
DISPENSA - ESERCIZI SVOLTI Di Scienza Delle Costruzioni
312
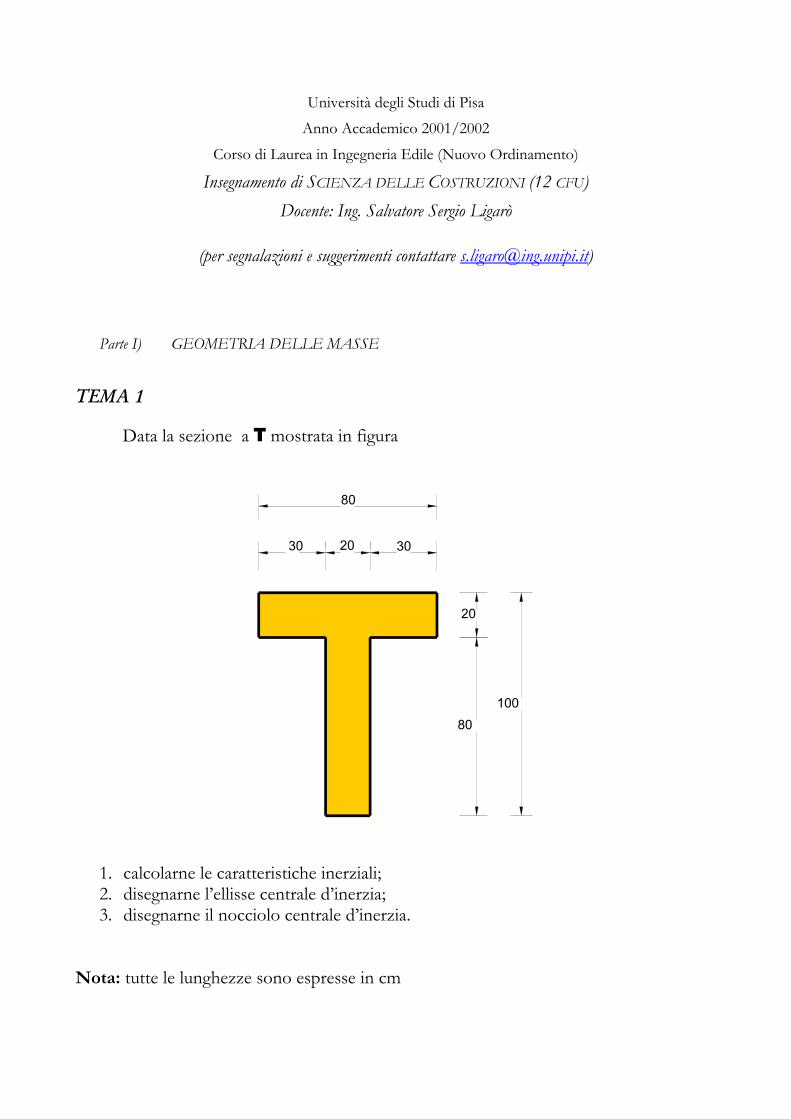
Università degli Studi di Pisa Anno Accademico 2001/2002 Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò (per segnalazioni e suggerimenti contattare [email protected] ) Parte I) GEOMETRIA DELLE MASSE TEMA 1 Data la sezione a T mostrata in figura 30 30 20 80 20 80 100 1. calcolarne le caratteristiche inerziali; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia. Nota: tutte le lunghezze sono espresse in cm
-
Upload
anna-renzi -
Category
Documents
-
view
8.397 -
download
143
Transcript of DISPENSA - ESERCIZI SVOLTI Di Scienza Delle Costruzioni
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 1
Data la sezione a T mostrata in figura
30 30 20
80
20
80 100
1. calcolarne le caratteristiche inerziali; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia.
Nota: tutte le lunghezze sono espresse in cm
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
SOLUZIONE:
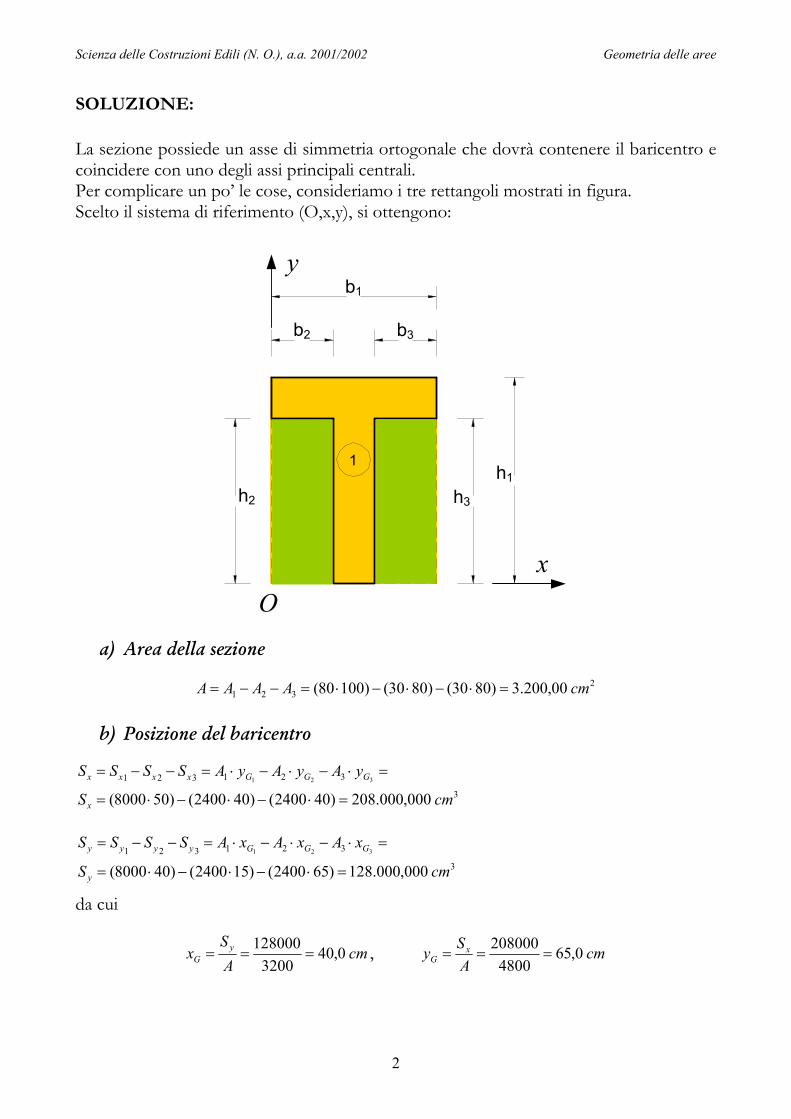
La sezione possiede un asse di simmetria ortogonale che dovrà contenere il baricentro e coincidere con uno degli assi principali centrali. Per complicare un po’ le cose, consideriamo i tre rettangoli mostrati in figura. Scelto il sistema di riferimento (O,x,y), si ottengono:
b1
b3 b2
h1 h3 h2 2
1
3
y
x O
a) Area della sezione
2321 00,200.3)8030()8030()10080( cmAAAA =⋅−⋅−⋅=−−=
b) Posizione del baricentro
3
321321
000,000.208)402400()402400()508000(321
cmS
yAyAyASSSS
x
GGGxxxx
=⋅−⋅−⋅=
=⋅−⋅−⋅=−−=
3
321321
000,000.128)652400()152400()408000(321
cmS
xAxAxASSSS
y
GGGyyyy
=⋅−⋅−⋅=
=⋅−⋅−⋅=−−=
da cui
cmAS
x yG 0,40
3200128000
=== , cmASy x
G 0,654800
208000===
2

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
c) Momenti del second’ordine rispetto al riferimento (O,x,y)
433
333
322
311321
6667,666.426.16)]8030(2)10080[(31
31
31
31
cmJ
hbhbhbJJJJ
x
xxxx
=⋅⋅−⋅=
=⋅−⋅−⋅=−−=
4
2333
23
333
322
311321
6667,666.026.6000.140.10000.180000.7206667,666.066.17
652400)3080(121)3080(
31)80100(
31
121
31
31
3
cmJ
J
xAbhbhbhJJJJ
y
y
Gyyyy
=−−−=
=⋅−⋅−⋅−⋅=
=⋅−⋅−⋅−⋅=−−=
4
321321
0000,000.320.8406524004015240050408000332211
cmJ
yxAyxAyxAJJJJ
xy
GGGGGGxyxyxyxy
=⋅⋅−⋅⋅−⋅⋅=
=⋅⋅−⋅⋅−⋅⋅=−−=
d) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’)
422' 6667,666.906.265200.36667,666.426.16 cmyAJJ Gxx =⋅−=⋅−=
422' 6667,666.90640200.36667,666.026.6 cmxAJJ Gyy =⋅−=⋅−=
4'' 0000,06540200.3000.320.8 cmyxAJJ GGxyyx =⋅⋅−=⋅⋅−=
e) Direzioni e momenti d’inerzia principali centrali
02
)2tan(''
'' =−
−=αyx
yx
JJJ
per cui
4' 6667,666.906.2 cmJJ x ==ξ , , 4
' 6667,666.906 cmJJ y ==η40000,0 cmJ =ξη
f) Raggi d’inerzia centrali
cmAJ
1,30==ρ ξξ , cm
AJ
8,16==ρ ηη
3
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
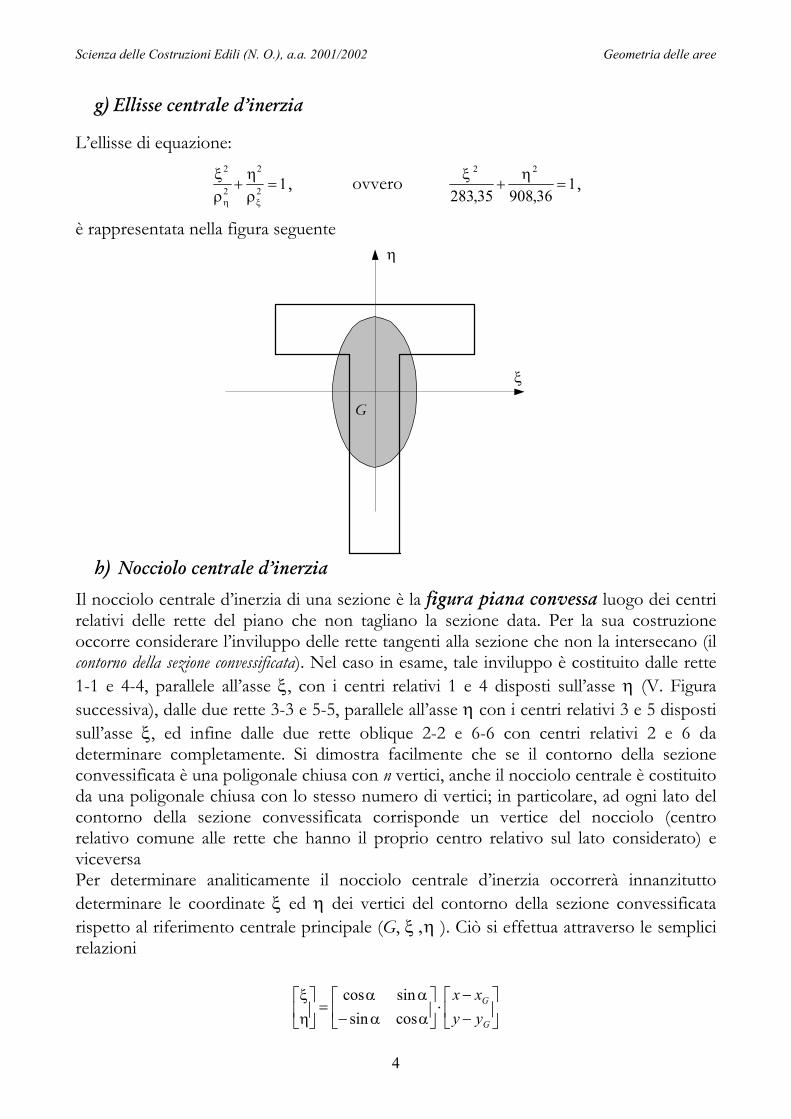
g) Ellisse centrale d’inerzia
L’ellisse di equazione:
12
2
2
2
=ρη
+ρξ
ξη
, ovvero 136,90835,283
22
=+ηξ ,
è rappresentata nella figura seguente
ξ
η
G
h) Nocciolo centrale d’inerzia
Il nocciolo centrale d’inerzia di una sezione è la figura piana convessa luogo dei centri relativi delle rette del piano che non tagliano la sezione data. Per la sua costruzione occorre considerare l’inviluppo delle rette tangenti alla sezione che non la intersecano (il contorno della sezione convessificata). Nel caso in esame, tale inviluppo è costituito dalle rette 1-1 e 4-4, parallele all’asse ξ, con i centri relativi 1 e 4 disposti sull’asse η (V. Figura successiva), dalle due rette 3-3 e 5-5, parallele all’asse η con i centri relativi 3 e 5 disposti sull’asse ξ, ed infine dalle due rette oblique 2-2 e 6-6 con centri relativi 2 e 6 da determinare completamente. Si dimostra facilmente che se il contorno della sezione convessificata è una poligonale chiusa con n vertici, anche il nocciolo centrale è costituito da una poligonale chiusa con lo stesso numero di vertici; in particolare, ad ogni lato del contorno della sezione convessificata corrisponde un vertice del nocciolo (centro relativo comune alle rette che hanno il proprio centro relativo sul lato considerato) e viceversa Per determinare analiticamente il nocciolo centrale d’inerzia occorrerà innanzitutto determinare le coordinate ξ ed η dei vertici del contorno della sezione convessificata rispetto al riferimento centrale principale (G, ξ ,η ). Ciò si effettua attraverso le semplici relazioni
−−
⋅
αα−αα
=
ηξ
G
G
yyxx
cossinsincos
4

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
dove x ed y sono le coordinate del punto nel sistema di riferimento originale (O, x, y), xG ed yG le coordinate del baricentro nello stesso riferimento ed infine α l’angolo, anch’esso noto, di cui è ruotato il riferimento principale rispetto al sistema parallelo baricentrico (G, x’, y’). Successivamente, si utilizza la relazione:
0120
20 =+
ρη⋅η
+ρ
ξ⋅ξ
ξη
,
che definisce la retta r0 avente per centro relativo il punto . ),( 000 ηξ≡P
Imponendo che tale retta passi per i vertici consecutivi e del lato 1-2 del contorno della sezione convessificata, le coordinate del vertice corrispondente del nocciolo risultano
),( 111 ηξ≡P ),( 222 ηξ≡P
),( 000 ηξ≡P
2
22
11
2
1
011
ηρ
ηξηξ
ηη
−=ξ , e 2
22
11
2
1
011
ξρ
ηξηξ
ξξ
−=η
Il nocciolo centrale d’inerzia della sezione data, è mostrato nella figura successiva.
I suoi vertici sono: 1 , , , , e .
)974.13,0.0(≡)909.9,242.8(
)909.9,242.8(2 −≡ )0.0,083.7(3 −≡ )952.25,0.0(4 −≡)0.0,083.7(5 ≡ 6 ≡
1 1
2
2
3
3
4 4
5
6
ξ
η
G
1 2
3
4
6
5 5
6
5
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 2
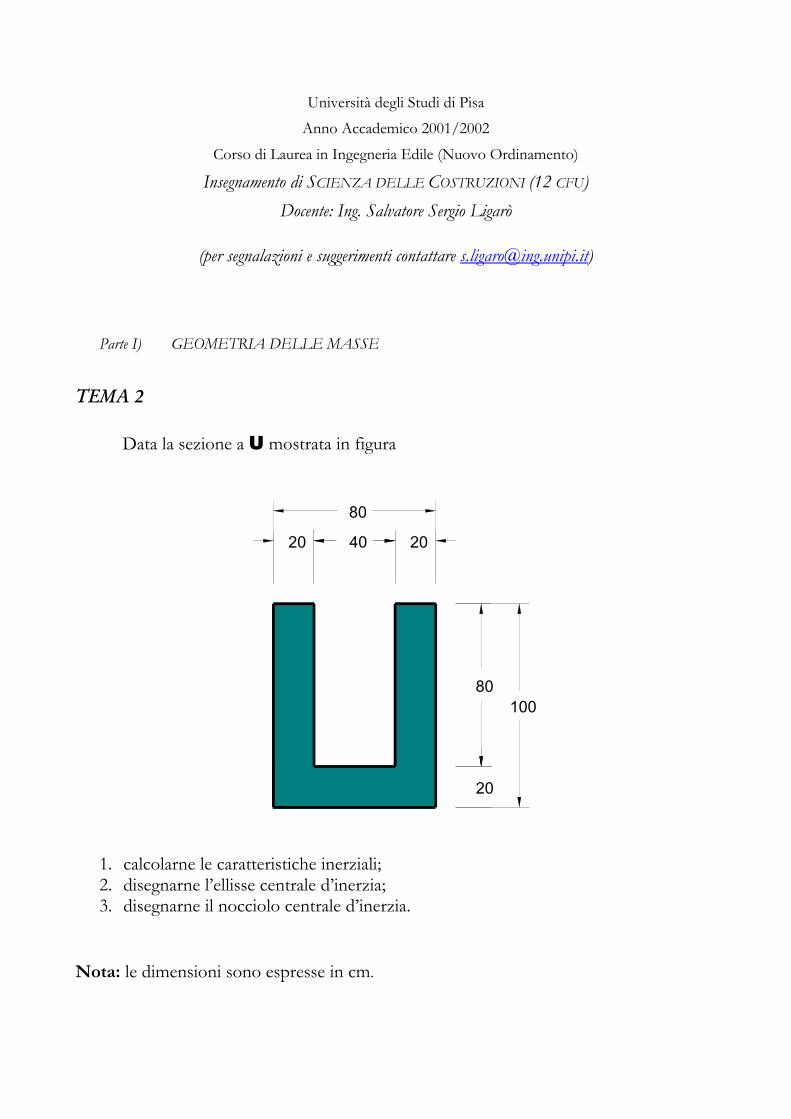
Data la sezione a U mostrata in figura
20 40 20
80
80
20
100
1. calcolarne le caratteristiche inerziali; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia.
Nota: le dimensioni sono espresse in cm.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
SOLUZIONE:
La sezione possiede un asse di simmetria ortogonale che dovrà contenere il baricentro e coincidere con uno degli assi principali centrali. Considerati i tre rettangoli mostrati in figura e scelto il sistema di riferimento (O,x,y), si ottengono:
b2 b1
h3
h2
b3
1
2
3 h1
y
x O
a) Area della sezione
2321 00,800.4)10020()2040()10020( cmAAAA =⋅+⋅+⋅=++=
b) Posizione del baricentro
3
321321
000,000.208)502000()10800()502000(321
cmS
yAyAyASSSS
x
GGGxxxx
=⋅+⋅+⋅=
=⋅+⋅+⋅=++=
3
321321
000,000.192)702000()40800()102000(321
cmS
xAxAxASSSS
y
GGGyyyy
=⋅+⋅+⋅=
=⋅+⋅+⋅=++=
da cui
cmA
Sx y
G 0,404800
192000=== , cm
AS
y xG 3,43
4800208000
≅== .
c) Momenti del second’ordine rispetto al riferimento (O,x,y)
433
333
322
311321
0000,000.440.13)]2040()10020(2[31
31
31
31
cmJ
hbhbhbJJJJ
x
xxxx
=⋅+⋅⋅=
=⋅+⋅+⋅=++=
2

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
4
23233
23
333
22
322
311321
0000,000.520.11000.800.96667,666.66000.280.16667,666.1066667,666.266
702000)20100(12140800)4020(
121)20100(
31
121
121
31
32
cmJ
J
xAbhxAbhbhJJJJ
y
y
GGyyyy
=++++=
=⋅+⋅+⋅+⋅+⋅=
=⋅+⋅+⋅+⋅+⋅=++=
4
321321
0000,000.320.850702000104080050102000332211
cmJ
yxAyxAyxAJJJJ
xy
GGGGGGxyxyxyxy
=⋅⋅+⋅⋅+⋅⋅=
=⋅⋅+⋅⋅+⋅⋅=++=
d) Momenti rispetto agli assi paralleli baricentrici (centrali)
422' 6667,666.426.43,434800000.440.13 cmyAJJ Gxx =⋅−=⋅−=
422' 0000,000.840.3404800000.520.11 cmxAJJ Gyy =⋅−=⋅−=
4'' 0000,03.43404800000.320.8 cmyxAJJ GGxyyx =⋅⋅−=⋅⋅−=
e) Direzioni e momenti d’inerzia principali centrali
02
)2tan(''
'' =−
−=αyx
yx
JJJ
per cui
4' 6667,666.426.4 cmJJ x ==ξ , ,
4' 0000,000.840.3 cmJJ y ==η
40000,0 cmJ =ξη
f) Raggi d’inerzia centrali
cmAJ
368,30==ρ ξξ , cm
AJ
284,28==ρ ηη .
g) Ellisse centrale d’inerzia
L’ellisse cercata ha equazione:
12
2
2
2
=ρη
+ρξ
ξη
, ovvero 121,922800
22
=η
+ξ ,
ed è rappresentata nella figura seguente
3
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
G
ξ
η
ρξ
ρη
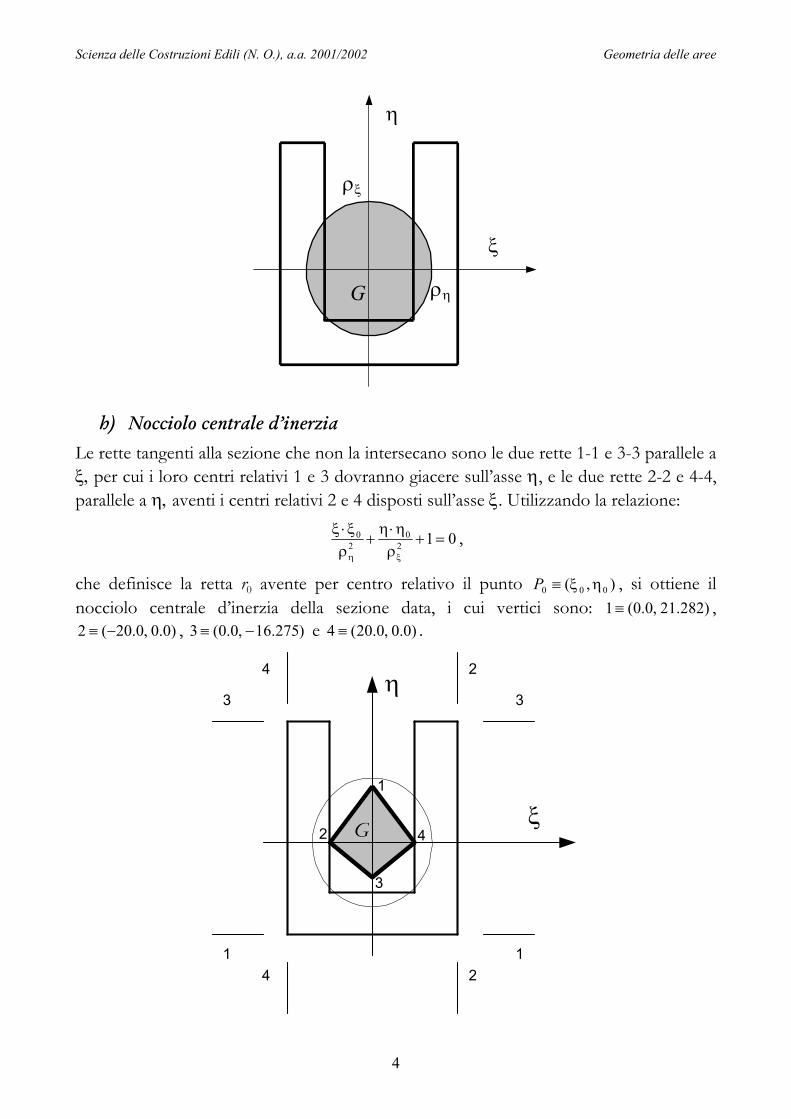
h) Nocciolo centrale d’inerzia Le rette tangenti alla sezione che non la intersecano sono le due rette 1-1 e 3-3 parallele a ξ, per cui i loro centri relativi 1 e 3 dovranno giacere sull’asse η, e le due rette 2-2 e 4-4, parallele a η, aventi i centri relativi 2 e 4 disposti sull’asse ξ. Utilizzando la relazione:
0120
20 =+
ρη⋅η
+ρ
ξ⋅ξ
ξη
,
che definisce la retta r0 avente per centro relativo il punto , si ottiene il nocciolo centrale d’inerzia della sezione data, i cui vertici sono: 1 ,
, 3 e 4 .
),( 000 ηξ≡P≡ )282.21,0.0(
)0.0,0.20(2 −≡ )275.16,0.0( −≡ )0.0,0.20(≡
1 1
3 3
4
4
2
2
1
2
3
4 ξ
η
G
4
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 3
Data la sezione a L mostrata in figura
20
80
20
100
1. calcolarne le caratteristiche inerziali; 2. disegnare l’ellisse centrale d’inerzia; 3. disegnare il nocciolo centrale d’inerzia.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
2
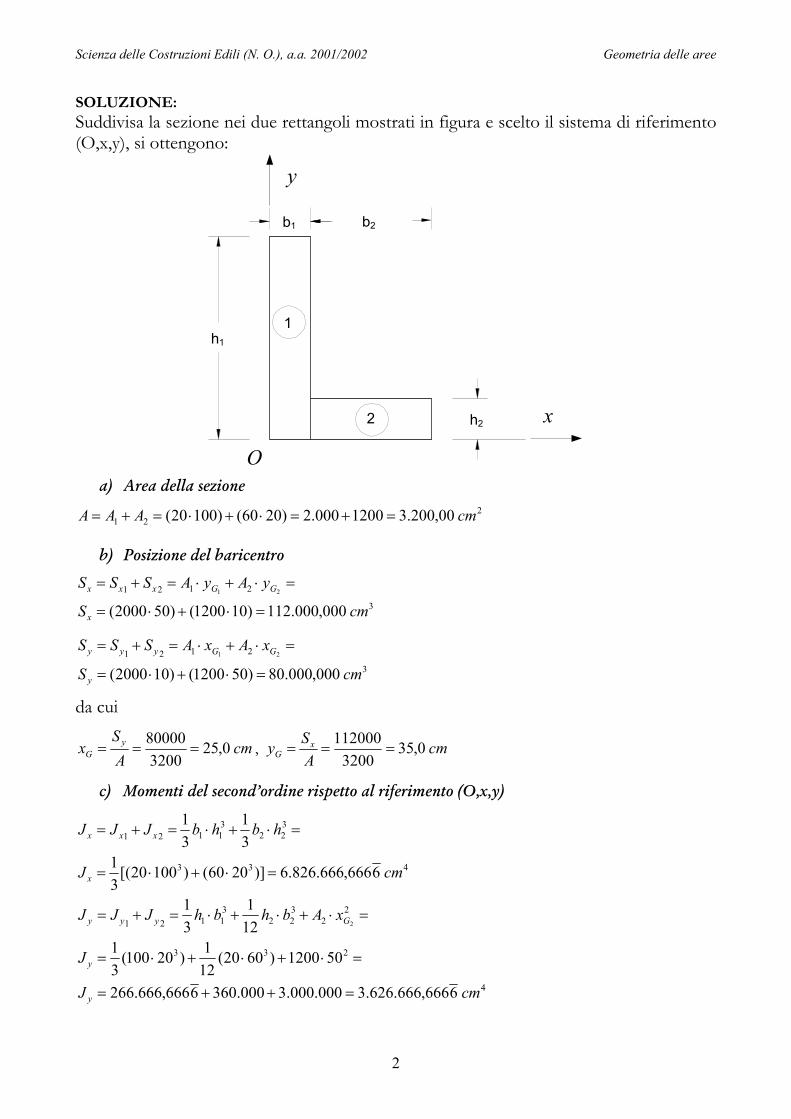
SOLUZIONE: Suddivisa la sezione nei due rettangoli mostrati in figura e scelto il sistema di riferimento (O,x,y), si ottengono:
b2 b1
h2
1
2
h1
y
x
O
a) Area della sezione 2
21 00,200.31200000.2)2060()10020( cmAAA =+=⋅+⋅=+=
b) Posizione del baricentro
3
2121
000,000.112)101200()502000(21
cmS
yAyASSS
x
GGxxx
=⋅+⋅=
=⋅+⋅=+=
3
2121
000,000.80)501200()102000(21
cmS
xAxASSS
y
GGyyy
=⋅+⋅=
=⋅+⋅=+=
da cui
cmAS
x yG 0,25
320080000
=== , cmASy x
G 0,353200
112000===
c) Momenti del second’ordine rispetto al riferimento (O,x,y)
433
322
31121
6666,666.826.6)]2060()10020[(31
31
31
cmJ
hbhbJJJ
x
xxx
=⋅+⋅=
=⋅+⋅=+=
4
233
22
322
31121
6666,666.626.3000.000.3000.3606666,666.266
501200)6020(121)20100(
31
121
31
2
cmJ
J
xAbhbhJJJ
y
y
Gyyy
=++=
=⋅+⋅+⋅=
=⋅+⋅+⋅=+=

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
3
4
2121
0000,000.600.110501200501020002211
cmJ
yxAyxAJJJ
xy
GGGGxyxyxy
=⋅⋅+⋅⋅=
=⋅⋅+⋅⋅=+=
d) Momenti rispetto agli assi paralleli baricentrici (centrali)
422' 6666,666.906.23532006666,666.826.6 cmyAJJ Gxx =⋅−=⋅−=
422' 6666,666.626.12532006666,666.626.3 cmxAJJ Gyy =⋅−=⋅−=
4'' 0000,000.200.135253200000.600.1 cmyxAJJ GGxyyx −=⋅⋅−=⋅⋅−=
e) Direzioni e momenti d’inerzia principali centrali
875.16666,666.626.16666,666.906.2
)000.200.1(22)2tan(
''
'' =−
−⋅−=
−−=α
yx
yx
JJJ
da cui 32,"49'57309637.30)875.1arctan(21
°=°==α
inoltre
42''
2''
'' 6666,666.626.34)(21
2cmJJJ
JJJ yxyx
yx =+−++
=ξ ,
42''
2''
'' 6666,666.9064)(21
2cmJJJ
JJJ yxyx
yx =+−−+
=η ,
40000,0 cmJ =ξη .
f) Raggi d’inerzia centrali
cmAJ
7,33==ρ ξξ , cm
AJ
8,16==ρ ηη
g) Ellisse centrale d’inerzia
L’ellisse cercata ha equazione:
12
2
2
2
=ρη
+ρξ
ξη
, ovvero 133,133.132,283
22
=η
+ξ ,
ed è rappresentata nella figura seguente

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
4
ξ
η
G
h) Nocciolo centrale d’inerzia
Le rette tangenti alla sezione ma che non la intersecano sono le cinque rette 1-1, 2-2, 3-3, 4-4 e 5-5 mostrate in figura. Poiché nessuna di esse è parallela ad alcuno degli assi centrali ξ ed η, le coordinate dei centri relativi alle rette passanti per i lati ( costruzione del nocciolo vertice per vertice) dovranno essere determinate utilizzando in modo inverso la relazione:
0120
20 =+
ρη⋅η
+ρ
ξ⋅ξ
ξη
,
che definisce la retta r0 avente per centro relativo il punto ),( 000 ηξ≡P . Iterando il procedimento per tutte le cinque rette, si ottiene il nocciolo centrale d’inerzia della sezione data, i cui vertici risultano:
)766.27,165.4(1 ≡ , )602.10,417.4(2 −≡ , )332.3,052.8(3 −−≡ e )951.14,243.2(4 −−≡ , )324.23,718.9(5 −≡ .
ξ
η
G
1
2
3 4
5
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 4
Data la sezione a Z mostrata in figura
50 10 50
14
72
14
1. calcolarne le caratteristiche inerziali; 2. disegnare l’ellisse centrale d’inerzia; 3. disegnare il nocciolo centrale d’inerzia.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
2
SOLUZIONE:
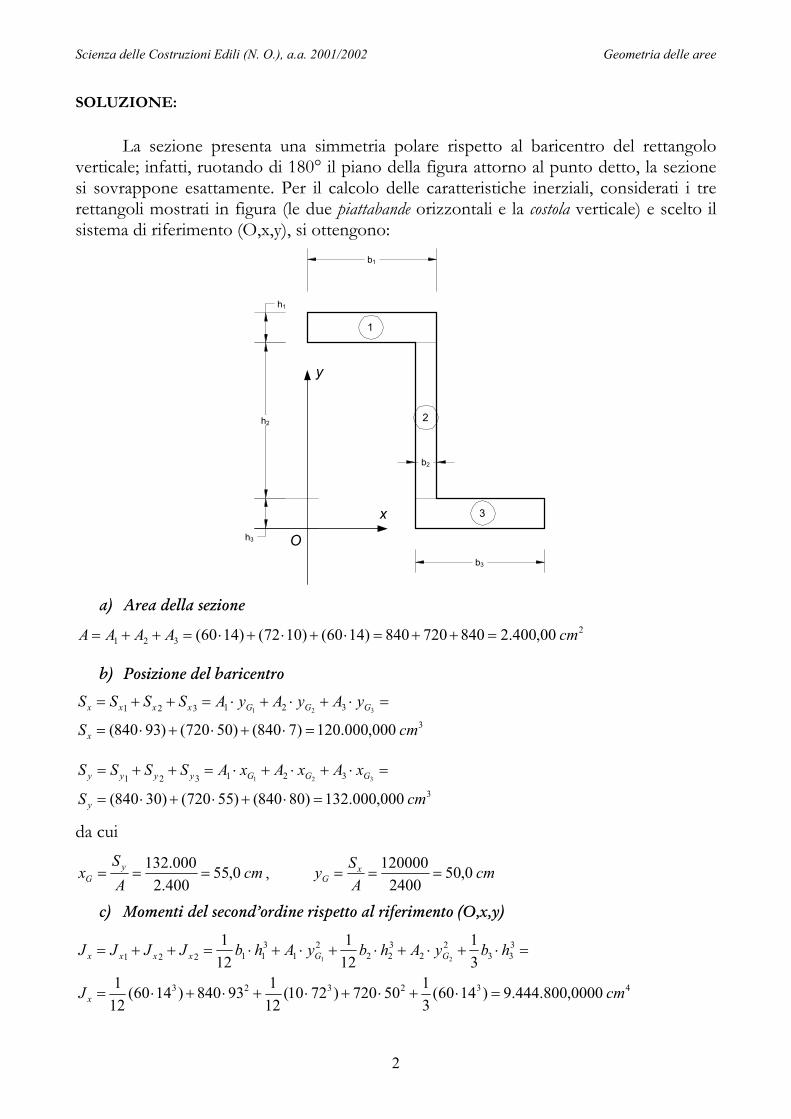
La sezione presenta una simmetria polare rispetto al baricentro del rettangolo verticale; infatti, ruotando di 180° il piano della figura attorno al punto detto, la sezione si sovrappone esattamente. Per il calcolo delle caratteristiche inerziali, considerati i tre rettangoli mostrati in figura (le due piattabande orizzontali e la costola verticale) e scelto il sistema di riferimento (O,x,y), si ottengono:
b1
h2
h3
h1
b3
b2
1
3
2
O
x
y
a) Area della sezione
2321 00,400.2840720840)1460()1072()1460( cmAAAA =++=⋅+⋅+⋅=++=
b) Posizione del baricentro
3
321321
000,000.120)7840()50720()93840(321
cmS
yAyAyASSSS
x
GGGxxxx
=⋅+⋅+⋅=
=⋅+⋅+⋅=++=
3
321321
000,000.132)80840()55720()30840(321
cmS
xAxAxASSSS
y
GGGyyyy
=⋅+⋅+⋅=
=⋅+⋅+⋅=++=
da cui
cmAS
x yG 0,55
400.2000.132
=== , cmASy x
G 0,502400
120000===
c) Momenti del second’ordine rispetto al riferimento (O,x,y)
432323
333
22
322
21
311221
0000,800.444.9)1460(3150720)7210(
12193840)1460(
121
31
121
121
21
cmJ
hbyAhbyAhbJJJJ
x
GGxxxx
=⋅+⋅+⋅+⋅+⋅=
=⋅+⋅+⋅+⋅+⋅=++=

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
3
423233
23
333
22
322
311321
0000,000.820.880840)6014(12155720)1072(
121)6014(
31
121
121
31
32
cmJ
xAbhxAbhbhJJJJ
y
GGyyyy
=⋅+⋅+⋅+⋅+⋅=
=⋅+⋅+⋅+⋅+⋅=++=
4
321321
0000,000.794.478084050557209330840332211
cmJ
yxAyxAyxAJJJJ
xy
GGGGGGxyxyxyxy
=⋅⋅+⋅⋅+⋅⋅=
=⋅⋅+⋅⋅+⋅⋅=++=
d) Momenti rispetto agli assi paralleli baricentrici (centrali) 422
' 0000,800.444.3502400800.444.9 cmyAJJ Gxx =⋅−=⋅−=
422' 0000,000.560.1552400000.820.8 cmxAJJ Gyy =⋅−=⋅−=
4'' 0000,000.806.150552400000.794.4 cmyxAJJ GGxyyx −=⋅⋅−=⋅⋅−=
e) Direzioni e momenti d’inerzia principali centrali
916383.1000.560.1800.444.3)000.806.1(22
)2tan(''
'' =−
−⋅−=
−−=α
yx
yx
JJJ
da cui 69,"18'1331221859.31)916383.1arctan(21
°=°==α
42''
2''
'' 4406,494.539.44)(21
2cmJJJ
JJJ yxyx
yx =+−++
=ξ,
42''
2''
'' 594,305.4654)(21
2cmJJJ
JJJ yxyx
yx =+−−+
=η,
40000,0 cmJ =ξη
f) Raggi d’inerzia centrali
cmAJ
5,43==ρ ξξ , cm
AJ
9,13==ρ ηη
g) Ellisse centrale d’inerzia
L’ellisse cercata ha equazione:
12
2
2
2
=ρη
+ρξ
ξη
, ovvero 124,193485,193
22
=η
+ξ ,
ed è rappresentata nella figura seguente

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
4
ξ
η
G
h) Nocciolo centrale d’inerzia
Le rette tangenti alla sezione ma che non la intersecano sono le sei rette 1-1, 2-2, 3-3, 4-4, 5-5 e 6-6 mostrate in figura nessuna delle quali è parallela ad alcuno degli assi centrali ξ ed η, per cui le coordinate dei loro centri relativi (vertici del nocciolo centrale d’inerzia) dovranno essere determinate utilizzando in modo inverso la relazione:
0120
20 =+
ρη⋅η
+ρ
ξ⋅ξ
ξη
,
che definisce la retta r0 avente per centro relativo il punto ),( 000 ηξ≡P . Iterando il procedimento per tutte le sei rette, si ottiene il nocciolo centrale d’inerzia della sezione data, i cui vertici risultano:
)350.32,010.2(1 ≡ , )826.17,015.3(2 −≡ , )175.1,581.6(3 −≡ e )350.32,010.2(4 −−≡ , )826.17,015.3(5 −≡ , )175.1,581.6(6 −≡ .
ξ
η
G
1
2
3
4
5
6
1 1 2
2
3
3 4 4
5 5
6
6
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 5
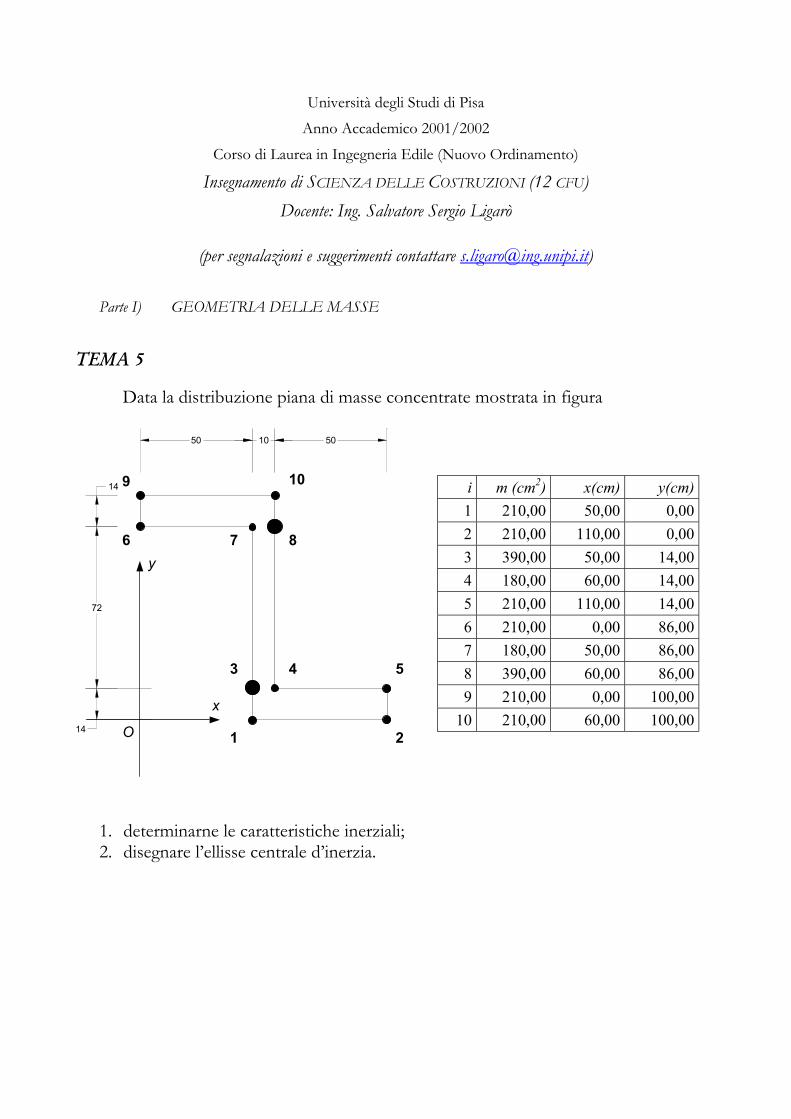
Data la distribuzione piana di masse concentrate mostrata in figura 50 10 50
14
72
14 O
x
y
1 2
3 4 5
6 7 8
9 10
i m (cm2) x(cm) y(cm) 1 210,00 50,00 0,00 2 210,00 110,00 0,00 3 390,00 50,00 14,00 4 180,00 60,00 14,00 5 210,00 110,00 14,00 6 210,00 0,00 86,00 7 180,00 50,00 86,00 8 390,00 60,00 86,00 9 210,00 0,00 100,00
10 210,00 60,00 100,00
1. determinarne le caratteristiche inerziali; 2. disegnare l’ellisse centrale d’inerzia.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
2
SOLUZIONE:
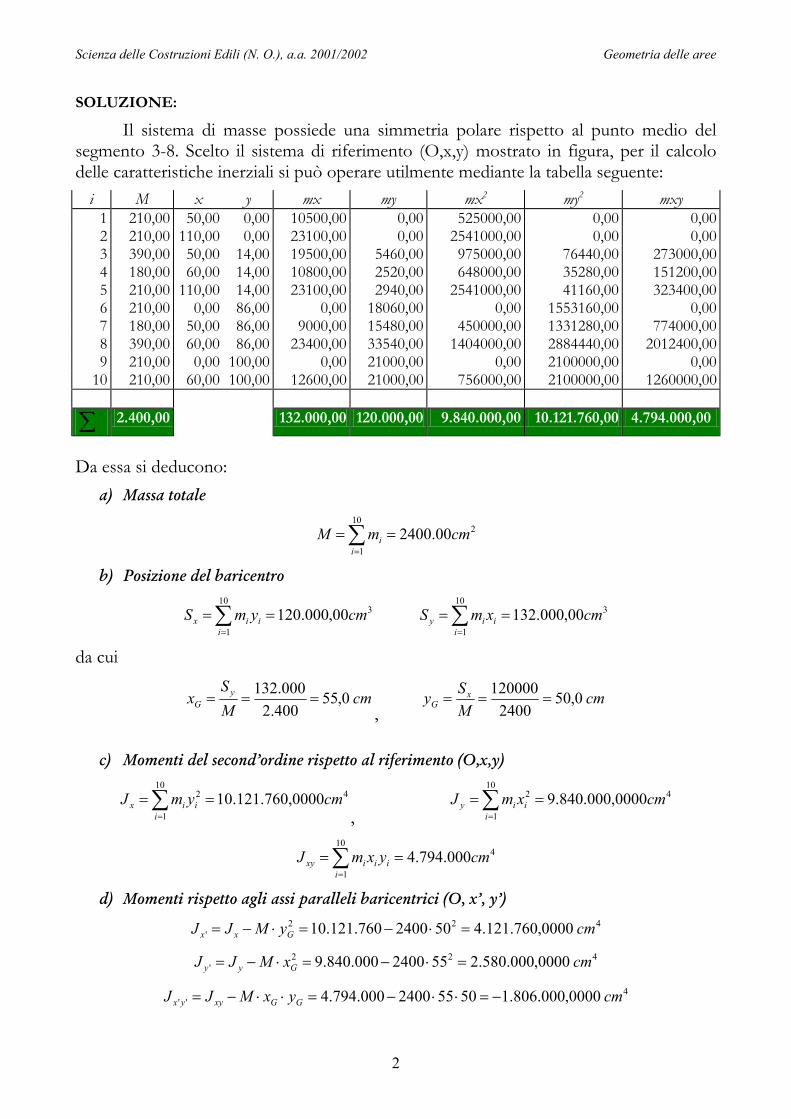
Il sistema di masse possiede una simmetria polare rispetto al punto medio del segmento 3-8. Scelto il sistema di riferimento (O,x,y) mostrato in figura, per il calcolo delle caratteristiche inerziali si può operare utilmente mediante la tabella seguente:
i M x y mx my mx2 my2 mxy 1 210,00 50,00 0,00 10500,00 0,00 525000,00 0,00 0,00 2 210,00 110,00 0,00 23100,00 0,00 2541000,00 0,00 0,00 3 390,00 50,00 14,00 19500,00 5460,00 975000,00 76440,00 273000,00 4 180,00 60,00 14,00 10800,00 2520,00 648000,00 35280,00 151200,00 5 210,00 110,00 14,00 23100,00 2940,00 2541000,00 41160,00 323400,00 6 210,00 0,00 86,00 0,00 18060,00 0,00 1553160,00 0,00 7 180,00 50,00 86,00 9000,00 15480,00 450000,00 1331280,00 774000,00 8 390,00 60,00 86,00 23400,00 33540,00 1404000,00 2884440,00 2012400,00 9 210,00 0,00 100,00 0,00 21000,00 0,00 2100000,00 0,00
10 210,00 60,00 100,00 12600,00 21000,00 756000,00 2100000,00 1260000,00
∑ 2.400,00 132.000,00 120.000,00 9.840.000,00 10.121.760,00 4.794.000,00
Da essa si deducono: a) Massa totale
210
100.2400 cmmM
ii == ∑
=
b) Posizione del baricentro
310
100,000.120 cmymS
iiix == ∑
= 3
10
100,000.132 cmxmS
iiiy == ∑
= da cui
cmMS
x yG 0,55
400.2000.132
===,
cmMSy x
G 0,502400
120000===
c) Momenti del second’ordine rispetto al riferimento (O,x,y)
4210
1000.121.760,001 cmymJ i
iix == ∑
= , 42
10
100009.840.000, cmxmJ i
iiy == ∑
=
410
14.794.000cmyxmJ ii
iixy == ∑
=
d) Momenti rispetto agli assi paralleli baricentrici (O, x’, y’) 422
' 0000,760.121.4502400760.121.10 cmyMJJ Gxx =⋅−=⋅−=
422' 0000,000.580.2552400000.840.9 cmxMJJ Gyy =⋅−=⋅−=
4'' 0000,000.806.150552400000.794.4 cmyxMJJ GGxyyx −=⋅⋅−=⋅⋅−=

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
3
e) Direzioni e momenti d’inerzia principali centrali
342777.2000.580.2760.121.4)000.806.1(22
)2tan(''
'' =−
−⋅−=
−−=α
yx
yx
JJJ
da cui 15,"33'2633442542.33)342777.2arctan(21
°=°==α
42''
2''
'' 52715.314.522,4)(21
2cmJJJ
JJJ yxyx
yx =+−++
=ξ ,
42''
2''
'' 47291.387.237,4)(21
2cmJJJ
JJJ yxyx
yx =+−−+
=η ,
40000,0 cmJ =ξη
f) Raggi d’inerzia centrali
cmAJ
47,1==ρ ξξ , cm
AJ
24,0==ρ ηη
g) Ellisse centrale d’inerzia
L’ellisse cercata ha equazione:
12
2
2
2
=ρη
+ρξ
ξη
, ovvero 136,214.201,578
22
=η
+ξ ,
ed è rappresentata nella figura seguente
ξ
η
G
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 6
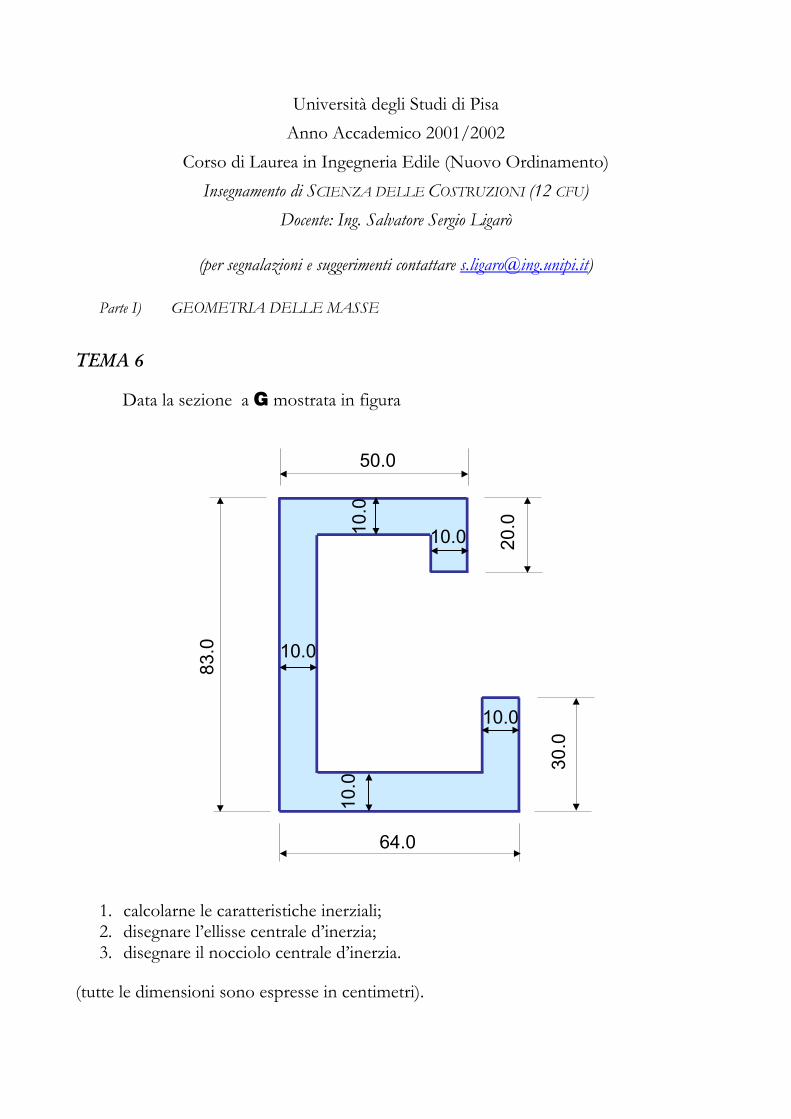
Data la sezione a G mostrata in figura
64.0
83.0
50.0
20.0
30.0
10.0
10.0
10
.0
10.0
10.0
1. calcolarne le caratteristiche inerziali; 2. disegnare l’ellisse centrale d’inerzia; 3. disegnare il nocciolo centrale d’inerzia.
(tutte le dimensioni sono espresse in centimetri).
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
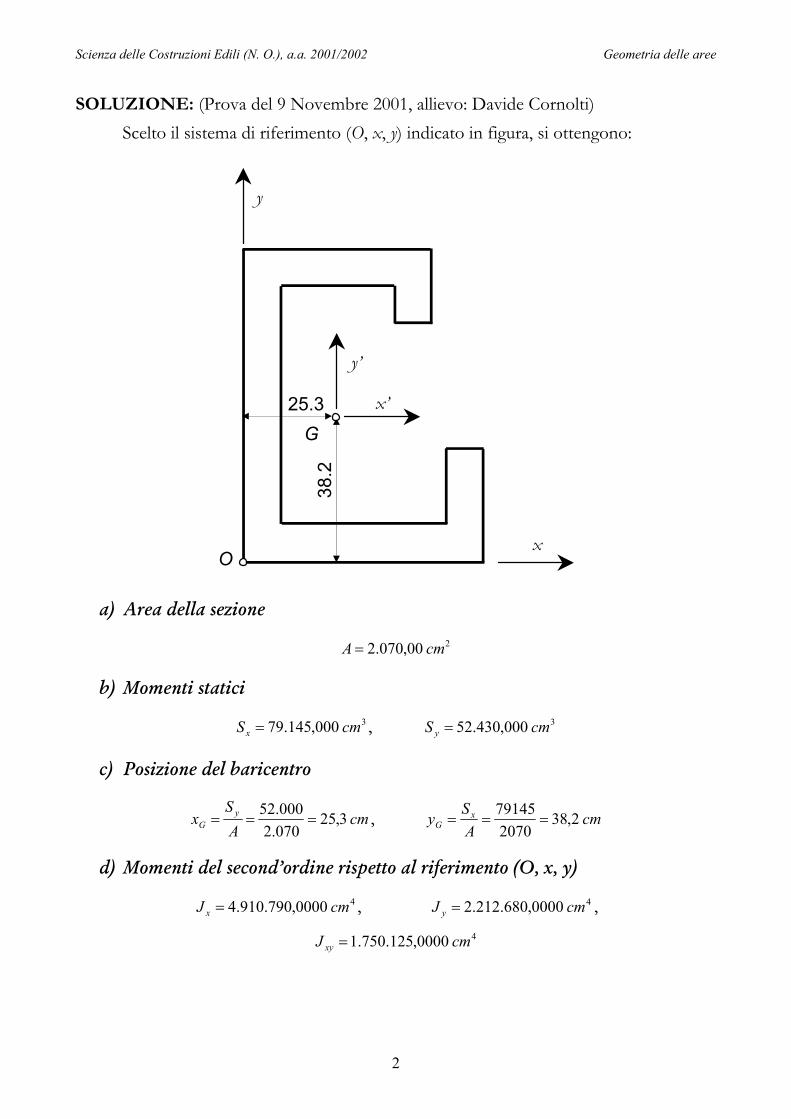
SOLUZIONE: (Prova del 9 Novembre 2001, allievo: Davide Cornolti) Scelto il sistema di riferimento (O, x, y) indicato in figura, si ottengono:
25.3
38.2
O
G
x
x’
y
y’
a) Area della sezione
200,070.2 cmA =
b) Momenti statici
3000,145.79 cmSx = , 3000,430.52 cmS y =
c) Posizione del baricentro
cmAS
x yG 3,25
070.2000.52
=== , cmASy x
G 2,38207079145
===
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
40000,790.910.4 cmJ x = , , 40000,680.212.2 cmJ y =
40000,125.750.1 cmJ xy =
2
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
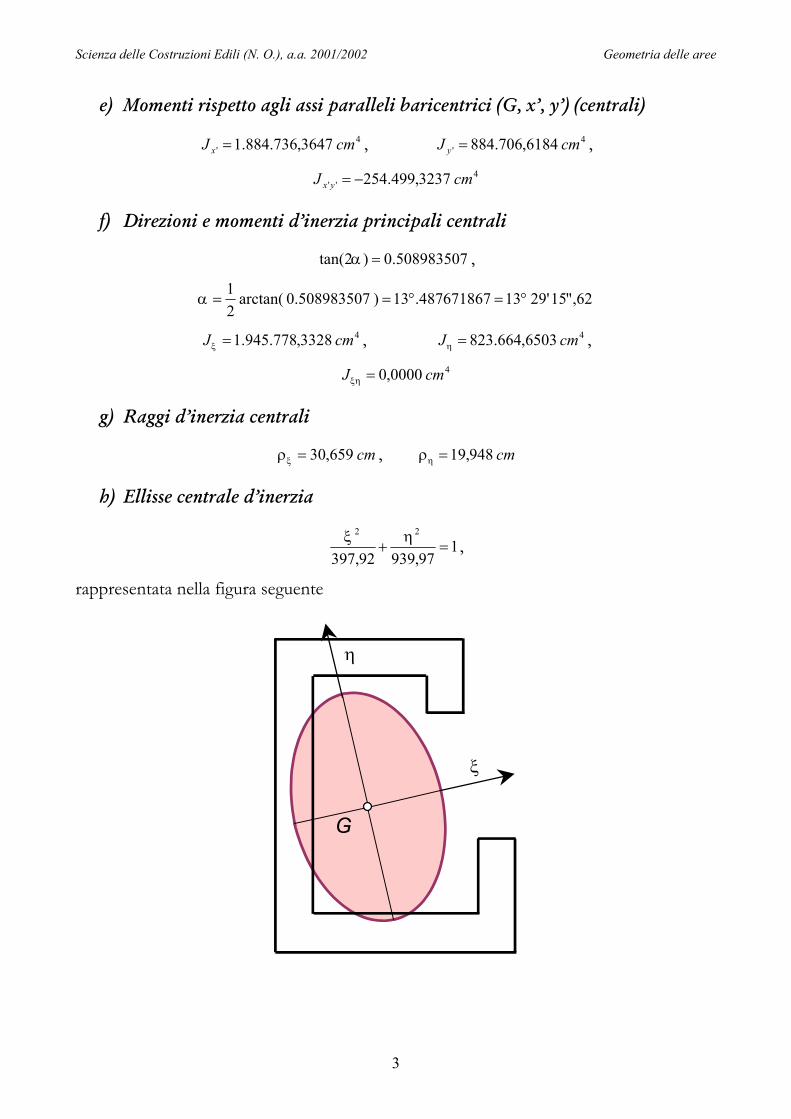
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’) (centrali)
4' 3647,736.884.1 cmJ x = , , 4
' 6184,706.884 cmJ y =
4'' 3237,499.254 cmJ yx −=
f) Direzioni e momenti d’inerzia principali centrali
508983507.0)2tan( =α ,
62,"15'2913487671867.13)508983507.0arctan(21
°=°==α
43328,778.945.1 cmJ =ξ , , 46503,664.823 cmJ =η
40000,0 cmJ =ξη
g) Raggi d’inerzia centrali
cm659,30=ξρ , cm948,19=ηρ
h) Ellisse centrale d’inerzia
197,93992,397
22
=+ηξ ,
rappresentata nella figura seguente
G
ξ
η
3
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree
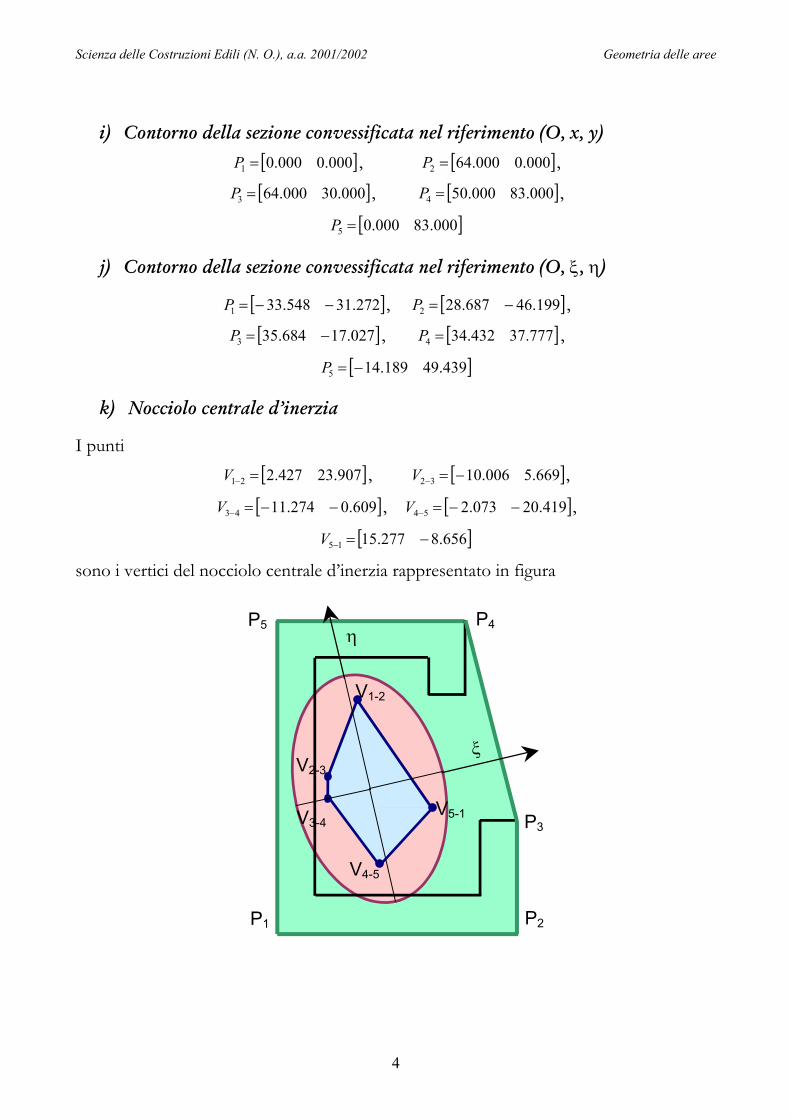
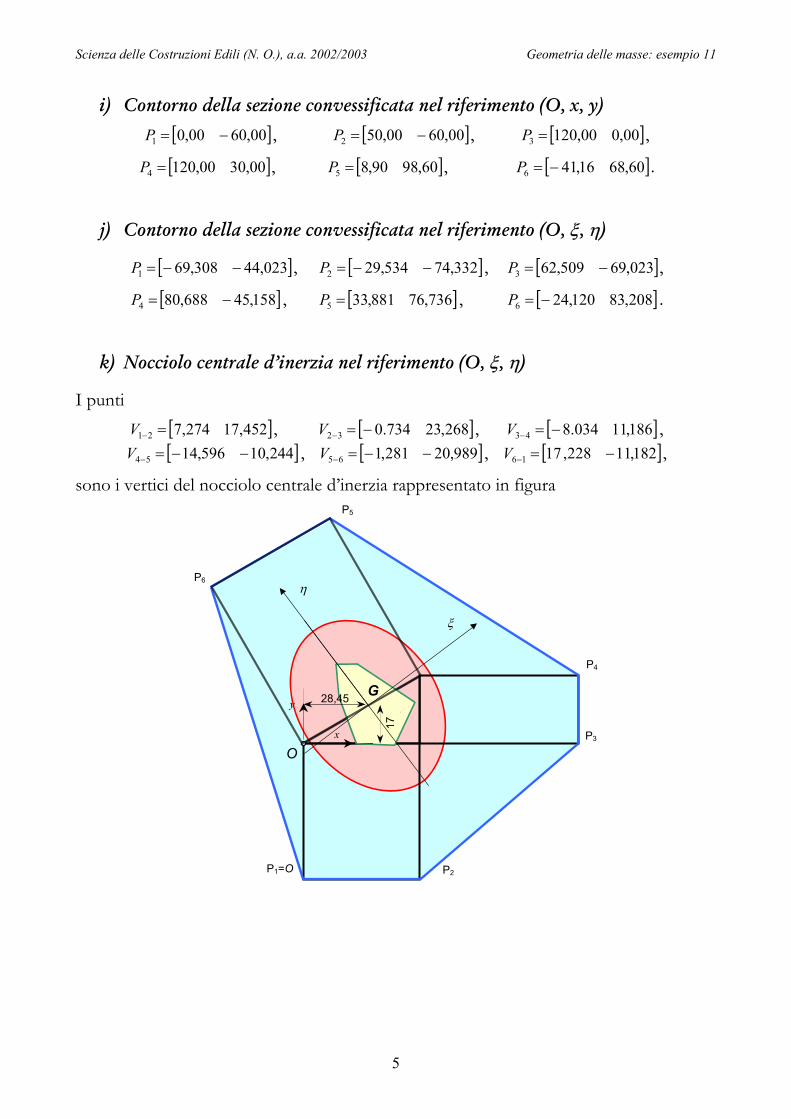
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]000.0000.01 =P , , [ ]000.0000.642 =P
[ ]000.30000.643 =P , , [ ]000.83000.504 =P
[ ]000.83000.05 =P
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]272.31548.331 −−=P , , [ ]199.46687.282 −=P
[ ]027.17684.353 −=P , , [ ]777.37432.344 =P
[ ]439.49189.145 −=P
k) Nocciolo centrale d’inerzia
I punti [ ]907.23427.221 =−V , , [ ]669.5006.1032 −=−V
[ ]609.0274.1143 −−=−V , , [ ]419.20073.254 −−=−V
[ ]656.8277.1515 −=−V sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
G
ξ
η
P1 P2
P3
P4 P5
V1-2
V2-3
V3-4
V4-5
V5-1
4
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
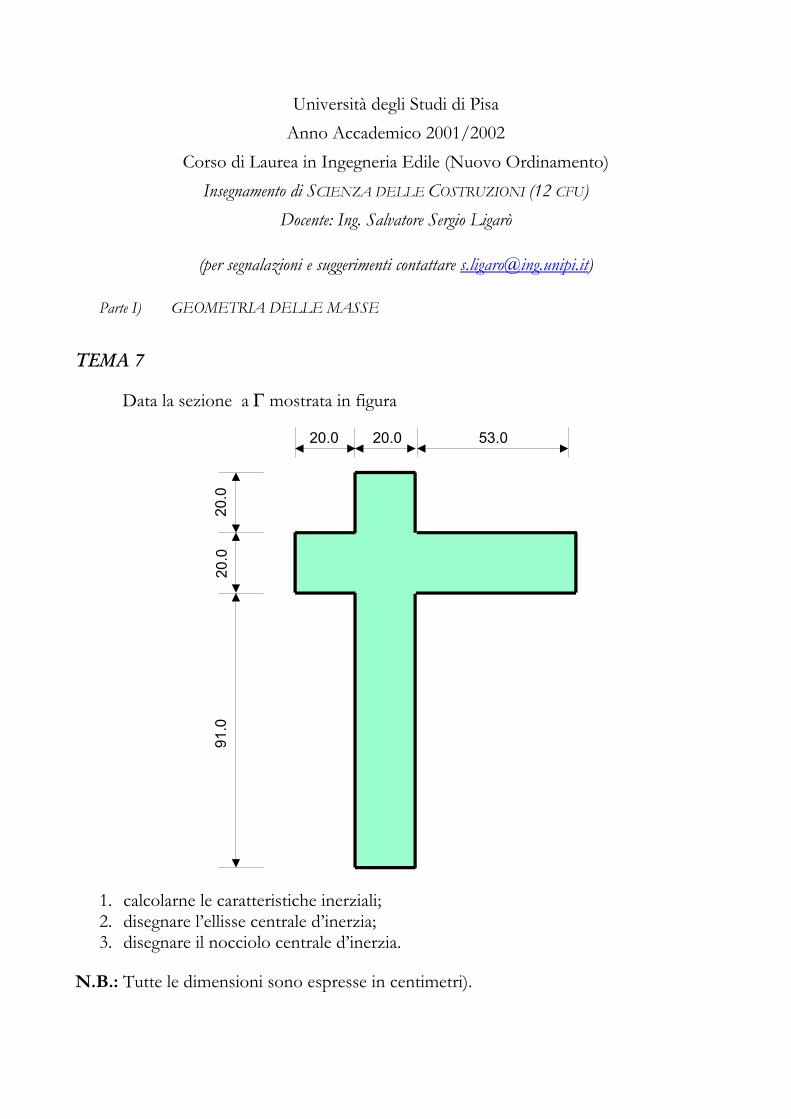
TEMA 7
Data la sezione a Γ mostrata in figura
91.0
53.0 20.0 20.0
20.0
20
.0
1. calcolarne le caratteristiche inerziali; 2. disegnare l’ellisse centrale d’inerzia; 3. disegnare il nocciolo centrale d’inerzia.
N.B.: Tutte le dimensioni sono espresse in centimetri).
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree: esempio 6
2
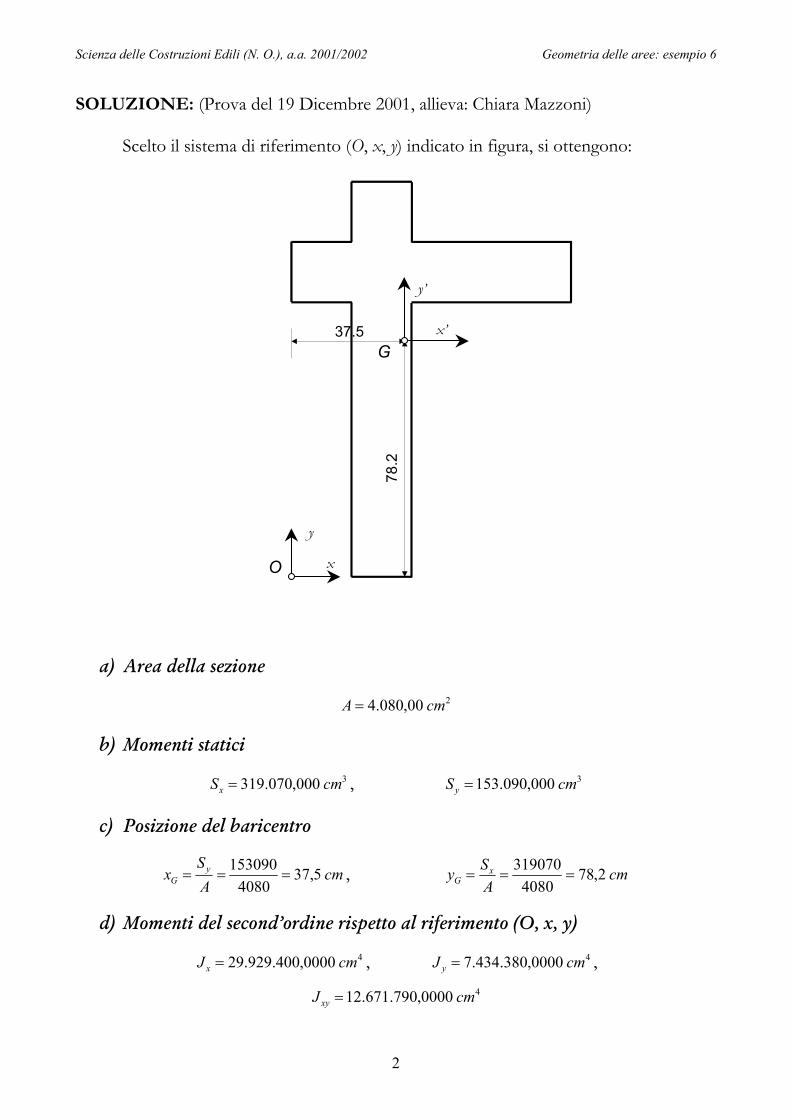
SOLUZIONE: (Prova del 19 Dicembre 2001, allieva: Chiara Mazzoni)
Scelto il sistema di riferimento (O, x, y) indicato in figura, si ottengono:
37.5
78.2
O x
y
G x’
y’
a) Area della sezione
200,080.4 cmA =
b) Momenti statici
3000,070.319 cmSx = , 3000,090.153 cmSy =
c) Posizione del baricentro
cmAS
x yG 5,37
4080153090
=== , cmASy x
G 2,784080
319070===
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
40000,400.929.29 cmJx = , 40000,380.434.7 cmJ y = , 40000,790.671.12 cmJxy =
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree: esempio 6
3
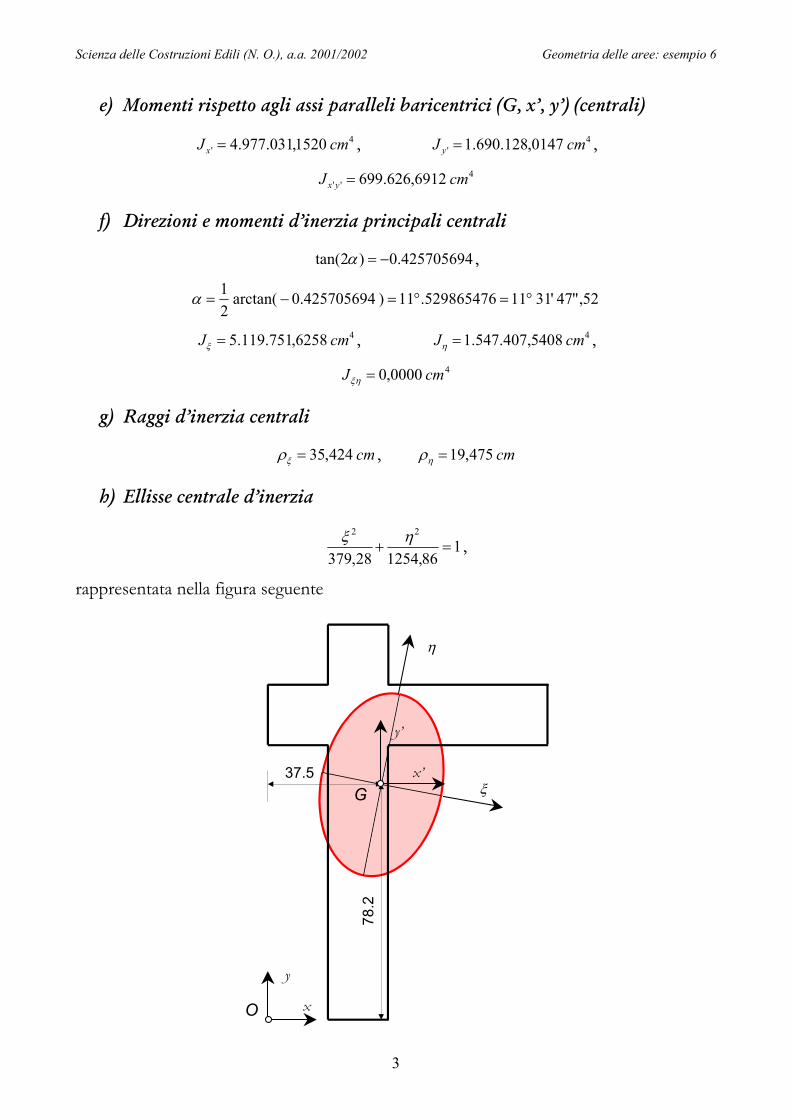
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’) (centrali)
4' 1520,031.977.4 cmJx = , 4
' 0147,128.690.1 cmJ y = , 4
'' 6912,626.699 cmJ yx =
f) Direzioni e momenti d’inerzia principali centrali
425705694.0)2tan( −=α ,
52,"47'3111529865476.11)425705694.0arctan(21
°=°=−=α
46258,751.119.5 cmJ =ξ , 45408,407.547.1 cmJ =η , 40000,0 cmJ =ξη
g) Raggi d’inerzia centrali
cm424,35=ξρ , cm475,19=ηρ
h) Ellisse centrale d’inerzia
186,125428,379
22
=+ηξ ,
rappresentata nella figura seguente
37.5
78.2
O x
y
G x’
y’
ξ
η
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Geometria delle aree: esempio 6
4
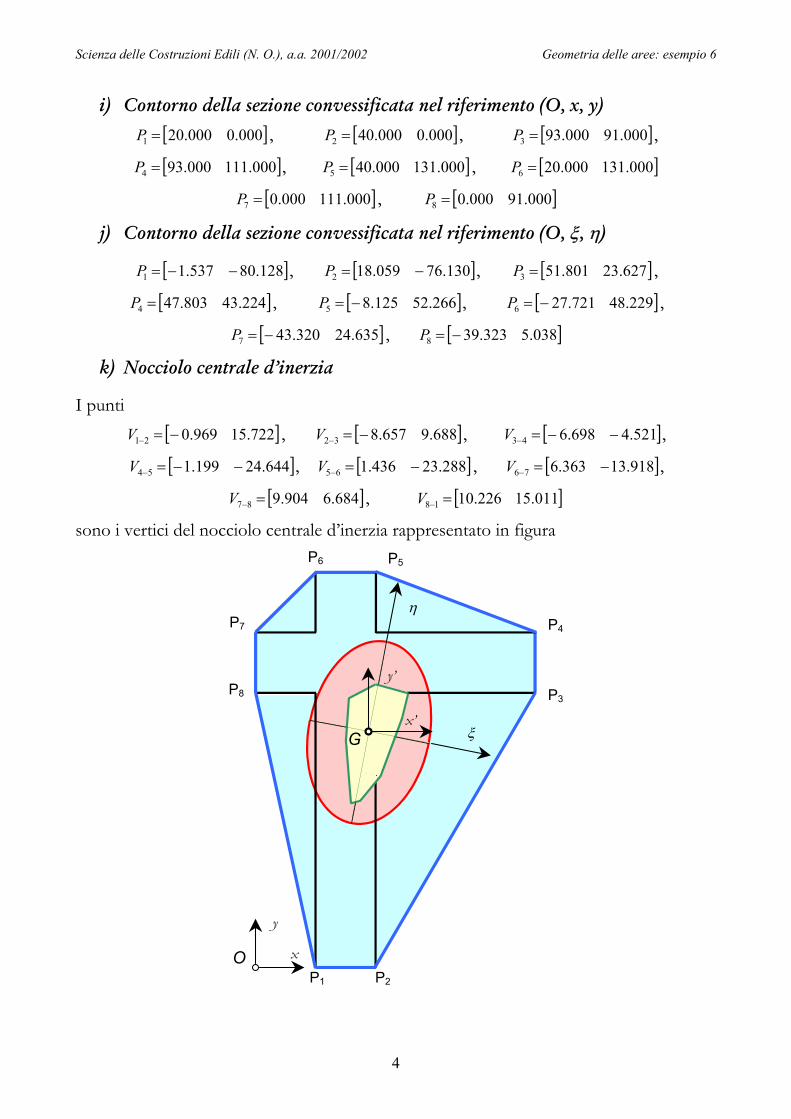
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]000.0000.201 =P , [ ]000.0000.402 =P , [ ]000.91000.933 =P ,
[ ]000.111000.934 =P , [ ]000.131000.405 =P , [ ]000.131000.206 =P
[ ]000.111000.07 =P , [ ]000.91000.08 =P
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]128.80537.11 −−=P , [ ]130.76059.182 −=P , [ ]627.23801.513 =P ,
[ ]224.43803.474 =P , [ ]266.52125.85 −=P , [ ]229.48721.276 −=P ,
[ ]635.24320.437 −=P , [ ]038.5323.398 −=P
k) Nocciolo centrale d’inerzia
I punti [ ]722.15969.021 −=−V , [ ]688.9657.832 −=−V , [ ]521.4698.643 −−=−V ,
[ ]644.24199.154 −−=−V , [ ]288.23436.165 −=−V , [ ]918.13363.676 −=−V ,
[ ]684.6904.987 =−V , [ ]011.15226.1018 =−V
sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
O x
y
x’
y’
ξ
η
P8
P7
P6 P5
P4
P3
P2 P1
G

Università degli Studi di Pisa Anno Accademico 2002/2003
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 8
La figura riporta la sezione di una trave metallica composta in parete sottile aperta, ottenuta saldando l’anima di un profilo semplice a C alla costola di un profilo a T rovescio.
85
x
y
O
30
45
102
112
Supponendo che lo spessore di entrambi i profili sia costante e pari a 10 mm, 1. calcolare le caratteristiche inerziali della sezione usando come unità di misura il cm; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia.
NOTA: Le lunghezze riportate in figura sono espresse in millimetri.

Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 8
SOLUZIONE: (Prova dell’11 Novembre 2002, allieva: Elisa Benvenuti) Rispetto al riferimento (O, x, y) indicato in figura, si ottengono:
x
y
O
53
71
G
a) Area della sezione
290,36 cmA = .
b) Momenti statici
3660,236 cmSx = , . 3045,195 cmSy =
c) Posizione del baricentro
cmAS
x yG 3,5
90,36045,195
=== , cmASy x
G 1,790,36660,263
=== .
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
41740,637.2 cmJx = , , . 43960,423.1 cmJ y =46540,534.1 cmJxy =
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’)
4' 2554,753 cmJx = , , . 4
' 4325,392 cmJ y =4
'' 0073,141 cmJ yx =
2
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 8
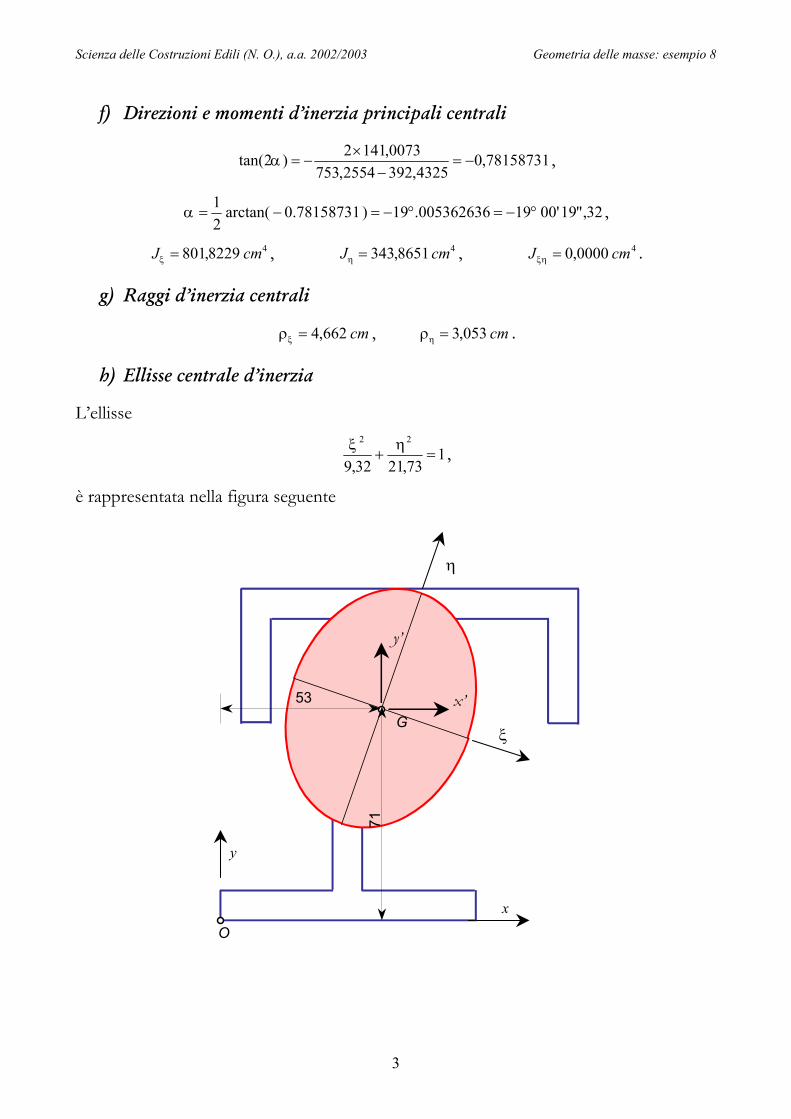
f) Direzioni e momenti d’inerzia principali centrali
78158731,04325,3922554,753
0073,1412)2tan( −=−
×−=α ,
32,"19'0019005362636.19)78158731.0arctan(21
°−=°−=−=α ,
48229,801 cmJ =ξ , , . 48651,343 cmJ =η40000,0 cmJ =ξη
g) Raggi d’inerzia centrali
cm662,4=ξρ , . cm053,3=ηρ
h) Ellisse centrale d’inerzia
L’ellisse
173,2132,9
22
=+ηξ ,
è rappresentata nella figura seguente
x
y
O
ξ
η
G x’
y’
71
53
3
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 8
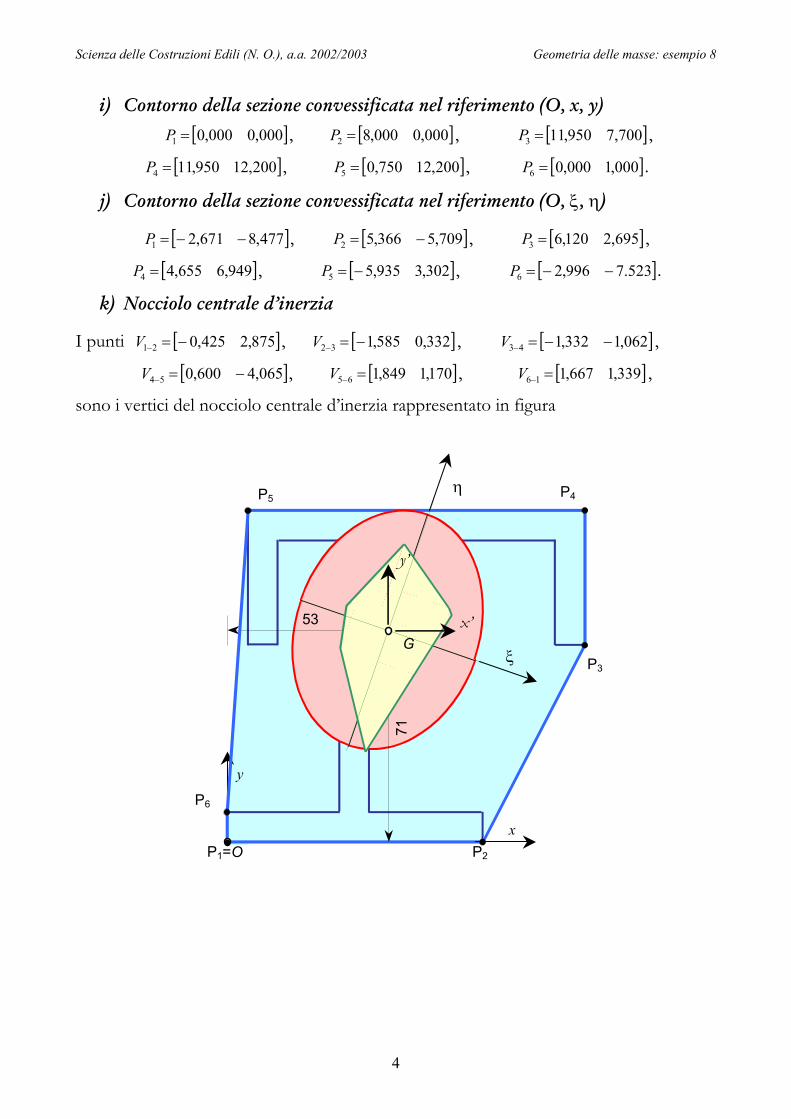
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]000,0000,01 =P , , , [ ]000,0000,82 =P [ ]700,7950,113 =P
[ ]200,12950,114 =P , , . [ ]200,12750,05 =P [ ]000,1000,06 =P
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]477,8671,21 −−=P , , , [ ]709,5366,52 −=P [ ]695,2120,63 =P
[ ]949,6655,44 =P , , . [ ]302,3935,55 −=P [ ]523.7996,26 −−=P
k) Nocciolo centrale d’inerzia
I punti V , , , [ ]875,2425,021 −=− [ ]332,0585,132 −=−V [ ]062,1332,143 −−=−V
[ ]065,4600,054 −=−V , , , [ ]170,1849,165 =−V [ ]339,1667,116 =−V
sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
x
y
ξ
η
71
53
P6
P5 P4
P3
P2 P1=O
G x’
y’
4

Università degli Studi di Pisa Anno Accademico 2002/2003
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
TEMA 9 La figura riporta la sezione di una trave metallica composta in parete sottile aperta, ottenuta saldando ortogonalmente la costola di un profilo semplice a T all’anima di un profilo ad H.
97
x
y
O
20
110
73
126
Supponendo che lo spessore di entrambi i profili sia costante e pari a 10 mm,
1. calcolare le caratteristiche inerziali della sezione usando come unità di misura il cm; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia.
NOTA: Le lunghezze riportate in figura sono espresse in millimetri.
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 9
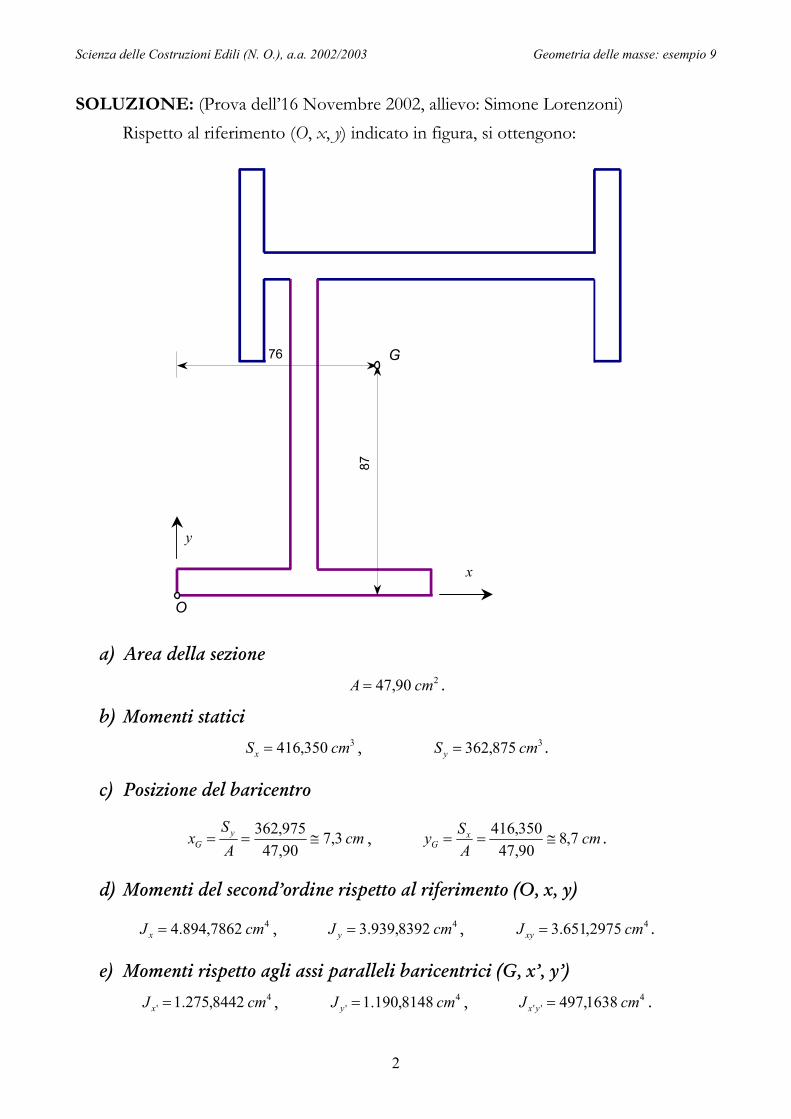
SOLUZIONE: (Prova dell’16 Novembre 2002, allievo: Simone Lorenzoni) Rispetto al riferimento (O, x, y) indicato in figura, si ottengono:
x
y
O
76 87
G
a) Area della sezione 290,47 cmA = .
b) Momenti statici 3350,416 cmSx = , . 3875,362 cmSy =
c) Posizione del baricentro
cmAS
x yG 3,7
90,47975,362
≅== , cmASy x
G 7,890,47350,416
≅== .
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
47862,894.4 cmJx = , , . 48392,939.3 cmJ y =42975,651.3 cmJxy =
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’) 4
' 8442,275.1 cmJx = , , . 4' 8148,190.1 cmJ y =
4'' 1638,497 cmJ yx =
2
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 9
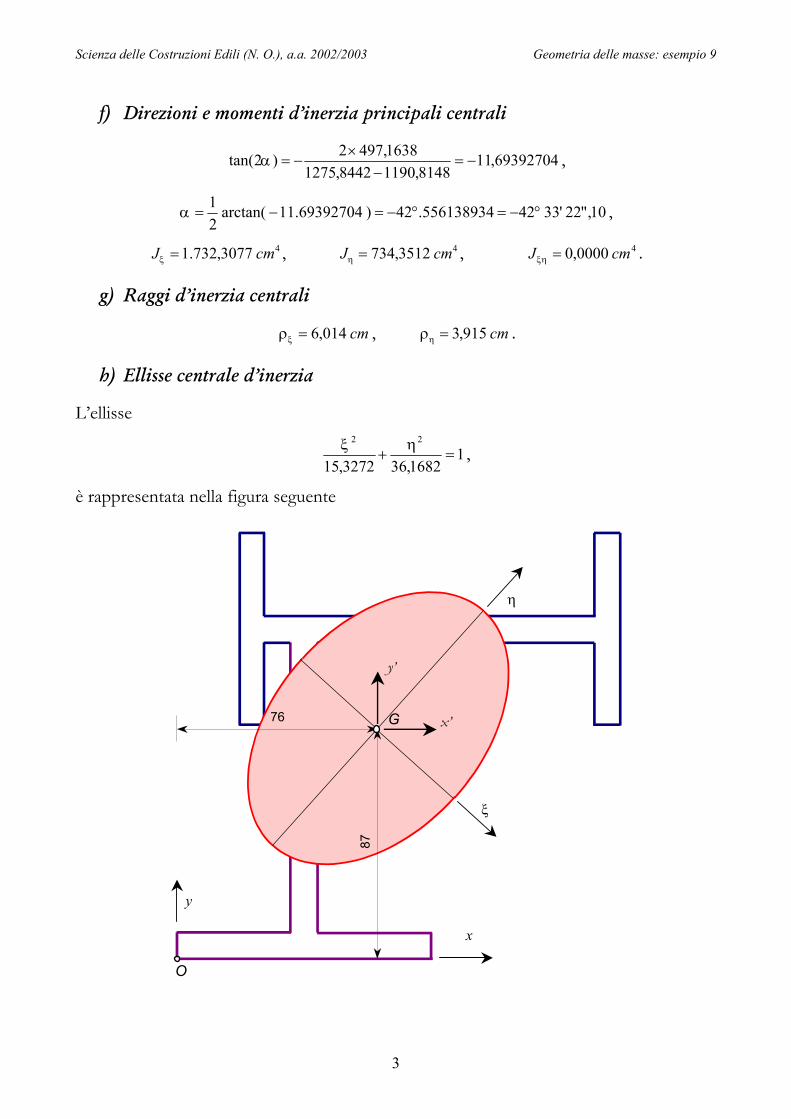
f) Direzioni e momenti d’inerzia principali centrali
69392704,118148,11908442,1275
1638,4972)2tan( −=−
×−=α ,
10,"22'3342556138934.42)69392704.11arctan(21
°−=°−=−=α ,
43077,732.1 cmJ =ξ , , . 43512,734 cmJ =η40000,0 cmJ =ξη
g) Raggi d’inerzia centrali
cm014,6=ξρ , . cm915,3=ηρ
h) Ellisse centrale d’inerzia
L’ellisse
11682,363272,15
22
=+ηξ ,
è rappresentata nella figura seguente
x
y
O
ξ
η
87
76 G x’
y’
3
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 9
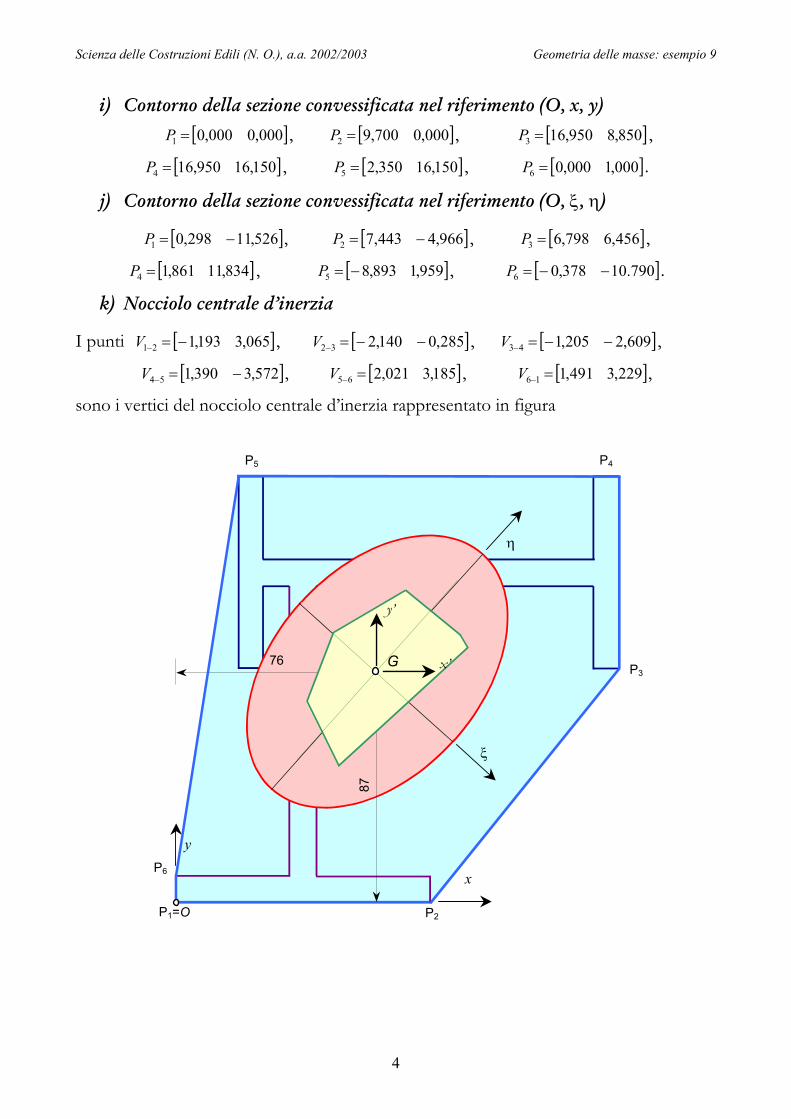
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]000,0000,01 =P , , , [ ]000,0700,92 =P [ ]850,8950,163 =P
[ ]150,16950,164 =P , , . [ ]150,16350,25 =P [ ]000,1000,06 =P
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]526,11298,01 −=P , , , [ ]966,4443,72 −=P [ ]456,6798,63 =P
[ ]834,11861,14 =P , , . [ ]959,1893,85 −=P [ ]790.10378,06 −−=P
k) Nocciolo centrale d’inerzia
I punti V , , , [ ]065,3193,121 −=− [ ]285,0140,232 −−=−V [ ]609,2205,143 −−=−V
[ ]572,3390,154 −=−V , , , [ ]185,3021,265 =−V [ ]229,3491,116 =−V
sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
x
y
ξ
η
87
76
P6
P5 P4
P3
P2 P1=O
G x’
y’
4
Università degli Studi di Pisa Anno Accademico 2002/2003
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
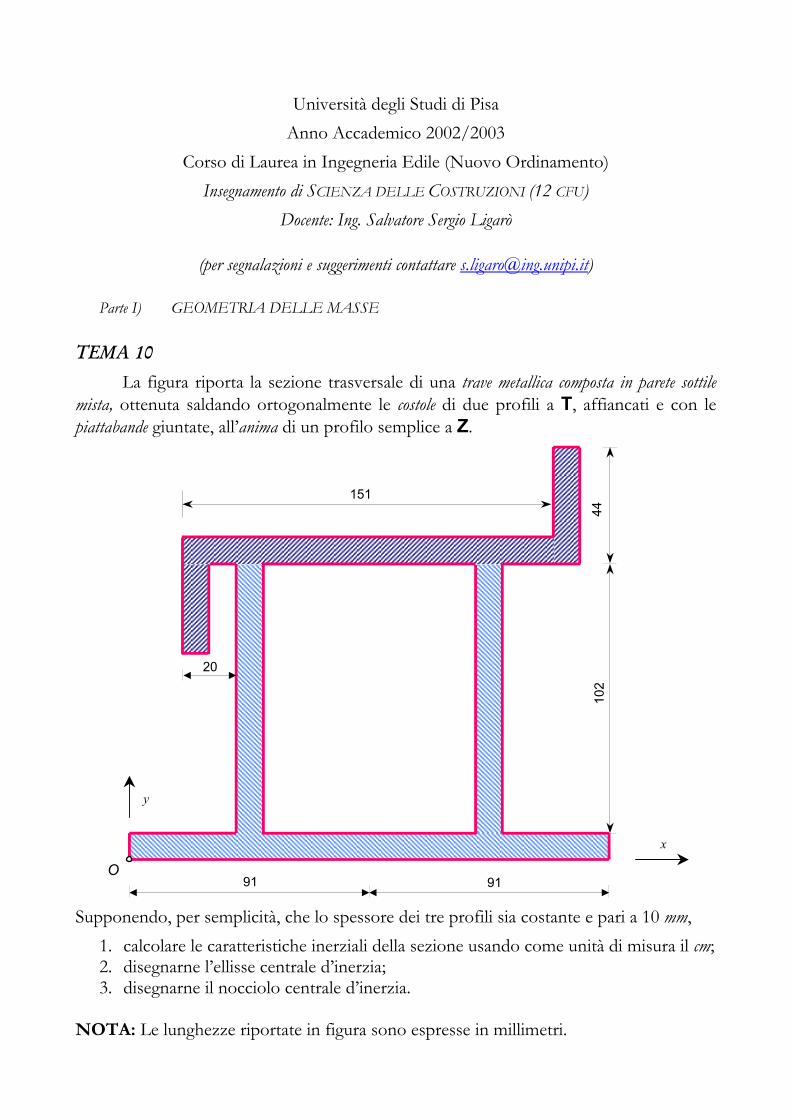
TEMA 10 La figura riporta la sezione trasversale di una trave metallica composta in parete sottile mista, ottenuta saldando ortogonalmente le costole di due profili a T, affiancati e con le piattabande giuntate, all’anima di un profilo semplice a Z.
x
y
O
102
44 151
91 91
20
Supponendo, per semplicità, che lo spessore dei tre profili sia costante e pari a 10 mm,
1. calcolare le caratteristiche inerziali della sezione usando come unità di misura il cm; 2. disegnarne l’ellisse centrale d’inerzia; 3. disegnarne il nocciolo centrale d’inerzia.
NOTA: Le lunghezze riportate in figura sono espresse in millimetri.
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 10
2
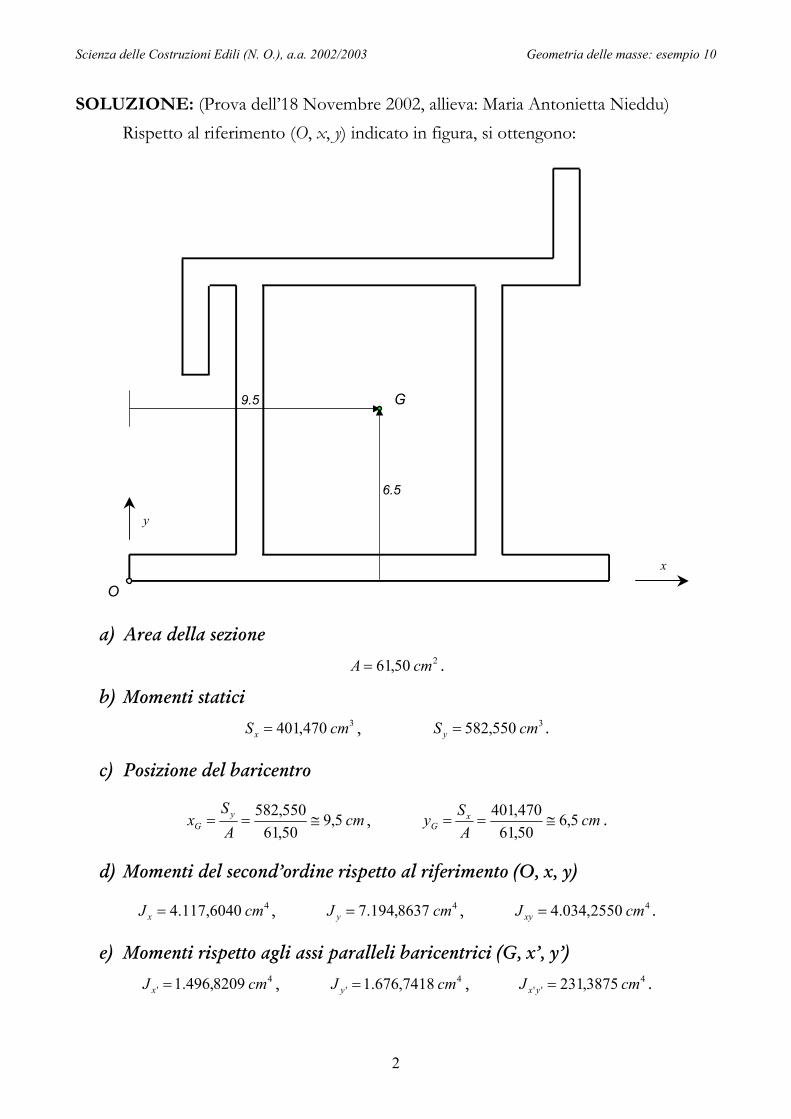
SOLUZIONE: (Prova dell’18 Novembre 2002, allieva: Maria Antonietta Nieddu) Rispetto al riferimento (O, x, y) indicato in figura, si ottengono:
x
y
O
G
6.5
9.5
a) Area della sezione 250,61 cmA = .
b) Momenti statici 3470,401 cmSx = , 3550,582 cmS y = .
c) Posizione del baricentro
cmAS
x yG 5,9
50,61550,582
≅== , cmASy x
G 5,650,61470,401
≅== .
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
46040,117.4 cmJ x = , 48637,194.7 cmJ y = , 42550,034.4 cmJ xy = .
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’) 4
' 8209,496.1 cmJ x = , 4' 7418,676.1 cmJ y = , 4
'' 3875,231 cmJ yx = .
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 10
3
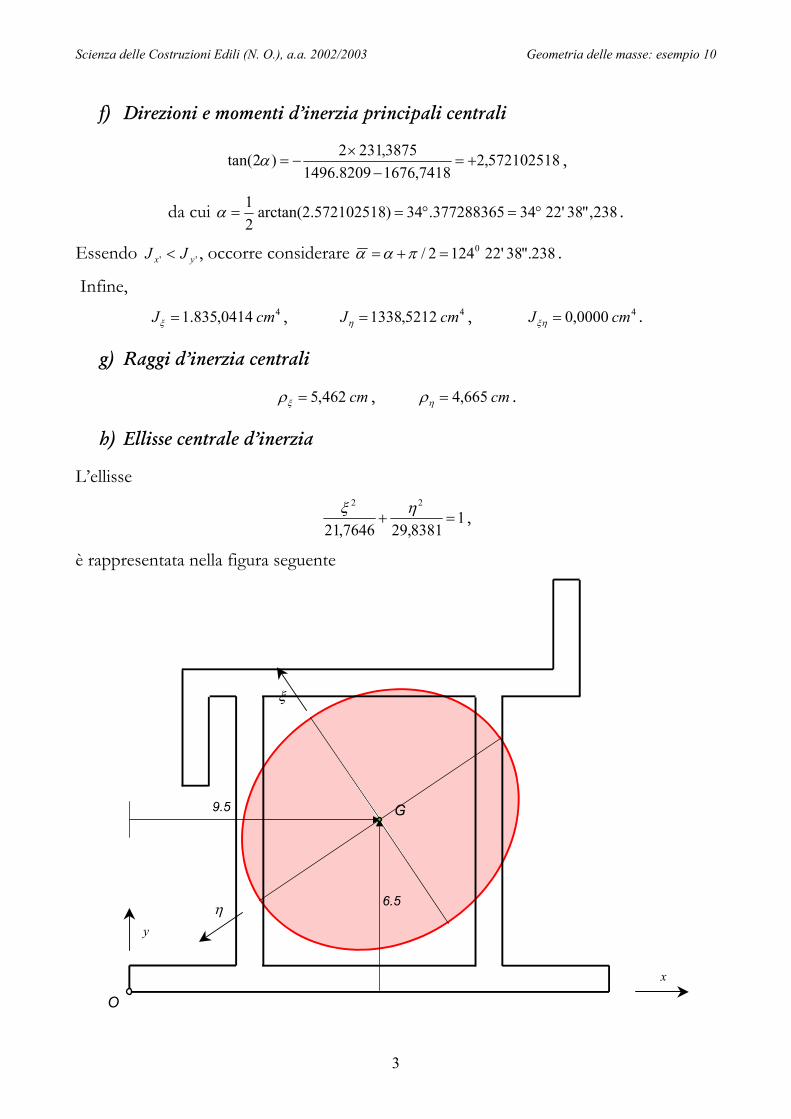
f) Direzioni e momenti d’inerzia principali centrali
572102518,27418,16768209.1496
3875,2312)2tan( +=−
×−=α ,
da cui 238,"38'2234377288365.34)572102518.2arctan(21
°=°==α .
Essendo '' yx JJ < , occorre considerare 238".38'221242/ 0=+= παα .
Infine, 40414,835.1 cmJ =ξ , 45212,1338 cmJ =η , 40000,0 cmJ =ξη .
g) Raggi d’inerzia centrali
cm462,5=ξρ , cm665,4=ηρ .
h) Ellisse centrale d’inerzia
L’ellisse
18381,297646,21
22
=+ηξ ,
è rappresentata nella figura seguente
ξ
η
x
y
O
9.5 G
6.5
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 10
4
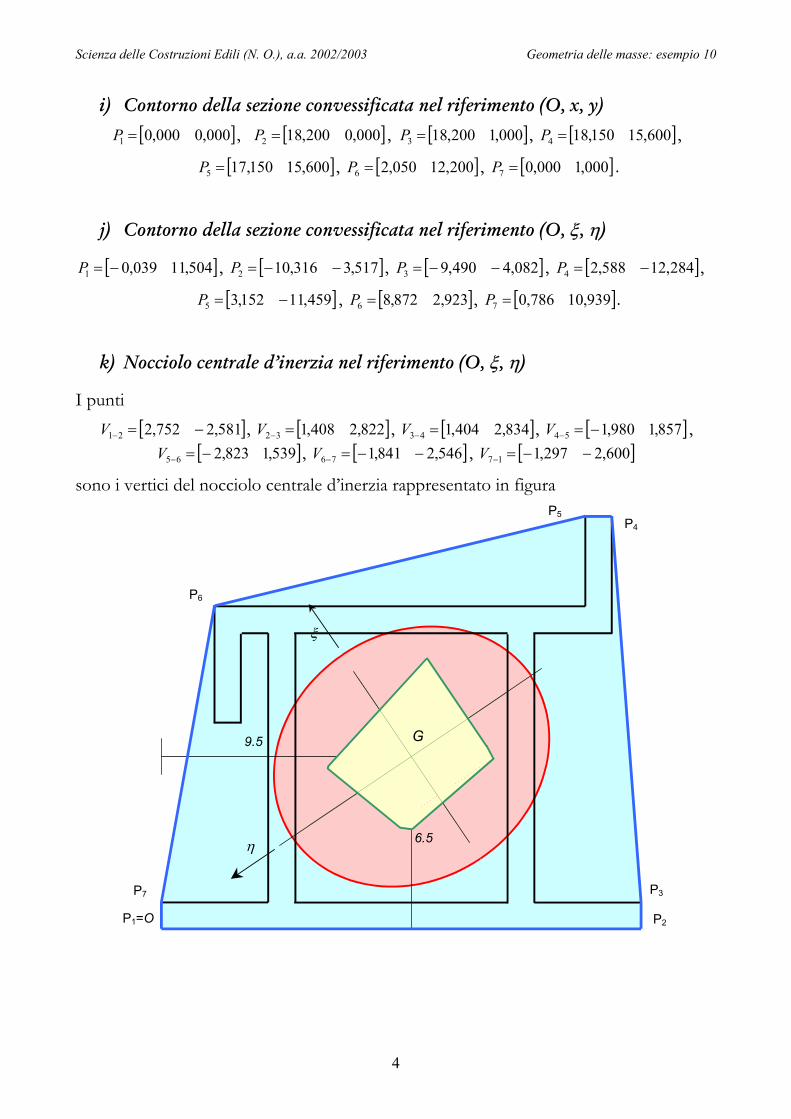
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]000,0000,01 =P , [ ]000,0200,182 =P , [ ]000,1200,183 =P , [ ]600,15150,184 =P ,
[ ]600,15150,175 =P , [ ]200,12050,26 =P , [ ]000,1000,07 =P .
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]504,11039,01 −=P , [ ]517,3316,102 −−=P , [ ]082,4490,93 −−=P , [ ]284,12588,24 −=P ,
[ ]459,11152,35 −=P , [ ]923,2872,86 =P , [ ]939,10786,07 =P .
k) Nocciolo centrale d’inerzia nel riferimento (O, ξ, η)
I punti [ ]581,2752,221 −=−V , [ ]822,2408,132 =−V , [ ]834,2404,143 =−V , [ ]857,1980,154 −=−V ,
[ ]539,1823,265 −=−V , [ ]546,2841,176 −−=−V , [ ]600,2297,117 −−=−V
sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
6.5
9.5
ξ
η
P7
P5 P4
P3
P2 P1=O
P6
G
Università degli Studi di Pisa Anno Accademico 2002/2003
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte I) GEOMETRIA DELLE MASSE
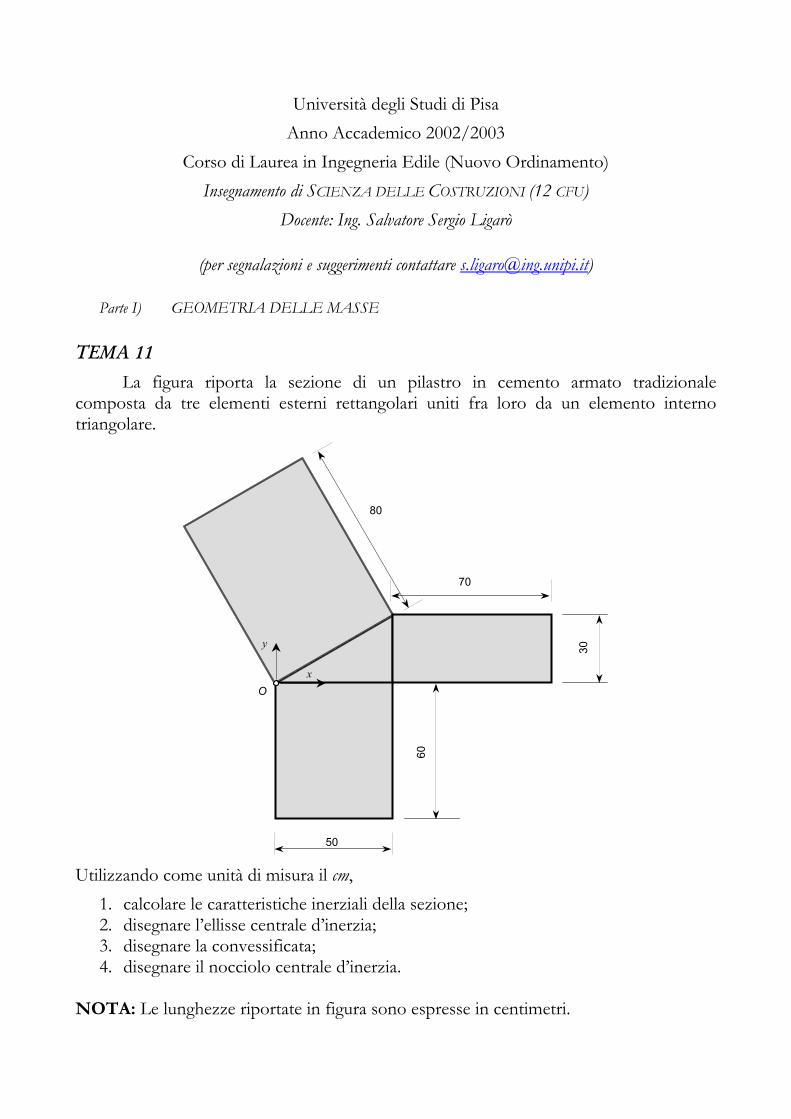
TEMA 11 La figura riporta la sezione di un pilastro in cemento armato tradizionale composta da tre elementi esterni rettangolari uniti fra loro da un elemento interno triangolare.
80
50
70
60
30
O x
y
Utilizzando come unità di misura il cm,
1. calcolare le caratteristiche inerziali della sezione; 2. disegnare l’ellisse centrale d’inerzia; 3. disegnare la convessificata; 4. disegnare il nocciolo centrale d’inerzia.
NOTA: Le lunghezze riportate in figura sono espresse in centimetri.
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 11
2
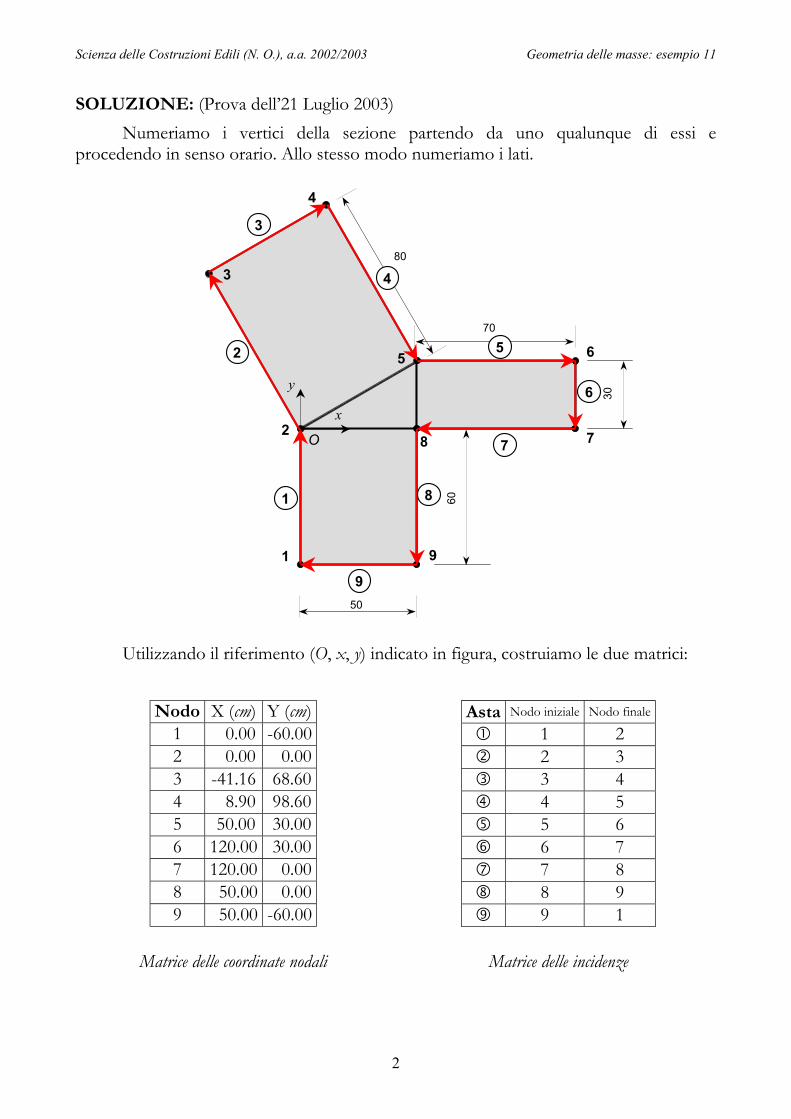
SOLUZIONE: (Prova dell’21 Luglio 2003) Numeriamo i vertici della sezione partendo da uno qualunque di essi e
procedendo in senso orario. Allo stesso modo numeriamo i lati.
80
50
70
60
30
O
x
y
3
1
2
4
5 6
7 8
9
9
1
2
3
4
5
6
7
8
Utilizzando il riferimento (O, x, y) indicato in figura, costruiamo le due matrici:
Nodo X (cm) Y (cm) 1 0.00 -60.00 2 0.00 0.00 3 -41.16 68.60 4 8.90 98.60 5 50.00 30.00 6 120.00 30.00 7 120.00 0.00 8 50.00 0.00 9 50.00 -60.00
Asta Nodo iniziale Nodo finale
1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 1
Matrice delle coordinate nodali Matrice delle incidenze
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 11
3
Escludendo dall’analisi i lati verticali (DX1=0.0) ed il lato (m=0.0 e q=0.0), otteniamo i valori delle grandezze ausiliarie
La
to
DY
1
DX
1
DX
2
DX
3
DX
4 m q
68,6 -41,2 847,07 -23243,678 717532,3285 -1,6667 0,0000 30,0 50,1 -807,47 23478,667 -715963,7725 0,5993 93,2664 -68,6 41,1 1210,40 41431,677 1560931,4440 -1,6691 113,4550 0,0 70,0 5950,00 534333,333 50277500,0000 0,0000 30,0000 0,0 -50,0 -1250,00 -41666,667 -1562500,0000 0,0000 -60,0000
e di quelle finali
Lato
Ak SXk SYk JXk JYk JXYk
-1411,79 -32282,886 38739,463 -1107302,9761 -1195887,2142 996572,6785 4185,02 176810,919 -61239,299 12869687,9473 1760707,3958 -2328205,3678 2642,73 93022,726 68171,748 22015151,8342 2095280,1167 2118596,6536 2100,00 31500,000 178500,000 630000,0000 16030000,0000 2677500,0000 3000,00 -90000,000 75000,000 3600000,0000 2500000,0000 -2250000,0000
10515,96 179050,76 299171,91 17864705,0902 21190100,2983 1214463,9642
Risultano, in definitiva,
a) Area della sezione 296,515.10 cmA = .
b) Momenti statici 3760,050.179 cmSx = , 3910,171.299 cmS y = .
c) Posizione del baricentro
cmAS
x yG 45,28
96,515.10910,171.299
≅== , cmASy x
G 03,1796,515.10760,050.179
≅== .
d) Momenti del second’ordine rispetto al riferimento (O, x, y)
40902,4705.1786 cmJ x = , 42983,0100.2119 cmJ y = , 49642,4463.121 cmJ xy = .
e) Momenti rispetto agli assi paralleli baricentrici (G, x’, y’) 4
' 7120,6083.1481 cmJ x = , 4' 2163,8861.1267 cmJ y = , 4
'' 3577,9409.387 cmJ yx −= .
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 11
4
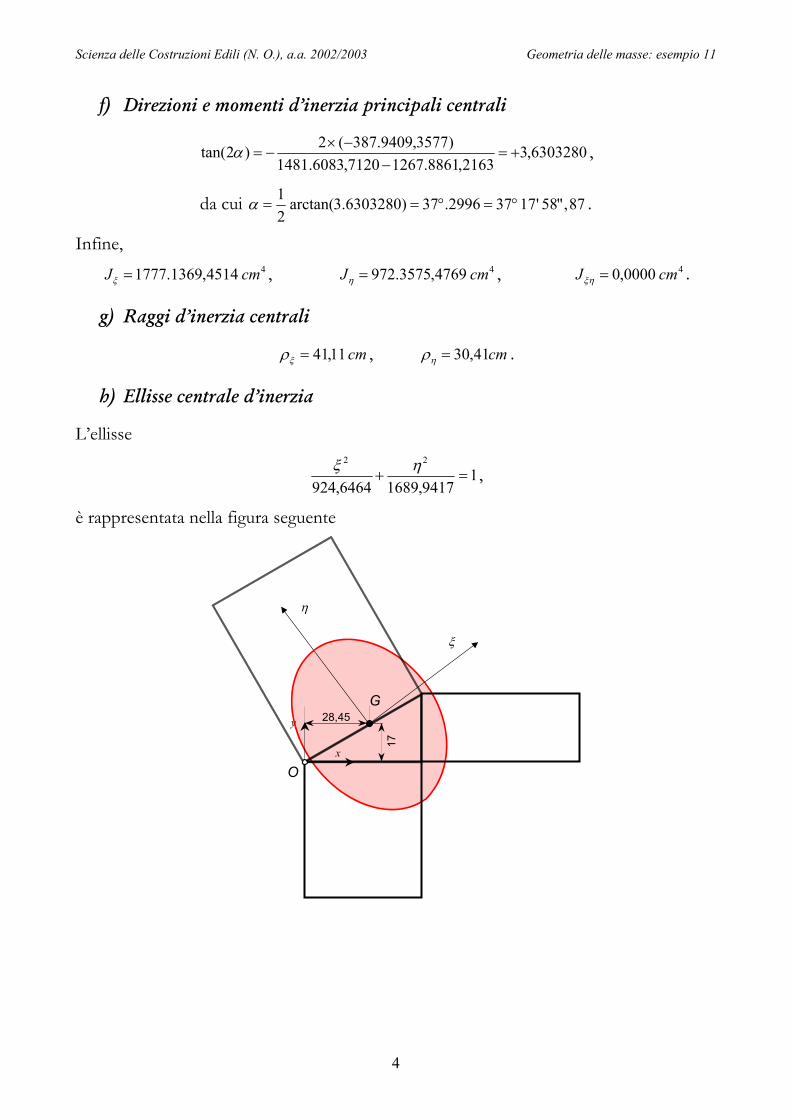
f) Direzioni e momenti d’inerzia principali centrali
6303280,32163,8861.12677120,6083.1481
)3577,9409.387(2)2tan( +=−
−×−=α ,
da cui 87,"58'17372996.37)6303280.3arctan(21
°=°==α .
Infine, 44514,1369.1777 cmJ =ξ , 44769,3575.972 cmJ =η , 40000,0 cmJ =ξη .
g) Raggi d’inerzia centrali
cm11,41=ξρ , cm41,30=ηρ .
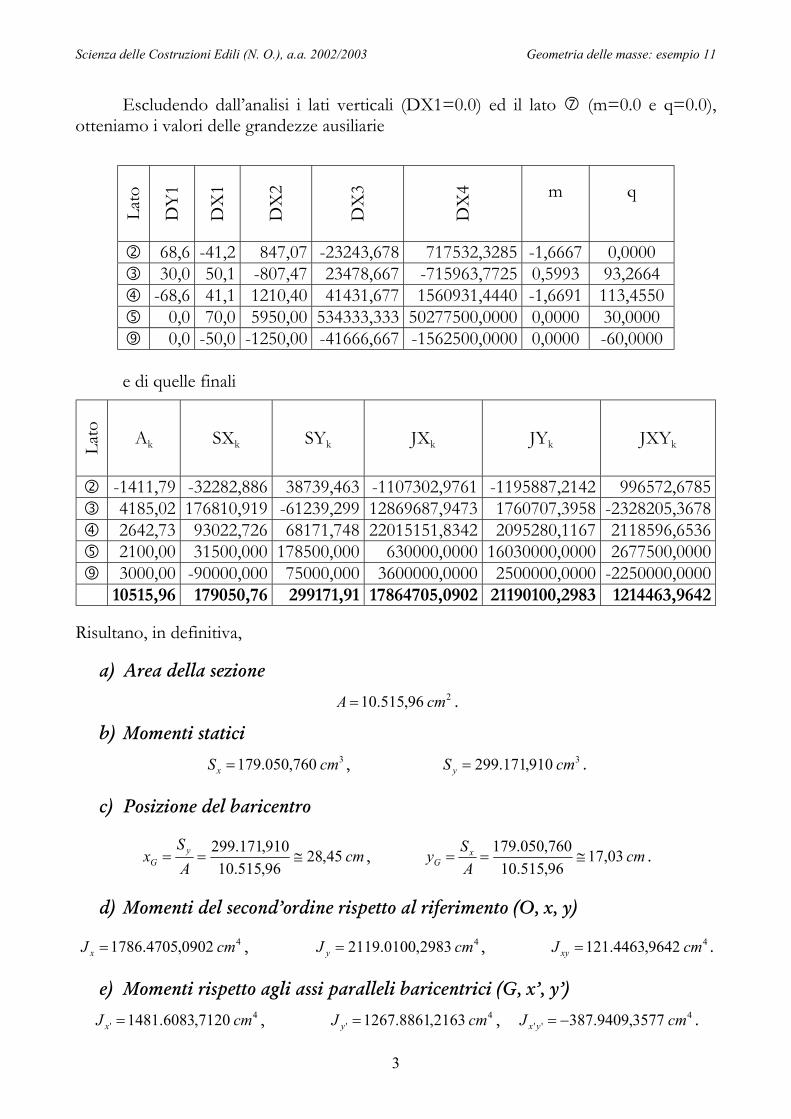
h) Ellisse centrale d’inerzia
L’ellisse
19417,16896464,924
22
=+ηξ ,
è rappresentata nella figura seguente
28,45
17
O x
y
G
ξ
η
Scienza delle Costruzioni Edili (N. O.), a.a. 2002/2003 Geometria delle masse: esempio 11
5
i) Contorno della sezione convessificata nel riferimento (O, x, y) [ ]00,6000,01 −=P , [ ]00,6000,502 −=P , [ ]00,000,1203 =P ,
[ ]00,3000,1204 =P , [ ]60,9890,85 =P , [ ]60,6816,416 −=P .
j) Contorno della sezione convessificata nel riferimento (O, ξ, η)
[ ]023,44308,691 −−=P , [ ]332,74534,292 −−=P , [ ]023,69509,623 −=P ,
[ ]158,45688,804 −=P , [ ]736,76881,335 =P , [ ]208,83120,246 −=P .
k) Nocciolo centrale d’inerzia nel riferimento (O, ξ, η)
I punti [ ]452,17274,721 =−V , [ ]268,23734.032 −=−V , [ ]186,11034.843 −=−V , [ ]244,10596,1454 −−=−V , [ ]989,20281,165 −−=−V , [ ]182,11228,1716 −=−V ,
sono i vertici del nocciolo centrale d’inerzia rappresentato in figura
O x
y
ξ
η
P5
P4
P3
P2 P1=O
P6
28,45
17
G

Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
TEMA 1
Dato il sistema piano di travi rigide mostrato in figura
x, u
y, v
O
L/2 L/2
H/2
H/2
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. classificare il sistema mediante il computo dei gradi di libertà; 4. costruire la matrice cinematica e verificare l’efficacia dei vincoli.
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi rigide: Esempio 1
2
SOLUZIONE:
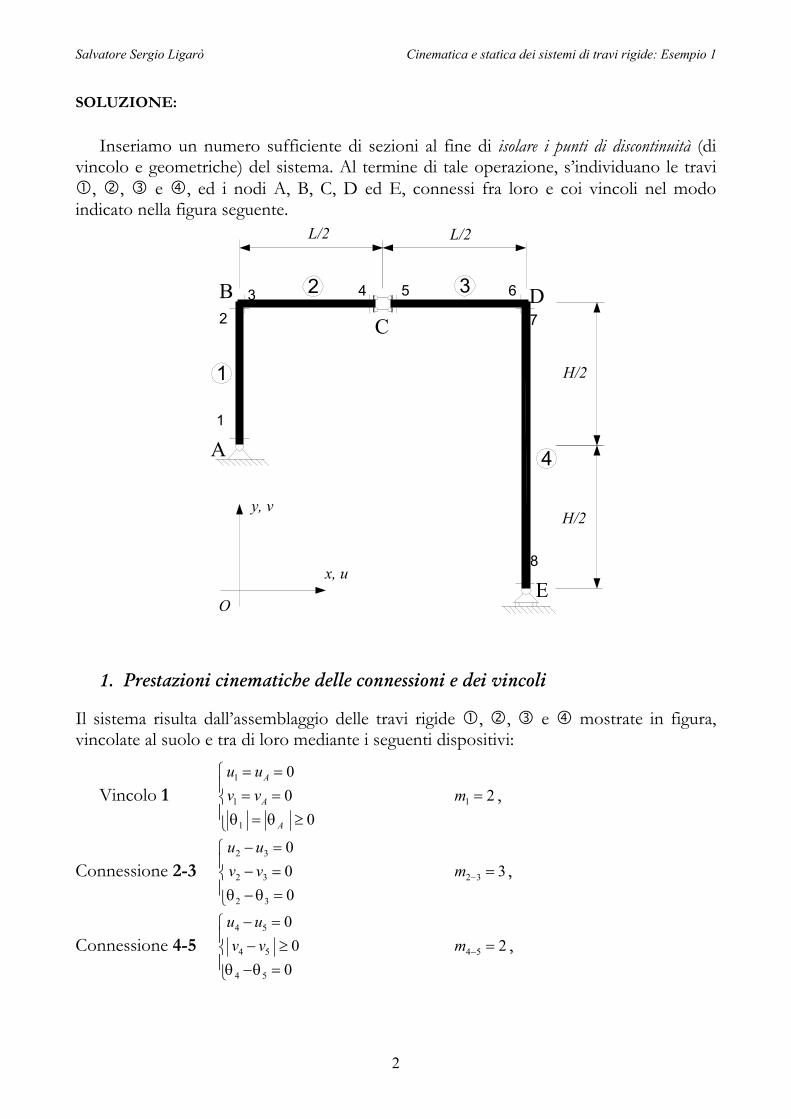
Inseriamo un numero sufficiente di sezioni al fine di isolare i punti di discontinuità (di vincolo e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi
, , e , ed i nodi A, B, C, D ed E, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
1
2 3
4
1
2 3 4 5
7
6
8 x, u
y, v
O
L/2 L/2
H/2
H/2
A
B
C D
E
1. Prestazioni cinematiche delle connessioni e dei vincoli
Il sistema risulta dall’assemblaggio delle travi rigide , , e mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
≥=====
000
1
1
1
A
A
A
vvuu
θθ 21 =m ,
Connessione 2-3
=θ−θ=−=−
000
32
32
32
vvuu
332 =−m ,
Connessione 4-5
=−≥−
=−
00
0
54
54
54
θθvvuu
254 =−m ,

Scienza delle Costruzioni Edili (N. O.) Anno Accademico 2001/2002
3
Connessione 6-7
=θ−θ=−=−
000
76
76
76
vvuu
376 =−m ,
Vincolo 8
≥===
≥=
00
0
8
8
8
E
E
E
vvuu
θθ 18 =m ,
dove gli spostamenti sono valutati nel sistema di riferimento (O, x, y). Le prestazioni cinematiche (molteplicità) di ciascun dispositivo sono indicate sulla destra. Le relazioni precedenti prendono il nome di equazioni di compatibilità cinematica esterna. In particolare, quelle riguardanti le connessioni si chiamano condizioni di raccordo, mentre quelle riguardanti i vincoli si chiamano condizioni al contorno.
2. Classificazione del sistema mediante il computo dei vincoli
a1) metodo generale (trave per trave o aste per asta)
Il sistema piano è ottenuto connettendo le quattro travi elastiche , , e fra loro e coi vincoli come mostrato in figura. In assenza di vincoli e connessioni, il sistema avrebbe 3 x 4 = 12 gradi di libertà.
D’altra parte: • la connessione 2-3 è tripla ( 32 uu = , 32 vv = , 32 θ=θ ), per cui 332 =−m ; • la connessione 4-5 è doppia ( 54 uu = , 54 θ=θ ), per cui 254 =−m ; • la connessione 6-7 è tripla ( 76 uu = , 76 vv = , 76 θ=θ ), per cui 376 =−m ; • la cerniera fissa in A è un vincolo doppio ( 0=Au , 0=Av ), per cui 2=Am ; • la cerniera mobile (carrello) in E è un vincolo semplice ( 0=Ev ), per cui 1=Em ; cosicché il grado complessivo di vincolo del sistema è 13. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più un cinematismo ad un grado di libertà (meccanismo).
a2) metodo sintetico (parte per parte)
Il sistema piano è ottenuto connettendo fra loro e coi vincoli le due parti I = [ + ] e II = [ + ] nel modo illustrato in figura. In assenza di vincoli e connessioni il sistema avrebbe 6 gradi di libertà.
D’altronde: • la connessione 4-5 è doppia ( 54 uu = , 54 θ=θ ), per cui 254 =−m ; • la cerniera fissa in A è un vincolo doppio ( 0=Au , 0=Av ), per cui 2=Am ; • la cerniera mobile (carrello) in E è un vincolo semplice ( 0=Ev ), per cui 1=Em ; cosicché il grado complessivo di vincolo del sistema è 5. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più un cinematismo ad un grado di libertà (meccanismo).

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi rigide: Esempio 1
4
3. Classificazione del sistema mediante il computo dei gradi di libertà
• La connessione doppia 4-5 permette lo spostamento relativo 5454 vvv −=∆ − ; • la cerniera fissa in A permette la rotazione assoluta Aθ ; • il carrello in E permette lo spostamento assoluto Eu e la rotazione assoluta Eθ .
Introdotti quattro vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una struttura costituita da una maglia chiusa esterna a cui compete un grado di iperstaticità pari a tre; pertanto, se i vincoli sono efficaci, il sistema dato è un cinematismo ad un grado di libertà (meccanismo).
4. Matrice cinematica
Per accertarsi dell’efficacia dei vincoli occorre verificare che le relazioni precedenti siano linearmente indipendenti. Per fare ciò occorre costruire la matrice cinematica del sistema e calcolarne il rango. Tali operazioni possono essere effettuate in molti modi.
• Procedimento generale (implementabile in un codice di calcolo automatico)
In tale metodo il componente elementare è la trave. Scelto per ciascuna trave un punto rappresentativo (polo), coincidente per ragioni di convenienza col baricentro di una delle sezioni estreme, risultano immediatamente definite le incognite cinematiche del problema, coincidendo queste con le componenti planari dello spostamento dei poli e con le rotazioni assolute delle sezioni che li contengono. Per il problema in esame, tali incognite sono riportate nella colonna 3 della tabella seguente:
Trave P Pδ Q Qδ
1u 1111212 2)( θ⋅−=θ⋅−−= Huyyuu
1v 111212 )( vxxvv =θ⋅−+= 1 1θ
2 12 θ=θ
3u 333434 )( uyyuu =θ⋅−−=
3v 3333434 2)( θ⋅+=θ⋅−+= Lvxxvv 3 3θ
4 34 θ=θ
5u 555656 )( uyyuu =θ⋅−−=
5v 5555656 2)( θ⋅+=θ⋅−+= Lvxxvv 5 5θ
6 56 θ=θ
5u 8888787 )( θ⋅−=θ⋅−−= Huyyuu
5v 888787 )( vxxvv =θ⋅−+= 8 5θ
7
87 θ=θ

Scienza delle Costruzioni Edili (N. O.) Anno Accademico 2001/2002
5
Nella colonna 4 sono indicate le sezioni ausiliarie, ossia, quelle sezioni che occorre considerare per scrivere le relazioni di connessione mutua fra travi diverse. Nella colonna 5, infine, sono riportate le espressioni delle componenti di spostamento delle sezioni ausiliarie in funzione delle componenti di spostamento del polo corrispondente. Tali relazioni esprimono il vincolo di rigidità fra punti materiali nell’ipotesi di spostamenti infinitesimi e prendono il nome di equazioni di compatibilità cinematica interna. Tenuto conto di tali espressioni, le equazioni di compatibilità cinematica risultano:
Vincolo 1
==
==
0
0
1
1
A
A
vv
uu
Connessione 2-3
=θ−θ=−=−
000
32
32
32
vvuu
⇒
=θ−θ
=−
=−θ⋅−
0
0
02
3
3
3
A
A
AA
vv
uHu
Connessione 4-5
=θ−θ=−
00
54
54 uu ⇒
=θ−θ=−
00
53
53 uu
Connessione 6-7
=θ−θ=−=−
000
76
76
76
vvuu
⇒
=θ−θ
=−θ⋅+
=θ⋅+−
0
02
0
5
55
85
E
E
E
vLv
Huu
Vincolo 8 0=Ev .
Il sistema lineare ed omogeneo cui da luogo l’insieme delle equazioni algebriche precedenti può essere scritto in notazione matriciale come:
=
⋅
−−
−−
−−
−−−
00000000000
010000000000100100000000
0102/1000000001001000000
0001001000000000010010000000001001000000000100100000000012/01000000000010000000000001
5
5
5
3
3
3
E
E
E
A
A
A
vu
vu
vu
vu
LH
H
θ
θ
θ
θ
ovvero 0δC = ,
dove C è la matrice cinematica del sistema di travi e δ il vettore degli spostamenti incogniti.
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi rigide: Esempio 1
6
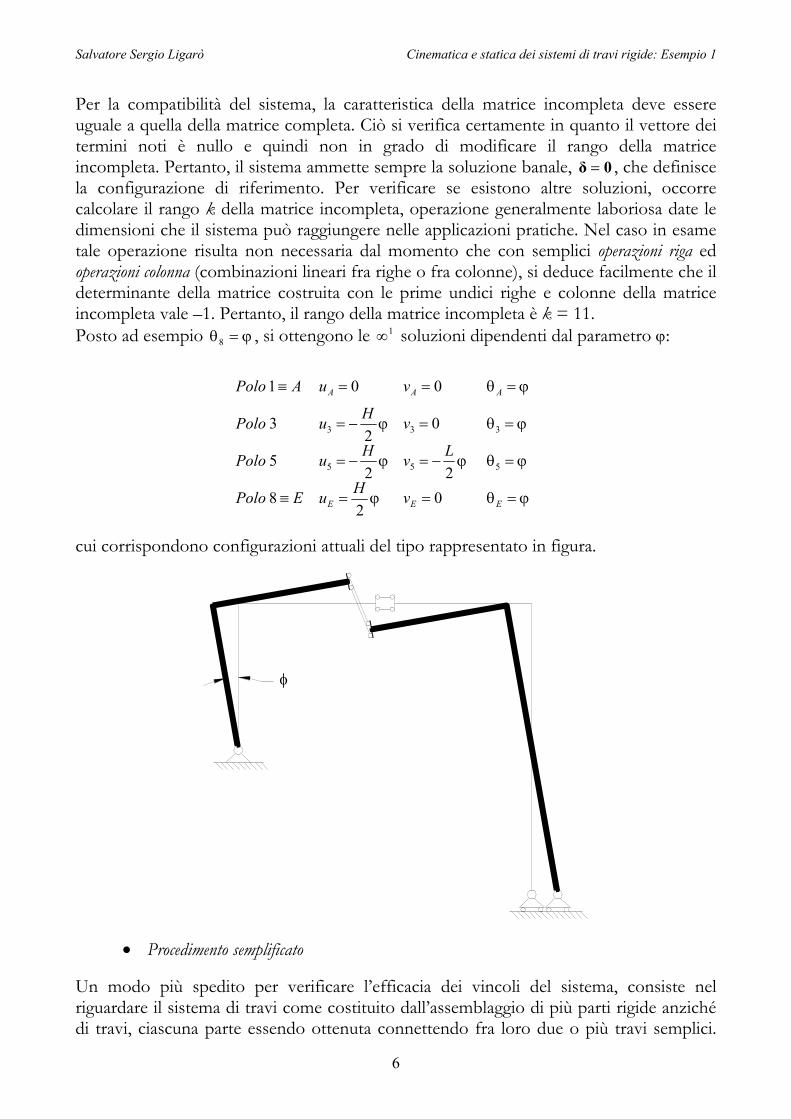
Per la compatibilità del sistema, la caratteristica della matrice incompleta deve essere uguale a quella della matrice completa. Ciò si verifica certamente in quanto il vettore dei termini noti è nullo e quindi non in grado di modificare il rango della matrice incompleta. Pertanto, il sistema ammette sempre la soluzione banale, 0δ = , che definisce la configurazione di riferimento. Per verificare se esistono altre soluzioni, occorre calcolare il rango k della matrice incompleta, operazione generalmente laboriosa date le dimensioni che il sistema può raggiungere nelle applicazioni pratiche. Nel caso in esame tale operazione risulta non necessaria dal momento che con semplici operazioni riga ed operazioni colonna (combinazioni lineari fra righe o fra colonne), si deduce facilmente che il determinante della matrice costruita con le prime undici righe e colonne della matrice incompleta vale –1. Pertanto, il rango della matrice incompleta è k = 11. Posto ad esempio ϕ=θ8 , si ottengono le 1∞ soluzioni dipendenti dal parametro ϕ:
ϕ=θ=ϕ=≡
ϕ=θϕ−=ϕ−=
ϕ=θ=ϕ−=
ϕ=θ==≡
EEE
AAA
vHuEPolo
LvHuPolo
vHuPolo
vuAPolo
02
822
5
02
3
001
555
333
cui corrispondono configurazioni attuali del tipo rappresentato in figura.
φ
• Procedimento semplificato
Un modo più spedito per verificare l’efficacia dei vincoli del sistema, consiste nel riguardare il sistema di travi come costituito dall’assemblaggio di più parti rigide anziché di travi, ciascuna parte essendo ottenuta connettendo fra loro due o più travi semplici.

Scienza delle Costruzioni Edili (N. O.) Anno Accademico 2001/2002
7
Ciò è molto utile poiché permette di non dovere considerare fra le equazioni di compatibilità esterna le relazioni che esprimono le connessioni triple fra le travi. In sostanza, scelto per ciascuna parte un punto rappresentativo (polo), le incognite cinematiche del problema sono quelle riportate nella colonna 3 della tabella seguente:
Parte P Pδ Q Qδ
1u 1111414 2)( θ⋅−=θ⋅−−= Huyyuu
1v 1111414 2/)( θ⋅+=θ⋅−+= Lvxxvv + 1 1θ
4 14 θ=θ
8u 8888585 )( θ⋅−=θ⋅−−= Huyyuu
8v 8888585 2/)( θ⋅−=θ⋅−+= Lvxxvv + 8 8θ
5
85 θ=θ
Le relazioni di compatibilità cinematica si scrivono:
Vincolo 1
==
==
0
0
1
1
A
A
vv
uu
Connessione [ + ]-[ + ]
=θ−θ=−
00
54
54 uu ⇒
=θ−θ
=θ⋅+−θ⋅−
0
02
EA
EEAA HuHu
Vincolo 8 08 == Evv .
L’insieme delle equazioni algebriche precedenti scritto in notazione matriciale diviene:
=
θ
θ⋅
−
−−
0
0
0
0
0
010000
100100
012/01
000010
000001
E
E
E
A
A
A
v
u
v
u
HH ,
ovvero
0δC = ,
dove la matrice cinematica
−−−=
010000100100
012/01000010000001
HHC ,

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi rigide: Esempio 1
8
è di ordine inferiore rispetto al caso precedente e la sua caratteristica ( 5=k ) è di più facile deduzione. Tutte le considerazioni svolte in precedenza valgono integralmente.
• Procedimento sintetico (per virtuosi)
Una semplificazione ancor più rilevante si ottiene inserendo subito le condizioni di vincolo nelle equazioni di compatibilità cinematica interna. Per il problema in esame, si ottiene:
Parte P Pδ Q Qδ
0 AHyyu θ⋅−=θ⋅−−= 2)( 1144
0 ALxxv θ⋅+=θ⋅−+= 2/)( 1144 + 1 1θ
4 Aθ=θ4
8u EE Huyyuu θ⋅−=θ⋅−−= 88585 )(
0 ELxxv θ⋅−=θ⋅−= 2/)( 8855 + 8 8θ
5
Eθ=θ5
La compatibilità cinematica del sistema è quindi assicurata dal sistema delle due sole equazioni
Connessione [ + ]-[ + ]
=θ−θ=−
00
54
54 uu ⇒
=θ−θ
=θ⋅+−θ⋅−
0
02
EA
EEA HuH
nelle tre incognite 1θ , Eu e Eθ . Tale sistema scritto in notazione matriciale diviene:
=
θ
θ
⋅
−
+−−
0
0
101
12/
E
E
A
uHH
,
per cui la matrice cinematica si riduce a
−
−−=
10112/ HH
C
e la sua caratteristica ( 2=k ) è di immediata deduzione. Più semplicemente, posto ϕ=θ=θ EA , la prima equazione fornisce la soluzione
ϕ=2HuE .
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
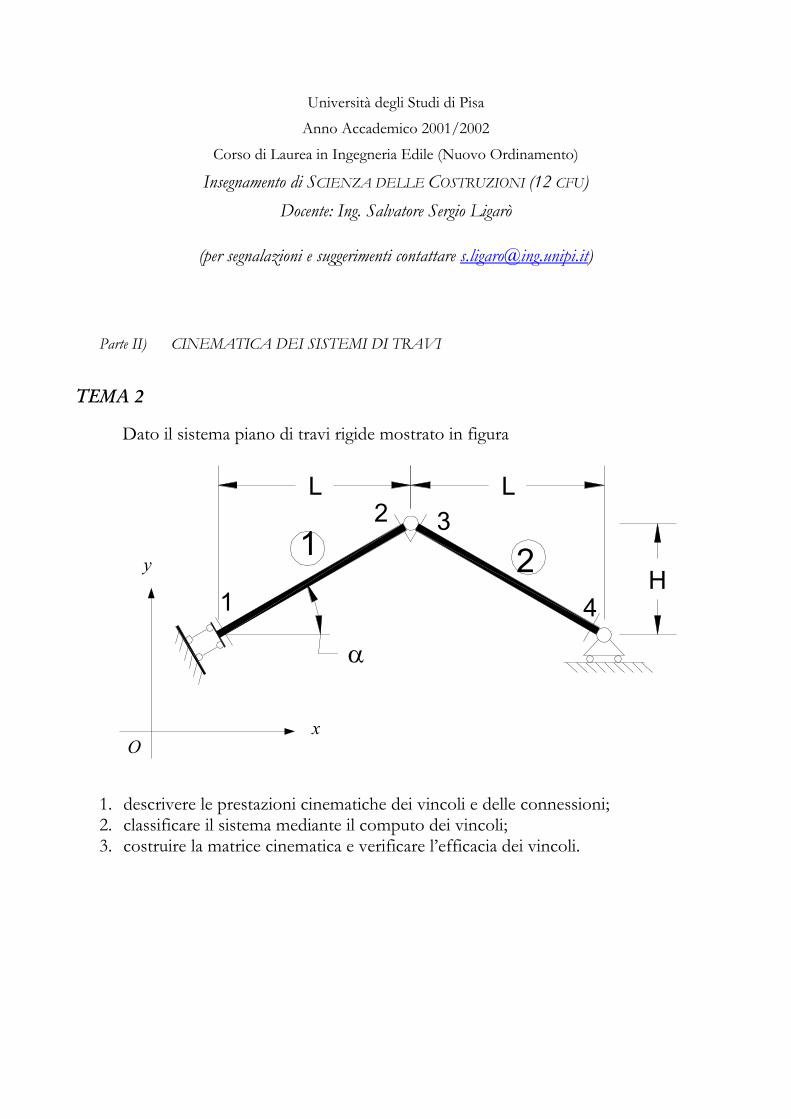
TEMA 2
Dato il sistema piano di travi rigide mostrato in figura
3
1
1
2
4
2
α
L L
H y
x O
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. costruire la matrice cinematica e verificare l’efficacia dei vincoli.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
2
SOLUZIONE:
a) Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle travi rigide e mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
=θαλ−=
αλ=
0cos
sin
1
11
11
vu
21 =m ,
dove 22/sin HLH +=α , 22/cos HLL +=α , mentre 021
2111 ≥+== vuδλ .
Connessione 2-3
≥−=−=−
000
32
32
32
θθvvuu
232 =−m ,
Vincolo 4
≥=≥
000
4
4
4
θvu
14 =m .
Gli spostamenti sono valutati nel sistema di riferimento (O, x, y).
b) Computo dei vincoli Poiché il numero di travi è t = 2, in assenza di vincoli e connessioni i gradi di libertà del sistema risulterebbero:
6233 =⋅=⋅= tg .
D’altra parte, se i vincoli e le connessioni fossero indipendenti (vincoli efficaci), il grado di vincolo del sistema risulterebbe:
51224321 =++=++= − mmmv ,
per cui il sistema di travi dato può essere (al più) un cinematismo ad un grado di libertà, ossia, un meccanismo.
c) Matrice cinematica Per accertare l’efficacia dei vincoli occorre costruire la matrice cinematica e calcolarne il
rango. A tal fine utilizziamo il procedimento sintetico inserendo immediatamente le condizioni di vincolo nelle equazioni di compatibilità interna.
Scelto un polo per ciascuna trave, le incognite cinematiche del problema sono riportate nella colonna 3 della tabella seguente. Nella colonna 4 sono indicate le sezioni ausiliarie, mentre nella colonna 5 sono riportate le espressioni delle componenti di spostamento corrispondenti.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
3
Trave P Pδ Q Qδ
1u 11111212 )( uHuyyuu =θ⋅−=θ⋅−−=
1v 111111212 /)( uHLvLvxxvv ⋅−==θ⋅+=θ⋅−+= 1 1θ
2 12 θ=θ
4u 4444343 )( θ⋅−=θ⋅−−= Huyyuu
4v 444343 )( θ⋅−=θ⋅−+= Lxxvv 4 4θ
3 43 θ=θ
Le equazioni di compatibilità cinematica si riducono alle sole due equazioni di raccordo:
Connessione 2-3
=−=−
00
32
32
vvuu ⇒
=θ+−=θ⋅+−0/
0
41
441
HuHuu ,
nelle tre incognite essenziali 1u , 4u e 4θ . Posto ϕ=θ4 , si ottiene immediatamente la soluzione
ϕ⋅= Hu1 ed ϕ⋅= Hu 24 .
Il precedente sistema algebrico, lineare ed omogeneo, di due equazioni in tre incognite, scritto in notazione matriciale diviene:
=
θ⋅
−
−00
10/111
4
4
1
uu
HH ,
ovvero, 0δC = , dove C è la matrice cinematica del sistema e δ il vettore degli spostamenti incogniti. Posto ϕ=θ4 , si ottengono le ∞ soluzioni:
ϕ=θ=ϕ⋅==θϕ⋅−=ϕ⋅=
444
111
02401
vHuPoloLvHuPolo
cui corrispondono configurazioni variate del tipo rappresentato in figura
1 2
∆ 2∆ θ 4
dove ϕ⋅==∆ Hu1 .
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
TEMA 3
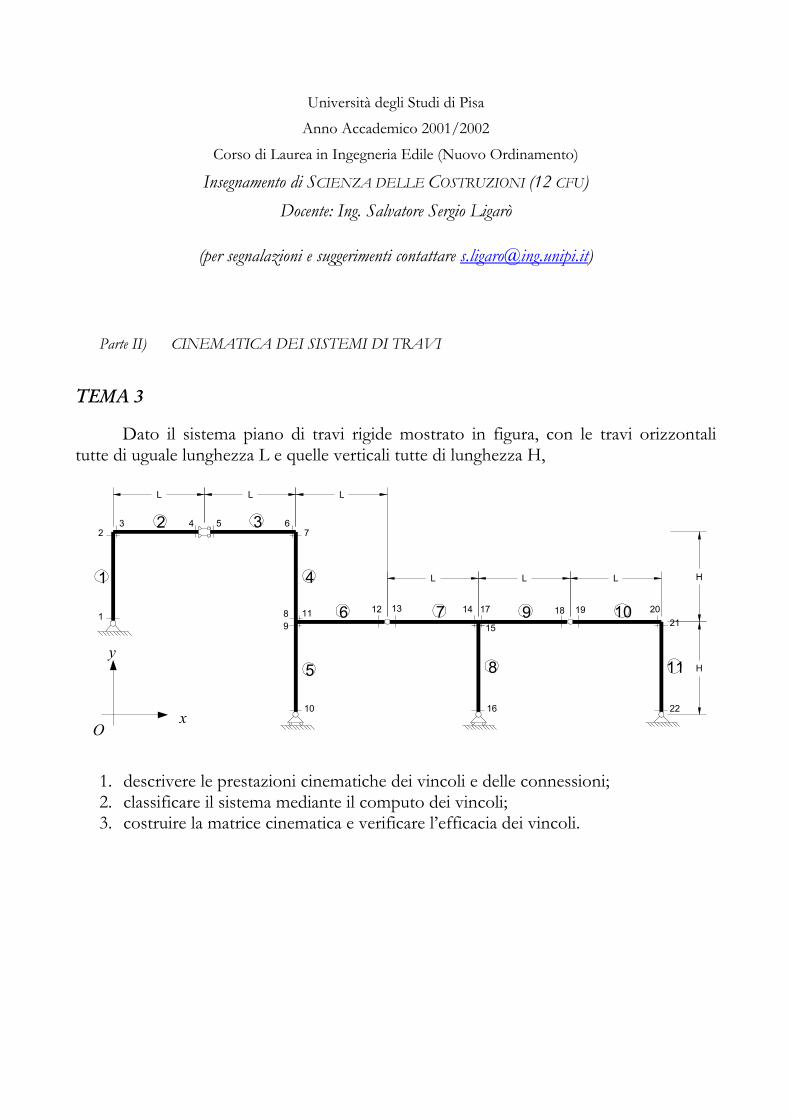
Dato il sistema piano di travi rigide mostrato in figura, con le travi orizzontali tutte di uguale lunghezza L e quelle verticali tutte di lunghezza H,
1
2 3
4
1
2 3 4 5 7 6
10
11 6 15
13 12 7 14
8
16
17 9 18 19 10 20 21
11
22
5
8 9
L L L
L L L
H
H
x
y
O
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. costruire la matrice cinematica e verificare l’efficacia dei vincoli.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
2
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo: 1. impaurire gli studenti; 2. fare un po’ di pratica con la scrittura delle equazioni di compatibilità cinematica, interna ed
esterna; 3. distinguere fra condizioni al contorno e condizioni di raccordo; 4. capire il significato di equazioni di congruenza e ricordare la loro provenienza; 5. capire che è del tutto arbitraria la suddivisione del sistema in travi od in parti; 6. capire che è del tutto indifferente la scelta sia del numero che della posizione delle sezioni
ausiliarie; 7. capire che è del tutto arbitraria la scelta dei poli.)
• Procedimento generale 1. Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle travi rigide , , , , , , , , , e (11) mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
≥==
000
1
1
1
θvu
21 =m ,
Connessione 2-3
=θ−θ=−=−
000
32
32
32
vvuu
332 =−m ,
Connessione 4-5
=−≥−
=−
00
0
54
54
54
θθvvuu
254 =−m ,
Connessione 6-7
=θ−θ=−=−
000
76
76
76
vvuu
376 =−m ,
Connessione 8-9-11
=θ−θ=−=−=θ−θ=−=−
000000
118
118
118
98
98
98
vvuu
vvuu
61198 =−−m ,
Vincolo 10
≥=≥
000
10
10
10
θvu
110 =m ,
Connessione 12-13
≥−=−=−
000
1312
1312
1312
θθvvuu
21312 =−m ,

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
3
Connessione 14-15-17
=θ−θ=−=−=θ−θ=−=−
000000
1714
1714
1714
1514
1514
1514
vvuu
vvuu
6171514 =−−m ,
Vincolo 16
≥=≥
000
16
16
16
θvu
116 =m ,
Connessione 18-19
≥−=−=−
000
1918
1918
1918
θθvvuu
21918 =−m ,
Connessione 20-21
=θ−θ=−=−
000
2120
2120
2120
vvuu
32120 =−m ,
Vincolo 22
≥==
000
22
22
22
θvu
222 =m ,
dove gli spostamenti sono valutati nel sistema di riferimento (O, x, y). Tali relazioni prendono il nome di equazioni di compatibilità cinematica esterna; più in particolare, quelle di vincolo sono chiamate condizioni al contorno (del problema cinematico), mentre le relazioni di connessione sono dette condizioni di raccordo. Accanto a ciascun gruppo di relazioni è riportata la prestazione cinematica (molteplicità) del dispositivo a cui si riferiscono, m, ovvero il numero di gradi di libertà che il dispositivo sottrae al sistema di travi.
2. Computo dei vincoli Indichiamo con t il numero complessivo di travi (t = 11). Poiché a ciascuna di esse, riguardata come un corpo rigido libero di muoversi nel piano, corrispondono tre gradi di libertà, in assenza di vincoli e connessioni il numero complessivo di gradi di libertà del sistema risulta:
331133 =⋅=⋅= tg .
Sommando le molteplicità dei vincoli e delle connessioni si ottiene il numero complessivo di vincoli semplici applicati al sistema (grado di vincolo):
3323216216323222212019181617151413121011987654321
=+++++++++++==+++++++++++= −−−−−−−−−− mmmmmmmmmmmmv .
Pertanto, se i vincoli e le connessioni fossero fra loro indipendenti (vincoli efficaci) il sistema di travi dato sarebbe (al più) una struttura isostatica.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
4
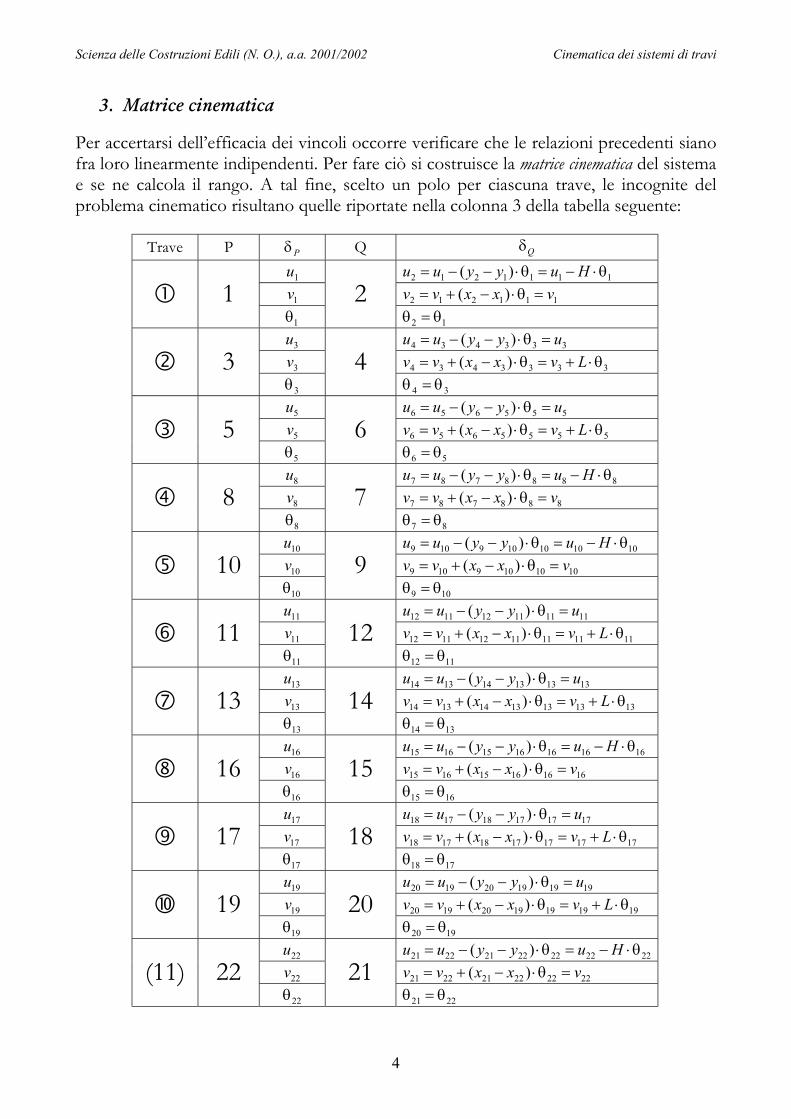
3. Matrice cinematica
Per accertarsi dell’efficacia dei vincoli occorre verificare che le relazioni precedenti siano fra loro linearmente indipendenti. Per fare ciò si costruisce la matrice cinematica del sistema e se ne calcola il rango. A tal fine, scelto un polo per ciascuna trave, le incognite del problema cinematico risultano quelle riportate nella colonna 3 della tabella seguente:
Trave P Pδ Q Qδ
1u 1111212 )( θ⋅−=θ⋅−−= Huyyuu
1v 111212 )( vxxvv =θ⋅−+= 1 1θ
2 12 θ=θ
3u 333434 )( uyyuu =θ⋅−−=
3v 3333434 )( θ⋅+=θ⋅−+= Lvxxvv 3 3θ
4 34 θ=θ
5u 555656 )( uyyuu =θ⋅−−=
5v 5555656 )( θ⋅+=θ⋅−+= Lvxxvv 5 5θ
6 56 θ=θ
8u 8888787 )( θ⋅−=θ⋅−−= Huyyuu
8v 888787 )( vxxvv =θ⋅−+= 8 8θ
7 87 θ=θ
10u 101010109109 )( θ⋅−=θ⋅−−= Huyyuu
10v 1010109109 )( vxxvv =θ⋅−+= 10 10θ
9 109 θ=θ
11u 111111121112 )( uyyuu =θ⋅−−=
11v 11111111121112 )( θ⋅+=θ⋅−+= Lvxxvv 11 11θ
12 1112 θ=θ
13u 131313141314 )( uyyuu =θ⋅−−=
13v 13131313141314 )( θ⋅+=θ⋅−+= Lvxxvv 13 13θ
14 1314 θ=θ
16u 16161616151615 )( θ⋅−=θ⋅−−= Huyyuu
16v 161616151615 )( vxxvv =θ⋅−+= 16 16θ
15 1615 θ=θ
17u 171717181718 )( uyyuu =θ⋅−−=
17v 17171717181718 )( θ⋅+=θ⋅−+= Lvxxvv 17 17θ
18 1718 θ=θ
19u 191919201920 )( uyyuu =θ⋅−−=
19v 19191919201920 )( θ⋅+=θ⋅−+= Lvxxvv 19 19θ
20 1920 θ=θ
22u 22222222212221 )( θ⋅−=θ⋅−−= Huyyuu
22v 222222212221 )( vxxvv =θ⋅−+= (11) 22 22θ
21 2221 θ=θ
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
5
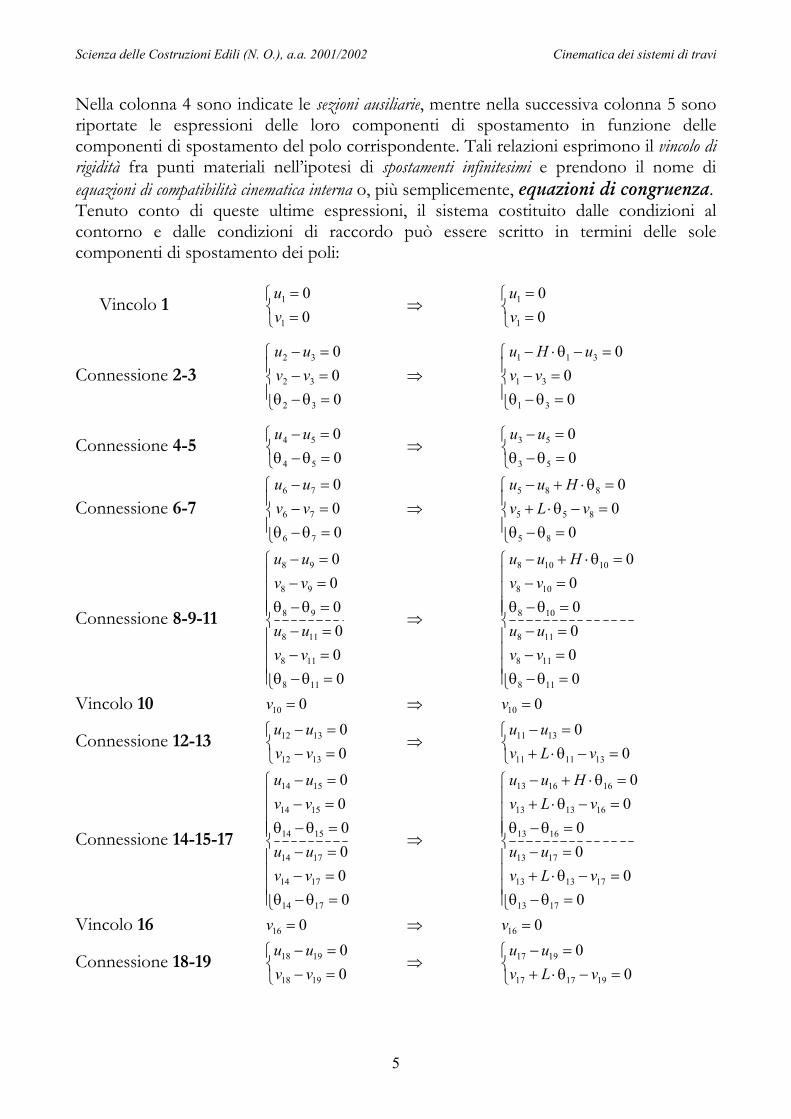
Nella colonna 4 sono indicate le sezioni ausiliarie, mentre nella successiva colonna 5 sono riportate le espressioni delle loro componenti di spostamento in funzione delle componenti di spostamento del polo corrispondente. Tali relazioni esprimono il vincolo di rigidità fra punti materiali nell’ipotesi di spostamenti infinitesimi e prendono il nome di equazioni di compatibilità cinematica interna o, più semplicemente, equazioni di congruenza. Tenuto conto di queste ultime espressioni, il sistema costituito dalle condizioni al contorno e dalle condizioni di raccordo può essere scritto in termini delle sole componenti di spostamento dei poli:
Vincolo 1
==
00
1
1
vu ⇒
==
00
1
1
vu
Connessione 2-3
=θ−θ=−=−
000
32
32
32
vvuu
⇒
=θ−θ=−
=−θ⋅−
00
0
31
31
311
vvuHu
Connessione 4-5
=θ−θ=−
00
54
54 uu ⇒
=θ−θ=−
00
53
53 uu
Connessione 6-7
=θ−θ=−=−
000
76
76
76
vvuu
⇒
=θ−θ=−θ⋅+=θ⋅+−
000
85
855
885
vLvHuu
Connessione 8-9-11
=θ−θ=−=−=θ−θ=−=−
000000
118
118
118
98
98
98
vvuu
vvuu
⇒
=θ−θ=−=−=θ−θ=−
=θ⋅+−
00000
0
118
118
118
108
108
10108
vvuu
vvHuu
Vincolo 10 010 =v ⇒ 010 =v
Connessione 12-13
=−=−
00
1312
1312
vvuu ⇒
=−θ⋅+=−
00
131111
1311
vLvuu
Connessione 14-15-17
=θ−θ=−=−=θ−θ=−=−
000000
1714
1714
1714
1514
1514
1514
vvuu
vvuu
⇒
=θ−θ=−θ⋅+
=−=θ−θ
=−θ⋅+=θ⋅+−
00
00
00
1713
171313
1713
1613
161313
161613
vLvuu
vLvHuu
Vincolo 16 016 =v ⇒ 016 =v
Connessione 18-19
=−=−
00
1918
1918
vvuu ⇒
=−θ⋅+=−
00
191717
1917
vLvuu
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
6
Connessione 20-21
=θ−θ=−=−
000
2120
2120
2120
vvuu
⇒
=θ−θ=−θ⋅+=θ⋅+−
000
2219
221919
222219
vLvHuu
Vincolo 22
==
00
22
22
vu ⇒
==
00
22
22
vu
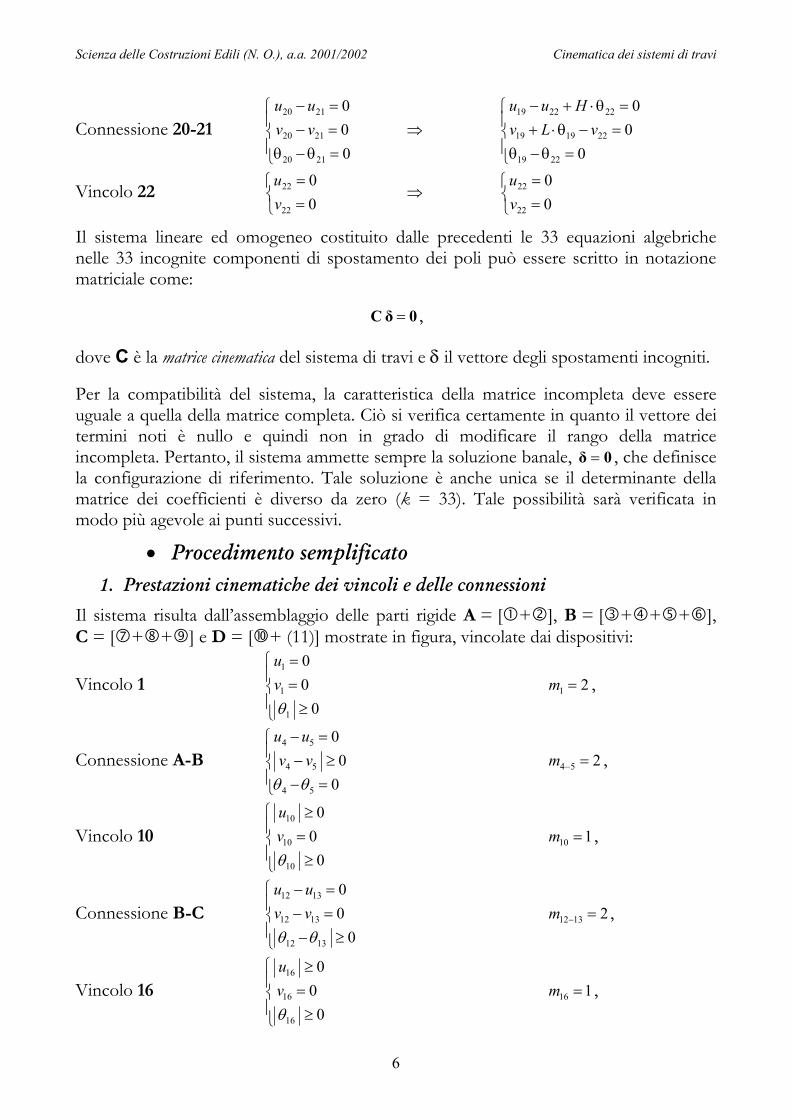
Il sistema lineare ed omogeneo costituito dalle precedenti le 33 equazioni algebriche nelle 33 incognite componenti di spostamento dei poli può essere scritto in notazione matriciale come:
0δC = ,
dove C è la matrice cinematica del sistema di travi e δ il vettore degli spostamenti incogniti.
Per la compatibilità del sistema, la caratteristica della matrice incompleta deve essere uguale a quella della matrice completa. Ciò si verifica certamente in quanto il vettore dei termini noti è nullo e quindi non in grado di modificare il rango della matrice incompleta. Pertanto, il sistema ammette sempre la soluzione banale, 0δ = , che definisce la configurazione di riferimento. Tale soluzione è anche unica se il determinante della matrice dei coefficienti è diverso da zero (k = 33). Tale possibilità sarà verificata in modo più agevole ai punti successivi.
• Procedimento semplificato 1. Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle parti rigide A = [ + ], B = [ + + + ], C = [ + + ] e D = [ + (11)] mostrate in figura, vincolate dai dispositivi:
Vincolo 1
≥==
000
1
1
1
θvu
21 =m ,
Connessione A-B
=−≥−
=−
00
0
54
54
54
θθvvuu
254 =−m ,
Vincolo 10
≥=≥
000
10
10
10
θvu
110 =m ,
Connessione B-C
≥−=−=−
000
1312
1312
1312
θθvvuu
21312 =−m ,
Vincolo 16
≥=≥
000
16
16
16
θvu
116 =m ,

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
7
Connessione C-D
≥−=−=−
000
1918
1918
1918
θθvvuu
21918 =−m ,
Vincolo 22
≥==
000
22
22
22
θvu
222 =m .
2. Computo dei vincoli Indichiamo con p il numero di parti rigide (p = 4). Il numero complessivo di gradi di libertà del sistema risulta:
12433 =⋅=⋅= pg .
Sommando le molteplicità dei vincoli e delle connessioni si ottiene il grado di vincolo:
12221212222191816131210541 =++++++=++++++= −−− mmmmmmmv .
Pertanto, se i vincoli e le connessioni considerate fossero indipendenti (vincoli efficaci) il sistema di travi dato sarebbe (al più) una struttura isostatica.
3. Matrice cinematica Scelto un polo per ciascuna parte rigida, si può costruire la tabella seguente:
Parte P Pδ Q Qδ
1u 1111414 )( θ⋅−=θ⋅−−= Huyyuu
1v 1111414 )( θ⋅+=θ⋅−+= Lvxxvv A 1 1θ
4 14 θ=θ
101010105105 2)( θ⋅−=θ⋅−−= Huyyuu 10u
101010105105 )( θ⋅−=θ⋅−+= Lvxxvv 5 105 θ=θ
10v 10101010121012 )( θ⋅−=θ⋅−−= Huyyuu
10101010121012 )( θ⋅+=θ⋅−+= Lvxxvv
B 10
10θ 12 1012 θ=θ
16161616131613 )( θ⋅−=θ⋅−−= Huyyuu 16u
16161616131613 )( θ⋅−=θ⋅−+= Lvxxvv 13 1613 θ=θ
16v 16161616181618 )( θ⋅−=θ⋅−−= Huyyuu
16161616181618 )( θ⋅+=θ⋅−+= Lvxxvv
C 16
16θ 18 1618 θ=θ
22u 22222222192219 )( θ⋅−=θ⋅−−= Huyyuu
22v 22222222192219 )( θ⋅−=θ⋅−+= Lvxxvv D 22 22θ
19 2219 θ=θ

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
8
Nella colonna 4 sono indicate le sezioni ausiliarie necessarie per scrivere le condizioni di raccordo, mentre nella successiva colonna 5 sono riportate le equazioni di congruenza. Il sistema delle condizioni al contorno e delle condizioni di raccordo risulta:
Vincolo 1
==
00
1
1
vu ⇒
==
00
1
1
vu
Connessione A-B
=θ−θ=−
00
54
54 uu ⇒
=θ−θ=θ⋅+−θ⋅−
002
101
101011 HuHu
Vincolo 10 010 =v ⇒ 010 =v
Connessione B-C
=−=−
00
1312
1312
vvuu ⇒
=θ⋅+−θ⋅+=θ⋅+−θ⋅−0
0
16161010
16161010
LvLvHuHu
Vincolo 16 016 =v ⇒ 016 =v
Connessione C-D
=−=−
00
1918
1918
vvuu ⇒
=θ⋅+−θ⋅+=θ⋅+−θ⋅−0
0
22221616
22221616
LvLvHuHu
Vincolo 22
==
00
22
22
vu ⇒
==
00
22
22
vu
Il sistema precedente, lineare ed omogeneo, di 12 equazioni algebriche in 12 incognite scritto in notazione matriciale diviene:
=
θ
θ
θ
θ
⋅
−−−
−−−
−−−
000000000000
010000000000001000000000
10100000000101000000
0000100000000001010000000010100000000001000000000010010000000020101000000000010000000000001
22
22
22
16
16
16
10
10
10
1
1
1
vu
vu
vu
vu
LLHH
LLHH
HH
,
ovvero, 0δC = ,
dove C è la matrice cinematica del sistema di travi e δ il vettore degli spostamenti incogniti. Il sistema ammette sempre la soluzione banale, 0δ = , che definisce la configurazione di riferimento. Tale soluzione è anche unica poiché il determinante della matrice dei coefficienti è diverso da zero (k = 12).

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
9
• Procedimento sintetico 1. Matrice cinematica
Inseriamo immediatamente le condizioni di vincolo in quelle di congruenza si ottiene:
Parte P Pδ Q Qδ
1u 111414 )( θ⋅−=θ⋅−−= Hyyuu
1v 111414 )( θ⋅=θ⋅−+= Lxxvv A 1 1θ
4 14 θ=θ
101010105105 2)( θ⋅−=θ⋅−−= Huyyuu 10u
1010105105 )( θ⋅−=θ⋅−+= Lxxvv 5 105 θ=θ
10v 10101010121012 )( θ⋅−=θ⋅−−= Huyyuu
101010121012 )( θ⋅=θ⋅−+= Lxxvv
B 10
10θ 12 1012 θ=θ
16161616131613 )( θ⋅−=θ⋅−−= Huyyuu 16u
161616131613 )( θ⋅−=θ⋅−+= Lxxvv 13 1613 θ=θ
16v 16161616181618 )( θ⋅−=θ⋅−−= Huyyuu
161616181618 )( θ⋅=θ⋅−+= Lxxvv
C 16
16θ 18 1618 θ=θ
22u 222222192219 )( θ⋅−=θ⋅−−= Hyyuu
22v 222222192219 )( θ⋅−=θ⋅−+= Lxxvv D 22 22θ
19 2219 θ=θ
Per cui la compatibilità cinematica del sistema è espressa delle condizioni di raccordo:
Connessione A-B
=θ−θ=−
00
54
54 uu ⇒
=θ−θ=θ⋅+−θ⋅−
002
101
10101 HuH
Connessione B-C
=−=−
00
1312
1312
vvuu ⇒
=θ+θ=θ⋅+−θ⋅−
00
1610
16161010 HuHu
Connessione C-D
=−=−
00
1918
1918
vvuu ⇒
=θ+θ=θ⋅+θ⋅−
00
2216
221616 HHu
Tale sistema, lineare ed omogeneo, è ora costituito da 6 equazioni algebriche nelle 6 incognite essenziali del problema 10u , 16u , 1θ , 10θ , 16θ , 22θ .
Posto ϕ−=θ16 e ϕ=θ=θ=θ 22101 , si ottiene:
=ϕ+ϕ+=ϕ−−ϕ−
=ϕ+ϕ−−
00
02
16
1610
10
HHuHuHu
HHu,
un sistema lineare ed omogeneo che ha come unica soluzione quella banale )0( 1610 === ϕuu ; pertanto, il sistema di travi assegnato è una struttura isostatica.
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
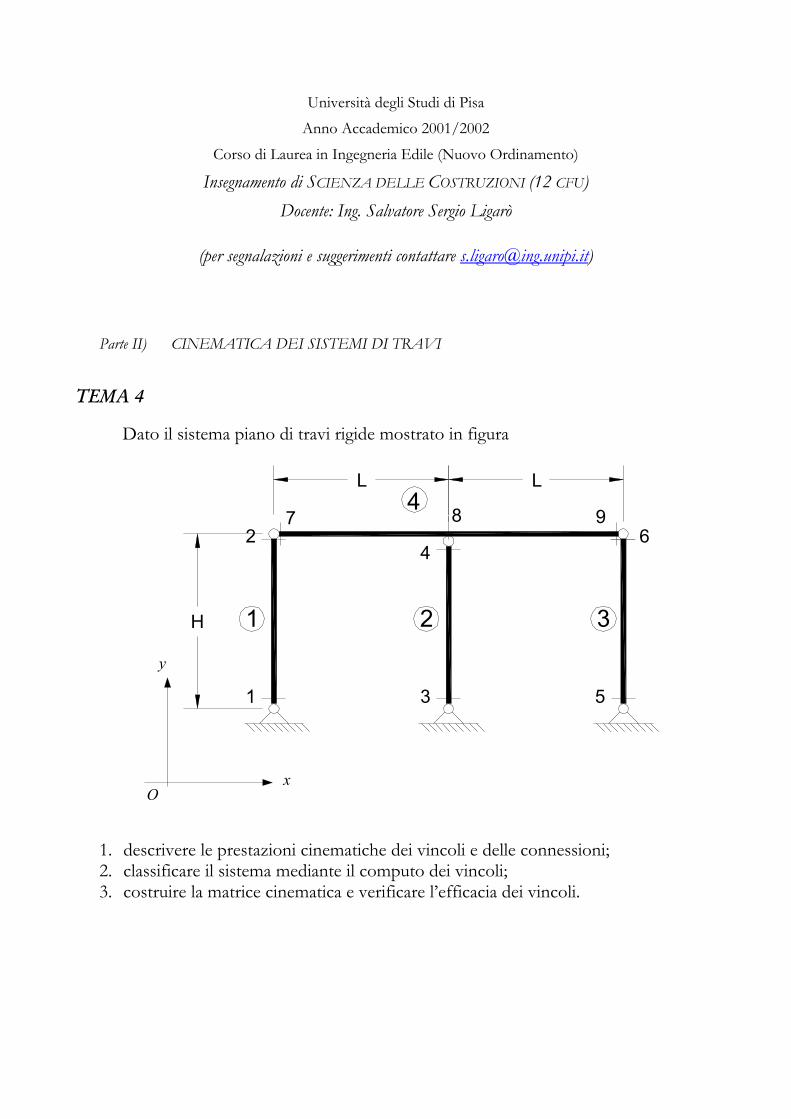
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
TEMA 4
Dato il sistema piano di travi rigide mostrato in figura
1
4
1
2 7
6
5 3
2 3
4
8 9
H
L L
y
x O
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. costruire la matrice cinematica e verificare l’efficacia dei vincoli.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
2
SOLUZIONE:
a) Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle quattro parti rigide , , e mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
≥==
000
1
1
1
θvu
21 =m ,
Vincolo 3
≥==
000
3
3
3
θvu
23 =m ,
Vincolo 5
≥==
000
5
5
5
θvu
25 =m ,
Connessione -
≥==
000
7
7
7
θvu
272 =−m ,
Connessione -
≥−=−=−
000
84
84
84
θθvvuu
284 =−m ,
Connessione -
≥−=−=−
000
96
96
96
θθvvuu
296 =−m ,
Gli spostamenti sono valutati nel sistema di riferimento (O, x, y).
b) Computo dei vincoli Poiché il numero di parti è p = 4, i gradi di libertà del sistema risultano:
12433 =⋅=⋅= pg . D’altra parte, se i vincoli e le connessioni fossero indipendenti (vincoli efficaci), il grado di vincolo del sistema risulterebbe:
12222222968472531 =+++++=+++++= −−− mmmmmmv ,
per cui il sistema di travi dato può essere (al più) una struttura isostatica.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
3
c) Matrice cinematica Per verificare l’efficacia dei vincoli costruiamo la matrice cinematica e calcoliamone il rango. Seguendo il procedimento sintetico, inseriamo immediatamente le condizioni al contorno nelle equazioni di congruenza. Scelto un polo per ciascuna parte, le incognite del problema cinematico sono quelle riportate nella colonna 3 della tabella seguente:
Parte P Pδ Q Qδ
1u 11111212 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
1v 0)( 111212 ==θ⋅−+= vxxvv 1 1θ
2 12 θ=θ
3u 33333434 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
3v 0)( 333434 ==θ⋅−+= vxxvv 3 3θ
4 34 θ=θ
5u 55555656 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
5v 0)( 555656 ==θ⋅−+= vxxvv 5 5θ
6 56 θ=θ
777878 )( uyyuu =θ⋅−−= 7u
7777878 )( θ⋅+=θ⋅−+= Lvxxvv 8 78 θ=θ
7v 777979 )( uyyuu =θ⋅−−=
7777979 2)( θ⋅+=θ⋅−+= Lvxxvv
7
7θ 9
79 θ=θ
Nella colonna 4 sono indicate le sezioni ausiliarie, mentre nella colonna 5 sono riportate le espressioni delle loro componenti di spostamento. Le equazioni di compatibilità cinematica si riducono alle equazioni di raccordo:
Connessione -
=−=−
00
72
72
vvuu ⇒
==+θ
00
7
71
vuH ,
Connessione -
=−=−
00
84
84
vvuu ⇒
=θ=+θ⋅
00
7
73 uH ,
Connessione -
=−=−
00
96
96
vvuu ⇒
=θ=+θ⋅
00
7
75 uH .
Tale sistema scritto in notazione matriciale diviene:
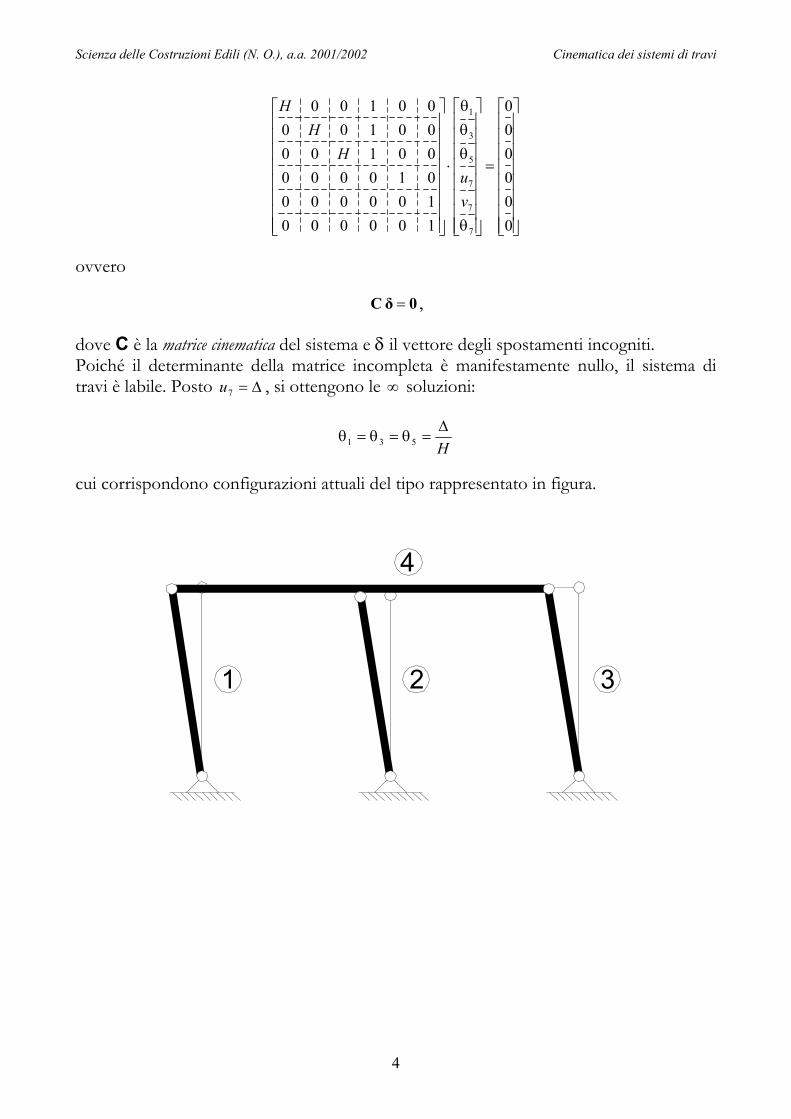
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
4
=
θ
θθθ
⋅
000000
100000100000010000001000010000100
7
7
7
5
3
1
vu
HH
H
ovvero
0δC = ,
dove C è la matrice cinematica del sistema e δ il vettore degli spostamenti incogniti. Poiché il determinante della matrice incompleta è manifestamente nullo, il sistema di travi è labile. Posto ∆=7u , si ottengono le ∞ soluzioni:
H∆
=θ=θ=θ 531
cui corrispondono configurazioni attuali del tipo rappresentato in figura.
4
1 2 3
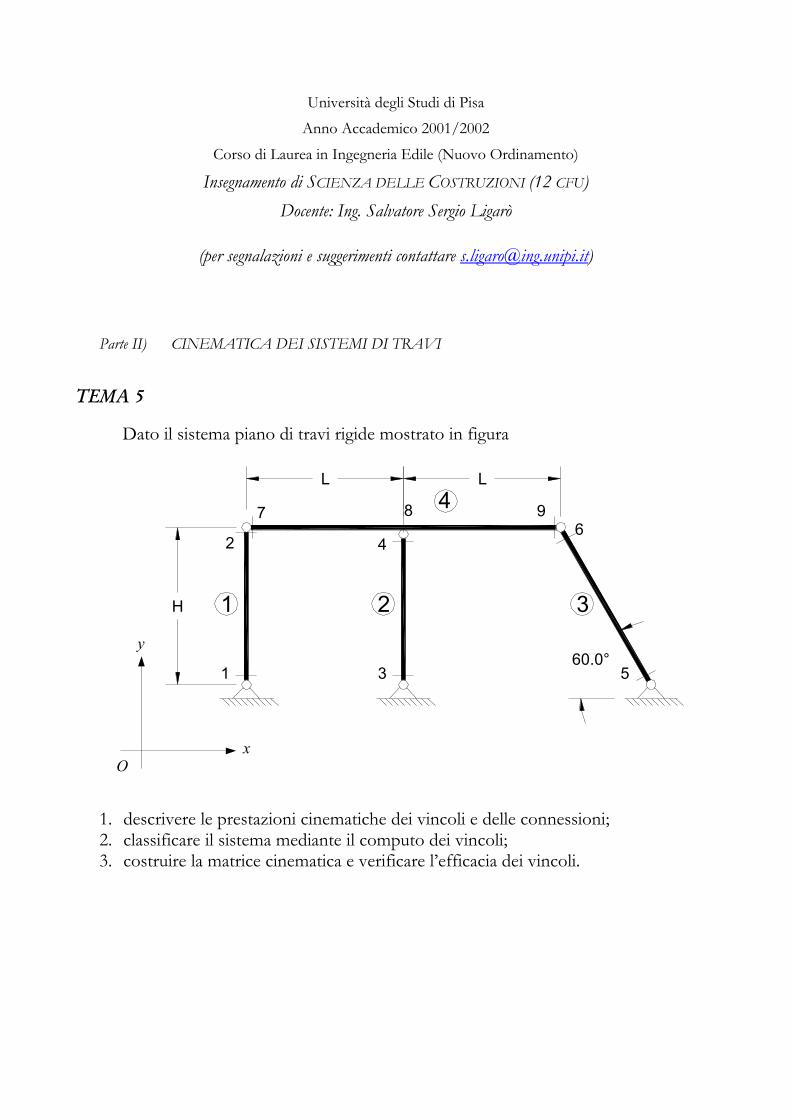
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
TEMA 5
Dato il sistema piano di travi rigide mostrato in figura
2
1
1
7 4
6
3
2
4
5
3
8 9
L L
H
60.0°
x
y
O
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. costruire la matrice cinematica e verificare l’efficacia dei vincoli.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
2
SOLUZIONE:
a) Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle quattro parti rigide , , e mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
≥==
000
1
1
1
θvu
21 =m ,
Vincolo 3
≥==
000
3
3
3
θvu
23 =m ,
Vincolo 5
≥==
000
5
5
5
θvu
25 =m ,
Connessione -
≥−=−=−
000
72
72
72
θθvvuu
272 =−m ,
Connessione -
≥−=−=−
000
84
84
84
θθvvuu
284 =−m ,
Connessione -
≥−=−=−
000
96
96
96
θθvvuu
296 =−m ,
Gli spostamenti sono valutati nel sistema di riferimento (O, x, y).
b) Computo dei vincoli
Poiché il numero di parti è p = 4, i gradi di libertà del sistema risultano: 12433 =⋅=⋅= pg .
D’altra parte, se i vincoli e le connessioni fossero indipendenti (vincoli efficaci), il grado di vincolo del sistema risulterebbe:
12222222968472531 =+++++=+++++= −−− mmmmmmv ,
per cui il sistema di travi dato può essere (al più) una struttura isostatica.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
3
c) Matrice cinematica
Per verificare l’efficacia dei vincoli costruiamo la matrice cinematica e calcoliamone il rango. Seguendo il procedimento sintetico, inseriamo immediatamente le condizioni al contorno nelle equazioni di congruenza.
Scelto un polo per ciascuna parte, le incognite del problema cinematico sono quelle riportate nella colonna 3 della tabella seguente:
Parte P Pδ Q Qδ
1u 11111212 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
1v 0)( 111212 ==θ⋅−+= vxxvv 1 1θ
2 12 θ=θ
3u 33333434 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
3v 0)( 333434 ==θ⋅−+= vxxvv 3 3θ
4 34 θ=θ
5u 55555656 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
5v 555656 3/)( θ⋅−=θ⋅−+= Hxxvv 5 5θ
6 56 θ=θ
777878 )( uyyuu =θ⋅−−= 7u
7777878 )( θ⋅+=θ⋅−+= Lvxxvv 8 78 θ=θ
7v 777979 )( uyyuu =θ⋅−−=
7777979 2)( θ⋅+=θ⋅−+= Lvxxvv
7
7θ 9
79 θ=θ
Nella colonna 4 sono indicate le sezioni ausiliarie, mentre nella colonna 5 sono riportate le espressioni delle loro componenti di spostamento.
Le equazioni di compatibilità cinematica si riducono alle equazioni di raccordo:
Connessione -
=−=−
00
72
72
vvuu ⇒
==+θ
00
7
71
vuH ,
Connessione -
=−=−
00
84
84
vvuu ⇒
=θ=+θ⋅
00
7
73 uH ,
Connessione -
=−=−
00
96
96
vvuu ⇒
=θ⋅−−θ⋅−=−θ⋅−
023/0
775
75
LvHuH .
Tale sistema scritto in notazione matriciale diviene:

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
4
=
θ
θθθ
⋅
000000
2103/00001001000000010001000000100
7
7
7
5
3
1
vu
LHH
H
H
ovvero
0δC = ,
dove C è la matrice cinematica del sistema e δ il vettore degli spostamenti incogniti. Poiché il determinante della matrice incompleta è diverso da zero, il sistema di
travi è una struttura isostatica. Pertanto, l’unica soluzione è δ=0 corrispondente alla configurazione iniziale.

Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) CINEMATICA DEI SISTEMI DI TRAVI
TEMA 6
Dato il sistema piano di travi rigide mostrato in figura
2 7
4
3 5
4
2
8 9
3
6
1
1
L L
H
60.0° 60.0°
x
y
O
1. descrivere le prestazioni cinematiche dei vincoli e delle connessioni; 2. classificare il sistema mediante il computo dei vincoli; 3. costruire la matrice cinematica e verificare l’efficacia dei vincoli.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
2
SOLUZIONE:
a) Prestazioni cinematiche dei vincoli e delle connessioni
Il sistema risulta dall’assemblaggio delle quattro parti rigide , , e mostrate in figura, vincolate al suolo e tra di loro mediante i seguenti dispositivi:
Vincolo 1
≥==
000
1
1
1
θvu
21 =m ,
Vincolo 3
≥==
000
3
3
3
θvu
23 =m ,
Vincolo 5
≥==
000
5
5
5
θvu
25 =m ,
Connessione -
≥−=−=−
000
72
72
72
θθvvuu
272 =−m ,
Connessione -
≥−=−=−
000
84
84
84
θθvvuu
284 =−m ,
Connessione -
≥−=−=−
000
96
96
96
θθvvuu
296 =−m ,
Gli spostamenti sono valutati nel sistema di riferimento (O, x, y).
b) Computo dei vincoli
Poiché il numero di parti è p = 4, i gradi di libertà del sistema risultano: 12433 =⋅=⋅= pg .
D’altra parte, se i vincoli e le connessioni fossero indipendenti (vincoli efficaci), il grado di vincolo del sistema risulterebbe:
12222222968472531 =+++++=+++++= −−− mmmmmmv ,
per cui il sistema di travi dato può essere (al più) una struttura isostatica.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
3
c) Matrice cinematica
Per verificare l’efficacia dei vincoli costruiamo la matrice cinematica e calcoliamone il rango. Seguendo il procedimento sintetico, inseriamo immediatamente le condizioni al contorno nelle equazioni di congruenza. Scelto un polo per ciascuna parte, le incognite del problema cinematico sono quelle riportate nella colonna 3 della tabella seguente:
Parte P Pδ Q Qδ
1u 11111212 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
1v 111212 3/)( θ⋅=θ⋅−+= Hxxvv 1 1θ
2 12 θ=θ
3u 33333434 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
3v 0)( 333434 ==θ⋅−+= vxxvv 3 3θ
4 34 θ=θ
5u 55555656 )( θ⋅−=θ⋅−=θ⋅−−= HHuyyuu
5v 555656 3/)( θ⋅−=θ⋅−+= Hxxvv 5 5θ
6 56 θ=θ
777878 )( uyyuu =θ⋅−−= 7u
7777878 )( θ⋅+=θ⋅−+= Lvxxvv 8 78 θ=θ
7v 777979 )( uyyuu =θ⋅−−=
7777979 2)( θ⋅+=θ⋅−+= Lvxxvv
7
7θ 9
79 θ=θ
Nella colonna 4 sono indicate le sezioni ausiliarie, mentre nella colonna 5 sono riportate le espressioni delle loro componenti di spostamento. Le equazioni di compatibilità cinematica si riducono alle equazioni di raccordo:
Connessione -
=−=−
00
72
72
vvuu ⇒
=−θ⋅=+θ⋅
03/0
71
71
vHuH ,
Connessione -
=−=−
00
84
84
vvuu ⇒
=θ⋅+=+θ⋅00
77
73
LvuH ,
Connessione -
=−=−
00
96
96
vvuu ⇒
=θ⋅++θ⋅=+θ⋅
023/0
775
75
LvHuH .
Tale sistema scritto in notazione matriciale diviene:
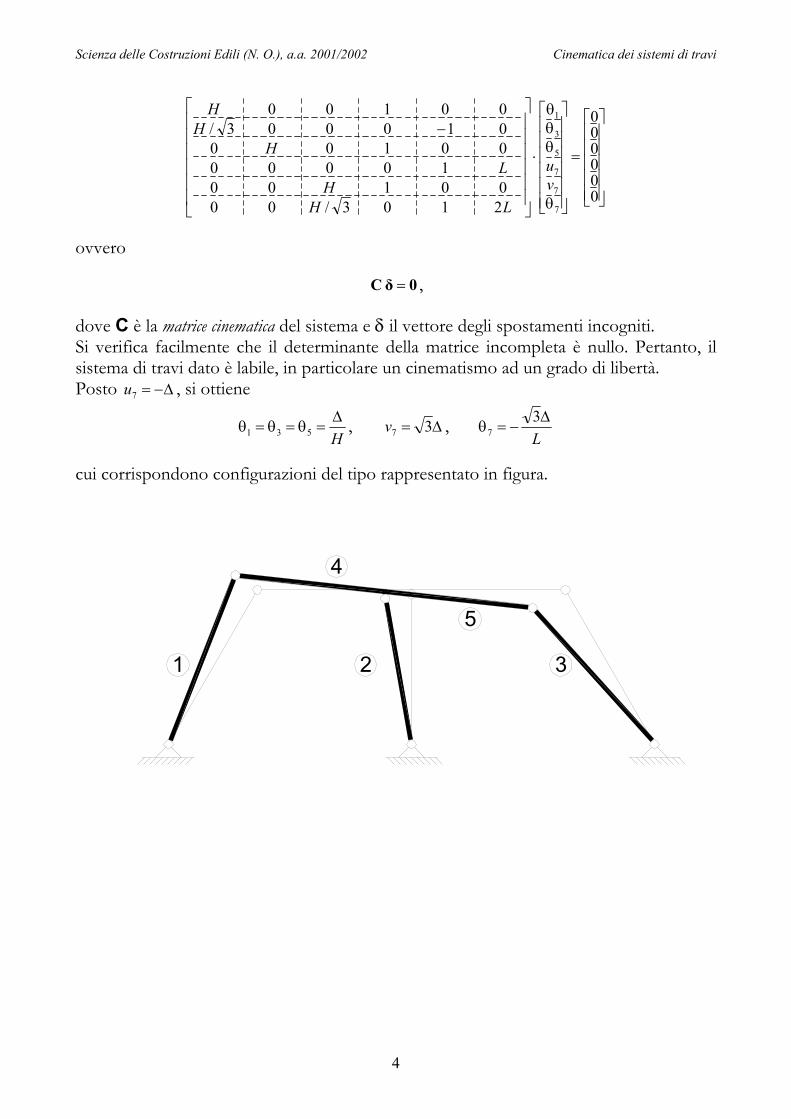
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica dei sistemi di travi
4
=
θ
θθθ
⋅
−
000000
2103/0000100
1000000100010003/00100
7
7
7
5
3
1
vu
LHH
LH
HH
ovvero
0δC = ,
dove C è la matrice cinematica del sistema e δ il vettore degli spostamenti incogniti. Si verifica facilmente che il determinante della matrice incompleta è nullo. Pertanto, il sistema di travi dato è labile, in particolare un cinematismo ad un grado di libertà. Posto ∆−=7u , si ottiene
H∆
=θ=θ=θ 531 , ∆= 37v , L∆
−=θ3
7
cui corrispondono configurazioni del tipo rappresentato in figura.
1
4
2 3
5
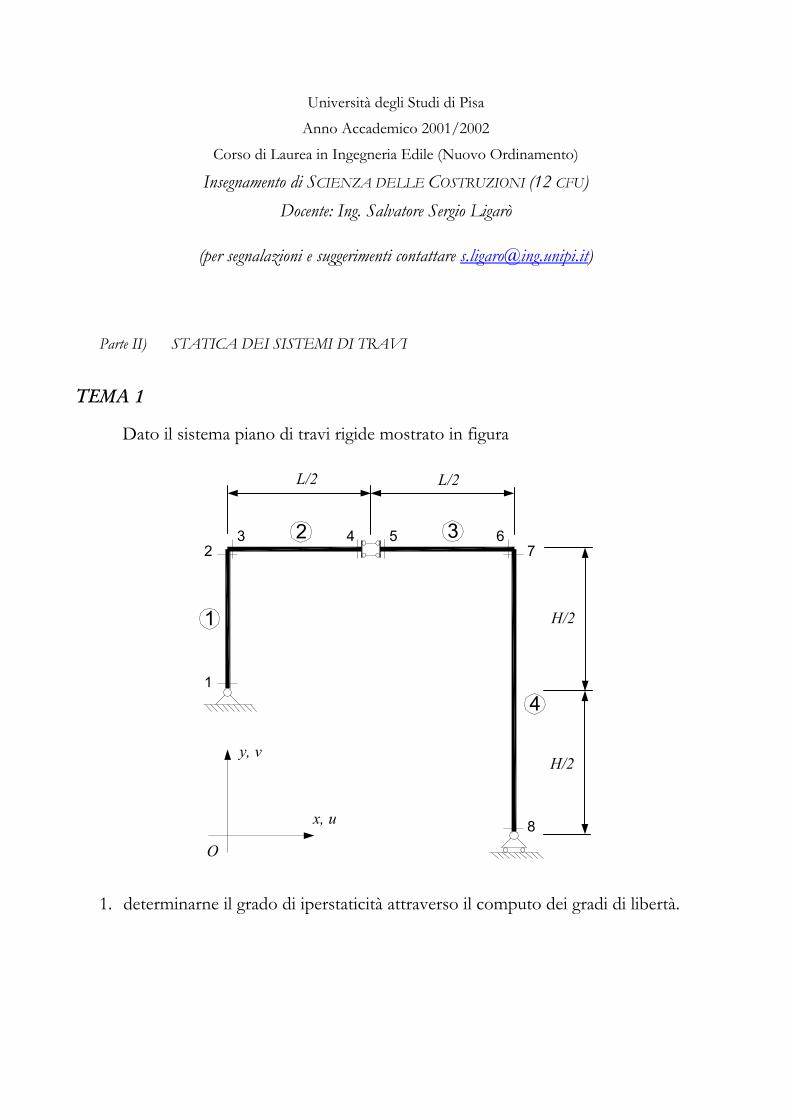
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 1
Dato il sistema piano di travi rigide mostrato in figura
1
2 3
4 1
2 3 4 5
7 6
8 x, u
y, v
O
L/2 L/2
H/2
H/2
1. determinarne il grado di iperstaticità attraverso il computo dei gradi di libertà.
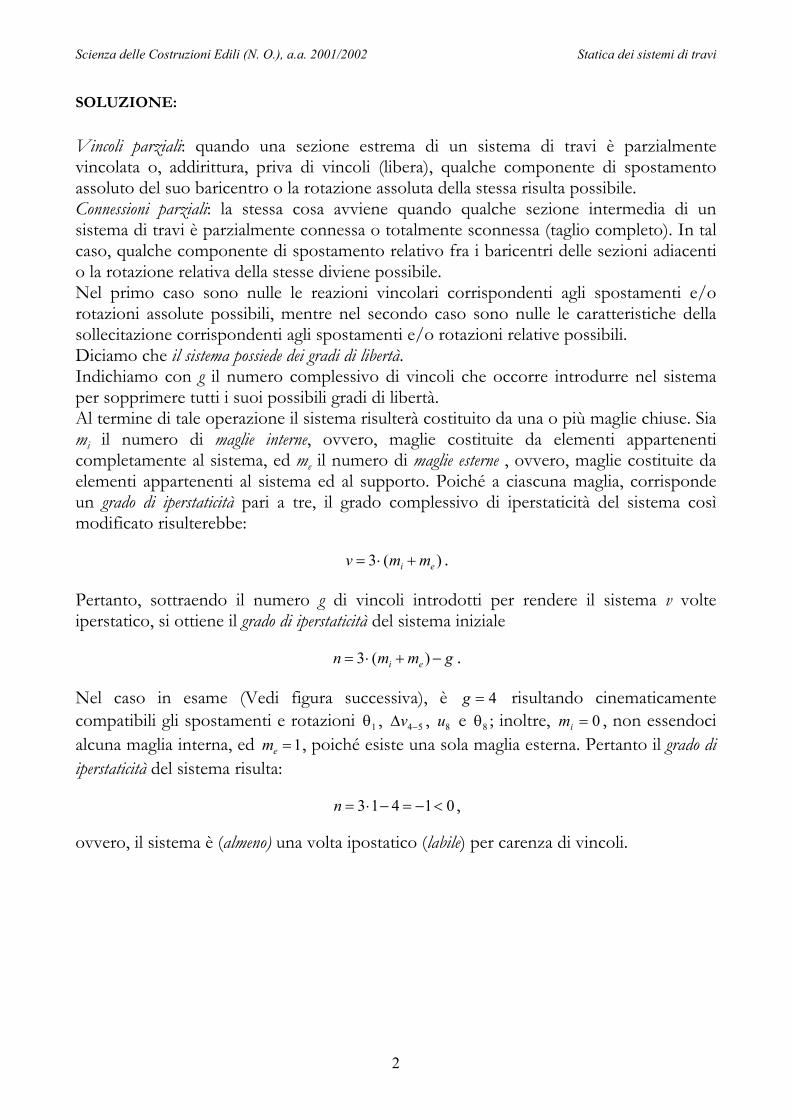
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
Vincoli parziali: quando una sezione estrema di un sistema di travi è parzialmente vincolata o, addirittura, priva di vincoli (libera), qualche componente di spostamento assoluto del suo baricentro o la rotazione assoluta della stessa risulta possibile. Connessioni parziali: la stessa cosa avviene quando qualche sezione intermedia di un sistema di travi è parzialmente connessa o totalmente sconnessa (taglio completo). In tal caso, qualche componente di spostamento relativo fra i baricentri delle sezioni adiacenti o la rotazione relativa della stesse diviene possibile. Nel primo caso sono nulle le reazioni vincolari corrispondenti agli spostamenti e/o rotazioni assolute possibili, mentre nel secondo caso sono nulle le caratteristiche della sollecitazione corrispondenti agli spostamenti e/o rotazioni relative possibili. Diciamo che il sistema possiede dei gradi di libertà. Indichiamo con g il numero complessivo di vincoli che occorre introdurre nel sistema per sopprimere tutti i suoi possibili gradi di libertà. Al termine di tale operazione il sistema risulterà costituito da una o più maglie chiuse. Sia mi il numero di maglie interne, ovvero, maglie costituite da elementi appartenenti completamente al sistema, ed me il numero di maglie esterne , ovvero, maglie costituite da elementi appartenenti al sistema ed al supporto. Poiché a ciascuna maglia, corrisponde un grado di iperstaticità pari a tre, il grado complessivo di iperstaticità del sistema così modificato risulterebbe:
)(3 ei mmv +⋅= .
Pertanto, sottraendo il numero g di vincoli introdotti per rendere il sistema v volte iperstatico, si ottiene il grado di iperstaticità del sistema iniziale
gmmn ei −+⋅= )(3 .
Nel caso in esame (Vedi figura successiva), è 4=g risultando cinematicamente compatibili gli spostamenti e rotazioni 1θ , 54−∆v , 8u e 8θ ; inoltre, 0=im , non essendoci alcuna maglia interna, ed 1=em , poiché esiste una sola maglia esterna. Pertanto il grado di iperstaticità del sistema risulta:
01413 <−=−⋅=n ,
ovvero, il sistema è (almeno) una volta ipostatico (labile) per carenza di vincoli.
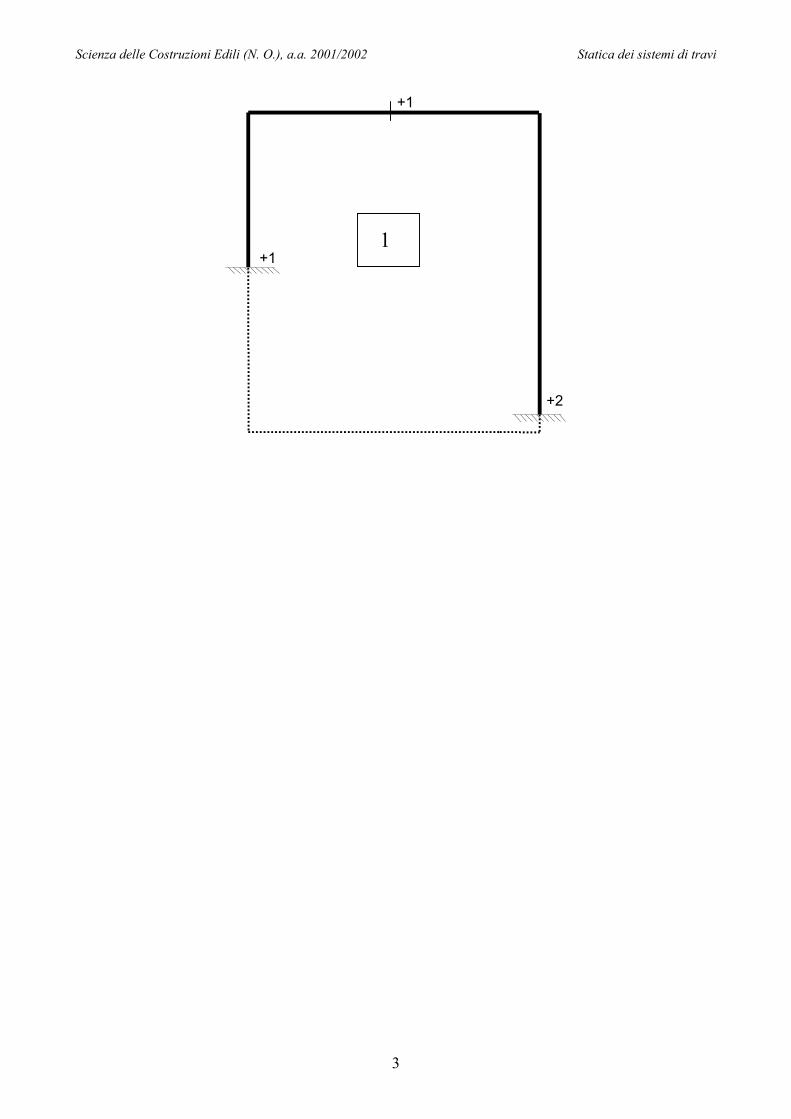
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
+1
+1
+2
1
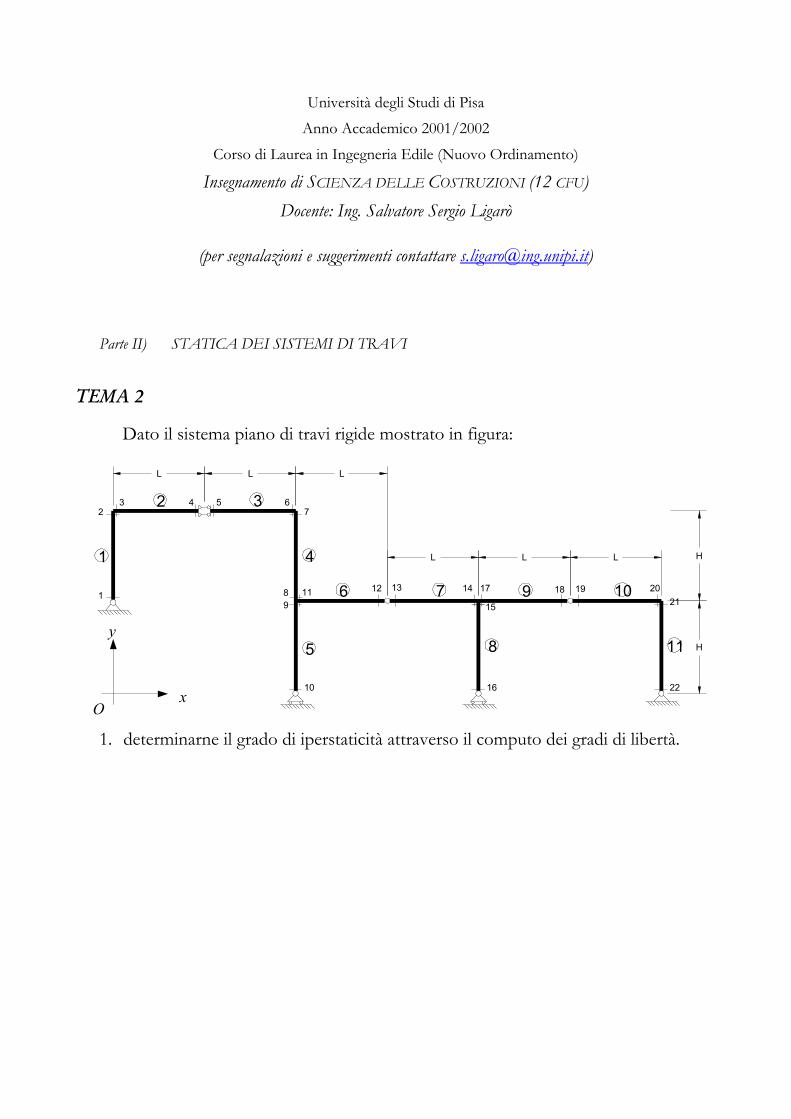
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 2
Dato il sistema piano di travi rigide mostrato in figura:
1
2 3
4
1
2 3 4 5 7 6
10
11 6 15
13 12 7 14
8
16
17 9 18 19 10 20 21
11
22
5
8 9
L L L
L L L
H
H
x
y
O
1. determinarne il grado di iperstaticità attraverso il computo dei gradi di libertà.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
Il sistema è dotato dei seguenti di vincoli parziali • Cerniera in 1 ed in 22; • Carrello in 10 ed in 16;
a cui corrispondono i gradi di libertà
• spostamenti assoluti: 10u , 16u ; • rotazioni assolute: 1θ , 10θ , 16θ , 22θ ;
e delle seguenti connessioni parziali
• Sconnessione T=0 in 4-5 • Sconnessione M=0 in 12-13 ed in 18-19
a cui corrispondono i gradi di libertà
• spostamenti relativi: 4554 vvv −=∆ − ; • rotazioni relative: 12131312 θ−θ=θ∆ − , 18191918 θ−θ=θ∆ − .
Il numero complessivo di vincoli che occorre aggiungere al sistema per eliminare tutti i possibili gradi di libertà risulta 9=g . Al termine di tale operazione il sistema risulterà costituito dalle tre maglie chiuse esterne mostrate in figura
1
2 3
+1
+1
+2
+1 +1
+2 +1
Pertanto, se i vincoli sono indipendenti, il grado di iperstaticità risulta
09333 =−×=−×= gmn e ,
ovvero, il sistema è isostatico.
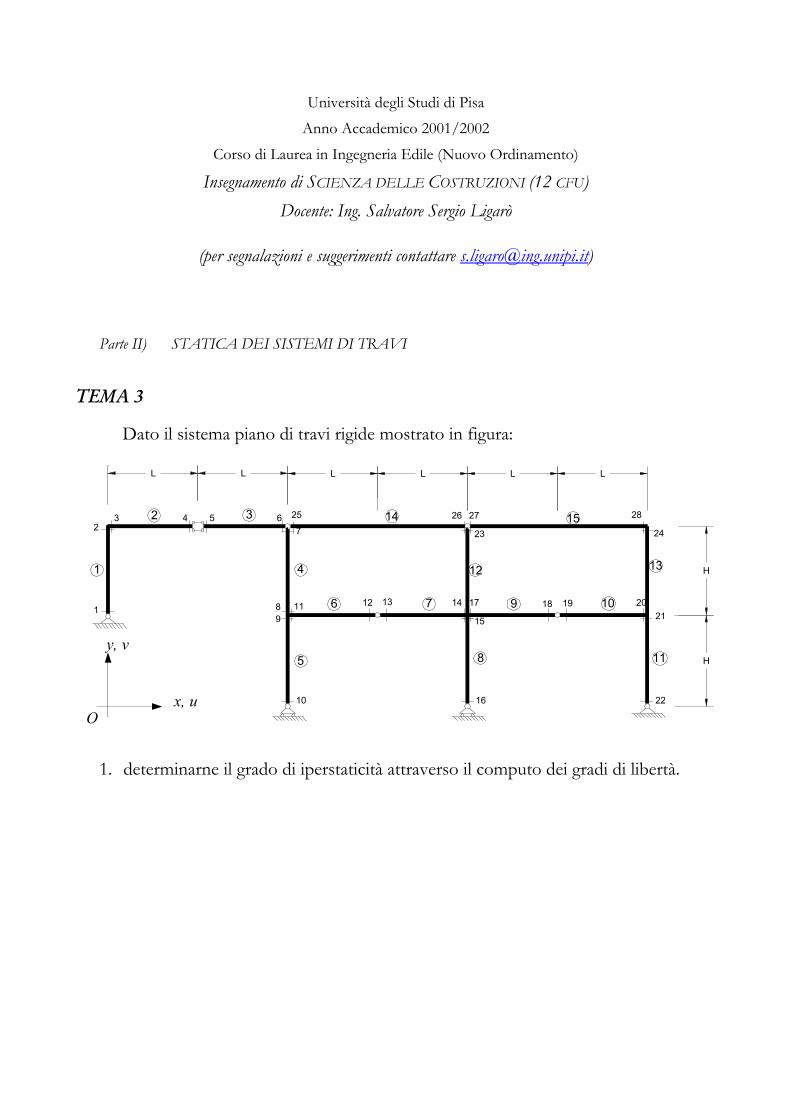
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 3
Dato il sistema piano di travi rigide mostrato in figura:
1
2 3
4
1
2 3 4 5 7
6
10
11 6 15
13 12 7 14
8
16
17 9 18 19 10 20 21
11
22
5
8 9
L L L L L L
H
H 12 13
14 15 23
26 27 24
28 25
x, u
y, v
O
1. determinarne il grado di iperstaticità attraverso il computo dei gradi di libertà.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE: Il sistema è dotato dei seguenti vincoli parziali
• Carrello in 10 e 16;
• Cerniera in 1 e 22; a cui corrispondono i gradi di libertà
• spostamenti assoluti: 10u , 16u ; • rotazioni assolute: 1θ , 10θ , 16θ , 22θ ;
e delle seguenti connessioni parziali
• Sconnessione T=0 in 4-5; • Sconnessione M=0 in 12-13, 18-19, 6-7-25, 23-26-27;
a cui corrispondono i gradi di libertà
• spostamenti relativi: 4554 vvv −=∆ − ; • rotazioni relative: 12131312 θ−θ=θ∆ − , 18191918 θ−θ=θ∆ − ; 6776 θ−θ=θ∆ − ;
725257 θ−θ=θ∆ − ; 26232326 θ−θ=θ∆ − ; 23272723 θ−θ=θ∆ − .
Il numero complessivo di vincoli che occorre aggiungere al sistema per sopprimere tutti i possibili gradi di libertà risulta 13=g . Al termine di tale operazione il sistema risulterà costituito dalle cinque maglie chiuse, di cui tre esterne e due interne, mostrate in figura
1
2 3
+1
+1
+2
+1 +1
+2 +1
+2 +2
4 5
Pertanto, se i vincoli sono indipendenti, il grado di iperstaticità del sistema risulta
213)23(3)(3 =−+×=−+×= gmmn ie .
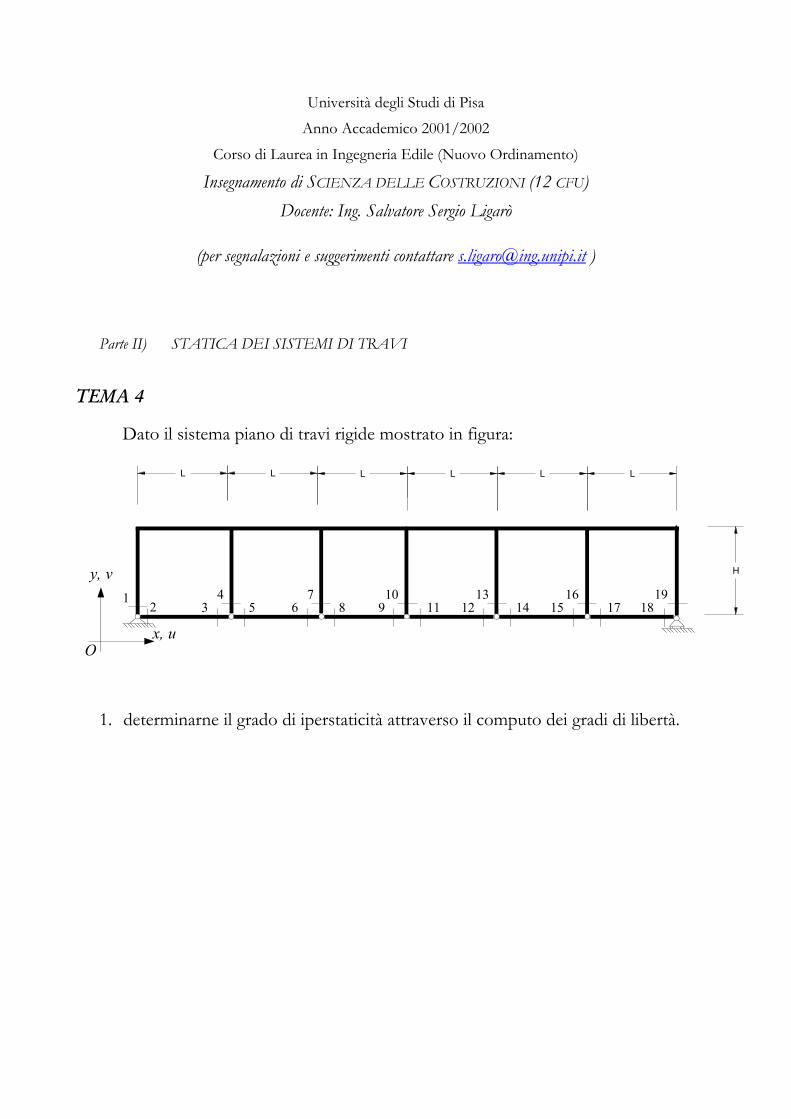
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU) Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 4
Dato il sistema piano di travi rigide mostrato in figura: L L L L L L
H
x, u
y, v
O
1 2
4 3 5
7 6 8
10 9 11
13 12 14
16 15 17
19 18
1. determinarne il grado di iperstaticità attraverso il computo dei gradi di libertà.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE: Il sistema è dotato dei seguenti vincoli parziali
• cerniera in 1;
• carrello in 19; a cui corrispondono i gradi di libertà
• spostamenti assoluti: 19u ; • rotazioni assolute: 1θ , 19θ ;
e delle seguenti connessioni parziali
• sconnessione M=0 in 1-2, 3-4-5, 6-7-8, 9-10-11, 12-13-14, 15-16-17, 18-19; a cui corrispondono i gradi di libertà
• rotazioni relative: 1221 θ−θ=θ∆ − , 3443 θ−θ=θ∆ − ; 4554 θ−θ=θ∆ − ; 6776 θ−θ=θ∆ − ; 7887 θ−θ=θ∆ − ;
910109 θ−θ=θ∆ − ; 10111110 θ−θ=θ∆ − ; 12131312 θ−θ=θ∆ − ; 13141413 θ−θ=θ∆ − ; 15161615 θ−θ=θ∆ − ; 16171716 θ−θ=θ∆ − ; 18191918 θ−θ=θ∆ −
Il numero complessivo di vincoli che occorre aggiungere al sistema per sopprimere tutti i possibili gradi di libertà risulta 15=g . Al termine di tale operazione il sistema risulterà costituito dalle sette maglie chiuse, di cui una esterna e sei interne, mostrate in figura
1 2 3 4 6
7
52 2 2 2 2 2 3
Pertanto, se i vincoli sono indipendenti, il grado di iperstaticità del sistema risulta
615)61(3)(3 =−+×=−+×= gmmn ie .
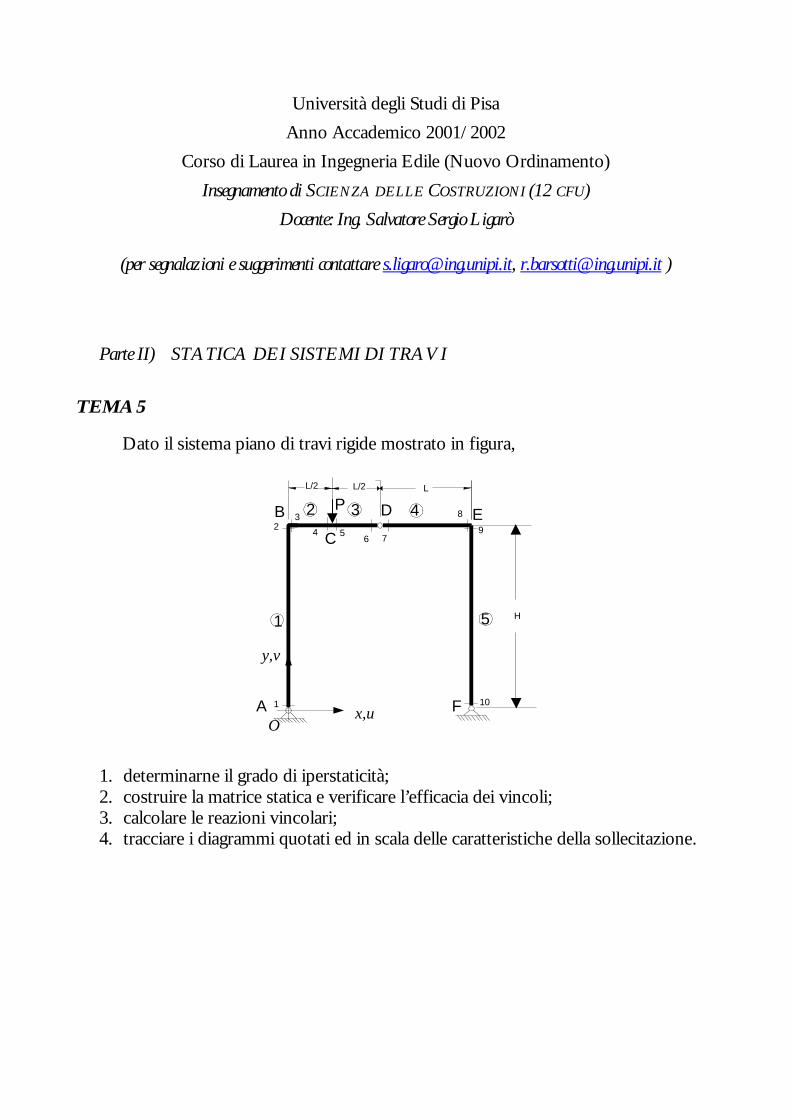
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected], [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 5
Dato il sistema piano di travi rigide mostrato in figura,
1
2 3 4 2 3
4 5 7 6
10
5
8 9
1
L/2 L
x,u
y,v
O
L/2
H
P
A
B
C
D E
F
1. determinarne il grado di iperstaticità; 2. costruire la matrice statica e verificare l’efficacia dei vincoli; 3. calcolare le reazioni vincolari; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
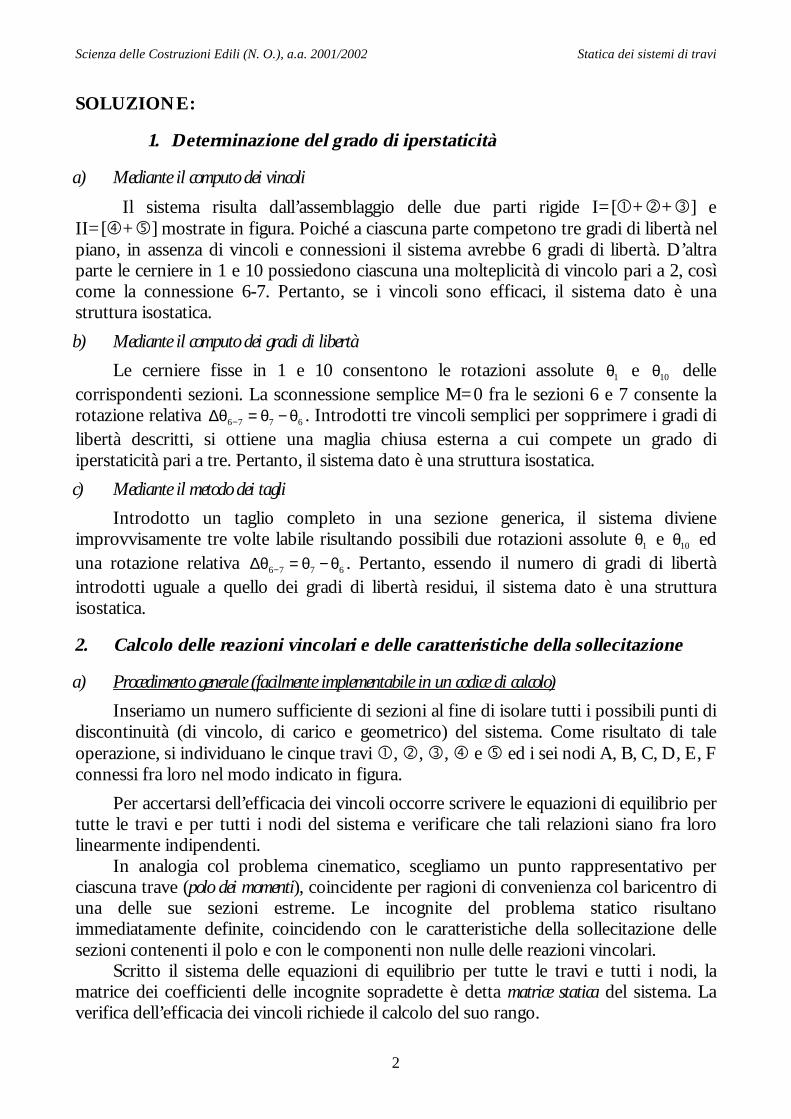
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
1. Determinazione del grado di iperstaticità
a) Mediante il computo dei vincoli Il sistema risulta dall’assemblaggio delle due parti rigide I=[!+"+#] e II=[$+%] mostrate in figura. Poiché a ciascuna parte competono tre gradi di libertà nel piano, in assenza di vincoli e connessioni il sistema avrebbe 6 gradi di libertà. D’altra parte le cerniere in 1 e 10 possiedono ciascuna una molteplicità di vincolo pari a 2, così come la connessione 6-7. Pertanto, se i vincoli sono efficaci, il sistema dato è una struttura isostatica. b) Mediante il computo dei gradi di libertà
Le cerniere fisse in 1 e 10 consentono le rotazioni assolute 1θ e 10θ delle corrispondenti sezioni. La sconnessione semplice M=0 fra le sezioni 6 e 7 consente la rotazione relativa 6776 θ−θ=θ∆ − . Introdotti tre vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una maglia chiusa esterna a cui compete un grado di iperstaticità pari a tre. Pertanto, il sistema dato è una struttura isostatica. c) Mediante il metodo dei tagli
Introdotto un taglio completo in una sezione generica, il sistema diviene improvvisamente tre volte labile risultando possibili due rotazioni assolute 1θ e 10θ ed una rotazione relativa 6776 θ−θ=θ∆ − . Pertanto, essendo il numero di gradi di libertà introdotti uguale a quello dei gradi di libertà residui, il sistema dato è una struttura isostatica.
2. Calcolo delle reazioni vincolari e delle caratteristiche della sollecitazione
a) Procedimento generale (facilmente implementabile in un codice di calcolo) Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometrico) del sistema. Come risultato di tale operazione, si individuano le cinque travi !, ", #, $ e % ed i sei nodi A, B, C, D, E, F connessi fra loro nel modo indicato in figura.
Per accertarsi dell’efficacia dei vincoli occorre scrivere le equazioni di equilibrio per tutte le travi e per tutti i nodi del sistema e verificare che tali relazioni siano fra loro linearmente indipendenti.
In analogia col problema cinematico, scegliamo un punto rappresentativo per ciascuna trave (polo dei momenti), coincidente per ragioni di convenienza col baricentro di una delle sue sezioni estreme. Le incognite del problema statico risultano immediatamente definite, coincidendo con le caratteristiche della sollecitazione delle sezioni contenenti il polo e con le componenti non nulle delle reazioni vincolari.
Scritto il sistema delle equazioni di equilibrio per tutte le travi e tutti i nodi, la matrice dei coefficienti delle incognite sopradette è detta matrice statica del sistema. La verifica dell’efficacia dei vincoli richiede il calcolo del suo rango.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
Nel caso in esame, essendoci cinque travi, si hanno come incognite le quindici caratteristiche della sollecitazione riportate a colonna 3 della tabella seguente più le quattro componenti non nulle delle reazioni vincolari delle due cerniere, per un totale di 19 incognite. Nella colonna 4 della stessa tabella, sono invece indicate le sezioni ausiliarie di ciascuna trave, necessarie per scrivere le equazioni di equilibrio dei nodi.
Equilibrio delle travi
Isolata ciascuna trave soggetta alle caratteristiche della sollecitazione delle sezioni di estremità ed agli eventuali carichi distribuiti lungo il suo asse (assenti nel problema in esame), le equazioni cardinali della statica
∑ = 0xF , ∑ = 0yF , ∑ = 0zM ,
permettono di esprimere le caratteristiche della sollecitazione delle sezioni ausiliarie QC in funzione delle caratteristiche delle sezioni contenenti i poli dei momenti PC . Tali espressioni sono riportate a colonna 5.
Trave P PC Q QC 1N 12 NN =
1T 12 TT = ! 1 1M
2 HTMM ⋅+= 112
3N 34 NN = 3T 34 TT = " 3 3M
4 2/334 LTMM ⋅+=
5N 56 NN = 5T 56 TT = # 5 5M
6 2/556 LTMM ⋅+=
7N 78 NN = 7T 78 TT = $ 7 7M
8 LTMM ⋅+= 778
9N 910 NN = 9T 910 TT = % 9 9M
10 HTMM ⋅+= 9910
Tali relazioni prendono il nome di equazioni di compatibilità meccanica interna o, più semplicemente, equazioni di equilibrio interno.
Equilibrio dei nodi
Isolato adesso ciascun nodo con le eventuali forze (X, Y) e coppie (Mz) esterne concentrate agenti su di esso e con le caratteristiche della sollecitazione (M, N, T) esercitate su di esso dalle travi collegate , le equazioni cardinali della statica si scrivono:

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
Nodo A
==+==+==+=
∑∑∑
000
11
1
1
MMMMNYFTXF
dAz
Ay
Ax
⇒
=−=
−=
01
1
1
MYNXT
A
A
,
Nodo B
=+−=+−==−−=−−==+−=+−=
∑∑∑
000
3232
3232
3232
MMMMMMTNTNYFNTNTXF
Bz
By
Bx
⇒
=−=
=
23
23
23
MMNT
TN,
Nodo C
=+−=+−==−+−=−+==+−=+−=
∑∑∑
000
5454
5454
5454
MMMMMMTTPTTYFNNNNXF
Cz
Cy
Cx
⇒
=−=
=
45
45
45
MMPTT
NN,
Nodo D
==+==−=−=
=−=−+==+−=+−=
∑∑∑∑
00
00
77
66
7676
7676
MMMMMMMM
TTTTYFNNNNXF
dD
dz
sD
sz
Dy
Dx
⇒
==
==
00
7
6
67
67
MM
TTNN
,
Nodo E
=+−=+−==−=−+=
=−−=−−=
∑∑∑
00
0
9898
9898
9898
MMMMMMNTNTYF
TNTNXF
Ez
Ey
Ex
⇒
==−=
89
89
89
MMTNNT
,
Nodo F
==+==+==+=
∑∑∑
000
1010
10
10
MMMMNYFTXF
dF
dz
Fy
Fx
⇒
=−=
−=
010
10
10
MYNXT
F
F
,
Tali relazioni prendono il nome di equazioni di compatibilità meccanica esterna; o, più semplicemente equazioni di equilibrio esterno. In particolare, quelle di vincolo sono chiamate condizioni al contorno (statiche), mentre le relazioni di connessione sono dette condizioni di raccordo (statiche).
Primo metodo di soluzione
L’insieme costituito dalle 15 equazioni di equilibrio interno e dalle 19 equazioni di equilibrio esterno, fornisce un bellissimo e semplicissimo (da costruire e da risolvere) sistema di 34 equazioni algebriche lineari, non omogeneo per la presenza del carico P, nelle 34 incognite costituite dalle 30 caratteristiche della sollecitazione delle sezioni contenenti i poli e delle sezioni ausiliarie, 10,,1,,, K=iMTN iii , più le quattro componenti non nulle delle reazioni vincolari AX , AY , FX e FY . Il sistema potrebbe essere risolto così come è stato scritto. Tuttavia, date le notevoli dimensioni che esso può raggiungere in situazioni più generali, esso si presta poco ad essere risolto manualmente, sebbene risulta estremamente semplice da trattare attraverso il calcolo automatico. Tre rilevanti vantaggi di tale metodo meritano di essere evidenziati. Il primo consiste della sua generalità potendo essere applicato a qualunque struttura, il secondo risiede nella facilità di implementazione in un codice di calcolo automatico, ed il terzo, infine, nel fatto che esso permette di risolvere completamente il problema statico in una sola fase:

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
infatti, le caratteristiche della sollecitazione nelle sezioni che servono per tracciare i relativi diagrammi vengono dedotte simultaneamente alle reazioni vincolari.
Secondo metodo di soluzione
Una valida alternativa al precedente metodo si ottiene sostituendo l’insieme delle 15 equazioni di equilibrio interno nelle 19 equazioni di equilibrio esterno. Si ottiene così un sistema lineare non omogeneo più piccolo, formato da 19 equazioni nelle 19 incognite costituite dalle caratteristiche della sollecitazione delle sole sezioni che contengono i poli,
9,7,5,3,1,,, =jMTN jjj , più le solite quattro componenti non nulle delle reazioni vincolari, AX , AY , FX e FY
=⋅+=+=+
=⋅−−=−=+
==
=−=−
=⋅−−=+−
=−=⋅−−
=+=−
==+=+
000
000
00
00
02/0
00
00
000
99
9
9
779
79
79
7
6
57
57
335
35
35
113
13
13
1
1
1
HTMYNXT
LTMMTNNT
MM
TTNN
LTMMPTT
NNHTMM
NTTN
MYNXT
F
F
A
A
Scritto in notazione matriciale tale sistema diviene
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
=
⋅
F
F
A
A
YXYXMTNMTNMTNMTNMTN
9
9
9
7
7
7
5
5
5
3
3
3
1
1
1
ovvero,
fxS = ,
dove S è la matrice statica del sistema, x il vettore delle incognite ed f quello dei termini noti. Per controllare l’efficacia dei vincoli, occorre verificare che il determinante di S sia diverso da zero. Tale operazione sarà effettuata più agevolmente coi metodi esposti nei prossimi paragrafi. Naturalmente, risolvere il sistema precedente non significa affatto risolvere il problema, dal momento che le caratteristiche della sollecitazione nelle sezioni ausiliarie debbono essere ancora determinate. Ciò richiede nuovamente l’uso delle 15 equazioni lineari che esprimono l’equilibrio interno delle travi. Pertanto il problema statico viene risolto in due fasi.
b) Procedimento semplificato (permette apparentemente qualche risparmio) Come per il problema cinematico anche per il problema statico risulta possibile un procedimento semplificato in cui si considera l’equilibrio delle parti anziché quello delle travi, evitando in tal modo di considerare esplicitamente le connessioni complete fra le travi. Il sistema risulta così dall’assemblaggio delle parti rigide I=[!+"+#] e II=[$+%] mostrate nella figura seguente.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
7 6
10 1
L/2 L
x,u
y,v
O
L/2
H
P
A F
I II
Nel caso in esame, essendoci due sole parti, si hanno come incognite le sei caratteristiche della sollecitazione riportate a colonna 3 della tabella seguente più le quattro componenti non nulle delle reazioni vincolari delle due cerniere, per un totale di 10 incognite. Nella colonna 4 sono invece indicate le sezioni ausiliarie di ciascuna trave, necessarie per scrivere le equazioni di equilibrio dei nodi.
Equilibrio delle parti
Isolata ciascuna parte soggetta ai carichi effettivi ed alle caratteristiche della sollecitazione delle sezioni di estremità, le equazioni cardinali della statica permettono di esprimere le caratteristiche della sollecitazione delle sezioni ausiliarie QC in funzione delle caratteristiche delle sezioni contenenti i poli dei momenti PC . Tali espressioni sono riportate a colonna 5.
Parte P PC Q QC
1N 16 TN = 1T PNT −−= 16 I=!+"+# 1 1M
6 2/1112 LPLNHTMM ⋅−⋅−⋅+=
7N 710 TN = 7T 710 NT −= II=$+% 7 7M
10 HNLTMM ⋅−⋅+= 77710
Equilibrio dei nodi
Isolato adesso ciascun nodo con le eventuali forze (X, Y) e coppie (Mz) concentrate esterne su di esso agenti e con le caratteristiche della sollecitazione (M, N, T) esercitate su di esso dalle travi collegate , le equazioni cardinali della statica si scrivono:

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
Nodo A
==+==+==+=
∑∑∑
000
11
1
1
MMMMNYFTXF
dAz
Ay
Ax
⇒
=−=
−=
01
1
1
MYNXT
A
A
,
Nodo D
==+==−=−=
=−=−+==+−=+−=
∑∑∑∑
00
00
77
66
7676
7676
MMMMMMMM
TTTTYFNNNNXF
dD
dz
sD
sz
Dy
Dx
⇒
==
==
00
7
6
67
67
MM
TTNN
,
Nodo F
==+==+==+=
∑∑∑
000
1010
10
10
MMMMNYFTXF
dF
dz
Fy
Fx
⇒
=−=
−=
010
10
10
MYNXT
F
F
,
Primo metodo di soluzione
L’insieme delle precedenti 6 equazioni di equilibrio interno e delle 10 equazioni di equilibrio esterno costituisce un sistema di 16 equazioni algebriche lineari, non omogeneo per la presenza del carico P, nelle 16 incognite costituite dalle 12 caratteristiche della sollecitazione delle sezioni contenenti i poli (1 e 7) e delle sezioni ausiliarie (6 e 10), più le quattro componenti non nulle delle reazioni vincolari AX , AY ,
FX e FY . Il sistema potrebbe essere risolto così come è stato scritto. Tuttavia, il problema statico non è affatto risolto poiché le caratteristiche della sollecitazione nelle sezioni non considerate vanno determinate per il tracciamento dei loro diagrammi.
Secondo metodo di soluzione
Una valida alternativa al metodo appena descritto si ottiene sostituendo le 6 equazioni di equilibrio interno nelle 10 equazioni di equilibrio esterno. Si ottiene così un sistema lineare non omogeneo, ancora più piccolo, di 10 equazioni nelle 10 incognite costituite dalle caratteristiche della sollecitazione delle sezioni contenenti i poli (1 e 7), più le solite quattro componenti non nulle delle reazioni vincolari AX , AY , FX e FY . Scritto in notazione matriciale tale sistema diviene
=
⋅
F
F
A
A
YXYXMTNMTN
7
7
7
1
1
1
.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
c) Procedimento sintetico (per virtuosi)
Un modo apparentemente semplice di risolvere il problema statico in esame consiste nel riguardare il sistema di travi come ottenuto dall’assemblaggio di più parti rigide alla stregua del metodo semplificato, introducendo però immediatamente le equazioni di equilibrio esterno in quelle di equilibrio interno.
Equilibrio delle parti
Isolata ciascuna parte soggetta ai carichi effettivi, alle caratteristiche della sollecitazione non nulle delle sezioni di estremità ed infine alle componenti non nulle delle reazioni vincolari (vedi figura successiva), le equazioni cardinali della statica forniscono
Parte !+"+#
=⋅−⋅−⋅==−−=
=+=
∑∑∑
02/0
0
6
6
LPLYHXMTPYF
NXF
AAz
Ay
Ax
Nodo $+%
=⋅+⋅==+=
=−=
∑∑∑
00
0
6
6
LYHXMTYFNXF
FFz
Fy
Fx
un sistema di sole 6 equazioni nelle sei incognite 6N , 6T , AX , AY , FX e FY , che scritto in notazione matriciale diviene
=
⋅
−−
−
000
2/
0
00001000100100010000001010000101
6
6
PLP
YXYXTN
LH
LH
F
F
A
A ,
facilmente risolvibile. Naturalmente, restano da calcolare tutte le caratteristiche della sollecitazione nelle sezioni non considerate necessarie per poter tracciare i relativi diagrammi. Pertanto, anche in questo modo il problema statico viene risolto in due fasi.
d) Metodo delle equazioni ausiliarie (per extravirtuosi)
Continuiamo la rassegna dei metodi esponendo le idee alla base del metodo delle equazioni ausiliarie. Gli obiettivi più evidenti dell’analisi statica consistono nel calcolo delle reazioni vincolari (risoluzione esterna del problema statico) e nel calcolo delle caratteristiche della sollecitazione in un conveniente numero di sezioni per poterne tracciare agevolmente i diagrammi relativi (risoluzione interna del problema statico). Ancora, possiamo osservare che, nel passaggio dal metodo generale a quello semplificato, il peso maggiore è stato dato alla fase di risoluzione esterna, rimandando il calcolo delle caratteristiche non direttamente considerate ad una fase successiva. Ebbene, tali idee raggiungono il culmine

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
nel metodo delle equazioni ausiliarie in cui le incognite del problema statico si riducono alle sole reazioni vincolari. Per poter applicare tale metodo, l’intero sistema di travi (non più singole travi o parti) viene ora considerato come un unico corpo rigido dotato al più di qualche sconnessione, soggetto a tutti carichi effettivi ed alle reazioni vincolari non nulle. Pertanto, poiché si ha a che fare con un unico corpo, scriveremo soltanto le tre equazioni cardinali della statica
∑ = 0xF , ∑ = 0yF , ∑ = 0zM ,
A queste equazioni, aggiungeremo una equazione per ciascuna sconnessione semplice presente nel corpo. Nel caso in esame, si ottiene
Equazioni cardinali
=⋅+⋅−==−+=
=+=
∑∑∑
02/320
0
LPLYMPYYF
XXF
AzF
FAy
FAx
Equazione ausiliaria 0=⋅+⋅ LYHX FF ,
da cui si ottengono i valori delle reazioni vincolari:
==−=
===
044
04
34
FFF
AAA
MPYHLPX
MPYHLPX
.
Il problema è esternamente risolto, ora va risolto internamente considerando le equazioni di equilibrio interno, trave per trave, e le equazioni di raccordo, nodo per nodo. A tal fine si possono risolvere in cascata le relazioni scritte nel metodo generale, ottenendo le seguenti caratteristiche della sollecitazione:
Sezione N T M
1 P43−
HLP
4−
0
2 P43−
HLP
4−
4PL−
3
HLP
4−
P
43
4PL−
4
HLP
4−
P
43
8PL
5 HLP
4−
4P−
8PL
6 HLP
4−
4P− 0
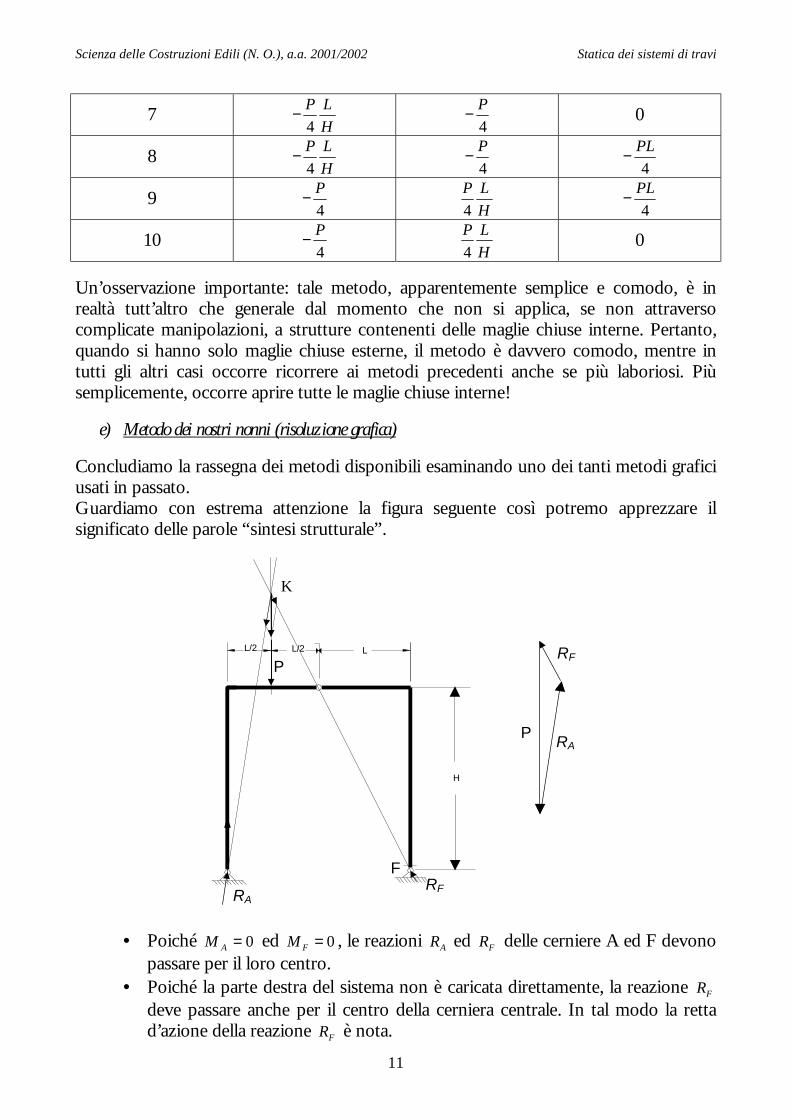
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
11
7 HLP
4−
4P− 0
8 HLP
4−
4P−
4PL−
9 4P−
HLP
4
4PL−
10 4P−
HLP
4 0
Un’osservazione importante: tale metodo, apparentemente semplice e comodo, è in realtà tutt’altro che generale dal momento che non si applica, se non attraverso complicate manipolazioni, a strutture contenenti delle maglie chiuse interne. Pertanto, quando si hanno solo maglie chiuse esterne, il metodo è davvero comodo, mentre in tutti gli altri casi occorre ricorrere ai metodi precedenti anche se più laboriosi. Più semplicemente, occorre aprire tutte le maglie chiuse interne!
e) Metodo dei nostri nonni (risoluzione grafica)
Concludiamo la rassegna dei metodi disponibili esaminando uno dei tanti metodi grafici usati in passato. Guardiamo con estrema attenzione la figura seguente così potremo apprezzare il significato delle parole “sintesi strutturale”.
L/2 L L/2
H
P
F RF
RA
K
P RA
RF
• Poiché 0=AM ed 0=FM , le reazioni AR ed FR delle cerniere A ed F devono passare per il loro centro.
• Poiché la parte destra del sistema non è caricata direttamente, la reazione FR deve passare anche per il centro della cerniera centrale. In tal modo la retta d’azione della reazione FR è nota.
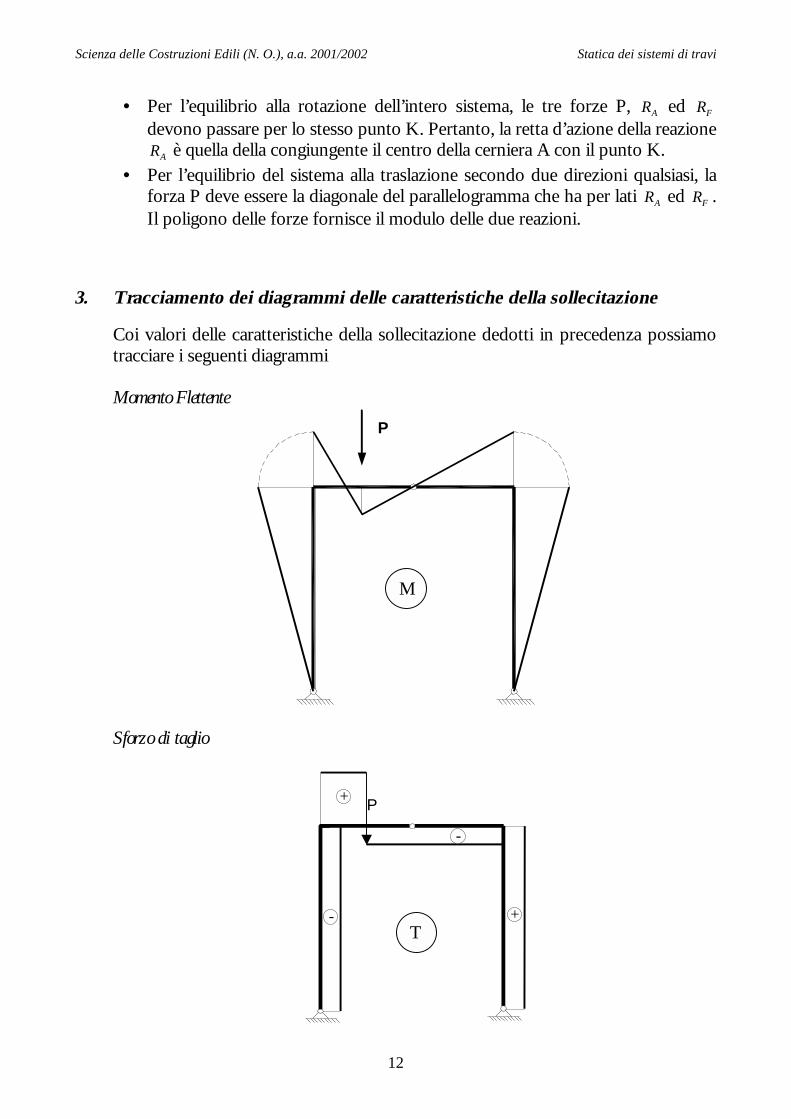
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
12
• Per l’equilibrio alla rotazione dell’intero sistema, le tre forze P, AR ed FR devono passare per lo stesso punto K. Pertanto, la retta d’azione della reazione
AR è quella della congiungente il centro della cerniera A con il punto K. • Per l’equilibrio del sistema alla traslazione secondo due direzioni qualsiasi, la
forza P deve essere la diagonale del parallelogramma che ha per lati AR ed FR . Il poligono delle forze fornisce il modulo delle due reazioni.
3. Tracciamento dei diagrammi delle caratteristiche della sollecitazione
Coi valori delle caratteristiche della sollecitazione dedotti in precedenza possiamo tracciare i seguenti diagrammi Momento Flettente
P
M
Sforzo di taglio
P
T
+
-
- +
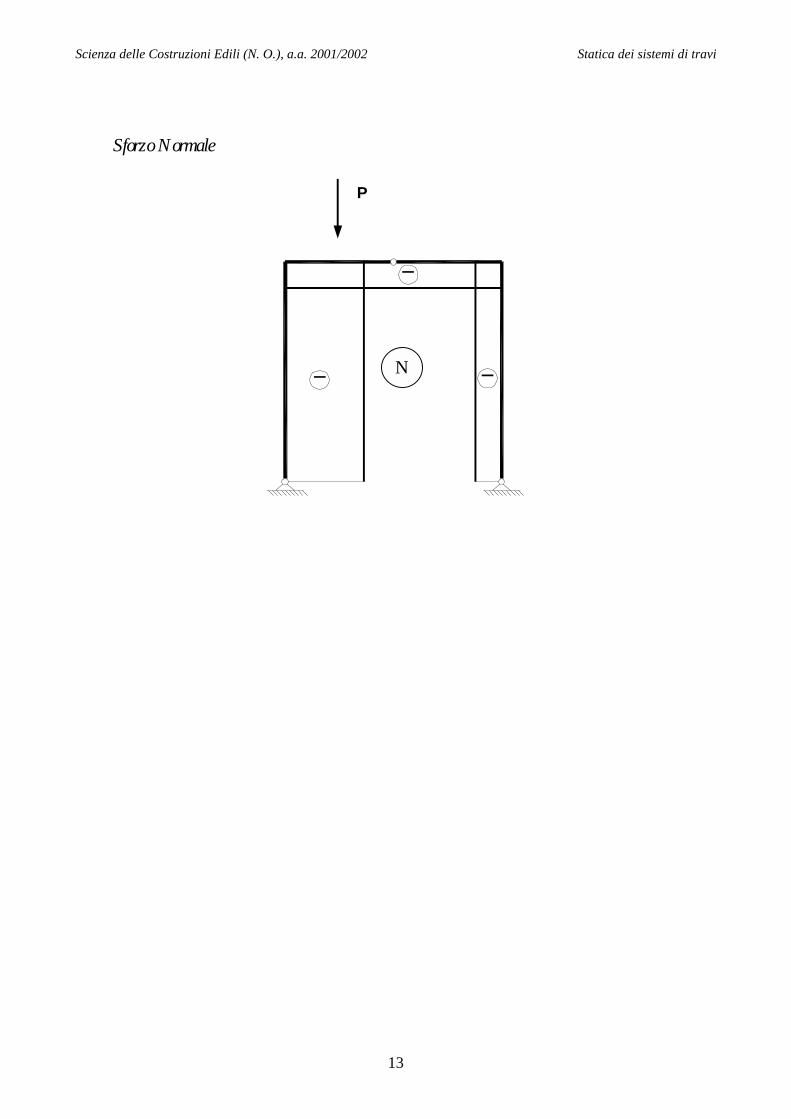
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
13
Sforzo Normale
−
− −
P
N
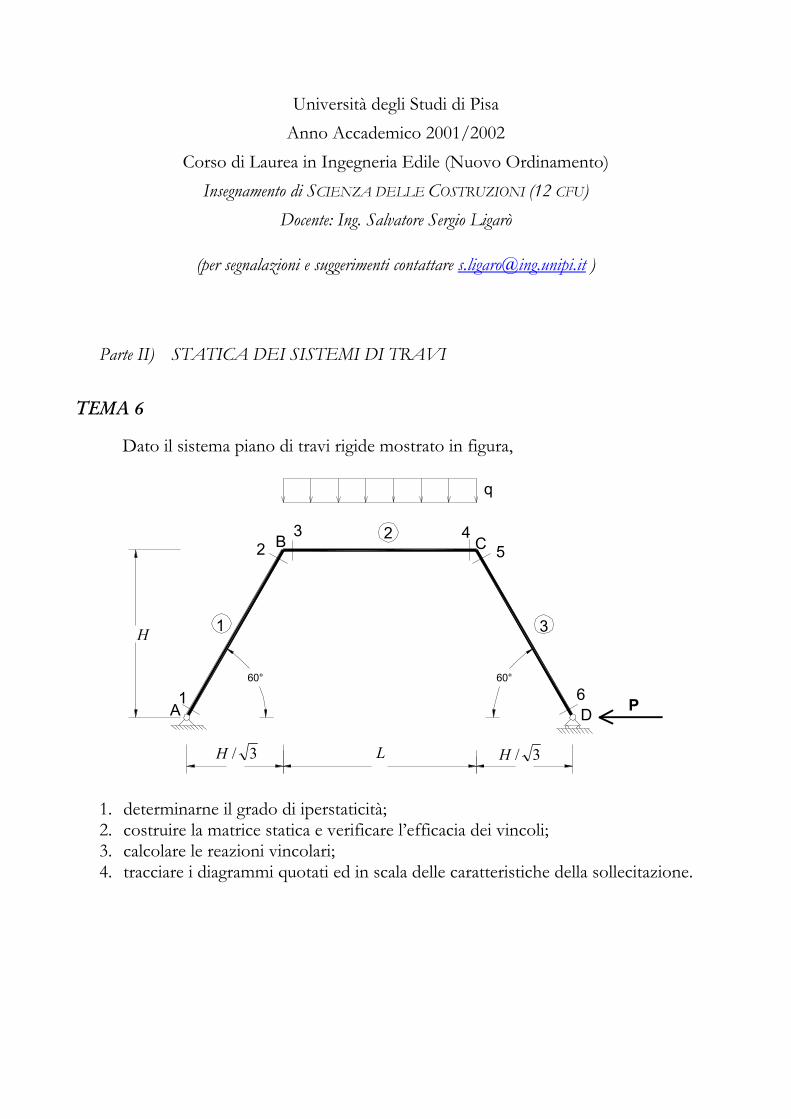
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 6
Dato il sistema piano di travi rigide mostrato in figura,
q
P
H
L
60° 60° 1
2 3 4
5
6
1
2
3
A
B C
D
3/H 3/H
1. determinarne il grado di iperstaticità; 2. costruire la matrice statica e verificare l’efficacia dei vincoli; 3. calcolare le reazioni vincolari; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo: 1. impaurire gli studenti, sempre (L’esempio è molto semplice in verità, ma … sperare di riuscire a
spaventare qualcuno non fa mai male!); 2. fare un po’ di pratica con la scrittura delle equazioni di compatibilità meccanica, interna ed
esterna; 3. far vedere come le equazioni di equilibrio possano essere scritte rispetto a qualunque sistema di
riferimento scelto a nostro piacimento dal momento che l’equilibrio è una proprietà del sistema mentre la scelta del sistema di riferimento è frutto solo della nostra fantasia;
4. mettere in evidenza il fatto che la presenza e le informazioni relative ai carichi esterni distribuiti vengono raccolte attraverso le equazioni di equilibrio interne, delle travi o delle parti;
5. mettere in evidenza il fatto che la presenza e le informazioni relative ai carichi esterni concentrati vengono raccolti attraverso le equazioni di equilibrio esterne dei nodi;
6. distinguere fra condizioni al contorno e condizioni di raccordo; 7. capire bene il significato di equazioni di equilibrio per i nodi, azioni nodali e reazioni vincolari; 8. capire che è del tutto arbitraria la suddivisione del sistema in travi od in parti; 9. capire che è del tutto indifferente la scelta dei poli e delle sezioni ausiliarie.)
1. Determinazione del grado di iperstaticità
a) Mediante il computo dei vincoli Il sistema è costituito dalla sola parte rigida I=[ + + ] mostrata in figura. Poiché ad essa competono tre gradi di libertà nel piano, in assenza di vincoli e connessioni il sistema avrebbe 3 gradi di libertà. D’altra parte, la cerniera in 1 possiede una molteplicità di vincolo pari a 2 ed il carrello in 6 una molteplicità pari a 1. Pertanto, se i vincoli sono efficaci (ciò si verifica se la reazione del carrello non passa per il centro della cerniera), il sistema dato è una struttura isostatica. b) Mediante il computo dei gradi di libertà
La cerniera in 1 ed il carrello in 6 consentono le due rotazioni assolute 1θ e 6θ delle corrispondenti sezioni mentre il carrello consente anche lo spostamento assoluto 6u . Introdotti tre vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una maglia chiusa esterna a cui compete un grado di iperstaticità pari a tre. Pertanto, il sistema dato è una struttura isostatica. c) Mediante il metodo dei tagli
Introdotto un taglio completo in una sezione intermedia generica, il sistema diviene improvvisamente tre volte labile risultando possibili le due rotazioni assolute 1θ e 6θ , e lo spostamento assoluto 6u . Pertanto, essendo il numero di gradi di libertà introdotti uguale a quello dei gradi di libertà residui, il sistema dato è una struttura isostatica.
2. Calcolo delle reazioni vincolari e delle caratteristiche della sollecitazione
La struttura è esternamente isostatica. L’unica reazione orizzontale è la AX , per cui deve essere necessariamente PX A = ; d’altra parte, data la simmetria della struttura e del

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
carico, deve risultare 2/qLYY DA == . Il calcolo delle reazioni vincolari è fatto! Ciononostante, la struttura verrà analizzata col procedimento generale per mettere in evidenza alcune caratteristiche delle equazioni di equilibrio interno ed esterno.
a) Procedimento generale (noioso ma facilmente implementabile in un codice di calcolo) Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, si individuano le tre travi , e ed i quattro nodi A, B, C e D, connessi fra loro nel modo indicato in figura.
Per accertarsi analiticamente dell’efficacia dei vincoli occorre scrivere le equazioni di equilibrio per tutte le travi e per tutti i nodi del sistema e verificare che tali relazioni siano linearmente indipendenti. Per far ciò, scegliamo un punto rappresentativo per ciascuna trave (polo dei momenti), coincidente per ragioni di convenienza col baricentro di una delle sezioni estreme. Le incognite del problema statico possono essere fatte coincidere allora con le caratteristiche della sollecitazione delle sezioni contenenti il polo e con le componenti non nulle delle reazioni vincolari.
Scritto il sistema delle equazioni di equilibrio per tutte le travi e tutti i nodi, la matrice dei coefficienti delle incognite sopradette è detta matrice statica del sistema. La verifica dell’efficacia dei vincoli richiede il calcolo del suo rango. Nel caso in esame, essendoci tre travi, si hanno come incognite le nove caratteristiche della sollecitazione riportate a colonna 3 della tabella seguente più le tre componenti non nulle delle reazioni vincolari (due della cerniera XA, YA, ed una del carrello YD), per un totale di 12 incognite. Nella colonna 4 della stessa tabella, sono invece indicate le sezioni ausiliarie di ciascuna trave, necessarie per scrivere le equazioni di equilibrio dei nodi.
Equilibrio delle travi
Isolata ciascuna trave sottoposta agli eventuali carichi distribuiti (azioni esterne) applicati lungo il suo asse ed alle caratteristiche della sollecitazione (azioni interne) delle sezioni di estremità, e fissato trave per trave un sistema di riferimento locale )',',','( zyxO congruente col sistema di riferimento globale ),,,( zyxO , con l’origine O’ coincidente con la sezione iniziale di ciascuna trave e con l’asse x’ coincidente con l’asse della trave ed orientato positivamente verso l’altro estremo, le equazioni cardinali della statica scritte nel riferimento locale di ciascuna trave
∑ = 0'xF , ∑ = 0'yF , ∑ = 0'zM ,
permettono di esprimere le caratteristiche della sollecitazione delle sezioni ausiliarie [ ] T
QQQQ MTN=c in funzione delle caratteristiche delle sezioni contenenti i poli dei momenti [ ]T
PPPP MTN=c . Tali espressioni sono riportate a colonna 5 della seguente tabella.
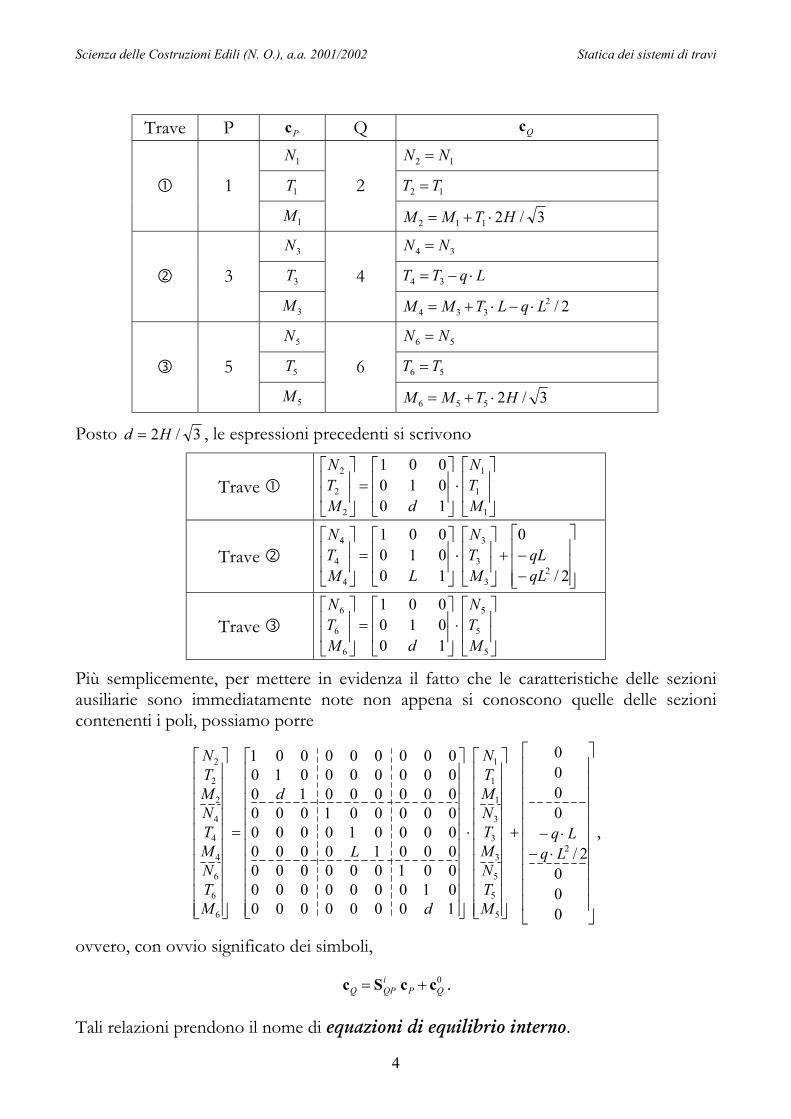
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
Trave P Pc Q Qc
1N 12 NN =
1T 12 TT = 1
1M 2
3/2112 HTMM ⋅+=
3N 34 NN =
3T LqTT ⋅−= 34 3
3M 4
2/2334 LqLTMM ⋅−⋅+=
5N 56 NN =
5T 56 TT = 5
5M 6
3/2556 HTMM ⋅+=
Posto 3/2Hd = , le espressioni precedenti si scrivono
Trave
⋅
=
1
1
1
2
2
2
10010001
MTN
dMTN
Trave
−−+
⋅
=
2/
0
10010001
23
3
3
4
4
4
qLqL
MTN
LMTN
Trave
⋅
=
5
5
5
6
6
6
10010001
MTN
dMTN
Più semplicemente, per mettere in evidenza il fatto che le caratteristiche delle sezioni ausiliarie sono immediatamente note non appena si conoscono quelle delle sezioni contenenti i poli, possiamo porre
⋅−⋅−+
⋅
=
000
2/
0000
100000000100000000010000000001000000001000000000100000000010000000010000000001
2
5
5
5
3
3
3
1
1
1
6
6
6
4
4
4
2
2
2
LqLq
MTNMTNMTN
d
L
d
MTNMTNMTN
,
ovvero, con ovvio significato dei simboli,
0QP
iQPQ ccSc += .
Tali relazioni prendono il nome di equazioni di equilibrio interno.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
Equilibrio dei nodi
Isolato adesso ciascun nodo con le eventuali forze e coppie (X, Y, Mz) esterne concentrate agenti su di esso (azioni nodali esterne o carichi nodali esterni) e con le caratteristiche della sollecitazione (M, N, T) esercitate su di esso dalle travi collegate (azioni nodali interne o carichi nodali interni), le equazioni cardinali della statica scritte nel sistema di riferimento globale ),,,( zyxO diventano:
Nodo A
==+==−+==++=
∑∑∑
0060cos60sin060sin60cos
11
01
01
01
01
MMMMTNYFTNXF
dAz
Ay
Ax
⇒
==−+=++
0032032
1
11
11
MTNYTNX
A
A
,
Nodo B
=+−=+−==−−+=
=+−−=
∑∑∑
0060sin60cos
060cos60sin
3232
30
20
2
30
20
2
MMMMMMTNTYFNNTXF
Bz
By
Bx
⇒
=+−=−+−=+−−
0023023
32
322
322
MMTTNNTN
,
Nodo C
=+−==−−+=
=−+−=
∑∑∑
0060cos60sin
060sin60cos
54
05
054
05
054
MMMMTNTYF
TNNXF
Cz
Cy
Cx
⇒
=+−=−−
=−+−
0032
032
54
554
554
MMTNT
TNN,
Nodo D
==+==++==+−−=
∑∑∑
0060cos60sin060sin60cos
66
06
06
06
06
MMMMTNYFTNPF
dD
dz
Dy
x
⇒
==++=+−−
0032032
6
66
66
MTNYTNP
D ,
Tali relazioni prendono il nome di equazioni di equilibrio esterno. In particolare, quelle di vincolo (A e D) sono chiamate condizioni al contorno (statiche), mentre quelle di connessione (B e C) sono dette condizioni di raccordo (statiche).
Primo metodo di soluzione
L’insieme delle 9 equazioni di equilibrio interno e delle 12 equazioni di equilibrio esterno, costituisce un sistema di 21 equazioni algebriche lineari, non omogeneo per la presenza dei carichi P e q, nelle 21 incognite costituite dalle 18 caratteristiche della sollecitazione delle sezioni contenenti i poli e delle sezioni ausiliarie, 6,,1,,, K=iMTN iii , più le tre componenti non nulle delle reazioni vincolari AX , AY e DY . Il sistema potrebbe essere risolto così come è stato scritto. Tuttavia, date le notevoli dimensioni, esso si presta poco ad essere risolto manualmente.
Secondo metodo di soluzione
Una valida alternativa al metodo precedente si ottiene sostituendo le 9 equazioni di equilibrio interno nelle 12 equazioni di equilibrio esterno. Si ottiene così un sistema lineare non omogeneo di sole 12 equazioni nelle 12 incognite costituite dalle caratteristiche della sollecitazione delle sezioni che contengono i poli,
5,3,1,,, =jMTN jjj , più le componenti non nulle delle reazioni vincolari, AX , AY e DY .
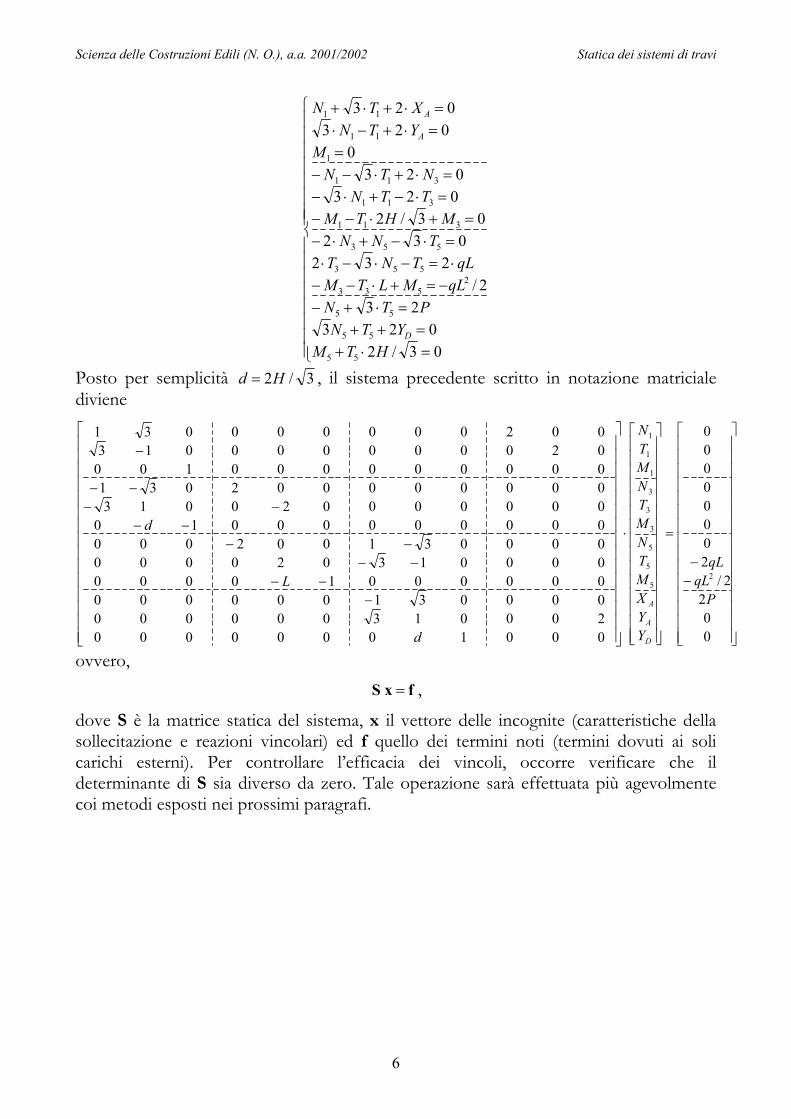
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
=⋅+=++
=⋅+−−=+⋅−−
⋅=−⋅−⋅=⋅−+⋅−
=+⋅−−=⋅−+⋅−=⋅+⋅−−
==⋅+−⋅=⋅+⋅+
03/2023
232/
232032
03/2023023
0023023
55
55
55
2533
553
553
311
311
311
1
11
11
HTMYTN
PTNqLMLTM
qLTNTTNN
MHTMTTNNTN
MYTNXTN
D
A
A
Posto per semplicità 3/2Hd = , il sistema precedente scritto in notazione matriciale diviene
−−
=
⋅
−−−
−−−−
−−−−
−−
−
00
22/
20000000
000100000002000130000000000310000000000001000000001302000000003100200000000000010000000020013000000002031000000000100020000000013002000000031
25
5
5
3
3
3
1
1
1
PqL
qL
YYXMTNMTNMTN
d
L
d
D
A
A
ovvero, fxS = ,
dove S è la matrice statica del sistema, x il vettore delle incognite (caratteristiche della sollecitazione e reazioni vincolari) ed f quello dei termini noti (termini dovuti ai soli carichi esterni). Per controllare l’efficacia dei vincoli, occorre verificare che il determinante di S sia diverso da zero. Tale operazione sarà effettuata più agevolmente coi metodi esposti nei prossimi paragrafi.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
Qualora le reazioni vincolari XA, YA ed YD fossero note, basterebbe considerare solo le prime nove equazioni per ricavare le caratteristiche incognite ed il sistema precedente diventerebbe
−−
⋅
⋅−⋅−
=
−−−−
−−−−
−−−−
−
2/2
20000
22
0001000001302000003100200000000010000020013000002031000000100000000013000000031
25
5
5
3
3
3
1
1
1
qLqLP
YX
MTNMTNMTN
L
d
A
A
ovvero,
rfcS +=Pe .
La risoluzione del problema statico potrebbe essere effettuata in tre passi distinti 1. calcolo delle reazioni vincolari; 2. calcolo delle caratteristiche della sollecitazione Pc tramite le [ ]rfSc +⋅=
−1eP ;
3. calcolo delle caratteristiche della sollecitazione Qc tramite le 0QP
iQPQ ccSc += .
b) Procedimento semplificato, procedimento sintetico e metodo delle equazioni ausiliarie
Essendo il sistema privo di sconnessioni, i tre procedimenti coincidono. In particolare, l’equilibrio dell’intero sistema è espresso dalle sole tre equazioni cardinali della statica
∑ = 0xF , ∑ = 0yF , ∑ = 0zM ,
che si scrivono:
=+⋅++⋅−==⋅−+=
=−=
∑∑∑
0)3/2/()3/2(0
0
HLqLHLYMLqYYF
PXF
AzD
DAy
Ax
da cui si ottengono i valori delle reazioni vincolari:
===
==−=
02
0
02
FFF
AAA
MqLYX
MqLYPX.
Il problema è esternamente risolto, ora va risolto internamente.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
3. Tracciamento dei diagrammi delle caratteristiche della sollecitazione
• Primo modo Essendo note le reazioni vincolari, le caratteristiche della sollecitazione in ciascuna sezione di estremità delle travi possono essere ricavate risolvendo in cascata il sistema delle equazioni di equilibrio scritte col procedimento generale
Sezione M T N
1 0 23
4PqL
− 4
32
qLP−−
2 HPHqL⋅−⋅
32
23
4PqL
− 4
32
qLP−−
3 HPHqL⋅−⋅
32
2qL P−
4 HPHqL⋅−⋅
32
2qL
− P−
5 HPHqL⋅−⋅
32
23
4PqL
+− 4
32
qLP−−
6 0 23
4PqL
+− 4
32
qLP−−
Oltre a questi valori, per la presenza del carico distribuito, converrà ricavare il valore del momento flettente massimo che si verifica nella sezione di mezzeria della trave B-C
832)
2(
21)
2()
23(
2)2/(
2qLPHqLHLLqPHLHqLLMM MAX +−=⋅−−+== .
• Secondo modo Determiniamo le caratteristiche della sollecitazione trave per trave col metodo diretto, ovvero, basandoci sulla loro definizione. A tal fine, scelta una conveniente ascissa curvilinea z con origine nella sezione iniziale di ciascuna trave, si ottengono le caratteristiche:
Trave M T N
1 zPzqL⋅−⋅ 2/3
4
23
4PqL
− 4
32
qLP−−
2 2
)3
(2
2qzHPzHqL−⋅−+⋅
2)2( zLq − P−
3 23)
32()
32(
4zHPzHqL
−⋅−−⋅ 23
4PqL
+− 4
32
qLP−−
a cui corrispondono i diagrammi delle figure riportate nelle pagine seguenti per i valori del carico P indicati nella seguente tabella
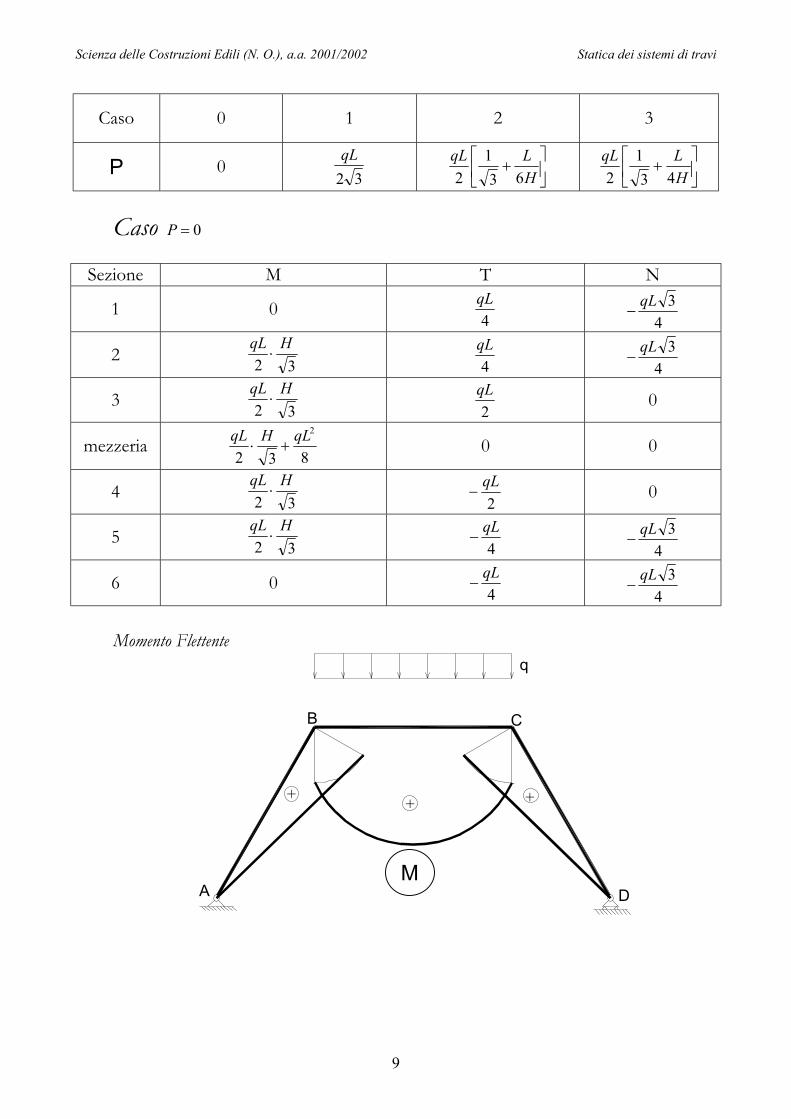
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
Caso 0 1 2 3
P 0 32
qL
+
HLqL
631
2
+
HLqL
431
2
Caso 0=P
Sezione M T N
1 0 4
qL 4
3qL−
2 32
HqL⋅
4qL
43qL
−
3 32
HqL⋅
2qL 0
mezzeria 832
2qLHqL+⋅ 0 0
4 32
HqL⋅
2qL
− 0
5 32
HqL⋅
4qL
− 4
3qL−
6 0 4
qL−
43qL
−
Momento Flettente
A
B
D
q
C
M
+ + +
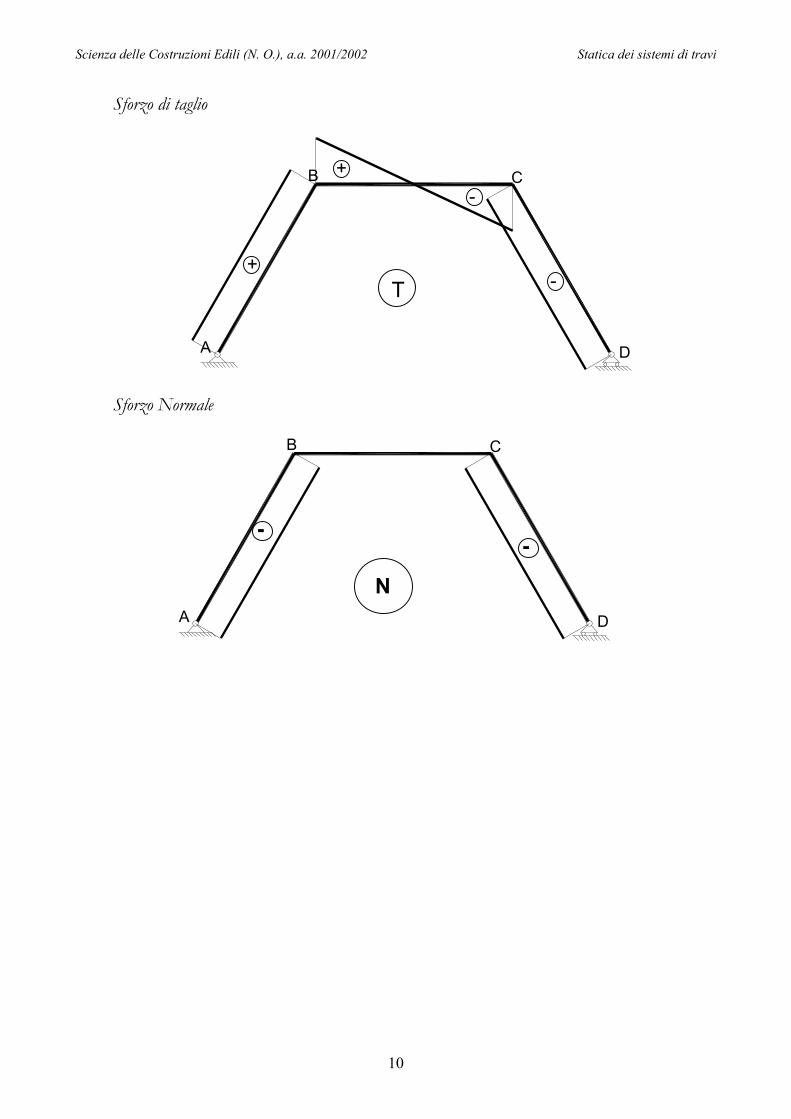
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
Sforzo di taglio
A
B C
D
+
+ -
- T
Sforzo Normale
A
B C
D
- -
N
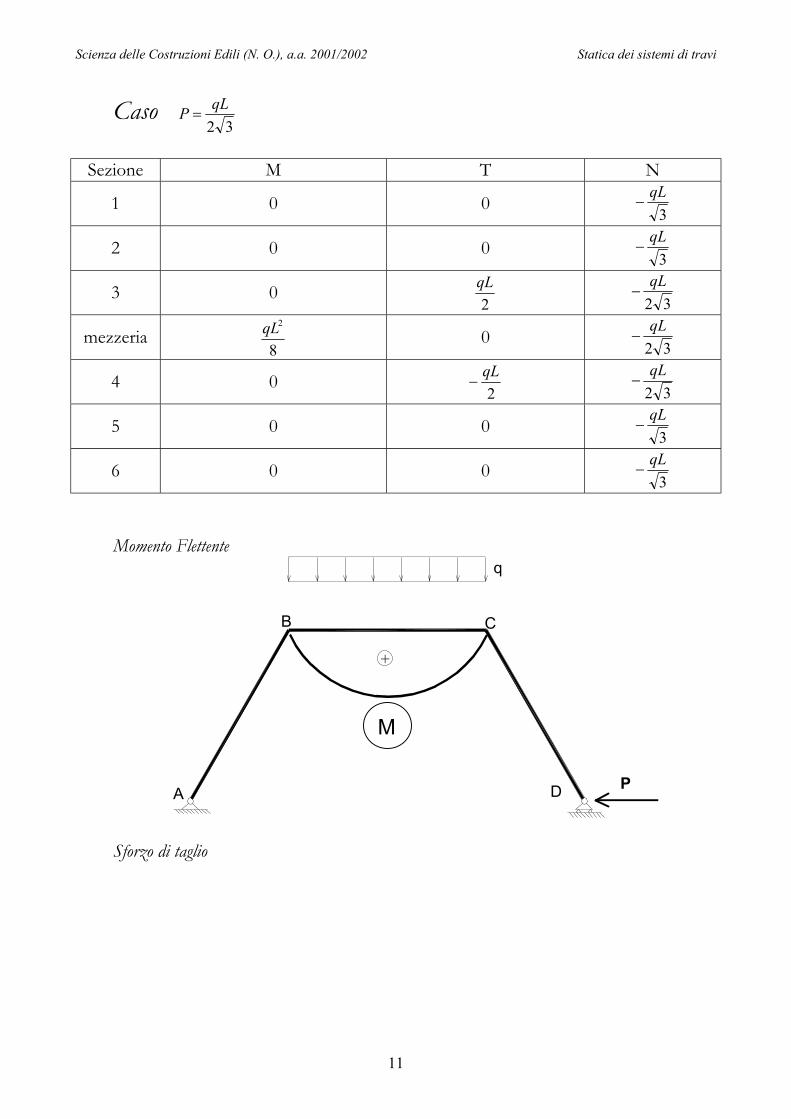
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
11
Caso 32
qLP =
Sezione M T N
1 0 0 3
qL−
2 0 0 3
qL−
3 0 2
qL 32
qL−
mezzeria 8
2qL 0 32
qL−
4 0 2
qL−
32qL
−
5 0 0 3
qL−
6 0 0 3
qL−
Momento Flettente
A
B
D
q
C
M
+
P
Sforzo di taglio
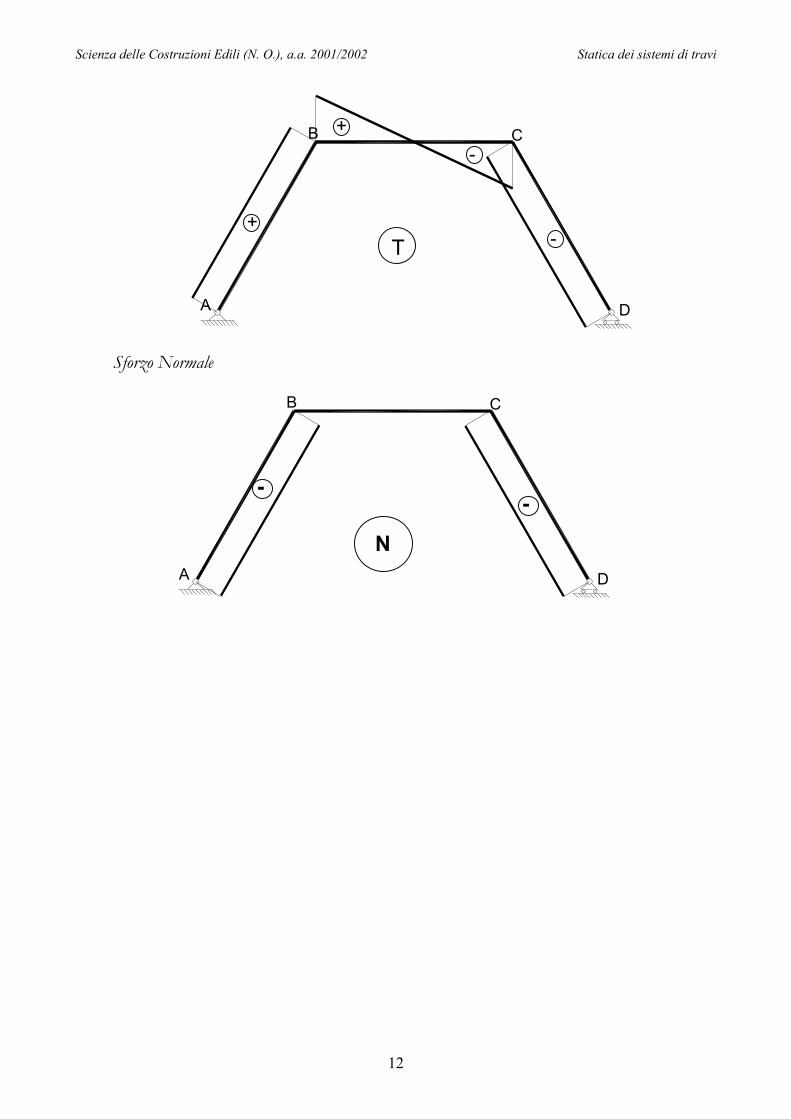
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
12
A
B C
D
+
+ -
- T
Sforzo Normale
A
B C
D
- -
N
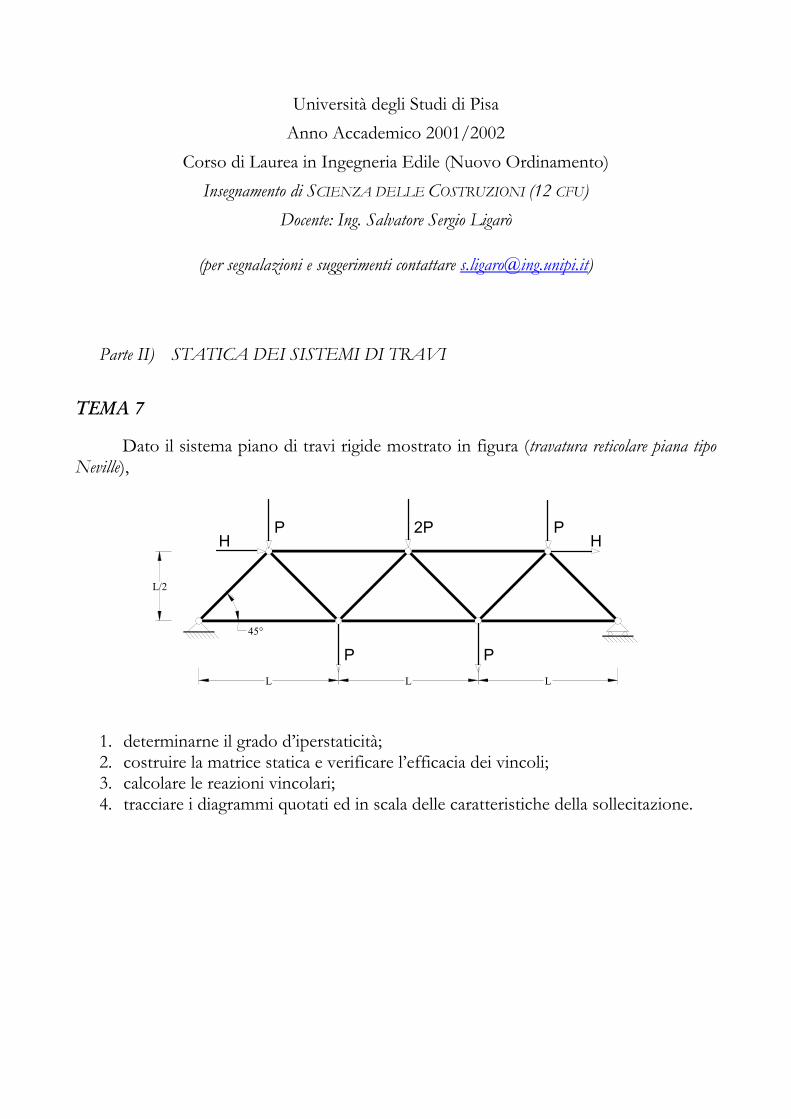
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 7
Dato il sistema piano di travi rigide mostrato in figura (travatura reticolare piana tipo Neville),
H H P 2P P
P P L L L
L/2
45°
1. determinarne il grado d’iperstaticità; 2. costruire la matrice statica e verificare l’efficacia dei vincoli; 3. calcolare le reazioni vincolari; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di quest’esempio ricordiamo: 1. impaurire gli studenti, come al solito; 2. far vedere come lo studio delle strutture reticolari attraverso il metodo dell’equilibrio dei nodi non sia
altro che una semplice applicazione del procedimento generale dell’analisi statica, già noto; 3. fare pratica con la scrittura delle equazioni di compatibilità meccanica, interna ed esterna; 4. far vedere come la scrittura delle equazioni d’equilibrio interno risulti particolarmente agevole
utilizzando il riferimento locale di ciascuna trave; 5. porre l’attenzione sull’equilibrio dei nodi che va espresso sempre nel riferimento globale
distinguendo fra azioni nodali (note) e reazioni vincolari (generalmente incognite); 6. acquisire la differenza fra equazioni nodali d’equilibrio e condizioni di sconnessione; 7. porre l’accento sull’utilità dell’ipotesi comune d’assenza di carichi esterni distribuiti sulle travi; 8. illustrare il metodo per la scrittura automatica delle equazioni d’equilibrio dei nodi; 9. evidenziare i concetti di strutture a nodi canonici e strutture a sezioni canoniche; 10. illustrare il metodo delle equazioni ausiliarie per la risoluzione esterna ed interna delle strutture
reticolari.)
0. Una piccola premessa
La scelta di un sistema composto da numerose travi e numerosi nodi come quello in esame per illustrare le principali caratteristiche delle strutture reticolari piane, è effettuata allo scopo di evidenziare come altrettanto numerose siano le semplificazioni che derivano da alcune ipotesi riguardanti il tipo di connessione fra elementi (cerniere lisce) ed il tipo di azioni esterne (carichi concentrati nei nodi del sistema).
1. Determinazione del grado d’iperstaticità
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le 11 travi , , , , , , , , , e (11) ed i sette nodi A, B, C, D, E, F e G connessi fra loro nel modo indicato nella figura seguente.
A B C
D
E F G
1 2 3
10 11
4 5 6 7 8 9
1 2 3 4 5 6 17
18 16
22 21
14
20
12
15 13 11 9
19
10 8
7
H H
P 2P P
P P
L L L
L/2
45°
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
a) Mediante il computo dei vincoli
Il sistema è costituito dall’assemblaggio di undici travi vincolate tra loro e col suolo mediante delle cerniere lisce come mostrato in figura. Poiché a ciascuna trave competono tre gradi di libertà nel piano, in assenza di vincoli e connessioni mutue il sistema avrebbe 33 gradi di libertà. D’altra parte, la cerniera in A possiede una molteplicità di vincolo pari a 4, il carrello in D una molteplicità di vincolo pari a 3, le connessioni E, G (in cui convergono tre travi) possiedono ciascuna una molteplicità pari a 4, ed infine le connessioni B, C, F (in cui convergono quattro travi) possiedono ciascuna una molteplicità di vincolo pari a 6. In totale, il grado di vincolo del sistema risulta
331883432 =+++=+++= BEDA vvvvv .
Pertanto, se i vincoli sono efficaci (ciò che si verifica se la reazione del carrello in D non passa per il centro della cerniera in A e se le travi sono ben posizionate), il sistema dato è una struttura isostatica.
b) Mediante il computo dei gradi di libertà
La cerniera in A consente una rotazione assoluta mentre il carrello in D consente sia una rotazione sia uno spostamento assoluto. Inoltre, per ciascuna delle cinque maglie triangolari interne risultano possibili tre rotazioni relative fra le travi che le compongono. Introdotti tre vincoli semplici per sopprimere i gradi di libertà assoluti e quindici vincoli semplici per bloccare le rotazioni relative interne, si ottiene una struttura costituita da una maglia chiusa esterna e cinque maglie chiuse interne cui compete un grado di iperstaticità pari a 18, esattamente uguale al numero dei vincoli introdotti. Pertanto, il sistema dato è una struttura isostatica.
c) Mediante il metodo dei tagli
Introdotto un taglio completo in una sezione intermedia generica delle cinque travi , , , e allo scopo di aprire tutte le maglie interne, il sistema diviene quindici volte
labile. Pertanto, essendo il numero di gradi di libertà introdotti pari a quello dei gradi di libertà residui, il sistema dato è una struttura isostatica.
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
2. Analisi statica
Utilizziamo il procedimento generale al fine di mettere in luce alcune proprietà notevoli di questa tipologia strutturale. Procedimento generale (meno noioso del solito)
Per accertarsi analiticamente dell’efficacia dei vincoli esterni (numero e buon posizionamento dei vincoli esistenti) e dell’efficacia dei vincoli interni (numero e buon posizionamento delle travi che compongono la struttura) occorre verificare che le relazioni che esprimono le condizioni d’equilibrio per le travi ed i nodi siano linearmente indipendenti. Per far ciò, scegliamo un polo dei momenti per ciascuna trave coincidente per ragioni di convenienza col baricentro di una delle sue sezioni estreme. In particolare, chiameremo principale la sezione (P) che contiene il polo ed ausiliaria la sezione (Q) posta all’altra estremità della stessa trave. Le incognite del problema statico possono allora essere fatte coincidere con le caratteristiche della sollecitazione delle sezioni principali e con le componenti in generale non nulle delle reazioni vincolari. La verifica dell’efficacia dei vincoli richiede il calcolo del rango della matrice statica del sistema.
Nel seguito scriveremo dapprima le equazioni di equilibrio delle travi, che servono ad esprimere le caratteristiche della sollecitazione delle sezioni ausiliarie, Qc , in funzione delle caratteristiche delle sezioni principali, Pc . Noteremo in tal caso come l’assenza di carichi distribuiti permetta una scrittura pressoché automatica di tali equazioni che risultano necessariamente omogenee.
Successivamente considereremo le equazioni di equilibrio dei nodi. Nel far ciò terremo conto delle conseguenze meccaniche (ed analitiche) imposte dalla presenza delle cerniere lisce fra le diverse travi ed i vincoli. In particolare, noteremo come nessuna coppia esterna possa essere applicata sui nodi (ovvero, nessuna coppia può essere applicata sul perno delle cerniere, se queste sono lisce) ed inoltre, poiché nessuna coppia può essere trasmessa da una trave all’altra attraverso i nodi, anche i momenti flettenti alle estremità delle travi debbono essere nulli. Queste due osservazioni, valide anche sotto condizione di carico del tutto generiche, rendono la scrittura delle equazioni di equilibrio nodali particolarmente semplice. Una delle semplificazioni più importanti consiste nella riduzione del numero di incognite del problema statico, coincidendo queste con i soli sforzi assiali nelle travi e con le componenti non nulle delle reazioni vincolari. Vediamo da dove scaturiscono tali semplificazioni.
Equilibrio delle travi Isolata ciascuna trave soggetta alle sole caratteristiche della sollecitazione delle sezioni di estremità per l’assenza del carico distribuito, e scelto un sistema di riferimento locale
)',',','( zyxO congruente col sistema di riferimento globale ),,,( zyxO , con l’origine O’ coincidente con la sezione principale di ciascuna trave, con l’asse x’coincidente con l’asse della trave ed orientato positivamente verso l’altra estremità, le equazioni cardinali della statica
∑ = 0'xF , ∑ = 0'yF , ∑ = 0'zM ,
scritte nel riferimento locale sono quelle riportate a colonna 5 della seguente tabella
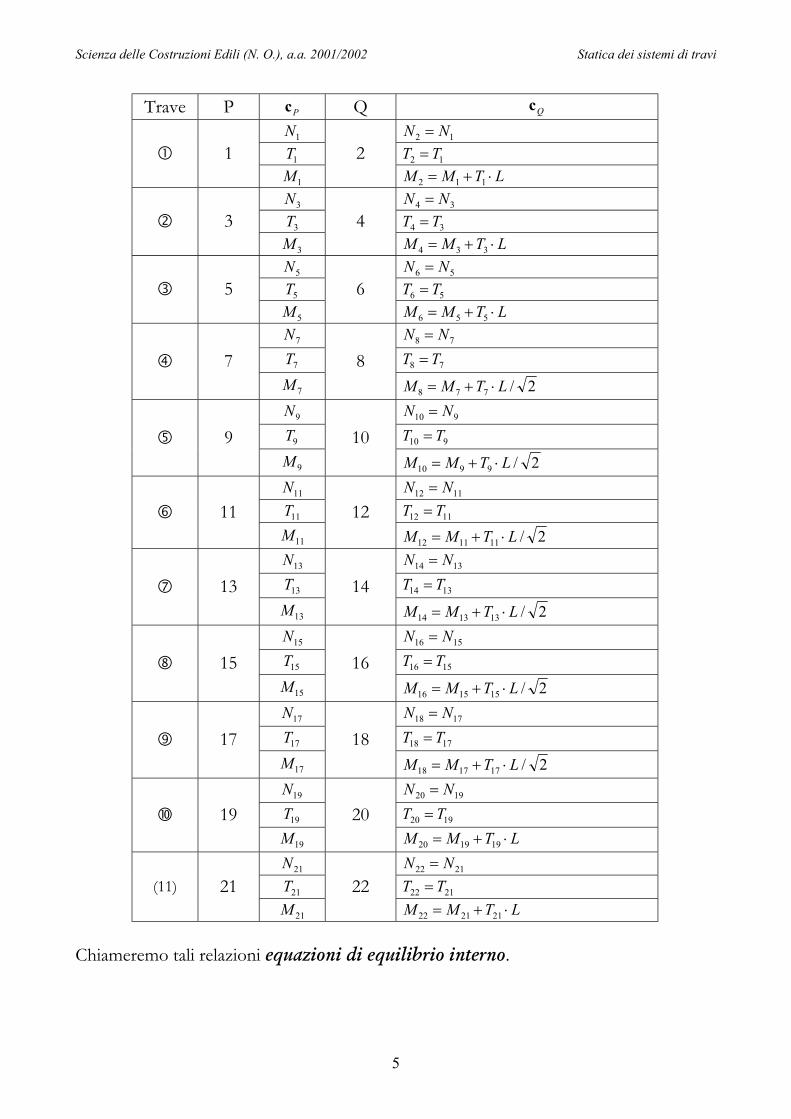
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
Trave P Pc Q Qc 1N 12 NN =
1T 12 TT = 1 1M
2 LTMM ⋅+= 112
3N 34 NN = 3T 34 TT = 3 3M
4 LTMM ⋅+= 334
5N 56 NN = 5T 56 TT = 5 5M
6 LTMM ⋅+= 556
7N 78 NN = 7T 78 TT = 7 7M
8 2/778 LTMM ⋅+=
9N 910 NN = 9T 910 TT = 9 9M
10 2/9910 LTMM ⋅+=
11N 1112 NN = 11T 1112 TT = 11 11M
12 2/111112 LTMM ⋅+=
13N 1314 NN = 13T 1314 TT = 13 13M
14 2/131314 LTMM ⋅+=
15N 1516 NN = 15T 1516 TT = 15 15M
16 2/151516 LTMM ⋅+=
17N 1718 NN = 17T 1718 TT = 17 17M
18 2/171718 LTMM ⋅+=
19N 1920 NN = 19T 1920 TT = 19 19M
20 LTMM ⋅+= 191920
21N 2122 NN = 21T 2122 TT = (11) 21 21M
22 LTMM ⋅+= 212122
Chiameremo tali relazioni equazioni di equilibrio interno.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
Equilibrio dei nodi Indichiamo sinteticamente con ixN , ixT , iyN e iyT , le componenti cartesiane dei
vettori rappresentativi dello sforzo assiale N e dello sforzo di taglio T se la trave contenente la sezione i-esima è inclinata rispetto al sistema di riferimento (O, x, y) scelto.
Isolato ciascun nodo soggetto alle forze esterne (X, Y) concentrate agenti su di esso (azioni nodali esterne note [carichi] od incognite [reazioni vincolari]) e con le caratteristiche della sollecitazione (M, N, T) esercitate dalle travi collegate (azioni nodali interne), le equazioni cardinali della statica scritte nel sistema di riferimento globale
),,,( zyxO comune a tutti i nodi, si scrivono:
Nodo Equilibrio Sconnessione
A
=−+−==+++=
∑∑
00
771
771
yyAy
xxAx
TNTYFTNNXF
==
00
7
1
MM
B
=−+++−+==++++−−=
∑∑
00
11119932
31111992
yyyyBy
xxxxBx
TNTNTTYFNTNTNNXF
====
0000
3
11
9
2
MMMM
C
=−+++−+==++++−−=
∑∑
00
1515131354
5151513134
yyyyCy
xxxxCx
TNTNTTYFNTNTNNXF
====
0000
5
15
13
4
MMMM
D
=+++==+−−=
∑∑
00
17176
17176
yyDy
xxDx
TNTYFTNNXF
==
00
17
6
MM
E
=−−−+−==+−+−−=
∑∑
00
19101088
19101088
TTNTNYFNTNTNXF
yyyyEy
xxxxEx
===
000
19
10
8
MMM
F
=−−−+−+==+−+−−−=
∑∑
00
211414121220
211414121220
TTNTNTYFNTNTNNXF
yyyyFy
xxxxFx
====
0000
21
14
12
20
MMMM
G
=−−+−+==−+−−−=
∑∑
00
1818161622
1818161622
yyyyGy
xxxxGx
TNTNTYFTNTNNXF
===
000
18
16
22
MMM
in cui le azioni nodali XA, YA, e YD sono le reazioni vincolari incognite, mentre i carichi noti sono XB=XC= XD=XF=0, XE=XG=H, YB=YC=YE=YG=-P, e YF=-2P. Le relazioni precedenti sono le equazioni di equilibrio esterno.
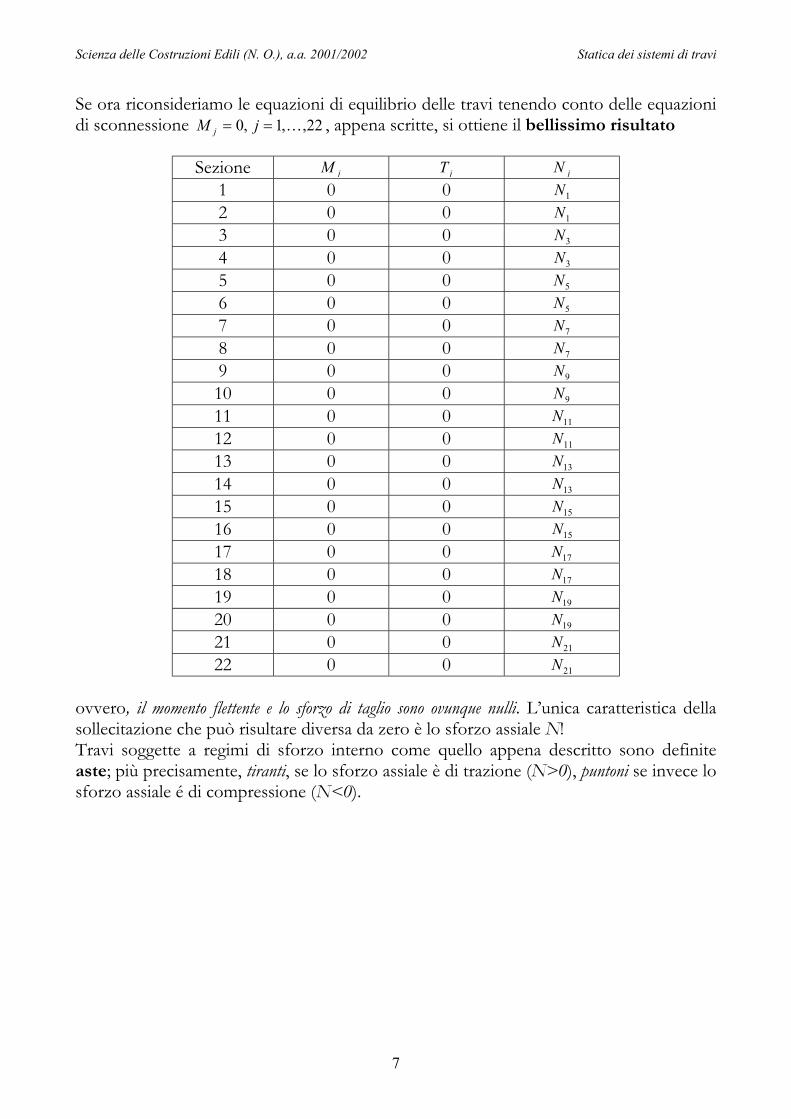
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
Se ora riconsideriamo le equazioni di equilibrio delle travi tenendo conto delle equazioni di sconnessione 22,,1,0 K== jM j , appena scritte, si ottiene il bellissimo risultato
Sezione jM jT jN 1 0 0 1N 2 0 0 1N 3 0 0 3N 4 0 0 3N 5 0 0 5N 6 0 0 5N 7 0 0 7N 8 0 0 7N 9 0 0 9N 10 0 0 9N 11 0 0 11N 12 0 0 11N 13 0 0 13N 14 0 0 13N 15 0 0 15N 16 0 0 15N 17 0 0 17N 18 0 0 17N 19 0 0 19N 20 0 0 19N 21 0 0 21N 22 0 0 21N
ovvero, il momento flettente e lo sforzo di taglio sono ovunque nulli. L’unica caratteristica della sollecitazione che può risultare diversa da zero è lo sforzo assiale N! Travi soggette a regimi di sforzo interno come quello appena descritto sono definite aste; più precisamente, tiranti, se lo sforzo assiale è di trazione (N>0), puntoni se invece lo sforzo assiale é di compressione (N<0).
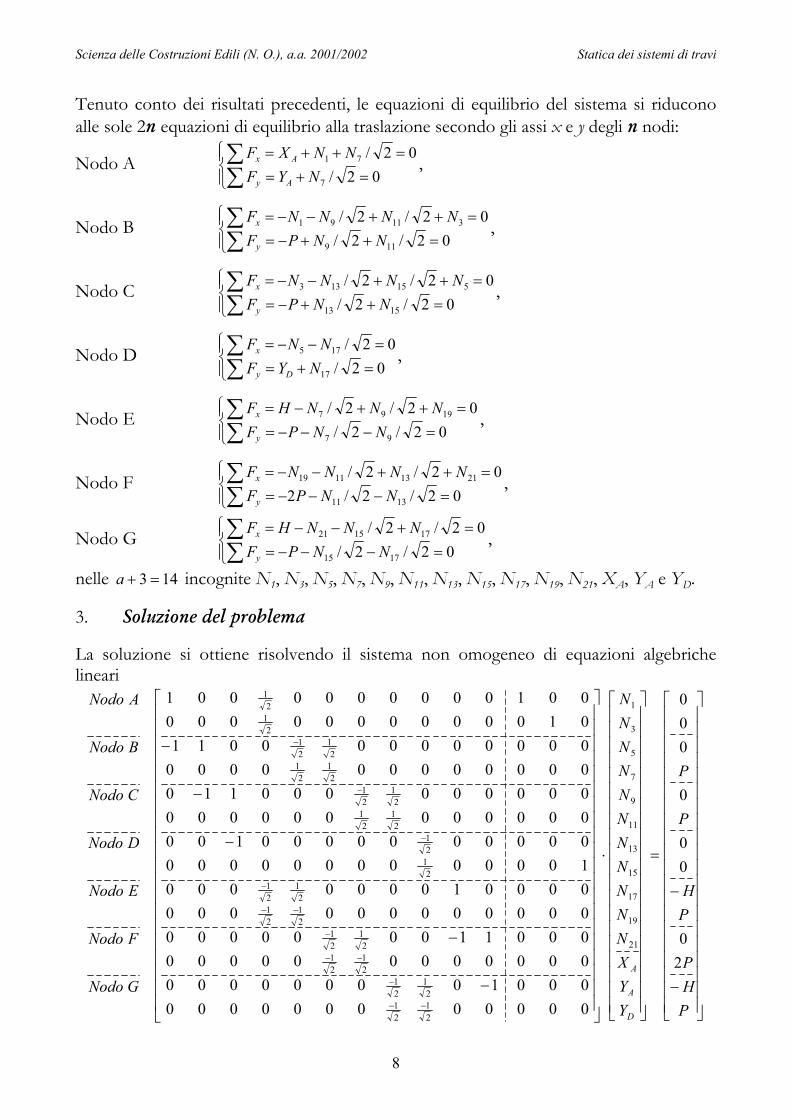
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
Tenuto conto dei risultati precedenti, le equazioni di equilibrio del sistema si riducono alle sole 2n equazioni di equilibrio alla traslazione secondo gli assi x e y degli n nodi:
Nodo A
=+==++=
∑∑
02/02/
7
71
NYFNNXF
Ay
Ax ,
Nodo B
=++−==++−−=
∑∑
02/2/02/2/
119
31191
NNPFNNNNF
y
x ,
Nodo C
=++−==++−−=
∑∑
02/2/02/2/
1513
515133
NNPFNNNNF
y
x ,
Nodo D
=+==−−=
∑∑
02/02/
17
175
NYFNNF
Dy
x ,
Nodo E
=−−−==++−=
∑∑
02/2/02/2/
97
1997
NNPFNNNHF
y
x ,
Nodo F
=−−−==++−−=
∑∑
02/2/202/2/
1311
21131119
NNPFNNNNF
y
x ,
Nodo G
=−−−==+−−=
∑∑
02/2/02/2/
1715
171521
NNPFNNNHF
y
x ,
nelle 143 =+a incognite N1, N3, N5, N7, N9, N11, N13, N15, N17, N19, N21, XA, YA e YD.
3. Soluzione del problema
La soluzione si ottiene risolvendo il sistema non omogeneo di equazioni algebriche lineari
−
−
=
⋅
−
−
−
−
−
−−
−
−−
−
−−
−
−
−
−
PHP
PH
P
P
YYXNNNNNNNNNNN
GNodo
FNodo
ENodo
DNodo
CNodo
BNodo
ANodo
D
A
A 20
00
0
000
0000000000000001000000000000000000000001100000000000000000000000100000001000000000000000000000010000000000000000000000011000000000000000000000001101000000000000010000000001
21
19
17
15
13
11
9
7
5
3
1
21
21
21
21
21
21
21
21
21
21
21
21
2121
21
21
21
21
21
21
21
21
212
1

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
Poiché il vettore dei termini noti è dato dalla combinazione lineare
−
−
⋅+
⋅=
−
−
01
0001
00000000
10201000101000
20
00
0
000
HP
PHP
PH
P
P
,
possiamo risolvere il sistema precedente assumendo una prima volta 1=P ed 0=H , una seconda volta 0=P ed 1=H e, successivamente, combinare le due soluzioni. Così facendo otteniamo:
−−
+−
−
−
−
⋅+
−−
−
−−
−
⋅=
3/13/123/13/13/23/23/23/23/23/23/113/5
330552322222223363
21
19
17
15
13
11
9
7
5
3
1
HP
YYXNNNNNNNNNNN
D
A
A
.
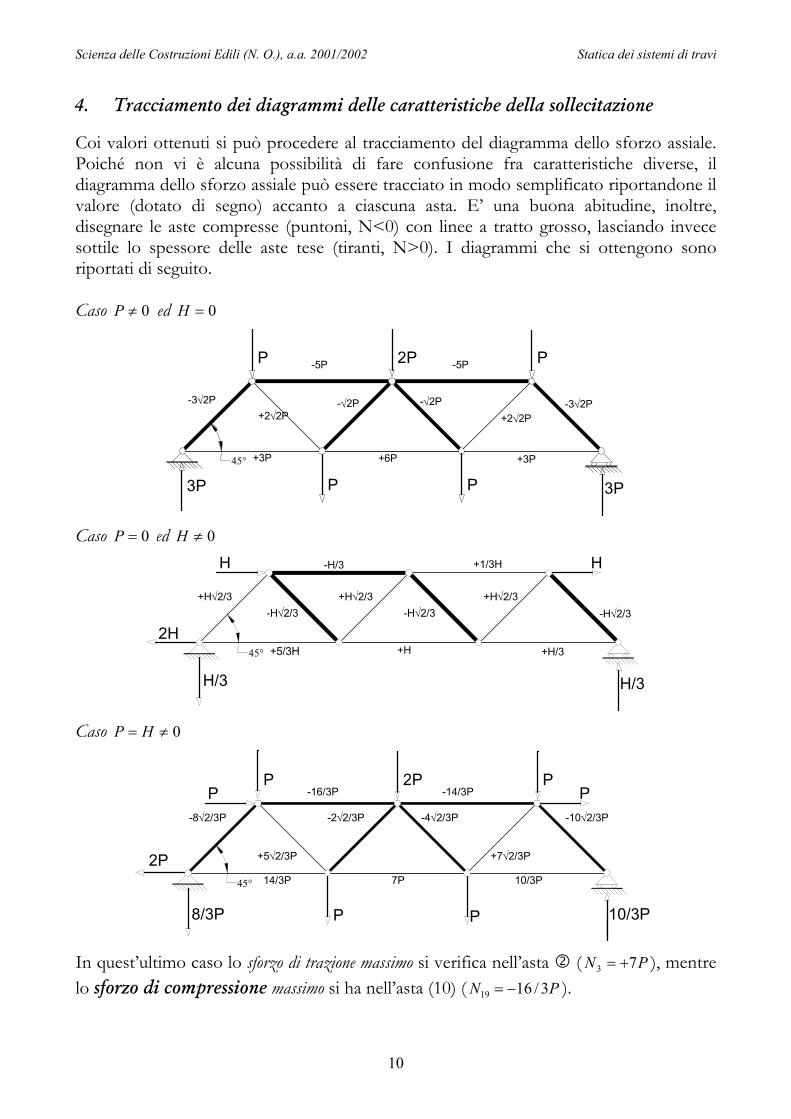
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
4. Tracciamento dei diagrammi delle caratteristiche della sollecitazione
Coi valori ottenuti si può procedere al tracciamento del diagramma dello sforzo assiale. Poiché non vi è alcuna possibilità di fare confusione fra caratteristiche diverse, il diagramma dello sforzo assiale può essere tracciato in modo semplificato riportandone il valore (dotato di segno) accanto a ciascuna asta. E’ una buona abitudine, inoltre, disegnare le aste compresse (puntoni, N<0) con linee a tratto grosso, lasciando invece sottile lo spessore delle aste tese (tiranti, N>0). I diagrammi che si ottengono sono riportati di seguito. Caso 0≠P ed 0=H
-5P P 2P P
P P
45°
-5P
+3P +6P +3P
-3√2P -3√2P +2√2P
-√2P -√2P +2√2P
3P 3P
Caso 0=P ed 0≠H H H
+H/3
H/3
45°
H/3
+5/3H
2H +H
-H√2/3
+1/3H -H/3
+H√2/3 -H√2/3
+H√2/3 -H√2/3
+H√2/3
Caso 0≠= HP
P P P 2P P
8/3P
45°
10/3P
2P
P P
14/3P 7P 10/3P
-16/3P -14/3P
-10√2/3P
+5√2/3P
-2√2/3P -4√2/3P -8√2/3P
+7√2/3P
In quest’ultimo caso lo sforzo di trazione massimo si verifica nell’asta ( PN 73 += ), mentre lo sforzo di compressione massimo si ha nell’asta (10) ( PN 3/1619 −= ).

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
11
1. Travature a nodi canonici Introduciamo un nuovo concetto. Se la struttura è isostatica, possiamo certamente risolverla dapprima esternamente (calcolo delle reazioni vincolari) e successivamente internamente (calcolo degli sforzi assiali nelle aste). Solo se il numero di incognite del problema è piccolo, questo modo di procedere può risultare utile poiché il sistema di equazioni a cui si perviene è di ordine più piccolo e la riduzione può essere rilevante. Nel caso in esame, determinate le reazioni vincolari HX A 2−= , 3/3 HPYA −= e
3/3 HPYD += mediante le equazioni cardinali della statica, la risoluzione interna richiede la soluzione di un sistema di equazioni algebriche lineari non omogenee più piccolo, cioè, un sistema di 11 equazioni estratte dal sistema precedente con un certo grado di arbitrarietà, nelle 11 incognite N1, N3, N5, N7, N9, N11, N13, N15, N17, N19, N21. Ad esempio, se consideriamo le prime 11 equazioni (N.B. Nessuno ci assicura che non vi siano tra esse delle combinazioni lineari!), otteniamo
−−−
+−
=
⋅
−
−
−
−
−
−−
−
−
−
−
0
3/30
0
03/3
2
1100000000000000000100000000000000000000000010000000000000000011000000000000000001100000000000000000001
21
19
17
15
13
11
9
7
5
3
1
21
21
21
21
21
21
2121
21
21
21
21
21
21
21
21
212
1
PH
HP
P
P
HPH
NNNNNNNNNNN
nelle sole incognite interne N1, N3, N5, N7, N9, N11, N13, N15, N17, N19, N21. La semplificazione ottenuta è in questo caso apparentemente modesta in quanto si è passati da un sistema iniziale di 14 equazioni ad un nuovo sistema di 11 equazioni in altrettante incognite. Tuttavia, se nel sistema di partenza sostituiamo i valori noti delle reazioni vincolari HX A 2−= , 3/3 HPYA −= e 3/3 HPYD += , questo diviene
Nodo A
=+−==++−=
∑∑
2/3/302/2
7
71
NHPFNNHF
y
x ,
Nodo B
=++−==++−−=
∑∑
02/2/02/2/
119
31191
NNPFNNNNF
y
x ,
Nodo C
=++−==++−−=
∑∑
02/2/02/2/
1513
515133
NNPFNNNNF
y
x ,
Nodo D
=++==−−=
∑∑
02/3/302/
17
175
NHPFNNF
y
x ,

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
12
Nodo E
=−−−==++−=
∑∑
02/2/02/2/
97
1997
NNPFNNNHF
y
x ,
Nodo F
=−−−==++−−=
∑∑
02/2/202/2/
1311
21131119
NNPFNNNNF
y
x ,
Nodo G
=−−−==+−−=
∑∑
02/2/02/2/
1715
171521
NNPFNNNHF
y
x .
E’ facile verificare come tale sistema possa essere risolto in modo assai semplice considerando le equazioni di equilibrio dei nodi a due a due nel seguente ordine: A E B e, contemporaneamente , D G C mentre le equazioni del nodo F possono servire per la verifica. Così facendo si ottiene:
Nodo Nodo A
⋅+⋅−=⋅+⋅=
HPNHPN
3/2233/53
7
1 D
⋅−⋅−=⋅+⋅=
HPNHPN
3/2233/13
17
5
E
⋅−⋅−=⋅−⋅=
HPNHPN
3/153/222
19
9 G
⋅−⋅−=⋅+⋅=
HPNHPN
3/253/222
21
15
B
+⋅=⋅+⋅−=
HPNHPN
63/22
3
11 C
⋅+⋅=⋅−⋅−=HPNHPN
3/2223/22
15
13
F
⋅−⋅−=⋅+⋅−=HPNHPN
3/223/22
13
11
Travature in cui gli sforzi assiali delle aste possono essere ricavati con sole equazioni di equilibrio nel modo appena visto, sono dette a nodi canonici. Ai tempi dei nostri nonni tale proprietà aveva una certa importanza, mentre ai nostri giorni ha perso molto del suo fascino. Nel seguito vedremo un metodo, semplice ed alternativo, che, nei casi in cui è applicabile, ci permetterà di determinare gli sforzi incogniti ad uno ad uno senza dover risolvere né il sistemone precedente né i sistemini costituiti da coppie d’equazioni. Prima però illustriamo una maniera per scrivere automaticamente le equazioni d’equilibrio dei nodi.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
13
5. La scrittura automatica delle equazioni di equilibrio nodale
Esaminiamo un metodo semplice per scrivere il sistema risolvente delle equazioni di equilibrio nodale. Tale metodo fa uso delle seguenti matrici:
Nodo xI yI A 0 0 B L 0 C 2L 0 D 3L 0 E L/2 L/2 F 3L/2 L/2 G 5L/2 L/2
(matrice delle coordinate nodali)
Trave Nodo Iniziale
Nodo finale
A B B C C D A E B E B F C F C G D G E F
(11) G F
(matrice delle incidenze delle travi) Operando trave per trave, si calcolano le quantità
22 )()( JIJIIJ yyxxL −+−= , IJJIIJ Lxx /)(cos −=α , IJJIIJ Lyy /)(sin −=α ,
rispettivamente la lunghezza dell’asta che collega i nodi I e J, ed i coseni direttori del versore orientato dal nodo I al nodo J. Tenuto conto di tali espressioni, il sistema delle equazioni di equilibrio è dato dalle 2n equazioni
=−
+=
=−
+=
∑ ∑
∑ ∑
=
=
0
0
1
1
IJm
JIJ
IJIy
IJm
JIJ
IJIx
NL
yyYF
NL
xxXF
I
I
,
in cui XI e YI sono le azioni concentrate agenti sul nodo I (siano esse carichi noti o reazioni vincolari incognite), JIIJ NN = è lo sforzo assiale attivo nell’asta che collega i nodi ),( II yxI ≡ e ),( JJ yxJ ≡ , mentre Im indica il numero di aste collegate al nodo I. Nel caso in esame, si ottiene Nodo A
=+=−
+−
+=
=++=−
+−
+=
∑
∑
02/
02/
7
71
NYNL
yyNL
yyYF
NNXNL
xxNL
xxXF
AAEAE
AEAB
AB
ABAy
AAEAE
AEAB
AB
ABAx
,

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
14
Nodo B
=++−=−
+−
+−
+−
+=
=++−−=−
+−
+−
+−
+=
∑
∑
02/2/
02/2/
119
31191
NNPNL
yyNL
yyNL
yyNL
yyYF
NNNNNL
xxNL
xxNL
xxNL
xxXF
BCBC
BCBF
BF
BFBE
BE
BEBA
BA
BABy
BCBC
BCBF
BF
BFBE
BE
BEBA
BA
BABx
Nodo C
=++−=−
+−
+−
+−
+=
=++−−=−
+−
+−
+−
+=
∑
∑
02/2/
02/2/
1513
515133
NNPNL
yyN
Lyy
NL
yyN
Lyy
YF
NNNNNL
xxN
Lxx
NL
xxN
Lxx
XF
CDCD
CDCG
CG
CGCF
CF
CFCB
CB
CBCy
CDCD
CDCG
CG
CGCF
CF
CFCB
CB
CBCx
Nodo D
=+=−
+−
+=
=−−=−
+−
+=
∑
∑
02/
02/
17
175
NYNL
yyN
Lyy
YF
NNNL
xxN
Lxx
XF
DCGCG
DGCD
CD
DCDy
CGCG
DGCD
CD
DCDx
,
Nodo E
=−−−=−
+−
+−
+=
=++−=−
+−
+−
+=
∑
∑
02/2/
02/2/
97
1997
NNPNL
yyNL
yyNL
yyYF
NNNHNL
xxN
Lxx
NL
xxXF
EFEF
EFEB
EB
EBEA
EA
EAEy
EFEF
EFEB
EB
EBEA
EA
EAEx
Nodo F
=−
+−
+−
+−
+=
=−
+−
+−
+−
+=
∑
∑
0
0
FGFG
FGFC
FC
FCFB
FB
FBFE
FE
FEFy
FGFG
FGFC
FC
FCFB
FB
FBFE
FE
FEFx
NL
yyN
Lyy
NL
yyNL
yyYF
NL
xxN
Lxx
NL
xxN
Lxx
XF,
ossia,
=−−−==++−−=
∑∑
02/2/202/2/
1311
21131119
NNPFNNNNF
y
x
Nodo G
=−−−=−
+−
+−
+=
=+−−=−
+−
+−
+=
∑
∑
02/2/
02/2/
1715
171521
NNPNL
yyNL
yyNL
yyYF
NNNHNL
xxNL
xxNL
xxXF
GDGD
GDGC
GC
GCGF
GF
GFGy
GDGD
GDGC
GC
GCGF
GF
GFGx
.
che coincidono con le equazioni ottenute in precedenza.
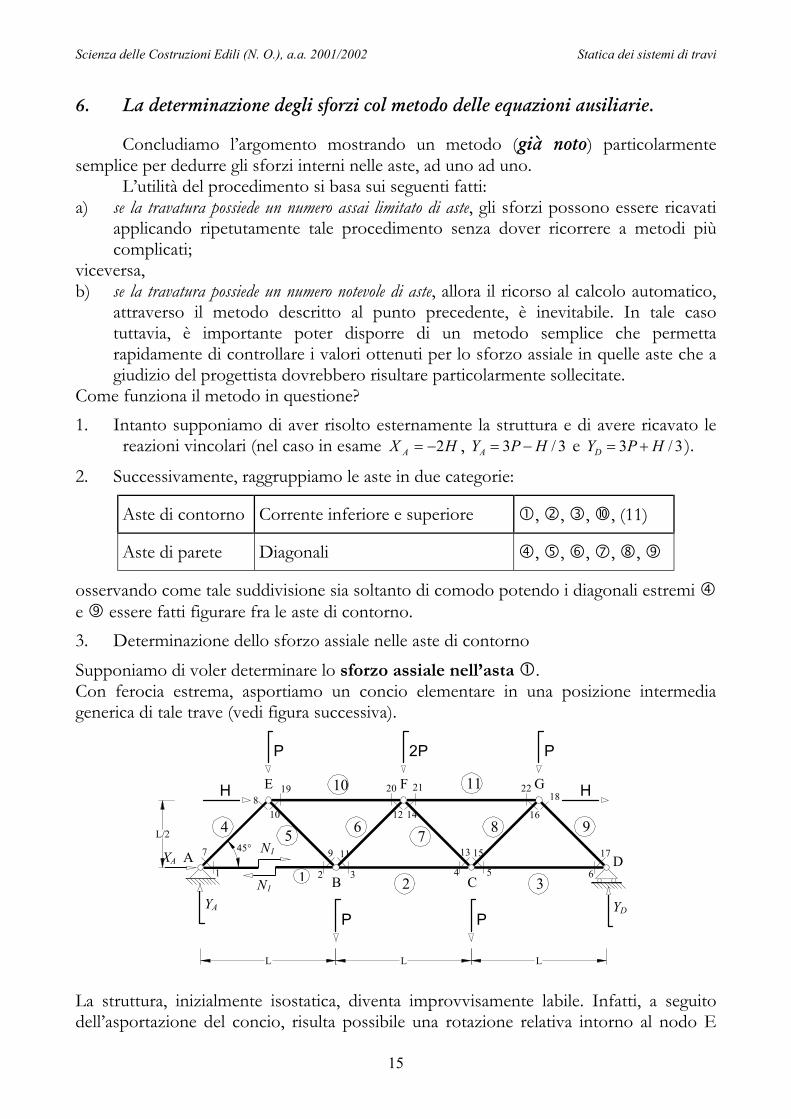
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
15
6. La determinazione degli sforzi col metodo delle equazioni ausiliarie.
Concludiamo l’argomento mostrando un metodo (già noto) particolarmente semplice per dedurre gli sforzi interni nelle aste, ad uno ad uno. L’utilità del procedimento si basa sui seguenti fatti: a) se la travatura possiede un numero assai limitato di aste, gli sforzi possono essere ricavati
applicando ripetutamente tale procedimento senza dover ricorrere a metodi più complicati;
viceversa, b) se la travatura possiede un numero notevole di aste, allora il ricorso al calcolo automatico,
attraverso il metodo descritto al punto precedente, è inevitabile. In tale caso tuttavia, è importante poter disporre di un metodo semplice che permetta rapidamente di controllare i valori ottenuti per lo sforzo assiale in quelle aste che a giudizio del progettista dovrebbero risultare particolarmente sollecitate.
Come funziona il metodo in questione? 1. Intanto supponiamo di aver risolto esternamente la struttura e di avere ricavato le
reazioni vincolari (nel caso in esame HX A 2−= , 3/3 HPYA −= e 3/3 HPYD += ).
2. Successivamente, raggruppiamo le aste in due categorie:
Aste di contorno Corrente inferiore e superiore , , , , (11)
Aste di parete Diagonali , , , , ,
osservando come tale suddivisione sia soltanto di comodo potendo i diagonali estremi e essere fatti figurare fra le aste di contorno. 3. Determinazione dello sforzo assiale nelle aste di contorno Supponiamo di voler determinare lo sforzo assiale nell’asta . Con ferocia estrema, asportiamo un concio elementare in una posizione intermedia generica di tale trave (vedi figura successiva).
A B C
D
E F G
1 2 3
10 11
4 5 6 7 8 9
1 2 3 4 5 6 17
18 16
22 21
14
20
12
15 13 11 9
19
10 8
7
H H
P 2P P
P P
L L L
L/2 45° N1
N1 YA
XA
YD
La struttura, inizialmente isostatica, diventa improvvisamente labile. Infatti, a seguito dell’asportazione del concio, risulta possibile una rotazione relativa intorno al nodo E

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
16
(polo dell’asta ) fra le due parti rigide in cui la struttura rimane suddivisa. Tale rotazione può essere impedita se e solo se sulle sezioni che ora appaiono separate noi applichiamo due forze uguali ed opposte, N1, (positive se tendono a ripristinare la continuità strutturale = se richiudono lo strappo) di valore uguale a quello che il concio esercitava sulle parti adiacenti prima della sua asportazione. Il valore dello sforzo N1 può essere ricavato utilizzando l’equazione ausiliaria 0=EM . Facendo riferimento al sistema delle forze che precedono, si ottiene:
02/2/2/ 1 =⋅−⋅−⋅= LNLXLYM AAE
da cui HPHHPXYN AA ⋅+⋅=−−⋅−⋅=−= 3/53)2(3/131 .
Determiniamo adesso lo sforzo assiale nell’asta . Con la solita ferocia che ormai ci contraddistingue, asportiamo un concio elementare in una posizione intermedia generica di tale trave.
A B C
D
E F G
1 2 3
10 11
4 5 6 7 8 9
1 2 3 4 5 6 17
18 16
22 21
14
20
12
15 13 11 9
19
10 8
7
H H
P 2P P
P P
L L L
L/2 45° N3
N3 YA
XA
YD
La struttura diventa improvvisamente ed inaspettatamente labile, poiché risulta possibile una rotazione relativa intorno al nodo F (polo dell’asta ) fra le due parti rigide in cui questa rimane suddivisa. Tale rotazione può essere impedita solo applicando sulle sezioni separate due forze, N3, uguali ed opposte, di valore uguale a quello che il concio esercitava sulle parti adiacenti prima della sua asportazione. Il valore dello sforzo N3 può essere ricavato utilizzando l’equazione ausiliaria 0=FM . Facendo riferimento al sistema delle forze che precedono, si ottiene:
02222
33 =⋅−⋅−⋅−⋅−⋅=
LNLPLPLXLYM AAF
da cui HPPHHPPXYN AA +⋅=⋅−−−⋅−⋅=⋅−−⋅= 63)2()3/13(3333 .
Allo stesso modo si procede per le rimanenti aste di contorno.
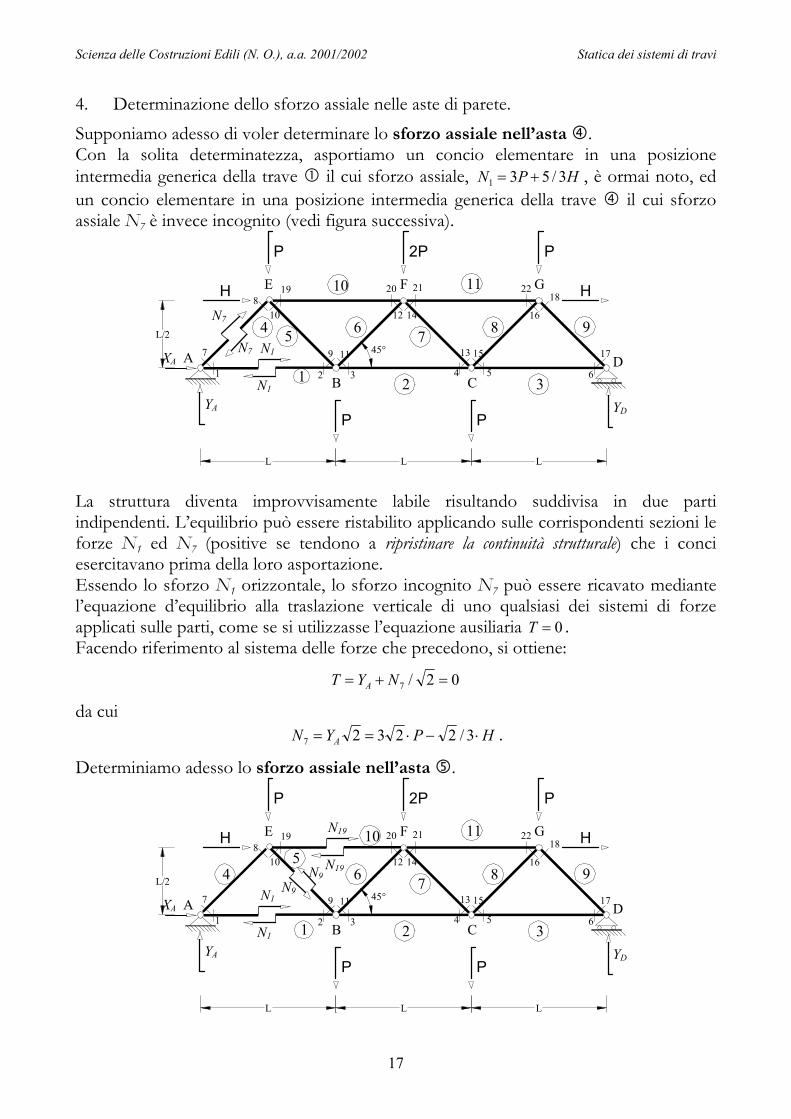
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
17
4. Determinazione dello sforzo assiale nelle aste di parete. Supponiamo adesso di voler determinare lo sforzo assiale nell’asta . Con la solita determinatezza, asportiamo un concio elementare in una posizione intermedia generica della trave il cui sforzo assiale, HPN 3/531 += , è ormai noto, ed un concio elementare in una posizione intermedia generica della trave il cui sforzo assiale N7 è invece incognito (vedi figura successiva).
A B C
D
E F G
1 2 3
10 11
4 5 6 7 8 9
1 2 3 4 5 6 17
18 16
22 21
14
20
12
15 13 11 9
19
10 8
7
H H
P 2P P
P P
L L L
L/2 45° N1
N1 YA
XA
YD
N7
N7
La struttura diventa improvvisamente labile risultando suddivisa in due parti indipendenti. L’equilibrio può essere ristabilito applicando sulle corrispondenti sezioni le forze N1 ed N7 (positive se tendono a ripristinare la continuità strutturale) che i conci esercitavano prima della loro asportazione. Essendo lo sforzo N1 orizzontale, lo sforzo incognito N7 può essere ricavato mediante l’equazione d’equilibrio alla traslazione verticale di uno qualsiasi dei sistemi di forze applicati sulle parti, come se si utilizzasse l’equazione ausiliaria 0=T . Facendo riferimento al sistema delle forze che precedono, si ottiene:
02/7 =+= NYT A
da cui HPYN A ⋅−⋅== 3/22327 .
Determiniamo adesso lo sforzo assiale nell’asta .
A B C
D
E F G
1 2 3
10 11
4 5
6 7 8 9
1 2 3 4 5 6 17
18 16
22 21
14
20
12
15 13 11 9
19
10 8
7
H H
P 2P P
P P
L L L
L/2 45° N1
N1 YA
XA
YD
N19
N19 N9
N9

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
18
Asportiamo un concio elementare in una posizione intermedia generica delle travi , e (vedi figura successiva), e scriviamo l’equazione d’equilibrio alla traslazione verticale di uno qualsiasi dei sistemi di forze applicati sulle due parti. Facendo riferimento al sistema delle forze che precedono, si ottiene:
02/9 =−−= NPYT A
da cui HPPYN A ⋅−⋅=−= 3/2222)(9 .
Il procedimento si ripete per tutte le aste di parete.
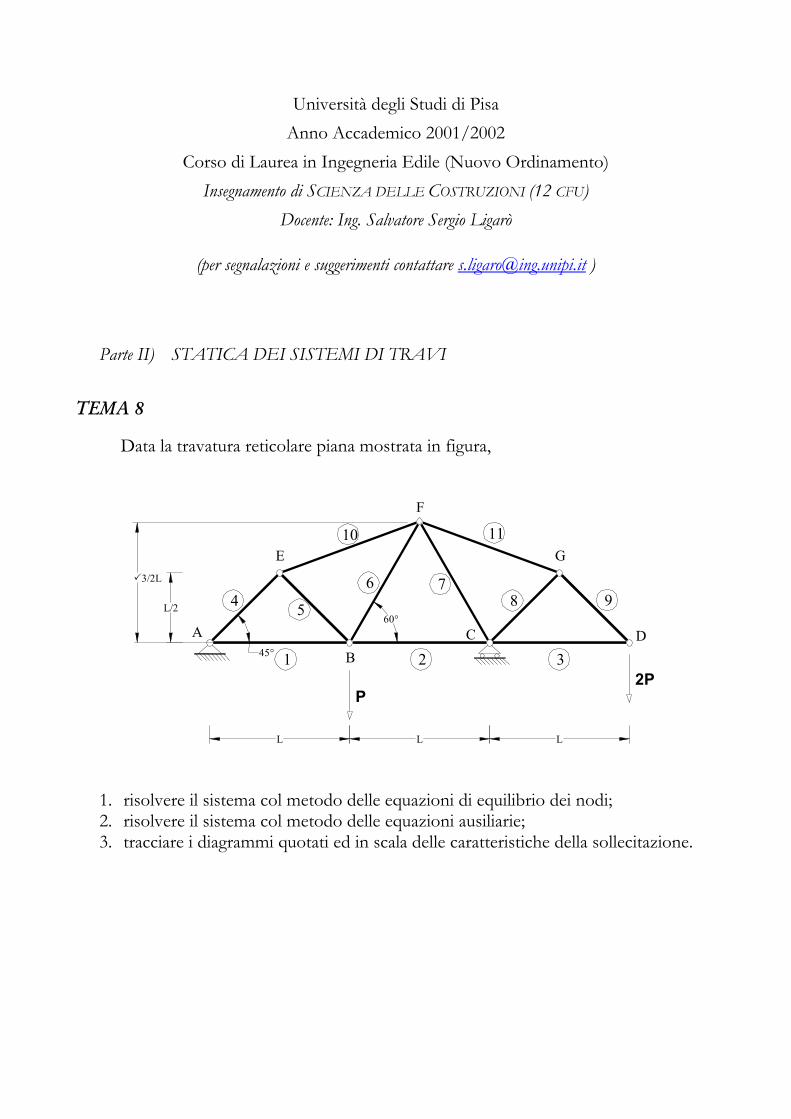
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 8
Data la travatura reticolare piana mostrata in figura,
A B
C D
E
F
G
1 2 3
10 11
4 5
6 7 8 9
P 2P
L L L
L/2
45°
60°
3/2L
1. risolvere il sistema col metodo delle equazioni di equilibrio dei nodi; 2. risolvere il sistema col metodo delle equazioni ausiliarie; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
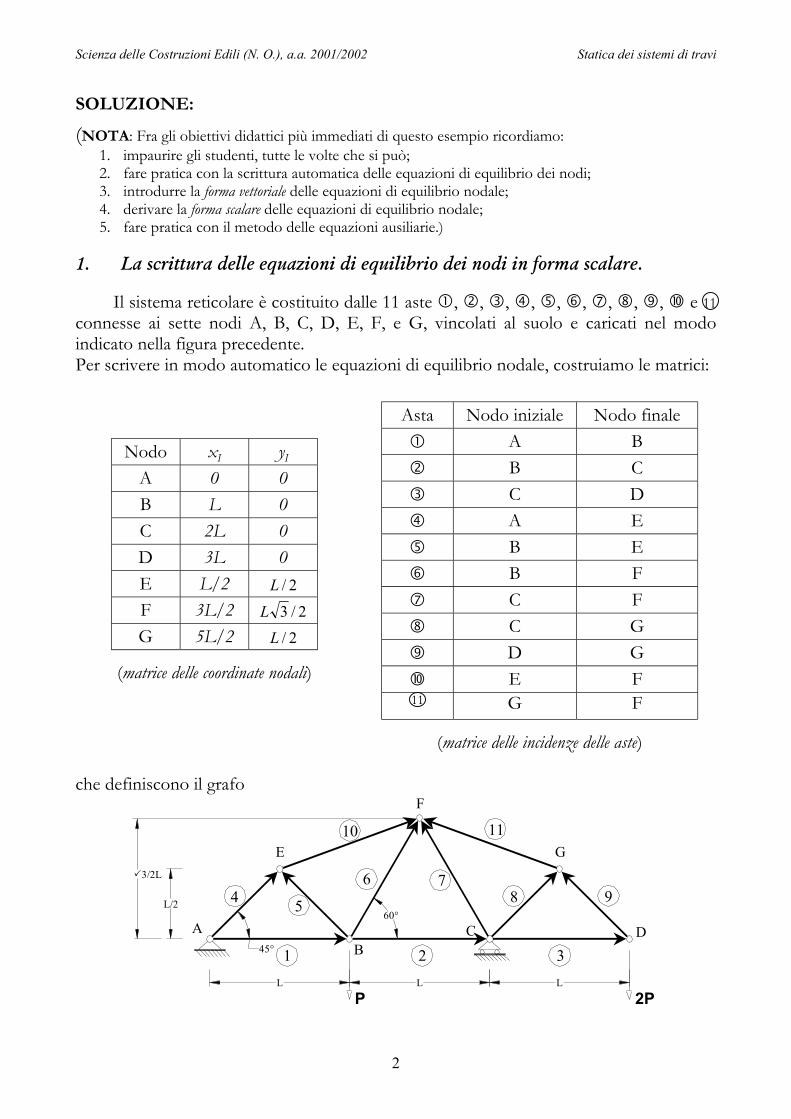
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo: 1. impaurire gli studenti, tutte le volte che si può; 2. fare pratica con la scrittura automatica delle equazioni di equilibrio dei nodi; 3. introdurre la forma vettoriale delle equazioni di equilibrio nodale; 4. derivare la forma scalare delle equazioni di equilibrio nodale; 5. fare pratica con il metodo delle equazioni ausiliarie.)
1. La scrittura delle equazioni di equilibrio dei nodi in forma scalare.
Il sistema reticolare è costituito dalle 11 aste , , , , , , , , , e 11 connesse ai sette nodi A, B, C, D, E, F, e G, vincolati al suolo e caricati nel modo indicato nella figura precedente. Per scrivere in modo automatico le equazioni di equilibrio nodale, costruiamo le matrici:
Nodo xI yI A 0 0 B L 0 C 2L 0 D 3L 0 E L/2 2/L F 3L/2 2/3L G 5L/2 2/L
(matrice delle coordinate nodali)
Asta Nodo iniziale Nodo finale
A B B C C D A E B E B F C F C G D G E F
11 G F
(matrice delle incidenze delle aste) che definiscono il grafo
A B
C D
E
F
G
1 2 3
10 11
4 5
6 7 8 9
P 2P L L L
L/2
45°
60°
3/2L

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
Costruiamo, inoltre, le seguenti matrici
Nodo XI YI A XA YA B 0 -P C 0 YC D 0 -2P E 0 0 F 0 0 G 0 0
(matrice dei carichi nodali)
Asta LIJ= LJI
L L L 2/L 2/L L L 2/L 2/L 2/32−L
11 2/32−L
(vettore delle lunghezze delle aste) dove
22 )()( JIJIJIIJ yyxxLL −+−== ,
è la lunghezza dell’asta che collega il nodo I al nodo J. Il sistema delle equazioni di equilibrio è dato dalle 2n relazioni
=−
+=
=−
+=
∑ ∑
∑ ∑
=
=
0
0
1
1
IJm
JIJ
IJIy
IJm
JIJ
IJIx
NL
yyYF
NL
xxXF
I
I
,
in cui XI ed YI sono le azioni concentrate agenti sul nodo I (siano esse carichi noti o reazioni vincolari incognite), JIIJ NN = è lo sforzo assiale attivo nell’asta che collega i nodi ),( II yxI ≡ e ),( JJ yxJ ≡ , mentre Im indica il numero di aste collegate al nodo I.
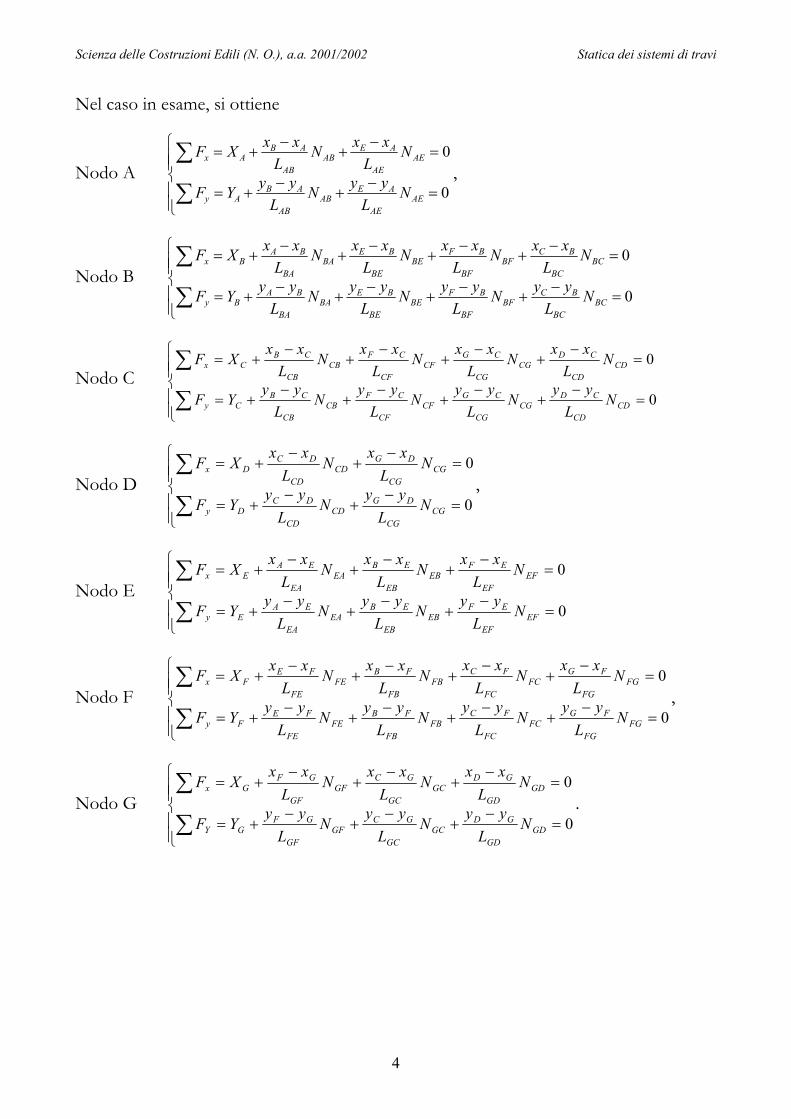
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
Nel caso in esame, si ottiene
Nodo A
=−
+−
+=
=−
+−
+=
∑
∑
0
0
AEAE
AEAB
AB
ABAy
AEAE
AEAB
AB
ABAx
NL
yyNL
yyYF
NL
xxNL
xxXF,
Nodo B
=−
+−
+−
+−
+=
=−
+−
+−
+−
+=
∑
∑
0
0
BCBC
BCBF
BF
BFBE
BE
BEBA
BA
BABy
BCBC
BCBF
BF
BFBE
BE
BEBA
BA
BABx
NL
yyNL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxNL
xxXF
Nodo C
=−
+−
+−
+−
+=
=−
+−
+−
+−
+=
∑
∑
0
0
CDCD
CDCG
CG
CGCF
CF
CFCB
CB
CBCy
CDCD
CDCG
CG
CGCF
CF
CFCB
CB
CBCx
NL
yyN
Lyy
NL
yyN
Lyy
YF
NL
xxN
Lxx
NL
xxN
Lxx
XF
Nodo D
=−
+−
+=
=−
+−
+=
∑
∑
0
0
CGCG
DGCD
CD
DCDy
CGCG
DGCD
CD
DCDx
NL
yyN
Lyy
YF
NL
xxN
Lxx
XF,
Nodo E
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
EFEF
EFEB
EB
EBEA
EA
EAEy
EFEF
EFEB
EB
EBEA
EA
EAEx
NL
yyNL
yyNL
yyYF
NL
xxN
Lxx
NL
xxXF
Nodo F
=−
+−
+−
+−
+=
=−
+−
+−
+−
+=
∑
∑
0
0
FGFG
FGFC
FC
FCFB
FB
FBFE
FE
FEFy
FGFG
FGFC
FC
FCFB
FB
FBFE
FE
FEFx
NL
yyN
Lyy
NL
yyNL
yyYF
NL
xxN
Lxx
NL
xxNL
xxXF,
Nodo G
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
GDGD
GDGC
GC
GCGF
GF
GFGY
GDGD
GDGC
GC
GCGF
GF
GFGx
NL
yyN
Lyy
NL
yyYF
NL
xxN
Lxx
NL
xxXF
.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
Tenuto conto dei dati riportati nelle tabelle, le equazioni di equilibrio alla traslazione secondo gli assi x ed y dei nodi del sistema risultano:
Nodo A
=+=
=++=
∑∑
02/
02/
4
41
NYF
NNXF
Ay
Ax ,
Nodo B
=++−=
=++−−=
∑∑
02/32/
02/2/
65
2651
NNPF
NNNNF
y
x ,
Nodo C
=+++=
=++−−=
∑∑
02/2/3
02/2/
87
3872
NNYF
NNNNF
Cy
x ,
Nodo D
=+−=
=−−=
∑∑
02/2
02/
9
93
NPF
NNF
y
x ,
Nodo E
=−−+−−=
=−++−=
∑∑
0328/)13(2/2/
0328/22/2/
1054
1054
NNNF
NNNF
y
x ,
Nodo F
=−−−−−−−−=
=−++−−−=
∑∑
0328/)13(2/32/3328/)13(
0328/22/2/328/2
117610
117610
NNNNF
NNNNF
y
x ,
Nodo G
=−−−−+=
=+−−−=
∑∑
02/2/328/)13(
02/2/328/2
9811
9811
NNNF
NNNF
y
x .
Quella appena scritta è la forma scalare delle equazioni di equilibrio nodale. Il problema è così ricondotto alla soluzione del sistema di 142 =n equazioni algebriche lineari non omogenee, nelle 143 =+a incognite IN , 11,,1K=I , e XA, YA e YC riportato di seguito.
⋅=
⋅
−
−
−
−
−−−
−−−
−
−
−
−−−−−
−−
−
−−−
−−
−
−
−
0
0
0
0
0
0
2
0
0
0
1
0
0
0
00000000000
00000000000
0000000000
0000000000
00000000000
00000000000
0000000000000
0000000000100
100000000000
000000000110
000000000000
000000000011
0100000000000
0010000000001
11
10
9
8
7
6
5
4
3
2
1
32813
21
21
3282
21
21
32831
32831
23
23
3282
3282
21
21
32813
21
21
3282
21
21
21
21
21
23
21
21
23
21
21
21
21
21
P
Y
Y
X
N
N
N
N
N
N
N
N
N
N
N
GNodo
FNodo
ENodo
DNodo
CNodo
BNodo
ANodo
C
A
A

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
2. La scrittura delle equazioni di equilibrio dei nodi in forma vettoriale.
Una maniera più semplice per risolvere lo stesso problema è la seguente. Introdotti i versori degli assi coordinati [ ]Ti 01= e [ ]Tj 10= ed il vettore nullo a due dimensioni [ ]T0 00= , le azioni nodali esterne si scrivono
Nodo Azione nodale A jiP AAA YX += B jjijiP PPYX BBB −=−+=+= 0 C jjijiP CCCCC YYYX +=++=+= 0 D jjijiP PPYX DDD 220 −=−+=+= E 0jijiP =++=+= 00EEE YX F 0jijiP =++=+= 00FFF YX G 0jijiP =++=+= 00GGG YX
(vettori dei carichi nodali)
In modo analogo, indicando con [ ]Tyixii nn=n il versore dell’asse geometrico dell’asta i
che collega il nodo R al nodo S, orientato positivamente da R ad S, di componenti
RSRSRSxi Lxxn /)(cos −=α= , ed RSRSRSyi Lyyn /)(sin −=α= ,
gli sforzi che tale asta esercita rispettivamente sui nodi R ed S si esprimono come
iii N nN = e )( iii N nN −=− .
Nella tabella seguente si riportano i valori delle componenti dei versori delle aste.
Asta Versore IJxn α= cos IJyn α= sin n1 1 0 n2 1 0 n3 1 0 n4 2/1 2/1 n5 2/1− 2/1 n6 2/1 2/3 n7 2/1− 2/3 n8 2/1 2/1 n9 2/1− 2/1 n10 328/2 − 328/)13( −−
11 n11 328/2 −− 328/)13( −− (versori delle aste e loro componenti)

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
Tutto ciò premesso, le equazioni di equilibrio dei nodi, espresse in forma vettoriale, si scrivono semplicemente come Nodo A 0PNN =+++ A41 ,
Nodo B 0PNNNN =++++− B2651 ,
Nodo C 0PNNNN =++++− C3872 ,
Nodo D 0PNN =++− D93 ,
Nodo E 0PNNN =++−− E1054 ,
Nodo F 0PNNNN =+−−−− F117610 ,
Nodo G 0PNNN =+−−+ G9811 .
ovvero, facendo uso dei versori delle aste
⋅=
⋅
−−−−−−
−−−
−−
000j0j0
RN
000n0nn0000000000nn00nn000000000n0000nn00000000n00000n00j00000nn000nn000000000nn00nn0ji0000000n00n
2
1198
111076
1054
93
8732
6521
41
P
GNodoFNodoENodoDNodoCNodoBNodoANodo
dove [ ]T1110987654321 NNNNNNNNNNN=N è il vettore che raccoglie gli sforzi assiali
nelle aste ed [ ]TCAA YYX=R è il vettore delle reazioni vincolari.
Procedendo asta per asta, se l’asta i è orientata positivamente da R ad S, come definito nella matrice delle incidenze, porremo ni nell’intersezione fra la riga R e la colonna i-esima e –ni nell’intersezione fra la riga S e la colonna i-esima. Ad esempio, l’asta che collega i nodi B ed F, ha il proprio versore n6 orientato positivamente nel verso da B ad F. Pertanto, porremo n6 nell’intersezione fra la riga B e la colonna e –n6 nell’intersezione fra la riga F e la colonna . Conseguentemente, se limitiamo la nostra attenzione alle colonne relative agli sforzi assiali, la proprietà più evidente della matrice delle equazioni di equilibrio nodale, è che la somma degli elementi di ciascuna colonna è nulla, circostanza che può risultare di grande aiuto per controllare la correttezza del sistema scritto. Più in generale, possiamo affermare che il sistema fornisce riga per riga l’equazione vettoriale che esprime l’equilibrio dei nodi, mentre colonna per colonna fornisce l’equazione vettoriale di equilibrio di ciascuna asta.
ASTE 11
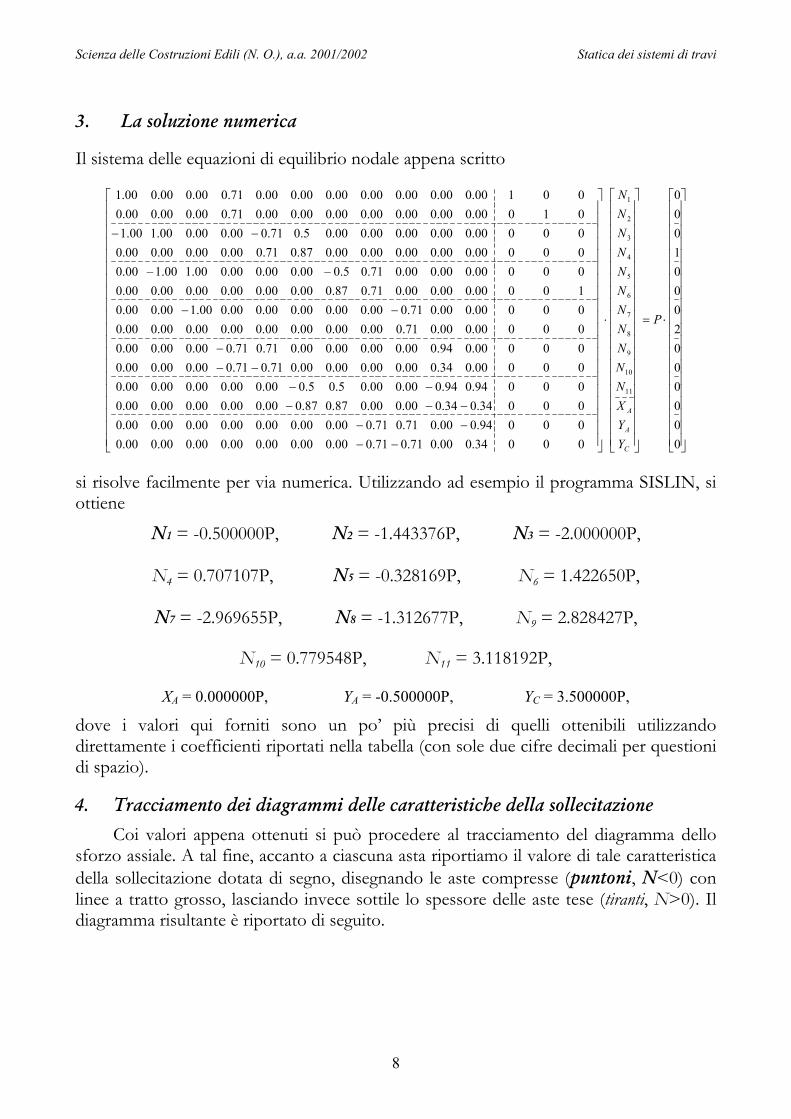
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
3. La soluzione numerica
Il sistema delle equazioni di equilibrio nodale appena scritto
⋅=
⋅
−−−−−−−
−−−−
−
−−
−−
−−
00000020001000
00034.000.071.071.000.000.000.000.000.000.000.000094.000.071.071.000.000.000.000.000.000.000.000034.034.000.000.087.087.000.000.000.000.000.000094.094.000.000.05.05.000.000.000.000.000.000000.034.000.000.000.000.071.071.000.000.000.000000.094.000.000.000.000.071.071.000.000.000.000000.000.071.000.000.000.000.000.000.000.000.000000.000.071.000.000.000.000.000.000.100.000.010000.000.000.071.087.000.000.000.000.000.000.000000.000.000.071.05.000.000.000.000.100.100.000000.000.000.000.000.087.071.000.000.000.000.000000.000.000.000.000.05.071.000.000.000.100.101000.000.000.000.000.000.000.071.000.000.000.000100.000.000.000.000.000.000.071.000.000.000.1
11
10
9
8
7
6
5
4
3
2
1
P
YYXNNNNNNNNNNN
C
A
A
si risolve facilmente per via numerica. Utilizzando ad esempio il programma SISLIN, si ottiene
N1 = -0.500000P, N2 = -1.443376P, N3 = -2.000000P,
N4 = 0.707107P, N5 = -0.328169P, N6 = 1.422650P,
N7 = -2.969655P, N8 = -1.312677P, N9 = 2.828427P,
N10 = 0.779548P, N11 = 3.118192P,
XA = 0.000000P, YA = -0.500000P, YC = 3.500000P,
dove i valori qui forniti sono un po’ più precisi di quelli ottenibili utilizzando direttamente i coefficienti riportati nella tabella (con sole due cifre decimali per questioni di spazio).
4. Tracciamento dei diagrammi delle caratteristiche della sollecitazione Coi valori appena ottenuti si può procedere al tracciamento del diagramma dello
sforzo assiale. A tal fine, accanto a ciascuna asta riportiamo il valore di tale caratteristica della sollecitazione dotata di segno, disegnando le aste compresse (puntoni, N<0) con linee a tratto grosso, lasciando invece sottile lo spessore delle aste tese (tiranti, N>0). Il diagramma risultante è riportato di seguito.
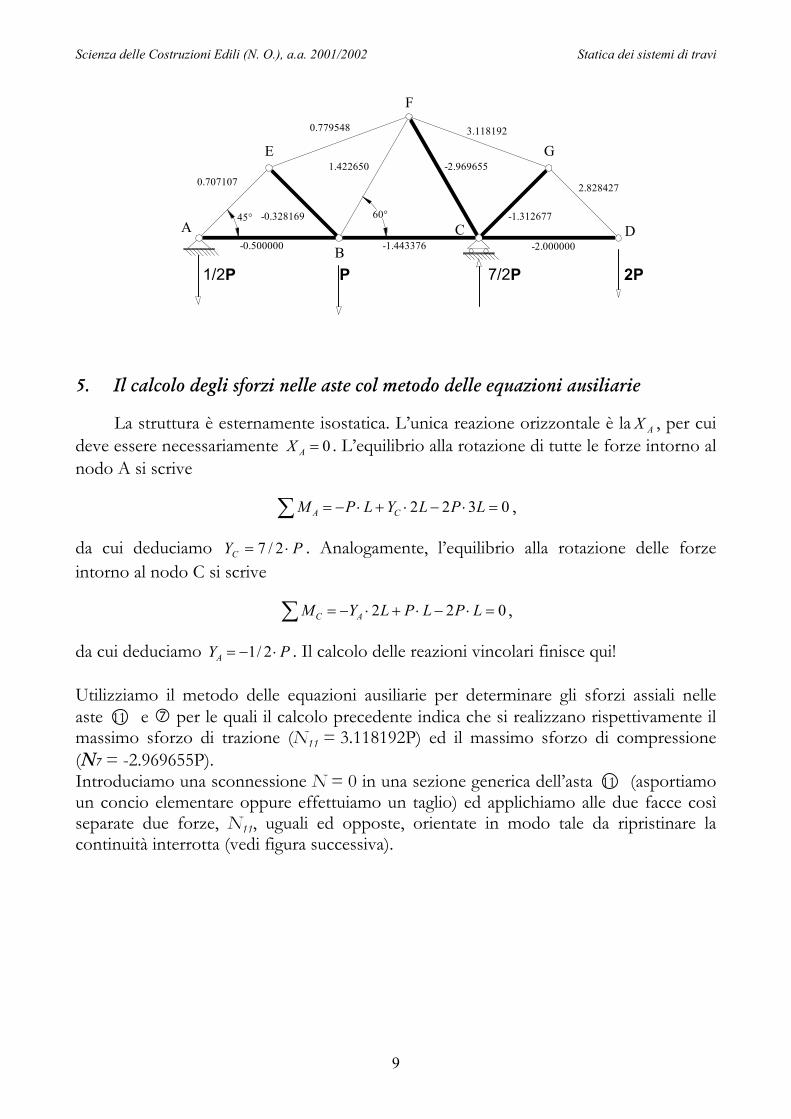
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
A B
C D
E
F
G
-0.500000
P 2P
45° 60°
1/2P 7/2P
-1.443376 -2.000000
0.707107
-0.328169
1.422650 -2.969655
-1.312677
0.779548 3.118192
2.828427
5. Il calcolo degli sforzi nelle aste col metodo delle equazioni ausiliarie
La struttura è esternamente isostatica. L’unica reazione orizzontale è la AX , per cui deve essere necessariamente 0=AX . L’equilibrio alla rotazione di tutte le forze intorno al nodo A si scrive
0322 =⋅−⋅+⋅−=∑ LPLYLPM CA ,
da cui deduciamo PYC ⋅= 2/7 . Analogamente, l’equilibrio alla rotazione delle forze intorno al nodo C si scrive
022 =⋅−⋅+⋅−=∑ LPLPLYM AC ,
da cui deduciamo PYA ⋅−= 2/1 . Il calcolo delle reazioni vincolari finisce qui! Utilizziamo il metodo delle equazioni ausiliarie per determinare gli sforzi assiali nelle aste 11 e per le quali il calcolo precedente indica che si realizzano rispettivamente il massimo sforzo di trazione (N11 = 3.118192P) ed il massimo sforzo di compressione (N7 = -2.969655P). Introduciamo una sconnessione N = 0 in una sezione generica dell’asta 11 (asportiamo un concio elementare oppure effettuiamo un taglio) ed applichiamo alle due facce così separate due forze, N11, uguali ed opposte, orientate in modo tale da ripristinare la continuità interrotta (vedi figura successiva).
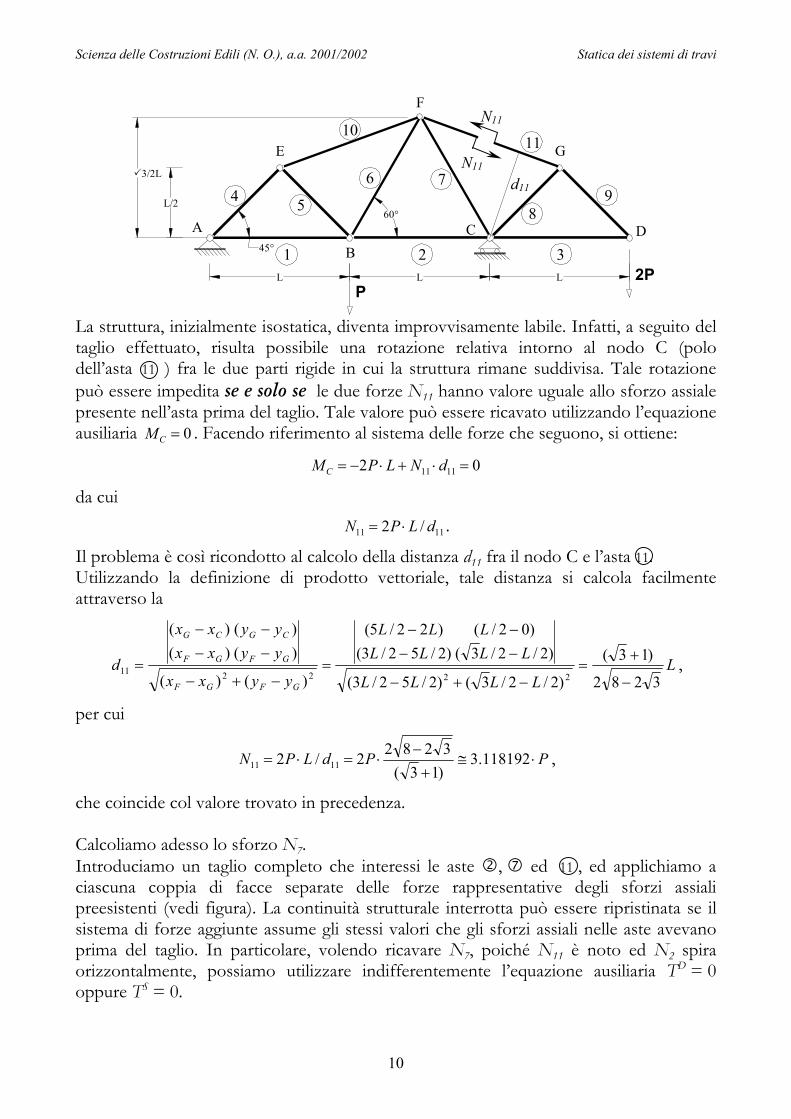
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
A B
C D
E
F
G
1 2 3
10 11
4 5
6 7
8 9
P 2P L L L
L/2
45°
60°
3/2L
N11
N11 d11
La struttura, inizialmente isostatica, diventa improvvisamente labile. Infatti, a seguito del taglio effettuato, risulta possibile una rotazione relativa intorno al nodo C (polo dell’asta 11 ) fra le due parti rigide in cui la struttura rimane suddivisa. Tale rotazione può essere impedita se e solo se le due forze N11 hanno valore uguale allo sforzo assiale presente nell’asta prima del taglio. Tale valore può essere ricavato utilizzando l’equazione ausiliaria 0=CM . Facendo riferimento al sistema delle forze che seguono, si ottiene:
02 1111 =⋅+⋅−= dNLPMC
da cui
1111 /2 dLPN ⋅= .
Il problema è così ricondotto al calcolo della distanza d11 fra il nodo C e l’asta 11. Utilizzando la definizione di prodotto vettoriale, tale distanza si calcola facilmente attraverso la
LLLLL
LLLLLLL
yyxx
yyxxyyxx
dGFGF
GFGF
CGCG
3282
)13(
)2/2/3()2/52/3(
)2/2/3()2/52/3()02/()22/5(
)()(
)()()()(
222211−
+=
−+−
−−−−
=−+−
−−−−
= ,
per cui
PPdLPN ⋅≅+−
⋅=⋅= 118192.3)13(32822/2 1111 ,
che coincide col valore trovato in precedenza. Calcoliamo adesso lo sforzo N7. Introduciamo un taglio completo che interessi le aste , ed 11 , ed applichiamo a ciascuna coppia di facce separate delle forze rappresentative degli sforzi assiali preesistenti (vedi figura). La continuità strutturale interrotta può essere ripristinata se il sistema di forze aggiunte assume gli stessi valori che gli sforzi assiali nelle aste avevano prima del taglio. In particolare, volendo ricavare N7, poiché N11 è noto ed N2 spira orizzontalmente, possiamo utilizzare indifferentemente l’equazione ausiliaria TD = 0 oppure TS = 0.
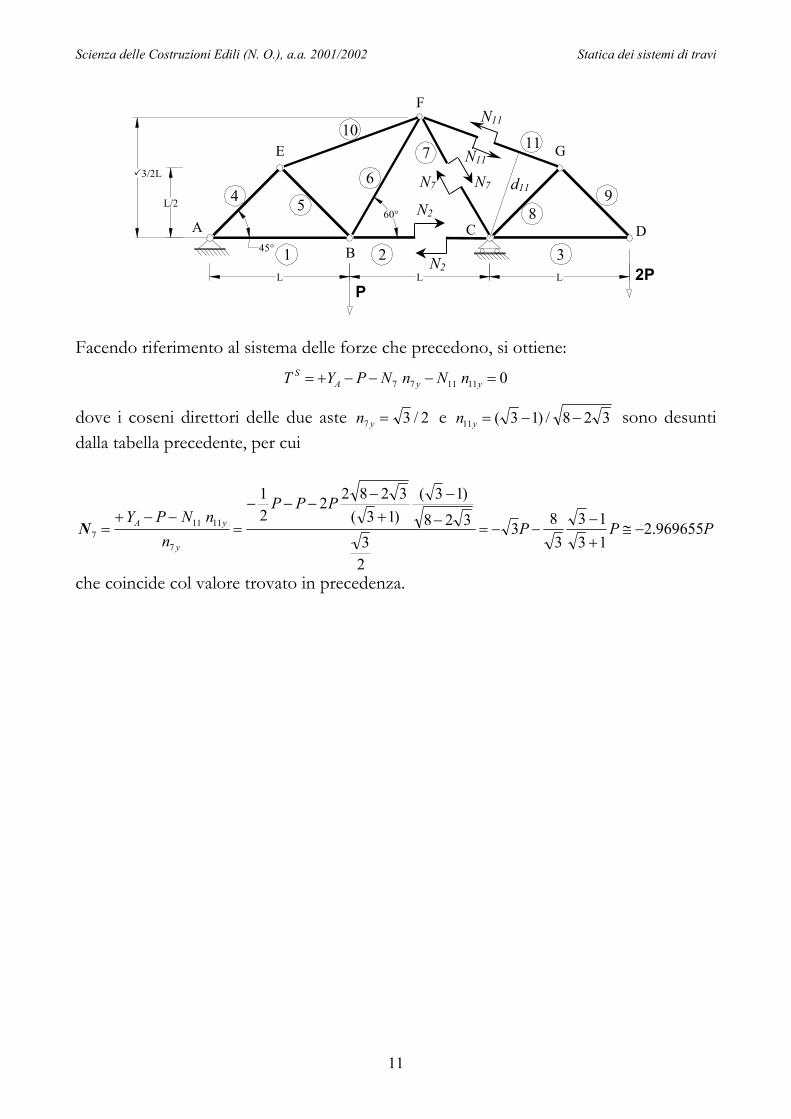
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
11
A B
C D
E
F
G
1 2 3
10 11
4 5
6 7
8 9
P 2P L L L
L/2
45°
60°
3/2L
N11
N11
d11 N7 N7
N2
N2
Facendo riferimento al sistema delle forze che precedono, si ottiene:
0111177 =−−−+= yyAS nNnNPYT
dove i coseni direttori delle due aste 2/37 =yn e 328/)13(11 −−=yn sono desunti dalla tabella precedente, per cui
PPPPPP
nnNPY
y
yA 969655.21313
383
23
328
)13()13(32822
21
7
11117 −≅
+−
−−=−
−+−
−−−
=−−+
=N
che coincide col valore trovato in precedenza.
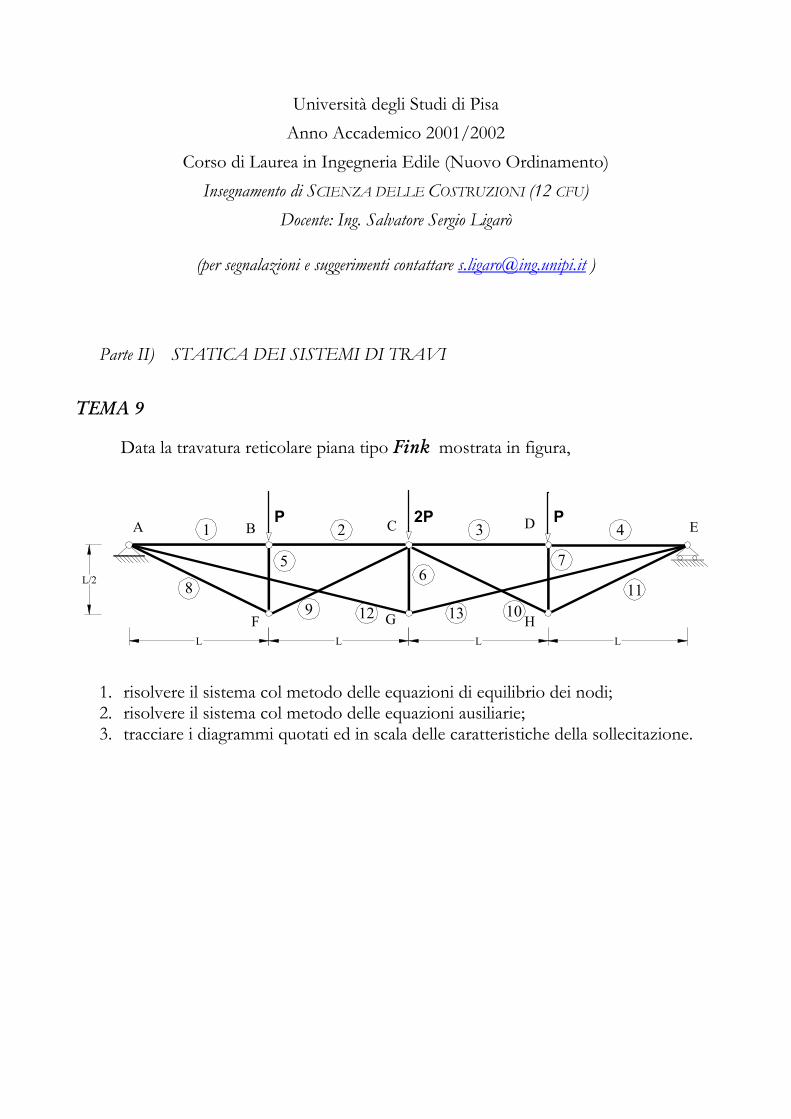
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 9
Data la travatura reticolare piana tipo Fink mostrata in figura,
A B C D E
F G
1 2 3
10 11
4
5 6
7
8 9
L L L H 12 13
2P P P
L/2
L
1. risolvere il sistema col metodo delle equazioni di equilibrio dei nodi; 2. risolvere il sistema col metodo delle equazioni ausiliarie; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
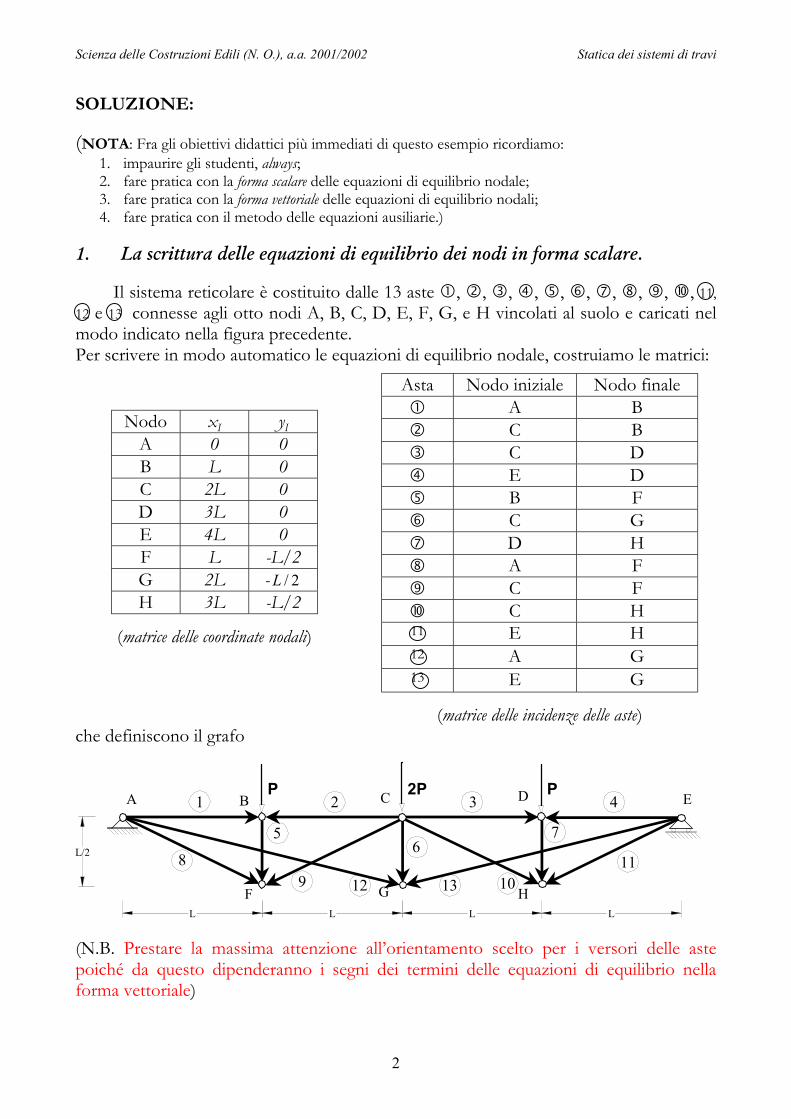
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo: 1. impaurire gli studenti, always; 2. fare pratica con la forma scalare delle equazioni di equilibrio nodale; 3. fare pratica con la forma vettoriale delle equazioni di equilibrio nodali; 4. fare pratica con il metodo delle equazioni ausiliarie.)
1. La scrittura delle equazioni di equilibrio dei nodi in forma scalare.
Il sistema reticolare è costituito dalle 13 aste , , , , , , , , , , 11, 12 e 13 connesse agli otto nodi A, B, C, D, E, F, G, e H vincolati al suolo e caricati nel modo indicato nella figura precedente. Per scrivere in modo automatico le equazioni di equilibrio nodale, costruiamo le matrici:
Nodo xI yI A 0 0 B L 0 C 2L 0 D 3L 0 E 4L 0 F L -L/2 G 2L - 2/L H 3L -L/2
(matrice delle coordinate nodali)
Asta Nodo iniziale Nodo finale A B C B C D E D B F C G D H A F C F C H
11 E H 12 A G 13 E G
(matrice delle incidenze delle aste) che definiscono il grafo
A B C D E
F G
1 2 3
10 11
4
5 6
7
8 9
L L L H 12 13
2P P P
L/2
L
(N.B. Prestare la massima attenzione all’orientamento scelto per i versori delle aste poiché da questo dipenderanno i segni dei termini delle equazioni di equilibrio nella forma vettoriale)

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
Costruiamo, inoltre, le seguenti matrici
Nodo XI YI A XA YA B 0 -P C 0 -2P D 0 -P E 0 YE F 0 0 G 0 0 H 0 0
(matrice dei carichi nodali)
Asta JIIJ LL =
L L L L L/2 L/2 L/2 2/5L 2/5L 2/5L
11 2/5L 12 2/17L 13 2/17L
(vettore delle lunghezze delle aste) dove
22 )()( JIJIJIIJ yyxxLL −+−== ,
è la lunghezza dell’asta che collega il nodo I al nodo J. Il sistema delle equazioni di equilibrio è dato dalle 2n relazioni
=−
+=
=−
+=
∑ ∑
∑ ∑
=
=
0
0
1
1
IJm
JIJ
IJIy
IJm
JIJ
IJIx
NL
yyYF
NL
xxXF
I
I
,
in cui XI ed YI sono le azioni concentrate agenti sul nodo I (siano esse carichi noti o reazioni vincolari incognite), JIIJ NN = è lo sforzo assiale attivo nell’asta che collega i nodi ),( II yxI ≡ e ),( JJ yxJ ≡ , mentre Im indica il numero di aste collegate al nodo I.
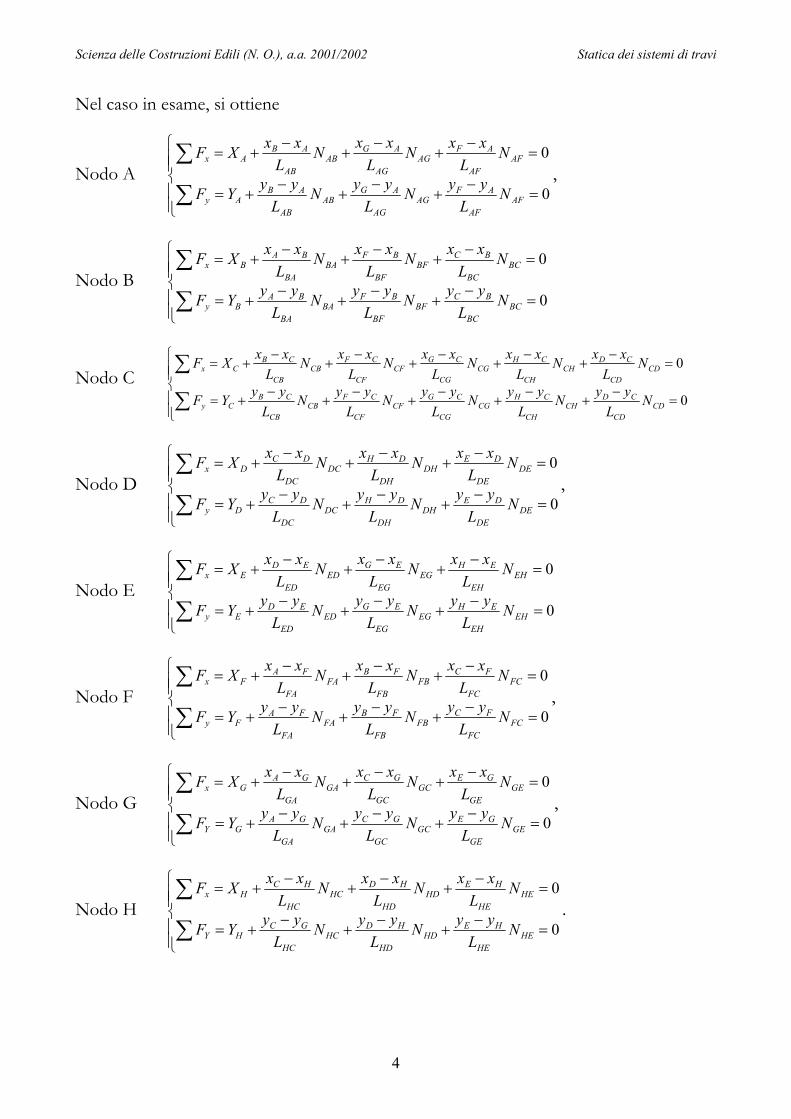
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
Nel caso in esame, si ottiene
Nodo A
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
AFAF
AFAG
AG
AGAB
AB
ABAy
AFAF
AFAG
AG
AGAB
AB
ABAx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF,
Nodo B
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
BCBC
BCBF
BF
BFBA
BA
BABy
BCBC
BCBF
BF
BFBA
BA
BABx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF
Nodo C
=−
+−
+−
+−
+−
+=
=−
+−
+−
+−
+−
+=
∑
∑
0
0
CDCD
CDCH
CH
CHCG
CG
CGCF
CF
CFCB
CB
CBCy
CDCD
CDCH
CH
CHCG
CG
CGCF
CF
CFCB
CB
CBCx
NL
yyNL
yyNL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxNL
xxNL
xxXF
Nodo D
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
DEDE
DEDH
DH
DHDC
DC
DCDy
DEDE
DEDH
DH
DHDC
DC
DCDx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF,
Nodo E
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
EHEH
EHEG
EG
EGED
ED
EDEy
EHEH
EHEG
EG
EGED
ED
EDEx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF
Nodo F
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
FCFC
FCFB
FB
FBFA
FA
FAFy
FCFC
FCFB
FB
FBFA
FA
FAFx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF,
Nodo G
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
GEGE
GEGC
GC
GCGA
GA
GAGY
GEGE
GEGC
GC
GCGA
GA
GAGx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF,
Nodo H
=−
+−
+−
+=
=−
+−
+−
+=
∑
∑
0
0
HEHE
HEHD
HD
HDHC
HC
GCHY
HEHE
HEHD
HD
HDHC
HC
HCHx
NL
yyNL
yyNL
yyYF
NL
xxNL
xxNL
xxXF.
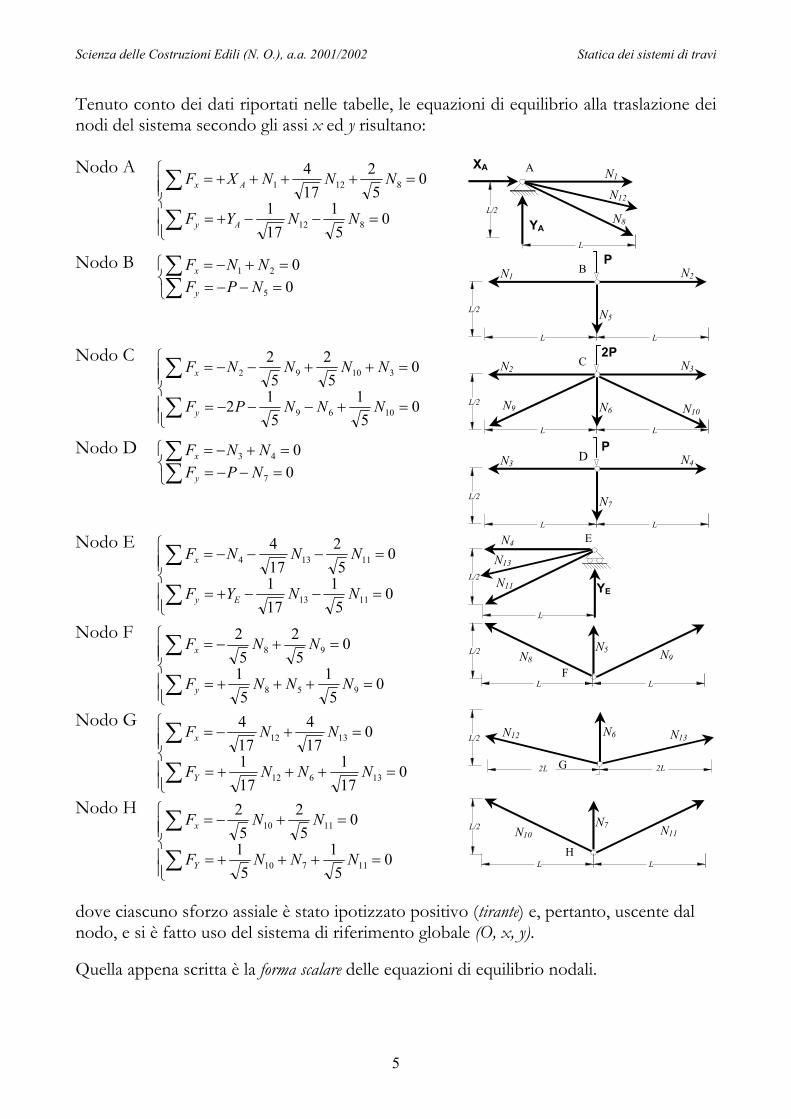
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
Tenuto conto dei dati riportati nelle tabelle, le equazioni di equilibrio alla traslazione dei nodi del sistema secondo gli assi x ed y risultano: Nodo A
=−−+=
=++++=
∑
∑0
51
171
05
2174
812
8121
NNYF
NNNXF
Ay
Ax
A N1
L
XA
L/2 YA
N12
N8
Nodo B
=−−==+−=
∑∑
00
5
21
NPFNNF
y
x
B N1
L L
P
L/2
N2
N5
Nodo C
=+−−−=
=++−−=
∑
∑0
51
512
05
25
2
1069
31092
NNNPF
NNNNF
y
x
C N2
L L
2P
L/2
N3
N6 N9 N10
Nodo D
=−−==+−=
∑∑
00
7
43
NPFNNF
y
x
D N3
L L
P
L/2
N4
N7
Nodo E
=−−+=
=−−−=
∑
∑0
51
171
05
2174
1113
11134
NNYF
NNNF
Ey
x
E N4
L
L/2 YE
N13
N11
Nodo F
=+++=
=+−=
∑
∑0
51
51
05
25
2
958
98
NNNF
NNF
y
x
F N8
L L
L/2 N5 N9
Nodo G
=+++=
=+−=
∑
∑0
171
171
0174
174
13612
1312
NNNF
NNF
Y
x
G
N12
2L
L/2 N6 N13
2L
Nodo H
=+++=
=+−=
∑
∑0
51
51
05
25
2
11710
1110
NNNF
NNF
Y
x
H N10
L L
L/2 N7 N11
dove ciascuno sforzo assiale è stato ipotizzato positivo (tirante) e, pertanto, uscente dal nodo, e si è fatto uso del sistema di riferimento globale (O, x, y).
Quella appena scritta è la forma scalare delle equazioni di equilibrio nodali.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
Il problema è così ricondotto alla soluzione di un sistema di 162 =n equazioni algebriche lineari non omogenee, nelle 163 =+a incognite IN , 13,,1K=I , e XA, YA e YE riportato di seguito.
⋅=
⋅
−
−
−
−
−
−
−
−
−
−
−−
−−
−−
−
−−
0
0
0
0
0
0
0
0
1
0
2
0
1
0
0
0
00000001000000
00000000000000
00000000100000
00000000000000
00000000010000
00000000000000
10000000000000
00000000001000
0000000001000000
0000000000001100
00000000100000
00000000000110
0000000000010000
0000000000000011
01000000000000
00100000000001
13
12
11
10
9
8
7
6
5
4
3
2
1
51
51
52
52
171
171
174
174
51
51
52
52
171
51
174
52
51
51
52
52
171
51
174
52
P
Y
Y
X
N
N
N
N
N
N
N
N
N
N
N
N
N
HNodo
GNodo
FNodo
ENodo
DNodo
CNodo
BNodo
ANodo
E
A
A
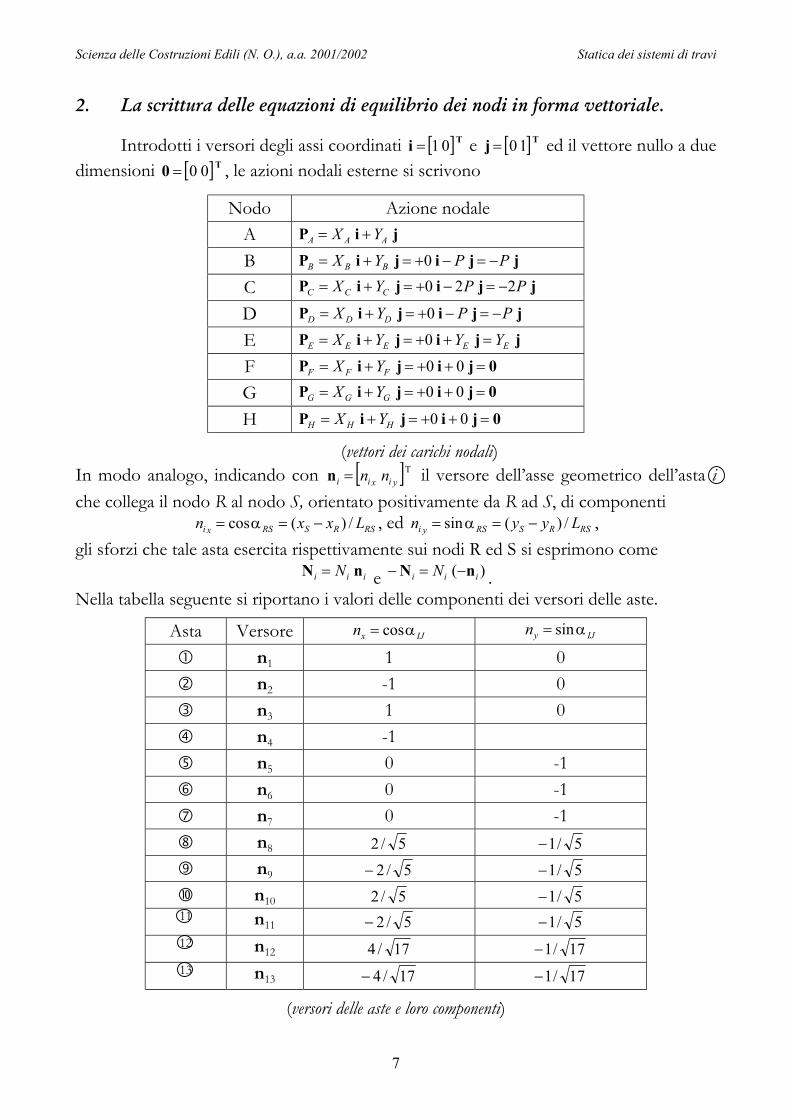
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
2. La scrittura delle equazioni di equilibrio dei nodi in forma vettoriale.
Introdotti i versori degli assi coordinati [ ]Ti 01= e [ ]Tj 10= ed il vettore nullo a due dimensioni [ ]T0 00= , le azioni nodali esterne si scrivono
Nodo Azione nodale A jiP AAA YX += B jjijiP PPYX BBB −=−+=+= 0 C jjijiP PPYX CCC 220 −=−+=+= D jjijiP PPYX DDD −=−+=+= 0 E jjijiP EEEEE YYYX =++=+= 0 F 0jijiP =++=+= 00FFF YX G 0jijiP =++=+= 00GGG YX H 0jijiP =++=+= 00HHH YX
(vettori dei carichi nodali) In modo analogo, indicando con [ ]T
yixii nn=n il versore dell’asse geometrico dell’asta i che collega il nodo R al nodo S, orientato positivamente da R ad S, di componenti
RSRSRSxi Lxxn /)(cos −=α= , ed RSRSRSyi Lyyn /)(sin −=α= , gli sforzi che tale asta esercita rispettivamente sui nodi R ed S si esprimono come
iii N nN = e )( iii N nN −=− . Nella tabella seguente si riportano i valori delle componenti dei versori delle aste.
Asta Versore IJxn α= cos IJyn α= sin n1 1 0 n2 -1 0 n3 1 0 n4 -1 n5 0 -1 n6 0 -1 n7 0 -1 n8 5/2 5/1− n9 5/2− 5/1− n10 5/2 5/1−
11 n11 5/2− 5/1− 12 n12 17/4 17/1− 13 n13 17/4− 17/1−
(versori delle aste e loro componenti)
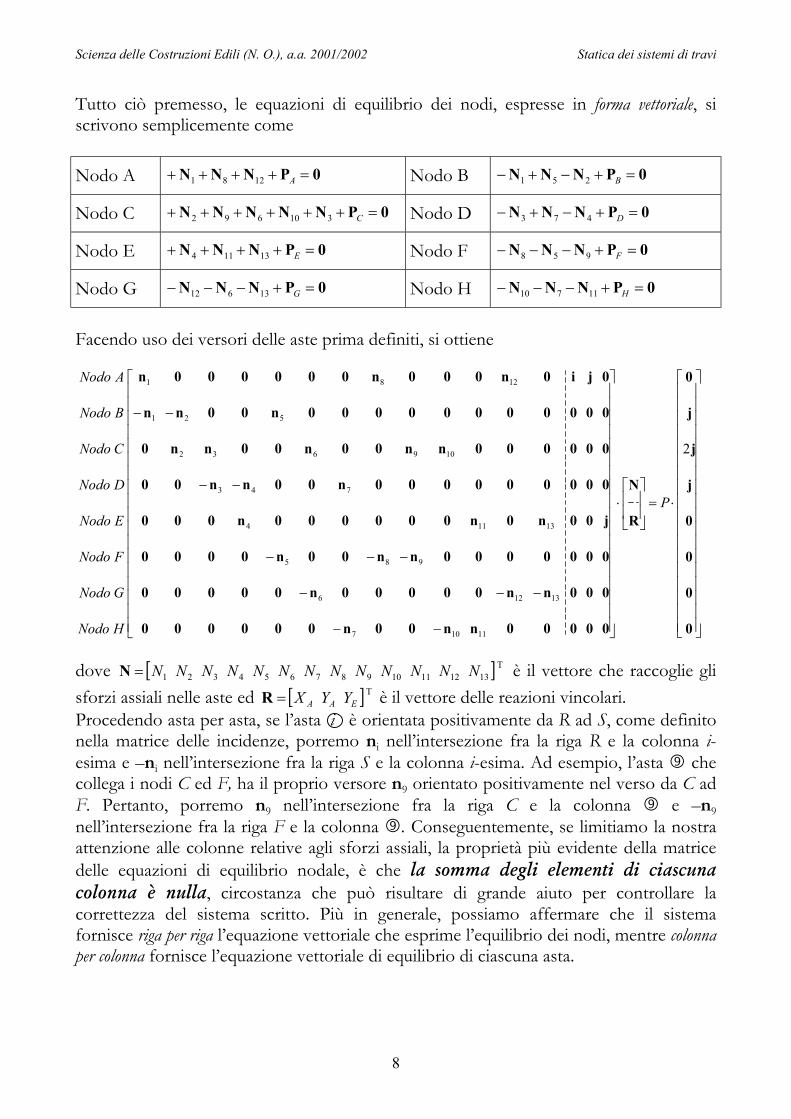
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
Tutto ciò premesso, le equazioni di equilibrio dei nodi, espresse in forma vettoriale, si scrivono semplicemente come Nodo A 0PNNN =++++ A1281 Nodo B 0PNNN =+−+− B251
Nodo C 0PNNNNN =++++++ C310692 Nodo D 0PNNN =+−+− D473
Nodo E 0PNNN =++++ E13114 Nodo F 0PNNN =+−−− F958
Nodo G 0PNNN =+−−− G13612 Nodo H 0PNNN =+−−− H11710
Facendo uso dei versori delle aste prima definiti, si ottiene
⋅=
⋅
−−
−−−
−−−
−−
−−
0
0
0
0
j
j
j
0
R
N
00000nn00n000000
000nn00000n00000
0000000nn00n0000
j00n0n000000n000
000000000n00nn00
000000nn00n00nn0
00000000000n00nn
0ji0n000n000000n
2
11107
13126
985
13114
743
109632
521
1281
P
HNodo
GNodo
FNodo
ENodo
DNodo
CNodo
BNodo
ANodo
dove [ ]T13121110987654321 NNNNNNNNNNNNN=N è il vettore che raccoglie gli
sforzi assiali nelle aste ed [ ]TEAA YYX=R è il vettore delle reazioni vincolari.
Procedendo asta per asta, se l’asta i è orientata positivamente da R ad S, come definito nella matrice delle incidenze, porremo ni nell’intersezione fra la riga R e la colonna i-esima e –ni nell’intersezione fra la riga S e la colonna i-esima. Ad esempio, l’asta che collega i nodi C ed F, ha il proprio versore n9 orientato positivamente nel verso da C ad F. Pertanto, porremo n9 nell’intersezione fra la riga C e la colonna e –n9 nell’intersezione fra la riga F e la colonna . Conseguentemente, se limitiamo la nostra attenzione alle colonne relative agli sforzi assiali, la proprietà più evidente della matrice delle equazioni di equilibrio nodale, è che la somma degli elementi di ciascuna colonna è nulla, circostanza che può risultare di grande aiuto per controllare la correttezza del sistema scritto. Più in generale, possiamo affermare che il sistema fornisce riga per riga l’equazione vettoriale che esprime l’equilibrio dei nodi, mentre colonna per colonna fornisce l’equazione vettoriale di equilibrio di ciascuna asta.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
3. La soluzione numerica
Il sistema di equazioni
⋅=
⋅
−−
−−
−−
−
−
−
−
−−
−−
−−
−
−−
0000000010201000
0000000100000000000000000000000000001000000000000000000000000000010000000000000000001000000000000000000000001000000000000100000000000000000011000000000010000000000000000110000000000001000000000000000000110100000000000000100000000001
13
12
11
10
9
8
7
6
5
4
3
2
1
51
51
52
52
171
171
174
174
51
51
52
52
171
51
174
52
51
51
52
52
171
51
174
52
P
YYXNNNNNNNNNNNNN
E
A
A
si risolve facilmente per via numerica. Utilizzando il programma SISLIN, si ottiene
N1 = N2 =N3 = N4 = -7. 0P,
N5 = -1.0P, N6 = -3.0P, N7 = -1.0P,
N8 = N9 = N10 = N11 = 1.118035P,
N12 = N13 = 6.184675P,
XA = 0.0P, YA = 2.0P, YE = 2.0P.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
4. Tracciamento dei diagrammi delle caratteristiche della sollecitazione Coi valori appena ottenuti si può procedere al tracciamento del diagramma dello
sforzo assiale. A tal fine, accanto a ciascuna asta riportiamo il valore di tale caratteristica dotata di segno, disegnando le aste compresse (puntoni, N<0) con linee a tratto grosso, lasciando invece sottile lo spessore delle aste tese (tiranti, N>0). Il diagramma risultante è riportato di seguito.
A B C D E
F G
-7.0
1.12
L L L H
2P P P
L/2
L
2P 2P
-7.0 -7.0 -7.0
-1.0 -1.0 -3.0
1.12 1.12 1.12 6.18 6.18
Lo sforzo di trazione massimo si verifica nei tiranti 12 e 13
N12 = N13 = 6.184675P.
Lo sforzo di compressione massimo si verifica invece nei puntoni , , ,
N1 = N2 =N3 = N4 = -7. 0P.
5. Il calcolo degli sforzi nelle aste col metodo delle equazioni ausiliarie
La struttura è esternamente isostatica. L’unica reazione orizzontale è la AX , per cui deve essere 0=AX . D’altra parte, per questioni di simmetria strutturale e di carico, risulta
PYY CA 2== .
Il calcolo delle reazioni vincolari finisce qui! Utilizziamo il metodo delle equazioni ausiliarie per determinare gli sforzi assiali nelle aste 12 e 13 . A tal fine introduciamo una sconnessione N = 0 in una sezione generica dell’asta 12 (asportiamo un concio elementare, oppure, effettuiamo un taglio) ed applichiamo alle due facce così separate due forze, N12, uguali ed opposte, orientate in modo tale da ripristinare la continuità interrotta (vedi figura successiva).

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
11
A B C D E
F G
1 2 3
10 11
4
5 6
7
8 9 L L L
H
12
13
2P P P
L/2
L N12
N12 d12 2P 2P
La struttura, inizialmente isostatica, diventa improvvisamente labile. Infatti, a seguito del taglio effettuato, risulta possibile una rotazione relativa intorno al nodo C (polo dell’asta 12 ) fra le due parti rigide in cui la struttura rimane suddivisa. Tale rotazione può essere impedita se e solo se le due forze N12 hanno valore uguale allo sforzo assiale presente nell’asta prima del taglio. Tale valore può essere ricavato utilizzando l’equazione ausiliaria 0=CM . Facendo riferimento al sistema delle forze che precedono, si ottiene:
022 1212 =⋅−⋅−⋅= dNLPLPM C
da cui
1212 /3 dLPN ⋅= . Il problema è così ricondotto al calcolo della distanza d12 fra il nodo C e l’asta 12. Utilizzando la definizione di prodotto vettoriale, tale distanza si calcola facilmente attraverso la
LLL
LLL
yyxx
yyxxyyxx
dAGAG
AGAG
CACA
172
)02/()02(
)02/()02()00()20(
)()(
)()()()(
222212 =−−+−
−−−−−
=−+−
−−−−
= ,
per cui
PPdLPN ⋅≅⋅=⋅= 184658.62173/3 1212 ,
valore esatto, pressoché coincidente col valore trovato in precedenza. Calcoliamo adesso lo sforzo N1.
A B C D E
F G
1 2 3
10 11
4
5 6
7
8 9 L L L
H
12
13
2P P P
L/2
L N12
N12 d12 2P 2P
N1
N1
f12

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
12
Notiamo che per simmetria deve risultare N1 =N4. D’altra parte, poiché nei nodi B e D agiscono due azioni orizzontali e due verticali, per l’equilibrio deve essere N1 = N2 e N3 = N4. Nella situazione ottenuta, introduciamo un ulteriore taglio nell’asta , ed applichiamo alle facce separate delle forze N1 rappresentative dello sforzo assiale preesistente. Per ricavare il valore dell’intensità di queste forze utilizziamo l’equazione ausiliaria 0=FM . Facendo riferimento al sistema delle forze che precedono, si ottiene:
02/2 12121 =⋅+⋅+⋅= fNLNLPM F
dove
17)02/()02(
)2/0()20()2/2/()2(
)()(
)()()()(
222212L
LL
LLLLLL
yyxx
yyxxyyxx
fAGAG
GAGA
FGFG
=−−+−
+−+−−
=−+−
−−−−
= ,
da cui
0172
1732
2 1 =⋅⋅+⋅+⋅=LPLNLPM F .
Risolvendo per N1, si ottiene
PN 71 −=
che coincide col valore trovato in precedenza.
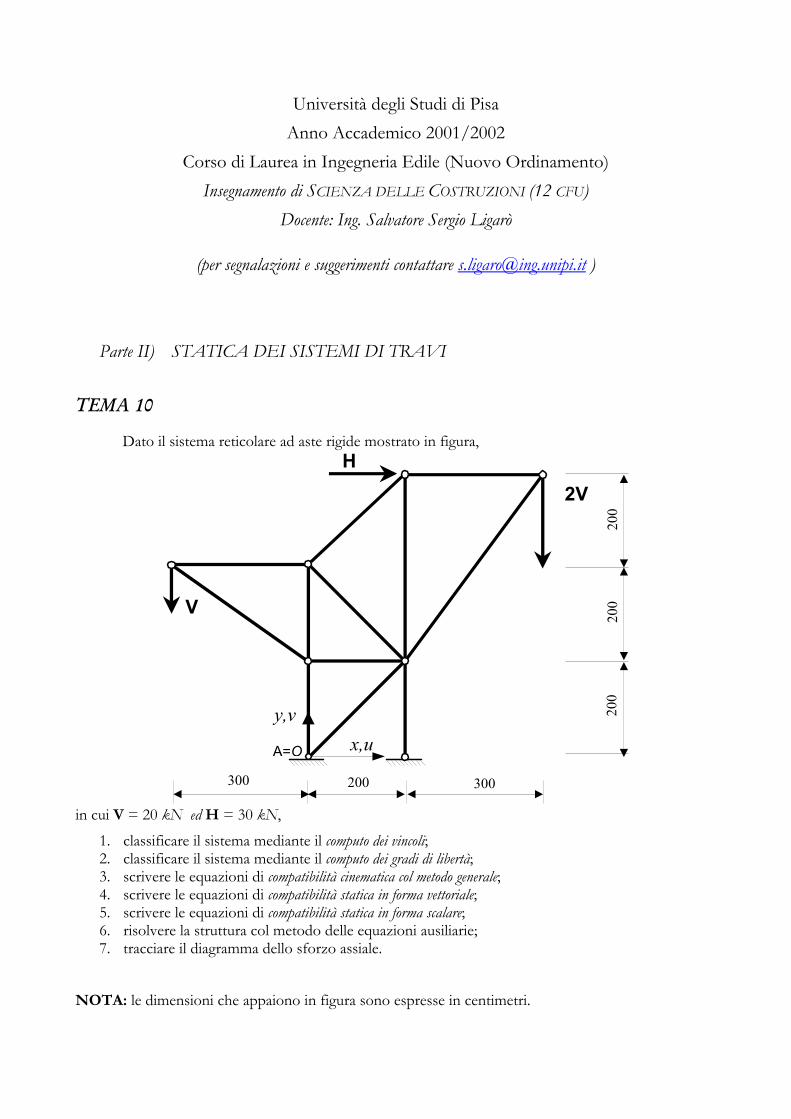
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte II) STATICA DEI SISTEMI DI TRAVI
TEMA 10
Dato il sistema reticolare ad aste rigide mostrato in figura,
A=O
200
V
y,v x,u
200
200 300 300
2V
H
200
in cui V = 20 kN ed H = 30 kN,
1. classificare il sistema mediante il computo dei vincoli; 2. classificare il sistema mediante il computo dei gradi di libertà; 3. scrivere le equazioni di compatibilità cinematica col metodo generale; 4. scrivere le equazioni di compatibilità statica in forma vettoriale; 5. scrivere le equazioni di compatibilità statica in forma scalare; 6. risolvere la struttura col metodo delle equazioni ausiliarie; 7. tracciare il diagramma dello sforzo assiale.
NOTA: le dimensioni che appaiono in figura sono espresse in centimetri.
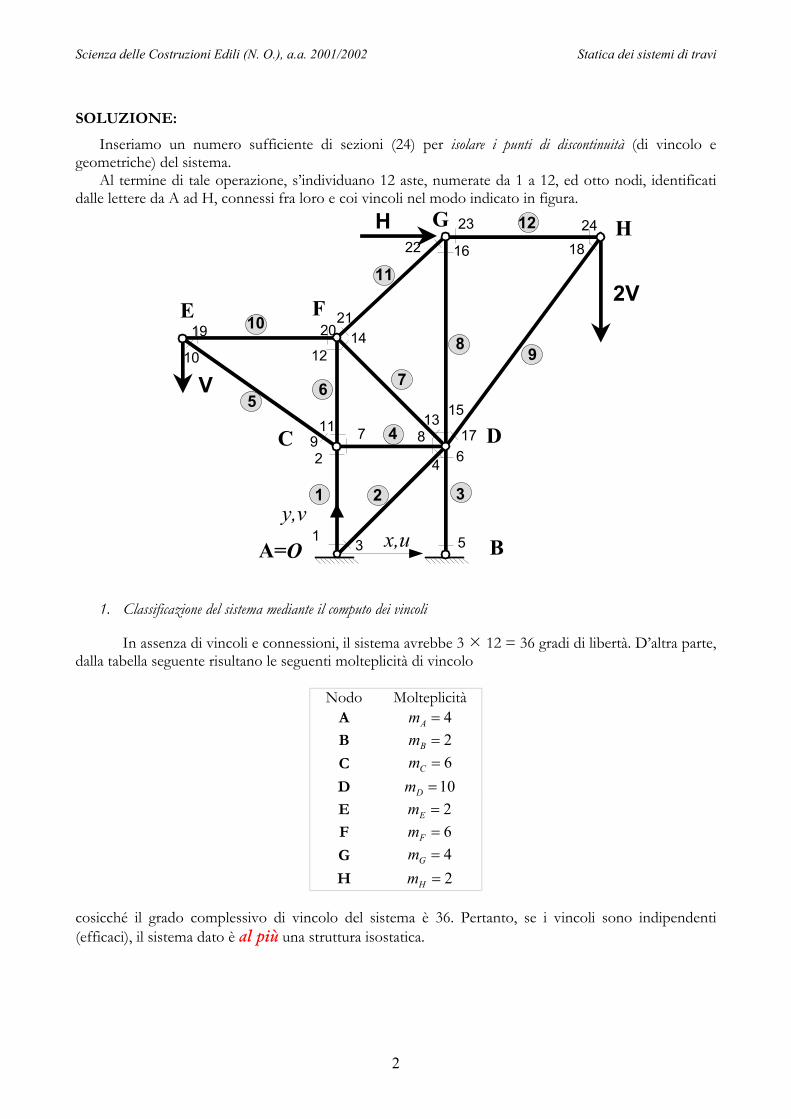
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
2
SOLUZIONE:
Inseriamo un numero sufficiente di sezioni (24) per isolare i punti di discontinuità (di vincolo e geometriche) del sistema.
Al termine di tale operazione, s’individuano 12 aste, numerate da 1 a 12, ed otto nodi, identificati dalle lettere da A ad H, connessi fra loro e coi vincoli nel modo indicato in figura.
A=O
V
y,v x,u
2V
H
B
C D
E F
G
1
2
3
4
5
1 2 3
4 5
6 7 8
16
11
10
9
6 13
14
15
7 8
H
9 10
11
12
12
19 20
22
21
23 24
18
17
1. Classificazione del sistema mediante il computo dei vincoli
In assenza di vincoli e connessioni, il sistema avrebbe 3 12 = 36 gradi di libertà. D’altra parte, dalla tabella seguente risultano le seguenti molteplicità di vincolo
Nodo Molteplicità
A 4=Am B 2=Bm C 6=Cm D 10=Dm E 2=Em F 6=Fm G 4=Gm H 2=Hm
cosicché il grado complessivo di vincolo del sistema è 36. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura isostatica.
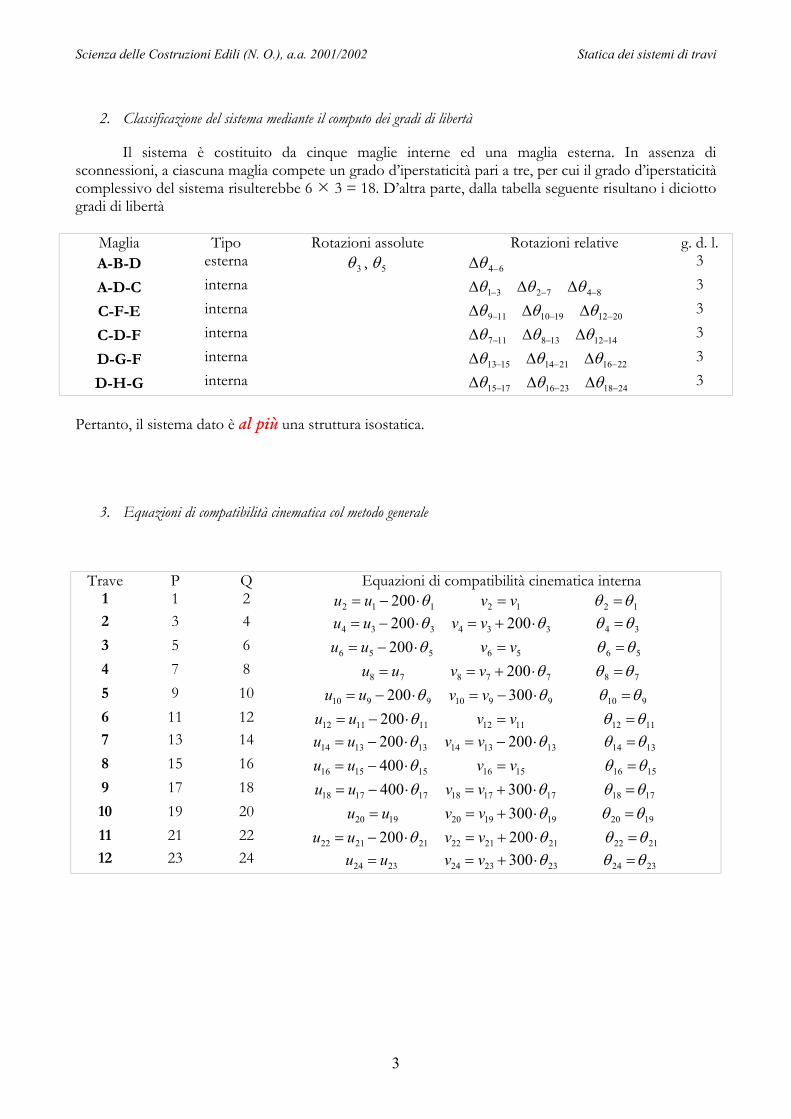
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
3
2. Classificazione del sistema mediante il computo dei gradi di libertà
Il sistema è costituito da cinque maglie interne ed una maglia esterna. In assenza di sconnessioni, a ciascuna maglia compete un grado d’iperstaticità pari a tre, per cui il grado d’iperstaticità complessivo del sistema risulterebbe 6 3 = 18. D’altra parte, dalla tabella seguente risultano i diciotto gradi di libertà
Maglia Tipo Rotazioni assolute Rotazioni relative g. d. l. A-B-D esterna
3θ , 5θ 64−∆θ 3
A-D-C interna 847231 −−− ∆∆∆ θθθ 3
C-F-E interna 20121910119 −−− ∆∆∆ θθθ 3
C-D-F interna 1412138117 −−− ∆∆∆ θθθ 3
D-G-F interna 221621141513 −−− ∆∆∆ θθθ 3
D-H-G interna 241823161715 −−− ∆∆∆ θθθ 3 Pertanto, il sistema dato è al più una struttura isostatica.
3. Equazioni di compatibilità cinematica col metodo generale
Trave P Q Equazioni di compatibilità cinematica interna 1 1 2
1212112 200 θθθ ==⋅−= vvuu 2 3 4
34334334 200200 θθθθ =⋅+=⋅−= vvuu 3 5 6
5656556 200 θθθ ==⋅−= vvuu 4 7 8
7877878 200 θθθ =⋅+== vvuu 5 9 10
91099109910 300200 θθθθ =⋅−=⋅−= vvuu 6 11 12
11121112111112 200 θθθ ==⋅−= vvuu 7 13 14
1314131314131314 200200 θθθθ =⋅−=⋅−= vvuu 8 15 16
15161516151516 400 θθθ ==⋅−= vvuu 9 17 18
1718171718171718 300400 θθθθ =⋅+=⋅−= vvuu 10 19 20
19201919201920 300 θθθ =⋅+== vvuu 11 21 22
2122212122212122 200200 θθθθ =⋅+=⋅−= vvuu 12 23 24
23242323242324 300 θθθ =⋅+== vvuu
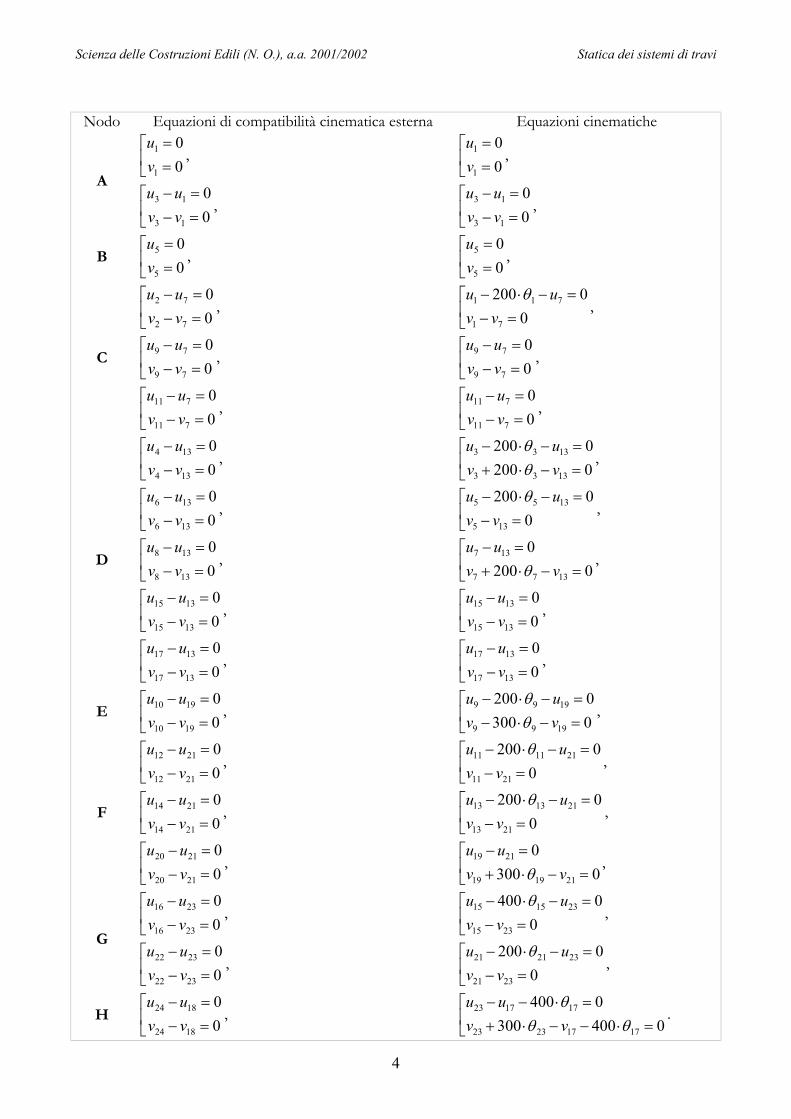
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
4
Nodo Equazioni di compatibilità cinematica esterna Equazioni cinematiche
A
==
00
1
1
vu
,
=−=−
00
13
13
vvuu
,
==
00
1
1
vu
,
=−=−
00
13
13
vvuu
,
B
==
00
5
5
vu
,
==
00
5
5
vu
,
C
=−=−
00
72
72
vvuu
,
=−=−
00
79
79
vvuu
,
=−=−
00
711
711
vvuu
,
=−
=−⋅−0
0200
71
711
vvuu θ
,
=−=−
00
79
79
vvuu
,
=−=−
00
711
711
vvuu
,
D
=−=−
00
134
134
vvuu
,
=−=−
00
136
136
vvuu
,
=−=−
00
138
138
vvuu
,
=−=−
00
1315
1315
vvuu
,
=−=−
00
1317
1317
vvuu
,
=−⋅+=−⋅−
02000200
1333
1333
vvuu
θθ
,
=−
=−⋅−0
0200
135
1355
vvuu θ
,
=−⋅+
=−0200
0
1377
137
vvuu
θ,
=−=−
00
1315
1315
vvuu
,
=−=−
00
1317
1317
vvuu
,
E
=−=−
00
1910
1910
vvuu
,
=−⋅−=−⋅−
03000200
1999
1999
vvuu
θθ
,
F
=−=−
00
2112
2112
vvuu
,
=−=−
00
2114
2114
vvuu
,
=−=−
00
2120
2120
vvuu
,
=−
=−⋅−0
0200
2111
211111
vvuu θ
,
=−
=−⋅−0
0200
2113
211313
vvuu θ
,
=−⋅+
=−0300
0
211919
2119
vvuu
θ,
G
=−=−
00
2316
2316
vvuu
,
=−=−
00
2322
2322
vvuu
,
=−
=−⋅−0
0400
2315
231515
vvuu θ
,
=−
=−⋅−0
0200
2321
232121
vvuu θ
,
H
=−=−
00
1824
1824
vvuu
,
=⋅−−⋅+
=⋅−−0400300
0400
17172323
171723
θθθvv
uu.
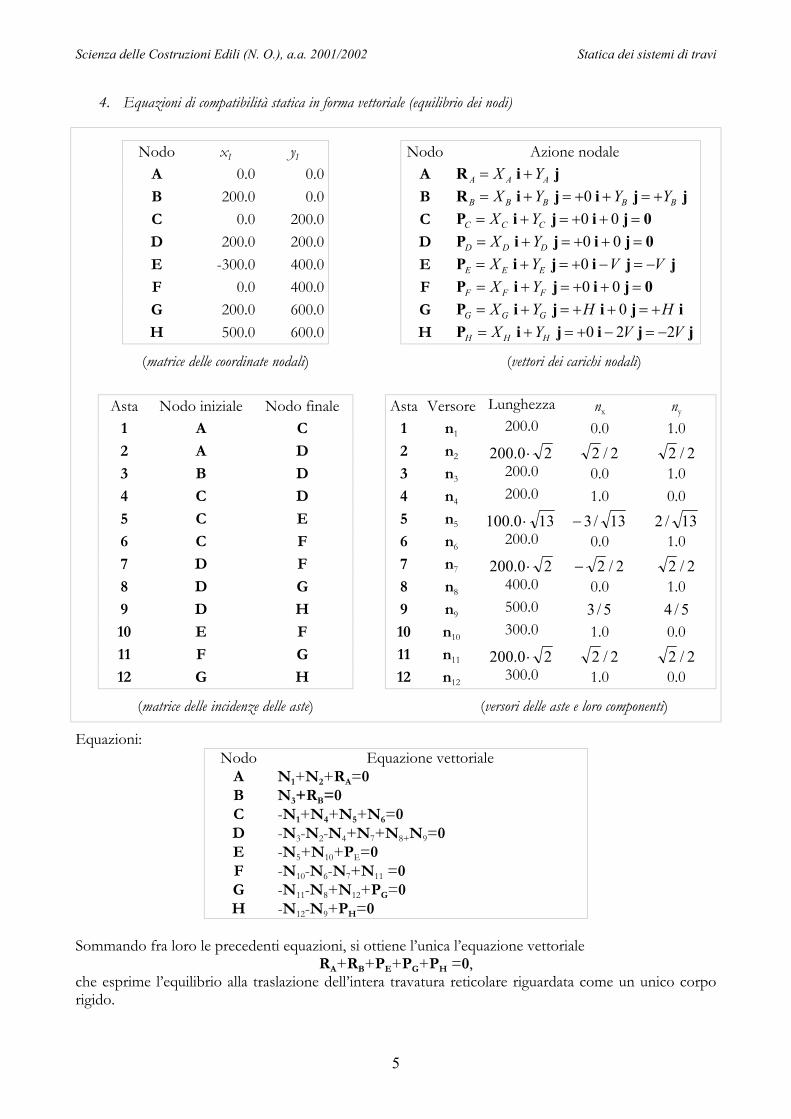
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
5
4. Equazioni di compatibilità statica in forma vettoriale (equilibrio dei nodi)
Nodo xI yI A 0.0 0.0 B 200.0 0.0 C 0.0 200.0 D 200.0 200.0 E -300.0 400.0 F 0.0 400.0 G 200.0 600.0 H 500.0 600.0
(matrice delle coordinate nodali)
Nodo Azione nodale A jiR AAA YX += B jjijiR BBBBB YYYX +=++=+= 0 C 0jijiP =++=+= 00CCC YX D 0jijiP =++=+= 00DDD YX E jjijiP VVYX EEE −=−+=+= 0 F 0jijiP =++=+= 00FFF YX G ijijiP HHYX GGG +=++=+= 0 H jjijiP VVYX HHH 220 −=−+=+=
(vettori dei carichi nodali)
Asta Nodo iniziale Nodo finale 1 A C
2 A D
3 B D
4 C D
5 C E
6 C F
7 D F
8 D G
9 D H
10 E F
11 F G
12 G H
(matrice delle incidenze delle aste)
Asta Versore Lunghezza nx ny
1 n1 200.0 0.0 1.0 2 n2 20.200 ⋅ 2/2 2/2 3 n3 200.0 0.0 1.0 4 n4 200.0 1.0 0.0 5 n5 130.100 ⋅ 13/3− 13/2 6 n6 200.0 0.0 1.0 7 n7 20.200 ⋅ 2/2− 2/2 8 n8 400.0 0.0 1.0 9 n9 500.0 5/3 5/4 10 n10 300.0 1.0 0.0 11 n11 20.200 ⋅ 2/2 2/2 12 n12 300.0 1.0 0.0
(versori delle aste e loro componenti)
Equazioni: Nodo Equazione vettoriale
A N1+N2+RA=0 B N3+RB=0 C -N1+N4+N5+N6=0 D -N3-N2-N4+N7+N8+N9=0 E -N5+N10+PE=0 F -N10-N6-N7+N11 =0 G -N11-N8+N12+PG=0 H -N12-N9+PH=0
Sommando fra loro le precedenti equazioni, si ottiene l’unica l’equazione vettoriale
RA+RB+PE+PG+PH =0, che esprime l’equilibrio alla traslazione dell’intera travatura reticolare riguardata come un unico corpo rigido.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
6
5. Equazioni di compatibilità statica in forma scalare (equilibrio dei nodi)
Nodo A
=+++=
=++=
∑
∑
022
022
21
2
NNYF
NXF
Ay
Ax
A
N1
XA
YA
N2
Nodo B
=++===
∑∑
000
3NYFF
By
x
B
N3
YB
Nodo C
=++−=
=−+=
∑
∑0
132
0133
651
54
NNNF
NNF
y
x
C
N5
N4
N1
N6
Nodo D
=++−−=
=+−−=
∑
∑0
54
22
053
22
9832
924
NNNNF
NNNF
y
x
D
N4
N2 N3
N8 N9
Nodo E
=−−=
=++=
∑
∑0
132
0133
5
510
VNF
NNF
y
x
E N10
V N5
Nodo F
=+−−=
=++−=
∑
∑
022
22
022
22
1176
11710
NNNF
NNNF
y
x
F N10
N6 N7
N11
Nodo G
=−−=
=+−+=
∑
∑
022
022
811
1211
NNF
NNHF
Y
x
G H
N11 N8
N12
Nodo H
=−−=
=−−=
∑
∑02
54
053
9
129
VNF
NNF
Y
x
H
N12
N9 2 V
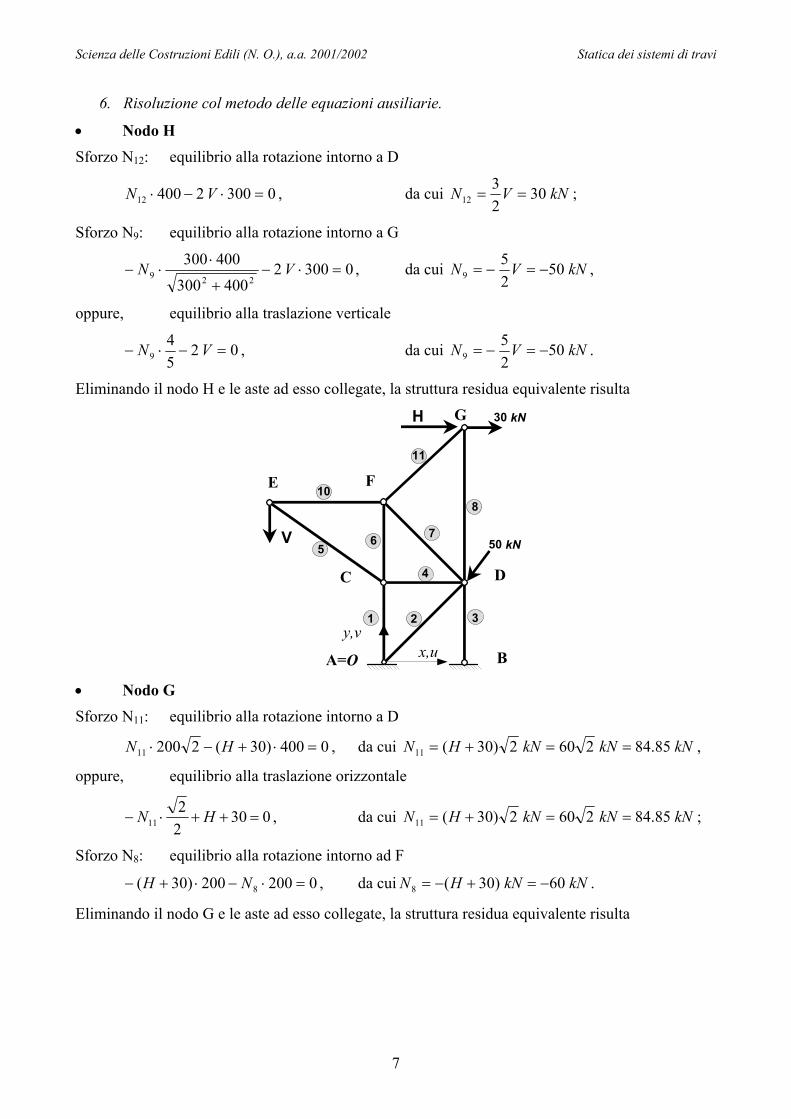
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
7
6. Risoluzione col metodo delle equazioni ausiliarie.
• Nodo H Sforzo N12: equilibrio alla rotazione intorno a D
0300240012 =⋅−⋅ VN , da cui kNVN 3023
12 == ;
Sforzo N9: equilibrio alla rotazione intorno a G
03002400300
400300229 =⋅−
+
⋅⋅− VN , da cui kNVN 50
25
9 −=−= ,
oppure, equilibrio alla traslazione verticale
0254
9 =−⋅− VN , da cui kNVN 5025
9 −=−= .
Eliminando il nodo H e le aste ad esso collegate, la struttura residua equivalente risulta
A=O
V
y,v x,u
H
B
C D
E F
G
1 2 3
4 5 6 7
8
50 kN
10
11
30 kN
• Nodo G Sforzo N11: equilibrio alla rotazione intorno a D
0400)30(220011 =⋅+−⋅ HN , da cui kNkNkNHN 85.842602)30(11 ==+= ,
oppure, equilibrio alla traslazione orizzontale
03022
11 =++⋅− HN , da cui kNkNkNHN 85.842602)30(11 ==+= ;
Sforzo N8: equilibrio alla rotazione intorno ad F
0200200)30( 8 =⋅−⋅+− NH , da cui kNkNHN 60)30(8 −=+−= .
Eliminando il nodo G e le aste ad esso collegate, la struttura residua equivalente risulta
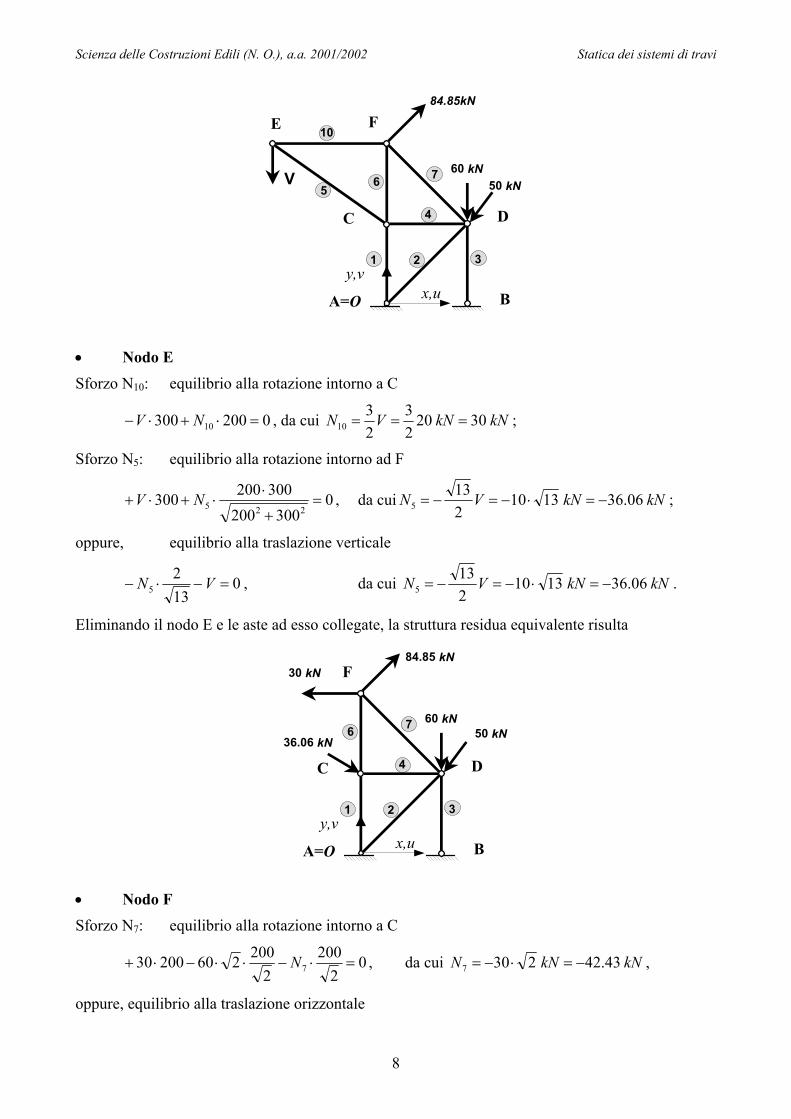
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
8
A=O
V
y,v x,u B
C D
E F
1 2 3
4 5 6 7
50 kN
10
60 kN
84.85kN
• Nodo E Sforzo N10: equilibrio alla rotazione intorno a C
0200300 10 =⋅+⋅− NV , da cui kNkNVN 302023
23
10 === ;
Sforzo N5: equilibrio alla rotazione intorno ad F
0300200
300200300225 =
+
⋅⋅+⋅+ NV , da cui kNkNVN 06.361310
213
5 −=⋅−=−= ;
oppure, equilibrio alla traslazione verticale
0132
5 =−⋅− VN , da cui kNkNVN 06.361310213
5 −=⋅−=−= .
Eliminando il nodo E e le aste ad esso collegate, la struttura residua equivalente risulta
A=O
y,v x,u B
C D
F
1 2 3
4
6 7 50 kN
60 kN
84.85 kN 30 kN
36.06 kN
• Nodo F Sforzo N7: equilibrio alla rotazione intorno a C
02
2002
20026020030 7 =⋅−⋅⋅−⋅+ N , da cui kNkNN 43.422307 −=⋅−= ,
oppure, equilibrio alla traslazione orizzontale
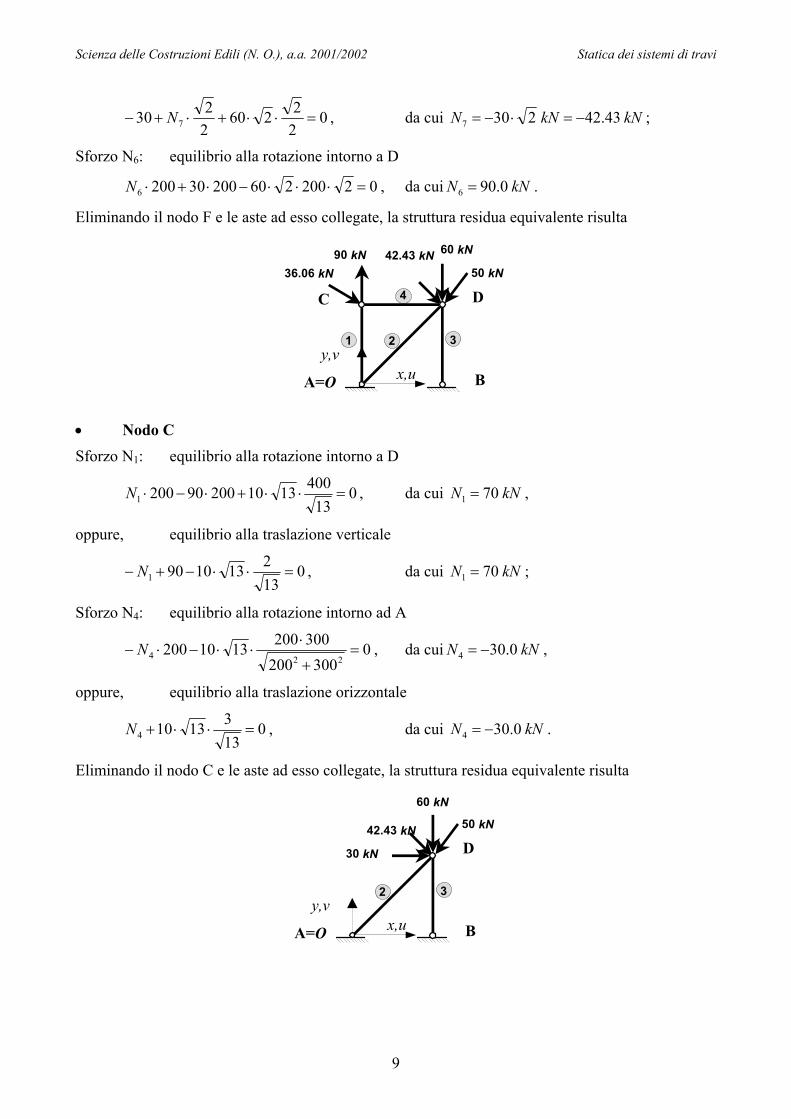
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
9
022260
2230 7 =⋅⋅+⋅+− N , da cui kNkNN 43.422307 −=⋅−= ;
Sforzo N6: equilibrio alla rotazione intorno a D
02200260200302006 =⋅⋅⋅−⋅+⋅N , da cui kNN 0.906 = .
Eliminando il nodo F e le aste ad esso collegate, la struttura residua equivalente risulta
A=O
y,v x,u B
C D
1 2 3
4 50 kN
60 kN 42.43 kN 90 kN 36.06 kN
• Nodo C Sforzo N1: equilibrio alla rotazione intorno a D
013
4001310200902001 =⋅⋅+⋅−⋅N , da cui kNN 701 = ,
oppure, equilibrio alla traslazione verticale
01321310901 =⋅⋅−+− N , da cui kNN 701 = ;
Sforzo N4: equilibrio alla rotazione intorno ad A
0300200
3002001310200224 =
+
⋅⋅⋅−⋅− N , da cui kNN 0.304 −= ,
oppure, equilibrio alla traslazione orizzontale
013313104 =⋅⋅+N , da cui kNN 0.304 −= .
Eliminando il nodo C e le aste ad esso collegate, la struttura residua equivalente risulta
A=O
y,v x,u B
D
2 3
50 kN 60 kN
42.43 kN 30 kN
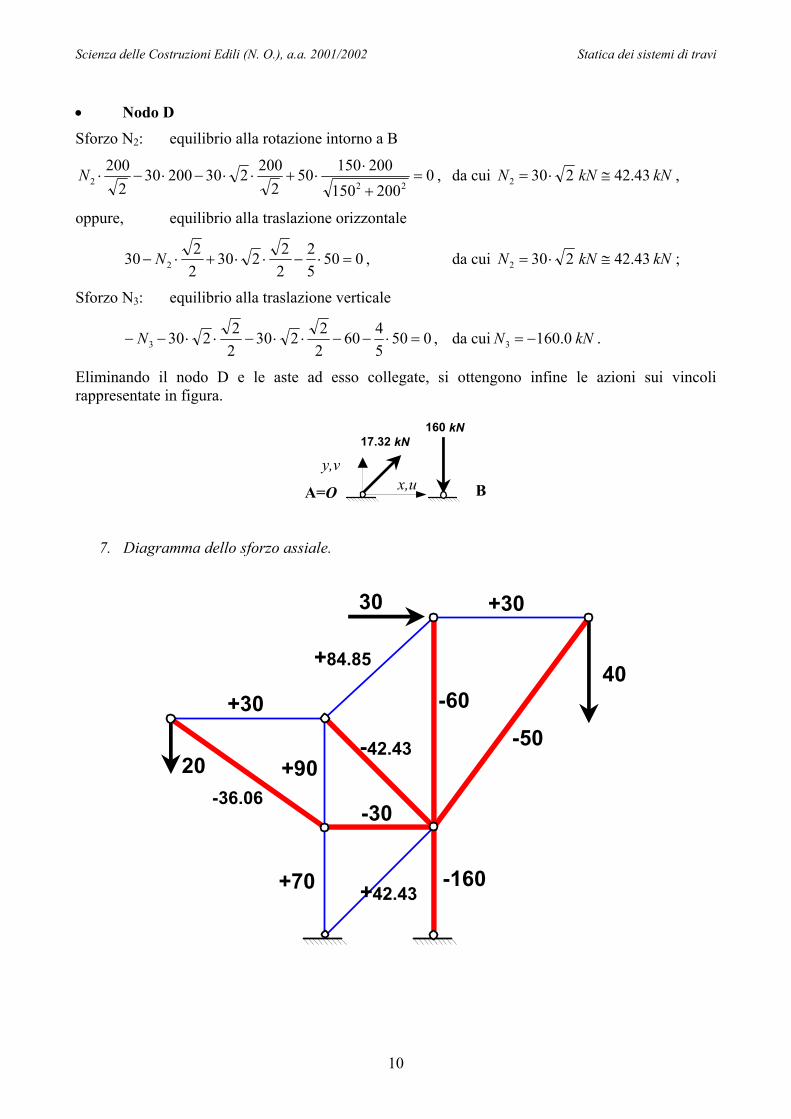
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Statica dei sistemi di travi
10
• Nodo D Sforzo N2: equilibrio alla rotazione intorno a B
0200150
200150502
200230200302
200222 =
+
⋅⋅+⋅⋅−⋅−⋅N , da cui kNkNN 43.422302 ≅⋅= ,
oppure, equilibrio alla traslazione orizzontale
05052
22230
2230 2 =⋅−⋅⋅+⋅− N , da cui kNkNN 43.422302 ≅⋅= ;
Sforzo N3: equilibrio alla traslazione verticale
0505460
22230
222303 =⋅−−⋅⋅−⋅⋅−− N , da cui kNN 0.1603 −= .
Eliminando il nodo D e le aste ad esso collegate, si ottengono infine le azioni sui vincoli rappresentate in figura.
A=O
y,v x,u B
160 kN 17.32 kN
7. Diagramma dello sforzo assiale.
20
40
30 +30
-50
-60
-42.43
-36.06
+30
-160 +70
-30
+42.43
+90
+84.85
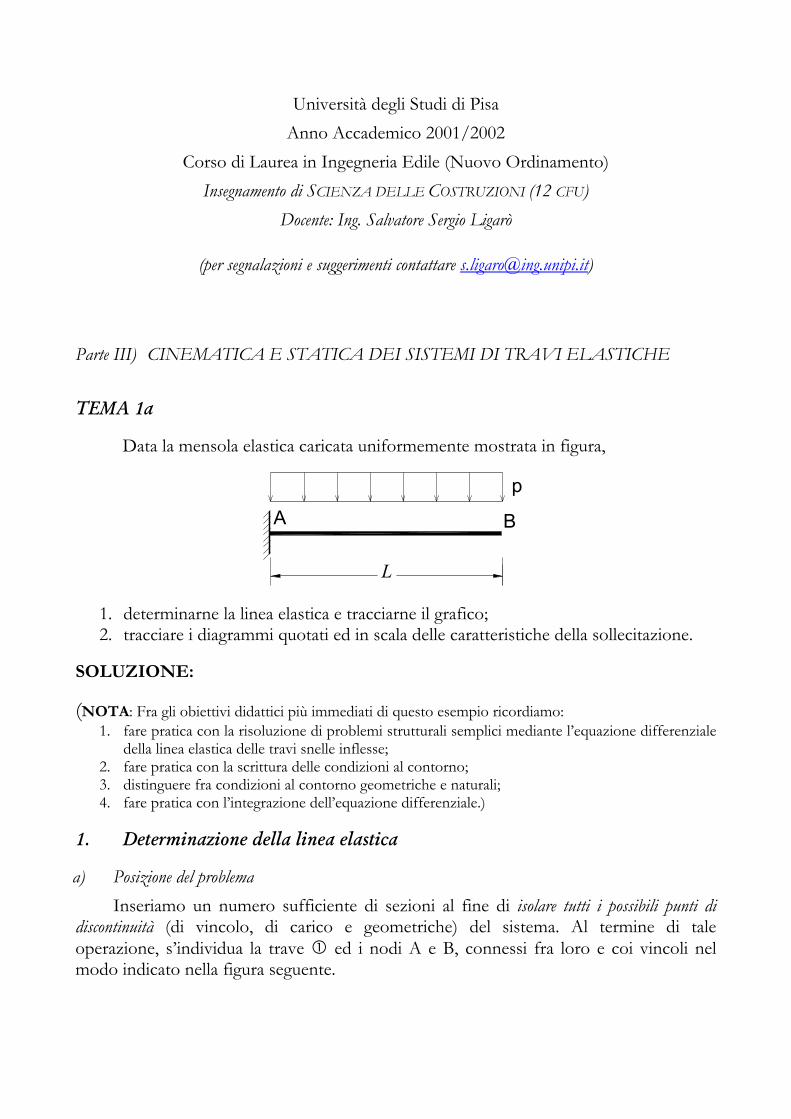
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA 1a
Data la mensola elastica caricata uniformemente mostrata in figura,
p
L
A B
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo: 1. fare pratica con la risoluzione di problemi strutturali semplici mediante l’equazione differenziale
della linea elastica delle travi snelle inflesse; 2. fare pratica con la scrittura delle condizioni al contorno; 3. distinguere fra condizioni al contorno geometriche e naturali; 4. fare pratica con l’integrazione dell’equazione differenziale.)
1. Determinazione della linea elastica
a) Posizione del problema Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.

Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
2
p
L
1 2 1
A=O B
z
y,v
Per semplicità si suppone che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la rigidezza flessionale, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 pvEJ iv = equazione differenziale della linea elastica
A z = 0
==
0)0('0)0(
vv condizioni al contorno di tipo geometrico
in
B z = L
==
0)(0)(
LTLM condizioni al contorno di tipo statico o naturale
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni al contorno di tipo naturale diventano
in B z = L
=−=−
0)('''0)(''
LvEJLvEJ condizioni al contorno di tipo statico o naturale
b) Integrazione dell’equazione differenziale
Integrando quattro volte l’equazione differenziale, si ottiene
pvEJ iv = 1) 1''' czpvEJ += , 2) 21
2
2'' czczpvEJ ++= ,
3) 32
2
1
3
26' czczczpvEJ +++= , 4) 43
2
2
3
1
4
2624czczczczpvEJ ++++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi attraverso le condizioni al contorno.
Dalla condizione 0)0( =v si ottiene 04 =c 0)0(' =v 03 =c 0)('' =− LvEJ 21
2 2/0 cLcpL ++= 0)(''' =− LvEJ 10 cLp +=
per cui Lpc −=1 e 2/22 pLc = .
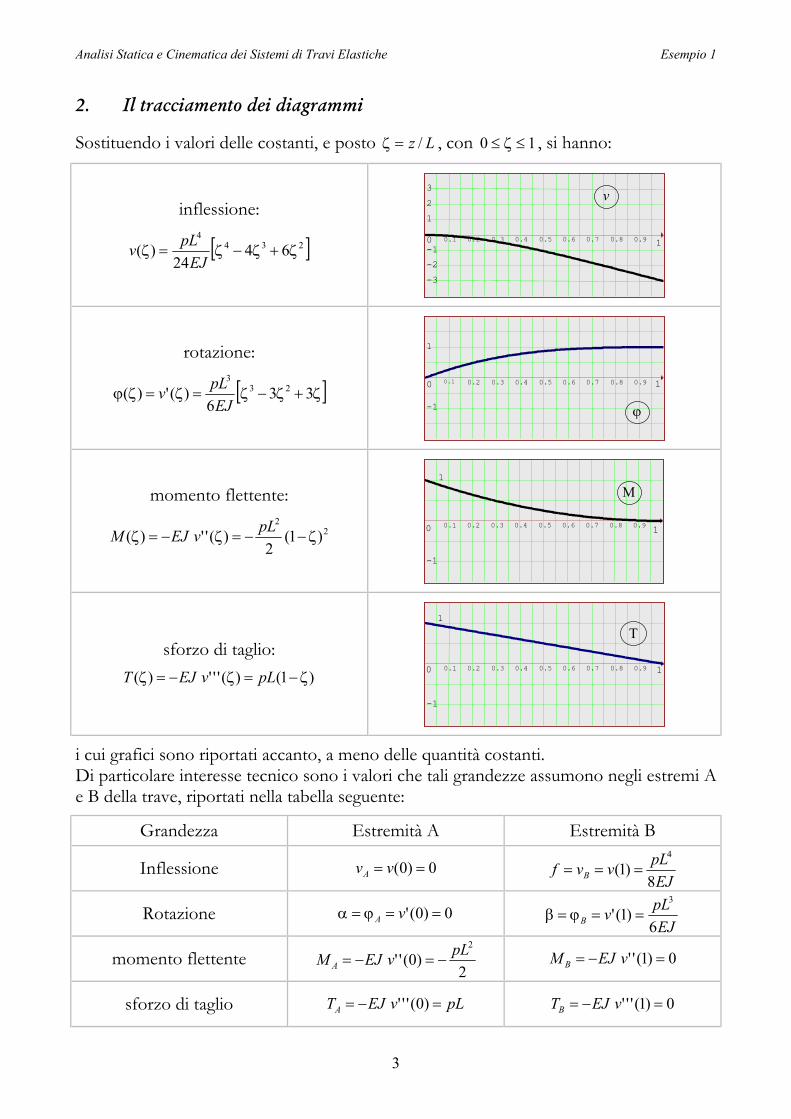
Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
3
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno:
inflessione:
[ ]2344
6424
)( ζ+ζ−ζ=ζEJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3
-2 -1 0
1
2
3 v
rotazione:
[ ]ζ+ζ−ζ=ζ=ζϕ 336
)(')( 233
EJpLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
ϕ
momento flettente:
22
)1(2
)('')( ζ−−=ζ−=ζpLvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
M
sforzo di taglio: )1()(''')( ζ−=ζ−=ζ pLvEJT
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
T
i cui grafici sono riportati accanto, a meno delle quantità costanti. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B
Inflessione 0)0( == vvA EJ
pLvvf B 8)1(
4
===
Rotazione 0)0(' ==ϕ=α vA EJ
pLvB 6)1('
3
==ϕ=β
momento flettente 2
)0(''2pLvEJM A −=−= 0)1('' =−= vEJM B
sforzo di taglio pLvEJTA =−= )0(''' 0)1(''' =−= vEJTB
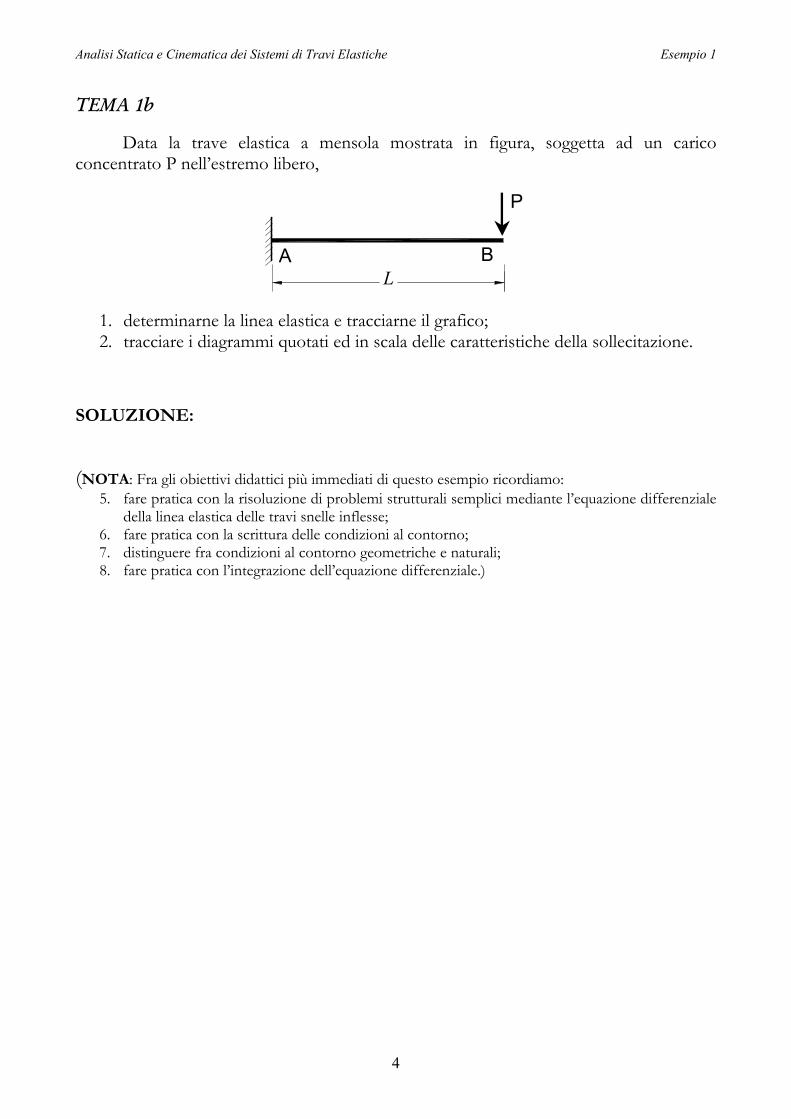
Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
4
TEMA 1b
Data la trave elastica a mensola mostrata in figura, soggetta ad un carico concentrato P nell’estremo libero,
P
L A B
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo:
5. fare pratica con la risoluzione di problemi strutturali semplici mediante l’equazione differenziale della linea elastica delle travi snelle inflesse;
6. fare pratica con la scrittura delle condizioni al contorno; 7. distinguere fra condizioni al contorno geometriche e naturali; 8. fare pratica con l’integrazione dell’equazione differenziale.)

Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
5
0. Determinazione della linea elastica
a) Posizione del problema Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
L
1 2 1
B A=O z
y,v
Per semplicità si suppone che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la rigidezza flessionale. L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 0=ivvEJ equazione differenziale della linea elastica
A z = 0
==
0)0('0)0(
vv condizioni al contorno di tipo geometrico
in
B z = L
==
PLTLM)(
0)( condizioni al contorno di tipo statico o naturale
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni al contorno di tipo naturale diventano
in B z = L
=−=−
PLvEJLvEJ
)('''0)('' condizioni al contorno di tipo statico o naturale
b) Integrazione dell’equazione differenziale Integrando quattro volte l’equazione differenziale, si ottiene
0=ivvEJ 1) 1''' cvEJ = , 2) 21'' czcvEJ += ,
3) 32
2
1 2' czczcvEJ ++= , 4) 43
2
2
3
1 26czczczcvEJ +++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi attraverso le condizioni al contorno.
Dalla condizione 0)0( =v si ottiene 04 =c 0)0(' =v 03 =c 0)('' =− LvEJ 0)( 21 =+− cLc PLvEJ =− )(''' Pc =− )( 1
per cui PLc =2 .
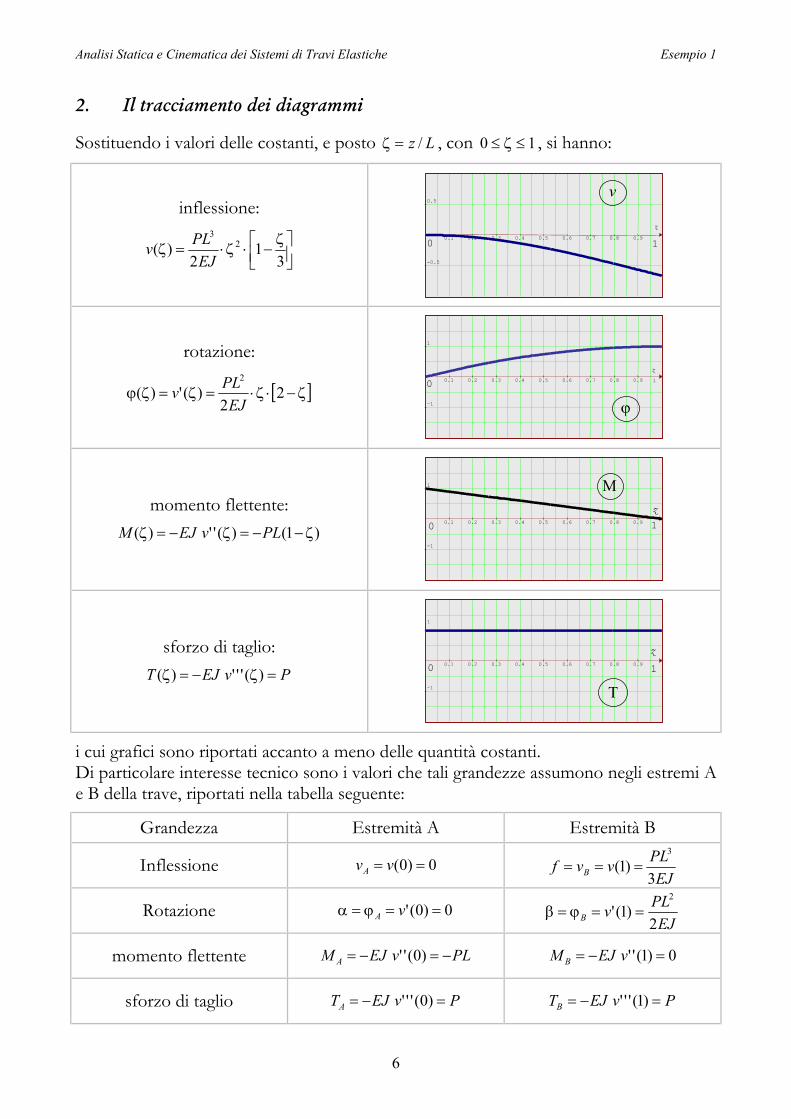
Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
6
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno:
inflessione:
ζ
−⋅ζ⋅=ζ3
12
)( 23
EJPLv
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.5 0
0.5 v
rotazione:
[ ]ζ−⋅ζ⋅=ζ=ζϕ 22
)(')(2
EJPLv
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1 0
1
ϕ
momento flettente: )1()('')( ζ−−=ζ−=ζ PLvEJM
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1 0
1 M
sforzo di taglio: PvEJT =ζ−=ζ )(''')(
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1 0
1
T
i cui grafici sono riportati accanto a meno delle quantità costanti. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B
Inflessione 0)0( == vvA EJ
PLvvf B 3)1(
3
===
Rotazione 0)0(' ==ϕ=α vA EJ
PLvB 2)1('
2
==ϕ=β
momento flettente PLvEJM A −=−= )0('' 0)1('' =−= vEJM B
sforzo di taglio PvEJTA =−= )0(''' PvEJTB =−= )1('''
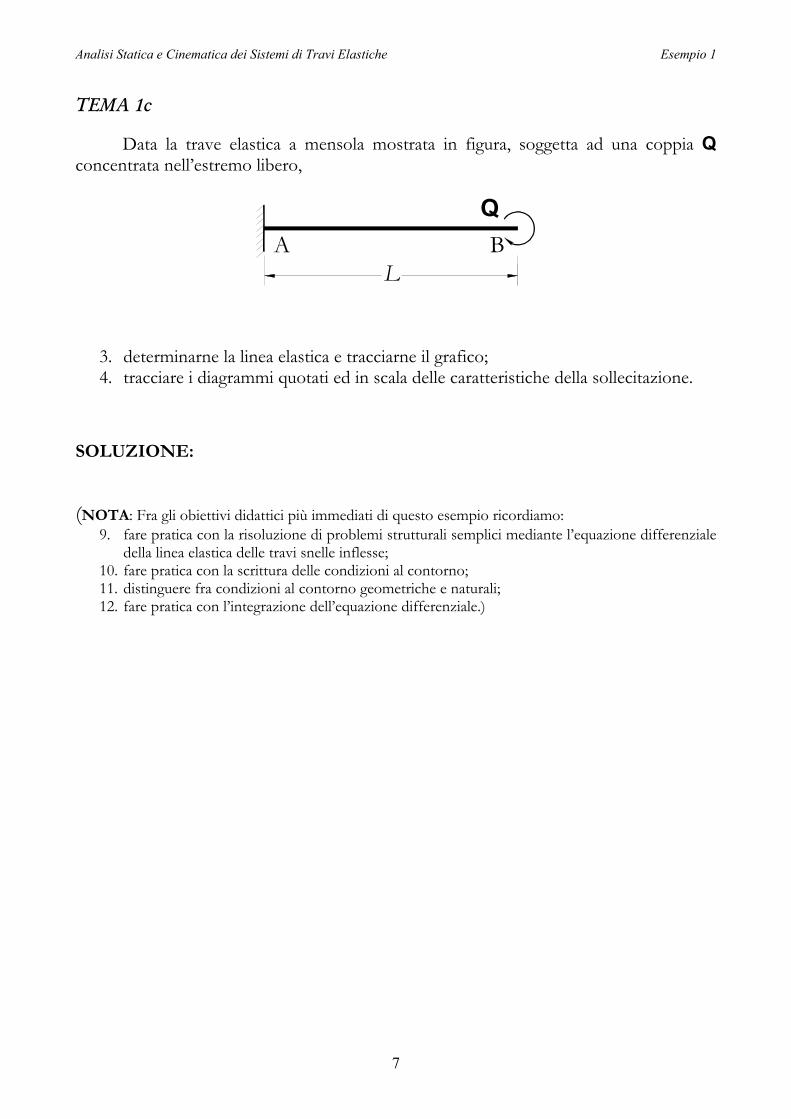
Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
7
TEMA 1c
Data la trave elastica a mensola mostrata in figura, soggetta ad una coppia Q concentrata nell’estremo libero,
A B Q
L
3. determinarne la linea elastica e tracciarne il grafico; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
(NOTA: Fra gli obiettivi didattici più immediati di questo esempio ricordiamo:
9. fare pratica con la risoluzione di problemi strutturali semplici mediante l’equazione differenziale della linea elastica delle travi snelle inflesse;
10. fare pratica con la scrittura delle condizioni al contorno; 11. distinguere fra condizioni al contorno geometriche e naturali; 12. fare pratica con l’integrazione dell’equazione differenziale.)

Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
8
1. Determinazione della linea elastica
c) Posizione del problema Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
L
1 2 1
B A=O z
y,v
Q
Per semplicità si suppone che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la rigidezza flessionale. L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 0=ivvEJ equazione differenziale della linea elastica
A z = 0
==
0)0('0)0(
vv condizioni al contorno di tipo geometrico
in
B z = L
=−=0)(
)(LT
QLM condizioni al contorno di tipo statico o naturale
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni al contorno di tipo naturale diventano
in B z = L
=−−=−
0)(''')(''LvEJ
QLvEJ condizioni al contorno di tipo statico o naturale
d) Integrazione dell’equazione differenziale
Integrando quattro volte l’equazione differenziale, si ottiene
0=ivvEJ 1) 1''' cvEJ = , 2) 21'' czcvEJ += ,
3) 32
2
1 2' czczcvEJ ++= , 4) 43
2
2
3
1 26czczczcvEJ +++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi mediante le condizioni al contorno. Dalla condizione 0)0( =v si ottiene 04 =c 0)0(' =v 03 =c QLvEJ =− )('' QcLc −=+− )( 21 0)(''' =− LvEJ 0)( 1 =− c
per cui Qc =2 .
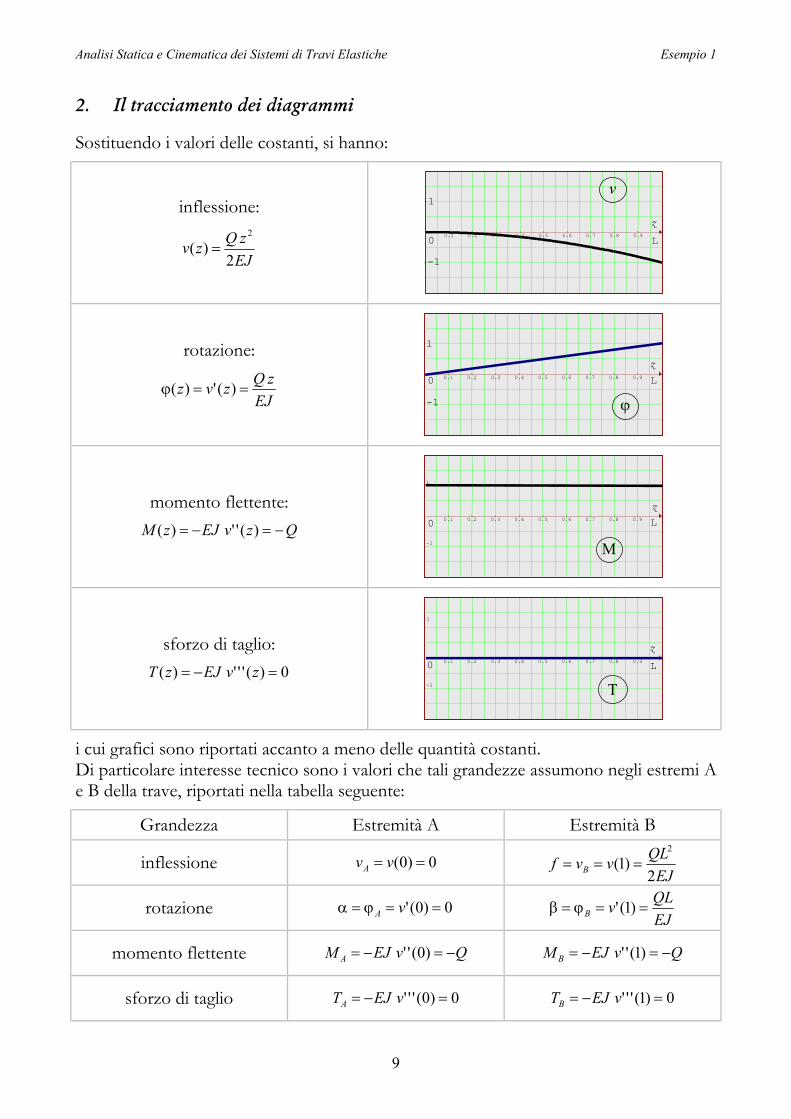
Analisi Statica e Cinematica dei Sistemi di Travi Elastiche Esempio 1
9
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, si hanno:
inflessione:
EJzQzv
2)(
2
=
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 L
-1
0
1 v
rotazione:
EJzQzvz ==ϕ )(')(
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 L
-1
0
1
ϕ
momento flettente: QzvEJzM −=−= )('')(
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 L
-1 0
1
M
sforzo di taglio: 0)(''')( =−= zvEJzT
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 L
-1 0
1
T
i cui grafici sono riportati accanto a meno delle quantità costanti. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B
inflessione 0)0( == vvA EJ
QLvvf B 2)1(
2
===
rotazione 0)0(' ==ϕ=α vA EJQLvB ==ϕ=β )1('
momento flettente QvEJM A −=−= )0('' QvEJM B −=−= )1(''
sforzo di taglio 0)0(''' =−= vEJTA 0)1(''' =−= vEJTB

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
(NOTA: Fra gli obiettivi didattici più importanti degli esempi successivi ricordiamo: 1. fare pratica con la risoluzione di problemi strutturali semplici utilizzando l’equazione differenziale della
linea elastica delle travi snelle inflesse; 2. fare pratica con la scrittura delle condizioni al contorno; 3. distinguere fra condizioni al contorno e condizioni di raccordo; 4. distinguere fra condizioni geometriche e naturali; 5. fare pratica con l’integrazione dell’equazione differenziale.)
TEMA 2a
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e caricata uniformemente,
p
L
A B
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
p
L
1 2 1
A=O B z
y,v
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 pvEJ iv = equazione differenziale della linea elastica condizione al contorno geometrica A z = 0
==
0)0(0)0(
Mv
condizione al contorno statica condizione al contorno geometrica
in
B z = L
==
0)(0)(
LMLv
condizione al contorno statica
Attraverso i legami costitutivi, '')( vEJzM −= e ''')( vEJzT −= , le condizioni al contorno statiche diventano
A z = 0 0)0('')0( =−= vEJM condizione al contorno statica in B z = L 0)('')( =−= LvEJLM condizione al contorno statica.
b) Integrazione dell’equazione differenziale
Integrando quattro volte l’equazione differenziale, si ottiene
pvEJ iv = 1) 1''' czpvEJ += , 2) 21
2
2'' czczpvEJ ++= ,
3) 32
2
1
3
26' czczczpvEJ +++= , 4) 43
2
2
3
1
4
2624czczczczpvEJ ++++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi attraverso le condizioni al contorno.
Dalla condizione 0)0( =v si ottiene 04 =c 0)0('' =− vEJ 02 =c 0)( =Lv 06/24/ 3
31
4 =++ LcLcpL 0)('' =− LvEJ 0)2/( 1
2 =+− LcLp
per cui 2/1 Lpc −= e 24/33 pLc = .
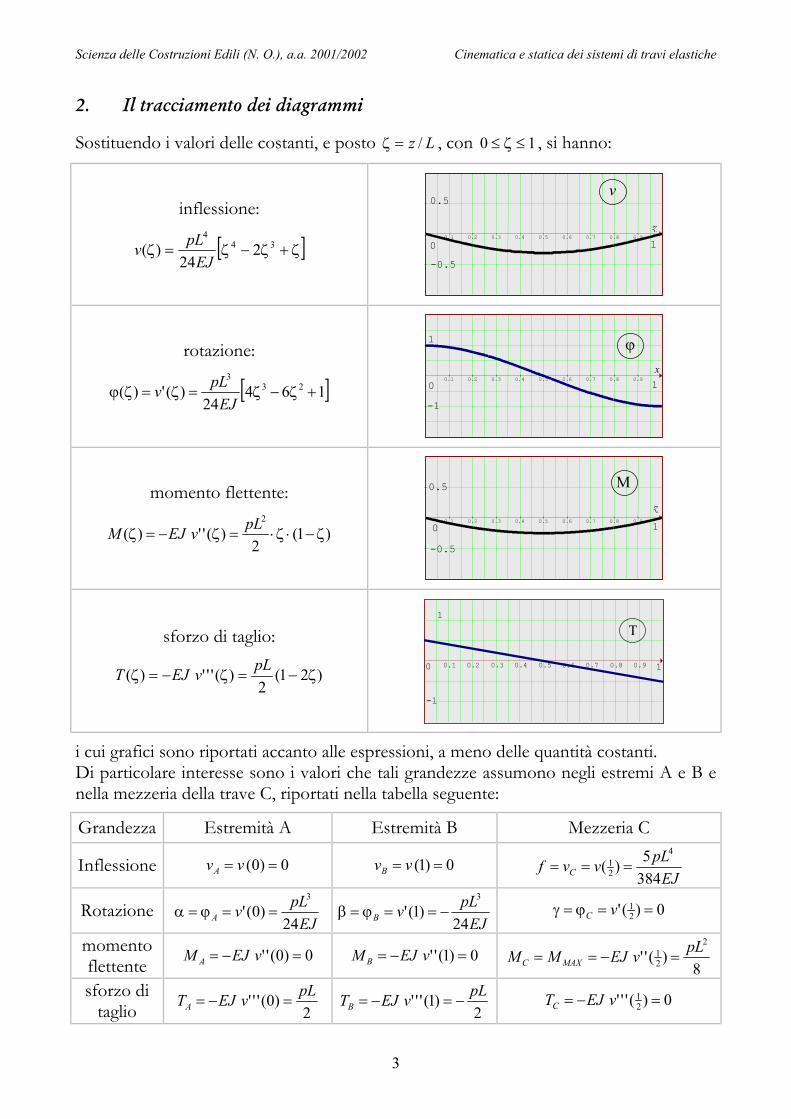
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno:
inflessione:
[ ]ζ+ζ−ζ=ζ 344
224
)(EJ
pLv
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.5
0
0.5 v
rotazione:
[ ]16424
)(')( 233
+ζ−ζ=ζ=ζϕEJ
pLv
x 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1 ϕ
momento flettente:
)1(2
)('')(2
ζ−⋅ζ⋅=ζ−=ζpLvEJM
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.5 0
0.5 M
sforzo di taglio:
)21(2
)(''')( ζ−=ζ−=ζpLvEJT
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
T
i cui grafici sono riportati accanto alle espressioni, a meno delle quantità costanti. Di particolare interesse sono i valori che tali grandezze assumono negli estremi A e B e nella mezzeria della trave C, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Mezzeria C
Inflessione 0)0( == vvA 0)1( == vvB EJ
pLvvf C 3845)(
4
21 ===
Rotazione EJ
pLvA 24)0('
3
==ϕ=α EJ
pLvB 24)1('
3
−==ϕ=β 0)(' 21 ==ϕ=γ vC
momento flettente 0)0('' =−= vEJM A 0)1('' =−= vEJM B
8)(''
2
21 pLvEJMM MAXC =−==
sforzo di taglio 2
)0(''' pLvEJTA =−= 2
)1(''' pLvEJTB −=−= 0)(''' 21 =−= vEJTC

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
TEMA 2b
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e soggetta ad un carico concentrato P in una sezione intermedia generica,
P
L
A B
a b C
3. determinarne la linea elastica e tracciarne il grafico; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B, e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
L
B a b
C 1 1
A=O z
y,v
3 2 4 2

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
L’equilibrio elastico della struttura è governato dalle relazioni:
az <<0 01 =ivvEJ equazione differenziale della linea elastica nel tratto
Lza << 02 =ivvEJ equazione differenziale della linea elastica nel tratto condizione al contorno geometrica
A z = 0
==
0)0(0)0(1
Mv
condizione al contorno statica )()( 21 avav = condizione di raccordo geometrica
)(')(' 21 avav = condizione di raccordo geometrica )()( +− = aMaM condizione di raccordo statica
C z = a
PaTaT += +− )()( condizione di raccordo statica condizione al contorno geometrica
in
B z = L
==
0)(0)(2
LMLv
condizione al contorno statica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche diventano
A z = 0 0)0('' =− vEJ condizione al contorno statica )('')('' 21 avEJavEJ −=− condizione di raccordo statica
C z = a PavEJavEJ +−=− )(''')(''' 21 condizione di raccordo statica
in
B z = L 0)('' =− LvEJ condizione al contorno statica.
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottiene
Integrazione Tratto Tratto 0) 01 =ivvEJ 02 =ivvEJ 1) 11 ''' cvEJ = 12 ''' dvEJ =
2) 211 '' czcvEJ += 212 '' dzdvEJ +=
3) 322
11 2/' czczcvEJ ++= 322
12 2/' dzdzdvEJ ++= 4) 43
22
311 2/6/ czczczcvEJ +++= 43
22
312 2/6/ dzdzdzdvEJ +++=
in cui le otto costanti incognite c1, c2, c3, c4 e d1, d2, d3, d4 devono essere determinate attraverso le condizioni al contorno e di raccordo prima scritte.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
0)0(1 =v 04 =c
0)0(''1 =− vEJ 02 =c
)()( 21 avav = 0)()(2
)(6
)( 4433
2
22
3
11 =−+−+−+− dcadcadcadc
)(')(' 21 avav = 0)()(2
)( 3322
2
11 =−+−+− dcadcadc
)('')('' 21 avEJavEJ −=− 0)()( 2211 =−+− dcadc
PavEJavEJ +−=− )(''')(''' 21 Pdc −=− 11
0)(2 =Lv 026 43
2
2
3
1 =+++ dLdLdLd
Da:
0)(''2 =− LvEJ
risulta
021 =+ dLd
ovvero,
−
=
⋅
−
−−
−−−
−−−−
0
0
0
0
0
0
0
0010000
126
0000
00010001
001001
012
012
126
126
00000010
00001000
4
3
2
1
4
3
2
1
23
22
2323
P
d
d
d
d
c
c
c
c
L
LLL
aa
aaaa
aaaaaa
un magnifico sistema di otto equazioni algebriche lineari, non omogeneo per la presenza del carico P, nelle otto incognite c1, c2, c3, c4 e d1, d2, d3, d4. Risolvendo otteniamo:
LLaPc /)(1 −= LPad /1 =
02 =c aPd ⋅−=2
( ) LLaLaPac 6/23 223 +−= LLaPad 6/)2( 22
3 +=
04 =c 6/34 Pad −=

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
Un modo più semplice per risolvere lo stesso sistema è il seguente. Consideriamo dapprima le sole condizioni di raccordo
)()( 21 avav = 0)()(2/)(6/)( 44332
223
11 =−+−+−+− dcadcadcadc
)(')(' 21 avav = 0)()(2/)( 33222
11 =−+−+− dcadcadc
)()( +− = aMaM 0)()( 2211 =−+− dcadc in C z = a
PaTaT += +− )()(
ovvero
Pdc −=− 11
Queste equazioni possono essere risolte facilmente mediante sostituzione all’indietro
Pdc −=− 11 Pdc −= 11
Padc =− 22 Padc += 22
2/233 aPdc −=− 2/2
33 aPdc −=
6/344 Padc =−
da cui si ricavano
6/344 Padc +=
Le restanti condizioni al contorno diventano
0)0(1 =v 06/34 =+ Pad
in A z = 0
==
0)0(0)0(1
Mv
0)0(''1 =− vEJ 02 =+ Pad
0)(2 =Lv 02/6/ 432
23
1 =+++ dLdLdLd in B z = L
==
0)(0)(2
LMLv
0)(''2 =− LvEJ
da cui
021 =+ dLd
Infine, otteniamo
LPad /1 = )1/(1 −= LaPc Pad −=2 02 =c
LLaPad 6/)2( 223 += LLaLaPac 6/)23( 22
3 +−= 6/3
4 Pad −=
04 =c
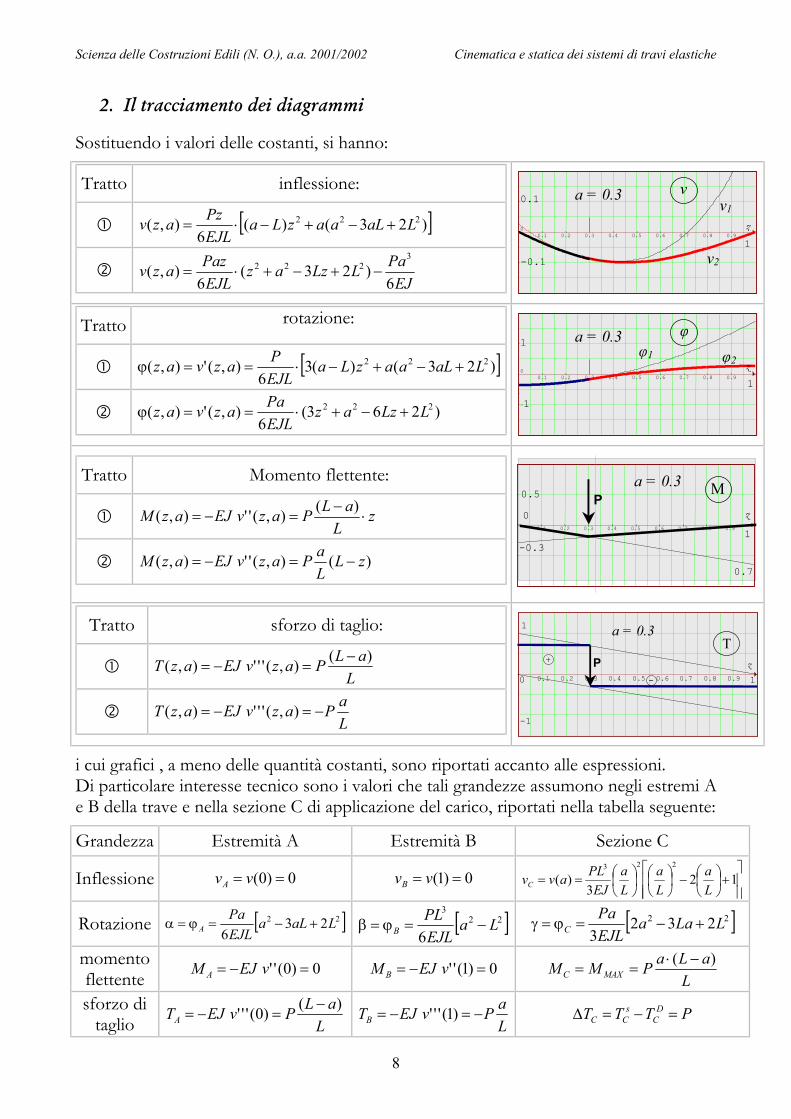
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, si hanno:
Tratto inflessione:
[ ])23()(6
),( 222 LaLaazLaEJLPzazv +−+−⋅=
EJ
PaLLzazEJLPazazv
6)23(
6),(
3222 −+−+⋅=
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.1
0
0.1
z
v v1
v2
a = 0.3
Tratto rotazione:
[ ])23()(36
),('),( 222 LaLaazLaEJLPazvaz +−+−⋅==ϕ
)263(6
),('),( 222 LLzazEJLPaazvaz +−+⋅==ϕ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
z
φ φ1 φ2
a = 0.3
Tratto Momento flettente:
zL
aLPazvEJazM ⋅−
=−=)(),(''),(
)(),(''),( zLLaPazvEJazM −=−=
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.3
0
0.5 M P
0.7
a = 0.3
Tratto sforzo di taglio:
L
aLPazvEJazT )(),('''),( −=−=
LaPazvEJazT −=−= ),('''),(
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
T +
-
P z
a = 0.3
i cui grafici , a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave e nella sezione C di applicazione del carico, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Sezione C
Inflessione 0)0( == vvA 0)1( == vvB
+
−
== 12
3)(
223
La
La
La
EJPLavvC
Rotazione [ ]22 236
LaLaEJLPa
A +−=ϕ=α [ ]223
6La
EJLPL
B −=ϕ=β [ ]22 2323
LLaaEJLPa
C +−=ϕ=γ
momento flettente 0)0('' =−= vEJM A 0)1('' =−= vEJM B
LaLaPMM MAXC
)( −⋅==
sforzo di taglio L
aLPvEJTA)()0(''' −
=−= LaPvEJTB −=−= )1(''' PTTT D
Cs
CC =−=∆
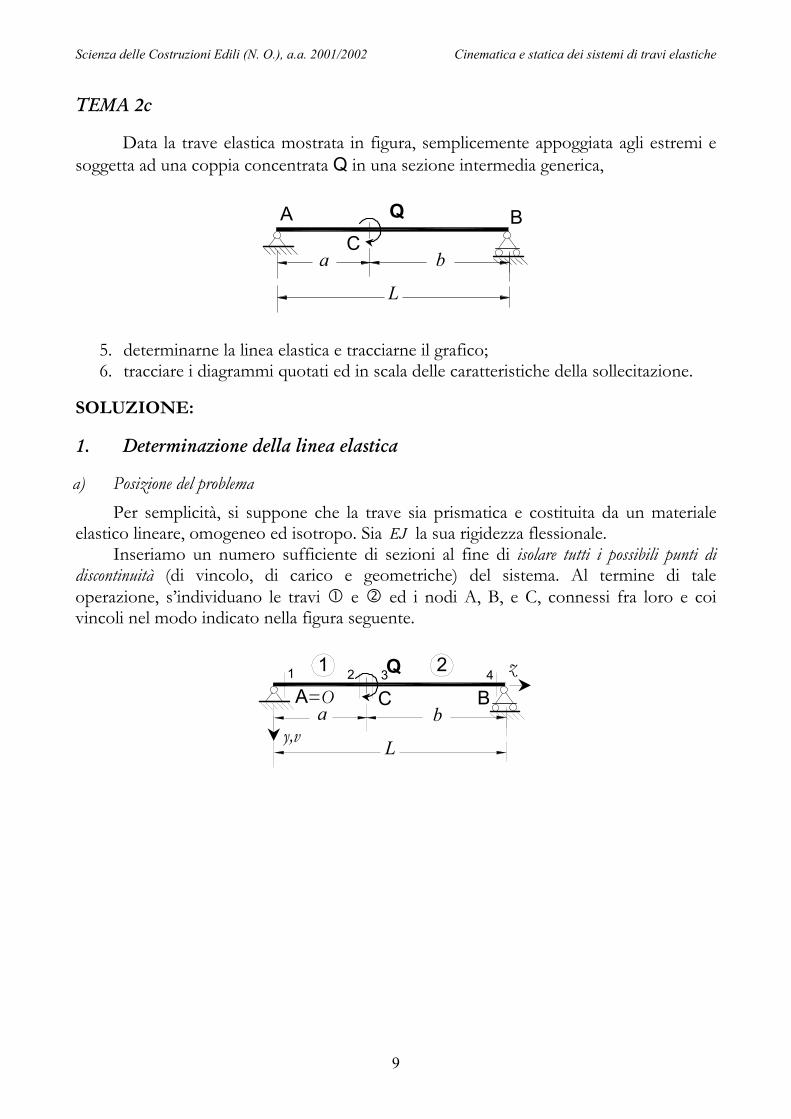
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
9
TEMA 2c
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e soggetta ad una coppia concentrata Q in una sezione intermedia generica,
Q
L
A B
a b C
5. determinarne la linea elastica e tracciarne il grafico; 6. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B, e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
L
B a b
1 1
A=O z
y,v
3 2 4 2
C
Q

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
10
L’equilibrio elastico della struttura è governato dalle relazioni:
az <<0 01 =ivvEJ equazione differenziale della linea elastica nel tratto
Lza << 02 =ivvEJ equazione differenziale della linea elastica nel tratto condizione al contorno geometrica
A z = 0
==
0)0(0)0(1
Mv
condizione al contorno statica )()( 21 avav = condizione di raccordo geometrica )(')(' 21 avav = condizione di raccordo geometrica
)()( +− =+ aMQaM condizione di raccordo statica C z = a
)()( +− = aTaT condizione di raccordo statica condizione al contorno geometrica
in
B z = L
==
0)(0)(2
LMLv
condizione al contorno statica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche possono essere scritte come
A z = 0 0)0('' =− vEJ condizione al contorno statica )('')('' 21 avEJQavEJ −=+− condizione di raccordo statica
C z = a )(''')(''' 21 avEJavEJ −=− condizione di raccordo statica
in
B z = L 0)('' =− LvEJ condizione al contorno statica.
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottiene
Integrazione Tratto Tratto 0) 01 =ivvEJ 02 =ivvEJ 1) 11 ''' cvEJ = 12 ''' dvEJ =
2) 211 '' czcvEJ += 212 '' dzdvEJ +=
3) 322
11 2/' czczcvEJ ++= 322
12 2/' dzdzdvEJ ++= 4) 43
22
311 2/6/ czczczcvEJ +++= 43
22
312 2/6/ dzdzdzdvEJ +++=
in cui le otto costanti incognite c1, c2, c3, c4 e d1, d2, d3, d4 devono essere determinate attraverso le condizioni al contorno e di raccordo prima scritte.
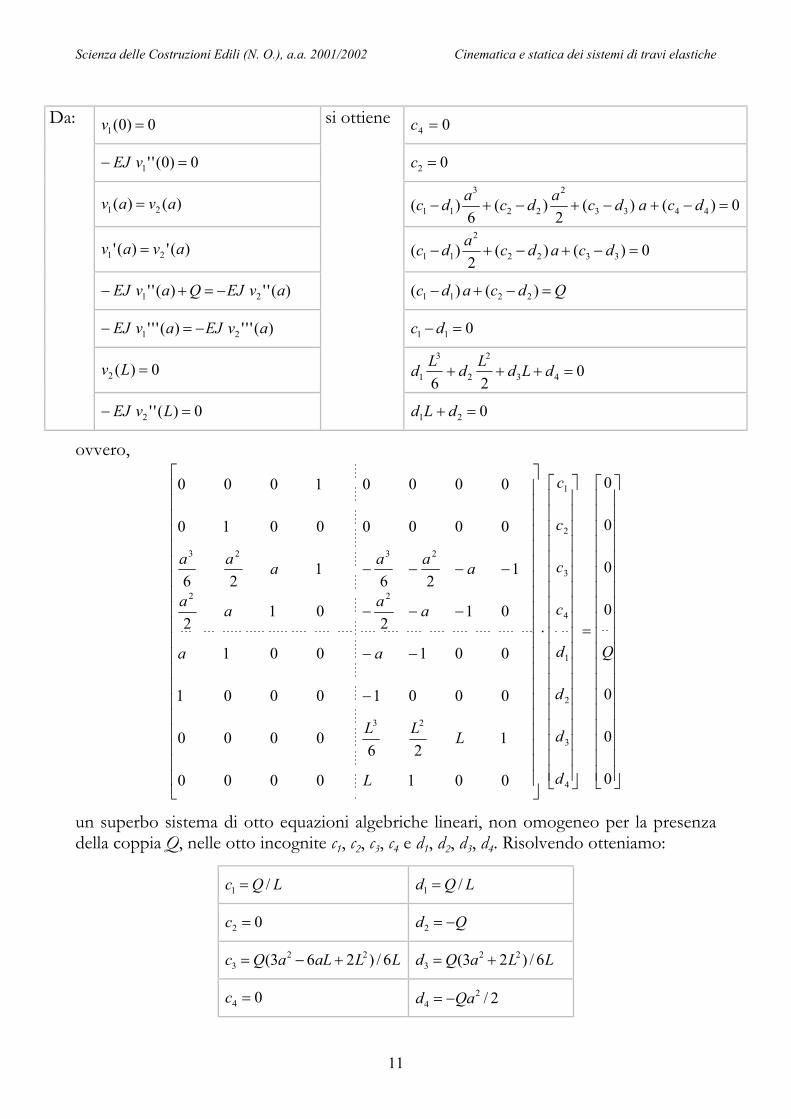
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
11
0)0(1 =v 04 =c
0)0(''1 =− vEJ 02 =c
)()( 21 avav = 0)()(2
)(6
)( 4433
2
22
3
11 =−+−+−+− dcadcadcadc
)(')(' 21 avav = 0)()(2
)( 3322
2
11 =−+−+− dcadcadc
)('')('' 21 avEJQavEJ −=+− Qdcadc =−+− )()( 2211
)(''')(''' 21 avEJavEJ −=− 011 =− dc
0)(2 =Lv 026 43
2
2
3
1 =+++ dLdLdLd
Da:
0)(''2 =− LvEJ
si ottiene
021 =+ dLd
ovvero,
=
⋅
−
−−
−−−
−−−−
0
0
0
0
0
0
0
0010000
126
0000
00010001
001001
012
012
126
126
00000010
00001000
4
3
2
1
4
3
2
1
23
22
2323
Q
d
d
d
d
c
c
c
c
L
LLL
aa
aaaa
aaaaaa
un superbo sistema di otto equazioni algebriche lineari, non omogeneo per la presenza della coppia Q, nelle otto incognite c1, c2, c3, c4 e d1, d2, d3, d4. Risolvendo otteniamo:
LQc /1 = LQd /1 =
02 =c Qd −=2
LLaLaQc 6/)263( 223 +−= LLaQd 6/)23( 22
3 +=
04 =c 2/24 Qad −=
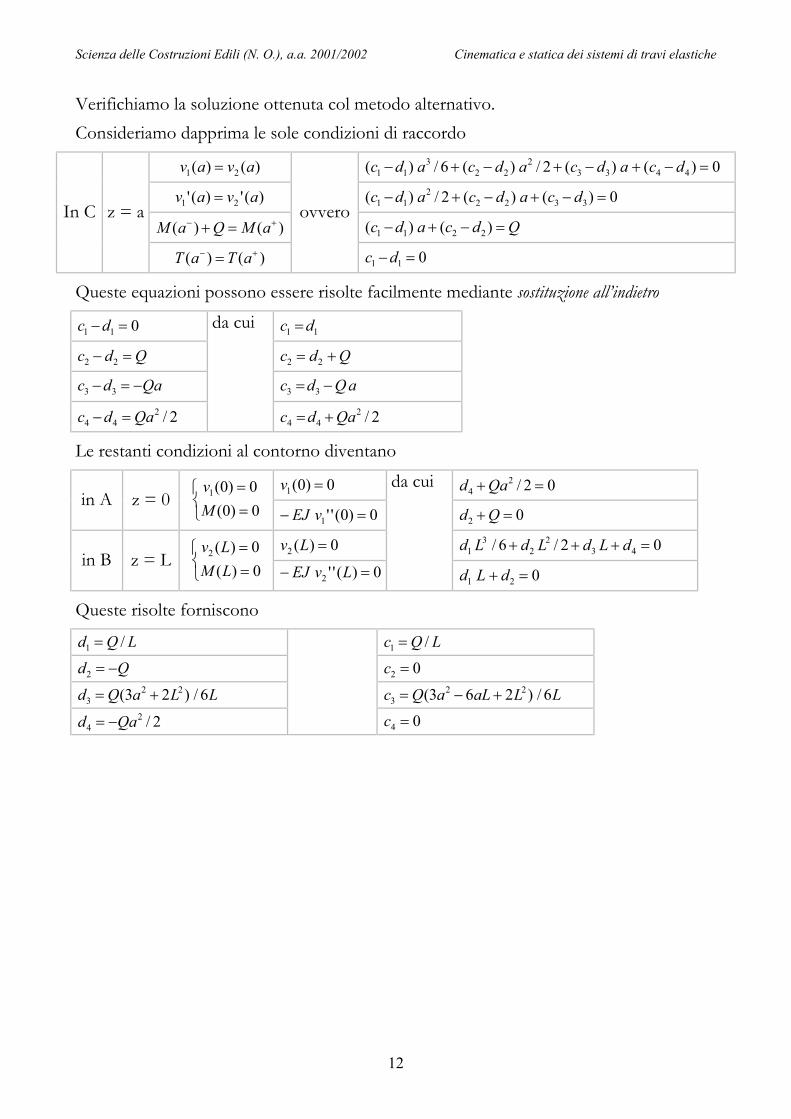
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
12
Verifichiamo la soluzione ottenuta col metodo alternativo. Consideriamo dapprima le sole condizioni di raccordo
)()( 21 avav = 0)()(2/)(6/)( 44332
223
11 =−+−+−+− dcadcadcadc
)(')(' 21 avav = 0)()(2/)( 33222
11 =−+−+− dcadcadc
)()( +− =+ aMQaM Qdcadc =−+− )()( 2211 In C z = a
)()( +− = aTaT
ovvero
011 =−dc
Queste equazioni possono essere risolte facilmente mediante sostituzione all’indietro
011 =−dc 11 dc =
Qdc =− 22 Qdc += 22 Qadc −=− 33 aQdc −= 33
2/244 Qadc =−
da cui
2/244 Qadc +=
Le restanti condizioni al contorno diventano
0)0(1 =v 02/24 =+ Qad
in A z = 0
==
0)0(0)0(1
Mv
0)0(''1 =− vEJ 02 =+ Qd
0)(2 =Lv 02/6/ 432
23
1 =+++ dLdLdLd in B z = L
==
0)(0)(2
LMLv
0)(''2 =− LvEJ
da cui
021 =+ dLd
Queste risolte forniscono
LQd /1 = LQc /1 = Qd −=2 02 =c
LLaQd 6/)23( 223 += LLaLaQc 6/)263( 22
3 +−= 2/2
4 Qad −=
04 =c
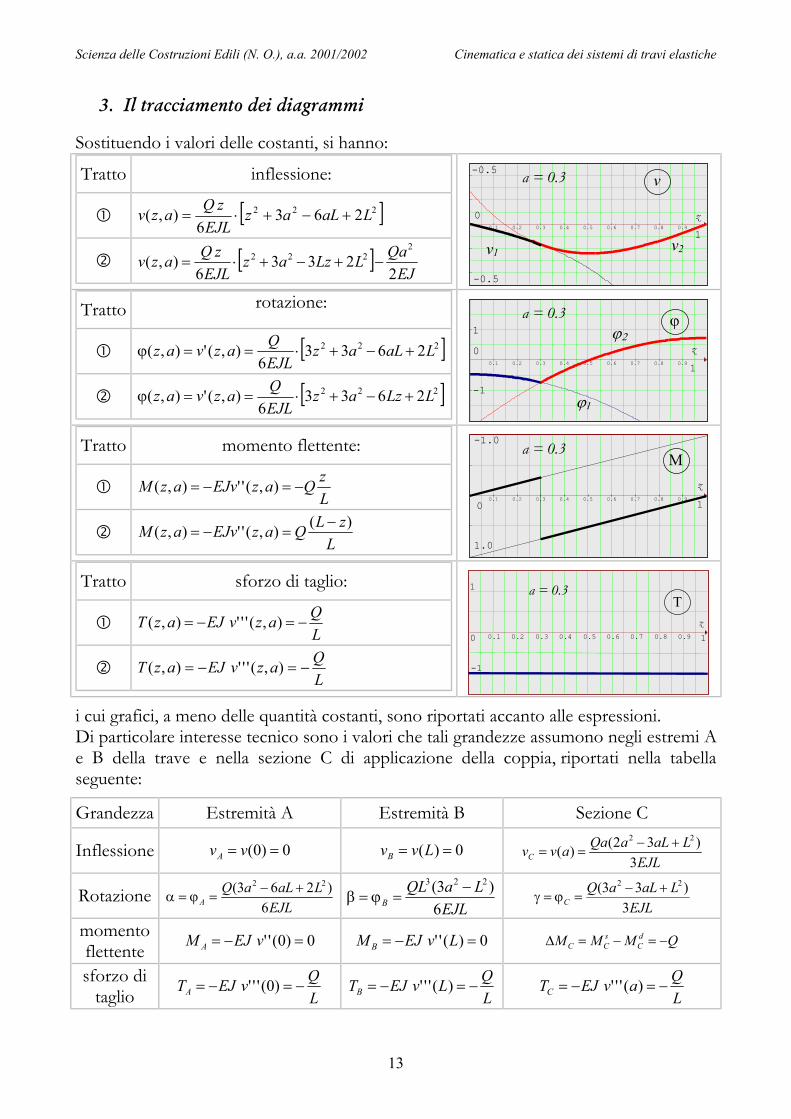
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
13
3. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, si hanno:
Tratto inflessione:
[ ]222 2636
),( LaLazEJL
zQazv +−+⋅=
[ ]EJ
QaLLzazEJL
zQazv2
2336
),(2
222 −+−+⋅=
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z
1
-0.5
0
-0.5 v a = 0.3
v2 v1
Tratto rotazione:
[ ]222 26336
),('),( LaLazEJLQazvaz +−+⋅==ϕ
[ ]222 26336
),('),( LLzazEJLQazvaz +−+⋅==ϕ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
z
a = 0.3 ϕ
ϕ1
ϕ2
Tratto momento flettente:
LzQazEJvazM −=−= ),(''),(
L
zLQazEJvazM )(),(''),( −=−=
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1.0
0
-1.0 M
a = 0.3
Tratto sforzo di taglio:
LQazvEJazT −=−= ),('''),(
LQazvEJazT −=−= ),('''),(
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
0
1
T z
a = 0.3
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave e nella sezione C di applicazione della coppia, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Sezione C
Inflessione 0)0( == vvA 0)( == LvvB EJL
LaLaQaavvC 3)32()(
22 +−==
Rotazione EJL
LaLaQA 6
)263( 22 +−=ϕ=α
EJLLaQL
B 6)3( 223 −
=ϕ=β EJL
LaLaQC 3
)33( 22 +−=ϕ=γ
momento flettente 0)0('' =−= vEJM A 0)('' =−= LvEJM B QMMM d
CsCC −=−=∆
sforzo di taglio L
QvEJTA −=−= )0(''' LQLvEJTB −=−= )('''
LQavEJTC −=−= )('''

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
(NOTA: Fra gli obiettivi didattici più importanti degli esempi successivi ricordiamo: 1. fare pratica con la risoluzione di problemi strutturali semplici mediante l’equazione differenziale della linea
elastica delle travi snelle inflesse; 2. fare pratica con la scrittura delle condizioni al contorno e di raccordo; 3. distinguere fra condizioni geometriche e naturali; 4. fare pratica con l’integrazione dell’equazione differenziale.)
TEMA 3a
Data la trave elastica mostrata in figura, incastrata ad un estremo, appoggiata all’altro, e caricata uniformemente,
p
L
A B
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
p
L
1 2 1
A=O B z
y,v
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 pvEJ iv = equazione differenziale della linea elastica
condizione al contorno geometrica A z = 0
==
0)0('0)0(
vv
condizione al contorno geometrica condizione al contorno geometrica
in
B z = L
==
0)(0)(
LMLv
condizione al contorno statica
Attraverso il legame costitutivo '')( vEJzM −= , la condizione al contorno statica diventa
in B z = L 0)('')( =−= LvEJLM condizione al contorno statica.
b) Integrazione dell’equazione differenziale
Integrando quattro volte l’equazione differenziale, si ottiene
pvEJ iv = 1) 1''' czpvEJ += , 2) 21
2
2'' czczpvEJ ++= ,
3) 32
2
1
3
26' czczczpvEJ +++= , 4) 43
2
2
3
1
4
2624czczczczpvEJ ++++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi attraverso le condizioni al contorno.
Dalla condizione 0)0( =v si ottiene 04 =c 0)0(' =v 03 =c 0)( =Lv 02/6/24/ 2
23
14 =++ LcLcpL
0)('' =− LvEJ 02/ 212 =++ cLcLp
per cui Lpc ⋅−= 8/51 e 8/22 pLc = .
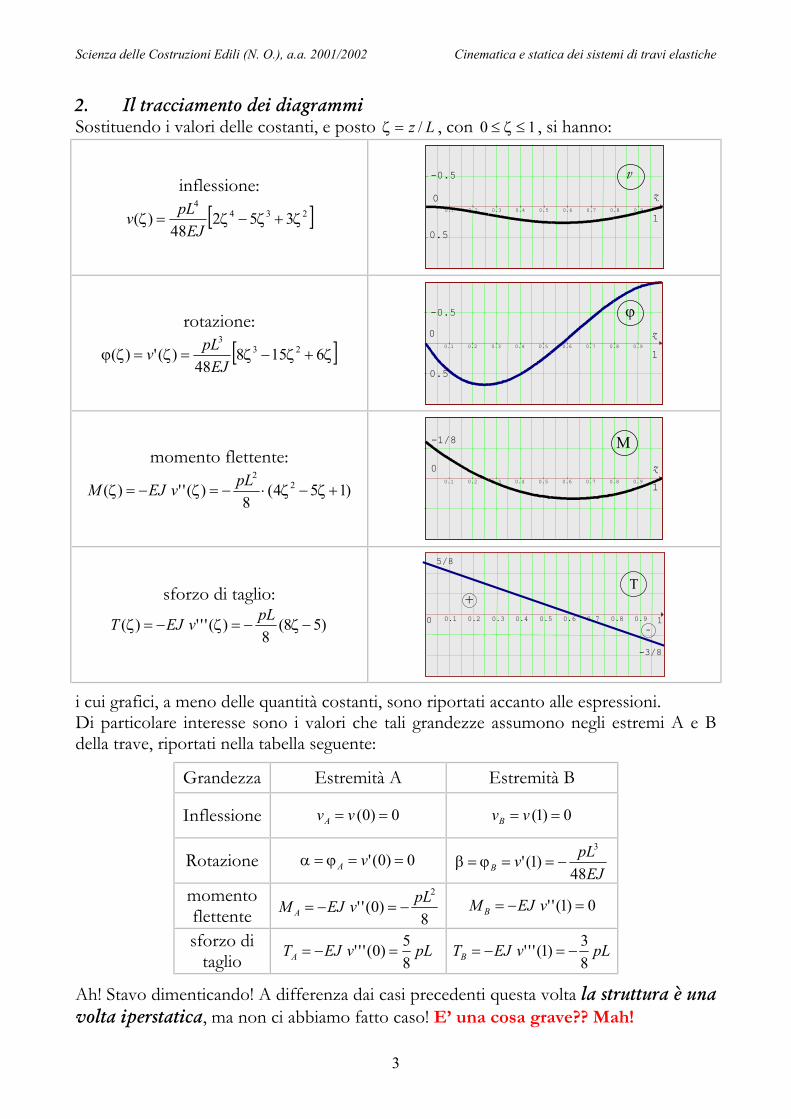
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
2. Il tracciamento dei diagrammi Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno:
inflessione:
[ ]2344
35248
)( ζ+ζ−ζ=ζEJ
pLv
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1 0.5
0
-0.5 v
rotazione:
[ ]ζ+ζ−ζ=ζ=ζϕ 615848
)(')( 233
EJpLv
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0
-0.5 ϕ
0.5
momento flettente:
)154(8
)('')( 22
+ζ−ζ⋅−=ζ−=ζpLvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z
1
0
-1/8 M
sforzo di taglio:
)58(8
)(''')( −ζ−=ζ−=ζpLvEJT
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3/8
0
5/8
T +
-
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse sono i valori che tali grandezze assumono negli estremi A e B della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B
Inflessione 0)0( == vvA 0)1( == vvB
Rotazione 0)0(' ==ϕ=α vA EJ
pLvB 48)1('
3
−==ϕ=β
momento flettente 8
)0(''2pLvEJM A −=−= 0)1('' =−= vEJM B
sforzo di taglio pLvEJTA 8
5)0(''' =−= pLvEJTB 83)1(''' −=−=
Ah! Stavo dimenticando! A differenza dai casi precedenti questa volta la struttura è una volta iperstatica, ma non ci abbiamo fatto caso! E’ una cosa grave?? Mah!
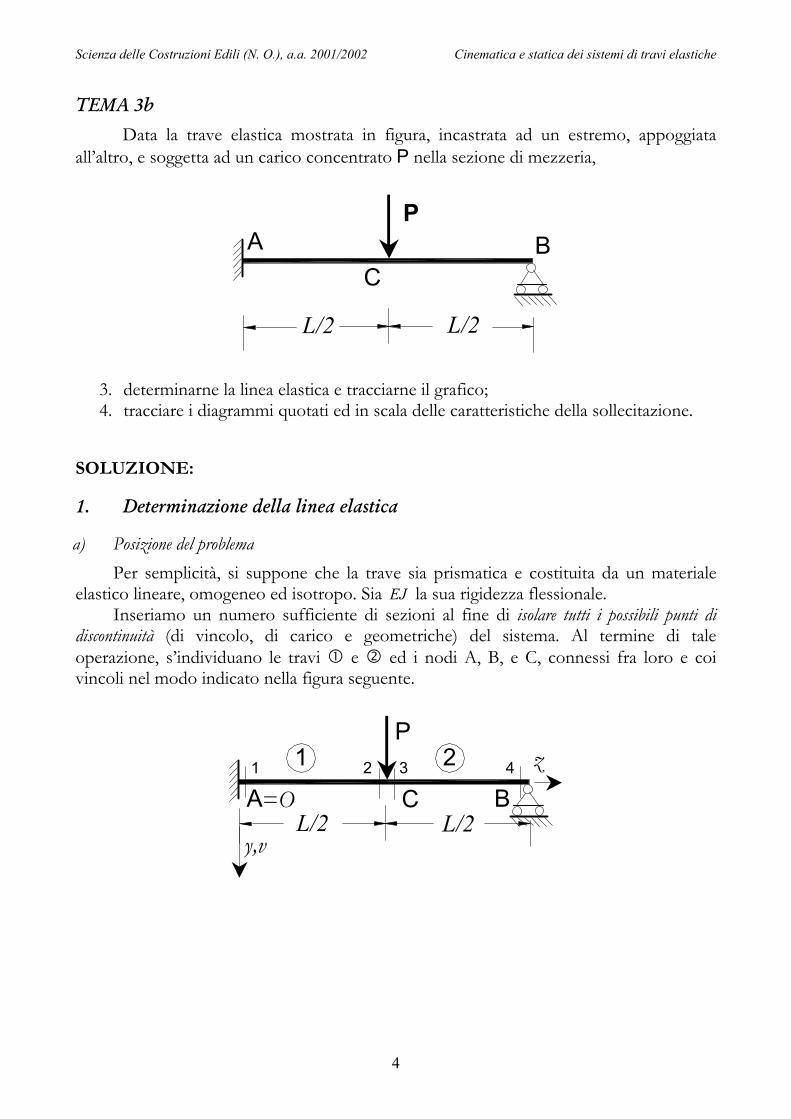
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
TEMA 3b Data la trave elastica mostrata in figura, incastrata ad un estremo, appoggiata all’altro, e soggetta ad un carico concentrato P nella sezione di mezzeria,
P A B
L/2 L/2
C
3. determinarne la linea elastica e tracciarne il grafico; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B, e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
B L/2
C 1 1
A=O
z
y,v
3 2 4 2
L/2

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
L’equilibrio elastico della struttura è governato dalle relazioni:
2/0 Lz << 01 =ivvEJ equazione differenziale della linea elastica nel tratto
LzL <<2/ 02 =ivvEJ equazione differenziale della linea elastica nel tratto condizione al contorno geometrica
A z = 0
==
0)0('0)0(
1
1
vv
condizione al contorno geometrica )2/()2/( 21 LvLv = condizione di raccordo geometrica
)2/(')2/(' 21 LvLv = condizione di raccordo geometrica )2/()2/( LMLM +− = condizione di raccordo statica
C z = L/2
PLTLT += +− )2/()2/( condizione di raccordo statica condizione al contorno geometrica
in
B z = L
==
0)(0)(2
LMLv
condizione al contorno statica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche si scrivono
)2/('')2/('' 21 LvLv = condizione di raccordo statica C z = L/2
PLvEJLvEJ +−=− )2/(''')2/(''' 21 condizione di raccordo statica in
B z = L 0)('' =Lv condizione al contorno statica.
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottiene
Integrazione Tratto Tratto 0) 01 =ivvEJ 02 =ivvEJ 1) 11 ''' cvEJ = 12 ''' dvEJ =
2) 211 '' czcvEJ += 212 '' dzdvEJ +=
3) 322
11 2/' czczcvEJ ++= 322
12 2/' dzdzdvEJ ++= 4) 43
22
311 2/6/ czczczcvEJ +++= 43
22
312 2/6/ dzdzdzdvEJ +++=
in cui le otto costanti incognite c1, c2, c3, c4 e d1, d2, d3, d4 devono essere determinate attraverso le condizioni al contorno e di raccordo prima scritte.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
0)0(1 =v 04 =c
0)0('1 =v 03 =c
)2/()2/( 21 LvLv = 0)(2
)(8
)(48
)( 4433
2
22
3
11 =−+−+−+− dcLdcLdcLdc
)2/(')2/(' 21 LvLv = 0)(2
)(8
)( 3322
2
11 =−+−+− dcLdcLdc
)2/('')2/('' 21 LvLv = 0)(2
)( 2211 =−+− dcLdc
PLvEJLvEJ +−=− )2/(''')2/(''' 21 Pdc −=− 11
0)(2 =Lv 026 43
2
2
3
1 =+++ dLdLdLd
Da:
0)(''2 =− LvEJ
risulta
021 =+ dLd
ovvero,
−
=
⋅
−
−−
−−−
−−−−
00
00000
0010000
126
0000
00010001
0012
0012
0128
0128
12848
12848
00000100
00001000
4
3
2
1
4
3
2
1
23
22
2323
P
ddddcccc
L
LLL
LL
LLLL
LLLLLL
un magnifico sistema di otto equazioni algebriche lineari, non omogeneo per la presenza del carico P, nelle otto incognite c1, c2, c3, c4 e d1, d2, d3, d4. Risolvendo otteniamo:
Pc ⋅−= 16/111 Pd ⋅= 16/51
PLc ⋅= 16/32 PLd ⋅−= 16/52
03 =c 8/23 PLd =
04 =c 48/34 PLd −=
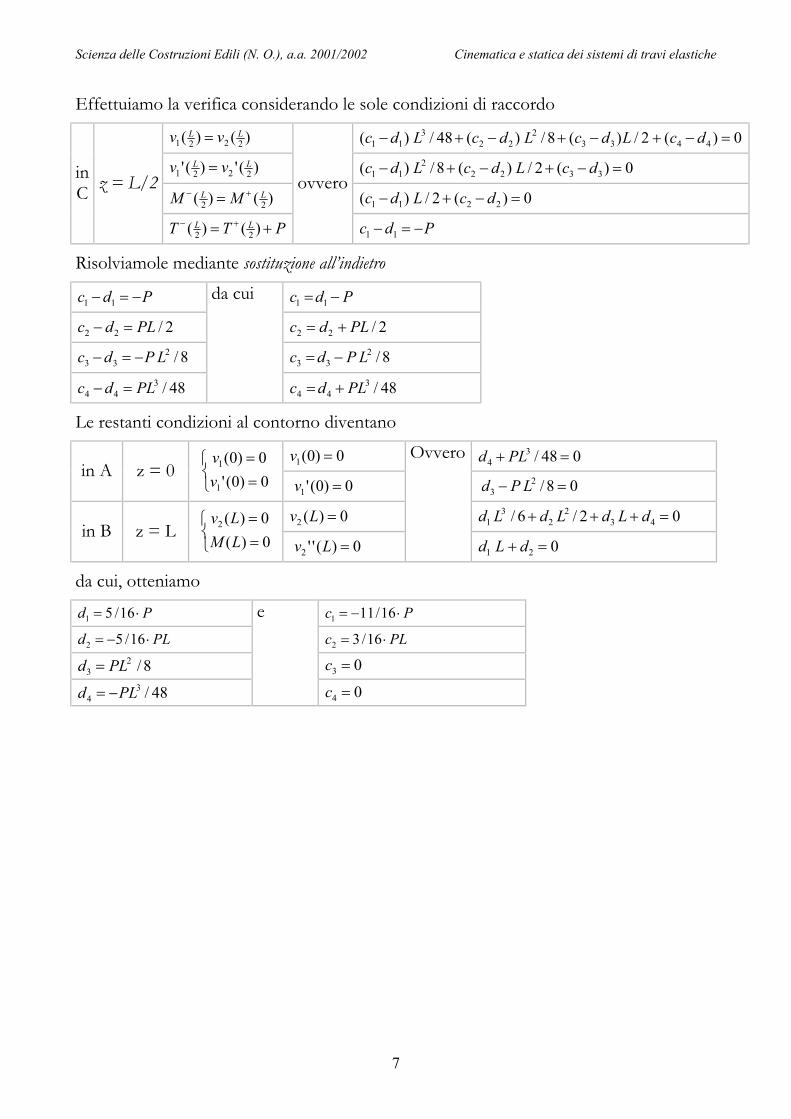
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
Effettuiamo la verifica considerando le sole condizioni di raccordo
)()( 2221LL vv = 0)(2/)(8/)(48/)( 4433
222
311 =−+−+−+− dcLdcLdcLdc
)(')(' 2221LL vv = 0)(2/)(8/)( 3322
211 =−+−+− dcLdcLdc
)()( 22LL MM +− = 0)(2/)( 2211 =−+− dcLdc
in C z = L/2
PTT LL += +− )()( 22
ovvero
Pdc −=− 11
Risolviamole mediante sostituzione all’indietro
Pdc −=− 11 Pdc −= 11
2/22 PLdc =− 2/22 PLdc +=
8/233 LPdc −=− 8/2
33 LPdc −=
48/344 PLdc =−
da cui
48/344 PLdc +=
Le restanti condizioni al contorno diventano
0)0(1 =v 048/34 =+ PLd
in A z = 0
==
0)0('0)0(
1
1
vv
0)0('1 =v 08/23 =− LPd
0)(2 =Lv 02/6/ 432
23
1 =+++ dLdLdLd in B z = L
==
0)(0)(2
LMLv
0)(''2 =Lv
Ovvero
021 =+ dLd
da cui, otteniamo
Pd ⋅= 16/51 Pc ⋅−= 16/111 PLd ⋅−= 16/52 PLc ⋅= 16/32
8/23 PLd = 03 =c
48/34 PLd −=
e
04 =c
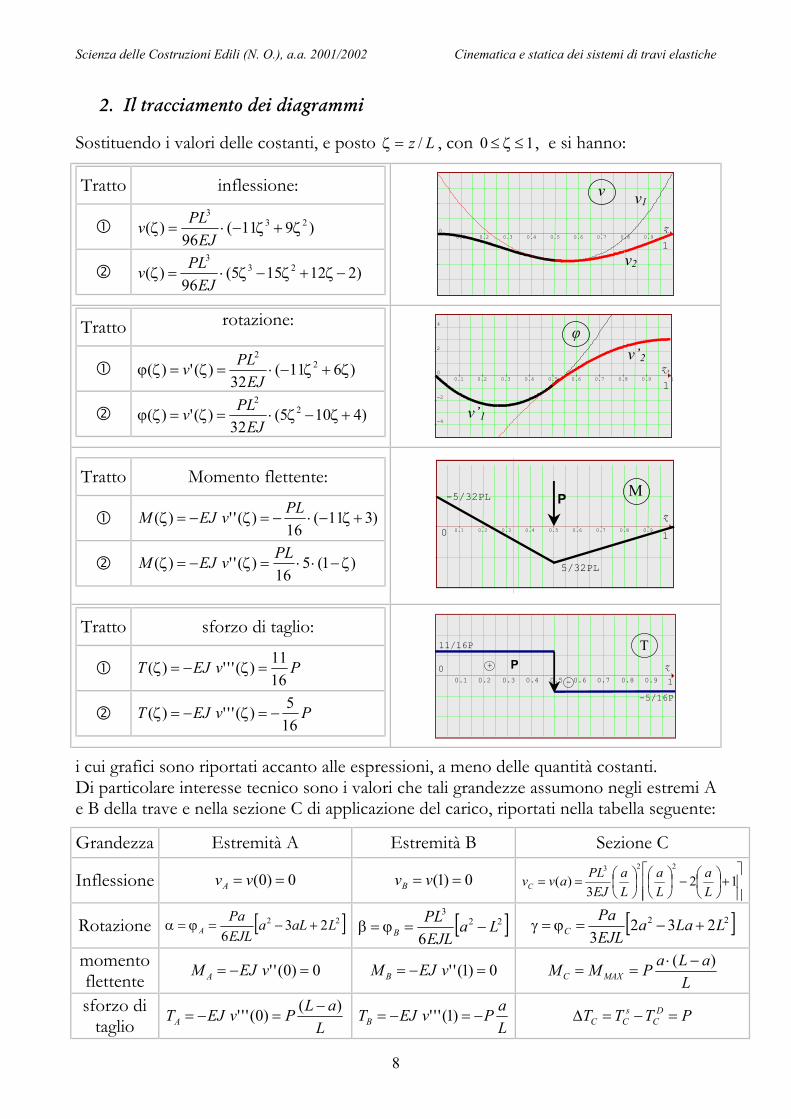
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , e si hanno:
Tratto inflessione:
)911(96
)( 233
ζ+ζ−⋅=ζEJ
PLv
)212155(96
)( 233
−ζ+ζ−ζ⋅=ζEJ
PLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 1
z
v v1
v2
Tratto rotazione:
)611(32
)(')( 22
ζ+ζ−⋅=ζ=ζϕEJ
PLv
)4105(32
)(')( 22
+ζ−ζ⋅=ζ=ζϕEJ
PLv
x 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-4 -2 0 2 4
1
z
φ
v’1
v’2
Tratto Momento flettente:
)311(16
)('')( +ζ−⋅−=ζ−=ζPLvEJM
)1(516
)('')( ζ−⋅⋅=ζ−=ζPLvEJM
z 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
5/32PL
0
M P-5/32PL
Tratto sforzo di taglio:
PvEJT1611)(''')( =ζ−=ζ
PvEJT165)(''')( −=ζ−=ζ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
11/16P T +
-
P z
-5/16P
i cui grafici sono riportati accanto alle espressioni, a meno delle quantità costanti. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave e nella sezione C di applicazione del carico, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Sezione C
Inflessione 0)0( == vvA 0)1( == vvB
+
−
== 12
3)(
223
La
La
La
EJPLavvC
Rotazione [ ]22 236
LaLaEJLPa
A +−=ϕ=α [ ]223
6La
EJLPL
B −=ϕ=β [ ]22 2323
LLaaEJLPa
C +−=ϕ=γ
momento flettente 0)0('' =−= vEJM A 0)1('' =−= vEJM B
LaLaPMM MAXC
)( −⋅==
sforzo di taglio L
aLPvEJTA)()0(''' −
=−= LaPvEJTB −=−= )1(''' PTTT D
Cs
CC =−=∆

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
9
TEMA 3c
Data la trave elastica mostrata in figura, incastrata ad un estremo, appoggiata all’altro estremo, e soggetta qui ad una coppia concentrata Q,
Q
L
A B
5. determinarne la linea elastica e tracciarne il grafico; 6. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A, e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
L B
1 1
A=O
z
y,v
2 Q
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 0=ivvEJ equazione differenziale della linea elastica nel tratto condizione al contorno geometrica
A z = 0
==
0)0('0)0(
vv
condizione al contorno geometrica
condizione al contorno geometrica
in
B z = L
−==
QLMLv
)(0)(
condizione al contorno statica
Attraverso il legame costitutivo '')( vEJzM −= , la condizione statica può essere scritta come
in B z = L QLvEJ −=− )('' condizione al contorno statica.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
10
b) Integrazione dell’equazione differenziale Integrando quattro volte l’equazione differenziale, si ottiene
Integrazione Tratto 0) 0=ivvEJ 1) 1''' cvEJ = 2) 21'' czcvEJ += 3) 32
21 2/' czczcvEJ ++=
4) 432
23
1 2/6/ czczczcvEJ +++=
in cui le quattro costanti incognite c1, c2, c3, e c4 devono essere determinate attraverso le condizioni al contorno prima scritte.
0)0(1 =v 04 =c
0)0('1 =v 03 =c
0)( =Lv 02/6/ 432
23
1 =+++ cLcLcLc
Dalla condizione
QLvEJ −=− )(''2
si ottiene
QcLc =+ 21
ovvero,
=
⋅
Qcccc
LLLL 0
00
00112/6/01001000
4
3
2
1
23
un semplice sistema di quattro equazioni algebriche lineari, non omogeneo per la presenza della coppia Q, nelle quattro incognite c1, c2, c3, e c4 che ha per soluzione
LQc 2/31 = 2/2 Qc −= 03 =c 04 =c
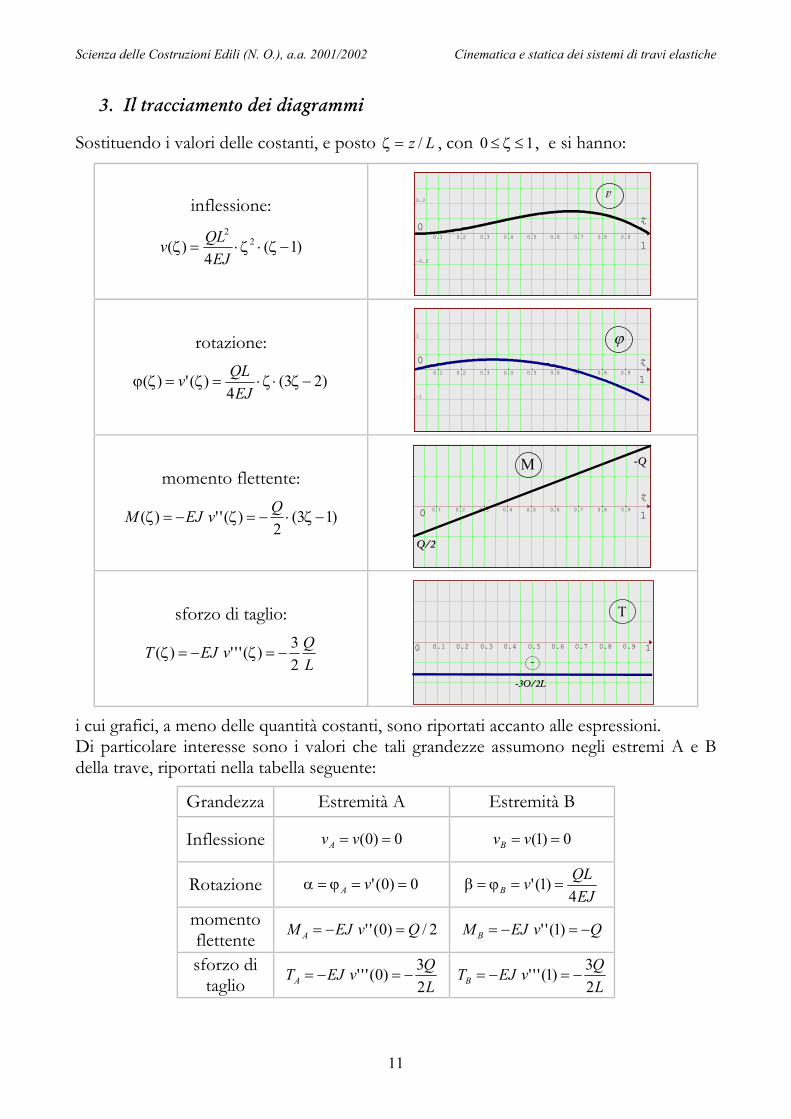
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
11
3. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , e si hanno:
inflessione:
)1(4
)( 22
−ζ⋅ζ⋅=ζEJ
QLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -0.2
0.2 z
1
0
v
rotazione:
)23(4
)(')( −ζ⋅ζ⋅=ζ=ζϕEJ
QLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -1
1 z
1
0
ϕ
momento flettente:
)13(2
)('')( −ζ⋅−=ζ−=ζQvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z
1 0
-Q M
Q/2
sforzo di taglio:
LQvEJT
23)(''')( −=ζ−=ζ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3Q/2L
0
T
-
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse sono i valori che tali grandezze assumono negli estremi A e B della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B
Inflessione 0)0( == vvA 0)1( == vvB
Rotazione 0)0(' ==ϕ=α vA EJ
QLvB 4)1(' ==ϕ=β
momento flettente 2/)0('' QvEJM A =−= QvEJM B −=−= )1(''
sforzo di taglio L
QvEJTA 23)0(''' −=−=
LQvEJTB 2
3)1(''' −=−=

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
(NOTA: Fra gli obiettivi didattici più importanti degli esempi successivi ricordiamo: 1. fare pratica con la risoluzione di problemi strutturali semplici mediante l’equazione differenziale della linea
elastica delle travi snelle inflesse; 2. fare pratica con la scrittura delle condizioni al contorno e di raccordo; 3. distinguere fra condizioni geometriche e naturali; 4. fare pratica con l’integrazione dell’equazione differenziale.)
TEMA 4a
Data la trave elastica mostrata in figura, incastrata ad entrambi gli estremi e caricata uniformemente,
p
L
A B
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
p
L
1 21
A=O B
z
y,v
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz <<0 pvEJ iv = equazione differenziale della linea elastica
condizione al contorno geometrica A z = 0
==
0)0('0)0(
vv
condizione al contorno geometrica condizione al contorno geometrica
in
B z = L
==
0)('0)(
LvLv
condizione al contorno geometrica
b) Integrazione dell’equazione differenziale
Integrando quattro volte l’equazione differenziale, si ottiene
pvEJ iv = 1) 1''' czpvEJ += , 2) 21
2
2'' czczpvEJ ++= ,
3) 32
2
1
3
26' czczczpvEJ +++= , 4) 43
2
2
3
1
4
2624czczczczpvEJ ++++= ,
in cui c1, c2, c3, e c4 sono delle costanti incognite da determinarsi attraverso le condizioni al contorno.
Dalla condizione 0)0( =v si ottiene 04 =c 0)0(' =v 03 =c 0)( =Lv 02/6/24/ 43
22
31
4 =++++ cLcLcLcpL 0)(' =Lv 02/6/ 32
21
3 =+++ cLcLcpL
per cui Lpc ⋅−= 2/11 e 12/22 pLc = .
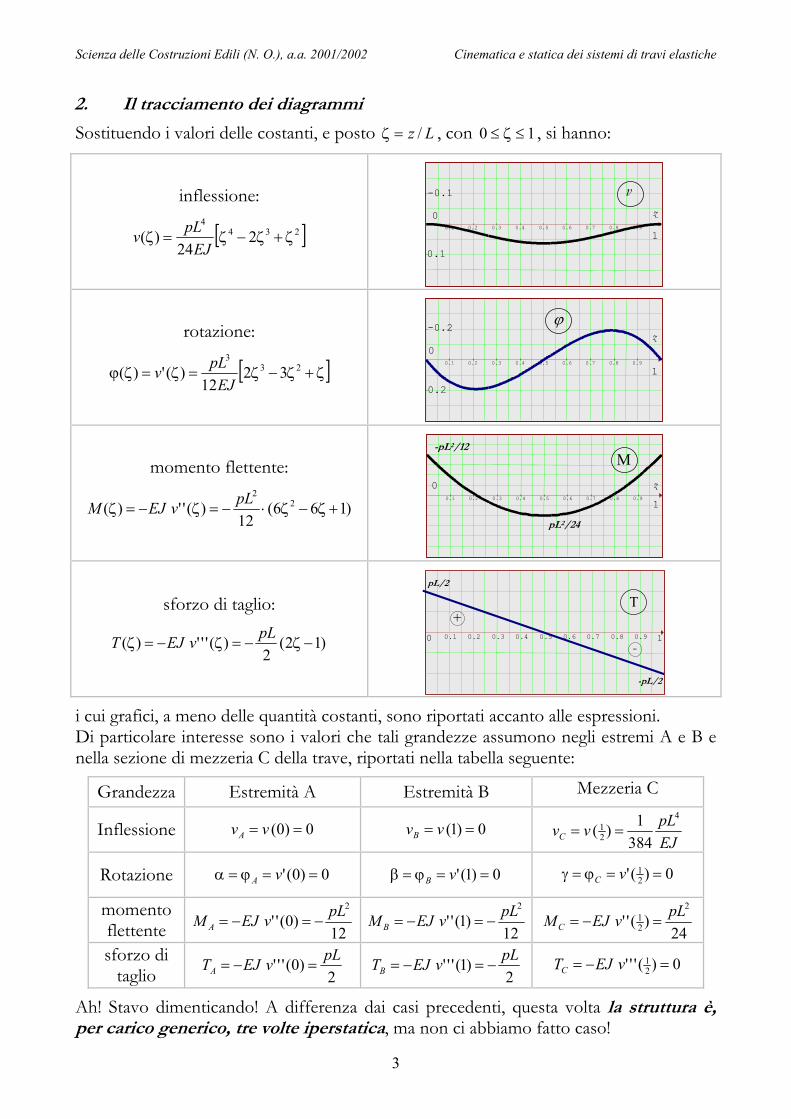
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno:
inflessione:
[ ]2344
224
)( ζ+ζ−ζ=ζEJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
-0.1z
10
v
rotazione:
[ ]ζ+ζ−ζ=ζ=ζϕ 233
3212
)(')(EJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.2
-0.2z
10
ϕ
momento flettente:
)166(12
)('')( 22
+ζ−ζ⋅−=ζ−=ζpLvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z
10
-pL2/12M
pL2/24
sforzo di taglio:
)12(2
)(''')( −ζ−=ζ−=ζpLvEJT
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
pL/2
T +
-
-pL/2
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse sono i valori che tali grandezze assumono negli estremi A e B e nella sezione di mezzeria C della trave, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Mezzeria C
Inflessione 0)0( == vvA 0)1( == vvB EJpLvvC
4
21
3841)( ==
Rotazione 0)0(' ==ϕ=α vA 0)1(' ==ϕ=β vB 0)(' 21 ==ϕ=γ vC
momento flettente 12
)0(''2pLvEJM A −=−=
12)1(''
2pLvEJM B −=−=24
)(''2
21 pLvEJM C =−=
sforzo di taglio 2
)0(''' pLvEJTA =−= 2
)1(''' pLvEJTB −=−= 0)(''' 21 =−= vEJTC
Ah! Stavo dimenticando! A differenza dai casi precedenti, questa volta la struttura è, per carico generico, tre volte iperstatica, ma non ci abbiamo fatto caso!
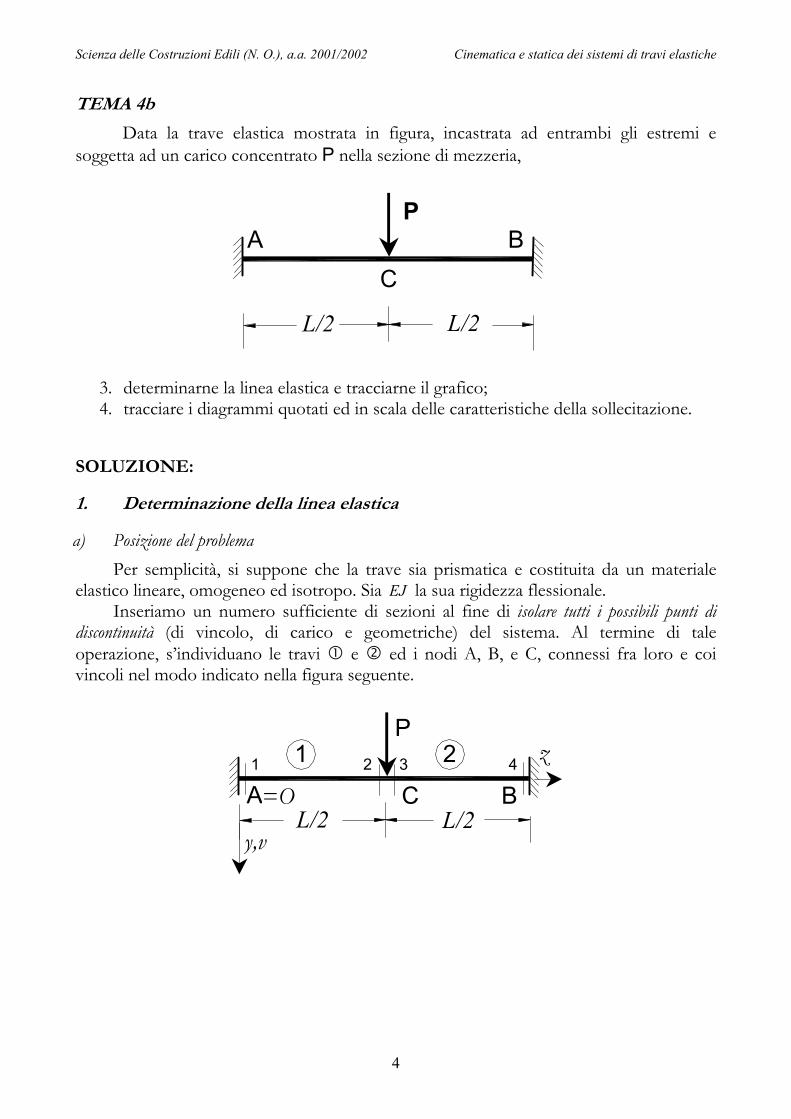
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
TEMA 4b
Data la trave elastica mostrata in figura, incastrata ad entrambi gli estremi e soggetta ad un carico concentrato P nella sezione di mezzeria,
PA
L/2 L/2
CB
3. determinarne la linea elastica e tracciarne il grafico; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B, e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
BL/2
C1 1
A=O
z
y,v
32 42
L/2

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
L’equilibrio elastico della struttura è governato dalle relazioni:
2/0 Lz << 01 =ivvEJ equazione differenziale della linea elastica nel tratto
LzL <<2/ 02 =ivvEJ equazione differenziale della linea elastica nel tratto condizione al contorno geometrica
A z = 0
==
0)0('0)0(
1
1
vv
condizione al contorno geometrica )2/()2/( 21 LvLv = condizione di raccordo geometrica
)2/(')2/(' 21 LvLv = condizione di raccordo geometrica )2/()2/( LMLM +− = condizione di raccordo statica
C z = L/2
PLTLT += +− )2/()2/( condizione di raccordo statica condizione al contorno geometrica
in
B z = L
==
0)('0)(
2
2
LvLv
condizione al contorno geometrica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche si scrivono
)2/('')2/('' 21 LvLv = condizione di raccordo statica in C z = L/2
PLvEJLvEJ +−=− )2/(''')2/(''' 21 condizione di raccordo statica
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottiene
Integrazione Tratto Tratto 0) 01 =ivvEJ 02 =ivvEJ 1) 11 ''' cvEJ = 12 ''' dvEJ =
2) 211 '' czcvEJ += 212 '' dzdvEJ +=
3) 322
11 2/' czczcvEJ ++= 322
12 2/' dzdzdvEJ ++= 4) 43
22
311 2/6/ czczczcvEJ +++= 43
22
312 2/6/ dzdzdzdvEJ +++=
in cui le otto costanti incognite c1, c2, c3, c4 e d1, d2, d3, d4 devono essere determinate attraverso le condizioni al contorno e di raccordo prima scritte.
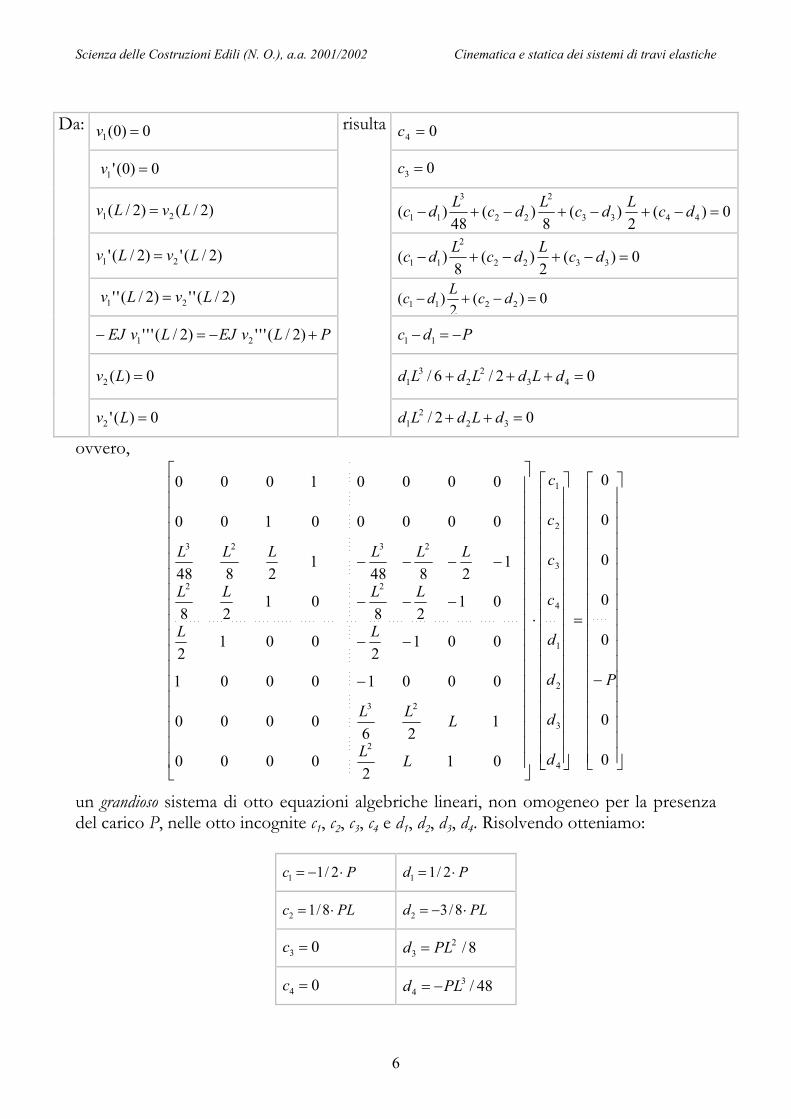
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
0)0(1 =v 04 =c
0)0('1 =v 03 =c
)2/()2/( 21 LvLv = 0)(2
)(8
)(48
)( 4433
2
22
3
11 =−+−+−+− dcLdcLdcLdc
)2/(')2/(' 21 LvLv = 0)(2
)(8
)( 3322
2
11 =−+−+− dcLdcLdc
)2/('')2/('' 21 LvLv = 0)(2
)( 2211 =−+− dcLdc
PLvEJLvEJ +−=− )2/(''')2/(''' 21 Pdc −=− 11
0)(2 =Lv 02/6/ 432
23
1 =+++ dLdLdLd
Da:
0)('2 =Lv
risulta
02/ 322
1 =++ dLdLd
ovvero,
−
=
⋅
−
−−
−−−
−−−−
0
0
0
0
0
0
0
012
0000
126
0000
00010001
0012
0012
0128
0128
12848
12848
00000100
00001000
4
3
2
1
4
3
2
1
2
23
22
2323
P
d
d
d
d
c
c
c
c
LL
LLL
LL
LLLL
LLLLLL
un grandioso sistema di otto equazioni algebriche lineari, non omogeneo per la presenza del carico P, nelle otto incognite c1, c2, c3, c4 e d1, d2, d3, d4. Risolvendo otteniamo:
Pc ⋅−= 2/11 Pd ⋅= 2/11
PLc ⋅= 8/12 PLd ⋅−= 8/32
03 =c 8/23 PLd =
04 =c 48/34 PLd −=
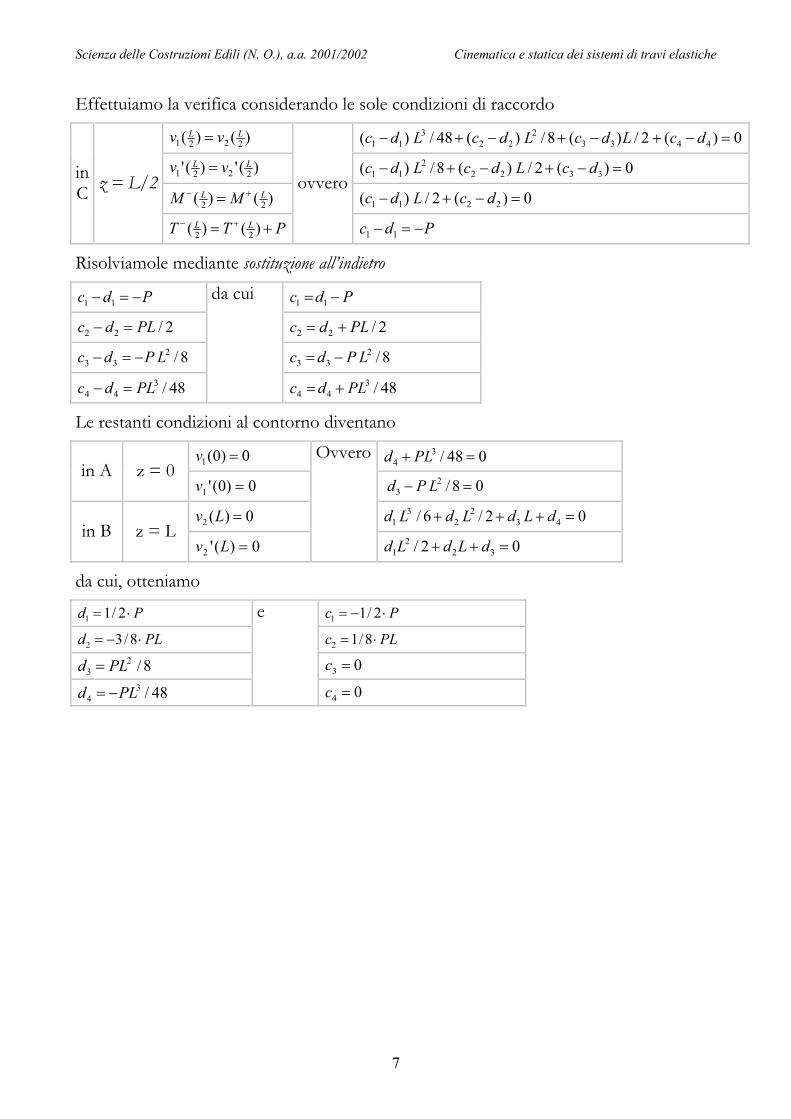
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
Effettuiamo la verifica considerando le sole condizioni di raccordo
)()( 2221LL vv = 0)(2/)(8/)(48/)( 4433
222
311 =−+−+−+− dcLdcLdcLdc
)(')(' 2221LL vv = 0)(2/)(8/)( 3322
211 =−+−+− dcLdcLdc
)()( 22LL MM +− = 0)(2/)( 2211 =−+− dcLdc
in C z = L/2
PTT LL += +− )()( 22
ovvero
Pdc −=− 11
Risolviamole mediante sostituzione all’indietro
Pdc −=− 11 Pdc −= 11
2/22 PLdc =− 2/22 PLdc +=
8/233 LPdc −=− 8/2
33 LPdc −=
48/344 PLdc =−
da cui
48/344 PLdc +=
Le restanti condizioni al contorno diventano
0)0(1 =v 048/34 =+ PLd
in A z = 0 0)0('1 =v 08/2
3 =− LPd
0)(2 =Lv 02/6/ 432
23
1 =+++ dLdLdLd in B z = L
0)('2 =Lv
Ovvero
02/ 322
1 =++ dLdLd
da cui, otteniamo
Pd ⋅= 2/11 Pc ⋅−= 2/11 PLd ⋅−= 8/32 PLc ⋅= 8/12 8/2
3 PLd = 03 =c 48/3
4 PLd −=
e
04 =c
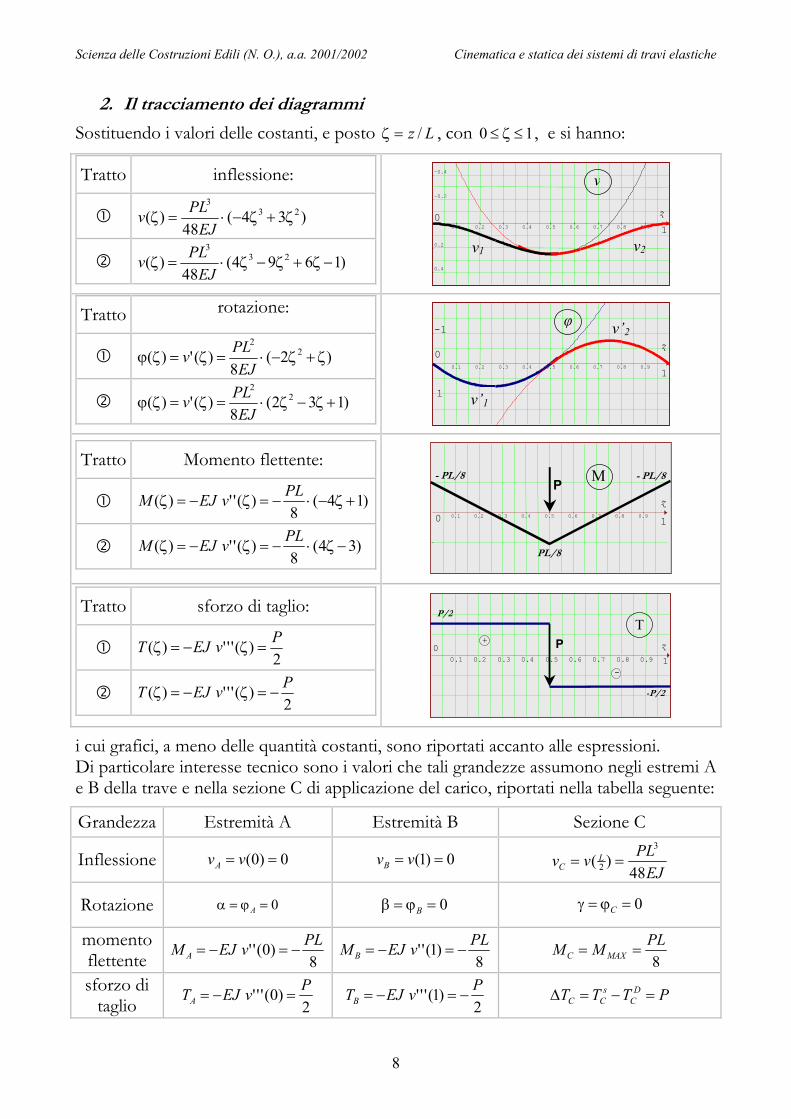
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
2. Il tracciamento dei diagrammi
Sostituendo i valori delle costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , e si hanno:
Tratto inflessione:
)34(48
)( 233
ζ+ζ−⋅=ζEJ
PLv
)1694(48
)( 233
−ζ+ζ−ζ⋅=ζEJ
PLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.4
0.2
0
-0.2
-0.4
1z
v
v2 v1
Tratto rotazione:
)2(8
)(')( 22
ζ+ζ−⋅=ζ=ζϕEJ
PLv
)132(8
)(')( 22
+ζ−ζ⋅=ζ=ζϕEJ
PLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0
-1
1
z
φ
v’1
v’2
Tratto Momento flettente:
)14(8
)('')( +ζ−⋅−=ζ−=ζPLvEJM
)34(8
)('')( −ζ⋅−=ζ−=ζPLvEJM
z0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
M P- PL/8 - PL/8
PL/8
Tratto sforzo di taglio:
2
)(''')( PvEJT =ζ−=ζ
2
)(''')( PvEJT −=ζ−=ζ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
P/2T
+
-
P z
-P/2
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Di particolare interesse tecnico sono i valori che tali grandezze assumono negli estremi A e B della trave e nella sezione C di applicazione del carico, riportati nella tabella seguente:
Grandezza Estremità A Estremità B Sezione C
Inflessione 0)0( == vvA 0)1( == vvB EJ
PLvv LC 48
)(3
2 ==
Rotazione 0=ϕ=α A 0=ϕ=β B 0=ϕ=γ C
momento flettente 8
)0('' PLvEJM A −=−=8
)1('' PLvEJM B −=−=8
PLMM MAXC ==
sforzo di taglio 2
)0(''' PvEJTA =−= 2
)1(''' PvEJTB −=−= PTTT DC
sCC =−=∆
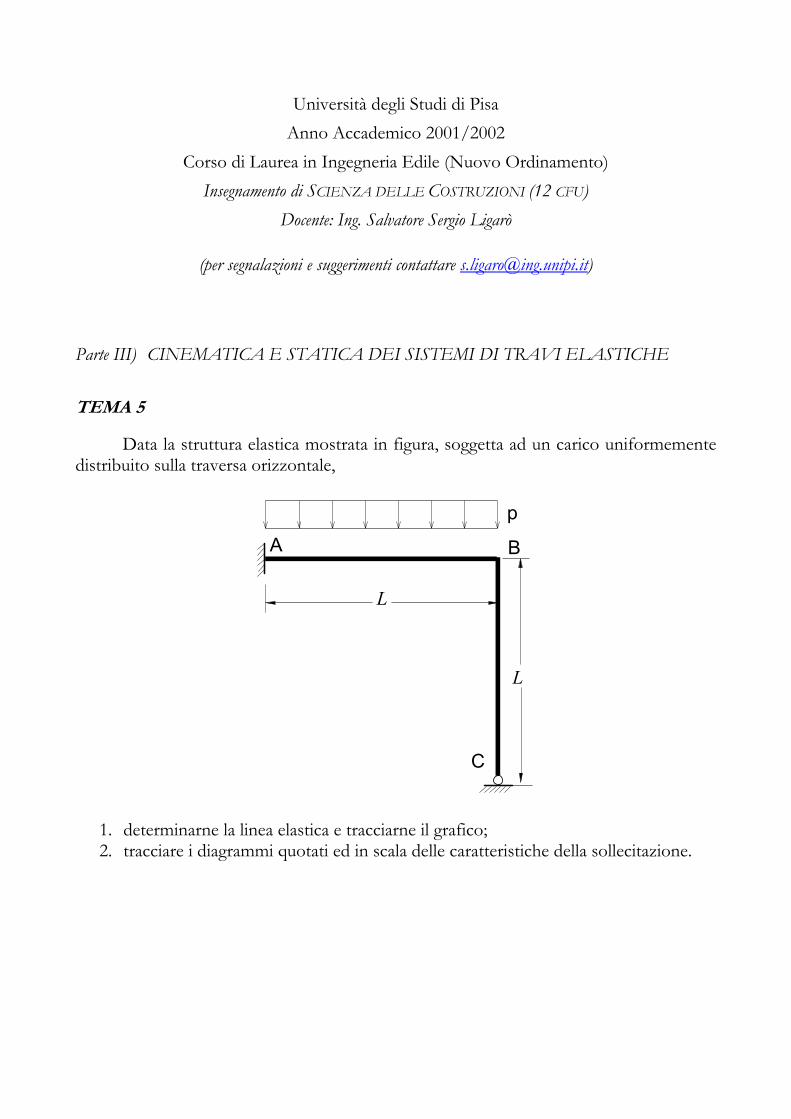
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA 5
Data la struttura elastica mostrata in figura, soggetta ad un carico uniformemente distribuito sulla traversa orizzontale,
p
L
A B
L
C
1. determinarne la linea elastica e tracciarne il grafico; 2. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
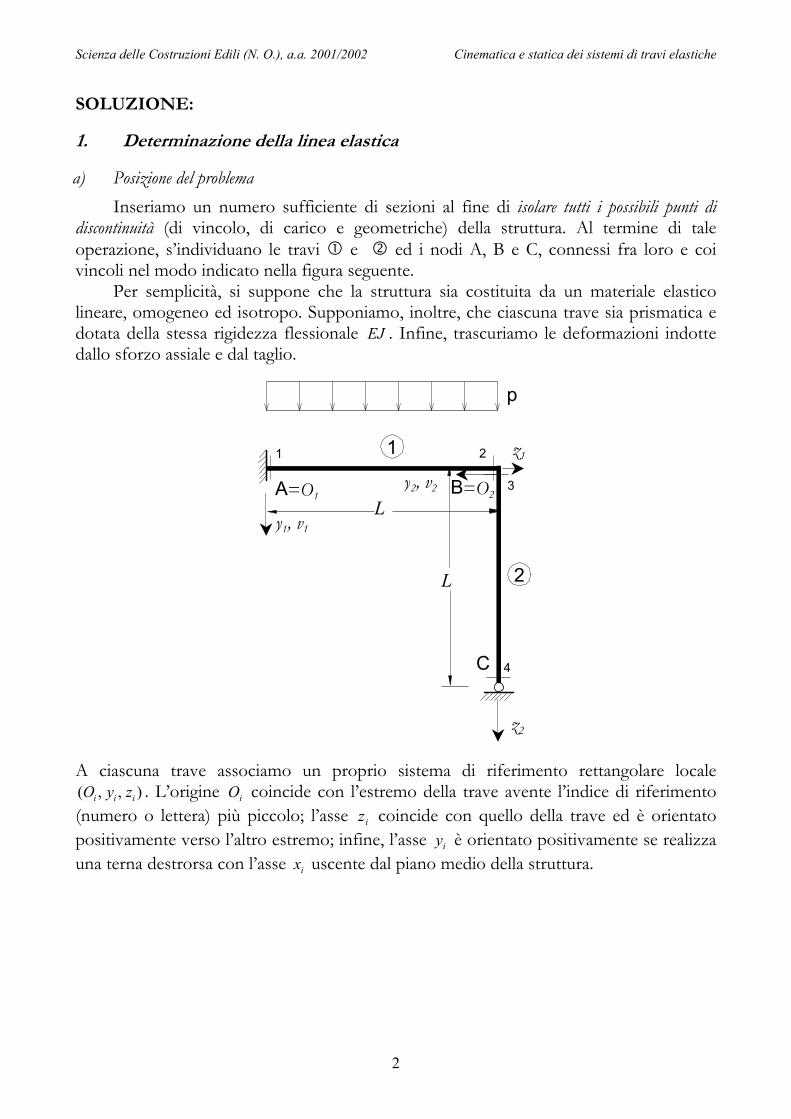
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) della struttura. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
Per semplicità, si suppone che la struttura sia costituita da un materiale elastico lineare, omogeneo ed isotropo. Supponiamo, inoltre, che ciascuna trave sia prismatica e dotata della stessa rigidezza flessionale EJ . Infine, trascuriamo le deformazioni indotte dallo sforzo assiale e dal taglio.
p
L
1 21
A=O1
z1
y1, v1
L
C
3
4
2
z2
y2, v2 B=O2
A ciascuna trave associamo un proprio sistema di riferimento rettangolare locale ),,( iii zyO . L’origine iO coincide con l’estremo della trave avente l’indice di riferimento
(numero o lettera) più piccolo; l’asse iz coincide con quello della trave ed è orientato positivamente verso l’altro estremo; infine, l’asse iy è orientato positivamente se realizza una terna destrorsa con l’asse ix uscente dal piano medio della struttura.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz << 10 pvEJ iv =1 equazione differenziale della linea elastica nel tratto
Lz << 20 02 =ivvEJ equazione differenziale della linea elastica nel tratto 0)0(1 =v condizione al contorno geometrica
A 01 =z 0)0('1 =v condizione al contorno geometrica 0)(1 =Lv condizione di raccordo geometrica 0)0(2 =v condizione di raccordo geometrica
)0(')(' 21 vLv = condizione di raccordo geometrica B 0, 21 == zLz
)0()( +− = BB MLM condizione di raccordo statica 0)(2 =Lv condizione al contorno geometrica
in
C Lz =2 0)( =LMC condizione al contorno statica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche si scrivono
B 0, 21 == zLz )0('')('' 21 vLv = condizione di raccordo statica in
C Lz =2 0)(''2 =Lv condizione al contorno statica
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottiene
Integrazione Tratto Tratto
0) pvEJ iv =1 02 =ivvEJ
1) 111 ''' cpzvEJ += 12 ''' dvEJ =
2) 211
21
1 2'' czczpvEJ ++= 2212 '' dzdvEJ +=
3) 312
21
1
31
1 26' czczczpvEJ +++= 322
22
12 2' dzdzdvEJ ++=
4) 413
21
2
31
1
41
1 2624czczczczpvEJ ++++= 423
22
2
32
12 26dzdzdzdvEJ +++=
in cui le otto costanti incognite c1, c2, c3, c4 e d1, d2, d3, d4 devono essere determinate attraverso le condizioni al contorno e di raccordo prima scritte.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
0)0(1 =v 04 =c
0)0('1 =v 03 =c
0)(1 =Lv 02624 43
2
2
3
1
4
=++++ cLcLcLcLp
0)0(2 =v 04 =d
)0(')(' 21 vLv = 332
2
1
3
26dcLcLcLp =+++
)0('')('' 21 vLv = 221
2
2dcLcLp =++
0)(2 =Lv 026 43
2
2
3
1 =+++ dLdLdLd
Da:
0)(''2 =Lv
risulta
021 =+ dLd
ovvero,
−
−
−
=
⋅
−
−
0
0
2/
6/
0
24/
0
0
0010000
12/6/0000
0010001
0100012/
10000000
000012/6/
00000100
00001000
2
3
4
4
3
2
1
4
3
2
1
23
2
23
pL
pL
pL
d
d
d
d
c
c
c
c
L
LLL
L
LL
LLL
un sistema di otto equazioni algebriche lineari, non omogeneo per la presenza del carico p, nelle otto incognite c1, c2, c3, c4 e d1, d2, d3, d4. Risolvendo otteniamo:
pLc ⋅−= 7/41 pLd ⋅−= 28/11
22 84/9 pLc ⋅= 2
2 28/1 pLd ⋅=
03 =c 33 84/1 pLd −=
04 =c 04 =d
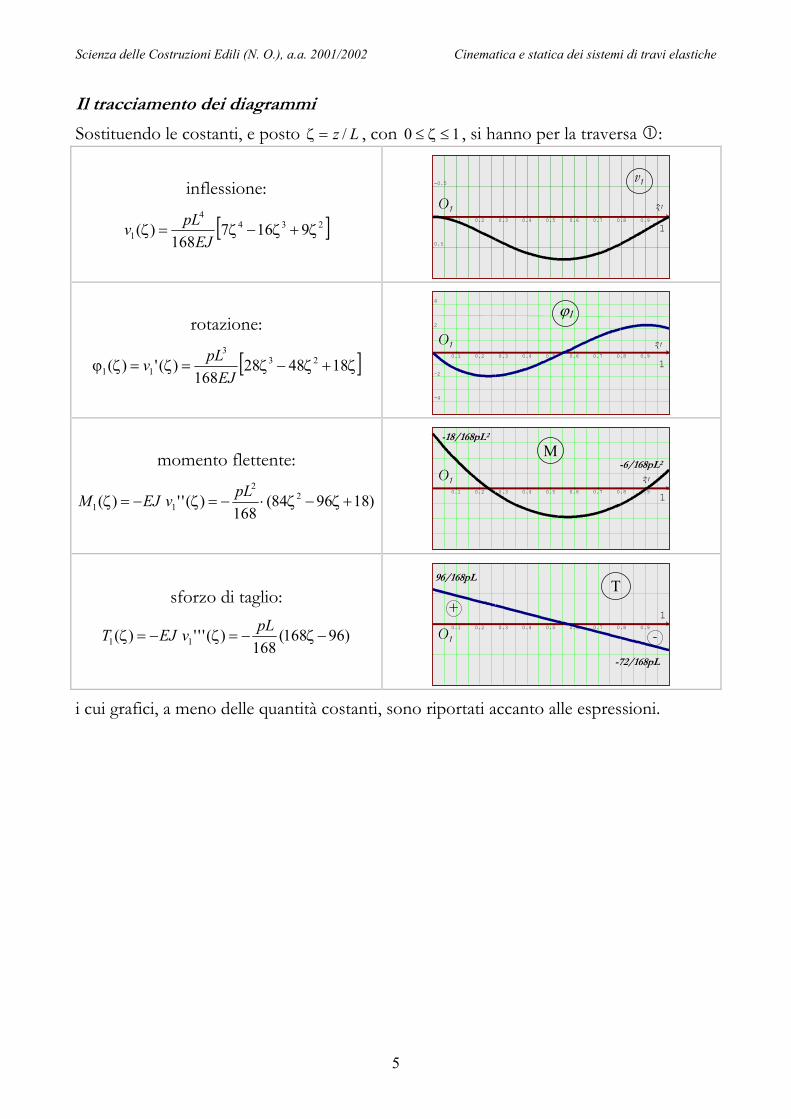
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
Il tracciamento dei diagrammi
Sostituendo le costanti, e posto Lz /=ζ , con 10 ≤ζ≤ , si hanno per la traversa :
inflessione:
[ ]2344
1 9167168
)( ζ+ζ−ζ=ζEJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0.5
-0.5
z1
1
v1
O1
rotazione:
[ ]ζ+ζ−ζ=ζ=ζϕ 184828168
)(')( 233
11 EJpLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
-4
-2
2
4
z1
1
ϕ1
O1
momento flettente:
)189684(168
)('')( 22
11 +ζ−ζ⋅−=ζ−=ζpLvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z1
1
-18/168pL2
M-6/168pL2
O1
sforzo di taglio:
)96168(168
)(''')( 11 −ζ−=ζ−=ζpLvEJT
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
96/168pLT
+
--72/168pL
O1
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni.
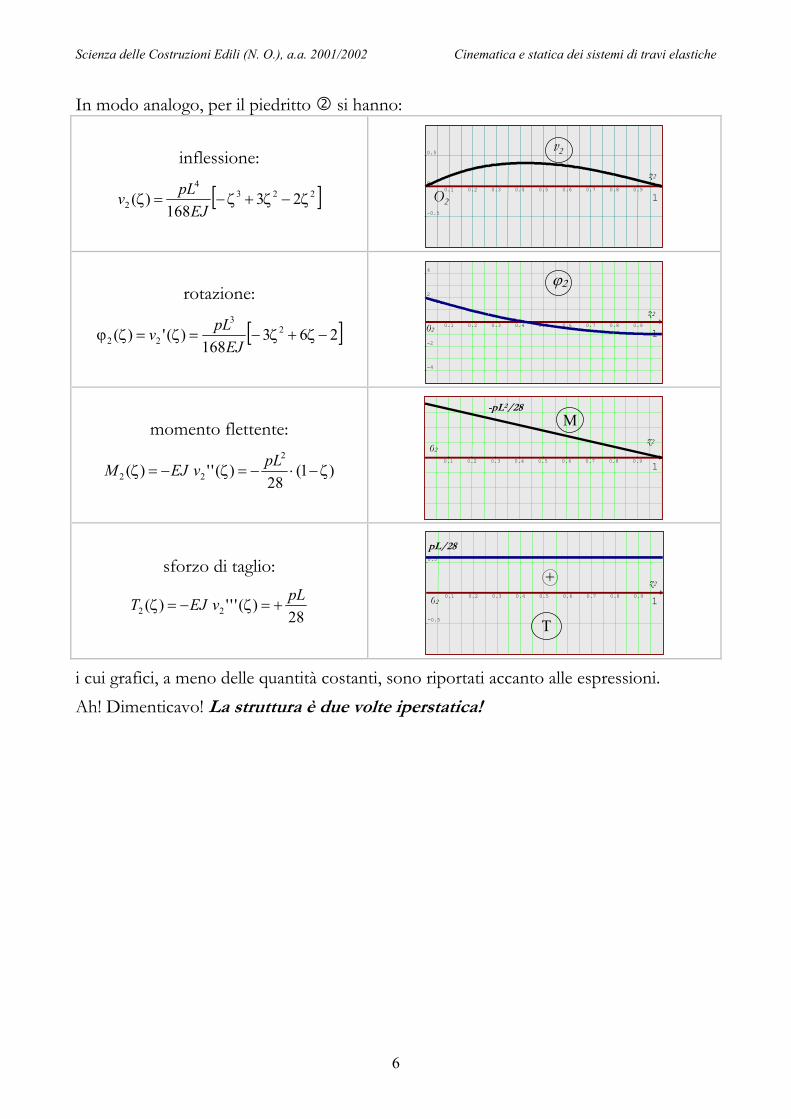
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
In modo analogo, per il piedritto si hanno:
inflessione:
[ ]2234
2 23168
)( ζ−ζ+ζ−=ζEJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -0.5
0
0.5
z2
1
v2
O2
rotazione:
[ ]263168
)(')( 23
22 −ζ+ζ−=ζ=ζϕEJ
pLv
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
-4
-2
2
4
z2
102
ϕ2
momento flettente:
)1(28
)('')(2
22 ζ−⋅−=ζ−=ζpLvEJM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 z2
102
-pL2/28M
sforzo di taglio:
28)(''')( 22
pLvEJT +=ζ−=ζ
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -0.5
0.5pL/28
T
+ z2
102
i cui grafici, a meno delle quantità costanti, sono riportati accanto alle espressioni. Ah! Dimenticavo! La struttura è due volte iperstatica!
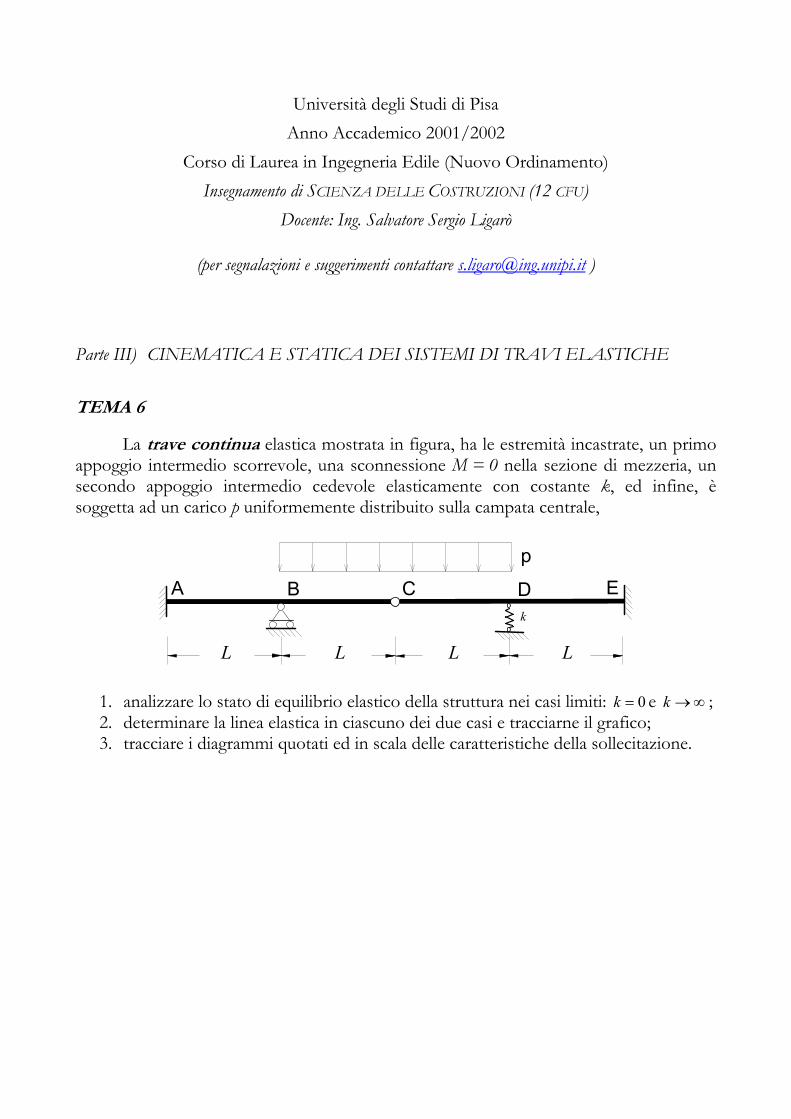
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA 6
La trave continua elastica mostrata in figura, ha le estremità incastrate, un primo appoggio intermedio scorrevole, una sconnessione M = 0 nella sezione di mezzeria, un secondo appoggio intermedio cedevole elasticamente con costante k, ed infine, è soggetta ad un carico p uniformemente distribuito sulla campata centrale,
p
L
A B C
L L L
D E k
1. analizzare lo stato di equilibrio elastico della struttura nei casi limiti: 0=k e ∞→k ; 2. determinare la linea elastica in ciascuno dei due casi e tracciarne il grafico; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
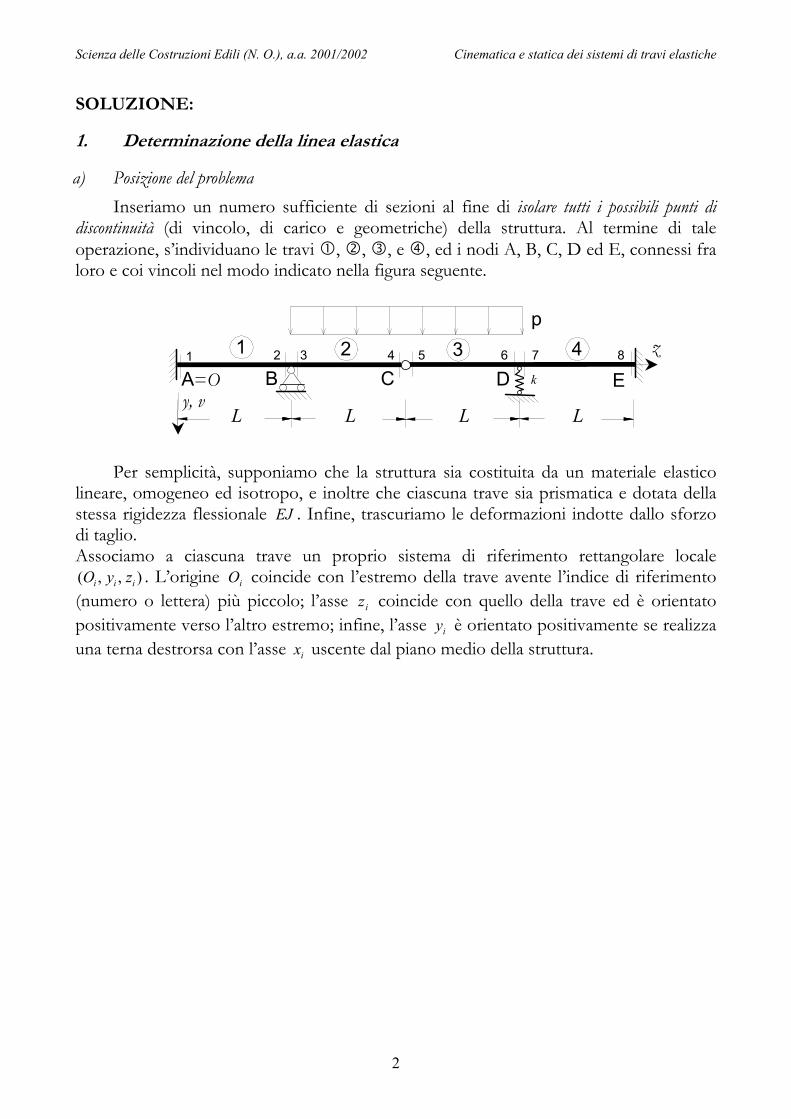
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
SOLUZIONE:
1. Determinazione della linea elastica
a) Posizione del problema Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di
discontinuità (di vincolo, di carico e geometriche) della struttura. Al termine di tale operazione, s’individuano le travi , , , e , ed i nodi A, B, C, D ed E, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
p
L
B C
L L L
D E k
1 2 1
A=O
z
y, v
3 4 5 6 7 8 2 3 4
Per semplicità, supponiamo che la struttura sia costituita da un materiale elastico lineare, omogeneo ed isotropo, e inoltre che ciascuna trave sia prismatica e dotata della stessa rigidezza flessionale EJ . Infine, trascuriamo le deformazioni indotte dallo sforzo di taglio. Associamo a ciascuna trave un proprio sistema di riferimento rettangolare locale
),,( iii zyO . L’origine iO coincide con l’estremo della trave avente l’indice di riferimento (numero o lettera) più piccolo; l’asse iz coincide con quello della trave ed è orientato positivamente verso l’altro estremo; infine, l’asse iy è orientato positivamente se realizza una terna destrorsa con l’asse ix uscente dal piano medio della struttura.
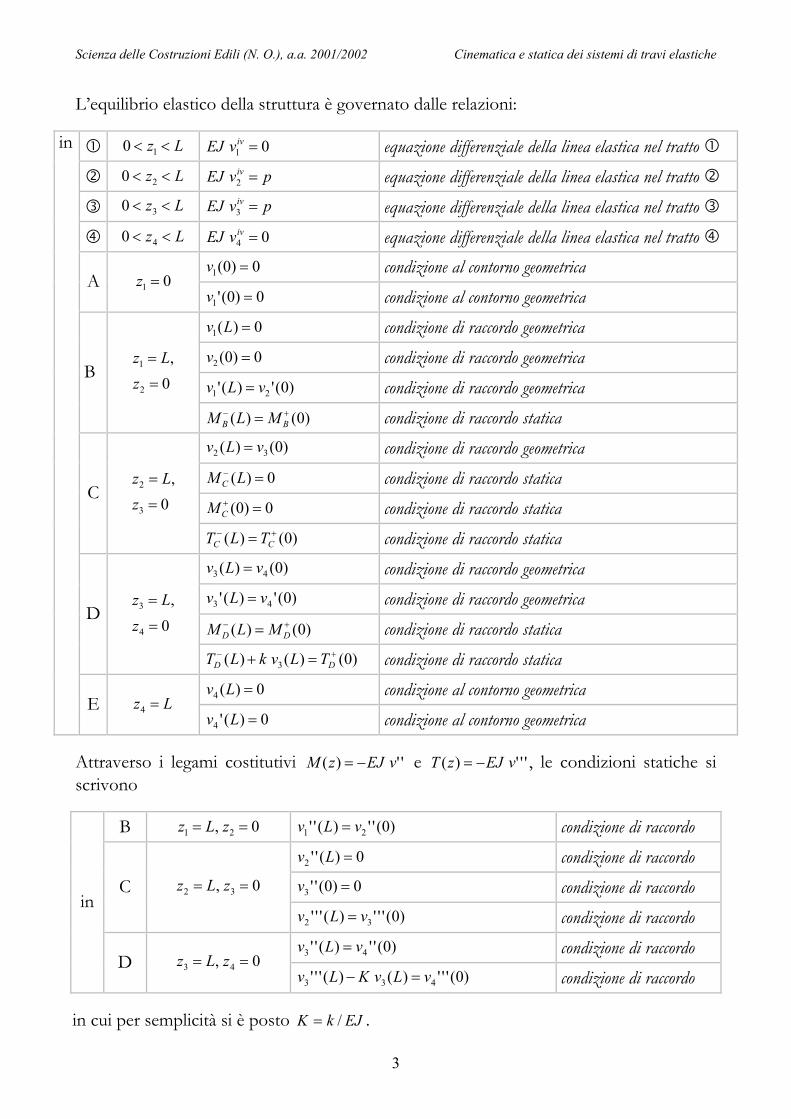
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
L’equilibrio elastico della struttura è governato dalle relazioni:
Lz << 10 01 =ivvEJ equazione differenziale della linea elastica nel tratto
Lz << 20 pvEJ iv =2 equazione differenziale della linea elastica nel tratto
Lz << 30 pvEJ iv =3 equazione differenziale della linea elastica nel tratto
Lz << 40 04 =ivvEJ equazione differenziale della linea elastica nel tratto 0)0(1 =v condizione al contorno geometrica
A 01 =z 0)0('1 =v condizione al contorno geometrica 0)(1 =Lv condizione di raccordo geometrica 0)0(2 =v condizione di raccordo geometrica
)0(')(' 21 vLv = condizione di raccordo geometrica B
0,
2
1
=
=
zLz
)0()( +− = BB MLM condizione di raccordo statica )0()( 32 vLv = condizione di raccordo geometrica
0)( =− LM C condizione di raccordo statica 0)0( =+
CM condizione di raccordo statica C
0,
3
2
=
=
zLz
)0()( +− = CC TLT condizione di raccordo statica )0()( 43 vLv = condizione di raccordo geometrica
)0(')(' 43 vLv = condizione di raccordo geometrica )0()( +− = DD MLM condizione di raccordo statica
D 0
,
4
3
=
=
zLz
)0()()( 3+− =+ DD TLvkLT condizione di raccordo statica
0)(4 =Lv condizione al contorno geometrica
in
E Lz =4 0)('4 =Lv condizione al contorno geometrica
Attraverso i legami costitutivi '')( vEJzM −= e ''')( vEJzT −= , le condizioni statiche si scrivono
B 0, 21 == zLz )0('')('' 21 vLv = condizione di raccordo 0)(''2 =Lv condizione di raccordo 0)0(''3 =v condizione di raccordo C 0, 32 == zLz
)0(''')(''' 32 vLv = condizione di raccordo )0('')('' 43 vLv = condizione di raccordo
in
D 0, 43 == zLz )0(''')()(''' 433 vLvKLv =− condizione di raccordo
in cui per semplicità si è posto EJkK /= .
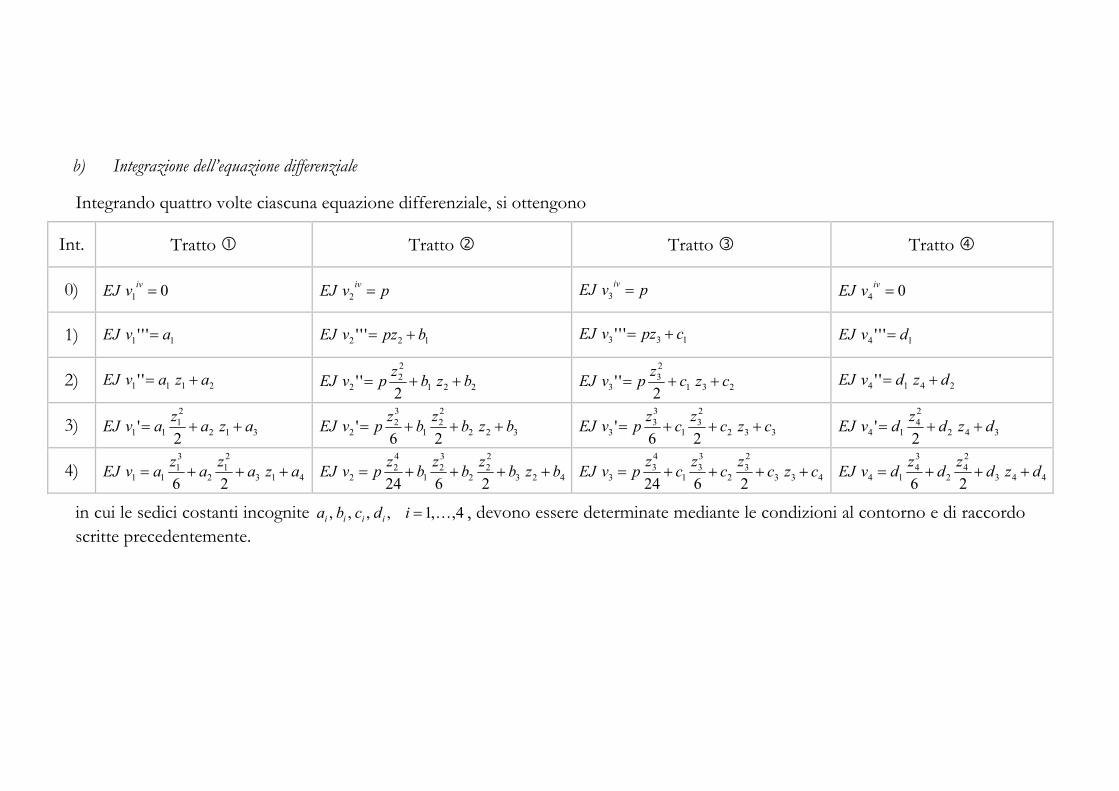
b) Integrazione dell’equazione differenziale
Integrando quattro volte ciascuna equazione differenziale, si ottengono
Int. Tratto Tratto Tratto Tratto
0) 01 =ivvEJ pvEJ iv =2 pvEJ iv =3 04 =ivvEJ
1) 11 ''' avEJ = 122 ''' bpzvEJ += 133 ''' cpzvEJ += 14 ''' dvEJ =
2) 2111 '' azavEJ += 221
22
2 2'' bzbzpvEJ ++= 231
23
3 2'' czczpvEJ ++= 2414 '' dzdvEJ +=
3) 312
21
11 2' azazavEJ ++= 322
22
1
32
2 26' bzbzbzpvEJ +++= 332
23
1
33
3 26' czczczpvEJ +++= 342
24
14 2' dzdzdvEJ ++=
4) 413
21
2
31
11 26azazazavEJ +++= 423
22
2
32
1
42
2 2624bzbzbzbzpvEJ ++++= 433
23
2
33
1
43
3 2624czczczczpvEJ ++++= 443
24
2
34
14 26dzdzdzdvEJ +++=
in cui le sedici costanti incognite 4,,1,,,, K=idcba iiii , devono essere determinate mediante le condizioni al contorno e di raccordo scritte precedentemente.

0)0(1 =v 04 =a
0)0('1 =v 03 =a
0)(1 =Lv 026 43
2
2
3
1 =+++ aLaLaLa
0)0(2 =v 04 =b
)0(')(' 21 vLv = 332
2
1 2baLaLa =++
)0('')('' 21 vLv = 221 baLa =+
)0()( 32 vLv = 443
2
2
3
1
4
2624cbLbLbLbLp =++++
0)(''2 =Lv 02 21
2
=++ bLbLp
0)0(''3 =v 02 =c
)0(''')(''' 32 vLv = 11 cbLp =+
)0()( 43 vLv = 443
2
2
3
1
4
2624dcLcLcLcLp =++++
)0(')(' 43 vLv = 332
2
1
3
26dcLcLcLp =+++
)0('')('' 43 vLv = 221
2
2dcLcLp =++
Da:
)0(''')0()(''' 443 vvKLv =−
risulta
141 ddKcpL =⋅−+
0)(4 =Lv 026 43
2
2
3
1 =+++ dLdLdLd
0)('4 =Lv 02 32
2
1 =++ dLdLd
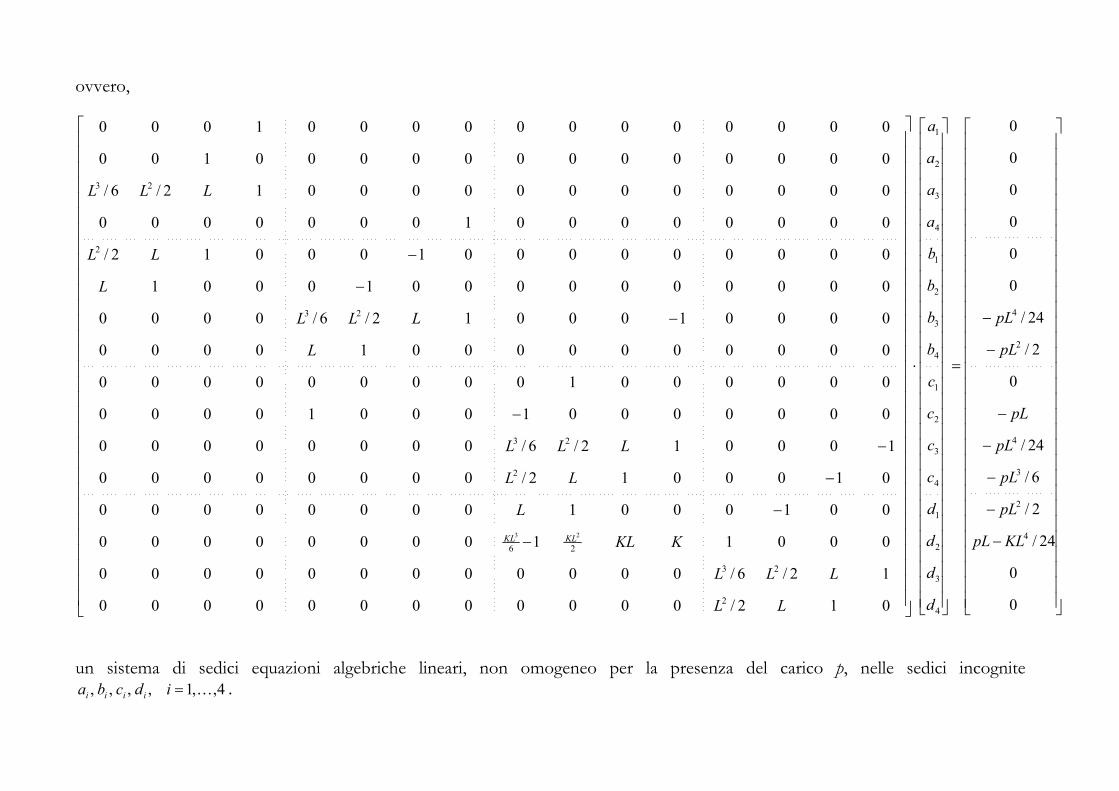
ovvero,
−
−
−
−
−
−
−
=
⋅
−
−
−
−
−
−
−
−
0
0
24/
2/
6/
24/
0
2/
24/
0
0
0
0
0
0
012/000000000000
12/6/000000000000
0001100000000
001000100000000
0100012/00000000
100012/6/00000000
0000000100010000
0000001000000000
000000000010000
0000100012/6/0000
000000000010001
000000000100012/
0000000010000000
00000000000012/6/
0000000000000100
0000000000001000
4
2
3
4
2
4
4
3
2
1
4
3
2
1
4
3
2
1
4
3
2
1
2
23
26
2
23
23
2
23
23 KLpL
pL
pL
pL
pL
pL
pL
d
d
d
d
c
c
c
c
b
b
b
b
a
a
a
a
LL
LLL
KKL
L
LL
LLL
L
LLL
L
LL
LLL
KLKL
un sistema di sedici equazioni algebriche lineari, non omogeneo per la presenza del carico p, nelle sedici incognite 4,,1,,,, K=idcba iiii .
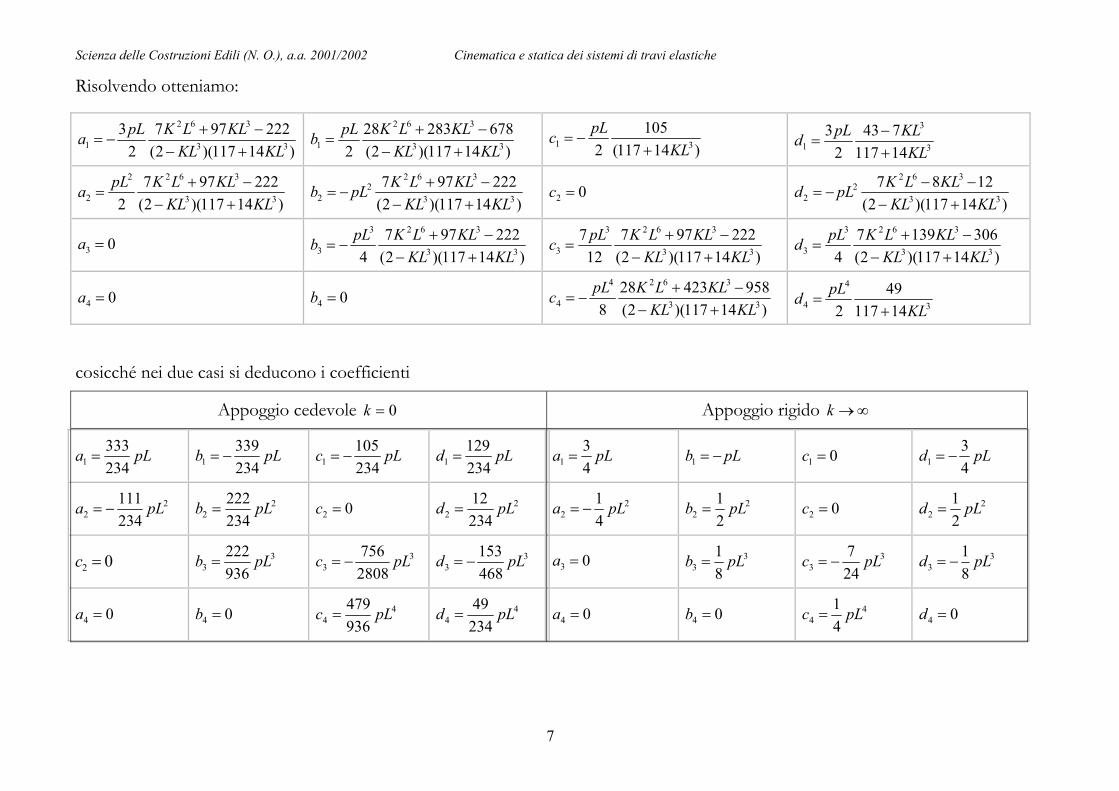
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
Risolvendo otteniamo:
)14117)(2(222977
23
33
362
1 KLKLKLLKpLa
+−−+
−= )14117)(2(
678283282 33
362
1 KLKLKLLKpLb+−
−+=
)14117(105
2 31 KLpLc
+−=
3
3
1 14117743
23
KLKLpLd
+−
=
)14117)(2(222977
2 33
3622
2 KLKLKLLKpLa
+−−+
= )14117)(2(
22297733
3622
2 KLKLKLLKpLb
+−−+
−= 02 =c )14117)(2(
128733
3622
2 KLKLKLLKpLd
+−−−
−=
03 =a )14117)(2(
2229774 33
3623
3 KLKLKLLKpLb
+−−+
−=)14117)(2(
22297712
733
3623
3 KLKLKLLKpLc
+−−+
= )14117)(2(
30613974 33
3623
3 KLKLKLLKpLd+−
−+=
04 =a 04 =b )14117)(2(
958423288 33
3624
4 KLKLKLLKpLc+−
−+−=
3
4
4 1411749
2 KLpLd
+=
cosicché nei due casi si deducono i coefficienti
Appoggio cedevole 0=k Appoggio rigido ∞→k
pLa234333
1 = pLb234339
1 −= pLc234105
1 −= pLd234129
1 =
22 234
111 pLa −= 22 234
222 pLb = 02 =c 22 234
12 pLd =
02 =c 33 936
222 pLb = 33 2808
756 pLc −= 33 468
153 pLd −=
04 =a 04 =b 44 936
479 pLc = 44 234
49 pLd =
pLa43
1 = pLb −=1 01 =c pLd43
1 −=
22 4
1 pLa −= 22 2
1 pLb = 02 =c 22 2
1 pLd =
03 =a 33 8
1 pLb = 33 24
7 pLc −= 33 8
1 pLd −=
04 =a 04 =b 44 4
1 pLc = 04 =d
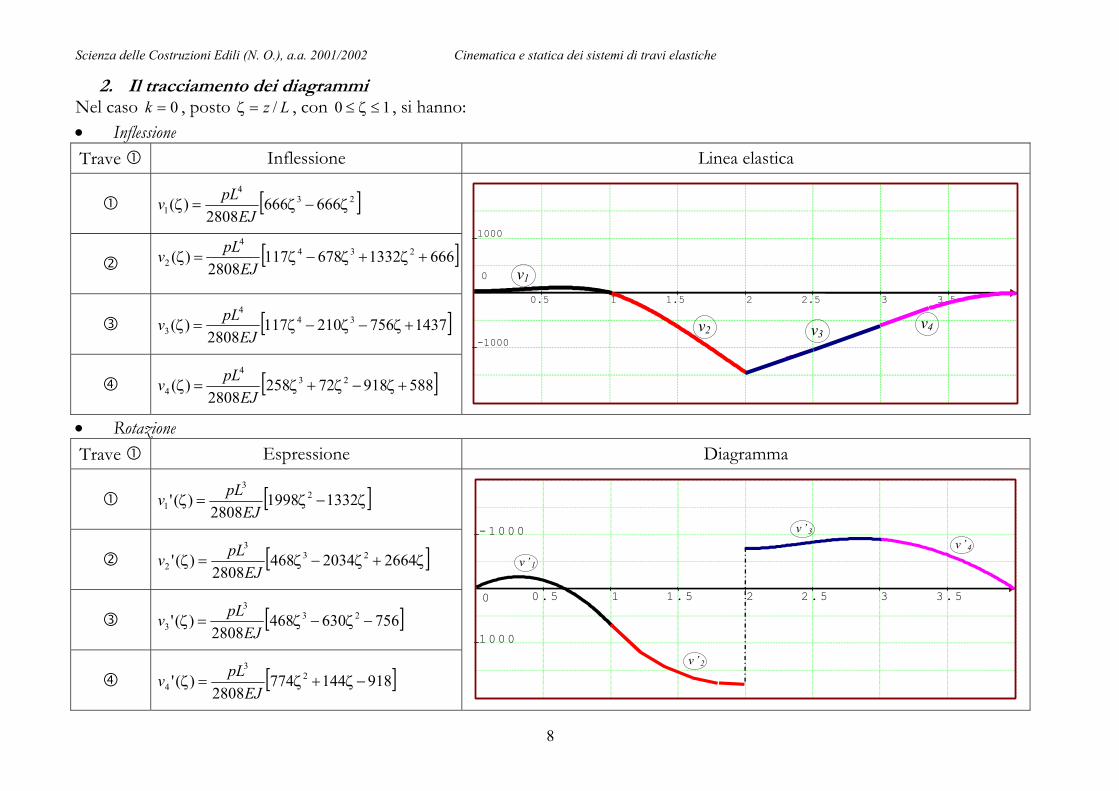
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
2. Il tracciamento dei diagrammi Nel caso 0=k , posto Lz /=ζ , con 10 ≤ζ≤ , si hanno: • Inflessione Trave Inflessione Linea elastica
[ ]234
1 6666662808
)( ζ−ζ=ζEJ
pLv
[ ]66613326781172808
)( 2344
2 +ζ+ζ−ζ=ζEJ
pLv
[ ]14377562101172808
)( 344
3 +ζ−ζ−ζ=ζEJ
pLv
[ ]588918722582808
)( 234
4 +ζ−ζ+ζ=ζEJ
pLv
0.5 1 1.5 2 2.5 3 3.5
-1000
0
1000
v4
v1
v2 v3
• Rotazione Trave Espressione Diagramma
[ ]ζ−ζ=ζ 133219982808
)(' 23
1 EJpLv
[ ]ζ+ζ−ζ=ζ 266420344682808
)(' 233
2 EJpLv
[ ]7566304682808
)(' 233
3 −ζ−ζ=ζEJ
pLv
[ ]9181447742808
)(' 23
4 −ζ+ζ=ζEJ
pLv
0.5 1 1.5 2 2.5 3 3.5
1000
0
-1000v ’4
v ’1
v ’2
v ’3
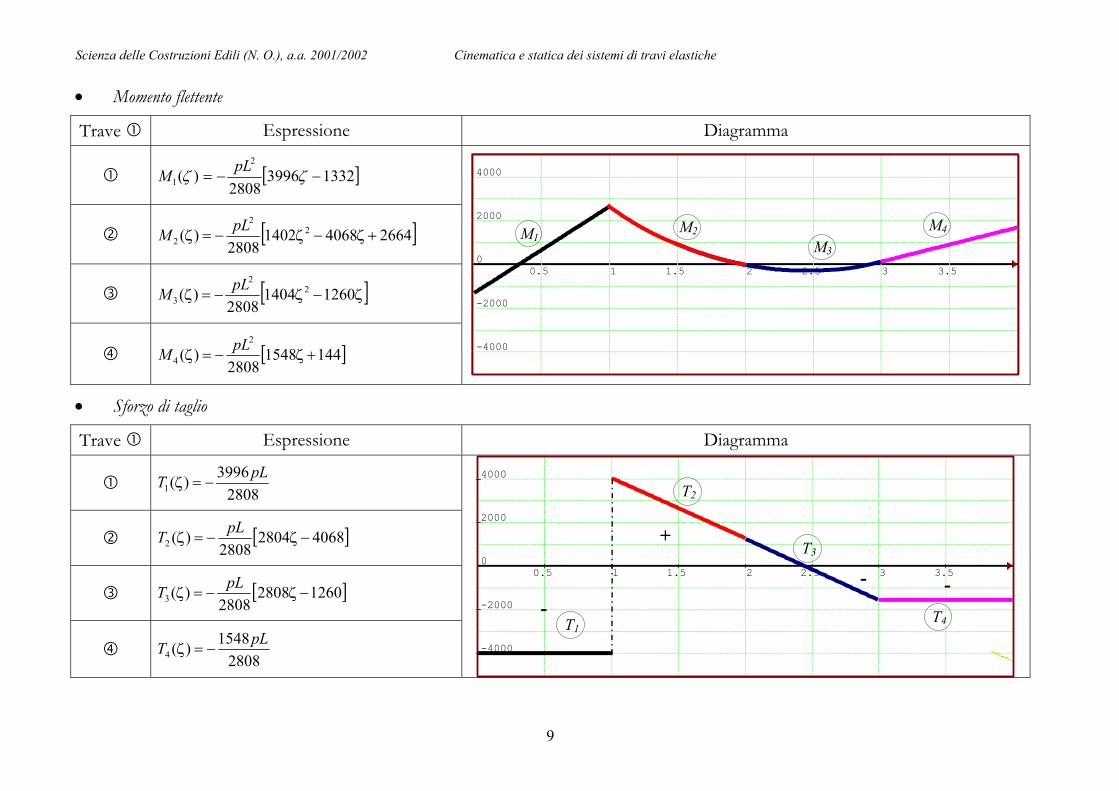
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
9
• Momento flettente
Trave Espressione Diagramma
[ ]133239962808
)(2
1 −−= ζζ pLM
[ ]2664406814022808
)( 22
2 +ζ−ζ−=ζpLM
[ ]ζ−ζ−=ζ 126014042808
)( 22
3pLM
[ ]14415482808
)(2
4 +ζ−=ζpLM
0.5 1 1.5 2 2.5 3 3.5
-4000
-2000
0
2000
4000
M1M2
M3
M4
• Sforzo di taglio
Trave Espressione Diagramma
2808
3996)(1pLT −=ζ
[ ]406828042808
)(2 −ζ−=ζpLT
[ ]126028082808
)(3 −ζ−=ζpLT
2808
1548)(4pLT −=ζ
0.5 1 1.5 2 2.5 3 3.5
-4000
-2000
0
2000
4000
T1
T2
T3
T4-
+
--
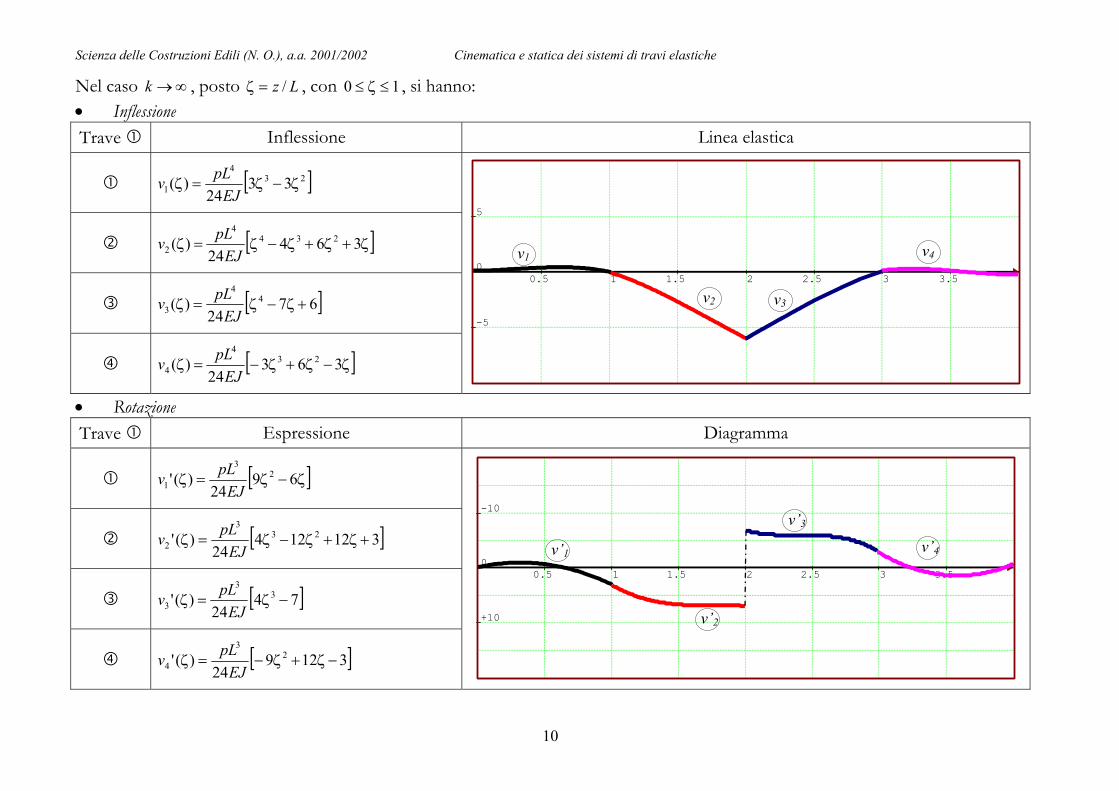
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
10
Nel caso ∞→k , posto Lz /=ζ , con 10 ≤ζ≤ , si hanno: • Inflessione Trave Inflessione Linea elastica
[ ]234
1 3324
)( ζ−ζ=ζEJ
pLv
[ ]ζ+ζ+ζ−ζ=ζ 36424
)( 2344
2 EJpLv
[ ]6724
)( 44
3 +ζ−ζ=ζEJ
pLv
[ ]ζ−ζ+ζ−=ζ 36324
)( 234
4 EJpLv
0.5 1 1.5 2 2.5 3 3.5
-5
0
5
v4 v1
v2 v3
• Rotazione Trave Espressione Diagramma
[ ]ζ−ζ=ζ 6924
)(' 23
1 EJpLv
[ ]31212424
)(' 233
2 +ζ+ζ−ζ=ζEJ
pLv
[ ]7424
)(' 33
3 −ζ=ζEJ
pLv
[ ]312924
)(' 23
4 −ζ+ζ−=ζEJ
pLv
0.5 1 1.5 2 2.5 3 3.5
+10
0
-10
v’4v’1
v’2
v’3
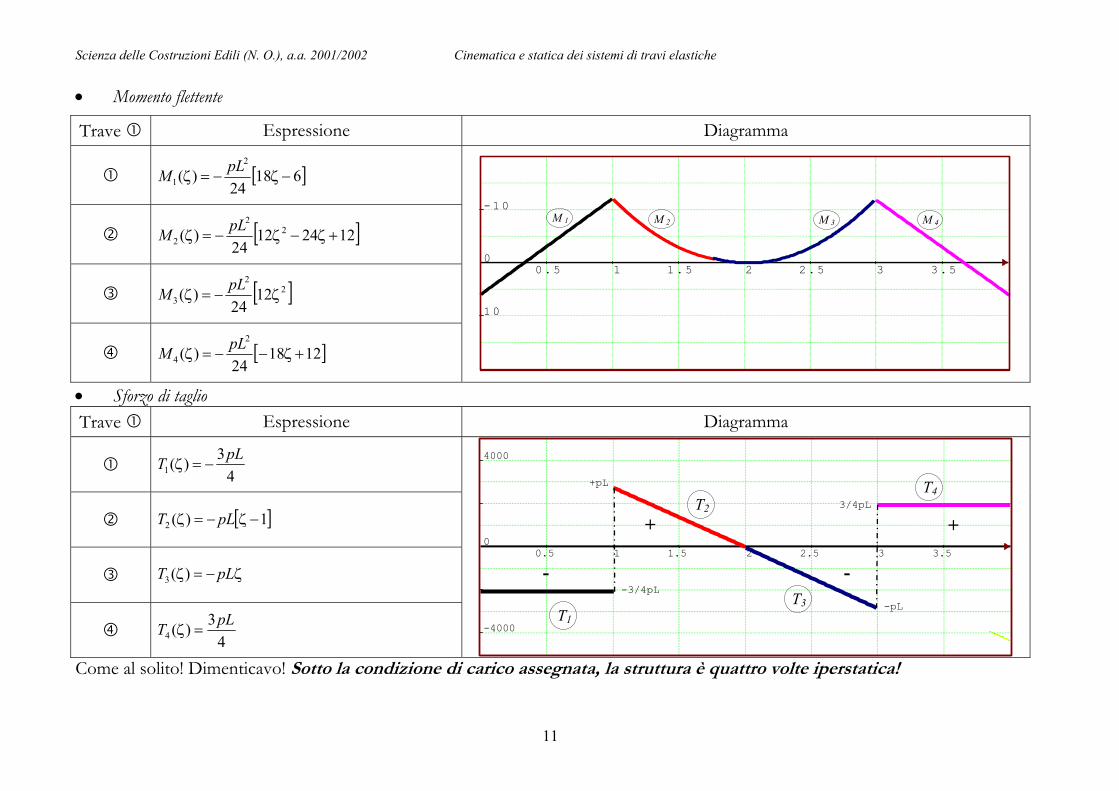
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
11
• Momento flettente
Trave Espressione Diagramma
[ ]61824
)(2
1 −ζ−=ζpLM
[ ]12241224
)( 22
2 +ζ−ζ−=ζpLM
[ ]22
3 1224
)( ζ−=ζpLM
[ ]121824
)(2
4 +ζ−−=ζpLM
0.5 1 1.5 2 2.5 3 3.5
10
0
-10M 1 M 2 M 3 M 4
• Sforzo di taglio Trave Espressione Diagramma
4
3)(1pLT −=ζ
[ ]1)(2 −ζ−=ζ pLT
ζ−=ζ pLT )(3
4
3)(4pLT =ζ
0.5 1 1.5 2 2.5 3 3.5
-4000-pL
0
+pL
4000
T1
T2
T3
T4
-
++3/4pL
--3/4pL
Come al solito! Dimenticavo! Sotto la condizione di carico assegnata, la struttura è quattro volte iperstatica!
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA 7a
Data la mensola elastica uniformemente caricata mostrata in figura,
p
L
A B
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
p
L
1 21
A=O B
z,w
y,v

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
Per semplicità, supponiamo che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. Infine, indichiamo con
LEJNN BAAB
2== , la semirigidezza della trave.
Operando col metodo degli spostamenti, le incognite del problema strutturale coincidono con le sei componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ • nodo B: Bw , Bv , Bϕ
D’altra parte, le condizioni al contorno risultano:
in A:
=ϕ
=
=
0
0
0
A
A
A
v
w
, in B:
=
=
=
0
0
0
B
yB
zB
M
P
P
,
per cui la struttura risulta tre volte cinematicamente indeterminata. Se, come nel caso in esame, la trave non varia la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché può ritenersi indeformabile assialmente, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww = ,
per cui 0=Bw , e la struttura diviene soltanto due volte cinematicamente indeterminata; infine, poiché una delle incognite è una traslazione, la struttura è a nodi mobili.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Bv e Bϕ scriviamo le seguenti equazioni:
Incognita Tipo Equazione Bv Spostamento secondo y Equilibrio alla traslazione secondo l’asse y Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B
L’equazione di equilibrio alla traslazione secondo l’asse y, può essere sostituita dall’equazione di equilibrio alla rotazione attorno al nodo A del sistema principale, necessariamente labile, essendo la struttura a nodi mobili, come mostrato nella figura successiva, e ottenuto inserendo una cerniera ideale in ciascuno dei nodi.
p
L A=O
B z
y,v
MAB θ vB

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
Facendo uso del principio dei lavori virtuali, si ottiene
022
22
=θ
+=θ+θ=
pLMpLML ABABve , ovvero, per l’arbitrarietà di θ, 2
2pLM AB −= .
Utilizzando il legame costitutivo, tale equazione può essere scritta in termini delle incognite componenti di spostamento nodali come
212)3(
22 pLpLN ABBAB −=−ψ−ϕ⋅ .
L’equilibrio alla rotazione intorno al nodo B si scrive
012
322
=+ψ−ϕpLNN ABABABB .
3. Determinazione dei coefficienti della linea elastica
La soluzione del problema strutturale coincide con la soluzione del sistema:
−=ψ−ϕ
−=ψ−ϕ
EJpLEJ
pL
ABB
ABB
2432
2453
3
3
, ovvero,
=ψ
=ϕ
EJpLEJ
pL
AB
B
8
63
3
,
per cui
EJpLLv ABB 8
4
=⋅ψ= .
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
212)
83
6(2)32(
2233 pLpLEJ
pLEJ
pLLEJMNM ABABBAABAB −=−⋅−=+ψ−ϕ+ϕ= ,
012
)8
36
2(2)32(233
=+⋅−⋅=+ψ−ϕ+ϕ=pL
EJpL
EJpL
LEJMNM BABAABBABA ,
e, successivamente, i tagli orari di estremità:
pLL
pLpL
LMMT BBAAB
AB =−−
−=++
−= 22
22
M ,
022
22
=+−
−=++
−=L
pLpL
LMMT ABAAB
BAM .
Infine, le costanti dell’equazione differenziale della linea elastica, risultano:
pLTc −=−= )0(1 , 2/)0( 22 pLMc =−= , 0)0('3 =ϕ== AEJvc , 0)0(4 === AvEJvc ,
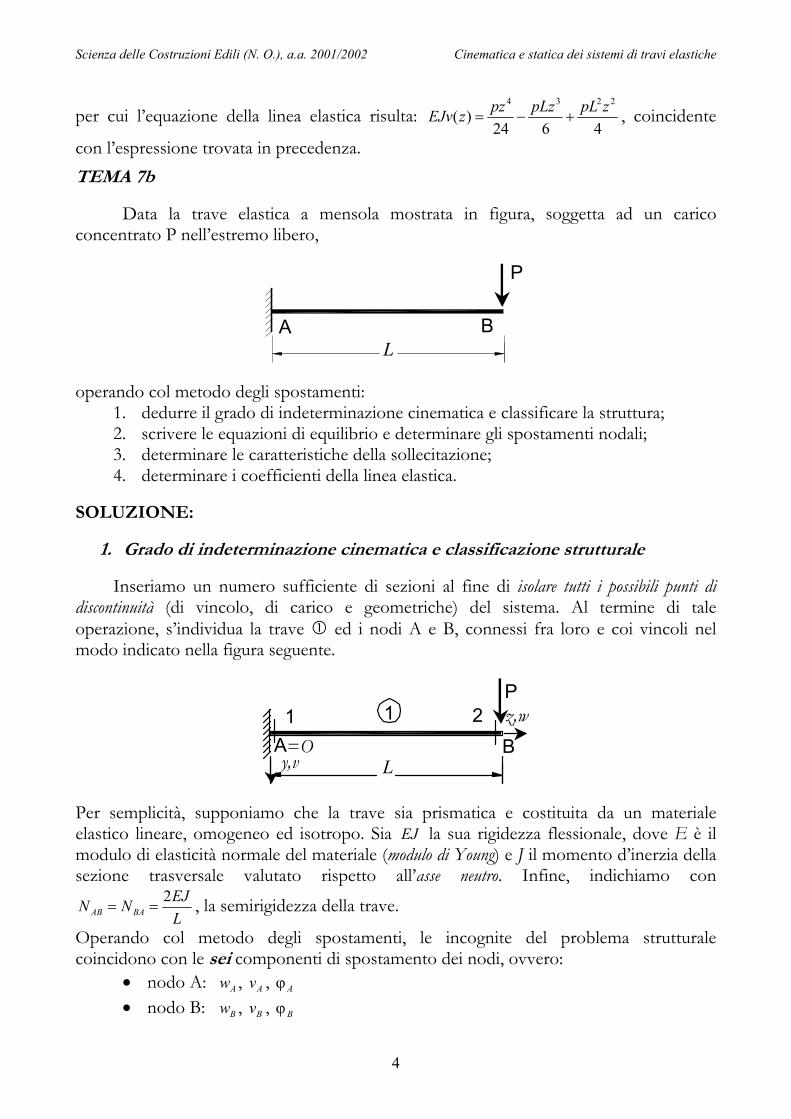
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
per cui l’equazione della linea elastica risulta: 4624
)(2234 zpLpLzpzzEJv +−= , coincidente
con l’espressione trovata in precedenza. TEMA 7b
Data la trave elastica a mensola mostrata in figura, soggetta ad un carico concentrato P nell’estremo libero,
P
LA B
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
L
1 21
BA=O z,w
y,v
Per semplicità, supponiamo che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. Infine, indichiamo con
LEJNN BAAB
2== , la semirigidezza della trave.
Operando col metodo degli spostamenti, le incognite del problema strutturale coincidono con le sei componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ • nodo B: Bw , Bv , Bϕ

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
D’altra parte, le condizioni al contorno risultano:
in A:
=ϕ
=
=
0
0
0
A
A
A
v
w
, in B:
=
=
=
0
0
B
yB
zB
M
PP
P
,
per cui la struttura risulta tre volte cinematicamente indeterminata. Se, come nel caso in esame, la trave non varia la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché può ritenersi indeformabile assialmente, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww =
per cui 0=Bw , e la struttura diviene soltanto due volte cinematicamente indeterminata; infine, poiché una delle incognite è una traslazione, la struttura è a nodi mobili.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Bv e Bϕ scriviamo le seguenti equazioni:
Incognita Tipo Equazione Bv Spostamento secondo y Equilibrio alla traslazione secondo l’asse y Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B
L’equazione di equilibrio alla traslazione secondo l’asse y, può essere sostituita dall’equazione di equilibrio alla rotazione attorno al nodo A del sistema principale, una volta labile, mostrato nella figura successiva.
L A=O
B z,w
y,v
MAB θ vB
P
Facendo uso del principio dei lavori virtuali, si ottiene: ( ) 0=θ+=θ+θ= PLMPLML ABABve , ovvero, per l’arbitrarietà di θ, PLM AB −= .
Utilizzando il legame costitutivo, tale equazione può essere scritta in termini delle incognite componenti di spostamento nodali come
PLN ABBAB −=ψ−ϕ⋅ )3( .
L’equilibrio alla rotazione intorno al nodo B si scrive 032 =ψ−ϕ ABABABB NN .

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
3. Determinazione dei coefficienti della linea elastica
La soluzione del problema strutturale coincide con la soluzione del sistema:
=ψ−ϕ
−=ψ−ϕ
0322
32
ABB
ABB EJPL
, ovvero,
=ψ
=ϕ
EJPLEJ
PL
AB
B
3
22
2
,
per cui
EJPLLv ABB 3
3
=⋅ψ= .
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
PLEJ
PLEJ
PLLEJMNM ABABBAABAB −=⋅−=+ψ−ϕ+ϕ= )
33
2(2)32(
22
,
0)3
32
2(2)32(22
=⋅−⋅=+ψ−ϕ+ϕ=EJ
PLEJ
PLLEJMNM BABAABBABA ,
e, successivamente, i tagli orari di estremità:
PLPL
LMMT BBAAB
AB =−
−=++
−=M ,
PLPL
LMMT ABAAB
BA =−
−=++
−=M .
Le costanti dell’equazione differenziale della linea elastica, risultano:
PTc −=−= )0(1 , PLMc =−= )0(2 , 0)0('3 =ϕ== AEJvc , 0)0(4 === AvEJvc ,
per cui l’equazione della linea elastica risulta: 26
)(23 PLzPzzEJv +−= , coincidente con
l’espressione trovata in precedenza.
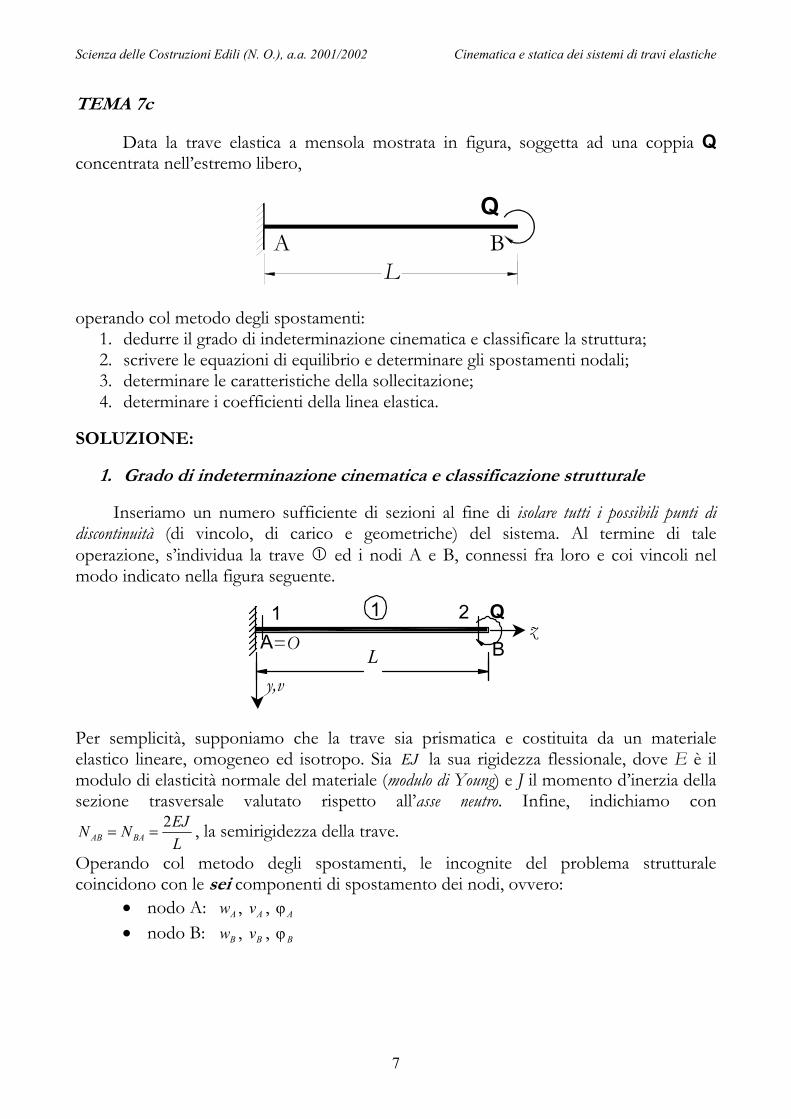
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
TEMA 7c
Data la trave elastica a mensola mostrata in figura, soggetta ad una coppia Q concentrata nell’estremo libero,
A BQ
L
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
L
1 21
BA=O z
y,v
Q
Per semplicità, supponiamo che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. Infine, indichiamo con
LEJNN BAAB
2== , la semirigidezza della trave.
Operando col metodo degli spostamenti, le incognite del problema strutturale coincidono con le sei componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ • nodo B: Bw , Bv , Bϕ

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
D’altra parte, le condizioni al contorno risultano:
in A:
=ϕ
=
=
0
0
0
A
A
A
v
w
, in B:
=
=
=
QM
P
P
B
yB
zB
0
0
,
per cui la struttura risulta tre volte cinematicamente indeterminata. Se, come nel caso in esame, la trave non varia la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché può ritenersi indeformabile assialmente, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww =
per cui 0=Bw , e la struttura diviene soltanto due volte cinematicamente indeterminata; infine, poiché una delle incognite è una traslazione, la struttura è a nodi mobili.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Bv e Bϕ scriviamo le seguenti equazioni:
Incognita Tipo Equazione Bv Spostamento secondo y Equilibrio alla traslazione secondo l’asse y Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B
L’equazione di equilibrio alla traslazione secondo l’asse y, può essere sostituita dall’equazione di equilibrio alla rotazione attorno al nodo A del sistema principale, una volta labile, mostrato nella figura successiva.
L A=O B
z,w
y,v
MAB θ vB
Q
Facendo uso del principio dei lavori virtuali, si ottiene: ( ) 0=θ+=θ+θ= QMQML ABABve , ovvero, per l’arbitrarietà di θ, QM AB −= .
Utilizzando il legame costitutivo, tale equazione può essere scritta in termini delle incognite componenti di spostamento nodali
QN ABBAB −=ψ−ϕ⋅ )3( .
L’equilibrio alla rotazione intorno al nodo B si scrive QNN ABABABB =ψ−ϕ 32 .

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
9
3. Determinazione dei coefficienti della linea elastica
La soluzione del problema strutturale coincide con la soluzione del sistema:
=ψ−ϕ
−=ψ−ϕ
EJQL
EJQL
ABB
ABB
232
23
, ovvero,
=ψ
=ϕ
EJQL
EJQL
AB
B
2
,
per cui
EJQLLv ABB 2
2
=⋅ψ= .
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
QEJ
QLEJQL
LEJMNM ABABBAABAB −=⋅−=+ψ−ϕ+ϕ= )
23(2)32( ,
QEJ
QLEJQL
LEJMNM BABAABBABA =⋅−⋅=+ψ−ϕ+ϕ= )
232(2)32( ,
e, successivamente, i tagli orari di estremità:
0=+−
−=++
−=L
QQL
MMT BBAABAB
M ,
0=+−
−=++
−=L
QQL
MMT ABAABBA
M .
Le costanti dell’equazione differenziale della linea elastica, risultano:
0)0(1 =−= Tc , QMc =−= )0(2 , 0)0('3 =ϕ== AEJvc , 0)0(4 === AvEJvc ,
per cui l’equazione della linea elastica risulta: 2
)(2zQzEJv = , coincidente con l’espressione
trovata in precedenza per altra via.
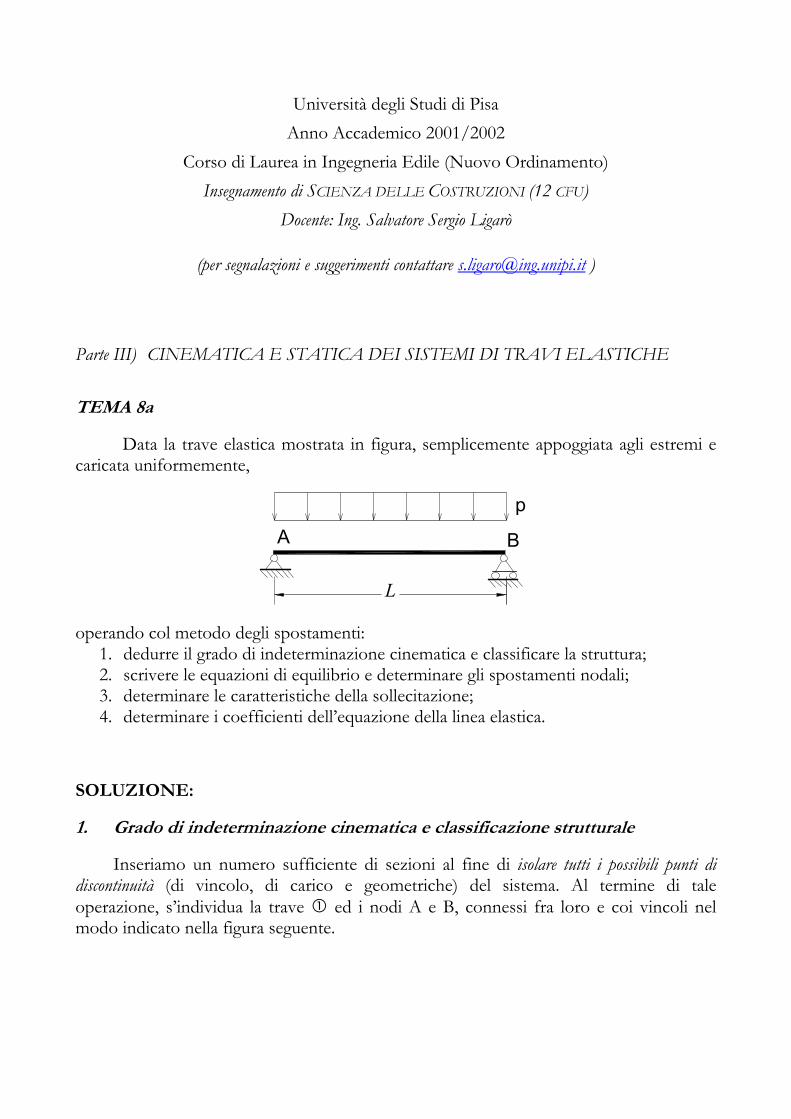
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA 8a
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e caricata uniformemente,
p
L
A B
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti dell’equazione della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
2
p
L
1 21
A=O B
z,w
y,v Per semplicità, supponiamo che la trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. Infine, indichiamo con
LEJNN BAAB
2== , la semirigidezza della trave.
Operando col metodo degli spostamenti, le incognite del problema strutturale sono le sei componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ ; • nodo B: Bw , Bv , Bϕ .
Le condizioni al contorno del problema risultano:
in A:
=
=
=
0
0
0
A
A
A
M
v
w
, in B:
=
=
=
0
0
0
B
B
zB
M
v
P
,
per cui la struttura é tre volte cinematicamente indeterminata. Tuttavia, se, come accade nel caso in esame, la trave non può variare la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché può ritenersi indeformabile assialmente, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww = ,
per cui 0=Bw , e la struttura diviene soltanto due volte cinematicamente indeterminata; infine, poiché le incognite Aϕ e Bϕ sono entrambe rotazioni, la struttura è a nodi fissi.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Aϕ e Bϕ scriviamo le equazioni di equilibrio corrispondenti:
Incognita Tipo Equazione Aϕ Rotazione Equilibrio alla rotazione intorno al nodo A Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B
L’equazione di equilibrio alla rotazione intorno al nodo A si scrive
012
22
=−ϕ+ϕpLNN BABAAB .
L’equazione di equilibrio alla rotazione intorno al nodo B si scrive
012
22
=+ϕ+ϕpLNN AABBAB .

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
3
3. Determinazione dei coefficienti della linea elastica
La soluzione del problema strutturale coincide con quella del sistema lineare:
−=ϕ+ϕ
+=ϕ+ϕ
EJpL
EJpL
BA
BA
242
242
3
3
, ovvero,
−=ϕ
+=ϕ
EJpL
EJpL
B
A
24
243
3
.
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
012
)2424
2(2)2(233
=−−⋅=+ϕ+ϕ=pL
EJpL
EJpL
LEJMNM ABBAABAB ,
012
)2424
2(2)2(233
=++⋅−=+ϕ+ϕ=pL
EJpL
EJpL
LEJMNM BAABBABA ,
e, successivamente, i tagli orari di estremità:
22
2
pLL
pL
LMMT BBAAB
AB +=−
−=++
−=M ,
22
2
pLL
pL
LMMT ABAAB
BA −=+
−=++
−=M .
Le costanti dell’equazione differenziale della linea elastica, risultano:
2/)0(1 pLTc −=−=
0)0(2 =−= Mc
24/)0(' 33 pLEJvEJc A =ϕ==
0)0(4 === AvvEJc
per cui l’equazione della linea elastica risulta:
241224)(
334 zpLpLzpzzEJv +−= ,
coincidente con l’espressione trovata in precedenza.
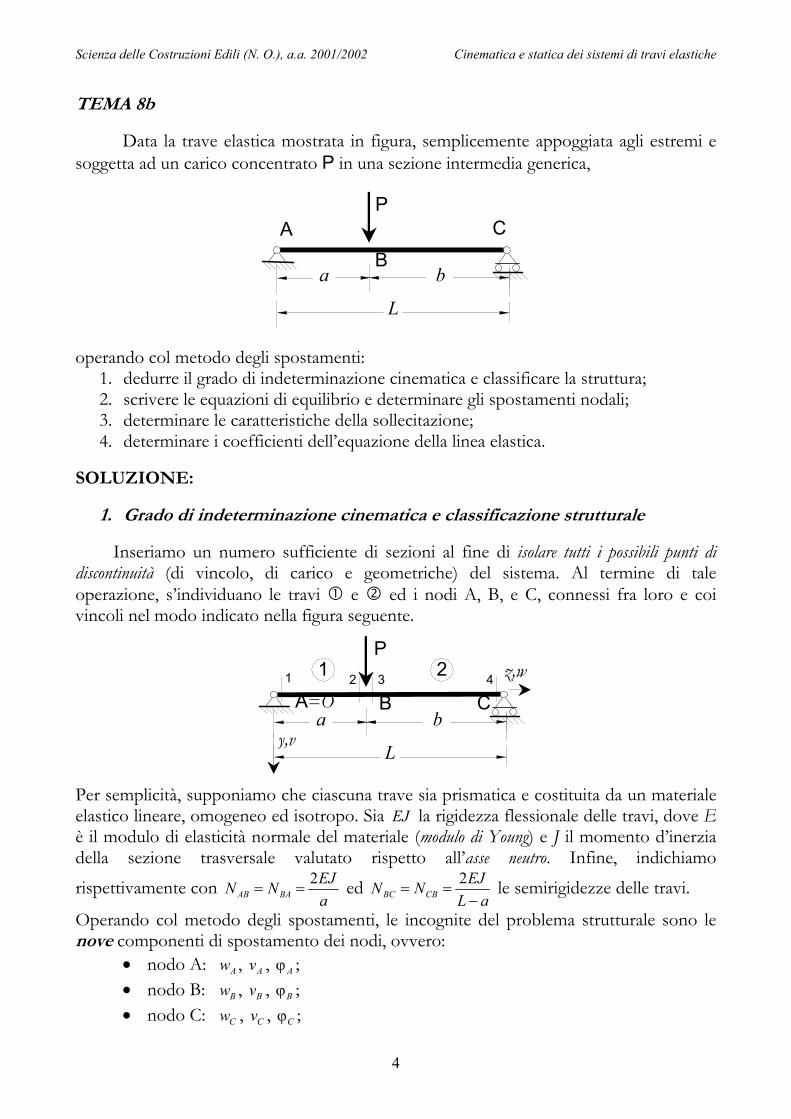
Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
4
TEMA 8b
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e soggetta ad un carico concentrato P in una sezione intermedia generica,
P
L
A B
a b
C
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti dell’equazione della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi e ed i nodi A, B, e C, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
P
L
Ba b
C1 1A=O
z,w
y,v
32 42
Per semplicità, supponiamo che ciascuna trave sia prismatica e costituita da un materiale elastico lineare, omogeneo ed isotropo. Sia EJ la rigidezza flessionale delle travi, dove E è il modulo di elasticità normale del materiale (modulo di Young) e J il momento d’inerzia della sezione trasversale valutato rispetto all’asse neutro. Infine, indichiamo
rispettivamente con aEJNN BAAB
2== ed
aLEJNN CBBC −
==2 le semirigidezze delle travi.
Operando col metodo degli spostamenti, le incognite del problema strutturale sono le nove componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ ; • nodo B: Bw , Bv , Bϕ ; • nodo C: Cw , Cv , Cϕ ;

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
5
D’altra parte, le condizioni al contorno risultano:
in A:
=
=
=
0
0
0
A
A
A
M
v
w
, in B:
=
=
=
0
0
B
yB
zB
M
PP
P
, in C:
=
=
=
0
0
0
C
C
zC
M
v
P
,
per cui la struttura risulta sei volte cinematicamente indeterminata. Tuttavia, se, come nel caso in esame, le travi e non variano la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché possono ritenersi assialmente indeformabili, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww = , e BC ww = ,
per cui risultano anche 0=Bw e 0=Cw , e la struttura diviene quattro volte cinematicamente indeterminata; infine, per la presenza fra le incognite della traslazione
Bv , la struttura è a nodi mobili.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Aϕ , Bϕ , Cϕ e Bv scriviamo le equazioni di equilibrio corrispondenti:
Incognita Tipo Equazione Aϕ Rotazione Equilibrio alla rotazione intorno al nodo A Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B Cϕ Rotazione Equilibrio alla rotazione intorno al nodo C Bv Traslazione Equilibrio alla traslazione secondo l’asse y
L’equazione di equilibrio alla rotazione intorno al nodo A si scrive
032 =ψ−ϕ+ϕ ABABBABAAB NNN .
L’equazione di equilibrio alla rotazione intorno al nodo B si scrive 033)(2 =ψ−ψ−ϕ+ϕ+ϕ+ BCBCABABCBCAABBBCAB NNNNNN .
L’equazione di equilibrio alla rotazione intorno al nodo C si scrive 032 =ψ−ϕ+ϕ BCBCBBCCBC NNN .
Per quanto riguarda lo spostamento Bv , anziché considerare direttamente l’equilibrio alla traslazione secondo l’asse y del nodo B, facciamo riferimento alla struttura principale mostrata nella figura seguente, ottenuta da quella effettiva introducendo delle cerniere ideali in ciascuno nodo, ed utilizziamo il principio dei lavori virtuali.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
6
P
L
B
a b
C1A=O z,w
y,v
2MBA MBCvB
θ1 θ2
Per il campo di spostamenti cinematicamente compatibile rappresentato dalla deformata rigida mostrata in figura, si ottiene
0121 =θ+θ+θ= aPMML BcBAve ,
ovvero, essendo 12 θ−
=θaL
a ,
01 =θ
+
−+= aP
aLaMML BCBAve
ed infine, per l’arbitrarietà di 1θ ,
0=+−
+ aPaL
aMM BCBA .
Utilizzando le formule risolutive per i momenti orari di estremità, tale equazione può essere scritta in termini delle incognite componenti di spostamento nodali come
0)32()32( =+−
ψ−ϕ+ϕ+ψ−ϕ+ϕ aPaL
aNN BCCBBCABABAB .
3. Determinazione dei coefficienti della linea elastica
Posto )/( aLa −=η , risulta ABBC NN η= , e ABBC ψη−=ψ , per cui la soluzione del problema strutturale coincide con quella del sistema:
=
ψ
ϕ
ϕ
ϕ
⋅
−ηηη+
η
−ηηη+
−
EJpa
AB
C
B
A
2
0
0
0
)1(3)1(21
210
)1(3)1(21
3012
2322
2
, ovvero,
−=ψ
−=ϕ
−=ϕ
+=ϕ
EJpLEJ
pLEJ
pLEJ
pL
AB
C
B
A
24
24
24
24
3
3
3
3
.
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
0)2424
2(2)32(33
=−−⋅=ψ−ϕ+ϕ=EJ
pLEJ
pLLEJNM ABBAABAB
trave
LaLPaNM ABABBABA
)()32( −=ψ−ϕ+ϕ=

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
7
LaLPa
EJpL
EJpL
LEJNM BCCBBCBC
)()2424
2(2)32(33 −
=−−⋅=ψ−ϕ+ϕ= trave
0)32( =ψ−ϕ+ϕ= BCBCBCCB NM
e, successivamente, i tagli orari di estremità:
LaLP
aMT BA
AB)( −
+=−= trave
LaLP
aMT BA
BA)( −
+=−=
LPa
aLMT BC
BC −=−
−= trave
LPa
aLMT BC
CB −=−
−=
Le costanti dell’equazione differenziale della linea elastica, risultano:
per la trave
LaLPTc /)()0(1 −−=−= , 0)0(2 =−= Mc ,
LLaLaPaEJEJvc A 6/)23()0(' 223 +−=ϕ== , 0)0(4 === AEJvEJvc ,
per cui l’equazione della linea elastica risulta:
[ ])23()(6
),( 222 LaLaazLaL
PzazEJv +−+−⋅= ,
coincidente con l’espressione trovata in precedenza;
per la trave
LPaaTd /)(1 −=−= , PaaMd −=−= )(2 ,
LLaPaEJaEJvd B 6/)2()(' 223 +=ϕ== , 6/)( 3
4 PaEJvaEJvd B −=== ,
per cui l’equazione della linea elastica risulta:
EJPaLLzaz
EJLPazazEJv
6)23(
6),(
3222 −+−+⋅= ,
coincidente con l’espressione trovata in precedenza.

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
8
TEMA 8c
Data la trave elastica mostrata in figura, semplicemente appoggiata agli estremi e soggetta ad una coppia concentrata Q nella sezione estrema B,
Q
L
A B
operando col metodo degli spostamenti: 1. dedurre il grado di indeterminazione cinematica e classificare la struttura; 2. scrivere le equazioni di equilibrio e determinare gli spostamenti nodali; 3. determinare le caratteristiche della sollecitazione; 4. determinare i coefficienti dell’equazione della linea elastica.
SOLUZIONE:
1. Grado di indeterminazione cinematica e classificazione strutturale
Inseriamo un numero sufficiente di sezioni al fine di isolare tutti i possibili punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individua la trave ed i nodi A e B, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
QL
A B1 1 z,w
y,v
2
Per semplicità, si suppone che la trave sia prismatica e costituita da un materiale
elastico lineare, omogeneo ed isotropo. Sia EJ la sua rigidezza flessionale. Operando col metodo degli spostamenti, le incognite del problema strutturale sono le sei componenti di spostamento dei nodi, ovvero:
• nodo A: Aw , Av , Aϕ ;
• nodo B: Bw , Bv , Bϕ .
Le condizioni al contorno del problema risultano:
in A:
=
=
=
0
0
0
A
A
A
M
v
w
, in B:
=
=
=
QM
v
P
B
B
zB
0
0
,

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
9
per cui la struttura é tre volte cinematicamente indeterminata. Tuttavia, se, come accade nel caso in esame, la trave non può variare la propria lunghezza per l’assenza dello sforzo assiale, oppure, in situazioni più generali, perché può ritenersi indeformabile assialmente, allora accanto alle relazioni precedenti possiamo scrivere:
AB ww = ,
per cui 0=Bw , e la struttura diviene soltanto due volte cinematicamente indeterminata; infine, poiché le incognite Aϕ e Bϕ sono entrambe rotazioni, la struttura è a nodi fissi.
2. Scrittura delle equazioni di equilibrio
Per determinare le incognite Aϕ e Bϕ scriviamo le equazioni di equilibrio corrispondenti:
Incognita Tipo Equazione Aϕ Rotazione Equilibrio alla rotazione intorno al nodo A Bϕ Rotazione Equilibrio alla rotazione intorno al nodo B
L’equazione di equilibrio alla rotazione intorno al nodo A si scrive 02 =ϕ+ϕ BABAAB NN ;
l’equazione di equilibrio alla rotazione intorno al nodo B si scrive QNN AABBAB =ϕ+ϕ2 .
3. Determinazione dei coefficienti della linea elastica
La soluzione del problema strutturale coincide con quella del sistema lineare:
=ϕ+ϕ
=ϕ+ϕ
EJQL
BA
BA
22
02, ovvero,
+=ϕ
−=ϕ−=ϕ
EJQL
EJQL
B
BA
3
62/
.
Noti i valori delle incognite, si ricavano i momenti orari di estremità:
012
)2424
2(2)2(233
=−−⋅=+ϕ+ϕ=pL
EJpL
EJpL
LEJMNM ABBAABAB ,
012
)2424
2(2)2(233
=++⋅−=+ϕ+ϕ=pL
EJpL
EJpL
LEJMNM BAABBABA ,
e, successivamente, i tagli orari di estremità:
22
2
pLL
pL
LMMT BBAAB
AB +=−
−=++
−=M ,
22
2
pLL
pL
LMMT ABAAB
BA −=+
−=++
−=M .
Le costanti dell’equazione differenziale della linea elastica, risultano:

Scienza delle Costruzioni Edili (N. O.), a.a. 2001/2002 Cinematica e statica dei sistemi di travi elastiche
10
2/)0(1 pLTc −=−=
0)0(2 =−= Mc
24/)0(' 33 pLEJvEJc A =ϕ==
0)0(4 === AvvEJc
per cui l’equazione della linea elastica risulta:
241224)(
334 zpLpLzpzzEJv +−= ,
coincidente con l’espressione trovata in precedenza.

Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni contattare [email protected], [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA
Dato il sistema piano di travi elastiche prismatiche mostrato in figura
x,u
y,v
O=A
p
D
H
B C
L
avente
L = 200,0 cm, H = 300,0 cm,
A = 112,00 cm2, J = 18.263,0000 cm4,
E = 21.000,00 kN/cm2, p = 0,10 kN/cm,
1. classificare il sistema mediante: a) il computo dei vincoli; b) il computo dei gradi di libertà;
2. risolvere il sistema mediante il metodo delle strutture ausiliarie; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della
sollecitazione; 4. trovare il valore dello spostamento Cu .
Emanuele Bonelli
9

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE:
1. Classificazione del sistema
Inseriamo un numero sufficiente di sezioni al fine di isolare i punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi , , e , ed i nodi A, B, C e D, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
x,u
y,v
O=A
p
D
H
B C
L
1
2
3
4 1
2
3 4
5
6
8 7
a1) computo dei vincoli - metodo generale (trave per trave o aste per asta)
Il sistema piano è ottenuto connettendo le quattro travi elastiche , , e fra loro e coi vincoli come mostrato in figura. In assenza di vincoli e
connessioni, il sistema avrebbe 3 x 4 = 12 gradi di libertà. D’altra parte:
• la connessione 1-8 è doppia ( 81 uu = , 81 vv = ), per cui 281 =−m ; • la connessione 2-3 è tripla ( 32 uu = , 32 vv = , 32 θ=θ ), per cui 332 =−m ; • la connessione 4-5 è doppia ( 54 uu = , 54 vv = ), per cui 254 =−m ; • la connessione 6-7 è tripla ( 76 uu = , 76 vv = , 76 θ=θ ), per cui 376 =−m ; • la cerniera fissa in A è un vincolo doppio ( 0=Au , 0=Av ), per cui
2=Am ; • la cerniera mobile (carrello) in D è un vincolo semplice ( 0=Dv ), per cui
1=Dm ; cosicché il grado complessivo di vincolo del sistema è 13. Pertanto, essendo i vincoli indipendenti (efficaci), il sistema dato è una struttura una volta iperstatica.

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 2
3
a2) computo dei vincoli - metodo sintetico (parte per parte)
Il sistema piano è ottenuto connettendo fra loro e coi vincoli le due parti I = [ + ] e II = [ + ] nel modo illustrato in figura. In assenza di vincoli e connessioni il sistema avrebbe 6 gradi di libertà.
D’altronde: • la connessione 1-8 è doppia ( 81 uu = , 81 vv = ), per cui 281 =−m ; • la connessione 4-5 è doppia ( 54 uu = , 54 vv = ), per cui 254 =−m ; • la cerniera fissa in A è un vincolo doppio ( 0=Au , 0=Av ), per cui
2=Am ; • la cerniera mobile (carrello) in D è un vincolo semplice ( 0=Dv ), per cui
1=Dm ; cosicché il grado complessivo di vincolo del sistema è 7. Pertanto, essendo i vincoli indipendenti (efficaci), il sistema dato è una struttura una volta iperstatica.
b) computo dei gradi di libertà
• La connessione doppia 1-8 permette la rotazione relativa 8181 θ−θ=θ∆ − ; • la connessione doppia 4-5 permette la rotazione relativa 5454 θ−θ=θ∆ − ; • la cerniera fissa in A permette la rotazione assoluta Aθ ; • il carrello in D permette lo spostamento assoluto Du e la rotazione assoluta
Dθ . Introdotti cinque vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una struttura costituita da due maglie chiuse, una esterna ed una interna, a ciascuna delle quali compete un grado di iperstaticità pari a tre. Pertanto, essendo i vincoli efficaci, il sistema dato è una struttura una volta iperstatica.
2. Risoluzione del sistema col metodo delle strutture ausiliarie
Adottiamo la struttura principale seguente.
x,u
y,v
O=A D
H
B C
L
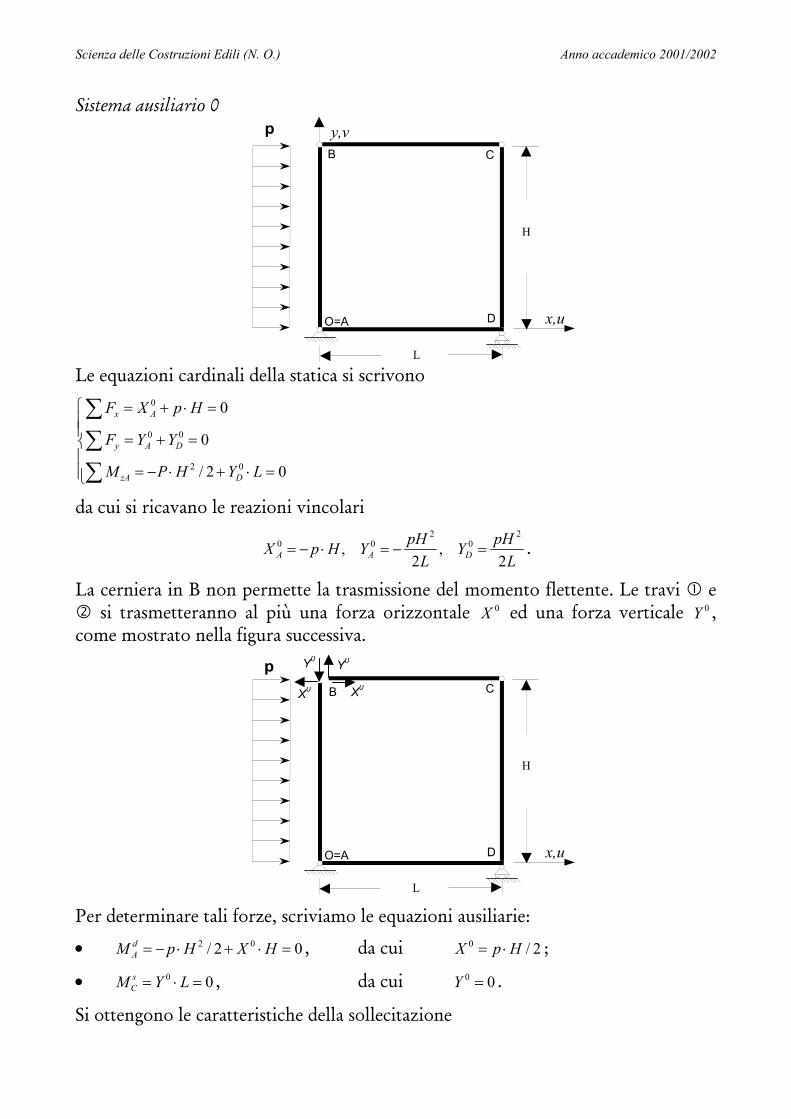
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Sistema ausiliario 0
x,u
y,v
O=A
p
D
H
B C
L Le equazioni cardinali della statica si scrivono
=⋅+⋅−=
=+=
=⋅+=
∑∑∑
02/
0
0
02
00
0
LYHPM
YYF
HpXF
DzA
DAy
Ax
da cui si ricavano le reazioni vincolari
L
pHY
L
pHYHpX DAA 2
,2
,2
02
00 =−=⋅−= .
La cerniera in B non permette la trasmissione del momento flettente. Le travi e si trasmetteranno al più una forza orizzontale 0X ed una forza verticale 0Y ,
come mostrato nella figura successiva.
x,u O=A
p
D
H
B C
L
X0 X0
Y0 Y0
Per determinare tali forze, scriviamo le equazioni ausiliarie:
• 02/ 02 =⋅+⋅−= HXHpM dA , da cui 2/0 HpX ⋅= ;
• 00 =⋅= LYM sC , da cui 00 =Y .
Si ottengono le caratteristiche della sollecitazione
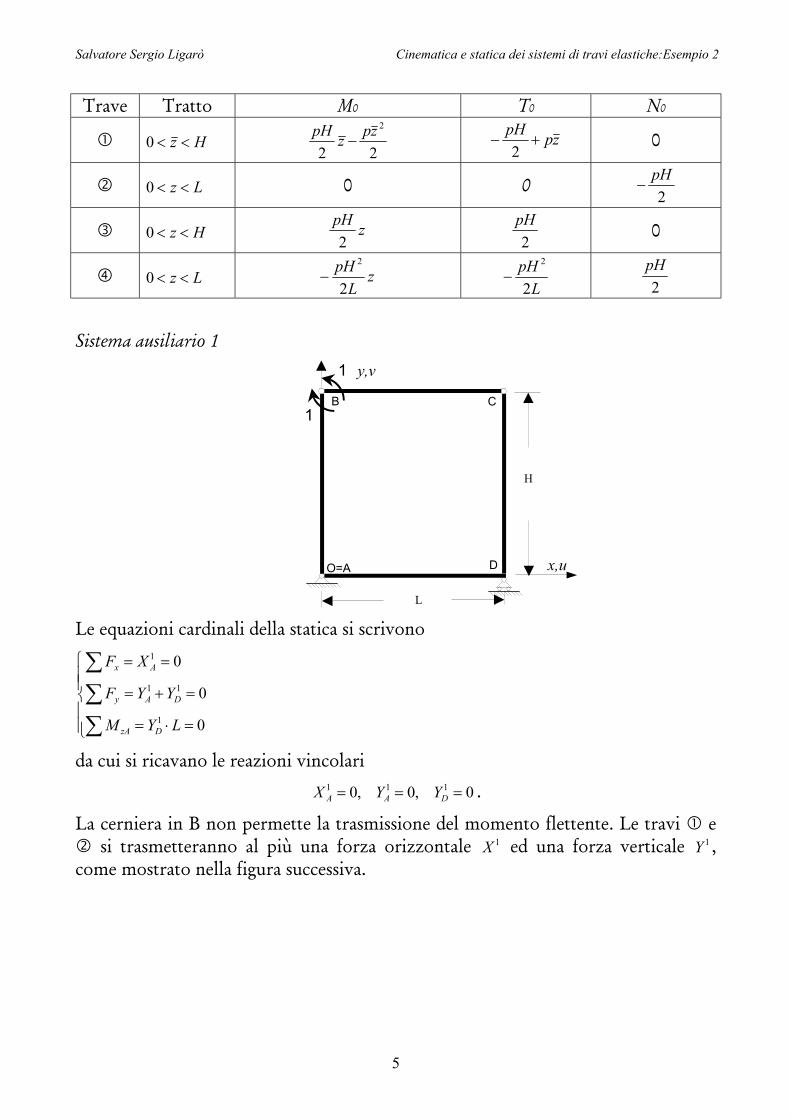
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 2
5
Trave Tratto M0 T0 N0
Hz <<0 22
2zpz
pH− zp
pH+−
2 0
Lz <<0 0 0 2
pH−
Hz <<0 zpH
2
2
pH 0
Lz <<0 zL
pH
2
2
− L
pH
2
2
− 2
pH
Sistema ausiliario 1
x,u
y,v
O=A D
H
B C
L
1
1
Le equazioni cardinali della statica si scrivono
=⋅=
=+=
==
∑∑∑
0
0
0
1
11
1
LYM
YYF
XF
DzA
DAy
Ax
da cui si ricavano le reazioni vincolari
0,0,0 111 === DAA YYX .
La cerniera in B non permette la trasmissione del momento flettente. Le travi e si trasmetteranno al più una forza orizzontale 1X ed una forza verticale 1Y ,
come mostrato nella figura successiva.
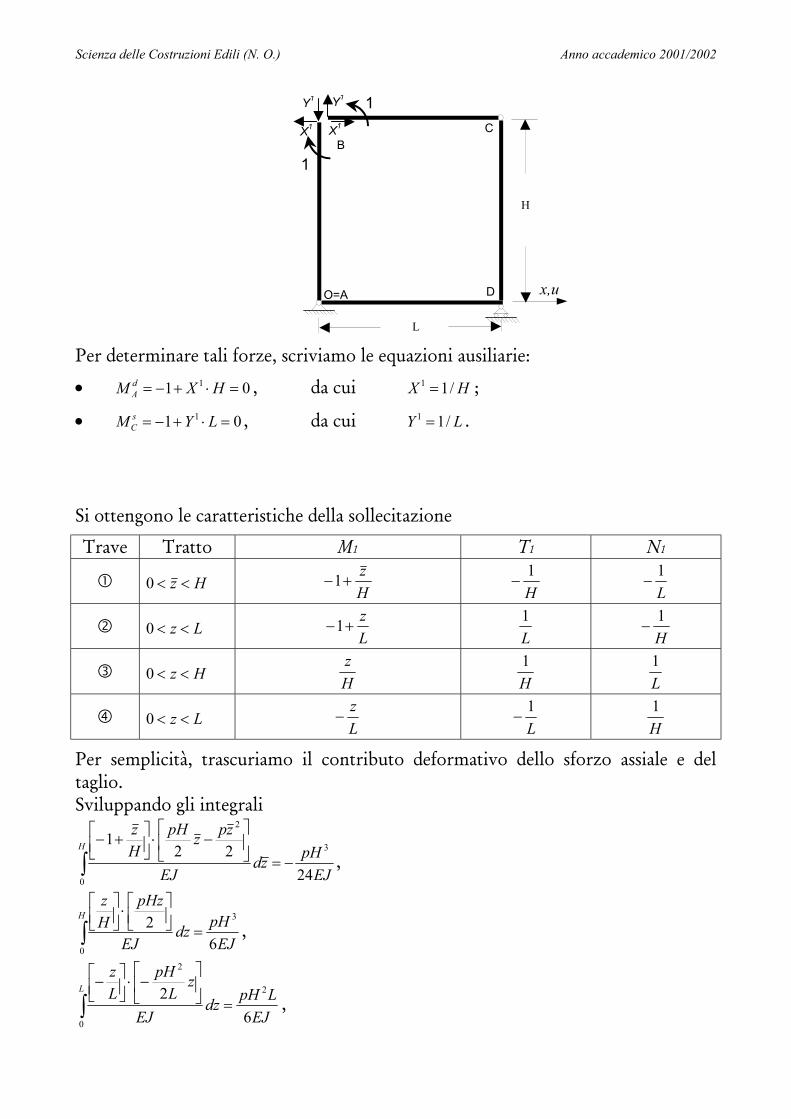
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
x,u O=A D
H
B C X1 X1
Y1 Y1
L
1
1
Per determinare tali forze, scriviamo le equazioni ausiliarie:
• 01 1 =⋅+−= HXM dA , da cui HX /11 = ;
• 01 1 =⋅+−= LYM sC , da cui LY /11 = .
Si ottengono le caratteristiche della sollecitazione
Trave Tratto M1 T1 N1
Hz <<0 H
z+−1
H
1−
L
1−
Lz <<0 L
z+−1
L
1 H
1−
Hz <<0 H
z H
1 L
1
Lz <<0 L
z−
L
1−
H
1
Per semplicità, trascuriamo il contributo deformativo dello sforzo assiale e del taglio. Sviluppando gli integrali
EJ
pHzd
EJ
zpz
pH
H
zH
24
221
3
0
2
−=
−⋅
+−
∫ ,
EJ
pHdz
EJ
pHz
H
zH
62 3
0
=
⋅
∫ ,
EJ
LpHdz
EJ
zL
pH
L
zL
6
2 2
0
2
=
−⋅
−
∫ ,

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 2
7
e sommandone i contributi, si ottiene
EJ
HLpHds
EJ
MM
S 24
)34(201
10
+=
⋅=η ∫ .
Sviluppando gli integrali
EJ
Hzd
H
z
H
z
EJzd
EJH
zHH
3
21
11
0
2
0
2
=
+−=
+−
∫∫ ,
EJ
Ldz
L
z
L
z
EJdz
EJL
zLL
3
21
11
0
2
0
2
=
+−=
+−
∫∫ ,
EJ
Hdz
H
z
EJdz
EJH
zHH
3
1
0
2
0
2
=
=
∫∫ ,
EJ
Ldz
L
z
EJdz
EJL
zLL
3
1
0
2
0
2
=
=
−
∫∫ ,
e sommandone i contributi, si ottiene
EJ
HLds
EJ
M
S 3
)(221
11
+==η ∫ ,
per cui
HL
HLpH
EJ
HLEJ
HLpH
X++
−=+
+
−=ηη
−=34
163
)(224
)34(2
2
11
10 .
Sostituendo i valori numerici, si ottiene
cmkNX ⋅−=+
⋅+⋅⋅−= 900
200300
20033004
16
2001.0 2
.
3. Tracciamento dei diagrammi delle caratteristiche della sollecitazione
Sostituendo il valore dell’incognita iperstatica, si ottengono le reazioni vincolari
==⋅⋅
==
−=−=⋅⋅
−=−=
−=⋅−=−=
,6666.03
20
3002
2001.0
2
,6666.03
20
3002
2001.0
2
,202001.0
22
22
kNL
pHY
kNL
pHY
kNpHX
D
A
A
e le caratteristiche della sollecitazione
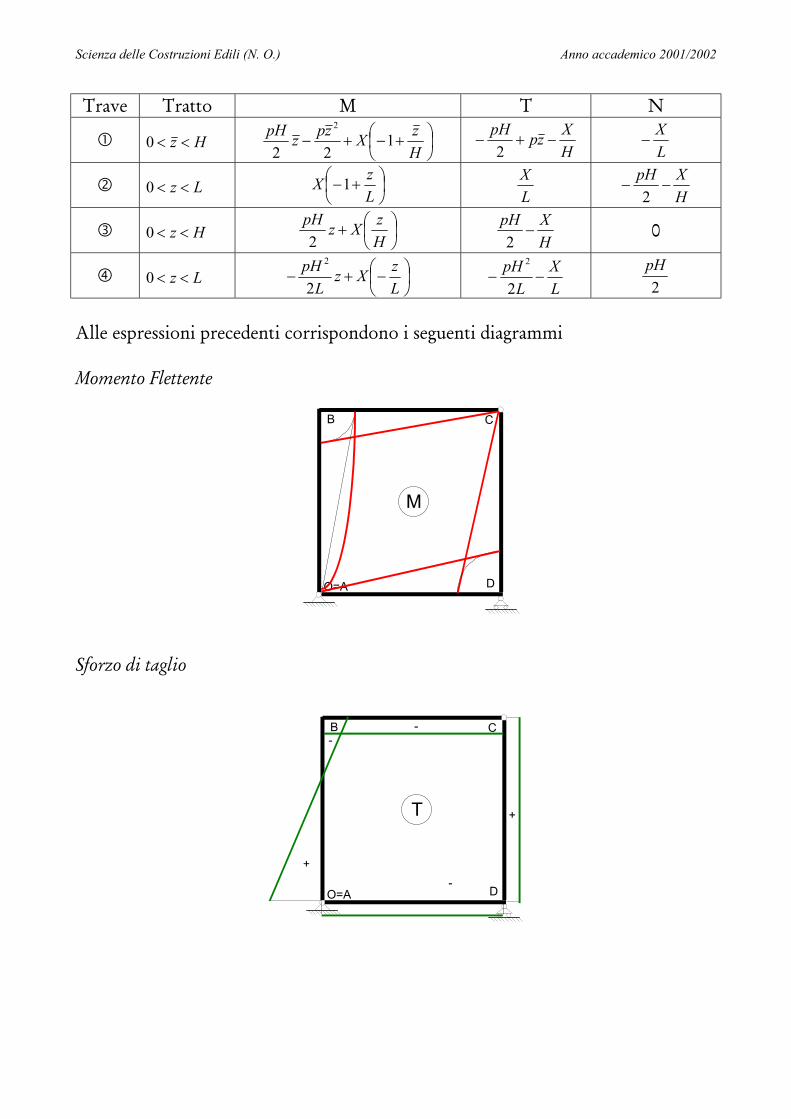
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Trave Tratto M T N
Hz <<0
+−+−
H
zX
zpz
pH1
22
2
H
Xzp
pH−+−
2
L
X−
Lz <<0
+−
L
zX 1
L
X H
XpH−−
2
Hz <<0
+
H
zXz
pH
2
H
XpH−
2 0
Lz <<0
−+−
L
zXz
L
pH
2
2
L
X
L
pH−−
2
2
2
pH
Alle espressioni precedenti corrispondono i seguenti diagrammi Momento Flettente
O=A D
B C
M
Sforzo di taglio
O=A D
B C
T
+
+
-
- -
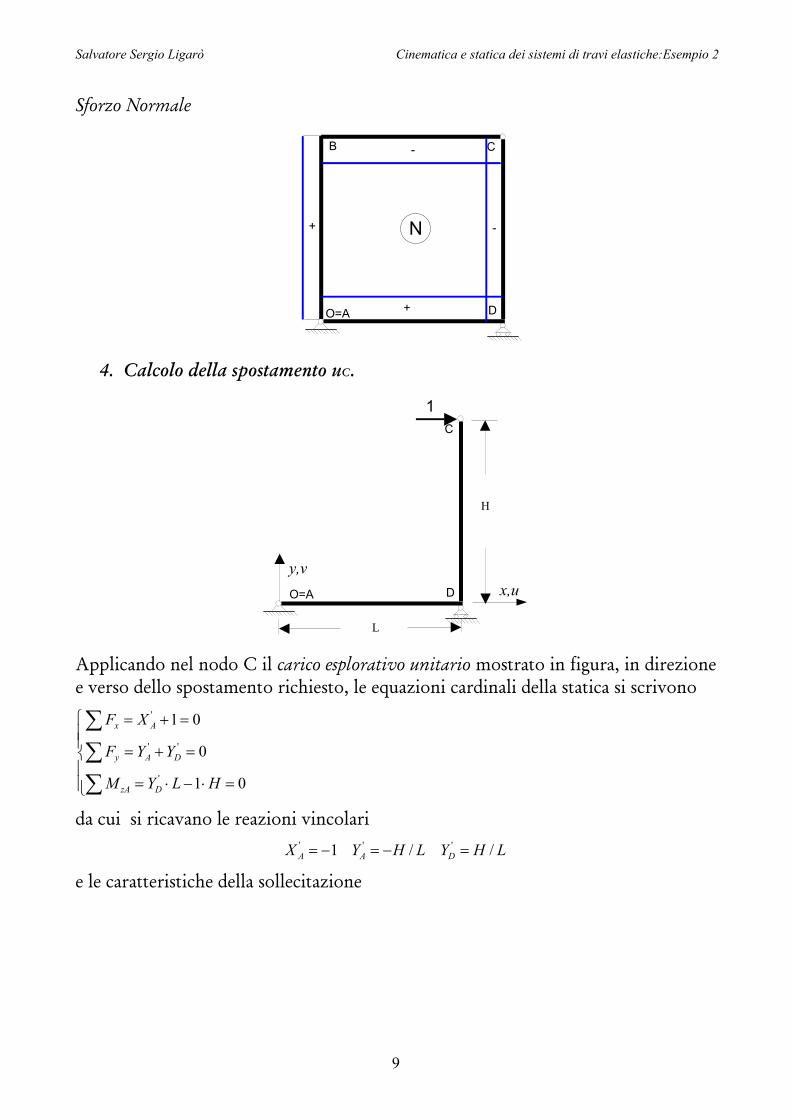
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 2
9
Sforzo Normale
O=A D
B C
N
+
-
+ -
4. Calcolo della spostamento uC.
x,u O=A D
H
C
L
1
y,v
Applicando nel nodo C il carico esplorativo unitario mostrato in figura, in direzione e verso dello spostamento richiesto, le equazioni cardinali della statica si scrivono
=⋅−⋅=
=+=
=+=
∑∑∑
01
0
01
'
''
'
HLYM
YYF
XF
DzA
DAy
Ax
da cui si ricavano le reazioni vincolari
LHYLHYX DAA //1 ''' =−=−=
e le caratteristiche della sollecitazione
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Trave Tratto '''M '''T '''N
Hz <<0 0 0 0
Lz <<0 0 0 0
Hz <<0 z 1 0
Lz <<0 zL
H−
L
H− 1
Trascurando il contributo deformativo dello sforzo assiale e del taglio, lo spostamento cercato vale
dsEJ
MMu
SC ∫⋅
=⋅'
1 .
Sviluppando gli integrali
[ ]
+=
+⋅
∫ H
XpH
EJ
Hdz
EJ
zH
Xz
pHzH
232 3
0
,
+=
−−⋅
−
∫ 2
3
0
2
23
2
H
XLpL
EJ
Hdz
EJ
L
Xz
L
zpHz
L
HL
,
e sommandone i contributi, si ottiene
+++=
2
3
223 H
XLpL
H
XpH
EJ
HuC ,
ovvero, sostituendo i numeri
cmuC 18.0200
30090
2
3001.0
200
90
2
2001.0
18263210003
2002
3
=
⋅
+⋅
++⋅
⋅⋅= .
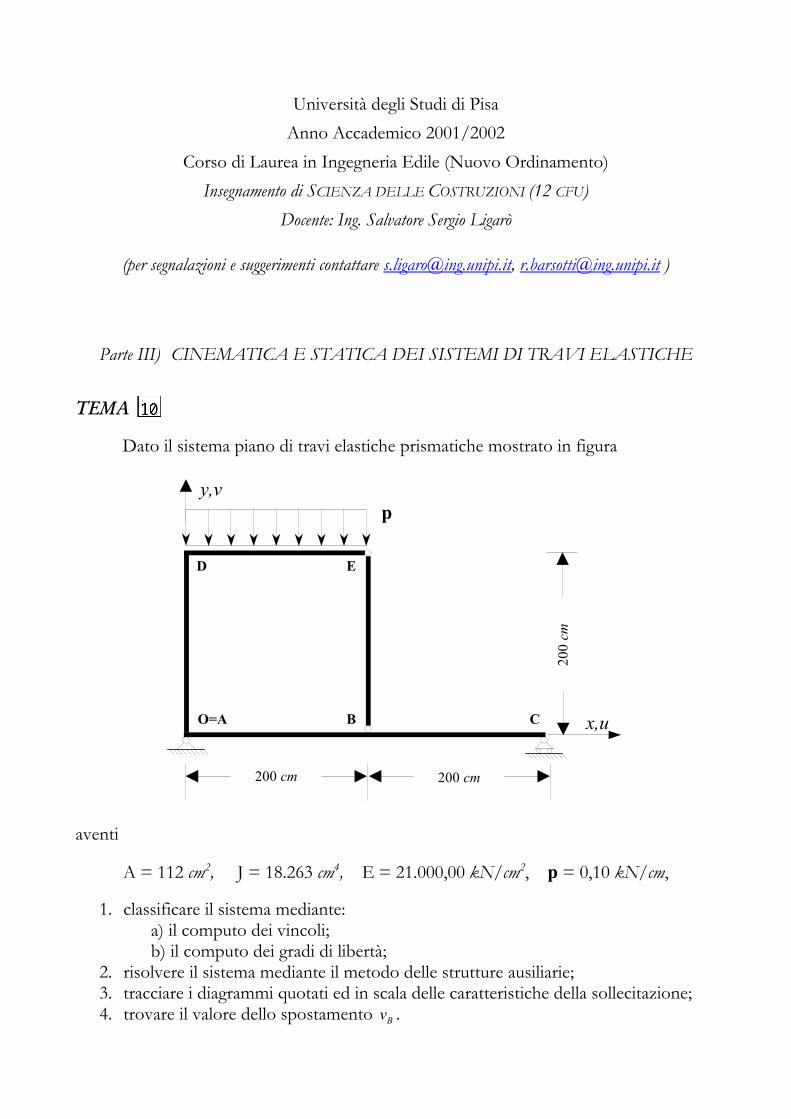
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected], [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA
Dato il sistema piano di travi elastiche prismatiche mostrato in figura
y,v
O=A
p
D
x,u
200
cm
B C
200 cm 200 cm
E
aventi
A = 112 cm2, J = 18.263 cm4, E = 21.000,00 kN/cm2, p = 0,10 kN/cm,
1. classificare il sistema mediante: a) il computo dei vincoli; b) il computo dei gradi di libertà;
2. risolvere il sistema mediante il metodo delle strutture ausiliarie; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione; 4. trovare il valore dello spostamento . Bv
Emanuele Bonelli
10

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE:
1. Classificazione del sistema
Inseriamo un numero sufficiente di sezioni al fine di isolare i punti di discontinuità (di vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi , , , e , ed i nodi A, B, C, D e E, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
y,v
O=A
p
D
x,u B C
E
H
L L
1
2
3 4 5
6
7 8 9 10
1
2
3
4 5
a1) computo dei vincoli - metodo generale (trave per trave o aste per asta)
Il sistema piano è ottenuto connettendo le cinque travi elastiche , , , e fra loro e coi vincoli come mostrato in figura. In assenza di vincoli e connessioni, il sistema avrebbe 3 x 5 = 15 gradi di libertà.
D’altra parte: • la connessione 1-9 è doppia ( , v ), per cui =m ; 91 uu = 91 v= 291−
• la connessione 2-3 è doppia ( , v ), per cui =m ; 32 uu = 32 v= 232−
• la connessione 4-5 è tripla (u , , θ ), per cui =m ; 54 u= 54 vv = 54 θ= 354−
• la connessione 6-7 è tripla (u , , θ ), per cui =m ; 76 u= 76 vv = 76 θ= 376−
• la connessione 8-9 è tripla (u , , θ ), per cui =m ; 98 u= 98 vv = 98 θ= 398−
• la cerniera fissa in A è un vincolo doppio (u , ), per cui ; 0=A 0=Av 2=Am• la cerniera mobile (carrello) in C è un vincolo semplice ( v ), per cui ; 0=C 1=Cmcosicché il grado complessivo di vincolo del sistema è 16. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 3
a2) computo dei vincoli - metodo sintetico (parte per parte) Il sistema piano è ottenuto connettendo fra loro e coi vincoli le due parti I = [ ]
e II = [ + + + ] nel modo illustrato in figura. In assenza di vincoli e connessioni il sistema avrebbe 6 gradi di libertà.
D’altronde: • la connessione 1-9 è doppia ( , v ), per cui =m ; 91 uu = 91 v= 291−
• la connessione 2-3 è doppia ( , v ), per cui =m ; 32 uu = 32 v= 232−
• la cerniera fissa in A è un vincolo doppio (u , ), per cui ; 0=A 0=Av 2=Am• la cerniera mobile (carrello) in C è un vincolo semplice ( v ), per cui ; 0=C 1=Cmcosicché il grado complessivo di vincolo del sistema è 7. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica. b) computo dei gradi di libertà
• La connessione doppia 1-9 permette la rotazione relativa ; 9191 θ−θ=θ∆ −
• la connessione doppia 2-3 permette la rotazione relativa ; 3232 θ−θ=θ∆ −
• la cerniera fissa in A permette la rotazione assoluta θ ; A
• il carrello in C permette lo spostamento assoluto e la rotazione assoluta . Cu CθIntrodotti cinque vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una struttura costituita da due maglie chiuse, una esterna ed una interna, a ciascuna delle quali compete un grado di iperstaticità pari a tre. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.
2. Risoluzione del sistema col metodo delle strutture ausiliarie Adottiamo la struttura principale seguente, ottenuta eliminando la connessione 1-9.
y,v
O=A
D
x,u B C
E
H
L L
z
z
z
z z
Per ciascuna trave indichiamo l’origine ed il verso positivo dell’ascissa curvilinea; inoltre, per semplificare i calcoli, assumiamo come positivi i momenti flettenti che tendono le fibre poste dalla parte tratteggiata.
3
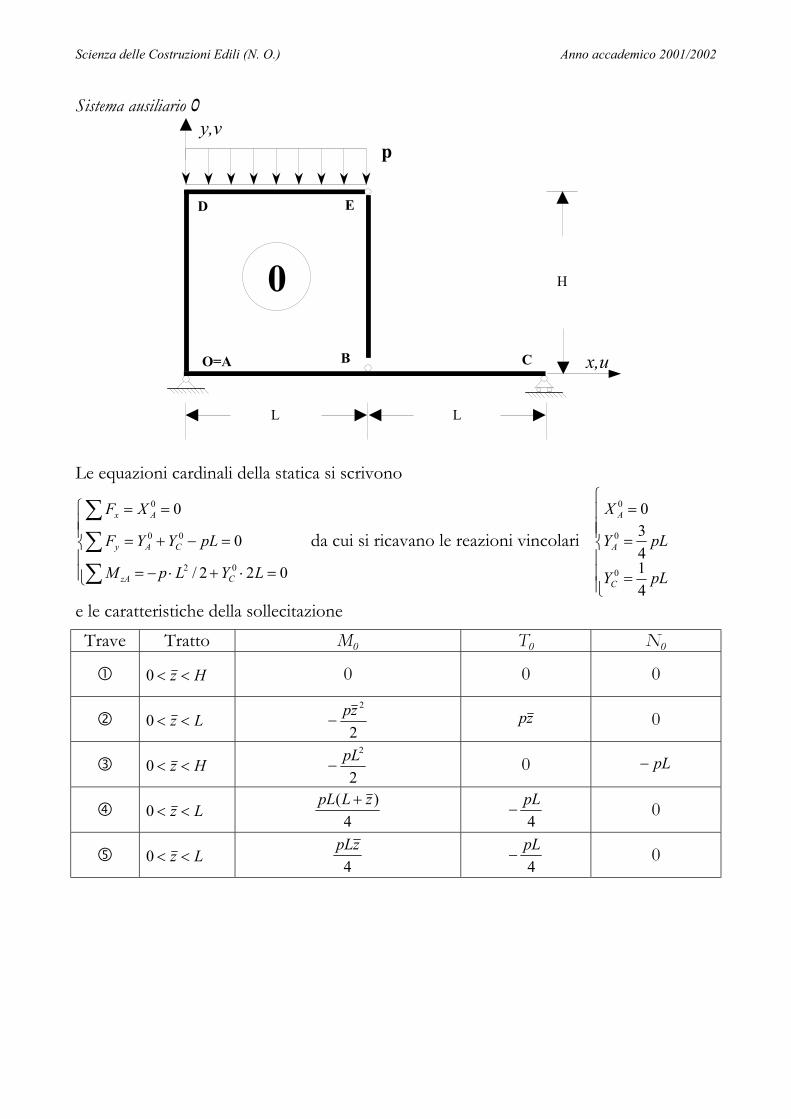
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Sistema ausiliario 0 y,v
O=A
p
D
x,u B C
E
H
L L
0
Le equazioni cardinali della statica si scrivono
=⋅+⋅−=
=−+=
==
∑∑∑
022/
0
0
02
00
0
LYLpM
pLYYF
XF
CzA
CAy
Ax
da cui si ricavano le reazioni vincolari
=
=
=
pLY
pLY
X
C
A
A
41430
0
0
0
e le caratteristiche della sollecitazione Trave Tratto M0 T0 N0
Hz <<0 0 0 0
Lz <<0 2
2zp− zp 0
Hz <<0 2
2pL− 0 pL−
Lz <<0 4
)( zLpL + 4pL
− 0
Lz <<0 4
zpL 4pL
− 0
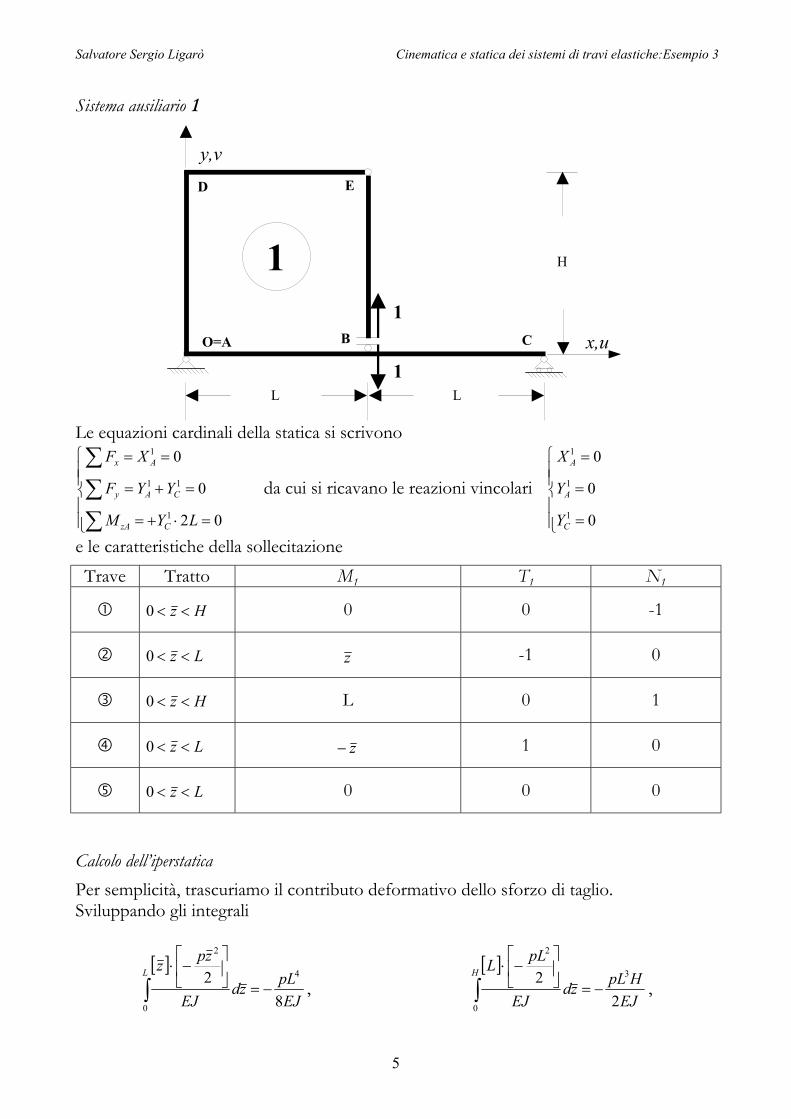
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 3
Sistema ausiliario 1
y,v
O=A
D
x,u B C
E
H
L L
1 1
1
Le equazioni cardinali della statica si scrivono
=⋅+=
=+=
==
∑∑∑
02
0
0
1
11
1
LYM
YYF
XF
CzA
CAy
Ax
da cui si ricavano le reazioni vincolari
=
=
=
0
0
0
1
1
1
C
A
A
Y
Y
X
e le caratteristiche della sollecitazione Trave Tratto M1 T1 N1
Hz <<0 0 0 -1
Lz <<0 z -1 0
Hz <<0 L 0 1
Lz <<0 z− 1 0
Lz <<0 0 0 0
Calcolo dell’iperstatica Per semplicità, trascuriamo il contributo deformativo dello sforzo di taglio. Sviluppando gli integrali
[ ]
EJpLzd
EJ
zpzL
82 4
0
2
−=
−⋅
∫ , [ ]
EJHpLzd
EJ
pLLH
22 3
0
2
−=
−⋅
∫ ,
5

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
[ ]
EJpLzd
EJ
zLpLzL
245
)(4 4
0
−=
+⋅−
∫ , [ ] [ ]EA
pLHzdEA
pLH
−=−⋅
∫0
1 ,
e sommandone i contributi, si ottiene
EApLH
EJHLpLds
EANNds
EJMM
SS
−+
−=⋅
+⋅
=η ∫∫ 6)32(3
010110 .
Sviluppando gli integrali
[ ]
EJLzd
EJzL
3
3
0
2
=∫ , [ ]EJ
HLdzEJLH 2
0
2
=∫ ,
[ ]
EJLdz
EJzL
3
3
0
2
=−
∫ , [ ]EAHzd
EA
H
=−
∫0
21 , [ ]EAHzd
EA
H
=∫0
21
e sommandone i contributi, si ottiene
EAH
EJHLLds
EANds
EJM
SS
23
)32(221
21
11 ++
=+=η ∫∫ ,
per cui
223
)32(6
)32(
2
3
11
10 pL
EAH
EJHLL
EApLH
EJHLpL
X =+
+
++
=−=ηη .
Coi valori numerici, si ottiene
kNX 102
==2001.0 ⋅ .
E’ facile constatare come il contributo deformativo dovuto allo sforzo assiale (termine estensionale) sia in ogni caso del tutto trascurabile rispetto a quello dovuto al momento flettente (termine flessionale).
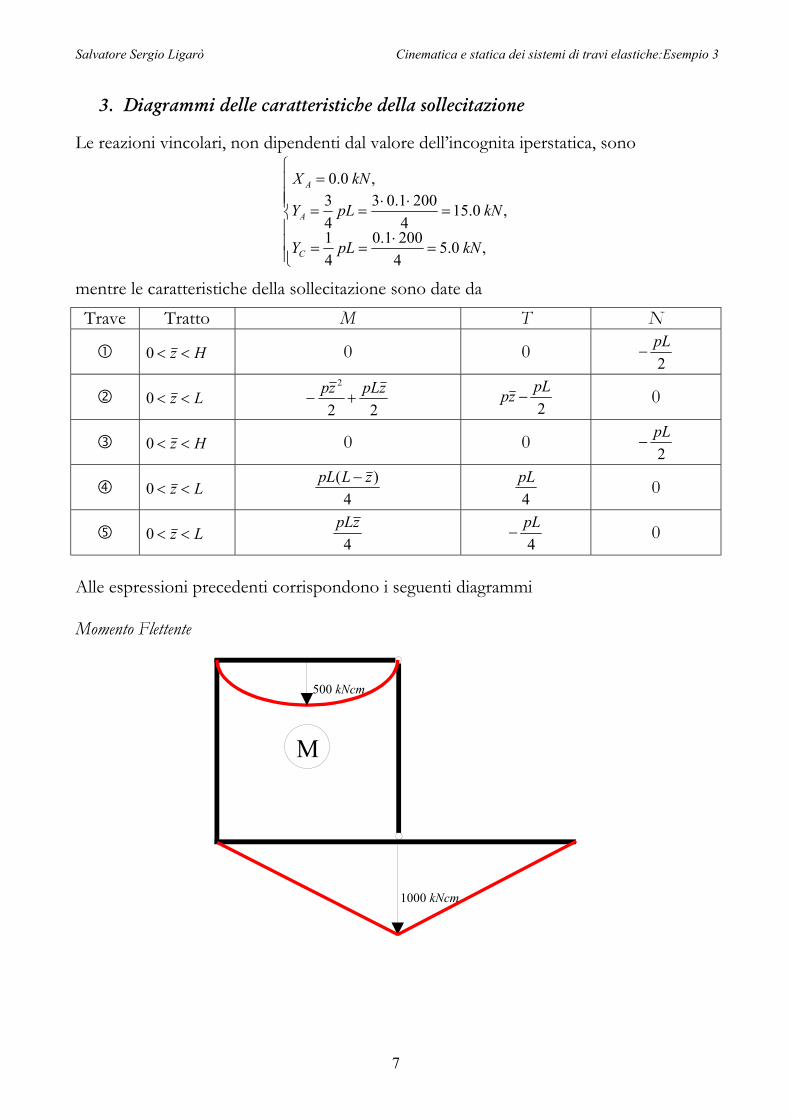
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 3
3. Diagrammi delle caratteristiche della sollecitazione
Le reazioni vincolari, non dipendenti dal valore dell’incognita iperstatica, sono
=⋅
==
=⋅⋅
==
=
,0.542001.0
41
,0.154
2001.0343
,0.0
kNpLY
kNpLY
kNX
C
A
A
mentre le caratteristiche della sollecitazione sono date da Trave Tratto M T N
Hz <<0 0 0 2pL
−
Lz <<0 22
2 zpLzp+−
2pLzp − 0
Hz <<0 0 0 2pL
−
Lz <<0 4
)( zLpL − 4pL 0
Lz <<0 4
zpL 4pL
− 0
Alle espressioni precedenti corrispondono i seguenti diagrammi Momento Flettente
M
500 kNcm
1000 kNcm
7

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Sforzo di taglio
T
-10 kN
+5 kN
+10 kN
-5 kN
Sforzo Normale
N
-10 kN -10 kN
4. Calcolo della spostamento vB.
y,v
O=A x,u
B C
L L
1
Applicando nel nodo B il carico esplorativo unitario in direzione e verso dello spostamento richiesto, risultano le reazioni vincolari [ ]2/12/10 ''' === CAA YYX
e le caratteristiche della sollecitazione Trave Tratto M’ T’ N’
Lz <<0 2/z 1/2 0
Lz <<0 2/z -1/2 0
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 3
Trascurando il contributo deformativo dello sforzo di taglio, lo spostamento cercato vale
dsEJ
MMvSB ∫
⋅=⋅
'
1 ,
ovvero,
∫ =
⋅
=L
B EJpLdz
EJ
zpLz
v0
4
12422 .
Sostituendo i valori numerici, si ottiene
cmvB 034765.0182632100012
2001.0=
⋅⋅⋅
=4
.
9
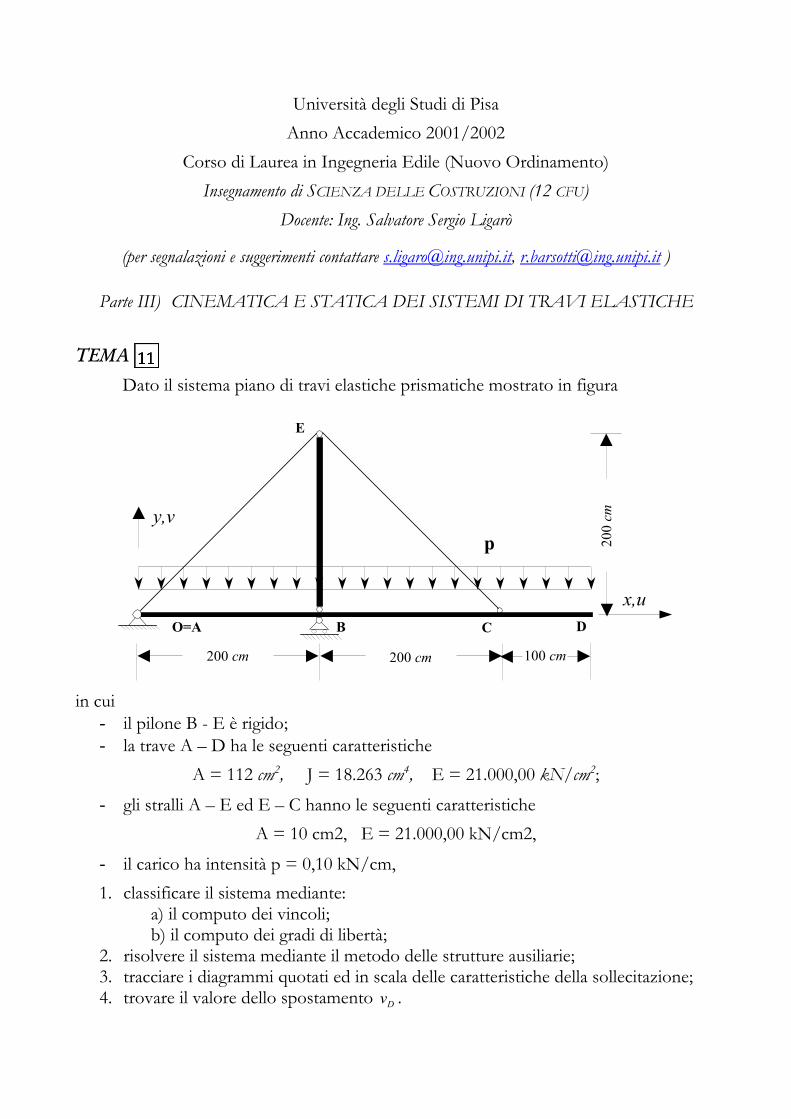
Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected], [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA Dato il sistema piano di travi elastiche prismatiche mostrato in figura
y,v
O=A
p
x,u 20
0 cm
B C
200 cm 200 cm
E
D
100 cm
in cui - il pilone B - E è rigido; - la trave A – D ha le seguenti caratteristiche
A = 112 cm2, J = 18.263 cm4, E = 21.000,00 kN/cm2;
- gli stralli A – E ed E – C hanno le seguenti caratteristiche A = 10 cm2, E = 21.000,00 kN/cm2,
- il carico ha intensità p = 0,10 kN/cm, 1. classificare il sistema mediante:
a) il computo dei vincoli; b) il computo dei gradi di libertà;
2. risolvere il sistema mediante il metodo delle strutture ausiliarie; 3. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione; 4. trovare il valore dello spostamento . Dv
Emanuele Bonelli
11

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE:
1. Classificazione del sistema Inseriamo un numero sufficiente di sezioni al fine di isolare i punti di discontinuità (di
vincolo, di carico e geometriche) del sistema. Al termine di tale operazione, s’individuano le travi , , , le aste , e , ed i
nodi A, B, C, D ed E, connessi fra loro e coi vincoli nel modo indicato nella figura seguente.
y,v
O=A
p
x,u
H
B C
L
E
D 1
10
8
7 5 6 2 3 4
3
4 5
L L/2 2 1
6
9
12
11
a1) computo dei vincoli - metodo generale (trave per trave o aste per asta)
In assenza di vincoli e connessioni, il sistema avrebbe gradi di libertà. 1863 =×D’altra parte:
• la connessione 1-7 è doppia ( , ), per cui 2=m ; 71 uu = 71 vv = 71−
• la connessione 2-3 è tripla (u , v , θ ), per cui 3=m ; 32 u= 32 v= 32 θ= 32−
• la connessione 2-9 è doppia ( , ), per cui 2=m ; 92 uu = 92 vv = 92−
• la connessione 4-5 è tripla (u , v , ), per cui =m ; 54 u= 54 v= 54 θ=θ 354−
• la connessione 4-11 è doppia (u , ), per cui =m ; 114 u= 114 vv = 2114−
• la connessione 8-10 è doppia (u , ), per cui =m ; 108 u= 108 vv = 2108−
• la connessione 8-12 è doppia (u , ), per cui =m ; 128 u= 128 vv = 2128−
• la cerniera fissa in A è un vincolo doppio ( , v ), per cui ; 0=Au 0=A 2=Am• la cerniera mobile (carrello) in B è un vincolo semplice ( ), per cui ; 0=Bv 1=Bmcosicché il grado complessivo di vincolo del sistema è 19. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica. a2) computo dei vincoli - metodo sintetico (parte per parte)
Il sistema piano è ottenuto connettendo fra loro e coi vincoli le quattro parti I = [ + + ], II = [ ], III =[ ] e IV =[ ] nel modo illustrato in figura. In assenza di vincoli e connessioni il sistema avrebbe gradi di libertà. 1243 =×
D’altronde: • la connessione 1-7 è doppia ( , ), per cui 2=m ; 71 uu = 71 vv = 71−
2
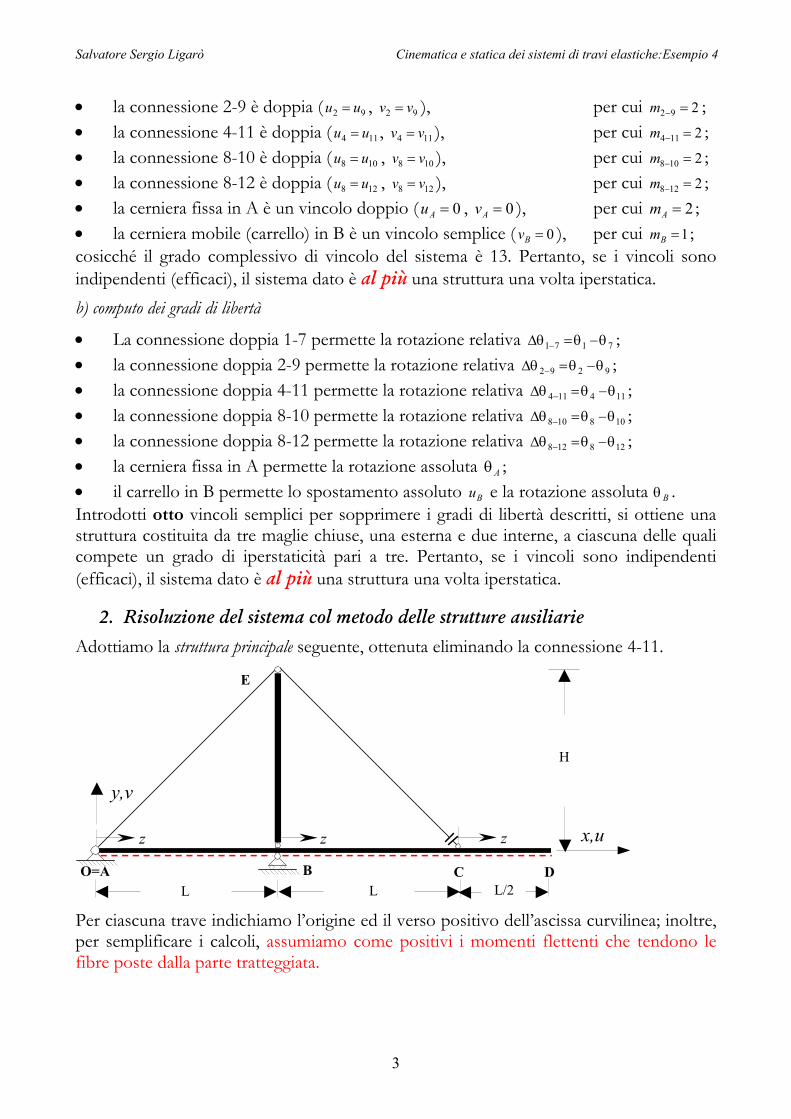
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
• la connessione 2-9 è doppia ( , ), per cui 2=m ; 92 uu = 92 vv = 92−
• la connessione 4-11 è doppia (u , ), per cui =m ; 114 u= 114 vv = 2114−
• la connessione 8-10 è doppia (u , ), per cui =m ; 108 u= 108 vv = 2108−
• la connessione 8-12 è doppia (u , ), per cui =m ; 128 u= 128 vv = 2128−
• la cerniera fissa in A è un vincolo doppio ( , v ), per cui ; 0=Au 0=A 2=Am• la cerniera mobile (carrello) in B è un vincolo semplice ( ), per cui ; 0=Bv 1=Bmcosicché il grado complessivo di vincolo del sistema è 13. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica. b) computo dei gradi di libertà
• La connessione doppia 1-7 permette la rotazione relativa ∆ ; 7171 θθθ −=−
• la connessione doppia 2-9 permette la rotazione relativa ; 9292 θθθ −=∆ −
• la connessione doppia 4-11 permette la rotazione relativa ; 114114 θθθ −=∆ −
• la connessione doppia 8-10 permette la rotazione relativa ; 108108 θθθ −=∆ −
• la connessione doppia 8-12 permette la rotazione relativa ; 128128 θθθ −=∆ −
• la cerniera fissa in A permette la rotazione assoluta ; Aθ
• il carrello in B permette lo spostamento assoluto e la rotazione assoluta θ . Bu B
Introdotti otto vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una struttura costituita da tre maglie chiuse, una esterna e due interne, a ciascuna delle quali compete un grado di iperstaticità pari a tre. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.
2. Risoluzione del sistema col metodo delle strutture ausiliarie Adottiamo la struttura principale seguente, ottenuta eliminando la connessione 4-11.
y,v
O=A
x,u
B C
E
D
H
L L
z z z
L/2 Per ciascuna trave indichiamo l’origine ed il verso positivo dell’ascissa curvilinea; inoltre, per semplificare i calcoli, assumiamo come positivi i momenti flettenti che tendono le fibre poste dalla parte tratteggiata.
3
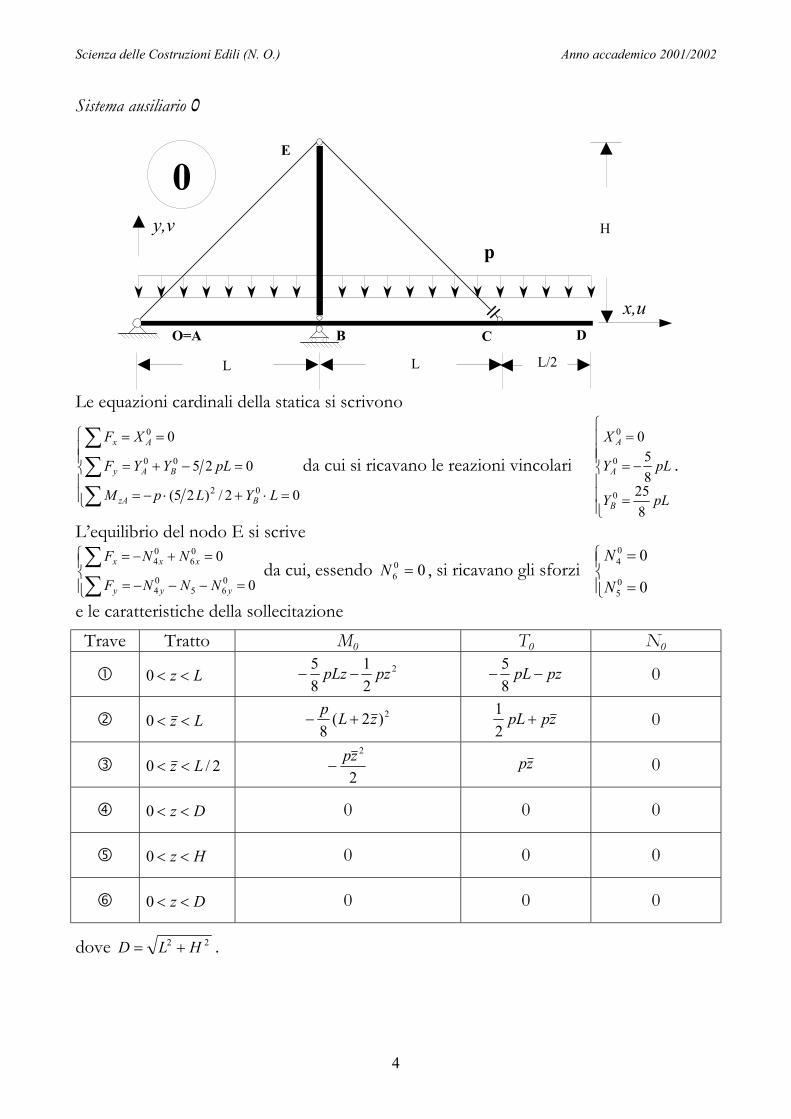
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Sistema ausiliario 0
y,v
O=A
p
x,u B C
E
D
H
L L/2
0
L
Le equazioni cardinali della statica si scrivono
=⋅+⋅−=
=−+=
==
∑∑∑
02/)25(
025
0
02
00
0
LYLpM
pLYYF
XF
BzA
BAy
Ax
da cui si ricavano le reazioni vincolari
=
−=
=
pLY
pLY
X
B
A
A
825
85
0
0
0
0
.
L’equilibrio del nodo E si scrive
=−−−=
=+−=
∑∑
0
0065
04
06
04
yyy
xxx
NNNF
NNF da cui, essendo , si ricavano gli sforzi 00
6 =N
=
=
0
005
04
N
N
e le caratteristiche della sollecitazione Trave Tratto M0 T0 N0
Lz <<0 2
21
85 pzpLz −− pzpL −−
85 0
Lz <<0 2)2(8
zLp+− zppL +
21 0
2/0 Lz << 2
2zp− zp 0
Dz <<0 0 0 0
Hz <<0 0 0 0
Dz <<0 0 0 0
dove 22 HLD += .
4
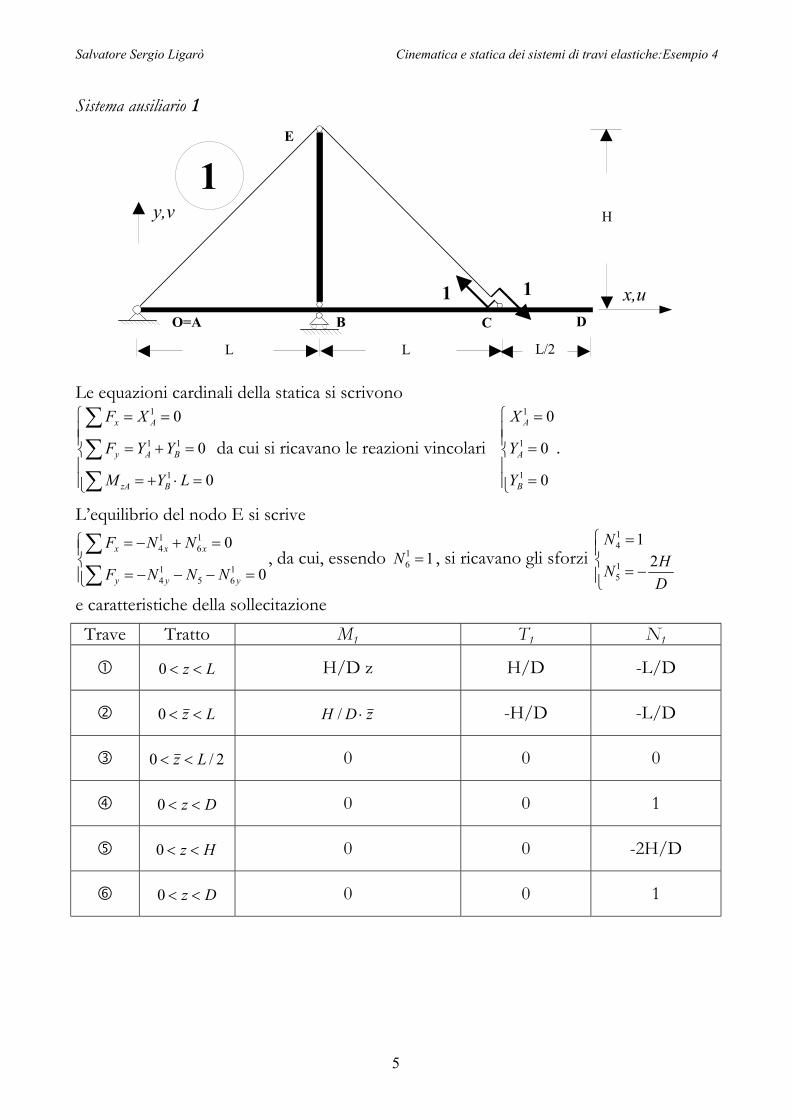
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
Sistema ausiliario 1
y,v
O=A
x,u B C
E
D
H
L L
1
1 1
L/2 Le equazioni cardinali della statica si scrivono
=⋅+=
=+=
==
∑∑∑
0
0
0
1
11
1
LYM
YYF
XF
BzA
BAy
Ax
da cui si ricavano le reazioni vincolari .
=
=
=
0
0
0
1
1
1
B
A
A
Y
Y
X
L’equilibrio del nodo E si scrive
=−−−=
=+−=
∑∑
0
0165
14
16
14
yyy
xxx
NNNF
NNF, da cui, essendo , si ricavano gli sforzi 11
6 =N
−=
=
DHN
N2
115
14
e caratteristiche della sollecitazione Trave Tratto M1 T1 N1
Lz <<0 H/D z H/D -L/D
Lz <<0 zDH ⋅/ -H/D -L/D
2/0 Lz << 0 0 0
Dz <<0 0 0 1
Hz <<0 0 0 -2H/D
Dz <<0 0 0 1
5

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Calcolo dell’iperstatica Per semplicità, trascuriamo il contributo deformativo dello sforzo di taglio. Sviluppando gli integrali
EJDHpLdz
EJ
pzpLzzDH
L
321
85
4
0
2
−=
−−⋅
∫ , EJD
HpLzdEJ
zLpzDH
L
4817
)2(8 4
0
2
−=
+−⋅
∫ ,
e sommandone i contributi, si ottiene
EJDHpLds
EJMM
S
401
10 1611
−=⋅
= ∫η .
Sviluppando gli integrali
2
23
0
2
322EJD
HLdzEJ
zDH
L
=
∫ , 2
3
0
2
22DEA
LdzEA
DL
T
L
T
=
−
∫ , [ ]S
D
S EADdz
EA212
0
2
=∫ ,
e sommandone i contributi, si ottiene
STSS EAD
DEAL
EJDHLds
EANds
EJM 22
32
2
3
2
2321
21
11 ++=+= ∫∫η ,
per cui
ST EAD
DEAL
EJDHL
EJDHpL
X22
32
1611
2
3
2
23
4
11
10
++=−=
ηη .
Coi valori numerici, si ottiene
kNX 84.2036.20498.4258
56.56786.1014.14698.4258
1022002
22001122002
22001826332002002
2200182632002001.0
1611
2
3
2
23==
++=
⋅⋅+⋅⋅
⋅+⋅⋅⋅
⋅⋅⋅⋅
⋅⋅
=
4
.
E’ facile constatare come il contributo deformativo dello sforzo assiale delle travi , e (il primo termine estensionale a denominatore = 1.786) sia trascurabile rispetto a quello dovuto al momento flettente (termine flessionale = 146.014) ed al termine estensionale degli stralli e (= 56.56).
6
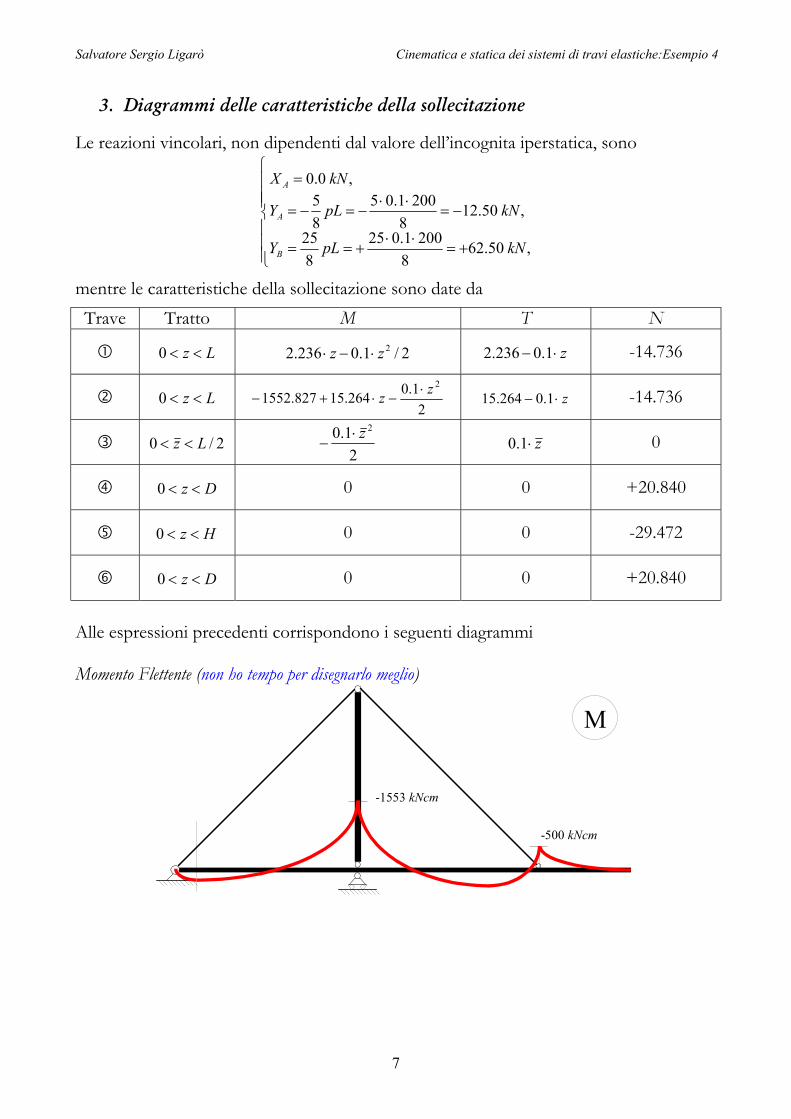
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
3. Diagrammi delle caratteristiche della sollecitazione
Le reazioni vincolari, non dipendenti dal valore dell’incognita iperstatica, sono
+=⋅⋅
+==
−=⋅⋅
−=−=
=
,50.628
2001.025825
,50.128
2001.0585
,0.0
kNpLY
kNpLY
kNX
B
A
A
mentre le caratteristiche della sollecitazione sono date da Trave Tratto M T N
Lz <<0 2/1.0236.2 2zz ⋅−⋅ z⋅− 1.0236.2 -14.736
Lz <<0 2
1.0264.15827.15522zz ⋅
−⋅+− z⋅− 1.0264.15 -14.736
2/0 Lz << 2
1.0 2z⋅− z⋅1.0 0
Dz <<0 0 0 +20.840
Hz <<0 0 0 -29.472
Dz <<0 0 0 +20.840
Alle espressioni precedenti corrispondono i seguenti diagrammi Momento Flettente (non ho tempo per disegnarlo meglio)
M
-1553 kNcm
-500 kNcm
7
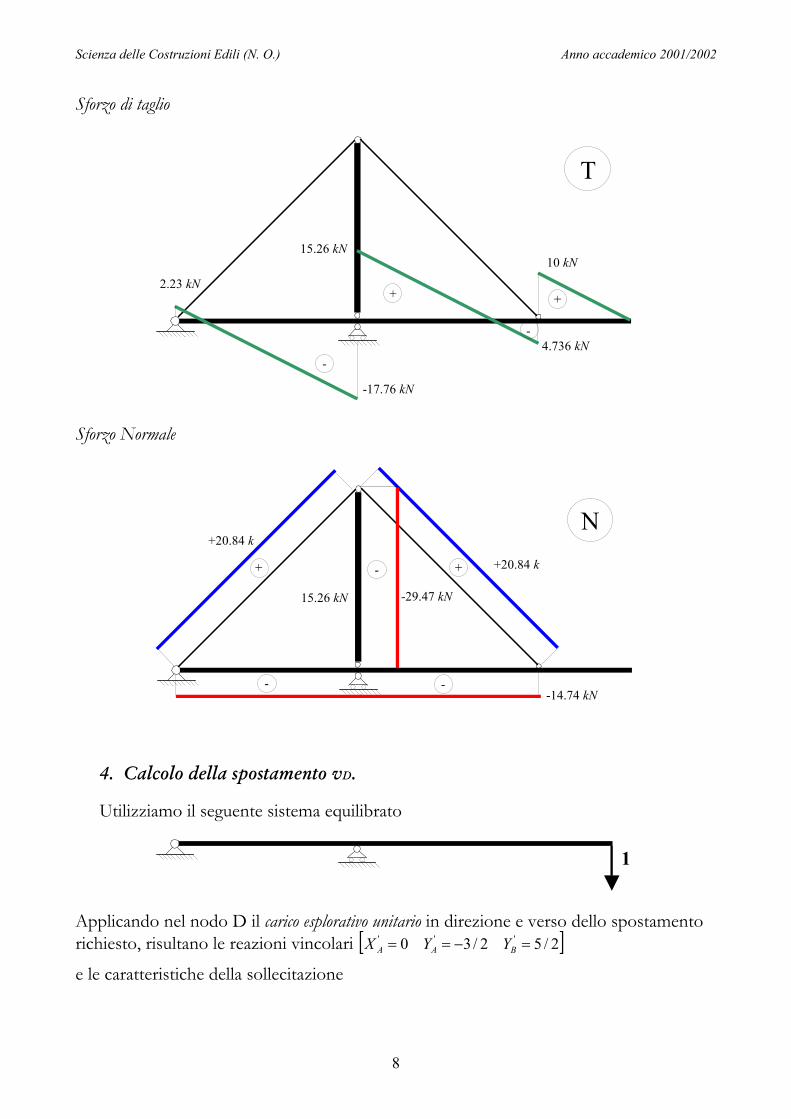
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Sforzo di taglio
T
2.23 kN
-17.76 kN
15.26 kN
4.736 kN
10 kN
+
-
-
+
Sforzo Normale
-29.47 kN 15.26 kN
-14.74 kN
+20.84 k+ - +
N +20.84 k
- -
4. Calcolo della spostamento vD.
Utilizziamo il seguente sistema equilibrato
1
Applicando nel nodo D il carico esplorativo unitario in direzione e verso dello spostamento richiesto, risultano le reazioni vincolari [ ]2/52/30 ''' =−== BAA YYX
e le caratteristiche della sollecitazione
8

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
Trave Tratto M’ T’ N’
Lz <<0 -3/2z -3/2 0
Lz <<0 )2/( zL +− 1 0
2/0 Lz << z− 1 0
Trascurando il contributo deformativo dello sforzo di taglio, lo spostamento cercato vale
dsEJ
MMvSD ∫
⋅=⋅
'
1 ,
ovvero, sviluppando i tre integrali
∫
⋅+−−⋅
L
dzEJ
zDHXpzpLzz
0
2
21
85
23
=
⋅++−⋅
+−
∫L
dzEJ
zDHXzLpzL
0
2)2(8
)2
(
[ ]=
−⋅−
∫2/
0
2
2L
dzEJ
zpz
e sostituendo i valori numerici, si ottiene
cmv 1396.0≈D ,
spostamento valutato in direzione e verso del carico esplorativo.
9
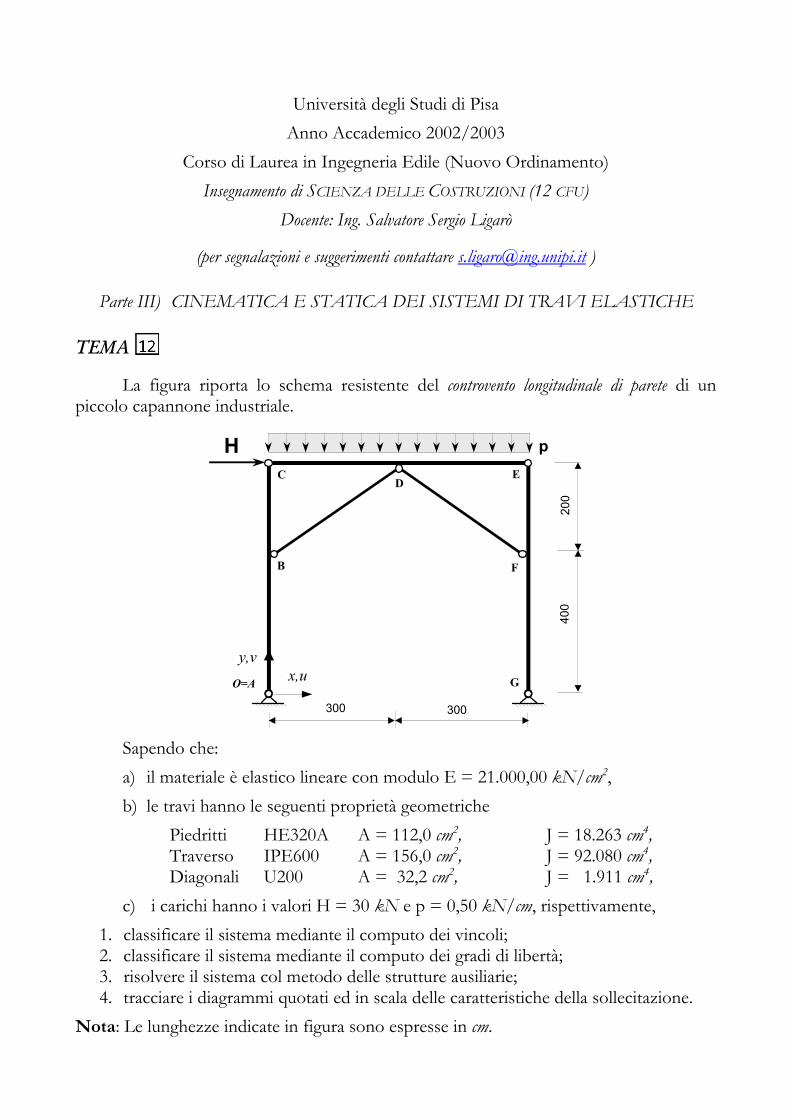
Università degli Studi di Pisa Anno Accademico 2002/2003
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected] )
Parte III) CINEMATICA E STATICA DEI SISTEMI DI TRAVI ELASTICHE
TEMA
La figura riporta lo schema resistente del controvento longitudinale di parete di un piccolo capannone industriale.
B
C D
E
p
300
400
200
F
y,v x,u O=A
H
300
G
Sapendo che: a) il materiale è elastico lineare con modulo E = 21.000,00 kN/cm2, b) le travi hanno le seguenti proprietà geometriche
Piedritti HE320A A = 112,0 cm2, J = 18.263 cm4, Traverso IPE600 A = 156,0 cm2, J = 92.080 cm4, Diagonali U200 A = 32,2 cm2, J = 1.911 cm4,
c) i carichi hanno i valori H = 30 kN e p = 0,50 kN/cm, rispettivamente, 1. classificare il sistema mediante il computo dei vincoli; 2. classificare il sistema mediante il computo dei gradi di libertà; 3. risolvere il sistema col metodo delle strutture ausiliarie; 4. tracciare i diagrammi quotati ed in scala delle caratteristiche della sollecitazione.
Nota: Le lunghezze indicate in figura sono espresse in cm.
Emanuele Bonelli
12

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2002/2003
SOLUZIONE:
1. Classificazione del sistema
Inseriamo un numero sufficiente di sezioni (16) al fine di isolare i punti di discontinuità (di vincolo, di carico e geometriche) del sistema.
Al termine di tale operazione, s’individuano sei travi, numerate da a , due aste, e , e sette nodi, identificati dalle lettere da A a G, connessi fra loro e coi vincoli nel
modo indicato nella figura seguente.
B
C D E
L h 1
h 2
F
y,v
x,u
O=A L G 1
2 3
4 5
1
2
3 4
5
6 7 8
12
11 10
9
6
13
14 15
16
7 8
10hz<<
a1) computo dei vincoli - metodo generale (trave per trave ed asta per asta)
In assenza di vincoli e connessioni, il sistema avrebbe 3 x 8 = 24 gradi di libertà. D’altra parte:
• la cerniera fissa in A è un vincolo doppio ( 01 =u , 01 =v ), per cui 2=Am ; • la cerniera fissa in G è un vincolo doppio ( 012 =u , 012 =v ), per cui 2=Gm ; • la connessione 2-3 è tripla ( 32 uu = , 32 vv = , 32 θθ = ), per cui 332 =−m ; • la connessione 2-13 è doppia ( 132 uu = , 132 vv = ), per cui 2132 =−m ; • la connessione 4-5 è doppia ( 54 uu = , 54 vv = ), per cui 254 =−m ; • la connessione 6-7 è tripla ( 76 uu = , 76 vv = , 76 θθ = ), per cui 376 =−m ; • la connessione 6-14 è doppia ( 146 uu = , 146 vv = ), per cui 2146 =−m ; • la connessione 6-15 è doppia ( 156 uu = , 156 vv = ), per cui 2156 =−m ; • la connessione 8-9 è doppia ( 98 uu = , 98 vv = ), per cui 298 =−m ; • la connessione 10-11 è tripla ( 1110 uu = , 1110 vv = , 1110 θθ = ), per cui 31110 =−m ; • la connessione 10-16 è doppia ( 1610 uu = , 1610 vv = ), per cui 21610 =−m ;

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
3
cosicché il grado complessivo di vincolo del sistema è 25. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.
a2) computo dei vincoli - metodo sintetico (parte per parte)
Il sistema piano è ottenuto connettendo fra loro e coi vincoli le cinque parti I = [ + ], II = [ + ], III = [ + ], IV = [ ] e V = [ ], nel modo illustrato in figura. In assenza di vincoli e connessioni il sistema avrebbe 15 gradi di libertà.
D’altronde: • la cerniera fissa in A è un vincolo doppio ( 01 =u , 01 =v ), per cui 2=Am ; • la cerniera fissa in G è un vincolo doppio ( 012 =u , 012 =v ), per cui 2=Gm ; • la connessione I-II è doppia ( 54 uu = , 54 vv = ), per cui 2=−IIIm ; • la connessione II-III è doppia ( 98 uu = , 98 vv = ), per cui 2=−IIIIIm ; • la connessione I-IV è doppia ( 132 uu = , 132 vv = ), per cui 2=−IVIm ; • la connessione II-IV è doppia ( 146 uu = , 146 vv = ), per cui 2=−IVIIm ; • la connessione II-V è doppia ( 157 uu = , 157 vv = ), per cui 2=−VIIm ; • la connessione III-V è doppia ( 1610 uu = , 1610 vv = ), per cui 2=−VIIIm ;
cosicché il grado complessivo di vincolo del sistema è 16. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.
b) computo dei gradi di libertà
Il sistema è costituito da un’unica parte vincolata al suolo e dotata di sconnessioni. • La cerniera fissa in A permette la rotazione assoluta 1θ ; • la cerniera fissa in C permette la rotazione assoluta 12θ ; • la sconnessione semplice M=0 in B permette la rotazione relativa IIVIVI θθθ −=∆ − ; • la sconnessione semplice M=0 in C permette la rotazione relativa IIIIII θθθ −=∆ − ; • la sconnessione doppia M=0 in D permette le rotazioni relative IIIVIVII θθθ −=∆ − e
IIVVII θθθ −=∆ − ; • la sconnessione semplice M=0 in E permette la rotazione relativa IIIIIIIIII θθθ −=∆ − ; • la sconnessione semplice M=0 in F permette la rotazione relativa IIIVVIII θθθ −=∆ − . Introdotti otto vincoli semplici per sopprimere i gradi di libertà descritti, si ottiene una struttura costituita da tre maglie chiuse, una esterna e due interne, a ciascuna delle quali compete un grado di iperstaticità pari a tre. Pertanto, se i vincoli sono indipendenti (efficaci), il sistema dato è al più una struttura una volta iperstatica.

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2002/2003
2. Risoluzione del sistema col metodo delle strutture ausiliarie
Adottiamo la struttura principale mostrata in figura, ottenuta eliminando la componente orizzontale XG della reazione vincolare in G.
B
C D
E
L
h 1
h 2
F
y,v x,u O=A
L
G
α d
s
Dotiamo ciascuna trave di una propria ascissa curvilinea, avente l’origine nell’estremo con indice alfanumerico inferiore (numero o lettera), e considerata positiva e crescente se diretta verso l’altro estremo. Assumiamo come positivi i momenti flettenti che tendono le fibre poste dalle parti tratteggiate in figura. Infine, ricaviamo i valori
cmhhh 60021 =+= , cmhLd 555.36022
2 =+= , cmdhLs 410.166/2 =⋅= ,
554700.0/sin 2 == dhα , 832050.0/cos == dLα .
Sistema ausiliario 0
B
C D
E
p
L
h 1
h 2
F
y,v x,u O=A
H
L
G
0

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
5
Le equazioni cardinali della statica si scrivono
=⋅+⋅−⋅−==⋅−+=
=+=
∑∑∑
02202
0
02
00
0
LYLphHMLpYYF
HXF
GzA
GAy
Ax
da cui si ricavano le reazioni vincolari
kNHX A 00.300 −=−= , kNpLL
HhYA 00.1202
0 =+−= , kNpLL
HhYG 00.1802
0 =++= .
L’equazione ausiliaria, 008 =⋅−= sNM E , fornisce 00
8 =N . L’equazione ausiliaria, 00
70 =⋅−⋅−= sNhXM AC , fornisce kNshXN A 20.108/00
7 =⋅−= , da cui
kNNN x 02.90cos07
07 =⋅= α , kNNN y 01.60sin0
707 =⋅= α .
Le caratteristiche della sollecitazione risultano Trave Tratto M0 T0 N0
10 hz << zX A ⋅− 0 0AX− 0
AY−
20 hz << zNzhX xA ⋅−+⋅− 071
0 )( 07
0xA NX −− 0
70
yA NY −−
Lz <<0 207
0 2/)( zpzNY yA ⋅−⋅+ zpNY yA ⋅−+ 07
0 HNX xA −− 07
0
Lz <<0 20 2/ zpzYG ⋅−⋅ zpYG ⋅+− 2/0 0
20 hz << 0 0 0GY−
10 hz << 0 0 0GY−
dz <<0 0 0 07N
dz <<0 0 0 0
Passando ai valori numerici si ha:
Trave Tratto M0 T0 N0 10 hz << 30 z 30 -120.0
20 hz << 12000 - 60.0 z -60.0 -180.0
Lz <<0 180.0 z - 0.25 z2 180.0 - 0. 5 z -90.0
Lz <<0 225.00.180 zz ⋅−⋅ z⋅− 5.00.180 0.0
20 hz << 0.0 0.0 -180.0
10 hz << 0.0 0.0 -180.0
dz <<0 0.0 0.0 108.2
dz <<0 0.0 0.0 0.0

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2002/2003
Sistema ausiliario 1
B
C D
E
L
h 1
h 2
F
y,v x,u O=A
L
G
1
1
Le equazioni cardinali della statica si scrivono
=⋅==+=
=+=
∑∑∑
020
01
1
11
1
LYMYYF
XF
GzA
GAy
Ax
da cui si ricavano le reazioni vincolari
001 111 ==−= GAA YYX .
L’equazione ausiliaria, 01 18 =⋅−⋅= sNhM E , fornisce kNshN 606.3/1
8 == da cui kNNN x 00.3cos1
818 =⋅= α , kNNN y 00.2sin1
818 =⋅= α .
L’equazione ausiliaria, 017
1 =⋅−⋅−= sNhXM AC , fornisce 18
117 / NshXN A =⋅−= , da cui
kNNN x 00.3cos17
17 =⋅= α , kNNN y 00.2sin1
717 =⋅= α .
Le caratteristiche della sollecitazione risultano
Trave Tratto M1 T1 N1 10 hz << z 1 0
20 hz << zNh x ⋅−+ )1( 171 1
71 xN− 17 yN−
Lz <<0 zNhNh yx ⋅+⋅− 172
17 1
7 yN 171 xN−
Lz <<0 zNhNh yx ⋅+⋅− 182
18 1
8 yN− 181 xN−
20 hz << zNh x ⋅−+ )1( 181 0 1
81 xN− 18 yN−
10 hz << z -1 0
dz <<0 0 0 17N
dz <<0 0 0 18N

Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
7
Passando ai valori numerici si ha:
Trave Tratto M1 T1 N1 10 hz << z 1.0 0.0
20 hz << 400 – 2 z -2.0 -2.0
Lz <<0 2 z 2.0 -2.0
Lz <<0 z2 -2.0 -2.0
20 hz << z2400 − 2.0 -2.0
10 hz << z -1.0 0.0
dz <<0 0.0 0.0 3.606
dz <<0 0.0 0.0 3.606
Calcolo dell’iperstatica
Trascurando il contributo deformativo dello sforzo di taglio, risultano
∫∫⋅
+⋅
=SS
dsEA
NNdsEJ
MM 010110η ed ∫∫ +=
SS
dsEANds
EJM 2
12
111η .
Tenuto conto delle diverse proprietà geometriche degli elementi, occorre valutare:
Trave : [ ] [ ] [ ] [ ] cmEJ
hdzzzEJ
dzzXzEJ
hh
A 669.1103011
1
31
010
0
1
11
≈⋅
=⋅⋅=⋅−⋅ ∫∫ ,
Trave : [ ] [ ]
[ ] [ ] cmdzzzEJ
dzzNXhXzNhEJ
h
h
xAAx
834.0601200024001
)()1(1
2
2
01
0
07
01
0171
1
≈−⋅−
=⋅−−+⋅−⋅⋅−+
∫
∫
Trave : [ ] [ ]
[ ] [ ] cmdzzzzEJ
dzzpzNYzNhNhEJ
L
L
yAYx
152.125.018021
2/)(1
0
2
2
0
207
0172
17
2
≈−⋅
=⋅−⋅+⋅⋅+⋅−
∫
∫
Trave : [ ] [ ]
[ ] [ ] cmzdzzzEJ
zdzpzYzNhNhEJ
L
L
Gyx
152.125.018021
2/1
0
2
2
0
20182
18
2
≈−⋅
=⋅−⋅−⋅⋅+⋅−
∫
∫

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2002/2003
Trave : [ ] [ ] [ ] [ ] cmzdEA
zdYNEA
hh
Gy 0552.00.180606.311 22
010
018
1
≈−⋅−=−⋅− ∫∫ ,
Asta : [ ] [ ] [ ] [ ] cmdzEA
dzNNEA
dd
2080.02.108606.311
030
07
17
3
≈⋅=⋅ ∫∫ .
Sommando i contributi, si ricava lo spostamento cercato cm093.510 ≅η .
Analogamente, calcoliamo i seguenti integrali
Trave : [ ] cmEJhdzz
EJ
h
055.03
1
1
31
0
2
1
1
≈=∫ ,
Trave : [ ] [ ] cmdzzEJ
dzzNhEJ
hh
x 0278.024001)1(1 22
0
2
10
2171
1
≈−=⋅−+ ∫∫ ,
Trave : [ ] [ ] cmEJLdzz
EJdzzNhNh
EJ
LL
Yx 019.034211
2
3
0
2
20
2172
17
2
≈==⋅+⋅− ∫∫ ,
Trave : [ ] [ ] cmEJLzdz
EJzdzNhNh
EJ
LL
yx 019.034211
2
3
0
2
20
2182
18
2
≈==⋅+⋅− ∫∫ ,
Trave : [ ] [ ] cmzdzEJ
zdzNhEJ
hh
x 0278.024001)1(1 22
0
2
10
2181
1
≈−=⋅−+ ∫∫ ,
Trave : [ ] cmEJhzdz
EJ
h
055.03
1
1
31
0
2
1
1
≈=∫ ,
Asta : [ ] [ ] cmEA
ddzEA
dzNEA
dd
0069.000.13606.311
30
2
30
217
3
≈⋅
== ∫∫
Asta : [ ] [ ] cmEA
ddzEA
dzNEA
dd
0069.000.13606.311
30
2
30
218
3
≈⋅
== ∫∫ .
Sommandone i contributi, si ricava lo spostamento cm2174.011 ≅η . In definitiva, il valore dell’iperstatica risulta
kNX 210.23/ 1110 −≅−= ηη .
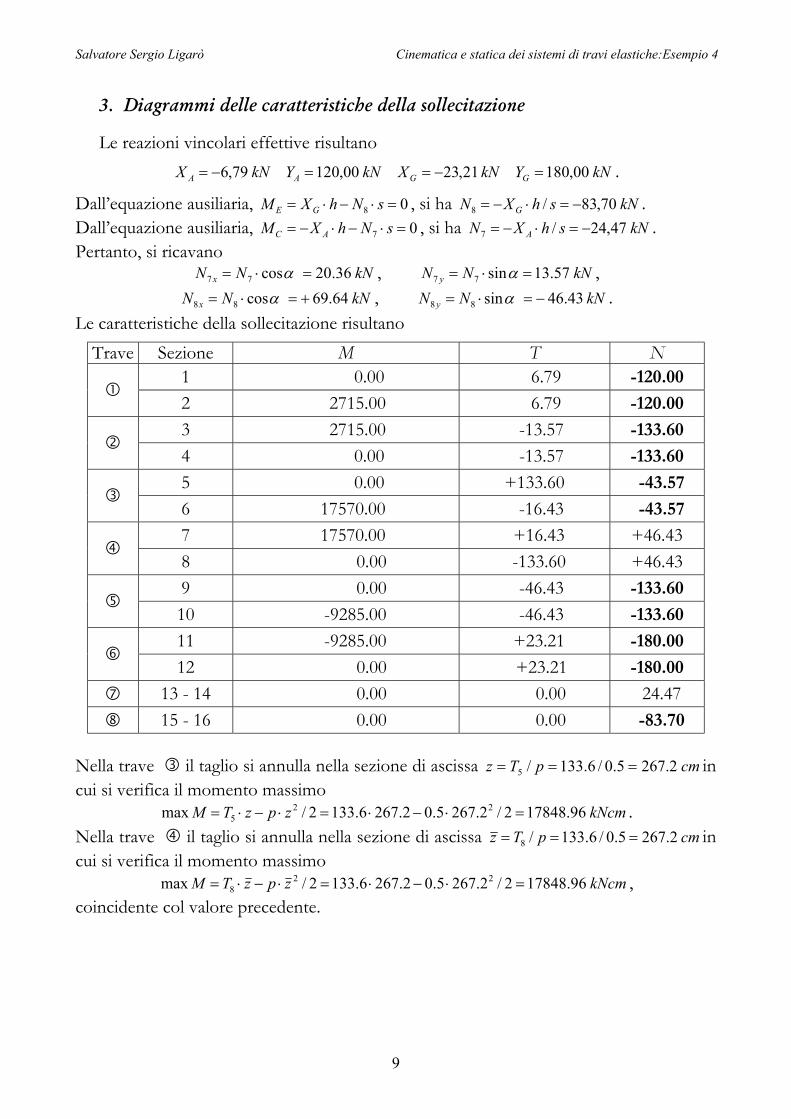
Salvatore Sergio Ligarò Cinematica e statica dei sistemi di travi elastiche:Esempio 4
9
3. Diagrammi delle caratteristiche della sollecitazione
Le reazioni vincolari effettive risultano kNYkNXkNYkNX GGAA 00,18021,2300,12079,6 =−==−= .
Dall’equazione ausiliaria, 08 =⋅−⋅= sNhXM GE , si ha kNshXN G 70,83/8 −=⋅−= . Dall’equazione ausiliaria, 07 =⋅−⋅−= sNhXM AC , si ha kNshXN A 47,24/7 −=⋅−= . Pertanto, si ricavano
kNNN x 36.20cos77 =⋅= α , kNNN y 57.13sin77 =⋅= α , kNNN x 64.69cos88 +=⋅= α , kNNN y 43.46sin88 −=⋅= α .
Le caratteristiche della sollecitazione risultano Trave Sezione M T N
1 0.00 6.79 -120.00
2 2715.00 6.79 -120.00
3 2715.00 -13.57 -133.60
4 0.00 -13.57 -133.60
5 0.00 +133.60 -43.57
6 17570.00 -16.43 -43.57
7 17570.00 +16.43 +46.43
8 0.00 -133.60 +46.43 9 0.00 -46.43 -133.60
10 -9285.00 -46.43 -133.60
11 -9285.00 +23.21 -180.00
12 0.00 +23.21 -180.00
13 - 14 0.00 0.00 24.47 15 - 16 0.00 0.00 -83.70
Nella trave il taglio si annulla nella sezione di ascissa cmpTz 2.2675.0/6.133/5 === in cui si verifica il momento massimo
kNcmzpzTM 96.178482/2.2675.02.2676.1332/max 225 =⋅−⋅=⋅−⋅= .
Nella trave il taglio si annulla nella sezione di ascissa cmpTz 2.2675.0/6.133/8 === in cui si verifica il momento massimo
kNcmzpzTM 96.178482/2.2675.02.2676.1332/max 228 =⋅−⋅=⋅−⋅= ,
coincidente col valore precedente.

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2002/2003
Momento Flettente
B
C D E
F
A G
M -2715 -9285
+17848 +17848
Sforzo di taglio
B
C D E
F
A G
T
+6.78
-133
.6
+133
.6
-16.
43
+16.
43
+23.21
-46.43
+
-
+
-
Sforzo Normale
B
C D E
F
A G
N
-133.6
-180
+46.43
-43.57
-120
-133.6
+24.47 -83.70

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte IV) MECCANICA DEI SOLIDI DEFORMABILI ED ELEMENTI DI TEORIA DELL’ELASTICITA’
TEMA 1
Dato il tensore degli sforzi riferito al sistema principale O, xp, yp, zp
−
−=
15500
03500
00100
T ,
in cui le tensioni sono espresse in kN/cm2 (1 kN/cm2 = 10 MPa) 1. rappresentare lo stato di tensione mediante i tre cerchi di Mohr; 2. determinare il valore della σ ; MAX
3. determinare il valore della σ ; min
4. determinare il valore della τ ; MAX
Definito il versore [ T1113
1=oct ]n della trisettrice del primo ottante principale,
determinare 5. il vettore trazione t ; oct
6. il valore della tensione normale σ ; oct
7. il valore della tensione tangenziale τ ; oct
8. rappresentare il punto nel piano di Mohr; ),( octoctoctP τσ=
Infine, coi valori dei moduli elastici, e ν , 2/00,000.210 cmkNE = 3,0=9. calcolare il valore della dilatazione lineare specifica ε nella direzione individuata
dal versore
llT
411
51
21
=l .
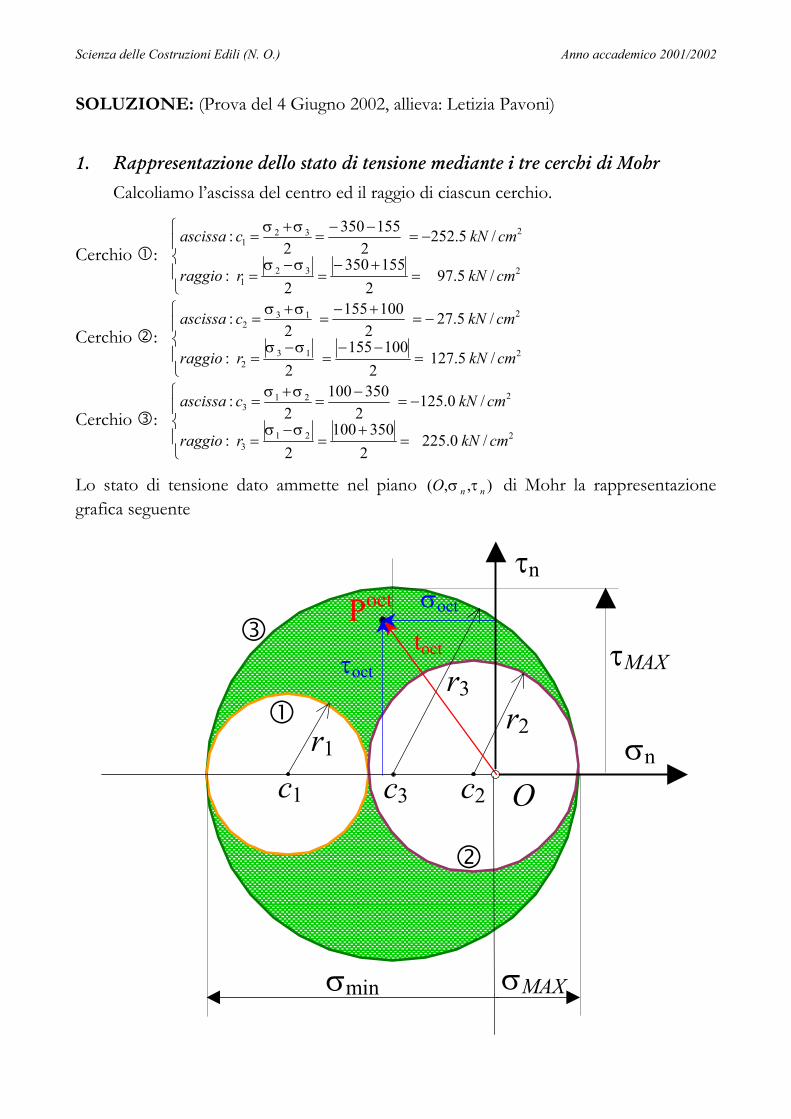
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE: (Prova del 4 Giugno 2002, allieva: Letizia Pavoni)
1. Rappresentazione dello stato di tensione mediante i tre cerchi di Mohr Calcoliamo l’ascissa del centro ed il raggio di ciascun cerchio.
Cerchio :
=+−
=−
=
−=−−
=+
=
2321
2321
/5.972
1553502
:
/5.2522
1553502
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Cerchio :
=−−
=−
=
−=+−
=+
=
2132
2132
/5.1272
1001552
:
/5.272
1001552
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Cerchio :
=+
=−
=
−=−
=+
=
2213
2213
/0.2252
3501002
:
/0.1252
3501002
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Lo stato di tensione dato ammette nel piano di Mohr la rappresentazione grafica seguente
),,( nnO τσ
τn
O
r1 r2
r3
c1 c2 c3
σmin σMAX
τMAX
σoct
τoct
σn
Poct toct

Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 1
2. Determinazione del valore della σ MAX
Note le tensioni principali, la σ è data da MAX
2
2
1321 /100155,350,100max,,max σσσσσ ==−−== cmkNMAX
3. Determinazione del valore della σ min
La σ è data da min
2321min /350155,350,100min,,min σσσσσ =−=−−== cmkN
4. Determinazione del valore della τ MAX
La τ è data da MAX
32
213133221 /0.225,,max
2,
2,
2max rcmkNrrrMAX ===
−−−
=σσσσσσ
τ
5. Determinazione del vettore trazione oct
oct
t
Il vettore trazione agente sull’elemento piano che ha per normale la trisettrice
del primo ottante principale,
t
[ T1113
=octn ]1
oct
, è dato da
octnTt = ,
dove T è il tensore degli sforzi assegnato. Nel riferimento principale O, xp, yp, zp le sue componenti sono
−
−=
−
−=
−
−=
=
489.89
073.202
735.57
30.155
30.350
30.100
31
31
31
0.155.0.0
.00.350.0
.0.00.100
octz
octy
x
oct
t
t
t
t
oct
.
Il modulo vale
( ) ( ) ( ) ( ) ( ) ( ) 2222222 /418.2280.1550.3500.1003
cmkNtttt octz
octy
octx
octoct =−+−+=++== t 1
6. Determinazione del valore della tensione normale σ oct
Il valore della tensione normale ottaedrale è dato da

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
[ ] 22/0.135
31
31
31
489.89073.202735.57 σσ =−=
−−=⋅== cmkNoctoctoct
oct ntσ
7. Determinazione del valore della tensione tangenziale τ oct
Il valore della tensione tangenziale ottaedrale è dato da
( ) ( ) ( ) ( ) 22222 /255.1840.135418.228 cmkNt octoctoct
oct =−−=−== στ τ
8. Rappresentazione del punto P nel piano di Mohr ),( octoctoct τσ=
Il punto è ben visibile nel diagramma mostrato in precedenza. Ovviamente, esso cade nella regione interna al cerchio maggiore ed esterna ai cerchi minori.
),(P τσ= octoctoct
9. Calcolo del valore della dilatazione lineare specifica nella direzione
individuata dal versore
llεT
411
51
21
=l
Utilizzando il legame costitutivo elastico lineare
−−
−−
−−
=
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
G
G
G
EEE
EEE
EEE
τ
τ
τ
σ
σ
σ
νν
νν
νν
γ
γ
γ
ε
ε
ε
100000
010000
001000
0001
0001
0001
in cui è il modulo di elasticità trasversale del materiale, si ricavano le seguenti componenti del tensore della deformazione, anch’esse nel riferimento principale,
)1(2/ ν+= EG
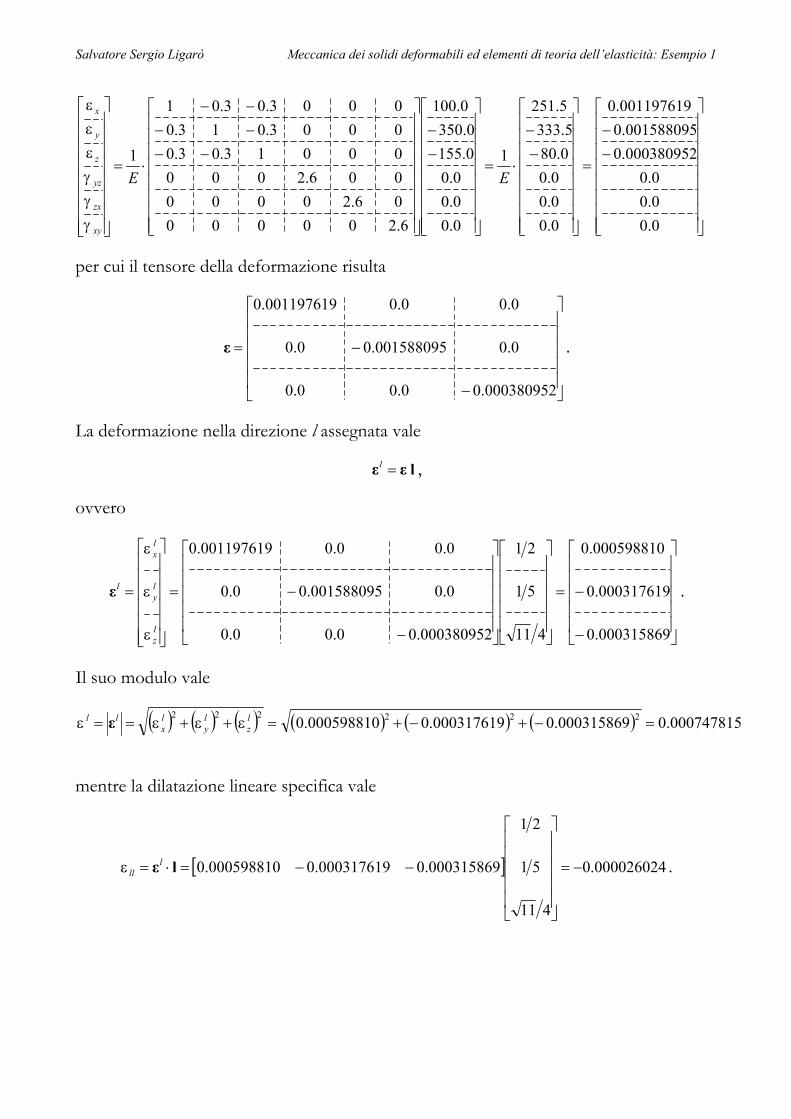
Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 1
−−
=
−−
⋅=
−−
−−−−−−
⋅=
0.00.00.0
000380952.0001588095.0
001197619.0
0.00.00.0
0.805.333
5.251
1
0.00.00.0
0.1550.350
0.100
2.60000002.60000002.600000010.30.30000.310.30000.30.31
1EE
xy
zx
yz
z
y
x
γγγεεε
per cui il tensore della deformazione risulta
−
−=
000380952.00.00.0
0.0001588095.00.0
0.00.0001197619.0
ε .
La deformazione nella direzione l assegnata vale
lεε =l ,
ovvero
−
−=
−
−=
=
000315869.0
000317619.0
000598810.0
411
51
21
000380952.00.00.0
0.0001588095.00.0
0.00.0001197619.0
lz
ly
x
l
ε
ε
ε
ε
l
.
Il suo modulo vale
( ) ( ) ( ) ( ) ( ) ( ) 000747815.0000315869.0000317619.0000598810.0 222222=−+−+=++== l
zly
lx
ll εεεε ε
mentre la dilatazione lineare specifica vale
[ ] 000026024.0
411
51
21
000315869.0000317619.0000598810.0 −=
−−=⋅= lεlllε .

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte IV) MECCANICA DEI SOLIDI DEFORMABILI ED ELEMENTI DI TEORIA DELL’ELASTICITA’
TEMA 2
In un punto P è noto lo stato di tensione. Nel sistema di riferimento O, x, y, z, le componenti del tensore degli sforzi, espresse in kN/cm2 (1 kN/cm2 = 10 MPa), assumono i valori
=
30.030.060.0
30.00.00.0
60.00.00.0
T .
Date le direzioni n ed m di versori [ T213141
= ]n ed [ ]T342291
=m ,
rispettivamente, determinare
1. i vettori trazione t e t ; n m
2. le tensioni normali σ e σ ; n m
3. le tensioni tangenziali τ e τ ; n m
4. verificare l’uguaglianza t ; ntm ⋅=⋅ mn
5. calcolare le tensioni e le direzioni principali; 6. rappresentare lo stato di tensione mediante i tre cerchi di Mohr; 7. determinare i valori delle σ , σ e τ ; MAX min MAX
Infine, supponendo che il materiale sia elastico, lineare, omogeneo ed isotropo, con e ν , 2/00,000.210 cmkNE = 3.0=
8. determinare il valore dello scorrimento angolare fra le direzioni n ed m.

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE: (Prova del 28 Giugno 2002, allieva: Cristina Antonelli)
1. Determinazione dei vettori trazione e n mt t
Il vettore trazione agente sull’elemento piano passante per il punto e normale al
versore
nt
[ T213141
=n ] , è dato da
nTt =n .
Nel riferimento principale O, x, y, z le sue componenti sono
=
=
=
161.72
036.16
071.32
142
141
143
0.300.300.60
0.300.00.0
0.600.00.0
nz
ny
nx
n
t
t
t
t ,
ed il suo modulo vale
( ) ( ) ( ) ( ) ( ) ( ) 2222222 /578.80161.72036.16071.32 cmkNtttt nz
ny
nx
nn =++=++== t .
In modo analogo, il vettore trazione agente sull’elemento piano per il punto normale
al versore
mt
[ T342291
= ]m , ha per componenti
=
=
=
279.61
713.16
425.33
293
294
292
0.300.300.60
0.300.00.0
0.600.00.0
mz
my
mx
m
t
t
t
t ,
ed il suo modulo vale
( ) ( ) ( ) ( ) ( ) ( ) 2222222 /776.71279.61713.16425.33 cmkNtttt mz
my
mx
mm =++=++== t .
2. Determinazione dei valori delle tensioni normali σ e σ n m
Il valori richiesti delle tensioni normali sono
[ ] 2/571.68142141143
161.72036.16071.32 cmkNnnn =
=⋅== ntσσ ,
[ ] 2/966.58293294292
279.61713.16425.33 cmkNmmm =
=⋅== mtσσ .

Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 2
3. Determinazione dei valori delle tensioni tangenziali τ e τ n m
Il valori delle tensioni tangenziali sono
( ) ( ) ( ) ( ) 22222 /318.42571.68578.80 cmkNt nnn
n =−=−== στ τ ,
( ) ( ) ( ) ( ) 2/924.40996.58776.71 cmkNt mmm
m =−=−== στ τ 2222
mn
.
4. Verificare dell’uguaglianza ntmt ⋅=⋅
Risultano:
[ ] 2/022.64293294292
161.72036.16071.32 cmkNnnm =
=⋅= mtτ ,
[ ] 2/022.64142141143
279.61713.16425.33 cmkNmmn =
=⋅= ntτ .
5. Calcolo delle tensioni e delle direzioni principali
Tensioni principali La ricerca delle componenti principali di tensione (più semplicemente, tensioni
principali) richiede: a) il calcolo degli invarianti del tensore degli sforzi, b) la scrittura dell’equazione caratteristica e c) la sua risoluzione.
Nel caso in esame gli invarianti sono: 2
1 /0.30 cmkNI zzyyxx =++= σσσσ ,
222 )/(0.4500 cmkNI
zzzy
yzyy
zzzx
xzxx
yyyx
xyxx
−=++=στ
τσ
στ
τσ
στ
τσσ ,
323 )/(0.0 cmkNI ij == σσ .
L’equazione caratteristica, σ , diviene σ . 0322
13 =−⋅+⋅− σσσ σσ III 0450030 23 =⋅−⋅− σσ
Mettendo in evidenza il fattore comune, si ha σ ; pertanto, una tensione principale è σ , mentre le altre due coincidono con le soluzioni dell’equazione di secondo grado σ , ovvero,
0)450030( 2 =−⋅−⋅ σσ
0=
22 /0.0 cmkN=
2 450030 −⋅− σ
−
=±⋅=±
=2
2
3,1
/739.83
/739.53)211(15
21890030
cmkN
cmkNσ .

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
Direzioni principali
La direzione principale 1, associata alla tensione principale σ1, ha versore . Le componenti del versore n[ T1111
zyx nnn=n ] 1 si ottengono risolvendo il sistema di equazioni algebriche, non lineare e non omogeneo,
=
⋅
−
−
−
1
0
0
0
)(
)(
)(
1
1
1
111
1
1
1
z
y
x
zyx
zzzyzx
yzyyyx
xzxyxx
n
n
n
nnn
σσττ
τσστ
ττσσ
, ovvero,
=
⋅
1
0
0
0
739.830.300.60
0.30739.530.0
0.600.0739.53
1
1
1
111z
y
x
zyx
n
n
n
nnn
.
La terza equazione è una combinazione lineare delle prime due; pertanto, limitando l’attenzione alle prime due di esse, possiamo costruire il vettore
−−
=
⋅+
⋅−
⋅+
=
−−
⋅−
−⋅−
−⋅−
=
=
+
+
+
88.288717.161234.3224
739.530.00.0739.53
)1(
0.300.00.60739.53
)1(
0.30739.530.600.0
)1(
)()(
)1(
)()1(
)()1(
1
133
123
1
13
1
1
1
1
σσττσσ
τττσστσσττ
yyyx
xyxx
yzyx
xzxx
yzyy
xzxy
z
y
x
NNN
N ,
calcolarne il modulo
( ) ( ) ( ) ( ) ( ) ( ) 016.461988.288717.161234.3224 22221212111 =+−+−=++== zyx NNNN N ,
e porre
−−
=
−−
=
==625215.0349029.0698057.0
88.288717.161234.3224
016.461911
1
1
1
11
11
z
y
x
NNN
NNNn .
Procedendo in modo analogo, ricaviamo i versori delle altre due direzioni principali
−=
−=
==000000.0894427.0447213.0
0.00.18000.900
461.201211
2
2
2
22
22
z
y
x
NNN
NNNn ,
=
−=
==780431.0279594.0559188.0
22.701217.251234.5024
056.898511
3
333
33
z
y
x
NNN
NNNn
3
.
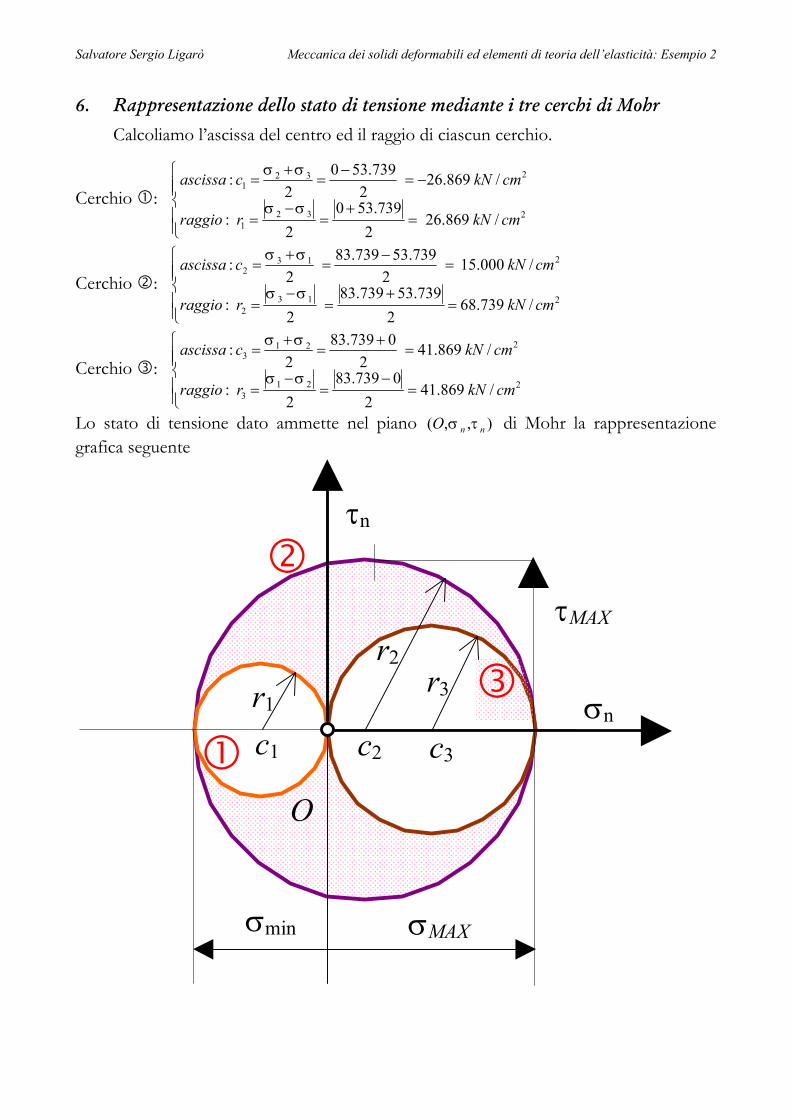
Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 2
6. Rappresentazione dello stato di tensione mediante i tre cerchi di Mohr Calcoliamo l’ascissa del centro ed il raggio di ciascun cerchio.
Cerchio :
=+
=−
=
−=−
=+
=
2321
2321
/869.262
739.5302
:
/869.262
739.5302
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Cerchio :
=+
=−
=
=−
=+
=
2132
2132
/739.682
739.53739.832
:
/000.152
739.53739.832
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Cerchio :
=−
=−
=
=+
=+
=
2213
2213
/869.412
0739.832
:
/869.412
0739.832
:
cmkNrraggio
cmkNcascissa
σσ
σσ
Lo stato di tensione dato ammette nel piano di Mohr la rappresentazione grafica seguente
),,( nnO τσ
τn
O
r1 r2
r3
1 c2 c3
σmin σMAX
τMAX
σn
c

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
7. Determinazione dei valori della σ , σ e τ MAX min MAX
Note le tensioni principali, la σ è data da MAX
2
2
1321 /739.83739.53,0.0,739.83max,,max σσσσσ ==−== cmkNMAX
La σ è data da min
3321min /739.53739.53,0.0,739.83min,,min σσσσσ =−=−== cmkN
La τ è data da MAX
22
213133221 /739.68,,max
2,
2,
2max rcmkNrrrMAX ===
−−−
=σσσσσσ
τ
8. Determinazione dello scorrimento angolare fra le direzioni n ed m
Utilizzando il legame costitutivo elastico lineare
−−
−−
−−
=
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
G
G
G
EEE
EEE
EEE
τ
τ
τ
σ
σ
σ
νν
νν
νν
γ
γ
γ
ε
ε
ε
100000
010000
001000
0001
0001
0001
in cui è il modulo di elasticità trasversale del materiale, si ricavano le seguenti componenti del tensore della deformazione nello stesso riferimento O, x, y, z
)1(2/ ν+= EG
−−
=
−−
⋅=
−−−−−−
⋅=
000000000.0000742857.0000371428.0000142857.0000042857.0000042857.0
0.00.1560.780.300.90.9
1
0.00.600.300.300.00.0
2.60000002.60000002.600000010.30.30000.310.30000.30.31
1EE
xy
zx
yz
z
y
x
γγγεεε
per cui il tensore della deformazione risulta

Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 2
−
−=
−
−=
000142857.0000185714.0000371428.0000185714.0000042857.0000000000.0000371428.0000000000.0000042857.0
30397839907809
1E
ε .
Prima della deformazione, l’angolo acuto formato dalle direzioni n ed m uscenti dal punto valeva )1( == mn
[ ] 7940666.0406
3241232914
cos ==⋅+⋅+⋅⋅==mn
θ1611⋅mn ,
da cui ''58'25376533258.07940666.0arccos406
arccos °=≈== rad16θ .
Per effetto dello stato di tensione, il versore n subisce la deformazione ε di componenti n
=
⋅=
−
−==
000423799.0000087814.0000164174.0
33369
129
1411
142141143
30397839907809
1EE
n nεε ,
per cui il versore n si trasforma nel vettore di componenti nεnn +='
=
+++
=534522483.0267349055.0801947899.0
000423799.0142000087814.0141000164174.0143
'n e di modulo 000155105.1' == nn' .
In modo analogo, il versore m subisce la deformazione ε di componenti m
=
⋅=
−
−==
000355473.0000071625.0000191000.0
40281
216
2911
293294292
30397839907809
1EE
m mεε ,
per cui il versore m si trasforma nel vettore di componenti mεmm +='
=
+++
=557441487.0742852977.0371581676.0
000355473.0293000071625.0294000191000.0292
'm e di modulo 000322198.1' == mm' .
L’angolo acuto formato dai vettori n’ ed m’ vale ora
794176091.0000322198.1000155105.1''
'cos =⋅
==mn
θ794555193.0''⋅mn
rad
rad
,
da cui θ . 98'.'20'253765314576.0794176091.0arccos' °=≈=
Lo scorrimento cercato vale dunque γ . 13'.'37'00000018004.0' °==−= ϑϑ

Università degli Studi di Pisa Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento) Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte IV) MECCANICA DEI SOLIDI DEFORMABILI ED ELEMENTI DI TEORIA DELL’ELASTICITA’
TEMA 3
In un punto P è noto lo stato di tensione. Nel sistema di riferimento O, x, y, z, le componenti del tensore degli sforzi, T,
espresse in kN/cm2 (1 kN/cm2 = 10 MPa), assumono i valori
=
0.900.00.1000.00.900.00.1000.00.0
T .
Date le direzioni l ed m di versori [ T431261
= ]l ed [ ] T825931
=m ,
rispettivamente, determinare 1. i vettori trazione t e t ; l m
2. le tensioni normali σ e σ ; l m
3. le tensioni tangenziali τ e τ ; l m
4. le tensioni e le direzioni principali; 5. rappresentare lo stato di tensione mediante i tre cerchi di Mohr; 6. determinare i valori della σ , σ e τ ; MAX min MAX
Infine, supponendo che il materiale sia elastico, lineare, omogeneo ed isotropo, con costanti elastiche e ν , 2/00,000.210 cmkNE = 3,0=
7. determinare le componenti del tensore della deformazione nel riferimento principale delle tensioni.

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
SOLUZIONE: (Prova del 15 Luglio 2002, allieva: Eleonora Colonnata)
1. Determinazione dei vettori trazione e l mt t
Il vettore trazione agente sull’elemento piano passante per il punto P e normale
al versore
lt
[ 31261
=l ]T4 , è dato da
lTt =l .
Nel riferimento O, x, y, z, le sue componenti sono
=
=
=213.90951.52446.78
264263261
0.900.00.1000.00.900.00.1000.00.0
lz
ly
lx
l
ttt
t ,
ed il suo modulo è
( ) ( ) ( ) ( ) ( ) ( ) 2222222 /752.130213.90951.52446.78 cmkNtttt lz
ly
lx
ll =++=++== t .
In modo analogo, il vettore trazione t corrispondente al versore m [ ]T825931
=m , ha
per componenti
=
=
=508.126665.18956.82
938932935
0.900.00.1000.00.900.00.1000.00.0
mz
my
mx
m
ttt
t ,
ed il suo modulo vale
( ) ( ) ( ) ( ) ( ) ( ) 2222222 /428.152508.126665.18596.82 cmkNtttt mz
my
mx
mm =++=++== t .
2. Determinazione dei valori delle tensioni normali σ e σ l m
Il valori richiesti delle tensioni normali sono
[ ] 2/308.117264263261
213.90951.52446.78 cmkNlll +=
=⋅== ltσσ ,
[ ] 2/828.151938932935
508.126665.18956.82 cmkNmmm +=
=⋅== mtσσ .

Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 3
3. Determinazione dei valori delle tensioni tangenziali τ e τ l m
Il valori delle tensioni tangenziali sono
( ) ( ) ( ) ( ) 22222 /750.57308.117752.130 cmkNt lll
l =−=−== στ τ ,
( ) ( ) ( ) ( ) 22222 /516.13828.151428.152 cmkNt mmm
m =−=−== στ τ .
4. Calcolo delle tensioni e delle direzioni principali Tensioni principali Gli invarianti di tensione sono
21 /0.180 cmkNI zzyyxx =++= σσσσ ,
222 )/(00.1900 cmkNI
zzzy
yzyy
zzzx
xzxx
yyyx
xyxx −=++=σττσ
σττσ
σττσσ ,
323 )/(000.900000 cmkNI ij −== σσ ,
per cui l’equazione caratteristica risulta σ . Questa può essere scritta come ; pertanto, una tensione principale è σ , mentre le altre due coincidono con le soluzioni dell’equazione algebrica σ , ovvero,
09000001900180 23 =+⋅−⋅− σσ90()90(]100)90( 22 ⋅−⋅−=−−− σσσσ
2/0. cmkN010000 =−⋅− σ
0)10000)[()90( =−⋅−⋅ σσ
2 90=902
−=±=
±= 2
2
3,1 /659.64/659.154
120254524810090
cmkNcmkN
σ .
Direzioni principali
La direzione 1, associata alla tensione principale σ1, ha versore n . Le componenti del versore n
[ ]T1111zyx nnn=
1 si ottengono risolvendo il sistema di equazioni algebriche, non lineare e non omogeneo,
=
⋅
−−
−
1000
)()(
)(
1
1
1
1111
1
1
z
y
x
zyx
zzzyzx
yzyyyx
xzxyxx
nnn
nnnσσττ
τσστττσσ
,
ovvero,
=
⋅
−−
−
1000
659.640.00.1000.0659.640.00.1000.0659.154
1
1
1
111 z
y
x
zyx
nnn
nnn
.
La terza equazione è proporzionale alla prima; pertanto, limitando l’attenzione alle prime due di esse, possiamo costruire il vettore

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
=
−−
−−
=
−−
−−
=
=00.1000000.090.6465
659.640.00.0659.1540.00.00.100659.1540.0659.640.1000.0
)()(
)(
1
1
1
1
1
1
1
σσττσσ
τττσσ
yyyx
xyxx
yzyx
xzxx
yz1yy
xzxy
z
y
x
τ)σ(σττ
NNN
N ,
calcolarne il modulo
( ) ( ) ( ) ( ) ( ) ( ) 311.1190800.1000000.090.6465 22221212111 =++−=++== zyx NNNN N ,
e porre
=
=
==839720.0000000.0542970.0
00.1000000.090.6465
311.1190811
1
1
1
11
11
z
y
x
NNN
NNNn .
Procedendo in modo analogo, ricaviamo i versori delle altre due direzioni principali
=
=
==000000.0000000.1000000.0
0.0010000.00
0.00
00.1000011
2
2
2
22
22
z
y
x
NNN
NNNn ,
=
=
==542970.0000000.0839720.0
00.1000000.090.15465
222.1841711
3
3
3
33
33
z
y
x
NNN
NNNn .
I risultati precedenti si ottengono più semplicemente osservando che , per cui σ è una tensione principale così come
è principale la direzione 2 ad essa associata di versore .
2/0.0 cmkNyzyx ==ττ 22/0.90 σ= cmkNyy =
[ ] [ ]TT2222 010== zyx nnnn
5. Rappresentazione dello stato di tensione mediante i tre cerchi di Mohr Calcoliamo l’ascissa del centro ed il raggio di ciascun cerchio.
Cerchio :
=+
=−
=
=−
=+
=
2321
2321
/329.772
659.64000.902
:
/671.122
659.64000.902
:
cmkNrraggio
cmkNcascissa
σσ
σσ
,
Cerchio :
=−−
=−
=
=+−
=+
=
2132
2132
/659.1092
659.154659.642
:
/000.452
659.154659.642
:
cmkNrraggio
cmkNcascissa
σσ
σσ
,
Cerchio :
=−
=−
=
=+
=+
=
2213
2213
/329.322
000.90659.1542
:
/329.1222
000.90659.1542
:
cmkNrraggio
cmkNcascissa
σσ
σσ
.

Salvatore Sergio Ligarò Meccanica dei solidi deformabili ed elementi di teoria dell’elasticità: Esempio 3
Lo stato di tensione dato ammette nel piano di Mohr la rappresentazione grafica seguente
),,( nnO τσ
σn
τn
O
r1 r2
r3 c1 c2 c3
σmin σMAX
τMAX
6. Determinazione dei valori della σ , σ e τ MAX min MAX
Note le tensioni principali, si hanno
2
2
1321 /659.154659.54,00.90,659.154max,,max σσσσσ ==−== cmkNMAX ,
3321min /659.64659.54,00.90,659.154min,,min σσσσσ =−=−== cmkN ,
22
213133221 /659.109,,max
2,
2,
2max rcmkNrrrMAX ===
−−−
=σσσσσσ
τ .
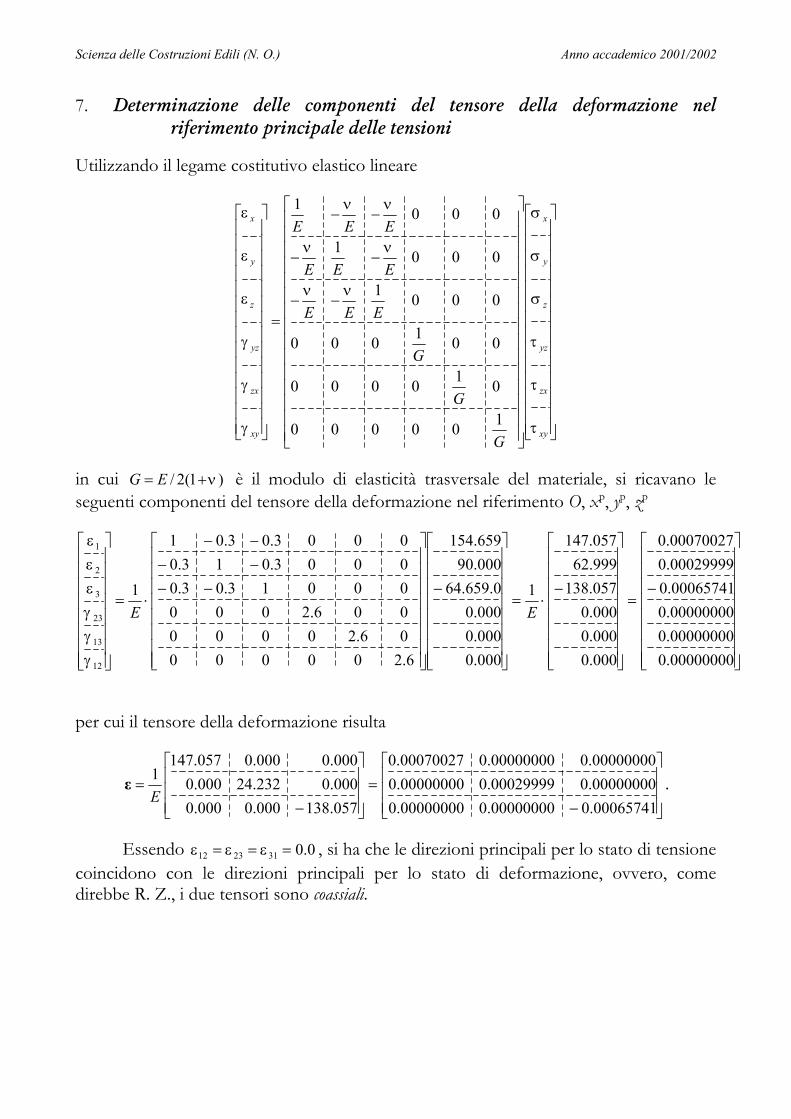
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
7. Determinazione delle componenti del tensore della deformazione nel riferimento principale delle tensioni
Utilizzando il legame costitutivo elastico lineare
−−
−−
−−
=
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
G
G
G
EEE
EEE
EEE
τ
τ
τ
σ
σ
σ
νν
νν
νν
γ
γ
γ
ε
ε
ε
100000
010000
001000
0001
0001
0001
in cui è il modulo di elasticità trasversale del materiale, si ricavano le seguenti componenti del tensore della deformazione nel riferimento O, x
)1(2/EG ν+=p, yp, zp
−=
−⋅=
−
−−−−−−
⋅=
00000000.000000000.000000000.000065741.000029999.000070027.0
000.0000.0000.0057.138999.62057.147
1
000.0000.0000.0
0.659.64000.90659.154
2.60000002.60000002.600000010.30.30000.310.30000.30.31
1
12
13
23
3
2
1
EE
γγγεεε
per cui il tensore della deformazione risulta
−=
−=
00065741.000000000.000000000.000000000.000029999.000000000.000000000.000000000.000070027.0
057.138000.0000.0000.0232.24000.0000.0000.0057.147
1E
ε .
Essendo ε , si ha che le direzioni principali per lo stato di tensione coincidono con le direzioni principali per lo stato di deformazione, ovvero, come direbbe R. Z., i due tensori sono coassiali.
0.0312312 === εε

Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte V) PROBLEMA DI SAINT VENANT E CRITERI DI RESISTENZA DEI MATERIALI
TEMA 1 La figura mostra la sezione di una trave metallica prismatica soggetta alle caratteristiche della sollecitazione:
• sforzo assiale kNN 50−= ;
• momento flettente kNcmM x 250= ;
• sforzo di taglio kNTy 100= ;
• momento torcente kNcmMt 45= .
x
y
G
10
60
40 10 80 10 40
1 2
3 4
5
Effettuare la verifica di resistenza nelle cinque sezioni indicate sapendo che:
1. il materiale è acciaio;
2. che plasticizza secondo il criterio di von Mises;
3. e che la tensione normale ammissibile è di 2/16 cmkN=σ .
NOTA: le lunghezze riportate in figura sono espresse in mm.
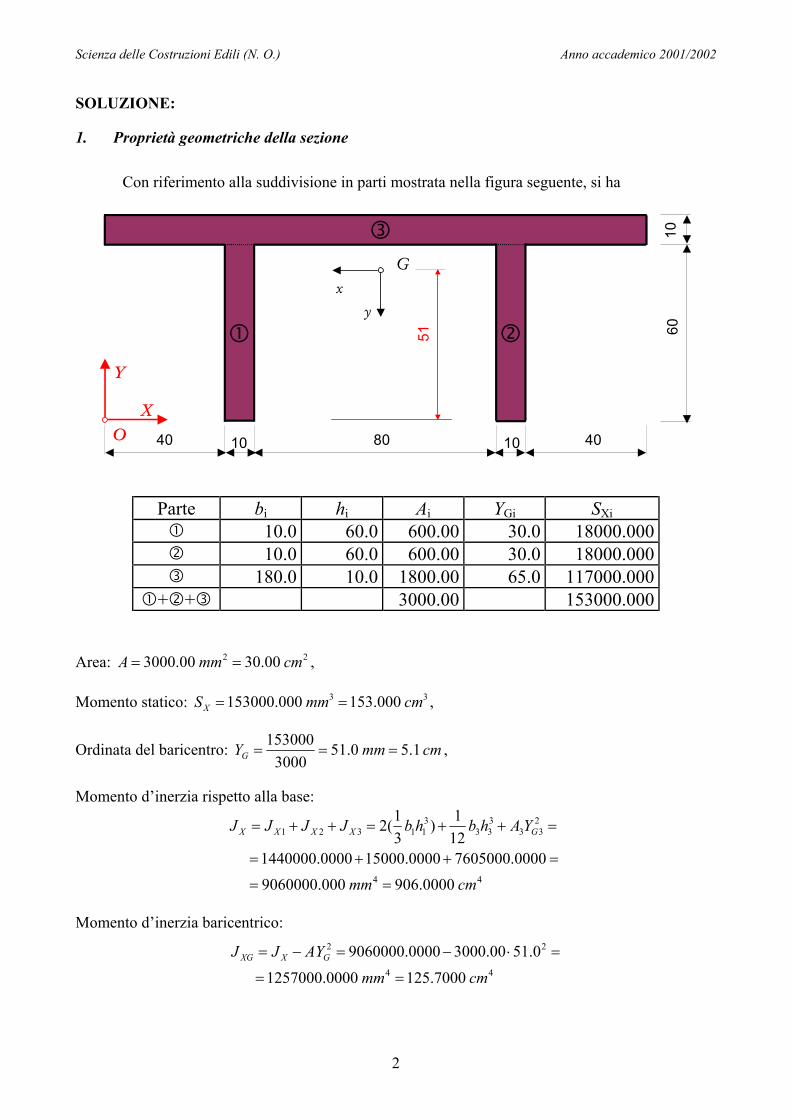
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
2
SOLUZIONE:
1. Proprietà geometriche della sezione Con riferimento alla suddivisione in parti mostrata nella figura seguente, si ha
x
y
G
10
60
40 10 80 10 40
O X
Y
51
Parte bi hi Ai YGi SXi 10.0 60.0 600.00 30.0 18000.000 10.0 60.0 600.00 30.0 18000.000 180.0 10.0 1800.00 65.0 117000.000
+ + 3000.00 153000.000
Area: 22 00.3000.3000 cmmmA == ,
Momento statico: 33 000.153000.153000 cmmmSX == ,
Ordinata del baricentro: cmmmYG 1.50.513000
153000=== ,
Momento d’inerzia rispetto alla base:
44
233
333
311321
0000.906000.90600000000.76050000000.150000000.1440000
121)
31(2
cmmm
YAhbhbJJJJ GXXXX
==
=++=
=++=++=
Momento d’inerzia baricentrico:
44
22
7000.1250000.1257000
0.5100.30000000.9060000
cmmm
AYJJ GXXG
==
=⋅−=−=
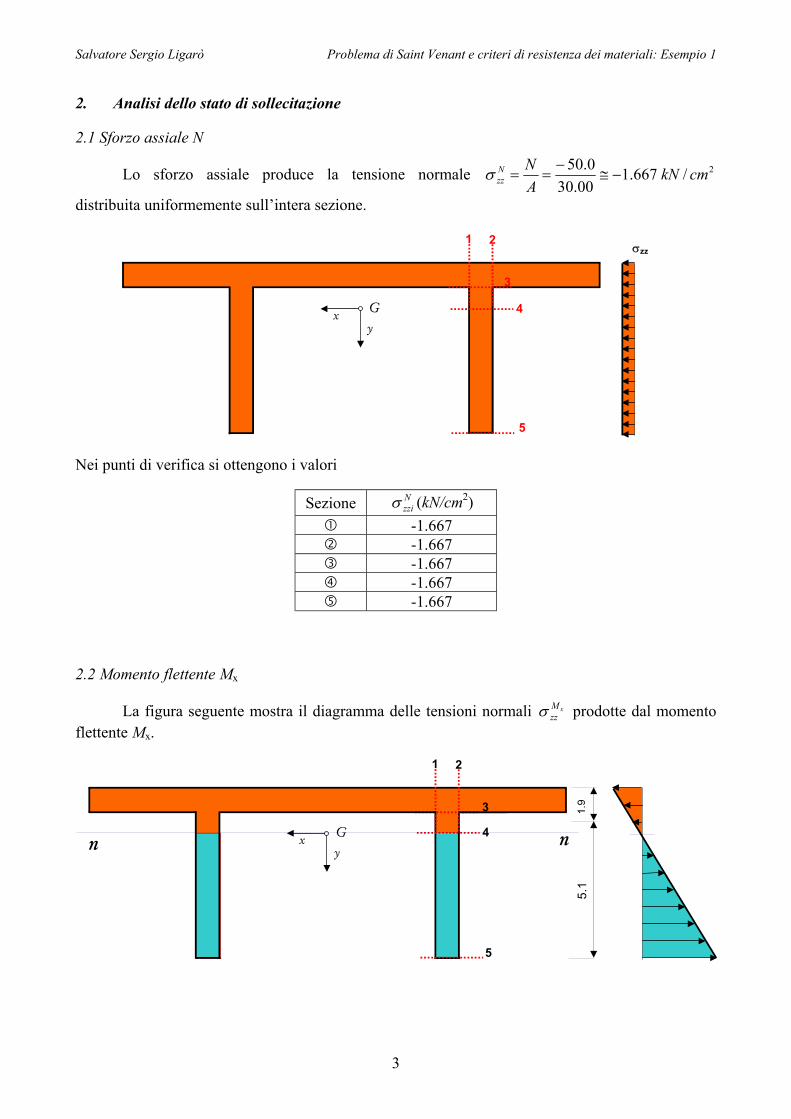
Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 1
3
2. Analisi dello stato di sollecitazione
2.1 Sforzo assiale N
Lo sforzo assiale produce la tensione normale 2/667.100.30
0.50 cmkNANN
zz −≅−
==σ
distribuita uniformemente sull’intera sezione.
x y
G
1 2
3
4
5
σzz
Nei punti di verifica si ottengono i valori
Sezione Nzziσ (kN/cm2)
-1.667 -1.667 -1.667 -1.667 -1.667
2.2 Momento flettente Mx
La figura seguente mostra il diagramma delle tensioni normali xMzzσ prodotte dal momento
flettente Mx.
x y
G
1.9
5.1
1 2
3
4
5
n n

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
4
Utilizzando la formula di Navier, x
ixMzzi J
yMx
⋅=σ , si ottengono i valori
Sezione xx JM / (kNcm-3) iy (cm) xMzziσ (kN/cm2)
-1.9 -3.779 -1.9 -3.779 -0.9 -1.790 0.0 0.000
1.98886
+5.1 +10.143 2.3 Sforzo di taglio Ty
La figura successiva mostra il flusso delle tensioni tangenziali yTτ prodotte dal taglio Ty.
x
y
G
1 2
3
4
5
+ +
- -
+
τzx
τzy τmax
Utilizzando la formula di Jourawski, rx
ryrs bJ
ST⋅⋅
=τ , si ottengono i valori
Sezione xy JT / (kNcm-3) rS (cm3) rb (cm) yTiτ (kN/cm2)
5.600 1.0 455.4−=zxτ 5.600 1.0 455.4+=zxτ
12.600 1.0 023.10=zyτ
13.005 1.0 346.10=zyτ
0.795545
0.000 1.0 000.0+=zyτ
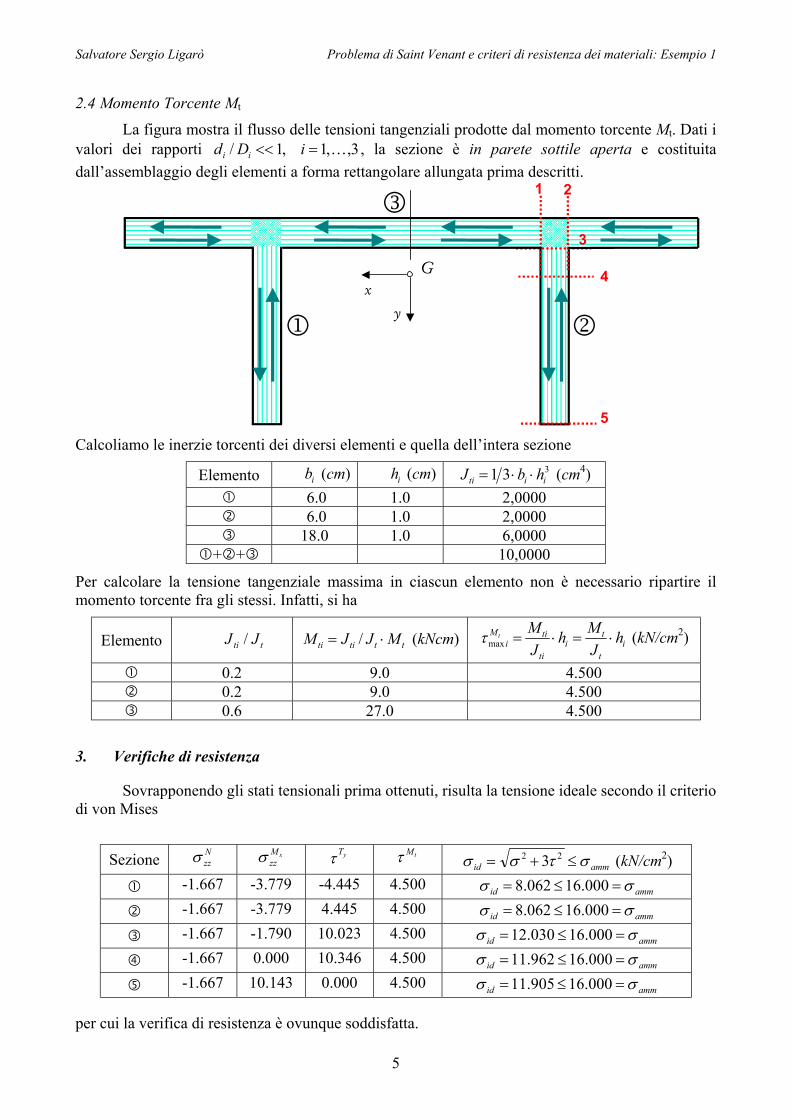
Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 1
5
2.4 Momento Torcente Mt
La figura mostra il flusso delle tensioni tangenziali prodotte dal momento torcente Mt. Dati i valori dei rapporti 3,,1,1/ K=<< iDd ii , la sezione è in parete sottile aperta e costituita dall’assemblaggio degli elementi a forma rettangolare allungata prima descritti.
x
y
G
1 2
3
4
5
1 2
3
Calcoliamo le inerzie torcenti dei diversi elementi e quella dell’intera sezione
Elemento ib (cm) ih (cm) 331 iiti hbJ ⋅⋅= (cm4) 6.0 1.0 2,0000 6.0 1.0 2,0000 18.0 1.0 6,0000
+ + 10,0000
Per calcolare la tensione tangenziale massima in ciascun elemento non è necessario ripartire il momento torcente fra gli stessi. Infatti, si ha
Elemento tti JJ / tttiti MJJM ⋅= / (kNcm) it
ti
ti
tiMi h
JMh
JM
t ⋅=⋅=maxτ (kN/cm2)
0.2 9.0 4.500 0.2 9.0 4.500 0.6 27.0 4.500
3. Verifiche di resistenza
Sovrapponendo gli stati tensionali prima ottenuti, risulta la tensione ideale secondo il criterio di von Mises
Sezione Nzzσ xM
zzσ yTτ tMτ ammid στσσ ≤+= 22 3 (kN/cm2)
-1.667 -3.779 -4.445 4.500 ammid σσ =≤= 000.16062.8 -1.667 -3.779 4.445 4.500 ammid σσ =≤= 000.16062.8 -1.667 -1.790 10.023 4.500 ammid σσ =≤= 000.16030.12 -1.667 0.000 10.346 4.500 ammid σσ =≤= 000.16962.11 -1.667 10.143 0.000 4.500 ammid σσ =≤= 000.16905.11
per cui la verifica di resistenza è ovunque soddisfatta.
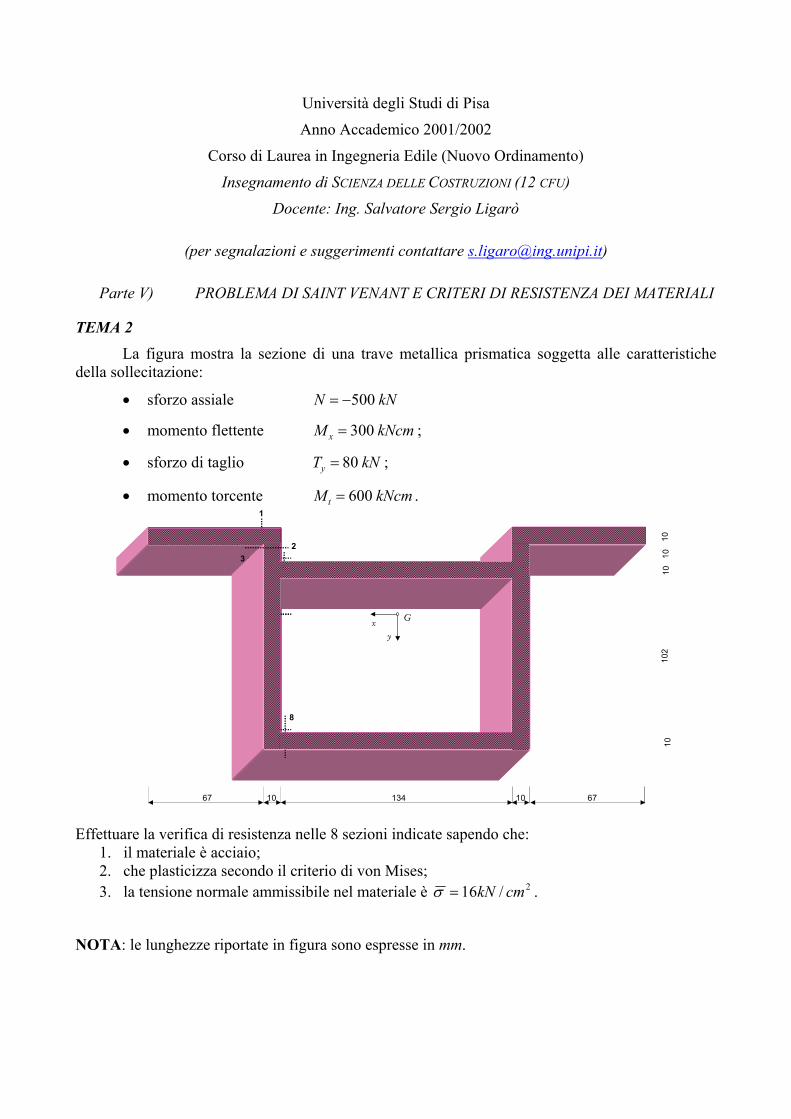
Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte V) PROBLEMA DI SAINT VENANT E CRITERI DI RESISTENZA DEI MATERIALI
TEMA 2 La figura mostra la sezione di una trave metallica prismatica soggetta alle caratteristiche della sollecitazione:
• sforzo assiale kNN 500−=
• momento flettente kNcmM x 300= ;
• sforzo di taglio kNTy 80= ;
• momento torcente kNcmMt 600= . 1
10
102
10
10
10
67 10 134 10 67
x
y
G
2 3
4 5
7 8
6
Effettuare la verifica di resistenza nelle 8 sezioni indicate sapendo che:
1. il materiale è acciaio; 2. che plasticizza secondo il criterio di von Mises; 3. la tensione normale ammissibile nel materiale è 2/16 cmkN=σ .
NOTA: le lunghezze riportate in figura sono espresse in mm.
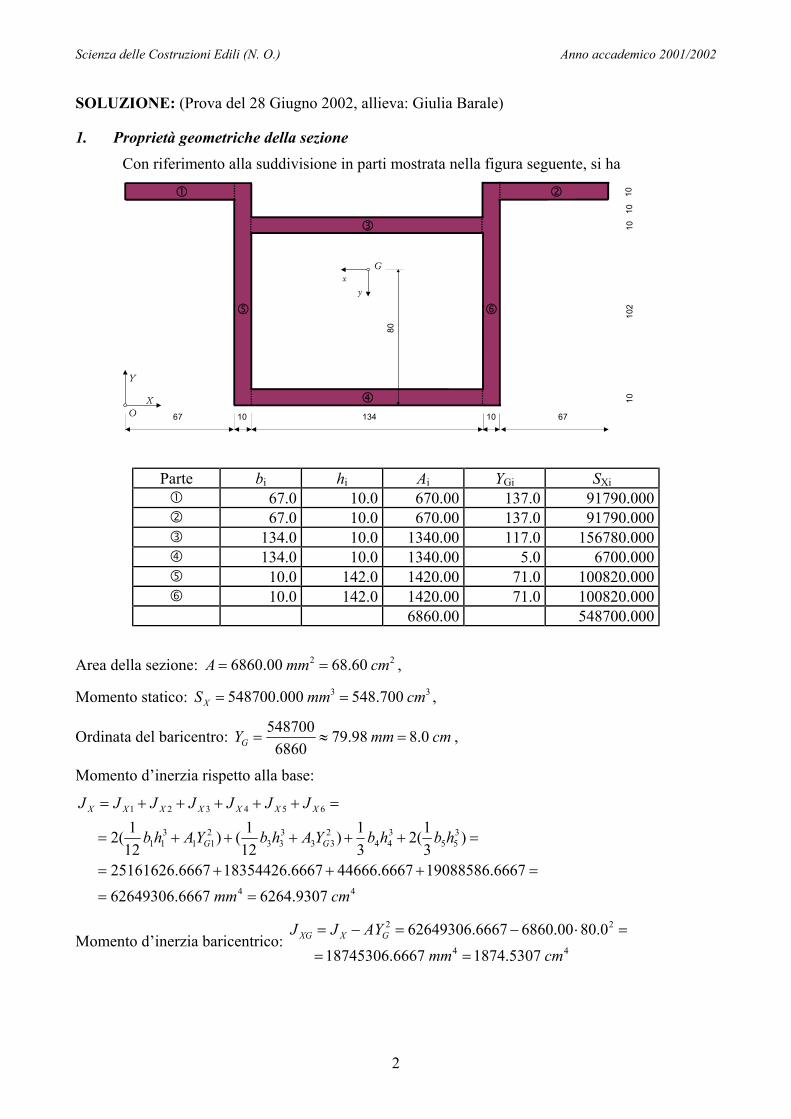
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
2
SOLUZIONE: (Prova del 28 Giugno 2002, allieva: Giulia Barale)
1. Proprietà geometriche della sezione Con riferimento alla suddivisione in parti mostrata nella figura seguente, si ha
10
102
67 10 134 10 67
10
10
10
O
x
y
G
X
Y
80
Parte bi hi Ai YGi SXi 67.0 10.0 670.00 137.0 91790.000 67.0 10.0 670.00 137.0 91790.000 134.0 10.0 1340.00 117.0 156780.000 134.0 10.0 1340.00 5.0 6700.000 10.0 142.0 1420.00 71.0 100820.000 10.0 142.0 1420.00 71.0 100820.000
6860.00 548700.000
Area della sezione: 22 60.6800.6860 cmmmA == ,
Momento statico: 33 700.548000.548700 cmmmSX == ,
Ordinata del baricentro: cmmmYG 0.898.796860
548700=≈= ,
Momento d’inerzia rispetto alla base:
44
355
344
233
333
211
311
654321
9307.62646667.626493066667.190885866667.446666667.183544266667.25161626
)31(2
31)
121()
121(2
cmmm
hbhbYAhbYAhb
JJJJJJJ
GG
XXXXXXX
==
=+++=
=+++++=
=+++++=
Momento d’inerzia baricentrico: 44
22
5307.18746667.18745306
0.8000.68606667.62649306
cmmm
AYJJ GXXG
==
=⋅−=−=
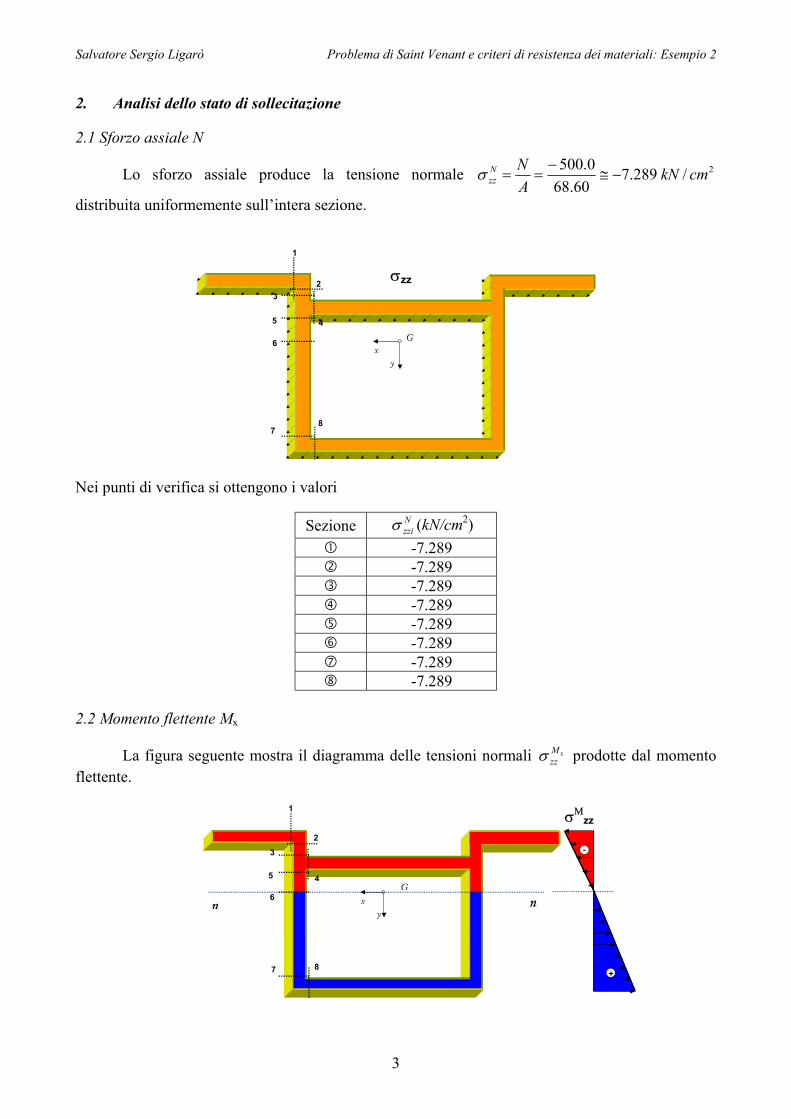
Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 2
3
2. Analisi dello stato di sollecitazione
2.1 Sforzo assiale N
Lo sforzo assiale produce la tensione normale 2/289.760.68
0.500 cmkNANN
zz −≅−
==σ
distribuita uniformemente sull’intera sezione.
x
y
G
1
2 3
4 5
7 8
6
σzz
Nei punti di verifica si ottengono i valori
Sezione Nzziσ (kN/cm2)
-7.289 -7.289 -7.289 -7.289 -7.289 -7.289 -7.289 -7.289
2.2 Momento flettente Mx
La figura seguente mostra il diagramma delle tensioni normali xMzzσ prodotte dal momento
flettente.
x
y
G
1
2 3
45
7 8
6
σΜzz
-
+
n n
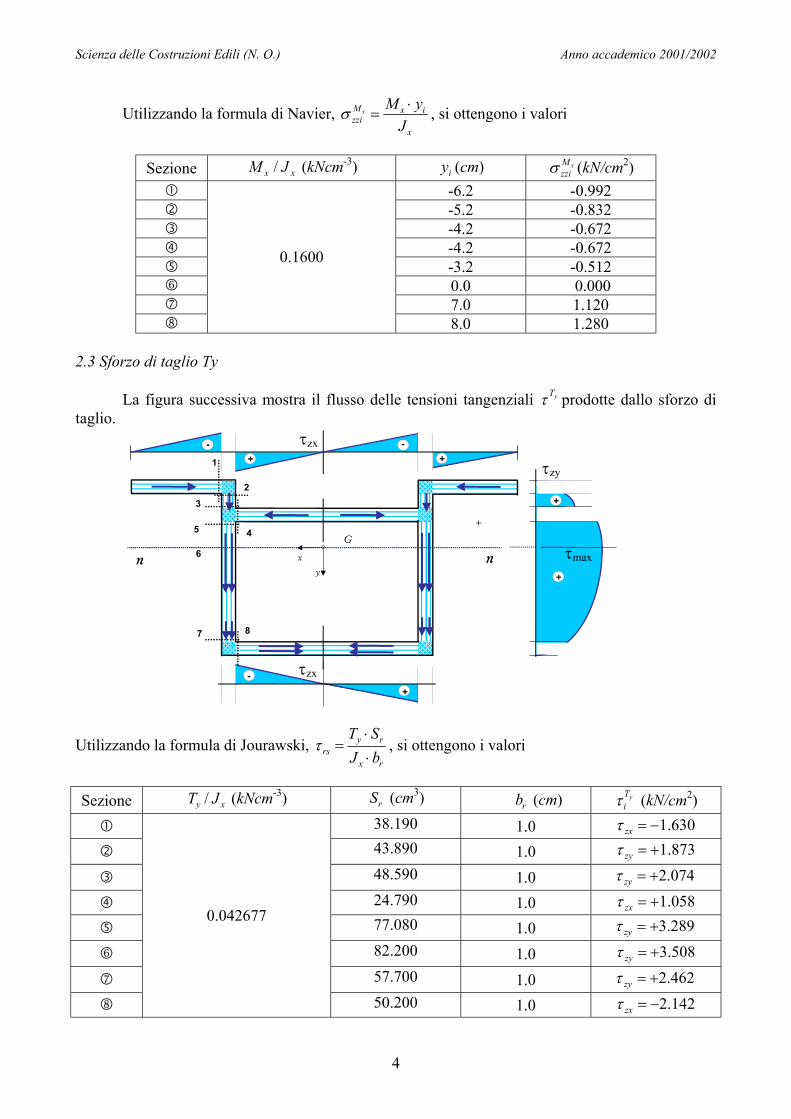
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
4
Utilizzando la formula di Navier, x
ixMzzi J
yMx
⋅=σ , si ottengono i valori
Sezione xx JM / (kNcm-3) iy (cm) xMzziσ (kN/cm2)
-6.2 -0.992 -5.2 -0.832 -4.2 -0.672 -4.2 -0.672 -3.2 -0.512
6 0.0 0.000 7 7.0 1.120 8
0.1600
8.0 1.280 2.3 Sforzo di taglio Ty
La figura successiva mostra il flusso delle tensioni tangenziali yTτ prodotte dallo sforzo di taglio.
x
y
G
n n
+ + - -
+
τzy
τmax
+ -
τzx
τzx
1
2 3
4 5
7 8
6
+
+
Utilizzando la formula di Jourawski, rx
ryrs bJ
ST⋅⋅
=τ , si ottengono i valori
Sezione xy JT / (kNcm-3) rS (cm3) rb (cm) yTiτ (kN/cm2)
38.190 1.0 630.1−=zxτ
43.890 1.0 873.1+=zyτ
48.590 1.0 074.2+=zyτ
24.790 1.0 058.1+=zxτ
77.080 1.0 289.3+=zyτ
6 82.200 1.0 508.3+=zyτ
7 57.700 1.0 462.2+=zyτ
8
0.042677
50.200 1.0 142.2−=zxτ
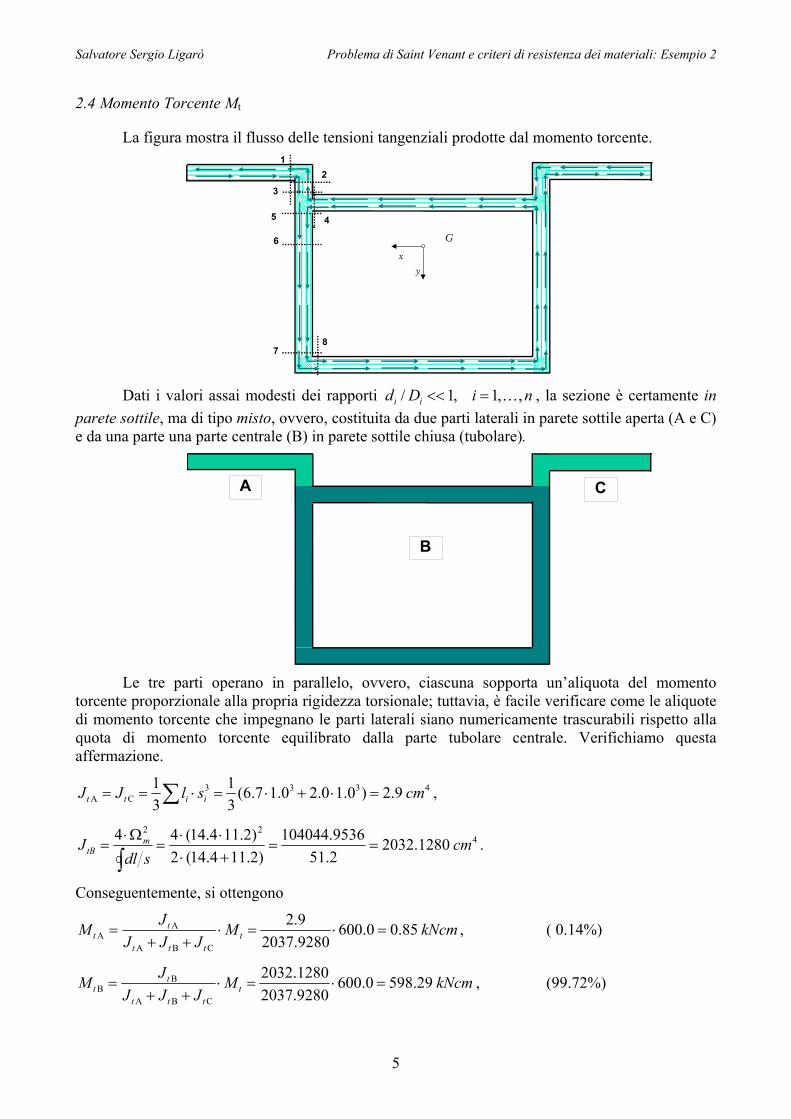
Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 2
5
2.4 Momento Torcente Mt
La figura mostra il flusso delle tensioni tangenziali prodotte dal momento torcente.
x
y
G
2 3
4 5
7 8
6
1
Dati i valori assai modesti dei rapporti niDd ii ,,1,1/ K=<< , la sezione è certamente in
parete sottile, ma di tipo misto, ovvero, costituita da due parti laterali in parete sottile aperta (A e C) e da una parte una parte centrale (B) in parete sottile chiusa (tubolare).
A
B
C
Le tre parti operano in parallelo, ovvero, ciascuna sopporta un’aliquota del momento torcente proporzionale alla propria rigidezza torsionale; tuttavia, è facile verificare come le aliquote di momento torcente che impegnano le parti laterali siano numericamente trascurabili rispetto alla quota di momento torcente equilibrato dalla parte tubolare centrale. Verifichiamo questa affermazione.
4333CA 9.2)0.10.20.17.6(
31
31 cmslJJ iitt =⋅+⋅=⋅== ∑ ,
422
1280.20322.519536.104044
)2.114.14(2)2.114.14(44 cm
sdlJ m
tB ==+⋅⋅⋅
=Ω⋅
=∫
.
Conseguentemente, si ottengono
kNcmMJJJ
JM tttt
tt 85.00.600
9280.20379.2
CBA
AA =⋅=⋅
++= , ( 0.14%)
kNcmMJJJ
JM tttt
tt 29.5980.600
9280.20371280.2032
CBA
BB =⋅=⋅
++= , (99.72%)
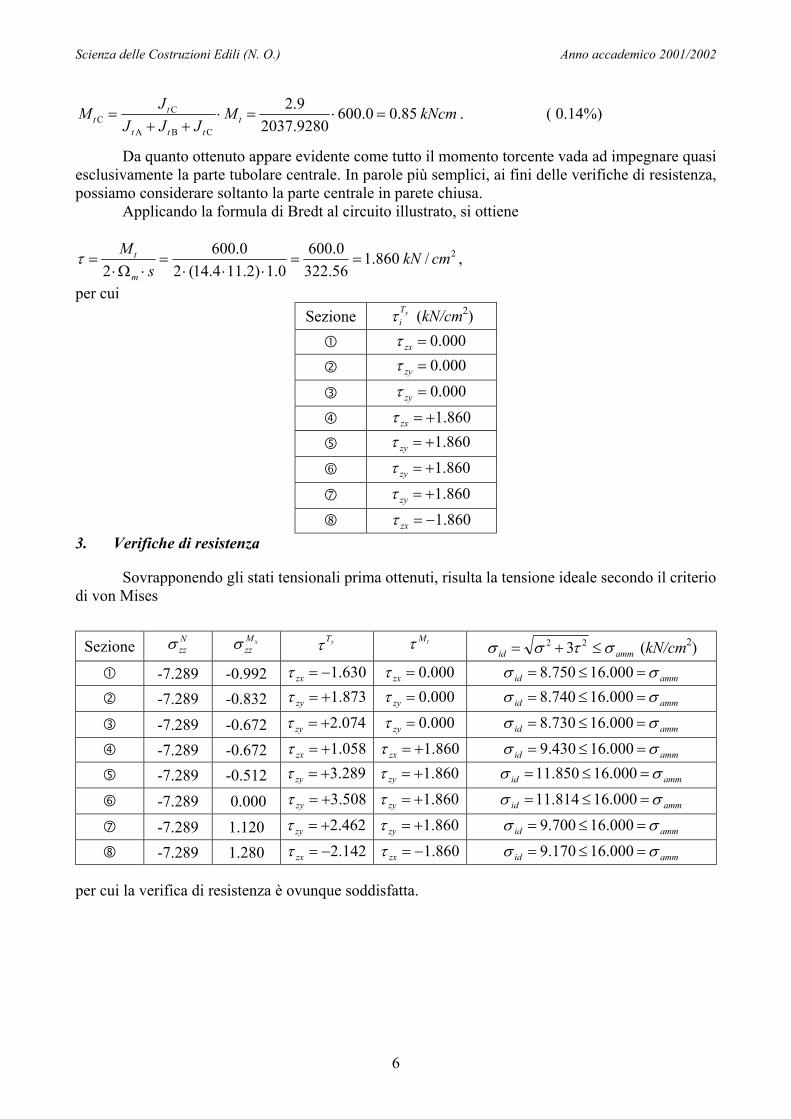
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
6
kNcmMJJJ
JM tttt
tt 85.00.600
9280.20379.2
CBA
CC =⋅=⋅
++= . ( 0.14%)
Da quanto ottenuto appare evidente come tutto il momento torcente vada ad impegnare quasi esclusivamente la parte tubolare centrale. In parole più semplici, ai fini delle verifiche di resistenza, possiamo considerare soltanto la parte centrale in parete chiusa.
Applicando la formula di Bredt al circuito illustrato, si ottiene
2/860.156.3220.600
0.1)2.114.14(20.600
2cmkN
sM
m
t ==⋅⋅⋅
=⋅Ω⋅
=τ ,
per cui Sezione yT
iτ (kN/cm2) 000.0=zxτ
000.0=zyτ
000.0=zyτ
860.1+=zxτ
860.1+=zyτ
6 860.1+=zyτ
7 860.1+=zyτ
8 860.1−=zxτ 3. Verifiche di resistenza
Sovrapponendo gli stati tensionali prima ottenuti, risulta la tensione ideale secondo il criterio di von Mises
Sezione Nzzσ xM
zzσ yTτ tMτ ammid στσσ ≤+= 22 3 (kN/cm2)
-7.289 -0.992 630.1−=zxτ 000.0=zxτ ammid σσ =≤= 000.16750.8
-7.289 -0.832 873.1+=zyτ 000.0=zyτ ammid σσ =≤= 000.16740.8
-7.289 -0.672 074.2+=zyτ 000.0=zyτ ammid σσ =≤= 000.16730.8
-7.289 -0.672 058.1+=zxτ 860.1+=zxτ ammid σσ =≤= 000.16430.9
-7.289 -0.512 289.3+=zyτ 860.1+=zyτ ammid σσ =≤= 000.16850.11
-7.289 0.000 508.3+=zyτ 860.1+=zyτ ammid σσ =≤= 000.16814.11
-7.289 1.120 462.2+=zyτ 860.1+=zyτ ammid σσ =≤= 000.16700.9
-7.289 1.280 142.2−=zxτ 860.1−=zxτ ammid σσ =≤= 000.16170.9
per cui la verifica di resistenza è ovunque soddisfatta.

Università degli Studi di Pisa
Anno Accademico 2001/2002
Corso di Laurea in Ingegneria Edile (Nuovo Ordinamento)
Insegnamento di SCIENZA DELLE COSTRUZIONI (12 CFU)
Docente: Ing. Salvatore Sergio Ligarò
(per segnalazioni e suggerimenti contattare [email protected])
Parte V) PROBLEMA DI SAINT VENANT E CRITERI DI RESISTENZA DEI MATERIALI
TEMA 3 La figura mostra la sezione di una trave metallica prismatica soggetta alle caratteristiche della sollecitazione:
• sforzo assiale kNN 800−=
• momento flettente kNcmM x 500= ;
• sforzo di taglio kNTy 120= ;
• momento torcente kNcmM t 600= .
x
y
G
10
230
145 10 290 10 145
1
2
3
4
5
10
10
7
9
8
160
6
Effettuare la verifica di resistenza nelle 9 sezioni indicate sapendo che: 1. il materiale è acciaio; 2. che plasticizza secondo il criterio di von Mises; 3. la tensione normale ammissibile nel materiale è 2/0.16 cmkN=σ .
NOTA: le lunghezze riportate in figura sono espresse in mm.

Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
2
SOLUZIONE: (Prova del 15 Luglio 2002, allieva: Sara Salomoni)
1. Proprietà geometriche della sezione Con riferimento alla suddivisione in parti mostrata nella figura seguente, si ha
x
y
G
10
230
145 10 290 10 145
1
2
3
4
5
10
10
7
9
8
160
6
1
2
3 4
5
6
7
8 18
5.4
X Y
O
Parte bi hi Ai YGi SXi
145.0 10.0 1450.00 415.0 601750.000 145.0 10.0 1450.00 5.0 7520.000 10.0 420.0 4200.00 210.0 882000.000 290.0 10.0 2900.00 245.0 710500.000 290.0 10.0 2900.00 5.0 14500.000 10.0 420.0 4200.00 210.0 882000.000 145.0 10.0 1450.00 415.0 601750.000 145.0 10.0 1450.00 5.0 7520.000
20000.00 3707540.000
Area: 22 00.20000.20000 cmmmA == ,
Momento statico: 33 540.3707000.3707540 cmmmSX == ,
Ordinata del baricentro: cmmmYG 54.18377.185200003707540 ≈== ,
Momento d’inerzia rispetto alla base:
43552
44
344
333
3222
11
311
54321
6667.1167683123
23
2)12
(2
222
cmhbYAhbhbhbYAhb
JJJJJJ
GG
XXXXXX
=++++++=
=++++=
Momento d’inerzia baricentrico: 422 4217.4805954.1800.2006667.116768 cmAYJJ GXXG =⋅−=−=

Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 2
3
2. Analisi dello stato di sollecitazione
2.1 Sforzo assiale N
Lo sforzo assiale produce la tensione normale di compressione 2/000.4
00.2000.800 cmkN
ANN
zz −≅−
==σ distribuita uniformemente sull’intera sezione.
x
y
G
1
2
3
4
5
7 9 8
6
σzz
Nei punti di verifica si ottengono i valori
Sezione Nzziσ (kN/cm2)
-4.000 -4.000 -4.000 -4.000 -4.000 -4.000 -4.000 -4.000 -4.000
2.2 Momento flettente Mx
La figura seguente mostra il diagramma delle tensioni normali xMzzσ originate dal momento
flettente.
x
y
G
1
2
3
4
5
7
9 8
6
σΜzz
-
+
n n
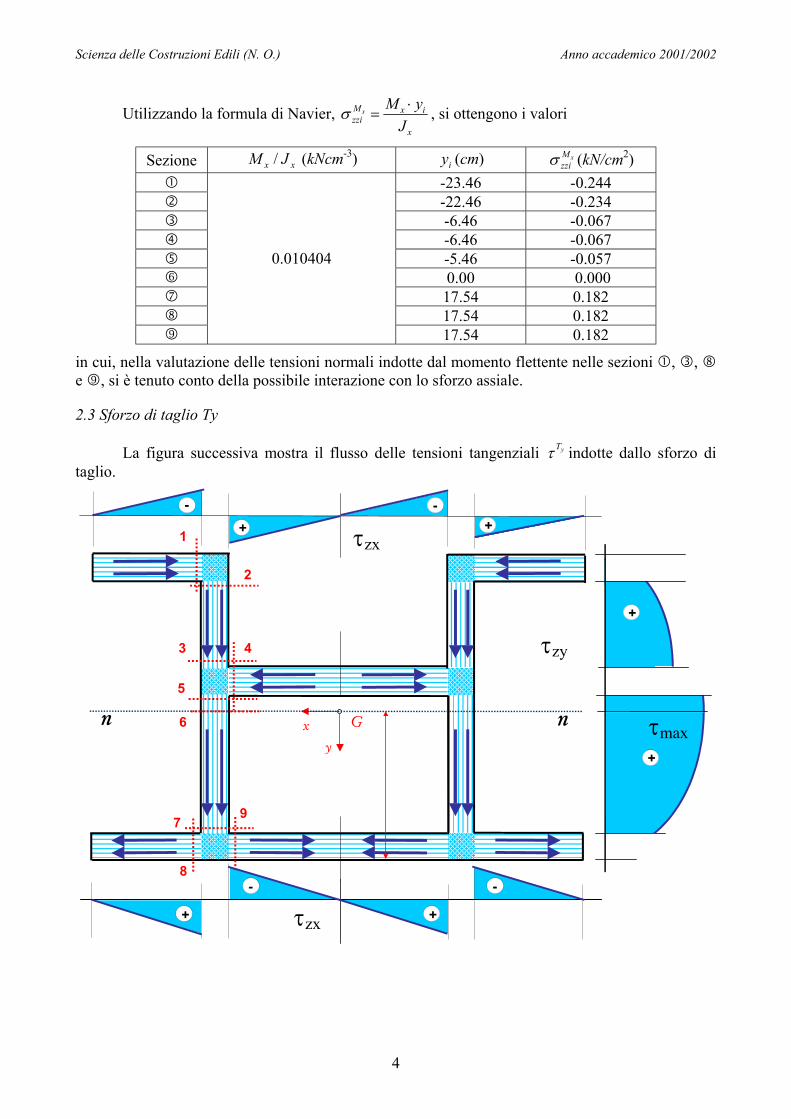
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
4
Utilizzando la formula di Navier, x
ixMzzi J
yMx
⋅=σ , si ottengono i valori
Sezione xx JM / (kNcm-3) iy (cm) xMzziσ (kN/cm2)
-23.46 -0.244 -22.46 -0.234 -6.46 -0.067 -6.46 -0.067 -5.46 -0.057
6 0.00 0.000 7 17.54 0.182 8 17.54 0.182 9
0.010404
17.54 0.182
in cui, nella valutazione delle tensioni normali indotte dal momento flettente nelle sezioni , , 8 e 9, si è tenuto conto della possibile interazione con lo sforzo assiale.
2.3 Sforzo di taglio Ty
La figura successiva mostra il flusso delle tensioni tangenziali yTτ indotte dallo sforzo di taglio.
x
y
G n n
+ + -
+
τmax
+
-
τzx
τzx
1
2
3 4
5
7 9
6
+
+
-
-
τzy
8
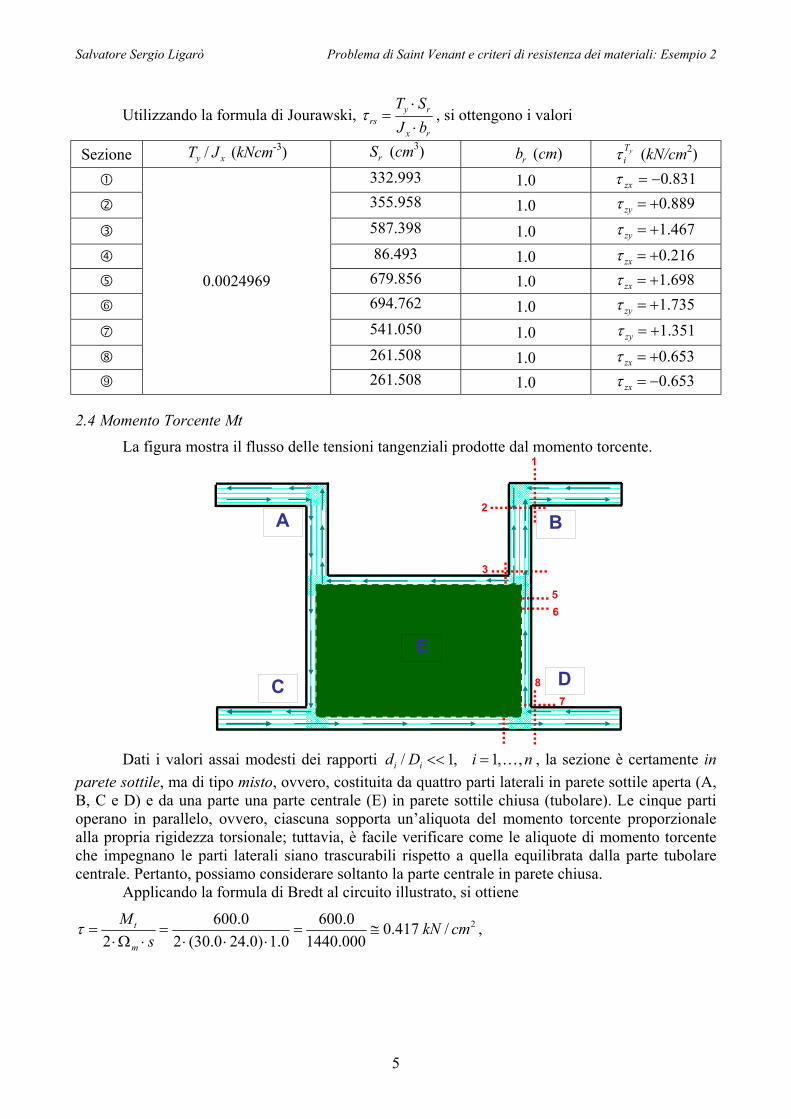
Salvatore Sergio Ligarò Problema di Saint Venant e criteri di resistenza dei materiali: Esempio 2
5
Utilizzando la formula di Jourawski, rx
ryrs bJ
ST⋅⋅
=τ , si ottengono i valori
Sezione xy JT / (kNcm-3) rS (cm3) rb (cm) yTiτ (kN/cm2)
332.993 1.0 831.0−=zxτ
355.958 1.0 889.0+=zyτ
587.398 1.0 467.1+=zyτ
86.493 1.0 216.0+=zxτ 679.856 1.0 698.1+=zxτ
6 694.762 1.0 735.1+=zyτ
7 541.050 1.0 351.1+=zyτ
8 261.508 1.0 653.0+=zxτ 9
0.0024969
261.508 1.0 653.0−=zxτ
2.4 Momento Torcente Mt
La figura mostra il flusso delle tensioni tangenziali prodotte dal momento torcente.
1
2
3
4
5
7
9
8
6
A B
C
E D
Dati i valori assai modesti dei rapporti niDd ii ,,1,1/ K=<< , la sezione è certamente in
parete sottile, ma di tipo misto, ovvero, costituita da quattro parti laterali in parete sottile aperta (A, B, C e D) e da una parte una parte centrale (E) in parete sottile chiusa (tubolare). Le cinque parti operano in parallelo, ovvero, ciascuna sopporta un’aliquota del momento torcente proporzionale alla propria rigidezza torsionale; tuttavia, è facile verificare come le aliquote di momento torcente che impegnano le parti laterali siano trascurabili rispetto a quella equilibrata dalla parte tubolare centrale. Pertanto, possiamo considerare soltanto la parte centrale in parete chiusa.
Applicando la formula di Bredt al circuito illustrato, si ottiene
2/417.0000.14400.600
0.1)0.240.30(20.600
2cmkN
sM
m
t ≅=⋅⋅⋅
=⋅Ω⋅
=τ ,
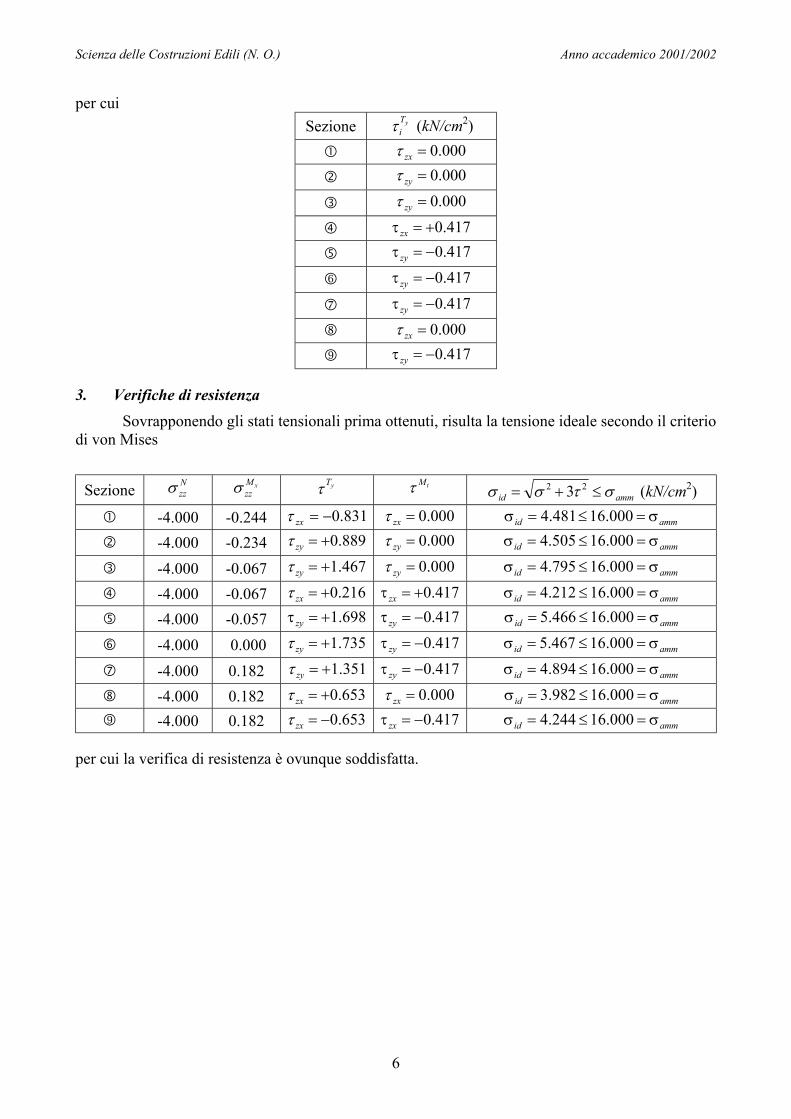
Scienza delle Costruzioni Edili (N. O.) Anno accademico 2001/2002
6
per cui Sezione yT
iτ (kN/cm2) 000.0=zxτ
000.0=zyτ
000.0=zyτ
417.0+=τzx
417.0−=τzy
6 417.0−=τzy
7 417.0−=τzy
8 000.0=zxτ
9 417.0−=τzy
3. Verifiche di resistenza Sovrapponendo gli stati tensionali prima ottenuti, risulta la tensione ideale secondo il criterio
di von Mises
Sezione Nzzσ xM
zzσ yTτ tMτ ammid στσσ ≤+= 22 3 (kN/cm2)
-4.000 -0.244 831.0−=zxτ 000.0=zxτ ammid σ=≤=σ 000.16481.4
-4.000 -0.234 889.0+=zyτ 000.0=zyτ ammid σ=≤=σ 000.16505.4
-4.000 -0.067 467.1+=zyτ 000.0=zyτ ammid σ=≤=σ 000.16795.4
-4.000 -0.067 216.0+=zxτ 417.0+=τzx ammid σ=≤=σ 000.16212.4
-4.000 -0.057 698.1+=τzy 417.0−=τzy ammid σ=≤=σ 000.16466.5
-4.000 0.000 735.1+=zyτ 417.0−=τzy ammid σ=≤=σ 000.16467.5
-4.000 0.182 351.1+=zyτ 417.0−=τzy ammid σ=≤=σ 000.16894.4
-4.000 0.182 653.0+=zxτ 000.0=zxτ ammid σ=≤=σ 000.16982.3 9 -4.000 0.182 653.0−=zxτ 417.0−=τzx ammid σ=≤=σ 000.16244.4
per cui la verifica di resistenza è ovunque soddisfatta.


















