Teoria Musicale e Paradigma scientifico Descartes Leibniz Keplero

1 / 24
Sistemi dinamici-Parte 2Problema dei due corpi
AM Cherubini
15 Maggio 2007

Leggi di Keplero
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
2 / 24
1. I pianeti si muovono lungo ellissi, di cui il sole e’ uno deifuochi
2. le ellissi sono percorse con velocita’ areolare costante3. il rapporto tra il quadrato del periodo di rivoluzione e il cubo
del semiasse maggiore e’ costante

3 / 24
A
B

Descrizione del problema
4 / 24
Siano dati due punti A,B ∈ R3 di masse rispettivamente a, b e interagenticon forze interne che dipendono solo da B −A: su A agisce una forzaF(B −A), su B agisce −F(B −A).Per esempio, la forza di gravita’
F = gab
|B −A|2B−A
|B−A|
I parametri del problema sono le coordinate di A e le coordinate di B, lalagrangiana
L(
A, B, A, B)
=1
2
(
aA2 + bB2)
− V (B−A)

Riduzione del problema
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
5 / 24
Mostriamo come il problema dei due corpi si riduce al problemadi un corpo in un potenziale centrale.Conviene mettersi in coordinate baricentriche
G =aA + bB
a + br = B−A (1)
Effettuo il cambio di coordinate
(A,B)←→ (G, r)
invertendo (1). Se m = a + b massa totale si ha
A = G−b
mr B = G +
a
mr

Moto centrale
6 / 24
Se µ = abm
e’ la massa ridotta, nelle nuove coordinate la lagrangiana e’
L′
(
G, r,G, r)
=1
2
(
mG2 + µr
2)
− V (r)
Il vettore G e’ costante (le forze sono interne quindi G si muove di motorettilineo uniforme): una volta fissato il vettore G, il sistema relativo a
L(
A, B, A, B)
si riduce al sistema per (r, r) di lagrangiana
L′′ (r, r) =1
2µr
2 − V (r) moto centrale

Piano dell’eclittica
7 / 24
ri
Ω
M
r = B−A e’ la posizione di B relativamente ad A ma ora in B si mette lamassa µ: e’ un trucco per lavorare nel sistema di riferimento con origine in A
come se fosse inerziale.L’orbita di un punto in potenziale centrale si svolge sul piano normale almomento angolare M (costante!), identificato dall’inclinazione i rispetto a z edall’angolo Ω tra x e la linea dei nodi (intersezione del piano dell’eclittica conxy)

Moto sul piano
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
8 / 24
Se il potenziale dipende dal modulo |r|, in coordinate polarir = |r| e θ la lagrangiana e’
L
(
r, θ, r, θ)
=1
2µ
(
r2 + r2θ2)
− V (r) (2)
θr
pericentro
Con la trasformata di Legendre trovo l’Hamiltoniana
H (pr, pθ, r, θ) =1
2µ
(
p2r +
p2θ
r2
)
+ V (r)

Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
9 / 24
pθ = cost
pθ
θ2π
pθ = µr2θ

Seconda legge di Keplero
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
10 / 24
Se l’orbita e’ r = r(θ), l’area spazzata dal raggio vettore dopo untempo t e’
A(t) =1
2
∫ θ(t)
θ0
r2(θ′)dθ′
La velocita’ areolare e’ costante:
A =1
2r2θ =
pθ
2µvelocita
′areolare (3)

Hamiltoniana per r
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
11 / 24
Fissata pθ, il moto della coppia di variabili coniugate (pr, r) e’governato dall’hamiltoniana
Hpθ(pr, r) =
1
2µp2
r +
1
2
pθ
µr2+ V (r)
︸ ︷︷ ︸
pot. efficace
Nel caso di potenziale gravitazionale
V = −k
rk > 0
il potenziale efficace e’
Ve(r) =1
2
pθ
µr2−
k
r

Potenziale efficace
12 / 24
Ve
r − +
E
r

13 / 24
Ve
r − +
E
r
r
pericentro
pr

14 / 24
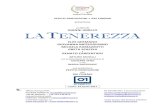
Per E < 0 la variabile r oscilla con periodo Tr tra il pericentro r− el’apocentro r+
Al livello minimo di energia corrisponde la soluzione costante r = r0 cioe’un’orbita circolare nel piano.
r
pr
r r +−
equilibrio
Se E ≥ 0, r ≥ r− e per t→∞ r(t)→∞ e pr(t)→ r∞ costante Nel caso separante E = 0, pr(t)→t→∞ 0

Moto quasi periodico
15 / 24
Per E < 0 , fuori dall’equilibrio, r si muove periodicamente con periodo Tr,quindi il moto della coppia (r, θ) e’ il prodotto di due moti periodici, e sisvolge sul toro T 2; in corrispondenza dell’equilibrio r0 il toro collassa in unacirconferenza.Visti sul piano dell’eclittica i moti quasi-periodici hanno un aspetto a rosetta.
L’idea e’ che la variabile θ, durante il periodo Tr, cioe’ tra due passaggi dalperielio, avanza di una quantita’ ∆θ: se ∆θ
2π∈ Q allora l’orbita e’ chiusa.

Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
16 / 24
L’orbita e’ periodica sul toro (e l’orbita sul piano dell’eclittica e’chiusa) solo se i periodi Tr e Tθdei due moti sono in rapportorazionale: questo avviene solo se
V = −k
roppure V = kr2 k > 0
(teorema di Bertrand)

Variabili di azione-angolo
17 / 24
Il passaggio a coordinate azione-angolo che portino ad una hamiltonianadipendente solo dalle azioni e’ un po’ laborioso: qui ricordiamo solo chele azioni I1e I2 sono funzione di E e di pθ; mentre scelta possile per gli angolie’ prenderne uno corrispondente all’argomento del perielio ω, che avanza di unangolo ∆θ ad ogni passaggio dal perielio ed e’ costante nel caso kepleriano:nel caso kepleriano c’e’ una terza costante del moto indipendente. Problemi diquesto tipo si dicono degeneri
Ωω
pericentroi

Formula di Binet
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
18 / 24
Per un potenziale kepleriano cerchiamo l’equazione r = r(θ) delleorbite possibili, andando a scrivere un’equazione differenziale per
1r(θ)
Si usa la conservazione della velocita’ areolare per ottenereθ = pθ
µr2 = 2cr2 . Allora
dr(θ)
dt=
dr(θ)
dθθ =
2c
r2
dr(θ)
dθ= −2c
d
dθ
1
r
derivando ancora
r = −4c2
r2
d2
dθ2
1
r
L’accelerazione radiale e’ quindi
ar = r − rθ2 = −4c2
r2
(d2
dθ2
(1
r
)
+1
r
)
(4)

19 / 24
Ma
µar = −k
r2(5)
Eguagliando (4) e (5) si ottiene un’equazione per 1r
d2
dθ2
(1
r
)
= −1
r+
4µc2
koscillatore forzato!
Si ha, per C e θ0 costanti arbitrarie
r(θ) =1
k4µc2
+ C cos (θ − θ0)(6)

Equazioni polari di una conica
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
20 / 24
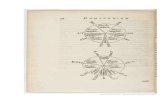
Si dimostra (vedi appendice al capitolo 2 del libro di Benettin)che l’equazione polare di una conica e’
r =p
1 + e cos θ
F
r
P
θ
e e’ l’eccentricita’ cioe’ il rapporto costante tra la distanza deipunti della conica dal fuoco F e dalla direttrice; p un parametro.Se e < 1 ho ellissi, se e = 1 parabole, se e > 1 iperboli

Prima legge di Keplero
21 / 24
Da (6), ponendo
p =4µc2
k=
pθ
µke =
√
1 +2Ep2
θ
µk2(7)
si har(θ) =
p
1 + e cos (θ − θ0)
quindi, per E < 0 l’orbita e’ una ellisse di cui A e’ uno dei fuochi
rθ pericentro
S
s
Se E > 0 l’orbita e’ un’iperbole (es: meteora. Ha energia abbastanza alta dasfuggire al campo gravitazionale e allontanarsi)

Terza legge di Keplero
22 / 24
Nel caso di orbite ellittiche il periodo di rivoluzione T si puo’ calcolare comerapporto tra l’area dell’ellisse e la velocita’ areolare costante A .Se s < S sono i semiassi dell’ellisse A = πsS quindi (scritta (3))
T = 2µπsS
pθ
Da (7), ricordando che l’eccentricita’ per un’ellisse e’ e = sS
si ha allora
T 2
S3=
4π2µ
k
Nel caso della gravitazione k ∝ gµ, quindi
T 2
S3=
4π2
gm
(la massa totale m = a + b ∼ a se a >> b, per esempio se A e’ il sole).

Referenze
Leggi di Keplero
Descrizione del
problema
Riduzione del
problema
Pianodell’eclittica
Moto sul piano
Seconda legge di
Keplero
Hamiltoniana
per r
Potenziale
efficaceMoto quasiperiodico
Variabili diazione-angolo
Formula di BinetEquazioni polaridi una conicaPrima legge diKeplero
Terza legge diKeplero
Referenze
23 / 24
Benettin etc: cap. 2.3,2.4Fasano, Marmi, Meccanica analitica, cap.5 e 11.8Scheck,Mechanics, 1.7Morbidelli,Modern celestial mechanics, primo capitoloGallavotti, Meccanica elementare, 4.9, 4.10

24 / 24
That’s all, folks!