capit19.pdf
28
19. Teoria perturbativa Scopo della teoria perturbativa ` e la costruzione di soluzioni approssimate per le equazioni del moto, partendo dalle soluzioni di equazioni integrabili. Tipici problemi sono le cor- rezioni alle piccole oscillazioni armoniche di un sistema attorno ad una posizione di equi- librio stabile e le correzioni alle orbite kepleriane dei pianeti causate dalla mutua inte- razione. Il procedimento perturbativo si pu` o formulare sulle equazioni del moto oppure sull’hamiltoniana. Dopo aver esaminato il problema dei termini secolari nella soluzione perturbativa delle equazioni del moto ed il metodo di Lindstedt per eliminarli, si illustra la teoria canonica delle perturbazioni per i sistemi hamiltoniani. Questa teoria permette di ridurre l’ampiezza della perturbazione di un sistema integrabile tramite un cambio di coordinate. Attraverso un algoritmo ricorsivo, basato sulle funzioni generatrici o le serie di Lie, una perturbazione iniziale di ordine λ diventa di ordine λ 2 al primo passo, di or- dine λ N al passo N . Trascurando la perturbazione residua il sistema diventa integrabile se le frequenze imperturbate sono non risonanti, possiede invece d − r integrali se queste soddisfano una condizione di risonanza di ordine r. La teoria perturbativa consente quindi la scelta del sistema di coordinate in cui diventano palesi le simmetrie del sistema e gli integrali primi che le generano. 19.1. EQUAZIONI DEL MOTO E TERMINI SECOLARI Per illustrare la soluzione perturbativa delle equazioni del moto consideriamo un oscillatore anarmonico unidimensionale la cui hamiltoniana ` e H = H 0 (q,p)+ λH 1 (q ), H 0 = p 2 2 + ω 2 0 2 q 2 (19.1.1) e H 1 (q )` e un polinomio in q . Detto f (q )= −H ′ 1 (q ), l’equazione differenziale del secondo
-
Upload
birdyedwards -
Category
Documents
-
view
217 -
download
0
Transcript of capit19.pdf
19. Teoria perturbativa
Scopo della teoria perturbativa e la costruzione di soluzioni approssimate per le equazionidel moto, partendo dalle soluzioni di equazioni integrabili. Tipici problemi sono le cor-rezioni alle piccole oscillazioni armoniche di un sistema attorno ad una posizione di equi-librio stabile e le correzioni alle orbite kepleriane dei pianeti causate dalla mutua inte-razione. Il procedimento perturbativo si puo formulare sulle equazioni del moto oppuresull’hamiltoniana. Dopo aver esaminato il problema dei termini secolari nella soluzioneperturbativa delle equazioni del moto ed il metodo di Lindstedt per eliminarli, si illustrala teoria canonica delle perturbazioni per i sistemi hamiltoniani. Questa teoria permettedi ridurre l’ampiezza della perturbazione di un sistema integrabile tramite un cambio dicoordinate. Attraverso un algoritmo ricorsivo, basato sulle funzioni generatrici o le seriedi Lie, una perturbazione iniziale di ordine λ diventa di ordine λ2 al primo passo, di or-dine λN al passo N . Trascurando la perturbazione residua il sistema diventa integrabilese le frequenze imperturbate sono non risonanti, possiede invece d − r integrali se questesoddisfano una condizione di risonanza di ordine r. La teoria perturbativa consente quindila scelta del sistema di coordinate in cui diventano palesi le simmetrie del sistema e gliintegrali primi che le generano.
19.1. EQUAZIONI DEL MOTO E TERMINI SECOLARI
Per illustrare la soluzione perturbativa delle equazioni del moto consideriamo un oscillatoreanarmonico unidimensionale la cui hamiltoniana e
H = H0(q, p) + λH1(q), H0 =p2
2+ω2
0
2q2 (19.1.1)
e H1(q) e un polinomio in q. Detto f(q) = −H ′1(q), l’equazione differenziale del secondo

374 19. Teoria perturbativa c©88-08- 9820
ordine cui q(t) soddisfa e
q + ω20q = λf(q) (19.1.2)
e di questa cerchiamo la soluzione con condizioni iniziali q(0), q(0) = p(0). Sviluppandola soluzione in serie di λ
q(t) =
∞∑
n=0
λnqn(t) (19.1.3)
le equazioni soddisfatte da qn(t) sono
q0 + ω20q0 = 0
q1 + ω20q1 = f1(t)
. . .
qn + ω20qn = fn(t)
(19.1.4)
dove fn(t) e il termine n−esimo dello sviluppo di λf(q(t)) in serie di λ che dipende soloda q0(t), q1(t), . . . , qn−1(t), ad esempio f1 = f(q0), f2 = q1f
′(q0). Le condizioni iniziali concui vanno risolte le equazioni (19.1.4) sono
q0(0) = q(0), q0(0) = p(0), qk(0) = qk(0) = 0 k ≥ 1 (19.1.5)
La prima equazione ha soluzione
q(t) = a0eiω0t + a∗0e
−iω0t, a0 =q(0)
2+p(0)
2iω0(19.1.6)
Per quanto riguarda la seconda si sviluppa in serie di Fourier f1(t) ≡ f(q0(t)), che e unafunzione periodica di t.
f1(t) =+∞∑
k=∞
ckeikω0t, c−k = c∗k (19.1.7)
La soluzione q1(t) per il primo ordine perturbativo e periodica se e solo se c1 = 0
q1(t) =c0
2ω20
+c1 t
2iω0eiω0t +
∞∑
k=2
ckω2
0(1 − k2)eikω0t + a1e
iω0t + c.c. (19.1.8)
dove c.c. sta ad indicare il complesso coniugato di tutti i termini che precedono. Iltermine a1e
iω0t e la soluzione generale della equazione omogenea e la costante complessaa1 vien determinata imponendo che q1(0) = 0, q1(0) = 0. Da (19.1.7) e (19.1.8) segue chef2 = q1f
′(q0) e un polinomio di primo grado in t con coefficienti periodici e pertanto q2(t)e un polinomio di grado 2 in t a coefficienti periodici. Per induzione si mostra che qn efn+1 sono polinomi di di grado n in t a coefficienti periodici. La presenza di termini non

c©88-08- 9820 19.2. Sviluppi di Lindstedt 375
periodici, detti secolari, e dovuta al procedimento perturbativo. Infatti la soluzione esattae periodica con frequenza ω(λ) 6= ω0 ed e rappresentata dallo sviluppo di Fourier
q(t) =+∞∑
k=−∞
Ak(λ)eikω(λ)t (19.1.9)
che per λ = 0 si riduce alla (19.1.6). E lo sviluppo perturbativo in λ, effettuato anche sullafrequenza ω(λ) = ω0 + λω1 + . . ., che causa l’insorgere dei termini secolari in quanto
eikω(λ)t = eikω0t[
1 + λikω1t+O(λ2)]
(19.1.10)
Come primo esempio consideriamo H1(q) = ω20q
2/2. La soluzione esatta e
q(t) = q(0) cos(ω0t√
1 + λ) +p(0)
ω0
√1 + λ
sin(ω0t√
1 + λ) (19.1.11)
e il suo sviluppo in λ manifesta i termini secolari. Come secondo esempio consideriamol’oscillatore quartico H1 = q4/4. L’ equazione del primo ordine perturbativo e
q1 + ω20q1 = −q30 = −a3
0e3iω0t − 3a2
0a∗eiω0t + c.c. (19.1.12)
e la soluzione si scrive
q1 =a30
8ω20
e3iω0t − 3a20a
∗0
2iω0teiω0t + a1e
iω0t + c.c. (19.1.13)
Scegliendo per semplicita q(0) = q0, q(0) = 0 si ha a0 = q0/2 e, fissato a1 in modo cheq1(t) abbia condizioni iniziali nulle, la soluzione diventa
q(t) = q0 cos(ω0t) + λq30
32ω20
(cos(3ω0t) − cos(ω0t)) −3q308ω0
t sin(ω0t) (19.1.14)
19.2. SVILUPPI DI LINDSTEDT
L’eliminazione dei termini secolari e possibile se si parte da un problema imperturbatoche abbia la frequenza esatta ω del moto. La frequenza ω, a priori ignota, e determinataimponendo che siano assenti i termini secolari. Al passo n questa condizione fissa l’n-esimocoefficiente ωn dello sviluppo in serie ω(λ) = ω0 + λω1 + . . .+ λnωn + . . .. Riscriviamo laequazione del moto nella forma
q + ω2q = (ω2 − ω20)q + λf(q) (19.2.1)
dove ω2 − ω20 e espressa dal seguente sviluppo
ω2 − ω20 = λ 2ω0ω1 + λ2 [2ω0ω2 + ω2
1 ] + . . .+ λn
[
2ω0ωn +
n−1∑
k=1
ωkωn−k
]
+ . . . (19.2.2)

376 19. Teoria perturbativa c©88-08- 9820
Contrariamente a quanto fatto in precedenza non vengono fissate all’inizio le condizioniiniziali, ma si impongono dopo aver costruito la soluzione. La ragione e chiara: in unproblema non lineare la frequenza dipende dall’ampiezza e quindi non e possibile fissarein modo indipendente la frequenza e le condizioni iniziali, da cui dipende l’ampiezza delmoto. Scriviamo la soluzione imperturbata
q0(t) = a eiωt + a∗ e−iωt, a =1
2Aeiα (19.2.3)
La soluzione dell’equazione completa, che e periodica con frequenza ω ha la forma seguente
q = q(Aei(ωt+α), Ae−i(ωt+α), λ), p = p(Aei(ωt+α), Ae−i(ωt+α), λ), ω = ω(A, λ)(19.2.4)
ed il metodo di Lindstedt consente di determinare lo sviluppo di q e di ω in serie di potenzedi λ. Si costruisce cosı una famiglia a due parametri A,α di soluzioni, interpretabile comeil cambiamento di coordinate, che trasforma la soluzione del problema assegnato nellasoluzione del problema lineare con la stessa frequenza. Questa trasformazione e definitanell’intorno dell’origine delimitato dalla separatrice e posto Θ = α+ωt rappresenta l’orbitacome immagine di un cerchio di raggio A su cui il moto e uniforme. L’ampiezza A e la faseα sono fissate dalle condizioni iniziali, mentre p, q sono esprimibili come serie di Fourierin Θ. I coefficienti di Fourier, valutati tramite lo sviluppo perturbativo in λ, consentonodi esprimere la variabile d’azione come funzione dell’ampiezza del moto J = J(A.λ). Ilmetodo si estende a sistemi con d gradi di liberta, il cui vettore delle frequenze ω sia nonrisonante. Le equazioni perturbative diventano
q0 + ω2q0 = 0
q1 + ω2q1 = 2ω0ω1q0 + f(q0)
. . .
qn + ω2qn = 2ω0ωnq0 + gn(t)
(19.2.5)
dove gn e una funzione nota che dipende da q0, q1, . . . , qn−1 e da ω0, ω1, . . . , ωn−1. Lasoluzione della prima equazione e data da (19.2.3). Se f(q0) e espressa dallo sviluppodi Fourier (19.1.7) con ω0 → ω, la soluzione della seconda equazione (19.2.5) si ottieneimponendo che i coefficienti di e±iωt si annullino, in modo da eliminare i termini secolari
ω1 = − c12aω0
q1 =c0
2ω2+
∞∑
k=2
ckω2(1 − k2)
eikωt + c.c. (19.2.6)
Come applicazione scriviamo la soluzione al primo ordine per l’oscillatore quartico H1 =q4/4. La equazione al primo ordine diventa
q1 + ω2q1 = 2ω0ω1q0 − q30 = (2ω0ω1a− 3a2a∗)eiωt − a3e3iωt + c.c. (19.2.7)
Il coefficiente di ω1 e dato da
ω1 =3
2
aa∗
ω0=
3
8
A2
ω0(19.2.8)

c©88-08- 9820 19.3. Teoria canonica non risonante 377
e come soluzione q1 scegliamo l’integrale particolare della equazione non omogenea
q1 =a3
8ω2e3iωt + c.c. =
A3
32ω2cos(3(ωt+ α)) (19.2.9)
Imponendo le condizioni iniziali q(0) = q0, q(0) = 0 sulla soluzione al primo ordine q0(t)+λq1(t), si trovano due equazioni per a e a∗, che vengono risolte perturbativamente ponendoa = a0 + λa1 per dare
q(t) = q0 cos(ωt) + λq30
32ω2
(
cos(3ωt) − cos(ωt))
(19.2.10)
19.3. TEORIA CANONICA NON RISONANTE
Data un’hamiltoniana integrabile espressa come funzione delle variabili di azione ed unaperturbazione di ordine λ dipendente dagli angoli, si considera una trasformazione canonicache rende la perturbazione di ordine λ2. La trasformazione e sempre ben definita se lefrequenze dell’hamiltoniana imperturbata sono non risonanti e puo essere estesa fino arendere la perturbazione di ordine λN+1. Consideriamo prima il caso di un’hamiltonianaimperturbata isocrono, che abbia cioe frequenze imperturbate costanti.
Medie angolari
Sia H un’hamiltoniana integrabile perturbata
H = ω · + λH1(θ, ) (19.3.1)
ove ω e un vettore di frequenze non risonante. La trasformazione canonica, che rendela perturbazione di ordine λ2, ha come generatrice la funzione F (θ,J) soluzione dellaequazione di Hamilton Jacobi
ω · ∂F∂θ
+ λH1
(
θ,∂F
∂θ
)
= ω · J + λH1(J) + λ2H2(θ,J;λ) (19.3.2)
Oltre alla funzione generatrice, e incognita la nuova hamiltoniana definita dal lato destrodella equazione (19.3.2). Se scriviamo F come una perturbazione di ordine λ della trasfor-mazione identica F = θ ·J+λF1(θ,J), sostituendo nella (19.3.2) ed uguagliando i terminidi ordine λ si ottiene
ω · ∂F1
∂θ+H1(θ,J) = H1(J) (19.3.3)
mentre i termini di ordine superiore definiscono la nuova perturbazione H2
H2(θ,J) =1
λ
[
H1
(
θ,J + λ∂F1
∂θ
)
−H1(θ,J)
]
(19.3.4)

378 19 Teoria perturbativa c©88-08- 9820
La nuova perturbazioneH2 va espressa come funzione dei nuovi angoliΘ tramite la trasfor-mazione θ = θ(Θ,J), ottenuta invertendo Θ = θ + λ∂F1/∂J. La funzione F1 e definitasul toro e la sua derivata rispetto a θ ha media nulla; come funzione definita sullo spaziodi ricoprimento R
d e periodica con periodo 2π in ogni angolo. Dalla media angolare di(19.3.3) segue
H1(J) = 〈H1(θ,J)〉 ≡ (2π)−d∫ 2π
0
. . .
∫ 2π
0
H1(θ,J)dθ1 . . . dθd (19.3.5)
La equazione (19.3.3) determina F1, che si valuta esplicitamente confrontando i coefficientidel suo sviluppo in serie di Fourier con quelli di H1. Il valor medio di F1, che e arbitrario,contribuisce alla trasformazione θ → Θ con una fase costante, che dipende da J.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!
θj
tt
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
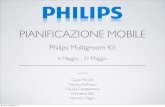
Figura 19.3.1. Medie delle traiettorie θ(t) e (t).
Il risultato e interpretabile come principio della media: la parte integrabile della nuovahamiltoniana e la media angolare dell’hamiltoniana iniziale, e la traiettoria, che essa deter-mina, e la media fatta sulle oscillazioni della traiettoria iniziale, vedi figura 19.3.1. Infattila soluzione delle equazioni del moto per per l’hamiltoniana iniziale
d
dt= −λ ∂
∂θ(H1 − 〈H1〉),
dθ
dt= ω + λ
∂〈H1〉∂
+ λ∂
∂(H1 − 〈H1〉) (19.3.6)
al primo ordine perturbativo in λ, vedi paragrafo 19.1, si scrive
(t) = 0 + λ f(θ0 + ωt, 0), θ(t) = θ0 + ωt+ λ∂〈H1〉∂
t+ λg(θ0 + ωt, 0) (19.3.7)
dove le funzioni f(θ, ) e g(θ, ), sono funzioni periodiche di θ valutabili tramite unosviluppo di Fourier. Cio vale perche H1 − 〈H1〉 e le sue derivate hanno media nulla.Per l’ergodicita della traslazione sul toro generata dall’hamiltoniana imperturbata, an-che la media temporale di f e g e nulla. La traiettoria media, calcolata in [t, t + T ] cont− t0 ≫ T ≫ 1, coincide con quella della nuova hamiltoniana, mentre i termini oscillantisono quelli introdotti dalla trasformazione di coordinate Θ,J → θ, all’ordine λ.
Equazioni di trasformazione
Tramite la trasformazione canonica definita da una generatrice
F (θ,J) = θ · J + λF1(θ,J) + . . .+ λNFN (θ,J) (19.3.8)

c©88-08- 9820 19.3. Teoria canonica non risonante 379
si rende la perturbazione di ordine λN+1 imponendo che
ω · ∂F∂θ
+ λH1
(
θ,∂F
∂θ
)
= ω · J +N∑
k=1
λkHk(J) + λN+1HN+1(θ,J) (19.3.9)
La trasformazione da (θ, ) a (Θ,J) si determina risolvendo l’equazione implicita Θ =∂F/∂J tramite uno sviluppo in serie di λ i cui primi termini sono
θ = θ(Θ,J) ≡ Θ − λ∂F1
∂J(Θ,J) − λ2
[
∂F2
∂J−
d∑
k=1
∂2F1
∂J∂Θk· ∂F1
∂Jk
]
(Θ,J) + . . . (19.3.10)
e sostituendo quindi nella seconda equazione di trasformazione = ∂F/∂θ. Per ognifissato valore di J, in un opportuno dominio, le (19.3.10) definiscono una trasformazioneinvertibile o automorfismo del toro. L’ipercubo si deforma in un dominio Bd, con gli stessivertici se imponiamo che θ = 0 → Θ = 0 (cio e possibile per l’arbitrarieta della fase dacui la trasformazione dipende). Le facce opposte di Bd sono identificate, e le traslazioni di2πk del cubo e di Bd si corrispondono, poiche da (19.3.10) e dalla periodicita di Fk segueche
θ(Θ + 2πk,J) = θ(Θ,J) + 2πk (19.3.11)
Un esempio di trasformazione per d = 2 e mostrato nella figura 19.3.2, ove sono tratteggiatiil quadrato di lato 2π ed il dominio trasformato B2.
333333333333333333333333333333333333333333333333333333333333333333333333333333333
3333333333333333333333333333333333333333333333333333333333333333
2θ Θ
2
1θ
1Θ
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Figura 19.3.2. Trasformazione di coordinate (θ1,θ2)→(Θ1,Θ2) sul toro T2.
Equazione omologica
L’equazione di Hamilton-Jacobi (19.3.9) si risolve per via perturbativa. Scriviamo losviluppo di H1 in serie di λ nella forma seguente
H1
(
θ,J + λ∂F1
∂θ+ . . .+ λN
∂FN∂θ
)
= Q1(θ,J) + . . .+ λN−1QN (θ,J) + λNHN+1(θ,J)
(19.3.12)

380 19 Teoria perturbativa c©88-08- 9820
dove il termine Qn dipende solo da F1, . . . , Fn−1, come mostra la espressione esplicita deiprimi termini
Q1 = H1, Q2 =∂H1
∂J· ∂F1
∂θ, Q3 =
∂H1
∂J· ∂F2
∂θ+
1
2
∂2H1
∂J∂J· ∂F1
∂θ
∂F1
∂θ(19.3.13)
Se sostituiamo lo sviluppo di F nella equazione (19.3.9) ed utilizziamo (19.3.12) per losviluppo di H1, uguagliando i coefficienti di λ, λ2, . . . , λN , otteniamo una successione diequazioni della stessa forma, dette omologiche. L’equazione all’ordine n si scrive
ω · ∂Fn∂θ
(θ,J) +Qn(θ,J) = Hn(J) (19.3.14)
dove Qn e noto poiche dipende da ordini inferiori a n dello sviluppo di F . La soluzionedella equazione omologica, che per n = 1 coincide con (19.3.3), si ottiene osservando cheil valor medio del termine noto 〈Qn〉 e uguale alla nuova hamiltoniana Hn, poiche questanon dipende dagli angoli. La parte restante Qn − 〈Qn〉 determina ∂Fn/∂θ che ha valormedio nullo. La soluzione della equazione (19.3.14) e quindi data da
Hn(J) = 〈Qn〉, ω · ∂Fn∂θ
= 〈Qn〉 −Qn(θ,J) (19.3.15)
Detti Qn,k e Fn,k i coefficienti dello sviluppo di Fourier di Qn e Fn la seconda equazione(19.3.15) e soddisfatta da
Fn(θ,J) = i∑
k 6=0
Qn,k(J)
k · ω eik·θ (19.3.16)
Si noti che 〈Qn〉 = Qn, 0 mentre Fn, 0, che resta indeterminata, contribuisce al fattore difase arbitrario da cui la trasformazione Θ → θ dipende. I termini k ·ω, sono detti piccoli
divisori possono diventare arbitrariamente piccoli per k grande. Se allo sviluppo di Fourierdi H1 contribuiscono solo i vettori k con |k| = |k1| + . . . + |kd| ≤ m, si dice che H1 e unpolinomio trigonometrico di ordine m. Da (19.3.16) segue che Fn e Qn sono polinomi dellostesso ordine e per induzione si prova che Qn e di grado nm, vedi (19.3.13). L’hamiltoniananelle nuove coordinate e data dal lato destro di (19.3.9) dove θ e riespresso attraverso Θ,Jtramite (19.3.10)
Se H1 non e un polinomio trigonometrico, la la serie che definisce F1 converge solo se si impongono re-
strizione alla crescita di (ω·k)−1 quando |k|→∞. Se il decadimento dei coefficienti di H1 e esponenziale
|H1 k|≤c exp(−|k|δ) e tollerabile una crescita a potenza dei divisori; questo si verifica se le frequenze sod-
disfano una condizione diofantina (18.3.7). Le frequenze diofantine sono generiche poiche si prova che le
frequenze non diofantine hanno misura nulla e quindi probabilita nulla in una scelta casuale. Introducendo
nello spazio Rd delle frequenze una misura normalizzata gaussiana µ si dimostra, vedi appendice C, che
la misura dell’insieme N delle frequenze diofantine e µ(N )≥1− γ−1 2Ωd√π(η−d+1)
dove Ωd e l’area della sfera
unitaria in dimensione d. Poiche per ogni fissato η>d−1 si puo scegliere γ arbitrariamente grande, la loro
misura si avvicina ad 1 arbitrariamente. In questo modo si escludono solo insiemi di misura nulla.

c©88-08- 9820 19.3. Teoria canonica non risonante 381
L’oscillatore anarmonico
Come esempio di applicazione della teoria canonica si considera l’oscillatore quarticounidimensionale, che e anche esattamente solubile per quadrature, vedi paragrafo 2.8.L’oscillatore bidimensionale e considerato nel paragrafo 23.3. Data l’hamiltoniana H =(p2 + ω2q2)/2 + λ q4/4 la prima equazione omologica si scrive
ω∂F2
∂θ+J2
ω2cos4 θ = H1(J) (19.3.17)
L’hamiltoniana H1 e la corrispondente frequenza sono date da
H1(J) =J2
ω2〈cos4 θ〉 =
J2
ω2
3
8, Ω(J) = ω +
λ
ω2
3J
4= ω +
λ
ω
3
8A2 (19.3.18)
dove A = (2J /ω)1/2 e l’ampiezza del moto, risultato in accordo con l’equazione (19.2.8).La funzione generatrice soddisfa l’equazione
∂F1
∂θ= −J
2
ω3
(
cos4 θ − 〈cos4 θ〉)
= − J2
8ω3(cos 4θ + 4 cos 2θ) (19.3.19)
e la soluzione si scrive
F1 = −J2
ω3
1
32(sin 4θ + 8 sin 2θ) (19.3.20)
Tenendo conto di (19.3.13) e (19.3.14) la seconda equazione omologica si scrive
ω∂F2
∂θ− 2J3
ω5
(
cos8 θ − 3
8cos4 θ
)
= H2(J) (19.3.21)
e prendendo la media rispetto a θ si ha
H2(J) = −2J3
ω5
(
35
128−(
3
8
)2)
= −J3
ω5
17
64(19.3.22)
La trasformazione dalle nuove alle vecchie coordinate al primo ordine e data da
= J − λ
8
J2
ω3(cos 4Θ + 4 cos 2Θ), θ = Θ +
λ
16
J
ω3(sin 4Θ + 8 sin 2Θ) (19.3.23)

382 19. Teoria perturbativa c©88-08- 9820
19.4. TEORIA CANONICA RISONANTE
Quando le frequenze ω sono risonanti non e possibile eliminare in H la dipendenza datutti gli angoli ma soltanto da d− r di questi, se r e l’ordine di risonanza. La costruzioneperturbativa mostra che la simmetria di H e al piu quella della sua parte imperturbata,vale a dire le traslazioni sul toro T
d−r, che si esprime, nelle coordinate appropriate, conl’indipendenza dagli angoli che lo parametrizzano.La strategia perturbativa va costruita in modo da evitare la presenza di divisori nulliω · k = 0, vedi (19.3.16). Questi possono non essere presenti nei primi ordini perturbativiconsentendo la costruzione non risonante. Se la risonanza e di ordine r e se H1 e unpolinomio trigonometrico di grado m, il primo ordine perturbativo e definito se tutti ivettori k ∈ Zr soddisfano |k| > m, perche in questo caso non vi sono divisori nulli. Adordini superiori divisori nulli si incontrano e lo sviluppo non e piu definito. Per evitarli sipropone lo schema alternativo della teoria canonica risonante, che consiste nel trasformareH in un’hamiltoniana H che ha una simmetria minore e soltanto d− r integrali primi.
Quando H1 non e un polinomio trigonometrico, gia il primo ordine perturbativo non e definito. Se pero il
decadimento dei coefficienti di Fourier e esponenziale |H1k|≤e−δ|k|, si puo spezzare la serie in un polinomio
trigonometrico H(m)1 =
∑
|k|≤mH1,k(J)eik·θ di grado m ed una serie residua R(m)=
∑
|k|≥mH1,k(J)eik·θ il
cui valore assoluto e minore di |λ|. Il valore di m e fissato da |R(m)|≤∑
|k|≥me−|k|δ≤Ce−mδ/2≤|λ|, vedi
appendice C. Scegliendo il taglio in frequenza m=(2/δ) log(C/|λ|), la teoria perturbativa al primo ordine e
applicabile all’hamiltoniano H in cui H0+λH(m)1 e la parte integrabile e ed il resto λ2H2+λR
(m) e di ordine
λ2. Se K e la norma minima dei vettori di Zr occorre che m<K oltre che |R(m)|≤λ e la costruzione non e
applicabile se |λ|<e−Kδ/2.
Frequenze nulle
Il caso piu semplice di frequenze risonanti di ordine r e quello in cui le prime r componentidel vettore ω sono nulle. Lo spazio Zr dei vettori ortogonali ad ω coincide con Z
r. Ognivettore k in questo spazio ha le ultime d − r componenti nulle k = (k1, . . . , kr, 0, . . . , 0).All’hamiltoniana
H = ωr+1r+1 + . . .+ ωdd + λH1(θ, ) (19.4.1)
applichiamo il procedimento descritto nel capitolo precedente ma limitatamente al sot-tospazio delle fasi T
d−r ×Rd−r i cui punti hanno coordinate θr+1, . . . , θd e r+1, . . . , d. In
questo sottospazio l’orbita imperturbata e densa sul toro e i divisori ωr+1kr+1 + . . .+ωdkdsono sempre diversi da zero. L’hamiltoniana trasformata diventa
H(θ, ) = ωr+1 Jr+1 + . . .+ ωd Jd + H1(θ1, . . . , θr, J1, . . . , Jd) + λ2H2(θ,J) (19.4.2)
dove H1 e la media di H1 su Td−r.
H1 =1
(2π)d−r
∫
Td−r
H(θ,J)dθr+1 · · · dθd =∑
k∈Zr
H1,k(J)eik·θ (19.4.3)

c©88-08- 9820 19.4. Teoria canonica risonante 383
La nuova hamiltoniana va riespressa in funzione dei nuovi angoli Θ ed essendo la trasfor-mazione prossima all’identita si modifica solo il resto λ2H2. Se questo resto vien igno-rato, la nuova hamiltoniana e invariante rispetto al flusso dell’hamiltoniana imperturbata,quindi rispetto al gruppo delle traslazioni sul toro T
d−r, ed ha d − r integrali primi delmoto Jr+1, . . . , Jd. La funzione generatrice e F = θ · J + λF1 dove
F1 = i∑
k 6∈Zr, k 6=0
H1k
kr+1ωr+1 + . . .+ kdωdeik·θ (19.4.4)
Iterando il procedimento all’ordine N si ottiene un’hamiltoniana, che dipende solo daθ1, . . . , θr ed un resto. La simmetria espressa dalla indipendenza da d − r angoli, non epiu esplicita passando ai nuovi angoli Θ, se la generatrice dipende da θ1, . . . , θd. Al fine dipreservare la simmetria esplicita e conveniente usare le trasformazioni costruite tramite leserie di Lie, vedi paragrafo 7.
Risonanza generica
Un generico vettore ω risonante di ordine r risulta ortogonale ai vettori di un sottospazioZr i cui vettori di base e1, . . . , er non sono i versori degli assi. Completando la base inmodo che la matrice E = (e1, . . . , ed) abbia determinante 1, consideriamo la trasformazionecanonica ψ = Eθ, ı = E
−1 ed il nuovo vettore delle frequenze Ω = Eω che ha le primer componenti nulle, vedi paragrafo 18.3. All’hamiltoniana scritta nelle variabili (ψ, ı) siapplica il procedimento perturbativo descritto sopra e dette Ψ , I i nuovi angoli e le nuoveazioni si ha H = Ωr+1Ir+1 + . . .ΩdId+λH1(Ψ1, . . . ,Ψr, I)+λ2H2(Ψ , I). Un procedimentoequivalente consiste nel passare prima a variabili canoniche Θ,J in cui l’hamiltoniana H1
contiene tutti i termini risonanti, e successivamente alle coordinate Ψ , I dove la dipendenzadagli ultimi d − r angoli scompare. In questo caso, se Zr e il sottospazio dei vettoririsonanti, la soluzione dell’equazione omologica si ottiene proiettandola su Zr e sul suocomplementare. Infatti notando che le funzioni eik·θ con k ∈ Zr sono nello spazio nullodell’operatore ω·∂/∂θ e quelle con k nel complementare di Zr sono nel range dell’operatore,si trova
H1 =∑
k∈Zr
H1,keik·θ, F1 = i
∑
k 6∈Zr
H1,k
k · ω eik·θ (19.4.5)
Anche in queste coordinate l’hamiltoniana e invariante rispetto al flusso dell’hamiltonianaimperturbata, e quindi rispetto al gruppo delle traslazioni sul toro T
d−r, che implical’esistenza di d − r integrali primi. La successiva trasformazione Ψ = Eψ, I = E
−1J
porta alla stessa forma sopra indicata, in cui H1 dipende solo dai primi r angoli e gli in-tegrali primi sono le azioni Ir+1, . . . , Id. Un esempio di costruzione perturbativa risonanteviene dato per un sistema di rotatori.

384 19. Teoria perturbativa c©88-08- 9820
Hamiltoniani anisocroni
Se l’hamiltoniana imperturbata non e isocrona, la trasformazione risonante o non risonanteper portarla in forma completamente o parzialmente integrabile dipende dal punto conside-rato nello spazio delle fasi. Sia H = H0()+λH1(θ, ) e ω() il vettore delle frequenze, A()la matrice hessiana di H0, che si suppone non singolare, vedi appendice A. In tutti i puntiJ dello spazio delle nuove azioni, in cui ω(J) e non risonante, si applica la teoria canonicanon risonante. L’equazione omologica e ancora (19.3.14) ma ω dipende da J ed i termininon omogenei Qn cambiano solo a partire dall’ordine n = 2, per i nuovi contributi chevengono da H0, vedi appedice A. Se H1 ha un numero finito di componenti di Fourier, soloun numero finito di condizioni di risonanza possono essere soddisfatte e, per ciascuna diqueste, si individua la regione nello spazio delle azioni in cui va applicato il corrispondentesviluppo perturbativo risonante.Consideriamo come esempio un sistema di due rotatori perturbati la cui hamiltoniana sia
H =212
+222
+ λ12 cos2 θ1 cos2 θ2 (19.4.6)
Lo sviluppo in serie di Fourier della perturbazione λH1, scritto in forma reale e
H1 =124
(
1 + cos(2θ1) + cos(2θ2) +1
2cos 2(θ1 + θ2) +
1
2cos 2(θ1 − θ2)
)
(19.4.7)
e mostra che solo i vettori linearmente indipendenti k = (1, 0), (0, 1), (1, 1), (1,−1) vi con-tribuiscono. Le frequenze dell’hamiltoniana imperturbata sono ω1 = 1, ω2 = 2 e quindila regione dello spazio delle azioni in cui e definito lo sviluppo non risonante e il comple-mentare della stella di rette J1 = 0, J2 = 0, J1 = ±J2. L’hamiltoniana trasformata e datada
H(J) =J2
1 + J22
2+ λ
J1J2
4(19.4.8)
e la funzione generatrice della trasformazione vale
F1 = −J1J2
4
(
sin(2θ1)
2J1+
sin(2θ2)
2J2+
sin 2(θ1 + θ2)
4(J1 + J2)+
sin 2(θ1 − θ2)
4(J1 − J2)
)
(19.4.9)
Al fine di mantenere uniformemente limitata la generatrice, e conveniente restringere l’in-sieme, su cui essa e definita al complementare di un insieme di strisce di spessore δ costruiteattorno alla stella di rette sopra definita, vedi figura 19.4.1 (si mostra anche l’intersezionecon l’ellisse H(J1, J2) = E). In ciascuna di queste strisce facciamo la costruzione pertur-bativa risonante appropriata. In |J1| ≤ δ lo sviluppo perturbativo risonante e immediatoperche Z1 e generato dal vettore e1 = (1, 0). L’hamiltoniana e data da
H(Θ,J) =J2
1 + J22
2+ λ
J1J2
4(1 + cos(2Θ1) ) (19.4.10)
e la funzione generatrice e ancora espressa da (19.4.9), dove il primo termine tra parentesie soppresso. In |J1 − J2| ≤ δ, lo spazio dei vettori risonanti Z1 e generato da e1 = (1,−1).

c©88-08- 9820 19.4. Teoria canonica risonante 385
Con il vettore e2 = (k, 1 − k), dove k e un intero qualsiasi, costruiamo una base in Z2
ove la matrice E = (e1, e2) e unimodulare. L’hamiltoniana H contiene le componenti diFourier con k ∈ Z1 ed e data da
H(Θ,J) =J2
1 + J22
2+ λ
J1J2
4(1 +
1
2cos 2(Θ1 − Θ2) ) (19.4.11)
la funzione generatrice e uguale a (19.4.9) dove l’ultimo termine e stato soppresso. Inquesto caso l’hamiltoniana non presenta integrali primi del moto espliciti perche e1 non elungo uno degli assi coordinati e quindi in risonanza nessuna delle componenti (J1, J2) delvettore delle frequenze imperturbate si annulla. Si considerano quindi le trasformazioniΨ = EΘ e I = E
−1J cui corrisponde Ω = Eω per le nuove frequenze. Scegliendo k = 0, ilsecondo vettore ha norma minima e2 = (0, 1) e si ha esplicitamente
Ψ1 = Θ1 − Θ2
Ψ2 = Θ2
I1 = J1
I2 = J1 + J2
Ω1 = J1 − J2 = 2I1 − I2Ω2 = J2 = I2 − I1
(19.4.12)
L’hamiltoniana (19.4.11)) dipende solo da Ψ1 come e immediato verificare e I2 e l’integraleprimo. La prima frequenza imperturbata si annulla quando I2 = 2I1, che e la linea dirisonanza corrispondente a J1 = J2 nelle nuove coordinate.
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
J
J2
1
Figura 19.4.1. Linee di risonanza per l’hamiltoniana dei rotatori.

386 19. Teoria perturbativa c©88-08- 9820
19.5. TEORIA CANONICA DIPENDENTE DAL TEMPO
Un’hamiltoniana integrabile, espressa in funzione delle azioni , si mantiene integrabile,se un parametro α, da cui dipende, acquista una dipendenza dal tempo. Se questa ha-miltoniana H(, α(t)) viene perturbata, la integrabilita si recupera attraverso una trasfor-mazione canonica, che dipende dal tempo ed elimina la dipendenza dagli angoli. La trasfor-mazione si determina con un procedimento perturbativo e le equazioni omologiche, cui siperviene, dipendono esplicitamente dal tempo. Il recupero della integrabilita e completo sela frequenza imperturbata e non risonante, ma la dipendenza dal tempo rende inevitabilel’attraversamento di risonanze. Quando l’hamiltoniana integrabile dipende dalle coordi-nate e dai momenti, la variazione nel tempo di un suo parametro α comporta la perditadi integrabilita, perche la trasformazione alle variabili azione e angolo acquista, tramiteα, una dipendenza dal tempo, che cambia l’hamiltoniana. Per sistemi con un sol grado diliberta l’azione rimane tuttavia quasi invariante, come si mostra nel paragrafo successivo.
Hamiltoniani dipendenti dal tempo
Consideriamo un’hamiltonianaH = H0(, t)+λH1(θ, , t), che risulta integrabile per λ = 0.Se H0 non dipende da t e H1 = H1(θ, ωd+1t, ) e periodica in t con frequenza ωd+1,nello spazio delle fasi esteso, l’hamiltoniana K = H0() + ωd+1 d+1 + λH1(θ, θd+1,J) eequivalente a quella data e vi si applica la teoria delle perturbazioni indipendente daltempo. Se invece anche H0 dipende dal tempo e necessario usare la teoria dipendentedal tempo, che e diversa in quanto cambia l’equazione omologica. La equazione che siintende risolvere per via perturbativa e quella che determina una generatrice F (θ,J, t) =θ · J + λF1(θ,J, t) + . . .+ λNFN (θ,J, t) dipendente da t tale che
∂F
∂t+H0
(
∂F
∂θ, t
)
+ λH1
(
θ,∂F
∂θ, t
)
= H0(J, t) +
N∑
n=1
λnHn(J, t) + λN+1HN+1(θ,J, t)
(19.5.1)ove naturalmente i termini H mantengono una dipendenza da θ se su di essi vogliamoscaricare tutte le componenti di Fourier con k ∈ Zr ortogonali ad un vettore ω risonante.Lo sviluppo perturbativo conduce ad equazioni omologiche che hanno la seguente struttura
∂Fn∂t
+ ω(J, t) · ∂Fn∂θ
+Qn(θ,J, t) = Hn(J, t) (19.5.2)
Per determinare Hn(J, t) si prende la media angolare e si trova che e uguale a 〈Qn〉scegliendo Fn a media angolare nulla. Per determinare Fn si considera il suo sviluppodi Fourier in θ e quello di Qn, i cui coefficienti sono Fn,k(J, t) e Qn,k(J, t) rispettivamente,dove i primi soddisfano, per k 6= 0, l’equazione
d
dtFn,k(J, t) + ik · ω(J, t)Fn,k(J, t) = −Qn,k(J, t) (19.5.3)
La soluzione della equazione (19.5.3), vedi paragrafo 2.2, si scrive
Fn,k(J, t)=An,ke−ik·Φ(J,t) −
∫ t
0
Qn,k(J, t′) eik·(
Φ(J,t′)−Φ(J,t))
dt′ Φ(J, t)=
∫ t
0
ω(J, t′)dt′
(19.5.4)
c©88-08- 9820 19.6. Invarianti adiabatici 387
dove An,k si determina imponendo che, quando ω e costante (quindi Qn,k non dipendonoda t), la soluzione Fn coincida con (19.3.16), e si ha An,k = iQn,k(J, 0)/k·ω(J, 0). Nel casoimportante in cui la dipendenza da t sia periodica di periodo T , anche F deve risultareperiodica in t con lo stesso periodo. Se indichiamo con 2πT−1ν la media temporale di ωnel periodo T , si puo esprimere la fase Φ come segue
Φ(J, t) = 2πt
Tν + Φ(J, t), ν(J) =
1
2π
∫ T
0
ω(J, t)dt (19.5.5)
dove Φ e la componente periodica di Φ. La soluzione periodica di (19.5.2) si scrive nellaforma
Fn,k(J, t) = C
∫ t+T
t
Qn,k(J, t′) eik·(
Φ(J,t′)−Φ(J,t))
dt′ (19.5.6)
La periodicita si verifica calcolando Fn,k in t + T . Se si tiene conto che Φ(J, t + T ) =Φ(J, t) + 2πν e della periodicita in t di Qn,k (questa segue con ragionamento induttivodalla periodicita di H1 e delle Fm con m ≤ n), il cambiamento di variabile t′′ = t′ − Tmostra che risulta uguale a Fn,k valutata in t. La costante C si determina imponendo cheFn,k,t sia soluzione di (19.5.2) e sostituendovi (19.5.5) si trova C−1 = exp(2π ik · ν) − 1.La funzione generatrice e quindi espressa da
Fn(θ,J, t) = −∑
k 6=k0
1
e2π ik·ν − 1
∫ t+T
t
Qn,k(J, t′) eik·(
θ+Φ(J,t′)−Φ(J,t))
dt (19.5.7)
Anche in questo caso se ω e costante, si ritrova l’usuale espressione dopo aver integrato sut′, tenendo conto che ω T = 2π ν.
19.6. INVARIANTI ADIABATICI
La teoria perturbativa consente di migliorare l’invarianza delle azioni rendendo piu piccoloil resto dell’hamiltoniana che dipende dagli angoli. Per i sistemi a un solo grado di liberta epossibile annullare il resto e risolvere esattamente l’equazione di Hamilton Jacobi, costru-endo una azione esattamente invariante. Quando un parametro τ , da cui l’hamiltonianadipende, varia lentamente col tempo, l’azione non e piu costante, ma le sue sue variazionirestano comunque piccole. Se infatti τ = τ0 + ǫt, la variazione dell’azione, che prende ilnome di invariante adiabatico, e inferiore a ǫ per un tempo tempo 1/ǫ.
Sia H(q, p, τ) un hamiltoniano le cui orbite sono chiuse quando τ e costante. Detta p =p(q, E, τ) la soluzione di H(q, p, τ) = E, l’azione e definita da
(E, τ) =1
2π
∮
p(q, E, τ)dq (19.6.1)

388 19. Teoria perturbativa c©88-08- 9820
ed invertendo = (E, τ) si ottiene E = E(, τ). La soluzione della equazione di HamiltonJacobi e data da
W (q, , τ) =
∫ q
0
p(q′, E(, τ), τ)dq′ (19.6.2)
Se τ varia consideriamo la stessa trasformazione canonica con τ dipendente dal tempo. Lageneratrice W (q, , τ(t)) trasforma H in un’hamiltoniana H definita da
H(θ, , t) = H +∂W
∂t= E(, τ) + τ
∂W
∂τ(19.6.3)
Dopo aver derivato W (q, , τ) rispetto a τ , riesprimiamo q in funzione di θ, invertendoθ = ∂W/∂. Se W = W0(q, , τ) + 2πn, dove W0 e la determinazione principale, lederivate rispetto ad τ di W e W0 sono uguali, poiche le variabili indipendenti sono q, , τ .La funzione ∂W/∂τ e a un sol valore sulla traiettoria chiusa e quindi come funzione di θdefinita sull’asse reale e periodica con periodo 2π. Riscriviamo l’hamiltoniana nella forma
H(θ, , τ) = H0(, τ) + ǫH1(θ, , τ), H1 =∂W0
∂τ(q(θ, , τ), , τ) (19.6.4)
dove H0(, τ) ≡ E(, τ) e le equazioni del moto sono
θ = ω(, τ) + ǫ∂H1
∂, = −ǫ∂H1
∂θ(19.6.5)
con ω = ∂H0/∂. L’azione non e un invariante del moto esatto, poiche H dipende da θ.Un’hamiltoniana indipendente dall’angolo e la corrispondente azione invariante si possonocostruire per via perturbativa. Quando τ varia, l’energia E = H(q, p, τ) = H0(, τ) e lafrequenza ω = ∂H0/∂ non sono piu costanti e le loro derivate temporali sono di ordine ǫ.Anche l’azione varia e la sua derivata e di ordine ǫ ma vale il seguente risultato.
Teorema. Se la frequenza ω non si annulla l’azione e un invariante adiabatico cioe si ha
|(t) − (0)| < C ǫ, per 0 ≤ t <1
ǫ(19.6.6)
Indichiamo con T = 2π/ω il periodo del moto. Nell’intervallo [t, t+T ] l’orbita ritorna sullasemiretta da cui e partita e l’angolo θ ha un incremento di 2π (quando τ varia l’orbita none piu chiusa ma spiraleggia). Usando le coordinate iniziali q, p calcoliamo il valor medio,su un periodo, di E = ∂H/∂t = ǫ ∂H/∂τ
〈E〉 =ǫ
T
∫ t+T
t
∂H
∂τ(q, p, τ) dt′ =
ǫ
T
∮
∂H
∂τ
(
∂H
∂p
)−1
dq = −ǫ ∂∂τ
(
∂
∂E
)−1
(19.6.7)
Osserviamo infatti che dt′=dq/q=(∂H/∂p)−1dq. Differenziando H(q,p,τ)−E=0 che definisce implicitamente
p=p(q,τ,E) si ricava ∂p/∂E=(∂H/∂p)−1, (∂p/∂τ)=−(∂H/∂τ) (∂H/∂p)−1 e l’integrale e uguale a 2π ∂/∂τ
mentre T=2π ∂/∂E.

c©88-08- 9820 19.6. Invarianti adiabatici 389
La derivata di , tenendo conto di (19.6.7) e di τ = ǫ, e espressa da
d
dt=
∂
∂EE +
∂
∂ττ =
∂
∂E(E − 〈E〉) =
ǫ
ω
(
∂H
∂τ−⟨
∂H
∂τ
⟩)
(19.6.8)
La variazione della azione e di ordine ǫ2 anziche di ordine ǫ se valutata su di un periodoossia l’intervallo di tempo tra due successive intersezioni con una semiretta data. Questorisultato puo essere provato integrando (19.6.8) tra t e t+T . Ne segue che la variazione sudi un intervallo di tempo di ordine 1/ǫ e la somma di (ǫ〈T 〉)−1 variazioni su di un periodopiu la variazione su di una frazione di periodo e quindi complessivamente di ordine ǫ.
Osserviamo che (19.6.8) consente di scrivere una nuova espressione per la perturbazioneH1 dell’hamiltoniana espressa in in variabili angolo-azione,
H1 = − 1
ω(, τ)
∫ θ (∂H
∂τ−⟨
∂H
∂τ
⟩)
dθ′ (19.6.9)
se si confronta (19.6.8) con la seconda equazione (19.6.5). Si noti che ∂∂τ H(q, p, τ),
riespressa in funzione di θ, , dipende anche da θ contrariamente a H che diventa H0(, τ).
Una strada alternativa piu semplice consiste nel fare un passo perturbativo su H definitoda (19.6.4) in modo tale che, trasformato attraverso la generatrice F (θ, J, τ) = θJ +ǫF1(θ, J, τ), diventi H = H + ǫ ∂F/∂τ = H0(J, τ) + ǫH1(J, τ) + ǫ2H2(Θ, J, τ). Per questahamiltoniana si trova che J = O(ǫ2) e quindi la sua variazione di J(t) e minore di ǫ pert < ǫ−1, vedi paragrafo 20.1. Ne segue che la variazione di (t) e anch’essa minore di ǫsullo stesso intervallo di tempo poiche
|(t) − (0)| ≤ |(t) − J(t)| + |J(t) − J(0)| + |J(0) − (0)| ≤ Cǫ (19.6.10)
I contributi del primo e del terzo termine sono espressi da ǫ|∂F1/∂θ| e sono di ordine ǫ sela derivata di F1 rispetto a θ e limitata. La costante C e finita se il periodo T non divergeper 0 < t < ǫ−1 e in questo caso e un invariante adiabatico.
Miglioramenti perturbativi
Con procedimenti perturbativi si puo migliorare ulteriormente la qualita dell’invarianteadiabatico. La generatrice F = θJ + ǫF1(J, θ, τ) + . . . + ǫNFN (J, θ, τ) che trasformal’hamiltoniana H in
H(J,Θ, τ) = H0(J, τ) + ǫH1(J, τ) + . . .+ ǫNHN (J, τ) + ǫN+1HN+1(J,Θ, τ) (19.6.11)
si determina tramite lo sviluppo perturbativo di
∂F
∂t+ H = H (19.6.12)

390 19. Teoria perturbativa c©88-08- 9820
definito dalla equazione omologica
ω(J, τ)∂Fn∂θ
+Qn(J, θ, τ) = Hn(J, τ) (19.6.13)
Questa equazione non presenta piccoli divisori, poiche le derivate temporali ǫn∂Fn/∂t =ǫn+1∂Fn/∂τ sono di ordine n+1 e contribuiscono ai resti dell’ordine successivo ǫn+1Qn+1.Siccome J = O(ǫN+1) la stima perturbativa data nel paragrafo 20.1 mostra che all’ordineN la variazione di J e inferiore a ǫ nell’intervallo di tempo 0 ≤ t < ǫ−N . Poiche non visono piccoli divisori lo sviluppo perturbativo converge per N → ∞ e consente di costruirel’invariante perpetuo J , che si mantiene costante su tutti i tempi. Quando la soluzioneesatta della equazione di Hamilton Jacobi per τ fisso non e disponibile, si puo costruirel’invariante adiabatico per via perturbativa. Se l’hamiltoniana nelle coordinate inizialie H0(q, p, τ) + λV (q, p), espressa in coordinate angolo azione diventa H = H0(, τ) +λV0(, θ, τ) + ǫ∂W0/∂τ dove W0 e soluzione della equazione di Hamilton-Jacobi per H0,Se λ ∼ ǫ l’hamiltoniana H e gia nella forma richiesta. Se invece ǫ ∼ λm si fanno m − 1passi perturbativi per rendere il resto di ordine ǫ. Ad esempio se ǫ = cλ2 detta F =θJ + λF1(J, θ, τ) l’hamiltoniana si scrive
H = H0(J, τ) + λ〈V0〉(J, τ) + ǫ(∂W0
∂τ(J,Θ, τ) + cH2(J,Θ, τ)
)
(19.6.14)
L’oscillatore lineare
Consideriamo un oscillatore H = 12 (p2 +ω2
0q2) con frequenza variabile ω0(τ). La soluzione
W (q, J, ω0) della equazione di Hamilton-Jacobi e data esplicitamente in (17.7.9) da cuisegue
∂W
∂ω0= − q
2ω0(2ω0− ω2
0q2)1/2 =
qp
2ω0= −
ω0sin θ cos θ (19.6.15)
L’hamiltoniana trasformata diventa quindi
H(, θ, τ) = ω0 −ǫ
ω0
dω0
dτ sin θ cos θ (19.6.16)
Si e provato che (t) varia meno di ǫ in un tempo ǫ−1. Quando la dipendenza dal tempoe periodica ω0(τ) = ω0(τ + 2π), l’ invariante perpetuo si determina esattamente, vediparagrafo 23.6 ed il moto e quasi periodico, in accordo con la teoria di Floquet, vediparagrafo 10.5.
Un modello solubile
Un modello in cui si riescono a fare esplicitamente i calcoli ed a verificare la stima fornitadal teorema precedente, e quello di una particella di massa m = 1 che si muove tra duepareti, una in x = 0 e l’altra in x = τ . Il vincolo unilaterale variabile si realizza con unpotenziale del tipo (5.2.9), che nel limite ǫ → 0 diventa una buca di potenziale infinita.Con questo potenziale singolare la traiettoria nello spazio delle fasi e rettangolare e l’azionevale 2πJ = 2τp. Se τ = τ0 + ǫt anche |p| varia; la velocita della parete e ǫ e nel riferimentosolidale con la parete si ha x′ = x − τ, p′ = p − ǫ. Detti p∓ i momenti nel sistema fissoprima e dopo l’urto e p′∓ = p∓ − ǫ gli stessi nel sistema mobile, da p′+ = −p′− segue
p+ − ǫ = −(p− − ǫ) −→ p+ = 2ǫ− p− (19.6.17)

c©88-08- 9820 19.6. Invarianti adiabatici 391
Valutiamo l’ azione immediatamente prima dell’urto supponendo che il primo urto si abbiaa t = 0. Se con pn e tn indichiamo i momenti prima dell’urto che avviene all’istante tn eτn = τ0 + ǫtn e la distanza della parete dall’origine a quell’istante, lo spazio percorso finoall’urto successivo e pn+1(tn+1 − tn) = τn + τn+1 = 2τn + ǫ(tn+1 − tn) e si ha la mappa
pn+1 = pn − 2ǫ, τn+1 = τn +2ǫτn
pn+1 − ǫ(19.6.18)
L’azione dopo ogni urto varia poco poiche da (19.6.18) segue che
π Jn+1 = pn+1τn+1 = pnτn
(
1 +2ǫ2
p2n
+O(ǫ3))
= π Jn + ǫ2 Tn +O(ǫ3) (19.6.19)
osservando che Tn = tn − tn−1 = 2τn p−1n + O(ǫ) e il periodo del moto. Ne segue che
Jn − J0 = ǫ2 π−1 (T0 + . . . + Tn−1) + O(ǫ3) e quindi, se il periodo si mantiene finito,detta 〈T 〉 la sua media, si ha Jn − J0 = n ǫ2 〈T 〉π−1 + O(ǫ3), in accordo con (19.6.6) seC = 〈T 〉π−1. L’invarianza adiabatica cade quando Tn non e piu limitato. e questo siverifica se pn = p0 − 2n ǫ = 0. Per n = p0(2ǫ)
−1 il punto si ferma e Tn diverge.
Perdita dell’invarianza adiabatica
Si verifica quando il periodo del sistema congelato (con ǫ = 0 ossia τ costante) diverge.Questo accade quando si raggiunge una separatrice. Per sistemi come il pendolo H =12p
2 − ω20 cos q o l’oscillatore quartico H = 1
2p2 − 1
2ω20q
2 + 14q
4 in cui ω20 = 1 − A cos τ
varia periodicamente con una frequenza ǫ ≪ 1, lontano dalla separatrice l’azione e unbuon invariante del moto e le orbite differiscono assai poco da quelle del sistema congelato.Nell’intorno della separatrice invece il periodo T e grande ed il moto diventa instabile.L’azione della sepratrice, che vale J sep = 4
3π ω0(τ) per l’oscillatore quartico e J sep =8ω0(τ) per il pendolo (avendo diviso per 2 al fine di avere continuita con l’azione perle orbite di rotazione), varia tra due estremi J±
sep , la cui differenza e di ordine 1. In unperiodo 2π/ǫ del moto lento l’azione di ogni orbita, purche inizialmente compresa tra J−
sep
e J+sep , ha un salto aleatorio, secondo la teoria sviluppata da Neishtadt. Indicando con
Jn il valore dell’azione dopo n periodi cioe per τ = 2π n, si dimostra che il salto ad ogniperiodo e dato da
Jn+1 − Jn = − ǫ
a(τn)
dJ sep
dτ(τn) Ξn, J sep (τn) = Jn (19.6.20)
dove a−1(τ) e il limite di −T (E, τ)/ log |E| per E → 0 energia della separatrice, e Ξn =log(2 sinπξn) − log(2 sinπξ′n) con ξn e ξ′n variabili aleatorie uniformemente distribuite in[0, 1]. Per il pendolo e per l’oscillatore a(t) = ω0(τ) e per il pendolo la mappa (19.6.20)diventa
Jn+1 − Jn = − 4 ǫA sin τn1 −A cos τn
Ξn, cos τn = A−1(
1 − 1
64J2n
)
(19.6.21)
Si tratta di una passeggiata aleatoria sui reali, vedi paragrafo 24.2, che da luogo ad unprocesso diffusivo per la variabile d’azione. Il salto dell’azione e di ordine ǫ in un periododel moto lento. Il coefficiente di diffusione e proporzionale a ǫ2, nel tempo scalato τ/2π oveil periodo del moto lento vale 1. Nel tempo t e il coefficiente di diffusione e proporzionalea ǫ3 e si calcola, per n grande, notando che Ξ ha media nulla e varianza σ2 = π2/6.

392 19. Teoria perturbativa c©88-08- 9820
19.7. SVILUPPI CON SERIE DI LIE
Le serie di Lie consentono di generare trasformazioni esplicite e sono particolarmente adatteper costruire gli sviluppi perturbativi, soprattutto nel caso risonante.Anziche generare la trasformazione con la serie G = λG1 + . . . + λNGN si considera unasuccessione di trasformazioni
eDG = eλNDGN . . . eλ
2DG2 eλDG1 (19.7.1)
ciascuna delle quali pone l’hamiltoniana nella forma desiderata ad un ordine crescente.Detta (Θ,J) = e−DG(θ, ) la trasformazione e (θ, ) = eDG(Θ,J) la sua inversa, l’hamil-toniana H(θ, ) = H0() + λH1(θ, ) espressa nelle nuove coordinate diventa
H(θ, ) = eλDG1H(Θ,J) = eλDG1
(
H0(J) + λH1(Θ,J))
= H0 + λDG1H0 + λH1+
(
eλDG1 − 1 − λDG1
)
H0 + (eλDG1 − 1)λH1 = H0(J) + λH1(J) + λ2H2(Θ,J;λ)
(19.7.2)Detto ω = ∂H0/∂J le equazioni che seguono sono
H1(J) = DG1H0 +H1 ≡ −ω · ∂G1
∂Θ+H1(Θ,J)
λ2H2 =(
eλDG1 − 1 − λDG1
)
H0 + (eλDG1 − 1)λH1
(19.7.3)
La prima equazione in (19.7.3) coincide con la (19.3.2) scritta per la funzione generatrice seponiamo G1 = −F1, poiche abbiamo definito (Θ,J) = e−DG(θ, ). La seconda equazionefornisce una espressione esplicita per H2. Per passare dal generico ordine n− 1 all’ordinen l’algoritmo e simile
eλnDGn
(
H0(J) + λH1(J) + . . .+ λn−1Hn−1(J) + λnHn(Θ,J))
=
= H0(J) + λH1(J) + . . .+ λn−1Hn−1(J) + λnHn(J) + λn+1Hn+1(Θ,J;λ)(19.7.4)
Separando i termini ordine λn si ottiene l’equazione omologica che determina Hn e Gn.I termini di ordine superiore a λn contribuiscono alla nuova perturbazione Hn+1
Hn(J) = DGnH0 +Hn ≡ −ω · ∂Gn
∂Θ+Hn(Θ,J)
λn+1Hn+1=(eλnDGn − 1)
(
λH1 + . . . λn−1Hn−1 + λnHn
)
+(
eλnDGn − 1 − λnDGn
)
H0
(19.7.5)Nel caso risonante l’algoritmo e lo stesso; quello che cambia e la soluzione della equazioneomologica. Indichiamo con Π il proiettore sul sottospazio delle funzioni periodiche eik·θ con

c©88-08- 9820 19.8. Sviluppi per forme normali 393
k ∈ Zr. Poiche Π proietta sullo spazio nullo dell’operatore ω · ∂/∂θ l’equazione omologicae risolta da
Hn = ΠHn, ω · ∂
∂Θ(1 − Π)Gn = (1 − Π)Hn (19.7.6)
Sviluppando in serie di Fourier di Fourier si ottiene
Hn =∑
k∈Zr
Hn,k eik·θ, (1 − Π)Gn = −i
∑
k 6∈Zr
Hn,k
k · ω eik·θ, (19.7.7)
La componente di ΠGn rimane indeterminata e puo essere scelta arbitrariamente.
19.8. SVILUPPI PER FORME NORMALI
La teoria perturbativa per gli oscillatori anarmonici o in generale un qualsiasi sistemahamiltoniano nell’intorno di un minimo del potenziale, puo essere sviluppata usando coor-dinate cartesiane anziche variabili angolo-azione. Consideriamo l’hamiltoniana
H = H2(q,p) +K3(q,p), H2 =
d∑
k=1
ωkp2k + q2k
2, K3 = H3 +H4 + . . .+HN + . . .
(19.8.1)dove Hn indica un polinomio omogeneo in q, p di grado n. Se si introducono le coordinatecomplesse
zk =qk − ipk√
2, z∗k =
qk + ipk√2
(19.8.2)
l’hamiltoniana diventa
H =d∑
k=1
ωkzkz∗k +K3(z, z
∗) (19.8.3)
La trasformazione non e canonica perche MJM = iJ e quindi la derivata di Lie diventa
DGH = i
d∑
k=1
(
∂H
∂zk
∂G
∂z∗k− ∂H
∂z∗k
∂G
∂zk
)
≡ i[H,G]z,z∗ (19.8.4)
ossia la parentesi di Poisson e i volte l’usuale prodotto di derivate che continuiamo adindicare col simbolo [ , ]. Le equazioni di Hamilton diventano complesse coniugate e sono
zk = i∂H
∂z∗k, z∗k = −i ∂H
∂zk(19.8.5)
La relazione con le variabili angolo-azione e data da
zk =√
jk eiθk , z∗k =
√
jk e−iθk (19.8.6)

394 19. Teoria perturbativa c©88-08- 9820
e zkz∗k sono gli integrali primi del sistema imperturbato; essi sono gli invarianti rispetto al
gruppo G generato da H2 costituito dalle rotazioni in ciascun piano, zk → eiαkzk.Si dice che una funzione e in forma normale, se risulta invariante rispetto alle trasformazionidel gruppo. Il gruppo G e equivalente a quello delle traslazioni sul toro T
d, che e densosu T
d se ω e non risonante, su Td−r se soddisfa una condizione di risonanza di ordine r.
Ogni variabile dinamica e rappresentata da una serie di potenze in z, z∗
A(z, z∗) =∑
k,m
Ak,mzk z∗m, zk ≡ zk11 · · · zkd
d (19.8.7)
Sulla base dei monomi l’operatore DH2, che genera il gruppo G, e diagonale e si ha
DH2zk z∗
m = iω · (k− m)zkz∗m etDH2zk z∗
m = eitω·(k−m)zkz∗m (19.8.8)
Una variabile in forma normale soddisfa la condizione di invarianza rispetto alle trasfor-mazioni del gruppo
etDGA(z, z∗) = A(z, z∗) (19.8.9)
ed e rappresentata dalla serie di potenze (19.8.7) in cui zkz∗m sono tali che eiω·(k−m)t = 1cioe con k − m ∈ Zr in quanto ortogonali ad ω. La costruzione della forma normale vienfatta per via perturbativa scegliendo ‖z‖ come piccolo parametro. Se si fa la trasformazionedi scala q → λq, p → λp, H → λ2H l’hamiltoniana diventa H = H2 + λH3 + λ2H4 + . . ..Lo sviluppo perturbativo e organizzato considerando all’ordine n i polinomi omogenei diordine n+ 2 e notando che DH2
non cambia l’ordine di un polinomio.
Costruzione perturbativa
Si considera una prima trasformazione di coordinate z → Z = (Q − iP)/√
2 generata daun polinomio omogeneo G3 di grado 3 tale che z = eDGZ e quindi
H(z, z∗) = H(
eDG3Z, eDG3Z∗))
= eDG3H(Z,Z∗) = H2(Z,Z∗) + H3(Z,Z
∗) +K4(Z,Z∗)
(19.8.10)dove la forma normale H3 ed il resto K4 sono dati da
H3 = DG3H2 +H3
K4 =(
eDG3 − 1 −DG3
)
H2 +(
eDG3 − 1)
H3 + eDG3 (H4 +H5 + . . .)(19.8.11)
La prima equazione, che riscriviamo nella forma
−DH2G3 +H3 = H3 (19.8.12)
determina G3 e H3. Il polinomio H3 e in forma normale e appartiene allo spazio nullodi DH2
. Se Π e il proiettore nel sottospazio dei polinomi in forma normale la equazioneomologica 19.8.11 e risolta da
H3 = ΠH3, G3 = (DH2)−1(1 − Π)H3 (19.8.13)
Le equazioni agli ordini successivi sono dello stesso tipo. Si noti che lo sviluppo per-turbativo fa solo intervenire operazioni tra polinomi e quindi puo venir automatizzatocompletante congiuntamente con quelli che permettono di valutare le serie di Lie, vedicapitolo 16.
c©88-08- 9820 19.A. Sviluppi a frequenza fissa 395
19.A. SVILUPPI A FREQUENZA FISSA
Quando la frequenza dell’hamiltoniana imperturbata non e costante e opportuno consi-derare uno sviluppo perturbativo locale su di una orbita a frequenza fissa non risonante.La trasformazione riparametrizza il toro distorto dalla perturbazione.Tali sviluppi sonoconvergenti, mentre gli sviluppi considerati nel caso isocrono risultano asintotici in ogniintorno del punto di equilibrio.Sia H = H0() + λH1(θ, ) un’hamiltoniana la cui parte integrabile H0 soddisfa una con-dizione di non degenerazione
Aik() =∂ωi∂k
=∂2H0
∂i∂k, detA() 6= 0 (19.A.1)
Se A() e definita positiva, l’hamiltoniana H0 e convessa e la corrispondenza tra azioni efrequenze e biunivoca. Se A e costante l’hamiltoniana si scrive
H0() = ω0 · +1
2 · A (19.A.2)
La frequenza dipende linearmente dall’azione ω = ω0+A e la superficie di energia costanteH0() = E e un elissoide. Gli sviluppi perturbativi sono quelli considerati nel paragrafo 3con la differenza che la frequenza imperturbata ω dipende dall’azione. Questo modifica itermini noti Qn con n ≥ 2 della equazione omologica.
Q1 = H1(θ,J), Q2 =1
2
∂F1
∂θ· A
∂F1
∂θ+∂H1
∂J· ∂F1
∂θ(19.A.3)
I termini di ordine n ≤ N della funzione generatrice
Fn(θ,J) = i∑
k 6=0
Qn,k(J)
k · ω eik·θ (19.A.4)
sono definiti solo in quella regione dello spazio delle azioni in cui il prodotto k ·ω e diversoda zero, con |k| ≤ nm se H1 e un polinomio trigonometrico di grado m. In questo dominiorisulta definita l’hamiltoniana trasformata H = H(J)+λN+1HN+1(Θ,J, λ) e la frequenzaΩ = ∂H/∂J si calcola a partire sviluppo di H
Ω(J) = ω(J) + λΩ1(J) . . .+ λNΩN (J) (19.A.5)
Se si impone cheΩ abbia un valore non risonante assegnato ω∗, che soddisfa una condizionediofantina, gli sviluppi risultano convergenti per N → ∞, se |λ| e sufficientemente piccolo.L’azione che soddisfa questa condizione si determina tramite uno sviluppo perturbativo
Ω(J, λ) = ω∗, J = J0 + λJ1 + . . . J0 = A−1(ω∗ − ω0), J1 = −A
−1Ω1(J0)(19.A.6)
396 19. Teoria perturbativa c©88-08- 9820
La costruzione perturbativa si riferisce ad un singolo valore dell’azione, cui corrispondeun toro parametrizzato da (19.3.10), con J dato da (19.A.6). Si noti che i divisori, checontribuiscono alla trasformazione Θ → θ, crescono tutti in modo controllato. Infatti sonorisprimibili attraverso i divisori di ω∗ poiche (k ·ω(J))−1 = (k ·ω∗ +O(λ))−1. La legge delmoto nelle coordinate iniziali si ottiene sostituendo Θ = Θ(0)+ω∗t in (19.3.10). Un modopiu conveniente di effettuare lo sviluppo perturbativo in questo caso consiste nel prendere,ad ogni passo, la componente integrabile dell’hamiltoniana come termine imperturbato. Inquesto modo l’ordine perturbativo cresce come 2n − 1 anziche come n al passo n, ma lafrequenza imperturbata diventa Ω, che, per l’azione scelta J, ha esattamente il valore ω∗.I divisori sono quelli voluti e non sono necessari ulteriori sviluppi. Un vantaggio ulterioredi questo metodo, proposto da Kolmogorov, e che avere un resto il resto proporzionale aλ2n
anziche λn+1, consente di controllare in modo assai piu efficace la crescita con k deidivisori (k·ω)−1 e di garantire la convergenza della serie. Al primo ordine la trasformazionee la stessa; al secondo si considera H0(J) + λH1(J) come hamiltoniana imperturbata e la
trasformazione canonica eλ2DG2 definisce una nuova hamiltoniana integrabile H(J) con un
resto di ordine λ4.
19.B. SISTEMI ANISOCRONI
La costruzione dell’hamiltoniano trasformato e piu complessa nel caso risonante, perche nonsi puo tener conto di piu di una risonanza per volta. Se l’hamiltoniano e quadratico nelleazioni e ha frequenza nulla nell’origine le superfici di energia costante M
Esono elissoidi con
centro nell’origine (se H0 e dato da (19.A.2) basta fare una traslazione). Nello spazio dellefrequenze i punti corrispondenti alla risonanza singola appartengono al piano ortogonalead un vettore intero k ed e conveniente considerare una partizione dello spazio in dominiW1,W2, . . . ,Wr i cui punti soddisfano condizioni di risonanza di ordine 1, 2, . . . , r e chehanno intersezione vuota. I punti di W1 appartengono al piano ortogonale al vettore interok1 privato delle intersezioni con tutti i piani ortogonali a qualsiasi altro vettore k2 noncolineare a k1, i punti di W2 sono sulla intersezione di due piani privata della intersezionecon un qualsiasi altro piano ortogonale ad un terzo vettore k3 linearmente indipendenteda k1,k2, e cosı via.
Se d = 3 e H0 = 12 ·A, le immagini di W1 e W2 nello spazio delle azioni sono ancora piani
privati delle loro intersezioni ed una stella di rette. Le loro intersezioni con l’elissoide dienergia costante ME sono mostrate nella figura 19.B.1. Questi insiemi (W1 ∪W2) ∩WE
hanno misura nulla ed il loro complementare, costituito da tutte le azioni cui corrispondeuna traslazione ergodica sul toro T
3, hanno misura uguale a quella dell’intero elissoide.Per λ → 0 tutti i tori con frequenze diofantine, la cui misura e quella dell’elissoide, vediappendice C, sono preservati anche se distorti. La costruzione perturbativa risonante vafatta dopo aver separato la perturbazione λH1 in un polinomio trigonometrico di ordinem ed in un resto di ordine λ2. A tutti i punti nello spazio delle azioni, le cui immagininello spazio delle frequenze distano meno di ǫ da un dominio Wr, si applica la costruzioneperturbativa risonante e sul loro complementare la costruzione non risonante. La misura

c©88-08- 9820 19.C. Stime 397
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
J
J
2
J3
1
Figura 19.B.1. Insiemi di risonanze semplici Z1 e doppie Z2 nello spazio delle azioni.
dei domini risonanti diminuisce all’aumentare dell’ordine perturbativo, ma le serie risultanocomunque non convergenti. Tuttavia e possibile arrestare lo sviluppo ad un ordine ottimaleper cui il resto e esponenzialmente piccolo in 1/λ ed ottenere delle stime del tempo distabilita esponenzialmente grande, vedi capitolo successivo.
19.C. STIME
Diamo la dimostrazione di alcune stime che sono state usate nel paragrafi 3,4,5. Per ivettori x di R
d oltre alla norma euclidea utilizziamo la la norma |x| definita da
|x| =
d∑
k=1
|xk| ‖x‖ =
(
d∑
k=1
x2k
)1/2
(19.C.1)
che soddisfa la seguente relazione
‖x‖ ≤ |x| ≤√d ‖x‖ (19.C.2)
La disuguaglianza di sinistra e ovvia poiche |x|2 − ‖x‖2 e somma di termini positivi. Ladisuguaglianza di destra segue applicando la disuguaglianza di Schwarz ai vettori di com-ponenti (|k1|, . . . , |kd|) e (1, . . . , 1) poiche il loro prodotto scalare e |k| mentre le rispettivenorme euclidee sono ‖k‖ e
√d rispettivamente. Il significato geometrico di (19.C.2) per
vettori di R2 e illustrato nella figura 19.8.1. I punti con |x| = R costante sono su un

398 19. Teoria perturbativa c©88-08- 9820
R
R/ 2
x2
1x
Figura 19.C.1. Luogo dei punti con |x|=R e ‖x‖=R.
quadrato la cui semidiagonale e lunga R e la minima distanza euclidea dall’origine deipunti del quadrato e R/
√2.
Convergenza
Se H1 e una serie di Fourier i cui coefficienti decadono esponenzialmente |H1k| ≤ e−δ|k| eω e diofantina, mostriamo che la serie che definisce la generatrice F1 e convergente
|F1| ≤∑
k
|H1,k||k · ω| ≤ γ
∑
k
|k|ηe−|k|δ ≤ γ
(
δ
2
)−η∑
k
e−|k|δ/2
(
|k|δ2
)η
e−|k|δ/2
≤ γ
(
δ
2
)−η
ηηe−η∑
k
e−|k|δ/2 ≤ γ
(
δ
2
)−η
ηηe−η2d(
1 − e−δ/2)−d
(19.C.3)
dove abbiamo usato la relazione xηe−x ≤ ηηe−η. Se δ < 2 usando la disuguaglianza(1 − e−x)−1 ≤ ex−1 valida per 0 ≤ x ≤ 1 possiamo scrivere
|F1| ≤ γ
(
4e
δ
)d (2η
eδ
)η
(19.C.4)
e pertanto se d e fissato, e scelto η = d (ricordiamo che η > d− 1), la dipendenza da δ perδ piccolo e data da δ−2d.
Taglio in frequenza
Un risultato simile si ottiene passando dalla norma |k| alla norma ‖k‖ tramite (19.C.2)e maggiorando la somma con un integrale gaussiano. Con questa tecnica valutiamol’hamiltoniana in cui sono sono state tagliate tutte le frequenze |k| ≤ m ottenendo la

c©88-08- 9820 19.C. Stime 399
stima esponenziale e−mδ/2.
∑
|k|≥m
e−|k|δ ≤∑
‖k‖≥m
e−‖k‖δ ≤∫
‖k‖≥m
e−‖k‖δdk =
= Ωd
∫ ∞
m
e−xδxd−1dx = Ωd(δ/2)−d
∫ ∞
mδ/2
(e−yyd−1)e−ydy ≤
≤ Ωd(δ/2)−d(d− 1)d−1e−d+1
∫ ∞
mδ/2
e−ydy ≤ Ωd(δ/2)−d(d− 1)d−1e−d+1 e−mδ/2
(19.C.5)Nel secondo passaggio si e maggiorata la somma con l’integrale, sono state usate coordinatepolari per k ∈ R
d, ponendo x = ‖k‖. Si e indicato con Ωd l’area della sfera unita in Rd e
posto y = xδ/2.
Misura delle frequenze diofantine
Proviamo che questa misura e arbitrariamente vicina ad 1 purche η > d− 1. Nello spazioRd delle frequenze sia µ una misura normalizzata di tipo gaussiano definita da
µ(D) = π−d/2
∫
D
e−‖ω‖2
dω (19.C.6)
per ogni insieme D ⊂ Rd. Consideriamo il complementare R delle frequenze che soddisfano
la condizione diofantina (18.3.6) per un γ fissato, che sara espresso da
R =⋃
k∈Zd
Rk, Rk = ω ∈ Rd, |k · ω| < ψ(|k|) ≡ γ−1|k|−η (19.C.7)
La misura di R e maggiorata dalla somma delle misure di Rk
µ(R) ≤∑
k 6=0
µ(Rk) = π−d/2
∫
|k·ω|≤ψ(|k|)
e−‖ω‖2
dω (19.C.8)
Si scelgano d− 1 vettori unitari e2, . . . , ed che insieme con e1 = k/‖k‖ formano una baseortogonale e sia xk = ek ·ω un nuovo sistema di coordinate. La trasformazione e ortogonale,ha jacobiano 1 e quindi
µ(Rk) ≤ π−d/2
∫ ψ(|k|)/‖k‖
−ψ(|k|)/‖k‖
e−x21dx1
∫
Rd−1
e−x22−...−x
2d−1dx2 . . . dxd ≤
≤ 2√π
ψ(|k|)‖k‖ ≤ 2√
π
ψ(‖k‖)‖k‖
(19.C.9)
Se le frequenze anziche a Rd sono in un compatto D come la sfera unitaria, µ e dato dalla
misura di Lebesgue normalizzata e la stima di µ(Rk) resta proporzionale a ψ(‖k‖)/‖k‖);
400 19. Teoria perturbativa c©88-08- 9820
cio che cambia e la costante di proporzionalita. Per dare una stima alla misura di R sisomma µ(Rk) e si maggiora la somma con un integrale
µ(R) ≤ 2γ−1
√π
∑
k 6=0
‖k‖−η−1 ≤ 2γ−1
√π
∫
‖k‖≥1
‖k‖−η−1dk =
=2γ−1Ωd√
π
∫ ∞
1
x−1−η+d−1dx =γ−1
η − d+ 1
2Ωd√π
, (19.C.10)
Ne segue infine che la misura delle frequenze diofantine e minorata da
µ(N ) = 1 − µ(R) ≥ 1 − γ−1
η − d+ 1
2Ωd√π, η > d− 1 (19.C.11)
Poiche per ogni fissato valore di H si puo scegliere γ arbitrariamente grande ne segue cheµ(N ) e arbitrariamente vicina a 1.




![CB965Series[C][3]-SDS ITALY-Italian-35.pdf · PDF fileCB965Series[C][3]-SDS_ITALY-Italian-35.pdf CB965Series[M][3]-SDS_ITALY-Italian-35.pdf CB965Series[Y][3]-SDS_ITALY-Italian-36.pdf](https://static.fdocumenti.com/doc/165x107/5a7200a87f8b9ab6538d2fbe/cb965seriesc3-sds-italy-italian-35pdf-h22235www2hpcomhpinfoglobalcitizenshipenvironmentproductpdf.jpg)