03 - Tecnologia dei controlli Automatici · non linearità casuale Caratteristica di un trasduttore...
42
27/11/2008 1 Università degli Studi di Modena e Reggio Emilia A utomation R obotics and S ystem CONTROL Tecnologia di un sistema di controllo COMPONENTI COMPONENTI COMPONENTI COMPONENTI PER IL CONDIZIONAMENTO PER IL CONDIZIONAMENTO PER IL CONDIZIONAMENTO PER IL CONDIZIONAMENTO DEI SEGNALI DEI SEGNALI DEI SEGNALI DEI SEGNALI Argomenti trattati Acquisizione – Multiplexer – Amplificatore – Campionatore – Convertitore analogico-digitale Attuazione – Convertitore digitale-analogico 3 Componenti della catena di acquisizione 4 Struttura tipica A 1001 1001 D Convertitore Amplificatore Multiplexer H S Campionatore
Transcript of 03 - Tecnologia dei controlli Automatici · non linearità casuale Caratteristica di un trasduttore...

27/11/2008
1
Università degli Studidi Modena e Reggio Emilia
AutomationRobotics andSystemCONTROL
Tecnologia di un sistema di
controllo
COMPONENTI COMPONENTI COMPONENTI COMPONENTI
PER IL CONDIZIONAMENTOPER IL CONDIZIONAMENTOPER IL CONDIZIONAMENTOPER IL CONDIZIONAMENTO
DEI SEGNALIDEI SEGNALIDEI SEGNALIDEI SEGNALI
Argomenti trattati
Acquisizione– Multiplexer
– Amplificatore
– Campionatore
– Convertitore analogico-digitale
Attuazione– Convertitore digitale-analogico
3
Componenti della catena di
acquisizione
4
Struttura tipica
A10011001D
Convertitore Amplificatore Multiplexer
H S
Campionatore

27/11/2008
2
Multiplexer
Scopo– consentire l’utilizzo di un solo convertitore A/D
Caratteristiche– n ingressi
• single-ended o differenziali
– 1 uscita
• single-ended o differenziale
Tecnologia costruttiva– CMOS o Bipolare
5
Multiplexer
Caratteristiche tecniche essenziali (ADG506/507A)– Ron: 280 Ω ±10%
– ∆Ron tra canali: 5%
– ∆Ron/∆T: 0.6%/ °C
– ton/off: 200 ÷ 500 ns
Parallelismi tipici– single-ended
• 8-16 canali
– differenziale
• 4-8 canali
6
Amplificatore differenziale
Problemi– Impossibilità di avere
resistenze uguali e con uguale coefficiente termico
– impedenza di ingresso dipendente dal guadagno e sbilanciata
– off-set ad elevato guadagno
non utilizzabile in applicazioni industriali ad elevato guadagno insieme ad un sensore
7
-
+
Vout
R2
R1
R3
R4
Amplificatore per
strumentazione
8
2 livelli
front-end differenziale
+
-
-
+
Rg
Vin+
Vin-
-
+
VoutR
R R
RR
R

27/11/2008
3
Amplificatore per
strumentazione
Calcolo del guadagno
9
+
-
-
+
Rg
Vcm-∆V/2
R
R
front-end
Vcm+∆V/2
e1 = Vcm - (1+2R/Rg) ∆V/2
e2 = Vcm + (1+2R/Rg) ∆V/2
∆∆∆∆∆∆∆∆V = VV = VdifferenzialedifferenzialeVVcmcm = V= Vmodo comunemodo comune
∆∆∆∆∆∆∆∆VVIf = ∆∆∆∆V/Rg
Vcm-∆∆∆∆V/2
Vcm+ ∆∆∆∆V/2
+
-
Rg
R
Amplificatore per
strumentazione
Calcolo del guadagno
10
∆∆∆∆∆∆∆∆V = VV = VdifferenzialedifferenzialeVVcmcm = V= Vmodo comunemodo comune
e1 = Vcm - (1+2R/Rg) ∆V/2
e2 = Vcm + (1+2R/Rg) ∆V/2
-
+
Vout
Vref
Vsense
R
RR
R
differenziale
VVoutout = (1+2R/R= (1+2R/Rgg) ) ∆∆∆∆∆∆∆∆VV
Amplificatore per
strumentazione
Caratteristiche tecniche essenziali (INA110AG)– Guadagno: configurabile 1,10,100,200,500
– ∆G: (0.04÷0.4)%
– ∆G/∆T: ±(20÷100) ppm/ °C
– off-set rip. all’ingresso (RTI): ± (500 + 5000/G)µV
– ∆off-set/∆T: ±(5+100/G) µV/ °C
– imped. ingresso: >(1012)/6 Ω/pF
– settling time (0.1%): 4÷11µs
– CMR: 70÷110 dB
11
Amplificatore per
strumentazione
12
+
-
-
+
Rg
Vin+
Vin-
-
+
VoutR
R R
RR
R
Attenzione alla saturazione del 1°stadioe = Vcm ± G*∆V/2
se Vout = 10Volte Vsat = 13Volt
5 Volt
Vcm < 8 V
e
27/11/2008
4
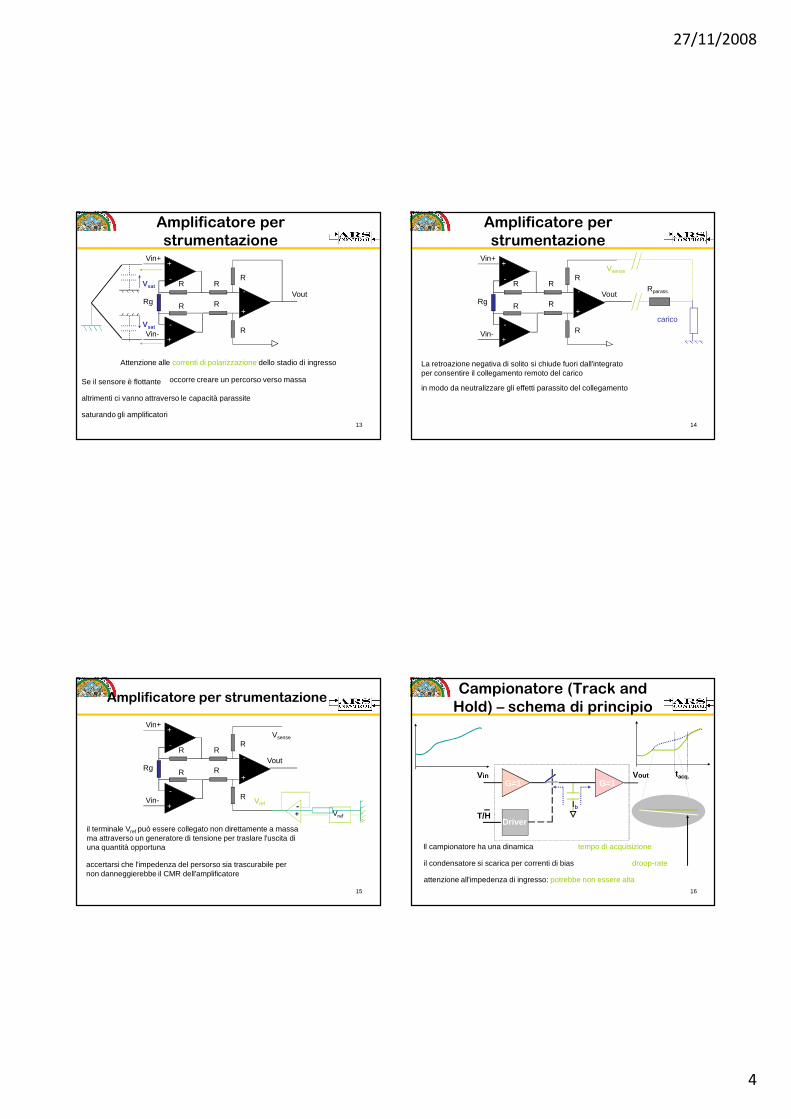
Amplificatore per
strumentazione
13
+
-
-
+
Rg
Vin+
Vin-
-
+
VoutR
R R
RR
R
Se il sensore è flottante
Attenzione alle correnti di polarizzazione dello stadio di ingresso
occorre creare un percorso verso massa
altrimenti ci vanno attraverso le capacità parassite
saturando gli amplificatori
Vsat
Vsat
Amplificatore per
strumentazione
14
La retroazione negativa di solito si chiude fuori dall'integratoper consentire il collegamento remoto del carico
Vsense
carico
Rparass.
in modo da neutralizzare gli effetti parassito del collegamento
+
-
-
+
Rg
Vin+
Vin-
-
+
VoutR
R R
RR
R
Amplificatore per strumentazione
15
+
-
-
+
Rg
Vin+
Vin-
-
+
VoutR
R R
RR
R
Vsense
Vref
il terminale Vref può essere collegato non direttamente a massa ma attraverso un generatore di tensione per traslare l'uscita di una quantità opportuna
-+ Vref
accertarsi che l'impedenza del persorso sia trascurabile per non danneggierebbe il CMR dell'amplificatore
Campionatore (Track and
Hold) – schema di principio
16
Il campionatore ha una dinamica
il condensatore si scarica per correnti di bias
attenzione all'impedenza di ingresso: potrebbe non essere alta
T/H
VoutG=1
VinG=1
Driver
tacq.
Ib
tempo di acquisizione
droop-rate

27/11/2008
5
Campionatore (Track and
Hold)
Caratteristiche tecniche essenziali (AD346)– tempo acquisizione (0.1%): 2ms
– off-set: ±3mV
– Doff-set/DT: ±0.3mV/ °C
– droop rate: 0.5mV/ms
– Ddroop-rate/DT: 0.7mv/ms/ °C
– impedenza ingresso: 3kW
17
Convertitore analogico-
digitale
Numerose tipologie– ad integrazione
• rampa
• doppia rampa
– in retroazione
• successive approssimazioni
• contatore
– conversione diretta
• flash
18
per l’automazioneper l’automazione
Convertitore analogico-
digitale
19
Criteri di scelta
tempo conversione elevato basso
risoluzione elevata elevata
immunità ai disturbi elevata bassa
disponibilità limitata elevata
costo limitato cresce coln. di bit
Rampa S. appross.
strumentazione controllo
Convertitore analogico-
digitale
Schema di principio di un Convertitore per successive approssimazioni
20
Clock
SAR
DAC
Vin
+-
nucleo base
3state
8
4
OEH
OEL
interfaccia di uscita
Vrefin
Ref Vrefout
generazionedel riferimento

27/11/2008
6
Convertitore analogico-
digitale
Caratteristiche tecniche essenziali (AD674B)– pinout standard industriale
– risoluzione: 12 bit
– linearità: 11 bit (Tmin, Tmax)
– tempo conversione: 15ms
– off-set: ±2LSB
– ∆off-set/∆T: 10 ppm/ °C
– impedenza ingresso: <7kΩ– riferimento tensione interno: si
– interfaccia bus: 8-16 bit
– funzionamento bipolare: si
21
Convertitore da Resolver a
digitale
Schema di principio
22
Demo-dulat.
sen( ϑϑϑϑ−−−−Φ)Φ)Φ)Φ)
1 1+sT1s 1+sT2
latch
VCOU/D
counter
x sen ΦΦΦΦ
x cos ΦΦΦΦV4sen ϑϑϑϑ
V4cos ϑϑϑϑ
V4=Vmsen ωωωωt φ
V4sen( ϑϑϑϑ−−−−Φ)Φ)Φ)Φ)-
+
Convertitore digitale-
analogico
23
Iout
Ref
R
2R
R
2R 2R 2R
Vref
LEh LElow4 8
µP BUSa 8 bit
LE12 glitches in uscita
per il caricamentoin sequenza del dato
0111 1000
Moltiplicativo: Vref variabile4 quadranti: -V1 < Vref < +V2
-+
Vout
Schema R-2R
Convertitore digitale-
analogico
Unica tipologia ⇒ rete a scala R-2R Molteplici realizzazioni tecnologiche
– numero di bit
• 8 - 24
– ingresso digitale
• parallelo o seriale
• latch singolo o multiplo
– uscita analogica
• corrente o tensione
– generatore di riferimento
• interno o esterno
• convertitore moltiplicativo 24

27/11/2008
7
Convertitore digitale-
analogico
Caratteristiche tecniche essenziali (DAC7545)– pinout standard industriale
– risoluzione: 12 bit
– linearità: ± 2 LSB
– monotonicità: 10 bit
– uscita: corrente
– ∆G: ±20 LSB
– ∆G/ ∆T: 5ppm/ °C
– tass: 2 µs– ingresso digitale: latch a 12 bit
– moltiplicativo: si a 4 quadranti
25
I I I I SENSORISENSORISENSORISENSORI
Indice
Parte 1– Schema generale di una catena di misura ed attuazione
– Trasduttori, sensori ed attuatori
– Caratteristica di un trasduttore
Parte 2– Sensori per grandezze meccaniche
• posizione, velocità, deformazione, forza, pressione
– Sensori di temperatura
– Sensori di corrente
27
Catena di misura ed
attuazione
Schema funzionale di un controllo digitale
I blocchi sono descritti come– guadagni, f.d.t.
28
A/D
Calcolatore
D/A
Attuatore
Processo
G(z) Ka G(S)Sp
SensoreKs

27/11/2008
8
Catena di misura ed
attuazione
Schema tecnologico di un controllo digitale– è evidenziata la struttura tecnologica del sistema
29
Unità di controllo digitale Attuatore
Sensore
Processo
AD1001
Anello di controllo a loop singolo
AD1001
Catena di misura ed
attuazione
Schema tecnologico di un sistema completo– molti anelli di controllo
30
Sensori
1 NH S
AD1001 Attuatori
Unità di controllo
A1001D
Trasduttori, sensori ed
attuatori
Trasduttore (dal latino trasducere = condurre attraverso)
– dispositivo fisico progettato per trasformare grandezze appartenenti ad un sistema energetico in grandezze equivalenti appartenenti ad un diverso sistema energetico
31
TrasduttoreTemperatura Tensione
Energia termica Energia elettrica
Trasduttore
Esempi dall’esperienza quotidiana
32
Energia elettrica
Energialuminosa
Energia meccanica
Energiaacustica

27/11/2008
9
Sensore
Trasduttore utilizzato per misurare le condizioni operative del processo
– Grandezza in ingresso
• energia nel dominio fisico di interesse
– Grandezza in uscita
• segnale nel dominio fisico dell’unità di controllo
Tipici domini fisici delle unità di controllo– elettrico, pneumatico, idraulico
33
Sensore
Esempio dall’esperienza quotidiana
34
Immagine Segnale
Sensore
Unità di elaborazione
Sensore
Esempio dall’esperienza quotidiana
35
TemperaturaIndicazione
Sensore
Unità dielaborazione
Sensore
Esempio dall’esperienza quotidiana
36
Peso
Indicazione
Sensore
Unità dielaborazione

27/11/2008
10
Attuatore
Trasduttore utilizzato per trasformare un segnale di comando in azione sul processo– Funzione complementare a quella del sensore
– Grandezza in ingresso
• segnale nel dominio fisico dell’unità di controllo
– Grandezza in uscita
• energia nel dominio fisico della grandezza di comando
Sono spesso realizzati per mezzo di più trasduttori
37
Attuatore
Esempio dall’esperienza quotidiana
38
SegnaleEnergia
meccanica
Unità di elaborazione
Attuatore
Attuatore
39
Esempio dall’esperienza quotidiana
Segnalemeccanico
Energiameccanica
AttuatoreAttuatorecompositocomposito
Trasduttore 1
Trasduttore 2
Energiaelettrica
Caratteristica di un
trasduttore
40
Caratteristica idealelineare
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Caratteristica idealenon lineare
non linearitàsistematica

27/11/2008
11
Caratteristica di un trasduttore
41
Famiglia dicaratteristiche reali
Caratteristica ideale
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
non linearitàsistematica
Caratteristica di un trasduttore
42
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Famiglia dicaratteristiche realiCurva che meglio approssima
Caratteristica idealenon linearitàsistematica
Caratteristica di un trasduttore
43
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
non linearitàsistematica
Importante la non linearità sistematica si può compensare con opportuni algoritmi o circuiti
Caratteristica di un trasduttore
44
Caratteristica ideale
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
non linearitàcasuale
Famiglia dicaratteristiche reali
27/11/2008
12
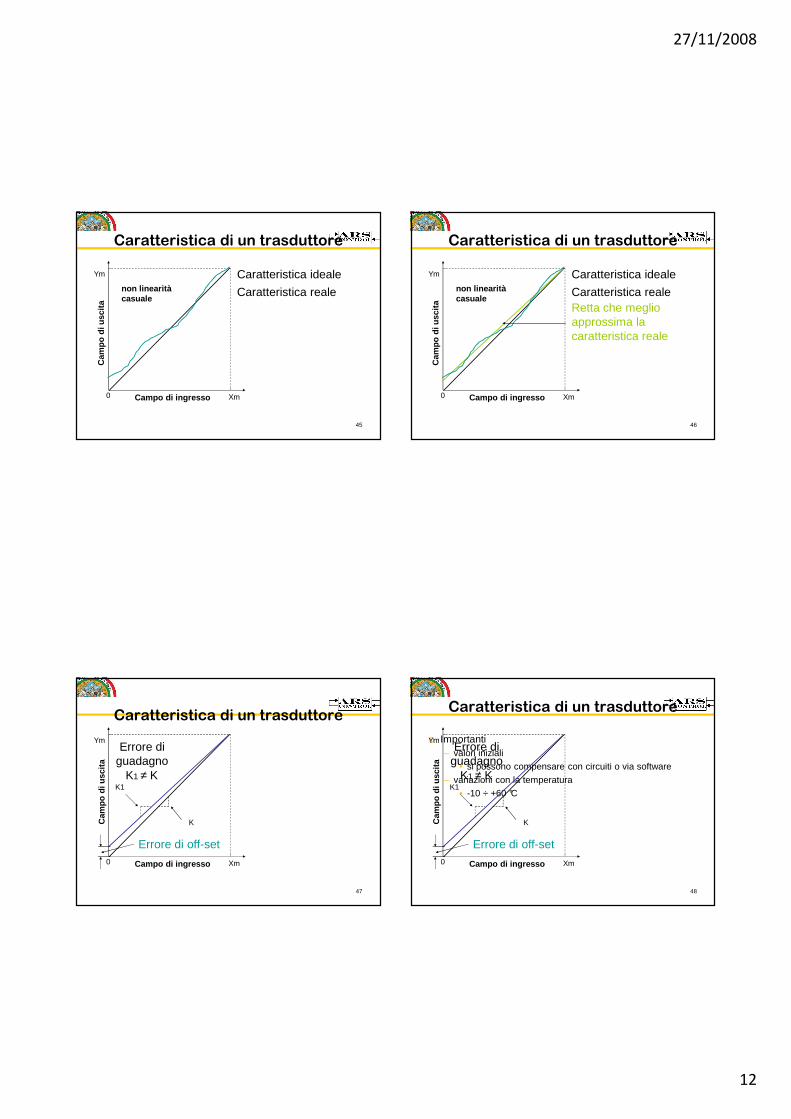
Caratteristica di un trasduttore
45
Caratteristica reale
Caratteristica ideale
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
non linearitàcasuale
Caratteristica di un trasduttore
46
Caratteristica reale
Caratteristica ideale
Retta che meglio approssima lacaratteristica reale
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
non linearitàcasuale
Caratteristica di un trasduttore
47
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Errore diguadagno
K1 ≠ ΚK1
K
Errore di off-set
Caratteristica di un trasduttore
Importanti – valori iniziali
• si possono compensare con circuiti o via software
– variazioni con la temperatura
• -10 ÷ +60 °C
48
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Errore diguadagno
K1 ≠ ΚK1
K
Errore di off-set

27/11/2008
13
Caratteristica di un trasduttore
49
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Errore di non linearità
casuale
Caratteristica di un trasduttore
Importanti – valori iniziali
• si compensano
– variazioni con la temperatura
50
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Errore di non linearità
casuale
Caratteristica di un trasduttore
Importanti – valore iniziale
• non si può compensare
– variazioni con la temperatura
51
Campo di ingresso
Cam
po d
i usc
ita
Xm
Ym
0
Errore di non linearità
casuale
non linearitàsistematica
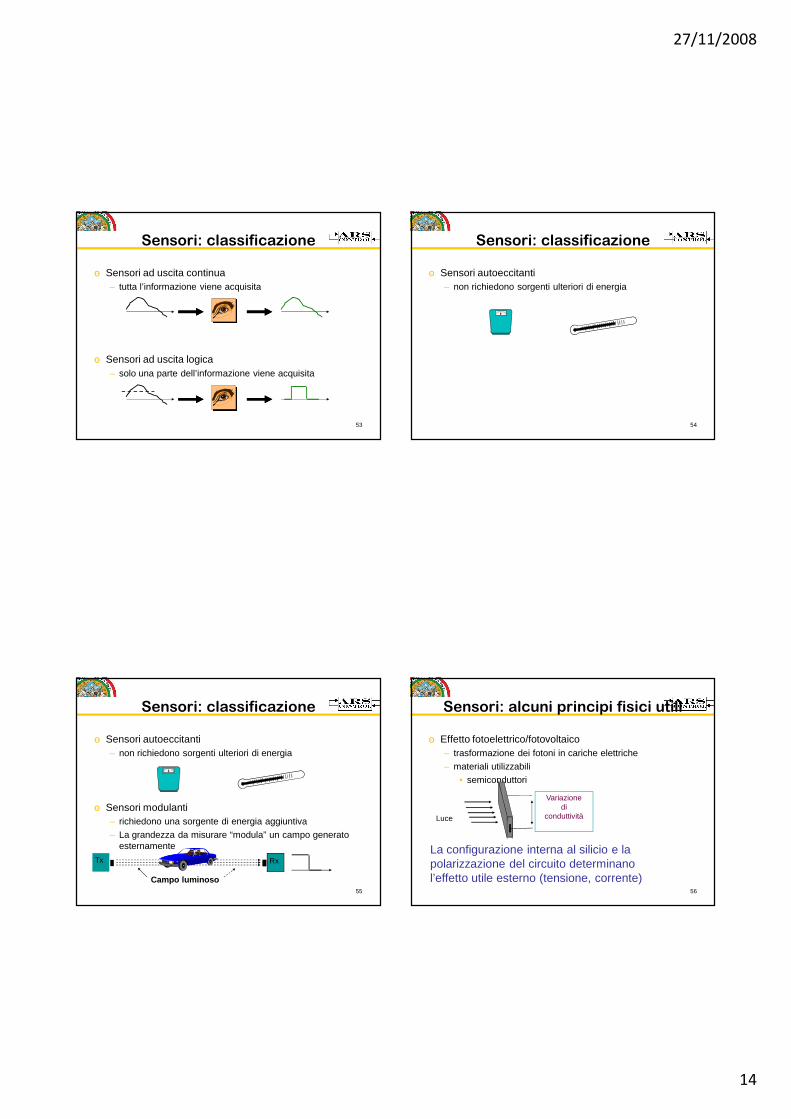
Sensori: classificazione
Sensori ad uscita continua– tutta l’informazione viene acquisita
52
27/11/2008
14
Sensori: classificazione
Sensori ad uscita continua– tutta l’informazione viene acquisita
Sensori ad uscita logica– solo una parte dell’informazione viene acquisita
53
Sensori: classificazione
Sensori autoeccitanti– non richiedono sorgenti ulteriori di energia
54
Sensori: classificazione
Sensori autoeccitanti– non richiedono sorgenti ulteriori di energia
Sensori modulanti– richiedono una sorgente di energia aggiuntiva
– La grandezza da misurare “modula” un campo generato esternamente
55
Campo luminoso
Tx Rx
Sensori: alcuni principi fisici utili
Effetto fotoelettrico/fotovoltaico– trasformazione dei fotoni in cariche elettriche
– materiali utilizzabili
• semiconduttori
56
Luce
Variazionedi
conduttività
La configurazione interna al silicio e lapolarizzazione del circuito determinanol’effetto utile esterno (tensione, corrente)

27/11/2008
15
Sensori: alcuni principi fisici utili
Effetto termoelettrico (Seebeck)– differenza di potenziale generata dalla temperatura
– materiali utilizzabili
• coppia di metalli diversi saldati ad un estremo
57
V = f(T2-T1)T2
T1nonlineare
giunzione calda giunzione fredda
Sensori: alcuni principi fisici utili
Effetto termoresistivo– variazione della resistività di un materiale causata dalla
variazione della temperatura
– materiali utilizzabili
• metalli, ossidi metallici, semiconduttori
58
R = f(T)T
spessolineare
Sensori: alcuni principi fisici utili
Effetto piezoresistivo– variazione della resistività di un materiale causata dalla
deformazione
– materiali utilizzabili
• metalli, semiconduttori
59
deforma-zione
R = f(d)
abbastanzalineare
Sensori: alcuni principi fisici utili
Effetto Hall– generazione di una tensione da parte dell’azione
congiunta di un campo magnetico ed una corrente
– materiali utilizzabili
• metalli, semiconduttori
60
Vout = K (H x I)
H
Iref Iref

27/11/2008
16
SENSORISENSORISENSORISENSORI PER PER PER PER GRANDEZZEGRANDEZZEGRANDEZZEGRANDEZZE
MECCANICHEMECCANICHEMECCANICHEMECCANICHE
Sensori per grandezze
meccaniche
– Posizione
• Potenziometro
• Trasformatore Differenziale Lineare - LVDT
• Resolver
• Encoder
– Velocità
• Dinamo tachimetrica
– Deformazione
• Estensimetro
– Forza e Pressione
• Estensimetri su strutture meccaniche
62
Potenziometro
Sensore di posizione– Grandezza misurata (ingresso)
• rotazione o spostamento lineare
– Grandezza di uscita
• tensione
– Tipo di sensore
• modulante
63
Potenziometro
Caratteristiche essenziali– Risoluzione: > 0.1%
– Linearità: >0.1%
– Resistenza: 1K ÷ 100K Ω– Numero di giri: 1 ÷ 10
Problemi di inerfacciamento– Tensione di riferimento
• autoriscaldamento
– impedenza di uscita
• interfacciamento
• disturbi elettromagnetici
64
Vref
Vout
Sensore modulante

27/11/2008
17
Trasformatore Differenziale Lineare
- LVDT
Sensore di posizione– Grandezza misurata (ingresso)
• spostamento
– Grandezza di uscita
• segnale analogico modulato
– Tipo di sensore
• modulante (campo magnetico)
• sensore (coppia di avvolgimenti)
65
Trasformatore Differenziale
Lineare - LVDT
66
V1 V2
S1 S2
sensore modulante
ϕ = 0 se X>0
ϕ = π se X<0
Vin=Vm sin ωt
X<0X>0
Vout = (V2 -V1)
= Vm(X) sin (ωt+ ϕ)
Trasformatore Differenziale
Lineare - LVDT
Caratteristiche essenziali– Risoluzione: 2 ÷ 20µm (lineare)
– Sensibilità: 50 ÷ 100mVout/(mmVin)
– Linearità: 0.1 ÷ 0.5 %
– Campo di misura: 1 ÷ 10 cm
– Frequenza di ecc.: 1 ÷ 50 Khz
Problemi di interfacciamento– demodulazione dell’uscita
– stabilità del generatore di riferimento
67
ϕ = 0 se X>0
ϕ = π se X<0
Vout = (V2 -V1) = Vm(X) sin (ωt+ ϕ)sensore modulante
Resolver
Sensore di velocità/posizione– Grandezza misurata (ingresso)
• rotazione
– Grandezza di uscita
• segnale analogico modulato
– Tipo di sensore
• modulante (campo magnetico)
• sensore (coppia di avvolgimenti)
68

27/11/2008
18
Resolver
Principio di funzionamento
69
In un Resolver reale il campo ègenerato da due avvolgimenti e vi
sono due sensori
ϑ
Generatore
Sensore
dΦcdtV=flusso
flusso concatenato
V ≠ 0 seΦc varia
Resolver
Schema di massima di Resolver con 2 poli
70
V2
V3
V1V4
Generatori
Rivelatori
se V3=0se V3=0
V1=V1=VmVmsensen ϑϑϑϑϑϑϑϑsensen ωωωωωωωωttV2V2==VmVmcoscos ϑϑϑϑϑϑϑϑsensen ωωωωωωωωtt
Generatori di riferim.V3=Vmsen ωωωωtV4=Vmsen ωωωωt
SensoriV1=V3cos ϑϑϑϑ + V4sen ϑϑϑϑV2=V4cos ϑϑϑϑ - V3sen ϑϑϑϑ
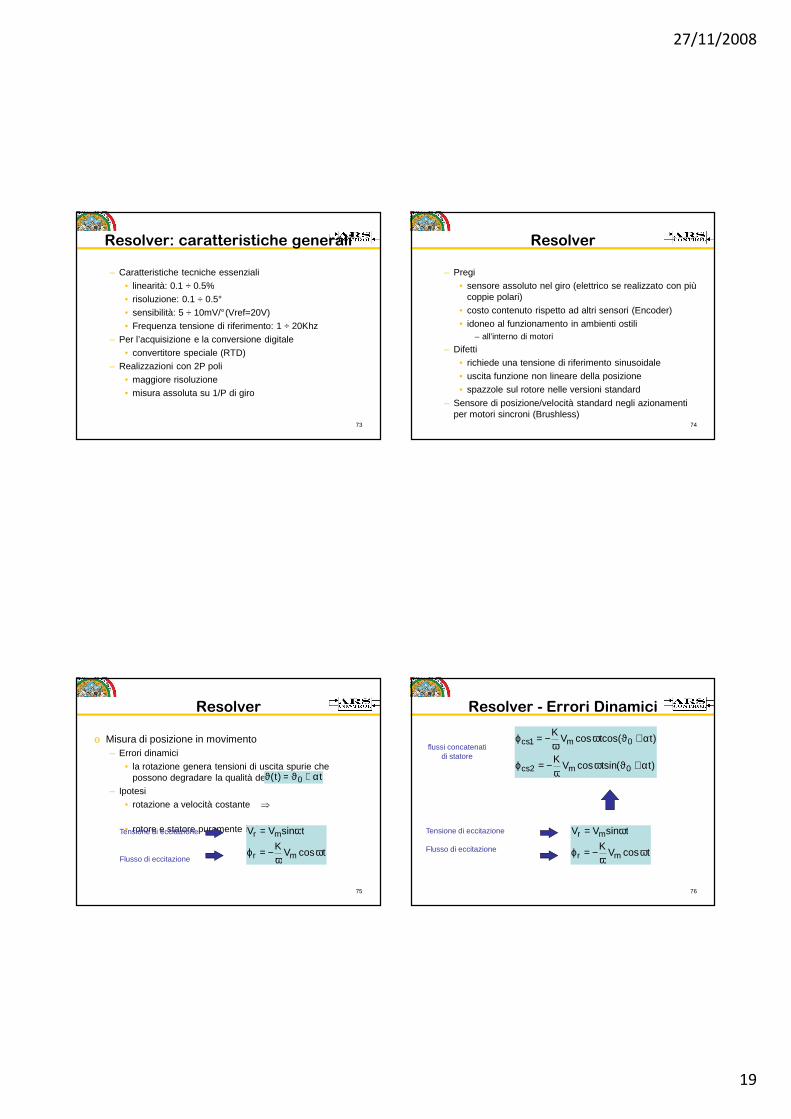
Resolver: caratteristiche generali
– Segnale di uscita
• tensione alternata modulata in ampiezza dalla posizione
– occorre demodulare
– ricavare ϑ da sen ϑ e cos ϑ– Due segnali modulati in quadratura
• possibilità di ricostruire la posizione su tutti i 360°
• semplificazione dell’inversione delle funzioni trigonometriche
71
Resolver: caratteristiche generali
72
Vr
Vs1
Vs2
secondari fissi
assi magneticiin quadratura
primariorotante
Realizzazione schematica di un Resolver per misura di posizione
3 avvolgimenti:1 sola eccitazione2 uscite
27/11/2008
19
Resolver: caratteristiche generali
– Caratteristiche tecniche essenziali
• linearità: 0.1 ÷ 0.5%
• risoluzione: 0.1 ÷ 0.5°
• sensibilità: 5 ÷ 10mV/°(Vref=20V)
• Frequenza tensione di riferimento: 1 ÷ 20Khz
– Per l’acquisizione e la conversione digitale
• convertitore speciale (RTD)
– Realizzazioni con 2P poli
• maggiore risoluzione
• misura assoluta su 1/P di giro
73
Resolver
– Pregi
• sensore assoluto nel giro (elettrico se realizzato con più coppie polari)
• costo contenuto rispetto ad altri sensori (Encoder)
• idoneo al funzionamento in ambienti ostili– all’interno di motori
– Difetti
• richiede una tensione di riferimento sinusoidale
• uscita funzione non lineare della posizione
• spazzole sul rotore nelle versioni standard
– Sensore di posizione/velocità standard negli azionamenti per motori sincroni (Brushless)
74
Resolver
Misura di posizione in movimento – Errori dinamici
• la rotazione genera tensioni di uscita spurie che possono degradare la qualità della misura
– Ipotesi
• rotazione a velocità costante ⇒
• rotore e statore puramente induttivi
75
t)t( 0 α+ϑ=ϑ
tcosVK
tsinVV
mr
mr
ωω
−=ϕ
ω=Tensione di eccitazione
Flusso di eccitazione
Resolver - Errori Dinamici
76
)t(sintcosVK
)tcos(tcosVK
0m2cs
0m1cs
α+ϑωω
−=ϕ
α+ϑωω
−=ϕflussi concatenati
di statore
tcosVK
tsinVV
mr
mr
ωω
−=ϕ
ω=Tensione di eccitazione
Flusso di eccitazione

27/11/2008
20
Resolver - Errori Dinamici
77
tensione di statore
tensione di statore
)tcos(tcosV
)t(sintsinKVdt
dV
)t(sintcosV
)tcos(tsinKVdt
dV
0m
0m2cs
2s
0m
0m1cs
1s
α+ϑωωα−
+α+ϑω=ϕ=
α+ϑωωα+
+α+ϑω=ϕ=
flussi concatenatidi statore
)t(sintcosVK
)tcos(tcosVK
0m2cs
0m1cs
α+ϑωω
−=ϕ
α+ϑωω
−=ϕ
errore dinamicoerrore dinamico
errore dinamicoerrore dinamico
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici– frequenza di eccitazione maggiore per velocità di rotazione
elevate
– demodulazione sensibile alla fase della portante
78
tensione di statore
tensione di statore
)tcos(tcosV
)t(sintsinKVdt
dV
)t(sintcosV
)tcos(tsinKVdt
dV
0m
0m2cs
2s
0m
0m1cs
1s
α+ϑωωα−
+α+ϑω=ϕ=
α+ϑωωα+
+α+ϑω=ϕ=
errore dinamicoerrore dinamico
errore dinamicoerrore dinamico
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici– frequenza di eccitazione maggiore per velocità di rotazione
elevate
– demodulazione sensibile alla fase della portante
79
segnale spurio
segnale utile
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici– frequenza di eccitazione maggiore per velocità di rotazione
elevate
– demodulazione sensibile alla fase della portante
• demodulazione del valore di cresta
80
segnale spurio
segnale utile

27/11/2008
21
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici– frequenza di eccitazione maggiore per velocità di rotazione
elevate
– demodulazione sensibile alla fase della portante
• demodulazione a valor medio nel semiperiodo
81
segnale utile
segnale spurio
Encoder
Sensore di velocità/posizione– Grandezza misurata (ingresso)
• rotazione o spostamento rettilineo
– Grandezza di uscita
• segnale logico o numero digitale
– Tipo di sensore
• modulante = campo luminoso
• sensore = effetto fotoelettrico
82
Encoder
Principio di funzionamento
83
Lampada
Collimatore
Interferente
Fotosensore
Campo
Encoder rotativo assoluto
Grandezza di uscita– valore digitale ad n bit
– misura di posizione assoluta in un giro
84
Disco interferentecodificato
4 bit
4 bit

27/11/2008
22
Encoder rotativo assoluto
Pregi– uscita direttamente utilizzabile dalla unità di elaborazione– non necessita di azzeramento (sensore assoluto)– mantiene l’informazione di posizione anche in assenza di
alimentazione Difetti
– costo elevato – costo crescente con la risoluzione
• il numero di bit utilizzati per la codifica (<12/14)– sensore assoluto nel giro
• elettronica esterna se utilizzato su più giri
85
Encoder rotativo incrementale
Grandezza di uscita– sequenza di impulsi
– misura di rotazione incrementale
86
codificatore a 1 bit
zero+
3
Encoder rotativo
incrementale
Pregi– costo contenuto– incremento di costo limitato con la risoluzione
• standard fino 5000 impulsi/giro Difetti
– sensore incrementale• elettronica esterna di conteggio e discriminazione del
verso di rotazione– necessita di azzeramento (sensore incrementale)– perde l’informazione di posizione in assenza di
alimentazione Sensore di posiz./velocità standard industriale
87
Riga ottica lineare
– Sensore per spostamenti lineari realizzato come l’Encoder incrementale ma con geometria lineare
• barra rettilinea ⇔ disco
• stesse caratteristiche
– Caratteristiche standard
• lunghezza – anche maggiore di 1 metro
• precisione – dell’ordine di qualche µm
88
0
fotoelementi
A
B
0

27/11/2008
23
Encoder incrementali
Segnali di uscita– 2 segnali in quadratura + 1 segnale di zero
– A+B servono per discriminare il verso di rotazione
89
A
B
0
passo P1/4P
Encoder incrementali
Discriminazione del verso di rotazione– rotazione oraria: A precede B
90
A
B
0
fotoelementi
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione oraria: A precede B
91
A
B
0
fotoelementi
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione oraria: A precede B
92
A
B
0
fotoelementi
A
B
0

27/11/2008
24
Encoder incrementali
Discriminazione del verso di rotazione– rotazione oraria: A precede B
93
A
B
0
fotoelementi
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione oraria: A precede B
94
A
B
0
fotoelementi
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– sul fronte di salita di A il segnale B è sempre 0
95
passo P
A
B
0
fotoelementi
A
B
0
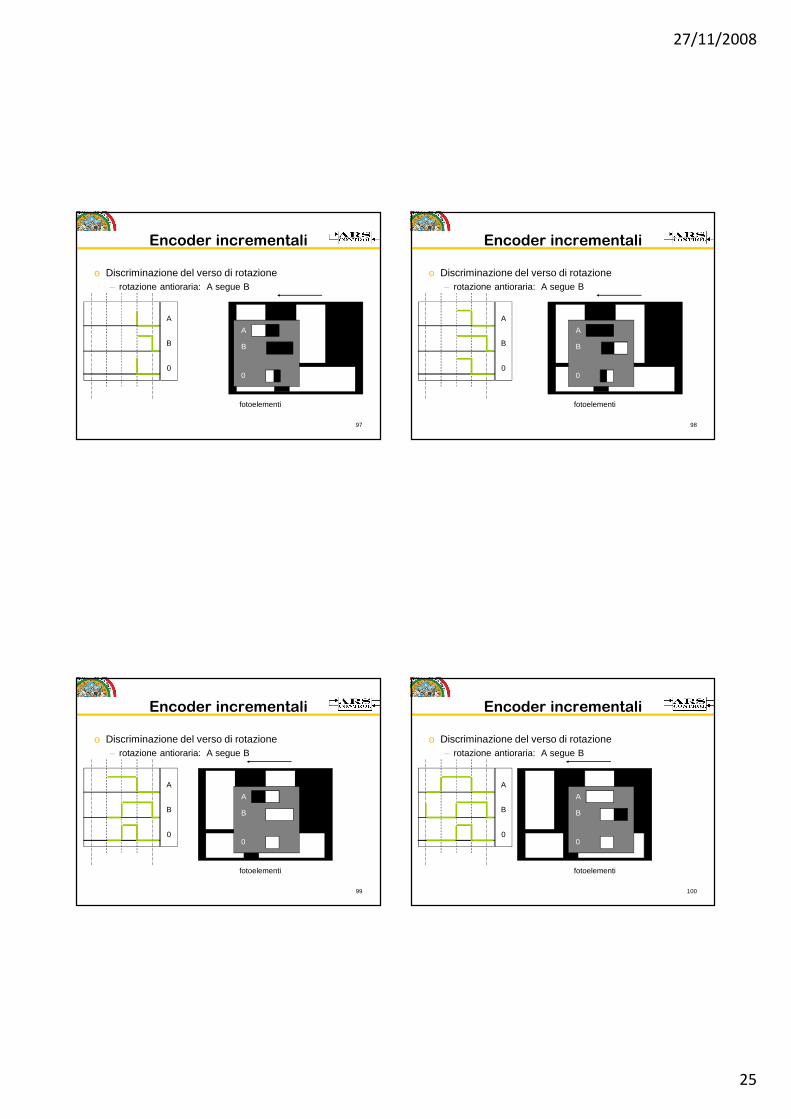
Encoder incrementali
Discriminazione del verso di rotazione– rotazione antiorariaoraria: A segue B
96
A
B
0
fotoelementi
A
B
0
27/11/2008
25
Encoder incrementali
Discriminazione del verso di rotazione– rotazione antioraria: A segue B
97
fotoelementi
A
B
0
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione antioraria: A segue B
98
fotoelementi
A
B
0
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione antioraria: A segue B
99
fotoelementi
A
B
0
A
B
0
Encoder incrementali
Discriminazione del verso di rotazione– rotazione antioraria: A segue B
100
fotoelementi
A
B
0
A
B
0

27/11/2008
26
Encoder incrementali
Discriminazione del verso di rotazione– sul fronte di salita di A il segnale B è sempre 1
101
fotoelementi
A
B
0
A
B
0
Encoder incrementali
Moltiplicazione degli impulsi
102
A
B
x2
x4
Attenzioneaumenta la risoluzione(x2 o x4)
non aumentaaltrettanto la precisione
Encoder incrementali
Circuiti per la moltiplicazione degli impulsi
103
XORx2
Monostabile
x2Monostabile
OR
NOT
circuito moltiplicatore per 4
M1
M2M1
M2
A
B
x2
x2
x4
Encoder incrementali
– Funzioni svolte
• discriminazione verso
• moltiplicazione impulsi
• accumulo posizione assoluta
104
Interfaccia di acquisizione
O
A
A
B
U/D
X 2o
X 4
0
Clk

27/11/2008
27
Sensori per grandezze
meccaniche
– Posizione
• Encoder
• Resolver
• LVDT
– Velocità
• Dinamo tachimetrica
– Deformazione
• Estensimetro
– Forza e Pressione
• Estensimetri su strutture meccaniche
105
Dinamo tachimetrica
Sensore di velocità– Motore a collettore usato a rovescio
• se fatto ruotare genera una tensione
– Grandezza misurata (ingresso)
• velocità angolare
– Grandezza di uscita
• tensione
– Tipo di sensore
• autoeccitante
106
Dinamo tachimetrica
Principio di funzionamento
107
V=KdΦcdt
N Sϑ
Dinamo tachimetrica
Pregi– sensore assoluto
– costo contenuto
– idoneo al funzionamento in ambienti ostili
• all’interno di motori
Difetti– contatti striscianti
– ripple strutturale sull’ uscita
– misura solo la velocità
108

27/11/2008
28
Dinamo tachimetrica
Caratteristiche tecniche essenziali– linearità: 0.5 ÷1%
– sensibilità: 5 ÷ 10V/1000 rpm
– ampiezza del ripple: 1 ÷ 2%
Sensore di velocità standard negli azionamenti per motori a collettore
109
Sensori per grandezze
meccaniche
– Posizione
• Encoder
• Resolver
– Velocità
• Dinamo tachimetrica
– Deformazione
• Estensimetro
– Forza e Pressione
• Estensimetri su strutture meccaniche
110
Estensimetro
– Grandezza misurata
• deformazione
– Grandezza in uscita
• resistenza
– Tipo di sensore
• autoeccitante – piezoresisitivo
– Per la misura– circuito per la trasformazione in una tensione
111
Estensimetro o Strain gage
Strain ⇒ ε = ∆L/L = deformazione relativa• ε adimensionale
112
piezoresistenza
10mm
0.5mm
a film metallicoa film metallicopiù comunepiù comune
a semiconduttorea semiconduttoreper applicazioni integrateper applicazioni integrate

27/11/2008
29
Estensimetro
– Trasformazione della variazione di resistenza in tensione
• 1 estensimetro deformato
113
Vref
Vout
1
2 3
4R
R+∆∆∆∆RR
R
ponte intero di Wheatstone
RR
41
V
R2R
14
RR
V
R2R
RR2RR
VV
refref
refout
∆≅
∆+
∆
=
−∆+
∆+=
se ∆∆∆∆RR
<< 1
Estensimetro
– Trasformazione della variazione di resistenza in tensione
• 4 estensimetri deformati
114
Vref
Vout
1
2 3
4R+∆∆∆∆R
R+∆∆∆∆RR-∆∆∆∆R
R−∆−∆−∆−∆R
ponte intero di Wheatstone
RR
V
R2RR
R2RR
VV
ref
refout
∆=
∆−−∆+=
relazione lineare
Estensimetro
Gage factor– fattore caratteristico di ogni estensimetro
115
misura raziometrica
strain
GF
R
RL
L
R
R V
V
V
V GFKV
out
ref
out
refout
= = =
= =
∆
∆
∆
ε ε
ε
1
1se ho 4 estensimetri identici
deformati
Estensimetro – Caratteristiche
tecniche essenziali
Caratteristiche tecniche essenziali
parametro film metallico semiconduttore
GF ≈ 2 ± 1% ≈ 100 ±3%
Rnom( Ω) 120, 350 molti valori
∆R/ ∆T(p.p.m /°C) 5 ÷50 100÷500
linearità dipende dall’allestimento meccanico
116
E’ possibile adattare ∆R/ ∆T al tipo di materiale di supporto per compensare le deformazioni
apparenti dovute agli effetti termici combinati

27/11/2008
30
Sensori per grandezze
meccaniche
– Posizione
• Encoder
• Resolver
– Velocità
• Dinamo tachimetrica
– Deformazione
• Estensimetro
– Forza e Pressione
• Estensimetri su strutture meccaniche
117
Forza
118
Estensimetri incollati su una struttura metallica che si deforma con l’applicazione della forza
FFdeformazionedeformazione
flessionaleflessionale
44
11
3322
FF
11 22
33 44deformazionedeformazione
assialeassiale
Forza
– Caratteristiche tecniche essenziali sull’uscita del ponte estensimetrico
• sensitività: 2mV/V a 1000µε• uscita: 20µV/µε• nonlinearità: < 0.5%
– I valori in forza e la linearità dipendono dal materiale di supporto
119
Pressione
Sensore integrato a semiconduttore
120
Ref Amp∆P
membrana
silicio piezoresistivo
acciaio
circuiti elettronici di
condizionamentosul sensore
27/11/2008
31
Pressione
– Caratteristiche tecniche essenziali all’uscita del circuito elettronico di compensazione
• sensitività: <1%
• off-set: <1%
• nonlinearità: < 0.5%
• derive termiche: <0.5%
• errore totale: <1.5%
121
SENSORISENSORISENSORISENSORI LOGICILOGICILOGICILOGICI
Sensori di prossimità
Sensori ad uscita logica– per la misura della presenza di persone o cose
– sensori modulanti
• campo magnetico
• campo luminoso
• campo acustico
123
Generatoredi
campoSensore
Amplifica-tore
Rivelatoredi
soglia
Sensori di prossimità
Magnetici– Contatto Reed
• materiale paramagnetico a bassa riluttanza– lega Ferro/Nickel
124
ampolla sotto vuoto

27/11/2008
32
Sensori di prossimità
Magnetici– Contatto Reed
• materiale paramagnetico a bassa riluttanza– lega Ferro/Nickel
125
N S
NS S
N
ampolla sotto vuotoindotti
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Diverse configurazioni
126
N S
G
Dist.
out
Dist.
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Diverse configurazioni
127
N S
G
Dist.
out
Dist.
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Diverse configurazioni
128
N S
G
Dist.
out
Dist.

27/11/2008
33
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Diverse configurazioni
129
N S
G
Dist.
out
Dist.
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Diverse configurazioni
130
N S
G
Dist.
out
Dist.
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Uscita lineare
131
N
S
G
Dist.
N
S
G
Dist.
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Elevata precisione
132
N
S
G
Dist.
N

27/11/2008
34
Sensori di prossimità
Magnetici– Effetto Hall
• azione combinata di magnete (campo) e sensore Hall
Contagiri
133
G
Dist.
SN N
SN
S
G
Dist.
N
Sensori di prossimità
Magnetici– induttivi
• interazione di un oggetto metallico con un campo magnetico alternato
• la presenza dell’oggetto metallico altera la frequenza dell’oscillazione
• un filtro passa-basso opportunamente tarato trasforma la variazione di frequenza in una variazione di ampiezza
134
solenoideoscill.
Sensori di prossimità
Ultrasuoni– ritardo di riflessione di un treno di impulsi acustici ad alta
frquenza
• rileva oggetti di qualunque materiale, purchè rifletta il suono
135
Ricevitore
Trasmettitore
CPU
Sensori di prossimità
Optoelettronici– interferenza dell’oggetto con un campo luminoso
• rileva oggetti di qualunque materiale, purchè rifletta/interrompa il fascio luminoso
ad interferenza
136
Tx Rx

27/11/2008
35
Sensori di prossimità
Optoelettronici– interferenza dell’oggetto con un campo luminoso
• rileva oggetti di qualunque materiale, purchè rifletta/interrompa il fascio luminoso
ad interferenza
137
Tx Rx
Sensori di prossimità
Optoelettronici– interferenza dell’oggetto con un campo luminoso
• rileva oggetti di qualunque materiale, purchè rifletta/interrompa il fascio luminoso
a riflessione
138
Rx
Tx
Sensori di prossimità
Optoelettronici– interferenza dell’oggetto con un campo luminoso
• rileva oggetti di qualunque materiale, purchè rifletta/interrompa il fascio luminoso
a riflessione
139
Rx
Tx
SENSORISENSORISENSORISENSORI DIDIDIDI TEMPERATURATEMPERATURATEMPERATURATEMPERATURA E E E E
CORRENTECORRENTECORRENTECORRENTE

27/11/2008
36
Sensori di Temperatura
141
• autoeccitante• semplice• robusto• poco costoso
• non lineare• bassa Vout• temp. di riferim.• bassa sensitività
• molto stabile• molto accurato• molto lineare
• costoso• rifer. di corrente• bassa resist.• autoriscald.
• molto sensibile• veloce• misura a 2 fili
• non lineare• range limitato • rifer. di corrente• autoriscald.
• molto lineare• output elevato• poco costoso
• T<200°C• serve aliment.• lento• autoriscald.
Pro
Contro
Termocoppie RTD Termistori Sensori a c.i.
V
T
R R V I
T T T
Termocoppia
– Grandezza misurata
• differenza di temperatura
– Grandezza in uscita
• tensione
– Tipo di sensore
• autoeccitante – termoelettrico
• non linearità sistematica– compensazione con tabelle o polinomi interpolanti
142
Termocoppia
Effetto Seebeck Coppie metalliche standard
143
V = f(T2-T1)T2
T1nonlineare
giunz. calda giunzione freddaJ ferro/costantanaferro/costantanaK NiNi--Cr/NiCr/Ni--AlAl
(cromel/alumel)(cromel/alumel)E cromel/costantanacromel/costantanaT rame/costantanarame/costantanaR platino/Ptplatino/Pt--rodiorodio
Termocoppia
Caratteristiche tecniche principali
144
J K E T R
Tmin °C 0 -200 -200 -200 0
Tmax °C 750 1250 900 350 1450
Vmax mV 42.25 50.63 68.78 17.81 16.74Errore °C 2.2 2.2 1.7 0.8 1.4
le Vmax sono riportate ipotizzando la giunzione di riferimento a 0 °C
27/11/2008
37
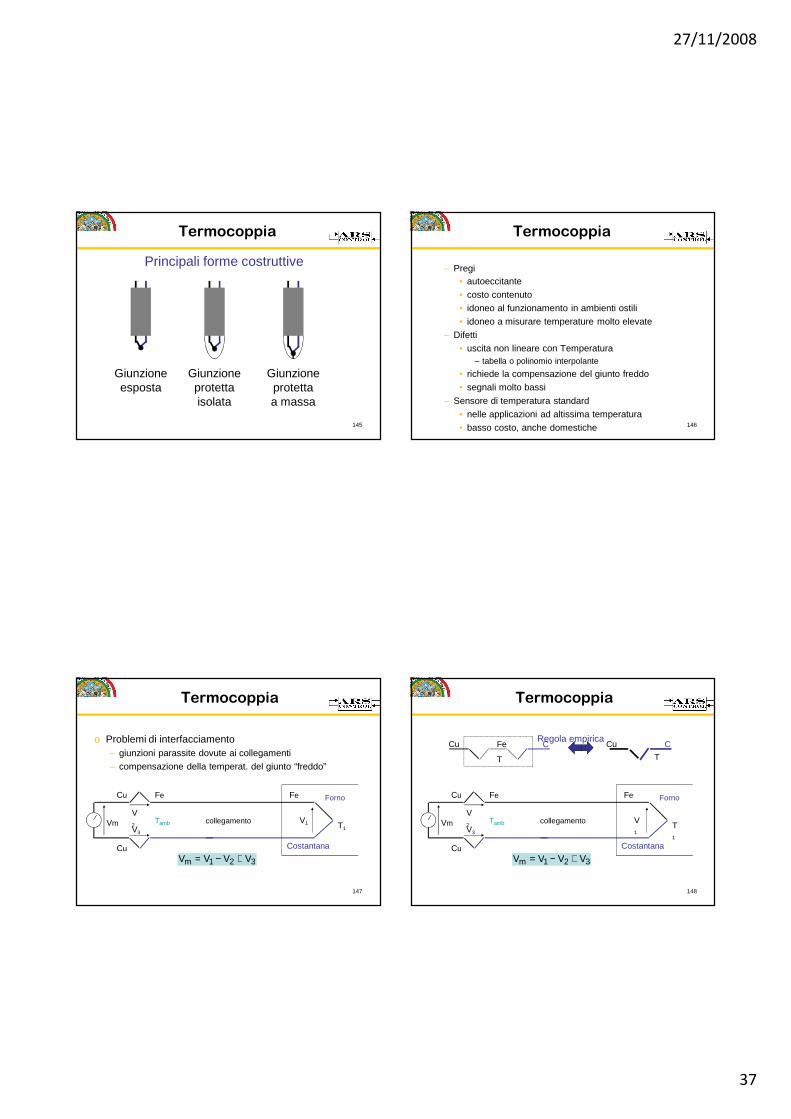
Termocoppia
145
Giunzioneesposta
Giunzioneprotettaisolata
Giunzioneprotettaa massa
Principali forme costruttive
Termocoppia
– Pregi• autoeccitante
• costo contenuto
• idoneo al funzionamento in ambienti ostili
• idoneo a misurare temperature molto elevate
– Difetti
• uscita non lineare con Temperatura– tabella o polinomio interpolante
• richiede la compensazione del giunto freddo
• segnali molto bassi
– Sensore di temperatura standard
• nelle applicazioni ad altissima temperatura
• basso costo, anche domestiche 146
Termocoppia
Problemi di interfacciamento– giunzioni parassite dovute ai collegamenti
– compensazione della temperat. del giunto “freddo”
147
Cu
Cu
Fe
Costantana
T1V1
V2V3
FornoFe
Vm collegamento
321m VVVV +−=
Tamb
Termocoppia
Regola empirica
148
Cu Fe C Cu C
T T
Cu
Cu
Fe
Costantana
T1
V1
V2V3
FornoFe
Vm collegamentoTamb
321m VVVV +−=

27/11/2008
38
Termocoppia
Regola empirica
149
FornoCu
Cu
Fe
Costantana
T1V1
V2V3
Fe
Vm collegamentoTref
4321m VVVVV −+−=
V4
Fe C
Cu Fe C Cu C
T T
Termocoppia
150
FornoCu
Cu
Fe
Costantana
T1V1
V2V3
Fe
Vm collegamentoTref
414321m VVVVVVV −=−+−=
se barriera isoterma
V4
Fe C
V2 = V3
V4tensione generata da una termocoppia del tipodi quella di misura a temperatura Tref
Termocoppia
151
FornoCu
Cu
Fe
Costantana
T1V1
Fe
Vm collegamentoTref
refm1
ref1m
VVV
VVV
+=−=
se barriera isoterma
Vref
C
V2 = V3
Vreftensione generata da una termocoppia del tipodi quella di misura a temperatura Tref
Fe
Termocoppia
152
Fe
Costantana
T1TTrefref V1
Forno
Terminazioneisoterma
Scheda di acquisizione
sensoredi T ref
Cavo specialedi collegamento
materiali a bassoeffetto Seebek con
quelli della Termocoppiadi misura

27/11/2008
39
Termocoppia
– Algoritmo di compensazione giunto “freddo”
• si misura Tref con un sensore a semiconduttore
• si converte la Tref in una tensione equivalente Vref
mediante la tabella (o polinomio) della termocoppia di misura
• alla tensione misurata Vm si somma Vref ricavata dalla tabella per trovare la tensione equivalente V1 della termocoppia di misura con giunzione fredda a 0°C
• si converte la tensione V1 nella corrispondente temperatura mediante la tabella (o il polinomio)
– misura di temperatura (alta) ottenuta mediante un’altra misura di temperatura (bassa)
• più semplice perchè a valori prossimi a Tamb
153
Termoresistenza
– Grandezza misurata
• temperatura
– Grandezza in uscita
• variazione di resistenza
– Tipo di sensore
• modulante – termoresistivo
– Richiede un circuito per la trasformazione della resistenza in tensione
154
Termoresistenza
Denominazione tecnica– RTD ⇒ Resistance Temperature Detector
Realizzazione tecnologica– materiale di supporto
• ceramica -200 < T < 750 °C
• vetro -200 < T < 500 °C
– materiale termoresisitivo
• platino α = 0.0038Ω/Ω/ °C– a filo avvolto ⇒ realizzazione standard– film spesso ⇒ sostituzione più veloce
– film sottile⇒ piccolo, rapidissimo
155
Termoresistenza
Caratteristiche tecniche principali
156
Rnom
@ 0 ºCΩ 100 ÷
1000100 ÷300
100 ÷1000
Off-set % 0.1 0.1 0.1
nonlin % 0.6 0.6 0.6
τ (aria) s 5 ÷ 15 10 ÷ 20 3 ÷ 10
sizel x Φ
mm 25x5 25x1.5 10x1
filo film spe. film sot.

27/11/2008
40
Termoresistenza
– Pregi
• idoneo al funzionamento in ambienti ostili
• molto lineare
• dimensioni anche molto ridotte
• elevata velocità di risposta
• costo contenuto
– Difetti
• richiede circuito di alimentazione
• temperature max più bassa di termocoppia
– Sensore di temperatura standard
• nelle applicazioni a temperatura intermedia
• elevata accuratezza
157
Termoresistenza
Dispositivo standard Pt 100– Termoresistenza al Platino
• valore nominale 100 Ω a 0°C
• coefficiente di Temperatura: +0.00392 (Ω/Ω/°C)– variazione di 0.392Ω per ogni °C
• campo di applicazione: -200 ÷ +850 °C
• ottima linearità
158
Termoresistenza
Circuito di eccitazione– metodo volt/ampermetrico
• 4 fili per una migliore accuratezza
• soluzione generale
159
VmIref Pt100
I=0
I=0Nel forno
Termoresistenza
Circuito di eccitazione– ponte di Wheatstone
• 3 fili per una migliore accuratezza
• solo per piccole variazioni di temperatura
160
Vref
Vm
11
22 33
44 R+∆R
Nel forno
R parassitedei collegamenti
I=0
R
R R
I ≠ 0
I ≠ 0

27/11/2008
41
Sensore di corrente isolato ad
Effetto-Hall
– Grandezza misurata
• corrente
– Grandezza in uscita
• 2 realizzazioni – tensione isolata
– corrente di minore intensità ed isolata
– Tipo di sensore
• modulante – effetto Hall
161
Sensore di corrente isolato ad
Effetto-Hall
Caratteristiche essenziali– Campo di misura
• 10 ÷ 100A
– Linearità
• migliore dell’1%
– Isolamento
• >1500V
– Risposta in frequenza
• >100Khz
– Costo
• contenuto
162
Sensore di corrente isolato ad
Effetto-Hall
– Pregi
• idoneo alla misura su Inverter di potenza
• molto lineare
• dimensioni anche molto ridotte
• elevata velocità di risposta
• costo contenuto
– Difetti
• richiede circuito di alimentazione
– Sensore di corrente standard
• nella misura di correnti > 5A
• elevata accuratezza
163
Sensore di corrente isolato ad
Effetto-Hall
Realizzazione in catena aperta
164
VoutIm
Iref
Vout = (K*Iref)*ImVout = (K*Iref)*Im

27/11/2008
42
Sensore di corrente isolato ad
Effetto-Hall
Realizzazione in retroazione
165
V
Iref
+
-GI1
VoutR
I2
Vout= RIVout= RI outout
Iout = n1/n2 I1Iout = n1/n2 I1
n2
n1
n1 = numero di avvolgimenti del cavo di misura. Di solito 1 n2 = numero di spire del secondario. Di solito 1000/2000