Alla mia famiglia - ingegneria-informatica.unina.it · Indetifier (BSSID) comuni prima di poter...
31
Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Reti di Calcolatori Reti veicolari: controllo e analisi delle prestazioni Anno Accademico 2016/2017 Candidato: Marco Zampella matr. N46/001755
Transcript of Alla mia famiglia - ingegneria-informatica.unina.it · Indetifier (BSSID) comuni prima di poter...

Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Reti di Calcolatori
Reti veicolari: controllo e analisi delle prestazioni
Anno Accademico 2016/2017 Candidato: Marco Zampella matr. N46/001755

Alla mia famiglia

Indice
Indice .................................................................................................................................................. III
Introduzione ......................................................................................................................................... 4
Capitolo 1: Le Reti VANET ................................................................................................................ 5
1.1 Applicazioni ............................................................................................................................... 7
1.2 IEEE 802.11p ............................................................................................................................. 8
1.1 IEEE 1609 .................................................................................................................................. 8
Capitolo 2: Sicurezza nelle Reti VANET .......................................................................................... 10
2.1 Privacy ..................................................................................................................................... 10
2.2 Tipi di attacco ad una rete VANET ......................................................................................... 10
2.3 Protocolli di autenticazione nelle reti VANET ........................................................................ 12
Capitolo 3: Protocolli di routing ........................................................................................................ 15
3.1 Protocollo di Flooding ............................................................................................................. 15
3.2 Protocolli reattivi...................................................................................................................... 16
3.3 Protocolli proattivi ................................................................................................................... 17
3.4 Protocolli ibridi ........................................................................................................................ 18
3.5 Protocolli geografici ................................................................................................................. 19
Capitolo 4: Veicoli a guida autonoma ................................................................................................ 21
4.1 Storia ........................................................................................................................................ 22
4.2 Potenziali vantaggi e svantaggi dei veicoli a guida autonoma................................................. 26
Conclusioni ........................................................................................................................................ 28
Bibliografia ........................................................................................................................................ 29
4
Introduzione
Negli ultimi anni, la rapida crescita e diffusione delle tecnologie wireless relative
all’informazione e alla comunicazione, ha indirizzato la ricerca ad investire nel
campo dell’ Intelligent Transport System (ITS).
L’obiettivo dell’ITS è quello di migliorare la sicurezza e l’efficienza delle modalità
di trasporto e di gestione del traffico attraverso le Vehicular Ad-Hoc Networks
(VANET).
Le reti VANET sono una sottocategoria delle Mobile Ad-hoc Networks (MANET),
create con lo scopo di permettere la comunicazione tra veicoli.
Un veicolo che percorre una strada, invia informazioni relative al traffico, alla
velocità di percorrenza delle auto, allo stato del terreno, alla presenza di incidenti,
che possono essere riutilizzate o scartate dalle altre entità appartenenti alla rete
veicolare.
Il fine di questa tesi è quello di fornire una panoramica sulle reti VANET,
analizzando in particolare il campo della sicurezza e dei protocolli di routing, e la
loro capacità di rendere possibile la guida autonoma dei veicoli.
5
Capitolo 1: Le Reti VANET
Una rete VANET permette ai veicoli di comunicare tra loro oppure con
infrastrutture stradali munite di sensori. Una rete veicolare è composta da dispositivi
a bordo dei veicoli denominati OBU (On Board Unit) e opzionalmente, da
dispositivi fissi installati ai margini della strada denominati RSU (Road Side Unit).
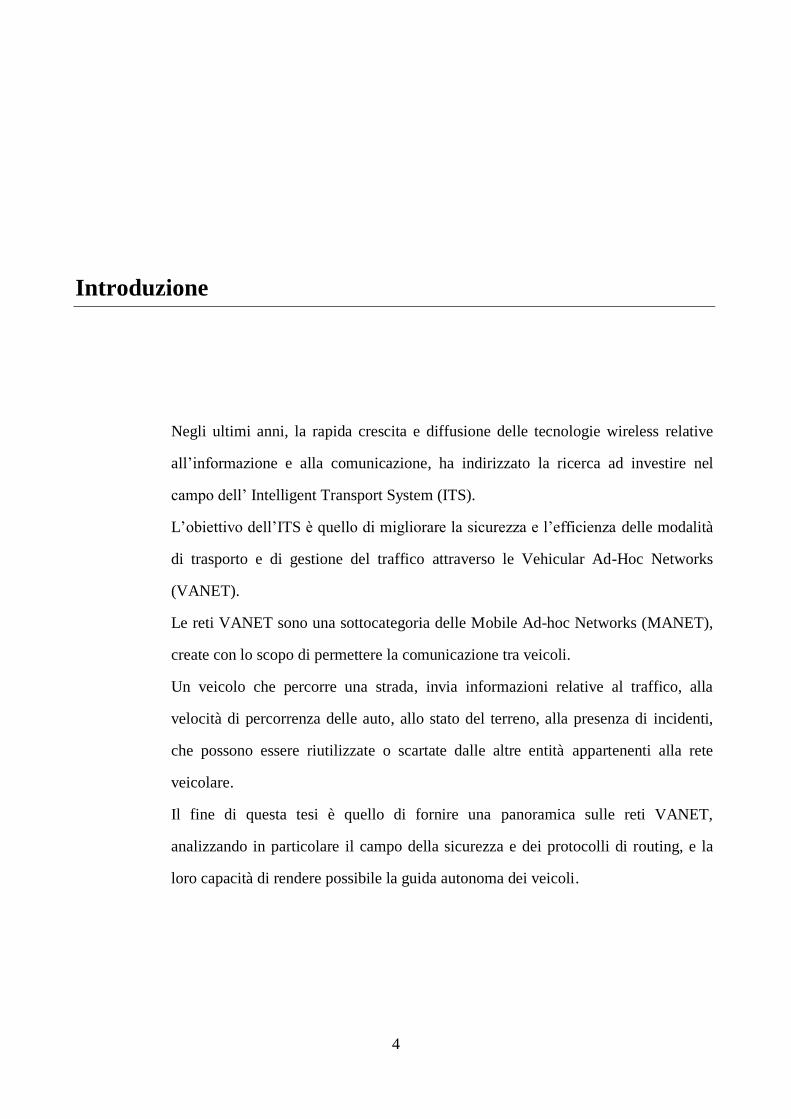
Le entità appartenenti ad una rete VANET possono comunicare in diversi modi [1]:
V2V (Vehicle-to-Vehicle) Propagazione del warning (Fig. 1.1-a): Ci sono
situazioni in cui è necessario inviare un messaggio a un veicolo specifico oppure
ad un gruppo di essi. Ad esempio, quando viene rilevato un incidente, è
necessario inviare un messaggio di avviso ai veicoli in arrivo per aumentare la
sicurezza del traffico.
V2V (Vehicle-to-Vehicle) Comunicazione di gruppo (Fig. 1.1-b): Solo i
veicoli dotati di alcune caratteristiche possono partecipare a questa
comunicazione. Queste caratteristiche possono essere statiche (ad esempio
veicoli della stessa impresa) o dinamiche (ad esempio veicoli sulla stessa area in
un intervallo di tempo).
V2V (Vehicle-to-Vehicle) Beaconing (Fig. 1.1-c): I messaggi beacon vengono
inviati periodicamente ai veicoli vicini. Contengono la velocità corrente e la
posizione del veicolo mittente. I beacon vengono inviati solo ai veicoli

6
comunicanti 1-hop, cioè non vengono inoltrati. In realtà, sono utili per il routing
di protocolli, in quanto consentono ai veicoli di scoprire il migliore vicino per
indirizzare un messaggio.
I2V/V2I (Vehicle to Infrastructure) warning (Fig. 1.1-d): Questi messaggi
vengono inviati dall'infrastruttura (tramite RSU) o da un veicolo quando viene
rilevato un pericolo potenziale. Sono utili per migliorare la sicurezza stradale.
Ad esempio, un'infrastruttura potrebbe inviare un messaggio ad un veicolo che si
avvicina ad un incrocio quando potrebbe verificarsi una possibile collisione.
Figura 1 – Modelli di comunicazione Wireless in una VANET

7
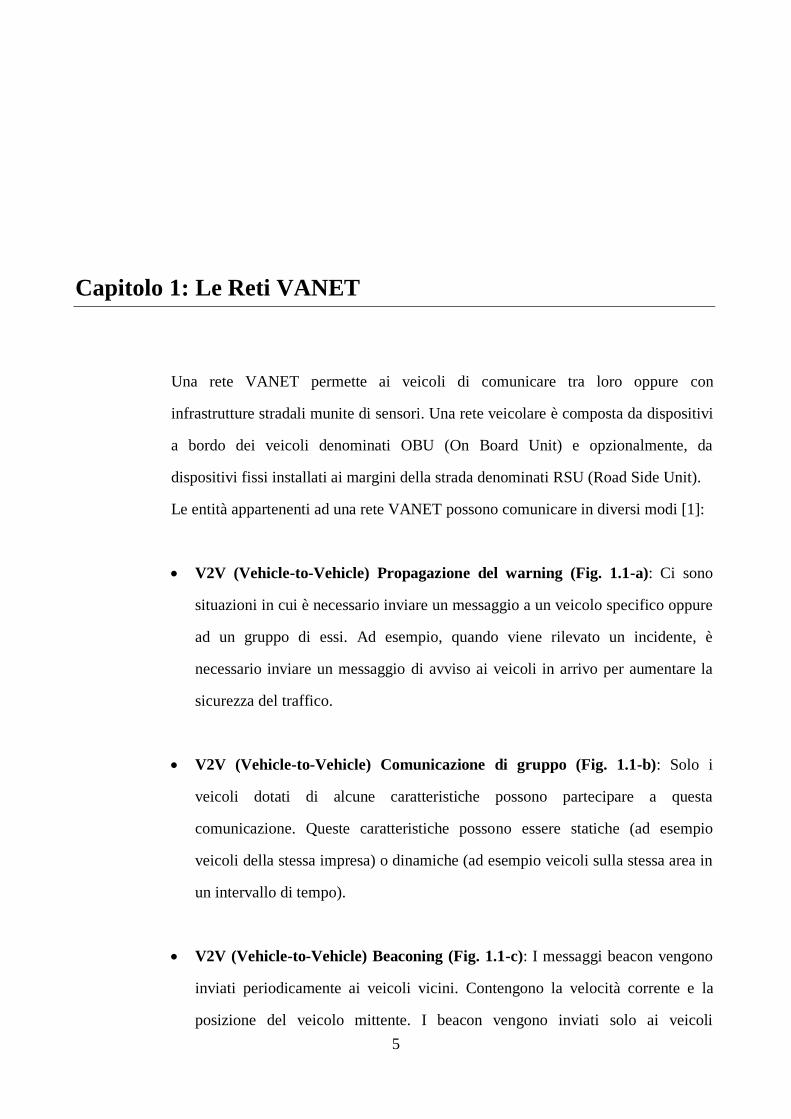
1.1 Applicazioni
Le applicazioni relative alle reti veicolari possono essere di quattro tipi [2]:
Informazioni generali: Servizi per i quali la perdita di messaggi non
rappresenta nessun tipo di problema.
Informazioni di sicurezza: Servizi per i quali è fondamentale non
perdere dei messaggi per non compromettere la sicurezza della guida.
Controllo del tragitto individuale: Servizi utili a migliorare la sicurezza
alla guida
Controllo del tragitto di gruppo: Servizi che cercano di regolare il
flusso generale dei veicoli.
Figura 2 – Classificazione delle applicazioni IVC
8
1.2 IEEE 802.11p
Lo standard 802.11p viene approvato dall’IEEE nel giugno del 2010 con lo scopo di
rendere il livello fisico e MAC di 802.11 idonei alla comunicazione tra veicoli.
Queste estensioni derivano dal fatto che due OBU oppure un OBU e un RSU hanno
la necessità di completare uno scambio di dati in tempi brevi.
In 802.11, in modalità infrastruttura, una stazione deve autenticarsi e associarsi ad
un Access Point prima di poter inviare i propri dati, in modalità ad hoc, le due
stazioni devono associarsi a Service Set Identifier (SSID) e Basic Service Set
Indetifier (BSSID) comuni prima di poter scambiare dati. Entrambe le procedure
implicano un tempo di esecuzione superiore al tempo disponibile di una rete
veicolare.
In 802.11p viene introdotta una modalità che consente a due stazioni di poter
comunicare direttamente tra loro, anche se non fanno parte dello stesso BSS o IBSS,
eliminando le procedure di associazione e autenticazione. In questo modo, il livello
MAC non può utilizzare gli algoritmi di cifratura per verificare le credenziali delle
altre stazioni.
Dato che l’integrità dei dati trasmessi è un requisito fondamentale per le VANET,
l’autenticazione viene gestita dai livelli superiori attraverso lo standard 1609.
1.1 IEEE 1609
Lo standard 1609 definisce il sistema WAVE [3] (Wireless Access in Vehicular
Environments) con l’obiettivo di garantire comunicazioni di tipo V2V e V2I.
La famiglia di standard IEEE 1609 fornisce protocolli per lo scambio wireless di
dati (1609.1), per la sicurezza dei messaggi (1609.2), per i servizi di rete (1609.3),
per la gestione del livello MAC (1609.4).
L’architettura WAVE, definita dallo standard 1609.0, indica che le applicazioni in
esecuzione su OBU e RSU possono comunicare tra loro secondo lo stack

9
protocollare in Figura 3.
Nel sistema WAVE, al protocollo TCP, viene aggiunto il WSMP (WAVE Short
Message Protocol) per rendere lo stack di protocolli maggiormente orientato ai
servizi.
WSMP consente di assegnare un PSID (Provider Service Identifier) ad un
dispositivo che fornisce un servizio invece della coppia IP e porto.
Un’applicazione che fornisce un servizio, invia in broadcast una frame di
management contenente il proprio PSID. Se esiste un’applicazione sul dispositivo
interessata al servizio, il PSID viene memorizzato in modo che tutti i messaggi
inviati dal provider vengono consegnati all’applicazione stessa.
Inoltre l’architettura WAVE utilizza diversi canali di frequenza per lo scambio di
messaggi. Il control channel è utilizzato per l’invio di messaggi di controllo mentre i
service channel sono utilizzati per i messaggi relativi ai servizi offerti dalle
applicazioni.
Figura 3 - Stack di protocollI WAVE

10
Capitolo 2: Sicurezza nelle Reti VANET
Attraverso le reti VANET circolano una grande quantità di informazioni che
possono riguardare la posizione, la velocità o la direzione di un veicolo, messaggi di
emergenza, notizie relative alla navigazione in Internet.
E’ necessario che i servizi messi a disposizione da queste reti rispettino la privacy
degli utenti evitando di tracciare i percorsi e gli spostamenti dei veicoli, controllino
la affidabilità dei dati ed effettuino queste operazioni con un basso costo
computazionale per evitare la perdita dei messaggi.
2.1 Privacy
Il concetto di Privacy esteso alle reti VANET garantisce la riservatezza dei percorsi
svolti da un veicolo. E’ possibile farlo tramite l’utilizzo di Trusted-Third Parties
(TTP) associando ad ogni veicolo uno pseudonimo che cambia periodicamente in
modo da non poter risalire alla sua vera identità [4].
La posizione, invece, può essere modificata attraverso l’uso di una zona fittizia, che
verrà inviata ai servizi basati sulla localizzazione (LBS) al posto delle coordinate
precise, in modo da non individuare l’utente.
2.2 Tipi di attacco ad una rete VANET
In questa sezione vengono presentati i tipi di attacco ad una rete VANET, spiegando

11
come possono essere eseguiti e le loro potenziali conseguenze [1].
Attacchi per l’identificazione e l’autenticazione
Ci sono due tipi di attacchi legati all’identificazione e all’autenticazione:
- Impersonation: L'attaccante finge di essere un'altra entità rubando
credenziali di quest’ultima. In questa modalità, l’attacker cerca di
mostrare il possesso di un attributo (ad esempio, essere membro di
un'impresa) per ottenere qualche beneficio. Ad esempio un veicolo
potrebbe inviare messaggi che lo descrivono come una pattuglia della
polizia.
- Sybil: [5] Questo tipo di attacco può essere effettuato quando un nodo è
in grado di ricevere un dato ma non è in grado di dedurre la posizione del
mittente come nel caso delle reti di sensori. [6] Un attacco di Sybil può
essere effettuato, ad esempio, a danno dei protocolli di routing
geografico. Il routing localizzato richiede spesso nodi per scambiare
informazioni di coordinamento con i propri vicini per percorrere in modo
efficiente i pacchetti geograficamente indirizzati. È ragionevole
aspettarsi che un nodo accetti un singolo insieme di coordinate da
ciascuno dei suoi vicini, ma utilizzando l'attacco di Sybil un avversario
può essere in più di un posto contemporaneamente. Un altro tipo di Sybil
attack è quello relativo all’allocazione delle risorse. Ad esempio, i nodi
vicini che condividono un singolo canale radio potrebbero essere
assegnati ad una frazione di tempo per intervallo durante il quale è
consentita la trasmissione. L'attacco Sybil può essere utilizzato per
consentire ad un nodo dannoso di ottenere una quota iniqua di qualsiasi
risorsa condivisa fornendo all'aggressore maggiori risorse per eseguire
altri attacchi.
12
Attacchi di non-repudiation
Con il termine non-repudiation si descrive la condizione secondo la quale,
nel caso della sicurezza digitale, l'autore di un attacco nega la paternità e la
validità dell’attacco stesso.
La non-repudiation può essere aggirata se due o più entità condividono le
stesse credenziali. Questo attacco è diverso dall' Impersonation descritto
prima poiché, in questo caso, due o più entità colludono per avere una
credenziale comune.
Attacchi alla riservatezza
L'attacco principale ai danni della riservatezza è rappresentato
dall’intercettazione eseguita in un veicolo o in una falsa RSU.
Il loro obiettivo è di ottenere illegalmente l'accesso a dati riservati.
Attacchi sulla disponibilità
Questi attacchi sono generati con lo scopo di annullare la disponibilità del
canale di comunicazione di una rete VANET.
- Denial of Service (DoS): [7] In ambiente VANET, un DoS attack tende
a sovraccaricare il canale di comunicazione e generare problemi di
accesso ai nodi della rete. Lo scopo principale è quello di impedire ai
nodi autentici di accedere ai servizi di rete o di utilizzarne le risorse.
2.3 Protocolli di autenticazione nelle reti VANET
L’assenza di dati sensibili nei pacchetti scambiati tra i veicoli implica l’utilizzo di
protocolli di autenticazione.
In questa sezione verranno descritti tre tipi di autenticazioni: autenticazione
13
simmetrica, autenticazione asimmetrica e autenticazione attraverso i sensori.
Autenticazione Asimmetrica
La procedura di autenticazione asimmetrica prevede che ogni veicolo
possieda le seguenti informazioni:
- Un’ identità elettronica chiamata ELP (Electronic License Plate) oppure
un ECN (Electronic Classic Number) emesso dalle case produttrici di
autoveicoli.
- Una coppia di chiavi, di cui una pubblica e una privata, utili per la
privacy.
L’ autenticazione asimmetrica premette di evitare alcuni degli attacchi
descritti nella sezione precedente:
- Un attacker non può cambiare identità e fingere di essere un altro
veicolo.
- Un attacker non può mutare la traiettoria di un veicolo vittima poiché
l’autenticazione asimmetrica utilizza la tecnica della correlazione dei dati
ricevuti che consiste nel confrontare quest’ultimi con quelli dei nodi
vicini.
- Non può esserci la non-repudiation poiché l’invio dei dati da parte di un
veicolo è firmato con la propria coppia di chiavi che è unica.
Autenticazione Simmetrica
L’autenticazione simmetrica nelle reti VANET viene raramente utilizzata
poiché è meno flessibile rispetto alla cifratura asimmetrica [8].
Questa tecnica possiede però delle chiavi di cifratura di dimensioni più
piccole con conseguente aumento della velocità di calcolo.

14
L’implementazione del protocollo a cifratura simmetrica prevede che tutti gli
elementi appartenenti ad una rete comunichino tra loro.
Appartengono alla rete, i nodi, i dispositivi che associano gli pseudonimi alle
entità reali e le base stations che hanno il compito di inviare in maniera
unidirezionale gli pseudonimi di breve durata.
Autenticazione attraverso i sensori
L’autenticazione attraverso i sensori prevede l’associazione di questi ultimi
ai sistemi di autenticazione descritti in precedenza.
Questa tecnica utilizza il modello delle VANET per la valutazione dei dati.
In questo modello ogni veicolo scarta i pacchetti provenienti da due nodi
distinti appartenenti allo stesso luogo geografico poiché due veicoli non
possono trovarsi nello stesso punto.
Inoltre vengono utilizzate regole per stabilire la veridicità dei dati come
l’utilizzo della ridondanza dato che più dati provenienti da più nodi possono
agevolare l’individuazione di un nodo maligno.

15
Capitolo 3: Protocolli di routing
Le reti VANET rendono possibile la comunicazione tra veicoli utilizzando la
modalità broadcast.
Il routing per le VANET può essere gestito attraverso diversi tipi di protocolli che
possono essere classificati in:
- Flooding
- Reattivi
- Proattivi
- Ibridi
- Geografici
3.1 Protocollo di Flooding
Nel flooding ogni nodo che riceve un pacchetto lo inoltra a tutti i suoi vicini.
La continua ritrasmissione dei messaggi aumenta il numero di pacchetti ridondanti
causando il broadcast storm. Esso si verifica quando il traffico aumenta in maniera
esponenziale riducendo le prestazioni della rete.
Per contrastare il problema del broadcast storm è possibile utilizzare metodi
probabilistici basati su contatore oppure basati sulla posizione [9].
I metodi basati su contatore numerano i messaggi che i nodi ricevono e introducono
un valore di soglia. Quando un nodo riceve un messaggio, incrementa di 1 il
contatore e inizializza un ritardo di trasmissione chiamato RAD (Random

16
Assessment Delay). Se durante il RAD il nodo riceve nuovamente il messaggio
allora incrementa nuovamente il contatore di una unità. Per poter inoltrare il
messaggio ricevuto, il valore del contatore deve essere inferiore a quello di soglia
altrimenti il pacchetto viene scartato.
Il metodo basato sulla posizione ritrasmette o scarta i messaggi ricevuti basandosi
sulla distanza con il mittente. Quando un nodo invia un messaggio, inserisce
nell’header la sua posizione geografica. Il nodo ricevente visualizza la posizione e
calcola tramite GPS la distanza con il mittente.
Se la distanza è inferiore alla soglia stabilita inizialmente dal flooding basato sulla
posizione, allora il nodo ritrasmette il messaggio.
3.2 Protocolli reattivi
I protocolli reattivi individuano un percorso verso una destinazione solo nel
momento in cui un nodo deve trasmettere un pacchetto.
L’utilizzo di questo tipo di protocolli comporta una riduzione dell’overhead legato
al salvataggio dei percorsi per ogni nodo verso ogni destinazione, poiché viene
effettuata una route discovery ogni volta che è necessario trasmettere un pacchetto.
Fanno parte dei protocolli reattivi, il protocollo AODV (Ad hoc on-demand
Distance Vector) e il protocollo DSR (Dynamic Source Routing).
Nel protocollo AODV [10], quando un nodo vuole scoprire un percorso verso la
destinazione, invia un messaggio Route Request in broadcast all’indirizzo IP
255.255.255.255 contenente l’indirizzo del nodo mittente e della destinazione, un ID
univoco del messaggio, un hop count settato a zero da incrementare ogni volta che il
messaggio viene inoltrato ed un sequence number per evitare che si generino dei
cicli di istradamento infiniti quando uno o più nodi lasciano la rete.
Ogni nodo inoltra la Route Request ai propri vicini. Il processo è ripetuto fin quando
il messaggio non arriva al nodo destinazione, il quale risponde inviando un
messaggio Route Reply contenente l’indirizzo del nodo sorgente e del nodo

17
destinazione, il proprio sequence number e l’hop count resettato.
Anche nel protocollo DSR [11], il percorso tra nodo mittente e destinatario è
generato attraverso l’invio in broadcast di messaggi Route Request e Route Reply.
La principale caratteristica di DSR è l’uso del source routing. Ciò vuol dire che ogni
nodo non determina autonomamente a chi inoltrare il messaggio come nel
protocollo AODV, ma il nodo sorgente inserisce nel pacchetto la lista dei nodi da
attraversare per arrivare a destinazione.
Per inviare un pacchetto si avvia la fase di route discovery attraverso un messaggio
Route Request contenente l’indirizzo IP del nodo sorgente e del nodo destinazione.
Ogni nodo che riceve un messaggio, prima di inoltrarlo, salva il percorso nella
propria route cache e aggiunge il proprio indirizzo alla lista con a capo l’IP del nodo
sorgente presente nella Route Request. Quando il pacchetto arriva al nodo
destinazione, quest’ultimo ottiene un percorso completo verso il nodo origine
invertendo la lista presente nella Route Request ricevuta. Il percorso viene
memorizzato nella route cache e utilizzato per inviare il messaggio di risposta Route
Reply.
3.3 Protocolli proattivi
Nei protocolli proattivi ogni nodo cerca di mantenere un percorso aggiornato verso
tutti gli altri nodi della rete ad-hoc. L’utilizzo di questi protocolli elide il ritardo di
consegna dei pacchetti generato dal calcolo del percorso per inviare un pacchetto ad
una destinazione diversa.
Un esempio di protocollo proattivo è OLSR (Optimized Link Stare Routing) [12].
Nel protocollo OLSR, ogni nodo scambia periodicamente dei messaggi UDP con i
propri vicini per costruire una tabella di routing con i percorsi aggiornati verso ogni
possibile destinazione. Per ridurre l’overhead legato all’invio di messaggi a tutti i
nodi della rete, OLSR utilizza la tecnica nota come Multi-Point Relaying. Ogni nodo
sceglie un insieme di nodi vicini, chiamati Multi-Point Relay, per ritrasmettere i

18
propri pacchetti. La scelta viene effettuata in modo che il messaggio generato dal
nodo origine riesca a raggiungere tutti i vicini a distanza di due hop.
3.4 Protocolli ibridi
I protocolli ibridi combinano i punti di forza degli algoritmi reattivi e proattivi per
ottenere performance di routing migliori.
ZRP (Zone Routing Protocol) [13] è un protocollo ibrido che introduce il concetto di
routing zone di dimensioni fisse per stabilire quale tipo di algoritmo utilizzare per
ricavare il percorso di routing. Se un nodo vuole inviare pacchetti ad una
destinazione presente all’interno della sua routing zone, utilizza un algoritmo di tipo
proattivo, se invece il nodo destinazione si trova fuori la zona del nodo mittente, il
percorso viene calcolato con gli algoritmi reattivi.
Gli elementi che compongono un protocollo ZRP sono:
- IARP (IntrAzone Routing Protocol): protocollo proattivo che ha il
compito di assicurare una tabella di routing aggiornata periodicamente ad
ogni nodo della routing zone.
- IERP (IntErzone Routing Protocol): protocollo reattivo che si occupa
della ricerca di percorsi verso nodi esterni alla routing zone.
- BRP (Bordercast Protocol): protocollo di flooding che permette ad un
nodo di inviare pacchetti in multicast ai nodi periferici della routing
zone.
- NDP (Neighbor Discovery Protocol): protocollo necessario ad
individuare i vicini di un nodo.
19
Per i nodi interni alla routing zone, ZRP implementa IARP con un qualsiasi
protocollo di routing proattivo e individua i suoi vicini utilizzando NDP. Se la
destinazione dei pacchetti non è raggiungibile tramite IARP, il nodo origine effettua
la fase di route discovery utilizzando il protocollo IERP inviando pacchetti ai nodi
periferici attraverso BRP. Un nodo periferico, alla ricezione del pacchetto, verifica
se l’indirizzo destinazione è presente nella sua tabella di routing. Se la verifica
fornisce esito positivo, il nodo invia il pacchetto alla destinazione, in caso di esito
negativo, ritrasmette il pacchetto ricevuto utilizzando BRP.
3.5 Protocolli geografici
I protocolli geografici individuano la posizione del nodo destinazione tramite il
GPS. Per poter inviare un pacchetto da un nodo origine, bisogna tener conto della
posizione del nodo destinazione inserita nel pacchetto e della posizione dei nodi
intermedi tra mittente e destinatario.
Nel protocollo GPSR (Greedy Perimeter Stateless Routing) [14] ogni nodo conosce
la posizione dei propri vicini inviando periodicamente in broadcast, dei messaggi di
beacon attraverso l’utilizzo dei servizi di localizzazione.
Il GPSR utilizza due metodi per la spedizione dei messaggi, il Greedy Forwarding
quando possibile e il Perimeter Forwarding che viene usato in alternativa al primo.
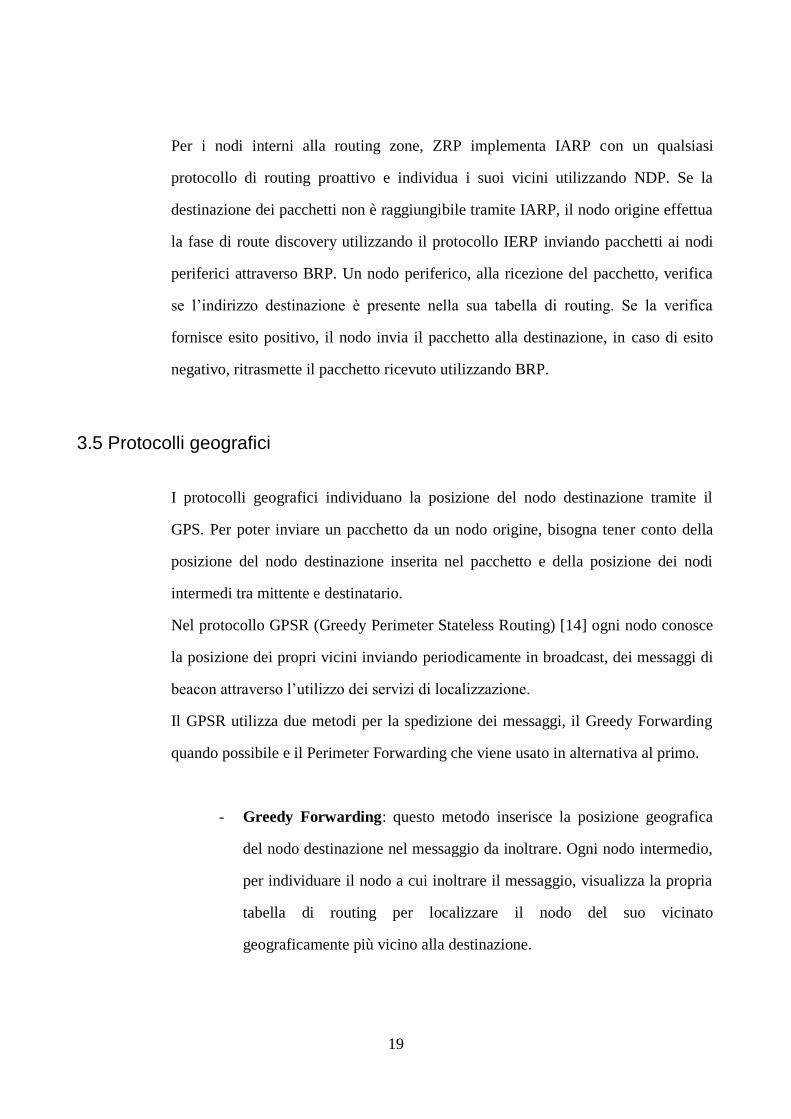
- Greedy Forwarding: questo metodo inserisce la posizione geografica
del nodo destinazione nel messaggio da inoltrare. Ogni nodo intermedio,
per individuare il nodo a cui inoltrare il messaggio, visualizza la propria
tabella di routing per localizzare il nodo del suo vicinato
geograficamente più vicino alla destinazione.
20
Figura 4 - Greedy Forwarding
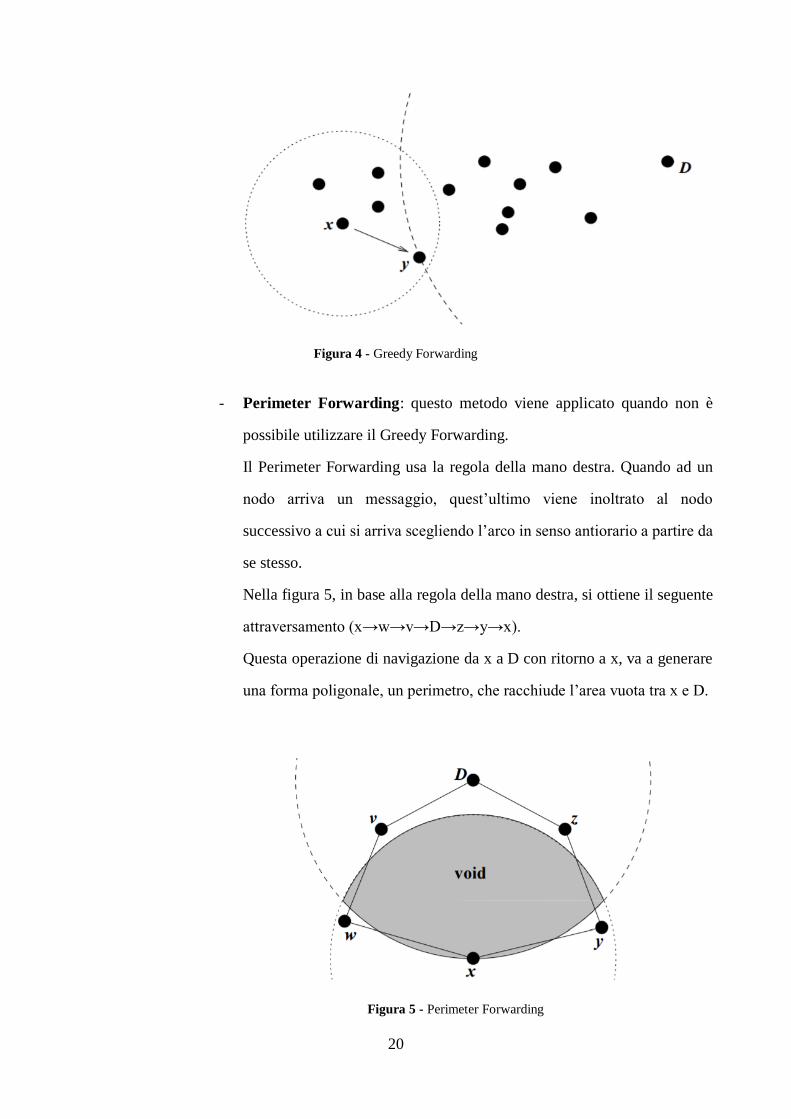
- Perimeter Forwarding: questo metodo viene applicato quando non è
possibile utilizzare il Greedy Forwarding.
Il Perimeter Forwarding usa la regola della mano destra. Quando ad un
nodo arriva un messaggio, quest’ultimo viene inoltrato al nodo
successivo a cui si arriva scegliendo l’arco in senso antiorario a partire da
se stesso.
Nella figura 5, in base alla regola della mano destra, si ottiene il seguente
attraversamento (x→w→v→D→z→y→x).
Questa operazione di navigazione da x a D con ritorno a x, va a generare
una forma poligonale, un perimetro, che racchiude l’area vuota tra x e D.
Figura 5 - Perimeter Forwarding

21
Capitolo 4: Veicoli a guida autonoma
Un veicolo autonomo è in grado di rilevare l’ambiente e la navigazione senza
l’intervento dell’uomo.
Nel 2014 la SAE International, un ente di normazione nel campo dell'industria
automobilistica, ha pubblicato un nuovo standard internazionale J3016 [15] che ha
definito sei differenti livelli per la guida automatica [16].
- Livello 0 Nessuna autonomia: il guidatore deve occuparsi di ogni
aspetto della guida
- Livello 1 Assistenza alla guida: la macchina può accelerare, frenare e
sterzare autonomamente in alcune situazioni, ma il guidatore deve essere
pronto a riprenderne il controllo in qualsiasi momento.
- Livello 2 Automazione parziale: il veicolo accelera, frena e sterza in
maniera autonoma, ma il guidatore deve comunque occuparsi
dell’ambiente circostante.
- Livello 3 Autonomia condizionata: Il veicolo si occupa dell’ambiente
circostante, di accelerare, frenare e sterzare, ma il guidatore deve essere
pronto ad intervenire in caso di richiesta del sistema.
- Livello 4 Alta automazione: il veicolo è in grado di gestire qualsiasi

22
evenienza, ma necessita dell’ausilio del guidatore in condizioni di guida
estreme.
- Livello 5 Completa automazione: Il veicolo è in grado di gestire tutte le
situazioni e non necessita quindi dell’ausilio di umani.
4.1 Storia
I primi esperimenti riguardanti l’automazione dell’automobile risalgono ai primi
decenni del XX secolo [17].
La prima auto ad ottenere buoni risultati è stata una Chandler del 1926. Essa
possedeva un’antenna grazie alla quale era possibile comandarla dall’esterno
attraverso dei comandi via radio.
Dagli anni ’50 sia negli Stati Uniti che in Europa sono stati sviluppati veicoli
comandati attraverso circuiti installati sotto la pavimentazione stradale.
Un esempio di veicolo autonomo prodotto in questi anni, precisamente al 1960, è
rappresentato dalla Citroen DS che è riuscita a viaggiare a 130 km/h senza subire
variazioni di velocità o direzione. Questo tipo di sperimentazione però ha subito una
brusca frenata a metà degli anni ’70 a causa di valutazioni non positive in relazione
al rapporto costi-benefici.
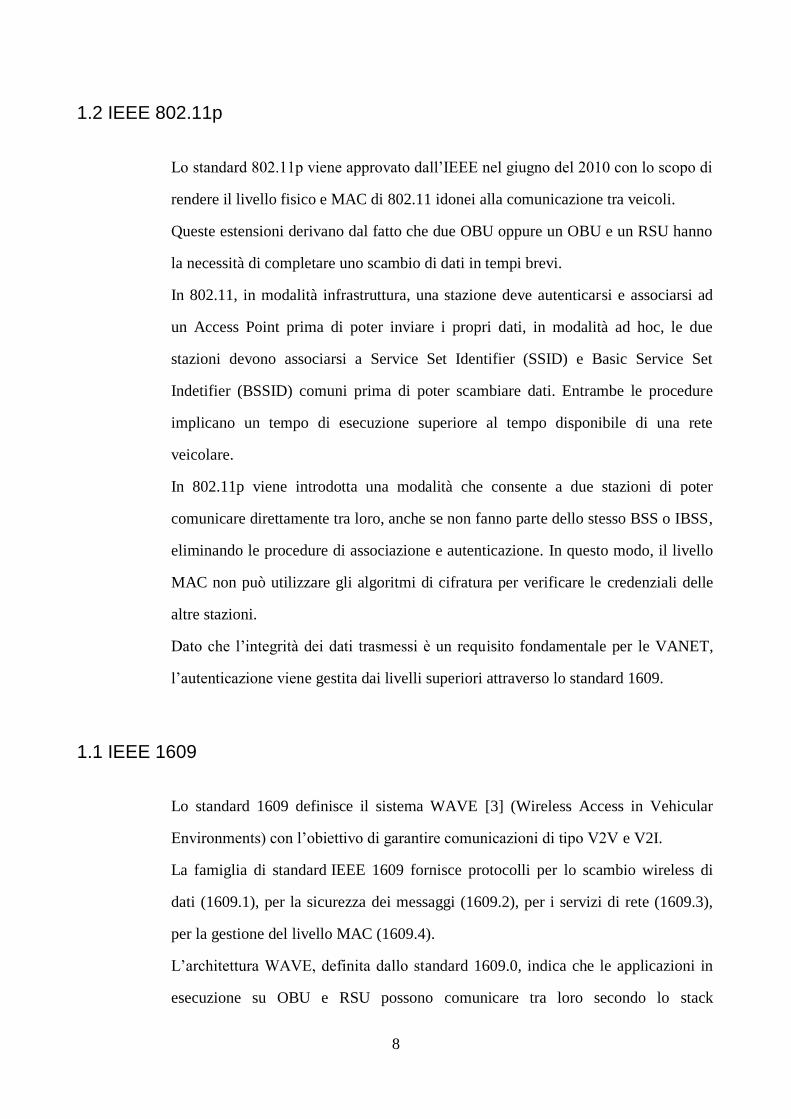
Nel 1994 entrano in azione due dei prototipi più innovativi fino a quel momento.
Essi sono VAMP, prodotto dalla Mercedes-Benz, e VITA-2 prodotto dalla
Bunderswehr University of Munich. Queste automobili sono in grado di viaggiare
senza conducente per lunghe distanze e con traffico intenso.

23
Figura 6 - Elenco componenti per la guida autonoma del veicolo VaMP
Negli anni ’90 è stato realizzato un prototipo di veicolo completamente autonomo
anche in Italia, all’Università degli studi di Parma, in cui una Lancia Thema ha
percorso in sei giorni circa 1900 km in autostrada, in presenza di traffico, con una
velocità media di 90 km/h.
Negli anni 2000 la tecnologia delle autonomous car si evolve in maniera
esponenziale anche perché è un settore in cui tutte le più grandi aziende iniziano ad
investire molte risorse.
Oltre alle aziende che popolano già da decenni il mercato automobilistico come
BMW [18], Audi, Mercedes-Benz, Ford [19], Toyota [20], in questi anni effettuano
il proprio ingresso nello sviluppo dei mezzi a guida autonoma anche Google, Tesla
ed Apple.
Google comincia a lavorare sulle driverless car dal 2009 percorrendo circa 160 km
con i veicoli Toyota Prius [21].
Nel 2012 sposta i propri prototipi in strade cittadine con pedoni, ciclisti, lavori
stradali e altro ancora.
Nel 2014 passa alla progettazione di un nuovo prototipo di veicolo con sensori
personalizzati, computer ma senza pedali e volante.

24
Nel 2016 Google affida lo sviluppo dei sistemi a guida autonoma alla società
Waymo, creata con lo scopo di migliorare questa tecnologia, abbandonando la
produzione di auto proprie [22].
Figura 7 - Prototipo di veicolo a guida autonoma realizzato da Google
Figura 8 - Sistema Waymo

25
Tesla esordisce nel 2015 nel settore delle driverless car con la tecnologia AutoPilot.
Al giorno d’oggi tutti i veicoli Tesla possiedono le caratteristiche necessarie per
supportare la tecnologia di guida autonoma di livello 5 [23].
Figura 9 - Tesla Model 3
Figura 10 - Sistema AutoPilot
26
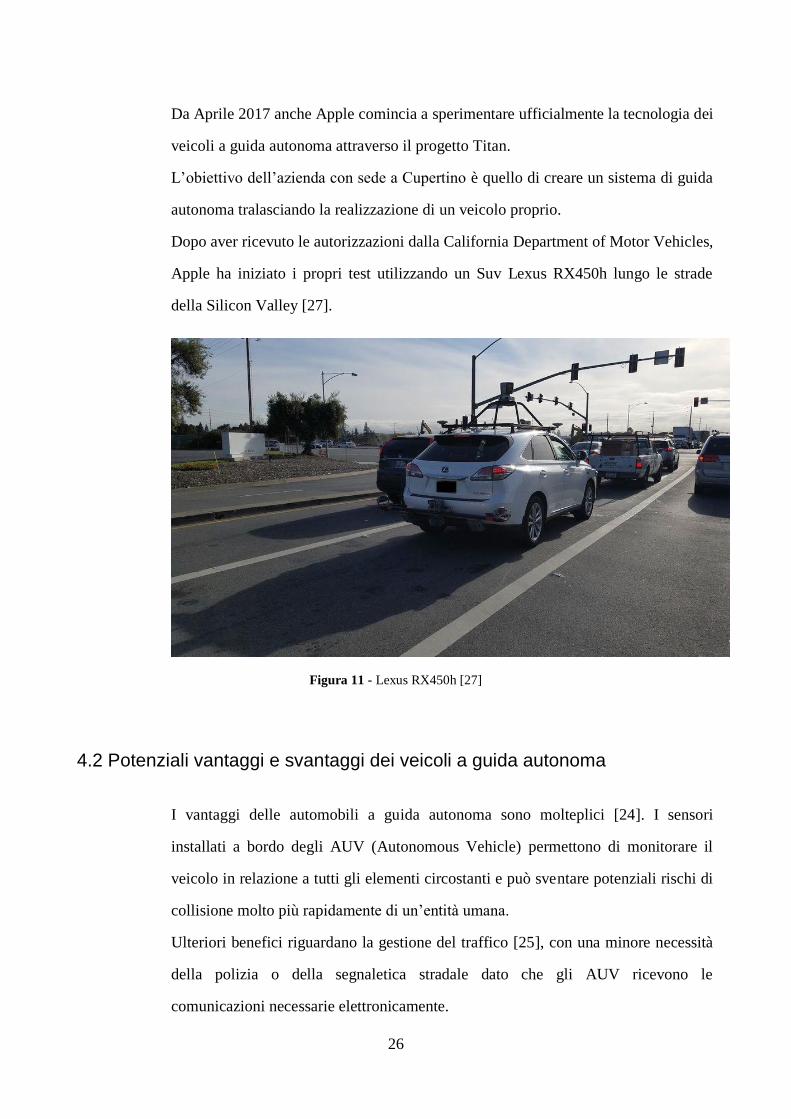
Da Aprile 2017 anche Apple comincia a sperimentare ufficialmente la tecnologia dei
veicoli a guida autonoma attraverso il progetto Titan.
L’obiettivo dell’azienda con sede a Cupertino è quello di creare un sistema di guida
autonoma tralasciando la realizzazione di un veicolo proprio.
Dopo aver ricevuto le autorizzazioni dalla California Department of Motor Vehicles,
Apple ha iniziato i propri test utilizzando un Suv Lexus RX450h lungo le strade
della Silicon Valley [27].
Figura 11 - Lexus RX450h [27]
4.2 Potenziali vantaggi e svantaggi dei veicoli a guida autonoma
I vantaggi delle automobili a guida autonoma sono molteplici [24]. I sensori
installati a bordo degli AUV (Autonomous Vehicle) permettono di monitorare il
veicolo in relazione a tutti gli elementi circostanti e può sventare potenziali rischi di
collisione molto più rapidamente di un’entità umana.
Ulteriori benefici riguardano la gestione del traffico [25], con una minore necessità
della polizia o della segnaletica stradale dato che gli AUV ricevono le
comunicazioni necessarie elettronicamente.
27
I veicoli a guida autonoma possono essere occupati da qualsiasi tipo di persona
eliminando vincoli di età o disabilità.
La diffusione degli AUV comporta anche degli svantaggi come la perdita di posti di
lavoro nei settori che prevedono un conducente, l’hacking dei veicoli per attacchi
terroristici o la potenziale perdita della privacy [26].

28
Conclusioni
In questa tesi sono state descritte le reti VANET. Si è partiti col rappresentare le
applicazioni di una rete veicolare e gli standard ad essa associati.
Sono stati poi analizzati gli attacchi a cui può essere sottoposta una VANET e i vari
protocolli di autenticazione per contrastarli.
Successivamente sono stati esaminati e classificati i vari protocolli di routing. Si può
dichiarare che non esiste un protocollo in grado di garantire ottime performance in
qualsiasi tipo di situazione. Ognuno possiede vantaggi e svantaggi a seconda dello
scenario in cui è utilizzato.
Infine è stato introdotto il concetto di guida autonoma descrivendo i passi
fondamentali del suo cammino evolutivo a partire dai primi anni del XX secolo fino
ai giorni nostri e ipotizzando eventuali benefici e danni che l’introduzione degli
AUV possa apportare.
Nonostante i tanti punti di domanda e i problemi sorti durante lo sviluppo dei
sistemi a guida autonoma, si può sicuramente ipotizzare un futuro in cui le driverless
car sostituiscano le automobili a guida manuale, andando a rafforzare il concetto di
Smart Mobility già in esponenziale evoluzione.
29
Bibliografia
[1] J. M. de Fuentes, A. I. González-Tablas, A. Ribagorda, “Overview of
Security issues in Vehicular Ad-hoc Networks”, 2010.
[2] Theodore L. Willke, Patcharinee Tientrakool, and Nicholas F. Maxemchuk,
“A survey of inter-vehicle communication protocols and their applications”, in IEEE
communication surveys & tutorials, vol. 11, 2009.
[3] “ITS Standard Fact Sheets”,
https://www.standards.its.dot.gov/Factsheets/Factsheet/80.
[4] A. Bartoli, J. Hernández-Serrano, M. Soriano, M. Dohler, A. Kountouris, D.
Barthel, “Security and Privacy in your Smart City”, in IEEE communication surveys
& tutorials, vol. 11, 2011.
[5] J. Douceur. “The Sybil Attack”, IPTPS '01 Revised Papers from the First
International Workshop on Peer-to-Peer Systems, 2002
[6] James Newsome, Elaine Shi, Dawn Song, Adrian Perrig, “The Sybil Attack
in Sensor Networks: Analysis & Defenses”,2004
[7] Varsha Raghuwanshi, Simmi Jain, “Denial of Service Attack in VANET: A
Survey”, in International Journal of Engineering Trends and Technology (IJETT),
vol 28, Ottobre 2015.
[8] J. Y. Choi, M. Jakobsson, “Balancing Auditability and Privacy in Vehicular
Networks” In EPFL Technical Report IC/2005/009, 2005.
[9] Y.C. Tseng, S.Y. Ni, “The broadcast storm problem in a mobile ad-hoc
Network in Wireless Networks”, Vol. 8, 2003.
[10] C. Perkins, E. Belding-Royer, S. Das, “Ad-hoc On-Demand Distance Vector

30
(AODV) Routing”, RFC 3561, IETF, Luglio 2003.
[11] D. Johnson, Y. Hu, D. Maltz, “The Dynamic Source Routing Protocol (DSR)
for Mobile Ad-Hoc Networks for IPv4”, rfc 4728,IETF, Febbraio 2007.
[12] T. Clausen, P. Jacquet, “Optimized Link State Routing Protocol (OLSR)” ,
RCF 3626, IETF, Ottobre 2003.
[13] Nicklas Beijar, “Zone Routing Protocol (ZRP)”, 2002.
[14] B. Karp, H.T. Kung, “GPSR : Gready Perimeter Stateless Routing for
Wireless Networks”, MOBICOM, 2000
[15] “SAE International”, https://www.sae.org/misc/pdfs/automated_driving.pdf.
[16] “Autonomous car”, https://en.wikipedia.org/wiki/Autonomous_car.
[17] “History of autonomous car”. https://en.wikipedia.org/wiki/
History_of_autonomous_car.
[18] Jack Carfrae , "An automated adventure at the wheel of a driverless BMW -
The National", Maggio 2010.
[19] "Ford is ready for the autonomous car. Are drivers? – Mobile Technology
News", Aprile 2012.
[20] "Toyota sneak previews self-drive car ahead of tech show", 2013.
[21] “Waymo”, https://waymo.com/journey/.
[22] “Google fonda Waymo, azienda dedicata alle soluzioni di guida autonoma”,
http://www.dday.it/redazione/21848/google-fonda-waymo-azienda-dedicata-alle-
soluzioni-di-guida-autonoma, Dicembre 2016.
[23] “Tesla”, https://www.tesla.com/it_IT/autopilot.
[24] Miller, John, "Self-Driving Car Technology's Benefits, Potential Risks, and
Solutions", Agosto 2014.
[25] Gibson, David K, "Can we banish the phantom traffic jam?", 2016.
[26] Mark Harris, "FBI warns driverless cars could be used as 'lethal weapons'",
2014
[27] Mark Bergen, Alex Webb, "Check Out the Lexus That Apple’s Using to
Test Self-Driving Car Technology '", https://www.bloomberg.com, Aprile 2017.

31