Controllo DC SCR Digitale a Recupero su Linea Serie 20H · forniti alle porte SCR attraverso...
118
Controllo DC SCR Digitale a Recupero su Linea Serie 20H Manuale di Installazione e Funzionamento 9/97 IMN720IT DC SCR DRIVE
Transcript of Controllo DC SCR Digitale a Recupero su Linea Serie 20H · forniti alle porte SCR attraverso...

Controllo DC SCR Digitale
a Recupero su Linea
Serie 20H
Manuale di Installazione e Funzionamento
9/97 IMN720IT
DC SCR DRIVE

Indice
Indice iIMN720IT
Capitolo 1Informazioni Generali 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Generalità 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Garanzia Limitata 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Avviso sulla Sicurezza 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 2Arrivo e Installazione 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo all’Arrivo 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Posizione Fisica 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installazione Opzionale Remota della Tastiera 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installazione del Controllo 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Considerazioni sull’Installazione 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Messa a Terra del Sistema 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Impedenza di Linea 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Considerazioni sul Cablaggio 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dimensionamento del Trasformatore di Isolamento 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Alimentazione Monofase 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni alla Sorgente di Alimentazione Generatore AC 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dimensione del Filo e Dispositivi di Protezione 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Linea AC e Motore 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessione delle Ventole di Raffreddamento 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cablaggio del Contattore M 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingresso External Trip 2-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installazione dell’Encoder 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingresso Interruttore Home (Orientamento Base) 2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Bufferizzate dell’Encoder 2-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni dei Circuiti del Controllo 2-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo Tastiera 2-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo Standard Run a 3 Fili 2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo 15 Velocità a 2 Fili 2-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo Velocità e Coppia Bipolare 2-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo Processo 2-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Specifiche del Modo Processo 2-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Modo Paranco Bipolare 2-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connessioni Paranco 7 Velocità Controllo a 2 Fili 2-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi ed Uscite Analogici 2-36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi Analogici 2-36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Analogiche 2-37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi Opto-Isolati 2-38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Opto-Isolate 2-39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lista di Controllo di Prefunzionamento 2-41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Procedura di Accensione 2-41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

ii Indice IMN720IT
Capitolo 3Programmazione e Funzionamento 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Generalità 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo Display 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Regolazione del Contrasto 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Schermi del Modo Display 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Accesso agli Schermi Visualizzazione e alle Informazioni Diagnostiche 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . .
Accesso al Log Errori 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo Programma 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Accesso ai Blocchi Parametri per la Programmazione 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modifica del Valore Parametri senza l’Uso del Codice di Sicurezza 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ripristino Parametri alle Impostazioni di Fabbrica 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inizializzazione Nuovo Firmware 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funzionamento del Controllo da Tastiera 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Definizione Parametri 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 4Ricerca guasti 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Assenza Visualizzazione – Regolazione Contrasto Display 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modalità di Accesso al Log Errori 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modalità di Azzeramento del Log Errori 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modalità di Accesso alle Informazioni Diagnostiche 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Test Point della Scheda Circuito di Controllo 4-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Considerazioni sull’Interferenza Elettrica 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cause e Rimedi 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Drive in Situazioni Speciali 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linee di Alimentazione Drive 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Radiotrasmettitori 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Protezioni del Controllo 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Considerazioni Speciali sul Motore 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Norme di Cablaggio 4-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Isolamento Ottico 4-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Massa dell’Impianto 4-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Indice iiiIMN720IT
Capitolo 5Specifiche e Dati Prodotto 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifiche 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Condizioni Operative 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display di Tastiera 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifiche di Controllo 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Alimentazione Campo 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingresso Analogico Differenziale 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Analogiche 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi Digitali 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Uscite Digitali 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indicazioni Diagnostiche 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Valori 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifiche Coppia 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Schema di Interconnessione 5-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dimensioni 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo Tipo A 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo Tipo B 5-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo Tipo C 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo Tipo D 5-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo Tipo G 5-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendice A A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modulo Alimentatore Campo A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendice B B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Valori dei Parametri B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendice C C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maschera per il Montaggio Remoto della Tastiera C-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

iv Indice IMN720IT

Capitolo 1Informazioni Generali
Informazioni Generali 1-1IMN720IT
Generalità Il controllo Baldor Serie 20H è un controllo di indotto e campo (dove applicabile) dimotore DC bidirezionale, a onda completa, trifase . Il ponte SCR converte l’alimentazionetrifase AC a DC controllata per azionare il rotore del motore DC. L’ingresso AC serveanche per l’ingresso del trasformatore di riferimento per effettuare l’azionamento deglialimentatori e la sincronizzazione alla linea di ingresso AC. Gli impulsi di innesco sonoforniti alle porte SCR attraverso amplificatori di impulso e trasformatori. La designazionedi questo controllo è NEMA Tipo C.
Il controllo Baldor Serie 20H può anche essere usato con motori a campo magneticopermanente e motori DC di comando mandrino. Inoltre, il controllo Baldor Serie 20H puòessere utilizzato con feedback standard da rotore o encoder. Il feedback di tachimetri oresolver è disponibile con schede di espansione opzionali.
Il controllo Baldor Serie 20H è utilizzabile in svariate applicazioni. Può essere configuratoper operare in un numero di modi in funzione dei requisiti dell’applicazione e dellapreferenza utente.
E’ a discrezione dell’utente determinare il modo operativo corretto da usare perl’applicazione. Queste scelte avvengono mediante tastiera come descritto nel Capitolo 3di questo manuale.
Avvertenza: Il controllo Baldor Serie 20H DC SCR non effettua il recupero damotori a derivazione stabilizzata o ad avvolgimento composto. Se sidevono usare derivazioni stabilizzate o avvolgimenti composti, ilcampo in serie deve essere isolato e non collegato. Contattare ilcostruttore del motore per le specifiche di riduzione prestazione delmotore sotto queste condizioni.

1-2 Informazioni Generali IMN720IT
Garanzia Limitata
Per un periodo di due (2) anni dalla data di acquisto originale, BALDORriparerà o sostituirà gratuitamente controlli e accessori che l’esame Baldordefinisce essere difettosi nel materiale o nella qualità. Questa garanzia èvalida se l’unità non è stata manomessa da persone non autorizzate, usatainadeguatamente, in modo improprio, o inappropriatamente installata e siastata usata conformemente alle istruzioni e/o ai valori forniti. Questagaranzia sostituisce qualsiasi altra garanzia sia espressa che implicita.BALDOR non sarà ritenuta responsabile per qualsiasi spesa (compresal’installazione o la rimozione), inconveniente, o danno consequenziale,comprese le lesioni a persone o danni alla proprietà causati da articoli dinostra fabbricazione o vendita. (Alcuni stati non consentono l’esclusione ola limitazione di danni accidentali o consequenziali, per cui l’esclusione dicui sopra non è valida.) In qualsiasi caso, l’obbligo totale della BALDOR, intutte le circostanze, non eccederà il prezzo totale di acquisto del controllo. Ireclami per il rimborso del prezzo di acquisto, riparazioni, o sostituzionidevono essere riferiti alla BALDOR con tutti i dati pertinenti al difetto, la datadi acquisto, il lavoro svolto dal controllo e il problema incontrato. Non siassume nessun obbligo per articoli d’uso come i fusibili.
La merce deve essere restituita soltanto con la notifica scritta compreso ilNumero di Autorizzazione Restituzione BALDOR e devono essere pagatetutte le spese di spedizione.
Capitolo 1Informazioni Generali
Informazioni Generali 1-3IMN720IT
Avviso sulla Sicurezza Questa apparecchiatura contiene tensione che può raggiungere 600 volt! La scaricaelettrica può causare infortuni gravi o fatali. La procedura di avviamento o la ricerca guastiper questa apparecchiatura devono essere eseguite soltanto da personale qualificato.
Questa apparecchiatura può essere collegata ad altre macchine che abbiano parti rotantio parti comandate da questa apparecchiatura. L’uso inappropriato può causare infortunigravi o fatali. La procedura di avviamento o la ricerca guasti per questa apparecchiaturadevono essere eseguite soltanto da personale qualificato.
Precauzioni
ATTENZIONE: Non toccare le schede elettroniche, i dispositivi di alimentazione o ilcollegamento elettrico prima di assicurarsi che l’alimentazione siascollegata e non vi sia alta tensione presente su questaapparecchiatura o altra apparecchiatura cui questa è collegata. Lascarica elettrica può causare infortuni gravi e fatali. La procedura diavviamento o la ricerca guasti per questa apparecchiatura devonoessere eseguite soltanto da personale qualificato.
ATTENZIONE: Questa unità è dotata di riavvio automatico che riattiva il motoreogniqualvolta è applicata l’alimentazione di ingresso e vieneemesso un comando RUN (FWD o REV). Se il riavvio automatico delmotore può causare lesioni al personale, il dispositivo di riavvioautomatico deve essere disabilitato cambiando il parametro RestartAuto/Man in Manual, blocco Miscellaneous di Livello 2.
ATTENZIONE: Assicurarsi di avere completa dimestichezza con le operazioni disicurezza di questa apparecchiatura. Questa apparecchiatura puòessere collegata ad altre macchine che abbiano parti rotanti o particontrollate da questa apparecchiatura. L’uso inappropriato puòcausare infortuni gravi o fatali. La procedura di avviamento o laricerca guasti per questa apparecchiatura devono essere eseguitesoltanto da personale qualificato.
ATTENZIONE: Assicurarsi che il sistema sia appropriatamente posto a massaprima di applicare l’alimentazione. Non applicare l’alimentazione ACprima di verificare che tutte le istruzioni di messa a terra siano stateeseguite. La scarica elettrica può causare infortuni gravi e fatali.
ATTENZIONE: Il funzionamento improprio del controllo può causare movimentiviolenti dell’albero motore e dell’apparecchiatura comandata.Assicurarsi che l’inatteso movimento dell’albero motore non causilesioni al personale o danni all’apparecchiatura. Alcuni tipi diguasto del controllo possono produrre coppie di picco moltosuperiori alla coppia nominale del motore.
ATTENZIONE: Il circuito del motore può avere alta tensione presenteogniqualvolta si applica l’alimentazione AC, anche quando il motorenon ruota. La scarica elettrica può causare infortuni gravi e fatali.
ATTENZIONE: L’albero del motore ruota durante la procedura di autocalibratura.Assicurarsi che l’inatteso movimento dell’albero motore non causilesioni al personale o danni all’apparecchiatura.
Continua alla pagina successiva

Capitolo 1Informazioni Generali
1-4 Informazioni Generali IMN720IT
Avvertenza: La protezione da sovracorrente è richiesta da National ElectricalCode. L’installatore di questa apparecchiatura è responsabile per laconformità National Electrical Code e qualsiasi norma localeapplicabile che governano tali realizzazioni come protezionecablaggio, messa a terra, scollegamenti ed altre protezioni dacorrente.
Avvertenza: Per evitare danni all’apparecchiatura, assicurarsi che la protezioneelettrica non sia in grado di dare più di 10.000 ampere simmetrici a230 VAC o 460 VAC.
Avvertenza: Non fornire alcuna alimentazione all’ingresso External Trip su J1-16e 17. L’alimentazione su questi capicorda può danneggiare ilcontrollo. Usare un contatto a vuoto che non richiede alcunaalimentazione esterna per funzionare.
Avvertenza: Non usare condensatori di rifasamento sulle linee di alimentazionein ingresso al controllo per non danneggiarlo.
Avvertenza: Non installare condensatori fra i terminali dell’indotto A1/A2altrimenti possono verificarsi anomalie SCR.
Avvertenza: Scollegare i capicorda motore (A1 e A2) dal controllo prima dieseguire una verifica “Megger” sul motore. Il mancatoscollegamento del motore dal controllo causerà gravi danni alcontrollo. In fabbrica il controllo è collaudato per l’alta tensione/resistenza di dispersione conformemente ai requisiti UnderwriterLaboratory.
Avvertenza: Non collegare l’alimentazione AC ai terminali del motore A1 e A2. Ilcollegamento dell’alimentazione AC a questi terminali puòdanneggiare il controllo.
Avvertenza: Baldor sconsiglia l’uso di capicorda di alimentazione trasformatore“Delta di diramazione a massa” che possono creare circuiti dimassa e degradare la prestazione del sistema. Raccomanda invecedi usare quattro fili con diramazione a Y.
Capitolo 2Arrivo e Installazione
Arrivo e Installazione 2-1IMN720IT
Controllo all’Arrivo Il Controllo Serie 20H DC SCR è completamente collaudato in fabbrica e attentamenteimballato per la spedizione. Quando il cliente riceve il controllo, deve eseguireimmediatamente diverse operazioni.
1. Osservare lo stato del contenitore di spedizione e indicare immediatamente alcorriere eventuali danni.
2. Verificare che la matricola del controllo ricevuto sia uguale a quella indicatasull’ordine di acquisto.
3. Se il controllo deve essere immagazzinato per alcune settimane prima dell’uso,assicurarsi che sia immagazzinato in un luogo conforme alle specifiche diimmagazzinaggio pubblicate. (Riferirsi al Capitolo 5 di questo manuale).
Posizione Fisica La posizione dei 20H è molto importante. Deve essere installato in un’area protetta dallaluce solare diretta, da corrosivi, da gas o liquidi dannosi, dalla polvere, da particellemetalliche e dalla vibrazione. L’esposizione a questi elementi può ridurre la vita operativae diminuire le prestazioni del controllo.Nel scegliere la posizione di installazione occorre tenere presenti diversi fattori:
1. Per rendere efficace il raffreddamento e la manutenzione, il controllo deveessere montato su una superficie verticale piana, liscia, non infiammabile.Quando il controllo è montato in una protezione, attenersi alle informazioni sullaperdita di potenza della Tabella 2-1 per garantire il raffreddamento e laventilazione appropriati (4 watt per ampere in uscita continutiva).
2. Occorre almeno una luce di 50 mm su tutti i lati per il flusso dell’aria.3. L’accesso anteriore deve essere previsto per consentire l’apertura o la
rimozione del coperchio del controllo durante l’assistenza e consentire lavisione del Display di Tastiera. (La tastiera opzionalmente può essere inposizione remota fino a 33 m dal controllo.)I controlli installati in una protezione a pavimento devono avere sufficiente luceper l’apertura dello sportello della protezione. Questa luce fornisce anche unsufficiente spazio d’aria per il raffreddamento.
4. Riduzione delle prestazioni da altitudine. Fino a 1000 m non vi è riduzionedelle prestazioni. Sopra 1000 m, ridurre la corrente di uscita continuativa e dipicco del 2 % ogni 330 m.
5. Riduzione delle prestazioni da temperatura. Fino a 40 °C non vi è riduzione delleprestazioni. Oltre 40 °C, ridurre la corrente di uscita di picco del 2 % per ogni °C. Lamassima temperatura ambiente è 55 °C.
Tabella 2-1 Valori di Perdita in Watt Serie 20H (4 W x A)N. Catalogo Cor-
renteNom
WattPersi
N. Catalogo Cor-renteNom
WattPersi
N. Catalogo Cor-renteNom
WattPersi
BC20H103-CL 20 80 BC20H205-CL 20 80 BC20H410-CL 20 80BC20H107-CL 40 160 BC20H210-CL 40 160 BC20H420-CL 40 160BC20H110-CL 60 240 BC20H215-CL 60 240 BC20H430-CL 60 240BC20H115-CL 75 300 BC20H220-CL 75 300 BC20H440-CL 75 300BC20H120-CL 100 400 BC20H225-CL 100 400 BC20H450-CL 100 400BC20H125-CL 140 560 BC20H240-CL 140 560 BC20H475-CL 140 560BC20H135-CL 180 720 BC20H250-CL 180 720 BC20H4100-CL 180 720BC20H140-CL 210 840 BC20H260-CL 210 840 BC20H4125-CL 210 840BC20H150-CL 270 1080 BC20H275-CL 270 1080 BC20H4150-CL 270 1080
BC20H2125-CL 420 1680 BC20H4200-CL 350 1400BC20H4250-CL 420 1680BC20H4300-CL 500 2000BC20H4400-EL 670 2680BC20H4500-EL 840 3360BC20H4600-EL 960 3840

Capitolo 1Informazioni Generali
2-2 Arrivo e Installazione IMN720IT
Installazione Opzionale Remota della Tastiera E’ possibile installare la tastiera in posizione remota usando il cavoprolunga della tastiera Baldor opzionale. Il gruppo tastiera (bianca – DC00005A-01; grigia– DC00005A-02) è fornito con le viti e la guarnizione richieste per montarla in unaprotezione. Quando la tastiera è appropriatamente montata in una protezione internaNEMA Tipo 4X, conserva i valori interni Tipo 4X.Strumenti Richiesti:
• Bulino, giramaschi, cacciaviti (a croce e a lama) e chiave a bocca.• Maschio 8-32 e punta da trapano #29 (per fori maschiati) o punta da trapano
#19 (per fori passanti).• Estrattore standard 1-1/4″ (diametro nominale 1-11/16″).• Sigillante RTV.• (4) dadi 8-32 e rondelle di sicurezza.• Viti prolungate 8-32 (testa cilindrica a cava esagonale) richieste se la superficie
di montaggio ha spessore superiore a 12 diametri e non è maschiata (foripassanti).
• Maschera per montaggio remoto della tastiera. Per comodità, una copiaestraibile è fornita alla fine di questo manuale.
Istruzioni di Montaggio: Per fori maschiati1. Localizzare una superficie di montaggio piana con larghezza 4″ x 5,5″ di
altezza minimo. Il materiale deve essere sufficientemente spesso (minimo 14diametri).
2. Collocare la maschera sulla superficie di montaggio o contrassegnare i foricome indicato.
3. Bulinare accuratamente i 4 fori (contrassegnati con A) e il grande foro asfondamento (contrassegnato con B).
4. Forare i quattro fori #29 (A). Maschiare ogni foro con un maschio 8-32.5. Localizzare il centro del foro a sfondamento 1-1/4″ (B) ed espellere seguendo le
istruzioni del costruttore.6. Sbavare l’apertura e i fori di montaggio verificando che il pannello sia pulito e
piano.7. Applicare RTV ai 4 fori contrassegnati (A).8. Assemblare la tastiera al pannello. Usare le viti 8-32, i dadi e le rondelle di
sicurezza.9. Dall’interno del pannello, applicare RTV su ognuna delle quattro viti di
montaggio e sui dadi. Coprire un’area di 3/4″ attorno ad ogni vite verificando dicompletare l’incapsulamento del dado e della rondella.
Istruzioni di Montaggio: Per fori passanti1. Localizzare una superficie di montaggio piana con larghezza 4″ x 5,5″ di
altezza minimo. Il materiale deve essere sufficientemente spesso (minimo 14diametri).
2. Collocare la maschera sulla superficie di montaggio o contrassegnare i foricome indicato sulla maschera.
3. Bulinare accuratamente i 4 fori (contrassegnati con A) e il grande foro asfondamento (contrassegnato con B).
4. Forare i quattro fori passanti #19 (A).5. Localizzare il centro del foro a sfondamento 1-1/4″ (B) ed espellere seguendo le
istruzioni del costruttore.6. Sbavare l’apertura e i fori di montaggio verificando che il pannello sia pulito e
piano.7. Applicare RTV ai 4 fori contrassegnati (A).8. Assemblare la tastiera al pannello. Usare le viti 8-32, i dadi e le rondelle di
sicurezza.9. Dall’interno del pannello, applicare RTV su ognuna delle quattro viti di
montaggio e sui dadi. Coprire un’area di 3/4″ attorno ad ogni vite verificando dicompletare l’incapsulamento del dado e della rondella.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-3IMN720IT
Installazione del Controllo Il controllo deve essere saldamente fissato alla superficie di montaggio. Utilizzare i quattro (4) foridi montaggio per fissare il controllo alla superficie di montaggio o alla protezione. Riferirsi alCapitolo 5 per le quote di montaggio e la posizione del foro di montaggio.Supporto ElasticoSe il controllo sarà soggetto a livelli di vibrazione superiori a 0,5 G a 10 – 60 Hz, il controllo deveessere dotato di supporto elastico. Eccessive vibrazioni all’interno del controllo possono causarel’allentamento delle connessioni e provocare guasti al componente o rischi di scossa elettrica.
Considerazioni sull’InstallazioneE’ necessario il cablaggio di interconnessione tra il controllo DC SCR, l’alimentazione di rete AC, ilmotore, il controllo host e qualsiasi stazione interfaccia operatore. Usare i connettori a circuito chiusoelencati perché sono di dimensione appropriata per il diametro fili usato. I connettori devono essereinstallati usando lo strumento aggraffatore specificato dal costruttore del connettore. Deve essereusato soltanto il cablaggio Classe 1.I controlli Baldor Serie 20H comprendono la protezione sovraccarico motore regolabile approvataUL idonea per motori con esercizio non inferiore al 50 % dell’uscita nominale del controllo. Altri enticome NEC richiedono la protezione sovracorrente separata. L’installatore di questaapparecchiatura è responsabile per la conformità National Electric Code e qualsiasi norma localeapplicabile che governano tali realizzazioni come protezione cablaggio, messa a terra,scollegamenti ed altre protezioni da corrente.
Messa a Terra del Sistema I Controlli Baldor sono previsti per essere alimentati da linee trifase standard elettricamentesimmetriche rispetto alla terra. La messa a terra del sistema è un passo importante nelleinstallazioni per evitare problemi. Il metodo di messa a terra consigliato è illustrato in Figura.Avvertenza: Baldor sconsiglia l’uso di capicorda di alimentazione trasformatore “Delta
di diramazione a massa” che possono creare circuiti di massa e degradarela prestazione del sistema. Raccomanda invece di usare quattro fili condiramazione a Y.
Figura 2-1 Messa a Terra Raccomandata del Sistema
L1
Alimentazione ACRete
Terra diSicurezza
Asta di MassaCondotta a Terra(Terra Impianto)
QuattroFili
“a Y”
L1
L2
L3
Terra
LOCAL
SHIFT
DISP
RESET
PROG
ENTER
JOG
STOP
REV
FWD
L2 L3 A1 A2
Serie H
Reattoredi Linea
Stendere tutti i 4 fili L1, L2, L3 e Massa (Terra)insieme nel tubo o cavo di protezione.
Stendere tutti i fili A1, A2, F+, F– e Massa Motoreinsieme nel tubo o cavo di protezione.
Collegare tutti i fili (compresa la massa mo-tore) all’interno della morsettiera motore.
Terra per NEC e altre Norme Locali.
F+ F–

Capitolo 1Informazioni Generali
2-4 Arrivo e Installazione IMN720IT
Sistema di Distribuzione Non a MassaCon un sistema di distribuzione alimentazione non a massa è possibile avere unpercorso continuo di corrente verso terra attraverso i dispositivi MOV. Per evitare danniall’apparecchiatura, è raccomandato un trasformatore di Isolamento secondario a massa.Ciò fornisce l’alimentazione trifase AC simmetrica rispetto alla massa.
Condizionamento dell’Alimentazione EntranteI controlli Baldor sono previsti per il collegamento diretto alle linee trifase standardelettricamente simmetriche rispetto alla massa. Alcune condizioni della linea dialimentazione devono essere evitate. Può essere necessario un reattore di linea AC o untrasformatore di isolamento per alcune condizioni di alimentazione.
� I controlli Baldor Serie H richiedono un’impedenza linea minima del 3 %.Riferirsi a “Impedenza di Linea” per le informazioni aggiuntive.
� Se il circuito alimentatore o di diramazione che fornisce l’alimentazione alcontrollo ha permanentemente collegati condensatori di rifasamento, deveessere collegato un reattore di linea AC o un trasformatore di isolamento iningresso tra i condensatori di rifasamento e il controllo.
� Se il circuito alimentatore o di diramazione che fornisce l’alimentazione alcontrollo è dotato di condensatori di rifasamento che vengono commutati online e off line, i condensatori non devono essere commutati quando il controllo ècollegato alla linea di alimentazione AC. Se i condensatori sono commutati online mentre il controllo è ancora collegato alla linea di alimentazione AC,occorre una protezione aggiuntiva. Deve essere installato un TVSS (TransientVoltage Surge Suppressor) (Soppressore Sovra Tensione Transitorio) di valoreidoneo tra il reattore di linea AC o un trasformatore di isolamento e l’ingressoAC del controllo.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-5IMN720IT
Impedenza di Linea Il controllo Baldor Serie 20H richiede una impedenza di linea massima del 5 % (la cadutadi tensione nel reattore è del 5 % quando il controllo assorbe la corrente di ingressonominale).
L’impedenza di ingresso delle linee di alimentazione può essere determinata in due modi:
1. Misurare la tensione tra linea e linea in assenza di carico e in presenza di tuttoil carico nominale. Usare questi valori misurati per calcolare l’impedenza nelmodo seguente:
%Impedance �(VoltsNo Load � VoltsFull Load)
(VoltsNo Load)� 100
2. Calcolare la capacità della corrente di cortocircuito della linea di alimentazione.Se la capacità della corrente di cortocircuito è superiore ai valori della correntedi cortocircuito massima indicata per il controllo, occorre installare un reattore dilinea.
Sono riportati due metodi di calcolo della intensità della corrente dicortocircuito:
A. Metodo 1Calcolare la corrente di cortocircuito nel modo seguente:
ISC �(KVAXFMR � 1000 � 100)
(%ZXFMR � VL�L � 3� )
Esempio: Trasformatore da 50 KVA con 2,75 % di impedenza @ 460 VAC
ISC �(50 � 1000 � 100)
(2, 75 � 460 � 3� )� 2282 Amps
B. Metodo 2Passo 1: Calcolare il cortocircuito in KVA nel modo seguente:
KVASC �(KVAXFMR)
(%ZXFMR
100 )� � 50
0, 0275� � 1818, 2 KVA
Passo 2: Calcolare la corrente di cortocircuito nel modo seguente:
ISC �(KVASC � 1000)
(VL�L � 3� )�
1818, 2 � 1000
460 � 3�� 2282 Amps
dove:KVAXFMR=KVA trasformatoreIsc=corrente di cortocircuitoZXFMR=Impedenza TrasformatoreVL–L = Volt di ingresso misurati da linea a linea.

Capitolo 1Informazioni Generali
2-6 Arrivo e Installazione IMN720IT
Considerazioni sul Cablaggio
Il controllo DC è autoprotetto da normali transitori e sovracorrenti della linea AC. Possonoessere richieste protezioni esterne aggiuntive se sono presenti transitori ad alta energiasulla sorgente di alimentazione entrante. Questi transitori possono essere causati dallacondivisione di una sorgente di alimentazione con apparecchiatura a saldatura ad arco,grandi motori avviati in cortocircuito, o altre apparecchiature industriali richiedenti intensesovracorrenti. Per evitare danni causati dai disturbi della sorgente di alimentazioneoccorre considerare quanto segue:
a) Collegare il controllo su una linea di alimentazione separata da quelle chealimentano grandi carichi induttivi.
b) Alimentare il controllo attraverso un trasformatore di isolamento correttamentedimensionato. Quando si usa un trasformatore di isolamento per alimentare ilcontrollo, spegnere ed accendere sempre l’alimentazione tra il secondario deltrasformatore e l’ingresso del controllo per evitare picchi transitori sul controlloquando viene spenta l’alimentazione dal lato primario.
Tutto il cablaggio dei segnali esterni verso il controllo DC deve essere steso in un tubo diprotezione separato da tutto l’altro cablaggio. Si consiglia l’uso di doppini avvoltischermati per tutto il cablaggio segnali. La schermatura del cablaggio del controllo deveessere collegata solo alla massa analogica del controllo DC. L’altra estremità dellaschermatura deve essere inserita nel rivestimento isolante dei fili per evitare cortocircuitielettrici.
I fili per l’indotto e i campi del motore possono essere stesi insieme in un tubo diprotezione in conformità NEC e alle norme e realizzazioni elettriche locali. Per ulterioriinformazioni concernenti le considerazioni sul cablaggio, riferirsi a “Considerazionisull’Interferenza Elettrica” nel Capitolo 4 di questo manuale.
Avvertenza: National Electrical Code richiede una protezione da sovracorrenteseparata. L’installatore di questa apparecchiatura è responsabileper la conformità National Electrical Code e qualsiasi norma localeapplicabile che governano tali realizzazioni come protezionecablaggio, messa a terra, scollegamenti ed altre protezioni dacorrente.
Avvertenza: Non usare condensatori di rifasamento sulle linee di alimentazioneentranti nel controllo per non danneggiarlo.
Avvertenza: Non installare condensatori in corto ai morsetti indotto A1/A2altrimenti possono sorgere anomalie SCR.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-7IMN720IT
E’ necessario il cablaggio di interconnessione tra il controllo DC, l’alimentazione di reteAC, il motore, il controllo host e qualsiasi stazione interfaccia operatore. Usare iconnettori a circuito chiuso elencati perché sono di dimensione appropriata per ildiametro fili usato. I connettori devono essere installati usando lo strumento aggraffatorespecificato dal costruttore del connettore.
Il controllo Serie 20H DC SCR può richiedere la protezione dell’alimentazione entrantesottoforma di interruttore o fusibili. Tutti i controlli sono dotati dalla Baldor ElectricCompany di tre fusibili all’ingresso ed un fusibile all’uscita dell’indotto. Riferirsi allaTabella 2.3 per la capacità dei fusibili.
Collegare le linee di alimentazione AC trifase ai morsetti di ingresso alimentazione L1,L2, e L3. La rotazione fase dell’alimentazione entrante non è importante poiché il controllo non èsensibile alla rotazione fase dell’alimentazione in ingresso.
Collegare una massa a terra alla forcella di massa del controllo (GRD) conformementealle norme elettriche locali applicabili. La massa motore e la massa di terradell’alimentazione entrante devono essere collegate alla forcella di massa.
Si raccomanda di usare uno scollegamento alimentazione tra l’alimentazione entrante e ilcontrollo per fornire un metodo di sicurezza per scollegare il controllo dall’alimentazioneentrante. Il controllo rimane nella condizione sottotensione sino a quando tuttal’alimentazione entrante è rimossa dal controllo.
Dimensionamento del Trasformatore di Isolamento
Usare le informazioni della Tabella 2-2 per selezionare il valore KVA del trasformatore infunzione degli HP nominali del controllo. La tensione secondaria sarà la tensioneentrante del controllo e l’impedenza deve essere del 5 % o inferiore.
Una eccezione alla Tabella 2-2 avviene quando la tensione indotto DC è inferiore allatensione entrante AC. In questo caso, usare la formula seguente: KVA � 0, 00163 � VACSecondary � IDCSecondary
Tabella 2-2 Selezione KVA del Trasformatore di Isolamento
HP 5 7,5 10 15 20 25 30 40 50 60 75 100 125 150 200 250 300KVA 7,5 11 14 20 27 34 40 51 63 75 93 118 145 175 220 275 330
Alimentazione Monofase Siccome il controllo raddrizza tutte e tre le fasi dell’alimentazione entrante, ilfunzionamento da sorgente di alimentazione monofase non è possibile.
Connessioni alla Sorgente di Alimentazione Generatore AC
Se si deve usare un gruppo generatore azionato da motore trifase come sorgente dialimentazione AC per il Controllo Baldor, il valore KVA del generatore deve esserealmeno 20 volte il valore KVA del controllo.

Capitolo 1Informazioni Generali
2-8 Arrivo e Installazione IMN720IT
Dimensione del Filo e Dispositivi di Protezione
Tabella 2-3 Dimensione Filo Raccomandata – 115 VAC
N mero
UscitaMassimo Fusibile Dimensione Filo
NumeroCatalogo
HP KW Indotto eIngresso AC
TipoB ss
Ingresso AC Uscita Indotto AlimentazioneCampoHP KW Ingresso AC Buss AWG mm2 AWG mm2 AWG mm2
BC20H103-CL 3 2,2 50 A, 500 V FWH-50A 10 6 10 6 14 2,5BC20H107-CL 7 5,2 80 A, 500 V FWH-80A 6 16 6 16 14 2,5BC20H110-CL 10 7,5 100 A, 500 V FWH-100A 4 25 3 30 14 2,5BC20H115-CL 15 11,2 150 A, 500 V FWH-150A 3 30 2 35 14 2,5BC20H120-CL 20 14,9 150 A, 500 V FWH-150A 1 50 1/0 54 14 2,5BC20H125-CL 25 18,6 300 A, 500 V FWH-300A 1/0 54 2/0 70 14 2,5BC20H135-CL 35 26 350 A, 500 V FWH-350A 3/0 95 4/0 120 14 2,5BC20H140-CL 40 29,8 400 A, 500 V FWH-400A 4/0 120 300MCM 150 14 2,5BC20H150-CL 50 37,3 450 A, 500 V FWH-450A 300MCM 150 500MCM 240 14 2,5
Tabella 2-4 Dimensione Filo Raccomandata – 230 VAC
N mero
UscitaMassimo Fusibile Dimensione Filo
NumeroCatalogo
HP KW Indotto eIngresso AC
TipoB ss
Ingresso AC Uscita Indotto AlimentazioneCampoHP KW Ingresso AC Buss AWG mm2 AWG mm2 AWG mm2
BC20H205-CL 5 3,7 50 A, 500 V FWH-50A 10 6 10 6 14 2,5BC20H210-CL 10 7,5 80 A, 500 V FWH-80A 6 16 6 16 14 2,5BC20H215-CL 15 11,2 100 A, 500 V FWH-100A 4 25 3 30 14 2,5BC20H220-CL 20 14,9 150 A, 500 V FWH-150A 3 30 2 35 14 2,5BC20H225-CL 25 18,6 150 A, 500 V FWH-150A 1 50 1/0 54 14 2,5BC20H240-CL 40 29,8 300 A, 500 V FWH-300A 1/0 54 2/0 70 14 2,5BC20H250-CL 50 37,3 350 A, 500 V FWH-350A 3/0 95 4/0 120 14 2,5BC20H260-CL 60 44,8 400 A, 500 V FWH-400A 4/0 120 300MCM 150 14 2,5BC20H275-CL 75 56 400 A, 500 V FWH-400A 4/0 120 300MCM 150 14 2,5
BC20H2125-CL 125 93 600 A, 500 V FWP-600A (2)300MCM 150 (2)400MCM 200 14 2,5

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-9IMN720IT
Tabella 2-5 Dimensione Filo Raccomandata – 460 VAC
N mero
UscitaMassimo Fusibile Dimensione Filo
NumeroCatalogo
HP KW Indotto eIngresso AC
TipoB ss
Ingresso AC Uscita Indotto AlimentazioneCampoHP KW Ingresso AC Buss AWG mm2 AWG mm2 AWG mm2
BC20H410-CL 10 7,5 50 A, 700 V FWP-50A 10 6 10 6 14 2,5BC20H420-CL 20 14,9 80 A, 700 V FWP-80A 6 16 6 16 14 2,5BC20H430-CL 30 22,4 100 A, 700 V FWP-100A 4 25 3 30 14 2,5BC20H440-CL 40 29,8 150 A, 700 V FWP-150A 3 30 2 35 14 2,5BC20H450-CL 50 37,3 150 A, 700 V FWP-150A 1 50 1/0 54 14 2,5BC20H475-CL 75 56 300 A, 700 V FWP-300A 1/0 54 2/0 70 14 2,5
BC20H4100-CL 100 74,6 350 A, 700 V FWP-350A 3/0 95 4/0 120 14 2,5BC20H4125-CL 125 93 400 A, 700 V FWP-400A 4/0 120 300MCM 150 14 2,5BC20H4150-CL 150 112 400 A, 700 V FWP-400A 300MCM 150 500MCM 240 14 2,5BC20H4200-CL 200 149 600 A, 700 V FWP-600A (2) 300MCM 150 (2) 400MCM 200 14 2,5BC20H4250-CL 250 187 600 A, 700 V FWP-600A (2) 300MCM 150 (2) 400MCM 200 14 2,5BC20H4300-CL 300 224 800 A, 700 V FWP-800A (2) 400MCM 200 (2) 500MCM 240 14 2,5BC20H4400-CL 400 298 (2) 500 A, 700
VFWP-500A (3) 300MCM 150 (3)500 mcm 240 * (2) 18 0,75
BC20H4500-CL 500 373 (2) 600 A, 700V
FWP-600A (3)500 mcm 240 (4) 400MCM 200 * (2) 18 0,75
BC20H4600-CL 600 448 (2) 600 A, 700V
FWP-600A (4) 500MCM 240 (4) 500MCM 240 * (2) 18 0,75
* La dimensione filo dipende dalla corrente richiesta per il motore.
Nota: Tutte le dimensioni filo sono basate su filo di rame a 75 °C, temperatura ambiente 40 °C, 4 – 6 conduttori pertubo di protezione o canalina eccetto quando indicato.
Nota: Le dimensioni dei fili sopra indicate valgono per pose di alimentazione di lunghezza normale. Deve essereconsiderata la caduta di tensione verso il motore e il controllo. Per pose di alimentazioni più lunghe, usare filodi rame di diametro superiore (entro la dimensione dei morsetti filo).
Tabella 2-6 Fusibili
Filo Ingresso Indotto (Rame) Filo Uscita Alimentazione Campo (Rame)Alimentazione Campo Standard (15 A) Buss KTK 20
Alimentazione Campo Alta Capacità (40 A) Baldor V4360050 (Gould A70Q50)Fusibili Riferimento/Alimentazione Buss FNQ 2/10 A

Capitolo 1Informazioni Generali
2-10 Arrivo e Installazione IMN720IT
Figura 2-1 Posizione Componenti Protezione 20H
�� �� �� ��
� �
�� �� �� ��
�� �� ��
� �
���
Tipo AL3L2L1A2
GRD
Morsettiera J1
GND
A1
GND
A1
�� �� �� ��
�� �� �� �� ��
�� ��
� � �� �� ��
Tipo B Tipo C
Tipo D
�� �� �� ��
�� �� �� ��
�� �� �� ��
�� ��
� � �� �� ��
1 2 3
JP1
1 2 3
JP1
1 2 3
JP1
1 2 3
JP1
L3L2L1A2
Morsettiera J1
L3L2L1A2
L3L2L1A2
A1
A1
A1
Morsettiera J1
Morsettiera J1
Tipo G
A1
GND
L1 L2 L3
JP1 montato sullascheda di controllo(lato opposto delpannello girevole).
A2

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-11IMN720IT
Connessioni Linea AC e MotorePrima di procedere assicurarsi che tutta l’alimentazione al controllo sia scollegata.
Le connessioni alimentazione AC e motore sono illustrate in Figura 2-3. Verificare laconformità con tutte le norme applicabili.
1. Collegare i fili dell’alimentazione AC entrante 3� a L1, L2 e L3 sui Morsetti deiCircuiti Principali. La rotazione fase non è importante poiché il controllo èinsensibile alla fase.
2. * Collegare la massa di terra al morsetto GRD del controllo.
Nota: Usare per la massa di terra lo stesso diametro filo utilizzato per leconnessioni L1, L2 e L3. Riferirsi alle tabelle Dimensione del Filo eDispositivi di Protezione descritti precedentemente in questo capitolo.
3. Collegare i capicorda dell’indotto del motore DC ai morsetti A1 e A2 delcontrollo.Si raccomanda un contattore nel circuito motore per fornire lo scollegamentopositivo dell’indotto motore.
4. * Collegare il filo di massa del motore al morsetto GRD del controllo.
5. ** Collegare i capicorda di alimentazione campo del motore DC ai morsetti F+ eF– del controllo. L’alimentazione campo standard fornisce fino all’85 % dellatensione di linea come propria tensione di uscita DC @ 15 ampere.L’alimentazione campo ad alta capacità fornisce fino all’85 % della tensione dilinea come propria tensione di uscita DC @ 40 ampere.
* La messa a terra con tubo di protezione o mediante connessione al pannellonon è idonea. Occorre usare un conduttore separato di dimensione appropriatacome conduttore di massa.
** Se il motore richiede più dell’85 % della tensione di linea come propria tensionedi ingresso DC, occorre un trasformatore elevatore. Il trasformatore vieneaggiunto tra i morsetti della linea entrante e i morsetti L1 e L2 del moduloalimentatore campo. Questa connessione è sensibile alla fase con l’ingressoprincipale L1 e L2. La tensione massima di ingresso al modulo alimentatorecampo è 528 VAC @ 60 Hz.
Nota: Il controllo 20H può essere collegato ad un motore DC a campomagnetico permanente. In questo caso, l’alimentazione campo non ècollegata, il Blocco Motor Data di Livello 2, parametro Motor Field èimpostato su PERM MAGNET, e il blocco Field Control di Livello 1,parametro Field PWR Supply è impostato su NONE.

Capitolo 1Informazioni Generali
2-12 Arrivo e Installazione IMN720IT
Connessione delle Ventole di RaffreddamentoAlcuni controlli sono dotati di ventole di raffreddamento (ventole a sogliola) o soffianticentrifughe che devono essere collegate all’alimentazione monofase. I controlli 230 VAChanno ventole monofase 230 VAC nominali e i controlli 460 VAC hanno ventole di115 VAC nominali. Riferirsi alla targa dati posta vicino alla ventola per l’identificazionedella tensione. Collegare l’alimentazione monofase appropriata ai due morsetti dellaventola posti sul lato ventola.
I controlli Tipo D hanno una soffiante centrifuga collegabile all’alimentazione monofase230 o 460 volt AC. Collegare i 230 VAC o 460 VAC alla soffiante come illustrato in Figura2-2. La morsettiera è posta sulla soffiante.
Figura 2-2 Connessioni della Soffiante 230 VAC/460 VAC (Monofase)
Blu
Arancione
Nero
Rosso
Morsettiera
230 VACa Curadell’Utente
Blu
Arancione
Nero
Rosso
Morsettiera
460 VACa Curadell’Utente

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-13IMN720IT
Figura 2-3 Connessioni Alimentazione AC Trifase e Motore
Connessione Opzionale del Contattore M
L1 L2 L3
L1 L2 L3
* Scollega-mento
Alimenta-zione
Terra* Componenti opzionali non forniti con il Controllo 20H.
Vedere le Coppie di Serraggio Raccomandate nelCapitolo 5.
Nota 2
ControlloBaldor
Serie 20H
Nota 1
Nota 3
A1 A2
Nota 4
* Dispositivo RC Electro-
cubeOpzionaleRG1781-3
789
* M Abilita-
zioneJ1
* Contattore MAlla Sorgente di Alimentazione
Fornita dal Cliente (Tensione Nominale Bobina)
M=Contatti del Contattore M opzionale
Nota: Chiudere “Abilitazione” dopo la chiusura del contatto “M”.
Note:
1. Vedere “Dimensione Filo e Dispositivi di Protezione” descrittiprecedentemente in questo capitolo per informazioni suldimensionamento e lo Scollegamento Alimentazione opzionale.
2. Schermare i fili in un tubo di protezione metallico.
3. Il tubo di protezione metallico deve essere usato per schermare ifili di uscita (tra controllo e motore). Collegare il tubo diprotezione metallico in modo che il Reattore di Carico o ilDispositivo RC non interrompa la schermatura EMI/RFI.
4. Si raccomanda l’uso di un contattore del circuito motore perfornire lo scollegamento positivo e evitare la rotazione del motorela quale potrebbe causare lesioni. Collegare il Contattore Mcome illustrato. Il contattore deve essere aperto per abilitarel’ingresso su J1-8 almeno 20 msec prima che i contatti Mprincipali si aprano per evitare la formazione dell’arco sui contatti.Ciò incrementa fortemente la vita del contattore e consente l’usodi contattori classificati IEC.
GRD
GRD
* Motore DC
F+ F–
F+ F–
Nota 3
A1 A2 GND
* Motore DC
F+ F–
F+ F–
*
*
* M
Tipica connessione di campo di motore avvolto in derivazione120/240 V o 150/300 V. Per i dettagli consultare i dati motorespecifici dei costruttori.
120 V o150 V
F1 F2
F3 F4
240 V o 300 V
F1 F4F2 F3
+
+
GRD
2-14 Arrivo e Installazione IMN720IT
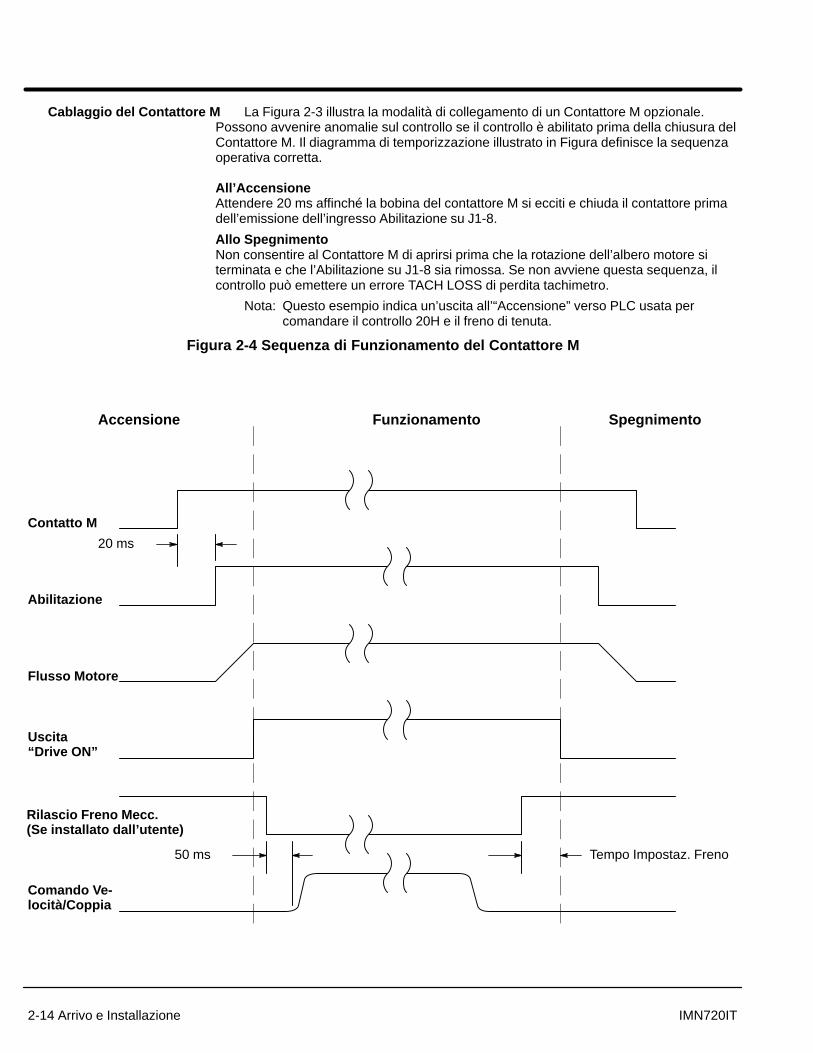
Cablaggio del Contattore M La Figura 2-3 illustra la modalità di collegamento di un Contattore M opzionale.Possono avvenire anomalie sul controllo se il controllo è abilitato prima della chiusura delContattore M. Il diagramma di temporizzazione illustrato in Figura definisce la sequenzaoperativa corretta.
All’AccensioneAttendere 20 ms affinché la bobina del contattore M si ecciti e chiuda il contattore primadell’emissione dell’ingresso Abilitazione su J1-8.
Allo SpegnimentoNon consentire al Contattore M di aprirsi prima che la rotazione dell’albero motore siterminata e che l’Abilitazione su J1-8 sia rimossa. Se non avviene questa sequenza, ilcontrollo può emettere un errore TACH LOSS di perdita tachimetro.
Nota: Questo esempio indica un’uscita all’“Accensione” verso PLC usata percomandare il controllo 20H e il freno di tenuta.
Figura 2-4 Sequenza di Funzionamento del Contattore M
Accensione Funzionamento Spegnimento
Contatto M
Abilitazione
20 ms
Flusso Motore
Uscita“Drive ON”
Rilascio Freno Mecc.(Se installato dall’utente)
Comando Ve-locità/Coppia
50 ms Tempo Impostaz. Freno

Arrivo e Installazione 2-15IMN720IT
Ingresso External Trip Il morsetto J1-16 è disponibile per il collegamento ad un relé normalmente chiuso fornitodall’utente in tutti i modi operativi come illustrato in Figura 2-5. ll contatto termostato deveessere un contatto di tipo a vuoto senza alimentazione disponibile dal contatto. Se iltermostato motore si attiva, il controllo automaticamente si disabilita e invia un’anomaliaExternal Trip . Quando il motore è sufficientemente raffreddato e il termostato motore siripristina, il controllo può essere riavviato.
Collegare i fili dell’Ingresso External Trip su J1-16 e J1-17. Non porre questi fili nellostesso tubo di protezione dei conduttori di alimentazione del motore.
Per attivare l’ingresso External Trip, il blocco Protection di Livello 2, parametro ExternalTrip deve essere impostato su “ON”.
Figura 2-5 Relè Temperatura Motore
* Motore
1617
J1
EXTERNAL TRIP
Non porre questi fili nello stesso tubodi protezione dei conduttori motore odel cablaggio di alimentazione AC.
Tensione Sorgente Fornita dal Cliente
Conduttori Termostato Motore
CR1
*
* Hardware opzionale. Deve essere ordinato separatamente.
Nota: Aggiungere dispositivo di protezionedi valore appropriato per il relè AC(stabilizzatore) o relè DC (diodo).

2-16 Arrivo e Installazione IMN720IT
Installazione dell’Encoder E’ necessario l’isolamento elettrico dell’albero e della scatola encoder dal motore.L’isolamento elettrico evita l’accoppiamento capacitivo dell’interferenza motore chedanneggerebbe i segnali encoder. Riferirsi alle considerazioni sull’interferenza elettricanel Capitolo 4 di questo manuale.
Preparazione Cavi
Il cablaggio dell’encoder deve essere a doppino avvolto schermato, #22 AWG(0,34 mm2) di dimensione minima, 200′ (60 m) massimo, con schermatura totale isolata.
Estremità del Controllo (Vedere Figura 2-6.)
1. Tagliare la camicia esterna di circa 0,375″ (9,5 mm) dall’estremità.
2. Saldare un filo #22 AWG (0,34 mm2) sulla calza di schermatura.
3. Collegare tutte le schermature su J1-30. A questo scopo, saldare un “Filo diDrenaggio” da ogni schermo al filo saldato sulla calza nel passo 2.
4. Isolare o nastrare le estremità non a massa delle schermature per evitare ilcontatto con altri conduttori o con la massa.
Estremità dell’Encoder
1. Tagliare la camicia esterna di circa 0,375″ (9,5 mm) dall’estremità.
2. Identificare ognuno dei quattro doppini avvolti e denominarli o usare i codicicolore indicati in Figura 2-7 per il Cavo Encoder Baldor opzionale.
3. Isolare o nastrare le estremità non a massa delle schermature per evitare ilcontatto con altri conduttori o con la massa.
Avvertenza: Non collegare alcuna schermatura alla scatola encoder o al telaiomotore. La fornitura +5 VDC dell’encoder su J1-29 è riferita alcomune della scheda circuito. Non collegare alcuna schermaturaalla massa o un’altra alimentazione per non danneggiare ilcontrollo.
Figura 2-6 Cavi dell’Encoder
No. 9891
CAMICIA ESTERNA
Calza di schermo e filo
Filo di massa 5 VDC
Fili A, A, B, B, C, e +5 VDC

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-17IMN720IT
Figura 2-7 Connessioni dell’Encoder
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
Nessuna Connessione
CODICI COLORE PERCAVI ENCODER BAL-DOR OPZIONALI INGRESSO
ENCODERINGRESSO ELETTRICAMENTE ISOLATO
Connessione Cavi dell’Encoder
I cavi dell’encoder devono essere distanti almeno 3” (76 mm) da percorsi paralleli di fili dipotenza. I cavi dell’encoder che attraversano fili di potenza devono attraversarliesclusivamente con angolo di 90°. I fili dell’encoder devono essere di #22 AWG(0,34 mm2) minimo, 200 piedi (60 m) massimo di lunghezza e devono avere schermaturatotale.
Nota: Prestare attenzione di non incastrare l’isolamento dei fili nei morsetti J1altrimenti non può essere effettuato il collegamento elettrico appropriato.
1. Alimentare l’estremità del controllo del cavo attraverso uno dei fori a“Sfondamento” nella scatola del controllo affinché le connessioni possanoessere eseguite internamente al controllo.
2. Connessioni DifferenzialiCollegare la schermatura a calza del cavo su J1-30 all’estremità del controllo.
Collegare le estremità del cavo nel modo seguente: (Vedere Figura 2-7.)
Estremità Encoder Estremità ControlloA J1-23 (A)H J1-24 (A)B J1-25 (B)J J1-26 (B)C J1-27 Index(C)K J1-28 Index(C)D J1-29 (+5V DC)F J1-30 (Comune)E Nessuna Conn.
3. Connessioni MonopolariGli ingressi differenziali sono raccomandati per migliorare l’immunità dainterferenza. Se sono disponibili soltanto segnali encoder monopolari, collegarlirispettivamente su A, B, e INDEX (C) (J1-23, J1-25 e J1-27).

2-18 Arrivo e Installazione IMN720IT
Ingresso Interruttore Home (Orientamento Base) La funzione Home o Orientamento Base induce l’albero del motore a ruotare in unaposizione base predefinita. La posizione base viene definita quando un interruttore èmontato sulla macchina o l’impulso “Index” dell’encoder è attivato (chiuso). Home o Baseviene definita dal fronte di salita di un segnale sul morsetto J1-27. L’albero continua aruotare soltanto nel senso antiorario per uno spostamento di valore definito dall’utente.Lo spostamento è programmato nel Livello 2, parametro Miscellaneous Homing Offset.La velocità con cui il motore raggiunge “Home” o l’orientamento è impostata con ilparametro Miscellaneous Homing Speed di Livello 2.
Può essere usato un interruttore montato sulla macchina per definire la posizione Homein luogo del canale index dell’encoder. Un’uscita driver della linea differenzialeproveniente da un interruttore allo stato solido è consigliabile per migliorare l’immunità dainterferenza. Collegare questa uscita differenziale ai morsetti J1-27 e J1-28.
Un interruttore allo stato solido monopolare o un interruttore limite deve essere cablatocome illustrato in Figura 2-8. Indipendentemente dal tipo di interruttore usato, sonorichiesti nitidi fronti di salita e di discesa su J1-27 per ottenere il posizionamento preciso.
Nota: Il controllo richiede l’hardware del freno dinamico per attivare la funzioneOrientamento (Homing). Il controllo avanza se non è installato l’hardware delfreno dinamico.
Figura 2-8 Connessioni Tipiche dell’Interruttore Home o Orientamento
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
SENSORE DI PROSSIMITÀ 5 VDC INTERRUTTORE LIMITE (Aperto quando alla base)
Uscite Bufferizzate dell’Encoder Il controllo fornisce un’uscita encoder bufferizzata sui pin da J1-31 a J1-38 come illustratoin Figura 2-9. Questa uscita può essere usata da hardware esterno per monitorare isegnali dell’encoder. Si raccomanda che questa uscita comandi soltanto un carico delcircuito di uscita.
Figura 2-9 Uscite Bufferizzate dell’Encoder
303132333435363738
29Common+5 VDC
Common
AABBINDEXINDEXNon Usato
Uscita BufferizzataEncoder
26LS31
AABBCCDD
IN BIN CIN D
IN A
E E
DalProcessore
Coppia di serraggio morsetti7 lb-in (0,8 Nm) max.
J1

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-19IMN720IT
Connessioni dei Circuiti del Controllo Nel controllo Serie 20H DC SCR sono disponibili otto modi operativi. Questimodi operativi definiscono l’impostazione base del controllo motore e il funzionamentodei morsetti J1 di ingresso e uscita (vedere Figura 2-1 per la posizione di J1). Dopo ilcompletamento delle connessioni dei circuiti, il modo operativo viene selezionatoprogrammando il parametro Operating Mode nel blocco di programmazione Input diLivello 1. I modi operativi disponibili sono:
• Keypad Control
• Standard Run, 3 Wire Control
• 15 Speed, 2 Wire Control
• Bipolar Speed or Torque
• Process Control
• Serial
• Bipolar Hoist
• 7 Speed Hoist
Nota: Il modo operativo Serial richiede una delle schede opzionali di espansioneInterfaccia Seriale (RS232 o 422/485). Le istruzioni di installazione efunzionamento di queste schede di espansione seriale sono fornite nelmanuale MN1310 della scheda di espansione di Comunicazione Seriale.Questo manuale è accluso alle schede di espansione.
Nota: Bipolar hoist e 7 speed hoist possono apparire come parametri OperatingMode disponibili nel software Serie 20H. I controlli unidirezionali Serie 19Hnon devono essere usati per applicazioni con trasporto di carichi, come ilparanco. I controlli Serie 20H Line Regen devono essere usati per i paranchied altre applicazioni di trasporto carichi.

Capitolo 1Informazioni Generali
2-20 Arrivo e Installazione IMN720IT
Connessioni Modo TastieraPer operare in modo tastiera, impostare su Keypad il parametro Operating Mode nelblocco Input di Livello 1. In questo modo, soltanto l’Ingresso Opto External Trip su J1-16è attivo (se è impostato su ON il parametro External Trip nel blocco Protection di Livello2). Le uscite analogiche rimangono entrambe attive. Le connessioni sono effettuate comeillustrato in Figura 2-10.
Il tasto STOP può operare in uno di due modi:
� Premere il tasto STOP una volta per frenare o fermare per inerzia (comeimpostato nel Livello 1, blocco Keypad Setup, parametro Keypad Stop Mode).
� Premere due volte il tasto STOP per disabilitare il controllo.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-21IMN720IT
Figura 2-10 Schema di Connessione del Controllo Tastiera
8
910
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
INPUT #1
INPUT #2
INPUT #3
INPUT #4
INPUT #5
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
Connessioni Non Richieste
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
Nessuna Connessione(Inattivo)
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Nota 2
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 3
UscitaBufferizzataEncoderNota 4INPUT #1
INPUT #7
6
Nota 1
Note:
1. Riferirsi a Uscite Analogiche.
2. Riferirsi a Uscite Opto Isolate.
3. Riferirsi a Installazione dell’Encoder.
4. Riferirsi a Uscite Bufferizzatedell’Encoder.
Riferirsi alla Figura 2-5.
J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita evisualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-22 Arrivo e Installazione IMN720IT
Connessioni Modo Standard Run a 3 FiliNel modo standard run, il controllo opera tramite gli ingressi Opto Isolati da J1-8 a J1-16e l’ingresso comando analogico. Gli ingressi opto possono essere commutati comeillustrato in Figura 2-11 o segnali logici da altro dispositivo. L’Ingresso Opto di ExternalTrip su J1-16 è attivo se è collegato come indicato ed è impostato su ON il parametroExternal Trip nel blocco Protection di Livello 2.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-23IMN720IT
Figura 2-11 Schema Connessione Standard Run a 3 Fili
PRESET SPEED #1
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
FORWARD RUN
REVERSE RUN
STOP
JOG
ACCEL/DECEL
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 5
UscitaBufferizzataEncoderNota 6
FAULT RESET
Nota 2
Nota 4
Nota 3
Pot Comando 5 k�Nota 1
Tensione o correntedi ingresso program-mabile
Note:
1. Riferirsi a Ingressi Analogici.
2. Riferirsi a Uscite Analogiche.
3. Riferirsi a Uscite Opto Isolate.
4. Per ingresso 4-20 mA, spostare ponticello JP1 su pin 2 e 3. (Vedere Figura 2-1).
5. Riferirsi a Installazione dell’Encoder .
6. Riferirsi a Uscite Bufferizzate dell’Encoder.
Riferirsi alla Figura 2-5.
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente alla corrente di fluire nel motore e produrre coppia.
J1-9 MOMENTARY CLOSED avvia il funzionamento del motore in senso Forward. In modoJOG, (J1-12 CLOSED), continuous CLOSED aziona il motore in modo jog in sensoForward.
J1-10 MOMENTARY CLOSED avvia il funzionamento del motore in senso Reverse. In modoJOG, (J1-12 CLOSED), CONTINUOUS closed aziona il motore in modo JOG in sensoReverse.
J1-11 Momentary OPEN causa decelerazione e arresto del motore (in funzionedell’impostazione parametro Keypad Stop Mode).
J1-12 CLOSED pone il controllo in modo JOG, sono usati i sensi Forward e Reverse perazionare il motore in modo jog.
J1-13 OPEN seleziona ACC / DEC / S-CURVE gruppo 1. CLOSED seleziona il gruppo 2.
J1-14 OPEN consente il comando velocità proveniente dall’ingresso Analogico #1 o #2 o Jog.CLOSED seleziona preset speed #1, (J1-12, elude questa preset speed),
J1-15 OPEN per funzionare. CLOSED ripristina la condizione di errore.J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita e
visualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-24 Arrivo e Installazione IMN720IT
Connessioni Modo 15 Velocità a 2 Fili La Tabella di Regolazione degli Interruttori è definita nella Tabella 2-7.
Il funzionamento in modo 15 Velocità a 2 Fili è controllato dagli ingressi Opto Isolati daJ1-8 a J1-16. Gli ingressi opto possono essere commutati come illustrato in Figura 2-12 osegnali logici da altro dispositivo. L’Ingresso Opto di External Trip su J1-16 è attivo se ècollegato come indicato e il blocco Protection di Livello 2, parametro External Trip èimpostato su ON.
Gli ingressi commutati su J1-11 fino a J1-14 consentono la selezione di 15 velocitàpreimpostate e forniscono Fault Reset come definito in Tabella 2-7.
Tabella 2-7 Tabella di Regolazione degli Interruttori per il Modo 15 Velocità, Controllo a 2 Fili
Funzione J1-11 J1-12 J1-13 J1-14Preset 1 Open Open Open OpenPreset 2 Closed Open Open OpenPreset 3 Open Closed Open OpenPreset 4 Closed Closed Open OpenPreset 5 Open Open Closed OpenPreset 6 Closed Open Closed OpenPreset 7 Open Closed Closed OpenPreset 8 Closed Closed Closed OpenPreset 9 Open Open Open Closed
Preset 10 Closed Open Open ClosedPreset 11 Open Closed Open ClosedPreset 12 Closed Closed Open ClosedPreset 13 Open Open Closed ClosedPreset 14 Closed Open Closed ClosedPreset 15 Open Closed Closed Closed
FAULT RESET Closed Closed Closed Closed

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-25IMN720IT
Figura 2-12 Schema Connessione 15 Velocità Controllo a 2 Fili
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
FORWARD RUN
REVERSE RUN
* SWITCH 1
* SWITCH 2
* SWITCH 3
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 3
UscitaBufferizzaEncoderNota 4
* SWITCH 4
ACC/DEC/“S” SELECT 1
Nota 1
Nota 2
* Riferirsi alla tabella di regolazione, Tabella 2-7.
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
Nessuna Connessione
Entrambi CLOSED= For-ward
Entrambi OPEN = Stop
* Tutti CLOSED= Re-set ErroriNote:
1. Riferirsi a Uscite Analogiche.
2. Riferirsi a Uscite Opto Isolate.
3. Riferirsi a Installazione dell’Encoder.
4. Riferirsi a Uscite Bufferizzatedell’Encoder. Riferirsi alla Figura 2-5.
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente allacorrente di fluire nel motore e produrre la coppia.
J1-9 OPEN il motore decelera fino all’arresto (in funzione dell’impostazione del parametroKeypad Stop Mode).CLOSED aziona il motore in senso Forward (con J1-10 aperto).
J1-10 OPEN il motore decelera fino all’arresto in funzione dell’impostazione del parametromodo Keypad Stop.CLOSED aziona il motore in senso Reverse (con J1-9 aperto).
J1-11 – 14 Seleziona le velocità preimpostate programmate come definito in Tabella 2-7
J1-15 Seleziona il gruppo ACC/DEC. OPEN seleziona il gruppo 1. CLOSED seleziona ilgruppo 2.
J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita evisualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-26 Arrivo e Installazione IMN720IT
Connessioni Modo Velocità e Coppia BipolareOltre al controllo individuale bipolare della velocità o coppia del motore, questo modo difunzionamento consente all’utente di memorizzare due (2) gruppi completi differenti diparametri operativi. La Tabella 2-8 indica le impostazioni degli interruttori richieste peraccedere ad ogni tabella parametri. Quando si programma un gruppo parametri, usare iltasto ENTER per accettare e salvare automaticamente i valori dei parametri.
Nota: Eccetto per il parametro Operating Mode di Livello 1, il controllo può essereprogrammato in modo REMOTE con il drive abilitato e gli interruttori nel passoNO TAG chiusi. Il controllo deve essere disabilitato per modificare il parametrodel modo operativo.
1. Impostare nel blocco INPUT di Livello 1 il parametro Operating Mode al valoreBIPOLAR in ognuno dei gruppi parametri.
2. Aprire l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il primo gruppo parametri che è numerato Table#0.
3. Chiudere l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il secondo gruppo parametri che è numerato Table#1.
4. Programmare i valori parametro per ogni tabella. Ricordare che per modificareil valore di un parametro in una delle tabelle parametri, occorre dapprimaselezionare la tabella usando gli interruttori. Non è possibile cambiare un valoredi una tabella se prima non si è selezionata detta tabella.
Nota: Table#0 deve contenere il valore più grande dei due parametri MAX SPEED.Il controllo si avvia sempre in Table#0.
Tabella 2-8 Tabella di Regolazione per la Selezione della Tabella Modo Bipolare
Funzione J1-13
Tabella #0 dei Parametri Open
Tabella #1 dei Parametri Closed
Nota: Tutti i parametri eccetto operating mode possono essere modificati e salvatiper ogni tabella.
Nota: Preset speed non concerne la selezione tabella.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-27IMN720IT
Figura 2-13 Schema Connessioni Velocità o Coppia Bipolare
89
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
FORWARD ENABLE
REVERSE ENABLE
CLOSED=ORIENT
SPEED/TORQUE
* TABLE SELECT
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 5
UscitaBufferizzataEncoderNota 6
FAULT RESET
Pot Comando 5 k�
Nota 2
Nota 1
Tensione o correntedi ingresso program-mabile
Nota 3
Nota 4
* Vedere Tabella 2-8.
Note:
1. Riferirsi a Ingressi Analogici.
2. Riferirsi a Uscite Analogiche.
3. Riferirsi a Uscite Opto Isolate.
4. Per ingresso 4-20 mA, spostare ponticello JP1 sui pin 2 e 3. (Vedere Figura 2-1).
5. Riferirsi a Installazione dell’Encoder.
6. Riferirsi a Uscite Bufferizzate dell’Encoder.
Riferirsi alla Figura 2-5.
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente alla corrente di fluire nel motore e produrre coppia.
J1-9 OPEN PER DISABILITARE il funzionamento Forward (il drive frena fino allo stop se èancora presente il comando Forward). CLOSED per abilitare il funzionamento in senso Forward.
J1-10 OPEN per disabilitare il funzionamento Reverse (il drive frena fino all’arresto se si usa ilcontattore di reverse opzionale con l’hardware del freno dinamico. Per ulterioriinformazioni riferirsi alle Uscite Opto Isolated).CLOSED per abilitare il funzionamento nella direzione Reverse (se si usa il contattore direverse opzionale).Per ulteriori informazioni riferirsi alle Uscite Opto Isolated)
J1-11 CLOSED induce l’albero motore a orientarsi su una tacca o interruttore esterno.
J1-12 OPEN pone il controllo in modo velocità.CLOSED pone il controllo in modo coppia.
J1-13 OPEN seleziona la tabella 0 dei parametri .CLOSED seleziona la tabella 1 dei parametri.
J1-15 OPEN per funzionare.Momentary CLOSED per ripristinare la condizione di errore.
J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita evisualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.
Capitolo 1Informazioni Generali
2-28 Arrivo e Installazione IMN720IT
Connessioni Modo ProcessoIl modo controllo processo è un sistema secondario ad anello chiuso che comprende ilcontrollo generico PID del set point. Può essere impostato in due modi diversi. Unoutilizza un set point preimpostato programmabile e l’altro utilizza un ingresso set point dicomando esterno. In ognuno dei due casi, è richiesto il segnale process feedback.
La selezione del comando set point e il segnale process feedback è posto nel blocco diprogrammazione Process Control rispettivamente sotto il Parametro Set point Source e ilParametro Process Feedback.
Il modo controllo del PID set point preimpostato programmabile può essere usato persistemi ad anello chiuso generici. Ciò è generalmente noto come feedback control.Questo metodo confronta il valore della variabile preimpostata programmata con lavariabile di processo. La loro differenza è l’errore di processo. L’errore di processo èquindi convertito in un segnale che regola la velocità o la coppia del motore per eliminarel’errore. Un grande errore di processo induce un’ampia variazione nel valore dellavelocità o sulla quantità di coppia generata dal motore. Analogamente, un piccolo erroreproduce una piccola variazione nel valore della velocità o della quantità di coppiagenerata dal motore. Come risultato finale il controllo PID regola la velocità o la coppiadel motore per forzare la variabile di processo ad essere il più vicino possibile al setpointpreimpostato programmato.
Il modo controllo PID su ingresso setpoint da comando esterno è usato per applicazionipiù complesse che hanno ampie interferenze esterne che possono influire sulla variabiledi processo. Questo è utile per processi che hanno significativo ritardo in tempo trainterferenza processo e la generazione di un segnale errore processo dal sensore diprocesso. Questo modo utilizza un comando feed forward per anticipare le modifiche nelprocesso. Questo segnale feed forward direttamente modifica la velocità o la coppia delmotore senza dover sviluppare prima un segnale di errore processo.
La Figura 2-14 illustra uno schema a blocchi del sistema di controllo Modo Processo.L’utente deve determinare quale tecnica applicare.
Due (2) gruppi completi differenti di parametri operativi possono essere selezionatidall’ingresso J1-11. Quando si programma un gruppo parametri, usare il tasto ENTERper accettare e salvare automaticamente i valori dei parametri.
Nota: Eccetto per il parametro Operating Mode di Livello 1, il controllo può essereprogrammato in modo REMOTE con il drive abilitato e gli interruttori nel passo 4chiusi. Il controllo deve essere disabilitato per modificare il parametro del modooperativo.
1. Impostare nel blocco INPUT di Livello 1 il parametro Operating Mode al valoreBIPOLAR in ognuno dei gruppi parametri.
2. Aprire l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il primo gruppo parametri che è numerato Table#0.
3. Chiudere l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il secondo gruppo parametri che è numerato Table#1.
4. Programmare i valori parametro per ogni tabella. Ricordare che per modificareil valore di un parametro in una delle tabelle parametri, occorre dapprimaselezionare la tabella usando gli interruttori. Non è possibile cambiare un valoredi una tabella se prima non si è selezionata detta tabella.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-29IMN720IT
Nota: Table#0 deve contenere il valore più grande dei due parametri MAX SPEED. Ilcontrollo si avvia sempre in Table#0.
Nota: Tutti i parametri eccetto operating mode possono essere modificati e salvati perogni tabella.
Nota: Preset speed non concerne la selezione tabella.
Figura 2-14 Schema a Blocchi Semplificato del ControlloProcesso
COMMAND SELECTLe sorgenti disponibilisono:Potentiometer± 10 Volts± 5 Volts4 – 20 mA10 V w/Ext Current LimitEXB Pulse Follower10 Volt EXB4 – 20 mA EXB3 – 15 PSI EXBTachometer EXBSerial EXBNone
∑∑
∑ ∑
PROCESS FEEDBACKLe sorgenti disponibili sono:Potentiometer± 10 Volts± 5 Volts4-20 mA10 Volt EXB4 – 20 mA EXB3 – 15 PSI EXBTachometer EXBSerialNone
Chiuso quando ModoProcesso è Abilitato(J1-13)
ACC/DECS-CurveProfilatore
Differenziatore
Impulso EXBSolo Follower
ss
Proporzionale
Gp
Gp
Proporzionale
Differenziale
Differenziale
Amp
Gd s
Gd s
Integrale
IntegraleMotore
Enc.
Limite regolazione Set Pointcon blocco integrale al va-lore limite max
Sistema Controllo Baldor Esistente
Differenziatore
-
–
+
+
+
+
PROCESS FEEDBACK
PROCESS FEEDFORWARD
Controllo Motore
Controllo PID Ausiliario
PARAMETEROSET POINT COMMAND
+
+
+
+
+
+
Gis
Gis

Capitolo 1Informazioni Generali
2-30 Arrivo e Installazione IMN720IT
Tabella 2-9 Compatibilità dei Segnali di Ingresso Modo Processo
Setpoint oFeedback
Setpoint oFeedforward J1-1 e 2 J1-4 e 5 5 V
EXB�10 V
EXB�4-20 mAEXB�
3-15 PSIEXB�
DC Tach EXB�
MPR/F EXB�
J1-1 e 2J1-4 e 55 V EXB� ËËËË
ËËËË10 V EXB� ËËËËËËËË4-20 mA EXB� ËËËË
3-15 PSI EXB�ËËËËËËËËËË
ËËËËËËËËËË
ËËËËËËËËDC Tach EXB�
ËËËËËËËËMPR/F EXB ��� ËËËËËËËËSerial EXB ��� ËËËËË
ËËËËËËËËËËËËËËË
ËËËËËËËË
ËËËËËËËË� Richiede scheda di espansione EXB007A01 (High Resolution Analog I/O EXB).
� Richiede scheda di espansione EXB004A01 (4 Output Relays/3-15 PSI Pneumatic Interface EXB).
� Richiede scheda di espansione EXB006A01 (DC Tachometer Interface EXB).
� Richiede scheda di espansione EXB005A01 (Master Pulse Reference/Isolated Pulse Follower EXB).
� Usata solo per Feedforward . Non deve essere usata per Setpoint Source o Feedback.
� Richiede scheda di espansione EXB001A01 (RS232 Serial Communication EXB). oRichiede scheda di espansione EXB002A01 (RS422/RS485 High Speed Serial Communication EXB).
Interferenza ingressi. Non usare parecchie volte lo stesso segnale di ingresso.ËËËËËË
Schede di espansione con interferenza a livello 1 o 2. Non usare!
Uscite Specifiche del Modo Processo
Solo Modo Processo, Uscite Monitoraggio Analogico
Nome DescrizioneProcess FDBK Ingresso scalato Process Feedback. Utile per osservare e calibrare il
circuito controllo processo.
Setpoint CMD Ingresso scalato Setpoint Command. Utile per osservare e calibrare ilcircuito controllo processo.
Speed Command Velocità Comandata del Motore. Utile per osservare e calibrare l’uscitadel circuito di controllo.
Solo Modo Processo, Uscite Opto Isolate
Nome DescrizioneProcess Error CLOSED quando Process Feedback è all’interno dello scostamento di
tolleranza specificato. OPEN quando Process Feedback è superiore alloscostamento di tolleranza specificato. L’ampiezza dello scostamento ditolleranza è regolata dal valore del parametro Process ERR TOL nelblocco Process Control di Livello 2.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-31IMN720IT
Figura 2-15 Schema Connessioni Modo Processo
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
Forward
Reverse
Table Select
Speed/Torque
Process Mode Enable
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
In-gressoEncoderNota 5
UscitaBufferiz-zataEncoderNota 6
JOG
FAULT RESET
Pot Comando 5 k�
Nota 2
Nota 1
Tensione o corrente diingresso programmabile
Nota 3
Nota 4
Riferirsi alla Figura 2-5.
Note:
1. Riferirsi a Ingressi Analogici.
2. Riferirsi a Uscite Analogiche.
3. Riferirsi a Uscite Opto Isolate.
4. Per ingresso 4-20 mA, spostare ponticelloJP1 sui pin 2 e 3. (Vedere Figura 2-1).
5. Riferirsi a Installazione dell’Encoder.
6. Riferirsi a Uscite Bufferizzate dell’Encoder.
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente allacorrente di fluire nel motore e produrre la coppia.
J1-9 OPEN il motore decelera fino all’arresto (in funzione dell’impostazione del parametroKeypad Stop Mode).CLOSED aziona il motore in senso Forward (con J1-10 aperto).
J1-10 OPEN il motore decelera fino all’arresto in funzione dell’impostazione del parametromodo Keypad Stop.CLOSED aziona il motore in senso Reverse (con J1-9 aperto).
J1-11 OPEN = TABELLA 0, CLOSED = TABELLA 1J1-12 OPEN, il controllo è in modo velocità.
CLOSED, il controllo è in modo coppia.J1-13 CLOSED per abilitare il Modo Processo.J1-14 CLOSED pone il controllo in modo JOG.
Il controllo opera in modo JOG soltanto in senso Forward.J1-15 OPEN per funzionare.
Momentary CLOSED per ripristinare una condizione di errore.J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita e
visualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-32 Arrivo e Installazione IMN720IT
Connessioni Modo Paranco BipolareQuesto modo di funzionamento consente all’utente di memorizzare due (2) gruppicompleti di parametri operativi per il funzionamento paranco. La Tabella 2-10 indica leimpostazioni interruttore richieste per accedere ad ogni tabella parametri. Quando siprogramma un gruppo parametro, usare il tasto ENTER per accettare e salvareautomaticamente i valori dei parametri.
Nota: Eccetto per il parametro Operating Mode di Livello 1, il controllo può essereprogrammato in modo REMOTE con il drive abilitato e gli interruttori nel passoNO TAG chiusi. Il controllo deve essere disabilitato per modificare il parametrodel modo operativo.
1. Impostare nel blocco INPUT di Livello 1 il parametro Operating Mode al valoreBIPOLAR in ognuno dei gruppi parametri.
2. Aprire l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il primo gruppo parametri che è numerato Table#0.
3. Chiudere l’interruttore J1-13. Assicurarsi che gli interruttori J1-9 e J1-10 sianoOPEN, J1-8 sia CLOSED. Introdurre tutti i valori dei parametri, el’autocalibratura come indicato nel Capitolo 3 di questo manuale. Ciò crea esalva il secondo gruppo parametri che è numerato Table#1.
4. Ricordare che per modificare il valore di un parametro in una delle tabelleparametri, occorre dapprima selezionare la tabella usando gli interruttori. Non èpossibile cambiare un valore di una tabella se prima non si è selezionata dettatabella.
Nota: Table#0 deve contenere il valore più grande dei due parametri MAX SPEED.Il controllo si avvia sempre in Table#0.
Tabella 2-10 Tabella di Regolazione per la Selezione Tabella Modo Bipolare
Funzione J1-13
Tabella #0 dei Parametri Open
Tabella #1 dei Parametri Closed
Nota: Tutti i parametri eccetto operating mode possono essere modificati e salvatiper ogni tabella.
Nota: Preset speed non concerne la selezione tabella.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-33IMN720IT
Figura 2-16 Schema Connessioni ParancoBipolare
89
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
FORWARD ENABLE
REVERSE ENABLE
CLOSED=ORIENT
SPEED/TORQUE
* TABLE SELECT
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 5
UscitaBufferizzataEncoderNota 6
FAULT RESET
Pot Comando 5 k�
Nota 2
Nota 1
Tensione o corrente diingresso programmabile
Nota 3
Nota 4
* Vedere Tabella 2-8.
Note:
1. Riferirsi a Ingressi Analogici.
2. Riferirsi a Uscite Analogiche.
3. Riferirsi a Uscite Opto Isolate.
4. Per ingresso 4 – 20 mA, spostare ponticelloJP1 sui pin 2 e 3. (Vedere Figura 2-1).
5. Riferirsi a Installazione dell’Encoder.
6. Riferirsi a Uscite Bufferizzate dell’Encoder.
Riferirsi alla Figura 2-5.
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente alla corrente di fluire nel motore e produrre coppia.
J1-9 OPEN disabilita il funzionamento Forward (il drive freno fino all’arresto se il comandoForward è ancora presente e nel modo velocità). CLOSED per abilitare il funzionamento in senso Forward.
J1-10 OPEN disabilita il funzionamento Reverse (il drive freno fino all’arresto se J1-8 Enable èchiuso e nel modo velocità).CLOSED per abilitare il funzionamento in senso Reverse.
J1-11 Causa l’orientamento del motore verso una tacca o un interruttore esterno.
J1-12 OPEN pone il controllo in modo velocità.CLOSED pone il controllo in modo coppia.
J1-13 OPEN seleziona la tabella 0 dei parametri.CLOSED seleziona la tabella 1 dei parametri.
J1-15 OPEN per funzionare.Momentary CLOSED per ripristinare una condizione di errore.
J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita evisualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-34 Arrivo e Installazione IMN720IT
Connessioni Paranco 7 Velocità Controllo a 2 Fili La Tabella di Regolazione degli Interruttori è definita inTabella 2-11.
Il funzionamento in modo 15 Speed a 2 Fili è controllato dagli ingressi Opto Isolati daJ1-8 a J1-16. Gli ingressi Opto possono essere commutati come illustrato in Figura 2-17o segnali logici da altro dispositivo. L’Ingresso Opto di External Trip su J1-16 è attivo seè collegato come indicato e il blocco Protection di Livello 2, parametro External Trip èimpostato su ON.
Gli ingressi commutati su J1-11 fino a J1-13 consentono la selezione di 7 velocitàpreimpostate per il funzionamento Hoist (Paranco) e forniscono il Ripristino Errori comedefinito in Tabella 2-11.
Tabella 2-11 Tabella di Regolazione degli Interruttori per 15 Velocità, Controllo a 2 Fili
Funzione J1-11 J1-12 J1-13Preset 1 Open Open OpenPreset 2 Closed Open OpenPreset 3 Open Closed OpenPreset 4 Closed Closed OpenPreset 5 Open Open ClosedPreset 6 Closed Open ClosedPreset 7 Open Closed Closed
FAULT RESET Closed Closed Closed

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-35IMN720IT
Figura 2-17 Schema Connessioni 15 Velocità Controllo a 2Fili
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ENABLE
FORWARD RUN
REVERSE RUN
* SWITCH 1
* SWITCH 2
* SWITCH 3
EXTERNAL TRIP
OPTO INPUT COMMON
Uscita Programmabile 0 – 5V (Preimp. Fabb.: Speed)
J1
ANALOG OUT 1
ANALOG OUT 2
OPTO OUT COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
1
2
3
4
5
6
7Uscita Programmabile 0 – 5V (Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
23
24
25
26
27
28
29
Common
+24 VDC
A
A
B
B
INDEX
INDEX
+5 VDC
OPTO IN POWER
OPTO OUT #1 RETURN
OPTO OUT #2 RETURN
OPTO OUT #3 RETURN
OPTO OUT #4 RETURN
Common
A
A
B
B
INDEX
INDEX
Not Used
IngressoEncoderNota 3
UscitaBufferizzaEncoderNota 4
Field Enable
ACC/DEC/“S” SELECT 1
Nota 1
Nota 2
* Riferirsi alla tabella di regolazione, Tabella 2-11.
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT –2
Nessuna Connessione
* Tutti CLOSED= Re-set ErroriNote:
1. Riferirsi a Uscite Analogiche.
2. Riferirsi a Uscite Opto Isolate.
3. Riferirsi a Installazione dell’Encoder.
4. Riferirsi a Uscite Bufferizzate dell’Encoder.
Riferirsi a Figura 2-5.
Entrambe OPEN = Stop
J1-8 OPEN disabilita il controllo e il motore si arresta per inerzia. CLOSED consente alla corrente di fluire nel motore e produrre coppia.
J1-9 OPEN il motore decelera fino all’arresto (in funzione dell’impostazione del parametroKeypad Stop Mode).CLOSED aziona il motore in senso Forward (con J1-10 aperto).
J1-10 OPEN il motore decelera fino all’arresto in funzione dell’impostazione del parametromodo Keypad Stop.CLOSED aziona il motore in senso Reverse (con J1-9 aperto).
J1-11 a 13 Seleziona le velocità preimpostate programmate come definito in Tabella 2-11.
J1-14 CLOSED consente che il campo sia eccitato prima dell’abilitazione indotto. Ciò fornisce istantaneamente la coppia quando l’indotto è abilitato.
J1-15 Seleziona il gruppo ACC/DEC. OPEN seleziona il gruppo 1. CLOSED seleziona ilgruppo 2.
J1-16 OPEN consente la ricezione external trip sul controllo. Il controllo si disabilita evisualizza external trip quando programmato su “ON”. In questo caso, viene emesso ilcomando di arresto motore, termina il funzionamento del drive e viene visualizzatol’errore external trip sul display di tastiera (viene anche registrato nel log errori). Se J1-16 è connesso, occorre impostare External Trip su “ON” nel blocco Protection diLivello 2.
J1-39 e 40 Ponticello come illustrato per alimentare le Uscite Opto dall’alimentazione +24 VDC interna.

Capitolo 1Informazioni Generali
2-36 Arrivo e Installazione IMN720IT
Ingressi ed Uscite AnalogiciIngressi Analogici Sono disponibili due ingressi analogici: l’ingresso analogico #1 (J1-1 e J1-2) e l’ingresso
analogico #2 (J1-4 e J1-5) come illustrato in Figura 2-18. Può essere selezionato uno deidue ingressi analogici nel blocco INPUT di Livello 1, valore parametro Command Select.L’ingresso analogico #1 è selezionato se è abilitato il valore parametro “Potentiometer”.L’ingresso analogico #2 è selezionato se è abilitato il valore parametro “+/–10 Volts,+/–5 Volts o 4-20 mA”.
Figura 2-18 Ingressi ed Uscite Analogici
Analog Ground
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
Analog Input -2
Analog Output 1
Analog Output 2
Pot Comando o
0 – 10 VDC (pin 1 e 2)
Tensione o corrente di ingresso programmabile
5 K�
0 – 5 VDC Programmabile(Preimp. Fabb.: Speed)
0 – 5 VDC Programmabile(Preimp. Fabb.: Current)
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).Ingresso Analogico #1 L’ingresso analogico monopolare #1 serve quando il controller è impostato su Controllo
Standard a 3 Fili, Processo, o Controllo Bipolare. Quando si utilizza un potenziometrocome comando velocità, feedback processo o fonte di setpoint, il blocco Input di Livello 1,parametro COMMAND SELECT deve essere impostato su “POTENTIOMETER”.
1. Collegare i fili da pot 5 K� come illustrato in Figura 2-18. Un polo delpotenziometro è collegato a J1-1 (massa analogica) e l’altro polo è collegato aJ1-3 (tensione di riferimento).
2. Collegare il cursore del potenziometro su J1-2. La tensione tra i morsetti J1-1 eJ1-2 è l’ingresso del comando velocità.
3. Un segnale del comando velocità 0 – 10 VDC può essere collegato tra J1-1 eJ1-2 anziché sul potenziometro 5 K�.
Ingresso Analogico #2 L’ingresso analogico #2 accetta un comando differenziale ±5 VDC, ±10 VDC o 4-20 mA.Il modo operativo è definito nel parametro OPERATING MODE nel blocco Input di Livello1.
Nota: L’ingresso analogico #2 è usato con i modi Standard Run a 3 Fili o ControlloBipolar e non usato per i modi operativi 15 Speed a 2 Fili o Serial .
1. Collegare l’Ingresso Analogico filo +2 su J1-4 e filo -2 su J1-5.2. Se si usa il segnale di comando 4-20 mA, il ponticello JP1 posto sulla scheda di
controllo principale deve essere sui pin 2 e 3. Per tutti gli altri modi, JP1 deveessere sui pin 1 e 2. Riferirsi alla Figura 2-1 per le informazioni sulla posizionedel ponticello.
Nota: L’Ingresso Analogico #2 può essere collegato per il funzionamentomonopolare ponendo a massa uno degli ingressi, purché la gamma ditensione del modo comune non sia superata. La tensione modo comune puòessere misurata con un voltmetro. Applicare la tensione di comando massimaall’ingresso analogico 2 (J1-4, 5). Misurare la tensione AC e DC tra J1-1 eJ1-4. Addizionare fra loro le letture AC e DC. Misurare la tensione AC e DCda J1-1 a J1-5. Addizionare fra loro le letture AC e DC.
Se il totale di una di queste misurazioni supera il totale di ±15 volt, la gammatensione del modo comune è stata superata. Se la gamma tensione del modocomune è stata superata, occorre cambiare la fonte di tensione del comandoo isolare la tensione del comando con un isolatore segnali disponibile incommercio.

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-37IMN720IT
Uscite Analogiche Sono fornite due uscite analogiche programmabili su J1-6 e J1-7. Vedere Figura 2-19.Queste uscite sono scalate a 0 – 5 VDC (corrente di uscita massima 1 mA) e possonoessere usate per fornire lo stato in tempo reale di varie condizioni di controllo. Lecondizioni di uscita sono definite in Tabella 3-2 del Capitolo 3 di questo manuale.
Il ritorno per queste uscite è la massa analogica J1-1. Ogni uscita è programmata nelblocco Output di Livello 1.
1. Collegare i fili dell’Uscita #1 su J1-6 e J1-1.
2. Collegare i fili dell’Uscita #2 su J1-7 e J1-1.
Figura 2-19 Circuiti Equivalenti di Uscite Analogiche
+
–
10 k�
10 k�
0,033 �f
10 k�������
0,033 �f
6Dal Micropro-cessore
+
–
10 k�
10 k�
0,033�f
10 k�������
0,033 �f
7
Note:
+
–Amps OP sono tutti TL082 o TL084
Analog Ground è separato daChassis Ground. Elettricamente sono separate dauna rete RC.
1
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
J1
Dal Micropro-cessore

Capitolo 1Informazioni Generali
2-38 Arrivo e Installazione IMN720IT
Ingressi Opto-Isolati Il circuito equivalente per i nove ingressi Opto è illustrato in Figura 2-20. La funzione diogni ingresso dipende dal modo operativo selezionato. Riferirsi agli schemi diconnessione dei modi operativi illustrati precedentemente in questo capitolo.
Figura 2-20 Circuito Equivalente IngressiOpto
9
10
11
12
13
14
15
16
Opto Input 2
Opto Input 3
Opto Input 4
Opto Input 5
Opto Input 6
Opto Input 7
J1
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
Opto Input 8
Opto Input 9
39
40
+24 VDC @ 200 mA (alimentazione morsetto 39).
Morsetti ponticello da 39 a 40(Installati dalla Fabbrica)
6,8 K 6,8 K 6,8 K 6,8 K 6,8 K 6,8 K 6,8 K 6,8 K
17OPTO INPUT COMMON
8Opto Input 1
6,8 K

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-39IMN720IT
Uscite Opto-Isolate Sono disponibili quattro uscite opto-isolate programmabili sui morsetti da J1-19 a J1-22.Vedere Figura 2-21. Ogni uscita può essere programmata per rappresentare unacondizione di uscita. Le condizioni di uscita sono definite nella Tabella 3-2 del Capitolo 3di questo manuale.
Le uscite Opto isolate possono essere configurate per dissipazione o fonte 60 mAognuna. Tuttavia, devono essere tutte configurate allo stesso modo. La tensionemassima dall’uscita opto al comune quando attiva è 1,0 VDC (compatibile TTL). Le usciteOpto isolate possono essere collegate in differenti modi come illustrato in Figura 2-21. Ilcircuito equivalente per le uscite Opto isolate è illustrato in Figura 2-22.
Se le uscite opto sono usate per comandare direttamente un relè, deve essere collegatoun diodo di richiusura di 1 A, 100 V (IN4002) minimo deve essere collegato attraverso labobina del relè. Vedere Considerazioni sull’Interferenza Elettrica nel Capitolo 4 di questomanuale.
1. Collegare i fili OPTO OUT #1 su J1-19 e J1-41.
2. Collegare i fili OPTO OUT #2 su J1-20 e J1-42.
3. Collegare i fili OPTO OUT #3 su J1-21 e J1-43.
4. Collegare i fili OPTO OUT #4 su J1-22 e J1-44.
Ogni Uscita Opto è programmata nel blocco di programmazione Output.
Figura 2-21 Configurazioni di Uscite Opto Isolate
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
18
19
20
21
22
40
39
41
42
43
44
Usando Alimentazione Interna(Dissipazione della Corrente Relè)
18
19
20
21
22
40
39
41
42
43
44
RelèOpzionali
Fornitidal Cliente
RelèOpzionali
Fornitidal Cliente
Usando Alimentazione Interna(Fonte della Corrente Relè)
18
19
20
21
22
40
39
41
42
43
44
Usando Alimentazione Esterna(Dissipazione della Corrente Relè)
18
19
20
21
22
40
39
41
42
43
44
RelèOpzionali
Fornitidal Cliente
RelèOpzionali
Fornitidal Cliente
Usando Alimentazione Esterna(Fonte della Corrente Relè)
Sorgente Opzionale 10 VDC a30 VDC Fornita dal Cliente
Sorgente Opzionale 10 VDC a30 VDC Fornita dal Cliente
+24 VDC24COM
+24 VDC
+24 VDC
+24 VDC+
–
+
–
17
24COM 17 24COM 17
1724COM

Capitolo 1Informazioni Generali
2-40 Arrivo e Installazione IMN720IT
Figura 2-22 Circuito Equivalente Uscite Opto
19
20
21
22
41
42
43
Opto Output 1
Opto Output 2
Opto Output 3
Opto Output 4
Opto Out 1 Return
J1
Coppia di Serraggio Morsetti = 7 Lb-in (0,8 Nm).
Opto Out 2 Return
Opto Out 3 Return
44 Opto Out 4 Return
18
4N3350mA max
4N3350mA max
4N3350mA max
4N3350mA max
10 – 30 VDCUscite Opto

Capitolo 1Informazioni Generali
Arrivo e Installazione 2-41IMN720IT
Lista di Controllo di Prefunzionamento Controllo degli Elementi Elettrici
Avvertenza: Dopo aver completato l’installazione, ma prima di applicarel’alimentazione, controllare assolutamente i seguenti elementi.
1. Verificare che la tensione di linea AC sorgente corrisponda ai valori delcontrollo.
2. Verificare che tutti i collegamenti elettrici siano accurati, corretti, saldi econformi alle norme.
3. Verificare che il controllo e il motore siano a massa fra loro e che il controllo siacollegato a terra.
4. Controllare l’accuratezza del cablaggio segnali.
5. Assicurarsi che tutte le bobine del freno, le bobine di contattori e relè sianodotate di soppressore disturbi. Il soppressore deve essere un filtro R-C perbobine AC e diodi a polarità inversa per bobine DC. Non è idonea lasoppressione del transitorio tipo MOV.
ATTENZIONE: Verificare che il funzionamento inatteso dell’albero del motoredurante l’avviamento non causi lesioni al personale o danniall’apparecchiatura.
Controllo dei Motori e degli Innesti
1. Verificare la libertà di movimento di tutti gli alberi dei motori e che tutti gli innestidei motori siano inseriti senza gioco.
2. Verificare che i freni di tenuta se presenti, siano correttamente regolati per losgancio completo e l’impostazione del valore coppia desiderato.
Procedura di Accensione Questa procedura facilita e velocizza l’avvio e il funzionamento del sistema nel modotastiera e consente di verificare il motore e il funzionamento del controllo. Questaprocedura presuppone che il controllo e il motore siano correttamente installati e chel’operatore abbia dimestichezza con la programmazione da tastiera e le procedure difunzionamento. Non è necessario collegare la Morsettiera per operare in modalitàtastiera.

Capitolo 1Informazioni Generali
2-42 Arrivo e Installazione IMN720IT
Condizioni InizialiAssicurare che il controllo e il motore siano cablati conformemente alle procedureprecedentemente descritte in questo capitolo. Addestrarsi con la programmazione datastiera e il funzionamento da tastiera del controllo come descritto nel Capitolo 3 di questomanuale.
1. Verificare che gli ingressi di abilitazione su J1-8 siano aperti.2. Accendere. Assicurarsi che non vi siano errori.3. Impostare nel blocco Input di Livello 1 il parametro Operating Mode su
“KEYPAD”.4. Introdurre i seguenti dati del motore nei parametri nel blocco Motor Data di
Livello 2:Armature VoltageARM Rated AmpsMotor Rated SpeedMotor Field (Shunt or Permanent Magnet)Motor Field VoltsMotor Field Amps
5. Impostare tipo feedback su Armature, Encoder, Resolver o Tachometer nelparametro Feedback Type, nel blocco Motor Data di Livello 2.
6. Se feedback type è Armature, saltare questo passo.Se feedback type di Encoder, Tachometer o Resolver erano selezionati,impostare uno dei seguenti corrispondenti parametri nel blocco Motor Data diLivello 2: Encoder Counts (ppr)Resolver SpeedTachometer Volts (VDC per 1000 RPM)
ATTENZIONE: Il motore dell’albero ruota durante questa procedura. Assicurarsiche l’inatteso movimento dell’albero motore non causi lesioni alpersonale o danni all’apparecchiatura.
7. Andare al blocco Autotune di Livello 2, premere ENTER, in CALC PRESETSselezionare YES (usando il tasto �) e consentire al controllo di calcolare ivalori preset per i parametri necessari per il funzionamento del controllo.
8. Scollegare tutte le alimentazioni in ingresso.9. Scollegare il motore dal carico (compreso l’accoppiamento o i volani). Se il
carico non può essere scollegato, non eseguire le prove Feedback del passo11.
10. Collegare l’alimentazione in ingresso.11. Andare al blocco Autotune di Livello 2, ed eseguire le seguenti prove:
CMD OFFSET TRIMCUR LOOP COMPFEEDBACK TESTS (Se il carico è scollegato)
12. Impostare il parametro “MIN OUTPUT SPEED” nel blocco Output Limits diLivello 2.
13. Impostare il parametro “MAX OUTPUT SPEED” nel blocco Output Limits diLivello 2.
14. Scollegare tutta l’alimentazione in ingresso.15. Accoppiare il motore al carico.16. Collegare l’alimentazione in ingresso.17. Andare al blocco Autotune di Livello 2, ed eseguire la prova SPD CNTRLR
CALC.18. Azionare il drive da tastiera usando uno dei seguenti: i tasti freccia per direct
speed control, una velocità introdotta da tastiera o il modo JOG .19. Selezionare parametri aggiuntivi per personalizzare il controllo all’applicazione
(MAX SPEED, ecc.).Ora il controllo è pronto all’uso in modalità tastiera. Se si desidera un differente modooperativo, riferirsi al Capitolo 2 Connessioni del Controllo e al Capitolo 3 Programmazionee Funzionamento.

Capitolo 3Programmazione e Funzionamento
Programmazione e Funzionamento 3-1IMN720IT
Generalità La tastiera è usata per programmare i parametri di controllo, per azionare il motore emonitorare lo stato e le uscite del controllo mediante l’accesso alle opzioni divisualizzazione, ai menu diagnostici e alla registrazione errori.
Figura 3-1 TastieraJOG – (Verde) si illumina quando è attiva l’intermittenza Jog.FWD – (Verde) si illumina quando è comandata la direzione Avanti (FWD).REV – (Verde) si illumina quando è comandata la direzione Inversa (REV).STOP – (Rosso) si illumina quando è comandato uno STOP del motore.Spie
Display di Tastiera – Visualizza leinformazioni di stato durante ilfunzionamento Locale o Remoto.Visualizza inoltre informazioni durante lamessa a punto parametri e leInformazioni di errore e Diagnostiche.JOG – Premere JOG per selezionare le
velocità jog preprogrammate. Dopo lapressione del tasto jog, usare i tasti FWDo REV per azionare il motore nelladirezione necessaria. Il tasto JOG è soloattivo nel modo Locale.
FWD – Premere FWD per iniziare larotazione avanti del motore. Questo tastoè attivo solo nel modo Tastiera o Locale.
REV – Premere REV per iniziare larotazione inversa del motore. Questotasto è attivo solo nel modo Tastiera oLocale.
STOP – Premere STOP una volta periniziare una sequenza stop. A secondadell’impostazione del controllo, il motoresi arresta seguendo la rampa o perinerzia. Questo tasto è operativo in tutti imodi di funzionamento a meno che siastato disabilitato dal parametro KeypadStop nel blocco Keypad Setup(programmazione). Premere STOP perdisabilitare il controllo (arresto inerziale).
Nota: Se il controllo opera in modoRemoto e viene premuto il tastostop, il controllo passa al modoLocale quando viene iniziato ilcomando stop. Per riprendere ilfunzionamento nel modo Remoto,premere il tasto LOCAL.
LOCAL – Premere LOCAL per passaredal funzionamento locale (tastiera) alfunzionamento remoto. Quando ilcontrollo è nel modo Locale tutti gli altricomandi esterni della morsettiera J1sono ignorati eccetto l’ingresso externaltrip.
DISP – Premere DISP per ritornare almodo Display dal modoProgrammazione. Fornisce lo statooperativo ed avanza alla successivaopzione menu display compresi glischermi diagnostici.SHIFT – Premere SHIFT nel modoProgramma per controllare il movimentocursore. La pressione del tasto SHIFTsposta il cursore lampeggiante di unaposizione carattere verso destra. Nelmodo Programma, è possibile ripristinareil valore di un parametro al valorepredisposto dalla fabbrica premendo iltasto SHIFT fino a quando i simbolifreccia lampeggiano all’estrema sinistradel display di tastiera, quindi premere iltasto freccia. Nel modo Display il tastoSHIFT è usato per regolare il contrastotastiera.RESET – Premere RESET perannullare tutti i messaggi di errore (inmodo Locale. Può anche essere usatoper ritornare all’inizio del menuprogrammazione blocco senza salvare lemodifiche nei valori parametri.
PROG – Premere PROG per entrarenel modo Programma. Nel modoProgramma il tasto PROG è usato permodificare l’impostazione parametri.
� – (Freccia SU).Premere � per modificare il valore delparametro visualizzato. Premendo �aumenta il valore al valore maggioresuccessivo. Inoltre, quando èvisualizzato il log errori o l’elencoparametri, il tasto � fa scorrere l’elencoverso l’alto. Nel modo Locale lapressione del tasto � aumenta lavelocità motore al valore maggioresuccessivo.
� – (Freccia Giù)Premere � per modificare il valore delparametro visualizzato. Premendo �diminuisce il valore al valore inferioresuccessivo. Inoltre, quando èvisualizzato il log errori o l’elencoparametri, il tasto � fa scorrere l’elencoverso il basso. Nel modo Locale lapressione del tasto � diminuisce lavelocità motore al valore inferioresuccessivo.
ENTER – Premere ENTER per salvarele modifiche dei valori parametri eritornare al livello precedente nel menuprogrammazione. Nel modo Display iltasto ENTER serve per impostaredirettamente il riferimento velocità locale.E’ inoltre usato per selezionare altreoperazioni quando proposte dal displaydi tastiera.

Capitolo 1Informazioni Generali
3-2 Programmazione e Funzionamento IMN720IT
Modo Display Il controllo è sempre nel MODO DISPLAY eccetto quando vengono modificati i valori e iparametri (modo Programmazione). Il Display di Tastiera indica lo stato del controllocome nell’esempio seguente.
Stato MotoreFunzionamento Controllo
Condizione UscitaValore e Unità
Il MODO DISPLAY è usato per visualizzare DIAGNOSTIC INFO e FAULT LOG. Ladescrizione sulle modalità operative per eseguire queste operazioni è riportata nellepagine seguenti.
Regolazione del Contrasto Quando è applicata l’alimentazione AC al controllo la tastiera visualizza lo stato delcontrollo. Se non appaiono visualizzazioni, osservare la procedura seguente per regolareil contrasto del display.
(Il contrasto può essere regolato nel modo Display quando il motore è fermo o in moto.)
Azione Descrizione Display Commenti
Applicare Alimentazione Nessuna visualizzazione
Premere il tasto DISP Pone il controllo in modo Display
Premere SHIFT SHIFT Consente la regolazione delcontrasto display
Premere il tasto � o � Regola l’intensità del display
Premere ENTER Salva il livello di contrasto edesce dal modo Display
Visualizzazione tipica

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-3IMN720IT
Modo Display Continua
Schermi del Modo Display
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo display indica la velocitàmotore.
Nessun errore presente. Modotastiera Locale. Se si è in modoremoto/seriale, premere local perquesta visualizzazione.
Premere il tasto DISP Visualizzazione Corrente
Premere il tasto DISP Visualizzazione Tensione
Premere il tasto DISP Visualizzazione Combinata
Premere il tasto DISP Schermo per accedere al LogErrori
Premere il tasto DISP Schermo per accedere al MenuDiagnostico
Premere il tasto DISP Esce dal modo Display e ritornaalla visualizzazione VelocitàMotore

Capitolo 1Informazioni Generali
3-4 Programmazione e Funzionamento IMN720IT
Modo Display Continua
Accesso agli Schermi Visualizzazione e alle Informazioni Diagnostiche
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo display indica la velocitàmotore.
Nessun errore presente. Modotastiera Locale. Se si è in modoremoto/seriale, premere local perquesta visualizzazione.
Premere il tasto DISP 5volte
Scorrere fino allo schermoInformazioni Diagnostiche
Schermo Accesso Diagnostica.
Premere il tasto ENTER Accesso alle InformazioniDiagnostiche.
Primo schermo InformazioniDiagnostiche.
Premere il tasto DISP Il modo Display indica latemperatura del controllo.
Premere il tasto DISP Indica la % della corrente disovraccarico rimanente.
Premere il tasto DISP Indica gli stati di ingressi e usciteopto.0=Open, 1=Closed
Stato Ingressi Opto (Sinistra); Stato Uscite Opto (Destra).
Premere il tasto DISP Indica il tempo di esecuzionereale del comando.
Formato HR.MIN.SEC.
Premere il tasto DISP Indica il modo operativo, tensionee tipo di controllo.
Premere il tasto DISP Indica gli ampere continuativi; ilvalore ampere PK; la scala A/Vdella retroazione, l’ID base dialimentazione.
ID visualizzato come valoredecimale.
Premere il tasto DISP Indica quali schede espansioneGruppo 1 o 2 sono installate.
Premere il tasto DISP Indica i giri dell’albero motore dalset point home REV.
Premere il tasto DISP Indica la versione e revisionefirmware installata nel controllo.
Premere il tasto DISP Visualizzazione dell’opzioneuscita.
Premere ENTER per uscire dalleinformazioni diagnostiche.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-5IMN720IT
Modo Display Continua
Accesso al Log Errori Quando avviene una condizione di errore, il funzionamento del motore si arresta e vienevisualizzato il codice errore sul display di Tastiera. Il controllo tiene la registrazione degliultimi 31 errori. Se il numero di errori è superiore a 31 viene cancellato l’errore piùvecchio dal log errori per lasciare spazio all’errore più recente. Per accedere al log erroriosservare la procedura seguente:
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo display indica la velocitàmotore.
Modo Display.
Premere il tasto DISP 4volte
Scorrere per ottenere lo schermoLog Errori
Schermo di accesso al Log Errori.
Premere il tasto ENTER Visualizzazione del primo tipo dierrore e l’orario.
Visualizzazione dell’errore piùrecente.
Premere il tasto � Scorrere lungo i messaggi dierrore.
In assenza di messaggi, vienevisualizzata l’opzione di uscita dallog errori.
Premere il tasto ENTER Ritorno al modo display. Il LED del tasto stop modo displayè acceso.

Capitolo 1Informazioni Generali
3-6 Programmazione e Funzionamento IMN720IT
Modo Programma Il Modo Programma è usato per:
1. Introdurre i dati motore.
2. Autocalibrare il motore.
3. Personalizzare i parametri del drive (Controllo e Motore) all’applicazione.
Dal Modo Display premere il tasto PROG per accedere al Modo Programma.
Nota: Quando è selezionato un parametro, premendo alternativamente i tasti Disp eProg si commuta tra il Modo Display e il parametro selezionato. Quando èselezionato un parametro per la programmazione, il display di tastierafornisce le informazioni seguenti:
Stato ParametroParametro
Valore e Unità
Stato del Parametro . Tutti i parametri programmabili sono visualizzati con “P:”nell’angolo inferiore sinistro del display di tastiera. Se un parametro è visualizzato con“V:”, il valore del parametro può essere visualizzato ma non modificato durante ilfunzionamento del motore. Se il parametro è visualizzato con “L:”, il valore è bloccato edoccorre introdurre il codice di sicurezza all’accesso prima di poter fare delle modifiche.
Accesso ai Blocchi Parametri per la ProgrammazioneOsservare la procedura seguente per accedere ai blocchi parametri per programmare ilcontrollo.
Azione Descrizione Display Commenti
Applicare Alimentazione Il Display di Tastiera indica ilmessaggio di apertura.
Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display.
In assenza di errori eprogrammato per funzionamentoREMOTO.
Se è visualizzato un errore,riferirsi al capitolo Ricerca Guastiin questo manuale.
Premere il tasto PROG Premere ENTER per accedere aiparametri Preset Speed.
Premere il tasto � o � Scorrere al bloccoACCEL/DECEL.
Premere ENTER per accedere aiparametri dei valori Accel eDecel.
Premere il tasto � o � Scorrere al blocco Livello 2. Premere ENTER per accedere aiblocchi Livello 2.
Premere il tasto ENTER Visualizzazione del primo bloccoLivello 2.
Premere il tasto � o � Scorrere al menu UscitaProgrammazione.
Premere ENTER per ritornare almodo Display.
Premere il tasto ENTER Ritorno al modo display.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-7IMN720IT
Modo Programma Continua
Modifica del Valore Parametri senza l’Uso del Codice di SicurezzaOsservare la procedura seguente per programmare o modificare parametri giàprogrammati nel controllo quando non si usa il codice di sicurezza.
L’esempio indicato modifica il modo operativo da Tastiera a Bipolare.
Azione Descrizione Display Commenti
Applicare Alimentazione Il Display di Tastiera indica ilmessaggio di apertura.
Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED di stopilluminato.
Premere il tasto PROG Accesso al modoProgrammazione.
Premere il tasto � o � Scorrere al blocco Livello 1 Input. Premere ENTER per accedere alparametro del blocco INPUT.
Premere il tasto ENTER Accesso al blocco Input. Il modo Keypad indicato èl’impostazione di fabbrica.
Premere il tasto ENTER Accesso al parametro OperatingMode.
Il modo Keypad indicato èl’impostazione di fabbrica.
Premere il tasto � Scorrere per cambiare laselezione.
A cursore lampeggiante,selezionare il modo desiderato, inquesto caso BIPOLAR.
Premere ENTER Salva la selezione in memoria. Premere ENTER per salvare laselezione.
Premere il tasto � Scorrere all’uscita menu.
Premere il tasto ENTER Ritorno al blocco Input.
Premere il tasto DISP Ritorno al modo display. Modo display tipico.

Capitolo 1Informazioni Generali
3-8 Programmazione e Funzionamento IMN720IT
Modo Programma Continua
Ripristino Parametri alle Impostazioni di FabbricaTalvolta è necessario ripristinare i valori dei parametri alle impostazioni di fabbrica. Aquesto scopo osservare la procedura seguente. Assicurarsi di modificare il blocco MotorData di Livello 2 “Motor Rated Amps” al valore corretto dopo questa procedura(l’impostazione di fabbrica ripristinata è 999).
Nota: Tutti i parametri specifici dell’applicazione già programmati andranno persiquando si ripristina il controllo alle impostazioni di fabbrica.
Nota: Dopo il ripristino delle impostazioni di fabbrica, il drive deve essereautocalibrato.
Azione Descrizione Display Commenti
Applicare Alimentazione Il Display di Tastiera indica ilmessaggio di apertura.
Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED di stopilluminato.
Premere il tasto PROG Accesso al modo Program.
Premere il tasto � o � Scorrere ai blocchi Livello 2.
Premere il tasto ENTER Selezionare i blocchi Livello 2.
Premere il tasto � o � Scorrere al blocco Miscellaneous.
Premere il tasto ENTER Selezionare il bloccoMiscellaneous.
Premere il tasto � Scorrere al parametro FactorySettings.
Premere il tasto ENTER Accesso al parametro FactorySettings.
� rappresenta il cursorelampeggiante.
Premere il tasto � Scorrere su YES, per scegliere leimpostazioni di fabbrica originali.
Premere il tasto ENTER Ripristina le impostazioni difabbrica.
“Loading Presets” è il primomessaggio“Operation Done” è il successivo“No” è visualizzato per ultimo.
Premere il tasto � Scorrere all’uscita menu. Uscita dai blocchi Livello 2.
Premere il tasto � o � Scorrere a UscitaProgrammazione.
Uscita dal modo programmazionee ritorno al modo display.
Premere il tasto ENTER Ritorno al modo display. Modo Display. LED di stopilluminato.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-9IMN720IT
Modo Programma Continua
Inizializzazione Nuovo FirmwareDopo aver installato il nuovo firmware, il controllo deve essere inizializzato alla nuova versione firmware e alleposizioni memoria. Osservare la procedura seguente per inizializzare il firmware.
Nota: Tutti i parametri specifici dell’applicazione già programmati andranno persi quando si ripristina il controllo alleimpostazioni di fabbrica.
Nota: Dopo il ripristino delle impostazioni di fabbrica, il drive deve essere autocalibrato.
Azione Descrizione Display CommentiApplicare Alimentazione Il Display di Tastiera indica il
messaggio di apertura.Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED di stopilluminato.
Premere il tasto PROG Accesso al modo Program.
Premere il tasto � o � Scorrere ai blocchi Livello 2.
Premere il tasto ENTER Selezionare i blocchi Livello 2.
Premere il tasto � o � Scorrere al blocco Miscellaneous.
Premere il tasto ENTER Selezionare il bloccoMiscellaneous.
Premere il tasto � Scorrere al parametro FactorySettings.
Premere il tasto ENTER Accesso al parametro FactorySettings.
� rappresenta il cursorelampeggiante.
Premere il tasto � Scorrere su YES, per scegliere leimpostazioni di fabbrica originali.
Premere il tasto ENTER Ripristina le impostazioni difabbrica.
“Loading Presets” è il primomessaggio“Operation Done” è il successivo“No” è visualizzato per ultimo.
Premere il tasto � Scorrere all’uscita menu.
Premere il tasto ENTER Ritorno al modo display. Modo Display. LED di stopilluminato.
Premere il tasto DISPparecchie volte
Scorrere fino allo schermoinformazioni diagnostiche.
Per verificare la versionefirmware, introdurre diagnosticinfo.
Premere il tasto ENTER Accesso alle InformazioniDiagnostiche.
Indica velocità comandata, sensodi rotazione, Locale/ Remoto evelocità motore.
Premere il tasto DISP Indica la versione e revisionefirmware installata nel controllo.
Verifica nuova versione firmware .
Premere il tasto DISP Visualizzazione dell’opzioneuscita.
Premere ENTER per uscire dalleinformazioni diagnostiche.

Capitolo 1Informazioni Generali
3-10 Programmazione e Funzionamento IMN720IT
Funzionamento del Controllo da TastieraSe il controllo è configurato per il controllo remoto o seriale, LOCAL MODE deve essereattivato prima che il controllo possa essere azionato da tastiera. Per attivare LOCALMODE, dapprima il motore deve essere fermato tramite i comandi tastiera, remoto oseriale. A motore fermo, LOCAL MODE è attivato premendo il tasto LOCAL. La selezioneLOCAL MODE elude qualsiasi ingresso di controllo remoto o seriale eccetto l’ingressoExternal Trip, J1-16.
Nota: Se il controllo è stato configurato mediante l’impostazione parametri, perKEYPAD MODE, nessun’altra modalità operativa è consentita eccetto latastiera.
Da tastiera, il controllo può azionare il motore in tre modi; regolazione velocità introdotteda tastiera, regolazione velocità con tasto freccia, o comandi modo JOG.
Regolazione velocità introdotte da tastiera
Azione Descrizione Display CommentiApplicare Alimentazione Il Display di Tastiera indica il
messaggio di apertura.Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED di stopilluminato.
Premere il tasto FWD oREV
Comandi funzionamento motoreforward o reverse alla velocitàselezionata.
LED FWD o REV illuminato.
Premere il tasto ENTER Accesso regolazione velocità. Visualizza regolazione velocità.�rappresenta il cursorelampeggiante.
Premere il tasto SHIFT Spostare il cursore a destra diuna cifra.
Premere il tasto � Aumentare il valore di due cifre.
Premere il tasto ENTER Salvare il nuovo valore e ritornarealla visualizzazione precedente.
Premere il tasto FWD oREV
Comandi funzionamento motoreforward o reverse alla velocitàselezionata.
Premere il tasto STOP Comando di decelerazionemotore.
LED STOP illuminato quando ilmotore raggiunge 0 RPM.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-11IMN720IT
Funzionamento del Controllo da Tastiera Continua
Regolazione velocità con tasto freccia
Azione Descrizione Display CommentiApplicare Alimentazione Il Display di Tastiera indica il
messaggio di apertura.Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED di stopilluminato.
Premere il tasto FWD oREV
Comandi funzionamento motoreforward o reverse alla velocitàselezionata.
LED FWD o REV illuminato.
Premere il tasto � Aumenta la velocità motore.
Premere il tasto � Diminuisce la velocità motore.
Premere il tasto STOP Comando di decelerazionemotore.
LED STOP illuminato quando ilmotore raggiunge 0 RPM.
Premere il tasto FWD oREV
Comandi funzionamento motoreforward o reverse alla velocitàselezionata.
Velocità motore aumenta allavelocità precedentementeimpostata.

Capitolo 1Informazioni Generali
3-12 Programmazione e Funzionamento IMN720IT
Funzionamento del Controllo da Tastiera Continua
Comandi modo JOG
Azione Descrizione Display CommentiApplicare Alimentazione Il Display di Tastiera indica il
messaggio di apertura.Visualizzazione del logo per 5secondi.
In assenza di errori eprogrammato per funzionamentoLOCALE.
Modo Display. LED Stopilluminato.
Premere il tasto JOG Abilitazione modo JOG (velocitàimpostata nel blocco Jog Settingsdi Livello 1, valore parametroJOG Speed).
LED JOG illuminato.
Premere e tenerepremuto il tasto FWD o REV
Aumenta la velocità motore. Il motore opera alla velocità JOGprogrammata mentre il tasto FWDo REV è premuto. LED JOGilluminato.
Premere il tasto STOP Comando di decelerazionemotore.
LED STOP illuminato quando ilmotore raggiunge 0 RPM.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-13IMN720IT
Definizione Parametri Per facilitare la programmazione, i parametri sono stati disposti in una struttura a duelivelli indicata in Tabella 3-1. Premere il tasto PROG per accedere al modoProgrammazione, appare il blocco programmazione “Preset Speeds”. Usare le frecce Su(�) e Giù (�) per scorrere lungo i blocchi parametri. Premere ENTER per accedere aiparametri all’interno di un blocco di programmazione.
Le Tabelle 3-2 e 3-3 forniscono la descrizione di ogni parametro. L’elenco dei Valori deiBlocchi Parametri è posto alla fine di questo manuale. Questo elenco definisce la gammaprogrammabile e il valore preimpostato dalla fabbrica per ogni parametro. L’elencofornisce lo spazio per registrare le impostazioni utente per eventuali riferimenti.
Tabella 3-1 Elenco dei Parametri
BLOCCHI LIVELLO 1 BLOCCHI LIVELLO 2 Preset Speeds INPUT OUTPUT LIMITS Motor DataPreset Speed #1 OPERATING MODE OPERATING ZONE Armature VoltagePreset Sped #2 COMMAND SELECT MIN OUTPUT SPEED ARM Rated AmpsPreset Speed #3 ANA CMD INVERSE MAX OUTPUT SPEED MOTOR RATED SPDPreset Speed #4 ANA CMD OFFSET PK CURRENT LIMIT Motor FieldPreset Speed #5 ANA 2 DEADBAND CUR RATE LIMIT Motor Field VoltsPreset Speed #6 Motor Field AmpsPreset Speed #7 Output Feedback TypePreset Speed #8 OPTO OUTPUT #1 Custom Units Encoder CountsPreset Speed #9 OPTO OUTPUT #2 DECIMAL PLACES Resolver SpeedPreset Speed #10 OPTO OUTPUT #3 VALUE AT SPEED Tachometer VoltsPreset Speed #11 OPTO OUTPUT #4 UNITS OF MEASURE PK Power LimitPreset Speed #12 Zero SPD Set PTPreset Speed #13 AT SPEED BAND Protection PROCESS CONTROLPreset Speed #14 SET SPEED OVERLOAD PROCESS FEEDBACKPreset Speed #15 ANALOG OUT #1 External Trip PROCESS INVERSE
ANALOG OUT #2 FOLLOWING ERROR SETPOINT SOURCEAccel / Decel Rate ANALOG #1 SCALE TORQUE PROVING SETPOINT COMMANDAccel Time #1 ANALOG #2 SCALE SET PT ADJ LIMITDecel Time #1 Position Band MISCELLANEOUS PROCESS ERR TOLS-Curve #1 RESTART AUTO/MAN PROCESS PROP GAINAccel Time #2 DC Control RESTART FAULT/HR PROCESS INT GAINDecel Time #2 Ctrl Base Volts RESTART DELAY PROCESS DIFF GAINS-Curve #2 Feedback Filter FACTORY SETTINGS FOLLOW I:O RATIO
Feedback Dir Homing Speed FOLLOW I:O OUTJog Settings ARM PROP Gain Homing Offset MASTER ENCODERJog Speed ARM INT GainJog Accel Time SPEED PROP GAIN SECURITY CONTROL AUTO-TUNINGJog Decel Time SPEED INT GAIN SECURITY STATE CALC PRESETSJog S-Curve Time Speed DIFF Gain ACCESS TIMEOUT CMD Offset Trim
POSITION GAIN ACCESS CODE CUR Loop CompKeypad Setup IR COMP Gain Feedback TestsKeypad Stop Key TACH Trim SPD CNTRLR CALCKeypad Stop Mode Null Force GainKeypad Run FwdKeypad Run Rev Field ControlKeypad Jog Fwd Field PWR SupplyKeypad Jog Rev Field ECON Level
Forcing LevelField Set SpeedField Step LimitField REG Gain

Capitolo 1Informazioni Generali
3-14 Programmazione e Funzionamento IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1
Titolo Blocco Parametro Descrizione
PRESETSPEEDS
Preset Speeds#1 – #15
Consente la selezione di 15 velocità predefinite di funzionamento motore. Ogni velocità è selezionabile con interruttori esterni connessi a J1-11, J1-12, J1-13 eJ1-14 quando il Modo Operativo è posto su 15 Speed.Per il funzionamento del motore, occorre il comando di direzione del motore e uncomando di velocità preimpostata.
ACCEL/DECELRATE
Accel Time #1,2
D l Ti #1 2
Il tempo Accel è il numero di secondi richiesto dal motore per incrementare convariazione lineare da 0 RPM al valore RPM specificato nel parametro “Max OutputSpeed” nel blocco Output Limits di Livello 2.
Il t D l è il di di i hi t d l t d tDecel Time #1,2
S-Curve #1,2
Il tempo Decel è il numero di secondi richiesto dal motore per decrementare convariazione lineare dalla velocità specificata nel parametro “Max Output Speed” a0 RPM.
S-Curve è una percentuale del tempo totale Accel e Decel e fornisce avvii e arrestiS-Curve è una percentuale del tempo totale Accel e Decel e fornisce avvii e arrestimorbidi. Metà della % S-Curve programmata è applicata alla rampa Accel e metà allarampa Decel.0 % rappresenta l’assenza della “S” e 100 % rappresenta la “S” senza segmentolinearelineare.
Nota: Accel #1, Decel #1 e S-Curve #1 sono correlati fra loro. Analogamente,Accel #2, Decel #2 e S-Curve #2 sono correlati fra loro. Queste correlazionipossono essere usate per controllare la Velocità Preimpostata o il comandoossono essere usate er controllare la Velocità Preim ostata o il comandoExternal Speed.
Nota: Se il drive sussulta durante Accel o Decel rapidi, la selezione della S-curvepuò eliminare il difetto.
JOG SETTINGS Jog Speed Jog Speed è la velocità programmata usata durante il modo jog. Jog può essere iniziatada tastiera o da morsettiera. Sulla Tastiera, premere il tasto JOG quindi premere etenere premuta la direzione (FWD o REV). Dalla morsettiera, chiudere l’ingresso dire-tenere remuta la direzione (FWD o REV). Dalla morsettiera, chiudere l ingresso dire-zione (J1-9 o J1-10) quindi chiudere l’ingresso JOG (J1-12).
Affinché il motore operi alla Velocità Jog il tasto FWD o REV deve essere premuto e
Jog Accel Time
Affinché il motore o eri alla Velocità Jog il tasto FWD o REV deve essere remuto etenuto premuto o il comando esterno Forward (J1-9) o Reverse (J1-10).
Jog Accel Time modifica Accel Time ad un nuovo valore preimpostato per il modo jog.
Jog Decel Time
Jog S-Curve
Jog Decel Time modifica Decel Time ad un nuovo valore preimpostato per il modo jog.
Jog S-Curve modifica S-Curve a un nuovo valore preimpostato per il modo jog.
Figura 3-2 Esempio S-Curve 40 %
Out
put
Spe
ed
Accel Time0 MaxAccel S-Curves
20%
20%
0 %Curve
40 %Curve
Out
put
Spe
ed
Decel Time0 MaxDecel S-Curves
20%
20%
0 %Curve
40 %Curve

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-15IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro Descrizione
KEYPAD SETUP Keypad Stop Key
Keypad Stop Mode
Keypad Run Fwd
Keypad Run Rev
Stop Key – Consente al tasto “STOP” della tastiera di iniziare l’arresto del motoredurante il funzionamento remoto o seriale (se il tasto Stop è impostato suRemote ON). Se attivo, la pressione di “STOP” automaticamente sele-ziona il modo Local e avvia il comando stop.
Stop Mode – Seleziona se il comando Stop induce il motore a fermarsi in “COAST” o afermarsi in “REGEN”. In COAST, il motore viene spento e si ferma perinerzia. In REGEN, la tensione e la frequenza del motore vengono ridotteal valore impostato “Decel Time”.
Run FWD – ON rende attivo il tasto “FWD” di tastiera in modo Local.Keypad Run Rev
Keypad Jog Fwd
Keypad Jog Rev
Run FWD ON rende attivo il tasto FWD di tastiera in modo Local.
Run REV – ON rende attivo il tasto “REV” di tastiera in modo Local.
Jog FWD – ON rende attivo il tasto “FWD” di tastiera in modo Local Jog.
Jog REV – ON rende attivo il tasto “REV” di tastiera in modo Local Jog .

Capitolo 1Informazioni Generali
3-16 Programmazione e Funzionamento IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro Descrizione
INPUT OPERATINGMODE
Sono disponibili sei “Modi Operativi”. Le selezioni sono: Keypad, Standard Run, 15SPD,Serial, Bipolar, Process, Bipolar Hoist e 7 Speed Hoist. Le connessioni esterne alcontrollo sono effettuate sulla morsettiera J1 (gli schemi di cablaggio sono illustrati nelCapitolo 2 “Connessioni del Circuito di Controllo”).
Command Select Seleziona il riferimento velocità esterna da usare. Il metodo più semplice di controllovelocità è selezionare POTENTIOMETER e collegare un 5 K� del potenziometro aJ1-1, J1-2, e J1-3. Può essere applicato il comando di ingresso ±5, ±10 VDC o4-20 mA su J1-4 e J1-5.
Se sono richieste lunghe distanze tra il controllo velocità esterna e il controllo, devono es-sere considerate le selezioni 4-20 mA su J1-4 e J1-5. Il current loop consente notevolilunghezze di cavo senza generare attenuazioni del segnale di comando.
10VOLT W/EXT CL – quando è presente un comando differenziale 10 V su J1-4 e 5, con-sente un ingresso 5V addizionale su J1-1, 2 e 3 che permette la riduzione del current limitprogrammato per ridurre la coppia durante il funzionamento.
10 VOLT W/TORQ FF – quando è presente un comando differenziale su J1-4 e 5, consentel’ingresso addizionale 5 V torque feedforward su J1-1, 2 e 3 per impostare una quantitàpredeterminata di coppia all’interno del rate loop con impostazioni high gain.
EXB PULSE FOL – seleziona la scheda di espansione opzionale Master Pulse Reference/Isolated Pulse Follower se installata.
10 VOLT EXB – seleziona la scheda di espansione opzionale High Resolution I/O se instal-lata.
3 – 15 PSI EXB seleziona la scheda di espansione opzionale 3-15 PSI se installata.
Tachometer EXB- seleziona la scheda di espansione opzionale DC Tachometer se instal-lata.
Serial – seleziona la scheda di espansione opzionale Serial Communications se installata.
Nota: Quando si usa l’ingresso 4-20 mA, il ponticello JP1 sulla scheda di controlloprincipale deve essere spostato sui pin 2 e 3.
ANA CMD Inverse “OFF” causa una tensione di ingresso minima (p.e. 0 VDC) con comando low motor speede una tensione di ingresso massima (p.e. 10 VDC) con comando maximum motor speed.
“ON” causa una tensione di ingresso minima (p.e. 0 VDC) con comando maximum motorspeed e una tensione di ingresso massima (p.e. 10 VDC) con comando low motor speed.
ANA CMD Offset Fornisce uno spostamento all’Ingresso Analogico per ridurre la deriva segnale. Peresempio, se il segnale velocità minima è 1 VDC (invece di 0 VDC), su ANA CMDOffset può essere impostato –10 % così l’ingresso tensione minima è visto dalcontrollo come 0 VDC.
ANA 2 Deadband Consente la definizione di una soglia di tensione. Un livello di segnale comando sottoquesta tensione non influenza l’uscita del controllo.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-17IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro Descrizione
OUTPUT OPTO OUTPUT #1 – #4
Quattro uscite digitali otticamente isolate aventi due stati operativi, logico Alto o Basso.Ogni uscita può essere configurata a qualsiasi delle seguenti condizioni:
Condizione Descrizione
Ready – Attivo quando l’alimentazione è applicata e non sono presentierrori.
Zero Speed – Attivo quando la frequenza in uscita verso il motore è inferiore alvalore del parametro Output di Livello 1 “Zero SPD Set Pt”.
At Speed – Attivo quando la velocità in uscita è compresa nella gammavelocità definita dal parametro Output di Livello 1 “At SpeedBand”.
At Set Speed – Attivo quando la velocità in uscita è uguale o superiore alparametro Output di Livello 1 “Set Speed”.
Overload – Un contatto normalmente chiuso attivo (si apre) durante unaanomalia Overload causata da tempo scaduto quando lacorrente in uscita è superiore alla Corrente Nominale.
Keypad Control – Attivo quando il controllo è in controllo Local keypad.
Fault – Attivo quando è presente una condizione di errore.
Following ERR – Attivo quando la velocità motore è esterna alla banda ditolleranza specificata dall’utente definita dal parametro At SpeedBand.
Motor Direction – Attivo Alto quando è ricevuto il comando di direzione REV.Attivo Basso quando è ricevuto il comando di direzione FWD.
Drive On – Attivo quando il controllo è Abilitato e “Ready”.
CMD Direction – Sempre attivo. Lo stato dell’uscita logica indica il senso Forward(Aperto) o Reverse (Chiuso).
AT Position – Attivo durante un comando di posizionamento quando il controlloè all’interno della tolleranza del parametro position band.
Over Temp Warn – Attivo quando heat sink del controllo è 3 °C all’interno di IntOvertemp.
Process Error – Attivo quando il segnale process feedback è esterno alla gammaspecificata dal blocco Process Control di Livello 2, parametro ATSetpoint Band. Si disattiva quando l’errore di retroazioneprocesso è rimosso.
Drive Run – Attivo quando il drive è Ready, Enabled, e viene ricevuto ilcomando Speed o Torque con l’emissione della direzioneFWD/REV.
Running Field – Attivo quando la corrente di campo è superiore al 90 % degliampere campo motore programmati dall’utente. Può essereusato come uscita per coppia pronta.
M/FWD Contact – Può essere usato per chiudere un contattore indotto motoreesterno. Questa uscita è alta quando il controllo è pronto e vieneemesso un comando forward o reverse. Interviene un ritardo di16 ms tra M/FWD CONTACT ON e quando il controllo realmenteimpegna il ponte di uscita. Il ritardo serve a compensareeventuali saltellamenti di contatti. L’uscita si disattiva quandoforward e reverse cadono e dopo la riduzione a zero dellacorrente indotto. Riferirsi alla descrizione Uscite Opto delCapitolo 2.
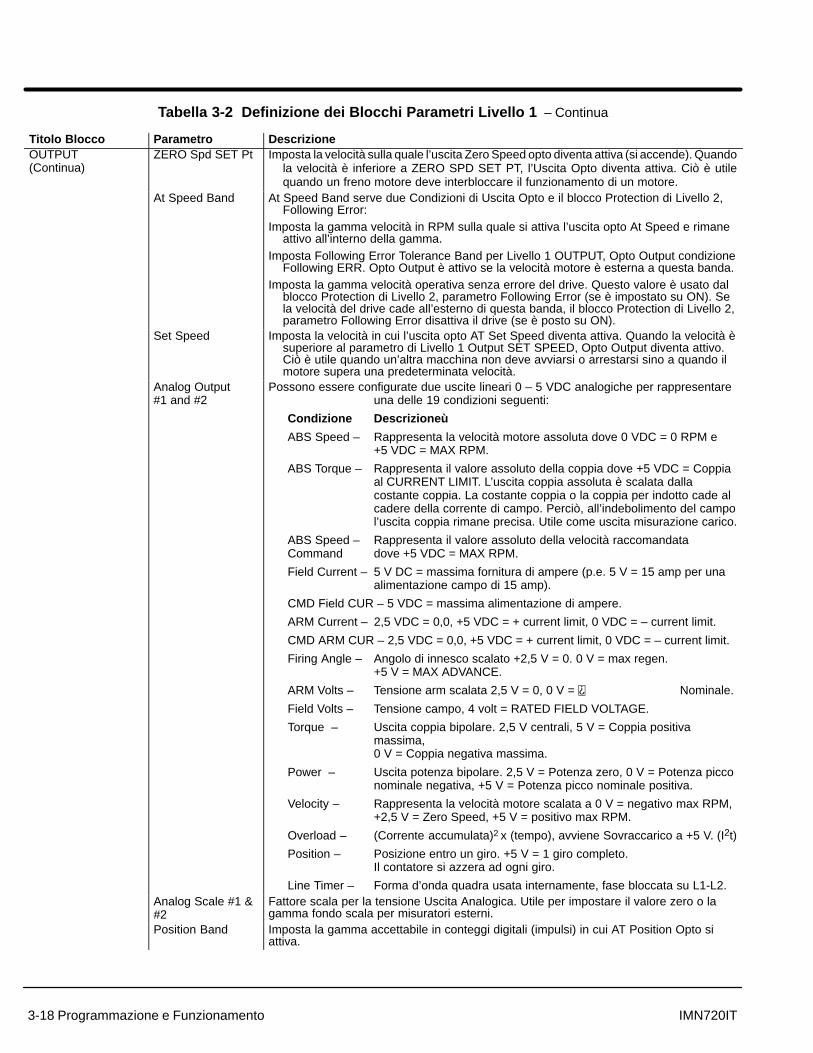
Capitolo 1Informazioni Generali
3-18 Programmazione e Funzionamento IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro DescrizioneOUTPUT(Continua)
ZERO Spd SET Pt Imposta la velocità sulla quale l’uscita Zero Speed opto diventa attiva (si accende). Quandola velocità è inferiore a ZERO SPD SET PT, l’Uscita Opto diventa attiva. Ciò è utilequando un freno motore deve interbloccare il funzionamento di un motore.
At Speed Band At Speed Band serve due Condizioni di Uscita Opto e il blocco Protection di Livello 2,Following Error:
Imposta la gamma velocità in RPM sulla quale si attiva l’uscita opto At Speed e rimaneattivo all’interno della gamma.
Imposta Following Error Tolerance Band per Livello 1 OUTPUT, Opto Output condizioneFollowing ERR. Opto Output è attivo se la velocità motore è esterna a questa banda.
Imposta la gamma velocità operativa senza errore del drive. Questo valore è usato dalblocco Protection di Livello 2, parametro Following Error (se è impostato su ON). Sela velocità del drive cade all’esterno di questa banda, il blocco Protection di Livello 2,parametro Following Error disattiva il drive (se è posto su ON).
Set Speed Imposta la velocità in cui l’uscita opto AT Set Speed diventa attiva. Quando la velocità èsuperiore al parametro di Livello 1 Output SET SPEED, Opto Output diventa attivo.Ciò è utile quando un’altra macchina non deve avviarsi o arrestarsi sino a quando ilmotore supera una predeterminata velocità.
Analog Output #1 and #2
Possono essere configurate due uscite lineari 0 – 5 VDC analogiche per rappresentareuna delle 19 condizioni seguenti:
Condizione Descrizioneù
ABS Speed – Rappresenta la velocità motore assoluta dove 0 VDC = 0 RPM e+5 VDC = MAX RPM.
ABS Torque – Rappresenta il valore assoluto della coppia dove +5 VDC = Coppiaal CURRENT LIMIT. L’uscita coppia assoluta è scalata dallacostante coppia. La costante coppia o la coppia per indotto cade alcadere della corrente di campo. Perciò, all’indebolimento del campol’uscita coppia rimane precisa. Utile come uscita misurazione carico.
ABS Speed – Rappresenta il valore assoluto della velocità raccomandata Command dove +5 VDC = MAX RPM.
Field Current – 5 V DC = massima fornitura di ampere (p.e. 5 V = 15 amp per unaalimentazione campo di 15 amp).
CMD Field CUR – 5 VDC = massima alimentazione di ampere.
ARM Current – 2,5 VDC = 0,0, +5 VDC = + current limit, 0 VDC = – current limit.
CMD ARM CUR – 2,5 VDC = 0,0, +5 VDC = + current limit, 0 VDC = – current limit.
Firing Angle – Angolo di innesco scalato +2,5 V = 0. 0 V = max regen. +5 V = MAX ADVANCE.
ARM Volts – Tensione arm scalata 2,5 V = 0, 0 V = Nominale.
Field Volts – Tensione campo, 4 volt = RATED FIELD VOLTAGE.
Torque – Uscita coppia bipolare. 2,5 V centrali, 5 V = Coppia positivamassima, 0 V = Coppia negativa massima.
Power – Uscita potenza bipolare. 2,5 V = Potenza zero, 0 V = Potenza picconominale negativa, +5 V = Potenza picco nominale positiva.
Velocity – Rappresenta la velocità motore scalata a 0 V = negativo max RPM, +2,5 V = Zero Speed, +5 V = positivo max RPM.
Overload – (Corrente accumulata)2 x (tempo), avviene Sovraccarico a +5 V. (I2t)
Position – Posizione entro un giro. +5 V = 1 giro completo. Il contatore si azzera ad ogni giro.
Line Timer – Forma d’onda quadra usata internamente, fase bloccata su L1-L2.Analog Scale #1 
Fattore scala per la tensione Uscita Analogica. Utile per impostare il valore zero o lagamma fondo scala per misuratori esterni.
Position Band Imposta la gamma accettabile in conteggi digitali (impulsi) in cui AT Position Opto siattiva.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-19IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro Descrizione
DC Control CTRL BASE Volts
Feedback Filter
Feedback DIR
ARM PROP Gain
ARM INT Gain
SPEED PROPGAIN
SPEED INT GAIN
Speed DIFF Gain
POSITION GAIN
IR COMP Gain(Vedere Nota 1)
TACH Trim
Null Force Gain
Imposta la tensione indotto dove il controllo inizia ad entrare in “indebolimento campo”per raggiungere alte velocità dal motore (non disponibile con armature feedback).Sceglie la tensione più bassa tra ARMATURE VOLTAGE, 130 % della Tensione Linea, ol’impostazione manuale per CTRL BASE VOLTS. Gamma regolabile 0-1000 V.
Imposta il numero di scansioni dal microprocessore del controllo per filtrare i segnali diingresso encoder. E’ automaticamente impostato a soddisfare la risoluzione encoderdurante la funzione Autocalibratura. Un valore più alto fornisce un segnale più filtrato,ma viene imposta un’ampiezza banda ridotta. Un valore più piccolo fornisce unfunzionamento più dolce alle basse velocità.
Imposta il senso di rotazione elettrico dell’encoder affinché corrisponda a quello delmotore.
Imposta il guadagno proporzionale di current loop.
Imposta il guadagno integrale current loop.
Imposta il guadagno proporzionale di speed (velocity) loop.
Imposta il guadagno integrale di speed (velocity) loop.
Imposta il guadagno differenziale speed (velocity) loop.
Imposta il guadagno proporzionale position loop.
Imposta il guadagno per la compensazione resistenza indotto. Usato soltanto perarmature feedback. Quando si usa armature feedback, iniziare con una impostazione di50 e regolare come necessario per la rimozione di errori velocità (No-Carico/Carico),livellamento e stabilità.
Scala la tensione tachimetro per compensare il fattore scala di tensione tach individuale.
Regola la risposta di piccoli segnali current loop relativi alle modifiche dell’angolo diinnesco. Facilita la risposta current loop ad essere nominale sull’intera gamma dicorrente del controllo, particolarmente ai carichi leggeri.
TACH Offset Regola la zona neutra a velocità zero quando si usa DC Tachometer feedback. Evita loscorrimento a velocità zero.
Nota 1: Per Armature Feedback, la regolazione IR COMP Gain compensa la caduta di tensione dell’indotto. Un eccessivoIR COMP Gain può causare una velocità motore erratica. I motori avvolti in derivazione con caratteristiche divelocità ascendente (dove la velocità aumenta con il carico) possono non essere idonei per armature feedback.Invece, Tachometer o Encoder feedback devono essere usati per queste applicazioni con avvolgimento inderivazione. I motori con avvolgimento in derivazione stabilizzato hanno la caratteristica velocità/coppia moltopiatta ed operano correttamente con armature feedback, ma possono operare non correttamente nelleapplicazioni con inversione.
Per impostare IR COMP Gain:1. Azionare il motore alla velocità base senza carico. Misurare gli RPM con un tachimetro manuale e registrare ilnumero di giri. (Non fidarsi della visualizzazione RPM del controllo poiché può essere non precisa con armature feedback.)2. Azionare il motore alla velocità base a pieno carico. Misurare gli RPM con un tachimetro manuale e registrare ilnumero di giri. 3. Regolare IR COMP Gain a 5 unità. 4. Ripetere i passi da 1 a 3 fino alla corrispondenza tra la velocità senza carico (passo 1) e la velocità a pienocarico (passo 2).

Capitolo 1Informazioni Generali
3-20 Programmazione e Funzionamento IMN720IT
Tabella 3-2 Definizione dei Blocchi Parametri Livello 1 – Continua
Titolo Blocco Parametro Descrizione
Field Control Field PWR Supply Usato per selezionare il tipo di alimentazione campo utilizzato con il controllo.L’alimentazione standard (per controlli fino a 300HP) può fornire fino a 15 ampere permotori avvolti in derivazione. Se si usano motori a magnete permanente, l’alimentazionecampo può essere disabilitata selezionando NONE. Se il motore con avvolgimento inderivazione richiede più di 15 ampere per il suo campo, può essere aggiuntaun’alimentazione campo opzionale di 40 ampere.
Field ECON Level Imposta la tensione campo applicata al motore durante l’attesa mentre il controllo èdisabilitato. Usato per tenere i campi caldi e assicurare che il motore possa operare allapropria velocità base. L’economia di campo è anche spesso usata invece di unriscaldatore di zona. Un’eccessiva tensione può causare il surriscaldamento del campocon conseguente guasto del motore. Qualsiasi valore inferiore al 25 % (o 100 mA)induce la disattivazione del circuito economia di campo quando disabilitato eautomaticamente posto a 0 %.
Forcing Level Questa impostazione è spesso usata nel modo hoist (paranco) per sovrasaturare icampi e indurre un avvio o arresto morbido. Disponibile soltanto nei controlli Serie 20HLine Regen e usato nei modi BIPOLAR HOIST e 7 SPEED HOIST.
Field Set Speed Imposta la velocità in cui la tensione di campo è commutata da Forcing Level allatensione funzionamento campo standard. Disponibile soltanto nei controlli Serie 20HLine Regen.
Field Step Limit Imposta il tempo nominale rampa quando si cambiano livelli di campo (tensione fieldforce a tensione standard run). Disponibile soltanto nei controlli Serie 20H Line Regen.
Field REG Gain Imposta il guadagno proporzionale nel controllo field current.
Field Integral Seleziona il tipo guadagno per il regolatore campo. L’impostazione Integral to ONseleziona PI gains. OFF seleziona solo proporzionale. Nella maggior parte dei casi,l’impostazione ON migliora la precisione delle impostazioni corrente controllo campo.
LEVEL 2 BLOCK ACCEDE AL MENU LIVELLO 2
Figura 3-3 Correlazione dei Parametri Controllo Campo
Velocità ImpostataCampo
Velocità Motore
Drive AbilitatoAbilitazione Campo Confermata Drive Disabilitato
Corrente Campo
Forzato
Normale
Stand (ECON)
Campo Decelera avalore 0 secondi
Campo Accelera avalore 0 secondi
Raggiunta VelocitàImpostata Campo
Limite Passo Campo(I Passi Campo Seguono Questo
Valore)
I parametri Field Forcing, Field Set Speed e Field Step Limit non sono attivi nei controlliSerie 20H. Questi parametri sono attivi solo nei controlli Serie 20H Line Regen quandoazionati nei modi Bipolar Hoist o 7 Speed Hoist.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-21IMN720IT
Tabella 3-3 Definizione dei Blocchi Parametri Livello 2
Titolo Blocco Parametro Descrizione
OUTPUT LIMITS Operating Zone Imposta la zona operativa a Unidirezionale (Non Line Regenerative) o REGEN.
MIN Output Speed Imposta la velocità minima del motore in RPM. Durante il funzionamento, non èconsentito che la velocità motore scenda oltre questo valore eccetto per gli avviimotore da 0 RPM.
MAX Output Speed Imposta la velocità massima motore in RPM.
PK Current Limit La massima corrente di picco in uscita del motore. Sono disponibili valori superiori al100 % della corrente nominale in funzione della zona operativa selezionata.
CUR Rate Limit Limita la corrente di punta del motore per proteggere il collettore motore.
* CUSTOM UNITS Decimal Places
Value at Speed
Units of Measure
Il numero di posti decimali della visualizzazione Output Rate sul display di Tastiera.Questo valore viene automaticamente ridotto per valori grandi. La visualizzazionedell’Output Rate è disponibile soltanto se il parametro Value At Speed non è zero.
Imposta l’output rate desiderato per gli RPM della velocità motore. Sul display di tastierasono visualizzati due numeri (separati da una barra “/”). Il primo numero (a sinistra) èil valore che si desidera avere visualizzato ad una velocità specifica del motore. Ilsecondo numero (a destra) sono gli RPM del motore corrispondenti alle unità delprimo numero. I decimali possono essere inseriti nei numeri ponendo il cursorelampeggiante sopra la freccia su/giù.
Consente la visualizzazione delle unità di misura specificate dall’utente sullavisualizzazione Output Rate. Usare i tasti shift e freccia per scorrere al primo e aicaratteri successivi. Se il carattere desiderato non è visualizzato, spostare il cursorelampeggiante sulla freccia a carattere speciale su/giù alla sinistra del display. Usare lefrecce su/giù e il tasto shift per scorrere lungo i 9 gruppi di caratteri. Usare il tastoENTER per salvare la selezione.
PROTECTION Overload Imposta il modo protezione su Fault (sgancio durante la condizione di sovraccarico) o suFoldback (riduce automaticamente la corrente in uscita sotto il livello di uscitacontinuativo) durante un sovraccarico. Foldback è la scelta da fare se si desidera ilfunzionamento continuativo. Fault richiede che il controllo sia “Ripristinato” dopo unsovraccarico.
External Trip OFF – External Trip disabilitato.ON – External Trip abilitato. Se viene aperto un contatto normalmente chiuso suJ1-16, avviene un errore External Trip che causa l’arresto del drive.
Following Error Questo parametro determina se il controllo deve sorvegliare la quantità di FollowingError che avviene in una applicazione. Following Error è la tolleranza programmabileper l’uscita AT Speed Opto definita dal blocco Livello 1 Output, parametro AT SpeedBand. Il funzionamento esterno alla gamma di velocità causa un errore e il drive siarresta.
Torque Proving Quando questo parametro è impostato su ON il controllo verifica la continuità del circuitoindotto per 20 ms. Indica un errore torque proving se non è rilevata correntesufficiente. Questa prestazione è utile in molte applicazioni per assicurare che lacoppia sia applicata. In un paranco, per esempio, torque proving è utile perassicurare che esista la coppia prima di rilasciare il freno. L’uscita “Drive On”, seprogrammata, non avviene se torque proving fallisce. Le impostazioni disponibili sonoON o OFF. L’impostazione di fabbrica è OFF.
* Unità Utente è presente nelle versioni software 1.23 e precedenti.

Capitolo 1Informazioni Generali
3-22 Programmazione e Funzionamento IMN720IT
AVVERTENZA: Se il riavvio automatico del controllo motore può causare lesioni alpersonale, il dispositivo riavvio automatico deve essere disabilitatomodificando il blocco Miscellaneous di Livello 2, parametro RestartAuto/Man su manuale.
Tabella 3-3 Definizione dei Blocchi Parametri Livello 2 – Continua
Titolo Blocco Parametro Descrizione
MISCELLANEOUS Restart Auto/Man Manual – Se avviene un errore o se cade l’alimentazione, il controllo deve essereripristinato manualmente per riprendere il funzionamento.Automatic – Se avviene un errore o se cade l’alimentazione, il controllo si ripristinaautomaticamente e riprende il funzionamento.
Restart Fault/Hr Il numero massimo di tentati riavvii automatici prima di richiedere il riavvio manuale.Trascorsa un’ora senza aver raggiunto il numero massimo di errori o se si spegne eriaccende, il conteggio errori viene azzerato.
Restart Delay Il periodo di tempo consentito dopo una condizione di errore prima che avvenga il riavvioautomatico. Utile per consentire un periodo di tempo sufficiente per azzerare l’erroreprima di riavviare.
Factory Settings Ripristina le impostazioni di fabbrica per tutti i valori dei parametri. Selezionare YES epremere il tasto “ENTER” per ripristinare i valori dei parametri di fabbrica. Il display ditastiera visualizza “Operation Done” quindi al termine ritorna a “NO”.
Nota: Quando sono ripristinate le impostazioni di fabbrica, il valore Motor RatedAmps è ripristinato a 999,9 amps. Il valore di questo parametro del bloccoMotor Data di Livello 2 deve essere modificato al valore corretto (postosulla targa motore) prima di effettuare l’avvio del drive e l’autocalibratura.
Homing Speed Nei modi Bipolare e Seriale, questo parametro imposta la velocità cui l’albero motoredeve ruotare nella posizione “Home” quando l’interruttore ingresso orientamento èchiuso (J1-11).
Homing Offset Nei modi Bipolare e Seriale, questo parametro imposta il numero di conteggi digitaliencoder dopo home in cui è emesso il comando di arresto motore. Gli impulsiquadrature encoder sono 4 volte il numero delle linee encoder per giro. Il numerominimo raccomandato è 100 conteggi encoder per consentire che la distanza didecelerazione permetta un morbido arresto del motore.
Nota: La direzione homing è sempre forward.

Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-23IMN720IT
Tabella 3-3 Definizione dei Blocchi Parametri Livello 2 – Continua
Titolo Blocco Parametro Descrizione
SECURITYCONTROL
Security State Off – Non è richiesto il Codice Accesso di sicurezza per modificare i valori deiparametri.Local – Richiede l’introduzione del Codice Accesso di sicurezza prima di effettuaremodifiche con la Tastiera.Serial – Richiede l’introduzione del Codice di Accesso di sicurezza prima di effettuaremodifiche con Serial Link.Total – Richiede l’introduzione del Codice Accesso di sicurezza prima di effettuaremodifiche con la Tastiera o con Serial Link.
Nota: Se security è impostato su Local, Serial o Total è possibile premere PROGe scorrere lungo i valori dei parametri programmati ma non è consentitomodificarli a meno che non si introduca il corretto codice di accesso.
Access Timeout Il tempo in secondi in cui l’accesso di sicurezza rimane abilitato dopo aver lasciato ilmodo programmazione. Se si esce e si ritorna nel modo Programma entro questoperiodo di tempo, il Codice di Accesso di sicurezza non deve essere reintrodotto.Questo temporizzatore si avvia quando si abbandona Program Mode (premendoDISP).
Access Code Codice numerico a 4 cifre. Soltanto le persone che conoscono il codice possonocambiare i valori dei parametri fissati di Livello 1 e Livello 2.
Nota: Registrare il proprio codice di accesso ed archiviarlo in un posto sicuro. Senon è possibile avere l’accesso ai valori dei parametri per modificare unparametro protetto, contattare Baldor. Predisporsi per fornire il codice a 5cifre indicato sul lato inferiore destro del Display di Tastiera al prompt delparametro Security Control Access Code.
MOTOR DATA Armature Voltage La tensione indotto nominale del motore (indicata sulla targa motore).
ARM Rated Amps La corrente indotto nominale del motore (indicata sulla targa motore). Se la correntemotore supera questo valore per un periodo di tempo, avviene un errore diSovraccarico.
Motor Rated Spd La velocità nominale del motore (indicata sulla targa motore). Nel caso di targhe motorea campo avvolto, la velocità può essere indicata come Base Speed/Max FieldWeakened Speed. Base speed è introdotta nel parametro MOTOR RATED SPD. MaxField Weakened Speed può essere introdotta nel parametro MAXIMUM OUTPUTSPEED posto nel blocco Output Limits, se si desidera il funzionamento più rapido dibase speed.
Motor Field Indica il tipo di campo nel motore. Impostazioni disponibile sono Shunt e PermanentMagnet.
Motor Field Amps Gli ampere di campo nominali del motore per il funzionamento alla velocità basedipendono dalle connessioni effettuate. Parecchi motori sono dotati di campo atensione duale. Ciò è dichiarato sulla targa motore come illustrato nello schemaconnessione motore. L’alimentazione campo standard per i controlli fino a 300HP è15 Amps. L’alimentazione campo di 40 Amp opzionale è disponibile per i motori concampo a tensione duale e per controlli superiori a 400HP.Se la corrente di campo cade a meno di 0,15 A, l’Errore Field Loss (Perdita Campo)viene visualizzato dal controllo.
Feedback Type Designa il tipo di feedback usato dal controllo. Le opzioni feedback standard delcontrollo sono ENCODER e ARMATURE. Specificare ARMATURE se il controllo èazionato in open loop e avviato con IR Comp Gain impostato su 50. Il feedback DCtachometer e resolver sono disponibili con le schede di espansione opzionaliappropriate. Il dispositivo feedback deve essere accoppiato all’albero motore o alrapporto 1:1.
Encoder Counts Il numero di conteggi (impulsi) per giro, se un encoder è tipo feedback.
Resolver Speed La velocità del resolver, se è usato un resolver per tipo feedback. Il parametro è attivosolo quando è installata la scheda di espansione opzionale Resolver to Digital.
Tachometer Volts I volt DC per l’uscita 1000 RPM del tachimetro (V/KRPM). Il parametro è attivo soloquando è installata la scheda di espansione opzionale tachometer feedback.
PK Power Limit Questa impostazione è spesso usata come limitatore di commutazione nei motori servoa magnete permanente per impostare la corrente di picco per i limiti di commutazione.Questo parametro è attivo solo quando è selezionato PERM MAGNET per il tipocampo motore.

Capitolo 1Informazioni Generali
3-24 Programmazione e Funzionamento IMN720IT
Tabella 3-3 Definizione dei Blocchi Parametri Livello 2 – Continua
Titolo Blocco Parametro Descrizione
PROCESSCONTROL
Process FeedbackProcess Inverse
Setpoint Source
Setpoint Command
Set PT ADJ Limit
Process ERR TOL
Process Prop GainProcess INT Gain
Process DIFF Gain
Follow I:O Ratio
Follow I:O Out
Master Encoder
Imposta il tipo di segnale usato per il segnale retroazione processo.Causa l’inversione del segnale retroazione processo. Usato con i processi attivi inversi
che usano un segnale unipolare come 4 – 20 mA. Se “ON”, 20 mA diminuisce lavelocità motore e 4 mA aumenta la velocità motore.
Imposta il tipo di segnale di ingresso sorgente cui sarà comparata la retroazioneprocesso. Se è selezionato “Setpoint CMD”, il valore fissato del setpoint viene introdotto nelvalore parametro Setpoint Command.
Imposta il valore del setpoint che il controllo tenterà di mantenere regolando la velocitàmotore. Si usa solo quando Setpoint Source è un valore fissato “Setpoint CMD” sottoSetpoint Source.
Imposta il valore massimo di correzione velocità da applicare al motore (in rispostaall’errore massimo di feedback setpoint). Per esempio, se la velocità massima motoreè 1750 RPM, l’errore setpoint feedback è 100 % e setpoint adjustment limit è 10 %, lavelocità massima del motore in risposta all’errore setpoint feedback è ±175 RPM. Seal process setpoint, la velocità motore è 1500 RPM, i limiti di regolazione velocitàmassima sono quindi da 1325 a 1675 RPM.
Imposta la larghezza della banda di comparazione (% del setpoint) con cui vienecomparato l’ingresso del processo. Il risultato è che se l’ingresso del processo è entrola banda di comparazione l’Opto Output corrispondente diventa attivo.
Imposta il guadagno proporzionale del PID loop. Ciò determina quanta regolazioneviene fatta alla velocità motore (entro il Set PT ADJ Limit) per spostare l’inputanalogico al setpoint.
Imposta il guadagno integrale del PID loop. Ciò determina la rapidità con cui la velocitàmotore è regolata per correggere un errore a lungo termine.
Imposta il guadagno differenziale del PID loop. Ciò determina la quantità di regolazioneeffettuata sulla velocità motore (entro il Set PT ADJ Limit) per l’errore transitorio.
Imposta il rapporto tra il Master e il Follower nelle configurazioni Master/Follower.Richiede la scheda di espansione Master Pulse Reference/Isolated Pulse Follower.Per esempio, il master encoder che si desidera seguire è un encoder a 1024conteggi. Il motore follower che si desidera controllare è anche dotato di un encoder a1024 conteggi. Se si desidera che il follower operi a velocità doppia del master,introdurre il rapporto 1:2. Rapporti frazionari come 0,5:1 sono introdotti come 1:2.Limiti dei rapporti sono (65.535:1) a (1:20).
Nota: Il parametro Master Encoder deve essere definito se si introduce un valorenel parametro Follow I:O Ratio.
Nota: Quando si usa la Comunicazione Seriale per azionare il controllo, questovalore è la porzione MASTER del rapporto. La porzione FOLLOWER delrapporto è impostata nel parametro Follow I:O Out.
Questo parametro è usato soltanto quando si utilizza la Comunicazione Seriale perazionare il controllo.E’ richiesta la scheda di espansione Master Pulse Reference/Isolated Pulse Follower.Questo parametro rappresenta la porzione FOLLOWER del rapporto. La porzioneMASTER del rapporto è impostata nel parametro Follow I:O Ratio.
Usato soltanto se è installata la scheda di espansione opzionale Master PulseReference/Isolated Pulse Follower. Definisce il numero di impulsi per giro del masterencoder. Usato soltanto per drive follower.
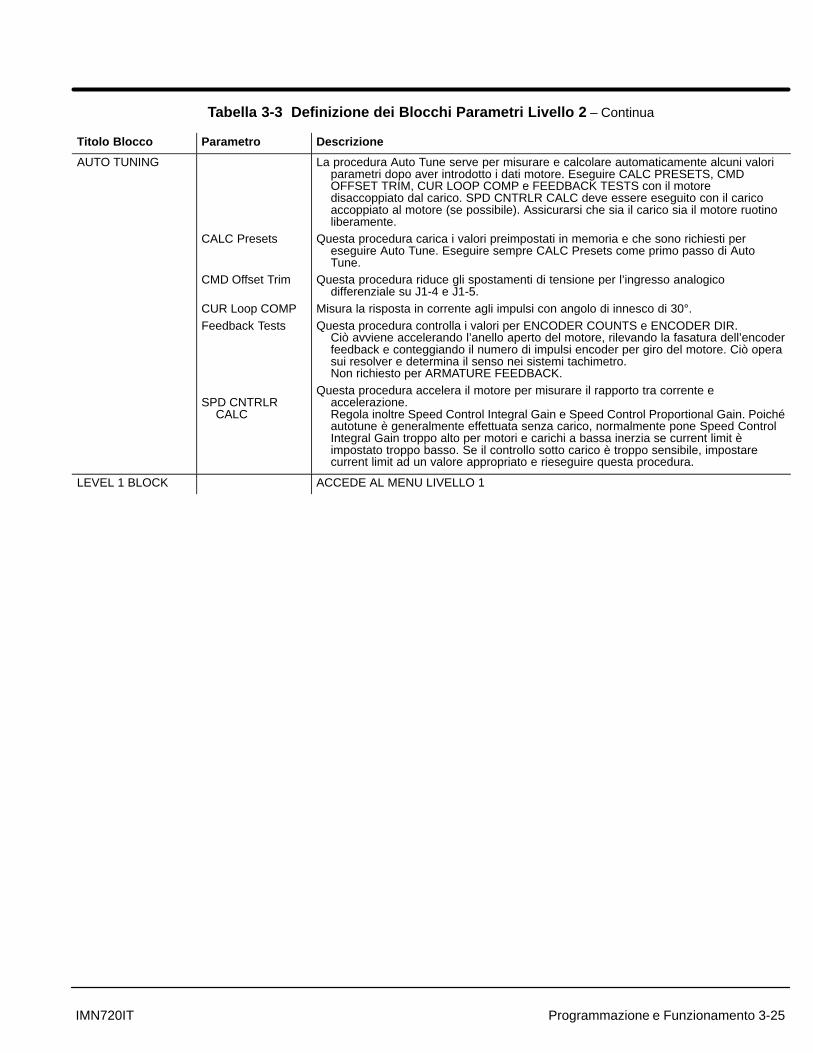
Capitolo 1Informazioni Generali
Programmazione e Funzionamento 3-25IMN720IT
Tabella 3-3 Definizione dei Blocchi Parametri Livello 2 – Continua
Titolo Blocco Parametro Descrizione
AUTO TUNING
CALC Presets
CMD Offset Trim
CUR Loop COMPFeedback Tests
SPD CNTRLRCALC
La procedura Auto Tune serve per misurare e calcolare automaticamente alcuni valoriparametri dopo aver introdotto i dati motore. Eseguire CALC PRESETS, CMDOFFSET TRIM, CUR LOOP COMP e FEEDBACK TESTS con il motoredisaccoppiato dal carico. SPD CNTRLR CALC deve essere eseguito con il caricoaccoppiato al motore (se possibile). Assicurarsi che sia il carico sia il motore ruotinoliberamente.
Questa procedura carica i valori preimpostati in memoria e che sono richiesti pereseguire Auto Tune. Eseguire sempre CALC Presets come primo passo di AutoTune.
Questa procedura riduce gli spostamenti di tensione per l’ingresso analogicodifferenziale su J1-4 e J1-5.
Misura la risposta in corrente agli impulsi con angolo di innesco di 30°.Questa procedura controlla i valori per ENCODER COUNTS e ENCODER DIR.
Ciò avviene accelerando l’anello aperto del motore, rilevando la fasatura dell’encoderfeedback e conteggiando il numero di impulsi encoder per giro del motore. Ciò operasui resolver e determina il senso nei sistemi tachimetro. Non richiesto per ARMATURE FEEDBACK.
Questa procedura accelera il motore per misurare il rapporto tra corrente eaccelerazione.Regola inoltre Speed Control Integral Gain e Speed Control Proportional Gain. Poichéautotune è generalmente effettuata senza carico, normalmente pone Speed ControlIntegral Gain troppo alto per motori e carichi a bassa inerzia se current limit èimpostato troppo basso. Se il controllo sotto carico è troppo sensibile, impostarecurrent limit ad un valore appropriato e rieseguire questa procedura.
LEVEL 1 BLOCK ACCEDE AL MENU LIVELLO 1

Capitolo 1Informazioni Generali
3-26 Programmazione e Funzionamento IMN720IT

Capitolo 4Ricerca guasti
Ricerca Guasti 4-1IMN720IT
I Controlli Baldor Serie 20H richiedono pochissima manutenzione ed operano per moltianni senza guasti se correttamente installati e usati. Occasionalmente occorreispezionarli per verificare che le connessioni del cablaggio siano salde e per evitarel’accumulo di polvere, sporcizia o particelle estranee che potrebbero ridurre ladissipazione del calore.
Prima di effettuare l’assistenza a questa apparecchiatura, occorre rimuovere tuttal’alimentazione agli ingressi del controllo per evitare il rischio di scosse elettriche.L’assistenza a questa apparecchiatura deve essere effettuata da un elettricista delservizio di assistenza qualificato ed esperto nell’area dell’elettronica ad alta potenza.
E’ importante acquisire le informazioni seguenti prima di accingersi alla ricerca guasti oall’assistenza del controllo. La maggior parte della ricerca guasti può essere eseguitausando soltanto un voltmetro digitale in cui l’impedenza all’ingresso superi 1 megaohm.In alcuni casi, può rendersi utile un oscilloscopio con ampiezza banda minima di 5 MHz.Prima di consultare la fabbrica, controllare che tutta l’alimentazione e il cablaggio dicontrollo sia corretto e installato secondo le raccomandazioni riportate in questomanuale.
Assenza Visualizzazione – Regolazione Contrasto Display Se non appare alcuna visualizzazione, osservare la procedura seguente per regolare ilcontrasto del display.
Azione Descrizione Display Commenti
Applicare Alimentazione Assenza visualizzazione.
Premere il Tasto DISP Verificare che il controllo sia inmodo Display.
Modo Display.
Premere il tasto SHIFT 2volte
Consente la regolazionecontrasto.
Premere il tasto � o � Regola il contrasto (intensità).
Premere il tasto ENTER Salva la regolazione contrasto edesce al modo Display.

Capitolo 1Informazioni Generali
4-2 Ricerca Guasti IMN720IT
Modalità di Accesso al Log Errori Quando avviene una condizione di errore, il moto del motore si arresta ed èvisualizzato il codice errore sul display di Tastiera. Il controllo tiene la registrazione degliultimi 31 errori. Se avvengono più di 31 errori, l’errore più vecchio viene cancellato dal logerrori per lasciare spazio all’errore più recente. Per accedere al log errori osservare laprocedura seguente:
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo Display indica lafrequenza di uscita.
Modo Display.
Premere il tasto DISP 5volte
Usare il tasto DISP per farscorrere le immissioni del LogErrori.
Premere il tasto ENTER Visualizza il primo tipo di errore el’ora relativa.
Visualizzazione tipica.
Premere il tasto � Scorrere lungo i messaggi dierrore.
In assenza di messaggi, èvisualizzata l’opzione per l’uscitadal log errori.
Premere il tasto ENTER Ritorno al modo Display. Il LED del tasto stop modoDisplay si illumina.
Modalità di Azzeramento del Log Errori Osservare la procedura seguente per azzerare il log errori.
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo display indica lafrequenza di uscita.
Modo Display.
Premere il Tasto DISP Premere il tasto DISP perscorrere le immissioni del LogErrori.
Premere il tasto ENTER Visualizza il messaggio piùrecente.
Premere il tasto SHIFT
Premere il tasto RESET
Premere il tasto SHIFT
Premere il tasto ENTER Il log errori è azzerato. Nessun errore nel log errori.
Premere il tasto � o � Scorrere il Log Errori per l’Uscita.
Premere il tasto ENTER Ritorno al modo Display.

Capitolo 1Informazioni Generali
Ricerca Guasti 4-3IMN720IT
Modalità di Accesso alle Informazioni Diagnostiche
Azione Descrizione Display Commenti
Applicare Alimentazione Visualizzazione del logo per 5secondi.
Il modo Display indica la velocitàmotore.
Assenza errori. Modo tastieralocale. Se l’attuale modo èremoto/seriale, per questavisualizzazione premere local.
Premere il tasto DISP 5volte
Scorrere per ottenere lo schermoInformazioni Diagnostiche
Schermo Accesso Diagnostica.
Premere il tasto ENTER Accesso alle informazionidiagnostiche.
Primo schermo InformazioniDiagnostiche.
Premere il Tasto DISP Il modo Display indica latemperatura del controllo.
Premere il Tasto DISP Indica la % della corrente disovraccarico rimanente.
Premere il Tasto DISP Indica gli stati di ingressi e usciteopto.0=Aperto, 1=Chiuso
Stato Ingressi Opto (Sinistra); Stato Uscite Opto (Destra).
Premere il Tasto DISP Indica il tempo di esecuzionereale del comando.
Formato HR.MIN.SEC.
Premere il Tasto DISP Indica il modo operativo, tensionee tipo di controllo.
Premere il Tasto DISP Indica gli ampere continuativi; ilvalore ampere PK; la scala A/Vdella retroazione, l’ID base dialimentazione.
ID è visualizzato come valoreesadecimale.
Premere il Tasto DISP Indica quali schede espansioneGruppo 1 o 2 sono installate.
Premere il Tasto DISP Indica i giri dell’albero motore daset point home REV.
Premere il Tasto DISP Indica la versione e revisionefirmware installata nel controllo.
Premere il Tasto DISP Visualizza l’opzione uscita. Premere ENTER per uscire dalleinformazioni diagnostiche.

Capitolo 1Informazioni Generali
4-4 Ricerca Guasti IMN720IT
Tabella 4-4 Ricerca guasti
INDICAZIONE CAUSA POSSIBILE AZIONE CORRETTIVA
ARM V FDBK Il controllo ha rilevato un eccessivovalore della tensione armaturefeedback sull’indotto all’accensione.
Il motore a magnete permanente può ruotare all’accensione.
Eccessiva interferenza sui cavi. Separare i conduttori indotto da qualsiasi altra alimentazione.
Scheda ID base difettosa. Chiamare Baldor se l’anomalia persiste.
AUTO TUNE ENCODER TEST
Encoder malcablato. Rimuovere i guasti cablaggio.ENCODER TEST
Accoppiamento encoder slittato,rotto o disallineato.
Riparare l’accoppiamento encoder-motore.
Eccessiva interferenza sulle lineeencoder.
Verificare il contatore posizione nelle Informazioni Diagnostiche su distorsione che confermerebbe guasto encoder.
Usare cavi encoder raccomandati.Verificare le connessioni encoder comprese le schermature.Separare i cavi encoder dal cablaggio di alimentazione.Far attraversare i cavi encoder e i conduttori di alimentazione a 90°.Isolare elettricamente l’encoder dal motore.Installare la scheda di espansione opzionale Isolated Encoder Feedback.
CHK TACHJUMPERS
Errata impostazione ponticellischeda espansione DC tach.
E’ stato introdotto TACH VOLTS o MAX SPEED ha modificatol’impostazione ponticello scheda tach. Verificare le info della scheda tachnella VISUALIZZAZIONE DIAGNOSTICA, correggere l’impostazioneponticello. premere RESET.
CURR SENSE Eccessivo armature currentfeedback.
Probabile errore alimentazione ±15 V, errore cablaggio tra ID base eschede feedback, scheda feedback o gradazione scheda TACH difettosa.
Encoder Loss Caduta alimentazione encoder. Verificare 5 VDC su J1-29 e J1-30. Verificare anche all’estremità encoder pin D e F.
Accoppiamento encoder slittato,rotto o disallineato.
Correggere o sostituire l’accoppiamento encoder-motore.
Eccessiva interferenza sulle lineeencoder.
Verificare il contatore posizione nelle Informazioni Diagnostiche su distorsione che confermerebbe guasto encoder.
Verificare le connessioni encoder.Separare i cavi encoder dal cablaggio di alimentazione.Far attraversare i cavi encoder e i conduttori di alimentazione a 90°.Isolare elettricamente l’encoder dal motore.Installare la scheda di espansione opzionale Isolated Encoder Feedback.
TACH LOSS Accoppiamento tach slittato o rotto. Verificare l’accoppiamento tach-motore.
Eccessiva interferenza sulle lineetach.
Verificare connessioni tach. Separare i capicorda tach dal cablaggio di alimentazione. Far attraversare i conduttori di alimentazione a 90°. Usare capicorda tach schermati.
Impostazioni ponticello errate sullascheda di espansione DC TACH.
Verificare la selezione ponticello basata su uscita tach e MAX SPEED delmotore. Ripristinare come necessario.
Contattore DC può essere aperto. Verificare contattore.
Resolver Loss Accoppiamento resolver slittato orotto.
Verificare l’accoppiamento resolver-motore.
Connessioni errate verso schedaespansione Resolver Feedback.
Consultare il manuale scheda espansione Resolver Feedback percorreggere il cablaggio e i parametri.
Eccessiva interferenza sulle lineeresolver.
Verificare connessioni resolver. Separare i capicorda resolver dalcablaggio di alimentazione. Far attraversare i capicorda di alimentazionea 90°. Usare capicorda resolver schermati.

Capitolo 1Informazioni Generali
Ricerca Guasti 4-5IMN720IT
Tabella 4-4 Ricerca guasti Continua
INDICAZIONE CAUSA POSSIBILE AZIONE CORRETTIVAEXTERNAL TRIP Insufficiente ventilazione motore. Pulire gli ingressi e le uscite aria del motore.
Verificare che la soffiante esterna funzioni e sia corretto il senso dirotazione.Verificare che la ventola interna del motore sia saldamente calettata.
Il motore assorbe eccessivacorrente.
Controllare il sovraccarico del motore. Verificare il dimensionamento appropriato del controllo e del motore.
Termostato non collegato. Verificare che il termostato abbia i contatti normalmente chiusi. Collegareil termostato.Verificare la connessione di tutti i circuiti di scatto esterni usati con iltermostato.Disabilitare l’ingresso termostato su J1-16 (Ingresso External Trip).
Connessioni termostato difettose. Controllare le connessioni del termostato.Parametro External Trip errato. Verificare la connessione del circuito external trip su J1-16.
Impostare il parametro external trip su “OFF” se non vi è connessione su J1-16.
FOLLOWINGERR
Guadagno proporzionale velocitàposto troppo basso.
Gamma tolleranza Following Error impostata troppo stretta.Aumentare il valore del parametro Speed PROP Gain.
Limite corrente impostato troppobasso.
Aumentare il valore del parametro Current Limit.
Tempo ACCEL/DECEL troppobreve.
Aumentare il tempo del parametro ACCEL/DECEL.
Eccessivo carico. Verificare il dimensionamento appropriato del controllo e del motore.Parametro Following Errorimpostato erroneamente su ON.
Impostare su OFF fil parametro Following Error del blocco Protezione diLivello 2.
Finestra Following Error troppopiccola.
Aumentare gli RPM del parametro AT Speed Band, blocco Output diLivello 1.
INT OVER-TEMP Motore sovraccaricato. Correggere carico motore.Verificare il dimensionamento appropriato del controllo e del motore.
Temperatura ambiente troppo alta. Ricollocare il controllo nell’area operativa del refrigeratore.Aggiungere ventole di raffreddamento o condizionatore aria per controllareil mobile.
INVALID BASE ID Il controllo non riconosce laconfigurazione HP e Tensione.
Premere il tasto “RESET” sulla tastiera. Se l’errore persiste, chiamareBaldor.
LOGIC SUPPLY Malfunzionamento di alimentazione. Sostituire l’alimentatore logica.LOST USERDATA
Errore memoria alimentata dabatteria.
Cancellati i dati dei parametri. Scollegare l’alimentazione al controllo e applicare l’alimentazione (Ciclare l’alimentazione). Introdurre tutti i
parametri. Ciclare l’alimentazione. Se l’anomalia persiste, contattare Baldor.
MEMORYERROR
Rilevato errore memoria EEPROM. Premere il tasto “RESET” sulla tastiera. Se l’errore persiste, chiamareBaldor.
�P RESET Eccessiva interferenza sulle lineeUscita Opto.
Verificare le Uscite Opto e aggiungere stabilizzatori se necessario.Sel’errore persiste, chiamare Baldor.
E’ avvenuto un errore processore ol’alimentazione 5 VDC è caduta.
Premere il tasto “RESET” sulla tastiera. Se l’errore persiste, chiamareBaldor.
LOW LINE La linea ingresso AC è inferiore ailimiti di tensione di ingressonominale.
Verificare l’alimentazione entrante AC. Correggere se inferiore ai requisitiminimi.
HIGH LINE La linea ingresso AC è superiore ailimiti di tensione di ingressonominale.
Verificare l’alimentazione entrante AC. Correggere se superiore ai requisitiminimi.
FIELD LOSS Uso di motore DC a magnetepermanente.
Impostare i parametri di controllo per PERMANENT MAGNET nel bloccoMOTOR DATA, FIELD TYPE.
Fusibile fuso nell’alimentazionecampo.
Verificare i fusibili e sostituire come necessario.
Campo motore erroneamentecablato.
Verificare che le connessioni campo motore siano corrette e abbianocontinuità.

Capitolo 1Informazioni Generali
4-6 Ricerca Guasti IMN720IT
Tabella 4-4 Ricerca guasti Continua
INDICAZIONE CAUSA POSSIBILE AZIONE CORRETTIVA
MOTOR HASWRONGRESPONSE TO SPEED
La tensione modo comunedell’ingresso analogico è eccessiva.
Collegare il comune della sorgente di ingresso del controllo al comune delcontrollo per diminuire la tensione modo comune. La tensione comunemassima sui morsetti J1-4 e J1-5 è ±15 VDC riferita al comune del telaio.
TO SPEEDCOMMAND La velocità è 4 volte la velocità
comandata, con encoder feedbackVerificare se A e B sono invertite.
MOTOR WILLNOT START
Insufficiente coppia di spunto. Aumentare l’impostazione Current Limit.NOT START
Motore sovraccaricato. Controllare l’adeguatezza del carico motore.Controllare il calettamento degli accoppiamenti.Verificare il dimensionamento appropriato del controllo e del motore.
Parametro motor field errato. Cambiare su Shunt o PERM Magnet come necessario.
Controllo non in modo locale difunzionamento.
Porre il controllo in modo locale.
Parametro MAX output speedimpostato su zero (0).
Cambiare parametro MAX Output Speed, Output Limits di Livello 2.
Parametro Command Select errato. Cambiare il parametro Command Select affinché corrisponda al cablaggiosu J1.
Comando speed errato. Verificare se il controllo riceve il segnale comando adeguato su J1.
Parametri Motor Field Volts o FieldAmps errati.
Cambiare parametri Field Volts o Field Amps, Motor Data di Livello 2.
MOTOR WILLNOT REACHMAXIMUM
Max Output Speed impostato troppobasso.
Regolare il valore del parametro MAX Output Speed.
MAXIMUMSPEED Motore sovraccaricato. Verificare il sovraccarico meccanico. Se l’albero motore in assenza di
carico non ruota liberamente, controllare i cuscinetti del motore.
Comando velocità inadeguato. Verificare se il controllo è impostato nel modo operativo appropriato perricevere il comando speed.Verificare se il controllo riceve l’appropriato segnale di comando suimorsetti di ingresso.Controllare i guadagni del circuito velocità.
Parametri Motor Field Volts o FieldAmps errati.
Cambiare parametri Field Volts o Field Amps, Motor Data di Livello 2.
Potenziometro velocità guasto. Sostituire il potenziometro.
MOTOR WILLNOT STOPROTATION
Parametro MIN Output Speedimpostato troppo alto.
Regolare il valore del parametro MIN Output Speed.
ROTATIONComando velocità inadeguato. Verificare se il controllo riceve l’appropriato segnale di comando sui
morsetti di ingresso.Verificare se il controllo è impostato per ricevere il comando velocità.
Potenziometro velocità guasto. Sostituire il potenziometro.
Se si usa Armature feedback ecomando 0 speed.
Il motore si arresta quando è premuto il tasto STOP o si disabilita ilcontrollo. Aggiungere TACH o Encoder feedback per migliorare laprestazione a velocità zero.
MOTOR WILLNOT REVERSE
Parametro controllo errato. Cambiare a REGEN il parametro Operating Zone, blocco Output Limits diLivello 2.

Capitolo 1Informazioni Generali
Ricerca Guasti 4-7IMN720IT
Tabella 4-4 Ricerca guasti Continua
INDICAZIONE CAUSA POSSIBILE AZIONE CORRETTIVANO DISPLAY Assenza della tensione di ingresso. Controllare che la tensione di ingresso sia adeguata.
Verificare l’integrità dei fusibili (e che l’interruttore automatico non siascattato).
Connessioni lasche. Controllare la terminazione dell’alimentazione di ingresso.Verificare le connessioni della tastiera operatore.
Regolare il contrasto display. Vedere Regolazione del Contrasto nel Capitolo 2 di questo manuale.I fili encoder +VDC e comuni sonoprobabilmente invertiti.
Verificare le connessioni encoder e correggere eventuali errori.
NEW BASE ID I parametri software non sonoinizializzati sulla scheda di controllo appena installata
Premere il tasto “RESET” sulla tastiera per azzerare la condizione dierrore. Ciclare l’alimentazione (spegnere e riaccendere). Ripristinare ivalori dei parametri alle impostazioni di fabbrica. Accedere alla diagnosticae confrontare il numero power base ID da elencare nella Tabella 4-5 perassicurarne la corrispondenza. Reintrodurre i Valori del Blocco Parametriregistrato nelle impostazioni utente alla fine di questo manuale.Autocalibrare il controllo.
NO EXBINSTALLED
Errato modo operativoprogrammato.
Cambiare Modo Operativo nel blocco Livello 1 Input con uno che nonrichieda la scheda di espansione.S
Necessita scheda di espansione. Installare la scheda di espansione corretta per il modo operativoselezionato.
EXB difettosa. Verificare le connessioni della scheda verso il controllo o altra scheda delgruppo. Consultare il manuale della scheda di espansione per correggerele connessioni. Chiamare Baldor se l’errore persiste.
OVERCURRENT Parametro Current Limit impostatotroppo veloce per commutazionemotore.
Aumentare il parametro PK Current Limit nel blocco di Livello 2 Output Limits, non deve superare il valore del drive.
Tempo ACCEL/DECEL troppobreve.
Aumentare i parametri ACCEL/DEC nel blocco Livello 1 ACCEL/DECELRate.
Interferenza elettrica dalle bobineDC esterne.
Installare i diodi a polarizzazione inversa su tutte le bobine dei relè DCesterne come illustrato negli esempi del circuito Uscite Opto di questomanuale. Consultare Considerazioni sull’Interferenza Elettrica nel Capitolo4 di questo manuale.
Interferenza elettrica dalle bobineAC esterne.
Installare stabilizzatori RC su tutte le bobine AC esterne. ConsultareConsiderazioni sull’Interferenza Elettrica nel Capitolo 4 di questo manuale.
Eccessivo carico. Ridurre il carico motore.Verificare il dimensionamento appropriato del controllo e del motore.
Parametro Current Rate Limitimpostato troppo veloce percommutazione motore.
Aumentare il valore tempo del parametro CUR Rate Limit, blocco OutputLimits di Livello 2.
OVERLOAD Eccessiva corrente. Controllare il parametro PK Current Limit nel blocco Output Limits di Livello2.Cambiare il parametro Overload nel blocco Protection di Livello 2
da Trip a Foldback.Controllare il sovraccarico del motore.Aumentare i tempi ACCEL/DECEL.Ridurre il carico motore.Verificare il dimensionamento appropriato del controllo e del motore.
OVER SPEED Il motore ha superato il 110 % delvalore parametro MAX Speed.
Verificare il parametro Max Output Speed, blocco Output Limits di Livello2.Aumentare il parametro Speed PROP Gain, blocco DC Control di Livello 1.
TORQUE PROVE La corrente misurata verso il motoreera insufficiente.
Verificare la continuità dal controllo agli avvolgimenti motore e controllarele connessioni motore e le spazzole. Questa verifica viene eseguitasoltanto quando il motore è avviato e quando il controllo è abilitato per laprima volta.
UNKNOWN Rilevato guasto, ma è statoazzerato prima di identificarne lasorgente.
Controllare la linea AC per verificare l’interferenza da alta frequenza.Controllare le connessioni dell’interruttore d’ingresso e l’interferenza dicommutazione.Verificare le connessioni di massa sul Controllo e sul Motore.
USER FAULTTEXT
Errore rilevato da software cliente. Riferirsi all’elenco errori del software cliente.

Capitolo 1Informazioni Generali
4-8 Ricerca Guasti IMN720IT
Tabella 4-5 ID Base Alimentazione – Serie 20H
Controllo 230 VACNumeri di Catalogo
IDBaseAlim
Controllo 460 VACNumeri di Catalogo
IDBaseAlim.Numeri di Catalogo Ali m.
BC20H410-CL 33CBC20H205-CL 2F2 BC20H420-CL 344BC20H210-CL SFA BC20H430-CL 34CBC20H215-CL 302 BC20H440-CL 354BC20H220-CL 30A BC20H450-CL 35CBC20H225-CL 312 BC20H475-CL 364BC20H240-CL 31A BC20H4100-CL 36CBC20H250-CL 322 BC20H4125-CL 374BC20H260-CL 32A BC20H4150-CL 37CBC20H275-CL 332 BC20H4200-CL 3A4
BC20H4250-CL 384BC20H4300-CL 38CBC20H4400-EL 1ACBC20H4500-EL 194BC20H4600-EL 19C
Nota: Il numero ID Base Alimentazione di un controllo è visualizzato in uno schermoInformazione Diagnostica come valore esadecimale.

Capitolo 1Informazioni Generali
Ricerca Guasti 4-9IMN720IT
Test Point della Scheda Circuito di Controllo
Figura 4-1 Descrizione dei Test Point
JP11 2 3
Pin Segnale di Comando1 e 2 Tensione2 e 3 4-20 mA
Test Point J6
AV ARM Volts (5 VDC=+1000, 2,5 VDC=0, 0 VDC=–1000)AI ARM Current (5 VDC=125 % del nominale, 0 VDC=–125 %
del nominaleFI Field Current (5 VDC=50 AT, 0 VDC=0 AT)TH Temperatura termodispersore (4 VDC=100 °C)
GNDMassa

Capitolo 1Informazioni Generali
4-10 Ricerca Guasti IMN720IT
Considerazioni sull’Interferenza Elettrica Tutti i dispositivi elettronici compreso il Controllo Serie 20H sonovulnerabili a significativi segnali di interferenza elettronica (comunemente chiamati“Interferenza Elettrica”). Al livello inferiore, l’interferenza può causare errori o guastioperativi intermittenti. Dal punto di vista di un circuito, 5 o 10 millivolt di interferenzapossono causare un funzionamento pregiudizievole. Per esempio, la velocità analogica egli ingressi di coppia sono spesso scalati da 5 a 10 VDC massimo con una risoluzionetipica di una parte su 1 000. Così l’interferenza di solo 5 mv rappresenta un erroresostanziale.
Al livello estremo, un’interferenza significativa può danneggiare il drive. Perciò, sisuggerisce di prevenire la generazione di interferenze e seguire pratiche di cablaggio perevitare che l’interferenza generata da altri dispositivi raggiunga i circuiti sensibili. In uncontrollo, tali circuiti comprendono gli ingressi per la velocità, la coppia, la logica dicontrollo e la retroazione della velocità e posizione, più le uscite ad alcuni indicatori ecomputer.
Cause e Rimedi L’interferenza elettrica indesiderata può essere prodotta da molte fonti. A seconda dellafonte, possono essere usati vari metodi per ridurre gli effetti di questa interferenza eridurre l’accoppiamento con i circuiti sensibili. Tutti i metodi sono meno costosi quandoprevisti inizialmente in un sistema di quando invece aggiunti dopo l’installazione.
La Figura 4-2 illustra la traccia oscilloscopio di interferenza indotta (all’apertura delcircuito bobina) in un filo lungo 0,33 m posto presso un conduttore per una bobina dicontattore Tipo 2. L’impedenza di ingresso dell’oscilloscopio è 10 K� per tutte le tracceoscilloscopio. La tensione di picco massima supera 40 V. Se non correttamente filtrataquesta è spesso interferenza sufficiente a rovinare l’output di una macchina produttiva.
Figura 4-2 Visualizzazione Interferenza Elettrica
Bobine di Relè e Contattori Fra le più comuni fonti di interferenza sono le bobine sempre presenti di contattori erelè. Quando questi circuiti di bobina altamente induttivi sono aperti, le condizioni deitransitori spesso generano picchi di alcune centinaia di volt nel circuito di controllo.Questi picchi possono indurre parecchi volt di interferenza in un filo adiacente stesoparallelamente ad un filo del controllo circuito.
Per sopprimere l’interferenza in queste bobine AC, aggiungere uno stabilizzatore R-C fraogni bobina di relè e contattore. Uno stabilizzatore composto da un resistore 33 K� inserie con un condensatore 0,47 �f generalmente opera correttamente. Lo stabilizzatoreriduce il valore dell’altezza e della tensione del picco nella bobina quando è interrotto ilflusso di corrente. Ciò elimina la formazione dell’arco e riduce la tensione di interferenzaindotta nei fili adiacenti. Nel nostro esempio, l’interferenza è stata ridotta da oltre 40 V dipicco a circa 16 V di picco come illustrato in Figura 4-3.
Figura 4-3 Circuito Stabilizzatore R-C

Capitolo 1Informazioni Generali
Ricerca Guasti 4-11IMN720IT
Considerazioni sull’Interferenza Elettrica Continua
La combinazione di uno stabilizzatore R-C e di un cavo doppino avvolto schermato tienela tensione in un circuito a meno di 2 V per una frazione di un millisecondo. La formad’onda illustrata in Figura 4-4 in aggiunta allo stabilizzatore per la bobina, il filo adiacenteè posto a massa in un doppino avvolto, cavo schermato. Notare che la scala verticale è1 V/div., anziché 20 V/div. come in Figura 4-2 e 4-3. Ciò indica che gli stabilizzatori e icavi a doppino avvolti schermati devono essere usati per circuiti sensibili posti adiacentiai fili della bobina.
Figura 4-4 Circuito Stabilizzatore R-C e Doppino Avvolto
Un diodo a polarizzazione inversa su bobina DC raggiunge lo stesso risultatodell’aggiunta di uno stabilizzatore R-C su bobina AC, Figura 4-5.
Figura 4-5 Soppressione Interferenza di Bobine AC e DC
Bobina AC
BobinaDC
Stabilizzatore RC
0,47 �fDiodo
–
+
33 �

Capitolo 1Informazioni Generali
4-12 Ricerca Guasti IMN720IT
Considerazioni sull’Interferenza Elettrica ContinuaFili tra Controlli e Motori
I conduttori di uscita da un tipico drive controller 460 VAC contiene rapide salite ditensione create dai semiconduttori di potenza che commutano 650 V in meno di unmicrosecondo, da 1 000 a 10 000 volte al secondo. Questi segnali di interferenzapossono accoppiarsi con circuiti di comando sensibili, come illustrato in Figura 4-6. Perquesta forma d’onda, viene indotto un transitorio in un filo di 0,33 m adiacente alconduttore del motore di un drive 10 hp, 460 VAC. L’oscilloscopio è posto a 5 V/div. e 2�sec/div.
Figura 4-6 Drive 460 VAC, 10HP
Se è utilizzato il cavo doppino schermato, l’accoppiamento è ridotto di circa il 90 %,Figura 4-7.
Figura 4-7 Drive 460 VAC, 10HP, Schermato
I conduttori del motore di motori DC contengono analoghi transitori di tensione. Il tasso dicommutazione è circa circa 360 volte al secondo. Questi transitori di interferenzapossono produrre circa 2 V di interferenza indotta in un filo adiacente al conduttore delmotore. Un Drive 500 VDC, 30HP, come illustrato in Figura 4-8. L’oscilloscopio èimpostato a 1 V/div. e 5 �sec/div.
Figura 4-8 Drive 500 VDC, 30HP
Inoltre, la sostituzione di un filo singolo con un cavo doppino schermato riducel’interferenza indotta a meno di 0,3 V, Figura 4-9.
Figura 4-9 Drive 500 VDC, 30HP, Schermato

Capitolo 1Informazioni Generali
Ricerca Guasti 4-13IMN720IT
Considerazioni sull’Interferenza Elettrica Continua
Anche le linee di alimentazione AC in ingresso contengono interferenza e possonoindurre interferenza nei fili adiacenti. Ciò è specialmente grave con i drive DC controllatiSCR, corrente sorgente e invertitori a sei stadi. La Figura 4-10 illustra un transitorioindotto in un filo di 0,33 m adiacente ad un filo dell’alimentazione di ingresso AC ad undrive DC, 20 hp. L’oscilloscopio è impostato su 500 mV/div. e 2 �sec/div.
Figura 4-10 Drive 500 VDC, 30HP, Schermato
Per evitare interferenza da transitori indotti nei fili dei segnali, tutti i conduttori del motoree le linee di alimentazione AC devono essere contenute in un tubo protettivo metallicorigido, o in un tubo flessibile. Non porre conduttori di linea e conduttori di carichi nellostesso tubo di protezione. Usare tubi di protezione separati per i fili di ingresso trifase e iconduttori di motori. Il tubo di protezione deve essere posto a massa per formare unoschermo che contenga le interferenze elettriche entro il percorso del tubo. I fili dei segnali– anche quelli in cavi schermati non devono essere posti nel tubo di protezione con fili dialimentazione di motori.
Se è richiesto il tubo di protezione flessibile, i fili devono essere doppini avvolti schermati.Quantunque questa pratica fornisca protezione migliore di fili non schermati, ad essamanca la protezione offerta dai tubi di protezione metallici.
Drive in Situazioni Speciali Per situazioni di grave interferenza, può rendersi necessario ridurre le tensioni deitransitori nei fili che vanno al motore aggiungendo reattori di carico. I reattori di caricosono installati tra il controllo e il motore. Questi sono sovente richiesti quando la carcassadel motore manca della schermatura necessaria (tipicamente motori lineari montatidirettamente sui telai macchina) o dove i fili di alimentazione del motore sono contenuti incavi flessibili.
I reattori sono tipicamente reattanze al 3 % e sono previsti per le frequenze incontrate neidrive PWM. Per ottimizzare il beneficio, i reattori devono essere montati nella protezionedel drive con conduttori corti tra il controllo e i reattori. Baldor offre una linea completa direattori di linea e di carico che riducono la corrente di ondulazione ed aumentano la vitadel motore.
Linee di Alimentazione Drive Lo stesso tipo di reattore installato sul lato del carico del controllo può anchesopprimere transitori sulle linee di alimentazione entranti. Collegato sul lato linea deldrive, il reattore protegge il drive a velocità regolabile da alcuni transitori generati da altraapparecchiatura e sopprime alcuni transitori prodotti dal drive stesso.
Radiotrasmettitori Non è una causa comune di interferenza, ma i trasmettitori in radiofrequenza, come lestazioni commerciali di radio diffusione, stazioni fisse ad onda corta e apparecchiatura dicomunicazione mobile (compresi i radiotelefoni portatili) creano interferenza elettrica. Laprobabilità che questa interferenza influisca sul drive a velocità regolabile aumenta conl’uso di protezioni aperte del controllo, cablaggio aperto e insufficiente messa a massa.

Capitolo 1Informazioni Generali
4-14 Ricerca Guasti IMN720IT
Considerazioni sull’Interferenza Elettrica Continua
Protezioni del Controllo I controlli del motore montati in una protezione a massa devono anche essere connessi aterra con un conduttore separato per ottimizzare il collegamento a massa. Sovente lamessa a massa del controllo sulla protezione metallica a massa è insufficiente. Lesuperfici verniciate e le guarnizioni generalmente prevengono il contatto solido metallicotra il controllo e la protezione pannello. Analogamente, il tubo di protezione non deveessere usato come conduttore di massa per i fili di alimentazione motore o i conduttori disegnali.
Considerazioni Speciali sul Motore I telai dei motori sono anche sull’elenco di messa a massa. Come per leprotezioni dei controlli, i motori devono essere posti a massa direttamente sul controllo esulla massa dell’impianto con un filo di massa il più corto possibile. Ecco perché.L’accoppiamento capacitivo negli avvolgimenti del motore produce tensioni di transitoritra il telaio motore e la massa. La gravità di queste tensioni aumentano con la lunghezzadel filo di massa. Le installazioni con il motore e il controllo montati sul telaio comune, econ pesanti fili di massa inferiori alla lunghezza di 3,3 m, raramente hanno problemicausati da queste tensioni di transitori generati dal motore.
Un altro rimedio può rendersi necessario quando le tensioni dei transitori del telaiomotore sono capacitivamente accoppiate ai dispositivi di retroazione montati sull’alberomotore. Specialmente con codificatori ottici, questi transitori creano interferenza suiconduttori di segnali e disturbano il funzionamento del drive.
Per evitare questo problema, aggiungere un isolamento elettrico tra il motore ed ildispositivo di retroazione per arrestare il flusso di corrente ed i relativi transitori. Il metodopiù semplice di isolamento, illustrato in Figura 4-11, è composto da due parti: 1) Unapiastra di materiale per isolamento elettrico posta tra la superficie di montaggio delmotore ed il dispositivo di retroazione. 2) Un accoppiamento isolante tra l’albero motoree l’albero del dispositivo di retroazione.
Figura 4-11 Metodo di Montaggio Isolato
Piastra Isolante
Accoppiamento Isolante
Encoder o altrodispositivo di retroazione
Mensola

Capitolo 1Informazioni Generali
Ricerca Guasti 4-15IMN720IT
Norme di CablaggioIl tipo di filo usato e il modo in cui è installato per le applicazioni specifiche fanno ladifferenza tra l’ottenimento di un funzionamento affidabile e la creazione di problemiaggiuntivi.
Cablaggio dell’Alimentazione I conduttori di trasporto potenza per apparecchi (per esempio motore, riscaldatore,bobina freno, o unità illuminanti) devono essere contenuti in un tubo di protezioneconduttivo posto a massa ad entrambe le estremità. Questi fili di potenza devono essereinstradati in tubi di protezione separatamente dal cablaggio segnali e controllo.
Conduttori di Controllo-logica Tipicamente, i controlli dell’operatore (pulsanti e interruttori), contatti a relè,interruttori di limite, PLC I/O, visualizzatori operatore e relè e bobine di contattori operanoa 115 VAC o 24 VDC. Quantunque questi dispositivi generalmente operino a bassi livellidi corrente, contengono interferenza di commutazione causata dal contatto aperto/chiusoe dalle operazioni degli interrutori allo stato solido. Perciò, questi fili devono essereinstradati lontano dai fili sensibili per segnali e contenuti in tubi di protezione o raccoltilontano dai fili aperti di alimentazione e di segnali.
Circuiti Tachimetrici DC Fra i circuiti più sensibili vi è il Tachimetro DC. L’affidabilità di un circuito tachimetrico DCè sovente migliorata dalle seguenti tecniche di riduzione interferenza:
• Collegare un condensatore 0,1 �F ai morsetti del tachimetro per sopprimerel’interferenza AC.
• Usare fili doppini avvolti schermati con schermatura posta a massa soloall’estremità del controllo. Evitare di porre a massa la schermatura sulla scatolao sul tubo di protezione del tachimetro.
• Seguire le norme di cablaggio per i segnali analogici.Fili di Segnali Analogici I segnali analogici generalmente hanno origine dai controlli velocità e coppia, più dai
tachimetri DC e dai controllori di processo. L’affidabilità è sovente migliorata dalleseguenti tecniche di riduzione interferenza:
• Usare doppini avvolti schermati con schermatura a massa solo all’estremità deldrive.
• Instradare i fili dei segnali analogici lontano dai fili di alimentazione e controllo(tutti gli altri tipi di cablaggio).
• Incrociare i fili di alimentazione e di controllo ad angolo retto (90°) per ridurrel’accoppiamento di interferenza induttiva.
Circuiti Encoder I drive a velocità regolabile sono fortemente sensibili all’interferenza da alta frequenzasulle linee dei segnali encoder. Poiché questi segnali di ingresso non possono esserealtamente filtrati occorre prestare particolare attenzione per evitare che l’interferenza deitransitori entri nelle linee di questi segnali. L’affidabilità del drive può essere fortementemigliorata usando le seguenti tecniche di riduzione interferenza:
• Usare encoder con uscita line driver per ridurre l’impedenza dell’uscita encoder.
• Selezionare ingressi line driver sul drive a velocità regolabile.
• Installare il filo schermato del doppino avvolto per l’alimentazione all’encoder etenere l’uscita di ognuno con il proprio ritorno. (Evitare conduttori comuni conuscite multiple o con un’uscita e la fonte di alimentazione.)
• Non collegare la massa dell’encoder al morsetto di massa di alimentazione delcontrollo.
• Posare tutti i fili dell’encoder indipendentemente da tutti gli altri fili dialimentazione.
Conduttori di Comunicazione Seriale I cavi standard di comunicazione seriale sono generalmente fabbricati conuna schermatura collegata al guscio del connettore ad entrambe le estremità.Generalmente pone a massa la sorgente dati sul telaio del drive a massa. Se la sorgentedati è flottante, tale collegamento offre una buona trasmissione dati. Tuttavia, se lasorgente dati è posta a massa, aggiungendo un pesante filo di massa (#14 o superiore)in parallelo con il cavo di comunicazione tra la sorgente e il telaio del drive generalmentesi riducono i problemi di interferenza.

Capitolo 1Informazioni Generali
4-16 Ricerca Guasti IMN720IT
Isolamento OtticoL’isolamento dei circuiti elettrici con alcune forme di trasmissioni della luce riducel’interferenza elettrica trasmessa da una parte del circuito all’altra. Cioè, il segnaleelettrico è convertito in un segnale ottico che viene trasmesso ad un ricevitore ottico.Questo riconverte la luce nuovamente nel segnale elettrico che contiene menointerferenza dell’input. Sono comunemente usati due metodi; gli accoppiatori ottici e lefibre ottiche.
Accoppiatori Ottici Gli accoppiatori ottici, sovente sono riferiti come opto accoppiatori usano un trasmettitoredi luce e un ricevitore di luce nella stessa unità di trasmissione dati isolandoelettricamente due circuiti. Questo isolamento scarta alcune interferenze. La grandezzadello scarto interferenza è generalmente specificata dallo “scarto modo comune, valoredv/dt”. Tipicamente, gli opto accoppiatori a basso costo hanno uno scarto modo comuneda 100 a 500 V/� sec, che è adeguato per la maggior parte dei segnali logici di controllo.Gli opto accoppiatori ad alta prestazione con valori modo comune fino a 5.000 V/� secsono installati negli ambienti con interferenze gravose.
Fibre Ottiche Trefoli di fibre di plastica speciali che trasmettono la luce su lunghe e corte distanze.Poiché le fibre sono immuni da energia elettromagnetica, l’uso di mazzi di fibre otticheeliminano il problema dell’interferenza di accoppiamento in tali circuiti. Questi cavi a fibraottica esenti da interferenza possono essere posati con conduttori di alimentazione o dimotori perché l’interferenza non può essere accoppiata in modo induttivo o capacitivo neitrefoli delle fibre ottiche.
Massa dell’Impianto Il collegamento di apparecchiatura elettrica ad una massa efficace è essenziale per lasicurezza e l’affidabilità di funzionamento. In molti casi, ciò che è percepito come massanon lo è. Conseguenza: malfunzionamenti dell’apparecchiatura o esistenza del rischio di scossaelettrica.
Può rendersi necessario avere l’assistenza di un esperto in campo elettrico che sia ancheun tecnico professionista patentato e con esperienza sulle norme di messa a terra pereffettuare le necessarie misurazioni onde stabilire se la massa dell’impianto è realmentea terra.

Capitolo 5Specifiche e Dati Prodotto
Specifiche e Dati Prodotto 5-1IMN720IT
Specifiche:
Protezione: Tipo aperto (Montaggio su telaio)
Potenza 2 – 50 HP @ 115VAC3 – 125 HP @ 230VAC5 – 600 HP @ 460VAC
Frequenza d’Ingresso 50/60 Hz ± 5 %
Tensione di Uscita 0 a (1,13 x VAC Ingresso)VDC (REGEN)0 a (1,30 x VAC Ingresso)VDC (UNIDIREZIONALE)
Corrente di Uscita Vedere Tabella Valori 5-1
Coefficente di Impiego 1,0
Utilizzo Continuativo
Capacità Sovraccarico Vedere Tabella Valori 5-1
Temperatura Magazzino: da –30 °C a +65 °C
Condizioni Operative:
Gamma Tensione: Modelli 115 VACModelli 230 VACModelli 460 VAC�
105-130 VAC 3� 60 Hz180-264 VAC 3� 60 Hz / 180-230 VAC 3� 50 Hz340-528 VAC 3� 60 Hz / 340-460 VAC 3� 50 Hz
Variazione Frequenza di Ingresso ±5 %, 8,0 Hz/Secondo Max Velocità di Risposta
Impedenza Linea di Ingresso: 5 % Massimo
Temperatura Operativa Ambiente: da 0 a +40 °CRiduzione Uscita 2 % per °C oltre 40 °C a 55 °C Max
Temperatura ambiente: 0 °C fino a +40 °C
Umidità: Da 10 a 90 % RH senza condensa
Altitudine: Dal livello del mare a 3300 Piedi (1000 metri)Riduzione 2 % per 1000 Piedi (303 metri) oltre 3300 Piedi
� Il controllo 460 VAC richiede 230 VAC 1� per le ventole di raffreddamento su alcuni controlli tipo B e C. VedereTabella 5-1.

Capitolo 1Informazioni Generali
5-2 Specifiche e Dati Prodotto IMN720IT
Display di Tastiera:
Display LCD Alfanumerico Retroilluminato 2 Linee x 16 Caratteri
Tasti 12 tasti a membrana con risposta tattile
Funzioni Monitoraggio stato uscitaControllo velocità digitaleImpostazione parametri e visualizzazioneVisualizzazione diagnostica e log erroriFunzionamento e jog motoreLocale/Remoto ciclico
Indicatori LED Comando funzionamento AvantiComando funzionamento IndietroComando Stop Jog attivo
Montaggio Remoto 100 piedi (30,3 m) massimo dal controllo
Specifiche di Controllo:
Metodo di Controllo Controllo trifase, onda intera, DC a ricupero bidirezionale con 6 impulsitotali per ciclo e 6 impulsi controllati per ciclo. NEMA Tipo C.
Tipo Retroazione a Regolazione Velocità:IndottoEncoderTachimetro (opzionale)Resolver (opzionale)
1 % velocità base0,1 % velocità impostata1 % velocità impostata0,1 % velocità impostata
Corrente (Valore Limite) – Tempo per corrente dipicco
0,008 secondi – 1,0 secondi
Tempo Accel/Decel 0 – 3600 Secondi per 2 preimpostazioni assegnabili più JOG
Tempo Curva S 0 – 100 %
Velocità JOG 0 – Massima velocità
Velocità Uscita Minima 0 – Massima velocità
Velocità Uscita Massima 0 – Massima velocità
Riavvio Auto Manuale o Automatico
Guadagno Compensazione IR Disponibile per Retroazione Indotto
Ampiezza Banda Velocity Loop Regolabile a 20 Hz
Ampiezza Banda Current Loop Regolabile a 70 Hz
Modi Operativi Selezionabili TastieraEsecuzione Standard 3 FiliControllo a 2 Fili con 15 PreimpostazioniSerialeVelocità/Coppia BipolareModo ProcessoParanco BipolareParanco 7 Velocità, 2 Fili

Capitolo 1Informazioni Generali
Specifiche e Dati Prodotto 5-3IMN720IT
Alimentazione Campo:
Tipo Tensione Limitata, Corrente Regolata Onda Intera Monofase
Tensione 0 – 85 % dell’Ingresso Linea AC (in Volt DC)
Corrente 0,1 – 15 Ampere massimo standard (Standard a 300HP)0,3 – 40 Ampere massimo opzionale (Standard ≥400HP)Off per Motori a Magnete Permanente
Livello Economia Campo Off, 25 – 100 %
Livello Forzatura Campo (solo modi paranco) 100 – 125 %
Ingresso Analogico Differenziale:
Scarto Modo Comune 40 db
Gamma Reale ±5 VDC, ±10 VDC, 4-20 mA
Risoluzioni Auto-selezionabili 12 bit + segno sotto comando 1 VDC 9 bit + segno sopra comando 1 VDC
Rinfresco 2,7 msec con linea 60 Hz
Altro Ingresso Analogico:
Gamma Reale ±10 VDC
Risoluzione 9 bit + segno
Rinfresco 2,7 msec con linea 60 Hz
Uscite Analogiche:
Uscite Analogiche 2 Assegnabili
Gamma Reale 0 – 5 VDC
Corrente Sorgente 1 mA massimo
Risoluzione 8 bit
Rinfresco 2,7 msec con linea 60 Hz

Capitolo 1Informazioni Generali
5-4 Specifiche e Dati Prodotto IMN720IT
Ingressi Digitali:
Ingressi Logici Opto-isolati 9 Assegnabili
Tensione Nominale 10 – 30 VDC (contatti chiusi standard)
Impedenza di Ingresso 6,8 K Ohm
Corrente di Dispersione 10 �A massimo
Rinfresco 16,6 msec
Uscite Digitali:
Uscite Logiche Opto-isolate 4 Assegnabili
ON Assorbimento Corrente 60 mA Max
ON Caduta Tensione 2 VDC Max
Rinfresco 16,6 msec
Massima Tensione 30 VDC
Indicazioni Diagnostiche:
Guasto Rilevamento Corrente Pronto Following Error
Sovracorrente Istantanea Perdita Parametri Perdita Encoder
Errore Microprocessore Sovraccarico Perdita Tachimetro
Sovratemperatura (Controllo) Prova Coppia Perdita Campo
Sovravelocità Errore Scheda Espansione Perdita Resolver
Guasto Rilevamento Tensione Indotto External Trip (Sovratemperatura Mo-tore)
Errato ID Base Alimentazione
Errore Rilevamento Campo Guasto Linea Alta Perdita Fase
Verifica Ponticelli Tachimetro Guasto Linea Bassa
Nota: Tutte le specifiche sono soggette a modifica senza preavviso.

Capitolo 1Informazioni Generali
Specifiche e Dati Prodotto 5-5IMN720IT
Valori
Tabella 5-1 Valori
Uscita MaxTensione Req isitiVAC
Ingr.NumeroCatalogo Volt HP kW
AmpRMS Amp
PiccoTIPO
TensioneSoffiante di
Raffreddamento
RequisitiAlimentazione
Soffiante
115 BC20H103-CL 140 3 2,2 20 60 A – –115 BC20H107-CL 140 7 5,2 40 120 A – –115 BC20H110-CL 140 10 7,5 60 150 A – –115 BC20H115-CL 140 15 11,2 75 190 B – –115 BC20H120-CL 140 20 14,9 100 250 B ��115VAC 1x24 Watt115 BC20H125-CL 140 25 18,6 140 420 C ��115 VAC 2x24 Watt115 BC20H135-CL 140 35 26 180 480 C ��115 VAC 2x24 Watt115 BC20H140-CL 140 40 29,8 210 540 C ��115VAC 2x24 Watt115 BC20H15-CL 140 50 37,3 270 680 C ��115VAC 1x1,9 Watt230 BC20H205-CL 240 5 3,7 20 40 A – –230 BC20H210-CL 240 10 7,5 40 60 A – –230 BC20H215-CL 240 15 11,2 60 120 A – –230 BC20H220-CL 240 20 14,9 75 150 B – –230 BC20H225-CL 240 25 18,6 100 200 B 230 VAC 1x24 Watt230 BC20H240-CL 240 40 29,8 140 280 C 230 VAC 2x24 Watt230 BC20H250-CL 240 50 37,3 180 360 C 230 VAC 2x24 Watt230 BC20H260-CL 240 60 44,8 210 420 C 230 VAC 2x24 Watt230 BC20H275-CL 240 75 56 270 540 C 230/460 VAC 1x 0,95 A/0,48 A230 BC20H2125-CL 240 125 93 420 1050 D 230/460 VAC 1x 0,95 A/0,48 A460 BC20H410-CL 500 10 7,5 20 40 A – –460 BC20H420-CL 500 20 14,9 40 80 A – –460 BC20H430-CL 500 30 22,4 60 120 A – –460 BC20H440-CL 500 40 29,8 75 150 B – –460 BC20H450-CL 500 50 37,3 100 200 B � 115VAC 1x24 Watt460 BC20H475-CL 500 75 56 140 280 C � 115VAC 2x24 Watt460 BC20H4100-CL 500 100 74,6 180 360 C � 115VAC 2x24 Watt460 BC20H4125-CL 500 125 93 210 420 C 230/460 VAC 1x 0,95 A/0,48 A460 BC20H4150-CL 500 150 112 270 540 C 230/460 VAC 1x 0,95 A/0,48 A460 BC20H4200-CL 500 200 149 350 875 D 230/460 VAC 1x 0,95 A/0,48 A460 BC20H4250-CL 500 250 187 420 840 D 230/460 VAC 1x 0,95 A/0,48 A460 BC20H4300-CL 500 300 224 500 1000 D 230/460 VAC 1x 0,95 A/0,48 A460 BC20H4400-EL 500 400 298 670 1340 G – Connessione In-
terna460 BC20H4500-EL 500 500 373 840 1680 G – Connessione In-
terna460 BC20H4600–EL 500 600 448 960 1920 G – Connessione In-
terna
� I controlli costruiti prima del secondo trimestre 1996 hanno ventole 230 VAC.
Gli Ampere Picco sono Nominali per 3 Sec Massimo. 150 % degli ampere motore – 60 secondi 200 % degli ampere motore – 8 secondi 300 % degli ampere motore – 3 secondi (Entro i limiti di capacità corrente di picco del controllo)
Nota: Tutte le specifiche sono soggette a modifica senza preavviso.

Capitolo 1Informazioni Generali
5-6 Specifiche e Dati Prodotto IMN720IT
Specifiche Coppia
Tabella 5-2 Specifiche per la Coppia di Serraggio
N mero di L1 L2 & L3 A1 A2 Potenza J1Capo-corda Morsetti Massa
Numero diCatalo go
L1, L2 & L3 A1 A2 PotenzaCampo
J1 cor daMassa
MorsettiTermici
Massa Controllo
CatalogoLb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm
BC20H103–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H107–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H110–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H115–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H120–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H125–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H135–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H140–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H150–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H205–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H210–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H215–CL 160 18,1 30 3,4 30 3,4 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H220–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H225–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H240–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H250–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H260–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H275–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H410–CL 160 18,1 30 3,4 30 3,5 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H420–CL 160 18,1 30 3,4 30 3,5 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H430–CL 160 18,1 30 3,4 30 3,5 12 1,4 7 0,8 50 5,6 5 0,56 5 0,56
BC20H440–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H450–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H475–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4100–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4125–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4150–CL 275 31 200 22,6 275 31 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4200–CL 375 42,4 375 42,4 375 42,4 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4250–CL 375 42,4 375 42,4 375 42,4 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4300–CL 375 42,4 375 42,4 375 42,4 5 0,56 7 0,8 200 22,6 5 0,56 5 0,56
BC20H4400–EL 375 42,4 375 42,4 375 42,4 32 3,5 7 0,8 375 42,4 5 0,56 5 0,56
BC20H4500–EL 375 42,4 375 42,4 375 42,4 32 3,5 7 0,8 375 42,4 5 0,56 5 0,56
BC20H4600–EL 375 42,4 375 42,4 375 42,4 32 3,5 7 0,8 375 42,4 5 0,56 5 0,56

Capitolo 1Informazioni Generali
Specifiche e Dati Prodotto 5-7IMN720IT

Capitolo 1Informazioni Generali
5-8 Specifiche e Dati Prodotto IMN720IT
Schema di Interconnessione
Controlli Tipo A – D

Specifiche e Dati Prodotto 5-9IMN720IT
MN720 captions page 5–7
BLOWER OR FANS = SOFFIANTI O VENTOLESCR INTERFACE = GRUPPO INTERFACCIA SCRFIELD POWER = MODULO ALIMENTAZIONE CAMPOLINEAR = SENSORE LINEARE TEMPERATURAFEEDBACK = GRUPPO FEEDBACKARM CURRENT = RILEV CORR ROTARM VOLT = RILEV VOLT ROTARMATURE SCR = CONTROLLO SCR ROTOREBASE I.D. SCHEDA I.D. BASELINE = RIFERIMENTO LINEAFIELD SCR = CONTROLLO SCR CAMPOLINEAR TEMP = SENSORE LIN TEMPKEYPAD INTERFACE = INTERFACCIA TASTIERAEXPANSION = PORTA SCHEDA ESPANSIONECUSTOMER LEVEL1 = I/O LIVELLO 1 CLIENTE CUSTOMER LEVEL2 = I/O LIVELLO 2 CLIENTECONTROL BOARD = SCHEDA CONTROLLOKEYPAD ASSEMBLY = GRUPPO TASTIERALEVEL1 = SCHEDA ESPANSIONE LIVELLO 1LEVEL2 = SCHEDA ESPANSIONE LIVELLO 2
NOTE:1GLI SCR DISPARI CONDUCONO CORRENTE FORWARD IN A1.GLI SCR PARI CONDUCONO CORRENTE REVERSE.2F– F* F8 E F9 SONO PARTE INTEGRANTE DEL GRUPPO MODULO ALIMENTAZIONECAMPO SOLO SUI CONTROLLER TIPO ”A”.3LE UNITA’ CHE RICHIEDONO IL RAFFREDDAMENTO FORZATO SONO DOTATE DI UNO(1) O DUE (2) VENTOLE 230 VAC MONOFASE O DI UNA SOFFIANTE SINGOLA 230/460VAC MONOFASE.

Capitolo 1Informazioni Generali
5-10 Specifiche e Dati Prodotto IMN720IT
Dimensioni
Controllo Tipo A
Massa
11,00
10,25
18,75
18,00
9,87
20,60
2 Posizioni
0,25
FU4 FU1 FU2 FU3
GND
F1 F2
A2 L1 L2 L3
FU5 FU6 FU7
G
N
D
A
1
P
1
P
2
G
N
D
DETTAGLIO “A”
VEDERE DETTAGLIO “A”
FU8 FU9
0,25

Capitolo 1Informazioni Generali
Specifiche e Dati Prodotto 5-11IMN720IT
Dimensioni Continua
Controllo Tipo B
A2 L1 L2 L3
A1
10,25
11,00
“A”
“B”
“C”
2 Posizioni
0,25
GND
FU4 FU1 FU2 FU3
11,125
T1 T2
FU8 FU9 FU5 FU6 FU7
G
N
D
F
1
F
2
P
1
P
2
G
N
D
VEDERE DETTAGLIO““A”
DETTAGLIO “A”
Tensione ingresso ”A ” ”B” ”C”230 V 23,12 23,87 25,70460 V 24,19 24,94 26,75
0,25
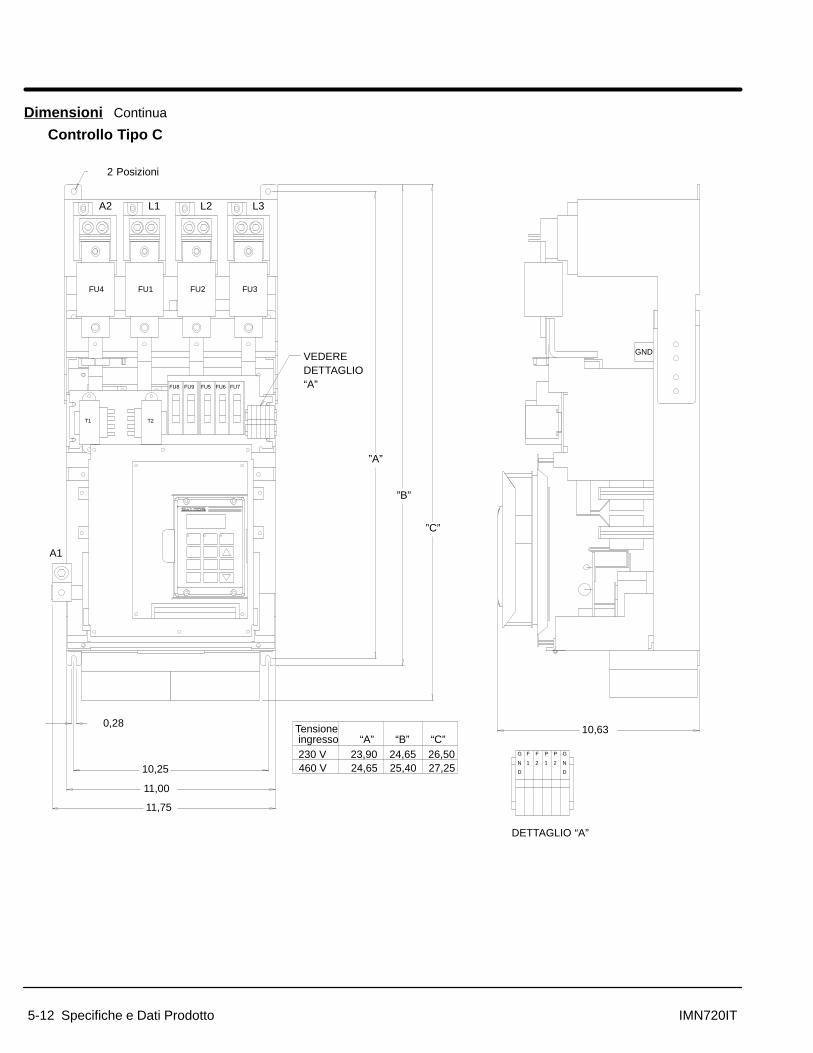
Capitolo 1Informazioni Generali
5-12 Specifiche e Dati Prodotto IMN720IT
Dimensioni Continua
Controllo Tipo C
A2 L1 L2 L3
10,25
11,00
11,75
”A”
”C”
”B”
2 Posizioni
0,2810,63
FU4 FU1 FU2 FU3
A1
GND
T1 T2
FU8 FU9 FU5 FU6 FU7
G
N
D
F
1
F
2
P
1
P
2
G
N
D
DETTAGLIO “A”
VEDERE DETTAGLIO“A”
Tensione ingresso “A” “B” “C”230 V 23,90 24,65 26,50460 V 24,65 25,40 27,25
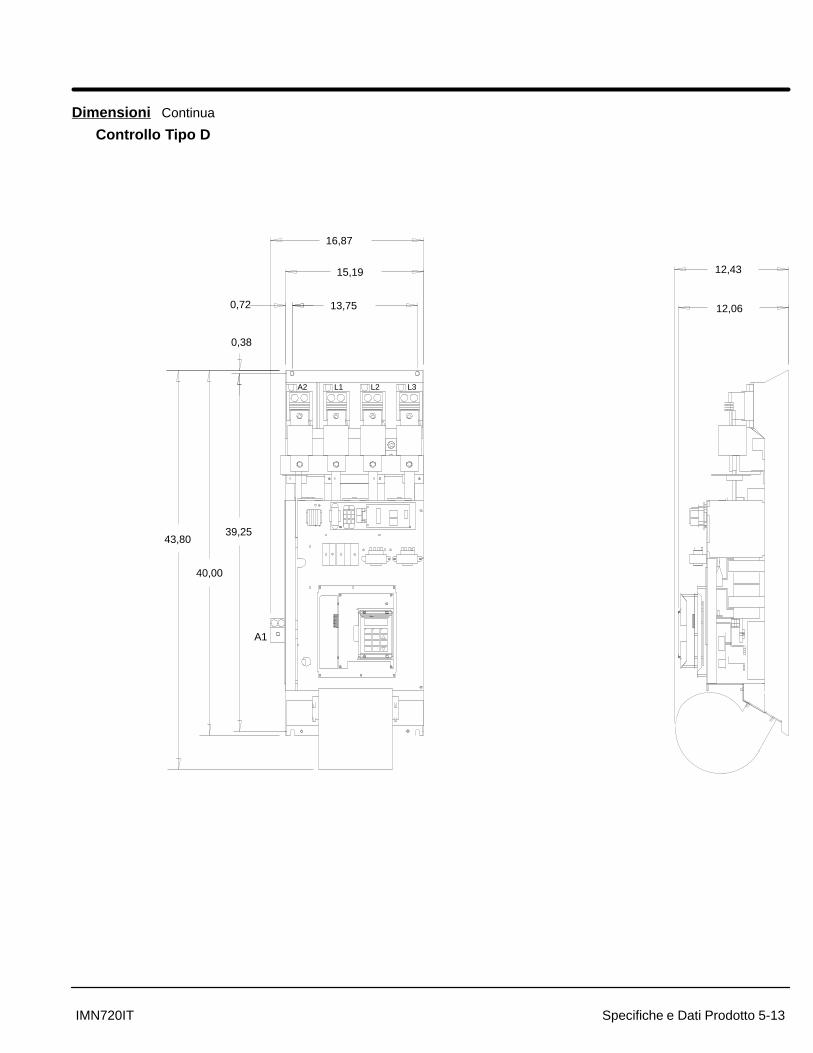
Capitolo 1Informazioni Generali
Specifiche e Dati Prodotto 5-13IMN720IT
Dimensioni Continua
Controllo Tipo D
43,80
40,00
39,25
0,38
15,19
13,750,72
A2 L1 L2 L3
A1
12,06
12,43
16,87

Capitolo 1Informazioni Generali
5-14 Specifiche e Dati Prodotto IMN720IT
Dimensioni Continua
Controllo Tipo G 3,72(94,6)
2,66(67,6)
Condotto AmovibilePiastre di Montaggio(Connessioni di Alimentazione delCliente)
24,00(609,6)
23,63(600)
(8,63)219
(8,63)219(12,41)315
31,50(800)
90,55(2300)
93,00(2362)
4,00(101,6)
47,25(1200)
GriglieUscitaAria
GriglieIngressoAria (6)

Appendice A
Appendice A-1IMN720IT
Modulo Alimentatore CampoIl modulo alimentatore campo standard fornisce fino all’85 % della tensione AC entrantecome massima tensione DC in uscita. La corrente standard di uscita è 15 A posta sultelaio di controllo con una fornitura massima di 40 A posta separatamente opzionaledisponibile dalla Baldor Electric.
E’ possibile azionare motori con campi superiori all’85 % della tensione AC entrante con ilcontrollo Serie 20H. A questo scopo occorre un trasformatore elevatore di tensioneaggiuntivo tra la connessione Ll – L2 del modulo alimentatore campo. Notare che questaconnessione è sensibile alla fase con Ll e L2. La massima tensione di ingresso AC per ilmodulo alimentatore campo deve essere limitata a 528 VAC su 60 Hz.
Il trasformatore elevatore richiesto viene calcolato:
Volt Ingr. AC Min. �Tensione Campo Motore Max Richiesta
0, 85
Esempio:
La tensione campo motore richiesta è 300 VDC, l’ingresso AC è 230 VAC
Tensione Campo Motore Max Richiesta0, 85
� 3000, 85
� 366 VAC Volt Ingr. AC Min.
Il rapporto di elevazione minimo per il trasformatore è calcolato:
Volt Ingr. AC Min. CalcolatiVolt Ingresso Linea AC
I KVA del trasformatore sono calcolati con:
KVA Trasformatore = Tensione Campo Max x Ampere di Campo Max
Nel caso del trasformatore elevatore di tensione, il parametro FIELD RATED VOLTSdeve essere calcolato con:
Volt Nominali Campo � Volt Campo Nominale �Volt IngressoVolt Uscita
Come dall’esempio precedente:
Volt Nominali Campo � 300 VDC ��230366� � 188 VDC

Capitolo 1Informazioni Generali
A-2 Appendice IMN720IT
La connessione campo standard è illustrata in Figura A-1.
Figura A-1 Connessione Campo Standard
L1
L2
L3
L1
L2
F+
F–
A10Modulo Alimentazione Campo
TensioneCampo DC
L1
L2
L3
Controllo Serie 20H
Quando si usa un trasformatore per aumentare l’ingresso AC al modulo alimentatorecampo per ottenere oltre l’85 % della tensione campo della linea AC viene collegatocome illustrato in Figura A-2.
Figura A-2 Connessione del Trasformatore Campo (per aumentare la tensione uscitacampo)
�1
�2
�3
L1
L2
F+
F–
A10Modulo Alimentazione Campo
TensioneCampo DC
�1
�2
�3
ControlloSerie 20H
�
Trasformatoredel Controllo
� Notare che il filo che collega �2 con L2 del Modulo Alimentazione Campo èrimosso e il trasformatore del controllo è collegato.
1. La tensione campo in uscita è regolata come specificato per l’applicazione.
2. Tensione Campo Motore Massima = 0,85 x V L1-L2
3. VL1�L2 � V �1��2 � N � V �1��2
Dove N=Rapporto di tensione del trasformatore del controllo(Secondario/Primario)
4. Valore VA minimo del trasformatore del controllo = (Amp DC di CampoMassimo) x NV�1 – �2

Appendice B
Appendice B-1IMN720IT
Valori dei Parametri
Valori Blocco Parametri Livello 1
Blocchi Livello 1
Titolo Blocco Parametro P# Gamma Regolabile Imposta-zione
di Fabbrica
ImpostazioneUtente
PRESETSPEEDS
PRESET SPEED #1 1001 0 – MAX Speed 0 RPMSPEEDS
PRESET SPEED #2 1002 0 – MAX Speed 0 RPM
PRESET SPEED #3 1003 0 – MAX Speed 0 RPM
PRESET SPEED #4 1004 0 – MAX Speed 0 RPM
PRESET SPEED #5 1005 0 – MAX Speed 0 RPM
PRESET SPEED #6 1006 0 – MAX Speed 0 RPM
PRESET SPEED #7 1007 0 – MAX Speed 0 RPM
PRESET SPEED #8 1008 0 – MAX Speed 0 RPM
PRESET SPEED #9 1009 0 – MAX Speed 0 RPM
PRESET SPEED #10 1010 0 – MAX Speed 0 RPM
PRESET SPEED #11 1011 0 – MAX Speed 0 RPM
PRESET SPEED #12 1012 0 – MAX Speed 0 RPM
PRESET SPEED #13 1013 0 – MAX Speed 0 RPM
PRESET SPEED #14 1014 0 – MAX Speed 0 RPM
PRESET SPEED #15 1015 0 – MAX Speed 0 RPM
ACCEL/DECELRATE
ACCEL TIME #1 1101 0 a 3600 Secondi 3,0 SECRATE
DECEL TIME #1 1102 0 a 3600 Secondi 3,0 SEC
S-CURVE #1 1103 0 – 100 % 0 %
ACCEL TIME #2 1104 0 a 3600 Secondi 3,0 SEC
DECEL TIME #2 1105 0 a 3600 Secondi 3,0 SEC
S-CURVE #2 1106 0 – 100 % 0 %
JOG SETTINGS JOG SPEED 1201 0 – MAX Speed 200 RPM
JOG ACCEL TIME 1202 0 a 3600 Secondi 3,0 SEC
JOG DECEL TIME 1203 0 a 3600 Secondi 3,0 SEC
JOG S-CURVE TIME 1204 0 – 100 % 0 %
KEYPAD SETUP KEYPAD STOP KEY 1301 REMOTE ON (Tasto Stop attivo du-rante il funzionamento remoto).REMOTE OFF (Tasto Stop inattivodurante il funzionamento remoto).
REMOTEON
KEYPAD STOP MODE 1302 COAST, REGEN REGEN
KEYPAD RUN FWD 1303 ON, OFF ON
KEYPAD RUN REV 1304 ON, OFF ON
KEYPAD JOG FWD 1305 ON, OFF ON
KEYPAD JOG REV 1306 ON, OFF ON

Capitolo 1Informazioni Generali
B-2 Appendice IMN720IT
Valori Blocco Parametri Livello 1 Continua
Blocchi Livello 1 – Continua
Titolo Blocco Parametro P# Gamma Regolabile Fabbrica ImpostazioneUtente
INPUT OPERATING MODE 1401 KEYPADSTANDARD RUN15SPDSERIALBIPOLARPROCESS MODEBIPLOAR HOIST7 SPEED HOIST
KEYPAD
COMMAND SELECT 1402 PTENTIOMETER +/–10 VOLTS+/–5 VOLTS4 TO 20 mA10 V W/EXT CL10 V W/TORQ FFEXB PULSE FOL5 V EXB10 V EXB4 – 20 mA EXB3 – 15 PSI EXBTACHOMETER EXBSERIALNONE
POTENTIO-METER
ANA CMD INVERSE 1403 ON, OFF OFF
ANA 2 OFFSET 1404 –20 % TO +20 % 0,0
ANA 2 DEADBAND 1405 0 – 10,00 V 0,20 V
OUTPUT OPTO OUTPUT #1 1501 READYZERO SPEED AT SPEEDOVERLOAD
READY
OPTO OUTPUT #2 1502OVERLOADKEYPAD CONTROLAT SET SPEEDFAULTFOLLOWING ERRMOTR DIRECTION
ZEROSPEED
OPTO OUTPUT #3 1503MOTR DIRECTIONDRIVE ONCMD DIRECTIONAT POSITIONOVER TEMP WARNRUNNING FIELD
AT SPEED
OPTO OUTPUT #4 1504 RUNNING FIELDPROCESS ERRORDRIVE RUNM/FWD CONTACT
FAULT
ZERO SPD SET PT 1505 0 – MAX Speed 200 RPM
AT SPEED BAND 1506 ±1000 RPM 100 RPM
SET SPEED 1507 0 – MAX Speed Rated MotorSpeed

Capitolo 1Informazioni GeneraliAppendice B
Appendice B-3IMN720IT
Valori Blocco Parametri Livello 1 Continua
Blocchi Livello 1 – Continua
Titolo Blocco Parametro P# Gamma Regolabile Fabbrica ImpostazioneUtente
OUTPUT(Continua)
ANALOG OUT #1 1508 ABS SPEEDABS TORQUESPEED COMMANDFIELD CURRENTCMD FIELD CURARM CURRENTCMD ARM CURFIRING ANGLE
ABSSPEED
ANALOG OUT #2 1509FIRING ANGLEARM VOLTAGEFIELD VOLTAGETORQUEPOWERVELOCITYOVERLOADPOSITIONLINE TIMER
ARMCURRENT
ANALOG #1 SCALE 1510 10 – 100 % 100 %
ANALOG #2 SCALE 1511 10 – 100 % 100 %
POSITION BAND 1512 0-32767 CNTS CALC
DC CONTROL CTRL BASE VOLTS 1601 0-1000 CALC
FEEDBACK FILTER 1602 0-7 CALC
FEEDBACK ALIGN 1603 FORWARD, REVERSE Forward
ARM PROP GAIN 1604 1 – 500 20
ARM INT GAIN 1605 0 – 30 10,0 Hz
SPEED PROP GAIN 1606 0 – 500 10
SPEED INT GAIN 1607 0 – 9,99 Hz 1,00 Hz
SPEED DIFF GAIN 1608 0 – 100 0
POSITION GAIN 1609 0 – 9999 CALC
IR COMP Gain 1610 0 – 1000 0
TACH TRIM 1611 90 – 110 % 100 %
NULL FORCE GAIN 1612 0 – 100 0
TACH Offset 1613 ±2 % 0 %
FIELD CONTROL FIELD PWR SUPPLY 1701 NONE, 15 AMP MAX, 40 AMP MAX
15 AMPMAX
FIELD ECON LEVEL 1702 0,25 – 100 % 67 %
FORCING LEVEL 1703 100 – 125 % 100 %
FIELD SET SPEED 1704 0 – MAX RPM 0
FIELD STEP LIMIT 1705 0 – 5 SEC 0
FIELD REG GAIN 1706 0 – 255 40
Field Integral 1707 OFF, ON ON
LEVEL 2 BLOCK ACCEDE AL MENU LIVELLO 2
�����������
���������� ��
Uscita dal modo programmazione e ritorno al modo display.

Capitolo 1Informazioni Generali
B-4 Appendice IMN720IT
Valori Blocco Parametri Livello 2
Blocchi Livello 2
Titolo Blocco Parametro P# Gamma Regolabile Fabbrica ImpostazioneUtente
OUTPUT LIMITS OPERATING ZONE 2001 ONE WAY, REGEN REGEN
MIN OUTPUT SPEED 2002 0 – MAX Speed 0 RPM
MAX OUTPUT SPEED 2003 0 – 5000 RPM Rated MotorSpeed
PK CURRENT LIMIT 2004 0 – PEAK RATED CURRENT 1,5 X MotorARM Rating
CUR RATE LIMIT 2006 0,008 – 1,00 SEC CALC
CUSTOM UNITS DECIMAL PLACES 2101 0 – 5 0
VALUE AT SPEED 2102 0 – 65535/1000 RPM 00000/01000 RPM
UNITS OF MEASURE 2103 Selezione di Gruppi di 9 Caratteri –
PROTECTION OVERLOAD 2201 FAULT, FOLDBACK FOLDBACK
EXTERNAL TRIP 2202 ON, OFF OFF
FOLLOWING ERROR 2203 ON, OFF OFF
TORQUE PROVING 2204 ON, OFF OFF
MISCELLANEOUS RESTART AUTO/MAN 2301 AUTOMATIC, MANUAL MANUAL
RESTART FAULT/HR 2302 0 – 10 0
RESTART DELAY 2303 0 – 120 SECONDS 0 SEC
FACTORY SETTINGS 2304 YES, NO NO
HOMING SPEED 2305 0 – MAX Speed 100 RPM
HOMING OFFSET 2306 0 – 65535 CNTS EncoderCounts
SECURITY CONTROL
SECURITY STATE 2401 OFF, LOCAL, SERIAL,TOTAL SECURITY
OFF
ACCESS TIMEOUT 2402 0 – 600 SEC 0 SEC
ACCESS CODE 2403 0 – 9999 9999
MOTOR DATA ARMATURE VOLTAGE 2501 0 – 600 VOLTS Imposta-zione diFabbrica
ARM RATED AMPS 2502 0 – 999,9 Imposta-zione diFabbrica
MOTOR RATED SPD 2503 0 – 5000 RPM 1750 RPM
MOTOR FIELD 2504 SHUNT, PERM MAGNET SHUNT
MOTOR FIELD VOLTS 2505 0 – 600 CALC
MOTOR FIELD AMPS 2506 0 – 40 0,3
FEEDBACK TYPE 2507 ARMATURE, ENCODER, TACHO-METER, RESOLVER
Armature
Encoder Counts 2508 50 – 65535 CNTS 1024 PPR
RESOLVER SPEEDS 2509 0 to 10 1
TACHOMETER VOLTS 2510 0 – 2000 V PER 1000 RPM 50
PK POWER LIMIT 2511 50 – 300 % 100

Capitolo 1Informazioni GeneraliAppendice B
Appendice B-5IMN720IT
Valori Blocco Parametri Livello 2 Continua
Blocchi Livello 2 – Continua
Titolo Blocco Parametro P# Gamma Regolabile Fabbrica ImpostazioneUtente
PROCESS CONTROL
PROCESS FEEDBACK 2601 POTENTIOMETER+/–10 VOLTS+/–5 VOLTS4 TO 20 mA5V EXB10 V EXB4 – 20 mA EXB3 – 15 PSI EXBTACHOMETER EXBNONE
NONE
PROCESS INVERSE 2602 ON, OFF OFF
SETPOINT SOURCE 2603 SETPOINT CMDPOTENTIOMETER+/–10 VOLTS+/–5 VOLTS4 TO 20 mA5 V EXB10 V EXB4 – 20 mA EXB3 – 15 PSI EXBTACHOMETER EXBNONE
SETPOINTCMD
SETPOINT COMMAND 2604 –100 % a +100 % 0,0 %
SET PT ADJ LIMIT 2605 0-100 % 10,0 %
PROCESS ERR TOL 2606 1 – 100 % 10 %
PROCESS PROP GAIN 2607 0 – 200 0
PROCESS INT GAIN 2608 0 – 9,99 Hz 0,00 Hz
PROCESS DIFF GAIN 2609 0-1000 0
FOLLOW I:O RATIO 2610 (1 – 65535) : (1 – 20) 1:1
FOLLOWER I:O OUT 2611 1 – 65535 1
MASTER ENCODER 2612 50 – 65535 1024

Capitolo 1Informazioni Generali
B-6 Appendice IMN720IT
Valori Blocco Parametri Livello 2 Continua
Blocchi Livello 2 – Continua
Titolo Blocco Parametro P# Gamma Regolabile Fabbrica ImpostazioneUtente
AUTO-TUNING CALC PRESETS CALC YES, NO NO
CMD OFFSET TRMMisura e riduce la tensioneoffset su IngressoAnalogico #2 (J1-4 e J1-5).
AU1 – –
CUR LOOP COMPMisura la risposta incorrente mentre il motorefunziona a metà dellacorrente motore nominale.
AU2 – –
FEEDBACK TESTSQuesta procedura controllail valore introdotto neiConteggi Encoder, nei Polidel Resolver e la direzioneFeedback. Ciò avvieneaccelerando ”l’anelloaperto” del motore,rilevando la fasatura delfeedback dell’encoder econtando il numero diimpulsi encoder per girodel motore. Controllaanche l’uscita quando èspecificato DC tach eimposta la direzionefeedback. Premere il tastoENTER per eseguire il testdi autocalibrazione. Nonrichiesto per ARMATUREFEEDBACK.
AU3 – –
SPD CNTRLR CALCMisura la corrente delmotore rispetto al rapportodi accelerazione durante larotazione motore. Questaprocedura regola iparametri Speed INT Gaine Speed PROP Gain.
AU4 -
LEVEL 1 BLOCK ACCEDE AL MENU LIVELLO 1
�����������
���������� ��
Uscita dal modo programmazione e ritorno al modo display.

Appendice C
Appendice C-1IMN720IT
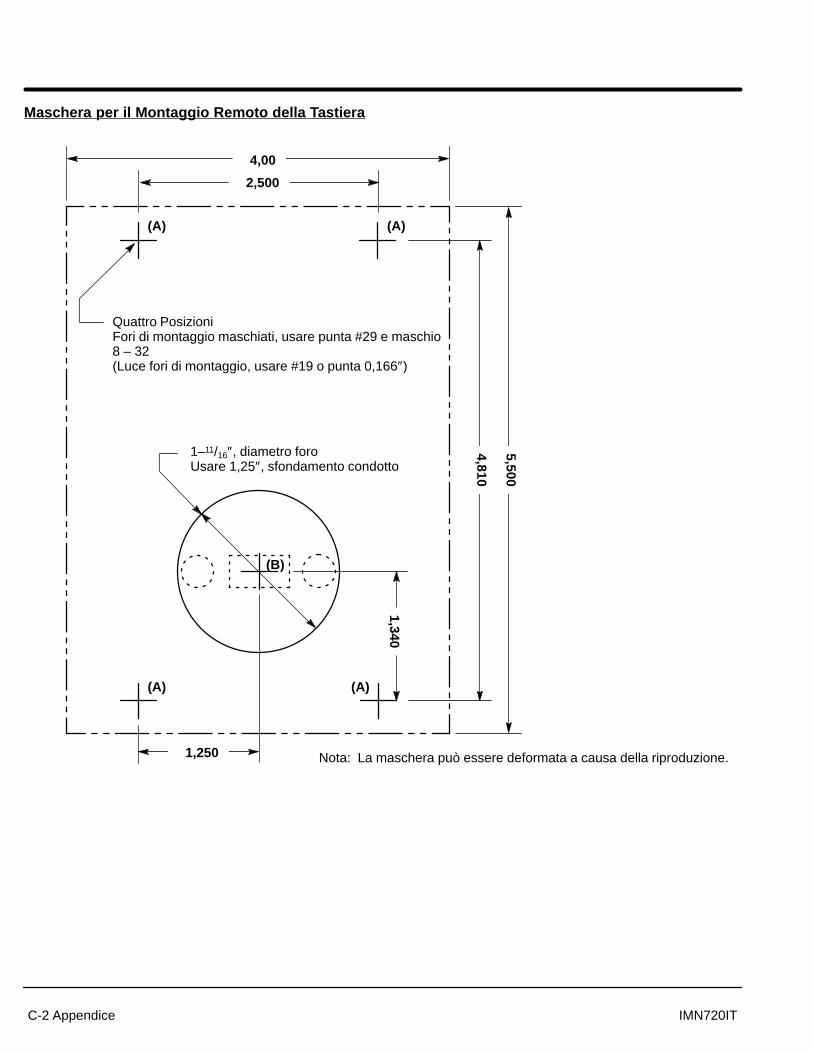
Capitolo 1Informazioni Generali
C-2 Appendice IMN720IT
Maschera per il Montaggio Remoto della Tastiera
Quattro PosizioniFori di montaggio maschiati, usare punta #29 e maschio8 – 32 (Luce fori di montaggio, usare #19 o punta 0,166″)
4,00
2,500
1,250
1,340
4,810
5,500
1–11/16″, diametro foroUsare 1,25″, sfondamento condotto
(B)
(A) (A)
(A) (A)
Nota: La maschera può essere deformata a causa della riproduzione.

BALDOR ELECTRIC COMPANYP.O. Box 2400
Ft. Smith, AR 72902-2400(501) 646-4711
Fax (501) 648-5792
Baldor Electric CompanyIMN720IT
Stampato in USA9/97 C&J2500
CHTEL:+41 52 647 4700FAX:+41 52 659 2394
DTEL:+49 89 90 50 80FAX:+49 89 90 50 8491
UKTEL:+44 1342 31 5977FAX:+44 1342 32 8930
ITEL:+39 11 562 4440FAX:+39 11 562 5660
FTEL:+33 145 10 7902FAX:+33 145 09 0864