Compendio di Fisica Classica - arriama.altervista.orgarriama.altervista.org/FisCla.pdf ·...
60
Transcript of Compendio di Fisica Classica - arriama.altervista.orgarriama.altervista.org/FisCla.pdf ·...

Compendiodi
Fisica Classica
Arrigo Amadori
dottore in Fisica
fondatore e presidente del Circolo Matematico Cesenate
7 agosto 2016
1

Indice
1 Prefazione. 4
2 Paradigma classico. 4
3 Principio di minima azione. 6
4 Determinismo classico laplaciano. 8
5 Relatività galileiana. 9
6 Conservazione dell'energia. 10
7 Conservazione della quantità di moto. 11
8 Conservazione del momento della quantità di moto. 13
9 Meccanica classica. 14
10 Meccanica hamiltoniana. 15
11 L'azione come funzione delle coordinate e del tempo. 17
12 Introduzione al calcolo tensoriale. 19
13 Relatività ristretta. 21
13.1 La trasformazione di Lorentz. . . . . . . . . . . . . . . . . . . . . 2113.2 Alcune conseguenze della trasformazione di Lorentz. . . . . . . . 23
13.2.1 Dilatazione dei tempi. . . . . . . . . . . . . . . . . . . . . 2313.2.2 Contrazione delle lunghezze. . . . . . . . . . . . . . . . . . 2413.2.3 Non assolutezza della contemporaneità. . . . . . . . . . . 2513.2.4 Non superabilità della velocità della luce. . . . . . . . . . 2513.2.5 Legge di composizione delle velocità. . . . . . . . . . . . . 25
13.3 Quadrivettori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2613.4 Cono di luce. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2713.5 Meccanica relativistica. . . . . . . . . . . . . . . . . . . . . . . . 2913.6 Meccanica relativistica in forma covariante. . . . . . . . . . . . . 31
13.6.1 Quadriimpulso. . . . . . . . . . . . . . . . . . . . . . . . . 32
14 Campo elettromagnetico. 32
14.1 Particella carica in un campo elettromagnetico assegnato. . . . . 3314.1.1 Invarianza di gauge. . . . . . . . . . . . . . . . . . . . . . 3414.1.2 Tensore elettromagnetico . . . . . . . . . . . . . . . . . . 3514.1.3 Equazioni intrinseche del campo elettromagnetico. . . . . 36
14.2 Campo elettromagnetico generato da cariche assegnate. . . . . . 3614.2.1 Quadricorrente. . . . . . . . . . . . . . . . . . . . . . . . . 3614.2.2 Equazione del campo generato da cariche assegnate. . . . 37
2

14.3 Descrizione completa del campo elettromagnetico. . . . . . . . . 3914.4 Onde elettromagnetiche. . . . . . . . . . . . . . . . . . . . . . . . 4014.5 Deduzione delle equazioni di Maxwell. . . . . . . . . . . . . . . . 4114.6 Denizione dei vettori campo elettrico e magnetico. . . . . . . . . 4214.7 Deduzione della prima coppia di equazioni di Maxwell. . . . . . . 4414.8 Deduzione della seconda coppia di equazioni di Maxwell. . . . . . 45
15 Relatività generale. 46
15.1 Calcolo tensoriale. . . . . . . . . . . . . . . . . . . . . . . . . . . 4615.1.1 Vettori e tensori controvarianti e covarianti. . . . . . . . . 4615.1.2 Derivata covariante. . . . . . . . . . . . . . . . . . . . . . 5015.1.3 Geodetiche. . . . . . . . . . . . . . . . . . . . . . . . . . . 5215.1.4 Curvatura. . . . . . . . . . . . . . . . . . . . . . . . . . . 53
15.2 Basi della teoria della relatività generale. . . . . . . . . . . . . . . 5415.3 Tempo proprio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5615.4 Moto di una particella in E4. . . . . . . . . . . . . . . . . . . . . 5615.5 Propagazione della luce in E4. . . . . . . . . . . . . . . . . . . . 5715.6 Equazione del campo gravitazionale. . . . . . . . . . . . . . . . . 5715.7 Conseguenze della RG (esposizione qualitativa). . . . . . . . . . . 59
16 Conclusione. 59
3

1 Prefazione.
Questo scritto è esclusivamente per mio personale diletto e per cercare di ssarele mie conoscenze prima che si sbiadiscano grazie al tempo che passa, ovvero al-l'aumento dell'entropia nel mio cervello. Se poi, leggendolo, qualcuno lo troveràinteressante e magari ne troverà giovamento, questo non potrà che farmi piace-re. Bisogna essere altruisti, è un imperativo categorico, e ciò che ho compresograzie ad una vita di studio lo devo assolutamente comunicare al prossimo.
La sica classica, da Newton ad Einstein, è stupendamente bella, poetica esublime. È il viaggio più bello che si possa fare. Credetemi. Più bella della piùsublime forma d'arte e della più sensuale esperienza.
Contiene anche in sé la struggente ed esaltante illusione di conoscere esat-tamente, deterministicamente, prima o poi, il Tutto. L'illusione di essere comeDio.
Purtroppo, le cose stanno diversamente e la sica quantistica è lì a dimo-strarcelo.
La probabilità e il caso regnano sovrane, anche se regolati da regole cheappaiono deterministiche (l'illusione del determinismo non morirà mai? o forseanche la probabilità è probabilistica?).
Dio, diversamente da ciò che pensava Einstein, gioca a dadi e, se non ba-stasse, si diverte anche a nascondere le regole del gioco!!!
Però, cosa c'è di più consolante dell'illusione, giusto per un attimo, per pochedecine di pagine zeppe di formule, prima di tornare alla dura realtà della vita,in questo tempo tragicamente transeunte e sfumante nel dolore che ci tocca insorte?
E poi, in ogni modo, la sica quantistica si fonda sulla sica classica... percui, per comprendere la realtà, la sica classica è un passaggio obbligato...
2 Paradigma classico.
La sica classica si basa su alcuni assunti fondamentali che riporto in questasezione. Essi sono molto prossimi al buon senso, al senso comune, prodottosinel nostro cervello dall'esserci evoluti nell'ambiente naturale della supercie delpianeta Terra come specie animale i cui individui hanno certe dimensioni. Nonsarebbe così se fossimo esseri abitanti altre dimensioni o molto più piccoli ograndi ecc.
Ecco i punti fondativi della sica classica:
1. La sica classica è un insieme omogeneo di teorie siche, basate fondamen-talmente sul concetto di traiettoria regolare, che descrivono essenzialmentele interazioni gravitazionali ed elettromagnetiche (le sole note no agli ini-zi del '900). Anche la sica statistica, che costituisce la teoria dei sistemicon molti gradi di libertà, nella sua parte classica distinta dalla sua partequantistica, fa parte ovviamente della sica classica. Di essa, però, nondirò in queste pagine.
4

2. Ricordiamo che una teoria sica è un modello matematico logico dedut-tivo che produce previsioni numeriche su certe grandezze siche tipichedella teoria stessa. Tali previsioni possono ricadere o non ricadere dentrol'intervallo della precisione degli strumenti di misura, cioè possono esserevericate o falsicate sperimentalmente. Una stessa teoria sica può esse-re vericata in certi casi, falsicata in altri, in dipendenza dalla precisionedegli strumenti di misura. Non esiste, perciò, il concetto di teoria vera oteoria falsa, non essendo il vero ed il falso categorie assolute applicabili allascienza che è per sua essenza produttrice di ipotesi e non di certezze, circala natura. La cosa in sé, il noumeno, non è oggetto della sica, semmaidella metasica. Unico interesse della sica è cercare di conoscere come lecose funzionano, non cosa esse siano.
3. Vale in blocco la logica classica aristotelica.
4. Vale sempre il principio di causalità. Gli eetti non precedono mai lecause. Le cause sono contemporanee agli eetti solo nel caso dell'azione adistanza (velocità delle interazioni innite).
5. Lo spazio ed il tempo sono enti continui, nel senso di essere riconducibiliall'insieme R dei numeri reali (insieme dotato della potenza del continuoℵ1 = c).
6. Prima di ogni aermazione, occorre avere denito un sistema di riferimentospaziotemporale. L'aermazione un corpo si muove non ha perciò sensosico se non si è prima denito un sistema di riferimento spaziotemporalerispetto al quale riferire il moto.
7. La materia è un ente continuo distribuito nello spazio ed evolventesi neltempo descrivibile dalla funzione densità di massa ρ(x, y, z, t).
8. Se le dimensioni di un corpo materiale sono trascurabili rispetto alle di-mensioni inerenti al suo moto, quel corpo è rappresentabile come unaparticella (detta anche punto materiale). Una particella è un punto geo-metrico privo di dimensioni ma dotato di massa ed eventualmente di ca-rica elettrica e, nel suo moto, è descrivibile dalla 4 − pla di numeri reali(x, y, z, t). Una particella, muovendosi, descrive una traiettoria continuaovvero la curva regolare (x(t), y(t), z(t)) .
9. Una particella possiede una propria individualità. Essa è sempre identi-cabile e distinguibile fra tutte le altre.
10. Il concetto classico di particella non ha nulla a che fare con il suo concettoquantistico (sia nella prima che nella seconda quantizzazione).
11. Anche i campi di forza sono enti continui descrivibili da funzioni del tipoA(x, y, z, t).
5

12. Lo scopo della sica classica è quello di determinare le traiettorie del-le particelle e l'evoluzione spaziotemporale dei campi e questo in mododeterministico, ovvero esatto, punto per punto, istante per istante.
13. La descrizione della realtà fornita dalla sica classica è ottima per il ma-crocosmo, no alla scala atomica. Per la descrizione del microcosmo (scalaatomica e subatomica) occorre la sica quantistica che è basata su altriparadigmi, spesso antitetici a quelli classici. La sica quantistica, però,contiene la sica classica come caso limite, quando si suppone nulla lacostante di Planck (h→ 0).
3 Principio di minima azione.
Tutta la sica teorica (quindi anche la sica classica) si basa sul principio diminima azione.
Si denisce l'azione S di un sistema sico nel caso più semplice (un sologrado di libertà) come l'integrale funzionale:
S =
∫ tB
tA
L(q(t), q(t), t)dt, (1)
dove q(t) e L(q, q, t) sono funzioni regolari e tA < tB sono due istanti di tempo.Il punto di q indica la derivata prima rispetto al tempo.
La funzione q = q(t) è detta traiettoria o equazione oraria o equazione delmoto del sistema.
La funzione L è detta lagrangiana del sistema.Si cerca la funzione q(t) che renda minima l'azione S (in generale, ci si ac-
contenta che S presenti un estremo relativo). Questo è l'enunciato del principiodi minima azione.
Ciò avviene se:δS = 0, (2)
dove δS è la variazione prima di S (infatti, la condizione necessaria perché Ssia estrema (presenti un massimo o minimo relativo) è che δS sia nulla). Laformula δS = 0 è l'espressione matematica del principio di minima azione.
Eseguiamo la variazione (vedi Figura 1):
q(t)→ q(t) + δq(t), (3)
dove δq(t) è una qualunque funzione regolare per cui si abbia:
δq(tA) = δq(tB) = 0. (4)
La derivata q(t) varia di conseguenza così:
q(t)→ d
dt[q(t) + δq(t)] = q(t) +
d
dtδq(t) = q(t) + δq(t) (5)
6

Figura 1: Variazione della traiettoria.
e l'azione S varia così:
S →∫ tB
tA
L(q(t) + δq(t), q(t) + δq(t), t)dt,
ovvero, più sinteticamente, nel seguente modo:
S →∫ tB
tA
L(q + δq, q + δq, t)dt.
Sviluppando in serie di Taylor al primo ordine si ottiene:
S → S +
∫ tB
tA
(δq∂L
∂q+ δq
∂L
∂q)dt.
La variazione prima dell'azione S è dunque:
δS =
∫ tB
tA
(δq∂L
∂q+ δq
∂L
∂q)dt.
Applicando il principio di minima azione δS = 0 si ottiene:∫ tB
tA
(δq∂L
∂q+ δq
∂L
∂q)dt = 0.
Da essa si ricava: ∫ tB
tA
δq∂L
∂qdt+
∫ tB
tA
d
dtδq · ∂L
∂qdt = 0
da cui (integrando per parti):∫ tB
tA
δq∂L
∂qdt+ [δq
∂L
∂q]tBtA −
∫ tB
tA
δq · ddt
∂L
∂qdt = 0 (6)
7

da cui (per la (4)): ∫ tB
tA
δq(∂L
∂q− d
dt
∂L
∂q)dt = 0.
Inne, poiché δq è arbitrario, deve essere:
d
dt
∂L
∂q=∂L
∂q. (7)
Questa è l'equazione di Euler-Lagrange (circa 1750) risolvendo la quale sitrova q(t), l'equazione del moto del sistema.
L'equazione di Euler-Lagrange, espressione del principio di minima azione,è alla base di tutta la sica teorica.
Essendo essa una equazione dierenziale del secondo ordine, sono necessariele condizioni iniziali:
q(t0); q(t0). (8)
4 Determinismo classico laplaciano.
Il determinismo classico laplaciano (in onore di Laplace) deriva dal precedenterisultato, cioè che le traiettorie delle particelle sono note, risolvendo l'equazionedi Euler-Lagrange (7), a partire dalla conoscenza delle condizioni iniziali (8).
Il determinismo classico laplaciano aerma che:
conosciute in un certo istante iniziale le posizioni e le velocità di tutte leparticelle di un sistema, nonché le leggi di forza con cui esse interagiscono, èpossibile conoscere esattamente posizioni e velocità delle particelle in ogni
istante futuro o passato.
Il determinismo classico laplaciano è il paradigma centrale della sica clas-sica. Purtroppo, gli esperimenti ci mostrano inconfutabilmente (ricordiamo chenon si può prescindere dagli esperimenti, in quanto la sica è una scienza speri-mentale basata sul metodo scientico galileiano, ovvero basata sulla possibilitàdi eseguire esperimenti ripetibili che vericano o falsicano una teoria) che larealtà non è deterministica, ma è probabilistica. Il sogno determinista dell'uomosi infrange perciò all'inizio del '900 con l'avvento della sica quantistica.
Tutto ciò ha un enorme valenza losoca, non ancora ben compresa ed assi-milata da tutti, che coinvolge totalmente il concetto di conoscenza umana e direaltà.
Occorre inne necessariamente notare che l'equazione di Euler-Lagrange (7)possiede sempre, in generale, soluzioni che sono le traiettorie delle particelle.Queste soluzioni, però, sono calcolabili analiticamente (esattamente) solo inpochi casi e con pochi gradi di libertà. Ciò non deve generare confusione. Lesoluzioni esistono, ma non sono calcolabili analiticamente! Si può, però, pernon molti gradi di libertà, sempre ricorrere al calcolo numerico con la precisionedesiderata. Per il caso di molti gradi di libertà, si deve ricorrere alla sicastatistica classica (Boltzmann) di cui non parlerò in queste pagine.
8

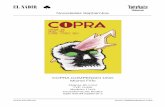
Figura 2: Sistemi di riferimento inerziali in congurazione standard.
La necessità della sica quantistica non deriva allora dal fatto che non siriesca praticamente a risolvere le equazioni del moto (7), ma dal fatto che insica quantistica decade il concetto paradigmatico di traiettoria regolare:
le particelle non seguono, nel loro moto, traiettorie regolari (principio diindeterminazione di Heisenberg, 1927), ma sono descritte da onde di
probabilità (almeno nella prima quantizzazione, perché nella seconda si ricorreaddirittura al concetto di campo particellare).
5 Relatività galileiana.
La relatività galileiana si basa essenzialmente sui seguenti quattro principi:
1. Le leggi della meccanica classica (meccanica newtoniana) sono le stesse intutti i sistemi di riferimento inerziali (principio di relatività galileiana).
2. La velocità delle interazioni che si esplicano fra le particelle è innita(azione a distanza).
3. Il tempo è lo stesso per tutti i sistemi di riferimento (assolutezza deltempo).
4. Lo spazio è relativo all'osservatore (relatività dello spazio).
La relatività galileiana è alla base della meccanica classica.La legge di trasformazione fra due sistemi di riferimento inerziali K e K ′
nella cosiddetta congurazione standard (vedi Figura 2), ovvero quando K ′ è in
9

moto con velocità V costante rispetto a K, è la trasformazione di Galileo:t = t′
x = x′ + V t
y = y′
z = z′
. (9)
Tale legge corrisponde al senso comune ed in particolare fornisce la legge dicomposizioni delle velocità (ottenibile derivando la seconda equazione una voltarispetto al tempo):
v = v′ + V (10)
e la legge di trasformazione delle accelerazioni (derivando la seconda equazionedella (9) due volte rispetto al tempo):
a = a′. (11)
Sottolineo ancora che, per la relatività galileiana, il tempo è consideratoassoluto, cioè lo stesso per tutti i sistemi di riferimento. Non così sarà per lateoria della relatività di Einstein.
6 Conservazione dell'energia.
Consideriamo un sistema isolato (che non interagisce con l'esterno) di particelledotato di n gradi di libertà che interagiscono fra loro istantaneamente (azionea distanza, ovvero la velocità delle interazioni è innita).
L'omogeneità del tempo deve essere una simmetria della lagrangiana. Per ilteorema di Noether (1918), ad ogni simmetria della lagrangiana (trasforma-zione continua che lascia invariata la lagrangiana) corrisponde una legge diconservazione.
Ricaviamo la legge di conservazione notando che l'omogeneità del tempoimplica che la lagrangiana del sistema non contenga esplicitamente il tempo. Siha perciò:
L(q1, ..., qn,q1, ..., qn). (12)
Poiché:
dL =
n∑i=1
(∂L
∂qidqi +
∂L
∂qidqi),
avremo:dL
dt=
n∑i=1
(∂L
∂qiqi +
∂L
∂qiqi).
Siccome, per l'equazione di Euler-Lagrange (7) si ha:
d
dt
∂L
∂qi=∂L
∂qi,
10

sostituendo, si ricava:
dL
dt=
n∑i=1
(d
dt
∂L
∂qiqi +
∂L
∂qiqi),
da cui:dL
dt=
n∑i=1
d
dt(∂L
∂qiqi)
ovvero:dL
dt=
d
dt
n∑i=1
∂L
∂qiqi
da cui:d
dt(
n∑i=1
∂L
∂qiqi − L) = 0
da cui, inne:
E =
n∑i=1
∂L
∂qiqi − L = costante. (13)
La grandezza E è costante nel tempo (si conserva) e si chiama energia(meccanica) del sistema.
7 Conservazione della quantità di moto.
Consideriamo un sistema isolato di n particelle che interagiscono fra loro istan-taneamente. La lagrangiana, in coordinate cartesiane, è:
L(r1, ..., rn, r1, ..., rn), (14)
dove ri (i caratteri in grassetto indicano i vettori di R3, spazio euclideo tridi-mensionale) sono i raggi vettore delle particelle.
L'omogeneità dello spazio deve essere una simmetria della lagrangiana.Sia la trasformazione (traslazione):
ri → ri + δr, (15)
dove δr è un vettore costante innitesimo.Ovviamente, le velocità non cambiano nella trasformazione, per cui:
ri → ri. (16)
Se la lagrangiana non cambia nella trasformazione, deve essere:
δL = 0. (17)
11

Calcolando, si ha:
δL =
n∑i=1
(∂L
∂riδri +
∂L
∂riδri) = 0
ovvero (essendo δr innitesimo):
δL =
n∑i=1
∂L
∂riδr = 0
ovvero:
δL = δr
n∑i=1
∂L
∂ri= 0.
Essendo δr arbitrario, deve essere:
n∑i=1
∂L
∂ri= 0.
Sostituendo con l'equazione di Euler-Lagrange (7), si ricava:
n∑i=1
d
dt
∂L
∂ri= 0
cioè:d
dt
n∑i=1
∂L
∂ri= 0
da cui, inne:
P =
n∑i=1
∂L
∂ri= costante. (18)
La grandezza P è costante nel tempo e si chiama quantità di moto o impulsodel sistema.
Le grandezze:
pi =∂L
∂ri(19)
sono le quantità di moto o impulsi delle singole particelle per cui:
P =
n∑i=1
pi. (20)
12

8 Conservazione del momento della quantità di
moto.
Consideriamo un sistema isolato di n particelle che interagiscono fra loro istan-taneamente. La lagrangiana, in coordinate cartesiane, come sappiamo, è:
L(r1, ..., rn, r1, ..., rn).
L'isotropia dello spazio deve essere una simmetria della lagrangiana.Sia la trasformazione (rotazione):
ri → ri + δϕ× ri, (21)
dove δϕ (il grassetto che indica il vettore non appare gracamente, n.d.a.) è unvettore costante innitesimo. Esso rappresenta una rotazione di angolo δϕ edha direzione e verso secondo la regola della vite destrorsa. Il simbolo × indicail prodotto vettoriale.
Le velocità cambiano nella trasformazione nel seguente modo:
ri → ri +d
dt(δϕ× ri). (22)
Se la lagrangiana non cambia nella trasformazione, deve essere:
δL = 0. (23)
Calcolando, si ha:
δL =
n∑i=1
[∂L
∂riδϕ× ri +
∂L
∂ri
d
dt(δϕ× ri)] = 0.
Poiché ∂L∂ri
= pi e ∂L∂ri
= pi (per la (19) e l'equazione di Euler-Lagrange (7)),dove pi sono le quantità di moto delle particelle, la formula precedente diventa:
δL =
n∑i=1
[piδϕ× ri + pid
dt(δϕ× ri)] = 0,
da cui:n∑i=1
d
dt[pi(δϕ× ri)] = 0,
ovvero (l'inversione dell'ordine dei fattori del prodotto scalare è per convenien-za):
d
dt
n∑i=1
(δϕ× ri)pi = 0.
Per le proprietà del prodotto vettoriale, possiamo scrivere:
d
dt
n∑i=1
(ri × pi)δϕ = 0
13

da cui:d
dt(δϕ
n∑i=1
ri × pi) = 0
e quindi (essendo δϕ arbitrario):
d
dt
n∑i=1
ri × pi = 0
da cui, inne:
M =
n∑i=1
ri × pi = costante. (24)
La grandezza M è costante nel tempo (si conserva) e si chiama momentodella quantità di moto o momento angolare del sistema.
Le grandezze:mi = ri × pi (25)
sono i momenti delle quantità di moto o momenti angolari delle singole particelleper cui:
M =
n∑i=1
mi. (26)
9 Meccanica classica.
La meccanica classica (o newtoniana) per un sistema isolato di n particelle cheinteragiscono istantaneamente è deducibile dalla seguente lagrangiana:
L = T − U =
n∑i=1
1
2mi||vi||2 − U(||rj − rk||, ...), (27)
dove T e U sono rispettivamente la cosiddetta energia cinetica e potenzialedel sistema, mi sono le masse delle particelle (grandezze scalari invarianti) evi = ri sono le velocità delle singole particelle. Il simbolo ||...|| indica la normao intensità o modulo di un vettore. L'energia potenziale U dipende dalle mutuedistanze fra le particelle per cui gli indici j, k prendono tutti i valori da 1 a n.
Per la (19), con un semplice calcolo si deduce che la quantità di moto di unaparticella è la ben nota:
pi =∂L
∂vi= mivi. (28)
Applicando l'equazione di Euler-Lagrange (7) si ottiene:
d
dt
∂L
∂vi=∂L
∂ri
da cui (usando la (27)):d
dtpi = −∂U
∂ri
14

ovvero:
mivi = −∂U∂ri
.
Introducendo l'accelerazione della particelle ai = vi = ri e la forza
Fi = −∂U∂ri
(29)
che agisce sulla particelle i− esima, si ricava:
miai = Fi (30)
che rappresenta la forma matematica del 2° principio della meccanica (o diNewton).
Si noti che il 1° principio della meccanica (il principio d'inezia) è contenutonel 2° ponendo Fi = 0.
Si noti anche che la (30) è coerente con la relatività galileiana (vedi la (11)).Siccome il sistema meccanico in oggetto è isolato, la quantità di moto totale
P =∑ni=1 pi si conserva. Si ha perciò:
d
dt
n∑i=1
pi = 0
ovvero:n∑i=1
pi = 0
e quindi:n∑i=1
Fi = 0. (31)
Questa è l'espressione matematica del 3° principio della meccanica (principiodi azione e reazione).
Anche l'energia del sistema si conserva per cui, usando la denizione dienergia (13), si ricava immediatamente:
E = T + U = costante. (32)
L'energia meccanica di un sistema isolato di particelle interagenti istanta-neamente, in meccanica classica, si conserva ed è la somma dell'energia cineticae dell'energia potenziale.
10 Meccanica hamiltoniana.
La descrizione di un sistema sico in termini di lagrangiana non è l'unico possibi-le. Un'altra possibilità è fornita dalla descrizione di un sistema sico in terminidi hamiltoniana. Tale descrizione è estremamente importante in molti campi
15

della sica (sica statistica, sica quantistica). Ovviamente, le due descrizionisono equivalenti e vanno tenute entrambe in considerazione.
Consideriamo la lagrangiana:
L(q1, ..., qn,q1, ..., qn, t), (33)
dove n sono i gradi di libertà del sistema. In analogia con la denizione diquantità di moto di una particella (vedi (19)), deniamo l'impulso generalizzato:
pi =∂L
∂qi. (34)
La meccanica lagrangiana, riassunta dall'equazione di Euler-Lagrange (7), èriferita al cosiddetto spazio delle congurazioni del sistema, ovvero allo spazioRn individuato dalle coordinate generalizzate (q1, ..., qn). La meccanica hamil-toniana, riassunta dalle equazioni di Hamilton che ricaverò sotto, è riferita alcosiddetto spazio delle fasi del sistema, ovvero allo spazio R2n individuato dagliimpulsi generalizzati e dalle coordinate generalizzate (p1, ..., pn, q1, ..., qn). Lospazio delle fasi è l'ambiente privilegiato della sica statistica.
Deniamo l'hamiltoniana H del sistema come la funzione:
H(p1, ..., pn, q1, ..., qn, t) =
n∑i=1
piqi − L, (35)
ovvero denita come l'energia del sistema (qui non necessariamente conser-vativa) (vedi(13)).
Scriviamo il dierenziale di L:
dL =
n∑i=1
∂L
∂qidqi +
n∑i=1
∂L
∂qidqi +
∂L
∂tdt
ovvero:
dL =
n∑i=1
pidqi +
n∑i=1
pidqi +∂L
∂tdt
ovvero (trasformando opportunamente il secondo termine a destra dell'uguale):
dL =
n∑i=1
pidqi + [d
n∑i=1
piqi −n∑i=1
qidpi] +∂L
∂tdt.
Da questa si ricava:
d(
n∑i=1
piqi − L) = −n∑i=1
pidqi +
n∑i=1
qidpi −∂L
∂tdt.
Scriviamo ora il dierenziale di H:
dH =
n∑i=1
∂H
∂pidpi +
n∑i=1
∂H
∂qidqi +
∂H
∂tdt.
16

Figura 3: Traiettorie reali, cioè che minimizzano l'azione.
Confrontando le ultime due formule si ricava (tenendo presente la (35)):qi = ∂H
∂pi
pi = −∂H∂qi(36)
e ∂L∂t = −∂H∂t (quest'ultima formula non è interessante).Queste (le (36)) sono le equazioni cercate, le cosiddette equazioni di Hamil-
ton. Si noti che si tratta di equazioni del primo ordine.Non procedo oltre nell'analisi della meccanica hamiltoniana. Faccio solo
osservare che si ritrova la legge di conservazione dell'energia notando che (ilcalcolo è banale):
dH
dt=∂H
∂t
per cui, se H non contiene esplicitamente il tempo, la sua derivata totale è nulla,quindi l'energia (identicata da H) si conserva.
11 L'azione come funzione delle coordinate e del
tempo.
Un'ulteriore descrizione di un sistema sico è possibile utilizzando l'azione comefunzione già minimizzata. Questo caso porta all'equazione di Hamilton-Jacobi.
Siano le traiettorie vicine q(t) e q(t) + δq(t) entrambe traiettorie reali delmoto, cioè che minimizzano l'azione come indicato nella Figura 3.
Consideriamo la formula (6) nell'ambito della deduzione dell'equazione diEuler-Lagrange (7) (opportunamente sistemata):
δS = [δq∂L
∂q]tBtA +
∫ tB
tA
δq(∂L
∂q− d
dt
∂L
∂q)dt.
17

Se la variazione fra le traiettorie avviene fra traiettorie vicine reali (cioèentrambe corrispondenti ad evoluzioni eettive del sistema), l'integrale è nullo(perché le suddette traiettorie soddisfano l'equazione di Euler-Lagrange (7)).
Nel presente caso, la condizione (4) ovviamente non vale. Poniamo alloraδq(tA) = 0 e semplicemente δq(tB) = δq. La variazione dell'azione è quindi:
δS = δq∂L
∂q,
ovvero, inserendo l'impulso generalizzato (34):
δS = pδq.
Per n gradi di libertà si ha dunque:
δS =
n∑i=1
piδqi
da cui, confrontando con il dierenziale di S considerata come funzione dellecoordinate e del tempo, si ricava inne:
∂S
∂qi= pi. (37)
Uguagliando le formule (la prima è per denizione (vedi (1)), la seconda èottenuta dal dierenziale di S):
dS
dt= L
e:dS
dt=∂S
∂t+
n∑i=1
∂S
∂qiqi =
∂S
∂t+
n∑i=1
piqi
si ricava:∂S
∂t= L−
n∑i=1
piqi
ovvero inne (vedi (35)):∂S
∂t= −H. (38)
Le (37) e (38) deniscono il legame fra l'azione come funzione delle coordinatee del tempo S(q1, ..., qn, t) e gli impulsi generalizzati e l'hamiltoniana.
Dalla (38) e dalla (37) si ricava l'equazione di Hamilton-Jacobi:
∂S
∂t+H(q1, ..., qn,
∂S
∂q1, ...,
∂S
∂qn, t) = 0, (39)
con la quale si ottiene una ulteriore rappresentazione della meccanica classica,oltre a quella in termini di lagrangiana e di hamiltoniana.
18

12 Introduzione al calcolo tensoriale.
Questa è una breve introduzione essenziale al calcolo tensoriale secondo Ricci-Curbastro e Levi-Civita.
Sia V n una varietà dierenziabile regolare di dimensione n immersa nellospazio reale euclideo Rm, con n ≤ m . Una parametrizzazione di V n sia:
y1 = y1(x1, ..., xn)
...
ym = ym(x1, ..., xn)
, (40)
dove le (x1, ..., xn) costituiscono un sistema di coordinate locali curvilinee dellavarietà e (y1, ..., ym) sono le coordinate cartesiane di Rm.
Si noti che gli indici in alto non vanno qui assolutamente intesi come ele-vamento a potenza. Si tratta di indici scritti in alto, da distinguersi da quelliscritti in basso (vedi più avanti).
La distanza al quadrato ds2 fra due punti della varietà innitamente vicinivale (per il teorema di Pitagora, essendo Rm euclideo):
ds2 =
m∑i=1
(dyi)2 =
m∑i=1
(
n∑j=1
∂yi
∂xjdxj)2 =
n∑i,j=1
gijdxidxj , (41)
dove le n2 funzioni gij = gij(x1, ..., xn), con i, j = 1, ..., n, costituiscono il
cosiddetto tensore metrico della varietà.Cosa sia esattamente un tensore e come usarlo, sarà più chiaro cammin
facendo. Per il momento basta sapere che il tensore è la generalizzazione delvettore, che un vettore è un tensore di ordine 1, uno scalare è un tensore diordine 0 e che le funzioni gij costituiscono un tensore.
D'ora in poi, in questa sezione, tutti gli indici assumeranno i valori 1, ..., n.L'elemento innitesimo di distanza ds sulla varietà è uno scalare invariante
(rispetto alle trasformazioni di coordinate locali curvilinee della varietà). Daquesto fatto fondamentale deriva il calcolo tensoriale.
Il tensore metrico gij è un tensore del secondo ordine completamente cova-riante (indici in basso, vedi più avanti) simmetrico, cioè per cui:
gij = gji. (42)
Esso è denito dalla formula:
gij =<
∂y1
∂xi
...∂ym
∂xi
,
∂y1
∂xj
...∂ym
∂xj
>, (43)
dove < ..., ... > indica l'usuale prodotto scalare (prodotto interno) in Rm.La formula fondamentale che denisce l'elemento ds può essere scritta in
modo più semplice usando la cosiddetta convenzione di Einstein secondo la
19

quale si omette di scrivere il segno di sommatoria per gli indici ripetuti. Si haperciò:
ds2 = gijdxidxj . (44)
D'ora in poi si prega di fare attenzione agli indici ripetuti perché sottinten-dono corrispondenti sommatorie.
Il tensore metrico gij denisce tutte le proprietà metriche della varietà (cioèla possibilità di misurare lunghezze, aree, volumi, angoli ecc.).
Anche la curvatura di una varietà è denita dal tensore metrico (vedi iltheorema egregium di Gauss, 1827) per cui, essendo il tensore metrico funzionedelle sole coordinate locali curvilinee (x1, ..., xn) della varietà, la curvatura dellavarietà, punto per punto, dipende dalle sole coordinate, ovvero è una grandezzaintrinseca alla varietà e non dipende dallo spazio Rm che contiene la varietà.Questo è un risultato di straordinaria importanza del tutto non banale.
A questo proposito, in questa sezione, non parlerò delle questioni inerentila curvatura quali la derivata covariante, le geodetiche, il tensore di curvaturadi Riemann, il tensore di Ricci e la curvatura scalare. Rimando tali argomentialle sezione relativa alla teoria della relatività generale di Einstein, della qualecostituiscono la base.
Per concludere, è essenziale denire bene le componenti controvarianti ecovarianti di un vettore.
Il vettore Ai è detto controvariante se, in un cambio di coordinate, si trasfor-ma come i dierenziali dxi delle coordinate stesse. Cioè, nella trasformazionedi coordinate xi = xi(x′1, ..., x′n), Ai si trasformerà in analogia con la formula:
dxi =∂xi
∂x′jdx′j ,
quindi, in questo modo:
Ai =∂xi
∂x′jA′j . (45)
Il vettore Bi è detto covariante se:
AiBi = scalare invariante. (46)
L'operazione AiBi = AiBi denisce il prodotto scalare (prodotto interno)
fra due vettori. In particolare:
AiAi = ||A||2 = norma quadra vettore. (47)
Le regole per alzare e abbassare (da covariante a controvariante e viceversa)un indice sono:
Ai = gijAj (48)
e:Ai = gijAj , (49)
valendo:gijg
jk = δki , (50)
20

dove:
δji =
1; i = j
0; i 6= j
è la cosiddetta delta di Kronecker che corrisponde alla matrice identità.Il tensore del secondo ordine gij completamente controvariante è denito
quindi come la matrice inversa di gij .Le precedenti denizioni di indici controvarianti e covarianti sono estendibili
in modo naturale ai tensori di qualunque ordine, essendo i tensori la naturalegeneralizzazione dei vettori.
Con l'operazione di contrazione degli indici, possiamo ottenere scalari, vet-tori e tensori a piacimento. Per esempio:
Ai = BjiCj ,
dove Bji è un tensore del secondo ordine misto (un indice controvariante ed unocovariante).
Siamo ora in grado di avere una denizione precisa (per il momento solo aparole, più avanti sarò più formale) di tensore:
un tensore è un ente che, in un cambiamento di coordinate, si trasformasecondo certe regole distinguibili in regola per la trasformazione delle
componenti controvarianti (indici in alto) e regola per la trasformazione dellecomponenti covarianti (indici in basso).
13 Relatività ristretta.
La teoria della relatività ristretta RR (altrimenti detta teoria della relativitàspeciale) di Einstein, pubblicata nel 1905, si basa essenzialmente sui seguentidue principi:
1. Le leggi della meccanica e dell'elettromagnetismo sono le stesse in tutti isistemi di riferimento inerziali (principio di relatività ristretta).
2. La velocità della luce nel vuoto è la stessa in tutti i sistemi di riferimentoinerziali (principio di costanza della velocità della luce).
La gravitazione è fuori da questo quadro concettuale. Essa viene trattata a partenella teoria della relatività generale. Una teoria vericata sperimentalmente checomprenda tutte le forze di natura è ancora in fase di costruzione e, sicuramente,non sarà una teoria classica.
13.1 La trasformazione di Lorentz.
Lo scenario geometrico della RR è determinato dallo spaziotempo quadridimen-sionale di MinkowskiM4. Si tratta di una varietà quadridimensionale i cui puntisono deniti dalle 4−ple (t, x, y, z) e su cui è denita la metrica pseudoeuclidea:
∆s2 = c2∆t2 −∆x2 −∆y2 −∆z2 (51)
21

dove le ∆ indicano incrementi niti, per esempio ∆t = t2 − t1, e c è la velocitàdella luce nel vuoto.
La legge di trasformazione delle coordinate fra sistemi di riferimento inerzialiche conserva la metrica di M4 è detta trasformazione di Lorentz. Le leggidella meccanica e dell'elettromagnetismo, per il principio di relatività ristretta,devono essere invarianti per la trasformazione di Lorentz. Tale trasformazioneè fondativa della RR.
Troviamola nella cosiddetta congurazione standard (vedi Figura 2).Cerchiamo la trasformazione di Lorentz nella forma:
t = At′ +Bx′
x = Ct′ +Dx′
y = y′
z = z′
(52)
(le coordinate y e z non cambiano perché il moto avviene lungo le x).Perché la metrica (51) sia invariante, occorre che (dovendo essere c costante
per il principio di costanza della velocità della luce):
c2∆t2 −∆x2 = c2∆t′2 −∆x′2.
Sostituendo la trasformazione (52), si ricava il sistema:c2A2 − C2 = c2
c2B2 −D2 = −1
c2AB − CD = 0
. (53)
Essendo 4 le incognite, occorre un'altra equazione. Dierenziando la trasfor-mazione (52), si ricava:
dx = Cdt′ +Ddx′
dt = Adt′ +Bdx′
da cui:dx
dt= V =
C +D dx′
dt′
A+B dx′
dt′
e, poiché dx′
dt′ = 0 (è come guardare da K l'origine O′ di K ′ muoversi con velocitàV , mentre O′ è fermo per K ′):
V =C
A. (54)
Questa è la quarta equazione cercata.La (53) con la (54) forniscono così i coecienti A,B,C,D (il calcolo è elemen-
tare) con i quali la trasformazione di Lorentz diventa inne (nella congurazione
22

standard):
t =t′+ V
c2x′√
1−V 2
c2
x = V t′+x′√1−V 2
c2
y = y′
z = z′
(55)
e, invertendo:
t′ =t− V
c2x√
1−V 2
c2
x′ = −V t+x√1−V 2
c2
y′ = y
z′ = z
. (56)
Le trasformazioni di Lorentz (55) e (56) sono state ricavate nella cosiddettacongurazione standard (gli assi allineati come in Figura 2). In generale, ilgruppo delle trasformazioni che conservano la metrica di Minkowski (51) è ilcosiddetto gruppo di Poincarè. Tali trasformazioni possono essere consideratecome movimenti rigidi in M4.
Si noti che, ponendo c =∞ (velocità delle interazioni innite), si ottiene latrasformazione di Galileo (9) che è alla base del principio di relatività galileianadella meccanica classica.
13.2 Alcune conseguenze della trasformazione di Lorentz.
Le conseguenze della trasformazione di Lorentz sono rivoluzionarie rispetto allameccanica classica (ed al senso comune) riguardo alle nozioni di spazio e ditempo. In particolare, nella RR il tempo non è una entità assoluta che scorreindipendentemente per tutti i sistemi di riferimento inerziali (in moto relativo).In RR, ogni sistema di riferimento inerziale possiede un proprio tempo misuratoda un proprio orologio (per esempio un preciso orologio atomico) solidale conesso. La sincronizzazione dei vari orologi la si ottiene considerando che l'evento(0, 0, 0, 0) si trasforma con la trasformazione di Lorentz in se stesso.
Le principali conseguenze della RR sono la dilatazione dei tempi, la con-trazione delle lunghezze, la non assolutezza della contemporaneità e la nonsuperabilità della velocità della luce.
13.2.1 Dilatazione dei tempi.
Calcoliamo la dilatazione temporale osservando il moto, visto da K, di unorologio solidale con K ′ e posto nella sua origine O′ (vedi Figura 2).
Consideriamo gli eventi (un evento è un punto di M4) di K ′:
E′1 = (t′1, 0, 0, 0);E′2 = (t′2, 0, 0, 0)
che rappresentano due istanti (t′1 < t′2) misurati dall'orologio solidale con K ′.
23

Essi, rispetto a K, a causa della trasformazione di Lorentz (55), risultano:
E1 = (t1, x1, 0, 0) = (t′1√
1−V 2
c2
,V t′1√1−V 2
c2
, 0, 0)
E2 = (t2, x2, 0, 0) = (t′2√
1−V 2
c2
,V t′2√1−V 2
c2
, 0, 0).
Da queste si ricava subito:
∆t =∆t′√1− V 2
c2
. (57)
L'intervallo di tempo ∆t′ misurato dall'orologio in moto (chiamato tempoproprio dell'orologio e quindi del sistema K ′, il cui tempo, quindi, è misuratodal solo orologio in questione) viene misurato da K ottenendo il risultato (ri-voluzionario per la meccanica classica) ∆t ≥ ∆t′. Si suole perciò dire che iltempo per i corpi in movimento appare (per chi si considera fermo) scorrerepiù lentamente, tanto più lentamente quanto più la velocità dei corpi in motosi avvicina alla velocità della luce c (limite invalicabile, secondo la RR (vedi piùavanti)).
13.2.2 Contrazione delle lunghezze.
Calcoliamo la contrazione della lunghezza osservando il moto, visto da K, di unregolo solidale con K ′ (vedi Figura 2).
Consideriamo gli eventi di K ′:
E′1 = (t′1, 0, 0, 0);E′2 = (t′2, l′, 0, 0).
Essi, rispetto a K, a causa della trasformazione di Lorentz (55), risultano:
E1 = (t1, x1, 0, 0) = (t′1√
1−V 2
c2
,V t′1√1−V 2
c2
, 0, 0)
E2 = (t2, x2, 0, 0) = (t′2+
Vc2l′√
1−V 2
c2
,V t′2+l
′√1−V 2
c2
, 0, 0).
Anché abbia senso fare una misura di lunghezza in K, occorre che t1 = t2,per cui:
t′1 = t′2 +V
c2l′.
Si avrà allora:
l = x2 − x1 =V t′2+l
′√1−V 2
c2
− V t′1√1−V 2
c2
=V (t′2−t
′1)+l
′√1−V 2
c2
=
=V (− V
c2l′)+l′√
1−V 2
c2
=l′(1−V 2
c2)√
1−V 2
c2
,,
cioè, inne:
l = l′√
1− V 2
c2. (58)
24

Questa formula esprime il fatto (altrettanto rivoluzionario nell'ambito dellameccanica classica quanto la dilatazione temporale) che le lunghezze dei corpiin moto (nella direzione del moto) appaiono, rispetto a chi si considera fermo,minori (infatti è l ≤ l′). La lunghezza di un corpo rispetto al sistema di ri-ferimento inerziale rispetto al quale è immobile (il corpo si deve muovere dimoto rettilineo uniforme rispetto a chi si considera fermo), si chiama lunghezzapropria.
13.2.3 Non assolutezza della contemporaneità.
Si tratta di una conseguenza diretta della trasformazione di Lorentz banalmentevericabile. Questa conseguenza della RR, anch'essa rivoluzionaria rispetto al-la meccanica classica ed al buon senso, ha implicazioni losoche sconcertanti.Due eventi che per un osservatore inerziale sono contemporanei, non lo sonopiù per un altro osservatore inerziale. Il principio di causalità, allora, potrebbeessere violato. Causa ed eetto potrebbero invertirsi nel loro susseguirsi. Comevedremo in seguito, per fortuna, tale principio è salvo in RR. Per trovare ecce-zioni a tale principio, apparentemente solidissimo, occorre scendere alle scale diPlanck. A quelle scale, forse, il tessuto dello spaziotempo non è più continuo e ilprincipio di causalità potrebbe non valere, tenendo anche presente che il tempo(ne sono convinto), come entità sica, in realtà non esiste, essendo esso solo lanostra percezione psicologica del movimento.
13.2.4 Non superabilità della velocità della luce.
Poiché nella trasformazione di Lorentz è presente al denominatore il termine√1− V 2
c2 , deve valere la condizione (con V e c è positive):
V < c. (59)
L'esistenza di particelle dotate di massa che viaggiano a velocità superlumi-nali è oggetto di speculazione teorica e porta al concetto di tachione. Non sihanno però, a riguardo, ancora evidenze sperimentali.
Il caso V = c vale per la radiazione elettromagnetica che, nella secondaquantizzazione, è assimilabile al moto dei fotoni, particelle di massa nulla.
13.2.5 Legge di composizione delle velocità.
Consideriamo una particella che si muove rispetto a K ′ con velocità costantev′ = dx′
dt′ (con direzione parallela all'asse x′ e nel verso positivo). Quale sa-rà la velocità v = dx
dt della stessa particella rispetto a K? Dierenziando latrasformazione di Lorentz (55), si ottiene facilmente:
v =V + v′
1 + V v′
c2
. (60)
25

Questa è la formula cercata. Essa, mirabilmente, pur nella sua semplicità,ha il requisito fondamentale di fornire come risultato c sia quando v′ = c, chequando V = c, che quando V = v′ = c, come è giusto che sia.
Si noti che, quando c = ∞, si ottiene v = V + v′, la legge di composizionegalileiana delle velocità (vedi (10)), legge che corrisponde perfettamente al sensocomune.
13.3 Quadrivettori.
Lo spaziotempo di Minkowski M4 è una varietà dierenziabile quadridimensio-nale dotata di una struttura pseudoriemanniana fornita dalla metrica:
ds2 = (dx0)2 − (dx1)2 − (dx2)2 − (dx3)2, (61)
dove:x0 = ct, x1 = x, x2 = y, x3 = z. (62)
Il tensore metrico, che chiamo eij , è denito da:
eij = eij =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
, (63)
per cui, per M4 si ha:ds2 = eijdx
idxj , (64)
con i, j = 0, ..., 3 (si noti che in RR, il valore degli indici è comunemente posto da0 a 3, anche se questa posizione non è universalmente riconosciuta, essendovi,in letteratura, altre denizioni (anche per la segnatura del tensore metrico),ovviamente del tutto equivalenti).
Il quadrivettore controvariante posizione (in M4) è denito da:
xi = (ct, x, y, z), (65)
il corrispondente quadrivettore covariante, per la regola di abbassamento degliindici (48), vale:
xi = (ct,−x,−y,−z). (66)
Il quadrivettore controvariante velocità (quadrivelocità controvariante) è de-nito da:
ui =dxi
ds(67)
ed il corrispondente quadrivettore covariante (quadrivelocità covariante) da:
ui =dxids
. (68)
Al denominatore è presente l'elemento di lunghezza scalare invariante ds.Questo garantisce il carattere vettoriale della velocità (vettore / scalare =vettore).
26

Le componenti della quadrivelocità sono:
ui = (1√
1− v2
c2
,x
c√
1− v2
c2
,y
c√
1− v2
c2
,z
c√
1− v2
c2
) = (1√
1− v2
c2
,v
c√
1− v2
c2
)
(69)e:
ui = (1√
1− v2
c2
,−x
c√
1− v2
c2
,−y
c√
1− v2
c2
,−z
c√
1− v2
c2
) = (1√
1− v2
c2
,−v
c√
1− v2
c2
).
(70)Il modulo quadro della velocità è:
uiui = 1. (71)
In modo analogo alla quadrivelocità si denisce la quadriaccelerazione:
wi =dui
ds=d2xi
ds2. (72)
13.4 Cono di luce.
Se si pone ∆s2 = 0, la metrica di Minkowski (51) fornisce:
c2∆t2 −∆x2 −∆y2 −∆z2 = 0. (73)
Il signicato sico degli eventi la cui distanza (in termini di metrica di Min-kowski) è nulla è che essi sono collegabili da un raggio di luce. Se poniamo percomodità:
t1 = 0 t2 = tx1 = 0 x2 = xy1 = 0 y2 = yz1 = 0 z2 = z
la formula precedente diventa:
c2t2 − x2 − y2 − z2 = 0. (74)
Questa equazione rappresenta una ipersupercie di dimensione 3, esattamen-te un cono, il cosiddetto cono di luce.
Le coppie di eventi per cui:∆s2 > 0 (75)
si dice che sono separati da un intervallo di genere tempo.Le coppie di eventi per cui:
∆s2 < 0 (76)
si dice che sono separati da un intervallo di genere spazio (si noti che in questocaso, la distanza fra due eventi è immaginaria).
27

Figura 4: Cono di luce.
Il tutto, ed altro che segue, può essere esemplicato in Figura 4 (in sole duedimensioni e ponendo per comodità graca c = 1).
Gli eventi che si trovano nella zona denominata futuro assoluto sono eventiche, rispetto all'evento (0, 0) posto nell'origine, sono collegabili ad esso con se-gnali viaggianti a velocità minore di c lanciati da (0, 0) verso tali eventi. Talieventi sono considerabili come eetti dell'evento causa (0, 0). Poiché, in unatrasformazione di Lorentz si conserva l'espressione ∆s2 > 0, tutti questi eventisaranno nel futuro dell'evento (0, 0) di qualunque sistema di riferimento iner-ziale. Ecco perché si dice futuro assoluto. Questa considerazione, come giàanticipato, salva il principio di causalità.
Gli eventi che si trovano nella zona denominata passato assoluto sono eventiche, rispetto all'evento (0, 0), sono collegabili ad esso con segnali viaggiantia velocità minore di c lanciati da quegli eventi verso (0, 0). Tali eventi sonoconsiderabili come cause dell'evento eetto (0, 0). Poiché, in una trasformazionedi Lorentz si conserva l'espressione ∆s2 > 0, tutti questi eventi saranno nelpassato dell'evento (0, 0) di qualunque sistema di riferimento inerziale. Eccoperché si dice passato assoluto. Anche questa considerazione salva il principiodi causalità.
Gli eventi posti al di fuori delle zone suddette (futuro e passato assoluti), nonpossono in alcun modo essere collegabili all'evento (0, 0) con segnali viaggiantia velocità minore di c. Tali eventi non sono in relazione di causa/eetto conl'evento posto nell'origine.
Ovviamente, tutte queste considerazioni valgono se l'evento di riferimen-to (dove è posto il centro del cono di luce) è posto ovunque nello spazio diMinkowski, non necessariamente nell'origine delle coordinate (0, 0).
28

13.5 Meccanica relativistica.
La meccanica relativistica nasce dal fatto che l'equazione (30) non è lorentzin-variante, ovvero non è invariante per la trasformazione di Lorentz (55), quindicon è coerente con la RR. Semmai è invariante per la trasformazione di Gali-leo (9) perché ne consegue la (11). La meccanica relativistica, però, si occupasolo di particelle libere, in quanto l'interazione elettromagnetica è trattata clas-sicamente nella teoria del campo elettromagnetico di Maxwell e l'interazionegravitazionale è trattata classicamente nella teoria della relatività generale diEinstein.
Consideriamo una particella libera di massam in moto rispetto ad un sistemadi riferimento inerziale di M4. La sua azione deve essere lorentzinvariante (cosìla coerenza con la RR è garantita). Allora, l'azione più semplice possibile è lalunghezza invariante:
S = a
∫ B
A
ds, (77)
dove A e B sono due eventi ed a è una costante da determinare facendo il limiteclassico, ovvero ponendo c → ∞ oppure v
c → 0. Infatti, la RR deve contenerela meccanica classica come caso limite in cui le velocità delle interazioni sonoinnite (così la trasformazione di Lorentz (55) diventa quella di Galileo(9)).
L'azione relativistica (77), usando la metrica (61), diventa:
S = a
∫ B
A
ds = a
∫ tB
tA
√c2 − x2 − y2 − z2dt.
Essendo per denizione S =∫ BALdt , confrontando si ottiene:
L = a√c2 − x2 − y2 − z2 = a
√c2 − v2 = ac
√1− v2
c2,
ovvero:L(β) = ac
√1− β2, (78)
dove β = vc .
Per determinare il coeciente a eseguiamo il limite classico β → 0 svilup-pando la (78) in serie di Taylor al secondo ordine:
L(β) = L(0) + βL′(0) +1
2β2L′′(0).
Con un facile calcolo si ottiene:
L = ac− 1
2acβ2.
Confrontando il termine − 12acβ
2 di questo risultato con la formula classicadella lagrangiana di una particella libera 1
2mv2, essendo il termine ac ininuente
perché costante (la lagrangiana, a causa delle derivate presenti nell'equazione
29

di Euler-Lagrange (7), è sempre denibile a meno di una costante additiva), siricava immediatamente:
a = −mc.
La lagrangiana relativistica di una particella libera, sostituendo nella (78),è quindi:
L = −mc2√
1− v2
c2(79)
e l'azione, sostituendo nella (77), è:
S = −mc∫ B
A
ds. (80)
Ricaviamo ora l'impulso e l'energia della particella relativistica riferendocialle (19) e (13). Un facile calcolo porta a:
p =mv√1− v2
c2
(81)
e:
E =mc2√1− v2
c2
. (82)
Queste formule sono le formule fondative della meccanica relativistica. Sinota subito che impulso ed energia, quando v → c, divergono. Questo è unrisultato rivoluzionario secondo la meccanica classica. Il signicato sico diquesto fatto è che quando si tenta di fare raggiungere ad un corpo dotato dimassa la velocità della luce, si deve fornire ad esso una energia innita. Questoa riprova della non raggiungibilità della velocità della luce per i corpi dotati dimassa.
Impulso ed energia soddisfano la relazione (ricavabile immediatamente):
E2
c2= p2 +m2c2. (83)
Se un corpo è fermo rispetto ad un certo sistema di riferimento inerziale(v = 0) si ha:
E = mc2. (84)
Questa formula, conosciuta da tutti e divenuta addirittura un'icona pop, haalmeno tre signicati che costituiscono un punto di svolta nel pensiero umano.
1. L'energia è equivalente alla massa (a meno di un coeciente moltiplicativocostante).
2. Un corpo possiede una energia intrinseca (a riposo).
3. La massa può trasformarsi in energia e viceversa.
Di tutto ciò non vi è traccia nella meccanica classica.
30

13.6 Meccanica relativistica in forma covariante.
Riscriviamo qui la meccanica relativistica utilizzando il formalismo dei quadri-vettori (o, come anche si dice, in forma covariante). Tale formalismo meglioincarna lo spirito e la sostanza della RR.
Riparto dall'azione (80) esprimendola nelle coordinate:
S = −mc∫ B
A
ds = −mc∫ B
A
√dxidxi (85)
e applico il principio di minima azione δS = 0 avendo introdotto la variazionedelle coordinate:
xi → xi + δxi (86)
tale per cui:δxi(A) = δxi(B) = 0. (87)
Dalla (86) si ricava:
dxi → dxi + dδxi = dxi + δdxi. (88)
La variazione prima dell'azione (85) è quindi (procedendo al solito modosviluppando in serie di Taylor al primo ordine):
δS = −mc∫ B
A
dxiδdxids
= −mc∫ B
A
uiδdxi = −mc∫ B
A
uidδxi.
Imponendo il principio di minima azione deve essere:
δS = −mc∫ B
A
uidδxi = −mc∫ B
A
uidδxids
ds = 0.
Integro per parti:
δS = −mc∫ B
A
uidδxids
ds = −mc[uiδxi]BA +mc
∫ B
A
dui
dsδxids = 0. (89)
Grazie alla condizione (87) si ottiene:∫ B
A
dui
dsδxids = 0.
Da questa è chiaro che, essendo δxi arbitrario, deve valere:
dui
ds= 0, (90)
cioè la quadriaccelerazione è nulla, come è giusto che sia per la particella libera.Questa è l'espressione relativistica del principio d'inerzia.
31

13.6.1 Quadriimpulso.
Ricaviamo ora il quadriimpulso. Per fare questo considero l'azione relativisticacome funzione delle coordinate e prendo traiettorie reali, cioè che la particellasegue eettivamente. La condizione (87) cessa di essere valida e pongo:
δxi(A) = 0
e:δxi(B) = δxi.
La (89), essendo per le traiettorie reali che eettivamente la particella compieil secondo integrale nullo, mi fornisce quindi:
δS = −mcuiδxi
ovvero:δS = −mcuiδxi. (91)
Tenendo presente la (37) e la (38) , dalla (91) si denisce il quadriimpulsodella particella relativistica come:
pi = mcui (92)
le cui componenti sono:
pi = (E
c,p). (93)
La norma quadra del quadrimpulso è:
pipi = m2c2 (94)
(vedi (83)).Introducendo in modo naturale la quadriforza relativistica:
gi =dpi
ds, (95)
l'analogo relativistico del secondo principio della meccanica diviene:
gi = mcdui
ds. (96)
14 Campo elettromagnetico.
Il campo elettromagnetico è generato dalle cariche elettriche, ovvero dalle par-ticelle dotate di carica elettrica. La carica elettrica, che è una grandezza scalareinvariante, può essere positiva o negativa.
Il campo elettromagnetico, in sica classica, è descritto a partire dal quadri-potenziale Ai che è un quadrivettore le cui componenti sono funzioni regolaridelle coordinate xi con i = 0, ..., 3. La descrizione del campo elettromagneticoin termini di quadripotenziale deve essere coerente con la RR.
32

14.1 Particella carica in un campo elettromagnetico asse-gnato.
Consideriamo una particella dotata di massa m e carica elettrica q immersain un campo elettromagnetico assegnato e rappresentato dal quadripotenzialeAi. L'azione della particella sarà allora costituita da due parti, una descriventela particella stessa come fosse libera e l'altra descrivente l'interazione fra laparticella ed il campo. Le due parti dell'azione devono essere lorentzinvarianti,così che la coerenza con la RR sia garantita.
L'azione è:
S =
∫ B
A
(−mcds− qAidxi). (97)
Il primo addendo è la nota azione della particella libera (vedi (80)) ed ilsecondo addendo è sicuramente il più semplice scalare invariante che si possacostruire a partire dal quadrivettore Ai (così l'invarianza dell'azione in unatrasformazione di Lorentz è garantita).
Calcoliamo la variazione prima dell'azione e poniamola nulla, applichiamocioè il principio di minima azione δS = 0 per ricavare le equazioni del moto (letraiettorie) della particella nel campo elettromagnetico assegnato.
Si ha (variando le coordinate xi e procedendo nel solito modo sviluppandoin serie di Taylor al primo ordine):
δS =
∫ B
A
[−mcuiδdxi − q(Aiδdxi +∂Ai∂xj
dxiδxj)] = 0
da cui (poiché δd = dδ):∫ B
A
[−mcui dδxids
ds− q(Aidδxi
ds+∂Ai∂xj
dxi
dsδxj)ds] = 0
e: ∫ B
A
(−mcui dδxids− qAi
dδxi
ds− q ∂Ai
∂xjuiδxj)ds = 0
e: ∫ B
A
dδxids
(−mcui − qAi)ds−∫ B
A
q∂Ai∂xj
uiδxjds = 0
e (integrando per parti il primo integrale):
[δxi(−mcui − qAi)]BA −∫ B
A
δxid
ds(−mcui − qAi)ds−
∫ B
A
q∂Ai∂xj
uiδxjds = 0
e (applicando δxi(A) = δxi(B) = 0):∫ B
A
δxid
ds(−mcui − qAi)ds+
∫ B
A
q∂Ai∂xj
uiδxjds = 0
33

e (raccogliendo e abbassando o alzando opportunamente gli indici):∫ B
A
δxi[d
ds(−mcui − qAi) + q
∂Aj∂xi
uj ]ds = 0.
Poiché la variazione δxi è arbitraria, deve essere:
d
ds(−mcui − qAi) + q
∂Aj∂xi
uj = 0
cioè:
mcduids
+ qdAids− q ∂Aj
∂xiuj = 0.
Poiché dAi
ds = ∂Ai
∂xjdxj
ds = ∂Ai
∂xj uj , si avrà:
mcduids
+ q∂Ai∂xj
uj − q ∂Aj∂xi
uj = 0
ovvero:
mcduids− q(∂Aj
∂xi− ∂Ai∂xj
)uj = 0. (98)
Questa è l'equazione relativistica del moto di una particella carica in uncampo elettromagnetico assegnato.
14.1.1 Invarianza di gauge.
Consideriamo la trasformazione:
Ai → Ai +∂f
∂xi, (99)
dove f è una funzione arbitraria delle xi. Sotto questa trasformazione, la parterelativa all'interazione carica-campo dell'azione (97), si trasforma così:∫ B
AAidx
i →∫ BA
(Ai + ∂f∂xi )dxi =
=∫ BAAidx
i +∫ BA
∂f∂xi dx
i =∫ BAAidx
i +∫ BAdf =
=∫ BAAidx
i + f(B)− f(A) =∫ BAAidx
i + costante
.
L'azione, quindi, sotto la (99), cambia in se stessa a meno di una costanteadditiva. Eseguendo poi il principio di minima azione dopo la trasformazione(99), tale costante additiva si annulla per cui si ottengono le stesse equazionidel moto.
Tutto ciò va sotto il nome di invarianza di gauge e la trasformazione (99) vasotto il nome di trasformazione di gauge.
La descrizione del campo elettromagnetico in termini di quadripotenziali nonè quindi univoca. Una innità di quadripotenziali, tutti ottenibili a partire daun dato quadripotenziale usando la (99), porta alle stesse equazioni del moto.Questo fatto, che potrebbe sembrare a prima vista negativo, ha però il vantaggiodi permetterci di ricercare quadripotenziali dotati di proprietà più convenienti.
34

14.1.2 Tensore elettromagnetico
Poiché il campo elettromagnetico si manifesta sicamente esercitando forze sul-le cariche elettriche (vedi (98)) ed essendo tali forze univoche e misurabili, sipuò ottenere una descrizione del campo elettromagnetico a partire da un enteinvariante rispetto alla (99). Tale ente è il cosiddetto tensore elettromagneticoche è denito come:
Fij =∂Aj∂xi− ∂Ai∂xj
. (100)
Tale denizione, come è immediato vericare, è invariante rispetto alla tra-sformazione di gauge (99).
L'equazione del moto (98) diventa allora:
mcduids
= qFijuj , (101)
osservando la quale si vede bene che a sinistra c'è la quadriaccelerazione e adestra la forza elettromagnetica (vedi (96)). La forza elettromagnetica qFijuj
si chiama anche forza di Lorentz.Circa la natura tensoriale di Fij basta notare che, essendo
dui
ds un quadrivet-tore, tale sarà anche Fijuj che è una contrazione di Fij tramite il quadrivettoreui. Quindi Fij è un tensore del secondo ordine completamente covariante cheha anche la proprietà di essere antisimmetrico, cioè tale per cui:
Fij = −Fji, (102)
per cui assume la forma:
Fij =
0 F01 F02 F03
−F01 0 F12 F13
−F02 −F12 0 F23
−F03 −F13 −F23 0
. (103)
Si vede bene che le componenti indipendenti di Fij sono 6. Esse rappresen-tano i termini di forza con cui il campo elettromagnetico agisce sulla particellacarica e corrispondono, come è semplice, anche se un po' laborioso dimostrare,alle componenti dei vettori campo elettrico E e campo magnetico B della teoriatradizionale di Maxwell (io, qui, sto presentando la stessa teoria, che è implici-tamente lorentzinvariante (la RR nasce proprio da considerazioni sulla teoria diMaxwell), nel formato covariante, ovvero tensoriale). Tale approccio ha anche ilvantaggio estetico di essere formalmente più simmetrico, semplice e compatto.
Il tensore elettromagnetico completamente controvariante, come è facile di-mostrare tenendo presente che F ij = eilejmFlm, vale:
F ij =
0 −F01 −F02 −F03
F01 0 F12 F13
F02 −F12 0 F23
F03 −F13 −F23 0
. (104)
35

14.1.3 Equazioni intrinseche del campo elettromagnetico.
Dalla denizione del tensore elettromagnetico:
Fik =∂Ak∂xi
− ∂Ai∂xk
(105)
(ho cambiato un indice per convenienza per ciò che deve venire, in quanto lalettera j servirà ad indicare la corrente elettrica) è facile ricavare l'equazione:
∂Fik∂xl
+∂Fkl∂xi
+∂Fli∂xk
= 0. (106)
Queste equazioni descrivono le proprietà intrinseche del campo elettroma-gnetico (senza considerare cioè come le sorgenti del campo, cioè le cariche, gene-rano il campo). Esse corrispondono alla prima coppia delle equazioni di Maxwell(quelle che non contengono le sorgenti del campo).
14.2 Campo elettromagnetico generato da cariche asse-gnate.
Fino ad ora abbiamo considerato un campo elettromagnetico assegnato descrittodal quadrivettore Ai e dal tensore Fik. Come risultato abbiamo ricavato leequazioni del moto di una particella carica e le proprietà intrinseche del campoelettromagnetico. Non abbiamo per nulla preso in considerazione come il campoelettromagnetico viene generato dalle cariche.
In questa sottosezione arontiamo il problema di come le cariche generanoil campo aermando subito che l'azione del campo elettromagnetico e delle ca-riche deve contenere, oltre ai termini già visti relativi alle particelle libere edall'interazione fra particelle e campo, un termine specico per il campo elettro-magnetico, termine che, come al solito, deve essere lorentzinvariante, ma ancheinvariante per trasformazione di gauge. Questa ulteriore condizione fa sì che ilsuddetto termine dell'azione abbia valore univoco in quanto deve rappresentareil campo stesso. Il termine dell'azione relativo al campo deve contenere quindiil tensore del campo. Il termine scalare invariante più semplice è l'espressioneFikF
ik.L'azione, per n particelle cariche è:
S = −∑∫
mcds−∑∫
qAidxi − a
∫FikF
ikdΩ, (107)
dove, per semplicità, ho omesso gli indici per le cariche, i primi due integrali sonolungo le traiettorie delle particelle ed il terzo integrale è un integrale di volumesu tutto lo spazio e fra due istanti di tempo ssati (dΩ = dx0dx1dx2dx3 =c dt dx dy dz è l'elemento di volume di M4). a è una costante da denire.
14.2.1 Quadricorrente.
Le particelle (punti materiali) dotate di massa e di carica elettrica sono esat-tamente ciò che esiste in natura (anche se il fatto che le particelle siano per-fettamente puntiformi o meno non è chiaro ed è oggetto di ricerca) (tenendo
36

anche presente che nel microcosmo la sica classica cessa di valere, per cui nellaseconda quantizzazione occorre il concetto di campo particellare). In molti casi,però, si ha anche fare con insiemi di molte particelle che costituiscono, in ottimaapprossimazione (senza scendere troppo di scala), un continuo. La descrizionedelle cariche avviene allora in termini di densità di carica ρ. La densità di ca-rica, poi, evolve nel tempo, per cui sorge la necessita del concetto di correnteelettrica. Vediamo allora come, col formalismo covariante, si possano denirequesti concetti e si possa riscrivere opportunamente l'azione (107).
Cominciamo dalla:dq = ρdV,
dove dV = dx dy dz è l'elemento di volume tridimensionale. Moltiplicando amboi membri per dxi si ottiene:
dqdxi = ρdV dxi
da cui:
dqdxi = ρdVdxi
dtdt.
Poiché dV dt = 1cdΩ è uno scalare invariante (in una trasformazione di Lo-
rentz, che è un movimento rigido in M4, un volume si conserva), allora, essendodqdxi un quadrivettore, anche ρdx
i
dt è un quadrivettore. Deniamo quindi laquadricorrente come:
ji = ρdxi
dt. (108)
Le sue componenti sono:
ji = (cρ, ρx, ρy, ρz) = (cρ, ρv) = (cρ, j). (109)
14.2.2 Equazione del campo generato da cariche assegnate.
Il secondo termine dell'azione (107) diventa allora:
∑∫qAidx
i =
∫ρdV Aidx
i =
∫ρdV Ai
dxi
dtdt =
1
c
∫Aij
idΩ,
per cui, l'azione completa diventa:
S = −∑∫
mcds− 1
c
∫Aij
idΩ− a∫FikF
ikdΩ (110)
(ho lasciato al primo termine il segno di sommatoria senza passare all'integra-le perché quel termine, essendole le correnti assegnate, non contribuisce allavariazione dell'azione).
I due integrali di volume quadridimensionale sono fatti su di un insieme diM4 delimitato fra tA e tB (con tA < tB) per quanto riguarda la coordinatatemporale x0 ed illimitato per quanto riguarda le coordinate spaziali x1, x2, x3.
37

Qui le correnti sono assegnate per cui le traiettorie delle particelle sonodate e, applicando il principio di minima azione, esse non subiscono variazione.Applicando il principio di minima azione, in questo caso, a subire variazionesono le componenti del quadripotenziale e, quindi, le componenti del tensoreelettromagnetico.
Tenendo presente la (105), introduciamo la variazione (con la condizione dinullità della variazione agli estremi dell'intervallo temporale):
Ai → Ai + δAiFik → ∂
∂xi (Ak + δAk)− ∂∂xk (Ai + δAi) = Fik + ∂δAk
∂xi − ∂δAi
∂xk = Fik + δFikδAi(tA, x, y, z) = δAi(tB , x, y, z) = 0
.
(111)I termini Aiji e FikF ik si trasformano di conseguenza così (ricordando che
qui le correnti non variano):
Aiji → (Ai + δAi)j
i = Aiji + δAij
i
FikFik → (Fik + δFik)(F ik + δF ik) = FikF
ik + FikδFik + F ikδFik + δFikδF
ik
ovvero (tenendo presente che FikδF ik = F ikδFik e che δFikδF ik è trascurabileperché del secondo ordine):
Aiji → Aij
i + δAiji
FikFik → FikF
ik + 2F ikδFik. (112)
Applichiamo ora il principio di minima azione δS = 0 alla (110). Si ottie-ne (ricordando che il primo termine dell'azione nella variazione si annulla edapplicando le precedenti posizioni):
δS =
∫(−1
cjiδAi − 2aF ikδFik)dΩ = 0
da cui: ∫[1
cjiδAi + 2aF ik(
∂δAk∂xi
− ∂δAi∂xk
)]dΩ = 0
ovvero: ∫(1
cjiδAi + 2aF ik
∂δAk∂xi
− 2aF ik∂δAi∂xk
)dΩ = 0
ovvero (permutando gli indici nel secondo termine):∫(1
cjiδAi + 2aF ki
∂δAi∂xk
− 2aF ik∂δAi∂xk
)dΩ = 0
ovvero (ricordando che F ik = −F ki):∫(1
cjiδAi − 2aF ik
∂δAi∂xk
− 2aF ik∂δAi∂xk
)dΩ = 0
per cui: ∫(1
cjiδAi − 4aF ik
∂δAi∂xk
)dΩ = 0.
38

Ora integriamo per parti il secondo termine (ricordando che siamo in M4
per cui il termine che va fuori dall'integrale di volume è un integrale di superciecalcolato sul bordo del volume su cui stiamo lavorando). Si ottiene:∫
1
cjiδAidΩ−
∫4aF ikδAidSk +
∫4a∂F ik
∂xkδAidΩ = 0,
dove, appunto, il secondo integrale è l'integrale di supercie di cui parlavo sopra(in pratica, questa è un'applicazione del teorema di Gauss in 4 dimensioni).
Il suddetto integrale di supercie è nullo perché, come detto sopra, δAi(tA) =δAi(tB) = 0 e perché il campo all'innito spaziale è supposto nullo. Si ottieneallora: ∫
(1
cji + 4a
∂F ik
∂xk)δAidΩ = 0.
Poiché la variazione δAi è arbitraria, deve essere inne:
∂F ik
∂xk= − 1
4acji. (113)
Questa è l'equazione cercata. Essa ci dice come il campo elettromagneticoviene generato da correnti assegnate. Questa equazione è la versione covariante(espressa tensorialmente) della seconda coppia delle equazioni Maxwell, quelleche contengono le sorgenti del campo.
14.3 Descrizione completa del campo elettromagnetico.
Fino ad ora abbiamo considerato due casi separati: campo assegnato e deduzio-ne delle equazioni del moto delle cariche, correnti assegnate e deduzione delleequazioni del campo. Abbiamo cioè applicato il principio di minima azione alla(110) non facendo variare tutti i suoi termini contemporaneamente, ma due allavolta.
Con questo abbiamo ricavato due descrizioni distinte del campo e delle ca-riche. È possibile ricavare una descrizione unica del campo e delle cariche fa-cendo variare i tre termini della (110) contemporaneamente? Ciò signiche-rebbe ricavare le equazioni del moto delle cariche e dell'evoluzione del cam-po in un frame unico, cioè, date le condizioni iniziali, si potrebbe descriverecontemporaneamente le traiettorie delle particelle e l'evoluzione del campo.
Purtroppo, che io sappia, questo lo si può fare, date le dicoltà matematiche,solo in casi semplici e ponendo opportune, ma fortemente limitanti, condizionirestrittive.
Il problema della descrizione completa del campo elettromagnetico e dellecariche lo si sposta e lo si risolve in sica quantistica (seconda quantizzazio-ne, teoria quantistica dei campi) con metodi matematici cosiddetti perturbativi(particolari approssimazioni a partire da casi semplici e se le energie non sonotroppo alte). Anche qui come si vede, senza ottenere soluzioni analitiche. Nel-l'ambito della teoria delle stringhe mi risulta, invece, che soluzioni analiticheesatte non perturbative siano possibili. Ma questa è un'altra storia.
39

Faccio notare che la teoria della relatività generale, come vedremo, è inveceuna teoria completa. Data la distribuzione delle masse ed il campo gravitazio-nale ad un dato istante e la loro velocità iniziale (anche del campo, ovvero lasua tendenza iniziale ad evolvere), si determina l'evoluzione successiva del siste-ma masse-campo in modo completo ed esatto (a questo proposito, è importantenotare che la cosmologia relativistica nasce proprio da questo fatto).
14.4 Onde elettromagnetiche.
Il formalismo covariante del campo elettromagnetico, oltre a fornirne una de-scrizione compatta e simmetrica nelle formule, ha in sé una grande eleganza esemplicità. La dimostrazione che il campo elettromagnetico è un'onda che sipropaga nel vuoto alla velocità c è oltremodo esemplare per quanto ho appenadetto.
Mettiamoci per semplicità nello spazio vuoto in assenza di cariche. La (113)diventa allora:
∂F ik
∂xk= 0. (114)
Sostituendovi la:
F ik =∂Ak
∂xi− ∂Ai
∂xk(115)
(lascio al lettore la dimostrazione del passaggio dagli indici covarianti agli indicicontrovarianti del tensore elettromagnetico a partire dalla (105)) si ricava:
∂2Ak
∂xi∂xk− ∂2Ai
∂xk∂xk= 0. (116)
Ora introduciamo il cosiddetto gauge di Lorentz:
∂Ak
∂xk= 0 (117)
che si ottiene facendo la trasformazione di gauge Ak → Ak + ∂f∂xk
(vedi la (99))per cui:
∂
∂xk(Ak +
∂f
∂xk) = 0
ovvero:∂Ak
∂xk+
∂2f
∂xk∂xk= 0
cioè:∂2f
∂xk∂xk= −∂A
k
∂xk
che è l'equazione che determina la funzione f della trasformazione di gauge.Questo signica che, se ho un quadripotenziale qualunque ed eseguo una trasfor-mazione di gauge con la f appena trovata, alla ne ottengo un quadripotenzialeche soddisfa il gauge di Lorentz (117) desiderato.
40

In situazione di gauge di Lorentz la (116) diventa:
∂2Ai
∂xk∂xk= 0. (118)
Questa è l'equazione cercata. Si tratta di un'onda che viaggia nel vuoto avelocità c. Infatti, passando alle coordinate (t, x, y, z) si ricava:
1
c2∂2Ai
∂t2− ∂2Ai
∂x2− ∂2Ai
∂y2− ∂2Ai
∂z2= 0
che può essere scritta più sinteticamente come:
Ai = 0, (119)
dove il simbolo rappresenta l'operatore dalembertiano denito da:
= 4− 1
c2∂2
∂t2=
∂2
∂x2+
∂2
∂y2+
∂2
∂z2− 1
c2∂2
∂t2,
essendo:
4 =∂2
∂x2+
∂2
∂y2+
∂2
∂z2
l'operatore laplaciano.L'equazione (119) è la classica equazione delle onde e tutte le componenti
del quadrivettore (nel gauge di Lorentz) la soddisfano.
14.5 Deduzione delle equazioni di Maxwell.
Nel 1865, Maxwell, uno dei più grandi sici i tutti i tempi, pubblicò le sue famosequattro equazioni dierenziali che riassumevano tutti i fenomeni elettromagne-tici no a lui noti. La sua mirabile sintesi rappresenta uno dei grandi capolavoridel pensiero umano. Le quattro equazioni di Maxwell sono una pietra miliaredel pensiero scientico e, come ogni grande teoria, aprì nuove porte alla cono-scenza. In particolare il concetto di campo, come entità avente valenza sica,trasportante energia ed impulso, e qui sta la grande novità, a velocità nita, cnel vuoto.
Con il lavoro di Maxwell (che scoprì la sconosciuta, no a lui, natura ondu-latoria del campo elettromagnetico col solo ausilio della matematica) si abban-dona il concetto approssimativo dell'azione a distanza (interazione istantanea)e si inaugura l'era del concetto di campo, era tuttora attuale (l'unica eccezioneal concetto di campo viaggiante a velocità nita che si conosce è l'entanglementquantistico, oggetto di ricerca attuale, in cui sembra che l'accoppiamento fra leparticelle, in certi casi, sia non locale, perciò istantaneo).
L'altra grande e fondamentale porta che le equazioni di Maxwell aprono, edin modo inaspettato, è l'avvento della RR. Le equazioni di Maxwell non sonoinvarianti secondo la trasformazione di Galileo, secondo la quale, la velocità
41

della luce c (Maxwell dimostrò anche che la luce è una radiazione elettromagne-tica!) cambia da un sistema di riferimento inerziale all'altro in moto rispettoal precedente. Invece, gli esperimenti (a partire dallo storico esperimento diMichelson-Morley (1887)) mostrano che la velocità della luce è la stessa in tuttii sistemi di riferimento inerziali. Così nasce il principio di costanza della velocitàdella luce e, di conseguenza, la RR (di cui ho parlato in precedenza).
Io ho mostrato n qui la teoria del campo elettromagnetico a partire dalquadripotenziale, dal tensore elettromagnetico e da una opportuna azione. Hoquindi ricavato le equazioni del moto delle particelle cariche e del campo stesso.Ho fatto questo in modo deduttivo partendo da certi assiomi (una certa azioneche deve avere una certa forma matematica che salvi la RR, quindi sia loren-tzinvariante). Tutto ciò è molto astratto e non rispetta la costruzione storicadella teoria, ma, in verità, in sica teorica si fa così, si rovescia tutto cioè, quan-do la teoria è consolidata, si riscrive tutto quanto da capo, in modo ipoteticodeduttivo (come si trattasse di una teoria matematica), spartendo dalla ne delprocesso storico.
Ora, se tutto ciò che ho mostrato è giusto, devo assolutamente ricavare lequattro equazioni di Maxwell, perché esse hanno fondamento sperimentale (lasica, per quanto teorica sia, alla ne deve essere confermata o falsicata dagliesperimenti!). Altrimenti ho costruito un edicio che, anche se bello e apparente-mente ben funzionante, addirittura perfetto, risulta irreale, non corrispondentealla realtà, puramente fantasioso, anche se razionale.
Per fortuna (si fa per dire) il metodo dell'applicazione delle simmetria all'a-zione funziona benissimo, anzi, nella seconda quantizzazione (teoria quantisticadei campi) questo è l'unico metodo perché, nell'innitamente piccolo, come me-todo di indagine abbiamo solo lagrangiane e simmetrie. Gli esperimenti vengonodopo a verica o meno delle ipotesi teoriche. Se no, se partissimo dagli espe-rimenti, cosa dovremmo sperimentare? Nell'innitamente piccolo siamo comeciechi che si muovono in una realtà incomprensibile.
14.6 Denizione dei vettori campo elettrico e magnetico.
Partiamo dall'azione (97) che è l'azione di una particella carica immersa in uncampo elettromagnetico assegnato. La riscrivo:
S =
∫ B
A
(−mcds− qAidxi)
e introduco il potenziale scalare ϕ ed il potenziale vettore A, entrambi funzionidi (t, x, y, z, ). Il quadripotenziale lo ridenisco in funzione di questi nuovi entiin questo modo:
Ai = (ϕ
c,A) (120)
da cui, ovviamente:
Ai = (ϕ
c,−A). (121)
42

L'azione, allora, diventa (con semplici calcoli):
S =
∫ B
A
(−mcds− qAidxi) =
∫ tB
tA
(−mc√c2 − v2 − qϕ+ qAv)dt.
Come sappiamo, per denizione, l'azione è denita come S =∫ tBtA
Ldt. Allo-ra, confrontando, siamo in grado di ricavale la lagrangiana della particella caricanel campo elettromagnetico assegnato. Si ha esattamente:
L = −mc√c2 − v2 − qϕ+ qAv. (122)
L'equazione del moto della particella è data dall'equazione di Euler-Lagrangeddt∂L∂v = ∂L
∂r , come ben sappiamo (vedi (7)). Applichiamola.Un facile calcolo ci dà:
∂L∂v = mv√
1− v2
c2
+ qA = p + qA
∂L∂r = ∇L = −q∇ϕ+ q∇(Av)
,
dove p è l'impulso relativistico (81) e ∇ è l'operatore dierenziale nabla ∇ =( ∂∂x ,
∂∂y ,
∂∂z ). Ricordo anche che, in letteratura, si trovano le posizioni ∇a =
grad a, ∇a = diva e ∇× a = rota (l'operazione × è il prodotto vettoriale).L'equazione del moto della particella è allora:
d
dt(p + qA) = −q∇ϕ+ q∇(Av)
ovvero:p = −qA− q∇ϕ+ q∇(Av).
Tenendo presente che A = ∂A∂t + (v∇)A (la dimostrazione è immediata
rifacendoci al dierenziale dA), si ottiene:
p = −q ∂A∂t− q(v∇)A− q∇ϕ+ q∇(Av).
Così, l'equazione del moto appare poco procua. Vediamo di anarla meglioe per questo proviamo a scomporre ∇(Av), ovvero il gradiente di un prodottoscalare. Per questo ci viene in ausilio una nota formula (che non sto a dimostrare,ma che sarebbe semplice fare) del calcolo dierenziale vettoriale. Esattamente,per due vettori qualunque a e b si ha:
gradab = ∇(ab) = (a∇)b + (b∇)a + b× rota + a× rotb,
dove i termini fra parentesi sono prodotti scalari, ∇ (lo ripeto) è l'operatorenabla e × indica il prodotto vettoriale. L'operatore rot è denito da:
rota = ∇× a =
∣∣∣∣∣∣∂∂x
∂∂y
∂∂z
ax ay aze1 e2 e3
∣∣∣∣∣∣ ,43

essendo e1 = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1) la base ortonormale canonicadi R3.
Applicando la suddetta formula, ottengo:
p = −q ∂A∂t− q∇ϕ+ qv × rotA,
avendo eliso i termini opposti e notato che le derivate parziali spaziali dellavelocità sono nulle. Così ridotta, l'equazione del moto è meglio utilizzabile.
PoniamoE = −gradϕ− ∂A
∂tB = rotA
. (123)
Così abbiamo introdotto i vettori campo elettrico E e campo magneticoB. L'equazione del moto della particella carica in un campo elettromagneticodiventa quindi:
p = qE + qv ×B, (124)
che è l'equazione del moto in forma tradizionale (non in forma di quadrivettori)dove il secondo membro è la ben nota forza di Lorentz. Faccio notare che p èl'impulso relativistico (81) che, per velocità piccole comparate a c, può esseresostituito con p = mv.
Con le posizioni (123), usando le (105), (115) e tenendo presente che:
B = rotA =
∣∣∣∣∣∣∂∂x
∂∂y
∂∂z
Ax Ay Aze1 e2 e3
∣∣∣∣∣∣ =
∂Az
∂y −∂Ay
∂z
−∂Az
∂x + ∂Ax
∂z∂Ay
∂x −∂Ax
∂y
,
si ricava (lascio al lettore i semplici calcoli):
Fik =
0 1
cEx1cEy
1cEz
− 1cEx 0 −Bz By− 1cEy Bz 0 −Bx− 1cEz −By Bx 0
(125)
e:
F ik =
0 − 1
cEx − 1cEy − 1
cEz1cEx 0 −Bz By1cEy Bz 0 −Bx1cEz −By Bx 0
. (126)
14.7 Deduzione della prima coppia di equazioni di Max-well.
Consideriamo l'equazione del campo senza le sorgenti (106), cioè le correnti, chequi riporto:
∂Fik∂xl
+∂Fkl∂xi
+∂Fli∂xk
= 0.
44

Da esse, ricordando che Fik = −Fki, si ottengono solo 4 equazioni indipen-denti non nulle. Esse sono:
∂F01
∂x2 + ∂F12
∂x0 + ∂F20
∂x1 = 0
∂F01
∂x3 + ∂F13
∂x0 + ∂F30
∂x1 = 0
∂F02
∂x3 + ∂F23
∂x0 + ∂F30
∂x2 = 0
∂F12
∂x3 + ∂F23
∂x1 + ∂F31
∂x2 = 0
.
Da queste, sostituendo le (125) , si ottiene:
∂Bz
∂t = ∂Ex
∂y −∂Ey
∂x
∂By
∂t = ∂Ez
∂x −∂Ex
∂z
∂Bx
∂t =∂Ey
∂z −∂Ez
∂y
∂Bx
∂x +∂By
∂y + ∂Bz
∂z = 0
.
Dalle prime 3 equazioni si ricava:
rotE = −∂B∂t
(127)
e dalla quarta:divB = 0. (128)
Esse costituiscono al prima coppia delle equazioni di Maxwell, quelle, dellequattro, senza le sorgenti del campo.
14.8 Deduzione della seconda coppia di equazioni di Max-well.
Consideriamo l'equazione del campo con le sorgenti (113), cioè le correnti, chequi riporto:
∂F ik
∂xk= − 1
4acji.
Da queste, considerando la (126) e la (109), si ricava:
∂F 01
∂x1 + ∂F 02
∂x2 + ∂F 03
∂x3 = − 14aρ
∂F 10
∂x0 + ∂F 12
∂x2 + ∂F 13
∂x3 = − 14acρx
∂F 20
∂x0 + ∂F 21
∂x1 + ∂F 23
∂x3 = − 14acρy
∂F 30
∂x0 + ∂F 31
∂x1 + ∂F 32
∂x2 = − 14acρz
45

e:∂Ex
∂x +∂Ey
∂y + ∂Ez
∂z = c4aρ
1c2∂Ex
∂t −∂Bz
∂y +∂By
∂z + 14acρx = 0
1c2∂Ey
∂t + ∂Bz
∂x −∂Bx
∂z + 14acρy = 0
1c2∂Ez
∂t −∂By
∂x + ∂Bx
∂y + 14acρz = 0
.
Ponendo:a =
ε0c
4,
dove ε0 è la cosiddetta costante dielettrica del vuoto, dalla prima equazione(delle ultime quattro scritte sopra) si ricava:
divE =1
ε0ρ (129)
e, ponendo:
ε0µ0 =1
c2, (130)
dove µ0 è la cosiddetta permeabilità magnetica del vuoto, dalle altre tre equa-zioni si ricava:
ε0∂E
∂t− 1
µ0rotB + j = 0. (131)
Le equazioni (129) e (131) costituiscono la cosiddetta seconda coppia delleequazioni di Maxwell, quelle contenenti le sorgenti del campo elettromagnetico,ovvero le cariche e le correnti.
15 Relatività generale.
15.1 Calcolo tensoriale.
La teoria della relatività generale (RG) necessita del calcolo tensoriale che nediventa la spina dorsale.
Ne riporto qui in sintesi i contenuti. Si tratta di una materia ardua neicontenuti e nella forma che fonda le sue radici nella geometria dierenziale. Illettore interessato dovrà approfondirne lo studio su testi completi ed organi-ci ampiamente disponibili in letteratura. Qui, purtroppo, posso solo procede-re in modo molto sintetico ed astratto, senza dimostrare tutti i risultati perl'approfondimento dei quali rimando alla letteratura.
15.1.1 Vettori e tensori controvarianti e covarianti.
I vettori sono deniti sullo spazio tangente ad una varietà nei suoi punti. Peresempio, se la varietà è una supercie ordinaria bidimensionale, prendiamo un
46

punto della supercie e consideriamo il piano tangente ad essa in quel punto.Il piano è ovviamente euclideo e su di esso possiamo denire una usuale strut-tura vettoriale (basi, vettori, componenti, prodotti scalari ecc.). Un vettore Apossiede due tipi di componenti, quelle controvarianti Ai e quelle covarianti Ai.Un tensore, invece, è una generalizzazione a più indici (controvarianti e cova-rianti) di un vettore. Vettori e tensori, in una trasformazione di coordinate, sitrasformano seguendo certe regole ben denite. Ma cominciamo dall'inizio.
Considero una varietà V n come introdotta nella sezione (12). Una V n, secon-do Levi-Civita, è sempre immergibile, almeno localmente, in uno spazio euclideodi dimensione 1
2n(n+ 1). Una parametrizzazione regolare di V n, che chiamo y,è così denita (vedi (40)):
y1 = y1(x1, ..., xn)
...
ym = ym(x1, ..., xn)
,
con n ≤ m. Gli indici sono scritti in alto per convenzione.In Rn prendo la curva regolare α(t) = (x1(t), ..., xn(t)), dove t è un oppor-
tuno parametro. La curva α(t) mappa su V n, grazie alla parametrizzazione y,la curva:
β(t) = y(α) = (y1(x1(t), ..., xn(t)), ..., ym(x1(t), ..., xn(t))).
Il vettore tangente alla curva β è:
β =
y1
...
...
...ym
=
∂y1
∂xi xi
...
...
...∂ym
∂xi xi
= x1
∂y1
∂x1
...
...
...∂ym
∂x1
+ ...+ xn
∂y1
∂xn
...
...
...∂ym
∂xn
(132)
ovvero:
β =
∂y1
∂x1 ... ∂y1
∂xn
... ... ...∂ym
∂x1 ... ∂ym
∂xn
α = dy · α = J · α, (133)
dove dy è il dierenziale (come operatore) della parametrizzazione y, J è lojacobiano della suddetta (α è il vettore tangente ad α). Siccome la curva βappartiene a V n e β è un vettore tangente a β, allora si dice che β è tangentea V n. In questo modo si costruiscono tutti i vettori tangenti alla varietà V n inun suo punto, quindi si costruisce lo spazio tangente a V n in quel punto (e cosìin ogni altro punto della varietà).
Se lo jacobiano J ha rango n, allora i suoi n vettori colonna sono vettorilinearmente indipendenti di Rm (per questo si dice che la varietà e la relativaparametrizzazione è regolare). Come si vede bene dalla (132), ogni vettoretangente è una combinazione lineare dei suddetti vettori colonna. Questi vettori,quindi, costituiscono una base dello spazio tangente a V n in un suo punto. Lo
47

spazio tangente a V n nel suo punto P lo indico con TPV n. Esso è uno spaziovettoriale di dimensione n.
La base di TPV n formata dai vettori colonna di J , che indico con b1, ..., bn,è la cosiddetta base associata alla parametrizzazione. I vettori della base (liriscrivo) sono:
bi =
∂y1
∂xi
...
...
...∂ym
∂xi
=∂y
∂xi, (134)
con i = 1, ..., n. L'ultimo membro esprime il vettore di base in un formato moltosintetico e conveniente.
Un vettore A (l'usuale grassetto che stigmatizza i vettori dello spazio eu-clideo, nel formalismo del calcolo tensoriale, può non essere usato) denito inTPV
n è perciò una certa combinazione lineare nella base b1, ..., bn, ovvero:
A = A1b1 + ...+Anbn = Aibi, (135)
dove le Ai sono le componenti di A in quella base.Analogamente, denisco il vettore B in TPV n :
B = B1b1 + ...+Bnbn = Bibi.
Cambio di base. Eettuiamo un cambiamento di base, ovvero deniamo unnuovo sistema di coordinate curvilineo sulla varietà tramite la trasformazioneregolare:
x1 = x1(x′1, ..., x′n)
...
xn = xn(x′1, ..., x′n)
. (136)
Come cambieranno le componenti del vettore A? Questa è una domandacruciale che porta alla denizione di componenti controvarianti e covarianti diun vettore (e, di conseguenza, di un tensore).
I nuovi vettori di base saranno:
b′i =∂y
∂x′i.
I vecchi vettori di base si trasformano così (secondo le regole di derivazionedelle funzioni composte):
bi =∂y
∂x′k∂x′k
∂xi.
Sostituendo in A = Aibi, si ricava:
A = Ai∂y
∂x′k∂x′k
∂xi= Aib′k
∂x′k
∂xi= A′kb′k,
48

dove (invertendo gli indici):
A′i =∂x′i
∂xkAk (137)
Questa è la legge di trasformazione dei vettori deniti nello spazio tangente.Tale legge, per denizione, caratterizza le componenti controvarianti dei vettori.Tutte le volte che vediamo un indice scritto in alto (in generale in un tenso-re) sappiamo per certo che si tratta di un indice che esprime una componentecontrovariante.
Prodotto scalare. Eseguiamo nello spazio tangente l'usuale prodotto scalare(prodotto interno) euclideo A·B (il punto si può omettere e si può anche scrivere< A,B >). Si ha:
AB = (Aibi)(Bibi) = AiBk < bi, bk >= gikA
iBk, (138)
dove le funzioni:
gik =< bi, bk >=<∂y
∂xi,∂y
∂xk>, (139)
dove gik è il cosiddetto tensore metrico del secondo ordine completamente cova-riante della varietà (gli indici in basso sono detti covarianti, vedi più avanti). Iltensore metrico, come già sappiamo, denisce tutte le proprietà metriche dellavarietà ed anche la sua curvatura.
Il prodotto scalare AB = gikAiBk può essere scritto, per comodità, anche
in questo modo:AB = AiB
i = AiBi, (140)
dove le Ai sono le cosiddette componenti covarianti (indice scritto in basso)del vettore A (così come le Bi del vettore B). Si hanno allora le formule perabbassare e da alzare gli indici:
Ai = gikAk
Ai = gikAk
(141)
(il signicato di gik ci è già noto, vedi sezione 12).
Regole generali di trasformazione dei tensori in un cambio di ba-
se. Naturalmente, il prodotto scalare è uno scalare invariante per cambi dicoordinate per cui, facendo la trasformazione di coordinate (136), si ottiene:
AB = gikAiBk = gik
∂xi
∂x′l∂xk
∂x′mA′lA′m = g′lmA
′lA′m,
dove (cambio gli indici):
g′ik =∂xl
∂x′i∂xm
∂x′kglm (142)
è la legge di trasformazione del tensore metrico completamente covariante.Con ragionamenti analoghi si perviene alle seguenti regole generali:
49

1. Gli scalari non cambiano.
2. I vettori cambiano così (mettendo i trasformati al secondo membro):
Ai =∂xi
∂x′kA′k (143)
Ai =∂x′k
∂xiA′k (144)
3. I tensori cambiano così (mettendo i trasformati al secondo membro):
Aik =∂xi
∂x′l∂xk
∂x′mA′lm (145)
Aik =∂x′l
∂xi∂x′m
∂xkA′lm (146)
Aik =∂xi
∂x′l∂x′m
∂xkA′lm (147)
e analogamente per ordini di tensori più elevati.
Elemento di linea sulla varietà. Il vettore innitesimo tangente ad α in unsuo punto è (x1dt, ..., xndt). Il suo trasformato, secondo y, è il corrispondentevettore innitesimo tangente a β e vale x1dtb1+...,+xndtbn = dx1b1+...+dxnbn.La norma quadra di quest'ultimo è evidentemente:
ds2 = gikdxidxk (148)
e denisce l'elemento di lunghezza innitesima sulla varietà (fra due suoi puntiinnitamente vicini)
15.1.2 Derivata covariante.
Per derivare un vettore (e quindi un tensore) occorre fare un confronto delmedesimo rispetto a due punti innitamente vicini. Occorre cioè confrontare ilvettore nel punto P rispetto al vettore nel punto Q, supposto che i due puntisiano innitamente vicini e poi dividere per uno scalare. Se questo viene fatto inuno spazio piatto, non ci sono problemi e si ha l'usuale denizione di derivata.Se, invece, si agisce su uno spazio curvo (una varietà non euclidea) le cosesi complicano alquanto perché non ha senso confrontare due vettori in puntiinnitamente vicini proprio a causa della curvatura dello spazio. Algebricamenteparlando, dAi non si trasforma come un vettore e, quindi non è un vettore (ladimostrazione, usando le formule di trasformazione indicate sopra, è immediata).
Questa dicoltà la si visualizza bene per una varietà V 2 immersa in R3.Il vettore A(P ) appartiene al piano tangente alla supercie in P , mentre ilvettore A(Q) appartiene al piano tangente alla supercie in Q e i due pianitangenti, proprio per la curvatura della supercie, in generale non coincidono.
50

La dierenza A(Q)−A(P ) è allora, in generale, un vettore che non giace né sulprimo, né sul secondo piano tangente. Da ciò risulta l'impossibilità di denirenei modi usuali una derivata che sia ancora un vettore (o un tensore). Occorreun altro concetto di derivata, la cosiddetta derivata covariante. Essa risultaancora un vettore (o un tensore).
Per potere denire la derivata covariante, occorre prima denire il concettodi trasporto (o spostamento) parallelo di un vettore. Il vettore A lo si devespostare parallelamente in B e, poi, procedere al confronto. Il trasporto parallelodi un vettore è un'operazione univoca e la si può ben visualizzare per una V 2.Esso risulta quel movimento che fa sì che la proiezione ortogonale del vettoredierenza A(Q) − A(P ) sul piano tangente in A, sia nulla (ricordo che A eB sono innitamente vicini). Questa è la naturale generalizzazione dell'usualetrasporto parallelo di un vettore in uno spazio euclideo.
Indico con δAi il trasporto parallelo del vettore Ai lungo il cammino inni-tesimo dxi (in verità, δAi è la variazione del vettore dopo il trasporto parallelo).La sua denizione rigorosa è:
δAi = −ΓiklAkdxl, (149)
dove Γikl, che sono funzioni delle coordinate x1, ..., xn, sono i cosiddetti sim-boli di Christoel che a loro volta devono essere espressi a partire dal tensoremetrico (essendo esso, in denitiva, tutto ciò che serve per denire tutte le pro-prietà metriche di una varietà). Diciamo subito che le Γikl non costituiscono untensore perché δAi non è un vettore (si visualizza bene per una V 2) e che laloro denizione analitica è di dicile deduzione. Comunque, in letteratura, ladimostrazione di come essi si ricavano è ben riscontrabile.
Nel nostro caso, cioè per le varietà riemanniane (in cui è denita una metricacome indicato sopra), i simboli di Christoel valgono:
Γikl =1
2gim(
∂gmk∂xl
+∂gml∂xk
− ∂gkl∂xm
). (150)
Ora posso procedere con la denizione di derivata covariante. Prima de-niamo il vettore innitesimo:
DAi = dAi − δAi (151)
che chiamo dierenziale covariante (per quanto detto prima, questo è proprioun vettore che giace sul piano tangente, infatti DAi = (Ai+dAi)− (Ai+ δAi)).Esprimendo dAi e δAi, si ricava:
DAi =∂Ai
∂xldxl + ΓiklA
kdxl
da cui:
DAi = (∂Ai
∂xl+ ΓiklA
k)dxl.
La derivata covariante (che si indica col simbolo ∇) di un vettore controva-riante è allora:
∇lAi =∂Ai
∂xl+ ΓiklA
k. (152)
51

La derivata covariante di un vettore covariante (non è dicile dimostrarlo)è:
∇lAi =∂Ai∂xl− ΓkilAk (153)
In modo analogo si denisce la derivata covariante di un tensore (non ripostola dimostrazione):
∇lAik =∂Aik
∂xl+ ΓimlA
mk + ΓkmlAim (154)
e:
∇lAik =∂Aik∂xl− ΓmklA
im + ΓimlA
mk (155)
e:
∇lAik =∂Aik∂xl
− ΓmilAmk − ΓmklAim. (156)
15.1.3 Geodetiche.
Una geodetica è una curva di lunghezza minima. Questa è la denizione metricadi geodetica. Si può anche dare una denizione di geodetica in termini di vettori.Una geodetica è una curva che possiede accelerazione (in senso non cinematico,ma riferita ad un parametro scalare) nulla in ogni suo punto. Nello spazioeuclideo Rn una geodetica è evidentemente una linea retta. In una varietàV n, una geodetica, dovendo seguire la curvatura della varietà, rappresenta lageneralizzazione del concetto di linea retta. Possiamo dire che le geodetichesono le linee rette di una varietà qualunque.
Le due denizioni di geodetica, quella metrica e quella vettoriale, coincidonosolo se le si applica in un insieme abbastanza piccolo. Se, per esempio, conside-riamo un cilindro ordinario e scegliamo due punti su di esso, la linea geodetica,sulla base della denizione metrica, è unica ed è facile immaginarla. Se, invece,si decide di girare attorno al cilindro, a mo' di vite, le geodetiche che congiun-gono due punti del cilindro sono innite, tutte le linee con accelerazione nulla,via via con passo più sempre stretto. Evidentemente, solo una è la linea piùcorta, le altre sono tutte più lunghe, ma hanno tutte accelerazione nulla.
Applicando la denizione vettoriale e prestando attenzione a quanto appe-na detto, una geodetica è una curva di V n tale per cui l'accelerazione (intesaall'interno del concetto di derivata covariante) è nulla, ovvero tale per cui lavariazione della velocità è nulla:
Dui = 0, (157)
dove D è il dierenziale covariante e ui = dxi
ds è la velocità (come già sappiamodalla RR).
Applicando la denizione di dierenziale covariante (151) e di spostamentoparallelo (149) si ricava:
dui − δui = 0
52

cioè:dui + Γiklu
kdxl = 0.
Dividendo ambo i membri per ds si ottiene:
dui
ds+ Γiklu
kul = 0,
ovvero:d2xi
ds2+ Γikl
dxk
ds
dxl
ds= 0. (158)
Questa è l'equazione cercata, l'equazione delle geodetiche in V n.
15.1.4 Curvatura.
Questo è un argomento cruciale della geometria riemanniana a cui diede uncontributo fondamentale, limitatamente alle superci ordinarie ma estendibiledirettamente alle varietà pluridimensionali, il grande Gauss con il suo theore-ma egregium col quale dimostrò che la curvatura è un ente intrinseco che nondipende dallo spazio contenente la varietà e che è esprimibile tramite il tensoremetrico (che lui chiamava coecienti della prima forma fondamentale).
Per la RG, la curvatura è un fatto strategico, in quanto lo spaziotempo èuna varietà quadridimensionale la cui curvatura è denita dalla distribuzionedelle masse.
Consideriamo il punto P di V n ed una curva chiusa innitesima γ che parteda P ed arriva su P (la curva può essere anche nita, ma ci conviene prenderlainnitesima per quello che segue). Prendiamo il vettore Ai denito in P e, conspostamenti paralleli, facciamogli percorre la curva γ. Se la varietà non è curva(euclidea, piatta), il vettore Ai sarà esattamente sovrapposto a se stesso. Se,invece, la varietà è curva (non euclidea), il vettore Ai, dopo l'intero tragittochiuso, non sarà per nulla sovrapposto a se stesso. Chiamo ∆Ai la dierenzafra vettore nale (dopo il trasporto) e quello iniziale. Esso è denibile come:
∆Ai =1
2RiklmAi∆f
lm, (159)
dove ∆f lm è l'elemento di supercie innitesima racchiusa dalla curva (non entronei particolari, mi limito a dire che ciò ha a che fare col teorema di Stokes) e Riklmè il cosiddetto tensore di curvatura di Riemann. Esso esprime la curvatura diV n in ogni suo punto ed è denito da (non riporto la complessa dimostrazione):
Riklm =∂Γikm∂xl
− ∂Γikl∂xm
+ ΓinlΓnkm − ΓinmΓnkl. (160)
Dal tensore di Riemann, per contrazione di due indici, si ottiene il tensoredi Ricci:
Rik = Rlilk (161)
(la contrazione è sull'indice l).
53

Dal tensore di Ricci si ottiene inne la curvatura scalare:
R = gikRik. (162)
Per le superci ordinarie, la curvatura scalare R, non è dicile dimostrare,coincide, a meno di un fattore 2, con la curvatura ordinaria di Gauss.
Il tensore di Ricci e la curvatura scalare, oltre al tensore metrico, entranonell'equazione gravitazionale di Einstein che è il fulcro della RG.
15.2 Basi della teoria della relatività generale.
La teoria della relatività generale di Einstein (pubblicata nel 1915) è una teoriadella gravitazione che corregge la teoria di Newton che è aetta dagli insuperabilidifetti di non contemplare il concetto di campo (in essa vale il concetto di azionea distanza, ovvero l'interazione gravitazionale agisce istantaneamente) e di nonessere coerente con la RR.
In questa sezione mi occupo solo del campo gravitazionale in assenza di cam-po elettromagnetico (eccetto il caso della semplice propagazione di luce di de-bole intensità tale da non apportare possibili disturbi al campo gravitazionale),quindi considero solo corpi dotati di massa.
In RR abbiamo visto che gli eventi (detti anche punti di universo, così comele traiettorie delle particelle sono dette linee di universo) sono punti dello spaziotempo quadridimensionale di Minkowski M4 la cui metrica ds2 = c2dt2− dx2−dy2 − dz2 = eikdx
idxk, con i, k = 0, ..., 3, è data dal tensore metrico:
eik = eik =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
.M4 è una varietà pseudoriemanniana pseudoeuclidea piatta, ovvero dotata
di curvatura nulla.Cosa succede se, invece, la varietà in cui si muovono le particelle (ed evolvono
i campi) non è piatta, ma curva? Lo studio della sica dello spaziotempo curvoè oggetto della RG.
Chiamo con E4 lo spaziotempo curvo della RG. La sua metrica, denita da:
ds2 = gikdxidxk, (163)
(dove i, k = 0, ..., 3 e x0 rappresenta la coordinata temporale) denisce tutte leproprietà metriche della varietà ed anche, come sappiamo, la sua curvatura.
La RG, universalmente considerata la più bella teoria sica, perché, aggiungoio, essenzialmente geometrica (anche la teoria delle stringhe è una teoria pretta-mente geometrica, in quanto le stringhe vibrerebbero in un complesso spazio diaddirittura undici dimensioni, lo spazio di Calabi-Yau), si basa principalmentesui seguenti presupposti:
54

1. Un campo gravitazionale, almeno localmente, si comporta come un siste-ma di riferimento non inerziale (accelerato) in quanto le particelle massive(dotate di masse piccole per non inuenzare le masse che generano il cam-po gravitazionale) si muovono in un campo gravitazionale con traiettorie(equazioni orarie) indipendenti dalla loro massa e questo fatto (traiettorieindipendenti dalla massa) succede solo nei sistemi di riferimento non iner-ziali. Tutto ciò va sotto il nome di principio di equivalenza debole e derivadal fatto, ancora più fondamentale (che però si associa al principio di equi-valenza debole senza la necessità di creare un ulteriore principio), che lamassa inerziale è uguale (a meno di una costante moltiplicativa non sica-mente decidibile, quindi uguagliabile arbitrariamente all'unità) alla massagravitazionale (questo è un principio di natura suragato dall'esperienza).Un campo gravitazionale, quindi, può essere descritto come un sistema diriferimento non inerziale che, a causa della RR che presuppone contrazionidi spazio e tempo, non può essere necessariamente cartesiano (soddisfa-cente la geometria euclidea). Lo spaziotempo del campo gravitazionaledeve perciò essere curvo.
2. Le masse generano il campo gravitazionale. Le masse incurvano la geo-metria di E4. Il campo gravitazionale è descritto dal tensore metrico gik.Dire campo gravitazionale o dire tensore metrico è la stessa cosa. Nonsappiamo cosa sia l'interazione gravitazionale in sé (come di ogni altroente sico), ma sappiamo come descriverla: esattamente con il tensoremetrico.
3. In E4 è possibile scegliere un qualunque sistema di coordinate (x0, x1, x2, x3)e l'elemento di lunghezza (distanza fra due punti innitamente vicini diE4) ds (vedi (163)) è uno scalare invariante per tutti i cambiamenti dicoordinate (x0 = (x′0, ..., x′3), ..., x3 = (x′0, ..., x′3)) su E4.
4. La distribuzione delle masse e la sua evoluzione in conformità alle leggi diconservazione dell'energia e dell'impulso, è descritta dal tensore energia-impulso Tik.
5. La curvatura di E4 è determinata da Tik (equazione del campo gravi-tazionale di Einstein). La RG è una teoria completa, ovvero descrivecontemporaneamente come Tik incurva E4 e come Tik evolve.
6. Localmente, lo spaziotempo curvo E4 è approssimabile dallo spaziotempopiatto M4 (principio di equivalenza forte). Si può cioè sempre, in ognipunto di E4, scegliere un sistema di riferimento galileiano (si chiama così,oppure localmente inerziale o localmente geodetico) in cui vale la RR. Ècome mettersi nella varietà tangente a E4 in un suo punto. Fisicamente,questa approssimazione la si ottiene prendendo un sistema di riferimentocostituito da corpi che cadono liberamente. Una importante conseguenzadi questo fatto è che il determinante del tensore metrico, inteso comematrice, è negativo ovunque, in simboli det(gik) < 0 (essendo det(eik) =
55

−1). Questa è una condizione necessaria perché la metrica abbia sensosico.
7. Le leggi della sica devono essere invarianti rispetto ad una trasformazionequalunque delle coordinate (principio di relatività generale).
15.3 Tempo proprio.
Poiché in RG le coordinate di E4 sono scelte in modo arbitrario, lo spazio edil tempo si misurano coerentemente alle coordinate scelte. L'arbitrarietà dellascelta delle coordinate produce un'arbitrarietà nella denizione degli intervallidi tempo e spazio. Come questa ambiguità può essere risolta dando senso sicoa spazio e tempo? Per il tempo è piuttosto facile, mentre per lo spazio è piùcomplicato. Vediamo come si può denire una misura sica di intervallo ditempo che conduce al concetto di tempo proprio. Praticamente si approssimaE4 in un suo punto con M4 in modo che due eventi innitamente vicini noncomportino uno spostamento nello spazio, ma solo una variazione di tempo. Siha perciò (grazie all'invarianza di ds2):
ds2 = g00(dx0)2 = c2dτ2
(il tempo proprio si indica di solito con τ) da cui:
dτ =1
c
√g00dx
0. (164)
Questa formula fondamentale rappresenta il legame fra l'intervallo (innite-simo) di tempo proprio (quello che ha sicamente signicato) con il corrispon-dente intervallo della coordinata curvilinea temporale. Dalla formula si evinceche, perché un tensore metrico gik abbia senso sico è necessario che sia g00 > 0ovunque.
Per esigenze di sintesi e di semplicità, non parlerò dell'intervallo spaziale pro-prio. Comunque, una volta conosciuto il tempo proprio, mandando opportuniraggi di luce (la sola cosa che ha senso sico fare grazie al principio di costanzadella velocità della luce in M4) si possono denire intervalli spaziali propri.
È fondamentale notare che, mentre in RR ogni sistema di riferimento iner-ziale ha un unico tempo proprio, in RG, a causa della curvatura di E4, ognipunto possiede il suo tempo proprio come se in ogni punto vi fosse un proprioorologio.
15.4 Moto di una particella in E4.
Consideriamo una particella di massa m (abbastanza piccola da non disturbarele altre masse) immersa in un campo gravitazionale assegnato gik. La sua azione,come in RR, è (per il principio di relatività generale, l'azione deve essere unoscalare invariante per trasformazioni arbitrarie di coordinate):
S = −mc∫ B
A
ds.
56

Essa corrisponde, a meno di un coeciente moltiplicativo, alla lunghezza diuna qualunque linea d'universo di E4 che unisce gli eventi A e B . Imponendoil principio di minima azione δS = 0 , si ricava la linea più breve che congiungeA e B, ovvero, come sappiamo, la linea geodetica (unica) che unisce A e B.
Il moto di una particella si riduce quindi al problema geometrico delladeterminazione di una geodetica.
Se lo spazio fosse piatto (M4) tale geodetica sarebbe una linea retta, comeè giusto che sia (vedi (90)). In E4, l'equazione della geodetica è (vedi (158)):
d2xi
ds2+ Γikl
dxk
ds
dxl
ds= 0.
15.5 Propagazione della luce in E4.
Per la propagazione della luce in E4 (così come per ogni altra onda elettroma-gnetica) si ha:
ds = 0, (165)
perché anche in RG, prendendo un sistema galileiano che localmente approssi-ma E4, vale il principio di costanza della velocità della luce. Poiché ds = 0,l'equazione della geodetica (che presenta ds ai denominatori) non è utilizzabileperché diventa priva di senso. Si deve, perciò, procedere senza l'ausilio di unaequazione dierenziale risolubile analiticamente direttamente (almeno in lineadi principio perché, in verità, le soluzioni analitiche sono disponibili solo per casisemplici).
Le curve per cui ds = 0 sono dette geodetiche nulle.Nei casi più semplici in cui il campo gik non contenga esplicitamente la
coordinata temporale x0 (campi costanti), può risultare utile il principio diFermat dal quale si ricava che la luce percorre linee spaziali di lunghezza minima.In questi casi, il problema si riduce alla determinazione delle geodetiche dellospazio tridimensionale (con le sole coordinate (x1, x2, x3)) ottenibile ponendox0 = costante.
15.6 Equazione del campo gravitazionale.
Siamo al punto cruciale della teoria, la determinazione delle equazioni del campogravitazionale e della materia in esso contenuta. L'azione del campo gravitazio-nale e della materia è composta di due parti:
S = Sg + Sm, (166)
dove Sg è l'azione riguardante il campo gravitazionale descritto da gik e Sm èl'azione riguardante la materia che si muove nel campo. Essendo presenti solodue termini (nella teoria del campo elettromagnetico i termini erano tre, dacui l'impossibilità matematica di eseguire una variazione comune dell'azione),si riesce ad eseguire una variazione comune dei due termini ed ottenere così unadescrizione completa del campo gravitazionale e della materia in esso contenuta.
57

Applicando il principio di minima azione, si ottiene:
δS = δSg + δSm = 0 (167)
ed esplicitando i termini (che introduco senza discuterli, perché la giusticazionedei suddetti è molto tecnica e coinvolge a fondo il calcolo tensoriale):
δ
∫R√−det(gik)dΩ +
1
2c
∫Tikδg
ik√−det(gik)dΩ = 0, (168)
dove gli integrali vanno eseguiti fra due istanti ben deniti di tempo x0 e sututto lo spazio, R è la curvatura scalare,
√−det(gik)dΩ è l'elemento invariante
di volume in E4 (si noti che in M4 il termine dentro radice è 1, come abbiamogià visto nella trattazione del campo elettromagnetico), Tik è il tensore energiaimpulso della materia e δgik è la variazione del tensore metrico controvarian-te. Eseguendo la variazione nel primo termine (anche qui ometto i complicatipassaggi) ed eliminando δgik perché è arbitrario, si ricava inne l'equazione diEinstein:
Rik −1
2gikR =
8πG
c4Tik, (169)
dove i termini che esprimono la curvatura della spaziotempo sono Rik, il tensoredi Ricci, e R, la curvatura scalare. Il termine G è la costante di gravitazioneuniversale classica di Newton (nel sistema SI vale G ≈ 6, 674 · 10−11Nm2kg−2).Faccio notare che, per la determinazione del coeciente che moltiplica Tik, siricorre all'approssimazione classica, cioè si prende un campo gravitazionale nonforte, si approssima l'equazione di Einstein e si confronta il risultato con laformula gravitazionale classica di Newton F = Gm1m2
r2 .Abbiamo perciò ottenuto due termini di cui, quello di sinistra, detto anche
tensore di Einstein, rappresenta la curvatura dello spaziotempo e quello di de-stra rappresenta la distribuzione della materia. Questo è esattamente ciò chevolevamo, perché la distribuzione della materia, come è nei postulati della RG,determina la curvatura dello spaziotempo.
L'equazione di Einstein non è lineare ed è formata in realtà da 16 equazionidelle quali, però, solo 10 sono indipendenti (grazie alla simmetria dei tensoricoinvolti nell'equazione). Il numero 10 può poi essere ridotto ulteriormentefacendo certe altre considerazioni.
L'equazione di Einstein può essere, data la sua complessità, risolta in modoanalitico solo in pochi casi. Per fortuna, il caso del campo gravitazionale gene-rato da una massa puntiforme (o a simmetria sferica) è ben determinabile e lametrica che si ottiene è la cosiddetta metrica di Schwarzschild da lui proposta,con la sorpresa ammirata di Einstein, solo nel 1916, l'anno della sua morte acausa di una malattia contratta in guerra. La soluzione di Schwarzschild aprela strada alla comprensione dei buchi neri.
C'è da dire che la (169) non è l'unica equazione possibile. Se si complica unpo' l'azione Sg relativa al campo gravitazionale con l'aggiunta della cosiddettacostante cosmologica Λ, l'equazione diventa:
Rik −1
2gikR =
8πG
c4Tik + Λgik. (170)
58

L'introduzione della costante cosmologia (considerata da Einstein il suo piùgrande errore, perché doveva servirgli per rendere stazionario l'universo, men-tre le osservazioni astronomiche a partire dagli anni venti cominciarono a mo-strare che l'universo invece si espande) denisce una dinamicità intrinseca alcampo gravitazionale stesso non dipendente dalle masse che lo generano. Lacostante cosmologica oggi serve per descrivere i modelli cosmologici ad espan-sione accelerata (che sembrano attualmente corrispondere alla realtà del nostrouniverso).
15.7 Conseguenze della RG (esposizione qualitativa).
Riporto qui di seguito, per concludere, l'elenco di alcune importanti e, dal pun-to di vista del senso comune, rivoluzionare, oltre che aascinanti, conseguenzedella RG. Ogni buona teoria deve prevedere fenomeni sconosciuti in precedenzae la RG si presenta veramente ricca di sorprese. L'analisi delle molte, complesse,profonde e proliche conseguenze della RG, ottenibili dall'analisi dell'equazionedi Einstein (170) (nel caso più generale con la costante cosmologica), richiede-rebbe uno sforzo matematico a livello specialistico ed esulerebbe dallo scopo diquesto compendio. Rimando perciò, ancora una volta, il lettore interessato adapprofondire (ci sono molti testi per ogni argomento) nella letteratura ancheonline. Basta dire che la cosmologia relativistica è assurta a scienza oltremodovasta, aperta ed in continuo rapido sviluppo. Per non parlare dei buchi neri edelle onde gravitazionali, rilevate per la prima volta sperimentalmente solo direcente.
Le principali conseguenze della RG sono:
1. Lenti gravitazionali.
2. Cosmologia relativistica.
3. Buchi neri.
4. Onde gravitazionali.
16 Conclusione.
Il lettore, che ha avuto la pazienza di leggere n qui, si chiederà il perché ditanto sfoggio di faticosa matematica e soprattutto il perché della necessità dirovesciare il processo storico che ha portato alla formazione delle teorie siche,mettendo alla testa ciò che è stato scoperto alla ne.
La risposta è tremendamente semplice:
oggi possiamo indagare l'innitamente piccolo e l'innitamente grande solo conl'occhio della matematica cercando le simmetrie che le lagrangiane possono
avere e poi, successivamente, cercando le veriche sperimentali delleconseguenze di tali simmetrie.
59

Concludendo ed accomiatandomi da te, caro lettore, non posso non fartinotare quello che per me appare quasi miracoloso (e io non credo ai miracoli...),cioè come da semplici principi e simmetrie si possa ottenere tutto questo checostituisce una enorme massa di informazioni sulla realtà. E poi ho omessovolutamente (non si può dire tutto) doverosi ed importanti approfondimentiottenibili con l'applicazione del teorema di Noether al campo elettromagneticoed alla RG e, per ultimo, la visione di tutta la teoria (specialmente la RR) intermini di teoria dei gruppi.
La teoria dei gruppi costituisce lo strumento principe, perché oltremodoprocuo, per arontare la seconda quantizzazione, cioè la teoria quantistica deicampi. In essa si tenta (con grandi risultati) di sposare la sica quantisticacon la RR. I risultati, dicevo, sono strabilianti (la teoria quantistica dei campi,QFT, quantum eld theory in inglese, è la teoria più precisa che abbiamo, almomento), ma, c'è sempre un ma, la gravitazione resta esclusa. Il tentativo disposare sica quantistica ed RG è ancora in fase di costruzione. Non si riesceancora ad avere una teoria dello spaziotempo a livello microscopico. Questo èil problema dei problemi (lo spaziotempo è continuo? oppure è discreto? cos'èlo spazio? Cos'è il tempo (che per me non esiste)? ). Riuscirà la bella teoriadelle stringhe a risolvere il problema e a darci una visione ultimativa del cosmo?Chissà...
60