6 · Web view“in un triangolo sferico qualsiasi il coseno di un lato è dato dal prodotto del...
28
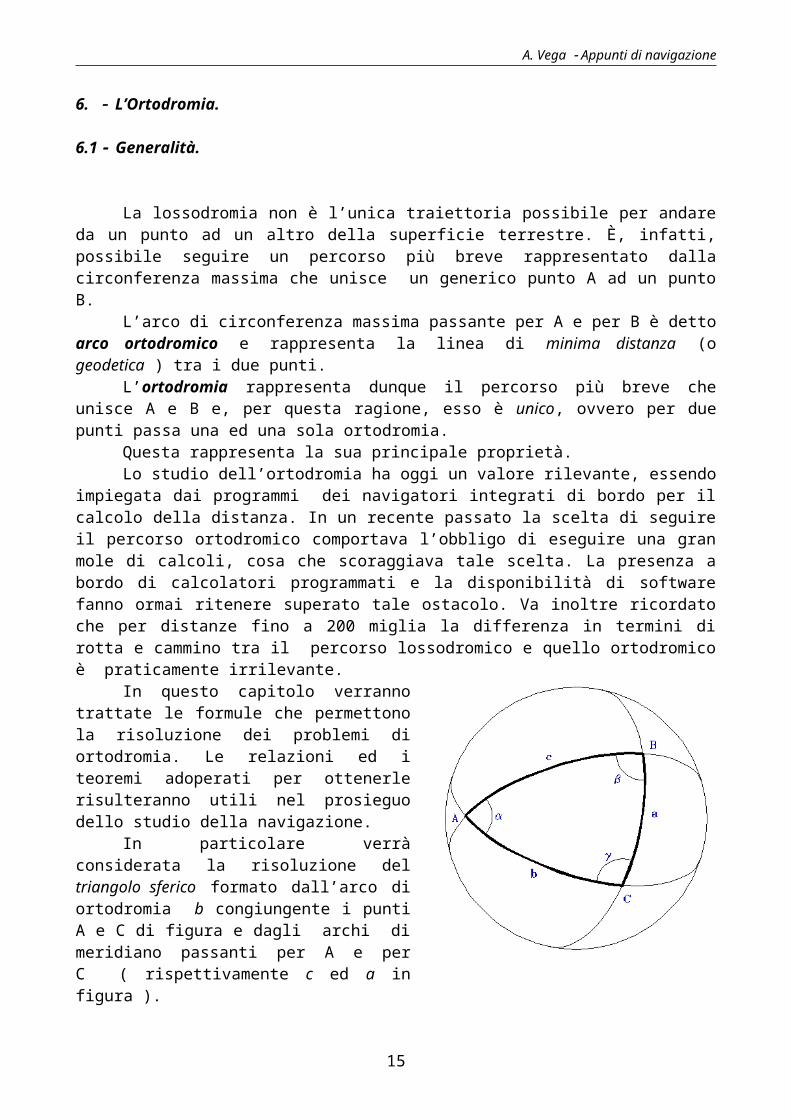
A. Vega Appunti di navigazione 6. L’Ortodromia. 6.1 Generalità. La lossodromia non è l’unica traiettoria possibile per andare da un punto ad un altro della superficie terrestre. È, infatti, possibile seguire un percorso più breve rappresentato dalla circonferenza massima che unisce un generico punto A ad un punto B. L’arco di circonferenza massima passante per A e per B è detto arco ortodromico e rappresenta la linea di minima distanza (o geodetica ) tra i due punti. L’ortodromia rappresenta dunque il percorso più breve che unisce A e B e, per questa ragione, esso è unico, ovvero per due punti passa una ed una sola ortodromia. Questa rappresenta la sua principale proprietà. Lo studio dell’ortodromia ha oggi un valore rilevante, essendo impiegata dai programmi dei navigatori integrati di bordo per il calcolo della distanza. In un recente passato la scelta di seguire il percorso ortodromico comportava l’obbligo di eseguire una gran mole di calcoli, cosa che scoraggiava tale scelta. La presenza a bordo di calcolatori programmati e la disponibilità di software fanno ormai ritenere superato tale ostacolo. Va inoltre ricordato che per distanze fino a 200 miglia la differenza in termini di rotta e cammino tra il percorso lossodromico e quello ortodromico è praticamente irrilevante. In questo capitolo verranno trattate le formule che permettono la risoluzione dei problemi di ortodromia. Le relazioni ed i teoremi adoperati per ottenerle risulteranno utili nel prosieguo dello studio della navigazione. In particolare verrà considerata la risoluzione del triangolo sferico formato dall’arco di ortodromia b congiungente i punti A e C di figura e dagli archi di meridiano passanti per A e per C ( rispettivamente c ed a in figura ). 15
Transcript of 6 · Web view“in un triangolo sferico qualsiasi il coseno di un lato è dato dal prodotto del...
A. Vega Appunti di navigazione
6. L’Ortodromia.
6.1 Generalità.
La lossodromia non è l’unica traiettoria possibile per andare da un punto ad un altro della superficie terrestre. È, infatti, possibile seguire un percorso più breve rappresentato dalla circonferenza massima che unisce un generico punto A ad un punto B.
L’arco di circonferenza massima passante per A e per B è detto arco ortodromico e rappresenta la linea di minima distanza (o geodetica ) tra i due punti.
L’ortodromia rappresenta dunque il percorso più breve che unisce A e B e, per questa ragione, esso è unico, ovvero per due punti passa una ed una sola ortodromia.
Questa rappresenta la sua principale proprietà.Lo studio dell’ortodromia ha oggi un valore rilevante, essendo impiegata dai programmi dei
navigatori integrati di bordo per il calcolo della distanza. In un recente passato la scelta di seguire il percorso ortodromico comportava l’obbligo di eseguire una gran mole di calcoli, cosa che scoraggiava tale scelta. La presenza a bordo di calcolatori programmati e la disponibilità di software fanno ormai ritenere superato tale ostacolo. Va inoltre ricordato che per distanze fino a 200 miglia la differenza in termini di rotta e cammino tra il percorso lossodromico e quello ortodromico è praticamente irrilevante.
In questo capitolo verranno trattate le formule che permettono la risoluzione dei problemi di ortodromia. Le relazioni ed i teoremi adoperati per ottenerle risulteranno utili nel prosieguo dello studio della navigazione.
In particolare verrà considerata la risoluzione del triangolo sferico formato dall’arco di ortodromia b congiungente i punti A e C di figura e dagli archi di meridiano passanti per A e per C ( rispettivamente c ed a in figura ).
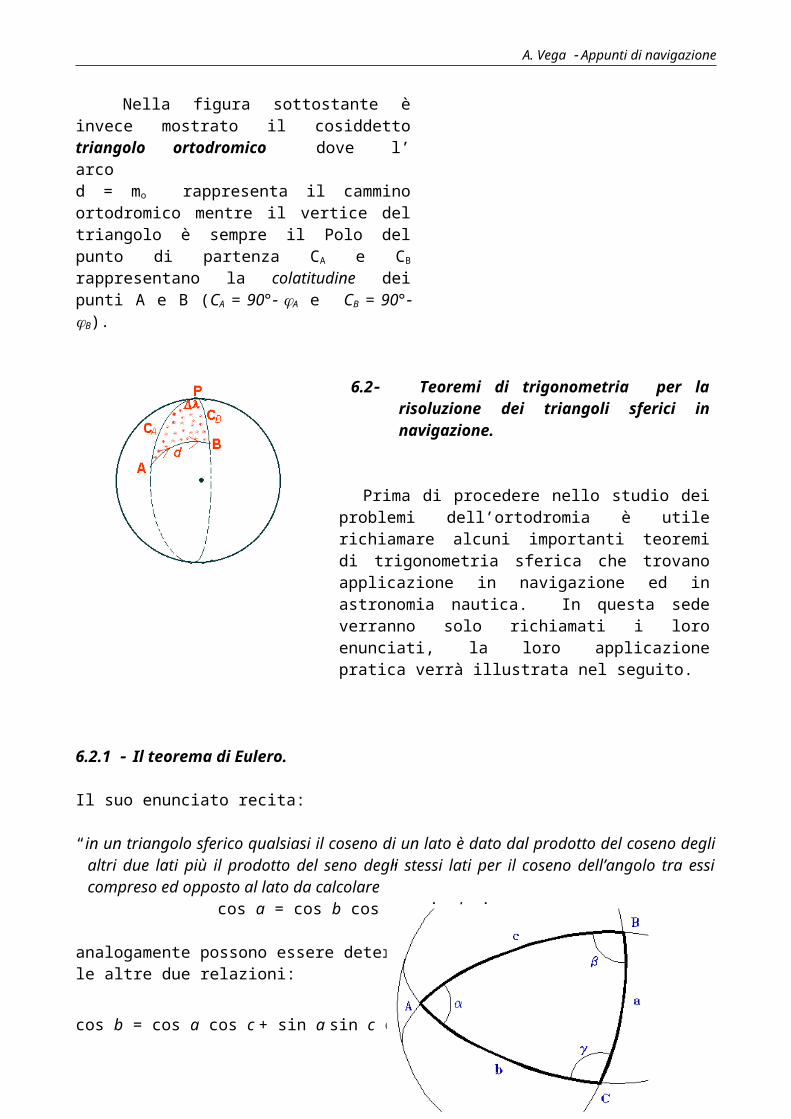
Nella figura sottostante è invece mostrato il cosiddetto triangolo ortodromico dove l’ arco d = mo rappresenta il cammino ortodromico mentre il vertice del triangolo è sempre il Polo del punto di partenza CA e CB rappresentano la colatitudine dei punti A e B (CA = 90° A e CB = 90° B).
6.2 Teoremi di trigonometria per la risoluzione dei triangoli sferici in navigazione.
Prima di procedere nello studio dei problemi dell’ortodromia è utile richiamare alcuni importanti teoremi di trigonometria sferica che trovano applicazione in navigazione ed in astronomia nautica. In questa sede verranno solo richiamati i loro enunciati, la loro applicazione pratica verrà illustrata nel seguito.
15
A. Vega Appunti di navigazione
6.2.1 Il teorema di Eulero.
Il suo enunciato recita:
“in un triangolo sferico qualsiasi il coseno di un lato è dato dal prodotto del coseno degli altri due lati più il prodotto del seno degli stessi lati per il coseno dell’angolo tra essi compreso ed opposto al lato da calcolare”
cos a = cos b cos c + sin b sin c cos
analogamente possono essere determinate le altre due relazioni:
cos b = cos a cos c + sin a sin c cos
cos c = cos a cos b + sin a sin b cos
6.2.1.1 - Il teorema dei seni
Il suo enunciato recita:
“Il rapporto fra il seno di un angolo ed il seno del lato opposto è costante”
sin -------sin a
=sin -------sin b
=sin -------sin c
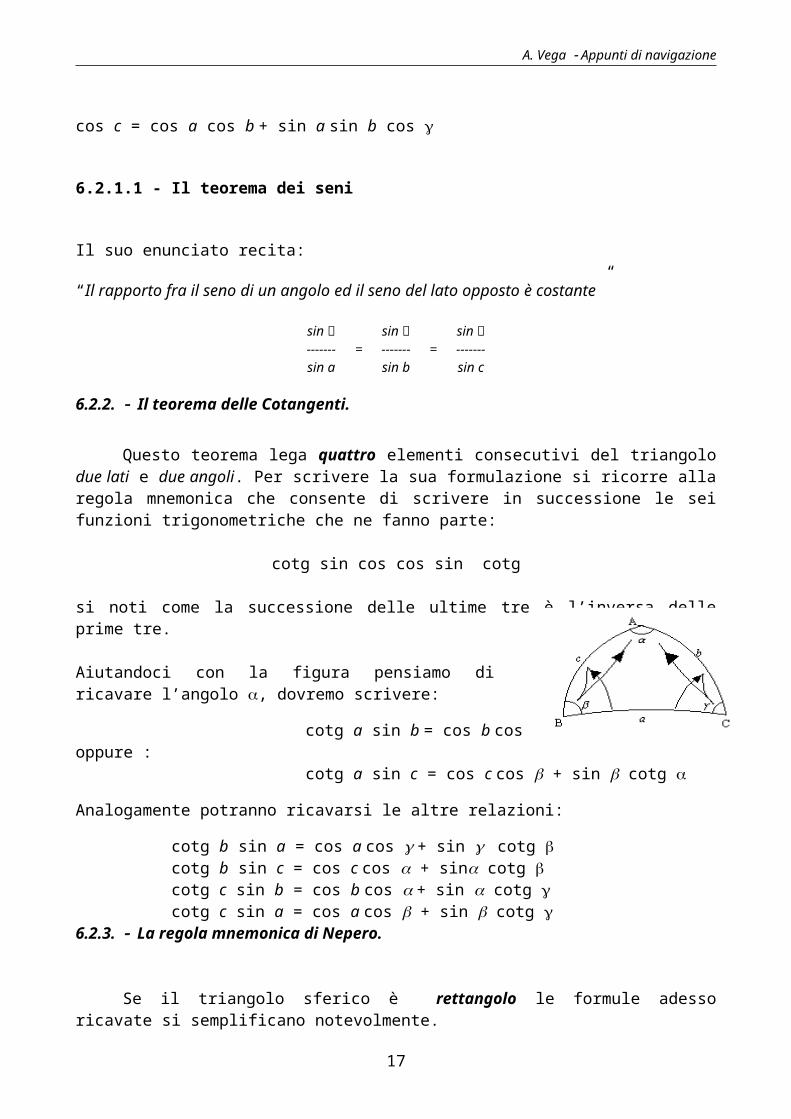
6.2.2. Il teorema delle Cotangenti.
Questo teorema lega quattro elementi consecutivi del triangolo due lati e due angoli. Per scrivere la sua formulazione si ricorre alla regola mnemonica che consente di scrivere in successione le sei funzioni trigonometriche che ne fanno parte:
cotg sin cos cos sin cotg
si noti come la successione delle ultime tre è l’inversa delle prime tre.
Aiutandoci con la figura pensiamo di ricavare l’angolo , dovremo scrivere:
cotg a sin b = cos b cos + sin cotg oppure : cotg a sin c = cos c cos + sin cotg
Analogamente potranno ricavarsi le altre relazioni:
cotg b sin a = cos a cos + sin cotg cotg b sin c = cos c cos + sin cotg cotg c sin b = cos b cos + sin cotg cotg c sin a = cos a cos + sin cotg
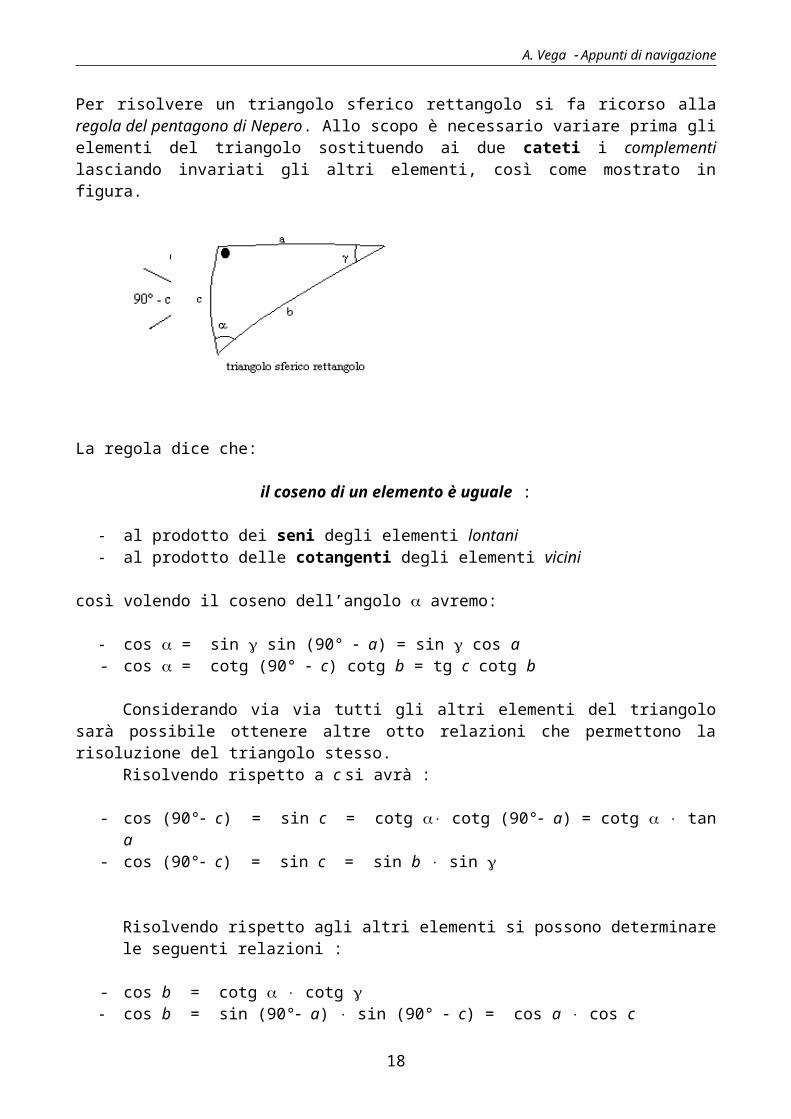
6.2.3. La regola mnemonica di Nepero.
16
A. Vega Appunti di navigazione
Se il triangolo sferico è rettangolo le formule adesso ricavate si semplificano notevolmente. Per risolvere un triangolo sferico rettangolo si fa ricorso alla regola del pentagono di Nepero. Allo scopo è necessario variare prima gli elementi del triangolo sostituendo ai due cateti i complementi lasciando invariati gli altri elementi, così come mostrato in figura.
La regola dice che:
il coseno di un elemento è uguale :
- al prodotto dei seni degli elementi lontani- al prodotto delle cotangenti degli elementi vicini
così volendo il coseno dell’angolo avremo:
- cos = sin sin (90° a) = sin cos a- cos = cotg (90° c) cotg b = tg c cotg b
Considerando via via tutti gli altri elementi del triangolo sarà possibile ottenere altre otto relazioni che permettono la risoluzione del triangolo stesso.
Risolvendo rispetto a c si avrà :
- cos (90° c) = sin c = cotg cotg (90° a) = cotg tan a- cos (90° c) = sin c = sin b sin
Risolvendo rispetto agli altri elementi si possono determinare le seguenti relazioni :
- cos b = cotg cotg - cos b = sin (90° a) sin (90° c) = cos a cos c
- cos (90° a) = sin a = cotg (90° c) cotg = tan c cotg - cos (90° a) = sin a = sin sin
- cos = cotg b cotg (90° a) = cotg b tan a- cos = sin (90° c sin = cos c sin
6.3 Impiego dell’Ortodromia.
17
A. Vega Appunti di navigazione
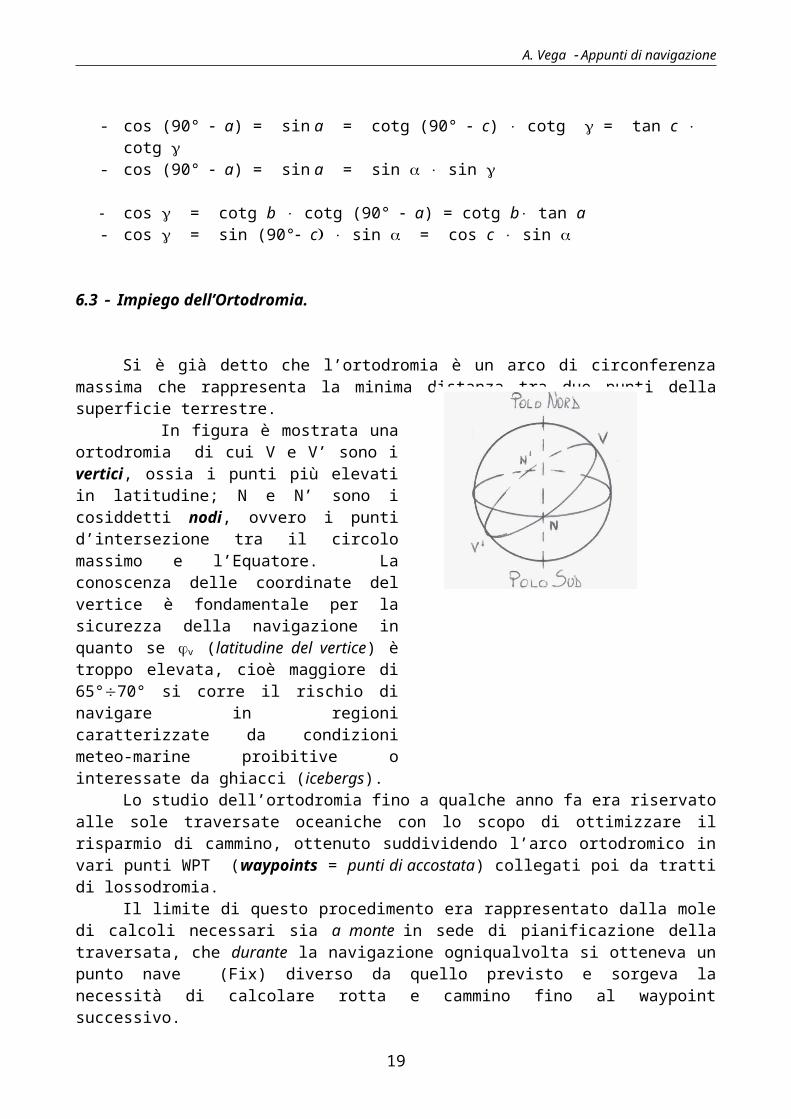
Si è già detto che l’ortodromia è un arco di circonferenza massima che rappresenta la minima distanza tra due punti della superficie terrestre.
In figura è mostrata una ortodromia di cui V e V’ sono i vertici, ossia i punti più elevati in latitudine; N e N’ sono i cosiddetti nodi, ovvero i punti d’intersezione tra il circolo massimo e l’Equatore. La conoscenza delle coordinate del vertice è fondamentale per la sicurezza della navigazione in quanto se v (latitudine del vertice) è troppo elevata, cioè maggiore di 65°70° si corre il rischio di navigare in regioni caratterizzate da condizioni meteo-marine proibitive o interessate da ghiacci (icebergs).
Lo studio dell’ortodromia fino a qualche anno fa era riservato alle sole traversate oceaniche con lo scopo di ottimizzare il risparmio di cammino, ottenuto suddividendo l’arco ortodromico in vari punti WPT (waypoints = punti di accostata) collegati poi da tratti di lossodromia.
Il limite di questo procedimento era rappresentato dalla mole di calcoli necessari sia a monte in sede di pianificazione della traversata, che durante la navigazione ogniqualvolta si otteneva un punto nave (Fix) diverso da quello previsto e sorgeva la necessità di calcolare rotta e cammino fino al waypoint successivo.
Oggi il calcolo è demandato ai computer di bordo, che oltretutto considerano le distanze ortodromiche anche nei calcoli per brevi tratti, il lavoro si riduce alla fase preparatoria della pianificazione della traversata, operazione anch’essa in gran parte semplificata nelle procedure dall’uso di software dedicati e dall’impiego di rotte consigliate, quindi note a priori, oltre che al sempre più diffuso utilizzo di ricevitori satellitari.
6.3.1 Primo problema dell’Ortodromia.
È il problema di partenza per lo studio dell’ortodromia:
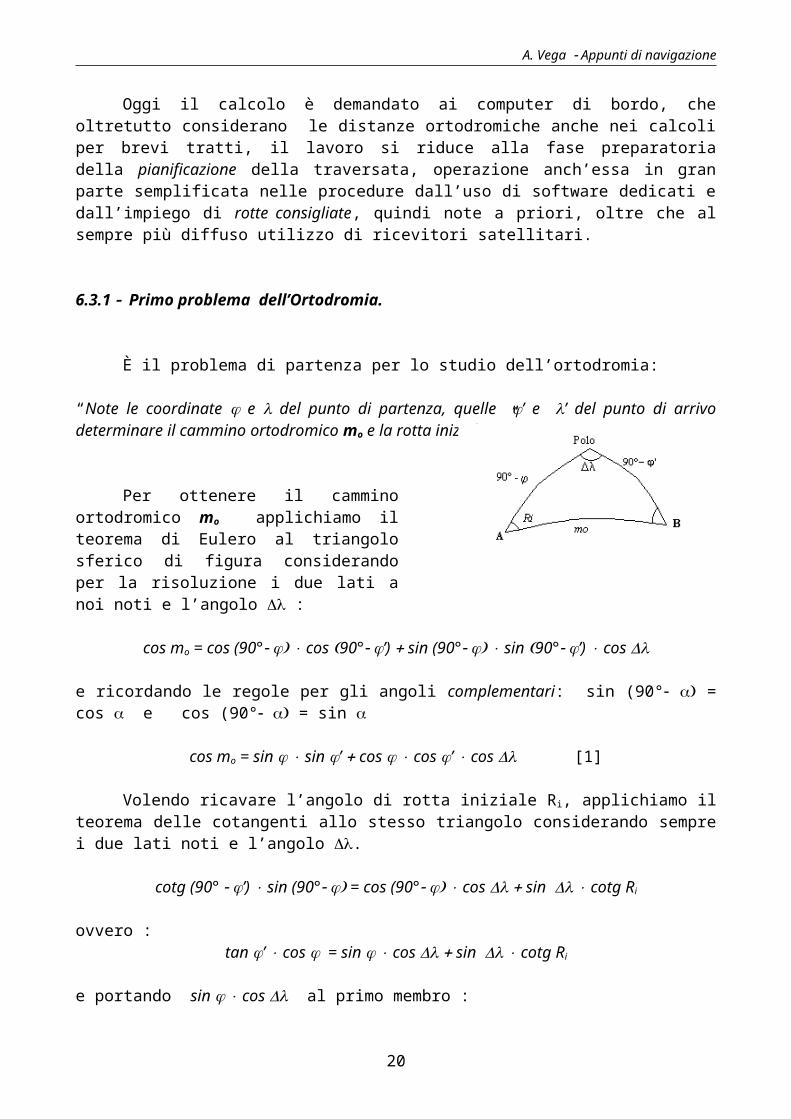
“Note le coordinate e del punto di partenza, quelle ’ e ’ del punto di arrivo determinare il cammino ortodromico mo e la rotta iniziale Ri”
Per ottenere il cammino ortodromico mo
applichiamo il teorema di Eulero al triangolo sferico di figura considerando per la risoluzione i due lati a noi noti e l’angolo :
cos mo = cos (90° cos 90° ’) sin (90° sin 90° ’) cos
e ricordando le regole per gli angoli complementari: sin (90° = cos e cos (90° = sin
cos mo = sin sin ’ cos cos ’ cos [1]
Volendo ricavare l’angolo di rotta iniziale Ri, applichiamo il teorema delle cotangenti allo stesso triangolo considerando sempre i due lati noti e l’angolo .
18
A. Vega Appunti di navigazione
cotg (90° ’) sin (90° = cos (90° cos sin cotg Ri
ovvero :tan ’ cos = sin cos sin cotg Ri
e portando sin cos al primo membro :
tan ’ cos sin cos = sin cotg Ri
e dividendo tutto per sin :
si otterrà infine :cotg Ri = tan ’ cos cosec sin cotg [2]
Le due relazioni ora ottenute consentono di risolvere il primo problema dell’ortodromia determinando mo e Ri .
Nell’esempio seguente è indicato lo schema di calcolo da seguire:
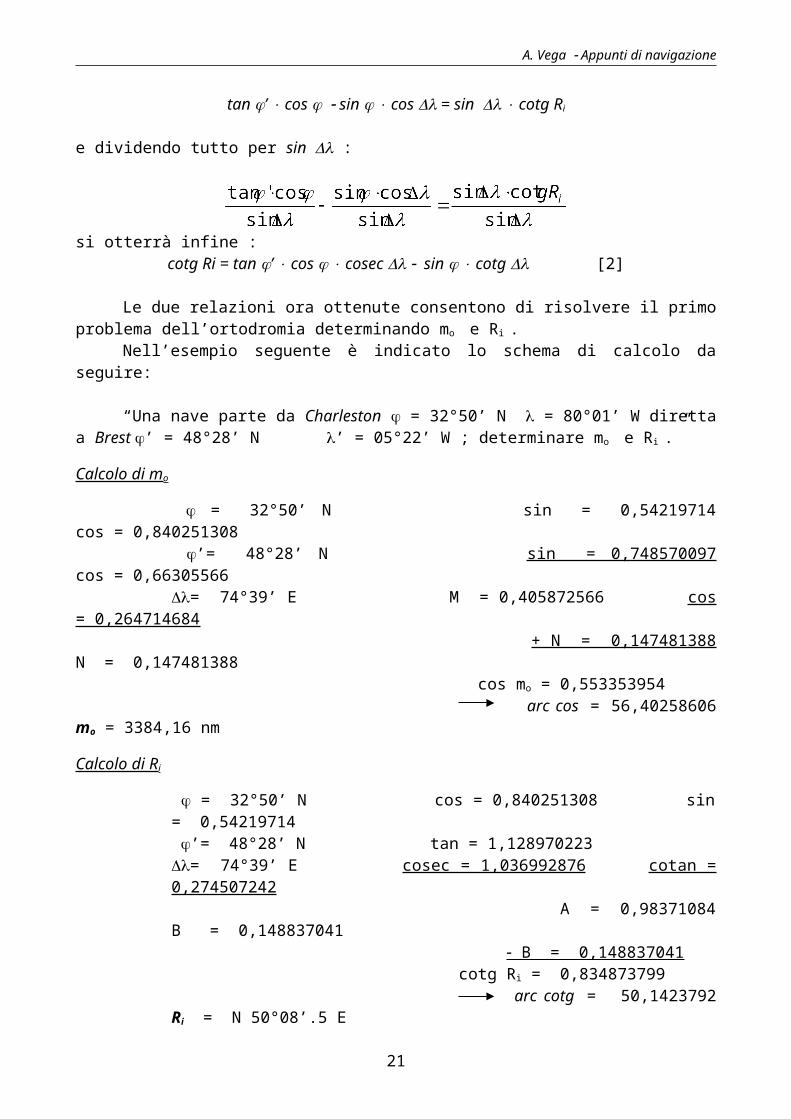
“Una nave parte da Charleston = 32°50’ N = 80°01’ W diretta a Brest ’ = 48°28’ N ’ = 05°22’ W ; determinare mo e Ri .”
Calcolo di mo
= 32°50’ N sin = 0,54219714 cos = 0,840251308 ’= 48°28’ N sin = 0,748570097 cos = 0,66305566= 74°39’ E M = 0,405872566 cos = 0,264714684 + N = 0,147481388 N = 0,147481388 cos mo = 0,553353954 arc cos = 56,40258606 mo = 3384,16 nm
Calcolo di Ri
= 32°50’ N cos = 0,840251308 sin = 0,54219714 ’= 48°28’ N tan = 1,128970223= 74°39’ E cosec = 1,036992876 cotan = 0,274507242 A = 0,98371084 B = 0,148837041 B = 0,148837041 cotg Ri = 0,834873799 arc cotg = 50,1423792 Ri = N 50°08’.5 E
Ambedue le relazioni sono di tipo semilogaritmico nel senso che risultano composte da due parti che devono essere sommate algebricamente tra loro. Il primo membro della relazione [1] può assumere segno negativo se i due punti A e B si trovano in emisferi opposti, uno in nord e l’altro in sud; mentre il secondo membro assume valore negativo se risulta > 90°.
In queste ipotesi, infatti, il valore del coseno risulta negativo in quanto espressione di archi maggiori di 90°. Se le due ipotesi si verificano entrambe contemporaneamente la somma tra il primo ed il secondo membro della [1] avrà segno .
Anche per la relazione [2] valgono le stesse considerazioni ora fatte. Nell’esempio che segue il punto di partenza ed il punto di arrivo si trovano in emisferi
opposti, cioè uno in nord ed uno in sud.
19
A. Vega Appunti di navigazione
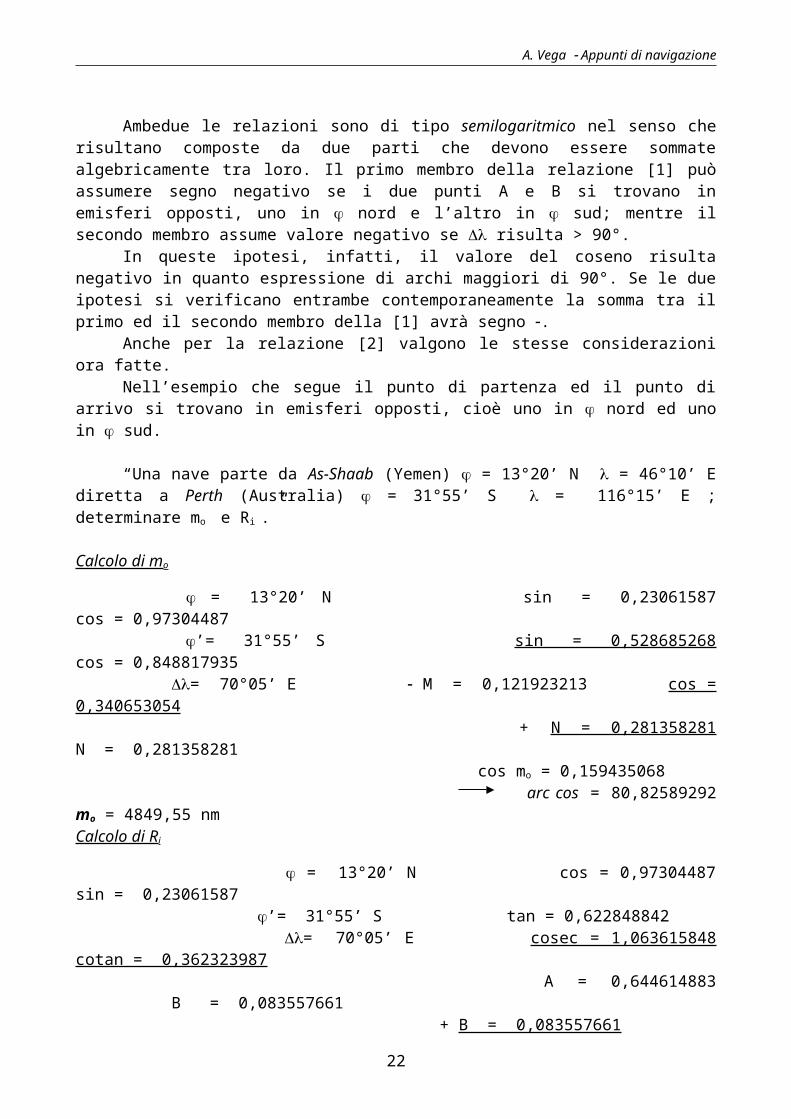
“Una nave parte da As-Shaab (Yemen) = 13°20’ N = 46°10’ E diretta a Perth (Australia) = 31°55’ S = 116°15’ E ; determinare mo e Ri .”
Calcolo di mo
= 13°20’ N sin = 0,23061587 cos = 0,97304487 ’= 31°55’ S sin = 0,528685268 cos = 0,848817935= 70°05’ E M = 0,121923213 cos = 0,340653054 + N = 0,281358281 N = 0,281358281 cos mo = 0,159435068 arc cos = 80,82589292 mo = 4849,55 nm
Calcolo di Ri
= 13°20’ N cos = 0,97304487 sin = 0,23061587 ’= 31°55’ S tan = 0,622848842 = 70°05’ E cosec = 1,063615848 cotan = 0,362323987
A = 0,644614883 B = 0,083557661 + B = 0,083557661 cotg Ri = 0,728172544
arc cotg = 53,93892083 Ri = S 53°56’.3 E Ri = 126°03’.7
“Una nave parte da Perth (Australia) = 31°55’ S = 116°15’ E diretta a Santa Cruz (Argentina) = 49°50’ S = 68°06’ W ; determinare mo e Ri .”
Calcolo di mo
= 31°55’ S sin = 0,528685268 cos = 0,848817935’= 49°50’ S sin = 0,764171411 cos = 0,64501322
= 175°39’ W M = 0,404007594 cos = 0,997119322 N = 0,545921622 N = 0,545921622 cos mo = 0,141914027 arc cos = 98,15861796 mo = 5889,51 nm
Calcolo di Ri
= 31°55’ S cos = 0,848817935 sin = 0,528685268 ’= 49°50’ S tan = 1,184737596 = 175°39’ W cosec = 13,18410572 cotan = 13,14612656
A = 13,25828635 B = 6,950163444 B = 6,950163444 cotg Ri = 20,20844979
arc cotg = 2,832927915 Ri = S 2°49’.9 E Ri = 177°10’
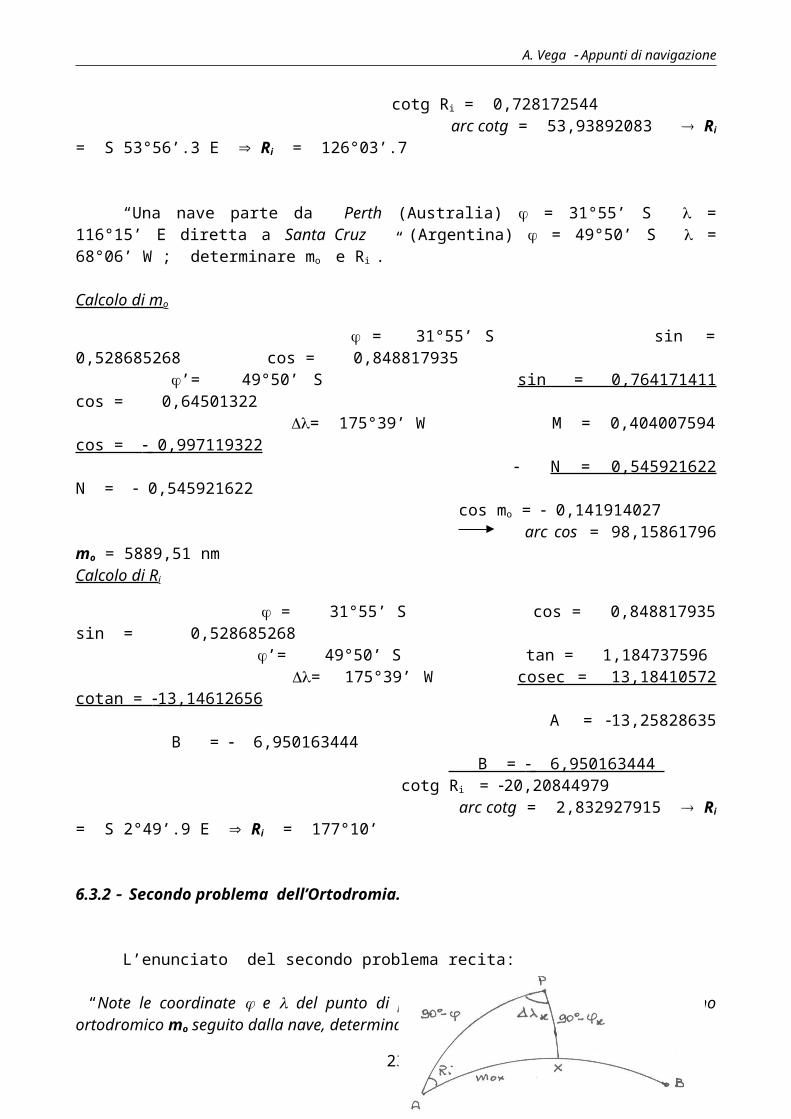
6.3.2 Secondo problema dell’Ortodromia.
L’enunciato del secondo problema recita:
“Note le coordinate e del punto di partenza, la rotta iniziale R i e il cammino ortodromico mo
seguito dalla nave, determinare le coordinate del punto X x e x ”
20
A. Vega Appunti di navigazione
Nella pratica questo tipo di problema trova scarsa applicazione, ma è ugualmente importante determinare le formule risolutive.
Applicando il teorema di Eulero al triangolo di figura si ricava
cos ( 90° x) = cos (90° ) cos mo + sin (90° ) sin mo cos Ri
e ricordando che :
cos (90° ) = sin e sin (90° ) = cos si otterrà :
sin x = sin cos mo + cos sin mo cos Ri [3]
relazione che permette di calcolare la latitudine del punto incognito X.Applicando il teorema delle cotangenti allo stesso triangolo si ottiene :
cot mo sin (90° ) = cos (90° cos Ri + sin Ri cot x
da cui : cot mo cos = sin cos Ri + sin Ri cot x
e portando sin cos Ri al primo membro si avrà :
cot mo cos sin cos Ri = sin Ri cot x
e dividendo ambo i membri per sin Ri si ricava :
da cui :
cot x = cot mo cos cosec Ri sin cot Ri [4]
espressione che permette di calcolare x con la semplice relazione :
x x
Anche per le relazioni [3] e [4] vale quanto detto sui segni delle funzioni trigonometriche il cui valore è positivo per angoli compresi tra 0° e 90° e negativo per angoli > 90°.
Ma consideriamo un esempio.
“Alle 615 del 2 ottobre una nave parte dal porto yemenita di AS-SHAAB = 13°20’ N = 46°10’ E diretta per ortodromia in Australia. Determinare la posizione della nave per le ore 1200 del giorno successivo sapendo che Vp = 18 kn e Ri = 126°.1 “
Calcolo di x
21
A. Vega Appunti di navigazione
mo = T Vp = 29,75 18 = 535,5 8°55’.5
= 13°20’ N sin = 0,23061587 cos = 0,97304487 mo = 8°55’.5 cos = 0,987892266 sin = 0,15514145 Ri = 126°.1 M = 0,227823634 cos = 0,589196357
N = 0,088944841 N = 0,088944841 sin x = 0,138878792 arc sin = 7°58’59” x 7°59’ N
Calcolo di x
mo = 8°55’.5 cot = 6,367687451 sin = 0,15514145 = 13°20’ N cos = 0,97304487 Ri = 126°.1 cosec = 1,237639257 cot = 0,729212542
A = 7,668469282 B = 0,113131091 B = 0,113131091 cotg x = 7,555338191
arc cotgx = 7°32’.6 E x = 46°10’ E + 7°32’.6 E = 53°42’.6 E
x = 7°59’ Nper cui le coordinate del punto X saranno : x = 53°42’.6 E
6.3.3 Calcolo delle coordinate del vertice.
Il vertice è il punto con la latitudine più elevata di un dato arco ortodromico, come già espresso nel paragrafo 6.1. La conoscenza delle sue coordinate è correlata alla sicurezza della navigazione poiché il vertice può cadere in zone pericolose per le condizioni meteomarine, pertanto nella fase di pianificazione della traversata può essere utile determinarle.
Il vertice può essere interno o esterno :
- è interno se è compreso tra il punto di partenza e quello di arrivo, nel qual caso la nave transiterà per esso;
- è esterno se invece cade al di fuori del tratto di circolo massimo interessato alla navigazione.
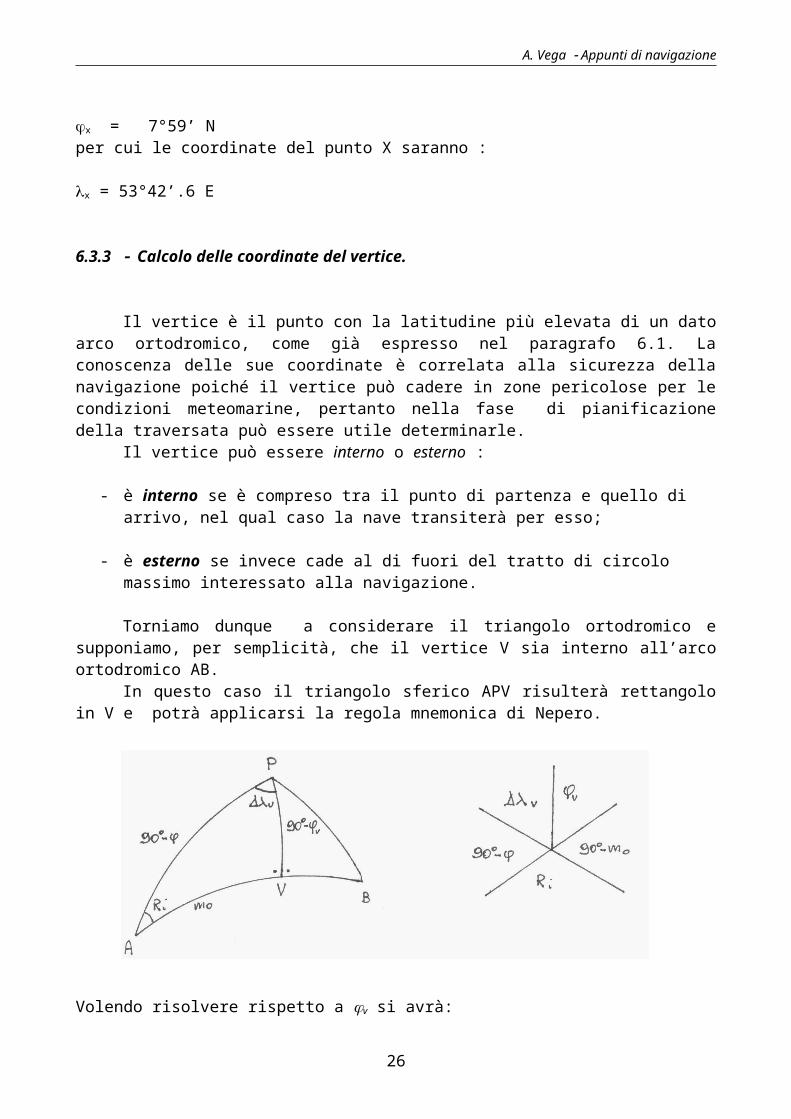
Torniamo dunque a considerare il triangolo ortodromico e supponiamo, per semplicità, che il vertice V sia interno all’arco ortodromico AB.
In questo caso il triangolo sferico APV risulterà rettangolo in V e potrà applicarsi la regola mnemonica di Nepero.
22
A. Vega Appunti di navigazione
Volendo risolvere rispetto a v si avrà:
cos v = sin (90° ) sin Ri
ovvero :cos v = cos sin Ri [5]
Risolvendo invece rispetto a 90° si otterrà :
cos (90° ) = cot v cot Ri
ovvero : cot v = sin tan Ri [6]
Queste due semplici relazioni permettono di calcolare le coordinate del vertice V, anzi dei due vertici V e V’ considerato che la loro latitudine v è uguale in modulo ma di segno opposto e che le longitudini v distano 180° l’una dall’altra.
Consideriamo un esempio:
“Determinare le coordinate del vertice dell’ortodromia compresa tra Charleston = 32°50’ N = 80°01’ W e Brest ’ = 48°28’ N ’ = 05°22’ W avente mo = 3384,16 nm e Ri = 50°08’.5”
= 32°50’ N cos = 0,8404251308 sin = 0,54219714 Ri = 50°08’.5 sin = 0,767631424 tan = 1,197755545 cos v = 0,645136739 cot v= 0,649419631 arc cos = 49°49’.8 N arc cot = 56°59’.9 E
v = = 80°01’ W 56°59’.9 E = 23°01’.1 E v = 49°49’.8 N per cui le coordinate del vertice , che risulta interno, saranno : v = 23°01’.1 W
v = 49°49’.8 S e, di conseguenza, le coordinate dell’altro vertice saranno : v = 156°59’.9 E
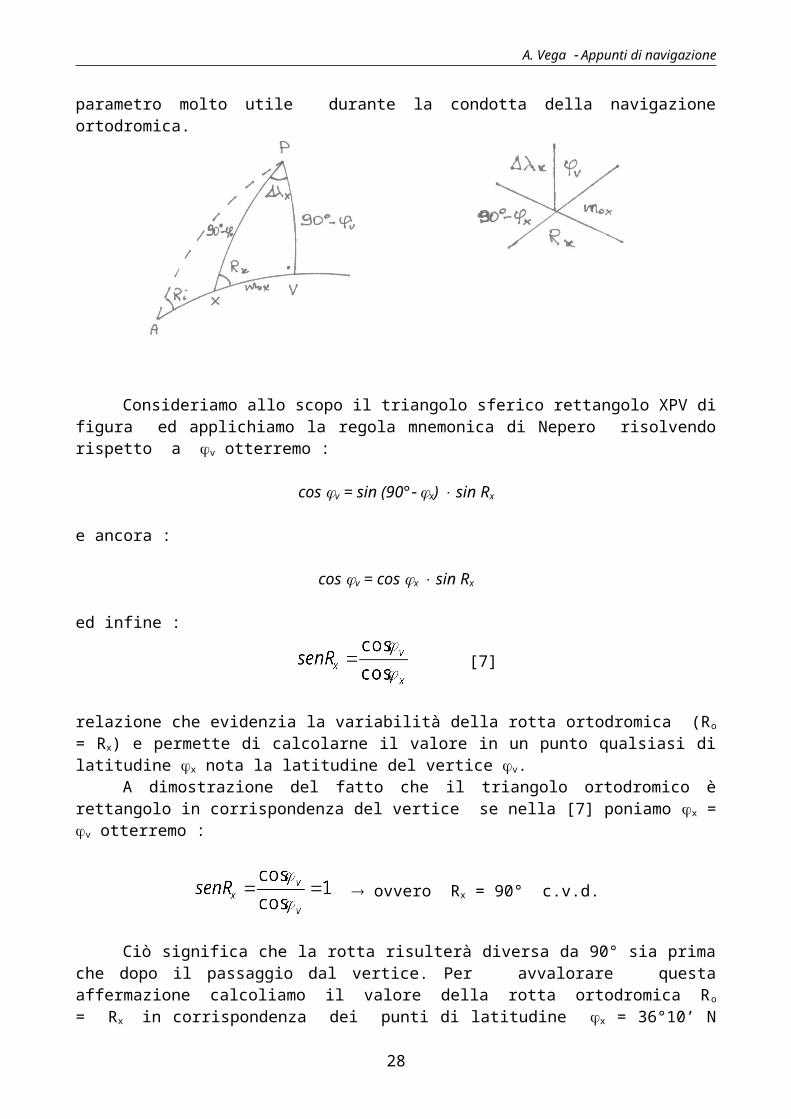
La conoscenza delle coordinate del vertice permette anche di conoscere il valore istantaneo della rotta ortodromica Ro, parametro molto utile durante la condotta della navigazione ortodromica.
Consideriamo allo scopo il triangolo sferico rettangolo XPV di figura ed applichiamo la regola mnemonica di Nepero risolvendo rispetto a v otterremo :
23
A. Vega Appunti di navigazione
cos v = sin (90° x) sin Rx
e ancora :
cos v = cos x sin Rx
ed infine :
[7]
relazione che evidenzia la variabilità della rotta ortodromica (Ro = Rx) e permette di calcolarne il valore in un punto qualsiasi di latitudine x nota la latitudine del vertice v.
A dimostrazione del fatto che il triangolo ortodromico è rettangolo in corrispondenza del vertice se nella [7] poniamo x = v otterremo :
ovvero Rx = 90° c.v.d.
Ciò significa che la rotta risulterà diversa da 90° sia prima che dopo il passaggio dal vertice. Per avvalorare questa affermazione calcoliamo il valore della rotta ortodromica R o = Rx in corrispondenza dei punti di latitudine x = 36°10’ N che si trova prima del vertice ed il punto di latitudine x = 49°00’ N che si trova invece dopo il vertice.
Rx = 53°01’.9
Rx = S 79°28’.2 E
per quest’ultimo valore, che rappresenta la Rx in forma quadratale, va considerato il suo supplemento :
Rx = 180° 79°28’.2 = 100°31’.8
evidentemente maggiore di 90°.6.3.4. La navigazione mista.
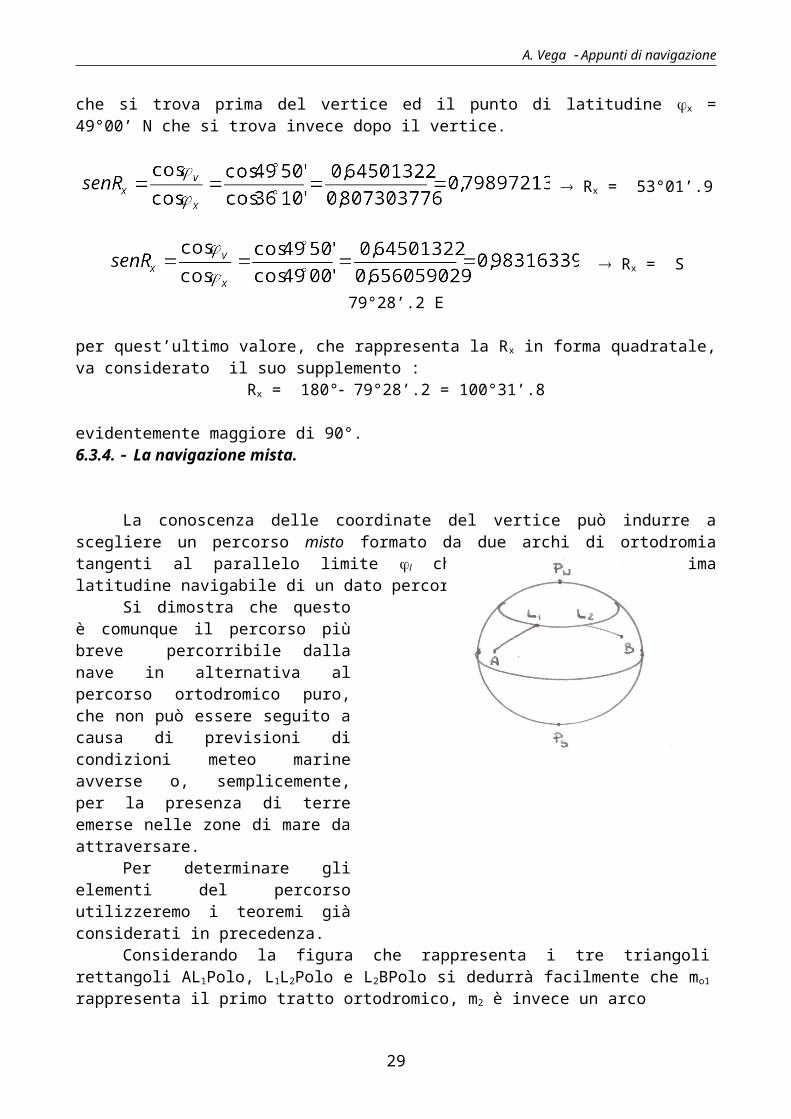
La conoscenza delle coordinate del vertice può indurre a scegliere un percorso misto formato da due archi di ortodromia tangenti al parallelo limite l che rappresenta la massima latitudine navigabile di un dato percorso.
Si dimostra che questo è comunque il percorso più breve percorribile dalla nave in alternativa al percorso ortodromico puro, che non può essere seguito a causa di previsioni di condizioni meteo marine avverse o, semplicemente, per la presenza di terre emerse nelle zone di mare da attraversare.
24
A. Vega Appunti di navigazione
Per determinare gli elementi del percorso utilizzeremo i teoremi già considerati in precedenza.
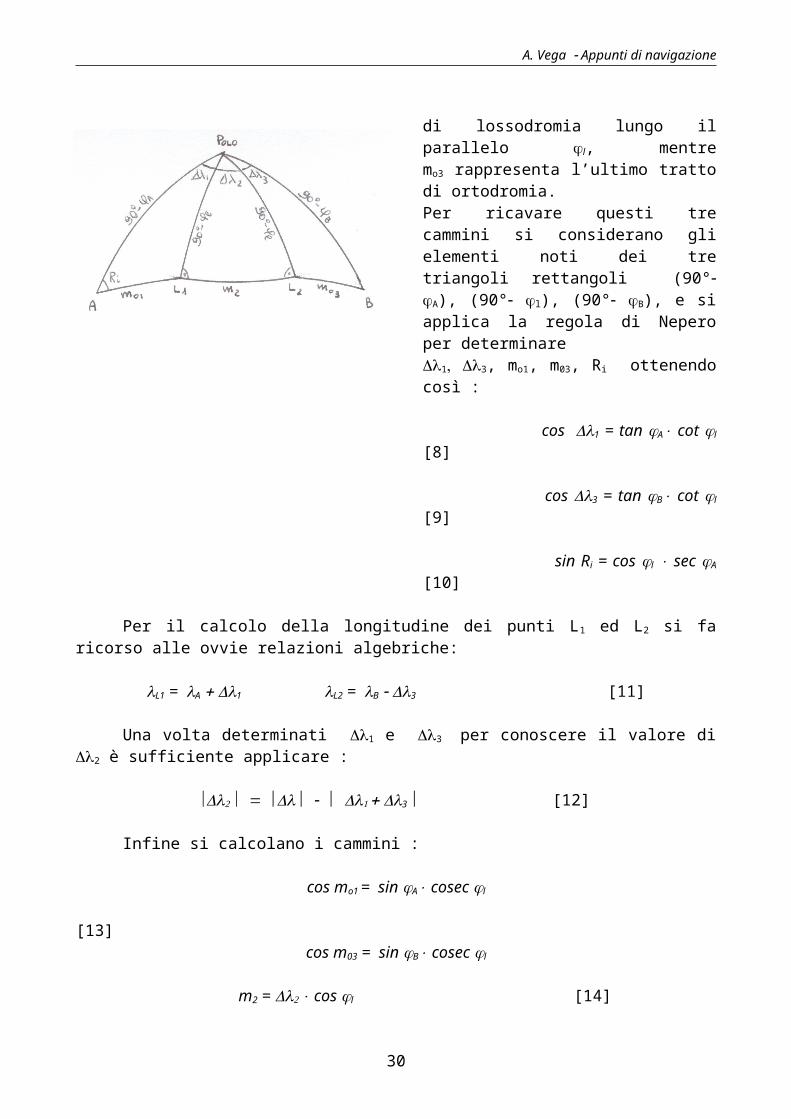
Considerando la figura che rappresenta i tre triangoli rettangoli AL1Polo, L1L2Polo e L2BPolo si dedurrà facilmente che mo1 rappresenta il primo tratto ortodromico, m2 è invece un arco di lossodromia lungo il parallelo l, mentre
mo3 rappresenta l’ultimo tratto di ortodromia. Per ricavare questi tre cammini si considerano gli elementi noti dei tre triangoli rettangoli (90° A), (90° l), (90° B), e si applica la regola di Nepero per determinare 1 3, mo1, m03, Ri ottenendo così :
cos 1 = tan A cot l [8]
cos 3 = tan B cot l [9]
sin Ri = cos l sec A [10]
Per il calcolo della longitudine dei punti L1 ed L2 si fa ricorso alle ovvie relazioni algebriche:
L1 = A 1 L2 = B 3 [11]
Una volta determinati 1 e 3 per conoscere il valore di 2 è sufficiente applicare :
3 [12]
Infine si calcolano i cammini :
cos mo1 = sin A cosec l
[13]cos m03 = sin B cosec l
m2 = cos l [14]
6.4 Considerazioni sulla condotta della navigazione ortodromica.
In un recente passato l’impiego dell’ortodromia era limitato alle traversate oceaniche dove si cercava di far seguire alla nave un percorso per Circolo Massimo allo scopo di risparmiare cammino. L’operazione risultava alquanto laboriosa per l’onerosità dei calcoli necessari.
Oltre a questo, la caratteristica dell’ortodromia di variare continuamente l’angolo di rotta rende difficile, nella pratica, seguire fedelmente il percorso previsto.
L’esperienza suggerisce di suddividere l’arco ortodromico individuando le coordinate di una serie di punti, detti waypoint WPT, uniti gli uni agli altri con archi di lossodromia.
I waypoint possono essere scelti:
- equidistanti in cammino m- equidistanti in - equidistanti in - equidistanti dal vertice V ( se interno)
25
A. Vega Appunti di navigazione
Va da se che tanto maggiore è il numero dei punti considerati, tanto maggiore è il risparmio di cammino in quanto il percorso risultante meglio si avvicina al percorso ortodromico.
Le tecniche adoperate per ricavare materialmente le coordinate dei waypoint si rifanno sostanzialmente al calcolo o alla loro determinazione con l’aiuto delle carte gnomoniche, carte nautiche che hanno la proprietà di rettificare l’ortodromia.
La scelta dei waypoint è utile nella fase di pianificazione della traversata per l’organizzazione della stessa. Le fonti di informazioni oggi disponibili sono diverse ed in continuo aggiornamento. La tendenza è di seguire rotte consigliate o assistite con informazioni meteorologiche che permettono di valutare con sufficiente anticipo cambiamenti di rotta e dirottamenti.
L’attualità dell’ortodromia risiede soprattutto nella diffusione dei calcolatori di bordo o navigatori computerizzati. Queste apparecchiature consentono, infatti, di disporre della posizione aggiornata della nave mediamente da 3 a 6 volte al minuto e, inoltre, calcolano la rotta ortodromica Ro tra la posizione attuale ed il waypoint di destinazione.
Con ulteriori calcoli automatici i navigatori computerizzati controllano se la nave si mantiene in rotta e avvisano se deriva e scarroccio conducono la nave fuori rotta, oltre un prefissato limite di tolleranza detto Cross Track Error ed indicato con XTE o XTC.
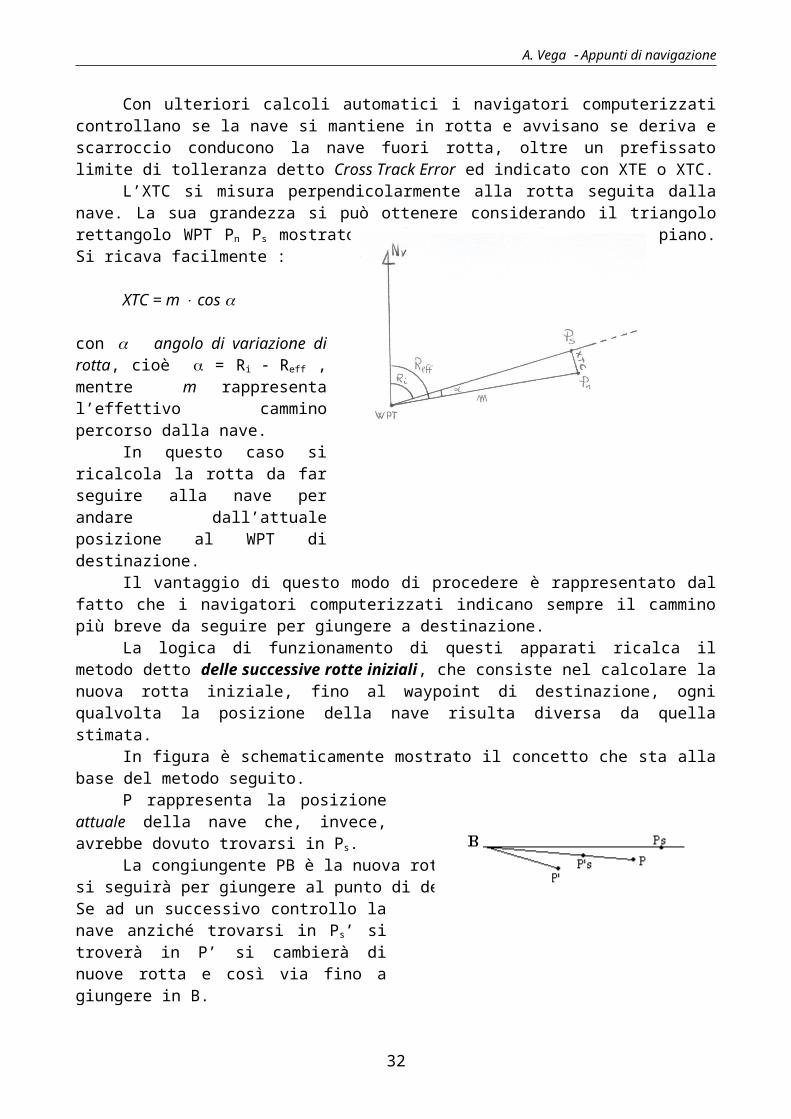
L’XTC si misura perpendicolarmente alla rotta seguita dalla nave. La sua grandezza si può ottenere considerando il triangolo rettangolo WPT Pn Ps mostrato in figura, che può ritenersi piano. Si ricava facilmente :
XTC = m cos
con angolo di variazione di rotta, cioè = Ri Reff , mentre m rappresenta l’effettivo cammino percorso dalla nave.
In questo caso si ricalcola la rotta da far seguire alla nave per andare dall’attuale posizione al WPT di destinazione.
Il vantaggio di questo modo di procedere è rappresentato dal fatto che i navigatori computerizzati indicano sempre il cammino più breve da seguire per giungere a destinazione.
La logica di funzionamento di questi apparati ricalca il metodo detto delle successive rotte iniziali, che consiste nel calcolare la nuova rotta iniziale, fino al waypoint di destinazione, ogni qualvolta la posizione della nave risulta diversa da quella stimata.
In figura è schematicamente mostrato il concetto che sta alla base del metodo seguito.P rappresenta la posizione attuale della
nave che, invece, avrebbe dovuto trovarsi in Ps. La congiungente PB è la nuova rotta che
si seguirà per giungere al punto di destinazione. Se ad un successivo controllo la nave anziché trovarsi in Ps’ si troverà in P’ si cambierà di nuove rotta e così via fino a giungere in B.
Il metodo delle successive rotte iniziali era conosciuto ed utilizzato anche da prima dell’avvento dei navigatori computerizzati, il limite era però rappresentato dalla laboriosità dei calcoli necessari e dallo scarso numero di waypoint considerati, mentre oggi il numero di quest’ultimi è addirittura ridondante.
26
A. Vega Appunti di navigazione
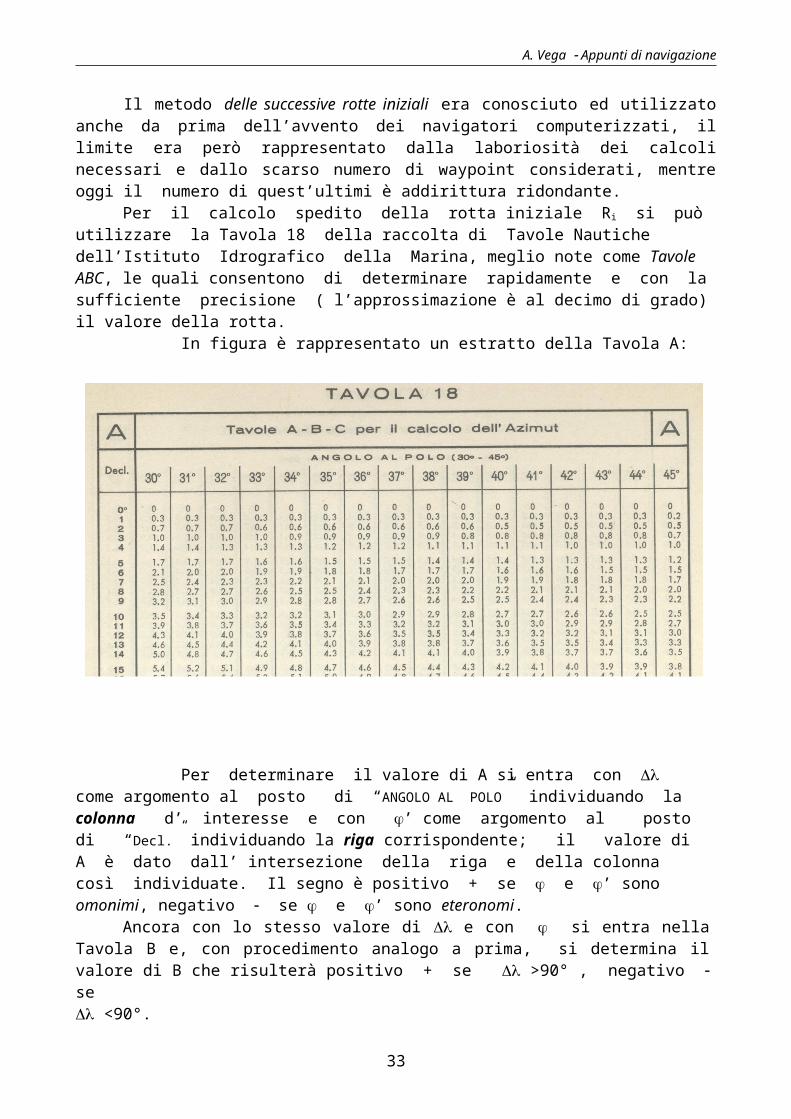
Per il calcolo spedito della rotta iniziale Ri si può utilizzare la Tavola 18 della raccolta di Tavole Nautiche dell’Istituto Idrografico della Marina, meglio note come Tavole ABC, le quali consentono di determinare rapidamente e con la sufficiente precisione ( l’approssimazione è al decimo di grado) il valore della rotta. In figura è rappresentato un estratto della Tavola A:
Per determinare il valore di A si entra con come argomento al posto di “ANGOLO AL POLO” individuando la colonna d’ interesse e con ’ come argomento al posto di “Decl.” individuando la riga corrispondente; il valore di A è dato dall’ intersezione della riga e della colonna così individuate. Il segno è positivo + se e ’ sono omonimi, negativo se e ’ sono eteronomi.
Ancora con lo stesso valore di e con si entra nella Tavola B e, con procedimento analogo a prima, si determina il valore di B che risulterà positivo + se >90° , negativo se <90°.
In figura è rappresentato un estratto della Tavola B.
27
A. Vega Appunti di navigazione
Attribuiti i segni ad A e B si opera la somma algebrica ottenendo A+B, con questo valore si entra nella Tavola C individuando la colonna con il valore corrispondente. Utilizzando come secondo argomento “Lat” si individua la riga corrispondente, dall’intersezione della riga e della colonna prescelte si determina il valore della rotta iniziale Ri, espressa in forma quadratale, con il prefisso N o S individuato dal segno di e dal valore algebrico di A+B, il suffisso E o W è invece individuato dal segno di .
In Figura è mostrato un estratto della Tavola C.
Lo schema di calcolo da adottare è quello mostrato in figura
7. – La rotta Brachistotronica
Finora sono state studiate e descritte le possibili traiettorie geometriche sviluppabili sulla sfera terrestre: la lossodromia e l’ortodromia.
Tuttavia la reale condotta della navigazione non può prescindere dalle condizioni meteomarine in cui si trova ad operare la nave.
Può verificarsi infatti che lungo il suo percorso s'incontrino vento forte e mare agitato, fattori che rallentano e disturbano considerevolmente il moto della nave.
L’esperienza del Comandante, la conoscenza della nave in termini di risposta e di tenuta del mare, può consigliare di cambiare rotta allo scopo di ridurre danni al carico e disturbi alle persone imbarcate. Tale eventuale rotta, che comporta le minori sofferenze per la nave, le minori riduzioni di velocità, consentendo di arrivare a destinazione nei minimo tempo è detta rotta brachistocrona o di minimo tempo
II tracciamento della brachistocrona non è semplice perché richiede la conoscenza sia della situazione attuale che di quella prevista dello stato del mare per tutta la traversata oltre che delle curve di prestazione della nave (figura a lato), cioè grafici che indicano la
28
A = a ( B = b ( C = a+b
A. Vega Appunti di navigazione
riduzione di velocità che subisce la stessa in funzione della direzione e dell'altezza delle onde significative e delle cosiddette indicatrici di velocità.
In aggiunta a queste curve si possono ottenere le indicatrici di velocità, ovvero rappresentazioni polari del vettore velocità della nave rispetto alla direzione di provenienza del mare.
Ciascuna indicatrice di velocità si riferisce ad una data altezza d’onda che, pertanto, rappresentano il parametro della famiglia di indicatrici di velocità.
Partendo da questi elementi dati – evidentemente diversi da nave a nave - si può pensare di tracciare la brachistocrona con la procedura dei fronti isocroni già ampiamente descritta da lavori del prof. R. James e ampiamente divulgata anche dal prof. Silvestro Sannino.
Il procedimento è il seguente:
1. si traccia l'ortodromia tra il punto di partenza e quello d'arrivo sulla carta gnomonica e si riporta per punti sulla carta di Mercatore ottenendo così la spezzata lossodromica.
2. sulla stessa carta di Mercatore si riportano in direzioni simmetriche rispetto all'ortodromia e spaziate di 10°, i cammini che la nave può compiere in 6÷12 ore, tenendo conto dellostato del mare e delle curve di prestazione della nave; congiungendo gli estremi dì talicammini sì ha il primo fronte isocrono luogo dei punti che la nave può raggiungere nelprimo intervallo dì navigazione
3. per diversi punti del fronte si tracciano le normali al fronte stesso e su queste si riportano icammini per il successivo intervallo dì navigazione; congiungendo gli estremi si ha il 2°fronte isocrono, come indicato nella figura precedente
4. la procedura si ripete fino a quando un fronte passa per il punto di arrivo; labrachistocrona è la traiettoria che, partendo da tale punto, segue a ritroso le normali aifronti, lungo i tratti più brevi, fino al punto di partenza
5. se le notizie meteo alla partenza non consentono di tracciare i fronti fino al punto dì arrivo,si considera come "arrivo fittizìo" quel punto dell'ultimo fronte tracciato che ha la minima distanza dalla destinazione finale
La brachistocrona è rimasta e rimane in larga parte una traiettoria teorica perché generalmente a bordo delle navi non sempre sono disponibili le curve dì prestazione succitate, questo nonostante a bordo oggi siano disponibili ricevitori meteofax che forniscono le carte del tempo e del mare e connessioni internet satellitari che danno accesso ad altre informazioni meteo fornite da siti dedicati. Inoltre la procedura descritta richiederebbe un grosso impegno: in ogni
29
A. Vega Appunti di navigazione
guardia bisognerebbe seguire e aggiornare l'evoluzione delle condizioni meteomarine, e conseguentemente tracciare i fronti isocroni.
Esistono e possono essere utilizzati in alternativa i servizi offerti da terra da Istituti inglesi, olandesi, americani come l'Ocean Routes di S.Francisco, i quali, su richiesta, consigliano via radio o via fax la rotta più sicura e meno "agitata" ad intervalli regolari.
Diversi noleggiatori impongono agli armatori di avvalersi di tali servizi, che naturalmente sono a pagamento; ma qualche volta sorgono conflitti fra i suggerimenti di tali Istituti a la volontà del comandante, che resta sempre l'unico responsabile delta sicurezza della navigazione.
La soluzione del problema implica evidentemente notevoli difficoltà, considerazione che porta ad introdurre volta per volta ipotesi semplificative che tengano conto del fatto che la scelta iniziale va sempre fatta fra la lossodromia e l’ortodromia e delle informazioni climatologiche e meteorologiche disponibili per il tratto di mare nel quale si intende navigare. Si perviene così alle rotte meteorologiche sviluppate tenendo conto di modelli matematici che non possono prescindere dal modello matematico della nave e dell’ambiente meteomarino; è ciò che oggi accade nei simulatori di manovra, dove un apposito software permette a modelli virtuali di diverse tipologie di navi di interagire con l’ambiente meteomarino (onde, vento, visibilità, correnti, ecc) consentendo così di comprendere e testare il possibile comportamento della nave nel cattivo tempo.
Evidentemente il perfezionamento di questi software e il conseguente miglioramento della precisione dei modelli di previsione meteo faranno si che in un futuro non troppo lontano la gestione della traversata possa essere resa più efficiente e sicura.
Per il momento si continua a fare affidamento sull’esperienza e sulla responsabilità dei Comandanti.
8. Principi fisici
Alcuni strumenti nautici utilizzano importanti principi della fisica ad esempio per misurare la velocità della nave, la profondità del mare e altri parametri.
In questa sede faremo dei brevi richiami sui principi largamente utilizzati quali la magnetostrizione, la piezoelettricità e l’effetto Doppler.
La magnetostrizione è il principio per cui certi materiali si espandono e contraggono quando messi in un campo magnetico alternato.
L'energia elettrica alternata dal generatore ultrasonico è prima convertita in un campo magnetico alternato attraverso l'uso di una spirale di un filo metallico. Il campo magnetico alternato è poi usato per indurre vibrazioni meccaniche a frequenza ultrasonica in strisce risonanti di nichel o altro materiale magnetostrittivo che sono attaccati alla superficie per essere vibrati.
30
A. Vega Appunti di navigazione
A causa delle costrizioni meccaniche dipendenti dalla fisica dell'hardware o anche complicazioni elettriche e magnetiche, i trasduttori ad alto potere magnetostrittivo operano spesso a frequenze oltre i 20 KHz.
La piezoelettricità (parola che deriva dal greco πιέζειν, premere, comprimere) è la proprietà di alcuni cristalli di generare una differenza di potenziale quando sono soggetti ad una deformazione meccanica. Tale effetto è reversibile e si verifica su scale dell'ordine dei nanometri.
Il funzionamento di un cristallo piezoelettrico è abbastanza semplice: quando viene applicata una pressione (o decompressione) esterna, si posizionano, sulle facce opposte, cariche di segno opposto. Il cristallo, così, si comporta come un condensatore al quale è stata applicata una differenza di potenziale. Se le due facce vengono collegate tramite un circuito esterno, viene quindi generata una corrente elettrica detta corrente piezoelettrica. Al contrario, quando si applica una differenza di potenziale al cristallo, esso si espande o si contrae.
Per fargli acquisire proprietà piezoelettriche il materiale viene riscaldato e immerso in un campo elettrico in modo da farlo polarizzare e raffreddare. Alla fine del processo il materiale ha tutte le celle deformate nella stessa direzione. L’espansione volumetrica è facilmente pilotabile ed è strettamente dipendente dalla stimolazione elettrica.
I trasduttori magnetostrittivi sono generalmente meno efficienti di quelli piezoelettrici.
I trasduttori piezoelettrici, al contrario, possono operare bene nella gamma dei megahertz. Questo è dovuto principalmente al fatto che il trasduttore magnetostrittivo richiede una doppia conversione di energia da elettrica a magnetica e poi da magnetica a meccanica. Un po' di efficienza viene persa in ogni conversione. Gli effetti di isteresi magnetica diminuiscono anche l'efficienza del trasduttore magnetostrittivo.
Le onde ultrasonore, che sono inviate in acqua, sono attenuate e/o riflesse, deviate o assorbite per causa dalle discontinuità di densità e temperatura in essa presenti.
Ognuno conosce cosa sia l'eco: il fenomeno dipende dalla riflessione delle onde sonore che rimbalzano contro la superficie dell'ostacolo, che è di natura diversa da quella del mezzo di propagazione (aria), fino al ritorno all'orecchio dell'ascoltatore.
Il segnale qui è costituito da un fascio d'onde ultrasonore generato sfruttando le proprietà piezoelettriche o magnetostrittive di alcuni cristalli, ovvero la loro capacità di contrarsi ed espandersi sotto l'azione d'un campo elettrico o d'un campo magnetico alternato. Le vibrazioni del cristallo producono onde elastiche, di frequenza ultrasonora dipendente dal rapporto spessore - diametro del cristallo piezoelettrico. Gli ultrasuoni così generati sono trasferiti direttamente in acqua grazie al contatto, o più propriamente al semplice accostamento del generatore (trasduttore) alla superficie del mare, e ciò rende possibile il trasferimento degli ultrasuoni all'acqua che risulta essere il miglior
31
A. Vega Appunti di navigazione
mezzo di propagazione. Il fascio d'onde ultrasonore si propaga in acqua con la stessa frequenza con cui è stato generato del cristallo, e con una velocità che dipende dagli strati d’acqua attraversati. Quando il fascio incontrerà il fondo o un ostacolo verrà riflesso, assorbito, deviato o diffratto, secondo le leggi comuni a tutti i fenomeni di propagazione delle onde.
Le onde riflesse possiedono la stessa frequenza di quelle incidenti, ma sono sfasate rispetto ad esse, anche in funzione del cammino percorso, cioè della distanza del trasduttore dai vari punti della superficie del fondo o dell'ostacolo. Normalmente gli strumenti rivelatori d'ultrasuoni si compongono di due parti, unite o distinte: il generatore del segnale da inviare all’acqua ed il rivelatore, che riceve, amplifica, filtra e visualizza i segnali che ritornano in superficie dopo la propagazione. In tal modo è possibile rivelare gli echi riflessi ed utilizzarli per gli scopi finali: determinazione della profondità o della velocità.
L'effetto Doppler è un fenomeno fisico che consiste nel cambiamento apparente della frequenza o della lunghezza d'onda di un'onda percepita da un osservatore che si trova in movimento o in quiete rispetto alla sorgente delle onde, anch'essa in movimento o in quiete. Per quelle onde che si trasmettono in un mezzo, come le onde sonore, la velocità dell'osservatore e dell'emettitore vanno considerate in relazione a quella del mezzo in cui sono trasmesse le onde. L'effetto Doppler totale può quindi derivare dal moto di entrambi, ed ognuno di essi è analizzato separatamente.
È importante notare che la frequenza del suono emesso dalla sorgente non cambia nel sistema di riferimento solidale alla sorgente. Per comprendere il fenomeno, consideriamo la seguente analogia: se siamo fermi sulla spiaggia, vediamo arrivare le onde supponiamo ogni cinque secondi, quindi ad una determinata frequenza; se ora entriamo in acqua e navighiamo verso il mare aperto, andiamo incontro alle onde, quindi le incontriamo più frequentemente (la frequenza aumenta), mentre se navighiamo verso riva, nella stessa direzione delle onde, la frequenza con cui le incontriamo diminuisce.
Per fare un altro esempio: qualcuno lancia una palla ogni secondo nella nostra direzione. Assumiamo che le palle viaggino con velocità costante. Se colui che le lancia è fermo, riceveremo una palla ogni secondo. Ma, se si sta invece muovendo nella nostra direzione, ne riceveremo un numero maggiore nel medesimo lasso di tempo (ovvero, a una frequenza maggiore), perché esse saranno meno spaziate. Al contrario, se si sta allontanando ne riceveremo di meno nell'unità di tempo. Ciò che cambia è quindi la frequenza nel sistema di riferimento del rilevatore; come conseguenza, l'altezza del suono percepito cambia.
32
A. Vega Appunti di navigazione
Se una sorgente in movimento sta emettendo onde con una frequenza f0, allora un osservatore stazionario (rispetto al mezzo di trasmissione) percepirà le onde con una frequenza f data da:
dove v è la velocità delle onde nel mezzo e vs, r è la velocità della sorgente rispetto al mezzo (considerando solo la direzione che unisce sorgente ed osservatore), positiva se verso l'osservatore, e negativa se nella direzione opposta.
Un'analisi simile per un osservatore in movimento e una sorgente stazionaria fornisce la frequenza osservata (la velocità dell'osservatore è indicata come vos):
In questo caso l'osservatore in moto verso la sorgente riceve un numero maggiore di fronti d'onda nello stesso intervallo di tempo e percepisce una frequenza maggiore: più precisamente, in un tempo pari a un secondo, l'osservatore in moto riceve, oltre al numero f0=v/λ0 di treni d'onda emessi dalla sorgente, anche un numero di treni d'onda pari a vos/λ0=vos• f0/v.
In generale, la frequenza osservata è data da:
dove vos è la velocità dell'osservatore, Vs,r è la velocità della sorgente, Vm è la velocità del mezzo, e tutte le velocità sono positive se nella stessa direzione lungo cui si propaga l'onda, o negative se nella direzione opposta.
33