COMPENDIO DI GEOMETRIA ANALITICA...
38
TORINO MARZO 2012 COMPENDIO DI GEOMETRIA ANALITICA E COMPLEMENTI DI GEOMETRIA di BART VEGLIA
Transcript of COMPENDIO DI GEOMETRIA ANALITICA...
TORINO MARZO 2012
COMPENDIO
DI
GEOMETRIA ANALITICA
E
COMPLEMENTI DI GEOMETRIA
di BART VEGLIA

2
ASSI CARTESIANI y
Assi cartesiani ortogonali y0 P (x0 ; y0 ) Sono due rette, tra loro perpendicolari, l’una orizzontale e l’altra verticale, il cui punto di incontro è detto origine degli 2° Q 1° Q
assi. L’asse orizzontale si chiama asse x, o delle ascisse; l’asse verticale asse y, o delle ordinate. O
I quattro angoli in cui è diviso il piano cartesiano si chiamano x0 x quadranti, detti 1°, 2°, 3° e e 4°. Il primo quadran te è quello a destra, in alto. Gli altri seguono in senso antiorario. 3° Q 4° Q
Coordinate cartesiane Il piano definito dagli assi cartesiani x ed y, con origine O, viene indicato con la notazione Oxy. Ogni punto di tale piano è individuato da due numeri, prima l’ascissa (x0) e poi l’ordinata (y0), dette coordinate cartesiane. Es. P (x0 ; y0) Ad ogni coppia ordinata di coordinate corrisponde uno ed un solo punto, e viceversa. C’è quindi una corrispondenza biunivoca tra punti del piano e coordinate. Distanza tra due punti, cioè lunghezza di un segmento y
___ La lunghezza di un segmento AB, i cui estremi hanno yB B
coordinate (xA ; yA) e ( xB ; yB ), si ottiene mediante il yM M
teorema di Pitagora ed è yA A
__ _____________________ AB = √ ( xA - xB )
2 + ( yA - yB )2
xA xM xB x
Punto di mezzo di un segmento ___ Le coordinate ( xM , yM ) del punto di mezzo M di un segmento AB si calcolano facendo la media aritmetica delle coordinate omologhe degli estremi del segmento ( xA ; yA ) e ( xB ; yB ) xA + xB y A + yB
xM = yM = 2 2 Coordinate del baricentro, o centro di gravità, di un triangolo Tre punti in un piano cartesiano A (xA ; yA) , B (xB ; yB) e C (xC ; yC), se non sono allineati definiscono un triangolo. Per determinare le coordinate del baricentro del triangolo, punto di intersezione delle tre mediane, valgono le formule xA + xB + xC yA + yB + yC
xG = yG = 3 3 Trasformazione di coordinate Dati due sistemi di assi: O x y e C X Y, il secondo ruotato di un angolo α rispetto al primo; per trasformare le coordinate di un punto, riferite al sistema O x y, in coordinate

3
riferite al sistema C X Y, si usano le formule: x = xo + X cos α - Y sen α y = yo + X sen α + Y cos α (1) dove xo e yo sono le coordinate del punto C, origine degli assi X e Y, rispetto al sistema O x y Rotazione degli assi Se i due sistemi hanno l'origine coincidente, cioè xo = 0 e yo = 0, il sistema (1) diventa x = X cos α - Y sen α y = X sen α + Y cos α che sono le formule di rotazione degli assi Ad esempio per una rotazione di 90° in senso antio rario attorno all'origine O le formule diventano x = - Y ovvero X = y y = X Y = -x Traslazione degli assi Se i due sistemi hanno gli assi paralleli ed equiversi è α = 0, il sistema (1) diventa x = xo + X da cui X = x - xo y = yo + Y Y = y - yo che sono le formule della traslazione degli assi
LE COORDINATE POLARI NEL PIANO
Le coordinate cartesiane nel piano non sono l’unico sistema per determinare la posizione di un generico punto P su un piano. Esistono infatti delle altre coordinate , dette polari, che consistono in due numeri, non negativi, mediante i quali si può determinare la posizione del punto P nel piano. Ecco in che cosa consistono le coordinate polari U Sia O un punto del piano, detto polo, e sia x una | | • P semiretta orientata, che ha origine in O, detta asse polare. ρ Se si indica con ρ la lunghezza assoluta, in una data unità di misura (U), del segmento OP, e con ϑ l’angolo che, in senso antiorario, il segmento OP forma con l’asse O• x polare, i due suddetti numeri, ρ e ϑ, rappresentano le coordinate polari di P e sono chiamati: ρ modulo e ϑ anomalia. Tra il punto P ed i due numeri ρ e ϑ sussiste una corrispondenza biunivoca che significa che, dato P sono fissate con certezza le due coordinate e, viceversa, stabilite le coordinate è determinato con sicurezza il punto P. Ovviamente l’anomalia ϑ è determinata a meno di multipli additivi di 2π. Trasformazione delle coordinate polari in coordinate cartesiane

4
• P Volendo trasformare le coordinate polari di un punto P nelle corrispondenti coordinate cartesiane, basta osservare ρ che è x = ρ cos ϑ e y = ρ sen ϑ ϑ E, viceversa, è O x Ρ2 = x2 + y2 e tg ϑ = y/x da cui Ρ = √ x2 + y2 e ϑ = arctg y/x Es. Si vuole trasformare in forma cartesiana le coordinate polari ρ = 2 ; e ϑ = π / 2 Applicando le formule soprariportate si ottiene: x = ρ cos ϑ = 2 cos π/2 = 0 y = ρ sen ϑ = 2 sen π/2 = 2 Le coordinate cercate sono quindi x = 0; y = 2 Es. Si vuole trasformare in forma polare l’equazione di una circonferenza data in forma cartesiana x2 + y2 = 4 (Si tratta di una circonferenza con centro O e raggio 2) Essendo, come risulta dalle formule di cui sopra, x = ρ cos ϑ e y = ρ sen ϑ si può trasformare l’equazione della circonferenza data nel modo seguente ρ2 cos2 ϑ + ρ2 sen2 ϑ = 4 da cui ρ2 ( sen2 ϑ + cos2 ϑ ) = 4 cioè ρ2 = 4 e quindi ρ = 2 Chr significa che tuti i punti della circonferenza data distano di 2 dal centro O. L’angolo ϑ, ovviamente, varia tra 0 e 2π
LE COORDINATE CARTESIANE NELLO SPAZIO
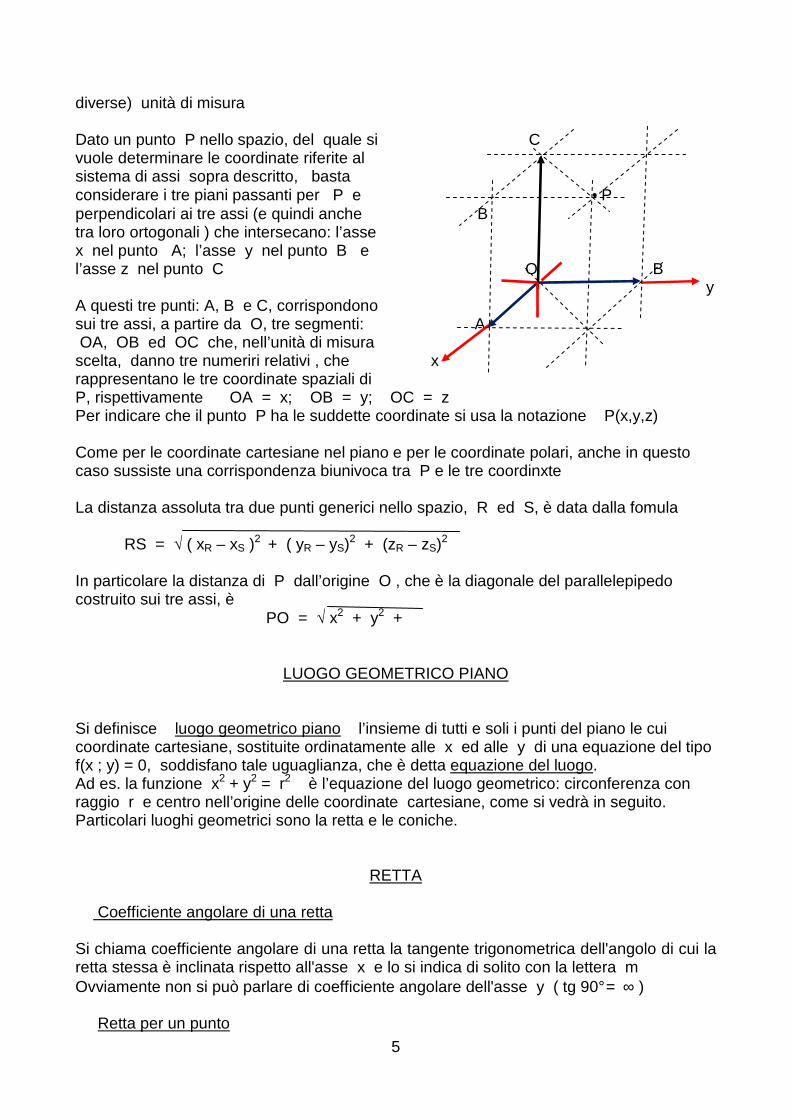
Per localizzare un punto nel piano è necessaria e sufficiente una coppia di numeri, che, come si è visto precedentemente, prende il nome di coordinate cartesiane nel piano. Per stabilire la posizione di un punto nello spazio occorre una terna di numeri detti coordinate cartesiane nello spazio. Questi tre numeri fanno riferimento a tre assi orientati: x, y, e z, perpendicolari tra di loro e passanti tutti e tre per lo stesso punto O,detto Origine degli assi. Su ognuno dei tre assi viene fissato un sistema di coordinate con l’origine in O, aven ti normalmente le stesse (ma anche z
5
diverse) unità di misura Dato un punto P nello spazio, del quale si C vuole determinare le coordinate riferite al sistema di assi sopra descritto, basta considerare i tre piani passanti per P e • P perpendicolari ai tre assi (e quindi anche B tra loro ortogonali ) che intersecano: l’asse x nel punto A; l’asse y nel punto B e l’asse z nel punto C O B y A questi tre punti: A, B e C, corrispondono sui tre assi, a partire da O, tre segmenti: A OA, OB ed OC che, nell’unità di misura scelta, danno tre numeriri relativi , che x rappresentano le tre coordinate spaziali di P, rispettivamente OA = x; OB = y; OC = z Per indicare che il punto P ha le suddette coordinate si usa la notazione P(x,y,z) Come per le coordinate cartesiane nel piano e per le coordinate polari, anche in questo caso sussiste una corrispondenza biunivoca tra P e le tre coordinxte La distanza assoluta tra due punti generici nello spazio, R ed S, è data dalla fomula RS = √ ( xR – xS )2 + ( yR – yS)2 + (zR – zS)2 In particolare la distanza di P dall’origine O , che è la diagonale del parallelepipedo costruito sui tre assi, è PO = √ x2 + y2 +
LUOGO GEOMETRICO PIANO Si definisce luogo geometrico piano l’insieme di tutti e soli i punti del piano le cui coordinate cartesiane, sostituite ordinatamente alle x ed alle y di una equazione del tipo f(x ; y) = 0, soddisfano tale uguaglianza, che è detta equazione del luogo. Ad es. la funzione x2 + y2 = r2 è l’equazione del luogo geometrico: circonferenza con raggio r e centro nell’origine delle coordinate cartesiane, come si vedrà in seguito. Particolari luoghi geometrici sono la retta e le coniche.
RETTA Coefficiente angolare di una retta Si chiama coefficiente angolare di una retta la tangente trigonometrica dell'angolo di cui la retta stessa è inclinata rispetto all'asse x e lo si indica di solito con la lettera m Ovviamente non si può parlare di coefficiente angolare dell'asse y ( tg 90° = ∞ ) Retta per un punto
6
La retta per un punto P ( xo ; yo ), inclinata di un angolo α rispetto all'asse x, e avente quindi il coefficiente angolare uguale a m ( = tg α ) ha l'equazione y - yo = m ( x - xo ) oppure y = m x + q (in cui q = yo - m xo) Queste equazioni sono dette equazioni esplicite della retta Retta per due punti Dati due punti P1 ( x1 ; y1 ) e P2 ( x2; y2 ), l'equazione della retta passante per tali due punti è x – x1 y – y1
= x 2 – x1 y2 – y1
che, ponendo a = y2 – y1 ; - b = x2 – x1 ; c = x2 y1 - x1 y2
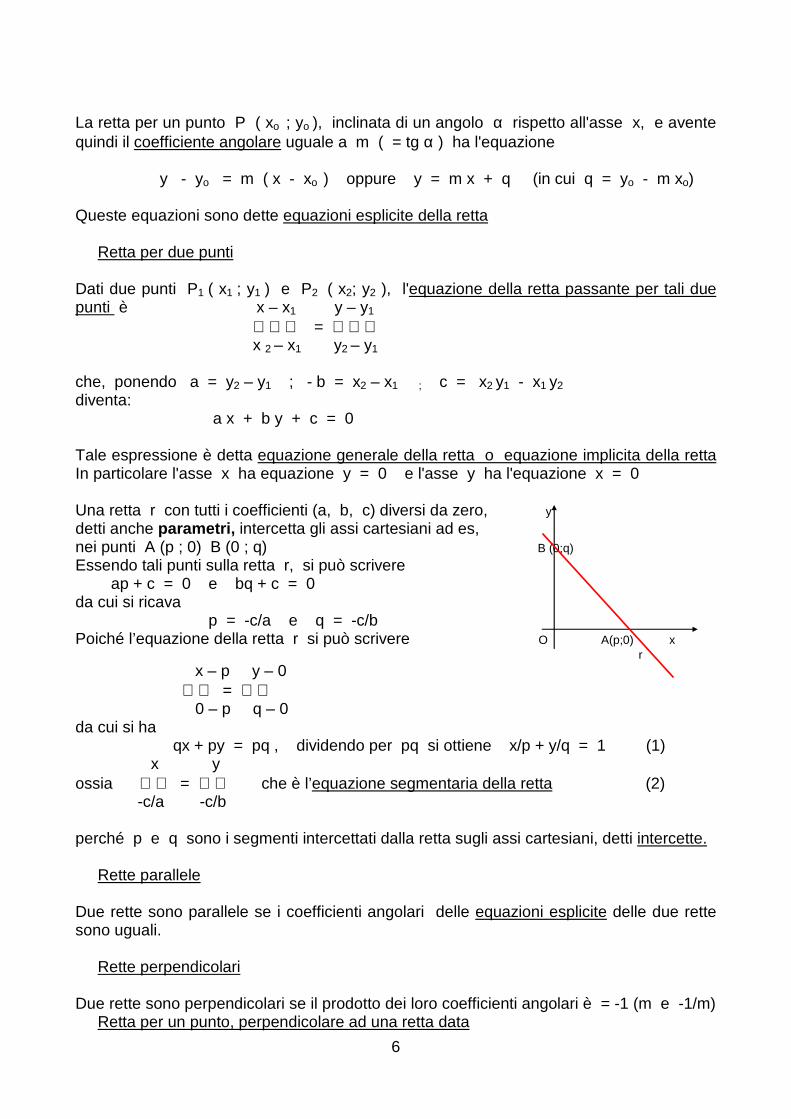
diventa: a x + b y + c = 0 Tale espressione è detta equazione generale della retta o equazione implicita della retta In particolare l'asse x ha equazione y = 0 e l'asse y ha l'equazione x = 0 Una retta r con tutti i coefficienti (a, b, c) diversi da zero, y detti anche parametri, intercetta gli assi cartesiani ad es, nei punti A (p ; 0) B (0 ; q) B (0;q)
Essendo tali punti sulla retta r, si può scrivere ap + c = 0 e bq + c = 0 da cui si ricava p = -c/a e q = -c/b Poiché l’equazione della retta r si può scrivere O A(p;0) x r x – p y – 0 = 0 – p q – 0 da cui si ha qx + py = pq , dividendo per pq si ottiene x/p + y/q = 1 (1) x y ossia = che è l’equazione segmentaria della retta (2) -c/a -c/b perché p e q sono i segmenti intercettati dalla retta sugli assi cartesiani, detti intercette. Rette parallele Due rette sono parallele se i coefficienti angolari delle equazioni esplicite delle due rette sono uguali. Rette perpendicolari Due rette sono perpendicolari se il prodotto dei loro coefficienti angolari è = -1 (m e -1/m) Retta per un punto, perpendicolare ad una retta data
7
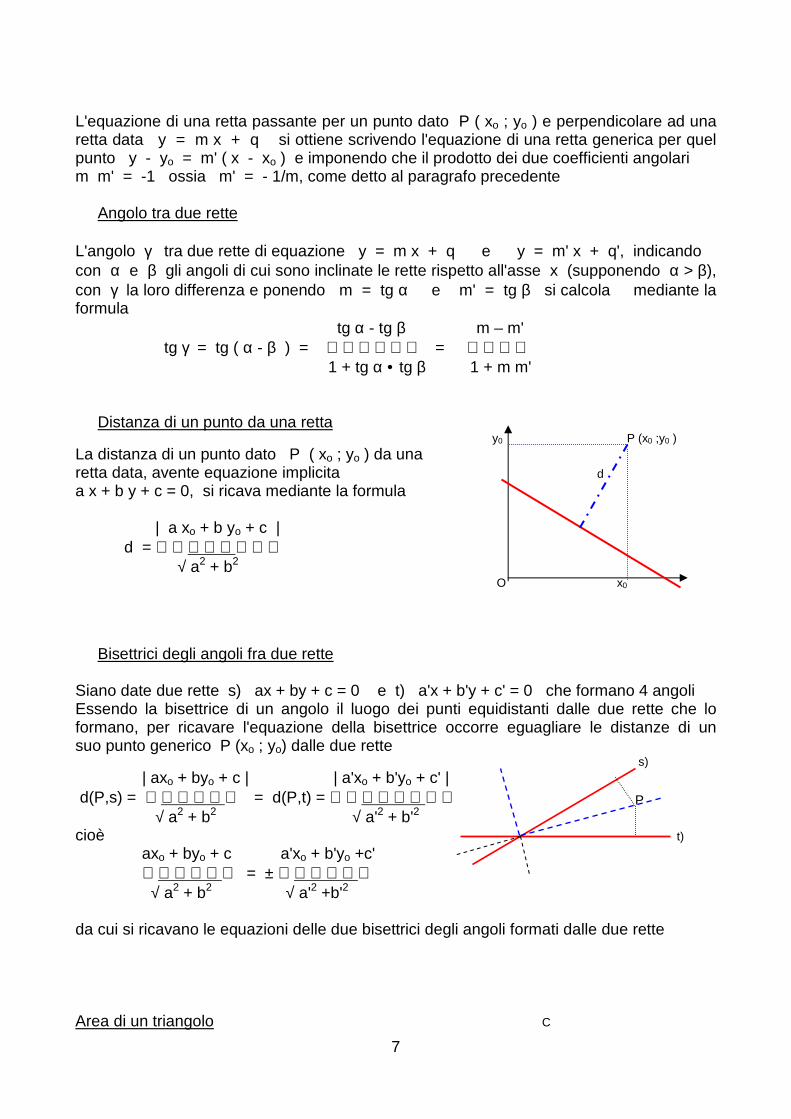
L'equazione di una retta passante per un punto dato P ( xo ; yo ) e perpendicolare ad una retta data y = m x + q si ottiene scrivendo l'equazione di una retta generica per quel punto y - yo = m' ( x - xo ) e imponendo che il prodotto dei due coefficienti angolari m m' = -1 ossia m' = - 1/m, come detto al paragrafo precedente Angolo tra due rette L'angolo γ tra due rette di equazione y = m x + q e y = m' x + q', indicando con α e β gli angoli di cui sono inclinate le rette rispetto all'asse x (supponendo α > β), con γ la loro differenza e ponendo m = tg α e m' = tg β si calcola mediante la formula tg α - tg β m – m' tg γ = tg ( α - β ) = = 1 + tg α • tg β 1 + m m' Distanza di un punto da una retta y0 P (x0 ;y0 ) La distanza di un punto dato P ( xo ; yo ) da una retta data, avente equazione implicita d a x + b y + c = 0, si ricava mediante la formula | a xo + b yo + c | d = √ a2 + b2 O x0
Bisettrici degli angoli fra due rette
Siano date due rette s) ax + by + c = 0 e t) a'x + b'y + c' = 0 che formano 4 angoli Essendo la bisettrice di un angolo il luogo dei punti equidistanti dalle due rette che lo formano, per ricavare l'equazione della bisettrice occorre eguagliare le distanze di un suo punto generico P (xo ; yo) dalle due rette s) | axo + byo + c | | a'xo + b'yo + c' | d(P,s) = = d(P,t) = √ a2 + b2 √ a'2 + b'2
cioè t) axo + byo + c a'xo + b'yo +c' = ± √ a2 + b2 √ a'2 +b'2
da cui si ricavano le equazioni delle due bisettrici degli angoli formati dalle due rette Area di un triangolo C
P
8
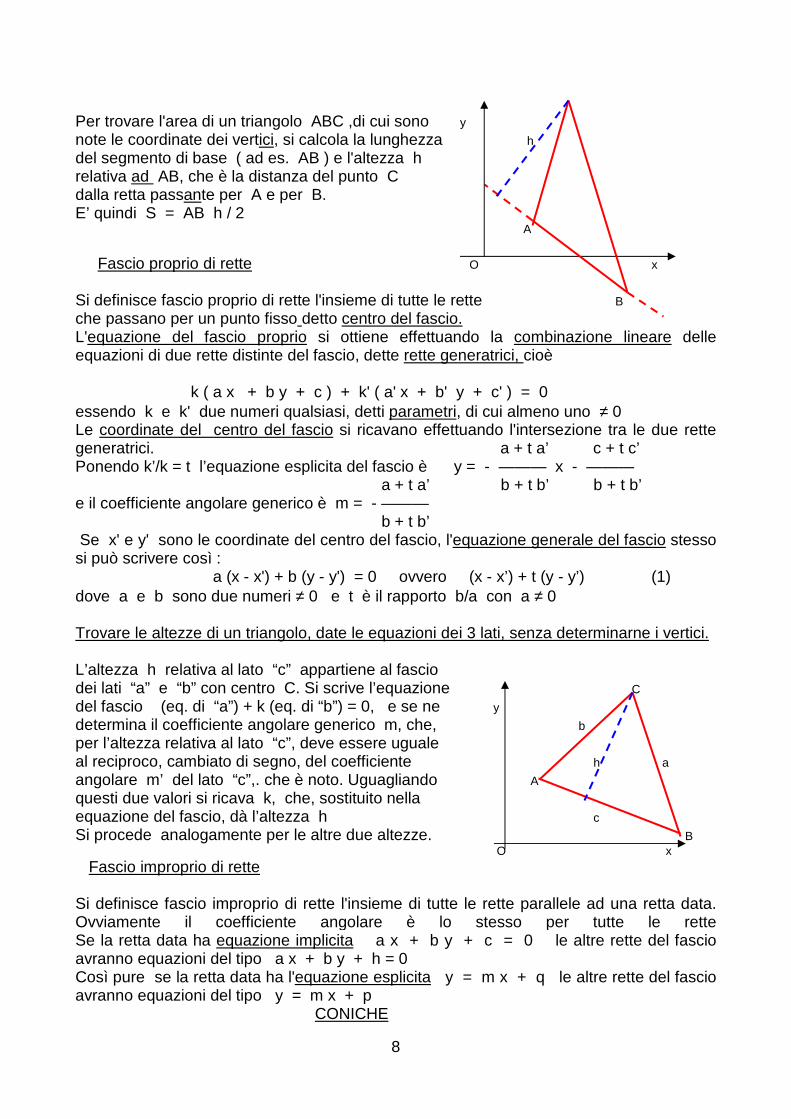
Per trovare l'area di un triangolo ABC ,di cui sono y
note le coordinate dei vertici, si calcola la lunghezza h
del segmento di base ( ad es. AB ) e l'altezza h relativa ad AB, che è la distanza del punto C dalla retta passante per A e per B. E’ quindi S = AB h / 2 A Fascio proprio di rette O x
Si definisce fascio proprio di rette l'insieme di tutte le rette B che passano per un punto fisso detto centro del fascio. L'equazione del fascio proprio si ottiene effettuando la combinazione lineare delle equazioni di due rette distinte del fascio, dette rette generatrici, cioè k ( a x + b y + c ) + k' ( a' x + b' y + c' ) = 0 essendo k e k' due numeri qualsiasi, detti parametri, di cui almeno uno ≠ 0 Le coordinate del centro del fascio si ricavano effettuando l'intersezione tra le due rette generatrici. a + t a’ c + t c’ Ponendo k’/k = t l’equazione esplicita del fascio è y = - ——— x - ——— a + t a’ b + t b’ b + t b’ e il coefficiente angolare generico è m = - ——— b + t b’ Se x' e y' sono le coordinate del centro del fascio, l'equazione generale del fascio stesso si può scrivere così : a (x - x') + b (y - y') = 0 ovvero (x - x’) + t (y - y’) (1) dove a e b sono due numeri ≠ 0 e t è il rapporto b/a con a ≠ 0 Trovare le altezze di un triangolo, date le equazioni dei 3 lati, senza determinarne i vertici. L’altezza h relativa al lato “c” appartiene al fascio dei lati “a” e “b” con centro C. Si scrive l’equazione C del fascio (eq. di “a”) + k (eq. di “b”) = 0, e se ne y determina il coefficiente angolare generico m, che, b
per l’altezza relativa al lato “c”, deve essere uguale al reciproco, cambiato di segno, del coefficiente h a
angolare m’ del lato “c”,. che è noto. Uguagliando A questi due valori si ricava k, che, sostituito nella equazione del fascio, dà l’altezza h c Si procede analogamente per le altre due altezze. B O x Fascio improprio di rette Si definisce fascio improprio di rette l'insieme di tutte le rette parallele ad una retta data. Ovviamente il coefficiente angolare è lo stesso per tutte le rette Se la retta data ha equazione implicita a x + b y + c = 0 le altre rette del fascio avranno equazioni del tipo a x + b y + h = 0 Così pure se la retta data ha l'equazione esplicita y = m x + q le altre rette del fascio avranno equazioni del tipo y = m x + p CONICHE
9
Si chiamano coniche le curve ottenute sezionando una superficie conica con un piano Se il piano secante è perpendicolare all'asse del cono, la conica è una circonferenza ( Che si riduce ad un punto se il piano passa per il vertice del cono ) Se il piano secante è parallelo alla generatrice del cono, la conica è una parabola ( Una coppia di rette coincidenti se il piano passa per il vertice del cono ) Se il piano secante è parallelo all'asse del cono, la conica è un'iperbole (Una coppia di rette incidenti se il piano passa per il vertice del cono ) Se il piano secante è inclinato, rispetto all'asse del cono, di un angolo diverso da 90°, non passante per il vertice e non parallelo alla generatrice del cono, la conica è una ellisse ( Un punto se il piano passa per il vertice del cono ) L'equazione generale di una conica è ax2 + bxy + cy2 + dx + ey + f = 0 L'espressione ∆ = b2 - 4ac si chiama discriminante della conica Se ∆ < 0 la conica è un'ellisse (Se a=c=1 e b=0 la conica è una circonferenza; se poi anche d=e=f=0, la circonferenza ha il centro in O(0;0)) Se ∆ = 0 " " " una parabola Se ∆ > 0 " " " un'iperbole (v. anche a pag 16) Circonferenza, ellisse e iperbole si chiamano coniche a centro perché hanno un centro di simmetria
CIRCONFERENZA La circonferenza è il luogo dei punti del piano equidistanti da un punto fisso detto centro C La distanza di ogni punto da C è il raggio r Indicando con α e β le coordinate del centro C, l'equazione cartesiana della circonferenza è ( x - α )2 + ( y - β )2 = r2 (1) Se C coincide con l'origine degli assi O ( α = β = 0 ) l'equazione diventa x2 + y2 = r2
L'equazione (1) sviluppata e con le sostituzioni a = -2α ; b = -2β ; c = α2 + β2 − r2 diventa x2 + y2 + ax + by + c = 0 (2) detta equazione normale della circonferenza Le coordinate del centro sono ovviamente α = a / -2 e β = b / -2 __________ Il raggio è r = √ α2 + β2 - c L'equazione (2) rappresenta realmente una circonferenza solamente se il raggio è > 0 r2 = α2 + β2 - c > 0 cioè (a/2)2 + (b/2)2 - c > 0
10
Intersezioni tra retta e circonferenza Le intersezioni di una circonferenza con una retta si ottengono facendo sistema delle due relative equazioni. Risolvendo il sistema si ottiene una equazione di 2° grado di cui ∆ è il discriminante Se ∆ > 0 (2 soluzioni) la retta è secante (2 intersezioni) Se ∆ = 0 (2 soluzionI coincidenti) la retta è tangente (punto doppio di tangenza) Se ∆ < 0 (nessuna soluzione reale) la retta è esterna alla circonferenza Lunghezza di una corda di una circonferenza Dati: l'equazione di una circonferenza ( ad es. x2 + y2 = 9 ) ed un punto A (x' ; y') su di essa ( ad es. (2 ;√5) ), volendo calcolare la lunghezza della corda intercettata dalla circonferenza su una secante passante per A con coefficiente angolare m ( ad es. m = 2/3 ) e la cui equazione è quindi y – y' = m (x – x') ( Nel caso dell'es. y = 2/3 (x-2) + √5 ) occorre porre a sistema le due equazioni ricavando così le coordinate dell'altro estremo B della corda La lunghezza della corda si ottiene come distanza tra i punti A e B ( v. § relativo a pag. 2 ) Circonferenza per tre punti Per scrivere l'equazione della circonferenza passante per tre punti dati: A B e C si può procedere nel modo seguente. Ricordando che il centro si trova sugli assi delle corde, si scrivono le equazioni delle rette AB e BC, si trovano le coordinate dei punti di mezzo dei segmenti AB e BC (M ed N), si scrivono le equazioni degli assi di AB e BC (cioè le rette per M ed N perpendicolari rispettivamente alle rette AB e BC) e si trova l'intersezione dei due assi ottenendo così le coordinate α e β del centro P della circonferenza cercata. Calcolato il raggio della circonferenza ( ad es PA ), l'equazione voluta è del tipo della (1) di pag 7. Un altro modo per risolvere tale problema è quello cui si fa riferimento nel paragrafo "Fascio di parabole" di pag 14 Circonferenza passante per due punti dati e tangente ad una retta data Si fa sistema tra l’equazione della circonferenza passante per i due punti e la equazione della retta. Ne risulta una equazione di 2° grad o di cui si pone il ∆.uguale a zero. Il risultato di questa equazione permette di risolvere il problema. Il problema si può risolvere anche indicando con α e β le coordinate del centro C e imponendo che la distanza di C dalla retta sia uguale al raggio. Tangenti alla circonferenza Le due tangenti ad una circonferenza da un punto P ( x' ; y' ) esterno alla stessa si ottengono scrivendo l'equazione generica di una retta passante per P, cioè y - y' = m ( x - x' ) , mettendola a sistema con l'equazione della circonferenza data e imponendo che il ∆ dell'equazione di 2° grado così ottenuta sia = 0 Si ottengono in tal modo due valori di m ed i valori delle coordinate dei punti di tangenza Un altro modo per scrivere l'equazione della tangente ad una circonferenza per P è quello di imporre che la distanza di una retta generica per P, dal centro sia uguale al raggio.
11
La tangente ad una circonferenza per un punto T ( x' ; y' ) appartenente alla stessa, si ottiene con la regola dello sdoppiamento, effettuando, nell'equazione della circonferenza le seguenti sostituzioni x2 = x x' ; y2 = y y' ; x = ( x + x' ) / 2 ; y = ( y + y') / 2 In questo modo l'equazione della tangente risulta: x x' + y y' + a ( x + x' ) / 2 + b ( y + y' ) / 2 + c = 0 Fascio di circonferenze Si definisce fascio di circonferenze l'insieme di tutte le circonferenze rappresentate dall'equazione risultante dalla combinazione lineare delle equazioni di due circonferenze date, dette generatrici k ( x2 + y2 + ax + by + c ) + k' ( x2 + y2 + a'x + b'y + c' ) = 0 o, più semplicemente, dividendo per k (supposto ≠ 0) e ponendo h = k' / k ≠ -1 x2 + y2 + ax + by + c + h ( x2 + y2 + a'x + b'y + c' ) = 0 a + a' h b + b' h c + c' h che si può scrivere x2 + y2 + x + y + = 0 (1) 1 + h 1 + h 1 + h Le coordinate del centro e il raggio di una generica circonferenza del fascio si ricavano dalla (1) ponendo a + a' h b + b' h 1 + h 1 + h c +c' h α = ; β = ; r2 = α2 + β2 - - 2 - 2 1 + h I diversi tipi di fasci di circonferenze 1°) Le due circonferenze generatrici si intersecan o in due punti A e B detti punti base per i quali passa una retta detta asse radicale ( la cui equazione si può ottenere facendo la differenza tra le equazioni delle due circonferenze generatrici ), perpendicolare alla retta passante per i centri, detta asse centrale Tutte le circonferenze del fascio passano per i punti base Per scrivere l'equazione di un fascio di circonferenze dati due punti (A e B) per i quali esse passano (punti base) si scrive l'equazione dell'asse radicale e poi quella dell'asse centrale Si sceglie un punto qualsiasi dell'asse centrale (per es l'intersezione con uno degli assi cartesiani) come centro C (α, β) di una circonferenza del fascio, se ne calcola il raggio r = AC e quindi l'equazione della circonferenza relativa (x - α)2 + (y -β )2 = r2 .
Si fa quindi la combinazione lineare delle equazioni dell'asse radicale e della circonferenza trovata, ottenendo così la richiesta equazione del fascio Un altro sistema è quello descritto nel paragrafo " Fascio di parabole " a pag. 14 dove è pure indicato un modo per scrivere l'equazione di una parabola passante per tre punti valido pure per la circonferenza 2°) Le due circonferenze generatrici sono tra loro tangenti in un punto T per il quale passa la tangente t che è l'asse radicale
12
Tutte le circonferenze del fascio sono tangenti in T alla retta t L'equazione del fascio si può scrivere come combinazione lineare di una circonferenza qualsiasi del fascio, ad es.quella il cui centro C è l’intersezione dell'asse centrale (retta perpendicolare alla t in T ) con uno degli assi cartesiani e il raggio CT, con l'equazione della retta t. In questo caso anche la circonferenza degenere di centro T e raggio nullo appartiene al fascio. 3°) Le due circonferenze generatrici sono concentr iche Tutte le circonferenze del fascio hanno lo stesso centro delle due date. Infatti essendo In questo caso, le coordinate del centro, uguali, risulta a = a' ; b = b' e l'equazione del fascio (dalla (1) ) diventa quindi c + k c' x2 + y2 + ax + by + = 0 1 + k che è l'equazione di una generica circonferenza concentrica con le due date
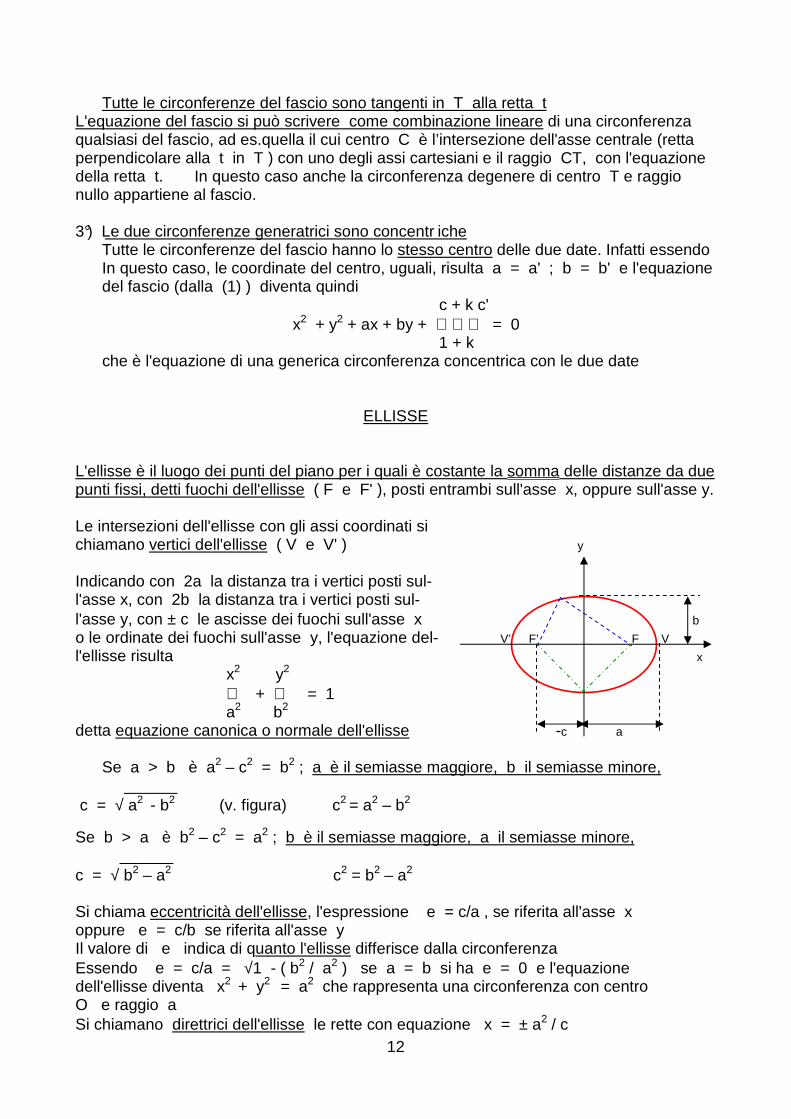
ELLISSE L'ellisse è il luogo dei punti del piano per i quali è costante la somma delle distanze da due punti fissi, detti fuochi dell'ellisse ( F e F' ), posti entrambi sull'asse x, oppure sull'asse y. Le intersezioni dell'ellisse con gli assi coordinati si chiamano vertici dell'ellisse ( V e V' ) y Indicando con 2a la distanza tra i vertici posti sul- l'asse x, con 2b la distanza tra i vertici posti sul- l'asse y, con ± c le ascisse dei fuochi sull'asse x b o le ordinate dei fuochi sull'asse y, l'equazione del- V’ F’ F V l'ellisse risulta x x2 y2 + = 1 a2 b2
detta equazione canonica o normale dell'ellisse -c a Se a > b è a2 – c2 = b2 ; a è il semiasse maggiore, b il semiasse minore, ______ c = √ a2 - b2 (v. figura) c2 = a2 – b2
Se b > a è b2 – c2 = a2 ; b è il semiasse maggiore, a il semiasse minore, ______ c = √ b2 – a2 c2 = b2 – a2
Si chiama eccentricità dell'ellisse, l'espressione e = c/a , se riferita all'asse x oppure e = c/b se riferita all'asse y Il valore di e indica di quanto l'ellisse differisce dalla circonferenza Essendo e = c/a = √1 - ( b2 / a2 ) se a = b si ha e = 0 e l'equazione dell'ellisse diventa x2 + y2 = a2 che rappresenta una circonferenza con centro O e raggio a Si chiamano direttrici dell'ellisse le rette con equazione x = ± a2 / c
13
Si chiama diametro dell'ellisse qualsiasi corda passante per il centro Si chiamano raggi vettori focali dell'ellisse le distanze di un suo punto P (x;y) dai fuochi F ed F' La somma dei due raggi focali è uguale a 2a, come risulta dalla definizione dell'ellisse Tangenti all'ellisse Le tangenti ad un'ellisse da un punto esterno ad essa si ottengono come per la circonferenza (v. pag 8) L'equazione della tangente ad un'ellisse per un punto (x' ; y' ) appartenente alla stessa è data, con la regola dello sdoppiamento ( v pag 7), da x x' y y' + = 1 a2 b2
Ellisse con gli assi paralleli agli assi cartesiani Se il centro C dell’ellisse non coincide con l’origine O degli assi coordinati, l’equazione di questa ellisse con gli assi paralleli agli assi x e y si ottiene mediante una traslazione di assi (V. a pag, 3) che porti O in C, avente coordinate x0 ; y0.. Pertanto la sua equazione rispetto ai nuovi assi X ed Y è X2 Y2 = 1 a2 b2 Ricordando le formule della traslazione degli assi, che sono le seguenti x = x0 + X dalle quali derivano X = x – x0
y = y0 + Y Y = y – y0
l’equazione succitata diventa (x – x0)
2 (y – y0)2
= 1 a2 b2
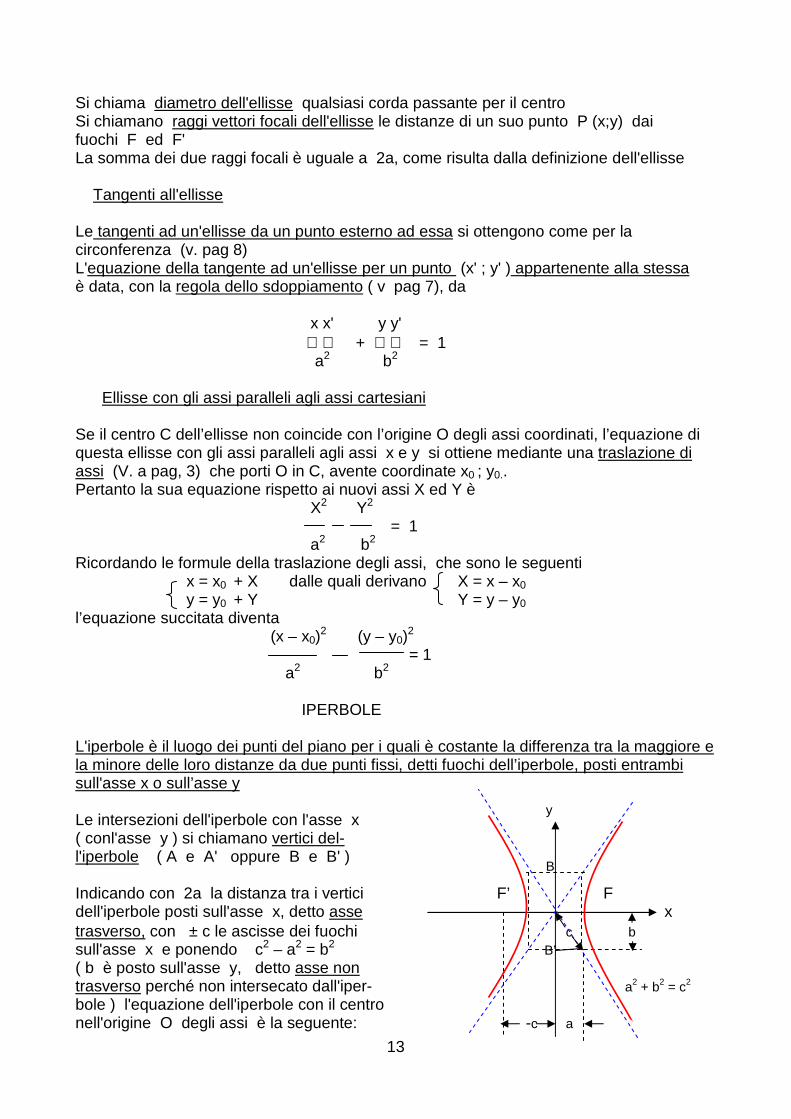
IPERBOLE L'iperbole è il luogo dei punti del piano per i quali è costante la differenza tra la maggiore e la minore delle loro distanze da due punti fissi, detti fuochi dell’iperbole, posti entrambi sull'asse x o sull’asse y Le intersezioni dell'iperbole con l'asse x ( conl'asse y ) si chiamano vertici del- l'iperbole ( A e A' oppure B e B' ) Indicando con 2a la distanza tra i vertici F’ F dell'iperbole posti sull'asse x, detto asse x trasverso, con ± c le ascisse dei fuochi c b sull'asse x e ponendo c2 – a2 = b2 B’ ( b è posto sull'asse y, detto asse non trasverso perché non intersecato dall'iper- a2 + b2 = c2 bole ) l'equazione dell'iperbole con il centro nell'origine O degli assi è la seguente: -c a
y
B
14
x2 y2 = 1 a2 b2 detta equazione canonica o normale dell'iperbole con l'asse x come asse trasverso (Questa equazione differisce solo per il segno da quella dell’iperbole) Se è l'asse y l'asse trasverso, è 2b la distanza tra i vertici dell'iperbole, c2 – b2 = a2,
l'equazione dell'iperbole, sempre con il centro nell'origine O degli assi, risulta y2 x2
- = 1 a2 b2
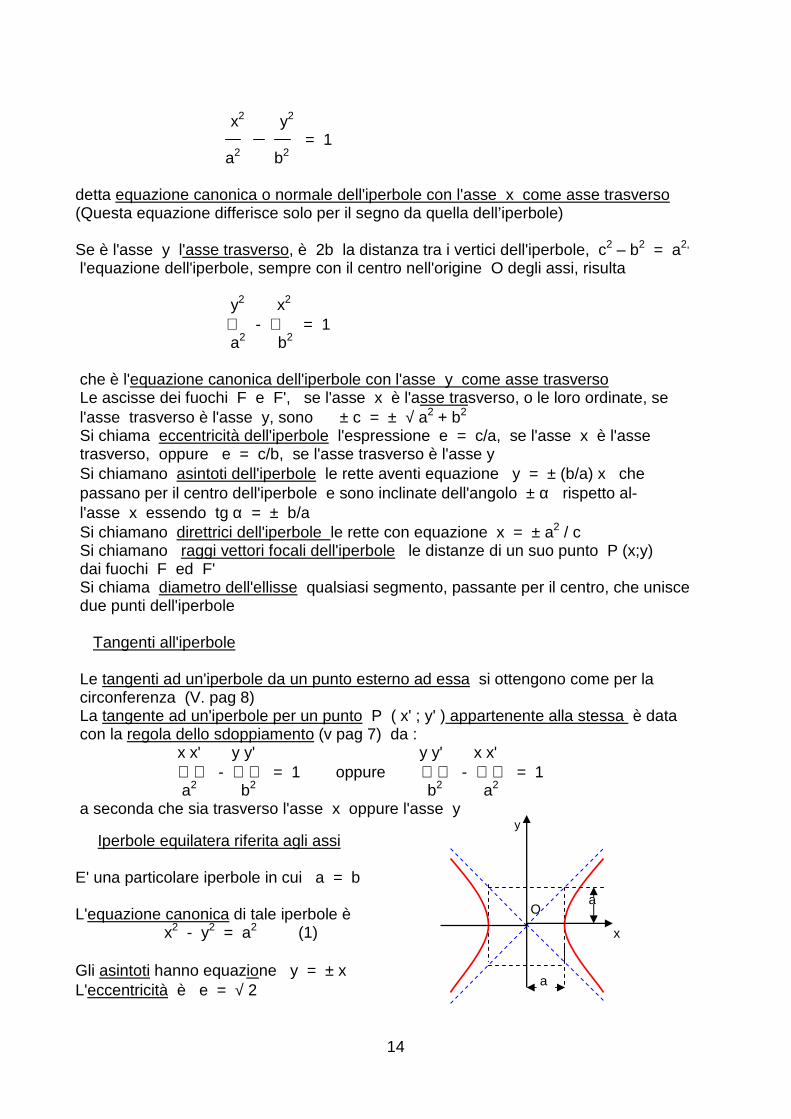
che è l'equazione canonica dell'iperbole con l'asse y come asse trasverso Le ascisse dei fuochi F e F', se l'asse x è l'asse trasverso, o le loro ordinate, se l'asse trasverso è l'asse y, sono ± c = ± √ a2 + b2 Si chiama eccentricità dell'iperbole l'espressione e = c/a, se l'asse x è l'asse trasverso, oppure e = c/b, se l'asse trasverso è l'asse y Si chiamano asintoti dell'iperbole le rette aventi equazione y = ± (b/a) x che passano per il centro dell'iperbole e sono inclinate dell'angolo ± α rispetto al- l'asse x essendo tg α = ± b/a Si chiamano direttrici dell'iperbole le rette con equazione x = ± a2 / c Si chiamano raggi vettori focali dell'iperbole le distanze di un suo punto P (x;y) dai fuochi F ed F' Si chiama diametro dell'ellisse qualsiasi segmento, passante per il centro, che unisce due punti dell'iperbole Tangenti all'iperbole Le tangenti ad un'iperbole da un punto esterno ad essa si ottengono come per la circonferenza (V. pag 8) La tangente ad un'iperbole per un punto P ( x' ; y' ) appartenente alla stessa è data con la regola dello sdoppiamento (v pag 7) da : x x' y y' y y' x x' - = 1 oppure - = 1 a2 b2 b2 a2 a seconda che sia trasverso l'asse x oppure l'asse y y Iperbole equilatera riferita agli assi E' una particolare iperbole in cui a = b L'equazione canonica di tale iperbole è x2 - y2 = a2 (1) x
Gli asintoti hanno equazione y = ± x L'eccentricità è e = √ 2
O
x
a
a
15
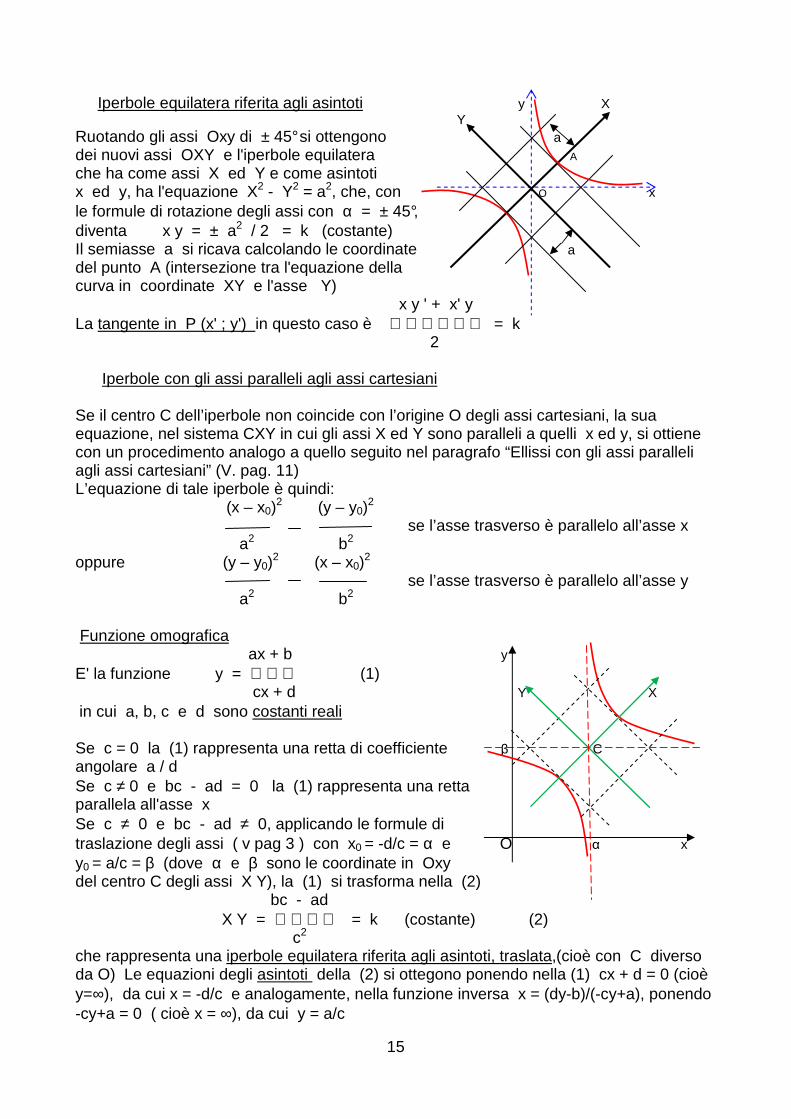
Iperbole equilatera riferita agli asintoti y X Y Ruotando gli assi Oxy di ± 45° si ottengono a dei nuovi assi OXY e l'iperbole equilatera A che ha come assi X ed Y e come asintoti x ed y, ha l'equazione X2 - Y2 = a2, che, con O x
le formule di rotazione degli assi con α = ± 45°, diventa x y = ± a2 / 2 = k (costante) Il semiasse a si ricava calcolando le coordinate a del punto A (intersezione tra l'equazione della curva in coordinate XY e l'asse Y) x y ' + x' y La tangente in P (x' ; y') in questo caso è = k 2 Iperbole con gli assi paralleli agli assi cartesiani Se il centro C dell’iperbole non coincide con l’origine O degli assi cartesiani, la sua equazione, nel sistema CXY in cui gli assi X ed Y sono paralleli a quelli x ed y, si ottiene con un procedimento analogo a quello seguito nel paragrafo “Ellissi con gli assi paralleli agli assi cartesiani” (V. pag. 11) L’equazione di tale iperbole è quindi: (x – x0)
2 (y – y0)2
se l’asse trasverso è parallelo all’asse x a2 b2 oppure (y – y0)
2 (x – x0)2
se l’asse trasverso è parallelo all’asse y a2 b2
Funzione omografica ax + b y E' la funzione y = (1) cx + d Y X
in cui a, b, c e d sono costanti reali Se c = 0 la (1) rappresenta una retta di coefficiente β C angolare a / d Se c ≠ 0 e bc - ad = 0 la (1) rappresenta una retta parallela all'asse x Se c ≠ 0 e bc - ad ≠ 0, applicando le formule di traslazione degli assi ( v pag 3 ) con x0 = -d/c = α e O α x
y0 = a/c = β (dove α e β sono le coordinate in Oxy del centro C degli assi X Y), la (1) si trasforma nella (2) bc - ad X Y = = k (costante) (2) c2
che rappresenta una iperbole equilatera riferita agli asintoti, traslata,(cioè con C diverso da O) Le equazioni degli asintoti della (2) si ottegono ponendo nella (1) cx + d = 0 (cioè y=∞), da cui x = -d/c e analogamente, nella funzione inversa x = (dy-b)/(-cy+a), ponendo -cy+a = 0 ( cioè x = ∞), da cui y = a/c
16
PARABOLA
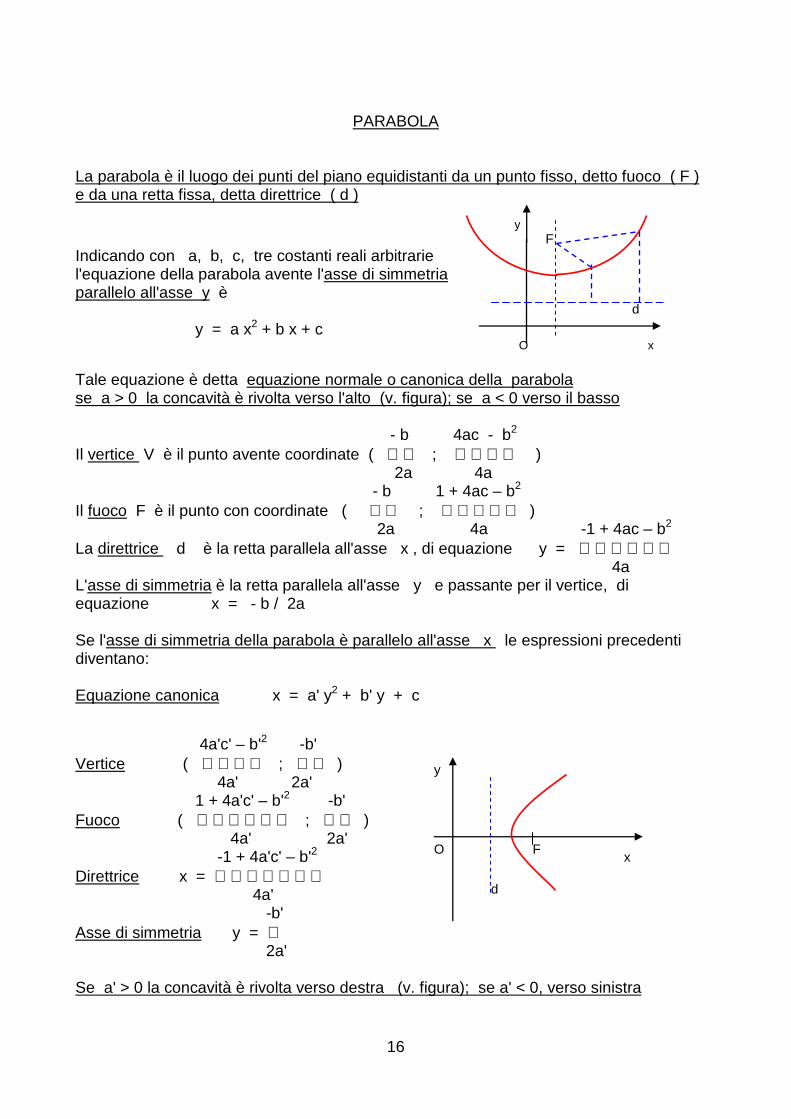
La parabola è il luogo dei punti del piano equidistanti da un punto fisso, detto fuoco ( F ) e da una retta fissa, detta direttrice ( d ) y F Indicando con a, b, c, tre costanti reali arbitrarie l'equazione della parabola avente l'asse di simmetria parallelo all'asse y è y = a x2 + b x + c O x Tale equazione è detta equazione normale o canonica della parabola se a > 0 la concavità è rivolta verso l'alto (v. figura); se a < 0 verso il basso - b 4ac - b2
Il vertice V è il punto avente coordinate ( ; ) 2a 4a - b 1 + 4ac – b2
Il fuoco F è il punto con coordinate ( ; ) 2a 4a -1 + 4ac – b2 La direttrice d è la retta parallela all'asse x , di equazione y = 4a L'asse di simmetria è la retta parallela all'asse y e passante per il vertice, di equazione x = - b / 2a Se l'asse di simmetria della parabola è parallelo all'asse x le espressioni precedenti diventano: Equazione canonica x = a' y2 + b' y + c 4a'c' – b'2 -b' Vertice ( ; ) 4a' 2a' 1 + 4a'c' – b'2 -b' Fuoco ( ; ) 4a' 2a' -1 + 4a'c' – b'2
Direttrice x = 4a' -b' Asse di simmetria y = 2a' Se a' > 0 la concavità è rivolta verso destra (v. figura); se a' < 0, verso sinistra
d
O
d
y
F x
17
Tangenti alla parabola Le tangenti alla parabola da un punto esterno ad essa si ottengono come per la circonferenza (v. pag 8) L' equazione della tangente alla parabola per un punto ( x' ; y' ) appartenente alla stessa, per una parabola con asse di simmetria parallelo all'asse y,è data con la regola dello sdoppiamento ( v pag 8 ) da: y + y' x + x' = a x x' + b + c 2 2 L'equazione di una parabola con asse di simmetria parallelo all'asse x si ottiene sostituendo i coefficienti a b c con a' b' c' e scambiando y e y' con x e x' e viceversa Parabola del tipo y = ax 2 + bx + c tangente ad una data circonferenza in un suo punto ( x' : y' ) Si scrivono le equazioni delle due tangenti, alla parabola ed alla circonferenza, in ( x' ; y' ) in forma esplicita e si eguagliano i coefficienti delle x (coefficienti angolari) ed i termini noti ottenendo così i valori di a , b, c. Per risolvere il problema occorre però ancora una condizione, come ad es. il passaggio della parabola per un punto dato. Fascio di parabole Analogamente a quanto detto per la circonferenza, si definisce fascio di parabole l'insieme di tutte le parabole rappresentate dall'equazione risultante dalla combinazione lineare delle equazioni di due parabole dette generatrici k ( y - ax2 - bx - c ) + k' ( y - a' x2 - b' x - c' ) = 0 o più semplicemente,dividendo tale equazione per k (supposto ≠ o) e ponendo h = k' / k ≠ -1 y - ax2 - bx - c + h ( y - a' x2 - b' x - c' ) = 0 Anche per il fascio di parabole, se le due generatrici si intersecano in due punti, detti punti base, tutte le parabole del fascio passano per quei punti. Se, invece, le due generatrici non si intersecano, nessun punto del piano è comune a tutte le parabole. Per scrivere l'equazione del fascio di parabole passanti per due punti (A, B) si sostituiscono, nell'equazione generica della parabola, ad x e ad y , le corrispondenti coordinate di A e poi di B e si ricavano, dal sistema di due equazioni in tre incognite così ottenuto, i valori di due dei tre coefficienti, dei quali uno o entrambi in funzione del terzo coefficiente. Assumendo quest'ultimo come parametro h si ottiene la richiesta equazione del fascio Per scrivere l'equazione della parabola del fascio passante per tre punti (A, B e C) si può scrivere l'equazione del fascio di parabole avente come punti base due dei tre punti dati (ad es A e B) mediante il procedimento sopraindicato. Quindi si sostituiscono le coordinate di C al posto di x e y nell'equazione del fascio ottenendo in tal modo il valore di h che permette di ricavare l'equazione della parabola passante per i tre punti dati.

18
CONICHE DEGENERI E NON DEGENERI L' equazione generale di una conica: (v. pag 7) si può scrivere anche così: ax2 + 2bxy + cy2 + 2dx + 2ey + f = 0 (1) Consideriamo il determinante dei coefficienti a b d ∆ = b c e = acf + bed + bed – cd2 – b2f – e2a d e f Consideriamo ora il determinante a b δ = = ac - b2
b c Consideriamo infine l'espressione Ι1 = a + c Le tre espressioni ∆, δ, Ι1 prendono il nome rispettivamente di invariante cubico, invariante quadratico, invariante lineare del polinomio F(x, y) = ax2 + 2bxy + cy2 + 2dx + 2ey + f Se ∆ = 0 la conica è degenere Se δ > 0 si tratta di un punto Se δ < 0 si tratta di una coppia di rette incidenti (perpendicolari se Ι1 = 0) Se δ = 0 si tratta di due rette parallele Il prodotto membro a membro delle equazioni, in forma implicita ,di due rette incidenti dà l'equazione di un'iperbole degenere Il quadrato dell'equazione, in forma implicita, di due rette coincidenti dà l'equazione di una parabola degenere L'ellisse degenere consiste in un punto; ad es. lo 0, come nell'equazione x2 + 2y2 = 0 Es. 2x2 + 3xy - 2y2 + 7x - y + 3 = 0 ( ∆ = 0) che si può scrivere ( 2x - y + 1) (x + 2y +3 ) che rappresenta appunto una coppia di rette Essendo 2 3/2 δ = = −4 −9/4 < 0 e Ι1 = a + c = 2 – 2 = 0 3/2 -2 le rette sono perpendicolari Si tratta di un'iperbole degenere Se ∆ ≠ 0 la conica non è degenere Se δ > 0 e il prodotto Ι1 * ∆ < 0 si tratta di un'ellisse reale " " " " " Ι1 * ∆ > 0 " " " ellisse immaginaria Se δ < 0 " " " iperbole " " " " " " Ι1 = 0 " " " iperbole equilatera Se δ = 0 " " di una parabola
19
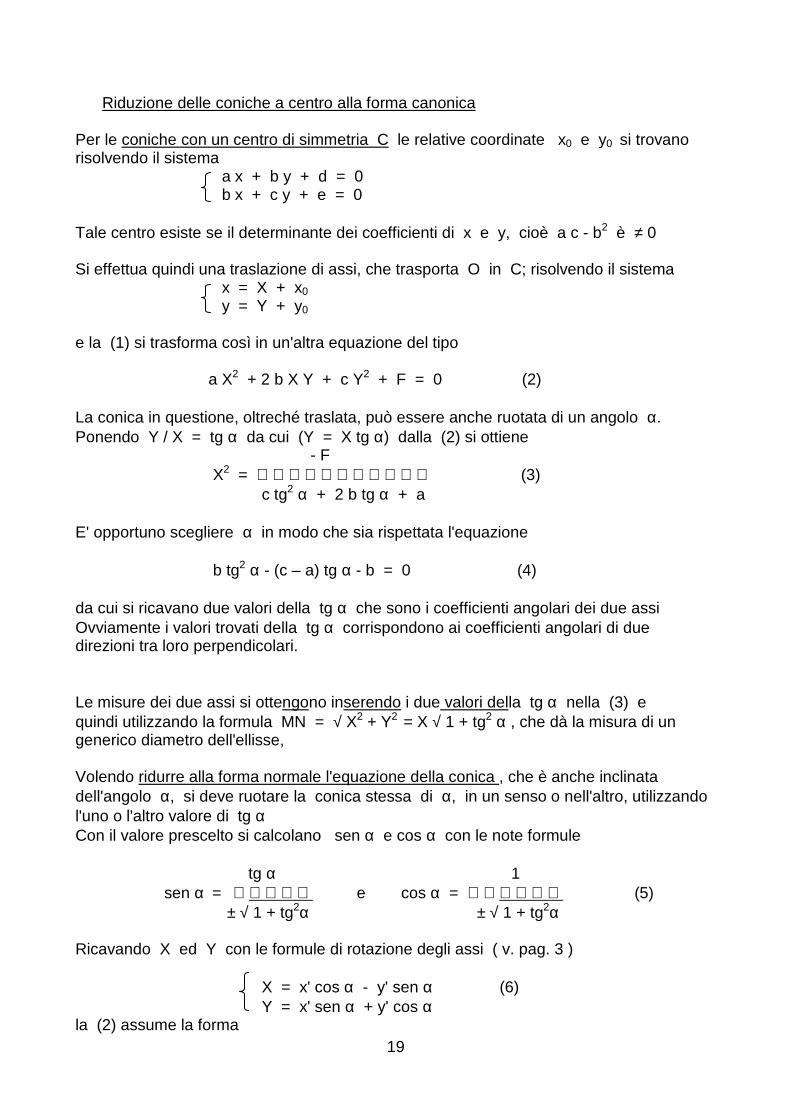
Riduzione delle coniche a centro alla forma canonica Per le coniche con un centro di simmetria C le relative coordinate x0 e y0 si trovano risolvendo il sistema a x + b y + d = 0 b x + c y + e = 0 Tale centro esiste se il determinante dei coefficienti di x e y, cioè a c - b2 è ≠ 0 Si effettua quindi una traslazione di assi, che trasporta O in C; risolvendo il sistema x = X + x0 y = Y + y0 e la (1) si trasforma così in un'altra equazione del tipo a X2 + 2 b X Y + c Y2 + F = 0 (2) La conica in questione, oltreché traslata, può essere anche ruotata di un angolo α. Ponendo Y / X = tg α da cui (Y = X tg α) dalla (2) si ottiene - F X2 = (3) c tg2 α + 2 b tg α + a E' opportuno scegliere α in modo che sia rispettata l'equazione b tg2 α - (c – a) tg α - b = 0 (4) da cui si ricavano due valori della tg α che sono i coefficienti angolari dei due assi Ovviamente i valori trovati della tg α corrispondono ai coefficienti angolari di due direzioni tra loro perpendicolari. Le misure dei due assi si ottengono inserendo i due valori della tg α nella (3) e quindi utilizzando la formula MN = √ X2 + Y2 = X √ 1 + tg2 α , che dà la misura di un generico diametro dell'ellisse, Volendo ridurre alla forma normale l'equazione della conica , che è anche inclinata dell'angolo α, si deve ruotare la conica stessa di α, in un senso o nell'altro, utilizzando l'uno o l'altro valore di tg α Con il valore prescelto si calcolano sen α e cos α con le note formule tg α 1 sen α = e cos α = (5) ± √ 1 + tg2α ± √ 1 + tg2α Ricavando X ed Y con le formule di rotazione degli assi ( v. pag. 3 ) X = x' cos α - y' sen α (6) Y = x' sen α + y' cos α la (2) assume la forma

20
x' 2 y' 2 ± = 1 x0
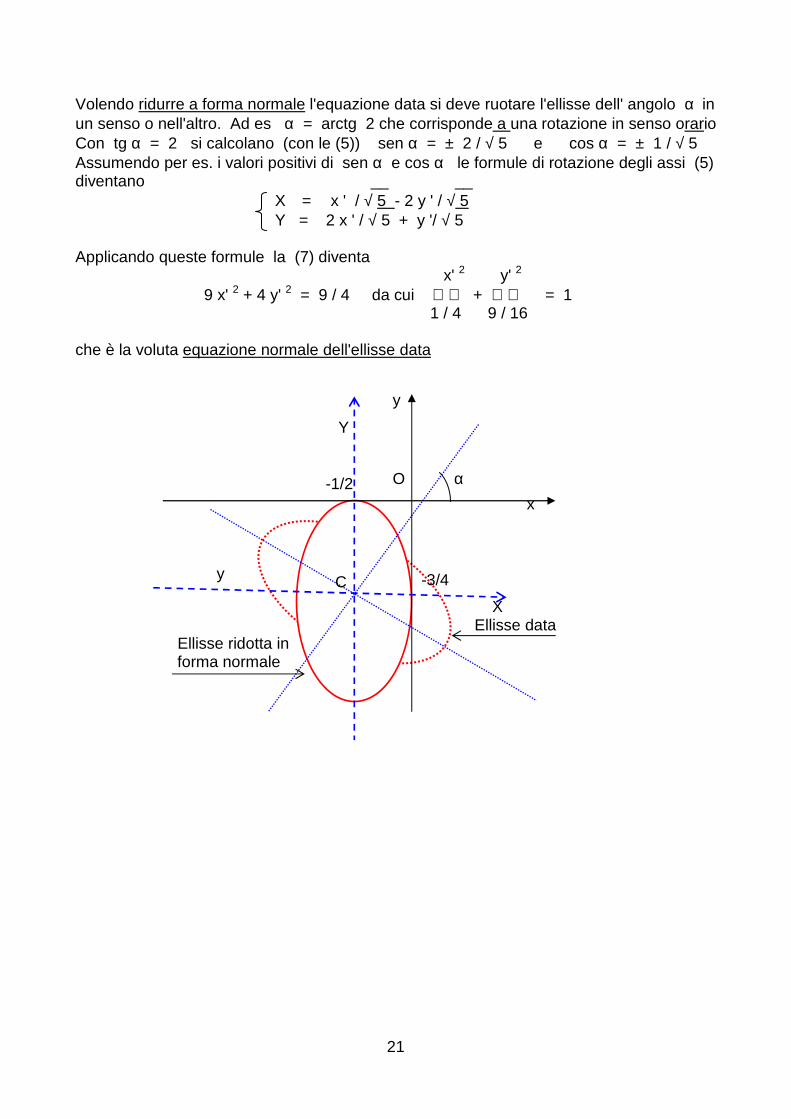
2 y0 che è la voluta equazione normale di una conica a centro Nel caso dell'iperbole gli asintoti sono le rette, passanti per C, aventi coefficiente angolare m = y / x dato dalla soluzione dell'equazione a x2 + 2 b x y + c y2 = 0 Esempio Sia data l'equazione 5 x2 + 4 xy + 8 y2 + 8 x +14 y + 5 = 0 Calcoliamo 5 2 4 ∆ = 2 8 7 = - 81 ≠ 0 Si tratta quindi di una conica non 4 7 5 degenere 5 2 δ = = 40 – 4 = 36 > 0 La conica è un'ellisse 2 8 I1 = a + c = 13 ∆ • I1 = (- 81 ) • 13 < 0 La conica è un'ellisse reale Calcolo del centro dell'ellisse C 5 x + 2 y + 4 = 0 xo = - 1/2 2 x + 8 y + 7 = 0 yo = - 3/4 coordinate di C effettuando la traslazione di assi x = X - 1 / 2 y = Y - 3 / 4 l'equazione dell'ellisse, nel nuovo sistema d'assi X,Y, diventa: 5 X2 + 4 X Y + 8 Y2 - 9/4 = 0 (7) Ponendo Y/X = tg α ( da cui Y = X tg α ) nell'equazione dell'ellisse, si ottiene (V. la (3)) 9 X2 = 4 ( 8 tg2 α + 4 tg α + 5 ) Applicando la (4), che nel caso dell'esempio vale: 2 tg2α - 3 tg α - 2 = 0 si ricavano i due valori di tg α ( 2: coefficiente angolare dell'asse minore e -1 / 2: coefficiente angolare dell'asse maggiore) e quindi le misure del semiasse minore (1 / 2 ) e di quello maggiore ( 3 / 4 )
21
Volendo ridurre a forma normale l'equazione data si deve ruotare l'ellisse dell' angolo α in un senso o nell'altro. Ad es α = arctg 2 che corrisponde a una rotazione in senso orario Con tg α = 2 si calcolano (con le (5)) sen α = ± 2 / √ 5 e cos α = ± 1 / √ 5 Assumendo per es. i valori positivi di sen α e cos α le formule di rotazione degli assi (5) diventano __ __ X = x ' / √ 5 - 2 y ' / √ 5 Y = 2 x ' / √ 5 + y '/ √ 5 Applicando queste formule la (7) diventa x' 2 y' 2 9 x' 2 + 4 y' 2 = 9 / 4 da cui + = 1 1 / 4 9 / 16 che è la voluta equazione normale dell'ellisse data X Ellisse data Ellisse ridotta in forma normale
Y
C
-1/2
-3/4
O α
y
y
x

22
EQUAZIONI PARAMETRICHE DELLE CONICHE
Equazioni parametriche dell’ellisse L’equazione cartesiana dell’ellisse , come si è visto nel § relativo a tale conica, è x2 y2
+ = 1 in cui a e b sono due numeri che rappresentano le misure dei due a2 b2 semiassi dell’ellisse Dalla goniometria è noto che sen2 φ + cos2 φ = 1 x2 y2 Si può quindi porre = cos2 φ e = sen2 φ la cui somma è a2 b2
appunto uguale a 1 Le espressioni sopra citate si possono anche scrivere x = cos φ x = a cos φ a (1) y = sen φ y = b sen φ b Le (1) sono le equazioni parametriche dell’ellisse. Esse permettono di disegnare per punti, con facilità, un’ ellisse data, nel modo seguente y
s A OA = a (in figura. a = 3,5) B P (x;y) OB = b (in figura . b = 2) b sen φ φ O B’ A’ x a cos φ Con il centro in O si disegnano due circonferenze aventi raggi a e b. Quindi, partendo da O, si conducono delle semirette, come la s, che forma l’angolo φ con l’asse x ed interseca le due circoferenze, rispettivamente, in A ed in B. Dette A’ e B’ le proiezioni di A e B sull’asse x, si può subito constatare che il segmento OA’ = a cos φ ed il segmento BB’ = b sen φ Pertanto il punto P(x;y). che è l’intersezione tra la parallela per A all’asse y e la parallela per B all’asse x, rappresenta un punto dell’ellisse, che nell’esempio del disegno ha l’equazione x2 y2 + = 1 da cui, essendo l’angolo φ nella figura di circa 49°, 9 4 si possono calcolare le coordinate parametriche di P che sono x = a cos φ = 3,5 cos 49° ≈ 2,3 e y = b sen φ = 2 sen 49° ≈ 1,51
23
I due valori calcolati corrispondono, come si può facilmente verificare, alle misure della figura. Ripetendo più volte la costruzione sopra descritta si può tracciare, in modo facile, per punti qualsiasi ellisse Equazioni parametriche della circonferenza Nel caso particolare in cui a = b = r l’ellisse diventa una circonferenza le cui equazioni parametriche si ricavano facilmente da quelle dell’ellisse, sostituendo r ad a ed a b. x = r cos φ Esse sono y = r sen φ Equazioni parametriche dell’iperbole Per quanto riguarda l’iperbole che, come si è visto nel § relativo a tale conica, ha l’equazione cartesiana x2 y2
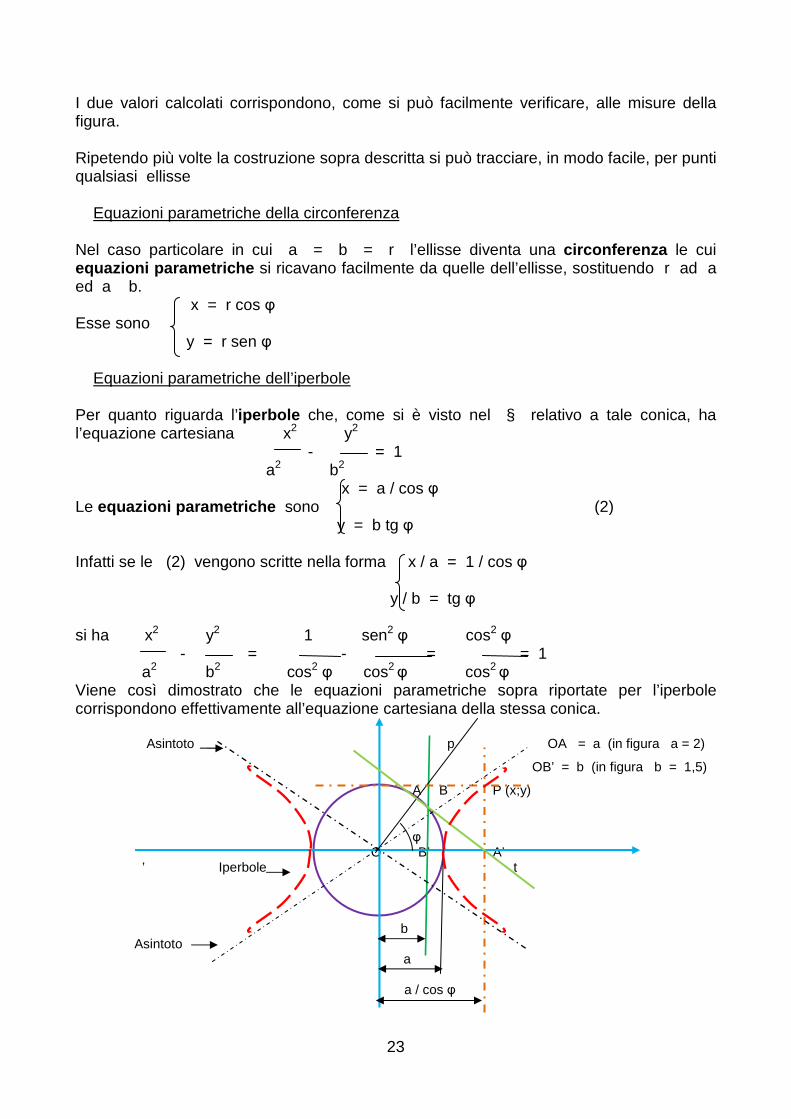
- = 1 a2 b2 x = a / cos φ Le equazioni parametriche sono (2) y = b tg φ Infatti se le (2) vengono scritte nella forma x / a = 1 / cos φ y / b = tg φ si ha x2 y2 1 sen2 φ cos2 φ - = - = = 1 a2 b2 cos2 φ cos2 φ cos2 φ Viene così dimostrato che le equazioni parametriche sopra riportate per l’iperbole corrispondono effettivamente all’equazione cartesiana della stessa conica. Asintoto p OA = a (in figura a = 2)
OB’ = b (in figura b = 1,5)
A B P (x;y)
φ O B’ A’ ’ Iperbole t b Asintoto a a / cos φ
24
- Anche nel caso dell’iperbole si può fare una facile costruzione per punti di una curva data c ome , ad es. quella della figura, nella quale a = 2 e b = 1,5. Bisogna operare nel modo seguente. Si disegna una circonferenza di centro O e raggio a, ed una retta di equazione x = b Si conducono quindi, a partire da O, delle semirette, come la p che forma con l’asse x l’angolo φ (Nella figura quest’ angolo vale circa 54°) e d interseca la circonferenza in A ( OA = a) e la retta di equazione x = b in B. Condotta per A la tangente t alla circonferenza, essa interseca l’asse x in A’, determinando il segmento OA’ che è uguale ad OA / cos φ cioè ad a / cos φ, che è la coordinata x dell’equazione parametrica dell’iperbole. L’intersezione tra la parallela all’asse y per A’ e la parallela all’asse x per B è il punto P, che è un punto dell’iperbole data in quanto la sua ascissa è x = a / cos φ e l’ordinata è y = b tg φ (Infatti dal triangolo OBB’ risulta che è tg φ = BB’ / b cioè y / b ) x = 2 / cos 54° ≈ 3,40 L’equazione parametrica della iperbole della figura è y ≈ 1,5 tg 54° = 2,06 I due valori trovati corrispondono abbastanza bene alle misure effettuate sulla figura. Ripetendo più volte la costruzione sopra descritta si può disegnare per punti qualunque iperbole. y2 x2 Se l’iperbole da tracciare ha l’equazione cartesiana - = 1 - a2 b in tal caso le cordinate parametriche, che costituscono le equazioni parametriche cercate, sono y = a / cos φ x = b tg φ
25
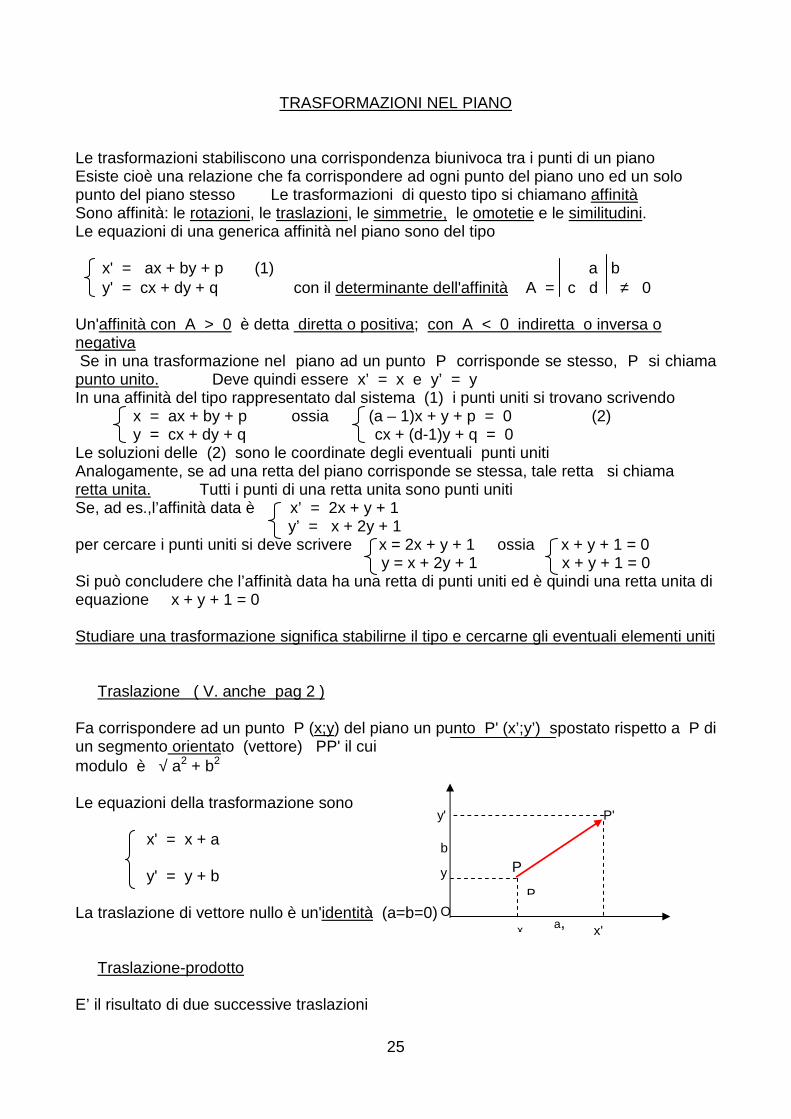
TRASFORMAZIONI NEL PIANO Le trasformazioni stabiliscono una corrispondenza biunivoca tra i punti di un piano Esiste cioè una relazione che fa corrispondere ad ogni punto del piano uno ed un solo punto del piano stesso Le trasformazioni di questo tipo si chiamano affinità Sono affinità: le rotazioni, le traslazioni, le simmetrie, le omotetie e le similitudini. Le equazioni di una generica affinità nel piano sono del tipo x' = ax + by + p (1) a b y' = cx + dy + q con il determinante dell'affinità A = c d ≠ 0 Un'affinità con A > 0 è detta diretta o positiva; con A < 0 indiretta o inversa o negativa Se in una trasformazione nel piano ad un punto P corrisponde se stesso, P si chiama punto unito. Deve quindi essere x’ = x e y’ = y In una affinità del tipo rappresentato dal sistema (1) i punti uniti si trovano scrivendo x = ax + by + p ossia (a – 1)x + y + p = 0 (2) y = cx + dy + q cx + (d-1)y + q = 0 Le soluzioni delle (2) sono le coordinate degli eventuali punti uniti Analogamente, se ad una retta del piano corrisponde se stessa, tale retta si chiama retta unita. Tutti i punti di una retta unita sono punti uniti Se, ad es.,l’affinità data è x’ = 2x + y + 1 y’ = x + 2y + 1 per cercare i punti uniti si deve scrivere x = 2x + y + 1 ossia x + y + 1 = 0 y = x + 2y + 1 x + y + 1 = 0 Si può concludere che l’affinità data ha una retta di punti uniti ed è quindi una retta unita di equazione x + y + 1 = 0 Studiare una trasformazione significa stabilirne il tipo e cercarne gli eventuali elementi uniti Traslazione ( V. anche pag 2 ) Fa corrispondere ad un punto P (x;y) del piano un punto P' (x’;y’) spostato rispetto a P di un segmento orientato (vettore) PP' il cui modulo è √ a2 + b2 Le equazioni della trasformazione sono x' = x + a y' = y + b La traslazione di vettore nullo è un'identità (a=b=0) Traslazione-prodotto E’ il risultato di due successive traslazioni
y
y'
x'
P
P'
a,
b
O x
P

26
1ˆ traslazione 2^ traslazione Traslazione- prodotto x' = x + a x” = x’ + c x” = x + a + c y' = y + b + y” = y’ + d y” = y + b + d Traslazione simmetrica Data la traslazione x' = x + a la traslazione simmetrica è x” = x’ - a y' = y + b y” = y’ - b La traslazione prodotto di due traslazioni simmetriche è l’identità. Infatti si ha x” = x’ - a = x + a – a = x y” = y’ - b = y + b – b = y Rotazione y y’ P’(x’;y’) Nella figura a fianco il segmento r = OP’ è ruotato di un ’ ’ angolo α rispetto a OP = r, che a sua volta forma un angolo β r con l’asse x. Le coordinate di P e P’ sono P(x;y) e P’(x’;y’) y P(x;y) r Poiché è x = r cos β e y = r sen β si ha α β x x’= r cos (α + β) = r (cos α cos β - sen α sen β) = x cos α - y sen α O x’ x
y’= r sen (α + β) = r (senα cos β + cos α sen β) = y cos α + x sen α ’ Le equazioni trovate x’ = x cos α – y sen α y’ = x sen α + y cos α sono le formule della rotazione, gia viste a pag.3 Simmetria assiale Fa corrispondere ad ogni punto P del piano il punto P' simmetrico di P rispetto ad una retta r detta asse di simmetria Se l'asse di simmetria è quello delle ascisse le equazioni della trasformazione sono x' = x y' = -y Analogamente se l'asse di simmetria è quello delle ordinate le equazioni della trasformazione sono O x' = -x y' = y
P
P'
r
27
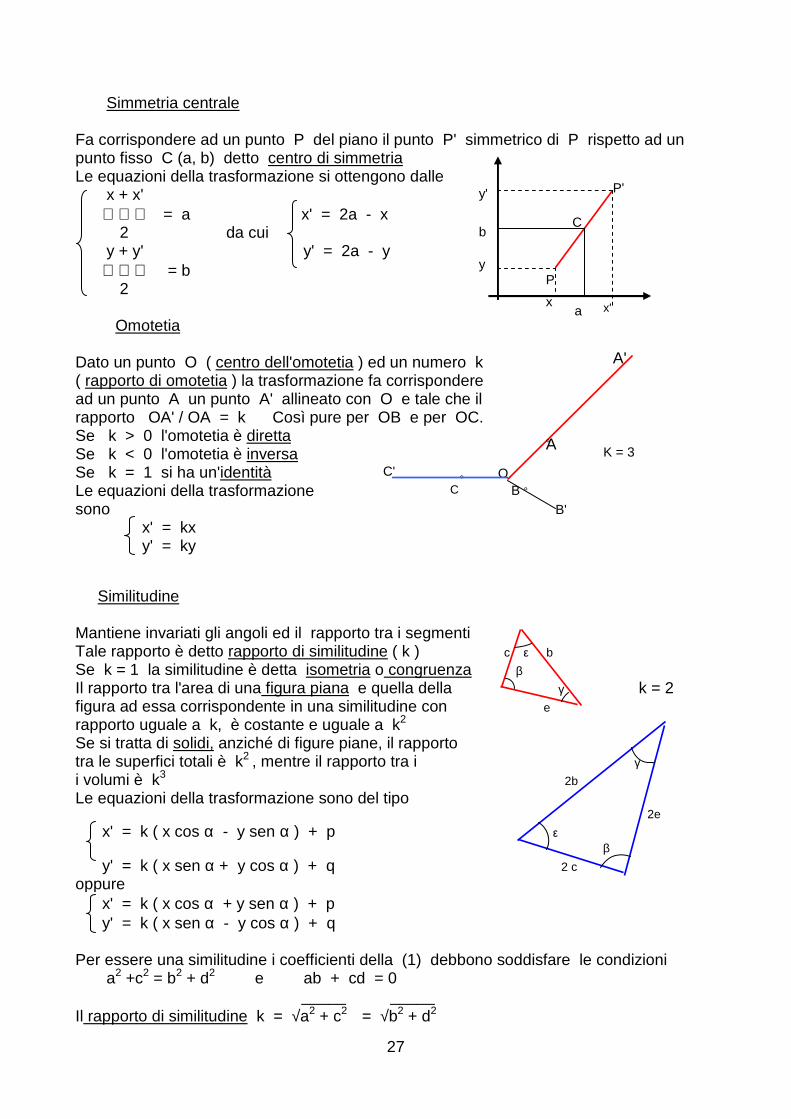
Simmetria centrale Fa corrispondere ad un punto P del piano il punto P' simmetrico di P rispetto ad un punto fisso C (a, b) detto centro di simmetria Le equazioni della trasformazione si ottengono dalle x + x' = a x' = 2a - x 2 da cui y + y' y' = 2a - y = b 2 Omotetia Dato un punto O ( centro dell'omotetia ) ed un numero k ( rapporto di omotetia ) la trasformazione fa corrispondere ad un punto A un punto A' allineato con O e tale che il rapporto OA' / OA = k Così pure per OB e per OC. Se k > 0 l'omotetia è diretta Se k < 0 l'omotetia è inversa Se k = 1 si ha un'identità Le equazioni della trasformazione sono x' = kx y' = ky Similitudine Mantiene invariati gli angoli ed il rapporto tra i segmenti Tale rapporto è detto rapporto di similitudine ( k ) c ε b Se k = 1 la similitudine è detta isometria o congruenza β Il rapporto tra l'area di una figura piana e quella della γ k = 2 figura ad essa corrispondente in una similitudine con e
rapporto uguale a k, è costante e uguale a k2 Se si tratta di solidi, anziché di figure piane, il rapporto tra le superfici totali è k2 , mentre il rapporto tra i γ i volumi è k3 2b Le equazioni della trasformazione sono del tipo 2e x' = k ( x cos α - y sen α ) + p ε β y' = k ( x sen α + y cos α ) + q 2 c oppure x' = k ( x cos α + y sen α ) + p y' = k ( x sen α - y cos α ) + q Per essere una similitudine i coefficienti della (1) debbono soddisfare le condizioni a2 +c2 = b2 + d2 e ab + cd = 0 _____ _____ Il rapporto di similitudine k = √a2 + c2 = √b2 + d2
P
P'
C
y
y'
x' a
O
° A
A'
B °
B'
° C'
K = 3
b x
C

28
Trasformazione prodotto E’ il risultato di due trasformazioni successive: ad es. una traslazione ed una rotazione danno origine ad una traslorotazione. Traslorotazione o rototraslazione Siano date: la traslazione (2) e la rotazione (3) espresse dalle formule viste prima. X = x’ + x0 x = x’ cos α - y’ sen α Y = y’ + yo (2) y = x’ sen α + y’ cos α (3) La trasformazione prodotto delle due è la traslorotazione le cui equazioni sono: X = x’ cos α - y’ sen α + x0 Y = x’ sen α + y’ cos α + y0 (4) Queste formule possono, ad es., essere impiegate per la risoluzione del problema della “Riduzione di una conica a centro alla forma canonica”, già trattato in una forma un po’ diversa alla pag. 16 Occorre innanzitutto ricordare la equazione generale delle coniche rappresentata dalla (1) di pag. 15 Riprendendo in esame la conica, traslata e ruotata, dell’esempio di pag. 17 che è 5 X2 + 4 XY + 8 Y2 + 8 X + 14 Y + 5 = 0 (5) si determinano innanzitutto i valori dei coefficienti che compaiono nella (1) con i quali è opportuno calcolare gli indici ∆, δ, I1. Tali indici avevano consentito di appurare (V. pagg. 15-17) che la conica in esame è una ellisse reale con un centro di coordinate x0 = -1/2 e y0 = -3/4 Sostituendo i valori di x0 e y0 nelle (4) e sostituendo le (4) nella (5) si ottiene 5 (x cos α - y sen α - ½)2 + 4 (x cos α - y sen α - ½)(x sen α + y cos α- ¾) + 8 (x sen α + y cos α – ¾)2 + 8 (x cos α – y sen α - ½) + 14 (x sen α + y cos α - ¾) + 5 = 0 Effettuati i calcoli piuttosto laboriosi si perviene alla seguente espressione (5 x2 + 8 y 2) cos2 α+ (5 y2 + 8 x 2) sen2 α+ 4 sen α cos α (x2 - y 2) + + 6 xy sen α cos α - 4 xy (sen2 α - cos2 α) – 9/4 = 0 (6) Poiché nella equazione della conica in forma canonica non compaiono termini in xy si pone 6 xy sen α cos α - 4 xy (sen2 α - cos2 α) = 0 Dividendo per 2 xy cos2 α si ottiene 2 tg2 α - 3 tg α - 2 = 0 -1/2 α1 = - 26,56505° da cui si ricavano i valori della tg α = ( α2 - α1 = 90°) 2 α2 = 63,43495° I due valori dell’angolo α corrispondono alla rotazione della conica data in senso orario ( α < 0 ) o in senso antiorario ( α > 0 ). Qualunque sia però il valore della tangente che si inserisce nelle formule del seno e del coseno ( che sono le (5) di pag. 17) da sostituire nella (6), si perviene allo stesso risultato, che è l’equazione 9 x2 + 4 y2 = 9/4 da cui dividendo per 9/4 si ottiene l’equazione canonica della ellisse, uguale a quella di pag.19.
x2 / (1/4) + y2 / (9/16) = 1
29
Elementi di geometria
DISCUSSIONE DI PROBLEMI DI GEOMETRIA
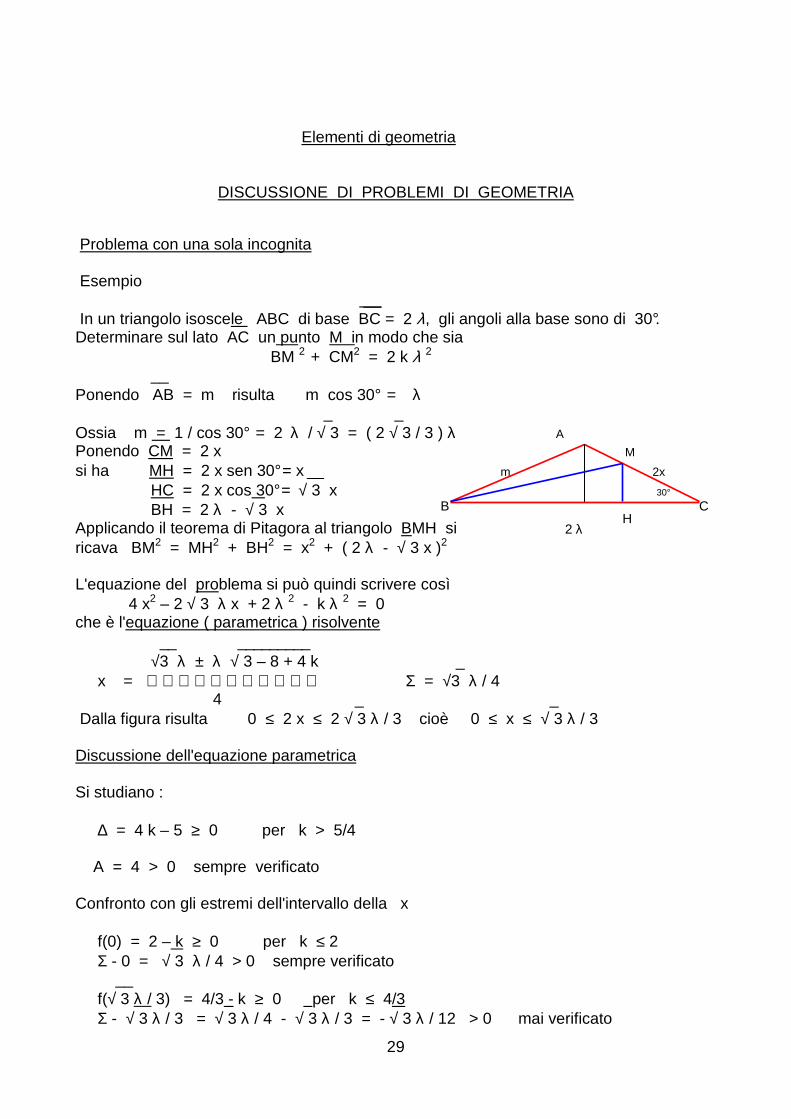
Problema con una sola incognita Esempio __ In un triangolo isoscele ABC di base BC = 2 λ, gli angoli alla base sono di 30°. Determinare sul lato AC un punto M in modo che sia BM 2 + CM2 = 2 k λ 2 __ Ponendo AB = m risulta m cos 30° = λ _ _ Ossia m = 1 / cos 30° = 2 λ / √ 3 = ( 2 √ 3 / 3 ) λ A Ponendo CM = 2 x M si ha MH = 2 x sen 30° = x __ m 2x
HC = 2 x cos 30° = √ 3 x 30° BH = 2 λ - √ 3 x Applicando il teorema di Pitagora al triangolo BMH si ricava BM2 = MH2 + BH2 = x2 + ( 2 λ - √ 3 x )2 L'equazione del problema si può quindi scrivere così 4 x2 – 2 √ 3 λ x + 2 λ 2 - k λ 2 = 0 che è l'equazione ( parametrica ) risolvente __ _________ √3 λ ± λ √ 3 – 8 + 4 k _ x = Σ = √3 λ / 4 4 _ _ Dalla figura risulta 0 ≤ 2 x ≤ 2 √ 3 λ / 3 cioè 0 ≤ x ≤ √ 3 λ / 3 Discussione dell'equazione parametrica Si studiano : ∆ = 4 k – 5 ≥ 0 per k > 5/4 A = 4 > 0 sempre verificato Confronto con gli estremi dell'intervallo della x f(0) = 2 – k ≥ 0 per k ≤ 2 Σ - 0 = √ 3 λ / 4 > 0 sempre verificato __ f(√ 3 λ / 3) = 4/3 - k ≥ 0 per k ≤ 4/3 Σ - √ 3 λ / 3 = √ 3 λ / 4 - √ 3 λ / 3 = - √ 3 λ / 12 > 0 mai verificato
B C
H
2 λ
30
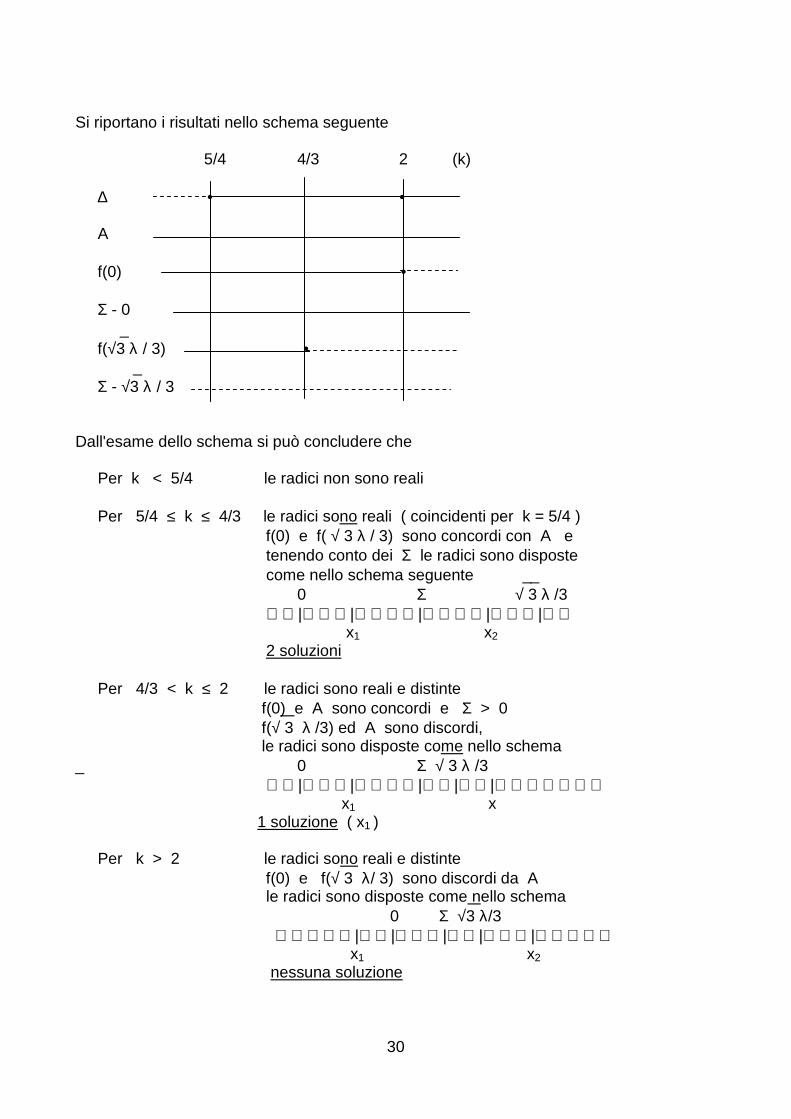
Si riportano i risultati nello schema seguente 5/4 4/3 2 (k) ∆ • • A f(0) • Σ - 0 _ f(√3 λ / 3) • _ Σ - √3 λ / 3 Dall'esame dello schema si può concludere che Per k < 5/4 le radici non sono reali Per 5/4 ≤ k ≤ 4/3 le radici sono reali ( coincidenti per k = 5/4 ) f(0) e f( √ 3 λ / 3) sono concordi con A e tenendo conto dei Σ le radici sono disposte come nello schema seguente __ 0 Σ √ 3 λ /3 ||||| x1 x2 2 soluzioni Per 4/3 < k ≤ 2 le radici sono reali e distinte f(0) e A sono concordi e Σ > 0 f(√ 3 λ /3) ed A sono discordi, le radici sono disposte come nello schema _ 0 Σ √ 3 λ /3 ||||| x1 x 1 soluzione ( x1 ) Per k > 2 le radici sono reali e distinte f(0) e f(√ 3 λ/ 3) sono discordi da A le radici sono disposte come nello schema 0 Σ √3 λ/3 ||||| x1 x2
nessuna soluzione

31
Problema con due incognite Esempio Nella circonferenza di centro O e raggio r sono condotte: a) la corda AB la cui distanza dal centro è uguale alla metà del raggio; b) la corda BC perpendicolare ad AB. Determinare sull'arco AC, non contenente B, un punto P in modo che sia 2 PC • PA = k r (1) __ __ Ponendo PC = x e PA = y l'equazione (1) del problema diventa 2 x + y = k r in cui 0 ≤ x ≤ 2 r 0 ≤ y ≤ 2 r __ Poiché AC è un diametro e l'angolo in P è quindi retto, dal teorema di Pitagora riferito al triangolo APC, si ha x2 + y2 = 4 r2
da cui il sistema y = k r - 2 x (2)
x2 + y2 = 4 r2 che si trasforma nel sistema misto ( V. Cap "Sistema misto" nel "Compendio di analisi matematica" ) 5 x2 - 4 k r x - 4 r2 + k 2 r2 = 0 equazione risolvente 0 ≤ x ≤ 2 r Discussione dell'equazione risolvente (tenendo presente la (2)) _______________ ______ 2 k r ± r √ 4 k2 + 20 - 5 k2 2 k r ± r √ 20 – k2
x = = Σ = 2 k r / 5 5 5 Adottiamo il metodo del confronto __
∆ = 20 - k2 ≥ 0 per k2 ≤ 20 cioè 0 ≤ k ≤ 2 √ 5 . A = 5 > 0 sempre verificato
r/2
A B
C
P
y
r
x
32
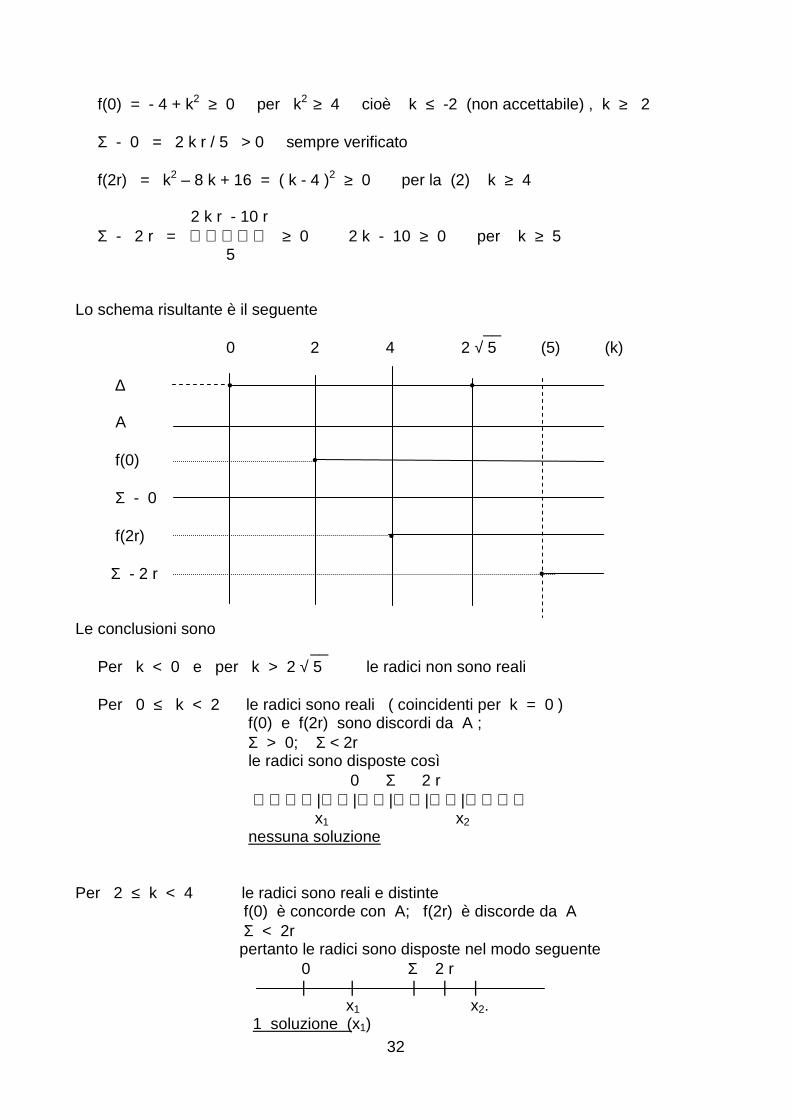
f(0) = - 4 + k2 ≥ 0 per k2 ≥ 4 cioè k ≤ -2 (non accettabile) , k ≥ 2 Σ - 0 = 2 k r / 5 > 0 sempre verificato f(2r) = k2 – 8 k + 16 = ( k - 4 )2 ≥ 0 per la (2) k ≥ 4 2 k r - 10 r Σ - 2 r = ≥ 0 2 k - 10 ≥ 0 per k ≥ 5 5 Lo schema risultante è il seguente __ 0 2 4 2 √ 5 (5) (k) ∆ • • A f(0) • Σ - 0 f(2r) • Σ - 2 r • Le conclusioni sono __ Per k < 0 e per k > 2 √ 5 le radici non sono reali Per 0 ≤ k < 2 le radici sono reali ( coincidenti per k = 0 ) f(0) e f(2r) sono discordi da A ; Σ > 0; Σ < 2r le radici sono disposte così 0 Σ 2 r ||||| x1 x2 nessuna soluzione Per 2 ≤ k < 4 le radici sono reali e distinte f(0) è concorde con A; f(2r) è discorde da A Σ < 2r pertanto le radici sono disposte nel modo seguente 0 Σ 2 r | | | | | x1 x2. 1 soluzione (x1)
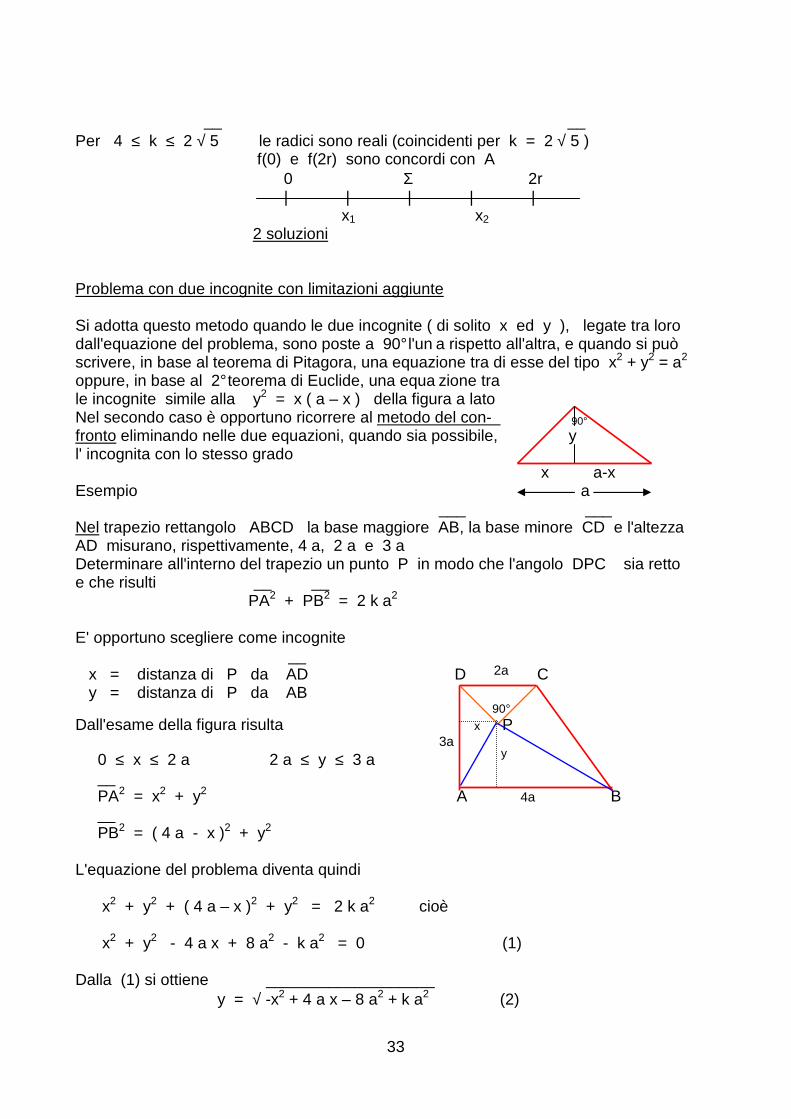
33
__ __ Per 4 ≤ k ≤ 2 √ 5 le radici sono reali (coincidenti per k = 2 √ 5 ) f(0) e f(2r) sono concordi con A 0 Σ 2r | | | | | x1 x2 2 soluzioni Problema con due incognite con limitazioni aggiunte Si adotta questo metodo quando le due incognite ( di solito x ed y ), legate tra loro dall'equazione del problema, sono poste a 90° l'un a rispetto all'altra, e quando si può scrivere, in base al teorema di Pitagora, una equazione tra di esse del tipo x2 + y2 = a2 oppure, in base al 2° teorema di Euclide, una equa zione tra le incognite simile alla y2 = x ( a – x ) della figura a lato Nel secondo caso è opportuno ricorrere al metodo del con- 90°
fronto eliminando nelle due equazioni, quando sia possibile, y l' incognita con lo stesso grado x a-x Esempio a ___ ___ Nel trapezio rettangolo ABCD la base maggiore AB, la base minore CD e l'altezza AD misurano, rispettivamente, 4 a, 2 a e 3 a Determinare all'interno del trapezio un punto P in modo che l'angolo DPC sia retto e che risulti __ __ PA2 + PB2 = 2 k a2
E' opportuno scegliere come incognite __ x = distanza di P da AD D C y = distanza di P da AB 90° Dall'esame della figura risulta x P 3a 0 ≤ x ≤ 2 a 2 a ≤ y ≤ 3 a __ PA2 = x2 + y2 A 4a B __ PB2 = ( 4 a - x )2 + y2 L'equazione del problema diventa quindi x2 + y2 + ( 4 a – x )2 + y2 = 2 k a2 cioè x2 + y2 - 4 a x + 8 a2 - k a2 = 0 (1) Dalla (1) si ottiene ___________________ y = √ -x2 + 4 a x – 8 a2 + k a2 (2)
2a
y

34
che è una nuova limitazione Poiché le incognite sono due occorre un'altra equazione per poter risolvere il sistema che ne risulta Facendo riferimento al triangolo rettangolo DPC, per il 2° teorema di Euclide è x ( 2 a – x ) = ( 3 a – y )2 cioè
x2 + y2 - 2 a x – 6 a y + 9 a2 = 0 (3) Risolvendo il sistema formato dalla (1) e dalla (3) ed eliminando la y si perviene al sistema misto ( V. il Cap "Sistema misto" nel "Compendio di analisi matematica") 40 x2 - 4 a ( 35 – k ) x + 289 a2 - 34 k a2 + k2 a2 = 0 equazione risolvente 0 ≤ x ≤ 2 a ___________________ 2 a ( 35 – k ) ± a √ – 6660 + 1080 k – 36 k2
x = Σ = a (35 – k ) / 20 40 Si studiano i soliti elementi, tenendo presente la figura e la (1), da cui si ricava Per x = 0 che corrisponde a y = 3 a si ha k = 17 (4) Per x = 2a “ “ “ y = 3 a “ “ k = 13 ∆ = - 6660 + 1080 k - 36 k2 ≥ 0 __ __ 9 k2 - 270 k + 1665 ≤ 0 per 15 – 2 √10 ≤ k ≤ 15 + 2 √10, A = 40 > 0 sempre verificato f(0) = 289 a2 - 34 k a2 +k2 a2 ≥ 0 k2 – 34 k+ 289 = (k – 17)2 ≥ 0 per la (2) e per le (4) k ≤ 17 Σ - 0 = a ( 35 - k ) / 20 ≥ 0 per 35 – k ≥ 0 k ≤ 35 f(2a) = 160 a2 – 8 ( 35 – k ) a2 + 289 a2 - 34 k a2 + k2 a2 ≥ k2 -26 k + 169 ≥ 0 = (k –13)2 ≥ 0 per la (2) e per le (4) k ≤ 13 35 a – k a – 40 a - k a – 5 a Σ - 2 a = = ≥ 0 mai verificato 20 20
35
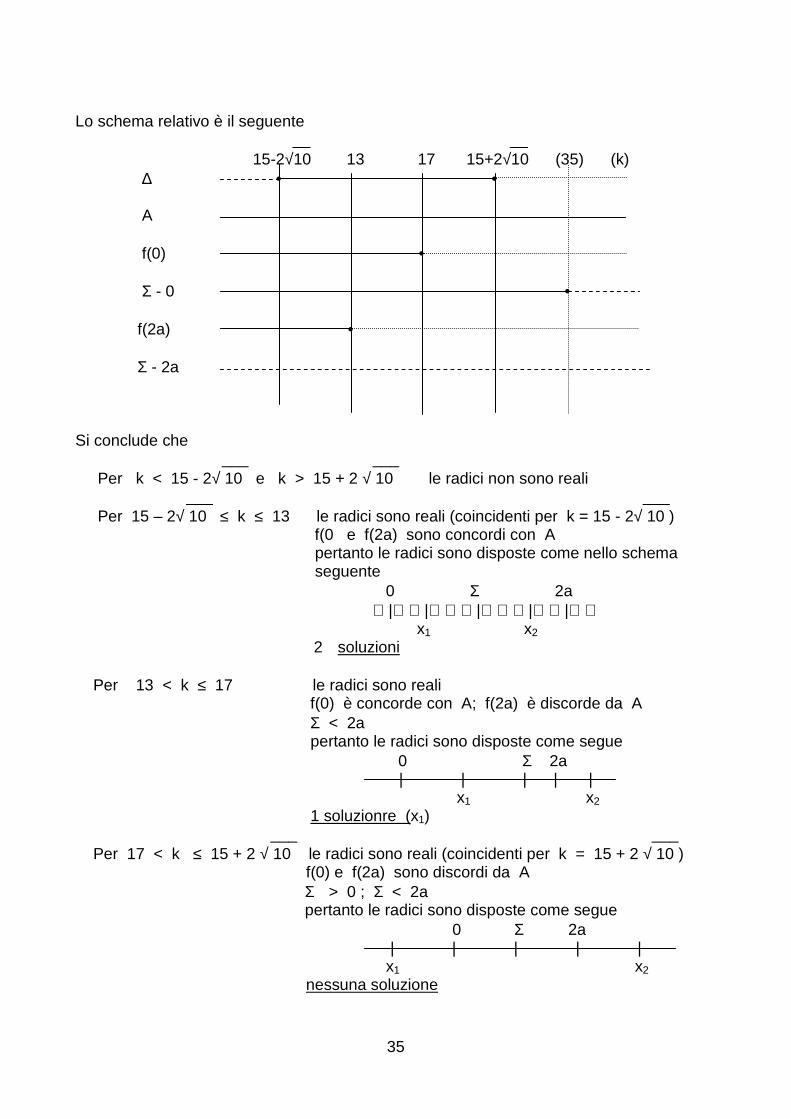
Lo schema relativo è il seguente __ __ 15-2√10 13 17 15+2√10 (35) (k) ∆ • • A f(0) • Σ - 0 • f(2a) • Σ - 2a Si conclude che ___ ___ Per k < 15 - 2√ 10 e k > 15 + 2 √ 10 le radici non sono reali ___ ___ Per 15 – 2√ 10 ≤ k ≤ 13 le radici sono reali (coincidenti per k = 15 - 2√ 10 ) f(0 e f(2a) sono concordi con A pertanto le radici sono disposte come nello schema seguente 0 Σ 2a ||||| x1 x2
2 soluzioni Per 13 < k ≤ 17 le radici sono reali f(0) è concorde con A; f(2a) è discorde da A Σ < 2a pertanto le radici sono disposte come segue
0 Σ 2a | | | | | x1 x2 1 soluzionre (x1) ___ ___ Per 17 < k ≤ 15 + 2 √ 10 le radici sono reali (coincidenti per k = 15 + 2 √ 10 ) f(0) e f(2a) sono discordi da A
Σ > 0 ; Σ < 2a pertanto le radici sono disposte come segue
0 Σ 2a | | | | | x1 x2 nessuna soluzione
36
BIBLIOGRAFIA Per la compilazione del " Compendio di geometria analitica " sono stati consultati In particolare i seguenti testi : - " Il problema geometrico e la geometria analitica " di R Ferrauto, edito dalla Società Editrice Dante Alighieri - " Strutture – Funzioni " di G Zwirner e L Scaglianti, edito dalla CEDAM - " Matematica guidata - Geometria analitica " di F Erba, L Fantini e C M Villa, edito da Ghisetti e Corvi Editori - " Geometria analitica e complementi di algebra " di L Cateni, C Bernardi e S Maracchia, edito da Le Monnier - " Corso di geometria analitica e complementi di algebra " di Dodero, Baroncini - e Toscani, edito da Ghisetti e Corvi Editori - " matHELP " di M. Scovenna e N. Checcaglini, edito dalla CEDAM - " Dizionario enciclopedico – Matematica " di A. Marini, N. Barcellona, M. Tinelli, edito dal Gruppo Editoriale Jackson.
INDICE
ASSI CARTESIANI ........................................................................................... pag. .......2 Assi cartesiani ortogonali ................................................................... ................2 Coordinate cartesiane ......................................................................... ................2 Distanza tra due punti, cioè lunghezza di un segmento....................... ................2 Punto di mezzo di un segmento .......................................................... ................2 Coordinate del baricentro, o centro di gravità, di un triangolo .............. ................2 Trasformazione di coordinate .............................................................. ................2 Rotazione degli assi ............................................................................ ................3 Traslazione degli assi.......................................................................... ................3 LE COORDiNATE POLARI NEL PIANO pag 3 Trasformazione delle coordinate polari in coordinate cartesiane 4 LE COORDINATE CARTESIANE NELLO SPAZIO pag 4 LUOGO GEOMETRICO PIANO pag 5 RETTA pag. 5 Coefficiente angolare di una retta........................................................ 5 Retta per un punto............................................................................... 6
37
Retta per due punti.............................................................................. 6 Rette parallele ..................................................................................... ................6 Rette perpendicolari ............................................................................ ................6 Retta per un punto, perpendicolare ad una retta data.......................... ................7 Angolo fra due rette............................................................................. ................7 Distanza di un punto da una retta........................................................ ................7 Bisettrici degli angoli fra due rette........................................................ ................7 Area di un triangolo ............................................................................. ................8 Fascio proprio di rette.......................................................................... ................8 Fascio improprio di rette...................................................................... 8 CONICHE ........................................................................................................ pag. .......9 CIRCONFERENZA........................................................................................... pag. .......9 Intersezioni fra retta e circonferenza ................................................... 10 Lunghezza di una corda di una circonferenza ..................................... 10 Circonferenza per tre punti .................................................................. 10 Circonferenza passante per due punti dati e tangente ad una retta data 10 Tangenti alla circonferenza ................................................................. 10 Fascio di circonferenze ....................................................................... 11 I diversi tipi di fasci di circonferenze .................................................... 11 ELLISSE ........................................................................................................... pag. 12 Tangenti all'ellisse ............................................................................... ..............13 Ellisse con gli assi paralleli agli assi cartesiani 13 IPERBOLE........................................................................................................ pag. .....13 Tangenti all'iperbole ............................................................................ ..............14 Iperbole equilatera riferita agli assi ...................................................... ..............14 Iperbole equilatera riferita agli asintoti ................................................. ..............15 Iperbole con gli assi paralleli agli assi cartesiani 15 Funzione omografica............................................................................ 15 PARABOLA ...................................................................................................... pag. .....16 Tangenti alla parabola......................................................................... ..............17 Parabola tangente ad una data circonferenza in un suo punto ............ ..............17 Fascio di parabole............................................................................... ..............17 CONICHE DEGENERI E NON DEGENERI ...................................................... pag. .....18 Riduzione delle coniche a centro alla forma canonica ......................... ..............19 EQUAZIONI PARAMETRICHE DELLE CONICHE pag 22 Equazioni parametriche dell’ellisse 22 Equazioni parametriche della circonferenza 23 Equazioni parametriche dell’iperbole 23 TRASFORMAZIONI NEL PIANO...................................................................... pag. .....25 Traslazione ......................................................................................... ..............25 Traslazione prodotto............................................................................ 25 Traslazione simmetrica ....................................................................... 26 Rotazione............................................................................................ 26 Simmetria assiale ……………………………………………… 26 Simmetria centrale .............................................................................. ..............27 Omotetia ............................................................................................. ..............27 Similitudine.......................................................................................... ............. 27 Trasformazione prodotto ..................................................................... 28
38
Traslorotazione o rototraslazione ........................................................ 28 Complementi di geometria DISCUSSIONE DI PROBLEMI DI GEOMETRIA............................................... pag. .....29 Problema con una sola incognita......................................................... ..............29 Problema con due incognite ................................................................ ..............31 Problema con due incognite e con limitazioni aggiunte ....................... ..............33
BIBLIOGRAFIA .............................................................................................. pag. .....36