
GLOSSARIO ITACA Itaitaca.mi.ingv.it/static_italy_20/doc/GLOSSARIO_ITACA_Ita.pdf · Correction La...
15
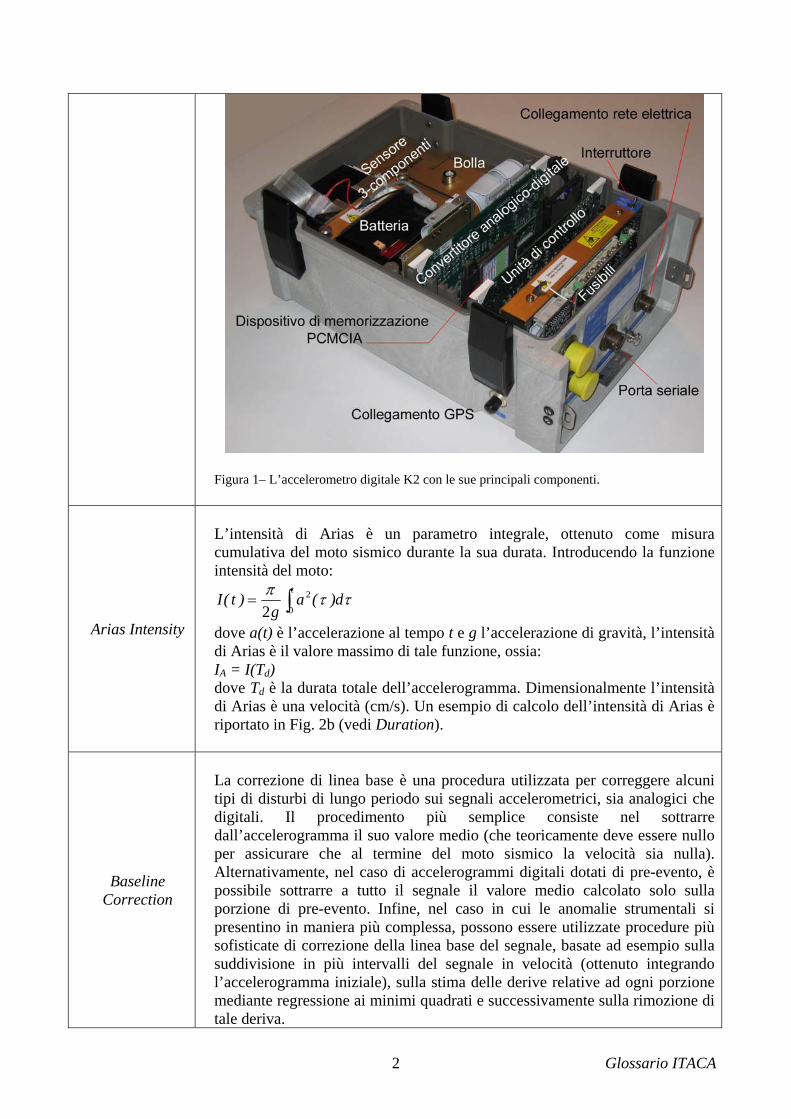
Glossario ITACA 1 GLOSSARIO 1 Parola chiave Significato Accelerometer (Analog or Digital) Strumento di misura dell’accelerazione del moto sismico. Si distingue principalmente tra: strumento analogico: l’accelerazione del suolo viene riprodotta da uno strumento di misura meccanico su un supporto fisico, tipicamente carta o pellicola fotografica, per poi essere digitalizzata in una fase successiva. strumento digitale: basato tipicamente su trasduttori elettro-magnetici o a controllo di forza (force-balance). Il segnale elettrico viene poi opportunamente condizionato, campionato e digitalizzato. Gli strumenti digitali sono in opera a partire da circa la metà degli anni ’80. L’immagine di un accelerometro digitale di vasto impiego anche nella Rete Accelerometrica Nazionale è illustrata in Fig. 1. I parametri più rappresentativi per definire le caratteristiche di risposta dello strumento di registrazione sono i seguenti: - la frequenza naturale di vibrazione non smorzata del sensore (frequency); - il coefficiente di smorzamento rispetto al critico del sensore (damping); - la banda di frequenze per cui il sensore ha una risposta “piatta” (frequency band); - la costante di trasduzione del segnale del sensore (gain); - un indice del più piccolo movimento che un sensore è in grado di misurare (sensitivity); - il livello di saturazione del segnale del sensore (full scale); - il numero di bits dell’acquisitore (number of bits). 1 Parte dei testi e delle figure sono adattati da Faccioli E. e R. Paolucci: “Elementi di Sismologia applicata all’Ingegneria”, Pitagora, 2005.
Transcript of GLOSSARIO ITACA Itaitaca.mi.ingv.it/static_italy_20/doc/GLOSSARIO_ITACA_Ita.pdf · Correction La...
Glossario ITACA 1
GLOSSARIO1
Parola chiave
Significato
Accelerometer (Analog or
Digital)
Strumento di misura dell’accelerazione del moto sismico. Si distingue principalmente tra: strumento analogico: l’accelerazione del suolo viene riprodotta da uno strumento di misura meccanico su un supporto fisico, tipicamente carta o pellicola fotografica, per poi essere digitalizzata in una fase successiva. strumento digitale: basato tipicamente su trasduttori elettro-magnetici o a controllo di forza (force-balance). Il segnale elettrico viene poi opportunamente condizionato, campionato e digitalizzato. Gli strumenti digitali sono in opera a partire da circa la metà degli anni ’80. L’immagine di un accelerometro digitale di vasto impiego anche nella Rete Accelerometrica Nazionale è illustrata in Fig. 1. I parametri più rappresentativi per definire le caratteristiche di risposta dello strumento di registrazione sono i seguenti: - la frequenza naturale di vibrazione non smorzata del sensore (frequency); - il coefficiente di smorzamento rispetto al critico del sensore (damping); - la banda di frequenze per cui il sensore ha una risposta “piatta” (frequency band); - la costante di trasduzione del segnale del sensore (gain); - un indice del più piccolo movimento che un sensore è in grado di misurare (sensitivity); - il livello di saturazione del segnale del sensore (full scale); - il numero di bits dell’acquisitore (number of bits).
1 Parte dei testi e delle figure sono adattati da Faccioli E. e R. Paolucci: “Elementi di Sismologia applicata all’Ingegneria”, Pitagora, 2005.
Glossario ITACA 2
Figura 1– L’accelerometro digitale K2 con le sue principali componenti.
Arias Intensity
L’intensità di Arias è un parametro integrale, ottenuto come misura cumulativa del moto sismico durante la sua durata. Introducendo la funzione intensità del moto:
∫=t
d)(ag
)t(I0
2
2ττπ
dove a(t) è l’accelerazione al tempo t e g l’accelerazione di gravità, l’intensità di Arias è il valore massimo di tale funzione, ossia: IA = I(Td) dove Td è la durata totale dell’accelerogramma. Dimensionalmente l’intensità di Arias è una velocità (cm/s). Un esempio di calcolo dell’intensità di Arias è riportato in Fig. 2b (vedi Duration).
Baseline Correction
La correzione di linea base è una procedura utilizzata per correggere alcuni tipi di disturbi di lungo periodo sui segnali accelerometrici, sia analogici che digitali. Il procedimento più semplice consiste nel sottrarre dall’accelerogramma il suo valore medio (che teoricamente deve essere nullo per assicurare che al termine del moto sismico la velocità sia nulla). Alternativamente, nel caso di accelerogrammi digitali dotati di pre-evento, è possibile sottrarre a tutto il segnale il valore medio calcolato solo sulla porzione di pre-evento. Infine, nel caso in cui le anomalie strumentali si presentino in maniera più complessa, possono essere utilizzate procedure più sofisticate di correzione della linea base del segnale, basate ad esempio sulla suddivisione in più intervalli del segnale in velocità (ottenuto integrando l’accelerogramma iniziale), sulla stima delle derive relative ad ogni porzione mediante regressione ai minimi quadrati e successivamente sulla rimozione di tale deriva.
Glossario ITACA 3
Nel processamento dei dati accelerometrici contenuti in ITACA è stata utilizzata la procedura standard di correzione, ovvero la sottrazione dall’accelerogramma del suo valore medio. Per dettagli sulla procedura di correzione adottata in ITACA si veda Corrected Record.
Component
Per componente si intende una delle tre componenti spaziali del moto sismico. Le due componenti orizzontali, ortogonali tra loro, vengono indicate come NS (Nord-Sud) e EW (Est-Ovest). La componente verticale viene indicata come UP.
Corrected Record
In un accelerogramma corretto si è provveduto a rimuovere o ridurre gli errori in alta e bassa frequenza contenuti nel segnale originale (vedi Raw/Uncorrected Record). Per eliminare i disturbi a bassa frequenza nell’accelerogramma, si opera in due fasi successive:
- si corregge la linea base nel dominio nel tempo (vedi Baseline Correction) si filtra passa-alto l’accelerogramma (vedi Filter Correction). Per eliminare i disturbi in alta frequenza nel segnale, si filtra passa-basso l’accelerogramma (vedi Filter Correction). Nel processamento dei dati accelerometrici contenuti in Itaca è stata adottata la seguente procedura:
correzione della linea base (sottrazione del valore medio del segnale); - applicazione di un taper cosinusoidale, basato su un’ispezione visiva della
registrazione (tipicamente tra il 2% e il 5% della lunghezza totale del segnale); alle registrazioni identificate come late-triggered (vedi Late triggered record) non viene applicato il taper;
- ispezione visiva dello spettro di Fourier del segnale (vedi Fourier Spectrum) per selezionare il range di frequenze su cui effettuare il filtro passa-banda. Quando possibile, lo stesso range di frequenze viene selezionato per le tre componenti del segnale (vedi Component);
- applicazione al segnale accelerometrico di un filtro acausale del secondo ordine di tipo Butterworth nel dominio delle frequenze nal campo di frequenze individuato;
- doppia integrazione del segnale accelerometrico per ottenere la storia temporale di spostamento;
- rimozione della deriva lineare presente nello spostamento; - doppia derivazione per ottenere l’accelerazione corretta, compatibile con il
dato di spostamento corretto.
Duration
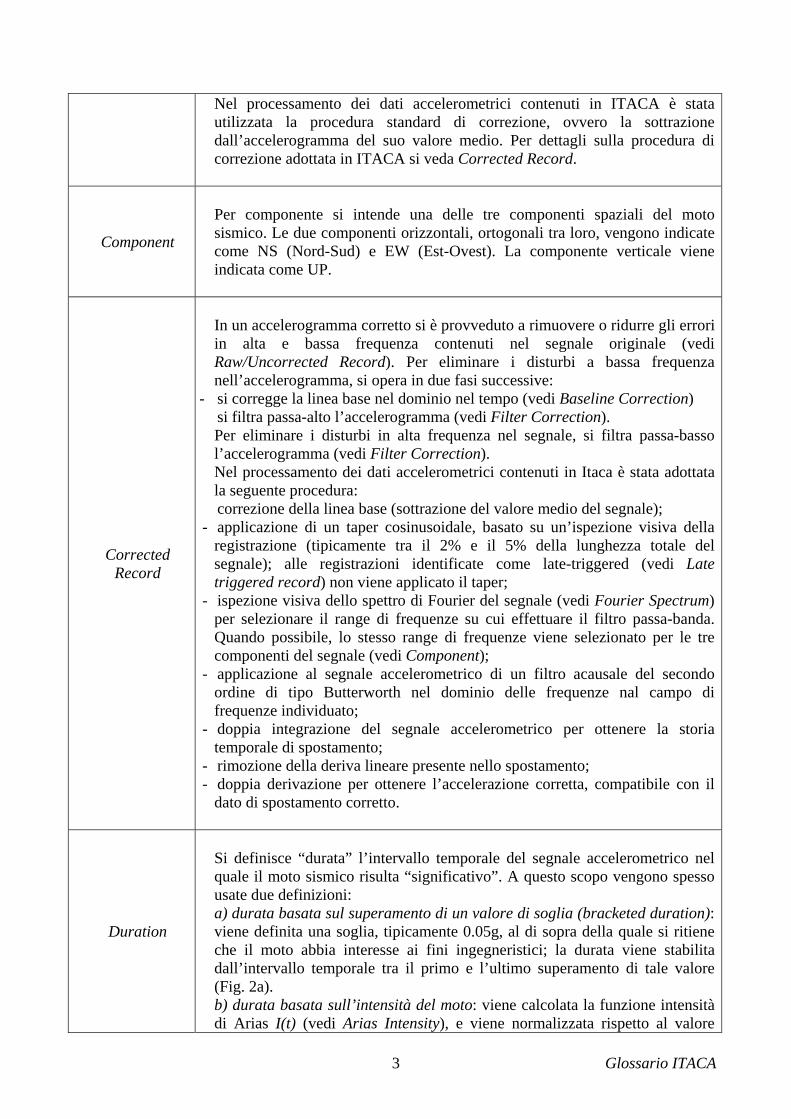
Si definisce “durata” l’intervallo temporale del segnale accelerometrico nel quale il moto sismico risulta “significativo”. A questo scopo vengono spesso usate due definizioni: a) durata basata sul superamento di un valore di soglia (bracketed duration): viene definita una soglia, tipicamente 0.05g, al di sopra della quale si ritiene che il moto abbia interesse ai fini ingegneristici; la durata viene stabilita dall’intervallo temporale tra il primo e l’ultimo superamento di tale valore (Fig. 2a). b) durata basata sull’intensità del moto: viene calcolata la funzione intensità di Arias I(t) (vedi Arias Intensity), e viene normalizzata rispetto al valore
Glossario ITACA 4
massimo Imax; la durata viene stabilita dall’intervallo temporale t2-t1, dove I(t1) = 0.05 e I(t2) = 0.95 (Fig. 2b). In ITACA la durata del moto sismico viene calcolata basandosi sull’intensità di Arias.
0 1 2 3 4 5 6 7 8 9
−5
0
5
Tempo (s)
m/s
2
(a)
durata = 7.4 s
0 1 2 3 4 5 6 7 8 90
0.2
0.4
0.6
0.8
1
(b)
Tempo (s)
I a(t)/
I max
durata = 3.3 s
Figura 2 – Esempio di calcolo della durata del moto sismico, secondo le due definizioni introdotte nel testo: (a) durata basata sul superamento del valore di soglia di 0.05g; (b) durata basata sull’intensità di Arias (vedi Arias Intensity).
Earthquake back azimuth
L’angolo di back azimuth indica la direzione, misurata in senso orario rispetto al Nord, dalla quale le onde sismiche giungono allo strumento di registrazione.
EC8 site class
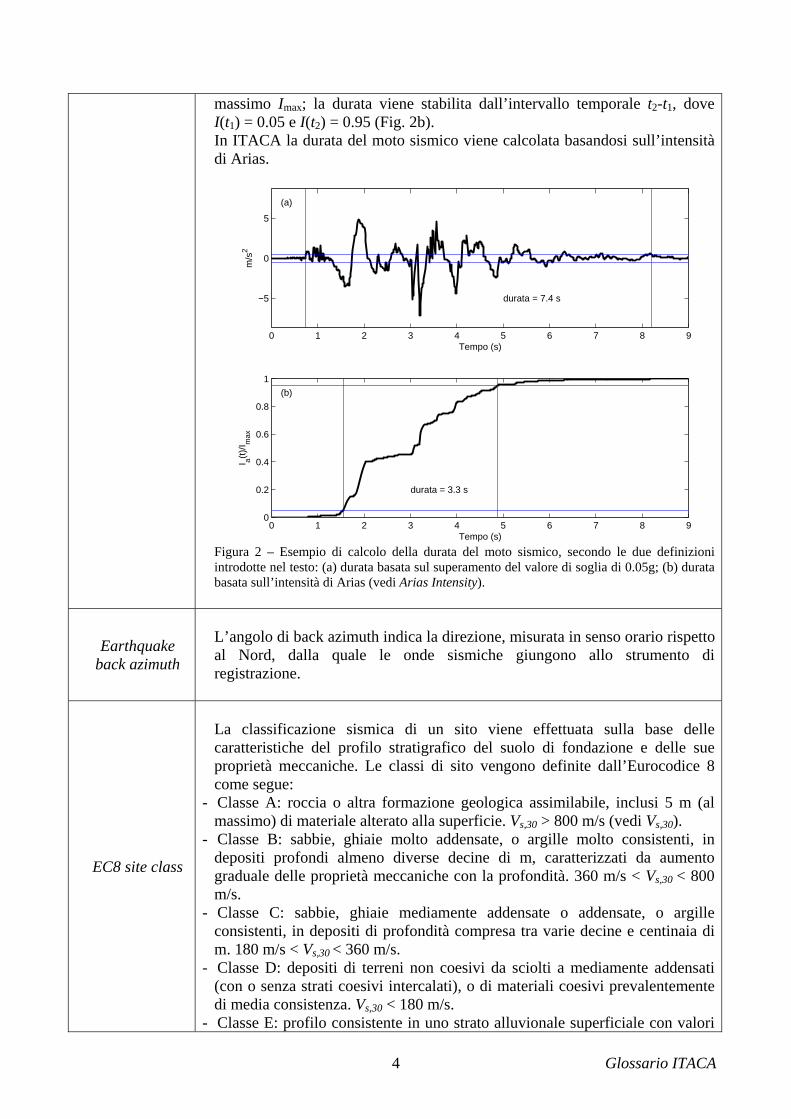
La classificazione sismica di un sito viene effettuata sulla base delle caratteristiche del profilo stratigrafico del suolo di fondazione e delle sue proprietà meccaniche. Le classi di sito vengono definite dall’Eurocodice 8 come segue:
- Classe A: roccia o altra formazione geologica assimilabile, inclusi 5 m (al massimo) di materiale alterato alla superficie. Vs,30 > 800 m/s (vedi Vs,30).
- Classe B: sabbie, ghiaie molto addensate, o argille molto consistenti, in depositi profondi almeno diverse decine di m, caratterizzati da aumento graduale delle proprietà meccaniche con la profondità. 360 m/s < Vs,30 < 800 m/s.
- Classe C: sabbie, ghiaie mediamente addensate o addensate, o argille consistenti, in depositi di profondità compresa tra varie decine e centinaia di m. 180 m/s < Vs,30 < 360 m/s.
- Classe D: depositi di terreni non coesivi da sciolti a mediamente addensati (con o senza strati coesivi intercalati), o di materiali coesivi prevalentemente di media consistenza. Vs,30 < 180 m/s.
- Classe E: profilo consistente in uno strato alluvionale superficiale con valori
Glossario ITACA 5
di Vs di tipo C o D e spessore compreso tra circa 5 m e 20 m, giacente su materiale con Vs,30 > 800 m/s.
- Classe S1: depositi consistenti di – o contenenti uno strato spesso almeno 10 m – argille tenere/limi ad alto indice di plasticità (P1 > 40) ed elevato contenuto d’acqua.
- Classe S2: depositi di terreno suscettibile di liquefazione, o di argille sensitive, o qualunque altro profilo non incluso nei tipi A-E oppure S1.
-
Epicentral Distance
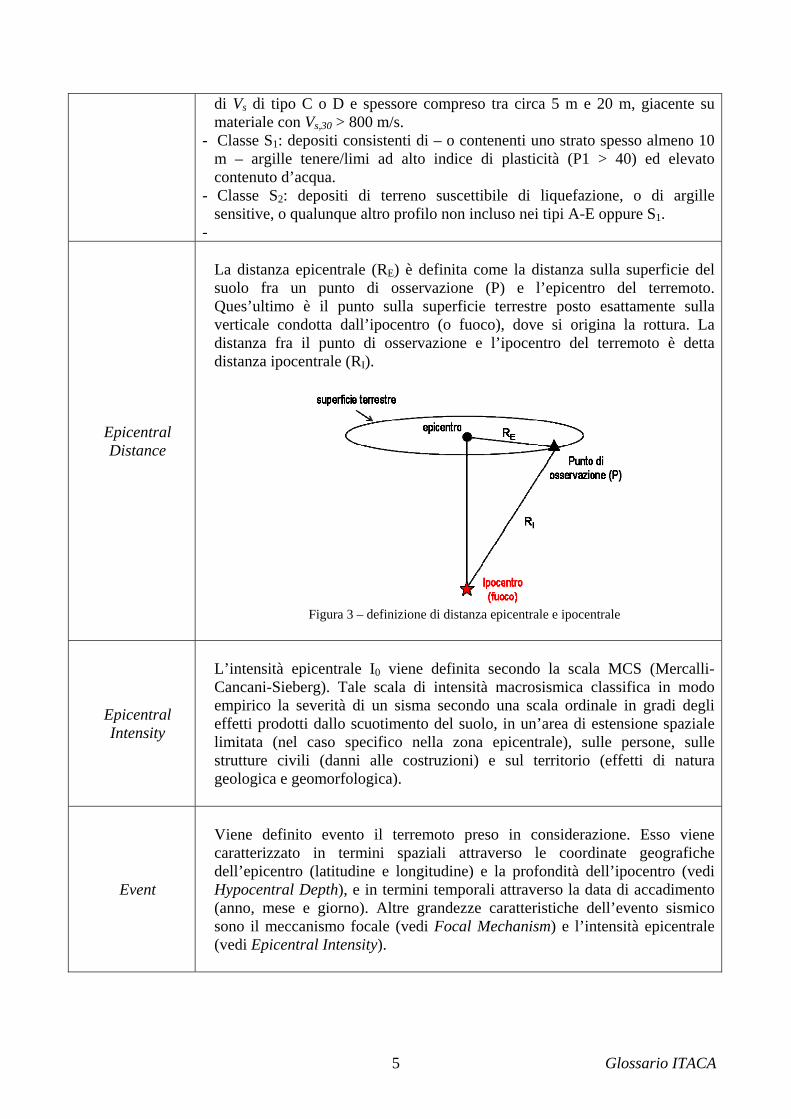
La distanza epicentrale (RE) è definita come la distanza sulla superficie del suolo fra un punto di osservazione (P) e l’epicentro del terremoto. Ques’ultimo è il punto sulla superficie terrestre posto esattamente sulla verticale condotta dall’ipocentro (o fuoco), dove si origina la rottura. La distanza fra il punto di osservazione e l’ipocentro del terremoto è detta distanza ipocentrale (RI).
Figura 3 – definizione di distanza epicentrale e ipocentrale
Epicentral Intensity
L’intensità epicentrale I0 viene definita secondo la scala MCS (Mercalli-Cancani-Sieberg). Tale scala di intensità macrosismica classifica in modo empirico la severità di un sisma secondo una scala ordinale in gradi degli effetti prodotti dallo scuotimento del suolo, in un’area di estensione spaziale limitata (nel caso specifico nella zona epicentrale), sulle persone, sulle strutture civili (danni alle costruzioni) e sul territorio (effetti di natura geologica e geomorfologica).
Event
Viene definito evento il terremoto preso in considerazione. Esso viene caratterizzato in termini spaziali attraverso le coordinate geografiche dell’epicentro (latitudine e longitudine) e la profondità dell’ipocentro (vedi Hypocentral Depth), e in termini temporali attraverso la data di accadimento (anno, mese e giorno). Altre grandezze caratteristiche dell’evento sismico sono il meccanismo focale (vedi Focal Mechanism) e l’intensità epicentrale (vedi Epicentral Intensity).
Glossario ITACA 6
Fault (Strike, Dip, Rake)
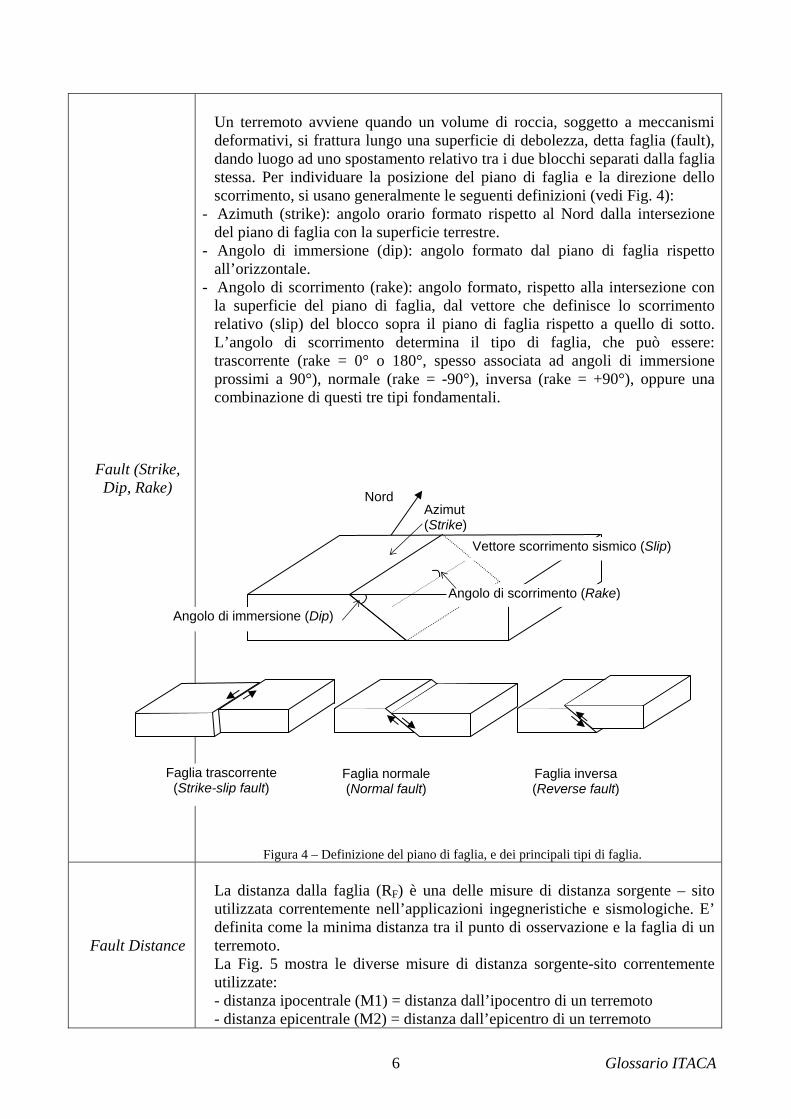
Un terremoto avviene quando un volume di roccia, soggetto a meccanismi deformativi, si frattura lungo una superficie di debolezza, detta faglia (fault), dando luogo ad uno spostamento relativo tra i due blocchi separati dalla faglia stessa. Per individuare la posizione del piano di faglia e la direzione dello scorrimento, si usano generalmente le seguenti definizioni (vedi Fig. 4):
- Azimuth (strike): angolo orario formato rispetto al Nord dalla intersezione del piano di faglia con la superficie terrestre.
- Angolo di immersione (dip): angolo formato dal piano di faglia rispetto all’orizzontale.
- Angolo di scorrimento (rake): angolo formato, rispetto alla intersezione con la superficie del piano di faglia, dal vettore che definisce lo scorrimento relativo (slip) del blocco sopra il piano di faglia rispetto a quello di sotto. L’angolo di scorrimento determina il tipo di faglia, che può essere: trascorrente (rake = 0° o 180°, spesso associata ad angoli di immersione prossimi a 90°), normale (rake = -90°), inversa (rake = +90°), oppure una combinazione di questi tre tipi fondamentali.
Figura 4 – Definizione del piano di faglia, e dei principali tipi di faglia.
Fault Distance
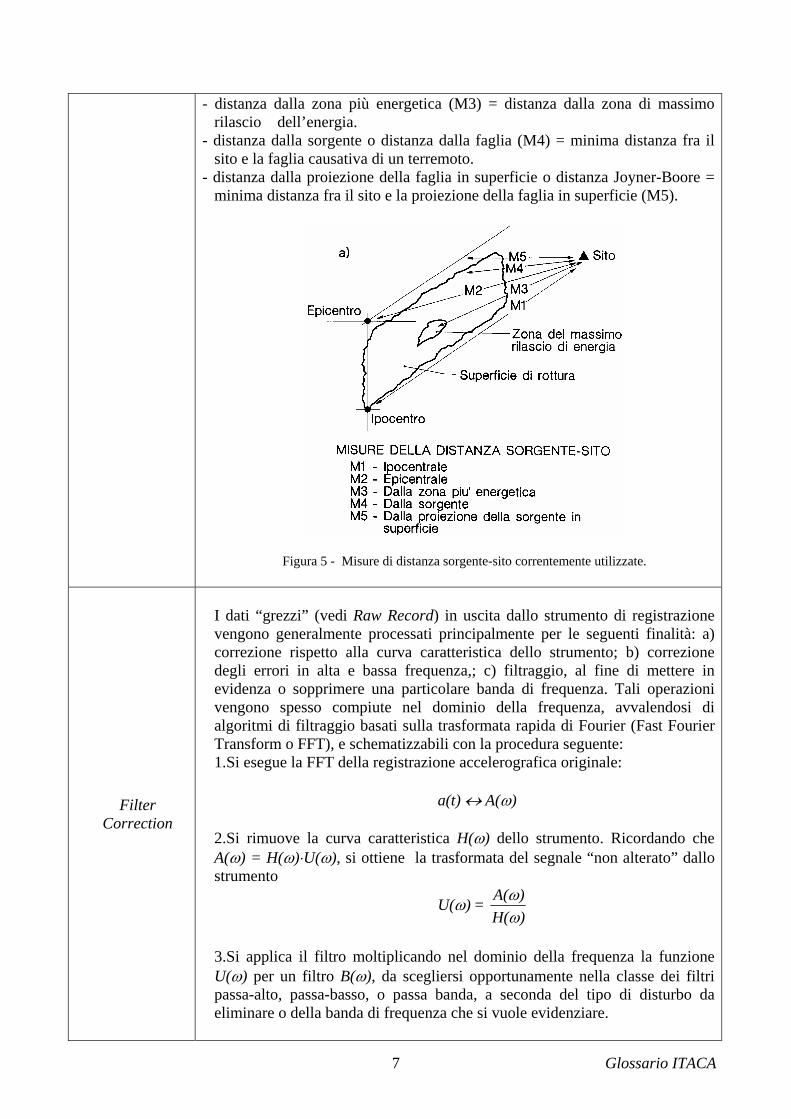
La distanza dalla faglia (RF) è una delle misure di distanza sorgente – sito utilizzata correntemente nell’applicazioni ingegneristiche e sismologiche. E’ definita come la minima distanza tra il punto di osservazione e la faglia di un terremoto. La Fig. 5 mostra le diverse misure di distanza sorgente-sito correntemente utilizzate: - distanza ipocentrale (M1) = distanza dall’ipocentro di un terremoto - distanza epicentrale (M2) = distanza dall’epicentro di un terremoto
Faglia trascorrente (Strike-slip fault)
Faglia normale (Normal fault)
Faglia inversa (Reverse fault)
NordAzimut (Strike)
Angolo di immersione (Dip)
Angolo di scorrimento (Rake)
Vettore scorrimento sismico (Slip)
Glossario ITACA 7
- distanza dalla zona più energetica (M3) = distanza dalla zona di massimo rilascio dell’energia.
- distanza dalla sorgente o distanza dalla faglia (M4) = minima distanza fra il sito e la faglia causativa di un terremoto.
- distanza dalla proiezione della faglia in superficie o distanza Joyner-Boore = minima distanza fra il sito e la proiezione della faglia in superficie (M5).
Figura 5 - Misure di distanza sorgente-sito correntemente utilizzate.
Filter Correction
I dati “grezzi” (vedi Raw Record) in uscita dallo strumento di registrazione vengono generalmente processati principalmente per le seguenti finalità: a) correzione rispetto alla curva caratteristica dello strumento; b) correzione degli errori in alta e bassa frequenza,; c) filtraggio, al fine di mettere in evidenza o sopprimere una particolare banda di frequenza. Tali operazioni vengono spesso compiute nel dominio della frequenza, avvalendosi di algoritmi di filtraggio basati sulla trasformata rapida di Fourier (Fast Fourier Transform o FFT), e schematizzabili con la procedura seguente: 1.Si esegue la FFT della registrazione accelerografica originale: a(t) ↔ A(ω) 2.Si rimuove la curva caratteristica H(ω) dello strumento. Ricordando che A(ω) = H(ω)⋅U(ω), si ottiene la trasformata del segnale “non alterato” dallo strumento
U(ω) = )H()A(
ωω
3.Si applica il filtro moltiplicando nel dominio della frequenza la funzione U(ω) per un filtro B(ω), da scegliersi opportunamente nella classe dei filtri passa-alto, passa-basso, o passa banda, a seconda del tipo di disturbo da eliminare o della banda di frequenza che si vuole evidenziare.
Glossario ITACA 8
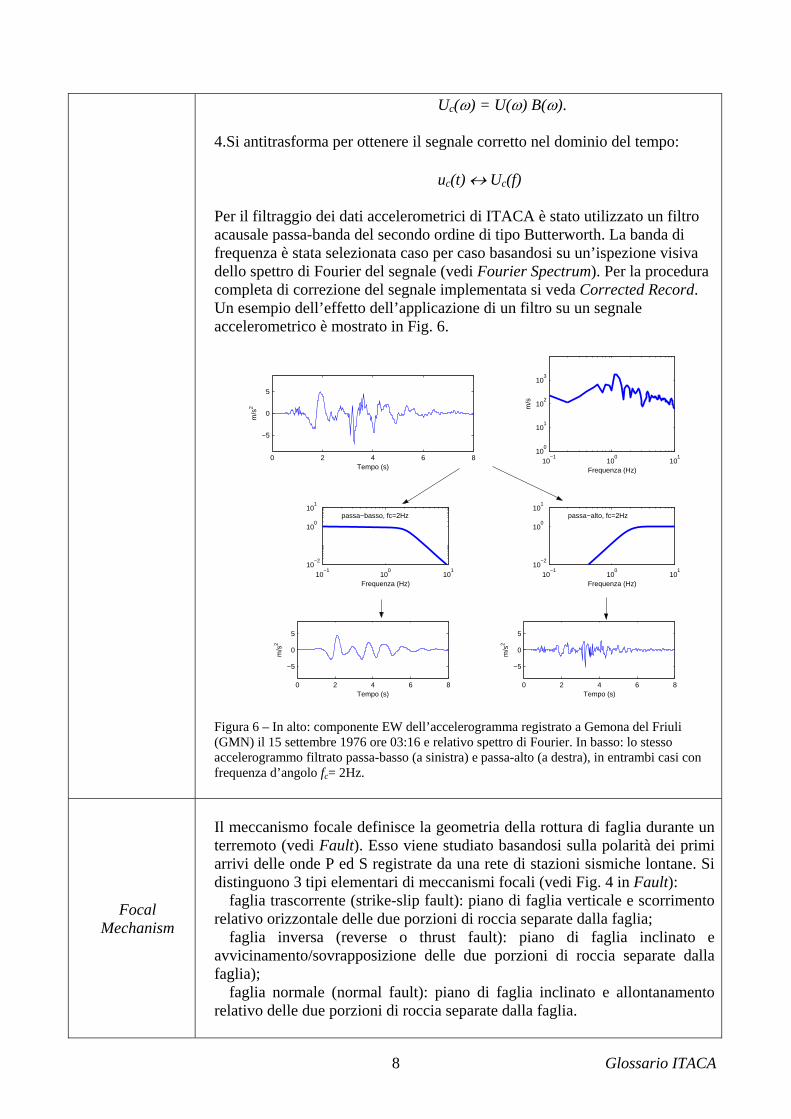
Uc(ω) = U(ω) B(ω). 4.Si antitrasforma per ottenere il segnale corretto nel dominio del tempo: uc(t) ↔ Uc(f) Per il filtraggio dei dati accelerometrici di ITACA è stato utilizzato un filtro acausale passa-banda del secondo ordine di tipo Butterworth. La banda di frequenza è stata selezionata caso per caso basandosi su un’ispezione visiva dello spettro di Fourier del segnale (vedi Fourier Spectrum). Per la procedura completa di correzione del segnale implementata si veda Corrected Record. Un esempio dell’effetto dell’applicazione di un filtro su un segnale accelerometrico è mostrato in Fig. 6.
0 2 4 6 8
−5
0
5
Tempo (s)
m/s
2
10−1
100
101
100
101
102
103
Frequenza (Hz)
m/s
10−1
100
101
10−2
100
101
Frequenza (Hz)
passa−basso, fc=2Hz
10−1
100
101
10−2
100
101
Frequenza (Hz)
passa−alto, fc=2Hz
0 2 4 6 8
−5
0
5
Tempo (s)
m/s
2
0 2 4 6 8
−5
0
5
Tempo (s)
m/s
2
Figura 6 – In alto: componente EW dell’accelerogramma registrato a Gemona del Friuli (GMN) il 15 settembre 1976 ore 03:16 e relativo spettro di Fourier. In basso: lo stesso accelerogrammo filtrato passa-basso (a sinistra) e passa-alto (a destra), in entrambi casi con frequenza d’angolo fc= 2Hz.
Focal Mechanism
Il meccanismo focale definisce la geometria della rottura di faglia durante un terremoto (vedi Fault). Esso viene studiato basandosi sulla polarità dei primi arrivi delle onde P ed S registrate da una rete di stazioni sismiche lontane. Si distinguono 3 tipi elementari di meccanismi focali (vedi Fig. 4 in Fault):
faglia trascorrente (strike-slip fault): piano di faglia verticale e scorrimento relativo orizzontale delle due porzioni di roccia separate dalla faglia;
faglia inversa (reverse o thrust fault): piano di faglia inclinato e avvicinamento/sovrapposizione delle due porzioni di roccia separate dalla faglia);
faglia normale (normal fault): piano di faglia inclinato e allontanamento relativo delle due porzioni di roccia separate dalla faglia.
Glossario ITACA 9
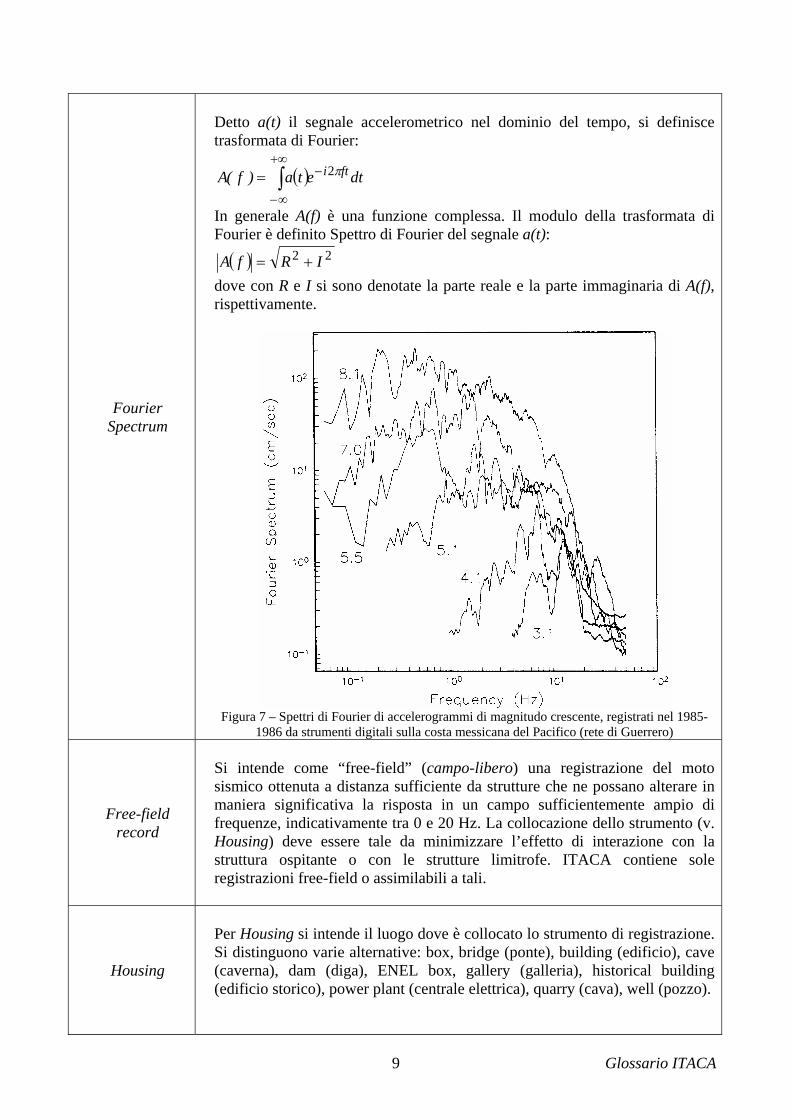
Fourier Spectrum
Detto a(t) il segnale accelerometrico nel dominio del tempo, si definisce trasformata di Fourier:
( ) dteta)f(A fti π2−+∞
∞−∫=
In generale A(f) è una funzione complessa. Il modulo della trasformata di Fourier è definito Spettro di Fourier del segnale a(t):
( ) 22 IRfA += dove con R e I si sono denotate la parte reale e la parte immaginaria di A(f), rispettivamente.
Figura 7 – Spettri di Fourier di accelerogrammi di magnitudo crescente, registrati nel 1985-
1986 da strumenti digitali sulla costa messicana del Pacifico (rete di Guerrero)
Free-field record
Si intende come “free-field” (campo-libero) una registrazione del moto sismico ottenuta a distanza sufficiente da strutture che ne possano alterare in maniera significativa la risposta in un campo sufficientemente ampio di frequenze, indicativamente tra 0 e 20 Hz. La collocazione dello strumento (v. Housing) deve essere tale da minimizzare l’effetto di interazione con la struttura ospitante o con le strutture limitrofe. ITACA contiene sole registrazioni free-field o assimilabili a tali.
Housing
Per Housing si intende il luogo dove è collocato lo strumento di registrazione. Si distinguono varie alternative: box, bridge (ponte), building (edificio), cave (caverna), dam (diga), ENEL box, gallery (galleria), historical building (edificio storico), power plant (centrale elettrica), quarry (cava), well (pozzo).
Glossario ITACA 10
Housner Intensity
L’intensità di Housner (o intensità dello spettro di risposta) viene definita come segue:
( ) ( )dT,TPSVSI.
.∫=52
10ξξ
dove PSV è lo spettro di risposta di pseudo-velocità (vedi Response Spectrum), T e ξ sono rispettivamente il periodo e lo smorzamento strutturale. Nel caso dei dati accelerometrici contenuti in ITACA il calcolo dell’intensità di Housner è stato effettuato considerando ξ = 5%. Questo parametro di severità del moto sismico è correlato al danno potenziale atteso per effetto del terremoto in esame, dal momento che la maggior parte delle strutture hanno un periodo fondamentale di vibrazione nell’intervallo compreso tra 0.1 e 2.5 secondi. Dimensionalmente l’intensità di Housner è uno spostamento (cm).
Hypocentral Depth
La profondità ipocentrale è la distanza tra ipocentro ed epicentro del terremoto (vedi Fig. 2 in Epicentral Distance).
Late/Normally triggered
record
Con Late triggered record si intende una registrazione in cui lo strumento è scattato dopo l’arrivo delle prime onde sismiche di ampiezza significativa. Il segnale registrato è quindi contraddistinto da un valore iniziale elevato rispetto al valore di picco del segnale stesso. Con Normally triggered record si intende invece una registrazione scattata con anticipo sufficiente a descrivere correttamente gli arrivi delle fasi principali del segnale sismico.
Magnitude
La magnitudo di un terremoto misura l’intensità dell’evento, basandosi su opportune elaborazioni del segnale sismico. In ITACA sono considerate due definizioni di magnitudo: la magnitudo locale e la magnitudo momento. La magnitudo locale, o magnitudo Richter, viene definita come segue:
0AlogAlogM L −= dove: A = ampiezza di picco, in mm, della traccia registrata da un sismografo del tipo Wood-Anderson ad una data distanza; A0 = ampiezza corrispondente del terremoto di riferimento (“zero”) alla stessa distanza. La scala di magnitudo Richter è di tipo logaritmico, pertanto un incremento di una unità in ML implica un aumento di 10 volte nell’ampiezza del moto. Nel passare da ML = 4 (terremoto di debole intensità) a ML = 7 (terremoto di forte intensità), c’è dunque un incremento di ampiezza di 1000 volte. Un limite della scala di magnitudo ML è rappresentato dalla tendenza alla saturazione per magnitudo attorno a 7.0-7.5 (vedi Fig. 8); ciò dipende in buona parte dalle limitazioni della larghezza di banda del sismografo Wood-Anderson, che non lo rendono adatto a registrare le oscillazioni a lungo periodo generate dai grandi terremoti. La magnitudo momento viene invece definita a partire dal momento sismico,
Glossario ITACA 11
definito come segue: AuGM Δ=0
dove G è il modulo di taglio del materiale crostale in cui avviene la rottura sismica, A l’area della superficie di rottura nella faglia sismogenetica, e uΔ il valor medio dello scorrimento cosismico sulla superficie di rottura. Il momento sismico contiene i parametri fisici più significativi associati al rilascio energetico durante un terremoto. La magnitudo momento si calcola a partire dal momento sismico con l’espressione:
tcosMlogMW −= 032
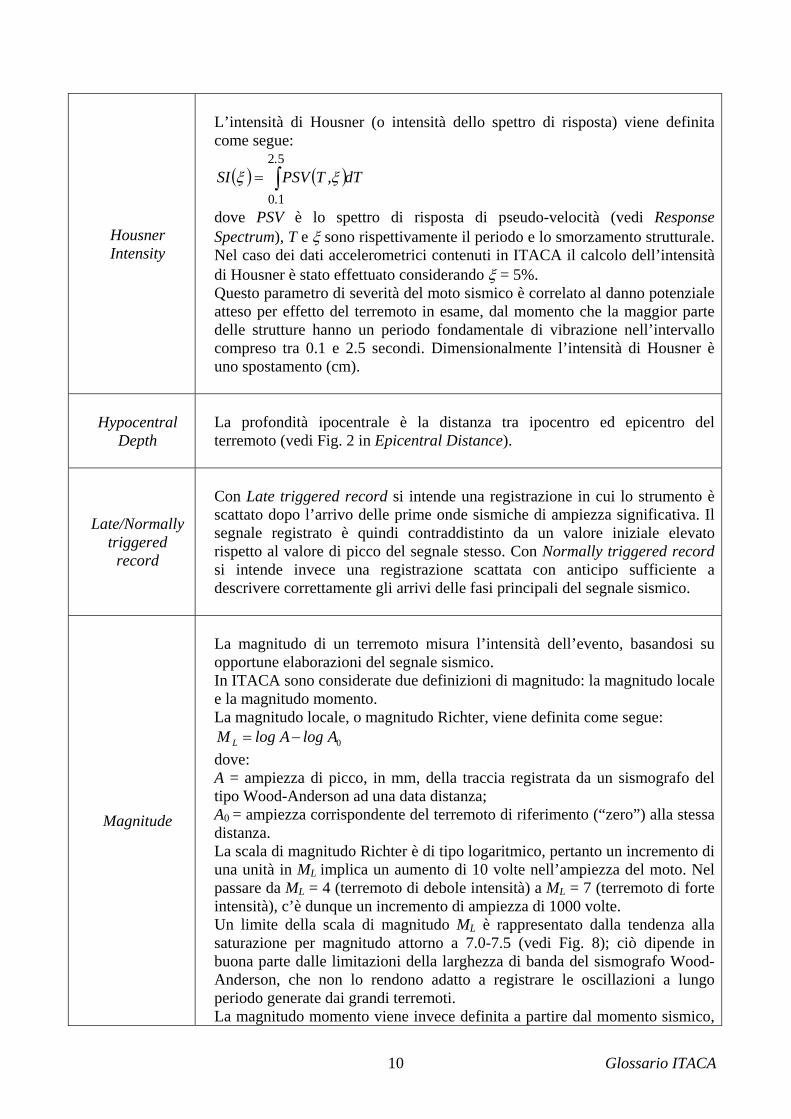
dove cost = 10.7 se M0 è misurato in dyne⋅cm e cost = 6.0 se M0 è misurato in N⋅m. M0 è una grandezza che può crescere indefinitamente al crescere delle dimensioni della sorgente e della dislocazione, pertanto MW ha il pregio di non saturare. Tale concetto è illustrato nella Fig. 8 dalla relazione tra MW e le altre scale di magnitudo più comunemente usate. Questa mostra che, in pratica, si può assumere MW = ML per MW ≤ 6.2.
Figura 8 – Relazione tra magnitudo momento MW e altre scale di magnitudo, in particolare la
magnitudo locale ML.
Morphology
In corrispondenza di questa voce viene riportata la morfologia del sito dove è localizzato lo strumento di registrazione. Si distinguono i seguenti tipi di morfologia: pianura (plain), centro di una valle (valley, centre), bordo di una valle (valley, edge), conoide alluvionale (alluvial fan), punto di sella (saddle), pendio (slope), bordo di una scarpata (edge of scarp), cresta (ridge).
Glossario ITACA 12
Network
Per Network si intende la rete accelerometrica di appartenenza dello strumento di registrazione di interesse. Si distinguono le seguenti reti sul territorio italiano: ITDPC (Dipartimento della Protezione Civile), ENEA, RAIS (Rete Accelerometrica Italia Settentrionale, INGV), ING (Rete temporanea Istituto Nazionale di Geofisica, Friuli), MN (Rete accelerometrica CNT, INGV), BAS (Regione Basilicata), PVTR (Provincia di Trento), SVALP (Rete temporanea Progetto Sismovalp), ecc.
PGA
Con PGA (peak ground acceleration) viene indicato il valore massimo di accelerazione registrato al suolo durante lo scuotimento sismico, dalle 3 componenti dello strumento.
PGD
Con PGD (peak ground displacement) viene indicato il valore massimo di spostamento registrato al suolo durante lo scuotimento sismico dalle 3 componenti dello strumento. Tale parametro viene ricavato integrando due volte la storia di accelerazione, e prendendo il valore massimo della corrispondente storia di spostamento.
PGV
Con PGV (peak ground velocity) viene indicato il valore massimo di velocità registrato al suolo durante lo scuotimento sismico dalle 3 componenti dello strumento. Tale parametro viene ricavato integrando una volta la storia di accelerazione, e prendendo il valore massimo della corrispondente storia di velocità.
Processed Record Vedi Corrected Record
Response Spectrum
Lo spettro di risposta fornisce l’ampiezza massima della risposta (in spostamento relativo, velocità relativa o accelerazione assoluta) di un oscillatore armonico ad 1 grado di libertà (gdl) soggetto a un accelerogramma arbitrario in funzione del periodo strutturale Tn e del fattore di smorzamento ξ (solitamente si adotta il valore standard pari a 5% dello smorzamento critico, normalmente applicabile alle strutture). Tale ampiezza massima si ottiene integrando opportunamente l’equazione del moto dell’oscillatore armonico: ( ) ( ) ( )tytytx nn &&& 22 2ξωω −−=
dove: y(t) è lo spostamento relativo dell’oscillatore rispetto al terreno ( )tx&& è l’accelerazione assoluta dell’oscillatore
nω è la pulsazione naturale dell’oscillatore Si introducono le definizioni seguenti:
Glossario ITACA 13
spettro di spostamento (relativo) D(Tn,ξ)= maxt
⎜ y(t) ⎜
spettro di velocità (relativa) V(Tn,ξ)= maxt
⎜ y& (t) ⎜
spettro di accelerazione (assoluta) A(Tn,ξ)= maxt
⎜ x&& (t) ⎜
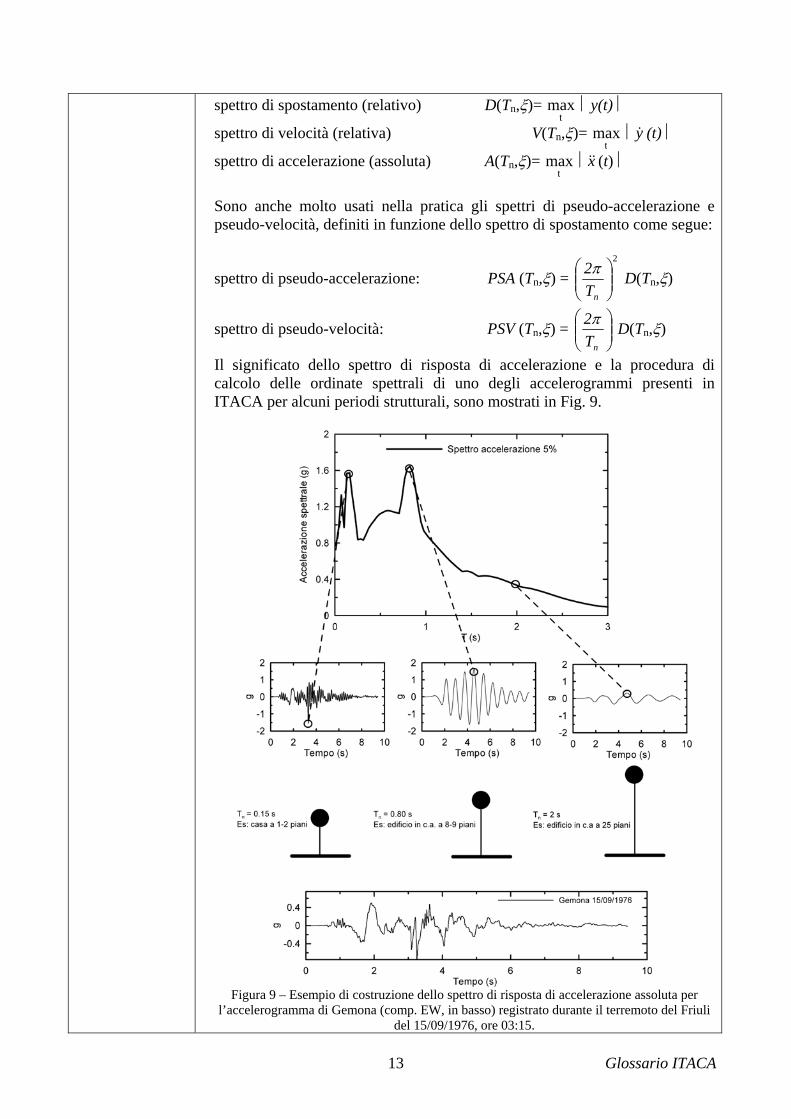
Sono anche molto usati nella pratica gli spettri di pseudo-accelerazione e pseudo-velocità, definiti in funzione dello spettro di spostamento come segue:
spettro di pseudo-accelerazione: PSA (Tn,ξ) = 2
⎟⎟⎠
⎞⎜⎜⎝
⎛
nT2π D(Tn,ξ)
spettro di pseudo-velocità: PSV (Tn,ξ) = ⎟⎟⎠
⎞⎜⎜⎝
⎛
nT2π D(Tn,ξ)
Il significato dello spettro di risposta di accelerazione e la procedura di calcolo delle ordinate spettrali di uno degli accelerogrammi presenti in ITACA per alcuni periodi strutturali, sono mostrati in Fig. 9.
Figura 9 – Esempio di costruzione dello spettro di risposta di accelerazione assoluta per
l’accelerogramma di Gemona (comp. EW, in basso) registrato durante il terremoto del Friuli del 15/09/1976, ore 03:15.
Glossario ITACA 14
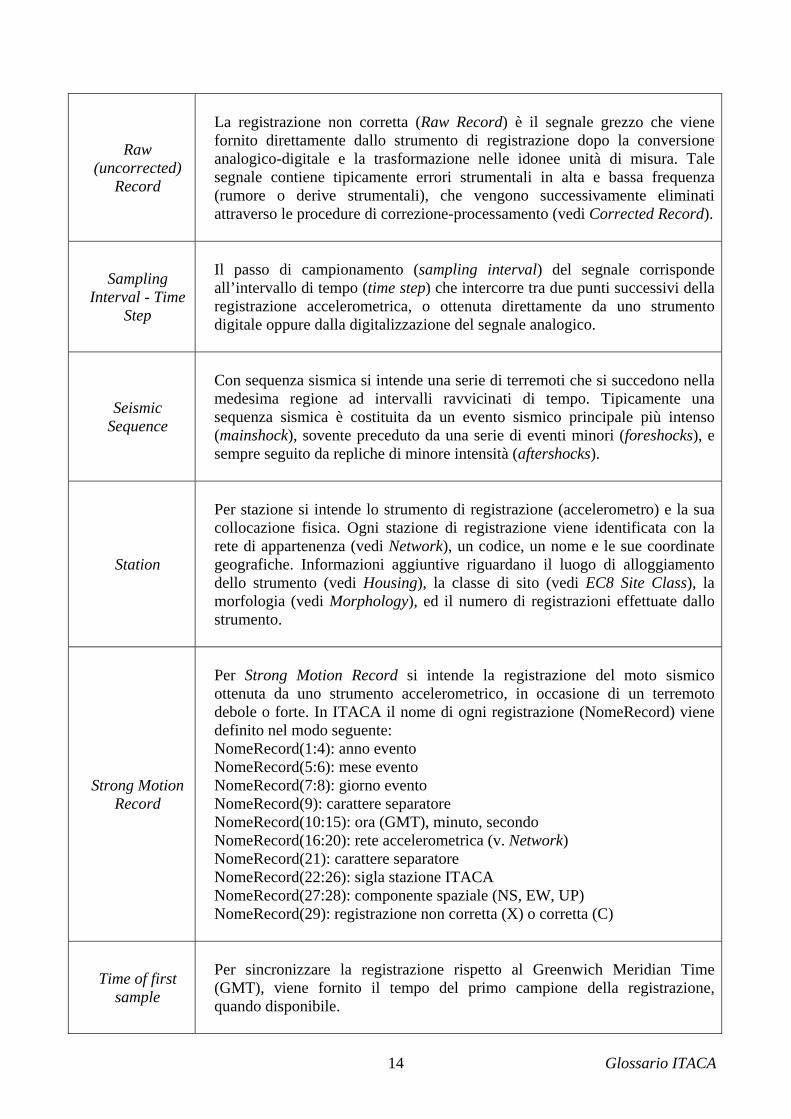
Raw (uncorrected)
Record
La registrazione non corretta (Raw Record) è il segnale grezzo che viene fornito direttamente dallo strumento di registrazione dopo la conversione analogico-digitale e la trasformazione nelle idonee unità di misura. Tale segnale contiene tipicamente errori strumentali in alta e bassa frequenza (rumore o derive strumentali), che vengono successivamente eliminati attraverso le procedure di correzione-processamento (vedi Corrected Record).
Sampling Interval - Time
Step
Il passo di campionamento (sampling interval) del segnale corrisponde all’intervallo di tempo (time step) che intercorre tra due punti successivi della registrazione accelerometrica, o ottenuta direttamente da uno strumento digitale oppure dalla digitalizzazione del segnale analogico.
Seismic Sequence
Con sequenza sismica si intende una serie di terremoti che si succedono nella medesima regione ad intervalli ravvicinati di tempo. Tipicamente una sequenza sismica è costituita da un evento sismico principale più intenso (mainshock), sovente preceduto da una serie di eventi minori (foreshocks), e sempre seguito da repliche di minore intensità (aftershocks).
Station
Per stazione si intende lo strumento di registrazione (accelerometro) e la sua collocazione fisica. Ogni stazione di registrazione viene identificata con la rete di appartenenza (vedi Network), un codice, un nome e le sue coordinate geografiche. Informazioni aggiuntive riguardano il luogo di alloggiamento dello strumento (vedi Housing), la classe di sito (vedi EC8 Site Class), la morfologia (vedi Morphology), ed il numero di registrazioni effettuate dallo strumento.
Strong Motion Record
Per Strong Motion Record si intende la registrazione del moto sismico ottenuta da uno strumento accelerometrico, in occasione di un terremoto debole o forte. In ITACA il nome di ogni registrazione (NomeRecord) viene definito nel modo seguente: NomeRecord(1:4): anno evento NomeRecord(5:6): mese evento NomeRecord(7:8): giorno evento NomeRecord(9): carattere separatore NomeRecord(10:15): ora (GMT), minuto, secondo NomeRecord(16:20): rete accelerometrica (v. Network) NomeRecord(21): carattere separatore NomeRecord(22:26): sigla stazione ITACA NomeRecord(27:28): componente spaziale (NS, EW, UP) NomeRecord(29): registrazione non corretta (X) o corretta (C)
Time of first sample
Per sincronizzare la registrazione rispetto al Greenwich Meridian Time (GMT), viene fornito il tempo del primo campione della registrazione, quando disponibile.
Glossario ITACA 15
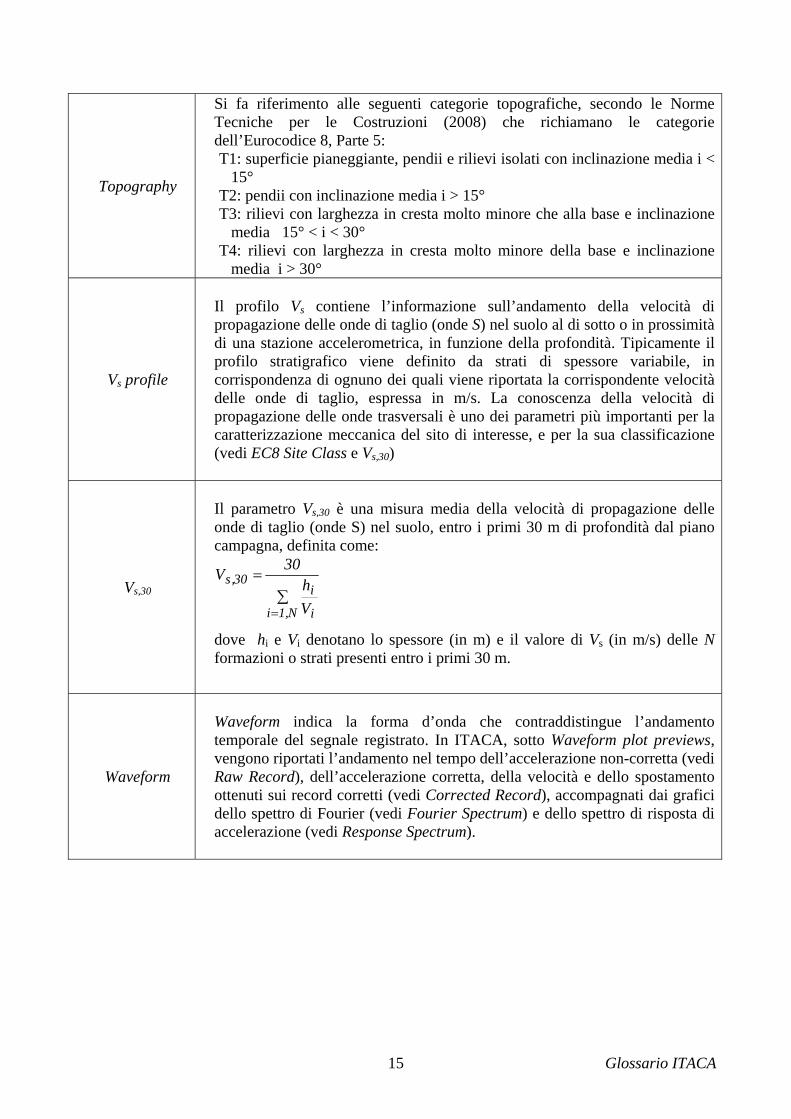
Topography
Si fa riferimento alle seguenti categorie topografiche, secondo le Norme Tecniche per le Costruzioni (2008) che richiamano le categorie dell’Eurocodice 8, Parte 5: T1: superficie pianeggiante, pendii e rilievi isolati con inclinazione media i <
15° T2: pendii con inclinazione media i > 15° T3: rilievi con larghezza in cresta molto minore che alla base e inclinazione
media 15° < i < 30° T4: rilievi con larghezza in cresta molto minore della base e inclinazione
media i > 30°
Vs profile
Il profilo Vs contiene l’informazione sull’andamento della velocità di propagazione delle onde di taglio (onde S) nel suolo al di sotto o in prossimità di una stazione accelerometrica, in funzione della profondità. Tipicamente il profilo stratigrafico viene definito da strati di spessore variabile, in corrispondenza di ognuno dei quali viene riportata la corrispondente velocità delle onde di taglio, espressa in m/s. La conoscenza della velocità di propagazione delle onde trasversali è uno dei parametri più importanti per la caratterizzazione meccanica del sito di interesse, e per la sua classificazione (vedi EC8 Site Class e Vs,30)
Vs,30
Il parametro Vs,30 è una misura media della velocità di propagazione delle onde di taglio (onde S) nel suolo, entro i primi 30 m di profondità dal piano campagna, definita come:
∑=
= N,1i i
i30,s
Vh
30V
dove hi e Vi denotano lo spessore (in m) e il valore di Vs (in m/s) delle N formazioni o strati presenti entro i primi 30 m.
Waveform
Waveform indica la forma d’onda che contraddistingue l’andamento temporale del segnale registrato. In ITACA, sotto Waveform plot previews, vengono riportati l’andamento nel tempo dell’accelerazione non-corretta (vedi Raw Record), dell’accelerazione corretta, della velocità e dello spostamento ottenuti sui record corretti (vedi Corrected Record), accompagnati dai grafici dello spettro di Fourier (vedi Fourier Spectrum) e dello spettro di risposta di accelerazione (vedi Response Spectrum).


















