[IEEE 2014 Third Mediterranean Photonics Conference - Trani, Italy (2014.5.7-2014.5.9)] 2014 Third...
3
Fiber Bragg Grating strain sensors for Tracking Particle Detector Agostino Iadicicco 1 , Massimo Della Pietra 1,2 , Stefania Campopiano 1, * 1 Engineering Dept, University of Naples “Parthenope” Centro Direzionale, Isola C4, 80143, Napoli , Italy 2 Istituto Nazionale di Fisica Nucleare, INFN, Sezione di Napoli Via Cinthia, 80126 Napoli, Italy *[email protected] Abstract: This work is devoted to a feasibility analysis of the use of Fiber Bragg Grating (FBG) sensing technology for real-time deformation monitoring of a gaseous tracking particle detector. Our attention is focused on a micromegas (an abbreviation for “micro mesh gaseous structure” (MM)), that is a micro pattern gas detector to be applied in Large Hadron Collider (LHC) at European Organization for Nuclear Research (CERN) in the ATLAS experiment. One mandatory issue for the correct operation of the MM detector is a precise monitoring of its panels’ fla tness/deformation. To this aim, FBG real-time sensing technology is proposed for its capability to meet important requirements in terms of radiation hardness and insensitivity to magnetic fields and to offer local strain detection with high sensitivity (resolution of 1 μɛ). As a demonstrative target, in this work some FBG sensors have been integrated (surface attached) with a miniature MM detector support panel in order to investigate their potentialities/capabilities in detecting local strain and thus bending. The obtained experimental results confirm that FBG sensors, that tolerate high radiation, are able to monitor deformation and curvature in accord with high energy physics requirements. Keywords: Fiber Bragg Grating (FBG) sensor, high energy physics, monitoring system, strain and bending sensors, gaseous tracking particle detector. 1. Introduction The Large Hadron Collider (LHC) [1] at CERN (European Organization for Nuclear Research) has been designed to produce proton-proton collisions at the energy of 14 TeV. Studying the particles produced in these collisions it is possible to study the elementary constituents of the matter and their interactions. For this purpose four experiments have been built [1] (ATLAS, CMS, LHCb, ALICE) around the interaction points of the accelerator. A measurement of the momentum of the charged particles produced in the collisions is obtained by measuring the curvature of their tracks in a magnetic field. To achieve a resolution of about 10 % for particles with 1 TeV/c momentum it is necessary to measure the charged particle track with a space resolution of the order of 100 μm. To achieve this performance the geometry of any tracking detector, in spite of the particular technology used, has to be known with a precision of the order of few tens of μm. The relative position of each detector with respect to a reference system can be measured through optical sensor elements (CCDs, lenses, light sources), but any deformation (bending, strain, torsion) with respect to its ideal shape has to be monitored as well. From this consideration, a real-time sensing technology capable to detect any curvature and deformation of the tracking detector with a resolution of few tens of μm is desirable. However any sensor to be integrated with the detector should ideally comply with many requirements in terms of radiation hardness, insensitivity to magnetic field, and so on. Fiber Bragg gratings (FBGs) seem to provide a suited solution. In fact, the fiber itself can tolerate very high levels of radiations, is insensitive to magnetic field and electromagnetic noise [2], and FBGs are intrinsic strain and temperature sensors [3-4] with wavelength-encoded information, offer high multiplexing capability with reduction of cabling complexity and linear output. In this work, for the first time to best of our knowledge, FBG technology is proposed as suitable sensing solution for the real-time deformation monitoring of the tracking particle detector. Since the less invasive operation relies with the integration of FBG strain sensors with detector support panels, in this work, as demonstrative target, some FBG sensors have been integrated with a miniature detector support panel in order to investigate their potentialities/capabilities in detecting local strain and thus bending. Preliminary experimental results are presented and discussed. 2. Proposed approach Our case of study is to use an FBG sensors with a micromegas [5] (an abbreviation for “micro mesh gaseous structure” (MM)), that is a gaseous particle detector. MM detectors consist of a planar (drift) electrode (first support plane), a gas gap of a few millimeters thickness and a thin metallic mesh at typically 100–150 μm distance from the readout electrode (second support panel). The working principle acts as following (see fig. 1(a)): charged particles traversing the drift space ionize the gas; the electrons liberated by the ionization process drift towards the mesh following an electric field 978-1-4799-4818-5/14/$31.00 ©2014 IEEE
Transcript of [IEEE 2014 Third Mediterranean Photonics Conference - Trani, Italy (2014.5.7-2014.5.9)] 2014 Third...
![Page 1: [IEEE 2014 Third Mediterranean Photonics Conference - Trani, Italy (2014.5.7-2014.5.9)] 2014 Third Mediterranean Photonics Conference - Fiber Bragg Grating strain sensors for tracking](https://reader035.fdocumenti.com/reader035/viewer/2022080418/5750a3061a28abcf0c9f9754/html5/thumbnails/1.jpg)
Fiber Bragg Grating strain sensors for Tracking Particle Detector
Agostino Iadicicco1, Massimo Della Pietra1,2, Stefania Campopiano1, * 1Engineering Dept, University of Naples “Parthenope” Centro Direzionale, Isola C4, 80143, Napoli, Italy
2Istituto Nazionale di Fisica Nucleare, INFN, Sezione di Napoli Via Cinthia, 80126 Napoli, Italy *[email protected]
Abstract: This work is devoted to a feasibility analysis of the use of Fiber Bragg Grating (FBG) sensing technology for real-time deformation monitoring of a gaseous tracking particle detector. Our attention is focused on a micromegas (an abbreviation for “micro mesh gaseous structure” (MM)), that is a micro pattern gas detector to be applied in Large Hadron Collider (LHC) at European Organization for Nuclear Research (CERN) in the ATLAS experiment. One mandatory issue for the correct operation of the MM detector is a precise monitoring of its panels’ flatness/deformation. To this aim, FBG real-time sensing technology is proposed for its capability to meet important requirements in terms of radiation hardness and insensitivity to magnetic fields and to offer local strain detection with high sensitivity (resolution of 1 μɛ). As a demonstrative target, in this work some FBG sensors have been integrated (surface attached) with a miniature MM detector support panel in order to investigate their potentialities/capabilities in detecting local strain and thus bending. The obtained experimental results confirm that FBG sensors, that tolerate high radiation, are able to monitor deformation and curvature in accord with high energy physics requirements.
Keywords: Fiber Bragg Grating (FBG) sensor, high energy physics, monitoring system, strain and bending sensors, gaseous tracking particle detector.
1. Introduction The Large Hadron Collider (LHC) [1] at CERN (European Organization for Nuclear Research) has been designed to produce proton-proton collisions at the energy of 14 TeV. Studying the particles produced in these collisions it is possible to study the elementary constituents of the matter and their interactions. For this purpose four experiments have been built [1] (ATLAS, CMS, LHCb, ALICE) around the interaction points of the accelerator. A measurement of the momentum of the charged particles produced in the collisions is obtained by measuring the curvature of their tracks in a magnetic field. To achieve a resolution of about 10 % for particles with 1 TeV/c momentum it is necessary to measure the charged particle track with a space resolution of the order of 100 μm. To achieve this performance the geometry of any tracking detector, in spite of the particular technology used, has to be known with a precision of the order of few tens of μm. The relative position of each detector with respect to a reference system can be measured through optical sensor elements (CCDs, lenses, light sources), but any deformation (bending, strain, torsion) with respect to its ideal shape has to be monitored as well. From this consideration, a real-time sensing technology capable to detect any curvature and deformation of the tracking detector with a resolution of few tens of μm is desirable. However any sensor to be integrated with the detector should ideally comply with many requirements in terms of radiation hardness, insensitivity to magnetic field, and so on. Fiber Bragg gratings (FBGs) seem to provide a suited solution. In fact, the fiber itself can tolerate very high levels of radiations, is insensitive to magnetic field and electromagnetic noise [2], and FBGs are intrinsic strain and temperature sensors [3-4] with wavelength-encoded information, offer high multiplexing capability with reduction of cabling complexity and linear output. In this work, for the first time to best of our knowledge, FBG technology is proposed as suitable sensing solution for the real-time deformation monitoring of the tracking particle detector. Since the less invasive operation relies with the integration of FBG strain sensors with detector support panels, in this work, as demonstrative target, some FBG sensors have been integrated with a miniature detector support panel in order to investigate their potentialities/capabilities in detecting local strain and thus bending. Preliminary experimental results are presented and discussed.
2. Proposed approach Our case of study is to use an FBG sensors with a micromegas [5] (an abbreviation for “micro mesh gaseous structure” (MM)), that is a gaseous particle detector. MM detectors consist of a planar (drift) electrode (first support plane), a gas gap of a few millimeters thickness and a thin metallic mesh at typically 100–150 μm distance from the readout electrode (second support panel). The working principle acts as following (see fig. 1(a)): charged particles traversing the drift space ionize the gas; the electrons liberated by the ionization process drift towards the mesh following an electric field
978-1-4799-4818-5/14/$31.00 ©2014 IEEE
![Page 2: [IEEE 2014 Third Mediterranean Photonics Conference - Trani, Italy (2014.5.7-2014.5.9)] 2014 Third Mediterranean Photonics Conference - Fiber Bragg Grating strain sensors for tracking](https://reader035.fdocumenti.com/reader035/viewer/2022080418/5750a3061a28abcf0c9f9754/html5/thumbnails/2.jpg)
of about few hundred Volt/cm. Beyond the mesh, a stronger electric field creates an electron avalanche in the thin amplification region, immediately above the readout electrodes: this avalanche gives a current pulse on the readout electrodes, that is segmented in strips, thus allowing a space reconstruction of incident particle track. The space and time resolution of a MM is about 100 μm and 5 ns, respectively. MM will be installed as a tracking detector in the ATLAS experiment [6] at LHC by the end of 2018, during a major upgrade of the experiment. The design of this upgrade has been done but not yet finalized [7]. One mandatory issue for the correct operation of the MM detector is a precise monitoring of its panels’ flatness/deformation. The basic idea, proposed here for the first time, relies with the development of a deformation monitoring system based on FBG technology, where several FBG strain sensors are surface attached to both detector support panels. Measuring strain on both sides of the panel it is possible to obtain its local curvature that is related to the second derivatives of the shape described by the bent surface. Actually, if a planar surface is bent, a positive strain (tensile) is induced on a side and a negative strain (compressive) is induced on the other one: curvature is proportional to the their relative difference. On the contrary, if a same sign strain is measured on the two sides of the surface, a longitudinal deformation of the surface can be derived. Following this idea, the whole surface of the support panels can be subdivide into a proper number of elements that undergo simple deformation. Each element will be monitored by using FBGs attached to the surface of the panel. A mechanical Finite Element Method (FEM) analysis of a full size support panel is necessary in order to determine the number and the dimension of these elements, taking into account the mechanical properties of the panel and performance requirements. Each element will be monitored by using FBGs attached to the surface of the panel. FEM analysis of the support panel is under develop in order to determine the number and the dimension of these elements, taking into account the mechanical properties of the panel and performance requirements. The support panel is formed by an honeycomb flame-resistant meta-aramid material (NOMEX) core with two skins of a composite material made of woven fiberglass cloth with an epoxy resin binder (FR4). One side of the panel has a thin copper film glued, in order to use it as an electrode inside the detector. In following it is simply schematized as a two-layer panel involving a composite top layer and a copper film.
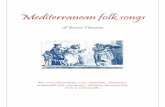
Figure 1. (a) Sketch of a micromegas detector and its working principle; (b) Scheme of the miniaturized panel; (c) FBG characteristics; (d) Picture of the panel with FBGs and SG sensors; and (e) Reflective spectrum of FBGs.
In order to test the proposed approach, in this paper we have monitored the deformation of an miniaturized preliminary support panel, that has been considered as a beam-like structure with supports at its two ends. The miniature panel sizes are of L2=20 cm and L1=40 cm whereas the thickness of d=9.0mm +/-0.1mm and the composition structure are the same of the final read-out panel. A set of different FBGs are properly surface attached to the miniaturized panel with different adhesives and positions (fig. 1 (b) and (c)). The aim is to compare the behaviour of bare FBGs with polyamide coated FBGs since the former is easy to fix ensuring maximum strain transfer whereas the last one is more robust in handle operations. We have also compared different adhesives such as Araldite 2011 and a Cyanoacrylate-base adhesive in order to validate the strain transfer capability of the former one that is already certificate for the operation at CERN. Moreover the responses of FBGs are compared with a conventional resistive strain gauges (SG) fixed close to FBG1. During the experiments the small temperature changes are properly compensated.
3. Experimental Results The detector panel is positioned on two rigid holders while several masses with weight up to 1432g (named W0 = 0g, W1 = 269 g; W2 = 537 g; W3 = 800 g; W4 = 1432 g, respectively) are applied in different points along the panel length
1535 1540 1545 1550 1555 1560 15650
0.2
0.4
0.6
0.8
1
Wavelength [nm]
Refle
ctivi
ty
holder
FBG3
FBG2 FBG1
FBG4
(d)
SG
d=9.0mm +/-0.1mm
copper film
FBG3 FBG2 FBG1 FBG4
a b L1
L2
holder
F1 F4 F2 F3
SG
x
(b) Top layer
Cro
ssV
iew
Top
Vie
w
(a) Grating Wavelength Coating Adhesive Position FBG1 1557.0 nm bare Cyanoacrylate Centre/Top FBG2 1541.4 nm bare Araldite Centre/Top FBG3 1533.4 nm polyamide Araldite Centre/Top FBG4 1549.1 nm bare Cyanoacrylate Lateral/Top FBG5 1565.3 nm polyamide Cyanoacrylate Centre/Back FBGT 1552.9 nm -- -- Free
(e)
(c)
![Page 3: [IEEE 2014 Third Mediterranean Photonics Conference - Trani, Italy (2014.5.7-2014.5.9)] 2014 Third Mediterranean Photonics Conference - Fiber Bragg Grating strain sensors for tracking](https://reader035.fdocumenti.com/reader035/viewer/2022080418/5750a3061a28abcf0c9f9754/html5/thumbnails/3.jpg)
(x axis), F1, F2, F3 and F4, to achieve mechanical deformation of the panel itself (see fig. 1(b)). The position F1 is selected as center of the detector support (b=20cm) and thus in correspondence of FBG1, FBG2, FBG3 and SG sensors; F3 is selected in correspondence of FBG4 (a=6.2cm); F2 is selected as center between F1 and F3 (x=(a+b)/2=13.1cm); and F4 is selected far from F2 side (for x=26cm). A picture of the panel is shown in fig. 1(d) while in fig. 1 (e) the experimental reflectance spectrum of the FBG array is plotted where the envelop of the peak amplitude is due to our light source shape.
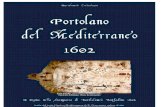
Figure 2. Strain measurements of the 5 FBGs and the SG (after thermal compensation): (a) strain vs the acquisition time and as function of the applied mass (W0, W1, W2, W3 and W4); (b) strain vs applied mass during load (L) and unload (U) phases.
The fig. 2(a) plots the strain measurements of optical and electrical sensors versus the time (with scan step of 15 seconds) during a stepwise weight increment (load) and decrement (unload), applied on position F1. From these data some important results can be highlighted. FBG1, FBG2, FBG3 and FBG4 record a negative strain while FBG5 records a positive strain. This means that , as expected, the top layer surface is compressed while the opposite surface (bottom copper layer) is stretched. Also, it can be noted that responses of FBG1, FBG2, FBG3 and SG are in perfect agreement (within +/- 1 μɛ). This means that bare and polyamide FBGs are both well candidate for our purpose and Araldite 2011 permits a full strain transfer operation. To highlight the capability to measure the strain distribution along the panel, we also compare the responses of the FBG4 with FBG1, FBG2 and FBG3. FBG4 retrieves a lower strain (absolute value) as compared with the FBGs positioned in the center/top of the support panel. The ratio of FBG4/FBGi (with i=1,2,3) in terms of Bragg wavelength shift is very close to the ratio of their position a/b (see fig. 1(a)) of 0.31 as expected if we take into consideration the mechanical moment of the applied mass. Furthermore, the absolute value of the strain detected from FBG1, FBG2 and FBG3 is about 2 times higher than the output of FBG5, as expected for an inhomogeneous panel. Finally, fig. 2(b) plot the strain versus weights during the load and unload phases. As evident all sensors (FBGs and SG) show a linear response versus the applied weight and a very good agreement between the load and unload phases. From these results it can be highlighted that: i) bending of the panel can be easily measured by taking into consideration the difference between Bragg wavelength shift of FBGs on top and bottom surface; ii) if FBGs on top and bottom surface measure same ΔλB the panel is in unbending strained state.
4. Conclusion In this paper we present a preliminary analysis on the use of FBG sensors integrated with tracking particle detector support panel as real-time deformation monitoring system. The results prove that the proposed approach has the potentialities to permit a continue monitoring of the deformation and bending of the support panels that currently are in phase of realization, testing and optimization. Further works are aimed to: i) implement the 2D analysis of the support panel; ii) repeat the same analysis on a full size panel. To this aim numerical mechanical-analysis of the final detector will be used to reveal the number and optimized position of the FBG sensors to determinate all possible stretching and bending of the detector due to mechanical stress and undesired thermal change.
References [1] “The Cern Large Hadron Collider: Accelerator And Experiments,” JINST 3, (2008) [2] G. Berruti, et al, “Radiation hard humidity sensors for high energy physics applications using polyimide-coated fiber Bragg gratings
sensors,” Sensors and Actuators B 177, 94–102 (2013) [3] K.O. Hill, G. Meltz, “Fiber Bragg Grating Technology Fundamentals and Overview,” Journal of Lightwave Technology 15, 1263 (1997) [4] C. Ambrosino, A. Iadicicco, S. Campopiano, A. Cutolo, M. Giordano, A. Cusano (2009). Fiber Bragg Grating sensors: Industrial
Applications. In An introduction to optoelectronics sensors. vol. 7, p. 34-76, ISBN: 978-9812834126 [5] Y. Giomataris, et al, “MICROMEGAS: A High granularity position sensitive gaseous detector for high particle flux environments,”
Nucl.Instrum.Meth. A376, 29–35 (1996) [6] ATLAS Collaboration, G. Aad et al., “The ATLAS Experiment at the CERN Large Hadron Collider,” JINST 3, S08003 (2008) [7] Kawamoto T., et al, “New Small Wheel Technical Design Report,” CERN-LHCC-2013-006, (2013)
0 500 1000 1500
-80
-60
-40
-20
0
20
40
Weight [g]
strain
[]
FBG1 LFBG1 U
FBG2 L
FBG2 UFBG3 L
FBG3 U
FBG4 L
FBG4 UFBG5 L
FBG5 U
SG LSG U
(b)
0 10 20 30 40
-80
-60
-40
-20
0
20
40
Time [minute]
Strai
n []
FBG1FBG2FBG3SG
FBG4
FBG5(a)
W0 W1
W2 W3
W4