Controllo Model-Based di un robot planare 2-DOF · Caratteristiche dei motori NSK Megatorque 1410...
9
Controllo Model-Based di un robot planare 2-DOF Filippo D’Ippolito [email protected] DEIM – Laboratorio di Robotica
Transcript of Controllo Model-Based di un robot planare 2-DOF · Caratteristiche dei motori NSK Megatorque 1410...

Controllo Model-Baseddi un robot planare 2-DOF
Filippo D’[email protected]
DEIM – Laboratorio di Robotica

Outline esercitazione2/9
Modello matematico del robot planare a 2 DOF
Algoritmo di controllo e stabilità a ciclo chiuso
Descrizione del sistema
Prove sperimentali
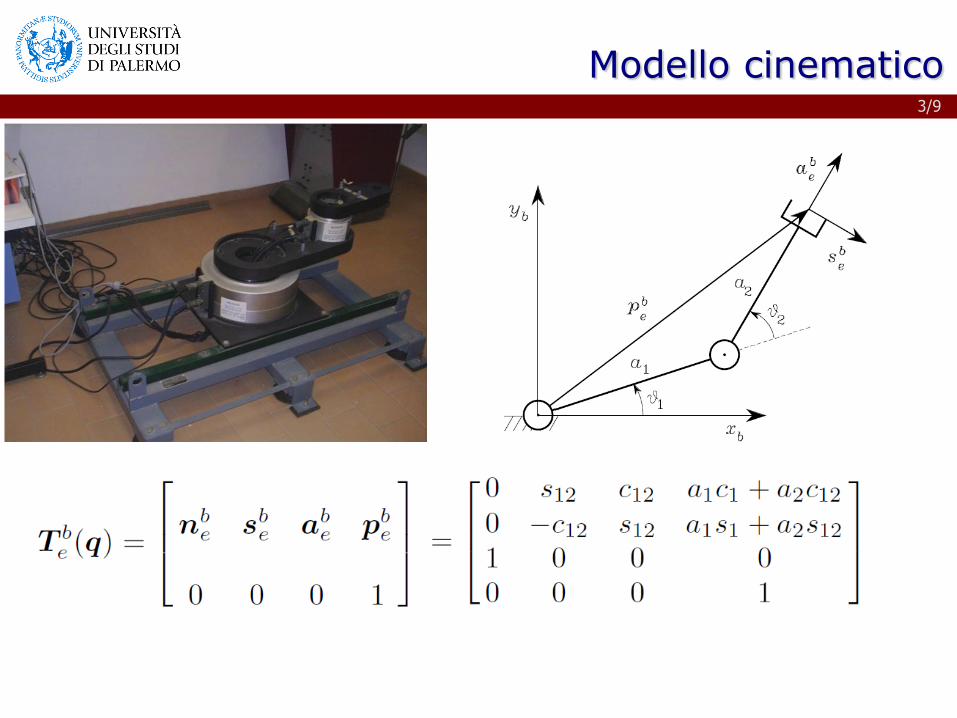
Modello cinematico3/9
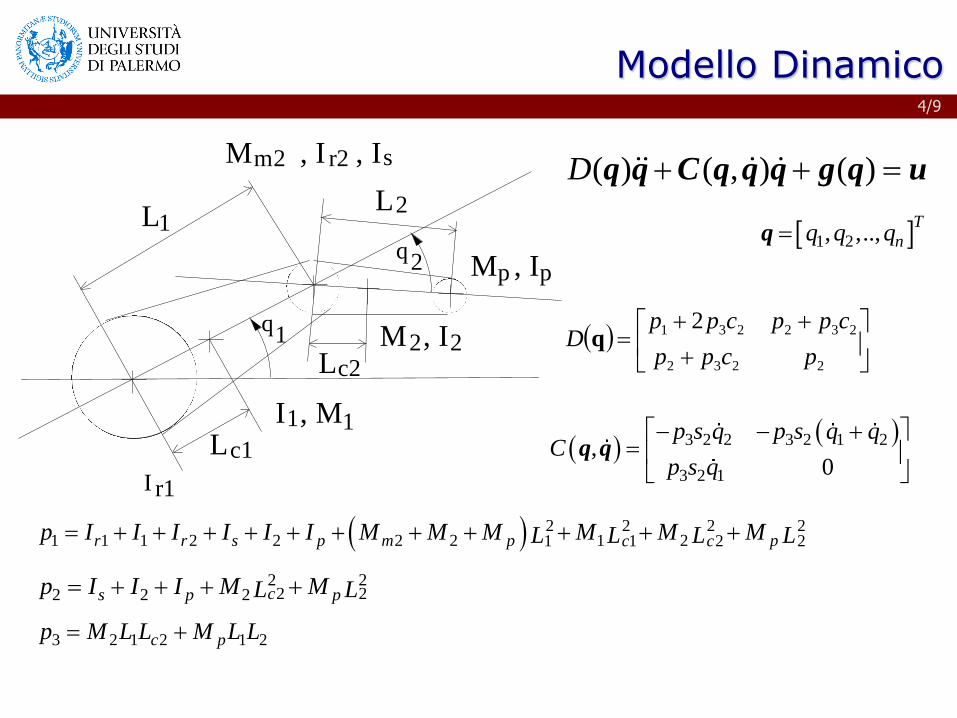
Modello Dinamico4/9
2232
232231 2
pcpp
cppcppD q
3 2 2 3 2 1 2
3 2 1
,0
p s q p s q qC
p s q
q q
2 2 2 21 1 1 2 2 2 2 1 21 1 2 2r r s p m p pc cp I I I I I I M M M M M ML L L L
2 22 22 2 2 cs p pp I I I M ML L
3 2 1 2 1 2c pp M L L M L L
( ) ( , ) ( )D q q C q q q g q u
1 2, ,..,T
nq q qq
I
I , M
M , I , I
M , I
M , I
LL
L
L
1
r1
c1
1 1
c222
2
sr2 m2
p p
q1
q2
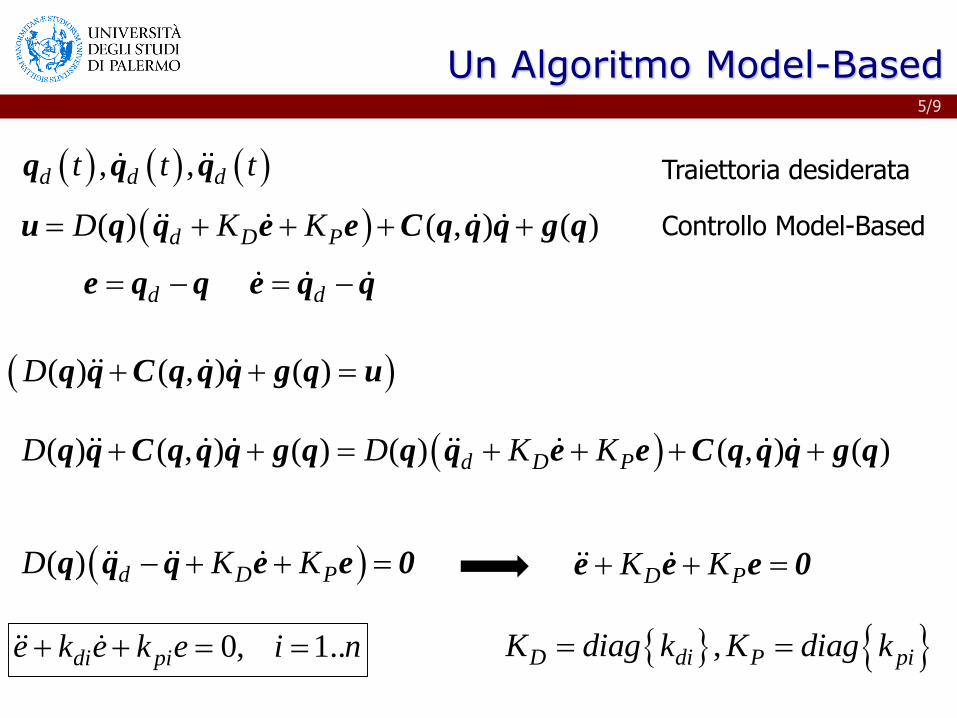
Un Algoritmo Model-Based5/9
( ) ( , ) ( )d D PD K K u q q e e C q q q g q
( ) ( , ) ( )D q q C q q q g q u
d e q q d e q q
( ) ( , ) ( ) ( ) ( , ) ( )d D PD D K K q q C q q q g q q q e e C q q q g q
( ) d D PD K K q q q e e 0 D PK K e e e 0
, ,d d dt t tq q q Traiettoria desiderata
Controllo Model-Based
0, 1..di pie k e k e i n ,D di P piK diag k K diag k
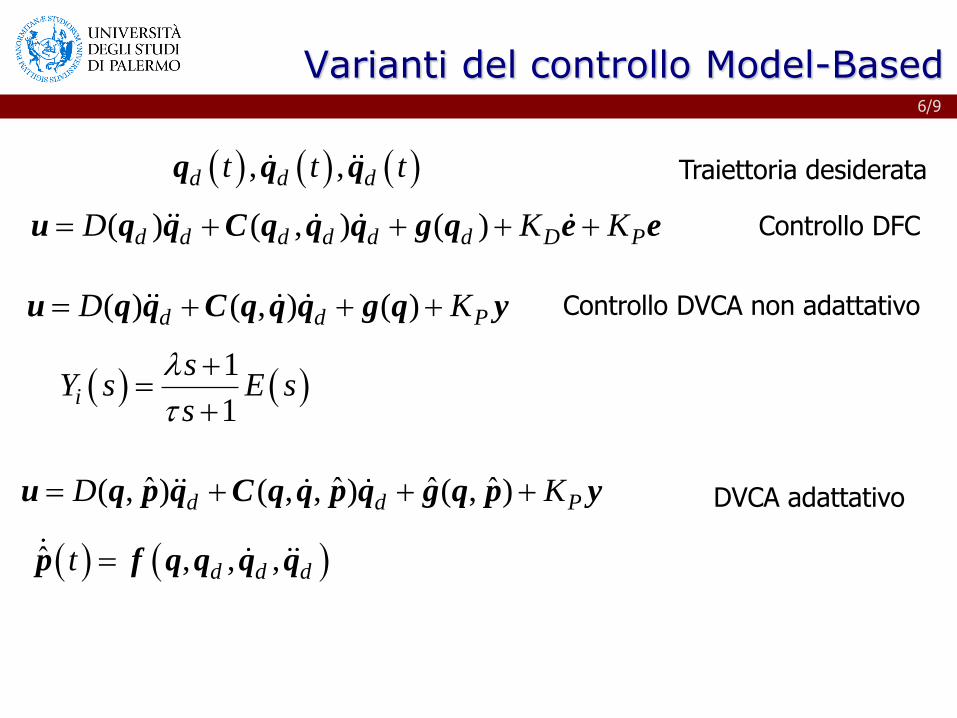
Varianti del controllo Model-Based6/9
( ) ( , ) ( )d d d d d d D PD K K u q q C q q q g q e e
, ,d d dt t tq q q Traiettoria desiderata
Controllo DFC
( ) ( , ) ( )d d PD K u q q C q q q g q y
1
1i
sY s E s
s
Controllo DVCA non adattativo
ˆ ˆ ˆ ˆ( , ) ( , , ) ( , )d d PD K u q p q C q q p q g q p y DVCA adattativo
ˆ , , ,d d dt p f q q q q
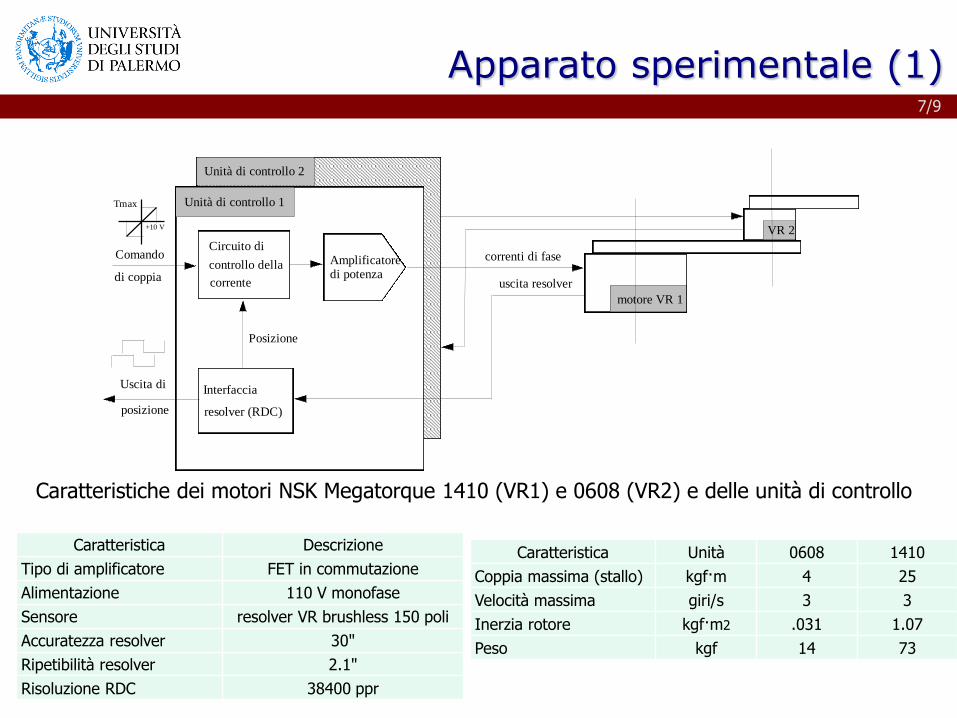
Apparato sperimentale (1)7/9
Caratteristica Unità 0608 1410
Coppia massima (stallo) kgf·m 4 25
Velocità massima giri/s 3 3
Inerzia rotore kgf·m2 .031 1.07
Peso kgf 14 73
Caratteristica Descrizione
Tipo di amplificatore FET in commutazione
Alimentazione 110 V monofase
Sensore resolver VR brushless 150 poli
Accuratezza resolver 30"
Ripetibilità resolver 2.1"
Risoluzione RDC 38400 ppr
Caratteristiche dei motori NSK Megatorque 1410 (VR1) e 0608 (VR2) e delle unità di controllo
Unità di controllo 2
Circuito di
controllo della
corrente
Amplificatoredi potenza
correnti di fase
uscita resolver
Interfaccia
resolver (RDC)
Posizione
Comando
Unità di controllo 1
motore VR 1
VR 2
di coppia
Uscita di
posizione
+10 V
Tmax

Apparato sperimentale (2)8/9
Unità di controllo 2
Circuito di
controllo della
corrente
Amplificatoredi potenza
correnti di fase
uscita resolver
Interfaccia
resolver (RDC)
Posizione
Comando
Unità di controllo 1
motore VR 1
VR 2
di coppia
Uscita di
posizione
+10 V
Tmax
• Implementazione Automaticadi modelliMATLAB®/Simulinksu Hardware
• Generazione Automatica di Codice
• ControlDesk®, accesso allaUnità di Controllo per calibrazione misura e diagnosi
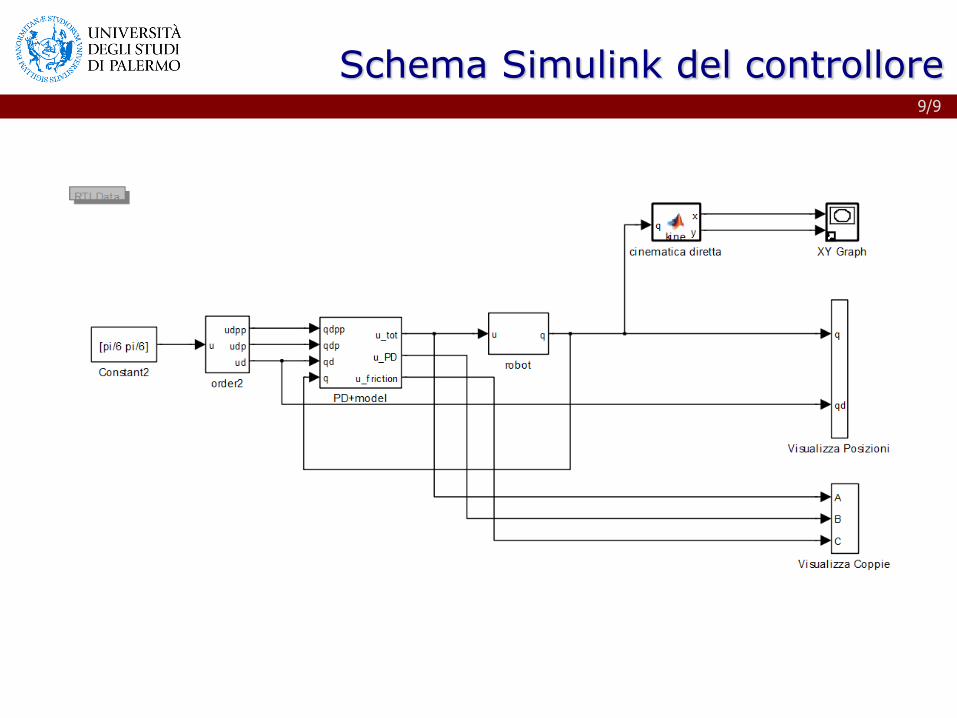
Schema Simulink del controllore9/9