
Analisi Numerica - di.univr.it · Introduzione Metodologia Generale Rappresentazione a stati...
39
Debora Botturi Laboratorio di Sistemi e Segnali Analisi Numerica Debora Botturi ALTAIR http://metropolis.sci.univr.it
Transcript of Analisi Numerica - di.univr.it · Introduzione Metodologia Generale Rappresentazione a stati...

Debora Botturi Laboratorio di Sistemi e Segnali
Analisi Numerica
Debora BotturiALTAIR
http://metropolis.sci.univr.it

Introduzione
● Argomenti
● Osservazioni
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Introduzione

Introduzione
● Argomenti
● Osservazioni
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Argomenti
Rappresentazione di sistemi con variabili di stato;
Tecniche di integrazione numerica
Obiettivo: risolvere sistemi di equazioni differenziali con metodinumerici.
Introduzione
● Argomenti
● Osservazioni
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Osservazioni
Non é sempre pratico analizzare le equazioni differenzialiattraverso la loro forma esplicita
In tali casi possono essere usati metodi numerici pertrovare una soluzione per un’equazione differenziale
La soluzione trovata é generalmente in forma di grafico odinsieme di numeriTali soluzioni possono quindi essere usate per analizzarecasi di studio specifici
La soluzione é data velocemente grazie alle tecniche usate(iterative che puntano all’azzeramento dell’errore)
Ma senza una rappresentazione esplicita il sistema non puóessere capito e manipolato

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Metodologia Generale
Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Rappresentazione a stati
Il processo generale per analizzare un sistema prevede:Mettere le equazioni in forma standard (variabili di stato)Integrarle con un metodo numerico
Ad ogni istante di tempo un sistema ha uno stato
Per identificare le variabili di stato si usano i seguenti fattoriLe variabili dovrebbero descrivere gli elementi cheimmagazzinano energiaLe variabili devono essere indipendentiGli stati dovrebbero descrivere gli elementi del sistema

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Rappresentazione a stati
Gli stati del sistema vengono usati per scrivereun’equazione del primo ordine lineare:
x = Ax + Bu
y = Cx + Du
x = vettore degli statiu = vettore di inputA = matrice di transizione relativa agli statiB = matrice che relaziona l’input all’outputy = valore che puó essere trovato direttamenteC = matrice di transizione relativa agli statiD = matrice che relaziona l’input all’output
L’equazione di output non é sempre richiesta, ma puóessere usata per calcolare nuovi valori di output

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esempio
Nota: per avere un insieme risolvibile di equazioni differenziali dobbiamo avere lo stessonumero di equazioni e di variabili. Se abbiamo poche equazioni si deve sviluppare unaequazione sfruttando relazioni non ancora usate. Se ci sono troppe equazioni laridondanza deve essere eliminata.
Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esercizio
Mettere l’equazione nella forma a stati:
F = Mx
soluzione:
x = v
v =F
M

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esempio

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esercizio
Sviluppare l’equazione a stati del seguente sistema
Soluzione:
x = v
v = vKd
M+ x
Ks
M

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esercizio
Sviluppare l’equazione a stati del seguente sistema
Soluzione:
x1 = v1
x2 = v2
v1 = v1
−Kd1
M1
+ x1
−Ks1
M1
+ v2
−Kd1
M1
+F
M1
v2 = v2
−Kd1
M2
+ x2
−Ks1 − Ks2
M2
+ v1
−Kd1
M2
+Ks1
M2

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Osservazioni
In alcuni casi le equazioni differenziali hanno piú di untermine di ordine piú elevato e quindi non possono essereridotte (ad esempio una equazione del secondo ordine condue variabili derivate seconde non puó essere trasformatanella forma a stati)
Si usa in questi casi una variabile fittizia che sostituisce ledue variabili di piú alto grado
Questo ad esempio succede nei sistemi meccanici quandole masse non sono considerate

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esempio
Data l’equazione:3y + 2y = 5u
Passo 1: mettere entrambe le derivate del primo ordine dallaparte sinistra dell’equazione
3y − 5u = −2y
Passo 2: Sostituire la parte sinistra dell’equazione con unavariabile fittizia
q = 3y − 5u q = −2y
Passo 3: Risolvere l’equazione usando la variabile fittizia,quindi risolvere per y come fosse un’equazione di output
q = −2y y =q + 5u
3

Introduzione
Metodologia Generale
● Rappresentazione a stati
● Rappresentazione a stati
● Esempio
● Esercizio
● Esempio
● Esercizio
● Esercizio
● Osservazioni
● Esempio
● Esempio
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
EsempioIn altri casi é possibile eliminare i termini ridondanti attraverso manipolazioni algebriche
Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Integrazione Numerica
Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
OsservazioniCalcoli ripetitivi possono essere usati per trovare unasoluzione approssimativa di un insieme di equazionidifferenzialiPartendo da condizioni iniziali date l’equazione é risolta conpiccoli passi temporali.
Piú piccoli si prendono gli intervalli di tempo maggiore sarál’accuratezza del risultato ottenuto
Il processo di analisi segue i seguenti passi:Generare l’equazione generale che modella il sistemaSelezionare la variabile di statoRiarrangiare l’equazione nella forma a statiAggiungere equazioni se necessario per renderlarisolvibileCalcolare e risolvere il sistema di equazioni
Per quest’ultimo passo di analisi diversi tool sono statiimplementati per risolvere equazioni differenziali in forma distato.

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
EsempioIn altri casi é possibile eliminare i termini ridondanti attraverso manipolazioni algebriche
Selezioniamo alcuni valori per i parametri dell’equazione e la funzione di input
Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
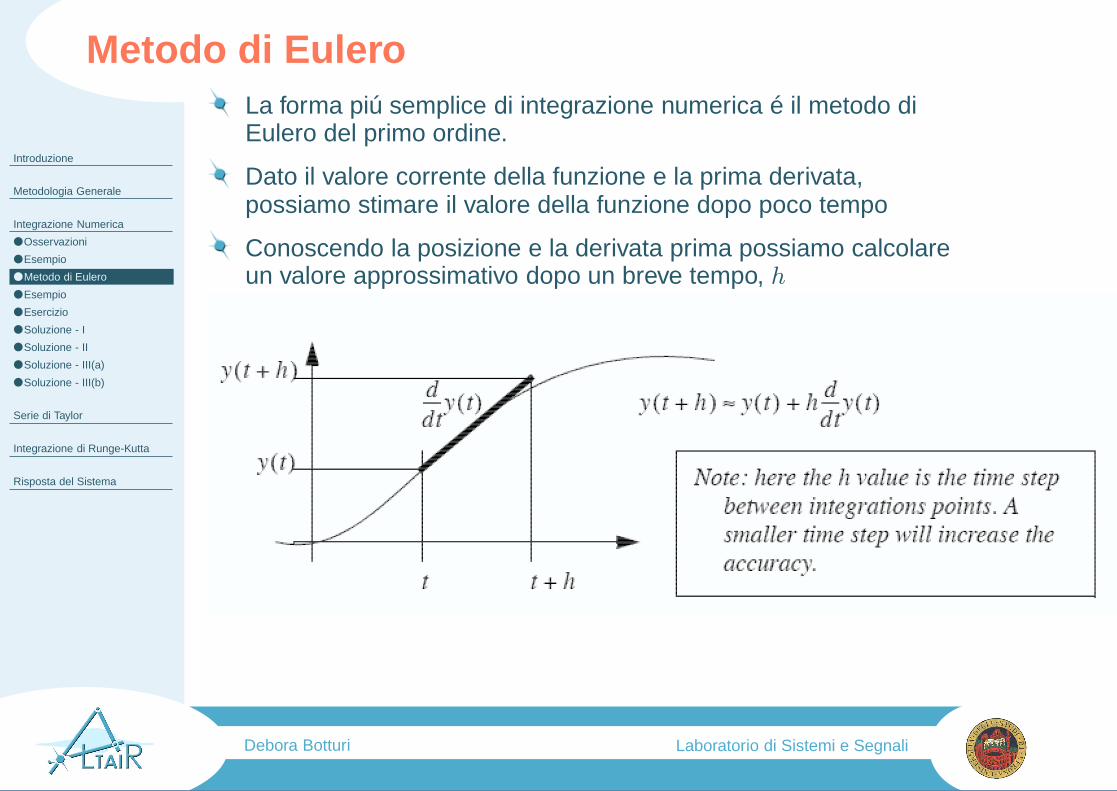
Metodo di EuleroLa forma piú semplice di integrazione numerica é il metodo diEulero del primo ordine.
Dato il valore corrente della funzione e la prima derivata,possiamo stimare il valore della funzione dopo poco tempo
Conoscendo la posizione e la derivata prima possiamo calcolareun valore approssimativo dopo un breve tempo, h

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
EsempioSoluzione della equazione di Newton usando il metodo di Eulero. In questo esempiocalcoliamo la velocitá integrando l’accelerazione causata dalla forza, L’accelerazione éusata direttamente nell’equazione di Eulero.
Nota: Se il sistema é di secondo ordine sono necessari due valori per il calcolo

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Esercizio
Usare l’integrazione del primo ordine per risolvere l’equazionedifferenziale da 0 a 10 secondi con un intervallo di 1 secondo.
x + 0.1x = 5

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Soluzione - IRisoluzione di un’equazione di stato con un programma inlinguaggio C

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Soluzione - IIRisoluzione di un’equazione di stato con un programma inlinguaggio Java

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Soluzione - III(a)Risoluzione di un’equazione di stato con un programma in Scilab

Introduzione
Metodologia Generale
Integrazione Numerica
● Osservazioni
● Esempio
● Metodo di Eulero
● Esempio
● Esercizio
● Soluzione - I
● Soluzione - II
● Soluzione - III(a)
● Soluzione - III(b)
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
Soluzione - III(b)

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
● Osservazioni
● Esempio
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Serie di Taylor

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
● Osservazioni
● Esempio
Integrazione di Runge-Kutta
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
OsservazioniL’integrazione numerica funziona bene con funzionismorzate
Quando incontriamo funzioni con andamento ondulatoriopossiamo usare equazioni di integrazione di piú alto ordinecome l’equazione della serie di Taylor
La prima parte dell’equazione della serie di Taylor é ugualealla equazione di Eulero, ma poi i termini di grado piúelevato aumentano l’accuratezzaL’equazione alla variabili di stato di un sistema non é adattaallo sviluppo in serie di Taylor propio perché quest’ultimarichiede termini di ordine superiore al primo.

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
● Osservazioni
● Esempio
Integrazione di Runge-Kutta
Risposta del Sistema
EsempioEsempio di applicazione della serie di Taylor. Data l’equazione differenziale dobbiamocalcolare le derivate e poi sostituirle nell’equazione di Taylor. Il risultato é usato percalcolarei valori iterativamente

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Integrazione di Runge-Kutta
Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
Debora Botturi Laboratorio di Sistemi e Segnali
Osservazioni
L’integrazione del primo ordine dá una ragionevolesoluzione all’equazione differenziale
L’accuratezza puó migliorare usando derivate di ordine piúelevato che compensano per la curvatura della funzione
La tecnica di Runge-Kutta usa equazioni del primo ordine(e quindi puó venir usata la rappresentazione di stato) perstimare le derivate di ordine superiore, quindi si ottieneaccuratezza elevata senza richiedere piú del primo ordinedell’equazione differenziale

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
EsempioEsempio di integrazione di Runge-Kutta del quarto ordine. Lafunzione f(t) é l’equazione di stato. Per ogni istante di tempo i valorida F1 a F4 sono calcolati in sequenza e poi usati nell’equazionefinale per trovare il valore successivo.

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
EsempioLa soluzione inizia mettendo l’equazione di stato in forma matriciale e definendo lecondizioni iniziali. Poi vengono calcolati i quattro fattori di integrazione, che poi vengonocombinati per dare il valore finale dopo un passo.

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
Esercizio
F = M(d
dt)2x
usando:
x(0) = 1
x(0) = 2
h = 0.5s
F = 10
M = 1

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
Soluzione I - parte IMetodo di integrazione di Runge-Kutta per un sistemamassa-moll-smorzatore con un programma in linguaggio C

Debora Botturi Laboratorio di Sistemi e Segnali
Soluzione I - parte II

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
● Osservazioni
● Esempio
● Esempio
● Esercizio
● Soluzione I - parte I
● Soluzione I - parte II
● Soluzione II
Risposta del Sistema
Soluzione IIMetodo di integrazione di Runge-Kutta per un sistema massa-moll-smorzatore con unprogramma in Scilab

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
● Osservazioni
● Esempio
Debora Botturi Laboratorio di Sistemi e Segnali
Risposta del Sistema
Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
● Osservazioni
● Esempio
Debora Botturi Laboratorio di Sistemi e Segnali
Osservazioni
In molti casi il risultato di un’analisi numerica é un graficood una tabella
Dettagli come costanti di tempo e frequenze dismorzamento possono essere ottenute con metodi dianalisi sperimentale
Per determinare la risposta a regime del sistema si usal’equazione di stato in cui le derivate vengono settate alvalore di zero e poi viene risolta l’equazione (vedi esempio)

Introduzione
Metodologia Generale
Integrazione Numerica
Serie di Taylor
Integrazione di Runge-Kutta
Risposta del Sistema
● Osservazioni
● Esempio
Debora Botturi Laboratorio di Sistemi e Segnali
Esempio






![Mod3-Proiezioni assonometriche [modalit compatibilit ] · Corso di Disegno Tecnico Industriale Lucido 26di 53. Esercizio Metodi di Rappresentazione Tecnica, Facoltà di Ingegneria,](https://static.fdocumenti.com/doc/165x107/5c6771e109d3f2bb148bad8b/mod3-proiezioni-assonometriche-modalit-compatibilit-corso-di-disegno-tecnico.jpg)









