
Dispensa Lab. Dinamica - INFN Sezione di...
23
Giancarlo Bottoni Dispensa del corso di Laboratorio di dinamica (C.L. in: Fisica e Astronomia - Tecnologie Fisiche Innovative, Facoltà di Scienze MFN, Università di Ferrara) 2 INDICE Analisi statistica della caduta libera di un grave. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Misura della costante elastica di una molla a spirale . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Determinazione del coefficiente di attrito statico con il piano inclinato . . . . . . . . . . . . 10 Determinazione dell’accelerazione di gravità con il pendolo reversibile di Kater . . . 12 Moduli di elasticità di un metallo e momento di inerzia di un sistema . . . . . . . . . . . . . 15 Analisi del moto rotazionale di un sistema attorno a un asse fisso . . . . . . . . . . . . . . . . 20 Misura della tensione superficiale di un liquido con lo stalagmometro. Bilancia di Mohr-Westphal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Misura della costante di tempo di un termometro a liquido . . . . . . . . . . . . . . . . . . . . . 28 Calibrazione di una termocoppia rame-costantana . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 Misura del calore specifico di un solido con il calorimetro delle mescolanze . . . . . . . 33 Generatore di funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 Contatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 Oscilloscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 Determinazione della velocità di propagazione del suono nell’aria col metodo dell’interferenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 Lunghezza d’onda di onde sonore mediante interferenza da due fenditure . . . . . . . . . 44
-
Upload
nguyendang -
Category
Documents
-
view
216 -
download
0
Transcript of Dispensa Lab. Dinamica - INFN Sezione di...

Giancarlo Bottoni
Dispensa del corso di Laboratorio di dinamica
(C.L. in: Fisica e Astronomia - Tecnologie Fisiche Innovative, Facoltà di Scienze MFN, Università di Ferrara)
2
INDICE
Analisi statistica della caduta libera di un grave. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Misura della costante elastica di una molla a spirale . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Determinazione del coefficiente di attrito statico con il piano inclinato . . . . . . . . . . . . 10
Determinazione dell’accelerazione di gravità con il pendolo reversibile di Kater . . . 12
Moduli di elasticità di un metallo e momento di inerzia di un sistema . . . . . . . . . . . . . 15
Analisi del moto rotazionale di un sistema attorno a un asse fisso . . . . . . . . . . . . . . . . 20
Misura della tensione superficiale di un liquido con lo stalagmometro. Bilancia di Mohr-Westphal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Misura della costante di tempo di un termometro a liquido . . . . . . . . . . . . . . . . . . . . . 28
Calibrazione di una termocoppia rame-costantana . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Misura del calore specifico di un solido con il calorimetro delle mescolanze . . . . . . . 33
Generatore di funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Contatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Oscilloscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Determinazione della velocità di propagazione del suono nell’aria col metodo dell’interferenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Lunghezza d’onda di onde sonore mediante interferenza da due fenditure . . . . . . . . . 44

3
ANALISI STATISTICA DELLA CADUTA LIBERA DI UN GRAVE
PREMESSA
Se lasciamo cadere da fermo un oggetto pesante, esso percorre in caduta libera un cammino h nel tempo t e le due quantità sono correlate tra loro dalla:
2gt2
1h = (1)
(nell’ipotesi che la resistenza dell’aria abbia effetti trascurabili). La validità di tale relazione può essere verificata lasciando cadere, da fermo, un oggetto qualsiasi (grave) e misurando le distanze percorse in caduta h e i tempi impiegati t. Dalla (1) si può anche ricavare il valore dell’accelerazione di gravità, obiettivo principale di questa misura:
2t
2hg =
Dalla determinazione della distanza percorsa, h, e del tempo impiegato a percorrerla, t, si può risalire alla misura di g. Questo semplice esperimento può essere eseguito con l’apparato sperimentale illustrato schemati-camente nella figura, in cui ai capi dell’interruttore I sono derivati due circuiti. Nel primo è inserita una elettrocalamita che trattiene il grave (una sferetta d’acciaio). Nel secondo circuito sono inseriti: un generatore di funzioni (od oscillatore), un contatore di impulsi ed un interruttore B, posto sulla linea di caduta del grave che, oltrepassandolo, apre il circuito. La funzione dell’oscillatore e del contatore è quella di misurare il tempo di caduta. L'oscillatore invia nel circuito una corrente alternata di nota frequenza ed il contatore rileva il numero di oscillazioni passanti nel circuito. Poiché questo resta chiuso soltanto nel tempo di volo della sferetta, il contatore rileverà soltanto il numero di impulsi n che gli pervengono in tale tempo, per cui, nota la frequenza ν dell’oscillatore (cioè il numero di impulsi al secondo), si può risalire al tempo di volo cercato.
ESECUZIONE
Per semplicità, lasceremo invariata la distanza h, nota, percorsa in caduta dal grave, e ci limiteremo alla misura del tempo impiegato dalla sferetta a percorrere tale distanza, da cui poi otterremo il cercato valore dell’accelerazione di gravità g. Occorre, prima di tutto, tarare l’oscillatore, determinare, cioè, l’effettiva frequenza del segnale da esso erogato. A tale scopo, chiusi con gli interruttori I e B il circuito con l’oscillatore, si procede rilevando il numero di impulsi contati dal contatore in un tempo noto (circa 2-3 minuti), ripetendo più volte, se necessario, l’operazione. Si risale quindi al numero di impulsi al secondo, cioè alla frequenza effettiva ν del segnale oscillante.
4
Si iniziano poi le operazioni di misura del tempo di caduta. Chiuso con l’interruttore I il circuito contenente l’elettrocalamita, si dispone la sferetta a contatto con essa, quindi si aziona l’interruttore I. Esso apre il circuito con l’elettrocalamita (la sferetta si stacca e prende a cadere) e contemporaneamente chiude quello con il contatore che incomincia a contare gli impulsi inviati dall’oscillatore. Quando la sferetta passa sull’interruttore B lo apre, interrompendo il conteggio degli impulsi. Il contatore legge un valore n1, che, diviso per la frequenza, ν, da il tempo di volo cercato: t1 = n1/ν (in secondi). Ripetendo più volte la misura si nota che ogni volta il numero degli impulsi contati risulta leggermente diverso. Ciò è imputabile alla inevitabile introduzione di errori casuali nel funzionamento dei vari apparati, nella trasmissione degli impulsi e nelle varie procedure sperimentali. Per esprimere quindi in modo corretto il risultato di questa misura occorre procedere con un’elaborazione statistica dei dati sperimentali. Si ripete pertanto N volte (N ≥ 50) la misura del tempo di caduta, contando ogni volta il numero di impulsi ni e calcolando il corrispondente intervallo di tempo ti. I valori di ti così trovati vengono suddivisi in classi, ottenute dividendo l'intervallo dei valori di t in vari sottointervalli, o classi, tutti di uguale ampiezza, e considerando equivalenti tutti i valoriti interni a ciascuna classe. Questa conterrà, quindi, un certo numero Ni di valori proporzionale alla frequenza fi = Ni/N della classe. Riportando gli Ni, o le frequenze, in funzione di t in un istogramma (figura), si dovrebbe ottenere un grafico il più possibile simile all’andamento della funzione di distribuzione normale, tratteggiata in figura, tipica delle misure affette esclusivamente da errori casuali. Per verificare la fondatezza di questa ipotesi, cioè di una distribuzione gaussiana delle frequenze dei dati sperimentali, si esegue il test del χ2. Se il test da un esito positivo, si può esprimere la misura del tempo con l’intervallo di attendibilità: tσt t m=dove t è la media aritmetica dei valori trovati in N prove:
N
tt
N
1i i∑ ==
e σt è la deviazione standard:
1-N
)t(tσ
N
1i
2i
t
∑ =−
=
(esprime la circostanza che un’ulteriore misura di t abbia la probabilità del 68,3 % di cadere all’interno dell’intervallo di attendibilità). Resta da determinare il risultato della misura dell’accelerazione di gravità g, per il quale è necessario conoscere l’indice di centralità g e quello di dispersione σg.
La media g = 2h/t2 si calcola facilmente nota la distanza h e il valor medio dei tempi t .
La deviazione standard σg si calcola con la legge di propagazione degli errori per le

5
misure indirette tenendo conto della deviazione standard σt nella misura dei tempi. Se si considera trascurabile l’errore nella determinazione di h, essa assume la forma:
t3t
2
tg σt
h4σt
gσt
gσ =∂∂=⎟
⎠⎞
⎜⎝⎛
∂∂=
La misura di g sarà dunque espressa dall’intervallo di attendibilità: gσgg m=
6
MISURA DELLA COSTANTE ELASTICA DI UNA MOLLA A SPIRALE
PREMESSA
Se ad una molla inizialmente a riposo viene applicata una forza F essa si estende, o si comprime, di una lunghezza Δl fino a raggiungere una nuova posizione di equilibrio in cui la forza F viene bilanciata dalla forza elastica di richiamo della molla: F = k⋅Δl ove k è la costante elastica della molla. Se la forza applicata è nota, la relazione precedente permette di ottenere il valore di k dall’allungamento Δl. Se, per esempio, alla molla applichiamo un peso mg sospendendo al suo estremo una massa m, otteniamo: mg = k⋅Δl (1) una relazione lineare tra la massa e l’allungamento della molla, che permette di determinare la costante elastica k.
Se, ora, la massa m viene spostata di un tratto x dall’equilibrio, la molla esercita su di essa una forza –kx e la sua equazione del moto è (supponendo la massa della molla trascurabile rispetto a m):
kxdt
xdm
2
2
−=
la cui soluzione è:
x = xo cos ωt ove: m
kω = .
La massa si muove di moto armonico semplice, oscillando con periodo:
k
m2πT = (2)
Questa relazione permette di dedurre la costante elastica della molla k dalla misura del periodo di oscillazione T.
Le relazioni (1) e (2) individuano due metodi indipendenti per la misura di k: un metodo che possiamo definire “statico” che fa uso della (1) e un metodo “dinamico” configurato dalla (2).
ESECUZIONE
La molla ha l’estremità superiore fissa, e all’estremità inferiore possono essere applicate delle masse con le quali si realizzano le forze peso note. Essa è racchiusa in una guaina cilindrica, fissata all’estremo inferiore, sulla quale è incisa una scala graduata in millimetri. Un tubo solidale all’estremità fissa della molla avvolge questa guaina e serve in tal modo da indice per gli allungamenti della molla. Per eseguire la misura, bisogna preventivamente caricare la molla con un peso opportuno, realizzabile con una massa addizionale, in modo da distaccare le spire che, altrimenti, restano premute una contro l’altra. Si sospende poi la prima massa nota m all’estremità inferiore della molla e si rilevano sperimentalmente l’allungamento Δl della molla (per il metodo statico) e il periodo di oscillazione T del sistema molla-massa (per la misura con il metodo dinamico). La misura di T si effettua convenientemente

7
rilevando il tempo t necessario per un numero relativamente grande (n ≥ 10) di oscillazioni complete: sarà allora T = t/n. Si ripetono le rilevazioni per una serie di carichi crescenti. Occorre aver cura che i carichi e le conseguenti deformazioni non siano troppo grandi per non superare i limiti di elasticità della molla.
Raccolti i dati sperimentali, si può procedere alla loro elaborazione per la determinazione della costante elastica con i due metodi.
Per il metodo statico, la relazione (1) può essere scritta come:
mk
gΔl =
che esprime una relazione lineare tra l’allungamento e la massa del carico che lo provoca. Dal coefficiente angolare della retta (figura 1) a = g/k si può calcolare il valore di k, nota l’accelerazione di gravità g. Il coefficiente angolare può essere determinato con il metodo dei minimi quadrati, applicato alla correlazione lineare; vale a dire si trova il coefficiente a della retta y = ax + b, mediante la:
( )( )∑
∑−
−=
2i
ii
xx
yxxa
un cui, in questo caso, y = Δl e x = m.
Figura 1
Per quanto riguarda il metodo dinamico, dobbiamo osservare che nei casi reali la (2) va riscritta tenendo conto che nel numeratore sotto radice va posta la massa totale applicata all’estremità inferiore della molla e che, se la massa della molla non è trascurabile, ad essa va aggiunto anche un terzo della massa ms della molla, come si può dimostrare. Tenuto conto di questo, nel nostro caso porremo: maggiuntiva + mguaina + ms/3 + m = M + m
8
ove abbiamo raggruppato in M le masse che possiamo considerare sempre appese alla molla, e m, come sappiamo, denota le masse note che aggiungiamo durante la misura. La (2) diviene:
k
mM2πT
+=
Essa può essere messa nella forma:
mk
4πM
k
4πT
222 +=
in cui esprime una relazione lineare tra il quadrato del periodo di oscillazione T2 e la
massa nota applicata m (figura 2). Dal coefficiente angolare della retta k
4πa
2
= , da
determinare, per esempio, con il metodo dei minimi quadrati, è possibile ricavare la costante elastica della molla k.
Figura 2
VALUTAZIONE DELL’ERRORE
Poiché, in entrambi i metodi, il valore di k viene misurato tramite la determinazione del coefficiente angolare della retta di regressione, è necessario calcolare l’errore da cui è affetto il coefficiente a della retta, tenuto conto delle incertezze con cui sono note la grandezze in x e y. Le masse note (x in entrambi i metodi) sono conosciute con buona precisione (errore relativo 10-4), mentre le incertezze nelle misure di Δl e T2 (grandezze in y) si valutano sulla base della sensibilità e del modo d’uso degli strumenti impiegati. Possiamo dire che soltanto y è soggetto ad incertezze apprezzabili, mentre l’errore di x è trascurabile. Inoltre l’incertezza Δy, per ciascun metodo, è la stessa in tutte le successive misurazioni. In tali condizioni semplificate, la legge di propagazione degli errori ci da, per l’incertezza nelle pendenze delle rette dei minimi quadrati,:
9
2N
1 i
N
1
2i
2
)x(xN
y)N(Δa∑∑ −
Δ=
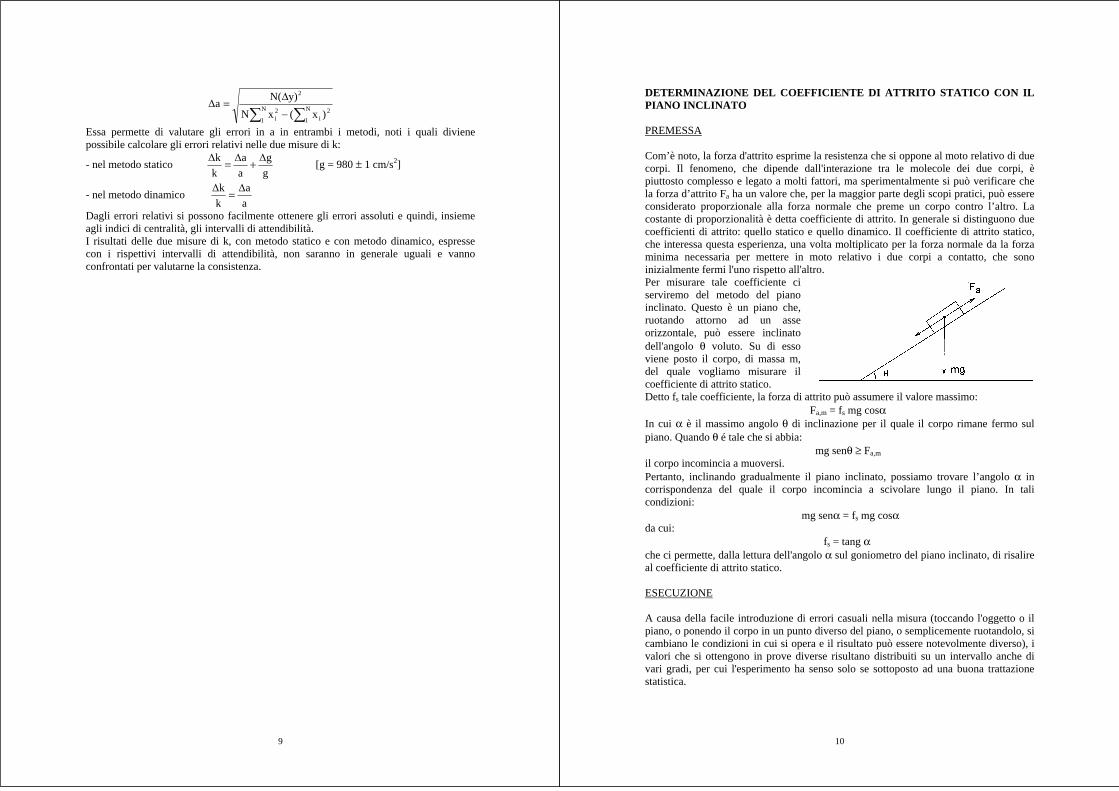
Essa permette di valutare gli errori in a in entrambi i metodi, noti i quali diviene possibile calcolare gli errori relativi nelle due misure di k:
- nel metodo statico g
Δg
a
Δa
k
Δk += [g = 980 ± 1 cm/s2]
- nel metodo dinamico a
Δa
k
Δk =
Dagli errori relativi si possono facilmente ottenere gli errori assoluti e quindi, insieme agli indici di centralità, gli intervalli di attendibilità. I risultati delle due misure di k, con metodo statico e con metodo dinamico, espresse con i rispettivi intervalli di attendibilità, non saranno in generale uguali e vanno confrontati per valutarne la consistenza.
10
DETERMINAZIONE DEL COEFFICIENTE DI ATTRITO STATICO CON IL PIANO INCLINATO
PREMESSA
Com’è noto, la forza d'attrito esprime la resistenza che si oppone al moto relativo di due corpi. Il fenomeno, che dipende dall'interazione tra le molecole dei due corpi, è piuttosto complesso e legato a molti fattori, ma sperimentalmente si può verificare che la forza d’attrito Fa ha un valore che, per la maggior parte degli scopi pratici, può essere considerato proporzionale alla forza normale che preme un corpo contro l’altro. La costante di proporzionalità è detta coefficiente di attrito. In generale si distinguono due coefficienti di attrito: quello statico e quello dinamico. Il coefficiente di attrito statico, che interessa questa esperienza, una volta moltiplicato per la forza normale da la forza minima necessaria per mettere in moto relativo i due corpi a contatto, che sono inizialmente fermi l'uno rispetto all'altro. Per misurare tale coefficiente ci serviremo del metodo del piano inclinato. Questo è un piano che, ruotando attorno ad un asse orizzontale, può essere inclinato dell'angolo θ voluto. Su di esso viene posto il corpo, di massa m, del quale vogliamo misurare il coefficiente di attrito statico. Detto fs tale coefficiente, la forza di attrito può assumere il valore massimo: Fa,m = fs mg cosαIn cui α è il massimo angolo θ di inclinazione per il quale il corpo rimane fermo sul piano. Quando θ é tale che si abbia: mg senθ ≥ Fa,m
il corpo incomincia a muoversi. Pertanto, inclinando gradualmente il piano inclinato, possiamo trovare l’angolo α in corrispondenza del quale il corpo incomincia a scivolare lungo il piano. In tali condizioni: mg senα = fs mg cosαda cui: fs = tang αche ci permette, dalla lettura dell'angolo α sul goniometro del piano inclinato, di risalire al coefficiente di attrito statico.
ESECUZIONE
A causa della facile introduzione di errori casuali nella misura (toccando l'oggetto o il piano, o ponendo il corpo in un punto diverso del piano, o semplicemente ruotandolo, si cambiano le condizioni in cui si opera e il risultato può essere notevolmente diverso), i valori che si ottengono in prove diverse risultano distribuiti su un intervallo anche di vari gradi, per cui l'esperimento ha senso solo se sottoposto ad una buona trattazione statistica.
11
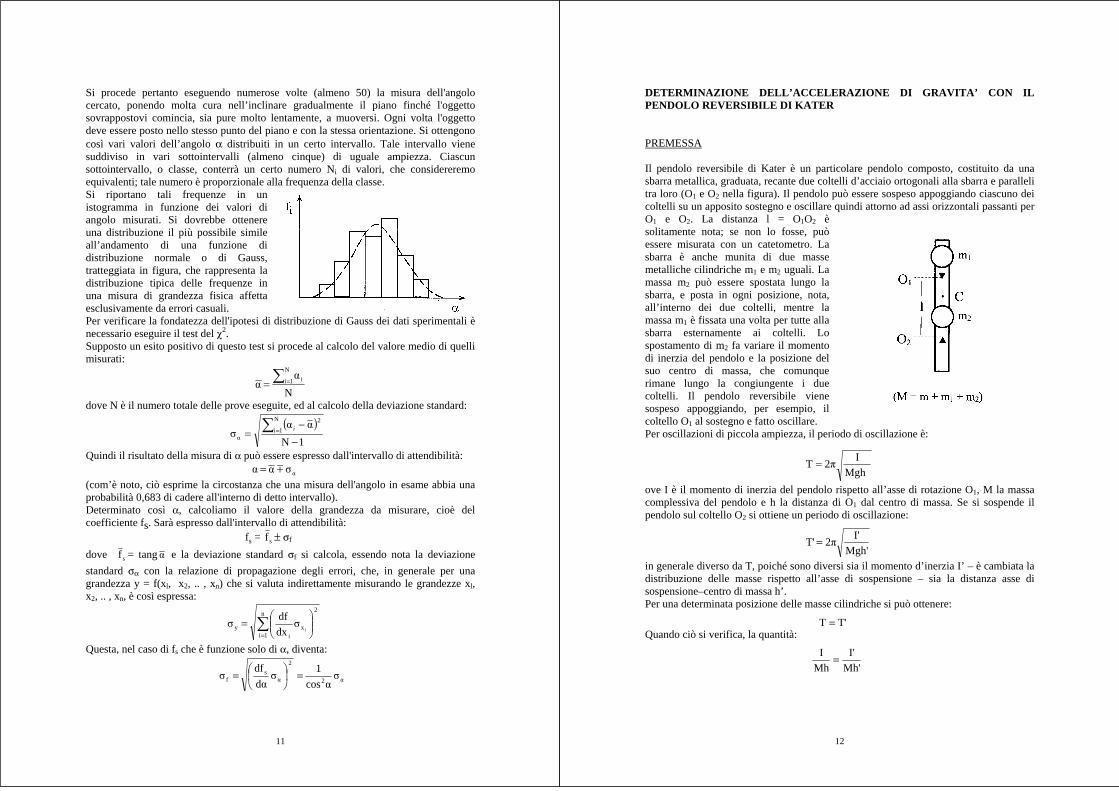
Si procede pertanto eseguendo numerose volte (almeno 50) la misura dell'angolo cercato, ponendo molta cura nell’inclinare gradualmente il piano finché l'oggetto sovrappostovi comincia, sia pure molto lentamente, a muoversi. Ogni volta l'oggetto deve essere posto nello stesso punto del piano e con la stessa orientazione. Si ottengono così vari valori dell’angolo α distribuiti in un certo intervallo. Tale intervallo viene suddiviso in vari sottointervalli (almeno cinque) di uguale ampiezza. Ciascun sottointervallo, o classe, conterrà un certo numero Ni di valori, che considereremo equivalenti; tale numero è proporzionale alla frequenza della classe. Si riportano tali frequenze in un istogramma in funzione dei valori di angolo misurati. Si dovrebbe ottenere una distribuzione il più possibile simile all’andamento di una funzione di distribuzione normale o di Gauss, tratteggiata in figura, che rappresenta la distribuzione tipica delle frequenze in una misura di grandezza fisica affetta esclusivamente da errori casuali. Per verificare la fondatezza dell'ipotesi di distribuzione di Gauss dei dati sperimentali è necessario eseguire il test del χ2. Supposto un esito positivo di questo test si procede al calcolo del valore medio di quelli misurati:
N
αα
N
1i∑ == i
dove N è il numero totale delle prove eseguite, ed al calcolo della deviazione standard:
( )
1N
αασ
N
1i
2
α −−
= ∑ = i
Quindi il risultato della misura di α può essere espresso dall'intervallo di attendibilità: ασαα m=(com’è noto, ciò esprime la circostanza che una misura dell'angolo in esame abbia una probabilità 0,683 di cadere all'interno di detto intervallo). Determinato così α, calcoliamo il valore della grandezza da misurare, cioè del coefficiente fs. Sarà espresso dall'intervallo di attendibilità: fs = sf ± σf
dove sf = tang α e la deviazione standard σf si calcola, essendo nota la deviazione
standard σα con la relazione di propagazione degli errori, che, in generale per una grandezza y = f(xl, x2, .. , xn) che si valuta indirettamente misurando le grandezze xl, x2, .. , xn, è così espressa:
2
n
1ix
iy i
σdx
dfσ ∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
Questa, nel caso di fs che è funzione solo di α, diventa:
α2
2
αs
f σαcos
1σdαdf
σ =⎟⎠⎞
⎜⎝⎛=
12
DETERMINAZIONE DELL’ACCELERAZIONE DI GRAVITA’ CON IL PENDOLO REVERSIBILE DI KATER
PREMESSA
Il pendolo reversibile di Kater è un particolare pendolo composto, costituito da una sbarra metallica, graduata, recante due coltelli d’acciaio ortogonali alla sbarra e paralleli tra loro (O1 e O2 nella figura). Il pendolo può essere sospeso appoggiando ciascuno dei coltelli su un apposito sostegno e oscillare quindi attorno ad assi orizzontali passanti perO1 e O2. La distanza l = O1O2 è solitamente nota; se non lo fosse, può essere misurata con un catetometro. La sbarra è anche munita di due masse metalliche cilindriche m1 e m2 uguali. La massa m2 può essere spostata lungo la sbarra, e posta in ogni posizione, nota, all’interno dei due coltelli, mentre la massa m1 è fissata una volta per tutte alla sbarra esternamente ai coltelli. Lo spostamento di m2 fa variare il momento di inerzia del pendolo e la posizione del suo centro di massa, che comunque rimane lungo la congiungente i due coltelli. Il pendolo reversibile viene sospeso appoggiando, per esempio, il coltello O1 al sostegno e fatto oscillare. Per oscillazioni di piccola ampiezza, il periodo di oscillazione è:
ove I è il momento di inerzia del pendolo rispetto all’asse di rotazione O1, M la massa complessiva del pendolo e h la distanza di O1 dal centro di massa. Se si sospende il pendolo sul coltello O2 si ottiene un periodo di oscillazione:
in generale diverso da T, poiché sono diversi sia il momento d’inerzia I’ – è cambiata la distribuzione delle masse rispetto all’asse di sospensione – sia la distanza asse di sospensione–centro di massa h’. Per una determinata posizione delle masse cilindriche si può ottenere:
Quando ciò si verifica, la quantità:
Mgh'
I'2πT' =
T'T =
Mh'
I'
Mh
I =
Mgh
I2πT =

13
(che ha le dimensioni di una lunghezza) è uguale alla distanza tra i due coltelli l. In tali condizioni il periodo di oscillazione del pendolo reversibile diviene:
g
l2πT =
cioè uguale al periodo di un pendolo semplice di lunghezza l (l prende il nome di lunghezza ridotta del pendolo composto). Individuato quindi il periodo comune, l’accelerazione di gravità può essere calcolato dalla:
2
2
T
l4πg = (1)
ESECUZIONE
Per trovare il valore del periodo comune T si può procedere nel modo seguente. Posta la massa m2 in una posizione sulla sbarra, individuata dalla quota y1 letta sulla scala graduata della sbarra (distanza della massa m2 dal coltello O1), si sospende il pendolo per il coltello O1 e si ottiene il periodo T1 misurando il tempo necessario per n = 10 oscillazioni t1 (T1 = t1/n); senza spostare la massa m2 si capovolge il pendolo, lo si sospende per il coltello O2 e si ottiene con le stesse modalità, il periodo di oscillazione
'1T . Si fa scorrere poi la massa m2 lungo la sbarra fino a una nuova posizione y2,
spostandola, p. es., di 10 cm, e si ripetono le misure del periodo di oscillazione attorno a O1 (T2) e a O2 (
'2T ). Si procede così successivamente per un certo numero di posizioni
y della massa m2 tra i due coltelli. Portando in un diagramma i periodi T e 'T in
funzione della posizione y della massa m2 si ottengono due curve, simili a quelle dell’esempio di figura, che si intersecano in uno o due punti. Le intersezioni indicano approssimativamente le possibili posizioni della massa m2 che danno luogo a uguali periodi di oscillazione attorno ai due centri di sospensione.Per avere una determinazione più precisa del periodo comune T, occorre ripetere le misure restringendole ad un piccolo intervallo avente centro nella quota di uno dei punti di intersezione delle due curve. In questa seconda fase conviene spostare la massa
20 40 60
y (cm)
1.60
1.65
1.70
1.75
1.80
1.85
1.90
T,T
'(s)
14
m2 di 1 - 2 cm per volta e misurare il periodo contando un maggior numero di oscillazioni (p. es., n = 50). Si ottiene quindi un nuovo grafico (di cui nella figura a lato è riportato un esempio), su cui la coincidenza dei due periodi si ottiene dall’ordinata del punto di intersezione delle rette. Noto T in questo modo, si potrà ricavare il valore dell’accelerazione di gravità g secondo la (1).
VALUTAZIONE DELL’ERRORE
L’errore in questa misura può essere facilmente ottenuto con il metodo di differenziazione:
T
ΔT2
l
Δl
g
Δg +=
ove ΔT è l’errore sulla misura del periodo (da non confondere con quello ottenibile dalla sensibilità del cronometro usato o da quello della misura del tempo necessario per le n oscillazioni).
20 22 24 26 28
y (cm)
1.66
1.68
1.70
1.72
1.74
T,T
'(s)

15
MODULI DI ELASTICITA’ DI UN METALLO E MOMENTO DI INERZIA DI UN SISTEMA
Questa esperienza è finalizzata allo studio delle proprietà elastiche dei materiali quando sottoposti a sforzi di trazione o di taglio. A tale scopo faremo uso di due apparati sperimentali, estensimetro e torsiometro, rispettivamente, l’ultimo dei quali consente anche la misura del momento di inerzia, importante proprietà dei sistemi meccanici. I corpi solidi reali, non possono essere considerati rigorosamente “rigidi”. Essi, infatti, quando vengono sottoposti a trazioni o compressioni cambiano la loro forma. Per esempio, se a un filo metallico, con un estremo ben fissato, viene applicata longitudinalmente una forza all’altro estremo, si osserva un allungamento (o accorciamento) del filo. Se la forza non è troppo grande, la deformazione è reversibile (regime elastico). In tal caso, la deformazione Δl è proporzionale alla intensità della forza F, secondo la legge di Hooke:
lK F Δ=ove K è la costante elastica del filo. Essa dipende anche dalle caratteristiche geometriche del corpo stesso (lunghezza, sezione, …), quindi non è utilizzabile per esprimere le proprietà elastiche del materiale che costituisce il corpo. Un parametro utile a tale scopo è invece è il cosiddetto modulo di elasticità longitudinale o modulo di Young E presente nella relazione sperimentale tra l’allungamento relativo Δl/l e la tensione F/S (S area della sezione del filo):
S
F
El
l 1=Δ
Le unità di misura di E sono N/m2 (SI) o dyne/cm2 (cgs). Scopo della prima parte di questa esperienza è la misura del modulo di Young E. L’ultima relazione esprime una dipendenza lineare tra allungamento Δl e forza F, che può essere espressa più convenientemente come:
FS
l
El
1=Δ (1)
ove il coefficiente angolare della retta S
l
E
1 contiene il modulo di Young E. Quindi
dalla misura degli allungamenti Δl del filo e delle forze F che li inducono, usando il metodo dei minimi quadrati applicato alla regressione lineare, potremo calcolare il coefficiente angolare B della retta, da cui, note le caratteristiche geometriche del filo, ricavare il cercato modulo di Young E.
La misura può essere eseguita servendosi di un estensimetro, sostanzialmente costituito da una struttura rigida (figura a) alla quale può essere fissato l’estremo superiore del filo metallico, il cui altro estremo è fissato ad una leva di secondo genere, recante un piattello mobile su cui possono essere caricate delle masse note m (figura b). Questo permette di realizzare la forza di trazione F sul filo. Il momento realizzato dal peso P = mg rispetto al fulcro f da luogo ad una forza F di trazione applicata al filo, per cui vale:
P(a + b) = F a
16
Da essa:
mgka
baPF =+= [
a
bak
+= ]
La conoscenza quindi della massa m e del rapporto k permette di ottenere il valore della forza F. La valutazione del (piccolo) allungamento Δl provocato dalla forza F avviene con il metodo della cosiddetta leva ottica. Sull’estensimetro è montato uno specchietto, a cui è solidale un braccetto che appoggia su un anellino fissato al filo metallico. Quando il filo subisce un allungamento Δl lo specchietto ruota attorno ad un asse orizzontale di un angolo α per il quale: Δl = d αove d è la lunghezza del braccetto. Un fascio luminoso colpisce lo specchietto e viene riflesso su una scala graduata. Quando lo specchietto ruota di un angolo α, il fascio riflesso ruota di un angolo 2α, per uno spostamento s sulla scala graduata. Vale la:
L
s=α2tan
ove L è la distanza dello specchietto dalla scala. Conseguentemente:
L
sd
L
sdl
2
1tan
2
1 1 ≅=Δ −
La lettura di s sulla scala graduata permette quindi di ricavare Δl, note d e L. La misura si esegue caricando successivamente masse m crescenti sul piattello e valutando i corrispondenti valori di s sulla scala della leva ottica. Da essi si ricavano i valori di Δl e F, legati dalla relazione lineare (1) [è utile realizzare un grafico Δl(F)].

17
Dal coefficiente angolare della retta, una volta misurate lunghezza l e area S della sezione del filo, si può ricavare il valore del modulo di Young E.
Oltre all’elasticità longitudinale, per i corpi solidi reali si può parlare anche di elasticità trasversale, quando sottoposti a sforzi di taglio. Se a un corpo solido, p. es. a forma di parallelepipedo, con la base mantenuta fissa, viene applicata un forza tangenziale Fsulla superficie superiore S (vedi figura) esso si deforma inclinandosi di un angolo:
S
F
G
1=Φ
G è una proprietà del materiale che costituisce il solido. Può essere chiamato modulo di elasticità trasversale, o modulo di scor-rimento, o modulo di rigidità del materiale. Esso è l’analogo tra-sversale del modulo di Young E, con cui condivide dimensioni e unità di misura (N/m2 o dyne/cm2). Il modulo di scorrimento del materiale G può essere misurato più facilmente se il solido ha forma cilindrica (filo a sezione circolare), del quale una base è mantenuta ferma, mentre l’altra viene ruotata di un angolo θ per effetto di una forza tangenziale o di una coppia di forze (figura a lato). Tra il momento delle forza τ rispetto all’asse del cilindro e la deformazione angolare θ sussiste la:
τ = Krθ-analogo rotazionale della legge di Hooke- (nel regime elastico). Kr è la costante elastica rotazionale, che chiameremo “coefficiente di torsione” del filo. Si può dimostrare che il coefficiente di torsione Kr è legato al modulo di scorrimento Gdalla:
l
rGK r
4
2
π= (2)
ove r e l sono rispettivamente il raggio della sezione e la lunghezza del filo metallico. Quindi se determiniamo Kr, da essa potremo ricavare il valore di G, note le caratteristiche geometriche del filo. Kr può essere ottenuto misurando il momento della forza τ e l’angolo di deformazione θcon metodo (statico) simile a quello usato per misurare il modulo di Young E. Useremo invece un metodo, che possiamo definire dinamico, che utilizza un apparato detto torsiometro o pendolo di torsione (figura). In esso l’estremo superiore del filo metallico è fissato, mentre all’estremo inferiore è sospeso un oggetto pesante (preferibilmente simmetrico: una sorta di disco o ruota), che può ruotare nel piano orizzontale attorno al suo asse, coincidente con il filo metallico. Se l’oggetto viene scostato dall’equilibrio
18
ruotandolo di un piccolo angolo e lasciato andare, esso prende ad oscillare, per effetto del momento della forza di richiamo dovuto alla deformazione del filo, con periodo:
rK
IT π2= (3)
ove I è il momento di inerzia dell’oggetto appeso al filo. La misura di tale periodo di oscillazione permetterà di ottenere Kr purché si conosca anche I. Per ottenere quest’ultimo useremo un metodo “perturbativo”, misurando il periodo di oscillazione T e, rimisurandolo dopo aver perturbato l’apparato con l’aggiunta di un oggetto di momento di inerzia noto In. In questo caso il periodo è dato da:
r
n
K
IIT
+= π21
Combinando queste espressioni per i due periodi si può facilmente ottenere:
22
1
2
TT
TII n −
= (4)
Quindi dalle misure dei due periodi T e T1 è possibile ottenere il momento di inerzia I. La misura di T si effettua ponendo in oscillazione l’oggetto sospeso al filo metallico e, per diminuire l’errore relativo, misurando il tempo t impiegato per compiere un numero n relativamente elevato di oscillazioni complete (per es., n ≥ 30), da cui si ottiene T = t/n. Si inserisce poi nel torsiometro l’oggetto di momento di inerzia noto In (conosciuto in quanto tale oggetto ha forma geometrica sufficientemente semplice da permettere il calcolo di In), e quindi con le stesse modalità si misura il periodo di oscillazione T1 del sistema perturbato. Dai valori di T e T1, noto In, con la (4) è possibile ricavare il valore del momento di inerzia I. Noto I, dalla (3) si otterrà facilmente il coefficiente di torsione Kr con la:
IT
K r 2
24π=
e da esso, tenendo conto della (2), possiamo infine calcolare il modulo di scorrimento:
rKr
lG
4
2
π=
(r e l, ricordo, sono rispettivamente il raggio della sezione e la lunghezza del filo metallico. Anch’essi vanno misurati).
VALUTAZIONE DELL’ERRORE
1) Estensimetro. E si ottiene dal coefficiente angolare della retta Δl(F) (1)
k
k
g
g
m
m
F
F Δ+Δ+Δ=Δ → trascurabile
(Δm/m < 10-4 Δk = 0 Δg = 0)

19
L
L
s
s
d
d
l
l Δ+Δ+Δ=ΔΔ
)Δ(
(Δd noto, Δs e ΔL dalla sensibilità degli strumenti usati)
Coefficiente angolare S
l
EB
1=
S
S
l
l
B
B
E
E Δ+Δ+Δ=Δ
ΔB dall’errore sul coefficiente angolare della retta
d
d
S
S Δ=Δ2 (d diametro sezione filo)
(Δd e Δl dalla sensibilità degli strumenti usati)
2) Torsiometro
- errore di I
22
1
1122
1
221
2
2 222........
)(
TT
TTTT
T
T
I
I
TT
TT
T
T
I
I
I
I
n
n
n
n
−Δ+Δ
+Δ+Δ
==−−Δ
+Δ+Δ
=Δ
- errore di Kr
T
T
I
I
K
K
r
r Δ+Δ=Δ
2
- errore di G
r
r
l
l
K
K
G
G
r
r Δ+Δ+Δ
=Δ4
ΔT e ΔT1 errori dei periodi (da non confondere con quelli ottenibili dalla sensibilità del cronometro usato o da quelli della misura del tempo necessario per le n oscillazioni), Δl e Δr dalla sensibilità degli strumenti usati.
20
ANALISI DEL MOTO ROTAZIONALE DI UN SISTEMA ATTORNO A UN ASSE FISSO
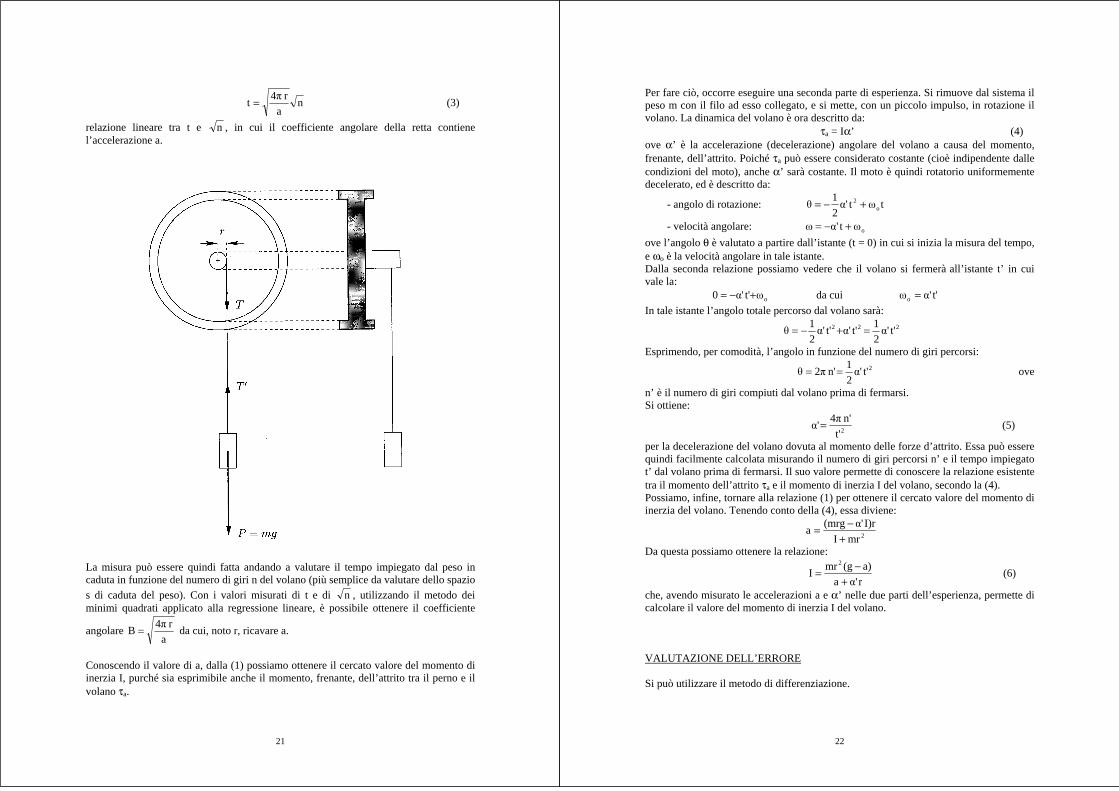
In questa esperienza studieremo sperimentalmente il comportamento di un corpo (volano) libero di ruotare attorno ad un asse fisso, quando soggetto alla applicazione di momenti di forze esterne. Scopo principale di questa analisi sarà la misura del momento di inerzia del corpo. Esso può essere determinato studiando le oscillazioni torsionali del corpo sospeso con un filo metallico ad un punto fisso (torsiometro) come avviene in un’altra esperienza di questo corso. In questo esperimento cercheremo invece di pervenire alla conoscenza del momento d’inerzia dal moto del volano in presenza di momenti di forze applicate. Vedremo che sarà necessario, a tale scopo, anche analizzare l’effetto del momento delle forze dissipative (attrito). Il volano, rappresentato schematicamente nella figura della pagina seguente, è un oggetto solido di forma circolare, in cui gran parte della massa è concentrata sulla circonferenza esterna. Ciò rende massimo il momento di inerzia a parità di massa. Nell’esperienza esso è libero di ruotare attorno a un asse fisso orizzontale. Sull’asse, solidale all’oggetto, è presente un cilindro di piccolo diametro, sul quale può essere avvolto un filo a cui è sospeso un peso di massa nota m. Quando il peso viene lasciato andare, prende a cadere e, trascinando il filo, mette in rotazione il volano. Le equazioni del moto per il peso e per il volano sono rispettivamente:
IατTr
maTmg
a
'
=−=−
ove a è l’accelerazione del peso, α l’accelerazione angolare del volano, I il momento di inerzia del volano, r il raggio del cilindro, τa il momento delle forze di attrito del volano attorno all’asse. Se il filo è inestensibile e di massa trascurabile 'TT = (la fune ha la stessa tensione in ogni suo punto) e α = a/r. Tenuto conto di ciò la risoluzione del sistema permette di ricavare l’accelerazione:
2a
mrI
)rτ(mrga
+−
= (1)
Poiché tutte le grandezze da cui a dipende sono costanti, anche l’accelerazione a sarà costante, quindi il moto è uniformemente accelerato (traslatorio per il peso, rotatorio per il volano). a può essere trovata dal moto del peso: esso percorre distanze s legate al tempo t dalla:
2at2
1s = (2)
(se misuriamo t a partire dall’inizio del moto: vo = 0). Le distanze s percorse in caduta sono legate al numero dei giri n del volano dalla relazione: s = 2πr n Dalla (2) si ha dunque:
2πr n = 2at2
1
da cui:
21
na
r 4πt = (3)
relazione lineare tra t e n , in cui il coefficiente angolare della retta contiene l’accelerazione a.
La misura può essere quindi fatta andando a valutare il tempo impiegato dal peso in caduta in funzione del numero di giri n del volano (più semplice da valutare dello spazio
s di caduta del peso). Con i valori misurati di t e di n , utilizzando il metodo dei minimi quadrati applicato alla regressione lineare, è possibile ottenere il coefficiente
angolare a
r 4πB = da cui, noto r, ricavare a.
Conoscendo il valore di a, dalla (1) possiamo ottenere il cercato valore del momento di inerzia I, purché sia esprimibile anche il momento, frenante, dell’attrito tra il perno e il volano τa.
22
Per fare ciò, occorre eseguire una seconda parte di esperienza. Si rimuove dal sistema il peso m con il filo ad esso collegato, e si mette, con un piccolo impulso, in rotazione il volano. La dinamica del volano è ora descritto da: τa = Iα’ (4) ove α’ è la accelerazione (decelerazione) angolare del volano a causa del momento, frenante, dell’attrito. Poiché τa può essere considerato costante (cioè indipendente dalle condizioni del moto), anche α’ sarà costante. Il moto è quindi rotatorio uniformemente decelerato, ed è descritto da:
- angolo di rotazione: tωtα'2
1θ o2 +−=
- velocità angolare: oωtα'ω +−=
ove l’angolo θ è valutato a partire dall’istante (t = 0) in cui si inizia la misura del tempo, e ωo è la velocità angolare in tale istante. Dalla seconda relazione possiamo vedere che il volano si fermerà all’istante t’ in cui vale la: oωt'α'0 +−= da cui t'α'ωo =In tale istante l’angolo totale percorso dal volano sarà:
222 t'α'2
1t'α't'α'
2
1θ =+−=
Esprimendo, per comodità, l’angolo in funzione del numero di giri percorsi:
2t'α'2
1n' 2πθ == ove
n’ è il numero di giri compiuti dal volano prima di fermarsi.Si ottiene:
2t'
n' 4πα'= (5)
per la decelerazione del volano dovuta al momento delle forze d’attrito. Essa può essere quindi facilmente calcolata misurando il numero di giri percorsi n’ e il tempo impiegato t’ dal volano prima di fermarsi. Il suo valore permette di conoscere la relazione esistente tra il momento dell’attrito τa e il momento di inerzia I del volano, secondo la (4). Possiamo, infine, tornare alla relazione (1) per ottenere il cercato valore del momento di inerzia del volano. Tenendo conto della (4), essa diviene:
2mrI
I)rα'(mrga
+−=
Da questa possiamo ottenere la relazione:
rα'a
a)(gmrI
2
+−= (6)
che, avendo misurato le accelerazioni a e α’ nelle due parti dell’esperienza, permette di calcolare il valore del momento di inerzia I del volano.
VALUTAZIONE DELL’ERRORE
Si può utilizzare il metodo di differenziazione.

23
Dalla (6):
rα'a
r)α'Δ(a
ag
a)Δ(g
r
Δr
m
Δm
I
ΔI2
2
+++
−−++=
Procediamo per gradi.
m
Δm< 10-4 (trascurabile)
r
Δr2
r
Δr2
2
=
aΔaΔga)Δ(g Δ=+=− [Δg = 0 (g valore noto)]
per calcolare Δa, poiché 2B
r 4πa = (B coefficiente angolare
retta)
B
ΔB2
r
Δr
a
Δa +=
ove ΔB è l’errore nel coefficiente angolare della retta )nt( .
Dall’errore relativo si può calcolare l’errore assoluto Δa. r)Δ(α'Δar)α'Δ(a +=+
r ' )αr
Δr
α'
Δα'(r)Δ(α' +=
ove, dalla (5): t'
Δt'2
n'
Δn'
α'
Δα' +=
[l’errore sul numero dei giri Δn’ può essere posto 10
1Δn'= ;
errore sui tempi Δt’ = 0.2 s)]
24
MISURA DELLA TENSIONE SUPERFICIALE DI UN LIQUIDO CON LO STALAGMOMETRO. BILANCIA DI MOHR-WESTPHAL
Per aumentare la superficie libera di un liquido occorre compiere un lavoro. Questa proprietà caratteristica delle superfici dei fluidi (e in generale di tutte le superfici di separazione tra sostanze diverse) si chiama tensione superficiale, e fa sì che le superfici dei liquidi siano le meno estese possibile, come conseguenza delle forze di coesione tra le molecole del fluido stesso. Si definisce coefficiente di tensione superficiale, o semplicemente tensione superficiale, τ di un liquido il lavoro necessario a provocare un aumento unitario della sua superficie libera:
ΔAW
τ = (1)
ove W è il lavoro che occorre compiere per aumentare la superficie del liquido di ΔA. τsi misura in erg/cm2 (cgs) o in J/m2 (SI). La presenza della tensione superficiale, che tende a ridurre la superficie libera del fluido, fa in modo che la lunghezza del contorno della superficie libera diminuisca. Essa può quindi essere anche interpretata come dovuta a una forza agente sull’unità di lunghezza del contorno della superficie libera, perpendicolare alla linea di contorno e diretta tangenzialmente alla superficie, verso il suo interno. In modo del tutto equivalente alla definizione precedente, la tensione superficiale può quindi essere definita:
LF
τ = (2)
ove F è la forza esercitata sul contorno dalla tensione superficiale e L è la lunghezza totale della linea di contorno. In tale descrizione τ si misura in dine/cm (cgs) o in N/m (SI). In questa esperienza la tensione superficiale di un liquido viene misurata per confronto con quella dell’acqua distillata con il metodo dello stalagmometro. Tale metodo richiede anche la conoscenza della densità dei liquidi esaminati, che verrà ottenuta con l’uso della bilancia idrostatica di Mohr-Westphal.
Iniziamo con questa parte dell’esperienza. La bilancia di Mohr-Westphal è un particolare tipo di bilancia idrostatica, basata cioè sulla spinta idrostatica che un opportuno immersore riceve da un liquido. Essa permette di ottenere, per lettura diretta, il valore della densità del liquido in cui si trova l’immersore. La bilancia di Mohr-Westphal è costituita da una leva a bracci diseguali (figura); nel braccio corto sono fissati una massa conveniente e un indice per verificare l’equilibrio; all’estremità del

25
braccio lungo è sospeso l’immersore, solitamente di vetro. La bilancia è fornita di quattro pesi particolari, detti “cavalieri”, che possono essere posti sui 10 pioli che suddividono il braccio lungo della bilancia in posizioni opportune in modo da ottenerne l’equilibrio. I due cavalieri più pesanti hanno la stessa massa: m1 = m2, il terzo ha massa m3 = m1/10, la massa del quarto cavaliere è m4 = m1/100. I cavalieri e l’immersore dei quali la bilancia è dotata sono tra loro in relazione: la condizione costruttiva fondamentale per la bilancia di Mohr-Westphal è che il volume V dell’immersore (in cm3) sia numericamente uguale alla massa m1 (in g) del cavaliere più pesante. Inizialmente la bilancia è in equilibrio con l’immersore nell’aria. Quando l’immersore viene introdotto nel liquido in esame, la spinta idrostatica su di esso perturba l’equilibrio della bilancia che deve essere ripristinato posizionando opportunamente i cavalieri. Se ciò avviene con i cavalieri m1, m2, m3, m4 nelle posizioni h, l, m e n nell’ordine, la condizione di equilibrio della bilancia sarà:
gnmgmmglmghm10gV 4321 +++=⋅ρove ρ è la densità del liquido. Semplificando e tenendo conto dei valori relativi delle masse dei cavalieri, si ottiene:
n100m
m10m
lmhm10V 1111 +++=⋅ρ
da cui, ricordando l’uguaglianza numerica tra il volume dell’immersore V e la massa del cavaliere m1, si ricava:
1000
n100m
10lh +++=ρ (3)
relazione che permette, dalla sola lettura delle posizioni dei cavalieri sulla bilancia in equilibrio, di ottenere la densità del liquido in cui l’immersore è stato posto. In virtù della condizione fondamentale per la bilancia di Mohr-Westphal, l’unità di misura della densità così trovata è g/cm3. Spesso la bilancia di Mohr-Westphal non è tarata, con la conseguenza di un errore sistematico in tutte le misure. Occorre dunque determinare un coefficiente di correzione k per la bilancia, il cui valore è dato dal rapporto tra il valore corretto della densità dell’acqua alla temperatura t di esperienza (Tabella 1) e il valore di densità indicato dalla bilancia all’equilibrio con l’immersore posto nell’acqua. Per ottenere i valori corretti delle densità degli altri liquidi valutati con la stessa bilancia, bisognerà moltiplicare i risultati ottenuti dallo strumento per il fattore di correzione k.
Lo stalagmometro di laboratorio è sostanzialmente costituito da un corto tubo, o cannello, di vetro che termina con una sezione allargata ben levigata (figura). Nello stalagmometro è possibile far entrare, aspirandolo dall’estremo superiore del tubo, il liquido da studiare. Il liquido, rilasciato, scende formando delle gocce che escono dall’estremo inferiore. La tensione superficiale del liquido può essere ottenuta sulla base della relazione stabilita da Tate tra la massa della goccia che si stacca dallo stalagmometro e la tensione superficiale del liquido. Tale relazione stabilisce l’identità tra il peso di una goccia mg e la forza τ⋅πd, dovuta alla tensione superficiale τ applicata al contorno
26
della sezione circolare di distacco πd, secondo la (2), ovvero: τπdmg =ove d è il diametro della sezione circolare di distacco della goccia.
Da essa: πdg
mτ =
Per un cannello di forma adeguata (larga e liscia sezione finale, come nello stalagmometro, per cui l’angolo di raccordo tra liquido e cannello è nullo), il diametro della sezione di distacco della goccia è praticamente costante per tutti i liquidi, quindi il rapporto τ/m risulta indipendente dal liquido usato. Ciò permette di ottenere, per confronto, la tensione superficiale τ2 del liquido esaminato nota la tensione superficiale τ1 di un liquido di riferimento (solitamente l’acqua), dalla:
1
1
2
2
mτ
mτ = (3)
una volta note le masse m1 e m2 di una goccia dei due liquidi. Un modo per farlo consiste nel cosiddetto metodo dello stalagmometro a volume. Si sfrutta un rigonfiamento nella parte superiore del cannello dello stalagmometro, il cui volume V è delimitato da due segni incisi sul cannello. Riempito con i due liquidi il rigonfiamento, si contano i numeri n1 e n2 di gocce necessari per svuotarne il volume V. Le masse di una goccia dei due liquidi possono essere trovati sulla base delle densità ρ1
e ρ2 dei liquidi:
1
11 n
Vm
ρ= 2
22 n
Vm
ρ=
Sostituite nella (3) si ottiene:
2
1
1
212 n
nττρρ= (4)
La relazione (4) consente di ottenere il valore cercato di tensione superficiale dalla misura delle densità dei due liquidi (mediante l’uso della bilancia di Mohr-Westphal), dai valori dei numeri di gocce n1 e n2 e da quello della tensione superficiale del liquido di riferimento (acqua – vedi Tabella 2).
VALUTAZIONE DELL’ERRORE
L’errore in questa misura può essere facilmente ottenuto con il metodo di differenziazione. Dalla (4) otteniamo che l’errore relativo è:
2
2
1
1
1
1
2
2
1
1
2
2
nΔn
ρΔρ
nΔnΔ
τΔτ
τΔτ ++++=
ρρ
ove Δτ1 = 0 (valore tabulato), Δρ1 e Δρ2 si deducono dalla sensibilità della bilancia di Mohr-Westphal, mentre l’incertezza sul numero di gocce è Δn1 = Δn2 = 1.

27
Tabella 1. Densità dell’acqua distillata a varie temperature.
Temperatura (°C)
Densità (g/cm3)
0 0,999868 1 0,999927 2 0,999968 3 0,999992 4 1,000000 5 0,999992 6 0,999968 7 0,999929 8 0,999876 9 0,999808
10 0,999727 11 0,999632 12 0,999525 13 0,999404 14 0,999271 15 0,999126
Temperatura (°C)
Densità (g/cm3)
16 0,998970 17 0,998801 18 0,998622 19 0,998432 20 0,998230 21 0,998019 22 0,997797 23 0,997565 24 0,997323 25 0,997071 26 0,996810 27 0,996539 28 0,996259 29 0,995971 30 0,995673 31 0,995366
Tabella 2. Tensione superficiale dell’acqua distillata a varie temperature.
Temperatura (°C)
Tensione superficiale (dine/cm)
0 75,49 1 75,34 2 75,20 3 75,05 4 74,90 5 74,75 6 74,60 7 74,45 8 74,30 9 74,15
10 74,01 11 73,86 12 73,70 13 73,56 14 73,41 15 73,26
Temperatura (°C)
Tensione superficiale (dine/cm)
16 73,11 17 72,96 18 72,82 19 72,66 20 72,53 21 72,37 22 72,22 23 72,08 24 71,93 25 71,78 26 71,63 27 71,48 28 71,33 29 71,18 30 71,03
28
MISURA DELLA COSTANTE DI TEMPO DI UN TERMOMETRO A LIQUIDO
PREMESSA
La costante di tempo di un termometro é una quantità che esprime la prontezza del termometro, cioè la sua velocità ad adeguarsi alla temperatura dell'ambiente in cui é immerso. L'avvicinamento della temperatura del termometro, inizialmente al valore To, alla temperatura Ta, mantenuta costante, dell'ambiente in cui esso viene immerso é rappresentato in figura. Come si vede T tende asintoticamente a Ta. In pratica dopo breve tempo la differenza di tempe-ratura tra termometro e ambiente diventa così piccola da non poter essere rilevata. Operativamente la costante di tempo di un termometro può essere così definita: supponiamo che il termometro, inizialmente a temperatura To, venga posto in un ambiente a temperatura Ta; chiameremo costante di tempo del termometro il tempo da esso impiegato per passare da To alla temperatura T tale che: Ta - T = (Ta - To)/e. Per effettuare la misura di tale costante si pone il termometro in un bagno termostatico a temperatura Ta costante. La quantità di calore dQ ceduta al termometro é legata alla differenza di temperatura dalla relazione:
T)K(Tdt
dQa −=
in cui T é la temperatura istantanea del termometro (valore letto sulla scala) e K é una costante di proporzionalità. Poiché: dQ = CdT dove C é la capacità termica del termometro, si ha:
T)(TC
K
dt
dTa −=
e, separando le variabili,:
dtC
K
TT
dT
a
=−
Integrando:
∫∫ =−
t
0
T
T a
dtC
K
TT
dT
o
tC
K
TT
TTln
oa
a −=−−
la quale, posto: C
K
τ1 =
diventa:
τt
TT
TTln
oa
a −=−−
(1)
dove τ è la costante di tempo da determinare.

29
La (1) può essere scritta nella forma:
τt
oaa )eT(TTT−
−=− (2)
Quindi, se rappresentiamo in un grafico (figura a) la differenza tra la temperatura limite e quella del termometro Ta - T in funzione del tempo risulta una curva esponenziale. D'altronde, la (1) può anche scriversi: ln (Ta – T) = - t/τ + ln (Ta – To) (3) relazione rappresentata graficamente da una retta che ha coefficiente angolare - l/τ(figura b).
a
b
30
ESECUZIONE
In laboratorio si porrà il termometro nel bagno termostatico, che può essere mantenuto, con buona stabilità, alla temperatura Ta prescelta. Occorre quindi prendere nota dei tempi di ascesa del mercurio nel termometro. Ciò difficilmente può essere fatto in un unica ascesa; é preferibile procedere ad una determinazione dei tempi di ascesa su intervalli di temperatura prestabiliti, via via maggiori, in prove successive utilizzando ogni ascesa per una sola determinazione. In questo modo si ottiene una serie di valori delle temperature e dei tempi con i quali si possono tracciare i grafici sopra descritti e soprattutto si può procedere al calcolo del coefficiente angolare della retta (3). Noto questo, é conosciuta anche la costante di tempo τ. Per calcolare il coefficiente angolare si usa il metodo dei minimi quadrati, in base al quale il coefficiente angolare della retta: y = ax + b si ottiene dalla:
( )( )∑
∑−
−=
2i
ii
xx
yxxa
In questo caso: y = ln (Ta -T) e x = t. L’adeguatezza della ipotizzata relazione lineare a descrivere il reale legame esistente tra le grandezze in esame viene valutata tramite il coefficiente di correlazione r, che, in questo caso di correlazione lineare, può essere calcolato con la formula dei momenti misti:
( )( )
( ) ( )∑ ∑∑
−−
−−=
2
i2
i
ii
yyxx
yyxxr
Infine, dal coefficiente angolare a, si ottiene la costante di tempo cercata:
a
1τ −= (s).
31
CALIBRAZIONE DI UNA TERMOCOPPIA RAME-COSTANTANA
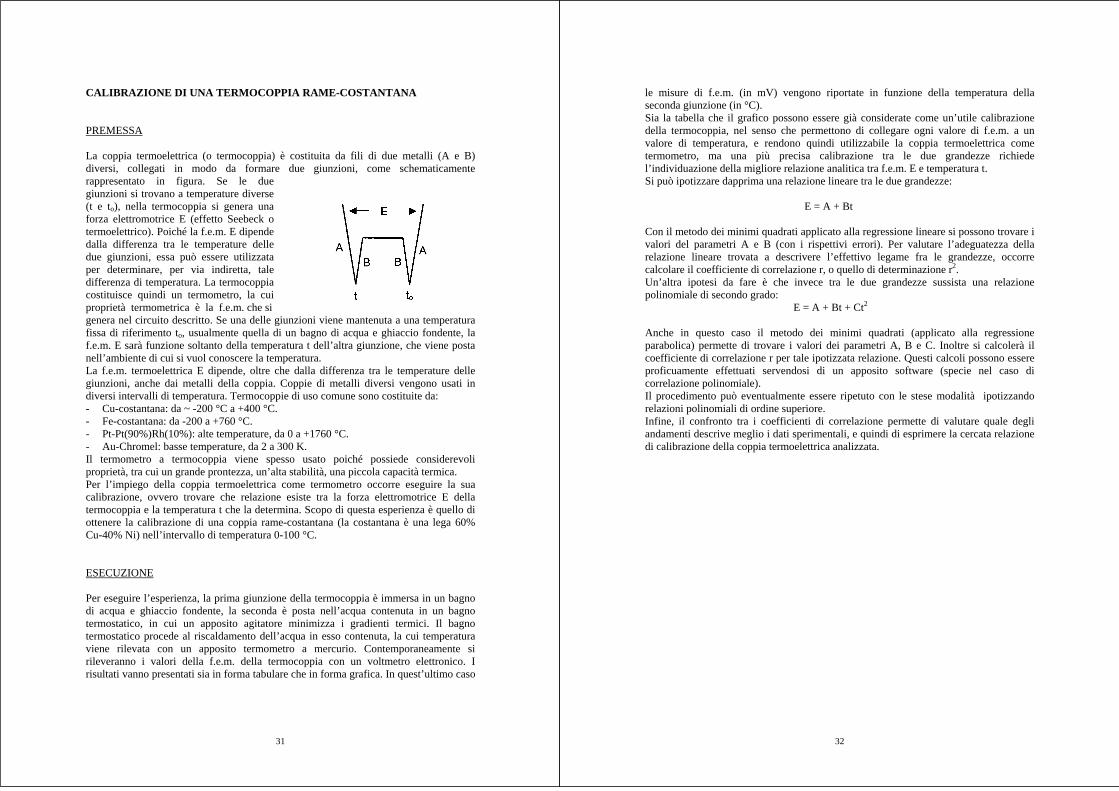
PREMESSA La coppia termoelettrica (o termocoppia) è costituita da fili di due metalli (A e B) diversi, collegati in modo da formare due giunzioni, come schematicamente rappresentato in figura. Se le due giunzioni si trovano a temperature diverse (t e to), nella termocoppia si genera una forza elettromotrice E (effetto Seebeck o termoelettrico). Poiché la f.e.m. E dipende dalla differenza tra le temperature delle due giunzioni, essa può essere utilizzata per determinare, per via indiretta, tale differenza di temperatura. La termocoppia costituisce quindi un termometro, la cui proprietà termometrica è la f.e.m. che si genera nel circuito descritto. Se una delle giunzioni viene mantenuta a una temperatura fissa di riferimento to, usualmente quella di un bagno di acqua e ghiaccio fondente, la f.e.m. E sarà funzione soltanto della temperatura t dell’altra giunzione, che viene posta nell’ambiente di cui si vuol conoscere la temperatura. La f.e.m. termoelettrica E dipende, oltre che dalla differenza tra le temperature delle giunzioni, anche dai metalli della coppia. Coppie di metalli diversi vengono usati in diversi intervalli di temperatura. Termocoppie di uso comune sono costituite da: - Cu-costantana: da ~ -200 °C a +400 °C. - Fe-costantana: da -200 a +760 °C. - Pt-Pt(90%)Rh(10%): alte temperature, da 0 a +1760 °C. - Au-Chromel: basse temperature, da 2 a 300 K. Il termometro a termocoppia viene spesso usato poiché possiede considerevoli proprietà, tra cui un grande prontezza, un’alta stabilità, una piccola capacità termica. Per l’impiego della coppia termoelettrica come termometro occorre eseguire la sua calibrazione, ovvero trovare che relazione esiste tra la forza elettromotrice E della termocoppia e la temperatura t che la determina. Scopo di questa esperienza è quello di ottenere la calibrazione di una coppia rame-costantana (la costantana è una lega 60% Cu-40% Ni) nell’intervallo di temperatura 0-100 °C.
ESECUZIONE
Per eseguire l’esperienza, la prima giunzione della termocoppia è immersa in un bagno di acqua e ghiaccio fondente, la seconda è posta nell’acqua contenuta in un bagno termostatico, in cui un apposito agitatore minimizza i gradienti termici. Il bagno termostatico procede al riscaldamento dell’acqua in esso contenuta, la cui temperatura viene rilevata con un apposito termometro a mercurio. Contemporaneamente si rileveranno i valori della f.e.m. della termocoppia con un voltmetro elettronico. I risultati vanno presentati sia in forma tabulare che in forma grafica. In quest’ultimo caso
32
le misure di f.e.m. (in mV) vengono riportate in funzione della temperatura della seconda giunzione (in °C). Sia la tabella che il grafico possono essere già considerate come un’utile calibrazione della termocoppia, nel senso che permettono di collegare ogni valore di f.e.m. a un valore di temperatura, e rendono quindi utilizzabile la coppia termoelettrica come termometro, ma una più precisa calibrazione tra le due grandezze richiede l’individuazione della migliore relazione analitica tra f.e.m. E e temperatura t. Si può ipotizzare dapprima una relazione lineare tra le due grandezze:
E = A + Bt
Con il metodo dei minimi quadrati applicato alla regressione lineare si possono trovare i valori del parametri A e B (con i rispettivi errori). Per valutare l’adeguatezza della relazione lineare trovata a descrivere l’effettivo legame fra le grandezze, occorre calcolare il coefficiente di correlazione r, o quello di determinazione r2. Un’altra ipotesi da fare è che invece tra le due grandezze sussista una relazione polinomiale di secondo grado: E = A + Bt + Ct2
Anche in questo caso il metodo dei minimi quadrati (applicato alla regressione parabolica) permette di trovare i valori dei parametri A, B e C. Inoltre si calcolerà il coefficiente di correlazione r per tale ipotizzata relazione. Questi calcoli possono essere proficuamente effettuati servendosi di un apposito software (specie nel caso di correlazione polinomiale). Il procedimento può eventualmente essere ripetuto con le stese modalità ipotizzando relazioni polinomiali di ordine superiore. Infine, il confronto tra i coefficienti di correlazione permette di valutare quale degli andamenti descrive meglio i dati sperimentali, e quindi di esprimere la cercata relazione di calibrazione della coppia termoelettrica analizzata.

33
MISURA DEL CALORE SPECIFICO DI UN SOLIDO CON IL CALORIMETRO DELLE MESCOLANZE
PREMESSA
Com’è noto, per calore specifico di un materiale si intende la quantità di calore che bisogna fornire all’unità di massa del materiale per innalzare la sua temperatura di un grado. L’unità di misura del calore specifico nel SI è J/K⋅kg. Tuttavia, una unità di misura ancora molto usata è cal/°C⋅g, poiché la caloria (cal), sebbene non ammessa nel SI, è una unità di misura del calore particolarmente utilizzata specie quando si fanno esperimenti con l’acqua (1 cal = 4,186 J). In questa esperienza misureremo il calore specifico c di un materiale metallico sulla base dello scambio di calore tra un solido costituito di tale materiale, precedentemente riscaldato, e un liquido (acqua, nel nostro caso) all’interno di un recipiente termicamente isolato (calorimetro delle mescolanze). In tal caso il calore ceduto dal solido uguaglierà il calore assorbito dal sistema calorimetrico:
assorbitoceduto QQ =Durante lo scambio di calore la temperatura del solido e quella del sistema calorimetrico variano fino a raggiungere una temperatura comune di equilibrio. Tenendo conto della definizione di calore specifico, la precedente uguaglianza può essere scritta:
)tC(t)tcm(t oeqeq1 −=−ove c e m sono il calore specifico e la massa del solido, t1 la temperatura a cui è stato portato il solido prima di introdurlo nel calorimetro, to la temperatura iniziale dell’acqua contenuta nel calorimetro, teq la temperatura di equilibrio e C la capacità termica del sistema calorimetrico. Da essa è possibile ricavare il calore specifico cercato:
)tm(t
)tC(tc
eq1
oeq
−−
= (1)
ESECUZIONE
Per ottenere il cercato valore di calore specifico, occorre dunque conoscere tutte le quantità presenti a secondo membro della (1), tra cui la capacità termica del sistema calorimetrico. Ricordiamo che la capacità termica C di un oggetto è la quantità di calore che bisogna fornire all’oggetto per innalzare la sua temperatura di un grado. Nel calorimetro sono contenuti, oltre all’acqua, anche un recipiente per contenerla (vaso calorimetrico), un termometro e un agitatore che occorre usare per minimizzare i gradienti di temperatura all’interno del liquido. Anch’essi assorbono parte del calore ceduto dal solido. Pertanto:
agitatoretermometrov.c.OH CCCCC2
+++= (2)
ove: CH2O = cH2O⋅mH2O è la capacità termica dell’acqua (cH2O e mH2O calore specifico e massa dell’acqua rispettivamente). Cv.c. = cv.c.⋅mv.c. è la capacità termica del vaso calorimetrico (cv.c. calore specifico del materiale di cui il vaso calorimetrico è costituito e mv.c. massa del vaso calorimetrico). Gli altri due termini sono, ovviamente, le capacità termiche di termometro e agitatore.
34
Si procede determinando prima di tutto le masse m, mv.c. e mH2O del solido, del vaso calorimetro e di una certa quantità di acqua. Poi si introducono nel calorimetro il vaso calorimetrico con l’acqua e si richiude il calorimetro sistemando il termometro e l’agitatore. Si possono quindi iniziare le misure della temperatura del calorimetro, effettuando per esempio una misura ogni minuto (1a fase). Nel frattempo il solido di cui vogliamo il calore specifico verrà posto in un opportuno riscaldatore ad acqua, fino a portarlo in equilibrio con la sua temperatura di ebollizione. Raggiunta tale temperatura, il solido verrà trasferito rapidamente nell’acqua all’interno del calorimetro. A questo punto avrà inizio la 2a fase, in cui il solido cede calore al calorimetro. In questa breve fase occorre prendere una misura di temperatura ogni 5 secondi, non dimenticando di agitare regolarmente l’acqua nel vaso calorimetrico, finché si nota che la temperatura smette di aumentare. Nella seguente 3a fase, in cui la temperatura è costante, anzi tende lentamente a diminuire a causa dell’inevitabile imperfetto isolamento del calorimetro, sarà sufficiente avere una misura di temperatura ogni 30 secondi. Con i valori rilevati si costruisce un grafico delle temperature in funzione del tempo, dal quale si possono ricavare la temperatura iniziale del calorimetro to e la temperatura di equilibrio teq, opportunamente corretta dagli effetti dell’imperfetto isolamento e della costante di tempo del calorimetro, come indicato in figura. t1 è la temperatura di ebollizione dell’acqua, funzione della pressione atmosferica (Tabella 3). Noti infine i valori dei calori specifici cv.c. e cH2O e delle capacità termiche di termometro e agitatore, il calore specifico c del materiale può quindi essere calcolato usando le equazioni (1) e (2).

35
VALUTAZIONE DELL’ERRORE
Dalla (1), applicando il metodo di differenziazione, si ottiene l’errore relativo:
eq1
eq1
oeq
oeq
tt
)tΔ(t
m
Δm
tt
)tΔ(t
C
ΔC
c
Δc
−−
++−−
+=
in cui l’errore assoluto nella capacità termica ΔC del calorimetro, tenendo conto della (1), è: agitatoretermometrov.c.OH ΔCΔCΔCΔCΔC
2+++=
ove, per esempio,: OH
OH
OH
OH
OH
OH
2
2
2
2
2
2
c
Δc
m
Δm
C
ΔC+= (errore
relativo da cui ricavare l’errore assoluto ΔCH2O). L’errore assoluto nella differenze di temperatura è:
oeqoeq ΔtΔt)tΔ(t +=−…….. Δm e Δt sono ricavabili dalle sensibilità della bilancia e del termometro usati.
36
Tabella 3. Pressione atmosferica e temperatura di ebollizione dell’acqua.
Pressione atmosferica
(mm Hg)
Temperatura di ebollizione
(°C) 707,17 98°0 709,74 98°1 712,13 98°2 714,90 98°3 717,49 98°4 720,08 98°5 722,69 98°6 725,30 98°7 727,92 98°8 730,55 98°9 733,19 99°0 735,83 99°1 738,49 99°2 741,15 99°3 743,82 99°4 746,49 99°5
Pressione atmosferica
(mm Hg)
Temperatura di ebollizione
(°C) 749,18 99°6 751,87 99°7 754,57 99°8 757,28 99°9 760,00 100°0 762,72 100°1 765,46 100°2 768,20 100°3 770,95 100°4 773,71 100°5 776,47 100°6 779,25 100°7 782,03 100°8 784,82 100°9 787,62 101°0 790,42 101°1

37
Generatore di funzioni (Oscillatore)
Si chiama oscillatore un circuito elettrico che oscilla in opportune condizioni; vale a dire, quando si altera l’equilibrio del circuito, esso genera una corrente oscillante. Tuttavia, con il nome di oscillatore o con il sinonimo di “generatore di funzioni” (in sigla, FG = function generator) si indica anche lo strumento destinato a generare un segnale elettrico periodico di frequenza, ampiezza e forma d'onda desiderate. A seconda della forma d'onda si hanno generatori sinusoidali, di onde quadre, triangolari, di rampa (dente di sega), ecc. E' possibile pilotare il generatore per sincronizzarne il segnale, modularlo in ampiezza e frequenza e variarne la forma d’onda. Un FG tipicamente può generare in uscita segnali con frequenze da 10-2 Hz a 107 Hz. La frequenza é regolata da un moltiplicatore a scatto o da una serie di pulsanti e da una manopola a disco.
Contatore Il contatore elettronico (pulse counter) è uno strumento destinato sia alla misura della durata di impulsi periodici che al conteggio di eventi, di qualsiasi natura, associabili ad impulsi elettrici. Un impulso, di tensione o di corrente, é un segnale che si esaurisce in un tempo molto breve: da qualche microsecondo ad un secondo. Ad esso può essere associata un’informazione relativa alla sua localizzazione temporale, all’ampiezza, alla durata e alla forma. Un conveniente trasduttore (antenna, cellula fotoelettrica, rivelatore di radiazione o altro) trasforma l’evento in un impulso elettrico da applicare all’ingresso (gate) del circuito di conteggio. Qui, tramite opportuni circuiti integrati, che comandano il dispositivo di visualizzazione delle cifre (display), avviene la conversione del segnale in uscita nel numero contato. Un pulsante (reset) consente di azzerare le cifre segnate sul display. Un contatore elettronico può effettuare: conteggi dell’ordine di 106 a frequenze di 107
Hz, conteggi su intervalli di tempo da 0,1 μs fino a 10 s e misurare intervalli di tempo da 0,1 μs a 107 s. Nel contatore di impulsi un oscillatore con segnale a frequenza nota accoppiato con un interruttore elettronico consente la misura dell’intervallo di tempo durante il quale si verifica un determinato evento. L’impulso applicato al contatore (all’inizio dell’evento) fa iniziare il conteggio ed un secondo impulso (alla fine) fa cessare il conteggio del numero di cicli dell’oscillatore. Se la frequenza di questo é f, l’intervallo di tempo risulta essere t = N/f, dove N é il numero segnato sul display. Prima di iniziare l’ operazione di conteggio é opportuno procedere alla campionatura o taratura della frequenza dell’oscillatore. Si determina, cioè, il valore medio del numero di impulsi al secondo (n/Δt) che l’oscillatore conta per k intervalli di tempo Δt (dell’ordine di qualche minuto) prefissati e misurati con un cronometro:
k
t
n
f
k
1i i
i∑= Δ
=
38
Oscilloscopio
Questo strumento (in sigla, CRO = cathode ray oscilloscope) rende visibili su schermo, e quindi registrabili fotograficamente, le curve di variazione nel tempo di grandezze elettriche rapidamente variabili, anche se relative ad eventi transitori rapidissimi. Questa analisi é resa possibile mediante la composizione di due moti, il primo in funzione della grandezza in esame e l’altro in funzione del tempo. Il componente principale del CRO é costituito da un tubo a raggi catodici (CRT). In esso (vedi figura) un fascio di elettroni, emessi da un catodo riscaldato K in un ambiente
a vuoto molto spinto, viene accelerato e focalizzato dal cannone elettronico al centro di uno schermo fluorescente S. Due tensioni, applicate a due coppie di “placche di deflessione”, disposte perpendicolarmente l' una rispetto all’altra (X1, X2 e Yl, Y2) consentono di controllare in senso orizzontale e verticale la direzione del fascio e quindi la posizione della macchia luminosa (spot) sullo schermo. La coppia orizzontale (Yl, Y2: placche “verticali”) serve allo spostamento verticale del fascio, mentre la coppia verticale (X1, X2: placche “orizzontali”) determina lo spostamento orizzontale. L’asse x (base dei tempi) é fornito da questa coppia. Le due deviazioni, proporzionali alle tensioni applicate alle rispettive placche, costituiscono le componenti x e y della posizione dello spot sullo schermo. Non esistendo parti meccaniche in movimento (é il fascio di elettroni che si muove), ogni inerzia é assente e il pennello elettronico é l'indicatore ideale di ogni tensione variabile in modo rapido. Se alle placche non é applicata alcuna tensione, al centro dello schermo compare solo lo spot. Nell’uso del CRO questo non deve mai essere troppo luminoso, perché una eccessiva luminosità danneggia irreparabilmente lo schermo. La tensione V(t) da analizzare é applicata, direttamente o tramite amplificazione, alle placche verticali (asse Y), mentre alle placche orizzontali si può applicare una tensione, fornita dal generatore di scansione, che cresce linearmente con il tempo. Lo spot traccia quindi una curva che rivela la variazione di V(t), o della grandezza che essa rappresenta, in funzione del tempo (o della grandezza che esso rappresenta). Il vetro dello schermo del CRT é segnato da un reticolo a righe orizzontali e verticali, che consente la misura in scala del segnale in esame. Nei CRT degli oscilloscopi di grande precisione il reticolo é inciso sulla faccia interna del tubo. La figura che segue mostra il diagramma “a blocchi” di un CRO tipico con le principali unità: a) il CRT; b) il generatore di scansione (o base dei tempi), capace di fornire una tensione V(t) “a dente di sega” con frequenza di scansione, fsc, variabile, e di

39
sincronizzarla con una tensione di ingresso ciclica; c) gli ampli-ficatori di ingresso (X e Y), che possono ampli-ficare ogni tensione di deflessione per eviden-ziare piccoli segnali di ingresso. Non è rappre-sentato qui l’alimenta-tore che fornisce i potenziali alle placche per il comando del fascio elettronico e la corrente per il riscal-damento del catodo. Il generatore di scansione
è un oscillatore a frequenza variabile, che eroga una differenza di potenziale che varia nel tempo secondo la forma indicata nella figura a lato. Teoricamente la tensione aumenta linearmente con il tempo fino ad un massimo per poi cadere quasi istantaneamente ad un minimo negativo di valore assoluto pari al massimo. Quando si applica l’uscita dal generatore di scansione alle placche di deflessione orizzontale, lo spot attraversa lo schermo a velocità costante. Nell’istante in cui la Vx raggiunge il massimo e precipita al minimo simmetrico negativo, lo spot scatta bruscamente indietro per poi ripetere il ciclo. La lunghezza del percorso è una misura del periodo dell’oscillatore (inverso della frequenza di scansione). La Vx é detta tensione di scansione o base dei tempi. A solo titolo di esempio, si supponga di applicare una tensione sinusoidale a 1000 Hz alle placche verticali del CRT e di applicare a quelle orizzontali il segnale della base dei tempi. Se si regola esattamente la frequenza del generatore di scansione per 1000 Hz, sullo schermo compare l’imma-gine stazionaria di un’onda sinusoidale relativa ad un ciclo completo. Se la fsc è leggermente diversa da 1000 Hz, la sinusoide si sposta verso sinistra o verso destra (il reciproco del tempo -in secondi- impiegato per “spazzare" esattamente una distanza pari ad una lunghezza d’onda misura lo scarto tra la fsc e la frequenza in ingresso). Se la fsc = 500 Hz, sullo schermo compaiono due sinusoidi complete stazionarie del segnale d'ingresso. Quando dunque la frequenza di scansione é uguale alla frequenza fy del segnale relativo alla grandezza in esame, il grafico é continuamente riproposto in sovrapposizione ed appare stazionario. Per fsc = 1/n fy (con n intero), sullo schermo compaiono n cicli del segnale e la frequenza di scansione si dice "sincronizzata". Per garantire che la fsc sia esattamente la
40
stessa di quella della tensione in esame, può essere bloccata dal controllo di sincronizzazione. Il CRO non solo consente la misura e/o la registrazione di correnti, tensioni e frequenze relative a fenomeni elettrici periodici o aperiodici, ma, con opportuni accorgimenti, consente anche lo studio di una qualsiasi grandezza che possa essere fedelmente convertita in un potenziale elettrico. Generalmente si ricorre ad un conveniente trasduttore: microfono o cristallo piezoelettrico per i suoni e le sollecitazioni meccaniche, fototransistore o fototubo a vuoto per le radiazioni luminose, coppia termoelettrica o termistore per l’energia termica, ecc. Il numero, l’impiego e la disposizione dei comandi di un CRO variano a seconda del tipo di oscilloscopio e della sua complessità. I comandi principali (i dispositivi speciali sono descritti nei manuali che accompagnano ogni tipo di oscilloscopio) consentono tipicamente: la regolazione della nitidezza (FOCUS) e della luminosità (INTENSITY) della traccia, la sua centratura sullo schermo (HOR POS, VERT POS), la regolazione della frequenza della base dei tempi (HOR/FREQ SELECTION), e del rapporto di amplificazione della traccia (VERT GAIN, HOR GAIN).
41
DETERMINAZIONE DELLA VELOCITA' DI PROPAGAZIONE DEL SUONO NELL'ARIA CON IL METODO DELL' INTERFERENZA
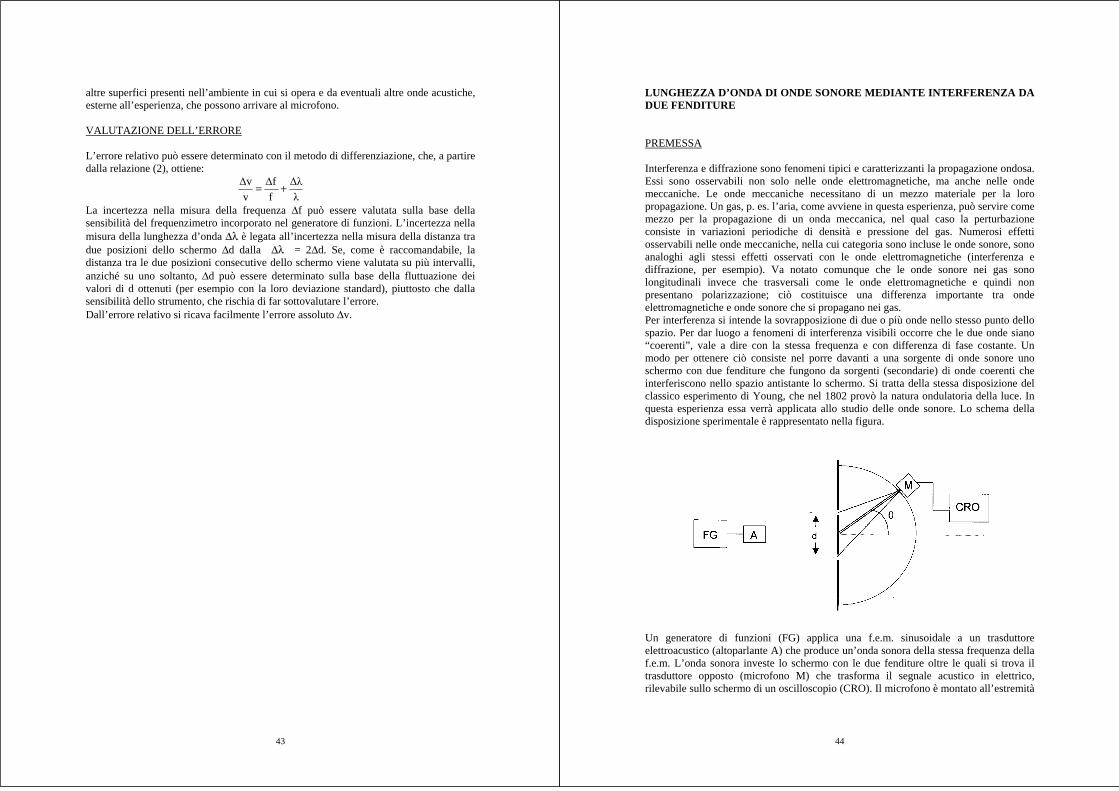
PREMESSA
Il suono si propaga con velocità finita che varia con la natura del mezzo e, nello stesso mezzo, aumenta al crescere della temperatura. Nell’aria si ha:
αt1vv ot += (1)
dove t è la temperatura in °C, vt e’ la velocità alla temperatura di esperienza, vo e’ la velocità a 0 °C (331,6 m/s in aria pura, secca) e α = 1/273 = 3,67⋅10-3 (°C)-1. Siano: T (periodo) il tempo necessario per compiere un'oscillazione completa e f (frequenza) = l/T il numero di oscillazioni compiute nell’unita’ di tempo. La distanza che una determinata fase della vibrazione percorre durante un periodo T si chiama lunghezza d’onda (λ): rappresenta la minima distanza tra due particelle che vibrano in fase tra loro. Il rapporto:
λ/T = λf = v (2) determina la velocità dell'onda, cioè la velocità con cui si propaga una data fase dell’onda. v è misurata in m/s quando λ e’ espressa in metri e f in Hertz (1 Hz = 1 s-1). La frequenza è una grandezza propria di qualsiasi sorgente di oscillazione; la lunghezza d'onda è caratteristica sia della sorgente, che del mezzo in cui l'onda si propaga, perché dipende dalla velocità di propagazione. I limiti inferiore e superiore delle frequenze udibili dall’orecchio umano sono, rispettivamente, circa 20 Hz e 20 kHz; a queste frequenze competono, assumendo per v il valore di 343 m/s a 20 °C, le lunghezze d'onda massima e minima, rispettivamente, di 17 m e 1,7 cm. Quando due onde, emesse da una stessa sorgente A (quindi con la stessa frequenza, la stessa ampiezza e la stessa fase) arrivano in una zona dello spazio M (vedi figura) dopo avere percorso cammini diversi (x1 é il percorso diretto e x2 é quello provocato da una riflessione su uno schermo S), le due onde si sovrappongono, dando luogo ad uno stato di vibrazione che dipende dalla differenza di fase delle due onde. Questa grandezza dipende dalla differenza di cammino percorso. Ponendo x2 – x1 = Δx, la differenza di fase assume il valore Δϕ = 2π Δx/λ. Quando Δx = kλ (con k = 0, l, 2, ...), cioè uguale ad un numero intero di lunghezze d’onda, il massimo di un’onda, per esempio quella diretta, coincide con il massimo di quella riflessa (condizione di concordanza di fase): nella zona di sovrapposizione le due onde si rinforzano a vicenda e l’onda risultante presenta un’ampiezza doppia. Quando, invece, Δx = (2k + 1) λ/2, cioè quando è uguale ad un numero dispari di mezze lunghezze d’onda, il massimo di un’onda coincide con il minimo dell’altra (sono in opposizione di fase): l’ampiezza dell’onda risultante è nulla. Per i valori intermedi di Δx l’onda risultante presenta sempre la stessa frequenza delle onde componenti ed ampiezza intermedia tra quelle dei due casi indicati.
42
ESECUZIONE
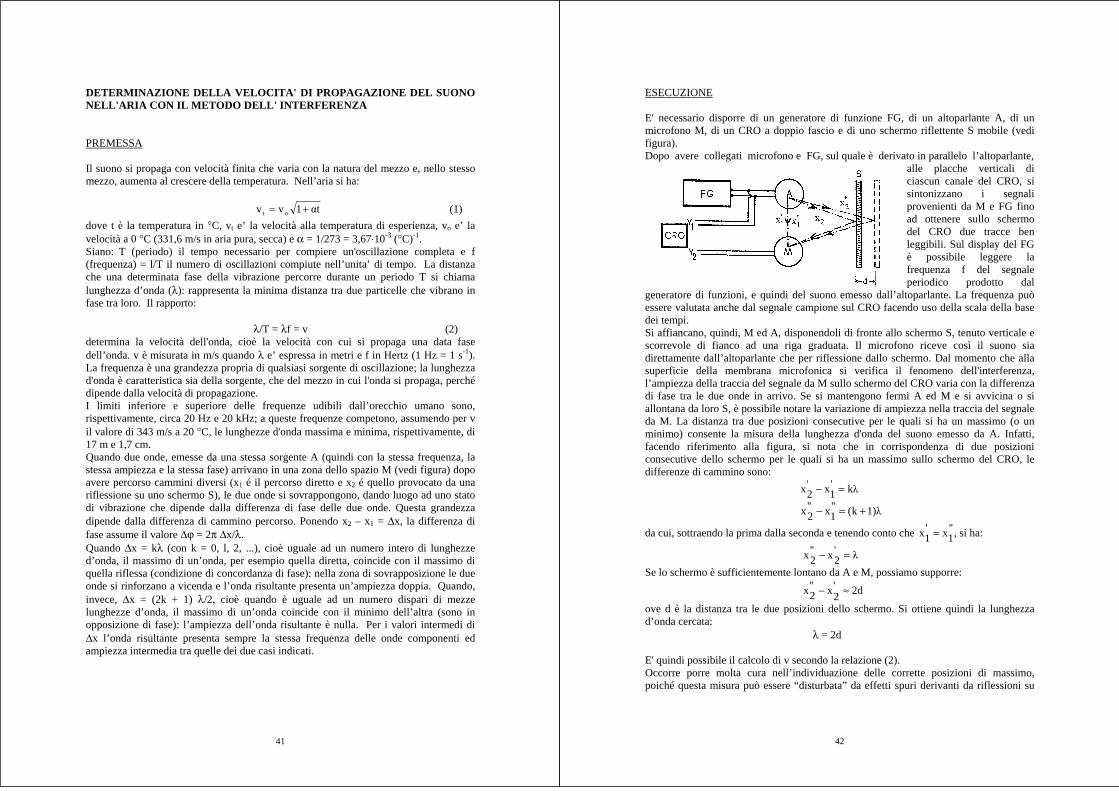
E' necessario disporre di un generatore di funzione FG, di un altoparlante A, di un microfono M, di un CRO a doppio fascio e di uno schermo riflettente S mobile (vedi figura). Dopo avere collegati microfono e FG, sul quale è derivato in parallelo l’altoparlante,
alle placche verticali di ciascun canale del CRO, si sintonizzano i segnali provenienti da M e FG fino ad ottenere sullo schermo del CRO due tracce ben leggibili. Sul display del FG è possibile leggere la frequenza f del segnale periodico prodotto dal
generatore di funzioni, e quindi del suono emesso dall’altoparlante. La frequenza può essere valutata anche dal segnale campione sul CRO facendo uso della scala della base dei tempi. Si affiancano, quindi, M ed A, disponendoli di fronte allo schermo S, tenuto verticale e scorrevole di fianco ad una riga graduata. Il microfono riceve così il suono sia direttamente dall’altoparlante che per riflessione dallo schermo. Dal momento che alla superficie della membrana microfonica si verifica il fenomeno dell'interferenza, l’ampiezza della traccia del segnale da M sullo schermo del CRO varia con la differenza di fase tra le due onde in arrivo. Se si mantengono fermi A ed M e si avvicina o si allontana da loro S, è possibile notare la variazione di ampiezza nella traccia del segnale da M. La distanza tra due posizioni consecutive per le quali si ha un massimo (o un minimo) consente la misura della lunghezza d'onda del suono emesso da A. Infatti, facendo riferimento alla figura, si nota che in corrispondenza di due posizioni consecutive dello schermo per le quali si ha un massimo sullo schermo del CRO, le differenze di cammino sono:
kλ'1x'
2x =−
1)λk(''1x''
2x +=−
da cui, sottraendo la prima dalla seconda e tenendo conto che ''1x'
1x = , si ha:
λ'2x''
2x =−Se lo schermo è sufficientemente lontano da A e M, possiamo supporre:
d2'2
x''2x ≈−
ove d è la distanza tra le due posizioni dello schermo. Si ottiene quindi la lunghezza d’onda cercata: λ = 2d
E' quindi possibile il calcolo di v secondo la relazione (2). Occorre porre molta cura nell’individuazione delle corrette posizioni di massimo, poiché questa misura può essere “disturbata” da effetti spuri derivanti da riflessioni su
43
altre superfici presenti nell’ambiente in cui si opera e da eventuali altre onde acustiche, esterne all’esperienza, che possono arrivare al microfono.
VALUTAZIONE DELL’ERRORE
L’errore relativo può essere determinato con il metodo di differenziazione, che, a partire dalla relazione (2), ottiene:
λΔλ
f
Δf
v
Δv +=
La incertezza nella misura della frequenza Δf può essere valutata sulla base della sensibilità del frequenzimetro incorporato nel generatore di funzioni. L’incertezza nella misura della lunghezza d’onda Δλ è legata all’incertezza nella misura della distanza tra due posizioni dello schermo Δd dalla Δλ = 2Δd. Se, come è raccomandabile, la distanza tra le due posizioni consecutive dello schermo viene valutata su più intervalli, anziché su uno soltanto, Δd può essere determinato sulla base della fluttuazione dei valori di d ottenuti (per esempio con la loro deviazione standard), piuttosto che dalla sensibilità dello strumento, che rischia di far sottovalutare l’errore. Dall’errore relativo si ricava facilmente l’errore assoluto Δv.
44
LUNGHEZZA D’ONDA DI ONDE SONORE MEDIANTE INTERFERENZA DA DUE FENDITURE
PREMESSA
Interferenza e diffrazione sono fenomeni tipici e caratterizzanti la propagazione ondosa. Essi sono osservabili non solo nelle onde elettromagnetiche, ma anche nelle onde meccaniche. Le onde meccaniche necessitano di un mezzo materiale per la loro propagazione. Un gas, p. es. l’aria, come avviene in questa esperienza, può servire come mezzo per la propagazione di un onda meccanica, nel qual caso la perturbazione consiste in variazioni periodiche di densità e pressione del gas. Numerosi effetti osservabili nelle onde meccaniche, nella cui categoria sono incluse le onde sonore, sono analoghi agli stessi effetti osservati con le onde elettromagnetiche (interferenza e diffrazione, per esempio). Va notato comunque che le onde sonore nei gas sono longitudinali invece che trasversali come le onde elettromagnetiche e quindi non presentano polarizzazione; ciò costituisce una differenza importante tra onde elettromagnetiche e onde sonore che si propagano nei gas. Per interferenza si intende la sovrapposizione di due o più onde nello stesso punto dello spazio. Per dar luogo a fenomeni di interferenza visibili occorre che le due onde siano “coerenti”, vale a dire con la stessa frequenza e con differenza di fase costante. Un modo per ottenere ciò consiste nel porre davanti a una sorgente di onde sonore uno schermo con due fenditure che fungono da sorgenti (secondarie) di onde coerenti che interferiscono nello spazio antistante lo schermo. Si tratta della stessa disposizione del classico esperimento di Young, che nel 1802 provò la natura ondulatoria della luce. In questa esperienza essa verrà applicata allo studio delle onde sonore. Lo schema della disposizione sperimentale è rappresentato nella figura.
Un generatore di funzioni (FG) applica una f.e.m. sinusoidale a un trasduttore elettroacustico (altoparlante A) che produce un’onda sonora della stessa frequenza della f.e.m. L’onda sonora investe lo schermo con le due fenditure oltre le quali si trova il trasduttore opposto (microfono M) che trasforma il segnale acustico in elettrico, rilevabile sullo schermo di un oscilloscopio (CRO). Il microfono è montato all’estremità
45
di un regolo imperniato nel punto centrale tra le fenditure e munito di goniometro per la misura dell’angolo θ. Le onde che interferiscono sono quelle che provengono dalle due fenditure. Si avrà interferenza costruttiva per quei valori di θ per cui la differenza tra i cammini delle onde dalle fenditure al microfono è pari a un numero intero di lunghezze d’onda (condizione di massimo):
d senθ = nλ [n = 0, 1, 2, ….] (1) Si otterrà un minimo per angoli θ per i quali tale differenza è pari a un numero semintero di lunghezze d’onda (condizione di minimo): d senθ = (n + ½)λ (2)
ESECUZIONE
Per eseguire l’esperimento si stabilisce una frequenza per la f.e.m. del generatore di funzioni, e quindi dell’onda sonora, compatibile con le caratteristiche dei trasduttori impiegati. Con il microfono si vanno a individuare i valori di angolo θ per i quali si ha interferenza costruttiva, rilevabile dal segnale di maggior ampiezza sullo schermo dell’oscilloscopio, da cui secondo la (1) è possibile determinare il valore di lunghezza d’onda:
n
senθ dλ = (3)
Gli angoli sono valutati rispetto alla direzione in cui si trova il massimo centrale (n = 0), in cui il microfono è equidistante dalle fenditure. Ruotando il regolo, p.es. verso destra, si trovano i valori θ1d, θ2d, θ3d, θ4d, …corrispondenti ai massimi di interferenza di ordine crescente (n = 1, 2, 3, 4, … rispettivamente), analogamente a sinistra si trovano i valori θ1s, θ2s, θ3s, θ4s, … per i massimi, simmetrici a quelli di destra. Per ciascun angolo è possibile calcolare, con la (3), il valore di lunghezza d’onda del suono alla frequenza prescelta. Si può anche tentare di individuare i valori degli angoli corrispondenti alle posizioni di minimo (minima ampiezza del segnale sullo schermo dell’oscilloscopio), dai quali secondo la (2) la lunghezza d’onda è ottenibile dalla:
21n
senθ dλ+
= (2)
(n = 0, 1, 2, 3, … in questo caso). Occorre porre molta cura nell’individuazione delle corrette posizioni di massimo [e di minimo], poiché questa misura può essere “disturbata” da effetti spuri derivanti da riflessioni su superfici presenti nell’ambiente in cui si opera, da fenomeni di diffrazione da ogni singola fenditura, nonché da eventuali altre onde acustiche, esterne all’esperienza, che possono arrivare al microfono. A causa dell’inevitabile incertezza nelle misure i valori di λ che si otterranno non saranno tutti uguali. Il risultato finale può essere espresso calcolando la media dei valori di λ, per esprimere l’indice di centralità, mentre l’indice di dispersione può essere
46
ottenuto sulla base dell’incertezza dei valori di d e θ, tramite la legge di propagazione degli errori, oppure se si dispone di un numero relativamente grande (≥ 10) di valori di λ facendo uso di uno dei parametri noti per esprimere la dispersione dei dati in una misura ripetuta (p. es., la deviazione standard).


















