11 Equazioni del moto di un sistema a più gradi di libertà · Scrittura delle equazioni del moto...
28
Prof. Adolfo Santini - Dinamica delle Strutture 1 Scrittura delle equazioni del moto di un sistema lineare viscoso a più gradi di libertà
Transcript of 11 Equazioni del moto di un sistema a più gradi di libertà · Scrittura delle equazioni del moto...

Prof. Adolfo Santini - Dinamica delle Strutture 1
Scrittura delle equazioni del moto di un
sistema lineare viscoso a più gradi di libertà

Prof. Adolfo Santini - Dinamica delle Strutture 2
Matrice di rigidezza
Teoricamente, i coefficienti della matrice di rigidezza associati a un insieme di gradi di libertà possono essere calcolati determinando le forze che mantengono in equilibrio il sistema in una configurazione deformata assegnata. Tuttavia, al crescere del numero dei gradi di libertà, questo modo di procedere risulta del tutto inefficiente. Nei casi pratici, il procedimento più conveniente per determinare le proprietà elastiche di un sistema strutturale è basato sul metodo degli elementi finiti. La struttura è suddivisa in un insieme discreto di elementi, gli “elementi finiti”, interconnessi tra di loro in punti, detti “punti nodali”. Le proprietà elastiche della struttura si determinano calcolando inizialmente quelle dei singoli elementi, che vengono poi sommate in maniera appropriata. Pertanto, il problema della definizione della matrice di rigidezza di una struttura si riduce alla valutazione della matrice di rigidezza di un tipico elemento finito.

Prof. Adolfo Santini - Dinamica delle Strutture 3
Elementi finiti di una struttura intelaiata
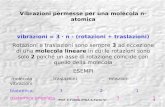
Nel caso delle strutture intelaiate, gli elementi finiti sono costituiti dalle aste del telaio. Si consi- deri la seguente trave piana ad asse rettilineo di lunghezza l e rigidezza flessionale EI(x), in cui i punti nodali coincidono con le estremità. Se si assume che la trave sia assialmente indeformabile, i gradi di libertà nodali sono quattro, le due traslazioni e le due rotazioni, indicati rispettivamente in figura con u1, u2, u3 e u4. In figura sono anche riportate le corrispondenti forze nodali, indicate con f1, f2, f3 ed f4.
u2u1
u4u3
gradi di libertà nodali
f2f1
f4f3forze nodali

Prof. Adolfo Santini - Dinamica delle Strutture 4
Spostamenti e forze nodali
Indicando con f e u i vettori delle forze e degli spostamenti nodali si ha
u2u1
u4u3
gradi di libertà nodali
f2f1
f4f3forze nodali
f = ku
dove k è la matrice di rigidezza dell’elemento finito considerato. In forma esplicita si ha
f1f2f3f4
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
k11 k12 k13 k14k21 k22 k23 k24k31 k32 k33 k34k41 k42 k43 k44
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
u1u2u3u4
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥

Prof. Adolfo Santini - Dinamica delle Strutture 5
Funzioni di forma
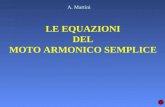
I termini delle colonne della matrice k sono le forze nodali corrispondenti alle deformate ψ1(x), ψ2(x), ψ3(x) e ψ4(x) associate a spostamenti nodali unitari, dette funzioni di forma.
k21
k11
k41k31
u3 = 1 u1 = u2 = u4 = 0
1
k22
k12
k42k32
u4 = 1 u1 = u2 = u3 = 0
1
u1 = 1 u2 = u3 = u4 = 0 u2 = 1 u1 = u3 = u4 = 0
k23k13
k43k33 1k24k14
k44k341
!1(x) !2(x)
!4(x)!3(x)

Prof. Adolfo Santini - Dinamica delle Strutture 6
Calcolo di kij
Il generico coefficiente kij può essere determinato mediante il principio dei lavori virtuali. Come esempio si calcola il coefficiente k13. I sistemi delle forze e degli spostamenti sono indicati in figura. I lavori virtuali esterno e interno si scrivono rispettivamente
!u1
k23k13
k43k33 1
!u1"1(x)
"3(x)
sistema degli spostamenti
sistema delle forzeLve = k13δu1
Lvi = M 3f( ) x( )χ1(s ) x( )dx
0
l
∫ =
= −EI x( ) ′′ψ 3 x( )δu1 − ′′ψ 1 x( )⎡⎣ ⎤⎦dx0
l
∫ =
= δu1 EI x( ) ′′ψ 1 x( ) ′′ψ 3 x( )dx0
l
∫
k13 = EI x( ) ′′ψ 1 x( ) ′′ψ 3 x( )dx0
l
∫
kij = EI x( ) ′′ψ i x( ) ′′ψ j x( )dx0
l
∫
Uguagliando Lve con Lvi, si ha
Questa relazione può essere generalizzata al calcolo di ogni termine, che è quindi dato da

Prof. Adolfo Santini - Dinamica delle Strutture 7
Valutazione delle funzioni di forma 1/2 Le funzioni di forma ψ1(x), ψ2(x), ψ3(x) e ψ4(x) potrebbero essere assunte come forme arbitrarie che soddisfano le condizioni nodali e la continuità interna dell’asta. In generale, tuttavia, sono calcolate come le forme di spostamento di travi uniformi soggette a spostamenti nodali unitari. Possono essere valutate con il metodo dell’equazione della linea elastica, imponendo le opportu- ne condizioni al contorno. Come esempio si calcola la funzione ψ1(x). L’equazione della linea elastica si scrive
il cui integrale generale è il seguente polinomio di terzo grado
ψ 1IV x( ) = 0
Le costanti A1, A2, A3 e A4 possono essere calcolate attraverso le condizioni nodali
ψ 1 0( ) = 1′ψ 1 0( ) = 0
⎧⎨⎪
⎩⎪;
ψ 1 l( ) = 0′ψ 1 l( ) = 0
⎧⎨⎪
⎩⎪
ψ 1 x( ) = A0 + A1x + A2x2 + A3x3
Dopo semplici passaggi si ottiene …

Prof. Adolfo Santini - Dinamica delle Strutture 8
…
Pertanto, la funzione di forma ψ1(x) si scrive
A0 = 1 ; A1 = 0 ; A2 = − 3l2
; A3 =2l 3
ψ 1 x( ) = 1− 3 xl
⎛⎝⎜
⎞⎠⎟2
+ 2 xl
⎛⎝⎜
⎞⎠⎟3
Valutate allo stesso modo, le altre funzioni di forma assumono la forma
ψ 2 x( ) = 3 xl
⎛⎝⎜
⎞⎠⎟2
− 2 xl
⎛⎝⎜
⎞⎠⎟3
ψ 3 x( ) = x 1− xl
⎛⎝⎜
⎞⎠⎟2
ψ 4 x( ) = −x xl
⎛⎝⎜
⎞⎠⎟ 1− x
l⎛⎝⎜
⎞⎠⎟
Valutazione delle funzioni di forma 2/2

Prof. Adolfo Santini - Dinamica delle Strutture 9
Matrice di rigidezza elementare Assumendo che l’elemento considerato sia a sezione costante, i coefficienti di rigidezza si calcolano con la relazione
kij = EI ′′ψ i x( ) ′′ψ j x( )dx0
l
∫e la matrice di rigidezza elementare assume la forma
k = 2EIl 3
6 −6 3l 3l−6 6 −3l −3l3l −3l 2l2 l2
3l −3l l2 2l2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
Si osserva che i coefficienti di rigidezza sono esatti nel caso di una trave uniforme in cui si possono trascurare le deformazioni taglianti, perché le funzioni di interpolazione ψ1(x), ψ2(x), ψ3(x) e ψ4(x) sono le vere deformate di questo caso. Tuttavia, anche se la trave non è uniforme, i coefficienti di rigidezza così calcolati costituiscono una buona approssimazione di quelli veri, soprattutto se la struttura è suddivisa in un numero sufficiente di elementi finiti. Dopo avere determinato la matrice di rigidezza di tutti gli elementi finiti, la matrice di rigidezza dell’intera struttura può essere ottenuta sommando in modo appropriato i coefficienti di rigidez- za dei singoli elementi. Tale procedimento prende il nome di metodo della rigidezza diretta.

Prof. Adolfo Santini - Dinamica delle Strutture 10
Il metodo della rigidezza diretta 1/5
EI
EI EI
u1u3u2
l
l
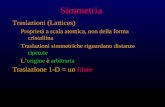
Si consideri il seguente sistema a tre gradi di libertà di cui si vuole determinare la matrice di rigidezza con il metodo della rigidezza diretta.

Prof. Adolfo Santini - Dinamica delle Strutture 11
Il metodo della rigidezza diretta 2/5
Coefficienti della prima colonna: u1 = 1, u2 = 0, u3 = 0.
k11
k31
k21
u1 = 1
u2 = u3 = 0
1 3
2k31k21
1 3
2 k11
6EIl
26EIl
2
12EIl
3
12EIl
312EI
l
3
12EIl
3
12EIl
312EI
l
3
12EIl
3
6EIl
26EIl
212EI
l
3
k = 2EIl 3
6 −6 3l 3l−6 6 −3l −3l3l −3l 2l2 l2
3l −3l l2 2l2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
k11 =24EIl 3
k21 = − 6EIl2
k31 = − 6EIl21
3

Prof. Adolfo Santini - Dinamica delle Strutture 12
Il metodo della rigidezza diretta 3/5
Coefficienti della seconda colonna: u1 = 0, u2 = 1, u3 = 0.
k = 2EIl 3
6 −6 3l 3l−6 6 −3l −3l3l −3l 2l2 l2
3l −3l l2 2l2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
k12 = − 6EIl2
k22 =8EIl
k12
k32
k22
u1 = u3 = 0
1 3
2u2 = 1
k32 =2EIl
3
k12k32k22
1
2
6EIl
26EIl
2
4EIl
2EIl
6EIl
2
6EIl
22EIl
6EIl
26EIl
2
6EIl
2
6EIl
2
2EIl
6EIl
2
6EIl
2
6EIl
2 4EIl
4EIl
6EIl
2
2 1

Prof. Adolfo Santini - Dinamica delle Strutture 13
Il metodo della rigidezza diretta 4/5
Coefficienti della terza colonna: u1 = 0, u2 = 0, u3 = 1.
k = 2EIl 3
6 −6 3l 3l−6 6 −3l −3l3l −3l 2l2 l2
3l −3l l2 2l2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
k13 = − 6EIl2
k23 =2EIl
k33 =8EIl2
3
3
k23
1
2
6EIl
26EIl
24EI
l
6EIl
2
6EIl
26EIl
2
6EIl
2
6EIl
2
6EIl
2
6EIl
22EIl
4EIl
2EIl
6EIl
2
k33k13
6EIl
2
k13
k33
k23
1 3
2u3 = 1
u1 = u2 = 0

Prof. Adolfo Santini - Dinamica delle Strutture 14
Il metodo della rigidezza diretta 5/5
La matrice di rigidezza si scrive quindi
k = 2EIl 3
12 −3l −3l−3l 4l2 l2
−3l l2 4l2
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
EI
EI EI
u1u3u2
l
l

Prof. Adolfo Santini - Dinamica delle Strutture 15

Prof. Adolfo Santini - Dinamica delle Strutture 16
Matrice di massa Quando l’intera massa è concentrata nei punti in cui sono definiti i gradi di libertà traslazionali, la matrice di massa è diagonale e assume la forma
M =
m1 0 0 0 00 m2 0 0 00 0 m3 0 0 0 0 0 mi 0 0 0 0 0 mN
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥
in cui il numero dei termini è pari a quello dei gradi di libertà. I termini fuori diagonale mij si annullano perché un’accelerazione di una massa concentrata produce una forza d’inerzia solo in corrispondenza di quella massa.

Prof. Adolfo Santini - Dinamica delle Strutture 17
Matrice di smorzamento Se fosse possibile determinare le varie forze dissipative che agiscono durante il moto di una struttura, il metodo degli elementi finiti potrebbe essere utilizzato anche per definire i termini della matrice di smorzamento C. Il generico coefficiente potrebbe essere calcolato mediante la relazione
cij = c(x) ψ i (x)0
l
∫ ψ j (x) dx
in cui la funzione c(x) rappresenta le proprietà di smorzamento viscoso distribuito. Dopo aver determinato la matrice di smorzamento di ogni elemento, quella dell’intera struttura potrebbe essere ottenuta mediante un procedimento di sovrapposizione analogo a quello del metodo della rigidezza diretta. In pratica, tuttavia, le funzioni c(x) non sono note. Per questa ragione, lo smorzamento è di solito espresso in termini di rapporti di smorzamento, che possono essere stabiliti sperimentalmente, piuttosto che per mezzo di una matrice di smorzamento C. Qualora fosse esplicitamente richie-sta, la matrice di smorzamento può essere calcolata a partire da valori specificati dei rapporti di smorzamento, come sarà mostrato in seguito.

Prof. Adolfo Santini - Dinamica delle Strutture 18
Vettore dei carichi Se il carico dinamico agente su una struttura è costituito da forze concentrate agenti in corrispon-denza dei gradi di libertà dinamici, il vettore dei carichi può essere scritto direttamente
In generale, però, i carichi possono essere applicati in punti distinti da quelli nodali e possono anche includere carichi distribuiti. In questo caso le componenti del vettore dei carichi sono forze generalizzate associate con gli spostamenti dei gradi di libertà. Il modo più semplice di definire queste forze consiste nel valutare un insieme di forze concentrate, staticamente equivalenti ai carichi distribuiti effettivamente applicati. A tale scopo si assume che i carichi siano applicati alla struttura attraverso una serie di travi appoggiate in corrispondenza dei punti nodali. Le reazioni agli estremi di queste travi costituiscono le forze nodali generalizzate. Questo modo di procedere conduce a forze applicate solo ai gradi di libertà traslazionali. Le forze nodali rotazionali saranno nulle, a meno che sui nodi agiscano anche coppie esterne concentrate.
p(t) =
p1p2pipN
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥

Prof. Adolfo Santini - Dinamica delle Strutture 19
Condensazione statica della matrice di rigidezza 1/4 I gradi di libertà di una struttura intelaiata sono dati dagli spostamenti dei nodi in cui sono inter- connessi due o più elementi finiti. Per esempio, un nodo di un telaio piano ha tre gradi di libertà, due traslazioni e una rotazione, mentre un nodo di un telaio spaziale ne ha sei, tre traslazioni e tre rotazioni. Il numero totale dei gradi di libertà può essere notevolmente ridotto se si trascurano le deformazioni assiali degli elementi strutturali. In genere queste ultime possono essere trascurate sempre nel caso delle travi, mentre solo in edifici non troppo alti nel caso dei pilastri. Si osserva che, in una medesima struttura, il numero di gradi di libertà da considerare in un’ana-lisi dinamica può essere molto diverso di quello da considerare in un’analisi statica. Nel caso di un’analisi statica, infatti, la matrice di rigidezza deve essere calcolata mettendo in conto tutti i gradi di libertà del sistema strutturale. Tuttavia, molti di questi gradi di libertà sono ininfluenti nella formulazione di un’analisi dinamica, perché a essi non corrisponde alcuna massa, come di solito accade per quelli rotazionali. Per questa ragione le dimensioni delle matrici di massa e di smorzamento risultano in genere inferiori a quelle della matrice di rigidezza. Per scrivere le equazioni del moto è dunque necessario eliminare questi gradi di libertà anche dalla matrice di rigidezza. Il procedimento, denominato condensazione statica della matrice di rigidezza, è illustrato dal seguente esempio.

Prof. Adolfo Santini - Dinamica delle Strutture 20
Si consideri il telaio piano a due campate e tre elevazioni illustrato in figura, costituito da aste assialmente indeformabili, in cui le masse sono concentrate solo in corrispondenza dei traversi. Il telaio possiede dodici gradi di libertà statici, le tre traslazioni dei traversi e le nove rotazioni dei nodi. Però i gradi di libertà dinamici sono solo tre, perché solo ai tre gradi di libertà traslazio- nali sono associate le forze d’inerzia che nascono durante il moto.
Condensazione statica della matrice di rigidezza 2/4

Prof. Adolfo Santini - Dinamica delle Strutture 21
Trascurando lo smorzamento e separando i gradi di libertà traslazionali ut da quelli rotazionali , privi di massa, le equazioni del moto in forma partizionata si scrivono
Mt[3x3] 0[3x9]
0[9 x3] 0[9 x9]⎡
⎣⎢⎢
⎤
⎦⎥⎥
ut[3x1]
uϕ[9 x1]
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥+
Ktt[3x3] Ktϕ
[3x9]
Kϕt[9 x3] Kϕϕ
[9 x9]
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥ut[3x1]
uϕ[9 x1]
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥=
pt[3x1]
0[9 x1]⎡
⎣⎢⎢
⎤
⎦⎥⎥
Separando le due equazioni partizionate si ha
Mt ut (t)+Kttut (t)+Ktϕuϕ (t) = pt (t)
Kϕtut (t)+Kϕϕuϕ (t) = 0
Dalla seconda si ha uϕ (t) = −Kϕϕ
−1Kϕtut (t)
che sostituita nella prima fornisce
Mt ut (t)+ Ktt −KtϕKϕϕ−1Kϕt( )ut (t) = pt (t)
uϕ
Condensazione statica della matrice di rigidezza 3/4

Prof. Adolfo Santini - Dinamica delle Strutture 22
…
cioè Mt ut (t)+ Ktt −KtϕKϕϕ
−1Kϕt( )ut (t) = pt (t)
Mt ut (t)+Ktut (t) = pt (t)
in cui Kt = Ktt −KtϕKϕϕ
−1Kϕt
è la matrice di rigidezza condensata, che ha le stesse dimensioni della matrice di massa.
In definitiva, l’equazione
consente di calcolare la risposta in termini dei gradi di libertà traslazionali, mentre l’equazione
permette di ottenere la risposta anche in termini dei gradi di libertà rotazionali.
Mt ut (t)+Ktut (t) = pt (t)
uϕ (t) = −Kϕϕ−1Kϕtut (t)
Condensazione statica della matrice di rigidezza 4/4

Prof. Adolfo Santini - Dinamica delle Strutture 23
In analogia all’equazione del moto di un sistema lineare viscoso a un grado di libertà, si può scrivere
Equazione del moto per moti del suolo 1/4
Mut (t)+C u(t)+Ku(t) = 0
Il vettore degli spostamenti totali dei gradi di libertà si può esprimere come la somma degli spostamenti rispetto alla base più il contributo aggiuntivo dovuto al moto del suolo. Nel caso piano si ha
ut (t) = u(t)+ rug (t)
in cui ug(t) è lo spostamento del suolo ed r è il cosiddetto vettore pseudo-statico. Le componenti di r sono o pari a uno, quando il corrispondente grado di libertà è diretto secondo il moto del suolo, o pari a zero quando è ortogonale. Le componenti del vettore pseudostatico, cioè, rappresentano gli spostamenti dei gradi di libertà conseguenti a uno spostamento statico unitario del suolo.

Prof. Adolfo Santini - Dinamica delle Strutture 24
Equazione del moto per moti del suolo 2/4
u2 = 1
u1 = 1
u3 = 1
ug = 1
r =111
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
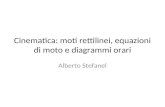
Nel caso di un telaio piano con gradi di libertà di sola traslazione, le componenti del vettore pseudostatico sono tutte pari ad uno.

Prof. Adolfo Santini - Dinamica delle Strutture 25
Equazione del moto per moti del suolo 3/4
r = 10
⎡
⎣⎢
⎤
⎦⎥
u1 = 1
u2 = 0
ug = 1
u1
u2
m
Per il seguente sistema a due gradi di libertà, invece, le componenti di r sono pari a 1 e 0 rispettivamente

Prof. Adolfo Santini - Dinamica delle Strutture 26
Equazione del moto per moti del suolo 4/4
Sostituendo la relazione
nelle equazioni del moto
ut (t) = u(t)+ rug (t)
Mut (t)+C u(t)+Ku(t) = 0
si ottiene
Mu(t)+C u(t)+Ku(t) = −Mrug (t)
L’azione corrispondente al moto del suolo può quindi essere descritta dalla forza equivalente
peq (t) = −Mrug (t)

Prof. Adolfo Santini - Dinamica delle Strutture 27
La risposta in termini di sollecitazioni 1/2 La soluzione delle equazioni del moto fornisce la risposta in termini di spostamento, velocità e accelerazione dei gradi di libertà. Da queste quantità possono essere determinati gli sforzi nei singoli elementi, necessari per il progetto o la verifica della struttura. Si possono seguire due diversi procedimenti:
(a) Per ogni istante di tempo t*, gli spostamenti nodali di ogni elementi finito possono essere ricavati dal vettore u(t*). Se u(t*) include solo i gradi di libertà traslazionali, quelli rotazionali possono essere ottenuti attraverso la relazione
valutata per t = t*. Dagli spostamenti nodali in termini di traslazioni e di rotazioni si possono poi determinare le corrispondenti forze nodali mediante la relazione
Tali forze consentono il calcolo degli sforzi interni in tutte le sezioni trasversali desiderate.
uϕ (t* ) = −Kϕϕ
−1Kϕtut (t* )
f1f2f3f4
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
k11 k12 k13 k14k21 k22 k23 k24k31 k32 k33 k34k41 k42 k43 k44
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
u1u2u3u4
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥

Prof. Adolfo Santini - Dinamica delle Strutture 28
La risposta in termini di sollecitazioni 2/2 (b) Per ogni istante di tempo t*, le forze statiche equivalenti fs(t*) possono essere calcolate mediante la relazione
fS (t* ) = Ku(t* )
Gli sforzi negli elementi strutturali possono essere determinati mediante un’analisi statica della struttura soggetta alle forze fs(t*).
Tuttavia, qualunque sia il metodo seguito, per avere una conoscenza adeguata della risposta l’analisi deve essere ripetuta per un numero elevato di istanti di tempo.