Appunti di fisica (classe seconda)
42
-
Upload
liceo-f-vercelli -
Category
Documents
-
view
135 -
download
3
description
Autori: Gianotti Lorenzo, Boero Francesca, Coppola AndreaFormato epub: http://db.tt/QIzgwXHU
Transcript of Appunti di fisica (classe seconda)

Indice
Cinematica
Principi della dinamica
Moto circolare
Moto armonico
Energia e lavoro
Calore e dilatazione
Onde
Ottica geometrica
Problemi
Tavole utili


LA CINEMATICA
La cinematica studia il moto dei corpi senza indagarne la causa.Il concetto più semplice del moto è quellodi un oggetto che segue una traettoria rettilinea.Per studiare il moto è necessario l'utilizzo di un sistema diriferimento cartesiano non necessariamente a due dimensioni ( può averne una ,due o tre).É necessarioavere anche un cronometro per misurare il tempo.Se costruiamo un diagramma spazio-tempo, sull'asstedelle x troviamo il tempo,mentre sull'asse delle y troviamo le posizioni dell'oggetto .Ogni punto suldiagramma rappresenta quindi una coppia di informazioni: quando(tempo,t) e dove(spazio,s).La linea suldiagramma non è la traettoria(questa si vede solo in un diagramma spazio-spazio) ma è il movimento.
Moto Rettilineo Uniforme
Nel moto rettilineo uniforme in intervalli di tempo uguali si percorrono distanze uguali.Il grafico che nerisulta è una linea retta passante per l'origine perciò spazio e tempo sono direttamente propozionali.Laretta ha coefficiente angolare costante,esso è dato dal rapporto tra la variazione verticale (Δs) e lavariazione orizzontale(Δt). La sua pendenza è legata alla velocità, se cambia la pendenza cambia anche lavelocità. Essa coincide con il coefficiente angolare. Quindi Δs/Δt =coefficiente angolare retta=pendenzaretta= velocità.
Le distanze sono direttamente proporzionali al tempo impiegato a percorrerle e la velocità è costante.
Velocità moto uniforme=distanza percorsa/intervallo di tempo corrispondente rapporto costante
Dove la distanza è lo spazio tra due istanti successivi.Inoltre,se il grafico è una linea retta, essorappresenta un moto uniforme anche se non passa per l'origine.In questo caso la posizione non èdirettamente proporzionale al tempo ma è correlata linearmente velocità media : v=Δs/Δt
Legge del moto:relazioni tra posizioni e istanti di tempo
Δs=v ∙ ∆t
∆s=s-s0 s=s0 + v ∙ ∆t
∆t=t-t0 s=s0 + v ∙ (t – t0) legge moto uniforme dove:
v=velocità
t0=istante iniziale
s0=posizione iniziale(cioè posizione occupate nell'istante di tempo t0)
s=posizione finale al tempo

Se t0= 0s e s0= 0m ,allora : s = v ∙ t
(c'è t0 se cronometro non è a zero nell'istante che voglio considerare)
Nel moto rettilineo uniforme s è l'area della superficie compresa tra il grafico e l'asse dei tempi.Nel motovario la velocità cambia da istante a istante . La velocità non è più costante e la velocità non è più unaretta. La velocità non è la velocità reale dell'oggetto ma un'approssimazionede di quest'ultima,é la mediadelle velocità avute nell'istante di tempo considerato. Un oggetto che cade non si muove di moto uniformema accelera durante la caduta a causa della forza di gravità.La velocità istantanea dell'oggetto cambiacontinuamente durante la caduta: essa aumenta al passare del tempo a causa dell'accelerazione digravità.Se si considerano intervalli di tempo più brevi,quanto più si riduce l'istante di tempo tanto più lavelocità si avvicina sempre di più a quella reale. La velocità istantenea in un punto P è il valore limite acui tende la velocità media,quando la si calcola su un intervallo di tempo sempre più piccolo rispetto a P.La velocità istantanea nel punto P è data dalla pendenza della retta in quel punto è tangente al graficospazio-tempo.
MOTO UNIFORMEMENTE ACCELERATO
Nel moto uniformemente accelerato l'accelerazione è costante. Esso è il moto in cui le variazioni divelocità sono direttamente proporzionali agli istanti di tempo.
∆v/∆t = costante =∆v/∆t accelerazione costante
L'accelerazione è la variazione di velocità rispetto al tempo. Questo tipo di moto si può rappresentarein un grafico velocità-tempo dove l'accelerazione è il coefficiente angolare della retta e quindi è anche lacostante di proporzionalità tra v e t. La retta ottenuta passa per l'origine se la velocità iniziale è pari azero(v0=0)
e l'equazione è v=a∙t. Se invece v0≠0 v=v0 + a∙t
In questo caso la retta non passa per l'origine. Se la velocità diminuisce il moto è sempre uniformementeaccelerato ma anche l'accelerazione diventa negativa (a < 0) perciò si parla di moto decelerato.
Nel moto uniformemente accelerato con v0=0
v=a∙t s= 1/2∙a∙t
s= v ∙ t (rettangolo) s=1/2∙ a∙t∙t=1/2∙a∙t (triangolo)
Nel diagramma spazio-tempo il moto uniformemente accelerato è sempre rappresentato da un tratto diparabola. L'accelerazione istantanea è data dalla pendenza del grafico nell'istante di tempo ∆t. Essa è illimite dell'accelerazione media calcolata su intervalli di tempo sempre più piccoli intorno a t.
ai=lim(∆t→0)∆v/∆t formula accelerazione istantanea
L'accelerazione istantanea è uguale al limite per ∆t che tende a 0 di ∆v/∆t
CADUTA DEI GRAVI

Un esempio di moto uniformemente accelerato è quello dei corpi che cadono nel vuoto.Considerandola resistenza dell'aria trascurabile in uno stesso luogo tutti i corpi cadono con accelerazione costante.Questa accelerazione è l'accelerazione di gravità(g),essa sulla superficie terrestre varia leggermente aseconda della latitudine(è minore all'equatore e massima ai poli).A 45° di latitudine essa è:
g=9,81 m/s²
Se un oggetto è fatto cadere dall'alto con velocità iniziale nulla,velocità scalare v,distanza s e tempo tavremo
v=g∙t e s=1/2g∙t²
Se invece lanciamo un oggetto verso l'alto avremo
v=v0 – g∙t e s=v0∙t – 1/2∙g∙t²

PRINCIPI DELLA DINAMICA
La dinamica è la parte della fisica che descrive le relazioni fra il moto dei corpi e le forze che agisconosu di essi. Per mantenere un oggetto in movimento è necessaria una forza. Non è vero però che il moto ècausato da una forza. Ad esempio un'auto non si ferma perchè smettiamo di applicarle una fo forza,alcontrario si ferma proprio per effetto di una forza:l'attrito. Quindi la somma delle forze avelocità costante è zero .La tendenza dei corpi a mantenere il loro stato di moto è detta inerzia: Questoeffetto viene generato dalla massa,più la massa è grande più l'inerzia è grande.Il primo a scoprirla fuGalileo Galilei.Egli affermò che se abbiamo una palla su di un piano inclinato e diminuiamo l'angolo lapallina percorrerà una distanza infinita ma l'altezza rimarrà sempre la stessa.
La dinamica ha tre principi fondamentali:
PRIMO PRINCIPIO DELLA DINAMICA (o principio d'inerzia di Galileo)se la somma delle forzeagenti su un corpo è nulla esso è fermo o si muove con velocità costante.I sistemi in cui è valido ilprincipio d'inerzia sono definiti sistemi di riferimento inerziali.Se il principio d'inerzia è valido inun sistema di riferimento, esso è valido in qualsiasi altro sistema di moto rettilineo uniforme rispettoal primo.I sistemi di riferimento accelerati non sono inerziali. In un sistema di riferimento noninerziale sembra che una forza spinga il corpo in avanti,essa è detta forza apparente.Questa forza inrealtà non esiste e la vedono solo coloro che sono al di fuori del sistema.Per creare un sistema diriferimento inerziale devo far muovere un corpo di moto rettilineo uniforme,per crearne unonon inerziale,invece,devo prendere un sistema inerziale e considerarne un corpo che accelera efrena.La terra nonostante sia un sistema accelerato può essere considerata un sistema di riferimentoinerziale poiché la sua accelerazione è abbastanza piccola da non compromettere la validità delprincipio d'inerzia.
SECONDO PRINCIPIO DELLA DINAMICA la somma delle forze agenti su un corpo è uguale alprodotto fra la massa(m) del corpo e l'accelerazione(a) da esso acquistata
F = m∙a
Si può dire che l'accelerazione acquistata da un corpo è direttamente proporzionale alla forzarisultante a esso applicata e inversamente proporzionale alla sua massa
F/a=m
Dove F si misura in newton,a in m/s² e m in kg,quest'ultima è la massa inerziale,ossia la misurad'inerzia di un corpo,la resistenza che esso oppone quando si cerca di accelerarlo. Inoltre si puòconsiderare il primo principio come un caso particolare del secondo,infatti se
F=0 a=0 v = costante
Considerando i corpi che cadono nel vuoto, a diventa uguale a g(accelerazione di gravità) perciò laformula diventa

P=m∙g
Dove con P indichiamo il peso del corpo.Con questa relazione capiamo anche che il peso e la massasono direttamente proporzionali fra loro.Il fattore di conversione tra massa e peso è quindi pari a
g=9,81 N/kg
Massa e peso sono due concetti distinti,la massa è uno scalare e,essendo una proprietà intrinseca alcorpo ,ha ovunque lo stesso lo stesso valore;il peso invece è un vettore e varia da luogo a luogo aseconda dell'accelerazione di gravità.
TERZO PRINCIPIO DELLA DINAMICA(o principio di azione e reazione) ad ogni azionecorrisponde una reazione di uguale intensità ma contraria.Considerando due oggetti A e B,quando Aesercita un effetto su B anche B esercita una forza su A. Le due forze hanno la stessa intensità e lastessa direzione ma verso opposto. Ad esempio, ogni massa attrae la Terra come la Terra attrae ognimassa,ma la Terra non viene attratta poiché,tenendo conto del secondo principio(F = m∙a), essa hauna massa maggiore.

MOTO CIRCOLARE UNIFORME
Considerazioni Generali Sul Moto Nel Piano
Velocità media e istantanea nel moto curvilineo
Consideriamo un corpo che percorre una traiettoria curvilinea su un piano. Se P1 è la sua posizione in uncerto istante t1 e P2 la posizione in un istante successivo t2, la velocità media del corpo tra t1 e t2 sicalcola:

In cui
si chiama spostamento tra i punti P1 e P2 (è quello che comunemente viene chiamato spostamento in linead’aria che in genere sarà diverso dalla lunghezza del tratto effettivamente percorso,a meno che latraiettoria da P1 a P2 non sia rettilinea), rappresentato dalla freccia con origine in P1 e punta in P2.
Osservando la formula, si capisce innanzitutto che la velocità media è una grandezza vettoriale perché èil risultato di un rapporto fra una grandezza vettoriale e una grandezza scalare (∆t); inoltre, poiché ∆t èsempre un numero positivo, la velocità media avrà stessa direzione e verso di ∆S.
Se invece vogliamo la velocità istantanea in un generico punto P, dovremo calcolare la velocità media inun tratto molto piccolo che contenga il punto P. Dimostreremo successivamente, nell’approfondimento,che la velocità istantanea in ogni punto è un vettore che ha origine da tale punto e che è tangente allatraiettoria. Nella figura seguente è schematizzato il moto curvilineo di un’automobile su una strada vistodall’alto. In ogni punto della sua traiettoria l’auto avrà una velocità avente come direzione quella dellatangente alla traiettoria in quel punto. Nella figura sono rappresentati come esempio i vettori velocità intre punti P1, P2 e P3. Consideriamo la situazione nel punto P1: per convincersi del fatto che il vettorevelocità in P1 è tangente alla traiettoria basta supporre le ruote da quel punto in poi non facciano piùpresa sulla strada; l’auto partirà diritta proprio lungo la direzione indicata da , cioè lungo la tangente allastrada. Il modulo della velocità in ogni punto corrisponderà invece al valore letto sul tachimetrodell’auto. Per esempio, se quando la macchina si trova nel punto P1 il tachimetro segna 40 km/h, quellosarà il modulo del vettore e sta a significare che, se l’auto continuasse a viaggiare sempre in quel modoper un’ora intera, percorrerebbe 40 km. Ovviamente il modulo della velocità può variare da istante aistante perché l’autista può frenare o premere sull’acceleratore.
Nella figura seguente sono mostrate una serie di fotografie successive che ci fanno vedere un disco cheviene fatto girare senza attrito lungo una circonferenza tramite una fune. Ad un certo punto si vede che lafune si spezza (nel punto in alto della figura) e il disco si allontana immediatamente lungo la direzionetangente alla circonferenza nel punto di rottura.

Approfondimento: perché la velocità istantanea è tangente alla traiettoria Dimostriamo graficamente chela velocità istantanea in un punto è un vettore tangente alla traiettoria in quel punto. Riprendiamo latraiettoria della figura precedente e supponiamo di voler calcolare la velocità istantanea nel punto P1. Aquesto scopo, dovremmo prendere un tratto di traiettoria molto piccolo che contenga il punto P1,calcolare il corrispondente a tale tratto (esso è semplicemente quel vettore che unisce i punti iniziale e
finale del tratto considerato) e infine eseguire il rapporto, dove ∆t è l’intervallo di tempo del tratto (equindi anch’esso sarà molto piccolo perché il tratto è molto piccolo). Se consideriamo punti sullatraiettoria sempre più vicini a P1 e costruiamo ogni volta il vettore che unisce P1 a questi punti, talevettore assumerà una direzione sempre più vicina alla tangente al punto P1.
Quindi, poiché per ∆t piccolo il vettore è praticamente tangente alla traiettoria, anche il vettore velocitàistantanea lo sarà, perché dobbiamo dividere il vettore per un numero (∆t) positivo e perciò verrà fuoriun vettore avente stessa direzione e verso di
.
Il RADIANTE

Forse siete così abituati a misurare gli angoli in gradi che non ci rendete più conto di quanto questometodo sia complesso e poco conveniente. L’angolo giro è suddiviso in 360 gradi e ognuno di essi èdiviso in sessanta primi d’arco, a loro volta suddivisi in sessanta secondi d’arco. Basta dover fareun’operazione qualunque per capire quanto questa scelta sia scomoda e per sentire la necessità diun’unità di misura che ci permetta di usare il solito sistema decimale. Esiste un metodo naturale e nonconvenzionale per misurare l’ampiezza di un angolo. Consideriamo un angolo di vertice O chechiameremo angolo α. Possiamo costruire, con centro in O, infinite circonferenze; in figura ne sono statedisegnate tre, i cui raggi li abbiamo chiamati r, r’, e r’’.
Le due semirette individuano sulle tre circonferenze gli archi di lunghezza l, l’, l’’. Come ci assicura unteorema della geometria, i rapporti l/r, l’/r’ e l’’/r’’ sono tutti uguali tra loro. In altre parole, talerapporto non dipende da quanto è grande la circonferenza, ossia dal suo raggio, ma soltantodall’ampiezza dell’angolo α. Proprio perché tale rapporto dipende solo dall’ampiezza dell’angolo, esso èstato scelto nel S.I. per esprimere la misura dell’angolo α. Quindi, dato un certo angolo, per avere la suamisura in radianti basta che costruiamo una circonferenza con il centro coincidente al vertice dell’angolo,poi dobbiamo eseguire il rapporto tra la lunghezza dell’arco che l’angolo intercetta sulla circonferenza eil raggio della circonferenza. Non ci dobbiamo preoccupare di quanto deve essere grande lacirconferenza, perché tale rapporto sarà lo stesso per qualunque circonferenza disegniamo.
Per esigenze di rigore verbale, possiamo dire allora che la misura di un angolo in radianti è definitocome il rapporto tra l’arco che sottende l’angolo e il raggio di una circonferenza avente il centrocoincidente con il vertice dell’angolo:
Da tale definizione si ricava: cioè la misura di un arco che su una circonferenza di raggio r sottende unangolo α, è uguale al prodotto della misura del raggio per la misura dell’angolo espressa in radianti.

Dalla definizione della misura di un angolo in radianti segue inoltre che 1 radiante è l’ampiezza diquell’angolo per il quale è l = r, cioè l’ampiezza dell’angolo al centro di circonferenza che intercetta unarco uguale al raggio, come rappresentato in figura.
Possiamo ora domandarci a quanti radianti corrisponda l’intero angolo giro di 360°. Questo è semplice,basta fare il rapporto tra l’arco che sottende un angolo giro (che è naturalmente la lunghezza dell’interacirconferenza) e il raggio: Quindi in un angolo giro ci stanno 2π radianti cioè 6,28…. radianti. Da questorisultato segue per esempio che un angolo di 180° corrisponde a πradianti, un angolo di 90° a π/2radianti, ecc.
In generale, se vogliamo passare dalla misura di un angolo in gradi alla misura dello stesso angolo inradianti e viceversa basterà impostare la seguente proporzione:
angolo in gradi: angolo in radianti = 360 : 2π
Un’ultima considerazione: si tenga presente che il radiante è un’unità di misura detta “ausiliaria”, perchél’angolo è una grandezza adimensionale, un numero puro e non dovrebbe avere unità di misura; èimportante saperlo, per non incorrere in contraddizioni quando si deve operare sulle unità di misura.
MOTO CIRCOLARE UNIFORME
Definizione di moto circolare uniforme
Un corpo si muove di moto circolare uniforme quando si muove lungo una circonferenza con una velocità(che chiameremo perché la sua direzione è sempre tangente alla circonferenza) sempre costante inmodulo:
Periodo (indicato con T):
Il periodo, che generalmente si indica con la lettera T, è il tempo che impiega il corpo per fare un girocompleto. Se un corpo che si muove di moto circolare uniforme si trova in una certa posizione in undeterminato istante, allora, dopo un periodo, si ripresenterà nella medesima posizione.
Unità di misura nel Sistema Internazionale: secondo [s]
Altre unità di misura potrebbero essere: minuto, ora, anno, ecc.
Frequenza (indicata con f o anche con ν):
La frequenza è il numero di giri completi che compie il corpo nell’unità di tempo.
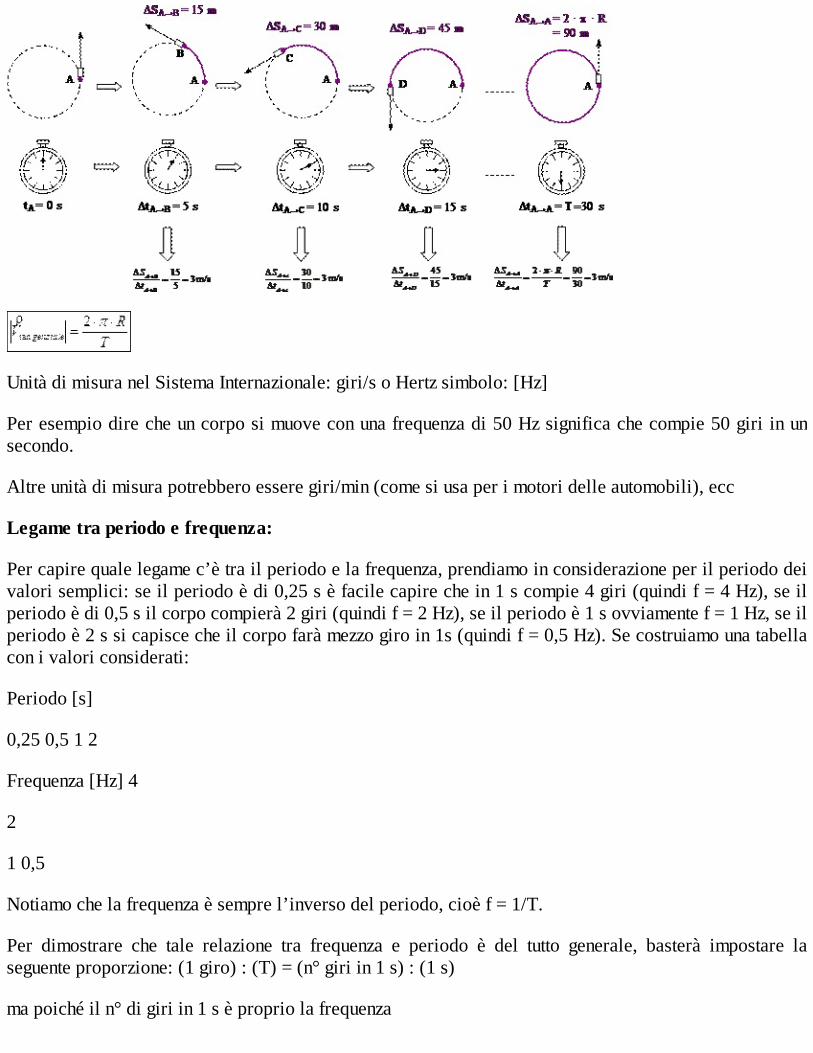
Unità di misura nel Sistema Internazionale: giri/s o Hertz simbolo: [Hz]
Per esempio dire che un corpo si muove con una frequenza di 50 Hz significa che compie 50 giri in unsecondo.
Altre unità di misura potrebbero essere giri/min (come si usa per i motori delle automobili), ecc
Legame tra periodo e frequenza:
Per capire quale legame c’è tra il periodo e la frequenza, prendiamo in considerazione per il periodo deivalori semplici: se il periodo è di 0,25 s è facile capire che in 1 s compie 4 giri (quindi f = 4 Hz), se ilperiodo è di 0,5 s il corpo compierà 2 giri (quindi f = 2 Hz), se il periodo è 1 s ovviamente f = 1 Hz, se ilperiodo è 2 s si capisce che il corpo farà mezzo giro in 1s (quindi f = 0,5 Hz). Se costruiamo una tabellacon i valori considerati:
Periodo [s]
0,25 0,5 1 2
Frequenza [Hz] 4
2
1 0,5
Notiamo che la frequenza è sempre l’inverso del periodo, cioè f = 1/T.
Per dimostrare che tale relazione tra frequenza e periodo è del tutto generale, basterà impostare laseguente proporzione: (1 giro) : (T) = (n° giri in 1 s) : (1 s)
ma poiché il n° di giri in 1 s è proprio la frequenza

(1 giro) : (T) = (f) : (1 s)
Da cui:
f = 1/T
Modulo della velocità tangenziale
Supponiamo che un corpo si muova di moto circolare uniforme lungo una circonferenza la cui lunghezzasia, per semplicità, pari esattamente a 90 m. Il raggio della circonferenza sarà di conseguenza pari a36/(2 ∙ π) = 5,73 m circa, ma ciò non ha molta importanza per il proseguo. La figura mostra le posizionioccupate dal corpo lungo il suo moto ad istanti di tempo separati l’uno dall’altro di 5 s.
Poiché il moto è uniforme, il corpo percorrerà spazi uguali in intervalli di tempo uguali. Nel nostro casoper ogni intervallo di tempo di 5 s il corpo percorre sempre 15 m. In modo equivalente si può dire che lospazio percorso dal corpo da quando è partito è direttamente proporzionale al tempo impiegato apercorrerlo (se l’intervallo di tempo trascorso dall’inizio diventa il doppio, il triplo, ecc. anche lo spaziototale percorso diventa doppio, triplo, ecc.).
Perciò il rapporto tra la lunghezza di un qualsiasi tratto di circonferenza percorso e il tempo impiegato apercorrerlo è costante e il valore di tale rapporto rappresenta proprio il modulo della velocitàtangenziale. Il modulo della velocità tangenziale ci dice quanto spazio percorre il corpo nell’unità ditempo.Nel nostro caso il corpo percorre 3 metri in un secondo.
Per calcolare quindi la velocità tangenziale, basta fare il rapporto tra la lunghezza di un tratto qualsiasi eil tempo impiegato a percorrerlo. Se in particolare vogliamo prendere come tratto percorso l’interacirconferenza (la cui lunghezza è 2 ∙ π ∙ r), sappiamo che essa viene percorsa in un tempo pari al periodoT, quindi: indica quanti metri percorre il corpo sulla traiettoria nell’unità di tempo

Velocità angolare
Prendiamo in considerazione sempre il moto descritto nel paragrafo precedente ma ora concentriamocisul vettore che parte dal centro della circonferenza e finisce nella posizione in cui si trova il corpo neivari istanti di tempo. Tale vettore, che si chiama raggio vettore, ovviamente ruoterà attorno al centro. Lafigura seguente mostra le posizioni occupate dal corpo lungo il suo moto ad istanti di tempo separati l’unodall’altro di 5 s, con la differenza rispetto alla figura del paragrafo precedente che ora è evidenziatol’angolo descritto dal raggio vettore.
Poiché il moto è uniforme, il raggio vettore ruoterà di angoli uguali in intervalli di tempo uguali. Nelnostro caso per ogni intervallo di tempo di 5 s il raggio vettore ruota sempre di 60°. In modo equivalentesi può dire che l’angolo totale di cui ruota il raggio vettore da quando è partito il corpo è direttamenteproporzionale al tempo impiegato (se l’intervallo di tempo trascorso dall’inizio diventa il doppio, iltriplo, ecc. anche l’angolo diventa doppio, triplo, ecc.).
Perciò il rapporto tra l’angolo di cui ruota i l raggio vettore (si dice anche angolo descritto dal raggiovettore) e il tempo impiegato per ruotare di tale angolo è costante e il suo valore rappresenta proprio lavelocità angolare. Il valore della velocità angolare ci dice di quanto ruota il raggio vettore nell’unità ditempo. Nel nostro caso il corpo percorre 12 gradi in un secondo.
Per calcolare quindi la velocità angolare (che si indica con ω), basta fare il rapporto tra l’angolo di cui èruotato il raggio vettore e il tempo impiegato a ruotare di quell’angolo. Se in particolare vogliamoprendere come angolo l’intero angolo giro, il corpo per fare l’intero angolo giro ci impiega un tempo parial periodo T, quindi: indica di quanto angolo ruota il raggio vettore nell’unità di tempo. Se vogliamoesprimere la velocità angolare in gradi/s, dobbiamo mettere al numeratore il valore 360°, mentre sevogliamo esprimerla in rad/s (come si usa di solito), poiché l’intero angolo giro misura 2 ∙ π radianti:
Legame tra velocità tangenziale e velocità angolare
Confrontando le formule per la velocità tangenziale e la velocità angolare in rad/s si vede facilmente che:
Vtangenziale = ω ∙ R
Accelerazione centripeta
In un moto circolare uniforme è presente un’accelerazione perché il vettore velocità varia continuamentein direzione.
Qualunque sia il moto di un corpo, la sua accelerazione media in un certo intervallo di tempo ∆t è infattidefinita come:

Come si vede dalla formula, il numeratore è un vettore perché è la differenza tra due vettori e poiché poiesso viene diviso per uno scalare il risultato finale sarà un vettore. Se vogliamo l’accelerazioneistantanea dobbiamo prendere un intervallo di tempo ∆t molto piccolo ma la formula sarà lastessa. Consideriamo allora un corpo che si muove di moto circolare uniforme e andiamo a vedere checaratteristiche ha il vettore accelerazione istantanea. Prendiamo in considerazione le posizioni iniziale efinale del corpo in un intervallo di tempo ∆t molto piccolo lungo la traiettoria e le rispettive velocitàtangenziali: Come si vede dalla figura, il vettore è diretto verso il centro della circonferenza e perciò losarà anche il vettore, visto che la divisione per ∆t, che è una quantità scalare positiva, non fa cambiare néla direzione né il verso del vettore.
Abbiamo perciò dimostrato che il vettore accelerazione istantanea in un moto circolare uniforme è unvettore diretto sempre lungo il centro della circonferenza, ed è per questo che viene chiamata
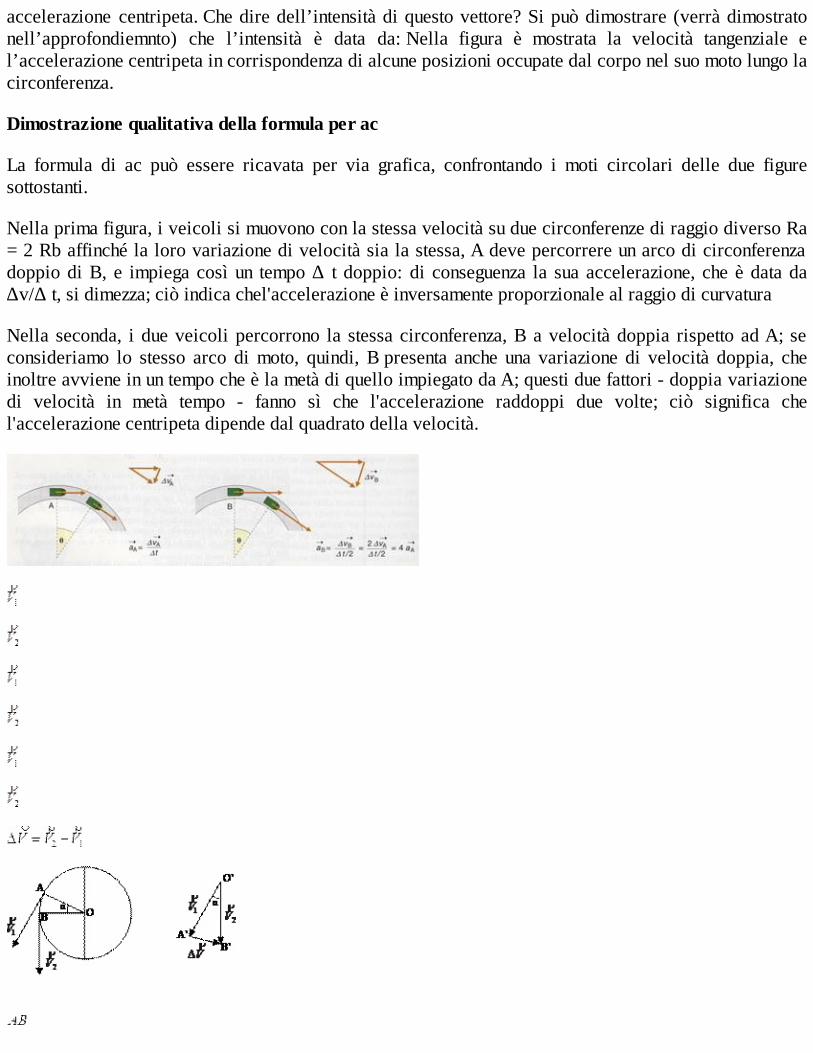
accelerazione centripeta. Che dire dell’intensità di questo vettore? Si può dimostrare (verrà dimostratonell’approfondiemnto) che l’intensità è data da: Nella figura è mostrata la velocità tangenziale el’accelerazione centripeta in corrispondenza di alcune posizioni occupate dal corpo nel suo moto lungo lacirconferenza.
Dimostrazione qualitativa della formula per ac
La formula di ac può essere ricavata per via grafica, confrontando i moti circolari delle due figuresottostanti.
Nella prima figura, i veicoli si muovono con la stessa velocità su due circonferenze di raggio diverso Ra= 2 Rb affinché la loro variazione di velocità sia la stessa, A deve percorrere un arco di circonferenzadoppio di B, e impiega così un tempo ∆ t doppio: di conseguenza la sua accelerazione, che è data da∆v/∆ t, si dimezza; ciò indica chel'accelerazione è inversamente proporzionale al raggio di curvatura
Nella seconda, i due veicoli percorrono la stessa circonferenza, B a velocità doppia rispetto ad A; seconsideriamo lo stesso arco di moto, quindi, B presenta anche una variazione di velocità doppia, cheinoltre avviene in un tempo che è la metà di quello impiegato da A; questi due fattori - doppia variazionedi velocità in metà tempo - fanno sì che l'accelerazione raddoppi due volte; ciò significa chel'accelerazione centripeta dipende dal quadrato della velocità.

Figura: Moto del punto Q sul diametro in conseguenza del moto di P sulla circonferenza. Nella figura ilpunto P è disegnato a intervalli di tempo uguali, duranti i quali esso percorre archi uguali. Invece si notache, negli stessi intervalli di tempo, il punto Q che segue il moto armonico non percorre distanze uguali;per la precisione: nelle zone centrali il moto armonico è più rapido e percorre distanze maggiori in tempiuguali; agli estremi il moto armonico è più lento e percorre distanze minori negli stessi tempi. Nei puntidi inversione del moto la velocità istantanea del punto è nulla.
Dimostrazione della formula per ac
Consideriamo due punti A e B della traiettoria molto vicini fra loro e le rispettive velocità istantanee .Tracciamo poi i raggi AO e BO.
Consideriamo poi separatamente i vettori V1 e V2 con la base in comune: il vettore che parte dalla puntadi V1 e V2 finisce nella punta di sarà il
vettore differenza ∆V=V2-V1 . Il tutto è rappresentato in figura.
Si può facilmente dimostrare che i triangoli ABO e A’B’O’ sono simili, quindi si può impostare laseguente proporzione:
∆V : V = AB : R
AB è il segmento rettilineo che unisce i punti A e B della traiettoria. Poiché il tratto AB è molto piccolo,possiamo approssimare tale tratto con la lunghezza del piccolo arco di circonferenza, come rappresentatoin figura.
Il moto di un pendolo e quello di un’altalena sono moti oscillatori, in cui la traiettoria del moto è ripetutadiverse volte in versi opposti. Il modello più semplice di moto oscillatorio, in cui si trascurano gli effettidegli attriti che smorzano l’oscillazione, è quello del moto armonico. Si chiama moto armonico ilmovimento che si ottiene proiettando su un diametro le posizioni di un punto materiale che si muove dimoto circolare uniforme. Di conseguenza, la traiettoria del moto armonico è un diametro del motocircolare uniforme che lo genera. Questo diametro divide la traiettoria del moto circolare uniforme in duesemicirconferenze.

Come è mostrato nella il punto Q che si muove di moto armonico oscilla Ma la lunghezza dell’arco ABnon è altro che lo in un verso (per esempio quello negativo) mentre il punto P si muove su una dellespazio percorso tra i punti A e B che, con buona approssimazione, si può calcolare con ilprodotto semicirconferenze (per esempio quella superiore) e nel verso opposto
V ∙ ∆t, quindi:
quando P percorre l’altra semicirconferenza.
∆V : V = V∙∆t : R
da cui, ricavando ∆V:
∆V = V2 ∙∆t / R
il modulo dell’accelerazione centripeta sarà
a=∆V / ∆t, quindi:
a= V2 / R

IL MOTO ARMONICO
Il moto armonico si può studiare in laboratorio grazie a una molla di buona qualità a cui è attaccato unpesetto. Con un sensore di movimento posto sotto la molla si rileva il grafico spazio-tempo dellafigura. Dal grafico si possono dedurre due grandezze fondamentali del moto armonico:
Grafico spazio-tempo del moto di un pesetto attaccato a una molla. (fig. 1)
Il grafico spazio-tempo del moto armonicoil periodo T, che è la durata di un’oscillazione completa avantie indietro. (fig. 2)


Figura (3,4,5):Velocità e accelerazione nel moto armonico
Velocità: Accelerazione:
figura 3 Aumenta partendo da zero Massima, verso il basso
figura 4 Massima Nulla
figura5 Diminuisce Verso l’alto
Con altri sensori è possibile studiare anche il grafico velocitàtempo del moto armonico e quelloaccelerazionetempo; nelle figure seguenti questi grafici sono sovrapposti a quello spaziotempo per avereun confronto.
Il grafico v t conferma che la velocità Il grafico a t rivela che a è nulla si annulla nei punti di inversionedel quando il moto oscillatorio passa per moto (linee tratteggiate arancioni), il centro (punti diintersezione tra le mentre assume il valore massimo due curve); inoltre a è massima (positivo o negativo)al centro dell’oscillazione (linee tratteggiate quando lo spostamento sè minimo e azzurre). viceversa(linee tratteggiate). Q ui nd i , il grafico spaziotempo e quello accelerazionetempo sonodirettamente proporzionali, ma i segni delle due grandezze sono sempre opposti.

Figura: Grafico spazio-tempo del moto armonico.
La legge del moto armonico
La curva che compare nel grafico spazio-tempo del moto armonico disegnata dal sensore di posizione sichiama cosinusoide. L’abbiamo ottenuta scegliendo un sistema di riferimento in cui l’origine s = 0 m èposta al centro dell’oscillazione e scegliendo l’istante t = 0 s nel momento in cui l’oscillazione è nel suopunto massimo. La formula che fornisce la posizione s in funzione dell’istante di tempo t è:
s= r cosω t= r cos2π tT
Ricordando la costruzione presentata all’inizio del paragrafo, ω è la velocità angolare del motocircolare uniforme che genera il moto armonico e r è il raggio della traiettoria circolare; ω e T sonolegati dalle equazioni . Nel moto armonico r è l’ampiezza dell’oscillazione e la grandezza ω vienechiamata pulsazione.
Per la velocità istantanea nel moto armonico, il grafico velocità-tempo visto in velocità del corpo cheoscilla ed è anche il precedenza e la teoria stabiliscono che vale la relazione modulo della velocità delmoto circolare:
v=−ω r senωt=−v0senωt.


La formula che fornisce a⃗ è:
Ricordando la formula il valore dell’accelerazione può essere espresso come a= − ω2 s= − ω2 rcosωt=−a0cosωt, dove a 0 = ω2 r è il massimo modulo dell’accelerazione del corpo che oscilla ed èanche valore dell’accelerazione centripeta del moto circolare uniforme ideale che genera il motoarmonico.
Dimostrazione della legge per l’accelerazione nel moto armonico
Per dimostrare la formula, disegniamo il raggio vettore r ⃗ , il vettore
posizione s ⃗ di Q, l’accelerazione centripeta a⃗ c del moto circolare e
l’accelerazione a⃗ del moto armonico .
• Si vede che i vettori a⃗ e s ⃗ hanno la stessa direzione e versi opposti, quindi

possiamo introdurre un fattore di proporzionalità k fra il modulo di a⃗ e il modulo
di s ⃗ , cioè scrivere a⃗ =− ks ⃗ .
• Per calcolare k notiamo che i due triangoli OQP e PML sono simili perché sono
entrambi rettangoli e hanno uguali gli angoli QOˆ P e LPˆ M (alterni interni
tra s ⃗ e a⃗ , con la trasversale r ⃗ ). Allora si può scrivere la proporzione
MP¯¯¯¯¯¯ OQ¯¯¯¯¯= PL¯¯¯¯¯ OP¯¯¯¯¯,cioè as= acr.
Il valore di a (modulo del vettore a⃗ ) si ricava moltiplicando per s i due membri della
seconda equazione e sostituendo al posto di ac l’espressione w 2 r:
• Quindi il valore di k è w 2, per cui otteniamo infine la formula: a⃗ = - ω2 s ⃗ .
ENERGIA E LAVORO
Una forza applicata ad un oggetto si dice che compie un lavoro quando determina uno spostamentodell'oggetto della direzione in cui è applicata.Per vedere dove si sposta dobbiamo osservare il punto diapplicazione della forza.Il lavoro (W) è il prodotto scalare tra la forza e lo spostamento.
W = F∙s
Se la forza e lo spostamento non hanno la stessa direzione allora bisogna scomporre la forza. La forzaverticale non compie alcun lavoro poiché il suo punto di applicazione non si muove.In questo caso laformula diventa
W = F ∙ s ∙ cos θ
dove θ è l'angolo compreso tra la forza e lo spostamento.
Se F e s hanno lo stesso verso lavoro motore Wmot=F ∙ s > 0 se 0 ≤ θ ≤ 90°
Se F e s hanno verso opposto lavoro resistente Wres = Fattrito∙ s < 0 90° ≤ θ ≤ 180°
Se forza è perpendicolare lavoro nullo θ =90°
Il lavoro si misura in joule (J),
1J = 1 joule = 1 newton ∙ 1 metro = 1 N ∙ m
La potenza
Conoscendo il tempo e il lavoro compiuto possiamo calcolare la potenza. Essa è il rapporto tra il lavoroe l'intervallo di tempo. Tanto è minore il tempo tanto è maggiore la potenza.L'unità di misura dellapotenza è il watt
1 watt = 1 w = 1J/1s
1 kilowatt = 1000 watt
Un'altra unità di misura è il cavallo vapore,
1 cv (hp) = 750 watt
L'ENERGIA CINETICA
L'energia cinetica è l'energia che acquista un corpo quando è sottoposto ad una forza. Se noi tiriamo unoggetto esso all'inizio si muove di moto uniformemente accelerato, lavoro=F ∙ s = m ∙ a ∙ ½ ∙ a ∙ t²
L'energia cinetica,quindi,si misura in joule e si indica con K ed è pari ad un mezzo della massa per lavelocità alla seconda.

K = ½ ∙ m ∙ v²
All'aumentare della velocità l'energia cinetica quadruplica. Se un oggetto in un sistema di riferimento èfermo la sua energia cinetica è pari a zero,se c'è attrito essa diminuisce.
Il lavoro è pari alla variazione di energia cinetica La risultante delle forze che agiscono su un corpo èuguale alla variazione dell'energia cinetica del corpo su cui sono applicate.
W= ΔK = Kfinale – Kiniziale
FORZE CONSERVATIVE E DISSIPATIVE
Una forza si dice conservativa se il lavoro da essa compiuto non dipende dal cammino ma solo dai puntiiniziale e finale.
In caso contrario esse sono dette dissipative. Esempi di forze conservative sono la forza di gravità e laforza elastica. Un esempio di forza dissipativa è la forza di attrito.
ENERGIA POTENZIALE
L'energia potenziale gravitazionale U di un corpo di massa m ad altezza h da un livello di riferimento è
U = m ∙ g ∙ h
Il principio di conservazione dell'energia meccanica dice che ,in assenza di forze dissipative ,l'energiameccanica totale di un sistema si conserva in quanto, la somma delle variazioni è nulla
ΔU + ΔK = 0
ΔU= U2 – U1 e ΔK=K2 – K1
Se queste ultime sono le due equazioni di un sistema,avremo
U2 – U1 + K2 – K1 = 0
U1 + K1 = U2 + K2
Da questa deduciamo che la somma delle energie cinetica e potenziale iniziale è uguale alla sommadell'energia cinetica e potenziale finale.

IL CALORE
Dilatazione termica
La temperatura è la proprietà fisica intensiva, definibile per mezzo di una grandezza fisica, che indica lostato termico di un sistema. La temperatura determina il verso del flusso di calore che si instaura fra duesistemi che interagiscono.
La temperatura puo' essere misurata in varie scale: Celsius, Kelvin e Fahreneheit.
Nella scala Celsius lo 0 corrisponde al punto di solidificazione dell'acqua e 100 il punto diebollizione(in condizioni standard cioè a pressione di 1 atm)
La scala Kelvin è spostata di 273,15 gradi centigradi rispetto alla scala Celsius(ovvero il punto disolidificazione dell'acqua è 273,15 K, mentre quello di ebollizione è di 373,15 K).
Nella scala Kelvin lo 0 corrisponde allo 0 assoluto(-273,15° C). La scala Fahreneheit è legata alla scalaCelsius dalla seguente relazione:
Temperatura Fahreneheit= 2 (temperatura Celsius)+32
Quando un solido è sottoposto ad un aumento di temperatura ΔT, subisce un allungamentoΔL approssimativamente proporzionale al prodotto del a sua lunghezza iniziale L0 per ΔT , ossia
ΔL=α L0 ΔT
dove la costante di propozionalità α viene chiamate coefficiente di dilatazione lineare.Il valore di αdipende dalla naturadella sostanza considerata e, per i fini che ci proponiamo, può essere ritenuta unacostante indipendente T, sebbene ciò sia raramente, o quasi mai, del tutto vero. Dall'equazioneprecedente, α risulta essere la variazione di lughezza per unità di lunghezza iniziale per una variazione ditemperatura di un grado.
Calorimetria
L'energia termica è l'energia cinetica posseduta in modo disordinato dalle particelle (solitamenteelettroni, ioni, atomi e molecole) che compongono un sistema. Il calore è l'energia termica che un sistema(o aggregato di elettroni, ioni e atomi) ad una certa temperatura trasmette spontaneamente ad un altrosistema, posto a contatto con il primo,avente una temperatura inferiore. Nel SI, la sua unità di misura è ilJoule; un altra unità di misura usata è la caloria.
1cal = 4.184 J
La ''caloria'' utilizzata dai nutrizionisti equivale a 1 kcal.
Il calore specifico di una sostanza è la quantità di calore necessaria per far variare di 1°C la temperatura.
C= ΔQ / Δm

oppure
ΔQ=cm ΔT
Il calore latente di fusione di un solido cristallino è la quantità di calore necessario per fondere unamassa unitaria del solido a temperatura costante;esso è uguale alla quantità di calore ceduta da una massaunitaria del solido fuso, mentre cristallizza alla stessa temperatura.
Il calore latente di fusione dell'acqua a 0° C è circa 335 Kj/Kg, o 80 Cal/G.
Il calore latente di vaporizzazione di un liquido è la quantità di calore necessaria per portare allo statoaeriforme una massa unitaria del liquido a temperatura costante.Per l'acqua a 100° C, è circa 2,26 Mj/Kg, o 540 Cal/g
I problemi relativi alla calorimetria riguardano situazioni in cui si verifica uno scambio di calore traoggetti.Poichè l'energia si conserva, è possibile stabilire la seguente relazione:
sommatoria delle variazioni di calore di ogni oggetto=0
La propagazione dell'energia termica
la propagazione dell'energia termica può avvenire per conduzione, convenzione e irraggiamento.
CONDUZIONE:la quantità di calore ΔQ in transito dalla faccia1 alla faccia2 in un tempo Δt è data da
ΔQ / Δt = A kt ΔT / L
IRRAGGIAMENTO : consiste nella propagazione di energia elettromagnetica radiante nel vuoto e neglispazi vuoti tra gli atomi. L'energia radiante si distingue dal calore e, sebbene entrambe siamo forme dienergia scambiata, si deve fare attenzione a non confonderle.
Per calcolare l'irraggiamento è necessario conoscere la legge di Stefan-Boltzmann:
P=ε A σ T 4
PASSAGGI DI STATO
Gli stati della materia sono:
STATO SOLIDO : i solidi hanno forma e volume propri ,sono resistenti alle deformazioni edifficilmente comprimibili. Allo stato solido U>KSTATO LIQUIDO : i liquidi hanno un volume definito e una forma dipendente dal recipiente che licontiene. Allo stato liquido U═KVAPORE : Allo stato di vapore U < KSTATO GASSOSO : se la materia si trova allo stato di gas significa che la sua temperatura è

superiore alla temperatura critica.La temperatura critica è la temperatura al di sopra della quale nonè possibile liquefare una sostanza per compressione. I gas occupano completamente il volumedisponible e sono facilmente comprimibili. Allo stato gassoso U<<KPLASMA : è lo stato in cui gli elettroni, avendo grandissima energia cinetica dovuta allatemperatura molto elevata, non riescono ad essere catturati culombianamente dai nuclei. Passandodallo stato solido a quello del plasma vediamo quindi un rilevante aumento di temperatura.
Il passaggio dallo stato liquido allo stato solido è detto fusione,la trasformazione inversa invece è dettasolidificazione . La vaporizzazione è il passaggio dallo stato liquido allo stato di vapore.Questatransizione può avvenire in due modi:
per evaporazione:processo che interessa solamente la superficie de liquido;per ebollizione:processo turbolento che interessa tutto il volume del liquido.
Il processo inverso alla vaporizzazione è detto condensazione.Alcuni solidi inoltre possono passaredirettamente dallo stato solido allo stato di vapore. Questa trasformazione è detta sublimazione. Ilpassaggio inverso è detto brinamento.

Onde
Generalità
Un sasso cade in uno stagno, delle onde si formano sulla sua superficie partendo dal punto di impatto. Sipropagano in tutte le direzioni con una simmetria circolare. Quello che è successo è che il sasso haceduto energia cinetica all’acqua, questa energia tende a propagarsi e disperdersi in tutte le direzioni. Ilmeccanismo più efficiente con cui lo fa è quello di un onda.
Un onda è una perturbazione che si propaga trasportando energia, ma non materia.
Si definisce onda la propagazione di una perturbazione.
Alla base di un fenomeno ondoso, vi è un moto oscillatorio che si genera quando una particella si muoveperiodicamente intorno ad una posizione di equilibrio. Nelle onde non si ha alcun trasporto di materia masoltanto di energia.
Una fondamentale classificazione delle onde le suddivide in:
onde meccaniche (come le onde del mare, il suono) generate da un fenomeno meccanico enecessitano di un mezzo di propagazione.onde elettromagnetiche (come la luce e le onde radio) che hanno alla base una variazione delcampo elettromagnetico e si propagano nel vuoto.onde di probabilità ,ossia la probabilità che un oggetto a cui l’onda è associata si trovi in unadeterminata posizione Le onde possono propagarsi lungo una sola direzione (es. onda su una cordatesa), nel piano (es. onde provocate da un sasso lasciato cadere in uno stagno) o in tutto lo spazio(es. onde sonore generate da sorgenti puntiformi).
Un'onda viene sempre generata da una sorgente che produce una perturbazione nello spazio che lacirconda. Alcuni semplici oggetti, oscillando possono diventare sorgenti di onde meccaniche. Perciascuno di essi esiste una posizione di equilibrio stabile. Se uno di essi viene spostato dalla posizionedi equilibrio, comincia ad oscillare fra due punti, con un proprio periodo di oscillazione. Responsabiledel moto è una forza di richiamo elastica, che, per piccole oscillazioni, è proporzionale allo spostamentodalla posizione di equilibrio. Durante l'oscillazione l'oggetto perturba il mezzo circostante cedendoglienergia: in tal modo genera un'onda.
Caratteristiche di un onda
Fronte d’onda
Si definisce fronte d’onda, il luogo dei punti caratterizzati dall’avere in ogni istante lo stesso valore dellospostamento dalla posizione di equilibrio. La forma che assume la superficie del fronte d’onda è anchedetta superficie d’onda. A seconda della forma che può assumere la superficie d’onda, possiamo avere:
Onda piana, cioè un onda in cui il fronte è una superficie piana perpendicolare alla direzione dipropagazione dell’onda.

Onda circolare, cioè un onda la cui superficie d’onda è una circonferenza che va allargandosi alpropagarsi dell’onda.
Onda sferica, cioè quando la superficie d’onda sono delle sfere, questo è il caso di onde che sipropagano nello spazio. La direzione lungo la quale un onda si propaga è detta raggio dell’onda ed èdefinita come la semiretta uscente dalla sorgente e perpendicolare alla superficie del fronte d’onda. Aseconda del modo in cui le onde possono propagarsi possiamo avere:
onde trasversali, quando la direzione della vibrazione (o perturbazione) è perpendicolare a quella dipropagazione del fronte;
onde longitudinali, quando la direzione della vibrazione (o perturbazione) è parallela a quella dipropagazione del fronte. Esistono anche onde nelle quali le particelle del mezzo subiscono spostamentisia longitudinali che trasversali (come ad es. le onde marine).
Onde periodiche, una perturbazione ondosa si dice periodica, quando un elemento della perturbazione siripete ad intervalli regolari di tempo. Le onde periodiche sono formate da creste e da gole. La distanzatra due creste successive (o due gole) si chiama lunghezza d'onda e si indica con il simbolo λ. Quandol'onda si propaga, i punti investiti dall'onda si muovono oscillando. Lo spostamento massimo di un puntodalla sua posizione di equilibrio si chiama ampiezza dell'onda e si indica con il simbolo A.
Un'onda è pertanto caratterizzata dalle seguenti grandezze:
λ = lunghezza d'onda (m)
A = ampiezza dell’onda (m)
T = periodo (s)
f = frequenza (Hz)
v = velocità dell'onda (m/s)
Esse sono tra di loro così correlate:
f = 1/T
v= /
λ T
v=λ f
La frequenza dell'onda indica quante volte in un punto del mezzo elastico passa una cresta (o una gola)in un secondo. Essa si indica con il simbolo f.
Il periodo T dell'onda è l'intervallo di tempo che intercorre tra il passaggio di due creste successive (odi due gole) per lo stesso punto. Appare evidente che la frequenza è il reciproco del periodo.
In un periodo l'onda percorre una distanza pari alla lunghezza d'onda. Quindi la velocità è il rapporto trala lunghezza d'onda e il periodo, se l'onda si sta propagando in un mezzo omogeneo a velocità costante. Ilperiodo e la frequenza dell'onda sono determinati dalle caratteristiche della sorgente che l'ha generata. Lavelocità è determinata dalle caratteristiche del mezzo in cui l'onda si propaga.
La relazione v = λ f è chiamata relazione fondamentale delle onde o legge di propagazione di un’onda.
Onde armoniche semplici
Onde
sinusoidali
L'ampiezza dell'onda dipende sia dalla sorgente, sia dal tipo di onda generato, sia dalle caratteristiche dielasticità del mezzo di propagazione.
Consideriamo una sorgente che, muovendosi di moto armonico di ampiezza A, generi onde meccaniche inun mezzo perfettamente elastico ed esaminiamo vari casi:
a) se le onde sono lineari come in una corda l'ampiezza dell'onda è quella del moto armonico dellasorgente.
b) se le onde sono circolari come quelle prodotte da una punta vibrante sull'acqua, o sferiche, comequelle del suono, l'ampiezza dell'onda diminuisce con la distanza dalla sorgente.
Se la sorgente oscilla di moto armonico, l'onda generata è sinusoidale e può essere descrittamatematicamente da una sinusoide.
Nelle onde sinusoidali l'ampiezza dell'onda varia in modo sinusoidale nel tempo e nello spazio. Questotipo di onde riveste un'importanza particolare perché ogni altra forma d'onda periodica può essereottenuta come sovrapposizione di onde sinusoidali.
FENOMENI ONDULATORI
La riflessione
La riflessione è un fenomeno che avviene quando le onde incontrano un ostacolo che interrompe la loropropagazione. Benché l’onda sia stata definita come un profilo che si muove senza trasporto di materia, lariflessione è da considerarsi come l’analogo dell’urto meccanico tra particelle dotate di massa: quandole particelle urtano elasticamente un ostacolo, esso reagisce secondo il terzo principio della dinamica. Siconserva quindi la quantità di moto totale e l’ostacolo restituisce tutta l’energia cinetica all’onda. Essa sipropaga quindi a ritroso con la stessa velocità che aveva prima dell’urto.
Esistono due leggi che regolano la riflessione delle onde, dovute a Cartesio che le elaborò sulla luce.
Per enunciarle faremo riferimento alla seguente figura:
La prima legge della riflessione afferma che il raggio incidente, il raggio riflesso e la normale allasuperficie riflettente giacciono sullo stesso piano, detto anche piano di incidenza.

La seconda legge della riflessione afferma invece che l'angolo di incidenza i e l'angolo di riflessione r'sono uguali tra loro: i = r', dove l'angolo di incidenza i è l'angolo che il raggio incidente forma con lanormale alla superficie, mentre r' è l'angolo che la normale alla superficie forma con il raggio riflesso.
Da notare che nella riflessione si conservano tutte le proprietà fisiche dell’onda, quindi la frequenza, lavelocità e la lunghezza d’onda.
Da ricordare che il raggio di un onda rappresenta quella retta sempre ortogonale alle superfici dei frontid’onda.
La rifrazione
Nel fenomeno della riflessione onde incidenti e onde riflesse viaggiano sempre nello stesso mezzo dipropagazione.
Esistono però casi in cui le onde attraversano diversi mezzi di propagazione.
L’energia iniziale dell’onda si trasmette in tutti i mezzi che incontra e l’effetto macroscopico è uncambiamento della velocità di propagazione nel passaggio da un mezzo a un altro: è il fenomeno dellarifrazione.
Consideriamo due mezzi trasparenti di diversa densità, quali possono essere l'aria e l'acqua, e un raggioincidente che, provenendo dall'aria, incide sulla superficie di separazione tra l'aria e l'acqua.
In corrispondenza della superficie di separazione dei due mezzi, il raggio incidente verrà parzialmenteriflesso e parzialmente trasmesso nel secondo mezzo. Questo fenomeno prende il nome di rifrazione e ilraggio che entra nell'acqua prende il nome di raggio rifratto.
L’energia totale dell’onda incidente si suddividerà, contribuendo in parte all’energia dell’onda riflessa ein parte all’energia dell’onda trasmessa ne secondo mezzo.
RELAZIONE FRA ANGOLO DI INCIDENZA ED ANGOLO DI RIFRAZIONE

OTTICA GEOMETRICA
L' ottica geometrica è la più antica branca dell'ottica, essa studia i fenomeni ottici assumendo che la lucesi propaghi mediante raggi rettilinei. Dal punto di vista dell'ottica ondulatoria essa è valida quando laluce interagisce solo con oggetti di dimensioni molto maggiori della sua lunghezza d'onda. Con questacondizione, gli unici fenomeni rilevanti sono la propagazione rettilinea, la riflessione e la rifrazione ed èpossibile dare una spiegazione approssimata, ma sufficiente in molti casi, del funzionamento di specchi,prismi, lenti e dei sistemi ottici costruiti con essi. L'ottica geometrica è basata sulle leggi seguenti:
Legge del a propagazione rettilinea:La legge afferma che nel vuoto la luce si propaga lungo lineerette. La prima formulazione di questo principio è dovuta a Euclide Leggi del a riflessione: La riflessione è il fenomeno per cui una congruenza ortogonale di raggi cheincide su una superficie di discontinuità genera una nuova congruenza ortogonale di raggi. Le leggidella riflessione affermano che tale nuovo raggio, detto raggio riflesso,si trova nel piano definito dalraggio incidente e dalla perpendicolare al a superficie nel punto di incidenza e forma con taleperpendicolare un angolo con la stessa ampiezza e verso opposto di quello formato dal raggioincidente.Leggi del a rifrazione (legge di Snel): La rifrazione è il fenomeno per cui una congruenzaortogonale di raggi che attraversa una superficie di discontinuità (contatto tra due materiali diversi)viene deviata. Le leggi della rifrazione affermano che:
• Il raggio uscente si trova sul piano definito dal raggio entrante e dalla perpendicolare al asuperficie nel punto di contatto.
• le ampiezze degli angoli formati dai due raggi rispetto al a perpendicolare alla superficiesono collegati dalla relazione: dove i coefficienti n (indice di rifrazione) dipendono dai materiali di cui sono costituiti i mezzi e dal colore della luce.
Nei fenomeni di rifrazione oltre al raggio rifratto, c'è sempre anche un raggio riflesso. Nel caso in cui ilraggio provenga dal mezzo con indice di rifrazione maggiore, con un angolo tale che l'angolo uscentedovrebbe essere maggiore di 90 gradi , il raggio rifratto non è presente e tutta la luce viene riflessa (riflessione totale).
GLI SPECCHI
Per costruire l’immagine di un oggetto occorre che il sistema ottico considerato sia in grado diconcentrare gli infiniti raggi luminosi che l’oggetto emette da tutti i suoi punti in altrettanti punti coniugatiil cui insieme formi l’immagine cercata. La verifica di tale costruzione può essere fatta graficamentedisegnando fra tutti i raggi luminosi emessi, due raggi di cui conosciamo il modo con cui vengono riflessio rifratti. Nel caso dello specchio piano riportato in figura 1 consideriamo anzitutto la punta della freccianera. Di tutti i raggi emessi seguiamo quello che incide perpendicolarmente allo specchio (e che vieneriflesso all’indietro nella stessa direzione) e quello che incide nel punto in cui lo specchio interseca ilpiano orizzontale (e che viene riflesso con lo stesso angolo di incidenza).
I raggi divergono dopo la riflessione, ma se prolungati all’indietro, oltre la superficie dello specchio, lelinee s’incontrano nel punto corrispondente alla punta della freccia grigia. Si potrebbe verificare

facilmente che in questo punto s’incontrano i prolungamenti di tutti i raggi emessi dalla punta dellafreccia nera. Un qualunque altro punto della freccia nera emetterà raggi luminosi i cui prolungamentiandranno ad incontrarsi nel punto equivalente della freccia grigia ricostruendo così completamentel’immagine della freccia. Se l’oggetto è posto a sinistra ad una distanza p dello specchio dove è fissatal’origine degli assi, l’immagine si formerà a destra ad una distanza q .
Un’immagine ricostruita con i prolungamenti dei raggi, come quella dello specchio piano, si chiamaimmagine virtuale perché per poterla vedere è necessario uno strumento ottico (per esempio l’occhio)che la osservi. Al contrario, nel punto in cui si forma un’immagine reale è possibile mettere un foglio dicarta (od una pellicola fotografica) e su questo vedere il formarsi dell’immagine. Infatti solo nel casodi immagine reale i raggi luminosi passano effettivamente per il punto d'intersezione e quindi l'energiatrasportata dai raggi luminosi può, per esempio, impressionare una pellicola fotografica. Riassumendo,possiamo dire che l'immagine formata da uno specchio piano è virtuale, diritta, di dimensioni uguali alledimensioni dell'oggetto (h = h') e posta alla distanza q = p dallo specchio.
SPECCHIO PIANO
Analizziamo ora come si formano le immagini per specchi sferici. Uno specchio sferico è caratterizzatoda un centro di curvatura C ed un raggio di curvatura R e si chiama convesso o concavo a seconda dicome è disposta la curvatura. Consideriamo ora uno specchio sferico convesso di raggio R . In analogiaal caso precedente, tracciamo due raggi che si dipartono dalla punta della freccia nera, quello direttoverso il centro C di curvatura dello specchio (e che verrà quindi riflesso all’indietro nella stessadirezione) e quello che incide nel punto in cui lo specchio interseca il piano orizzontale (e che vieneriflesso con lo stesso angolo di incidenza). Anche in questo caso i raggi dopo la riflessione divergono,ma se prolungati all’indietro, oltre la superficie dello specchio, le linee si incontrano nel puntocorrispondente alla punta della freccia grigia. Si può verificare facilmente che in questo puntos i incontrano i prolungamenti di tutti i raggi emessi dalla punta della freccia nera. L’immagine che siforma è virtuale, diritta, rimpicciolita e la sua posizione è compresa tra lo specchio ed il centro dicurvatura.
SPECCHIO CONVESSO
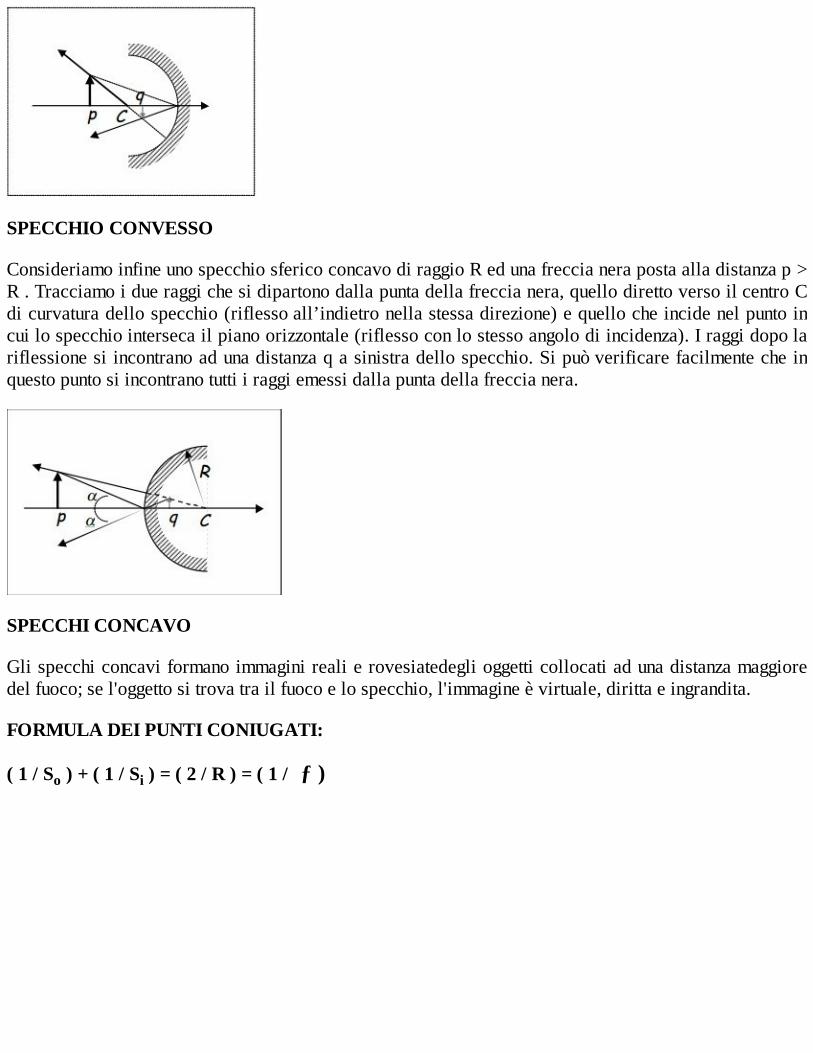
Consideriamo infine uno specchio sferico concavo di raggio R ed una freccia nera posta alla distanza p >R . Tracciamo i due raggi che si dipartono dalla punta della freccia nera, quello diretto verso il centro Cdi curvatura dello specchio (riflesso all’indietro nella stessa direzione) e quello che incide nel punto incui lo specchio interseca il piano orizzontale (riflesso con lo stesso angolo di incidenza). I raggi dopo lariflessione si incontrano ad una distanza q a sinistra dello specchio. Si può verificare facilmente che inquesto punto si incontrano tutti i raggi emessi dalla punta della freccia nera.
SPECCHI CONCAVO
Gli specchi concavi formano immagini reali e rovesiatedegli oggetti collocati ad una distanza maggioredel fuoco; se l'oggetto si trova tra il fuoco e lo specchio, l'immagine è virtuale, diritta e ingrandita.
FORMULA DEI PUNTI CONIUGATI:
( 1 / So ) + ( 1 / Si ) = ( 2 / R ) = ( 1 / ƒ )

Problemi Moto rotatorio in un piano
1) Si esprimano 40.0 gradi/s in (a) giri/s, (b) giri/min e (c) rad/s. [sol. (a) 0.111 giri/s , (b) 6.67giri/min, (c) 0.698 rad/s ]
2) Ponendo che il raggio della Terra misuri 6370km, di quanti radianti si sposta un punto sullasuperficiein 6.00h, per il moto rotatorio del pianeta?Qual è la velocità di un punto all'equatore? [sol. 1.57 rad, 463m/s ]
3) Un'auto che si muove a 5.0m/s tenta di girare un angolo su un astrada piana, descrivendo un arcocircolare di raggio 8.0m. Quale deve essere il coefficiente di attrito tra ruote e la strada, affinchè l'autonon slitti? [sol. 0.32 ]
Propagazione energia termica
1) Quale deve essere il grafiente termico di un'asta di alluminio, affinchè lungo l'asta si propaghino 8.0cal al secondo per cm2 di sezione trasversale? Per l'alluminio, kt corrisponde a 210 W/k*m. [sol.16°C/cm ]
2) Una sfera di raggio 3.0cm, che si comporta come un corpo nero, si trova in equilibrio con l'ambientecircostante, da cui assorbe la potenza irradiata di 30 kW dall'ambiente circostante. Qual è la temperaturadella sfera? [sol. 2.6x103 K]
Dilatazione termica1) Si calcoli l'aumento di lunghezza subito da un filo di rame lungo 50m, quando la temperatura varia da12°C a 32°C. Per il rame, α=1.7x10-5 °C-1. [sol. 1.7 cm]
2) Si scopre che un'asta lunga 3.0m ha subito una dilatazione in lunghezza di 0.091cm dopo un aumento ditemperatura di 60°C. Qual è α per il materiale di cui è composto il filo? [sol. 5.1x10-5 °C-1]

Tavola periodica degli elementi
Alfabeto greco