Appunti di Fisica I - Istituto Nazionale di Fisica...
70
Appunti di Fisica I per il Corso di Laurea in Chimica Prof. G. Carboni V. 2.2 – marzo 2001
Transcript of Appunti di Fisica I - Istituto Nazionale di Fisica...
����������� ������ � ������������� � � � �����! � "$# �%'&(��� � � �)"
Appunti di FisicaIperil Corsodi Laureain Chimica
Prof. G. Carboni
V. 2.2– marzo2001


Indice
I Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3II Dinamicadelpuntomateriale . . . . . . . . . . . . . . . . . . . . . . . . 10III Moto oscillatorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27IV Trasformazionidi riferimento . . . . . . . . . . . . . . . . . . . . . . . . 32V Lavorodi unaforza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36VI Dinamicadeisistemidi punti . . . . . . . . . . . . . . . . . . . . . . . . 46VII Urti fra particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49VIII Momentoangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53IX Dinamicadeicorpi rigidi . . . . . . . . . . . . . . . . . . . . . . . . . . . 58X Dinamicadeifluidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66


Capitolo I
Cinematica
1 La cinematicae quellabrancadellameccanicachestudiail movimentodei corpi sen-za domandarsiquali sonole causeche lo producono.Nella cinematicavengonodefinite levariabili necessarieperdescrivereil motodei corpi.
2 Sistemadi riferimento Perdescrivereil motooccorreservirsidi un sistemadi riferi-mento. Un sistemadi riferimentoe costituitodaun insiemedi corpi, fissi relativamentel’unoall’altro, rispettoai quali definiamola posizionedel corpostudiatoe il suomovimento. Unesempiosemplicepotrebbeesserela stanzanella qualeci troviamo. In tal casola posizionedel corpochestudiamopuo esseredefinitamisurandonele distanzedallepareti.
3 La sceltadel sistemadi riferimentoe del tutto arbitraria.Unamoscachevola all’in-ternodi un vagoneferroviario in movimentopuo esserestudiatasia rispettoa un riferimentosolidalecon lo scompartimentodel vagonesia rispettoa un riferimentofissorispettoal suo-lo. Tuttavia spessola sceltadi un determinatosistemapermettedellenotevoli semplificazioninellasoluzionedi unproblema.
4 Sistemadi coordinate Il sistemadi coordinatevieneutilizzato per permetterela de-scrizionematematicadel movimentorispettoal sistemadi riferimento. In praticail sistemadi coordinatepuo esserepensatocomeancorato al sistemadi riferimento. E importantenonconfondereil sistemadi coordinatecon il sistemadi riferimento,anchesea volte perfino ilibri di testoconfondonole duecose.Mentreil sistemadi riferimentoe qualcosadi fisico, ilsistemadi coordinatee qualcosadi geometrico.Possiamosempresceglierefra infiniti sistemidi coordinatequellochemeglio si prestaalla descrizionedelproblema.
5 Sistemadi coordinate cartesianeortogonali Un sistemadi coordinatemolto usatoe quello cartesianoortogonale. Sempreallo scopodi ribadire la differenzafra sistemadicoordinateesistemadi riferimento,notiamochenell’esempiodellamoscasul trenopossiamousareun sistemadi coordinatecartesianeortogonalisia(a) nel sistemadi riferimentosolidalecol vagoneche(b) nel sistemadi riferimentosolidalecol suolo.Nel caso(a) gli assipossonoesseregli spigoli delleparetidello scompartimento,nel caso(b) gli spigoli delleparetidellasalad’aspettonellastazionepiu vicina.
6 Sistemadi coordinatepolari In certicasiil sistemadi coordinatecartesianeortogonalinone il piu adattoa formulareo risolvereuncertoproblema.Ad esempio,perstudiareil motodi unapallinacheruotaattornoauncentrosuunatraiettoriacircolareeconsigliabileutilizzareun sistemadi coordinate polari r * θ. Perche tale sistemae vantaggiosorispettoal sistema
3

CAPITOLO I. CINEMATICA
cartesiano?Il motivo e semplice: per descrivere il moto della pallina e sufficiente la solavariabileangolareθ datochela distanzar dellapallinadalcentrononvaria.Conle coordinatecartesianeavremmodovuto utilizzare le due variabili x e y. In altri casi, che vedremoinseguito,converracontinuareadusarele coordinatepolari,pur ser dovessevariare.
7 Unit a di misura Le lunghezze(dimensioni + L , ) si misuranoin metri (m) nel sistemaMKS, in centimetri(cm) nel sistemacgs. 1 cm = 0.01m. Gli angoli non hannodimensionie si misuranogeneralmentein radianti(rad); i gradisi possonoconvertire in radiantitenendopresenteche360o - 2π rad.
8 Trasformazioni di coordinate Il fattochela sceltadelsistemadi coordinatesiaarbitra-ria implica chee semprepossibileesprimerele coordinatedi un sistematramitele coordinatedi un altrosistema.Si usaperquestoil terminedi trasformazionedi coordinate. Ad esempio:
x - r cosθy - r sinθ
esprimela trasformazioneda coordinatepolari nel pianoa coordinatecartesianeortogonali:dater e θ si ottengonox ey. La trasformazioneeovviamenteinvertibile:
r -/. x2 0 y2
θ - arctan1 y2 x39 Traslazionedi un sistemadi coordinatecartesiane Traslareunsistemadi coordinate
cartesianesignificaspostarnel’origine mantenendopero invariatele direzionidegli assi. Sup-poniamoadesempiodi traslarel’origine di a lungox, di b lungoy e di c lungoz. Chiamiamo1 x45* y46* z473 le coordinatedi un puntoP nel sistematraslato. Allora le coordinatenel vecchiosistemaenel nuovo sarannolegatein manieramoltosemplice:
x - x4 0 a
y - y4 0 b
z - z4 0 c
(1)
10 Rotazioni Supponiamodi volerruotareil nostrosistemadi coordinatecartesiane.Pos-siamo riferirci alla Fig. 1 per visualizzare il problema nel caso semplice
x
y
x’
y’
θ
P
Fig. 1
maabbastanzafrequentedi unarotazioneattornoa unasse(z in questocaso).L’angolodi rotazionee θ. Os-serviamoprima di tutto chela coordinataz non cam-bia. Per le altre due,con un pocodi trigonometriasiottiene:
x4 - xcosθ 0 ysinθy4 - ycosθ 8 xsinθz4 - z
(2)
Comesi vedeciascunadellenuovecoordinateinfluen-zatedalla rotazione(quindi non z) e funzionedi en-trambele duevecchie. La trasformazionelasciagiu-stamenteinalteratala distanzadi Pdall’origine:
4

CAPITOLO I. CINEMATICA
x2 0 y2 0 z2 - x4 2 0 y4 2 0 z4 2 (verificatelodirettamente).Tenetepresenteche la formulava beneanchein casodi rotazioni in sensoopposto(cioe orario) purche si cambi il segnodell’angolodi rotazione.
Se la rotazionenon avviene lungo uno degli assicoordinatiabbiamocomunquesempredelle trasformazionilineari checoinvolgonole tre coordinateinsieme,con delle formule unpocopiu complicate,mala sostanzanoncambia.
11 Punto materiale Descrivereil motodi un corpodi formaarbitrariapuo esseremoltocomplicato.Il casopiu semplicechepuo presentarsie quellodel cosiddettopuntomateriale,per descrivere il qualesonosufficienti 3 coordinatecartesianeortogonaliper il moto nellospazio,mentrenebastano2 nel pianoe1 solaseil motoavvienelungounaretta.
12 Traiettoria Un punto materialemuovendosinello spaziooccupasuccessivamenteun’infinita di posizionisuccessive. Si chiamatraiettoria il luogodei punti occupatisuccessi-vamentedal puntomaterialenel suomoto. Si trattain generedi unalineacurva. Sela lineaechiusail moto e limitato e il puntopercorrecontinuamentela medesimatraiettoria,comenelcasodelleorbiteplanetarie.
13 Gradi di libert a Un puntomaterialenellospaziopuo venireidentificatoda3 coordi-natecartesianeortogonali.Il numerodi coordinateindipendentinoncambiaseusiamocoordi-natepolari o cilindricheo ellitticheo altre.Diciamoquindi cheil puntomaterialenellospazioha3 gradi di liberta. Analogamentei gradidi libertasono2 seil puntosi muovenelpianoecc.Il numero deigradi di liberta nonpuo esseremodificatodalla sceltadelsistemadi coordinate.
14 Vettori Le tre coordinatecartesianecheidentificanola posizionedi un puntoP nellospazioci diconocomedobbiamospostarcidall’origine dellecoordinateper arrivarein P. Adesempiopossiamospostarcisuccessivamentelungo x * y e z di distanzepari alle coordinatedel punto. Non e necessariocheci spostiamoin quest’ordine:va benissimoanchemuoversiprima lungoz, poi lungoy e poi lungox. OppurepossiamopuntaredirettamenteversoP. Lospostamentoda O versoP e quindi associatoa unadirezione, a un verso, ed infine al valoredella distanzadi cui dobbiamospostarci. Lo spostamentoe una grandezzache si chiamavettore e lo indichiamocon unanotazionespeciale:9r, o anche,sevogliamoevidenziarelapartenzae l’arrivo, con 9OP. La freccia serve a ricordarci che ogni vettoree caratterizzatodaunadirezione.La lunghezzadello spostamentonon e altro chela distanzafra l’origine Oe P, ossia . x2 0 y2 0 z2, e costituisceil modulodel vettorechesi indica con : 9r : x o anchesemplicementeconr.
Segueda tutto questocheil vettore9r e intrinsecamentelegatoalle coordinate1 x * y* z3 diP e quindi 1 x * y* z3 sonoqualcosadi piu di tre semplicinumeri. Il numerodi caramellein unsacchetto,il numerodi atomiin unamolecoladi DNA, la temperaturaa cui l’acquabolle nondipendonodallasceltadelsistemadi coordinate.Sonograndezzescalari. Le trecoordinatediunpuntoinvecemutanosecambiamosistemadi coordinate;nonsolo,malo fannoin manieradipendentel’una dall’altra,comeabbiamovisto prima. Chiamiamola ternadi numeri 1 x * y* z3le componentidelvettore9r.
15 VettorespostamentoAbbiamodefinitoil nostrovettoreposizioneriferendociall’ori-gineO delnostrosistemadi coordinate.Secambiamol’origine delsistemadi coordinateenoi
5

CAPITOLO I. CINEMATICA
ci spostiamonellanuovaorigine,O4 , echiarochein generedovremoguardarein unadirezionediversapervedereil puntoP. Il nuovo vettoreposizione,9r 4 saraquindi diversoda9r.
Consideriamoora non piu il vettoreposizionema il vettorespostamento9w dal puntoPa un altro puntoQ. Si usaindicarequestovettorea volte anchecon la notazione 9PQ: la suadirezioneindicadacheparteci si devespostareperandaredaPaQ e il suomoduloeal solitola distanzafra questiduepunti:: 9PQ: - : 9w : -(; 1 xp 8 xq 3 2 0 1 yp 8 yq 3 2 0 1 zp 8 zq 3 2(3)
Questovettorespostamentoha unasuarealta autonomatotalmentesvincolatadal sistemadicoordinate,perchelegatasoloall’esistenzadeipuntiPeQ. Il vettoreeunoggettochenoncam-bia quindi col sistemadi coordinate.Quelchecambiasarannosolamentele suecomponenti,chepasserannodalla ternadi numeri 1 wx * wy * wz 3 a unaterna 1 w4x * w4y * w4z3 . Quindi stavolta ilvettore 9w potra indicaredi volta il volta i trenumeri 1 wx * wy * wz3 o 1 w4x * w4y * w4z 3 asecondadellecoordinatecheabbiamoscelto.
Il vantaggiodellanotazionevettorialestanel fattochee indipendentedal sistemadi coor-dinate,e quindi ci permettera in seguito di scrivere in manierasemplicele equazionisenzapreoccuparcidi definireunsistemadi coordinate.Scrivendol’equazione9a - 9b intendiamocheessahavaloreindipendentementedallecoordinate,ossiacheseduevettori sonouguali in uncertosistemadi coordinateallorasonougualisempre.La conseguenzache,unavoltasceltelecoordinate,avremoax
- bx * ay- by * az
- bz, qualunquesiala scelta.
16 Coordinate del vettorespostamentoRestadavederecomeottenerele coordinatedelvettorespostamento.La primacosadatenerea mentee di nonpensarea questovettorecomea qualcosafissatoin un puntodellospazio:none unafrecciaconla codain P e la puntain Q.Sebbeneabbiamointrodottoil vettorebasandocisulladirezionee la distanzaperspostarsidaP a Q, tuttavia tutti i vettori paralleli ad essoe con lo stessomodulorappresentanola stessacosa.E’ piu appropriatopensareal vettorecomeall’agodi unabussola:dovunquelo portiamoindica semprela stessadirezione.Sediamoa tantepersonesparsenella citta di Romadellebussoleeaciascunadiciamodi spostarsidi 2 metri in direzioneNord-Esttuttequestepersonefarannolo stessospostamento.Il chenonvuol direovviamentechefinirannonellostessopostodatocheognunaepartitadaunaposizionediversa.
A questopuntosi vedesubitochele trecomponentidellospostamentosono1 xq 8 xp * yq 8 yp * zq 8 zp 3 , ossiale differenzedellecoordinatefra il puntod’arrivo e quellodipartenza.Il fattochecompaiala differenzaci assicurachele componentinoncambianonelletraslazioni: infatti nella traslazionele nuove coordinatedifferisconodalle vecchieper dellecostantichespariscononellasottrazione.
Per quantoriguardale rotazioni, dato che le componentidei vettori posizioneP e Q sitrasformanosecondola (2), questovaleancheperle loro differenzeossiaperle componentidi9w, checostitusconoquindi unvettorea tutti gli effetti.
17 Moto nello spazio Cominciamoa studiareil motodi un puntomaterialenellospaziomisurandola suaposizionerispettoaunaternadi coordinatecartesianeortogonali:
P < 1 x * y* z3SeO e l’origine degli assi . x2 0 y2 0 z2 rappresentala distanzadi P dall’origine. Le coordi-nate 1 x * y* z3 sonole componentidelvettore 9OP - 9r cheeorientatodaO versoPechesi chiama
6

CAPITOLO I. CINEMATICA
raggio vettore. Il raggiovettorehaunasuarealta autonomarispettoal sistemadi coordinate,percui cercheremoin generedi basarei ragionamentisul vettorestesso.A volte tuttavia puoconvenireriferirsi esplicitamenteallecoordinate:in questocasoutilizzandoi versori degli assipossiamoscrivere: 9OP - 9r - x 9ex
0 y 9ey0 z 9ez
18 Leggeoraria Nel casodel motonello spaziola conoscenzadel vettore9r in funzionedel tempoci da in ogni istantet la posizionedel puntomaterialee prendeil nomedi leggeoraria delmoto.Conoscere9r - 9r 1 t 3 equivaleconosceretreleggi orarieperle trecoordinatedelmoto:x 1 t 3=* y 1 t 3=* z1 t 3 . Si parlaavoltedi composizionedi motiquandosi studianoseparatamentele leggi orariedelle tre coordinate.Questopuo in certi casiaiutarea schematizzaremeglio ilproblemafisico: adesempio,il motodi un sassolanciatopuo vedersicomela composizionedi un moto rettilineo uniformenel pianoorizzontalee di un moto uniformementeacceleratoversoil basso.
Similmentea quantofa un orario ferroviario, la leggeorariaci permettedi conoscereilmoto in manieracompleta. La leggeorariapuo esserdatain forma puramentenumericaodi tabellache fa corrispondere9r a t, e questae la forma in generein cui vengonoriportatii risultati di una misurasperimentale.Oppurepuo venir datala funzionematematica 9r 1 t 3 ,e in questaforma vengonoscritte le soluzioni delle equazionidel moto se ammettonounasoluzionematematicasemplice.Sela soluzionedelleequazionie molto complicata(in realtaquestoavvienenella maggiorpartedei casipratici) allora 9r 1 t 3 e il risultatodi unasoluzionenumerica(in genereottenutaal calcolatore)delleequazionistesse.
19 Moto rettilineo uniforme in tr edimensioni La leggeorariapiu sempliceequelladelmotorettilineouniforme,chesi scrive in coordinatecartesiane:
x 1 t 3 - x00 vxt
y 1 t 3 - y00 vyt
z1 t 3 - z00 vzt
(4)
chenonealtrochel’equazioneparametricadi unaretta.Il vettorecostante9r0
- 1 x0 * y0 * z0 3 rappresentail raggiovettoredellaposizionedel puntoat - 0. Le costantivx * vy * vz sonole componentidi un altro vettore9v chesi chiamavelocita delpunto.Vettorialmentequindi il motosi scrivecome:9r - 9r0
0 9v t
Essendocostantegli spazipercorsiin tempi uguali lungogli assicoordinatisonouguali,dacui il nomedi uniformedatoal moto. La velocita none altro chela variazionedel vettorespostamentonell’unitadi tempo: 9v - 9r 1 t2 3>8?9r 1 t1 3
t2 8 t1
20 Unit a di misura La velocita hadimensioni + L ,@+ T ,BA 1. L’unita di velocita nel sistemaMKS e il metroal secondochesi abbrevia: m/s. Nel sistemacgse il centimetroal secondochesi abbrevia: cm/s.Altre unitadi usopratico,comeil km all’ora (abbreviatokm/h)possonoridursi all’unita MKS o cgsper sempliciconversioni(esempio:1 km/h = 1000m/h = (1000m)/(3600s) = 0.27777...m/s).
7

CAPITOLO I. CINEMATICA
21 Moto vario - Velocita istantanea Possiamodefinireunavelocitaancheseil motononesemplicementequellorettilineouniforme(19), ossiaseasecondomembrodellaleggeoraria(4) abbiamodelle generichefunzioni del tempox 1 t 3=* y 1 t 3=* z1 t 3 ? La rispostae chiaramenteaffermativa, ma in tal casola velocita varia da un istanteall’altro e parleremodi velocitaistantanea.
Cominciamoa calcolarcila velocitadel puntosuun intervallo di tempo∆t molto piccolo.Consideriamoche all’interno di questointervallo di tempoil moto sia rettilineo uniforme.Allora la velocita lungox fra gli istantit e t 0 ∆t e:
vx 1 t * t 0 ∆t 3 - x 1 t 0 ∆t 3>8 x 1 t 3∆t
Se∆t e infinitesimovx rappresentala velocita mediasuun tratto infinitesimodel percorso,eal limite ∆t < 0 essae la velocita lungo x del puntonell’istantet o velocita istantanea. Madettolimite none altro chela derivatarispettoal tempodellaleggeoraria.Percui otteniamoil risultatochela velocita delpuntomaterialea unistantedatoe la derivatadella leggeorariadel motoin quellostessoistante:
vx 1 t 3 - dx 1 t 3dt
vy 1 t 3 - dy 1 t 3dt
vz 1 t 3 - dz1 t 3dt
(5)
chein formavettorialee la derivatadel vettorespostamentorispettoal tempo:9v 1 t 3 - d9r 1 t 3dt
(6)
22 Costruzionegrafica della Velocita Il vettorespostamentodelpuntoda9r 1 t 3 a 9r 1 t 0 ∆t 3corrispondealla differenzadi questiduevettori comemostratonellafigura 2. La velocita siottienedividendolo spostamentoper∆t e passandoal limite per∆t < 0. La direzionedi talevettoreequindi tangentealla traiettoria.Introducendoil versore9eT, la velocitasi puo scrivere:
d9rdt
- 9eTdsdt
- 9eT v
v - dsdt
- C dxdt D 2 0 C dy
dt D 2 0 C dzdt D 2
P
P’r(t)
r(t+ ∆ t)
∆ r(t)
tangente
P
P’r(t)
tangente∆r(t)
r(t+∆t)
Fig. 2
8
CAPITOLO I. CINEMATICA
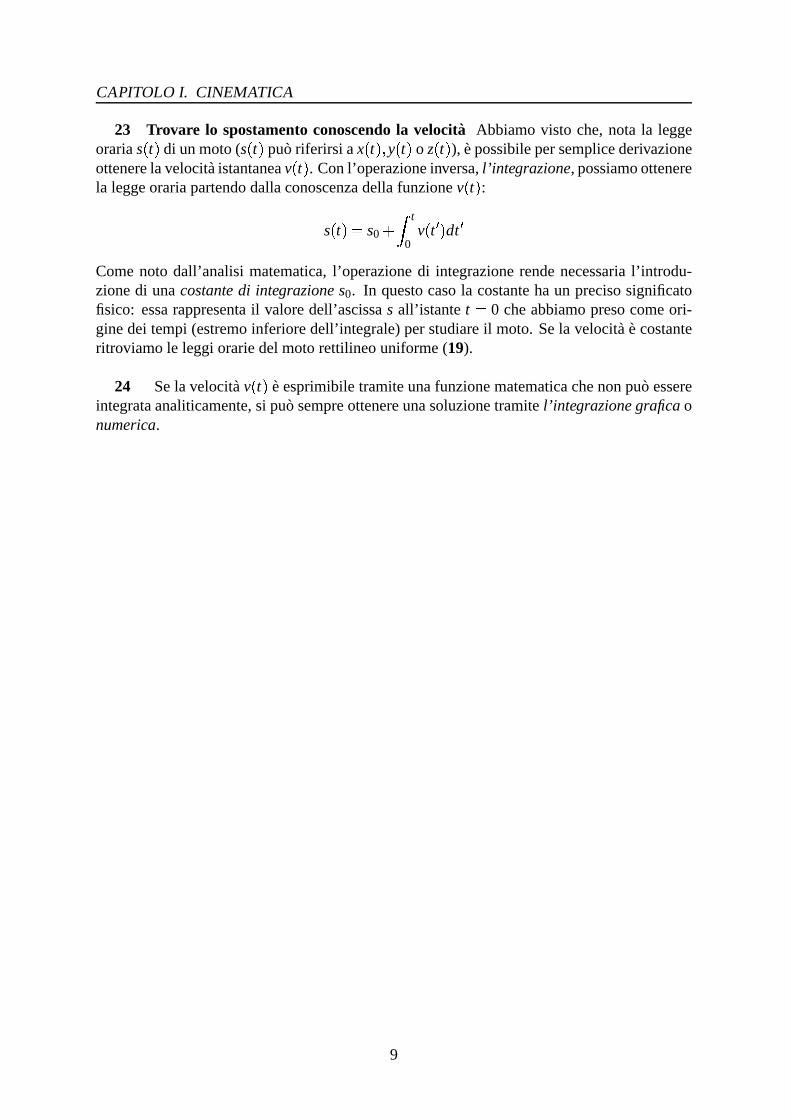
23 Trovare lo spostamentoconoscendola velocita Abbiamovisto che,nota la leggeorarias1 t 3 di unmoto(s1 t 3 puo riferirsi ax 1 t 3E* y 1 t 3 o z1 t 3 ), epossibilepersemplicederivazioneottenerela velocitaistantaneav 1 t 3 . Conl’operazioneinversa,l’integrazione, possiamoottenerela leggeorariapartendodallaconoscenzadellafunzionev 1 t 3 :
s1 t 3 - s00GF t
0v 1 t 4 3 dt 4
Comenoto dall’analisi matematica,l’operazionedi integrazionerendenecessarial’introdu-zionedi unacostantedi integraziones0. In questocasola costantehaun precisosignificatofisico: essarappresentail valoredell’ascissas all’istantet - 0 cheabbiamopresocomeori-ginedei tempi(estremoinferioredell’integrale)perstudiareil moto. Sela velocita e costanteritroviamole leggi orariedelmotorettilineouniforme(19).
24 Sela velocitav 1 t 3 e esprimibiletramiteunafunzionematematicachenonpuo essereintegrataanaliticamente,si puo sempreottenereunasoluzionetramitel’integrazionegraficaonumerica.
9

Capitolo II
Dinamica del punto materiale
25 La dinamicastudiail movimentoin relazioneallecausechelo producono.Ladinamicaebasatasutreprincipi, dettiprincipi fondamentali della dinamica. Essisono:
I. Il Principiod’inerzia
II. La Leggedi Newton
III. Il Principiodi azionee reazione.
26 Primo principio o principio d’inerzia Fu formulatodaGalileoGalilei (1567–1642)estrapolandoil risultatodi provesperimentali:
“un corpononsoggettoaforzepermanenelsuostatodi motorettilineouniforme”,o anche:“un corpo permanenel suo stato di quiete o di moto (rettilineo uniforme) finche non
intervieneunacausaesternaamodificaretalestato”.Seil corpoe in moto,cioehaunavelocita 9v, questarimanecostante.See in quiete(9v - 0)
rimanein quiete.
27 Un corpo,adesempio,checadenonsegueil principio d’inerziain quantolo vediamomuoversiconvelocitacrescenteversoil basso.Attribuiamotalecomportamentoal fattocheilcorpoe soggettoa unaforzachechiamiamogravita.
28 Nello stessomodo,dev’esserenecessariamentesoggettoaforzeuncorpochesi muovedi motocircolare(siapureuniforme).Sela forza(dettacentripeta)venisseamancareil corpoinizierebbea muoversidi moto rettilineouniformelungo la tangentealla circonferenzanellaposizionein cui e cessatal’azionedellaforza.
29 Il primoprincipiononspecificacosasianole “forze”. Intuitivamenteci aspettiamochesianopero connessealla presenzadi altri corpi estraneia quello di cui studiamoil moto: adesempiola terra(cheattraeversodi se il corpochecade)o il filo chetieneil corpoin rotazionelungola circonferenza.
30 Le forzesonoanchecollegabili allo sforzomuscolare.E noto infatti chepermetterein movimentounqualsiasioggettodobbiamoesercitareunsforzo(fare“f atica”). E notoanchecheesistonooggetti“leggeri” (peri qualifacciamopocosforzo)e“pesanti”(difficili dametterein moto),
10

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
HF I F J FFig. 3
31 Da Aristotelefino all’epocadi Galileoeracomunementeaccettatochepermuovereavelocitacostanteunoggettooccorresseunaforzacostante.E chein mancanzadi forzail motovenisseacessare.Cio equellocheosserviamosullabasedellanostraesperienza.Galileointuıchel’arrestodel motononeradovuto a un’assenzadi forzemaalla presenzadi unaforzadifrenamento(comel’attrito). Il motouniformee possibilein quantola forzamotriceapplicataal corpocontrobilanciaesattamentela forza resistente.In tale situazioneil corpo,soggettoa dueforze eguali e contrarie,e comesefosselibero e pertantosi muove di moto rettilineouniforme.Sela forzamotricemancaperchesmettiamodi spingereil corporimanepursemprela forzaresistentecheneprovocala diminuzionedi velocitaequindi l’arresto.
32 Una forza puo esercitarsisia compiendouno sforzo muscolareche tramite sistemimeccanicisemplici,comelemolle. Entrambii tipi di forzecitati peressereefficientirichiedonoun contattofra l’agentecheesercitala forzae il corposucui essaagisce.Altre forze,comela gravitae le forzedell’elettromagnetismo,si trasmettonodauncorpoaun altrosenzachevisiauncontattodiretto,sonocioe “azioni adistanza”.
33 Per meglio specificareuna forza, vorremmoassociarleuna grandezzafisica che neesprimasia l’intensita sia la direzione. Infatti unaforzapuo avereeffetti assaidiversi in basealla direzione(vedi fig. 3). E naturalepensareaun vettorepercaratterizzarela forza: 9F.
34 Comeabbiamoaccennatoprima, un concettobasee quello che le forze si possanoequilibrare fra loro. Ad esempio,seio stospingendounacassachescivolasulpavimento,unapersonadall’altro lato spingendoin sensooppostoal mio puo provocarel’arrestodellacassa.In tal casostiamoapplicandoalla cassadue forze eguali e contrarieche si annullano(o siequilibrano).Percontrobilanciarela forzadameapplicatasi edovutaintrodurreesplicitamenteunasecondaforza.
35 Meno evidentee il caso,ad esempio,di unacassapoggiatasul pavimento: essanonsi muove (non cadeattraversoil pavimento) pur essendosoggettaalla forza di gravita 9FG.L’apparentecontraddizioneerisoltaipotizzandocheil pianoreagiscaconunaforza 9FN
- 8 9FGin modochealla cassarisultaapplicatala forzarisultante9FN
0 9FG- 0.
Anchein questocasoquindi abbiamounasecondaforza in gioco. Questaforza fa partedi unacategoria di forze dettereazionivincolari chesarannoesaminatepiu in dettaglionelseguito.
11

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
36 Secondoprincipio o Leggedi Newton Essosi formulacosı:9F - md9vdt
dovem e unacostantechesi chiamamassainerzialeede unacaratteristicadel corpoal qualela forzae applicata.La leggedi Newtonci dicequindi cheK la velocitadi uncorpovariatantopiu rapidamentequantomaggioree la forzaimpressa;K la variazionedi velocitaavvienesemprenelladirezionedellaforza;K sela forza e nulla nonvi e variazionedi velocita e quindi il moto e rettilineoe unifor-
me(19);
La derivatad 9v 2 dt si calcolain manieraanalogaa comesi e fatto per calcolarsila velocitapartendodallo spostamento.Essaprendeil nomedi accelerazione:9a - d9v
dt
Mentre 9F e 9a sonodue vettori, la massae uno scalare, additivo che a parita di materialee proporzionaleal volumedel corpo. Data unastessa9F, corpi di massediverseassumonoaccelerazioniinversamenteproporzionalialle rispettivemasse.
Il nomemassainerzialee legatoal fattochela massaesprimel’ inerziadel corpo,ossialasuariluttanzaacambiarevelocita (in modulo,direzionee verso).
37 Quantit a di moto La grandezzavettoriale9p - m9vsi chiamaquantita di motodi un corpo. Sela massae costante(comesara quasisempreinquestedispense)si puo riscriverela Leggedi Newton (36) nellaforma:9F - m9a - m
d9vdt
- d9pdt
cioe se 9F - 0 < 9p - costante.Si diceanchechein tal casola quantitadi motosi conserva.
38 La leggedi Newtonsi puo vederedaduepunti di vista:K comeunadefinizionedellaforza,edusarlaperdeterminarneil valoremisurandol’acce-lerazioneacui e soggettoun corpodi prova;K la si puo utilizzarecomeequazionedel motoperdeterminarel’accelerazioneunavoltanotala forza,al fine di prevedereil motodi un corpo.
E chiaroanchechenonsi puo usarlaperle duecoseallo stessotempo,penafinire in uncircolovizioso!
12

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
39 Unit a di misura Le dimensionidell’accelerazionesono + L ,@+ T , A 2. L’accelerazionesimisuranel sistemaMKS in m2 s2 enel sistemacgssi misurain cm2 s2.
La massaeun’unitadi tipo nuovo, equindi haunasuadimensione+M , . Nel sistemaMKSsi misurain chilogrammi(kg), mentrenelsistemacgssi misurain grammi(g). 1 kg = 1000g.
Le dimensionidella forza sonodefinite tramite la leggedi Newton: + F , - +M ,@+ L ,@+ T , A 2.L’unita di misuradella forza e il Newton, N. Una massadi 1 kg cheha un’accelerazionedi1 m2 s2 e soggettaalla forza di 1 N. Nel sistemacgsl’unit a di forza e la dyne(cheproducel’accelerazionedi 1 cm2 s2 applicandolasuunamassadi 1 grammo).Lasciamoallo studentedadimostrareche1 N = 105 dyne.
40 Equazionedel moto L’equazione9F - m9a, nota 9F, e sufficientea determinarecom-pletamenteil motodi unpuntomaterialein baseallecondizioniiniziali 9v 1 t0 3=* 9r 1 t0 3 . Il procedi-mentosi chiamacomunementeintegrazionedell’equazionedelmoto. I casiin cui l’equazionedel motoe integrabilepervia analiticasonopochi,limitati a particolaritipi di forze.Nel casogeneralesi trattadi un’operazioneassaicomplessa.
In certi casiunasituazionecomplessapuo ridursi a unasemplice,in cui il moto e essen-zialmentedeterminatoda una forza preponderante,a cui si aggiungel’effetto di forze “pi ucomplicate”ma piu deboli. Si pensiad esempioal moto della Luna, chee sempliceper lapartedominatadalla forzaTerra-Lunamentrel’effetto della forzaSole-Luna,piu complicatoda trattare,e modestodatala piccolezzadi tale forza in rapportoalla prima. Questatecnicadi risoluzionedei problemisi chiamametodoperturbativoedil procedimentoe usatissimoinFisica(enonsolonellaMeccanica).
41 Forze costanti E’ il casopiu sempliceda trattare,ma non per questopoco impor-tante: la forzadi gravita vicino alla superficieterrestree infatti un esempiodi forzacostante.La suadirezionee quelladel filo a piomboe la suaintensita e proporzionalealla massadelcorpo. Questaparticolarita fa sı chetutti i corpi soggettialla forzadi gravita, corpi chechia-miamo pesanti, hannola stessaaccelerazione,di modulo circa 9 L 8 msA 2. Si indica con laletterag il modulodell’accelerazionedi gravita. Il motoconforzecostantiprendeil nomediuniformementeaccelerato.
Conforzecostanticonvienescriverela leggedi Newton in un sistemadi coordinatein cuiun assee orientatonella direzionedella forza. Ad esempioscegliamo l’assey. L’equazionedel motosara allora:
mdvx
dt- 0
mdvy
dt- F
mdvz
dt- 0
Possiamopensareal motocomeallacomposizionedi tremoti indipendentilungoi treassicartesiani:datochelungox eznonvi sonocomponentidellaforzail motosarasemplicementerettilineouniforme.Ma seil motoerettilineouniformenelpianox * zpotremoruotareil sistemadi coordinatein mododafar coinciderel’assex con la direzionedel moto,e in questomodo
13
CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
possiamoridurci astudiareil motosolonel pianox * y:
mdvx
dt- 0
mdvy
dt- F
(7)
42 Moto uniformementeaccelerato La soluzionedell’equazionedel moto(7) e moltosemplice.Comeprima,lungox abbiamoun motorettilineouniforme.equindi
vx 1 t 3 - v0x- costante
x 1 t 3 - x00 v0xt
(8)
x0 e la coordinatax del puntoall’istanteiniziale t - 0 e, insiemealla velocita v0x, dev’essereinclusafra i dati delproblema.La leggeorariax 1 t 3 risultaalloracompletamentedeterminata.
Perrisolverel’equazionelungoy procediamoa dueintegrazionisuccessive. Innanzitutto,utilizzandol’accelerazionea - F 2 m, possiamoesprimerela velocitacome:
vy 1 t 3 - v0y0 at(9)
La velocita crescequindi linearmentecol tempo,e la costantedi proporzionalita e appuntol’accelerazione.v0y e semplicementela velocita del puntoall’istanteiniziale t - 0. Dalla (9)integrandounasecondavoltaotteniamo:
y 1 t 3 - y00 v0yt 0 1
2at2(10)
Abbiamointrodottoqui unanuovacostante,y0, cherappresentail valoredi y al tempot - 0.Le dueequazioni(9) e(10)descrivonoquindi il motoconaccelerazionecostantechesi chiamamotouniformementeaccelerato. Le costantix0 * y0 * v0x e v0y si chiamanole condizioniinizialie fannopartedei dati del problema.In effetti occorretenerpresentecheil signorNewton cipermettedi prediresolo le variazionidi velocita del moto (scusatese e poco). Non ci puodire qual erala velocita iniziale del corpodatochequestae un datoiniziale del problemaedobbiamoconoscerlanoi. Seil corpochesi muove ha in partenza(al tempot - 0) unasuavelocita questasi sommaa tutte le variazionipreviste dalla leggedi Newton. In definitiva,abbiamounasoluzioneuniversalecheva benein qualunquepartedel mondo,perqualunquevelocita inizialehail corpo:bastachemettiamoi numerigiusti nellecondizioniiniziali.
43 Moto deigravi Convienein questocasosceglierel’assey lungolaverticaleeorientatoversol’alto. In tal casoa - 8 g eabbiamo
x 1 t 3 - x00 v0xt(11)
y 1 t 3 - y00 v0yt 8 1
2gt2(12)
Perdeterminarela traiettoriasi deve eliminareil tempodalleequazioni,esprimendoy infunzionedi x. Si ottienealloral’equazionedi unaparabola, conil massimoa unacertaquotay - h e i duerami rivolti versoil basso. A secondadelle condizioni iniziali, naturalmentele parabolechesi ottengonosonodiverse. Sex0 e y0 non mutano,le paraboleottenuteperdiversevelocita iniziali rappresenterannounafamiglia di traiettorieper i corpi lanciati dallastessaposizioneinizialeconvelocitaeangolidiversi.
14
CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
44 Calcoliamola traiettoriaimmaginandodi lanciareil corpodall’origine delle coor-dinate: allora avremo x0
- y0- 0. Inoltre, invecedi usarev0x e v0y utilizziamo il modu-
lo v0- ; v2
0x0 v2
0y e l’angolo di lancio α rispettoall’orizzontale: per cui v0x- v0cosα e
v0y- v0sinα. Ricavandoil tempodall’equazione(11) e sostituendolonella (12) otteniamo
quindi:
y - xtanα 8 x2 C g
2v20cos2 α D(13)
cheeappuntol’equazionedellaparabolacercata.La parabolaintersecal’assex in duepunti: x - 0 (il puntodacui e avvenutoil lancio)e
xM- 2 1 v2
0 2 g3 cosαsinα - 1 v20 2 g3 sin1 2α 3 . La massimaaltezzaraggiuntadal proiettileviene
raggiuntaperx - xM 2 2 evaleyM- 1 v2
0 2 g3 sin2α.
45 Tempodi caduta Guardandoal motodel grave comea unasovrapposizionedi moti(rettilineo uniformelungox e uniformementeacceleratolungo y) e facile rendersicontocheil tempocheun corpolanciatoimpiegaa caderea terranon dipendechedal moto verticale.Ad esempio,qualunqueoggettoscagliatoorizzontalmente(quindi conv0y
- 0) daunaquotah, toccaterradopoun tempot M - . 2h2 g, cioe lo stessotempodi un corpolasciatocadereda fermo. Naturalmenteil valoredi xM in cui il corpo toccaterra dipendedal valoredellacomponentev0x dellavelocita.
46 Moto circolare - Velocita Sappiamochepossiamofar compierea unapallina unatraiettoriacircolarelegandolaa un filo e facendoquestodobbiamoapplicareal filo unaforza.Questaforza e quindi direttacomeil raggiodel cerchioe provocala continuavariazionedivelocitachela pallinahanel suomoto.Ci proponiamodi calcolarequantovalequestaforza.
Perdescriverequestotipo di motorisultaconvenienteusarele coordinatepolari (nel pianodel moto). Il vantaggio,comeabbiamogia accennato,e che per descrivere il moto bastaconoscerela leggeorariadi variazionedell’angolopolareφ 1 t 3 .
Sappiamochela velocita e tangentealla circonferenza:9v - 9eTds2 dt. Percalcolareds2 dtosserviamochel’arco di cerchiocorrispondenteaunangolodφ valeRdφ. L’angolodev’esseremisuratoin radianti(e infatti a 2π radcorrispondela lunghezzadellacirconferenza,2πR). Lavelocitasaraquindi:
v - dsdt
- Rdφ 1 t 3
dt- Rω 1 t 3(14)
doveω 1 t 3 prendeil nomedivelocita angolaredel puntomateriale.Seω - costantealloraparliamodi motocircolare uniforme. Abbiamoin tal casoun moto
periodicochesi ripetedopoil periodoT - 2π 2 ω. Si chiamafrequenzal’inversodel periodo:ν - 12 T. La frequenzasi misurain Hertz(Hz). 1 Hz = 1/s.
47 La velocita nel motocircolarepuo esprimersivettorialmenteseintroduciamoil vet-tore velocita angolare 9ω cheha comedirezionel’asseintorno la qualeavvienela rotazione.Il versoe tale cheunapersonaorientatacomeil vettorevedela rotazioneavvenirein sensoantiorario. La velocitaprendequindi la forma:9v - 9ω N 9R(15)
15

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
Questaequazionerappresentaadesempiola velocitadeipuntiappartenentiaunaruotachegira attornoa un assefisso. Duepunti oppostialla stessadistanzadall’assehannovelocita diugualemoduloedi versocontrario.
48 Moto circolare - Accelerazione Dato chela velocita e tangentealla circonferenza,essacambiacontinuamentela suadirezionedandoluogoa un’accelerazionenonnulla. L’ac-celerazionecorrispondesia alla variazionedel modulo della velocita che alla variazionedidirezione.Possiamoquindi scrivereche:9a - d
dt1 9eTv3 - 9eT
dvdt0 v
d9eT
dtIn questaequazioneil primo terminerappresentail contributo all’accelerazionedovuto alla
dφ
eT
eN
eN
dφeN
eT
(t)eT
dφ
eT
eT
(t+dt)(t)
(t+dt)’
= 1
Fig. 4
variazionedel modulodi v, mentreil secondoe proporzionalea quantorapidamentela dire-zionedellavelocita cambia.Percalcolareil secondotermineconsideriamola figura4, doved9eT si ottienesottraendovettorialmente9eT 1 t 3 (nel puntoP) da 9eT 1 t 0 dt 3 (nel puntoP’). Seconduciamoda P e P’ le normali alla traiettoriaquestesi intersecanonel centrodel cerchioformandofra loro un angolodφ. Allora e facilevederechela differenzavettorialedei versorie direttaversoil centrodel cerchioehapermodulodφ:
d9eT- dφ 9eN
doveabbiamoindicatocon 9eN il versorenormalealla traiettoriae orientatoversoil centrodelcerchio.Pertantopotremoscrivere:
vd9eT
dt- v
dφdt
9eN- v
RR
dφdt
9eN- v
Rdsdt9eN
- v2
R9eN
Questoterminedell’accelerazione,che e diretto versoil centrodel cerchio,prendeil nomedi accelerazionecentripeta. Cio significacheil puntodev’esseresoggettoa unaforzadirettaversoil centrodi modulo:
Fc- m
v2
Roppure Fc
- mω2R(16)
dove abbiamousatola relazionev - ωR. In definitiva l’accelerazionecompletaprendelaforma: 9a - dv
dt9eT0 v2
R9eN
16

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
49 Risultaistruttivo confrontarei risultaticonquelli ottenutiusandole coordinatecartesiane(cheprenderemoconl’origine nel centrodel cerchio).Limitiamoci al casodel motouniforme.Scriveremopercio le leggi orariex O t PRQ y O t P e da esseverificheremoche,prendendonele derivate,si ottengonolavelocita (46) e l’ accelerazione(48).
Cominciamoa scrivere le componentidel versoretangentee di quello normaleal cerchioin unadataposizioneθ del puntomateriale:S
eT T OVU sinθ Q cosθ P SeN T OVU cosθ Q@U sinθ P(17)
(perverificarlocalcolarsiSeN W SeT).
Percalcolarevelocita eaccelerazionederiviamola leggeoraria(tenerepresentechedsinθ O t PYX dt Tdθ X dt cosθ ecc.):
x O t P T Rcosθ O t Py O t P T Rsinθ O t P(18)
ottenendo:
vx T U ωRsinθ ax T U ω2Rcosθ
vy T ωRcosθ ay T U ω2Rsinθ
Usandole definizionidei versoritroviamosubitoche:Sv T ωROVU sinθ Q cosθ P T ωR
SeTS
a T ω2ROVU cosθ Q@U sinθ P T ω2RSeN
comedovevasidimostrare.
50 Coordinate polari E’ semprepossibileusarele coordinatepolari per descrivere ilmotoanchesenonecircolare.Utilizzandoquesteele loro derivaterispettoal temposi possonoricavarela velocita e l’accelerazione.Nel seguito del corsoci servira soltantola velocita,chepuo esserscrittafacilmenteapartiredallospostamentoinfinitesimods, chevale:
ds - . dr2 0 r2dθ2
equindi peril modulodellavelocitaabbiamo:
v - C drdt D 2 0 r2 C dθ
dt D 2
A scansodi equivoci, sottolineiamoche l’accelerazionecentripetanon e v2 2 r, ma semprev2 2 R dove R e il raggio di curvaturadella traiettoria(48). Questoin generenon coincidecon la coordinatapolarer, eccettochenel casodel moto circolaregia visto. In effetti, perconvincersene,bastaconsiderareun motorettilineouniformein coordinatepolari: il raggiodicurvaturadellatraiettoriae infinito, mar nonlo e.
51 Forza di gravit a Il fatto sperimentale(osservatoper la prima volta da Galileo) chetutti i corpi soggettialla forzadi gravita si muovonoconla stessaaccelerazione, indipenden-tementedalla loro massa, ci dicequindi cheessisonosoggettia forzediverse, e questeforze
17

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
devonoessereproporzionalialle loro masse:9FGrav, 1- m19a19FGrav, 2- m29a2 Z 9a1
- 9a2- 9g (datosperimentale)9FGrav, 1
- m1
m2
9FGrav, 2 (conseguenza)
Detta 9g l’accelerazione(ugualepertutti i corpi) la forzadi gravita si scrivepertanto:9FGrav- m 9g(19)
La forzadi gravitasi chiamaanchecomunementeforzapeso. In questotestochiamiamocorpopesanteun corpodotatodi massaesoggettoalla forzapeso.
52 Quantovalela forzapesosuunamassadi 2 kg ? F - 2 kg N 9 L 8 m2 s2 - 19L 6 N.
53 Unavoltasi usavaanchecomeunita (maqualcuno,in particolaregli ingegneri,lo usaancora)il kg-forza.1 kg-forzaesemplicementela forzapeso(sullaTerra)chesi esercitasuunamassadi 1 kg. Pertantoessoequivalea9.8N. Oggigli ingegneriusanospessoil decanewtonodaNperche valeappuntocircaun vecchiokg-forza. Il caricomassimoperunagru vienedatoin daN.
54 Risultante delleforze Generalizzandoquantodettoprima,sepiu forzesonoapplicatea un puntomateriale, essosi muove comese ad essofosseapplicataun’unica forza dettarisultante: 9FR
- 9F10 9F2
0�[\[\[ 9FN
In particolare,se 9FR- 0, il puntomaterialesi comportacomeun puntoisolato.
55 A questopuntodovrebbeesserebenchiaro,malo ripetiamoancoraunavolta, cheseosserviamounpuntomaterialefermoo in motorettilineouniformeessodev’esseresoggettoaunaforzarisultantenulla. Sesiamocerti chealmenounaforzanonnulla e applicataadesso,alloradeve esisternealmenounasecondacheequilibrala prima. Riflettendocisoprafiniremosempreperindividuarla.
56 E molto importantenotareil fatto, di per se per nulla scontato,chenel calcolarelarisultantepossiamosommarele forzesenzapreoccuparciseabbianonaturadiversa.La forzapesopuo essereequilibrata,ed esempio,da unaforza di tipo elettricocomeavvieneseunapalla e appesaa unamolla. La forza chetieneinsiemegli atomi nel reticolo cristallino delmetallochecostituiscela molla e unaforzaelettrica.La risultantedi tuttele forzeelettrichealivello atomicocontrobilanciala forzadi gravita esercitatadallaTerrasullapalla.
57 Dinamometri Il fatto chele forze sianosommabilicomevettori ci offre unapossi-bilit a alternativa di misurarlestaticamente.Ad esempio,sospendendoa unamolla unamassaM possiamomisurarel’allungamentodellamolla. Questocorrispondera alla forzapesoM 9g.Utilizzandodellemasse2M * 3M, ecc.,potremotararela molla in termini di forze. Talemollasi chiamadinamometro.
18
CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
58 Riferimenti inerziali Consideriamoun oggettochesi muove di motorettilineouni-forme essendosoggettoa unaforza nulla. Il sistemadi riferimentoin cui facciamotale os-servazionevienechiamatoriferimento inerzialeper significareche in essovale il principiod’inerzia(26).
Seunsecondoosservatoresi muoverispettoanoi di motorettilineouniformesenzaruotaresusestessol’oggettocontinueraadapparirgli in motorettilineouniforme(99), seppurela suavelocitapossaesserediversadi quellacheappareanoi. In baseal II Principioancheil secondoosservatorededurra chel’oggetto in questionee soggettoa unaforzanulla e potra affermareanch’egli la validita del principio d’inerzianel suoriferimento,e quindi a buondiritto riterradi esserein un riferimentoinerziale.
Dato che la velocita del secondoosservatorerispettoa noi e del tutto arbitraria(bastachesia costante)deduciamochepassandoda un sistemadi riferimento inerzialea un altrochetraslarispettoal primo in moto rettilineo uniformeci troviamo ancorain un riferimentoinerziale. In breve, tutti i sistemidi riferimento che traslanocon moto rettilineo uniformerispettoaunsistemadi riferimentoinerziale,sonoanch’essiinerziali.
59 Principio di relativit a di Galileo Si deducesubitochestudiareunmedesimofenome-no fisico in diversisistemiinerziali e del tutto equivalente.Questofatto fu messoin evidenzaperla primavoltadaGalileo,eprendeil nomedi principio di relativita. Galileosottolineo cheera impossibile,per mezzodi misurecondottetutte all’interno di un medesimoriferimento,determinaresequestoerao menoin movimento(rettilineoeuniforme),datochein tutti questiriferimenti i fenomeniappaionogli stessi.
Percapiremeglio questoconcetto,dobbiamotenerein mentechele forze costituisconol’essenzadei fenomenifisici: un fenomenonuovo in genereimplica unanuova forza. Ora,il passareda un riferimentoinerzialea un altro non fa nascereo scomparireaccelerazioniequindi nemmenoforze,pertantononaggiungenullaalla fisicachegia conosciamo.
Unaconseguenzadelprincipiodi relativitagalileianaechenonhanemmenosensopensareall’esistenzadi sistemidi riferimentoprivilegiati. Il vantaggiodi usareuncertosistemarispettoa un altro dipendeda fattori contingenti. Spessounacertasceltaapparenaturaleo serve asemplificareunproblema.
60 Riferimenti non inerziali Al contrario,un corpoa riposo(o a 9v - costante) vistoda un osservatorecheacceleraapparira muoversidi moto chenon sara piu rettilineo unifor-me. In tal casol’osservatore,see certocheil corponone soggettoa forze,riterra nonvalidoil principio d’inerzia. Il sistemadi riferimentonon e quindi per lui inerziale. L’accelerazio-ne responsabiledi questopuo esseresia puramentescalare,sia dovutaa un cambiamentodidirezione(rotazione).
61 Comecasoparticolaredi sistemadi riferimentoacceleratoconsideriamoperesempioun sistemadi riferimentocheruota: un sistemalegatoalla Terracompieunarotazionein 24ore.La StellaPolareeconbuonaapprossimazioneariposonelsistemadi riferimentoinerzialedelle stellefisse. Tuttavia a noi chestiamosulla Terra la StellaPolareapparefareun motocircolare: sorge, tramonta,passadall’altra partedella Terra,riappareecc. Non fa quindi unmotorettilineouniformepur nonessendosoggettaa forze. Il principio d’inerzianone quindivalido,e il sistemalegatoalla Terranoneunsistemainerziale.
19

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
62 Si potrebbeporsi la domanda:se 9a ]- 0 comefacciamoa stabilire se siamoin unriferimentonon inerzialeoppuresec’e effettivamenteuna forza cheagiscesul punto? Larispostaalladomandanonesemplice.In generalepossiamodirecheseabbiamoottimeragioniperritenereil puntomaterialelibero allora lo stiamoosservandodaun sistemadi riferimentonon inerziale. Nel casodella Stella Polarepotremmoipotizzareche la forza di attrazionegravitazionalesia responsabiledella suatraiettoriacircolareattornoalla Terra. Tuttavia sitratta di una forza minima datal’enorme distanzafra noi e la stella e certamentenon puoesserritenutaresponsabiledelsuomotocircolare.Inoltreunmarzianocheosservassela stessastelladaMartegiungerebbeaconclusionisimili, solocheperlui la forzadi attrazionesarebberivolta versoMarte. In definitiva l’ipotesi dellaforzanonregge,l’unica ipotesiplausibilee lapiu semplicee chela Terrasiaunsistemadi riferimentononinerziale.
63 Impulso Consideriamounaforza 9F cheagisceperun tempo∆t molto breve. In basealla Leggedi Newton(36) possiamoscrivere:9F∆t - m∆9v - ∆9p(20)
e la grandezza9F∆t prendeil nomedi impulsodella forza F. Questarelazioneprendeancheil nomedi Teoremadell’impulso. Si utilizzera questoteoremaper studiarefenomeni(dettiappuntoimpulsivi) nei quali sonoin giocoforzeconsiderevoli macheduranoun tempomoltopiccolo (tali pero cheil prodotto 9F∆t siafinito e non infinitesimo). Un esempiosonogli urti.In quei casi, il corpoin praticanon si muove apprezzabilmentedurantel’applicazionedellaforza,maacquistaunaquantitadi moto(o variaquellachegia possiede)in basealla (20).
64 Terzoprincipio o principio di azioneereazioneQuestoprincipioci dicechele forzenonvengonomai sole. Infatti dati duepunti materialiisolati (nonsoggettia forzeesterne)siosservache: 9F12
- 8 9F21
ovverola forzache1 esercitasu2 eugualeecontrariaaquellache2 esercitasu1. L’equazionepuo’ riscriversicome: 9F12
0 9F21- 9FR
- 0
ovvero la risultantedelleforzeinterneenulla. Pertantola quantita di motototale9P - 9p10 9p2
- m19v10 m29v2
di un sistemaisolatodi 2 corpi rimanecostantenel tempo,o, conaltro termine,si conserva.Infatti la suaderivatae zero:
d 9Pdt
- d9p1
dt0 d 9p2
dt- m1
d 9v1
dt0 m2
d 9v2
dt- 9F12
0 9F21- 0
65 Il razzo Il razzofunzionain virtu del III Principio. Consideriamoun razzodi massaM, cheviaggialungol’assex convelocitaV. Il razzohaquindi unaquantitadi motoMV. Seora il razzoeiettaunamassadm di gasdi scaricocon velocita relativa al razzo 8 u lungo x,la quantita di motototalerestera la stessadatocheil sistemarazzo+gase isolato.La quantita
20

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
del moto del razzosara datadal prodottodella suamassa(diminuita di quelladm del gasdiscarico),per la velocita dopo l’eiezione,V 0 dV. La quantita del moto del gassara invecedm 1 V 8 u3 . Potremoquindi scrivereche:
M V - 1 V 8 u3 dm 0 1 V 0 dV 3�1 M 8 dm3_^`8 u dm 0 M dV 0 M V
(abbiamotrascuratoil prodottodV dm)Ne seguechedV - u dm2 M. Questaequazioneva integratatenendocontochela massa
del razzovariadaun massimoMi (alla partenza)fino a M f (quandotutto il carburantee statoespulso).Perintegraresi terra contochedm - 8 dM, percui si haalla fine:
Vf- u ln
Mi
M f
Comeesempio,il razzoSaturnoV delprogrammaApollo, avevale seguenticaratteristicheperil primo stadio:
m - 2 L 5 106 kg
u - 3000 m/s
massaespulsa - 1 L 6 104 kg/s
tempodi accensione - 2 min
percui si ricavaVf- 15780km/h.
66 La forza di gravitazione La forza di gravitazionesi esercitafra duecorpi dotati dimassa.Essaeattrattiva,e il suomoduloedatoda:
F - Gm1m2
r2(21)
dove r e la distanzafra le duemasse.La costanteG e misuratasperimentalmentein labo-ratorio e vale 6 L 67 10A 11 N kg A 2 m2. Percorpi vicini alla superficiedella Terra, la forza digravitazionesi riducealla forzapeso.Infatti si puo approssimarer col raggiodellaTerra,RT
econsiderarela forzacostante.Si haquindi:
g - GMT
R2T
Perscriverela forza gravitazioneesercitatada 1 su 2 in termini vettoriali, utilizziamo ilvettore9r21
- 9r2 8 9r1 cheedirettoda1 a2. Il versorecorrispondentee9e21- 9r21
r21
Essendola forza attrattiva, essae diretta in sensooppostoa questovettore. Quantoallaforzaesercitatada2 su1, si ottieneutilizzando9r12
- 8 9r21 e r12- r21:9F21
- 8 Gm1m2
r221
9e219F12- 8 G
m1m2
r221
9212- G
m1m2
r221
9e21- 8 9F21
(22)
21

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
in ossequioal principiodi azionee reazione.
Permasseutilizzabili in laboratoriola forzadi gravitazioneepiccolissimarispettoallealtreforze(peso,attriti): essaquindida luogoadaccelerazionipiccolissimeemisurabilicongrandedifficolta. La prima misuradi G fu effettuatanel 1798da Henry Cavendishutilizzandounabilancia di torsionecheha unasensibilita molto elevata. A causadei problemidi misuralacostanteG e notaconunaprecisionerelativamentescarsa(1 partesu10.000)rispettoadaltregrandezzedellafisica.Molto piu semplicee l’esperimentoperverificarechela forzadi gravitanondipendedallesostanzedi cui sonocostituitele masse.Le misuredi Dicke e collaboratori(anni’60) hannopermessodi verificarechele forzaesercitatadalsolesumassedi alluminioeoro e la stessaamenodi 1 partein 1011.
67 Le reazionivincolari Sappiamodall’esperienzacheuncorpopoggiatosopraunpianoorizzontalee in quiete.Pertantodovra essere:
∑ 9Fest - 0
∑ 9Fest - M 9g 0 9a - 09a e la forzaesercitatadalpianosulcorpochelo fa restarein quietealtrimentiil corpocadrebbeattraversoil piano: 9a - 8 M 9ge si chiamareazionevincolare. Un vincolo, comedice il nome,modifica le possibilita dimovimentodi un corpo. Il vincolo fa questoesercitandosul corpodelle forze,dettereazionivincolari, chesommandosialle forzeesternemodificanoil movimentodel corpostesso.Nelcasodel pianoappuntola reazionevincolareobbligail corpoastaresolodaun latodel piano.Un altro casopuo esserequello di obbligareil corpo a seguire una determinatatraiettoria(esempio:i binari del treno).
E danotarechela reazionevincolaresi adatta,percosı dire, automaticamente, alla forzaconla qualedeve combinarsi.Uno stessopianopuo quindi esercitaredelle reazionivincolaridi intensitadiversissima,semplicementein baseal pesodell’oggettochechegli vienepoggiatosopra.Naturalmenteci sonodeilimiti, chenonhannonulladi misteriosomaanziunbenchiarosignificatofisico: seil pianonone piu in gradodi esercitarela necessariareazionevincolaresi rompe.
68 Reazionevincolarenormale Nel casocheabbiamoesaminatola reazionee normalealla superficiedi contattodell’oggettocol piano. La reazioneinoltre e rivolta versol’esternodel vincolo, in mododa respingere il corpo. Si chiamaliscio un vincolo chepuo esercitaresoloreazioninormaliallasuasuperficie.
69 Sealla forzapesoaggiungiamounaforza 9F0 il vincolo reagiscecon 9a - 8 M 9g 8 9F0
(chehamoduloMg 0 :F0 : sela forzaeconcordecol peso).Seinvecela forzatendeasollevareil corpoallora : a : - Mg 8�:F0 : e se :F0 : - Mg allora la forzadi reazionevincolaresi annulla,in quantoil corposi distaccadalvincolo.
70 III Principio e reazioni vincolari In baseal principio di azionee reazione,se ilvincolo esercitasul corpo una forza 9a , il corpo a suavolta esercitasul vincolo una forza
22

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE8 9a . Questofattoci permettedi risponderealla domandaapparentementebanale:qualeforzaesercitasul pavimentounacassadi massaM o di pesoM 9g ? (Naturalmentela rispostae: lacassaesercitaunaforzaparial suopeso.)
La forzapesoM 9g e applicataalla cassa.Poiche la cassastasul pavimentoquestoreagisceapplicandoalla cassala reazione 9a - 8 M 9g. Per il principio di azionee reazionela cassaesercitainfinesulpavimentounaforza 8 9a cheeappuntoparialla forzapesoM 9g.
71 Reazionevincolare su corpi in movimento Seil corpoe in movimentola reazionevincolaresi combinaconle altreforzeagentisul corpostessopersottometterloall’azionedelvincolo. Se il vincolo e liscio occorresempretenerpresenteche la reazionevincolarepuoesercitarsisoloperpendicolarmentealla superficiedel vincolo. O meglio, perpendicolarmentealla traiettoria cheil vincoloobbliga il corpoa seguire. Questaprecisazionee importanteseil vincolo e,adesempio,un filo. In effetti il filo si comportadavincolo quandoe teso,e in talcasola forzacheesercitaeallineatacol filo, mae tuttavia normalealla traiettoriacheil corpoecostrettoa seguire. Perchiariremeglio il concettoconsideriamoun puntopesantechescivolasenzaattritosuunasuperficiecurva. Persemplificareimmaginiamocheil motoavvengasuunpianochetaglia la superficiecurva e consideriamoil motosutalepiano. Il motodel puntoedeterminatodallaleggedi Newton:9F - 9Fest 0 9a - m9a - m
dvdt9eT0 m
v2
R9eN
Se scomponiamola forza esterna9F in due componenti,una lungo 9eT e l’altra lungo 9eN, eteniamocontochela reazionevincolaree solo lungo 9eN (perche il vincolo e liscio) potremoscrivereche: a
N0 Fest
N- m
v2
R
Il sensopositivo e nel versodi 9eN, quindi dallapartedel centrolocaledi curvatura(vedi fig.5). Osserviamocheil secondomembroe semprepositivo, rappresentandola forzacentripetacheedirettaversoil centrodi curvatura.
R N R N
FN
(a) (b)
m g FNm g
Fig. 5
Si possonoesaminareduecasi,a se-condase il puntosta dal lato convessoo concavo della superficie. Nel primocaso, (a), poiche
aN dovra esserene-
gativo, questopuo avvenire solo se laforza esternae sufficientementeinten-sadaschiacciare,percosı dire, il puntosulla superficie.Nel secondocaso,(b),a
N dovra esserepositivo e l’equazio-ne e sempresoddisfatta qualunquesial’intensitadellaforzaesterna.
Nel primo caso, se la forza ester-nanone sufficienteo sel’accelerazionecentripetae troppo grandel’eguaglian-za non e piu soddisfatta e il punto sidistaccadalvincolo.
23

CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
72 Corde Unacordao filo puo co-stituire,setesa,unvincolo. La cordaper
costituireun vincolo idealedev’essereinestensibile. Non e invecenecessariochesiapriva dimassa.
Si chiamatensionenelpuntoX di unacordail modulodella forzachela cordasviluppainquelpunto.
UnacordatesalungaL sottopostaa unaforza 9FA e 9FB ai dueestremiA eB, si muoveconun’accelerazionedatada: 9a - 1 9FA
0 9FB 3\2 mdove m e la massadella corda. Ne seguecheunacordadi massanulla, per muoversi conaccelerazionefinita, deveesseresottopostaa forzedi egualmoduloai dueestremi.In tal casola tensionedella cordae la stessain tutti i punti e valeT - : 9FA : - : 9FB : . Seinvecela massanonenulla, la tensionevariadapuntoapuntoesi ricava facilmente.
Un segmentodi cordalungox attaccatoall’estremoA hamassamx- 1 x2 L 3 medesottopo-
stoa unaforzarisultanteFA 8 T 1 x3 . Siccomela suaaccelerazionee la stessadi tutta la cordanel suoinsieme,neseguechedev’essere:
T 1 x3 - FA0 1 FB 8 FA 3 x
L
ovverola tensionevaria linearmentedaunestremoall’altro fra i valori : 9FA : e : 9FB : .73 Esempio Nella fig. 6 sonorappresentati3 blocchi chescivolanosu un pianooriz-
zaontaleliscio, collegati fra loro dacordeideali e prive di massa.Una forzaorizzontaleF eapplicatain c (direttaversodestra).Si deve trovarel’accelerazionedei blocchi e la tensionedellecordein a, b ec. bcbdecefcf ghiciciciciciciiciciciciciciiciciciciciciiciciciciciciiciciciciciciicicicicicicijcjcjcjcjcjjcjcjcjcjcjjcjcjcjcjcjjcjcjcjcjcjjcjcjcjcjcjjcjcjcjcjcj kckckckckkckckckckkckckckckkckckckckkckckckckkckckckck
lclclclcllclclclcllclclclcllclclclcllclclclcllclclclcl mcmcmcmcmcmcmmcmcmcmcmcmcmmcmcmcmcmcmcmmcmcmcmcmcmcmmcmcmcmcmcmcmmcmcmcmcmcmcmncncncncncnncncncncncnncncncncncnncncncncncnncncncncncnncncncncncn
a b cA CB
Fig. 6
Perrisolvereil problemasi partedall’ultimo corpodellafila, A e si scrivonole equazionidel motoperi treblocchi:
Ta- MA a
Tb 8 Ta- MB a
Tc 8 Tb- MC a
(23)
NotiamocheTc- F. Sommandomembroamembrole 3 equazioniabbiamo
F - 1 MA0 MB
0 MC 3 a(24)
dacui si ottienesubitol’accelerazionea. Inserendolaequazioni23si ottengonole tensioni.
74 L’equazione24 si sarebbepotutascriveresubitodatoche(1) il sistemadei 3 blocchisi muoverigidamentecomesefosseununicopuntomaterialedi massaMA
0 MB0 MC al quale
eapplicatal’unica forzaesterna(nonci sonoattriti!) F .
24
CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
opopopopopopopopopopoopopopopopopopopopopoopopopopopopopopopopoqpqpqpqpqpqpqpqpqpqpqqpqpqpqpqpqpqpqpqpqpqqpqpqpqpqpqpqpqpqpqpqF
aa
M
Fig. 7
rprprprprprprprprprprprrprprprprprprprprprprprspspspspspspspspspspsspspspspspspspspspspsa
M1
M2
a
Fig. 8
75 Oveci fosseroattriti, occorrera inserirli nelleequazioni23 insiemealle tensioni.
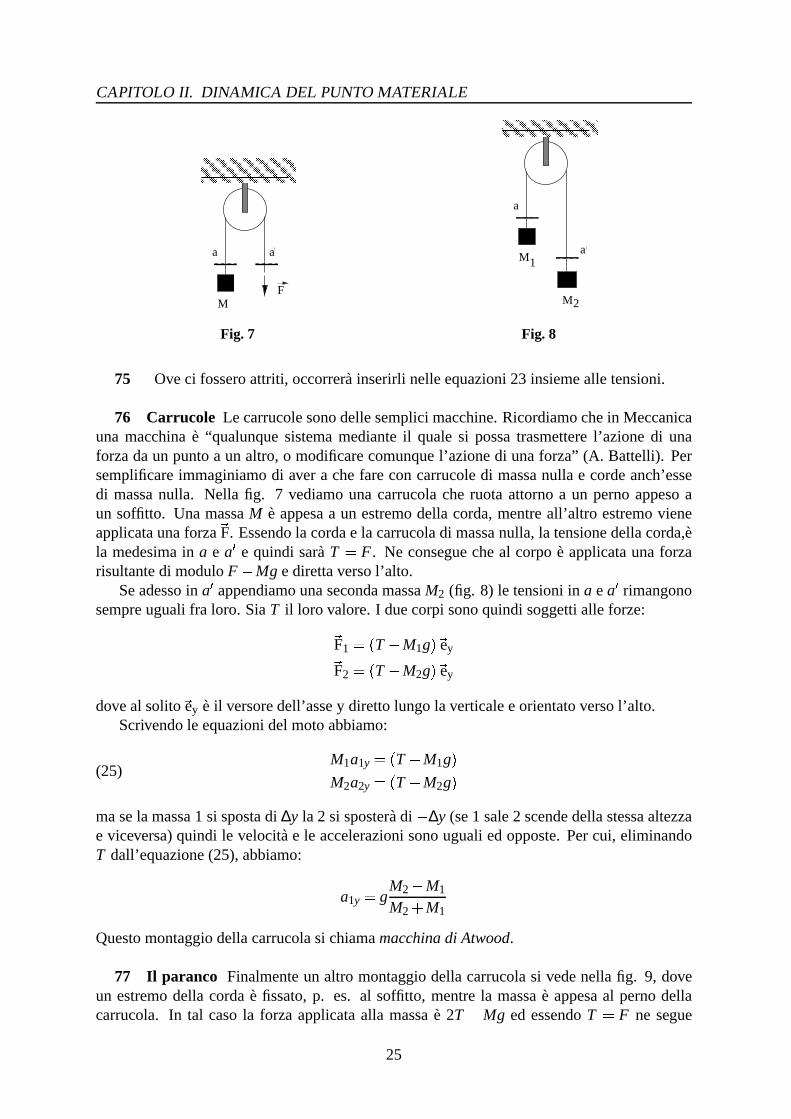
76 Carrucole Le carrucolesonodellesemplicimacchine.Ricordiamochein Meccanicauna macchinae “qualunquesistemamedianteil qualesi possatrasmetterel’azione di unaforzadaun puntoa un altro, o modificarecomunquel’azionedi unaforza” (A. Battelli). Persemplificareimmaginiamodi aver a chefarecon carrucoledi massanulla e cordeanch’essedi massanulla. Nella fig. 7 vediamounacarrucolacheruota attornoa un pernoappesoaun soffitto. Una massaM e appesaa un estremodella corda,mentreall’altro estremovieneapplicataunaforza 9F. Essendola cordae la carrucoladi massanulla, la tensionedellacorda,ela medesimain a e a4 e quindi sara T - F. Ne conseguecheal corpoe applicataunaforzarisultantedi moduloF 8 Mg edirettaversol’alto.
Seadessoin a4 appendiamounasecondamassaM2 (fig. 8) le tensioniin a ea4 rimangonosempreugualifra loro. SiaT il loro valore.I duecorpi sonoquindi soggettialle forze:9F1
- 1 T 8 M1g3 9ey9F2- 1 T 8 M2g3t9ey
doveal solito 9ey e il versoredell’assey direttolungola verticaleeorientatoversol’alto.Scrivendole equazionidel motoabbiamo:
M1a1y- 1 T 8 M1g3
M2a2y- 1 T 8 M2g3(25)
masela massa1 si spostadi ∆y la 2 si sposteradi 8 ∆y (se1 sale2 scendedellastessaaltezzae viceversa)quindi le velocita e le accelerazionisonougualiedopposte.Percui, eliminandoT dall’equazione(25),abbiamo:
a1y- g
M2 8 M1
M20 M1
Questomontaggiodellacarrucolasi chiamamacchinadi Atwood.
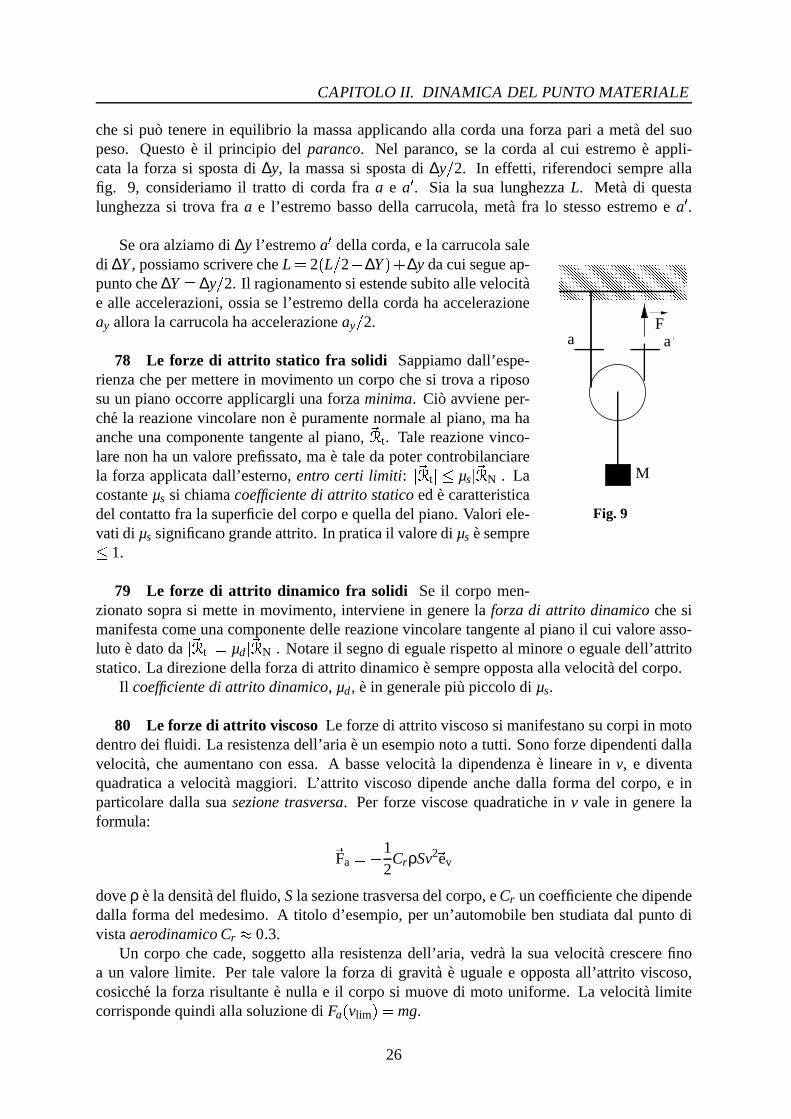
77 Il paranco Finalmenteun altro montaggiodellacarrucolasi vedenellafig. 9, doveun estremodella cordae fissato,p. es. al soffitto, mentrela massae appesaal pernodellacarrucola. In tal casola forza applicataalla massae 2T 8 Mg ed essendoT - F ne segue
25
CAPITOLO II. DINAMICA DEL PUNTO MATERIALE
chesi puo tenerein equilibrio la massaapplicandoalla cordaunaforza pari a meta del suopeso. Questoe il principio del paranco. Nel paranco,se la cordaal cui estremoe appli-catala forza si spostadi ∆y, la massasi spostadi ∆y2 2. In effetti, riferendocisempreallafig. 9, consideriamoil tratto di cordafra a e a4 . Sia la sualunghezzaL. Meta di questalunghezzasi trova fra a e l’estremobassodella carrucola,meta fra lo stessoestremoe a4 .
uvuvuvuvuvuvuvuvuvuvuuvuvuvuvuvuvuvuvuvuvuuvuvuvuvuvuvuvuvuvuvuwvwvwvwvwvwvwvwvwvwvwwvwvwvwvwvwvwvwvwvwvwwvwvwvwvwvwvwvwvwvwvwa a
M
F
Fig. 9
Seoraalziamodi ∆y l’estremoa4 dellacorda,e la carrucolasaledi ∆Y, possiamoscriverecheL - 2 1 L 2 2 8 ∆Y 3 0 ∆y dacui segueap-puntoche∆Y - ∆y2 2. Il ragionamentosi estendesubitoallevelocitae alle accelerazioni,ossiasel’estremodellacordahaaccelerazioneay allorala carrucolahaaccelerazioneay 2 2.
78 Le forze di attrito statico fra solidi Sappiamodall’espe-rienzachepermetterein movimentoun corpochesi trova a ripososuun pianooccorreapplicargli unaforzaminima. Cio avvieneper-che la reazionevincolarenon e puramentenormaleal piano,mahaancheunacomponentetangenteal piano, 9a t. Tale reazionevinco-larenonhaun valoreprefissato,mae taledapotercontrobilanciarela forza applicatadall’esterno,entro certi limiti : : 9a t :yx µs : 9a N : . Lacostanteµs si chiamacoefficientedi attrito staticoede caratteristicadel contattofra la superficiedel corpoequelladel piano.Valori ele-vati di µs significanograndeattrito. In praticail valoredi µs esemprex 1.
79 Le forze di attrito dinamico fra solidi Se il corpomen-zionatosoprasi mettein movimento,intervienein generela forzadi attrito dinamicochesimanifestacomeunacomponentedellereazionevincolaretangenteal pianoil cui valoreasso-luto e datoda : 9a t : - µd : 9a N : . Notareil segnodi egualerispettoal minoreo egualedell’attritostatico.La direzionedellaforzadi attritodinamicoe sempreoppostaalla velocitadel corpo.
Il coefficientedi attrito dinamico, µd, e in generalepiu piccolodi µs.
80 Le forzedi attrito viscoso Le forzedi attritoviscososi manifestanosucorpi in motodentrodeifluidi. La resistenzadell’aria e un esempionotoa tutti. Sonoforzedipendentidallavelocita, cheaumentanocon essa. A bassevelocita la dipendenzae linearein v, e diventaquadraticaa velocita maggiori. L’attrito viscosodipendeanchedalla forma del corpo,e inparticolaredalla suasezionetrasversa. Per forze viscosequadratichein v vale in generelaformula: 9Fa
- 8 12CrρSv29ev
doveρ e la densitadelfluido, S la sezionetrasversadelcorpo,eCr uncoefficientechedipendedalla forma del medesimo.A titolo d’esempio,per un’automobilebenstudiatadal puntodivistaaerodinamicoCr ^ 0 L 3.
Un corpochecade,soggettoalla resistenzadell’aria, vedra la suavelocita crescerefinoa un valore limite. Per tale valore la forza di gravita e ugualee oppostaall’attrito viscoso,cosicche la forza risultantee nulla e il corposi muove di moto uniforme. La velocita limitecorrispondequindi alla soluzionedi Fa 1 vlim 3 - mg.
26

Capitolo III
Moto oscillatorio
81 Moto periodico Un altro tipo di motoimportantee il motoperiodico, di cui abbiamoin naturainnumerevoli esempi.Il moto periodicoe un moto chesi ripeteugualea se stessodopoun intervallo di tempodettoperiodo. Perun motoa 1 gradodi liberta la definizionedimotoperiodicodi periodoT e:
s1 t 3 - s1 t 0 T 3Il motoperiodicoequindiunmotooscillatorio, datocheil puntonelsuomotoripassasempreperi luoghigia occupatiin precedenza.
82 Perovvie ragioniunmotoperiodicodevenecessariamenteduraredat - 8 ∞ a t - ∞.Naturalmentequestaeun’astrazione,maseneltempoin cuinoi studiamoil fenomenocontieneun grannumerodi periodialloral’astrazionee lecita.
83 La forza elastica La forzaelasticadi unamollaseguela leggedi Hooke: la forzacheagiscesuunamassaspostatadi x dallaposizionedi equilibriodellamolla si scrive:
F - 8 kx(26)
In questaformulak e la costanteelasticadellamolla. Il segno“ 8 ” ci dicechela direzionedellaforza e sempreoppostaallo spostamento,e la suaintensita crescecon l’allungamentodellamolla stessa.La formulae validanel casochela molla si muova lungol’assex. Altrimenti in3 dimensionila forzaelasticasi scrivecome9F - 8 k 9r
La forza elasticada luogo a un moto armonico: infatti usandol’eq. (26) nella LeggediNewtonsi ha:
md2xdt2
- 8 kx
ossial’equazionedell’oscillatorearmonico(90) conω - . k 2 m.
84 Moto armonico Il casopiu semplicedi motoperiodicoe quelloarmonicocheha laseguentesemplicissimaleggeoraria:
s1 t 3 - Asin1 ωt 0 ϕ 327

CAPITOLO III. MOTO OSCILLATORIO
dove A, ω e ϕ sonodellecostanti.Le dimensionidellecostantisono: +A, - + L , , +ω , - + T , A 1
mentreϕ e un numeropuro e non ha dimensioni. Questomoto e periodicoperche, per leproprietadellefunzioni trigonometriche,essosi ripetedopoil periodo:
T - 2πω
La costanteA e positivae si chiamaampiezzadel motoin quanto8 A x s1 t 3zx A. La costanteω si chiamapulsazioneesi misurain rad/s.Infineϕ si chiamafaseinizialedelmoto,in quantoal tempot - 0 abbiamos1 03 - Asin1 ϕ 3 e la misureremoin radianti.
85 Frequenza La frequenzadelmotoarmonicoe l’inversodelperiodo:ν - 12 T. Essaepari al numerodi oscillazionichevi sonoin 1 secondo,evienemisuratain Hz. 1 Hz = 1 sA 1.
86 Un motodel tipo:
s1 t 3 - Acos1 ωt 0 ψ 3e anch’essoarmonicodatochee identicoa
s1 t 3 - Asin1 ωt 0 φ 3in cui poniamoφ - ψ 0 π 2 2.
87 Seil motodi unpuntopuo rappresentarsicomela sommadi due(o piu) moti periodicile cosesi complicano.Limitandocia2 moti, se
s1 t 3 - A1sin1 ω1t 0 φ1 3 0 A2sin1 ω2t 0 φ2 3la condizioneaffinche il motosiaperiodicoechedopouncertotempoT essosi ripeta.Questosignificachedeveaversiω1T - 2nπ e insiemeω2T - 2mπ (n e m sonodueinteri qualunque)ovvero:
ω1
ω2
- nm- T2
T1
ossiale 2 pulsazioni(o i 2 periodi)devonostarefra loro in un rapportorazionale. Secio nonavviene,adesempioseT1
-|{ 2T2, il motorisultantenoneperiodico.
88 Comepossiamoclassificareil motosO t P T Asin2 O ωt } φ P ? A primavistapossiamodire chesi trattadi un moto periodicoin quantocertamentesi ripetedopoT ~ T 2π X ω. Seguardiamomeglio,usandola relazione
sin2 x T 1 U cos2x2
possiamoscriverlo come:
sO t P T A U cos2 O ωt } φ P2
equindi vediamochesO t P�U AX 2 eunmotoarmonicoconT T π X ω.
28

CAPITOLO III. MOTO OSCILLATORIO
89 Velocita nel moto armonico La velocitadel puntosi ottienederivandos rispettoa t:
v 1 t 3 - Aωcos1 ωt 0 φ 3esi vedechedovelo spostamentoin valoreassolutoemassimolavelocitasi annulla.Viceversala velocita massimain valoreassolutosi hapers - 0. La velocita del motoarmonicooscillaanch’essa,rimanendocompresafra gli estremi 8 Aω eAω.
90 Accelerazionenel moto armonico Derivandola velocita,ovveroderivandoduevoltela leggeoraria(48), otteniamol’accelerazione:
a 1 t 3 - dvdt
- d2sdt2
- 8 Aω2sin1 ωt 0 φ 3 - 8 ω2s1 t 3chepuo essereriscrittanellaformadi un’equazionedifferenziale:
d2s1 t 3dt2
0 ω2s1 t 3 - 0
notaappuntocome“equazionedell’oscillatorearmonico”.In questocasosiamopartiti daunasoluzionegeneraleesiamoarrivati aottenerel’equazionedifferenzialeacui essasoddisfa. Vi-ceversa,tutte le soluzionidell’equazionedifferenzialedell’oscillatorearmonicosonodel tipos1 t 3 - Asin1 ωt 0 φ 3 . Tuttele volte cheincontreremotaleequazionesapremoquindi scriverneimmediatamentele soluzioni.
91 Costanti econdizioni iniziali Perdefinirele costantiA eω necessitanodueequazioniche,ad esempio,si ottengonoimponendoal tempot - 0 le condizioni sulla posizionee lavelocitadelpunto:
s1 03 - Asinϕv 1 03 - Aωcosϕ
dacui otteniamo:
tanϕ - ωs1 03v 1 03
A2 - s2 1 03 0 v2 1 03ω2
92 Comenelcasodelmotouniformementeaccelerato,l’esistenzadi 2 costantinell’equa-zionedellaleggeorariae legataallanecessitadi specificarela posizionee la velocitadelpuntoa un determinatoistante,cheabbiamopresocomet - 0. Si trattadi unaproprieta generaledellameccanicadei punti materiali: il movimentodi un puntoe determinato,unavolta risoltele equazionidel moto, dalla suaposizionee velocita a un dato istantedi tempo(in generel’istanteiniziale).
93 Il pendolo Il pendolodi Galileofunzionain virtu dellareazionevincolare.
29

CAPITOLO III. MOTO OSCILLATORIO
T
P
O
T
Mg
O
P
Mg
θ< 0 θ > 0
θθ
Fig. 10
Un filo idealee privo di massafissatoin Oportaappesoun puntomaterialeP di massaM (vedi fig. 10). Sappiamodall’esperien-za cheP oscilla rispettoalla verticale,man-tenendoteso il filo. Galileo trovo che perpiccoleoscillazioni(definiremodopochesi-gnifica piccole) il periodo delle oscillazio-ni non dipendedalla loro ampiezzane dallamassaM. Vogliamo trovare l’equazionedimovimentodel pendolo.
Datocheil filo e tesoil pendolosi muovesuun arcodi circonferenzail cui raggionone altro che la lunghezzadel filo, � . Ma af-finchecio avvengadovraesserviunaforzadireazionevincolare 9a che,componendosicol
pesoM 9g, diaunarisultantetangenteall’arcodi circonferenza.Taleforzae trasmessaal puntoP dal filo checostituisceappuntoil vincolo e quindi puo solo esserdirettalungo il filo da PversoO. La suaintensitaT e la tensionedel filo medesimo.
In figuraabbiamorappresentatodueposizionidel pendolo.Unasolavariabile,l’angolo θ,e sufficientea descriverela posizione.A sinistraabbiamodei valori di θ � 0, e a destra� 0.Perscriverele forzeusiamoun sistemadi coordinatecartesianeortogonalicon l’origine in P,l’assey direttodaP versoO e l’assex tangentealla traiettoriae orientatonelladirezionedi θcrescenti.Abbiamoquindi:
Fx- 8 Mgsinθ
Fy- T 8 Mgcosθ
La componenteFx dovra essereugualealla massaper l’accelerazionetangenziale,chevaleincoordinatepolari � d2θ 2 dt2. Pertantoavremo
M � d2θdt2
- 8 Mgsinθ
d2θdt2
- 8 g� sinθ(27)
Perdeterminareil motodel pendoloe sufficientequestasolaequazione.PerquantoriguardaFy, osserviamocheessadev’essereugualealla forzacentripeta,ossia:
m1 dθ 2 dt 3 2� . Essadeterminaquindi la tensionedelfilo:
T - Mgcosθ 0 m� C dθdt D 2
Unavolta risolto il motodel pendolotramitela (27) (vedi oltre), questaequazioneci permet-te quindi di conoscerela tensionedel filo in ogni istantet o per qualunqueposizioneθ delpendolo.
94 Notiamocheil segno“ U ” nell’equazioneappenascrittae importantissimodatoche:
1. Seil pendoloe asinistra(θ � 0) l’accelerazioneepositiva: infatti:
30
CAPITOLO III. MOTO OSCILLATORIO� seil pendolosimuoveversodestra(velocitapositiva)essotendeaaccrescerela suavelocitaavvicinandosiallaverticale� seinvecesi muoveversosinistra(velocita negativa)essotendesempreadaccrescerela suavelocita,cheessendonegativacrescendosi riducein moduloallontanandosidallaverticale
2. Seil pendoloe adestra(θ � 0) l’accelerazionee negativa: infatti:� seil pendolosi muoveversodestra(velocita positiva) essotendeadiminurela suavelocitaallontanandosidallaverticale� seinvecesi muove versosinistra(velocita negativa) essotendeancoraa diminuire la suavelocita, cheessendonegativa diminuendocrescein moduloavvicinandosiallaverticale
Il segno“ U ” nonlo abbiamoimpostonoi: e venutofuori in manieraautomatica(e corretta)scegliendoil sistemadi coordinateescrivendoi passaggiin manieracoerente.Siccomepero la sceltaearbitraria,siconsigliadi provareconunasceltadiversa(adesempiocontandogli angoliin sensoorarioo scegliendol’orientazioneoppostaperl’assex) perrendersicontocheallafine i risultati nondevonocambiare.
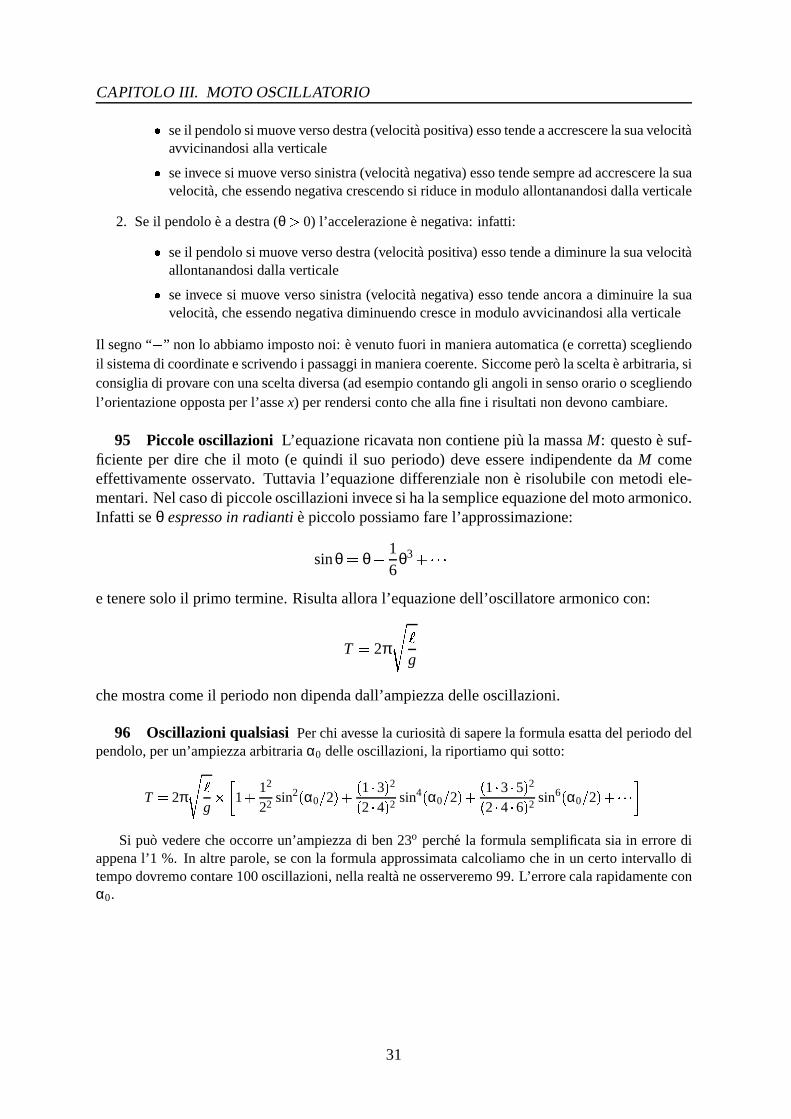
95 Piccoleoscillazioni L’equazionericavatanoncontienepiu la massaM: questoe suf-ficienteper dire che il moto (e quindi il suoperiodo)deve essereindipendenteda M comeeffettivamenteosservato. Tuttavia l’equazionedifferenzialenon e risolubile con metodiele-mentari.Nel casodi piccoleoscillazioniinvecesi halasempliceequazionedelmotoarmonico.Infatti seθ espressoin radianti e piccolopossiamofarel’approssimazione:
sinθ - θ 8 16
θ3 0�[\[\[e teneresoloil primo termine.Risultaalloral’equazionedell’oscillatorearmonicocon:
T - 2π�g
chemostracomeil periodonondipendadall’ampiezzadelleoscillazioni.
96 Oscillazioni qualsiasi Perchi avessela curiosita di saperela formulaesattadel periododelpendolo,perun’ampiezzaarbitrariaα0 delleoscillazioni,la riportiamoqui sotto:
T T 2π �g ��� 1 } 12
22 sin2 O α0 X 2P�} O 1 W 3P 2O 2 W 4P 2 sin4 O α0 X 2P�} O 1 W 3 W 5P 2O 2 W 4 W 6P 2 sin6 O α0 X 2P�} WYWYW6�Si puo vederecheoccorreun’ampiezzadi ben23o perche la formula semplificatasia in erroredi
appenal’1 %. In altreparole,secon la formulaapprossimatacalcoliamochein un certointervallo ditempodovremocontare100oscillazioni,nellarealtaneosserveremo99. L’errorecalarapidamenteconα0.
31
Capitolo IV
Trasformazioni di riferimento
97 In fisica non esistonosistemidi riferimento privilegiati: lo stessofenomenopuoesserestudiatoin sistemidi riferimentodiversi e in ciascunodi questidev’esserepossibileunadescrizionedel fenomenoin basealle medesimeleggi della fisica. Ne conseguecheleosservazionie le misurefattein un sistemadi riferimentodevonoessere“traducibili” perunosservatorecheusaun altro riferimento. Deve’esserequindi possibiletrovaredelle formulechepermettonodi effettuarele cosiddettetrasformazionidi riferimento.
y
z
O
x
R
O
x
y
z
Fig. 11
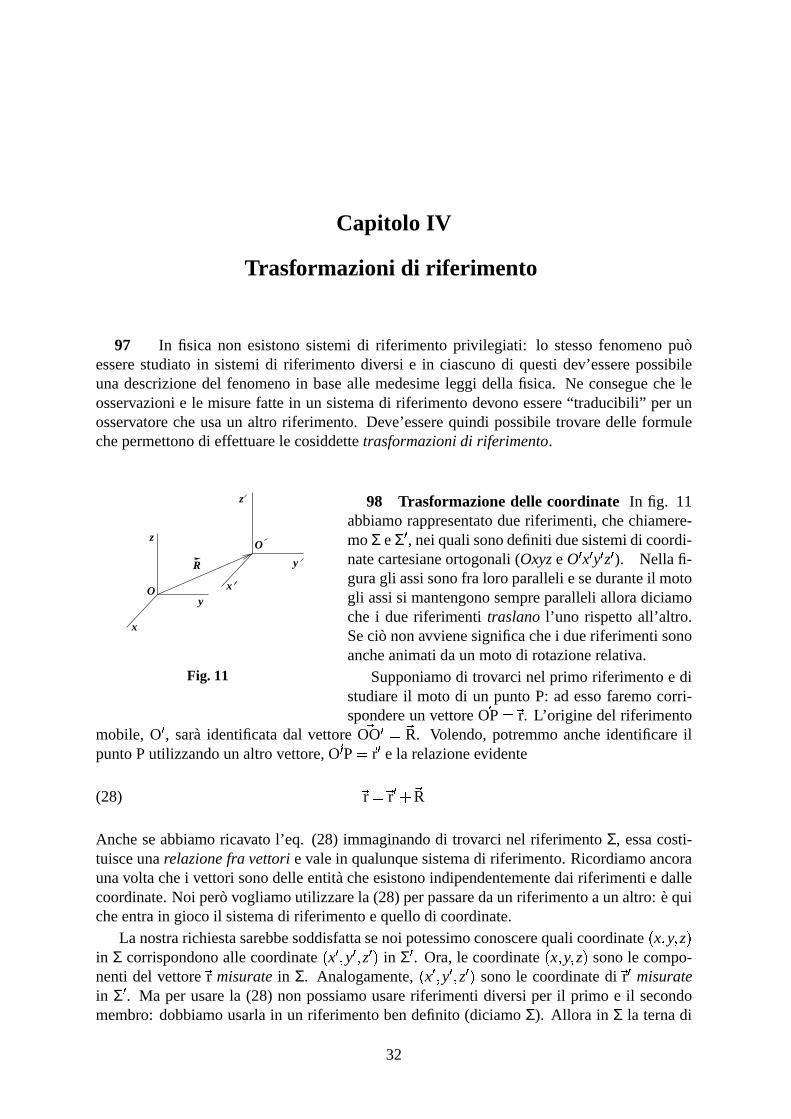
98 Trasformazione delle coordinate In fig. 11abbiamorappresentatodueriferimenti, chechiamere-moΣ eΣ 4 , neiqualisonodefiniti duesistemidi coordi-natecartesianeortogonali(Oxyze O4 x4 y4 z4 ). Nellafi-guragli assisonofra loro parallelieseduranteil motogli assisi mantengonosempreparallelialloradiciamoche i dueriferimenti traslanol’uno rispettoall’altro.Secio nonavvienesignificachei dueriferimenti sonoancheanimatidaun motodi rotazionerelativa.
Supponiamodi trovarci nel primo riferimentoe distudiareil moto di un puntoP: ad essofaremocorri-spondereun vettore 9OP - 9r. L’origine del riferimento
mobile, O4 , sara identificatadal vettore 9OO4 - 9R. Volendo,potremmoancheidentificareilpuntoPutilizzandounaltro vettore, 9O4 P - 9r 4 e la relazioneevidente9r - 9r 4 0 9R(28)
Ancheseabbiamoricavato l’eq. (28) immaginandodi trovarci nel riferimentoΣ, essacosti-tuisceunarelazionefra vettori evalein qualunquesistemadi riferimento.Ricordiamoancoraunavolta chei vettori sonodelleentita cheesistonoindipendentementedai riferimenti e dallecoordinate.Noi pero vogliamoutilizzarela (28)perpassaredaunriferimentoaunaltro: equicheentrain giocoil sistemadi riferimentoequellodi coordinate.
La nostrarichiestasarebbesoddisfattasenoi potessimoconoscerequali coordinate1 x * y* z3in Σ corrispondonoalle coordinate1 x45* y46* z4�3 in Σ 4 . Ora, le coordinate1 x * y* z3 sonole compo-nenti del vettore9r misurate in Σ. Analogamente,1 x45* y45* z4�3 sonole coordinatedi 9r 4 misuratein Σ 4 . Ma per usarela (28) non possiamousareriferimenti diversi per il primo e il secondomembro:dobbiamousarlain un riferimentobendefinito (diciamoΣ). Allora in Σ la ternadi
32

CAPITOLO IV. TRASFORMAZIONI DI RIFERIMENTO
numeri 1 x45* y45* z4�3 none il vettore9r 4 , maquestosara invecedatoda:9r 4 - x4 9ex’0 y4 9ey’
0 z4 9ez’(29)
dove 9ex’ * 9ey’ * 9ez’ sonoi versoridegli assidi Σ 4 visti nelprimoriferimento.Peradoperarela leggedi trasformazione(28) dovremoquindi conoscerein ogni istantel’orientamentodei versori 9e4in Σ e riscriverlacome: 9r - 9R 0 x4 9ex’
0 y4 9ey’0 z4 9ez’
Nel solo casodella traslazione,i versori 9e - 9e4 (perche gli assi rimangonoparalleli) epassandoalle componentila relazionediventa:
x - x4 0 X
y - y4 0 Y
z - z4 0 Z
(30)
99 Trasformazionedella velocita Perottenerela leggedi trasformazionedellevelocitacominciamoa derivarela (28)ottenendo:9v - d9r 4
dt0 d 9R
dt
Tuttavia, mentred 9R2 dt si identifica immediatamentecomela velocita 9V con cui l’originedi Σ 46* O4 si muove rispettoa O, l’interpretazionedel termined9r 472 dt non e immediata. Nonpossiamoconsiderarlala velocitadi P in Σ 4 perche 9r 4 cambianonsoloacausadel motodi P inΣ 4 maancheperil motorelativo di quelriferimentorispettoa Σ.
Per esplicitarequestofatto riscriviamo ancorauna volta 9r 4 usandoi versori degli assi(eq.29): 9r 4 - x4 9ex’
0 y4 9ey’0 z4 9ez’
Derivandoavremo:
d9r 4dt
- dx4dt9ex’
0 x4 d9ex’
dt0�[\[\[
La velocitadelpuntonel riferimentoΣ 4 si identificacol vettore:9v 4 - dx4dt9ex’
0 dy4dt9ey’
0 dz4dt9ez’
Percheaffermiamoquesto?La ragionee semplice:unosservatorechesi trova in Σ 4 determinala velocitamisurandonele componentilungoi suoitreassiequestecomponentisonoappuntodx472 dt * dy4�2 dt * dz4�2 dt. Allora la nostraequazionediventa:
d9r 4dt
- 9v 4 0 C x4 d9ex’
dt0 y4 d9ey’
dt0 z4 d9ez’
dt De rimanedainterpretareil terminefra parentesi.
33

CAPITOLO IV. TRASFORMAZIONI DI RIFERIMENTO
Esaminandoil terminefra parentesinotiamochecontienele derivatetemporalidei versoridel sistemaO4 x4 y4 z4 , comesonovistedall’osservatorein Σ. Questederivatestannoa indicarel’effettodellevariazionidell’orientamentodel riferimentoΣ 4 rispettoaΣ esonoidenticamentenulle nel casodi unapuratraslazionedi un sistemarispettoall’altro. Ma nel casogeneralealla traslazionesi accompagnaunarotazione(moto rototraslatorio), e quest’ultimae respon-sabiledellavariazionedei versori.La rotazionedel riferimentosi caratterizzaconl’ampiezzadell’angolodi cui il sistemaruota. Perintendersioccorrepero anchedire attornoa qualedi-rezioneavvienela rotazione,e stabilireper questaun verso(positivo o negativo). Possiamoquindi associarealla rotazioneun vettore,chehaperdirezionequellaanzidettae permodulol’angolo. Seunapersonaorientatacomeil vettorevedela rotazioneavvenirein sensoantiora-rio, associamoa questail segno 0 e 8 nel casoopposto.Seconsideriamounarotazionecheavvienein un tempodt moltopiccolo,l’angolosaraanch’essoinfinitesimo,d 9α, edividendoloperdt otteniamoil vettorevelocita angolare:
d 9αdt
- 9ωSi puo facilmentedimostrareche:
d9ex’
dt- 9ω N 9ex’
d9ey’
dt- 9ω N�9ey’
d9ez’
dt- 9ω N 9ez’
(31)
Neconseguechela trasformazionedellevelocitaprendela formafinale:9v - 9V 0 9v 4 0 9ω N 9r 4(32)
Il termine 9V 0 9ω N>9r 4 prendeavolte il nomedi velocita di trascinamento.
100 Velocita relativa SeP e fermonel riferimentomobileΣ 4 questosi chiamail riferi-mentodi quietedi P. In tal casola velocita misuratanel riferimentoΣ 9v e nient’altro che 9Vdatoche 9v 4 - 0. Consideriamooraduepunti materialiP1 e P2 e sianoΣ e Σ 4 i corrispondentiriferimenti di quiete. Chiamiamovelocita relativa di 1 rispettoa 2 la velocita che1 ha nelriferimentodi quietedi 2 (quindi in Σ 4 ): 9v12
- 8 9V. Viceversa,chiamiamovelocita relativadi2 rispettoa 1 la velocita che2 hanel riferimentodi quietedi 1 (quindi in Σ 4 ): 9v21
- 9V. Comec’era da aspettarsile duevelocita sonouguali in moduloe direzionee oppostein verso. Ingeneralequindi la velocita relativadi 2 punti i * j e sempredatada9vi j
- 9vi 8�9v j- 8�9v j i
101 Trasformazionedell’accelerazione Il procedimentoperottenerela leggedi trasfor-mazionedell’accelerazionee del tutto simile a quello usatoper la velocita. Si cominciaaderivarela (32) dopoaver esplicitatoi versoridegli assial secondomembronell’espressionedi 9r e 9v 4 . Usandoancorale formule(31)si ottienela formulaseguente:9a - 9a4 0 9A 0 d 9ω
dtN 9r 4 0 2 9ω N 9v 4� ��� �
Acc. di Coriolis
0 9ω N�1 9ω N 9r 4 3� ��� �Acc. centripeta
34
CAPITOLO IV. TRASFORMAZIONI DI RIFERIMENTO
dove 9A e l’accelerazionedi O4 . La sommadei termini a destradi 9a4 prendeil nome diaccelerazionedi trascinamento
102 Forze apparenti in riferimenti non inerziali Sappiamoche nei riferimenti noninerziali il principio d’inerzianone valido: un corpolibero haun’accelerazione.E possibilesalvaguardareformalmenteil principiod’inerziain tali sistemiattribuendoquestaaccelerazio-neallapresenzadellecosiddetteforzeapparenti. Questeforzeapparentisi sommanoalleforzereali e insiemeaquestedeterminanoil motodel corponel riferimentononinerziale.
Perdeterminarleconsideriamoun puntomaterialelibero in un certoriferimentoinerziale,quindiconaccelerazionenulla. Servendocidellaleggedi trasformazione(101) troviamochelasuaaccelerazionein unriferimentononinerzialesaradatadall’accelerazionedi trascinamentodi quest’ultimo,cambiatadi segno: 9a4 - 8 9Atrasc(33)
Quindi la forza apparente,definita comequella forza che imprime a un corpo di massaml’accelerazioneosservata9a4 , vale 9Fapp
- 8 m9Atrasc.Notiamochela forzaapparente,similmentealla forzapeso,eproporzionaleallamassadel
corpo. Ne segueche in un sistemaacceleratocon un’accelerazionepari a g tutto si svolgecomesesi fossein presenzadellagravita terrestre.Questoe il principio di equivalenza.
103 Forza centrifuga Un esempioatutti notodi forzaapparenteela forzacentrifugachee importantein sistemidi riferimentoin rotazione.In questisistemiun corpoisolatotendeadallontanarsidal centro,comeseunaforzacentrifugalo spingessein fuori. In realta il corposimuovedi motorettilineouniformein unriferimentoinerziale,mentreperfarloruotareinsiemeal riferimentosarebbenecessariaunaforzacentripeta. La forzacentrifugae quindi realmenteunamancanzaduunaforzacentripeta, ehail suostessovaloremaedirettaversol’esterno.
Sviluppandoil doppioprodottovettoriale(101) vediamochela forzacentrifugahagran-dezzamω2R, doveR e la distanzadelcorpodall’assedi rotazione.La suadirezioneenormaleall’assedi rotazioneeversol’esterno.
104 Riferimenti in caduta libera Un sistemadi riferimentochesi muove,soggettosoloalla forzadi gravitazione(ascensorecheprecipita,nave spazialecheviaggiaa motori spenti,Terrachesi muove intornoal Sole,ecc.) si dice in cadutalibera. Si trattadi un riferimentononinerziale,nel qualel’accelerazionedi trascinamentoe l’accelerazionedi gravitanel luogodoveil riferimentosi trova. Chiamiamo9g4 taleaccelerazione,cheda luogoallaforzaapparente9Fapp
- 8 m9g4 .La forzadi gravitazioneagiscesui corpi chesi osservanonel riferimento,e vale 9F - m9g4 .
D’altronde l’osservatorenel riferimento in cadutalibera dovra scriverela Leggedi Newtonsommandoa questala forzaapparente,9Fapp
- 8 m9g4 , percui la forzarisultantee nulla. Il ri-sultato(valido indipendentementedallamassa)echeil corporisulteraprivo di pesoall’osser-vatore. Questoavvieneappuntoperche l’osservatoree il corpocadonoinsiemecon la stessaaccelerazione.Non essendovi quindi accelerazionerelativa osssevatore-corpo,quest’ultimoappareprivo di peso.
35

Capitolo V
Lavoro di una forza
105 Lavoro infinitesimo Consideriamoun punto materialeche si spostadi un trattoinfinitesimodx lungol’assex esucui agisceunaforza 9F - 1 Fx * Fy * Fz 3 . Supponiamodapprimachela forzasiacostante.Si chiamalavoro infinitesimodellaforza 9F il prodotto:
d � - Fxdx
Sela forzanone costantela definizioneva egualmentebene:naturalmentela forzadovraesserecalcolatanellaposizionein cui si trovail punto,edatochelo spostamentoe infinitesimopotremosupporrela forza costanteda x a x 0 dx durantelo spostamentoe usareil valorecalcolatoin P - 1 x * y* z3 .
Selo spostamentononavvienelungo l’assex mahacomponenti1 dx * dy* dz3 (ed e quindirappresentabiledaun vettoreinfinitesimod9r - 1 dx * dy* dz3 ) il lavoro infinitesimoe datoda:
d � - 9F [ d9r - Fxdx 0 Fydy 0 Fzdz
essendoil prodottoquello scalareper il qualepossiamoanchescrivere d � - :F : ds cosθ,dove ds e lo spostamento(ds - :d9r : ) e θ e l’angolo cheessofa con la forza. In altro modoequivalentepotremoscriverlo d � - F��� ds doveabbiamointrodottola componentedellaforzaparallela alla traiettoria.Avremoquindi cheil lavoropotra essere:
1. positivo se 9F ed9r sonoconcordi;
2. negativo se 9F ed9r sonodiscordi;
3. nullo se 9F ed9r sonoortogonali;
106 Importante. Lo spostamentodel puntosara ovviamentedeterminatodallaforzari-sultantecheagiscesudi esso,in basealla leggedi Newton. Tuttavia sesul corpoagisconopiuforzenienteci impediscecalcolarciseparatamentei lavori fatti daciascunadi detteforze. Adesempio,sesuunpuntoagisconola forzapesoeunaforzadi attritoviscoso,potremocalcolareseparatamentei lavori fatti daciascunadi questeforze.Sommandoliinsiemeavremoil lavorodellaforzarisultante.
107 Moto rettilineo uniforme Seun corposi muove di motorettilineo uniformesottol’azione di piu forze (ad esempio,corpo pesanteche cadesottopostoad attrito viscoso)illavoro totale fatto dalle forze e nullo. Infatti essendoil moto uniformela forza risultanteenecessariamentenullaecosı e il lavoro.
36

CAPITOLO V. LAVORO DI UNA FORZA
108 Lavoro delle reazioni vincolari e delle forze d’attrito Le reazionivincolari deivincoli lisci sono,perdefinizione,semprenormaliallo spostamento(67) e pertantononfannolavoro. Ad esempio,nel motocircolare,siaessouniformeo meno,la forzacentripetanonfalavoro.
Se il vincolo non e liscio esisteunacomponentedella reazionetangenteal vincolo cheda luogoalla forzad’attrito. Essendola forzadi attrito semprecontrariaallo spostamento,illavorodellaforzadi attrito sarasemprenegativoeviene,conaltro termine,dettoresistente.
109 Se lo spostamentonon e infinitesimo ma finito, partendoad esempiodal puntoAper finire al puntoB, si procedera sommandotanti lavori infinitesimi corrispondentia deglispostamentid9ri lungo la traiettoriaseguitadal punto. Passandoal limite avremoun integraleil cui valorein generaledipendera dal percorso,nonche ovviamentedai punti di partenzae diarrivo: ��1 A * B 3 - ∑ 9Fi
[ d9ri < F B
A9F 1 9r 3 [ d9r
Un tale integralesi dice integrale di linea datochee appuntocalcolatosulla linea dellatraiettoria.
110 Forze dipendenti dalla posizione Una forzasi dice dipendentedalla posizioneo,con altro termine,posizionale, se e una funzioneesclusivamentedel punto P1 x * y* z3 : 9F -9F 1 x * y* z3 . La forzadi gravitazionee in particolarela forzapeso,la forzadi Coulomb,la forzaelasticasonotutti esempidi forze dipendentidalla posizione. Le forze di attrito dinamicodipendonoinveceanchedallavelocita,essendosempreopposteadessa,enonrientranoquindiin questacategoria.
111 Seper una forza dipendentedalla posizionela traiettorialungo la qualesi calcolail lavoro e percorsain sensoinverso,partendodal puntoB per terminarein A, maseguendola stessatraiettoriaΓ, allora nel calcolodel lavoro la forza rimaneimmutatamentretutti glispostamenticambianodi segnoe cosı pureil lavoro:� Γ 1 A * B 3 - 8v� Γ 1 B * A 3
112 Lavoro di una forza costante Sela forzae costante(in modulo,direzionee verso)alloraepossibileportarlafuori dall’integrale:� - 9F [\F B
Ad9r - 9F [ 1 9rB 8 9rA 3
epossiamonotarechein questocasoil lavoro e indipendentedallatraiettoriaseguitadalpuntoperspostarsidaA a B. Questoe un risultatomolto importante,e vedremoin seguito cheessorimanevalidoancheperalcuneforzenoncostanti.
113 Potenza Si dicepotenzail lavoro fattonell’unitadi tempo:
W - d �dt
- 9F [ d9rdt- 9F [ 9v
e 9v e la velocitadelpuntomateriale.
37

CAPITOLO V. LAVORO DI UNA FORZA
114 Teorema delle forze vive. Energia cinetica Consideriamoadessoil lavore totalefatto dalle forze su un puntomateriale. Dato cheessonon e altro che il lavoro fatto dallaforza risultantee cheproprio quest’ultimadeterminail moto del puntomateriale, possiamosostituiream9a la forza 9F nell’espressionedel lavoro infinitesimo:
d � - 9F [ d9r - m9a [ d9r- md 9vdt
[ d9r - md9v [ 9v- m1 dvx vx0 dvy vy
0 dvzvz 3- m1 12
d 1 v2x 3 0 1
2d 1 v2
y 3 0 12
d 1 v2z 3 -- m
12
d 1 v2 3 - d 1 12
mv2 3La relazionericavatasoprae un’eguaglianzafra 2 differenziali. Integrandoamboi membridell’uguaglianzaper un puntomaterialechesi muove da A a B otteniamoil Teoremadelleforzevive: ��1 A * B 3 - F B
A9F 1 9r 3 [ d9r - 1
2mv2
B 8 12
mv2A
dove la quantita 12mv2 prendeil nomedi Energia Cinetica del puntomateriale. L’energia
cineticae unagrandezzascalare semprepositiva (la velocita compareal quadratoe la massae sempremaggioredi 0). AbbiamoesplicitamenteindicatoA e B nell’espressionedel lavoro,��1 A * B 3 , perricordarechesi trattadel lavoro fattoperspostareil puntomaterialedaA a B, echenaturalmentedipendedallatraiettoriadaessoseguita.L’enunciatodelTeoremadelleforzevive e:
“La variazionedi energiacineticadi unpuntomaterialeeugualeal lavorototaledelleforzecheagisconosudi esso,calcolatosulla traiettoriapercorsa.”
115 Unit a di misura del lavoro e dell’energia L’unita di misuradel lavoro nel sistemaMKS si chiamaJoulee si abbrevia J.Seun puntomaterialesi spostadi 1 m nelladirezioneenel versodi unaforzadi 1 N adessoapplicata,quest’ultimacompieil lavoro di 1 J.Datocheil lavoro si trasformain energia cinetica,anchequest’ultimasi misurain Joule.
Nel sistemacgsl’unit a di lavoro edenergia e l’erg, checorrispondea unaforzadi 1 dyneeaunospostamentodi 1 cm: 1 J= 107 erg.
La potenzasi misurain Watt (W) nel sistemaMKS: 1 W = 1 J/s,1 kW = 1000W. Nonesisteun’unita nel sistemacgs. E d’usoa volte nellapraticautilizzare,comeunita di misuradel lavoro,il Watt-ora(Wh) o il kilowatt-ora(kWh), checorrispondeaunapotenzadi 1 o 1000W erogataper1h = 3600s. Quindi adesempio1 kWh = 3 L 6106 J.Questaenergia costaa noiutenticircalire 350(tassecomprese)sela acquistiamodall’ENEL.
116 Seil lavoro fattodalleforzeepositivo l’energia cineticaaumenta.Seenegativo essadiminuisce.Un corposoggettoalla solaforzadi attrito ha la suaenergia cineticain costantediminuzione.Datotuttavia chel’energiacineticanonpuo esserenegativa,essapotradiminuireal minimo azero,il cheavvieneall’arrestodel corpo.
Un corpo che scivola su un piano orizzontaleprivo di attrito mantienecostantela suaenergia cinetica m
2 v2 dato che le forze che su di essoagiscono(pesoe reazionevincolarenormale)sonoortogonalial movimentoequindi nonfannolavoro.
38

CAPITOLO V. LAVORO DI UNA FORZA
117 Un puntomaterialepossiedeenergia cineticama non possiedelavoro. Il lavoro esempresvoltodalle forze. Essomodifical’energia cineticapossedutadal corpo.
118 Mentrepossiamodistinguereil lavoro fattoseparatamentedallevarie forzecheagi-sconosuun corpo,nonhasensovoler scomporrel’energia cineticain componentidistinte: ilteoremadelleforzevivesi applicaal motoeal lavorocompleto.
119 Forza peso La forza pesoe l’esempiopiu comunedi forza costante.Utilizzandola formuladel (112) possiamocalcolareil lavoro fattoquandoun puntomaterialepesantesispostaA aB: 9F - 1 0 * 0 *\8 mg3 < ��1 A * B 3 - 8 mg1 zB 8 zA 3il checi fa vedereesplicitamentecheil lavoro dipendesolo dalla differenzadi livello fra leposizionidi partenzaedi arrivo.
Il lavoro chefa la forza pesoe quindi negativo seil puntomaterialesale. Perun corpolanciatoversol’alto si haquindi unadiminuzionedell’energia cineticanella faseascendente.Nella fasedi discesail lavoro e positivo e quindi comportaun aumentodell’energia cineticadel punto.
120 Forze conservative – Energia potenziale Un casoparticolare,molto importantenellapratica(lo abbiamogia incontratocalcolandoil lavoro dellaforzapeso),si haquandoillavorodaA aB nondipendedalpercorsoseguito. In tal casoil lavoroperandaredaA aB noncambiera sesceglieremoun’altra traiettoriapassanteperun puntoO: il lavoro daA a B saraquindi ugualeal lavorodaA aO piu il lavorodaO aB:��1 A * B 3 - ��1 A * O3 0 ��1 O * B 3 - ��1 A * O3�8���1 B * O3equindi peril teoremadelleforzevive (114) 12 2m1 v2
B 8 v2A 3 - ��1 A * B 3 si ha:
12
mv2A0 ��1 A * O3 - 1
2mv2
B0 ��1 B * O3
La formularicavataedi notevoleimportanza:in effetti al primomembroabbiamola sommadiduegrandezzechesonocalcolatenel puntoA (l’energia cinetica12 2mv2
A e il lavoro ��1 A * O3 ).Al secondomembrole stesseduegrandezzesonocalcolatein B. Seripetessimoil calcoloinqualunquealtropuntotroveremmola stessaeguaglianza.Affinchecio si verifichi e necessarioquindichelasommadelleduegrandezzesiacostante. Conaltroterminediciamochelasommasi conserva. Peranalogiaconil primo terminedellasomma,cheegia statobattezzatoenergiacinetica,il secondoterminevienedettoenergia potenziale:
V 1 A3 - ��1 A * O3 - 8���1 O * A 3V 1 A3>8 V 1 B3 - ��1 A * B 3(34)
La sommadelledueenergie (cineticaepotenziale)rimanequindi costanteduranteil motodelpuntomaterialee cio esprimeil principio dellaconservazionedell’energia meccanica:
12
mv2A0 V 1 A 3 - 1
2mv2
B0 V 1 B 3 - E - costante(35)
39

CAPITOLO V. LAVORO DI UNA FORZA
La dimostrazionetestefattasi ebasatasul fattocheil lavoro delleforzefosseindipendentedal percorso.Cadendol’ipotesi il principio di conservazionedell’energia meccanicacessadivalere. Si chiamanoFORZE CONSERVATIVE le forzeper le quali il lavoro non dipendedalpercorso,eper le quali appuntovaleil principio di conservazionedell’energia meccanica.
121 La sceltadelpuntoO puo esseredel tuttoarbitrariaenoninfluiscesul risultatofinale.Il suoeffetto e quellodi modificareil valoredell’energia potenzialeV, sommandoadessaunvalorecostante:V 1 A 3�< V 1 A 3 0 cost.. Poiche quellochecontasonole variazionidi energiapotenzialee la costantescomparenelledifferenzei risultati fisici noncambiano.Si diceper-tantochel’energia potenzialee definitaa menodi unacostantearbitraria. Ci si puo valerediquestaarbitrarietaperdefinire,seriescecomodo,il cosiddettozero dell’energiapotenziale.Adesempio,nel campodellaforzapeso,si puo assumerelo zerodell’energia a livello del suolo.In tal casoV 1 A3 - 8���1 O * A 3 - mgzA, equindiV � 0 soprail livello del suoloeV � 0 sotto.
122 Lavoro su una traiettoria chiusa In un campodi forze conservative il lavoro suuna traiettoriachiusae semprezero. Perdimostrarloconsideriamouna traiettoriachiusaΓchecominciae finisce in A. Spezziamolaidealmenteconsiderandoun puntoO sulla traiet-toria e chiamiamoΓ1 la partedi traiettoriada A fino ad O e Γ2 la parterimanentecheda Oritornain A (vedifigura).Allora il lavoro perspostarsidaA adA sullatraiettoriachiusasara:
A
O
Γ
Γ
1
2
Fig. 12
��1 A * A 3 - ��1 O * A 3 Γ10 ��1 O * A 3 Γ2
- ��1 O * A 3 Γ18���1 O * A 3 Γ2
Ma poiche il campoe per ipotesi conservativo, i due lavori a secondomembrosonougualipur avvenendosutraiettoriediverse,datochecomi-cianoefiniscononegli stessipunti. Quindi la loro differenzaezerocomevolevasidimostrare.
Questaproprietadelleforzeconservativesi dimostrapiu rapidamenteosservandochela variazionedi energia potenzialeV e nulla datocheilpuntodi partenzae di arrivo coincidono. Pertantonon vi e lavoro ne variazionedi energiacinetica: ad esempio,un corposcagliatoverticalmenteversol’alto con unacertavelocita 9v,avra unavelocitadi egualemodulonelmomentoin cui toccail suolocadendo.
123 Forze centrali Si chiamaforza centrale ogni forza che(1) e direttacomela con-giungentedal puntoal centrodellaforza,e (2) la cui intensita dipendesoltantodalladistanzadadettocentro.Essapuo essereattrattivao repulsiva. Unaimportanteforzacentralee la forzadi gravitazione(attrattiva), chedecrescecome12 r2 all’allontanarsidal centro.La forzaelet-trostaticadi Coulombha unadipendenzada r comela forza di gravitazione,ma puo esseresia attrattiva cherepulsiva. La forza elasticae anch’essauna forza centraleattrattiva la cuiintensitacrescelinearmenteconla distanzadalcentro.
Dimostriamooraunteoremamolto importante:le forzecentrali sonosempreconservative.Perla dimostrazionecominciamoa osservarequantosegue: datochela unaforza centraleediretta lungo il raggio vettore,gli spostamentiche avvengonoa r - costantesonosempreortogonalialla forza. Sequindi il puntosi spostasullasuperficiedi unaidealesferala forzanonfa lavoro. Consideriamola figura(13)doveil puntomaterialesi spostadaA aB seguendola linea tratteggiata. Approssimiamola traiettoriacon unaspezzatadi segmentiinfinitesimi,
40

CAPITOLO V. LAVORO DI UNA FORZA
spostandocialternativamentemantenendor - rn- cost (1) e quindi lungo il raggio (2) per
passaredarn a rn� 1.
BO
A
rn
Fig. 13
Avverra chenel calcolodel lavoro totaleavremocontributisolo dagli spostamenti(2) lungo il raggio ed e facile render-si contoche,seguendoun’altra traiettoriamaseguendola stes-saprocedura,avremoun contributo,solodagli spostamenti(2),ugualeaprima. Il lavoroquindisaraugualeperleduetraiettorieepotendosiripetereil ragionamentoperqualunquetraiettorianeseguecheil campodi forzae conservativo.
124 Energia potenziale del campo gravitazionale Percalcolarel’energia potenzialenel campogravitazionaleconvie-ne prenderecome punto a energia potenzialezero l’infinito:in tal casol’energia potenzialesi calcolera comeil lavoro fat-to dal campoper spostareil puntomaterialeall’infinito. Datocheil lavoro e indipendentedal percorsolo possiamocalcolareperlo spostamentopiu comodo,ossiaunospostamentolungoilraggio.Chiamandopersemplicitak - GM1M2 avremo:
V 1 A3 - 8 k F ∞
A
d rr2
- 8 k1rA
e la conservazionedell’energia si scrive:
12
mv2 8 kr- E - cost.
Datochek � 0 allora l’energia potenzialee negativa: un corpoavvicinandosial centrovedel’energia potenzialedecrescere(crescendoin valoreassoluto),quindi la suaenergia cineticacrescesemprepiu: il corpo precipitasul centro. Viceversaper un corpo che si allontanal’energia cineticadiminuisce(il corporallenta). Selo si vuoleallontanarea grandedistanzadal centroattrattoreoccorrefornirgli un’energia cineticainiziale elevata,ovvero imprimerglila cosiddettavelocita di fuga.
125 Energia potenzialedella forza elastica La forzaelasticain 3 dimensionisi scrive:9F - 8 k9rPercalcolarel’energia potenzialeassumiamol’origine comepuntoapotenziale0 equindi
calcoliamoil lavoro perspostareil puntodaA fino all’origine muovendocilungoil raggio:
V 1 A3 - ��1 A * O3 - 8 k F 0
rA
r dr - 12
kr2A
percui la conservazionedell’energia si esprimecome:
12
mv2 0 12
kr2 - E - costante(36)
E facile verificarequestaequazioneutilizzandoesplicitamentela soluzionedel moto armo-nico unidimensionale(84). Sostituendonella (36) la soluzionex 1 t 3 - Asin1 ωt 0 φ 3 , ev 1 t 3 - ωAcos1 ωt 0 φ 3 troviamochein effetti la sommadelleenergie cineticheepotenzialeecostantee vale12 2kA2
41

CAPITOLO V. LAVORO DI UNA FORZA
126 Lavoro delle forze esterne Consideriamoora si spostareun corpopesanteversol’alto o verso il basso,mantenendocostantela suavelocita. Essendola velocita costantesappiamochesul corpoagisceuna forza risultantenulla: infatti noi dobbiamoapplicarealcorpounaforzaesterna9Fext
- 8 M 9g percontrobilanciarela forzapeso.In tal casoil teoremadelleforzeviveci diceche:
1. il lavoro enullo datochela forzatotaleenulla;
2. l’energia cineticanonvaria(infatti v - cost)
Questorisultatopur essendoperfettamentecorrettononci e molto utile. Domandiamociorachelavoro facciamonoi (o meglio la forzaesternadanoi applicata):��1 z1 * z2 3 ext
- 8 F z2
z1
M 9g [ d9r - M g 1 z2 8 z1 3e siccomeM g 1 z2 8 z1 3 - V 1 z2 3�8 V 1 z1 3 ne seguecheil lavoro della forza esternae ugualealla variazionedell’energia potenzialedel corpo. Ma in questocasoparticolarela variazionedell’energia potenzialee ugualealla variazionedell’energia complessiva E, percui possiamoaffermareche: ��1 z1 * z2 3 ext
- E2 8 E1
127 Il risultato trovato ha validita generalein presenzadi forze interneconservative.Infatti notandoche 9Ftot
- 9Fint0 9Fext possiamoscrivereperil lavoro:��1 A * B 3 ext- ��1 A * B 3 tot 8���1 A * B 3 int��1 A * B 3 ext- TB 8 TA 8���1 A * O3 int 8���1 O * B 3 int� ��� �
VB A VA (120)
- EB 8 EA
cioe il lavoro delle forze esterneva ad incrementareo a diminurel’energia meccanicatotaledel sistema.
128 Trovare le forze dall’energia potenziale. Il Gradiente Dataunafunzionescalaref 1 x * y* x3 si definiscegradientedi talefunzioneil vettore:
∇ f -�C ∂ f∂x* ∂ f∂y* ∂ f
∂z D(37)
(il simbolo,o meglio, l’operatore, ∇ si chiamanabla). Il nomeoperatorederiva dal fattocheesso,operandosuunoscalare,lo trasformain unvettore.
Si dimostrache,datal’energia potenzialeV in funzionedel punto,la forza e calcolabilecomeil gradientedell’energia potenzialecambiatodi segno: 9F - 8 ∇V:
Fx- 8 ∂V
∂xFy- 8 ∂V
∂yFz- 8 ∂V
∂z
Viceversa,seunaforzaeesprimibilecomeil gradientedi unafunzione,alloraquestafunzionecambiatadi segnoe l’energia potenziale(a menodi unacostante)e la forzae conservativa.
La verificasi puo farefacilmenteneicasigiavisti, calcolandosiesplicitamenteil gradientedell’energia potenzialeconle formuledellederivateparziali.Ovviamente,nel casoaunasoladimensione,il gradientecoincideconla usualederivata.
42
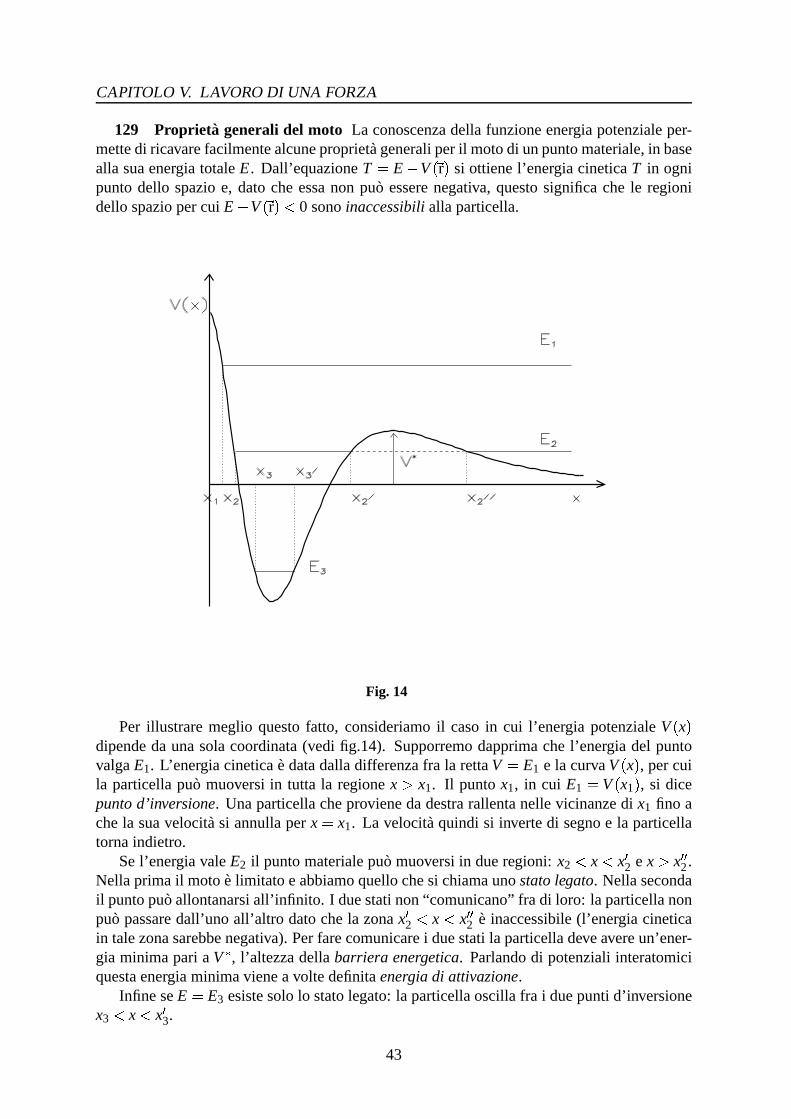
CAPITOLO V. LAVORO DI UNA FORZA
129 Proprieta generali del moto La conoscenzadella funzioneenergia potenzialeper-mettedi ricavarefacilmentealcuneproprietageneraliperil motodi unpuntomateriale,in basealla suaenergia totaleE. Dall’equazioneT - E 8 V 1 9r 3 si ottienel’energia cineticaT in ognipuntodello spazioe, datocheessanon puo esserenegativa, questosignificache le regionidellospaziopercui E 8 V 1 9r 3 � 0 sonoinaccessibilialla particella.
Fig. 14
Per illustraremeglio questofatto, consideriamoil casoin cui l’energia potenzialeV 1 x3dipendeda unasolacoordinata(vedi fig.14). Supporremodapprimachel’energia del puntovalgaE1. L’energia cineticae datadalladifferenzafra la rettaV - E1 e la curvaV 1 x3 , percuila particellapuo muoversi in tutta la regionex � x1. Il puntox1, in cui E1
- V 1 x1 3 , si dicepuntod’inversione. Unaparticellacheprovienedadestrarallentanellevicinanzedi x1 fino achela suavelocita si annullaperx - x1. La velocita quindi si invertedi segnoe la particellatornaindietro.
Sel’energia valeE2 il puntomaterialepuo muoversiin dueregioni: x2 � x � x42 e x � x4�42.Nellaprimail motoe limitato eabbiamoquellochesi chiamaunostatolegato. Nellasecondail puntopuo allontanarsiall’infinito. I duestatinon“comunicano”fra di loro: la particellanonpuo passaredall’uno all’altro datochela zonax42 � x � x4�42 e inaccessibile(l’energia cineticain talezonasarebbenegativa).Perfarecomunicarei duestati la particelladeveavereun’ener-gia minimapari aV M , l’altezzadellabarriera energetica. Parlandodi potenzialiinteratomiciquestaenergia minimavieneavoltedefinitaenergia di attivazione.
Infine seE - E3 esistesololo statolegato:la particellaoscillafra i duepuntid’inversionex3 � x � x43.
43

CAPITOLO V. LAVORO DI UNA FORZA
130 Equilibrio e energia potenziale E facile formularele condizioni di equilibrio diun puntomaterialebasandosisul potenziale.Consideriamodapprimail casosemplicea unasoladimensionee sviluppiamol’energia potenzialein serieintornoal puntodi equilibrio cheprendiamocomeorigine.Avremo:
V 1 x3 - V 1 03 0 C d Vd x D 0
x 0 12C d2 V
d x2 D 0x2 0�[\[\[ -
Poiche la primacondizioneperl’equilibrio e chela forzasianulla,datocheF - 8 d Vd x , dovra
essere:
All’equilibrio < d Vd x
- 0< il potenzialehaun MASSIMO O UN MINIMO
Esaminiamooraseparatamentei duecasidi massimoeminimo:
1. MASSIMO: In tal casola derivatasecondae negativa e quindi la forzaha il segnodi x.Sex � 0 la forzae direttalungox e tendeadallontanareil puntomaterialedall’origine.Sex � 0 la forza e direttain sensooppostoa x e ancoratendead allontanareil puntomaterialedall’origine: abbiamoin questocasoequilibrio instabile.
2. MINIMO: Si hala situazioneopposta,la forzatendesempreariportareil puntomaterialeversol’origine. Abbiamoin questocasoequilibrio stabile
Si visualizzanofacilmentele duecondizionidi equilibrio disegnandol’energia potenzialeV 1 x3 e immaginandochela funzionerappresentiun profilo (liscio) sul qualesi puo muovereliberamenteun puntomaterialepesante.La quotaacui si trova il puntoci da,moltiplicatapermg, la suaenergia potenziale.I minimi di V sonodegli avvallamentie sonoquindi punti diequilibriostabile.I massimisonoinvecepunti di equilibrio instabile.
Nel casogeneralea 3 dimensionirestaveral’affermazionechepunti di equilibrio stabilesonoquelli di minimo del potenziale,mentresonoinstabili quelli di massimo.
131 L’energia potenzialedi unamolla, 12 2kx2 (125), ha un solo minimo pertantounpuntomaterialeattaccatoa unamolla e semprein equilibrio stabile.
Un casodi energia potenzialecon massimie minimi si ha nel casodel pendolo. Perunpendolocostituitodaunamassam situataall’estremita di un’astalunga � l’energia potenzialevale(ci limitiamo aconsiderarel’intervallo 8 π x θ x π):
V 1 θ 3 - mg�¡1 1 8 cosθ 3che ha ovviamenteun minimo per θ - 0 (dove V - 0) e due massimiper θ -£¢ π (doveV - 2mg� ). La posizionedi minimo, con la massain basso,e quindi quella di equilibriostabile. Le posizionidi massimocorrispondonoalla situazionein cui la massasi trova invecesopra il puntodi sospensione,ove l’equilibrio e instabile.
132 Moto armonico intor no ai punti di equilibrio stabile Nei moltissimicasiin cui lefunzionienergia potenzialeammettonounosviluppointornoai minimi:
V 1 x3¤^ 12V 4¥4 1 x0 3¦1 x 8 x0 3 2
44
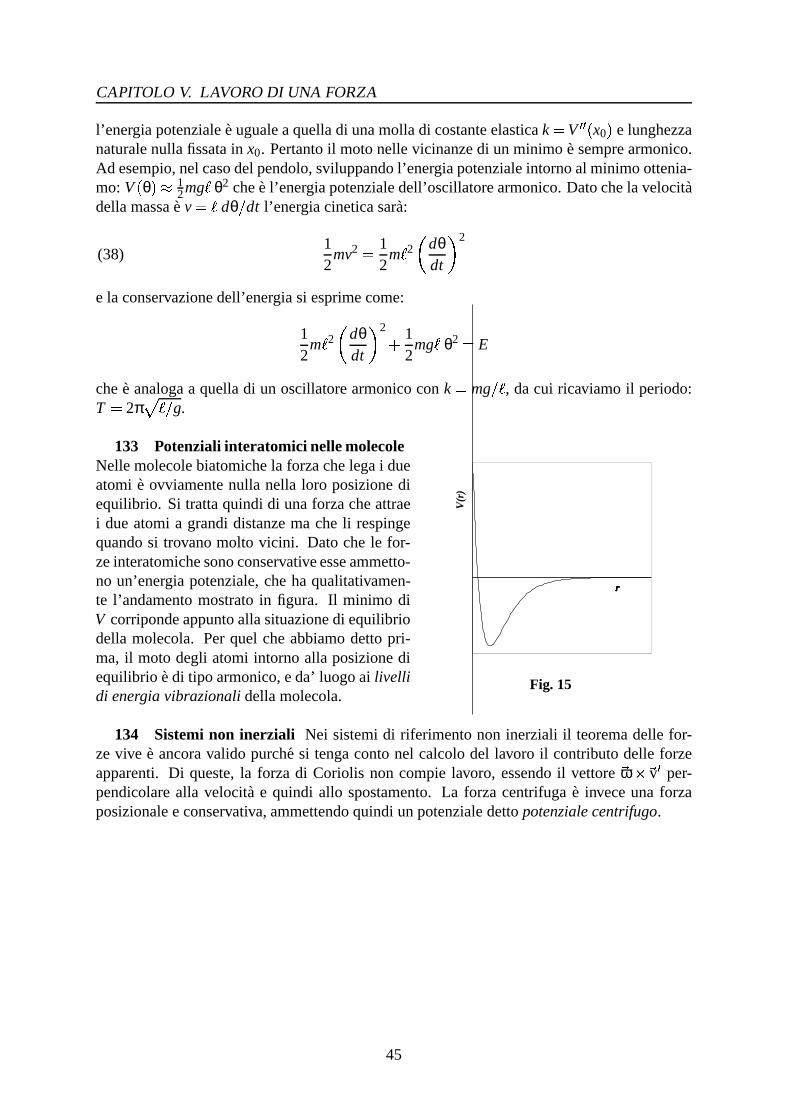
CAPITOLO V. LAVORO DI UNA FORZA
l’energiapotenzialeeugualeaquelladi unamolladi costanteelasticak - V 4¥4B1 x0 3 e lunghezzanaturalenulla fissatain x0. Pertantoil motonellevicinanzedi un minimo e semprearmonico.Ad esempio,nelcasodelpendolo,sviluppandol’energiapotenzialeintornoal minimoottenia-mo: V 1 θ 3�^ 1
2mg� θ2 chee l’energiapotenzialedell’oscillatorearmonico.Datochela velocitadellamassaev - � dθ 2 dt l’energia cineticasara:
12
mv2 - 12
m� 2 C dθdt D 2
(38)
e la conservazionedell’energia si esprimecome:
12
m� 2 C dθdt D 2 0 1
2mg� θ2 - E
chee analogaa quelladi un oscillatorearmonicoconk - mg2�� , dacui ricaviamo il periodo:T - 2π . �§2 g.
r¨V
(r)
Fig. 15
133 Potenziali interatomici nellemolecoleNellemolecolebiatomichela forzachelegai dueatomi e ovviamentenulla nella loro posizionediequilibrio. Si trattaquindi di unaforzacheattraei dueatomi a grandidistanzema cheli respingequandosi trovanomolto vicini. Dato chele for-zeinteratomichesonoconservativeesseammetto-no un’energia potenziale,cheha qualitativamen-te l’andamentomostratoin figura. Il minimo diV corripondeappuntoallasituazionedi equilibriodella molecola. Perquel cheabbiamodettopri-ma, il moto degli atomi intorno alla posizionediequilibrio edi tipo armonico,eda’ luogoai livellidi energia vibrazionalidellamolecola.
134 Sistemi non inerziali Nei sistemidi riferimentonon inerziali il teoremadelle for-ze vive e ancoravalido purche si tengacontonel calcolodel lavoro il contributo delle forzeapparenti.Di queste,la forza di Coriolis non compielavoro, essendoil vettore 9ω N 9v 4 per-pendicolarealla velocita e quindi allo spostamento.La forza centrifugae inveceuna forzaposizionaleeconservativa,ammettendoquindi unpotenzialedettopotenzialecentrifugo.
45

Capitolo VI
Dinamica dei sistemidi punti
135 La dinamicadei sistemidi punti e formalmenteun’estensionedi quelladel puntomaterialesingolo. Il motodi ciascunaparticellasara determinatodallarisultantecomplessivadelle forze che si esercitanosu di essa. Questeforze potrannoin generedividersi in duecategorie: quelleesterne, ossiachesi originanoal di fuori del sistemadi punti (ad esempiola forzapeso)e quelleinterne, dovutealla presenzadi tutte le altreparticelle.E chiarochelamaggiorcomplicazionenel risolvereil problemadelmotodipendepropriodalleforzeinterne,dato che essevarianocontinuamentedi intensita e direzionein basenon solo in virtu delmotodellaparticellasottoesamemaanchedelmutardellaposizionedi tuttele altreparticelledel sistema. Nonostantel’estremacomplessita del problema(sottolineiamoche non esisteunasoluzioneanaliticadel moto nemmenoper un sistemadi soletre particelle!) si possonoricavaretuttavia delleproprietageneraliimportantiperla dinamicadeisistemidi punti in baseaprincipi primi.
136 Sistemiisolati Consideriamoun sistemaisolatodi punti materiali,ossiaun sistemasul qualenonsi esercitanoforzeesterne.Le soleforzepresentisonodovutealle particelledelsistema.Allora, in virtu del Principiodi azionee reazione(64) e prendendotutte le possibilicoppiedi particelle,si ricava facilmentechela risultantedelleforzeinternee nulla:
∑ 9Finti
- 0
equindi la quantitadi motototalesi conserva:9P - ∑ 9pi- ∑mi 9vi
- costante
Si trattadi un risultatoassaiimportante,chevaleperqualunquesistemaisolato:potrebbetrattarsidel sistemasolare,o di unagalassiao di unamolecoladi gas. La solacondizioneechesi possanotrascuraretuttele influenzeesterne.
137 Centro di massao baricentro Il centrodi massa(o baricentro)di un sistemadipunti materialie individuatodal vettore:9RCM
- ∑mi 9ri
∑mi(39)
In praticasi trattadi unamediapesataconle massedei raggivettorideisingolipunti. La deri-vatad 9RCM 2 dt rappresentala velocita del centrodi massa,chechiameremo9VCM . In definitivala quantitadi motototaledi unsistemadi punti puo esserscritta:9P - M 9VCM
46

CAPITOLO VI. DINAMICA DEI SISTEMIDI PUNTI
doveabbiamoindicatoconM - ∑mi la massatotaledelsistemadi puntimateriali.In assenzadi forzeesterneil baricentrosi muovequindidi motorettilineouniforme.
138 Calcolodel baricentro Percalcolareil baricentrosi fausodella(39)scegliendonelmodopiu convenientel’origine dellecoordinate.Dovendocalcolareil baricentrodi unsistemasi puo:K dividereil sistemain sottosistemi;K calcolarsii baricentri 9a i deivari sottosistemi,di massa© i ;K trattandoogni sottosistemacomeun puntodi massa© i situatoin 9a i calcolarsiil bari-
centrototale.
139 Prima EquazioneCardinale Sesonopresentiforzeesterne,soloquestedetermina-nola variazionedellaquantitadi motototaledelsistema.Infatti la risultantedelleforzeinternee semprenulla,mentrela forza 9FTOT e la risultantedi tuttele N forzeesternecheagisconosulsistemadi punti:
d 9Pdt
- ∑ 9Festi- 9FTOT(40)
Abbiamoquindi un’equazioneugualealla leggedi Newton per il moto di un singolopuntomateriale,di massapari alla massatotaledel sistemadi punti,∑mi. Questaequazioneprendeil nomedi PrimaEquazioneCardinaledelladinamicadeisistemidi punti. Datochela quantitadi moto totalesi puo esprimereanchecomeM 9VCM , la PrimaEquazioneCardinalesi scriveanchecome:
Md 9VCM
dt- M
d2 9RCM
dt2- 9FTOT(41)
Nel casoi punti sianopesantila forzaesternacheagiscesudi essie la forzapeso: 9Fexti-
mi 9g. Datoche 9g e unacostante,la risultantedella forzapesoe semplicementedatada 9Ftot-9g∑mi
- 9gM doveM e la massatotaledel sistemadi punti.
140 Riferimento del centro di massa Spessorisultaconvenienteporsiin un riferimento“solidale” col sistemadi particellechesi vuole studiare. Qui per “solidale” intendiamounriferimentonel qualeil nostrosistemadi punti sia“in media”fermoe,perdareun significatoprecisoaquestafrase,intenderemochein taleriferimentola quantitadi motototalesianulla.
Il sistemadi riferimento che godedi tale proprieta si chiamariferimento del centro dimassa: essoha origine nel CM stesso,e quindi, per definizioneessendoin essoil CM ariposo, la quantita di moto totaledel sistema∑mi 9v 4i - ∑ 9p4i e zero. Applicandole leggi ditrasformazioneper le velocita la quantita di moto di un singolo punto puo essereespressacome 9pi
- mi 9v 4i 0 mi 9VCM-- 9p4i 0 mi
M9PCM
(42)
47

CAPITOLO VI. DINAMICA DEI SISTEMIDI PUNTI
dove 9p4i e la quantitadi motocheil puntopossiedenel sistemadel baricentro. Inoltre terremopresenteper il futuro chein tale riferimentoil vettore∑mi 9r 4 i e identicamentenullo, essendoproporzionaleal vettoreposizionedel CM chenel riferimentodel CM si trovanell’origine!
Determinareil motodel CM e abbastanzasemplicedatochela Primaequazionecardinalelo riconduceal problemadi un puntomaterialesoggettoa unaforza(la risultantedelle forzeesterne).Una volta fatto questo,un approcciomolto usatoconsistenel cercaredi risolvereil moto del sistemadi punti nel riferimentodel CM. Seil CM si muove di moto accelerato,dovremo considerareche oltre alle forze reali (sia interneche esterne)nel suo riferimentosarannopresentianchele forzeapparenti 9Fapp
i- 8 ∑mi 9ACM (102).
141 Energia cinetica L’energia cineticadi un sistemadi punti e unagrandezzaadditivachequindi si ottieneaddizionandole energie cinetichedi tutti i punti del sistema.Essasi puoscomporrein dueparti distinteusandoil teoremadi Koenigchequi sottodimostriamo:
T - 12∑mi 1 9vi 3 2 - 1
2∑mi 1 9VCM0 9v 4 i 3 2 -- 1
2∑mi +71 9VCM 3 2 0 2 9VCM[ 9v 4 i 0 1 9v 4 i 3 2 , -- 1
2∑mi VCM2 0 1
2∑mi v4 i2 -- 12
MVCM2 0 1
2∑mi v4 i2in quantola somma∑mi 9v 4 i - 0 (140). I dueterminichecompongonol’energiacineticatotalesono(I) l’energia cineticadel CM pensatocomeun puntomaterialedi massaM e velocita’9VCM e (II) l’energia cineticadel movimentointernoal sistemadel CM.
142 Conservazionedell’energia meccanica Il teoremadelleforzevive e’ valido ancheperunsistema.Sele forzesonoconservativenesegueil teoremadi conservazionedell’energia(cineticapiu potenziale). In tal casol’energia potenzialee datadalla sommadelle energiepotenzialiVi di tutte le particelledel sistema.Osserviamochel’energia potenzialeVi di unagenericaparticelladel sistemadipendera in generaledallaposizionedi tutte le altree quinditrovarnel’espressioneesplicitanone semplice.
Osserviamoancorache, pur essendonulla la risultantedelle forze interne,non e nullala risultantedelleforzesuunasingolaparticella, pertantodurantel’evoluzionedel sistemaleforzeinternein generalecompionolavoro. Il lavorodelleforzeinterneezerosolosele distanzereciprochedeipuntimaterialidel sistemanoncambiano,cosacheavvieneneicosiddetticorpirigidi .
48
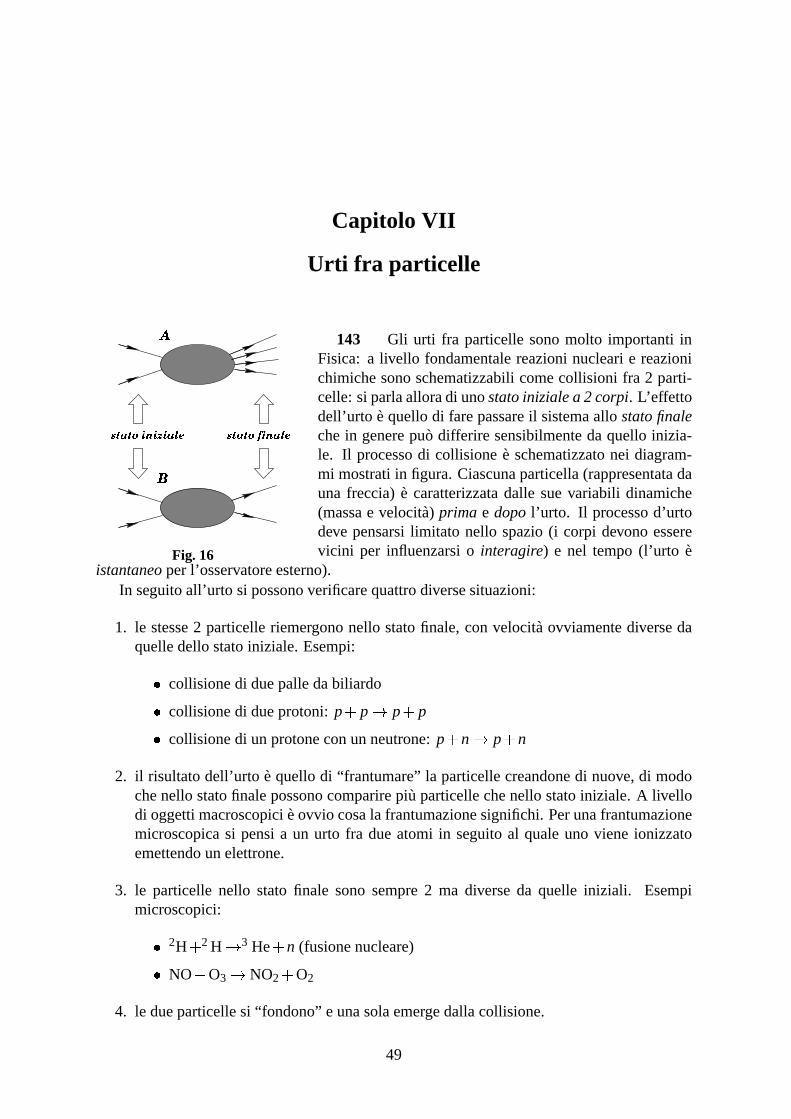
Capitolo VII
Urti fra particelle
ª¬«��«¯®�°²± ³�µ´¥¶ª\«�µ«�®·±¥³¸±¥¹E±¥�´¥¶º
»Fig. 16
143 Gli urti fra particellesonomolto importanti inFisica: a livello fondamentalereazioninuclearie reazionichimichesonoschematizzabilicomecollisioni fra 2 parti-celle:si parlaalloradi unostatoinizialea 2 corpi. L’effettodell’urto e quellodi farepassareil sistemaallo statofinalechein generepuo differire sensibilmenteda quello inizia-le. Il processodi collisionee schematizzatonei diagram-mi mostratiin figura.Ciascunaparticella(rappresentatadauna freccia) e caratterizzatadalle suevariabili dinamiche(massae velocita) prima e dopo l’urto. Il processod’urtodeve pensarsilimitato nello spazio(i corpi devono esserevicini per influenzarsio interagire) e nel tempo(l’urto e
istantaneoperl’osservatoreesterno).In seguitoall’urto si possonoverificarequattrodiversesituazioni:
1. le stesse2 particelleriemergononello statofinale, con velocita ovviamentediversedaquelledellostatoiniziale. Esempi:K collisionedi duepalledabiliardoK collisionedi dueprotoni: p 0 p < p 0 pK collisionedi un protoneconunneutrone:p 0 n < p 0 n
2. il risultatodell’urto e quellodi “frantumare”la particellecreandonedi nuove, di modochenello statofinalepossonocomparirepiu particellechenello statoiniziale. A livellodi oggettimacroscopicieovvio cosala frantumazionesignifichi. Perunafrantumazionemicroscopicasi pensia un urto fra dueatomi in seguito al qualeuno viene ionizzatoemettendounelettrone.
3. le particellenello statofinale sono sempre2 ma diverseda quelle iniziali. Esempimicroscopici:K 2H 0 2 H < 3 He 0 n (fusionenucleare)K NO 0 O3 < NO2
0 O2
4. le dueparticellesi “fondono” eunasolaemergedallacollisione.
49

CAPITOLO VII. URTI FRA PARTICELLE
144 Seil sistemadi particellein collisionee isolatola suaquantita di motosi conserva.In pratica,datochel’urto hain genereunaduratabrevissima,possiamoassumerela conserva-zionedellaquantitadi motodurantela collisioneanchein presenzadi forzeesterne.Riguardoinvecealla conservazionedell’energia meccanicaclassificheremogli urti come:K urti elastici,sel’energia meccanicasi conserva;K urti anelastici,sel’energia meccanicanonsi conserva. Questoe il casochesi presenta
piu di frequente:ad esempiopartedell’energia puo essereconvertita in caloree dissi-pata,o puo esserutilizzataperrompereun legamefra atomi. In meccanicarelativistical’energia puo ancheessereusatapercrearela massadi nuove particelle(E - mc2 !), etal casomassaed energia nonsi conservanoseparatamentema insieme:E 0 ∑mic2 -cost.
Daquantodettoe chiarochepossonoessereelasticisologli urti in cui le particellenello statofinalesonole stessechein quelloiniziale. La condizionepero ovviamentenonesufficiente.
Scrivendol’energia cineticadel sistemautilizzandoil teoremadi Koenigsi ha:
T - 12
MVCM2 0 1
2∑mi v4 i2masiccomela quantitadi motototaledelsistemasi conservaelamassatotalerimaneimmutataallora il primo terminedellasommanonpuo cambiaredurantel’urto. Quindi solo il secondotermine,T 4 , cherappresental’energia cineticainternadel sistema,puo cambiaree cio avvieneappuntosel’urto eanelastico.
145 Urti a 2 corpi Ci limitiamo da ora a studiaregli urti nei quali abbiamoduecorpinello statofinale. In tal casoper descrivere il moto di entrambinel CM bastautilizzare ilvettorevelocitarelativa: 9u - 9v 41 8 9v 42. DatochenelCM m1 9v 4 1 0 m2 9v 4 2 - 0 possiamoesprimerele duevelocita in termini dellasola 9u:9v 41 - m2
m10 m2
9u 9v 42 - 8 m1
m10 m2
9uequindi l’energia cineticainternaprendela formasemplice:
T 4 - 12
m1m2
m10 m2
u2 - 12
µu2
doveabbiamoindicatoconµ la cosiddettamassaridotta delsistema:m1m2 2t1 m10 m2 3 . L’urto
elasticosi haquindi see solosel’energia internadello statofinaleT 4f e ugualea quellanellostatoiniziale T 4i . Perche cio avvengaoccorrechele massee il modulodellavelocita relativanoncambinonellacollisione.
Seinveceuf ]- ui l’urto sara anelastico.Seuf- 0 abbiamola massimadissipazionedi
energiameccanica:nellostatofinalele dueparticellehannovelocitarelativanulla,“fondendo-si” in unasoladi massam - m1
0 m2. Questaunicaparticellaviaggera alloranel laboratorioconla velocita 9VCM dalmomentochein essasi trova il CM del sistema.
50

CAPITOLO VII. URTI FRA PARTICELLE
146 Urti elastici Gli urti elasticisonocaratterizzatidal fattochenelsistemadel CM 9u silimita a mutaredirezioneo verso.Unavolta nota 9uf si possonotrovarele velocita finali delleparticellesianelCM chenel laboratorio.Un casoparticolarmentesempliceequellodegli urticosiddetticollineari, in cui nel laboratoriola particella2 e fermae dopo l’urto sia 1 che2muoversinelladirezionecheaveva 1 primadell’urto. In tal caso9u noncambiadirezionemasoloverso,quindi 9uf
- 8 9ui .Un altro casosemplicesi hasele 2 particellein collisionehannougualemassae 2 e ini-
zialmenteferma:alloranelsistemadel laboratoriole equazionidi conservazionedellaquantitadi motoedell’energia si scrivono: 9vi
1- 9v f
10 9v f
21 vi1 3 2 - 1 vf
1 3 2 0 1 vf2 3 2
2fv
v
v1
1
f
i
θ=π/2
Fig. 17
L’uguaglianzadei vettori si rappresentagraficamentecome un triangolo (vedi figura), e la conservazionedell’energia mostracheil triangolodev’essererettan-golo. Quindi le direzioni delle particelle1 e 2 dopola collisioneformanofra loro un angoloretto. Si os-servasperimentalmentequestofenomeno,adesempio,quandounneutronein movimentourtaunprotonefer-mo. Si deve notareche la particella incidentedopol’urto ha la suaenergia cineticadiminuitanel sistemadellaboratorio.Un neutronequindichetraversala ma-teriasi trovaa perderecontinuamenteenergia cineticae rallenta:si diceanchechesi modera.
147 Urti di fotoni I fotonisonoi quantidi luce. Comele particelletrasportanoenergia equantita di motomanonhannomassa.Peril fattodi nonaveremassaviaggianoalla velocitadella luce in qualunquesistemadi riferimento. Comele particellepossonofareurti elasticieanelastici.
La relazionefra quantitadi motoedenergia ediversadi quellafra particelle“normali”, checomesappiamoe E - p2 2 2m. Peril fotoneinvece
Eγ- pγc(43)
Inoltrel’energiaelegataallafrequenzadellaluceν tramitelaCostantedi Planck(h - 6 L 62610A 34
Js):
Eγ- hν(44)
Consideriamocomeesempioun fotonechevieneassorbitototalmentedaunaparticelladimassaM inizialmentea riposo.Dopol’urto avremo:
P - pγ- Eγ
c(45)
L’energia cineticadellaparticellae dataquindi da:
EM- P2
2M- P2c2
2Mc2- E2
γ
2Mc2(46)
51
CAPITOLO VII. URTI FRA PARTICELLE
Sel’energia del fotonee ¼ Mc2 unapartetrascurabiledi tale energia serve a mettereinmoto la particella. Dato cheMV - Eγ 2 c ¼ Mc2 ne vienecheV ¼ c ossiala particellapuoesseretrattataconla meccanicaclassicanonrelativistica.
Quasitutta l’energia del fotonee quindi dissipatointernamentealla stessaparticella.Seeun atomoo unamolecolaadesempioverrannoeccitatii livelli atomicio molecolari.
148 Effetto Compton L’EffettoComptonconsistein unurtoelasticodi unfotonecontroun elettrone.Sel’elettronee inizialmentefermoacquistaenergia cineticaa spesedel fotone.Datochel’energia del fotonee proporzionalealla suafrequenza,dopola collisioneil fotone,oltre a trovarsideviato rispettoalla direzioneiniziale,haunafrequenzapiu bassa.
52

Capitolo VIII
Momento angolare
149 Datoun puntomateriale,si definiscemomentoangolare o momentodella quantitadi motorispettoal poloO il vettore: 9� - 1 9r 8 9RO 3�N 9pIl vettore9RO specificail poloO. Il polopuoesserefissoo mobile. Peril momentoconsideriamosoloil casodel polofissoescegliamolocomeorigine. In tal caso:9� - 9r N 9p(47)
Possiamocalcolarcila leggedi variazionedelmomentoangolarederivandoamboi membridella(47)e usandola leggedi Newton:
d 9�dt
- d9rdtN 9p 0 9r N d 9p
dt- 9v N 9p 0 9r N 9F
Il pezzod9v N 9p e zero dato che sonodue vettori paralleli. Rimanea secondomembrodell’equazionela quantita 9K - 9r N 9F, dettamomentodella forza, percui:
d 9�dt
- 9r N 9F(48)
Seil momentodellaforzaenullo il momentoangolaresi conserva.
150 Forzecentrali Un casonotevoleequellodelleforzecentrali,in cui la forzaedirettalungoil raggiovettore.Allora il momentodellaforzaeidenticamentenullodatocheil prodottovettorialedi 9r e di 9F chesonoparalleli e zero. Pertutte questeforze il momentoangolareeconservato.
151 Moto circolare uniforme Comeprimo esempioprendiamouna particellache simuovedi motocircolareuniformesuuncerchiodi raggioRecalcoliamoil momentoangolareusandocomepolo il centrodel cerchio. 9� e diretto normaleal piano del cerchio,orienta-to comeil vettorevelocita angolare,e di modulomRv - mR2ω. Pertantopossiamoscriverevettorialmente: 9� - mR2 9ωIn questocasoil momentoangolaree costantecomeci aspettavamoessendola forzacentrale.
53

CAPITOLO VIII. MOMENTO ANGOLARE
b
bO
mv
a)
mv
b
O
bb)
Fig. 18
152 Orbite planetarie Nelle orbite planetarie,che comesappiamosonodelle ellissi,la conservazionedel momentoangolaresi traducenel fatto che l’area spazzatadal raggiovettoree costante. Questospiega comemai al Solstizio d’inverno, quandola Terra e allaminimadistanzadalSole(perielio),la suavelocita lungol’orbita emassima,mentreeminimaal Solstiziod’estate,quandola distanzae massima(afelio). La conservazionedel momentoangolareci da la III Leggedi Keplero,ossiacheil quadratodelperiododi rivoluzione(in altritermini la duratadell’anno) e proporzionaleal cubodell’assemaggioredell’orbita. Questaleggee facilissimadaricavaresel’orbita e circolare.
Notiamoil fattointeressantechela III leggedi Keplerosi basasolosul fattochela forzaecentrale,e nonhanientea chevedereconla peculiarita dellaforzadi gravitazionee dellasuadipendenzada12 r2.
153 Urto Comesecondoesempioconsideriamounaparticellacheviaggiaparallelamenteall’assex agrandedistanzadall’ originedellecoordinate,in cui si trovail centrodi forza.Nellafig. 18 abbiamopresentatoduecasi: in a) la forza e repulsiva comepotrebbeavvenirenellacollisionefra dueprotoni(caricheugualisi respingono):in b) la forzae inveceattrattivacomepotrebbeavvenireperunacometachesi avvicinaal Sole.
In entrambii casiagrandedistanzala particellahavelocitav e la suatraiettoriaeunarettachepassaaunacertadistanzab dal centro.Il momentoangolareequindidatoda:� - mvb - pb(49)
La particellavienedeflessadal campodi forza e la suavelocita varia. In a) la velocitadiminuisce,essendola forzarepulsiva,quindiperconservareil momentoangolarela particelladeveallontanarsi“lateralmente”daO fino achenonharaggiuntoil puntod’inversione.Dopoaver superatoil puntod’inversionela velocita crescedi nuovo e traiettoriadi uscita,pur adun angolodiversodaquellainiziale, distaancorab daO. Nel puntod’inversioneil momentoangolaresi scrivecome:mR0v0: abbiamoquindi unarelazionechelegaR0 ev0. Datocheunasecondarelazionesi ottienedallaconservazionedell’energia epossibiledeterminareentrambele grandezzesenzarisolverele equazionidelmoto.
In b) la velocitaaumentae quindi la particellatendeadavvicinarsi“lateralmente”a O permantenere� costante,ma a partei dettagli il fenomenoe esattamentelo stessocheabbiamovisto nelcasodi forzarepulsiva.
54

CAPITOLO VIII. MOMENTO ANGOLARE
154 Meccanicaquantistica Il momentoangolareha grandeimportanzain meccanicaquantistica.La ragionee chesi trattadi unagrandezza“quantizzata”,ossiamultipla interadellacostantedi Planckdivisaper2π:� - n
h2π
1 n intero3(50)
Il “quanto” di momentoangolare(“accatagliato”) vale:
h - h2π
- 1 L 05510A 34Js(51)
Peravereun’ideadellasuapiccolezzacalcoliamoil momentoangolaredi unamassadi 1 µgchesi muoveconvelocita 1 m/ssuun cerchiodi raggio1 µm: � - 10A 15 Js.Questoequivalean ^ 1019! Soloperi sistemiatomiciil numerodi quantie basso.Nellameccanicaclassicailnumerodi quantie talmenteelevatochesi puo trattareil momentoangolarecomeunavariabile“continua”,ossiaunavariabilechepuo assumerequalsiasivalore.
155 Sistemidi particelle Il momentoangolaree unagrandezzaadditiva: perun sistemadi particelleessoe la sommadi tutti i momentiangolaridi esse:9L - ∑ 9ri N 9pi(52)
156 SecondaEquazioneCardinale Derivando 9L rispettoal tempootteniamola cosid-dettasecondaEquazioneCardinale:
d 9Ldt
- ∑ 9r 4i N 9Fi- 9KTOT(53)
Al momentorisultante9KTOT- ∑ 9r 4i N 9Fi contribuisconotuttele forzecheagisconosuipunti,
tuttavia in virtu delprincipiodi azionee reazioneil momentototaledelleforze internee iden-ticamentenullo, pertantole forze internenon contribuisconoalla variazionedi 9L nel tempo.
Terra
Sole
Fig. 19
157 Scomposizionedel momento angolare Consideria-mo il moto della Terra intorno al Sole. Se trattiamo la Ter-ra comeun punto materialeil cui raggio vettoree quello delbaricentrodellaTerra,il suomomentoangolaresaradatoda:9LO
- 9RCM N 9PCM
In questomodoabbiamodel tutto trascuratoil fattochela Terradeveavereun momentoangolaresupplementareperil fattocheruotasusestessa.Il modocorrettodi procedereedi riscriverela(52)esprimendole quantitadi moto 9pi ei raggivettori 9ri tramitei loro valori nel riferimentodelCM (140):9ri
- 9r 4i 0 9RCM9pi- 9p4i 0 mi
M9PCM
55

CAPITOLO VIII. MOMENTO ANGOLARE
Sviluppandoil prodottovettorialeotteniamo9L - ∑ 9r 4i N 9p4i 0 9RCM N 9PCM- 9LCM
0 9RCM N 9PCM(54)
Perottenerequestaequazioneabbiamousatoil fattochenel riferimentodelCM
∑ 9r 4i - 0 ∑ 9p4i - 0
L’equazione(54)haunchiarosignificatofisico: il momentoangolareecostituitodallasommadi un componenteorbitale (il termine 9RCM N 9PCM) e di un componenteinterno o intrinsecocherappresentail momentoangolaredovuto al motodel sistemanel suoCM. Nel casodellaTerra la prima parteda il contributo del moto di rivoluzioneintorno al Sole (per questosichiamaorbitale) e il secondocontienel’effetto dellarotazionediurnadellaTerra.Nel casodiun elettronein orbitadentroun atomo 9LCM corrispondeallo spin, 9S.
158 Derivandol’equazione54) rispettoal tempola II EquazioneCardinalesi spezzaindueparti distinte:
d 1 9RCM N 9PCM 3dt
- 9RCM N 9FTOT
d 9LCM
dt- ∑ 9r 4i N 9Fi
- 9K 4TOT
(55)
Comesi vedela variazionedelmomentoangolareorbitaleequellachesi avrebbeperunpuntomaterialesoggettoal momentodellasolarisultantedi tuttele forze(equindiperdefinizionedituttele forzeesternein virtu delprincipio di azionee reazione(64)).
Perquantoriguardail momentoangolareintrinseco,bisognaconsiderareil momentodelleforzecalcolatonel CM, 9K 4TOT
- ∑ 9r 4i N 9Fi .
159 Forze apparenti Nel casocheil CM compiaun motoacceleratoil sistemadi riferimentonon e inerziale. Ci si puo quindi domandaresenel calcolodel momentodelle forze rispettoal CMoccorraincludereanchele forzeapparenti
SFapp
i T U ∑mi
SACM (102). La rispostaechenonenecessario:
infatti il momentodelle forzeapparentirispettoal CM e identicamentenullo, comesi puo facilmentedimostrare(vedi sottol’analogocasodellaforzapeso).
160 Campo della forza peso Seun sistemadi corpi si trovanel campodellaforzapeso,in cui le forzesonoproporzionalialle massedei singoli corpi e hannotuttela stessadirezioneeverso,alloraquesteforzehannosempremomentonullo rispettoal CM. In effetti9K 4TOT
- ∑ 9r 4i N 9Fi- ∑ 9r 4i N mi 9g- 1 ∑mi9r 4i 3½N 9g - 0
(56)
L’ultimo passaggiosegueda quantoe statodettoin (140). Ne deriva adesempiocheperuncorpopesantechecade9LCM rimanecostante.
161 Sceltadel polo Facciamonotarechenelcasogeneraleil valoredeimomentidipendedallasceltadel polo. E quindi opportunoscegliereil polo in manieradarenderepiu semplicela soluzionedelproblema.
56

CAPITOLO VIII. MOMENTO ANGOLARE
162 Sistemidi forze a risultante nulla Seun sistemadi forzeha risultantenulla allorail momentototaledi detteforzee indipendentedallasceltadel polo. Infatti:9KO
- ∑ 1 9ri 8 9RO 3�N 9Fi- ∑ 1 9ri 8 9RQ
0 9RQ 8 9RO 3�N 9Fi-- ∑ 1�9ri 8 9RQ 3�N 9Fi
0 1 9RQ 8 9RO 3½N ∑ 9Fi� ��� �¾ 0 in quanto∑ ¿Fi¾ 0
- 9KQ
Questoteoremae specialmenteimportantequandosi studianocasidi equilibrio, datocheinessila risultantedelle forzedev’esserecomunquenulla. Permettequindi di scegliersi il polochesi ritienepiu comodoperi calcoli.
57
Capitolo IX
Dinamica dei corpi rigidi
163 Si chiamanocorpi rigidi degli insiemidi punti materialile cui distanzerelativesonoinvariabili nel tempo. La posizionee l’orientamentodi un corporigido sonocompletamantedescritteda6 variabili: adesempio,le 3 coordinatedel CM e tre angoli chespecificanol’o-rientamentodel corponello spazio.Seil corporigido e costituitodapunti materialiallineati(esempio:unasbarrasottile,unamolecolabiatomica)allorabastano5 variabili in tutto.
Lo studiodel motodi un corporigido pertantopuo affrontarsistudiandosuccessivamente(I) il motodel CM e(II) la rotazionedel corpomedesimorispettoal CM stesso.
164 Equazioni del moto Sonola Prima(139) e la SecondaEquazioneCardinale(156).Eventualmentepotrebbeessereconvenienteesprimerequest’ultimanella forma (158), comeperesempioquandosi studiail rotolamentodellaruota(vedi oltre).
Trattandosidi due equazionivettoriali esseequivalgonoa sei equazioniscalari,quindisufficienti adeterminareil motodelcorporigido che,comeabbiamovisto,hasoloseigradidiliberta.
Ne conseguecheil motodi un corporigido e determinatounivocamentesesi conoscelarisultantedelleforzeesternee il momentorisultantedelleforzeesterne.Il motodelcorpononcambierasesostituiremoil sistemadi forzeconunoequipollente, chehacioe la medesimari-sultanteeil medesimomomentorisultante.In particolarepotraessereutile sostituireil sistemadi forze con unaforza e con unacoppiaappropriate(ossiala forza deve avereintensita parialla risultantee la coppiamomentopari al momentorisultante).
165 Moto rotatorio di un corpo rigido Seil corpoerigido essonelCM haunpuromotorotatorio: 9v 4 i - 9ω N 9r 4 i . L’assedi rotazionee direttocomela velocitaangolare9ω e passaperilCM. Notiamochein un corporigido il motoapparerotatoriodaqualunquepuntodel corpo,conun assepassanteperdettopuntoe paralleloa 9ω. Infatti 9v 4 i 8 9v 4 j - 9ω NÀ1 9r 4 i 8 9r 4 j 3 . Si dicequindi chein un corporigido vi sonoinfiniti assidi rotazionetutti paralleli fra loro.
166 Momento d’inerzia L’energiacineticadi rotazionesi scrive in terminidellavelocitaangolare9ω. In effetti v4 i - ω ρi essendoρi la distanzadall’assedi rotazioneO dell’i-esimopunto.Quindi
12∑mi 1 9v 4 i 3 2 - 1
2ω2 ∑mi ρi
2 - 12
ω2 I(57)
La grandezzaI - ∑mi ρi2 si chiamamomentod’inerzia del corporigido rispettoall’assedi
rotazione.Essadipendedallamassaedallaformadelcorpo,nonchedallasceltadell’asse.
58

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
Il momentod’inerzia e additivo: ossiasesi suddivide il corpoin molteparti, il momentototalee la sommadei momentidellevarieparti.
Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÁ�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�Á�ÁÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�ÂÂ�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â�Â
ρ à ÄÅÆÇ�ÇÈ É ÄÊ ÃÃρËÉ
Fig. 20
167 Teoremadi Huygens-Steiner I momentid’iner-zia I * I 4 rispettoa due assi paralleli tra loro, dei quali ilprimo e un assepassanteper il CM ovverocentrale, sonolegatidallarelazione:
I 4 - I 0 MD2(58)
doveD e la distanzafra gli assiedM la massadelcorpo.
168 Relazionefra momentoangolare e velocita angolare Comedettosopra(165), ilmotodi un corporigido nel sistemadel CM e un motodi rotazioneconunavelocitaangolare9ω 1 t 3 . L’assedi rotazione,chee diretto lungo 9ω, in generalecambianel tempo.Il problemasisemplificanotevolmentesel’assedi rotazioneefisso.In tal casopossiamocalcolarefacilmenteil momentoangolareprendendocomepolo un puntoqualunquedell’asse.Perfissarele ideeprendiamoun sistemadi coordinatecon l’assez lungo l’assedi rotazione,immaginiamoilcorposcompostoin particelledi massami , e consideriamola componenteLz del momentoangolare.
Dato che i punti ruotanoattornoall’assela loro velocita 9vi- 9ω N 9ri giacein un piano
normaleall’asseevalein modulovi- ω ρi (ρi e la distanzadall’asse),percui
LzÌ i - mi ρi2 ω(59)
Si vedeche l’espressioneottenutanon contienenessunacoordinataz. Questosignificachesi otterrebbelo stessovaloredel momentoangolarescegliendoun altro qualsiasipolo purchesituatosull’assedi rotazione.Sommandosututti i punti:
Lz- ∑mi ρi
2 ω - I ω(60)
dove I e il momentod’inerzia rispettoall’assedi rotazionecheabbiamogia definito parlan-do dell’energia cinetica(166). Questaequazionee molto importantee definisceil momentoassialedellaquantita di motoo momentoangolareassiale.
169 Assiemomenti principali d’inerzia Si devetenerbenpresentecheil momentoangolareassialee solounadelle3 componentidi
SL e chein generalenonsussistela proporzionalita fra i vettoriS
L eSω (ossiain questocaso,pur essendoωx T ωy T 0, si puo avereLx ÍT 0 Q Ly ÍT 0). La proporzionalita
si hasolonel casodi un corporigido a formadi sfera,mentreperun solidoqualunquela relazionefrala velocita angolaree il momentoangolaree in generecomplicataevariabilenel tempo.
Si dimostratuttavia cheperungenericocorporigido, edatounqualunquepuntoP, esistonosemprealmenotreassidelcorpo(passantiperP) lungoi quali
Sω e
SL sonoparallelieproporzionali:
SL T I j
Sω Q j T
1 Q 2 Q 3 I coefficienti I j sonoi momentid’inerzia rispettoa tali assi.Tali assisi chiamanoassiprincipalid’inerziae,sepassantiperil CM, si diconocentrali.
170 Momenti d’inerzia dellemolecoleSi usaspessoconsiderarele molecolecomecorpirigidi. Si tratta di un’approssimazionedato che la distanzainteratomicanella realta non ecostantea causadelleoscillazionimolecolari.
59

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
Ogni molecolae quindi caratterizzatadal suomomentod’inerzia. Sela molecolahaunasimmetriagli assiprincipali d’inerziahannola stessasimmetria.Ad esempio,sela molecolaha un pianodi simmetriail baricentrodella molecolasi trovera sul pianostesso.Allora dueassiprincipali si trovanosulpianoe il terzoeperpendicolareal piano.
Un casoparticolaree quello della molecolalineare. Perquestail momentod’inerzia I3rispettoall’assedellamolecolae zero.Gli altri duemomentid’inerziasonougualievalgono
I1 - I2 - I - ∑i
miz2i(61)
171 Li velli di energia di rotazione Consideriamounamolecola,cheruotaattornoadunasseprincipale.Allora L - I ω. Sostituendonella(57)abbiamo
E - 12
ω2 I - L2
2 I(62)
La quantizzazionedel momentoangolare(154) imponechesiaL - nh, percui abbiamo
En- n2h2
2I(63)
Questae la formula per i livelli rotazionalidelle molecole1. Sostituendoi numerie pa-ragonandoi livelli energetici rotazionalicon i livelli atomici si vedechei valori sonomoltiordini di grandezzainferiori. Questocorrispondeal fattochegli spettrirotazionalisonosituatinell’infrarosso.
172 Momento della forza peso Il momentodella forza pesoche agiscesu un corpo(rigido o meno)si calcolacome: 9KO
- ∑ 1 9ri 8 9RO 3½N 9Fi- ∑ 1 9ri 8 9RO 3½N mi 9g- 1 ∑mi 9ri 8 M 9RO 3½N 9g- 1 9RCM 8 9RO 3�N M 9g(64)
In praticaquindi il calcolosi effettuacomeseavessimoun puntomaterialedi massapari allamassatotaledelcorpo,localizzatonel baricentro(vedifigura21).
R CM
R O-
MgO
CM
Fig. 21
173 Rotazioneattorno a un assefisso Quandoabbiamoun corpo girevole attornoa un assefisso (o anchesolo di di-rezionefissa)bastala solacomponentelungo taleassedella IIEquazioneCardinale.Si scegliera il poloO sull’assedi rotazio-ne (chechiameremoz). Il momentoangolareassialee definitodall’eq. (60). Quantoalla componentezdelmomentorisultantedelleforze(momentoassiale)questavale:Kz Î ∑i Ï xiFiy Ð yiFix Ñ .Siccomenellasommanoncompaionole coordinatezi Ð Zo il ri-sultatonondipendedallacoordinataZo delpoloequindi il polopuo esseredovunquesull’asse.
1In realta la formulaquantisticaesattapreveden Ò n Ó 1Ô al postodi n2, mala differenzae piccola.
60
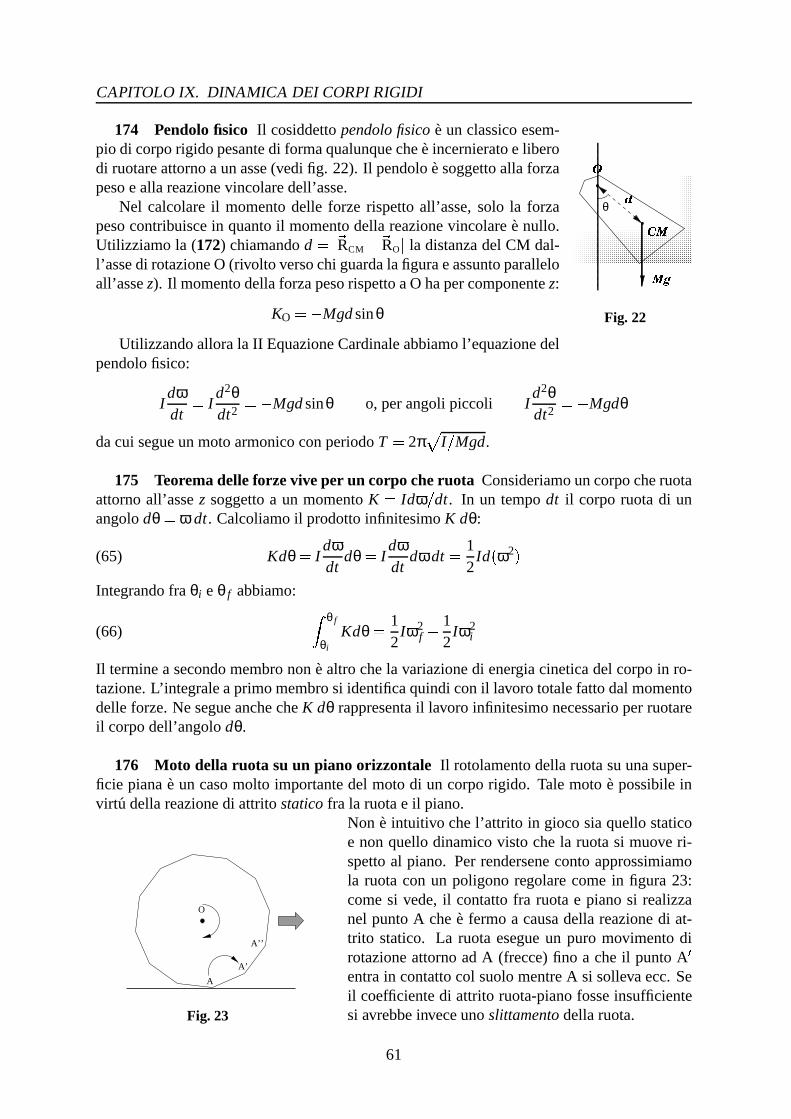
CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
ÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕÖÕ×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö××Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ö×Ø
ÙÖÚÚÜÛθ ÝFig. 22
174 Pendolofisico Il cosiddettopendolofisico e un classicoesem-pio di corporigido pesantedi formaqualunquechee incernieratoe liberodi ruotareattornoaunasse(vedifig. 22). Il pendoloesoggettoalla forzapesoealla reazionevincolaredell’asse.
Nel calcolareil momentodelle forze rispettoall’asse,solo la forzapesocontribuiscein quantoil momentodella reazionevincolaree nullo.Utilizziamo la (172) chiamandod ΣÞàßRCM Ð�ßRO Þ la distanzadel CM dal-l’assedi rotazioneO (rivolto versochi guardala figuraeassuntoparalleloall’assez). Il momentodellaforzapesorispettoaO hapercomponentez:
KO Î`Ð Mgdsinθ
Utilizzandoallorala II EquazioneCardinaleabbiamol’equazionedelpendolofisico:
Idωdt Î I
d2θdt2 Î`Ð Mgdsinθ o, perangolipiccoli I
d2θdt2 Î`Ð Mgdθ
dacui segueunmotoarmonicoconperiodoT Î 2π á I â Mgd.
175 Teoremadelle forzeviveper un corpo cheruota Consideriamouncorpocheruotaattornoall’assez soggettoa un momentoK Î Idω â dt. In un tempodt il corporuotadi unangolodθ Î ω dt. Calcoliamoil prodottoinfinitesimoK dθ:
Kdθ Î Idωdt
dθ Î Idωdt
dω dt Î 12
Id Ï ω2 Ñ(65)
Integrandofra θi e θ f abbiamo: ãθ f
θi
Kdθ Î 12
Iω2f Ð 1
2Iω2
i(66)
Il terminea secondomembronone altro chela variazionedi energia cineticadel corpoin ro-tazione.L’integraleaprimomembrosi identificaquindiconil lavoro totalefattodalmomentodelleforze.NesegueanchecheK dθ rappresentail lavoro infinitesimonecessarioperruotareil corpodell’angolodθ.
176 Moto della ruota su un piano orizzontale Il rotolamentodellaruotasuunasuper-ficie pianae un casomolto importantedel motodi un corporigido. Talemoto e possibileinvirtu dellareazionedi attritostaticofra la ruotae il piano.
A
A’
A’’
O
Fig. 23
Non e intuitivo chel’attrito in giocosiaquellostaticoe non quellodinamicovisto chela ruotasi muove ri-spettoal piano. Perrendersenecontoapprossimiamola ruotacon un poligonoregolarecomein figura 23:comesi vede,il contattofra ruotae pianosi realizzanel puntoA chee fermo a causadella reazionedi at-trito statico. La ruotaesegueun puro movimentodirotazioneattornoad A (frecce)fino a cheil puntoA äentrain contattocol suolomentreA si sollevaecc.Seil coefficientedi attrito ruota-pianofosseinsufficientesi avrebbeinveceunoslittamentodellaruota.
61

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
177 Momento angolare Utilizziamo l’equazione(54) perscomporreil momentoango-lare della ruota che rotola su un piano in unaparte ßRCM å ßPCM e in unaparteintrinsecadirotazioneattornoa un assepassanteper il CM. La scomposizionedella II EquazioneCardi-naleci permettedi trattareseparatamentele dueparti. La prima delle dueequazioni(55) inquestocasonondicenientedi piu dellaI EquazioneCardinale,percui nonnefaremouso.Ineffetti Þ ßRCM å ßPCM ެΠRPCM doveR ecostanteessendoil raggiodellaruota,percui il momentoangolareorbitalee semplicementeproporzionalealla quantita di moto della ruota. Per la IIEquazioneabbiamobisognodi calcolareil momentodelleforzerispettoall’assedi rotazione,cosachefaremoin uncasoparticolare.
178 Ruota trainata da una forza Schematizziamola ruotacomeun cilindro omogeneodi massaM eraggioRpostosuunpianoorizzontale(vedifig. 24)econl’asselungoz. Essendoil cilindro omogeneo,possiamoconsideraresolo la suaproiezionesul pianox æ y contenenteilCM, datochele risultanti delle forze sonocontenutein dettopiano. Oltre alla forza ßFest Î
O
C
F
F
est
a
y
x
R
Fig. 24
F ßeX, applicatanelCM (O), sullaruotaagiscela reazionevincolaredi attritostatico, ßFa, cheeapplicatanelpuntoC di contattocol pianoecheimpediscealla ruotadi strisciare.
L’accelerazionedel CM dellaruotasi ottienedallaI EquazioneCardinale:ßACM Î ßFest ç ßFa
MACM Î F Ð Fa
M(67)
La velocita angolaredella ruotasara direttacome Ð z (la ruotaavanzaversodestra). Invirtu del fattochenonvi e strisciamentosi haω Î VCM â R. Infatti in un tempodt la ruotagiradi unangolodα Î ω dt eavanzadi unospazioRdα Î VCM dt. Utilizzandoquestarelazioneel’eq. (67)possiamoscrivere:
d ωdt Î 1
Rd VCM
dt Î ACM
R Î F Ð Fa
MR(68)
Poiche il cilindro ruotaattornoal suoassechee un asseprincipale d’inerzia il suomo-mentoangolareeparalleloallavelocitaangolare:ßL Î I ßω:
L Î`Ð IO ωdLdt Î`Ð IO
d ωdt ÎèÐ IO
ACM
R ÎèÐ R2 Ï F Ð Fa Ñ(69)
doveabbiamousatoil fattocheil momentod’inerziaIO peruncilindro omogeneodi massaMe raggioRvale1â 2MR2.
62

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
A questopuntononabbiamoancorautilizzatola II EquazioneCardinale.Questaequazioneimponeche dL â dt sia ugualeal momentodelle forze rispettoall’asse,e quindi costituisceunasecondacondizioneche dev’essererispettatainsiemeall’ eq. (69). Al momentodelleforze rispettoall’assecontribuiscesolo la reazionedi attrito (infatti la forzaesterna,essendoapplicatanel CM, ha momentonullo). Il momentodella forza d’attrito e Ð RFa e otteniamoquindi:
dLdt Î`Ð RFa epertanto,usandola (69) Ï F Ð Fa Ñ
2 Î Fa
dacui ricaviamoperla reazionedi attritoFa Î F â 3 e in definitiva:
ACM Î 23
FM
(70)
DalleequazioniotteniamoanchecheACM Î 2Fa â M e,tenendocontocheFa é µsMg, vediamochel’accelerazione(o la decelerazione,in casodi frenata)di unaruotapienatrainatadaunaforzanonpuo mai superare2µsg.
179 Asseistantaneodi rotazione L’assechecorrispondeallazonadi contattofra il cilindro eil pianosi chiamaasseistantaneodi rotazione. Il nomediscendedal fattocherispettoataleasseil motodel cilindro si riducea unapurarotazione.E quindi comesetaleassefosseistantaneamentefermo. Ilmoto puo essererisolto ancheusandocomepolo un puntosu taleasse(C, vedi fig. 24). Il momentodellaforzadi attrito in questocasoenullo, ecosı purequellodellaforzapeso,mentreil momentodellaforzaesternavale ê RF. Pertantola II EquazioneCardinaleda:
dLdt ë ê IC
ACM
R ë ê RF
Utilizzando il Teoremadi Huygens-Steiner(167) IC ë IO ì MR2 ë 3 í2 MR2 e quindi ritroviamo il
risultato(70).
180 Energia della ruota Un’ulteriorepossibilita e quelladi studiareil motodellaruotausandoil teoremadelle forze vive (114). La reazionedi attrito staticonon fa lavoro, per-tantola solaforza chefa lavoro e quellaesterna.Il lavoro fatto per uno spostamentods delCM vale quindi Fds ed essoe ugualealla variazionedi energia cinetica. Perquantoriguar-da quest’ultima,utilizzandoil teoremadi Koenige tenendocontocheVCM Î ωR possiamoscrivere:
T Î 12VCM
2 ç 12
IO Ï VCM
R Ñ 2 Î 34
MVCM2
Si vedechiaramentecomel’energia cineticadella ruota sia superiorea quella di un puntomaterialedi ugualemassae velocita. Nel nostrocasol’incrementodi energia cineticacausatodallarotazioneepari al 50 %. Utilizzandoil Teoremadelleforzevive:
d Ï 34MVCM2 ѤΠFds
Dividendoentrambii membriperdt (dsâ dt Î v ed Ï v2 Ñ_Î 2vdv) troviamo:
ACM Î 23
FM
ossiail risultato(70).
63

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
181 Carrucole di massa îÎ 0 Finoraabbiamosempreparlatodi carrucoledi massanulla.In tal casoabbiamovisto chela carrucola,anchesein moto, si limita a variarela direzionedellaforzadirettalungoil filo, senzachela tensionedelfilo cambi.
Se la massadella carrucolanon puo esseretrascurataquestonon e piu vero. Infatti lacarrucolacheruotadeve avereun momentoangolareIω îÎ 0. Sequestocambianel tempoalloranecessariamentedeve esistereunacoppiadi momentononnullo rispettoall’assedellacarrucola. Ma questacoppiae datadalla differenzadelle tensionidella cordasui due latidella carrucola,moltiplicataper il suoraggio. Ne seguequindi che le tensionidella corda,in “entrata”e in “uscita” dallacarrucola,nonsarannole stessesela carrucolastacambiandovelocitaangolare,maavremo:
Idωdt Î RÏ T1 Ð T2 Ñ
Detto in manieranon molto precisama cherendebenel’idea, un pocodella tensionedellacordae spesaperfareaccelerarela carrucola.
Possiamoapplicarequestaequazioneal paranco(77) schematizzandola carrucolacomeuncilindro di raggioRe massam, al qualeeapplicatoil pesoM:
Idωdt Î Ï T2 Ð T1 Ñ R ï mR
2dωdt Î T2 Ð T1
Ora, R ω e pari alla velocita del centro della carrucola,dYâ dt, per la condizionedi nonstrisciamento,percui si puo scrivere:
m2
d2Ydt2 Î T2 Ð T1(71)
La risultantedelle forzeapplicatealla carrucola(l’assey e presolungo la verticaleversol’alto) sara T1 ç T2 Ð Ï M ç mÑ g. TenendocontocheT2 Î F avremo:Ï M ç mÑ d2Y
dt2 Î T1 ç F Ð Ï M ç mÑ g(72)
esommandomembroamembrola (71)e la (72)otteniamochel’accelerazionedellacarrucolavale:
Ay Î 2F Ð Ï M ç mÑ gM ç 3
2m(73)
Notiamochem îÎ 0 noncambiala condizionedi equilibrio,ossiain tal casola forzae sempreugualeal pesototale.
182 Paranco e teoremadelle forze vive Sempliciconsiderazionienergetiche(senoncisonoattriti) possonoaiutarcinellacomprensionedelparanco.Ad esempiopossiamodimostra-re facilmentela relazione∆Y Î ∆yâ 2 (77).
Partiamodallarelazionedi equilibrioF Î 2Mg e (variandodi pochissimoF) spostiamodi∆y l’estremoaä dellacordacui e applicatala forza(vedi fig.9). Il lavoro fattodallaforzasaraF∆y Î 2Mg∆y. Ma selo spostamentoeeseguitoavelocitacostanteo molto lentamentenoncisaravariazioneapprezzabiledell’energiacineticaequindiquestolavorodovraessereugualeeoppostoa quellodellaforzapeso,Ð Mg∆Y. Neseguequindi che∆Y Î ∆yâ 2.
64

CAPITOLO IX. DINAMICA DEI CORPIRIGIDI
Il teoremadelle forze vive ci permetteanchedi ottenerefacilmentel’accelerazionedelparanco. Infatti il lavoro infinitesimototale e datoda ð 2F Ð Ï M ç mÑ gñ dY mentrel’energiacineticasi scrive:
T Î 12 Ï M ç mÑ V2
Y ç 12
Iω2Î 12 Ï M ç mÑ V2
Y ç 14
mR2ω2Î 12 Ï M ç 3
2mÑ V2
Y
(74)
Abbiamoquindi:
dT Î Ï M ç 32
mÑ VYdVY Î ð 2F Ð Ï M ç mÑ gñ dY
edividendoperdt esemplificandootteniamonuovamentel’eq. (73).
183 Statica La staticastudiale condizioninecessarieperl’equilibrio dei corpi rigidi.Condizioninecessarieesufficienti perl’equilibio di un corporigido sono:
1. chela forzarisultantecheagiscesul corposianulla;
2. cheil momentodelleforzesianullo rispettoaun qualsiasipolo.
Il motivo percui nella2. la sceltadelpolopuo esseredel tutto arbitrariadiscendedal fattoche,perla 1., le forzedevonoavererisultantenulla. Ma allora,in virtu della(162), il momentodelleforzenondipendedallasceltadelpolo. Naturalmenteoccorreincluderenelcalcolodellerisultantianchetuttele reazionivincolari.
65

Capitolo X
Dinamica dei fluidi
184 Si chiamanofluidi le sostanzechenon hannoforma propria. La forma di un fluidoe in generequelladel recipientechelo contiene1. Quei fluidi chehannovolumeproprio sichiamanoliquidi, gli altri sonoi gas.
Lo studiodelladinamicadei fluidi nonpuo esserfattocon i normalimetodidellamecca-nica,datol’elevatissimonumerodi particellein gioco. Infatti, anchesepotessimorisolvereleequazionidelmoto,saremmodi fronteall’impossibilitadi specificarele velocitae le posizioniiniziali di ò 1023 molecoleo atomi. D’altronde l’esperienzaci mostrachenello studiodeifluidi nonci servirebbeanienteconoscerel’evoluzionedellesingolemolecole,servepiuttostoquelladi porzionidi fluido estesesudimensionimacroscopiche.Si cercaquindi di determi-nareil motodi questeporzionidi fluido applicandoad essele equazionidellameccanica.Ilproblemaprincipalee tenercontodi tutte le forzechele varieparti di fluido esercitanofra diloro. Un altro problemastanel fatto che il volumedi fluido in generenon conserva la suaformaduranteil motoeavoltenemmenola suamassa.
185 Densita Datoun volumettodi fluido dV la suamassasi esprimecomedm Î ρdV,e la grandezzaρ Î dmâ dV vienechiamatadensita del fluido. Essain generalecambiadaun puntoall’altro all’interno del fluido. See costanteil fluido si dice incompressibile, unaproprietacheeapprossimativamenteveraperi liquidi.
186 Velocita Seil volumettodV di fluido e abbastanzapiccolo (pur avendodimensionimacroscopiche)potremoagevolmenteparlaredella suavelocita. La misuradella velocita diun liquido si fa sperimentalmentemescolandoadessodellepolveri coloratee scattandodellefotografiea intervalli regolari. In realta la velocita dellemolecolecontenutenel volumettoemolto diversafra unamolecolae l’altra, maquellochedeterminala velocita del volumettoela mediadi tutte le velocita molecolari,ed essanon cambiain manieracaotica. Inoltre noncambiain mododrasticopassandodaun volumettoadunaltro vicino.
Avendoassegnatounamassae unavelocita al volumetto,essosara dotatodi unaquantitadi motopari a ρdV ßv. La risultantedelleforzecheagisconosul volumettodi fluido determina,in basealla leggedi Newton, la variazionedellaquantitadi moto.
187 Si dannoaquestopuntoduemetodidifferentiperlo studiodelladinamicadei fluidi:
1. puntodi vistasostanzialeo Lagrangiano, in cui si segueil motodi ciascunelementodifluido;
1Diciamo “in genere”perche se lanciamo in aria l’acqua contenutain un bicchiere il recipientevienemomentaneamentea mancare,machiaramentel’acquanoncessaperquestodi essereun fluido.
66

CAPITOLO X. DINAMICA DEI FLUIDI
2. puntodi vista locale o Euleriano, in cui si studiacomevarianonel tempole proprietadel fluido (densita,velocita,ecc.)in ciascunpuntodellospazio.
Le equazionichesi ottengonosononaturalmentediverse.Per il nostrostudioelementarecibaseremosul secondometodo,quellolocale.
188 Forze- PressioneComeesercitalesueforzeunfluidosuglioggettiimmersiin essoosulleparetichelo circondano?L’esperienzamostrachequesteforzesonotrasmesseattraversole superficidi separazionefra gli oggettie il fluido. Notiamoper inciso che“oggetto” e unterminedel tutto generico:ancheunaporzionedel fluido stessopuo considerarsiun oggetto.Suddividendola superficiedi separazionein piccoli elementidi areadS, si trova chela forzaesercitatadalfluido esemprenormaleall’elementoeproporzionaleallasuaarea:si puo quindiscrivere d ßF Î ßenPdS (ßen e il versorenormalealla superficie,diretto dalla parteoppostaalfluido). Il coefficientedi proporzionalitaP si chiamapressionedelfluido in quelpunto.Comedimostreremofra poco,essonon dipendedall’orientamentodella superficiee quindi e unoscalare.
189 Fluido pesante:variazione di P con la quota Si trova facilmentechela pressionein un fluido pesantevariasecondola seguentelegge:
dPdz Î`Ð ρg(75)
dovebisognaricordarsichea priori ρ e funzionedi Ï x æ yæ zÑ . Seρ Î cost (fluido incompresssi-bile) la (75)puo essereintegratatrovandocheP Ï z2 Ñ>Ð P Ï z1 ѤÎ`Ð ρg Ï z2 Ð z1 Ñ .
190 Principio dei vasi comunicanti
191 Manometro e barometro Il manometroe uno strumentocheserve a misurarelapressione.Il disegno dei manometridipendedalle pressionichesi vogliono misurare,dallaprecisionerichiesta,dal tipo di fluido, ecc.Le forzedi pressionepossonoadesempioprodurredeformazionimaccanichecheagisconosuunostrumentoindicatore.Sela pressionedamisu-raree quellaatmosferica,si parladi barometro.Esistonobarometripuramentemeccanici(perintenderciquelli cheusiamoin casa)e ancheelettrici (sfruttanole proprieta di certi cristalli),tuttavia la versioneoriginaledel barometro(inventatoda EvangelistaTorricelli) e ancorainusoe la descriviamobrevemente.
192 Unit a di misura della pressione La pressione,essendounaforza divisa un’area,si misuranel sistemaMKS in Newton/ m2. Questaunita prendeil nomedi Pascal(Pa) e lapressioneatmosfericavale circa 101000Pa. Sonoin usoanchei multipli del Pascal(kPa eMPa) 2. Unita tradizionalieancorain usosono:ó l’atmosfera“standard”checorrispondea760mmdi mercuriomisuraticol barometrodi
Torricelli, echeprendeancheil nomedi bar(sottomultiploil mbar)evale101325Pa;
2Sfortunatamenteil Panonevicino aunmultiplo “ragionevole” delleunitausatein passato(comeil kg/ cm2)percui stentaadattecchirenell’usocorrente.Eccezionedegnadi lodesonoi pullmandi pellegrini polacchi,suiquali le pressionidi gonfiaggiodelleruotesonoindicateappuntoin MPa!
67
CAPITOLO X. DINAMICA DEI FLUIDIó il kg/ cm2 (sempremolto usatoper la pressionedellegomme)in cui il kg e in realta ilkg-forza(pari acirca9.8N) percui quest’unitavalecirca98000Pa;ó il torr (o millimetro di mercurio)di cui 760fanno1 baro 1 atm.
Si tendespessoa confonderel’atm. col kg/ cm2, in realta la somiglianzae approssimatae deltutto fortuita.
193 Moto laminareevorticoso
194 Linee di corrente
195 Equazionedi continuit a
196 Equazionedi Bernoulli
197 Teoremadi Torricelli
68