2 - LE CONICHE - Dipartimento di Matematicaverardi/CONICHE.pdf · Geometria Proiettiva – modulo...
30
Geometria Proiettiva – modulo prof. Verardi – Le coniche 41 2 - LE CONICHE 2.1 – Coni quadrici e forme quadratiche Siano m, n∈N, non nulli, e sia K un campo. Sia f = fx 0 ,x 1 , K,x n ( ) un polinomio omogeneo di grado m in n+1 indeterminate x 0 ,x 1 , K,x n . Esso è costituito da una somma di monomi, ciascuno di grado m, ed ha la seguente proprietà: per ogni "# K, f "# x 0 , "# x 1 , K, "# x n ( ) = " m # fx 0 ,x 1 , K,x n ( ) Ne segue che se per un vettore v " K n +1 si ha fv ( ) = 0, allora f "# v ( ) = 0 . L’insieme C delle soluzioni dell’equazione fx 0 ,x 1 , K,x n ( ) = 0 è chiamato (iper)- cono di grado m di K n +1 e, se non è vuoto, è costituito da un insieme di rette vettoriali. Ne segue che C si può interpretare come un insieme di punti dello spazio proiettivo " n K ( ) . Osservazione 2.1.1. Mentre lo studio dei sistemi lineari e delle matrici è sostanzialmente la stesso per ogni tipo di campo, non è così per gli iper-coni e le figure da essi indotte negli spazi proiettivi. Per esempio, consideriamo il polinomio omogeneo di II grado x 0 2 + x 1 2 , che si può definire in ogni campo. • Nel campo reale ha la sola soluzione nulla (0,0), quindi nella retta proiettiva " 1 R ( ) definisce l’insieme vuoto. • Nel campo complesso, invece, si scinde nei due fattori lineari x 0 ± i " x 1 , che danno luogo ai due punti distinti 1, ±i [ ] di " 1 C ( ) . • Infine, in un campo K di caratteristica 2, in cui l’applicazione x " x 2 è un monomorfismo, si ha x 0 2 + x 1 2 = x 0 + x 1 ( ) 2 , e si ha il punto doppio 1,1 [ ] . Nel seguito consideriamo il caso m = 2. Se n = 2, la curva in " 2 K ( ) si chiama conica; se n = 3, si dice quadrica, mentre se n ≥ 4, si chiama iperquadrica.
Transcript of 2 - LE CONICHE - Dipartimento di Matematicaverardi/CONICHE.pdf · Geometria Proiettiva – modulo...

Geometria Proiettiva – modulo prof. Verardi – Le coniche
41
2 - LE CONICHE
2.1 – Coni quadrici e forme quadratiche
Siano m, n∈N, non nulli, e sia K un campo. Sia
!
f = f x0, x1,K, xn( ) un polinomio
omogeneo di grado m in n+1 indeterminate
!
x0, x1,K, xn . Esso è costituito da
una somma di monomi, ciascuno di grado m, ed ha la seguente proprietà:
per ogni
!
" # K,
!
f " # x0, " # x1,K, " # xn( ) = "m # f x0, x1,K, xn( )
Ne segue che se per un vettore
!
v " Kn+1 si ha
!
f v( ) = 0, allora
!
f " # v( ) = 0 .
L’insieme C delle soluzioni dell’equazione
!
f x0, x1,K, xn( ) = 0 è chiamato (iper)-
cono di grado m di
!
Kn+1 e, se non è vuoto, è costituito da un insieme di rette
vettoriali. Ne segue che C si può interpretare come un insieme di punti dello
spazio proiettivo
!
"n K( ) .
Osservazione 2.1.1. Mentre lo studio dei sistemi lineari e delle matrici è sostanzialmente la
stesso per ogni tipo di campo, non è così per gli iper-coni e le figure da essi indotte negli spazi
proiettivi. Per esempio, consideriamo il polinomio omogeneo di II grado
!
x02
+ x12
, che si può
definire in ogni campo.
• Nel campo reale ha la sola soluzione nulla (0,0), quindi nella retta proiettiva
!
"1 R( )
definisce l’insieme vuoto.
• Nel campo complesso, invece, si scinde nei due fattori lineari
!
x0 ± i " x1, che danno luogo
ai due punti distinti
!
1, ±i[ ] di
!
"1 C( ) .
• Infine, in un campo K di caratteristica 2, in cui l’applicazione
!
x " x2 è un monomorfismo,
si ha
!
x02
+ x12
= x0 + x1( )2, e si ha il punto doppio
!
1,1[ ] .
Nel seguito consideriamo il caso m = 2. Se n = 2, la curva in
!
"2 K( ) si chiama
conica; se n = 3, si dice quadrica, mentre se n ≥ 4, si chiama iperquadrica.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
42
Un polinomio omogeneo di secondo grado prende spesso il nome di forma
quadratica. Per studiarlo, per molte ragioni escludiamo il caso dei campi di
caratteristica 2. In tal caso, ogni elemento non nullo è il doppio di un altro.
Infatti,
!
2 "1 = 1+1 # 0, per cui esiste il suo inverso. Allora per ogni y ≠ 0, posto
!
x = 1+1( )"1 # y , si ha
!
2x = 1+1( ) " x = y . Pertanto, è possibile denotare con
!
2aijxix j i
termini “rettangolari”, ossia quelli con i ≠ j. Si può allora scrivere la forma
quadratica in forma compatta nel modo seguente.
Siano
!
X =
x0x1K
xn
"
#
$ $ $ $
%
&
' ' ' '
ed
!
A =
a00 a01 K a0na10 a11 K a1nK K K K
an0 an1 K ann
"
#
$ $ $ $
%
&
' ' ' '
, con
!
aij = a ji , ossia A simmetrica.
Allora
!
f X( ) = f x0, x1,K, xn( ) = Xt " A " X .
Vediamo ora il caso di K = R. Le seguenti proprietà delle matrici simmetriche
dovrebbero essere ben note:
a) Il polinomio caratteristico
!
det A " #In+1( ) di A ha tutte le radici (ossia gli
autovalori di A) reali.
b) L’autospazio
!
V" relativo all’autovalore λ ha dimensione uguale alla
molteplicità di λ come radice del polinomio caratteristico.
c) Autospazi relativi ad autovalori distinti sono ortogonali.
Ne consegue che l’endomorfismo α di
!
Rn+1 di matrice A non solo è
diagonalizzabile, ma diviene diagonale rispetto ad una opportuna base
ortonormale di
!
Rn+1. In altre parole, la matrice A’ di α rispetto alla nuova base
ha nella diagonale principale gli autovalori di A (contati con le loro molteplicità)
ed è legata alla matrice A dalla formula
!
A = P"1 # $ A # P , dove la matrice di
passaggio P è ortogonale, ossia
!
P"1 = Pt .
Rispetto alla nuova base, il vettore-colonna X si trasforma in X’, dove
!
X = P " # X .
Allora si ha
!
f X( ) = P " # X ( )t " A " P " # X ( ) = # X t " Pt " A " P$
% &
'
( ) " # X = # X t " # A " # X .
Detti quindi
!
"0, "1,K, "n gli autovalori, ne risulta
!
f " x 0, " x 1,K, " x n( ) = # i $ xi2
i=0
n% .

Geometria Proiettiva – modulo prof. Verardi – Le coniche
43
2.2. Le coniche proiettive a coefficienti reali
Consideriamo qui il caso delle coniche a coefficienti nel campo reale, anche se,
per confronto, penseremo spesso di immergere tale conica nel campo complesso.
L’equazione generale di una conica è
!
a00 " x02
+ a11 " x12
+ a22 " x22
+ 2a01 " x0 " x1 + 2a02 " x0 " x2 + 2a12 " x1 " x2 = 0
con i coefficienti non tutti nulli. Sia
!
A =
a00 a01 a02a01 a11 a12a02 a12 a22
"
#
$ $ $
%
&
' ' ' la matrice simmetrica
dei coefficienti e siano
!
"0, "1, "2 i suoi autovalori. La trasformazione di
coordinate che porta la matrice A alla forma diagonale
!
"0 0 00 "1 00 0 "2
#
$
% % %
&
'
( ( ( induce una
collineazione nel piano proiettivo, che trasforma la conica data nella conica
!
"0 # x02
+ "1 # x12
+ "2 # x22
= 0, con i tre coefficienti reali e non tutti nulli.
Pertanto, ogni conica è proiettivamente equivalente ad una di questo tipo.
Cerchiamo ora di classificarla.
Nel campo complesso la distinzione principale è la quantità di autovalori non
nulli, ossia il rango della matrice A. Nel campo reale conta anche il segno.
Ciò posto,
A) Sia
!
"1 = "2 = 0. Allora
!
"0 # 0 e quindi, semplificandolo, si ottiene
l’equazione
!
x02
= 0. Essa si spezza nelle due equazioni uguali
!
x0 = 0, che
danno la retta proiettiva doppia
!
1,0,0[ ] .
B)
!
"2 = 0, unico autovalore nullo. Allora la conica ha equazione
!
"0 # x02
+ "1 # x12
= 0, o anche, posto
!
µ = "1 / "0 ,
!
x02
+ µ " x12
= 0. Nel
campo complesso avremmo due rette distinte. Nel campo reale, invece,
tutto dipende dal segno di µ: se µ < 0, allora la trasformazione di

Geometria Proiettiva – modulo prof. Verardi – Le coniche
44
coordinate
!
y0 = x0y1 = µ " x1y2 = x2
#
$ % %
& % %
produce l’equazione
!
y02" y1
2= 0 e quindi si
hanno le due rette proiettive distinte
!
1, ±1,0[ ] ; se è > 0, allora la stessa
trasformazione produce l’equazione
!
y02
+ y12
= 0, che implica
!
y0 = y1 = 0
e quindi il solo punto reale
!
0,0,1[ ] .
C) I tre autovalori siano non nulli. Si osserva subito che il polinomio
!
f x0, x1, x2( ) = "0 # x02
+ "1 # x12
+ "2 # x22 non si spezza nel prodotto di due
fattori lineari. Basta infatti moltiplicare due fattori lineari
!
a0 " x0 + a1 " x1 + a2 " x2( ) " b0 " x0 + b1 " x1 + b2 " x2( ) ed osservare che la
forma quadratica risultante ha la matrice dei coefficienti col
determinante nullo,
a0*b0 (a0*b1+a1*b0)/2 (a0*b2+a2*b0)/2 (a0*b1+a1*b0)/2 a1*b1 (a1*b2+a2*b1)/2 = 0 (a0*b2+a2*b0)/2 (a1*b2+a2*b1)/2 a2*b2
e perciò uno dei tre autovalori dovrebbe essere nullo. Ne segue che la
conica non degenera in due rette. Nel campo reale possiamo avere tre
autovalori con lo stesso segno, che possiamo supporre positivo, oppure
due con un segno ed uno col segno opposto, e possiamo supporre che
siano positivi gli ultimi due. Nel primo caso, la forma quadratica è
definita positiva, ossia, più terra terra, è somma di tre numeri non
negativi, dunque si annulla solo per
!
x0 = x1 = x2 = 0. Tuttavia, la terna
nulla non ha significato nel piano proiettivo, quindi in questo caso la
conica non ha punti reali. Con un ulteriore cambio di coordinate, ossia
posto
!
y0 = "0 # x0y1 = "1 # x1y2 = "2 # x2
$
% & &
' & &
, si ottiene l’equazione
!
y02
+ y12
+ y22
= 0. Nel
secondo caso, si possono dividere i tre coefficienti per
!
"0 e porre
!
µi = "# i / #0, ottenendo
!
x02
= µ1 " x12
+ µ2 " x22, con
!
µi > 0, i = 1,2. Si ha
così
!
x0 = 0 " x1 = x2 = 0. Per ogni coppia di valori non entrambi nulli

Geometria Proiettiva – modulo prof. Verardi – Le coniche
45
assegnati alle due variabili
!
x1, x2 si ricavano due valori opposti di
!
x0 . La
conica ha così infiniti punti reali. Con l’ulteriore cambio di coordinate:
!
y0 = x0y1 = µ1 " x1y2 = µ2 " x2
#
$ %
& % %
, abbiamo il risultato finale,
!
y02
= y12
+ y22. Pertanto, ogni
conica con due autovalori positivi ed uno negativo (o viceversa) si riduce
ad una espressione di questo tipo rispetto ad una opportuna scelta del
sistema di riferimento. Ora, il cambiare sistema di riferimento equivale a
trasformare la conica con una collineazione, pertanto, ogni conica con il
determinante della matrice A non nullo è proiettivamente equivalente ad
una conica di equazione
!
y02
+ y12
+ y22
= 0 oppure
!
y02
= y12
+ y22.
Diremo degenere una conica tale che det(A) = 0, ossia con almeno un autovalore
nullo; non degenere in caso contrario, ossia se det(A) ≠ 0.
Riassumendo, ogni conica nel piano reale è proiettivamente equivalente ad una
delle coniche seguenti:
!
x02
= 0 Retta doppia
!
x02" x1
2= 0 Due rette distinte Coniche degeneri
!
x02
+ x12
= 0 Un solo punto reale
!
x02
+ x12
+ x22
= 0 Nessun punto reale
Coniche non degeneri
!
x02" x1
2" x2
2= 0 Conica reale non deg.
Esempio 2.2.1. Sia data la conica proiettiva
!
8x0x2 + 5x12
= 0 . Proviamo a
classificarla e a trovare una collineazione che la porti ad una delle cinque forme
canoniche precedenti.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
46
La sua matrice è
!
A =
0 0 40 5 04 0 0
"
#
$ $ $
%
&
' ' ' ed i suoi autovalori si trovano risolvendo
!
det A " t # I3( ) =
"t 0 40 5" t 04 0 "t
= " t "5( ) # t2 "16$
% &
'
( ) = 0 . Si trovano le tre radici 5, -4, 4,
ossia due positive ed una negativa. Siamo quindi nel caso “ordinario” della
conica reale non degenere. Per trovare una collineazione che trasformi la conica
data
!
8x0x2 + 5x12
= 0 nella conica “canonica”
!
x02" x1
2" x2
2= 0 operiamo per
esempio come segue: troviamo dapprima tre autovettori relativi ai tre autovalori.
Per t = -4:
!
4x0 + 4x2 = 09x1 = 0
4x0 + 4x2 = 0
"
# $
% $
& v1 =
10'1
(
)
* * *
+
,
- - - ; lo normalizziamo dividendolo per
!
v1 = 2 .
per t = 4:
!
"4x0 + 4x2 = 09x1 = 0
4x0 " 4x2 = 0
#
$ %
& %
' v2 =12
101
(
)
* * *
+
,
- - - ; per t = 5:
!
"5x0 + 4x2 = 00 = 0
4x0 "5x2 = 0
#
$ %
& %
' v3 =
010
(
)
* * *
+
,
- - - .
Posto
!
P =
1/ 2 1/ 2 00 0 1
"1/ 2 1/ 2 0
#
$
% % % %
&
'
( ( ( (
, si ha
!
X = P " # X $x0 = # x 0 + # x 1( ) / 2x1 = # x 2x2 = % # x 0 + # x 1( ) / 2
&
' ( (
) ( (
, che trasforma
l’equazione data nella equazione
!
"4 # x 02
+ 4 # x 12
+ 5 # x 22
= 0. Posto infine
!
y0 = 2 " x 0y1 = 2 " x 1y2 = 5 " x 2
#
$ %
& %
, a meno di un cambio di segno si ottiene
!
y02" y1
2" y2
2= 0. Non
resta ora che comporre le due trasformazioni:
!
y0 = 2 " x 0y1 = 2 " x 1y2 = 5 " x 2
#
$ %
& %
'
" x 0 = y0 /2" x 1 = y1 /2" x 2 = 5y2 /5
#
$ %
& %
'
x0 = 2 y0 + y1( ) / 4
x1 = 5y2 /5x2 = 2 (y0 + y1( ) / 4
#
$
% %
&
% %
.
Tutto ciò è avvenuto in
!
R3, ma basta moltiplicare X per un coefficiente reale λ
non nullo per concludere con la collineazione cercata.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
47
Esercizio 2.2.2. Mostrare che la conica proiettiva di equazione:
!
3 " x02
+13 " x0 " x1 #2 " x0 " x2 #10 " x12
+ 7 " x1 " x2 # x22
= 0
si spezza in due rette distinte e trovarle.
Svolgimento. La matrice di questa conica è
!
A =
3 13/2 "113/2 "10 7/2"1 7/2 "1
#
$
% % %
&
'
( ( ( , ed il suo
determinante è nullo. Si tratta perciò di una conica degenere. Il polinomio
caratteristico è
!
det A " t # I3( ) ="t2
2t2 +16t "157$
% &
'
( ) . Oltre alla radice nulla, per la
nota “regola di Cartesio” esso ha una radice positiva ed una negativa, quindi la
conica si spezza in due rette reali.
Per trovarle, basta risolvere l’equazione nell’incognita
!
x0 :
!
3 " x02
+ 13 " x1 #2 " x2( ) " x0 #10 " x12
+ 7 " x1 " x2 # x22
= 0
Il suo discriminante è
!
13 " x1 #2 " x2( )2 # 4 "3 " #10 " x12
+ 7 " x1 " x2 # x22$
% &
'
( ) = 289 " x1
2#136 " x1 " x2 +16 " x2
2=
!
= 17 " x1 # 4 " x2( )2. Pertanto, con un minimo di calcoli, si ottiene la scomposizione
nelle due rette distinte:
!
x0 + 5 " x1 # x2( ) " 3 " x0 #2 " x1 + x2( ) = 0
OSSERVAZIONE 2.2.3. Se una conica reale possiede quattro punti a tre a tre
non allineati, è possibile sceglierli come quaterna di riferimento
!
1,0,0[ ] ,
!
0,1,0[ ] ,
!
0,0,1[ ] ,
!
1,1,1[ ] ed allora nell’equazione della conica:
!
a00 " x02
+ a11 " x12
+ a22 " x22
+ 2a01 " x0 " x1 + 2a02 " x0 " x2 + 2a12 " x1 " x2 = 0
si ottiene subito
!
a00 = a11 = a22 = 0,
!
a01 + a02 + a12 = 0 .
Se la conica non è degenere, i tre coefficienti rimasti devono essere diversi da
zero, perciò si può porre
!
!
a01 = 1,
!
a02 = a ,
!
a12 = " 1+ a( ) , con
!
a " a +1( ) # 0 .
L’equazione allora diventa:
!
x0 " x1 + a " x0 " x2 # 1+ a( ) " x1 " x2 = 0 .

Geometria Proiettiva – modulo prof. Verardi – Le coniche
48
2.3. Proprietà delle coniche proiettive.
Consideriamo sempre il piano proiettivo reale. Incominciamo dallo studio delle
intersezioni tra una conica ed una retta.
Lemma 2.3.1. Se una conica ed una retta hanno in comune tre punti distinti,
allora la conica è degenere e contiene la retta.
Dimostrazione. Il sistema costituito dalle loro equazioni è di II grado. Ricavata
una delle tre incognite dall’equazione della retta e sostituita nell’altra, si ottiene
un’equazione omogenea in due incognite, del tipo
!
a " x2 + b " x " y + c " y2 = 0. Se
uno almeno dei tre coefficienti non è nullo, l’equazione è di secondo grado ed ha
al più due soluzioni, che corrispondono ad al più due punti di intersezione. Se i
tre coefficienti sono nulli, ogni punto della retta appartiene alla conica, quindi la
conica contiene la retta ed è degenere.
Teorema 2.3.2. Siano dati in
!
"2 R( ) cinque punti distinti A, B, C, D, E.1
a) Esiste sempre una conica alla quale appartengono.
b) Se al più tre di essi sono allineati, allora la conica è unica
Dimostrazione. a) Se infatti almeno tre di essi sono su una stessa retta r, detta s
una qualsiasi retta contenente gli altri due punti si ha la conica degenere
costituita dalle due rette r ed s (eventualmente coincidenti).
Nell’altro caso, in cui tre di essi non sono mai su una stessa retta, come detto
nell’osservazione 2.2.3 si possono scegliere i punti A, B, C, D come riferimento
proiettivo, ossia si può supporre
!
A = 1,0,0[ ] ,
!
B = 0,1,0[ ] ,
!
C = 0,0,1[ ] ,
!
D = 1,1,1[ ] .
Allora l’equazione allora diventa:
!
x0 " x1 + a " x0 " x2 # 1+ a( ) " x1 " x2 = 0 , con
!
a " a +1( ) # 0 , mentre il passaggio per E, che è distinto da D, fornisce un’ulteriore
condizione che determina il parametro a. In definitiva, si ha una conica passante
per i cinque punti, ed una sola.
b) Se almeno 4 punti sono allineati, la retta r che li contiene ed una retta s
qualsiasi passante per il quinto formano infinite coniche che contengono i
1 La lettera A denoterà quasi sempre la matrice della conica, ma talora denota, come in questo caso, un punto del piano proiettivo. Si prega di prestare attenzione al suo significato in base al contesto.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
49
cinque punti. Se tre sono allineati su una retta r, per esempio A, B, C, e gli altri
due, D, E, non sono su r, allora per il lemma 2.3.1 ogni conica contenente i
cinque punti contiene r ed un’altra retta s. I punti D ed E devono appartenere
dunque ad s, e la individuano. Perciò in questo caso la sola conica è il prodotto
di r ed s. Infine, se non ci sono mai tre punti allineati, l’unicità è già stata
dimostrata.
La nozione di retta tangente ad una conica non degenere C in un suo punto
!
X0 è
quella tradizionale: si tratta di una retta che interseca la conica in due punti
coincidenti con
!
X0 .
Teorema 2.3.3. La retta tangente alla conica reale non degenere C di
equazione:
!
a00 " x02
+ a11 " x12
+ a22 " x22
+ 2a01 " x0 " x1 + 2a02 " x0 " x2 + 2a12 " x1 " x2 = 0
in un suo punto
!
X0 ha equazione
!
X0t" A " X = 0, dove A è la matrice di C.
Dimostrazione. Se la conica e la retta avessero in comune un altro punto
!
X1, si
avrebbe il sistema
!
X0t" A " X0 = 0
X0t" A " X1 = 0
X1t" A " X1 = 0
#
$
% %
&
% %
. Di qui, per ogni λ, µ∈R si avrebbe
!
"X0 + µX1( )t # A # "X0 + µX1( ) = 0 , quindi ogni punto della retta
!
X0X1
apparterrebbe alla conica, assurdo. Circa l’unicità, poiché la conica è non
degenere possiamo supporre per 2.2.3 che la conica abbia equazione del tipo
!
x0 " x1 + a " x0 " x2 # 1+ a( ) " x1 " x2 = 0 , con
!
a " 1+ a( ) # 0 , e che sia
!
X0 =
!
1,0,0[ ] . Una
generica retta per
!
X0 ha equazione
!
"x1 + µx2 = 0. Le rette
!
x1 = 0 ed
!
x2 = 0 sono
secanti, perciò una tangente in
!
X0 deve avere
!
" # 0 # µ, e possiamo porre
!
" = 1.
Allora:
!
x0 " x1 + a " x0 " x2 # 1+ a( ) " x1 " x2 = 0x1 + µ " x2 = 0
$ % &
' & (
x2 = 0x1 = 0
$ % '
)
x2 =µ # a( ) " x0
µ " 1+ a( )x1 =
a # µ( ) " x0
1+ a( )
$
%
& & &
'
& & &
.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
50
La prima soluzione è il punto
!
X0 . Affinché la retta sia tangente, occorre che
anche la seconda soluzione coincida con
!
X0 , e ciò è possibile se e solo se
!
µ = a , e
la retta
!
x1 + a " x2 = 0 è proprio quella che si ricava da
!
X0t" A " X = 0.
Il teorema seguente estende il teorema dell’esagono di Pappo, ed ha anche un
duale, noto come teorema di Briançon, che si ottiene sostituendo ad un punto
della conica la retta tangente in quel punto e dualizzando l’enunciato.
Teorema 2.3.4. (Pappo – Pascal). Sia data una conica reale non degenere e
siano A, B, C, A’, B’, C’ due terne di punti distinti su di essa. Siano L, M, N i tre
punti intersezione rispettivamente delle rette: AB’ con A’B; AC’ con A’C; BC’ con
B’C. Allora i tre punti L, M, N sono su una stessa retta u.
Dimostrazione. I quattro punti A, B, A’ C’ consentono di fissare un sistema di
riferimento proiettivo in cui
!
A = 1,0,0[ ] ,
!
B = 0,1,0[ ] ,
!
" A = 0,0,1[ ] ,
!
" B = 1,1,1[ ] .
Allora, come visto nella osservazione 2.2.3, la conica ha equazione del tipo
!
x0 " x1 + a " x0 " x2 # 1+ a( ) " x1 " x2 = 0 , con a ≠ 0 ed a ≠ -1.
Poiché C non è sulle rette AB, AA’, BA’, allora le sue coordinate sono non nulle e
si può porre
!
C = x, y,1[ ] , con la condizione
!
x " y + a " x # 1+ a( ) " y = 0 . Si osservi che
se fosse
!
x = a +1 allora si otterrebbe l’assurdo
!
a " a +1( ) = 0 . Perciò
!
x " a +1
Analogamente,
!
" C = u, v,1[ ] , con
!
u " v + a "u # 1+ a( ) " v = 0 ed
!
u " a +1.
Le rette AB’ e A’B hanno equazioni rispettivamente di coefficienti
!
A " B = 0,#1,1[ ] ,
!
" A B = #1,0,0[ ] . Ne segue
!
L = 0,1,1[ ] .

Geometria Proiettiva – modulo prof. Verardi – Le coniche
51
Le rette AC’ e A’C hanno equazioni rispettivamente di coefficienti
!
A " C = 0,#1, v[ ] ,
!
" A C = #y, x,0[ ]. Ne segue
!
M = "v # x,"v # y,"y[ ].
Infine, BC’ e B’C hanno equazioni rispettivamente di coefficienti
!
B " C = 1,0,#u[ ] ,
!
" B C = 1# y, x #1, y # x[ ] . Ne segue
!
N = u " x #1( ),u " y #1( ) + x # y, x #1[ ] .
Verifichiamo che i tre punti L, M, N sono allineati. Per questo determiniamo la
retta r = LM e proviamo che passa per N. Si ha
!
r = v " y # y,#v " x, v " x[ ]. Il
“prodotto scalare” di r per N è
!
u " v " x # y( ) # x #1( ) " y( ) + v " x " y #1( ) . Per provare
che si annulla, ricaviamo v ed y dalle due equazioni
!
x " y + a " x # 1+ a( ) " y = 0 e
!
u " v + a "u # 1+ a( ) " v = 0 . Si ha:
!
y = "a # x / x " a "1( )v = "a #u / u " a "1( )$ % &
' & (i denominatori sono non
nulli perché
!
x " a +1 e
!
u " a +1). Sostituendo, si ottiene proprio che il prodotto
scalare è nullo, ossia N è incidente ad r, come si voleva.
Sia data una conica non degenere C e sia O un punto non su di essa. Si traccino
tre rette per O, che intersechino la conica in tre coppie di punti A, A’, B, B’, C, C’.
La retta u determinata dal teorema di Pappo – Pascal si chiama polare di O
rispetto alla conica, e non dipende dalle tre rette per O prescelte.
Per completezza, chiamiamo polare di un punto T della conica la tangente in T
alla conica. Questa definizione risulta compatibile con i risultati seguenti.
Geometria Proiettiva – modulo prof. Verardi – Le coniche
52
Lemma 2.3.5. La polare del punto O rispetto alla conica non degenere C
intersechi la conica in un punto H. Allora la retta OH è tangente alla conica.
Dimostrazione. Supponiamo che la retta OH intersechi la conica anche in un
altro punto H’. Le due rette AH’ e A’H si intersecano un un punto S di u. Ma A’H
interseca u in H, quindi necessariamente è S = H e dunque H appartiene anche
alla retta AH’. Se fosse
!
H " # H , la conica, che non è degenere, intersecherebbe la
retta AH’ nei tre punti distinti A, H, H’, assurdo. Ne segue H’ = H, ossia la retta
OH è tangente alla conica.
Teorema 2.3.6. Sia C una conica non degenere.
a) (Reciprocità della polare). Siano O ed N due punti non sulla conica, e sia N
appartenente alla polare u del punto O rispetto a C. Allora la polare di N passa
per O.
b) Ogni retta è la polare di un punto rispetto alla conica.
c) Il polo di una secante r alla conica C è l’intersezione delle tangenti condotte
dai punti d’intersezione di r con C.
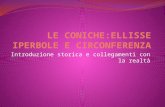
Dimostrazione. a) Si traccino:
una secante OB, che tagli la
conica anche in B’; la retta BN,
che tagli la conica anche in C’; la
retta OC’, che tagli la conica
anche in C: il punto BC’∩B’C
appartiene ad u, quindi è il
punto u∩BC’ = N. Dal punto di
vista di N, le rette BC’ e B’C sono
secanti per N alla conica, quindi O = BB’∩CC’ appartiene alla sua polare.
b) Siano M, N due punti distinti appartenenti alla retta, ma non alla conica. Le
loro polari si incontrino in un punto O. Se il punto O appartiene alla conica,
allora OM ed ON sono tangenti in O alla conica, quindi OM = ON = MN ed O è la
sua polare. Altrimenti, la polare di O passa per P e Q, quindi è la retta data.
c) Siano H e K i punti d’intersezione e sia O il polo di r: per 2.3.5, le rette OH ed
OK sono tangenti alla conica in H e K rispettivamente, ed O è la loro
intersezione.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
53
OSSERVAZIONE. Siano C una conica non degenere e T un suo punto. Abbiamo
chiamato polare di T la tangente in T alla conica. Ciò rispetta la reciprocità: se
infatti consideriamo il punto T in cui la polare di un punto O interseca la conica,
la tangente in T (ossia la polare di T) contiene il punto O.
Teorema 2.3.7. La polare di un punto P 2 rispetto alla conica non degenere C
di equazione
!
a00 " x02
+ a11 " x12
+ a22 " x22
+ 2a01 " x0 " x1 + 2a02 " x0 " x2 + 2a12 " x1 " x2 = 0
è la retta di equazione
!
Pt " A " X = 0 (dove A è la matrice simmetrica di C).
Dimostrazione. Sia d la polare di P. Distinguiamo due casi.
a) sia T un punto comune a d e C: Allora la tangente in T a C è la retta PT ed ha
equazione
!
Tt " A " X = 0. Il passaggio per P impone
!
Tt " A " P = 0, o anche,
trasponendo,
!
Pt " A "T = 0. Dunque, T appartiene alla retta di equazione
!
Pt " A " X = 0. Se questa retta è tangente alla conica, allora è la tangente in T alla
conica, che sappiamo passare per P. Dunque, deve essere
!
Pt " A " P = 0 e quindi P
appartiene alla conica e coincide con T. La sua polare è allora proprio la retta
!
Pt " A " X = 0. Se invece questa retta è secante, oltre che in T incontra la conica
anche in un altro punto U. Il passaggio per P della tangente in U a C dà come
sopra la condizione
!
Pt " A " U = 0. Ciò significa che i due punti T ed U
appartengono alla retta di equazione
!
Pt " A " X = 0. D’altra parte, quest’ultima
retta ha il polo che è proprio l’intersezione P delle due tangenti in T ed U alla
conica, ossia è proprio la polare d di P.
b) La polare d non intersechi C. Siano H, K i poli di due secanti per P: allora
!
Ht " A " P = 0,
!
Kt " A " P = 0. Trasponendo, segue che H e K appartengono alla
retta di equazione
!
Pt " A " X = 0 che, per la reciprocità, è proprio la polare di P.
2 Per ragioni di leggibilità, in questa sezione il punto di cui si calcola la polare sarà denotato con P anziché con O.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
54
Esercizio 2.3.8. Siano date la conica di equazione
!
x02"2x1 # x2 = 0 ed il punto
P di coordinate proiettive
!
1,0,"1[ ] .
a) Si verifichi che la conica è non degenere.
b) Si calcoli l’equazione della polare di P rispetto alla conica.
c) Se il punto è esterno, si calcolino le equazioni delle due tangenti da P alla
conica.
Svolgimento. a) La matrice della conica è
!
A =
1 0 00 0 "10 "1 0
#
$
% % %
&
'
( ( ( , non singolare. Inoltre,
la conica possiede punti reali, per esempio
!
0,0,1[ ] , quindi è reale non degenere.
b) L’equazione è
!
1 0 "1[ ] #1 0 00 0 "10 "1 0
$
%
& & &
'
(
) ) ) #
x0x1x2
$
%
& & &
'
(
) ) )
= 0, ossia
!
x0 + x1 = 0.
c) Il sistema
!
x02"2x1 # x2 = 0
x0 + x1 = 0
$ % &
' & dà come soluzioni i due punti
!
T = 0,0,1[ ] ,
!
U = "2,2,1[ ] , quindi il punto P è esterno. Le tangenti allora sono le rette PT e PU,
che hanno coefficienti
!
0,"1,0[ ] e
!
2,1,2[ ] , ossia hanno equazioni rispettivamente
!
x1 = 0 e
!
2x0 + x1 + 2x2 = 0. Oppure, le tangenti si possono calcolare mediante
!
Tt " A " X = 0, Ut " A " X = 0.
Teorema 2.3.9. Siano dati una
conica non degenere C, un suo punto
P, un punto O non appartenente a C e
la polare d di O rispetto a C. La retta
OP intersechi la conica in P’. Allora la
prospettività α di centro O, asse d, e
che porta P in P’ trasforma in sé la
conica. Inoltre, è una involuzione,
ossia il suo quadrato è l’identità.
Dimostrazione. Sia Q un altro punto di C e sia Q’ l’intersezione ulteriore della
retta OQ con C. Per le proprietà della polare, le rette PQ e P’Q’ si intersecano in

Geometria Proiettiva – modulo prof. Verardi – Le coniche
55
un punto K della polare; analogamente, le rette QP’ e PQ’ si intersecano in un
punto L della polare. Allora, la prospettività α porta Q in Q’ e Q’ in Q, quindi
anche P’ in P. Poiché Q è un punto qualunque della conica, e si ha
!
" Q = # Q( )
ancora appartenente alla conica, allora la conica è trasformata in se stessa dalla
prospettività α. Inoltre, poiché porta P in P’ e P’ in P, allora coincide con la sua
inversa
!
"#1 ed il suo quadrato è l’identità.
Il prossimo teorema fornisce una costruzione di una conica come luogo di punti
intersezione di rette corrispondenti in una proiettività fra due fasci di rette.
I fasci di rette sono assimilabili alla retta proiettiva
!
"1 R( ) ottenuta partendo
dallo spazio vettoriale
!
R2 e chiamando punti i sottospazi 1-dimensionali. Una
proiettività di
!
"1 R( ) è un elemento del gruppo
!
GL2 R( )Z GL2 R( )( )
=GL2 R( )
"I2 " # 0{ }. Essa
pertanto ha equazione:
!
"y0 = m00 # x0 + m01 # x1"y1 = m10 # x0 + m11 # x1
$ % &
, con
!
m00 m01m10 m11
" 0 e con
!
" # 0
Lo stesso tipo di equazioni si ha per proiettività tra fasci di rette di centri O ed U,
immersi in un piano proiettivo, se si scelgono opportunamente i coefficienti
delle rette.
Teorema 2.3.10. (Steiner). Siano dati due punti distinti O ed U sul piano
proiettivo reale e sia data una proiettività
!
" tra il fascio di rette di centro O e
quello di centro U, che ad ogni retta r per O essa associa una retta
!
" r( ) per U. Se
la retta OU non corrisponde a se stessa, allora, al variare di r, il punto P
intersezione di r con
!
" r( ) descrive una conica non degenere.
Dimostrazione. Possiamo supporre
!
O = 0,0,1[ ] ,
!
U = 1,0,0[ ] . Le rette passanti per
O ed U hanno equazioni rispettivamente
!
a0 " x0 + a1 " x1 = 0 e
!
b1 " x1 + b2 " x2 = 0,
ossia hanno coefficienti
!
a0,a1,0[ ] e
!
0, b1, b2[ ] . La retta OU ha equazione
!
x1 = 0.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
56
La proiettività α ha allora la forma
!
"b1 = m00 #a0 + m01 #a1"b2 = m10 #a0 + m11 #a1
$ % &
, con
!
m00 m01m10 m11
" 0
e con
!
" # 0. Ad ogni retta r di equazione
!
a0 " x0 + a1 " x1 = 0 del fascio per O essa
associa la retta
!
" r( ) per U di equazione
!
b1 " y1 + b2 " y2 = 0, ossia la retta:
!
m00 "a0 + m01 "a1( ) " y1 + m10 "a0 + m11 "a1( ) " y2 = 0
Eseguiamo il consueto prodotto vettoriale tra i coefficienti delle due rette
!
a0,a1,0[ ] e
!
0, m00 "a0 + m01 "a1( ), m10 "a0 + m11 "a1( )[ ] per trovarne
l’intersezione, ottenendo il punto
!
P = x0, x1, x2[ ] , dove:
!
"x0 = m10 #a0 + m11 #a1( ) #a1"x1 = $ m10 #a0 + m11 #a1( ) #a0"x2 = m00 #a0 + m01 #a1( ) #a0
%
& ' '
( ' '
, con λ ≠ 0.
Si tratta ora di eliminare i parametri. Moltiplichiamo la seconda equazione per
!
x2 e la terza per
!
x1 e confrontiamo le due equazioni.
Se
!
a0 = 0 si ottiene il punto U. Se
!
a0 " 0 possiamo semplificare l’equazione
ottenendo:
!
m00 "a0 + m01 "a1( ) " x1 + m10 "a0 + m11 "a1( ) " x2 = 0.
Di qui ricaviamo
!
a0 " m00 " x1 + m10 " x2( ) + a1 " m01 " x1 + m11 " x2( ) = 0.
Se si ha
!
m01 " x1 + m11 " x2( ) = 0, dall’essere
!
a0 " 0 segue
!
m00 " x1 + m10 " x2( ) = 0,
e poiché
!
m00 m01m10 m11
" 0, ne segue
!
x1 = x2 = 0, ossia di nuovo il punto U.
In caso contrario, si può ottenere
!
a1 = "m00 # x1 + m10 # x2m01 # x1 + m11 # x2
#a0.
Sostituendo nel sistema precedente, si ricava:
!
"x0 =m00 # x1 + m10 # x2( ) #det(M) # x1
m01 # x1 + m11 # x2( )2#a0
2
"x1 =det(M) # x1
m01 # x1 + m11 # x2#a0
2
"x2 =det(M) # x2
m01 # x1 + m11 # x2#a0
2
$
%
& & & & &
'
& & & & &
, dove
!
det M( ) =m00 m01m10 m11
" 0
Si può porre per semplicità
!
k = det M( ) "a02 / # .
Geometria Proiettiva – modulo prof. Verardi – Le coniche
57
Se
!
x1 = x2 = 0 allora si ha nuovamente il punto U. Se uno dei due è diverso da
zero, dalla seconda o terza equazione si ricava
!
k = m01 " x1 + m11 " x2.
Sostituendo nella prima equazione, si ottiene:
!
m01 " x1 + m11 " x2( ) " x0 # m00 " x1 + m10 " x2( ) " x1 = 0
Questa è l’equazione di una conica. Svolgendo i calcoli e moltiplicando per 2 per
comodità, si ricava:
!
"2m00 # x12
+ 2m01 # x0 # x1 + 2m11 # x0 # x2 "2m10 # x1 # x2 = 0
La sua matrice è
!
A =
0 m01 m11m01 "2m00 "m10m11 "m10 0
#
$
% % %
&
'
( ( (
Il suo determinante è:
!
det A( ) = 2 "det M( ) "m11. Sarà quindi una conica degenere
se e solo se
!
m11 = 0. In tal caso, essa si spezza nelle rette
!
x1 = 0 (cioè la retta
OU) e
!
m00 " x1 #m01 " x0 + m10 " x2 = 0.
Tuttavia, se
!
m11 = 0, poiché
!
det M( ) =m00 m01m10 0
" 0 , allora
!
m01 " 0 . La
corrispondente della retta OU, ossia di
!
x1 = 0, che ha
!
a0 = 0 e
!
a1 " 0, è
!
m01 "a1( ) " y1 = 0, cioè se stessa.
Escluso questo caso, ossia se la retta OU non è unita nella collineazione, si
ottiene una conica non degenere, che passa per O e per U.
OSSERVAZIONE. Un caso particolare di proiettività tra i fasci per O ed U si ha
considerando una collineazione di
!
"2 R( ) che porti O in U: essa infatti induce tra
i due fasci di rette una proiettività. Sia
!
µ " Y = N # X l’espressione analitica della
collineazione α (dove µ è non nullo). Poiché associa al punto O il punto U, la sua
matrice è della forma
!
N =
n00 n01 n02n10 n11 0n20 n21 0
"
#
$ $ $
%
&
' ' ' , quindi
!
n02 " 0 ed anche
!
n10 "n21 #n11 "n20 $ 0 . Quest’ultima sottomatrice è la matrice inversa della
matrice M della proiettività fra i due fasci per O ed U. Ad ogni retta r’ di
equazione
!
b1 " y1 + b2 " y2 = 0 (ossia
!
0, b1, b2[ ] " Y = 0) del fascio per U essa

Geometria Proiettiva – modulo prof. Verardi – Le coniche
58
associa la retta
!
r = "#1 $ r ( ) per O di equazione
!
0, b1, b2[ ] "N " X = 0 , i cui
coefficienti si possono anche calcolare così:
!
0 b1 b2[ ] "n00 n01 n02n10 n11 0n20 n21 0
#
$
% % %
&
'
( ( (
= n10 )b1 + n20 )b2 n11 )b1 + n21 )b2 0[ ] .
Posto quindi
!
a0 = n10 "b1 + n20 "b2,
!
a1 = n11 "b1 + n21 "b2 e ricavando
!
b1 e
!
b2,
si ottiene la retta r’ in funzione di r, ossia la matrice
!
M =n10 n11n20 n21
"
# $
%
& '
(1.
Dal punto di vista grafico, costruire una proiettività tra due fasci di rette che
non trasformi in se stessa la retta congiungente i due centri O ed U è meno
ovvio. Infatti, per esempio una prospettività che porti il punto O nel punto U ha
il centro sulla retta OU e quindi la retta OU è unita. Occorre usare un altro
approccio, basato sul concetto di birapporto di quattro punti su una retta
proiettiva, che fornisce inoltre una importante proprietà della polare di un
punto rispetto ad una conica. In realtà, in vista delle applicazioni, consideriamo
le rette immerse nel piano proiettivo reale.
Nella retta r di equazione
!
x0 = 0 di
!
"2 R( ) consideriamo i tre punti distinti
!
A = 0,1,0[ ] ,
!
B = 0,0,1[ ] ,
!
C = 0,1,1[ ] . Sia D un punto di questa retta, diverso da A.
Allora possiamo scrivere
!
D = 0,",1[ ] . Il numero ρ si chiama birapporto dei quattro
punti A, B, C, D, e si denota con
!
A,B;C,D( ). Consideriamo ora una retta s diversa da r e su di essa tre punti distinti
!
T1,
!
T2,
!
T3 ed un quarto punto
!
T4 " T1, tutti diversi dal punto
!
r "s . Scegliamo il sistema
di coordinate in
!
"2 R( ) in modo che la retta s coincida con
!
x1 = 0 (in particolare,
ciò significa
!
B = r "s). I quattro punti abbiano coordinate
!
ti,0,1[ ], 1 " i " 4, con
!
ti " 0. Cerchiamo una collineazione di
!
"2 R( ) , della forma
!
" # Y = M $ X , dove M è
una matrice non singolare di ordine 3, che trasformi r in s e faccia corrispondere
alla quaterna A, B, C, D di r la quaterna
!
T1,
!
T2,
!
T3,
!
T4 di s.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
59
Imponiamo le condizioni
!
"1 #T1 = M $ A"2 #T2 = M $ B"3 #T3 = M $C
%
& '
( '
nonché
!
"4 #T4 = M $D . Otteniamo
!
m11 = m12 = 0 ,
!
m01 = t1 "m21m02 = t2 "m22
# $ %
,
!
m01 + m02 = t3 " m21 + m22( )r "m01 + m02 = t3 " r "m21 + m22( )# $ %
& % . Sostituendo,
otteniamo
!
" =t3 # t1( ) $ t4 # t2( )t4 # t1( ) $ t3 # t2( )
. Allora il birapporto dei quattro punti è
!
" = T1,T2;T3,T4( ) =t3 # t1( ) $ t4 # t2( )t4 # t1( ) $ t3 # t2( )
, ed è la prima coordinata di un vettore
!
v = ",0,1( ) che rappresenta
!
T4 nel sistema di riferimento determinato dai tre
punti
!
T1,
!
T2,
!
T3.
OSSERVAZIONE. Eseguendo i consueti calcoli, possiamo osservare che i punti
!
G = AT3 "CT1 e
!
T2 = BT1 "AT2 determinano una retta u sulla quale si incontrano i punti
!
H = AT4 "DT1 ,
!
K = CT4 "DT3 : è la retta u del teorema di Pappo determinata per esempio
dalle due terne A, C, D su r e
!
T1,
!
T3,
!
T4, e che al punto B fa corrispondere
!
T2.
Dunque, rovesciando il discorso, possiamo prendere su r una terna A, B, C e su s una terna E,
F, G, poi costruire la retta di Pappo determinata dalle due terne. Per ogni punto D sulla prima
retta consideriamo per esempio
!
K = DG"u e poi
!
H = CK "s . Allora
!
A,B;C,D( ) = E,F;G,H( ) .
La dualità tra punti e rette consente di definire anche il birapporto (a,b;c,d) di una quaterna di
rette a, b, c, d appartenenti ad un fascio di centro R. Inoltre, come abbiamo appena fatto per r
ed s col teorema di Pappo, dati un altro centro S e tre rette e, f, g per S, dal teorema duale di
Pappo è possibile costruire la retta h per S tale che il birapporto (e,f;g,h) sia uguale ad (a,b;c,d).

Geometria Proiettiva – modulo prof. Verardi – Le coniche
60
La figura mostra la costruzione di una conica come luogo descritto dal punto P
intersezione di due rette r = OM ed r ’= UM’ corrispondenti nella proiettività tra i
due fasci di centri O ed U indotta dalla proiettività tra le rette a e b costruita
come descritto nell’osservazione precedente: detta u = GH la retta data dal
teorema di Pappo, posto M = r∩a, L = MC’∩u, M’ = CL∩b, r’ = UM’, P = r∩r’, al
variare di r per O, ossia, equivalentemente ma meglio per il software, del punto
M su a, il punto P descrive la conica prevista dal teorema di Steiner.
Se per quattro punti
!
T1,T2,T3,T4 di una retta proiettiva si ha
!
T1,T2;T3,T4( ) = "1
la quaterna si dice armonica. Si osservi che si ha anche
!
T1,T2;T3,T4( ) = T3,T4;T1,T2( ) . La seguente è una proprietà delle coniche
proiettive, importantissima per le conseguenze che ha nel caso affine:

Geometria Proiettiva – modulo prof. Verardi – Le coniche
61
Teorema 2.3.11. Siano dati una conica non degenere C, un suo punto P, un
punto O fuori di essa, e siano d la polare di O rispetto a C, P’ l’ulteriore
intersezione di OP con C, ed L il punto in cui OP interseca d. Allora
!
O,L;P, " P ( ) = #1.
Dimostrazione. Scegliamo il sistema di riferimento in modo che siano
!
O = 2,0,1[ ] ,
!
P = 0,0,1[ ] , perciò OP è la retta
!
x1 = 0. Tra i punti di questa retta c’è anche P’, a
cui assegnamo le coordinate
!
" P = 1,0,1[ ] . La conica abbia equazione
!
Xt " A " X = 0,
con A simmetrica. Affinché essa contenga i punti P e P’ nella matrice A si deve
avere
!
a22 = 0 e
!
a00 = "2 #a02.
Se identifichiamo O col vettore-riga [2, 0, 1], la polare d di O è
!
O " A " X = 0,
ossia ha coefficienti
!
O " A = #2 $a0,0,#3 $a0[ ] . Il punto L = OP∩d ha quindi
coordinate proiettive
!
"2a02,0,"3a02[ ] = 2/3,0,1[ ] , calcolate come sempre.
Per la quaterna
!
O,L;P, " P ( ) si ha così
!
t1 = 2, t2 =23
, t3 = 0, t4 = 1. Sostituiamo nella
espressione
!
" =t3 # t1( ) $ t4 # t2( )t4 # t1( ) $ t3 # t2( )
ed otteniamo proprio ρ = -1
Osservazione 2.3.12. Fissata una
conica non degenere C, di
equazione
!
Xt " A " X = 0 , l’appli-
cazione γ che ad ogni punto P del
piano proiettivo reale associa la sua
polare γ(P) è una correlazione (o
reciprocità) tra il piano
!
"2 R( ) ed il
suo duale.
Infatti, ad ogni retta incidente a P essa associa un punto incidente alla polare di P. Inoltre, se
r = γ(P) allora γ(r) = P. La conica C è l’insieme dei punti P appartenenti alla propria polare γ(P),
che in tal caso è la tangente alla conica in P. La sua nozione duale è allora quella di inviluppo
delle tangenti. Poiché γ associa al punto proiettivo P la retta di coefficienti
!
B = A " P , la matrice
di γ è precisamente A. Allora la duale di C ha equazione
!
Bt " A#1 " B = 0.
Geometria Proiettiva – modulo prof. Verardi – Le coniche
62
Il teorema di Pascal relativo a questo inviluppo diventa il:
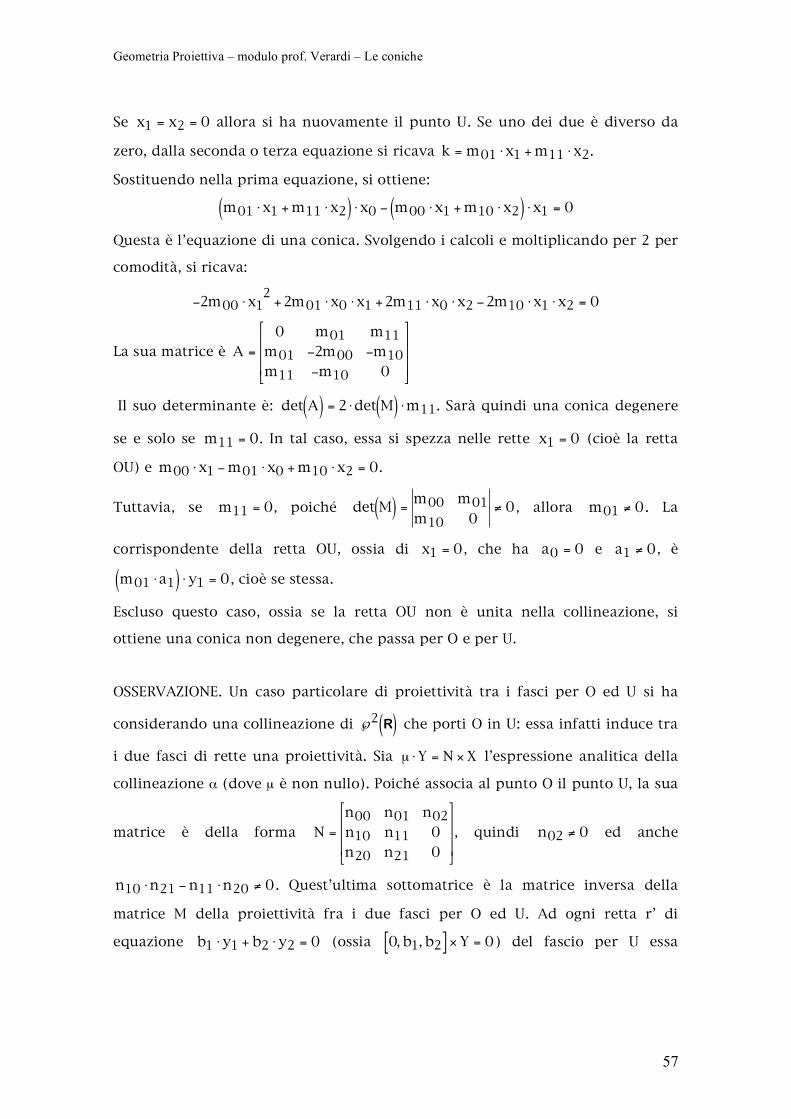
Teorema 2.3.13. (Teorema di Briançon). Date sei rette distinte a, a’, b, b’, c,
c’ dell’inviluppo, siano G = a∩b’ , H = a’∩b, K = a∩c’, L = a’∩c, I = b∩c’, J = b’∩c.
Allora le tre rette l = GH, m = KL, n = IJ passano per uno stesso punto M.
Teorema 2.3.14. Data una conica reale non degenere e sei suoi punti distinti
A, B, C, A’, B’, C’, sia d la retta che essi determinano, dal teorema di Pascal. Siano
poi a, b, c, a’, b’, c’ le sei tangenti in quei sei punti, e sia M il punto che esse
determinano, dal teorema di Briançon. Allora d è la polare di M.
Dimostrazione. La polarità associa ad ogni punto della conica la sua tangente,
quindi ad A la retta a, ecc. Perciò G = a∩b’ è il polo della secante AB’ e H = a’∩b è
il polo di A’B. Ne segue che S = AB’∩A’B è il polo di l = GH.
Analogamente, il polo di n = IJ è T = BC’∩B’C.
Dunque il punto M = l∩n è il polo della retta ST. Quest’ultima è proprio la retta d
del teorema di Pascal.
Osservazione 2.3.15. Le coniche del piano proiettivo reale dipendono da sei
coefficienti non tutti nulli, definiti a meno di una costante di proporzionalità.
Esse costituiscono dunque uno spazio proiettivo a 5 dimensioni.
Le rette proiettive di questo spazio prendono il nome di fasci di coniche.
Un fascio di coniche è dunque ottenuto dalle combinazioni lineari delle
equazioni di due coniche date: se le loro equazioni sono rispettivamente
!
Xt "A " X = 0 e
!
Xt "B" X = 0, con A, B matrici simmetriche d’ordine 3, allora il
Geometria Proiettiva – modulo prof. Verardi – Le coniche
63
fascio si rappresenta con
!
Xt " # $A + µ $B( ) " X = 0, con i due parametri λ, µ non
entrambi nulli e definiti a meno di una costante non nulla.
Se due coniche non hanno rette in comune, allora si intersecano in quattro punti
A, B, C, D, distinti o no. Per essi naturalmente passano tutte le coniche del fascio
determinato dalle due coniche date, ma, viceversa, si può dimostrare che ogni
conica passante per quei 4 punti (contati con le loro molteplicità) fa parte del
fascio. Essi si chiamano punti base del fascio.
Se essi sono distinti, allora le due coniche degeneri costituite dalle rette AB, CD e
AC, BD, generano il fascio, quindi ogni altra conica del fascio è loro
combinazione lineare. Fissato un ulteriore punto P, imponendo il passaggio della
generica conica del fascio per P si ha l’unica conica per i 5 punti A, B, C, D, P.
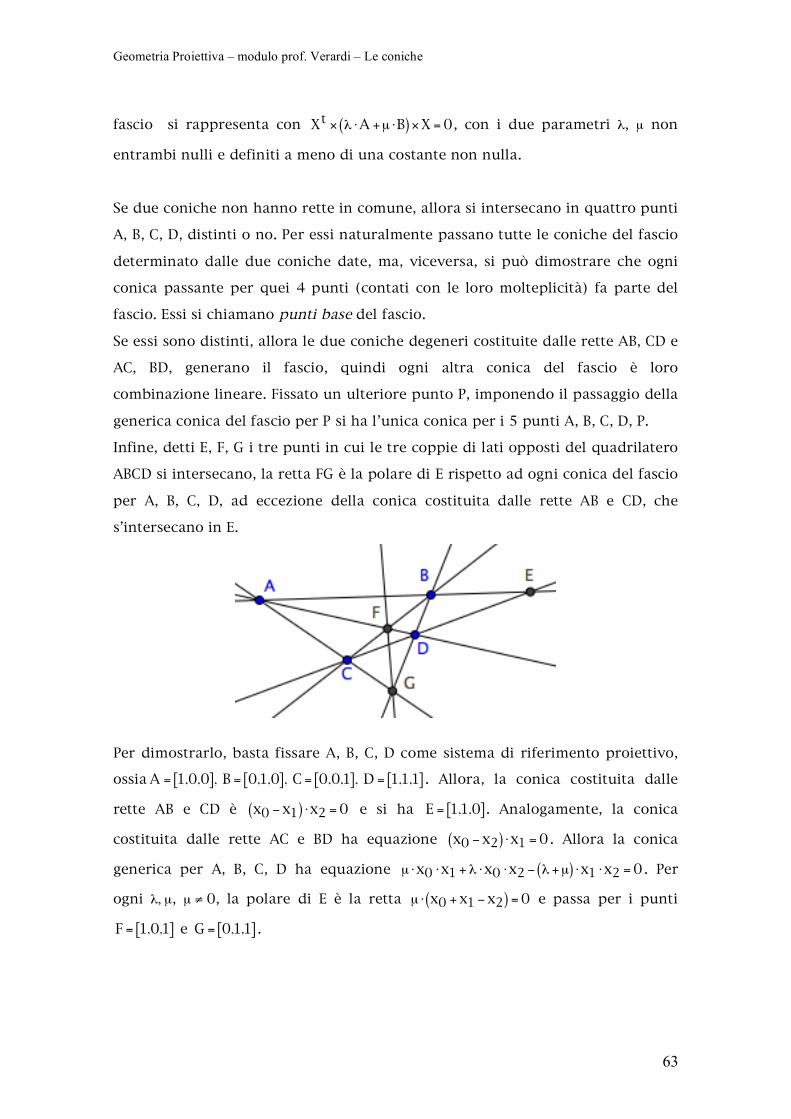
Infine, detti E, F, G i tre punti in cui le tre coppie di lati opposti del quadrilatero
ABCD si intersecano, la retta FG è la polare di E rispetto ad ogni conica del fascio
per A, B, C, D, ad eccezione della conica costituita dalle rette AB e CD, che
s’intersecano in E.
Per dimostrarlo, basta fissare A, B, C, D come sistema di riferimento proiettivo,
ossia
!
A = 1,0,0[ ], B = 0,1,0[ ], C = 0,0,1[ ], D = 1,1,1[ ] . Allora, la conica costituita dalle
rette AB e CD è
!
x0 " x1( ) #x2 = 0 e si ha
!
E = 1,1,0[ ] . Analogamente, la conica
costituita dalle rette AC e BD ha equazione
!
x0 " x2( ) #x1 = 0 . Allora la conica
generica per A, B, C, D ha equazione
!
µ "x0 "x1 + # "x0 "x2 $ # + µ( ) "x1 "x2 = 0 . Per
ogni λ, µ, µ ≠ 0, la polare di E è la retta
!
µ " x0 + x1 # x2( ) = 0 e passa per i punti
!
F = 1,0,1[ ] e
!
G = 0,1,1[ ] .

Geometria Proiettiva – modulo prof. Verardi – Le coniche
64
2.4. Coniche affini.
Se K è un campo, dal piano
!
"2 K( ) si ottiene un unico tipo di piano affine,
qualunque sia la retta scelta come retta impropria, perché il gruppo delle
collineazioni è transitivo sulle rette del piano proiettivo. Le affinità sono le
collineazioni che mutano in sé la retta impropria, e formano un sottogruppo del
gruppo delle collineazioni.
L’equivalenza tra figure di un piano affine (che è talora chiamata semplicemente
affinità) è definita dicendo che due figure sono affini se esiste un’affinità che
muti la prima nella seconda. In tal modo, tutti i punti del piano affine sono
equivalenti tra loro, come è ovvio che sia, e lo stesso accade per le rette, ed
anche per i fasci di rette parallele.
La classificazione delle coniche del piano affine è invece più complicata rispetto
al piano proiettivo. Infatti, la posizione della retta r, scelta come retta impropria,
fa avere oppure no alla conica affine punti “all’infinito”, a seconda che r
intersechi, sia tangente o non intersechi la conica proiettiva. Abbiamo già visto
un esempio nella lezione 1.
Tutto ciò si riflette in una diversa partizione in classi di affinità. Infatti, fissata
una volta per tutte la retta impropria r ed ottenuto il piano affine, si ottengono
svariate situazioni.
Per cominciare, scegliamo come retta impropria la retta
!
x0 = 0. Per i punti
propri avremo allora coordinate
!
1, x, y[ ] , o semplicemente (x, y). Le rette proprie
avranno equazione
!
a " x + b " y + c = 0, con a e b non entrambi nulli.
Riprendiamo i cinque casi visti nel piano proiettivo:
!
x02
= 0 Retta doppia
!
x02" x1
2= 0
Due rette distinte Coniche degeneri
!
x02
+ x12
= 0 Un solo punto reale

Geometria Proiettiva – modulo prof. Verardi – Le coniche
65
!
x02
+ x12
+ x22
= 0 Nessun punto reale
Coniche non degeneri
!
x02" x1
2" x2
2= 0
Conica reale non deg.
Come si spezzano nel piano affine reale? Vediamo le varie possibilità:
A) Una retta doppia: può essere propria, per esempio
!
x2 = 0, ma potrebbe
essere la retta scelta come impropria, e l’equazione diventerebbe 1 = 0.
B) Due rette distinte: possono essere o entrambe proprie non parallele, per
esempio
!
x2 " y2 = 0, o proprie parallele, come
!
x2 "1 = 0, ma anche una
propria e l’altra impropria, e l’equazione diventerebbe del tipo x = 0.
C) Un solo punto reale: può essere proprio, per esempio
!
x2 + y2 = 0, oppure
improprio, per esempio
!
x2 +1 = 0.
D) Una conica non degenere immaginaria: può essere solo del tipo
!
x2 + y2 +1 = 0, in quanto non ha punti reali in comune con la retta
impropria.
E) Una conica reale non degenere: ci sono tre possibili situazioni, a seconda
che intersechi la retta impropria in due punti distinti, per esempio
!
x2 " y2 = 1, oppure in un punto doppio,
!
x2 " y = 0, oppure non
l’intersechi,
!
x2 + y2 = 1. I tre casi prendono il nome rispettivamente di
iperbole, parabola, ellisse.
I casi elencati, 11 in tutto, corrispondono a situazioni sicuramente non
equivalenti dal punto di vista affine, e non ce ne sono altri, perché abbiamo
esaminato le possibili posizioni della retta impropria rispetto alla conica.
Le proprietà delle coniche affini si deducono da quelle delle coniche proiettive.
In particolare:
Teorema 2.4.1. La polare di una conica rispetto ad un punto improprio O non
appartenente alla conica, da cui esce un fascio di rette parallele, è il luogo dei
punti medi delle corde in cui ogni retta del fascio taglia la conica.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
66
Dimostrazione “euristica”. Il birapporto
!
" =t3 # t1( ) $ t4 # t2( )t4 # t1( ) $ t3 # t2( )
, quando
!
t1 " #,
tende a
!
t4 " t2( )t3 " t2( )
e poiché (con i simboli del teorema 2.3.11) per la quaterna
!
O,L;P, " P ( ) il birapporto vale costantemente -1, allora si ricava
!
t2 =t3 + t4
2, ossia L
è il punto medio fra P e P’.
Un diametro Il centro O
La polare di un punto improprio prende il nome di diametro della conica. Il
polo della retta impropria si chiama centro della conica. Per la reciprocità, tutti i
diametri passano per il centro.
Due diametri si dicono coniugati se ciascuno di essi passa per il polo dell’altro.
Il centro, se è proprio, è il punto medio di tutte le corde che i diametri
intercettano sulla conica (corde che a loro volta si chiamano usualmente
diametri), dato che ogni diametro è il luogo dei punti medi delle rette parallele
al diametro coniugato.
Pertanto, per trovare il centro della conica, si fissino tre punti distinti A, B, C
sulla conica, si traccino la retta AC e la sua parallela per B e se ne determini
l’ulteriore punto G d’intersezione con la conica. I punti medi H di AC e K di BG
determinano il diametro coniugato alla direzione di AC. Detti I, J i punti
intersezione del diametro con la conica, il punto medio O di IJ è il centro.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
67
Se la conica è una parabola, è tangente
alla retta impropria, quindi il suo
centro è il punto di tangenza, ossia è il
punto improprio della parabola. Ne
segue che tutti i diametri sono
paralleli tra loro.
Se la conica è un’iperbole, le rette che
congiungono il centro O con i due
punti impropri (che sono le
intersezioni della sua polare con la
conica) sono le tangenti all’iperbole
condotte da O, e prendono il nome di
asintoti.
Sia
!
Xt " A " X = 0 una conica immaginaria. Poiché ovviamente non interseca la
retta impropria, la chiameremo ellisse immaginaria. Usando l’equazione
!
Pt " A " X = 0, la nozione di polo e polare si può dare in questo caso. Ne segue
che un’ellisse immaginaria ha il centro in un punto proprio. Ellisse, ellisse
immaginaria ed iperbole sono dette coniche a centro.
Teorema 2.4.2. Tutte le iperboli sono affini tra loro, tutte le parabole lo sono e
così pure le ellissi e le ellissi immaginarie.
Dimostrazione. Sia data una conica affine non degenere. Posto
!
x0 = 1, i suoi
punti propri soddisfano l’equazione:
!
a11 " x12
+ a22 " x22
+ 2a12 " x1 " x2 + 2a01 " x1 + 2a02 " x2 + a00 = 0
con
!
det A( ) =
a00 a01 a02a01 a11 a12a02 a12 a22
" 0 . I punti impropri (
!
x0 = 0) soddisfano l’equazione
omogenea
!
a11 " x12
+ a22 " x22
+ 2a12 " x1 " x2 = 0 . L’essere la conica un’iperbole,
una parabola o un’ellisse (reale o immaginaria) dipende dal segno del
discriminante “ridotto”
!
a122" a11 #a22 = "
a11 a12a12 a22
.

Geometria Proiettiva – modulo prof. Verardi – Le coniche
68
Se è negativo, si ha un’ellisse (reale o immaginaria); se è nullo, una parabola, se
è positivo un’iperbole.
Ora cerchiamo di ridurre le coniche non degeneri a una forma canonica, per
dedurne come conseguenza il teorema
A) Il caso della conica a centro. Eliminiamo dapprima i termini di I grado. Per
questo, calcoliamo le coordinate
!
l1, l2( ) del centro L: è il polo della retta
impropria, di equazione
!
x0 = 0, perciò nell’equazione
!
Lt " A " X = 0 occorre
azzerare i coefficienti di
!
x1 e
!
x2, ottenendo un sistema lineare nelle coordinate
!
l1, l2( ) . Sia ora
!
Aij il complemento algebrico in A dell’elemento
!
aij. Allora
!
A00 =a11 a12a12 a22
" 0 . Con la regola di Cramer si ricava subito
!
L = l1, l2( ) =A01A00
, A02A00
"
# $ $
%
& ' ' . Consideriamo ora la traslazione
!
x1 = " x 1 + l1x2 = " x 2 + l2
# $ %
.
Sostituendo, con alcuni calcoli si ricava la nuova equazione:
!
a11 " # x 12
+ 2 "a12 " # x 1 " # x 2 + a22 " # x 22
+det A( )A00
= 0,
il cui centro è ora nell’origine:
!
L = O = 0,0( ) . Ora consideriamo la matrice della forma quadratica:
!
a11 " # x 12
+ 2 "a12 " # x 1 " # x 2 + a22 " # x 22
Essa ha due autovalori reali
!
"1 e
!
"2. Esiste come noto una trasformazione di
coordinate del tipo
!
" X = P # Y , con P ortogonale, che muta la forma quadratica
nella forma diagonale
!
"1 # y12
+ "2 # y22, quindi la conica diventa:
!
"1 # y12
+ "2 # y22
+det A( )A00
= 0
Poniamo ora
!
µi ="# i $A00det A( )
, i = 1,2. L’equazione diventa:
!
µ1 " y12
+ µ2 " y22
= 1.
Infine, la trasformazione “diagonale”
!
y1 = x µ1
y2 = y µ2
"
# $
% $
trasforma l’equazione in:

Geometria Proiettiva – modulo prof. Verardi – Le coniche
69
!
sign µ1( ) " x2 + sign µ2( ) " y2 = 1, dove come noto la funzione sign (o sgn) vale 1 o -1
a seconda che l’argomento sia positivo e negativo. Abbiamo così le quattro
possibilità:
!
x2 + y2 = 1,
!
x2 " y2 = 1,
!
"x2 + y2 = 1,
!
"x2 " y2 = 1.
La terza in realtà si muta nella seconda scambiando x con y, ed è un’iperbole.
La prima è un’ellisse reale, l’ultima è un’ellisse immaginaria.
Abbiamo ora solo da comporre le varie trasformazioni: la traslazione, la
trasformazione di matrice ortogonale, quella di matrice diagonale e l’eventuale
scambio di variabili x ed y, che sono tutte affinità, per concludere che ogni
conica a centro non degenere è affine o all’ellisse
!
x2 + y2 = 1, o all’iperbole
!
x2 " y2 = 1 o all’ellisse immaginaria
!
x2 + y2 +1 = 0.
B) Nel caso della parabola, la forma quadratica
!
a11 " x12
+ 2 "a12 " x1 " x2 + a22 " x22
ha discriminante nullo, ossia
!
a122" a11 #a22 = 0. Vediamo due casi:
B1. - Sia
!
a22 = 0. Allora,
!
a12 = 0 , mentre
!
a11 " 0 . Allora dividiamo l’equazione
per
!
a11 ed otteniamo
!
x12
+ 2"01 # x1 + 2"02 # x2 + "00 = 0.
Col metodo del completamento dei quadrati otteniamo allora:
!
x1 + "01( )2 + 2"02 # x2 + "00 $ "012%
& '
(
) * = 0 .
Ne segue che
!
"02 # 0, altrimenti la conica sarebbe degenere. Allora, con la
traslazione
!
x1 = y1 " #01
x2 = y2 "
#00 " #012$
% &
'
( )
2#02
*
+
, ,
-
, ,
l’equazione diventa
!
y12
+ 2"02 # y2 = 0.
Infine, la trasformazione “scalare”
!
y1 = "2#02 $xy2 = "2#02 $y% & '
trasforma l’equazione
nella forma
!
x2 " y = 0.
Ovviamente, ciò si può ripetere anche nel caso
!
a11 = 0 .
B2. – Sia
!
a11 " 0 " a22. Allora, a meno di cambiamenti di segno, supponiamo
!
a11 > 0 . Allora la forma quadratica
!
a11 " x12
+ 2 "a12 " x1 " x2 + a22 " x22 ha

Geometria Proiettiva – modulo prof. Verardi – Le coniche
70
un autovalore nullo ed un altro positivo, sia λ. Una trasformazione
ortogonale porta l’equazione della parabola alla forma
!
" # y12
+ 2$01 # y1 + 2$02 # y2 + $00 = 0
e siamo nel caso precedente.
Ne segue che ogni parabola è affine alla parabola di equazione
!
x2 " y = 0.
Osservazione. Le trasformazioni viste in precedenza sono ottenute componendo una
traslazione, una trasformazione ortogonale e solo alla fine una trasformazione diagonale.
Prescindendo da quest’ultima si arriva, per le coniche non degeneri, ad equazioni un po’ più
generali, del tipo:
•
!
"1 # x2 + "2 # y2 +det A( )A00
= 0, per le coniche a centro, con
!
"1, "2 autovalori del
minore complementare di
!
a00 .
•
!
a " x2 # y = 0, a ≠ 0, per le parabole, con a non nullo.
Esercizio 2.4.3. Si classifichi la conica affine
!
x1 " x2 #1 = 0.
Svolgimento: Sappiamo bene di che si tratta, ma proviamo di dedurlo con i
risultati visti nel teorema precedente. Moltiplichiamo per 2 i coefficienti, per
comodità. La matrice della conica è allora
!
"2 0 00 0 10 1 0
#
$
% % %
&
'
( ( ( , di determinante 2, quindi
la conica non è degenere. Uguagliamo a zero la forma quadratica ed otteniamo i
due punti impropri
!
0,1,0[ ] e
!
0,0,1[ ] . Pertanto, abbiamo un’iperbole. Il suo centro
ha coordinate affini
!
A01A00
, A02A00
"
# $ $
%
& ' ' = 0,0( ) , quindi è l’origine. I suoi asintoti sono le
rette che congiungono il centro con i punti impropri, ossia
!
x1 = 0 e
!
x2 = 0.


















