Geometria analitica: curve e superfici - Politecnico di...
45
Geometria analitica: curve e superfici Coniche ©2006 Politecnico di Torino 1 Geometria analitica: curve e superfici 2 Coniche Coniche geometriche Coniche algebriche Coniche e matrici Coniche e isometrie Riduzione Invarianti Studio di coniche Intersezione con rette e tangenti Coniche in forma parametrica
Transcript of Geometria analitica: curve e superfici - Politecnico di...
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 1
Geometria analitica: curve e superfici
2
Coniche
Coniche geometriche Coniche algebriche Coniche e matrici Coniche e isometrie Riduzione InvariantiStudio di coniche Intersezione con rette e tangentiConiche in forma parametrica
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 2
Coniche
4
Coniche come luoghi geometrici
Ellisse: insieme dei punti del piano la cui somma delle distanze da due punti F1 e F2, detti fuochi, ècostante. Il caso F1 = F2 corrisponde alla circonferenza.
Iperbole: insieme dei punti del piano la cui differenza delle distanze da due punti F1 e F2, detti fuochi, è costante.
Parabola: insieme dei punti del piano equidistanti da una retta d, detta direttrice e da un punto F, F ∉ d, detto fuoco.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 3
5
Coniche in forma canonica (1/3)
Sia C una conica. Scegliamo un sistema di riferimento Oxy nel piano in modo che:
Se C è una ellisse o una iperbole, allora F1 = (c, 0) e F2 = (-c, 0) con c ≥ 0;
Se C è una parabola, F = (0, c ) e d : y = -ccon c > 0.
6
Coniche in forma canonica (2/3)
Nei sistemi di riferimento del tipo descritto le coniche sono rappresentate da equazioni di forma particolarmente semplice. Si dice in tal caso che le coniche sono in forma canonica.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 4
7
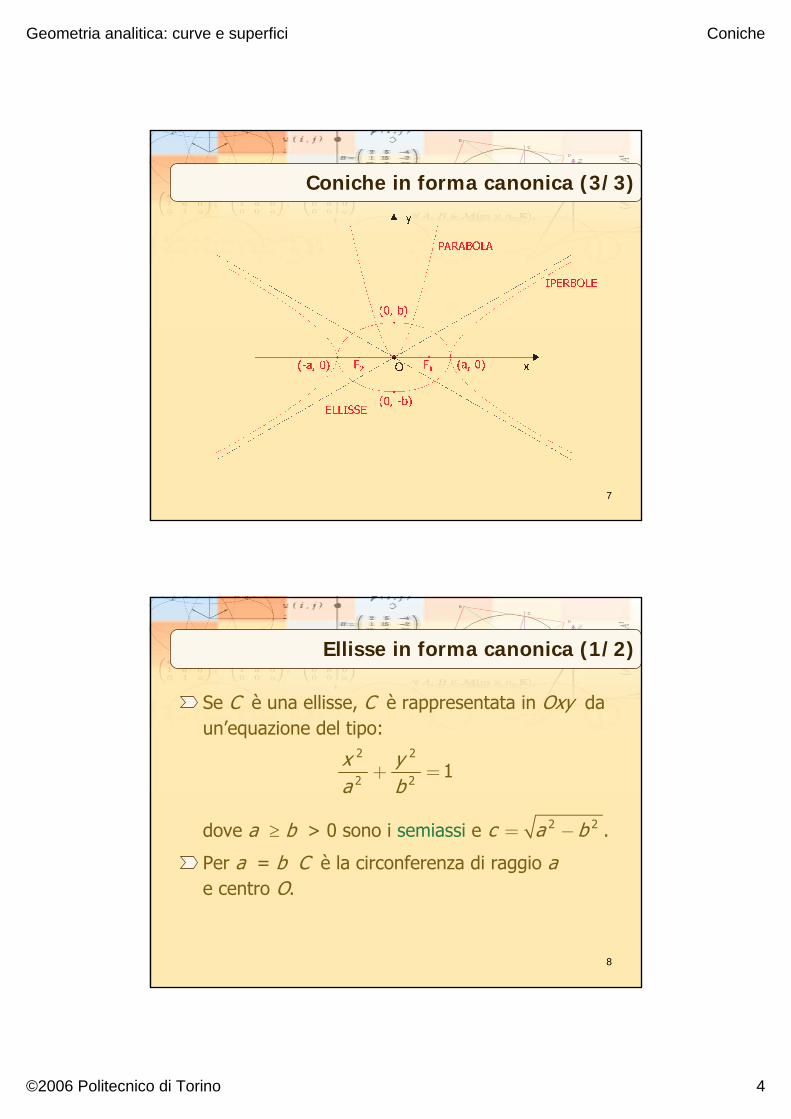
Coniche in forma canonica (3/3)
8
Ellisse in forma canonica (1/2)
Se C è una ellisse, C è rappresentata in Oxy da un’equazione del tipo:
dove a ≥ b > 0 sono i semiassi e .
Per a = b C è la circonferenza di raggio ae centro O.
2 2
2 21+ =
x ya b
2 2= −c a b
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 5
9
Ellisse in forma canonica (2/2)
C ha un centro di simmetria (l’origine) e due assi di simmetria (gli assi coordinati).
Le intersezioni di C con gli assi, dette i vertici di C, sono i punti (a, 0), (-a, 0), (0, b ), (0, -b ).
10
Iperbole in forma canonica (1/2)
Se C è un’iperbole, C è rappresentata in Oxy da un’equazione del tipo:
dove a >0, b > 0 sono i semiassi e
Per a = b C è una iperbole equilatera.
2 2
2 21− =
x ya b
2 2 .= +c a b

Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 6
11
Iperbole in forma canonica (2/2)
C ha un centro di simmetria (l’origine) e due assi di simmetria (gli assi coordinati).
I vertici di C sono i punti (a, 0), (-a, 0).Le rette bx ± ay = 0 sono gli asintoti di C.
12
Parabola in forma canonica
Se C è una parabola, C è rappresentata in Oxy da un’equazione del tipo:
dove a > 0 è la concavità e c = 1/4a.
C ha un asse di simmetria (asse delle ordinate) e un vertice (l’origine).
2=y ax

Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 7
Coniche
14
Premessa
Le coniche si possono rappresentare come luoghi di zeri di particolari polinomi di secondo grado in due variabili.
Invertendo tale procedimento, studieremo i luoghi di zeri dei generici polinomi di secondo grado in due variabili. Chiameremo tali luoghi di zeri coniche algebriche.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 8
15
Polinomi a due variabili
Il generico polinomio di grado 2 in due variabili a coefficienti reali ha forma
con i coefficienti ai,j non tutti nulli.
( ) 2 21,1 1,2 2,2 1 2, 2 2 2 ,= + + + + +p x y a x a xy a y b x b y c
16
Coniche come luoghi di zeri (1/2)
Il luogo di zeri C = Z (p ) = {(x, y ) ∈ | p (x, y ) = 0}
di p si dice conica algebrica in R 2 di equazione p (x, y ) = 0. Quindi
Se k ≠ 0 il polinomio kp (x, y ) definisce la stessa conica, quindi l’equazione di C è determinata a meno di un fattore non nullo.
2 21,1 1,2 2,2 1 2: 2 2 2 0+ + + + + =C a x a xy a y b x b y c
2
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 9
17
Coniche come luoghi di zeri (2/2)
In questa lezione per “conica” intenderemo “conica algebrica in ”. Questa definizione, oltre a ellissi, iperboli o parabole, comprende altri insiemi, come si vede dai seguenti esempi.
2
18
Esempi
Se C : x 2 + y 2 + 1 = 0 o C : x 2 +1 = 0, allora C = ∅.
Se C : x 2 + y 2 = 0, allora C è il punto (0, 0).
Se C : x 2 – y 2 = 0, allora C è la coppia di rette incidenti
Se C : x 2 – 1 = 0, allora C è la coppia di rette parallele
Se C : x 2 = 0, allora C è la retta x = 0.
.= ±y x
1.= ±x
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 10
19
Coniche degeneri e non degeneri
Le ellissi, iperbole e parabole si dicono coniche non degeneri mentre il ∅, i punti, le rette, le coppie di rette (incidenti o parallele) si dicono coniche degeneri.
20
Coniche isometriche
Se C , C’ sono coniche e se esiste una isometria ftale che f (C’ ) = C , C e C’ si dicono isometriche(tramite f ). Essere isometriche è una relazione di equivalenza:
C è isometrica a sé stessa tramite Id ;
Se C e C’ sono isometriche tramite f , allora C’ e Csono isometriche tramite f -1;
Se C e C’ sono isometriche tramite f e se C’ e C’’sono isometriche tramite g, allora C e C’’ sono isometriche tramite f o g.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 11
21
Elementi fondamentali
Poiché le coniche non degeneri sono definite da condizioni metriche, se C e C’ sono isometriche tramite f e se C è non degenere, anche C’ lo è e gli elementi fondamentali (fuochi, assi, centro, vertici, asintoti, semiassi, concavità) di C saranno i trasformati di quelli di C’ tramite f.
22
Riduzione e riconoscimento
Proveremo che ogni conica C è isometrica a una conica C’ in forma canonica tramite una isometria f detta riduzione di C a C’.
Poiché C’ può essere inserita in uno degli 8 tipi di coniche individuati (tra non degeneri e degeneri), otteniamo un procedimento di classificazione di Cdetto riconoscimento di C.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 12
Coniche
24
Matrice associata
Sia
La matrice simmetrica 3 x 3
si dice matrice associata alla conica C.
1,1 1,2 1
1,2 2,2 2
1 2
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜= ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎝ ⎠C
a a bM a a b
b b c
2 21,1 1,2 2,2 1 2: 2 2 2 0.+ + + + + =C a x a xy a y b y b y c
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 13
25
Equazione matriciale (1/2)
Posto
abbiamo l’equazione matriciale
1,1 1,2 1
1,2 2,2 2
, , ,⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎟ ⎟ ⎟⎜ ⎜ ⎜⎟= = =⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎟⎜ ⎟ ⎜⎟⎜ ⎝ ⎠⎝ ⎠⎝ ⎠
a a b xA B X
a a b y
: 2 0.t tC XAX BX c+ + =
26
Equazione matriciale (2/2)
La forma quadratica qA (X ) = tXAX si dice parte quadratica, l’applicazione lineare lB (X ) = tBX si dice parte lineare mentre c è il termine noto.
C è univocamente determinata da MC a meno di un fattore non nullo.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 14
27
Esempio
Se
allora
e
2 2: 4 4 4 6 2 2 0,+ − + − + =C x y xy x y
31
⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜−⎝ ⎠B
4 2,
2 4
⎛ ⎞− ⎟⎜= ⎟⎜ ⎟⎟⎜−⎝ ⎠A
( ) ( )4 2
: , 2 3, 1 2 0.2 4
⎛ ⎞⎛ ⎞ ⎛ ⎞− ⎟ ⎟ ⎟⎜ ⎜ ⎜+ − + =⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜−⎝ ⎠⎝ ⎠ ⎝ ⎠
x xC x y
y y
28
Coniche traslate
Sia una conica. Se la matrice A è diagonale diremo che C è una conica traslata. In particolare, se A = aI2 con a ≠ 0 abbiamo
Quindi C è una circonferenza, un punto o il vuoto.
2 21 2: 2 2 0.+ + + + =C ax ay b x b y c
: 2 0t tC XAX BX c+ + =
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 15
29
Coniche a centro
Le ellissi e le iperboli in forma canonica sono coniche traslate con parte lineare nulla.In generale, le equazioni del tipo
con α, β non entrambi nulli definiscono le coniche a centro in forma canonica.
Queste coniche (se diverse da ∅) hanno l’origine come centro di simmetria e gli assi come assi di simmetria.
2 2 0+ − =x yα β γ
30
Parabole
Le parabole in forma canonica sono coniche traslate con parte quadratica dipendente solo da x, parte lineare solo da y e termine noto nullo. In generale, le equazioni del tipo
con α, γ non nulli definiscono le parabole in forma canonica.
Queste coniche hanno l’origine come vertice e l’asse delle ordinate come asse di simmetria.
2 2 0− =x yα γ
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 16
Coniche
32
Equazioni di coniche e isometrie (1/2)
Sia C : p (X ) = t XAX + 2t BX + c = 0 e sia f (X ) = NX + P una isometria di . Per ogni X ∈ esiste un unico
tale che X = f (X’ )
Allora X = NX’ + P ∈ C se e solo se
2''
'
⎛ ⎞⎟⎜= ∈⎟⎜ ⎟⎟⎜⎝ ⎠
xX
y
2
2
( ) ( ) ( )( ) ( )
' ' 2 '
' ' 2 ' 0.
t t
t t t
NX P A NX P B NX P c
X NANX N AP B X p P
+ + + + + =
= + + + =
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 17
33
Equazioni di coniche e isometrie (2/2)
Osserviamo che p (P ) = t PAP + 2tBP + cè il valore che il polinomio p assume nel punto P.
Posto A’ = tNAN, B’ = tN (AP + B ) e c’ = p (P ), la conica
è tale che f (C’ ) = C e f -1 (C ) = C’.
' 2 ' ' 0t tXA X B X c+ + =' :C
34
Matrice di riduzione (1/3)
Sia C : t XAX + 2tBX + c = 0. Poiché A èsimmetrica, esiste N ∈ O (2) tale che
dove α, β ∈ sono gli autovalori di A. Per ipotesi A ≠ O, quindi α e β non sono entrambi nulli.
0'
0
⎛ ⎞⎟⎜= = ⎟⎜ ⎟⎟⎜⎝ ⎠tNAN A
αβ
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 18
35
Matrice di riduzione (2/3)
Ricordiamo che:
Le colonne [N ]1 = Xα, [N ]2 = Xβ di N sono autovettori di A con autovalori α e βrispettivamente e formano una base ortonormaledi ;
D (A ) = D (A’ ) = αβ, tr (A ) = tr (A’ ) = α + β.
2
36
Matrice di riduzione (3/3)
La matrice N si dice matrice di riduzione della conica C. Osserviamo che N non è unica ma che, se α ≠ β e se fissiamo l’ordine degli autovalori, vi sono quattro matrici di riduzione ottenute cambiando i segni di Xα e Xβ.
Se α = β, A = αI2, e ogni matrice N ∈ O (2) è di riduzione (caso delle circonferenze).
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 19
37
Convenzione sugli autovalori
Adotteremo le seguenti convenzioni:
Se D (A ) > 0, allora ;
Se D (A ) < 0 e D (MC ) > 0, allora α > 0 e β < 0;
Se D (A ) < 0 e D (MC ) < 0, allora α < 0 e β > 0;
Se D (A ) = 0, allora α ≠ 0 e β = 0.
≤α β
Coniche
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 20
39
Riduzione a coniche traslate
Se C : p (X ) = t XAX + 2t BX + c = 0 e se N èuna matrice di riduzione di C , dato P ∈l’isometria f (X ) = NX + P trasforma la conica traslata
in C . C’ è una conica in forma canonica a centro se tN (AP + B ) = O. Ciò equivale a AP + B = Oin quanto N è invertibile.
( ) ( ) ( )' : 2 0t t tC X NAN X N AP B X p P+ + + =
2
40
Coniche a centro
La conica C : p (X ) = tXAX + 2t BX + c = 0 si dice conica a centro se il sistema
AX = -Bè risolubile. In tal caso, se P è una soluzione di AX = -B e se f (X ) = NX + P, posto γ = -p (P ) abbiamo la conica in forma canonica
Quindi f è una riduzione di C a C’.
2 2' : 0.C x yα β γ+ − =
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 21
41
Parabole (1/4)
Se C : p (X ) = t XAX + 2tBX + c = 0 e se il sistema AX = -B è impossibile, allora D (A ) = 0 e A ha autovalori α ≠ 0, β = 0.
Se B = {Xα, X0} è una base ortonormale di
autovettori per A, prendiamo come matrice di riduzione N la matrice ortogonale che ha come colonne tali versori.
42
Parabole (2/4)
Se f (X ) = NX + P è un’isometria con P qualsiasi, e se C’ = f -1 (C )
Allora si prova che esistono unici P e γ ≠ 0 tali che p (P ) = 0 e tN (AP + B ) = (0, -γ ) = -γe2.
( ) ( )2' : 2 0.t xC x N AP B p P
yα
⎛ ⎞⎟⎜+ + + =⎟⎜ ⎟⎟⎜⎝ ⎠
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 22
43
Parabole (3/4)
Siccome Ne2 = X0, tali condizioni equivalgono al sistema (non lineare!) parametrico
Si prova che esiste un solo γ ≠ 0 per cui S ha soluzione P e che tale soluzione è unica.
0
2 0:
t tXAX BX cSAX B Xγ
⎧⎪ + + =⎪⎨⎪ =− −⎪⎩
44
Parabole (4/4)
Scegliendo per definire f (X ) = NX + P il punto P e il numero γ che soddisfano alle equazioni di S otteniamo la conica in forma canonica
Quindi C è una parabola, e f è una riduzione di C a C’.
2' : 2 0.− =C x yα γ
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 23
45
Teorema di Riduzione
Se C è una conica, allora esiste una riduzione di C a una conica in forma canonica C’.
Osserviamo che questo teorema assicura che le coniche possono essere riconosciute utilizzando le coniche in forma canonica e permette di ottenere gli elementi fondamentali di una conica C come trasformati degli elementi fondamentali di una sua forma canonica C’ tramite la relativa riduzione f.
46
Centro e assi di una conica a centro (1/2)
Sia C ≠ ∅ una conica a centro e sia f (X ) = NX + P una riduzione di C a una forma canonica C’. Allora f trasforma l’origine e gli assi coordinati in centro e assi di simmetria. Quindi
Se P è una soluzione del sistema AX = -B, allora P è centro di simmetria di C ;
Le rette passanti per P e con direzione gli autovettori di A sono assi di simmetria di C.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 24
47
Centro e assi di una conica a centro (2/2)
In particolare se D (A ) ≠ 0 vi è unico centro di simmetria, detto il centro di C ; se inoltre Cnon è una circonferenza, vi sono due assi di simmetria, detti gli assi di C.
48
Vertice e asse di una parabola
Sia C una parabola e sia f (X ) = NX + P una riduzione di C a una forma canonica C’. Allora f trasforma l’origine nel vertice e l’asse delle ordinate nell’asse di simmetria. Quindi:
Se P ∈ C è soluzione di AX = -B -γX0, conX0 autovettore di A relativo a 0 e allora P è il vertice di C ;
L’asse di simmetria di C è la retta passanteper P con direzione X0.
0 1,=X
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 25
Coniche
50
Teorema di Invarianza
Siano C : t XAX + 2tBX + c = 0 e C’ : t XA’ X + 2tB’ X + c’ = 0 coniche isometriche.Allora D (A ) = D (A’ ), tr (A ) = tr (A’ ), D (MC ) = D (MC’ ), r (MC ) = r (MC’ ).
I numeri D (A ), tr (A ), D (MC ), r (MC ) si dicono numeri invarianti di C.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 26
51
Matrici di forme canoniche
I numeri invarianti e i Teoremi di Riduzione e di Invarianza ci permettono di riconoscere una conica C : t XAX + 2tBX + c = 0.
Se C’ è una forma canonica di C,
o '
0 00 00 0
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜= ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜ −⎝ ⎠CM
αβ
γ'
0 00 0 .0 0
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜= − ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜ −⎝ ⎠CM
αγ
γ
52
Parabole
Posto MC = M e MC’ = M’ , osserviamo che nel primo caso D (A ) = αβ = 0 ⇒ D (M ) = - αβγ = 0 mentre nel secondo D (A ) = 0 e D (M ) = - αγ 2 ≠ 0
Quindi se D (A ) = 0 e D (M ) ≠ 0, allora C è una parabola.
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 27
53
Coniche a centro (1/3)
Se D (A ) > 0, α e β hanno lo stesso segno (che è il segno di tr (A ) = α + β ) mentre γ ha il segno opposto a D (M ).
Se tr (A ) D (M ) < 0, γ ha lo stesso segno di αe β e C è un’ellisse;
Se tr (A ) D (M ) > 0, γ ha segno opposto a α e β e C = ∅;
Se D (M ) = 0, γ = 0 e C è un punto (l’unica soluzione di AX = -B ).
54
Coniche a centro (2/3)
Se D (A ) = αβ < 0, α e β hanno segni opposti.
Se D (M ) ≠ 0, γ ≠ 0 e C è una iperbole;
Se D (M ) = 0, γ = 0 e C è una coppia di rette incidenti.
Se D (A ) = αβ = 0, α ≠ 0, β = 0 e D (M ) = 0.
Se r (M ) = 1, allora γ = 0 e C è una retta;
Se r (M ) = 2, allora γ ≠ 0 e C è una coppia di rette parallele o il ∅ a seconda del segno di α e γ .
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 28
55
Riconoscimento e caso degenere
Riassumendo, ogni conica è classificabile in uno dei seguenti tipi:
Coniche non degeneri: ellisse, iperbole, parabola;
Coniche degeneri: punto, retta, coppia di rette incidenti, coppia di rette parallele, vuoto.
Dallo studio dei numeri invarianti otteniamo che:Se C è una conica e C ≠ ∅, allora C è non degenere se e solo se D (MC ) ≠ 0.
56
Forma canonica con invarianti
Se C è una conica a centro e D (A ) ≠ 0, abbiamo
Se C è una parabola,
Quindi possiamo ottenere una forma canonica C’di C senza calcolare esplicitamente la riduzione di C a C’.
( )( )
;=−D MD A
γ
( )( )
.= ± −D Mtr A
γ
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 29
Coniche
58
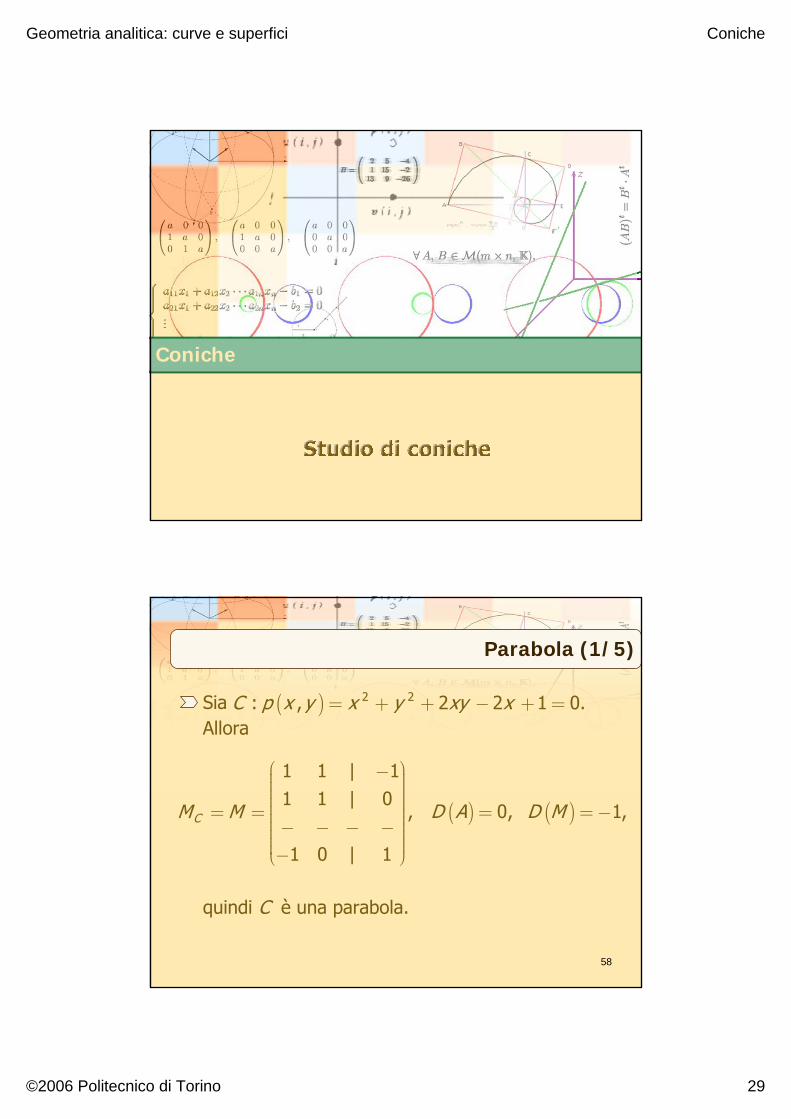
Parabola (1/5)
SiaAllora
quindi C è una parabola.
( ) 2 2: , 2 2 1 0.= + + − + =C p x y x y xy x
1 1 | 11 1 | 0
,
1 0 | 1
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜= = ⎟⎜ ⎟− − − −⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜−⎝ ⎠
CM M ( ) ( )0, 1,= =−D A D M
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 30
59
Parabola (2/5)
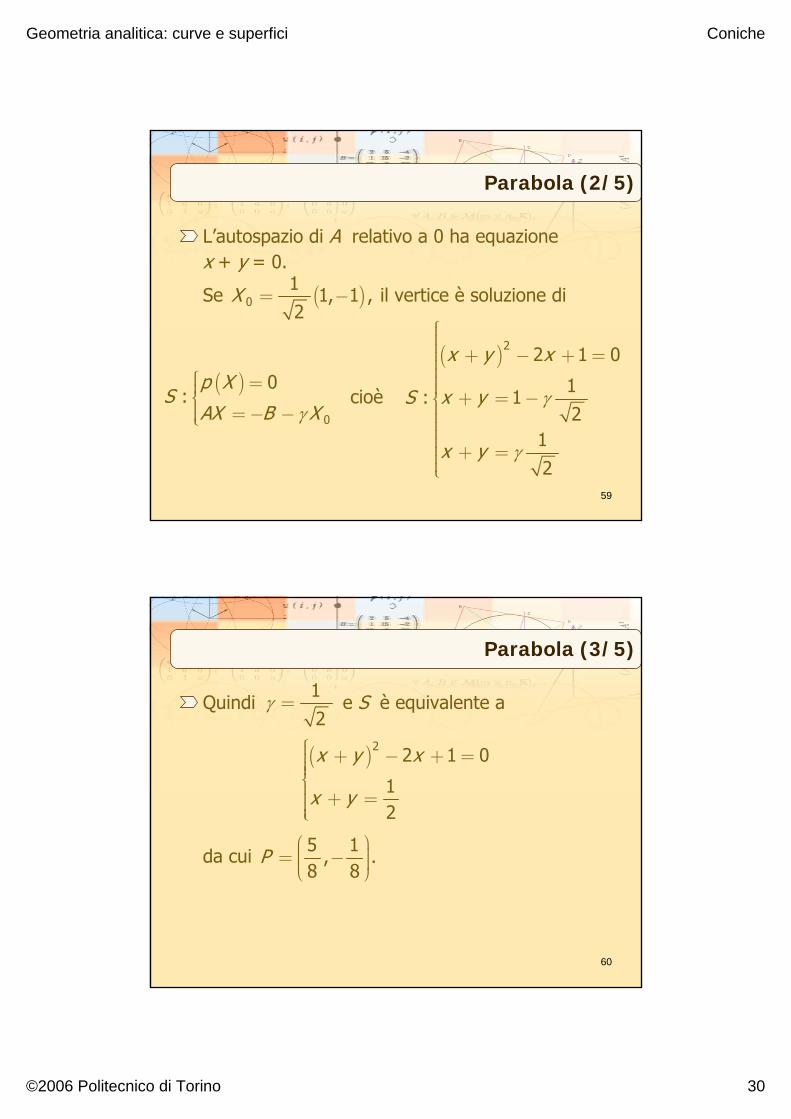
L’autospazio di A relativo a 0 ha equazione x + y = 0.
Se il vertice è soluzione di ( )01
1, 1 ,2
= −X
( )0
0:⎧⎪ =⎪⎨⎪ =− −⎪⎩
p XS
AX B Xγ
( )2 2 1 0
1: 1
212
⎧⎪⎪⎪ + − + =⎪⎪⎪⎪⎪ + = −⎨⎪⎪⎪⎪⎪ + =⎪⎪⎪⎩
x y x
S x y
x y
γ
γ
cioè
60
Parabola (3/5)
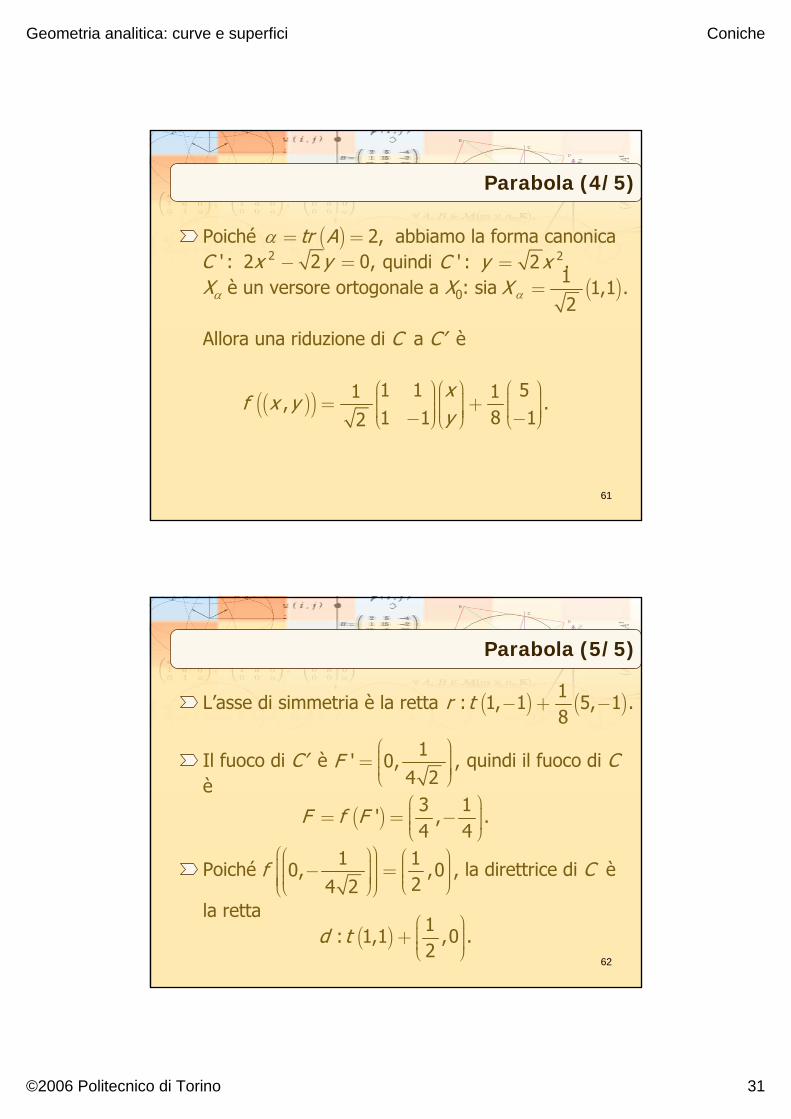
Quindi e S è equivalente a
da cui 5 1, .
8 8⎛ ⎞⎟⎜= − ⎟⎜ ⎟⎜⎝ ⎠
P
12
=γ
( )2 2 1 0
12
⎧⎪ + − + =⎪⎪⎪⎨⎪ + =⎪⎪⎪⎩
x y x
x y
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 31
61
Parabola (4/5)
Poiché abbiamo la forma canonicaquindi
Xα è un versore ortogonale a X0: sia
Allora una riduzione di C a C’ è
( ) 2,= =tr Aα2' : 2 2 0,C x y− = 2' : 2 .C y x=
( )11,1 .
2=X α
( )( ) 1 1 51 1, .
81 1 12
⎛ ⎞⎛ ⎞ ⎛ ⎞⎟ ⎟ ⎟⎜ ⎜ ⎜= +⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜− −⎝ ⎠⎝ ⎠ ⎝ ⎠
xf x y
y
62
Parabola (5/5)
L’asse di simmetria è la retta
Il fuoco di C’ è quindi il fuoco di Cè
Poiché la direttrice di C è
la retta
( ) ( )1: 1, 1 5, 1 .
8− + −r t
1' 0, ,
4 2
⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠F
( ) 3 1' , .
4 4⎛ ⎞⎟⎜= = − ⎟⎜ ⎟⎜⎝ ⎠
F f F
1 10, ,0 ,
24 2
⎛ ⎞⎛ ⎞ ⎛ ⎞⎟⎜ ⎟ ⎟⎜ ⎜⎟− =⎟⎜ ⎟⎜ ⎜⎟⎟ ⎟⎜ ⎜⎟⎜ ⎟⎜ ⎝ ⎠⎝ ⎠⎝ ⎠f
( ) 1: 1,1 ,0 .
2⎛ ⎞⎟⎜+ ⎟⎜ ⎟⎜⎝ ⎠
d t
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 32
63
Iperbole (1/5)
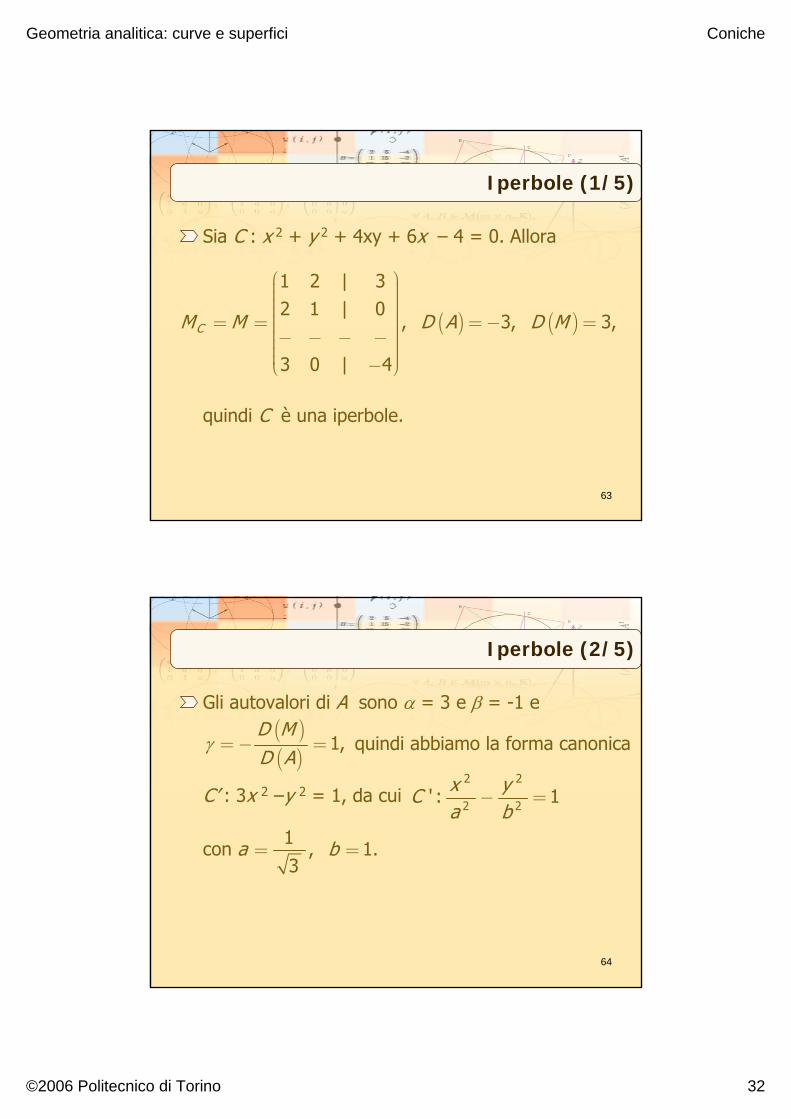
Sia C : x 2 + y 2 + 4xy + 6x – 4 = 0. Allora
quindi C è una iperbole.
1 2 | 32 1 | 0
,
3 0 | 4
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜= = ⎟⎜ ⎟− − − −⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜ −⎝ ⎠
CM M ( ) ( )3, 3,=− =D A D M
64
Iperbole (2/5)
Gli autovalori di A sono α = 3 e β = -1 e
quindi abbiamo la forma canonica
C’ : 3x 2 –y 2 = 1, da cui
con
( )( )
1,=− =D MD A
γ
2 2
2 2' : 1− =
x yCa b
1, 1.
3= =a b

Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 33
65
Il centro P di C è l’unica soluzione di AX = -B : P = (1, -2). Scegliendo gli autovettori
e abbiamo la
riduzione di C a C’ :
Iperbole (3/5)
( )11,1
2=X α
( )( ) 1 1 11, .
1 1 22
⎛ ⎞⎛ ⎞ ⎛ ⎞− ⎟ ⎟ ⎟⎜ ⎜ ⎜= +⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜−⎝ ⎠⎝ ⎠ ⎝ ⎠
xf x y
y
( )11,1
2= −X β
66
Gli assi di simmetria di C sono le rettee
I fuochi di C’ sono
quindi i fuochi di C sono
Iperbole (4/5)
( ) ( )1 : 1,1 1, 2+ −r t
( )2 21,2
1' ,0 2 ,0 ,
3
⎛ ⎞⎟⎜= ± + = ± ⎟⎜ ⎟⎟⎜⎝ ⎠F a b
( ) ( )2 : 1,1 1, 2 .− + −r t
( )1,2 1,22 2
' 1, 2 .3 3
⎛ ⎞⎟⎜ ⎟= = ± + ± −⎜ ⎟⎜ ⎟⎜⎝ ⎠F f F
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 34
67
Gli asintoti di C’ sono le rette
quindi gli asintoti di C
sono le rette
Iperbole (5/5)
1,2' : 3 ,= ± = ±bs y x xa
( ) ( ) ( )
( ) ( ) ( )
1 1
2 2
1' : 1 3 ,1 3 1, 2 ,
21
' : 1 3 ,1 3 1, 2 .2
= − + + −
= + − + −
s f s t
s f s t
68
Ellisse (1/4)
Sia Ck : 2x 2 + 2y 2 + 2xy + 6x + k = 0 con k ∈ . Allora
quindi Ck è una ellissi per k < 6, un punto per k = 6 e il vuoto per k > 6.
2 1 | 31 2 | 0
,
3 0 |
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜= = ⎟⎜ ⎟− − − −⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜⎝ ⎠
kC kM M
k
( ) ( ) ( )3, 4, 3 18,= = = −kD A tr A D M k
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 35
69
Ellisse (2/4)
Sia C = C5 : 2x 2 + 2y 2 + 2xy + 6x + 5 = 0.
Gli autovalori di A sono α = 1 e β = 3 e
quindi abbiamo la forma
canonica da cui
con
( )( )
1,=− =D MD A
γ
2 2' : 3 1,+ =C x y2 2
2 2' : 1+ =x yCa b
11, .
3= =a b
70
Ellisse (3/5)
Il centro P di C è P = (-2, 1). Scegliendo gli autovettori
abbiamo la riduzione di C a C’ :
( ) ( )1 11, 1 e 1,1
2 2= − =X Xα β
( )( ) 1 1 21, .
1 1 12
⎛ ⎞⎛ ⎞ ⎛ ⎞−⎟ ⎟ ⎟⎜ ⎜ ⎜= +⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜−⎝ ⎠⎝ ⎠ ⎝ ⎠
xf x y
y
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 36
71
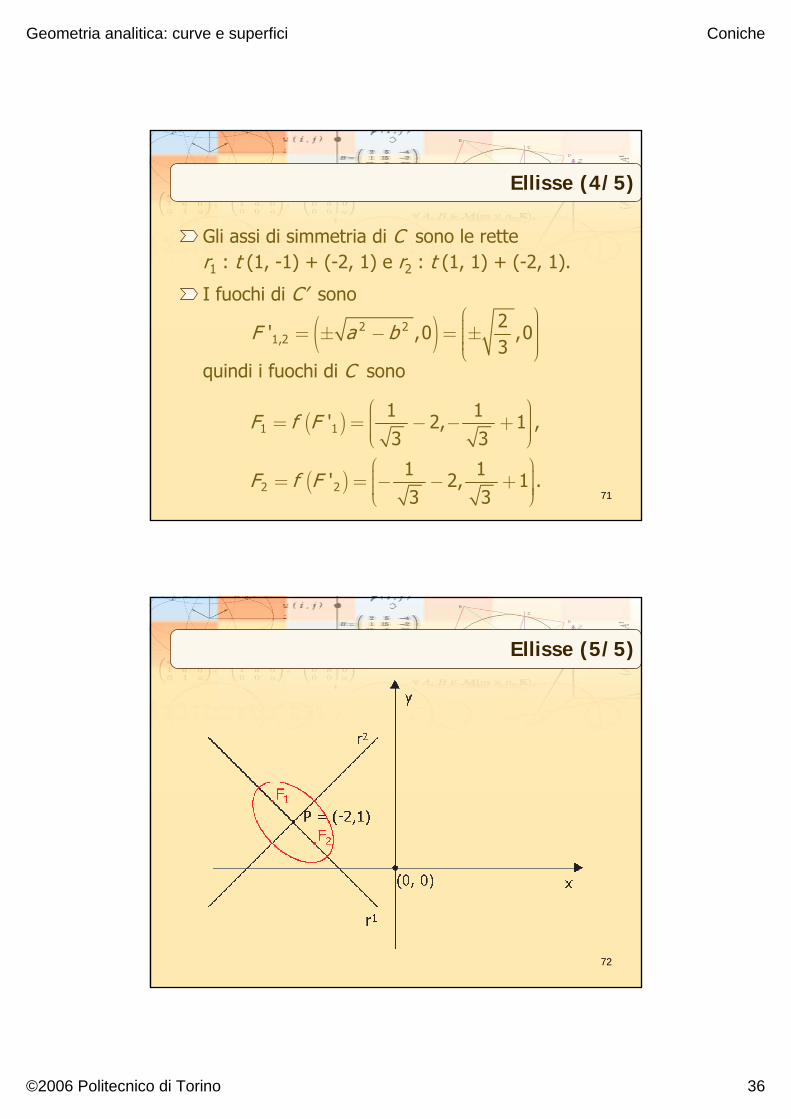
Ellisse (4/5)
Gli assi di simmetria di C sono le rette r1 : t (1, -1) + (-2, 1) e r2 : t (1, 1) + (-2, 1).
I fuochi di C’ sono
quindi i fuochi di C sono
( )2 21,2
2' ,0 ,0
3
⎛ ⎞⎟⎜ ⎟= ± − = ±⎜ ⎟⎜ ⎟⎜⎝ ⎠F a b
( )
( )
1 1
2 2
1 1' 2, 1 ,
3 3
1 1' 2, 1 .
3 3
F f F
F f F
⎛ ⎞⎟⎜= = − − + ⎟⎜ ⎟⎟⎜⎝ ⎠
⎛ ⎞⎟⎜= = − − + ⎟⎜ ⎟⎟⎜⎝ ⎠
72
Ellisse (5/5)

Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 37
73
Coniche degeneri (1/2)
Sia Ck : x 2 + y 2 + 2xy - 2x – 2y + k = 0 con k ∈Allora
quindi Ck è una retta per k = 1 (r (Mk) = 1) mentre Ck è ∅ o una coppia di rette parallele per k ≠ 1.
1 1 | 11 1 | 1
,
1 1 |
⎛ ⎞− ⎟⎜ ⎟⎜ ⎟⎜ − ⎟⎜ ⎟⎜= = ⎟⎜ ⎟− − − −⎜ ⎟⎟⎜ ⎟⎜ ⎟⎜− −⎝ ⎠
kC kM M
k
( ) ( ) 0,= =kD A D M
74
Coniche degeneri (2/2)
PoichéCk : (x + y )2 - 2(x + y ) + k = = (x + y – 1)2 + k – 1 = 0,
C1 è la retta x + y - 1 = 0;
Ck è la coppia di rette parallele x + y = per k < 1 mentre Ck = ∅ per k > 1.
1± − k
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 38
Coniche
76
Intersezione tra coniche e rette
Dallo studio precedente otteniamo che intersecando una conica C con una retta rabbiamo uno dei seguenti casi:
C ∩ r = ∅;
C ∩ r è un punto;
C ∩ r sono due punti;
C ∩ r = r (solo caso degenere).
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 39
77
Esempio
Se C : p (x, y ) = x 2 + y 2 + 2xy - 2x + 2 = 0 e se rk : Pk (t ) = t (0, 1) + (k , 0) per k ∈ , sostituendo abbiamo
che ha soluzioni
Se k > 1, C ∩ rk = {Pk (t1), Pk (t2)};
se k = 1, C ∩ r1 = {P1(-1) = (1, -1)};
se k < 1, C ∩ rk = ∅.
( )( ) 2 22 2 2 0= + + − + =kp P t t kt k k
1,2 2 2 .=− ± −t k k
78
Tangente a una conica
Sia C : p (x, y ) = 0 una conica non degenere e sia P ∈ C . Una retta r : P (t ) passante per P si dice tangente a C in P se l’equazione in t p (P (t )) = 0 è di secondo grado con due soluzioni coincidenti.
Per ogni punto di C passa una e una sola retta tangente a C in P, che indichiamo con tgP (C ).
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 40
79
Equazione della tangente (1/3)
Se C : p (x, y ) = tXAX + 2tBX + c = 0, P ∈ C e r : P (t ) = tL + P si verifica che l’equazione p (P (t )) = 0 diventa
in quanto p (P ) = 0. Allora r = tgP (C ) se e solo se tLAL ≠ O e t (AP + B )L = (AP + B ) . L = 0.
( )( ) ( ) ( )2 2 0= + + =t tp P t LAL t AP B Lt
80
Equazione della tangente (2/3)
Quindi tgP (C ) è la retta per P di direzione ortogonale a AP + B. Poiché p (P ) = 0 implica -t PAP – tBP = tBP + c , abbiamo l’equazione
( ) ( )( ) ( ): 0.+ − = + + + =t t tPtg C AP B X P AP B X BP c
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 41
81
Equazione della tangente (3/3)
Se P = (x0, y0), l’equazione della tangente si può scrivere in modo esplicito:
Per esempio, se C : 2x 2 + y 2 – 4xy – 4x + 2y – 1 = 0, il punto P = (-1, -1) ∈ C e tgP (C ) : -x + y = 0.
( ) ( )( )
1,1 0 1,2 0 1
1,2 0 2,2 0 2 1 0 2 0
:
0
+ + +
+ + + + + + =
Ptg C a x a y b x
a x a y b y b x b y c
82
Tangenti nei vertici
Sia C una conica non degenere e sia P un vertice di C. Per il Teorema di Riduzione abbiamo:
Se C è una conica a centro, tgP (C ) è la rettaper P parallela all’asse di simmetria non contenente P ;
Se C è una parabola, tgP (C ) è la retta per Pparallela alla direttrice.

Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 42
Coniche
84
Ellisse in forma canonica
Se posto e
abbiamo la parametrizzazione
2 2
2 2: 1,+ =x yCa b
( )cos
, 0, 2 . sen
⎧ =⎪⎪ ⎡ ⎤= ∈⎨ ⎣ ⎦⎪ =⎪⎩
x aP
y bθ
θ θ πθ
cos=xa
θ sen ,=yb
θ
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 43
85
Iperbole in forma canonica
Se posto e
abbiamo le parametrizzazioni
L’iperbole è unione di due curve in forma parametrica, dette i rami di C.
2 2
2 2: 1,− =x yCa b
( )( )( )
cosh, .
senh
⎧⎪ = ±⎪= ∈⎨⎪ =⎪⎩
x a tP t t R
y b t
( )cosh=x ta
( )senh=y tb
86
Parabola in forma canonica
Se posto x = t , abbiamo la parametrizzazione
2: ,=C y ax
( ) 2, .
⎧ =⎪⎪= ∈⎨⎪ =⎪⎩
x tP t t R
y at
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 44
87
Caso generale
Sia C una conica qualsiasi e sia f (X ) = NX + Puna riduzione di C a una forma canonica C’. Se Q (t ) è una parametrizzazione di C’, allora P (t ) = NQ (t ) + P è una parametrizzazionedi C.
88
Esempio (1/2)
Sia C : 2x 2 + 2y 2 + 2xy + 6x + 5 = 0. C è una ellisse e
sono rispettivamente una forma canonica di C e una riduzione di C a C’.
( )( )2 2 1 1 21' : 3 1, ,
1 1 12
⎛ ⎞⎛ ⎞ ⎛ ⎞−⎟ ⎟ ⎟⎜ ⎜ ⎜+ = = +⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜−⎝ ⎠⎝ ⎠ ⎝ ⎠
xC x y f x y
y
Geometria analitica: curve e superfici Coniche
©2006 Politecnico di Torino 45
89
Esempio (2/2)
Poiché
abbiamo la parametrizzazione di C :
( ) 1' : cos , sen ,
3
⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠C Q θ θ θ
( ) ( )( )
1 1cos sen 2
2 61 1
cos sen 12 6
⎧⎪⎪ = + −⎪⎪⎪= = ⎨⎪⎪ =− + +⎪⎪⎪⎩
xP f Q
y
θ θθ θ
θ θ