COMPONENTI DELL’AUTOMAZIONE INDUSTRIALE - UniBG · Sensore: converte una grandezza fisica...
40
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia- 1 COMPONENTI DELL’AUTOMAZIONE INDUSTRIALE Sensori • Misura grandezze di processo • Acquisizione retroazioni in anelli di regolazione • Diagnostica, protezione, eventi, allarmi Attuatori • Comandi, segnalazioni, abilitazioni, interventi di protezione • Movimentazioni (azionamenti) • Controllo di variabili di processo (riscaldatori, umidificatori,…) Sistemi di elaborazione • Robot • Macchine a controllo numerico • Unità intelligenti per il comando (comando, segnalazione, controllo, regolazione) • Unità intelligenti per la supervisione e l’interfaccia operatore • Unità intelligenti per il rilevamento, la memorizzazione, la trasmissione e la gestione (diagnosi, controllo di processi lenti) dei dati
Transcript of COMPONENTI DELL’AUTOMAZIONE INDUSTRIALE - UniBG · Sensore: converte una grandezza fisica...

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
1
COMPONENTI DELL’AUTOMAZIONE INDUSTRIALE Sensori • Misura grandezze di processo • Acquisizione retroazioni in anelli di regolazione • Diagnostica, protezione, eventi, allarmi Attuatori • Comandi, segnalazioni, abilitazioni, interventi di protezione • Movimentazioni (azionamenti) • Controllo di variabili di processo (riscaldatori, umidificatori,…)
Sistemi di elaborazione • Robot • Macchine a controllo numerico • Unità intelligenti per il comando (comando, segnalazione, controllo, regolazione) • Unità intelligenti per la supervisione e l’interfaccia operatore • Unità intelligenti per il rilevamento, la memorizzazione, la trasmissione e la
gestione (diagnosi, controllo di processi lenti) dei dati

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
2
SENSORI Sensore: converte una grandezza fisica (misurando) in un segnale elettrico
Classificazione: • Principio fisico • Grandezza da misurare • Settore applicativo
Classificazione energetica: • Sensori attivi (non necessitano di potenza esterna)
- segnale di uscita debole (richiedono amplificazione) - sensori piezoelettrici, fotoelettrici,....
• Sensori passivi (necessitano di potenza esterna per fornire il segnale di uscita) - dissipano, si deteriorano,.... - sensori resistivi, capacitivi,....
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
3
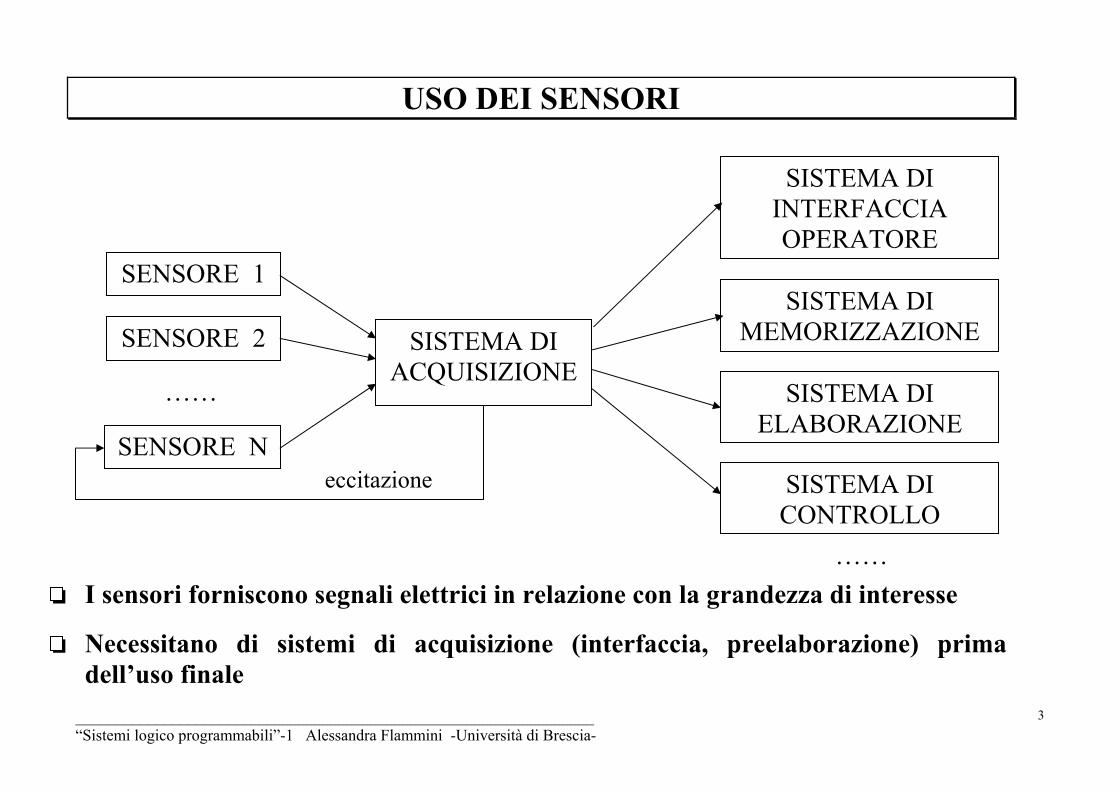
USO DEI SENSORI I sensori forniscono segnali elettrici in relazione con la grandezza di interesse
Necessitano di sistemi di acquisizione (interfaccia, preelaborazione) prima dell’uso finale
SENSORE 1
SENSORE 2
SENSORE N
……
SISTEMA DI ACQUISIZIONE
SISTEMA DI MEMORIZZAZIONE
SISTEMA DI CONTROLLO
SISTEMA DI INTERFACCIA OPERATORE
……
eccitazione
SISTEMA DI ELABORAZIONE

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
4
ACQUISIZIONE DATI DA SENSORI
SENSOREmisurando
grandezze di influenza
alimentazione o eccitazione
SISTEMA DI ACQUISIZIONE
SISTEMI DI MEMORIZZAZIONE,
ELABORAZIONE, CONTROLLO,…
CONDIZIONAMENTO - isolamento - amplificazione / attenuazione - filtro - multiplexing /campionamento
simultaneo - ....
ACQUISIZIONE - conversione A/D - sistemi di conteggio - elettronica analogica dedicata - ....

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
5
SENSORI: problematiche Termocoppie (sensori di temperatura) • non necessitano di alimentazione, segnale piccolo (µV), temperatura di giunto
freddo Celle estensimetriche (sensori di spostamento) • necessitano di alimentazione, dipendono dalla temperatura (configurazione a
ponte) Cellule fotoelettriche (sensori di presenza) • necessitano di alimentazione e isolamento, problemi di interferenza, segnale
facile da trattare (ON/OFF) Encoder incrementale (sensori di posizione, velocità) • necessitano di alimentazione, segnali in quadratura da gestire in tempo reale ...
CONDIZIONAMENTO E PREELABORAZIONE “AD HOC”
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
6
SENSORI: CARATTERIZZAZIONE Caratteristiche statiche descrivono le prestazioni del sensore in condizioni normali con variazioni lente dell’ingresso ed in assenza di sollecitazioni esterne
Caratteristiche dinamiche descrivono il comportamento del sensore alle variazioni dell’ingresso con il tempo Caratteristiche ambientali si riferiscono alle prestazioni del sensore dopo l’esposizione -condizioni ambientali non operative- o durante l’esposizione –condizioni ambientali operative- a specifiche sollecitazioni esterne Caratteristiche di affidabilità sono relazionate alla vita utile del sensore e a possibili cause di mal funzionamento nel sistema in cui è inserito
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
7
SENSORI: CARATTERISTICA DI TRASFERIMENTO Esiste una relazione ideale h tale che Out = h(M) • In genere h è lineare • Invece della funzione h, il costruttore mette a disposizione grafici o tabelle
garantiti per valori tipici delle grandezze di influenza Acquisito Out, si ricava la stima di M = <M> = h-1(Out) Sensore reale: • Peculiarità costruttive -> h differisce leggermente da sensore a sensore • Fascia di incertezza massima α <M> = h-1(Out±α[%(Outmax-Outmin)]) • Determino α sulla base della calibrazione (taratura) del singolo sensore Calibrazione • Test nei quali si applicano al sensore valori noti registrandone i valore di uscita • Caratteristica di trasferimento per punti • Riduce α, incide sul costo del sensore

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
8
SENSORI: CARATTERISTICHE STATICHE (1/2) Range o span o portata o fondo scala (FS) intervallo dinamico di ingresso (massimo valore meno minimo valore) che può essere convertito dal sensore con una incertezza prestabilita
Full Scale Output (FSO) differenza fra i segnali di uscita del sensore quando ad esso sono applicati i valori estremi del range
Isteresi [%FSO] massima differenza tra i valori di uscita corrispondente ad uno stesso ingresso, ottenuto per valori crescenti e decrescenti.
Ripetibilità [entro….%FSO] capacità di riprodurre la stessa uscita quando è applicato lo stesso ingresso, consecutivamente, nelle stesse condizioni operative e nella stessa direzione. E’ espressa come massima differenza tra le uscite di più cicli di calibrazione.

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
9
SENSORI: CARATTERISTICHE STATICHE (2/2) Risoluzione o detectivity [%FSO] • Rappresenta l’abilità del trasduttore nel rivelare il segnale di ingresso (limitata
dal rumore da esso prodotto) • minimo segnale rilevabile = segnale di ingresso I tale che SNRuscita = 1
I = 0 -> solo rumore; minimo segnale rilevabile / Potenza(I) = Potenza(rumore) Linearità [entro ±….%FSO] indica lo scostamento della curva di taratura sperimentale dalla retta di riferimento (r.r.) ottenuta dai dati sperimentali di calibrazione. • Linearità terminale (r.r. per gli estremi) • Linearità ai minimi quadrati (r.r. ottenuta con il metodo dei minimi quadrati) • …..
Sensibilità [….%] (sensitivity o responsivity o costante di trasduzione) • rapporto tra il segnale di uscita e la grandezza trasdotta calcolata sulla r.r. • sensibilità traversa verso altre grandezze (cross sensitivity) • Offset = segnale di uscita in assenza di stimolo

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
10
SENSORI: CARATTERISTICHE DINAMICHE Le caratteristiche dinamiche in un sensore descrivono il suo comportamento in condizioni di variazioni (rapide) dell’ingresso con il tempo. • Tempo di risposta del sensore -> “errore”
Risposta in frequenza [ ±..% da ..a..Hz] variazione del rapporto fra ampiezza di uscita e di ingresso (differenza fra fase di ingresso e di uscita) al variare della frequenza entro una prefissata banda
Risposta nel tempo [s] Caratterizza la risposta del dispositivo ad una variazione dell’ingresso con il tempo • Tempo di risposta = tempo in cui l’uscita raggiunge 95% o 98% del valore finale • Tempo di salita = tempo in cui l’uscita va dal 10% al 90% del valore finale • Costante di tempo = tempo in cui l’uscita raggiunge il 63% del valore finale

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
11
SENSORI: CARATTERISTICHE AMBIENTALI E DI AFFIDABILITA’
Errore di temperatura [%FSO] massimo scostamento dell’uscita a parità di ingresso al variare della temperatura in un determinato range
Errore di vibrazioni [%FSO] massimo scostamento dell’uscita a parità di ingresso quando al sensore sono applicate vibrazioni di ampiezza e frequenza prefissate
Affidabilità • MTBF (Mean Time Between Failure) -> tempo medio al guasto • Tempo medio al degrado (degrado = mancata osservanza di alcune caratteristiche
di funzionamento)
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
12
USCITA DEL SENSORE Sensori “grezzi” • resistenza • capacità • induttanza • tensione AC o DC • corrente AC o DC • ….
Sensori “condizionati” • tensione 0-10V, 0-5V, 2V±1V, … • corrente 0-20mA, 4-20mA • frequenza
Sensori “intelligenti” • uscita seriale SPI, I2C, RS232 o RS485 • bus di campo • USB, Ethernet, wireless

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
13
ENCODER OTTICI INCREMENTALI Dispositivi che forniscono un segnale ad onda quadra con m impulsi per ogni giro • velocità angolare = w -> frequenza di uscita = m*w • 3 segnali di uscita:
- due segnali in quadratura per posizione, velocità e verso di rotazione - un impulso di zero per la ricostruzione della posizione assoluta - elettronica di condizionamento veloce (circuiti di conteggio)
A
B
0-pulse
A
B
0-pulse
AVANTI INDIETRO

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
14
ATTUATORI Organi di comando discreti (ON/OFF) o continui (azionamento)
Comandi: • da operatore • da sistema automatico
Comandi di emergenza: • da operatore (diretto) e da sistema automatico
Alcuni tipi di attuatori: • Lampade di segnalazione (220AC, 24AC, 24DC,..) • Attuatori termici (forni, impianti di riscaldamento, raffreddamento,..)
- regolazione continua della tensione applicata al riscaldatore - regolazione ON/OFF
• Attuatori elettromagnetici (elettromagneti di sollevamento, freni, giunti, valvole, relais...)

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
15
RELAIS Organi di comandi discreti
I Relais sono: • Amplificatori di potenza
(comando a 100mA, contatto a 10A) • Moltiplicatori di contatti • Utilizzati da personale non altamente qualificato • Isolatori naturali • Lenti (tempi: 10µs-10ms) • Negatori naturali • Utilizzati per semplici funzioni logiche • Ingombranti, dissipativi
Comando Contatto NO
Contatto NC
Relais
A
V+
V-
C
B
C = A OR B
A
V+
V-
C
C = NOT(A)
V+
A
V-
C
C = A AND B
B

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
16
AZIONAMENTI Utilizzati per ottenere avviamenti controllati e/o regolazione della velocità
In prima approssimazione: • controllano la coppia regolando la corrente • controllano la velocità regolando la tensione
Controllo digitale (PID)
Gestiscono le protezioni • massima corrente • protezione termica
Forniscono indicazioni diagnostiche • corrente, velocità, posizione • stato dei comandi e delle protezioni
Si interfacciano ai sistemi di controllo e supervisione
n
M PID+ PID+ PID+
I p
pref
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
17
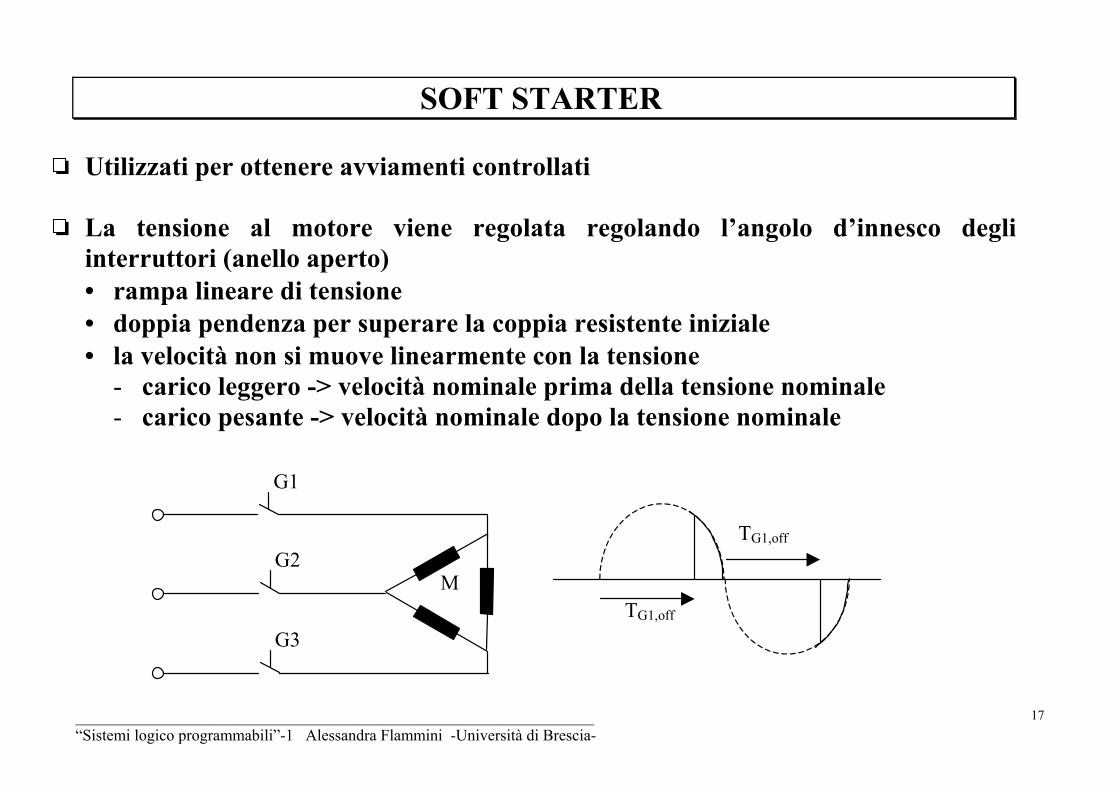
SOFT STARTER Utilizzati per ottenere avviamenti controllati
La tensione al motore viene regolata regolando l’angolo d’innesco degli interruttori (anello aperto) • rampa lineare di tensione • doppia pendenza per superare la coppia resistente iniziale • la velocità non si muove linearmente con la tensione
- carico leggero -> velocità nominale prima della tensione nominale - carico pesante -> velocità nominale dopo la tensione nominale
TG1,off
TG1,off
G1
G3
G2 M

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
18
AZIONAMENTI AC/DC Utilizzati per la regolazione di motori in corrente continua
Azionamenti in C. C. • ottime prestazioni (dinamica, accuratezza, assenza di vibrazioni) • funzionamento sui 4 quadranti (motore avanti, motore indietro, recupero avanti,
recupero indietro) • regolazione della tensione continua di armatura • ciascuna coppia agisce in conduzione naturale per 1/6 del periodo
1 U3
D3
U2
D2
U1
D1
M 2 3
SEQUENZA DELLE FASI: U1 U1 U2 U2 U3 U3 U1 ... D2 D3 D3 D1 D1 D2 D2 ...

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
19
AZIONAMENTI AC/AC
Inverter: utilizzati per la regolazione di tensione e frequenza dei motori in A.C.
Convertitore AC/DC seguito da un convertitore DC/AC • sinusoidi mediante interruttori -> PWM (Pulse Width Modulation) • onda rettangolare (A, D=Ton/(Ton+Toff)) -> filtro passa-basso -> VDC = A*D. • sinusoide PWM = uscita comparatore tra sinusoide (f) e onda triangolare (>>f)
1 U3
D3
U2
D2
U1
D1
M 2 3
S3
I3
S2
I2
S1
I1
Ton
Toff
V=A*Ton/(Ton+Toff)

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
20
INTERRUTTORI DI POTENZA Potenze medio basse: transistori bipolari e MOSFET di potenza
Diodi di potenza • non consentono alcuna parzializzazione dell’angolo d’innesco • configurazione in antiparallelo per la bidirezionalità
Tiristore • 4 strati (PNPN) • diodo con accensione controllata dal gate • spegnimento non controllato
GTO (Gate Turn Off thyristor) • Si spegne applicando una tensione negativa al gate
IGBT (Insulated Gate Bipolar Transistor) • Combina la tecnologia bipolare e CMOS • Perdite nulle -> maggiori potenze
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
21
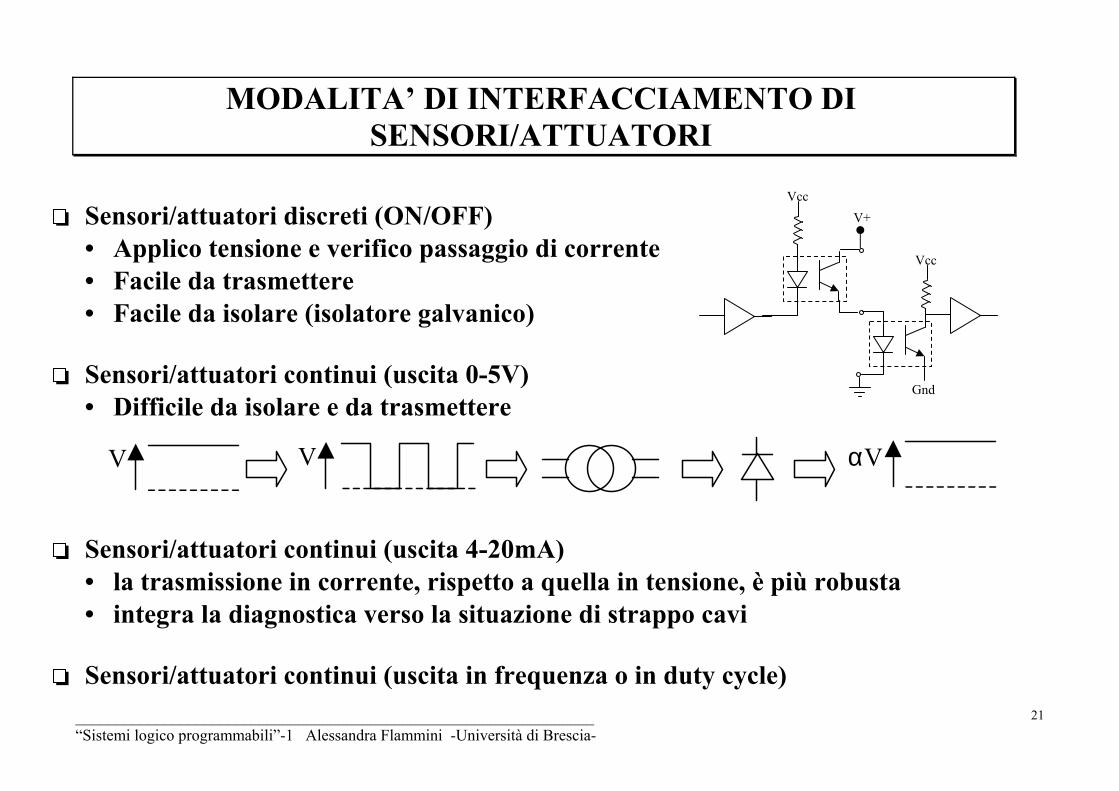
MODALITA’ DI INTERFACCIAMENTO DI SENSORI/ATTUATORI
Sensori/attuatori discreti (ON/OFF) • Applico tensione e verifico passaggio di corrente • Facile da trasmettere • Facile da isolare (isolatore galvanico)
Sensori/attuatori continui (uscita 0-5V) • Difficile da isolare e da trasmettere
Sensori/attuatori continui (uscita 4-20mA) • la trasmissione in corrente, rispetto a quella in tensione, è più robusta • integra la diagnostica verso la situazione di strappo cavi
Sensori/attuatori continui (uscita in frequenza o in duty cycle)
Vcc
Vcc
Gnd
V+
V V αV
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
22
SISTEMI DI ELABORAZIONE A LIVELLO DI CELLA Varie tipologie:
• Robot
• Macchine a controllo numerico
• Unità intelligenti per il comando (comando, segnalazione, controllo, regolazione)
• Unità intelligenti per la supervisione e l’interfaccia operatore
• Unità intelligenti per il rilevamento, la memorizzazione, la trasmissione e la gestione (diagnosi, controllo di processi lenti) dei dati
• ..... Basso costo di µC semplici sistemi programmabili tutto è “smart”
Unità intelligenti dedicate

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
23
ROBOT Scarsa capacità di elaborazione, memorizzazione e trasmissione dell’informazione
Utilizzati per: • spostare componenti (pezzi, utensili) per macchine utensili • maneggiare componenti nelle lavorazioni pericolose (vernici, saldature,...) • maneggiare componenti negli ambienti pericolosi (mare, ambienti radioattivi,...) • orientare per sistemi di visione (diagnosi, misure di qualità)
Comandati da operatore o macchine
Costituiti da: • sensori, attuatori • linee di I/O per i comandi e le segnalazioni (interfacce numeriche via radio, cavo) • sistemi di elaborazione molto specializzati ad un singolo compito
Programmi (configurabilità più che programmabilità): • on-line (dall’operatore a robot fermo) • off-line (da sistemi automatici mentre il robot lavora)

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
24
CONTROLLO NUMERICO (CN) Scarsa capacità di elaborazione, memorizzazione e trasmissione dell’informazione
Utilizzati per il controllo delle macchine utensili
Comandati da operatore o macchine (ciclo di lavoro)
Programmati da un operatore (programmazione lenta e off-line)
I CN o CNC (Computer Numeric Control) sono costituiti da: • interfaccia verso la parte di potenza per l’interfaccia verso la macchina utensile • controllo di più assi • computer dedicato
I DNC (Direct Numeric Control) sono CN a controllo digitale interfacciati a un computer di supervisione che consente la programmazione automatica attraverso: • database di “lavorazioni elementari” (archivio disegni/programmi) • database per la gestione (numero di pezzi prodotti, tempi di fermo,...) • programmi per l’ottimizzazione dei tempi morti (cambio utensili,...) • possibilità di funzionamento “stand alone”

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
25
UNITA’ INTELLIGENTI ALTAMENTE PROGRAMMABILI Svolgono funzioni diverse in quanto a requisiti (potenza, velocità, memoria,...) • comando e segnalazione • controllo, coordinamento e regolazione • rilevamento, memorizzazione, trasmissione dati • interfaccia operatore (Human Machine Interface -HMI-)
Si ripartiscono in: • PLC (Programmable Logic Controller) • PMC (Programmable Multifunction Controller) • PC industriali
PC PLC PMC Punti di I/O - + + Capacità di elaborazione ++ - + Memoria ++ - + Controllo in tempo reale - + ++ Software di base ++ + - Semplicità d’uso + ++ -
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
26
PLC (PROGRAMMABLE LOGIC CONTROLLER) PLC = sistema logico programmabile in grado di realizzare un insieme ordinato di operazioni, definite da comandi facilmente modificabili, strutturate in modo ciclico
Introdotti all’inizio degli anni ’70 come alternativa alle logiche a relais, che sono: • Semplici da utilizzare • Lenti, ingombranti, dissipativi
Anni 70-80: i PLC hanno poca fortuna perchè: • Costosi, poco affidabili, lenti per le regolazioni (>100ms) • Poco “comprensibili” per gli addetti ai lavori (programmazione, ricerca guasti,...)
Anni 90: i PLC invadono il mercato perchè: • Economici, robusti, potenti • Ben supportati dalla distribuzione e assistenza • Programmabili in modo semplice grazie ai linguaggi a contatti

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
27
PLC versus RELAIS il PLC ha sostituito le logiche a relais perchè:
• Riduzione dei cablaggi
• Riduzione degli ingombri
• Riduzione della potenza (assorbimento ≈ 100mA nei PLC più compatti)
• Elevata versatilità verso “upgrade”
• Aumento della velocità di elaborazione
• Semplice, robusto ed affidabile
• Consente nuovi campi d’impiego (regolazione, controllo, calcolo multivariabile,.)

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
28
PLC: CARATTERISTICHE GENERALI HW modulare • Espandibile • Diversi moduli
- CPU - ingressi logici - uscite logiche - ingressi analogici - ingressi dedicati - .... - moduli funzionali
SW “semplice” • schemi a contatti • struttura ciclica • autodiagnostica
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
29
PMC (PROGRAMMABLE MULTIFUNCTION CONTROLLER) PMC = computer a struttura modulare, operanti in tempo reale, utilizzati per lo svolgimento di compiti complessi in termini di tempo critico (regolazione, comunicazione,...) e grandi volumi di dati
PMC vs PLC: • HW simile ai PLC • SW a basso livello “aperto” • Sono più flessibili rispetto ai moduli funzionali • Gestiscono complesse architetture dati • Permettono linguaggi informatici (Es. C) • Richiedono personale qualificato • Ottengono le massime prestazioni da un dato HW
PMC vs PC: • HW modulare (I/O decentrato?) • Sistemi operativi “real time” (RTOS per PC?) • Sistema dedicato “non standard”

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
30
PMC (PROGRAMMABLE MULTIFUNCTION CONTROLLER) Caratteristiche PMC: • HW affidabile, modulare, potente, veloce, direttamente gestibile dall’operatore • Diverse tipologie di prodotto (monoCPU, multiCPU) • Possobilità di realizzare prodotti “custom” integrando hardware commerciale e
“ad hoc” • SW scritto in C o in linguaggi “orientati al tecnologo” • Lunghi sviluppi del software
VME BUS
CPU MEMORIA INGRESSI LOGICI
INGRESSO ENCODER
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
31
PMC: MODULI CPU Elevata varietà di moduli CPU:
• CPU General Purpose ad alte prestazioni • (con µP potenti e configurabili come Master o Slave)
• CPU General Purpose "compatte" • (con µP a 8-16bit, generalmente Slave, dedicate ad applicazioni
• CPU General Purpose orientate all'I/O (-Esempio: Schede PLC-)
• CPU Grafiche • (Utilizzate per la gestione di monitor ad alta risoluzione e tastiere -Es.: Schede
PC-)
• CPU di interfacciamento • (CPU dedicate alle comunicazioni verso altri computer; spesso dotate di
firmware- per il protocollo di interfacciamento)
• CPU di controllo periferiche (Esempio: controllore di memorie di massa)
• Moduli coprocessori numerici • (in disuso, data la potenza dei nuovi microprocessori)

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
32
PMC: MODULI I/O Elevata varietà di moduli I/O:
• Moduli di ingresso/uscita logici (isolati e non isolati)
• Moduli di ingresso/uscita analogici (in tensione, in corrente, differenziali, sbilanciati,...)
• Moduli di conteggio (Esempio: interfaccia verso encoder come trasduttore di velocità/posizione)
• Moduli di temporizzazione (Esempio: orologio, calendario, allarme)
• Moduli di interfaccia parallela (Esempio: interfaccia Centronics verso stampante)
• Moduli di interfaccia seriale (Esempio: RS232 verso periferiche -terminali, stampanti-, RS485 verso sistemi controllati da un microprocessore -azionamenti- verso trasduttori/sensori,..)
• Moduli di comunicazione (HW più FW di supporto per un certo bus)
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
33
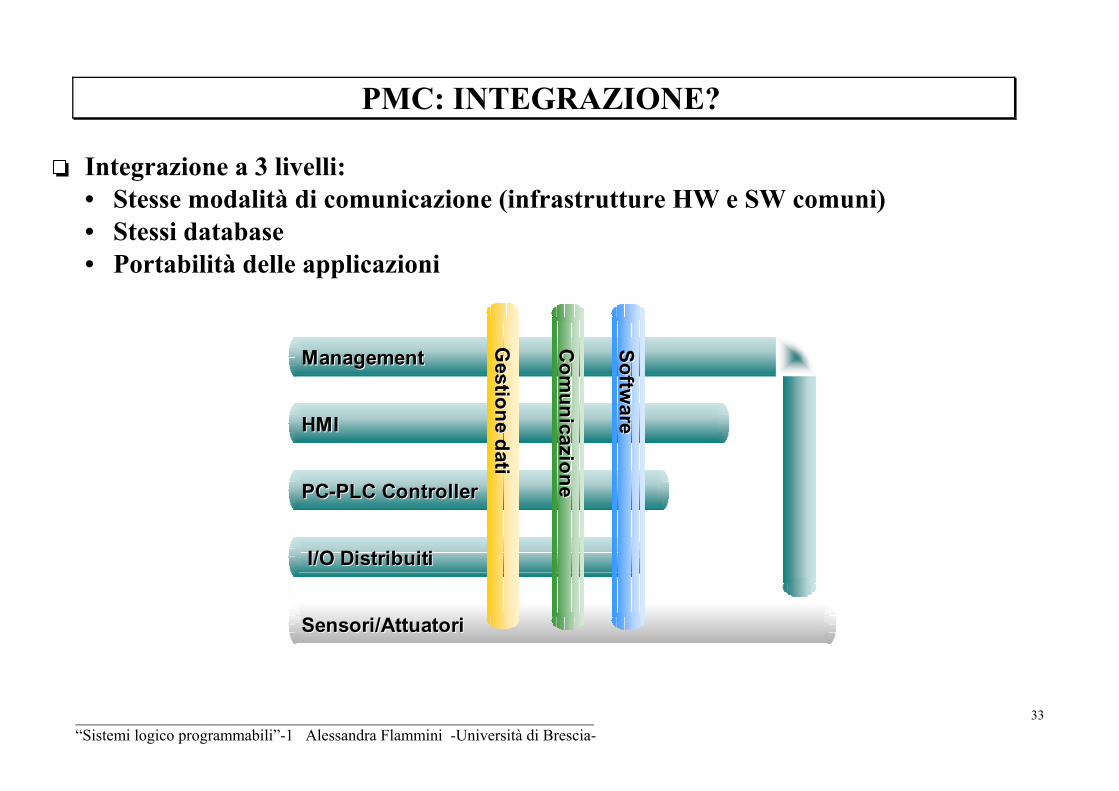
PMC: INTEGRAZIONE? Integrazione a 3 livelli: • Stesse modalità di comunicazione (infrastrutture HW e SW comuni) • Stessi database • Portabilità delle applicazioni
I/O DistribuitiI/O Distribuiti
PC-PLC ControllerPC-PLC Controller
HMIHMI
ManagementManagement
Com
unicazioneC
omunicazione
Gestione dati
Gestione dati
Software
Software
Sensori/AttuatoriSensori/Attuatori
I/O DistribuitiI/O Distribuiti
PC-PLC ControllerPC-PLC Controller
HMIHMI
ManagementManagement
Com
unicazioneC
omunicazione
Com
unicazioneC
omunicazione
Gestione dati
Gestione dati
Gestione dati
Gestione dati
Software
Software
Software
Software
Sensori/AttuatoriSensori/Attuatori

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
34
COMPUTER INDUSTRIALI Grande importanza a livello di area, importanza crescente a livello di cella • Ottima interfacciabilità e integrazione • Il vantaggio del SW standard • La necessità di HW robusto e affidabile • PC “office” e PC industriali”: necessità e costi
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
35
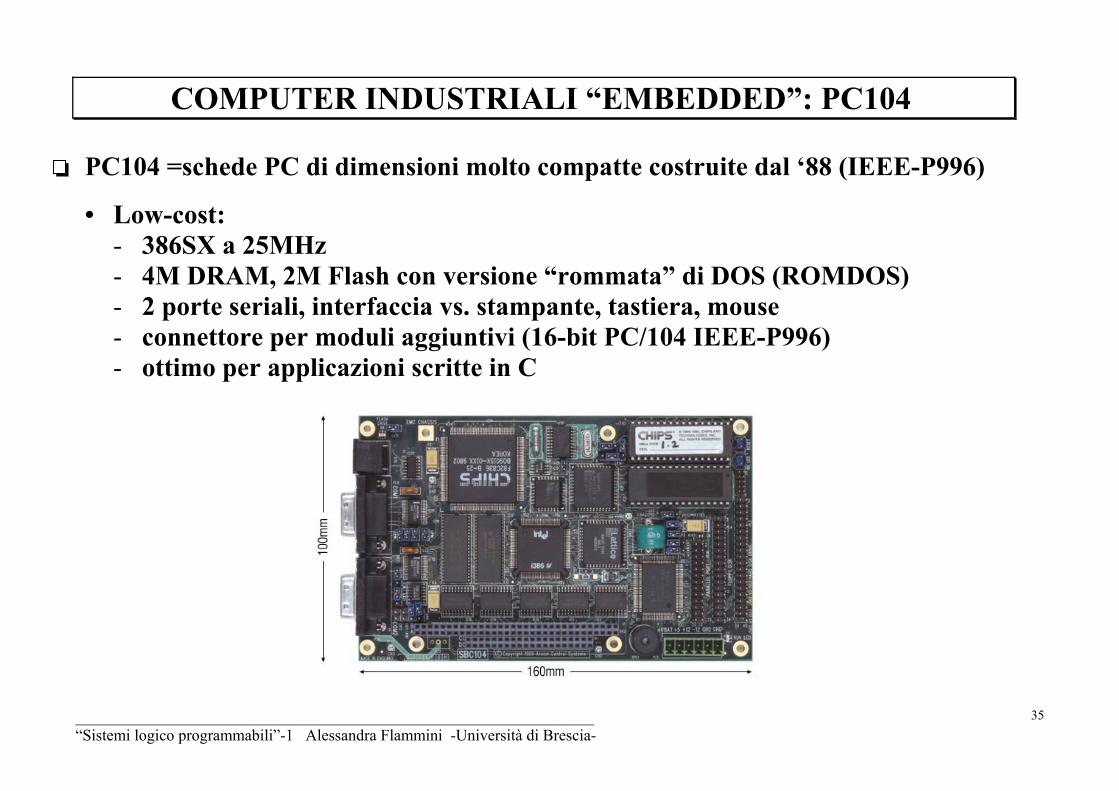
COMPUTER INDUSTRIALI “EMBEDDED”: PC104 PC104 =schede PC di dimensioni molto compatte costruite dal ‘88 (IEEE-P996)
• Low-cost: - 386SX a 25MHz - 4M DRAM, 2M Flash con versione “rommata” di DOS (ROMDOS) - 2 porte seriali, interfaccia vs. stampante, tastiera, mouse - connettore per moduli aggiuntivi (16-bit PC/104 IEEE-P996) - ottimo per applicazioni scritte in C

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
36
COMPUTER INDUSTRIALI “EMBEDDED”: PC104 PC104 =schede PC di dimensioni molto compatte costruite dal ‘88 (IEEE-P996)
• High-performance: - Celeron 433MHz – 1GHz, Pentium III (133MHz FSB –Front Side Bus-) - Acceleratore grafico per applicazioni 3D (S3® Savage4™) - 512M DRAM, 32M Flash, Award BIOS (Millenium Compliant) - interface di rete (10BaseT, 100BaseT), interface USB - connettore per moduli aggiuntivi (16-bit PC/104 IEEE-P996), slot PCI - ottimo per applicazioni sotto SW applicativi
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
37
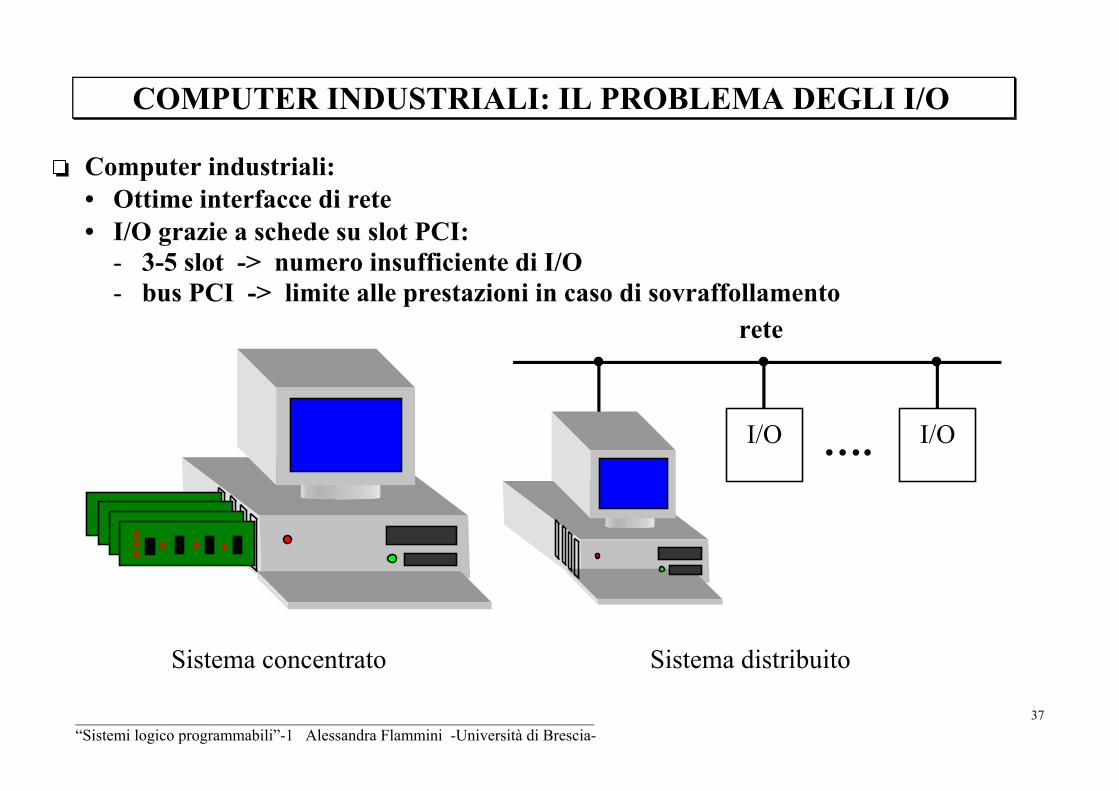
COMPUTER INDUSTRIALI: IL PROBLEMA DEGLI I/O Computer industriali: • Ottime interfacce di rete • I/O grazie a schede su slot PCI:
- 3-5 slot -> numero insufficiente di I/O - bus PCI -> limite alle prestazioni in caso di sovraffollamento
Sistema concentrato Sistema distribuito
I/O I/O….
rete

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
38
COMPUTER INDUSTRIALI: IL PROBLEMA DEL TEMPO REALE
Gestione degli I/O decentrati: • Necessità di reti veloci e deterministiche • Incremento del costo del sensore: sensor -> smart sensor
Sistema operativo: • Sistemi operativi “noti” con possibilità di sviluppo di applicazioni “portabili”
(Win2000, Linux, MacOS, Solaris per SUN) -> mancato determinismo • Sistemi operativi in tempo reale derivati da UNIX (Es QNX) -> mancato supporto
dei software di sviluppo delle applicazioni • Costo del sistema operativo in tempo reale e dei relativi accessori (Es. interfaccia
di rete,..) COMPUTER INDUSTRIALE Soluzione ancora “innovativa”

_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
39
PANNELLI DI VISUALIZZAZIONE Sistemi dedicati: • Ottimo livello di industrializzazione • Integrano PLC e PC (e i relativi ambienti software “semplificati”, ossia liguaggi a
contatti, linguaggi pseudografici, SW di gestione database,…) • Ottime capacità di interfaccia
_________________________________________________________________ “Sistemi logico programmabili”-1 Alessandra Flammini -Università di Brescia-
40
SISTEMI DI VISIONE Sistemi dedicati: • Utilizzati per controlli dimensionali e di qualità, identificazione e conteggio
pezzi,… • Ottimo livello di industrializzazione • Integrano una videocamera a elevata risoluzione e un computer programmabile • Si interfaccia ad un PC con SW specializzati che permettono di realizzare
programmi applicativi in C basandosi su funzioni a libreria (Es. riconoscimento caratteri
• Interfacce di rete veloci per trasferimento immagini e configurazione on-line