
Fondamenti e Concetti della Fisica Contemporanea Cenni di...
73
Fondamenti e Concetti della Fisica Contemporanea Cenni di Matematica e Fisica Roberto Casalbuoni Dipartimento di Fisica, Universit` a di Firenze Sezione INFN, Firenze Istituto di Fisica Teorica Galileo Galilei, Arcetri, Firenze OpenLab, Universita’ di Firenze Appunti delle lezioni tenute all’Universita’ di Firenze nell’a.a. 2011/2012 nell’ambito della Laurea Magistrale in Logica, Filosofia e Storia della Scienza.
Transcript of Fondamenti e Concetti della Fisica Contemporanea Cenni di...
Fondamenti e Concetti della FisicaContemporanea
Cenni di Matematica e Fisica
Roberto Casalbuoni
Dipartimento di Fisica, Universita di Firenze
Sezione INFN, Firenze
Istituto di Fisica Teorica Galileo Galilei, Arcetri, Firenze
OpenLab, Universita’ di Firenze
Appunti delle lezioni tenute all’Universita’ di Firenze nell’a.a. 2011/2012nell’ambito della
Laurea Magistrale in Logica, Filosofia e Storia della Scienza.

Indice
Indice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1 Cenni di matematica 2
1.1 Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Trigonometria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 I limiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Le derivate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.1 Equazioni differenziali e formula di Taylor . . . . . . . . . . . . . . . 141.4.2 Funzioni di piu’ variabili . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Gli integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.6 Numeri complessi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.7 Le matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2 Cenni di fisica 27
2.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.2 I postulati della meccanica classica . . . . . . . . . . . . . . . . . . . . . . . 302.3 Onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.1 Descrizione delle onde . . . . . . . . . . . . . . . . . . . . . . . . . . 372.3.2 L’interferenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.3.3 Il meccanismo della visione . . . . . . . . . . . . . . . . . . . . . . . 42
2.4 Gli inizi della meccanica quantistica . . . . . . . . . . . . . . . . . . . . . . 432.4.1 Il corpo nero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.4.2 Einstein e i fotoni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.4.3 Il problema atomico . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.4.4 La meccanica delle onde e quella delle matrici . . . . . . . . . . . . . 502.4.5 Il significato probabilistico della funzione d’onda . . . . . . . . . . . 562.4.6 Il principio di indeterminazione . . . . . . . . . . . . . . . . . . . . . 582.4.7 Equivalenza della meccanica ondulatoria (Schrodinger) e della mec-
canica delle matrici (Heisenberg) . . . . . . . . . . . . . . . . . . . . 592.5 L’esperimento di interferenza di Young . . . . . . . . . . . . . . . . . . . . . 602.6 L’esperimento di Stern e Gerlach . . . . . . . . . . . . . . . . . . . . . . . . 67
2.6.1 Analogia con la polarizzazione della luce . . . . . . . . . . . . . . . . 69
1
Capitolo 1
Cenni di matematica
1.1 Funzioni
Una funzione e’ una regola per associare ad un oggetto un altro oggetto. L’oggetto da
cui si parte e’ detto l’argomento della funzione, quello di arrivo e’ il risultato prodotto
dalla funzione. L’insieme a cui appartiene l’argomento e’ detto il dominio della funzione.
Il risultato dell’applicazione di una funzione ad un argomento appartiene in genere ad un
insieme che e’ detto il codominio, ma l’insieme dei risultati e’ detto range della funzio-
ne. In generale, codominio e range non coincidono necessariamente. ma il range e’ un
sottoinsieme del codominio.
• Consideriamo f(x) = x2. Questa funziona associa ad ogni argomento x appartenen-
te ai reali (dominio) il suo quadrato che appartiene ai reali positivi (range). E’ da
osservare che la notazione f indica la trasformazione, mentre f(x) indica il risultato
della trasformazione f applicata all’argomento x. Nel caso specifico f sta per ele-
vazione al quadrato. Mentre, per es. f(2) = 4 e’ il risultato di prendere il quadrato
di 2. Notiamo che il codominio e’ dato da tutti i numeri reali.
• Consideriamo la funzione g(x) = x2 con dominio sugli interi positivi. L’operazione
g coincide con l’operazione f ma il dominio di definizione e’ diverso. Quindi f e g
devono essere considerate funzioni diverse.
• Consideriamo h(x) =√
x. Perche’ questa funzione abbia senso il dominio deve
essere dato dai reali maggiori od uguali a zero. Il range sono i reali positivi, mentre
il codominio sono i numeri reali.
Qualche volta e’ utile considerare la composizione di due funzioni h(x) e j(x). La
composizione e’ una nuova funzioe k = h ◦ j definita calcolando prima j(x) e poi h(x).
Cioe’
k(x) = h ◦ j(x) = h(j(x)) (1.1)
Per esempio, se
h(x) = sin x, j(x) = x2 (1.2)
2
si ha
k(x) = h ◦ j(x) = h(x2) = sin(x2) (1.3)
E’ da tener presente che se si inverte l’ordine delle funzioni il risultato e’ diverso. In questo
caso
j ◦ h(x) = j(sin x) = (sin x)2 (1.4)
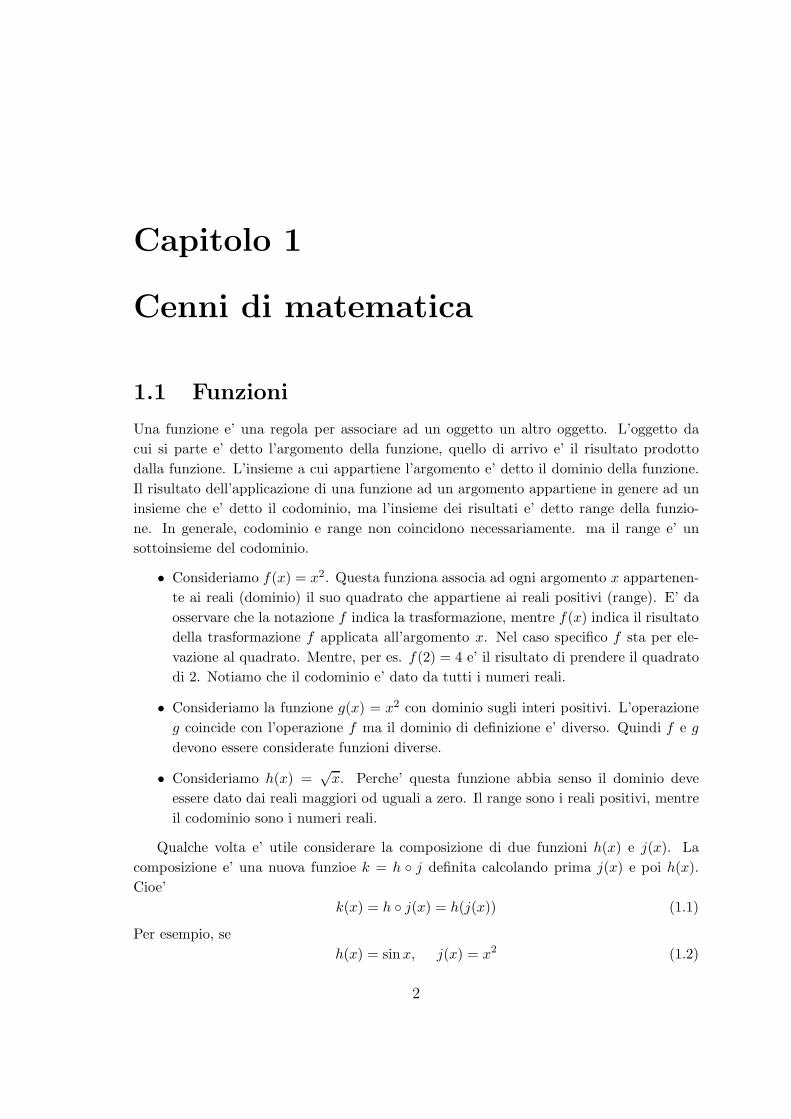
Lo strumento fondamentale per lo studio dettagliato delle funzioni e’ il calcolo diffe-
renziale. L’idea, che nasce con Leibnitz e Newton, si basa sull’idea che qualunque tratto di
curva (vedi Figura 1.1), se preso su un intervallo sufficientemente piccolo, si puo’ assimilare
ad un segmento rettilineo
Figura 1.1: La figura in basso rappresenta la stessa curva disegnata in alto manell’intervallo piu’ piccolo (1.4, 1.6). Come si vede, in questo intervallo puo’ essereidentificata con un segmento rettilineo.
Quindi l’idea e’ quella di andare a considerare quelle che si chiamano le proprieta’
locali delle funzioni per poi derivarne le proprieta’ generali. Prima pero’ di addentrarci
nel calcolo differenziale introduciamo alcune nozioni elementari di trigonometria.
1.2 Trigonometria
Consideriamo il cerchio di raggio uno di Figura 1.2 ed il triangolo descritto dai punti
P1OQ1. I rapporti dei cateti all’ipotenusa dipendono solo dal valore di θ1 e possiamo
3

θ1
θ2
x1x 2
y1
y2
PP 12
x
y
OQ1
III
III IV
Figura 1.2: La figura illustra la definizione di seno e coseno per gli angoli θ1,2.
quindi definire le seguenti funzioni dell’angolo θ1
sin θ1 =P1Q1
OP1= y1, cos θ1 =
OQ1
OP1= x1 (1.5)
dove si e’ tenuto conto che OP1 = 1. In queste definizioni le coordinate x, y sono prese con
il loro segno algebrico. Dunque nel primo quadrante sono entrambe positive e cosi’ saranno
seno e coseno. Nel secondo quadrante x e’ negativo e quindi il seno e’ positivo mentre il
coseno e’ negativo. Questo caso e’ considerato nella Fig.1.2, come l’agolo θ2.Analogamente
si possono considerare gli altri casi Nel III quadrante sono entrambi negativi, mentre nel
IV il coseno e’ positivo ed il seno negativo. Si trovano anche subito i seguenti valori del
seno e coseno per valori particolari degli angoli
sin 00 = 0, cos 00 = 1, sin 900 = 1, cos 900 = 0, sin 450 = cos 450 =1√2
(1.6)
per il teorema di Pitagora si ha
(P1Q1)2 + (OQ1)
2 = (OP1)2 = 1 (1.7)
da cui
sin2 θ1 + cos2 θ1 = 1 (1.8)
Questa proprieta’ vale per qualunque valore dell’angolo e quindi le funzioni seno e coseno
non sono indipendenti tra loro.
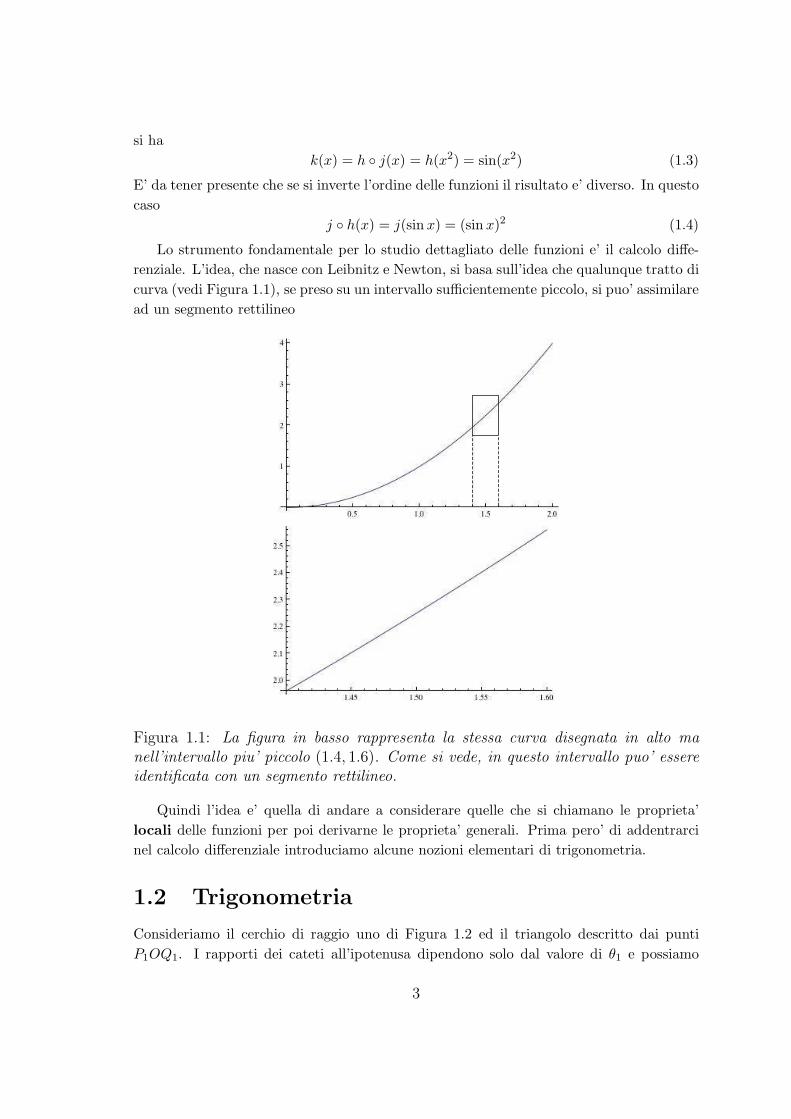
Segue subito dalla definizione di seno e coseno (il punto P ritorna su se stesso dopo
un giro di 3600), ma anche guardando il grafico di Figura 1.3, che si tratta di funzioni
periodiche con un periodo di 3600, cioe’
sin(θ + 3600) = sin θ, cos(θ + 3600) = cos θ (1.9)
4
50 100 150 200 250 300 350
-1.0
-0.5
0.5
1.0
Figura 1.3: Il grafico delle funzioni seno (linea continua) e coseno (linea tratteggiata)tra 0 e 360 gradi.
Relazioni importanti sono le seguenti (che dimostreremo facendo uso dei numeri com-
plessi)
sin(α + β) = sin α cos β + sin β cos α
cos(α + β) = cos α cos β − sin α sin β (1.10)
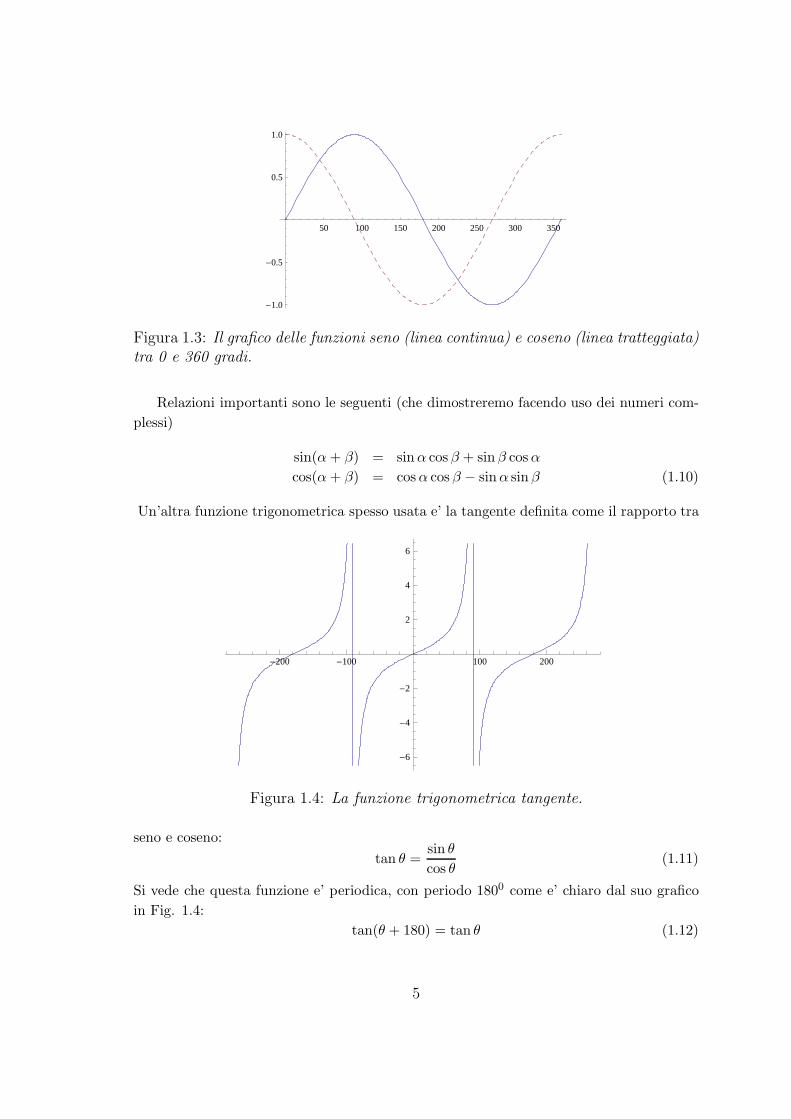
Un’altra funzione trigonometrica spesso usata e’ la tangente definita come il rapporto tra
-200 -100 100 200
-6
-4
-2
2
4
6
Figura 1.4: La funzione trigonometrica tangente.
seno e coseno:
tan θ =sin θ
cos θ(1.11)
Si vede che questa funzione e’ periodica, con periodo 1800 come e’ chiaro dal suo grafico
in Fig. 1.4:
tan(θ + 180) = tan θ (1.12)
5

Dalla Fig. 1.2 vediamo che la tangente dell’angolo θ1 e’ anche data da
tan θ1 =P1Q1
OQ1=
y1
x1(1.13)
In molti casi e’ conveniente misurare gli angoli in radianti. Per definire questa misura,
consideriamo la Figura 1.5. Allora si definisce il valore di α in radianti come il rapporto tra
l’arco AB ed il raggio OA. Per un cerchio di raggio 1 corrisponde alla lunghezza dell’arco
corrispondente.
La lunghezza dell’arco per un angolo giro vale 2π e quindi si ha la seguente corrispon-
denza tra i valori in gradi ed i valori radianti
3600 ⇔ 2π, 1800 ⇔ π, 900 ⇔ π
2, 450 ⇔ π
4(1.14)
Piu’ precisamente
αradianti = αgradiπ
180(1.15)
O A
B
α
Figura 1.5: La misura di un angolo in radianti.
1.3 I limiti
Supponiamo sia data una funzione f(x) ed un punto a sull’asse delle x. Quello che vogliamo
determinare e’ cosa succede alla f(x) quando x e’ molto vicino ma non uguale ad a.
Consideriamo per esempio la seguente funzione con dominio tutto l’asse reale eccetto il
punto x = 2
f(x) = 3x − 1, per x 6= 2 (1.16)
Ovviamente non ha senso dire che f(2) = 5 dato che questa funzione non e’ definita in quel
punto1. Posssiamo pero’ domandarci che valore assume la funzione quando siamo molto,
1Vedremo in seguito che casi di questo tipo, sebbene appaiono molto artificiali, li incontreremospesso
6

molto vicini a 2. Per capire il punto costruiamo due tabelle, la prima in cui partiamo
da valori di x < 2 calcolando il corrispondente valore della f ed un’altra analoga ma per
valori decrescenti di xx 1 1.5 1.9 1.99 1.999
f(x) 2 3.5 4.7 4.97 4.997(1.17)
x 3 2.5 2.1 2.01 2.001f(x) 8 6.5 5.3 5.03 5.003
(1.18)
Vediamo che avvicinandosi a 2 da entrambe le parti il risultato si avvicina sempre piu’ a 5.
Partendo da valori inferiori a 2 la sequenza superiore tende a 5 per valori inferiori, mentre
per valori superiori a 2 la seuqnza tende a 5 per valori maggiori a 5. Dunque abbiamo
due successioni numeriche, una che tende a 5 per valori inferiori a 2 ed una che ci tende
per valori superiori. Questo e’ il modo usuale con il quale si definiscono, per esempio, i
numeri reali, tramite due successioni che approssimano il numero una per valori superiori
e l’altra per valori inferiori. Dunque diremo che
limx→2
f(x) = 5 (1.19)
Dunque, questa procedura ci permette di dare un senso a qualcosa che a priori non e’
definito.
In questa definizione di limite abbiamo considerato la convergenza ad un determinato
valore sia partendo da valori minori di x che maggiori rispetto al punto limite. Possiamo
pero’ definire anche un limite da destra e uno da sinistra. Indicheremo il limite fatto
da destra o da sinistra con i due simboli limx→a± . Consideriamo, per esempio, la curva
-2 -1 1 2 3 4
2
4
6
Figura 1.6: Nel punto x = 3. che non appartiene al dominio della curva in figura,il limite destro ed il limite sinistro non coincidono.
di Fig. 1.6 che non e’ definita per x = 3. Possiamo pero’ definire il limite destro e quello
sinistro che sono rispettivemente:
limx→3−
f(x) = 6, limx→3+
f(x) = 2 (1.20)
7

Ovviamente, se il limite destro e quello sinistro esistono ma non coincidono il limite tout
court (cioe’ quello definito in precedenza) non esiste.
In molti casi e’ interessante conoscere il comportamento della funzione per grandi valori
di x. In questo caso definiamo il limite per x → ±∞ e scriveremo
limx→±∞
f(x) = L± (1.21)
Dove si intende che prendendo x sempre piu’ grande in valore assoluto, se x > 0, allora il
valore della funzione diventa sempre piu’ vicino a L+ o a L− quando x < 0.
Facciamo alcuni esempi meno banali. Consideriamo la seguente funzione
f(x) =x2 − 3x + 2
x − 2(1.22)
e notiamo che questa funzione e’ definita ovunque eccetto in x = 2 dove il denominatore
si annulla. Se ne consideriamo il limite in un qualunque punto diverso da x = 2 possiamo
semplicemente sostituire il valore di x dentro la funzione e calcolare il risultato. Per
esempio
limx→−1
(−1)2 − 3(−1) + 2
−1 − 2= −2 (1.23)
Ma per x = 2 non possiamo seguire questa strada. In generale occorre seguire la procedura
che abbiamo visto prima,cioe’ studiare cosa succede quando x si avvicina sempre piu’ a 2
ma senza uguagliarlo. In molti casi ci sono dei trucchi che possiamo adottare. Nel caso in
esame si puo’ notare che anche il numeratore si annulla per x = 2. Questo significa che si
puo’ fattorizzare il numeratore estraendo il fattore x − 2. Infatti avremo
limx→2
x2 − 3x + 2
x − 2= lim
x→2
(x − 2)(x − 1)
x − 2= lim
x→2(x − 1) = 1 (1.24)
Dato che nell’ultimo passaggio, l’espressione che risulta dopo la divisione tra i due polinomi
al numeratore ed al denominatore e’ ben definita, e quindi possiamo calcolare il limite
semplicemente sostituendo il valore di x. Notiamo che la f(x) e (x− 1) non sono la stessa
funzione, dato che la f(x) e’ definita su tutto l’asse reale escludendo il punto x = 2, mentre
la seconda funzione e’ definita ovunque. Ma l’osservazione cruciale e’ che le due funzioni
sono uguali in tutti gli altri punti. Questo fatto ci permette di calcolare in modo semplice
il limite della f(x) nel punto in cui non e’ ben definita.
Se consideriamo il rapporto di due polinomi e gli zeri del denominatore non coincidono
con zeri del numeratore, il limite in questi punti tendera’ a ±∞ a seconda del segno della
funzione per grandi valori di |x|.Intuitivamente diciamo che una curva e’ continua se la possiamo disegnare senza alzare
la penna dal foglio. Ci sono pero’ funzioni come 1/x (vedi Fig. 1.7) che vanno a +∞ per
x → 0+ e a −∞ per x → 0− che non godono di questa proprieta’ perche’ x = 0 non sta
nel dominio ed inoltre il limite destro ed il limite sinistro non coincidono.
Diremo dunque che una funzione e’ continua nel punto x = a se a e’ nel dominio della
funzione e se
limx→a
f(x) = f(a) (1.25)
8
-4 -2 2 4
-2
-1
1
2
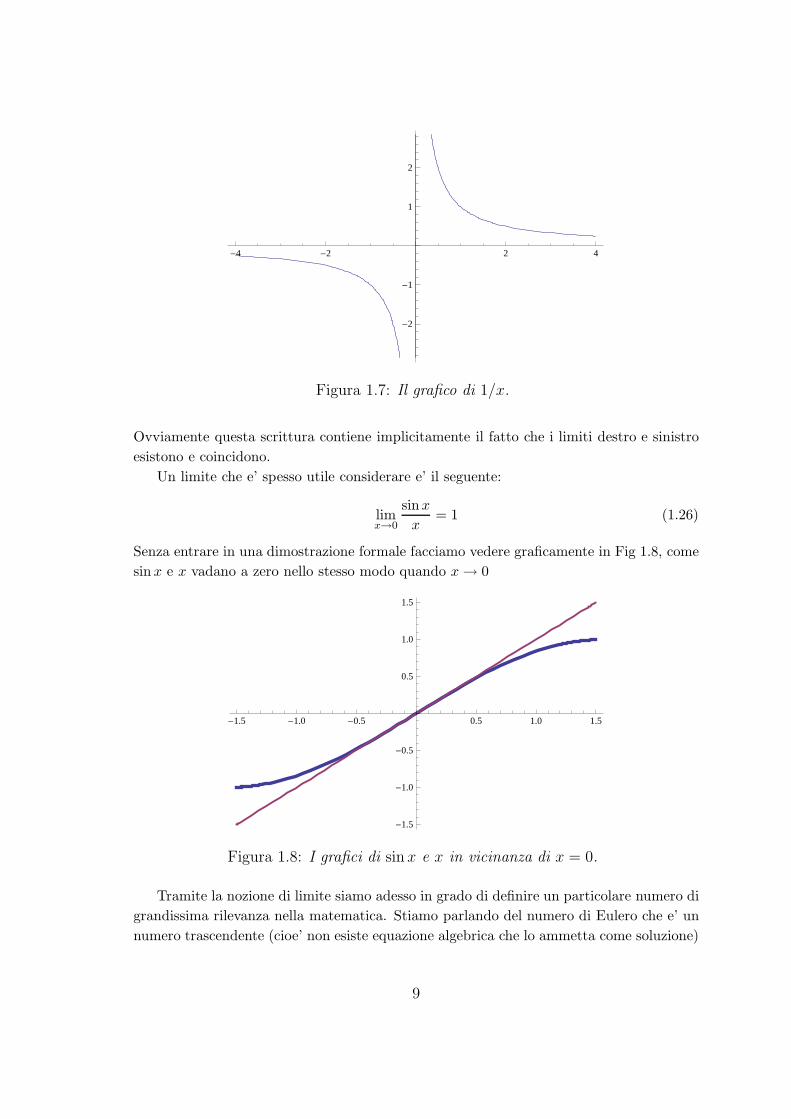
Figura 1.7: Il grafico di 1/x.
Ovviamente questa scrittura contiene implicitamente il fatto che i limiti destro e sinistro
esistono e coincidono.
Un limite che e’ spesso utile considerare e’ il seguente:
limx→0
sinx
x= 1 (1.26)
Senza entrare in una dimostrazione formale facciamo vedere graficamente in Fig 1.8, come
sin x e x vadano a zero nello stesso modo quando x → 0
-1.5 -1.0 -0.5 0.5 1.0 1.5
-1.5
-1.0
-0.5
0.5
1.0
1.5
Figura 1.8: I grafici di sin x e x in vicinanza di x = 0.
Tramite la nozione di limite siamo adesso in grado di definire un particolare numero di
grandissima rilevanza nella matematica. Stiamo parlando del numero di Eulero che e’ un
numero trascendente (cioe’ non esiste equazione algebrica che lo ammetta come soluzione)
9

la cui rappresentazione decimale (ovviamente infinita, come π) e’ data da
e = 2.71828182845904523536028..... (1.27)
La definizione rigorosa di e e’ la seguente
e = limn→∞
(
1 +1
n
)n
(1.28)
Questa espressione ha il significato che si devono calcolare i termini della successione
e1, e2, · · · .... (1.29)
A questo punto piu’ grande e’ il valore di n che si considera, tanto piu’ il termine en della
successione en definita da
en =
(
1 +1
n
)n
(1.30)
si avvicina ad e. Per esempio si ha
e1 = 2, e2 = 2.25, e3 = 2.37, · · · e10 = 2.59374, e1000 = 2.71692, · · · (1.31)
Scegliendo n sufficientemente grande possiamo calcolare e con la precisione che si vuole
(anche se questo non e’ il metodo piu’ efficiente).
Supponiamo adesso di voler calcolare una potenza di e,
ea = limn→∞
((
1 +1
n
)n)a
= limn→∞
(
1 +1
n
)an
= limm→∞
(
1 +a
m
)m(1.32)
dove abbiamo sotituito ad n la quantita’ m/a. Infatti fare il limite per n → ∞ o m → ∞non fa differenza.
Ricordiamo qui anche la definizione di logaritmo. Se abbiamo una equazione del tipo
ax = b, a, b > 0 (1.33)
con a e b noti, il valore di x per cui questa e’ soddisfatta si chiama il logaritmo di b in
base a e si scrive
x = loga b (1.34)
Quindi, per definizione
aloga
b = b (1.35)
Ricordiamo alcune proprieta’ del logaritmo
loga(bc) = loga b + logb c, loga
(
b
c
)
= loga b − loga c, loga(br) = r loga b (1.36)
Jnoltre
loga 1 = 0, loga a = 1, loga(ax) = x (1.37)
10

Esiste anche un modo semplice per cambiare la base dei logaritmi in cui si lavora. Preci-
samente, i logaritmi di uno stesso numero in due basi diverse sono correlati da
loga x =logc x
logc a(1.38)
Ovviamente la scelta della base per i logaritmi e’ completamente arbitraria. Quando
si usano per calcoli numerici una base molto conveniente e’ la base 10, ma quando si voglia
una base comoda per sviluppi matematici, questa e’ la base e, cioe’ si sceglie come base il
numero di Eulero. I logaritmi in base e sono anche detti logaritmi naturali. I logaritmi
naturali hanno una scrittura particolare che non indica la base stessa2:
loge a ≡ ln a (1.39)
In particolare, per i logaritmi naturali valgono le seguenti regole
eln x = x, ln(ex) = x, ln 1 = 0 (1.40)
ln(xy) = ln x + ln y, ln
(
x
y
)
= ln x − ln y, ln xy = y ln x (1.41)
1.4 Le derivate
Se vogliamo definire la velocita’ media di una automobile dobbiamo prendere la distanza
percorsa in un dato tempo e dividerla per il tempo impiegato, cioe’
velocita′media =distanza
tempo(1.42)
Un modo per misurare la distanza e’ considerare i segnali chilometrici. Se ad una dato
istante passiamo da un dato segnale chilometrico, diciamo che la nostra posizione e’ quella
indicata dal segnale. In pratica stiamo definendo una funzione tale che quando l’argomento
e’ il tempo che corrisponde al passaggio da un dato segnale, assume un valore numerico
pari al valore dei chilometri indicati. Se chiamiamo questa funzione posizione, potremo
scrivere la distanza tra due segnali come
posizione(t2) − posizione(t1) = distanza tra i due segnali (1.43)
dove t1 e t2 sono gli istanti di tempo nei quali passiamo al primo ed al secondo segnale.
Se immaginiamo di avere una distribuzione di segnali in tutti i punti della strada che
stiamo percorrendo, possiamo definire una funzione che ad ogni istante ci segnala la nostra
posizione sulla strada in relazione all’istante considerato. Chiamando questa funzione con
s(t) possiamo definire la velocita’ media come
v =s(t2) − s(t1)
t2 − t1(1.44)
2Ma qualvolta, per abuso di notazioni, scriveremo ln a nella forma log a. Cioe’, ogni volta chenon si indichi esplicitamente la base si intende che il logaritmo e’ in base e
11

dove t1 e t2 sono gli istanti tra i quali vogliamo calcolare la velocita’ media.
Supponiamo adesso di voler determinare la velocita’ ad ogni istante t, cioe’ quello che
in pratica fa un contachilometri. A questo scopo fissiamo l’istante t al quale vogliamo
definire la velocita’. Poi prendiamo un altro istante t′ e calcoliamo la velocita’ media
prendendo t′ sempre piu’ vicino a t. Quello che stiamo facendo e’ di definire la velocita’
istantanea come il limite
v = limt′→t
s(t′) − s(t)
t′ − t(1.45)
Ovviamente e’ necessario il concetto di limite in questa definizione perche’ il rapporto
che definisce la velocita’ media non e’ definito quando i due istanti considerati coincidono.
Una maniera piu’ illuminante per definire la velocita’ istantanea (velocita’ tout court) e’
quello di considerare t′ = t + ∆t e poi prendere il limite per ∆t che tende a zero
v = lim∆t→0
s(t + ∆t) − s(t)
∆t(1.46)
Si dice anche che la velocita’ e’ il limite del rapporto incrementale, o la derivata di s(t),
ed il risultato del limite viene rappresentato in vari modi. Per esempio
v =ds(t)
dt= s(t) (1.47)
sono notazione equivalenti. La seconda espressione ricorda il fatto che la derivata e’ il
limite del rapporto tra due variazione, la variazione della posizione e la variazione del
tempo. Infatti potremmo scrivere
∆s = s(t + ∆t) − s(t) (1.48)
che rappresenta la variazione di posizione nel passare dal tempo t al tempo t+∆t e scrivere
ds(t)
dt= lim
∆t→0
∆s
∆t(1.49)
Dopo questa premessa, consideriamo una generica funzione f(x) e definiamone la
derivata come il limite del rapporto incrementale
df(x)
dx≡ f ′(x) = lim
∆x→0
f(x + ∆x) − f(x)
∆x(1.50)
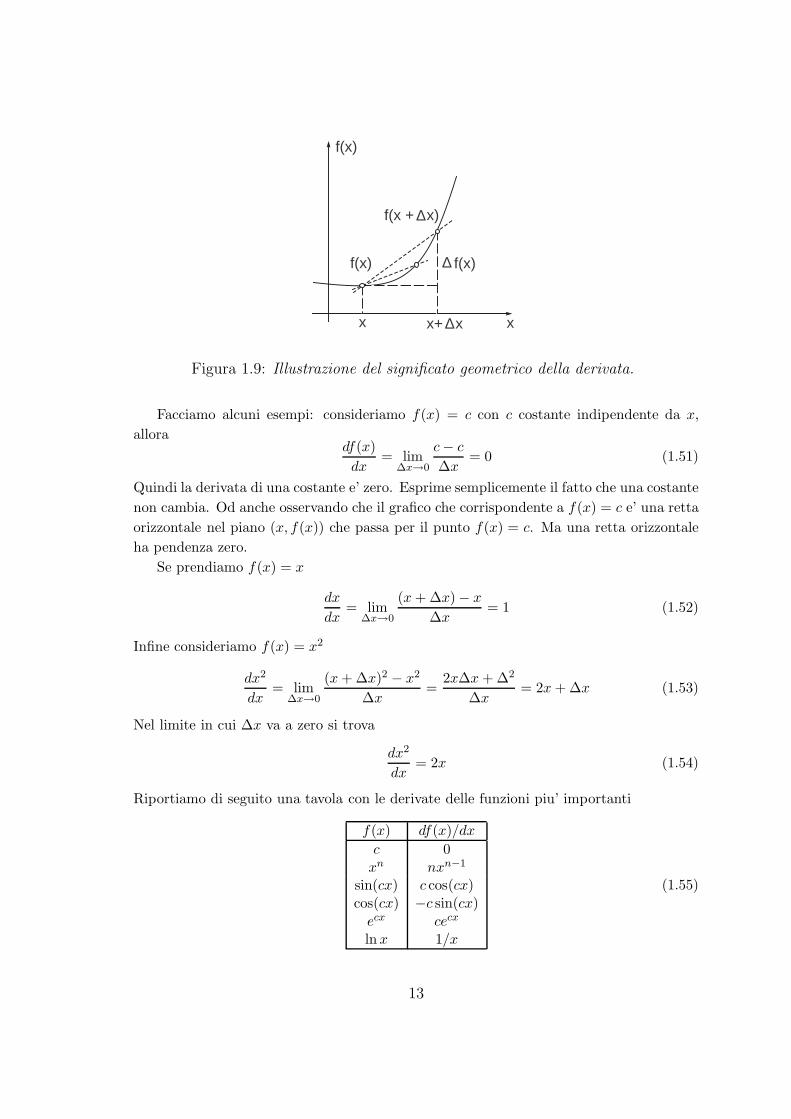
La derivata ha un semplice significato geometrico. Consideriamo la Fig. 1.9. Il rapporto
incrementale e’ il rapporto dei due cateti ∆f(x) e ∆x del triangolo rettangolo che ha
per ipotenusa la linea tratteggiata che passa per i punti (x + ∆x, f(x + ∆x) e (x, f(x).
Dunque e’ la tangente dell’angolo che l’ipotenusa forma al vertice f(x) con il catetoo,
in altri termini, la pendenza dell’ipotenusa. Quando facciamo tendere ∆x a zero, questa
ipotenusa tende a diventare la tangente alla curva nel punto di coordinate (x, f(x). Questa
osservazione permettere di capire molto semplicemente quanto vale la derivata guardando
il grafico della funzione.
12
x x+ x∆
f(x)
f(x + x)∆
∆ f(x)
x
f(x)
Figura 1.9: Illustrazione del significato geometrico della derivata.
Facciamo alcuni esempi: consideriamo f(x) = c con c costante indipendente da x,
alloradf(x)
dx= lim
∆x→0
c − c
∆x= 0 (1.51)
Quindi la derivata di una costante e’ zero. Esprime semplicemente il fatto che una costante
non cambia. Od anche osservando che il grafico che corrispondente a f(x) = c e’ una retta
orizzontale nel piano (x, f(x)) che passa per il punto f(x) = c. Ma una retta orizzontale
ha pendenza zero.
Se prendiamo f(x) = x
dx
dx= lim
∆x→0
(x + ∆x) − x
∆x= 1 (1.52)
Infine consideriamo f(x) = x2
dx2
dx= lim
∆x→0
(x + ∆x)2 − x2
∆x=
2x∆x + ∆2
∆x= 2x + ∆x (1.53)
Nel limite in cui ∆x va a zero si trova
dx2
dx= 2x (1.54)
Riportiamo di seguito una tavola con le derivate delle funzioni piu’ importanti
f(x) df(x)/dx
c 0xn nxn−1
sin(cx) c cos(cx)cos(cx) −c sin(cx)
ecx cecx
ln x 1/x
(1.55)
13
Tavola 1 - Una tavola di derivate. In queste espressioni c e’ una costante.
Una regola importante e’ quella che serve per calcolare la derivata di un prodotto. Si
ha
(f(x)g(x))′ = lim∆x→0
f(x + ∆x)g(x + ∆x) − f(x)g(x)
∆x=
lim∆x→0
f(x + ∆x)g(x + ∆x) − f(x + ∆x)g(x) + f(x + ∆x)g(x) − f(x)g(x)
∆x(1.56)
dove nell’ultimo passaggio abbiamo aggiunto e levato f(x + ∆x)g(x). Possiamo riscrivere
(f(x)g(x))′ = lim∆x→0
f(x + ∆x)(g(x + ∆x) − g(x)) + (f(x + ∆x) − f(x))g(x)
∆x(1.57)
Dato che nel limite f(x + ∆x) tende a f(x) si trova
(f(x)g(x))′ = f(x)g′(x) + f ′(x)g(x) (1.58)
Infine consideriamo la derivata di una funzione di funzione, cioe’ di un funzione f(x) dove
a sua volta x e’ una funziona di un’altra variabile y, cioe’ f(x(y)). Ci si chiede quale sia
la derivata della funzione f rispetto ad y. Si ha
df(x(y))
dy=
df(x)
dx
∣
∣
∣
x=x(y)
dx(y)
dy(1.59)
Supponiamo, per esempio, di avere la funzione f(y) = sin(y3). Per calcolare la sua
derivata introduciamo x = y3. Dunque
df(x(y))
dy=
d sin x
dx
∣
∣
∣
x=y3
dy3
dy= cos x
∣
∣
∣
x=y33y2 = 3y2 cos(y3) (1.60)
Le derivate di ordine piu’ alte si definiscono per ricorrenza. La derivata seconda e’ la
derivata della derivata prima, ecc. La derivata di ordine n viene indicata con uno dei
seguenti simboli
f (n)(x) =dnf(x)
dxn(1.61)
1.4.1 Equazioni differenziali e formula di Taylor
Consideriamo una equazione differenziale del primo ordine del tipo:
df(x)
dx+ h(x)f(x) = g(x) (1.62)
dove h(x) e g(x) sono funzioni note e f(x) e’ la funzione incognita. Un teorema fonda-
mentale sulle equazioni differenziali dice che: se assegniamo il valore di f(x) in un punto,
l’equazione ha una ed una sola soluzione.
14

L’idea della dimostrazione e’ molto semplice. Consideriamo la definizione di derivata
(1.50). Se la quantita’ ∆x e’ sufficientemente piccola, possiamo approssimare la derivata
della funzione f(x) nel punto x, con il relativo rapporto incrementale
df(x)
dx≈ f(x + ∆x) − f(x)
∆x(1.63)
Ma questa relazione puo’ anche essere usata per calcolare approssimativamente la f(x +
∆x) in funzione della f(x) e della sua derivata nello stesso punto:
f(x + ∆x) ≈ f(x) + ∆xdf(x)
dx(1.64)
Data allora la funzione in un punto x0, la possiamo calcolare in un punto vicino
f(x0 + ∆x) ≈ f(x0) + ∆xdf(x)
dx
∣
∣
∣
x=x0
= f(x0) + ∆x (g(x0) − h(x0)f(x0)) (1.65)
dove abbiamo usato l’equazione differenziale per riesprimere la derivata di f(x) in x0 in
termini di f(x0). Adesso il secondo membro e’ noto e quindi conosciamo f(x0 + ∆x).
Possiamo poi procedere analogamente per calcolare la f nel punto x0 + 2∆x0)
f(x0 + 2∆x) = f(x0 + ∆x) + ∆xdf(x)
dx
∣
∣
∣
x=x0+∆x(1.66)
Dato che dal calcolo precedente abbiamo determinato f(x0+∆x), possiamo riesprimere
la derivata nel punto x0 + ∆x usando l’equazione differenziale dove compaiono adesso
tutte quantita’ note. Cosi procedendo e’ possibile determinare la f(x) in tutti i punti.
Naturalmente questa procedura e’ tanto piu’ corretta quanto piu’ piccolo si [rende ∆x.
Una procedura di questo tipo, o sue variazioni, viene usata per risolvere, o integrare,
numericamente un’equazione differenziale. Questa procedura e’ facilmente implementabile
in un calcolatore elettronico.
In genere, l’errore che si fa in questa approssimazione e’ di ordine (∆x)2. Per esem-
pio se ∆x ≈ 0.1, l’errore e’ di ordine 10−2. Usando questo risultato si puo’ calcolare
l’approssimazione a ex0 nel seguente modo
ex0+∆x ≈ ex0 + ∆xex0 = ex0(1 + ∆x) (1.67)
Il valore della funzione in un punto, che serve per risolvere l’equazione differenziale, viene
anche detto costante d’integrazione.
La formula (1.65) e’ un caso particolare di una formula piu’ generale che si chiama
formula di Taylor che permette di calcolare il valore di una funzione in un punto se si
conoscono le prime N derivate
f(x) ≈ f(a) + (x − a)f ′(a) +1
2!(x − a)2f ′′(a) + · · · 1
(N − 1)!f (N−1)(a) (1.68)
dove
f (N)(a) ≡ dNf(x)
dxN
∣
∣
∣
x=a(1.69)
15

La correzione a questa espressione e’ in genere di ordine (x − a)N . Per esempio, se ci
limitiamo sino al termine con la derivata terza, e se x − a = 0.1, l’errore che facciamo e’
di ordine (10−1)4 = 10−4 = 0.0001. Sotto certe ipotesi possiamo prendere il limite per
N → ∞ di questa espressione e trovare una rappresentazione esatta (detta sviluppo in
serie) della funzione f(x)
f(x) =
∞∑
n=0
1
n!(x − a)nf (n)(a) (1.70)
Se consideriamo ex e sviluppiamo in serie per a = 0, dato che la derivata prima e’
uguale all’esponenziale di partenza, tutte le derivate sono uguali all’esponenziale e se le
calcoliamo a x−0 si trova 1. Il risultato e’ che l’esponenziale ammette il seguente sviluppo
in serie
ex = 1 + x +1
2!x2 + · · · + 1
n!xn + · · · =
∞∑
n=0
xn
n!(1.71)
Questi risultati si possono facilmente generalizzare al caso di equazioni differenziali di
ordine piu’ elevato, cioe’ ad equazioni che coinvolgano la derivata ennesima di una funzione.
In questo caso per avere un’unica soluzione occorre assegnare n costanti d’integrazione che,
per esempio, possono essere scelte come il valore della funzione e delle sue derivate sino
all’ordine (N − 1) in un punto. Vedremo in seguito alcuni esempi.
1.4.2 Funzioni di piu’ variabili
Nel caso di funzioni di piu’ variabili si possono definire le derivate rispetto alle singole
variabili. In questo caso si parla di derivate parziali. Per esempio, se si ha una funzione
f(x, y) la sua derivata parziale rispetto ad x e’ definita da
∂f(x, y)
∂x= lim
∆x→0
f(x + ∆x, y) − f(x, y)
∆x(1.72)
ed analogamente∂f(x, y)
∂y= lim
∆y→0
f(x, y + ∆y) − f(x, y)
∆y(1.73)
Quindi, quando si esegue una derivata parziale rispetto ad una variabile, le altre devono
essere tenute ferme. Per esempio
∂(x3y2)
∂x= 3x2y2,
∂(x3y2)
∂y= 2x3y (1.74)
1.5 Gli integrali
Ci sono due tipi di integrali, il cosi detto integrale indefinito e quello definito. L’integrale
indefinito e’ l’operazione inversa della derivata. Cioe’ data un funzione f(x), il suo integrale
indefinito
F (x) =
∫
f(x)dx (1.75)
16

e’ quella funzione F (x) tale che la sua derivata e’ f(x). F (x) e’ anche detta una primitiva
di f(x)dF (x)
dx= f(x) (1.76)
Quindi per calcolare l’integrale di una funzione elementare come quelle di Tavola 1 basta
leggere la tavola stessa in ordine inverso. L’integrale indefinito dipende da una costante
arbitraria, dato che la derivata di una costante e’ nulla. Per esempio, l’integrale di x sara’
∫
x dx =x2
2+ c (1.77)
Troviamo cosi la seguente tavola di integrali indefiniti
f(x)∫
f(x) dx
xn xn+1/(n + 1) + costcos(cx) sin(cx)/c + costsin(cx) − cos(cx)/c + cost
ecx ecx/c + cost1/x ln x + cost
(1.78)
Tavola 2 - Una tavola di integrali. In queste espressioni c e’ una costante.
Chiaramente il concetto di integrale indefinito e’ utile per risolvere una equazione
differenziale.
Vediamo alcuni esempi.
Moto con accelerazione costante
In questo caso la derivata della velocita’, cioe’ l’accelerazione e’ costante, quindi
dv
dt= a → v(t) =
∫
dv
dtdt =
∫
adt = at + costante (1.79)
con a una costante indipendente dal tempo. Pertanto
v(t) = at + costante (1.80)
Come possiamo determinare la costante? Se assegniamo la velocita’ v0 al tempo t0,
dovremo avere
v(t0) = v0 = at0 + costante (1.81)
Possiamo ricavare la costante da questa relazione
costante = v0 − at0 (1.82)
e sostituendo
v(t) = at + v0 − at0 (1.83)
17

da cui
v(t) = v0 + a(t − t0) (1.84)
Se ci chiediamo come varia la posizione della particella nel caso in esame, dovremo risolvere
l’equazioneds(t)
dt= v(t) = v0 + a(t − t0) (1.85)
In questa equazione abbiamo a secondo membro un termine costante ed uno lineare in t.
In entrambi i casi si calcolano agevolmente le primitive con il risultato
s(t) = (v0 − at0)t +1
2at2 + costante (1.86)
Se conosciamo la posizione al tempo t0, s0 = s(t0), possiamo determinare la costante
risolvendo
s0 = (v0 − at0)t0 +1
2at20 + costante = v0t0 −
1
2at20 + costante (1.87)
Dunque
costante = s0 − v0t0 +1
2at20 (1.88)
e sostituendo
s(t) = (v0 − at0)t +1
2at2 + s0 − v0t0 +
1
2at20 (1.89)
da cui
s(t) = s0 + v0(t − t0) +1
2a(t − t0)
2 (1.90)
Un esempio meno banale e’ il moto di una molla. In questo caso, dalla legge di Newton,
F = ma e dal fatto che per spiccoli spostamente, la molla tende a ritornare alla posizione
di equilibrio con una forza proporzionale allo spostamento, F = −kx, si ha
md2x(t)
dt= −kx(t) (1.91)
Occorre dunque trovare una funzione che derivata due volte e’ proporzionale a se stessa.
Vediamo dalle nostre tavole che le funzioni trigonometriche seno e coseno godono entrambe
di questa proprieta’. Segue immediatamente che la soluzione e’ data da
x(t) = A cos ωt + B sin ωt, ω2 =k
m(1.92)
Dove le costanti A e B sono legate alle condizioni iniziali. Per esempio, se diamo a t = 0
la posizione e la velocita’, avremo
x0 = x(0) = A (1.93)
e
v0 = v(0) = [−ωA sin ωt + ωB cos ωt]t=0 = ωB (1.94)
18
Quindi
x(t) = x(0) cos ωt +v(0)
ωsin ωt (1.95)
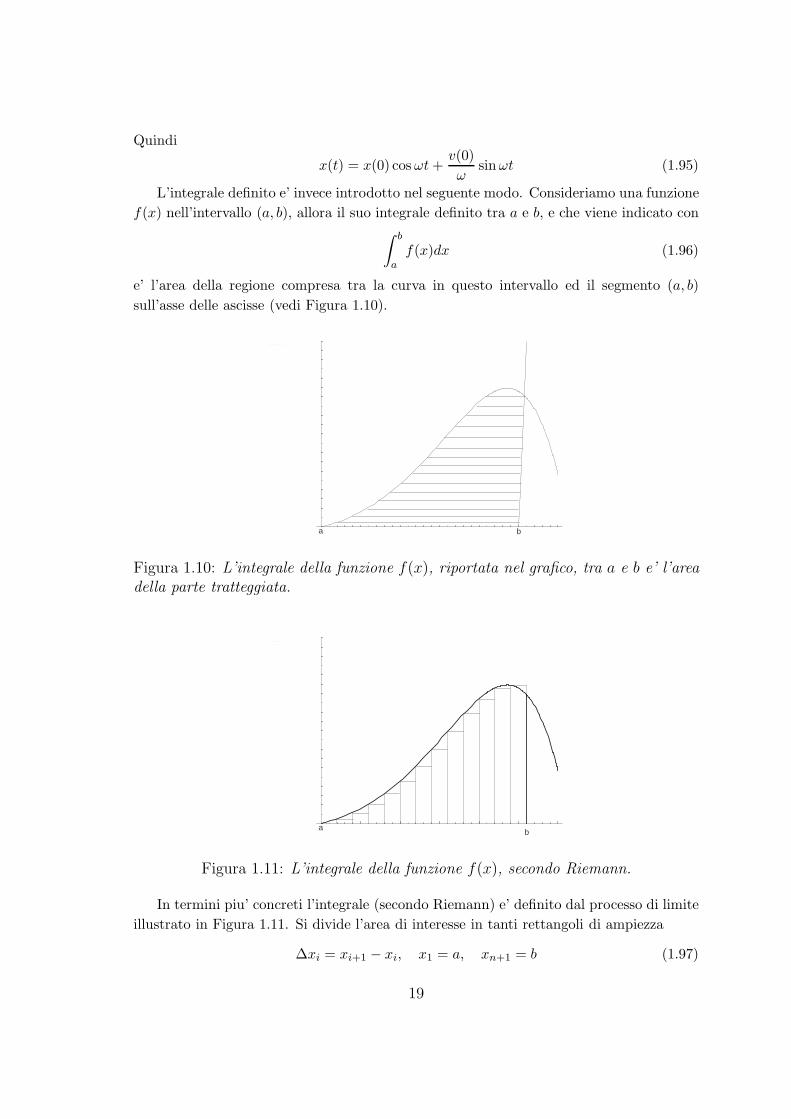
L’integrale definito e’ invece introdotto nel seguente modo. Consideriamo una funzione
f(x) nell’intervallo (a, b), allora il suo integrale definito tra a e b, e che viene indicato con∫ b
af(x)dx (1.96)
e’ l’area della regione compresa tra la curva in questo intervallo ed il segmento (a, b)
sull’asse delle ascisse (vedi Figura 1.10).
0.0 0.5 1.0 1.5 2.0 2.5 3.0
2
4
6
8
10
a b
Figura 1.10: L’integrale della funzione f(x), riportata nel grafico, tra a e b e’ l’areadella parte tratteggiata.
0.0 0.5 1.0 1.5 2.0 2.5 3.0
2
4
6
8
10
a b
Figura 1.11: L’integrale della funzione f(x), secondo Riemann.
In termini piu’ concreti l’integrale (secondo Riemann) e’ definito dal processo di limite
illustrato in Figura 1.11. Si divide l’area di interesse in tanti rettangoli di ampiezza
∆xi = xi+1 − xi, x1 = a, xn+1 = b (1.97)
19

e si approssima l’area con la somma delle aree dei rettangoli e poi si prende il limite per
∆xi → 0. In formule∫ b
af(x)dx = lim
∆xi→0
n∑
i=1
f(xi)∆xi (1.98)
Consideriamo adesso una primitiva di f(x). Dunque una funzione tale che
dF (x)
dx= f(x) (1.99)
Dunque possiamo scrivere in via approssimata
F (xi+1) ≈ F (xi) + (xi+1 − xi)f(xi) (1.100)
od anche
∆xif(xi) ≈ F (xi+1) − F (xi) (1.101)
da cui∫ b
af(x)dx = lim
∆xi→0
n∑
i=1
(F (xi+1 − F (xi)) (1.102)
Scriviamo i vari termini di questa somma nel seguente modo
F (x2) − F (x1) +
+ F (x3) − F (x2) +
+ F (x4) − F (x3) +
+ · · · ++ F (xn) − F (xn−1) +
+ F (xn+1) − F (xn) (1.103)
Chiaramente i termini di questa somma si annullano a due a due ed il risultato e’ semplica-
mente F (b)−F (a). Dunque abbiamo dimostrato il teorema fondamentale del calcolo
integrale che dice l’integrale definito e quello indefinito sono connessi dalla seguente
relazione∫ b
af(x)dx = F (b) − F (a) (1.104)
dove F (x) e’ la primitiva di f(x). La costante arbitraria che appare nel calcolo dell’inte-
grale indefinito di f(x) (o della primitiva) non ha effetto nel calcolo dell’integrale definito,
dato che nella differenza F (b) − F (a) si cancella. Facciamo un semplice esempio
∫ 2
1x2dx =
x3
3
∣
∣
∣
x=2− x3
3
∣
∣
∣
x=1=
8
3− 1
3=
7
3(1.105)
20
1.6 Numeri complessi
I numeri complessi nascono dall’esigenza di trovare comunque delle soluzioni alle equazio-
ni algebriche di secondo grado che, com’e’ noto, nel caso di discriminante negativo non
ammettono soluzioni reali. L’esempio piu’ semplice e’ quello dell’equazione
x2 = −1 (1.106)
Il modo in cui viene risolto il problema e’ quello di definire un numero nuovo, non reale,
che e’ indicato con la lettera i (immaginario in contrasto ai numeri reali), tale che
i2 = −1 (1.107)
Questo permette di allargare il campo dei numeri reali introducendo delle nuove quantita’
(i numeri complessi) che sono determinati da una coppia di reali:
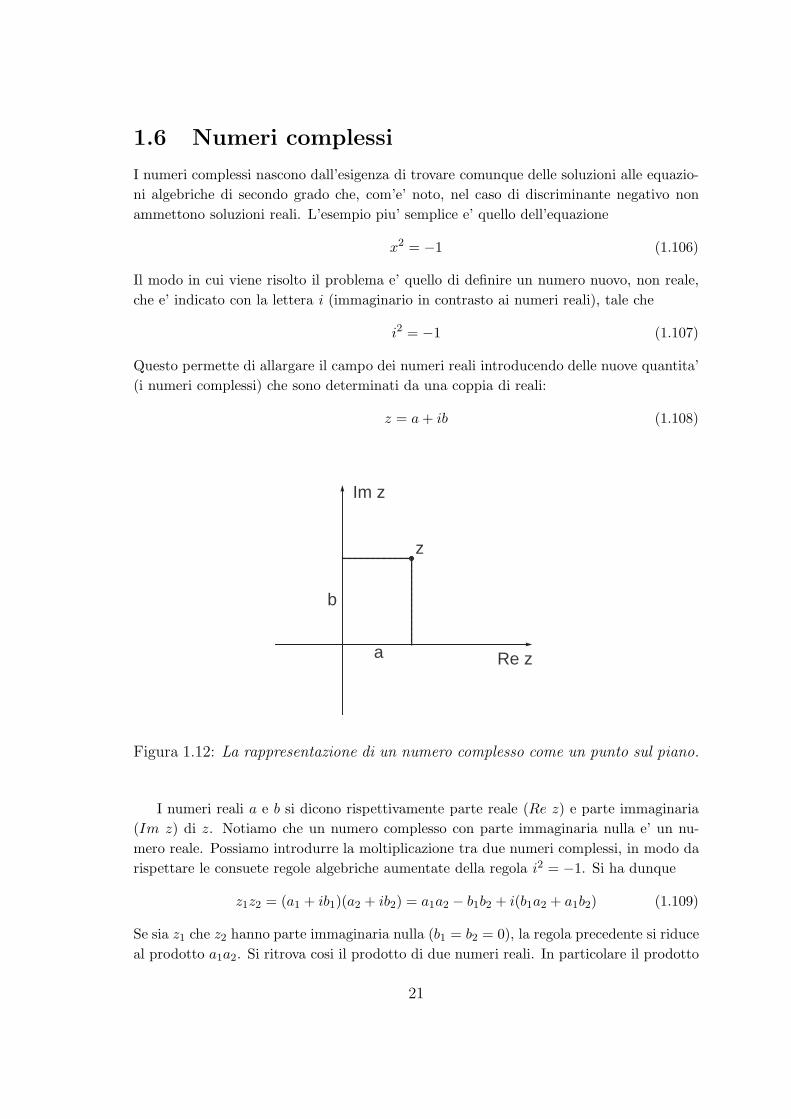
z = a + ib (1.108)
Re z
Im z
z
a
b
Figura 1.12: La rappresentazione di un numero complesso come un punto sul piano.
I numeri reali a e b si dicono rispettivamente parte reale (Re z) e parte immaginaria
(Im z) di z. Notiamo che un numero complesso con parte immaginaria nulla e’ un nu-
mero reale. Possiamo introdurre la moltiplicazione tra due numeri complessi, in modo da
rispettare le consuete regole algebriche aumentate della regola i2 = −1. Si ha dunque
z1z2 = (a1 + ib1)(a2 + ib2) = a1a2 − b1b2 + i(b1a2 + a1b2) (1.109)
Se sia z1 che z2 hanno parte immaginaria nulla (b1 = b2 = 0), la regola precedente si riduce
al prodotto a1a2. Si ritrova cosi il prodotto di due numeri reali. In particolare il prodotto
21

di un numero reale per un numero complesso (nel caso precedente b1 = 0) da’
a1z2 = a1a2 + ia1b2 (1.110)
Si definisce il complesso coniugato di un numero complesso tramite l’operazione di tra-
sformare i → −i. Precisamente
z∗ = (a + ib)∗ = a − ib (1.111)
Il modulo quadro di z e’ una quantita’ positiva ed e’ data da
|z|2 = zz∗ = (a + ib)(a − ib) = a2 + b2 ≥ 0 (1.112)
Dato che un numero complesso e’ identificato da una coppia di numeri reali, lo possiamo
anche descrivere in termini di punti su un piano, in cui l’asse x e l’asse y siano rappresentati
dalla parte reale e dalla parte immaginaria del numero complesso (vedi Figura 1.12). Pos-
siamo dare anche un’altra rappresentazione di z usando coordinate polari. Cioe’ possiamo
scrivere
a = ρ cos θ, b = ρ sin θ (1.113)
da cui
z = ρ(cos θ + i sin θ) (1.114)
Il numero ρ e’ correlato semplicemente al modulo quadro di z. Infatti usando la rappre-
sentazione polare si ha
|z|2 = ρ2(cos θ + i sin θ)(cos θ − i sin θ) = ρ2(cos2 θ + sin2 θ) = ρ2 (1.115)
Dunque
ρ =√
|z|2 (1.116)
Esiste una importantissima relazione, chiamata l’identita’ di Eulero, tra l’espressione tri-
gonometrica di un numero complesso di modulo 1 ed il numero di Eulero, indicato con la
lettera e, data da
eiθ = cos θ + i sin θ (1.117)
Notiamo intanto che entrambi i membri hanno modulo 1. Per il secondo membro vedi
l’equazione (1.115). Per il primo membro ricordiamo una identita’ algebrica valida per
potenze con la stessa base
axay = ax+y (1.118)
Segue
eiθ1eiθ2 = ei(θ1+θ2) (1.119)
da cui
|eiθ|2 = eiθ(
eiθ)∗
= eiθe−iθ = 1 (1.120)
22

Siamo ora in grado di dimostrare le equazioni (1.10), assumendo l’identita’ di Eulero.
Usando su entrambi i membri della (1.119) questa identita’ si ha
ei(θ1+θ2) = cos(θ1 + θ2) + i sin(θ1 + θ2) (1.121)
eiθ1eiθ2 = (cos θ1 + i sin θ1) (cos θ2 + i sin θ2) =
= cos θ1 cos θ2 − sin θ1 sin θ2 + i(sin θ1 cos θ2 + sin θ2 cos θ1) (1.122)
Dato che due numeri complessi sono uguali se e solo se hanno uguale parte reale e parte
immaginaria, confrontando queste due espressioni vediamo che le relazioni che si ottengono
sono esattamente le (1.10).
Dimostriamo adesso l’identita’ di Eulero. Consideriamo le due funzioni
f1(θ) = eiθ, f2(θ) = cos θ + i sin θ (1.123)
Si hadf1(θ)
dθ= if1(θ) (1.124)
df2(θ)
dθ= − sin θ + i cos θ = i(cos θ + i sin θ) = if2(θ) (1.125)
Inoltre
f1(0) = 1, f2(0) = 1 (1.126)
Dunque f1(θ) e f2(θ) coincidono ovunque, dato che soddisfano la stessa equazione diffe-
renziale del primo ordine e coincidono in θ = 0. Dalla formula di Eulero segue quella che
viene considerata la piu’ bella formula della matematica perche’ connette il numero
e, π, l’unita’ immaginaria e −1. Infatti se nella formula di Eulero scegliamo θ = π segue
subito
eiπ = −1 (1.127)
1.7 Le matrici
Una matrice e’ una collezione di n×m numeri (in genere considereremo numeri complessi)
che indicheremo con il simbolo
mij, i = 1, · · · , n, j = 1, · · · ,m (1.128)
In genere questi numeri si dispongono in un rettangolo che si denota complessivamente
con un unico simbolo, per esempio, M
M =
m11 m12 · · · m1m
m21 m22 · · · m2m...
......
...mn1 m2n · · · mnm
(1.129)
23

I singoli numeri mij sono detti elementi della matrice M . Il primo indice determina la
riga, mentre il secondo indice la colonna. Facciamo alcuni esempi:
Matrice 2 × 2 :
(
0 11 0
)
(1.130)
Matrice 2 × 1 :
(
01
)
(1.131)
Matrice 1 × 2 :(
1 0)
(1.132)
Le matrici come le ultime due sono anche dette vettori. Nel primo caso si parla di un
vettore colonna, nel secondo caso di un vettore riga. Le matrici di ordine n × m formano
uno spazio vettoriale di dimensione n × m, con la somma di due matrici definita da:
(A + B)ij = Aij + Bij (1.133)
ed il prodotto
(αA)ij = αAij (1.134)
Per matrici 2 × 2 questo significa(
a bc d
)
+
(
a′ b′
c′ d′
)
=
(
a + a′ b + b′
c + c′ d + d′
)
(1.135)
e
α
(
a bc d
)
=
(
αa αbαc αd
)
(1.136)
E’ possibile definire un prodotto tra due matrici A e B se il numero di colonne di A e’
uguale al numero di righe di B. Precisamente se A e’ di ordine m1 ×n e B n×m2, allora
il loro prodotto, una matrice m1 × m2, e’ dato da
Cij =
n∑
k=1
AikBkj (1.137)
Piu’ esplicitamente si ha
C11 = A11B11 + A12B21 + · · · + A1nBn1
C12 = A11B12 + A12B22 + · · · + A1nBn2
· · ·C1m2
= A11B1m2+ A12B2m2
+ · · · + A1nBnm2
C21 = A21B11 + A22B21 + · · · + A2nBn1
· · ·Cij = Ai1B1j + Ai2B2j = · · · + AinBnj
· · ·Cm1m2
= Am11B1m2+ Am12B2m2
+ · · · + Am1nBnm2(1.138)
Il prodotto cosi’ definito si chiama prodotto righe per colonne. Infatti, se guardiamo
l’espressione precedente, vediamo che, per esempio, l’elemento C11, e’ dato dalla somma
24

dei prodotti dei termini della prima riga di A per i corrispondenti della prima colonna di
B. Nello stesso modo, l’elemento Cij e’ dato dalla somma dei prodotti dei termini della
riga i-ma di A per i corrispondenti della colonna j-ma di B. Diamo alcuni esempi di
prodotti. Il prodotto di due matrici 2 × 2 e’ ancora una matrice 2 × 23
(
0 11 0
)(
1 00 −1
)
=
(
0 −11 0
)
(1.139)
Il prodotto di una matrice 2 × 2 per una 2 × 1 (un vettore) e’ ancora un vettore 2 × 14
(
0 11 0
)(
01
)
=
(
10
)
(1.140)
Analogamente il prodotto di un vettore 1 × 2 per una matrice 2 × 2 e’ un vettore 1 × 25
(
0 1)
(
0 11 0
)
=(
1 0)
(1.141)
Notiamo infine che il prodotto di un vettore 1 × n per un vettore n × 1 da’ una matrice
1 × 1 cioe’ un numero. Per esempio
(
a b)
(
a′
b′
)
= aa′ + bb′ (1.142)
Nel caso di matrici quadrate si definisce una quantita’ importante che e’ il determi-
nante. Importante, in particolare, perche’ un sistema di n equazioni lineari in n incognite
si riconduce ad un calcolo di determinanti di matrici costruite con i coefficienti delle equa-
zioni del sistema. In particolare, se si ha un sistema lineare omogeneo, cioe’ senza termini
noti, quale per esempio
a11x + a12y = 0, a21x + a22y = 0 (1.143)
si puo’ dimostrare che si hanno soluzioni non nulle se e solo se il determinante della matrice
dei coefficienti e’ nullo. In questo caso il determinante e’ dato da
Det
(
a11 a12
a21 a22
)
= a11a22 − a21a12 (1.144)
In generale il determinante si ottiene prendendo tutti i possibili prodotti di elementi che
non appartengono alla stessa riga e alla stessa colonna e combinandoli assieme con un
opportuno segno in fronte a ciascuno di essi. Senza entrare in dettagli diciamo che esiste
3In genere il prodotto di due matrici quadrate n×n e’ ancora una matrice quadrata dello stessoordine
4In generale il prodotto di una matrice n× n per il vettore n-dimensionale, n× 1, e’ ancora unvettore n-dimensionale
5Anche qui in generale, un vettore 1× n per una matrice quadrata n× n da’ un vettore di tipo1 × n
25

un metodo ricorsivo per calcolare i determinanti effettuando il cosi detto sviluppo per
righe (o per colonne). Consideriamo ad esempio il determinante di una matrice 3 × 3
Det
a11 a12 a13
a21 a22 a23
a31 a32 a33
=
= a11Det
(
a22 a23
a32 a33
)
− a12Det
(
a21 a23
a31 a33
)
+ a13Det
(
a21 a22
a31 a32
)
(1.145)
Come si vede il segno di ogni termine e’ scelto positivo o negativo se la somma degli indici
del coefficiente dell’elemento per il quale si sta sviluppando e’ pari o dispari rispettiva-
mente. Inoltre le sottomatrici sono ottenute cancellando dalla matrice iniziale l’intera
riga e l’intera colonna corrispondenti all’elemento dello sviluppo. Il metodo si applica a
qualunque riga o colonna da cui sia preferibile partire. Ovviamente e’ conveniente partire
dalla riga o dalla colonna che ha piu’ elementi nulli perche’ questo diminuisce il numero di
sotto-determinanti da calcolare. Da queste regole si vede facilmente che il determinante e’
una somma di termini costituita da tutti i possibili prodotti di elementi di matrice che non
appartengono alla stessa riga e alla stessa colonna, presi ognuno con un segno opportuno.
Per esempio tra i vari prodotti appare il prodotto di tutti gli elementi della diagonale
principale (quella che va da sinistra a destra) preso con il segno positivo. Questi termini
si chiamano anche prodotti dedotti.
Per matrici quadrate a determinante non nullo e’ possibile trovare una matrice inversa,
definita dalla regola
AA−1 = A−1A = I (1.146)
dove I e’ la matrice identita’, cioe’ una matrice con tutti 1 sulla diagonale principale e
zero in tutti gli altri posti). In componenti
n∑
i=1
Aji(A−1)ik =
n∑
i=1
(A−1)jiAik = δjk (1.147)
Il simbolo δjk e’ detto la δ di Kronecker ed e’ uguale ad 1 per j = k e zero in tutti gli altri
casi. Per esempio, se si ha la matrice 2 × 2
A =
(
a11 a12
a21 a22
)
(1.148)
allora l’inversa e’ data da
A−1 =1
DetA
(
a22 −a12
−a21 a11
)
(1.149)
26
Capitolo 2
Cenni di fisica
2.1 Introduzione
Una delle questioni piu’ interessanti relative alla concezione del mondo che ci circonda e’
sempre stata la seguente: la materia, allo stato piu’ elementare, ha composizione corpu-
scolare o piuttosto continua? Questa domanda deriva a sua volta dal problema di cosa
succeda qualora si continui a dividere un pezzo di materia. E’ possibile continuare questo
processo di divisione sino all’infinito? In questo caso potremo parlare di continuita’ della
materia. Se invece il processo di divisibilita’ ha termine perche’ alla fine non ci e’ pos-
sibile effettuare ulteriori divisioni, parleremo di costituzione corpuscolare della materia.
Nel periodo che va dal 600 al 300 AC molti pensatori greci (Talete, Anassimene, Eracli-
to, Empedocle, Platone e Aristotele) formularono o sostennero l’idea che la materia fosse
costituita da quattro elementi, aria, acqua, terra e fuoco che producevano varie sostanze
tramite processi di rarefazione e di condensazione. Questo portava all’idea di una conti-
nuita’ della materia elementare. La posizione opposta fu assunta da Democrito (verso il
460 AC), che introdusse l’idea di atomi1. Questi atomi erano uguali, eccetto per la forma,
la grandezza ed il moto. Quindi i vari elementi derivavano da una diversa disposizione
degli atomi stessi. Uno dei problemi della concezione di Democrito e’ che questa portava
necessariamente all’idea di vuoto. Infatti tra un atomo e l’altro non esiste materia. Leu-
cippo (≈ 450 AC), Epicuro (347-271 AC) e Lucrezio (98-55 AC) appoggiarono le idee di
Democrito, ma in genere questa idea fu abbandonata per il sopravvento delle idee di Pla-
tone e Aristotele che aborrivano l’idea del vuoto e che quindi preferivano l’idea dei quattro
elementi. Questa idea permase per molti secoli. Finalmente Cartesio (1596-1650) riprese
l’idea corpuscolare, sebbene anche lui fosse contrario al vuoto. L’affermazione definitiva
dell’idea corpuscolare, o meglio dell’idea atomica, avvenne grazie alle ricerche fatte sui gas
ed allo sviluppo della chimica. Di particolare rilievo fu il contributo di Dalton (1766-1844)
che introdusse l’idea che tutti gli atomi che costituiscono lo stesso elemento2 fossero iden-
tici tra loro. Nonostante che le evidenze della chimica fossero di natura schiacciante, fino
1Dal greco ατøµøς che significa indivisibile2L’idea che gli elementi costituiscano tutte le sostanze fu introdotta da Boyle (1627-1691)
27
ai primi del novecento c’erano ancora molti scienziati che mettevano in dubbio l’effettiva
realta’ degli atomi. Per esempio lo stesso Einstein nella sua tesi di abilitazione del 1905
affrontava i metodi di misura delle dimensioni molecolari, lavoro teso a rafforzare le idee
corpuscolari sulla materia. Nello stesso anno dava anche un contributo decisivo alle idee
atomiche con il suo lavoro sul moto browniano.
Tutta la discussione precedente si riferisce in realta’ ad una descrizione puramente
cinematica della materia. Dal punto di vista dinamico, dopo la formulazione delle leggi di
Newton (1643-1727) si era consolidata l’idea di una rappresentazione completamente mec-
canicistica dell’universo, l’idea cioe’ di un universo riconducibile ad un modello puramente
meccanico descritto appunto dalle leggi di Newton. In particolare si tento’ di descrivere
anche i fenomeni luminosi in termini meccanici. Newton stesso formulo’ una teoria cor-
puscolare della luce. Questa era anche giustificata da quella parte dell’ottica, nota come
ottica geometrica, che descrive la luce come composta da raggi che attraversano lo spazio
in modo rettilineo essendo poi riflessi od assorbiti dalle superfici incontrate. Questo pote-
va essere chiaramente interpretato in termini di moti di particelle. Quest’ idea si scontro’
successivamente con la scoperta di vari fenomeni, quali la diffrazione e l’interferenza che
non potevano essere spiegati nei termini corpuscolari, ma piuttosto in termini di onde3.
In realta’ l’idea di moti ondosi si era gia’ largamente diffusa nei domini dell’acustica e
della dinamica dei fluidi. Infatti, anche se l’aria e l’acqua sono composti da atomi ed hanno
quindi struttura corpuscolare, se consideriamo fenomeni che avvengono su una scala D,
molto grande rispetto alle dimensioni interatomiche d4, il mezzo (aria o acqua) puo’ di fatto
essere considerato come un continuo. I fenomeni interessanti che avvengono in un mezzo
continuo sono fenomeni di disturbo del mezzo stesso e vengono schematizzati nel seguente
modo. Noi siamo interessati a cosa avviene nei vari punti del mezzo. Indichiamo il generico
punto con P . Per esempio nel caso di un bacino d’acqua possiamo iniziare considerando
tutta l’acqua ferma. Questa situazione viene descritta come lo stato di equilibrio o stato
fondamentale del sistema. Possiamo poi considerare un disturbo (dovuto ad una qualunque
ragione), per cui, invece di avere lo specchio d’acqua immobile, in ogni punto P , il livello
dell’acqua varia con il tempo. Questo fenomeno si puo’ allora descrivere in termini di
una funzione h(P, t) che descrive la variazione di altezza del liquido nel punto P ed al
tempo t rispetto al livello di equilibrio. La quantita’ h(P, t) e’ detta un campo e nel caso
specifico un campo scalare perche’ associa ad ogni punto e ad ogni istante un numero:
h(P, t). Un altro esempio di campo scalare e’ la variazione di pressione nell’aria. Anche
questa puo’ essere descritta da un campo scalare p(P, t) che ci fornisce la variazione di
pressione ripetto alla pressione in aria quieta in ogni punto P e ad ogni istante t. Un
altro esempio di campo scalare e’ la temperatura nei vari punti di una stanza ad un dato
istante di tempo T (P, t). In altri casi puo’ avere interesse avere informazioni che non si
riducono ad un puro numero. Per esempio potremmo essere interessati a conoscere ad
3A questo contribuirono i lavori di Huygens, Fresnel e quello definitivo di Young nel 1801 conil famoso esperimento della doppia fenditura, vedi in seguito
4Stiamo cioe’ assumendo d ≪ D
28
ogni istante la velocita’ dell’acqua nei vari punti di una condotta. La velocita’ e’ una
grandezza vettoriale e quindi l’informazione puo’ essere codificata in tre campi, ~V (P, t),
che rappresentano le tre componenti della velocita’ in un dato sistema di riferimento. In
questo caso si parla di un campo vettoriale. Da un punto di vista matematico, un campo
scalare e’ una applicazione di R3×R → R, dove R3 rappresenta lo spazio tridimensionale,
il primo R e’ il campo reale nel quale varia il tempo, mentre il secondo R non e’ altro che
lo spazio dei valore assunti dalla funzione scalare, cioe’ nei vari casi, h(P, t), p(P, t), ecc.
Nel caso di campi vettoriali si ha una applicazione da R3 × R → R3.
Come abbiamo detto, questi campi rappresentano in genere la variazione dello stato
del mezzo rispetto ad una situazione di equilibrio. Nel caso dell’altezza dell’acqua h, e’
la variazione dell’altezza rispetto al caso di acqua stagnante. p e’ essere la variazione
della pressione rispetto ad una situazione di pressione costante. Il campo ~V ci fornisce
la velocita’ dell’acqua rispetto allo stato in cui l’acqua e’ ferma e cosi via. Nonostante
tutti questi campi rappresentino delle situazioni fisiche molto diverse, quando le variazioni
rispetto alla situazione di equilibrio sono piccole, si hanno situazioni completamente ana-
loghe sul piano matematico. Infatti sotto queste condizioni tutti questi campi descrivono
delle propagazioni ondose. Cioe’ soddisfano un’equazione, detta equazione delle onde.
Dunque l’dea di onde era piuttosto diffusa a seguito degli studi sulla propagazione
dei disturbi nei mezzi. Quando risulto’ evidente che anche la luce dava luogo a fenomeni
di diffrazione e di interferenza, le idee corpuscolari in merito svanirono rapidamente e si
affermo’ in maniera definitiva la descrizione ondulatoria. Alla fine dell’ottocento la teoria
di Maxwell, che prevedeva che la radiazione elettromagnetica soddisfacesse un’equazione
d’onda, fu l’affermazione definitiva della teoria ondulatoria della luce, anche per la maniera
unitaria in cui i fenomeni elettrici e magnetici venivano trattati.
Dunque alla fine dell’ottocento si era in una situazione in cui la materia veniva de-
scritta in maniera corpuscolare, mentre la radiazione elettromagnetica in termini di onde.
Ovviamente gli irriducibili sostenitori delle idee newtoniane cercarono di interpretare le
equazioni di Maxwell in termini meccanicistici. La questione stava in una possibile inter-
pretazione delle onde em come spostamenti di particelle che costituiscono il mezzo in cui
si propagano, cosi come le onde acustiche o le onde di velocita’. In questi casi l’onda esiste
perche’ c’e’ un mezzo materiale che la supporta. Ma quale e’ questo mezzo nel caso della
luce? Si introdusse allora l’idea di etere come il mezzo che, per cosi’ dire, riempie il vuoto
e le cui vibrazioni originano i campi elettromagnetici. Questa idea fu spazzata in modo
definitivo dalla teoria di Einstein (ci riferiamo alla teoria della relativita’ ristretta). Da
quel momento in poi il campo elettromagnetico fu pensato semplicemente in termini di
campi elettrici e magnetici che si propagano nel vuoto. Cioe gli oggetti che vibrano sono
i campi elettromagnetici.
Piu’ o meno nello stesso periodo cominciarono ad emergere fatti nuovi che metteva-
no in crisi i due pilastri della fisica classica, l’equazione di Newton e quelle di Maxwell.
Descriveremo poi questi fenomeni. In questa introduzione e’ sufficiente dire che il primo
colpo fu assestato alla teoria ondulatoria della luce con l’analisi di Planck del corpo nero
(1900) e l’idea successiva di Einstein che la luce fosse costituita da corpuscoli (fotoni) con
29
energia quantizzata. Questa ipotesi permetteva di spiegare l’effetto Compton (1922), che
consiste nel cambiamento di frequenza della luce quando e’ diffusa da un elettrone. Lo
studio dei sistemi atomici portava a concludere che la fisica classica non era in grado di
spiegare la stabilita’ degli atomi che, al contrario, sarebbero dovuti collassare in tempi
brevissimi. L’analisi di Bohr (1913) mostrava che le leggi che regolano i sistemi microsco-
pici dovevano subire una revisione profonda. Nel 1923 De Broglie formulava l’ipotesi che
cosi come la luce mostra un duplice aspetto, ondulatorio e corpuscolare, anche la materia
doveva possedere un duplice aspetto, corpuscolare e ondulatorio. Nel 1927 Davisson e
Germer mostrarono che gli elettroni possono dare luogo ad un fenomeno di interferenza,
mettendone cosi in luce l’aspetto ondulatorio. In questo periodo gli sviluppi procedettero
a velocita’ straordinaria. Nel gennaio del 1925 Pauli enunciava il principio di esclusione e
nel luglio dello stesso anno Heisenberg, con la collaborazione di Born e Jordan, formulava
la meccanica delle matrici che permetteva di effettuare veri e propri calcoli quantistici,
tant’e’ vero che Pauli nel Gennaio del 1926 fu capace di usare le meccanica di Heisenberg
per calcolare l’energia dei livelli dell’atomo di idrogeno. Dopo una decina di giorni usci’ il
primo di una serie di articoli di Schrodinger sulla formulazione ondulatoria della meccanica
quantistica. Questa teoria fu poi mostrata essere equivalente a quella di Heisenberg ma
offriva il fondamentale vantaggio, per i fisici dell’epoca, di essere espressa in termini di
equazioni differenziali, invece che in termini di matrici, tecnica quest’ultima scarsamente
nota ai fisici di allora. Nel febbraio dello stesso anno Fermi, durante la sua permanenza
di due anni presso l’Istituto di Fisica dell’Universita’ di Firenze scrisse il primo lavoro
su quella che poi sarebbe stata conosciuta come la statistica di Fermi-Dirac. Ancora
nel mese di Giugno Born scrisse il primo lavoro sulla interpretazione probabilistica della
meccanica quantistica. Con questo lavoro si puo’ dire che la meccanica quantistica fosse
completamente formulata nella versione nota come l’interpretazione di Copenhagen.
Come abbiamo visto nell’introduzione i capisaldi della fisica classica alla finedell’ottocento erano la teoria di Newton e le equazioni di Maxwell. Qui daremo unabreve introduzione su come la teoria di Newton possa essere riformulata in manierada poter consentire un confronto diretto con quelli che saranno i postulati dellameccanica quantistica. Per quanto concerne invece le equazioni di Maxwell, sarebbetroppo lungo e complicato discuterne. Ci limiteremo dunque ad esporre alcune delleproprieta’ delle onde.
2.2 I postulati della meccanica classica
Consideriamo il caso semplice di un moto unidimensionale di una particella punti-forme di massa m soggetta ad una forza F (x). L’equazione di Newton che descriveil moto della particella risulta essere5
md2x(t)
dt2≡ mx(t) = F (x(t)) (2.1)
5E’ uso indicare le derivate prime e seconde rispetto al tempo con uno o due puntirispettivamente.
30

Questa equazione determina completamente il moto della particella nel senso che sesi assegnano i valori al tempo t = 0 della posizione x(0) e della velocita’ dx(t)/dt|t=0 ≡x(0), il moto ai tempi successivi e’ completamente determinato, cioe’ dall’equa-zione precedente possiamo calcolare x(t). Questo problema si puo’ riformulareintroducendo la variabile di impulso che e’ semplicemente connessa alla velocita’:
p(t) = mx(t) (2.2)
In questi termini la singola equazione del moto, del secondo ordine nelle derivatetemporali, viene convertita in due equazioni differenziali del primo ordine
x(t) =p
m, p(t) = F (x(t)) (2.3)
Se esiste una funzione V (x) (che nel caso unidimensionale esiste sempre ma non e’detto che esista in generale), tale che
F (x) = −dV (x)
dx(2.4)
allora
x(t) =p(t)
m, p(t) = −dV (x)
dx
∣
∣
∣
x=x(t)(2.5)
In questo caso si puo’ introdurre una funzione delle variabili p e x (detta l’hamilto-niana del sistema) data da
H =p2
2m+ V (x) (2.6)
in termini della quale le due equazioni del moto (2.5) si possono scrivere nella forma
x(t) =∂H
∂p, p(t) = −∂H
∂x(2.7)
Un sistema di equazioni cosi fatto si chiama sistema hamiltoniano e le due va-riabili (x, p) vengono dette canonicamente coniugate. Si dice anche che p e’coniugata a x e viceversa, o che x e p sono una coppia di variabili coniugate. Nelcaso in esame la funzione H ha anche il significato di energia meccanica del siste-ma, essendo la somma dell’energia cinetica p2/2m = mx2/2 e dell’energia potenzialeV (x). Ma indipendentemente dal significato fisico particolare di x e p un sistemadi equazioni cosi’ fatto e’ estremamente generale ed e’ in grado di descrivere moltitipi di sistemi fisici. Notiamo anche che se introduciamo il piano (x, p), le condizioniiniziali x(0) e p(0) sono rappresentate da un punto e la soluzione delle equazionidel moto (x(t), p(t) da’ luogo ad una linea passante da (x(0), p(0)), come si vede inFigura 2.1. Lo spazio (in questo caso il piano) descritto dalle variabili (x, p) vienedetto lo spazio delle fasi e quindi il moto di una particella si puo’ pensare come almoto di un punto in questo spazio le cui coordinate ci danno, istante per istante,
31
x
p
(x(0), p(0))
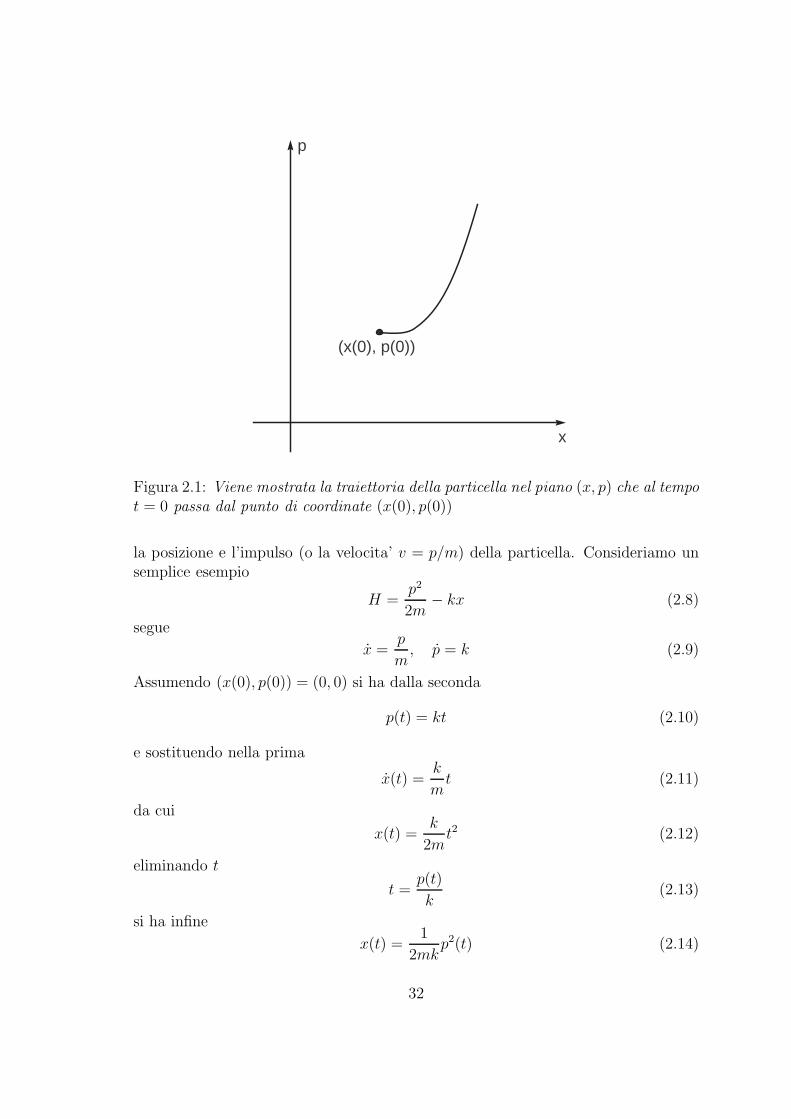
Figura 2.1: Viene mostrata la traiettoria della particella nel piano (x, p) che al tempot = 0 passa dal punto di coordinate (x(0), p(0))
la posizione e l’impulso (o la velocita’ v = p/m) della particella. Consideriamo unsemplice esempio
H =p2
2m− kx (2.8)
segue
x =p
m, p = k (2.9)
Assumendo (x(0), p(0)) = (0, 0) si ha dalla seconda
p(t) = kt (2.10)
e sostituendo nella prima
x(t) =k
mt (2.11)
da cui
x(t) =k
2mt2 (2.12)
eliminando t
t =p(t)
k(2.13)
si ha infine
x(t) =1
2mkp2(t) (2.14)
32
x
p
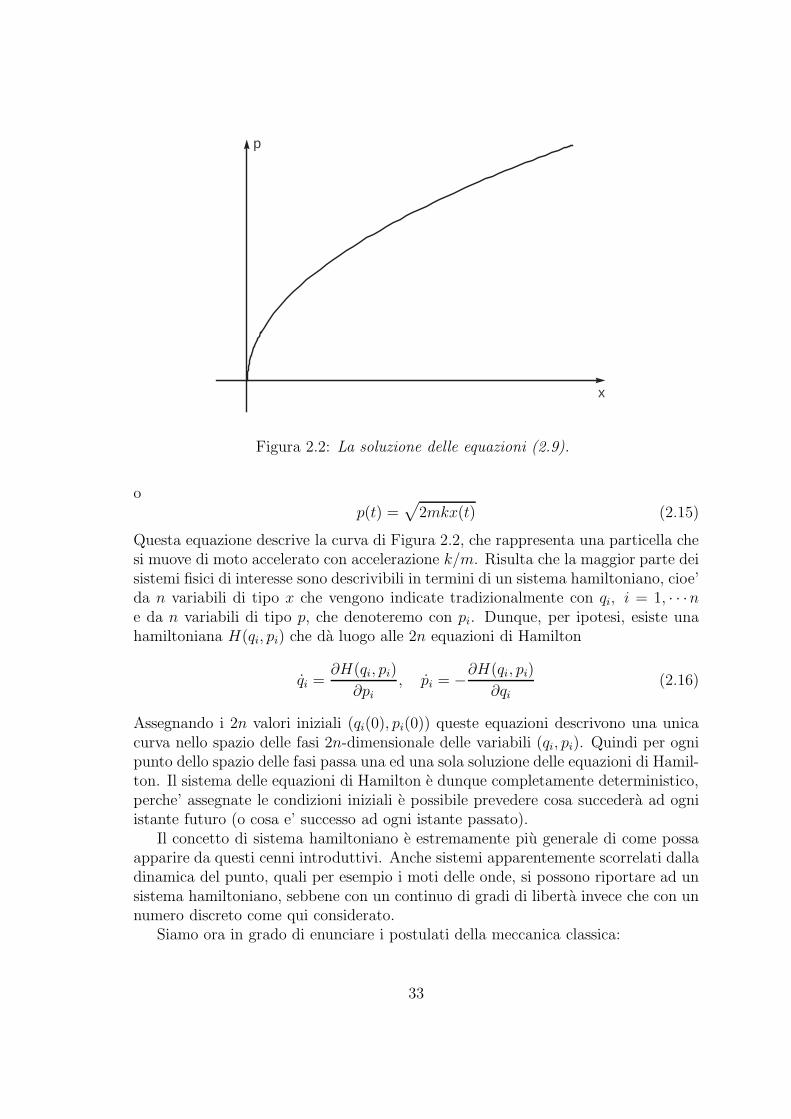
Figura 2.2: La soluzione delle equazioni (2.9).
op(t) =
√
2mkx(t) (2.15)
Questa equazione descrive la curva di Figura 2.2, che rappresenta una particella chesi muove di moto accelerato con accelerazione k/m. Risulta che la maggior parte deisistemi fisici di interesse sono descrivibili in termini di un sistema hamiltoniano, cioe’da n variabili di tipo x che vengono indicate tradizionalmente con qi, i = 1, · · ·ne da n variabili di tipo p, che denoteremo con pi. Dunque, per ipotesi, esiste unahamiltoniana H(qi, pi) che da luogo alle 2n equazioni di Hamilton
qi =∂H(qi, pi)
∂pi, pi = −∂H(qi, pi)
∂qi(2.16)
Assegnando i 2n valori iniziali (qi(0), pi(0)) queste equazioni descrivono una unicacurva nello spazio delle fasi 2n-dimensionale delle variabili (qi, pi). Quindi per ognipunto dello spazio delle fasi passa una ed una sola soluzione delle equazioni di Hamil-ton. Il sistema delle equazioni di Hamilton e dunque completamente deterministico,perche’ assegnate le condizioni iniziali e possibile prevedere cosa succedera ad ogniistante futuro (o cosa e’ successo ad ogni istante passato).
Il concetto di sistema hamiltoniano e estremamente piu generale di come possaapparire da questi cenni introduttivi. Anche sistemi apparentemente scorrelati dalladinamica del punto, quali per esempio i moti delle onde, si possono riportare ad unsistema hamiltoniano, sebbene con un continuo di gradi di liberta invece che con unnumero discreto come qui considerato.
Siamo ora in grado di enunciare i postulati della meccanica classica:
33

1. Lo stato di un sistema e caratterizzato ad ogni istante dalle 2n variabili (qi, pi),cioe da un punto nello spazio delle fasi.
2. Ogni variabile dinamica ω e funzione delle coordinate (qi, pi), ω ≡ ω(qi, pi).Per esempio, l’hamiltoniana e una loro funzione.
3. Se il sistema si trova nello stato caratterizzato da (qi, pi), la misura di ω da concertezza il valore ω(qi, pi). E’ sempre possibile fare una misura ideale, cioe’una misura per cui lo stato del sistema rimane inalterato dopo la misura, cioela posizione nello spazio delle fasi non cambia. Questo significa che il processodi misura non interferisce con il sistema (come vedremo questo postulato vieneabbandonato in meccanica quantistica).
4. Lo stato del sistema si evolve nel tempo in accordo alle equazioni di Hamilton
qi =∂H(qi, pi)
∂pi, pi = −∂H(qi, pi)
∂qi(2.17)
Il generico sistema classico e’ dunque caratterizzato dai suoi gradi di liberta’ edalla sua hamiltoniana. Con questi elementi ed i postulati assegnati si puo’ determi-nare completamente il moto del sistema (assegnando il punto nello spazio delle fasiall’istante iniziale). Per esempio, la descrizione del moto di un punto, nella mecca-nica di Newton ed in quella relativistica di Einstein, differisce solo per la forma diH , ma valgono sempre i postulati precedenti.
Nella meccanica analitica giocano un ruolo primario le parentesi di Poissonche, come vedremo, hanno un importante analogo quantistico. Le parentesi di Pois-son intervengono allorche’ si sia interessati a calcolare la variazione temporale di unagenerica variabile dinamica ω(qi(t), pi(t), t), calcolata lungo la traiettoria del sistemanello spazio delle fasi. Si ha
dω
dt=∂ω
∂t+
n∑
i=1
(
∂ω
∂qiqi +
∂ω
∂pipi
)
(2.18)
ed usando le equazioni di Hamilton (2.17)
dω
dt=∂ω
∂t+
n∑
i=1
(
∂ω
∂qi
∂H
∂pi− ∂ω
∂pi
∂H
∂qi
)
(2.19)
Date due variabili dinamiche A e B, la loro parentesi di Poisson e definita da
{A,B} =n
∑
i=1
(
∂A
∂qi
∂B
∂pi
− ∂A
∂pi
∂B
∂qi
)
(2.20)
Dunquedω
dt=∂ω
∂t+ {ω,H} (2.21)
34
Le parentesi di Poisson godono di alcune importanti proprieta algebriche che possonoessere verificate immediatamente:
{A,B} = −{B,A} (2.22)
{A,B + C} = {A,B} + {A,C} (2.23)
{A,BC} = {A,B}C +B{A,C} (2.24)
Inoltre, essendo qi e pi variabili indipendenti si ha
{qi, qj} = {pi, pj} = 0, {qi, pj} = δij (2.25)
2.3 Onde
Un’onda e’ una perturbazione che si propaga attraverso lo spazio trasportando ener-gia ma non materia. Ad eccezione della radiazione elettromagnetica, ed a livelloteorico della radiazione gravitazionale, che possono propagarsi nel vuoto, gli altritipi di onde si propagano in un mezzo che, per deformazione, e’ in grado di produrreforze elastiche di ritorno. Attraverso il mezzo, le onde possono viaggiare e trasferireenergia da un punto all’altro, senza che alcuna particella del mezzo venga disloca-ta permanentemente. Ogni punto, od ogni particella materiale, interagisce con leparticelle vicine ed e’ quindi in grado di trasferire energia. Non esiste, quindi, untrasporto di massa associato, ogni punto oscilla attorno a una posizione fissa. In-tuitivamente il concetto di onda e’ associato al trasporto di una perturbazione nellospazio, ma non e’ associato con il moto del mezzo che occupa lo spazio stesso. Inun’onda, l’energia vibrazionale si muove dalla sorgente sotto forma di perturbazionesenza un moto collettivo del mezzo in cui si propaga.
La teoria delle onde rappresenta una particolare branca della fisica teorica cheriguarda lo studio delle onde indipendentemente dalla loro origine fisica. Questapeculiarita’ deriva dal fatto che la teoria matematica delle onde puo’ essere usataper descrivere fenomeni ondulatori in contesti anche molto differenti. Per esempiol’acustica si distingue dall’ottica per il fatto che la prima si occupa del trasportovibrazionale di energia meccanica, mentre la seconda di perturbazioni del campoelettrico e magnetico. Concetti come massa, inerzia, quantita’ di moto, elasticita’diventano quindi cruciali per descrivere i processi ondulatori acustici, al contrariodell’ottica. La struttura particolare del mezzo introduce inoltre alcuni fattori di cuibisogna tenere conto, come ad esempio i fenomeni vorticosi per l’aria e l’acqua o lacomplessa struttura cristallina nel caso di alcuni solidi. Per esempio, basandosi sul-l’origine meccanica delle onde acustiche, ci puo’ essere un movimento nello spazio enel tempo di una perturbazione se e solo se il mezzo non e’ ne’ infinitamente flessibilene’ infinitamente rigido. Se tutte le parti che compongono il mezzo si dispongonoin modo rigido l’una rispetto all’altra, non sara’ possibile alcun movimento relati-vo infinitesimo e quindi non ci sara’ alcuna onda (ad esempio l’ idealizzazione del
35
corpo rigido). Al contrario, se tutte le parti sono indipendenti l’una dall’altra senzaalcun tipo di interazione reciproca, non vi sara’ alcuna onda in quanto non ci sara’trasmissione di energia fra le varie parti componenti del corpo.
Altre proprieta’ tuttavia possono essere usate per descrivere indifferentementetutti i tipi di onde. Per esempio, le onde periodiche presentano una cresta (puntopiu’ alto) ed un ventre (punto piu’ basso). Si possono poi distinguere onde lon-gitudinali e trasversali. Nelle onde trasversali la vibrazione e’ perpendicolare alladirezione di propagazione (ad esempio le onde di una corda vibrante, in cui le partiinfinitesime che costituiscono la corda stessa si muovono verso l’ alto e verso il bassoin verticale, mentre l’onda si propaga orizzontalmente). Le onde longitudinali sonoinvece caratterizzate da una vibrazione concorde con la direzione di propagazionedell’onda (ad esempio le onde sonore, le particelle dell’aria si muovono nella stessadirezione di propagazione del suono). Esistono tuttavia onde che sono sia longitudi-nali che trasversali e sono dette onde miste (ad esempio le onde sulla superficie delmare).
Tutte le onde hanno un comportamento comune in situazioni standard e possie-dono le seguenti proprieta’:
• Riflessione: quando una onda cambia direzione incidendo su un materialeriflettente.
• Rifrazione: il cambio di direzione di un’onda causata dal passaggio tra duemezzi (ad esempio con densita’ diversa).
• Diffrazione: la diffusione delle onde, per esempio quando passano per unafessura stretta (piu’ correttamente piccola rispetto alla lunghezza d’onda)
• Interferenza: la somma vettoriale (possono annullarsi) di due onde che entranoin contatto
• Dispersione: la divisione di un’onda in sotto onde in dipendenza della lorofrequenza.
Un’onda e’ polarizzata se puo’ oscillare solo in una direzione. La polarizzazione diun’onda trasversale descrive la direzione di oscillazione, nel piano perpendicolare alladirezione di moto. Onde longitudinali come quelle sonore non hanno polarizzazione,in quanto per queste onde la direzione di oscillazione e’ lungo la direzione di moto.Un’onda puo’ essere polarizzata con un filtro polarizzatore. Nel caso dell’otticaquesto filtro puo’ essere una lente Polaroid.
A seconda del mezzo in cui si propagano e della caratteristica fisica che usiamoper rappresentarle si hanno:
• onde elastiche o di spostamento, in cui poniamo l’attenzione sullo spostamentodelle particelle;
• onda di velocita’, se poniamo l’attenzione sulla velocita’ delle particelle;
36

• onda di densita’, se studiamo la densita’ volumica e per questo ne e’ associataun’ onda di pressione.
• radiazione elettromagnetica che riguarda un insieme di onde come luce, onderadio, raggi X nel cui caso la propagazione non ha bisogno di un mezzo, leonde posso propagarsi ne vuoto;
2.3.1 Descrizione delle onde
Come abbiamo detto, le onde sono caratterizzate da funzioni delle coordinate spa-ziali e del tempo. Sappiamo inoltre dal teorema di Fourier (vedi dopo) che unafunzione (periodica o no) puo’ essere decomposta in termini di componenti (fun-zioni) periodiche, quali seno e/o coseno. La caratteristica specifica di una funzioneperiodica e’ il periodo T , definito come il tempo nel quale una funzione ritorna alvalore iniziale. In formule
f(t+ T ) = f(t) (2.26)
Il periodo e’ strettamente collegato alla frequenza ν cioe’ il numero di periodi perunita’ di tempo; se quest’unita’ e’ il secondo allora la frequenza si misura in hertz.Queste grandezze sono correlate nel modo seguente:
ν =1
T(2.27)
Ad un periodo temporale corrisponde un periodo spaziale detto lunghezza d’onda λche e’ legata al periodo dalla velocita’ di propagazione dell’onda
λ = vT (2.28)
Un’onda viene spesso descritta per mezzo della sua frequenza angolare (ω, radian-ti/secondo); quest’ultima e’ correlata alla frequenza ν secondo la formula:
ω =2π
T= 2πν. (2.29)
Non tutte le onde sono sinusoidali (ovvero hanno la forma della funzione senoe/o coseno). Come abbiamo detto, in generale si possono esprimere come somma disinusoidi, ma questa somma non e’ necessariamente una sinuosoide. Un esempio dionda non sinusoidale e’ l’impulso che si muove lungo una corda poggiata per terra.Matematicamente si ha che un’onda (teorema di Fourier) puo’ essere rappresentatatramite la somma
A(x, t) =∑
k
Ak sin(kx− ωt) (2.30)
con ω = kv e v la velocita’ di propagazione dell’onda. La quantita’ k si chiamaanche il vettore d’onda. Si definisce anche come lunghezza d’onda la quantita’:
k =2π
λ(2.31)
37

vediamo dunque che
k =ω
v=
2π
vT(2.32)
e, confrontando con la precedente
λ = vT (2.33)
Dunque la lunghezza d’onda corrisponde allo spazio di un punto che si muove convelocita’ v in un periodo. Un’ onda sinusoidale di questo tipo e’ una soluzioneparticolare dell’equazione generale delle onde ed e’ quella che di solito e’ studiata inun primo approccio ai fenomeno ondulatori.
Notiamo chekx− ωt = k(x− vt) (2.34)
dunque l’argomento della funzione sinusoidale dipende solo dalla differenza x − vt.Come vedremo tra un po’ una funzione di x−vt rappresenta un’onda che si propagaverso destra, mentre una funzione di x + vt un’onda che si propaga in direzioneopposta. In generale si vede facilmente che generiche funzioni di x − vt o di x+ vtsoddisfano l’equazione delle onde:
∂2φ(x, t)
∂x2− 1
v2
∂2φ(x, t)
∂t2= 0 (2.35)
La soluzione piu’ generale di questa equazione dipende da due funzioni arbitrarie
φ(x, t) = f(x− vt) + g(x+ vt) (2.36)
Per le considerazioni precedenti sin(kx±ωt) sono soluzioni particolari dell’equazionedelle onde. Il fatto che una soluzione generica la si possa esprimere come somma dionde sinusoidali e’ conseguenza della linearita’ dell’equazione delle onde. Cioe’ se f1
e f2 sono due soluzioni, anche una generica combinazione
αf1 + βf2 (2.37)
con α e β costanti arbitrarie, e’ una soluzione.Per capire meglio il significato di queste soluzioni consideriamo f(x − vt) e
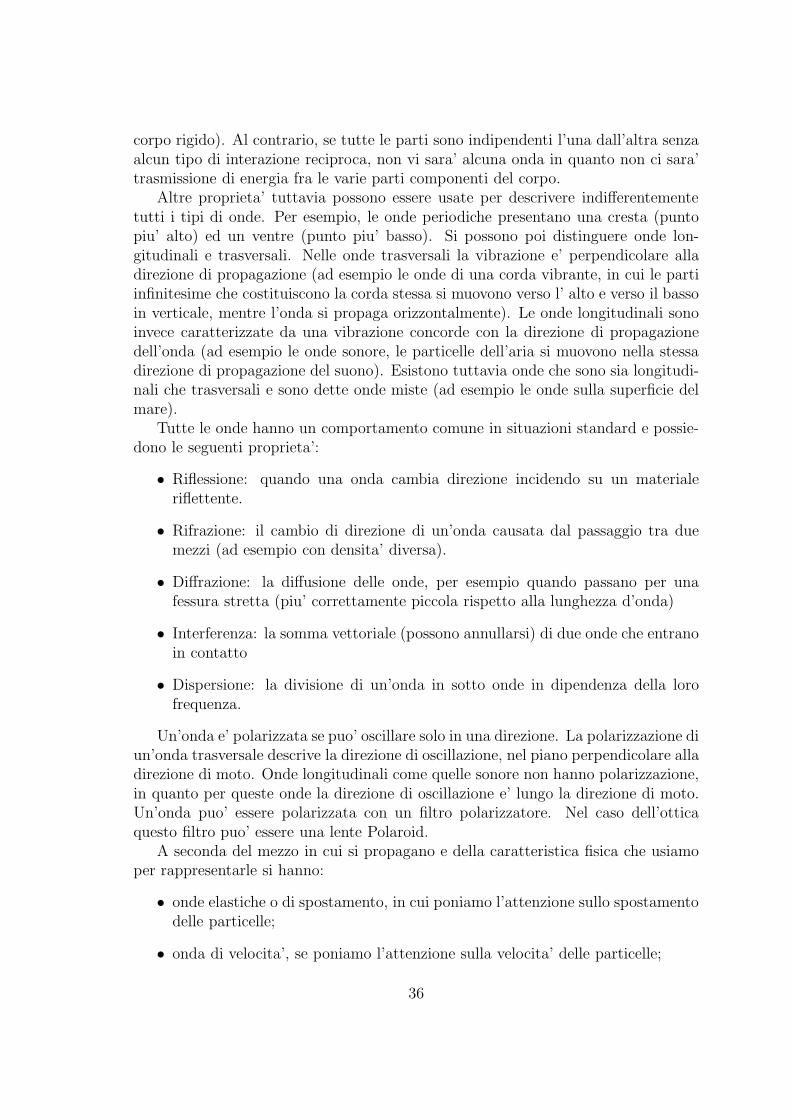
supponiamo che la f sia una gaussiana (vedi Figura 2.3
f(y) = e−y2/2∆2
(2.38)
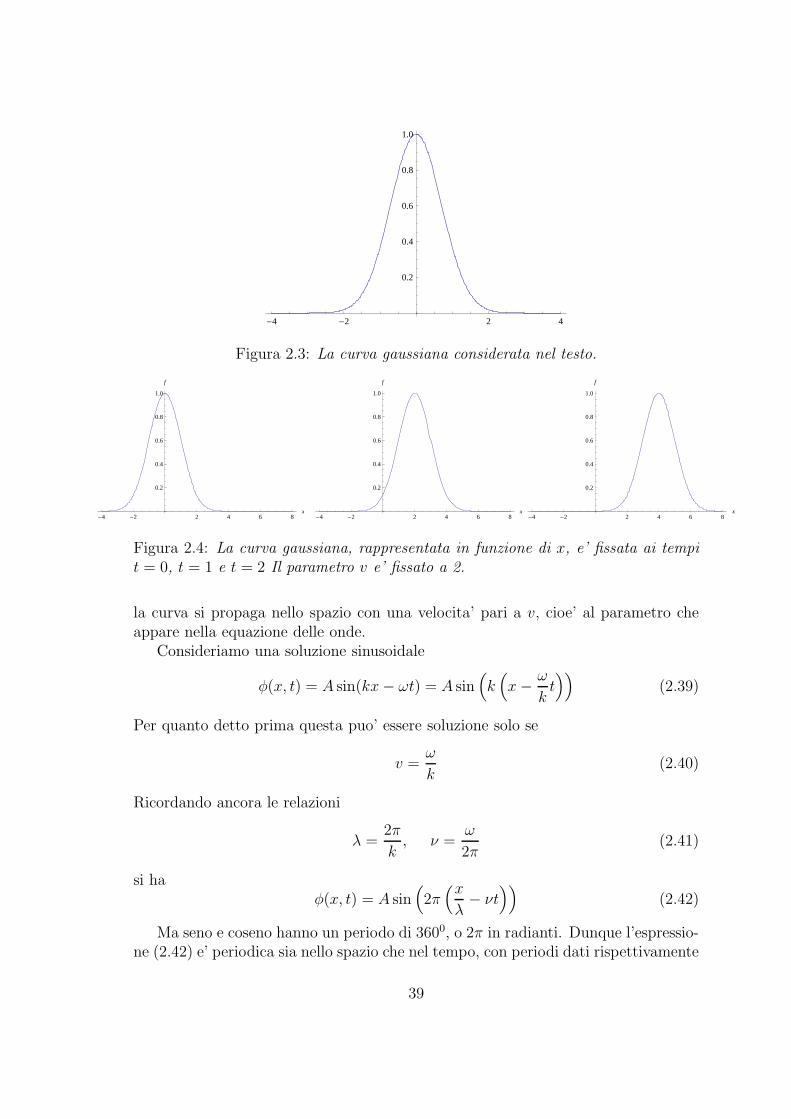
Quando y = x−vt possiamo vedere come questa curva cambia al passare del tempo.Come si vede dai grafici in Figura 2.4, la curva si sposta con una velocita’ pari a2, cioe’ pari al parametro v. Questo si capisce facilmente considerando il valoref(0) = 1. Quando x − vt = 0 il valore di f e’ sempre lo stesso. Questo accade intutti i punti tali che x(t) = vt. Analogamente se calcoliamo, per esempio, f(0.2), intutti i punti per cui x(t) = vt+ 0.2 la curva avra’ sempre lo setsso valore. Dunque
38
-4 -2 2 4
0.2
0.4
0.6
0.8
1.0
Figura 2.3: La curva gaussiana considerata nel testo.
-4 -2 2 4 6 8x
0.2
0.4
0.6
0.8
1.0
f
-4 -2 2 4 6 8x
0.2
0.4
0.6
0.8
1.0
f
-4 -2 2 4 6 8x
0.2
0.4
0.6
0.8
1.0
f
Figura 2.4: La curva gaussiana, rappresentata in funzione di x, e’ fissata ai tempit = 0, t = 1 e t = 2 Il parametro v e’ fissato a 2.
la curva si propaga nello spazio con una velocita’ pari a v, cioe’ al parametro cheappare nella equazione delle onde.
Consideriamo una soluzione sinusoidale
φ(x, t) = A sin(kx− ωt) = A sin(
k(
x− ω
kt))
(2.39)
Per quanto detto prima questa puo’ essere soluzione solo se
v =ω
k(2.40)
Ricordando ancora le relazioni
λ =2π
k, ν =
ω
2π(2.41)
si haφ(x, t) = A sin
(
2π(x
λ− νt
))
(2.42)
Ma seno e coseno hanno un periodo di 3600, o 2π in radianti. Dunque l’espressio-ne (2.42) e’ periodica sia nello spazio che nel tempo, con periodi dati rispettivamente
39
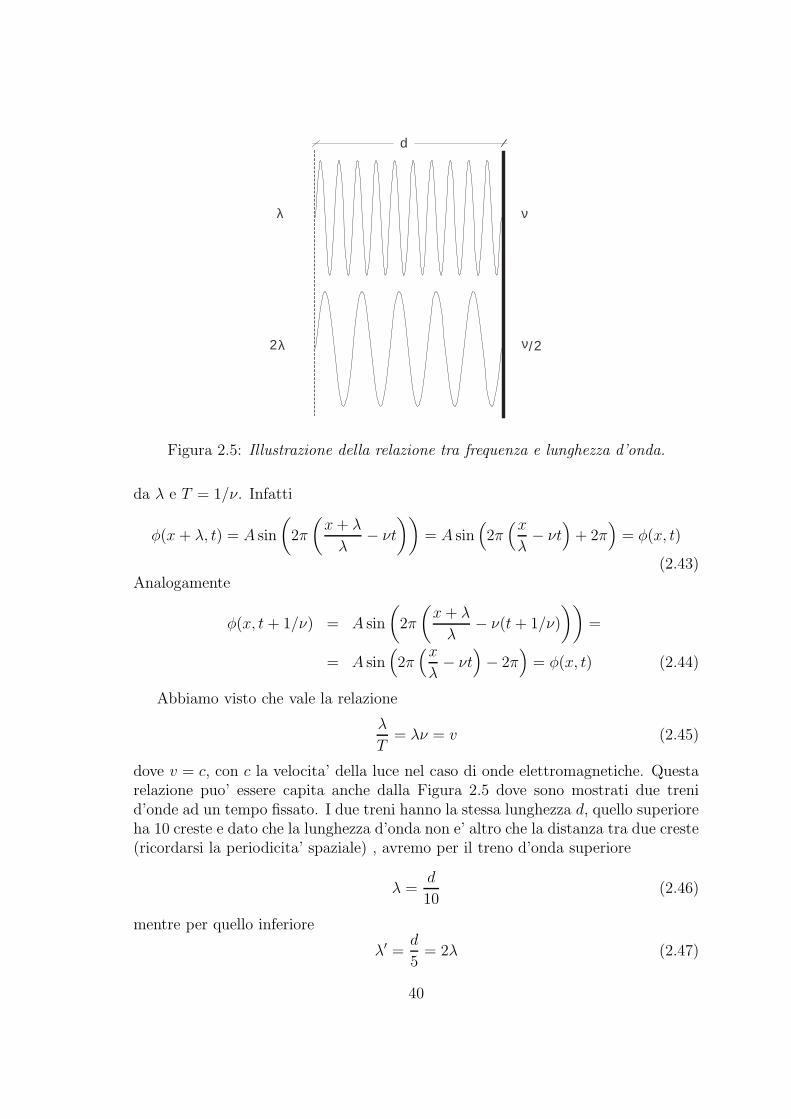
λ
λ2
ν
ν/2
d
Figura 2.5: Illustrazione della relazione tra frequenza e lunghezza d’onda.
da λ e T = 1/ν. Infatti
φ(x+ λ, t) = A sin
(
2π
(
x+ λ
λ− νt
))
= A sin(
2π(x
λ− νt
)
+ 2π)
= φ(x, t)
(2.43)Analogamente
φ(x, t+ 1/ν) = A sin
(
2π
(
x+ λ
λ− ν(t+ 1/ν)
))
=
= A sin(
2π(x
λ− νt
)
− 2π)
= φ(x, t) (2.44)
Abbiamo visto che vale la relazione
λ
T= λν = v (2.45)
dove v = c, con c la velocita’ della luce nel caso di onde elettromagnetiche. Questarelazione puo’ essere capita anche dalla Figura 2.5 dove sono mostrati due trenid’onde ad un tempo fissato. I due treni hanno la stessa lunghezza d, quello superioreha 10 creste e dato che la lunghezza d’onda non e’ altro che la distanza tra due creste(ricordarsi la periodicita’ spaziale) , avremo per il treno d’onda superiore
λ =d
10(2.46)
mentre per quello inferiore
λ′ =d
5= 2λ (2.47)
40

Se le onde viaggiano ad una velocita’ v, dopo un tempo t = d/v, entrambi i trenisaranno passati al di la’ dello schermo. Quindi per il treno superiore saranno passate10 onde e 5 per quello inferiore. Pertanto le frequenze (il numero di onde per unita’di tempo) saranno date da
ν =10
t, ν ′ =
5
t=ν
2(2.48)
Abbiamo cosi’ mostrato che
λν = λ′ν ′ =d
t= v (2.49)
2.3.2 L’interferenza
-5 5
-2
-1
1
2
-5 5
-2
-1
1
2
-5 5
-2
-1
1
2
-5 5
-2
-1
1
2
Figura 2.6: Le quattro figure mostrano, da sinistra verso destra, la somma di dueonde sfasate rispettivamente di 00, 450, 900 e 1800 (nella figura gli angoli sonoespressi in radianti e corrispondono a 0, π/4, π/2 e π radianti rispettivamente).
Il fenomeno di interferenza nasce dalla maniera in cui si compongono due ondeluminose della stessa frequenza ma con fase diversa. nella Figura 2.6 si mostra lasomma di due coseni sfasati di un angolo α
cos(θ) + cos(θ + α) (2.50)
A seconda del valore di α si ottengono risultati diversi. In particolare, quando leonde sono in fase (prima illustrazione in alto) si ottiene un’onda che in ogni puntoha un valore doppio, mentre quando la differenza di fase e’ 1800 (o π) si ottieneun’onda nulla, poiche’ cos(θ + π) = − cos θ.
41

L’interferenza di due raggi luminosi fu stabilita con una famosa esperienza dovutoa Young. Una discussione piu’ approfondita verra’ fatta in seguito. Qui bastaricordare che nell’esperimento due onde (con la stessa frequenza) provenienti dafenditure diverse vengono fatte incidere su uno schermo. Queste onde sono descritteda
φ(x, t) = A sin
(
2π
λ(x− λνt)
)
(2.51)
Dato che la x misura la distanza a partire da una data origine, per esempio lasorgente, il valore della x con cui le due onde arrivano sullo schermo e’ in generediverso tra loro. Avremo cosi una differenza di fase a seconda della distanza percorsa.Segue cosi’ il fenomeno per cui in certe zone dello schermo si hanno dei massimi o deiminimi di intensita’ (che, ricordiamo, varia con il quadrato del campo e quindi comeil quadrato della somma delle due onde). Infatti, ricordiamo, che il campo elettricoed il campo magnetico, sono grandezze vettoriali e come tali si compongono con leregole della somma vettoriale (si sommano tra loro le componenti).
La direzione del campo elettrico esprime anche la polarizzazione di un’ondaelettromagnetica ed esiste sempre la possibilita’ di decomporre un vettore lungodue direzioni perpendicolari tra loro e nello stesso piano del vettore. Per esempioun campo elettrico diretto lungo l’asse delle x ha componenti (E, 0, 0) e lo si puo’decomporre lungo gli assi x′ e y′ ortogonali tra loro e, per esempio, a 450 con ilcampo, ottenendo
~E =1√2(E,−E) (2.52)
dove ora le componenti sono rispetto al nuovo riferimento (vedi Figura 2.7).
x
y x'
y'
E
Figura 2.7: Il campo elettrico ~E decomposto lungo gli assi (x′, y′).
2.3.3 Il meccanismo della visione
Veniamo adesso ai processi di indagine fisica quali, per esempio, la misura di posi-zione di una particella. Queste osservazioni vengono fatte, di norma, inviando sul-
42
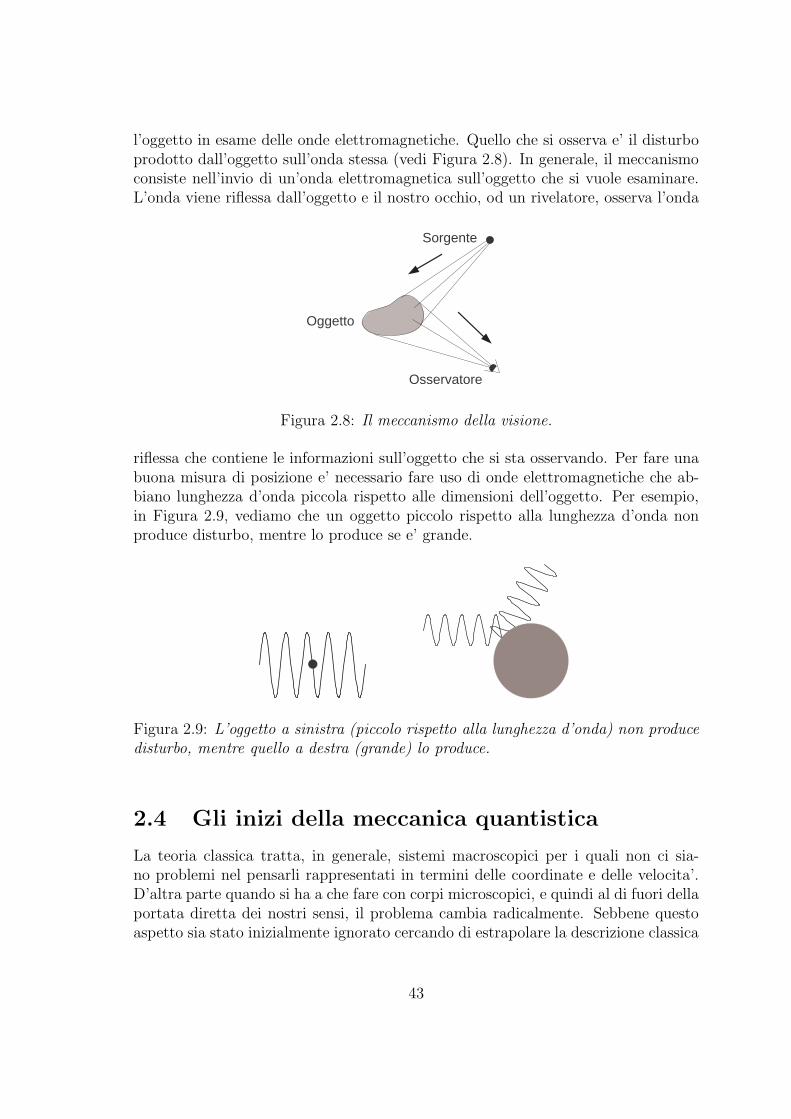
l’oggetto in esame delle onde elettromagnetiche. Quello che si osserva e’ il disturboprodotto dall’oggetto sull’onda stessa (vedi Figura 2.8). In generale, il meccanismoconsiste nell’invio di un’onda elettromagnetica sull’oggetto che si vuole esaminare.L’onda viene riflessa dall’oggetto e il nostro occhio, od un rivelatore, osserva l’onda
Sorgente
Osservatore
Oggetto
Figura 2.8: Il meccanismo della visione.
riflessa che contiene le informazioni sull’oggetto che si sta osservando. Per fare unabuona misura di posizione e’ necessario fare uso di onde elettromagnetiche che ab-biano lunghezza d’onda piccola rispetto alle dimensioni dell’oggetto. Per esempio,in Figura 2.9, vediamo che un oggetto piccolo rispetto alla lunghezza d’onda nonproduce disturbo, mentre lo produce se e’ grande.
Figura 2.9: L’oggetto a sinistra (piccolo rispetto alla lunghezza d’onda) non producedisturbo, mentre quello a destra (grande) lo produce.
2.4 Gli inizi della meccanica quantistica
La teoria classica tratta, in generale, sistemi macroscopici per i quali non ci sia-no problemi nel pensarli rappresentati in termini delle coordinate e delle velocita’.D’altra parte quando si ha a che fare con corpi microscopici, e quindi al di fuori dellaportata diretta dei nostri sensi, il problema cambia radicalmente. Sebbene questoaspetto sia stato inizialmente ignorato cercando di estrapolare la descrizione classica
43

a queste nuove circostanze, le evidenze sperimentali mostravano che questa estrapo-lazione non funzionava. La prima indicazione in questo senso venne dal problemadel corpo nero.
2.4.1 Il corpo nero
L’ipotesi dei quanti fu formulata da Max Planck (fisico tedesco) nel 1900 in cor-rispondenza dei suoi studi sul corpo nero. E’ comune esperienza che un metalloriscaldato sino all’incandescenza emette radiazioni luminose. Per esempio a 850 0K(un po’ meno di 600 0C) un metallo emette luce rossa. Aumentando la temperaturasi vede il giallo ed il colore si sposta lentamente verso il blu sino a circa 2000 0Kdove si vede il bianco cioe’ una mescolanza di tutti i colori del visibile. La ricerca diPlanck aveva lo scopo di determinare lo spettro della radiazione emessa da un corpoincandescente, ma questa radiazione dipende dal corpo che si scalda. Esiste pero’una situazione ideale, quella del corpo nero, cioe’ un corpo che assorbe completa-mente le radiazioni che lo colpiscono, per cui la radiazione che emette non dipendene’ dalla forma ne’ dalla sostanza del corpo stesso e questo permette una indagi-ne delle proprieta’ intrinseche della radiazione. Un corpo nero si puo’ realizzare,
Figura 2.10: Come si puo realizzare un corpo nero.
come mostrato in Figura 2.10, con una scatola chiusa nella quale venga praticatoun piccolo forellino che, in pratica, lascia entrare la luce ma ne fa uscire solo unapiccolissima quantita.
La Figura 2.11 mostra che il risultato del calcolo classico dell’intensita emes-sa in funzione della frequenza dell’onda elettromagnetica e in contrasto con i datisperimentali. Inoltre, dato che il calcolo classico da’ una intensita crescente conla frequenza, si vede che, integrando su tutte le frequenze per determinare l’in-tensita totale della radiazione emessa, si ottiene un risultato infinito (catastrofeultravioletta), cosa fisicamente assurda. Le curve sperimentali mostrano inveceun andamento che va esponenzialmente a zero per grandi frequenze. All’equilibriotermico le pareti del corpo nero e la radiazione saranno in equilibrio termico. Si puo’
44
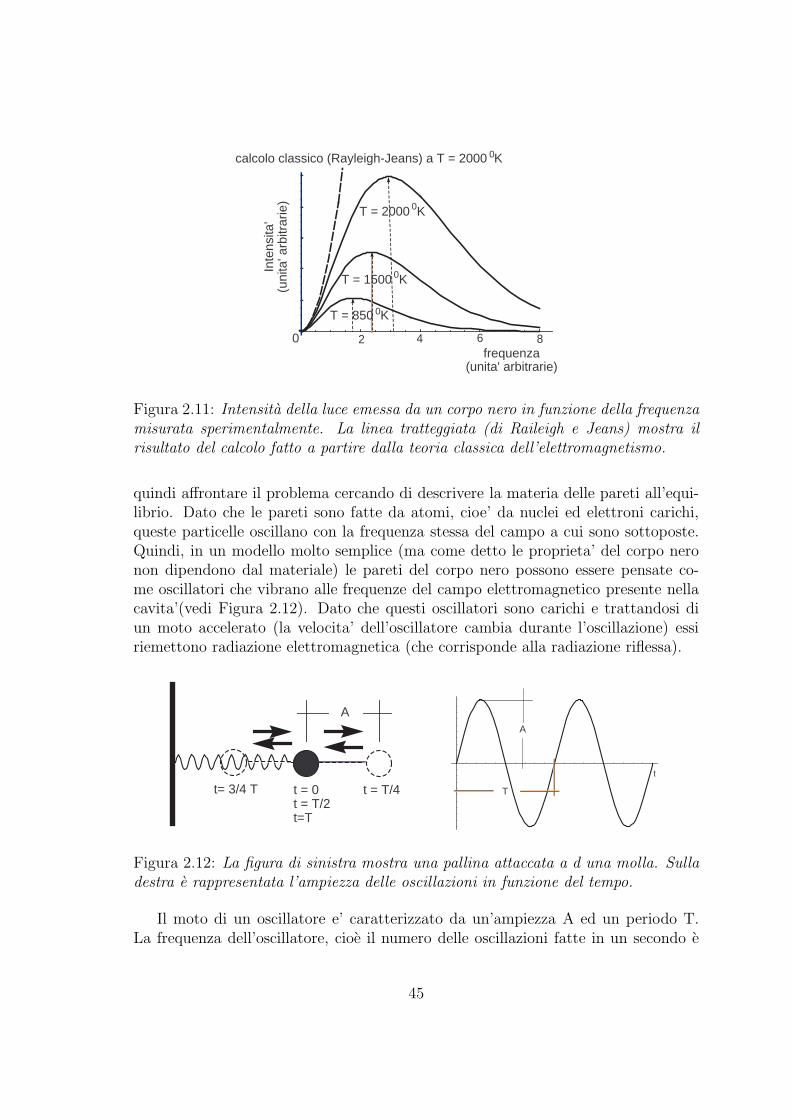
2 4 6 80frequenza
(unita' arbitrarie)
Inte
nsita
'(u
nita
' arb
itrar
ie) 0
0
0T = 850 K
T = 1500 K
T = 2000 K
calcolo classico (Rayleigh-Jeans) a T = 2000 K0
Figura 2.11: Intensita della luce emessa da un corpo nero in funzione della frequenzamisurata sperimentalmente. La linea tratteggiata (di Raileigh e Jeans) mostra ilrisultato del calcolo fatto a partire dalla teoria classica dell’elettromagnetismo.
quindi affrontare il problema cercando di descrivere la materia delle pareti all’equi-librio. Dato che le pareti sono fatte da atomi, cioe’ da nuclei ed elettroni carichi,queste particelle oscillano con la frequenza stessa del campo a cui sono sottoposte.Quindi, in un modello molto semplice (ma come detto le proprieta’ del corpo neronon dipendono dal materiale) le pareti del corpo nero possono essere pensate co-me oscillatori che vibrano alle frequenze del campo elettromagnetico presente nellacavita’(vedi Figura 2.12). Dato che questi oscillatori sono carichi e trattandosi diun moto accelerato (la velocita’ dell’oscillatore cambia durante l’oscillazione) essiriemettono radiazione elettromagnetica (che corrisponde alla radiazione riflessa).
t = 0t = T/2t=T
t = T/4t= 3/4 T
A
t
A
T
Figura 2.12: La figura di sinistra mostra una pallina attaccata a d una molla. Sulladestra e rappresentata l’ampiezza delle oscillazioni in funzione del tempo.
Il moto di un oscillatore e’ caratterizzato da un’ampiezza A ed un periodo T.La frequenza dell’oscillatore, cioe il numero delle oscillazioni fatte in un secondo e
45

l’inverso del periodo
ν =1
T(2.53)
Invece, l’ampiezza dell’oscillazione dipende dall’energia conferita (cioe’ dalla forzaapplicata). Secondo la fisica classica l’energia dell’oscillatore puo’ assumere qualun-que valore. Se pero’ si ha un insieme di oscillatori ad una data temperatura alloratutti gli oscillatori hanno mediamente la stessa energia. Dato che si hanno infinitefrequenze l’energia totale del corpo nero risulterebbe infinita (catastrofe ultraviolet-ta). Planck (1900) risolse questo problema assumendo che un singolo oscillatore difrequenza ν potesse avere solo valori discreti di energia
E = nhν (2.54)
dove h e la costante di Planck che ha le dimensioni di un’azione (energia× tempo)e vale
h ≈ 6.626 × 10−34 J · s. (2.55)
mentre n e un intero positivo. Inoltre assunse che la distribuzione di energia relativaai singoli oscillatori non potesse superare il valore previsto dalla fisica classica, vediFigura 2.13. Come si vede il numero di modi di oscillazione possibili diminuisce alcrescere della frequenza, mentre nel caso classico rimane costante. Quindi nell’ipotesidi Planck la catastrofe ultravioletta viene evitata.
n = 1
n = 2
n = 3
n = 4
n = 5
E = h nν
frequenza
energia classica
Figura 2.13: La figura mostra il numero di modi possibili per ogni valore di n alvariare della frequenza.
46

2.4.2 Einstein e i fotoni
Einstein in un lavoro fondamentale del 1905 riprendeva l’analisi di Planck del corponero in quanto riteneva che l’idea di identificare la distribuzione di energia della ra-diazione em all’interno del corpo con la distribuzione di energia degli oscillatori nonfosse corretta, ma piuttosto che si dovesse passare all’idea che la radiazione stessafosse quantizzata secondo la formula di Planck, cioe’ che ad ogni radiazione di fre-quenza ν dovesse associarsi un quanto di energia (il fotone) pari a hν. E’ possibileche anche Planck avesse avuto un’idea simile ma ritenenendola eretica avesse prefe-rito trasferire la quantizzazione a livello della materia, sulla quale all’epoca ben pocosi sapeva, mentre le proprieta’ della radiazione em che derivavano dalle equazioni diMaxwell facevano parte del credo dei fisici. L’idea di Einstein era eretica dato cheapparentemente si allontanava dal comportamento ondulatorio della radiazione cheera ben nota dagli esperimenti di diffrazione ed interferenza. Queste ultime proprie-ta’ discendono direttamente dalle equazioni di Maxwell in cui all’epoca c’era unafede incrollabile. L’idea rivoluzionaria di Einstein era che la luce possedesse, oltre adun aspetto ondulatorio riflesso dalla presenza della frequenza della radiazione nellaformula di Planck, anche un aspetto corpuscolare che si manifestava con l’assorbi-mento e l’ emissione della radiazione per quantita’ discrete di energia, il quanto hν.Solo piu’ tardi, nel 1916, mostro’ che al fotone era necessario associare un impulsodato dalla relazione p = E/c. L’ipotesi del fotone fu confermata sperimentalmenteda Compton nel 1923 che studio’ il comportamento degli elettroni sotto l’azione diun’onda elettromagnetica e mostro’ che il risultato non e’ in accordo con le idee clas-siche ma che invece, in tali circostanze, la radiazione elettromagnetica si comportacome un insieme di corpuscoli.
Dunque, Einstein, contrariamente a Planck, ipotizzava che un campo em in unacavita si comportasse come un sistema di oscillatori armonici, e che l’energia emche competeva ad una data frequenza ν fosse dovuta ad un insieme di corpuscoliindipendenti in numero pari a:
n =U
hν(2.56)
dove U e’ l’energia em associata all’onda. In altri termini l’energia dell’onda siripartisce tra n corpuscoli (fotoni) ognuno di energia E = hν. In questo modol’interpretazione di Einstein del corpo nero era che la luce veniva emessa come uninsieme di fotoni ognuno con energia hν. Applicando questa idea anche all’assor-bimento Einstein fu in grado di spiegare in modo semplice l’effetto fotoelettrico.L’effetto consiste nell’emissione di elettroni da parte di metalli irraggiati con la ra-diazione e.m.. I principali fatti sperimentali a questo riguardo sono:1) - esiste una frequenza di soglia ν0 che dipende dal metallo irraggiato.2) - L’energia cinetica degli elettroni emessi varia tra 0 ed un massimo che dipendein modo lineare dalla frequenza ν0, ma non dipende dall’intensita della radiazione.3) - Il numero di elettroni emessi per secondo e per unita di superficie e proporzio-nale all’intensita della radiazione.
47
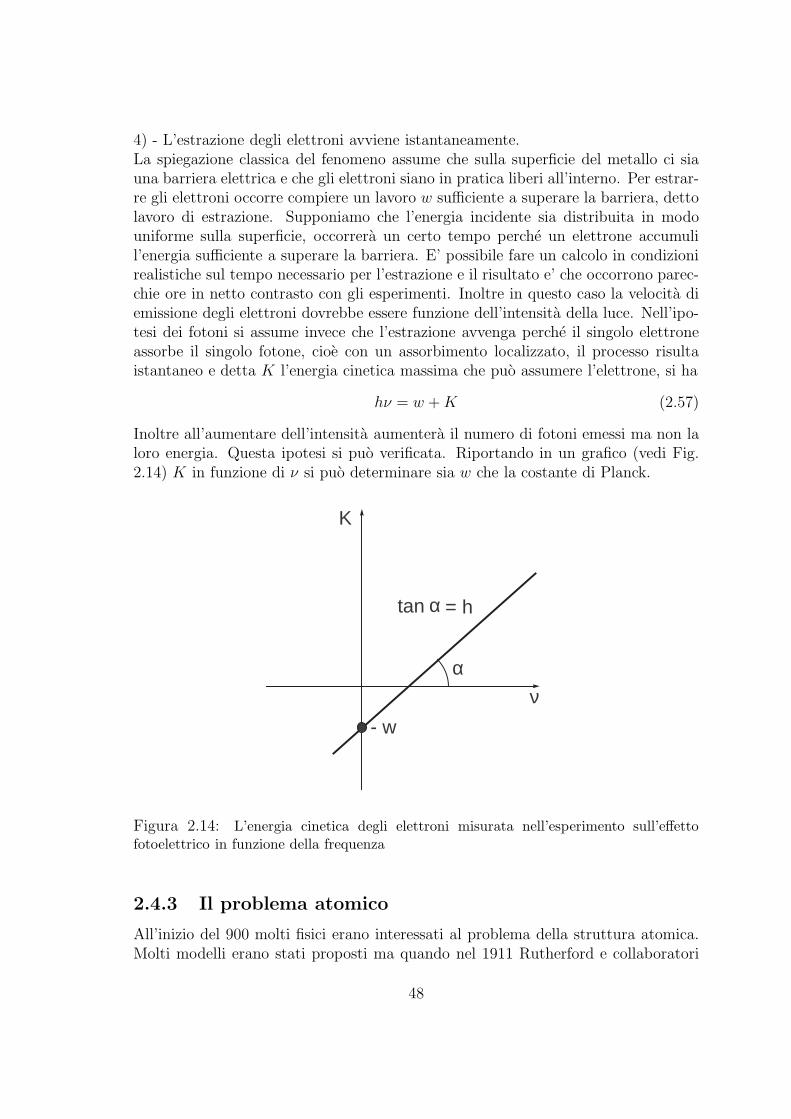
4) - L’estrazione degli elettroni avviene istantaneamente.La spiegazione classica del fenomeno assume che sulla superficie del metallo ci siauna barriera elettrica e che gli elettroni siano in pratica liberi all’interno. Per estrar-re gli elettroni occorre compiere un lavoro w sufficiente a superare la barriera, dettolavoro di estrazione. Supponiamo che l’energia incidente sia distribuita in modouniforme sulla superficie, occorrera un certo tempo perche un elettrone accumulil’energia sufficiente a superare la barriera. E’ possibile fare un calcolo in condizionirealistiche sul tempo necessario per l’estrazione e il risultato e’ che occorrono parec-chie ore in netto contrasto con gli esperimenti. Inoltre in questo caso la velocita diemissione degli elettroni dovrebbe essere funzione dell’intensita della luce. Nell’ipo-tesi dei fotoni si assume invece che l’estrazione avvenga perche il singolo elettroneassorbe il singolo fotone, cioe con un assorbimento localizzato, il processo risultaistantaneo e detta K l’energia cinetica massima che puo assumere l’elettrone, si ha
hν = w +K (2.57)
Inoltre all’aumentare dell’intensita aumentera il numero di fotoni emessi ma non laloro energia. Questa ipotesi si puo verificata. Riportando in un grafico (vedi Fig.2.14) K in funzione di ν si puo determinare sia w che la costante di Planck.
K
tan = h
ν
α
α
- w
Figura 2.14: L’energia cinetica degli elettroni misurata nell’esperimento sull’effettofotoelettrico in funzione della frequenza
2.4.3 Il problema atomico
All’inizio del 900 molti fisici erano interessati al problema della struttura atomica.Molti modelli erano stati proposti ma quando nel 1911 Rutherford e collaboratori
48

studiarono l’urto di particelle alpha6 sugli atomi, divenne chiaro che l’atomo dovevaessere costituito da un nucleo centrale, in cui si concentrava in pratica tutta lamassa dell’atomo, e da elettroni esterni, molto piu’ leggeri. Le dimensioni tipicheatomiche sono dell’ordine di 10−8 cm., mentre quelle del nucleo circa 10−12 − 10−13.In linea di principio il problema del moto degli elettroni (carichi negativamente)nel campo della forza coulombiana generata da un nucleo carico positivamente sipoteva affrontare e risolvere tramite la meccanica classica. In particolare, il casodell’atomo di idrogeno, composto da una carica centrale positiva e dall’elettronedi carica opposta era matematicamente identico a quello del moto di un pianetanel campo gravitazionale del sole. Infatti la forza gravitazionale e quella elettricadipendono entrambe dall’inverso del quadrato della distanza e danno luogo allostesso tipo di equazione differenziale. D’altra parte, anche senza fare molti conti sicapisce il tipo di problema a cui si va incontro. Infatti un elettrone, in analogia aipianeti, girera’ attorno al nucleo e quindi si muovera’ di moto accelerato. D’altraparte la teoria di Maxwell dell’elettromagnetismo ci dice che una carica accelerataperde energia in modo proporzionale al quadrato della sua accelerazione. Dunquel’elettrone perde via via energia e corrispondentemente si avvicina sempre piu’ alnucleo7. E’ allora semplice vedere che un elettrone che sia inizialmente ad unadistanza dell’ordine del raggio atomico (10−8 cm.) e’ destinato a cadere sul nucleoin un tempo dell’ordine di 10−11 secondi. Ovviamente questo significherebbe che lamateria come noi la conosciamo non puo’ esistere.
Nel 1908, Walter Ritz scopri’ una semplice proprieta’ delle frequenze della ra-diazione elettromagnetica emesse da un atomo. Questa proprieta prende il nome diPrincipio di Combinazione e dice che tutte le frequenze, ν, emesse da un dato atomosi possono scrivere nella semplice forma
ν = νn − νm, n,m = 1, 2, 3, · · · (2.58)
dove le frequenze νn sono caratteristiche dell’atomo considerato. Fu Bohr, nel 1913,a suggerire che associando ad ogni frequenza ν emessa dall’atomo, l’emissione di unfotone di energia E = hν, era possibile spiegare il principio di Ritz come conseguenzadella variazione dell’energia dell’atomo dovuta all’emissione (o all’assorbimento) diun fotone
hν = En − Em (2.59)
Inoltre Bohr, pur rimanendo nell’ambito della meccanica classica, fece due nuoveimportanti assunzioni. La prima fu che non tutte le energie fossero possibili per l’e-lettrone nell’atomo o, detto in altro modo, che non tutte le orbite di raggio arbitrario8
fossero permesse, ma solo quelle per cui il momento orbitale e’ quantizzato
L = mvr = nh/ , h/ =h
2π(2.60)
6La particella alpha (α) e’ il nucleo dell’elio ed e’ costituita da due protoni e due neutroni7Una buona analogia e’ quella di un satellite artificiale in orbita terrestre che a causa dei vari
attriti perde energia e quindi alla fine cade sulla terra8Per semplicita’ considereremo solo orbite circolari
49

con m la massa dell’elettrone, v la sua velocita’, r il raggio dell’orbita e h la costantedi Planck. Infine Bohr postulava, contrariamente al risultato classico, che l’elettrone,ruotando attorno al nucleo, non emettesse energia em, ma emettesse solo quandol’elettrone passa da un’orbita all’altra. Questa ipotesi fu detta ipotesi degli statistazionari, nel senso che un elettrone che si trova nello stato corrispondente ad unodei possibili valori dell’energia quantizzata, non puo’ emettere radiazione. Sottoqueste condizioni, ed usando la meccanica classica, si potevano facilmente calcolarele energie (quantizzate) delle possibili orbite, e nel caso dell’atomo di idrogeno ilrisultato era
En = − m
2n2
e4
h/2 , n = 1, 2, · · · ,∞ (2.61)
con e il valore assoluto della carica dell’elettrone 1, 602×10−19 Coulomb. Il risultatosi accordava benissimo con un risultato empirico dovuto a Balmer che dava appuntole frequenze emesse come
ν = R
(
1
22− 1
m2
)
, m = 3, 4, · · · (2.62)
Dunque le ipotesi di Bohr erano in accordo con i dati empirici ed inoltre permetteva-no il calcolo di R (costante di Rydberg) in termini di costanti fondamentali (m, e, h).Ovviamente, il problema della instabilita’ atomica non era veramente risolto dallateoria di Bohr, ma semplicemente evitato con l’ipotesi delle orbite stazionarie.
2.4.4 La meccanica delle onde e quella delle matrici
Dopo questi successi della teoria atomica di Bohr ci furono ulteriori sviluppi specienella generalizzazione al caso delle orbite ellittiche dovuta a Sommerfeld e Watson(1915), ma i progressi furono lenti, anche perche’ si rimaneva in un ambito di pensieroeminentemente classico, al quale veniva aggiunto (in modo piu’ o meno arbitrario) unqualche postulato di quantizzazione. Il passo successivo, piu’ significativo sul pianoconcettuale, e’ dovuto a De Broglie nel 1923. Questo passo fu di una importanzadecisiva perche’ in qualche modo buttava a mare l’intera costruzione classica. In altritermini l’idea di De Broglie non era quella di correggere ed introdurre delle regolequantistiche all’interno della teoria classica ma, bensi, di costruire una meccanicasu basi concettuali nuove. De Broglie suppose che l’idea di una descrizione dualedella luce in termini corpuscolari ed ondulatori la si potesse estendere anche alleparticelle. Dunque si trattava di associare una descrizione ondulatoria a quella diparticella. De Broglie penso’ che questo si potesse fare lasciandosi guidare dalladescrizione duale che si da per le onde luminose. Partando dalla relazione che legal’energia, E, trasportata da un raggio luminoso monocromatico all’impulso, p dellaradiazione stessa9
E = pc (2.63)
9La luce esercita su una superficie su cui venga riflessa una pressione di radiazione. La lucerimbalzando cede una certo impulso alla superficie che a sua volta genera una forza e quindi una
50

possiamo scrivereE = pc = p(νλ) (2.64)
dove si e’ usato la relazione tra frequenza e lunghezza d’onda per un’onda luminosa(λ = c/ν). Ma la relazione di Planck ci dice che
E = hν (2.65)
e quindihν = p(νλ) ⇒ h = pλ (2.66)
e finalmente la relazione fondamentale di De Broglie
p =h
λ(2.67)
Einstein per primo aveva attribuito ai fotoni l’impulso (2.67), ma l’idea di De Broglieera di associare anche ai corpi materiali di impulso p un’onda con una lunghezzad’onda pari a h/p. Come si vede l’impulso e’ inversamente proporzionale alla lun-ghezza d’onda, per cui a particelle di grande impulso sono associate piccole lunghezzed’onda. Come vedremo nella sezione successiva, un’onda da’ luogo a fenomeni diinterferenza o di diffrazione passando attraverso a delle fenditure, solo se la lun-ghezza d’onda e’ dello stesso ordine di grandezza delle fenditure stesse. Qualora lalunghezza d’onda sia piccola tali fenomeni non si manifestano. In tali circostanze unraggio luminoso ha comportamento molto simile a quello di una particella. A scopoesemplificativo consideriamo una palla di massa m = 0.5Kg che si muova con unavelocita’ di 3 m/sec. Il suo impulso sara’
p = mv = 0.5 × 3 = 1.5Kg ×m/sec (2.68)
Il valore della lunghezza d’onda associata e’ pari a10
λ =h
p=
6.626 × 10−34joule× sec
1.5Kg ×m/sec= 4.4 × 10−34m (2.69)
Quando si fa passare un fascio di luce attraverso un foro (vedi Figura 2.15), la massi-ma deviazione che subisce il raggio luminoso (contrariamente ad un fascio di particel-le che passerebbero tirando a diritto) e’ data da un angolo θ che approssimativamenterisulta (per λ << d)
θ ≈ λ
d(2.70)
pressione sulla superficie. Per un’onda monocromatica si verifica facilmente come E e p sianocorrelate. Il fenomeno e’ analogo a quello in cui una palla rimbalzando a terra, produce una forza(pressione) sul pavimento
10Le dimensioni di h sono quelle di un’azione, quindi energia × t o, [h] = m(ℓ/t)2 × t = mℓ2/t.Quindi [h/mv] = ℓ
51

Quindi se consideriamo un foro dell’ordine di 10 cm, cioe’ 0.1m segue
θ ≈ 4.4 × 10−34
0.1= 4.4 × 10−33 radianti (2.71)
Se assumiamo che la nostra palla continui il suo percorso sino ai confini dell’universo(le cui dimensioni sono stimate in 1025m, segue che la deviazione subita e’ pari a4.4 × 10−8m, cioe’ quasi dell’ordine delle dimensioni atomiche. Dunque per unoggetto macroscopico gli effetti ondulatori associati all’aspetto ondulatorio dellamateria non sono osservabili. Diverso e’ il caso di un elettrone in un atomo. Le
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
θd
Figura 2.15: Il fenomeno della diffrazione
velocita’ tipiche sono dell’ordine di 108m/sec e la massa dell’elettrone e’ dell’ordinedi 10−30Kg. Dunque p = 10−22Kg ×m/sec e
λ ≈ 6.6 × 10−34
10−22= 6.6 × 10−12m (2.72)
Dunque la lunghezza d’onda dell’elettrone in un atomo e’ dell’ordine di grandezzadelle dimensioni atomiche. In questa situazione l’aspetto ondulatorio non puo’ esse-re certo trascurato. Una maniera molto semplice per capire le profonde conseguenzedi tutto questo e’ di considerare ancora l’atomo di idrogeno. Supponiamo che l’e-lettrone faccia un’orbita circolare. In questo caso l’onda associata dovra’ adattarsiall’atomo stesso. La condizione e’ che si formi un’onda stazionaria e la condizionegeometrica di continuita’ e’ che il diametro della circonferenza percorsa dall’elettronesia un multiplo intero di lunghezze d’onda (vedi Figura 2.16)
2πr = nλ (2.73)
Moltiplicando questa equazione per l’impulso dell’elettrone si ha
2πpr = npλ = nh (2.74)
52
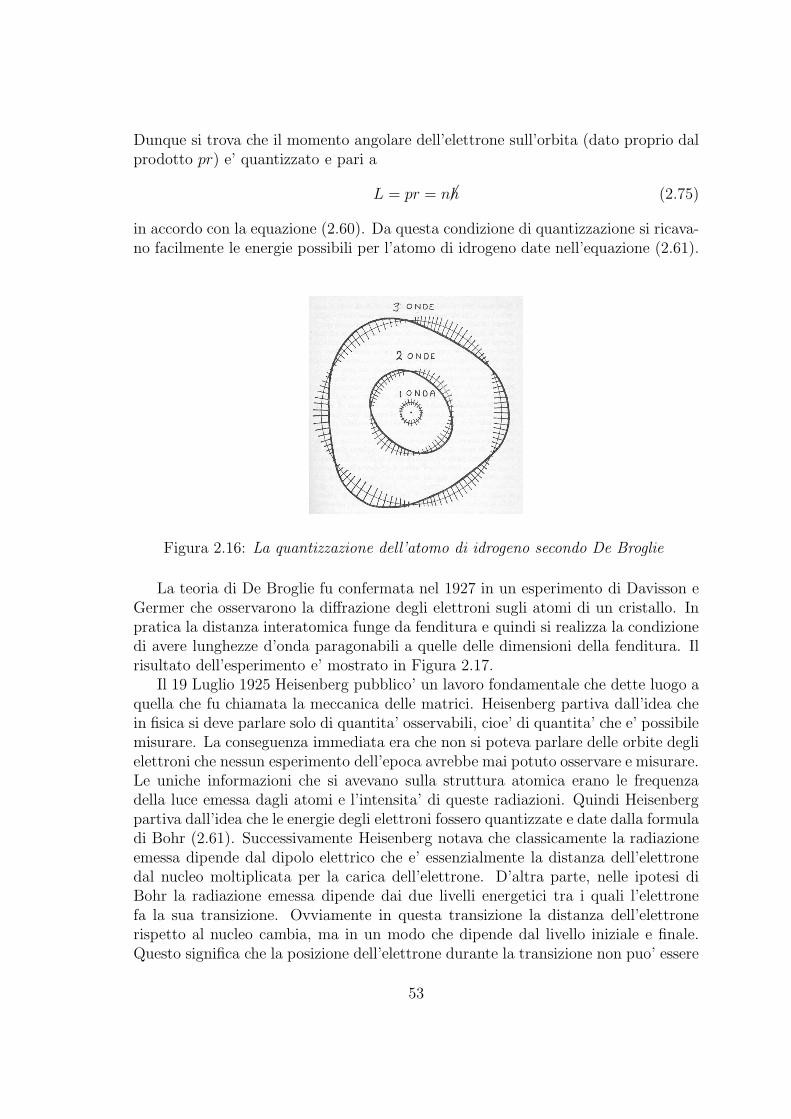
Dunque si trova che il momento angolare dell’elettrone sull’orbita (dato proprio dalprodotto pr) e’ quantizzato e pari a
L = pr = nh/ (2.75)
in accordo con la equazione (2.60). Da questa condizione di quantizzazione si ricava-no facilmente le energie possibili per l’atomo di idrogeno date nell’equazione (2.61).
Figura 2.16: La quantizzazione dell’atomo di idrogeno secondo De Broglie
La teoria di De Broglie fu confermata nel 1927 in un esperimento di Davisson eGermer che osservarono la diffrazione degli elettroni sugli atomi di un cristallo. Inpratica la distanza interatomica funge da fenditura e quindi si realizza la condizionedi avere lunghezze d’onda paragonabili a quelle delle dimensioni della fenditura. Ilrisultato dell’esperimento e’ mostrato in Figura 2.17.
Il 19 Luglio 1925 Heisenberg pubblico’ un lavoro fondamentale che dette luogo aquella che fu chiamata la meccanica delle matrici. Heisenberg partiva dall’idea chein fisica si deve parlare solo di quantita’ osservabili, cioe’ di quantita’ che e’ possibilemisurare. La conseguenza immediata era che non si poteva parlare delle orbite deglielettroni che nessun esperimento dell’epoca avrebbe mai potuto osservare e misurare.Le uniche informazioni che si avevano sulla struttura atomica erano le frequenzadella luce emessa dagli atomi e l’intensita’ di queste radiazioni. Quindi Heisenbergpartiva dall’idea che le energie degli elettroni fossero quantizzate e date dalla formuladi Bohr (2.61). Successivamente Heisenberg notava che classicamente la radiazioneemessa dipende dal dipolo elettrico che e’ essenzialmente la distanza dell’elettronedal nucleo moltiplicata per la carica dell’elettrone. D’altra parte, nelle ipotesi diBohr la radiazione emessa dipende dai due livelli energetici tra i quali l’elettronefa la sua transizione. Ovviamente in questa transizione la distanza dell’elettronerispetto al nucleo cambia, ma in un modo che dipende dal livello iniziale e finale.Questo significa che la posizione dell’elettrone durante la transizione non puo’ essere
53
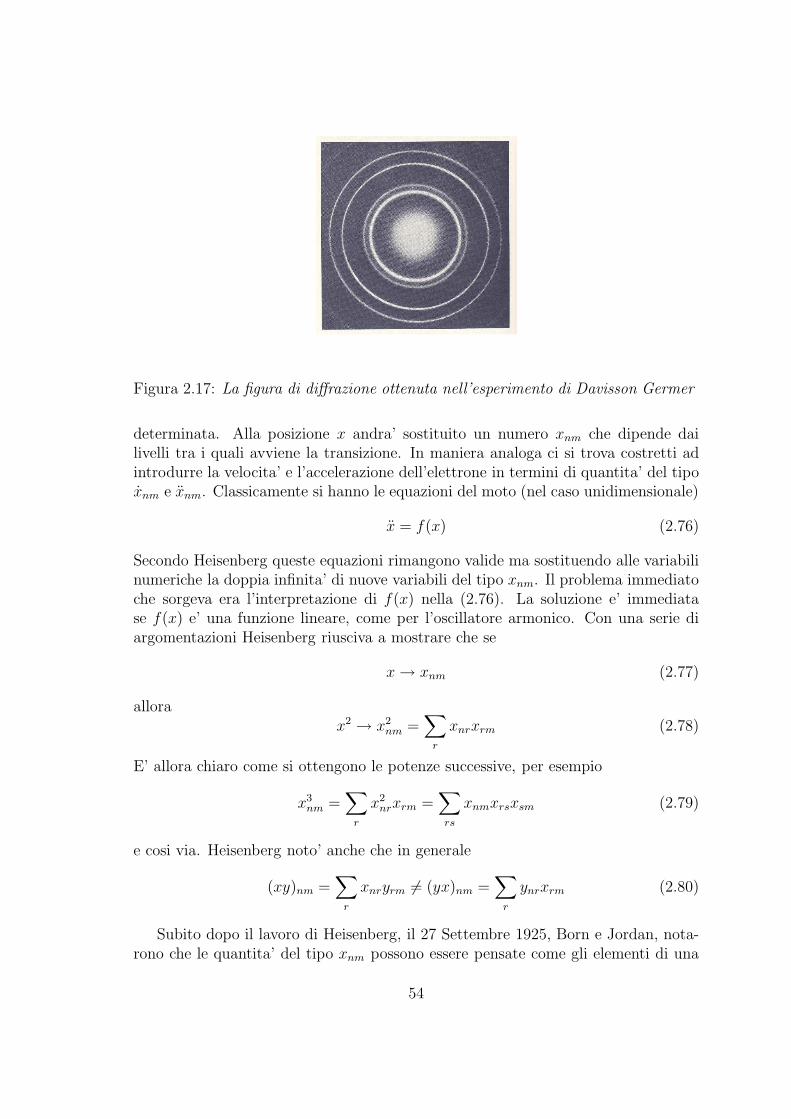
Figura 2.17: La figura di diffrazione ottenuta nell’esperimento di Davisson Germer
determinata. Alla posizione x andra’ sostituito un numero xnm che dipende dailivelli tra i quali avviene la transizione. In maniera analoga ci si trova costretti adintrodurre la velocita’ e l’accelerazione dell’elettrone in termini di quantita’ del tipoxnm e xnm. Classicamente si hanno le equazioni del moto (nel caso unidimensionale)
x = f(x) (2.76)
Secondo Heisenberg queste equazioni rimangono valide ma sostituendo alle variabilinumeriche la doppia infinita’ di nuove variabili del tipo xnm. Il problema immediatoche sorgeva era l’interpretazione di f(x) nella (2.76). La soluzione e’ immediatase f(x) e’ una funzione lineare, come per l’oscillatore armonico. Con una serie diargomentazioni Heisenberg riusciva a mostrare che se
x→ xnm (2.77)
allorax2 → x2
nm =∑
r
xnrxrm (2.78)
E’ allora chiaro come si ottengono le potenze successive, per esempio
x3nm =
∑
r
x2nrxrm =
∑
rs
xnmxrsxsm (2.79)
e cosi via. Heisenberg noto’ anche che in generale
(xy)nm =∑
r
xnryrm 6= (yx)nm =∑
r
ynrxrm (2.80)
Subito dopo il lavoro di Heisenberg, il 27 Settembre 1925, Born e Jordan, nota-rono che le quantita’ del tipo xnm possono essere pensate come gli elementi di una
54

matrice (che indicheremo con X) e che la regola di prodotto data in (2.78) altro none’ che il prodotto righe per colonne di due matrici. Questi autori furono anche ingrado di dimostrare che le matrici associate alle variabili classiche x e p soddisfanola seguente regola (regola di commutazione)
[X,P ]− ≡ XP − PX = ih/ (2.81)
Poco piu’ di un mese dopo, il 7 Novembre 1925 Dirac arrivava alla stessa regola dicommutazione per via completamente indipendente. Inoltre Dirac mostrava che lamatrice X (oggi detta operatore di posizione) soddisfa l’equazione
X = − i
h/[X,H ] (2.82)
dove H = H(X,P ) e’ l’hamiltoniana espressa in termini delle matrici X e P equindi una matrice essa stessa. Dirac notava anche l’analogia che esiste tra questaequazione e la (2.21), quando si scelga x come variabile dinamica
x = {x,H} (2.83)
e si mettano in corrispondenza il commutatore −i[X,H ]/h/ con la parentesi di Pois-son {x,H}. Dirac il 7 Novembre 1925 e pochi giorni dopo, il 16 Novembre, Hei-senberg, Born e Jordan lasciarono perdere la strada originale di Heisenberg con-centrandosi invece sulla formulazione di una nuova meccanica in cui le variabili diposizione e di impulso non fossero numeri ordinari ma matrici non commutanti traloro. Questi autori fornirono la prima trattazione completa della meccanica dellematrici.
Il 17 Gennaio 1926 Schrodinger pubblico’ il primo dei suoi lavori in cui riuscivaa dare una formulazione precisa delle intuizioni di De Broglie. Cio’ che Schrodingerfece fu di scrivere un’equazione analoga, in un certo senso, all’equazione per leonde elettromagnetiche. Nel caso dello stato stazionario di un atomo di energia En,l’equazione soddisfatta dalla funzione d’onda ψn(q) era
H
(
q,−ih/ ∂
∂q
)
ψn(q) = Enψn(q) (2.84)
La funzione H(q, p) e’ l’hamiltoniana classica sulla quale Schrodinger effettuava lasostituzione
p→ −ih/ ∂
∂q(2.85)
Per l’atomo di idrogeno si ha
H(~x, ~p) =~p 2
2m− e2
|~x| (2.86)
e dunque
H(~x,−ih/ ~∇) = − h/2
2m|~∇|2 − e2
|~x| (2.87)
55

L’equazione differenziale che ne risultava era ben nota nella fisica matematica enon e’ difficile trovare i valori En per i quali esistono soluzioni che si annullanoall’infinito11. In questo modo Schrodinger ricavo’ la formula di Bohr per le energiedell’atomo di idrogeno. Il lavoro di Schrodinger ebbe molta risonanza anche perche’faceva uso di equazioni differenziali, sulle quali i fisici matematici dell’epoca eranomolto preparati, invece di usare un’algebra matriciale di conoscenza non comune.Inoltre Schrodinger generalizzo’ la sua equazione d’onda al caso non stazionario
ih/∂ψ(q, t)
∂t= H
(
q,−ih/ ∂
∂q
)
ψ(q, t) (2.88)
Erwin Schrodinger realizzo’ molto presto che la funzione d’onda per un sistemadi molti elettroni non poteva essere definita nello spazio ordinario a tre dimensioni.Per esempio, nel caso di due elettroni essa doveva dipendere dalle coordinate dientrambi e quindi doveva essere una funzione di sei variabili spaziali e del tempo.Ci si trovava davanti ad una generalizzazione mai vista prima, si aveva a che farecon oggetti definiti in uno spazio astratto multidimensionale ed inoltre le funzioniin oggetto assumevano valori complessi, come e’ chiaro dal fatto che in entrambe leequazioni di Schrodinger, sia la (2.84) che la (2.88), compare esplicitamente l’unita’immaginaria.
2.4.5 Il significato probabilistico della funzione d’onda
Uno dei problemi della teoria atomica di Bohr era quello relativo al meccanismo diemissione e di assorbimento dei quanti di luce. Nel 1915-16 Einstein non riuscendoa trovare questi meccanismi uso’ un metodo statistico per determinare le probabi-lita’ relative. In questo modo fu capace di ritrovare la formula di Planck per laradiazione di corpo nero. Rimaneva pero’ l’interrogativo sui meccanismi di base,cioe’ su cosa provocava questi fenomeni. Un problema analogo si era presentato aRutherford nel 1900 quando aveva cercato di formulare una teoria fenomenologicadella radioattivita’. Anche Rutherford fece uso di metodi statistici introducendo laprobabilita’ di decadimento di un nucleo ed il concetto di mezza vita, cioe’ in quantotempo una popolazione atomica si dimezza. I due problemi (quello atomico e quellodella radioattivita’) erano molto simili, anche l’emissione da parte di un atomo puo’infatti essere pensata come una sorta di decadimento. Restava pero’ nell’animo diEinstein l’idea che questa descrizione fosse provvisoria e che la si dovesse un giornosostituire con una spiegazione deterministica al momento in cui si fosse formulatauna teoria adeguata. Come vedremo la risposta della meccanica quantistica e’ cheinvece non esiste nessuna spiegazione deterministica dei decadimenti, e che invece lanatura probabilistica dei fenomeni atomici e’ una legge fondamentale della natura.Nelle considerazioni atomiche esisteva anche un altro elemento di incomprensione
11Schrodinger pensava correttamente che essendo l’elettrone presente solo in vicinanza del nucleo,la funzione d’onda correlata dovesse annullarsi all’infinito
56
e cioe’ da dove viene e dove va il fotone al momento dell’emissione o dell’assorbi-mento. La risposta a questa particolare domanda risiede nella teoria quantisticadella radiazione o piu’ in generale nella teoria dei campi quantizzati che pero’ nonconsidereremo in questo corso.
Venendo alla questione dell’interpretazione probabilistica della meccanica quan-tistica, fu Max Born che il 25 Giugno del 1926 (e piu’ compiutamente il mese succes-sivo) scopri’, per primo, il significato empirico della funzione d’onda, che poi detteluogo all’interpretazione di Copenhagen della meccanica quantistica. Born aveva inmente le considerazioni di Einstein ed in particolare il fatto che l’energia associataad una radiazione di frequenza ν in un dato volume V , dello spazio puo’ essere inter-pretata come dovuta ad n fotoni di energia hν. Dunque in termini di fotoni l’energiasara’ data da nhν. Questo significa che nel dato volume ci sono n fotoni. Se l’energiatotale dell’onda (cioe’ quella relativa a tutto lo spazio) corrisponde a N fotoni, alloran/N e’ la probabilita’ di trovare un fotone nel volume V . Ma la densita’ di energiae’ proporzionale al quadrato del campo em, e quindi la probabilita’ n/N puo’ esserecalcolata dal quadrato del campo em. Dopo queste considerazioni l’analisi di Bornsi concentro’ sul processo di collisione di un elettrone su un atomo analizzandoloin analogia con la diffrazione dei raggi X. In questo modo arrivo’ a realizzare chel’elettrone poteva essere in tutti quei punti dello spazio dove la funzione d’onda eranon nulla e che non c’era modo di dire dove esso fosse effettivamente dato che sitrattava di un evento casuale. Quindi Born arrivo’ a teorizzare che la probabilita’,dP , affinche’ un elettrone si trovi nell’elemento di volume infinitesimo dV fosse datada
dP = |ψ(~x)|2dV (2.89)
Da questa interpretazione seguiva la necessita’ di normalizzare la funzione d’onda,di richiedere cioe’ che
∫
|ψ(~x)|2dV = 1 (2.90)
dove l’integrale e’ fatto su tutto lo spazio. Il significato di questa equazione e’ che iltrovare un elettrone in un qualunque punto e’ un evento certo, e quindi la probabilita’corrispondente deve essere uguale ad uno. Come vedremo successivamente, la sceltadel modulo quadro della funzione d’onda permette di ritrovare molto semplicementele proprieta’ di diffrazione e di interferenza mostrate anche dai corpuscoli materiali.
Ovviamente questa interpretazione da’ luogo a un problema concettuale moltoimportante. Infatti noi possiamo calcolare la probabilita’ che un elettrone dopo avercolliso con un atomo vada in una direzione assegnata, ma la teoria non ci offre alcunelemento per poter dire a priori in quale direzione l’elettrone potra’ andare. Quindinon possiamo mai dire dove si trovi una particella, possiamo solo dare la probabilita’che si trovi in un certo punto. Dunque la meccanica quantistica deve essere unateoria strettamente probabilistica e pertanto atta a calcolare solo ed esclusivamentele probabilita’ degli eventi. Una situazione, solo apparentemente analoga, esistein meccanica statistica. In questo caso si tratta con un numero molto grande disistemi elementari ed e’ praticamente impossibile conoscere le condizioni iniziali
57
di tutti questi sistemi che ci permetterebbe di fare delle previsioni completamentedeterministiche. Si e’ dunque costretti ad usare metodi probabilistici, ma questisono dovuti ad ignoranza nostra. Invece nel caso della meccanica quantistica unaconcoscenza piu’ dettagliata della realta’ fisica e’ imposssibile. Questo fu reso moltopiu’ chiaro dalla formulazione del principio di indeterminazione di Heisenberg (Marzo1927).
2.4.6 Il principio di indeterminazione
Heisenberg fece un’analisi critica dei processi di misura tenendo conto della dualita’onda corpuscolo. L’idea era quella di misurare contemporaneamente posizione edimpulso di un elettrone. Per determinare accuratamente la posizione e’ necessario,come sappiamo, usare luce con lunghezza d’onda dell’ordine delle dimensioni del-l’elettrone, quindi molta piccola. Ma il fotone trasporta un impulso dato da h/λ,quindi piccola lunghezza d’onda significa grande impulso. Supponiamo di voler mi-surare contemporaneamente l’impulso dell’elettrone. Dato che per la misura dellaposizione necessitiamo di fotoni di grande impulso, l’urto cambiera’ molto l’impulsodell’elettrone che quindi non potra’ essere determinato con buona approssimazione.Se vogliamo migliorare questa misura occorre usare fotoni di impulso piccolo, allorala lunghezza d’onda associata sara’ grande e la misura della posizione non risultera’molto precisa. Mettendo insieme questi elementi Heisenberg riusciva a dimostrareche il prodotto delle indeterminazioni sulla posizione, ∆x e sull’impulso ∆px ha unlimite inferiore
∆x∆px ≥ h/
2(2.91)
Il fatto che il limite inferiore non sia zero significa che non riusciremo mai a conoscerecon infinita precisione (∆x = 0) la posizione di una particella e lo stesso vale perl’impulso. Questo e’ da contrastare con la meccanica classica in cui si ammettedi poter conoscere con infinita precisione in qualunque istante posizione e impulsoconiugato di una particella. In pratica queste indeterminazioni possono anche esseretrascurabili. Vediamo alcuni esempi. Consideriamo una particella macroscopica dimassa 1 grammo. Supponiamo di aver misurato la sua posizione con una precisionedi un milionesimo di millimetro, cioe’ 10−9m. Allora
∆v =h/
2m∆x≈ 10−34
2 × 10−310−9= 0.5 × 10−22m/sec (2.92)
Vediamo che per una particella macroscopica gli effetti del principio di indetermi-nazione sono completamente trascurabili e mascherati dalle incertezze sulle misuredovute alla nostra strumentazione che molto difficilmente riuscira’ a raggiungere leprecisioni di cui sopra. Molto diversa e’ la situazione per un elettrone in un atomo.Dato che le dimensioni di un atomo sono dell’ordine di 10−10m dovremo misurarela posizione dell’elettrone molto meglio di cosi. Diciamo per esempio ∆x = 10−13m
58
(cioe’ una precisione percentuale del per mille). Dato che per la massa dell’elettronesi ha m = 9 × 10−31 ≈ 10−30Kg, segue
∆v =h/
2m∆x≈ 10−34
2 × 10−3010−13= 0.5 × 109m/sec (2.93)
La velocita’ di un elettrone in un atomo e’ tipicamente di 108m/sec e quindi l’inde-terminazione sulla velocita’ dell’elettrone e’ grandissima. Dunque nel caso atomicoil principio di indeterminazione e’ importante ed infatti la fisica classica fallisce com-pletamente e come si capisce risulta molto difficile parlare di traiettoria dell’elettroneo della sua orbita dato che conosciamo male posizione ed impulso. Esaminiamo in-fine il cammino di un elettrone in una camera a nebbia che e’ stata per molti anniun tipico rivelatore di particelle. L’elettrone nel suo cammino ionizza gli atomi chefungono da nucleo di condensazione e quindi lascia una traccia visibile all’osserva-tore. Tramite l’analisi di queste tracce e’ possibile determinare posizione e velocita’dell’elettrone. Come si riconcilia questo con il principio di indeterminazione? Ladimensione tipica delle tracce e’ di circa un millesimo di millimetro, 10−6m. Si hadunque per un elettrone
∆v =h/
2m∆x≈ 10−34
2 × 10−3010−6= 0.5 × 102m/sec (2.94)
Ma in questi esperimenti la velocita’ degli elettroni e’ in genere superiore a 1/10della velocita’ della luce, ≈ 3 × 108m/sec, quindi
∆v
v=
0.5 × 102
3 × 106≈ 0.16 × 10−4 (2.95)
Dunque, in base al principio di indeterminazione, possiamo conoscere la velocita’con una precisione massima di 10−5. In pratica la precisione sperimentale e’ in-feriore. In ogni caso il principio di indeterminazione costituisce un ostacolo vero eproprio all’idea di particelle che si muovono nello spazio descrivendo delle traiettorie,dato che non e’ possibile determinare contemporaneamente, con infinita precisione,posizione e velocita’.
2.4.7 Equivalenza della meccanica ondulatoria (Schrodin-
ger) e della meccanica delle matrici (Heisenberg)
Alla fine del 1926 Schrodinger e Dirac mostrarono la relazione tra la meccanicaondulatoria e la meccanica delle matrici. Prima di tutto osserviamo che esiste unarelazione semplice tra le due equazioni di Schrodinger, quella che descrive ondestazionarie (2.84) e quella dipendente dal tempo (2.84). Precisamente l’evoluzionetemporale di uno stato stazionario e’ data da
ψ(x, t) = e−iEnt/h/ψn(x) (2.96)
59
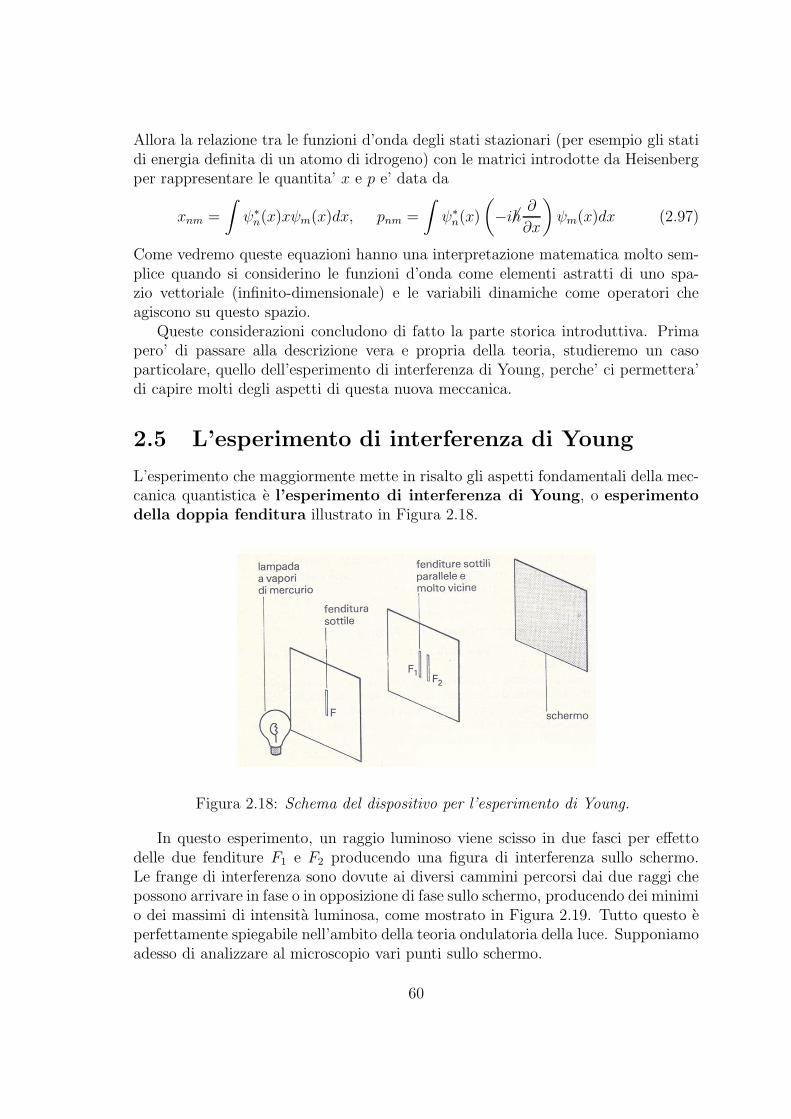
Allora la relazione tra le funzioni d’onda degli stati stazionari (per esempio gli statidi energia definita di un atomo di idrogeno) con le matrici introdotte da Heisenbergper rappresentare le quantita’ x e p e’ data da
xnm =
∫
ψ∗
n(x)xψm(x)dx, pnm =
∫
ψ∗
n(x)
(
−ih/ ∂
∂x
)
ψm(x)dx (2.97)
Come vedremo queste equazioni hanno una interpretazione matematica molto sem-plice quando si considerino le funzioni d’onda come elementi astratti di uno spa-zio vettoriale (infinito-dimensionale) e le variabili dinamiche come operatori cheagiscono su questo spazio.
Queste considerazioni concludono di fatto la parte storica introduttiva. Primapero’ di passare alla descrizione vera e propria della teoria, studieremo un casoparticolare, quello dell’esperimento di interferenza di Young, perche’ ci permettera’di capire molti degli aspetti di questa nuova meccanica.
2.5 L’esperimento di interferenza di Young
L’esperimento che maggiormente mette in risalto gli aspetti fondamentali della mec-canica quantistica e l’esperimento di interferenza di Young, o esperimentodella doppia fenditura illustrato in Figura 2.18.
Figura 2.18: Schema del dispositivo per l’esperimento di Young.
In questo esperimento, un raggio luminoso viene scisso in due fasci per effettodelle due fenditure F1 e F2 producendo una figura di interferenza sullo schermo.Le frange di interferenza sono dovute ai diversi cammini percorsi dai due raggi chepossono arrivare in fase o in opposizione di fase sullo schermo, producendo dei minimio dei massimi di intensita luminosa, come mostrato in Figura 2.19. Tutto questo eperfettamente spiegabile nell’ambito della teoria ondulatoria della luce. Supponiamoadesso di analizzare al microscopio vari punti sullo schermo.
60
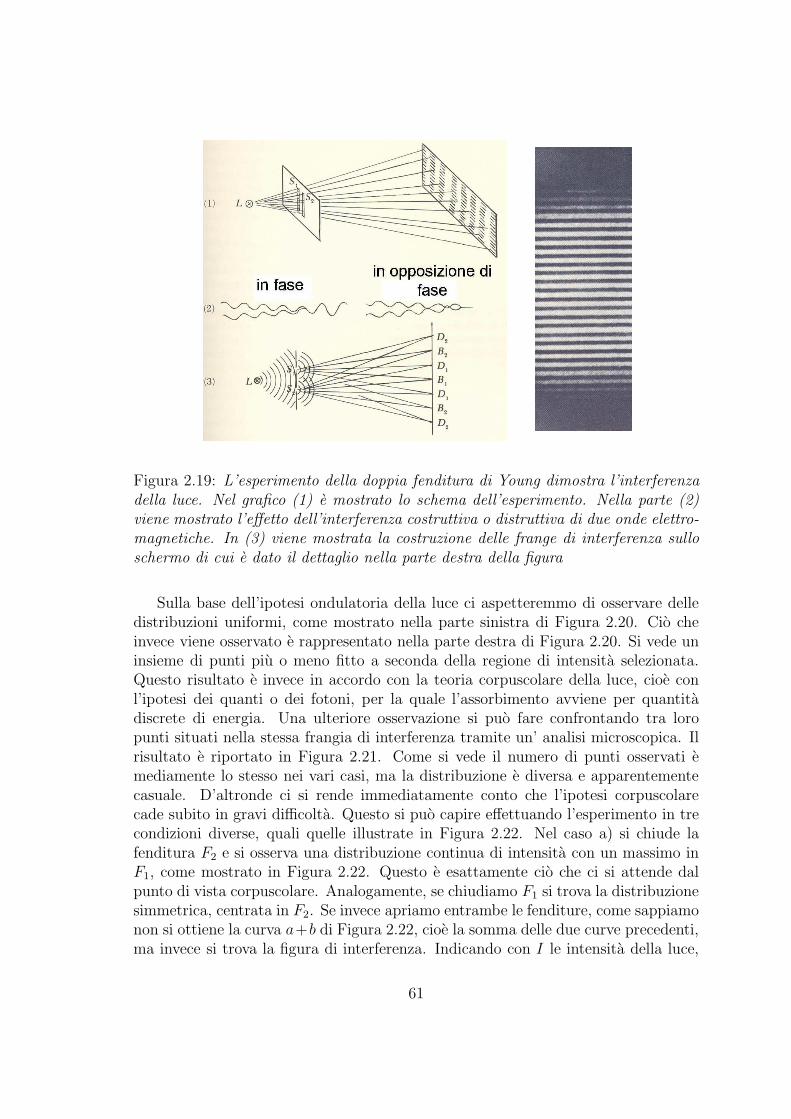
Figura 2.19: L’esperimento della doppia fenditura di Young dimostra l’interferenzadella luce. Nel grafico (1) e mostrato lo schema dell’esperimento. Nella parte (2)viene mostrato l’effetto dell’interferenza costruttiva o distruttiva di due onde elettro-magnetiche. In (3) viene mostrata la costruzione delle frange di interferenza sulloschermo di cui e dato il dettaglio nella parte destra della figura
Sulla base dell’ipotesi ondulatoria della luce ci aspetteremmo di osservare delledistribuzioni uniformi, come mostrato nella parte sinistra di Figura 2.20. Cio cheinvece viene osservato e rappresentato nella parte destra di Figura 2.20. Si vede uninsieme di punti piu o meno fitto a seconda della regione di intensita selezionata.Questo risultato e invece in accordo con la teoria corpuscolare della luce, cioe conl’ipotesi dei quanti o dei fotoni, per la quale l’assorbimento avviene per quantitadiscrete di energia. Una ulteriore osservazione si puo fare confrontando tra loropunti situati nella stessa frangia di interferenza tramite un’ analisi microscopica. Ilrisultato e riportato in Figura 2.21. Come si vede il numero di punti osservati emediamente lo stesso nei vari casi, ma la distribuzione e diversa e apparentementecasuale. D’altronde ci si rende immediatamente conto che l’ipotesi corpuscolarecade subito in gravi difficolta. Questo si puo capire effettuando l’esperimento in trecondizioni diverse, quali quelle illustrate in Figura 2.22. Nel caso a) si chiude lafenditura F2 e si osserva una distribuzione continua di intensita con un massimo inF1, come mostrato in Figura 2.22. Questo e esattamente cio che ci si attende dalpunto di vista corpuscolare. Analogamente, se chiudiamo F1 si trova la distribuzionesimmetrica, centrata in F2. Se invece apriamo entrambe le fenditure, come sappiamonon si ottiene la curva a+b di Figura 2.22, cioe la somma delle due curve precedenti,ma invece si trova la figura di interferenza. Indicando con I le intensita della luce,
61

Figura 2.20: Nella parte destra: cosa si dovrebbe osservare, in base alla teoria on-dulatoria, guardando al microscopio le frange di interferenza prodotte nell’esperi-mento di Young. Nella parte sinistra cosa si osserva realmente al microscopio. Neicerchi di sinistra l’osservazione di intensita massima, mentre nei cerchi di destral’osservazione di tre zone di debole intensita
Figura 2.21: L’analisi dettagliata di piu punti situati nella stessa frangia di interfe-renza mostra che il numero medio di punti impressionati e lo stesso, ma cambia laloro distribuzione che appare del tutto casuale.
si haIa+b 6= Ia + Ib (2.98)
Ovviamente questo non e un problema dal punto di vista ondulatorio dato che nelcaso della radiazione luminosa sappiamo che dobbiamo sommare i campi. Detta Al’ampiezza del campo si ha
Aa+b = Aa + Ab (2.99)
e dato che l’intensita luminosa e essenzialmente il modulo quadrato del campo segue
|Aab|2 = |Aa|2 + |Ab|2 + A∗
aAb + AaA∗
b 6= |Aa|2 + |Ab|2 (2.100)
D’altra parte abbiamo anche visto che sul piano microscopico la distribuzione del-l’intensita sullo schermo non e cio che ci si attende dall’ipotesi ondulatoria. Un
62
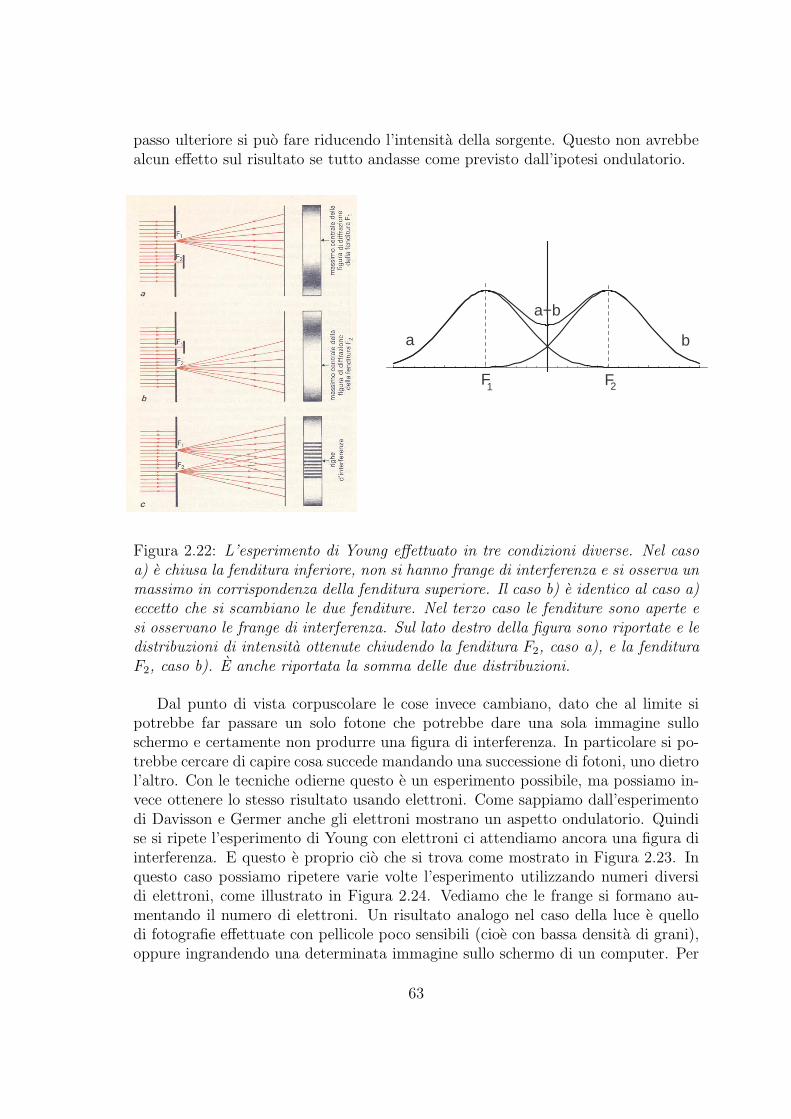
passo ulteriore si puo fare riducendo l’intensita della sorgente. Questo non avrebbealcun effetto sul risultato se tutto andasse come previsto dall’ipotesi ondulatorio.
a b
a+b
F F1 2
Figura 2.22: L’esperimento di Young effettuato in tre condizioni diverse. Nel casoa) e chiusa la fenditura inferiore, non si hanno frange di interferenza e si osserva unmassimo in corrispondenza della fenditura superiore. Il caso b) e identico al caso a)eccetto che si scambiano le due fenditure. Nel terzo caso le fenditure sono aperte esi osservano le frange di interferenza. Sul lato destro della figura sono riportate e ledistribuzioni di intensita ottenute chiudendo la fenditura F2, caso a), e la fendituraF2, caso b). E anche riportata la somma delle due distribuzioni.
Dal punto di vista corpuscolare le cose invece cambiano, dato che al limite sipotrebbe far passare un solo fotone che potrebbe dare una sola immagine sulloschermo e certamente non produrre una figura di interferenza. In particolare si po-trebbe cercare di capire cosa succede mandando una successione di fotoni, uno dietrol’altro. Con le tecniche odierne questo e un esperimento possibile, ma possiamo in-vece ottenere lo stesso risultato usando elettroni. Come sappiamo dall’esperimentodi Davisson e Germer anche gli elettroni mostrano un aspetto ondulatorio. Quindise si ripete l’esperimento di Young con elettroni ci attendiamo ancora una figura diinterferenza. E questo e proprio cio che si trova come mostrato in Figura 2.23. Inquesto caso possiamo ripetere varie volte l’esperimento utilizzando numeri diversidi elettroni, come illustrato in Figura 2.24. Vediamo che le frange si formano au-mentando il numero di elettroni. Un risultato analogo nel caso della luce e quellodi fotografie effettuate con pellicole poco sensibili (cioe con bassa densita di grani),oppure ingrandendo una determinata immagine sullo schermo di un computer. Per
63
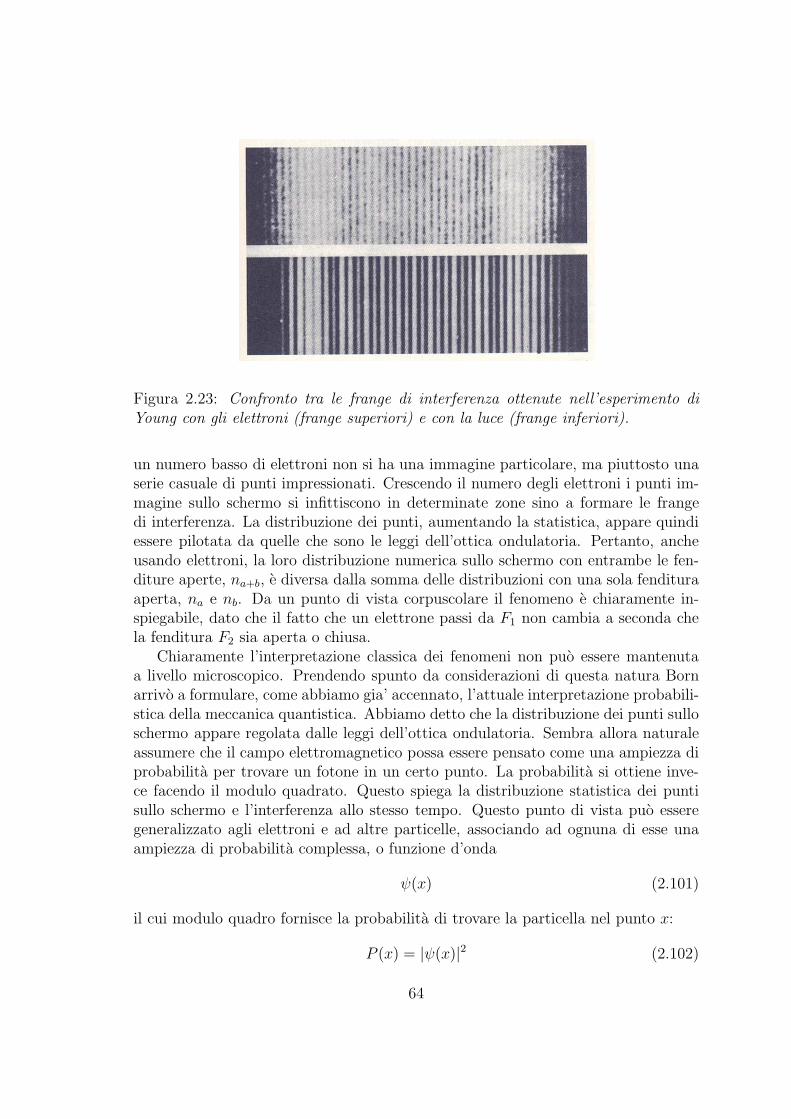
Figura 2.23: Confronto tra le frange di interferenza ottenute nell’esperimento diYoung con gli elettroni (frange superiori) e con la luce (frange inferiori).
un numero basso di elettroni non si ha una immagine particolare, ma piuttosto unaserie casuale di punti impressionati. Crescendo il numero degli elettroni i punti im-magine sullo schermo si infittiscono in determinate zone sino a formare le frangedi interferenza. La distribuzione dei punti, aumentando la statistica, appare quindiessere pilotata da quelle che sono le leggi dell’ottica ondulatoria. Pertanto, ancheusando elettroni, la loro distribuzione numerica sullo schermo con entrambe le fen-diture aperte, na+b, e diversa dalla somma delle distribuzioni con una sola fendituraaperta, na e nb. Da un punto di vista corpuscolare il fenomeno e chiaramente in-spiegabile, dato che il fatto che un elettrone passi da F1 non cambia a seconda chela fenditura F2 sia aperta o chiusa.
Chiaramente l’interpretazione classica dei fenomeni non puo essere mantenutaa livello microscopico. Prendendo spunto da considerazioni di questa natura Bornarrivo a formulare, come abbiamo gia’ accennato, l’attuale interpretazione probabili-stica della meccanica quantistica. Abbiamo detto che la distribuzione dei punti sulloschermo appare regolata dalle leggi dell’ottica ondulatoria. Sembra allora naturaleassumere che il campo elettromagnetico possa essere pensato come una ampiezza diprobabilita per trovare un fotone in un certo punto. La probabilita si ottiene inve-ce facendo il modulo quadrato. Questo spiega la distribuzione statistica dei puntisullo schermo e l’interferenza allo stesso tempo. Questo punto di vista puo esseregeneralizzato agli elettroni e ad altre particelle, associando ad ognuna di esse unaampiezza di probabilita complessa, o funzione d’onda
ψ(x) (2.101)
il cui modulo quadro fornisce la probabilita di trovare la particella nel punto x:
P (x) = |ψ(x)|2 (2.102)
64
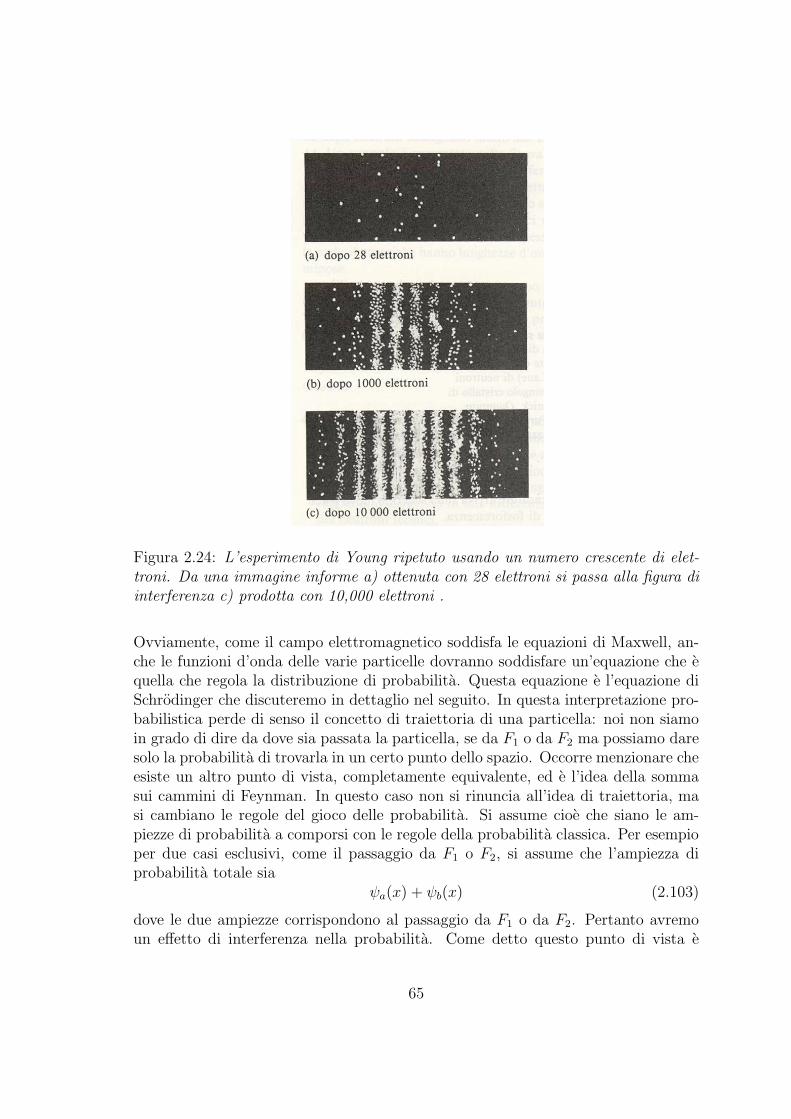
Figura 2.24: L’esperimento di Young ripetuto usando un numero crescente di elet-troni. Da una immagine informe a) ottenuta con 28 elettroni si passa alla figura diinterferenza c) prodotta con 10,000 elettroni .
Ovviamente, come il campo elettromagnetico soddisfa le equazioni di Maxwell, an-che le funzioni d’onda delle varie particelle dovranno soddisfare un’equazione che equella che regola la distribuzione di probabilita. Questa equazione e l’equazione diSchrodinger che discuteremo in dettaglio nel seguito. In questa interpretazione pro-babilistica perde di senso il concetto di traiettoria di una particella: noi non siamoin grado di dire da dove sia passata la particella, se da F1 o da F2 ma possiamo daresolo la probabilita di trovarla in un certo punto dello spazio. Occorre menzionare cheesiste un altro punto di vista, completamente equivalente, ed e l’idea della sommasui cammini di Feynman. In questo caso non si rinuncia all’idea di traiettoria, masi cambiano le regole del gioco delle probabilita. Si assume cioe che siano le am-piezze di probabilita a comporsi con le regole della probabilita classica. Per esempioper due casi esclusivi, come il passaggio da F1 o F2, si assume che l’ampiezza diprobabilita totale sia
ψa(x) + ψb(x) (2.103)
dove le due ampiezze corrispondono al passaggio da F1 o da F2. Pertanto avremoun effetto di interferenza nella probabilita. Come detto questo punto di vista e
65

completamente equivalente a quello di Born. Il solo problema e che la matematicaassociata e assolutamente non banale, e sebbene nei problemi piu attuali il punto divista di Feynamn sia il piu usato, noi affronteremo lo studio seguendo l’approccioalla Born.
Una cosa che e’ molto importante sottolineare e’ che se pensiamo ai fotoni o aglielettroni come corpuscoli, si potrebbe pensare di interpretare questo esperimentodicendo che si ha quella che viene chiamata una miscela statistica. Una miscelastatistica significa, in questo caso, che abbiamo N particelle, con probabilita’ Pa(x)e Pb(x) di passare da F1 e F2 rispettivamente e di arrivare ad un punto x sulloschermo. Dunque in ogni punto x arriveranno
N(x) = NPa(x) +NPb(x) (2.104)
particella. In questo caso la probabilita’ e’ data da
P (x) =N(x)
N= Pa(x) + Pb(x) (2.105)
e non si ha interferenza. L’interferenza e’ dovuta al fatto che il sistema e’ descrittoda una funzione d’onda che e’ data dalla somma di due contributi
ψ = ψa + ψb (2.106)
con Pi = |ψi|2 e quindi calcolando il modulo quadro si ha un termine misto respon-sabile dell’interferenza. E’ da notare invece che se misuriamo il numero di particelleche passano da F1 (che sara’ pari a N
∫
dxPa(x)), sapremo con certezza che il nu-mero di particelle che passano da F2 sara’ dato da N
∫
dxPb(x). Dunque la misurafatta in F1 determina automaticamente il numero di particelle che passano da F2.Possiamo anche dire che se non effettuiamo la misura in F1 la funzione d’onda delsistema complessivo e’
ψ(x) = ψa(x) + ψb(x) (2.107)
e non e’ possibile distinguere le due parti della funzione d’onda. Se invece misuriamole particelle che passano in F1 separiamo il sistema in due parti, una descritta daψa e l’altra descritta da ψb. In altri termini la misura cambia lo stato del sistema.Possiamo anche dire che mentre prima della misura lo stato tiene conto di entrambele particelle, dopo la misura in F1 le particelle che passano da F2 perdono completa-mente memoria della loro relazione con quelle che sono passate da F1. Questo e’ unpunto di importanza estrema importanza e, come vedremo, dara’ luogo ad uno deicapisaldi della interpretazione di Copenhagen, il cosi detto postulato di riduzionedella funzione d’onda.
Vorremmo anche sottolinere che l’esperimento della doppia fenditura eseguitoinviando un fotone alla volta e’ stato fatto solo a meta’ degli anni 80 a Parigi.Quello con elettroni (sempre un elettrone alla volta) da un team giapponese nel1987. All’inizio degli anni 90 un gruppo tedesco ha usato atomi di elio, mentre
66
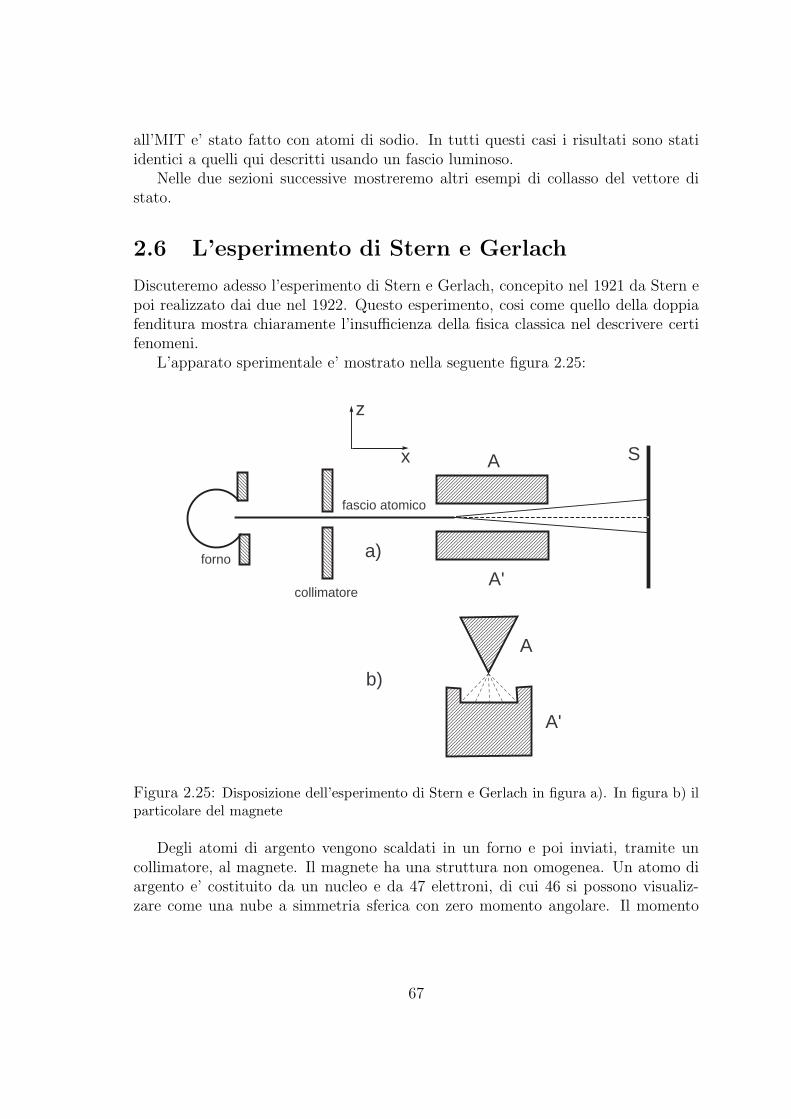
all’MIT e’ stato fatto con atomi di sodio. In tutti questi casi i risultati sono statiidentici a quelli qui descritti usando un fascio luminoso.
Nelle due sezioni successive mostreremo altri esempi di collasso del vettore distato.
2.6 L’esperimento di Stern e Gerlach
Discuteremo adesso l’esperimento di Stern e Gerlach, concepito nel 1921 da Stern epoi realizzato dai due nel 1922. Questo esperimento, cosi come quello della doppiafenditura mostra chiaramente l’insufficienza della fisica classica nel descrivere certifenomeni.
L’apparato sperimentale e’ mostrato nella seguente figura 2.25:
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
A
A'
fascio atomico
S
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
A
A'
a)
b)
xxxxxxxxxxxxxxxxxxxxxxxxxxxxx
x
z
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
forno
collimatore
Figura 2.25: Disposizione dell’esperimento di Stern e Gerlach in figura a). In figura b) ilparticolare del magnete
Degli atomi di argento vengono scaldati in un forno e poi inviati, tramite uncollimatore, al magnete. Il magnete ha una struttura non omogenea. Un atomo diargento e’ costituito da un nucleo e da 47 elettroni, di cui 46 si possono visualiz-zare come una nube a simmetria sferica con zero momento angolare. Il momento
67
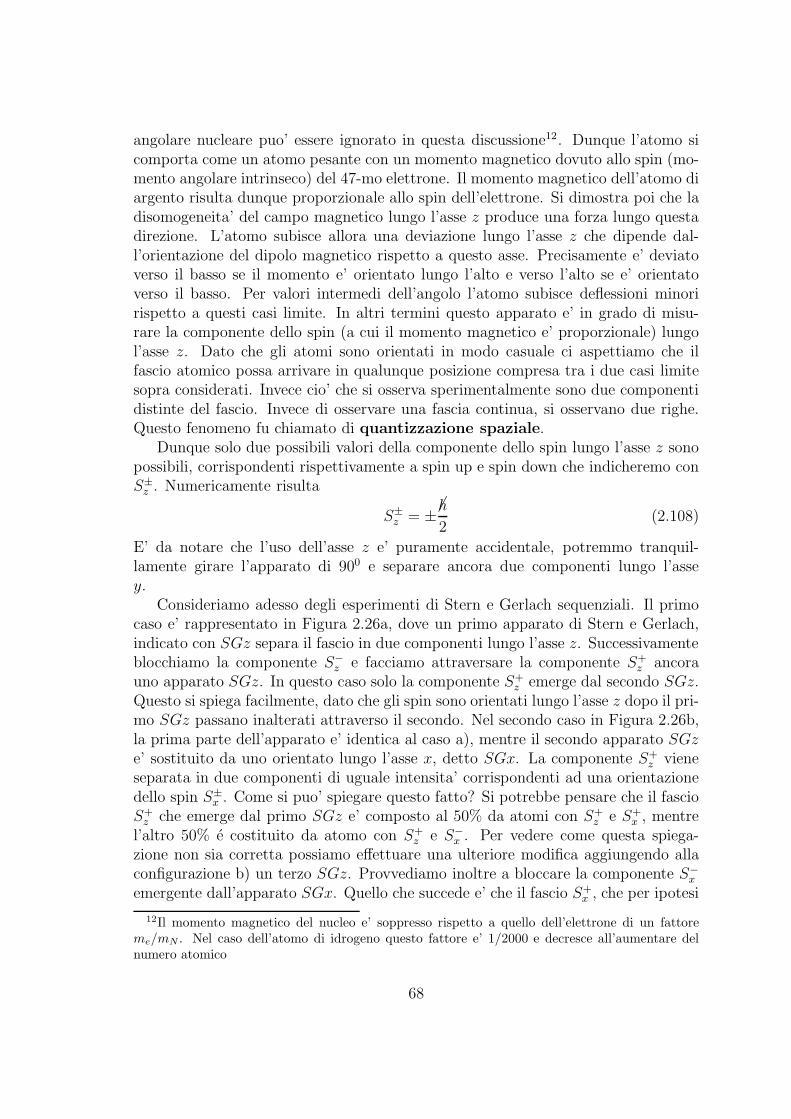
angolare nucleare puo’ essere ignorato in questa discussione12. Dunque l’atomo sicomporta come un atomo pesante con un momento magnetico dovuto allo spin (mo-mento angolare intrinseco) del 47-mo elettrone. Il momento magnetico dell’atomo diargento risulta dunque proporzionale allo spin dell’elettrone. Si dimostra poi che ladisomogeneita’ del campo magnetico lungo l’asse z produce una forza lungo questadirezione. L’atomo subisce allora una deviazione lungo l’asse z che dipende dal-l’orientazione del dipolo magnetico rispetto a questo asse. Precisamente e’ deviatoverso il basso se il momento e’ orientato lungo l’alto e verso l’alto se e’ orientatoverso il basso. Per valori intermedi dell’angolo l’atomo subisce deflessioni minoririspetto a questi casi limite. In altri termini questo apparato e’ in grado di misu-rare la componente dello spin (a cui il momento magnetico e’ proporzionale) lungol’asse z. Dato che gli atomi sono orientati in modo casuale ci aspettiamo che ilfascio atomico possa arrivare in qualunque posizione compresa tra i due casi limitesopra considerati. Invece cio’ che si osserva sperimentalmente sono due componentidistinte del fascio. Invece di osservare una fascia continua, si osservano due righe.Questo fenomeno fu chiamato di quantizzazione spaziale.
Dunque solo due possibili valori della componente dello spin lungo l’asse z sonopossibili, corrispondenti rispettivamente a spin up e spin down che indicheremo conS±
z . Numericamente risulta
S±
z = ±h/
2(2.108)
E’ da notare che l’uso dell’asse z e’ puramente accidentale, potremmo tranquil-lamente girare l’apparato di 900 e separare ancora due componenti lungo l’assey.
Consideriamo adesso degli esperimenti di Stern e Gerlach sequenziali. Il primocaso e’ rappresentato in Figura 2.26a, dove un primo apparato di Stern e Gerlach,indicato con SGz separa il fascio in due componenti lungo l’asse z. Successivamenteblocchiamo la componente S−
z e facciamo attraversare la componente S+z ancora
uno apparato SGz. In questo caso solo la componente S+z emerge dal secondo SGz.
Questo si spiega facilmente, dato che gli spin sono orientati lungo l’asse z dopo il pri-mo SGz passano inalterati attraverso il secondo. Nel secondo caso in Figura 2.26b,la prima parte dell’apparato e’ identica al caso a), mentre il secondo apparato SGze’ sostituito da uno orientato lungo l’asse x, detto SGx. La componente S+
z vieneseparata in due componenti di uguale intensita’ corrispondenti ad una orientazionedello spin S±
x . Come si puo’ spiegare questo fatto? Si potrebbe pensare che il fascioS+
z che emerge dal primo SGz e’ composto al 50% da atomi con S+z e S+
x , mentrel’altro 50% e costituito da atomo con S+
z e S−
x . Per vedere come questa spiega-zione non sia corretta possiamo effettuare una ulteriore modifica aggiungendo allaconfigurazione b) un terzo SGz. Provvediamo inoltre a bloccare la componente S−
x
emergente dall’apparato SGx. Quello che succede e’ che il fascio S+x , che per ipotesi
12Il momento magnetico del nucleo e’ soppresso rispetto a quello dell’elettrone di un fattoreme/mN . Nel caso dell’atomo di idrogeno questo fattore e’ 1/2000 e decresce all’aumentare delnumero atomico
68
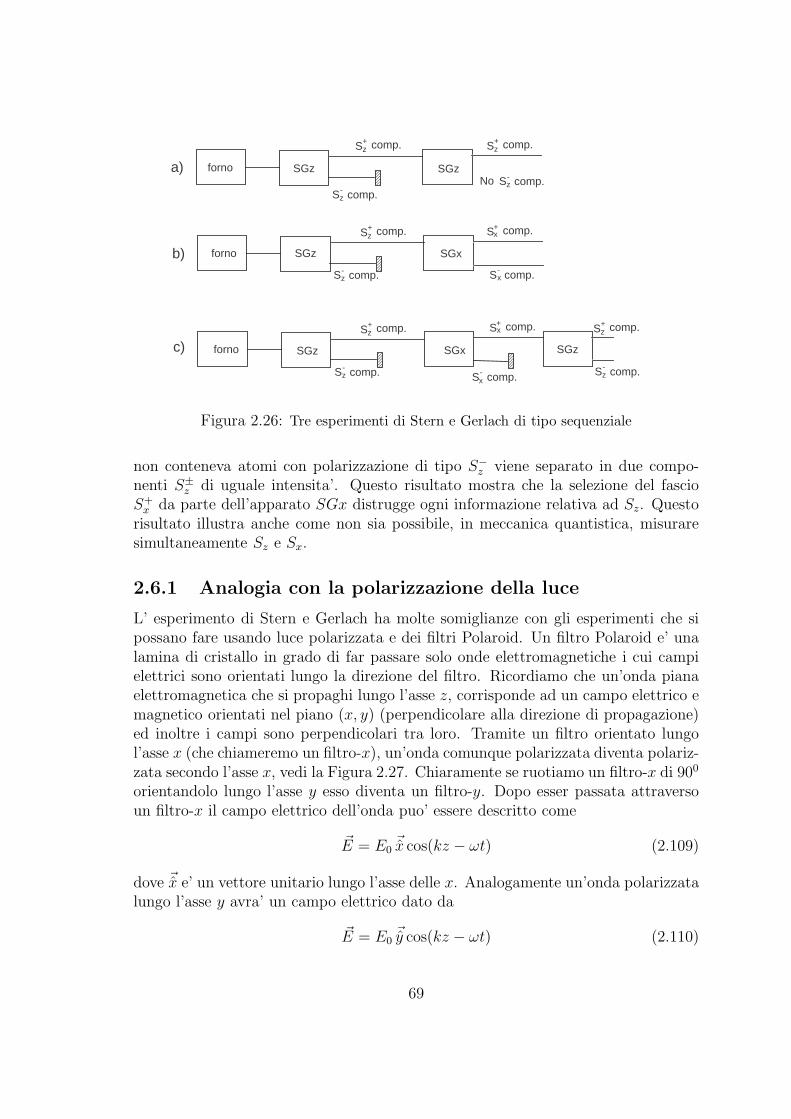
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxx
xxxxxxxxx
xxxxxxxx
forno
forno
forno
SGz SGz
SGz
SGz SGz
Sz+ comp.Sz
+ comp.
Sz+ comp.
Sz+ comp. Sz
+ comp.
Sz- comp.
Sz- comp.
Sz- comp. Sz
- comp.
Sz- comp.No
S+ comp.
S- comp.
S- comp.
S+ comp.
a)
b)
c)
x
x
x
x
SGx
SGx
Figura 2.26: Tre esperimenti di Stern e Gerlach di tipo sequenziale
non conteneva atomi con polarizzazione di tipo S−
z viene separato in due compo-nenti S±
z di uguale intensita’. Questo risultato mostra che la selezione del fascioS+
x da parte dell’apparato SGx distrugge ogni informazione relativa ad Sz. Questorisultato illustra anche come non sia possibile, in meccanica quantistica, misuraresimultaneamente Sz e Sx.
2.6.1 Analogia con la polarizzazione della luce
L’ esperimento di Stern e Gerlach ha molte somiglianze con gli esperimenti che sipossano fare usando luce polarizzata e dei filtri Polaroid. Un filtro Polaroid e’ unalamina di cristallo in grado di far passare solo onde elettromagnetiche i cui campielettrici sono orientati lungo la direzione del filtro. Ricordiamo che un’onda pianaelettromagnetica che si propaghi lungo l’asse z, corrisponde ad un campo elettrico emagnetico orientati nel piano (x, y) (perpendicolare alla direzione di propagazione)ed inoltre i campi sono perpendicolari tra loro. Tramite un filtro orientato lungol’asse x (che chiameremo un filtro-x), un’onda comunque polarizzata diventa polariz-zata secondo l’asse x, vedi la Figura 2.27. Chiaramente se ruotiamo un filtro-x di 900
orientandolo lungo l’asse y esso diventa un filtro-y. Dopo esser passata attraversoun filtro-x il campo elettrico dell’onda puo’ essere descritto come
~E = E0~x cos(kz − ωt) (2.109)
dove ~x e’ un vettore unitario lungo l’asse delle x. Analogamente un’onda polarizzatalungo l’asse y avra’ un campo elettrico dato da
~E = E0~y cos(kz − ωt) (2.110)
69
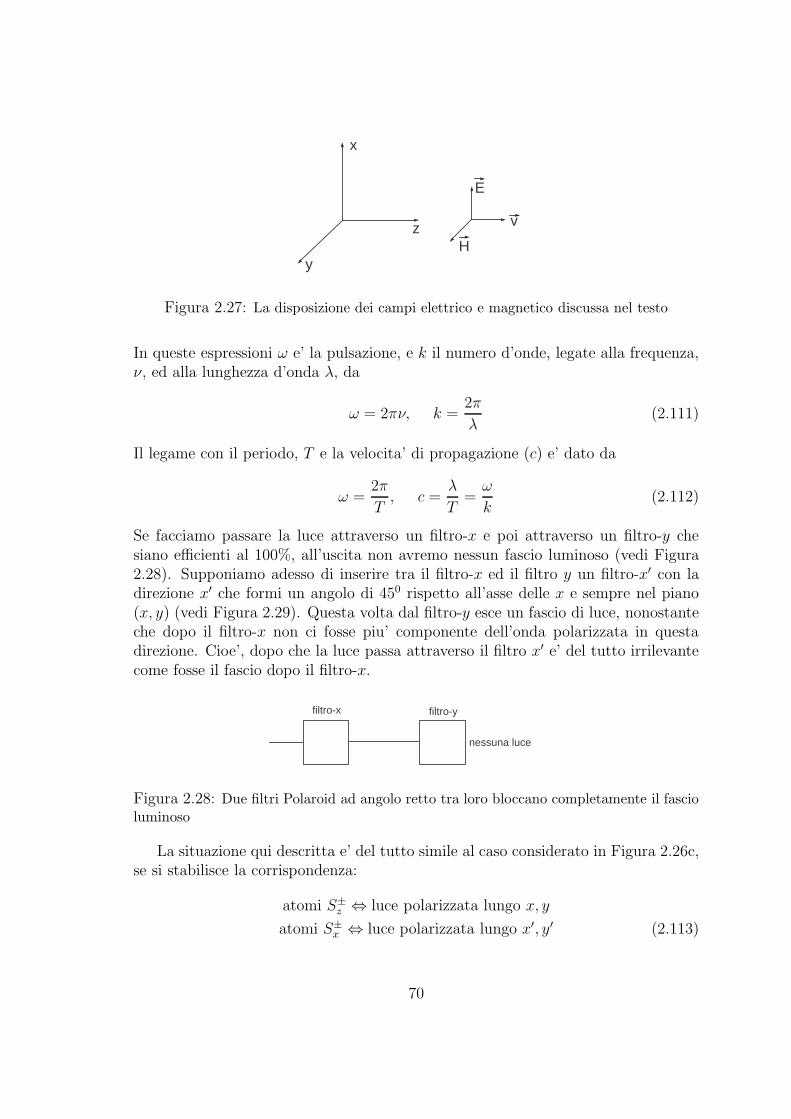
x
y
z
E
H
v
Figura 2.27: La disposizione dei campi elettrico e magnetico discussa nel testo
In queste espressioni ω e’ la pulsazione, e k il numero d’onde, legate alla frequenza,ν, ed alla lunghezza d’onda λ, da
ω = 2πν, k =2π
λ(2.111)
Il legame con il periodo, T e la velocita’ di propagazione (c) e’ dato da
ω =2π
T, c =
λ
T=ω
k(2.112)
Se facciamo passare la luce attraverso un filtro-x e poi attraverso un filtro-y chesiano efficienti al 100%, all’uscita non avremo nessun fascio luminoso (vedi Figura2.28). Supponiamo adesso di inserire tra il filtro-x ed il filtro y un filtro-x′ con ladirezione x′ che formi un angolo di 450 rispetto all’asse delle x e sempre nel piano(x, y) (vedi Figura 2.29). Questa volta dal filtro-y esce un fascio di luce, nonostanteche dopo il filtro-x non ci fosse piu’ componente dell’onda polarizzata in questadirezione. Cioe’, dopo che la luce passa attraverso il filtro x′ e’ del tutto irrilevantecome fosse il fascio dopo il filtro-x.
filtro-x filtro-y
nessuna luce
Figura 2.28: Due filtri Polaroid ad angolo retto tra loro bloccano completamente il fascioluminoso
La situazione qui descritta e’ del tutto simile al caso considerato in Figura 2.26c,se si stabilisce la corrispondenza:
atomi S±
z ⇔ luce polarizzata lungo x, y
atomi S±
x ⇔ luce polarizzata lungo x′, y′ (2.113)
70

filtro-x filtro-yfiltro-x' (45 gradi)
x
yx'
y'
Figura 2.29: Nella parte superiore i tre filtri x, x′ e y. Nella parte inferiore sonorappresentate le tre corrispondenti di polarizzazione del fascio
con y′ la direzione perpendicolare a x′. Secondo l’elettrodinamica classica la spie-gazione relativa e’ data dal fatto che la luce polarizzata lungo l’asse x′ la possiamorappresentare nel seguente modo
E0~x′ cos(kz − ωt) =
E0√2
[
~x cos(kz − ωt) + ~y cos(kz − ωt)]
(2.114)
cioe’ come una combinazione di due fasci, uno polarizzato lungo l’asse y e l’altrolungo l’asse x. Quindi quando questo fascio passa attraverso il secondo filtro-y, la suacomponente x viene assorbita, mentre passa la componente y. L’analisi complessivaci dice che dopo il primo filtro-x, il fascio puo’ essere visto come una combinazionelineare di fasci x′ ed y′. Il filtro-x′ lascia passare solo la componente x′. A suavolta, come gia’osservato, questo fascio puo’ essere visto come una combinazionedi polarizzazione x ed y ed il secondo filtro y lascera’ passare solo la componentey. La corrispondenza che abbiamo stabilito suggerisce che, come la polarizzazionedel campo elettromagnetico puo’ essere vista come un vettore bidimensionale nelpiano (x, y), anche lo stato di spin di un atomo di argento puo’ essere pensato comeun vettore bidimensionale in uno spazio astratto a due dimensioni da considerarsidistinto dallo spazio ordinario (x, y), Cosi come la polarizzazione lungo x′ e’ vistacome combinazione lineare delle due polarizzazioni x ed y, potremo pensare allo statoS+
x dell’atomo di argento come una combinazione lineare degli stati S±
z . Useremoper questi stati (vettori bidimensionali) la notazione di Dirac |S±
z 〉. In analogia aquanto accade per le onde elettromagnetiche ci aspettiamo allora per lo stato S+
x
|S+x 〉 =
1√2
(
|S+z 〉 + |S−
z 〉)
(2.115)
71

Quindi dall’apparato SGx esce una sovrapposizione di stati S±
z . Pertanto, mentrela componente S−
z verra’ bloccata, la componente S+z passera’ inalterata. In questo
modo si riproducono i risultati di Figura 2.26c.Una questione da esaminare e’ come si possano descrivere gli stati dell’atomo di
argento di tipo S±
y , dato che i due stati S±
z vengono gia’ usati per descrivere S±
x .Infatti lo stato S−
x e’ dato da
|S−
x 〉 =1√2
(
−|S+z 〉 + |S−
z 〉)
(2.116)
che risulta ortogonale a |S+z 〉. La risposta e’ suggerita ancora dalla polarizazione della
luce. Infatti oltre alla polarizzazione x o y la luce puo’ avere anche una polarizza-zione circolare. Questa puo’ essere descritta matematicamente usando combinazionicomplesse dei campi lungo x ed y. Senza entrare in troppi dettagli diciamo che e’possibile stabilire la seguente corrispondenza
atomi S+y ⇔ luce polarizzata destrogira
atomi S−
y ⇔ luce polarizzata levogira (2.117)
In corrispondenza i vettori che descrivono gli stati S±
y in termini di S±
z sono dati da
|S±
y 〉 =1√2
(
|S+z 〉 ± i|S−
z 〉)
(2.118)
Dunque lo spazio bidimensionale necessario per descrivere lo spin risulta complesso.Cioe’ i vettori di questo spazio si costruiscono prendendo combinazioni complessedei due vettori di base |S±
z 〉.Riassumendo, abbiamo visto che la meccanica quantistica fa uso di ampiezze di
probabilita complesse che si possono sommare tra loro e che devono obbedire unaequazione d’onda, che per la linearita delle ampiezze, deve essere lineare, perche lasomma di due soluzioni deve essere anch’essa una soluzione. Pertanto la strutturamatematica che emerge da queste considerazioni e, come vedremo meglio in seguito,quella di uno spazio vettoriale complesso (spazio di Hilbert).
72

















![Chimica Generale - Libero.it · Web view(Settembre 2004) (Per andare all’argomento desiderato [Ctrl + click] o semplicemente cliccare (a seconda della versione di Word posseduta)](https://static.fdocumenti.com/doc/165x107/5e3a45a536cb8453106b63cb/chimica-generale-web-view-settembre-2004-per-andare-allaargomento-desiderato.jpg)
