondenti spostamenti del primo sistema (a) e con bF e bs le forze
e i corrispondenti spostamenti del secondo sistema (b). Allora facendo agire prima le aF e poi le
bF il lavoro compiuto vale
∑∑∑ ++= babbaae sFsFsFL21
21

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
5
infatti le forze aF e bF compiono, per effetto degli spostamenti da esse provocati, i lavori
valutati secondo il teorema di Clapeyron, mentre le aF , agenti con il loro valore finale
all’applicazione delle bF compiono il lavoro
∑ basF
Invertendo l’ordine di applicazione delle forze, cioè prima quelle del secondo sistema bF e poi le
aF , il lavoro è dato da
∑∑∑ ++= abaabbe sFsFsFL21
21
poiché i due lavori devono essere uguali, in quanto il sistema è conservativo, segue l’eguaglianza
dei lavori mutui:
∑∑ = abba sFsF
cioè
baab LL =
“ il lavoro che le forze del primo sistema compiono per gli spostamenti del secondo sistema è
uguale al lavoro che le forze del secondo sistema compiono per gli spostamenti del primo sistema”
Il teorema di Castigliano Siano valide le ipotesi del teorema di Betti e si consideri una struttura in equilibrio soggetta
alle forze esterne iF (Figura 6)
Fig. 6
Il lavoro di deformazione dipenderà allora unicamente dalle forze esterne, che potranno riguardarsi
come variabili indipendenti

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
6
),...,,...,( 21 ni FFFFLL∧
=
Tra le forze esterne si consideri la forza concentrata F e la componente di spostamento lungo la
direzione della forza stessa sF. Se si incrementa la forza F della quantità infinitesima dF,
l’incremento del lavoro di deformazione che ne consegue è
dFFLdL
∂∂
= (1)
e consta di due parti
1. il lavoro prodotto da tutte le forze Fi in seguito agli spostamenti dei loro punti di
applicazione, spostamenti dovuti all’azione di dF. Applicando il teorema di Betti per i due
sistemi a e b, questo contributo può essere così espresso
• sistema a
Fig. 7
• sistema b
Fig. 8
dFssF FidF
n
ii =∑
=,
1 (2)
con il vantaggio di coinvolgere un unico termine;
2. il lavoro della forza infinitesima dF per lo spostamento da essa stessa prodotto.

Corso di Scienza delle Costruzioni anno 2009-2010 Prof.ssa Emanuela Speranzini LAVORO ED ENERGIA
7
Poiché il secondo contributo è trascurabile rispetto al primo, uguagliando la (1) e la (2) si ottiene la
relazione che traduce il Teorema di Castigliano
FsFL=
∂∂
che si enuncia così
“la derivata parziale del lavoro di deformazione rispetto ad una forza esterna è uguale allo
spostamento del punto di applicazione della forza nella direzione della forza stessa”
osservazioni
1. per la validità del teorema, il lavoro di deformazione deve essere conseguente
all’applicazione delle sole forze esterne, senza l’intervento di altre cause di deformazione
come, ad esempio, le variazioni termiche o i cedimenti anelastici dei vincoli.
2. forze e spostamenti possono essere intesi in senso generalizzato, così per il teorema è valida
anche la seguente forma:
MML ϕ=
∂∂
3. il teorema di Castigliano è utilizzabile per il calcolo degli spostamenti in strutture
isostatiche. Si può a tal fine notare, valutando il teorema di deformazione con il teorema di
Clapeyron
+++++∂∂
=∂∂
= ∫ ∫ ∫ ∫ ∫ ∫S S S S S ST
Z
Y
Y
X
XYY
XXF ds
EJMds
EJMds
EJMds
GATds
GATds
EAN
FMLs
222222
21 χχ
∫∫∫ +∂∂
+∂∂
+∂∂
=S
YY
YS
XX
XS
dsGAT
FTds
GAT
FTds
EAN
FN χχ
∫∫∫ ∂∂
+∂∂
+∂∂
=S
T
TTS
Y
YYS
X
XX dsEJM
FMds
EJM
FMds
EJM
FM
(4)
ed indicando le componenti dell’azione interna associate alla forza F=1 con
FNN∂∂
=' FTT X
X ∂∂
=' FTT Y
Y ∂∂
=' F
MM XX ∂
∂='
FMM Y
Y ∂∂
=' F
MM TT ∂
∂='
si ottiene una formale coincidenza della (4) con il PLV nella forma delle forze virtuali.
4. qualora si debba valutare uno spostamento relativo tra due punti di una struttura, occorre
applicare due forze uguali in modulo ed opposte in verso.