Appunti%20di%20analisi%20matematica 21%20settembre%202013
136
APPUNTI DI ANALISI MATEMATICA LIMITI - CONTINUITÀ - DERIVABILITÀ - INTEGRABILITÀ
-
Upload
alessandro-miniati -
Category
Documents
-
view
256 -
download
2
description
http://alemin.dyndns.org/phocadownloadpap/appunti%20di%20analisi%20matematica-21%20settembre%202013.pdf
Transcript of Appunti%20di%20analisi%20matematica 21%20settembre%202013

APPUNTI DI ANALISI MATEMATICA
LIMITI - CONTINUITÀ - DERIVABILITÀ - INTEGRABILITÀ

Lezioni del prof. Alessandro MiniatiI.P.S.I.A. "A. Pacinotti" - Pescia
Anno scolastico 2013 – 14Versione 2.0.467
Data: sabato 21 settembre 2013
- 2 -

Cap. 1 LIMITI DELLE FUNZIONI REALI DI UNA VARIABILE REALE
0. Introduzione
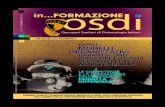
Approfondiamo lo studio delle funzioni reali di variabile reale e, a tale scopo, introduciamoun nuovo concetto, quello di “limite” che è uno dei più importanti dell'analisi matematica perché adesso faremo riferimento quando dovremo introdurre altre proprietà (ed esattamente: la continuità, laderivabilità e l'integrabilità delle funzioni).Per meglio chiarire questo concetto fondamentale, cominciamo con alcune considerazioni di carat-tere intuitivo, servendoci di un linguaggio geometrico, sia pure impreciso ma intuitivo.Sia f x una funzione reale di variabile reale definita in un intervallo [a , b ] e sia c un punto internoa tale intervallo. Molte volte, qualunque sia la circostanza che si presenta per la f x in c, dellaquale non ci occupiamo, interessa esaminare i valori che essa assume, quando alla x si attribuisconovalori di [a ,b ] prossimi al numero c; in altre parole interessa studiare il comportamento della f x in convenienti intorni del punto c, escluso sempre il punto c.I casi che si incontrano sono del tipo di quelli illustrati nelle figure 1, 2, 3, 4 e 5.A) Può darsi che attribuendo ad x valori “sufficiente-mente vicini” a c, i corrispondenti valori di y = f x risultino “sufficientemente vicini” ad un numero
l ∈ℝ (fig. 1). Più precisamente, fissiamo un numero
ε0 , arbitrariamente piccolo, e consideriamo lastriscia orizzontale (cioè la parte di piano compresa fradue rette parallele all'asse x) avente come mediana la
retta y = l e semi-ampiezza ε . Può darsi che sia possi-
bile determinare un intorno H c di c (dipendente in ge-nerale da quella striscia e quindi dal numero che abbia-mo scelto arbitrariamente e cioè ε) tale che per ognix∈Hc il corrispondente punto della curva sia interno
alla striscia, cioè abbia una ordinata f x che differi-
sce, in valore assoluto da l, per meno di ε . In
c Hc
O x
y
l ε
l −ε
l y=f(x)
fig. 1
altri termini può darsi che in tali punti risulti verificata la seguente relazione:
l−ε< f ( x)< l+ εo, ciò che è lo stesso:
∣ f x −l∣ε .
B) Può accadere che, attribuendo a x valori “sufficientemente vicini” a c, i corrispondenti valoridella funzione f x risultino, in valore assoluto, sempre più grandi, oltrepassando qualunquenumero fissato ad arbitrio. Più precisamente, fissato ad arbitrio un numero reale k > 0, può darsi chesia possibile determinare un intorno H c di c (dipendente in generale da k) tale che per ogni x ilcorrispondente punto della curva abbia un'ordinata che superi, in valore assoluto, il numero k (e inquesto caso di dice che la curva diverge a ∞); ossia può darsi che in tali punti, diversi da c, risulti(figg. 2a, 2b, 2c):
∣ f x ∣k , oppure f x k , oppure f x −k .
- 3 -

cO x
y
y=f(x)k
- k
Hc
cO x
y
y=f(x)k
- k
Hc
cO x
y
y=f(x)k
- k
Hc
fig. 2a fig. 2b fig. 2cC) Il comportamento descritto in alle primedue lettere A) e B) può presentarsi, anziché inun conveniente intorno completo di c, in unconveniente intorno destro Hc
+ o sinistro del
punto c e cioè Hc- (fig. 3).
fig. 3
D) Inoltre, in alcuni casi, se assegniamo valorisufficientemente grandi alla x, i valori corrispon-
denti di y tendono ad un valore finito l (fig. 4).
fig. 4
E) Infine, può capitare che, attribuendo a x valori “sufficientemente grandi” i corrispondenti valo-ri diventino, in valore assoluto, sempre più grandi, oltrepassando qualunque numero fissato adarbitrio (fig. 5a e fig. 5b).
NO x
y
y=f(x)
y →
+∞
k
fig. 5a
NO x
y
y=f(x)
y → −∞
-k
fig. 5b
- 4 -
l + ε
l - ε
NO x
y
y=f(x)
y → l
cO x
y
y=f(x)l 2
H c
l 1y=f(x)
H c−

1. Limite finito per una funzione in un punto
Sia f x una funzione definita in un intervallo [a ,b ] escluso al più un punto c di questo.Quanto detto nel al punto A) del paragrafo 0, viene rigorosamente precisato dalla seguente:
1a DEFINIZIONE - Si dice che la funzione f x per x tendente a c, ha per limite il numero l, e si
scrive:
limx c
f x =l ,
quando, in corrispondenza ad un arbitrario numero positivo ε, si può sempre determinare un intornoH c del punto c, tale che per ogni x∈Hc , escluso al più il punto c, risulti soddisfatta la disequazione:
∣ f x −l∣ε ;
o, ciò che è lo stesso, se:
l−ε f x lε .
Le ultime due disequazioni significano che i valori della f x differiscono da l, in valore assoluto,
per una quantità inferiore al numero da noi arbitrariamente fissato, che è ε .ESEMPI.1) Verificare che risulta:(1) lim
x 23 x1 =7 .
Per provare ciò, dobbiamo far vedere che in corrispondenza ad un qualunque numero ε0 , la se-guente disequazione:(2) ∣3 x1−7∣ε ,è soddisfatta per tutti i valori della x che formano un intorno del punto x = 2 (tale punto appartieneall'asse x (!)). La disequazione (2) può essere anche scritta nella seguente forma: ∣3 x−6∣ε , che èequivalente a:
6−ε3 x6ε ,che è risolta per:
2−ε3x2
ε3
,
che dà origine a un intorno del punto di ascissa x = 2 (e ordinata nulla (!)). Quindi, resta provata l'e-
sistenza, per un qualunque numero ε0 , di un intorno H 2≡2− ε3
, 2+ε3 , tale che per ogni x∈H2
risulta soddisfatta la (2). Ciò significa, per la definizione di limite, che vale la (1).Si nota che la funzione f x =3 x1 , calcolata nel punto x = 2, vale proprio 7 infatti: f 3 =7 eperciò in questo caso risulta:
limx 2
f x = f 2
cioè: il limite coincide con il valore della funzione nel punto di ascissa x = 2.2) Dimostrare che è :
limx 4
xx−2
= 2 .
Per provare l'uguaglianza precedente, fissiamo ε0 . Dopo si deve far vedere che esiste un intornodi 4 (e cioè H4), tale che, per ogni x∈H4, x≠4 , si abbia:
(1) ∣ xx−2
−2∣ε ,
ossia:
∣4−xx−2∣ε ;
e quindi:
- 5 -

−ε 4− xx−2
ε .
Da questa disequazione possiamo ricavare un sistema di due disequazioni confrontando, rispettiva-mente, il primo e il secondo termine e il secondo e il terzo termine e cioè:
{4−xx−2
ε
−ε4−xx−2
ovvero:
(2) {4−xx−2
ε
4− xx−2
−ε.
Potendo supporre x−20 , (perché?), il sistema (2) si può scrivere:
{4−x< ε x−2ε4−x> 2 ε−ε x
da cui: {x (ε+ 1)> 4+ 2 εx (ε−1)> 2 ε−4
,
ossia, assumendo (senza perdere nulla in generalità), ε1 e quindi ε−10 , risulta:
(3) {x42 εε1
x2ε−4ε−1
.
Il sistema (3), essendo:
42εε1
2ε−4ε−1
,
è verificato per:
(4) 42εε1
x2 ε−4ε−1
.
Con semplici operazioni, arriviamo a scrivere le disequazioni (4) in una forma migliore, cioè:
4−2 ε
ε1x4
2 ε1−ε
che ci consente di comprendere che effettivamente si è formato un intorno del punto 4.Esercizi:1) Provare che, se a∈ ℝ e a > 1, risulta:
limx0
ax=1 .
2) Provare che, se a∈ ℝ , a > 0 e a≠1, risulta:limx1
log a x=0 .
Osservazione. Negli esempi sopra riportati il valore del limite per x→c coincide con il valore della
funzione per x = c (cioè: limx→ c
f (x )= f (c )=l ).Bisogna però osservare che l'esistenza del limite di una funzione, in un dato punto c, è indipendentedal comportamento della funzione in quel punto. In altre parole, può accadere che nel punto c esistail limite della funzione, oppure che esista anche il valore della funzione in questo punto e questo sia
diverso dal valore del limite, cioè sia l≠ f c . E tutto questo perché l'esistenza del limite nel punto
c non richiede necessariamente che la disequazione (1) debba essere soddisfatta per x = c. Da qui
- 6 -

segue che se due funzioni f x e g x assumono gli stessi valori per ogni x ≠ c, e se, per es. si ha:
limx →c
g ( x)=l , allora risulta anche:
limx c
f x =l .
ESEMPIOVerificare che risulta:
limx 2
x2−4x−2
= 4 .
Dobbiamo dimostrare che,∀ ε0 , la disequazione:
(1) ∣x2−4
x−2−4∣ε
è soddisfatta per tutti i valori di x che formano un intorno del punto di ascissa 2, escluso x = 2 dovela funzione non è definita.Ma poiché per x ≠ 2 si ha:
x2−4
x−2=
x−2 x2 x−2
= x2 ,
la disequazione (1) equivale alla: 2−εx2ε ,
che è proprio un intorno del punto x = 2.Si nota che per x = 2 non esiste il valore della funzione, mentre nel punto x = 2 esiste finito il limi-te.ESERCIZI
Verificare che risulta :
a) limx3
x2−5 x6
x2−9
=16
;
b) limx3
x−3
x−3=23 .
2. Definizione di limite infinito per una funzione in un puntoIl comportamento della funzione descritto al punto B) del primo paragrafo viene rigorosamente pre-cisato dalla seguente:
2a DEFINIZIONE Si dice che la funzione f x per x tendente a c, ha per limite l'infinito (oppureche diverge all'infinito), e si scrive:
limx c
f x =∞ ,
quando, in corrispondenza ad un arbitrario numero reale positivo M, si può trovare sempre un intor-no H c del punto c tale che per ogni x∈Hc , x ≠ c, risulta:
∣ f x ∣M , cioè la f x assume valori, in modulo, maggiori di M.Se in H c , escluso c, vale invece sempre la disequazione:
f x M ,si ha che :
limx c
f x = +∞ ;
se invece vale la disequazione:f x −M ,
si ha che:
limx c
f x = −∞.
- 7 -

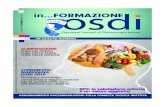
ESEMPIOVerifichiamo che risulta:
limx0
−1x =∞ .
A tale scopo, bisogna far vedere che la dise-quazione:
(1) ∣−
1x∣M ,
è soddisfatta, qualunque sia il numero M > 0,da valori che formano un intorno del punto 0,escluso il punto 0.La (1), infatti, equivale alla:
∣x∣1M
,
che è soddisfatta quando:
−
1M x
1M
,
e questi valori formano un intorno H0 delpunto 0. Il grafico della funzione è riportato qui adestra (fig. 6).
fig. 6
ESERCIZIOVerificare che risulta:
limx1
1
1−x 2
=+∞ .
3. Limite destro e sinistro di una funzione.
Può accadere che non esista il limite di f x per x→c, ma un tale limite esista quando si con-
siderino solo i valori di f x che appartengono ad un intorno destro: c< x< c+ δ (δ∈ℝ+) del punto
c (ancora privato, ovviamente, del punto c), oppure ad un intorno sinistro: c−δ< x< c (δ∈ℝ+ ) .Si dà quindi la seguente:
3a DEFINIZIONE. Si dice che il numero l è il limite destro della funzione f x , per x→c, e si
scrive:
limx c
f x = l ,
quando, in corrispondenza a un arbitrario numero reale positivo ε, si può sempre trovare un intornodestro H c del punto c tale che per ogni x∈Hc , escluso eventualmente il punto c, risulti soddisfatta ladisequazione:
∣ f x −l∣ε .
Se l'intorno H c , invece, è un intorno sinistro del punto c, allora si dice che il numero l è il limite si-
nistro di f x , per x→c, e si scrive:
limx c−
f x = l .
Analoghe definizioni si possono dare per i limiti:lim
x c−f x =∞ e lim
x cf x =∞.
Si può dimostrare che se i limiti destro l 1 e sinistro l 2 esistono e sono uguali, cioè l 1=l 2=l allora
l è il limite di questa funzione (per x→c) nel senso della 1a definizione. Viceversa, se una funzione
- 8 -
M
- M
H0

ha per limite l, per x→c, allora i limiti destro e sinistro di queste funzioni x c± esistono e sono
uguali.ESEMPIO
Sia data la funzione: y=2 x∣x∣x
. Verificare che risulta:
(1) limx 0
−f x =−1 e lim
x 0
f x =1 .
Per provare la prima delle (1), si osserva che, dovendo calcolare il limite sinistro della funzionef x per x tendente a 0, ci interessano solo i valori negativi della x: per tali valori essendo∣x∣=−x , la funzione data diventa:
2 x−x
x=2 x−1 .
Premesso ciò, dobbiamo fare vedere che il sistema:
{∣2 x−1−−1∣εx0
, con ε0 arbitrario,
ammette soluzioni che formano un intorno sinistrodel punto 0, escluso al più lo 0. Risolvendo il si-
stema, si trova che è soddisfatto per: −ε2x0 ,
e tali soluzioni formano proprio un intorno sinistrodello 0. In modo del tutto analogo, tenendo pre-sente che per x > 0 si ha ∣x∣= x , si prova che valela seconda delle (1). Possiamo quindi affermare
che la funzione f x =2 x∣x∣x
, nel punto 0 non
ammette limite, né esiste il valore della funzionein tale punto; pur tuttavia, sempre nello stessopunto, esiste il limite sinistro e destro e valgono,rispettivamente, −1 e 1.
fig. 7
Il grafico della funzione data è rappresentato nel grafico di fig. 7.Esercizio.
Se a∈ ℝ e a > 1, verificare che risulta:lim
x 0
loga x=−∞ .
4. Definizione di limite per una funzione all'infinitoIl comportamento della funzione descritto alla lettera D) del primo paragrafo, viene rigoro-
samente precisato dalle seguenti:4a DEFINIZIONE . Si dice che la funzione f x , per x tendente all'infinito, ha per limite il numero
l, e si scrive:
limx∞
f x =l ,
quando, in corrispondenza a un arbitrario numero ε0 , si può determinare un numero N > 0, taleche per ogni x che verifica la condizione:(1) ∣x∣N ,si abbia:
∣ f x −l∣ε ,
cioè i corrispondenti valori della f x differiscano tutti da l, in valore assoluto, meno di ε .
Se la (1) è soddisfatta soltanto per xN , oppure soltanto per x−N , allora si dice che esistono,
- 9 -

rispettivamente, i limiti:
limx + ∞
f x =l e limx - ∞
f x= l .
5a DEFINIZIONE. Si dice che per x tendente all'infinito la funzione f x ha per limite l'infinito, esi scrive:
limx ∞
f x =∞ ,
quando, in corrispondenza a un arbitrario M > 0, è sempre possibile determinare un numero N > 0,tale che per ogni x verificante la condizione:
∣x∣N ,si abbia:
∣ f x ∣M ,cioè i corrispondenti valori della f x siano tutti, in valore assoluto, maggiori di M.Se invece per ∣x∣N risulta sempre f x M , oppure f x −M , allora si dirà che esistonorispettivamente i limiti:
limx ∞
f x =∞, limx ∞
f x=−∞ .
Se per x > N risulta sempre ∣ f x ∣M , oppure f x M , oppure f x −M , allora si dice cheesistono rispettivamente i limiti:
limx ∞
f x =∞ , limx ∞
f x=∞ e limx ∞
f x=−∞ .
Se, infine, per x−N risulta sempre ∣ f x ∣M , oppure f x M , oppure f x −M , allora sidice che esistono rispettivamente i limiti:
limx −∞
f x =∞ , limx −∞
f x=∞ e limx −∞
f x=−∞ .
ESEMPIOVerifichiamo che risulta:
(1) limx∞ x1
x =1.
Per provare quanto scritto sopra, in base alla definizione 4a, dobbiamo dimostrare che la disequazio-ne:
(2) ∣x1x−1∣ε ,
qualunque sia ε0 , è soddisfattaper valori della x che risultano, invalore assoluto, maggiori di uncerto numero positivo N (che di-pende da ε ).La disequazione (2) è equivalente
alla disequazione: ∣1x∣ε , che è
soddisfatta quando si verifica che:
∣x∣1ε=N ,
e ciò prova la (1). Il grafico dellafunzione è quello riportato in fig.8.
fig. 8
ESERCIZI1) Verificare che risulta:
- 10 -
y=1+ε
y=1-εy=1

limx - ∞
1− x=∞ .
2) Se a∈ ℝ+ e a > 1, verificare che risulta:lim
x - ∞a x=0 , lim
x + ∞ax =+∞ e lim
x + ∞loga x =+∞ .
5. Definizione di limite in termini di intorniLa definizione di limite data in precedenza si può riscrivere in termini di intorni nella se-
guente maniera.Sia A un sottoinsieme di ℝ e c∈ ℝ . Il punto c si dice che è un punto di accumulazione di A quandoin ogni intorno di c cadono infiniti punti di A. Ad esempio se consideriamo l'insieme di numerireali:
A={x∣x=1n
,n∈ℕ} ,
si può dimostrare che 0 è un punto di accumulazione di A. Sia f: A→B (dove A, B ⊆ ℝ ) e c un punto di accumulazione di A. Si dice che la funzione f tende
verso l, per x→c, e si scrive:
limx c
f x= l ,
quando, dato un qualunque intorno U di l, esiste sempre un intorno V di c, tale che si abbia:
∀ x∈V∩A ∖ {c }⇒ f x ∈U .
Questa definizione possiede il vantaggio di applicarsi sia al caso in cui l è sostituito da uno dei sim-
boli: ∞ , ∞ , −∞ sia nel caso in cui c è sostituito da uno di tali simboli. 6. Teoremi fondamentali sui limiti
In questo paragrafo dimostreremo alcuni importanti teoremi sui limiti, e per semplicità, con-sidereremo solo i casi in cui i limiti, per x→c, sono finiti. Con semplici cambiamenti è possibileestendere tali dimostrazioni anche ai casi in cui il limite sia ∞, e quando x→∞.Teorema 6.1 Unicità del limite.Se esiste il limite della funzione f x , per x→c, tale limite è unico.
Dim. Supponiamo per assurdo che invece esistano, per x→c, due limiti l 1 e l 2 , con l 1≠l 2 . Pos-
siamo supporre, senza perdere niente in generalità, l 1l 2 . Per la definizione di limite, ∀ ε0 ,
scelto arbitrariamente, devono esistere due intorni H1 e H2 di c , tali che per ogni x∈H1 x≠c siabbia:
(1) l 1−ε f x l 1ε
e, per ogni x∈H2 x≠c si abbia:
(2) l 2−ε f x l 2ε .
Nell'intorno H c=H1∩H2 (ved. fig. 9) lerelazioni scritte sopra devono valere si-multaneamente.
c Hc
H1
H2
fig. 9
Possiamo scegliere un ε abbastanza piccolo perché risulti:
l 1ε l 2−ε 1 cioè:ε l 2−l 1
2 .1 Precisamente, se abbiamo due numeri distinti (ad es. 4 e 5) è evidente che 4 < 5. Ciò non toglie che se aggiungiamo una quantità arbitraria a 4 e
togliamo la stessa quantità a 5 la relazione d'ordine precedente continua ancora a valere. Infatti, la seguente relazione è vera: 4+1
10< 5−
110
.
- 11 -

Questa disuguaglianza ci permette di trovare il legame che unisce la (1) alla (2) in modo tale chepossiamo scrivere:
(3) l 1−ε f x l 1ε l 2−ε f x l 2ε ,
che costituisce una relazione chiaramente assurda poiché confrontandone il secondo e il quinto ter-mine si ottiene:
f x f x . Da qui, dunque, discende l'unicità del limite.•Si è così provato che una funzione in un punto c non può avere due limiti finiti distinti. Ma con unragionamento analogo al precedente, si può provare che nel punto c la funzione non può avere con-temporaneamente per limite ∞ e −∞, e nemmeno un limite finito e uno infinito. E così pure siprova il teorema se c è ∞ o ∞ o −∞ .Teorema 6.2 Teorema della permanenza del segno.
Se per x tendente al numero c la funzione f x tende ad un limite finito l non nullo, esiste un intor-
no del punto c per ogni x del quale, escluso al più il punto c, la funzione assume valori dello stessosegno del suo limite.
Dim. Per ipotesi si ha che: limx c
f x= l≠0 . Per provare la tesi, osserviamo innanzi tutto che essen-
do, per ipotesi, l≠0 , risulta: ∣l∣0 . Preso allora ε=∣l∣, per definizione di limite, in corrispondenza
di questo numero, esiste un intorno Hc del punto c (ved fig. 10), tale che per ogni x∈Hc , xc ,risulta:
(1) l−∣l∣ f x l∣l∣.
fig. 10
Esaminiamo, uno per uno, i due casi possibili. Nel primo caso, se è l > 0 sarà anche ∣l∣=l ovvero
l−∣l∣=0 e, dalla (1), segue: f x 0 . Analogamente, nel secondo caso, se è l < 0 sarà anche
∣l∣=−l ovvero l∣l∣=l−l=0 e, ancora dalla (1), segue: f x 0 . Poiché x∈Hc, escluso al più il
punto c, da questi due risultati segue la validità della tesi.•Oss. Il teorema vale ancora se è l=∞ o l=−∞ .
Teorema 6.3 Criterio del confronto.Se f x , h x e g x sono tre funzioni definite nello stesso intervallo, eccettuato al più il punto c diquesto, e se per ogni x risulta:
(1) f x ≤h x ≤g x ,
e se, inoltre, è :
(2) limx c
f x= limxc
g x= l ,
allora risulta anche:
limx c
h x=l .
Dim. Per la definizione di limite, applicata alla prima delle (2), in corrispondenza di un numeroε0 , fissato ad arbitrio, possiamo determinare un intorno H1 del punto c tale che per ogni x∈H1 ,
x diverso da c, risulta: ∣ f x −l∣ε , ossia:
(3) l−ε f x lε .
- 12 -
c Hc

Sempre per la definizione di limite, applicata alla seconda delle (2), in corrispondenza di un nume-ro ε0 , fissato ad arbitrio, possiamo determinare un intorno H 2 del punto c tale che per ognix∈H2 , x diverso da c, risulta:
(4) l−εg x lε .
Posto H c=H1∩H2, per ogni x∈Hc diverso da c, valgono simultaneamente la (3) e la (4). Tenendoconto delle (1), (3) e (4), per ogni x∈Hc diverso da c, si ha :
l−ε f x ≤h x ≤g x lε ,
da cui segue immediatamente che:
l−εh x lε , e, dalla definizione di limite, si ha che:
(5) ∣h x −l∣ε .
Così si è dimostrato che in corrispondenza di un numero ε0 , fissato arbitrariamente, esiste un in-torno H c del punto c tale che per ogni x∈Hc , x diverso da c, vale la (5). Ma, in base alla definizionedi limite, possiamo scrivere che:
limxc
h x= lche prova la validità della tesi.•
Il teorema continua a valere se l è ∞ o −∞.
ESERCIZIO.Proviamo che:
(1) limx 0
senx=0 ,
e:(2) lim
x 0cosx=1.
Dim. Infatti, per valori della x non nulli e in valore assoluto minori diπ2
, si ha: 0∣senx∣∣x∣ e
poiché limx 0∣x∣=0 , per il teorema 6.3 possiamo anche scrivere: lim
x 0senx=0 , che prova la (1).
Per provare la (2), consideriamo la ben nota uguaglianza:
cosx=1−2 sen2 x2
.
Siccome il limite di una costante è la costante stessa e, come vedremo in seguito, il limite della dif -ferenza di due funzioni è uguale alla differenza dei limiti (se essi sono finiti) delle due funzioni, siha, facendo valere il risultato precedente:
limx 0
cosx=limx01−2 sen2 x
2 =1−0=1.
7. Infinitesimi e loro proprietà fondamentali
In questo paragrafo studiamo le funzioni il cui limite vale 0, ottenendo risultati utili ancheperché semplificano le dimostrazioni dei teoremi successivi sui limiti.DEFINIZIONE. Si dice che la funzione f x è un infinitesimo per x→c (o per x→∞), quandorisulta: lim
x cf x =0 , oppure lim
x∞f x=0.
Ne segue che quando una funzione è infinitesima ed è, per es. limx c
f x =0 , allora, per definizione
di limite, in corrispondenza ad un arbitrario numero ε > 0 è possibile determinare un intorno Hc di c,tale che per ogni x∈Ηc, escluso al più il punto c, si ha: ∣ f x ∣ε . Le funzioni infinitesime, per po-terle distinguere dalle altre, saranno indicate con scritture abbreviate del tipo:
- 13 -

α [=α x ] e β [= β x ] , e così via.ESEMPI.1) La funzione: α x = x−3
2 è infinitesima per x 3, in quanto:
limx 3
x−3 2=0 .
2) La funzione: α x =1x
è infinitesima per x→∞, perché:
limx∞
1x=0 .
Valgono i seguenti teoremi.Teorema 7.1 Se una qualunque funzione f x è tale che:
(1) limx c
f x= l ,
allora ciò equivale a dire che, in un opportuno intorno di c:
(2) f ( x )=α ( x )+ l ,
dove α x è infinitesima per x→c.Dim. Infatti, se vale il limite (1), allora in corrispondenza ad un numero ε0 fissato arbitraria-
mente, esiste un intorno Hc di c, per ogni x del quale, (escluso c), vale: ∣ f x −l∣ε , e, posto
α ( x )= f ( x )−l ,si può scrivere:
∣α x ∣ε , per ogni x∈Hc , e ciò prova che lim
xcαx =0.
Viceversa, se vale la (2), allora è: ∣α x ∣=∣ f x−l∣, e se limxc
α x=0 , allora in corrispondenza ad
un arbitrario ε0 , è possibile determinare un intorno H c di c, per ogni x del quale (escluso al più il
punto c), risulta: ∣α x ∣ε , cioè ∣ f x −l∣ε , che prova che limx c
f x =l . •
Teorema 7.2 Se risulta:(1) lim
x cα x =0 .
ed esiste un intorno H c di c, per ogni x del quale (escluso al più c) risulta: α x ≠0 , allora è:(2) lim
x c
1α x
=∞ .
Dim. Infatti, se vale il limite (1), significa che in corrispondenza ad un numero arbitrario ε0 ,esiste un intorno H c di c, per ogni x del quale, (eccetto al più il punto c), risulta: ∣α x ∣ε , e per
ogni x dell'intorno H∩H c di c si ha anche: ∣ 1α x ∣ε , e, posto 1
ε=M , quest'ultima uguaglianza
prova che vale il limite (2).•Teorema 7.3 La somma algebrica di un numero finito di infinitesimi è anch'essa infinitesima.Dim. Proviamo il teorema solo nel caso di due funzioni, poiché la dimostrazione resta la stessa an-che per un numero maggiore di infinitesimi. Dunque si deve provare che se è:(1) lim
x cα x =0 e lim
xcβx =0 ,
allora, posto u x =α x β x , risulta:(2) lim
xcu x=0.
Infatti, se valgono i limiti (1), allora fissato ad arbitrio un numero ε > 0, in corrispondenza a tale nu-mero esiste certamente, per definizione di limite, un intorno H1 del punto c, tale che per ognix∈H1 , (escluso al più il punto c), risulta:
- 14 -

(3) ∣α x ∣ ε2
,
e, per la stessa ragione, esiste un intorno H 2 di c tale che per ogni x∈H 2 (escluso al più il punto c),risulta:
(4) ∣β x ∣ ε2
,
Posto H=H1∩H2 (ved. Fig 9), per ogni x∈H diverso da c, valgono contemporaneamente la (3) e la(4) e quindi:
∣α x ∣∣β x ∣ε , e, a maggior ragione2 vale anche:(5) ∣α x β x ∣ε .Fissato un qualunque ε0 , abbiamo visto che in corrispondenza a tale numero esiste un intornoH c di c, per ogni x del quale, escluso c, vale la (5). Ma ciò significa che la funzione:
u x =α x β x ,per x→c, tende a zero. Da qui deduciamo che vale la (2).•Analogamente si prova il teorema nel caso in cui:
limx∞
α x =0
e:limx∞
βx =0.
Teorema 7.4 Il prodotto di un infinitesimo α x per una funzione limitata f x , è un infinitesimoper x→c, (o per x→∞).Dim. Proviamo il teorema nel caso in cui x→c. Se la funzione f x è limitata per x→c, allora esisteun numero M > 0, tale che:(1) ∣ f x ∣≤M ,per ogni x di un opportuno intorno H1 di c. Inoltre, se α x è infinitesimo, allora in corrispondenzaad un arbitrario ε0 , è possibile determinare un intorno H 2 di c, per ogni x del quale, escluso c, siha:
(2) ∣α x ∣ εM
.
Dalla (1) e dalla (2) segue che per ogni x∈H=H1∩H2 (escluso c), si ha:
∣α x ⋅ f x ∣ εM⋅M=ε ,
che prova che il prodotto: α x ⋅ f x è infinitesimo.•La dimostrazione è del tutto analoga per il caso in cui x→∞.ESEMPIO.
Dimostriamo che: limx∞
senxx=0.
Essendo limx∞
1x=0 e ∣senx∣≤1 per ogni x∈ ℝ , per il teorema 7.4, si ha subito:
limx∞
senxx=0.
Allo stesso modo si dimostra che:
limx 0
x⋅senx1x=0.
Corollario 7.1 Se è:limxc
α x =0
2Infatti, per la disuguaglianza triangolare, dati due qualunque numeri reali a e b , si ha: ∣a+ b∣≤∣a∣ + ∣b∣ .
- 15 -

e:limx c
βx =0 ,
allora risulta:limx c
[α x⋅βx ]=0 .
Infatti, β x è una funzione limitata per x→c. Questo risultato si estende ad un numero qualunque di infinitesimi.Corollario 7.2 Se è lim
xcα x =0 e k = costante, allora risulta:
limx c
α x =0 .
Corollario 7.3 Il quoziente:α x f x
, tra un infinitesimo α x e una funzione f x , il cui limite è
diverso da zero, è un infinitesimo.
8. Operazioni con i limiti
In questo paragrafo elenchiamo i più importanti teoremi relativi alle operazioni sui limiti (leproprietà saranno provate nel paragrafo successivo).
Se risulta: limx c
f x =l 1 e limx c
g x= l 2 con l 1 e l 2 numeri reali, allora si ha:
1°) limx c
[ f x ±g x ]=l 1±l 2 ;
2°) limx c
[ f x ⋅g x ]=l 1⋅l 2 ;
3°) se l 2≠0 si ha: limx c [
f x g x ]=
l 1
l 2
;
4°) limx c∣ f x∣=∣l 1∣;
5°) se è: limx c
f x =l 1 , limx c
g x=∞ ,
oppure: limx c
f x =∞ , limxc
g x =∞ ,
oppure: limx c
f x =−∞ , limxc
g x =−∞ ,
allora il limite della somma è, rispettivamente, ∞ , ∞ , −∞ ;
6°) se è: limx c
f x =l 1≠0 , limxc
g x=∞ ,
oppure: limx c
f x =∞ , limxc
g x =∞ ,
risulta: limx c
[ f x ⋅g x ]=∞ ;
7°) se è: limx c
f x =∞ e limxc
g x=l 2 l 2≠0,∞ ,
risulta: limx c [
f x g x ]=∞ ;
8°) Se è: limx c
f x =l 1 l 1≠0,∞ e limxc
g x =∞ ,
risulta: limx c [
f x g x ]=0 ;
9°) Se è: limx c
f x =l 1 l 1≠0,∞ e limxc
g x =0 ,
con g x ≠0 in un opportuno intorno del punto c, allora risulta:
- 16 -

limx c [
f x g x ]=∞ .
9. Dimostrazioni dei teoremi sui limitiProviamo qui alcuni dei teoremi enunciati nel paragrafo precedente.
Teorema 9.1 Se f x e g x sono due funzioni definite nello stesso intervallo, eccettuato al più ilpunto c di questo, e se esistono e sono finiti i limiti di queste due funzioni per x→c, allora anche laloro somma ha limite finito e coincide con la somma dei limiti.
Dim. Siano: limx c
f x =l 1 e limx c
g x = l 2 . llora per il teorema 7.1, possiamo scrivere:
f x =l 1α x e g x =l 2β x ,
dove α e β sono funzioni infinitesime. Pertanto si ha (sommando membro a membro):
f x g x = l 1l 2 α x β x .
Poiché l 1l 2 è una costante e α x β x è un infinitesimo, essendo somma di infinitesimi,
sempre applicando il risultato del teorema 7.1, si può scrivere:
limx c
[ f x g x ]=l 1l 2 .•
Teorema 9.2 Nelle ipotesi del teorema 9.1, il limite del prodotto coincide con il prodotto dei limitidelle singole funzioni.Dim. Posto, come nel teorema precedente,
f x =l 1α x e g x =l 2β x ,
si ha (moltiplicando membro a membro):
f x ⋅g x = l 1α x l 2β x =l 1⋅l 2l 1 β x l 2 α x α x β x .
Il prodotto l 1⋅l 2 è costante e, per i teoremi del paragrafo 7, l'espressione:
l 1β x l 2 α x α x β x
è infinitesima (per x→c). Pertanto risulta:
limx c
[ f x ⋅g x ]= l 1⋅l 2 .In particolare, se k è una costante, si ha:
limx c
[ k⋅ f x ]=k limx c
[ f x ]=k l 1 .•
Teorema 9.3 Se alle ipotesi del teorema 9.1, si aggiunge l'ulteriore ipotesi che sia l 2≠0 , allora
esiste anche il limite del quoziente ed è uguale al quoziente dei limiti delle singole funzioni.Dim. Posto, come nei teoremi precedenti:
f x =l 1α x e g x =l 2β x ,
consideriamo l'identità:
f x g x
=l
1α x
l 2β x=
l1
l 2
l 1α x
l 2β x−
l1
l 2= l
1
l 2
l
2⋅α x −l 1 βx
l2⋅ l 2
β x,
da cui:
f x g x
=l 1
l 2
l 2⋅α x −l 1βx
l2⋅ l 2
β x.
- 17 -

Si nota che la frazionel 1
l 2
è una costante e la frazionel
2⋅α x−l 1β x
l2⋅ l 2
β x, è un infinitesimo (per il
corollario 7.3) perché l 2⋅α x −l 1 βx è un infinitesimo, mentre il limite del denominatore è
uguale a l 2
2≠0 . Pertanto vale la tesi e cioè:
limx c
f x g x
=l 1
l 2
. •
Teorema 9.4 Se risulta:
limx c
f x= l ,
è anche:
limx c∣ f x ∣=∣l∣ .
Dim. In base alla definizione di limite, in corrispondenza ad un numero ε0 , arbitrariamente fis-sato, esiste un intorno H c del punto c tale che per ogni x∈Hc , escluso al più il punto c, risulta:
∣ f x −l∣ε .
Poiché:
∣∣ f x ∣−∣l∣∣≤∣ f x −l∣,allora, a maggior ragione, per ogni x∈Hc , escluso al più il punto c, si ha:
∣∣ f x ∣−∣l∣∣ε ,
e quindi la tesi vale.•Osservazioni importanti.1°) Ricordiamo che nulla si può dire, in generale, sul lim
x c[ f x g x ] , quando è:
limx c
f x =∞ e limxc
g x =−∞ ; sul limx c
[ f x ⋅g x ] , quando è: limx c
f x=0 e limx c
g x =∞ ;
sul limxc
f x g x
, quando è: limxc
f x =0 e limxc
g x=0 ; sul limxc
f x g x
, quando è: limx c
f x=∞ e
limx c
g x =∞ . Quindi i teoremi che abbiamo sopra dimostrato, perdono di significato quando i limiti
considerati si presentano sotto una delle forme:
∞−∞ ; 0⋅∞ ; 00
; ∞
∞,
che vanno sotto il nome di “forme indeterminate”, perché di un limite che si presenta sotto una diqueste forme non si può dire a priori, quando esiste o quanto valga.
2°) Si deve tener presente che i simboli: ∞ , ∞ , −∞ non rappresentano numeri e nonhanno senso se non in relazione con un limite. Perciò sono assurde le scritture:
5∞=0;
∞
4=∞ ;
30=∞,
proprio perché il simbolo ∞ non rappresenta un numero. Tuttavia, per comodità di scrittura, a voltesi usa sintetizzare i teoremi dimostrati nel paragrafo precedente con scritture simboliche del tipo:
∞ ∞ =∞ ; −∞ −∞ =−∞ ; ∞ l=∞ ; ∞ ⋅∞ = ∞ ; −∞ ⋅−∞ =∞ ;
1±∞
=0. Se l ≠ 0, si usa anche scrivere simbolicamente: ∞ ⋅l=∞ , dove ∞ avrà il segno di l;
- 18 -

∞
l=∞ , dove, come prima, ∞ avrà il segno di l. Quindi il simbolo ∞ non è un numero e le nota-
zioni precedenti sono solamente delle forme simboliche abbreviate degli enunciati dei teoremi a cuisi riferiscono.
I teoremi 7.1 .. 7.4 ci assicurano che, quando esistono finiti i limiti delle due funzioni f x e g x in un punto c, nello stesso punto, esiste finito il limite della somma, differenza, prodotto e quoziente(ovviamente, deve essere lim
x cg x ≠0 , g x ≠0 ). Bisogna però far presente che possono non valere
i teoremi inversi e precisamente: può benissimo esistere finito il limite della somma, differenza,prodotto e quoziente di due funzioni, senza che necessariamente debba esistere il limite dellesingole funzioni.
ESEMPI.1) Consideriamo le seguenti due funzioni, definite per x ≠ 0:
f x =sen2 1x
e g x=cos2 1x
.
Evidentemente nessuna delle due funzioni ammette limite per x→0, perché in qualunque intorno dix= 0, esse compiono infinite oscillazioni sempre di ampiezza 1. Però la funzione somma:
s x = sen2 1xcos2 1
xvale sempre 1 ∀ x ≠ 0, ammette limite per x→0 e questo limite vale 1.2) La funzione definita dalla legge:
f x ={2 ∀ x2 ;3 ∀ x≥2 ;
non ammette limite per x→2, perché limx 2−
f x =2, limx2
f x =3 . Così pure non ammette limite
per x→2, la funzione g x =[ x ]=E x definita dalla legge:
g x =E x = {x , se x∈Z,
all'intero immediatamenteprecedente x , se x∉Z
il cui grafico è riportato in fig. 11 ed è costituito da infi-niti segmenti paralleli all’asse x, di misura 1u. e privatidell’estremo destro. Infatti, per es., per −2≤x−1 è y=−2 ma per x=−1 è y=−1 , per 1≤ x2 è y=1 ma per x=2 è y=2.E x rappresenta dunque la parte intera contenuta in xed è nota come la funzione di Legendre (geometra ematematico francese vissuto fra il 1752 e il 1833). Cal-coliamo alcuni valori di E x :
fig. 11
E 52 =2 , E−32 =−2 , E 0 =0 , E−1
4 =−1 .
Inoltre risulta:
lim
x 2−
E x =1 , limx2
E x =2 .
Però la funzione differenza d x = f x −g x , ∀ x ≠ 3, x∈[1, 3] vale sempre 1, e quindi risulta:limx 2
[ f x − g x ]=1 .
Alla luce di quanto visto sopra, possiamo dunque concludere che i teoremi 9.1 .. 9.4, danno solocondizioni sufficienti, ma non necessarie, per l'esistenza del limite finito della funzione somma, dif-ferenza, prodotto e quoziente.ESERCIZI.
- 19 -

Servendosi della definizione di limite, dimostrare che si ha:
1) limx 23 x2
1 =13 ; 2) limx 3 x21 =10 ; 3) lim
x 9 x=3 ; ;
4) limx 3 x1=2 ; 5) lim
x 2
3 x6=2 ; 6) lim
x−1 x35 =4 ;
7) limx 3
5x−3
=∞ ; 8) limx 4
1
x−2=∞ ; 9) lim
x 0
2 x−5
x2=−∞ .
- 20 -

Cap. 2 FUNZIONI CONTINUE
0. Introduzione
Accanto alla nozione di “limite di una funzione”, si deve introdurre il concetto di “conti-nuità di una funzione” che è un ulteriore completamento di quella. Si è visto che la nozione di li-mite per x→c riguarda il comportamento della funzione f x negli intorni H c di c, privati del puntoc stesso, e pertanto non dipende affatto dal valore f c assunto da f x in c; anzi f x può nonessere definita in c.Tuttavia, è chiaro che il caso in cui il valore del limite della f x per x→c sia uguale a f c sarà ilcaso più frequente. Quando ciò si verifica si dirà che la funzione è continua nel punto c.
1. Definizioni
Si dà la seguente definizione:si dice che la funzione f x , definita in un intervallo I=[a , b ] è continua in c∈ a ,b , se risulta:
(1) limx c
f x = f c .
In altre parole, la funzione f x è continua nel punto c, quando si verificano queste tre circostanze:1) esiste il valore della funzione nel punto c,2) esiste il limite della funzione per x→c,3) il limite coincide con il valore della funzione nel punto c.Osservazioni.1) In base alla definizione di limite, la definizione data equivale alla seguente:la funzione f x è continua nel punto c se, in corrispondenza ad un arbitrario numero ε > 0, si puòdeterminare un intorno H c del punto c, in modo che per ogni x∈Hc (c compreso) si abbia:
(1a) ∣ f x − f c ∣εossia:
f c −ε f x f cε .2) Se indichiamo il punto variabile x con c + h (h∈ ℝ ), allora la (1) si può scrivere:
2a) limh0
f ch= f c ,
oppure, equivalentemente:(2b) lim
h 0
[ f ch − f c ]=0 .
3) Dalla 2b) segue che la continuità di una fun-zione in un punto dato può essere interpretata, intermini geometrici, dicendo che la differenza delleordinate del grafico della funzione y= f x neipunti c + h∈a ,b e c∈a ,b è arbitrariamente pic-cola in valore assoluto, quando l'incremento h è“sufficientemente piccolo” (ved fig. 1); cioè sef x è continua per x = c, a piccole variazioni dellax, a partire da c, corrispondono piccole variazionidella funzione f x . Quando, invece della (1), valesoltanto la relazione:
limx c
f x = f c ,
fig. 1allora si dice che la funzione è continua a destra del punto x = c.Analogamente, se vale soltanto la relazione: lim
x c−f x = f c , allora si dice che la funzione è
- 21 -
c+hO x
yy=f(x)
ca
f(c)
f(c+h)
b
f(a)
f(b)
} f ch− f c
h

continua a sinistra del punto c. Per esempio, la funzione di Legendre y=[ x ]=E x , in x = 2 è con-tinua soltanto a destra di tale punto. Se la f x è definita nel chiuso [a ,b ] , evidentemente nel puntox = a si può parlare soltanto di continuità a destra e nel punto x = b soltanto di continuità a sinistra.Quindi, per definizione:una funzione f x si dice continua nell'intervallo [a ,b ] se essa è continua in ogni punto di taleintervallo.Adesso, dopo aver definito analiticamente il concetto di continuità diamo la definizione più intuitivadi funzione continua in un intervallo da punto di vista grafico. A questo scopo diremo che una fun-zione y= f x è continua graficamente in intervallo [a ,b ] quando ne potremo tracciare il relativografico senza “staccare” dal piano lo strumento che usiamo per disegnare (la penna dal foglio, ilgesso dalla lavagna, ecc.).
2. Prime proprietà delle funzioni continue
Dalla definizione di continuità e dai teoremi sui limiti possiamo provare i seguenti teoremi.Teorema 2.1 La somma di due funzioni continue in un punto c, è anch'essa una funzione continuanel punto c.Dim. Infatti è:
limx c
[ f x g x ]= limx c
f x limx c
g x = f c g c . •
Considerazioni analoghe si possono ripetere per dimostrare i seguenti teoremi.Teorema 2.2 La differenza di due funzioni continue in un punto c, è anch'essa una funzione conti-nua nel punto c.Teorema 2.3 Il prodotto di due funzioni continue è una funzione continua.Teorema 2.4 Il quoziente di due funzioni continue è una funzione continua, se nei punti conside-rati la funzione divisore non si annulla. Teorema 2.5 Se f x è continua in c, tale è anche ∣ f x ∣ .Teorema 2.6 Teorema della permanenza del segno.Se f x è continua in c∈[a ,b ] ed è f x ≠0 , esiste un conveniente intorno H c di c, tale che perogni x∈Hc la f x assume valori dello stesso segno di f c .Dim. È sufficiente applicare il teorema della permanenza del segno studiato per i limiti e ricordareche in questo caso è:
limx c
f x = f c . •
3. La continuità delle funzioni elementari
Quando sappiamo che la funzione f x è continua nel punto c, allora non solo esiste illimx c
f x , ma il valore di tale limite coincide per definizione, con f c , e perciò, in questo caso, il
calcolo del limite non presenta alcuna difficoltà. Per questo motivo è importante sapere quali sonole principali funzioni continue. Cominciamo con le:A) Funzioni razionali.1°) Una funzione costante, f x , è continua in ogni punto e cioè: lim
x cf x =k. Infatti, essendo
per ogni x: f x −k=0 , si ha: ∣ f x −k∣ε , per ogni ε0 , arbitrario. Questo prova che f x =k ècontinua.2°) La variabile x è continua in ogni punto: cioè: lim
x cf x =c . Infatti, per ogni ε0 arbitrario,
la disequazione ∣x−c∣ε , è soddisfatta per: c−ε xcε , che risulta essere un intorno completodi c.
Da queste due proprietà segue che:a) x n , con n∈N, è una funzione continua, perché prodotto di n funzioni continue.
Per la stessa ragione:b) kxn , con k∈R, con k∈ ℝ , è una funzione continua.
- 22 -

Inoltre:c) ogni funzione razionale intera:
(3) f x =∑i=0
n
ai xi=a0a1 xa2 x2
........an xn,
è continua per ogni valore della x, perché somma algebrica di n + 1 funzioni continue.d) Ogni funzione razionale fratta:
f x =A x B x
,
dove A x e B x sono polinomi nella indeterminata x a coefficienti reali, è continua per tutti queivalori della x che non annullano il denominatore, perché quoziente di funzioni continue.B) Funzioni goniometriche.3°) Le funzioni senx e cosx sono continue per ogni valore della x, cioè:(4) lim
x csenx=senc , lim
xccosx=cosxc ,
Infatti, essendo limx 0
senx=0 e limx0
cosx=1, posto x=ch , h∈R, per le formule di addizione del
seno e del coseno, si ha:senx=sen ch =sen c ⋅cos h cos c ⋅sen h ,
e:cos x=cos ch =cos c ⋅cos h −sen c ⋅sen h
da cui, tenendo conto che, quando x→c allora h→0 e cos c e sen c sono limitati (perché in valoreassoluto non superano il numero 1), si ha:
limx c
senx= limxc
sen ch = limxc
senc⋅cosh limx c
senh⋅cosc =senc ;
limxc
cosx=limxc
cos ch =limx c
cosc⋅cosh limx c
senh⋅senc =cosc.
Quindi vale la tesi.
4°) La funzione tan x=senxcosx
, in quanto quoziente di funzioni continue, è continua per ogni va-
lore della x≠ 2k1 π2
, k∈Z , per i quali perde di significato.
C) Funzioni esponenziali.5°) La funzione y=ax , a0 , è continua per ogni valore della x, cioè risulta, qualunque sia c:(5) lim
x cax=ac .
Infatti ricordiamo che risulta: limx 0
ax=a0
=1 , per ogni a > 0; se poniamo, allora, x=ch , h∈R, si
ha: limx c
a x=lim
h 0ach
= limh 0
ac ah=ac lim
h0ah=ac ,
da cui discende la validità della tesi.Le proprietà della funzione ax studiate in algebra vengono riassunte nei due seguenti schemi:
se: a > 1:ax è positiva e crescente,
cioè se: α < β ⇒ aαaβ :
ax{∞ per x∞1 per x00 per x−∞
;
se: 0 < a < 1:ax è positiva e decrescente,
cioè se α < β ⇒ aαaβ :
ax{0+ per x∞
1 per x0∞ per x−∞
.
D) Funzioni logaritmiche.6°) la funzione y=loga x , a0 , a≠1 , è continua per ogni valore positivo dell'argomento x,cioè risulta, qualunque sia il numero positivo c:
- 23 -

(6) limx c
loga x=loga c .
Le proprietà della funzione y=log a x , studiate in algebra, vengono riassunte nei seguenti schemi:
se a > 1: log a x è crescente, e:
è positivo, per x > 1,è negativo, per 0 < x < 1,è nullo, per x =1;ovvero, riassumendo:
loga x {−∞ per x0+
∞ per x∞;
se: 0 < a < 1 log a x è decrescente, e:
è positivo, per 0 < x < 1,è negativo, per x > 1,è nullo, per x =1;ovvero, riassumendo:
loga x {∞ per x0+
−∞ per x∞.
E) Funzione potenza e funzione irrazionale.Enunciamo le seguenti proprietà:7°) La funzione y= xα ,α∈R, è continua per ogni valore della x0; cioè qualunque sia ilnumero positivo c, si ha:
limx c
xα=cα .
In particolare:8°) La funzione y=
n x è continua per ogni valore di x con x≥0, cioè qualunque sia il numero
non negativo c, risulta:limx c
n x=
nc .
ESEMPI.Si ha:
a) limx
π6
senx=senπ6=
12
; b) limx 2
x3−5 x2
7 =−5 ;
c) limx 3
5x=53
=125 ; d) limx13x2 log x
2x =32 log 12=5 ;
e) limx
π3
2 tan2 xcosx =2 tan2 π3cos
π3=
132
; f) limx 5
x 2−3 x72 x1
=1711
.
OSSERVAZIONE. La funzione definita da:
y={xsen1x
per x≠0 ,
0 per x=0 ;
è evidentemente continua per x ≠ 0, perché è un prodotto delle due funzioni continue x e sen1x
.
Però essa è continua anche per x = 0, perché si è dimostrato che risulta: limx 0 x sen
1x =0 , e 0 è pure
il valore della funzione per x = 0. Inoltre: ∣y∣=∣x sen1x ∣=∣x∣⋅∣sen
1x∣≤∣x∣, il grafico della curva è
situato nella regione del piano compresa fra le rette y=±x. Il grafico raggiunge la retta y=x nei
- 24 -

punti di ascissa: x=1
4 k1 π2
, con k∈Z, cioè nei punti dove risulta: sen1x=1 ; raggiunge invece
la retta y=−x nei punti di ascissa: x=1
4 k−1 π2
, con k∈Z,
cioè nei punti dove risulta: sen1x=−1. La
funzione inoltre assume il valore 0 negli in-
finiti punti di ascissa x=1
k π, con k∈Z .
Perciò in qualunque intorno dell'origineessa assume valori positivi e negativi, com-piendo oscillazioni le cui ampiezze vannosmorzandosi se x→0. Ne segue un graficodel tipo di quello riportato nella figura quiaccanto, che, nell’intorno dell’origine, nonpuò più venire disegnato a causa dell'ad-densarsi, sempre maggiore, delle oscilla-zioni.
fig. 2
4. La continuità delle funzioni composteSappiamo che se una funzione è continua in un intervallo A= [a ,b ] , si ha:
limx c
f x = f c ,∀ c∈A .
Poiché c=limx c
x , ne segue che: limx c
f x = f limx c
x , cioè:
se una funzione è continua, i segni di limite e di funzione sono permutabili.Questo risultato è generalizzabile alle funzioni composte, mediante un teorema fondamentale. Pri-ma, però, ricordiamo che se: g : AB e f : CD , sono due funzioni reali di variabile reale, e seg A e C hanno elementi in comune, allora le funzioni f e g definiscono la funzione composta:f o g : A1 D , dove A1 è il sottoinsieme di A costituito da tutti gli elementi di A che hanno come
immagine elementi di g A ∩C. Ricordato questo, enunciamo il seguente teorema:
Teorema 4.1 Se la funzione g x ammette, per x→c, limite finito l:limx c
g x = l ,
e se g z è continua per z = l,limz l
f z = f l ,allora risulta:
limx c
f [ g x ]= f [ limx c
g x ]= f l .
Questo teorema è molto utile per la ricerca del limite in c della funzione f [ g x ] composta da g e daf.Per esempio, sotto le ipotesi del teorema 4.1, che si dovranno tuttavia precisare caso per caso, se ri-sulta:
limx c
g x = l
con l ∈R , allora valgono i seguenti teoremi:
- 25 -

Teorema 4.1.1 limx c
n g x =n limxc
g x =n l .
Teorema 4.1.2 limx c
loga g x =loga limx c
g x =loga l .
Teorema 4.1.3 limx c
ag x =alimx c
g x
=al
. In particolare:
limx c
eg x =elimx c
g x
=el
.
Dai teoremi 4.1.2 e 4.1.3 segue che:Teorema 4.1.4 Se i limiti:
limx c
f x =l 1 0 e limx c
g x = l 2 ,
esistono finiti, allora:
limx c
[ f x ]g x = l 1
l 2.
Infatti si ha:
[ f x ] g x =e ln f x g x
=eg x ln f x , e quindi:
limx c
[ f x ]g x =lim
xceg x ln f x
=elimxc
g x ln f x
=el 2 ln l 1=e
ln l 1
l 2
=l 1
l 2.
Infine, come corollario del teorema 4.1, vale il seguente importante:Teorema 4.2 Se g x è continua nel punto c e f z è continua nel punto z 0=g c, allora la fun-
zione f [g x ] è continua nel punto c.Infatti, per il teorema 4.1 e per la continuità di g x , si ha:
limx c
f [ g x ]= f [ limx cg x ]= f [ g c ] .
Questo teorema ha una un'utilità pratica grandissima, perché permette di estendere notevolmente laclasse delle funzioni continue. Per esempio, se f x è continua in A, lo sono pure le funzioni:1) a f x , con a0 ;2) log a f x , con f x 0 , a0 , a≠1 ;
3) sen f x , cos f x ,....;
4) xα , con x > 0 e α∈ ℝ ; perché è: xα=aα loga x , ∀ a > 0 e a ≠ 1;
5) se f x e g x sono continue ed è f x 0 , anche la funzione [ f x ]g x è continua;6) se f x e g x sono continue ed è f x 0 , f x ≠1 , g x 0 , anche la funzione log f x g x
è continua.
5. Proprietà delle funzioni continue in un intervallo chiuso e limitato
In Analisi Matematica hanno molta importanza le proprietà delle funzioni y= f x definitenegli insiemi compatti (cioè limitati e chiusi) e ivi continue.Teorema 5.1 Teorema di Weierstrass.Se f x è una funzione continua in un intervallo chiuso e limitato I= [a ,b ] , devono esistere in I unpunto in cui f x raggiunge il suo massimo valore M e un punto in cui raggiunge il suo minimovalore m.Dim. Daremo una dimostrazione rigorosa di questo teorema. Come Gauss ed altri grandi matema-tici, si potrebbe accettare e applicare questa proprietà intuitiva senza provarla. Tuttavia se la f x ècontinua in I allora è sicuramente limitata, perché se non fosse limitata la f non sarebbe continua.L'insieme dei valori assunti dalla funzione possiede pertanto un estremo superiore M ed un estremoinferiore m con ∣m∣, ∣M∣∞ . D'altra parte la funzione ausiliaria:
- 26 -

(1) x =1
f x −Mnon è continua. Infatti per la continuità di f x , si possono determinare valori di x contenuti in Itali che: ∣ f x −M∣ sia minore di un numero arbitrario piccolo a piacere; per tali valori cioè∣ x ∣ diviene maggiore di un numero grande a piacere, per cui: lim
x c x =∞ , per un c∈I. Esiste
proprio un punto c∈I, per cui è: f c =M. Infatti se non esistesse, il denominatore della (1) non siannullerebbe mai, e quindi x , quoziente di due funzioni continue a denominatore mai nullo, sa-rebbe continua, contro l'asserzione precedente. In modo del tutto analogo si prova che esiste un pun-to in cui: f x =m.•OSSERVAZIONI.1a) In questo teorema è fondamentale il fatto che: una funzione f x continua in un intervallolimitato e chiuso [a ,b ] , è ivi limitata.
2a) Notiamo che il massimo e il mini-mo di una funzione continua y= f x inun intervallo chiuso I= [a ,b ] , possonocadere tanto nei punti interni all'interval-lo, quanto negli estremi di esso, o uno al-l'interno e l'altro in un estremo. Questediverse possibilità (che, come si vedràmeglio nel seguito, è bene tenere distinte)sono illustrate nelle figure 3a, 3b, 3c e 3ddove la lettera m indica il minimo e lalettera M indica il massimo.
Ox
y
a
y=f(x)
bm
M
aO x
y
y=f(x)
b
m
M
O x
y
a
y=f(x)
b
m
M
aO x
y
y=f(x)
bm
MM
fig. 3a fig. 3b
fig. 3c fig. 3d
fig. 3
3a) Caso particolare di questo teorema è la seguente proprietà:Se la f x è crescente (decrescente) in [a ,b ] , essa raggiunge il massimo (minimo), nell'estremodestro b, mentre raggiunge il minimo (massimo) nell'estremo sinistro a (ved. fig.3a).
CONTROESEMPI.È molto importante la segnalazione di controesempi, cioè di esempi che pongono in rilievo
come le ipotesi enunciate nel teorema di Weierstrass, cioè che [a , b ] sia chiuso e limitato, e chef x sia continua, siano essenziali; infatti se viene meno una di tali ipotesi, il teorema può non
essere vero.
1) La funzione definita in ℝ : f x =1
3x2 , è continua su tutto ℝ (insieme chiuso ma non li-
mitato). Questa funzione, come è semplice verificare, ammette il Max nel punto x = 0, ma non am-mette il min.2) La funzione: y=cosx, considerata nell'intervallo aperto 0 ,π è continua. L'estremo inferioreè −1 e quello superiore è 1, ma questi due valori non sono assunti dalla funzione in alcun puntodell'aperto 0 ,π .
- 27 -

3) La funzione y = tanx sia definita in −π2x
π2 . La y in questo caso è continua nell'inter-
vallo limitato e aperto. Essa tuttavia non ammette né Max né min.4) La funzione y = x definita in 0 ,1 è continua e limitata in questo intervallo ma non ammettené Max né min. Teorema 5.2 Teorema dell'esistenza degli zeri. Se una funzione f x è continua in un intervallo chiuso e limitato [a , b ] e se agli estremidell'intervallo assume valori di segno opposto, essa si annulla in almeno un punto internoall'intervallo; cioè esiste almeno un punto c∈a ,b tale che:
f c =0 , con a xb .Dim. Supponiamo che sia f a 0 e f b 0 . Per il teorema della permanenza del segno vi sonosicuramente degli intorni destri di a (un intorno destro di a si ha quando a ne è l'estremo sinistro) incui è f x 0 . Gli estremi destri di tali intorni costituiscono un insieme limitato, che ha pertanto unestremo superiore minore di b (essendo b un punto per cui f x è negativa). Sia c tale estremo: dallacontinuità della funzione si ha:
lim xc−
f x = f c
ma, poiché a sinistra di c è f x sempre positiva, è anche f c ≥0. D'altra parte a destra di c la f x è negativa, quindi:
lim xc
f x = f c ,
deve essere ≤ 0. si conclude che f c =0 .•OSSERVAZIONE. L'interpretazione geometrica di questo teorema è molto semplice. Il graficodella funzione continua y= f x che congiunge i punti P1≡a , f a e P2≡ b , f b dovef a 0 e f b 0 (o viceversa) taglia l'asse x in almeno un punto (fig. 4).
ESEMPIO. Data la funzione: y=x3−1, è y 0 =−1 e y 2 =7 . Questa funzione è continua nel
chiuso [0, 2]. Dunque esiste almeno un punto dell'intervallo in cui la funzione y=x3−1 si annulla.Infatti (fig. 5) è: y 1 =0 .
f(a)O x
y
y=f(x)
ba
f(b)
fig. 4
fig. 5
Teorema 5.3 (di Darboux-Bolzano) Se f x è continua in [a , b ] , assume in questo intervallo almeno una volta tutti i valori compresi trail minimo m e il massimo M.
- 28 -

Dim. Infatti la f può assumere un valore k qua-lunque compreso tra m e M. Se f x è continua,anche la funzione:
F x = f x −kè continua. Quando f x prende i valori m e M,F x assume rispettivamente i valori:
m−k ,e:
M−k ;che sono di segno contrario essendo m < k < M.Allora, applicando il teorema 5.2, possiamo affer-mare che F x si annulla almeno una volta, equando F x si annulla, f x diventa uguale a k.•
M
O x
y
y=f(x)
ba
f(b)
y=kf(a)=m
fig. 6Il senso di questo teorema è chiaramente illustrato dalla fig. 6. In questo caso ogni retta:
y = k, m < k < M, interseca almeno una volta il grafico della funzione.Come corollario di questo teorema si ha il:Teorema 5.4 Se f x è una funzione reale continua in un intervallo I (non necessariamente néchiuso né limitato), allora il codominio C di f x è pure un intervallo.Dim. Siano y1 e y2 appartenenti al codominio C di f x . Allora esistono due numeri x1 e x 2
dell'intervallo I, tali che:f x1=y1 e f x2 = y2 .
Ma nell'intervallo chiuso [ x1, x2 ] la f x è continua e dal teorema precedente segue allora che:
[ y1, y2 ]⊆C . •
6. Invertibilità, monotonia e continuità
Sappiamo che una funzione è invertibile se e solose è una corrispondenza biunivoca fra gli elementi didue insiemi. Inoltre, se y= f x è una funzionestrettamente monotòna nell'insieme A, allora essa èinvertibile, e la funzione inversa x=g y è purestrettamente monotòna e ha come insieme di defini-zione il codominio della f x . Tuttavia, è bene ri-cordare che, in generale, non tutte le funzioni inverti-bili sono monotòne. Infatti sia data la funzione:
f x ={x1, per x∈ℝ∖ℚ ,x , per x∈ℚ .
Questa funzione, il cui grafico è in fig. 7, è ovvia-mente invertibile ma non monotòna. Infatti:
fig. 7
∀ x∈ℚ : x y= x , e y∈ℚ , ∀ x∈ℝ∖ℚ: x y=x1 e y∈ℝ∖ℚ .Viceversa:∀ y∈ℚ : y x= y , e x∈ℚ , ∀ y∈ℝ∖ℚ : y x= y−1 e x∈ℝ∖ℚ.Questo significa che il concetto di monotonia è più restrittivo di quello di invertibilità e quindi, ingenerale, i concetti di invertibilità e di monotonia non si equivalgono.Esistono, però, delle particolari ed importanti funzioni per le quali i concetti di invertibilità e di mo-notonia sono equivalenti: le funzioni continue in un intervallo limitato e chiuso, ovvero compatto.Studiamo quindi, le funzioni reali di variabile reale f: [a ,b ]ℝ in relazione ai concetti di invertibi-lità, monotonia, e continuità.Sia y= f x una funzione continua nell'intervallo chiuso [a , b ] ed ivi monotòna (in senso stretto). In
- 29 -

tal caso il codominio della f x è l'intervallo chiuso [m , M ] , dove m e M sono, rispettivamente, ilminimo e il massimo assoluti della f x in [a ,b ] , e quindi la funzione inversa x=g y è monotònain [m , M ] , con m= f a e M= f b , se la f è crescente, oppure con m= f b e M= f a se la f èdecrescente.Inoltre, (§5), non solo ogni valore di y compreso tra m e M è effettivamente assunto dalla funzionein un conveniente punto di [a ,b ] , ma è assunto una volta sola, poiché la f x è iniettiva.Chiarito questo aspetto, possiamo provare che:Teorema 6.1 Se la funzione y= f x è continua e monotòna in senso stretto nel chiuso [a ,b ] , anchela funzione inversa x=g y (oltre che strettamente monotòna) è continua nel chiuso [m , M ] ,descritto da y= f x quando x varia in [a , b ] .Dim. Infatti, se tende a zero la differenza k= f xh − f x , poiché x è l'unico punto di [a ,b ] ,dove la funzione assume il valore f x , il punto x + h tende a x, cioè h tende a zero. Con ciò restaprovato che la funzione x=g y è continua in ogni x∈[a ,b ] . •Da questo teorema e dal teorema 5.4, segue più generalmente:Teorema 6.2 Se f x ℝ è una funzione reale continua e monotòna in senso stretto in unintervallo I (non necessariamente né chiuso né limitato) allora essa è dotata di funzione inversacontinua e monotòna in senso stretto nell'intervallo f I descritto da f x al variare di x in I.In base al teorema ora enunciato, possiamo, per esempio, affermare che le funzioni arcsenx, arcco-sx, arctanx, arccotanx sono continue nel loro insieme di definizione. Così risulta per esempio:
limx
12
arcsenx=arcsen12=
π6
, limx−1
arctanx=arc tan −1 =−π4
.
ESERCIZIO.Dimostrare il seguente teorema:Teorema 6.3 Teorema di monotonia. Se f : [a , b ] è continua e invertibile nell'inter-vallo [a ,b ] essa è strettamente monotòna in[a , b ] .Sugg. per assurdo....Da questo e dal precedente teorema segue cheper le funzioni continue in un intervallo chiusoe limitato, i concetti di invertibilità e di mono-tonia si equivalgono.Si nota che l'ipotesi che il dominio della f x sia un intervallo è essenziale per la validità delteorema di continuità delle funzioni inverse.Questo perché, in generale, non è detto chel'inversa di una funzione continua sia anch'essacontinua. Per esempio, l'inversa della funzionecontinua (fig. 8):
f x ={2 x , per 0≤ x≤1,2 x−2 , per 2x≤3,
è la funzione (scambiando la x con la y):
g x={x2
, per 0≤x≤2,
1x2
, per 2< x≤4,
che non è continua (fig. 9).
fig. 8
fig. 9
- 30 -

7. Due limiti fondamentali
Esistono alcune funzioni reali di variabile reale che, per x tendente a un certa posizione dellaretta ℝ , assumono valori che non è possibile dedurre in modo elementare. Qui ci occuperemo inparticolare del comportamento di due funzioni a causa della loro grande importanza che ricoprononell'ambito dell'analisi matematica.1) Dimostriamo che è:
limx 0
senxx=1 .
purché x indichi la misura in radianti dell'angolo.Anzitutto proviamo che, se x è la misura in radianti di un angolo, si ha:
(1) senx xtan x , per 0xπ2
.
Infatti si consideri (vedi fig. 10) nel cerchio di raggio rtangente ad AC, l'angolo A O B di misura x. Avremo:area del triangolo AOB < area del settore AOB < area deltriangolo AOC, ossia:
12
r2 senx12
r2 x12
r2 tanx
che è quanto si voleva provare (r ≠ 0).
Essendo 0xπ2⇒ senx0 , per cui, dividendo i termini
della (1) per senx si ha:senxsenx
x
senx
tanxsenx
,
e, elevando alla −1 , si ha:fig. 10
1senx
xcosx .
Se moltiplichiamo per −1 , possiamo scrivere;
−1−senx
x−cosx .
e se sommiamo 1a tutti i membri otteniamo:
01−senx
x1−cosx .
Poiché: limx 0
cosx=1 ,
applicando il teorema del confronto fra i limiti, segue la tesi e cioè:
limx 0
senxx=1 . •
Si nota che, applicando direttamente il teorema del limite del quoziente, si ottiene la forma indeter-
minata 00
.
Abbiamo dimostrato che vale la (1), se x indica la misura in radianti dell'angolo. Se invece indichia-mo con α la misura dell'angolo in gradi sessagesimali, allora si prova che è:
limα 0
senαα=
π180°
.
Per dimostrare ciò, ricordiamo che che il legame che unisce la misura x in radianti dell'angoloA O B e la misura α dello stesso angolo in gradi è:
x=π
180 °α .
Premesso ciò, è: senx = senα, per cui con un procedimento del tutto uguale a quello seguito sopra si
- 31 -

può arrivare a scrivere la seguente relazione:
limα 0
180 °π⋅
senαα =1 ,
ossia:180°
πlimα0
senαα =1 ,
da cui:
limα 0
senαα = π
180°.
2) È noto (o almeno dovrebbe esserlo!) come si sia giunti storicamente alla definizione del nu-mero π: si considerino tutti i poligoni regolari inscrivibili in una circonferenza di raggio r, in ordinecrescente secondo il numero n dei lati. Il loro perimetro cresce al crescere di n, ma non diventa maiinfinitamente grande. Diremo che la successione dei perimetri è crescente e limitata per cui tale suc-cessione è convergente ad un valore limite () che si indica con 2πr che esprime la misura dellacirconferenza.3
Qualcosa di analogo faremo ora cercando il limite, per x tendente ad infinito, della funzione:
f x =11x
x
.
Si prova che questo limite esiste ed è finito e lo si indica, convenzionalmente, con la lettera e il cuivalore approssimato alle prime 50 cifre decimali è:
limx∞11
x x
=e≃2.71828182845904523536028747135266249775724709369995957496696762772407 .
Cominciamo con il considerare x crescente per valori interi positivi, cioè:
limn∞
f n = limn∞11
n n
,
con n > 0 e intero. Si vede che, qualunque sia n, è: 2≤ f n 3; cioè f n costituisce una succes-sione limitata. Infatti, utilizzando la formula del binomio di Newton, si ha:
11n
n=11
1−1n
2 !1−1
n ⋅1−2n
3 !. . .2
12 !
13!.. .
1n !111
2
122. .. .
12n−1 =
=1
1−1
2n
1−12
11
1−12
=3 .
D'altra parte f n è crescente. Infatti: f n1 f n in quanto:
3 Sia AB il lato del poligono regolare di n lati inscritto in una circonferenza di raggio r e centro O. La misura dell'ango-
lo al centro AOB è 2 πn
radianti. Indicando con H il piede dell'altezza del triangolo rettangolo AHO possiamo cal-
colare la misura di AH e cioè: AH=r senπn
e, quindi:
AB=2r senπn
e il perimetro pn del poligono ad n lati è: pn=2n r senπn
.
Adesso si tratta di calcolare il limite della successione il cui termine generale è pn.
A questo scopo, operiamo una sostituzione di variabile e sia: n=1z
per cui: z=1n
e, poiché n∞, si ha che: z0. Allora:
limn∞
pn= limn∞
2 nr senπn= lim
z02 r
sen π zz
= limz0
2 r π sen π z
π z=2 π r⋅1=2 π r . •
- 32 -

f n1 =111−
1n12
.... ; f n =111−
1n
2.... ;
ed essendo:
n1n , è h
n1
hn
, h∈ℝ .
Tutte le frazioni che compaiono nello sviluppo di f n1 sono maggiori delle corrispondenti dellosviluppo di f n . Inoltre lo sviluppo di f n1 contiene un termine positivo in più. Allora per (),f n tende, al crescere di n, a un limite che si indica con la lettera e. Si vede poi che la tesi valeanche quando x non è intero e positivo. Infatti, essendo:
n < x < n + 1, è:
1 1n1
n
11x
x
11n
n1
,
da cui :
limn∞1 1
n1 n
≤ limx∞11
x x
≤ limn∞11
n n1
.
Ma:
limn∞1 1
n1 n
=
limn∞1 1
n1 n1
limn∞1 1
n1 =e ,
limn∞11
n n1
=limn∞11
n n
limn∞11
n =e ,
da cui, applicando il teorema del confronto fra limiti, si ha la tesi.•Ovviamente se x è negativo, ponendo x=− y , y∈R , si ottiene ancora la tesi. Inoltre:
limx∞
1+yx
x
=e y ,
con y∈ℝ . 8. Esercizi sui limiti. Forme indeterminate
Come si è visto, i teoremi sui limiti e sulle funzioni continue, permettono il calcolo dei limitidelle funzioni in numerosi casi. Tuttavia esistono dei casi in cui si devono “gestire” delle funzionialle quali non sono applicabili i teoremi ora richiamati. Questi casi prendono il nome di “forme in-determinate”, in quanto non esiste alcun teorema che permetta di calcolare il limite, ma ogni voltabisogna fare delle opportune trasformazioni per raggiungere il risultato del calcolo del limite.Le forme indeterminate più frequenti sono:
00
, ∞
∞, −∞∞ , ∞0, 00 , 1∞.
Altre forme indeterminate meno frequenti sono:log 0∞, log 0 0 , log ∞0 , log 11 .
Vediamo, negli esercizi seguenti, come ci si comporta di fronte ai vari casi di indeterminatezza.
A) Forma00
.
A1) Calcolare il limite: limx1
x 25 x−6
x2x−2.
Si ha:
limx1
x 25 x−6
x2x−2=lim
x1
x−1 x6 x−1 x2
=limx1
x6x2
=73
.
- 33 -

2) Calcolare il limite: limx 0
tanxx
.
Tenendo conto del primo limite fondamentale, scriviamo:
limx 0
tanxx=lim
x0 senx
x⋅
1cosx =1 .
A3) Calcolare il limite: limx 0
1−cosxx
.
Si ha:
limx 0
1−cosxx
= limx0
1−cosx 1cosx
x 1cosx =lim
x 0
sen2 xx 1cosx
= limx 0 senx
x⋅senx⋅
11cosx =0 .
A4) Calcolare il limite: limx 0
1−cosx
x2. Procediamo applicando un procedimento analogo al pre-
cedente:
limx 0
1−cosxx2
=limx 0
1−cos2 xx2 1cosx
=limx 0
sen2 xx2 1cosx
=limx0 [
senxx⋅
senxx⋅
11cosx ]=1⋅1⋅
12=
12
.
A5) Calcolare il limite: limx 3[ ln
x−3 x6−3 ] .
Si ha:
limx 3[ ln
x−3 x6−3 ]=lim
x3 [ln x−3 x63
x−3 ]=ln limx3
x63 =ln6 .
B) Forma 0⋅∞ .B1) Calcolare il limite: lim
xπ2
[ tanx 1−senx ] .
Si ha:
limx
π2
[ tanx 1−senx ]= limx
π2
cos2 x⋅senxcosx 1senx
= limx
π2
cosx⋅senx1senx
=02=0 .
B2) Calcolare il limite: limx∞
x⋅senπx . Cerchiamo di riportare questo limite in una forma simile
a quella del primo limite fondamentale.
limx∞π⋅x
π⋅sen
πx =lim
t 0π⋅sent
t =π ,
avendo posto πx=t per cui se ∞ allora t 0 .
C) Forma ∞−∞ .
C1) Calcolare il limite: limx∞
9 x21−3 x .
Si ha:
limx∞
9 x21−3 x = limx∞
9 x21−9 x2
9 x213 x
=0 .
C2) Calcolare il limite: limx1
11−x
−3
1−x3 .
Si ha:
limx1
11−x
−3
1−x3 =limx1 1x x2−3
1−x3 = limx1
x2x−2
1−x 1xx2 =lim
x1
x−1 x2
− x−1 1xx2 =
= limx1− x2
1 xx2 =−1 .
- 34 -

C3) Calcolare il limite: limx 0
[ ln sen2 x−ln x ] .
Si ha:
limx 0
[ ln sen2 x−ln x ]= limx0
[ ln sen 2 xx ]=ln lim
x0
2 sen x⋅cos xx
=ln 2⋅1⋅1 = ln2 .
D) Forma∞
∞.
D1) Calcolare il limite: limx∞
cosxx3 xsenx
.
Poiché: limx∞
cosxx=0 e lim
x∞
senxx=0 , si ha lim
x∞
cosx x3 xsen x
= limx∞
1cosx
x
3senx
x
=13
.
OSSERVAZIONE.Quando si vuole determinare il limite del rapporto di due polinomi p x e q x ∈ℝ [ x ]
dove ℝ [ x ] indica l'“anello” dei polinomi nella indeterminata x e a coefficienti reali, (o, natural-mente, in una qualunque altra variabile), per x→∞, è utile dividere il numeratore e il denominatoreper xn , essendo n il massimo dei gradi di questi due polinomi. Si può spesso applicare unprocedimento analogo alle frazioni contenenti delle espressioni irrazionali, stando però ben attenti.D2) Provare che è:
limx∞
an x nan−1 xn−1
. . . + a1 xa0
bn x nbn−1 xn−1
. . . + b1 xb0
=an
bn
.
Il limite si presenta nella forma indeterminata∞
∞. Per calcolarlo dividiamo numeratore e denomi-
natore per xn .Così, con un semplice calcolo, si ha:
limx∞
an x nan−1 xn−1. . . + a1 xa0
bn x nbn−1 xn−1. . . + b1 xb0
= limx∞
xn anan−1
x. .. +
a1
xn−1
a0
xn xn bn
bn−1
x.. . +
b1
xn−1
b0
xn =
an
bn
,
tendendo a zero (per x→∞) tutte le frazioni del numeratore e del denominatore.
D3) Analogamente, si prova che il limite: limx∞
an x nan−1 xn−1
. . .. . + a1 xa0
bm xmbm−1 xm−1
.. . +b1 xb0
, vale 0 per
nm e vale ∞ per n > m.
D4) Calcolare il limite: limx∞
2 x x2−133 x3−2 x21
.
Dividendo numeratore e denominatore per x, si ha:
limx∞
2 x x2−1
33 x3−2 x21= lim
x∞
21−1x
33−2x
1x3
=3
33=
39 .
D5) Calcolare il limite: limx∞
x x21− x .
Si ha:
limx∞
x x21−x = limx∞
x x21− x2
x21x= lim
x∞
1
11
x21
=12
.
- 35 -

E) Altri casi.
E1) Provare che risulta:
(1) limx 0
1x 1x=e ,
sapendo che: limx∞11
x x
=e .
Se poniamo1x=t , si ha:
limx 0
1x 1x= lim
t∞ 11t
t
=e .
E2) Provare che risulta:
(2) limx∞1α
x x
=eα , con α∈R.
Infatti:
limx∞
1αx
x
= limx∞1α
x xα⋅α
= (♣),
e, postoxα=t , si ha:
(♣) = [ limt∞11
t t
]α
=e .
In particolare:
(3) limx∞
1− 1x
x
=1e
,
(4) limx∞
1 kx
mx
=emk , con m e k∈R.
E3) Provare che risulta:
(5) limx 0
ln 1x x
=1 .
Si ha, tenendo conto del limite (1):
limx 0
ln 1x x
=limx0
[ln 1x 1x ]=ln [ lim
x01x
1x ]=lne=1 .
E4) Provare che risulta:
(6) limx 0
ax−1x=lna .
Posto: a x−1=t , si ha: a x
=t1 , da cui, prendendo i logaritmi a destra e a sinistra:
x lna=ln t1 ossia: x=ln t1
lna, pertanto, tenendo conto anche del limite (5), si può scrivere:
limx 0
ax−1x=lim
t 0
tln t1
⋅lna=1⋅ln a=lna .
In particolare:
(7) limx 0
ex−1x=1 .
E5) Provare che risulta:
(8) limx 0
1x k−1kx
=1 , con k∈R.
Tenendo presenti i limiti (5) e (7), si ha:
- 36 -

limx0
1 x k−1
kx= lim
x0
eln 1x k−1kx
=limx0
e k ln 1x −1kx
= limx0
ek ln 1x −1k ln 1x
⋅ln 1x
x=1.
E6) Calcolare il limite: limx∞
x [ ln x1 −ln x ] .
Si ha:
limx∞
x [ ln x1 −ln x ]= limx∞
x lnx1
x=ln lim
x∞1 1
x x
=1 .
E7) Calcolare il limite: limx∞ x−1
x1 x
.
Dividendo il numeratore e il denominatore della frazione per x, si ha:
limx∞ x−1
x1 x
= limx∞ 1−
1x
11x
x
= limx∞
1−1x
x
11x
x=
limx∞1−1
x x
limx∞11
x x=
e−1
e=
1e2
.
E8) Calcolare il limite: limx 0 sen x n
sen x n .
Si ha:
limx 0 senxn
senx n =lim
x0 senxn
xn⋅
xn
senx n =1⋅1n=1 .
E9) Calcolare il limite: limz1
1−z tanπ z2
.
Se poniamo:1−z=x ,
allora: z=1−x ,
e:
limz1
1−z tanπ z2=lim
x 0x tan π−π x
2 =limx0
x tan π2−π x2 == lim
x0xcotan
π x2=lim
x0
π2
x
π2
⋅
cosπ x2
senπ x2
=
=limx0
π2
x
senπ x2
⋅
cosπ x2
π2
=1⋅1π2
=2π
.
E10) Provare che risulta, ∀ c∈ R :
(9) limx∞
ln x
xc =0 ,
(10) limx 0
xc ln x=0 .
Come si può dedurre dal grafico della fig. 11, è facile provare che, per x > 0, è:lnx < x.
Scriviamo xc2 al posto di x. In questo modo avremo:
- 37 -

ln xc2x
c2⇒
c2
ln xxc2⇒ ln x
2c
xc2 . Quindi,
dividendo ambo i membri per xc , si arrivaalla relazione:
0lnxxc
2c
xc2 .
Dal teorema del confronto, essendo:
limx∞
2c
x−
c2=0 ,segue la (9).
La (10) è deducibile immediatamente dalla (9)
operando il cambio di variabile x=1t
.
Dalla (9) segue subito che: fig. 11(11) lim
x∞ x−c⋅ln x =+∞ .
Infatti, se c < 0, il limite è evidente. Se c > 0, si scrive:
limx∞
x−c⋅ln x = limx∞[ x 1−c⋅ln x
x ] ,e si nota che, nella parentesi quadra, il primo fattore diverge e il secondo converge a 1.E11) Provare che risulta per ogni costante c∈ ℝ+
(12) limx∞
ex
x c=∞ ,
(13) limx∞
xc e−x=0,
Infatti, posto xc=ec ln x e, tenendo conto della (11), si ottiene:
limx∞
e x
xc= lim
x∞ex−c lnx ,
e, poiché limx∞
x−c lnx =+∞ , segue la (12).
La (13) non è altro che il limite del reciproco della funzione precedente.F) Altre forme indeterminate.Per i prossimi esercizi occorre tener presente che:
limxc
[ f x ]g x =lim
x ce [g x ln f x ]=e
limxc
[ g x ln f x ]
dove la seconda uguaglianza la possiamo scrivere solo quando limxc
[g x ln f x ] esiste finito.
F1) Calcolare il limite: limx 0
2sen xx
x .
Si ha:
limx 0
2senxx
x =elimx 0 senxx
x⋅ln 2=e2 ln 2
=e ln 4=4 .
F2) Calcolare il limite: limx∞
7
3 x22 x1
4 x31 .
Si ha:
limx∞
7
3 x22 x1
4 x31 =elimx∞ 3 x 22 x1
4 x 31⋅ln 7=e0
=1 .
F3) Dimostrare che se: limx c
f x =1 , limx c
g x =∞ , allora:
- 38 -

(14) limx c
[ f x ]g x =e
limxc
[ f x - 1 ]⋅g x
.
Infatti, posto f x =1α x , dove α x è infinitesimo per x→c, si ha:
limx c
[ f x ]g x = lim
xc
[1+ αx 1
α x ]α x ⋅g x
,
ed essendo:
limx c1α x
1
α x=lim
α 01+ α x
1
α x=e ,
ed α x = f x −1, risulta subito la (14).
In applicazione di questo risultato, calcoliamo: limx1
x1
1− x .
Poiché:
limx1
x−1 ⋅1
1−x=−1 ,
si trova:
limx1
x1
1− x=e−1 .
9. Confronto fra infinitesimi
Ricordiamo che: una funzione f x si dice un infinitesimo per x→c, se è:limx c
f x=0.
Questa definizione vale anche quando x∞ oppure x∞ o x−∞ .
ESEMPI.
1) Le funzioni: y=x3x , y=senx , y=1−cos x
x, y=ex
−1 , y=ln 1 x , sono
infinitesimi per x 0.
2) Le funzioni: y= x3
, y= senx , sono infinitesimi per x 0.
3) Le funzioni y=3
x3−2
, y=x
e x , sono infinitesimi per x∞ .
Gli infinitesimi vengono indicati con: α x , β x , γ x , δ x ,.....; e, per semplicità e nel caso in cuiciò non dia luogo ad equivoci, vengono indicati dalle lettere: α , β , γ , δ ,.....; senza scrivere quindila variabile da cui dipendono.Diamo ora alcune definizioni che saranno utili nel seguito.Def. 1. Se α e β sono entrambi infinitesimi per x→c, si dice che α e β sono due infinitesimisimultanei.Dati due infinitesimi simultanei, α e β , (per x→c, dove c può essere anche uguale a ∞ , ∞ , −∞
) è utile considerare il comportamento del rapportoαβ
, ammesso che esista un opportuno intorno di
x = c, in cui risulti sempre β x ≠0 , salvo al più il punto x = c.
Def. 2. Se limαβ=l≠0 , l ∈R , si dice che α e β sono infinitesimi dello stesso ordine. In questo
caso si scrive α=O β che si legge: “ α è o (vocale) grande di β ”.
Def. 3. Se limαβ=0 si dice che α (cioè l'infinitesimo al numeratore) è un infinitesimo di ordine
superiore rispetto a β . In questo caso si scrive α=o β che si legge: “ α è o (vocale) piccolo di β ”.
- 39 -

Def. 4. Se limαβ=∞ ∞ o −∞ , si dice α è un infinitesimo di ordine inferiore rispetto a β .
Def. 5. Se limαβ
NON esiste si dice che i due infinitesimi α e β , sono fra loro non confrontabili.
Talvolta è desiderabile precisare il confronto tra infinitesimi simultanei α , β , γ ,.....; indicando conun numero l'ordine di ciascuno rispetto ad uno di essi assunto come fondamentale (cioè come unaspecie di unità di misura). Di solito si prendono come unità di misura gli infinitesimi
x− x0 e 1x
,
rispettivamente quando x→x0 o x→ +∞ o x→ −∞ .Si pone la seguente definizione: si dice che l'infinitesimo β è di ordine k rispetto all'infinitesimo(fondamentale) α se β e αk hanno lo stesso ordine, cioè se
limβαk=l≠0 , l ∈R .
Ad esempio loga 1x , a x−1 , 1 x r−1 , r0 e sen x sono infinitesimi del primo ordine ri-
spetto a x. Invece 1−cosx , tanx−senx , sono infinitesimi rispettivamente di ordine 2 e 3 rispetto ax. La prima di queste due affermazioni è già stata provata, per quanto riguarda la seconda, si osservache:
limx 0
tanx−senx
x3=lim
x 0
senxcos x
−senx
x3=lim
x 0
senx−senx cosxcos x
x3=lim
x 0
senxx⋅
1−cosx
x2⋅
1cosx
=12
,
ovvero: 1−cosx=O x2 , tanx−senx=O x3 ,
ESEMPI.
1) L'infinitesimo: α= 1
x32 x−7
, è d'ordine superiore rispetto all'infinitesimo β= 1x3
,
per x→+∞, perché risulta:
limx∞
αβ= lim
x∞
x3
x32 x−7
=0 .
2) L'infinitesimo α=ln x è d'ordine inferiore, rispetto all'infinitesimo β= x−1 3 , per x→1, perché, posto x−1=t , si ha:
limx1
αβ=lim
x1
ln x
x−1 3=lim
t0
ln1+ t t
⋅1
t2=∞ .
3) L'infinitesimo α= x sen1x
non è confrontabile con l'infinitesimo β=x , per x→0, perché
limx0
xsen1x
x=lim
x0sen
1x
non esiste.
10. Infinitesimi equivalenti
Se α e β sono due infinitesimi e se risulta:
limαβ=1 ,
allora i due infinitesimi si dicono equivalenti e si scrive: α~β .
Inoltre, uno dei due si dice parte principale dell'altro nel senso che ora sarà precisato. Sappiamo
che se β è di ordine k rispetto a α si ha per definizione: βαk l≠0, l ∈R , quindi: β
l αk1 ,
- 40 -

ossia: β~l αk . L'infinitesimo l αk si dice la parte principale di β . Ad esempio, x è la parte princi-
pale di senx e di tanx,12
x2 è quella di 1−cosx ,12
x3 quella di tanx−senx .
Proprietà di facile dimostrazione sono le seguenti:1) due infinitesimi α e β sono equivalenti se e soltanto se la loro differenza è un infinitesimo
d'ordine superiore rispetto a ciascuno di essi; cioè: α~β⇔ limα−β
α=0 e lim
α−ββ=0 .
Infatti, se α~β , allora limβα=1 ; pertanto: lim
α−βα=lim1− β
α =1−limβα=1−1=0 . Viceversa,
se limα−β
α=0 , allora:
lim1−βα =0⇒1−lim
βα=0⇒ lim
βα=1⇒α ~ β . •
ESEMPIO. Sia α=x , β=xx3 e x→0. Gli infinitesimi α e β sono equivalenti, perché la differenza
β−α=x3 è un infinitesimo d'ordine superiore rispetto a α e a β. Infatti:
limx 0
β−αα=lim
x0
x3
x=lim
x0x2=0, e lim
x 0
β−αβ=lim
x0
x3
x3x=lim
x0
x2
x21=0 .
2) Principio di sostituzione degli infinitesimi equivalenti. Se il rapporto di due infinitesimi ammette un limite, questo limite resta invariato se si sosti-
tuisce ciascuno di essi con un infinitesimo equivalente; cioè:
α ~ α1 e β ~ β1⇒limαβ=lim
α1
β1
.
Infatti, si ha:
limαβ=lim
αβ⋅1⋅1=lim
αβ⋅lim
α1
α⋅lim
ββ1
=limα1
β1
. •
È facile provare che le seguenti coppie di infinitesimi, per x→0, sono equivalenti: I) senα~α II) tanα~α III) arcsen α~αIV) arctan α~α V) ln 1α ~α VI) aα−1~α lna , a0
VII) e α−1~α VIII) 1α k−1~k α IX)
n1α−1~αn
ESEMPI.
1) Provare che, per x0 : sen x x~ x 2 x3 . Applicando I) si ha:
sen x x ~ x x= x34 ,
e:
x2 x3= x1 xx=x 1
1 x=x x1
x=x
1−14 x1=x
34 1 x ~ x
34 ,
da cui la tesi.•
2) Trovare il limite: limx 0
ln 13 x sen x
tan x2 .
Essendo:ln 13 x sen x ~3 x sen x e tan x2 ~x2 ,
si ha:
limx 0
ln 13 x sen x
tan x2 =lim
x0
3 x sen xx 2
=3 .
- 41 -

3) Determinare il limite: limx 0
ln cos x
ln 1 x2 .
Essendo: ln cos x=ln [1−1−cosx ]~−1−cosx ,
e:ln 1x2 ~x2,
si ha:
limx 0
ln cos x
ln 1 x2 = lim
x0
−1−cos x
x2 =−12
.
4) Determinare il limite: limx 0
sen5 xln 1+4 x
.
Poiché:sen5x ∼ 5x, e ln(1 + 4x) ∼ 4x,
si può scrivere:
limx 0
sen5 xln 1+4 x
=limx0
5 x4 x=
54
.
5) Determinare il limite: limx 0
sen 2 xarcsen2 x−arctan2 x3x
.
Essendo:sen2 xarcsen2 x−arctan2 x~sen 2 x~2 x ,
si ha:
limx 0
sen 2 xarcsen2 x−arctan2 x3x
=limx 0
2 x3 x=
23
.
6) Determinare il limite: limx 0
sen3 x⋅ln 13 x
arctan x 2 e5
3x−1
.
Applicando il principio di sostituzione degli infinitesimi equivalenti, si possono scrivere queste re-lazioni:
sen3 x ~
3 x , ln 1+3 x ~ 3 x ,arctan x ~ x , e5
3 x−1 ~ 5 3 x .
Allora si ha:
limx 0
sen3 x⋅ln 13 x
arctan x 2 e5
3 x−1
=limx 0
3 x⋅3 x
x⋅5 3 x=
35
.
OSSERVAZIONE. - Principio di “eliminazione” degli infinitesimi.Come conseguenza immediata del principio sostituzione si ha il seguente teorema:
Teorema 10.1 Siano α , β , γ , δ , infinitesimi simultanei (per x→c, o per x→∞). Se γ , δ, sono
infinitesimi d'ordine superiore, rispettivamente, rispetto a α e β e se limαβ
esiste finito o infinito,
allora risulta:
(1) limαγβδ
=limαβ
.
Dim. Infatti, per esempio, possiamo scrivere: limαγ
α=lim
ααlim
γα=10=1 , da cui dedu-
ciamo che αγ~α , βδ~β , per il principio di sostituzione degli infinitesimi equivalenti, seguesubito la (1).• Possiamo anche aggiungere la seguente proprietà: il limite del rapporto di due infinitesimi resta in-variato aggiungendo o togliendo agli infinitesimi dati infinitesimi, rispettivamente, d'ordine superio-re.Questo teorema è molto utile quando si deve trovare il limite del rapporto di due infinitesimi; inquesto caso si possono sostituire gli infinitesimi dati, con altri che ne differiscano per infinitesimi
- 42 -

d'ordine superiore; si possono , cioè, “trascurare” gli infinitesimi d'ordine superiore, senza alterareil risultato finale, ottenendo così una notevole semplificazione dei calcoli.
11. Punti di discontinuità per una funzione.Se è f : AB c∈A, e lim
x cf x ≠ f c , allora si dice che f è discontinua in x=c .
Quando x∉A, non avrebbe senso chiederci se la f è continua, oppure no, in x = c. Tuttavia, conabuso di linguaggio, si è soliti chiamare “punti di discontinuità” anche quei valori x = c che, purnon appartenendo ad A, siano punti di accumulazione per A dove per punto di accumulazione siintende un punto c∈A tale che in ogni intorno di c cadono infiniti punti di A. Pertanto, se x = c èpunto di accumulazione per A e non è lim
x cf x = f c , in x = c si ha una discontinuità. Se la
funzione f x non è continua in c, il punto c si dice punto singolare o di discontinuità di f x . Visono vari tipi di discontinuità, in relazione ai motivi per cui l'uguaglianza lim
xcf x = f c non ha
luogo. Precisamente:A) punti di discontinuità di prima specie.Si dice che nel punto x = c la funzione f x ha una discontinuità di prima specie, se in tale puntoesistono finiti i limiti destro e sinistro e essi sono diversi fra loro cioè, in altri temini, se accade che:
limx c
f x =l 1 e lim
x c−
f x =l 2 con l 1≠l 2 e ∣l 1∣, ∣l 2∣∞ .
La differenza:
∣ limx c
f x − lim
xc−
f x ∣=∣l 1−l 2∣
si chiama salto della f x in c.ESEMPI.1) Consideriamo la funzione:
f x =x∣x∣=sgn x ,
(che si legge: segno di x) il cui grafico è in fig. 12.
Per x < 0, si hax∣x∣=−1 , per x > 0, si ha:
x∣x∣=1 .
Quindi: limx 0−
x∣x∣=−1 e lim
x0
x∣x∣
= + 1 .
Quindi nel punto x = 0 la funzione ha una discon-tinuità di prima specie, con salto uguale a 2u.
fig. 12
2) Consideriamo la funzione: f x =1
1e1
1− x
il cui grafico è in fig.13. Si ha:
limx1−
1
1e1
1− x
=0 e limx1
1
1e1
1−x
=1 ,
quindi in x = 1 la funzione ammette una discon-tinuità di prima specie con salto uguale a 1.Inoltre le eventuali discontinuità di una funzionemonotòna, definita in un intervallo chiuso, sonotutte di prima specie.
fig. 13
- 43 -

B) Punti di discontinuità di seconda specie.Si dice che nel punto x = c la funzione f x ha una discontinuità di seconda specie, se in tale puntouno almeno dei due limiti destro o sinistro lim
x cf x , lim
x c−f x è infinito oppure non esiste.
ESEMPI.
1) La funzione y=1x
ha una discontinuità di seconda specie nel punto x = 0, perché:
limx 0−
1x=−∞ e lim
x0
1x
=+∞ .
2) La funzione y=sen1x
ha una discontinuità di seconda specie nel punto x = 0, perché in tale
punto non esiste né il limite destro né quello sinistro.3) La funzione:
y=21x
ha una discontinuità di seconda specie nelpunto x = 0, perché in tale punto si ha:
limx0
21x =+∞ , lim
x0−2
1x=0
come si può vedere nel grafico di fig. 14.
fig. 14
4) La funzione y = tanx ha nei punti x=π2k π , k∈ℤ , delle discontinuità di seconda specie
perché risulta:lim
xπ2
−
tanx=∞ , limx π
2
tanx=−∞ .
C) Punti di discontinuità di terza specie.Si dice che nel punto x = c la funzione f x ha una discontinuità di terza specie o una di-
scontinuità eliminabile, se in tale punto esiste finito il limx c
f x , ma il valore di f x o non esiste in
x = c, oppure esiste ma risulta:limx c
f x ≠ f c .
L'aggettivo “eliminabile” è dovuto al fatto che si può stabilire per la f x la continuità nel puntox=c completando la definizione di f x in x=c ponendo semplicemente lim
x cf x ,= f c
quando la f x in x=c non è definita, oppure cambiando il valore di f x per x=c , ponendo:limx c
f x = f c .
La nuova funzione così ottenuta si chiama il prolungamento per continuità di f x nel puntox=c e la funzione che si ottiene non è più quella di partenza, ma ne differisce solo per x=c .
ESEMPI.
1) Consideriamo la funzione y=senx
x. Essa ha nel punto x = 0 una discontinuità di terza spe-
cie perché, come si è visto, esiste finito il limite, ma non esiste il valore della funzione. Tale funzio-ne pertanto è prolungabile per continuità in x = 0, e il suo prolungamento è la funzione (fig. 15):
- 44 -

f * x={
sen xx
, per ogni x≠0,
1, per x=0 .
fig. 15
2) La funzione f x =1 x3
1 x nel punto x=−1 ha una
discontinuità di terza specie. Infatti:
f x =1x3
1x=
1x 1−xx2 1x
che in x=−1 assume la forma 00
. Tuttavia nei punti:
x≠−1 , la f x si comporta come la parabola:p x =x2
− x1 , (ved. fig. 16).
fig. 16Come è facile verificare, si ha: p −1 =3 , per cui possiamo prolungare con continuità la f x po-nendo:
f * x={1x3
1x, per x≠−1,
3, per x=−1.
OSSERVAZIONE.Una funzione f x che in ogni intervallo limitato presenti solo un numero finito di discon-
tinuità è detta generalmente continua. Ad esempio sono tali le funzioni:
y=2 x∣x∣x
, y=sen1x
, y=tanx . Se poi, oltre ad essere generalmente continua, tutti i punti sin-
golari della funzione sono dei punti di discontinuità di prima specie, si dice che la f x è continuaa tratti (come la prima funzione nell'esempio precedente).ESEMPI.
1) Completare la definizione della funzione f x =x3−x
2 x2−2in modo da renderla continua ∀ x∈ ℝ .
La funzione può essere scritta anche nella forma: f x =x x 2
−1 2 x2−1
. Essa è definita e continua
∀ x≠±1. Essendo:
- 45 -

limx1
f x =12
, limx−1
f x =−12
.
Com’è evidente, la funzione può esserecompletata nel modo indicato a destra.
f *x ={
x3−x
2 x 2−2=
x2
, per x≠±1,
12
, per x=1,
−12
, per x=−1.
2) Dire se è possibile completare la funzione f x =x−1
x2−x
, in modo da renderla continua
∀ x∈R .La f x è definita e continua per x ≠ 0 e x ≠ 1 e si ha:
limx1
x−1
x 2− x=1, lim
x0
x−1
x2−x=∞ ;
pertanto la f x può essere “completata” o “prolungata” in modo da renderla continua in x = 1 mala stessa cosa non può essere fatta per x = 0.
3) Dire se è possibile completare la funzione f x =senx
ln 1 x , in modo da renderla continua
∀ x∈R .Il dominio della funzione è A={ x∣x∈R ∧-1x0∧x0 } e:
limx−1
senxln 1 x
=0 e limx0
senxln 1x
=limx0
senxx
ln 1 x x
=1 .
Pertanto la f x è prolungabile in modo da renderla continua in x = 0 e continua a destra dix=−1 ponendo f 0=1 e f −1=0.
4) Studiare le discontinuità della funzione: f x =e
1x
1− x.
S hanno discontinuità in x = 0 e in x = 1. I primi due limiti sono:
limx 0
e1x
1−x=+∞ e lim
x0−
e1x
1−x=0 ,
pertanto in x = 0 la f x ha una discontinuità di seconda specie. Inoltre:
limx1
e1x
1−x=∞
e anche in x = 1 si ha una discontinuità di seconda specie.
5) Studiare le discontinuità della funzione: f x =senlnx
lnx.
La funzione è definita solo per x positivo e diverso da 1; i punti x = 0 e x = 1 sono quindi singolariper la f x . Inoltre:
limx→0+
senlnxlnx
=0 e limx→1
senlnxlnx
=1 .
Tali discontinuità sono eliminabili completandola funzione nel modo indicato a destra:
f *(x)={
0, per x=0,
1 , per x=1,
senlnxlnx
, per x>0 e x≠1.
- 46 -

6) Studiare le discontinuità della funzione: f ( x )=1
1+etan x .
Questa funzione è definita per: x≠(2 k +1 )π2
,
k∈ℤ ; i punti: x=(2k +1 )π2
, k∈ℤ , sono
quin-di singolari per la funzione. Essendo:
limx→ (2 k +1 )
π2
−
1
1+ etanx =0 e limx→ (2 k+1 )
π2
+
1
1+ etanx =1 ,
le discontinuità sono tutte di prima specie equindi la funzione considerata è continua a tratti(ved. fig. 17).
fig. 17
7) Studiare le discontinuità della funzione: f ( x )=tan1x
.
Questa funzione non esiste per x = 0 e per1x=π
2+k π , k∈ℤ , ossia nei punti x = 0 e
x=1
π2+k π
, k∈ℤ .
La funzione considerata ha quindi infinitipunti singolari. Essendo:
limx→(
1π2+kπ )
−
tan1x=−∞
e:
limx→(
1π2+kπ )
+
tan1x
=+∞ ,fig. 18
i punti x=1
π2+k π
, k∈ℤ, sono punti di discontinuità di seconda specie. Si osserva che questi punti
di discontinuità vanno sempre più addensandosi verso lo zero, in modo che in qualsiasi intornodello zero ne cadono infiniti. Quindi in ogni intorno dello zero la funzione compie infinite oscilla-zioni che vanno da −∞ a +∞ , da cui segue che per x→0 non esiste né il limite destro né quello si-nistro. Così il punto x = 0 è un punto di discontinuità di seconda specie per la funzione. Qualunquegrafico della funzione nell'intorno dell'origine darebbe un'idea errata del reale andamento dellacurva (ved. fig. 18).
- 47 -

Cap. 3 DERIVATE
0. Problemi che conducono al concetto di derivata
L'invenzione del calcolo infinitesimale deve senza dubbio farsi coincidere con il momentoin cui Newton e Leibniz, circa alla metà del 1600 e indipendentemente l'uno dall'altro, introdusserola nozione di derivata e di differenziale sviluppando le relative regole di calcolo. Tuttavia, traccedi questo calcolo si riscontrano presso gli antichi geometri, specialmente in Archimede; nel periodoimmediatamente precedente a Newton e Leibniz, le opere di Cavalieri e Torricelli, allievi di Galilei,si devono considerare come quelle che più potentemente contribuirono a preparare il terreno allesuccessive scoperte.I problemi che particolarmente diedero origine al concetto di derivata e costituirono perciò il puntodi partenza per il nuovo calcolo, sono quello delle tangenti e quello della velocità. Vediamo breve-mente in che cosa consistono questi due problemi iniziando da quello delle tangenti.A) problema delle tangentiPer definire la tangente in un punto ad una curva qualunque, osserviamo che:a) la definizione adottata nella geometria ele-mentare nel caso dello studio delle coniche (se-condo la quale la retta tangente in un punto Tdella curva, è quella retta avente in comune con laconica solo il punto T) è evidentemente dascartare, come si vede dalla figura 1.
fig. 1
b) non può servire nemmeno l'altra definizio-ne che talvolta è data nella geometria ele-mentare, secondo la quale la tangente è quellaretta uscente da F che lascia la circostanteporzione della curva tutta dalla stessa parte,perché questo non accade nel caso della figu-ra 2, pur essendo la retta f intuitivamente unatangente alla curva.
fig. 2
Nessuna obiezione si presenta, invece, se noi idealizziamo il procedimento con cui, nella pratica, undisegnatore traccia approssimativamente la tangente ad una data curva in un punto P, considerandosulla curva un altro punto Q, molto vicino a P, e disegnando la retta PQ. Volendo precisare meglio,possiamo dare la seguente definizione.Definizione. Si chiama tangente ad una curva piana in un suo punto P, la posizione limite, se esi-ste, della retta che unisce P con un altro punto Q della curva, allorché si fa avvicinare Q indefinita-mente a P (fig. 3). Si noti che la posizione limite di PQ deve esistere (ed essere sempre la stessa) co-munque Q si avvicini a P. Pertanto la curva disegnata nella figura 4 non è secondo la definizione
data, dotata di tangente nel punto P, perché la posizione limite di PQ è t' o t'' secondo che Q si avvi-cini a P dal ramo destro o da quello sinistro.
- 48 -
Ff
y=f(x)
T
ty=f(x)
P

Ox
y
y=f(x)
P
Q
st
fig. 3fig. 4
Premesso ciò, vogliamo determinare l'equazione della retta tangente in suo punto P, ad una curva Γrappresentata analiticamente (in coordinate cartesiane) da un'equazione del tipo:
y= f ( x) ,nell'ipotesi che in tale punto la tangente esista. A tale scopo si indica con α l'angolo che l'asse x for-ma con la retta tangente t (fig. 5) e con x0 , f x0 le coordinate del punto P. Sappiamo che l'equa-
zione della retta tangente, passante per il punto P, deve essere della forma:(1) y− f x0=m x−x 0 ,dove m è il coefficiente angolare della retta t che, come è noto, è dato da:
m = tanα.Per determinare il valore di m, cioè di tanα,consideriamo sulla curva Γ (rappresentata infigura 5 dalla curva di equazione y= f x),un altro punto Q ed indichiamo con
x0h , f x0h le sue coordinate, e siano s
la retta PQ e β l'angolo che l'asse x forma conla retta s. Allora, per la definizione data, t è laposizione limite della retta s quando Q si avvi-cina alla curva indefinitamente a P.Pertanto si ha:
limQ P
s=t ,
cioè:limQ P
β=α ,
ossia, poiché tanx assume tutti i valori compresifra α e β:
fig. 5
(2) limQ P
tanβ=tanα .
Ma se Q→P, allora h→0, e quindi il limite (2), si può scrivere;(3) lim
h0tan β=tanα .
Tracciate per P la parallela all'asse x e per Q la parallela all'asse y, fino ad incontrarsi in ℝ , daltriangolo rettangolo PRQ, risulta :
tanβ=RQPR=
f x0h− f x0
h,
e quindi la (3) si può scrivere:
- 49 -
Ox
yy=f(x)
P
Q
s
t
Rβ
α TSβ
} f x0h
} f x0
x0 x0h
O x
y
y=f(x)
P
t' t''s' s''
y=f(x)Q

(4) limh0
f x0h− f x0
h=tanα .
Quindi il valore del coefficiente angolare m (=tanα) della tangente sarà determinato se riusciremo acalcolare il limite (4), dopo di che l'equazione cercata della retta tangente è la (1) con m dato dal li-mite (4).Possiamo perciò concludere:se la curva di equazione y= f x , nel punto di ascissa x0 , ammette retta tangente, non parallela
all'asse y, il coefficiente angolare di tale retta è dato dal limite (4).B) Velocità di un moto rettilineo qualunqueConsideriamo un punto mobile ed il suo moto sia rettilineo.Indichiamo con t il tempo variabile e con s lo spazio percor-so nel tempo t. Evidentemente lo spazio s è una funzionedella variabile t. Poniamo: s= f t . Se indichiamo con O la posizione, sulla retta r (fig. 6), cheil punto mobile ha nell'istante t = 0, con P la posizione che fig. 6ha all'istante t 0 e con Q la posizione che ha all'istante t 0h. allora lo spazio PQ, percorso nel tempoh, che intercorre dall'istante t 0 all'istante t0h è dato da:
f t0h − f t0 .
Quindi il rapporto:f t0h − f t0
h,
tra lo spazio percorso e il tempo impiegato a percorrerlo, si chiama velocità media del punto mo-bile nell'intervallo di tempo [ t 0 , t0h ] . Tale velocità media è quella che avrebbe un punto che,
muovendosi di moto uniforme, impiegasse il tempo h per percorrere lo spazio PQ. Se il moto non èuniforme la velocità media varia con il variare di h ed in generale si constata che quando h è moltopiccolo la velocità media varia di poco. È quindi naturale chiamare velocità del punto mobile nell'i-stante t 0h il valore del limite:
limh0
f t0h − f t0 h
.
Allora, come si vede, per calcolare la velocità che un punto ha ad un certo istante t 0 ; si deve calco-
lare un limite del tutto analogo a quello che abbiamo incontrato precedentemente.
1. Derivate
Data una funzione y= f x , definita in un intervallo [a ,b ] , si presenta frequentemente lanecessità di considerare il passaggio da un valore x0 della variabile x, appartenente ad a ,b ad un
altro valore x= x0h , anch'esso appartenente ad a ,b .
Si dice incremento della variabile indipendente x nel passaggio dal valore iniziale x0 al valore
x= x0h , la differenza:
x=h= x−x0 .Questo incremento può essere positivo o negativo: allora il punto x si trova, rispettivamente, alla de-stra o alla sinistra del punto x0 .Si dice incremento della funzione y= f x , relativo al passaggio dal valore x0 al valore
x= x0h , la differenza:
y= f x0h − f x0 .Questo incremento può essere positivo, nullo, negativo.Si chiama rapporto incrementale della funzione f x relativo al punto x0 e all'incremento h il rap-porto:
- 50 -
O P Q
r

(1) y
x=
f x0h − f x0 h
,
tra l'incremento ∆y della funzione e l'incremento ∆x = h della variabile indipendente. Quando saràutile distinguere, chiameremo rapporto incrementale destro (o sinistro) ogni rapporto incrementalein cui sia h > 0 (o h < 0). Quindi, il rapporto è una funzione del punto iniziale x0 e dell'incremento
h; una volta fissato x0 esso risulta funzione della sola variabile h (≠0).Premesso tutto questo, si dà la seguente definizione.Si chiama derivata della funzione y= f x nel punto x0 il limite, se esiste ed è finito, del rapporto
incrementale (1) per h→0.
Pertanto la derivata f ' x0 della funzione f x è definita dalla relazione:
limh0
f x0h − f x0 h
= f ' x0 ,
nell'ipotesi che il limite del primo membro esista e sia finito.La derivata s'indica con uno qualunque dei seguenti simboli:
1) f ' x0
2) y ' x0 }, notazione di Leibniz
3) [D f x ] x= x0, notazione di Cauchy
4) y , notazione di Newton .
Si può anche scrivere:
limx x 0
f x − f x0 x−x 0
= f ' x0 .
L'operazione con la quale si calcola la derivata di una funzione f x è detta la derivazione di questafunzione.OSS.1) Si parla di derivata, per le funzioni definite in un intervallo, nei punti x0∈a ,b ;2) la derivata di f in x0∈a ,b , quando esiste, è un numero.Introduciamo, per terminare, le nozioni di derivata destra e di derivata sinistra.Si dice che f x ammette derivata destra nel punto x0 , quando esiste finito il limite del rapportoincrementale destro al tendere a zero (per valori positivi) dell'incremento h della variabile indipen-dente.In modo del tutto analogo si definisce la derivata sinistra di f x nel punto x0 .
Le derivate destra e sinistra di f x in x0 , si indicano rispettivamente, con i simboli f ' x0 e
f '− x0 ; cioè si pone per definizione:
(2) limh0
f x0h − f x0 h
= f '+ x0 ; lim
h0−
f x0h − f x0 h
= f '− x0 .
Come conseguenza della definizione di limite, abbiamo:
se esiste la derivata f ' x0 , esistono anche separatamente la derivata destra e quella sinistra e sono
uguali fra loro; cioè si ha:
f ' x0 = f '+ x0 = f '
− x0 ,
e viceversa.
- 51 -

2. Significato geometrico della derivataFacendo riferimento a quanto detto al §0 di questo capitolo, si ha che l'interpretazione geo-
metrica della derivata è la seguente:
il valore della derivata f ' x0 , in un dato punto x0 , è uguale al coefficiente angolare m della tan-
gente alla curva di equazione y= f x, nel punto P≡ x0 , f x0 . In altri termini se α è l'angolo che
l'asse x forma con la retta t tangente alla curva di equazione y= f x, nel punto P di ascissa x0 , siha:
m=tanα= f ' x0 .Vediamo così che l'esistenza della derivata è legata all'esistenza della tangente alla curva di
equazione y= f x e il coefficiente angolare della tangente, cioè tanα= f ' x0 , deve esistere
finito. In altre parole, la tangente non deve risultare parallela all'asse y.
In quest'ultimo caso, infatti risulta α=±π2
e la tangente goniometrica di tale angolo non esiste.
Una curva continua può in certi punti non ammettere tangente, o averne una parallela all'asse y equindi per i valori corrispondenti di x, la funzione f x non ha derivata.Esaminiamo, in dettaglio, i casi presentati dalla figura 7.Alcuni dei casi che si possono presentare sono i se-guenti:
1) se le derivate f '+ x0 e f '
− x0 esistono finite
entrambe e sono differenti, ciò corrisponde al caso incui nel punto di ascissa x0 esistono, a destra e a si-nistra, delle tangenti non parallele all’asse y, e questetangenti sono diverse tra loro.È questo il caso rappresentato dal punto P1 della fig.7. I punti come P1 si chiamano punti angolosi dellacurva.2) nel caso in cui i limiti (2) tendano a +∞ e a −∞ ,rispettivamente, si dice che nel punto x0 si ha una
cuspide rivolta verso il basso (è il caso del puntoP0 ).
t1
O x
y
y=f(x)
P0
t2
P1 P2
P3
fig. 7
Invece, se i limiti (2) tendono rispettivamente, a −∞ e a +∞ si dice che nel punto x0 si ha una cu-spide rivolta verso l’alto (è il caso del punto P2 ).
3) nei punti come P3 si ha che i limiti (2) tendono entrambi a + ∞; in tal caso si dice che nel puntoP3 si ha un punto di flesso a tangente verticale.
3. EsempiPer calcolare la derivata di una funzione y= f x, dobbiamo, per definizione, effettuare le
seguenti operazioni: 1°) dare un incremento h al punto x0 e calcolare il corrispondente incremento della funzione;
∆ y= f x0h − f x0 2°) formare il rapporto incrementale relativo al punto x0 e all'incremento h;
y
x=
f x0h − f x0 h
.
3°) calcolare il limite di questo rapporto per h = ∆x→0;
limh0
y
x=lim
h 0
f x0h − f x0 h
.
- 52 -

Per esempio, calcoliamo la derivata della funzione f x =x2− x nel punto x=3.
Risulta: y
x=
f 3h − f 3 h
=3h 2−3h −323
h=h5 ,
e quindi:
limh0
f 3h − f 3 h
=limh0
h5 =5.
Si conclude affermando che la funzione è derivabile per x = 3 e la derivata in tale punto vale 5.
Cerchiamo, ora, la derivata della funzione: y=e 2 x1 , nel punto generico x e nel punto x=12
.
Dalla definizione si ottiene:
y
x=
f xh − f x h
=e2 xh 1
−e2 x1
h=e2 x1 e2 h−1
h;
ed essendo e 2 x1 costante (rispetto a h), si ha:
limh0
e 2 x1 e2 h−1h
=2e 2 x1 limh0
e2h−1
2 h.
Ma, se h→0, è:e2h−1≃2h
quindi si potrà scrivere questa uguaglianza:
limh0
e2 h−1
2 h=1 ,
dalla quale si deduce il risultato:
limh0
f xh − f x h
=2e 2 x1 ⋅1=2e 2 x1 .
In particolare, nel punto x=12
, si ha:
f ' 12 =2e2 .
4. Derivate di alcune funzioni elementari1°) La derivata di una costante vale zero. Infatti, se y = k è la funzione, si ha:
y '= limh 0
k−kh= lim
h00=0.
2°) La derivata della funzione y = x vale 1. Infatti:
y '=limh 0
xh −xh
limh0
1=1.
3°) La derivata della funzione y = senx è uguale a cosx, purché x sia misurato in radianti, cioè:Dsenx = cosx.
Infatti, risulta:
y '=limh0
senxh−senxh
=limh 0
senx coshcosx senh− senxh
=limh 0
senx cosh−1cosx senhh
=
= limh0
senx cos h−1cosx senhh
=limh 0
sen xcosh−1
hlim
h0cos x
senhh
.
Poiché: limh0
senhh=1 e lim
h0
cos h−1h
=0 , si ottiene:
y '=cosx .
In modo del tutto analogo si prova che:4°) La derivata di cosx vale −sen x , cioè;
D cos x=−sen x .
- 53 -

5°) La derivata di y = lnx, (con x > 0), vale:
D lnx=1x
.
Infatti, tenendo presente il limite fondamentale:
limt0
1t 1t e ,
e, ponendo t=hx
, si ha:
y '=limh0
ln xh −lnxh
=limh0
ln 1hx
h=lim
h 0
1x⋅
xh⋅ln 1h
x =1x⋅lim
h 0ln 1 h
x xh=
1x
lne=1x
.
6°) Se è y=log a x , si ha:
D loga x=1x⋅log a e=
1x⋅
1lna
.
Infatti, come è noto, risulta:
loga x=lnx⋅1
lna=lnx⋅log ae .
7°) La derivata di un prodotto di una costante k per una funzione y= f x è uguale alla costanteper la derivata della funzione, cioè:
D k f x =k D f x .Infatti:
D k f x =limh0
kf xh −kf x h
=limh0
k⋅f xh − f x
h=k⋅lim
h0
f xh − f x h
=k⋅D f x .
8°) Se è y=ekx con k costante reale, si ha:D ekx
=k⋅ekx .
Infatti, tenendo conto che: limx 0
e x−1x=1 si ha che:
limh0
ek xh −ekx
h=lim
h0ekx⋅
ekh−1h
=limh0
k⋅ekx⋅ekh−1
kh=k⋅ekx .
5. Derivate di una somma, di un prodotto e di un quoziente
Siano f e g due qualunque funzioni derivabili in un intervallo I= a ,b . Valgono i seguentiteoremi: Teorema 5.1 Teorema della sommaLa derivata della somma di due (o più) funzioni derivabili, esiste ed è uguale alla somma delle deri-vate di queste funzioni, cioè:
D f g = f 'g ' .Dim. Infatti, per ogni x∈I, si ha:
limh0
[ f xh g xh ]− [ f x g x ]h
=limh 0
f xh − f x h
limh0
g xh −g x h
= f ' x g ' x .
La tesi del teorema può essere estesa immediatamente per ricorrenza alla somma di un numero fini-to di funzioni, derivabili in I, nel modo seguente:
D f 1 x f 2 x . .. f n x = f '1 x f '
2 x . .. f '
n x .
Esempi:
a) D3 senx2 lnx=3 cosx2x
;
b) D2cosx−4 senxlogx−2 senx−4cosx1x
log e .
Teorema 5.2 Teorema del prodotto
- 54 -

La derivata del prodotto di due funzioni derivabili esiste ed è uguale al prodotto della derivata delprimo fattore per il secondo fermo, più il prodotto del primo fattore fermo per la derivata del secon-do e cioè:
D f⋅g = f '⋅g f⋅g ' .Dim. Infatti, per ogni x∈I, si ha:
* limh 0
f xh ⋅g xh − f x ⋅g x h
e, togliendo ed aggiungendo (al numeratore) il prodotto f xh ⋅g x , possiamo scrivere il limite(*) così:
limh0
f xh ⋅g xh − f xh ⋅g x f xh ⋅g x − f x ⋅g x h
,
ovvero:
limh0
f xh ⋅g xh − f xh ⋅g x h
limh 0
f xh ⋅g x − f x ⋅g x h
=
= limh0
f xh g xh −g x
hlim
h 0g x
f xh − f x h
, **
ed essendo f x derivabile in x allora f x è anche continua in x cioè:limh0
f xh = f x ,
che ci consente di affermare che la tesi è vera in quanto (∗∗) diventa uguale a:
f ' x ⋅g x f x⋅g ' x .La tesi del teorema può essere estesa immediatamente, come nel caso del teorema 5.1, per ricorren-za al prodotto di un numero finito di funzioni, derivabili in I, nel modo seguente:
D f 1 x ⋅f 2 x ⋅. . .⋅f n x = f '1 x ⋅ f 2 x ⋅. ..⋅f n x f 1 x ⋅f '
2 x ⋅. ..⋅ f n x . .. f 1 x ⋅ f 2 x ⋅. . .⋅ f '
n x .
In particolare la funzione:
y=[ f x ]n
,con n > 1, ha come derivata:
y '=n [ f x ]n−1⋅ f ' x ,
e, ancora più in particolare, se è y=xn si ha:y '=nxn−1 .
ESEMPI.a) D x5
−4 x32 x−3 =5x 4
−12 x22 .
b) D x21 5 =5 x2
1 4⋅2 x=10 x x2
1 4.
c) D x2cosx lnx=2 x−senx ⋅lnxx 2cosx
x.
Teorema 5.3 Teorema del quoziente Siano f x e g x due funzioni derivabili in I e sia g x ≠0 , ∀ x∈I. La derivata del quoziente didue funzioni derivabili esiste ed è uguale a una frazione avente al denominatore il quadrato deldenominatore della funzione di partenza e al numeratore la differenza tra il prodotto del deno-minatore invariato per la derivata del numeratore e il prodotto della derivata del denominatore per ilnumeratore invariato e cioè, in formule:
D f x g x = f ' x ⋅g x − f x ⋅g ' x
g x 2.
Dim. Infatti, per ogni x∈I, si ha:
- 55 -

∗ limh0
f xh
g xh −
f x
g x h
=limh0
f xh g x − f x g xh
g xh g x h
e, togliendo ed aggiungendo al numeratore il prodotto f x ⋅g x , possiamo scrivere (*) nella formaseguente;
limh 0
f xh g x − f x g x f x g x − f x g xh
g xh g x h
=
= limh 0
f xh g x − f x g x −[ f x g xh − f x g x ]h
g xh g x =
= limh 0
g x f xh − f x
hg xh g x
−limh0
f x g xh −g x
hg xh g x
**
e, tenendo conto che g x è derivabile in I, g x è anche continua in I per cui: lim
h0g xh =g x .
Ciò ci consente di affermare che la tesi è vera in quanto (∗∗) è uguale a:
f ' x ⋅g x − f x ⋅g' x
g2 x .
ESEMPI.
1°) Dx
x2 1=
x2 1 - x 2 x x2 1 2
=1− x2
x2 12.
2°) Dsenx
1cosx=
cosx 1cosx −senx −senx
1cosx 2
=cosxcos2 xsen2 x
1 cosx 2=
1cos x
1cos x 2=
11cos x
.
3°) D x2 tanx−1−senxx−cosx
=2 x tanxx 2
cos2 x−−cosx x−cosx −1senx ⋅1−senx
x−cosx 2=
= 2 x⋅tanx x2
cos2 x
xcosx
x−cosx 2
.
6. Tabella delle formule e regole di derivazioneQui di seguito sono riportate le principali formule e regole di derivazione. A sinistra è ripor-
tata le funzione y= f x e a destra la sua derivata y '= f ' x :
y= f x y '= f ' x y= f x y '= f ' x
y = costante y '=0 y=xn y '=n xn−1
y=n x y '=
1
nn xn−1 y=∣x∣ y '=
xx=±1
y = senx y '=cos x y = cosx y '=−sen x
y = tanx y '=1
cos 2 xy = cotanx y '=−
1
sen2 x
y=log a x y '=1x
loga e y = lnx y '=1x
y=ax y '=ax ln a y=e kx , k∈R y '=k ekx
y=k⋅ f x , k∈R y '=k⋅f ' x y= f x ±g x y '= f ' x±g ' x
- 56 -

y= f x ⋅g xy '= f ' x g x+
+ f x g 'x
y=f x g x
, g x ≠0 y '=f ' x g x − f x g ' x
[ g x ]2
y= f x g x
Oss: Se f x 0, si ha: y= f x g x =eg x ln f x y '
= f xg x g ' x ln f x g x
f 'x
f x .Esercizi.A) Scrivere il rapporto incrementale di ciascuna delle seguenti funzioni nel punto indicato a
fianco:
A1) f x =3 x21 , per x=2 ; A2) f x =−x23 x−2 , per x=
12
;
A3) f x =x
x−2, per x=−3 ; A4) f x =
x−2
x2 , per x=−2 .
B) Applicando le regole di derivazione, calcola le seguenti derivate:B1) D( 3 + x + sen x); B2) D(x + log 2 x ); B3) D( 2x + senx ) ;B4) D( 3x + log 4 x ); B5) D( 3xe x ); B6) D( x54 x 2 );
B7) D ( 12 x2−
3x +3 x2) ; B8) D x6−3 x3 x2
x4 ; B9) D x41
e41 ;B10) D( 8 x x ) ; B11) D x⋅cosxsenx ; B12) D [ x 2 x3 logx ] ;B13) D x2 senx ; B14) D[(1 - 2cosx) . tanx ]; B15) D xcosxsenx
3;
B16) D { x−1 x21} ; B17) D senxxcosx ; B18) D x
x2 ;B19) D 3− x2
x2 ; B20) D x 2 x2
x2−1 ; B21) D2 x−x
x21 ;
B22) D x
x3x 2
2 ; B23) D x3x1x−1 ; B24) D logx1
logx−1 ;B25) D e x1
2−e− x ; B26) D ex
x3x 2 ; B27) D cosxxcosx2 ;
B28) D senx1cosx−senx ; B29) D xsenx
xcosx ; B30) Dex senxsenx−cosx ;
B31) D xx3
tanx ; B32) D x x1 ; B33) D x
x1 ;B34) D ln senxcosx ; B35) D esenxcosx ; B36) D ln ex−2 ;
B37) D {ln xx−1 } ; B38) D x22
x3
−x4 ; B39) D x3
2 x2−3 x1 ;B40) D x−1
3− x ; B41) D 3 x22 x−1
x−2 2 ; B42) D x−3
x 22 ;
B43) D x−2x2 ; B44) D x x
x− x ; B45) D x−2
x 2 ;
B46) D 1 x21 x−1 ; B47) D 1senx
1cosx ; B48) D 3 x−12 x ;
B49) D 32 x−21
x 2 ; B50) D− sen2 x1−senx
−1 ; B51) Desenx cosx1x ;
B52) D 5 x4−3 x2
x5−x33log 1
3
e ; B53) D−12 lnx
x2ln2 x ; B54) Darcsen
1lnx .
- 57 -

C) Negli esercizi seguenti determina l'equazione della tangente alla curva di equazione data nelpunto dato:
C1) y=−x22 x3, x0=−2 ; C2) y= x2
−x , x0=−2 ;
C3) y= x3−2 x21, x0=1 ; C4) y=x
x−1, x0=−3 ;
C5) y= x25, x0=12
; C6) y= 25−x2 , x0=3 ;
C7) y=x22
x−2, x0=4 ; C8) y=
14
x413
x32 , x0=1 ;
C9) y= x3− x2
−1, x0=0 ; C10) y=senx−cosx , x0=π4
.
D) Determina k (k∈ ℝ ) in modo tale che le parabole y=x2k e y=−x2−x siano tangenti.Determina le coordinate del loro punto di contatto T e l'equazione della loro tangente comune.
7. Derivazione di funzioni composte
Una delle più importanti regole di derivazione riguarda le derivate delle funzioni composte.Siano date due funzioni:(1) y= f u e u=g x ,e supponiamo che, variando x nell'intervallo I, la funzione u=g x assuma valori appartenenti aldominio della funzione y= f u . Allora, come sappiamo, le (1) definiscono la funzione compostaf [ g x ] che possiamo indicare con F x , cioè poniamo:
(2) F x = f [ g x ] .Vogliamo trovare una regola che consenta di calcolare la derivata della funzione composta (2), permezzo delle derivate delle due funzioni componenti (1).A tale scopo si enuncia il seguente:Teorema 7.1 Sia g x una funzione reale definita in un intervallo I e derivabile nel punto x∈I, e siaf u una funzione reale definita in un intervallo I', tale che g I ⊆I' , e derivabile nel puntou=g x . Allora la funzione composta è derivabile in x e si ha:(3) F ' x = f ' u ⋅g ' x ,dove u=g x .Questo teorema, se indichiamo, rispettivamente, con ∆u e ∆y gli incrementi di u e y corrispondentiad un incremento ∆x di x, (e supponendo che ∆u ≠ 0), si può considerare come una immediata con-seguenza della evidente identità:
y
x= y
u⋅ u
x.
Ancora, questo teorema si può anche enunciare affermando che:per derivare una funzione di funzione, questa si deve anzitutto derivare rispetto alla variabile da cuidipende direttamente e poi moltiplicare per la derivata di quest'ultima rispetto alla variabile indipen-dente.Inoltre, questo teorema si estende anche al caso in cui le funzioni componenti siano più di due. Peresempio se è:y= f z ; z=g u ; h ; u=h x cioè: y= f g u = y= f g h x , allora è:
y '= f ' z ⋅g ' u ⋅h' x ..
ESEMPI.1) Sia da calcolare la derivata della funzione y = lnsenx.
Poniamo: u = senx e y = lnu. In questo modo si ha:
- 58 -

u ' x=cosx e lnu '= 1u
.
Pertanto, in base alla (3), si ha: y '=1u⋅cosx , cioè: y '=
1senx
⋅cosx=cotanx.
2) Calcolare la derivata della funzione y = cosln3x.In pratica si può procedere più velocemente nel modo seguente. Si deriva cosln3x conside-rando ln3x come variabile indipendente e si ottiene: −sen ln3 x ; poi si deriva ln3x conside-
rando lnx come variabile indipendente e si ottiene 3ln2x e infine si deriva lnx ottenendo1x
.
Il prodotto di tutte le derivate trovate, fornisce la derivata della funzione composta conside-rata:
y '=−sen ln3 x ⋅3 ln2 x ⋅1x=−
3x⋅ln2 x⋅sen ln3 x .
ESERCIZI.Calcolare la derivata delle seguenti funzioni :
1) D ln 1−x 2 ; 2) D ln 1x2
1−x2 ; 3) D lncos x1
2cos 2 x ;4) D lnsen x ; 5) D
3 ln sen x34 ; 6) Dsen2 x−
14
sen3 x xln x .8. Massimi e minimi assoluti e relativi
Sia f x una funzione definita in un intervallo [a , b ] .Se in tale intervallo esiste un punto c, in cui la funzione assume un valore non minore dei valori cheessa assume negli altri punti di [a ,b ] , si dice che nel punto c la funzione ha un massimo assoluto.In modo simile, se in [a ,b ] esiste un punto d, in cui la f x assume un valore non maggiore deivalori che essa assume negli altri punti di [a ,b ] , si dice che in quel punto la funzione ha un minimoassoluto.Definiamo ora i massimi e i minimi relativi di una funzione.DEFINIZIONE. Si dice che un punto x0∈a ,b , è un punto di massimo relativo per la funzione
f x , se esiste un sottointervallo H=α ,β ⊆a , b contenente x 0 , tale che per ogni x∈α ,β risulti:(1) f x ≤ f x0 .Analogamente si dice che x0 è un punto di minimo relativo per la f x , se esiste un sottointervallo
H=α ,β ⊆a , b contenente x0 , tale che per ogni x∈α ,β risulti:(2) f x ≥ f x0 .Il punto x0 si dirà poi un punto di massimo (minimo) relativo proprio se la (1) o (la (2) può essere
sostituita dalla:f x f x0 , f x f x0 ,
per tutti gli x∈α ,β x≠x0 .I punti di massimo e minimo relativo si chiamano anche estremanti relativi (o locali) della funzio-ne. Il valore che la f x assume in un punto di massimo o minimo relativo, si chiama un massimoo un minimo relativo di f x . Secondo le date definizioni, occorre tener ben presente che il valoreassunto dalla funzione in un punto x0 di massimo o minimo relativo, non è necessariamente il più
grande o il più piccolo valore fra quelli che essa assume in tutto l'intervallo [a , b ] , ma è soltanto ilpiù grande o il più piccolo valore fra quelli che la funzione assume in un intervalloH=α ,β ⊆a , b tale che x0∈α ,β . Cioè, l'estremo di una funzione presenta un carattere locale:
esprime il più grande, o il più piccolo, valore rispetto ai suoi valori “vicini”. Da ciò segue che lafunzione può, nel dato intervallo, avere svariati massimi e minimi relativi, come potrà avvenire cheun massimo relativo sia più piccolo di un minimo relativo. La rappresentazione geometrica rende
- 59 -

evidenti tutte queste considerazioni. Così, la funzione rappresentata in fig. 8 ha punti di massimorelativo in x 0 e x 2 ; punti di minimo relativo in x 1 e x 3 . Si osservi che il minimo in x 3 , cioèf x 3 , è maggiore del massimo relativo in x0 , cioè di f x 0 . La funzione assume il suo minimo
assoluto in x 1 , che è anche un punto di minimo relativo.
Ox
y
y=f(x)
a x0 x1 x2 x3
t
xb
fig. 8Invece il massimo assoluto viene assunto dalla funzione nell'estremo b dell’intervallo e quindi NONè un massimo relativo.
9. Massimi e minimi delle funzioni derivabiliOccupiamoci ora della ricerca dei punti di massimo o minimo relativo di una funzione defi-
nita e derivabile in un intervallo [a ,b ] .Diciamo, però, esplicitamente che tutte le considerazioni che svolgeremo qui e nei successivi para-grafi, sono valide esclusivamente per i punti di massimo o minimo relativo, che cadono interna-mente all'intervallo [a , b ] .Enunciamo, innanzi tutto, il seguente teorema.TEOREMA. Se x 0 è un punto di massimo o minimo relativo per la funzione f x e in tale punto laf x è derivabile, risulta:
f ' x0 =0
OSS.1) Geometricamente questo teorema è evi-
dente, perché è intuitivo che in un puntodi massimo o di minimo relativo la tan-gente t alla curva y= f x , ammesso cheesista, risulti parallela all'asse delle x(ved. fig. 8).
2) Si sottolinea il fatto che, per la validitàdel teorema, è essenziale che si tratti dimassimo o minimo relativo, cioè chex 0 sia interno all'intervallo ove la f x
è definita. Per esempio, nel caso dellafig. 9 il valore minimo della f x è
all'estremo sinistro, dove è f ' a≠0 , fig. 9
perché la tangente nel punto corrispondente del diagramma non è parallela all'asse delle x.3) È facile notare che può non valere l'inverso del teorema enunciato sopra, cioè in un punto
può benissimo essere nulla la derivata prima della funzione senza che in quel punto la fun-
- 60 -
O x
y
y=f(x)
a
t
xb

zione sia massima o minima. Ad esempio consideriamo la funzione:y= x−1 32
la cui derivata è:
y '=3 x−1 2 .
Essa si annulla per x = 1. Ora, in tale punto risulta: f 1 =2, mentre per x < 1, essendo:
x−1 30 , si ha: f x 2 e per x > 1, essendo:
x−1 30 , si ha: f x 2. Nel punto x = 1 la
funzione non ha quindi né massimo né minimo,perché non esiste un intervallo dell'asse x conte-nente il punto x = 1 in cui risulti sempre:
f x ≤ f 1=2 ,oppure
f x ≥ f 1=2 .Geometricamente ciò vuol dire che la tangente talla curva nel punto di ascissa x = 1, pur essendoparallela all'asse x, attraversa la curva (ved. fig.10).
fig. 10
4) Ogni punto x 0 in cui f ' x0 =0 è detto punto stazionario. I punti nei quali risulta:
f ' x0 =0 , oppure la derivata non esiste, sono detti punti critici (il termine “critico” sta a
richiamare l'attenzione sulla necessità di un esame più approfondito). Dunque, secondo ladefinizione, ogni punto stazionario è critico.
10. Criterio per l'esistenza di estremi relativi
Dal ragionamento svolto segue che l'annullarsi di f ' x0 è una condizione necessaria per-
ché x 0 sia un punto di massimo o di minimo relativo, ma, in generale, NON è sufficiente. Cer-
chiamo allora quali ulteriori condizioni debbano essere soddisfatte perché in x 0 vi sia un massimo oun minimo relativo. A tale scopo enunciamo il seguente:Teorema. Sia f x una funzione continua e derivabile in un intervallo I=α ,β contenente x 0 .1) Se nell'intervallo I risulta:
f ' x= {< 0, per xx 0 ;= 0, per x=x0 ;> 0, per xx 0 ;
allora x 0 è un punto di minimo relativo (proprio) per la funzione.2) Se nell'intervallo I risulta:
f ' x= {> 0, per xx 0 ;= 0, per x=x0 ;< 0, per xx 0 ;
allora x 0 è un punto di massimo relativo (proprio) per la funzione.
3) Infine, se la derivata non cambia segno attraversando x 0 , allora questo punto non è né un
massimo né un minimo e occorre proseguire nello studio delle derivate di ordine superiore.OSS. Questo teorema permette di evitare, nella maggior parte dei casi semplici, il calcolo della de-
rivata seconda f '' x0 , di cui ci occuperemo in modo più approfondito in seguito.Esempi su come determinare i massimi e minimi delle funzioni.
1) Sia f x =4 x 2−5 x2x−1
.
- 61 -

Abbiamo :
(*) f ' x =
4 x2−8 x3
x−1 2
.
La f ' x si annulla per x=12
e per x=32
. .
Siccome il denominatore della frazione (*) èsempre positivo, per x ≠ 1, allora, come è noto,
la f ' x è positiva quando attribuiamo valori
R
12
f ' x 0 f ' x 0 f ' x0
321
fig. 11
esterni all'intervallo [ 12 ,32 ] (fig. 11), negativa per valori interni allo stesso intervallo (naturalmente
≠ 1). Perciò, segue che x=12
è un punto di massimo e x=32
è un punto di minimo per la funzione.
2) Sia y= x5−5 x4
5 x31 .
Allora: y '=5 x 4−20 x315 x2
=5 x2 x2−4 x3 . Quindi i segni della f ' x sono:
y '0 per x1 o per x3 e su queste due semirette la funzione è crescente;
y '0 per 1x3 e in questo intervallo la funzione è decrescente.Pertanto x = 1 è un punto di massimo relativo (M)per la funzione e x = 3 è un punto di minimo relati-vo (m). La fig. 12 descrive questa situazione.
fig.12
11. Derivate di ordine n
Se f : A→B è una funzione derivabile, la funzione f ' può essere a sua volta derivabile. La
derivata della f ' in un punto x0 si dice derivata seconda della f in x 0 e si indica con uno dei
simboli:
f '' x0 , D2 f x∣x=x0,
dove l'ultima notazione, D2 f x∣x= x0, si legge: “derivata seconda di f x calcolata nel punto
x= x0 oppure: “derivata seconda di f x ristretta al punto x= x0 ”.Procedendo per induzione, se esiste la funzione derivata n−1 −ma della f, si definisce la derivatan-ma ponendo:
f n x0 =D {Dn−1 f x∣x= x0} .
È quindi naturale indicare la derivata n−ma oltre che col simbolo: f n x0 anche con: Dn f x∣x= x0.
12. Studio del massimo e del minimo delle funzioni utilizzando anche le derivate d'ordine superiore al primo
Accanto al criterio enunciato nel paragrafo 10, conviene segnalarne un altro perché talvolta
può non essere agevole stabilire il segno di y ' . Questo nuovo criterio è anch'esso sufficiente, hacarattere “puntuale” e invoca l'esistenza delle derivate successive a quella del primo ordine nelpunto x 0 .A tale scopo si enuncia il seguente teorema.Teorema 12.1. La funzione f x sia definita nell'intervallo I= [a ,b ] ed in I sia derivabile quanto
occorre. Se in un punto x 0 , interno all'intervallo I risulta f n x0≠0 , mentre nello stesso punto
- 62 -
R0 31
M
m

sono nulle tutte le derivate di ordine minore di n, cioè se è:
f 'x0 = f ''
x0 =. . .. .. . .. . = f n−1 x0=0 ,
allora:
1) x 0 è un punto di massimo relativo, se n è pari e f n x00 ;
2) x 0 è un punto di minimo relativo, se n è pari e f n x00 ;
3) x 0 non è né punto di massimo relativo né punto di minimo relativo, se n è dispari.In particolare, nei casi più comuni, ci possiamo servire del seguente criterio:Sia f x definita in [a ,b ] e sia x 0 un punto interno ad [a ,b ] .
1) Nelle ipotesi: { f ' x0 =0
f '' x0 <0 il punto x 0 è punto di massimo relativo.
2) Nelle ipotesi: { f '( x0 )=0
f ''( x0) >0
il punto x 0 è punto di minimo relativo.
3) Nelle ipotesi: {f ' x0 =0
f '' x0 =0
f ''' x0 ≠0 il punto x 0 non è né un punto di massimo relativo né di
minimo relativo vedremo in seguito come stabilire la natura del punto x0 , f x0 .In pratica per la determinazione dei massimi e dei minimi relativi di una funzione derivabile si deveprocedere così:1) si deriva la funzione f x e poi si trovano i valori che annullano la f ' x , cioè si determi-
nano le soluzioni dell'equazione:
f ' x =0 .
2) Se x 0 è una di queste soluzioni, si calcola f '' x0 . Se risulta f '' x0 ≠0 , allora x 0 è un punto
di massimo o minimo a seconda che sia:
f '' x0 0 oppure f '' x0 0 .
3) Se risulta invece f '' x0 =0 ; si calcola f ''' x0 . Se f ''' x0 ≠0 , allora x 0 non è un punto di
massimo né un punto di minimo per la funzione.4) Se risulta invece f ''' x0 =0, si calcolano in x 0 le derivate successive fino a trovare quella
che in si annulla proprio in x 0 . Se quest'ultima è di ordine pari (cioè è la quarta o la sesta
ecc.), in x 0 si ha un massimo se, ad esempio, f iv x0 0 oppure si ha un minimo se, ad
esempio, f iv x0 0. Se invece è d'ordine dispari (cioè è la quinta o la settima ecc.), x 0
NON è né punto di massimo né di minimo per la funzione.ESEMPIO. Usando la derivata seconda, ricercare i punti di massimo e minimo relativo di:
y = 2senx + cos2x.Poiché la funzione è periodica di periodo 2π, ci possiamo limitare a studiare l'andamento della fun-
zione nell'intervallo [0, 2 π ] . Si ha: y '=2cosx 1−2 senx e y ''=−2 senx−4 cos2 x .Dall'equazione 2cosx 1−2 senx =0 ricaviamo i punti critici nell'intervallo [0,π ] . Essi sono:
x=π6
,π2
,5π6
,3π2
. Ora determiniamo il segno della derivata seconda in questi punti critici:
- 63 -

f '' π6 =−30⇒π6
è un punto di massimo.
Inoltre: f π6 =32
;
f '' π2 =20⇒π2
è un punto di minimo. Inoltre:
f π2 =1 ;
f '' 56 π=−30⇒56
π è un punto di massimo.
Inoltre: f 56 π=32
;fig .13
f '' 32 π=60⇒32
π è un punto di minimo. Inoltre: f 3π2 =−3 .
In fig. 13 è descritto l'andamento del grafico della funzione y = 2senx + cos2x:
13. Massimi e minimi assoluti
Sia f x una funzione definita nell'intervallo [a ,b ] . Se in tale intervallo esiste un punto c incui la funzione assume un valore non minore (maggiore) dei valori che essa assume negli altri puntidi [a , b ] , il valore f c si dice massimo (minimo) assoluto della f x in [a , b ] e il punto c si dicepunto di massimo (minimo) assoluto per la f x in [a ,b ] .Il massimo (minimo) assoluto di una funzione f x continua in un intervallo [a ,b ] , è assunto o neipunti critici oppure agli estremi dell'intervallo. In questo caso, per determinare il massimo (minimo)assoluto della funzione dobbiamo calcolare, quando è possibile, i suoi valori in tutti i puntiestremanti relativi all'intervallo [a ,b ] , i valori f a e f b della funzione nei punti estremidell'intervallo e scegliere il più grande (il più piccolo) fra i numeri ottenuti.ESERCIZI.Calcolare i massimi e i minimi assoluti delle seguenti funzioni, negli intervalli a fianco indicati:
1) y=2 x 3−3 x2−12 x1; [−2, 52 ] ; 2) y=3 x 4
−8 x3−6 x2
24; [0, 3 ] ;
3) y = senxcosx + cosx; [0,2π ] ; 4) y= x2 lnx , [1, e ] .Soluzioni:M1=8 ; m1=−19 ; M 2=45 ; m2=0 ;
M3=33
4; m 3=−
334
; M 4=e2 ; m4=0 .
ESEMPIO.
Calcolare gli eventuali massimi e minimi assoluti di y=x
1 x2, per x∈R.
Si nota subito che la funzione è definita in un intervallo illimitato. Calcoliamo la derivata prima. Siha:
y '=
1− x2
1 x2 2
,
da cui si vede subito che y '=0 per x = ± 1. Inoltre: y 1 =12
, y −1 =−12
. D'altra parte risulta:
limx±∞
x
1x 2=0 ,
quindi, possiamo concludere che il massimo e il minimo assoluti della funzione valgono, rispettiva-
- 64 -

mente,12
e −12
.
14. Concavità, convessità. Punti di flesso
Sia f x una funzione definita e continua nell'intervallo I= [a ,b ] ed in I sia derivabilequanto occorrerà considerare.Sia P 0≡ x0 , y 0 un punto qualunque della curva grafico della f x con x 0 interno ad [a ,b ] ;essendo f x derivabile in x 0 , allora esiste in P 0 la retta t tangente alla curva e tale retta non è
parallela all'asse y (altrimenti la derivata avrebbe valore infinito, cioè non esisterebbe).Si danno le seguenti definizioni:1) si dice che nel punto P 0 la curva rivolge la concavità verso la direzione positiva dell'asse y
(o verso l'alto), quando esiste un intervallo α , β ⊆a , b tale che x0∈ α ,β e che per ogni
x∈α ,β , x≠ x 0 , l'ordinata del punto di ascissa x appartenente al grafico è maggiore di quella ap-partenente alla tangente in P 0 ed avente la medesima ascissa.
2) Se invece per ogni x∈α ,β , x≠ x 0 , le ordinate dei punti della curva sono minori di quelledei corrispondenti sulla tangente, si dice che la curva nel punto P 0 volge la convessità verso la di-rezione positiva dell'asse y (o verso l'alto), oppure, ciò che è lo stesso, volge la concavità verso ilbasso.In entrambi i casi, nell'intervallo α ,β , che contiene x 0 , il grafico di f x sta in uno solo deisemipiani averti per bordo la retta tangente nel punto P 0 (ved. fig. 14).3) Se poi non si presenta alcu-no di questi due casi, cioè seesiste un intervallo α , β contenente x 0 tale che la curvastia in uno dei semipiani dibordo la retta tangente t perx x0 e x∈α ,β e nel se-
mipiano opposto per x x0
e x∈α ,β ,si dice che in P 0 la
curva ha un flesso (o un puntodi inflessione) (ved. ancora lafig. 14).
fig. 14Dalla definizione di flesso segue che in un punto P 0 di flesso la tangente t attraversa la curva. A
questo proposito enunciamo il seguente teorema.Teorema 14.1 Se risulta: f '' x0 ≠0 , allora la curva in P 0 volge:
a) la concavità verso l'alto, se è f '' x0 0 ;
b) la concavità verso il basso, se è f '' x0 0 ;c) se invece risulta:
f '' x0 =0 e f ''' x0 ≠0 ,
allora la curva ha in x 0 un flesso.Una generalizzazione di questa proprietà è il seguente teorema.Teorema 14.2 Se x0 è una soluzione dell'equazione:
f '' x0 =0 ,e se la prima derivata, dopo la seconda, che non si annulla in x0 :1) è di ordine dispari, allora in P 0 la curva ha un flesso;
- 65 -
Ox
y
y=f(x)
x0
P0
y=f(x)
x0
P0
y=f(x)
x0
P0
t
tt

2) è di ordine pari, allora in P 0 la curva volge la concavità verso l'alto o verso il basso a se-conda che questa derivata sia positiva o negativa.Inoltre sussiste il seguente teorema.Teorema 14.3 Sia f x una funzione definita in [a ,b ] e dotata di derivata “infinita” nel punto x0
interno ad [a , b ] (si dice che una funzione ha “derivata infinita” in un punto x0 se in tale punto laderivata NON esiste, e il limite, per x x0 , del rapporto incrementale è o ∞ o −∞ ). Allora lacurva di equazione y= f x ha nel punto P 0≡ x0 , y 0 un flesso nel quale la tangente è la rettaverticale x= x0.
ESEMPIO. Determinare per la funzioney=x55 x−6 gli intervalli in cui il grafico
della stessa volge la concavità verso l'alto equelli in cui volge la concavità verso il basso.Determinare infine gli eventuali punti di flesso.
Si ha: y '=5 x 45 e y ''=20 x3 .
Per x0 è y ''0 e per x0 è y ''0. Pertanto la curva rivolge la concavità verso l'altoper x0 e verso il basso per x < 0. Il puntoP 0≡0 , −6 è un flesso (ved. fig. 15).
fig. 15Esercizi. Risolvere la questione analoga dell'esempio precedente per le seguenti funzioni:1) y=3 x 4
−8 x36 x2
12 x ; 2) y=e−x 2
;3) y= x1
4e x ; 4) y=x e x ;
5) y=x−sen x .
Soluzioni:
1) La curva è concava verso l'alto per x13
o x1 . I punti di flesso sono 13 , 41127 e
1,13 .
2) La curva è concava verso l'alto per x− 22
o x 22
. I punti ±22
, e−
12 sono i flessi
della curva data.3) La curva è concava verso l'alto ∀x∈ ℝ .
4) La curva è concava verso l'alto per x−2 ; il flesso è nel punto F≡−2 , −2 e− 2 .5) La curva è concava verso l'alto per 2 k π x2 k1 π , k∈Z .
I flessi sono in F≡ k π , k π .
15. Studio di una funzione
L'analisi e lo studio del grafico di una funzione è stato introdotto a livello soprattutto intuiti-vo. Ora, avendo a disposizione gli strumenti analitici per poter usare le derivate, si può intraprende-re uno studio più approfondito per analizzare il comportamento e le varie proprietà delle funzioni inuna variabile. Nello studio di una funzione y= f x , spesso, conviene procedere secondo il seguente schema(maggiormente dettagliato in appendice):1) determinare l'insieme di esistenza (o dominio o campo di esistenza) della funzione f, le even-
tuali simmetrie rispetto all'asse y o all'origine delle coordinate, la eventuale periodicità, il se-gno e le condizioni ai limiti del dominio (nei cosiddetti punti di “frontiera”);
2) determinare gli eventuali punti di intersezione della curva con gli assi coordinati;
- 66 -

3) discutere le discontinuità della curva trovando gli eventuali asintoti verticali (che sono retteesprimibili nella forma generica: x = cost.);
4) controllare se esistono asintoti orizzontali (che sono rette esprimibili nella forma generica:y = cost) e se esistono asintoti obliqui (che sono rette esprimibili nella forma generica:y = mx + p; m, p∈ ℝ );
5) calcolo di f ' x ed, eventualmente, di f '' x per lo studio:5a) dei massimi e dei minimi relativi;5b) della concavità e della convessità;5c) dei flessi;
6) calcolo dei limiti della f ' x nei punti di “frontiera” del dominio.Prima di passare ad esaminare alcuni esempi di studio di una funzione, consideriamo uno
schema riassuntivo sui punti critici.
Come sappiamo (ved. Massimi e minimi assoluti e relativi) un punto c è detto critico se f ' c =0(punto stazionario), oppure se in esso NON esiste la derivata prima. Esaminiamo questi due casi:
A) Punti stazionari: f ' c =0 . In tal caso, il punto c è:A1) un estremante: massimo o minimo (fig. 16);A2) un punto di flesso a tangente orizzontale (fig. 17);
fig. 16 fig. 17B) NON esiste la derivata prima nel punto c (anche se in c la funzione è continua). Questoavviene quando:
1) limh0
yh=∞ .
Si presentano i seguenti casi:
B1) limx c±
f ' x =+ ∞ .
Il punto c è un punto di flesso, a tangente verti-cale o “ascendente” (ved. fig. 18).
O
y
y=f(x)
c
t
x
fig. 18
- 67 -
O
y
y=f(x)
c
t
xO
y
y=f(x)
c c '
t
x
t'

B2) limx c±
f ' x =−∞ .
Il punto c è un punto di flesso, a tangente verti-cale o “discendente” (ved. fig. 19).
O
y
y=f(x)
c
t
x
fig. 19
B3) limx c±
f ' x =±∞ .
Nel punto c si ha una “cuspide” rivolta verso ilbasso (ved. fig. 20).
fig. 20
B4) limx c±
f ' x =∓∞ .
Nel punto c si ha una “cuspide” rivolta versol'alto (ved. fig. 21).
O
y
c
t
x
y=f(x) y=f(x)
fig. 21
2) f '−c ≠ f '
+c .
In tal caso si hanno i punti “angolosi” (ved.fig.22). Si hanno punti angolosi anche quando
f 'c è infinita e f '
−c è finita, o viceversa
(ved. fig. 23).
fig .22
- 68 -
O
y
c
t
x
y=f(x)y=f(x)
O x
y
y=f(x)
t' t''
y=f(x)
c

O x
y
y=f(x)
t'
t''
y=f(x)
c O x
y
y=f(x)
t''
t'
y=f(x)
c
fig. 23
Vediamo ora qualche esempio.
Es. 1 Sia da studiare la funzione di tipo algebrico razionale fratto:
y=x
x21
.
La funzione è definita ∀ x∈ℝ (quindi non esiste alcun asintoto verticale) ed è simmetricarispetto all'origine. Per x = 0 si ha y = 0⇒ la curva passa per l'origine del sistema di riferimento.Per x±∞ il denominatore della frazione, che ha grado maggiore del numeratore, cresce più rapi-damente del numeratore e quindi:
limx±∞
x
x21=0 ,
ovvero, se: x±∞⇒ y0± .Da ciò si deduce che la retta di equazione y = 0 (cioè l'asse x) è asintoto orizzontale della curva sia adestra che a sinistra.Se poniamo y > 0 (per determinare il segno della funzione) si vede subito che:
y > 0 per x > 0 e y < 0 per x > 0. Derivando si ha:
y '=1− x2
x21 2
.
Questa derivata si annulla per x = ±1.
Calcoliamo ora la y '':
y ''=
2 x x 2−3
x21 3
,
e valutiamola nelle ascisse che annullano la derivata prima.Si ha:
y '' −1 =12
>0⇒ il punto di ascissa x=−1 è un punto di minimo;
y '' 1 =−12
<0⇒ il punto di ascissa x=1 è un punto di massimo.
Per calcolare le ordinate corrispondenti a queste due ascisse basta andare a sostituire i due valori−1 e 1 nella funzione y. Facendo così si trova:
y 1 =12
e y −1 =−12
.
Quindi, se indichiamo con m e M i punti, rispettivamente, del minimo e del massimo si potrà scri-vere:
- 69 -

M≡1,12 e m≡−1,−
12 ; (ved. fig. 24).
Riprendiamo ora in esame la derivata seconda della funzione per cercare di provare l'esistenza di
eventuali flessi. Poiché y ''=0 per x=0,±3 , bisogna calcolare la derivata terza della funzione yper vedere se, per i valori che annullano la derivata seconda, essa è o non è diversa da zero. Se laderivata terza della y, calcolata in tali ascisse, risulterà effettivamente diversa da zero, allora resteràprovata l'esistenza di punti di flesso per la curva y= f x . Dopo alcuni semplici calcoli, si ha:
y '''=−
6 x 2−2 x−1 x 2
2 x−1
x 21 4
.
Valutiamo ora la y ''' nelle ascisse che annullano la y ''.
y ''' 3 = 316
⇒ il punto di ascissa x=3 è un punto di flesso;
y ''' 0 =−6 ⇒ il punto di ascissa x=0 è un punto di flesso;
y ''' −3 =− 316
⇒ il punto di ascissa x=−3 è un punto di flesso.
Calcoliamo ora le ordinate corrispondenti alle ascisse dei punti di flesso. Per ottenere ciò, basta an-dare a sostituire, nell’equazione della funzione, alla x quei valori numerici che annullano la derivataseconda e cioè:
y 3 =34≃0,433 ⇒ il punto F 1≡3,
34 è un punto di flesso;
y 0 =0 ⇒ il punto F O≡0,0 è un punto di flesso;
y −3 =−34≃−0,433 ⇒ il punto F 2≡−3,−
34 è un punto di flesso.
Il grafico di fig. 24 illustra le variazioni della funzione y=x
x21
.
fig . 24
grafico della funzione: y=x
x21 Es. 2 Sia da studiare la funzione di tipo algebrico razionale fratto:
y=x3
x2−1.
Questa è una funzione razionale che risulta definita nei punti dove il denominatore è ≠ 0.Questo accade quando si verifica la condizione: x 2−1≠0 che conduce a scrivere che x deve essere
- 70 -

diverso da ±1. Quindi, il dominio di y è: D=ℝ∖ {−1,1 }=(−∞ ,−1 )∪ (−1,1 )∪(1,+∞ ) .
Essendo f x =− f −x ,
la funzione è simmetrica rispetto all'origine degli assi cartesiani.Il valore nell'origine è y = 0⇒ la curva passa per tale punto.Stabiliamo il segno della funzione e per questo studiamo la condizione y > 0. Come è facile verifi-care, si trova che y0 per −1 x0 e x1.Calcoliamo i limiti per conoscere il comportamento della funzione nei punti di discontinuità. Si ha:
limx−1±
x3
x2−1=±∞ , lim
x + 1±
x3
x 2−1=±∞ .
Come corollario, dal calcolo di questi limiti, possiamo affermare che le rette x = ±1 sono due asin-toti verticali per la curva.In questa, come in ogni funzione razionale in cui al numeratore ci sia un polinomio di grado mag-giore di quello al denominatore, è sempre utile eseguire la divisione tra numeratore e denominatore.Procedendo così si ottiene un'uguaglianza del tipo:
x3
x2−1=x
x
x2−1dove la funzione razionale presente al secondo membro ha il grado del numeratore minore di quellodel denominatore e quindi, a mano a mano che x tende a−∞ o −∞ diventa un addendo sempre piùtrascurabile. In altri termini, se x−∞ o x−∞ i valori di y sono sempre più vicini ai valori di x.Poiché il grafico di y = x è una retta, di essa si parla come di un asintoto obliquo della funzione.Calcoliamo la derivata prima. Dopo semplici passaggi si ha :
y '=x2 x2
−3 x2−1 2
.
Si vede subito che y '=0 per x=0,±3. Studiamo ora il segno della y ' . Osserviamo subito che il
denominatore è sempre maggiore o uguale a zero (risulta zero quando x = ±1 ed in questi punti laderivata è infinita cioè NON esiste). Un'analoga considerazione la possiamo fare a proposito del ter-
mine x 2 che è al numeratore. Allora si ha y '0 per x−3 o per x3 . (*)
In particolare y ' 0 =0 ma y 'non cambia segno quando la curva attraversa l'origine mantenendo il
segno negativo come stabilito sopra da (*). Per inciso x = 0 è un buon candidato ad essere un puntodi flesso per la y. Quindi, il punto x = 0 non potrà essere un minimo o un massimo per la funzione y. Studiamo ora laderivata seconda che risulta essere:
y ''=
2 x x 23
x2−1 3
;
e valutiamola nelle ascisse che annullano la y ' (eccetto, per il motivo scritto sopra, il punto x = 0).Si ha:
y '' −3 =−332≃−2,59 ⇒ il punto d'ascissa −3 è un massimo;
y '' 3 =332≃2,59 ⇒ il punto d'ascissa 3 è un minimo.
Per calcolare le ordinate corrispondenti a queste due ascisse basta andare a sostituire i due valori−3 e 3 in f x . Procedendo così si trova:
y 3 =332
e y −3 =−332
.
Quindi, se indichiamo con m e M i punti, rispettivamente, del minimo e del massimo si potrà scri-vere:
- 71 -

m≡3,33
2 e M≡−3,−33
2 .Cerchiamo ora di provare quanto affermato sopra a proposito della presenza o meno di un flesso in
x = 0. Intanto y ''=0 per x=0. La derivata terza (ottenuta dopo qualche semplice calcolo) è:
y '''=−
6 x 46 x2
1
x2−1 4
,
e si vede che y '''=−6 , dimostrando così che in x = 0 esiste un flesso a tangente orizzontale.
Il grafico di fig. 25 illustra le variazioni della funzione y=x3
x2−1.
fig. 25
grafico della funzione: y=x3
x2−1 Es. 3 Studiamo la funzione di tipo trascendente trigonometrico:
y=2 cos x−1−cos 2 x .1. Dominio. La funzione è definita ∀x∈ ℝ . È una funzione periodica di periodo 2π e
poiché f −x = f x ⇒ f è una funzione pari (ovvero il suo grafico è simmetrico rispetto all’assedelle ordinate). Possiamo quindi limitarci a studiarla in [0,π ] .
2. Intersezioni con gli assi.
∩asse y : {x =0y =2 cos0−1−cos 2⋅0=0
.
∩asse x : {y=02cosx−1−cos 2 x=0
⇒{y=02 cosx−1−2 cos2 x1=0
⇒ {y=02 cosx 1−cosx =0
⇒
- 72 -

⇒ {y=0
x=π2
, oppure x=0.
Riassumendo: la funzione incontra gli assi coordinati nei punti
O≡0,0 e A≡ π2 ,0 . Inoltre: f π =−4 .
3. Studio del segno: f x 0 per: cosx 1−cosx 0 , ovvero per: 0 < cosx < 1, da cui: y > 0
per 0xπ2
.
4. Studio della derivata prima: y ' x =−2 senx2 sen2 x=2 senx 2 cosx−1 . Allora:
y ' x =0 per: senx = 0 cioè per x = 0, π; oppure per cosx=12
cioè per: x=π3
.
y ' x 0 per: senx 2 cosx−1 0 . Per risolvere questa disequazione riportiamo in un grafico (ved. fig. 26) le variazioni del
segno dei due fattori del prodotto.
R0π3 π
sen x0
2 cos x−10
fig. 26
Da questo grafico si deduce che y ' x 0 in 0,π3 . In tale intervallo la f è crescente e nei
punti di ascissa: x = 0, π la funzione ha (molto probabilmente) dei minimi relativi, mentre
nel punto di ascissa: x=π3
si può dedurre che la f presenta (molto probabilmente) un
massimo relativo tale che f π3 =12
(come proveremo in seguito più rigorosamente).
5. Studio della derivata seconda:
f '' x =−2cosx4cos2 x=2 −cosx4cos2 x−2 . Risolvendo l’equazione: y '' x =0 , si ha:
cosx=1±33
8 da cui:
x1=arccos 1338 =α≃0,56783 e x2=arccos1−33
8 =β≃2,20566 .
6. Verifichiamo le affermazioni fatte prima a proposito dei minimi e massimi:
y '' 0 =20 , per cui in x=0 c'è effettivamente un minimo;
y '' π3 =−30 , per cui in x=π3
c'è effettivamente un massimo;
y '' π =60 , per cui in x=π c'è effettivamente un minimo.
y '' x 0 per cosx133
8 oppure per cosx
1−338
cioè per: 0 xα
oppure βxπ .Da qui resta provato che la funzione è convessa per 0 < x < α e β < x < π e concava inα < x< β.I punti di ascissa x = α e x = β sono candidati ad essere ascisse di punti di flesso. Per dimostrare questo, studiamo la derivata terza.
- 73 -

6. Studio della derivata terza: y ''' x =2 senx−8 sen 2 x.
y ''' α ≃−6.17888 ≠0 ⇒ in x=α c’è effettivamente un flesso e:
f α =333−1316
≃0,264605;
y ''' β ≡9,25047 ≠0 ⇒ in x=β c'è effettivamente un flesso e:
f β =−3331316
≃−1,8896.
Nel grafico di fig. 27 sono indicate le variazioni della funzione y=2 cos x−1−cos 2 x .
fig. 27 grafico della funzione: y=2 cos x−1−cos2 x
ESERCIZI. Studiare le seguenti funzioni e disegnarne il grafico:
1) y= x + 12
2 x−2; 2) y=
x3 + x2−2 x−3
x2−3;
3) y=x3
x2− x - 2; 4) y=
2
x2−6 x5
;
5) y=x2−4
x2−3 x2; 6) y=
x2−6 x + 5x−3
;
7) y=x2−6 x + 8
x2−6 x + 9; 8) y=
4 x 2 - x + 24 x - 3
;
9) y= x2x−1
; 10) y=x−1
x2−4;
11) y = senx + cosx; 12) y=cos 2 xsenx ;13) y=log 7 x−x2 ; 14) y=2x
−2− x ;15) y=e x2−1 ; 16) y=e x senx ;17) y=sene x ; 18) y=ln sen x ;
19) y= x2 ln3 −x−2 ; 20) y=∣x∣e
x−1
x2
;
21) y= ln x−2 2
x−3 x1 ; 22) y= x3
x2−4 x3;
23) y=x21
2 x3 ; 24) y=cosx
cos 2 x.
- 74 -

Funzioni più complicate per approfondire le abilità acquisite:
1) y= x− x−1 x2 −3 ; 2) y=3 −x32 x2 ;
3) y=∣1− x2
∣
1 x2; 4) y=
x2−3∣x∣
;
5) y=ex
1−2exe2 x; 6) y=
x2
4−x 2;
7) y= x−ln e x
1ex ; 8) y=1
x2−4ln x4−8 x216 ;
9) y= x2x e1x ; 10) y=
∣x−3∣
x2−6 x8;
11) y= x5 e− x−4
; 12) y=arccos2 x−1
2 x;
13) y=arctan−1
3 x2; 14) y= x x−1
x2;
15) y= x 3−xx1
; 16) y=x2x5
2 x−4 ;
17) y= x⋅e
1
3ln x2
; 18) y=∣x∣−1 e1
x1 ;
19) y=∣x∣−∣x 2
−1∣∣x−2∣
; 20) y=ln∣x3−4 x25 x−2
x2−2 ∣;21) y=ln∣x2
6 x8∣∣x2∣; 22) y= x2−4 x3−2 ln∣3− x∣;
23) y=3arctan x−3 − x−3 ; 24) y= xarctan x−12
ln 1x2 ;
25) y=arcsenln x22 x2 ; 26) y=4 senx
1senx
;
27) y=3 x2−10 x3∣3 x−3∣; 28) y=ln senx−cos∣x∣1−senx ;
29) y=arccos cosxsen2∣x∣3cosx ; 30) y= xarctanx−
12
ln 1x2 .
- 75 -

Cap. 4 I TEOREMI DI ROLLE, LAGRANGE E CAUCHY. I TEOREMI DI DE L'HOSPITAL
1. Il teorema di Rolle
Sia f x una funzione continua in [a , b ] , derivabile in a , b , che assume valori uguali negliestremi dell'intervallo, cioè tale che sia:
f a = f b .Sotto queste ipotesi, si prova che esiste almeno un punto c∈a ,b in cui la derivata prima dellafunzione si annulla cioè:(1) f ' c =0 .Dim. Poiché per ipotesi la f x è continua in [a ,b ] , per il teorema di Weierstrass, essa è ivi dotatadi massimo M e di minimo m, ed inoltre: m ≤ M. Si possono allora presentare due casi a secondache risulti m = M o m < M.1° Caso.- Se è m = M la funzione f x è costante in tutto l'intervallo a ,b e quindi la sua derivataè nulla in ogni punto dell'intervallo, e il teorema, in questo caso, vale.2° Caso.- Sia ora m < M e siano c ,d∈a ,b due punti tali che f c =M e f d =m . Poiché è:
mMsegue che f x non è costante in a ,b e dato che per ipotesi è f a = f b siamo certi che almenouno dei due punti c o d dovrà certamente cadere nell'interno di a , b . Senza perdere niente ingeneralità sia c il punto in questione. Allora, se h∈R è scelto in modo che i puntic−h e ch∈ [a ,b ] , dato che in c la funzione assume il suo massimo valore e dalla definizione dipunto di massimo, si ha:
f ch − f c ≤0 , f c−h − f c ≤0 .
Dividendo la prima disuguaglianza per h e la seconda per −h , si ottiene:
(2)f ch − f c
h≤0 ,
(3)f c−h − f c
−h≥0 .
Analizziamo il rapporto (2): esso non è altro che il rapporto incrementale destro della f x relativoal punto c e all'incremento h, mentre (3) è il rapporto incrementale sinistro relativo allo stesso pun-to. Siccome per ipotesi la f x è derivabile nel punto c, allora i limiti per h→0 dei due rapporti in-crementali (2) e (3) esistono e sono finiti e uguali fra loro; precisamente il valore comune del limite
dei due rapporti (2) e (3) vale f ' c .Passando al limite per h→0 nella (2) si ha(4) f ' c ≤0 ,mentre, passando al limite per h→0 nella (3) si ha:(5) f ' c ≥0 .
Dalla (4) segue che f ' c non può essere un numero positivo, mentre dalla (5) segue che f ' c nonpuò essere un numero negativo. Pertanto è:
f ' c =0 .Si ragiona e si conclude in modo analogo se internamente a a , b cade invece il punto di minimod.•
Osservazione 1 Interpretazione geometrica del teorema di Rolle.Se un arco di una curva continua è dotato di tangente in ogni suo punto, esclusi al più gli
estremi, ed ha uguali le ordinate degli estremi, esiste almeno un punto interno all'arco dove la tan-gente è parallela all'asse delle x (ved. fig. 1). Questo risultato è del tutto intuitivo; basta notare peròche ciò non avverrà, in generale, se la derivata non esiste in qualche punto interno ad a ,b : ad
- 76 -

esempio in qualche punto angoloso (ved. fig. 2).
O
y
y=f(x)
a xbdc
f(c)
f(d)
f(a)=f(b)
fig .1 fig. 2Ricordando la definizione di funzione continua e quella di funzione derivabile e facendo anche rife-rimento alla fig. 2, provare, per esercizio, il seguente teorema:Sia f una funzione continua in I ⊆ ℝ . f è derivabile in I?E cosa si può dire del teorema contrario e cioè:sia f una funzione derivabile in I ⊆ ℝ . f è continua in I?Esercizi:Dire se le seguenti funzioni soddisfano le ipotesi del teorema di Rolle, nell'intervallo a fianco indi-cato e, in caso affermativo, determinare l'ascissa c del punto (o dei punti) che verifica (verificano) ilsuddetto teorema.1) f x =x3
−x , in [-1, 0] e [0, 1]; 2) f x =3 x−8
2, in [0, 16];
3) f x =1−3 x2 , in [-1, 1]; 4) f ( x )=ln sen x , in [π6 ,
5 π6 ] .
2. Il teorema di Lagrange o del valor medio
Se f x è una funzione continua in [a ,b ] e derivabile in (a ,b ) , allora esiste almeno unpunto c∈a ,b che verifica la seguente uguaglianza:
(6)f (b)− f (a )
b−a= f ' (c) .
Dim. Per provare la tesi definiamo la funzione ausiliaria:g x = f x k x ,
dove k è una costante che determineremo in modo che la funzione g x verifichi la terza condizionedel teorema di Rolle, cioè:
g a =g b ,ossia:
f a k a= f b k b ,da cui:
(7) k=−f b − f a
b−a.
Ma, ricordando le ipotesi fatte sulla f x , la g x risulta continua in [a , b ] e derivabile in a ,b ,perché somma di funzioni continue in [a , b ] e derivabili in a ,b . Possiamo perciò applicare allafunzione g x in [a , b ] , il teorema di Rolle e affermare che esiste almeno un punto c∈a ,b per ilquale è:
g ' c = f ' c k=0 ,cioè:
f ' c =−k ,
- 77 -
O
y
y=f(x)
a xbc
f(c)
f(a)=f(b)

da cui, tenendo presente il valore di k dato dalla (7), si ottiene:f b − f a
b−a= f '
c .
Quest'uguaglianza prova la tesi.•Osservazione 21) Il teorema di Rolle è un caso particolare di quello di Lagrange.2) La formula di Lagrange non dipende dall'ipotesi a < b; lo scambio di b con a non altera, in-
fatti, il rapporto incrementale:f b − f a
b−a.
3) La formula di Lagrange può essere scritta:
f b − f a =b−a ⋅f ' c .Spesso, ponendo b=ah e c=aΘ b−a , con 0Θ1, tale formula può essere scritta:
f ah =h⋅ f ' aΘ h con 0Θ1 .Il punto a+Θh risulta, così, interno all'intervallo di estremi a e a + h, senza che sia necessario pre-cisare quale dei due preceda l'altro (cioè quale sia il segno di h).4) A volte, la formula di Lagrange viene chiamata formuladi Cavalieri (~1638), cui risale la seguente osservazionegeometrica:quando un arco di curva continua è dotato di tangente in ognisuo punto, esclusi al più gli estremi, esiste almeno un puntointerno all'arco nel quale la tangente è parallela alla corda checongiunge i punti estremi dell'arco (ved. fig. 3).Infatti dal triangolo rettangolo ABC si ha:
tanxr=CBAC=
f b − f a b−a
;
inoltre, se t è la tangente alla curva nel punto P di ascissa c,
per il significato geometrico di derivata si ha: tanxr= f ' c .O
y
y=f(x)
a xbc
A B
CP
fig. 3
Quindi, poiché il teorema di Lagrange afferma che è: f ' (c)=f (b)− f (a )
b−a, tan xt=tan xr , da cui:
xt=xr ; si conclude perciò che la retta t e la retta AC sono parallele.5) Bisogna notare che di punti c di cui si parla nell'enunciato del teorema di Lagrange, ne
esiste sempre almeno uno, ma ne possono esistere anche più di uno: ad esempio P ' e P '' (ved. fig.4).
O
y
y=f(x)
a xbc
P '
P ' '
fig. 4
O
y
y=f(x)
a xbc
P
r
fig. 5Se la funzione f x , di cui si parla nel teorema di Lagrange, non è derivabile in qualche punto in-terno ad [a ,b ] allora il teorema può non essere vero (ved. fig. 5).
- 78 -

ESERCIZI:Dire se le seguenti funzioni soddisfano le ipotesi del teorema di Lagrange, nell'intervallo a fiancoindicato, e in caso affermativo, determinare l'ascissa c del punto (o dei punti) che verifica (verifica-no) il suddetto teorema:1) y=x3 in [−1,1 ] ;2) y=x−x3 in [−2,1 ] ;3) y=ln 2 x−1 in [1,2 ] .
3. Il teorema di Cauchy o degli incrementi finitiSe f x e g x sono due funzioni continue in [a , b ] e derivabili in a , b e se la derivata
g ' x non si annulla mai, esiste almeno un punto c∈a ,b tale che sia:
(8)f (b)− f (a )
g (b) −g (a )=
f ' ( c)
g '(c ).
Dim. Osserviamo anzitutto che g b−g a≠0 perché se fosse g b−g a=0 per il teorema di
Rolle, la derivata g ' x dovrebbe annullarsi in almeno un punto, contraddicendo l'ipotesi. Dettociò, definiamo la funzione ausiliaria:
h x = f x k⋅g x ,con k costante e che determineremo in modo che la funzione h x verifichi la condizione:
h (a )=h (b ) cioè:
f a k⋅g a = f b k⋅g b .da cui:
(9) k=−f b − f a g b −g a
.
Avendo scelto k in questo modo, possiamo applicare il teorema di Rolle alla funzione h x e quindiesiste un punto c∈a ,b tale che:
h ' c = f ' c k⋅g ' c =0 ,cioè:
k=−f ' c
g ' c , g ' c ≠0 ,
da cui, tenendo conto del valore di k definito dalla (9), si ha:
f (b)− f (a )
g (b) −g (a )=
f ' (c )
g ' (c ), (a < c < b).•
Osservazione 31) Al teorema di Cauchy se poniamo b = a + h e c = a + Θh, con 0 < Θ < 1, si può dare la for-ma:
f (a+ h)− f (a )
g (a+ h ) −g (a )=
f ' (a+Θ⋅h )
g ' (a+ Θ⋅h ), (0 < Θ < 1).
2) Ponendo nella (8) g x =x , avremmo g ' x =1 ; e potremmo scrivere:
f 'c =
f b − f a b−a
.
cioè: il teorema di Lagrange è un caso particolare del teorema di Cauchy.
Esercizio:Dimostrare che le funzioni:
f x = x2−2 x3 e g x =x3
−7 x 220 x−5 ;
soddisfano le condizioni del teorema di Cauchy in [1,4 ] e calcolare il corrispondente valore di c.(Soluzione: c = 2).
- 79 -

4. I teoremi di De L'Hospital.
Sappiamo che i teoremi sui limiti non valgono più quando i limiti delle funzioni che si con-siderano si presentano sotto una delle forme indeterminate di tipo algebrico:
00
, ∞
∞, 0⋅∞ , ∞−∞ ,
o di tipo esponenziale:∞0 , 00 , 1∞ .
Ora, se le funzioni in questione sono derivabili le forme indeterminate si possono “aggirare” utiliz-zando due teoremi detti di De L'Hospital, che consentono molto spesso di calcolare, sotto determi-nate condizioni, limiti di funzioni che si presentano sotto forma indeterminata.
Iniziamo con l'esaminare la forma00
e a tale scopo proviamo il seguente teorema.
Teorema 4.1 Primo teorema di De L'Hospital.Siano f x e g x due funzioni reali di variabile reale definite in un intorno H del punto a. Inoltresiano soddisfatte le seguenti condizioni:
1) f x e g x siano continue in x=a e f a =g a =0 ;2) f x e g x siano derivabili in H0=H ∖ {a };
3) g ' ( x )≠0 in H0;
4) esiste (finito o infinito) il limxa
f ' x
g ' x .
Allora esiste anche il limxa
f x g x
e si ha:
(1) limx→a
f ( x )
g ( x ) =lim
x→ a
f ' ( x )
g ' ( x ).
Dim. Osserviamo subito che il rapportof ' x
g ' x ha sempre significato in H 0 , per l'ipotesi che ab-
biamo fatto: g ' x ≠0 in H0 . In H0 ha anche significato il rapportof x g x
perché qui è sicuramente
g x ≠0 . Infatti se in H0 esistesse un punto b in cui g b =0 , per il teorema di Rolle, esisterebbe tra
a e b almeno un punto α dove g ' α =0 , contro l'ipotesi 3). Per il teorema di Cauchy, si ha che adogni x∈H0 si può far corrispondere un punto c∈a ,b , in modo che risulti:
f ( x )− f (a )
g ( x )−g (a ) =
f ' (c )
g ' (c );
e, tenendo conto che f a =g a =0, si ha:
(2)f ( x )
g ( x ) =
f ' (c )
g ' (c ); (a<c< x ) .
Quando x→a, anche c→a, perché c è compreso tra a e x.Inoltre, se:
limx a
f ' x
g ' x = l ,
allora: limc a
f ' c
g ' c esiste ed è uguale ad l . Pertanto, tenendo presente la (2), si ottiene:
limx→a
f ( x )
g ( x ) =lim
x→ a
f ' (c )
g ' (c )=lim
c→ a
f ' (c )
g ' ( c )=lim
x→a
f ' ( x )
g ' ( x )=l .
- 80 -

In conclusione si può scrivere:
limx→a
f ( x )
g ( x ) =lim
x→a
f ' ( x )
g ' ( x )=l . •
Osservazione 4A) Se invece dell'ipotesi 1), fosse: lim
x af x =lim
xag x =0 ed f x e g x , definite in H0 ,
basta porre f a = g a =0 e le funzioni risultano così definite e continue in H.B)
Se il quoziente: f ' ( x )
g ' ( x ) per x→a presenta di nuovo una indeterminazione del tipo indicato e se
le derivate f ' x e g ' x verificano le condizioni enunciate per f x e g x , convieneallora passare al rapporto delle derivate seconde e così via.
C) Il teorema è vero anche nel caso in cui H 0 sia un intorno destro o sinistro di a.
D) Non è lecito applicare il teorema al calcolo del limx→0
senxx
. Per applicarlo, infatti, bisogna co-
noscere che Dsenx = cosx; ma per saperlo è necessario aver calcolato il limite in questione.Quindi si cadrebbe in un ciclo infinito totalmente improduttivo.
E) Il teorema di De L'Hospital può essere ugualmente applicato nel caso in cui: limx∞
f x =0 ,
e limx∞
g x =0 . Infatti, posto x=1z
, si vede che quando x→+∞ allora z0 e quindi:
limz0
f 1z =0 e limz0
g 1z =0 .
Applicando il teorema di De L'Hospital al rapporto: f 1z g 1z
, si trova:
limx∞
f x g x
= limz0
f 1z g 1z
= limz0
f ' 1z − 1
z2 g ' 1z − 1
z2 = lim
z 0
f ' 1z g ' 1z
= limx∞
f ' x
g ' x
,
come volevamo provare.Naturalmente, esiste un criterio perfettamente analogo nel caso in cui x→+∞. Inoltre basta combi-nare i due risultati, per ottenere un teorema analogo relativo al caso della divergenza della variabileindipendente verso infinito.Esempio: il limite seguente si calcola applicando per ben tre volte il teorema di De L'Hospital:
limx→0(e
x−(e− x )−2 xx−sen x )=
H→ lim
x→0(e
x−(−e− x )−21−cos x )=
H→ lim
x→0(e
x−(e−x )sen x )=
H→ lim
x→0(e
x−(−e− x )cos x )=e0
+e−0
cos 0=
1+11=2 .
Esercizi.
1) Determinare il limite: limx0
xsenx
; soluzione=∞ ;
2) determinare il limite: limx0
x−arctanxarcsenx− x
; soluzione= 2 ;
3) determinare il limite: limx0
sen3 x2
lncos 2 x2−x ; soluzione=−6 ;
4) determinare il limite: limx→0
ex−1+ln (1−x )
tanx−x; soluzione=−
12 .
- 81 -

Consideriamo ora il problema del limite del rapporto di due funzioni f x e g x che abbiano am-bedue, nel punto a (o all'infinito) per limite l'infinito.A questo scopo enunciamo il secondo teorema di De L'Hospital. Teorema 4.2 Secondo teorema di De L'Hospital
Siano f x e g x due funzioni reali di variabile reale definite in un intorno H0=H∖ {a } ,essendo H un intorno di a. Inoltre siano soddisfatte le seguenti condizioni:
1) limx a
f x =limxa
g x =∞ ;
2) f x e g x siano derivabili in H0;
3) g ' x ≠0 in H0 ;
4) esiste (finito o infinito) il limx a
f ' x
g ' x .
Allora esiste anche il limx a
f x g x
e si ha:
(1) limx a
f x g x
=limxa
f ' x
g' x
.
Il teorema continua a valere quando a rappresenta uno dei simboli: ∞ , −∞,∞. Inoltre il teorema èvero anche nel caso in cui H0 sia un intorno destro o sinistro di a.ESERCIZI.Provare che valgono le seguenti uguaglianze:
1) limx∞
x ex2
xex=0 ; 2) lim
x∞
ln 12 e x
1x 2=1; 3) lim
x∞
xn
e x=0;
4) limx∞
loga x
xn=0 ; 5) lim
x 0
ex−e−x
senx=2 ; 6) lim
x1
x x−1−1
x2−1=22
;
7) limx0
tan5xtan2 xtanx
=5; 8) limx
π2
1−senx 3
2 cosx=0 ; 9) lim
x 0
3 senx
x3sen2 x
=∞ ;
10) limx 0
x−tanxtanx
=0; 11) limx1
x 23 x−4x−1
=5 ; 12) limx 0
tanx1−cosx
=∞ ;
13) limx 0
1−1− x2
x=0 ; 14) lim
x 2
ln x2−3
x23 x−10=
47
; 15) limx0
lnsenxcotanx
=0 .
- 82 -

Cap. 5 IL DIFFERENZIALE DI UNA FUNZIONE ℝℝ
0. Definizione di differenziale
Ricordiamo il rapporto incrementale di una funzione y= f x con f :ℝℝ : y
x=
f x0h − f x0
ho, ciò che è lo stesso:
(1)f x0h − f x0
h= f '
x0ε
dove: limh0
ε=0 .
Dalla (1), moltiplicando per h, si ha:
f x0h − f x0= f ' x0⋅hε⋅hdove:
limh0
ε⋅h=0 .
L’espressione f ' x0 ⋅h si dice differenziale della f in x 0 e si può scrivere:
(2) d f x0 = f ' x0 ⋅h, ∀ x0∈ℝ .
Quindi, il differenziale di una curva (o di una funzione esplicita), in un punto in cui esiste la de-rivata, è il prodotto della derivata per l’incremento della variabile indipendente.
In particolare, se f x =x , si ha: f ' x =1dx=1⋅h=h , cioè il differenziale della variabile indi-pendente coincide con il suo incremento.Sostituendo nella (2) si ha:
d f x = f ' x ⋅dx .
1. Significato geometrico del concetto di differenziale
Ox
y
y=f(x)
R
tQ
α]∆ f = {
x0 x0∆ x
P0
QR=df
S
fig. 1
Dall'uguaglianza: tan α= RQP0Q
si ha che:
QR=P0 Q⋅tanα=P0 Q ⋅ f ' ( x0)=Δ x⋅ f ' ( x0)=df .
Cioè il differenziale di una funzione relativo al puntox 0 è l’incremento che subisce l’ordinata del punto
che si muove sulla tangente alla curva nel puntoP 0≡ x0, f x0 .
quando la sua ascissa passa dal valore x 0 al valorex 0+Δ x . Essendo: QS=Δ f , sostituire l’incrementoΔ f della funzione con il differenziale significaapprossimare geometricamente, nell’intorno di x 0 ,la curva con la tangente in questo punto.
Quest’approssimazione è tanto più accettabile quanto più è piccolo ∆x, come si nota dalla fig. 1. In-fatti: df −Δ f →0 per Δ x→0 . Tuttavia la differenza: df −Δ f è un infinitesimo d'ordine superiorerispetto a x . Infatti si ha:
limΔ x→0
Δ f −dfΔ x
= limΔ x→0[
Δ fΔ x− f '
( x0 )]=0 .
Questa proprietà si esprime anche scrivendo quest'uguaglianza:d f −Δ f =o (Δ x ) ,
- 83 -

dove “o” si legge: o piccolo e indica una quantità infinitesima di ordine superiore rispetto a ciò chesta racchiuso all’interno delle parentesi. Allora, l’incremento Δ f della funzione f relativo all’incre-mento Δ x si può scrivere come somma del differenziale df della funzione e di un infinitesimoo (Δ x ) di ordine superiore a Δ x , cioè:
d f =Δ f +o (Δ x ) .L’ultima uguaglianza significa che, al fine di determinare l’incremento Δ f , si può calcolare ildifferenziale in x0 , commettendo un errore tanto più piccolo (e quindi sempre più trascurabile)
quanto più Δ x è piccolo e, in conclusione, se Δ x è piccolo si potrà scrivere che:d f ≃Δ f .
ESEMPI1) Sia data la funzione: y= x2 . Calcoliamo l’incremento f e il differenziale df per un certox= x0∈R e x arbitrario. Allora si ha:
Δ f = f (x0+Δ x )− f ( x0 )=( x0+Δ x )2−x0
2=2 x0Δ x+(Δ x )2 , df =2 x0Δ x ,
e:df =2 x0Δ x .
Calcolando Δ f −df si ottiene:Δ f −df =(Δ x )2=o (Δ x ) ;
con (Δ x )2 che tende a zero più velocemente di Δ x .Ponendo ora: x0=30 e Δ x=0,1 si ottiene:
f −df=0,01 ;e quindi l’errore compiuto sostituendo all’incremento Δ f il differenziale df risulta uguale a 0,01 seΔ x=0,1 .2) Sia data la funzione: y=3 x2
− x . Calcoliamo l’incremento Δ f e il differenziale df perx=1 e Δ x=0,01. Allora si ha: Δ f =[3 ( x+Δ x )2−( x+Δ x )−3 x2+x ]∣x=1=[ (6 x−1 )⋅Δ x+3 (Δ x )2 ]∣x=1=5⋅0,01+3⋅(0,01 )2=0,0503 ,
e:df =[ (6 x−1 )⋅Δ x ]∣x=1=5⋅0,01=0,05 .
In conclusione:Δ f −df =0,0003 .
- 84 -

Cap. 6 L’INTEGRALE INDEFINITO
0. Introduzione
Alcune volte si è avuto modo di avere a che fare con il concetto di “inversione”. Infatti adogni operazione elementare abbiamo associato la sua inversa (pensiamo alla sottrazione (inversadell’addizione), alla divisione (inversa della moltiplicazione), alla estrazione di radice (inversa dellapotenza)) e, più in generale, ad ogni funzione f x , abbiamo studiato sotto quali condizioni èpossibile determinare la sua funzione inversa f −1 x .Vediamo ora di fare altrettanto per quanto riguarda l’operazione di derivazione delle funzioni.Quindi, data una qualunque funzione f x , dobbiamo cercare di trovare, se esiste, una funzioneF x tale che sia verificata la seguente uguaglianza:
f x =dF x
dx.
Inoltre, dovremo cercare di definire delle regole che ci permettano, nel modo più agevole possibile,di poter calcolare la F x .Usando le esperienze fatte a proposito del calcolo delle derivate sappiamo, ad esempio, che:
d senx
dx=cos x ,
per cui possiamo affermare che esiste almeno una funzione la cui derivata è cosx: tale funzione èsenx. Tuttavia, anche se abbiamo risolto, per la funzione cosx, il problema dell’esistenza di unafunzione con la caratteristiche ricercate, dobbiamo risolvere il problema dell’unicità.Inoltre, esaminando una qualunque tavola di derivate fondamentali, ci possiamo accorgere che gliesponenti tendono a calare e alcune funzioni a diventare, da trascendenti, algebriche. Ad esempiobasta ricordare che:
d ln x dx
=1x
, d arctanx
dx=
11x2
.
È quindi logico chiedersi a quali difficoltà sconosciute si vada incontro se cerchiamo di applicarel’operazione inversa della derivata a funzioni definite da equazioni più o meno complicate. Infatti,supponiamo che non si possa dare una regola per ottenere, mediante la combinazione di un nu-mero finito di simboli di funzioni algebriche od anche trascendenti, una funzione la cuiderivata sia una funzione data. Allora, per questo motivo, sarà necessario dare un teorema diesistenza, in modo tale che saremo sicuri che, se saranno verificate alcune ipotesi, tale funzioneesiste (anche se non potremo scrivere materialmente una funzione la cui derivata sia la funzionedata). Le applicazioni della teoria del calcolo differenziale e integrale sono importantissime e fondamenta-li in quasi tutti gli ambiti delle discipline scientifiche.
1. L’integrale indefinito come inverso della derivata
Data una funzione f x , vogliamo determinare quale o quali funzioni F x ammettano comederivata f x . Le funzioni F x , se esistono, si diranno integrali o funzioni primitive, dif x in [a ,b ] .
Una qualunque funzione primitiva di f x viene indicata con il simbolo:
∫ f x dx ,
che si legge: “integrale indefinito di f x in dx”, per distinguerlo da un altro integrale che saràintrodotto successivamente.Allora è:(1) F x =∫ f x dx .In altre parole: si dice che la funzione F x è una primitiva della f x , nell’intervallo [a , b ] , sef x è derivabile in [a , b ] e si ha:
- 85 -

F ' x = f x .
Ad esempio una primitiva di x4 è x5
5 poiché
d x5
5 dx
=x 4 .
Da questo esempio scaturisce subito un’osservazione molto importante. Infatti, qualunque funzione
del tipo:x5
5c , con c costante, risulta essere una primitiva nel senso della definizione. Infatti:
d x5
5c
dx= x4 ,
poiché, come sappiamo, la derivata di una costante è 0.Da questa nota scaturisce subito un teorema.Teorema 1.1 Se F x è una primitiva di f x in [a ,b ] , cioè se è: F ' x = f x , allora ancheF x c , con c costante arbitraria, è una primitiva di f x in [a ,b ] .
Dim. Infatti, a causa della linearità dell’operazione di derivazione, si ha:d [F x c ]
dx=
dF x dx
dcdx=F '
x 0=F ' x = f x .
Viceversa, se G x è una primitiva di f x , diversa da F x , si potrà scrivere∀ x∈[a , b ] :
G' x = f x , e F ' x = f x ,da cui:
G' x =F ' x .Allora la F e la G differiranno per una costante additiva arbitraria c, vale a dire:
G x =F x c . •OSS.Una funzione f x può non avere primitive in [a ,b ] , ma se ne ammette una, ne ammette infinite.Quindi se F x è una primitiva di f x , tutte e sole le primitive di f x saranno esprimibili nellaforma:
F x c ,dove c è una costante additiva arbitraria.Allora la (1) dovrà essere riscritta per completarla così in modo opportuno:
∫ f x dx = F x c .
In altre parole, per una qualunque primitiva della F x di f x , risulta:d [F x ]
dx= f x , e dF x = f x dx ,
ovvero:ddx∫ f x dx= f x e d∫ f x dx= f x dx .
Questa operazione di integrazione indefinita è quindi l’operazione “inversa” dell’operazione di de-
rivazione. Inoltre, il simbolo “∫ ” è detto segno d’integrazione (assomiglia ad una lettera S “tirata”
per gli estremi superiore ed inferiore. La lettera S sta per “somma” e, in seguito, ne capiremo ilmotivo). La funzione f x si dice funzione integranda, f x dx si dice espressione sotto il segnod’integrazione. L’integrale indefinito si può considerare graficamente come un insieme costituitoda infinite curve tali che possiamo passare da una ad un’altra semplicemente effettuando unatraslazione nel senso positivo o negativo dell’asse y. ESEMPIO.
Sia f x = 1
cos2 x. Allora ∀ c costante arbitraria si ha:
- 86 -

F x =∫ 1
cos2 xdx=tanxc .
Infatti:d tanxc
dx=
1
cos2 x.
Ora, proviamo a porci una domanda che riguarda un aspetto fondamentale della teoria ora esposta.Ogni funzione f x ammette primitiva? E, se la risposta è negativa, sotto quali condizioni la f x ha una primitiva?A questo proposito, enunciamo un teorema.Teorema 1.2 Ogni funzione continua in un intervallo ammette sempre primitiva.Questo, come si intuisce, è un risultato fondamentale che sarà bene tenere a mente.Quindi, ora sappiamo che, mentre l’operazione di derivazione può non essere consentita per alcunefunzioni continue, l’operazione inversa è lecita per tutte le funzioni continue. Naturalmente, noi ci occuperemo di risolvere il problema della cosiddetta integrazione elementare,cioè di integrare quelle funzioni che si possono esprimere con un numero finito di operazioni(+ ,− ,⋅,/ , ^ (con esponente razionale )) eseguite su funzioni razionali, esponenziali, logaritmiche egoniometriche. Sono immediate le prime proprietà degli integrali indefiniti:1a) Se k è una costante qualunque, si ha:(1) ∫ k⋅ f x dx=k∫ f x dxcioè: l’integrale del prodotto di una costante per una funzione continua è uguale al prodotto dellacostante per l’integrale della funzione.2a) Se f 1 x , f 2 x , . . . , f n x sono n funzioni continue, si ha:
(2) ∫ [ f 1 x f 2 x .. . f n x ]dx=∫ f 1 x dx∫ f 2 x dx. ..∫ f n x dx ,
cioè: l’integrale della somma di n funzioni continue risulta uguale alla somma degli integrali dellesingole funzioni.Combinando la 1a) e la 2a) si ha:
∫ [k1⋅f x k 2⋅g x ]dx = k1⋅∫ f x dxk2⋅∫ g x dx ,
dove k1 e k 2 sono costanti rispetto a x. Quindi, possiamo affermare che: l’“operatore” di integrale indefinito (o di primitiva) è un operatore lineare.OSS.In generale, al fine di non commettere gravi errori sarà bene ricordare che:
∫ [ f x ⋅g x ] dx≠∫ f x dx⋅∫ g x dx .
2. Integrali indefiniti immediatiSfruttando alcune delle abilità relative al calcolo delle derivate, è possibile, nei casi più sem-
plici arrivare a scrivere l’equazione della primitiva F x di una funzione f x assegnata. Adesempio:
∫ x ndx=xn +1
n +1c , n∈N e n≠−1 .
Infatti:
d xn1
n1c
dx=
1n1
n1 xn=xn .
Se n=−1 si ha che:
∫ 1x
dx=ln∣x∣c .
Infatti, sappiamo che, se x > 0, è: ln∣x∣=ln x , da cui segue:
- 87 -

d ln∣x∣dx
=d ln x
dx=
1x
.
Se x < 0, si ha che: ln∣x∣=ln −x . Allora, applicando la formula di derivazione delle funzioni difunzione, si ottiene:
d ln∣x∣dx
=d ln −x
dx=
1−x
d −x dx
= 1−x
−1 =1x
.
Riassumendo questi due casi, potremo scrivere che, ∀ x∈ ℝ e x≠0 , si ha:d ln∣x∣
dx=
1x
.
Tenendo presenti le tavole di derivazione delle funzioni, otteniamo una tavola delle primitive im-mediate o integrali indefiniti immediati:
1) ∫ x ndx=x n1
n +1+ c, n∈N, n≠−1; 2) ∫ 1
xdx=ln∣x∣c ;
3) ∫ sen a x dx=−1a
cos axc , a∈R; 4) ∫ cosa x dx=1a
sena xc , a∈R ;
5) ∫1
cos2 xdx=tanxc ; 6) ∫
1
sen2 xdx =−cotanxc ;
7) ∫ tan x dx=−ln∣cosx∣c ; 8) ∫ cotanxdx=ln∣senx∣c ;
9) ∫e x dx=exc ; 10) ∫ ax dx=1
ln aaxc ;
11) ∫1
1−x 2dx=arcsenxc ; 12) ∫
1
1 x2 dx=arctanxc ;
13) ∫1
a2−x2dx=arcsen
x∣a∣c , a≠0; 14) ∫
1
a2x2 dx=
1a
arctanxac , a≠0;
15) ∫x
x2adx= x2ac ;
16)
∫ x
a−x2dx=−a− x2c , a >0 ;
17) ∫ 1
a2−x2 dx=1
2 aln∣ax
a−x∣c ; 18) ∫ 1
x2−a2
dx=1
2 aln∣x−a
xa∣c ;
19) ∫1
x2±a2dx=ln∣x x2±a2∣c ; 20)
∫ 1senx
dx=ln∣tanx2 ∣c=
= ln∣cosecx−cotanx∣c ;
21) ∫1
cosxdx=ln∣tan x2 π
4 ∣c=
= ln∣secxtanx∣c ;
22) ∫ sen2 x dx=12 x−senx cos x c ;
23) ∫cos2 x dx=12 xsen x cos x c ; 24)
∫a2−x2 dx=12a2arcsen
x∣a∣
x a2−x2c
, a≠0 ;
25) ∫ senh xdx = coshxc ; 26) ∫ cosh xdx = senhxc ;
27) ∫1
cosh2 xdx=tanhxc ; 28) ∫
1
senh2 xdx =−cotanhxc .
OSS.Gli integrali della tabella precedente possono venire generalizzati attraverso delle semplici
trasformazioni della funzione integranda.Se F x è una primitiva della funzione continua f x in [a ,b ] si ha:
- 88 -

(3) ∫ f x dx = F x c .
Sia ora g t una funzione continua, insieme alla sua derivata prima, in un intervallo [α ,β ] e sup-poniamo che il codominio della g t sia contenuto in [a ,b ] , in modo che possiamo considerare lafunzione composta f [ g t ] .Si vuol dimostrare che dalla (3) si deduce:
(4) ∫ f [ g t ] g ' t dx = F [ g t ]c .
Infatti, derivando la funzione F [g t ] con la regola di derivazione delle funzioni composte e, ricor-
dando che F ' x = f x , si ha: d F [ g t ]c
dt=F ' [g t ]⋅g ' t = f [ g t ]⋅g ' t ,
come doveva essere.La (4) si scrive anche così:(5) ∫ f [ g t ]dg t = F [ g t ]c .Quindi, se sappiamo calcolare l’integrale (3), allora possiamo risolvere anche l’integrale (5) cheviene così determinato pensando la g t come variabile indipendente. Con la formula (5), possiamogeneralizzare vari integrali elencati nella tabella precedente e, scrivendo x al posto di t, si ha:
29) ∫ [ g x ]ng ' x dx =∫ [ g x ]
ndg x =
1n1
[ g x ]n1c , per n∈N e n≠−1 ;
30) ∫ 1g x
g ' x dx =∫ 1g x
dg x =ln∣g x ∣c ;
31) ∫ sen [ g x ] g ' x dx =∫ sen [ g x ]dg x =−cos [ g x ]c ;
32) ∫ cos [ g x ] g ' x dx =∫cos [ g x ] dg x = sen [ g x ]c ;
33) ∫ 1
sen2 [g x ]g ' x dx =∫ 1
sen2 [g x ]dg x =−cotan [ g x ]c ;
34) ∫ 1
cos2 [ g x ]g ' x dx =∫ 1
cos2 [ g x ]dg x = tan [ g x ]c ;
35) ∫ag x g ' x dx =∫ag x dg x = ag x
ln ac ;
36) ∫eg x g' x dx =∫eg x dg x =eg x c ;
37) ∫1
1−g2 x g ' x dx =∫ 1
1−g2 x dg x = arcsen g x c ;
38) ∫ 1
a2g 2 x g' x dx =∫ 1
a2g 2 x dg x =
1a
arctang x
ac ;
39) ∫ 1
a2−g 2 x g' x dx =∫ 1
a2−g 2 x dg x =
12 a
ln∣ag x a−g x ∣c .
ESEMPI1) Determiniamo l’integrale:
∫e senx cos xdx .Applicando la formula 36) si ha:
∫e senx cos xdx=∫esenx d sen x=esenxc .2) Calcoliamo l’integrale:
∫ 1
x24 x5dx .
Applicando la formula 38) si ha:
- 89 -

∫ 1
x24 x5dx=∫ 1
x24 x4 x2
2
1dx=∫
d x2
x2 21= arctan x2 c .
3) Determiniamo l’integrale:
∫ x 9− x2 dx .
Questo integrale si risolve considerando che x=−12−2 x . Allora:
∫ x 9−x2 dx=−12∫ 9−x2
12
d 9−x2 =−12⋅
239−x2
32c=−
139−x2
3c .
ESERCIZICalcolare i seguenti integrali indefiniti:
α) ∫ sen5 x cos xdx ; β) ∫x22 x
1 x33x 21 2
dx ; γ) ∫ 13 x5
dx ;
δ) ∫ 5 x3 9dx ; ε) ∫ 3tanx
cos2 xdx ; ζ) ∫ dx
4−x 2−4 x
.
3. Integrazione per scomposizioneNei prossimi paragrafi illustreremo alcuni dei metodi più utilizzati per determinare l’integra-
le indefinito di una qualunque funzione continua. Infatti, poiché non esiste un metodo generale chepermetta di trovare la primitiva, caso per caso, occorre adoperare opportuni procedimenti algebriciche servono per ricondurre gli integrali dati o ad altri noti o ad altri più facilmente calcolabili. Il pri-mo di questi metodi è il metodo di integrazione per scomposizione, che consiste, in parolepovere, nella scomposizione della funzione che si deve integrare nella somma algebrica di funzionidelle quali o è noto l’integrale particolare oppure è più facile il calcolo, dopodiché si applica laproprietà (2) del paragrafo 1. Questi metodi saranno introdotti con esempi commentati per farcomprendere meglio le varie abilità occorrenti.
ESEMPI1) Sia da calcolare il seguente integrale:
∫ x1 x
dx .
Si ha:
x1x
=x1−1
aggiungiamoe togliamo 1
1x=
x11x
−1
1x
scomponiamo la frazione nella som-ma di due frazioni
=1−1
1x.
Nell’ultimo membro, la frazione ha il numeratore uguale ad 1 e risulta la derivata del denominatore1 x , per cui:
∫ x1x
dx =∫1− 11x dx=∫1⋅dx−∫ 1
1xdx=x−ln∣1x∣c .
2) Calcoliamo:
∫ 1
sen2 x⋅cos2 xdx .
Applichiamo la relazione trigonometrica fondamentale: sen2 xcos2 x=1 , e scriviamo:
Se f 1 x , f 2 x , . . . , f n x sono n funzioni continue, si ha:
∫ [ f 1 x f 2 x ..... f n x ] dx=∫ f 1 x dx∫ f 2 x dx.....∫ f n x dx .
- 90 -

∫ 1
sen2 x⋅cos2 xdx=∫ sen2 xcos2 x
sen2 x⋅cos2 xdx=∫ sen2 x
sen2 x⋅cos2 xdx∫ cos2 x
sen2 x⋅cos2 xdx=
=∫ 1
cos2 xdx∫ 1
sen2 xdx=tan x−cotanxc .
ESERCIZI:Calcolare i seguenti integrali:
2a) ∫ x25 x−1
xdx ,
2b) ∫cos 4 x⋅sen 7 xdx ; [ per quest'ultimo si utilizzano le formule di Werner ] .
3) Integrali del tipo:
∫ dx
ax2bxc,
si riconducono agli integrali indicati dai numeri 19) e 13) della tabella, cercando di ricostruire unquadrato perfetto a partire dal trinomio di secondo grado che è sotto radice al denominatore (senza,ovviamente, alterare il valore dell’espressione).Ad esempio, sia da calcolare l’integrale:
∫ dx
x22 x5.
Si ha: x22 x5=x 2
2 x 14scriviamo
5 come 1 + 4
= x1 2
ecco il
quadratoche vole-
vamo
4 .
Allora:
∫ dx
x22 x5=∫ d x1
x1 24=ln∣x1 x22 x5∣c .
Esercizio:Calcolare il seguente integrale:
∫ dx
−3x 24 x−1.
4) Integrali del tipo:
∫ AxB dx
ax2bxc,
si calcolano cercando di far comparire al numeratore la derivata del trinomio che è radicando dellaradice che si trova al denominatore e poi scomporre l’integrale nella somma di due integrali.Ad esempio, si debba determinare l’integrale:
∫5 x−3 dx
2 x28 x1.
Si ha: d 2 x2
8 x1 dx
=4 x8 .
Ora, al fine di far comparire al numeratore la derivata del trinomio che è radicando della radice chesi trova al denominatore, scriviamo la seguente identità:
5 x−3=5 4 x8
4−13 ,
che ci permette di ottenere, all’interno delle parentesi tonde, la derivata del radicando. Allora:
- 91 -

∫
5 x−3 dx
2 x 28 x1=∫
5 4 x8 4
−132 x28 x1
dx=54∫ 4 x8
2 x28x1dx−13∫ 1
2 x28 x1dx =
=522 x 28 x1−
132∫ dx
x24 x12
=522 x28 x1−
132
ln∣x2 x24 x12∣c .
4. Integrazione per cambiamento di variabile (o per sostituzione)In certe circostanze il calcolo di un integrale:
(1) ∫ f x dxsi semplifica se cambiamo la variabile d’integrazione x con un’altra, ad esempio t, unita alla x dauna relazione ben definita.Infatti, sia x=g t il legame che unisce la x alla t, con g t funzione che ammette derivata continuae diversa da zero, e chiamiamo t=h x la funzione inversa. Consideriamo ora l’integrale, che, peripotesi, sappiamo calcolare:
(2) ∫ f g t g ' t dt=F t c ,e facciamo vedere che l’integrale (1) vale:
F [h x ]c ,ovvero, basterà provare che è:
dF [h x ]dx
= f x .
Facciamo notare che F [h x ] è una funzione composta e le componenti sono: F t e h x . Appli-cando la regola di derivazione delle funzioni composte si trova:
dF [ h x ]dx
=F ' t ⋅h' x .
D’altra parte, poiché dalla (2) si ha:
F ' t = f [ g t ]⋅g ' t ,possiamo scrivere che:
(3)dF [h x ]
dx= f [g t ]⋅g ' t ⋅h' x .
Ma g t e h x sono l’una l’inversa dell’altra e quindi anche le loro derivate sono reciproche inmodo che:
g ' t ⋅h' x =1 . Allora, la (3) diventa:
dF [ h x ]dx
= f [ g t ] ,
ed, essendo x=g t , segue che:dF [ h x ]
dx= f x ,
che è esattamente quanto volevamo dimostrare.Come sarà illustrato di seguito, in pratica, dopo aver fissato una conveniente sostituzione del tipo:
x=g t , calcoleremo il differenziale di x, dx=g ' t ⋅dt , e, quindi, nell’integrale (1) alla x sostitui-
remo g t e a dx l’espressione g ' t dt . Dopo aver risolto l’integrale rispetto a t, opereremo la so-stituzione: t=h x . La funzione che ne risulterà, come si è visto nella dimostrazione, è propriol’integrale indefinito ricercato.Osserviamo che in alcune occasioni è preferibile, per chiara opportunità, operare un cambiamentodi variabile del tipo t=h x invece che x=g t . Se siamo stati capaci di trasformare l’espressionesotto il segno di integrale f x dx nell’espressione ϕ t dt , dove t=h x , e se sappiamo calcolare
- 92 -

l’integrale∫ϕ t dt , cioè:
∫ϕ t dt=F t c ,allora ne segue:
∫ f x dt=F [ h x ]c .ESEMPI1) Sia da calcolare l’integrale:
∫ 1
x 1−ln2 xdx .
Poniamo lnx=t , ovvero x=e t da cui segue che:dx=et dt . Allora:
∫ 1
x 1−ln2 xdx=∫ 1
et1−t 2e t dt=∫ 1
1−t2dt=arcsen tc=arcsenln xc .
2) Sia da calcolare l’integrale:
∫ 1x1−x
dx .
Poniamo: x=sent , vale a dire dx=cos tdt . Allora:4
∫ 1x1−x
dx=∫ 1sen t1−sen t
cost dt=∫ 1sen t 2
1−sen2 tmoltiplichiamoe dividiamo sot-to radice per: 1sent
cost dt=∫ 1sen tcos tved.
nota 1
cost dt=∫ 1sen t dt=
=t−costc=arcsenx−1−x2c .
3) Calcoliamo l’integrale:
∫ x
x42 x2
5dx .
Innanzi tutto trasformiamo opportunamente il denominatore: x 42 x2
5= x21 4 .
Poniamo: x 21 =t , da cui: 2 x dx=dt , cioè: xdx=dt2
. Allora, applicando la formula (14), si ha:
∫ xx42 x25
dx=12∫ dt
t24=
12⋅
12
arctant2c=
14
arctanx212c .
4) Calcoliamo l’integrale:
∫e x−1dx .
Poniamo: ex−1=t , da cui: e x=t 21 , e quindi: x=ln t21 , dx=2 t
t21
dt . Allora:
∫ ex−1 dx=∫ t2 t
t21dt=2∫ t2
t21dt=2∫1− 1
t21 dt=2 t−arctan t c=
=2 e x−1−arctane x
−1 c .
5) Calcoliamo l’integrale:
∫ x21
x2dx .
Poniamo: x=tant , dx=dt
cos2 t. Allora:
∫ x21
x2dx = ∫ tan2 t1
tan2 t
dt
cos2 t = ∫ sec t cos2 t
sen2 t
dt
cos2 t = ∫ 1
sen2 t cos tdt = ∫ sen2 tcos2 t
sen2 t cos tdt =
4Osserviamo che, affinché g t = sent sia invertibile, deve essere: −
π2≤t≤
π2
che implica:cos2t=cost .
- 93 -

=∫dtcost
∫ costdt
sen2 t = ln∣tant+sect∣− 1
sentc=ln∣tant1tan2 t∣−1tan2 t
tan tc=
= ln∣x x21∣− x21x
c .
ESERCIZICalcolare i seguenti integrali utilizzando la sostituzione suggerita a fianco:
α) ∫dx
x x2−2, x=
1t
; β) ∫xdx
x1, t= x +1 ; γ) ∫
dx
e x1
, x=−ln t ;
δ) ∫cos x dx
1sen2 x, t=sen x ; ε)∫ x 5 x2−3
7dx , 5 x2−3=t ; ζ) ∫
dx
x 1−x , x= sen2 t .
5. Integrazione per parti
Siano u e v due funzioni continue con derivata continua. Essendo:d uv =du⋅vu⋅dv ,
potremo scrivere la seguente uguaglianza:
d uv =u '⋅v⋅dxu⋅v '⋅dx ,
e, isolando u⋅v'⋅dx , otterremo la relazione:
u⋅v'⋅dx=d uv −u'⋅v⋅dxche, sviluppata opportunamente, darà origine ad una utile formula di integrazione.Infatti, integrando entrambi i membri di questa equazione, si ottiene, a meno di una costante: (1) ∫u⋅v '⋅dx=uv−∫u '⋅v⋅dx .Quest'uguaglianza assume il nome di regola di integrazione per parti. Conviene usare questa for-
mula quando, di uno dei fattori, v' nel nostro caso, si sa calcolare una primitiva v, oppure quando
l’integrale∫u'⋅v⋅dx è più semplice da calcolarsi di ∫u⋅v '⋅dx . Il fattore u è chiamato fattore fi-
nito e il fattore dv=v'⋅dx si chiama fattore differenziale.
ESEMPI1) Sia da calcolare l’integrale:
∫ ln xdx .
Poniamo u=ln x e v '=1 , da cui: v= x e du=dxx
.
Allora, applicando la (1), si ha:
∫ ln xdx=x lnx−∫ x⋅1x
dx= x lnx−xc=x ln x−1c .
2) Calcoliamo l’integrale:
∫ x sen xdx .
Se poniamo: u=x ev '=senx si ha subito: du=dx , e v=−cosx , da cui:
∫ x sen xdx=−x cos x∫ cos xdx=−x cosxsen xc .È utile evidenziare il fatto che, se avessimo deciso di sostituire u = senx e v = x, avremmo trovato:
∫ xsen xdx=12
x2 sen x12∫ x2 cos xdx ,
che è, senza dubbio, un integrale più complicato di quello di partenza.3) Calcoliamo, ora, un integrale “particolare”:
∫e x sen xdx .
Poniamo: u=senx e v=ex . Allora: du=cosx dx , e dv=ex dx , da cui:
∫e x sen xdx=e x⋅senx−∫ e x cos xdx=e x⋅sen x−[e x⋅cos x∫ ex sen xdx ] .
- 94 -

Quindi, considerando il primo membro e l’ultimo membro dell’ultima uguaglianza, avremo:
2∫e x sen xdx=e x sen x−cos x c ,
ovvero:
∫e x sen xdx=e x
2 sen x−cos x c .
ESERCIZICalcolare i seguenti integrali applicando la formula d’integrazione per parti:
α) ∫ arctan xdx ; β) ∫ arcsen xdx ; γ) ∫ x cos 3 x dx ;
δ) ∫ x
e xdx ; ε) ∫ x2 e3 x dx ; ζ)
∫ cos2 ln x dxSugg. : porre lnx=u ,
e, poi, per parti
.
6. Integrali semplici contenenti un trinomio di secondo grado
Consideriamo un integrale del tipo:
∫ mxn
ax2bxc
dx .
Il metodo principale di calcolo consiste nel ridurre il polinomio di secondo grado nella forma: (1) a x2
b xc=a xk 2l .
dove k e l sono costanti. Per compiere la trasformazione (1) è più opportuno ricavare un quadrato
intero dal trinomio di secondo grado. Si può ricorrere anche alla sostituzione:2a xb=t .
Se m = 0, trasformando il trinomio di secondo grado nella forma (1) si ottiene uno dei due integralielementari, che abbiamo già incontrato:
1) ∫ dx
x2−a2=1
2aln∣ x−a
xa∣c ,a≠0, oppure: ∫ dx
a2−x2=1
2 aln∣ax
a−x∣c , a≠0,
2) ∫ dx
x2a2=
1a
arctanxac=−
1a
arccotanxac , a≠0.
ESEMPIO
∫ dx
2 x2−5 x7=
12∫
dx
x2−2⋅54
x2516
72−
2516
=12∫
d x− 54
x−54
2
3116
=12
1
314
arctan4 x−5
31c .
Se m ≠ 0, allora dal numeratore si ricava la derivata 2ax+b del trinomio di secondo grado.ESEMPI
1) ∫ mxnax2bxc
dx=∫
m2a
2a xb n−m b2a
a x2b xcdx=
m2a
ln∣a x2bxc∣
n−mb2a ∫ dx
a x2b xc, e così ci si riconduce all’integrale esaminato precedentemente.
2) ∫ x−1x2− x−1
dx=∫
122 x−1 −1
2x2−x−1
dx=12
ln∣x2−x−1∣−12∫
d x−12
x−12
2
−54
=
=12
ln∣x2−x−1∣−125
ln∣2 x−1−52 x−15 ∣c .
- 95 -

7. Integrazione delle funzioni razionali
L’integrazione di una funzione razionale si riduce all’integrazione di una frazione del tipo:
(1)Q x P x
,
dove Q x e P x sono polinomi e il grado del numeratore P x è inferiore a quello del denomi-
natore Q x . Se Q x = x−a α⋅. . ..⋅ x− l λ
, dove a, ..., l sono le radici reali e distinte del polinomio
Q x ed α, ..., λ dei numeri naturali che indicano la molteplicità di tali radici, allora è ammissibilela decomposizione della frazione (1) in elementi semplici:
(2)Q x P x
=A1
x−a
A2
x−a 2. ..
Aα
x−a α.. .
L1
x− l
L2
x− l 2. . .
Lλ
x− l λ.
Per calcolare i coefficienti indeterminati A1 , A2 , . . . , Lλ si riducono allo stesso denominatore i duemembri della (2) e poi si uguagliano i coefficienti delle stesse potenze della variabile x (primo me-todo).Si possono anche determinare questi coefficienti ponendo, nella (2) o in un’altra ad essa equivalen-te, x uguale a valori convenientemente scelti (secondo metodo).Questo algoritmo di integrazione è chiamato metodo dei coefficienti indeterminati.ESEMPI1) Calcolare:
∫ xdx
x−1 x1 2 .
Si ha: x
x−1 x1 2=
Ax−1
B1
x1
B2
x1 2,
da cui:(3) x≡A x1 2B1 x−1 x1 B2 x−1 .a) primo metodo di determinazione dei coefficienti. Riscriviamo l’identità (3) nella forma:
x≡ AB1 x2 2 AB2 x A−B1−B2 .
Uguagliando i coefficienti delle stesse potenze di x, si trova:0= AB1 , 1= 2 AB2 , 0= A−B1−B2 ,
da cui:
A=14
, B1=−14
, B2=12
.
b) secondo metodo di determinazione dei coefficienti. Ponendo x = 1 nella (3) si può scrivere:
1=A⋅4, cioè: A=14
.
Ponendo x=−1, si ha:
−1=−B2⋅2, cioè: B2=12
.
Ponendo x = 0, si ha:0=A−B1−B2 ;
cioè:
B1=A−B2=−14
.
Di conseguenza:14∫ dx
x−1−
14∫ dx
x1
12∫ dx
x1 2=
14
ln∣x−1∣−14
ln∣x1∣−1
2 x1 c =−
12 x1
14
ln∣x−1x1∣c .
2) Calcolare:
- 96 -

∫ dx
x3−2 x 2
x.
Si ha: 1
x3−2 x2
x=
1
x x−1 2=
Ax
Bx−1
C
x−1 2 ,
ovvero:(4) 1=A x−1
2B⋅x⋅ x−1 C⋅x .
Per calcolare i valori di A, B e C può essere vantaggioso utilizzare entrambi i metodi di determina-zione dei coefficienti. Applicando il secondo metodo, poniamo, in (4), x = 0, da cui:
1 = A. Ponendo invece x = 1, si trova:
1 = C. Ora, applichiamo il primo metodo e uguagliamo i coefficienti di x2 . Si ottiene:
0 = A + B, e, in conclusione:
B=−1 ; che costituiva il risultato mancante. Allora:
∫ dx
x3−2 x2x=∫ dx
x−∫ dx
x−1 ∫ dx
x−1 2=ln∣x∣−ln∣x−1∣−
1x−1
c .
ESERCIZICalcolare i seguenti integrali:
1) ∫ dx xa xb
; 2) ∫ x2−5 x9
x2−5 x6dx ;
3) ∫ 1 x−1 x2 x3
dx ; 4) ∫ x3−1
4 x3− xdx ;
5) ∫ 1
x31
dx ; 6) ∫ 1
x x1 2 dx ;
7) ∫ 2 x 241 x−91
x−1 x3 x−4 dx ; 8) ∫ 5x3
2x3−5 x24 x
dx ;
9) ∫ 1
x3−1
dx ; 10) ∫ x2
x2−5 x4
dx .
APPROFONDIMENTI:
11) ∫ 1
x41
dx ; 12) ∫ x4
x4−1dx ;
13) ∫ 1
x4 x2
1dx ; 14) ∫ 1
x42 x2
1dx .
- 97 -

Cap. 7 L’INTEGRALE DEFINITO
0. Introduzione
La motivazione storica che portò i matematici alla creazione del calcolo degli integrali defi-niti fu quello di determinare l’area delle superfici piane limitate da lati curvilinei. Prima di entrarenel dettaglio del problema ricordiamo alcune nozioni di geometria euclidea utili per il prosieguo. Sidice area di un quadrato Q rispetto ad un altro quadrato U, assunto come unità di misura, il numeroreale positivo che esprime il rapporto fra il quadrato Q e il quadrato U.
Dalla teoria dell’equivalenza fra figure piane si sache ogni poligono è equivalente ad un quadrato eperciò si definisce come area di un poligono l’areadel quadrato ad esso equivalente. Quando però sipassa a definire l’area del cerchio si incontra unagrande difficoltà perché si dimostra che il cerchionon è equiscomponibile con alcun poligono e per-ciò la nozione di area del cerchio non può essere ri-condotta a quella di un poligono, come l’area diquesto la si era ricondotta a quella di un quadrato.Infatti, in geometria euclidea, per definire l’area diun cerchio si procede così:si definiscono tutti i poligoni regolari inscritti e cir-coscritti ad un cerchio indicando con an l’area del
poligono regolare con n lati inscritto nel cerchio econ An l’area del poligono regolare con n lati cir-
coscritto al cerchio stesso (in fig. 1 è disegnato un fig. 1cerchio e i poligoni regolari di 12 lati che approssimano per difetto e per eccesso l’area del cerchio).Si può far vedere che le due successioni:(1) a1 ,a2 , a3 , . . . , an , . . . ,
(2) A1 , A2 , A3, . . . , An , . . . ,
formano due classi contigue di numeri reali (♣). Notiamo che due classi di numeri reali A e B, nell’ordine scritto, si dicono contigue quando soddi-sfano le seguenti proprietà:
1) ogni numero della prima classe è minore di ogni numero della seconda;2) fissato ad arbitrio un qualunque numero ε > 0, è sempre possibile determinare un
numero b∈B e un numero a∈A tali che:b−aε .
Dopodiché si enuncia il seguente teorema.Teorema 0.1 Se A e B sono due classi contigue di numeri reali, esiste uno ed un solo numeroreale che non è inferiore ad alcun numero di A e non è superiore ad alcun numero di B.Il teorema ora ricordato, per la definizione di limite, si può riscrivere anche così:le successioni (1) e (2) sono convergenti e hanno lo stesso limite, cioè:
limn∞
an= limn∞
An .
In base a ciò, la definizione precedente si può formulare nel modo seguente:si chiama area di un cerchio il limite comune a cui tendono le due successioni formate, rispettiva-mente, dalle aree dei poligoni regolari inscritti e circoscritti al cerchio.Allora, per superare questa difficoltà, vediamo di definire una nuova tecnica analitica che ci permet-ta di risolvere il problema della misurazione delle aree di poligoni con lati anche curvilinei.
- 98 -

1. L’area di un trapezoide
Sia f x una funzione continua in [a ,b ] e ∀ x∈[a , b ] sia f x 0. Sia dato un quadrilaterocon un lato curvilineo (che da ora in poi sarà indicato con il nome di trapezoide) ABNM delimitatodal grafico della curva di equazione y= f x dall’asse x e dai segmenti AM e BN che sono paralleliall’asse y (ved. fig. 2).
O x
y
y=f(x)
A
a=x0 x1
r1
R1
r 2
R2
x2 b=xnxn−1xi−1 xi
r n
Rn
ri
Ri
M
B
N
fig. 2Vediamo di indicare con precisione come si può arrivare a definire il concetto d'area del trapezoideABNM. Innanzi tutto dividiamo l’intervallo [a ,b ] in n sotto-intervalli tutti congruenti fra loro e sia
h=b−a
nl’ampiezza comune di ciascun intervallo. Consideriamo le somme sn e S n definite dalle
seguenti uguaglianze:
sn=m1hm2 h. . . + mn h=∑i=1
n
mi h ,
S n=M 1 hM 2h. . . + M n h=∑i=1
n
M i h ,
dove mi e M i indicano rispettivamente il minimo e il massimo assunti dalla y nell’i-mo intervallo.
Tali valori mi e M i , cioè i minimi e i massimi nei singoli intervalli , esistono in virtù del teorema
di Weierstrass. Naturalmente si ha:
sn≤S n .Data la funzione y, ad ogni valore fissato per n viene a corrispondere un ben definito valore persn e per Sn , potendo così considerare le seguenti due successioni numeriche:
(3) s1 , s2 ,. . ., sn ,. . . ,
(4) S1 , S 2 , .. ., S n ,. .. .Inoltre, facciamo notare che il valore sn rappresenta la somma delle aree degli n rettangoli aventiper base, rispettivamente, gli intervallini in cui è stato diviso l’intervallo [a ,b ] e per altezze le ordi-nate minime mi dei punti della curva in tali intervallini (ved. fig. 2) mentre il valore S n rappresentala somma delle aree degli n rettangoli aventi ancora per base, rispettivamente, gli intervallini in cuiè stato diviso l’intervallo [a , b ] e per altezze le ordinate massime M i dei punti della curva. L’insieme costituito dai primi rettangoli (r) costituisce una figura che chiameremo plurirettangolo
- 99 -

inscritto nel trapezoide; quello dei secondi rettangoli (R) si chiamerà plurirettangolo circoscrittoal trapezoide. Il plurirettangolo inscritto è contenuto nel trapezoide, mentre il plurirettangolo circo-scritto lo contiene, e questo vale qualunque sia n.Teorema 1.1 Le due classi numeriche U e V definite, rispettivamente dalle aree dei plurirettangolicircoscritti e inscritti sono contigue ((♣) = cioè definiscono uno stesso numero reale). Dim. Infatti, si nota subito che le due classi sono separate, perché chiaramente l’area di un pluriret-tangolo inscritto non sarà mai superiore all’area del corrispondente plurirettangolo circoscritto. Ba-sterà allora provare che,∀ ε0 è possibile scegliere i punti di suddivisione x i , in modo che risulti:
sn−S nε .
Dalla continuità della y in [a ,b ] si può dimostrare – teorema di Heinie-Cantor – che, ∀ ε0 , si puòtrovare un numero reale k > 0, tale che quando l’intervallo [a , b ] viene suddiviso in intervalliparziali di ampiezza minore di k, cioè:
x i−x i−1k ,l’oscillazione della y risulta, in ogni intervallo parziale, minore di
εb−a
,
cioè:
(5) M i−miε
b−a.
Da qui ne segue che se le due somme (3) e (4) sono state costruite prendendo i punti xi in modoche le differenze xi−xi−1 siano minori di k, vale la (5) e dalle (3) e (4) segue:
(6) sn−S n=∑i=1
n
M i−mi hε
b−a⋅ b−a =ε ,
e quest’ultima relazione prova la tesi.•OSS.1) Abbiamo stabilito che esiste un numero che definisce l’area del trapezoide ABMN e sia essoA. È naturale chiamare A area della figura piana ABMN (ricordiamo che A è l’elemento di separa-zione delle due classi U e V).2) L’enunciato del teorema 1.1 lo potremmo riscrivere anche in questa forma:Se f x è una funzione continua e f x 0 in [a ,b ] , le due successioni:
s1 , s2 ,. . ., sn ,. . . ,e
S1 , S 2 , .. ., S n ,. .. ;sono convergenti e ammettono come limite uno stesso numero, cioè:
limn∞
sn= limn∞
Sn .
Se esiste un numero che sia lecito definire come area del trapezoide ABMN, esso dovrà essere unnumero compreso fra sn e S n , ∀n∈N . Ma se n→∞ sappiamo che sn e S n tendono allo stesso li-mite; quindi possiamo affermare che di numeri compresi fra sn e S n ve n’è uno ed uno solo cherisulta quindi il valore comune di lim
n∞sn e lim
n∞S n . In base a questi risultati, definiamo rigorosa-
mente il concetto di area.DEFINIZIONE. Si chiama area di un trapezoide ABMN, delimitato da una curva continua diequazione y= f x con f x 0 , dall’asse x e dalle parallele AM e BN all’asse y, il numero cherappresenta il valore comune delle due successioni:
s1 , s2 ,. . ., sn ,. . . ,e
S1 , S 2 , .. ., S n ,. .. .A questo punto, per calcolare il valore dell’area di un trapezoide bisogna costruire la successiones1 , s2 , . . . , sn , . . . o la successione S1 , S2 , . . . , Sn , . . . e poi calcolare il limite consapevoli del fatto
- 100 -

che il valore di tale limite sarà, per definizione, l’area ricercata.Tuttavia, cerchiamo di trovare degli algoritmi e relative procedure che ci consentano di definire del-le regole “comuni” che ci permettano, data una qualunque funzione continua y= f x in [ a ,b ] , dicalcolare il valore di tale area.
2. Definizione di integrale definito
Sia f x una funzione definita e continua in [a ,b ] . Dividiamo[a ,b ]in n sotto-intervalli con-gruenti l’uno rispetto all’altro, in modo tale che: a=x0x1x2. . . < xn−1xn=b (ved. fig. 3).
a=x0 x1 x2 b=xnxn−1xi−1 xia=x0 x1 x2
fig. 3
Siano mi e M i rispettivamente il minimo ed il massimo valore della funzione y nell’i-mo intervallo
[ xi−1 , xi ] e consideriamo le somme:
sn=m1hm2 h. . . + mn h=∑i=1
n
mi h ,
S n=M 1 hM 2h. . . + M n h=∑i=1
n
M i h .
Naturalmente si ha:sn≤S n .
Assegnata una y, ad ogni valore fissato per n viene a corrispondere un ben definito valore per sn eper Sn . Restano quindi definite le due successioni numeriche:(7) s1 , s2 , . . . , sn , . . .
(8) S1 , S 2 , .. ., S n ,. .. .Enunciamo, senza dimostrarlo, ilTeorema 2.1 Se f x è una funzione continua in [a , b ] le due successioni (7) ed (8) sono conver-genti e convergono verso lo stesso valore, cioè:
limn∞
sn= limn∞
Sn .
Dopodiché diamo la seguenteDEFINIZIONE: Il valore comune del limite delle due successioni (7) e (8) si chiama integrale defi-nito della funzione y= f x esteso all’intervallo [a ,b ] , e si indica con la scrittura:
∫a
bf x dx .
che deve essere letta così:“integrale definito da a a b di f x in dx”. I numeri a e b si dicono gli estremi dell’intervallo diintegrazione (a sarà l’estremo inferiore e b quello superiore). La funzione y si dirà funzione inte-granda, la variabile x si chiamerà variabile d’integrazione. Al numero, generato dall’integrale de-finito:
∫a
bf x dx ,
andrà associata una opportuna unità di misura: ad esempio u2 .Quindi, per definizione si ha:
∫a
bf x dx=lim
n∞sn= lim
n∞S n .
3. Definizione più generale di integrale definito
Nel paragrafo 2 è stata data una definizione di integrale definito di una funzione continuaf x , nel costruire le somme sn o Sn si è diviso [a ,b ] in sotto-intervalli tutti della stessa misura e
- 101 -

poi, facendo riferimento a tali intervallini, abbiamo considerato il minimo ed il massimo valoreassunto da f x . Tuttavia, poiché queste condizioni sono piuttosto restrittive, vediamo di genera-lizzare, cercando un metodo analitico equivalente a quello precedente, ma che richieda meno ipote-si. Cerchiamo, quindi, di definire una suddivisione di [a , b ] in intervalli diversi fra di loro, prendendoin ogni intervallino anziché il minimo o il massimo di f x un valore qualunque che la f x puòassumere.Sia f x definita e continua in [a ,b ] . Scomponiamo [a ,b ] in n sotto intervalli qualunque, comemostrato in fig. 4.
a=x0 x1 b=xnxn−1xi−1 xia=x0 ξ1 ξiξ2 ξnx2
fig. 4
e poniamo:h1= x1− x0 , h2= x2−x1 ,. . . , h i= x i−x i−1 , .. . , hn=x n− xn−1 .
Fissiamo arbitrariamente, nel primo intervallino un punto 1 , nel secondo un punto 2 , nell’i-mo un
punto i , e nell’n-mo un punto ξn e, calcolati i corrispondenti valori di y:
f 1 , f 2 ,. .. , f i ,. . ., f n ,
consideriamo la somma:
(9) ∑i=1
n
f ξ i ⋅h i= f 1⋅h1 f 2⋅h2.. . f i ⋅hi. .. f n⋅hn .
Facciamo notare che ad ogni suddivisione fissata di [a ,b ] in n sotto-intervalli, corrispondono infi-nite somme del tipo (9), in relazione proprio agli infiniti modi con cui negli intervallini possiamoscegliere i punti 1 , 2 , .. . , i ,. .. , n . Perciò, se indichiamo con δ la massima delle ampiezze:
h1 , h2 , .. . , hi , .. . , hn ,degli intervallini, possiamo affermare che ogni suddivisione di [a , b ] in parti di ampiezza minore diδ, vengono a essere trovati infiniti valori per la somma (9). Quindi, il valore di (9) dipende da δ, maè anche una funzione di δ ad infiniti valori.Vediamo ora di definire il concetto di limite della somma (9) se δ→0, cioè al tendere a zero dellamassima lunghezza degli intervallini in cui viene diviso l’intervallo [a ,b ] . A questo proposito si dà la seguente:
DEFINIZIONE: Si dice che la somma (9) ha per limite il numero l per δ→0, e si scrive:
limδ0∑i=1
n
f i ⋅hi=l ,
quando, ∀ ε0 , si può trovare un numero positivo η tale che, per ogni scomposizione di [a ,b ] inparti di ampiezza inferiore di η, cioè per δ < η, e qualunque siano i punti ξi scelti nei singoli inter-
vallini [ x i−1 , xi ] , sia sempre:
∣∑i= 1
n
f i −l∣ε .
Si enuncia, quindi, il seguente:Teorema 3.1 Se f x è una funzione continua in [a , b ] , esiste ed è finito il
(10) limδ0∑i=1
n
f i ⋅hi .
A questo punto, diamo la seguente:DEFINIZIONE: Si chiama integrale definito della funzione continua f x , esteso all’intervallo
- 102 -

[a ,b ] , il valore del limite (10), cioè, per definizione:
∫a
bf x dx= lim
δ0∑i= 1
n
f i ⋅hi .
OSS.1) Poiché, da quello che è stato scritto, il limite (10) esiste ed ha sempre lo stesso valore co-munque si faccia tendere a zero l’ampiezza degli intervallini in cui si suddivide [a , b ] , e comunquesi prendano i punti ξi nei singoli intervallini, allora per calcolare il limite (10) si potranno anche
scegliere nei singoli intervallini come punti ξi i punti di massimo (di minimo) della f x in tali
intervalli, e suddividere [a ,b ] in parti congruenti. Allora, il limite (10) viene a coincidere con il li-mite comune delle due successioni (7) e (8), e, in conclusione, questa definizione più generale di in-tegrale porta allo stesso risultato illustrato nel paragrafo precedente (con il vantaggio però di esseremeno esigente dal punto di vista delle ipotesi fatte in partenza).
2) La variabile x, che figura nell’integrale ∫a
bf x dx , è una variabile “apparente”, poiché l’in-
tegrale è un numero e si ha:
∫a
bf x dx=∫a
bf y dy=∫a
bf t dt=.....
4. Alcune proprietà dell’integrale definito
DEFINIZIONE: se è b < a, poniamo:
∫a
bf x dx=−∫b
af x dx .
Così si dà un significato al simbolo d'integrale definito anche quando l’estremo inferiore è maggioredell’estremo superiore. In particolare:
∫a
af x dx=0.
Dopo queste definizioni preliminari enunciamo i tre teoremi seguenti:Teorema 4.1 Se a, b, c (a < c < b), sono tre qualunque punti di un intervallo dove una funzionef x è continua, si ha:
∫a
bf x dx=∫a
cf x dx∫c
bf x dx .
Teorema 4.2 Se f 1 x , f 2 x , .. ., f n x , sono n funzioni continue in [a ,b ] , si prova che:
∫a
b
[ f 1 x f 2 x . . . f n x ]dx=∫a
bf 1 x dx∫a
bf 2 x dx.. .∫a
bf n x dx .
Teorema 4.3 Se k è una costante e f x una funzione continua in [a , b ] , si ha:
∫a
bk⋅ f x dx=k⋅∫a
bf x dx ,
cioè: un fattore moltiplicativo passa inalterato in “integrazione”.Teorema 4.4 (teorema della media) L’integrale definito di una funzione continua f x in [a ,b ] èuguale al prodotto fra la misura dell’intervallo di integrazione e il valore che la funzione integrandaassume in un opportuno punto di tale intervallo; cioè:
∫a
bf x dx=b−a f x1 ,
dove x1∈[a ,b ] ed è opportunamente scelto. Dim. Siano m e M rispettivamente il minimo assoluto ed il massimo assoluto assunti dalla funzionef x in [a ,b ] . Dividiamo l’intervallo [a ,b ] in n parti tutte congruenti l’una rispetto all’altra. Dettomi il minimo valore della f x nell’i-mo intervallino [ x i−1 , xi ] , possiamo scrivere che:
m≤mi≤M ,
e, chiamata h=b−a
n l’ampiezza comune dei singoli intervallini, si ha che:
m⋅h≤mi⋅h≤M⋅h .Ora facciamo variare i fra 1e n. Facendo così si possono scrivere le seguenti disuguaglianze:
m⋅h≤m1⋅h≤M⋅h ,
- 103 -

m⋅h≤m2⋅h≤M⋅h,.........................,.........................,
m⋅h≤mn⋅h≤M⋅h .A questo punto, notiamo che la somma dei primi membri delle n disuguaglianze scritte sopra è:
m⋅h⋅n=m⋅b−a
n⋅n=m⋅b−a ,
e che la somma dei terzi membri vale: M⋅b−a .
Indicando con sn la somma dei secondi membri, si ha:m⋅ b−a ≤sn≤M⋅b−a .
Da quest’ultima relazione, passando al limite per n→∞, essendo il limite di una costante la costantestessa e che, per definizione, è:
limn∞
sn=∫a
bf x dx ,
si ottiene:
m⋅ b−a ≤∫a
bf x dx≤M⋅b−a .
Ragioniamo su quest’ultima relazione. L’integrale ∫a
bf x dx è diventato un termine intermedio
compreso fra i due estremi:m⋅b−a
e: M⋅b−a ,
che altro non sono che i prodotti fra la misura di [a ,b ] e, rispettivamente, il minimo assoluto ed ilmassimo assoluto assunti dalla funzione y sempre in [a ,b ] . Allora rimane provata l’esistenza di unnumero k∈ ℝ tale che:(♣) m ≤ k ≤ M, soddisfacente alla seguente uguaglianza:
∫a
bf x dx=b−a ⋅ k .
D’altra parte, la y è continua in [a , b ] . Quindi: ∀ x∈[a ,b ] :
(♦) m≤ f x ≤M .Dal confronto di (♣) con (♦), risulta provata l’esistenza di un punto x1∈ [a , b ] tale che:
f x1 =k ;e, per sostituzione, si ottiene l’uguaglianza che prova la tesi e cioè:
∫a
bf x dx=b−a f x1 . •
5. Rapporto fra integrale definito e quello indefinito di una funzione
Sia f x una funzione continua in [a ,b ] ed x un punto variabile di [a ,b ] . Consideriamo l’in-tegrale:
(11) ∫a
xf t dt ,
dove si è indicato con t la variabile d’integrazione, essendo diventata la x un estremo d’integrazio-ne.Possiamo dire che (11) è un integrale che dipende proprio dal suo estremo superiore x, cioè ad ognivalore della x, l’intervallo [a , b ] , corrisponde uno ed un sol valore per l’integrale (11). Esso rappre-senta una funzione F x , del suo estremo superiore x, definita in [a ,b ] . Si può allora scrivere:
F x =∫a
xf t dt .
La F x si chiama funzione integrale mentre, come è stato già scritto, la f t si dice funzione inte-
- 104 -

granda.A questo proposito dimostriamo ilTeorema 5.1 Teorema fondamentale del calcolo integrale (o teorema di Torricelli). Se la funzione f x è continua, esiste la derivata della funzione integrale F x :
(12) F x =∫a
xf t dt ,
nel punto x, ed è uguale al valore che la funzione integranda assume nello stesso punto, cioè:(13) F ' x = f x .Dim. Notiamo che l’incremento della F x relativo al punto x ed all’incremento h, è dato da:
F xh −F x =∫a
xhf t dt−∫a
xf t dt ,
ed, applicando il teorema 4.1, si ha:
F xh −F x =∫a
xf t dt∫x
xhf t dt−∫a
xf t dt ,
ovvero:
F xh −F x =∫x
xhf t dt .
Applicando all’integrale∫x
xhf t dt il teorema della media (n° 4.4), si ha:
F xh −F x =h⋅ f x1 ,dove x1 è un opportuno punto dell’intervallo [ x , xh ] . Allora vale la seguente uguaglianza:
F xh −F x h
= f x1 .
Se fissiamo x e h→0, x1 , x1∈[ x , xh ] tenderà ad avvicinarsi sempre di più a x cioè x1 x .Inoltre, dalla continuità della f x , discendono le seguenti uguaglianze:
limh0
f x1 = limx x1
f x1 = f x ,
da cui:
limh0
F xh −F x h
= f x ,
e, dalla definizione di derivata di una funzione, si ha:
F ' x = f x . •Questo teorema ci mette in grado di calcolare l’integrale definito di una funzione per mezzo dell’in-tegrale indefinito della funzione stessa, evitandoci il compito di determinare il valore del limite del-la successione (7) o (8). Infatti, se ϕ x è una qualunque primitiva di f x , si ha:
ϕ' x = f x ,e, applicando il risultato del teorema fondamentale 5.1, si può scrivere:
F ' x = f x ,e, quindi, le due funzioni F x e ϕ x differiscono solo per una costante additiva k. Allora:
ϕ x =F x k ,e applicando la (12) potremo scrivere la seguente uguaglianza:
ϕ x =∫a
xf t dtk .
Ponendo in quest’ultima relazione x = a, si ha: a =k .
Questo implica che:
ϕ x =∫a
xf t dtϕ a ,
ovvero:
∫a
xf t dt=ϕ x −ϕ a ,
- 105 -

e, se x = b, si ottiene una relazione importantissima per il calcolo delle aree delle figure piane ecioè:
(14) ∫a
bf t dt=ϕ b −ϕ a ,
che significa proprio che la misura dell’area del trapezoide delimitato dal grafico della curva conti-nua y= f t dalle rette x = a, x = b, e dall’asse x la calcoliamo facendo la differenza fra i valoriϕ b e ϕ a .OSS.1) La formula di integrazione per parti assume la forma seguente:
∫a
bu x v ' x dx= [u x v x ]a
b−∫a
bv x u' x dx .
2) La formula di integrazione per sostituzione assume la forma seguente:
∫a
bf x dx=−∫g−1 a
g−1 b f g t g ' t dt ,
dove g−1 a e g−1 b ,
(estremi dell’integrale che dobbiamo calcolare) sono i valori che la funzione inversa g−1 della gassume in x = a e x = b.
6. Alcune applicazioni dell’integrale definito
Se f x è una funzione è continua in [a ,b ] e f x 0 ∀ x∈[a ,b ] , il valore dell’integrale:
∫a
bf x dx ,
rappresenta la misura dell’area del trapezoide ABNM (fig.2) delimitato dalla curva continua diequazione y= f x , dall’asse x, e dalle parallele AM e BN all’asse y.Se la curva y= f x incontra l’asse x in un numero finito di punti, il trapezoide si scompone in tanteparti costituite dalle aree tutte contenute o nel semipiano y > 0 o nel semipiano y < 0. Per questomotivo il calcolo delle misure di queste aree, effettuato con la tecnica degli integrali, fornisce comerisultato la somma algebrica di tali aree. Infatti, solo gli integrali definiti, relativi alle aree situatenel semipiano y > 0, forniranno risultati positivi, mentre, quegli integrali definiti riferiti ad areeposte nel semipiano y < 0, produrranno risultati negativi. Ad esempio, in fig. 5, l’area grigia è nelsemipiano y < 0. Per quanto affermato sopra, si ha:
Area grigia=∫c
df x dx0 .
aO x
y
y=f(x)
bc
N
d BA
M
fig . 5
- 106 -

L’integrale definito si presta però bene anche a determinarela misura dell’area di una superficie piana S limitata da uncontorno tale che ogni parallela all’asse y la intersechi inal massimo due punti. Infatti, sia y= f 1 x l’equazionedell’arco di curva MPN, e sia y= f 2 x l’equazione del-l’arco MQN (fig. 6).Se la superficie S si trova tutta situata nel semipianoy0 allora f 1 x 0 e f 2 x 0 , con f 1 x ≥ f 2 x ;∀ x∈[a ,b ] . In queste ipotesi risulta evidente che:
Area S=∫a
b
[ f 1 x − f 2 x ]dx . ()
Area S
aO x
y
b
N
BA
M
y= f 1 x
y= f 2 x
P
Q
fig. 6Se invece la superficie S è in parte nel semipiano delley0, possiamo trasportare l’origine delle coordinatelungo l’asse delle y e verso il basso di un segmento h, inmodo che la superficie S si trovi tutta al di sopra dell’assex (fig. 7). Nel nuovo sistema di riferimento gli archi dicurva MPN e MQN sono indicati rispettivamente dalle se-guenti equazioni:
y= f 1 x h e f 2 x h .Allora si ha:
Area S = ∫a
b
{[ f 1 x h ]− [ f 2 x h ]}dx=
=∫a
b
[ f 1 x − f 2 x ]dx
confermando, anche ora, la formula ().
Area S
a
Ox
y
b
N
BA
M
y= f 1 x
y= f 2 x
P
Q
O' x'
h {
fig. 7
7. Calcolo dei volumi dei solidi di rotazione
Sia f x una funzione è continua in [a ,b ] e f x 0 ∀ x∈[a ,b ] . Inoltre, supponiamo chef x sia crescente in [a ,b ] come rappresentato in fig. 8. Consideriamo il trapezoide ABNM delimi-
tato dalla curva di equazione y= f x , dall’asse x, dalle parallele AM e BN all’asse y. Questotrapezoide, ruotando e facendo un giro completo intorno all’asse x, origina un solido di rotazione Tdi cui vogliamo calcolare il volume.Come al solito, dividiamo l’intervallo [a ,b ] in n intervallini tutti congruenti fra loro e siano:
h=b−a
n,
la misura comune di tali intervallini,mi
il minimo della f x nell’i-mo intervallino eM i
il massimo della f x sempre nell’i-mo intervallino.Consideriamo il plurirettangolo inscritto (fig. 8) e il plurirettangolo circoscritto (fig. 9) al trapezoideAMNB.
- 107 -

aO x
y
y=f(x)
b
M
A
N
B
fig. 8
aO x
y
y=f(x)
b
M
A
N
B
fig. 9In una rotazione di un angolo giro intorno all’asse x, il plurirettangolo inscritto descrive un solidoche risulta la somma di n cilindri aventi per altezza la misura degli intervallini in cui è stato diviso[a , b ] e per basi i cerchi i cui raggi sono le ordinate minime mi dei punti della curva in tali intervalli,mentre il plurirettangolo inscritto descrive un solido che risulta la somma di n cilindri aventi lestesse altezze dei precedenti e per basi i cerchi i cui raggi sono le ordinate massime M i .Il primo solido sarà chiamato pluricilindro inscritto nel solido T, il secondo pluricilindro circo-scritto al solido T. Con semplici formule potremo così esprimere il volume dei due pluricilindri. Ilpluricilindro inscritto ha volume:
v n=∑i=1
n
π mi2 h ,
mentre il pluricilindro circoscritto ha volume:
V n=∑i=1
n
π M i2 h
(ved. fig. 10 e fig. 11).
Osserviamo che, se mi [M i ] è il minimo [massimo] della funzione f x , allora mi2 [M i
2 ]è un minimo
[massimo] per f 2 x nell’i-mo intervallino, e, per il teorema 2.11, si possono scrivere le seguentiuguaglianze:
limn∞∑i=1
n
mi2 h= lim
n∞∑i=1
n
M i2 h =∫a
bf 2 x dx
1 TEOREMA 2.1 Se f x è una funzione continua in [a, b], le due successioni: s1 , s2 , .. ., sn ,. . . e S1
, S 2 ,. . ., S n , .. .
, sono convergenti e convergono verso lo stesso valore, cioè:limn∞
sn=lim
n∞
Sn .
- 108 -

ovvero:
limn∞
v n= limn∞
V n=π∫a
bf 2 x dx .
O x
y
y=f(x)
M
N
Ba bA
M'
N'
xi h
}mi {
M i
fig. 10
O x
y
y=f(x)
M
N
Ba bA
M'
N'
fig. 11Quindi, per quanto ora scritto, e poiché, ∀ n∈ ℕ , il pluricilindro inscritto è contenuto interamentenel solido T mentre il pluricilindro circoscritto lo contiene, rimane naturale definire volume del so-lido T il “numero”:
π∫a
bf 2 x dx
(a cui, magari dopo aver svolto tutti i necessari passaggi algebrici, andrà associata una opportunaunità di misura: ad esempio u3 ). Quindi:
() Volume di T =π∫a
bf 2 x dx .
ESEMPI:
- 109 -

1) Volume del cono rotondo.Siano dati il raggio r di base e l’altezza h del cono generato da una rotazione completa intorno al-l’asse x del triangolo rettangolo AOB (fig. 12 e 13).
fig. 12 fig. 13
Sappiamo che: tan A O B=rh
per cui il coefficiente angolare della retta OB varràrh
.
L’equazione della retta che passa per l’origine O e che ha coefficiente angolare m=rh
è:
y=rh⋅x .
Applicando la (), il volume del cono circolare retto è:
V=π∫0
h rh
x 2
dx=π∫0
h r 2
h2x2 dx= π r 2
h2 [ x3
3 ]0h
=π r 2
h2⋅
h3
3=
13
π r 2h u3 .
2) Volume della sferaSia data una sfera generata dalla rotazione, intorno all’asse x, di una semicirconferenza di centrol’origine O e raggio r (fig. 14 e 15).
O
x
y
−r r
fig. 14
x
y
−r rO
fig. 15L’equazione esplicita della semicirconferenza che è situata nel semipiano y > 0 è:
y= r2−x 2 .Applicando ancora la (), il volume della sfera di raggio r sarà dato da:
V=π∫−r
r r 2−x2 2dx=π∫−r
r r2− x2dx=π[r 2 x−
x3
3 ]−r
r
=πr 3−r 3
3r3−
r3
3 = 43
π r 3u3 .
- 110 -
O
x
B
O
y
A
h
r
r
B
A
h
r
r
O
x
B
O
y
A
h
r
r
B
A
h
r
r
O
xA
h
r
r
B
O
y
A
h
r
r
B

8. Misura di un arco di curva piana
Sia γ un arco di curva piana di equazione y= f x compreso fra le due ordinate relative alleascisse a e b. Dividiamo l’intervallo [a, b] in n intervalli congruenti fra loro per mezzo delle ascisse:
a=x0 x1. ..xn−1 xn=b .
Dai punti x0 , x1 ,..., xn−1 , x n tracciamo le perpendicolari all’asse delle x che incontreranno l’arco γ,
rispettivamente, nei punti P0 , P1 ,..., Pn−1 , Pn . Sia ∆s la misura del segmento P i−1 P i (ved. fig.16).
aO x
y
y=f(x)
b
M
A
N
Bx
i−1 xi
Pi−1
Pi
∆ x
∆ y∆ s
y=f(x)
fig. 16Posto:
x= x i− x i−1 ,e:
y= f xi − f x i−1 , avremo che:
s2= x2
y2 .Se n∞ , passando ai differenziali avremo:
ds2=dx2dy2 ; da cui: ds2
dx2=1
dy 2
dx 2 .
Quindi:
dsdx=1
dy 2
dx 2, ovvero: ds=1
dy2
dx2dx .
Integrando ed estendendo il ragionamento precedente ad ogni arco in cui è suddivisa la curva γ, po-tremo scrivere che:
s=∫a
b
1dy2
dx2dx=∫a
b 1 f ' x 2
dx .
- 111 -

APPENDICE
A1) Elenco dei simboli più importanti
Simbolo Significato= uguale≠ diverso (disuguale)≃ circa uguale< minore> maggiore≤ minore o uguale≥ maggiore o uguale± più o meno
∣a∣ valore assoluto (modulo) di a: √a2=∣a∣={ a , se a≥0
−a , se a< 0
Insiemi∈ appartiene∉ non appartiene∃ esiste (ovvero ∃ è il quantificatore esistenziale)∀ per ogni (ovvero ∀ è il quantificatore universale)
Insieminumericiℕ Numeri interi positivi o numeri naturali
ℤ Numeri interi relativi
ℚ Numeri razionali
ℝ Numeri reali
Operazioniinsiemistiche
∪ Unione
∩ Intersezione
Relazioniinsiemistiche
⊆ È contenuto o è uguale a... (concetto di sottoinsieme)
⊂ È contenuto in ...
⊇ Contiene o è uguale a... (concetto di soprainsieme)
⊂ Contiene...
∅ Insieme vuoto (cioè∅ è l'insieme che non contiene alcun elemento)
Logica∨ o (inclusivo), vel, or (disgiunzione inclusiva)∧ e, et, and (congiunzione)
⇒ oppure → se…allora… oppure: implica (deduzione)⇔ se e solo se
- 112 -

A2) Proprietà delle potenze e alcune formule algebriche più importanti
Proprietà delle potenzeSiano a∈ℝed n∈ℤ. Ricordiamo, anzitutto, le seguenti definizioni:
1) se n > 1, si chiama potenza ennesima (o n-ma) del numero reale a, il prodotto di nfattori uguali ad a, cioè:
an= a⋅a⋅a⋅. . . . . .⋅a ⏟
n volte
2) se n=1, si pone: a1=a ;
3) se n=0 e a≠0 , si pone: a0=1;
4) se n0 e a≠0 , si pone: an=1
a−n.
Dalle definizioni date segue che le proprietà delle potenze a esponente intero dei numeri razionali,valgono anche per le potenze a esponente intero dei numeri reali.Cioè, se a ,b∈ℝed m ,n∈ℤ , risulta:
P1) am⋅an=amn ; P2) am :an
=am−n ;
P3) am n=amn ; P4) a⋅b n=an
⋅bn;
P5) ab n
=an
bn.
Elenco di alcune formule algebriche più importantiDati a ,b e c∈ℝ si può provare facilmente che valgono le seguenti identità:
FA1) Differenza fra quadrati: a2−b2= a−b ⋅ab ;FA2) Quadrato di un binomio: a±b
2=a2
±2 abb2;
FA3) Cubo di un binomio: a±b 3=a3±3 a2 b3a b2
±b3 ;
FA4) Somma e differenza fra cubi: a3±b3
=a±b ⋅a2∓abb2 ;
FA5) Quadrato di un trinomio: abc 2=a2b2
c22ab2a c2b c .
N.B. Nell'insieme dei numeri reali ℝ la somma di quadrati a2b2
non si può scomporre. Tuttavia,esistono delle formule, utili in determinati casi, che consentono una fattorizzazione particolare di ungruppo di polinomi di questo tipo ed esattamente:
1. a2b2
= a±b 2∓2a b 2. a4
b4=a2
±b2 2∓2a2 b2 e, in generale:
3. ∀ n∈ℕ si ha: a2 nb2 n
=an±bn
2∓2anbn
Formule di Waring7 Le formule di Waring sono formule algebriche utilizzate nella soluzione di un sistema simmetrico,e derivano dalle teorie di Edward Waring, matematico britannico del XVIII secolo. Le formule piùutilizzate sono quelle per potenze del binomio di ordine n=2 oppure 3, che sono quelle del quadratoe cubo del trinomio. Questo calcolo serve a trasformare le potenze del binomio di variabili a e b insomme e prodotti di queste variabili. Tali somme e prodotti di queste variabili sono riconducibilialla forma normale di un sistema simmetrico. Da notare che: s = a + b e p = a * b.
FW2) a2 + b2 = (a + b)2 − 2ab = s2 − 2p;FW3) a3 + b3 = (a + b)3 − 3a2b − 3ab2 = (a + b)3 − 3ab(a + b) = s3 − 3ps;FW4) a4 + b4 = (a + b)4 − 4a3b − 6a2b2 − 4ab3 = (a + b)4 − 4ab(a2 + b2) − 6a2b2 = s4 −
− 4p(s2 − 2p) − 6p2 = s4 − 4ps2 + 2p2;FW5) a5 + b5 = (a + b)5 − 5ab(a3 + b3) − 10a2b2(a + b) = s5 − 5ps3 + 5p2s;ecc...
7 Da Wikipedia, l'enciclopedia libera
- 113 -

A3) I sistemi di equazioni di primo grado
Innanzitutto ricordiamo che la forma normale (o canonica) di un sistema in due equazioni di primo grado è la seguente:
{a xb y=ca ' xb' y=c '
dove a, b, c, a', b' e c'∈ ℝ e x e y rappresentano le incognite. Tuttavia, se il sistema assegnato non fosse scritto in forma normale, con le operazioni di m.c.m., somme fra monomi simili, semplificazioni ecc..., è sempre possibile riuscire a riscriverlo nella forma algebrica migliore possibile per applicare uno dei metodi risolutivi illustrati nei paragrafi seguenti.
I. Metodo di sostituzioneDopo aver effettuato tutte le operazioni presenti nel sistema e ridotto i monomi simili, siisola un'incognita da una delle due equazioni, ossia si ricava un’incognita in funzionedell’altra seguendo possibilmente il consiglio di isolare quell'incognita il cui coefficientenumerico o è uguale a 1 o è più prossimo ad 1. Poi, se la variabile isolata si trova al membrodi sinistra dell'uguaglianza, sostituiamo l'espressione che è al membro di destra, nellarestante equazione che, riducendosi ad una sola variabile, si risolve facilmente.Infine il valore dell’incognita così ottenuto lo sostituiamo nell’equazione in cui l’altraincognita era stata isolata.Esempio svolto:
{3 x−6
4
4 y−7 5
=x410−
y−34
2 x3−
y12=
3 x−1 5
−5 y1
12calcoliamo il m.c.m:
{15 x−6 16 y−7
20=
2 x4 −5 y−3 20
40 x−30 y1 60
=36 x−1 −5 5 y1
60eliminiamo i denominatori:
{15 x−9016 y−112=2 x8−5 y1520 x−30 y−30=36 x−36−25 y−5
isoliamo le incognite dalle costanti:
{15 x−2 x16 y5 y=9015811240 x−36 x−30 y25 y=−36−530
semplifichiamo e scriviamo il sistema in forma normale:
{13 x21 y=2254 x−5 y=−11
isoliamo x nella seconda equazione:
{13 x21 y=225
x=5 y−11
4sostituiamo nella prima equazione
- 114 -

{135 y−114 21 y=225
x=5 y−11
4nella prima equazione abbiamo una sola incognita: risolviamo allora rispetto ad essa:
{65 y−14384 y=900
x=5 y−11
4⇒ {
149 y=1043
x=5 y−11
4⇒{y=
1043149
=7
x=5 y−11
4infine sostituiamo il valore di y così determinato nella seconda equazione per trovare x:
{y=7
x=5⋅7−11
4=
244=6
e la soluzione, riscritta in forma ordinata, è:
{x=6y=7
.
II. Metodo di somma o sottrazione o metodo di riduzione
Dopo aver effettuato tutte le operazioni presenti nel sistema, ridotto i monomi simili e postoil sistema nella forma canonica,
II.a si individua il minimo comune multiplo dei coefficienti di un’incognitaII.b si trova il fattore che consente di ottenere tale m.c.m. (e il suo opposto) per
l’incognita considerataII.c si sommano algebricamente in colonna le due equazioni: in questo modo scompare
un’incognitaII.d si risolve l’equazione così ottenuta ad una sola incognitaII.e a scelta si può ripetere il procedimento per l’eliminazione dell’altra incognita
oppure effettuare il metodo di sostituzione.Esempio svolto (riprendendo l'esempio del numero I):
{13 x21 y=225, chiamiamo ( 1 ) la prima equazione4 x−5 y=−11 , chiamiamo ( 2 ) la seconda equazione
Procediamo cercando di eliminare la x: il m.c.m. tra 13 e 4 è 52, perciò moltiplichiamo laprima equazione per 4 e la seconda per 13 (queste moltiplicazioni sono ammesse in virtù delsecondo principio di equivalenza per le equazioni) e poi eseguiremo la sottrazione membro amembro. Conveniamo di indicare questa operazione con la seguente notazione:
4 1 −13 2 dove 1 e 2 indicano, rispettivamente come scritto sopra, la prima e la seconda equazionedel sistema e conseguentemente:
{4 13 x21 y =4⋅22513 4 x−5 y =13⋅−11
Per eliminare la y è sufficiente eseguire la sottrazione membro a membro ovvero:
{52 x84 y=90052 x−65 y=−143
⇒ {52 x84 y=90052 x−65 y=−143
__________________________________
52 x−52 x84 y65 y=900143
⇒ 149 y=1043⇒ y=7
In maniera del tutto equivalente, eseguiamo l'operazione:5 1 21 2
allo scopo, stavolta di eliminare la y:
- 115 -

{5 13 x21 y =5⋅22521 4 x−5 y =21⋅−11
⇒ {65 x105 y=112584 x−105 y=−231
__________________________________
65 x84 x105 y−105 y=1125−231
⇒ 149 x=894⇒ x=6
Quindi la soluzione è:{x=6y=7
.
III. Metodo del confrontoÈ un'applicazione della proprietà transitiva dell'uguaglianza che afferma che seA=B e B=C allora A=C. Infatti, se il sistema è ridotto alla forma normale, isoliamo la
stessa incognita in entrambe le equazioni e, poi (in virtù della proprietà transitivadell'uguaglianza), uguagliamo le espressioni situate ai membri di destra.Si ottiene così un’equazione in una sola incognita (per es. x), facilmente risolvibile.Allo scopo di individuare il valore dell'altra incognita (la y), sostituiamo il valore ottenuto(di x) in una delle due equazioni di partenza e così riusciamo ad ottenere la soluzionecompleta.Esempio svolto (riprendendo ancora l'esempio del numero I):
{13 x21 y=2254 x−5 y=−11
isoliamo x da entrambe le equazioni:
{x=225−21 y
13
x=5 y−11
4
uguagliamo i due membri di destra:225−21 y
13=
5 y−114
⇒900−84 y
52=
65 y−14352
eliminiamo i due denominatori e risolviamo rispetto ad y:
−65 y−84 y=−900−143⇒−149 y=−1043⇒ y=−1043−149
=7
Adesso, isoliamo y da entrambe le equazioni ed uguagliamo ancora i due membri di destra:
{y=225−13 x
21
y=114 x
5
⇒225−13 x
21=
114 x5
calcoliamo il m.c.m (=110), eliminiamo i due denominatori e risolviamo rispetto ad x :
1125−65x=23184 x⇒−65 x−84 x=231−1125⇒−149 x=−894⇒ x=−894−149
⇒ x=6
Quindi la soluzione è: {x=6y=7
.
IV. Metodo di Cramer o delle matrici
Consideriamo ancora un sistema ridotto alla forma normale: {a xb y=ca ' xb' y=c '
.
Siano delta, delta x, delta y, rispettivamente, le seguenti espressioni:
=∣a ba ' b '∣=a⋅b '−a '⋅b , x=∣c b
c ' b '∣=c⋅b '−c '⋅b e y=∣a ca ' c '∣=a⋅c '−a '⋅c.
Se ≠0 le soluzioni si trovano calcolando:
x= x
e y=
y
Esempio svolto (riprendendo un'ultima volta l'esempio del numero I):
- 116 -

{13 x21 y=2254 x−5 y=−11
=∣13 214 −5∣=13⋅−5 −4⋅21=−65−84=−149 ,
x=∣225 21−11 −5 ∣=225⋅−5 11⋅21=−1125231=−894 e
y=∣13 2254 −11 ∣=13⋅−11 −4⋅225=−143−900=−1043
⇒{ x= x
=−894−149
=6
y= y
=−1043−149
=7
- 117 -

A4) Definizione e proprietà dei radicali
Definizione: dati tre elementi a∈ℝ+ e m ,n∈ℕ si definisce radicale di indice m e radicando an la
potenza anm ed esattamente:
anm =
DEF.
man .
Quindi per poter svolgere agevolmente qualunque operazione con i radicali sarà necessarioapplicare correttamente le proprietà delle potenze. Intanto ricordiamo che:
Se n è numero intero pari Se n è numero intero disparina=b significa a=bn
se a, b sono numeri reali positivi o nulli
na=b significa a=bn
se a, b sono numeri reali positivi, negativi o nulli
Esempi:9=3 ; mentre −9 non esiste; 327=3 e
3−27= -3 .
Operazioni:Semplificazione: n
an=a ; ad esempio
454=5 .
n⋅pam⋅p=nam ; esempio:
14a30=7a15 ; poiché si semplifica la frazione:
3014
=157 .
Somma di radicali: si esegue solo se i radicali sono simili: an xb
n x= ab
n x ;
Esempio: 2252=72 ; mentre non si può calcolare: 2352 .
Prodotto di radicali: si esegue solo se gli indici delle radici sono uguali:n xm⋅
n y p
=n x m y p .
Esempio 1:na x⋅
mb y=pa
x⋅ pn b
y⋅pn ; dove con p si è indicato il m.c.m.(n, m);
Esempio 2:325⋅
435=3⋅4 254⋅
4⋅ 3 35 3=12 220⋅315 .
Quoziente di radicali: si esegue solo se gli indici delle radici sono uguali:n xm :
n y p
=n xm: y p .
Esempio 1: na x:mby=
pa x⋅p
n : b y⋅ p
n =
p a x⋅ p
n
b y⋅ p
n ; dove con p si è indicato il m.c.m.(n, m)
Esempio 2:325:
435=
3⋅4 25 4:4⋅ 3 35
3=
12 220
315.
Trasporto di fattori sotto il segno di radice: an bm
=nbm⋅an ; es.: 3⋅
354=
354⋅ 33 ;
Trasporto di fattori fuori dal segno di radice:nbm⋅an=a
n bm ; es.: a6
⋅b3=a6
⋅b21=a3
⋅b⋅b .
Potenza di radicali: na m= nam ; Esempio: 43
3= 433 .
Radice di radice: m na=
m⋅n a ; Esempio:
467=
4⋅ 6 7=
247 .
Razionalizzazione del denominatore. Esaminiamo tre casi:
1. ab=
ab⋅bb=
abb
; 2. a
bc=
abc
⋅b−cb−c
=a b−c
b−c;
3. a
nbm=
anbm⋅
nbn−m
nbn−m=
a⋅nbn−m
nbm n−m=
a⋅nbn−m
nbn=
a⋅nbn−m
b.
Radicali doppi:vale la seguente identità (utile se la quantità (a2 - b) è un quadrato):
a±b= aa2−b2
± a−a2−b2
.
Esempio: 23= 222−32
2−22−32
= 212 2−1
2= 3
2 1
2.
- 118 -

A5) Formula risolutiva dell'equazione algebrica di secondo grado e fattorizzazionedel trinomio di 2°
Un’equazione algebrica di secondo grado (=2°) è un oggetto algebrico che, scritto nella formacompleta, si può rappresentare così:
ax 2bxc=0
dove a ,b e c∈ℝ e a≠0 .Possiamo facilmente provare che le soluzioni possono essere scritte nella seguente forma:
x=−b±b2−4 ac
2aAdesso conveniamo di chiamare il radicando del radicale che compare nella formula risolutivadiscriminante dell’equazione di 2° ponendolo, per comodità, uguale a (si legge: delta) e cioè:
Δ=b2−4 ac .
Per classificare le due soluzioni dobbiamo considerare tre casi (in base alle variazioni del segno di ):
1) 0. Allora la è un numero reale e abbiamo due soluzioni x1 , x2 reali e distinte
x1≠x2 2) =0. Allora la è uguale a 0 e abbiamo due soluzioni x1 , x2 reali ma coincidenti
x1=x2 3) 0. Allora la non è un numero reale e l’equazione completa ax 2
bxc=0 non ha soluzioni reali.
Esempio:risolviamo l’equazione: 2 x 2
−9 x−5=0 .
Innanzitutto si ha: {a=2b=−9c=−5
. Applichiamo la formula e otteniamo:
x=−b±b2−4 ac
2a=
9±81−4 2 −5 4
==9±121
4=
9±114
.
Allora: x1=911
4=
204=5 e x2==
9−114=−
24=−
12
.
Troviamo un'applicazione di questa formula nella fattorizzazione a coefficienti reali del trinomio disecondo grado a x2
b xc . A questo proposito è facile dimostrare che vale la seguente identità:(1) a x2b xc =
≥0
a x− x1 x−x2
dove x1 e x 2 sono le soluzioni reali dell'equazione algebrica associata al trinomio e cioè le soluzioni
dell'equazione: ax 2bxc=0 .
Esempio:
Consideriamo il trinomio: −12
x2−3 x2 .Troviamo le soluzioni dell'equazione algebrica asso-
ciata: −12
x2−3 x2=0⇒ x=
3±94−1
=−3±13 . Applicando la formula (1) possiamo quindi
fattorizzare il trinomio e esattamente:
−12
x2−3 x2=−
12x−3−13 ⋅ x− 313 .
- 119 -

A6) Formule più importanti di trigonometria
È assegnato un triangolo rettangolo ABC
disegnato in fig. 1:
fig. 1Le funzioni trigonometriche dell'angolo x sono definite così:
1. sen x=ac=
cateto oppostoipotenusa
2. cos x=bc=
cateto adiacenteipotenusa
3. tanx=sen xcos x
=ab=
cateto oppostocateto adiacente
4. cotan x=cos xsen x
=ba=
cateto adiacentecateto opposto
5. sec x=1
cos x=
cb=
ipotenusacateto adiacente
6. cosec x=1
sen x=
ca=
ipotenusacateto opposto
Relazione fondamentale:7. ∀ x∈ℝ si può dimostrare che vale la seguente identità:
sen2 xcos2 x=1
da cui: sen x=±1−cos2 x e cos x=±1−sen2 xFormule di addizione e sottrazione:
8. Qualunque siano i due numeri α e β∈ℝ valgono le seguenti identità:
sen α±β =senα⋅cosβ±senβ⋅cos αcos α±β =cos α⋅cosβ∓senα⋅senβ
tan α±β = tanα±tanβ1∓tan α⋅tanβ
Formule di bisezione:9. Qualunque sia α∈ℝ valgono le seguenti identità:
senα2=± 1−cosα
2, cos
α2=± 1cos α
2Relazioni tra gli elementi di un triangolo qualsiasiI due seguenti teoremi si utilizzano quando di un triangolo qualsiasi dobbiamo determinare lati eangoli. Per i due teoremi che seguono facciamo riferimento alla fig. 2
A
B
αb
a
c
β γC
fig. 2Teorema dei seni (o di Eulero)Enunciato:in un triangolo qualsiasi le misure dei lati sono proporzionali ai seni degli angoli opposti ecioè, facendo riferimento alla fig. 2, si ha:
- 120 -
A C
B
xb
ac

asen α
=b
senβ=
csen γ
Esempi di applicazione del teorema dei seni:
1) α=30 ° , β=45 ° , a=16 u.⇒sen 30 °16u .
=sen 45°
b⇒b=16u.⋅2
2⋅
12≈22.62u. ;
2) α=40 ° , b=15u. , a=25u.⇒sen40 °
25u.=
senβ15u.
⇒ senβ≈0.38 .
Teorema del coseno (o di Carnot)Enunciato:in un triangolo qualsiasi, il quadrato della misura di ogni lato è uguale alla somma deiquadrati delle misure degli altri due lati, diminuita del doppio prodotto delle misure di questidue lati per il coseno dell’angolo fra essi compreso e cioè, facendo ancora riferimento alla fig.2, si ha:
1. a2=b2
c2−2 b⋅c⋅cos α
2. b2=a2c2−2a⋅c⋅cos β3. c2
=a2b2
−2 a⋅b⋅cos γEsempio di applicazione del teorema del coseno
γ=60°, a=5u., b=8u.⇒c2=a2b2−2abcos60°=25u.264u.2−2⋅5u.⋅8u.⋅12=49u.2;
per cui:
c=7u. , a=5u. , b=6 u.⇒ dal teorema precedente si ha:a
senα=
csen γ
⇒senα
a=
sen γc⇒ senα=a⋅sen γ
c⇒
senα=5 u.⋅ 3
27 u.
=5
143≃0 .61⇒α≃37° ,59 .
- 121 -

A7) Formule riguardanti la retta e alcune coniche in un piano cartesiano
Nel seguito useremo queste notazioni: P0≡ x0 , y0 , P1≡ x1 , y1 e P2≡ x2 , y2 per indicare i punti P0 , P1 e P2
1. Formula della distanza fra due punti: P1P2= x2−x1 2 y2− y1
2
2. Punto medio M del segmento di estremi i punti P1 e P2: M≡ x1 x2
2,
y1 y2
2
3. Equazione della retta r passante per due punti distinti: r :x−x1
x2−x1
=y− y1
y2− y1
3a) se x1= x2⇒ la retta è parallela all'asse y e ha equazione: x=cost. 3b) se y1= y2⇒ la retta è parallela all'asse x e ha equazione: y=cost.
3c) il coefficiente angolare si indica con m e si pone: m=y2− y1
x 2−x1
=tanα e
α=arctan m =tan−1 m Oss. La dimostrazione dell'equazione cartesiana di una retta si trova a questa pagina.
4. Equazione della retta r in forma esplicita: r : y=mxp
5. Equazione della retta r in forma implicita: r : axbyc=0
6. Equazione del fascio di rette passanti per il punto P0: y− y0=m x− x0 7. Per disegnare il grafico di una retta è necessario determinare esattamente due punti
appartenenti alla retta stessa: se la retta è scritta in forma esplicita y=mx p alloraconviene determinare le coordinate di questi punti assegnando prima il valore 0 alla x,calcolare il corrispondente valore di y e poi il valore 1 e poi calcolare il corrispondente valore di y come descritto nella seguente tabella:
x y
0 p
1 m+p
Se la retta è assegnata in forma implicita, e cioè, axbyc=0 allora, per determinare i duepunti, è sufficiente assegnare prima alla x il valore 0, calcolare il corrispondente valore di ye poi il valore 0 ad y e poi calcolare il corrispondente valore di x come descritto nellaseguente tabella:
x y
0 −cb
−ca
0
Qualora nell'equazione implicita il termine noto fosse 0 ad es. r : y=x , allora basterà eseguire una variazione nei valori scelti come illustrato dalla seguente tabella:
x y
0 −cb
1 −ca
b
Nel seguito faremo riferimento alle rette r e s di equazioni: r : y=mr x pr e s : y=m s xps
- 122 -

8. Condizione di parallelismo fra rette: due rette, r e s, sono parallele e si scriverà r // s se iloro coefficienti angolari sono uguali ovvero se:
mr=ms
9. Condizione di perpendicolarità fra rette: due rette, r e s, sono perpendicolari e si scriverà
r ┴ s se il prodotto dei loro coefficienti angolari è −1 ovvero se:mr⋅m s=−1
10. Il punto d'intersezione P fra due rette non parallele r e s :
P=r∩s={y=mr x pr
y=ms x ps
11. Formula della distanza fra un punto P0e una retta di equazione implicita r : axbyc=0
d=∣a x0b y0c∣
a2b2
Oss. La dimostrazione della formula della distanza punto-retta si trova a questa pagina.
12. Angolo formato fra due rette: Consideriamo le rette r e s rappresentate nel seguente grafico:È facile dimostrare che vale la seguente uguaglian-za:
αs=αrβovvero:
β=αs−αr
e, quindi:tan β =tan αs−αr
e dalla formula di sottrazione della tangente si ha:
tan β =tan αs−αr =tan αs−tan αr
1tanαs⋅tanαr
.
Ricordando che tan αs =ms e tan αr =mr , sosti-tuendo si ottiene la formula che calcola la tangentedell'angolo formato fra le due rette ed esattamente:
tan β =m s−mr
1ms⋅mr
e, applicando tan−1 ad entrambi i membri, si ottiene l'angolo:
β=tan−1 ms−mr
1m s⋅mr.
- 123 -
r O x
y
s
αr αs
β
β

Formule riguardanti le coniche– CIRCONFERENZA
Definizione: una circonferenza è costituita da un insieme di punti di un piano equidistanti da un punto fisso, C, chiamato centro. La distanza di un punto qualunque della circonferenza dal centro si chiama raggio.
Equazione cartesiana di una circonferenza: Γ : x2 y2
axbyc=0
Centro di una circonferenza: C≡−a2
, −b2
Raggio di una circonferenza: r= a2
4
b2
4−c
Equazione cartesiana di una circonferenza con ilcentro nell'origine e raggio r: Γ : x2
y2−r2
=0 ovvero: Γ : x2 y2
=r2
Equazione cartesiana di una circonferenza con il
centro sull'asse x e cioè nel punto C≡−a2
, 0: Γ : x2 y2
axc=0
Equazione cartesiana di una circonferenza con il
centro sull'asse y e cioè nel punto C≡0 , −b2 : Γ : x2
y2byc=0
– PARABOLADefinizione: una parabola è costituita da un insieme di punti di un piano equidistanti da un punto fisso, F, chiamato fuoco e da una retta, d, chiamata direttrice.
Equazione cartesiana di una parabola che ha l'assedi simmetria // all'asse y: P: y=a x2
b xc
Coordinate del Vertice: V≡− b2 a
, −b2−4ac4a ≡− b
2a, −
4a ricordando che: =b2
−4 ac
Coordinate del Fuoco: F≡− b2 a
, 1−
4a Equazione cartesiana della retta direttrice: d : y=−
14 a
Equazione cartesiana dell'asse di simmetria: x=−b
2a
Equazione cartesiana di una parabola che ha l'assedi simmetria // all'asse x: P: x=a y2
b yc
– Mutue posizioni di una circonferenza (o parabola) ed una retta:Una retta ed una circonferenza (o parabola) possono essere:1) secanti e, in questo caso, esistono due punti di intersezione, S1 e S2, fra la
circonferenza (o parabola) e la retta s2) tangenti e, in questo caso, esiste un punto di intersezione, T, fra la circonferenza (o
parabola) e la retta t3) esterne e, in questo caso, NON esistono punti di intersezione fra la circonferenza (o
parabola) e la retta e.Tutto ciò è riassunto graficamente nelle figg. 1 e 2.
- 124 -

t
O x
y
s e
T S1
S2
Γt
O x
ys e
T
S1S2
P
fig. 1 fig. 2Per determinare analiticamente la posizione di una circonferenza rispetto ad una retta r qua-
lunque, occorre risolvere un sistema di 2° costituito dall'equazione della circonferenza e l'equazionedella retta e poi studiare il discriminante dell'equazione risolvente il sistema e cioè:
{x2 y2
a xb yc=0y=m x p
⇒{x2m xp
2a xb m xp c=0
y=m x p⇒
{x2m2 x2
2m p x p2a xb m xb pc=0
y=m x p⇒ {1m2 x2
2m pb ma xp2b pc=0
y=m x p
L'equazione: 1m2 x22 m pb ma x p2b pc=0 è chiamata equazione risolvente il si-stema e, come scritto sopra, ne dobbiamo studiare il discriminante. Ponendo:α=1m2 , β=2m pb ma e γ=p2
b pc , l'equazione si trasforma ed assume la seguen-te semplice (e nota) forma: α x 2β xγ=0 il cui discriminante è: =β2−4α⋅γ . Possono capitaretre casi (a seconda del segno di ) ed esattamente: – > 0. Allora esistono due intersezioni x1 , x2 distinte x1≠x 2 e la retta è secante e i punti
di intersezione sono: S1≡ x1 , m x1p e S2≡ x2, m x2 p – = 0. Allora esistono due intersezioni x1 , x2 coincidenti x1=x 2 e la retta è tangente e il
punto di tangenza è: T≡ x1 , m x1 p – < 0. Allora NON esistono intersezioni reali e la retta è esterna.
Nel caso della parabola si procede in maniera del tutto analoga.
- 125 -

A8) Dimostrazione della formula della distanza punto-retta
Siano assegnati una retta r:axbyc=0 ed un punto P0 esterno ad r cioè P0≡ x0, y0 ∉r.
Facendo riferimento alla fig. 1, ricordiamo che la distanza fra un punto ed una retta è rappresentatadal segmento di minima lunghezza che possiamo tracciare per congiungere il punto e la retta inquestione. In base a ciò, il segmento, che ha origine in P0 dovrà essere ortogonale alla retta r. Sia Hil piede della perpendicolare tracciata da P0.
fig. 1
Detto ciò, vogliamo dimostrare che la distanza d=HP0 è definita dalla seguente formula:
d=∣ax0by0c∣
a2b2
Dim. Sapendo che la retta r è assegnata in forma implicita (qualora fosse assegnata in formaesplicita sappiamo che è sempre possibile esprimerla in forma implicita con semplici passaggialgebrici), possiamo determinarne il coefficiente angolare:
mr=−ab
e, dovendo essere HP0⊥r, possiamo calcolare il coefficiente angolare della retta HP0 e cioè:
mr⊥=
ba
.
Scriviamo l'equazione della retta HP0 che ha per coefficiente angolare ba
:
HP0 : y− y0=ba x−x0
e, calcolando il m.c.m. ed eliminando il denominatore se a≠0 , si ha:HP0 : a y− y0 =b x− x0 .
Adesso, allo scopo di determinare le coordinate del punto d'intersezione H fra la retta HP0 e la rettar, impostiamo e risolviamo il sistema:
{ax+by+c=0a ( y− y0 )=b (x−x0 )
⇒ {x=−by+c
aa ( y− y0 )=b ( x−x0 )
⇒{x=−by+c
a
b(−by+ca−x0)−a ( y− y0 )=0
⇒
{x=−by+c
a−b2 y−bc−abx0−a2 y+a2 y0=0
⇒{x=−by+c
a−y (a2
+b2 )=bc+abx0−a2 y0
⇒ {x=−by+c
ay (a2
+b2 )=a2 y0−abx0−bc
⇒
- 126 -
rO x
y
O
Hd
P0≡ x0 , y0

{x=−
by+ca
y H=a2 y0−abx0−bc
a2+b2⏟
y H è l'ordinata di H
⇒{x=−b
a2 y0−abx0−bc
a2+b2+c
a
y H=a2 y0−abx0−bc
a2+b2
⇒{ax+ba2 y0−abx0−bc
a2+b2+c=0
y H=a2 y0−abx0−bc
a2+b2
⇒
{a3 x+a b2 x+a2 b y0−a b2 x0−b2 c+a2 c+b2 c=0
y H=a2 y0−abx0−bc
a2+b2
⇒ {a3 x+ab2 x+a2 b y0−ab2 x0+a2 c=0
yH=a2 y0−abx0−bc
a2+b2
⇒
{a2 x+b2 x+a b y0−b2 x0+a c=0
y H=a2 y0−abx0−bc
a2+b2
⇒ {xH=
b2 x0−a b y0−a c
a2+b2⏟xH è l'ascissa di H
yH=a2 y0−abx0−bc
a2+b2
⇒
H≡(b2 x0−ab y0−a c
a2+b2,
a2 y0−abx0−bc
a2+b2 ).Adesso, utilizzando la formula della distanza fra due punti, troviamo d=HP0.
d=HP0=√(x0−b2 x0−a b y0−a c
a2+b2 )2
+( y0−a2 y0−abx0−bc
a2+b2 )2
=
=√( (a2+b2 ) x0−b2 x0+ab y0+a c
a2+b2 )
2
+( (a2+b2 ) y0−a2 y0+abx0+bc
a2+b2 )
2
=
=√( 1
a2+b2 )
2
(( (a2+b2 ) x0−b2 x0+a b y0+a c )2+ ((a2+b2 ) y0−a2 y0+abx0+bc )
2
)=
=√( 1
a2+b2 )
2
( (a2 x0+b2 x0−b2 x0+ab y0+a c )2+(a2 y0+b2 y0−a2 y0+abx0+bc )
2)=
=√( 1
a2+b2 )2
( (a2 x0+a b y0+a c )2+ (b2 y0+abx0+bc )
2)=
=√( 1
a2+b2 )
2
(a4 x02+a2 b2 y0
2+a2 c2
+2 a3b x0 y0+2a3 c x0+2a2 b c y0+b4 y02+a2 b2 x0
2+b2 c2
+
+2ab3 x0 y0+2b3 c y0+2 a b2 c x0 )
=
=√( 1
a2+b2 )2
(a2 x02 (a2+b2 )+b2 y0
2 (a2+b2 )+2a b x0 y0 (a2+b2 )+2 ac x0 (a
2+b2 )+2bc y0 (a2+b2 )+
+c2 (a2+b2 ) )
=√( 1
a2+b2 )
2
(a2+b2 ) (a2 x0
2+b2 y0
2+2a b x0 y0+2 ac x0+2bc y0+c2 )=
=√( a2+b21
(a2+b2 )
21 ) (a2 x0
2+b2 y0
2+c2+2a b x0 y0+2 ac x0+2bc y0 )⏟
Questa espressione è il quadrato di: a x0+b y0+c
= √ (a x0+b y0+c )2
a2+b2 =√ (a x0+b y0+c )
2
√a2+b2=
=∣a x0+b y0+c∣
√a2+b2 c.v.d.
- 127 -

A9) Dimostrazione dell'equazione cartesiana di una retta
Siano assegnati due punti distinti P1≡ x1 , y1 e P2≡ x2 , y2 con il segmento P1 P2 non parallelo né all'asse x né all'asse y. Per un postulato di geometria elementare sappiamo che, per due puntidistinti, passa una e una sola retta P1 P2. Basandoci su questo postulato, vogliamo determinarel'equazione cartesiana della retta r che, in piano cartesiano ortogonale e monometrico Oxy, passaper i due punti distinti P1 e P2 .
fig. 1Dim. Consideriamo la fig. 1. Supponiamo, senza perdere nulla in generalità, che anche P∈r. P è unqualunque altro punto appartenente alla retta r e quindi le sue coordinate saranno generiche eincognite: P≡ x , y . Partendo dai punti P1≡ x1 , y1 , P2≡ x2 , y2 e P≡ x , y tracciamo le proie-zioni ortogonali P1 H1, P2 H2, P H (rispetto all'asse x ) e P1 K1 , P2 K2 , P K (rispetto all'asse y ). Perla perpendicolarità, conosciamo le misure dei seguenti segmenti:
(*) HH1 = x−x1, H2 H1 = x2− x1 , KK1 = y− y1 , K2 K1 = y2− y1.
Inoltre, i due trapezi rettangoli H1 H2 P2 P1 e H1 H P P1 sono simili tra loro poiché hanno lo stessonumero di lati e gli angoli corrispondenti sono congruenti. Per questo motivo vale questa relazione:
(1)HH1
H2 H1
=PP1
P2 P1
,
e, per la stessa ragione, i due trapezi rettangoli K1 P1 P K e K1 P1 P2 K 2 sono simili tra loro in modoche è vera questa relazione:
(2)KK1
K2 K1
=PP1
P2 P1
.
Confrontando la (1) con la (2) si ha:
(3)HH1
H2 H1
=KK1
K2 K 1
e, sostituendo le misure definite dalle uguaglianze (*), si ottiene:
(4) r: x−x1
x2−x1
=y− y1
y2− y1
.
Quest'ultima uguaglianza si chiama: equazione cartesiana di una retta r passante per due punti distinti P1P2.Oss.A) Se x1 = x2 , allora la retta P1 P2 è verticale. In questo caso, l'equazione (4) perde di significa-
to poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzarel'equazione: x = costante o, più sinteticamente: x=cost o, meglio ancora: r: x=k.
- 128 -
r O x
y
O
P
P1
P2
B
H
C
A
H1 H2H2
K1
H1
K 2
K

B) Se y1= y2 , allora la retta P1 P2 è orizzontale. Come prima, l'equazione (4) perde di significa-to poiché un suo denominatore vale 0. È tuttavia naturale, in questo caso, utilizzarel'equazione: y = costante o, più sinteticamente: y=cost o, meglio ancora: r: y=k.
C) Se x1≠x2 e y1≠ y2 allora, con semplici passaggi algebrici, possiamo riscrivere l'equazione(4) nella forma implicita e cioè:
(5) r: ax+by+c=0 e, ancora, isolando la variabile y, possiamo riscrivere l'equazione (4) nella forma esplicita ecioè:
(6) r: y=mx+p
- 129 -

A10) Schema riassuntivo dello studio di una funzione reale di variabile reale
Per facilitare lo studio di una funzione reale di variabile reale è conveniente svolgere attentamente iseguenti passaggi rispettando possibilmente l'ordine di esecuzione:
1. classificare il tipo della funzione2. dominio della funzione3. segno della funzione4. comportamento agli estremi del dominio5. intersezione con gli assi6. ricerca degli asintoti7. ricerca di eventuali intersezioni tra funzione ed asintoto orizzontale o obliquo8. ricerca degli intervalli di crescenza, decrescenza e delle ascisse ed ordinate dei punti di
massimo o minimo9. ricerca degli intervalli di concavità, convessità e ascisse ed ordinate dei punti di flesso10. ricerca di eventuali simmetrie11. rappresentazione grafica della funzione seguendo rigorosamente i risultati ottenuti
1. TIPO DELLA FUNZIONEUna funzione si può classificare entro i seguenti tipi (illustrati nel dettaglio subito sotto):
a1) FUNZIONE ALGEBRICA RAZIONALE INTERA: se è del tipoy=P x dove P x è un polinomio a coefficienti reali nella variabile x;
a2) FUNZIONE ALGEBRICA RAZIONALE FRATTA: se è del tipo
y=P x Q x
dove P x e Q x sono due polinomi nella variabile x ;
a3) FUNZIONE IRRAZIONALE con indice pari: se è del tipo: y=2 n f x , se n∈ℕ ;a4) FUNZIONE IRRAZIONALE con indice dispari: se è del tipo:
y= 2 n1 f x con n∈ℕ ;
t1) FUNZIONE TRASCENDENTE TRIGONOMETRICA: se compaiono in essaespressioni trigonometriche;
t2) FUNZIONE TRASCENDENTE ESPONENZIALE: se è del tipo y=aP x oppure
y=a
P x Q x con a∈ℝ+ ;
t3) FUNZIONE TRASCENDENTE LOGARITMICA: se è del tipo y=loga P x oppu-
re y=loga
P x Q x
con a∈ℝ+ e a≠1 .
2. DOMINIO DELLA FUNZIONE
- 130 -
Algebrico {Razionale {a1) Intero; ad es. f x =−
13
x3−5 x2
−43
x−2
a2) Fratto; ad es. f x =3 x2−
13
x−2
2 x²−3 x4
Irrazionale {a3) se l'indice è pari: f x =2 n g x con n∈ℕ ; ad es. y= x2
−1
a4) se l'indice è dispari: f x =2 n1 g x con n∈ℕ ; ad es. y=
3 x2−3 x1
Trascendente {t1) Trigonometrico ; ad es. y=sen x , y=tanx , ecc...
t2) Esponenziale ; ad es. y=ex , y= 12 x
, ecc...
t3) Logaritmico ; ad es. y=ln x , y=log x , y=log a x dove a0 e a≠1 , ecc...

2a) Se la funzione è RAZIONALE INTERA y = P(x) il dominio risulta:∀ x∈ℝ (ov-vero: per ogni x appartenente al campo Reale ℝ) in quanto P(x) è un polinomio acoefficienti reali nell’incognita x.
2b) Se la funzione è RAZIONALE FRATTA y=P x Q x
il dominio risulta:∀ x∈ℝ
escludendo quei valori che annullano il denominatore Q(x) e cioè: Q x ≠02c) Se la funzione è IRRAZIONALE con indice del radicale pari
y=2 nPx con n∈ℕ allora si impone al radicando d'essere maggiore o uguale a
zero e cioè: P x ≥0
2d) Se la funzione è IRRAZIONALE con indice del radicale dispari y=2 n1
P x al-lora il dominio di y coincide con quello della funzione radicando P x ;
2e) Se la funzione è TRASCENDENTE TRIGONOMETRICAy=sen f x o y=cos f x allora il dominio coincide con il dominio dell’argo-
mento f x . Se si ha y=tan f x allora occorre porre cos f x ≠0 e controllareeventuali restrizioni da imporre su f x . Gli altri casi della cotangente, secante ecosecante si trattano in modo simile a questo, considerando la natura particolare diquest’ultime tre funzioni.
2f) Se la funzione è TRASCENDENTE ESPONENZIALE y=aP x allora il dominio
coincide con il dominio della funzione che si trova all’esponente e cioè P(x)2g) Se la funzione è TRASCENDENTE LOGARITMICA y=loga P x allora si impo-
ne all'argomento del logaritmo d'essere strettamente positivo e cioè: P x 0 . Se è
y=loga
P x Q x
, con a∈ℝ+ ea≠1 allora si impone all'argomento del logaritmo
d'essere strettamente positivo e cioè: Px Q x
0 escludendo ancora quei valori che
annullano il denominatore Q(x) e cioè (in aggiunta alla condizione precedente):Q x ≠0
3. SEGNO DELLA FUNZIONEStudiando il segno di una funzione è possibile delimitare la parte di piano entro la qualeesiste il grafico della funzione stessa.Si vanno a cercare gli intervalli del dominio nei quali la funzione risulta o positiva onegativa. Se la funzione è y= f x allora si impone y0 che implica di risolvere la dise-quazione f x 0 .Dopo aver fatto ciò, si ottengono gli intervalli della x in cui la funzione è positiva e nellostesso tempo si trovano gli intervalli in cui la funzione è negativa.Terminata questa procedura,può essere utile disegnare unpiano cartesiano ancora neces-sariamente impreciso e indicarein esso le regioni in cui il grafi-co della funzione esiste (ved.fig. 1).
O x
y
NO
NO
NO
SÌ
SÌ
SÌ
fig. 1
- 131 -

4. COMPORTAMENTO AGLI ESTREMI DEL DOMINIODopo aver trovato gli estremi del dominio è necessario capire il comportamento dellafunzione in prossimità di questi estremi.Per tale motivo si cercano i limiti della funzione al tendere di x ai valori estremanti del
dominio. Se individuiamo forme indeterminate del tipo00
oppure∞
∞allora dovremo ricorre-
re alla regola di De L'Hospital derivando distintamente Numeratore e Denominatore.Inoltre si ricorda che tali comportamenti servono a trovare anche gli asintoti della funzionedata (ved. paragrafi seguenti).
5. INTERSEZIONI CON GLI ASSIPer trovare i punti d'incontro con i due assi cartesiani basta risolvere due sistemi tra lafunzione y= f x e i 2 assi e cioè:
∩ asse y :{y= f x x=0
∩ asse x :{y= f x y=0
Si ricorda che l'asse x ha equazione y = 0, mentre l'asse y ha equazione x = 0.6. ASINTOTI DELLA FUNZIONE
Si definisce ASINTOTO di una funzione y= f x una retta alla quale la curva rappresen-tativa della funzione si avvicina senza mai toccarla ad eccezione degli asintoti orizzontali oobliqui che possono anche incontrare la curva (naturalmente nei punti al finito).È ovvio notare che una funzione razionale intera non ammette asintoti di alcun genere.Per cercare gli asintoti verticali di una funzione (normalmente fratta) si trovano prima leradici del denominatore e quindi si calcolano i limiti (destri e sinistri) per x tendente ai valoriche si sono trovati supponiamo che essi siano in numero di n e cioè: x i , 1≤i≤n . Se il
risultato è infinito allora le rette x = xi , 1≤i≤n sono asintoti verticali della funzione.Per cercare gli asintoti orizzontali di una funzione (normalmente fratta) si calcolano i limitiper x tendente a −∞ ed anche a ∞ . Se il risultato è un numero finito h allora si dirà che laretta y = h è l'asintoto orizzontale.Per cercare gli asintoti obliqui di una funzione (normalmente fratta) si ricorda dapprima cheuna retta obliqua ha equazione esplicita del tipo y = mx + p. Il valore di m sarà dato o da
questo limite: limx∞
f ' x =m oppure da quest’altro limite: limx∞
f x x=m . Se il risultato è
diverso da 0 allora il valore di p è dato dal limite limx∞
f x −mx = p . Analoghe conside-
razioni per x−∞ . In pratica per trovare gli asintoti di una funzione razionale fratta possiamo procedereseguendo il seguente schema: 6a) Si scompone il numeratore e il denominatore con relativa eventuale semplificazione 6b) Si cercano le radici del denominatore e se esse sono xi 1≤i≤n si dirà che x = xi sono
le equazioni degli asintoti verticali (a meno che la funzione non ammetta, in tali punti,discontinuità di terza specie)
6c) Se il grado del numeratore è inferiore al grado del denominatore allora esiste l'asintoto orizzontale che è y = 0 (asse delle ascisse)
6d) Se il grado del numeratore è uguale a quello del denominatore allora esiste l'asintotoorizzontale che risulta y = h dove h è generato dal rapporto dei coefficienti di gradomaggiore tra numeratore e denominatore (ovvero è il quoziente della divisione tranumeratore e denominatore)
6e) Se il grado del numeratore supera quello del denominatore di una sola unità allora esistel'asintoto obliquo la cui equazione è y = mx + p dove mx + p risulta il quoziente delladivisione tra numeratore e denominatore
6f) Se il grado del numeratore è superiore a quello del denominatore di più di una unità
- 132 -

allora esisterà un asintoto curvo di equazione y=q x dove q x è generato dal quoziente tra numeratore e denominatore.
7. RICERCA EVENTUALI INTERSEZIONI TRA ASINTOTI ORIZZONTALIOPPURE OBLIQUI CON LA FUNZIONEInnanzitutto è importante ricordare (per evitare gravi errori) che una qualsiasi funzione non
può incontrare MAI i propri asintoti verticali poiché se x= l è un asintoto verticale allora
x= l è un punto di discontinuità (di seconda specie) della funzione.
Possono invece esistere intersezioni tra gli asintoti orizzontali oppure obliqui con lafunzione. Per trovare queste eventuali intersezioni basta risolvere il sistema tra la curva e irispettivi asintoti.
8. RICERCA INTERVALLI DI CRESCENZA, DECRESCENZA E ASCISSE DEIPUNTI DI MINIMO E MASSIMOSi procede (sinteticamente) in questo modo:
8a) Si calcola y ' , ovvero la derivata prima della funzione
8b)Si impone ad essa d'essere positiva ovvero si risolve la disequazione y '>08c) Trovati i risultati si dirà che essi sono gli intervalli di crescenza mentre i rimanenti del
dominio risultano gli intervalli di decrescenza.8d)Si illustra con un grafico il risultato ottenuto definendo nello stesso le ascisse dei punti
di minimo e di massimo per i quali y'=08e) Si sostituiscono le ascisse trovate nella funzione data per determinare le rispettive
ordinate. 9. RICERCA INTERVALLI DI CONCAVITÀ, CONVESSITÀ E ASCISSE DEI PUNTI
DI FLESSOSi procede (sinteticamente) in questo modo:
9a) Si calcola y ' ' , ovvero la la derivata seconda della funzione data
9b)Si impone ad essa d'essere positiva ovvero si risolve la disequazione y ' '>09c) Trovati i risultati si dirà che essi sono gli intervalli di concavità mentre i rimanenti del
dominio risultano quelli di convessità9d)Si illustra con un grafico il risultato ottenuto definendo nello stesso le ascisse dei punti
di flesso per i seguenti passaggi9e) Si sostituiscono le ascisse trovate nella funzione data per determinare le rispettive
ordinate. 10. RICERCA EVENTUALI SIMMETRIE
Le simmetrie più importanti che possono essere riscontrate in uno studio di funzione sono:10a) Simmetria rispetto l'asse delle ordinate:in questo caso deve avvenire che
f x = f −x . Se la funzione è razionale o irrazionale basta che la variabileindipendente x compaia solo con grado pari
10b) Simmetria rispetto l'origine: in questo caso deve avvenire che f x =− f −x 10c) Simmetria rispetto l'asse delle ascisse: è il caso meno frequente. In questo caso deve
avvenire che f y = f − y . In pratica accade quando la funzione è irrazionale con indice pari.
11. RAPPRESENTAZIONE GRAFICA DELLA FUNZIONEÈ la parte più importante ma nello stesso tempo la più semplice se si procede in questomodo:11a) Si rappresentano gli asintoti della funzione e i punti derivanti dalle intersezioni con
gli assi e dalle intersezioni con gli asintoti orizzontali o obliqui11b) Si disegnano delle linee verticali non continue in corrispondenza delle intersezioni
con l'asse delle ascisse11c) Si cancellano le parti di piano in cui la funzione o non è positiva o non è negativa
(vedi il segno della funzione)
- 133 -

11d) Si disegna il grafico della funzione spostandosi (rispetto l'asse delle ascisse) da−∞ a ∞ rispettando asintoti e punti per i quali passa la funzione.
N.B. Lo schema precedente può risultare valido per tutte le funzioni razionali o irrazionali; per lefunzioni trascendenti lo studio deve essere integrato da altre abilità.
- 134 -

Indice generale
Indice generaleCAP. 1 LIMITI DELLE FUNZIONI REALI DI UNA VARIABILE REALE ................... 3
0. INTRODUZIONE
...................................................................................................................................
3 1. LIMITE FINITO PER UNA FUNZIONE IN UN PUNTO
......................................................................................
5 2. DEFINIZIONE DI LIMITE INFINITO PER UNA FUNZIONE IN UN PUNTO
..............................................................
7 3. LIMITE DESTRO E SINISTRO DI UNA FUNZIONE.
.........................................................................................
8 4. DEFINIZIONE DI LIMITE PER UNA FUNZIONE ALL'INFINITO
...........................................................................
9 5. DEFINIZIONE DI LIMITE IN TERMINI DI INTORNI
......................................................................................
11 6. TEOREMI FONDAMENTALI SUI LIMITI
....................................................................................................
11 7. INFINITESIMI E LORO PROPRIETÀ FONDAMENTALI
....................................................................................
13 8. OPERAZIONI CON I LIMITI
..................................................................................................................
16 9. DIMOSTRAZIONI DEI TEOREMI SUI LIMITI
..............................................................................................
17
CAP. 2 FUNZIONI CONTINUE ........................................................................................... 21
0. INTRODUZIONE
.................................................................................................................................
21 1. DEFINIZIONI
....................................................................................................................................
21 2. PRIME PROPRIETÀ DELLE FUNZIONI CONTINUE
.......................................................................................
22 3. LA CONTINUITÀ DELLE FUNZIONI ELEMENTARI
.......................................................................................
22 4. LA CONTINUITÀ DELLE FUNZIONI COMPOSTE
.........................................................................................
25 5. PROPRIETÀ DELLE FUNZIONI CONTINUE IN UN INTERVALLO CHIUSO E LIMITATO
...........................................
26 6. INVERTIBILITÀ, MONOTONIA E CONTINUITÀ
...........................................................................................
29 7. DUE LIMITI FONDAMENTALI
...............................................................................................................
31 8. ESERCIZI SUI LIMITI. FORME INDETERMINATE
........................................................................................
33 9. CONFRONTO FRA INFINITESIMI
............................................................................................................
39 10. INFINITESIMI EQUIVALENTI
...............................................................................................................
40 11. PUNTI DI DISCONTINUITÀ PER UNA FUNZIONE.
.....................................................................................
43
CAP. 3 DERIVATE ................................................................................................................. 48
0. PROBLEMI CHE CONDUCONO AL CONCETTO DI DERIVATA
.........................................................................
48 1. DERIVATE
.......................................................................................................................................
50 2. SIGNIFICATO GEOMETRICO DELLA DERIVATA
........................................................................................
52 3. ESEMPI
...........................................................................................................................................
52 4. DERIVATE DI ALCUNE FUNZIONI ELEMENTARI
........................................................................................
53 5. DERIVATE DI UNA SOMMA, DI UN PRODOTTO E DI UN QUOZIENTE
.............................................................
54 6. TABELLA DELLE FORMULE E REGOLE DI DERIVAZIONE
............................................................................
56 7. DERIVAZIONE DI FUNZIONI COMPOSTE
..................................................................................................
58 8. MASSIMI E MINIMI ASSOLUTI E RELATIVI
..............................................................................................
59 9. MASSIMI E MINIMI DELLE FUNZIONI DERIVABILI
.....................................................................................
60 10. CRITERIO PER L'ESISTENZA DI ESTREMI RELATIVI
.................................................................................
61 11. DERIVATE DI ORDINE N
...................................................................................................................
62 12. STUDIO DEL MASSIMO E DEL MINIMO DELLE FUNZIONI UTILIZZANDO ANCHE LE DERIVATE D'ORDINE SUPERIORE AL PRIMO
............................................................................................................................................
62 13. MASSIMI E MINIMI ASSOLUTI
............................................................................................................
64 14. CONCAVITÀ, CONVESSITÀ. PUNTI DI FLESSO
.......................................................................................
65 15. STUDIO DI UNA FUNZIONE
................................................................................................................
66
CAP. 4 I TEOREMI DI ROLLE, LAGRANGE E CAUCHY. I TEOREMI DI DE L'HOSPITAL ................................................................................................................................... 76
1. IL TEOREMA DI ROLLE
......................................................................................................................
76 2. IL TEOREMA DI LAGRANGE O DEL VALOR MEDIO
...................................................................................
77 3. IL TEOREMA DI CAUCHY O DEGLI INCREMENTI FINITI
..............................................................................
79 4. I TEOREMI DI DE L'HOSPITAL.
...........................................................................................................
80
- 135 -

CAP. 5 IL DIFFERENZIALE DI UNA FUNZIONE ........................................................... 83
0. DEFINIZIONE DI DIFFERENZIALE
..........................................................................................................
83 1. SIGNIFICATO GEOMETRICO DEL CONCETTO DI DIFFERENZIALE
...................................................................
83
CAP. 6 L’INTEGRALE INDEFINITO ................................................................................. 85
0. INTRODUZIONE
.................................................................................................................................
85 1. L’INTEGRALE INDEFINITO COME INVERSO DELLA DERIVATA
.....................................................................
85 2. INTEGRALI INDEFINITI IMMEDIATI
.......................................................................................................
87 3. INTEGRAZIONE PER SCOMPOSIZIONE
.....................................................................................................
90 4. INTEGRAZIONE PER CAMBIAMENTO DI VARIABILE (O PER SOSTITUZIONE)
....................................................
92 5. INTEGRAZIONE PER PARTI
..................................................................................................................
94 6. INTEGRALI SEMPLICI CONTENENTI UN TRINOMIO DI SECONDO GRADO
.........................................................
95 7. INTEGRAZIONE DELLE FUNZIONI RAZIONALI
...........................................................................................
96
CAP. 7 L’INTEGRALE DEFINITO ..................................................................................... 98
0. INTRODUZIONE
.................................................................................................................................
98 1. L’AREA DI UN TRAPEZOIDE
................................................................................................................
99 2. DEFINIZIONE DI INTEGRALE DEFINITO
.................................................................................................
101 3. DEFINIZIONE PIÙ GENERALE DI INTEGRALE DEFINITO
...........................................................................
101 4. ALCUNE PROPRIETÀ DELL’INTEGRALE DEFINITO
...................................................................................
103 5. RAPPORTO FRA INTEGRALE DEFINITO E QUELLO INDEFINITO DI UNA FUNZIONE
.........................................
104 6. ALCUNE APPLICAZIONI DELL’INTEGRALE DEFINITO
...............................................................................
106 7. CALCOLO DEI VOLUMI DEI SOLIDI DI ROTAZIONE
..................................................................................
107 8. MISURA DI UN ARCO DI CURVA PIANA
...............................................................................................
111
APPENDICE ................................................................................................................................... 112
A1) ELENCO DEI SIMBOLI PIÙ IMPORTANTI
.............................................................................................
112 A2) PROPRIETÀ DELLE POTENZE E ALCUNE FORMULE ALGEBRICHE PIÙ IMPORTANTI
......................................
113 A3) I SISTEMI DI EQUAZIONI DI PRIMO GRADO
........................................................................................
114 A4) DEFINIZIONE E PROPRIETÀ DEI RADICALI
.........................................................................................
118 A5) FORMULA RISOLUTIVA DELL'EQUAZIONE ALGEBRICA DI SECONDO GRADO E FATTORIZZAZIONE DEL TRINOMIO DI 2°
...............................................................................................................................................
119 A6) FORMULE PIÙ IMPORTANTI DI TRIGONOMETRIA
.................................................................................
120 A7) FORMULE RIGUARDANTI LA RETTA E ALCUNE CONICHE IN UN PIANO CARTESIANO
...................................
122 A8) DIMOSTRAZIONE DELLA FORMULA DELLA DISTANZA PUNTO-RETTA
......................................................
126 A9) DIMOSTRAZIONE DELL'EQUAZIONE CARTESIANA DI UNA RETTA
............................................................
128 A10) SCHEMA RIASSUNTIVO DELLO STUDIO DI UNA FUNZIONE REALE DI VARIABILE REALE
............................
130
INDICE GENERALE .................................................................................................................... 135
- 136 -





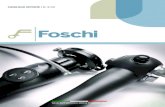


![Piano dell’ Offerta Formativa€¦ · Scuola Sec.1°gr ad indirizzo musicale. “Ferrajolo-Capasso” %281%29Parte%20Generale%20POF%202013-14%5B1%5D[1].doc4 2 PARTE GENERALE](https://static.fdocumenti.com/doc/165x107/6004c2e9fe2d994ed95e1b71/piano-della-offerta-formativa-scuola-sec1gr-ad-indirizzo-musicale-aoeferrajolo-capassoa.jpg)