Appendice A Richiami di calcolo - link.springer.com978-88-470-5495-0/1.pdf · Meccanica Razionale....
35
Appendice A Richiami di calcolo A.1 Punti, vettori Punti Sia O un punto dello spazio euclideo tridimensionale E nel quale si ambienta il mo- to del sistema. Utilizzando una base fe 1 ; e 2 ; e 3 g, identifichiamo la posizione di ogni punto P 2 E attraverso le sue coordinate cartesiane x;y;z , con OP D x 1 e 1 C x 2 e 2 C x 3 e 3 : (A.1) L’origine O e la terna fe 1 ; e 2 ; e 3 g utilizzate per descrivere la posizione dei punti del sistema costituiscono un sistema di riferimento. Osserviamo che in (A.1), come tutto il resto del testo, il carattere grassetto identifica un vettore. Gli unici vettori che fan- no eccezione a questa regola risultano proprio essere quelli che collegano due punti, come OP in (A.1), che rappresenta il vettore che punta da O verso P . Prodotto scalare Dati due vettori u D u 1 e 1 C u 2 e 2 C u 3 e 3 e v D v 1 e 1 C v 2 e 2 C v 3 e 3 , definiamo il prodotto scalare tra u e v come: u v D 3 X i D1 u i v i : • Il prodotto scalare consente di definire il modulo di un vettore e l’angolo tra due vettori: u DjujD p u u D q u 2 1 C u 2 2 C u 2 3 ; cos ˛ D u v ˇ ˇ u ˇ ˇ ˇ ˇ v ˇ ˇ ; (A.2) Biscari P., Ruggeri T., Saccomandi G., Vianello M.: Meccanica Razionale. Unitext – La Matematica per il 3+2 69 DOI 10.1007/978-88-470-5495-0_A, © Springer-Verlag Italia 2013
Transcript of Appendice A Richiami di calcolo - link.springer.com978-88-470-5495-0/1.pdf · Meccanica Razionale....

Appendice A
Richiami di calcolo
A.1 Punti, vettori
Punti
Sia O un punto dello spazio euclideo tridimensionale E nel quale si ambienta il mo-to del sistema. Utilizzando una base fe1; e2; e3g, identifichiamo la posizione di ognipunto P 2 E attraverso le sue coordinate cartesiane
�x; y; z
�, con
OP D x1 e1 C x2 e2 C x3 e3: (A.1)
L’origine O e la terna fe1; e2; e3g utilizzate per descrivere la posizione dei punti delsistema costituiscono un sistema di riferimento. Osserviamo che in (A.1), come tuttoil resto del testo, il carattere grassetto identifica un vettore. Gli unici vettori che fan-no eccezione a questa regola risultano proprio essere quelli che collegano due punti,come OP in (A.1), che rappresenta il vettore che punta da O verso P .
Prodotto scalare
Dati due vettori u D u1 e1 C u2 e2 C u3 e3 e v D v1 e1 C v2 e2 C v3 e3,definiamo il prodotto scalare tra u e v come:
u � v D3XiD1
uivi :
• Il prodotto scalare consente di definire il modulo di un vettore e l’angolo tra duevettori:
u D juj D pu � u D
qu21 C u22 C u23 ; cos˛ D u � vˇ
uˇ ˇvˇ ; (A.2)
Biscari P., Ruggeri T., Saccomandi G., Vianello M.: Meccanica Razionale.Unitext – La Matematica per il 3+2 69DOI 10.1007/978-88-470-5495-0_A, © Springer-Verlag Italia 2013

320 Appendix A Richiami di calcolo
dove si è indicato con ˛ l’angolo determinato dalle direzioni dei due vettori u, v.Chiameremo versore ogni vettore di modulo unitario.
• Il prodotto scalare è simmetrico e lineare nei due vettori che si moltiplicano:�v C �w
� � u D u � �v C �w� D u � v C �u � w:
• Due vettori si dicono ortogonali se il loro prodotto scalare è nullo. Di conseguenza,una base si dice ortogonale se risulta composta da vettori a due a due ortogonali.Chiameremo inoltre ortonormale una base ortogonale formata da versori.
• Sia e un versore. Definiamo componente lungo e di un vettore u, il prodotto scalare
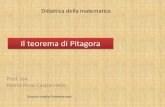
ue D u � e:Analogamente, dato un qualunque puntoP e una retta r passante perO e parallelaad e, si costruisce (vedi Fig. A.1a) la proiezione di P su r come il punto Pr taleche:
OPr D �OP � e� e:
Il Teorema di Pitagora fornisce un modo semplice di esprimere la distanza delpunto P dalla retta r in termini di due prodotti scalari. Infatti, detto ˛ l’angolodeterminato da OP con il versore e si ha:
d.P; r/ D jPPr j D jOP j sin˛ Dp
jOP j2 � jOPr j2 (A.3)
DqOP �OP � �
OP � e�2 :• Sia � il piano ortogonale al versore e passante per O . Dato un qualunque puntoP , si costruisce (vedi Fig. A.1b) la proiezione di P su � come il punto P� taleche:
OP� D OP � �OP � e� e:
Il Teorema di Pitagora consente ancora di esprimere anche la distanza del puntoP dal piano � . Infatti, detto nuovamente ˛ l’angolo determinato da OP ed e (sinoti che ˛ è complementare all’angolo tra OP e �) si ha:
d.P; �/ D jPP� j D jOP j j cos˛j D ˇOP � eˇ:
Il prodotto scalare�OP �e� è positivo se P si trova nel semispazio delimitato da �
verso cui punta e, è nullo seP appartiene a � , ed è negativo seP si trova nell’altrosemispazio.
Prodotto vettoriale
Dati due vettori u D u1 e1 C u2 e2 C u3 e3 e v D v1 e1 C v2 e2 C v3 e3,definiamo il prodotto vettoriale tra u e v come:
u ^ v D .u2v3 � u3v2/ e1 C .u3v1 � u1v3/ e2 C .u1v2 � u2v1/ e3:

A.1 Punti, vettori 321
r
d.P; r/ D jOP ^ ejP
PrOP
e
˛
O
Figura A.1. Proiezione ortogonale di un punto su una retta e su un piano
Osserviamo che la seconda e terza componente del prodotto vettoriale si possono ot-tenere semplicemente dalla prima attraverso permutazioni cicliche del tipo 1 ! 2 !3 ! 1.
• Il prodotto vettoriale è lineare nei due fattori, ed è antisimmetrico: u ^ v D �v ^u .
• Il prodotto vettoriale u^v è ortogonale sia a u che a v. Il suo verso si può ottenerecon la regola della mano destra: puntando il pollice della mano destra in direzionedi u e l’indice in direzione di v, il dito medio fornisce il verso di u ^ v.
• Il prodotto vettoriale si annulla se uno dei due fattori è nullo o se i due vettori sonoparalleli. In generale,
ju ^ vj D juj jvj sin˛;se ˛ è l’angolo formato dalle direzioni dei due vettori.
• Dati due vettori u e v, vale la relazione
ju ^ vj2 C .u � v/2 D juj2jvj2 D .u � u/ .v � v/:• Utilizzando il prodotto vettoriale si possono riscrivere le distanze di un punto P
da una retta r e da un piano � (entrambi passanti perO , e rispettivamente parallelala prima, e ortogonale il secondo, al versore e) come:
d.P; r/ D jOP j sin˛ D jOP ^ e j (A.4)
d.P; �/ D jOP j j cos˛j DqˇOP
ˇ2 � ˇOP ^ e
ˇ2:
• Dati tre vettori u, v e w,
u ^ .v ^ w/ D .u � w/v � .u � v/w e
.u ^ v/ ^ w D .u � w/v � .w � v/u: (A.5)
Si osservi in particolare che il risultato del doppio prodotto vettoriale dipendedall’ordine in cui i singoli prodotti vengono eseguiti.
• Il prodotto vettoriale di due elementi di una base ortogonale è parallelo al terzo

322 Appendix A Richiami di calcolo
vettore della base. Più precisamente,
e1 ^ e2 D �e2 ^ e1 D e3e2 ^ e3 D �e3 ^ e2 D e1e3 ^ e1 D �e1 ^ e3 D e2
(si osservi nuovamente che la seconda e terza riga seguono dalla prima attraversopermutazioni cicliche dei versori della base).
Prodotto misto
Dati tre vettori u, v e w, si definisce il loro prodotto misto:
u � v ^ w D u � .v ^ w/
Lo scambio di due qualunque dei fattori cambia il segno del prodotto misto:
u � v ^ w D �v � u ^ w D w � u ^ v D �w � v ^ u D : : :
Come risultato della precedente proprietà, ogni permutazione ciclica dei tre vettoricoinvolti nel prodotto misto, così come lo scambio delle operazioni vettoriali, non nemodificano il risultato:
u ^ v � w D u � v ^ w D w � u ^ v D v � w ^ u : (A.6)
Il prodotto misto si annulla se e solo se i tre vettori sono complanari. Il suo valoreassoluto è pari al volume del parallelepipedo avente per spigoli i vettori u, v e w.
Risoluzione dell’equazione lineare vettoriale a ^ v D b
Analizziamo la seguente equazione lineare nell’incognita vettoriale v:
a ^ v D b; (A.7)
dove a e b sono vettori assegnati (con a ¤ 0).
• Essendo il prodotto vettoriale ortogonale a ciascuno dei due fattori, una condizio-ne necessaria affinché la (A.7) abbia senso e possa ammettere qualche soluzioneè che i vettori assegnati a e b siano ortogonali fra di loro. Se a � b ¤ 0, la (A.7)non ammette alcuna soluzione.
• Moltiplichiamo ora vettorialmente la (A.7) per a. Otteniamo:�a ^ v
� ^ a D b ^ a ;
equivalente a
v D a � va2
a C b ^ aa2
: (A.8)

A.2 Curve 323
La (A.8) ammette una semplice interpretazione: i vettori v che soddisfano l’equa-zione (A.7) hanno una componente arbitraria parallela ad a (infatti tale compo-nente scompare nel prodotto vettoriale) e una componente assegnata ortogonalead a, pari al secondo addendo della (A.8). La più generale soluzione di (A.7) sipuò quindi scrivere come:
v D a C b ^ aa2
; con 2 R: (A.9)
A.2 Curve
definition
Una curva è una funzioneP W I ! E , che associa un puntoP.t/ 2 E a ogni valore diun parametro reale t 2 I � R. Chiameremo regolare ogni curva derivabile almenodue volte con continuità. In quel che segue supporremo che tutte le curve che trattia-mo sono regolari. Per comodità supporremo inoltre che la derivata prima PP .t/ nonsi annulli mai (una curva in cui PP fosse sempre nulla descriverebbe semplicementeun punto).
Chiameremo supportoSP della curvaP il luogo geometrico dei punti visitati dallacurva stessa:
SP D ˚Q 2 E tali che P.t/ D Q per qualche t 2 I �:
È evidente che lo stesso supporto può essere percorso da infinite curve diverse, cosìcome la stessa strada può essere percorsa in infiniti modi diversi da un’automobile.
Rette
Le più semplici curve sono le rette, o le porzioni di rette. In esse, la legge che forniscela variazione del punto P.t/ è affine nel parametro t :
OP.t/ D OP0 C v t; t 2 I � R: (A.10)
• A seconda del tipo di intervallo I � R in cui assume valori il parametro t , il sup-porto della curva (A.10) è il segmento che collega P.t1/ a P.t2/, se I D Œt1; t2�;una semiretta di estremo P.t1/, se I D Œt1;C1/ oppure I D .�1; t1�; una rettase I D R.
• La curva (A.10) appartiene alla retta passante per P0 D P.0/ e parallela al vettorev. Infatti, presi due punti P 0 D P.t 0/ e P 00 D P.t 00/ si ha:
P 0P 00 D v .t 00 � t 0/ H) P 0P 00 ^ v D 0:
• Una curva avente come supporto il segmento congiungente i punti Q;R è la se-guente:
OP.t/ D OQCQR t ; t 2 Œ0; 1�: (A.11)

324 Appendix A Richiami di calcolo
La retta passante per i punti Q;R si può ottenere estendendo la curva (A.11) at 2 R.
Retta e versore tangente
Sia P una curva regolare. Chiamiamo retta tangente a P , nel punto P0 D P.t0/,la retta che si ottiene come limite delle rette passanti per i punti P.t0/, P.t0 C �/,nel limite � ! 0. Un semplice sviluppo di Taylor di P.t0 C �/ al prim’ordine in �dimostra che tale retta R.t/ è data da:
OR.t/ D OP0 C .t � t0/ PP .t0/:La rettaR.t/ passa ovviamente perP0 (per t D t0). Inoltre, essa è parallela al versoretangente a P.t/ nel punto P0
t.t0/ DPP .t0/ˇ PP .t0/
ˇ :Nelle espressioni precedenti, come in tutte le successive, abbiamo utilizzato il puntoper indicare sinteticamente la derivata rispetto al parametro t .
Ascissa curvilinea
Sia P una curva regolare. Chiamiamo ascissa curvilinea s, a partire dal punto P1 DP.t1/, la lunghezza dell’arco di supporto compreso tra P1 e P.t/:
s.t/ DZ t
t1
ˇ PP .u/ˇ du:• Dal Teorema Fondamentale del calcolo integrale, segue che
ds
dtD ˇ PP .t/ˇ > 0 per ogni t;
se la derivata prima non si annulla mai. In tal caso la funzione s.t/ è invertibile.• Sia P W Œt1; t2� ! E una curva la cui derivata prima non si annulla mai. Siat D Ot .s/ la funzione inversa dell’ascissa curvilinea, e L D s.t2/ la lunghezza delsupporto diP . Definiamo una nuova curva OP .s/, a valori sull’intervallo s 2 Œ0; L�,come:
Œ0; L� 3 s ! OP .s/ D P�Ot .s/� 2 E :
La curva OP percorre lo stesso supporto della curva P , ma in modo uniforme. In-fatti, utilizzando prima la derivazione di funzione composta e poi la derivazionedi funzione inversa, troviamo:
d OPds
D PP �Ot.s/� d Otds
DPP �Ot .s/�ˇ PP �Ot .s/�ˇ D t
�Ot .s/� (A.12)

A.2 Curve 325
ed in particolareˇd OPds
ˇD 1. La parametrizzazione OP .s/ ha quindi la notevole
proprietà di dipendere solo dal supporto di P , e non dal modo in cui questo èpercorso.
Curvatura e raggio di curvatura
Vogliamo ora introdurre una misura quantitativa della linearità del supporto di unacurva. In una retta, il versore tangente non varia, qualunque sia il punto in cui es-so venga calcolato. Risulta allora naturale associare la misura che cerchiamo allarapidità di variazione del versore tangente lungo la curva stessa. Più precisamente,definiamo la curvatura come segue:
c Dˇd tds
ˇ: (A.13)
• La definizione di c attraverso la derivata del versore tangente rispetto all’ascis-sa curvilinea (invece che rispetto al parametro originale t ) garantisce che tutte lecurve che percorrano lo stesso supporto misureranno la medesima curvatura alpassare da uno stesso punto.
• In termini della parametrizzazione P.t/,
c Dˇ PP ^ RP ˇˇ PP ˇ3 2 Œ0;C1/: (A.14)
La (A.14) risulta estremamente utile nel calcolo diretto della curvatura di una cur-va, poiché la definizione (A.13) non è operativa prima di aver calcolato l’ascis-sa curvilinea s.t/ e aver esplicitato la sua funzione inversa Ot.s/. Riportiamo percompletezza i passaggi dai quali si può ricostruire la dimostrazione di (A.14):
c Dˇd tds
ˇDˇd tdt
d Otds
ˇD 1ˇ PP ˇ
ˇˇ ddt PPˇ PP ˇ
ˇˇ D 1ˇ PP ˇ
ˇˇ RPˇ PP ˇ �
RP � PPˇ PP ˇ3 PPˇˇ
D 1ˇ PP ˇ2 ˇ RP � � RP � t� tˇ Dˇt ^ RP ˇˇ PP ˇ2 D
ˇ PP ^ RP ˇˇ PP ˇ3• La curvatura ha le dimensioni dell’inverso di una lunghezza. Il suo inverso
� D 1
cD
ˇ PP ˇ3ˇ PP ^ RP ˇ 2 .0;C1�:
ha quindi le dimensioni di una lunghezza e viene chiamato raggio di curvatura.L’origine di tale denominazione sarà chiarita in breve.

326 Appendix A Richiami di calcolo
Versore normale principale
Consideriamo un punto a curvatura non nulla di una curva regolare P . Sapendo cheil versore tangente cambierà direzione, chiamiamo normale principale (o, semplice-mente, normale) il versore che indica la direzione verso la quale si sta volgendo t:
n Dd tdsˇd tds
ˇ D 1
c
d tds: (A.15)
• Come illustrato in Figura A.2, la normale principale punta per costruzione versola concavità del supporto della curva.
• La normale principale è indipendente dal verso in cui una curva percorre un da-to supporto, mentre il versore tangente si inverte quando si cambia il verso dipercorrenza del supporto.
• La normale principale è sempre ortogonale alla tangente. Questa proprietà è uncaso particolare del seguente Lemma.
Lemma A.1. Sia f una funzione vettoriale differenziabile, dipendente dalla va-riabile reale t . Il vettore f.t/ ha modulo costante al variare di t se e solo se essoè sempre ortogonale alla sua derivata:ˇ
fˇ2 D costante () f � Pf D 0 8t: (A.16)
Dimostrazione. La (A.16) si dimostra semplicemente osservando che
d
dt
ˇfˇ2 D d
dtf � f D 2 f � Pf:
La variazione del modulo di f.t/ dipende quindi dal prodotto scalare tra f e Pf. Inparticolare, il prodotto scalare è nullo se e solo se jf.t/j è costante.
Conseguenza immediata di questo Lemma è l’ortogonalità tra il versore tangente,il cui modulo è sempre costante (pari a 1) e la normale principale, che è parallelaalla derivata del versore tangente.
Versore binormale
Consideriamo nuovamente un punto a curvatura non nulla di una curva regolare P .Sapendo che i versori tangente e normale principale sono ortogonali tra di loro, in-troduciamo il versore binormale:
b D t ^ n : (A.17)
La base ortonormale ft;n;bg così costruita prende il nome di terna intrinseca, illu-strata in Figura A.2.

A.3 Trasformazioni lineari, matrici 327
Figura A.2. Terna intrinseca
Al fine di calcolare i versori normali senza fare ricorso all’ascissa curvilinea, sipossono utilizzare le seguenti espressioni:
b DPP ^ RPˇ PP ^ RP ˇ e n D b ^ t : (A.18)
La seconda delle (A.18) segue dalla (A.17), attraverso una permutazione ciclica, chepuò sempre effettuarsi nell’espressione che lega un versore di una base ortonormale alprodotto vettoriale degli altri due versori della base. Forniamo di seguito i principalipassaggi della dimostrazione della prima delle (A.18). Nella dimostrazione, inglobia-mo negli scalari ; 0; 00; 000 tutti i fattori che non entrano direttamente nel prodottovettoriale che determina la direzione di b. Tali scalari contribuiscono a rendere uni-tario il versore binormale, ma tale normalizzazione è già banalmente garantita daldenominatore della (A.18/1:
b D t ^ n D t ^ d tds
D 0 t ^ d tdt
D 00 PP ^ d
dt
PPj PP j
!
D 00 PP ^ RP
j PP j C PP d
dt
1
j PP j
!D 000 PP ^ RP :
Cerchio osculatore
Sia P una curva regolare. Riceve il nome di cerchio osculatore a P , nel punto P0 DP.t0/, il limite a cui tendono i cerchi passanti perP.t0/,P.t0C�/,P.t0C�0/, quando� ¤ �0 tendono a 0. Si dimostra che il cerchio osculatore ha raggio pari al raggio dicurvatura �, e centro posto a distanza � da P0, nella direzione in cui punta la normaleprincipale n.
A.3 Trasformazioni lineari, matrici
Raccogliamo in questa sezione alcune proprietà notevoli del calcolo matriciale. Sianou; v vettori di dimensione n, e siano A;B W Rn ! R
n trasformazioni lineari da Rn in

328 Appendix A Richiami di calcolo
sé. Detta fe1; : : : ; eng una base ortonormale di Rn, indicheremo rispettivamente confui ; i D 1; : : : ; ng e faij ; i; j D 1; : : : ; ng le componenti del vettore u, e gli elementidella matrice che rappresenta A, nella base data.
Componenti, elementi di matrice
L’i-esima componente del vettore u è data da ui D ei � u . Analogamente, l’elemen-to aij della matrice che rappresenta la trasformazione lineare A nella stessa base èdato da
aij D ei � Aej : (A.19)
Vettore trasformato
Applicando la trasformazione lineare A al vettore u si ottiene il vettore v D Au, dicomponenti
vi D ei � v D ei � Au D ei � A
nXjD1
uj ej
!
DnXjD1
�ei � Aej
�uj D
nXjD1
aijuj D aij uj :
Nell’ultimo passaggio della precedente espressione è stata sottintesa, utilizzando lanotazione einsteniana, la somma sull’indice ripetuto j . D’ora in avanti tale notazionesarà ripetutamente utilizzata ove non sorgano ambiguità di interpretazione.
Trasformazione trasposta
Chiameremo trasformazione trasposta di A, e la indicheremo con AT , la trasforma-zione che gode della proprietà
u � Av D AT u � v 8u; v 2 Rn: (A.20)
È semplice mostrare a partire dalla (A.19) che la trasformazione trasposta esiste, èunica, e i suoi elementi di matrice sono:�
aT�ij
D aj i :
La trasposta del prodotto di due trasformazioni non coincide con il prodotto delletrasposte. Infatti:
u � �AB�v D u � A�Bv� D AT u � Bv D BTAT u � v ;da cui risulta che �
AB�T D BTAT :

A.3 Trasformazioni lineari, matrici 329
Una trasformazione lineare si dice simmetrica se coincide con la propria trasforma-zione trasposta, mentre si dice antisimmetrica se è l’opposto della sua trasposta:
S simmetrica () S D ST
W antisimmetrica() W D �WT :
Ogni trasformazione lineare A può essere scritta in un’unica maniera come sommadi una trasformazione lineare simmetrica più una trasformazione lineare antisimme-trica:
A D S C W ; con S D 12
�A C AT
�e W D 1
2
�A � AT
�:
Prodotto di trasformazioni
Date le trasformazioni lineari A,B, gli elementi di matrice della trasformazione com-posta (o prodotto) AB sono .AB/ij D aik bkj . Sottolineiamo che sia composizionedi trasformazioni lineari che, di conseguenza, il prodotto delle loro matrici non sonocommutativi: AB ¤ BA.
Trasformazione inversa
Sia I la trasformazione identica, i cui elementi di matrice sono:
iij D ıij D(1 se i D j
0 se i ¤ j;
dove è stato introdotto il simbolo di Kronecker ıij . Chiameremo trasformazione in-versa di A, e la indicheremo con A�1, la trasformazione che gode della proprietàAA�1 D A�1A D I. Come vedremo in seguito, non tutte le trasformazioni linea-ri ammettono una trasformazione inversa. La trasformazione inversa del prodotto didue trasformazioni (se esiste) non coincide con il prodotto delle inverse. Infatti:�
AB� �AB
��1 D I H) B�AB
��1 D A�1 H) �AB
��1 D B�1A�1:
Traccia, determinante
Si chiamano invarianti scalari quelle combinazioni degli elementi di matrice di unatrasformazione lineare che non dipendono dalla particolare base rispetto alla quale lamatrice è stata calcolata. Si dimostra che una trasformazione lineare a valori in Rn
ammette n invarianti scalari linearmente indipendenti, ma nelle nostre applicazionifaremo uso di solo due di essi: la traccia e il determinante.

330 Appendix A Richiami di calcolo
• La traccia di una trasformazione lineare è la somma degli elementi diagonali diuna sua qualunque matrice:
trA DnXiD1
ai i D ei � Aei :
La traccia è un’operazione lineare:
tr�A C �B
� D trA C � trB se ;� 2 R:• Definiamo il determinante di una trasformazione lineare in modo iterativo, attra-
verso la Regola di Laplace. Sia A W Rn ! Rn una trasformazione lineare.
– Se n D 1, detA D a11 D e1 �Ae1. (In questo caso, il determinante coincidecon la traccia.)
– Se n > 1, per ogni i; j D 1; : : : ; n introduciamo la matrice ottenuta can-cellando dalla matrice di A l’i-esima riga e la j -esima colonna. Detto mij ildeterminante della matrice risultante, definiamo
detA DnXjD1
.�1/iCjaijmij�qualunque sia i
�:
Osserviamo che questa definizione consente di esprimere il determinante di unamatrice di ordine n come combinazione lineare di n determinanti di matrici diordine .n � 1/.In particolare, se n D 2 risulta detA D a11a22 � a12a21, mentre per n D 3
troviamo:
detA D a11a22a33 C a21a32a13 C a12a23a31
� a13a22a31 � a12a21a33 � a23a32a11 :Il determinante gode delle seguenti proprietà:
det�AB
� D det�BA� D �
detA� �
detB�
det�AT� D detA ; det
�A�1� D �
detA��1
u ^ v D det
0@e1 e2 e3ux uy uzvx vy vz
1A ; u � v ^ w D det
0@ux uy uzvx vy vzwx wy wz
1AAu � Av ^ Aw D �
detA�u � v ^ w :
Invertibilità
Si dimostra che condizione necessaria e sufficiente affinché una trasformazione li-neare A sia invertibile à che il suo determinante non sia nullo. Sotto tale ipotesi,gli elementi di matrice della trasformazione inversa si costruiscono come segue. Sia

A.3 Trasformazioni lineari, matrici 331
nuovamentemij il determinante della matrice ottenuta eliminando l’i-esima riga e laj -esima colonna dalla matrice che rappresenta A. Allora:
�a�1�
ijD .�1/iCjmj i
detA:
Gruppo ortogonale
Una trasformazione lineare Q si dice ortogonale se conserva tutti i prodotti scalari,vale a dire se
Qu � Qv D u � v 8u; v 2 Rn: (A.21)
In particolare, una trasformazione ortogonale conserva il modulo di ogni vettore, egli angoli formati tra vettori. Applicata a una base ortonormale, quindi, una trasfor-mazione ortogonale fornisce una nuova base ortonormale. Si può dimostrare che valeanche il viceversa: la trasformazione che manda una base ortonormale in una baseortonormale è necessariamente ortogonale.
La composizione di due trasformazioni ortogonali è ortogonale. Infatti, se Q e Rsono ortogonali, si ha:
.RQ/u � .RQ/v D R.Qu/ � R.Qv/ D Qu � Qv D u � v 8u; v 2 Rn:La (A.21) implica che le trasformazioni ortogonali sono caratterizzate dalla proprietà
QQT D QTQ D I () Q�1 D QT : (A.22)
In particolare, tutte le trasformazioni ortogonali risultano invertibili, e sia le lorotrasposte che le loro inverse sono ortogonali. Chiameremo gruppo ortogonale l’in-sieme di tutte le trasformazioni ortogonali.
Il determinante di una trasformazione ortogonale può assumere solo i valori C1 e�1. Infatti, la (A.22) implica
det�QQT
� D �detQ
�det
�QT
� D �detQ
�2 D det I D 1 H) detQ D ˙1:In particolare, si chiamano rotazioni le trasformazioni ortogonali il cui determinanteè pari a C1.
Cambi di base
Siano fe1; : : : ; eng e ff1; : : : ; fng due basi ortonormali, e sia Q la trasformazione or-togonale che le collega:
ei D Qfi ; fi D Q�1ei D QT ei ; per i D 1; : : : ; n:
Siano rispettivamente fui ; i D 1; : : : ; ng e fu0i ; i D 1; : : : ; ng le componenti di un
vettore u nelle due basi. Tali componenti sono legate dalla seguente relazione:
u0i D fi � u D QT ei � u D ei � Qu D .Qu/i D qijuj :

332 Appendix A Richiami di calcolo
Allo stesso modo, detti rispettivamente faij ; i; j D 1; : : : ; ng e fa0ij ; i; j D 1; : : : ; ng
gli elementi della matrice che rappresenta A nelle due basi, si ha:
a0ij D fi �Afj D QT ei �AQT ej D ei �QAQT ej D �
QAQT�ij
D qikaklqjl : (A.23)
Autovalori, autovettori
Uno scalare si dice autovalore della trasformazione lineare A, e un vettore u ¤ 0si dice autovettore di A, associato a , se vale la relazione
Au D u :
Si dimostra che gli autovalori sono tutte e sole le radici del polinomio caratteristico:
det�A � I� D 0:
Diagonalizzabilità
Una trasformazione lineare si dice diagonalizzabile se esiste una base ortonormalefe1, : : : , eng nella quale la sua matrice è diagonale, vale a dire nella quale
ei � Aej D 0 se i ¤ j H) aij D ıiji : (A.24)
Se una trasformazione è diagonalizzabile, la base in cui si diagonalizza è com-posta da suoi autovettori, e gli elementi diagonali sono suoi autovalori. Infatti, dalla(A.24) segue che
Aei D i ei : (A.25)
Utilizzando la regola di trasformazione di base (A.23), si osserva che se una trasfor-mazione è diagonalizzabile deve essere simmetrica. Infatti, in una qualunque baseottenuta dalla precedente attraverso la trasformazione ortogonale Q,
a0ij D qikakN qjN D qikıkNkqjN D qikkqjk D a0
j i :
Si dimostra che la simmetria non è solo condizione necessaria, bensì anche condizio-ne sufficiente per la diagonalizzabilità di una trasformazione lineare: le trasforma-zioni diagonalizzabili sono tutte e sole le trasformazioni simmetriche.
Trasformazioni antisimmetriche
Sia W D �WT . L’immagine Wv di un qualunque vettore v è ortogonale al vettorestesso. Infatti,
Wv � v D v � WT v D �v � Wv H) Wv � v D 0 8 v 2 Rn:Inoltre, detW D 0, se la dimensione n dello spazio su cui agisceW è dispari, poiché
detW D detWT D det� � W
� D .�1/n detW:

A.4 Diagonalizzazione simultanea di matrici simmetriche 333
Consideriamo infine in maggior dettaglio il caso n D 3. Attraverso un calcolo espli-cito è possibile dimostrare che esiste uno e un solo vettore !, detto vettore assiale diW, tale che
Wu D ! ^ u 8u 2 R3: (A.26)
Le componenti di ! in una qualunque base sono legate agli elementi di matrice diWcome segue:
!1 D w32 D �w23; !2 D w13 D �w31; !3 D w21 D �w12:Sottolineiamo ancora come la seconda e la terza delle precedenti relazioni seguanodalla prima attraverso semplici permutazioni cicliche degli indici 1 ! 2 ! 3 ! 1.
A.4 Diagonalizzazione simultanea di matrici simmetriche
Rienunciamo e dimostriamo ora la proprietà utilizzata a pag. 289, riguardante il ca-rattere delle radici del polinomio caratteristico (12.49).
Teorema A.2 (Diagonalizzazione simultanea). Sia A una matrice N � N , simme-trica e definita positiva, tale cioè che valgano le proprietà A D AT e v � Av > 0 perogni v ¤ 0. Sia inoltre B una matrice N � N simmetrica. Esiste un base di vettorifv1; : : : ; vN g, ortonormale rispetto al prodotto scalare
.u; v/ D u � Av ;in cui A e B si trasformano rispettivamente nella matrice identità e in una matricediagonale. Inoltre, tutte le radici del polinomio caratteristico
det .B � �A/ D 0 (A.27)
sono reali (ed occupano le posizioni diagonali nella suddetta rappresentazione di B).
Dimostrazione. Indicato con u �v il prodotto scalare canonico, definiamo il seguenteprodotto scalare, associato ad A:
.u ; v/ D u � Av: (A.28)
È semplice verificare che l’operazione bilineare definita in (A.28) gode di tutte leproprietà che definiscono un prodotto scalare, grazie alla simmetria di A e al suocarattere definito positivo.
La matrice C D A�1B è simmetrica rispetto al prodotto scalare (A.28). Infatti
.u ; Cv/ D u � A �A�1B�v D Bu � v D A
�A�1B
�u � v D .Cu ; v/:
Per il Teorema spettrale, esiste quindi una base fv1; : : : ; vN g, composta da autovettoridi C, che è ortonormale rispetto al prodotto scalare (A.28):
Cvk D �kvk 8 k D 1; : : : ; N; (A.29)
e inoltre .vj ; vk/ D ıjk , dove ıjk indica il simbolo di Kronecker. Inoltre, gli auto-valori f�k ; k D 1; : : : ; N g sono reali.

334 Appendix A Richiami di calcolo
Nella base appena identificata, A e B sono rappresentate dalla matrice identità edalla matrice diagonale i cui elementi diagonali sono gli autovalori di C. Infatti, dettiajk e bjk i loro elementi di matrice, abbiamo
ajk D vj � Avk D .vj ; vk/ D ıjk;
bjk D vj � Bvk D vj � A.Cvk/ D vj � A.�kvk/ D �k ıjk :
Se, infine, sostituiamo la definizione diC in (A.29) troviamo immediatamente chei suoi autovalori sono esattamente le radici del polinomio caratteristico (A.27):
Cvk D A�1Bvk D �kvk ) Bvk D �k Avk ) det .B � �k A/ D 0:
ut
Passiamo ora alla dimostrazione di un teorema utilizzato a pag. 292.
Teorema A.3 (Segnatura di una matrice simmetrica). Sia A una matrice N �N ,simmetrica e definita positiva, tale cioè che valgano le proprietà A D AT e v �Av > 0 per ogni v ¤ 0. Sia inoltre B una matrice N � N simmetrica. Il polinomiocaratteristico
det .B � �A/ D 0
ha un numero di radici positive, nulle e negative esattamente pari al numero di au-tovalori positivi, nulli e negativi della matrice B.
Dimostrazione. Introduciamo nuovamente il prodotto scalare canonico u �v, insiemeal prodotto scalare .u ; v/ D u � Av, associato ad A.
Sia fe1; : : : ; eN g una base ortonormale di autovettori di B, scelta in modo che irispettivi autovalori f�1; : : : ; �N g siano ordinati in modo decrescente. In particola-re, i primi r autovettori saranno positivi, i successivi s saranno nulli e i rimanentiN � r � s saranno negativi. Siano inoltre VC, V0 e V� i sottospazi rispettivamentegenerati dai primi r , dai successivi s e dagli ultimi N � r � s autovettori.
La matrice B è definita positiva in VC, nulla in V0 e definita negativa in V�, in-dipendentemente dal prodotto scalare utilizzato per calcolarne il suo segno. Infatti,dato
v DrXiD1
vi ei 2 VC .v ¤ 0/
si ha
.Bv; v/ D Bv � Av DrX
i;jD1vivjBei � Aej D
rXi;jD1
�ivivj ei � Aej
� �r
rXi;jD1
vivj ei � Aej D �rv � Av > 0:
Nella precedente dimostrazione si è usato il fatto che �r è il più piccolo degli auto-valori positivi, e che A è definita positiva. In modo analogo si dimostra che Bv D 0se v 2 V0, e infine che .Bv; v/ < 0 se v 2 V� n f0g.

A.5 Richiami di equazioni differenziali ordinarie 335
Cambiare il prodotto scalare non modifica quindi i sottospazi VC, V0 e V� su cuiBha segno definito. Sono dunque invarianti anche il numero di autovalori positivi, nul-li o negativi della matrice B relativi alla matrice A che definisce il prodotto scalare.Tali numeri, che coincidono con le dimensioni degli autospazi VC, V0 e V�, formanola segnatura della matrice simmetrica B.
A.5 Richiami di equazioni differenziali ordinarie
Le equazioni del moto sono equazioni differenziali del secondo ordine. Al fine diagevolare la loro risoluzione, riepiloghiamo in questo paragrafo alcuni risultati chele riguardano, insieme alle tecniche di risoluzioni di alcuni tra i più comuni tipi diequazioni differenziali di interesse meccanico.
Definizione A.4. Un’equazione differenziale è una equazione scalare la cui incognitaè una funzione di una variabile y.t/, e che coinvolge una o più derivate della funzio-ne incognita. L’ordine n 2 N di un’equazione differenziale è l’ordine della più altaderivata presente nell’equazione.
Le equazioni differenziali di cui ci occupiamo in questa trattazione (e in questotesto) sono normalmente dette ordinarie. Esistono anche le equazioni differenzialialle derivate parziali, che coinvolgono funzioni incognite di più variabili. Essendosolo interessati alle prime, sottintenderemo sempre l’aggettivo ordinarie.
Definizione A.5. Un problema differenziale è una equazione differenziale, cui sonostate aggiunte una o più condizioni iniziali o condizioni al bordo, vale a dire condi-zioni che fissano il valore della funzione incognita o delle sue derivate in uno o piùpunti del suo dominio.
Un problema differenziale può ammettere un qualunque numero (finito o infinito)di soluzioni. Il teorema fondamentale che garantisce l’esistenza e unicità delle solu-zioni di un problema differenziale è il Teorema di Cauchy, che abbiamo enunciato apag. 118.
Passiamo ora all’analisi di particolari tipi risolubili di equazioni e problemi dif-ferenziali. Per ognuno di essi forniremo la struttura delle eventuali soluzioni, senzaalcuna dimostrazione, per le quali rimandiamo il lettore a un testo di Analisi.
A.5.1 Equazioni differenziali a variabili separabili
Definizione A.6. Un’equazione differenziale del primo ordine si dice a variabili se-parabili se può essere espressa nella forma Py.t/ D a.t/ b.y/.
Proposizione A.7. Il problema differenziale
Py.t/ D a.t/ b.y/; y.t0/ D y0
ammette una e una sola soluzione in un intervallo aperto contenente t D t0 se lafunzione a è continua e b è C 1 (vale a dire se è derivabile con derivata continua).

336 Appendix A Richiami di calcolo
Inoltre, se b.y0/ D 0 la soluzione è costante: y.t/ � y0 per ogni t . Se inveceb.y0/ ¤ 0, la soluzione soddisfaZ y.t/
y0
du
b.u/DZ t
t0
a.�/ d�:
Le equazioni differenziali a variabili separabili sono di interesse meccanico nellostudio di sistemi sui quali agiscano forze dipendenti dalla velocità, e nessuna forzadipendente dalla posizione. In tal caso l’equazioneF.v/ D ma diventa un’equazionea variabili separabili nella incognita v.t/, come mostriamo di seguito.
Esempio A.8. Determiniamo il moto di un punto materiale di massa m vincolato amuoversi lungo l’asse x sottoposto alla forza resistiva F.v/ D �.t/v, con coeffi-ciente di resistenza crescente nel tempo: .t/ D �t .
Risolviamo il problema differenziale
Pv.t/ D ��t v; v.0/ D v0:
Abbiamo:
a.t/ D ��t H) A.t/ D �Za.t/ dt D �1
2�t2
b.v/ D v H) B.v/ DZdv
vD log jvj:
Supposto v0 > 0 il moto del punto soddisfa v.t/ D v0e�t2=2.
Equazioni differenziabili integrabili per quadrature
Un tipo di equazioni differenziali del secondo ordine riconducibili a equazioni a va-riabili separabili è il seguente
Ry.t/ D f .y.t//: (A.30)
Tale equazione descrive il moto di un sistema a un grado di libertà, sottoposto a unaforza posizionale f .y/. Se moltiplichiamo la (A.30) per Py possiamo ricavarne unintegrale primo:
Py Ry D Py f .y/ H) d
dt
�1
2Py2 � U.y/
�D 0 H) 1
2Py2 � U.y/ D E;
(A.31)dove U.y/ è una primitiva di f .y/ ed E è una costante di integrazione che si deter-mina attraverso le condizioni iniziali. L’equazione (A.31) è ora un’equazione diffe-renziale del primo ordine a variabili separabili. Possiamo infatti porre
Py D ˙p2.E C U.y// ;
dove la scelta del segno di Py va effettuata in base al segno di Py.t0/. Considerando per

A.5 Richiami di equazioni differenziali ordinarie 337
esempio il segno positivo si ottiene quindiZ y.t/
y0
dup2.E C U.u//
D t � t0;
che fornisce in modo implicito la soluzione y.t/.
A.5.2 Equazioni differenziali lineari
Definizione A.9. Una equazione differenziale di ordine n si dice lineare se assumela seguente espressione
an.t/y.n/.t/C an�1.t/y.n�1/.t/C � � � C a1.t/ Py.t/C a0.t/y.t/ D f .t/:
Un’equazione differenziale lineare si dice omogenea se il termine noto f .t/ è nul-lo. Si dice invece a coefficienti costanti se i coefficienti fak ; k D 0; 1; : : : ; ng nondipendono dal tempo.
Proposizione A.10. Le soluzioni di un’equazione differenziale lineare omogenea diordine n formano uno spazio vettoriale di ordine n, nel senso che sono tutte e sole lecombinazioni lineari di n soluzioni fondamentali fy1.t/; : : : ; yn.t/g.
Tutte le soluzioni di un’equazione differenziale lineare non omogenea di ordine nsono esprimibili come somma di una qualunque soluzione particolare yp.t/ più unadelle soluzioni dell’equazione differenziale lineare omogenea associata (quella cioèche si ottiene eliminando il termine noto f .t/).
Il problema della determinazione delle soluzioni di un’equazione differenziale li-neare si può quindi separare in due parti: la ricerca di n soluzioni fondamentali del-l’equazione omogenea associata, e la ricerca di una soluzione particolare.
Equazioni differenziali lineari del primo ordine
Consideriamo il problema differenziale
Py.t/C a.t/ y.t/ D f .t/; y.t0/ D y0: (A.32)
L’equazione omogenea associata è un’equazione a variabili separabili. Una solu-zione fondamentale è quindi fornita da y1.t/ D e�A.t/, dove A.t/ indica una primi-tiva di a.t/.
Una soluzione particolare dell’equazione differenziale in (A.32) è data da
yp.t/ D F.t/e�A.t/; con F.t/ DZf .t/ eA.t/dt:
La soluzione generale è infine y.t/ D yp.t/CC1y1.t/, dove C1 si determina impo-nendo la condizione iniziale in (A.32).

338 Appendix A Richiami di calcolo
Esempio A.11 (Equazioni differenziali lineari del primo ordine a coefficienti costan-ti). Nel caso particolare a.t/ � a0 si ha A.t/ D a0t , e
y.t/ D �F.t/C C1
�e�a0t ; con F.t/ D
Zf .t/ ea0tdt:
Equazioni differenziali lineari del secondo ordine a coefficienti costanti
Consideriamo ora l’equazione differenziale
a Ry.t/C b Py.t/C cy.t/ D f .t/: (A.33)
Equazioni del moto di questo tipo rappresentano il moto di un punto (di massa a in(A.33)) sottoposto alle seguenti forze: una forza di resistenza Fr D �b Py, con coeffi-ciente resistivo b, una forza elastica Fel D �cy, con costante elastica c, e una forzaesterna f .t/, eventualmente dipendente dal tempo, spesso detta forzante.
La struttura delle soluzioni fondamentali dipende dalle radici 1; 2 del polinomiocaratteristico associata
a2 C bC c D 0: (A.34)
Sottolineiamo che nell’esempio appena illustrato i tre coefficienti a; b; c sono nonnegativi, il che implica che la parte reale delle radici di (A.34) sarà certamente nonpositiva.
• Se 1 ¤ 2 2 R (vale a dire b2 � 4ac > 0) le soluzioni fondamentali sono
y1.t/ D e�1t e y2.t/ D e�2t :
• Se 1 D 2 D 2 R (vale a dire b2 � 4ac D 0) le soluzioni fondamentali sono
y1.t/ D e�t e y2.t/ D t e�t :
• Se 1;2 D ˛˙ iˇ 2 C (vale a dire b2 � 4ac < 0) le soluzioni fondamentali sono
y1.t/ D e˛t cosˇt e y2.t/ D e˛t sinˇt:
Dall’analisi del segno precedentemente effettuata possiamo ricavare che nelle ap-plicazioni suddette le soluzioni fondamentali saranno limitate per ogni t . Se inoltre laparte reale delle radici risulta strettamente negativa (il che succede se b > 0), le so-luzioni fondamentali tenderanno a zero all’aumentare del tempo. Per questo motivoqueste soluzioni vengono spesso denominate transienti.
La ricerca di una soluzione particolare può essere più complessa in generale. Con-sideriamo qui un caso particolare di forzante f .t/, che copre buona parte delle ap-plicazioni pratiche vale a dire il caso f .t/ D A cos!t , dove A è l’ampiezza dellaforzante, e ! la sua frequenza. La struttura della soluzione particolare dipende da ! edalle radici del polinomio caratteristico (A.34). Più precisamente, bisogna controllarese una delle soluzioni fondamentali coincide o meno con cos!t .

A.5 Richiami di equazioni differenziali ordinarie 339
• Se 21;2 ¤ �!2 le soluzioni fondamentali non sono oscilllanti, o sono oscillanticon frequenza diversa da quella della forzante. In tal caso la soluzione particolareè del tipo
yp.t/ D A
a.!2 C 21/.!2 C 22/
�12 � !2� cos!t � .1 C 2/! sin!t
�:
(A.35)Particolarmente interessante è il caso in cui 1;2 D ˙!o, vale a dire il caso in cuiin assenza di forzanti il sistema oscillerebbe con una sua frequenza naturale !o.In tal caso la (A.35) si semplifica e fornisce
yp.t/ D A cos!t
a.!2o � !2/ : (A.36)
La struttura della soluzione particolare mostra come l’ampiezza dell’oscillazio-ne provocata dalla forzante cresca illimitatamente quando ! ! !o, vale a direquando la frequenza della forzante si avvicina a quella naturale del sistema.
• Se 21;2 D �!2, la soluzione particolare (A.36) non esiste, in quanto !o D ! e ildenominatore in esso contenuta si annulla. In questo caso la soluzione particolareassume l’espressione
yp.t/ D A
4a!2Œcos!t C 2!t sin!t� : (A.37)
La soluzione (A.37) aumenta illimitatamente al passare del tempo. Questo effettoè noto come risonanza e può provocare effetti devastanti sui sistemi meccanici.Ogni sistema in equilibrio stabile, infatti, possiede delle frequenze naturali a cuipuò oscillare, come dimostra la nostra trattazione dei modi normali oscillatori (ve-di § 12.7.2). La presenza di forzanti (anche di ampiezza limitata) con frequenzeanche solo vicine a quelle naturali può indurre delle oscillazioni talmente ampieda distruggere il sistema.

Riferimenti bibliografici
Allo studente che volesse approfondire gli argomenti trattati nel presente volume si ricor-da che il trattato italiano di Meccanica Razionale per eccellenza rimane ancora oggi il LeviCivita e Amaldi [11]. Un trattato in tre volumi con molti esempi ed esercizi, la cui letturaparticolarmente interessante richiede ovviamente un particolare impegno.Libri di testo che sicuramente hanno ispirato il presente volume sono quelli di Benvenuti,Bordoni e Maschio [4], di Cercignani [7] e di Grioli [10].Tutti questi testi sono stati pensati per i corsi di Meccanica Razionale delle Facoltà di In-gegneria. Il libro di Gallavotti [9] invece permette uno sguardo diverso sugli argomenti quitrattati in quanto il volume è stato pensato soprattutto per i corsi di studio in Fisica una pro-spettiva abbastanza diversa. Il volume di Fasano e Marmi [8] permette invece di approfondiresoprattutto gli aspetti matematici della Meccanica Analitica.Per quanto riguarda gli eserciziari segnaliamo i testi [2, 3, 6, 12] che, almeno in parte, seguonola filosofia del presente volume e che permettono di avere un buon numero di esercizi e temidi esame con cui mettersi alla prova.Infine, si segnalano due testi in lingua inglese [1] e [5] la loro consultazione può essere interes-sante non solo per il contenuto proposto ma anche per apprendere la terminologia meccanicaanglosassone.
1. M.F. Beatty: Principles of Engineering Mechanics: Volume 1 & 2. Springer, New York(2006).
2. G. Belli, C. Morosi, E. Alberti: Meccanica Razionale. Esercizi. Maggioli Editore (2009).3. P. Benvenuti, G. Maschio: Esercizi di Meccanica Razionale. Edizioni Compomat, Rieti
(2010).4. P. Benvenuti, P. Bordoni, G. Maschio: Lezioni di Meccanica Razionale. Edizioni
Compomat, Rieti (2013).5. P. Biscari, C. Poggi, E. G. Virga: Mechanics Notebook. Liguori, Napoli (2005).6. S. Bressan, A. Grioli: Temi svolti dell’esame di meccanica razionale. Cortina, Padova
(1998).7. C. Cercignani: Spazio, tempo, movimento. Zanichelli, Bologna (1977).8. A. Fasano, S. Marmi: Meccanica Analitica con Elementi di Meccanica Statistica e dei
Continui. Boringhieri, Torino (2002).9. G. Gallavotti: Meccanica Elementare. Boringhieri, Torino (1986).
10. G. Grioli: Lezioni di Meccanica Razionale. Cortina, Padova (2002).
Biscari P., Ruggeri T., Saccomandi G., Vianello M.: Meccanica Razionale.Unitext – La Matematica per il 3+2 69DOI 10.1007/978-88-470-5495-0, © Springer-Verlag Italia 2013

342 Riferimenti bibliografici
11. T. Levi Civita, U. Amaldi: Lezioni di Meccanica Razionale. Zanichelli, Bologna (1923).Riedizione a cura di E. Cirillo, G. Maschio, T. Ruggeri, G. Saccomandi per le EdizioniCompomat, Rieti (2012).
12. A. Muracchini, T. Ruggeri, L. Seccia: Esercizi e Temi d’Esame di Meccanica Razionale.Esculapio, Bologna (2013).

Indice analitico
accelerazione, 2, 21– assoluta, 40– atto di moto rigido, 21– centripeta, 36– complementare, 41– componente
normale, 4radiale, 6tangente, 4trasversa, 6
– composizione, 41– Coriolis, 40, 119– gravità, 170– relativa, 40– trascinamento, 40, 119angoli– Cardano, 15– Eulero, 12, 28, 160, 222
nutazione, 12precessione, 12rotazione propria, 12
– rotazione, 24, 48ascissa curvilinea, 2, 175, 324asse– centrale, 101– giroscopico, 87– istantanea rotazione, 35– moto, 32– nodi, 12atto di moto, 30, 72– elicoidale, 31– rigido, 30– rotatorio, 31, 35
– rototraslatorio, 30, 40, 67, 73– traslatorio, 30, 35, 40– virtuale, 48, 50, 59, 64
irreversibile, 60reversibile, 60
attrito, 128– angolo, 127– coefficiente
dinamico, 178, 251statico, 128, 178, 251, 255, 317
– cono, 129, 159autofrequenza, 289autovalore relativo, 289autovettore relativo, 289
baricentro, 76– composizione, 78– moto, 190, 211, 217– piano diametrale, 78barriera, 179biforcazione– diagramma, 146– punti, 147Binet, Formula, 185binomi lagrangiani, 266braccio, 97
caratteristiche cinetiche, 70, 298carrello, 49, 245Cauchy– Teorema, 118– teoria degli sforzi, 303
Biscari P., Ruggeri T., Saccomandi G., Vianello M.: Meccanica Razionale.Unitext – La Matematica per il 3+2 69DOI 10.1007/978-88-470-5495-0, © Springer-Verlag Italia 2013

344 Indice analitico
centro– istantanea rotazione, 35– pressione, 155– vettori paralleli, 103cerchio– apsidale, 186– limite, 186– osculatore, 327Chasles, Teorema, 35componente lagrangiana– forze attive, 112, 265– forze dissipative, 295– opposto delle forze d’inerzia, 265configurazione– confine, 60, 138– ordinaria, 60, 138coordinate– libere, 47, 55, 62, 72– polari, 5coppia, 98– inerzia, 262Coriolis, Teorema, 40coseni direttori, 10costante elastica, 109Coulomb-Morin, Legge, 127, 153, 178, 251,
317curvatura, 4, 325– raggio, 4, 176, 325curve, 323
densità di massa, 75determinismo, 117, 126– lagrangiano, 267Dirichlet-Lagrange, Teorema, 277dissipazione, 295
effetto giroscopico, 236elasticità, coefficiente, 157energia– cinetica, 174, 204
corpo rigido, 205sistema olonomo, 207Teorema, 221
– meccanica, 174– potenziale, 109, 174equazione– costitutiva, 308equazione/i– cardinali
dinamica, 208, 218, 221statica, 149
– fondamentale della dinamica, 116– Maggi, 299– Newton, 116, 122– pura, 259
dinamica, 175, 213statica, 136
– simbolica della dinamica, 264equilibrio, 125– corpo rigido
appoggiato, 155con asse fisso, 160con punto fisso, 160
– equazioni (continui)indefinite, 305intrinseche, 312
– instabile, 142, 147– punto materiale, 127– relativo, 162– scala, 159– sistemi, 130
olonomi, 136– stabile, 142, 147– treppiede, 156Eulero– asta, 307– Teorema, 275
forma differenziale, 103forze, 95, 124– apparenti, 119– attive, 96– centrali, 108, 182– centrifuga, 163, 170– componente tangenziale, 106, 107– conservative, 106, 112, 141, 182– Coriolis, 119, 162, 189, 192– costanti, 95, 107– coulombiana, 109– dissipative, 278– distribuite, 304– elastiche, 95, 109– esterne, 121– gravitazionale, 95, 109, 169– inerzia, 260– interne, 121– perdute, 260– peso, 95, 107, 170

Indice analitico 345
– posizionali, 95, 105, 177– resistenti, 105– resistenza, 95– sistemi, 96– trascinamento, 119, 162, 170funzione lipschitziana, 118
Galileo– Teorema, 39– trasformazioni, 41, 116girazione– raggio, 81giroscopio, 87, 228– tenacia, 237– tendenza al parallelismo, 237gradi di libertà, 72gravitazione universale, Legge, 187
Hamiltoniana, 274Hooke, Legge, 157Huygens-Steiner, Teorema, 82
inerzia– assi principali, 87– ellissoide, 88
centrale, 88– matrice, 86– momento, 81
assi concorrenti, 85geometrico, 82principale, 87
– prodotto, 86– tensore, 86– terna principale, 87instabilità– criterio di Chetaev, 281– criterio di Hagedorn-Taliaferro, 281– criterio di Liapunov, 280integrali primi, 210– energia, 174, 177, 275– Hamiltoniana, 274– momento cinetico, 273– velocità areolare, 184invariante scalare, 98– cinematico, 32, 35
Keplero, Leggi, 187– critica, 192Koenig, Teorema, 204
Lagrange, Equazioni, 264Lagrangiana, 269lavoro– cammino chiuso, 105– elementare, 103– forze conservative, 106– sistema, 109
olonomo, 111rigido, 110
– virtuale, 111legge oraria, 2, 106
manicotto, 246massa, 116, 123– inerziale, 116– matrice, 207, 268– ridotta, 191meta asintotica, 181modo normale, 286– iperbolico, 290– lineare, 290– oscillatorio, 289molla, 109– torsionale, 111, 293momento, 97– interno, 304
flettente, 304torcente, 304
– risultante, 97, 110momento delle quantità di moto, 198– baricentrale, 200– sistema rigido, 200moto, 34– centrale, 182– limitato, 180, 186– per inerzia, 177– periodico, 180– periodico., 186– relativo a un punto, 191, 198– rigido, 9
elicoidale, 25piano, 26, 35polare, 27precessione, 27rettilineo, 22rettilineo uniforme, 22rotatorio, 25rototraslatorio, 23traslatorio, 22

346 Indice analitico
Mozzi– asse, 32– Teorema, 33
operazione elementare, 99orbita, 1osservatore, 1– fisso, 37– inerziale, 116– mobile, 37– solidale a un corpo rigido, 9
parallelogramma delle forze, 117pattino, 246pendolo composto, 240piano– diametrale, 77– direttore, 26– inclinato, 127– simmetria materiale, 77piccole oscillazioni, 281– frequenza, 283Poisson– Formule, 18– Teorema, 17poligono di appoggio, 155potenza, 105potenziale, 106, 174– coppia costante, 111– derivata direzionale, 107– efficace, 186– forza centrale, 108– forza costante, 107– forza gravitazionale, 109– forza peso, 108– molla, 109– molla torsionale, 111– stazionarietà, 141, 281precessione, 27– regolare, 28– terrestre, 229principio– azione e reazione, 117, 124– d’Alembert, 260– invarianza
distanze, 37intervalli temporali, 37
– lavori virtuali, 135, 147, 149– reazioni vincolari, 119, 259
– sovrapposizione delle forze, 124– statica dei sistemi deformabili, 303problema dei due corpi, 190problemi diretti e inversi, 173prodotto– misto, 322– scalare, 319– vettoriale, 320punto, 1, 319– inversione, 181– isolato, 116– solidale a un corpo rigido, 9
quantità di moto, 197quiete, 125
reazioni vincolari, 127, 147– ideali, 134relazione simbolica della dinamica, 262retta, 323– applicazione, 96
risultante, 101– tangente, 324risultante, 97rotazione, 11, 15– infinitesima, 21, 25, 62
virtuale, 62– permanente, 225
sforzo interno, 304– assiale, 304– taglio, 304simmetria materiale, 77sistema– G-determinato, 213– iperstatico, 64– ipervincolato, 64– isolato, 117, 213– isostatico, 65– labile, 64sistemi di vettori applicati– equilibrati, 98– equivalenti, 99– riduzione, 99– vettori paralleli, 98sollecitazione– equivalente, 239– interna, 149, 211, 220

Indice analitico 347
spostamento– elementare, 2, 21, 50, 62, 103, 111
rigido, 21– finito, 21– infinitesimo, 2– virtuale, 51, 60, 62, 111, 263
corpo rigido con punto fisso, 131corporigido con asse fisso, 133irreversibile, 60punto appoggiato, 131puro rotolamento, 133reversibile, 60, 263rigido, 62
stabilità– equilibrio
alla Liapunov, 276asintotica, 279in senso statico, 142
– rotazioni permanenti, 226superficie equipotenziale, 108svincolamento, 151
terna intrinseca, 4traiettoria, 1trasformazione lineare, 327– antisimmetrica, 332– diagonalizzabile, 332– invertibile, 330– ortogonale, 331– rotazione, 331– simmetrica, 332travi, 305
velocità, 1– angolare, 17, 18, 21, 24, 28, 35
composizione, 41
– assoluta, 39– componente
radiale, 6tangente, 4trasversa, 6
– composizione, 39, 96– relativa, 39– strisciamento, 66, 252– trascinamento, 39, 40– virtuale, 48, 51, 59, 60
irreversibile, 58reversibile, 58
versore– binormale, 4, 176, 326– normale principale, 4, 176, 326– tangente, 4, 106, 175, 324vettore– assiale, 29, 333– posizione, 1, 39– risultante, 110vincolo, 47, 59, 119– anolonomo, 69, 70, 297– bilatero, 58, 60, 263– contatto, 66– fisso, 59– ideale, 134, 149, 259– inestensibilità, 302– liscio, 130– mobile, 55, 59– mobilità, 65, 68– olonomo, 47, 59, 65, 67, 68, 259– puro rotolamento, 65–67, 134, 249– unilatero, 57, 60, 128, 246
Weierstrass, Teoria, 179

Collana Unitext – La Matematica per il 3+2
A cura di:A. Quarteroni (Editor-in-Chief)L. AmbrosioP. BiscariC. CilibertoG. van der GeerG. RinaldiW.J. Runggaldier
Editor in Springer:F. [email protected]
Volumi pubblicati. A partire dal 2004, i volumi della serie sono contras-segnati da un numero di identificazione. I volumi indicati in grigio si riferi-scono a edizioni non piu in commercio.
A. Bernasconi, B. CodenottiIntroduzione alla complessita computazionale1998, X+260 pp, ISBN 88-470-0020-3
A. Bernasconi, B. Codenotti, G. RestaMetodi matematici in complessita computazionale1999, X+364 pp, ISBN 88-470-0060-2
E. Salinelli, F. TomarelliModelli dinamici discreti2002, XII+354 pp, ISBN 88-470-0187-0
S. BoschAlgebra2003, VIII+380 pp, ISBN 88-470-0221-4
S. Graffi, M. Degli EspostiFisica matematica discreta2003, X+248 pp, ISBN 88-470-0212-5

S. Margarita, E. SalinelliMultiMath – Matematica Multimediale per l’Universita2004, XX+270 pp, ISBN 88-470-0228-1
A. Quarteroni, R. Sacco, F.SaleriMatematica numerica (2a Ed.)2000, XIV+448 pp, ISBN 88-470-0077-72002, 2004 ristampa riveduta e corretta(1a edizione 1998, ISBN 88-470-0010-6)
13. A. Quarteroni, F. SaleriIntroduzione al Calcolo Scientifico (2a Ed.)2004, X+262 pp, ISBN 88-470-0256-7(1a edizione 2002, ISBN 88-470-0149-8)
14. S. SalsaEquazioni a derivate parziali - Metodi, modelli e applicazioni2004, XII+426 pp, ISBN 88-470-0259-1
15. G. RiccardiCalcolo differenziale ed integrale2004, XII+314 pp, ISBN 88-470-0285-0
16. M. ImpedovoMatematica generale con il calcolatore2005, X+526 pp, ISBN 88-470-0258-3
17. L. Formaggia, F. Saleri, A. VenezianiApplicazioni ed esercizi di modellistica numericaper problemi differenziali2005, VIII+396 pp, ISBN 88-470-0257-5
18. S. Salsa, G. VerziniEquazioni a derivate parziali – Complementi ed esercizi2005, VIII+406 pp, ISBN 88-470-0260-52007, ristampa con modifiche
19. C. Canuto, A. TabaccoAnalisi Matematica I (2a Ed.)2005, XII+448 pp, ISBN 88-470-0337-7(1a edizione, 2003, XII+376 pp, ISBN 88-470-0220-6)

20. F. Biagini, M. CampaninoElementi di Probabilita e Statistica2006, XII+236 pp, ISBN 88-470-0330-X
21. S. Leonesi, C. ToffaloriNumeri e Crittografia2006, VIII+178 pp, ISBN 88-470-0331-8
22. A. Quarteroni, F. SaleriIntroduzione al Calcolo Scientifico (3a Ed.)2006, X+306 pp, ISBN 88-470-0480-2
23. S. Leonesi, C. ToffaloriUn invito all’Algebra2006, XVII+432 pp, ISBN 88-470-0313-X
24. W.M. Baldoni, C. Ciliberto, G.M. Piacentini CattaneoAritmetica, Crittografia e Codici2006, XVI+518 pp, ISBN 88-470-0455-1
25. A. QuarteroniModellistica numerica per problemi differenziali (3a Ed.)2006, XIV+452 pp, ISBN 88-470-0493-4(1a edizione 2000, ISBN 88-470-0108-0)(2a edizione 2003, ISBN 88-470-0203-6)
26. M. Abate, F. TovenaCurve e superfici2006, XIV+394 pp, ISBN 88-470-0535-3
27. L. GiuzziCodici correttori2006, XVI+402 pp, ISBN 88-470-0539-6
28. L. RobbianoAlgebra lineare2007, XVI+210 pp, ISBN 88-470-0446-2
29. E. Rosazza Gianin, C. SgarraEsercizi di finanza matematica2007, X+184 pp,ISBN 978-88-470-0610-2

30. A. MachìGruppi – Una introduzione a idee e metodi della Teoria dei Gruppi2007, XII+350 pp, ISBN 978-88-470-0622-52010, ristampa con modifiche
31 Y. Biollay, A. Chaabouni, J. StubbeMatematica si parte!A cura di A. Quarteroni2007, XII+196 pp, ISBN 978-88-470-0675-1
32. M. ManettiTopologia2008, XII+298 pp, ISBN 978-88-470-0756-7
33. A. PascucciCalcolo stocastico per la finanza2008, XVI+518 pp, ISBN 978-88-470-0600-3
34. A. Quarteroni, R. Sacco, F. SaleriMatematica numerica (3a Ed.)2008, XVI+510 pp, ISBN 978-88-470-0782-6
35. P. Cannarsa, T. D’AprileIntroduzione alla teoria della misura e all’analisi funzionale2008, XII+268 pp, ISBN 978-88-470-0701-7
36. A. Quarteroni, F. SaleriCalcolo scientifico (4a Ed.)2008, XIV+358 pp, ISBN 978-88-470-0837-3
37. C. Canuto, A. TabaccoAnalisi Matematica I (3a Ed.)2008, XIV+452 pp, ISBN 978-88-470-0871-3
38. S. GabelliTeoria delle Equazioni e Teoria di Galois2008, XVI+410 pp, ISBN 978-88-470-0618-8
39. A. QuarteroniModellistica numerica per problemi differenziali (4a Ed.)2008, XVI+560 pp, ISBN 978-88-470-0841-0
40. C. Canuto, A. TabaccoAnalisi Matematica II2008, XVI+536 pp, ISBN 978-88-470-0873-12010, ristampa con modifiche

41. E. Salinelli, F. TomarelliModelli Dinamici Discreti (2a Ed.)2009, XIV+382 pp, ISBN 978-88-470-1075-8
42. S. Salsa, F.M.G. Vegni, A. Zaretti, P. ZuninoInvito alle equazioni a derivate parziali2009, XIV+440 pp, ISBN 978-88-470-1179-3
43. S. Dulli, S. Furini, E. PeronData mining2009, XIV+178 pp, ISBN 978-88-470-1162-5
44. A. Pascucci, W.J. RunggaldierFinanza Matematica2009, X+264 pp, ISBN 978-88-470-1441-1
45. S. SalsaEquazioni a derivate parziali – Metodi, modelli e applicazioni (2a Ed.)2010, XVI+614 pp, ISBN 978-88-470-1645-3
46. C. D’Angelo, A. QuarteroniMatematica Numerica – Esercizi, Laboratori e Progetti2010, VIII+374 pp, ISBN 978-88-470-1639-2
47. V. MorettiTeoria Spettrale e Meccanica Quantistica – Operatori in spazi di Hilbert2010, XVI+704 pp, ISBN 978-88-470-1610-1
48. C. Parenti, A. ParmeggianiAlgebra lineare ed equazioni differenziali ordinarie2010, VIII+208 pp, ISBN 978-88-470-1787-0
49. B. Korte, J. VygenOttimizzazione Combinatoria. Teoria e Algoritmi2010, XVI+662 pp, ISBN 978-88-470-1522-7
50. D. MundiciLogica: Metodo Breve2011, XII+126 pp, ISBN 978-88-470-1883-9
51. E. Fortuna, R. Frigerio, R. PardiniGeometria proiettiva. Problemi risolti e richiami di teoria2011, VIII+274 pp, ISBN 978-88-470-1746-7

52. C. PresillaElementi di Analisi Complessa. Funzioni di una variabile2011, XII+324 pp, ISBN 978-88-470-1829-7
53. L. Grippo, M. SciandroneMetodi di ottimizzazione non vincolata2011, XIV+614 pp, ISBN 978-88-470-1793-1
54. M. Abate, F. TovenaGeometria Differenziale2011, XIV+466 pp, ISBN 978-88-470-1919-5
55. M. Abate, F. TovenaCurves and Surfaces2011, XIV+390 pp, ISBN 978-88-470-1940-9
56. A. AmbrosettiAppunti sulle equazioni differenziali ordinarie2011, X+114 pp, ISBN 978-88-470-2393-2
57. L. Formaggia, F. Saleri, A. VenezianiSolving Numerical PDEs: Problems, Applications, Exercises2011, X+434 pp, ISBN 978-88-470-2411-3
58. A. MachìGroups. An Introduction to Ideas and Methods of the Theory of Groups2011, XIV+372 pp, ISBN 978-88-470-2420-5
59. A. Pascucci, W.J. RunggaldierFinancial Mathematics. Theory and Problems for Multi-period Models2011, X+288 pp, ISBN 978-88-470-2537-0
60. D. MundiciLogic: a Brief Course2012, XII+124 pp, ISBN 978-88-470-2360-4
61. A. MachìAlgebra for Symbolic Computation2012, VIII+174 pp, ISBN 978-88-470-2396-3
62. A. Quarteroni, F. Saleri, P. GervasioCalcolo Scientifico (5a ed.)2012, XVIII+450 pp, ISBN 978-88-470-2744-2

63. A. QuarteroniModellistica Numerica per Problemi Differenziali (5a ed.)2012, XVIII+628 pp, ISBN 978-88-470-2747-3
64. V. MorettiSpectral Theory and Quantum MechanicsWith an Introduction to the Algebraic Formulation2013, XVI+728 pp, ISBN 978-88-470-2834-0
65. S. Salsa, F.M.G. Vegni, A. Zaretti, P. ZuninoA Primer on PDEs. Models, Methods, Simulations2013, XIV+482 pp, ISBN 978-88-470-2861-6
66. V.I. ArnoldReal Algebraic Geometry2013, X+110 pp, ISBN 978-3-642–36242-2
67. F. Caravenna, P. Dai PraProbabilita. Un’introduzione attraverso modelli e applicazioni2013, X+396 pp, ISBN 978-88-470-2594-3
68. A. de Luca, F. D’AlessandroTeoria degli Automi Finiti2013, XII+316 pp, ISBN 978-88-470-5473-8
69. P. Biscari, T. Ruggeri, G. Saccomandi, M. VianelloMeccanica Razionale2013, XII+352 pp, ISBN 978-88-470-5494-3
La versione online dei libri pubblicati nella serie e disponibilesu SpringerLink. Per ulteriori informazioni, visitare il sito:http://www.springer.com/series/5418












![Pitagora - icgallico.gov.it · Capitolo1 Pitagora CopiaromanadelIsec.a.C.dioriginalegrecoconservatanei MuseiCapitolinidiRoma Pitagora[2] (Samo, tra il 580 e il 570 – Metaponto,](https://static.fdocumenti.com/doc/165x107/5c66dc2309d3f252168cfa43/pitagora-capitolo1-pitagora-copiaromanadelisecacdioriginalegrecoconservatanei.jpg)