12_Esempi Di Determinazione Delle Reazioni Vincolari Con Le Equazioni Della Statica
Upload
pierluigi-merraCategory
view
8download
5
© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 1/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
LEZIONE 14 – Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali.
Nucleo tematico Lez. Contenuto
5 14 Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali.
Sono riproposti nel seguito gli esempi risolti nella lezione 11 con le Equazioni Cardinali della Statica. In questo cotesto alcune reazioni vincolari vengono determinate con il Principio dei Lavori Virtuali.
Sono opportune alcune precisazioni preliminari. 1. Negli esempi che seguono ed in generale, salvo precisazione
contraria, le grandezze fisiche sono espresse rispetto ad un sistema di riferimento (xOy) con l’asse x parallelo al lato corto e l’asse y parallelo al lato lungo del foglio. Le direzioni identificate dagli assi x ed y vengono brevemente dette anche “orizzontale” e “verticale”, rispettivamente. Così, ad esempio con la dizione “spostamento verticale del punto P” si intende la componente secondo l’asse y dello spostamento del punto P.
2. Negli esempi che seguono è necessario sostituire ad alcuni vincoli le corrispondenti componenti di reazione vincolare. Queste vengono rappresentate nello schema di riferimento mediante vettori ed identificate mediante simboli. Viene poi valutarto il lavoro compiuto dalle reazioni relativamente ad una configurazione spostata del sistema. Il verso assunto per il vettore che rappresenta una reazione incognita è del tutto arbitrario. Scelto il parametro di spostamento (o i parametri, nel caso di sistemi con più gradi di libertà) che identifica una configurazione spostata del sistema, il verso che si attribuisce a questo parametro è del tutto arbitrario e non ha alcuna relazione con le forze applicate al sistema. Ad esempio se si sceglie una rotazione come parametro di spostamento indipendente è indifferente considerare una configurazione spostata identificata da una rotazione oraria o antioraria. Coerentemente con l’assunzione dei versi delle incognite e degli spostamenti virtuali si valutano i lavori delle forze, tenendo ovviamente presente che nel caso di una forza il cui punto di applicazione si sposta nella direzione della forza stessa il lavoro compiuto è positivo se la forza e lo spostamento hanno lo stesso verso ed è negativo se la forza e lo spostamento hanno verso opposto. Alla fine del procedimento, un valore positivo di una incognita trovata indica che il verso arbitrariamente scelto all’inizio è effettivamente quello della reazione incognita; viceversa un valore negativo indica che la reazione incognita ha verso opposto rispetto a quello arbitrariamente scelto.

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 2/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
Esempio 14.1 Relativamente alla struttura isostatica di figura 14.1 si determini
la componente verticale della reazione dell’appoggio A.
Figura 14.1.
Sostituendo la cerniera A con un carrello che consente solo gli
spostamenti verticali e con la componente di reazione yA incognita si ottiene il sistema una volta labile di figura 14.2.
Figura 14.2.
Identificati i centri di rotazione assoluti e relativi (figura 14.2) e assunta la rotazione ϕ1 dell’elemento 1 come parametro di spostamento che identifica la configurazione spostata del sistema, può tracciarsi il diagramma degli spostamenti verticali di figura 14.3 (tutte le forze sono verticali e quindi non compiono lavoro relativamente agli spostamenti orizzontali, pertanto il diagramma degli spostamenti orizzontali è inutile al fine di determinare yA; nel presente caso, inoltre, è immediato riconoscere che tali spostamenti sono tutti nulli).
Figura 14.3.
Con considerazioni geometriche si riconosce che il modulo della rotazione dell’elemento 2 è
L L L/2 L
F 1 2 A B = C1 C = C12 D = C2
yA
x
v(x)
E
F A B C D
E δA δE
xC1 vA xC12
xC2 vE
C0
C1
ϕ1 ϕ2
L L L/2 L
F 1 2 A B ≡ C1 C ≡ C12 D ≡ C2
yA
L L L/2 L
F 1 2 A B C D
© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 3/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
12 ϕ=ϕ (e.1.1)
Relativamente agli spostamenti virtuali di figura 14.3 la forza F compie il lavoro
12EF LF21
2LFvFEFL ϕ−=ϕ−=⋅−=δ×=δ (e.1.2)
e la forza A
y compie il lavoro
1AAAAyA LyvyAyL ϕ=⋅=δ×=δ (e.1.3)
essendo Aδ e Eδ gli spostamenti virtuali dei punti A ed E relativamente al passaggio della struttura dalla configurazione iniziale C0 a quella spostata C1 (figura 14.3). I moduli delle componenti verticali vA e vE di questi spostamenti si leggono sul diagramma di figura 14.3. Il sistema è in equilibrio per il valore di yA che rende nullo il lavoro virtuale delle forze applicate; la condizione di equilibrio è pertanto:
0LyLF21LLL 1A1uAF =ϕ+ϕ−=δ+δ=δ (e.1.4)
dividendo ambo i membri per ϕ1 e per L si ottiene l’equazione
0yF21
A =+− (e.1.5)
e quindi
2FyA = (e.1.6)
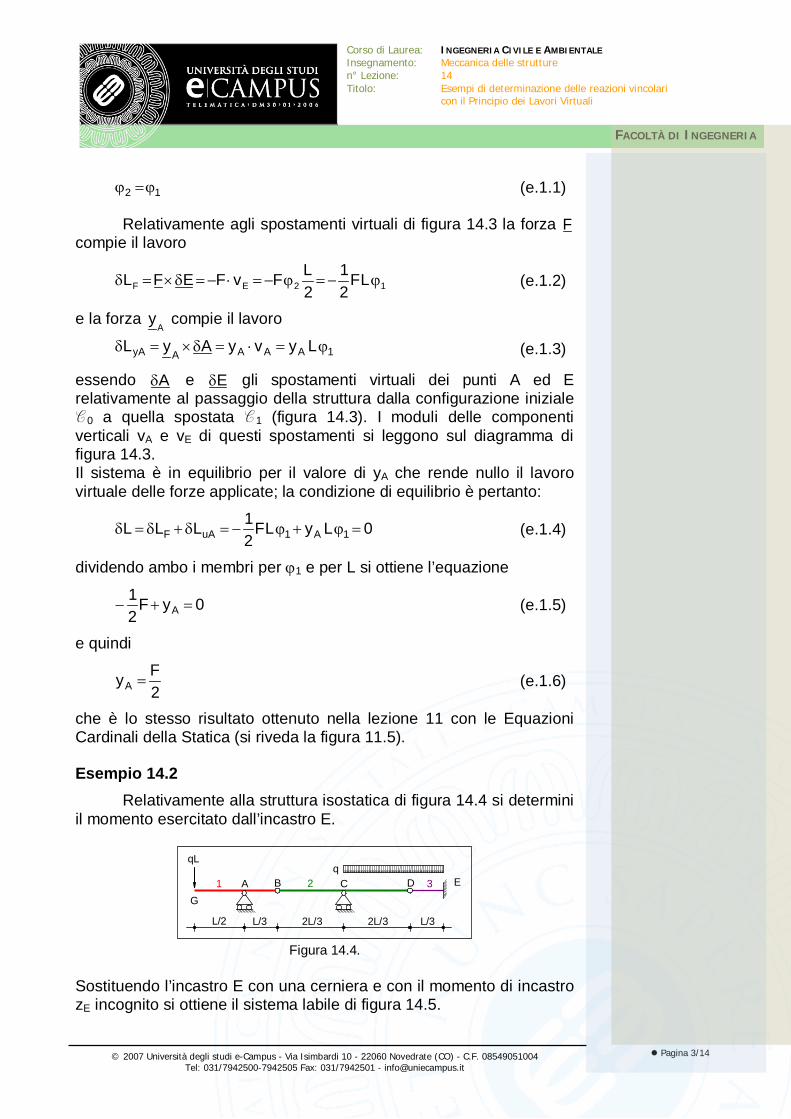
che è lo stesso risultato ottenuto nella lezione 11 con le Equazioni Cardinali della Statica (si riveda la figura 11.5). Esempio 14.2
Relativamente alla struttura isostatica di figura 14.4 si determini il momento esercitato dall’incastro E.
Figura 14.4.
Sostituendo l’incastro E con una cerniera e con il momento di incastro zE incognito si ottiene il sistema labile di figura 14.5.
L/2 L/3 2L/3 2L/3 L/3
A B C D 1 2 3
qL q
E
G

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 4/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
Figura 14.5.
Il centro di rotazione assoluto C3 dell’elemento 3 è la cerniera E; il centro di rotazione relativo tra gli elementi 2 e 3 è la cerniera D; il centro di rotazione assoluto dell’elemento 2 deve giacere sulla retta r verticale per C e, per le proprietà di allineamento dei centri di rotazione, sulla retta contenente C23 e C3; si conclude che C2 è il punto C. Il centro di rotazione relativo tra gli elementi 1 e 2 è la cerniera B; il centro di rotazione assoluto dell’elemento 1 deve giacere sulla retta s verticale per A e, per le proprietà di allineamento dei centri di rotazione, sulla retta contenente C2 e C12; si conclude che C1 è il punto A (figura 14.6). Assunta la rotazione ϕ3 dell’elemento 3 come parametro di spostamento che identifica la configurazione spostata del sistema può tracciarsi il diagramma degli spostamenti verticali di figura 14.6 (anche in questo caso gli spostamenti orizzontali sono tutti nulli).
Figura 14.6.
I carichi distribuiti vengono preliminarmente sostituiti con le risultanti relative a ciascun elemento rigido. Con considerazioni geometriche si determinano i moduli delle rotazioni ϕ1 e ϕ2 degli elementi 1 e 2 in funzione di ϕ3
L
31L
32
32 ⋅ϕ=⋅ϕ
L31L
32
12 ⋅ϕ=⋅ϕ da cui 2
32
ϕ=ϕ
321 2 ϕ=ϕ=ϕ (e.2.1)
vG vM
L/2 L/3 2L/3 2L/3 L/3
B ≡ C12 C ≡ C2 D 1
2
3
qL
E ≡ C3 zE
G
qL/3 2qL/3
D ≡
C23
qL
G δG
qL/3 2qL/3
zE
δH
H
δM
M
A
B
C D E
C0
C1
x
v(x)
xC1 xC12 xC2
xC23 xC3
ϕ1 ϕ2
ϕ3 vH
A ≡ C1
r s
L/2 L/3 2L/3 2L/3 L/3
A B C D 1 2 3
qL q
E zE G

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 5/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
Relativamente agli spostamenti virtuali di figura 14.6 la forza qL applicata a G compie il lavoro
32
1G1 qL21
2LqLvqLL ϕ=ϕ=⋅=δ (e.2.2)
la risultante 2qL/3 applicata a H compie il lavoro
32
22
2H2 qL91qL
92L
31qL
32vqL
32L ϕ=ϕ=ϕ=⋅=δ (e.2.3)
la risultante qL/3 applicata a M compie il lavoro
32
3M3 qL181L
61qL
31vqL
31L ϕ=ϕ=⋅=δ (e.2.4)
e la coppia zE compie il lavoro
3E4 zL ϕ⋅−=δ (e.2.5)
essendo vG, vH e vM i moduli delle componenti verticali degli spostamenti virtuali dei punti G, H ed M relativamente al passaggio della struttura dalla configurazione iniziale C0 a quella spostata C1. Queste componenti si leggono sul diagramma di figura 14.6. Il sistema è in equilibrio per il valore di zE che rende nullo il lavoro virtuale delle forze applicate; la condizione di equilibrio è pertanto:
0zqL181qL
91qL
21
LLLLL
3E32
32
32
4321
=ϕ⋅−ϕ+ϕ+ϕ=
=δ+δ+δ+δ=δ (e.2.6)
dividendo ambo i membri per ϕ3 si ottiene l’equazione
0zqL32
E2 =− (e.2.7)
e quindi
2E qL
32z = (e.2.8)
che è lo stesso risultato ottenuto nella lezione 11 con le Equazioni Cardinali della Statica (si riveda la figura 11.13).
© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 6/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
LEZIONE 14 – Sessione di studio 1 Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali. Si propongono nel seguito tre esempi. Si consiglia al lettore di risolverli autonomamente e di confrontare successivamente i risultati trovati con la soluzione descritta nella successiva sessione di studio. Esempio 14.3
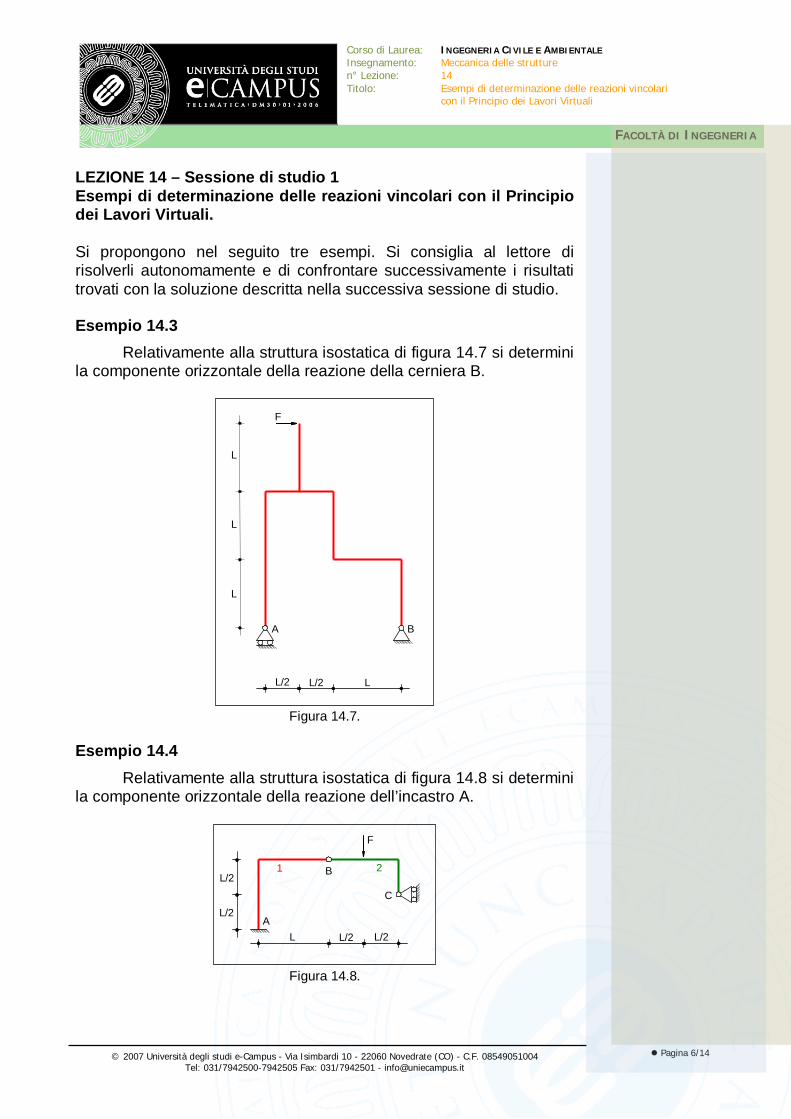
Relativamente alla struttura isostatica di figura 14.7 si determini la componente orizzontale della reazione della cerniera B.
Figura 14.7.
Esempio 14.4
Relativamente alla struttura isostatica di figura 14.8 si determini la componente orizzontale della reazione dell’incastro A.
Figura 14.8.
L/2 L/2 L
F
L/2
L/2
A
B
C
1 2
L/2 L/2 L
L
L
L
F
A B
© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 7/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
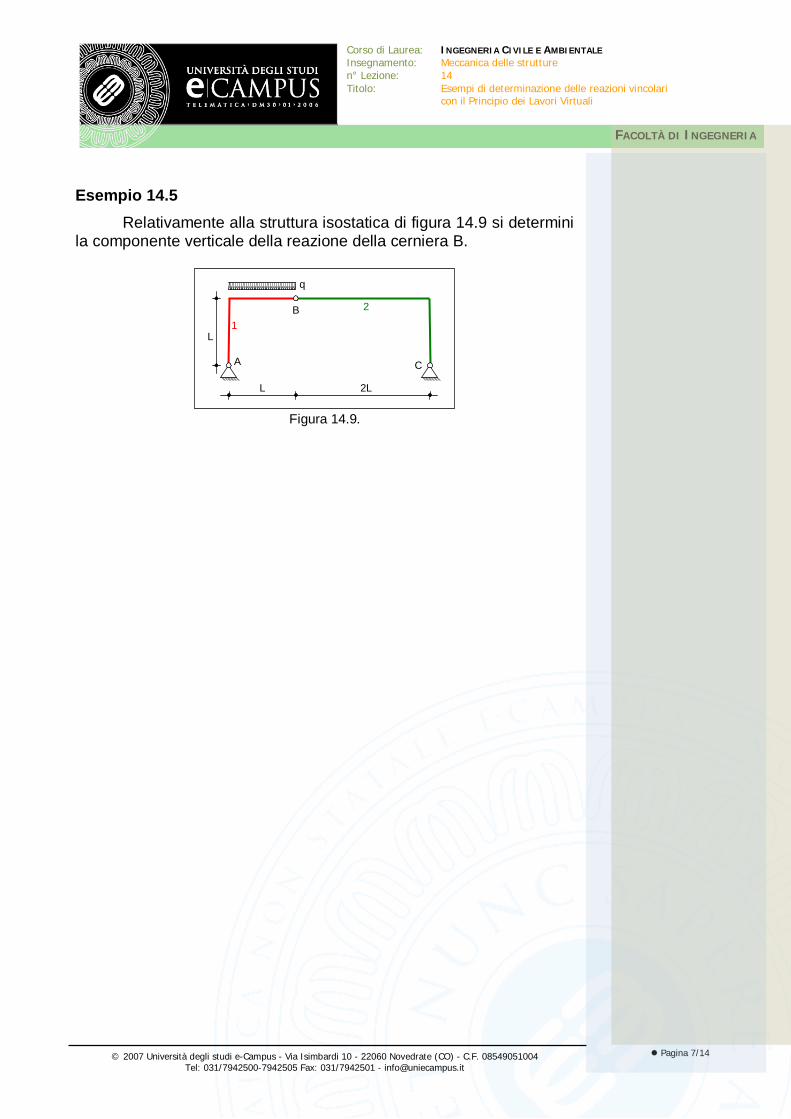
Esempio 14.5
Relativamente alla struttura isostatica di figura 14.9 si determini la componente verticale della reazione della cerniera B.
Figura 14.9.
2L L
L
A
B
C
1
2
q

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 8/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
LEZIONE 14 – Sessione di studio 2 Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali. Sono commentate nel seguito le soluzioni degli esempi proposti nella precedente sessione. Soluzione dell’esempio 14.3
Per far compiere lavoro alla componente orizzontale xB della reazione dell’appoggio B è necessario consentire lo spostamento orizzontale del punto B. Si sostituisce quindi la cerniera B con un carrello che consente solo gli spostamenti orizzontali e con la componente di reazione xB incognita. Lo spostamento verticale di B resta impedito, sicché si ottiene il sistema una volta labile di figura 14.10.
Figura 14.10.
Il centro di rotazione assoluto C1 dell’unico elemento rigido costituente la struttura deve giacere sulla retta r verticale per A ed anche sulla retta s verticale per B; si conclude che C1 è a distanza infinita in direzione verticale. Pertanto il sistema labile di figura 14.10 può solo traslare in direzione orizzontale. Assunto lo spostamento orizzontale u di un punto qualunque (tutti i punti si spostano in direzione orizzontale della stessa quantità) come parametro di spostamento che identifica la configurazione spostata del sistema può tracciarsi il diagramma degli spostamenti orizzontali di figura 14.11 (gli spostamenti verticali sono tutti nulli).
L/2 L/2 L
L
L
L
A B xB
F C

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 9/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
Figura 14.11.
Relativamente agli spostamenti virtuali di figura 14.11 la forza
F compie il lavoro
uFuFCFL CF ⋅=⋅=δ×=δ (e.3.1)
e la forza Bx compie il lavoro
uFuxBxL BBBxB ⋅=⋅=δ×=δ (e.3.2)
essendo Cδ e Bδ gli spostamenti virtuali dei punti C e B relativamente al passaggio della struttura dalla configurazione iniziale C0 a quella spostata C1 (figura 14.11). I moduli delle componenti orizzontali uC e uB di questi spostamenti si leggono sul diagramma di figura 14.11 e sono uguali a u. Il sistema è in equilibrio per il valore di xB che rende nullo il lavoro virtuale delle forze applicate; la condizione di equilibrio è pertanto:
0uxuFLLL BxBF =+=δ+δ=δ (e.3.3)
dividendo ambo i membri per u si ottiene
FxB −= (e.3.4)
che è lo stesso risultato ottenuto nella lezione 11 con le Equazioni Cardinali della Statica (si riveda la figura 11.18). Soluzione dell’esempio 14.4
Per far compiere lavoro alla componente orizzontale xA della reazione dell’appoggio A è necessario consentire lo spostamento orizzontale del punto A. Si sostituisce quindi l’incastro A con un
F
L/2 L/2 L
L
L
L
A B A B xB
F C C δC
δB
C0 C1
xB u(y)
y
r s
C1 → ∞
uB
uB
u

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 10/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
incastro scorrevole in modo da consentire lo spostamento orizzontale di A e con la componente di reazione xA incognita. La rotazione dell’elemento 1 e lo spostamento verticale di A restano impediti, sicché si ottiene il sistema una volta labile di figura 14.12.
Figura 14.12.
Il centro di rotazione assoluto C1 dell’elemento 1 è a distanza infinita su una retta verticale; il centro di rotazione relativo tra gli elementi 1 e 2 è la cerniera B; il centro di rotazione assoluto dell’elemento 2 è sulla retta r orizzontale per C; per le proprietà di allineamento dei centri di rotazione si conclude che C2 è il punto intersezione tra r e la retta s, verticale per B (figura 14.13). Assunta la rotazione ϕ2 dell’elemento 2 come parametro di spostamento che identifica la configurazione spostata del sistema possono tracciarsi i diagrammi degli spostamenti di figura 14.13.
Figura 14.13.
Relativamente agli spostamenti virtuali di figura 14.13 la forza F compie il lavoro
2DF LF21vFDFL ϕ=⋅=δ×=δ (e.4.1)
e la forza Ax compie il lavoro
1 2 F
A
B
C D
δA uD
C 0 C 1
x A xA
F
A
B ≡ C12
C D
C 2
C1 → ∞
x v(x)
xC1 = xC2 = xC12
v D ϕ 2 ϕ = 0
y
u(x)
yC2
yC12
L/2 L/2 L
L/2 L/2 ϕ 2 ϕ
1 = 0
δD
δD vD
uA
L/2
L/2
xA
F
A
B
C
1 2
(b)
D
L/2 L/2 L

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 11/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
2AAAAxA Lx21uxAxL ϕ=⋅=δ⋅=δ (e.4.2)
essendo Dδ e Aδ gli spostamenti dei punti D ed A relativamente al passaggio della struttura dalla configurazione iniziale C0 a quella spostata C1 e vD e uA i moduli della componente verticale di Dδ e della componente orizzontale di Aδ . Queste componenti si leggono sui diagrammi di figura 14.13. Il sistema è in equilibrio per il valore xA che rende nullo il lavoro virtuale delle forze applicate; la condizione di equilibrio è pertanto:
0Lx21FL
21LLL 2A2xAF =ϕ+ϕ=δ+δ=δ (e.4.3)
dividendo ambo i membri per ϕ2 e per L si ottiene l’equazione
0x21F
21
A =+ (e.4.4)
e quindi
FxA −= (e.4.5)
che è lo stesso risultato ottenuto nella lezione 11 con le Equazioni Cardinali della Statica (si riveda la figura 11.18). Soluzione dell’esempio 14.5
Per far compiere lavoro alla componente verticale yB della reazione della cerniera interna B è necessario consentire lo spostamento relativo verticale tra i punti B1 e B2, avendo indicato con B1 il punto B pensato appartenente all’elemento 1 e con B2 il punto B pensato appartenente all’elemento 2. Si sostituisce quindi la cerniera B con un pendolo interno disposto in modo da consentire lo spostamento relativo in direzione verticale tra gli estremi B1 e B2 e con la componente di reazione yB incognita. Lo spostamento relativo orizzontale tra B1 e B2 resta impedito, sicché si ottiene il sistema una volta labile di figura 14.14, nel quale il carico distribuito sull’asta orizzontale dell’elemento 2 è stato sostituito con la sua risultante.
Figura 14.14.
2L L
L
qL
A
B
C
1 2
yB D
B1 B2
yB

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 12/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
Il centro di rotazione assoluto C1 dell’elemento 1 è il punto A; il centro di rotazione assoluto C2 dell’elemento 2 è il punto B; il centro di rotazione relativo C12 tra gli elementi 1 e 2 è sulla retta r orizzontale per B; per le proprietà di allineamento dei centri di rotazione si conclude che C12, dovendo giacere sulla retta r e sulla retta s passante per A e B (figura 14.15) è disposto a distanza infinita in direzione orizzontale.
Figura 14.15.
Assunta la rotazione ϕ1 dell’elemento 1 come parametro di spostamento che identifica la configurazione spostata del sistema, possono tracciarsi i diagrammi degli spostamenti di figura 14.15. Tracciando il diagramma degli spostamenti orizzontali ci si rende conto del fatto che la rotazione ϕ2 dell’elemento 2 è uguale a ϕ1. Assegnata infatti la rotazione ϕ1 arbitraria e tracciato il diagramma degli spostamenti orizzontali dell’elemento 1, il diagramma dell’elemento 2 deve passare per il punto che identifica lo spostamento orizzontale di B1 (il pendolo impone lo stesso spostamento orizzontale a B1 e B2) e per la proiezione del centro di rotazione C2, che è la stessa del centro di rotazione C1.
Relativamente agli spostamenti virtuali di figura 14.15 la risultante qL compie il lavoro
L
xC1 xC2
A ≡ C1 C ≡ C2 yC1 = yC2
yC12
ϕ1
ϕ2 = ϕ1
ϕ2 = ϕ1
x
v(x) u(y)
y
vD
vB2
vB1
D
qL
B1
B2
2L L
A
B1
C
1 2
qL
D
δD δB1
δB2 B2
δD uD
vD
C0
C1
δB1
δB2
δB1
δB2 vB2
vB1 uB1 = uB2
r
s
C12 → ∞
yB
yB

© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 13/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
12
D1 Lq21vqLL ϕ−=⋅−=δ (e.5.1)
la forza B
y agente sull’elemento 1 compie il lavoro
1B1BB1B LyvyL ϕ=⋅=δ (e.5.2)
e la forza B
y agente sull’elemento 2 compie il lavoro
1B2BB2B Ly2vyL ϕ=⋅=δ (e.5.3)
essendo vD, vB1 e vB2 i moduli delle componenti verticali degli spostamenti virtuali dei punti D, B1 e B2 relativamente al passaggio della struttura dalla configurazione iniziale C0 a quella spostata C1 (figura 14.15). Il sistema è in equilibrio per il valore di yB che rende nullo il lavoro virtuale delle forze applicate; la condizione di equilibrio è pertanto:
0Ly2LyLq21LLLL 1B1B1
22B1B1 =ϕ+ϕ+ϕ−=δ+δ+δ=δ (e.5.4)
dividendo ambo i membri per ϕ1 e per L si ottiene l’equazione
0y2yLq21
BB =++− (e.5.5)
e quindi
6
qLyB = (e.5.6)
che è lo stesso risultato ottenuto nella lezione 11 con le Equazioni Cardinali della Statica (si riveda la figura 11.26).
© 2007 Università degli studi e-Campus - Via Isimbardi 10 - 22060 Novedrate (CO) - C.F. 08549051004 Tel: 031/7942500-7942505 Fax: 031/7942501 - [email protected]
Pagina 14/14
Corso di Laurea: INGEGNERIA CIVILE E AMBIENTALE Insegnamento: Meccanica delle strutture n° Lezione: 14 Titolo: Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali
FACOLTÀ DI INGEGNERIA
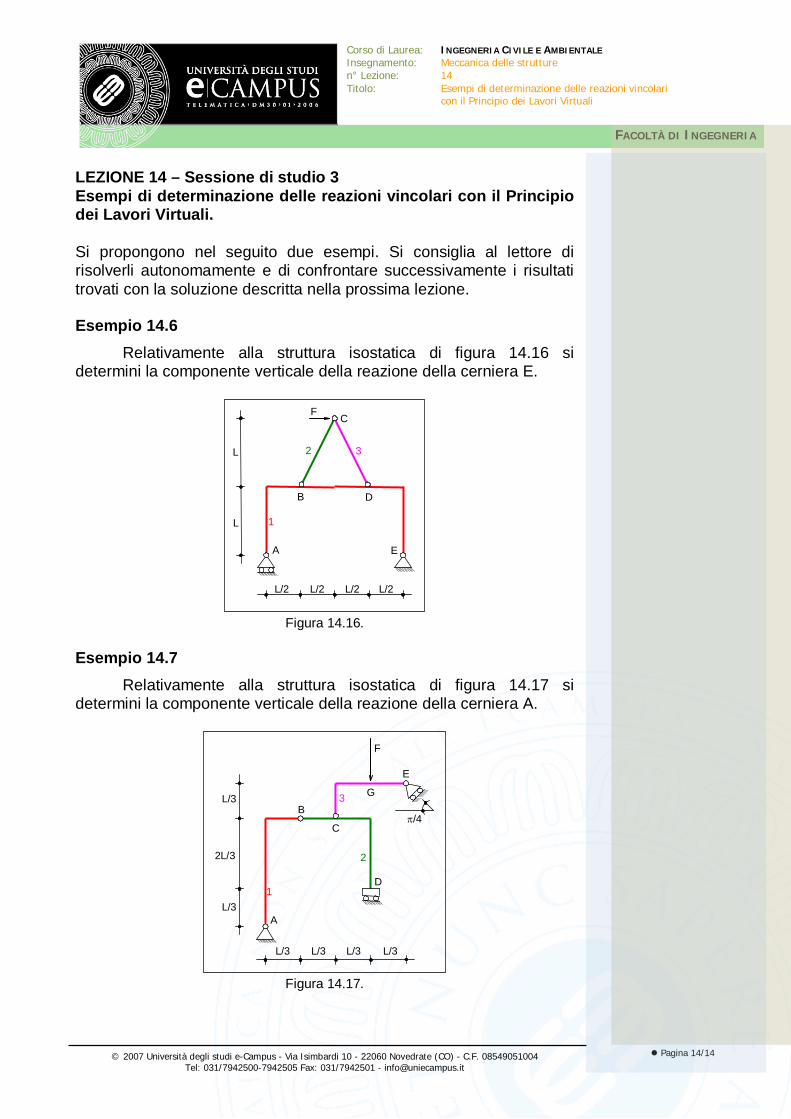
LEZIONE 14 – Sessione di studio 3 Esempi di determinazione delle reazioni vincolari con il Principio dei Lavori Virtuali. Si propongono nel seguito due esempi. Si consiglia al lettore di risolverli autonomamente e di confrontare successivamente i risultati trovati con la soluzione descritta nella prossima lezione. Esempio 14.6
Relativamente alla struttura isostatica di figura 14.16 si determini la componente verticale della reazione della cerniera E.
Figura 14.16.
Esempio 14.7
Relativamente alla struttura isostatica di figura 14.17 si determini la componente verticale della reazione della cerniera A.
Figura 14.17.
1
2
F
A
B
C
D
3
L/3 L/3 L/3 L/3
L/3
2L/3
L/3
E
π/4
G
1
2
L/2 L/2 L/2 L/2
L
L
F
A
B D
C
E
3