Aspetti dell’integrale funzionale in meccanica quantisticacoriano/tesi/dellerose.pdf · Delle tre...
49
UNIVERSIT ` A DEGLI STUDI DEL SALENTO Facolt` a di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Tesi di laurea triennale Aspetti dell’integrale funzionale in meccanica quantistica Relatore: Dr. Claudio Corian`o Candidato: Luigi Delle Rose Anno accademico 2006 - 2007
Transcript of Aspetti dell’integrale funzionale in meccanica quantisticacoriano/tesi/dellerose.pdf · Delle tre...

UNIVERSITA DEGLI STUDI DEL SALENTO
Facolta di Scienze Matematiche, Fisiche e NaturaliCorso di Laurea in Fisica
Tesi di laurea triennale
Aspetti dell’integrale funzionale inmeccanica quantistica
Relatore:
Dr. Claudio Coriano
Candidato:
Luigi Delle Rose
Anno accademico 2006 - 2007
Indice
Introduzione al lavoro di tesi 1
1 Introduzione all’integrale sui cammini 3
1.1 Richiami di Meccanica Quantistica . . . . . . . . . . . . . . . . . . . 3
1.2 Calcolo dell’ampiezza di transizione . . . . . . . . . . . . . . . . . . . 5
1.3 Interpretazione e limite classico . . . . . . . . . . . . . . . . . . . . . 7
1.4 Equivalenza con l’equazione di Schrodinger . . . . . . . . . . . . . . . 9
1.5 Regola di composizione . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Strumenti e proprieta dell’integrale funzionale 13
2.1 Derivata funzionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Rotazione di Wick . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Approssimazione semiclassica . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Teoria perturbativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Alcune applicazioni in meccanica quantistica 23
3.1 Particella libera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Instantoni 33
4.1 Doppia buca di potenziale e instantoni . . . . . . . . . . . . . . . . . 33
4.2 Calcolo dell’ampiezza di transizione . . . . . . . . . . . . . . . . . . . 37
4.3 Soluzioni multi-instantoniche . . . . . . . . . . . . . . . . . . . . . . . 40
Conclusioni 42
A Ordinamento di Weyl 43
ii

Bibliografia 45
iii
Introduzione al lavoro di tesi
Delle tre formulazioni della Meccanica quantistica, date rispettivamente dalla for-
mulazione operatoriale di Heisenberg, dalla meccanica ondulatoria di Schrodinger e
dall’integrale funzionale, quest’ultima e storicamente la piu recente, essendo stata
introdotta per la prima volta da Feynman nell’articolo “Space-Time Approach to
Non-Relativistic Quantum Mechanics” del 1948.
L’idea di poter descrivere la meccanica quantistica mediante un integrale sui cam-
mini, detto anche “integrale funzionale”, fu suggerita per la prima volta da alcune
osservazioni di Dirac nel suo libro “The principles of Quantum Mechanics”. Qui
l’autore evidenzia una corrispondenza tra l’azione classica della particella, calcolata
su un certo percorso, e l’ampiezza di transizione quantistica. Il ragionamento di Di-
rac, di natura semiclassica, indusse Feynman a rielaborare la meccanica quantistica
in un modo assolutamente nuovo e, al tempo stesso, equivalente alle formulazioni
precedenti, introducendo contemporaneamente un formidabile strumento di calcolo
sul quale generazioni di fisici e di matematici si sarebbero misurati negli anni avveni-
re. L’approccio di Feynman fu chiaramente euristico e poco rigoroso, e descrivendo
il suo stato d’animo mentre lavorava sull’argomento, egli osservo che “..ci si sente
come avrebbe dovuto sentirsi Cavalieri nel calcolare il volume di una piramide prima
dell’invenzione del calcolo infinitesimale”. Fu nei decenni successivi che l’integrale
funzionale venne formulato in modo matematicamente corretto.
Oggi l’integrale sui cammini fornisce una descrizione della meccanica quantisti-
ca che si avvicina molto alla visione classica del moto di un punto materiale su
delle traiettorie ben definite nello spazio delle fasi o nello spazio-tempo. E pro-
prio questa immediatezza che fornisce un nuovo livello interpretativo della dinamica
quantistica. Mentre la meccanica quantistica di Heisenberg e di Schrodinger in-
troduce immediatamente il concetto di operatore-misura e di osservatore lasciando
poco spazio all’intuizione classica a cui siamo comunemente abituati, l’integrale sui
1

cammini non distrugge completamente il concetto di traiettoria del punto materia-
le ma lo estende. In questa estensione e racchiusa la potenza della formulazione
di Feynman che permette di affrontare problemi complessi in particolari condizioni
nelle quali le altre formulazioni sono difficili da implementare. Ad esempio, nell’a-
nalisi di processi caratterizzati da una forte interazione del sistema quantistico con
un potenziale esterno, una espansione perturbativa per il calcolo di correzioni allo
spettro di osservabili e praticamente inutile, mentre l’integrale funzionale fornisce
un metodo non perturbativo particolarmente efficace che, eventualmente, puo essere
formulato numericamente su un apposito reticolo spaziale. Perche questo avvenga e
necessario utilizzare una formulazione euclidea dell’integrale sui cammini.
In questa tesi cercheremo di passare in rassegna le proprieta piu importanti
di questo nuovo strumento teorico discutendone alcune delle sue applicazioni piu
semplici.
2
Capitolo 1
Introduzione all’integrale sui
cammini
1.1 Richiami di Meccanica Quantistica
Per introdurre il formalismo dell’integrale funzionale in meccanica quantistica par-
tiamo dalla definizione dell’operatore di evoluzione temporale elencandone alcune
proprieta.
In meccanica quantistica l’evoluzione temporale e determinata dall’equazione di
Schrodinger dipendente dal tempo
i~∂
∂t|ψ(t)〉 = H|ψ(t)〉, (1.1)
dove H e l’hamiltoniano del sistema e |ψ(t)〉 e il ket che lo descrive al tempo t.
Introducendo la funzione d’onda ψ(x,t) = 〈x|ψ(x,t)〉 in rappresentazione delle coor-
dinate la (1.1) prende la forma
i~∂
∂tψ(x,t) = − ~2
2m
∂2
∂x2ψ(x,t) + V (x,t)ψ(x,t), (1.2)
dove abbiamo supposto che l’hamiltoniano sia della forma H = p2
2m+ V (x,t).
Risolvere questa equazione significa trovare l’operatore di evoluzione temporale
U(t2,t1) che propaga lo stato del sistema dal tempo t1 al tempo t2
|ψ(t2)〉 = U(t2,t1)|ψ(t1)〉, (1.3)
3

1 – Introduzione all’integrale sui cammini
per questo motivo e detto anche propagatore.
Nel caso in cui H non dipende esplicitamente dal tempo la sua espressione e data
da
U(t2,t1) = U(t2 − t1) = e−i~ (t2−t1)H (1.4)
mentre, nel caso piu generale, U(t2,t1) puo essere determinato sfruttando la serie di
Dyson e, in forma compatta, assume l’espressione
U(t2,t1) = Te−i~∫ t2t1
dτH(τ), (1.5)
dove con T indichiamo il prodotto temporalmente ordinato di operatori. Questo e
tale da ordinare gli operatori rispetto al tempo in modo tale che gli istanti temporali
siano disposti in ordine decrescente da destra verso sinistra, per esempio abbiamo
che
T (A(t1)B(t2)) =
{A(t1)B(t2) se t1 > t2
B(t2)A(t1) se t2 > t1. (1.6)
Nella rappresentazione delle coordinate U(t2,t1) e determinato completamente se si
conoscono i suoi elementi di matrice
〈x2|U(t2,t1)|x1〉 ≡ U(t2,x2; t1,x1) (1.7)
e l’evoluzione temporale della funzione d’onda e ottenuta da
ψ(x2,t2) =
∫dx1U(t2,x2; t1,x1)ψ(x1,t1). (1.8)
Invece nello schema di Heisenberg sono gli operatori che evolvono nel tempo, men-
tre gli stati non cambiano. Usando la relazione che lega gli stati in entrambe le
rappresentazioni
|ψ(t)〉 = U(t,0)|ψ〉H (1.9)
e sfruttando l’unitarieta dell’operatore di evoluzione temporale si ottiene che, per
t2 > t1 > 0,
H〈x2,t2|x1,t1〉H = 〈x2|U(t2,0)U †(t1,0)|x1〉, (1.10)
e poiche vale la legge di composizione
U(t2,0) = U(t2,t1)U(t1,0) (1.11)
4

1 – Introduzione all’integrale sui cammini
si ricava infine
H〈x2,t2|x1,t1〉H = U(t2,x2; t1,x1). (1.12)
Cio significa che gli elementi di matrice dell’operatore di evoluzione temporale sono
le ampiezze di transizione tra gli autostati dell’operatore posizione nella rappresen-
tazione di Heisenberg.
1.2 Calcolo dell’ampiezza di transizione
Si vuole calcolare U(tf ,xf ; ti,xi) = 〈xf ,tf |xi,ti〉 con tf > ti in un modo alternativo
(per semplicita omettiamo il pedice H per indicare gli stati nella rappresentazione
di Heisenberg). Consideriamo un’hamiltoniana indipendente dal tempo e dividiamo
l’intervallo (tf ,ti) in N parti di uguale lunghezza ε =tf−tiN
, tali che tf = ti + nε,
con n = 1, . . . ,N − 1. Introduciamo un insieme completo di autostati dell’operatore
posizione per ogni tempo intermedio ottenendo
U(tf ,xf ; ti,xi) = 〈xf ,tf |xi,ti〉
= limε→0
N→∞
∫dx1 . . . dxN−1〈xf ,tf |xN−1,tN−1〉〈xN−1,tN−1|xN−2,tN−2〉 . . . 〈x1,t1|xi,ti〉.
(1.13)
Abbiamo cosı espresso l’ampiezza di transizione 〈xf ,tf |xi,ti〉 in termini di una se-
quenza di ampiezze intermedie. Per una generica di queste vale
〈xn,tn|xn−1,tn−1〉 = 〈xn|e−i~ tnHe
i~ tn−1H |xn−1〉
= 〈xn|e−i~ (tn−tn−1)H |xn−1〉 = 〈xn|e−
i~ εH |xn−1〉
=1
2π~
∫dpn exp
{i
~pn(xn − xn−1)−
i
~εH
(xn + xn−1
2, pn
)},
(1.14)
5

1 – Introduzione all’integrale sui cammini
dove nell’ultimo passaggio abbiamo utilizzato la relazione ricavata in Appendice A.
In definitiva otteniamo, usando la (1.14)
U(tf ,xf ; ti,xi) = limε→0
N→∞
∫dx1 . . . dxN−1
dp1
2π~. . .
dpN2π~×
× exp
{i
~
N∑n=1
[pn(xn − xn−1)− εH
(xn + xn−1
2, pn
)]},
(1.15)
nella quale abbiamo identificato xi ≡ x0 e xf ≡ xN . L’espressione precedente e
l’integrale di cammino di Feynman definito nello spazio delle fasi.
Analizziamo piu accuratamente il fattore di fase
limε→0
N→∞
i
~
N∑n=1
[pn(xn − xn−1)− εH
(xn + xn−1
2, pn
)], (1.16)
moltiplicando e dividendo per ε si giunge all’espressione
limε→0
N→∞
i
~ε
N∑n=1
[pnxn − xn−1
ε−H
(xn + xn−1
2, pn
)]=
i
~
∫ tf
ti
dt[px−H(x,p)]
=i
~
∫ tf
ti
dt L, (1.17)
e osserviamo che, nel limite ε → 0 il fattore di fase e proporzionale all’azione del
sistema.
Ora poniamoci nel caso piu frequente di un’hamiltoniana della forma H = p2
2m+V (x),
funzione quadratica negli impulsi. La (1.15) diventa
U(tf ,xf ; ti,xi) = limε→0
N→∞
∫dx1 . . . dxN−1
dp1
2π~. . .
dpN2π~
×
× exp
{i
~ε
N∑n=1
[pnxn − xn−1
ε− p2
n
2m− V
(xn + xn−1
2
)]}.
(1.18)
6

1 – Introduzione all’integrale sui cammini
L’integrale negli impulsi e gaussiano e puo essere calcolato con facilita ottenendo∫dpn2π~
e− i
~ ε
[p2n2m−pn
xn−xn−12
]=( m
2πi~ε
) 12eimε2~
(xn−xn−1
ε
)2
, (1.19)
e in definitiva risulta
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πı~ε
)N2
∫dx1 . . . dxN−1 ×
× exp
{i
~ε
N∑n=1
[m
2
(xn − xn−1
ε
)2
− V(xn + xn−1
2
)]}.
(1.20)
La precedente relazione puo essere scritta in forma piu compatta, definendo
Dx ≡ limN→∞
N−1∏i=1
dxi = limN→∞
N−1∏i=1
dx(ti), (1.21)
e ottenendo la rappresentazione formale
U(tf ,xf ; ti,xi) = A
∫Dx e
i~∫ tfti
dt( 12mx2−V (x)) = A
∫Dx e
i~S[x]. (1.22)
Abbiamo pertanto mostrato come sia possibile esprimere l’operatore di evoluzione
temporale in termini di un integrale che contiene una nuova misura di integrazione
e che prende il nome di integrale funzionale. Gran parte della discussione che segue
sara dedicata a stabilire il significato fisico e le ulteriori proprieta formali di questo
nuovo strumento teorico.
1.3 Interpretazione e limite classico
Cerchiamo di capire il significato della nuova misura di integrazione Dx e le sue
proprieta nello spazio funzionale dei cammini di Feynman.
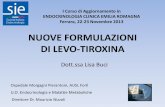
Consideriamo la (1.20): l’insieme dei punti {x0, x1, . . . ,xN−1, xN} puo essere in-
terpretato come l’insieme dei vertici di una spezzata ΓN tale che ΓN = {x(ti) =
x0, x(t1) = x1, . . . ,x(tN) = xN}. Allora possiamo affermare che l’integrale (1.20) e
calcolato su tutte le possibili spezzate ΓN .
7

1 – Introduzione all’integrale sui cammini
Quando N → ∞, ΓN diventa una curva continua, x(t), e l’integrale e calcolato su
tutte le possibili curve con estremi fissati, cioe su tutti i cammini o traiettorie che la
particella potrebbe percorrere dal punto iniziale x(ti) a quello finale a x(tf ). Ognuno
di essi contribuisce all’ampiezza di transizione con il fattore eı~S[x].
Sottoliniamo come il nostro risultato sia stato ottenuto a partire dalla formula-
Figura 1.1. Discretizzazione dell’intervallo temporale
Figura 1.2. Per N →∞ le spezzate diventano curve continue
zione operatoriale della meccanica quantistica, ma questo non e l’unico modo per
ottenere la (1.22). Infatti l’approccio di Feynman [1] fu molto diverso. Basandosi
su delle osservazioni di Dirac [2] propose dei postulati che ora enunciamo e da que-
sti derivo l’equazione di Schrodinger e tutto l’apparato della tradizionale meccanica
quantistica:
8

1 – Introduzione all’integrale sui cammini
1. la probabilita che una particella si trovi nel punto x2 all’instante t2, essen-
do nel punto x1 all’instante t1, e data dal modulo quadro di un’ampiezza di
transizione U(t2,x2; t1,x1);
2. l’ampiezza di transizione e ottenuta dalla somma dei contributi di tutti i
possibili cammini che congiungono i due punti agli istanti considerati
U(t2,x2; t1,x1) =∑
cammini
φ[x(t)]; (1.23)
3. ogni cammino contribuisce con lo stesso modulo ma con fase diversa, ottenuta
dall’azione classica calcolata sul cammino
φ[x(t)] = Aeı~S[x(t)], (1.24)
dove la costante A e scelta per normalizzare opportunamente la U .
Contrariamente a quanto si possa immaginare, non tutti i cammini contribuiscono
con lo stesso peso all’ampiezza di transizione, infatti in tutti quelli per cui xn � xn−1
il primo termine nell’esponenziale di (1.20) diventa molto grande e questo implica
che la corrispondente fase oscilla velocemente fornendo un risultato mediamente nul-
lo.
Uno dei vantaggi della formulazione di Feynman e quello di rendere molto intuitivo il
limite classico: ~→ 0. Infatti in questa situazione ogni grandezza del sistema, com-
presa l’azione, e molto grande rispetto ad ~ e in generale se si scelgono due cammini,
x1(t) e x2(t), molto vicini tra loro, benche la variazione dell’azione |S[x1]− S[x2]| siaanch’essa piccola come |x1(t)−x2(t)|, in conseguenza al limite classico, la fase oscilla
rapidamente e i contributi dei due cammini tendono a cancellarsi. L’unica eccezione
si presenta per tutti quei cammini contigui a quello che estremizza l’azione, cioe il
cammino x che soddisfaδS
δx
∣∣∣∣x=x
= 0, (1.25)
e pertanto e la traiettoria classica che si ottiene dal principio di minima azione.
E importante sottolineare che nel limite classico non e solo la traiettoria classica che
incide in misura maggiore, ma sono tutti i cammini vicini a questa.
9

1 – Introduzione all’integrale sui cammini
1.4 Equivalenza con l’equazione di Schrodinger
Per maggiore chiarezza mostreremo come la formulazione integrale sia perfettamente
coerente con l’equazione differenziale di Schrodinger dipendente dal tempo. In modo
particolare ricaveremo questa equazione dalla definizione dell’ampiezza di transizione
come integrale sui cammini cosı come fece Feynman.
Consideriamo il propagatore tra due istanti infinitesimamente vicini, ottenuto in
modo analogo alla (1.20)
U(tf = ε,xf ; ti = 0,xi) =( m
2πi~ε
)1/2
exp
{iε
~
[m
2
(xf − xi
ε
)2
− V(xf + xi
2
)]}(1.26)
e sfruttiamolo per ottenere la funzione d’onda al tempo ε nota la ψ(x,0). Avremo
la relazione
ψ(x,ε) =
∫dx′U(ε,x; 0,x′)ψ(x′,0)
=( m
2πi~ε
)1/2∫
dx′ eim2~ε (x−x
′)2− iε~ V (x+x′
2)ψ(x′,0).
(1.27)
A questo punto cambiando la variabile di integrazione in η = x′ − x otteniamo
ψ(x,ε) =( m
2πi~ε
)1/2∫
dη eim2~εη
2− iε~ V (x+ η2)ψ(x+ η,0). (1.28)
Poiche ε e molto piccolo, se η e grande la fase che compare nell’integrando oscilla
rapidamente attorno allo zero senza contribuire al risultato. Questo ci suggerisce
che il contributo principale e fornito da η piccolo e che e conveniente sviluppare in
serie di Taylor trascurando i termini di ordine superiore a η2 ed a ε, ottenendo
ψ(x+ η,0) ' ψ(x,0) + ηψ′(x,0) +η2
2ψ′′(x,0),
e−iε~ V (x+ η
2 ) = 1− iε
~V(x+
η
2
)+O(ε2) ' 1− iε
~V (x).
(1.29)
Inserendo le approssimazioni precedenti nella (1.28) ricaviamo
ψ(x,ε) '( m
2πi~ε
)1/2∫
dη exp
(im
2~εη2
)×
×[ψ(x,0) + ηψ′(x,0) +
η2
2ψ′′(x,0)− iε
~V (x)ψ(x,0)
] (1.30)
10

1 – Introduzione all’integrale sui cammini
e calcolando gli integrali, noti i risultati∫dη η eiαη
2
= 0, (1.31)∫dη η2eiαη
2
=i
2α
√iπ
α, (1.32)
si ottiene
ψ(x,ε) = ψ(x,0)− iε
~V (x)ψ(x,0) +
i~ε2m
ψ′′(x,0). (1.33)
Quindi riordinando i termini ricaviamo
ψ(x,ε)− ψ(x,0)
ε= − i
~
[− ~2
2m
∂2
∂x2+ V (x)
]ψ(x,0). (1.34)
Nel limite ε→ 0 l’ultima relazione e proprio l’equazione di Schrodinger dipendente
dal tempo. Abbiamo pertanto dimostrato, seguendo il percorso di Feynman, che la
definizione di propagatore in termini di integrale funzionale permette di ottenere la
ben nota equazione di Schrodinger, pilastro fondamentale di tutto l’apparato della
meccanica quantistica non relativistica.
1.5 Regola di composizione
Concludiamo questo capitolo descrivendo una delle caratteristiche piu importanti
dell’integrale sui cammini che prende il nome di regola di composizione. Infatti si
dimostra facilmente che il propagatore (1.22) gode della seguente proprieta
U(t2,x2; t1,x1) =
∫dxn U(t2,x2; tn,xn)U(tn,xn; t1,x1) con t2 > tn > t1. (1.35)
E sufficiente considerare nella (1.20) la variabile di integrazione xn corrispondente
al tempo t = tn: l’integrazione su tutti i punti precedenti conduce al propagatore
U(t2,x2; tn,xn), mentre l’integrale su tutti i punti successivi fornisce U(tn,xn; t1,x1).
A questo punto cio che resta nella (1.20) e solo l’integrale su xn e il risultato puo
essere scritto come nella (1.35). Osserviamo inoltre che questa proprieta e l’analoga
di quella operatoriale presentata nella (1.11).
L’interpretazione della (1.35) e immediata se si considera che l’ampiezza di transi-
zione dal punto x1 al punto xn e poi al punto x2 e semplicemente il prodotto delle
rispettive ampiezze di transizione: queste sono ottenute sommando rispettivamente
11
1 – Introduzione all’integrale sui cammini
i contributi di tutti i possibili cammini con gli estremi considerati. Integrare su xn
significa tenere conto di tutte le traiettorie che congiungono gli estremi x1 e x2, come
e necessario per ottenere l’ampiezza di transizione tra i due punti.
Figura 1.3. Rappresentazione schematica della regola di composizione
12

Capitolo 2
Strumenti e proprieta
dell’integrale funzionale
Dopo aver introdotto l’integrale funzionale sia mediante le relazioni di completezza
che assiomaticamente utilizzando le ipotesi di Feynman, discutiamo in questo ca-
pitolo alcuni degli strumenti formali e delle proprieta che verranno estensivamente
utilizzati in seguito.
2.1 Derivata funzionale
Cominciamo la nostra presentazione discutendo la derivata funzionale che generaliz-
za al caso di funzionali la derivata ordianria. Questa definizione e necessaria poiche
abbiamo bisogno di strumenti di calcolo che operino su spazi di funzioni.
Un funzionale e un’applicazione definita su uno spazio di funzioni a valori nel campo
reale o complesso e in generale puo essere scritto nella forma
F [f ] =
∫dxG(f(x)). (2.1)
Un esempio di funzionale e l’azione S[x] del sistema.
E possibile definire anche una derivata funzionale
δF [f ]
δf(y)=
∫dxδG(f(x))
δf(y), (2.2)
conδG(f(x))
δf(y)= lim
ε→0
G(f(x) + εδ(x− y))−G(f(x))
ε, (2.3)
13

2 – Strumenti e proprieta dell’integrale funzionale
che gode delle stesse proprieta di linearita e composizione di una derivata ordinaria.
Inoltre si puo scrivere lo sviluppo in serie di Taylor di F [f ]
F [f ] = F [0] +
∫dx1
δF [f ]
δf(x1)
∣∣∣∣f=0
f(x1)
+1
2!
∫dx1dx2f(x1)
δ2F [f ]
δf(x1)δf(x2)
∣∣∣∣f=0
f(x2) + . . . . (2.4)
Di seguito riportiamo alcuni esempi che si riveleranno utili nei successivi paragrafi.
Calcoliamo la derivata funzionale dell’azione utilizzando la definizione (2.2)
S[x] =
∫ tf
ti
dt′ L(x,x) con L(x,x) = T (x)− V (x) =1
2mx2 − V (x) (2.5)
e sfruttando il semplice risultato
δf(x)
δf(y)= δ(x− y). (2.6)
Innanzitutto determiniamo la derivata funzionale dell’energia cinetica T
T (x(t′))
δx(t)= lim
ε→0
T(ddt′
(x(t′) + εδ(t′ − t)))− T (x(t′))
ε
= limε→0
T(x(t′) + ε d
dt′δ(t′ − t)
)− T (x(t′))
ε
=∂T (x(t′))
∂x(t′)
d
dt′δ(t′ − t) = mx(t′)
d
dt′δ(t′ − t), (2.7)
e quella del potenziale V
δV (x(t′))
δx(t)= lim
ε→0
V (x(t′) + εδ(t′ − t))− V (x(t′))
ε
=∂V (x(t′))
∂x(t′)δ(t′ − t) = V ′(x(t′))δ(t′ − t), (2.8)
per ottenere il risultato finale
δL
δx(t)= mx(t′)
d
dt′δ(t′ − t)− V ′(x(t′))δ(t′ − t), (2.9)
δS[x]
δx(t)=
∫ tf
ti
dt′δL(x(t′),x(t′))
δx(t)= −mx(t)− V ′(x(t)). (2.10)
14

2 – Strumenti e proprieta dell’integrale funzionale
2.2 Rotazione di Wick
Uno strumento molto utile per risolvere problemi connessi con l’integrale funzionale
e la rotazione di Wick o la rotazione euclidea. Consiste nella continuazione analitica
dell’integrale funzionale al tempo immaginario attraverso la sostituzione
t → t′ = −iτ con τ reale. (2.11)
Il procedimento puo essere schematizzato in Fig. 2.1. Un primo vantaggio di que-
Figura 2.1. Rotazione di Wick
sta tecnica consiste nella regolarizzazzione di integrali mal definiti, per via delle
oscillazioni della fase, del tipo ∫Dx e
i~S[x]. (2.12)
Usando la (2.11) si ottiene
S[x] =
∫ tf
ti
dt
(1
2m
(dx
dt
)2
− V (x)
)→ i
∫ τf
τi
dτ
(1
2m
(dx
dτ
)2
+ V (x)
)= iSE[x],
(2.13)
dove abbiamo introdotto l’azione euclidea, reale e definita positiva,
SE[x] =
∫ τf
τi
dτ
(1
2m
(dx
dτ
)2
+ V (x)
), (2.14)
e quindi vale la seguente sostituzione
I = A
∫Dx e
i~S[x] → IE = A
∫Dx e−
1~SE [x] (2.15)
15

2 – Strumenti e proprieta dell’integrale funzionale
in cui il secondo membro e ben definito.
Notiamo che nel caso di funzionali dipendenti dallo spazio-tempo di Minkoski, la
rotazione di Wick ci permette di passare dallo stesso spazio di Minkoski a quello
euclideo. Infatti consideriamo un evento spaziotemporale xµ = (t,−→x ) con la norma
xµxµ = t2 − −→x 2. Se effettuiamo la rotazione di Wick otteniamo (t,−→x ) → (−iτ,−→x )
e t2 −−→x 2 → −(t2 +−→x 2) che e, a parte il segno negativo, la distanza in uno spazio
euclideo ordinario, da qui il nome di rotazione euclidea.
Infine osserviamo che, in seguito alla (2.14), le equazioni di Eulero-Lagrange nello
spazio euclideo descrivono il moto di una particella reale soggetta al potenziale
−V (x).
2.3 Approssimazione semiclassica
Passiamo ora a discutere uno dei metodi piu importanti per il calcolo approssimato
dell’integrale funzionale. Questo metodo e detto approssimazione semiclassica ed
e molto utile in un vasto numero di applicazioni e problemi fisici. Innanzitutto
consideriamo un caso semplificato dell’argomento che verra poi trattato in questo
paragrafo. Calcoliamo l’integrale
I =
∫ +∞
−∞dx e−
f(x)a , (2.16)
dove a e un parametro molto piccolo, mentre f e una funzione con un solo minimo
nel punto x0. Possiamo sviluppare f(x) intorno al punto x0 ottenendo
f(x) = f(x0) +f ′′(x0)
2(x− x0)
2 +O((x− x0)
3), (2.17)
e sostituendo nell’integrale si ricava
I =
∫ +∞
−∞dx e−
f(x0)a− f′′(x0)2a
(x−x0)2−O((x−x0)3)
a . (2.18)
Con la sostituzione y = x−x0√a
l’integrale diventa
I = e−f(x0)a√a
∫ +∞
−∞dy e−
f ′′(x0)2
y2−O(√ay3), (2.19)
16

2 – Strumenti e proprieta dell’integrale funzionale
e trascurando l’ultimo termine nell’argomento dell’esponenziale si giunge al risultato
I =
√2πa
f ′′(x0)e−
f(x0)a . (2.20)
A questo punto osserviamo che se la funzione ha piu minimi e necessario conside-
rare tutti i contributi di questi punti stazionari, percio in generale vale la relazione
seguente
I =∑
ximinimi
√2πa
f ′′(xi)e−
f(xi)
a . (2.21)
Questo risultato puo essere generalizzato anche all’integrale funzionale e risulta di
grande aiuto nei casi in cui non si riesce a calcolare esattamente la (1.20). Quando
~ e piccolo rispetto a S e possibile utilizzare il metodo precedentemente esposto ed
espandere l’azione attorno alla traiettoria classica, da qui il nome di approssimazione
semiclassica.
Il primo problema da affrontare e la regolarizzazione dell’integrale (poiche e oscillan-
te) attraverso la rotazione di Wick (2.11). Successivamente consideriamo la traiet-
toria x che minimizza l’azione SE, ossia la traiettoria classica nello spazio euclideo,
imponendo la condizioneδSEδx(t)
∣∣∣∣x=x
= 0. (2.22)
Procedendo come prima, espandiamo l’azione intorno alla traiettoria considerata
x(t) = x(t) + η(t), (2.23)
dove η(t) rappresenta le fluttuazioni intorno a x, e in questo modo otteniamo
SE[x] = SE[x+ η] = SE[x] +1
2
∫∫dτ1dτ2η(τ1)
δ2SE[x]
δx(τ1)δx(τ2)η(τ2) +O(η3). (2.24)
A questo punto inseriamo la precedente relazione nell’integrale che compare a destra
della (2.15) ed effettuiamo la sostituzione (2.23) si giunge all’espressione
IE = A
∫Dη exp
(−SE[x]
~− 1
2~
∫∫dτ1dτ2 η(τ1)
δ2SE[x]
δx(τ1)δx(τ2)η(τ2)−
O(η3)
~
).
(2.25)
Da questa, trascurando l’ultimo termine nell’argomento dell’esponenziale, otteniamo
IE ' Ae−SE [x]
~
∫Dη exp
(− 1
2~
∫∫dτ1dτ2 η(τ1)
δ2SE[x]
δx(τ1)δx(τ2)η(τ2)
). (2.26)
17

2 – Strumenti e proprieta dell’integrale funzionale
Per calcolare l’integrale precedente possiamo utilizzare una base opportuna di auto-
funzioni ortonormali in cui sviluppare le fluttuazioni η(τ). Poiche vale l’uguaglianza
δ2SE[x]
δx(τ1)δx(τ2)=
(−m d2
dτ 21
+ V ′′(x)
)δ(τ1 − τ2)
≡ A(τ1)δ(τ1 − τ2), (2.27)
conviene scegliere le autofunzioni φn(τ1), appartenenti agli autovalori λn, dell’ope-
ratore A(τ1) con le condizioni al contorno φn(τi) = φn(τf ) = 0. In questo modo si
ottiene
η(τ) =∑n
cnφn(τ). (2.28)
Inoltre osserviamo che integrare su tutte le possibili fluttuazioni significa integrare
su tutti i possibili valori di cn e percio possiamo riscrivere la (2.26) nel seguente
modo
IE 'Ae−SE [x]
~
∫ ∏n
dcn exp
(− 1
2~
∫∫dτ1dτ2
∑n
cnφn(τ1)A(τ1)δ(τ1 − τ2)cnφn(τ2)
)
=Ae−1~SE [x]
∫ ∏n
dcn exp
(− 1
2~∑n
c2n
∫dτ1φn(τ1)A(τ1)φn(τ1)
)
=Ae−1~SE [x]
∫ ∏n
dcn exp
(− 1
2~∑n
c2nλn
∫dτ1φ
2n(τ1)
)
=Ae−1~SE [x]
∫ ∏n
dcn exp
(− 1
2~∑n
λnc2n
)(2.29)
=Ae−1~SE [x]
√2π~∏n λn
≡ A′e−1~SE [x]√
det(−m d2
dτ2 + V ′′(x)) . (2.30)
Infine, passando alla variabile t ordinaria utilizzando la sostituzione di Wick inversa
ricaviamo
〈xf ,tf |xi,ti〉 'A√
det(m d2
dt2+ V ′′(xcl)
)e i~S[xcl]. (2.31)
Il metodo fallisce se un autovalore dell’operatore e nullo poiche in tal caso l’intero
determinante nella (2.31) risulta uguale a zero. In questi casi il problema deve essere
affrontato con piu attenzione, presenteremo una situazione in cui questo accade nel
capitolo 4. Inoltre notiamo che se ci sono piu traiettorie che minimizzano l’azione
18

2 – Strumenti e proprieta dell’integrale funzionale
e necessario considerare tutti i possibili contributi e la (2.31) si generalizza con la
seguente
〈xf ,tf |xi,ti〉 ' A∑a
ei~S[xa]√
det(m d2
dt2+ V ′′(xa)
) . (2.32)
2.4 Teoria perturbativa
Sappiamo bene che in meccanica quantistica sono pochi i problemi che si riescono a
risolvere esattamente e molto spesso si ricorre, quando e possibile, alla teoria pertur-
bativa, accontentandosi di trovare una forma approssimata della soluzione. Questo
approccio si puo seguire anche con il formalismo dell’integrale funzionale e si co-
struisce una teoria perturbativa che si presta ad un’efficace interpretazione fisica.
A tal fine consideriamo una particella descritta inizialmente da una lagrangiana L0
(indichiamo con S0 l’azione relativa) per la quale si sa calcolare esattamente il pro-
pagatore. Supponiamo che al tempo ti venga accesa una perturbazione descritta dal
potenziale V (x,t), con la nuova lagrangiana data da L = L0−V . Siamo interessati al
calcolo dell’ampiezza di transizione delle particella dal punto (ti,xi) al punto (tf ,xf )
U(tf ,xf ; ti,xi) = N
∫Dx exp
{i
~
∫ tf
ti
dt(L0 − V )
}. (2.33)
Se l’integrale di V (x,t) che compare nel secondo membro della (2.33) sul generico
cammino x(t) e piccolo rispetto a ~, possiamo sviluppare in serie l’esponenziale
exp
{− i
~
∫ tf
ti
dt V (x(t),t)
}= 1− i
~
∫ tf
ti
dt V (x(t),t) +1
2!
(−i~
)2 [∫ tf
ti
dt V (x(t),t)
]2
+ . . .
=+∞∑n=0
1
n!
(−i~
)n [∫ tf
ti
dt V (x(t),t)
]n.
(2.34)
Introducendo l’espansione precedente nella (2.33) si ottiene
U(tf ,xf ; ti,xi) =+∞∑n=0
Un(tf ,xf ; ti,xi) (2.35)
19

2 – Strumenti e proprieta dell’integrale funzionale
con
U0(tf ,xf ; ti,xi) =
∫Dx exp
{i
~
∫ tf
ti
dt L0
}, (2.36)
U1(tf ,xf ; ti,xi) =− i~
∫Dx exp
{i
~
∫ tf
ti
dt L0
}∫ tf
ti
dt1 V (x(t1),t1), (2.37)
U2(tf ,xf ; ti,xi) =1
2!
(−i~
)2 ∫Dx exp
{i
~
∫ tf
ti
dt L0
}[∫ tf
ti
dt′ V (x(t′),t′)
]2
.
(2.38)
Per semplicita abbiamo omesso il fattore di normalizzazione N . Il propagatore
all’ordine zero e semplicemente quello che si ottiene in assenza della perturbazione,
mentre per studiare la correzione al primo ordine e opportuno invertire i due simboli
di integrazione
U1(tf ,xf ; ti,xi) =
∫ tf
ti
dt1
∫Dx
(−i~
)V (x(t1),t1) exp
{i
~
∫ tf
ti
dt L0
}. (2.39)
Osserviamo che per ogni cammino il potenziale dipende solo dall’istante t1 e dalla
posizione x(t1) che occupa la particella allo stesso istante. Prima e dopo t1 la fun-
zione d’onda della particella evolve come prescritto da U0. Questo ci suggerisce di
interpretare − i~V (x(t),t) come l’ampiezza di probabilita, per unita di tempo e di
volume, che la particella interagisca con il potenziale. Quindi, per le regole di com-
posizione, l’ampiezza della probabilita che la particella vada da (ti,xi) a (t1,x(t1)),
che qui venga diffusa dal potenziale, e poi arrivi in (tf ,xf ) e data da
U0(tf ,xf ; t1,x1)
(− i
~
)V (x(t1),t1)U0(t1,x1; ti,xi). (2.40)
Poiche e necessario sommare su tutti i possibili cammini la (2.40) deve essere inte-
grata in x1 = x(t1) e in t1, e quindi, per la (1.35), si ottiene la (2.37).
La correzione al secondo ordine si costruisce allo stesso modo: la particella evolve
da (ti,xi) a (t1,x(t1)), subisce un’interazione con il potenziale, evolve da (t1,x(t1)) a
(t2,x(t2)), con ti < t1 < t2 < tf , interagisce nuovamente, ed infine arriva in (tf ,xf ).
L’ampiezza di transizione di questo evento e
U0(tf ,xf ; t2,x2)
(− i
~
)V (x(t2),t2)U0(t2,x2; t1,x1)
(− i
~
)V (x(t1),t1)U0(t1,x1; ti,xi).
(2.41)
20
2 – Strumenti e proprieta dell’integrale funzionale
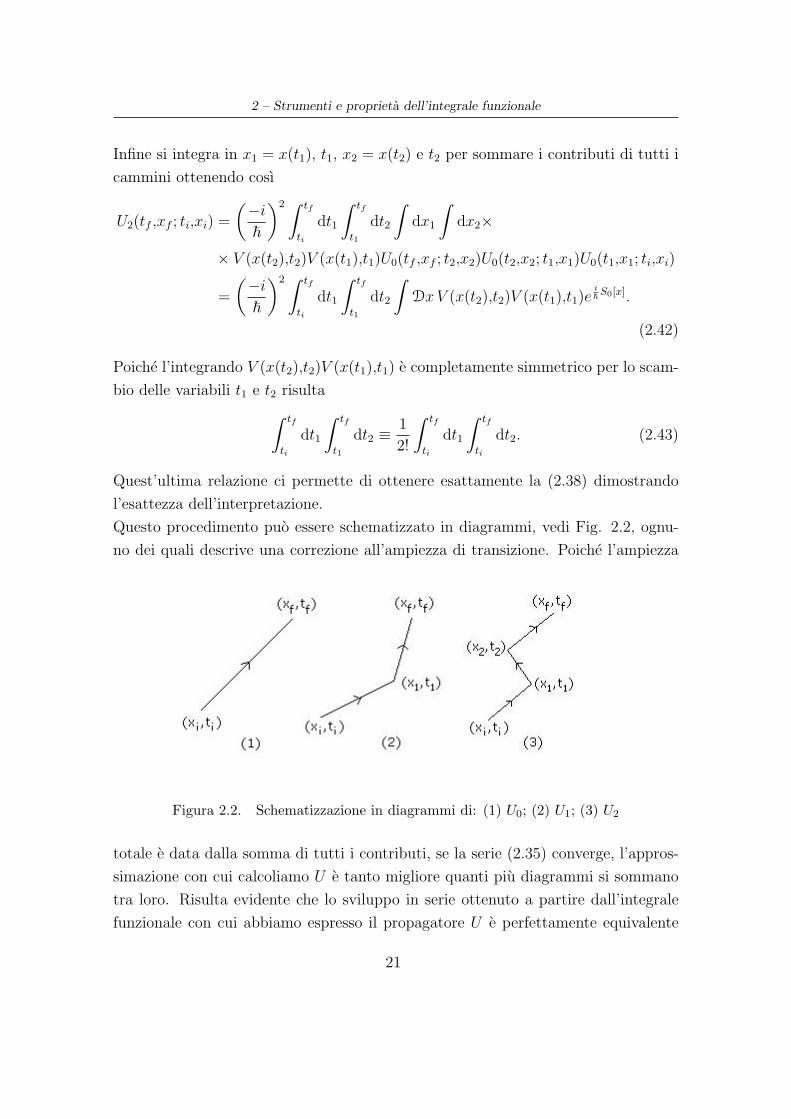
Infine si integra in x1 = x(t1), t1, x2 = x(t2) e t2 per sommare i contributi di tutti i
cammini ottenendo cosı
U2(tf ,xf ; ti,xi) =
(−i~
)2 ∫ tf
ti
dt1
∫ tf
t1
dt2
∫dx1
∫dx2×
× V (x(t2),t2)V (x(t1),t1)U0(tf ,xf ; t2,x2)U0(t2,x2; t1,x1)U0(t1,x1; ti,xi)
=
(−i~
)2 ∫ tf
ti
dt1
∫ tf
t1
dt2
∫DxV (x(t2),t2)V (x(t1),t1)e
i~S0[x].
(2.42)
Poiche l’integrando V (x(t2),t2)V (x(t1),t1) e completamente simmetrico per lo scam-
bio delle variabili t1 e t2 risulta∫ tf
ti
dt1
∫ tf
t1
dt2 ≡1
2!
∫ tf
ti
dt1
∫ tf
ti
dt2. (2.43)
Quest’ultima relazione ci permette di ottenere esattamente la (2.38) dimostrando
l’esattezza dell’interpretazione.
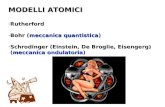
Questo procedimento puo essere schematizzato in diagrammi, vedi Fig. 2.2, ognu-
no dei quali descrive una correzione all’ampiezza di transizione. Poiche l’ampiezza
Figura 2.2. Schematizzazione in diagrammi di: (1) U0; (2) U1; (3) U2
totale e data dalla somma di tutti i contributi, se la serie (2.35) converge, l’appros-
simazione con cui calcoliamo U e tanto migliore quanti piu diagrammi si sommano
tra loro. Risulta evidente che lo sviluppo in serie ottenuto a partire dall’integrale
funzionale con cui abbiamo espresso il propagatore U e perfettamente equivalente
21

2 – Strumenti e proprieta dell’integrale funzionale
alla serie di Dyson per l’operatore di evoluzione temporale. Osserviamo che in que-
st’ultima compaiono esplicitamente prodotti temporalmente ordinati di operatori
mentre la formulazione di Feynman fornisce automaticamente l’ordinamento tem-
porale. Possiamo evidenziare questa proprieta nel semplice caso della funzione di
correlazione a due punti tra due autostati dell’operatore posizione.
A tal fine Consideriamo
〈xf ,tf |X(t2)X(t1)|xi,ti〉 con ti < t1 < t2 < tf (2.44)
e sfruttiamo la relazione di completezza per gli autostati dell’operatore posizione
agli istanti t1 e t2 nella rappresentazione di Heisenberg ottenendo
〈xf ,tf |X(t2)X(t1)|xi,ti〉
= 〈xf ,tf |X(t2)
∫dx2|x2,t2〉〈x2,t2|
∫dx1|x1,t1〉〈x1,t1|X(t1)|xi,ti〉
=
∫dx2dx1x(t2)x(t1)〈xf ,tf |x2,t2〉〈x2,t2|x1,t1〉〈x1,t1|xi,ti〉.
(2.45)
Poiche ogni prodotto scalare che compare nella (2.45) puo essere scritto come inte-
grale sui percorsi, si ottiene
〈xf ,tf |X(t2)X(t1)|xi,ti〉 = N
∫Dx x(t2)x(t1) exp
{i
~
∫ tf
ti
dt L
}. (2.46)
Osserviamo che x(t1) e x(t2) sono quantita reali e commutano qualunque siano t1 e
t2 mentre il primo membro della (2.46) e vincolato dalla relazione t1 < t2. In modo
analogo si dimostra facilmente che si ottiene lo stesso risultato se si considera la
funzione di correlazione
〈xf ,tf |X(t1)X(t2)|xi,ti〉 con ti < t2 < t1 < tf , (2.47)
dimostrando che vale la seguente uguaglianza
〈xf ,tf |T (X(t2)X(t1))|xi,ti〉 = N
∫Dxx(t1)x(t2) exp
{i
~
∫ tf
ti
dt L
}. (2.48)
Il risultato appena ottenuto si puo estendere a qualunque insieme di operatori e a
qualunque stato: in ogni caso l’integrale sui cammini presenta una misura tempo-
ralmente ordinata.
Cio conferma ancora una volta come sia possibile formulare una teoria quantistica
alternativa e altrettanto valida, fondata sull’integrale di Feynman, senza far ricorso
a vettori e operatori su spazi di Hilbert.
22
Capitolo 3
Alcune applicazioni in meccanica
quantistica
In questo capitolo passiamo a discutere delle semplici applicazioni della meccani-
ca quantistica utilizzando il formalismo funzionale esposto nei capitoli precedenti.
Iniziamo dal caso della particella libera per poi considerare il caso dell’oscillatore
armonico con sorgente.
3.1 Particella libera
Calcoliamo il propagatore per una particella libera.
Poiche V (x) = 0 la (1.20) assume l’espressione semplificata
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)N2
∫dx1 . . . dxN−1 exp
(im
2~ε
N∑n=1
(xn − xn−1)2
).
(3.1)
In questa espressione se si cambiano le variabili di integrazione mediante
yn =( m
2~ε
)1/2
xn, (3.2)
23

3 – Alcune applicazioni in meccanica quantistica
la (3.1) si semplifica ulteriormente, diventando
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)N2
(2~εm
)N−12
×
×∫
dy1 . . . dyN−1 exp
(iN∑n=1
(yn − yn−1)2
).
(3.3)
Inoltre e facile verificare che valgono i seguenti risultati∫dy1 exp
{i[(y1 − y0)
2 + (y2 − y1)2]}
= ei2(y2−y0)2
(iπ
2
)1/2
, (3.4)
∫dy1dy2 exp
{i[(y1 − y0)
2 + (y2 − y1)2 + (y3 − y2)
2]}
= ei3(y3−y0)2
((iπ)2
3
)1/2
,
(3.5)
. . .∫dy1 . . . dyN−1 exp
(iN∑n=1
(yn − yn−1)2
)= e
iN
(yN−y0)2(
(iπ)N−1
N
)1/2
, (3.6)
ed utilizzando l’ultima di queste relazioni si ricava l’espressione finale per il propa-
gatore
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)N2
(2~εm
)N−12(
(iπ)N−1
N
)1/2
eiN
(yN−y0)2
= limε→0
N→∞
( m
2πi~Nε
)1/2
exp
{im
2~Nε(xf − xi)2
}
=
[m
2πi~(tf − ti)
]1/2
exp
{i
~1
2m
(xf − xi)2
tf − ti
}. (3.7)
Per finire notiamo come il fattore di fase contenga l’azione del sistema calcolata sulla
traiettoria classica x(t) = v = cost. Infatti si ottiene facilmente
U(tf ,xf ; ti,xi) =
[m
2πi~(tf − ti)
]1/2
ei~S[xcl]. (3.8)
Pertanto abbiamo visto come ricavare il propagatore di una particella libera sfrut-
tando la definizione dell’integrale sui cammini.
24

3 – Alcune applicazioni in meccanica quantistica
3.2 Oscillatore armonico
Consideriamo adesso l’oscillatore armonico unidimensionale in un campo esterno J
descritto dalla lagrangiana
L =1
2mx2 − 1
2mω2x2 + Jx (3.9)
la cui equazione di Eulero-Lagrange, descrivente la traiettoria classica, e data da
mxcl +mω2xcl − J(t) = 0. (3.10)
Per calcolare U(tf ,xf ; ti,xi) e conveniente espandere l’azione attorno alla traiettoria
classica effettuando la sostituzione
x(t) = xcl(t) + η(t). (3.11)
Il procedimento e analogo a quello usato per l’approssimazione semiclassica, ma in
questo caso, poiche l’azione e quadratica nella veriabile x(t), il risultato e esatto. Ora
faremo vedere un altro esempio dell’integrale funzionale a partire dalla definizione
(1.20).
Consideriamo lo sviluppo in serie dell’azione utilizzando l’espansione funzionale
S[x] = S[xcl] +1
2
∫dt1dt2η(t1)
δ2S[xcl]
δxcl(t1)δxcl(t2)η(t2). (3.12)
Per la lagrangiana (3.9), utilizzando le regole della derivata funzionale, ricaviamo la
relazione
S[x] = S[xcl] +1
2
∫ tf
ti
dt(mη2 −mω2η2
), (3.13)
che fornisce, in questo caso, l’ampiezza di transizione
U(tf ,xf ; ti,xi) = Aei~S[xcl]
∫Dη exp
(i
2~
∫ tf
ti
dt(mη2 −mω2η2)
). (3.14)
Calcoliamo questo integrale discretizzando l’intervallo temporale come prescritto
dalla (1.20)
tn = ti + nε con n = 0,1, . . . ,N (3.15)
e definiamo i valori delle fluttuazioni η(t) in questi punti
η(tn) = ηn, (3.16)
25

3 – Alcune applicazioni in meccanica quantistica
con le condizioni al contorno
η0 = ηN = 0. (3.17)
Si ottiene
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)N2ei~S[xcl] ×
×∫
dη1 . . . ηN−1 exp
{iε
2~
N∑n=1
[m
(ηn − ηn−1
ε
)2
−mω2
(ηn + ηn−1
2
)2]}
.
(3.18)
Con il cambiamento di variabili
ηn →( m
2~ε
)1/2
ηn (3.19)
la (3.18) diventa
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)N2
(2~εm
)N−12
ei~S[xcl] ×
×∫
dη1 . . . ηN−1 exp
{iN∑n=1
[(ηn − ηn−1)
2 − ε2ω2
4(ηn + ηn−1)
2
]}.
(3.20)
A questo punto scriviamo l’argomento dell’integrale in forma matriciale, ossia defi-
niamo η vettore colonna con N − 1 componenti
η =
η1
η2
...
ηN−1
, (3.21)
e B matrice quadrata di dimensione (N − 1)× (N − 1)
B =
2 −1 0 0 . . .
−1 2 −1 0 . . .
0 −1 2 −1 . . ....
......
.... . .
− ε2ω2
4
2 1 0 0 . . .
1 2 1 0 . . .
0 1 2 1 . . ....
......
.... . .
(3.22)
26

3 – Alcune applicazioni in meccanica quantistica
in modo che l’integrale che compare nella (3.20) possa scriversi come∫dη eiη
TBη con dη =N−1∏n=1
dηn. (3.23)
Osserviamo che la matrice B e simmetrica ed ha elementi reali, quindi e diagonaliz-
zabile tramite una matrice unitaria P; indicheremo con BD la matrice diagonale e
con bn i suoi autovalori. Poniamo
B =
x y 0 0 . . .
y x y 0 . . .
0 y x y . . ....
......
.... . .
(3.24)
con
x = 2
(1− ε2ω2
4
)e y = −
(1 +
ε2ω2
4
), (3.25)
e
BD = P−1BP. (3.26)
Definiamo η = Pξ ed elaboriamo la (3.23) con tale sostituzione ricavando∫dξ exp
(iξTBDξ
)=
∫dξ1 . . . dξN−1 exp
(iN−1∑n=1
bnξ2n
)=
=N−1∏n=1
(iπ
bn
)1/2
= (iπ)N−1
2 (det B)−1/2, (3.27)
nella quale det B 6= 0, cioe nessun autovalore deve essere nullo.
Sostituiamo il risultato appena ottenuto nella (3.20) per ottenere l’espressione
U(tf ,xf ; ti,xi) = limε→0
N→∞
( m
2πi~ε
)1/2
(det B)−1/2ei~S[xcl], (3.28)
nella quale ci resta solo da calcolare det B e quindi effettuare l’operazione di limite.
Un’analisi piu approfondita della struttura di B permette di ricavare la relazione di
ricorrenza
In+1 = xIn − y2In−1 con n = 0,1,2, . . . I0 = 1 e I−1 = 0 (3.29)
27

3 – Alcune applicazioni in meccanica quantistica
dove In e il determinante di una matrice quadrata del tipo B con n righe. La stessa
equazione puo essere riscritta in forma matriciale(In+1
In
)=
(x −y2
1 0
)(In
In−1
). (3.30)
Partendo dal vettore
(I1
I0
)e applicando la relazione precedente N − 2 volte,
otteniamo l’uguaglianza
(IN−1
IN−2
)=
N−2(x −y2
1 0
)︸ ︷︷ ︸
A
(I1
I0
)= AN−2
(x
1
)(3.31)
che rappresenta un sistema di due equazioni delle quali vogliamo ricavare IN−1 che
e il determinante che compare nella (3.28).
Si verifica banalmente che la matrice A e diagonalizzabile e che gli autovalori sono
λ± =x±√x2−4y2
2e quindi, se indichiamo con S la matrice che diagonalizza A, si
ottiene
A = SADS−1 ⇒ AN−2 = SADN−2S−1 (3.32)
ed infine (IN−1
IN−2
)= S
(λN−2
+ 0
0 λN−2−
)S−1
(x
1
). (3.33)
A questo punto e necessario esplicitare S (formata dagli autovettori di A disposti
in colonna) e la sua inversa nella forma seguente
S =
(λ+ λ−
1 1
)S−1 =
1
λ+ − λ−
(1 −λ−−1 λ+
), (3.34)
e dopo aver svolto il prodotto matriciale si giunge al risultato
IN−1 =λN+ − λN−λ+ − λ−
. (3.35)
Possiamo esplicitare il secondo membro della precedente uguaglianza tenendo conto
della (3.25) e delle seguenti relazioni
λ+ − λ− = 2iεω, (3.36)
28

3 – Alcune applicazioni in meccanica quantistica
λN+ =
(x
2+
√x2 − 4y2
2
)N
=
(1− ε2ω2
4+ iεω
)N' (1 + iεω)N , (3.37)
λN− ' (1− iεω)N , (3.38)
dove abbiamo trascurato i termini in ε2 poiche dovremo considerare il limite per
ε→ 0.
Utilizzando queste relazioni ed effettuando il limite nella (3.28) otteniamo
limε→0
N→∞
ε det B = limε→0
N→∞
εIN−1 = limε→0
N→∞
(1 + iεω)N − (1− iεω)N
2iω. (3.39)
A questo punto moltiplicando e dividendo per N all’interno delle parentesi, e ricor-
dando che T = tf − ti = εN ricaviamo
limε→0
N→∞
(1 + iωTN
)N − (1− iωTN
)N
2iω=
1
ω
eiωT − e−iωT
2i=
sin(ωT )
ω, (3.40)
e dalla (3.28) si ottiene l’espressione
U(tf ,xf ; ti,xi) =
(mω
2πi~ sin(ωT )
)1/2
ei~S[xcl]. (3.41)
Notiamo come U sia costituito dal prodotto di due fattori: il primo, quello in paren-
tesi tonde, dipende solo dagli istanti temporali iniziale e finale, mentre il secondo,
caratterizzato dall’azione calcolata sulla traiettoria classica, e funzione dei punti
(tf ,xf ), (ti,xi) e del campo esterno J . Si puo dimostrare che questa proprieta e
valida in generale per ogni sistema la cui lagrangiana e della forma
L = a(t)x2 + b(t)xx+ c(t)x2 + d(t)x+ e(t)x+ f(t). (3.42)
L’ultimo passo da compiere nella (3.41) consiste nella determinazione dell’azione
S calcolata sulla traiettoria classica e per questo motivo dobbiamo risolvere l’eq.
(3.10), equivalente alla seguente(d2
dt2+ ω2
)xcl(t) =
J(t)
m. (3.43)
29

3 – Alcune applicazioni in meccanica quantistica
La soluzione di questa equazione si scrive come somma di due funzioni
xcl(t) = xo(t) + xp(t), (3.44)
delle quali xo e la soluzione generale dell’equazione omogenea associata, mentre xp
e una soluzione particolare. La prima e banale: xo(t) = Aeiωt + Be−iωt, con A e
B costanti, la seconda, invece, si puo determinare con il metodo di Green, cioe si
introduce la funzione G(t− t′) tale da soddisfare l’equazione(d2
dt2+ ω2
)G(t− t′) = −δ(t− t′). (3.45)
In questo modo la soluzione cercata e semplicemente data da
xp(t) = −∫ tf
ti
dt′G(t− t′)J(t′)
m. (3.46)
Le costanti A e B si ricavano imponendo le condizioni al contorno
xcl(ti) = xi xcl(tf ) = xf , (3.47)
mentre per determinare la funzione di Green si introduce la trasformata di Fourier
G(k) tale che
G(t− t′) =1√2π
∫dk e−ik(t−t
′)G(k), (3.48)
e ricordando che la delta di Dirac gode della proprieta
δ(t− t′) =1
2π
∫dk e−ik(t−t
′), (3.49)
si ottiene l’espressione di G(k)
G(k) =1√2π
1
k2 − ω2. (3.50)
Quindi la funzione di Green si determina risolvendo l’integrale
G(t− t′) =1
2π
∫dk
e−ik(t−t′)
k2 − ω2. (3.51)
L’argomento dell’integrando ha due poli per k = ±ω e per questo motivo dobbiamo
scegliere un cammino opportuno lungo cui integrare evitando cosı le divergenze. In
30

3 – Alcune applicazioni in meccanica quantistica
meccanica quantistica si considera la funzione di Green ritardata mentre in mecca-
nica quantistica relativistica si utilizza la funzione di Green di Feynman GF . Le due
funzioni hanno significato fisico molto diverso e sono ottenute scegliendo percorsi
differenti attorno ai poli nel piano complesso di k. La GF si determina sul percorso
evidenziato in Fig. 3.1 che e perfettamente equivalente a spostare i poli come in in
Fig. 3.2
k = −ω → k = −ω + iδ, (3.52)
k = +ω → k = +ω − iδ. (3.53)
Quindi si regolarizza la funzione di Green nel seguente modo
Figura 3.1. Percorso di integrazione
Figura 3.2. Regolarizzazione dell’integrale
31

3 – Alcune applicazioni in meccanica quantistica
GF (k) = limε→0+
1√2π
1
k2 − ω2 + iε= lim
δ→0+
1√2π
1
k + ω − iδ1
k − ω + iδ(3.54)
con
δ =ε
2ω(3.55)
e si calcola la (3.48) sfruttando il lemma di Jordan e il teorema dei Residui. Per
t− t′ < 0 chiudiamo il percorso con una semicirconferenza all’infinito nel semipiano
superiore, mentre per t − t′ > 0 si chiude il cammino nel semipiano opposto e si
ottiene
G−(t− t′) =1
2iωeiω(t−t′) per t− t′ < 0 (3.56)
G+(t− t′) =1
2iωe−iω(t−t′) per t− t′ > 0, (3.57)
GF (t− t′) = θ(t− t′)G+(t− t′) + θ(t′ − t)G−(t− t′), (3.58)
dove θ(t) e la funzione di Heaviside
θ(t) =
{0 per t < 0
1 per t > 0. (3.59)
Risulta che la soluzione particolare (3.46) assume una forma molto semplice se scritta
in funzione del campo esterno
xp(t) = − 1
2imω
[∫ t
ti
dt′ e−iω(t−t′)J(t′) +
∫ tf
t
dt′ eiω(t−t′)J(t′)
](3.60)
e permette di esplicitare S[xcl] come ci eravamo proposti all’inizio. Qui forniamo
direttamente il risultato [4] che e dato da
S[xcl] =mω
2 sin(ωT )
[(x2
i + x2f ) cos(ωT )− 2xixf
+2ximω
∫ tf
ti
dt J(t) sin(ω(tf − t)) +2xfmω
∫ tf
ti
dt J(t) sin(ω(t− ti)
− 2
m2ω2
∫ tf
ti
dt
∫ t
ti
dt′ J(t) sin(ω(tf − t)) sin(ω(t′ − ti))J(t′)]. (3.61)
Pertanto abbiamo visto come sia possibile utilizzare il formalismo dell’integrale fun-
zionale per affrontare i problemi della meccanica quantistica ottenendo gli stessi
risultati che si ricaverebbero con l’ordinaria formulazione operatoriale. Inoltre os-
serviamo come questo metodo ci permetta di determinare il propagatore del sistema
senza risolvere direttamente l’equazione di Schrodinger.
32
Capitolo 4
Instantoni
Come ulteriore applicazione dell’integrale funzionale in meccanica quantistica stu-
dieremo la doppia buca di potenziale e faremo vedere come emergano delle particolari
soluzioni, gli instantoni, che descrivono l’effetto tunnel.
4.1 Doppia buca di potenziale e instantoni
Consideriamo una particella in un potenziale dall’espressione analitica
V (x) =g2
8(x2 − a2)2 (4.1)
con g e a costanti reali e positive. La forma della funzione e schematizzata in Fig.
4.1. L’ equazione di Eulero-Lagrange ci fornisce due soluzioni banali
x(t) = a x(t) = −a (4.2)
che descrivono la particella in quiete in uno dei due minimi. Una trattazione quan-
tistica piu accurata mostra che in realta la particella non e ferma ma compie delle
oscillazioni attorno ai due minimi che possono essere approssimate con delle oscil-
lazioni armoniche. Dallo studio del sistema, a causa della finitezza della barriera
tra i due minimi, emerge anche l’esistenza di un fenomeno tipicamente quantistico:
l’effetto tunnel. Cercheremo di descriverlo attraverso l’integrale funzionale.
L’ampiezza di transizione che esamineremo e
〈xf ,T
2|xi,−
T
2〉 = 〈xf |e−
i~HT |xi〉 = N
∫Dx e
i~S[x] (4.3)
33

4 – Instantoni
Figura 4.1. Doppia buca di potenziale
in cui xf , xi = ±a e con
S[x] =
∫ T/2
−T/2dt
[1
2mx2 − g2
8(x2 − a2)2
]. (4.4)
E conveniente ruotare nello spazio euclideo come prescritto dalla (2.11)
〈xf |e−i~HT |xi〉 → 〈xf |e−
1~HT |xi〉 = N
∫Dx e−
1~SE [x] (4.5)
con
SE[x] =
∫ T/2
−T/2dt
[1
2mx2 +
g2
8(x2 − a2)2
]. (4.6)
Risolveremo il problema ricorrendo all’approssimazione semiclassica. Il primo passo
consiste nella determinazione delle soluzioni classiche euclidee, cioe quelle equazioni
del moto di una particella in un potenziale −V (x) come in Fig. 4.2. Osservando
l’andamento del potenziale ci aspettiamo le due soluzioni banali x(t) = −a e x(t) = a
che rappresentano la particella in quiete all’estremita dei due picchi e la soluzione
che descrive il moto della stessa dal punto −a all’istante −T2
al punto a all’istan-
te T2, scendendo nel fondo della buca per poi risalire. Questa soluzione si chiama
instantone e poiche connette i due punti −a ed a possiamo considerarlo come la de-
scrizione euclidea di un processo di tunnel quantistico in cui la particella transita da
−a ad a in un tempo T . Ovviamente ci sono anche quelle soluzioni composte da piu
instantoni. In questo secondo caso la particella transita tra i due punti un numero
finito di volte ponendosi alla fine nel punto −a o in a. Questi percorsi multipli sono
34

4 – Instantoni
Figura 4.2. Potenziale nello spazio euclideo
caratterizzati da un intero N che conta il numero di transizioni tra i due massimi
(euclidei) e dal tempo totale in cui le transizioni avvengono. E evidente che questi
processi sono interpretati in meccanica quantistica come processi di tunnel succes-
sivi tra due configurazioni che, in presenza di una barriera infinita, descriveremmo
approssimativamente con due potenziali armonici localizzati in −a e a.
Ora poniamo l’attenzione su un singolo instantone; affronteremo in seguito il pro-
blema dei multi-instantoni.
Le espressioni analitiche delle soluzioni dell’equazione euclidea del moto, nell’inter-
vallo temporale T , sono
1.
xcl(t) = ±a (4.7)
2.
xcl(t− tc) = ±a tanh
(ω(t− tc)
2
)valide per T → +∞ (4.8)
con mω2 = g2a2 = V ′′(±a) e tc costante di integrazione arbitraria tale che
|tc| < T2. Le due soluzioni nel punto 2 sono chiamate rispettivamente instan-
tone e anti-instantone e sono rappresentate in Fig. 4.3.
35

4 – Instantoni
Figura 4.3. (a) Instantone; (b) Anti-instantone
Si verifica facilmente che le xcl(t) soddisfano l’equazione del moto e che valgono le
seguenti proprieta
limt→−∞
xcl(t) = ∓a, (4.9)
limt→+∞
xcl(t) = ±a, (4.10)
E =1
2mx2 − V (x) = 0, (4.11)
S0 ≡ SE[xcl] =2
3mωa2, (4.12)
LE[xcl] =ma2ω2
4sech2
(ω(t− tc)
2
). (4.13)
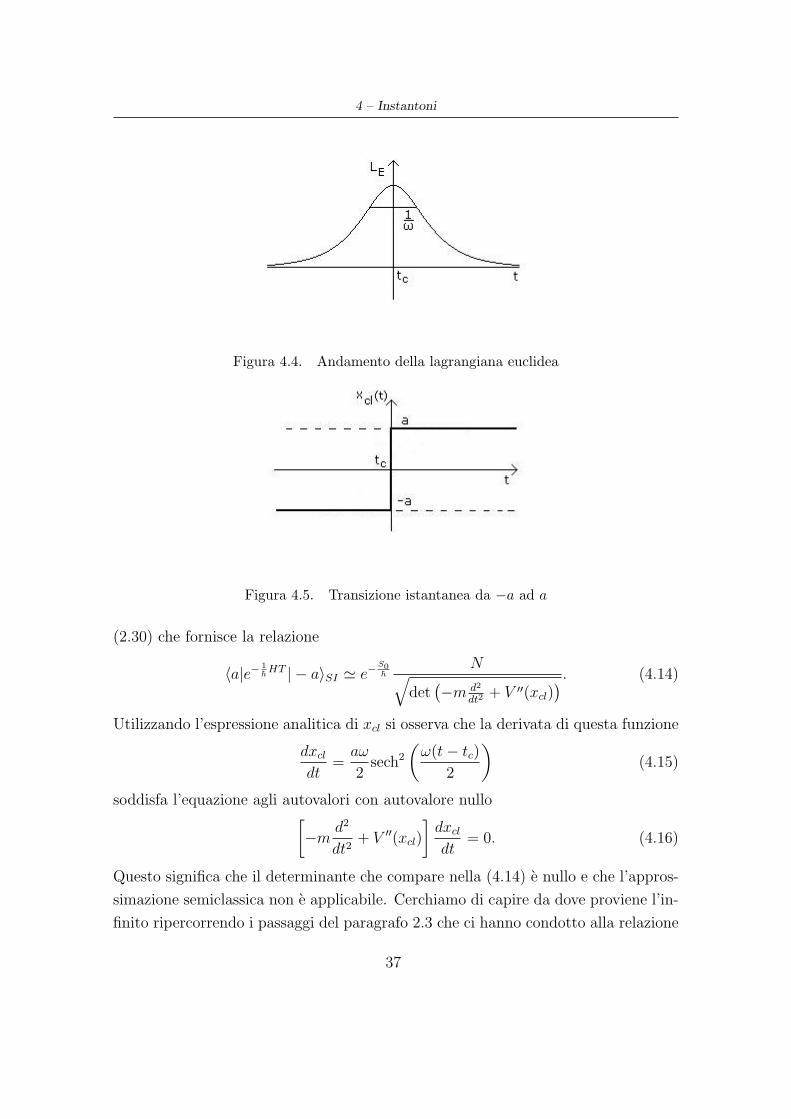
Osserviamo dalla (4.12) che l’azione euclidea calcolata sulle soluzioni instantoniche e
diversa da zero contrariamente a quanto accade per le due soluzioni banali xcl(t) =
±a, e dalla (4.13) che la lagrangiana e temporalmente localizzata in t = tc con
un’ampiezza ∆t ∼ 1ω
. Inoltre, sulla scala di T (T → +∞), le soluzioni appaiono
come una transizione istantanea da −a ad a e viceversa come illustrato in Fig. 4.5.
Queste due proprieta giustificano il nome attribuito a questa soluzione.
4.2 Calcolo dell’ampiezza di transizione
Calcoliamo l’ampiezza di transizione 〈a,T2| − a, − T
2〉 mediante l’approssimazione
semiclassica considerando il contributo di un singolo instantone (SI) a partire dalla
36
4 – Instantoni
Figura 4.4. Andamento della lagrangiana euclidea
Figura 4.5. Transizione istantanea da −a ad a
(2.30) che fornisce la relazione
〈a|e−1~HT | − a〉SI ' e−
S0~
N√det(−m d2
dt2+ V ′′(xcl)
) . (4.14)
Utilizzando l’espressione analitica di xcl si osserva che la derivata di questa funzione
dxcldt
=aω
2sech2
(ω(t− tc)
2
)(4.15)
soddisfa l’equazione agli autovalori con autovalore nullo[−m d2
dt2+ V ′′(xcl)
]dxcldt
= 0. (4.16)
Questo significa che il determinante che compare nella (4.14) e nullo e che l’appros-
simazione semiclassica non e applicabile. Cerchiamo di capire da dove proviene l’in-
finito ripercorrendo i passaggi del paragrafo 2.3 che ci hanno condotto alla relazione
37

4 – Instantoni
finale. In particolare si ottiene dalla (2.29)
〈a|e−1~HT | − a〉SI ' Ne−
SE [xcl]
~
∫ ∏n≥0
dcn exp
(− 1
2~∑n≥0
λnc2n
), (4.17)
e se indichiamo con λ0 l’autovalore nullo la precedente diventa
〈a|e−1~HT | − a〉SI ' Ne−
SE [xcl]
~
∫dc0
∫ ∏n>0
dcn exp
(− 1
2~∑n>0
λnc2n
). (4.18)
Risulta chiaro che l’integrale su c0 e la causa dell’infinito. Poiche le autofunzioni
ortonormali φn dell’operatore che compare in parentesi quadre nella (4.16) costi-
tuiscono la base su cui sono state costruite le fluttuazioni attorno alla traiettoria
classica, come risulta evidente dalla (2.28), la stessa
φ0(t) =
(S0
m
)−1/2dxcldt
=
(S0
m
)−1/2aω
2sech2
(ω(t− tc)
2
)(4.19)
rappresenta una particolare fluttuazione. E questa l’unica responsabile dell’infinito
come si puo osservare dal secondo membro della (4.18). Inoltre tenendo conto che
una variazione infinitesima del parametro tc
tc → tc + δtc (4.20)
comporta una variazione della traiettoria classica
xcl(t− (tc + δtc))− xcl(t− tc) = −dxcl(t− tc)dtc
δtc =dxcldt
δtc, (4.21)
confrontando con la (4.19) osserviamo che φ0 rappresenta quella fluttuazione infi-
nitesima che trasla il centro dell’instantone tc. Questa trasformazione non cambia
la struttura dell’instantone che, cosı modificato, continua ad essere soluzione dell’e-
quazione del moto. Anche l’azione rimane sempre la stessa percio ci aspettiamo che
il contributo all’ampiezza di transizione di quella classe di fluttuazioni che traslano
il centro dell’instantone sia proporzionale all’intervallo su cui varia tc, ossia tra −T2
e T2. Allora la divergenza scaturisce dal limite T →∞.
Tali osservazioni ci suggeriscono di valutare con piu accuratezza l’integrale (4.18)
esplicitando il parametro tc dal coefficiente co.
Innanzitutto mostriamo come c0 sia effettivamente una funzione di tc. Dato che
x(t) = xcl(t− tc) + η(t− tc), (4.22)
38

4 – Instantoni
Figura 4.6. Traslazione del centro dell’instantone
o equivalentemente, con un cambiamento di variabile,
x(t+ tc) = xcl(t) + η(t) = xcl(t) +∑n≥0
cnφn(t), (4.23)
moltiplichiamo il primo membro della (4.23) per φ0(t) e integriamo in t; si ottiene∫ T/2
−T/2dt x(t+ tc)φ0(t) =
∫ T/2
−T/2dt
[xcl(t) +
∑n≥0
cnφn(t)
]φ0(t)
=
(S0
m
)−1/2 ∫ T/2
−T/2dt xcl(t)
dxcldt
+ c0, (4.24)
dove abbiamo usato l’ortonormalita delle autofunzioni φn, ed infine, svolgendo l’in-
tegrale, si ricava∫ T/2
−T/2dt x(t+ tc)φ0(t) =
1
2
(S0
m
)−1/2
x2cl(t)
∣∣T/2−T/2 + c0. (4.25)
Poiche il primo membro e una funzione di tc, anche c0 che compare nell’ultimo mem-
bro ne risulta dipendente. Ci resta da calcolare lo jacobiano della trasformazione.
A tal proposito consideriamo una variazione infinitesima della traiettoria classica
dovuta ad una variazione infinitesima di c0
δc0 → δxcl = δη = δc0φ0(t) =
(S0
m
)−1/2dxcldt
δc0. (4.26)
Dal confronto della precedente relazione con la (4.21) segue che
δc0 =
(S0
m
)1/2
δtc. (4.27)
39

4 – Instantoni
A causa della sostituzione (4.27) l’integrale∫
dc0 della (4.18) va sostituito con(S0
m
)1/2 ∫ T/2−T/2 dtc = T e l’ampiezza di transizione (4.14) si scrive
〈a|e−1~HT | − a〉SI =
N(S0
m
)1/2e−
1~S0√
det′(−m d2
dt2+ V ′′(xcl)
)T, (4.28)
dove con il simbolo det′ abbiamo indicato il determinante dell’operatore in parentesi
calcolato escludendo l’autovalore nullo. Calcoli laboriosi [5] conducono al risultato
〈a|e−1~HT | − a〉SI =
(mωπ~
)1/2
e−ωT2 rT, (4.29)
con
r = 2
√2m
~ω3/2ae−
1~S0 . (4.30)
4.3 Soluzioni multi-instantoniche
Come abbiamo accennato all’inizio di questo capitolo esistono altre soluzioni dell’e-
quazione del moto come per esempio quella che descrive il moto della particella da−aal tempo −T
2ad a ad un istante compreso tra −T
2e T
2, e poi di nuovo a −a al tempo
T2. Questa soluzione e ottenuta da un instantone e da un anti-instantone. L’ampiez-
za di questo evento e data semplicemente dal prodotto dell’ampiezze di transizione
dovute alle due soluzioni; inoltre, per questioni di simmetria, l’anti-instantone contri-
buisce allo stesso modo dell’instantone. Ovviamente possiamo considerare cammini
piu complicati composti dalla successione di instantoni e anti-instantoni che rappre-
sentano nello spazio euclideo successivi effetti tunnel. Se consideriamo tutte queste
soluzioni non interagenti tra di loro otteniamo il modello a gas diluito. In queste
condizioni il contributo dell’n-instantone all’ampiezza di transizione puo essere fa-
cilmente ottenuto dalla (4.29) tenendo conto che i centri degli instantoni soddisfano
la catena di disuguaglianze
−T2≤ tn ≤ . . . ≤ t1 ≤
T
2(4.31)
come si puo vedere anche dalla Fig. 4.7. Quindi l’n-instantone contribuisce con(mωπ~
)1/2
e−ωT2 rn
∫ T/2
−T/2dt1
∫ t1
−T/2dt2 . . .
∫ tn−1
−T/2dtn =
(mωπ~
)1/2
e−ωT2
(rT )n
n!. (4.32)
40

4 – Instantoni
Figura 4.7. Soluzione multi-instantonica
Osserviamo che per ottenere l’ampiezza di transizione totale nell’approssimazione
semiclassica devono essere considerati tutti i possibili cammini, ossia ogni soluzione
multi-instantonica.
Inoltre si intuisce facilmente che ad ampiezze del tipo
〈a|e−1~HT |a〉 〈−a|e−
1~HT | − a〉 (4.33)
puo contribuire solo un numero pari di instantoni, mentre ad
〈a|e−1~HT | − a〉 〈−a|e−
1~HT |a〉 (4.34)
solo un numero dispari. Alla luce di tutte queste considerazioni si ricava che
〈a|e−1~HT |a〉 =
+∞∑n=0
(mωπ~
)1/2
e−ωT2
(rT )2n
(2n)!=(mωπ~
)1/2
e−ωT2 cosh(rT )
=1
2
(mωπ~
)1/2 [e−(ω
2−r)T + e−(ω
2+r)T
]. (4.35)
Per completare la trattazione utilizzeremo il risultato appena ottenuto per calcolare
la divisione in energia tra i due piu bassi stati energetici che rappresenteremo con
|+〉 e |−〉. Infatti sappiamo che se la barriera fosse infinitamente alta avremmo livelli
energetici degeneri ma poiche tale barriera e finita ognuno di questi stati si separa in
due livelli vicini. Per determinare tale separazione in energia inseriamo un insieme
completo di autostati dell’hamiltoniano nell’ampiezza di transizione 〈a|e− 1~HT |a〉 e
41

4 – Instantoni
consideriamo il limite per T → +∞
limT→+∞
〈a|e−1~HT |a〉 ' 〈a|e−
1~HT |−〉〈−|a〉+ 〈a|e−
1~HT |+〉〈+|a〉
= e−1~E−T |〈a|−〉|2 + e−
1~E+T |〈a|+〉|2. (4.36)
Dal confronto con la (4.35), considerando gli argomenti degli esponenziali, si ricava
E± =~ω2± ~r. (4.37)
Cioe abbiamo ottenuto l’energia dell’oscillatore armonico con la correzione ~r. Ri-
cordando la definizione di r nella (4.30) si ricava la separazione tra i due livelli
∆E = E+ − E− = 2~r = 4√
2m~ω3/2ae−1~S0 . (4.38)
Confrontiamo la (4.38) con il risultato ottenuto mediante il metodo WKB [5] appli-
cato allo stesso potenziale
∆Ewkb =4e
π
√m~ω3/2ae−
1~S0 . (4.39)
Si osserva che∆E
∆Ewkb=
√2π
e' 1.6 , (4.40)
dimostrando un ottimo accordo tra i due risultati. Cio avvalora l’interpretazione
dell’instantone come rappresentazione dell’effetto tunnel ed evidenzia, ancora una
volta, come il formalismo dell’integrale funzionale conduca alle stesse conclusioni,
seppur con strumenti diversi, del formalismo tradizionale.
42
Conclusioni
In questo lavoro di tesi abbiamo introdotto ed analizzato alcune proprieta dell’in-
tegrale funzionale in meccanica quantistica, anche noto col nome di “integrale sui
percorsi”. La sua introduzione in meccanica quantistica ha rappresentato un’im-
portante sviluppo teorico che ha portato a ridefinire questa teoria mediante uno
strumento nuovo ed intuitivo con enormi possibilita di applicazioni pratiche. Og-
gi l’integrale sui percorsi di Feynman puo fungere da punto di partenza di ogni
teoria quantistica, sia non relativistica che relativistica. E noto altresı che questa
formulazione puo essere estesa con gran successo in teorie della gravita ed in ogni
formulazione della teoria dei campi. Come abbiamo visto, dall’integrale di Feyn-
man e possibile estrarre informazioni sia sulla teoria perturbativa che su quella non
perturbativa di un certo sistema. Inoltre abbiamo osservato come sia possibile, ad
esempio, descrivere l’operatore di evoluzione quantistico mediante questo integrale e
l’interazione del sistema con potenziali esterni in maniera consistente per studiarne
il limite semiclassico. Nel caso non perturbativo ci siamo occupati del ruolo svolto
da transizioni di tipo istantonico in semplici sistemi quantistici. Anche in questo
caso abbiamo osservato come l’integrale di Feynman puo essere usato per descrivere
con successo l’effetto tunnel. Il calcolo semiclassico di questo integrale evidenzia
una naturale corrispondenza col piu tradizionale metodo WKB per lo studio del
medesimo effetto usando la meccanica quantistica di Schrodinger.
43
Appendice A
Ordinamento di Weyl
Il passaggio dalla meccanica classica alla teoria quantistica avviene attraverso il
principio di corrispondenza e, in particolare, le grandezze classiche sono sostituite
con operatori che in generale non commutano.
Consideriamo l’hamiltoniano del sistema
H(x, p) → H = H(x, p). (A.1)
La corrispondenza e ambigua se, per esempio, la funzione classica e del tip xp. In
questo caso si potrebbero associare due diverse combinazioni: xp e px, in quanto
x e p non commutano. Non esiste uno schema sicuramente corretto, pero ci sono
delle regole convenzionali, come l’ordinamente normale e l’ordinamento di Weyl, che
permettono di ordinare i fattori. Il primo consiste nel posizionare gli impulsi alla
sinistra delle coordinate
xp → px, (A.2)
px2 → px2, (A.3)
invece il secondo prescrive di considerare una media pesata di tutte le possibili
combinazioni degli operatori
xp → 1
2(xp+ px) , (A.4)
px2 → 1
3
(x2p+ px2 + xpx
). (A.5)
44

A – Ordinamento di Weyl
Le due convenzioni implicano espressioni diverse per gli elementi di matrice delle
funzioni di osservabili. Noi utilizzeremo il secondo schema per calcolare
〈x′|H|x〉 (A.6)
con |x′〉 e |x〉 autostati dell’operatore posizione.
Innanzitutto osserviamo che la seguente relazione, nella quale abbiamo considerato
x e p non commutanti tra loro, permette di ottenere l’ordimento di Weyl dei prodotti
xkpN−k
(ax+ bp)N =N∑k=0
N !
k!(N − k)!akbN−k(xkpN−k)Weyl. (A.7)
Allora se ne calcoliamo l’esponenziale avremo tutte le potenze di x e p, e dallo studio
di 〈x′|eax+bp|x〉 ricaveremo le informazioni necessarie per costruire la (A.6).
Consideriamo
〈x′|eax+bp|x〉 = 〈x′|e12axebpe
12ax|x〉, (A.8)
dove la relazione tra gli esponenziali che appaiono a primo e secondo membro si puo
verificare facilmente utilizzando un risultato ottenuto dalla formula BHC
eAeB = eA+B+ c2 se [A,B] = cI con c reale o complesso. (A.9)
Inseriamo la relazione di completezza degli autostati dell’operatore impulso tra il
secondo e il terzo esponenziale nel secondo membro della (A.8)
〈x′|eax+bp|x〉 =
∫dp〈x′|e
12axebp|p〉〈p|e
12ax|x〉 =
∫dp e
12ax′ebpe
12ax〈x′|p〉〈p|x〉
=1
2π~
∫dp e−
i~p(x−x
′)ea2(x+x′)+bp. (A.10)
Confrontando il primo con l’ultimo membro siamo in grado di costruire, in perfetta
analogia, l’elemento di matrice (A.6) con l’ordinamento di Weyl
〈x′|H|x〉 =1
2π~
∫dp e−
i~p(x−x
′)H
(x+ x′
2, p
); (A.11)
questo risultato e chiamato prescrizione del punto medio.
45
Bibliografia
[1] R. P. Feynman, Reviews of Modern Physics 20 (1948) 367.
[2] P. A. M. Dirac, “The principles of Quantum Mechanics” Oxford University
Press 1958.
[3] M. Roncadelli e A. Defendi, “I cammini di Feynman” - Quaderni di fisica teorica
- Universita degli Studi di Pavia, 2001.
[4] R. P. Feynman e A. R. Hibbs, “Quantum Mechanics and Path Integral”
McGraw-Hill, New York, 1965.
[5] Ashok Das, “Field Theory: a path integral approach” World Scientific
Publishing, Singapore, 1997.
[6] M. J. Teper, “Instantons, Theta Vacua, Confinement...: A Pedagogical Intro-
duction” Lectures given at Rutherford Laboratory and the Univ. of Oregon,
Spring, 1979.
[7] S. Coleman, Subnucl. Ser. 15 (1979) 805.
46