Formule di Area e Coarea - Dario PrandiDe nizione 1.5. Viene detta ˙-algebra di Borel su Rn la piu...
54
Universit ` a degli Studi di Modena e Reggio Emilia Facolt`a di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Matematica Formule di Area e Coarea Candidato: Relatore: Dario Prandi dott. Gian Paolo Leonardi Anno Accademico 2007/2008 - Sessione 2
Transcript of Formule di Area e Coarea - Dario PrandiDe nizione 1.5. Viene detta ˙-algebra di Borel su Rn la piu...

Universita degli Studi diModena e Reggio Emilia
Facolta di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Matematica
Formule di Area e Coarea
Candidato: Relatore:Dario Prandi dott. Gian Paolo Leonardi
Anno Accademico 2007/2008 - Sessione 2

Indice
Introduzione i
1 Nozioni introduttive di Teoria della Misura 11.1 Misure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Funzioni Misurabili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Teoremi per il calcolo integrale . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Teorema di ricoprimento di Besicovitch . . . . . . . . . . . . . . . . . . . . 7
2 Misura di Hausdorff 102.1 Misura di Hausdorff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Prime proprieta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Dimensione di Hausdorff . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Hn = Ln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.1 Simmetrizzazione di Steiner . . . . . . . . . . . . . . . . . . . . . . 152.4 Misura di Hausdorff e funzioni lipschitziane . . . . . . . . . . . . . . . . . 20
3 Funzioni lineari e differenziabilita 223.1 Funzioni Lineari e Jacobiani . . . . . . . . . . . . . . . . . . . . . . . . . . 223.2 Teoremi sulla differenziabilita . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Formula di Area 284.1 Dimostrazione della formula di area . . . . . . . . . . . . . . . . . . . . . 294.2 Formula di Cambio di Variabile . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Formula di Coarea 365.1 Costruzione preparatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.2 Dimostrazione della formula di coarea . . . . . . . . . . . . . . . . . . . . 405.3 Decomposizione di integrali multipli . . . . . . . . . . . . . . . . . . . . . 43
6 Applicazioni 456.1 Applicazioni della formula di Area . . . . . . . . . . . . . . . . . . . . . . 45
6.1.1 Lunghezza di una curva . . . . . . . . . . . . . . . . . . . . . . . . 456.1.2 Area di un grafico . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.1.3 Volume su sottovarieta di Rn . . . . . . . . . . . . . . . . . . . . . 46
6.2 Applicazioni della formula di coarea . . . . . . . . . . . . . . . . . . . . . 466.2.1 Coordinate Polari . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.2 Linee di livello . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A Notazione 48A.1 Vettori e insiemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48A.2 Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48A.3 Misure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49A.4 Altre notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
1

Introduzione
Lo scopo di questa tesi e arrivare ad una esauriente e dettagliata esposizione delle for-mule di area e coarea. La formula di area puo essere vista come una generalizzazionedella classica formula per il calcolo del volume n-dimensionale dell’immagine f(A) di uninsieme A tramite la mappa f :
Ln(f(A)) =∫A|detDf(x)| dLn(x), (1)
dove A e un dominio di Rn, f e un diffeomorfismo e Ln e la misura di Lebesgue suRn. La formula di coarea, d’altra parte, estende il ben noto teorema di Fubini sulladecomposizione delle misure prodotto, e in particolare della misura di Lebesgue:
Lm(A) =∫
Rn
Lm−n(Ay) dLn(y), (2)
dove Ay = {z ∈ Rm−n | (z, y) ∈ A}. In entrambe le formule entra in gioco una funzionelipschitziana f : Rm → Rn assieme allo jacobiano Jf , definito Lm-quasi ovunque suA. Inoltre, esse richiedono l’utilizzo della misura di Hausdorff s-dimensionale su RN
(indicata con Hs), una generalizzazione della misura di Lebesgue particolarmente adattaper misurare insiemi a dimensione inferiore o uguale a quella dello spazio (euclideo) nelquale sono immersi.
In particolare, la formula di area afferma che, nel caso m ≤ n e comunque preso uninsieme Lm-misurabile A ⊂ Rm, si ha∫
AJf(x) dLm(x) =
∫Rn
H0(f−1(y) ∩A) dHm(y), (3)
dove H0 coincide con la misura che conta e Jf(x) e lo jacobiano di f definito perquasi ogni x ∈ A come Jf(x) =
√det(Df(x)∗Df(x)) e corrispondente al fattore di
conversione del volume m-dimensionale associato alla trasformazione f . D’altro cantola formula di coarea, strettamente legata alla formula di area in un senso che sara piuchiaro in seguito, dice che, quando m ≥ n e A ⊂ Rm e Lm-misurabile,∫
AJf(x) dLm(x) =
∫Rn
Hm−n(f−1(y) ∩A) dHn(y), (4)
dove in questo caso Jf(x) =√
det(Df(x)Df(x)∗). Oltre all’evidente somiglianza for-male delle due formule, la (3) e la (4) si riducono alla (1) nel caso in cui m = n e f
i

INTRODUZIONE ii
sia iniettiva su A. Successivamente si vedra che, con poco sforzo, sara possibile ottene-re come corollario la formula di cambio di variabile (4.8) e la formula di coarea per ladecomposizione di integrali multipli.
Per una migliore trattazione, la tesi e suddivisa in vari capitoli: nei primi tre sonoraccolte le nozioni introduttive necessarie per poter comprendere e successivamente di-mostrare le formule di area e coarea; gli ultimi due capitoli, invece, sono dedicati alledimostrazioni e a qualche applicazione delle suddette formule.
Piu in dettaglio, nel primo capitolo daremo alcune nozioni introduttive e risultaticlassici di teoria della misura, omettendo nella maggior parte dei casi le dimostrazioni.Il secondo capitolo riguarda la misura di Hausdorff, la sua definizione ed alcune sueproprieta fondamentali, e contiene un breve cenno al concetto di dimensione di Hau-sdorff. In particolare verra dimostrata l’uguaglianza Hn = Ln su Rn, facendo uso diargomenti di carattere fortemente geometrico, come la simmetrizzazione di Steiner e ladisuguaglianza isodiametrica. Per maggiore chiarezza espositiva sono state aggiunte, do-ve sembrava opportuno, alcune illustrazioni che visualizzano l’idea geometrica alla basedei procedimenti utilizzati. Nel terzo capitolo sono riportati alcuni teoremi di algebralineare che saranno utili in seguito, come ad esempio la decomposizione polare e il teo-rema 3.8. Alla dimostrazione di quest’ultimo e stata rivolta particolare attenzione, inquanto difficilmente rintracciabile in letteratura; quella qui riportata e la generalizzazio-ne al caso rettangolare di quella trovata in [2]. Viene poi richiamata la definizione didifferenziabilita per una funzione f : Rm → Rn, unitamente alla definizione di jacobianoe risultati ad essa connessi (in particolare un importante teorema di decomposizione, ilteorema 3.18, che sara fondamentale nei due capitoli seguenti).
I tre capitoli successivi sono centrali nell’economia della tesi. Il quarto e interamentededicato alla dimostrazione della formula di area, secondo lo schema utilizzato in [4] e[7] (si veda anche [6]), nonche ad alcune sue conseguenze immediate; nel quinto, invece,viene dimostrata la formula di coarea, tramite un procedimento che prende spunto inparte dalla dimostrazione contenuta in [3], in cui viene messa in evidenza la strettadipendenza dal teorema di Fubini e dalla formula dell’area, in parte da quella utilizzatain [4]. Queste scelte e integrazioni di varie tecniche dimostrative sono state fatte conl’intento di fornire dimostrazioni chiare, rigorose e, al contempo, sufficientemente generalidelle formule anzidette. Infine nel capitolo 6 vengono presentate alcune applicazioni delledue formule.
Le dimostrazioni dei risultati contenuti nei primi tre capitoli, soprattutto di quellinei capitoli 1 e 3, sono state in buona parte omesse, in quanto standard o comunque aldi la degli scopi della tesi. Salvo diversa indicazione, il testo a cui far riferimento pertali dimostrazioni e [4].

Capitolo 1
Nozioni introduttive di Teoriadella Misura
In questo capitolo sono raccolte notazioni, definizioni e risultati di teoria della misurache saranno utilizzati anche nei capitoli seguenti. Come gia accennato nell’introduzione,per le dimostrazioni qui omesse, salvo diversa indicazione, si rimanda a [4].
1.1 Misure
Definizione 1.1. Sia X un insieme, e µ : 2X → [0,+∞] e detta misura se gode delleseguenti proprieta
(i) µ(∅) = 0,
(ii) monotonia: Se A ⊂ B allora µ(A) ≤ µ(B),
(iii) σ-subadditivita µ (⋃∞i=1Ai) ≤
∑∞i=1 µ(Ai) per ogni successione di insiemi Ai ⊂ X.
Nota. Abbiamo qui definito come misura quella che in molti testi viene chiamata misuraesterna, adottando la convenzione utilizzata, in particolare, in [4] e [7].
Definizione 1.2. Un insieme A ⊂ X viene detto µ-misurabile se per ogni B ⊂ X si ha
µ(B) = µ(B ∩A) + µ(B \A).
Teorema 1.3 (Proprieta degli insiemi misurabili). Siano A e {Ak}∞k=1 insiemi µ-misurabili.Allora valgono le seguenti affermazioni:
(i) gli insiemi X \A,⋃k Ak e
⋂k Ak sono µ-misurabili,
(ii) σ-additivita: Se gli insiemi {Ak}∞k=1 sono disgiunti, allora
µ
( ∞⋃k=1
Ak
)=∞∑k=1
µ(Ak),
1

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 2
(iii) se A1 ⊂ . . . ⊂ Ak ⊂ Ak+1 ⊂ . . ., allora
µ
( ∞⋃k=1
Ak
)= lim
k−→∞µ(Ak)
(iv) se A1 ⊃ . . . ⊃ Ak ⊃ Ak+1 ⊃ . . . e µ(A1) <∞, allora
µ
( ∞⋂k=1
Ak
)= lim
k−→∞µ(Ak)
Definizione 1.4. Una famiglia di A ⊂ 2X viene detta σ-algebra se gode delle seguentiproprieta:
(i) ∅, X ∈ A,
(ii) A ∈ A implica X \A ∈ A,
(iii) Ak ∈ A, k ∈ N implica⋃k Ak ∈ A.
Nota. Risulta evidente che per le proprieta enunciate in precedenza la famiglia degliinsiemi µ-misurabili forma sempre una σ-algebra.
Definizione 1.5. Viene detta σ-algebra di Borel su Rn la piu piccola σ-algebra conte-nente gli insiemi aperti di Rn. I suoi elementi sono detti boreliani.
Nota. Dalla definizione 1.4 e chiaro che la σ-algebra di Borel contiene anche tutti gliinsiemi chiusi di Rn.
Definizione 1.6. Un insieme A ⊂ X e detto σ-finito rispetto a µ se esiste una suc-cessione {Bk}∞k=1 di insiemi µ-misurabili con µ(Bk) < ∞ per ogni k ∈ N tale cheA =
⋃k Bk.
Definizione 1.7.
(i) Una misura µ su X e detta regolare se per ogni A ⊂ X esiste un insieme Bµ-misurabile tale che A ⊂ B e µ(A) = µ(B).
(ii) Una misura µ su Rn e detta di Borel se tutti i boreliani sono µ-misurabili.
(iii) Una misura µ su Rn e detta di Borel regolare se e di Borel e per ogni A ⊂ Rn esisteun boreliano B tale che A ⊂ B e µ(A) = µ(B).
(iv) Una misura µ su Rn e detta di Radon se µ e di Borel regolare e per ogni K ⊂ Rn
compatto µ(K) <∞.
Diamo ora un criterio, detto di Caratheodory, che permette di determinare se unamisura µ e di Borel.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 3
Teorema 1.8 (Criterio di Caratheodory). Una misura µ su Rn e di Borel se e solo secomunque presi due insiemi A,B ∈ Rn con d(A,B) > 0, si ha
µ(A ∪B) = µ(A) + µ(B).
Definizione 1.9. Una proprieta p(x) viene detta essere vera µ-quasi ovunque su A(spesso scriveremo µ-q.o. su A) se esiste un insieme B ⊂ A con µ(B) = 0 tale che p(x)e vera per ogni x ∈ A. \B
Teorema 1.10 (Approssimazione di insiemi misurabili). Sia µ una misura di Radon suRn allora comunque preso A ⊂ Rn
µ(A) = inf {µ(U) | U ⊂ A,U aperto}
e, se A e µ-misurabile,
µ(A) = sup {µ(K) | K ⊂ A,K compatto} .
1.2 Funzioni Misurabili
Estendiamo ora la nozione di misurabilita dagli insiemi alle funzioni. Per tutta la sezioneX sara un insieme su cui e definita una misura µ e Y uno spazio topologico.
Definizione 1.11. Una funzione f : X → Y e detta misurabile se comunque preso unaperto U ⊂ Y , f−1(U) e µ-misurabile.
Teorema 1.12. Sia f : X → [0,+∞] una funzione µ-misurabile. Allora esiste unasuccessione {Ak}∞k=1 di insiemi µ-misurabili in X tali che
f =∞∑k=1
1kχAK
,
dove χAkindica la funzione caratteristica di Ak.
Dimostrazione. SiaA1 := {x ∈ X | f(x) ≥ 1} ,
quindi possiamo definire per induzione
Ak :=
x ∈ X | f(x) ≥ 1k
+k−1∑j=1
1jχAj
.
Dalla definizione di Ak si ottiene immediatamente
f ≥∞∑k=1
1kχAK
.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 4
Se f(x) = +∞, allora x ∈ Ak per ogni k. D’altra parte, se 0 ≤ f(x) < +∞, alloraper infiniti n, x /∈ An. Quindi per infiniti n si ha
0 ≤ f(x)−n−1∑k=1
1kχAK
≤ 1n.
Il seguente teorema sta alla base del teorema 3.18, che permette di rendere moltopiu semplice la dimostrazione delle formule di area e coarea (vedi (4.1) e (5.1)).
Teorema 1.13 (Teorema di Egorov). Sia µ una misura su Rm e siano fk : Rm → Rn
funzioni µ-misurabili per ogni k ∈ N. Sia poi A ⊂ Rm un insieme µ-misurabile conµ(A) <∞, tale che fk −→ f µ-q.o. su A.
Allora per ogni ε > 0 esiste un insieme µ-misurabile B ⊂ A tale che µ(A \B) < ε efk −→ f uniformemente su B. Nel caso in cui µ sia di Radon l’insieme B puo esserescelto compatto.
Dimostrazione. Definiamo
Ci,j :=∞⋃k=j
{x ∈ A : |fk(x)− f(x)| > 1
2i
}, i, j ∈ N.
Allora Ci,j+1 ⊂ Ci,j per ogni i e j, e quindi, poiche µ(A) <∞,
limj−→∞
µ(A ∩ Ci,j) = µ
A ∩ ∞⋂j=1
Ci,j
= 0.
Quindi esiste un intero N(i) tale che µ(A ∩ Ci,N(i)) < ε/2i+1.Sia B := A \
⋃iCi,N(i). Allora
µ(A \ B) ≤∞∑i=1
µ(A ∩ Ci,N(i)) <ε
2, (1.1)
e comunque presi i ∈ N, x ∈ B, e per ogni k ≥ N(i), si ha
|fk(x)− f(x)| ≤ 12i.
Quindi fk −→ f uniformemente su B = B.Nel caso in cui µ sia di Radon, per il teorema 1.10 e possibile scegliere B ⊂ B
compatto e tale che µ(B \ B) < ε/2, da cui per la (1.1) si ottiene µ(A \B) < ε.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 5
Corollario 1.14. Sia µ una misura su Rm e siano{f1k
}∞k=1
, . . . ,{fpk}∞k=1
successionidi funzioni µ-misurabili. Sia poi A ⊂ Rm un insieme µ-misurabile con µ(A) < ∞, taleche f ik −→ f i µ q.o. su A per ogni i = 1, . . . , p.
Allora per ogni ε > 0 esiste un insieme µ-misurabile B ⊂ A tale che µ(A \B) < ε ef ik −→ f i uniformemente su B per k −→∞ e per ogni i. Nel caso in cui µ sia di Radonl’insieme B puo essere scelto compatto.
Dimostrazione. E sufficiente applicare il teorema 1.13 separatamente a ciascuna delle{f ik}∞k=1 ottenendo quindi un numero finito di insiemi B1, . . . , Bp sui quali si ha la con-vergenza uniforme a f1, . . . , fp e tali che, per ogni i, µ(A \ Bi) < ε/p. A questo puntobasta definire B =
⋂pi=1Bi ed osservare che, nel caso µ sia di Radon, si puo scegliere Bi
compatto per ogni i = 1, . . . , p, per cui B risulta compatto a sua volta.
1.3 Teoremi per il calcolo integrale
Poniamof+ := max(f, 0), f− := max(−f, 0),
da cui si haf = f+ − f− e |f | = f+ + f−.
Definizione 1.15. Una funzione ϕ : X → [−∞,+∞] e detta funzione semplice se ϕ(X)e numerabile.
Definizione 1.16. Se ϕ e una funzione semplice, µ-misurabile e con ϕ ≥ 0 definiamo∫ϕdµ :=
∑0≤y≤∞
y µ(ϕ−1(y)).
Se ϕ e una funzione semplice, µ-misurabile e∫ϕ+ dµ < ∞ o
∫ϕ− dµ < ∞, diremo
ϕ una funzione semplice µ-integrabile e definiremo∫ϕdµ :=
∫ϕ+dµ−
∫ϕ−dµ
Definizione 1.17. Sia f : X → [−∞,+∞] una funzione µ-misurabile. Definiamointegrale superiore di f∫ ∗
fdµ := inf{∫
ϕ idµ | ϕ e una funzione semplice µ-integrabile con ϕ ≥ f µ-q.o.}
e integrale inferiore di f∫∗fdµ := sup
{∫ϕdµ | ϕ e una funzione semplice µ-integrabile con ϕ ≤ f µ-q.o.
}.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 6
Diremo che f e µ-integrabile se∫ ∗fdµ =
∫∗ fdµ, ed in tal caso possiamo∫
fdµ :=∫ ∗
fdµ =∫∗fdµ.
Diremo infine che f e µ-sommabile nel caso in cui sia µ-integrabile e∫|f |dµ <∞.
Definizione 1.18. Data f : X → [−∞,+∞] µ-sommabile, definiamo l’integrale sull’in-sieme A ⊂ X di f come ∫
Afdµ =
∫fχA dµ.
Teorema 1.19 (Lemma di Fatou). Siano fn : X → [0,∞] funzioni µ-misurabili conn ∈ N. Allora ∫
lim infn−→∞
fn dµ ≤ lim infn−→∞
∫fn dµ.
Teorema 1.20 (Teorema di convergenza monotona). Siano le funzioni fn : X →[0,+∞] µ-misurabili per n ∈ N, con f1 ≤ . . . ≤ fn ≤ fn+1 ≤ . . ., allora∫
limn−→∞
fndµ = limn−→∞
∫fndµ.
Teorema 1.21 (Teorema di convergenza dominata). Siano g una funzione µ-sommabilee f , {fn}∞n=1 funzioni µ-misurabili. Se |fn| ≤ g e fn −→ f µ-q.o. per n −→∞, allora
limn−→∞
∫|fn − f |dµ = 0.
Proposizione 1.22. Siano f : X → R una funzione µ-sommabile e {Ek} una succes-sione di sottoinsiemi disgiunti e misurabili di Rn tali che
A =∞⋃k=1
Ek,
dove A ⊂ Rn. Allora ∫Af dµ =
∞∑k=1
∫Ek
f dµ.
Dimostrazione. Per la definizione 1.18, possiamo scrivere∫Af dµ =
∫fχA dµ =
∫ ∞∑k=1
fχEkdµ,
nell’ultimo termine della quale possiamo scambiare il simbolo di sommatoria con quellodi integrale applicando il teorema di convergenza dominata, usando come successione{∑k
i=1 fχEi}∞k=1 e come funzione dominante |f |.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 7
Definizione 1.23. Sia µ una misura su X e ν una misura su Y Definiamo la misuraµ× ν : 2X×Y → [0,∞] come
(µ× ν)(S) := inf
{ ∞∑i=1
µ(Ai)ν(Bi)
}∀S ⊂ X × Y,
dove l’inf e su tutte le famiglie di insiemi µ-misurabili {Ai}∞i=1 ⊂ 2X e ν-misurabili{Bi}∞i=1 ⊂ 2Y tali che
S ⊂∞⋃i=1
(Ai ×Bi).
La misura µ× ν e detta misura prodotto di µ e ν.
Teorema 1.24 (Teorema di Fubini). Sia µ una misura su X e ν una misura su Y ,allora se f : X × Y → [−∞,+∞] e (µ× ν)-sommabile, si ha che
y 7→∫Xf(x, y)dµ(x) e ν-integrabile,
x 7→∫Xf(x, y)dν(x) e µ-integrabile
e vale ∫X×Y
fd(µ× ν) =∫Y
[∫Xf(x, y)dµ(x)
]dν(y)
=∫X
[∫Yf(x, y)dν(y)
]dµ(x).
Definizione 1.25. Definiamo misura di Lebesgue 1-dimensionale L1 su R come
L1(A) := inf
{ ∞∑i=1
diamCi | A ⊂∞⋃i=1
Ci, Ci ⊂ R
}, ∀A ⊂ R,
e, per induzione, misura di Lebesgue n-dimensionale su Rn come
Ln := Ln−1 × L1 = L1 × . . .× L1︸ ︷︷ ︸n volte
= Ln−k × Lk.
1.4 Teorema di ricoprimento di Besicovitch
Riportiamo qui il teorema di ricoprimento di Besicovitch ed un suo corollario, che verrausato nel corso della dimostrazione delle formule di area e coarea per estendere la validitadelle formule da un ricoprimento di A a tutto l’insieme.

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 8
Definizione 1.26. Una famiglia F di palle chiuse di Rn e un ricoprimento di un insiemeA ⊂ Rn se
A ⊂⋃B∈F
B.
F e un ricoprimento fine di A se, in aggiunta, per ogni x ∈ A e ε > 0, esiste δ ∈ (0, ε)tale che B(x, δ) ∈ F .
Teorema 1.27 (Teorema di ricoprimento di Besicovitch). Esiste una costante ζ(n),dipendente unicamente da n, con la seguente proprieta: se F e una qualunque famigliadi palle chiuse non degeneri di Rn, con
sup {diamB | B ∈ F} <∞
e se A e l’insieme dei centri delle palle di F , allora esistono G1, . . . ,Gζ(n) ⊂ F tali cheper ogni i ∈ {1, . . . , ζ(n)}, Gi e una famiglia numerabile di palle disgiunte di F e
A ⊂ζ(n)⋃i=1
⋃B∈Gi
B.
Corollario 1.28. Siano µ una misura di Borel su Rn, A ⊂ Rn, µ(A) <∞ ed F un suoricoprimento fine di A tramite palle chiuse. Allora esiste una sottofamiglia numerabiledi palle disgiunte di F che ricopre A µ-q.o. .
Dimostrazione. Senza perdita di generalita e possibile supporre A boreliano. Fissiamopoi θ ∈ (1− 1/ζ(n), 1) e definiamo F1 := {B | B ∈ F ,diamB ≤ 1}. Per il teorema 1.27esistono le famiglie di palle disgiunte G1, . . . ,Gζ(n) ⊂ F1 tali che
A ⊂ζ(n)⋃i=1
⋃B∈Gi
B,
da cui, per la monotonia e la subadditivita della misura µ, e tenendo conto delladefinizione di F1, si ha
µ(A) ≤ζ(n)∑i=1
µ
A ∩ ⋃B∈Gi
B
.
Scegliamo ora j ∈ {1, . . . , ζ(n)} tale che µ(A ∩⋃B∈Gj
B) sia massimo, e quindi
µ
A ∩ ⋃B∈Gj
B
≥ 1ζ(n)
µ(A) > (1− θ)µ(A), (1.2)
per come e stato scelto θ. Per la proprieta (iii) degli insiemi misurabili (teorema 1.3) epossibile trovare una sottofamiglia finita {B1, . . . , Bp1} ⊂ Gj tale che la (1.2) continui avalere, ovvero
µ
(A ∩
p1⋃i=1
Bi
)≥ (1− θ)µ(A).

CAPITOLO 1. NOZIONI INTRODUTTIVE DI TEORIA DELLA MISURA 9
Dall’additivita della misura µ otteniamo
µ(A) = µ
(A ∩
p1⋃i=1
Bi
)+ µ
(A \
p1⋃i=1
Bi
),
da cui si deduce che
µ
(A \
p1⋃i=1
Bi
)≤ θµ(A). (1.3)
Siano ora A2 := A \⋃p1i=1Bi e F2 := {B | B ∈ F , B ≤ 1}. Come in precedenza, sara
possibile trovare una famiglia di palle disgiunte {Bp1+1, . . . , Bp2} ⊂ F2 tali che
µ
(A \
p2⋃i=1
Bi
)= µ
A2 \p2⋃
i=p1+1
Bi
≤ θµ(A2)
≤ θ2µ(A),
dove nell’ultima disuguaglianza abbiamo applicato la (1.3).Reiterando il processo costruiamo quindi una famiglia numerabile di palle disgiunte
di F tali che, comunque scelto k,
µ
(A \
pk⋃i=1
Bi
)≤ θkµ(A).
Poiche µ(A) <∞ e θk −→ 0 per k −→∞ il corollario e dimostrato.

Capitolo 2
Misura di Hausdorff
Una prima definizione di area di una superficie regolare m-dimensionale M = f(A) inRn e data da
Area(M) =∫AJf(x) dLm(x), (2.1)
dove A ⊂ Rm f : Rm → Rn e una funzione iniettiva di classe C1 e m ≤ n. Tuttavia questoapproccio risulta insufficiente nel momento in cui ci si ponga il problema di definire l’areas-dimensionale di una classe piu ampia di sottoinsiemi di Rn.
A questo scopo si definisce la cosiddetta misura di Hausdorff s-dimensionale in Rn
(indicata con Hs), che si dimostra coincidere con Ls quando s = n. Questa definizione,pero, produce molto di piu, in quanto l’esponente s potra, come vedremo, assumere unqualunque valore reale in [0,+∞). Cio, in particolare, permette di definire un concettopiu generale di dimensione (la dimensione di Hausdorff) per un qualunque sottoinsiemedi Rn (vedi sezione 2.2).
Anticipiamo che la formula di area, dimostrata nel capitolo 4, afferma l’uguaglianzatra Area(M) (definita sopra) e Hm(M) nel caso in cui f sia lipschtziana.
2.1 Misura di Hausdorff
Definizione 2.1 (Pre-misura di Hausdorff). Sia s ≥ 0 un numero reale. Comunquescelto un insieme A ⊂ Rn, definiamo per ogni δ > 0:
Hsδ := inf
∞∑j=1
α(s)(
diamCj2
)s| A ⊂
∞⋃j=1
Cj , diamCj ≤ δ
,
dove diamCj indica il diametro dell’insieme Cj e α : [0,+∞)→ [0,+∞) e una funzioneopportunamente scelta. La scelta canonica e di fissare α(s) tale che, per s intero, siabbia Ls(B(x, r)) = α(s)rs, quindi α(s) indica in questo caso il volume della pallas-dimensionale in Rs.
10

CAPITOLO 2. MISURA DI HAUSDORFF 11
Nota 2.2. Per soddisfare la condizione posta sopra, si pone
α(s) =πs/2
Γ( s2 + 1),
dove Γ indica la funzione gamma di Eulero, definita come
Γ(z) =∫ ∞
0tz−1e−t dt.
Cio, in particolare, rende α continua su [0,+∞).
Definizione 2.3. Per A ed s scelti come sopra, definiamo
Hs(A) := limδ−→0
Hsδ(A) = supδ>0Hsδ(A)
(Il limite esiste sempre in quanto Hsδ e decrescente in δ). La funzione di insiemi cosıdefinita e una misura, detta misura di Hausdorff di dimensione s in Rn.
Prima di tutto ricopriamo l’insieme A con una famiglia numerabile di insiemi didiametro piu piccolo di un fissato δ > 0, per poi passare al limite per δ −→ 0 inmodo da, in un certo senso, costringere i ricoprimenti ad adattarsi alla geometria localedell’insieme A.
Figura 2.1: Due ricoprimenti di una curva tramite palle con δ diverso.
Nota. La misura Hs e chiaramente invariante per isometrie e Hs(λA) = λsHs(A) comedimostrato in 2.6, quindi e naturale chiedersi se Hs coincida su Rs con Ls, a meno diqualche costante moltiplicativa. Definire α(s) come sopra permette di rendere questacostante pari a 1, e quindi di far sı che Hs(A) = Ls(A) nel caso in cui s sia intero ecoincida con la dimensione dello spazio, come dimostreremo in seguito.
Enunciamo il seguente teorema, fornendo solamente l’idea della dimostrazione, checome detto in precedenza puo essere trovata con tutti i dettagli in [4].
Teorema 2.4. Hs e una misura di Borel regolare per 0 ≤ s <∞.

CAPITOLO 2. MISURA DI HAUSDORFF 12
Idea della dimostrazione. La misurabilita dei Boreliani segue da una verifica del criteriodi Caratheodory (teorema 1.8).
Per dimostrare invece che ogni A ⊂ Rn e contenuto in un boreliano B della stessamisura, si osservi anzitutto che ciascuno dei Cj della definizione di premisura puo esseresostituito dalla sua chiusura, non modificando questa il diametro, in modo che
⋃∞j=1Cj
risulti essere un boreliano. Se ora {{Ckj }j}∞k=1 e una successione di ricoprimenti tali che∑j α(s)(diamCkj /2)s e convergente a Hs(A) per k −→∞, allora il boreliano che stiamo
cercando sara B =⋂k
⋃j Cj .
2.1.1 Prime proprieta
Proposizione 2.5. H0 e la misura che conta.
Dimostrazione. Banalmente osserviamo come α(0) = 1, da cui H0({a}) = 1 per ognia ∈ Rn e quindi segue l’asserto per la σ-additivita delle misure.
Proposizione 2.6. Siano s ∈ (0,+∞), λ > 0 e A ⊂ Rn. Allora Hs(λA) = λsHs(A).
Dimostrazione. Fissato δ > 0, comunque scelto {Cj}∞j=1 ricoprimento diA, con diamCj <
δ, la famiglia {λCj}∞j=1 e un ricoprimento di λA con diamλCj < δ. Quindi
Hsλδ(λA) = inf
∞∑j=1
α(s)(
diamλCj2
)s| A ⊂
∞⋃j=1
Cj , diamCj ≤ δ
= λs inf
∞∑j=1
α(s)(
diamCj2
)s| A ⊂
∞⋃j=1
Cj , diamCj ≤ δ
= λsHsδ(A).
Passando poi al limite per δ −→ 0 completiamo la dimostrazione.
Il teorema seguente, strettamente legato alla definizione di dimensione di Hausdorff,afferma ad esempio che se una curva ha lunghezza finita la sua area 2-dimensionalee nulla, e viceversa se una superficie ha area 2-dimensionale finita la sua lunghezza1-dimensionale e infinita (vedere anche figura 2.2).
Teorema 2.7. Sia A ⊂ Rn e siano s e t due numeri reali tali che 0 ≤ s < t. SeHs(A) <∞, allora Ht(A) = 0, ovvero se Ht(A) > 0, allora Hs(A) =∞.
Dimostrazione. Sia Hs(A) < ∞ e δ > 0. Allora, per la definizione di pre-misura diHausdorff e di estremo inferiore, deve esistere una famiglia numerabile di insiemi {Cj}∞j=1
tali che, comunque scelto j, si abbia diamCj ≤ δ, formino un ricoprimento di A eproducano la seguente stima per Hsδ(A):
∞∑j=1
α(s)(
diamCj2
)s≤ Hsδ(A) + 1 ≤ Hs(A) + 1

CAPITOLO 2. MISURA DI HAUSDORFF 13
Figura 2.2: Una rappresentazione grafica dell’enunciato del teorema 2.7
Quindi, con semplici passaggi algebrici:
Htδ(A) ≤∞∑j=1
α(t)(
diamCj2
)t=α(t)α(s)
∞∑j=1
α(s)(
diamCj2
)s(diamCj2
)t−s≤ α(t)α(s)
(δ
2
)t−s(Hs(A) + 1),
da cui, per δ −→ 0, si conclude che Ht(A) = 0, dimostrando cosı la prima affermazione,mentre la seconda e chiaramente equivalente.
2.2 Dimensione di Hausdorff
Definizione 2.8. La dimensione di Hausdorff di un insieme A ⊂ Rn e definita come
dimH(A) := inf {s ∈ [0,∞) : Hs(A) = 0} .
Nota.
1. Come e naturale aspettarsi da una buona definizione di dimensione: dimH(A) ≤ n
2. Se s = dimH(A) allora Ht(A) = 0 per tutti i t > s e Ht(A) = ∞ per tutti i t < s,mentre Hs(A) ∈ [0,∞], per il teorema (2.7).
3. Come gia accennato, non e detto che dimH(A) sia un intero, e anche nel caso in cuilo fosse questo non significa che A sia propriamente una superficie di dimensione paria dimH(A), anche se la corrispondente misura di Hausdorff fosse finita.
4. La dimensione di Hausdorff e un concetto strettamente legato alla metrica dello spazio,e non solo alla sua topologia. Infatti, e invariante per diffeomorfismi ma non per

CAPITOLO 2. MISURA DI HAUSDORFF 14
omeomorfismi e quindi non coincide sempre con la dimensione topologica. Ad esempiola dimensione di Hausdorff del grafico di una funzione continua f : R→ R pur avendodimTop = 1 puo avere dimH ∈ [1, 2], come accade per l’esempio fatto da Weierstrassdi funzione continua ma ovunque non differenziabil (figura 2.3, esempio preso da [5]).
Figura 2.3: L’esempio di Weierstrass f(t) =∑∞
k=1 λ(s−2)k sin(λkt) con λ = s = 1.5.
2.3 Hn = Ln
Obiettivo di questa sezione e dimostrare l’uguaglianza su Rn di Hn e Ln. Per fare ciodovremo utilizzare la cosiddetta disuguaglianza isodiametrica, che afferma che a parita didiametro l’insieme con il massimo volume e la sfera, per dimostrare la quale e necessariointrodurre il concetto di simmetrizzazione di Steiner.
Prima di passare al risultato generale, pero, dimostriamo che l’uguaglianza tra le duemisure e valida in R.
Proposizione 2.9. H1 = L1 su RDimostrazione. Comunque scelti A ⊂ R e δ > 0, si ha:
L1(A) = inf
∞∑j=1
diamCj : A ⊂∞⋃j=1
Cj
≤ inf
∞∑j=1
diamCj : A ⊂∞⋃j=1
Cj ,diamCj ≤ δ
= H1
δ(A).
Per l’altro verso della disuguaglianza, fissando Ik := [kδ, (k+1)δ] per k ∈ Z otteniamoche diam(Cj ∩ Ik) ≤ δ e
∞∑k=−∞
diam(Cj ∩ Ik) ≤ diamCj ,

CAPITOLO 2. MISURA DI HAUSDORFF 15
da cui
L1(A) = inf
∞∑j=1
diamCj : A ⊂∞⋃j=1
Cj
≥ inf
∞∑j=1
∞∑k=−∞
diam(Cj ∩ Ik) : A ⊂∞⋃j=1
Cj
≥ H1
δ(A).
Quindi L1 = H1δ per ogni δ > 0 e a maggior ragione L1 = H1 su R
2.3.1 Simmetrizzazione di Steiner
Figura 2.4: La simmetrizzazione di Steiner in opera. Immagine presa da [4].
Fissati a, b ∈ Rn con |a| = 1, definiamo
Lab := {b+ ta | t ∈ R}, la retta passante per b di direzione a,
Pa := {x ∈ Rn | x · a = 0}, il piano passante per l’origine e perpendicolare ad a.
Definizione 2.10 (Simmetrizzazione di Steiner). Siano A ⊂ Rn e a ∈ Rn con |a| = 1.Definiamo simmetrizzazione di Steiner di A rispetto al piano Pa l’insieme
Sa(A) :=⋃b∈Pa
A∩Lab 6=∅
{b+ ta | |t| ≤ 1
2H1(A ∩ Lab )
}
Per dimostrare la proposizione 2.12 sara utile il seguente lemma, la cui dimostrazionee omessa.

CAPITOLO 2. MISURA DI HAUSDORFF 16
Lemma 2.11. Sia f : Rn → [0,+∞] Ln-misurabile. Allora la regione A sottesa algrafico di f ,
A = {(x, y) | x ∈ Rn, y ∈ R, 0 ≤ y ≤ f(x)} ,
e Ln+1-misurabile.
Figura 2.5: Schema geometrico della dimostrazione del punto (i) della proposizione 2.12
Proposizione 2.12. (Proprieta della simmetrizzazione di Steiner).
(i) diamSa(A) ≤ diamA.
(ii) Se A e Ln-misurabile, allora lo e anche Sa(A) e Ln(Sa(A)) = Ln(A).
Dimostrazione.
(i) L’affermazione e banale se diamA = ∞ e, essendo diam A = diamA, possiamosupporre A chiuso con diamA <∞.
Fissiamo un ε > 0 e scegliamo, per le proprieta del sup, x, y ∈ Sa(A) tali che
diamSa(A) ≤ |x− y|+ ε
Prendiamo ora le proiezioni di x e y su Pa, dette rispettivamente b e c, quindib = x− (x · a)a e c = y − (y · a)a, e definiamo
r := inf{t | b+ ta ∈ A},s := sup{t | b+ ta ∈ A},u := inf{t | c+ ta ∈ A},v := sup{t | c+ ta ∈ A}.

CAPITOLO 2. MISURA DI HAUSDORFF 17
Senza perdita di generalita possiamo supporre v − r ≥ s − u (in caso contrario esufficiente scambiare x e y). Quindi
v − r ≥ 12
(v − r) +12
(s− u)
=12
(s− r) +12
(v − u)
≥ 12H1(A ∩ Lab ) +
12H1(A ∩ Lac ).
Per costruzione della simmetrizzazione |x ·a| ≤ 12H
1(A∩Lab ) e |y ·a| ≤ 12H
1(A∩Lac ),quindi, applicando la disuguaglianza triangolare sul modulo,
v − r ≥ |x · a|+ |y · a| ≥ |x · a− y · a|
Dunque, applicando il teorema di Pitagora,
(diamSa(A)− ε)2 ≤ |x− y|2
= |b− c|2 + |x · a− y · a|2
≤ |b− c|2 + (v − r)2
= |(b+ ra)− (c+ va)|2
≤ (diamA)2,
dove l’ultimo passaggio e giustificato dal fatto che A e chiuso per ipotesi. Da questodiscende l’asserto per ε −→ 0.
(ii) Poiche Ln e invariante per rotazioni, possiamo supporre a = en = (0, . . . , 0, 1).Di conseguenza Pa = Pen = Rn−1. Poiche L1 = H1 su R per il teorema 2.9, ilteorema di Fubini (vedi 1.24) implica che la funzione f : Rn−1 → R definita comef(ξ) = H1(A ∩ Laξ ) sia Ln−1-misurabile e che
Ln(A) =∫
Rn−1
f(ξ)dξ.
Quindi
Sa(A) :={
(ξ, y) | −f(ξ)2≤ y ≤ f(ξ)
2
}\ {(ξ, 0) | Laξ ∩A = ∅}
risulta essere Ln-misurabile per il lemma 2.11, e
Ln(Sa(A)) =∫
Rn−1
f(ξ)dξ = Ln(A).

CAPITOLO 2. MISURA DI HAUSDORFF 18
Teorema 2.13 (Disuguaglianza isodiametrica). Dato A ⊂ Rn, si ha
Ln(A) ≤ α(n)(
diamA
2
)n. (2.2)
Dimostrazione. Supponiamo diamA < ∞, dato che in caso contrario l’asserto risultabanalmente soddisfatto. Detta {e1, . . . , en} la base canonica di Rn definiamo A1 :=Se1(A), A2 := Se2(A1), . . . , An := Sen(An−1). Chiamiamo A∗ = An.
Per prima cosa dimostriamo che A∗ e simmetrico rispetto all’origine, procedendoper induzione sugli Ai. Chiaramente A1 e simmetrico rispetto a Pe1 , quindi la basedell’induzione e verificata. Supponiamo poi che Ak sia simmetrico rispetto a Pe1 , . . . , Pek
comunque scelto k ∈ {1, . . . , n − 1}. Per definizione Ak+1 = Sek+1(Ak) e simmetrico
rispetto a Pek+1.
Fissiamo ora j ∈ {1, . . . , k} e definiamo σj : Rn → Rn la simmetria rispetto a Pej ,ovvero, dato x = (x1, . . . , xn), σj(x) := (x1, . . . ,−xj , . . . , xn). Sia poi b ∈ Pek+1
; poicheσj(Ak) = Ak abbiamo
H1(Ak ∩ Lek+1
b ) = H1(Ak ∩ Lek+1
σj(b))
e quindi{t | b+ tek+1 ∈ Ak+1} = {t | σj(b) + tek+1 ∈ Ak+1} .
Da cui σj(Ak+1) = Ak+1, e quindi Ak+1 e simmetrico rispetto a Pej e risulta cosıprovato anche il passo induttivo. Dunque A∗ = An e simmetrico rispetto a Pe1 , . . . , Pen
e quindi rispetto all’origine.Vediamo ora come
Ln(A∗) ≤ α(n)(
diamA∗
2
)n.
Infatti tenendo presente la simmetria dimostrata in precedenza, osserviamo chediamA∗ ≥ 2|x| per ogni x ∈ A∗, poiche anche −x ∈ A∗, e quindi
A∗ ⊂ B(
0,diamA∗
2
),
il che, per la monotonia di Ln, implica
Ln(A∗) ≤ α(n)(
diamA∗
2
)n
Concludiamo la dimostrazione osservando che essendo A Ln-misurabile il punto (ii)della proposizione 2.12 implica che Ln((A)∗) = Ln(A) e il punto (i) della stessa chediam(A)∗ ≤ diam A, da cui

CAPITOLO 2. MISURA DI HAUSDORFF 19
Ln(A) ≤ Ln(A) = Ln(A∗)
≤ α(n)(
diam A∗
2
)n≤ α(n)
(diam A
2
)n= α(n)
(diamA
2
)n.
Teorema 2.14. Hn = Ln su Rn.
Dimostrazione. Fissato un δ > 0 scegliamo una famiglia {Cj}∞j=1 di insiemi tali cheA ⊂
⋃j Cj e diamCj ≤ δ. Allora dalla disuguaglianza isodiametrica (2.2) segue
immediatamente che
Ln(A) ≤∞∑j=1
Ln(Cj) ≤∞∑j=1
α(n)(
diamCj2
)n,
passando poi all’inf da ambo i membri possiamo concludere che Ln(A) ≤ Hnδ (A) e quindiLn(A) ≤ Hn(A).
Per l’altra disuguaglianza (Hn(A) ≤ Ln(A)) notiamo anzitutto che e sufficiente dimo-strarla per A boreliano, dato che entrambe le misure sono di Borel, e limitato, dato cheentrambe sono σ-finite su Rn. Per il teorema 1.10 e per la disuguaglianza appena dimo-strata, e possibile, fissato σ > 0, scegliere Uσ ⊃ A tale che Ln(Uσ \A) ≤ Hn(Uσ \A) < σ.Quindi Hn(Uσ) < ∞, e per la definizione di misura di Hausdorff e possibile, per ogniε > 0, determinare δ > 0 tale che
Hn(Uσ) ≤ inf
∞∑j=1
α(n)(
diamCj2
)n| diamCj ≤ δ, Uσ ⊂
∞⋃j=1
Cj
+ ε. (2.3)
Applichiamo il corollario 1.28 con
F := {B(x, r) | r ≤ δ,B(x, r) ⊂ Uσ} ,
per ottenere un ricoprimento disgiunto e numerabile G di un insieme B ⊂ Uσ con Hn(A\Uσ) = 0. Sia poi G′ un ricoprimento di Uσ \B con palle di diametro al piu δ tali che
∑C∈G′
α(n)(
diamC
2
)n≤ ε.

CAPITOLO 2. MISURA DI HAUSDORFF 20
Allora G ∪ G′ ricopre Uσ, e quindi
Hn(Uσ) ≤∑
C∈G∪G′α(n)
(diamC
2
)n+ ε
≤∑C∈GLn(C) +
∑C∈G′
α(n)(
diamC
2
)n+ ε
≤ Ln(Uσ) + 2ε,
il che per ε −→ 0 dimostra che Hn(Uσ) ≤ Ln(Uσ), ovvero che Hn(A) +Hn(Uσ \ A) ≤Ln(A) + Ln(Uσ \A). Passando infine al limite per σ −→ 0 si ha l’asserto.
2.4 Misura di Hausdorff e funzioni lipschitziane
In questa sezione introduciamo le funzioni lipschitziane e vediamo come si comporta lamisura di Hausdorff in rapporto ad esse. Come vedremo in seguito, questa e la classe difunzioni per cui e naturale considerare le formule di area e coarea.
Definizione 2.15. Una funzione f : Rm → Rn e detta lipschitziana se esiste unacostante C tale che
|f(x)− f(y)| ≤ C|x− y| ∀x, y ∈ Rm.
In tal caso definiamo
Lip(f) := sup{|f(x)− f(y)||x− y|
| x, y ∈ Rm, x 6= y
}.
I seguenti teoremi enunciano importanti proprieta della misura di Hausdorff di im-magini lipschitziane di insiemi. Sono risultati notevoli e generali, basati sulla definizionipuramente metriche di lipschitzianita e di misura di Hausdorff.
Teorema 2.16 (Principio di Lipschitz). Siano A un insieme di Rm e f : A → Rn unamappa lipschitziana. Allora, comunque preso s ∈ [0,+∞), si ha
Hs(f(A)) ≤ (Lip(f))sHs(A). (2.4)
Dimostrazione. Fissiamo un δ > 0 e scegliamo una famiglia di insiemi {Cj}∞j=1 tali chediamCj ≤ δ e A ⊂
⋃j Cj . Ponendo L = Lip(f) si ottiene diam f(Cj) ≤ LdiamCj ≤ Lδ
e f(A) ⊂⋃j f(Cj). Quindi
HsLδ(f(A)) ≤∞∑j=1
α(s)(
diam f(Cj)2
)s≤ Ls
∞∑j=1
α(s)(
diamCj2
)s.

CAPITOLO 2. MISURA DI HAUSDORFF 21
Passando all’inf su tutte le famiglie {Cj}∞j=1 otteniamo
HsLδ(f(A)) ≤ LsHsδ(A)
che per δ −→ 0 implica la (2.4).
Corollario 2.17. Sia E ⊂ Rm con Hm(E) = 0 e f : Rm → Rn una mappa lipschitziana,allora Hm(f(E)) = 0.
Dimostrazione. Per il teorema 2.16, Hm(f(E)) ≤ (Lip f)mHm(E) = 0.
Corollario 2.18. Sia f : Rm → Rn una mappa lipschitziana. Allora, comunque presoA ⊂ Rm si ha
dimH(f(A)) ≤ dimH(A)
.
Dimostrazione. Dai teoremi 2.7 e 2.16 e dalla definizione di dimensione di Hausdorffotteniamo che
dimH(f(A)) = inf {s ∈ [0,+∞) | Hs(f(A)) = 0}≤ inf {s ∈ [0,+∞) | Lip(f)sHs(A) = 0}= inf {s ∈ [0,+∞) | Hs(A) = 0}= dimH(A).
Teorema 2.19. Siano f : Rm → Rn una mappa lipschitziana e A ⊂ Rm un insiemeLm-misurabile. Allora f(A) e Ln-misurabile.
Enunciamo ora un risultato che mette in evidenza un importante proprieta dellafunzioni lipschitziane: il mantenere invariata la dimensione di Hausdorff del propriografico rispetto a quella del dominio.
Teorema 2.20. Sia f : Rm → Rn una mappa e A ⊂ Rm tale che Lm(A) > 0, allora
(i) dimH(G(f,A)) ≥ m,
(ii) Se f e lipschitziana, dimH(G(f,A)) = m,
dove G(f,A) denota il grafico di f ristretta all’insieme A.

Capitolo 3
Funzioni lineari e differenziabilita
3.1 Funzioni Lineari e Jacobiani
Richiamiamo ora qualche nozione di algebra lineare, indispensabile per poter definire lojacobiano di una mappa f : Rm → Rn.
Definizione 3.1.
(i) Una mappa lineare O : Rm → Rn con m ≤ n, e ortogonale se conserva il prodottoscalare, quindi se si ha Ox ·Oy = x · y per ogni x, y ∈ Rm.
(ii) Una mappa lineare S : Rn → Rn e simmetrica se si ha x · Sy = Sx · y per ognix, y ∈ Rn.
(iii) Una mappa lineare D : Rn → Rn e diagonale se esistono d1, . . . , dn ∈ R tali cheDx = (d1x1, . . . , dnxn) per ogni x ∈ Rn.
(iv) Sia A : Rm → Rn una mappa lineare. E detta aggiunta di A la mappa lineareA∗ : Rn → Rm tale che x ·A∗y = Ax · y per ogni x ∈ Rm e y ∈ Rn.
Proposizione 3.2.
(i) A∗∗ = A.
(ii) (A ◦B)∗ = B∗ ◦A∗
(iii) Se O : Rn → Rn e ortogonale, allora O∗ = O−1.
(iv) Se S : Rn → Rn e simmetrica, allora S∗ = S.
(v) Se S : Rn → Rn e simmetrica, allora esiste una mappa ortogonale O : Rn → Rn euna diagonale D : Rn → Rn tale che
S = O ◦D ◦O−1 = O ◦D ◦O∗.
22

CAPITOLO 3. FUNZIONI LINEARI E DIFFERENZIABILITA 23
(vi) Se O : Rm → Rn e ortogonale, allora
O∗ ◦O = I su Rm
O ◦O∗ = I su O(Rm)
Teorema 3.3 (Decomposizione Polare). Sia L : Rm → Rn una mappa lineare.
(i) Se m ≤ n, esistono una mappa simmetrica S : Rm → Rm e una ortogonale O :Rm → Rn tali che
L = O ◦ S
(ii) Se m ≥ n, esistono una mappa simmetrica S : Rn → Rn e una ortogonale O :Rn → Rm tali che
L = S ◦O∗
Nota 3.4. La decomposizione polare vale anche per mappe lineari L : Cn → Cn, chesi possono decomporre come L = R ◦ U , dove R e una matrice hermitiana semidefini-ta positiva e U e unitaria (generalizzazione nei complessi rispettivamente delle matricisimmetriche e di quelle ortogonali), e questo puo essere facilmente visto come l’analogomatriciale della forma polare di un numero complesso z, cioe z = reiθ con r ≥ 0, poichele matrici hermitiane semidefinite positive 1 × 1 sono i numeri reali non negativi e lematrici unitarie 1× 1 sono i punti della circonferenza unitaria.
Definizione 3.5. Sia L : Rm → Rn una mappa lineare.
(i) Se m ≤ n scriviamo L = O ◦ S come sopra e definiamo lo jacobiano di L come
[[L]] = |detS|.
(ii) Se m ≥ n scriviamo L = S ◦O∗ come sopra e definiamo lo jacobiano di L come
[[L]] = |detS|.
Nota 3.6. La definizione di [[L]] non dipende dalla scelta particolare di O ed S, e, per leproprieta elementari elencate in precedenza, [[L]] = [[L∗]].
Teorema 3.7. Sia L : Rm → Rn una mappa lineare.
(i) Se m ≤ n,[[L]]2 = det(L∗ ◦ L).
(ii) Se m ≥ n,[[L]]2 = det(L ◦ L∗).

CAPITOLO 3. FUNZIONI LINEARI E DIFFERENZIABILITA 24
Dimostrazione. Se m ≤ n possiamo scrivere
L = O ◦ S, L∗ = S∗ ◦O∗ = S ◦O∗;
da cuiL∗ ◦ L = S ◦O∗ ◦O ◦ S = S2,
e per l’ortogonalita della O si ha l’asserto. Analogamente per il caso (ii).
Dimostriamo ora un teorema sui determinanti, che sara indispensabile per la dimo-strazione della formula di coarea, la cui dimostrazione e stata presa da [2].
Teorema 3.8. Date A e B matrici di dimensioni, rispettivamente, m × n e n × m,abbiamo
det(Im +AB) = det(In +BA),
dove con Ik indichiamo la matrice identita di ordine k.
Dimostrazione. Verifichiamo prima di tutto la validita dell’asserto nel caso m = n.Infatti, se A e invertibile, possiamo scrivere, applicando il teorema di Binet,
det(In +AB) = det(A(A−1 +B)) = det((A−1 +B)A) = det(In +BA). (3.1)
Nel caso in cui A sia singolare, comunque scelto ε > 0, per la (3.1) si ha
det(In + (A+ εIn)B) = det(In +B(A+ εIn)),
che per ε −→ 0 dimostra l’affermazione.Consideriamo ora il caso m > n. Chiamiamo
(A 0) e(B0
)le matrici m×m ottenute aggiungendo rispettivamente m−n colonne e righe di zeri adA e B. Allora, applicando il punto precedente,
det(Im +AB) = det(Im + (A 0)
(B0
))= det
((In 00 Im−n
)+(B0
)(A 0)
)= det(In +BA).
Il teorema 3.7 ci fornisce una formula per calcolare [[L]], che andremo solitamentead applicare abbinandola alla seguente formula di Binet-Cauchy.

CAPITOLO 3. FUNZIONI LINEARI E DIFFERENZIABILITA 25
Definizione 3.9. Se m ≤ n definiamo
Λ(n,m) = {λ : {1, . . . ,m} → {1, . . . , n} | λ e crescente} .
Per ogni λ ∈ Λ(n,m), definiamo Pλ : Rn → Rm come
Pλ(x1, . . . , xn) := (xλ(1), . . . , xλ(n)).
Nota 3.10. Per ogni λ ∈ Λ(n,m), esiste un sottospazio m-dimensionale
Sλ := span{eλ(1), . . . , eλ(m)} ⊂ Rn
tale che Pλ e la proiezione di Rn su Sλ.
Teorema 3.11 (Formula di Binet-Cauchy). Sia m ≤ n e L : Rm → Rn una mappalineare. Allora
[[L]]2 =∑
λ∈Λ(n,m)
(det(Pλ ◦ L))2
Nota 3.12. Per calcolare [[L]]2, sommiamo quindi i quadrati dei deteminanti di ciascunadelle sottomatrici (n × n) della matrice (m × n) che rappresenta L rispetto alle basicanoniche.
3.2 Teoremi sulla differenziabilita
La proprieta di differenziabilita, richiamata sotto, sara molto importante in seguito,soprattutto alla luce del teorema di Rademacher, che ci garantisce la differenziabilitaLm-q.o. delle funzioni lipschitziane.
Definizione 3.13. Una funzione f : Rm → Rn e detta differenziabile se esiste unamappa lineare L : Rm → Rn tale che
limy−→x
|f(y)− f(x)− L(x− y)||x− y|
= 0,
o equivalentemente
f(y) = f(x) + L(y − x) + o(|y − x|) per y −→ x.
Dato che per il teorema di unicita del limite se una tale mappa esiste e unica, ladenoteremo con
Df(x)
e la diremo derivata di f nel punto x.
Il seguente risultato verra utilizzato nel capitolo 5.

CAPITOLO 3. FUNZIONI LINEARI E DIFFERENZIABILITA 26
Teorema 3.14 (Teorema della funzione inversa). Sia f : Rn → Rn, f ∈ C1 e x ∈ Rn
tale che Jf(x) 6= 0 allora esiste U ⊂ Rn nel quale la funzione e un diffeomorfismo.Inoltre D(f−1) = (Df)−1 su tutto U .
Definizione 3.15. Una funzione f : A → Rn e detta localmente lipschitziana se perogni compatto K ⊂ A, esiste una costante CK tale che
|f(x)− f(y)| ≤ CK |x− y| ∀x, y ∈ K
Teorema 3.16 (Teorema di Rademacher). Sia f : Rm → Rn una funzione localmentelipschitziana, allora f e differenziabile Lm-q.o. .
Sia ora f : Rm → Rn una mappa lipschitziana, e quindi chiaramente anche localmentelipschitziana. Per il teorema di Rademacher, f e differenziabile Lm-q.o. e quindi Df(x)esiste e puo essere vista come un’applicazione lineare da Rm in Rn per Lm-q.o. x ∈ Rm,quindi scrivendo f = (f1, . . . , fn), e lecito definire
Df =
∂f1
∂x1. . .
∂f1
∂xm...
. . ....
∂fn∂x1
. . .∂fn∂xm
∈ Rn×m.
Definizione 3.17. Lo jacobiano di f , definito per Lm-q.o. x ∈ Rm, e
Jf(x) := [[Df(x)]]
Il seguente risultato, basato fortemente sul teorema di Rademacher, ci permettera,nei capitoli 4 e 5 di suddividere il dominio di una funzione lipschitziana in sottoinsiemicompatti sui quali la funzione presenti una regolarita molto maggiore.
Teorema 3.18. Sia f : Rm → Rn localmente lipschitziana. Allora ogni boreliano A diRm ammette una decomposizione
A =∞⋃k=1
Ak ∪ C
dove C e un boreliano con Lm(C) = 0 e A1, . . . , Ak, . . . sono compatti disgiunti tali cheper ogni k
(i) Df e uniformemente continua su Ak
(ii) la funzione f e uniformemente differenziabile su Ak, nel senso che le funzioni ∆p
definite come
∆p(x) := sup{|f(x′)− f(x′′)−Df(x)(x′ − x′′)|
|x′ − x′′|: x′, x′′ ∈ B
(x,
1p
), x′ 6= x′′
}convergono uniformemente a 0 su Ak quando p −→∞.

CAPITOLO 3. FUNZIONI LINEARI E DIFFERENZIABILITA 27
Dimostrazione. Il teorema di Rademacher garantisce che l’insieme dei punti dove f none differenziabile ha misura nulla, quindi possiamo considerarlo sottoinsieme di C. Aquesto punto la f risulta differenziabile su tutto A \ C.
Possiamo poi, senza perdita di generalita, considerare A limitato, in quanto in casocontrario potremmo suddividerlo in una quantita numerabile di insiemi limitati, graziealla σ-finitezza di Rm.
Sia dp : Rm → Rn×m la mappa definita per componenti come
dpi,j(x) :=fi(x+ 1
pej)− fi(x)1p
, i = 1, . . . , n; j = 1, . . . ,m,
dove abbiamo scritto f = (f1, . . . , fn) e (e1, . . . , em) e la base canonica di Rm. Chiara-mente, per p −→∞, dp(x) converge puntualmente a Df(x) su tutto A\C, quindi Df(x)e misurabile e la sua restrizione ad un qualunque sottoinsieme di A in cui la convergenzasia uniforme e continua.
Introduciamo ora la seguente funzione
∆p(x) = sup{|f(x+ h)− f(x)−Df(x)h|
|h|, h 6= 0, h ∈ B
(0,
1p
)}.
La ∆p e chiaramente misurabile, in quanto per le proprieta del sup e sufficiente conside-rare h ∈ Qm ∩B(0, 1
p), e inoltre ∆p −→ 0 per la differenziabilita di f .Possiamo a questo punto, fissato ε = 1
n , applicare iterativamente il corollario 1.14al teorema di Egorov sulle due successioni {dp} e {∆p}, e definire, detto Bk l’insiemeottenuto dall’applicazione del corollario al passo k,
Ak = Bk ∪k−1⋃i=1
Bi.
In questo modo su ogni Ak la convergenza delle due successioni di funzioni e uniforme,ed essendo compatti la derivata Df(x) risulta uniformemente continua su di essi. Infineaggiungiamo all’insieme C l’insieme, di misura nulla per la regolarita delle misure,
A \∞⋃i=1
Ai.
La differenziabilita della f sugli Ak implica inoltre che per ogni x′, x′′ ∈ B(x, 12p)∩Ak
|f(x′)− f(x′′)−Df(x)(x′ − x′′)| ≤ |f(x′)− f(x′′)−Df(x′)(x′ − x′′)|+ ||Df(x)−Df(x′)|| · |x′ − x′′|
≤(
∆p(x′) + ||Df(x)−Df(x′)||)|x′ − x′′|.
Quindisupx∈Ak
∆2p(x) ≤ supx′∈Ak
∆p(x′) + supx,x′∈Ak
|x−x′|≤ 1p
||Df(x)−Df(x′)||.
Dato che il membro a destra tende a 0 per p −→ 0, si ottiene l’asserto.

Capitolo 4
Formula di Area
Nota. Per tutto il capitolo, salvo diversa indicazione, supponiamo m ≤ n.
Enunciamo il risultato principale di questo capitolo che, come gia anticipato, lega ladefinizione (2.1) di area di una superficie regolare s-dimensionale M in Rn con la suamisura di Hausdorff Hs(M).
Teorema 4.1 (Formula di Area). Sia f : Rm → Rn una mappa lipschitziana. Allora,comunque si scelga un insieme A ⊂ Rm Lm-misurabile vale∫
AJf(x)dx =
∫Rn
#(f−1(y) ∩A) dHm(y). (4.1)
Nota 4.2. Ricordiamo che, per la proposizione 2.5, per ogni A ⊂ Rm si ha #(A) = H0(A).
Per prima cosa verifichiamo che la (4.1) sia valida nel caso in cui f sia affine.
Lemma 4.3 (Formula dell’area per funzioni affini). La formula (4.1) e valida nel casoin cui f sia affine, ovvero f(x) = a+ F (x) con F lineare.
Dimostrazione. Con abuso di notazione indichiamo con F sia la mappa lineare che lasua rappresentazione matriciale rispetto alle basi canoniche.
Figura 4.1: Formula di area.
28
CAPITOLO 4. FORMULA DI AREA 29
Supponiamo prima di tutto f(0) = 0 e F (Rm) ≡ Rm×{(0, . . . , 0)}, non singolare. Intal caso possiamo applicare la formula (1), enunciata nell’introduzione, alla composizioneπnm ◦ F : Rm → Rm della F con la proiezione canonica di Rn in Rm. Ottenendo∫
AJf(x)dx =
∫A
√det(F ∗F )dx
=∫A| det(πnm ◦ F )|dx
=∫A| det (D(πnm ◦ F )) |dx
= Lm(πnm ◦ F (A))= Hm(F (A)).
Nel caso in cui f(0) = a 6= 0 e F non singolare, e sempre possibile definire unatrasformazione ortogonale U : Rn → Rn tale che U ◦ F (Rm) ≡ Rm × {(0, . . . , 0)}. Siaquindi f(x) := Uf(x)− U(a), allora f(0) = 0 e f(Rm) ≡ Rm × {(0, . . . , 0)}.
Quindi, essendo Hm invariante per traslazioni e trasformazioni ortogonali, otteniamograzie al punto precedente∫
AJf(x)dx =
∫AJf(x)dx = Hm(f(A)) = Hm(f(A)).
Infine nel caso in cui F sia singolare possiamo, come nel caso precedente, supporre, ameno della trasformazione ortogonale U , F (Rm) ≡ Rs×{(0, . . . , 0)} con s < m e quindi,essendo un sottospazio di misura minore strettamente di m,∫
AJf(x)dx =
∫A
√det(F ∗F )dx
= 0= Hm(f(A)).
4.1 Dimostrazione della formula di area
La dimostrazione del teorema 4.1 si articola in vari passi nei quali si fara frequentericorso al teorema 3.18, alla proposizione 1.22 e al corollario 1.28. Possiamo infattiscrivere A = A1 ∪A2 ∪A3 dove
A1 = {x ∈ A : f e differenziabile in x e Jf(x) > 0},A2 = {x ∈ A : f e differenziabile in x e Jf(x) = 0},A3 = {x ∈ A : f non e differenziabile in x}.
Per il teorema di Rademacher, Hm(A3) = 0 e quindi il contributo di A3 nella formula(4.1) e trascurabile per il corollario 2.17 al principio di Lipschitz.

CAPITOLO 4. FORMULA DI AREA 30
E sufficiente percio dimostrare il teorema separatamente per A1 ed A2, tenendoin conto che in virtu della proposizione 3.18, e senza perdere in generalita grazie allaproposizione 1.22, possiamo supporre
(i) Df uniformemente continua su A1 e A2
(ii) la funzione f uniformemente differenziabile su A1 e A2, nel senso che le funzioni∆p definite come
∆p(x) := sup{|f(x′)− f(x′′)−Df(x)(x′ − x′′)|
|x′ − x′′|: x′, x′′ ∈ B
(x,
1p
), x′ 6= x′′
}convergono uniformemente a 0 su A1 e A2 quando p −→∞.
L’idea della dimostrazione nel caso di A1 e che per le proprieta enunciate sopra epossibile approssimare localmente f vicino al punto x tramite una funzione affine Tx,per la quale sappiamo gia valere la (4.1) grazie al lemma 4.3. Possiamo quindi fissatoε > 0 individuare B(x, δ) e osservare come la funzione φ = f ◦ T−1
x : Tx(B(x, δ)∩A1)→f(B(x, δ)∩A1) (vedi fig. 4.1), per le proprieta di Tx, risulti lipschitziana con Lip(φ) = 1+ε, e questo ci permette di controllare utilizzando il principio di Lipschitz (teorema 2.16)Hm(φ(Tx(B(x, δ) ∩ A1))) = Hm(f(B(x, δ) ∩ A1)) con Hm(Tx(B(x, δ) ∩ A1)). Passandoquindi al limite per ε −→ 0 otteniamo la (4.1) in B(x, δ)∩A1. Applicando poi il corollario1.28 riusciamo a estendere questo risultato locale a tutto l’insieme A1.
Figura 4.2: Uno schema che rappresenta l’azione di φ
Una volta fatta la dimostrazione per A1 rimane solo da dimostrare che l’insieme A2
dei punti dove Jf(x) = 0 non contribuisce al secondo membro della (4.1), cosı comechiaramente non contribuisce al primo. Prendiamo in considerazione una funzione g chead un punto x ∈ Rm associa il punto corrispondente (f(x), εx) ∈ Rn × Rm del grafico,schiacciandolo pero nella componente di Rm di un fattore ε > 0. In questo modootteniamo una funzione a jacobiano positivo sull’insieme A e su cui possiamo quindiapplicare la parte gia dimostrata della (4.1), per poi far tendere ε −→ 0 e ottenere lastima che desideravamo.

CAPITOLO 4. FORMULA DI AREA 31
Dimostrazione del teorema 4.1.
1. La (4.1) vale se A ⊂ {x | f e differenziabile e Jf(x) > 0}.Affermiamo che per ogni ε > 0 e ogni x ∈ A esiste un δ > 0 tale che per ognix′, x′′ ∈ A ∩B(x, δ) si ha
|Jf(x′)− Jf(x′′)| < ε (4.2)
e
(1− ε)|Tx(x′)− Tx(x′′)| ≤ |f(x′)− f(x′′)| ≤ (1 + ε)|Tx(x′)− Tx(x′′)| (4.3)
dove Tx(z) = f(x) +Df(x)(z − x) e l’approssimazione affine di f vicino al punto x.
Infatti per ogni σ > 0 possiamo trovare p tale che ∆p(x) ≤ σ su A e inoltre possiamosempre trovare un δ ∈ (0, 1/p) tale che la (4.2) sia valida per tutti gli x′ ∈ A∩B(x, δ).Quindi applicando la disuguaglianza triangolare∣∣|f(x′)− f(x′′)| − |Tx(x′)− Tx(x′′)|
∣∣ ≤ |f(x′)− f(x′′)− (Tx(x′)− Tx(x′′))|= |f(x′)− f(x′′)−Df(x)(x′ − x′′)|≤ ∆p(x)|x′ − x′′|≤ σ|x′ − x′′|≤ σ||(Df(x))−1|| · |Tx(x′)− Tx(x′′)|,
dove ||Df(x)−1|| e intesa come norma operatore, cioe ||Df(x)−1|| = sup|y|=1 |Df(x)−1·y|, sicuramente finita per continuita di Df(x)−1. Scegliendo a questo punto σ =ε/2||(Df(x))−1|| l’affermazione risulta dimostrata.
Scegliamo ora x, ε e δ tali che (4.2) e (4.3) valgano sull’insieme B(x, δ) ∩ A. PoicheTx e iniettiva possiamo considerare la mappa
φ = f ◦ T−1x : Tx(B(x, δ) ∩A)→ f(B(x, δ) ∩A).
Per (4.3) abbiamo che Lip(φ) = (1 + ε) e Lip(φ−1) = (1− ε)−1. Grazie al lemma 4.3,al principio di Lipschitz (teorema 2.16) e al fatto che per ogni ξ ∈ B(x, δ) ∩ A si haJTx(ξ) = Jf(x), otteniamo
Hm(f(B(x, δ) ∩A)) =Hm(φ(Tx(B(x, δ) ∩A)))≤(1 + ε)mHm(Tx(B(x, δ) ∩A))
=(1 + ε)m∫B(x,δ)∩A
Jf(x)dHm(ξ)
≤(1 + ε)m(∫
B(x,δ)∩AJf(ξ)dHm(ξ) + εLm(B(x, δ) ∩A)
)(4.4)

CAPITOLO 4. FORMULA DI AREA 32
e analogamente per φ−1
Hm(f(B(x, δ) ∩A)) ≥(1− ε)mHm(Tx(B(x, δ) ∩A))
≥(1− ε)m(∫
B(x,δ)∩AJf(ξ)dHm(ξ)− εLm(B(x, δ) ∩A)
)(4.5)
Per ogni ε la famiglia delle palle B(x, δ) tali che valgano le stime (4.4) e (4.5) e unricoprimento fine di A. Quindi per il corollario 1.28 possiamo ricoprire Hm-quasitutto A con una sottofamiglia numerabile di palle disgiunte G tale che f e iniettivasu ogni Ui = A ∩Bi con Bi ∈ G e
(1− ε)m(∫
Ui
Jf(ξ)dHm(ξ)− εLm(Ui))≤ Hm(f(Ui)) ≤
≤ (1 + ε)m(∫
Ui
Jf(ξ)dHm(ξ) + εLm(Ui)), (4.6)
e poiche f : Ui → f(Ui) e iniettiva si ha #(f−1(y) ∩ Ui) = χf(Ui) da cui
Hm(f(Ui)) =∫
Rn
χf(Ui)dHm(y)
=∫
Rn
#(f−1(y) ∩ Ui)dHm(y).
Sommando su i nella (4.6), si ottiene, per σ-additivita,
(1− ε)m(∫
AJf(ξ)dHm(ξ)− εLm(A)
)≤∫
Rn
#(f−1(y) ∩A)dHm(y) ≤
≤ (1 + ε)m(∫
AJf(ξ)dHm(ξ) + εLm(A)
). (4.7)
Poiche A era supposto limitato, e quindi di misura finita, e per l’arbitrarieta di ε > 0la (4.7) implica la (4.1) per ε −→ 0.
2. La (4.1) vale se A ⊂ {x | f e differenziabile in x ma Jf(x) = 0}.Fissato ε > 0 scriviamo f = p ◦ g, dove
g : Rm → Rn × Rm, g(x) := (f(x), εx) ∀x ∈ Rm
p : Rn × Rm → Rn, p(y, z) := y ∀(y, z) ∈ Rn × Rm.
Affemiamo che esiste una costante C tale che per ogni x ∈ A
0 < Jg(x) ≤ Cε.

CAPITOLO 4. FORMULA DI AREA 33
Infatti, possiamo scrivere g come g = (f1, . . . , fn, εx1, . . . , εxm), quindi
Dg(x) =(Df(x)εIm
)∈M(m+n)×m.
Poiche secondo la formula di Binet-Cauchy Jg(x)2 e uguale alla somma dei quadratidei sottodeterminanti (m×m) di Dg(x) abbiamo che uno di questi sara Df(x) mentretutti gli altri saranno costituiti da almeno una riga interamente di 0 tranne per un ε,quindi
Jg(x)2 ≥ ε2n > 0.
Inoltre, poiche ||Df(x)|| ≤ Lip(f) <∞, se utilizziamo la formula di Binet-Cauchy percacolare Jg(x)2, possiamo, per lo stesso argomento usato sopra, trovare una costantetale che
Jg(x)2 ≤ Cε2
per ogni x ∈ A.
Poiche p e una proiezione, possiamo calcolare, per il caso precedente,
Hm(f(A)) ≤ Hm(g(A))
≤∫
Rm+n
#(g−1(y, z) ∩A)dHm(y, z)
=∫AJg(x)dx
≤ ε√CLm(A).
Per ε −→ 0 otteniamo quindi Hm(f(A)) = 0, da cui, essendo #(f−1(y)∩A) 6= 0 solose y ∈ f(A), si ha ∫
Rm
#(f−1(y) ∩A) dHm(y) = 0 =∫AJf(x) dx.
3. Caso generale.
Come detto all’inizio della sezione, applicando il teorema di Rademacher si scriveA = A1∪A2∪A3. Gli insiemi A1 e A2 sono stati trattati nei punti precedenti, mentreessendo Hm(A3) = 0 per il teorema di Rademacher questo, grazie al corollario 2.17,non contribuisce a nessuno dei due membri della (4.1).
E con questo la dimostrazione della formula dell’area (4.1) e completa. Traiamo oraalcune semplici conseguenze, prima di passare alla formula di cambio di variabile.
Corollario 4.4. Sia f : Rm → Rn una mappa lipschitziana. Allora

CAPITOLO 4. FORMULA DI AREA 34
(i) Dato A ⊂ Rm Lm-misurabile tale che∫A Jf(x)dx < ∞ l’insieme f−1(y) ∩ A e
finito per Hm-quasi ogni y ∈ f(A).
(ii) Si ha Hm({y ∈ Rn | f−1(y) non e numerabile}) = 0
Dimostrazione. (i) Per la formula di area∫AJf(x)dx =
∫Rn
#(f−1{y} ∩A) dHm(y),
quindi∫
Rn #(f−1{y}∩A)dHm(y) <∞ e dunque #(f−1{y}∩A) <∞ perHm-quasitutti gli y ∈ f(A).
(ii) Escludendo per il teorema di Rademacher l’insieme di misura nulla E nel qualeJf(x) non e definito, il complementare Rm \ E e unione numerabile di insiemi Aktali che
∫AkJf(x)dx <∞ per ogni k ∈ N. Quindi, per (i), gli insiemi
Mk = {y ∈ f(Ak) | f−1(y) ∩Ak e infinito}
sono anch’essi insiemi di misura Hm nulla.
Se ora y e un punto tale che f−1(y) non e numerabile, allora y appartiene oall’insieme di misura Hm nulla f(E) o ad uno degli insiemi Mk, da cui l’asserto.
4.2 Formula di Cambio di Variabile
Teorema 4.5. Siano ϕ : Rm −→ Rn Lipschitz e g : Rm → R Lm-sommabile vale
∫Rm
g(x)Jϕ(x)dx =∫
Rn
∑x∈ϕ−1{y}
g(x)
dHm(y). (4.8)
Nel caso in cui g sia iniettiva, la formula sopra diventa∫Rm
g(x)Jϕ(x)dx =∫
Rn
g ◦ ϕ−1(y) dHm(y).
Dimostrazione. Supponiamo senza perdita di generalita la g ≥ 0, dato che altrimenti esufficiente scriverla g = g+ − g− ed applicare a g+ e g− la seguente dimostrazione.
Grazie al teorema 1.12 possiamo scrivere
g =∞∑i=1
1iχAi
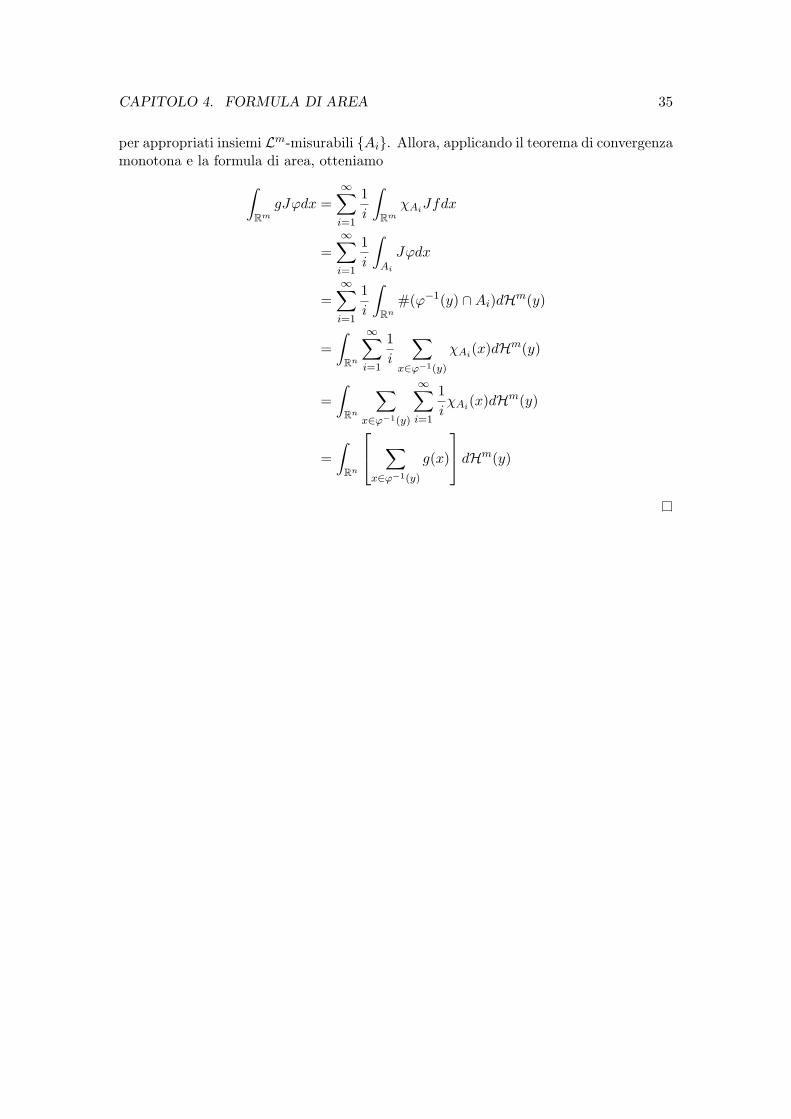
CAPITOLO 4. FORMULA DI AREA 35
per appropriati insiemi Lm-misurabili {Ai}. Allora, applicando il teorema di convergenzamonotona e la formula di area, otteniamo∫
Rm
gJϕdx =∞∑i=1
1i
∫Rm
χAiJfdx
=∞∑i=1
1i
∫Ai
Jϕdx
=∞∑i=1
1i
∫Rn
#(ϕ−1(y) ∩Ai)dHm(y)
=∫
Rn
∞∑i=1
1i
∑x∈ϕ−1(y)
χAi(x)dHm(y)
=∫
Rn
∑x∈ϕ−1(y)
∞∑i=1
1iχAi(x)dHm(y)
=∫
Rn
∑x∈ϕ−1(y)
g(x)
dHm(y)

Capitolo 5
Formula di Coarea
Nota. Per tutto il capitolo, salvo diversa indicazione, m ≥ n.
Obiettivo di questo capitolo e arrivare ad una dimostrazione della formula di coarea,una sorta di teorema di Fubini curvilineo ottenuto sezionando un dato insieme A me-diante insiemi di livello di mappe lipschitziane (ad esempio la formula per l’integrazionein coordinate polari su Rn ne e un caso particolare).
Teorema 5.1 (Formula di Coarea). Sia f : Rm → Rn una mappa lipschitziana, allora,comunque preso A ⊂ Rm Lm-misurabile, vale∫
AJfdx =
∫Rn
Hm−n(f−1(x) ∩A) dHn(x). (5.1)
La dimostrazione e fatta in modo simile a quello dell’area, dividendo quindi l’insiemeA nei tre sottoinsiemi
A1 = {x ∈ A : f e differenziabile in x e Jf(x) > 0},A2 = {x ∈ A : f e differenziabile in x e Jf(x) = 0},A3 = {x ∈ A : f non e differenziabile in x},
Figura 5.1: Formula di area.
36

CAPITOLO 5. FORMULA DI COAREA 37
sapendo per il teorema di Rademacher che Lm(A3) = 0 ed applicando ai primi due ilteorema 3.18, in modo da potersi limitare a lavorare con insiemi compatti e nei quali lafunzione f sia di classe C1.
Tuttavia, per poter affermare che i sottoinsiemi di A a misura nulla non influisconoai fini del computo dell’integrale al secondo membro della (5.1), e pero necessario ilseguente teorema
Teorema 5.2 (Disuguaglianza di Eilenberg). Sia f : Rm → Rn una mappa lipschitziana.Allora per ogni A ⊂ Rm
∗∫Rn
Hm−n(A ∩ f−1(y))dHn(y) ≤ α(m− n)α(n)α(m)
(Lip f)nHm(A)
Dimostrazione. Comunque preso j ∈ N, esiste una successione di palle chiuse di Rm,{Bj
i }∞j=1, tale che
A ⊂∞⋃j=1
Bji , diamBj
i ≤1j,
e∞∑i=1
Lm(Bji ) ≤ L
m(A) +1j.
Definiamo ora
gji := α(m− n)
(diamBj
i
2
)m−nχf(Bj
i ).
Per il teorema 2.19, gji e Ln-misurabile. Notiamo anche che per ogni y ∈ Rn,
Hm−n1/j (f−1(y) ∩A) ≤∞∑i=1
gji (y).

CAPITOLO 5. FORMULA DI COAREA 38
Quindi applicando il lemma di Fatou e la disuguaglianza isodiametrica 2.13, otteniamo∫ ∗Rn
Hm−n(f−1 ∩A)dHn(y) =∫ ∗
Rn
limj−→∞
Hm−n1/j (f−1(y) ∩A)dHn(y)
≤∫
Rn
lim infj−→∞
∞∑i=1
gji dHn(y)
≤ lim infj−→∞
∞∑i=1
∫Rn
gji dHn(y)
= lim infj−→∞
∞∑i=1
α(m− n)
(diamBj
i
2
)m−nLn(f(Bj
i ))
≤ lim infj−→∞
∞∑i=1
α(m− n)
(diamBj
i
2
)m−nα(n)
(diam f(Bj
i )2
)n
≤ α(m− n)α(n)α(m)
(Lip(f))n lim infj−→∞
∞∑i=1
Lm(Bji )
≤ α(m− n)α(n)α(m)
(Lip(f))nLm(A),
da cui l’asserto.
Nota 5.3. Con una dimostrazione analoga si puo affermare che data f : Rm → Rn
lipschitziana, per ogni A ⊂ Rn si ha
∗∫Rn
Hk(A ∩ f−1(y))dHl(y) ≤ α(k)α(l)α(k + l)
(Lip f)lHk+l(A).
Per ulteriori approfondimenti su questa disuguaglianza vedere [6, Sezioni 2.10.25 e2.10.26].
Dal teorema 5.2 e dunque chiaro che, se Hm(A) = 0, la formula (5.1) e banalmenteverificata.
Per quanto detto fin’ora, dunque, possiamo limitarci a studiare la (5.1) nel caso incui f sia di classe C1 e A un insieme compatto.
5.1 Costruzione preparatoria
La dimostrazione della formula (5.1) per l’insieme A1 dei punti di A ove Jf > 0, vienefatta “raddrizzando” le linee di livello della f , quindi applicando il teorema di Fubini.In questa sezione ci occuperemo di descrivere questa procedura di “raddrizzamento”.
Data una funzione f : Rm → Rn, f ∈ C1, (Jf) 6= 0, e un insieme A ⊂ Rm Lm-misurabile,che possiamo supporre di misura finita, scegliamo (z0, y0) ∈ A con z0 ∈ Rm−n e y0 ∈ Rn,

CAPITOLO 5. FORMULA DI COAREA 39
quindi poniamo x = f(z, y) e x0 = f(z0, y0). Nelle nostre ipotesi possiamo supporre, ameno di un cambio di coordinate su Rm,
det(∂yf(z0, y0)) = det
∂f1
∂y1. . .
∂f1
∂yn...
. . ....
∂fn∂yn
. . .∂fn∂yn
(z0, y0)
6= 0.
Definiamo ora la funzione φ : Rm → Rn come φ(z, y) := (z, x) = (z, f(z, y)) che,essendo composizione di funzioni di classe C1 su tutto A, risultera essere di classe C1 e,in particolare,
Jφ = |det(Dφ)| =∣∣∣∣det
[(Im−n 0∂zf ∂yf
)]∣∣∣∣ = |det (∂yf)| , (5.2)
da cui Jφ(z0, y0) 6= 0. La funzione φ sopra definita “raddrizza” gli insiemi di livello dif , infatti
φ(f−1(x0) ∩A) = φ {(z, y) ∈ A | f(z, y) = x0}= {(z, x0) ∈ A | per un qualche y si ha f(z, y) = x0}
risulta essere contenuto nell’iperpiano (m − n)-dimensionale Tx0 = {(z, x0) ∈ Rm | z ∈Rm−n}.
Applichiamo ora a φ, grazie alla (5.2), il teorema 3.14 che garantisce l’esistenzadi un intorno W ∈ Rm di (z0, y0) tale che esista φ−1 : W → W , φ−1 ∈ C1 e cheD(φ−1) = (Dφ)−1, e quindi, sempre per la (5.2),
Jφ−1 = det(∂yf)−1. (5.3)
Osserviamo quindi che e sempre possibile trovare una coppia di intorni di z0 e x0, rispet-tivamente U ∈ Rm−n e N ∈ Rn, tali che U ×N ⊂ φ(W ), quindi l’esistenza dell’inversalocale φ−1 implica l’esistenza di g : U ×N → V con V intorno di y0, anch’essa di classeC1, tale che φ−1(z, x) = (z, g(z, x)).
In questo modo f(z, y) = x⇔ y = g(z, x) comunque scelto (z, y) ∈ U×V e x ∈ N ; inaltre parole il grafico della funzione gx(z) := g(z, x) definita in U a valori in V coincidecon l’insieme di livello f−1∩(U×V ). Un semplice calcolo ci permette dunque di ottenere
Dgx0 = −(∂yf)−1∂zf ∈ Rn×(m−n).
Definiamo infine Gx : U → U × V come Gx(z) := φ−1(z, x) = (z, gx(z)), da cui
(JG)2 = det(DG∗DG) = det
[(Im−n Dg∗x)
(Im−nDgx
)]In questo modo, per ogni (z, y) ∈ A otteniamo un intorno aperto (U×V )(z,y) nel quale
valgono le proprieta discusse in precedenza, e quindi una famiglia {(U×V )(z,y)}(z,y)∈A che

CAPITOLO 5. FORMULA DI COAREA 40
Figura 5.2: Schema della costruzione preparatoria.
ovviamente ricopre tutto A. La famiglia F di tutte le palle chiuse B((z, y), δ) di centro(z, y) ∈ A e contenute nel rispettivo (U × V )(z,y), costituisce quindi un ricoprimentofine dell’insieme A dal quale, per il corollario 1.28, e possibile estrarre un ricoprimentodisgiunto e numerabile G ⊂ F di A a meno di un insieme di misura nulla. E dunquesufficiente dimostrare la (5.1) nel caso in cui A = A ∩ B((z, y), δ) ⊂ (U × V )(z,y) per unqualche (z, y) ∈ A, in quanto dato che tali palle sono in quantita numerabile e possibileapplicare il teorema 1.22.
5.2 Dimostrazione della formula di coarea
Prima di poter passare alla dimostrazione nel caso in cui A ≡ A1 avremo bisogno delseguente lemma.
Lemma 5.4. Nelle ipotesi e notazioni introdotte sopra, per ogni x ∈ Rm vale
Hm−n(f−1(x) ∩A) =∫φ(f−1(x)∩A)
Jf(φ−1(z, x))Jφ−1 dHm−n(z, x).
Dimostrazione. Per la formula dell’area (teorema 4.1) e ricordando che φ(f−1(x)∩A) e

CAPITOLO 5. FORMULA DI COAREA 41
contenuto nell’iperpiano Tx = {(z, x) | z ∈ Rm−n},
Hm−n(f−1(x) ∩A) =∫πm−n
m (φ(f−1(x)∩A))JG(z) dHm−n(z)
=∫φ(f−1(x)∩A)
JG(z) dHm−n(z, x),(5.4)
dove πm−nm (z, x) = z e l’ultimo passaggio e giustificato dal fatto che Hm−n ristretta a Txcoincide, a meno della proiezione πm−nm , con Lm−n su Rm−n. Tenendo quindi presenti la(5.4) e la (5.3) e sufficiente dimostrare che, dato y = G(z), vale
Jf(z, y)Jφ(z, y)
= JG(z). (5.5)
Studiamo i membri dell’equazione (5.5) al quadrato, ricordando le osservazioni pre-cedenti:
(JG)2 = det
[(Im−n, Dg∗)
(Im−nDg
)]= det [Im−n +Dg∗ ·Dg]= det
[Im−n + ∂zf
∗ · (∂yf−1)∗ · ∂yf−1 · ∂zf],
(Jf
Jφ
)2
=det
[(∂zf ∂yf) ·
(∂zf
∗
∂yf∗
)](det (∂yf))2
= det [∂zf · ∂zf∗ + ∂yf · ∂yf∗] · det[(∂yf−1)∗ · ∂yf−1
]= det
[In + ∂yf
−1 · ∂zf · ∂zf∗ · (∂yf−1)∗].
Infine ponendo A = ∂zf∗ · (∂yf−1)∗ e B = ∂yf
−1 ·∂zf , possiamo applicare il teorema3.8 e dimostrare cosı la validita della (5.5) e quindi dell’asserto.
Possiamo ora procedere alla dimostrazione.
Dimostrazione del teorema 5.1.
1. La (5.1) vale se A ⊂ {x | Jf(x) > 0}.Data la costruzione preparatoria, essendo la φ invertibile (e quindi iniettiva) in unintorno di (z0, y0), applichiamo il teorema di cambio di variabile 4.5, utilizzandoϕ = φ−1 e g = Jf ◦ φ−1 · χφ(A) ottenendo cosı∫
AJf(z, y) dLm(z, y) =
∫φ(A)
Jf(φ−1(z, x))Jφ−1(z, x) dLm(z, x) (5.6)

CAPITOLO 5. FORMULA DI COAREA 42
Ricordando che φ(f−1(x) ∩ A) e contenuta nell’iperpiano Tx = {(z, x) | z ∈ Rm−n}e osservando che φ(A) =
⋃x∈Rn φ(f−1(x) ∩A), possiamo applicare Fubini e ottenere
quindi
∫AJf(z, y) dHm(z, y) =
∫Rn
[∫πm−n
m (φ(f−1(x)∩A))Jf(φ−1(z, x))Jφ−1 dLm−n(z, x)
]dLn(x)
=∫
Rn
[∫φ(f−1(x)∩A)
Jf(φ−1(z, x))Jφ−1 dHm−n(z, x)
]dHn(x)
A questo punto il teorema 5.4 ci permette di arrivare all’asserto.
2. La (5.1) vale se A ⊂ {x | f e differenziabile in x ma Jf(x) = 0}.Fissato ε > 0 osserviamo come, per ogni w ∈ Rn, si abbia∫
Rn
Hm−n(f−1(y) ∩A) dy =∫
Rn
Hm−n(f−1(y − εw) ∩A) dy
=1
α(m)
∫B(0,1)
∫Rn
Hm−n(f−1(y − εw) ∩A) dy dw(5.7)
e definiamo, per ogni x ∈ Rm e y ∈ Rn,
g : Rm × Rn → Rn, g(x, y) := f(x) + εy,
p : Rm × Rn → Rn, p(x, y) := y.
Quindi Dg = (Df, εIn) ∈ Rn×(m+n) e, utilizzando la formula di Binet-Cauchy inmodo analogo a come e stata usata nella dimostrazione del teorema 4.1, otteniamo
εn ≤ Jg = [[Dg]] ≤ Cε.
Fissati ora y, w ∈ Rn e definito B := A×B(0, 1) ⊂ Rm+n verifichiamo che
B ∩ g−1(y) ∩ p−1(w) ={
∅ se w /∈ B(0, 1)(f−1(y − εw) ∩A)× {w} se w ∈ B(0, 1)
. (5.8)
Infatti un punto (x, z) ∈ B ∩ g−1(y) ∩ p−1(w) se e solo se x ∈ A, z ∈ B(0, 1),f(x) + εz = y e z = w, ovvero se e solo se
x ∈ A, z = w ∈ B(0, 1), f(x) = y − εw,
che e equivalente a
w ∈ B(0, 1), (x, z) ∈ (f−1(y − εw) ∩A)× {w} .
CAPITOLO 5. FORMULA DI COAREA 43
Utilizziamo ora la (5.8), la nota 5.3 e il passo precedente della dimostrazione, perproseguire i calcoli della (5.7)∫
Rn
Hm−n(f−1(y) ∩A) dy =1
α(m)
∫Rn
∫Rn
Hm−n(B ∩ g−1(y) ∩ p−1(w)) dy dw
≤ α(m− n)α(m)
∫Rn
Hm(B ∩ g−1(y)) dy
=α(m− n)α(m)
∫BJg dx dz
≤ α(m− n)α(n)α(m)
Lm(A) supBJg
≤ CLm(A)ε.
Passando ora al limite per ε −→ 0 otteniamo∫Rn
Hm−n(f−1(y) ∩A) dy = 0 =∫AJf dx,
e quindi la dimostrazione e conclusa.
3. Caso generale.
Come detto all’inizio del capitolo applicando il teorema di Rademacher e possibilescrivere A = A1∪A2∪A3. Gli insiemi A1 e A2 sono stati trattati nei punti precedenti,mentre A3 puo essere trascurato applicando la disuguaglianza di Eilenberg 5.2, inquanto Hm(A3) = 0 per il teorema di Rademacher.
5.3 Decomposizione di integrali multipli
In modo analogo a come si e ottenuta la formula di cambio di variabile 4.5, e possibilericavare la formula di decomposizione contenuta nel seguente teorema 5.6.
Nota 5.5. Se f : Rm → Rn e una mappa lipschitziana, per ogni y ∈ Rn si ha che f−1(y)e chiuso e quindi Hm−n-misurabile.
Teorema 5.6. Sia ϕ : Rm → Rn una mappa lipschitziana e g : Rm → R una funzioneLm-sommabile, allora
g|ϕ−1(y) e Hm−n-sommabile per Ln q.o. y
ed inoltre ∫Rm
g(x)Jϕ(x)dx =∫
Rn
[∫ϕ−1(y)
g dHm−n]dy (5.9)

CAPITOLO 5. FORMULA DI COAREA 44
Dimostrazione. Come nel caso del teorema 4.5 possiamo considerare g ≥ 0. Quindi,grazie al teorema (1.12) possiamo scrivere
g =∞∑i=1
1iχAi
per appropriati insiemi Lm-misurabili {Ai}. Allora, applicando il teorema di convergenzamonotona e la formula della coarea, otteniamo∫
Rm
gJϕ dx =∞∑i=1
1i
∫Ai
Jϕdx
=∞∑i=1
1i
∫Rn
Hm−n(ϕ−1(y) ∩Ai) dHn(y)
=∫
Rn
∞∑i=1
1iHm−n(ϕ−1(y) ∩Ai) dHn(y)
=∫
Rn
[∫ϕ−1(y)
g dHm−n]dy
Capitolo 6
Applicazioni
In questo capitolo elenchiamo alcune semplici applicazioni delle formule di area e coarea.
6.1 Applicazioni della formula di Area
6.1.1 Lunghezza di una curva
Sia γ = f([0, 1]) il supporto della curva parametrizzata dalla funzione f : [0, 1] → Rn,che supponiamo lipschitziana e iniettiva. Scriviamo f = (f1, . . . , fn) e Df = (f ′1, . . . , f
′n),
in modo cheJf = det(Df) = ||f ′||.
Dunque, applicando il Teorema di Fubini e la (4.1), la lunghezza di γ sara:
H1(γ) =∫
[0,1]H0(f−1(y)) dH1(y) =
∫ 1
0||f ′(x))|| dx.
6.1.2 Area di un grafico
Sia G(g;U) = {(x, g(x)) | x ∈ U} il grafico di una funzione lipschitziana g : Rm → Rsull’insieme aperto U ⊂ Rm. Definendo f : Rm → Rm+1 come f(x) := (x, g(x)) siottiene
Df =
1 . . . 0...
. . ....
0 . . . 1∂g
∂x1. . .
∂g
∂xm
∈ R(m+1)×m.
Applicando ora la formula di Binet-Cauchy possiamo calcolare (Jf)2 come la somma deiquadrati dei determinanti dei minori n× n di Df , quindi
(Jf)2 = 1 +(∂g
∂x1
)2
+ . . .+(∂g
∂xm
)2
= 1 + ||Dg||2,
45

CAPITOLO 6. APPLICAZIONI 46
che ci permette di calcolare l’area della superficie di G(g;U) come
Hm(G(g;U)) =∫
Rm
H0({y, g−1(y)
}∩ U
)dHm(y) =
∫U
√1 + ||Df(x)||2 dx.
6.1.3 Volume su sottovarieta di Rn
Siano M una sottovarieta lipschitziana m-dimensionale di Rn, e f : U →M con U ⊂ Rm
una sua parametrizzazione locale. Siano poi B ⊂ f(U) un boreliano e A := f−1(B).Definiamo ora
gij :=∂f
∂xi
∂f
∂xj, i, j = 1, . . . ,m,
g := det ((gij)i,j) .
Quindi(Jf)2 = Df∗Df = (gij)i,j ⊂ Rm×m
e il volume di B in M puo essere valutato come
Hm(B) =∫
Rm
H0(f−1(y) ∩B
)dHm(y) =
∫A
√g(x) dx.
6.2 Applicazioni della formula di coarea
6.2.1 Coordinate Polari
Sia g : Rm → R una funzione Lm-sommabile. Definiamo f : Rm → R come f(x) := |x|,da cui
Df(x) =x
|x|e quindi per ogni x 6= 0 si ha Jf(x) = 1. Applicando ora la (5.9) otteniamo∫
Rm
g(x) dx =∫
R
(∫f−1(y)
g dHm−1
)dy =
∫ ∞0
(∫∂B(0,ρ)
g dHm−1
)dρ.
In particolare, per il teorema fondamentale del calcolo integrale, vediamo come
d
dρ
(∫B(0,ρ)
g(x) dx
)=∫∂B(0,ρ)
g dHn−1
per L1-quasi tutti i ρ > 0.

CAPITOLO 6. APPLICAZIONI 47
6.2.2 Linee di livello
Sia f : Rm → R una funzione lipschitziana. Allora, dato che Jf = |Df |,∫Rm
|Df(x)| dx =∫
RHm−1({f = t}) dt.
La seguente proposizione e una generalizzazione dei due esempi precedenti.
Proposizione 6.1. Sia f : Rm → R una funzione lipschitziana tale che |Df(x)| > 0per Lm-quasi tutti gli x ∈ Rm. Sia poi g : Rm → R una funzione Lm-sommabile. Allora∫
{x|f(x)>t}g(x) dx =
∫ ∞t
(∫{x|f(x)=s}
g(y)|Df(y)|
dHm−1(y)
)ds.
In particolare,
d
dt
(∫{x|f(x)>t}
g(x) dx
)= −
∫{x|f(x)=t}
g(y)|Df(y)|
dHm−1(y)
per L1-quasi tutti i t ∈ R.
Dimostrazione. Chiaramente Jf = |Df |. Scriviamo Et = {x | f(x) > t} e usiamo ilteorema 5.6 per valutare∫
{x|f(x)>t}g(x) dx =
∫Rm
χEt
g(x)|Df(x)|
Jf(x) dx
=∫ ∞−∞
(∫∂Es
g(y)|Df(y)|
χEt dHm−1(y))ds
=∫ ∞t
(∫∂Es
g(y)|Df(y)|
dHm−1(y))ds.

Appendice A
Notazione
A.1 Vettori e insiemi
2X Insieme delle parti di X.Rn Spazio euclideo n-dimensionale.ei (0, . . . , 1, . . . , 0) con 1 in i-esima posizione.x = (x1, . . . , xn) Tipico punto di Rn.|x|
√x2
1 + x22 + . . .+ x2
n.x · y x1y1 + x2y2 + . . .+ xnyn.B(x, r) {y ∈ Rn | |x− y| < r}= palla aperta con centro x e raggio r.B(x, r) {y ∈ Rn | |x− y| ≤ r}= palla chiusa con centro x e raggio r.α(n) Volume della palla unitaria di Rn.χE Funzione caratteristica dell’insieme E.E Chiusura di E.∂E Frontiera dell’insieme E.Sa(E) Simmetrizzazione di Steiner dell’insieme E, vedi sezione 2.3.1.diamE supx,y∈E |x− y|= diametro dell’insieme E.
A.2 Funzioni
f+, f− max(f, 0), max(−f, 0).f |E f ristretta all’insieme E.Df Derivata di f .||Df(x)|| Norma operatore, ||Df(x)|| = sup|y|=1 |Df(x) · y|.∂fi
∂xjDerivata parziale di f : Rm → R rispetto alla variabile xj .
∂yf Derivata parziale di f fatta rispetto al gruppo di variabili y = (y1, . . . , yn).Jf Jacobiano di f , vedi capitolo 3.Lip(f) Costante di Lipschitz di f , vedi sezione 2.4.G(f,A) Grafico di f sull’insieme A.
48

APPENDICE A. NOTAZIONE 49
Ck {f : Rm → Rn | f e differenziabile k volte con continuita }.
A.3 Misure
# Misura che conta.Ln Misura di Lebesgue n-dimensionale.Hsδ Premisura di Hausdorff, vedi sezione 2.1.Hs Misura di Hausdorff, vedi sezione 2.1.dimH Dimensione di Hausdorff, vedi sezione 2.2.
A.4 Altre notazioni
L∗ Aggiunta di L, vedi sezione 3.1.[[L]] Jacobiano della mappa lineare L, vedi sezione 3.1.Pλ Proiezione associata con λ ∈ Λ(n,m), vedi sezione 3.1.πmn Proiezione di Rn su Rm.

Bibliografia
[1] G. Alberti. Geometric measure theory. Encyclopedia of Mathematical Physics,2:520–527, 2007.
[2] R. Bellmann. Introduction to matrix analysis. Mac Graw Hill, 1960.
[3] Yu. D. Burago, V. A. Zalgaller. Geometric inequalities. Springer-Verlag, 1988.
[4] L. C. Evans, R. F. Gariepy. Measure theory and fine properties of functions. CRCPress, Inc., 1992.
[5] K. Falconer. Fractal Geometry: mathematical foundations and applications. JohnWiley and Sons, 1990.
[6] H. Federer. Geometric Measure Theory. Springer-Verlag, 1969.
[7] F. Morgan. Geometric Measure Theory, A Beginner’s Guide. Academic Press, 2000.
[8] H. von Weizsacker. Fractal sets and preparation to geometric measure theory. Notedi J. Geißler, 2006.
50