APPUNTI DI RELATIVITA SPECIALE` - Unofficial department of ... · Capitolo 2 FORMULAZIONE DELLA...
102
APPUNTI DI RELATIVIT ` A SPECIALE Francesco Haardt 21 giugno 2010
Transcript of APPUNTI DI RELATIVITA SPECIALE` - Unofficial department of ... · Capitolo 2 FORMULAZIONE DELLA...

APPUNTI DI RELATIVITA SPECIALE
Francesco Haardt
21 giugno 2010

Indice
1 ORIGINI CONCETTUALI 51.1 Induzione magnetica . . . . . . . . . . . . . . . . . . . . . . . 51.2 L’esperienza di Michelson & Morley . . . . . . . . . . . . . . . 6
2 FORMULAZIONE DELLA RELATIVITA SPECIALE 92.1 Princıpi e osservatori inerziali . . . . . . . . . . . . . . . . . . 92.2 Diagrammi spazio-tempo . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Invarianza dell’intervallo . . . . . . . . . . . . . . . . . 142.2.2 Iperboli invarianti . . . . . . . . . . . . . . . . . . . . . 15
2.3 Dilatazione del tempo . . . . . . . . . . . . . . . . . . . . . . 162.4 Contrazione delle distanze . . . . . . . . . . . . . . . . . . . . 192.5 Trasformate di Lorentz . . . . . . . . . . . . . . . . . . . . . . 212.6 Composizione delle velocita . . . . . . . . . . . . . . . . . . . 23
2.6.1 Aberrazione della luce . . . . . . . . . . . . . . . . . . 242.6.2 Effetto Doppler . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Trasformazione dell’accelerazione . . . . . . . . . . . . . . . . 272.7.1 MCRF . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.7.2 Particella uniformemente accelerata . . . . . . . . . . . 28
2.8 I (finti) paradossi della Relativita . . . . . . . . . . . . . . . . 292.8.1 Il paradosso dei gemelli . . . . . . . . . . . . . . . . . . 292.8.2 Il paradosso del garage . . . . . . . . . . . . . . . . . . 32
2.9 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3 MECCANICA RELATIVISTICA 343.1 Equazione della meccanica . . . . . . . . . . . . . . . . . . . . 343.2 Quantita relativistiche . . . . . . . . . . . . . . . . . . . . . . 35
3.2.1 Momento lineare . . . . . . . . . . . . . . . . . . . . . 353.2.2 Momento angolare . . . . . . . . . . . . . . . . . . . . 35
2

INDICE 3
3.2.3 Energia cinetica . . . . . . . . . . . . . . . . . . . . . . 363.2.4 Energia totale . . . . . . . . . . . . . . . . . . . . . . . 363.2.5 Relazione fra momento ed energia . . . . . . . . . . . . 37
3.3 Trasformazioni di Lorentz . . . . . . . . . . . . . . . . . . . . 383.3.1 Momento . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.2 Forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.4 Esempio: carica in un campo elettromagnetico . . . . . . . . . 403.4.1 Campo elettrico costante ed uniforme . . . . . . . . . . 403.4.2 Campo magnetico costante ed uniforme . . . . . . . . . 41
3.5 Esempio: particella in un potenziale centrale . . . . . . . . . . 43
4 ALGEBRA VETTORIALE 464.1 Quadrivettori . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.1.1 Basi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.1.2 Trasformazioni inverse . . . . . . . . . . . . . . . . . . 48
4.2 4-velocita e 4-momento . . . . . . . . . . . . . . . . . . . . . . 494.2.1 4-velocita . . . . . . . . . . . . . . . . . . . . . . . . . 494.2.2 4-momento . . . . . . . . . . . . . . . . . . . . . . . . 504.2.3 Conservazione del 4-momento . . . . . . . . . . . . . . 51
4.3 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . 534.4 4-velocita e 4-accelerazione come differenziali . . . . . . . . . . 544.5 Energia e momento . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5.1 Fotoni . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.6 Esempio: scattering Compton . . . . . . . . . . . . . . . . . . 574.7 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5 ALGEBRA TENSORIALE 635.1 Tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.1.1 Definizione e tensore metrico . . . . . . . . . . . . . . . 635.1.2 1-forme . . . . . . . . . . . . . . . . . . . . . . . . . . 645.1.3 Derivata covariante . . . . . . . . . . . . . . . . . . . . 67
5.2 Tensori(
0
2
)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.2.1 Generalita . . . . . . . . . . . . . . . . . . . . . . . . . 695.2.2 Ruolo del tensore metrico . . . . . . . . . . . . . . . . 71
5.3 Tensori(
MN
)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.4 Differenziazione di tensori . . . . . . . . . . . . . . . . . . . . 755.5 Esempio: il tensore energia–momento . . . . . . . . . . . . . . 765.6 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81

4 INDICE
6 ELETTRODINAMICA RELATIVISTICA 836.1 Equazioni di Maxwell . . . . . . . . . . . . . . . . . . . . . . . 83
6.1.1 Conservazione della carica elettrica . . . . . . . . . . . 836.1.2 Equazione delle onde . . . . . . . . . . . . . . . . . . . 856.1.3 Tensore elettromagnetico . . . . . . . . . . . . . . . . . 866.1.4 Equazioni di Maxwell in forma tensoriale . . . . . . . . 87
6.2 Trasformazioni dei campi . . . . . . . . . . . . . . . . . . . . . 896.3 Campi da cariche in moto uniforme . . . . . . . . . . . . . . . 916.4 Elettrodinamica covariante . . . . . . . . . . . . . . . . . . . . 94
6.4.1 La 4-forza di Lorentz . . . . . . . . . . . . . . . . . . . 956.5 Radiazione da cariche relativistiche . . . . . . . . . . . . . . . 96
6.5.1 Potenza totale . . . . . . . . . . . . . . . . . . . . . . . 966.5.2 Distribuzione angolare della radiazione emessa . . . . . 97
6.6 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101

Capitolo 1
ORIGINI CONCETTUALI
1.1 Induzione magnetica
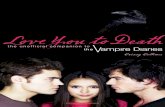
Un problema chiaro nella interpretazione dei fenomeni elettromagnetici siriscontra nell’interpretazione fisica dell’induzione magnetica. Consideriamoinfatti un magnete ed un conduttore in moto relativo (figura 1.1). Il fenomenofisico (induzione) non dipende dal sistema di riferimento, ma osserviamo chela descrizione di quello che accade al conduttore e differente, a seconda checi si trovi in un sistema solidale con esso, oppure solidale con il magnete.Infatti:
• SISTEMA DI RIFERIMENTO DEL MAGNETE:campo B =const, e campo E = 0. Le cariche sul conduttore chesi muove sono soggette alla forza di Lorentz F = e(v × B), che noncompie lavoro.
• SISTEMA DI RIFERIMENTO DEL CONDUTTORE:si crea un campo indotto E′, e le cariche sul conduttore sono soggettea F′ = eE′ che compie lavoro.
Il problema e riconciliare queste due interpretazioni del medesimo fenomenofisico. Einstein da questo capı che le trasformazioni Galileiane non eranoconciliabili con le eqz. di Maxwell. Alla radice del problema sta il concettostesso di “tempo”, ed in particolare, di “misura del tempo”.
5

6 CAPITOLO 1. ORIGINI CONCETTUALI
S
v
N
S
=0
=const
v x B)=e(
EBF
E’F’ indotto
=e
E’
Sistema del conduttore
Sistema del magnete
v
N
Figura 1.1: Induzione magnetica vista nel sistema di riferimento del magnete ed in quellodel conduttore.
1.2 L’esperienza di Michelson & Morley
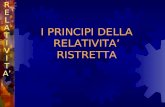
Un fenomeno empirico fondamentale nella costruzione di tutta la SR e l’inva-rianza della velocita della luce rispetto a sistemi di riferimento inerziali (chedefiniremo dopo). Nell’esperienza di Michelson & Morley (1887) un fascio diluce emesso da una sorgente E viene fatto incidere su uno specchio semiri-flettente M0 con un angolo di 45 gradi, come mostrato in figura 1.2. I duefasci “1 e “2 vengono quindi ricomposti sul cannocchiale R, dove si osservanole frange d’interferenza. L’intero apparato e’ in moto con velocita v rispettoall’etere, un ipotetico mezzo che sostiene il moto delle onde elettromagneti-che (EM). Le onde EM si muovono a velocita c rispetto all’etere. La velocita

1.2. L’ESPERIENZA DI MICHELSON & MORLEY 7
nel sistema del laboratorio del fascio “1” e c+ v da M0 a M1, mentre e c− vda M1 a M0. Il tempo per percorrere due volte il cammino L1 e quindi
T1 =L1
c+ v+
L1
c− v=
2L1
c
(
1
1− β2
)
, (1.1)
dove β = v/c. Per il fascio “2” abbiamo invece:
cT2 = 2√
L22 + (vT2/2)2, (1.2)
da cui
T2 =2L2
c
1√
1− β2. (1.3)
R
L2
L1
v
M0
M1
M2
1 2
2
1E
Figura 1.2: Schema dell’esperienza di Michelson & Morley.
La differenza di cammino ottico fra i due fasci produce quindi un ∆T =T2 − T1 dato da:
∆T =2
c
(
L2√
1− β2− L1
1− β2
)
(1.4)

8 CAPITOLO 1. ORIGINI CONCETTUALI
Se ora si ruota di 90 gradi l’interferometro, si ha
∆T ′ =2
c
(
L2
1− β2− L1√
1− β2
)
. (1.5)
La rotazione quindi produrrebbe uno spostamento delle frange d’interferenza
∆n = ν(∆T ′ −∆T ) ≃ L1 + L2
λβ2 ≃ 0.4, (1.6)
usando λ = 5.5× 10−7 m, β ≃ 10−4, L1 = L2 = 11 m.
Nell’esperienza di Michelson & Morley non si osservo alcun spostamentodelle frange. Se ne concluse che la velocita della luce era la stessa in tutte lepossibili direzioni di moto rispetto all’etere.

Capitolo 2
FORMULAZIONE DELLARELATIVITA SPECIALE
2.1 Princıpi e osservatori inerziali
La teoria della relativita speciale (RS) di Einstein e del 1905. La descrizionegeometrica della spazio-tempo ad opera di Minkowski e del 1908. I principisu cui si fonda la RS sono due:
1. Il Principio di Relativita Galileiano, cioe: nessun esperimento puoprovare l’esistenza di una velocita assoluta.
2. La velocita della luce e la stessa in ogni sistema di riferimento.
La RS tratta la fisica in sistemi di riferimento detti inerziali. La RS includeanche le forze, ad esclusione della forza di Gravita, per la quale e necessariala Teoria Generale della Relativita.
Un Sistema di Riferimento Inerziale (brevemente, sistema inerziale) edefinito come segue:
1. La distanza fra due punti x1 e x2 e indipendente dal tempo.
2. Gli orologi sono sincroni e “corrono” allo stesso rate.
3. La geometria e, ad ogni tempo, Euclidea.
9

10 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
Definiamo come unita di tempo la lunghezza. Un intervallo di 1 metro ditempo e il tempo in cui la luce compie una distanza di 1 metro. Con questeunita la velocita e quindi adimensionale, e la velocita della luce vale
c =1 m
1 m= 1. (2.1)
accelerata
O
v=0
v=1
v=1
v>1
v<1
universo a t costante
t [m]
x [m]
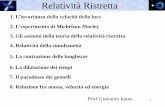
Figura 2.1: Linee di Universo nello spazio-tempo.
2.2 Diagrammi spazio-tempo
Le coordinate t, x, y, z sono quattro coordinate di uno spazio 4-D detto spazio-tempo. Per convenzione (t, x, y, z) si indicano come (x0, x1, x2, x3) ≡ xα, conα = 0, 1, 2, 3. Indici romani (es., i, j, k) indicano invece solo le tre coordinatespaziali. Un punto nello spazio-tempo 4-D viene detto evento. La traiettoriadi un punto materiale (particella) nello spazio tempo viene detta linea di
Universo (abbreviato in WL, dall’inglese world line). In figura 2.1 e mostrato

2.2. DIAGRAMMI SPAZIO-TEMPO 11
lo spazio-tempo di un osservatore inerziale O [dove nel disegno l’asse x deveconsiderarsi rappresentare lo spazio (xyz)] e alcune WL esemplificative.
Consideriamo due osservatori inerziali O e O′, dove O′ si muove, rispettoa O, con velocita v. Senza perdere in generalita, consideriamo la velocitav = v orientata lungo l’asse x positiva (come mostrato in figura 2.2).
O
y’
x’O’
vz’
y
z
x
Figura 2.2: Osservatori in moto.
Vogliamo calcolare come “vede” O lo spazio-tempo di O′. Iniziamo dall’asset′. L’asse t′ e il luogo con x′ = y′ = z′ = 0, cioe, per O, non e altro che laWL di O′ (si veda figura 2.3). Si noti che tanφ = v.

12 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
φ
t
x
t’
Figura 2.3: Asse t′ vista daO. La linea tratteggiata e’ inclinata di 45 gradi, e rappresentaquindi la WL di un fotone.
Consideriamo ora l’esperimento eseguito da O′ della riflessione di un fo-tone. Il fotone viene emesso al tempo t′ = −a da O′ in direzione x′ positiva.Incontra uno specchio al tempo t′ = 0 (e quindi posizionato in x′ = +a), eviene riflesso indietro (e quindi raggiungeO′ in x′ = 0 al tempo t′ = +a). L’e-sperimento, nello spazio-tempo di O′, appare come mostrato a sinistra dellafigura 2.4. La riflessione viene vista da O come mostrato invece a destra infigura. Il fotone viene messo in E, da cui parte una WL a 45 gradi, e ricevutoin R, a cui arriva una WL, anchessa inclinata di 45 gradi ma in direzioneopposta. L’intersezione di queste 2 WL, punto P, e evidentemente l’eventoriflessione. E chiaro quindi che la retta congiungente P e l’origine deve esserel’asse t′ = 0 su cui avviene la riflessione, a distanza +a dall’origine. Cioel’asse x′. Si noti che l’angolo fra gli assi t e t′ e uguale all’angolo fra gli assix e x′. Il punto fondamentale e considerare che le WL di fotoni sono sem-pre rette inclinate di 45 gradi, indipendentemente dal sistema di riferimento.Questo per via dell’invarianza della velocita della luce discussa preceden-temente. Si noti come l’evento P sia simultaneo, per O′, al suo passaggionell’origine al tempo t′ = t = 0, mentre lo stesso evento accada dopo per

2.2. DIAGRAMMI SPAZIO-TEMPO 13
l’osservatore O. Il concetto stesso di simultaneita perde di significato in RS.
x
Riflessione in O’ Vista da O
φ
φR
P
E
t’
x’
t’
R
P
E
x’
t
Figura 2.4: Riflessione di fotoni in O′ come viene vista da O.
Ovviamente lo spazio tempo di O viene visto da O′ semplicemente con-siderando il caso precedente, con v rimpiazzata da −v (si veda figura 2.5).
x
φ
φt’
x’
x
t
φ
φt’
x’
t
Figura 2.5: Moto relativo di O e O′. O′ si muove lungo le x positive.
Non e’ difficile mostrare che gli assi y′ e z′ (cioe gli assi spaziali perpendi-colari al moto) rimangono invariati per O. Ci resta ora solo da trovare comeviene trasformata la scala degli assi t′ e x′ in O.

14 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
2.2.1 Invarianza dell’intervallo
Siano E e P due eventi lungo un raggio di luce, separati da ∆xα. Perl’invarianza di c = 1 abbiamo che
(∆x)2 + (∆y)2 + (∆z)2 − (∆t)2 = 0
(∆x′)2 + (∆y′)2 + (∆z′)2 − (∆t′)2 = 0.(2.2)
Definiamo intervallo fra due eventi la quantita
∆s2 ≡ −∆t2 +∆x2 +∆y2 +∆z2, (2.3)
dove per non appesantire la notazione, abbiamo omesso le parentesi tonde.Sappiamo quindi che ∆s2 = 0 → ∆s′2=0, cioe per fotoni, l’intervallo e uninvariante.
Dimostriamo ora che questo vale per eventi qualsiasi, cioe che
∆s2 = ∆s′2 (2.4)
Consideriamo un intervallo infinitesimo ds2. Ora, data la trasformazionefra i due sistemi, ds2 e ds′2 devono essere infinitesimi dello stesso ordine,cioe ds2 = a ds′2, dove la costante di proporzionalita puo solo dipendere dalmodulo della velocite relativa ai due sistemi v, non dalle sua direzione (perl’isotropia dello spazio), ne tanto meno dalle coordinate dei due eventi (perl’omogeneita dello spazio).
Consideriamo ora tre sistemi di riferimento, K, K1 eK2. Sia v1 la velocitarelativa fra K e K1, v2 quella fra K e K2, e v12 quella fra K1 e K2. Da
ds2 = a(v1)ds21
ds2 = a(v2)ds22
ds21 = a(v12)ds22
ricaviamoa(v2)
a(v1)= a(v12) (2.5)
Ora, v12 dipende da v1, v2, e dall’angolo fra le due velocita, mentre, comedetto prima, v1 e v2 non dipendono da alcun angolo, ma solo dal valoreassoluto delle due velocita. Quindi l’eq. 2.5 puo solo avere soluzione se a(v) =costante = 1, cioe ds2 = ds′2.

2.2. DIAGRAMMI SPAZIO-TEMPO 15
• Se ∆s2 > 0, l’intervallo si dice di tipo spaziale.
• Se ∆s2 < 0, l’intervallo si dice di tipo temporale.
• Se ∆s2 = 0, l’intervallo si dice di tipo luce o nullo.
Dato un evento, possiamo definire il suo cono di luce (figura 2.6), cioe illuogo degli eventi che possono essere stati in contatto causale con l’eventoconsiderato (passato assoluto) e di quelli che potranno esserlo nel futuro(futuro assoluto). La superficie del cono di luce forma un angolo di 45o con ilpiano del presente definito dalla condizione t = 0 (qui esemplificato, in 2-D,dal piano xy). Il complementare del cono di luce nello spazio-tempo descrivel’altrove assoluto.
E
altrove
altrove
passato assoluto
t=0
futuro assoluto
t
yx
Figura 2.6: Cono di luce dell’evento E. Lo spazio 3-D e qui rappresentato dal piano xy.
2.2.2 Iperboli invarianti
Cerchiamo ora la scala degli assi diO′ nello spazio-tempo diO. Si considerinole due iperboli −t2 + x2 = +1, e −t2 + x2 = −1 in figura 2.7 a sinistra. Laprima, in verde, descrive ovviamente un luogo di intervalli spaziali, mentre la

16 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
seconda, in rosso, temporali. Le due iperboli sono, per quanto visto prima,invarianti relativistiche, cioe descrivono intervalli uguali a +1 e −1 anchein O′. Esse sono, asintoticamente, tangenti alle bisettrici, cioe a due raggidi luce. Nella figura a destra, le coordinate (t, x) dell’evento A per O sono(1, 0), mentre l’evento E ha coordinate (0, 1). Nel sistema O′, per l’invarianzadelle iperboli, sono l’evento B e l’evento F ad avere coordinate (t′, x′) ugualia (1, 0) e (0, 1), rispettivamente. Notiamo che la retta tangente all’iperbolein B e’ parallela all’asse x′, e rappresenta il luogo di simultaneita a B perO′. Per O, invece, il luogo di simultaneita a B sara una retta passante perB stesso e parallela all’asse x.
t’
F
E
B
Ax’
x
t’t
x
t
x’
Figura 2.7: Le iperboli verde e rossa marcano intervalli ds2 = +1 e ds2 = −1rispettivamente.
2.3 Dilatazione del tempo
Consideriamo l’evento B in figura 2.7, che in O′ ha coordinate (t′, x′) = (1, 0).Le coordinate di B in O saranno date dal sistema seguente:
−t2 + x2 = −1
t = x/v,(2.6)

2.3. DILATAZIONE DEL TEMPO 17
da cui
t =1√
1− v2> 1. (2.7)
Il fattore 1/√1− v2 ≡ γ e detto fattore di Lorentz. L’eq. 2.7 ci dice cioe
che un intervallo di tempo ∆t misurato in O, equivale ad un intervallo γ∆t′
misurato in O′, cioe e piu lungo. O vede le lancette degli orologi di O′
muoversi piu lentamente di quelle dei propri orologi.
E
t
x
x’
t’
BC
F
D
A
Figura 2.8: Dilatazione del tempo.
Chiedamoci: O′ vede quindi gli orologi di O muoversi piu velocemente? Se si,questo sembra produrre un paradosso, poiche sarebbe in contraddizione conprincipio di relativita Galileiana. Il paradosso e solo apparente. Possiamodire che:
• Tutti gli osservatori sono d’accordo sul risultato di dati eventi. Dueorologi affiancati vengono letti nello stesso modo dai due osservatori.
• Il problema e il “rate” al quale le lancette corrono. Per potere fare unconfronto, occorre leggere due orologi in due istanti diversi. Essendo

18 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
in moto relativo, i due orologi saranno affiancati solo in uno dei dueistanti diversi.
Come misura l’intervallo di tempo O? Consideriamo la figura 2.8. O deveconfrontare la lettura di un singolo orologio di O′ (O′
clock che si muove lungouna WL da A a B) con due orologi diversi. Il primo, nell’ordine, “legge”O′
clock in A. Il secondo, che si trova in F al tempo t = 0, “legge” O′clock in B.
La WL del primo orologio di O e l’asse t, mentre la WL del secondo orologiodi O e’ la retta passante per F e B.
• O dice: il mio primo orologio e O′clock in A leggono entrambi t = t′ = 0.
Il mio secondo orologio in B legge t = γ > 1, mentre O′clock legge t
′ = 1.Quindi O′
clock rallenta.
• O′ dice: sono d’accordo sulla lettura degli orologi. Ma per potere direche il mio O′
clock rallenta, devi essere sicuro che i tuoi due orologi sianosincronizzati, altrimenti il fatto che O′
clock e il tuo secondo orologiosegnino, in B, due tempi diversi non e significativo.
• O dice: sono sincronizzati. Infatti in A e F segnano lo stesso tempot = 0.
• O′ dice: non lo sono per me. L’evento simultaneo a B, per me, e E,non C. Le coordinata temporale di E e t = 1/γ, che e prima di t = γ,segnato dal secondo orologio in B. Quindi i tuoi due orologi non sonosincronizzati. Inoltre, il tuo primo orologio, in A segna t = 0, mentrein E segna intervallo t = 1/γ, mentre la lettura del mio da A a B(simultaneo ad E) va da t′ = 0 a t′ = 1. E il tuo primo orologio cherallenta.
La relativite Galileiana non e violata. Il “trucco” sta nel fatto che i due os-servatori fanno misure di intervalli di tempo in due modi diversi. O, dovendousare due orologi, deve necessariamente utilizzare il concetto di simultaneita
degli eventi, concetto che, come visto, dipende dal sistema di riferimento.Per O, A e F sono simultanei (entrambi i suoi orologi segnano t = 0), manon per O′ (non sono simultanei), e quindi, se i due orologi di O segnanolo stesso tempo t = 0 in due eventi non simultanei, significa che non sonosincronizzati.
Due note:

2.4. CONTRAZIONE DELLE DISTANZE 19
• O vede tutto l’Universo di O′ rallentato. Non e un effetto di mecca-nica degli orologi, tutti i processi gli appaiono piu lenti, anche quellibiologici.
• Non sono illusioni ottiche dovute alla “lettura” degli orologi.
Tempo proprio
Definiamo tempo proprio τ il tempo misurato da un singolo orologio che passaattraverso due eventi. Cioe, nel caso di prima, ∆t′. Per un orologio a riposoin O′ si ha che ∆x′2 = ∆y′2 = ∆z′2 = 0, per cui ∆s2 = −∆t′2 = −∆τ 2.Notiamo che il tempo proprio per O e invece ∆τ = ∆t/γ.
2.4 Contrazione delle distanze
La contrazione delle distanze e l’effetto in qualche modo “speculare” delladilatazione del tempo. Si consideri un regolo di lunghezza ℓ a riposo in O′,e posizionato lungo l’asse x′, cioe lungo la direzione del moto relativo di O′
rispetto ad O. Quale e la lunghezza del regolo per O? Consideriamo lafigura 2.9.
Il regolo lungo ℓ in O′ si trova, al tempo t′ = 0 definito fra gli eventiA e C. L’asse t′ e ovviamente la WL della coda del regolo, mentre la rettaparallela a t′ e passante per B e C e la WL della punta del regolo. Per O, alsuo tempo t = 0, il regolo e lungo AB che indichiamo come xB.

20 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
punta
A
t’
x’
x
t
C
B
coda
Figura 2.9: Contrazione delle distanze.
Se indichiamo le coordinate in O dell’evento C come (tC, xC), per invarianzadell’intervallo abbiamo
−t2C + x2C = ℓ2.
Inoltre, da tC = vxC, otteniamo
xC = γ ℓ
tC = vγ ℓ(2.8)
Osservando chexC − xB
tC − tB= v,
da tB = 0, otteniamo
xB = xC − vtC.
Sostituendo i valori per xC e tC di eq. 2.8, finalmente si ha
xB = ℓ γ(1− v2) =ℓ
γ. (2.9)

2.5. TRASFORMATE DI LORENTZ 21
Il regolo appare quindi piu corto in O. In questo caso l’assimetria dei duesistemi e palese: in O′ il regolo e a riposo, mentre si muove rispetto ad O.Nel caso della dilatazione del tempo, l’assimetria e piu sottile, e nasce dalmodo di misurare gli intervalli di tempo.
E infine semplice mostrare che perpendicolarmente al moto non si haalcuna contrazione delle distanze.
2.5 Trasformate di Lorentz
Diamo ora una trattazione piu formale di quanto visto fino ad ora. Consi-deriamo sempre un boost di O′ in direzione x positiva, con velocita v. Ingenerale, avremo che
t′ = αt+ βx
x′ = ηt+ σx
y′ = y
z′ = z.
(2.10)
Se osserviamo la parte destra di figura 2.4, vediamo che l’asse t′ (luogo deglieventi x′ = 0) ha eq. t = x/v, da cui ricaviamo η/σ = −v. Analogamente,l’asse x′ (luogo degli eventi t′ = 0) ha eq. t = vx, da cui β/α = −v. Quindi
t′ = α(t− vx)
x′ = σ(x− vt)
y′ = y
z′ = z.
(2.11)
Sempre osservando figura 2.4, Consideriamo gli eventi R e P che sono connessida un raggio di luce. Se in O le coordinate (t, x) di R sono (tR, xR), quelledi P saranno (tP , xP ) = (xR, tR). In O′ abbiamo invece che R ha coordinate(t′, x′) = (α(tR−vxR), 0), mentre P (t′, x′) = (0, σ(xP−vtP )), usando eq. 2.11.Poiche i due eventi sono connessi da un raggio di luce, anche in O′ l’intervallodeve essere nullo:
∆s2 = −[α(tR − vxR)]2 + [σ(xP − vtP )]
2 = 0.

22 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
Da tR = xP e xR = tP otteniamo α = σ. Abbiamo quindi
t′ = α(t− vx)
x′ = α(x− vt)
y′ = y
z′ = z.
(2.12)
da cui, usando ∆s2 = −∆t2 +∆x2 = −∆t′2 +∆x′2, otteniamo
−α2(t− vx)2 + α2(x− vt)2 = −t2 + x2 =⇒ α2 =1
1− v2≡ γ2.
Delle due soluzioni α = ±γ scegliamo α = +γ, in modo che v = 0 dial’indentita, e non l’inversione delle coordinate. Abbiamo quindi
t′ = γt− γvx
x′ = −γvt+ γx
y′ = y
z′ = z,
(2.13)
che rappresenta la trasformazione di Lorentz, cioe la relazione fra le coor-dinate di O′ e O, dove O′ si muove con velocita v lungo le x positive. Eevidente che la relazione che esprime le coordinate di O come combinazionelineare delle coordinate di O′ si ottiene semplicemente cambiando v in −v,cioe
t = γt′ + γvx′
x = γvt′ + γx′
y = y′
z = z′,
(2.14)
Un modo piu compatto di scrivere le relazioni 2.13 e il seguente. Per ogniα′ = 0, 1, 2, 3 scriviamo
xα′
=3∑
β=0
Λα′
β xβ ≡ Λα′
β xβ, (2.15)
dove nella seconda uguaglianza abbiamo usato la convezione di Einstein, cioeogni volta che compare un indice ripetuto, una volta in alto ed una in basso

2.6. COMPOSIZIONE DELLE VELOCITA 23
(in questo caso β), si conviene che esiste una sommatoria su quell’indice.Cioe nel nostro caso β e un indice muto. Da 2.13, i coefficienti non nulli ineq. 2.15 sono
Λ0′
0 = γ Λ0′
1 = −γvΛ1′
0 = −γv Λ1′
1 = γΛ2′
2 = 1 Λ3′
3 = 1.(2.16)
In forma matriciale, possiamo scrivere la trasformazione come
Λα′
β =
γ −γv 0 0−γv γ 0 00 0 1 00 0 0 1
(2.17)
2.6 Composizione delle velocita
Consideriamo ora una particella che abbia velocita w′ rispetto all’osservatoreO′, il quale si muove rispetto ad O con velocita v lungo l’asse x positivo.Assumiamo, per adesso, che w′ = w′ sia parallela al moto relativo fra i dueosservatori, e nella medesima direzione. Ci proponiamo di trovare la velocitaw della particella rispetto ad O.
Differenziando le prime 2 espressioni in eq. 2.14 si ha
dt = γdt′ + γvdx′
dx = γvdt′ + γdx′,(2.18)
da cui
w =dx
dt=
γ(vdt′ + dx′)
γ(dt′ + vdx′)=
v + w′
1 + vw′, (2.19)
dove w′ = dx′/dt′.
Notiamo che:
• w = 1 =⇒ (1− v)(1− w′) = 0, cioe v = 1 e/o w′ = 1.
• w < 1 =⇒ v, w′ < 1.
• w′ = 1 =⇒ w = 1 ∀ v (invarianza della velocita della luce).

24 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
• v, w′ ≪ 1 =⇒ w = v + w′ (composizione Galileiana).
Se w′ non e parallela a v, l’eq. 2.19 e valida per la componente di w lungox, cioe
wx =v + w′
x
1 + vw′x
. (2.20)
Inoltre, da dy = dy′, wy = dy/dt, w′y = dy′/dt′, e dalla prima di eq. 2.18,
otteniamo
wy =dy
dt=
dy′
γ(dt′ + vdx′)=
w′y
γ(1 + vw′x), (2.21)
e analogamente
wz =w′
z
γ(1 + vw′x). (2.22)
Infine, per una v fra i due osservatori qualsiasi, cioe non necessariamentelungo x′, possiamo dividere w′ nelle componenti parallela w′
‖ e perpendicolarew′
⊥ a v, ottenendo
w‖ =v + w′
‖
1 + vw′‖
(2.23a)
w⊥ =w′
⊥
γ(1 + vw′‖). (2.23b)
2.6.1 Aberrazione della luce
Un’applicazione immediata delle formule sulla composizione delle velolcitariguarda l’aberrazione della luce. Possiamo identificare il piano definito daw′ e da v con il piano x′y′ di O′, dove la direzione e verso di v definisconol’asse x′ (figura 2.10). Da
w′⊥ = w′ sin θ′
w′‖ = w′ cos θ′,
(2.24)
usando eq. 2.23a e 2.23b, abbiamo
w⊥
w‖= tan θ =
w′ sin θ′
γ(w′ cos θ′ + v). (2.25)

2.6. COMPOSIZIONE DELLE VELOCITA 25
x
w’
v
’θ
y’
O’ x’
y
O
Figura 2.10: Aberrazione della luce.
Se la particella emessa in O′ con angolo θ′ e un fotone (w = w′ = 1), pos-siamo, da eq. 2.25, scrivere una relazione fra l’angolo di emissione nei duesistemi:
tan θ =sin θ′
γ(cos θ′ + v), (2.26)
che puo anche essere scritta come
cos θ =v + cos θ′
1 + v cos θ′(2.27a)
sin θ =sin θ′
γ(1 + v cos θ′). (2.27b)
Immaginiamo di avere una sorgente di radiazione isotropa in O′. Metadella radiazione e emessa con un angolo −π/2 < θ′ < π/2 (mentre il rima-nente 50% con π/2 < θ′ < 3/2π). Per O, usando eq. 2.27a e 2.27b, l’angolocorrispondente a θ′ = ±π/2 risulta essere
cos θ = v
sin θ = 1/γ.(2.28)
Se γ ≫ 1, abbiamo θ ∼ 1/γ. Cioe l’osservatore O vede meta della radiazione“inconata” entro un angolo ∼ 1/γ davanti alla particella emittente. L’effettosi chiama beaming (figura 2.11).

26 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
1/
OO’
γ
Figura 2.11: Beaming dei fotoni.
2.6.2 Effetto Doppler
Consideriamo una sorgente luminosa O′ in moto con velocita v che formaun angolo θ rispetto ad un osservatore all’infinito O (figura 2.12). Si notiche θ e l’angolo misurato nel sistema dell’osservatore, non in quello dellasorgente. Assumiamo che fra i punti 1 e 2 la sorgente compia un’oscillazione,cioe che ∆t′ = 2π/ω′, dove ∆t′ e il periodo dell’oscillazione, nel sistema O′
della sorgente. Per O si ha L = v∆t e, utilizzando le trasformate di Lorentz,∆t = γ∆t′ = γ(2π/ω′). Ora, O riceve due segnali emessi in 1 e 2 con unritardo dato da
∆tA = ∆t−D = (1− v cos θ)∆t, (2.29)
dove abbiamo usato D = v∆t cos θ. La frequenza osservata e quindi
ω =2π
∆tA=
2πω′
2πγ(1− v cos θ)=
ω′
γ(1− v cos θ). (2.30)
Rispetto alla formula classica, si ha il fattore γ a denominatore, dovutoalla trasformazione del tempo fra i due sistemi di riferimento. Notiamo checos θ > 0 =⇒ ω > ω′.

2.7. TRASFORMAZIONE DELL’ACCELERAZIONE 27
v
θ
1 2L
D
O
O’
Figura 2.12: Effetto Doppler.
La formula 2.30 e ibrida, in quanto non separa chiaramente quantitamisurate in O rispetto a O′. Puo comunque essere riscritta come
ω′ = ωγ(1− v cos θ), (2.31)
oppure, utilizzando eq. 2.27a,
ω = ω′γ(1 + v cos θ′). (2.32)
2.7 Trasformazione dell’accelerazione
Differenziando eq. 2.23a e 2.23b otteniamo
dw‖ =1
γ2(1 + vw′‖)
2dw′
‖, (2.33)
e
dw⊥ =1
γ(1 + vw′‖)
2
[
(1 + vw′‖)dw
′⊥ − vw′
⊥dw′‖
]
. (2.34)
Utilizzando ora la prima di eq. 2.18 si ha
a‖ ≡dw‖
dt=
1
γ3σ′3a′‖, (2.35)

28 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
e
a⊥ ≡ dw⊥
dt=
1
γ2σ′3(σ′a′⊥ − vw′
⊥a′‖), (2.36)
dove a′‖ ≡ dw′‖/dt
′, a′⊥ ≡ dw′⊥/dt
′, e σ′ ≡ (1 + vw′‖).
2.7.1 MCRF
Possiamo ora definire il cosiddetto MCRF (per Momentary Comoving RestFrame), cioe un sistema di riferimento rispetto al quale la particella sia, inogni istante, in quiete. L’MCRF sara diverso da istante a istante, ed e intale sistema che la definizione di accelerazione puo essere confrontata conl’analogo Newtoniano.
Nell’MCRF (che per noi e O′) abbiamo che w′⊥ = w′
‖ = 0 =⇒ σ′ = 1,e quindi eq. 2.35 e 2.36 danno le relazioni seguenti fra le accelerazioni nelMCRF della particella, e quelle nel sistema O dell’osservatore:
a′‖ = γ3 a‖ (2.37a)
a′⊥ = γ2 a⊥. (2.37b)
2.7.2 Particella uniformemente accelerata
Una particella si dice uniformemente accelerata se e soggetta ad un’accele-razione costante nel tempo nel suo MCRF. Vogliamo sapere quanto vale lavelocita v della particella dopo un tempo t, sapendo che v = 0 a t = 0, e lastrada che ha percorso.
Immaginiamo che il moto avvenga lungo l’asse x. Nel sistema dellaparticella a′ = a′‖ =costante. Sappiamo che (eq. 2.37a)
a′ = γ3a = γ3dv
dt
da cui
a′dt =1
(1− v2)3/2dv.
Integrando
a′t =v
(1− v2)1/2,

2.8. I (FINTI) PARADOSSI DELLA RELATIVITA 29
da cui
v(t) =a′t√
1 + a′2t2. (2.38)
Scrivendo v = dx/dt, La strada percorsa in un tempo t, se x = 0 a t = 0,sara data da
x(t) =
∫ t
0
dta′t√
1 + a′2t2=
1
a′
(√1 + a′2t2 − 1
)
. (2.39)
Notiamo infine come v(t) e x(t) nel limite non relativistico coincidano con leformule classiche v = at e x = at2/2.
Se, ad esempio, a′ = 10 m/s2, chiediamoci quanto tempo occorre allaparticella per arrivare ad avere una velocita v=0.999. Possiamo usare laformula per v(t) (eq. 2.38) esplicitando questa volta t:
t =1
a′v√
1− v2.
Scriviamo a′ in unita naturali: a′ = 10/c2 = 1.1 × 10−16 1/m, e quindiabbiamo t = 2× 1017 m che equivale a circa 22 anni.
Chiedamoci ora questi 22 anni a quanti anni del tempo proprio τ dellaparticella corrispondono. Da dτ = dt/γ, abbiamo
τ =
∫ t
0
dt
γ=
∫ t
0
dt√1− v2 =
∫ t
0
dt
√
1− a′2t2
1 + a′2t2=
1
a′sinh−1(a′t),
(2.40)che corrispondono a circa 3.6 anni.
2.8 I (finti) paradossi della Relativita
2.8.1 Il paradosso dei gemelli
Un astronauta parte per un viaggio lasciando il suo gemello sulla Terra.L’astronauta viaggia per un tempo τ = 7 anni del suo tempo a velocita v =0.96 rispetto alla Terra, poi inverte i motori e torna indietro alla medesimavelocita. Al suo ritorno sulla Terra, trovera il suo gemello piu giovane, conla stessa eta, o piu invecchiato?
Consideriamo il diagramma spazio tempo del viaggio in figura 2.13.

30 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
x’
B
P x
tt"
x"
t’
A
B1
B2
Figura 2.13: Diagramma spazio-tempo del paradosso dei gemelli.
Mentre per il gemello rimasto sulla Terra possiamo considerare un solo si-stema inerziale O, per il gemello viaggiatore occorre considerare un primosistema O′ uscente, ed un secondo sistema O′′ rientrante. La traiettoria deidue viaggi e rappresentata dalle freccie rosse.
Le coordinate dell’evento di partenza sono P →O
(0, 0), e anche P →O′
(0, 0).
L’evento B di inversione avra coordinate B →O′
(τ, 0) per il viaggiatore, mentre
B →O
(γτ, vγτ) nel sistema della Terra. A questo il viaggiatore inverte i
motori, e cambia sistema di riferimento, ponendosi in O′′. Le coordinatedell’evento di rientro R saranno R →
O′′
(τ, 0) per il sistema dell’astronave,

2.8. I (FINTI) PARADOSSI DELLA RELATIVITA 31
mentre per il sistema terra R →O
(2γτ, 0).
In definiva, per l’astronauta passa un tempo uguale a 2τ = 14 anni,mentre per il gemello rimasto sulla Terra passano 2γτ = 50 anni.
Notiamo che l’evento simultaneo a B sulla Terra nel sistema uscente el’evento B1, le cui coordinate nel sistema della Terra sono A →
O(τ/γ, 0), cioe
sono passati 2 anni. Come deve essere per il principio di relativita Galileia-no, l’astronauta vede il gemello sulla Terra invecchiare meno velocemente.Quando improvvisamente cambia sistema di riferimento, l’evento simultaneoa B sulla Terra diviene l’evento B2, la cui coordinata temporale (sulla Terra)e 48 anni. A questo punto l’astronauta “vede” il suo gemello istantaneamenteinvecchiare, e poi, durante il viaggio di ritorno che dura 7 anni, vede inveceche per il gemello sulla Terra ne passano solo 2 (da B2 ad A).
Ma cosa significa “vede il suo gemello istantaneamente invecchiare”? Ilpunto fondamentale e che per poter “vedere” il gemello sulla Terra, il viag-giatore deve registrare in qualche modo quello che accade sulla Terra mentrelui viaggia. Per fare questo puo far mandare altri viaggiatori dopo di luiche passano la Terra a velocita v e controllano l’eta del gemello. Analoga-mente puo mandare viaggiatori in rientro prima di lui che controllino l’etadel gemello terrestre. Il viaggiatore leggerebbe che, quando l’astronave haraggiunto il punto B, l’ultimo dei suoi colleghi uscenti ha registrato che sonopassati 2 anni sulla Terra, e rimarrebbe perplesso del leggere che invece ilprimo dei suoi colleghi in viaggio di rientro ha registrato un tempo di 48anni sulla Terra al momento dell’inversione dei motori. Qual’e l’errore? Ilsistema dei viaggiatori in uscita, smettendo di registrare l’eta del gemellosulla Terra una volta che l’astronave giunge la punto B, copre di fatto solo iltratto P-B1 dell’asse del tempo terrestre, cosı come il sistema dei viaggiatoriin rientro copre solo il tratto B2-A. Questi sistemi sono una cattiva scelta,non coprendo tutto lo spazio-tempo terrestre (il tratto B1-B2).
Notiamo infine che l’effetto e reale, non essendoci simmetria fra i duegemelli: la Terra e un unico sistema inerziale, mentre l’astronave e descrittada due sistemi inerziali diversi. In relativita non esistono paradossi.

32 CAPITOLO 2. FORMULAZIONE DELLA RELATIVITA SPECIALE
2.8.2 Il paradosso del garage
Immaginiamo che O′ guidi un autobus lungo 20 m a velocita v = 0.8, e che lovoglia posteggiare dentro un box lungo solo 15 m. Sulla porta del box si troval’amico O, a cui e stato detto di chiudere la porta quando tutto l’autobusfosse entrato nel garage.
Cerchiamo di descrivere la situazione. L’autobus e lungo ℓ′a = 20 mnel suo sistema di riferimento, quindi in quello di O′, mentre per O la sualunghezza sara ℓa = ℓ′a/γ = 12 m. Per lui non ci sono problemi a farlo starenel box che e lungo ℓb = 15 m e quindi a chiudere la porta, non fosse che ilbox, per O′, appare lungo solo ℓ′b = ℓb/γ = 9 m. Sembra quindi che in unsistema (quello solidale a box) la porta possa venire chiusa, mentre che cionon sia possibile nel sistema solidale con l’autobus. Questo e un paradosso,perche la chiusura o meno della porta deve essere un evento la cui realta eindipendente dal sistema di riferimento.
Dobbiamo considerare due eventi; uno e la chiusura della porta non ap-pena la coda dell’autobus entra nel box, l’altro e l’urto del muso dell’autobuscontro la parete opposta del box. Cerchiamo le coordinate di questi eventinei due sistemi di riferimento.
Nel sistema O abbiamo visto che il bus (12 m) entra nel box (15 m).Assegniamo all’evento “chiusura della porta” le coordinate (0, 0)m. Quandola porta viene chiusa, il muso dell’autobus si trova a 15−12 = 3 m dal fondodel box. L’urto avviene quindi dopo un tempo 3/0.8 = 3.75m. Le coordinatedell’evento “urto” sono quindi (3.75, 15)m. L’urto avviene dopo la chiusuradella porta.
Vediamo ora le coordinate dei due eventi nel sistema dell’autobus O′.Ricordiamo che l’autobus e lungo 20 m, mentre il box solo 9 m. In questosistema e il box che si muove a velocita 0.8 incontro al bus. E chiaro cheil muso urtera contro la parete opposta del box prima che l’autobus riescaad entrare nel box. Diamo all’evento “urto” le coordinate (0, 0). Quanto cimette la coda del bus (che e fuori dal box al momento dell’urto) a fermarsi?Non puo fermarsi istantaneamente, poiche l’onda d’urto ci mettera un tempominimo 20/1 m a propagare dal muso alla coda (abbiamo assunto qui chel’onda d’urto propaghi alla velocita dell luce). La coda, in 20 m di tempoa velocita 0.8 percorre un tratto di 20 × 0.8 = 16 m. Poiche al momentodell’urto del muso con la parete, la coda si trovava a 20 − 9 = 11m dalla

2.9. ESERCIZI 33
porta d’ingresso, vediamo che effettivamente il bus, comprimendosi, riesce adentrare nel box. La coda entera nel box (e quindi la porta viene chiusa) dopoun tempo 11/0.8 = 13.75m dall’urto. Le coordinate dell’evento “chiusura”sono quindi (13.75, 20)m. L’urto avviene prima della chiusura della porta.
Questo non e un paradosso. Se calcoliamo l’intervallo fra i due eventi,abbiamo ∆s2 = −(3.752)+(152) = 210m2 (oppure ∆s′2 = −(13.752)+(20)2 =210m2). L’intervallo (invariante come deve essere) e di tipo spaziale, cioepositivo. Gli eventi chiusura e urto non sono quindi connessi causalmente, ein questo caso esistono sistemi di riferimento in cui l’ordine temporale vienescambiato, senza che questo crei alcun problema concettuale. Ancora unavolta, non esistono paradossi in relativita.
2.9 Esercizi
1. Scrivere nelle unita in cui c = 1, le unita di accelerazione, forza, energia,potenza.
2. I tachioni sono ipotetiche particelle che viaggiano con v > 1 nel sistema del-l’emettitore. Immaginiamo che un ricevitore R si trovi a distanza L dall’e-mettitore E quando riceve un messaggio tachionico, e che, immediatamenterisponda inviando un tachione come risposta. Quanto tempo passa per Efra l’emissione del primo tachione e la ricezione del tachione di risposta?
3. Un pione π ha un tempo di decadimento, nel suo sistema di riferimento, ditdec = 2.5 × 10−8 sec. Se viaggia a v = 0.999 rispetto ad un osservatore,quale tempo di decadimento misura l’osservatore?
4. La stella s1 ha velocita v rispetto ad un osservatore. La stella s2 ha velocitav rispetto ad s1, la stella s3 ha velocita v rispetto ad s2 e cosı via. Calcolarela velocita della stella sn rispetto all’osservatore.

Capitolo 3
MECCANICARELATIVISTICA
3.1 Equazione della meccanica
L’eq. di Newton
F = mdv
dt(3.1)
non e relativisticamente corretta, poiche una forza costante applicata suffi-cientemente a lungo produrrebbe velocita arbitrariamente grandi.
Sperimentalmente si trova che la legge della meccanica deve essere modi-ficata come segue:
F =d
dt(mγv). (3.2)
Affinche eq. 3.2 sia relativisticamente corretta, occorre che i due membri adestra e sinistra si trasformino nello stesso modo passando da un sistemadi riferimento ad un altro. In meccanica Newtoniana il problema non esiste,poiche l’accelerazione di un oggetto, al contrario della velocita, e indipendentedal sistema di riferimento.
Da eq. 3.2 si ha
F = mγdv
dt+mv
dγ
dt= mγa+mv
dγ
dt, (3.3)
34

3.2. QUANTITA RELATIVISTICHE 35
dove, si noti, la forza ha due componenti: una parallela all’accelerazione(come in meccanica Newtoniana), e una, nuova, parallela alla velocita.
Da dγ/dt = γ3v · a, possiamo riscrivere eq. 3.3 come
mγa = F−mγ3v(v · a). (3.4)
Moltiplicando vettorialmente ambo i membri per v abbiamo poi
mγ3(v · a) = F · v, (3.5)
che inserita in eq. 3.4 da infine
ma =1
γ[F− v(F · v)] (3.6)
Notiamo che nel caso in cui a e v siano parallele si ha
F = mγ3a.
3.2 Quantita relativistiche
3.2.1 Momento lineare
Il momento lineare (o, semplicemente, il momento) e definito come
p = mγv. (3.7)
Da eq. 3.2 abbiamo quindidp
dt= F, (3.8)
che sembra l’equivalente Newtoniano. Notiamo pero che p e v, in questocaso, non sono linearmente proporzionali.
3.2.2 Momento angolare
Il momento angolare e definito come
L = x× p, (3.9)
da cui, notando che v × p = 0,
dL
dt= x× F. (3.10)
Cioe se F = 0, allora L e costante.

36 CAPITOLO 3. MECCANICA RELATIVISTICA
3.2.3 Energia cinetica
Il lavoro compiuto da una forza e dW = F · dx = dK, dove abbiamo assuntoche il lavoro aumenti esclusivamente l’energia cinetica K. Abbiamo quindi
dK
dt= F · v, (3.11)
da cui, utilizzando eq. 3.5 e notando che (v · dv/dt)dt = dv2/2, si ottiene
dK =1
2mγ3 dv2. (3.12)
L’integrale di eq. 3.12 da 0 a v2 fornisce quindi l’energia cinetica acquisita:
K =m
2
∫ v2
0
γ3du2 = m(γ − 1). (3.13)
Per v = 0 si ha K = 0. Al primo ordine in v2, se v ≪ 1, abbiamo
K = m
(
1 +1
2v2)
+ . . .−m ≃ 1
2mv2, (3.14)
cioe, per velocita non relativistiche, ritroviamo la formulazione Newtoniana.
3.2.4 Energia totale
Da K = γm−m, definendo l’energia totale come
E ≡ γm (3.15)
e l’energia di massa (o energia a riposo) come
E0 ≡ m, (3.16)
possiamo scrivereE = K + E0. (3.17)
Nel limite non relativistico si ha E ≃ m + 1/2mv2, espressione che non haun corrispettivo Newtoniano. Notiamo anche che, da eq. 3.11, abbiamo
dE
dt= F · v, (3.18)

3.2. QUANTITA RELATIVISTICHE 37
mentre da eq. 3.7 e 3.15,v = p/E. (3.19)
L’eq. 3.16 rappresenta un risultato fondamentale della relativita, cioe l’e-quivalenza fra massa ed energia (usando unita standard avremo E0 = mc2).Nei processi fisici la quantita che si conserva e l’energia, non la massa.
Ad esempio, nella reazione chimica
H2 +1
2O2 −→ H2O
si libera ∆E ≃ 2.8 × 105 Joule/mole, a cui corrisponde una variazione dimassa ∆M = ∆E/c2 ≃ 3.1× 10−10 kg (usiamo il S.I.). Da Mmole ≃ 0.018 g,abbiamo ∆M/M ≃ 1.7× 10−8, che e trascurabile.
Nella fissione di un nucleo di 238U ad opera di un neutrone lento,
n + 238U −→ 143Ba + 93Kr + 3n,
si libera un’energia ∆E ≃ 170 MeV, a cui corrisponde ∆M ≃ 3× 10−28 kg.Da MU ≃ 3.97 × 10−25 kg, abbiamo che ∆M/M ≃ 7.6 × 10−4, quasi cinqueordini di grandezza maggiore rispetto al caso di reazioni chimiche.
3.2.5 Relazione fra momento ed energia
Da E = γm e p = mγv, elevando al quadrato entrambe le espressioni efacendone la differenza, otteniamo E2 = p2 +m2, cioe
E =√
p2 +m2, (3.20)
da confrontare con E = p2/2m in meccanica Newtoniana.
Fotoni
L’eq. 3.20 permette di definire un’energia anche per particelle di massa nulla(e.g., i fotoni). Se m = 0 abbiamo infatti
E = p. (3.21)
In meccanica Newtoniana, m = 0 =⇒ E → ∞.

38 CAPITOLO 3. MECCANICA RELATIVISTICA
Eq. 3.21 implica che se m = 0, da E = p, ricordando v = p/E, allorav = 1. Cioe particelle di massa nulla devono necessariamente viaggiare allavelocita della luce. E importante osservare che per i fotoni le espressionip = mγv e E = γm non hanno significato, ma nondimeno p ed E sonodefinite (e finite) poiche m = 0 =⇒ v = 1.
3.3 Trasformazioni di Lorentz
3.3.1 Momento
Immaginiamo di avere una particella di velocita w′ in O′, il quale si muovecon velocita v lungo l’asse x positivo di O. Vogliamo trovare una relazioneche leghi il momento della particella calcolato nei due sistemi di riferimento.
Se la velocita della particella in O e w = (wx, wy, wz), il suo momentosara dato da p = (px, py, pz) = mγw (wx, wy, wz), dove γw ≡ 1/
√1− w2, e la
sua energia da E = mγw. In O′ avremo le analoghe espressioni primate, cioew′ = (w′
x, w′y, w
′z), p
′ = (p′x, p′y, p
′z), eccetera.
Ora, per esprimere w′ in funzione di w e v, possiamo utilizzare le eq. 2.20,2.21, e 2.22, semplicemente scambiando il ruolo dei due sistemi di riferimento,e operando la sostituzione v → −v. Utlizzando eq.2.20, possiamo scrivere
p′x = γv(px − vE)
p′y = py
p′z = pz
E ′ = γv(E − vpx),
(3.22)
dove γv e il fattore di Lorentz del moto relativo fra i due sistemi, cioe γv ≡1/√1− v2. La trasformazione inversa e banalmente
px = γv(p′x + vE ′)
py = p′ypz = p′zE = γv(E
′ + vp′x).
(3.23)

3.3. TRASFORMAZIONI DI LORENTZ 39
E interessante notare come il vettore con componenti (E, px, py, pz) si trasfor-mi esattamente come (t, x, y, z) (eq. 2.13 e 2.14). Il perche e l’importanza diquesto fatto risulteranno chiari nel prossimo Capitolo.
Per un boost generico, non necessariamente lungo l’asse x positivo, si hache
p′ = p+ (γv − 1)(v · p)v/v2 − γvEv
E ′ = γv(E − v · p),(3.24)
con l’ovvia trasformazione inversa.
Qualche passaggio mostra che
E ′2 − p′2 = E2 − p2 = m2. (3.25)
La massa a riposo e quindi un invariante relativistico (non dipende cioe dalsistema di riferimento).
3.3.2 Forza
L’eq. 3.8 deve valere in ogni sistema di riferimento. Nel caso di boost lungol’asse x positivo, usando eq. 3.22, possiamo scrivere
F ′x =
dp′xdt′
= γvd
dt′(px − vE). (3.26)
Differenziando la prima delle eq. 2.13 e dividendo per dt, otteniamo
dt′
dt= γv(1− vwx),
dove wx = dx/dt. Quindi
d
dt′=
1
γv(1− vwx)
d
dt,
che puo essere sostituito in eq. 3.26, ottenendo
F ′x =
1
(1− vwx)
(
dpxdt
− vdE
dt
)
=1
(1− vwx)(Fx − vF ·w), (3.27a)
F ′y =
dp′ydt′
=dpydt′
=Fy
γv(1− vwx), (3.27b)
F ′z =
dp′zdt′
=dpzdt′
=Fz
γv(1− vwx). (3.27c)

40 CAPITOLO 3. MECCANICA RELATIVISTICA
Per un boost generico possiamo scrivere
F ′‖ = [F‖ − v(F ·w)]/(1− v ·w)
F ′⊥ = F⊥/[γv(1− v ·w)].
(3.28)
Si noti come, nel caso non relativistico, si abbia F′ = F.
3.4 Esempio: carica in un campo elettroma-
gnetico
Per un campo EM abbiamo F = e(E+v×B). Il lavoro compiuto dalla forzae
dW = F · v dt = eE · v dt = −e dφ, (3.29)
dove abbiamo introdotto il potenziale elettrico E = −∇φ. L’energia poten-ziale e quindi dU = −dW , cioe U = e φ, mentre l’energia della particelladiviene
Etot = E + U =√
p2 +m2 + eφ = mγ + eφ. (3.30)
3.4.1 Campo elettrico costante ed uniforme
Orientiamo il sistema di riferimento in modo che E = (Ex, 0, 0). Da dp/dt =eE si ha
px = eExt+ const
py = const
pz = const.
(3.31)
Poniamo ora pz = 0 a t = 0, in modo che il moto avvenga nel piano xy.Inoltre, se px = 0 a t = 0, il moto avviene lungo l’asse x. Quindi px =γmvx = eExt, da cui
vx =dx
dt=
ǫt√1 + ǫ2t2
, (3.32)
dove ǫ ≡ eEx/m e l’accelerazione. Integrando, e supponendo che x = 0 at = 0, abbiamo la legge oraria della carica:
x(t) =1
ǫ
(√1 + ǫ2t2 − 1
)
, (3.33)

3.4. ESEMPIO: CARICA IN UN CAMPO ELETTROMAGNETICO 41
che abbiamo visto nel capitolo precedente come caso generale di particellauniformemente accelerata. Notiamo che eq. 3.33 puo essere riscritta come
(
x+1
ǫ
)2
− t2 =1
ǫ2,
che rappresenta un’iperbole avente come asintoto la retta x = t− 1/ǫ.
Nel caso caso non relativistico ǫt ≪ 1, da cui vx ≃ ǫt e x(t) ≃ 1/2ǫt2, cioela legge oraria e una parabola. Gli andamenti di vx(t) e x(t) sono mostratiin figura 3.1.
t
R
NR
x
NRR
t
1v
Figura 3.1: Legge oraria e velocita di una carica in un campo Ex uniforme e costante.NR rappresenta il limite non relativistico.
Nel caso relativistico, la forza aumenta la massa della carica (mγ), nonla sua velocita.
3.4.2 Campo magnetico costante ed uniforme
In questo caso abbiamo
d
dt(mγv) = e(v ×B). (3.34)
Notiamo che poiche la forza e comunque perpendicolare alla velocita, ricor-dando eq. 3.3, possiamo scrivere
mγdv
dt= e(v ×B) (3.35)

42 CAPITOLO 3. MECCANICA RELATIVISTICA
Poniamo ora B = (0, 0, Bz), da cui
mγvx = evyBz
mγvy = −evxBz
mγvz = 0,
(3.36)
che ci porta a concludere che z(t) = vzt + z0, con vz = const. Il moto lungol’asse del campo e quindi rettilineo ed uniforme.
Moltiplicando per l’unita immaginaria i la seconda di eq. 3.36, e somman-dola membro a membro con la prima, otteniamo
mγd(vx + ivy)
dt= −ie(vx + ivy)Bz, (3.37)
che integrata porta a
vx + ivy = (vx0 + ivy0)e−iωct, (3.38)
dove
ωc ≡eBz
mγ(3.39)
e detta frequenza di ciclotrone. Notiamo che nel piano xy, perpendicolare aBz, si ha che v2⊥ ≡ v2x + v2y = v2x0 + v2y0 = const.
Ponendo ora
vx0 = v⊥ cosα
vy0 = v⊥ sinα,(3.40)
dove α e detto pitch angle, possiamo riscrivere eq. 3.38 come
vx = v⊥ cos (ωct− α)
vy = v⊥ sin (ωct− α),(3.41)
che integrate danno
x(t) = v⊥/ωc, sin (ωct− α) + x0
y(t) = v⊥/ωc cos (ωct− α) + y0,(3.42)
che rappresenta un moto circolare di raggio R = v⊥/ωc = mγv⊥/eBz. Il motocircolare, unito al moto uniforme lungo z, da origine ad un moto elicoidale.Rispetto al caso non relativistico, si ha la comparsa del fattore γ in ωc.

3.5. ESEMPIO: PARTICELLA IN UN POTENZIALE CENTRALE 43
3.5 Esempio: particella in un potenziale cen-
trale
Consideriamo una particella in un potenziale centrale V (r). Per simmetria,il momento angolare L si deve conservare, quindi il moto avviene in un piano(che possiamo identificare con xy). L’energia della particella
E = γm+ V (r) (3.43)
e l’altra costante del moto.
In coordinate polari (r, φ), con r =√
x2 + y2, abbiamo
v = r r+ rφ φ
L = r r×mγ(r r+ rφ φ) = mr2φγ z.(3.44)
In eq. 3.43 operiamo ora la sostituzione γ =√
1 + γ2v2, eliminiamo quindiv2 attraverso la relazione
v2 = r2 + r2φ2 = φ2(r′2 + r2),
dove r′ ≡ dr/dφ. Il termine φ2 puo essere esplicitato da
L2 = m2r4φ2γ2,
ottenendo quindi per l’energia
E = m
√
1 + L2r′2 + r2
m2r4+ V (r), (3.45)
da cui(
dr
dφ
)2
+ r2 =r4
L2
[
(E − V )2 −m2]
. (3.46)
Effettuando ora la sostituzione u ≡ 1/r, moltiplicando per u4 e derivando ind/dφ ambo i membri di eq. 3.46, e dividendoli quindi per 2du/dφ, si ha infine
d2u
dφ2+ u =
α
L2(E + αu), (3.47)
dove abbiamo posto V = −α/r (α = GmM nel caso di potenziale Gravita-zionale).

44 CAPITOLO 3. MECCANICA RELATIVISTICA
Nel limite non relativistico si ha E + αu = E − V ≃ E0 = m, e quindi
d2u
dφ2+ u =
αm
L2, (3.48)
che e l’equazione Newtoniana della traiettoria.
Ponendo
q =
√
1− α2
L2(3.49)
e
p =L2 − α2
αE(3.50)
eq. 3.47 divened2u
dφ2+ q2u =
q2
p,
da cui, operando la sostituzione w = u− 1/p,
d2w
dφ2+ q2w = 0. (3.51)
La soluzione di eq. 3.51 si ottiene facilmente come
w = A cos [q(φ− φ0)], (3.52)
da cuir(φ) =
p
1 + e cos [q(φ− φ0)], (3.53)
con e ≡ Ap, detta eccetricita.
Nel limite non relativistico q ≃ 1 (da α ≪ L), e quindi, per e < 1,l’orbita e un’ellisse. Nel caso relativistico, invece, q < 1, implicando chel’asse dell’orbita ruota (precessione del pericentro). Infatti, il pericentro edefinito da cos [q(φ− φ0)] = 1 che implica φ = φ0. Dopo un’orbita, la fasedel pericentro sara φ = φ0 + 2π/q, ruotata quindi di un angolo
δ =2π
q− 2π = 2π
1√
1− α2
L2
− 1
.
In situazioni astronomiche α ≪ L, da cui
δ ≃ πα2
L2= π
(
GMm
L
)2
.

3.5. ESEMPIO: PARTICELLA IN UN POTENZIALE CENTRALE 45
Test osservativi sul moto dei pianeti danno δ circa sei volte piu grande diquello previsto dall’equazione precedente. Questo avviene poiche la forzagravitazionale non puo essere trattata in modo completo nell’ambito dellarelativita speciale.

Capitolo 4
ALGEBRA VETTORIALE
4.1 Quadrivettori
Un vettore e un oggetto geometrico che puo essere definito indipendentementeda un sistema di coordinate. Consideriamo ora il vettore “posizione” nellospazio-tempo O:
∆~x →O
∆xα (4.1)
dove ∆xα = ∆x0,∆x1,∆x2,∆x3 sono le componenti del vettore in O. Ab-biamo gia visto come cambiano le coordinate in un boost (eq. 2.15):
xα′
= Λα′
β xβ,
dove abbiamo utilizzato la convenzione di Einstein sugli indici ripetuti.
Definiamo generico quadrivettore (4-vettore, cioe un vettore nello spazio
di Minkowski) un vettore ~A →O
Aα tale che, in O′, si abbia
Aα′
= Λα′
β Aβ, (4.2)
cioe un oggetto le cui componenti cambiano come le componenti del vettoreposizione. Vale che
~A + ~B →O
(A0 +B0, A1 +B1, A2 +B2, A3 +B3), (4.3)
eµ ~A →
O(µA0, µA1, µA2, µA3). (4.4)
46

4.1. QUADRIVETTORI 47
4.1.1 Basi
La base e costituita da quattro 4-vettori particolari. In O, la base e data da
~e0 →O
(1, 0, 0, 0)
~e1 →O
(0, 1, 0, 0)
~e2 →O
(0, 0, 1, 0)
~e3 →O
(0, 0, 0, 1).
(4.5)
Notiamo che in O′, ad esempio, ~e0′ →O′
(1, 0, 0, 0), ma che ~e0′ 6= ~e0, poiche
sono 4-vettori definiti in sistemi di riferimento diversi. Se ci chiediamo qualee la componente β di ~eα, essa e data da (~eα)
β = δβα.
Un 4-vettore puo essere espresso come combinazione lineare dei 4-vettoribase, cioe ~A →
O(A0, A1, A2, A3) puo essere scritto come
~A = A0~e0 + A1~e1 + A2~e2 + A3~e3 = Aα~eα. (4.6)
Poiche un 4-vettore e indipendente dal sistema di riferimento (sono le com-ponenti del 4-vettore a dipendere dal sistema di riferimento), deve valereche
~A = Aα~eα = Aα′
~eα′ . (4.7)
Notiamo che le singole componenti della combinazione lineare 4.7 sono, ingenere, diverse, cioe ad esempio, A0′~e0′ 6= A0~e0 etc. E invece la somma cheproduce il medesimo vettore.
Ora Aα~eα = Aα′
~eα′ = Λα′
β Aβ~eα′ = AβΛα′
β ~eα′ = AαΛβ′
α ~eβ′ , da cui Aα(~eα −Λβ′
α ~eβ′) = 0. Quindi
~eα = Λβ′
α ~eβ′. (4.8)
Si noti che la formula precedente non e un cambio di componenti similea eq. 4.2, ma invece esprime la base di O come combinazione lineare dei4-vettori base di O′.

48 CAPITOLO 4. ALGEBRA VETTORIALE
Esempio
O′ viaggia con velocita v lungo x relativamente ad O. Sia ~A →O
(5, 0, 0, 2).
Le componenti di ~A in O′ sono
A0′ = Λ0′
0 A0 + Λ0′
1 A1 + Λ0′
2 A2 + Λ0′
3 A3 = 5γ
A1′ = Λ1′
0 A0 + Λ1′
1 A1 + Λ1′
2 A2 + Λ1′
3 A3 = −5vγ
A2′ = Λ2′
0 A0 + Λ2′
1 A1 + Λ2′
2 A2 + Λ2′
3 A3 = 0
A3′ = Λ3′
0 A0 + Λ3′
1 A1 + Λ3′
2 A2 + Λ3′
3 A3 = 2,
dove i coefficienti della trasformazione di Lorentz sono dati da eq. 5.59. Cioe~A →
O′
(5γ,−5vγ, 0, 2).
4.1.2 Trasformazioni inverse
I coefficienti Λβ′
α dipendono solo dalla velocita relativa dei due sistemi diriferimento, cioe Λβ′
α (v). Eq. 4.8 esprime la base di O partendo dalla basedi O′ utilizzando la trasformazione con velocita v. Allora la base di O′ devepotersi ottenere dalla base di O con una trasformazione con velocita −v, cioe
~eµ′ = Λνµ′(−v)~eν . (4.9)
La matrice [Λνµ′] e identica a [Λβ′
α ], solo con v cambiata in −v. Notiamo chela matrice [Λ] e costruita usando la velocita del sistema “sopra” rispetto aquello “sotto”. Cioe in [Λν′
µ ] compare la velocita di O′ rispetto a O (che e+v), mentre in [Λν
µ′] compare la velocita di O rispetto a O′ (cioe −v).
Ora, da ~eβ′ = Λνβ′(−v)~eν , abbiamo ~eα = Λβ′
α (v)~eβ′ = Λβ′
α (v) Λνβ′(−v)~eν ,
dove compaiono solo le basi di O. Quindi deve essere
Λβ′
α (v) Λνβ′(−v) = δνα, (4.10)
che implica ~eα = δνα~eν .
La formula 4.10 e la definizione di matrice inversa. Notiamo anche che, daAβ′
= Λβ′
α Aα, si ha Λν
β′(−v)Aβ′
= Λνβ′(−v) Λβ′
α (−v)Aα = δναAα = Aν , cioe le
componenti del 4-vettore ~A in O sono ottenute da quelle in O′ trasformandolecon −v, come deve essere.

4.2. 4-VELOCITA E 4-MOMENTO 49
Se osserviamo eq. 4.2 e 4.9, vediamo come base e componenti si trasformi-no in modo inverso uno rispetto all’altro. Solo in questo modo un 4-vettore~A = Aα~eα risulta essere indipendente dal sistema di riferimento.
4.2 4-velocita e 4-momento
4.2.1 4-velocita
Nello spazio 3-D della meccanica Newtoniana, la velocita e un vettore tan-gente al moto di una particella. Nello spazio-tempo di Minkowski, possia-mo definire quadrivelocita un vettore tangente alla WL di una particella, eche abbia lunghezza, nel sistema O′ della particella, uguale ad una unita ditempo.
t’
x’
WL
P
0
1
1
0
e’
e’
e
e
t
x
Figura 4.1: 4-velocita di una particella nell’evento P. La 4-velocita ~u e il vettore base~e0′ .
Con questa definizione, se la particella ad esempio si muove di moto rettilineoed uniforme, il vettore 4-velocita coincide con ~e0′ . Possiamo utilizzare questaidentita come definizione di 4-velocita, cioe

50 CAPITOLO 4. ALGEBRA VETTORIALE
La 4-velocita ~u di una particella e il vettore base ~e0′ del sistema rispetto
al quale la particella stessa e a riposo.
Se la particella e in moto non uniforme, ovviamente non esiste un sistemarispetto al quale la particella sia a riposo. Possiamo pero utilizzare il concettodi MCRF, e definire la 4-velocita come il vettore base ~e0′ del MCRF. Talevettore e ovviamente tangente alla WL della particella (figura 4.1).
4.2.2 4-momento
Definiamo 4-momento ~p il 4-vettore
~p ≡ m~u, (4.11)
dove m e la massa a riposo della particella. Scrivendo ~p →O
(p0, p1, p2, p3),
definiamo p0 = E, energia della particella, mentre p1, p2 e p3 sono dettecomponenti spaziali del 4-momento.
A questo punto non e immediatamente chiaro il perche ~e0′ si chiami 4-velocita. Consideriamo la velocita della particella v come il solito boost diO′ lungo l’asse x postivo (cioe, consideriamo O′ come il sistema in cui laparticellae a riposo). Quali sono le componenti di ~u e ~p in O? Da ~u = ~e0′ e ~p = m~u,utilizzando le tegole per la trasformazione della componenti di un 4-vettoreviste in precedenza, si ha immediatamente che
uα = Λαβ′ (~e0′)
β′
= Λα0′ , (4.12)
e
pα = mΛα0′, (4.13)
cioe, ricordando che Λνµ′ = Λν
µ′(−v),
u0 = γ
u1 = γv
u2 = 0
u3 = 0,
(4.14)

4.2. 4-VELOCITA E 4-MOMENTO 51
e
p0 = mγ
p1 = mγv
p2 = 0
p3 = 0.
(4.15)
Per piccole v, cioe nel caso non relativistico, le componenti spaziali di ~usono (v, 0, 0), che ci dice perche ~u si chiami 4-velocita. Notiamo anche che,sempre per piccole v, sia p0 ≃ m + 1/2mv2, cioe l’energia totale e l’energiadi massa piu l’energia cinetica Newtoniana.
Abbiamo ottenuto i medesimi risultati del capitolo precedente. Nellaformulazione covariante, pero, due concetti differenti, la velocita ed il mo-mento, sono inglobati in un unico 4-vettore. Questo e molto importante,poiche sappiamo esattamente le regole di trasformazione dei 4-vettori.
4.2.3 Conservazione del 4-momento
Nella meccanica Newtoniana, le interazioni fra particelle sono governate dadue principi empirici: la conservazione dell’energia e la conservazione delmomento. In relativita postuliamo che il 4-momento totale,
~p =∑
~pi, (4.16)
si conservi durante un’interazione, dove la somma e estesa a tutte le par-ticelle che partecipano all’interazione. Cioe il 4-momento e lo stesso primae dopo l’interazione. La conservazione del momento in 3-D vale non re-lativisticamente. Nel 4-momento e inclusa anche la massa a ripose delleparticelle.
E importante considerare cosa significhi “prima” e “dopo” un’interazio-ne, avendo visto come, in relativita, il concetto di simultaneita dipenda dalsistema di riferimento. Consideriamo figura 4.2.

52 CAPITOLO 4. ALGEBRA VETTORIALE
t
B
A
t’
x’
x
Figura 4.2: Conservazione del 4-momento.
PerO, l’evento-interazione A accade prima di t = 0, mentre l’evento-interazioneB accade dopo t = 0, quindi in t = 0 il 4-momento e la somma dei 4-momentidopo A e prima di B. Per O′, invece, entrambi gli eventi sono prima di t′ = 0,per cui il 4-momento in t′ = 0 e la somma dei 4-momenti dopo sia A che B.Per il principio di conservazione del 4-momento, il 4-momento prima e dopol’evento A deve essere lo stesso, cosı come prima e dopo B. Ogni osservato-re vede lo stesso ~p (le componenti sono diverse, ma il 4-vettore e lo stesso).Ogni osservatore puo definire una linea di tempo costante (una superficie 3-Dnello spazio-tempo), a quel tempo sommare tutti i 4-momenti, ed ottenere lostesso vettore di ogni altro osservatore.
Esiste infine un sistema di riferimento particolare, il sistema del centrodel momento, in cui le coordinate del 4-momento sono
∑
~pi→CM
(E, 0, 0, 0). (4.17)
E e l’energia totale delle particelle.

4.3. PRODOTTO SCALARE 53
4.3 Prodotto scalare
In modo del tutto simile all’intervallo ds2, possiamo definire grandezza di un4-vettore come
( ~A)2 ≡ −(A0)2 + (A1)2 + (A2)2 + (A3)2. (4.18)
Poiche le componenti di un 4-vettore sono definite in modo da trasformarsicome le componenti del vettore posizione (∆t,∆x,∆y,∆z), dall’invarianzadell’intervallo segue l’invarianza della grandezza, cioe
( ~A′)2 = ( ~A)2. (4.19)
L’invarianza e assicurata dall’aver definito la grandezza con il segno “-”davanti alla componente “0”.
4-vettori di grandezza positiva si dicono di tipo spaziale, di grandezzanegativa di tipo temporale, e di grandezza uguale a zero di tipo nullo (notache non necessariamente hanno componenti (0, 0, 0, 0)).
Dati due 4-vettori, e ora naturale il prodotto scalare o prodotto interno
come~A · ~B ≡ −A0B0 + A1B1 + A2B2 + A3B3. (4.20)
Dimostriamo ora una fondamentale proprieta del prodotto scalare cosıdefinito, cioe che il prodotto scalare e un invariante relativistico. Infatti,sappiamo che ~A · ~A = ( ~A)2 e invariante. Anche ( ~A+ ~B) · ( ~A+ ~B) e invariante,
in quanto modulo del 4-vettore ~A + ~B. Ma poiche ( ~A + ~B) · ( ~A + ~B) =
( ~A)2 + ( ~B)2 + 2 ~A · ~B, ne consegue che anche ~A · ~B deve necessariamenteessere invariante.
Due 4-vettori tale per cui
~A · ~B = 0 (4.21)
si dicono ortogonali. Notiamo che due 4-vettori ortogonali non necessaria-mente formano un angolo π/2 in un diagramma spazio-tempo. In generale,sono ortogonali se formano angoli uguali con un raggio di luce. Ad esempio,guardando figura 4.1, vediamo che ~e0 e ~e1 sono fra loro ortogonali, ma lo sonoanche fra loro ~e0′ e ~e1′ . In particolare, i 4-vettori base, poiche ~e0 · ~e0 = −1,~e1 · ~e1 = ~e2 · ~e2 = ~e3 · ~e3 = +1, e ~eα · ~eβ = 0 se α 6= β, formano una tetrade

54 CAPITOLO 4. ALGEBRA VETTORIALE
di 4-vettori mutualmente ortogonali di lunghezza unitaria (l’unita dell’assetemporale e -1!).
Notiamo infine che un 4-vettore nullo (raggio di luce) e ortogonale a sestesso, e che per 4-velocita si ha che ~u · ~u = −1, valida in ogni sistema diriferimento.
4.4 4-velocita e 4-accelerazione come diffe-
renziali
4-velocita
Possiamo dare ora una definizione piu intuitiva della 4-velocita, analoga con-cettualmente alla definizione classica che se ne da in meccanica Newtoniana.
Le coordinate del moto infinitesimo di una particella sono
d~x →O
(dt, dx, dy, dz), (4.22)
da cui il modulo del moto risulta essere
(d~x)2 = −dt2 + dx2 + dy2 + dz2, (4.23)
cioe (d~x)2 = ds2 = d~x·d~x, che risulta essere negativo (le WL di particelle sonodi tipo tempo, poiche v < 1). Definiamo allora tempo proprio la quantita
dτ 2 ≡ −ds2 = −d~x · d~x. (4.24)
Consideriamo ora il 4-vettore
d~x
dτ. (4.25)
Esso e tangente alla WL del moto, essendo un multiplo di d~x (si noti che dτe un numero). Il suo modulo vale
d~x
dτ· d~xdτ
=d~x · d~xdτ 2
= −1, (4.26)

4.4. 4-VELOCITA E 4-ACCELERAZIONE COME DIFFERENZIALI 55
da cui ne consegue che il 4-vettore 4.25 e di tipo temporale, di modulo unita-rio, e tangente alla WL. Se ci mettiamo nel MCRF della particella, avremoche
d~x →MCRF
(dt, 0, 0, 0) (4.27)
da cuid~x
dτ→
MCRF(1, 0, 0, 0), (4.28)
avendo notato che, nell’MCRF, dτ = dt. Quindi si ha
d~x
dτ= (~e0)MCRF, (4.29)
che e la definizione vista in precedenza di 4-velocita ~u.
4-accelerazione
Consideriamo il 4-vettored~u
dτ=
d2~x
dτ 2. (4.30)
Poiche vale ched
dτ(~u · ~u) = 2~u · d~u
dτ= 0 (4.31)
(il prodotto scalare e invariante), ne consegue che ~u e d~u/dτ sono fra loroortogonali. Da ~u →
MCRF(1, 0, 0, 0) segue che
d~u
dτ→
MCRF(0, ax, ay, az). (4.32)
Il 4-vettore
~a ≡ d~u
dτ(4.33)
si chiama 4-accelerazione, e, come visto, vale che ~a ·~u = 0. Possiamo definirequindi la 4-forza come
~F ≡ m~a. (4.34)
Notiamo che ~a ·~u = 0 =⇒ ~F ·~u = 0, cioe la 4-forza deve avere una dipendenzadalla velocita, dipendenza che diviene trascurabile nel limite non-relativistico.

56 CAPITOLO 4. ALGEBRA VETTORIALE
4.5 Energia e momento
Consideriamo una particella di 4-momento ~p. Allora possiamo scrivere che
~p · ~p = m2~u · ~u = −m2 = −E2 +3∑
i=1
(pi)2, (4.35)
cioe
E2 = m2 +3∑
i=1
(pi)2. (4.36)
Supponiamo ora un osservatore O′ che si muove con 4-velocita ~uobs (ingenerale, non e la 4-velocita della particella). Allora vale che
~p · ~uobs = ~p′ · ~e0′ , (4.37)
avendo notato che nell’MCRF di O′ ~u = ~e0′ . Nel frame O′ abbiamo
~p →O′
(E ′, p′1, p′2, p′3)
da cui eq. 4.37 divieneE ′ = −~p · ~uobs. (4.38)
L’eq. 4.38 significa che l’energia della particella relativa all’osservatore O′,puo essere calcolata da chiunque in ogni frame facendo il prodotto scalarefra ~p e ~uobs che e indipendente dal sistema di riferimento.
4.5.1 Fotoni
I fotoni si muovono lungo un WL nulla, cioe d~x · d~x = 0 =⇒ dτ = 0. None possibile definire un MCRF in questo caso, la velocita 3-D e sempre ecomunque v = 1.
Il 4-momento per un fotone deve essere un 4-vettore nullo, poiche paralleload una WL nulla. Immaginiamo che il fotone viaggi lungo l’asse x. In questocaso
~p →O
(E, px, 0, 0),
da cui~p · ~p = −E2 + (px)2 = 0 =⇒ px = E. (4.39)

4.6. ESEMPIO: SCATTERING COMPTON 57
Cioe per i fotoni il 3-momento spaziale e uguale all’energia.
Come viene vista l’energia di un fotone cambiando sistema di riferimento?Possiamo operare una trasformazione di Lorentz di ~p:
E ′ = γE − γvpx = γhν − γvhν = hν ′,
dove E = hν e E ′ = hν ′. Abbiamo quindi
ν ′
ν= γ(1− v) =
√
1− v
1 + v, (4.40)
che e la formula dell’effetto Doppler nel caso di moto parallelo alla direzionedel fotone (si veda eq. 2.30).
Particella di massa nulla
Per una qualsiasi particella di massa nulla deve valere che
m2 = −~p · ~p = 0. (4.41)
Cioe ogni particella con massa nulla deve avere il 4-momento nullo, e vice-versa. Inoltre si ha p1/p0 = 1, mentre per una particella massiva p1/p0 <1.
4.6 Esempio: scattering Compton
Elettrone a riposo
Consideriamo l’urto elastico fra un fotone di energia ǫ0 ed un elettrone ariposo. Il processo e detto scattering Compton. La situazione e schematizzatain figura 4.3.
Vogliamo trovare l’energia ǫ1 del fotone dopo l’interazione. La conserva-zione del 4-momento ci dice che
~pγ0 + ~pe0 = ~pγ1 + ~pe1, (4.42)

58 CAPITOLO 4. ALGEBRA VETTORIALE
dove
~pγ0 →O′
(ǫ0, ǫ0~n0) (4.43a)
~pγ1 →O′
(ǫ1, ǫ1~n1) (4.43b)
~pe0 →O′
(m, 0, 0, 0) (4.43c)
~pe1 →O′
(mγ, ~P ). (4.43d)
Per compattezza di notazione, abbiamo indicato con ~n0 e ~n1 i versori 3-Dlungo la direzione iniziale e finale del fotone, e con ~P il momento spazialefinale dell’elettrone.
ε 0
e
θ
1ε
Figura 4.3: Scattering Compton con un elettrone a riposo.
E possibile ora eliminare il 4-momento finale dell’elettrone riarrangiandoi termini di eq. 4.42 come ~pe1 = ~pe0 + ~pγ0 − ~pγ1, e facendone la grandezza diambo i membri. Infatti, ricordando che (~p)2 = −m2 (eq. 4.35), abbiamo
−m2 = ~pe0 · ~pe0 + ~pγ0 · ~pγ0 + ~pγ1 · ~pγ1 + 2~pe0 · ~pγ0 − 2~pe0 · ~pγ1 − 2~pγ0 · ~pγ1,da cui, utilizzando eq. 4.43a, 4.43b, 4.43c, e 4.43d,
−m2 = −m2 − 2mǫ0 + 2mǫ1 + 2ǫ1ǫ0(1− cos θ),
dove ~n0 ·~n1 = cos θ (il prodotto scalare e da intendersi nel senso usuale 3-D).Esplicitando infine ǫ1 abbiamo
ǫ1 =ǫ0
1 + ǫ0m(1− cos θ)
≃ ǫ0
[
1− ǫ0m(1− cos θ)
]
, (4.44)

4.6. ESEMPIO: SCATTERING COMPTON 59
dove la seconda uguaglianza approssimata vale per piccoli angoli di scatte-ring. Notiamo che ǫ1 < ǫ0, per via del rinculo dell’elettrone. Inoltre, perǫ0 ≪ m (cioe per energie del fotone incidente molto inferiori alla massa ariposo dell’elettrone) si ha ǫ1 ≃ ǫ0. L’urto e quindi elastico, e viene chiamatoscattering Thomson.
Elettrone in moto
Immaginiamo ora ’interazione fra un fotone ed un elettrone in moto. Latrattazione vista precedentemente e valida nel sistema dell’elettrone O′. Lastrategia e portarsi con una trasformazione di Lorentz nel sistema dell’elet-trone, lı trattare matematicamente l’interazione come visto sopra nel caso dielettrone a riposo, e quindi operare una seconda trasformazione di Lorentzper tornare al sistema del laboratorio (si veda figura 4.4).
e
ε
0εO’: REST FRAME
1’
0’
θ
θ1
0’
’ε
ε
x’
O: LAB FRAME
x
1θ
0θ1
Figura 4.4: Scattering Compton con un elettrone in moto. Il sistema O e quello dellaboratorio, il sistema O′ e quello in cui l’elettrone e a riposo.
Possiamo utlizzare le formule Doppler 2.31 e 2.32 trascurando, per semplicita,gli angoli, e considerando lo scattering elastico. Avremo quindi
ǫ′0 ∼ γǫ0
ǫ′1 ≃ ǫ′0ǫ1 ≃ γǫ′1
dove la prima uguaglianza deriva dall’effetto Doppler nel passaggio da O aO′, la seconda e eq. 4.44 nel caso Thomson, e la terza e ancora effetto Doppler

60 CAPITOLO 4. ALGEBRA VETTORIALE
nel passaggio da O′ a O. Quindi
ǫ1 ∼ γ2ǫ0. (4.45)
Il fattore γ2 e un puro effetto relativistico dovuto al doppio cambio di sistemadi riferimento., cioe alla doppia trasformazione di Lorentz, ognuna della qualida un fattore γ.
4.7 Esercizi
1. Date le seguenti espressioni, si determinino, per ognuna di esse, gli indiciliberi e gli indici muti, e si dica quante espressioni o equazioni descrivono:
(a) AαBα = 5;
(b) Aµ′
= Λµ′
ν Aν ;
(c) TαµλAµCγλ = Dγα;
(d) Rµν − 12gµνR = Gµν .
2. Dati i numeri A0 = 5, A1 = 0, A2 = −1, A3 = −6, e B0 = 0, B1 = −2, B2 =4, B3 = 0. Dati inoltre
Cαβ =
1 0 2 35 −2 −2 04 5 2 −2−1 −1 −3 0
,
si calcolino:
(a) AαBα;
(b) AαCαβ per tutti i β;
(c) AνCµν per tutti i µ.
3. Dato ~A →O
(0,−2, 3, 5),
(a) Trovare le componenti di ~A in O′, dove O′ si muove rispetto a O convelocita v = 4/5 luno le x positive;

4.7. ESERCIZI 61
(b) Si faccia lo stesso in O′′ che si muove rispetto a O′ con v = 3/5 rlungole x′ positive;
(c) Trovare la grandezza di ~A nei 3 sistemi di riferimento.
4. La trasformata di Lorentz da O a O′ e data da
1.25 0 0 0.750 1 0 00 0 1 0
0.75 0 0 1.25
.
(a) Si determini direzione, verso e modulo della velocita di O′ rispetto aO;
(b) Si determini la matrice della trasformata inversa;
(c) Dato ~A →O′
(1, 2, 0, 0), si determino le componenti di ~A in O.
5. Disegnare in un diagramma spazio-tempo ~e0 e ~e1. Disegnare ~e0′ e ~e1′ se O′
ha velocita v = +0.6 rispetto a O. Disegnare ~e0′′ e ~e1′′ se O′′ ha velocitav = +0.6 rispetto a O′.
6. O′ ha velocita v rispetto a O. O′′ ha velocita v′ rispetto a O′.
(a) Trovare la trasformata da O a O′′, Λα′′
µ ;
(b) Sia v = 0.6~ex, e v′ = 0.8~ey′ . Determinare esplicitamente Λα′′
µ ;
(c) E una trasformata di Lorentz?
7. (a) Si calcolino le componenti in O della 4-velocita di una particella la cuivelocita rispetto a O e v lungo le x positive;
(b) Generalizzare ad v = (vx, vy, vz);
(c) Scrivere v in termini di ~u.
8. Si dimostri che per ogni 4-vettore ~V di tipo temporale (V 2 < 0), esiste unsistema di riferimento in cui le componenti spaziali di ~V sono nulle.
9. (a) Mostrare che la somma di due vettori di tipo spaziale ortogonali e unvettore di tipo spaziale;
(b) Mostrare che un vettore di tipo temporale ed uno nullo non banale (cioenon con le tutte componenti identicamente nulle) non sono ortogonali.

62 CAPITOLO 4. ALGEBRA VETTORIALE
10. Scrivere l’energia totale di una particella con correzione all’ordine v4. Deter-minare per quale valore di v meta del termine cinetico Newtoniano eguagliala correzione in v4.
11. Una particella ha 4-momento ~p →O
(4, 1, 1, 0) kg. Si determini l’energia totale,
la massa a riposo e la 3-velocita della particella.
12. Due particelle, i cui 4-momenti sono ~p1 →O
(3,−1, 0, 0) kg e ~p2 →O
(2, 1, 1, 0)
kg, interagiscono e danno origine a 3 nuove particelle, per le quali si ha~p3 →
O(1, 1, 0.0) kg, e ~p4 →
O(1,−0.5, 0, 0) kg.
(a) Si determini il 4-momento, l’energia, la massa a riposo, e la 3-velocitadella terza particella prodotta.
(b) Trovare la 3-velocita del centro del momento.
13. Un’astronave, di 4-velocita ~u →O
(2, 1, 1, 1), incontra un raggio cosmico (una
particella ultra-relativistica prodotta probabilmente in una supernova) di4-momento ~p →
O(300, 299, 0, 0) kg. Quale e l’energia del raggio cosmico
misurata dall’astronave?
14. Provare che la reazione di annichilazione ad un fotone, e+ − e− −→ 1γ, evietata, mentre e possibile a due fotoni.
15. Un fotone ha frequenza ν in O e la sua traiettoria forma un angolo θ rispettoall’asse x. Se O′ si muove con velocita v lungo le x positive, quale e lafrequenza ν ′ misurata da O′?
16. Un fotone incide su di uno specchio con un angolo di incidenza θ, e vieneriflesso. Si calcoli il 4-momento trasferito allo specchio.

Capitolo 5
ALGEBRA TENSORIALE
5.1 Tensori
5.1.1 Definizione e tensore metrico
Si considerino due 4-vettori scritti sulla base di O, ~A = Aα~eα e ~B = Bα~eα.Se ne facciamo il prodotto scalare avremo
~A · ~B = (Aα~eα) · (Bβ~eβ) = AαBβ(~eα · ~eβ) = AαBβηαβ , (5.1)
dove i numeri reali
η00 = −1 (5.2a)
η11 = η22 = η33 = +1 (5.2b)
ηαβ = 0, se α 6= β (5.2c)
sono detti componenti del tensore metrico. Notiamo che ηαβ fornisce unaregola per associare a due 4-vettori un singolo reale.
Definiamo quindi tensore di tipo(
0N
)
una funzione di N 4-vettori nei reali,funzione lineare nei suoi argomenti.
Il prodotto scalare e quindi un tensore(
02
)
, e linearita significa che
(α ~A) · ~B = α( ~A · ~B)
( ~A+ ~B) · ~C = ~A · ~C + ~B · ~C
63

64 CAPITOLO 5. ALGEBRA TENSORIALE
e
~A · (β ~B) = β( ~A · ~B)
~A · ( ~B + ~C) = ~A · ~B + ~A · ~C.
Chiamiamo quindi il tensore g( , ) tale per cui
g( ~A, ~B) ≡ ~A · ~B (5.3)
tensore metrico. Per linearita vale che g(α ~A+β ~B, ~C) = αg( ~A, ~B)+βg( ~B, ~C).
Notiamo che nella definizione di tensore non sono menzionate le compo-nenti dei 4-vettori, ma unicamente i 4-vettori stessi. La regola che associaai 4-vettori i reali deve essere indipendente dal sistema di riferimento, comelo e il prodotto scalare. Notiamo anche che una funzione della posizionef(t, x, y, z) e un tensore
(
00
)
.
In pratica, si ha che ~A e ~B sono due 4-vettori specifici, ~A · ~B e un realespecifico, g( , ) il nome della funzione che associa il reale ai due 4-vettori.
Componenti di un tensore
Nel sistema di riferimento O, le componenti di un tensore(
0N
)
sono i valoriche la funzione assume quando gli argomenti sono i 4-vettori base ~eα. Lecomponenti sono quindi dipendenti dal sistema di riferimento, essendo labase, base di un sistema specifico. Notiamo anche che, con questa definizione,le componenti del tensore metrico sono g(~eα, ~eβ) = ~eα · ~eβ = ηαβ , come vistoin precedenza.
5.1.2 1-forme
Un tensore di tipo(
01
)
si dice 1-forma. Altri nomi che vengono usati sonocovettore e vettore covariante. Una 1-forma e quindi tale che
p( ~A) ∈ R,
e, date s = p+ q e r = αp,
s( ~A) = p( ~A) + q( ~A)
r( ~A) = αp( ~A).

5.1. TENSORI 65
Le 1-forme formano quindi uno spazio vettoriale, detto spazio duale dellospazio dei 4-vettori.
Le componenti di una 1-forma sono, dalla definizione data in precedenza,
pα ≡ p(~eα). (5.4)
L’indice in basso identifica le componenti di una 1-forma, mentre l’indice inalto identifica le componenti di un 4-vettore.
Vale che
p( ~A) = p(Aα~eα) = Aαp(~eα) = Aαpα = A0p0 + A1p1 + A2p2 + A3p3, (5.5)
detta contrazione di ~A e p. Si noti che la somma ha tutti i segni “+”. Alge-bricamente e importante notare che la 1-forma agisce senza fare riferimentoad alcun altro tensore, al contrario del prodotto scalare, che usa un terzooggetto, il tensore metrico, per dare un reale. In altre parole, un 4-vettorenon mappa un 4-vettore nei reali, ma ha bisogno della metrica. Una metricadifferente darebbe un reale diverso, pur partendo dai medesimi 4-vettori.
Le componenti di p sulla base di O′ sono date da
pβ′ = p(~eβ′) = p(Λαβ′~eα) = Λα
β′ p(~eα) = Λαβ′pα. (5.6)
Se ricordiamo che
Aα′
= Λα′
β Aβ
~eβ′ = Λαβ′~eα,
vediamo come una 1-forma si trasformi come le basi, cioe in modo inversorispetto ai 4-vettori. Questo fa sı che la contrazione Aαpα sia indipendentedal sistema di riferimento, per ogni 4-vettore ~A e ogni 1-forma p. Infatti
Aα′
pα′ = (Λα′
β Aβ)(Λµα′pµ) = Λα′
β Λµα′A
βpµ = δµβAβpµ = Aβpβ .
I 4-vettori sono detti anche vettori contro-varianti, in quanto si trasforma-no in modo opposto rispetto alle basi. Notiamo che la trasformazione dellebasi e esprimere nuovi 4-vettori in termini dei vecchi, mentre la trasforma-zione di componenti e esprimere il medesimo oggetto su una nuova base.Concettualmente sono due cose diverse.

66 CAPITOLO 5. ALGEBRA TENSORIALE
Base delle 1-forme
In modo analogo alla base dello spazio vettoriale, possiamo definire le 1-formebase dello spazio duale come
p ≡ pαωα. (5.7)
Le 1-forme ωα si dicono base duale di ~eα. Da
p( ~A) = pαAα = pαω
α( ~A) = pαωα(Aβ~eβ) = pαA
βωα(~eβ)
ne deduciamo che
ωα(~eβ) = δαβ , (5.8)
cioe la β−esima componente dell’α−esima 1-forma base. Abbiamo quindi
ω0 →O
(1, 0, 0, 0)
ω1 →O
(0, 1, 0, 0)
ω2 →O
(0, 0, 1, 0)
ω3 →O
(0, 0, 0, 1)
(5.9)
Come nello spazio vettoriale, la trasformazione delle 1-forme base e in-versa rispetto alla trasformazione delle componenti delle 1-forme, in modoche l’oggetto geometrico sia indipendente dal sistema di riferimento. Cioeabbiamo che
ωα′
= Λα′
β ωβ. (5.10)
Riepilogando, le componenti dei 4-vettori e le basi 1-forme si trasfor-mano allo stesso modo, ed inversamente rispetto ai 4-vettori base ed allecomponenti delle 1-forme.
Visivamente, noi pensiamo ai vettori come a frecce, a cui associamo unadirezione, un verso, ed un lunghezza una volta che si abbia definito una unitadi misura. Una 1-forma puo essere pensata come ad una divisione in “fette”di una certa zona dello spazio (figura 5.1). La contrazione di un vettore su diuna 1-forma da un reale uguale al numero di “fette” attraversate dal vettorestesso.

5.1. TENSORI 67
p
A
Figura 5.1: 1-forma p e 4-vettore ~A. Il numero di “fette” attraversate da ~A fornisce il
reale p( ~A) = pαAα.
5.1.3 Derivata covariante
Consideriamo un campo scalare φ(~x) definito in ogni punto/evento dello spa-zio tempo. Una particella incontra un valore del campo, in generale diverso,lungo la sua WL (figura 5.2). Possiamo parametrizzare la WL utilizzando iltempo proprio τ della particella, cioe leggendo un orologio che muove lungola WL. Allora le coordinate, in O, degli eventi lungo la WL saranno
~x(τ) →O
[t(τ), x(τ), y(τ), z(τ)]. (5.11)
mentre la 4-velocita
~u →O
(
dt
dτ,dx
dτ,dy
dτ,dz
dτ
)
. (5.12)
Il campo φ e quindi una funzione (implicita) di τ , φ = φ[t(τ), x(τ), y(τ), z(τ)],e la sua variazione lungo la WL e data da
dφ
dτ=
∂φ
∂t
dt
dτ+
∂φ
∂x
dx
dτ+
∂φ
∂y
dy
dτ+
∂φ
∂z
dz
dτ=
∂φ
∂tu0 +
∂φ
∂xu1 +
∂φ
∂yu2 +
∂φ
∂zu3. (5.13)
L’eq. 5.13 puo essere intesa come la contrazione di una particolare 1-formacon il 4-vettore velocita (si veda eq. 5.5). Infatti osserviamo come da un 4-vettore (~u) si produca un reale (dφ/dτ), che e il rate di variazione del campoφ lungo la WL cui ~u e tangente. Poiche dφ/dτ e lineare in ~u, possiamoconcludere che le componenti di questa 1-forma sono, in O,
dφ →O
(
∂φ
∂t,∂φ
∂x,∂φ
∂y,∂φ
∂z
)
. (5.14)

68 CAPITOLO 5. ALGEBRA TENSORIALE
t
Ο
φ=φ(τ)
u
τ=2
τ=1
τ=0
x
Figura 5.2: Campo scalare φ(τ) = φ[t(τ), x(τ), y(τ), z(τ)] percorso dalla WL di unaparticella.
Il gradiente di un campo scalare e quindi una 1-forma, non un vettore.Per poter essere un vettore avremmo dovuto introdurre una metrica, in mododa sapere il numero il numero di “fette” per unita di lunghezza in cui si dividelo spazio. Il concetto di “unita di lunghezza” e un concetto metrico.
Se operiamo ora un trasformazione di Lorentz, abbiamo che
(dφ)α′ = Λβα′(dφ)β. (5.15)
Poiche vale che∂φ
∂xα′=
∂φ
∂xβ
∂xβ
∂xα′,
ricaviamo che
(dφ)α′ =∂xβ
∂xα′(dφ)β ,
cioe∂xβ
∂xα′= Λβ
α′ . (5.16)
Si usa la notazione∂φ
∂xα≡ φ,α , (5.17)

5.2. TENSORI(
0
2
)
69
dove l’indice in basso ci dice che e la componente di una 1-forma, non di un4-vettore.
Notiamo che x,αβ = δαβ . Inoltre, da wα(~eβ) = δαβ otteniamo che
dxα = ωα,
cioe la base delle 1-forme e dxα. Possiamo quindi scrivere
df =∂f
∂xαdxα. (5.18)
5.2 Tensori(
02
)
5.2.1 Generalita
Definizione
Un tensore di tipo(
02
)
e una funzione lineare di due 4-vettori nei reali. Il
tensore metrico e un tensore(
02
)
. Il piu semplice e il prodotto di due 1-forme,secondo la regola seguente: siano p e q due 1-forme. Allora l’oggetto p⊗ q eun tensore
(
02
)
se, fornito degli argomenti ~A e ~B, da il reale p( ~A)q( ~B).
Il prodotto ⊗ viene detto prodotto esterno. Si noti che esso non e com-mutativo, cioe che p⊗ q 6= q ⊗ p, poiche p( ~A)q( ~B) 6= q( ~A)p( ~B).
Componenti
In generale, un tensore(
02
)
non e un semplice prodotto esterno, ma puocomunque essere espresso come somma di prodotti esterni. Dalla definizionedata in precedenza di componenti di un tensore, se f e un generico tensore(
02
)
, le sue componenti sono
fαβ ≡ f(~eα, ~eβ). (5.19)
Notiamo che sono 16 componenti, visualizzabili come una matrice 4x4. Ilreale che si ottiene dando ad f come argomenti due 4-vettori generici ~A, ~B e
f( ~A, ~B) = f(Aα~eα, Bβ~eβ) = AαBβf(~eα, ~eβ) = AαBβfαβ , (5.20)
che e una doppia somma sugli indici α e β.

70 CAPITOLO 5. ALGEBRA TENSORIALE
Base
La base ωαβ dei tensori(
02
)
deve essere tale che
f = fαβωαβ, (5.21)
da cui si ha che
fµν = f(~eµ, ~eν) = fαβ ωαβ(~eµ, ~eν) =⇒ ωαβ(~eµ, ~eν) = δαµδ
βν = ωα(~eµ)ω
β(~eν),
cioe
ωαβ = ωα ⊗ ωβ (5.22)
e la base dei tensori(
02
)
. Possiamo quindi scrivere
f = fαβ ωα ⊗ ωβ. (5.23)
Simmetria e antisimmetria
In generale, f( ~A, ~B) 6= f( ~B, ~A). Un tensore(
02
)
si dice simmetrico se vale che
f( ~A, ~B) = f( ~B, ~A) ∀ ~A, ~B. (5.24)
Utilizzando le basi come argomenti, cioe ~A = ~eα e ~B = ~eβ, si ha che per untensore simmetrico vale quindi
fαβ = fβα. (5.25)
Dato un generico tensore h di tipo(
02
)
, e possibile costruite un tensoreh(s) tale che
h(s)( ~A, ~B) =1
2h( ~A, ~B) +
1
2h( ~B, ~A). (5.26)
Il tensore cosı costruito e ovviamente simmetrico, e le sue componenti sono
h(s)αβ =1
2(hαβ + hβα) ≡ h(αβ), (5.27)
dove gli indici scritti entro una parentesi tonda indicano, per convenzione, lecomponenti di un tensore simmetrico.

5.2. TENSORI(
0
2
)
71
Un tensore(
02
)
si dice antisimmetrico se vale che
f( ~A, ~B) = −f( ~B, ~A) ∀ ~A, ~B. (5.28)
Ovviamente si hafαβ = −fβα. (5.29)
In modo del tutto analogo ad eq. 5.26 ed 5.27, possiamo costruire untensore antisimmetrico come
h[a]( ~A, ~B) =1
2h( ~A, ~B)− 1
2h( ~B, ~A), (5.30)
le cui componenti sono
h[a]αβ =1
2(hαβ − hβα) ≡ h[αβ]. (5.31)
Gli indici scritti entro una parentesi quadra indicano, per convenzione, lecomponenti di un tensore antisimmetrico.
Un tensore(
02
)
si puo dividere univocamente nelle sue parti simmetricaed antisimmetrica come h = h(s) + h(a). In termini di componenti abbiamoche
hαβ = h(αβ) + h[αβ]. (5.32)
5.2.2 Ruolo del tensore metrico
Come visto nella sezione 5.1.1, il tensore metrico, poiche si ha g( ~A, ~B) =
g( ~B, ~A), e simmetrico.
Ora, dati g e un 4-vettore ~V , possiamo considerare l’oggetto
g(~V , )
come una 1-forma, in quanto, fornito di un 4-vettore argomento, da un reale.Allora possiamo convenzionalmente scrivere che
g(~V , ) ≡ V ( ),
dove la regola eV ( ~A) = g(~V , ~A) = ~V · ~A. (5.33)

72 CAPITOLO 5. ALGEBRA TENSORIALE
Il tensore metrico permette di associare ad un 4-vettore una 1-forma. Dallasimmetria di g si ha che V ( ) ≡ g( , ~V ).
Le componenti della 1-forma V associata, attraverso g, al 4-vettore ~Vsono, per definizione,
Vα ≡ V (~eα)
da cuiVα = ~V · ~eα = ~eα · (V β~eβ) = V β(~eα · ~eβ) = ηαβV
β. (5.34)
Si noti come a sinistra si abbia l’indice basso, proprio delle componenti diuna 1-forma, mentre a destra si abbia l’indice alto, proprio delle componentidi un 4-vettore. In particolare abbiamo
V0 = η0βVβ = η00V
0 + η01V1 + η02V
2 + η03V3 = −V 0 (5.35a)
V1 = η1βVβ = η10V
0 + η11V1 + η12V
2 + η13V3 = V 1 (5.35b)
V2 = η2βVβ = η20V
0 + η21V1 + η22V
2 + η23V3 = V 2 (5.35c)
V3 = η3βVβ = η30V
0 + η31V1 + η32V
2 + η33V3 = V 3. (5.35d)
Cioe, se~V →
O(a, b, c, d)
alloraV →
O(−a, b, c, d).
Possiamo ora operare l’operazione inversa, cioe associare ad una 1-formaA un 4-vettore ~A. Da Aα = ηαβA
β, possiamo scrivere
Aα = ηαβAβ, (5.36)
dove ηαβ e la matrice inversa di ηαβ , che esiste in quanto ηαβ e diagonale condet = −1. Notiamo che, in termini di componenti, ηαβ = ηαβ.
Possiamo concludere dicendo che il tensore metrico g mappa in modounivoco ed invertibile le 1-forme nei 4-vettori, e viceversa. L’operazione“pratica” e il cambio del segno della componente “0” (temporale).
Notiamo infine che nello spazio 3-D Euclideo, il tensore metrico e δij,per cui le componenti dei vettori coincidono con le componenti delle 1-formeassociate. In algebra elementare non si opera quindi una distinzione fraspazio vettoriale ed il suo duale, in quanto coincidono. In relativita speciale

5.3. TENSORI(
MN
)
73
la metrica non e Euclidea (per via del segno “-” davanti alla componentetemporale), e la distinzione e significativa. Ad esempio, abbiamo che
dφ →O
(
∂φ
∂t,∂φ
∂x,∂φ
∂y,∂φ
∂z
)
~dφ →O
(
−∂φ
∂t,∂φ
∂x,∂φ
∂y,∂φ
∂z
)
.
Sarebbe risultato arbitrario definire direttamente ~dφ con il segno “-” davantialla coordinata temporale.
Prodotto scalare di 1-forme
Per definizione, la grandezza di una 1-forma e uguale alla grandezza del 4-vettore associato ad essa attraverso la metrica, cioe
(p)2 ≡ (~p)2 = ηαβpαpβ. (5.37)
Allora possiamo definire un prodotto scalare (o prodotto interno) per le 1-forme come
p · q ≡ 1
2[(p+ q)2 − (p)2 − (q)2], (5.38)
che esprime un reale dato da −p0q0 + p1q1 + p2q2 + p3q3.
5.3 Tensori(
MN
)
A questo punto, il dualismo e completo, poiche possiamo considerare i 4-vettori come funzioni lineari che mappano le 1-forme nei reali, cioe
~V (p) ≡ p(~V ) = pαVα ≡ 〈p, ~V 〉, (5.39)
dove la notazione 〈 , 〉 esprime la dualita della contrazione.
Analogamente ai tensori di tipo(
02
)
, i tensori di tipo(
0N
)
sono funzioni
lineari di N vettori nei reali. Un tensore(
M0
)
sara invece una funzione lineare
di M 1-forme nei reali. I 4-vettori sono dunque tensori di tipo(
10
)
.

74 CAPITOLO 5. ALGEBRA TENSORIALE
Ad esempio, un tensore(
20
)
e una funzione lineare di due 1-forme nei reali.
Puo essere scritto come ~V ⊗ ~W , e, fornito delle 1-forme p e q, da il reale
~V (p) ~W (q) ≡ p(~V )q( ~W ) = V αpαWβqβ. (5.40)
Le componenti di ~V ⊗ ~W sono quindi V αW β, mentre la base dei tensori(
20
)
e ~eα⊗~eβ. In generale, le componenti di un tensore(
M0
)
sono ottenute usandocome argomenti le 1-forme base ωα, cosı come le componenti di un tensore(
0N
)
sono ottenute usando come argomenti i 4-vettore base ~eα. Notiamo che le
componenti dei tensori(
M0
)
hanno gli indici in alto (come i 4-vettori), mentre
le componenti dei tensori(
0N
)
hanno gli indici in basso (come le 1-forme).
A questo punto possiamo generalizzare ulteriormente, e definire tensoredi tipo
(
MN
)
una funzione lineare di N vettori ed M 1-forme nei reali.
Ad esempio, se R e un tensore(
11
)
, significa che
R(p; ~A)
e un reale. Le componenti di R in un certo sistema O sono date, perdefinizione, da
Rαβ ≡ R(ωα;~eβ). (5.41)
In generale, le componenti di un tensore(
MN
)
hanno N indici bassi (detticovarianti) ed M indici alti (detti controvarianti).
Se vogliamo le componenti di R nel sistema O′ che si muove, al solito,rispetto a O lungo l’asse x positiva con velocita v, abbiamo che
Rα′
β′ ≡ R(ωα′
;~eβ′) = R(Λα′
µ ωµ; Λνβ′~eν) = Λα′
µ Λνβ′ R(ωµ;~eν) = Λα′
µ Λνβ′ Rµ
ν .(5.42)
Alzare ed abbassare gli indici
Abbiamo visto come la metrica mappi i tensori(
10
)
(4-vettori) nei tensori(
01
)
(1-forme), e come la metrica inversa agisca al contrario. Cosı, possiamo direche la metrica mappa un generico tensore
(
MN
)
in un tensore(
M−1N+1
)
, mentre
la metrica inversa mappa un tensore(
MN
)
in un tensore(
M+1N−1
)
.
Ad esempio, se T e un tensore(
21
)
, le sue componenti saranno del tipoT αβγ . Mappando la seconda 1-forma argomento (β) in un 4-vettore con la

5.4. DIFFERENZIAZIONE DI TENSORI 75
metrica, cioeηβµ T
αµγ = T α
βγ ,
otteniamo le componenti di un tensore(
12
)
. Se mappiamo la prima 1-formaargomento (α) otteniamo
ηαµ Tµβγ = T β
αγ .
Infine, mappando il 4-vettore (γ) con la metrica inversa, otteniamo le com-ponenti di un tensore
(
30
)
:
ηγµ T αβµ = T αβγ .
Le regole nell’alzare ed abbassare gli indici sono semplici: alzando odabbassando un indice temporale (“0”) la componente cambia di segno, mentrealzando od abbassando gli indici spaziali (“1,2,3”) la componente non cambia.
5.4 Differenziazione di tensori
Concludiamo il capitolo con qualche cenno alla differenziazione di tensori.Abbiamo visto che il gradiente di una funzione scalare f , pensabile come untensore
(
00
)
, e una 1-forma, cioe un tensore(
01
)
. Possiamo quindi dire chedifferenziando un tensore, si ottiene un tensore di un grado covariante piualto.
In generale, consideriamo un tensore T di tipo(
11
)
. Per definizione dicomponenti abbiamo che
T = T αβ ωβ ⊗ ~eα. (5.43)
Immaginiamo ora che le componenti di T siano funzione della posizione nel-lo spazio-tempo. Come fatto nella differenziazione di una funzione scalare,possiamo parametrizzare una WL con il suo tempo proprio τ , e valutare iltasso di cambiamento di T lungo la WL stessa:
dT
dτ= lim
∆τ→0
T(τ +∆τ)− T(τ)
∆τ. (5.44)
Ora, fissato un sistema di riferimento, le basi sono le stesse in tutto il sistema(non vero in Relativita Generale). Cioe ωα(τ+∆τ) = ωα(τ), e analogamenteper ~eα, da cui eq. 5.44 puo essere scritta come
dT
dτ=
(
dT αβ
dτ
)
ωβ ⊗ ~eα, (5.45)

76 CAPITOLO 5. ALGEBRA TENSORIALE
dove la derivata in parentesi e la derivata ordinaria delle componenti T αβ
lungo la WL (come detto, le basi non cambiano). Ora, ricordando che
df
dτ= f,γu
γ,
abbiamo chedT α
β
dτ= T α
β,γuγ. (5.46)
Dalla definizione 5.44, dT/dτ e un tensore dello stesso tipo di T, cioe ditipo
(
11
)
. Poiche, da eq. 5.44, per ogni 4-vettore ~u abbiamo
dT
dτ=(
T αβ,γ ω
β ⊗ ~eα)
uγ, (5.47)
da cui deduciamo che l’oggetto ∇T, detto gradiente di T, e definito comesegue:
∇T ≡ T αβ,γ ω
β ⊗ ωγ ⊗ ~eα (5.48)
e un tensore di tipo(
12
)
.
Si usa la notazionedT
dτ≡ ∇~uT,
le cui componenti sono
∇~uT →O
T αβ,γ u
γ
.
5.5 Esempio: il tensore energia–momento
Il tensore energia–momento (piu correttamente sforzo–energia, in inglesestress–energy tensor) riveste un ruolo particolarmente importante in una for-mulazione relativistica della meccanica, in quanto contiene i termini di den-sita e pressione dovuti ai campi. Consideriamo il caso di un fluido perfetto,cioe, una collezione statistica di particelle in cui le forze parallele all’interfac-cia fra due elementi del fluido stesso siano nulle. Il caso piu semplice di fluidoperfetto e la cosiddetta polvere, cioe un fluido le cui particelle sono a riposoin un qualche sistema di riferimento inerziale (MCRF). Questo significa chenon esistono moti random delle particelle.

5.5. ESEMPIO: IL TENSORE ENERGIA–MOMENTO 77
Se chiamiamo n la densita numerica (numero di particelle per unita divolume) nel MCRF, in un sistema O′ in moto con velocita v lungo l’asse x,la densita sara
nO′ ≡ n′ = γ n, (5.49)
a causa della contrazione della dimensione parallela al moto (e notando cheil numero di particelle si conserva).
Consideriamo ora il flusso di particelle, cioe il numero di particelle cheattraversano una superficie unitaria nell’unita di tempo. Nel MCRF esso eovviamente nullo (nel caso di polvere). In O′, se immaginiamo la superficie∆A′ perpendicolare alla direzione del moto, il numero di particelle attraversoal superficie in un tempo ∆t′ sara dato dato da n′v∆t′∆A′, da cui
flussox′
= γnv. (5.50)
Se, in generale, la velocita delle particelle ha componenti vx, vy e vz, si habanalmente
(flusso)x′
= γnvx,
(flusso)y′
= γnvy,
(flusso)z′
= γnvz.
Possiamo quindi definire un 4-vettore, detto 4-flusso, come
~N ≡ n~u, (5.51)
dove ~u e la 4-velocita. Allora, in un sistema O dove
~u →O
(γ, γvx, γvy, γvz)
abbiamo~N →
O(γn, γnvx, γnvy, γnvz). (5.52)
Notiamo che in fisica Galileiana n e uno scalare, e il flusso dipende dal sistemadi riferimento. In relativita ~N e un 4-vettore, quindi indipendente dal sistemadi riferimento (sono le sue componenti che variano). Dato ~N , la densita
numerica n puo essere ottenuta notando che ~N · ~N = −n2, da cui n =(− ~N · ~N)1/2.

78 CAPITOLO 5. ALGEBRA TENSORIALE
Che la densita sia la componente temporale di un flusso 4-dimensionalenon deve sorprendere. Infatti consideriamo le WL delle particelle del fluidonel sistema O′ rispetto al quale esso si muove (figura 5.3). Il numero di WLche attraversano una superficie unitaria S1 nell’unita di tempo ∆t′ = 1 eovviamente il flusso numerico. Nella figura, la WL di tale superficie e unaretta vericale, ad x′ costante. In realta, considerando che lo spazio e 3D(xyz), la superficie unitaria per un tempo unitario definisce un volume uni-tario 3-D nello spazio-tempo ∆t′ = ∆y′ = ∆z′ = 1. Consideriamo ora unasuperficie S2 a t′ costante, nella figura una retta orizzontale. Il “flusso” diparticelle attraverso questa superficie in una sua sezione con ∆x′ = 1 none altro che la densita delle particelle (considerando le 3 dimensioni spaziali,∆x′ = 1 definisce un volume unitario ∆x′ = ∆y′ = ∆z′ = 1). La densitapuo essere quindi vista come un flusso time-like, cioe un flusso attraverso unasuperficie unitaria definita ad un tempo costante. In altre parole, nello spa-zio 4-dimensionale possiamo definire delle densita come numero di particelleper unita di volume 3-D dxαdxβdxµ. Quando i tre differenziali sono le trecoordinate spaziali, abbiamo la densita classica. Quando uno dei differenzialie la coordinata tempo, il volume 3-D e una superficie per un tempo, e quindisi ha un flusso.
∆
∆
t’
x’particelle del fluido
2
1
S
S
=1
=1t’
x’

5.5. ESEMPIO: IL TENSORE ENERGIA–MOMENTO 79
Figura 5.3: Linee d’Universo di particelle di fluido. Il flusso di WL nell’uniita di volume∆t′ = ∆y′ = ∆z′ = 1 (S1) definita ad x′ costante e il normale flusso numerico di particelle,cioe numero di particelle per unita di superficie per unita di tempo. Il flusso nell’unita divolume ∆x′ = ∆y′ = ∆z′ = 1 (S2) definita a t′ costante e un flusso time-like, che coincidecon la densita numerica di particelle (numero di particelle per unita di volume).
Supponiamo ora che tutte le particelle abbiano massa a riposo m. Ladensita di energia nell’MCRF e
ρ = mn, (5.53)
assumendo trascurabili i moti random (polvere). Nel sistema in moto rispettoal fluido O′, da n′ = γn e m′ = γm, avremo che
ρ′ = γ2ρ. (5.54)
Nell’equazione precedente compaiono due trasformazioni di Lorentz, una perla densita e una per la massa. La densita di energia non e quindi la compo-nente di un 4-vettore. Possiamo definirla come la componente di un tensoredi tipo
(
20
)
. Infatti per definire energia ci serviamo di una 1-forma per sele-zionare la componente 0-esima del 4-vettore energia-momento. Per definire“densita” ci serviamo di una 1-forma per selezionare la componente 0-esimadel 4-flusso. In modo analogo, ci serviranno due 1-forme per definire un flus-so di energia, una densita di momento, e un flusso di momento. Definiamoquindi il tensore energia–momento T di tipo
(
20
)
come segue:
T(dxα, dxβ) = T αβ (5.55)
il flusso del momento α-esimo attraverso una superficie unitaria definita ad xβ
costante. Notiamo che il momento α-esimo puo essere scritto come 〈dxα, ~p〉.In particolare, avremo
• T 00 = flusso di energia attraverso superficie con x0 costante, cioe den-sita di energia;
• T 0i = flusso di energia attraverso una superficie con xi costante.
• T i0 = flusso di i-esimo momento attraverso superficie con x0 costante,cioe densita di momento;

80 CAPITOLO 5. ALGEBRA TENSORIALE
• T ij = flusso di i-esimo momento attraverso superficie con xj costante.
E possibile dimostrare che T cosı definito e simmetrico. Infatti flusso dienergia = densita di energia per velocita = densita di massa per velocita =densita di momento, cioe T 0i = T i0. Inoltre, nel caso in cui T ij 6= T ji, l’assen-za di forze viscose parallele all’interfaccia fra elementi di fluido, produrrebbemoti vorticosi con accelerazione infinita.
Notiamo che nel caso particolare di polvere, le componenti del tensoreenergia–momento nel MCRF sono (T 00)MCRF = ρ = mn, mentre tutte lealtre componenti sono nulle (solo nel MCRF), per assenza di moti random.
Se consideriamo il tensore costruito come ~p⊗ ~N , esso ha le stesse compo-nenti di T, cioe T = ~p⊗ ~N = mn~u⊗ ~u. In termini di componenti,
T αβ = T(ωα, ωβ) = ρ~u(ωα)~u(ωβ) = ρ uαuβ.
In un sistema generico O in cui
~u →O
(γ, γvx, γvy, γvz)
abbiamo quindi
T 00 =ργ2,
T 0i =ρu0ui = ργ2vi,
T i0 =ρuiu0 = ργ2vi,
T ij =ρuiuj = ργ2vivj.
Per un fluido generico in cui esistono moti random, e definita ovviamenteanche una pressione p ed occorre considerare viscosita e conduzione di calore.Anche in questo caso e possibile dimostrare che il tensore energia–momentoe simmetrico. E facile dimostrare che
T αβ,β = 0. (5.56)
Con α = 0 l’equazione rappresenta la conservazione dell’energia, con β =1, 2, 3 la conservazione delle tre componenti del momento.

5.6. ESERCIZI 81
Nel caso in cui viscosita e conduzione siano trascurabili si ha un fluidoperfetto (la polvere e un fluido perfetto a pressione nulla). In questo caso epossibile vedere che
T = (p+ ρ)~u⊗ ~u+ pg−1, (5.57)
dove ricordiamo g−1 e l’inverso del tensore metrico. In termini di componenti
T αβ = (p+ ρ)uαuβ + pηαβ, (5.58)
che formano la seguente matrice:
T αβ =
ρ 0 0 00 px 0 00 0 py 00 0 0 pz
, (5.59)
dove px, py, e pz sono le componenti della pressione lungo i 3 assi spaziali.
5.6 Esercizi
1. Dati i seguenti 4-vettori,
~A →O
(2, 1, 1, 0)
~B →O
(1, 2, 0, 0)
~C →O
(0, 0, 1, 1)
~D →O
(−3, 2, 0, 0),
sapendo che p( ~A) = 1, p( ~B) = −1, p( ~C) = 1−, e p( ~D) = 0, si determininole componenti di p in O.
2. Dati ~eα e le 1-forme base λβ, doveλ0 →
O(1, 1, 0, 0)
λ1 →O
(1,−1, 0, 0)
λ2 →O
(0, 0, 1,−1)
λ3 →O
(0, 0, 1, 1),

82 CAPITOLO 5. ALGEBRA TENSORIALE
(a) Si dimostri che p 6= p(~eα)λα;
(b) Dato p →O
(1, 1, 1, 1), determinare le componenti di p sulla base λα.
3. Dati p →O
(1, 1, 0, 0) e q →O
(−1, 0, 1, 0),
(a) Si determinino le componenti del tensore(02
)
h = p⊗ q;
(b) si determinino le componenti di h(s) e di h[a].
4. Siano A un tensore(
02
)
, e B un tensore(
20
)
. Si dimostri che AαβBαβ einvariante relativistica.
5. Siano: A un tensore(20
)
antisimmetrico, B un tensore(02
)
simmetrico, C un
tensore(
02
)
qualsiasi, e D un tensore(
20
)
qualsiasi. Provare che:
(a) AµνBµν = 0;
(b) AµνCµν = AµνC[µν];
(c) BµνDµν = BµνD
(µν).
6. Dati
~U →O
(1 + t2, t2,√2t, 0)
~D →O
(x, 5tx,√2t, 0) :
(5.60)
(a) ~U puo essere una 4-velocita? E ~D?
(b) Determinare la 3-velocita di una particella la cui 4-velocita e ~U . De-terminarne i limiti per t → 0 e t → ∞;
(c) Trovare Uα;
(d) Trovare U,αβ ;
(e) Dimostrare che per ogni β si ha UαU,αβ = 0;
(f) Trovare D,ββ;
(g) Trovare (UαDβ),β ;
(h) Trovare Uα(UαDβ),β ;
(i) Trovare ∇~U~D e ∇ ~D
~U .

Capitolo 6
ELETTRODINAMICARELATIVISTICA
6.1 Equazioni di Maxwell
Le equazioni di Maxwell sono
∇ ·D = 4πρ (6.1a)
∇ ·B = 0 (6.1b)
∇×E = −∂B
∂t(6.1c)
∇×H = 4πJ+∂D
∂t, (6.1d)
dove D = ǫE e B = µH. In esse compaiono implicitamente 2 costanti, lavelocita della luce e la carica elettrica, che sono invarianti relativistiche. Neconsegue che le equazioni di Maxwell sono invarianti relativistiche. Voglia-mo ora scriverele in forma tensoriale. Per quanto visto precedentemente,possiamo scegliere indifferentemente la forma covariante o controvariante.
6.1.1 Conservazione della carica elettrica
Se scriviamo la densita di carica come
ρ ≡ de
dV, (6.2)
83

84 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
dove dV ≡ dx1 dx2 dx3 e il volume 3-D, l’invarianza della carica elettrica cidice che
de = ρdV = ρ dx1 dx2 dx3 (6.3)
e invariante. Definiamo ora il 4-volume come
d~V ≡ dx0 dx1 dx2 dx3. (6.4)
Mostriamo ora che d~V e invariante. Consideriamo infatti un volume 3-Ddi lato ℓ′ in quiete nel sistema O′, sistema che come al solito si muove divelocita v lungo l’asse x positiva rispetto a O (figura 6.1). In O′ il volume3-D e quindi ℓ′3.
O x
z
y
z’v
O’ x’
y’
l’
l’
l’
Figura 6.1: Moto del volume 3-D ℓ′3.
Applicando le trasformazioni di Lorentz, possiamo scrivere che
ℓx = ℓ′/γ
ℓy = ℓ′
ℓz = ℓ′
da cui, per il volume 3-D, si ha
V =V ′
γ.

6.1. EQUAZIONI DI MAXWELL 85
Inoltre, poiche ∆t = γ∆t′ (dilatazione del tempo), ricaviamo che per il 4-volume vale
~V = ~V ′, (6.5)
cioe il 4-volume e invariante, come volevamo dimostrare.
Ora, confrontando le definzioni 6.3 e 6.4, abbiamo che ρ si trasforma comela componente “0” di un 4-vettore. Possiamo allora scrivere la conservazionedella carica,
∂ρ
∂t+∇ · J = 0
in forma tensoriale comeJµ,µ = 0 (6.6)
dove le componenti della 4-corrente ~J sono
~J →O
(ρ, Jx, Jy, Jz) . (6.7)
Come fatto unendo due concetti classici diversi, energia e momento, inun unico 4-vettore, anche qui abbiamo unito due concetti diversi, densitadi carica e densita di corrente, in un unico 4-vettore. Questo e importante,poiche sappiamo esattamente come si trasformano i 4-vettori passando da unsistema di riferimento all’altro.
6.1.2 Equazione delle onde
Ricordiamo che, dati il potenziale scalare φ e vettoriale A, il gauge di Lorentze
∇ ·A+∂φ
∂t= 0. (6.8)
da cui, nel caso delle eqz. di Mazwell nel vuoto, ricaviamo l’equazione delleonde,
∇2φ− ∂2φ
∂t2= −4πρ (6.9a)
∇2A− ∂2A
∂t2= −4πJ. (6.9b)
Se ora definiamo il 4-potenziale ~A, le cui componenti sono
~A →O
(φ,Ax, Ay, Az) , (6.10)

86 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
possiamo scrivere le 4 equazioni 6.9a e 6.9b in forma tensoriale come
Aβ,α,α = −4πJβ. (6.11)
Come esempio concreto, consideriamo al caso β = 0. Abbiamo
A0,α,α = −4πJ0,
cioe, da eq. 6.10,φ,α,α = −4πρ.
Notiamo che compaiono una derivata covariante ed una controvariante. Espli-citando il conto si ha
φ,0,0 + φ,1
,1 + φ,2,2 + φ,3
,3 = −∂2φ
∂t2+
∂2φ
∂x2+
∂2φ
∂y2+
∂2φ
∂z2= −∂2φ
∂t2+∇2φ = −4πρ
e analogamente i casi β = 1, 2, 3 danno le tre equazioni per le componentidel potenziale vettore in eq. 6.9b.
Possiamo scrivere anche il gauge di Lorentz (eq. 6.8) in forma tensorialecome
Aα,α = 0. (6.12)
6.1.3 Tensore elettromagnetico
Vogliamo ora cercare la forma tensoriale dei campo E e B. I campi, scrittiin termini dei potenziali, sono
B = ∇×A, (6.13a)
E = −∇φ − ∂A
∂t. (6.13b)
I due campi danno, in totale, 6 componenti indipendenti, che possiamopensare come le componenti di un tensore
(
02
)
antisimmetrico con diagonalenulla. Se costruiamo un tensore F di componenti
Fµν ≡ Aν,µ − Aµ,ν (6.14)
vediamo che e ovviamente antisimmetrico e che, osservando eq. 6.13a e 6.13b,fornisce le 6 componenti dei campi. Il tensore F viene detto tensore elettro-
magnetico.

6.1. EQUAZIONI DI MAXWELL 87
Esplicitiamo ora le componenti. Innanzitutto, da eq. 6.10, abbiamo che
A →O
(−φ,Ax, Ay, Az) .
Inoltre, eq. 6.13a e 6.13b ci dicono immediatamente che
F00 = F11 = F22 = F33 = 0.
e
F01 = A1,0 − A0,1 =∂Ax
∂t+
∂φ
∂x= −Ex
F02 = A2,0 − A0,2 =∂Ay
∂t+
∂φ
∂y= −Ey
F03 = A3,0 − A0,3 =∂Az
∂t+
∂φ
∂z= −Ez
F12 = A2,1 − A1,2 =∂Ay
∂x− ∂Ax
∂y= Bz
F13 = A3,1 − A1,3 =∂Az
∂x− ∂Ax
∂z= −By
F23 = A3,2 − A2,3 =∂Az
∂y− ∂Ay
∂z= Bx.
Le componenti del tensore elettromagnetico in forma di matrice sono quindi
Fµν =
0 −Ex −Ey −Ez
Ex 0 Bz −By
Ey −Bz 0 Bx
Ez By −Bx 0
. (6.15)
6.1.4 Equazioni di Maxwell in forma tensoriale
Equazioni con sorgenti
Consideriamo le due equazioni di Maxwell con sorgenti:
∇ · E = 4πρ (6.16a)
∇×B− ∂E
∂t= 4πJ. (6.16b)

88 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
Utilizzando il tensore elettromagnetico, possiamo scriverle come
F ,νµν = 4πJµ. (6.17)
Consideriamo la prima delle 4 equazioni 6.17, ponendo µ = 0. Abbiamo
F ,ν0ν = F ,0
00 + F ,101 + F ,2
02 + F ,303 = 4πJ0
che, da eq. 6.15, in termini di componenti dei campi equivale a
−∂Ex
∂x− ∂Ey
∂y− ∂Ez
∂z= −4πρ,
cioe eq. 6.16a.
Poniamo ora µ = 1 in eq. 6.17. Abbiamo
F ,ν1ν = F ,0
10 + F ,111 + F ,2
12 + F ,313 = 4πJ1
cioe
−∂Ex
∂t+
∂Bz
∂y− ∂By
∂z= 4πJx,
che e la componente x di eq. 6.16b. Analogamente
F ,ν2ν = 4πJ2,
e
F ,ν3ν = 4πJ3,
sono la componente y e z di eq. 6.16b.
Conservazione della carica
Ricordando che Jµ,µ = 0, da eq. 6.17, la conservazione della carica implica che
4πJµ,µ = F µν
,µν = 0. (6.18)

6.2. TRASFORMAZIONI DEI CAMPI 89
Equazioni interne
Consideriamo ora le due equazioni di Maxwell “interne”, cioe quelle in cuinon compaiono sorgenti:
∇ ·B = 0 (6.19a)
∇× E+∂B
∂t= 0. (6.19b)
Sono anch’esse 6 equazioni, e possono essere scritte in forma tensoriale come
Fµν,σ + Fσµ,ν + Fνσ,µ = 0. (6.20)
Notiamo che nella formula precedente non ci sono somme implicite. E fa-cile rendersi conto che l’antisimmetria del tensore elettromagnetico e la suadiagonale nulla, implicano che le uniche combinazioni di indici che danno unrisultato non nullo sono quelle in cui i 3 indici di ciascun termine sono diversifra loro e che combinazioni in cui compaiono i medesimi indici, ma in ordinediverso, danno il medesimo risultato. Detto questo, abbiamo le permutazionidi 4 oggetti distinti (i possibili valori di un indice), a gruppi di 3, cioe
(
43
)
= 4possibili risultati:
F12,3 + F31,2 + F23,1 = 0 (6.21)
che coincide eq. 6.19a,
F02,3 + F30,2 + F23,0 = 0 (6.22)
F01,3 + F30,1 + F13,0 = 0 (6.23)
F01,2 + F20,1 + F12,0 = 0, (6.24)
che, rispettivamente, danno le componenti x, y, e z di eq. 6.19b.
6.2 Trasformazioni dei campi
Applichiamo ora le trasformazioni di Lorentz al tensore elettromagnetico.Questo ci permette di calcolare immediatamente le trasformazioni dei campiE ed B passando da un sistema di riferimento ad un altro in moto relativo.Come al solito consideriamo un boost lungo l’asse x positivo.

90 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
Sappiamo che le componenti di un generico tensore di tipo(
02
)
(e quindianche quelle del tensore elettromagnetico) si trasformano come
Fµ′ν′ = Λαµ′ Λ
βν′ Fαβ , (6.25)
dove, ricordiamo Λση′ = Λσ
η′(−v).
Analizziamo le singole componenti trasformate. Innanzitutto e immediatovedere che
F0′0′ = Λα0′ Λ
β0′ Fαβ
= Λ00′Λ
00′ F00 + Λ0
0′ Λ10′ F01 + Λ1
0′ Λ00′ F10 + Λ1
0′ Λ10′ F11 = 0,
dove abbiamo esplicitato solo i coefficienti di Lorentz non nulli. Analoga-mente,
F1′1′ = F2′2′ = F3′3′ = 0.
Inoltre
Ex′ = F1′0′ = Λ01′ Λ
10′ F01 + Λ1
1′ Λ00′ F10
= −Λ01′ Λ
10′ F10 + Λ1
1′ Λ00′ F10 = (−γ2v2 + γ2)F10 = F10 = Ex
cioe
Ex′ = Ex.
Per la componenti y′ e z′ si ha, rispettivamente
Ey′ = F2′0′ = Λ22′ Λ
00′ F20 + Λ2
2′ Λ10′ F21 = γEy − γvBz
e
Ez′ = F3′0′ = Λ33′ Λ
00′ F30 + Λ3
3′ Λ10′ F31 = γEz + γvBy.
In definitiva, considerando le componenti di E parallela e perpendicolareal moto, possiamo scrivere
E ′‖ = E‖ (6.26a)
E ′⊥ = γ(E⊥ + v ×B). (6.26b)

6.3. CAMPI DA CARICHE IN MOTO UNIFORME 91
In modo del tutto analogo, per le componenti del campo magnetico Btroviamo
Bx′ = F2′3′ = Λ22′ Λ
33′ F23 = F23 = Bx
By′ = F3′1′ = Λ33′ Λ
01′ F30 + Λ3
3′ Λ11′ F31 = γvF30 + γF31 = γvEz + γBy
Bz′ = F1′2′ = Λ01′ Λ
22′ F02 + Λ1
1′ Λ22′ F12 = γvF02 + γF12 = −γvEy + γBz,
cioe, in termini di componenti parallele e perpendicolari al moto,
B′‖ = B‖ (6.27a)
B′⊥ = γ(B⊥ − v × E). (6.27b)
Scalari invarianti
Le regole dell’algebra tensoriale ci dicono che ogni scalare costruito partendoda tensori e invariante rispetto a cambi di sistemi di riferimento. Allorapossiamo dire che lo scalare
Fµν Fµν = 2(B2 −E2)
e invariante, cosı comedet F = (E ·B)2.
Cioe, le quantita B2 −E2 ed E ·B sono invarianti relativistiche.
6.3 Campi da cariche in moto uniforme
Consideriamo una carica q in moto con velocita lungo l’asse x di O. Nelsistema O′ della carica il campo E vale
E ′x = q x′/r′3
E ′y = q y′/r′3
E ′z = q z′/r′3,
dove r′ =√
x′2 + y′2 + z′2, mentre per il campo B abbiamo
B′x = B′
y = B′z = 0.

92 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
Nel sistema O dell’osservatore, utlizzando eq. 6.26a e 6.26b, si ottiene
Ex = E ′x = q x′/r′3
Ey = γq y′/r′3
Ez = γq z′/r′3,
e, da, eq. 6.27a e 6.27b,
Bx = 0
By = −q γ v z′/r′3
Bz = q γ v y′/r′3.
Utilizzando le trasformate di Lorentz
x′ = γ(x− vt)
y′ = y
z′ = z,
otteniamo
Ex = q γ (x− vt)/r3 (6.28a)
Ey = q γ y/r3 (6.28b)
Ez = q γ z/r3, (6.28c)
e
Bx = 0 (6.29a)
By = −q γ v z/r3 (6.29b)
Bz = q γ v y/r3, (6.29c)
con r =√
γ2(x− vt)2 + y2 + z2. Notiamo che i campi cosı ottenuti non sonoaltro che il “campo di velocita” ottenuto dai potenziali di Leinard–Wiechart.
Supponiamo ora che il punto P dello spazio 3-D in cui vogliamo calcolarei campi abbia coordinate (0, b, 0), mentre la carica si muove lungo l’asse x, esi trova in (0, 0, 0) al tempo t = 0 (figura 6.2).

6.3. CAMPI DA CARICHE IN MOTO UNIFORME 93
zB
xE
yE
O
B
E
q
P
b
vt x
y
z
v
Figura 6.2: Carica q in moto lungo l’asse x. Si calcola il valore dei campi E ed B nelpunto P, in funzione del tempo t.
Abbiamo quindi, da eq. 6.28a, 6.28b, e 6.28c il campo E nel punto P,
Ex(P ) = −q γvt/(γ2v2t2 + b2)3/2
Ey(P ) = q γb/(γ2v2t2 + b2)3/2
Ez(P ) = 0,
e, da eq. 6.29a, 6.29b, e 6.29c il campo B nel punto P,
Bx(P ) = 0
By(P ) = 0
Bz(P ) = q γvb/(γ2v2t2 + b2)3/2.
Notiamo che Bz(P ) = vEy(P ), che, per nel caso ultrarelativistico γ ≫ 1,diviene Bz(P ) ≃ Ey(P ). Il campo E si trova nel piano xy e diretto lungo lacongiungente fra la carica q ed il punto P, mentre il campo B, perpendicolarea E, e parallelo all’asse z nel piano zy. Il valore massimo di Ey (e quindi diBz) si ha al tempo t = 0, cioe quando la carica si trova in (0, 0, 0), e valeEy = Bz = qγ/b2, mentre il valore massimo di Ex e Ex ≃ q/b2 ≪ Ey (si

94 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
veda figura 6.3). Il campo elettromagnetico e quindi concentrato nel pianoperpendicolare al moto.
t
xE
zB=yE
0
Figura 6.3: Valori dei campi E ed B nel pun to P in funzione del tempo.
Spettro
Lo trasformata di Fourier dell’impulso di radiazione in P e, poiche Ex ≪ Ey,
E(ω) ≃ 1
2π
∫ +∞
−∞
Ey(t) eiωt dt =
qγb
2π
∫ +∞
−∞
(γ2v2t2 + b2)−3/2 eiωt dt
=qω
πγv2K1
(
bω
γv
)
, (6.30)
dove K1 e la funzione di Bessel modificata del prim’ordine. Lo spettrodell’impulso e quindi
dW
dAdt= |E(ω)|2 = q2ω2
π2γ2v4K2
1
(
bω
γv
)
. (6.31)
Notiamo come lo spettro “tagli” per ω ∼> γv/b, come implicato dal principiodi indeterminazione.
6.4 Elettrodinamica covariante
Abbiamo gia visto la trattazione relativistica del moto di cariche soggettealla forza di Lorentz. Vogliamo ora farne una trattazione covariante.

6.4. ELETTRODINAMICA COVARIANTE 95
6.4.1 La 4-forza di Lorentz
Dalla definizione classica FLorentz = q[E + v × B], vediamo come la 4-forzadi Lorentz debba necessariamente contenere il tensore elettromagnetico F ela 4-velocita ~u. Scriviamo quindi
F µ = qF µν u
ν (6.32)
da cui ricaviamo l’equazione tensoriale del moto di una particella carica:
aµ =q
mF µν u
ν . (6.33)
Analizziamo la componente temporale di eq. 6.32. Ponendo µ = 0 otte-niamo
F 0 = qF 0ν u
ν = q(F 00 u
0 + F 01 u
1 + F 02 u
2 + F 03 u
3)
= q(−F00u0 − F01u
1 − F02u2 − F03u
3)
= q(Exγvx + Eyγvy + Ezγvz). (6.34)
Poiche abbiamo F µ = dpµ/dτ , la componente F 0 della 4-forza di Lorentz cifornisce la variazione di energia (potenza) della particella e, quindi, in terminiclassici 3-D, eq. 6.34 rappresenta la conservazione dell’energia,
dW
dt= qE · v,
dove abbiamo usato usato dt = γdτ . Se ora poniamo µ = 1 in eq. 6.32, si ha
F 1 = qF 1ν u
ν = q(F 10 u
0 + F 11 u
1 + F 12 u
2 + F 13 u
3)
= q(F10u0 + F11u
1 + F12u2 + F13u
3)
= q(γEx + γvyBz − γvzBy), (6.35)
cioedpxdt
= q[Ex + (v ×B)x]. (6.36)
Analogamente, ponendo µ = 2 e µ = 3 in eq. 6.33, si ha
dpydt
= q[Ey + (v ×B)y], (6.37)

96 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
edpzdt
= q[Ez + (v ×B)z], (6.38)
cioe le componenti spaziali dell’equazione del moto di una particella caricain un campo elettromagnetico. Significa che la forza di Lorentz “classica” ein realta relativisticamente invariante. Questo poiche lo sono le equazioni diMaxwell.
Notiamo infine che, in generale, scrivere l’equazione del moto in formatensoriale permette di unire due concetti classici diversi, l’equazione del moto3-D, e, nella sua componente “0”, la conservazione dell’energia.
6.5 Radiazione da cariche relativistiche
6.5.1 Potenza totale
Supponiamo di avere una carica in moto che emetta radiazione isotropica-mente nel suo MCRF O′. Vogliamo calcolare le caratteristiche della radia-zione nel sistema dell’osservatore O, rispetto al quale la carica si muove.Immaginiamo la velocita della carica orientata lungo l’asse x.
Nel MCRF il momento 3-D della radiazione e nullo poiche la radiazionee isotropa, cioe
p′1 = p′2 = p′3 = 0.
Allora, se dW ′ e l’energia emessa in un intervallo di tempo dt′, nel sistemaO abbiamo
dW = dp0 = Λ0µ′dpµ
′
= γ dp′0 = γ dW ′. (6.39)
E importante avere in mente che ~p e qui il 4-momento della radiazione emessa,non della carica, mentre Λα
β′ e la trasformata di Lorentz relativa al moto dellacarica. Ora, poche dt = γdt′, otteniamo che
dW
dt=
dW ′
dt′, (6.40)
cioe la potenza emessa e invariante (se la radiazione e isotropa nel MCRF).
Ricordiamo ora la formula di Larmor:
P ′ =2q2
3|a′|2, (6.41)

6.5. RADIAZIONE DA CARICHE RELATIVISTICHE 97
dove la potenza e misurata nel sistema della carica, e l’accelerazione e un3-vettore. Se ci spostiamo nello spazio 4-D di Minkoski, da ~u · ~a, abbiamoche, nel MCRF, a′0 = 0. Quindi, numericamente, |a′|2 = ~a · ~a, valida in ognisistema di riferimento. Quindi abbiamo che, in O, la potenza totale e
P =2q2
3~a · ~a. (6.42)
Se ora consideriamo quanto visto nel Capitolo 2 per quanto riguarda latrasformazione dell’accelerazione, possiamo, utilizzando eq. 2.37a e 2.37b,scrivere
P =2q2
3~a · ~a =
2q2
3~a′ · ~a′ = 2q2
3(a′2‖ + a′2⊥) =
2q2
3γ4(γ2a2‖ + a2⊥). (6.43)
E importante notare che per particelle ultrarelativistiche a⊥ ≫ a‖, per cui,nonostante il fattore extra γ2, il termine dominante nell’equazione di Larmorrelativistica 6.43 e a2⊥.
6.5.2 Distribuzione angolare della radiazione emessa
Energia
Nel MCRF della carica, consideriamo una quantita infinitesima di energiadW ′ emessa entro l’angolo solido dΩ′ = dφ′dµ′, con µ′ ≡ cos θ′, e θ′ angolorispetto all’asse x′ (figura 6.4). La componente spaziale del momento dellaradiazione entro dΩ′ non sara nulla (lo e se integrata su tutto l’angolo solido).Abbiamo quindi
p0 = Λ0µ′pµ
′
= γp′0 + γvp′1,
(confrontarle con eq. 6.39). Ora, per i fotoni, p′1/p′0 = µ′, da cui
dW = γ(1 + vµ′)dW ′. (6.44)
Ora, la trasformazione di µ e data da eq. 2.27a, e inoltre φ = φ′ in quantol’angolo azimutale e perpendicolare al moto. Possiamo scrivere quindi
dµ =dµ′
γ2(1 + vµ′)2
dφ = dφ′,

98 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
da cui
dΩ =dΩ′
γ2(1 + vµ′)2.
L’energia emessa per unita di angolo solido vista nel sistema O dell’osserva-tore e quindi
dW
dΩ= γ3(1 + vµ′)3
dW ′
dΩ′. (6.45)
Potenza
Vogliamo ora trovare la potenza emessa. Nel MCRF semplicemente la po-tenza e
P ′ =dW ′
dt′. (6.46)
Nel sistema O abbiamo invece due scelte possibili:
• dt = γdt′: intervallo di tempo durante il quale abbiamo emissione inO. Questa scelta fornisce la potenza emessa in O: Pe
• dtA = γ(1 − vµ)dt′: intervallo di tempo della radiazione ricevuta daO. Il fattore extra (1 − vµ) viene dal moto della sorgente (si veda latrattazione dell’effetto Doppler fatta in 2.6.2). Questa scelta forniscela potenza ricevuta in O: Pr.
Abbiamo quindi
dPe
dΩ= γ2(1 + vµ′)3
dP ′
dΩ′=
1
γ4(1− vµ)3dP ′
dΩ′(6.47a)
dPr
dΩ= γ4(1 + vµ′)4
dP ′
dΩ′=
1
γ4(1− vµ)4dP ′
dΩ′, (6.47b)
dove abbiamo utilizzato γ(1 + vµ′) = 1/[γ(1 − vµ)]. Poiche Pr e la potenzache viene effettivamente misurata da un osservatore, consideriamo ora soloeq. 6.47b.

6.5. RADIAZIONE DA CARICHE RELATIVISTICHE 99
q
Ωd ’
x’
vΘ
θ
φ
’’
’
a’
Figura 6.4: Emissione di radiazione entro l’angolo solido dΩ′ nel MCRF della carica q.
Carica ultrarelativistica
Supponiamo che la radiazione sia isotropa in O′, e assumiamo una caricaultrarelativistica, v ≃ 1. Allora eq. 2.27a al secondo ordine in θ divieneµ ≃ 1− θ2. Inoltre possiamo scrivere
v =
√
1− 1
γ2≃ 1− 1
2γ2,
da cui la potenza ricevuta (eq.6.47b) diviene
dPr
dΩ≃(
2γ
1 + γ2θ2
)4dP ′
dΩ′. (6.48)
Carica accelerata
Fino ad ora non abbiamo considerato alcun motivo specifico per il quale lacarica emetta radiazione. Consideriamo adesso che la carica sia accelerata,e quindi esplicitiamo il termine dP ′/dΩ′. Nel sistema della carica, possiamoutilizzare l’approssimazione di dipolo per il pattern della radiazione emessa:
dP ′
dΩ′=
q2a′2
4πsin2Θ′, (6.49)

100 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
dove Θ′ e l’angolo fra accelerazione e la direzione considerata della radiazioneemessa (figura 6.4). Ora, scrivendo ~a′ = a′‖ + a′⊥, abbiamo
dP
dΩ=
q2
4π
(γ2a2‖ + a2⊥)
(1− vµ)4sin2Θ′, (6.50)
dove abbiamo usato eq. 6.47b, e le regole di trasformazione dell’accelerazione,eq. 2.37a ed 2.37b.
Ci manca ora da scrivere Θ′ del sistema O. Analizziamo due casi parti-colari:
• a ‖ v: in questo caso Θ′ = θ′ (figura 6.4), e, usando eq. 2.27a, abbiamo
sin2Θ′ =sin2 θ
γ2(1− vµ)2,
da cui
dP‖
dΩ=
q2
4πa2‖
sin2 θ
(1− vµ)6. (6.51)
• a ⊥ v: in questo caso cosΘ′ = sin θ′ cosφ′, e, sempre usando eq. 2.27a,abbiamo
sin2Θ′ = 1− sin2 θ cos2 φ
γ2(1− vµ)2,
da cui
dP⊥
dΩ=
q2
4πa2⊥
1
(1− vµ)4
[
1− sin2 θ cos2 φ
γ2(1− vµ)2
]
. (6.52)
La radiazione, nel sistema O, viene ricevuta inconata entro un angolo ∼1/γ. Uno schema del pattern della radiazione emessa e mostrato in figura 6.5.

6.6. ESERCIZI 101
v x’
LAB: OMCRF: O’
x
∼1/γ
v x’ x
LAB: OMCRF: O’
∼1/γ
va’
a’
v
Figura 6.5: Pattern della radiazione emessa da una carica accelerata nel sistema MCRFO′ (a sinistra), e nel sistema dell’osservatore O. In alto, il caso in cui a′ ‖ v, in bassoa′ ⊥ v.
6.6 Esercizi
1. Una sorgente celeste si muove con velocita v verso un osservatore, ed il suomoto forma un angolo θ rispetto alla linea di vista. Si determini la velocitaapparente proiettata sulla volta celeste (cioe perpendicolarmente alla lineadi vista).
2. Scrivere la legge di Ohm in forma tensoriale.
3. Una particella di massa a riposo m so muove di velocita v lungo l’asse xin un sistema O. Nel suo sistema O′, la particella emette parte della sueenergia interna W ′ come radiazione isotropa.
(a) Esiste una forza di reazione sulla particella? Oppure resta ferma inO′?
(b) La particella e accelerata nel sistema O?

102 CAPITOLO 6. ELETTRODINAMICA RELATIVISTICA
(c) Quale e il 4-momento della radiazione emessa in O′? E in O?
(d) La particella rallenta in O per via della componente x del momentodella radiazione?
(e) Come si riconcilia con la conservazione del 4-momento?
4. Una particella di massa a riposo m assorbe un fotone di energia hν, conver-tendo la sua energia come energia interna. Dopo l’interazione la particellaha massa a riposo m′ e si muove con velocita v′ rispetto al sistema in cuiprima dell’interazione era ferma.
(a) Trovare la relazione fra m e m′;
(b) Trovare la medesima relazione nel caso in cui la particella si muove,prima dell’interazione, con velocita v.