






Le lingue
Pagine
Legale

Universita degli Studi di Firenze
Facolta di Scienze Matematiche Fisiche e Naturali
Tesi di Laurea in Fisica
di
Cristiano Marchettini
Anno Accademico 2000/01
23 Aprile 2002
Studio dell’elettronica di lettura e
realizzazione di una stazione di qualifica
per i rivelatori a microstrisce di silicio
dell’esperimento CMS
Candidato: C. Marchettini
Relatore: Dott. M. Meschini
Correlatore: Prof. E. Focardi


“Preferivo il bianco”, dissi“Bianco!”, sogghigno. “Serve come base.
Il tessuto bianco puo essere tinto.La pagina bianca ricoperta di scrittura,
e la luce bianca decomposta”.‘Nel qual caso non sara piu bianca”, dissi.
“E colui che rompe un oggetto per scoprire cos’e,ha abbandonato il sentiero della saggezza”.
– J. R. R. TolkienLa Compagnia dell’Anello

Indice
Introduzione 1
1 L’acceleratore LHC 3
1.1 Gli esperimenti ad LHC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 ALICE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.2 LHCb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.3 ATLAS e CMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 L’esperimento CMS ad LHC 13
2.1 Il magnete superconduttore . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Il sistema tracciante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 I rivelatori di silicio . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Struttura del sistema tracciante a microstrip di silicio . . . . . . . . 21
2.2.3 I moduli di rivelatori . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3 I calorimetri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Il rivelatore per muoni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5 La fisica a CMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5.1 Sezione d’urto e luminosita . . . . . . . . . . . . . . . . . . . . . . . 33
2.5.2 Il bosone di Higgs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.5.3 La fisica dei B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.5.4 La supersimmetria . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
i

3 Il sistema di acquisizione 47
3.1 La catena di acquisizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2 L’APV-25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2.1 Il protocollo I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2.2 I registri dell’APV-25 . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.3 Il registro di comando . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.2.4 Il registro di errore . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.2.5 Il registro di modalita . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.2.6 Il registro di latenza . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.2.7 I registri per il controllo della calibrazione . . . . . . . . . . . . . . 59
3.2.8 Il reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.2.9 L’impulso di trigger e l’impulso di calibrazione . . . . . . . . . . . . 61
3.2.10 Il formato dei dati in uscita . . . . . . . . . . . . . . . . . . . . . . 61
3.2.11 Il preamplificatore e lo shaper . . . . . . . . . . . . . . . . . . . . . 63
3.2.12 Valutazione del rumore . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.2.13 Il filtro APSP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.3 Il sequencer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.4 Il software di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4 L’analisi dei dati 73
4.1 Acquisizione dei dati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.2 Le prime analisi dei risultati . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.3 Alto flusso di particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.4 Risultati in modalita picco . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.5 Risultati in modalita deconvoluzione . . . . . . . . . . . . . . . . . . . . . 89
4.6 Conclusione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
ii

5 Il sistema di qualificazione dei moduli 95
5.1 La stazione di test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.1.1 L’hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.2 Il software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.3 L’acquisizione dei dati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.4 L’analisi dei dati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.5 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Bibliografia 117
A Guida all’installazione e all’uso del software di qualificazione dei moduli a
A.1 I file necessari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . a
A.2 Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . e
A.3 Caricamento dei moduli del kernel . . . . . . . . . . . . . . . . . . . . . . . g
A.4 Dim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . h
A.5 Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . h
A.6 Gui . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
A.7 Esecuzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
iii

iv
Introduzione
Gli acceleratori di particelle sono sempre stati di fondamentale importanza nello studio
della fisica delle alte energie. Infatti, grazie a loro si sono scoperte molte delle particelle
attualmente conosciute (fino alle piu recenti scoperte del quark top e dei bosoni W± e
Z0), si sono verificati risultati gia noti e se ne e migliorata la precisione, e si sono aperti
campi di ricerca del tutto nuovi.
Per tutti questi motivi, e necessario aggiornare sempre le loro strutture, per renderli
in grado di raggiungere energie piu elevate e di produrre un maggior numero di collisioni,
in modo da studiare anche eventi particolarmente rari.
In quest’ottica si inquadra la nascita del nuovo acceleratore di particelle al CERN (Cen-
tro Europeo per la Ricerca Nucleare) di Ginevra, in Svizzera: il Large Hadron Collider,
LHC.
In questa tesi espongo il mio contributo alla realizzazione di uno dei 4 esperimenti che
saranno installati sull’anello di LHC: il Compact Muon Solenoid, CMS.
Questo rivelatore e equipaggiato con un sistema tracciante molto evoluto, in grado
di riconoscere con estrema precisione i punti di passaggio delle particelle prodotte nelle
collisioni tra protoni. Per questo scopo, e dotato di oltre 12 milioni di canali di rivela-
zione. L’acquisizione dei dati di ciascuno di questi canali e fatta dal circuito di lettura
APV-25 progettato e disegnato dal Rutherford Appleton Laboratory e realizzato dall’IBM
espressamente per CMS.
E dunque di fondamentale importanza comprendere al meglio il funzionamento di
1

questo chip, al fine di ottimizzarne le prestazioni, sia in laboratorio che in un ambiente
piu simile possibile a quello nel quale si trovera ad operare durante i 10 anni di durata
previsti per l’esperimento.
La tesi e suddivisa nel modo seguente.
Nel Capitolo 1 descrivo la realizzazione ed il funzionamento del nuovo acceleratore di
particelle, e gli obiettivi dei 4 esperimenti che verranno installati al suo interno.
Nel secondo Capitolo concentro la mia attenzione sul rivelatore CMS, ed in partico-
lare sul funzionamento del suo sistema tracciante a microstrisce di silicio. Questa parte
permette di chiarire sia le finalita che i requisiti del sistema stesso. Do anche una breve
descrizione dei fenomeni fisici che sara possibile studiare, e dei risultati attesi.
Nel Capitolo 3 e descritto in modo approfondito il funzionamento del circuito di lettura
e della stazione di misura che ho realizzato per la sua analisi: della sua realizzazione ed
ottimizzazione mi sono occupato sia per quanto riguarda la parte hardware che quella
software.
Nel Capitolo 4 analizzo i risultati ottenuti dallo studio del circuito APV-25, in diverse
situazioni, con particolare attenzione allo studio del suo comportamento in condizioni di
alto flusso di particelle; discuto inoltre le possibilita di ottimizzazione del circuito stesso.
Nell’ultimo capitolo tratto la realizzazione della prima stazione italiana di test del
sistema rivelatore di silicio–circuito di lettura. Queste stazioni di test serviranno per
qualificare tutti i moduli prodotti al fine di accertarne la funzionalita prima dell’utilizzo
all’interno dell’esperimento. Descrivo inoltre le analisi che ho effettuato, utilizzando la
stazione realizzata, su due dei primi moduli prodotti.
2
Capitolo 1
L’acceleratore LHC
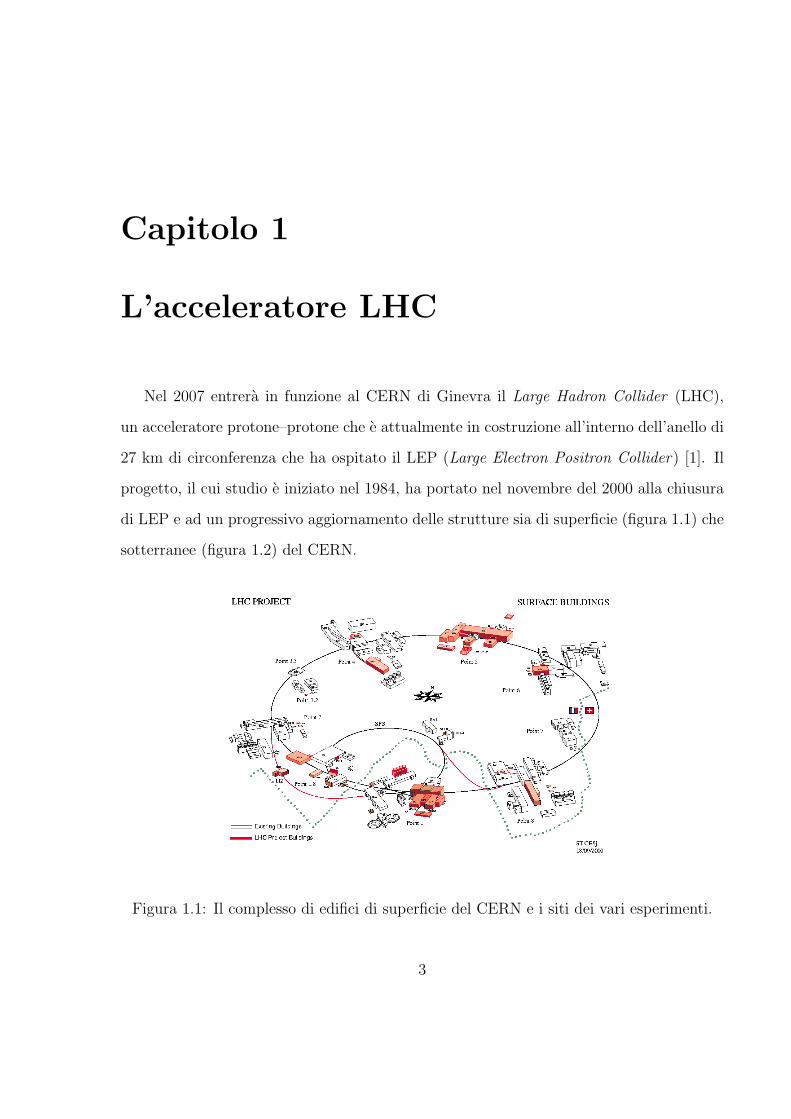
Nel 2007 entrera in funzione al CERN di Ginevra il Large Hadron Collider (LHC),
un acceleratore protone–protone che e attualmente in costruzione all’interno dell’anello di
27 km di circonferenza che ha ospitato il LEP (Large Electron Positron Collider) [1]. Il
progetto, il cui studio e iniziato nel 1984, ha portato nel novembre del 2000 alla chiusura
di LEP e ad un progressivo aggiornamento delle strutture sia di superficie (figura 1.1) che
sotterranee (figura 1.2) del CERN.
Figura 1.1: Il complesso di edifici di superficie del CERN e i siti dei vari esperimenti.
3
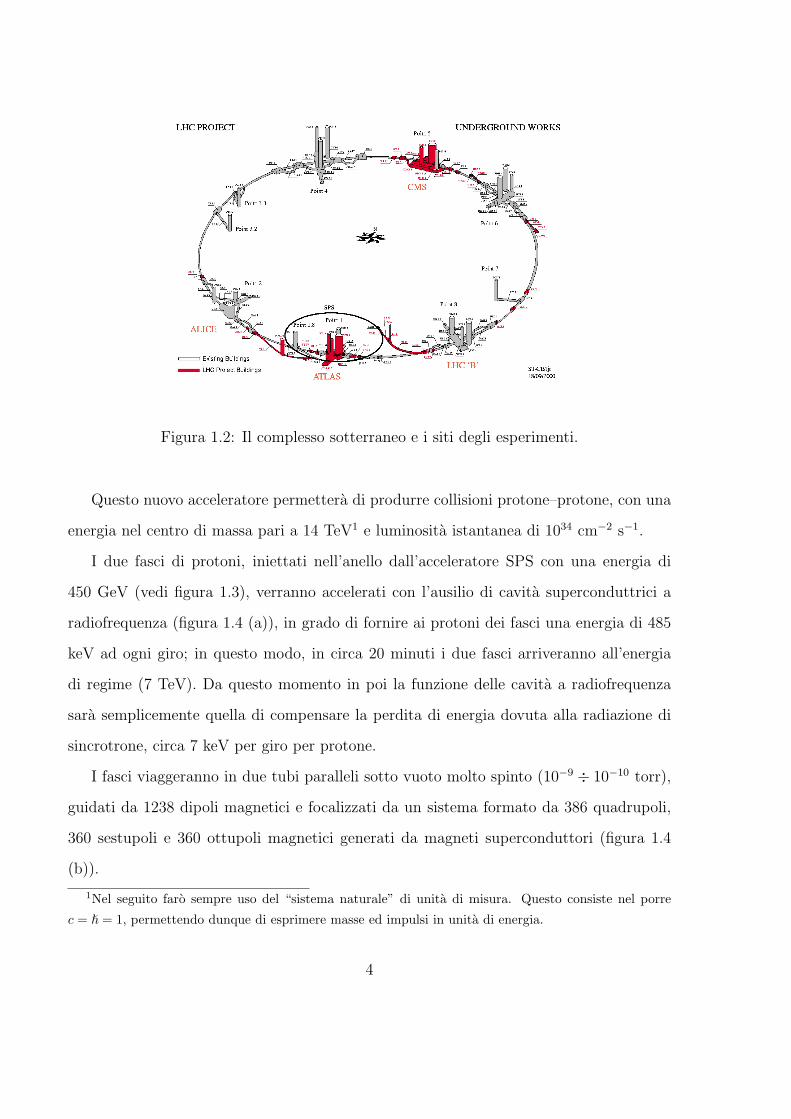
Figura 1.2: Il complesso sotterraneo e i siti degli esperimenti.
Questo nuovo acceleratore permettera di produrre collisioni protone–protone, con una
energia nel centro di massa pari a 14 TeV1 e luminosita istantanea di 1034 cm−2 s−1.
I due fasci di protoni, iniettati nell’anello dall’acceleratore SPS con una energia di
450 GeV (vedi figura 1.3), verranno accelerati con l’ausilio di cavita superconduttrici a
radiofrequenza (figura 1.4 (a)), in grado di fornire ai protoni dei fasci una energia di 485
keV ad ogni giro; in questo modo, in circa 20 minuti i due fasci arriveranno all’energia
di regime (7 TeV). Da questo momento in poi la funzione delle cavita a radiofrequenza
sara semplicemente quella di compensare la perdita di energia dovuta alla radiazione di
sincrotrone, circa 7 keV per giro per protone.
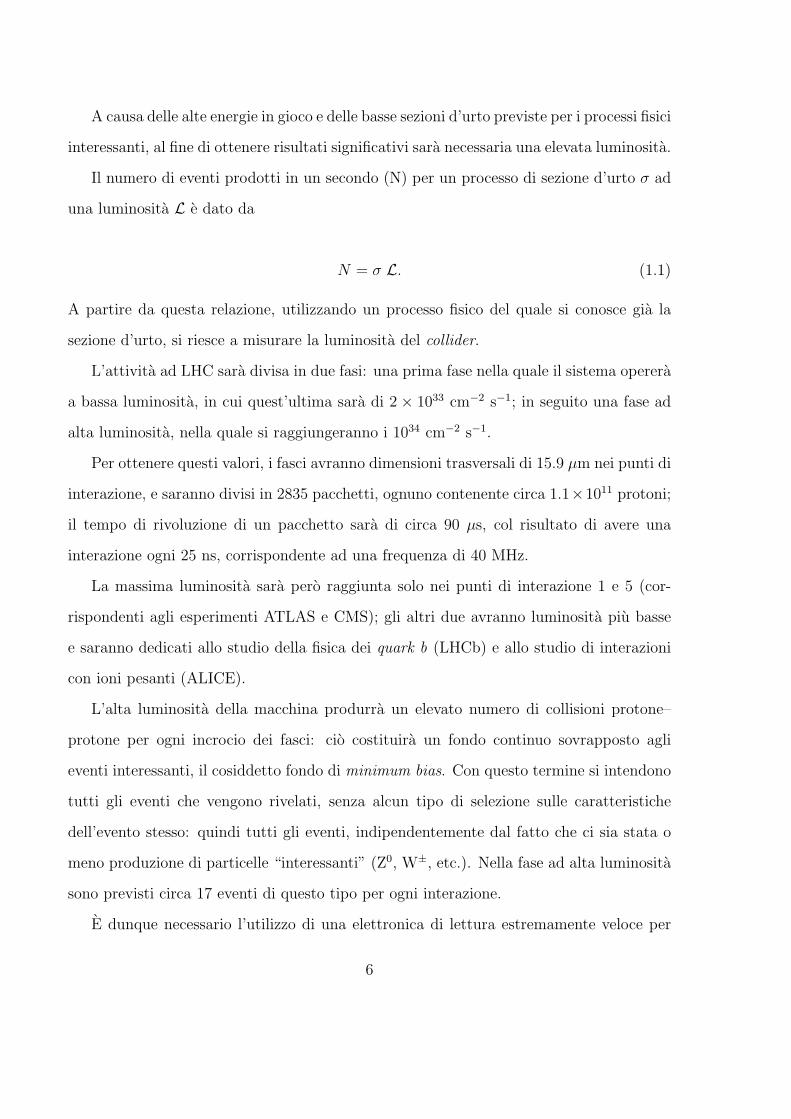
I fasci viaggeranno in due tubi paralleli sotto vuoto molto spinto (10−9 ÷ 10−10 torr),
guidati da 1238 dipoli magnetici e focalizzati da un sistema formato da 386 quadrupoli,
360 sestupoli e 360 ottupoli magnetici generati da magneti superconduttori (figura 1.4
(b)).
1Nel seguito faro sempre uso del “sistema naturale” di unita di misura. Questo consiste nel porre
c = = 1, permettendo dunque di esprimere masse ed impulsi in unita di energia.
4
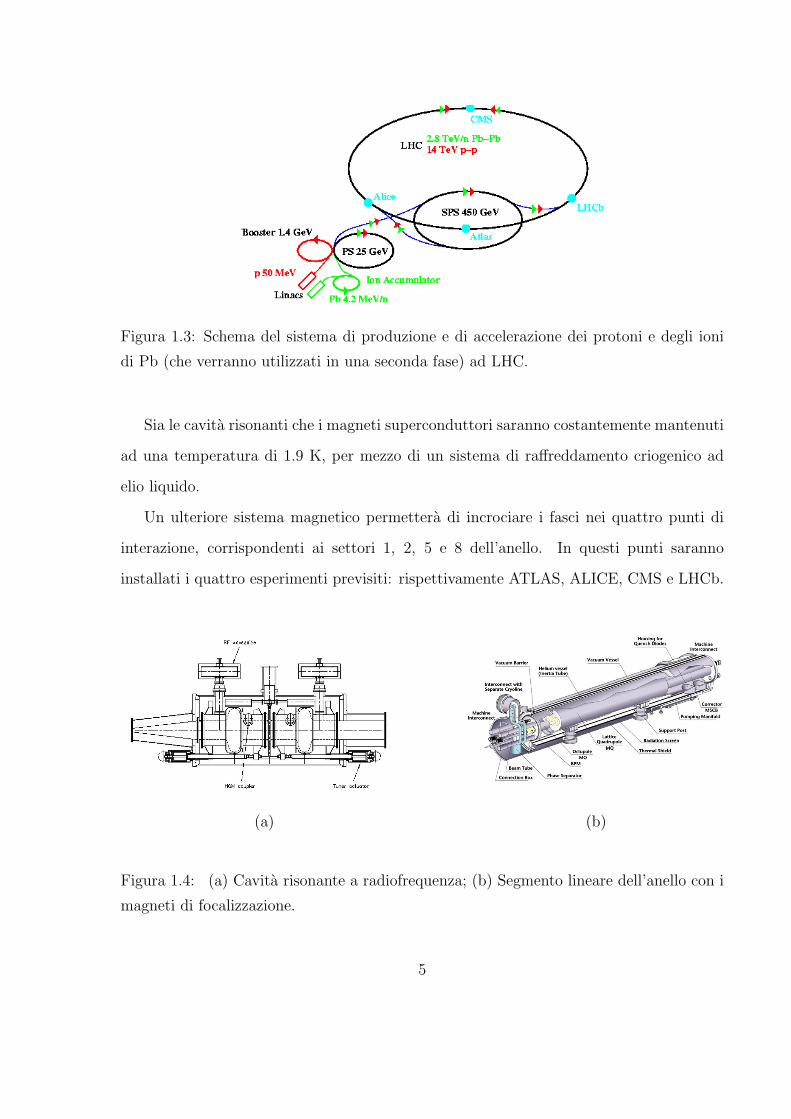
Figura 1.3: Schema del sistema di produzione e di accelerazione dei protoni e degli ioni
di Pb (che verranno utilizzati in una seconda fase) ad LHC.
Sia le cavita risonanti che i magneti superconduttori saranno costantemente mantenuti
ad una temperatura di 1.9 K, per mezzo di un sistema di raffreddamento criogenico ad
elio liquido.
Un ulteriore sistema magnetico permettera di incrociare i fasci nei quattro punti di
interazione, corrispondenti ai settori 1, 2, 5 e 8 dell’anello. In questi punti saranno
installati i quattro esperimenti previsiti: rispettivamente ATLAS, ALICE, CMS e LHCb.
(a) (b)
Figura 1.4: (a) Cavita risonante a radiofrequenza; (b) Segmento lineare dell’anello con i
magneti di focalizzazione.
5
A causa delle alte energie in gioco e delle basse sezioni d’urto previste per i processi fisici
interessanti, al fine di ottenere risultati significativi sara necessaria una elevata luminosita.
Il numero di eventi prodotti in un secondo (N) per un processo di sezione d’urto σ ad
una luminosita L e dato da
N = σ L. (1.1)
A partire da questa relazione, utilizzando un processo fisico del quale si conosce gia la
sezione d’urto, si riesce a misurare la luminosita del collider.
L’attivita ad LHC sara divisa in due fasi: una prima fase nella quale il sistema operera
a bassa luminosita, in cui quest’ultima sara di 2 × 1033 cm−2 s−1; in seguito una fase ad
alta luminosita, nella quale si raggiungeranno i 1034 cm−2 s−1.
Per ottenere questi valori, i fasci avranno dimensioni trasversali di 15.9 µm nei punti di
interazione, e saranno divisi in 2835 pacchetti, ognuno contenente circa 1.1×1011 protoni;
il tempo di rivoluzione di un pacchetto sara di circa 90 µs, col risultato di avere una
interazione ogni 25 ns, corrispondente ad una frequenza di 40 MHz.
La massima luminosita sara pero raggiunta solo nei punti di interazione 1 e 5 (cor-
rispondenti agli esperimenti ATLAS e CMS); gli altri due avranno luminosita piu basse
e saranno dedicati allo studio della fisica dei quark b (LHCb) e allo studio di interazioni
con ioni pesanti (ALICE).
L’alta luminosita della macchina produrra un elevato numero di collisioni protone–
protone per ogni incrocio dei fasci: cio costituira un fondo continuo sovrapposto agli
eventi interessanti, il cosiddetto fondo di minimum bias. Con questo termine si intendono
tutti gli eventi che vengono rivelati, senza alcun tipo di selezione sulle caratteristiche
dell’evento stesso: quindi tutti gli eventi, indipendentemente dal fatto che ci sia stata o
meno produzione di particelle “interessanti” (Z0, W±, etc.). Nella fase ad alta luminosita
sono previsti circa 17 eventi di questo tipo per ogni interazione.
E dunque necessario l’utilizzo di una elettronica di lettura estremamente veloce per
6
evitare la sovrapposizione di dati provenienti da interazioni in incroci successivi dei fasci
(pile-up), oltre che una buona resistenza alle radiazioni sia per le componenti elettroniche
che per i rivelatori.
Una ulteriore complicazione e data dal fatto che la velocita massima di scrittura degli
eventi su disco per le analisi successive e di soli 100 Hz; e quindi necessaria una procedura
che permetta di selezionare in modo veloce ed efficiente soltanto gli eventi fisici interessanti
(trigger). Tale procedura dovra essere in grado di operare una selezione di 1 : 107 eventi
in tempo reale.
In seguito, sara possibile sostituire i fasci di protoni con fasci di ioni di piombo (208Pb),
con energia di 2.76 TeV per nucleone, per dar luogo a collisioni con energia 1100 TeV nel
centro di massa. In questa fase la luminosita prevista e di 1027 cm−2 s−1.
1.1 Gli esperimenti ad LHC
In corrispondenza delle quattro zone di interazione dei fasci di protoni saranno siste-
mati quattro esperimenti: ATLAS e CMS nei due punti ad alta luminosita e ALICE e
LHCb nei due a bassa luminosita.
1.1.1 ALICE
Nella regione di interazione corrispondente al settore 2 verra installato il rivelatore
ALICE (A Large Ion Collider Experiment, figura 1.5), ideato per studiare l’eventuale for-
mazione di un plasma di quark e gluoni (Quark–Gluon Plasma, QGP), previsto dalla cro-
modinamica quantistica (Quantum Cromo Dynamic, QCD), in condizioni di temperature
e densita della materia nucleare molto elevate [2].
Questo studio sara di importanza fondamentale per comprendere a fondo i meccanismi
della QCD, come ad esempio il confinamento del colore. Questo rivelatore e progettato
7

Figura 1.5: Il rivelatore ALICE.
per sfruttare a pieno le potenzialita delle collisioni tra ioni pesanti ad energie cosı elevate
come quelle raggiungibili ad LHC.
Particolare attenzione e stata dedicata alla capacita di riconoscimento delle tracce
delle numerose particelle cariche prodotte in ogni collisione, riconoscimento fondamentale
per comprendere le caratteristiche del plasma di quark e gluoni.
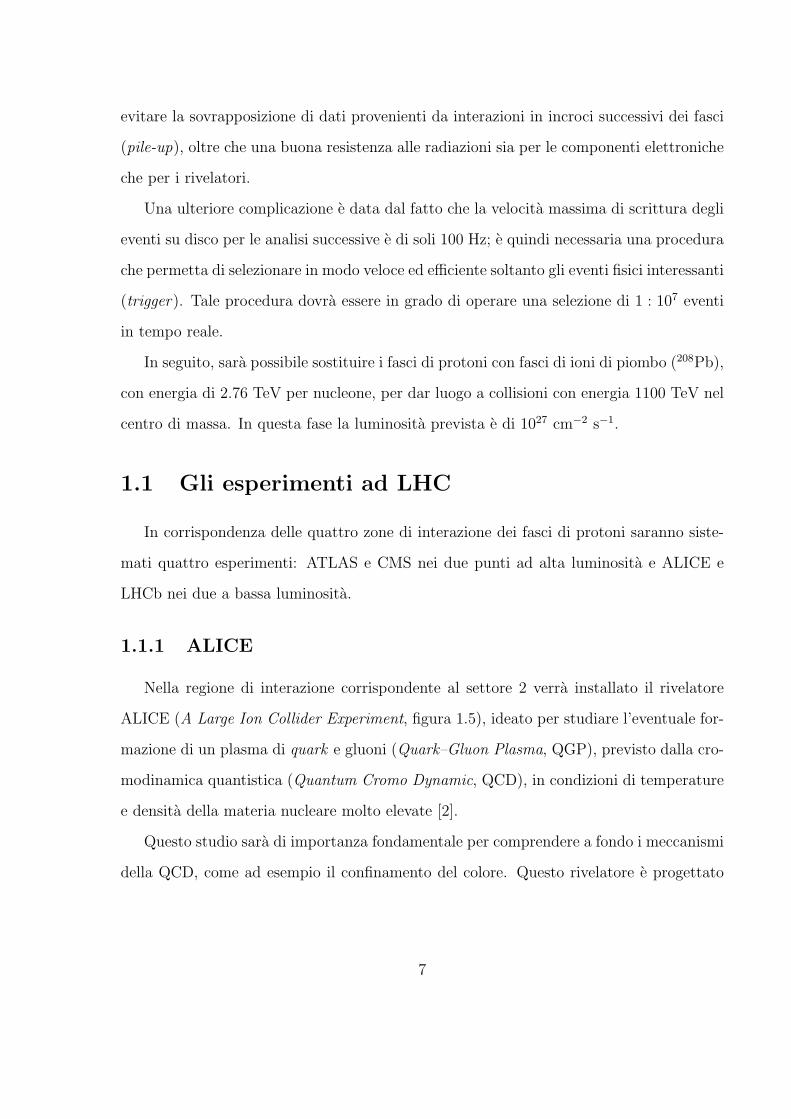
1.1.2 LHCb
LHCb (LHC beauty experiment) nasce per studiare nel dettaglio la fisica dei quark
bottom e la violazione della simmetria CP (coniugazione di Carica-Parita) nel decadimento
dei mesoni B [3]. La sua caratteristica principale e la forte asimmetria del rivelatore,
come risulta evidente anche in figura 1.6: infatti lo studio sara focalizzato sull’analisi
delle particelle prodotte in una sola direzione, molto vicino alla direzione di uno dei due
fasci.
Gli elementi principali che costituiscono questo esperimento sono il rivelatore di vertice
per il riconoscimento delle traiettorie delle particelle cariche ed il RICH (Ring Imaging
CHerenkov), che garantisce una precisa identificazione delle particelle su un ampio spettro
8
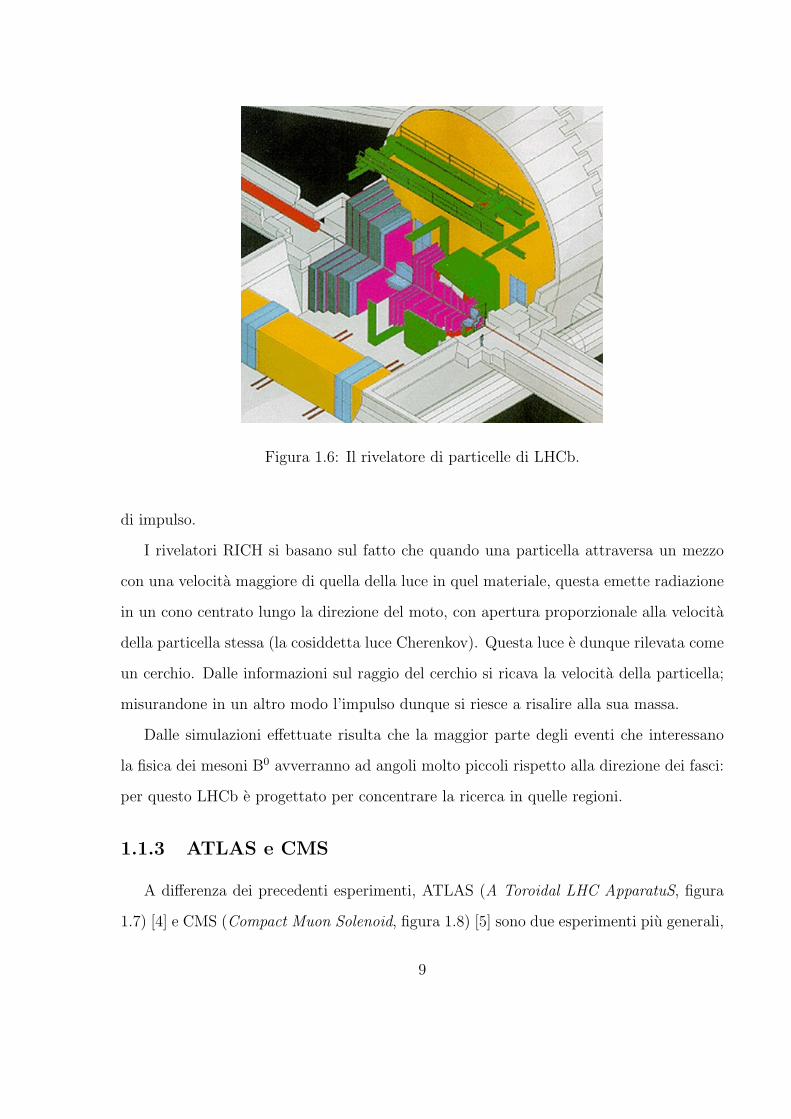
Figura 1.6: Il rivelatore di particelle di LHCb.
di impulso.
I rivelatori RICH si basano sul fatto che quando una particella attraversa un mezzo
con una velocita maggiore di quella della luce in quel materiale, questa emette radiazione
in un cono centrato lungo la direzione del moto, con apertura proporzionale alla velocita
della particella stessa (la cosiddetta luce Cherenkov). Questa luce e dunque rilevata come
un cerchio. Dalle informazioni sul raggio del cerchio si ricava la velocita della particella;
misurandone in un altro modo l’impulso dunque si riesce a risalire alla sua massa.
Dalle simulazioni effettuate risulta che la maggior parte degli eventi che interessano
la fisica dei mesoni B0 avverranno ad angoli molto piccoli rispetto alla direzione dei fasci:
per questo LHCb e progettato per concentrare la ricerca in quelle regioni.
1.1.3 ATLAS e CMS
A differenza dei precedenti esperimenti, ATLAS (A Toroidal LHC ApparatuS, figura
1.7) [4] e CMS (Compact Muon Solenoid, figura 1.8) [5] sono due esperimenti piu generali,
9
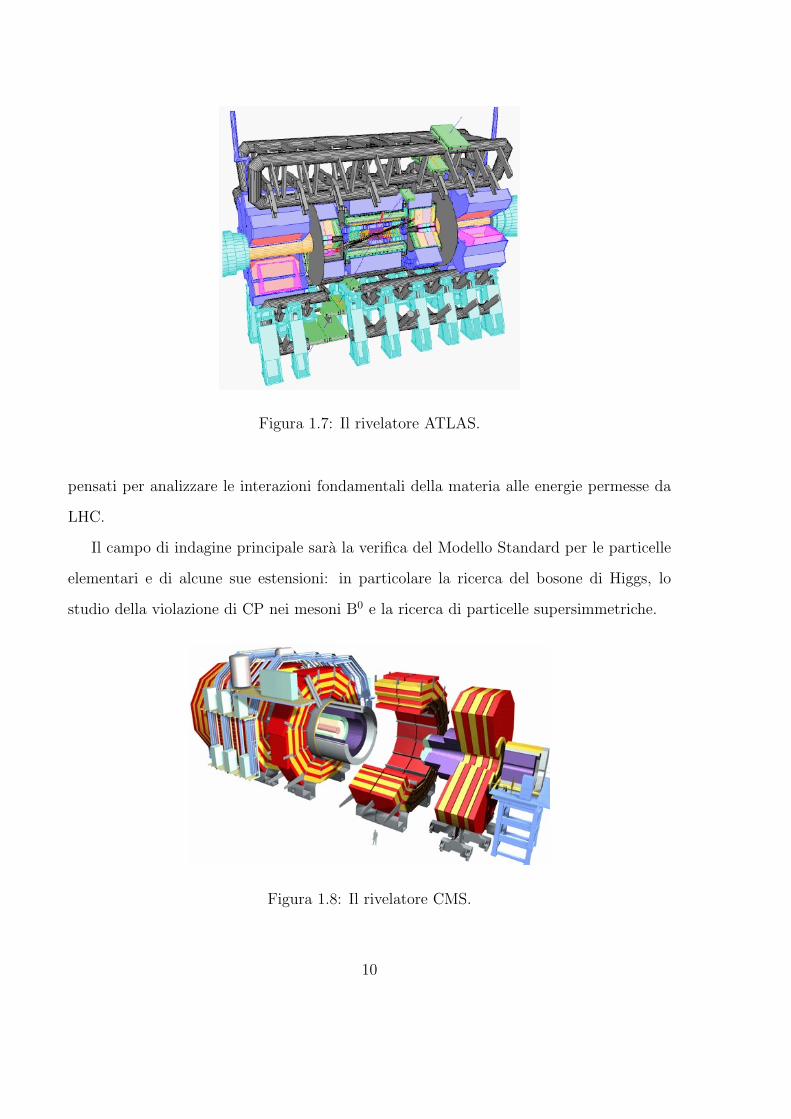
Figura 1.7: Il rivelatore ATLAS.
pensati per analizzare le interazioni fondamentali della materia alle energie permesse da
LHC.
Il campo di indagine principale sara la verifica del Modello Standard per le particelle
elementari e di alcune sue estensioni: in particolare la ricerca del bosone di Higgs, lo
studio della violazione di CP nei mesoni B0 e la ricerca di particelle supersimmetriche.
Figura 1.8: Il rivelatore CMS.
10
La struttura dei due rivelatori e molto simile: partendo dal punto di interazione e
procedendo verso l’esterno si incontrano un rivelatore al silicio per la ricostruzione delle
tracce, due sistemi di calorimetri, uno elettromagnetico ed uno adronico per la misura
dell’energia delle particelle, e infine un sistema di camere a muoni nella zona piu esterna.
Una delle differenze principali sta invece nella diversa scelta dei campi magnetici: per
CMS e stato scelto un campo magnetico solenoidale mentre per ATLAS uno toroidale,
entrambi prodotti attraverso dei magneti superconduttori. Questa diversa scelta influenza
anche le dimensioni dei due: il primo rivelatore risulta infatti estremamente piu compatto
del secondo.
11

12
Capitolo 2
L’esperimento CMS ad LHC
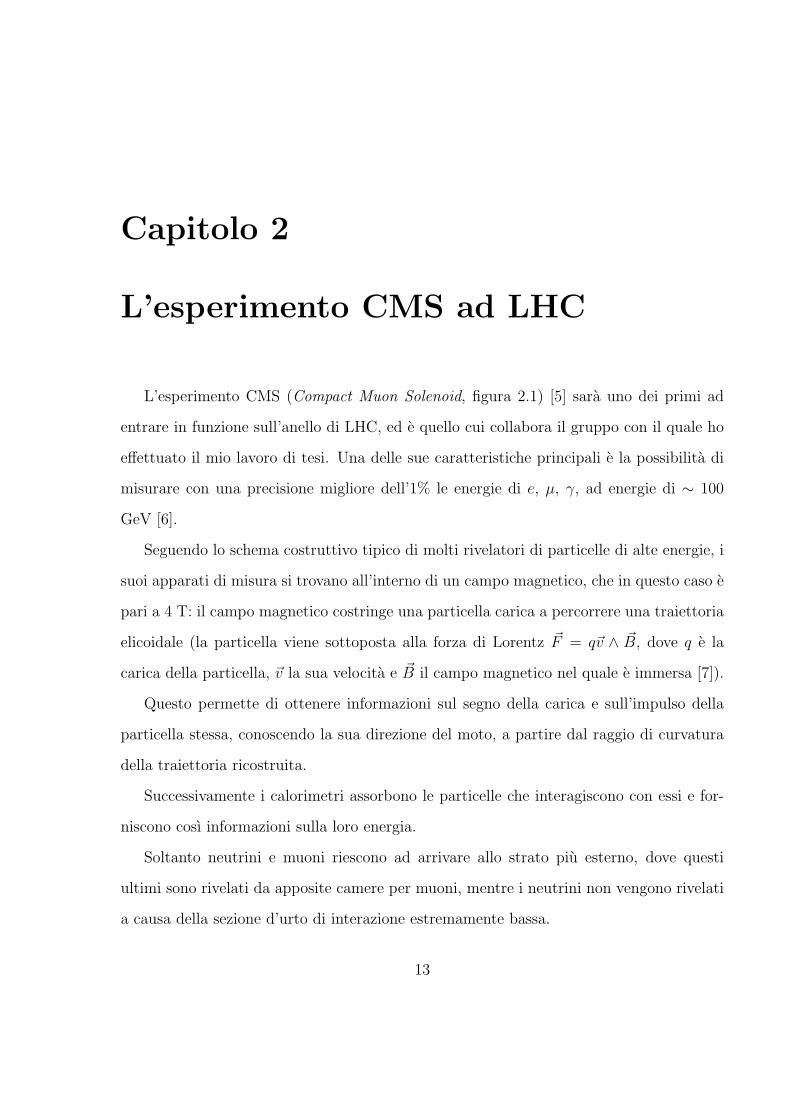
L’esperimento CMS (Compact Muon Solenoid, figura 2.1) [5] sara uno dei primi ad
entrare in funzione sull’anello di LHC, ed e quello cui collabora il gruppo con il quale ho
effettuato il mio lavoro di tesi. Una delle sue caratteristiche principali e la possibilita di
misurare con una precisione migliore dell’1% le energie di e, µ, γ, ad energie di ∼ 100
GeV [6].
Seguendo lo schema costruttivo tipico di molti rivelatori di particelle di alte energie, i
suoi apparati di misura si trovano all’interno di un campo magnetico, che in questo caso e
pari a 4 T: il campo magnetico costringe una particella carica a percorrere una traiettoria
elicoidale (la particella viene sottoposta alla forza di Lorentz ~F = q~v ∧ ~B, dove q e la
carica della particella, ~v la sua velocita e ~B il campo magnetico nel quale e immersa [7]).
Questo permette di ottenere informazioni sul segno della carica e sull’impulso della
particella stessa, conoscendo la sua direzione del moto, a partire dal raggio di curvatura
della traiettoria ricostruita.
Successivamente i calorimetri assorbono le particelle che interagiscono con essi e for-
niscono cosı informazioni sulla loro energia.
Soltanto neutrini e muoni riescono ad arrivare allo strato piu esterno, dove questi
ultimi sono rivelati da apposite camere per muoni, mentre i neutrini non vengono rivelati
a causa della sezione d’urto di interazione estremamente bassa.
13

MUON BARREL
CALORIMETERS
Silicon MicrostripsPixels
ECALScintillating
PbWO4 crystals
Cathode Strip Chambers (CSC)Resistive Plate Chambers (RPC)
Drift TubeChambers (DT)
Resistive PlateChambers (RPC)
SUPERCONDUCTINGCOIL
IRON YOKE
TRACKER
MUONENDCAPS
Total weight : 12,500 tOverall diameter : 15 mOverall length : 21.6 mMagnetic field : 4 Tesla
HCALPlastic scintillator/brasssandwich
Figura 2.1: Schema del rivelatore CMS.
A causa della geometria del rivelatore, non e possibile rivelare particelle emesse ad
angoli piccoli (. 8o) rispetto alla direzione del fascio. Questo rende impossibile misurare
l’energia totale di un evento; le quantita globali che sono effettivamente misurabili sono
soltanto l’impulso e la proiezione del flusso di energia ortogonali alla direzione del fascio,
comunemente indicate con ~pt (impulso trasverso) e Et (energia trasversa).
2.1 Il magnete superconduttore
La caratteristica principale del rivelatore e il magnete che circonda il sistema tracciante
e i calorimetri [8]. La scelta e caduta su un solenoide superconduttore, lungo 13 m e con
diametro interno di 5.9 m, che produce un campo magnetico di 4 T parallelo alla direzione
dei fasci.
Il campo magnetico si richiude su uno strato di ferro dello spessore di 1.8 m: e in
14
questa zona che trovano posto le camere a muoni. Inoltre, poiche il ferro di ritorno
del magnete e l’elemento principale di CMS in termini di peso (oltre 11000 tonnellate),
dimensioni e rigidita, esso costituisce l’elemento strutturale deputato a sostenere tutte le
altre componenti del rivelatore.
2.2 Il sistema tracciante
La ricostruzione delle tracce delle particelle e dei vertici di decadimento secondari,
effettuata con rivelatori che identifichino i punti di passaggio delle particelle cariche con
alta precisione ed efficienza, e fondamentale in un esperimento di questo tipo. Per questo,
il sistema tracciante (tracker) dovra soddisfare in particolare i seguenti criteri:
Risoluzione dell’impulso delle particelle cariche. E necessaria una buona risoluzione
nella misura dell’impulso dei leptoni energetici, per la comprensione degli eventi di
nuova fisica, spesso caratterizzati dal decadimento dei bosoni di gauge in leptoni;
come ad esempio nei decadimenti H0 → Z0 Z0 → ` ` j j oppure H0 → Z0 Z0 → 4 `±,
dove con ` si indica uno qualsiasi dei tre leptoni (e, µ, τ) e con j un jet adronico.
Individuazione e riconoscimento dei jet b. I jet generati da quark bottom sono
importanti per molti tipi di eventi che CMS si propone di studiare, in particolare
per lo studio della fisica del quark top e delle nuove particelle. Questo richiede una
buona capacita sia di distinguere due tracce vicine sul rivelatore che di ricostruire
le traiettorie delle particelle a partire dai punti di passaggio per riconoscere i vertici
secondari dei decadimenti.
Gli eventi di nuova fisica interessanti saranno ottenibili principalmente alle massi-
me luminosita raggiungibili (1034 cm−2 s−1), pertanto queste richieste dovranno essere
soddisfatte anche a tali livelli.
In questi casi, in associazione con i 17 eventi di minimum bias, saranno prodotte nel
tracker circa 500 tracce cariche. Affinche queste non nascondano gli eventi interessanti
15
sara dunque necessario lavorare con l’occupazione minima possibile su ciascun canale e
con il numero maggiore possibile di punti per traccia, compatibilmente con le esigenze
di gestione dei costi e della complessita dell’intero apparato: in particolare per ottenere
questo scopo saranno necessari rivelatori con alta granularita ed un buon numero di piani
di misura.
La distribuzione delle particelle cariche nel tracker e influenzata dalla presenza di un
campo magnetico molto intenso, che confina in traiettorie elicoidali di piccolo raggio le
particelle con basso impulso trasverso; il raggio dell’orbita infatti e legato all’intensita del
campo magnetico dalla relazione
R =pt
Z e B(2.1)
dove pt e l’impulso trasverso, Z e la carica della particella e B il campo magnetico.
Il basso impulso trasverso e una delle caratteristiche principali degli eventi di minimum
bias, che rimangono cosı concentrati nelle regioni piu interne del sistema tracciante, come
si puo ricavare dalla eq. 2.1.
La densita di particelle diminuisce dunque rapidamente all’aumentare della distanza
dal punto di interazione. Questo ha permesso di scegliere due diverse tecnologie nella
costruzione del tracker, in base alle loro proprieta di risoluzione e granularita: nella regione
piu interna verranno utilizzati rivelatori a pixel di silicio, mentre in quella piu esterna dei
rivelatori a microstrisce (microstrip) di silicio [9, 10].
2.2.1 I rivelatori di silicio
Il funzionamento di un rivelatore di silicio puo essere schematizzato come quello di un
insieme di diodi contropolarizzati posti uno accanto all’altro; un diodo contropolarizzato
e una giunzione pn alla quale e applicata una tensione (bias) che permette di svuotare la
regione di contatto tra p e n dalle cariche di conduzione presenti.
Quando un particella carica attraversa il diodo, perde parte della sua energia per
16
Microstrip silicon detector
Implant,p -type+
SiO2
t
S
EBulk,n-type
Pre-amplifiers/Shapers
Strip pitch, P
(typ
. 300
um)
electrons
holes
Particle
Backplane, n - type silicon++ Bias Voltage
Metalisation
Implant width, W
Principles of operation
Alessandro Buffini - Firenze Limassol, June 19-24, 2000 6
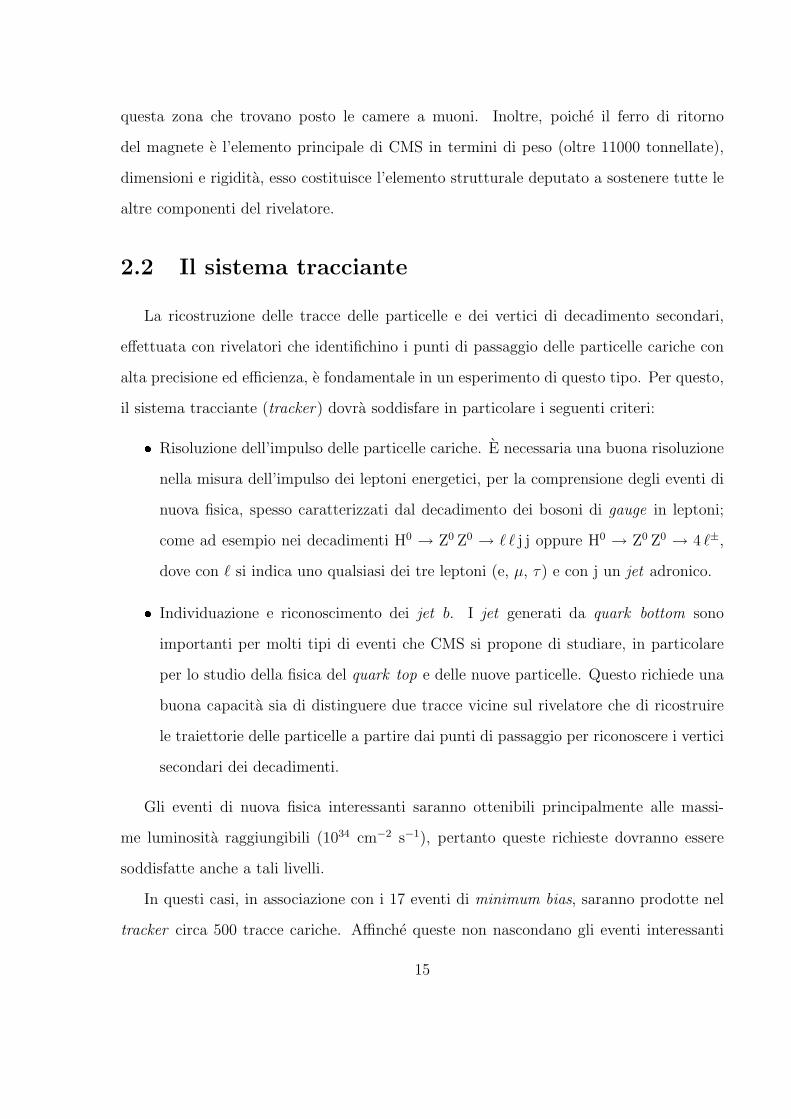
Figura 2.2: Modello di un rivelatore a microstrip di silicio attraversato da una particella
carica.
ionizzazione: questo fa sı che alcuni elettroni della banda di valenza acquistino l’ener-
gia necessaria (per un silicio “puro” questa e pari a 1.14 eV) per passare alla banda di
conduzione, producendo dunque coppie elettrone–lacuna (hole).
La presenza del campo elettrico impedisce che gli elettroni e le lacune prodotti in
questo modo si ricombinino rapidamente, e li costringe a migrare verso i capi del diodo.
In figura 2.2 e riportato un esempio del funzionamento di un rivelatore a microstrisce
di silicio, attraversato da una particella carica: il rivelatore e formato da un substrato
(detto bulk) drogato n, sul quale da una parte sono impiantate delle strisce drogate p+
(lato giunzione) e dall’altra e realizzato uno strato drogato n+; in entrambi i lati le zone
ad alto drogaggio sono ricoperte da una metallizzazione in alluminio. Il campo elettrico
permette di svuotare tutto il bulk consentendo di riconoscere il passaggio di una particella.
17
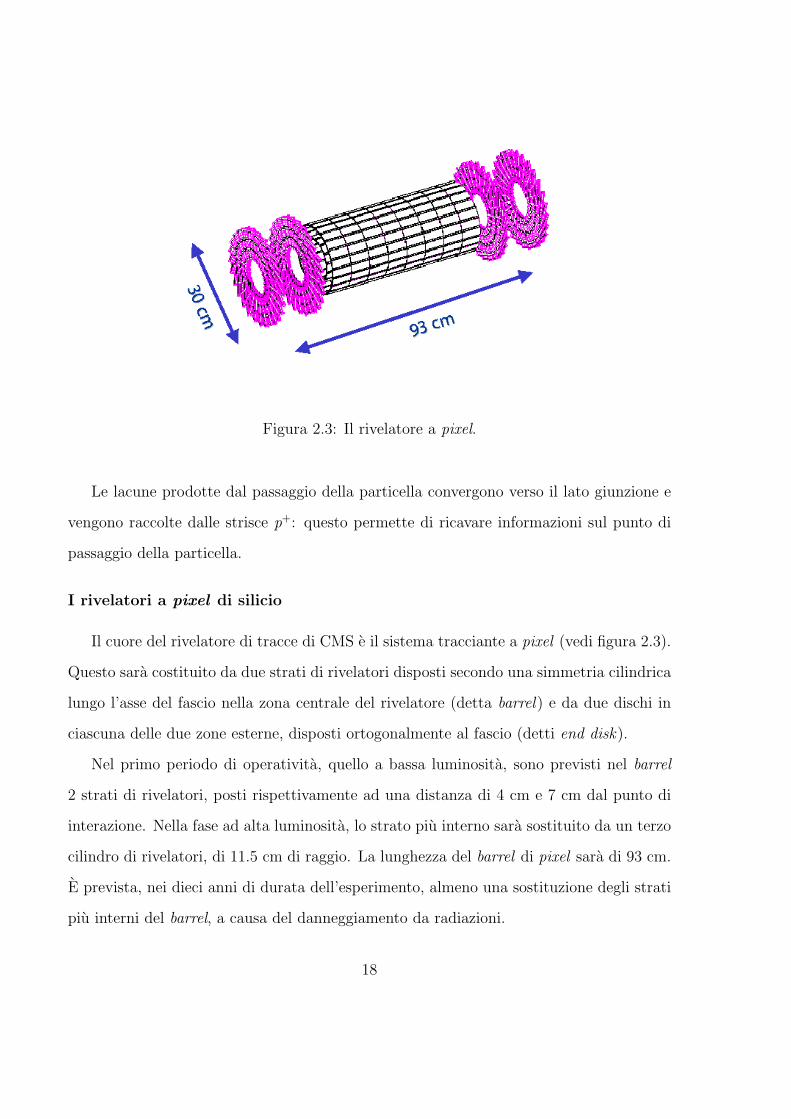
Figura 2.3: Il rivelatore a pixel.
Le lacune prodotte dal passaggio della particella convergono verso il lato giunzione e
vengono raccolte dalle strisce p+: questo permette di ricavare informazioni sul punto di
passaggio della particella.
I rivelatori a pixel di silicio
Il cuore del rivelatore di tracce di CMS e il sistema tracciante a pixel (vedi figura 2.3).
Questo sara costituito da due strati di rivelatori disposti secondo una simmetria cilindrica
lungo l’asse del fascio nella zona centrale del rivelatore (detta barrel) e da due dischi in
ciascuna delle due zone esterne, disposti ortogonalmente al fascio (detti end disk).
Nel primo periodo di operativita, quello a bassa luminosita, sono previsti nel barrel
2 strati di rivelatori, posti rispettivamente ad una distanza di 4 cm e 7 cm dal punto di
interazione. Nella fase ad alta luminosita, lo strato piu interno sara sostituito da un terzo
cilindro di rivelatori, di 11.5 cm di raggio. La lunghezza del barrel di pixel sara di 93 cm.
E prevista, nei dieci anni di durata dell’esperimento, almeno una sostituzione degli strati
piu interni del barrel, a causa del danneggiamento da radiazioni.
18
I due end disk saranno posizionati a |z| = 32.5 cm e |z| = 46.5 cm (z indica la
coordinata lungo il fascio, con l’origine fissata nel punto di interazione). Anche per questi
e prevista la sostituzione dopo sei anni di operativita.
I rivelatori a pixel sono costituiti da un piano sensibile segmentato dello spessore di
circa 250 µm; i pixel sono quadrati con dimensione 150 µm × 150 µm, e sono ottenuti
impiantando zone di tipo n+ su un substrato di tipo n.
Tutto questo garantisce una risoluzione intrinseca del punto di impatto della particella
di 10− 15 µm nel barrel e di 15− 20 µm negli end disk.
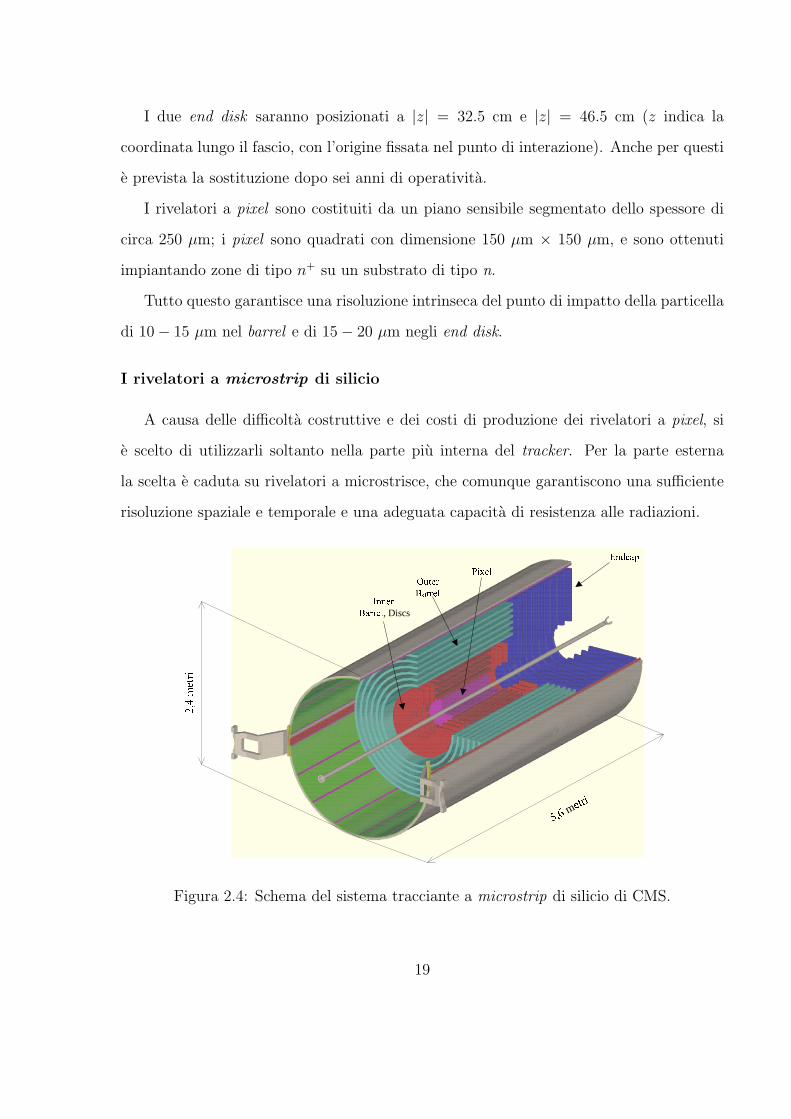
I rivelatori a microstrip di silicio
A causa delle difficolta costruttive e dei costi di produzione dei rivelatori a pixel, si
e scelto di utilizzarli soltanto nella parte piu interna del tracker. Per la parte esterna
la scelta e caduta su rivelatori a microstrisce, che comunque garantiscono una sufficiente
risoluzione spaziale e temporale e una adeguata capacita di resistenza alle radiazioni.
, Discs
"!"#$&%('*),+
-./012435
Figura 2.4: Schema del sistema tracciante a microstrip di silicio di CMS.
19
Il sistema tracciante a microstrip di silicio di CMS (SST, Silicon Strip Tracker, figura
2.4) e lungo circa 5.6 m lungo l’asse z e copre la regione di pseudorapidita |η| < 2.5,
fornendo un’area attiva di silicio di oltre 230 m2.
La pseudorapidita e un parametro che viene spesso utilizzato nella fisica delle particelle:
e un numero puro definito da
η = −ln
(tan
(ϑ
2
)), (2.2)
dove ϑ e l’angolo che la particella forma con il fascio. La comodita di questo parametro
e legata al fatto che e possibile dimostrare che la distribuzione di particelle prodotte
in una interazione rispetto ad η e circa uniforme, mentre non lo e affatto se misurata
semplicemente rispetto all’angolo ϑ.
I rivelatori a microstrip saranno installati leggermente sovrapposti tra loro in tutte
le direzioni, in modo da eliminare le zone morte e permetterne un miglior allineamento.
Inoltre la geometria del sistema tracciante e stata sviluppata per avere il maggior numero
di punti di misura possibile: data la disposizione scelta per i moduli, sono previsti tra i
10 e i 14 punti per particelle con pseudorapidita |η| ≤ 2.5.
Per permettere una buona ricostruzione delle tracce a partire dai punti di passaggio
delle particelle in questa zona del tracciatore sono richieste risoluzioni di almeno 50 µm.
Nell’attuale disegno del sistema tracciante il passo delle strip di silicio varia da 80 µm
a 183 µm nella regione cilindrica e da 81 µm a 205 µm nei dischi. In questo modo si
ottiene una risoluzione che va dai 15 µm per i sensori con strip di passo piu piccolo ai 50
µm per gli altri.
Per mantenere l’occupazione dei canali e il rumore ad un livello accettabile le strip
dovranno essere lunghe al massimo 12 cm nella regione interna e 18 cm in quella esterna.
20
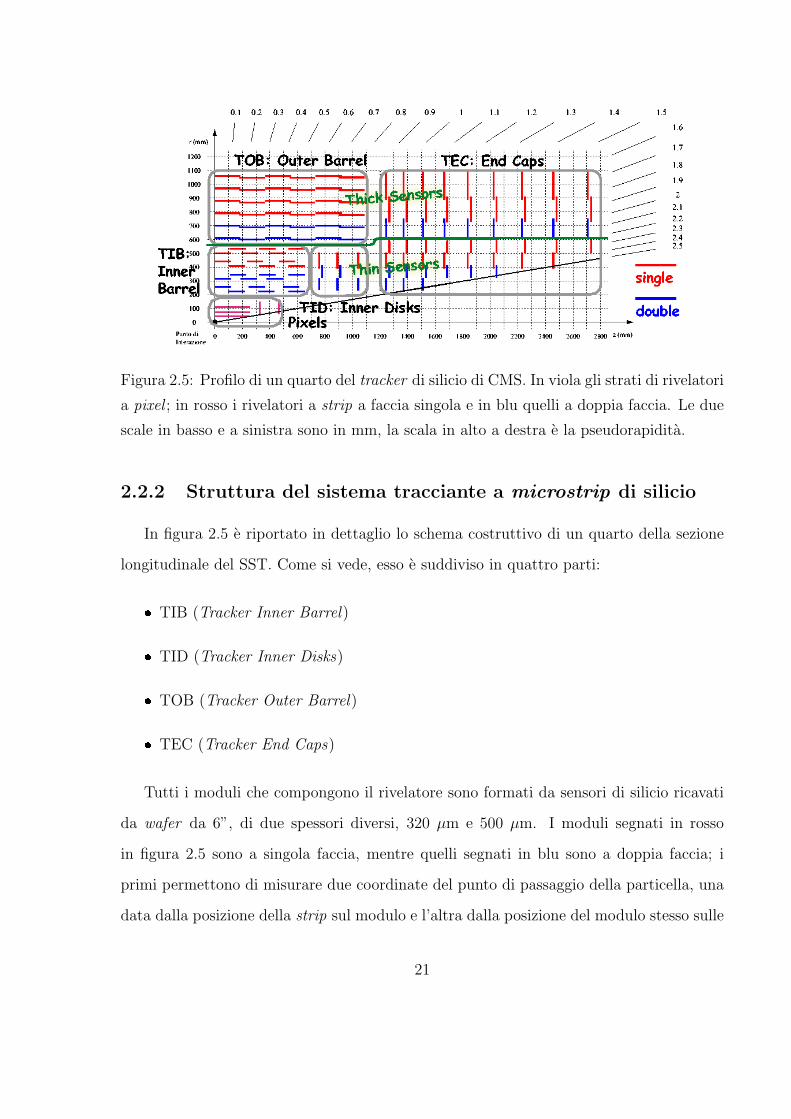
Figura 2.5: Profilo di un quarto del tracker di silicio di CMS. In viola gli strati di rivelatori
a pixel ; in rosso i rivelatori a strip a faccia singola e in blu quelli a doppia faccia. Le due
scale in basso e a sinistra sono in mm, la scala in alto a destra e la pseudorapidita.
2.2.2 Struttura del sistema tracciante a microstrip di silicio
In figura 2.5 e riportato in dettaglio lo schema costruttivo di un quarto della sezione
longitudinale del SST. Come si vede, esso e suddiviso in quattro parti:
TIB (Tracker Inner Barrel)
TID (Tracker Inner Disks)
TOB (Tracker Outer Barrel)
TEC (Tracker End Caps)
Tutti i moduli che compongono il rivelatore sono formati da sensori di silicio ricavati
da wafer da 6”, di due spessori diversi, 320 µm e 500 µm. I moduli segnati in rosso
in figura 2.5 sono a singola faccia, mentre quelli segnati in blu sono a doppia faccia; i
primi permettono di misurare due coordinate del punto di passaggio della particella, una
data dalla posizione della strip sul modulo e l’altra dalla posizione del modulo stesso sulle
21
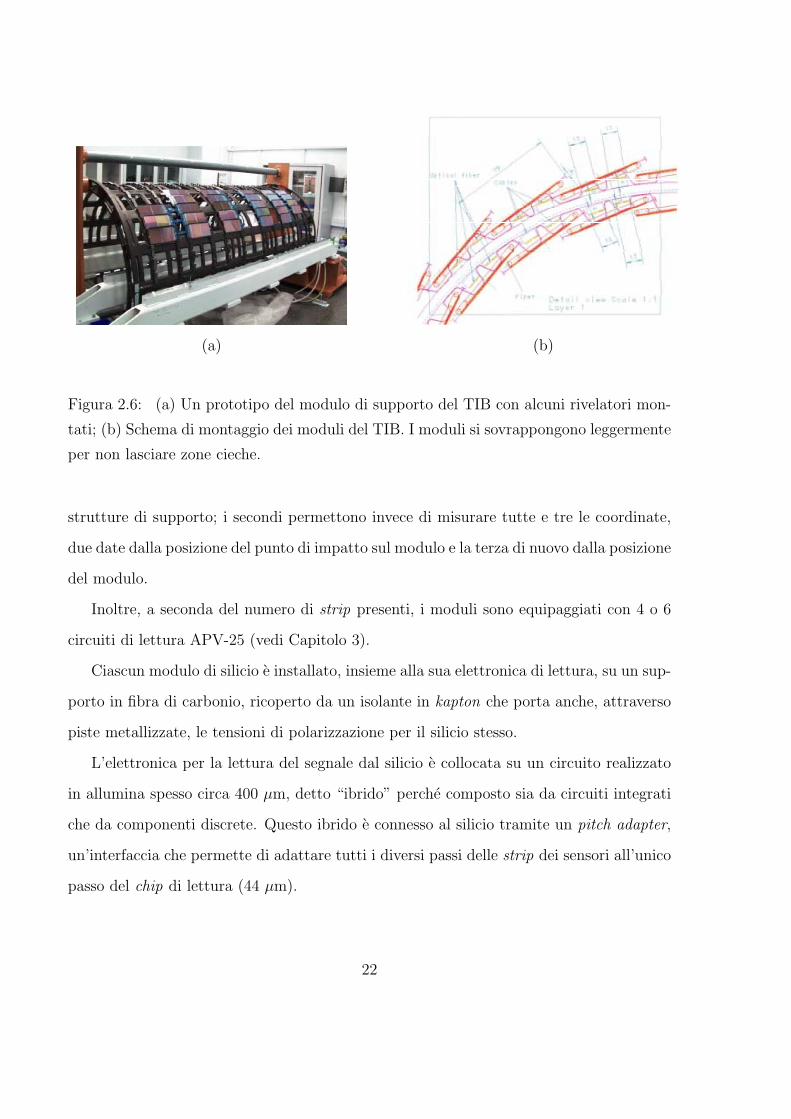
(a) (b)
Figura 2.6: (a) Un prototipo del modulo di supporto del TIB con alcuni rivelatori mon-
tati; (b) Schema di montaggio dei moduli del TIB. I moduli si sovrappongono leggermente
per non lasciare zone cieche.
strutture di supporto; i secondi permettono invece di misurare tutte e tre le coordinate,
due date dalla posizione del punto di impatto sul modulo e la terza di nuovo dalla posizione
del modulo.
Inoltre, a seconda del numero di strip presenti, i moduli sono equipaggiati con 4 o 6
circuiti di lettura APV-25 (vedi Capitolo 3).
Ciascun modulo di silicio e installato, insieme alla sua elettronica di lettura, su un sup-
porto in fibra di carbonio, ricoperto da un isolante in kapton che porta anche, attraverso
piste metallizzate, le tensioni di polarizzazione per il silicio stesso.
L’elettronica per la lettura del segnale dal silicio e collocata su un circuito realizzato
in allumina spesso circa 400 µm, detto “ibrido” perche composto sia da circuiti integrati
che da componenti discrete. Questo ibrido e connesso al silicio tramite un pitch adapter,
un’interfaccia che permette di adattare tutti i diversi passi delle strip dei sensori all’unico
passo del chip di lettura (44 µm).
22
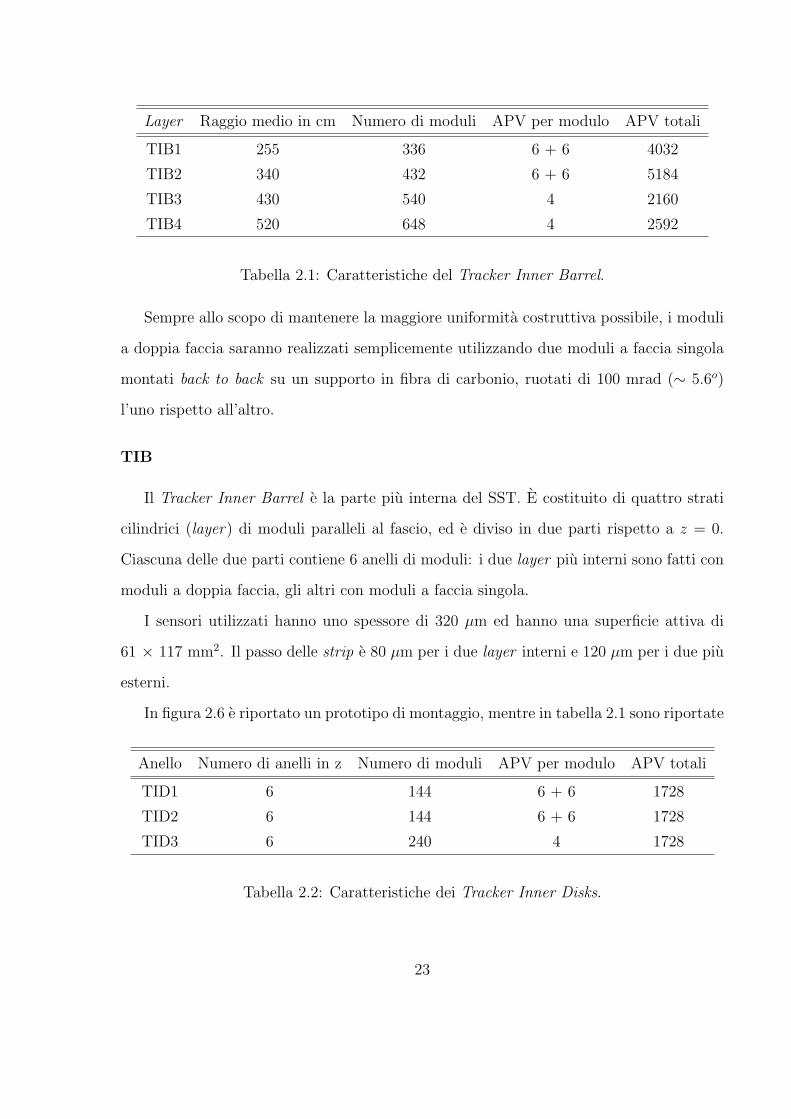
Layer Raggio medio in cm Numero di moduli APV per modulo APV totali
TIB1 255 336 6 + 6 4032
TIB2 340 432 6 + 6 5184
TIB3 430 540 4 2160
TIB4 520 648 4 2592
Tabella 2.1: Caratteristiche del Tracker Inner Barrel.
Sempre allo scopo di mantenere la maggiore uniformita costruttiva possibile, i moduli
a doppia faccia saranno realizzati semplicemente utilizzando due moduli a faccia singola
montati back to back su un supporto in fibra di carbonio, ruotati di 100 mrad (∼ 5.6o)
l’uno rispetto all’altro.
TIB
Il Tracker Inner Barrel e la parte piu interna del SST. E costituito di quattro strati
cilindrici (layer) di moduli paralleli al fascio, ed e diviso in due parti rispetto a z = 0.
Ciascuna delle due parti contiene 6 anelli di moduli: i due layer piu interni sono fatti con
moduli a doppia faccia, gli altri con moduli a faccia singola.
I sensori utilizzati hanno uno spessore di 320 µm ed hanno una superficie attiva di
61 × 117 mm2. Il passo delle strip e 80 µm per i due layer interni e 120 µm per i due piu
esterni.
In figura 2.6 e riportato un prototipo di montaggio, mentre in tabella 2.1 sono riportate
Anello Numero di anelli in z Numero di moduli APV per modulo APV totali
TID1 6 144 6 + 6 1728
TID2 6 144 6 + 6 1728
TID3 6 240 4 1728
Tabella 2.2: Caratteristiche dei Tracker Inner Disks.
23
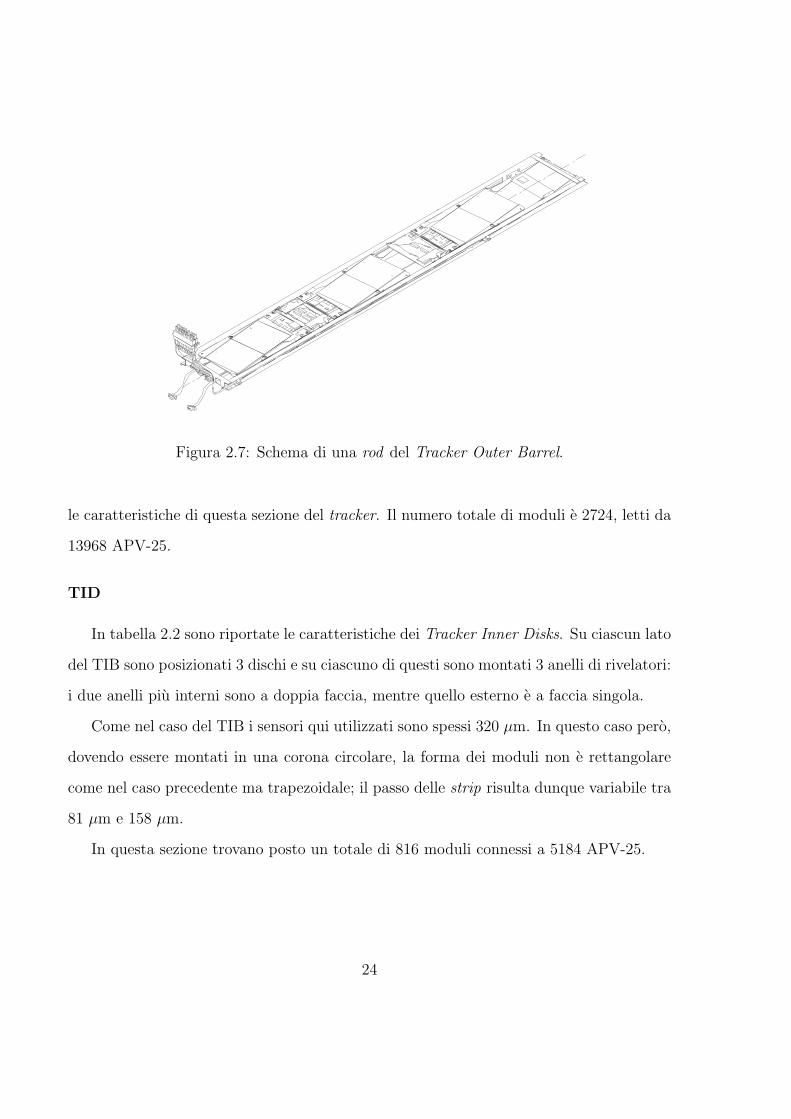
Figura 2.7: Schema di una rod del Tracker Outer Barrel.
le caratteristiche di questa sezione del tracker. Il numero totale di moduli e 2724, letti da
13968 APV-25.
TID
In tabella 2.2 sono riportate le caratteristiche dei Tracker Inner Disks. Su ciascun lato
del TIB sono posizionati 3 dischi e su ciascuno di questi sono montati 3 anelli di rivelatori:
i due anelli piu interni sono a doppia faccia, mentre quello esterno e a faccia singola.
Come nel caso del TIB i sensori qui utilizzati sono spessi 320 µm. In questo caso pero,
dovendo essere montati in una corona circolare, la forma dei moduli non e rettangolare
come nel caso precedente ma trapezoidale; il passo delle strip risulta dunque variabile tra
81 µm e 158 µm.
In questa sezione trovano posto un totale di 816 moduli connessi a 5184 APV-25.
24
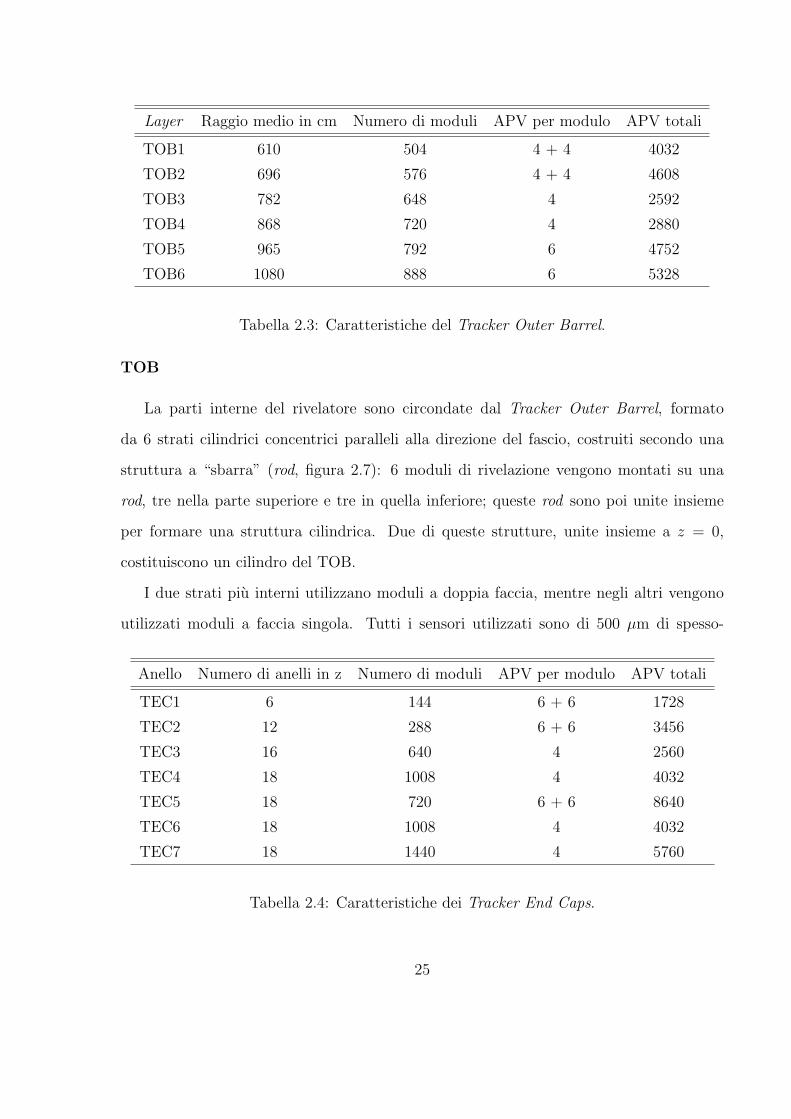
Layer Raggio medio in cm Numero di moduli APV per modulo APV totali
TOB1 610 504 4 + 4 4032
TOB2 696 576 4 + 4 4608
TOB3 782 648 4 2592
TOB4 868 720 4 2880
TOB5 965 792 6 4752
TOB6 1080 888 6 5328
Tabella 2.3: Caratteristiche del Tracker Outer Barrel.
TOB
La parti interne del rivelatore sono circondate dal Tracker Outer Barrel, formato
da 6 strati cilindrici concentrici paralleli alla direzione del fascio, costruiti secondo una
struttura a “sbarra” (rod, figura 2.7): 6 moduli di rivelazione vengono montati su una
rod, tre nella parte superiore e tre in quella inferiore; queste rod sono poi unite insieme
per formare una struttura cilindrica. Due di queste strutture, unite insieme a z = 0,
costituiscono un cilindro del TOB.
I due strati piu interni utilizzano moduli a doppia faccia, mentre negli altri vengono
utilizzati moduli a faccia singola. Tutti i sensori utilizzati sono di 500 µm di spesso-
Anello Numero di anelli in z Numero di moduli APV per modulo APV totali
TEC1 6 144 6 + 6 1728
TEC2 12 288 6 + 6 3456
TEC3 16 640 4 2560
TEC4 18 1008 4 4032
TEC5 18 720 6 + 6 8640
TEC6 18 1008 4 4032
TEC7 18 1440 4 5760
Tabella 2.4: Caratteristiche dei Tracker End Caps.
25
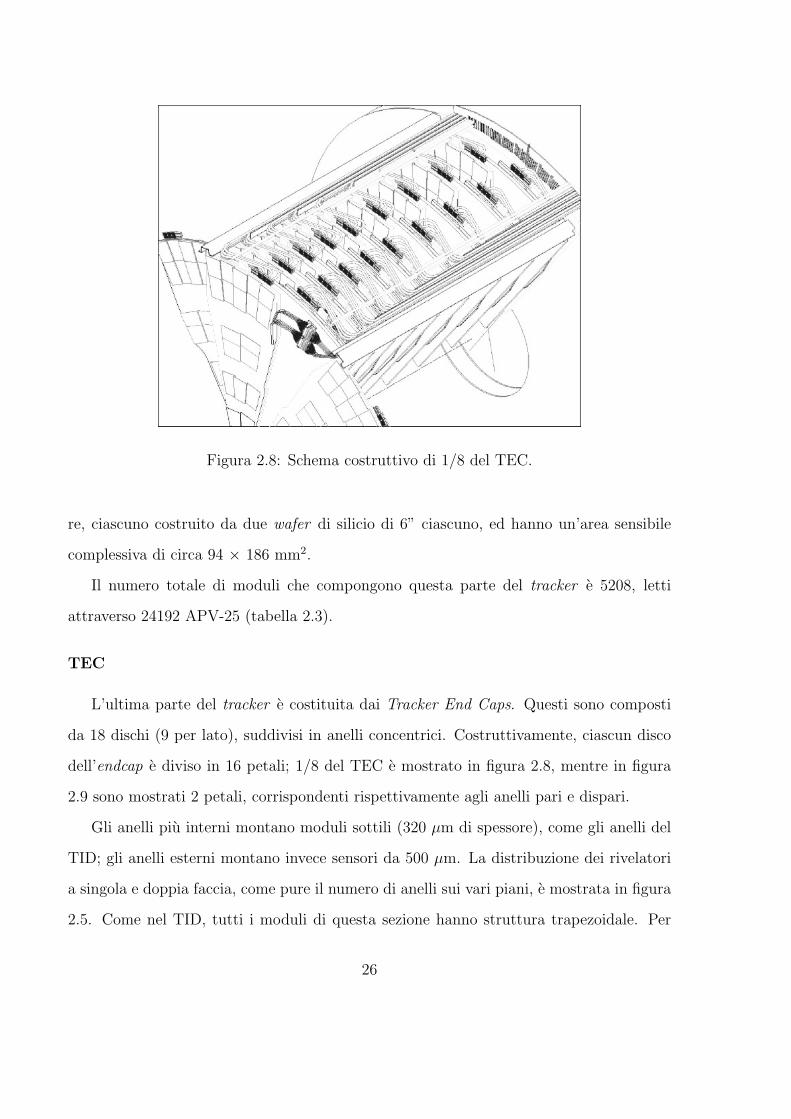
Figura 2.8: Schema costruttivo di 1/8 del TEC.
re, ciascuno costruito da due wafer di silicio di 6” ciascuno, ed hanno un’area sensibile
complessiva di circa 94 × 186 mm2.
Il numero totale di moduli che compongono questa parte del tracker e 5208, letti
attraverso 24192 APV-25 (tabella 2.3).
TEC
L’ultima parte del tracker e costituita dai Tracker End Caps. Questi sono composti
da 18 dischi (9 per lato), suddivisi in anelli concentrici. Costruttivamente, ciascun disco
dell’endcap e diviso in 16 petali; 1/8 del TEC e mostrato in figura 2.8, mentre in figura
2.9 sono mostrati 2 petali, corrispondenti rispettivamente agli anelli pari e dispari.
Gli anelli piu interni montano moduli sottili (320 µm di spessore), come gli anelli del
TID; gli anelli esterni montano invece sensori da 500 µm. La distribuzione dei rivelatori
a singola e doppia faccia, come pure il numero di anelli sui vari piani, e mostrata in figura
2.5. Come nel TID, tutti i moduli di questa sezione hanno struttura trapezoidale. Per
26
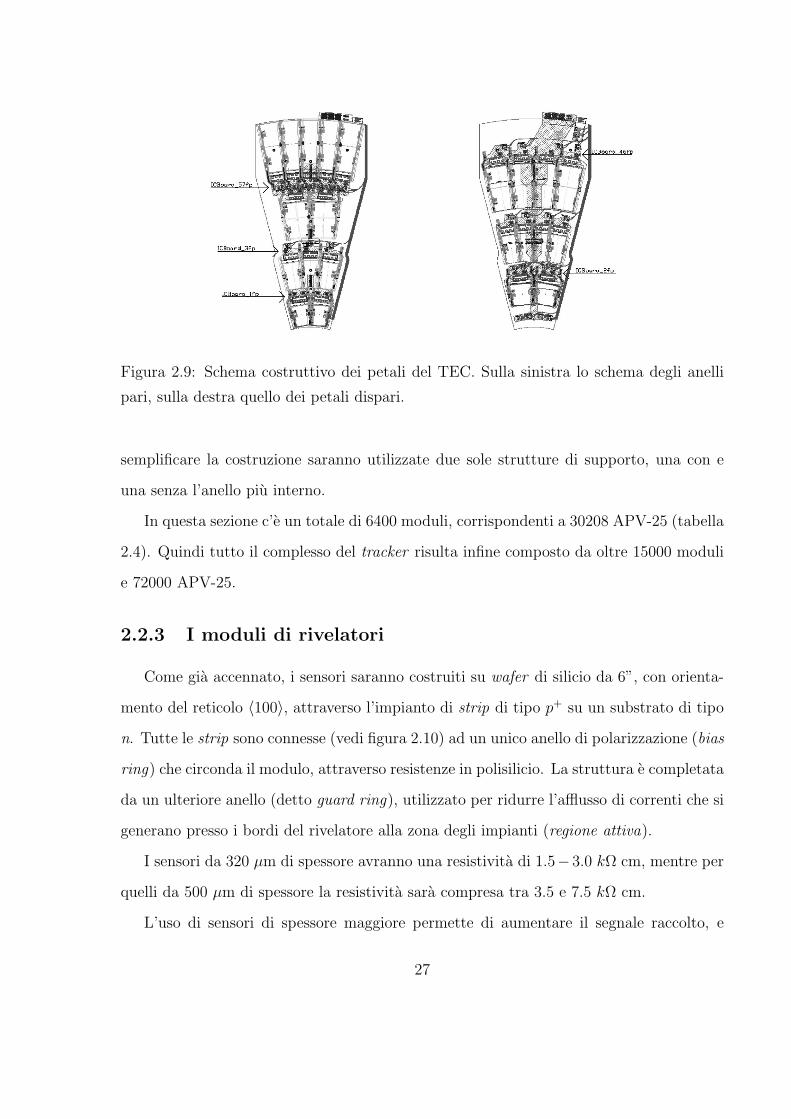
Figura 2.9: Schema costruttivo dei petali del TEC. Sulla sinistra lo schema degli anelli
pari, sulla destra quello dei petali dispari.
semplificare la costruzione saranno utilizzate due sole strutture di supporto, una con e
una senza l’anello piu interno.
In questa sezione c’e un totale di 6400 moduli, corrispondenti a 30208 APV-25 (tabella
2.4). Quindi tutto il complesso del tracker risulta infine composto da oltre 15000 moduli
e 72000 APV-25.
2.2.3 I moduli di rivelatori
Come gia accennato, i sensori saranno costruiti su wafer di silicio da 6”, con orienta-
mento del reticolo 〈100〉, attraverso l’impianto di strip di tipo p+ su un substrato di tipo
n. Tutte le strip sono connesse (vedi figura 2.10) ad un unico anello di polarizzazione (bias
ring) che circonda il modulo, attraverso resistenze in polisilicio. La struttura e completata
da un ulteriore anello (detto guard ring), utilizzato per ridurre l’afflusso di correnti che si
generano presso i bordi del rivelatore alla zona degli impianti (regione attiva).
I sensori da 320 µm di spessore avranno una resistivita di 1.5−3.0 kΩ cm, mentre per
quelli da 500 µm di spessore la resistivita sara compresa tra 3.5 e 7.5 kΩ cm.
L’uso di sensori di spessore maggiore permette di aumentare il segnale raccolto, e
27

Sensor characterization
• Sensors have been fully characterized in laboratoryby measuring:
– depletion voltage Vdepl
– leakage current Ibias
– bias resistances Rbias
– capacitances Cbulk, Cint, CAC
CAC
C
C
Cint intint
Al metallization
intint
bulk n
n implant+bias
Al
Ibias
SiO2Si N
3 4
C
C
bulk
C
Rbias
-+
V
p implant+
bulkC
CAC CACACC ACC
C
bulkC
ACC
int
AC
int
C CAC
int
bulkCint
CCAC
+
-
Guard ring Bias ring Bias
resistor
AC pads
DC pads
Alessandro Buffini - Firenze VCI 2001, February 19-23 5
Figura 2.10: Il bordo di un modulo di silicio con gli anelli di guardia (guard ring) e
di polarizzazione (bias ring). In questa figura le resistenze di polarizzazione sono poste
alternativamente alle due estremita del modulo.
quindi di realizzare strip di lunghezza maggiore. A questo vantaggio si aggiungono anche
una maggiore resistenza meccanica della struttura, oltre ad un piu semplice processo di
costruzione a livello industriale.
In particolare i sensori con le strip piu lunghe sono realizzati affiancando due cristalli
di silicio e collegando le loro strip in serie. Un prototipo dei moduli che equipaggeranno
il TOB e sul quale ho effettuato parte delle mie misure (vedi Capitolo 5) e mostrato in
figura 2.11. L’uso di moduli piu grandi permette inoltre di coprire una maggiore superficie
a parita di canali, e quindi in definitiva di ridurre sia il numero stesso di canali di lettura
necessari che la complessita (nonche il costo) dell’intero sistema.
Il tipo di silicio da usare va anche scelto tenendo conto delle condizioni di alto flusso
di radiazioni nelle quali si trovera ad operare per i 10 anni di durata dell’esperimento,
in particolare per quello che andra ad equipaggiare i moduli della parte piu interna. Gli
28
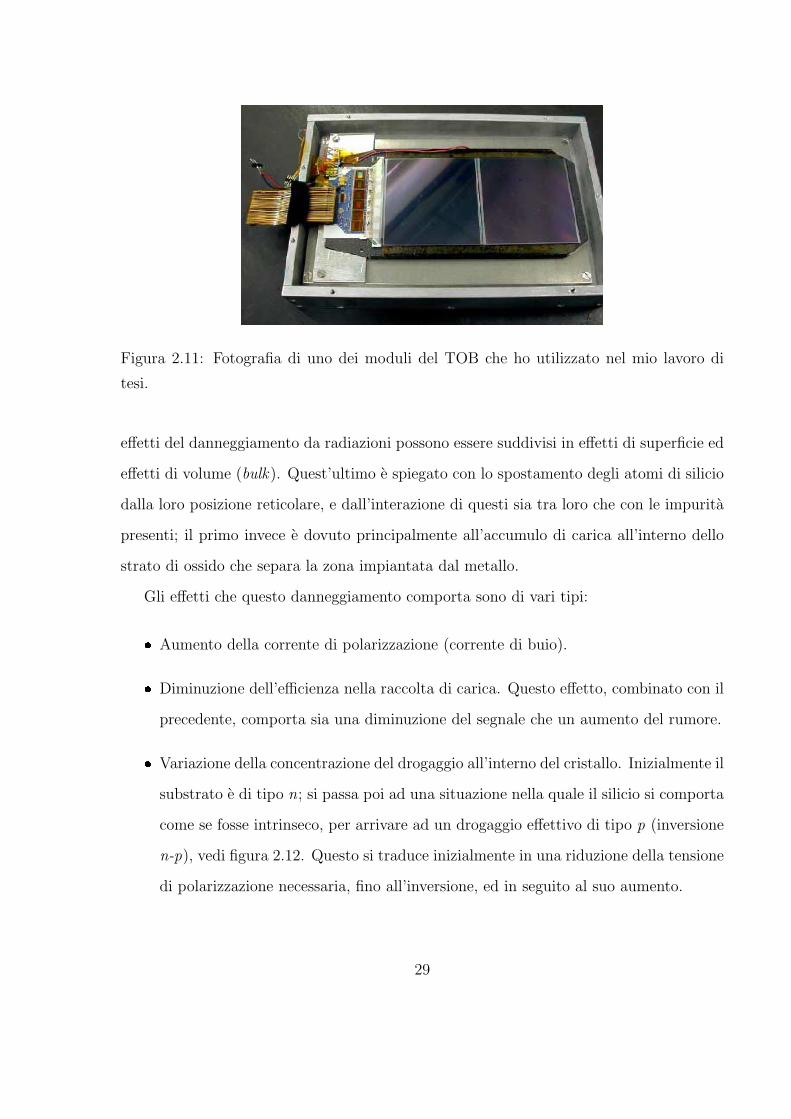
Figura 2.11: Fotografia di uno dei moduli del TOB che ho utilizzato nel mio lavoro di
tesi.
effetti del danneggiamento da radiazioni possono essere suddivisi in effetti di superficie ed
effetti di volume (bulk). Quest’ultimo e spiegato con lo spostamento degli atomi di silicio
dalla loro posizione reticolare, e dall’interazione di questi sia tra loro che con le impurita
presenti; il primo invece e dovuto principalmente all’accumulo di carica all’interno dello
strato di ossido che separa la zona impiantata dal metallo.
Gli effetti che questo danneggiamento comporta sono di vari tipi:
Aumento della corrente di polarizzazione (corrente di buio).
Diminuzione dell’efficienza nella raccolta di carica. Questo effetto, combinato con il
precedente, comporta sia una diminuzione del segnale che un aumento del rumore.
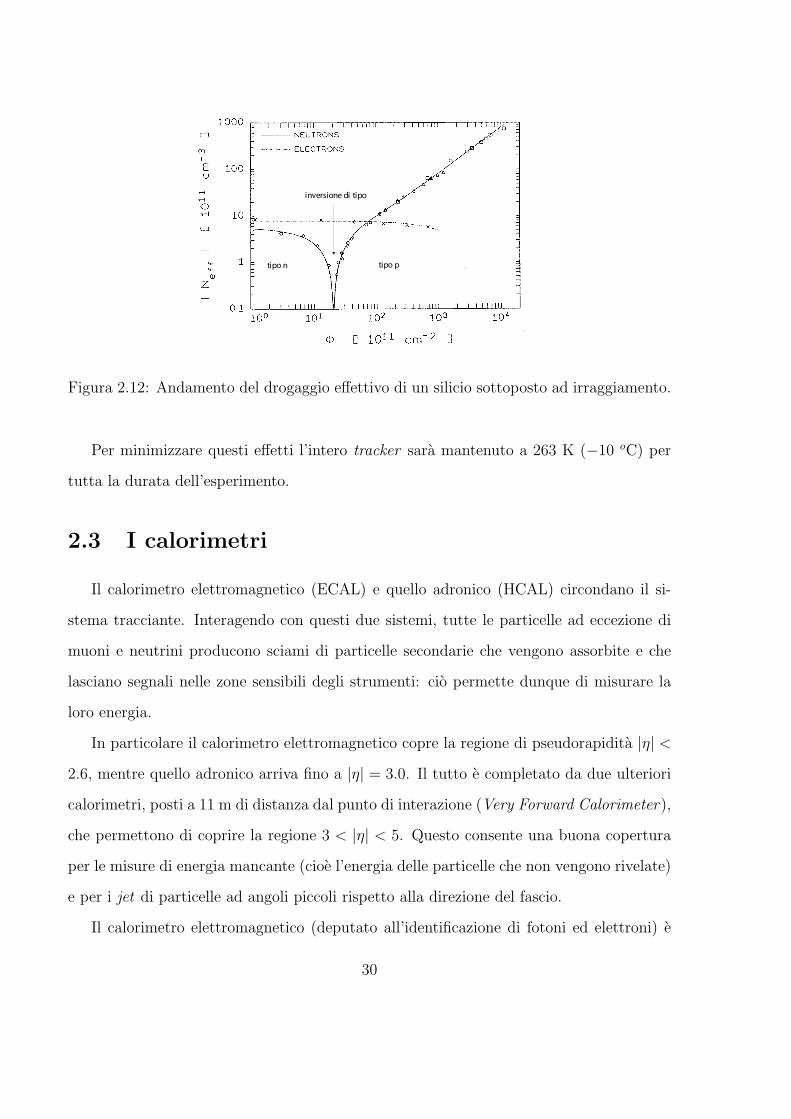
Variazione della concentrazione del drogaggio all’interno del cristallo. Inizialmente il
substrato e di tipo n; si passa poi ad una situazione nella quale il silicio si comporta
come se fosse intrinseco, per arrivare ad un drogaggio effettivo di tipo p (inversione
n-p), vedi figura 2.12. Questo si traduce inizialmente in una riduzione della tensione
di polarizzazione necessaria, fino all’inversione, ed in seguito al suo aumento.
29
inversione di tipo
tipo ptipo n
Figura 2.12: Andamento del drogaggio effettivo di un silicio sottoposto ad irraggiamento.
Per minimizzare questi effetti l’intero tracker sara mantenuto a 263 K (−10 oC) per
tutta la durata dell’esperimento.
2.3 I calorimetri
Il calorimetro elettromagnetico (ECAL) e quello adronico (HCAL) circondano il si-
stema tracciante. Interagendo con questi due sistemi, tutte le particelle ad eccezione di
muoni e neutrini producono sciami di particelle secondarie che vengono assorbite e che
lasciano segnali nelle zone sensibili degli strumenti: cio permette dunque di misurare la
loro energia.
In particolare il calorimetro elettromagnetico copre la regione di pseudorapidita |η| <
2.6, mentre quello adronico arriva fino a |η| = 3.0. Il tutto e completato da due ulteriori
calorimetri, posti a 11 m di distanza dal punto di interazione (Very Forward Calorimeter),
che permettono di coprire la regione 3 < |η| < 5. Questo consente una buona copertura
per le misure di energia mancante (cioe l’energia delle particelle che non vengono rivelate)
e per i jet di particelle ad angoli piccoli rispetto alla direzione del fascio.
Il calorimetro elettromagnetico (deputato all’identificazione di fotoni ed elettroni) e
30
composto da circa 80000 cristalli di tungstato di piombo (PbWO4) [11], caratterizzati da
una bassa lunghezza di radiazione1 (X0 = 9 mm) e da un raggio di Moliere2 di 2,2 cm. La
scelta di questo materiale permette di ridurre notevolmente le dimensioni dello strumento.
Inoltre questi cristalli danno una risposta temporale veloce (il tempo di decadimento
della scintillazione e di soli 10 ns) e sono resistenti alle radiazioni. Lo scarso numero di
fotoni emessi per unita di energia depositata (circa 50 fotoni / MeV) e compensato con
l’inserimento di sistemi di fotodiodi a valanga che amplificano il segnale.
Nel barrel i cristalli hanno una lunghezza radiale di 23 cm (corrispondente a ∼ 26X0)
ed un’area, sul lato rivolto verso il punto di interazione, di 20.5× 20.5 mm2; negli endcap
la lunghezza e di 22 cm (che corrisponde a ∼ 24X0) e l’area varia tra 18 × 20 mm2 e
27× 29 mm2. La risoluzione prevista per fotoni ed elettroni di 120 GeV e di
σE
E' 0.6 %. (2.3)
Il calorimetro adronico [14] e un calorimetro a campionamento, in cui le piastre di
rame che servono come assorbitori sono alternate con scintillatori plastici, che fungono
da rivelatori. Questi scintillatori sono segmentati con una granularita di ∆η × ∆ϕ ≈
0.09 × 0.09, per cui si potra ottenere una buona separazione tra jet vicini e una buona
risoluzione della massa invariante nel caso di coppie di jet. Nella formula, η e di nuovo
la pseudorapidita, mentre con ϕ si indica l’angolo sul piano ortogonale al fascio. Le
coordinate cilindriche (ϕ, la coordinata lungo il fascio z e la coordinata radiale r) sono
un sistema utilizzato spesso nella descrizione dei rivelatori di particelle.
1L’energia di un elettrone in funzione dello spazio percorso X, in un dato materiale, considerando solo
la perdita di energia per radiazione di frenamento (bremsstrahlung) e data da E0 e−X
X0 , dove il parametro
X0 e detto lunghezza di radiazione [12].2Il raggio di Moliere RM definisce lo sviluppo trasverso della cascata di particelle nel materiale attra-
versato. E legato alla lunghezza di radiazione dalla formula RM = X0Es
E , dove Es e una costante pari a
21,20 MeV [13].
31
La risoluzione prevista per adroni di energia E espressa in GeV e data da
σE
E' 70 %√
E⊕ 5 % (2.4)
dove con il simbolo ⊕ si indica la somma in quadratura dei due termini.
2.4 Il rivelatore per muoni
E progettato per identificare i muoni e misurarne l’impulso, ed e anche fondamentale
per fornire il trigger dell’esperimento. Consiste di quattro stazioni di misura che coprono
sia la regione degli endcap che quella del barrel, intervallate dalle piastre di ferro di ritorno
del magnete, che svolgono anche l’ulteriore funzione di assorbitori [15].
La precisione richiesta per la determinazione della posizione di passaggio dei muoni e
garantita dall’utilizzo di rivelatori di vario tipo nelle varie zone del rivelatore.
Nel barrel, nel quale si ha un basso flusso di particelle (< 10 Hz/cm2) e un campo
magnetico radiale trascurabile, sara installato un sistema di tubi a deriva (Drift Tubes,
DT). Ogni stazione dello spettrometro nella regione centrale e composta da tre gruppi
di quattro strati di camere a deriva in alluminio, due dei quali disposti parallelamente al
fascio (per la misura di r e ϕ) e uno ortogonalmente (per la misura di z).
Negli endcap invece i rivelatori saranno costituiti da camere a strip catodiche (Ca-
thode Strip Chambers, CSC). Questo perche in quella regione e previsto un alto flusso di
particelle e un campo magnetico poco uniforme. Ogni camera contiene sei strati, con le
strip catodiche orientate in direzione radiale per la misura di ϕ. La risoluzione temporale
di questo strumento e abbastanza elevata (∼ 4 ns) e consente dunque di riconoscere le
tracce di muoni provenienti da incroci differenti dei fasci.
Il rivelatore e completato dalla presenza, in tutte e due le regioni, di un sistema di
camere a piastre resistive (Resistive Plate Chambers, RPC), che viene utilizzato come
32
trigger, in quanto, a scapito di una peggiore risoluzione spaziale, e dotato di una migliore
risoluzione temporale (1 ns).
Lo spessore del calorimetro e la presenza del ferro di ritorno del magnete supercon-
duttore garantiscono che soltanto i muoni (che perdono energia quasi esclusivamente per
ionizzazione) possano raggiungere tutte le stazioni di misura dello strumento.
2.5 La fisica a CMS
2.5.1 Sezione d’urto e luminosita
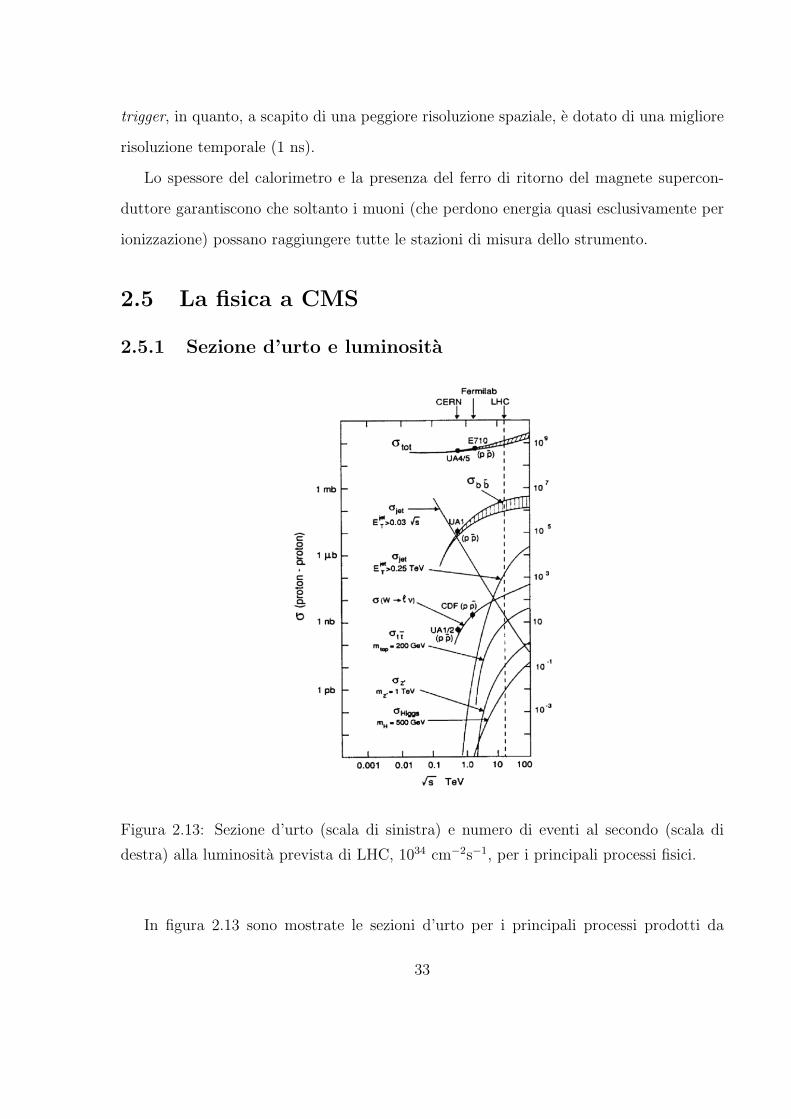
Figura 2.13: Sezione d’urto (scala di sinistra) e numero di eventi al secondo (scala di
destra) alla luminosita prevista di LHC, 1034 cm−2s−1, per i principali processi fisici.
In figura 2.13 sono mostrate le sezioni d’urto per i principali processi prodotti da
33
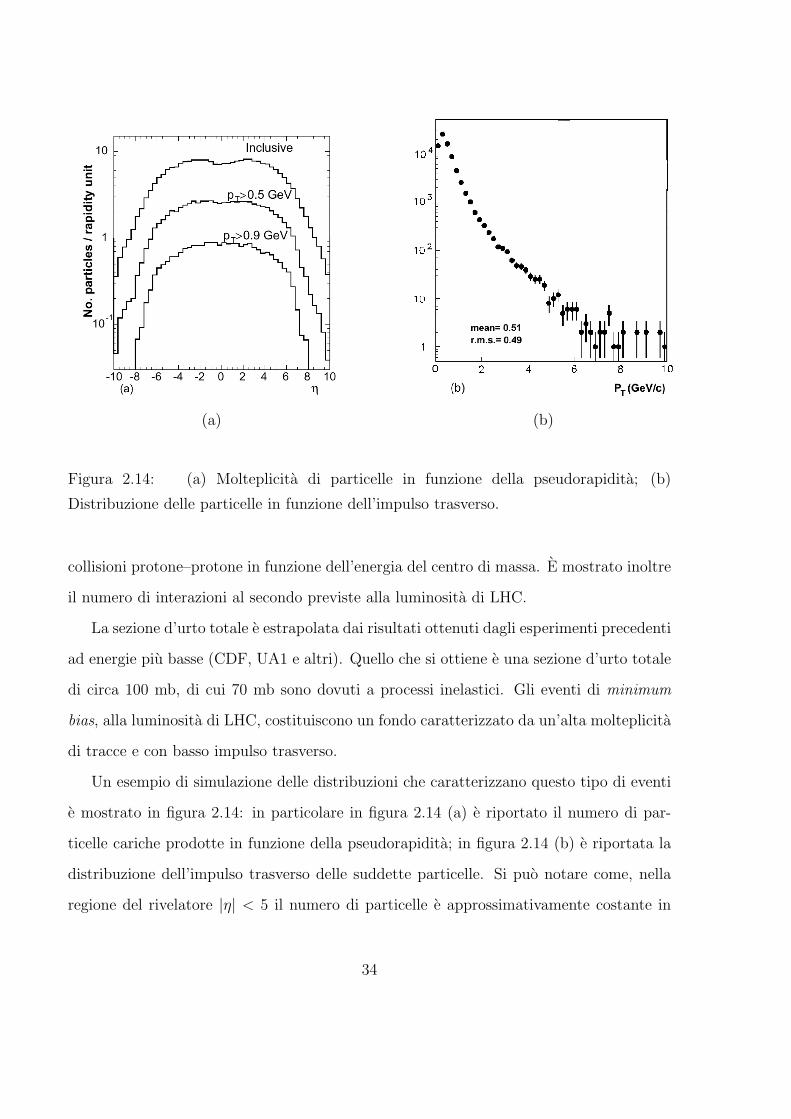
(a) (b)
Figura 2.14: (a) Molteplicita di particelle in funzione della pseudorapidita; (b)
Distribuzione delle particelle in funzione dell’impulso trasverso.
collisioni protone–protone in funzione dell’energia del centro di massa. E mostrato inoltre
il numero di interazioni al secondo previste alla luminosita di LHC.
La sezione d’urto totale e estrapolata dai risultati ottenuti dagli esperimenti precedenti
ad energie piu basse (CDF, UA1 e altri). Quello che si ottiene e una sezione d’urto totale
di circa 100 mb, di cui 70 mb sono dovuti a processi inelastici. Gli eventi di minimum
bias, alla luminosita di LHC, costituiscono un fondo caratterizzato da un’alta molteplicita
di tracce e con basso impulso trasverso.
Un esempio di simulazione delle distribuzioni che caratterizzano questo tipo di eventi
e mostrato in figura 2.14: in particolare in figura 2.14 (a) e riportato il numero di par-
ticelle cariche prodotte in funzione della pseudorapidita; in figura 2.14 (b) e riportata la
distribuzione dell’impulso trasverso delle suddette particelle. Si puo notare come, nella
regione del rivelatore |η| < 5 il numero di particelle e approssimativamente costante in
34
(a) (b)
(c) (d)
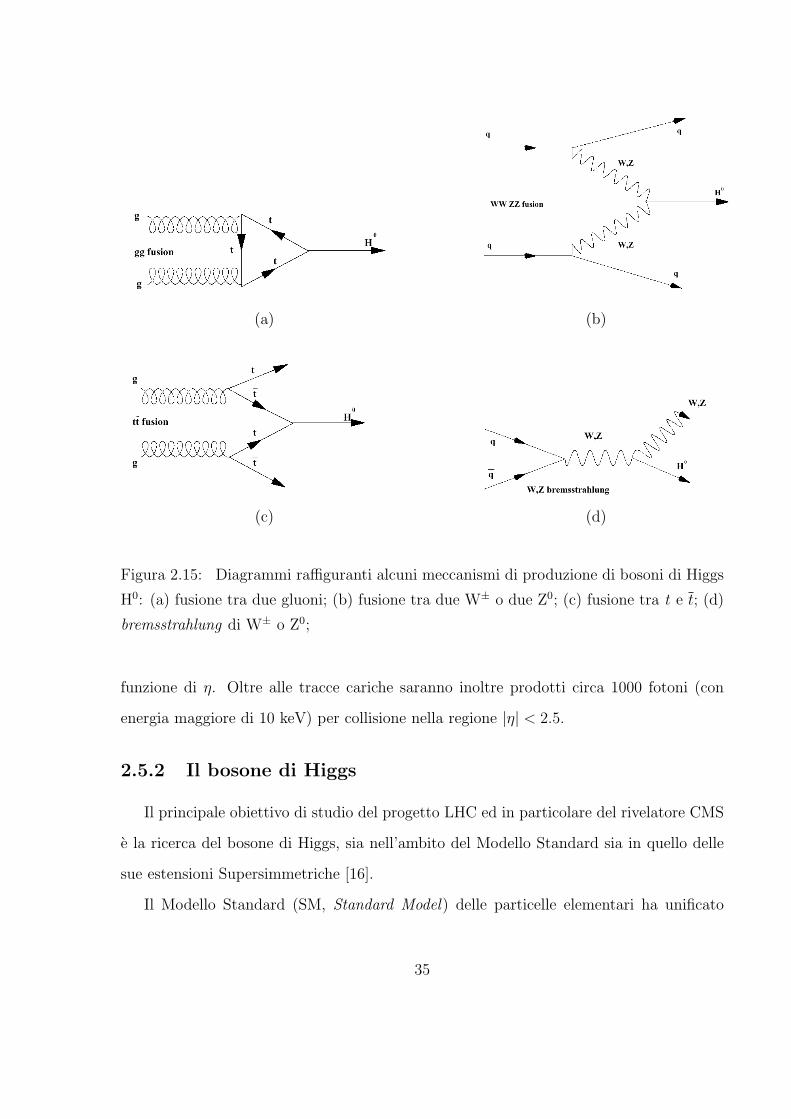
Figura 2.15: Diagrammi raffiguranti alcuni meccanismi di produzione di bosoni di Higgs
H0: (a) fusione tra due gluoni; (b) fusione tra due W± o due Z0; (c) fusione tra t e t; (d)
bremsstrahlung di W± o Z0;
funzione di η. Oltre alle tracce cariche saranno inoltre prodotti circa 1000 fotoni (con
energia maggiore di 10 keV) per collisione nella regione |η| < 2.5.
2.5.2 Il bosone di Higgs
Il principale obiettivo di studio del progetto LHC ed in particolare del rivelatore CMS
e la ricerca del bosone di Higgs, sia nell’ambito del Modello Standard sia in quello delle
sue estensioni Supersimmetriche [16].
Il Modello Standard (SM, Standard Model) delle particelle elementari ha unificato
35
l’interazione elettromagnetica (che ha come bosone vettore il fotone) e l’interazione debole
(che ha come vettori i 3 bosoni W+, W−e Z0). Questi 4 bosoni sono pero molto diversi
tra loro: il fotone e privo di massa, mentre gli altri tre sono pesanti: la massa dei W± e
di 80.419± 0.056 GeV e quella della Z0 e 91.1882± 0.0022 GeV.
Nella struttura del Modello Standard le particelle acquistano massa a causa della loro
interazione con un ulteriore campo: il campo di Higgs. Questo implica l’esistenza di una
nuova particella, indicata con H0, chiamata appunto bosone di Higgs.
La teoria non e in grado di calcolare la massa di questa particella, ma e in grado di
fornirci i suoi tassi di produzione e i modi di decadimento in funzione della sua possibile
massa.
I meccanismi piu importanti attraverso i quali dovrebbe essere prodotto il bosone di
Higgs a LHC sono mostrati in figura 2.15: fusione tra due gluoni (figura 2.15 (a)), fusione
tra due W± oppure due Z0 (figura 2.15 (b)), fusione tra due quark t e t (figura 2.15 (c))
e infine bremsstrahlung di W± e Z0 (figura 2.15 (d)) [17].
I dati raccolti in precedenza da LEP hanno permesso di porre un limite inferiore di
114 GeV per la massa di un bosone di Higgs standard [18], al 95% di livello di confidenza.
CMS e ottimizzato per studiare la regione di massa che parte da tale limite e arriva fino ad
1 TeV, limite imposto da argomenti di autoconsistenza della teoria del Modello Standard
[19].
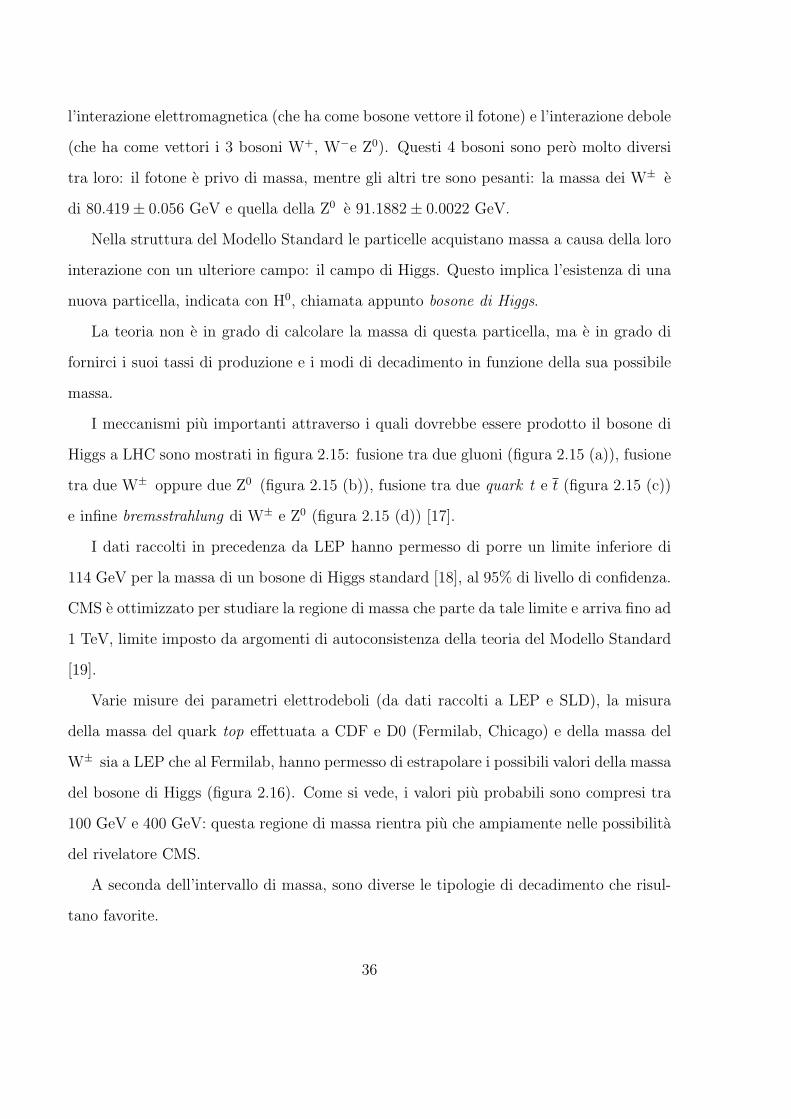
Varie misure dei parametri elettrodeboli (da dati raccolti a LEP e SLD), la misura
della massa del quark top effettuata a CDF e D0 (Fermilab, Chicago) e della massa del
W± sia a LEP che al Fermilab, hanno permesso di estrapolare i possibili valori della massa
del bosone di Higgs (figura 2.16). Come si vede, i valori piu probabili sono compresi tra
100 GeV e 400 GeV: questa regione di massa rientra piu che ampiamente nelle possibilita
del rivelatore CMS.
A seconda dell’intervallo di massa, sono diverse le tipologie di decadimento che risul-
tano favorite.
36
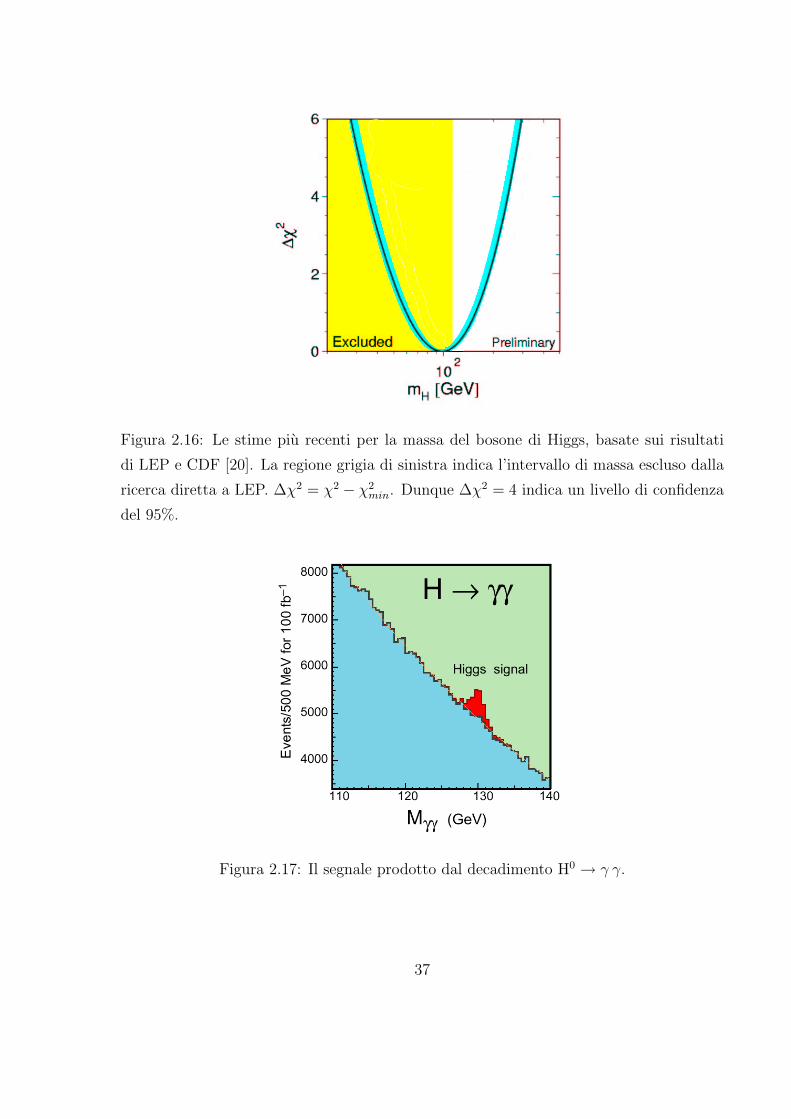
Figura 2.16: Le stime piu recenti per la massa del bosone di Higgs, basate sui risultati
di LEP e CDF [20]. La regione grigia di sinistra indica l’intervallo di massa escluso dalla
ricerca diretta a LEP. ∆χ2 = χ2 − χ2min. Dunque ∆χ2 = 4 indica un livello di confidenza
del 95%.
Figura 2.17: Il segnale prodotto dal decadimento H0 → γ γ.
37
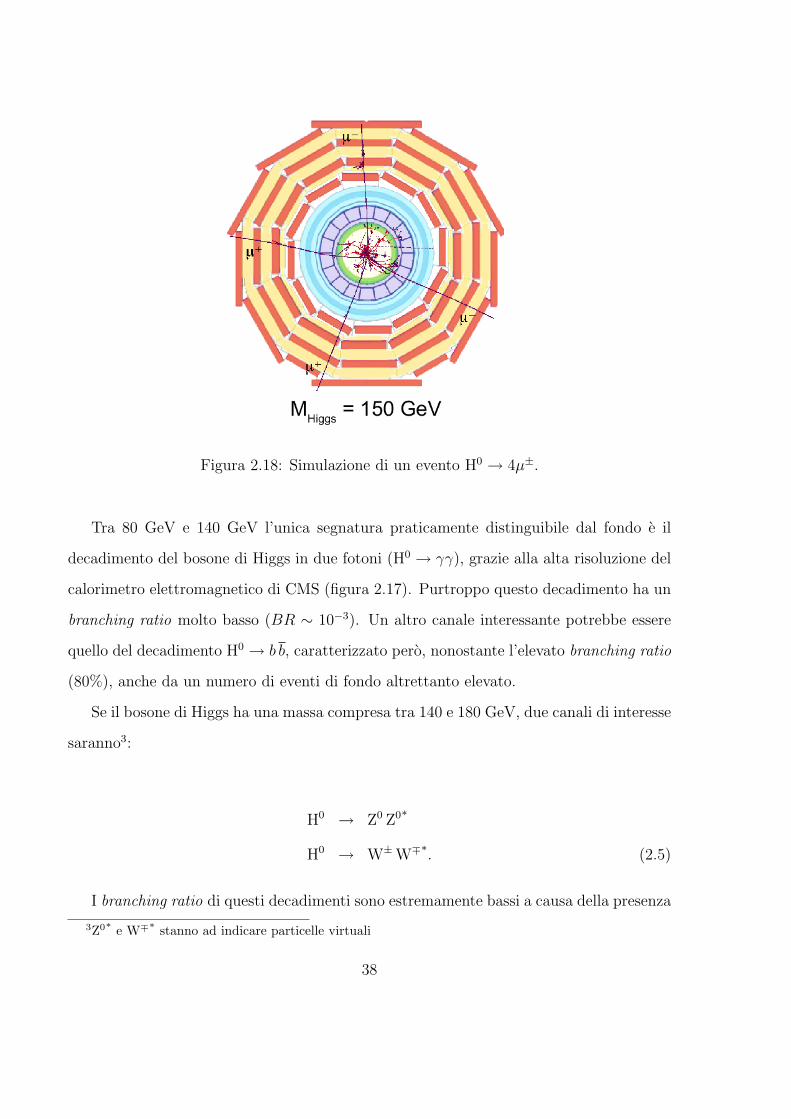
Figura 2.18: Simulazione di un evento H0 → 4µ±.
Tra 80 GeV e 140 GeV l’unica segnatura praticamente distinguibile dal fondo e il
decadimento del bosone di Higgs in due fotoni (H0 → γγ), grazie alla alta risoluzione del
calorimetro elettromagnetico di CMS (figura 2.17). Purtroppo questo decadimento ha un
branching ratio molto basso (BR ∼ 10−3). Un altro canale interessante potrebbe essere
quello del decadimento H0 → b b, caratterizzato pero, nonostante l’elevato branching ratio
(80%), anche da un numero di eventi di fondo altrettanto elevato.
Se il bosone di Higgs ha una massa compresa tra 140 e 180 GeV, due canali di interesse
saranno3:
H0 → Z0 Z0∗
H0 → W± W∓∗. (2.5)
I branching ratio di questi decadimenti sono estremamente bassi a causa della presenza
3Z0∗ e W∓∗ stanno ad indicare particelle virtuali
38
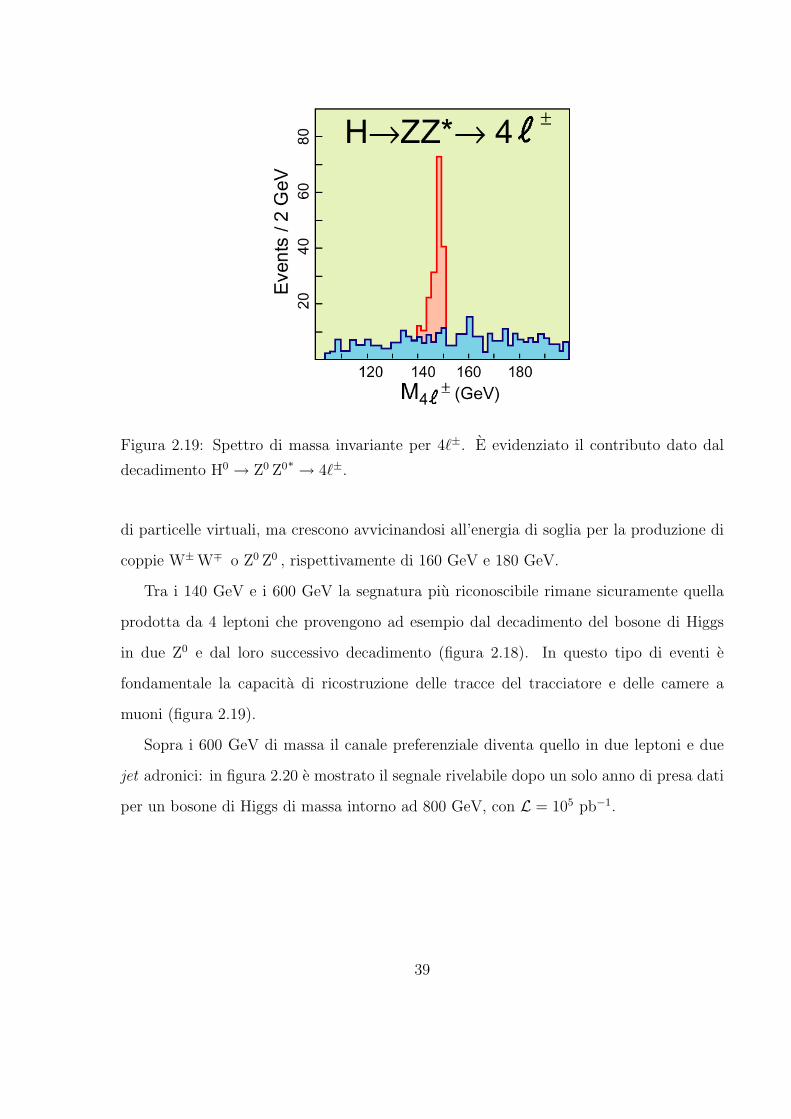
Figura 2.19: Spettro di massa invariante per 4`±. E evidenziato il contributo dato dal
decadimento H0 → Z0 Z0∗ → 4`±.
di particelle virtuali, ma crescono avvicinandosi all’energia di soglia per la produzione di
coppie W±W∓ o Z0 Z0 , rispettivamente di 160 GeV e 180 GeV.
Tra i 140 GeV e i 600 GeV la segnatura piu riconoscibile rimane sicuramente quella
prodotta da 4 leptoni che provengono ad esempio dal decadimento del bosone di Higgs
in due Z0 e dal loro successivo decadimento (figura 2.18). In questo tipo di eventi e
fondamentale la capacita di ricostruzione delle tracce del tracciatore e delle camere a
muoni (figura 2.19).
Sopra i 600 GeV di massa il canale preferenziale diventa quello in due leptoni e due
jet adronici: in figura 2.20 e mostrato il segnale rivelabile dopo un solo anno di presa dati
per un bosone di Higgs di massa intorno ad 800 GeV, con L = 105 pb−1.
39

Figura 2.20: Spettro di massa invariante ``jj. E evidenziato il contributo dato dal
decadimento H0 → Z0 Z0 → ` ` j j.
2.5.3 La fisica dei B
Un altro importante obiettivo della ricerca a CMS e lo studio della fisica dei quark
bottom, con particolare attenzione alla violazione della simmetria CP. Questa violazione
fu scoperta nel 1964 dall’analisi dei decadimenti dei K0, mesoni che contengono il quark
strano s.
Per l’analisi di questo fenomeno e necessaria un’alta statistica di eventi esclusivi carat-
terizzati da bassi branching ratio (10−4÷10−7), ad esempio B0 → J/ψ K0s . Risulta dunque
essenziale per questo tipo di misure l’alta sezione d’urto per la produzione di coppie bb
(vedi figura 2.13) disponibile ad LHC. In particolare ci si aspettano circa 1012÷1013 coppie
all’anno. Il numero di eventi acquisibili e dunque limitato esclusivamente dalla possibi-
lita di selezionare online tali eventi, utilizzando un trigger opportuno, e dalla velocita di
scrittura dei dati su disco.
Lo studio della violazione di CP si puo effettuare ad LHC tramite la misura dell’asim-
40

metria del decadimento dei mesoni B0 e B0 in autostati di CP:
A =Γ(B0 → f)− Γ(B0 → f)
Γ(B0 → f) + Γ(B0 → f)∝ sin 2ϕ, (2.6)
dove con ϕ si indica uno degli angoli del triangolo di unitarieta della matrice Cabibbo-
Kobayashi-Maskawa (CKM) e frappresenta il particolare stato finale oggetto della misura.
Allo stato attuale delle conoscenze i valori attesi sono [21]
sin 2α ' 0.7,
sin 2β ' 0.5, (2.7)
sin 2γ ' 0.9.
L’unico di questi parametri che fino ad oggi e stato effettivamente misurato e
sin 2β = 0.59± 0.15 (stat) ± 0.15 (sys), (2.8)
risultato ottenuto dagli esperimenti Belle e BaBar [22].
Nell’esperimento CMS, grazie al suo rivelatore tracciante, si prevede di studiare effi-
cacemente i decadimenti
B0 → J/ψK0s ,
B0 → π+ π−. (2.9)
Dal primo si puo ricavare il valore di sin 2β e dal secondo, dopo opportune correzioni,
quello di sin 2α [23].
In figura 2.21 e riportato un possibile evento: dalla ricostruzione della catena completa
del primo decadimento (indicato in figura 2.21 con 1) si ottengono la massa invariante
del B0 (B0) e le informazioni per ricostruire completamente lo stato finale f dell’eq. 2.6,
41
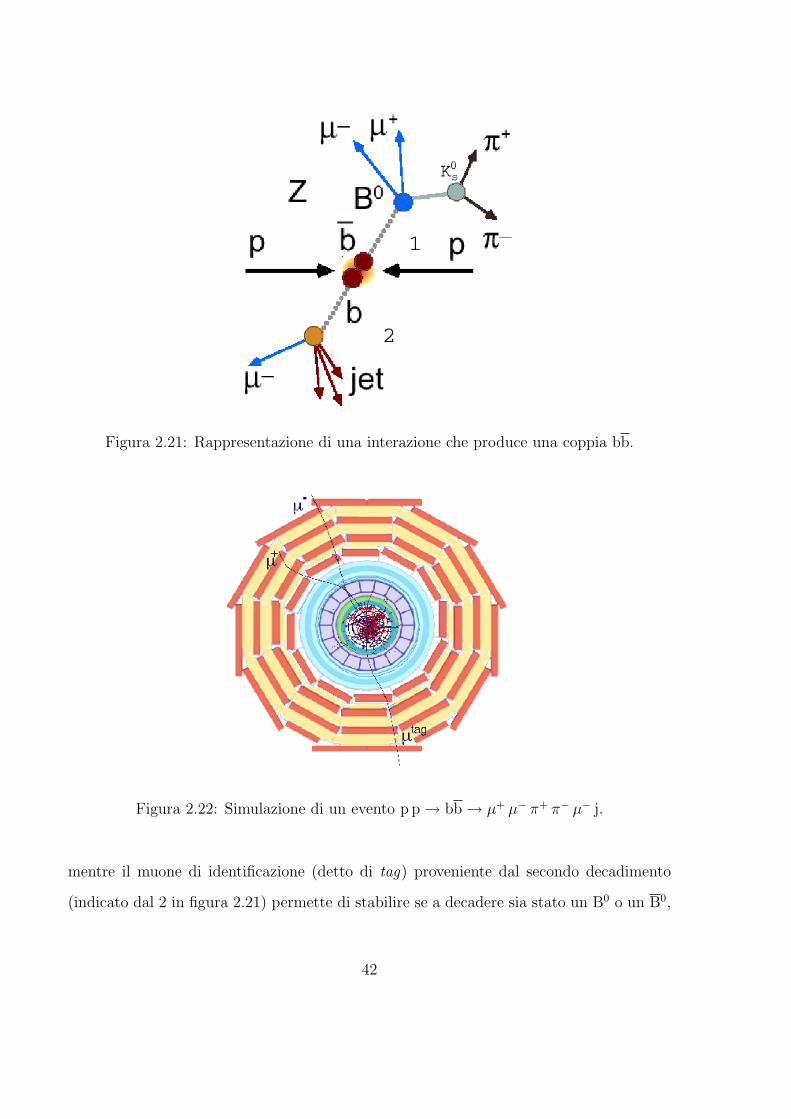
Figura 2.21: Rappresentazione di una interazione che produce una coppia bb.
Figura 2.22: Simulazione di un evento p p → bb → µ+ µ− π+ π− µ− j.
mentre il muone di identificazione (detto di tag) proveniente dal secondo decadimento
(indicato dal 2 in figura 2.21) permette di stabilire se a decadere sia stato un B0 o un B0,
42
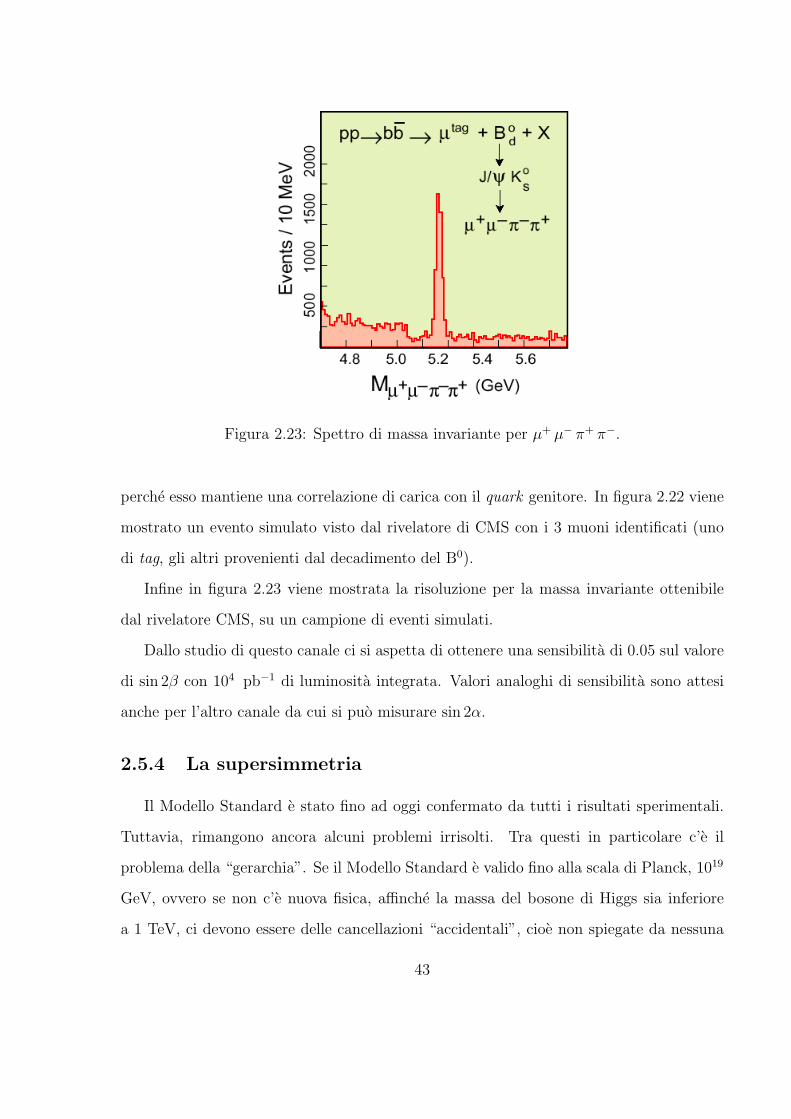
Figura 2.23: Spettro di massa invariante per µ+ µ− π+ π−.
perche esso mantiene una correlazione di carica con il quark genitore. In figura 2.22 viene
mostrato un evento simulato visto dal rivelatore di CMS con i 3 muoni identificati (uno
di tag, gli altri provenienti dal decadimento del B0).
Infine in figura 2.23 viene mostrata la risoluzione per la massa invariante ottenibile
dal rivelatore CMS, su un campione di eventi simulati.
Dallo studio di questo canale ci si aspetta di ottenere una sensibilita di 0.05 sul valore
di sin 2β con 104 pb−1 di luminosita integrata. Valori analoghi di sensibilita sono attesi
anche per l’altro canale da cui si puo misurare sin 2α.
2.5.4 La supersimmetria
Il Modello Standard e stato fino ad oggi confermato da tutti i risultati sperimentali.
Tuttavia, rimangono ancora alcuni problemi irrisolti. Tra questi in particolare c’e il
problema della “gerarchia”. Se il Modello Standard e valido fino alla scala di Planck, 1019
GeV, ovvero se non c’e nuova fisica, affinche la massa del bosone di Higgs sia inferiore
a 1 TeV, ci devono essere delle cancellazioni “accidentali”, cioe non spiegate da nessuna
43
simmetria, nelle correzioni radiative alla massa dell’Higgs; correzioni radiative che prese
individualmente sono molto maggiori della massa stessa.
Un modo elegante di risolvere questo problema e attraverso la teoria della supersim-
metria, o SUSY (SUper SYmmetry). Questa postula l’esistenza di una relazione tra le
particelle che costituiscono la materia (fermioni, a spin semi-intero) e i portatori delle
interazioni (bosoni, a spin intero): a ciascun fermione viene associato un partner super-
simmetrico di spin intero, mentre a ciascun bosone e associato un partner supersimmetrico
a spin semi-intero.
Un’altra conseguenza e che anche il settore di Higgs viene esteso, in quanto sono
necessari almeno 5 bosoni di Higgs, dei quali due sono carichi e tre neutri nel cosiddetto
Modello Super Simmetrico Minimale (MSSM) [24], perche tutti i fermioni acquistino
massa non nulla.
Malgrado questa teoria raddoppi il numero di particelle esistenti, possiede sicuramente
diversi vantaggi: assumendo l’esistenza di partner supersimmetrici, le forze Forte, Debole
ed Elettromagnetica si unificano a energie di circa 1016 GeV (GUT, Grand Unification
Theory); fornisce una spiegazione naturale al fatto che la massa dell’Higgs debba essere
inferiore ad 1 TeV; permette di spiegare la materia oscura dell’universo in termini della
particella supersimmetrica piu leggera (LSP, Lightest SUSY Particle), che deve essere
stabile e con carica nulla.
Il fatto che a tutt’oggi non sia stata osservata nessuna “s-particella” (particella su-
persimmetrica), implica che la SUSY sia una simmetria “rotta”, cioe che le masse delle
particelle siano diverse da quelle dei loro partner supersimmetrici.
I calcoli effettuati col MSSM fissano dei limiti superiori per le masse degli Higgs super-
simmetrici. In particolare risulta che il bosone di Higgs piu leggero dovrebbe avere una
massa piuttosto piccola (inferiore ai 150 GeV), minore di quella prevista per il bosone di
Higgs postulato dal Modello Standard. L’attenzione di CMS si potra dunque concentrare
sulla ricerca dei 5 bosoni di Higgs e dei partner supersimmetrici degli Higgs stessi e dei
44
bosoni W± Z0 e γ, detti chargini o neutralini a seconda che siano carichi o neutri.
Un altro campo di indagine di CMS sara la ricerca di “s-leptoni”, ad esempio si possono
ricercare interazioni di questo tipo:
p p→ l+L l−L +X → l+ l− χ0
1 χ01 +X (2.10)
dove con lL si indica il leptone supersimmetrico e con il neutralino χ01 la LSP. Queste
interazioni sono caratterizzate dal fatto che i due leptoni sono della stessa famiglia e che
l’energia mancante e superiore a 100 GeV.
45

46
Capitolo 3
Il sistema di acquisizione
Durante la prima parte del mio lavoro di tesi ho studiato il funzionamento dell’elet-
tronica di front end del tracker di CMS e del sistema di acquisizione dei dati, ponendo
particolare attenzione sul chip APV-25. Questo circuito e stato progettato per funzionare
da interfaccia tra i rivelatori di silicio e il sistema di acquisizione, trasformando il segnale
della carica raccolta dal silicio stesso in un segnale utilizzabile per le analisi successive.
Affinche il sistema operi in condizioni ottimali e necessario studiare approfonditamente
il comportamento di questo chip. Un primo passo fondamentale e la comprensione del suo
funzionamento in condizioni di laboratorio, cioe a temperatura ambiente, con un basso
flusso di particelle, mantenendo il sistema in un ambiente non radioattivo. Si tratta poi
di estendere questo studio alle condizioni ben piu critiche nelle quali il circuito si trovera
a funzionare all’interno dell’esperimento: elevato flusso di particelle, bassa temperatura
e ambiente fortemente radioattivo. In particolare il mio studio in questa fase si e rivolto
verso l’analisi del comportamento del circuito in condizioni di alto flusso di particelle.
A questo scopo, ho preparato una stazione di test per raccogliere i dati prodotti dal
chip e per gestirne il funzionamento. Per questo ho scritto una serie di programmi,
utilizzando il linguaggio C++, per gestire l’APV-25 e tutta la stazione nel suo complesso,
con una particolare attenzione per le operazioni di acquisizione dei dati dei test.
47
Controller I2C Tricard APV−25
ProcessoreRIO
ADC Sequencer impulsatore
Bus VME
PCIbridge
ClockTriggerCalibrazione e reset
Dati
I2C I2C e dati
ClockTrigger
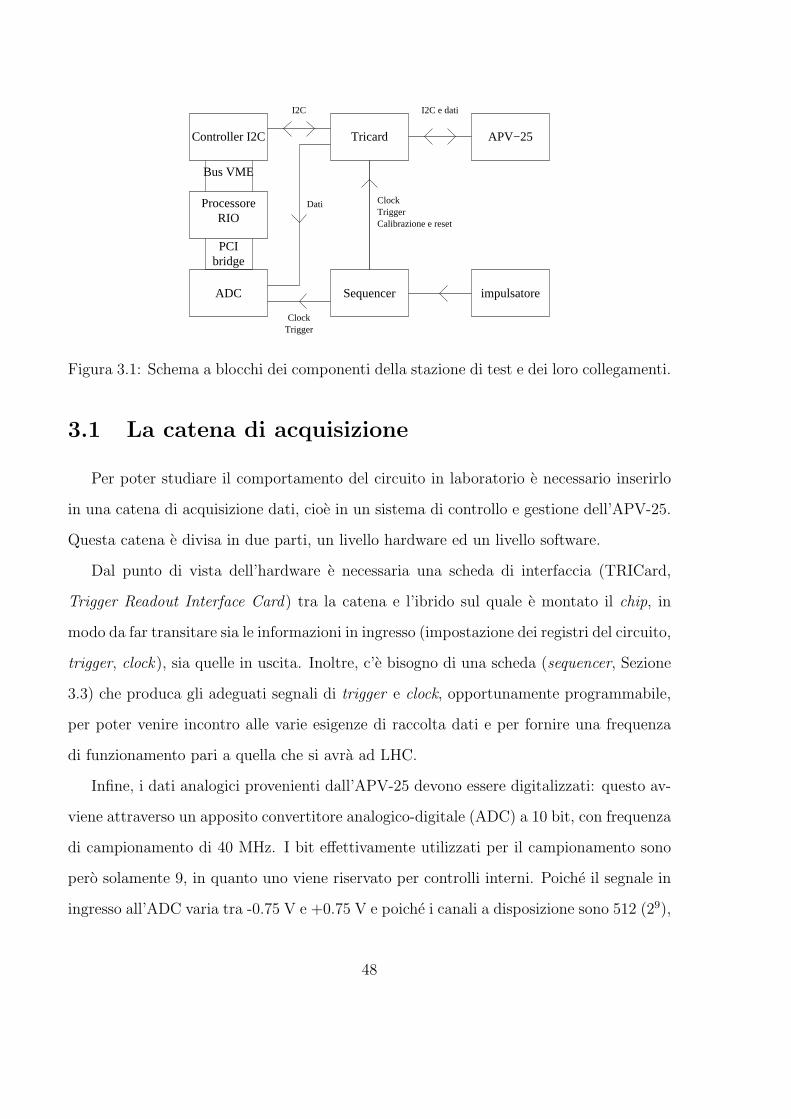
Figura 3.1: Schema a blocchi dei componenti della stazione di test e dei loro collegamenti.
3.1 La catena di acquisizione
Per poter studiare il comportamento del circuito in laboratorio e necessario inserirlo
in una catena di acquisizione dati, cioe in un sistema di controllo e gestione dell’APV-25.
Questa catena e divisa in due parti, un livello hardware ed un livello software.
Dal punto di vista dell’hardware e necessaria una scheda di interfaccia (TRICard,
Trigger Readout Interface Card) tra la catena e l’ibrido sul quale e montato il chip, in
modo da far transitare sia le informazioni in ingresso (impostazione dei registri del circuito,
trigger, clock), sia quelle in uscita. Inoltre, c’e bisogno di una scheda (sequencer, Sezione
3.3) che produca gli adeguati segnali di trigger e clock, opportunamente programmabile,
per poter venire incontro alle varie esigenze di raccolta dati e per fornire una frequenza
di funzionamento pari a quella che si avra ad LHC.
Infine, i dati analogici provenienti dall’APV-25 devono essere digitalizzati: questo av-
viene attraverso un apposito convertitore analogico-digitale (ADC) a 10 bit, con frequenza
di campionamento di 40 MHz. I bit effettivamente utilizzati per il campionamento sono
pero solamente 9, in quanto uno viene riservato per controlli interni. Poiche il segnale in
ingresso all’ADC varia tra -0.75 V e +0.75 V e poiche i canali a disposizione sono 512 (29),
48
si ottiene una risoluzione di circa 3 mV per canale ADC, risoluzione piu che sufficiente
per le analisi che ci interessano.
Lo schema del sistema di test che ho preparato, con le varie periferiche necessarie al
suo funzionamento, e riportato in figura 3.1.
Dal punto di vista software e necessario uno strumento che da una parte renda pos-
sibile impostare i valori programmabili dell’APV-25, dall’altra che dia la possibilita di
effettuare acquisizioni di eventi, salvandoli per la successiva analisi offline. L’alto flusso
di informazioni che si ottengono dalla lettura del sistema infatti non mi ha permesso di
effettuare alcuna analisi online, costringendomi appunto a rimandare la fase di studio dei
dati raccolti ad un secondo momento.
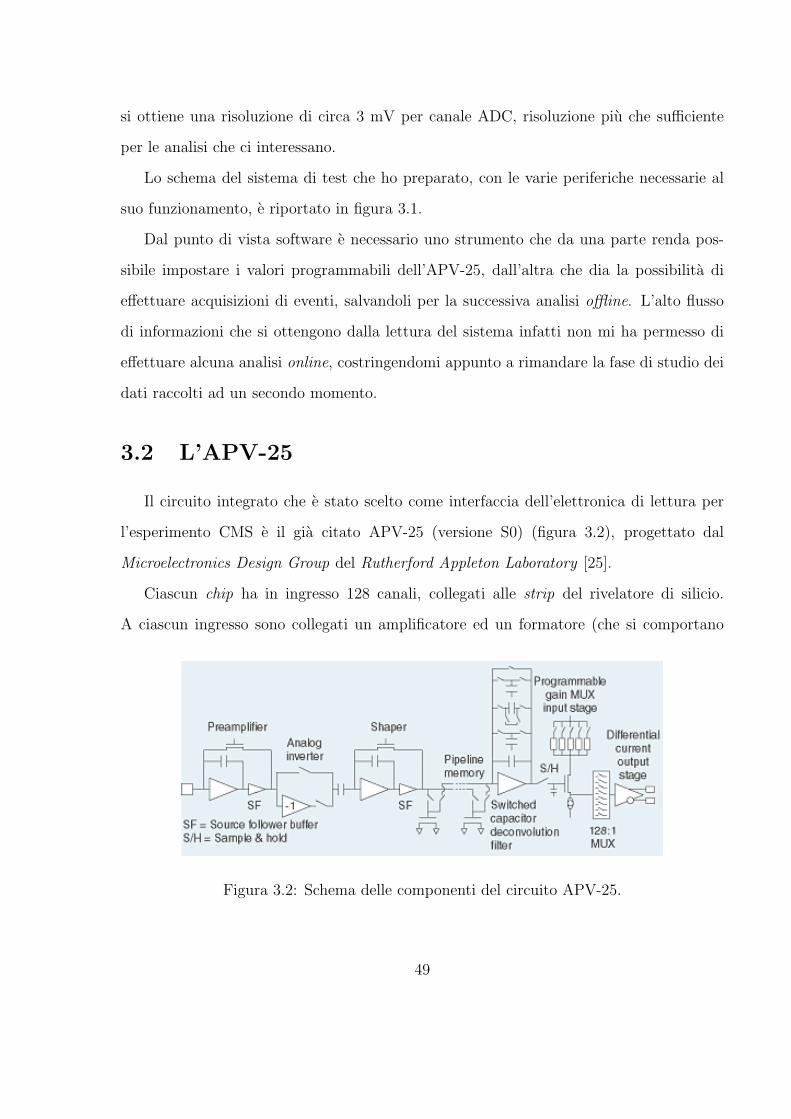
3.2 L’APV-25
Il circuito integrato che e stato scelto come interfaccia dell’elettronica di lettura per
l’esperimento CMS e il gia citato APV-25 (versione S0) (figura 3.2), progettato dal
Microelectronics Design Group del Rutherford Appleton Laboratory [25].
Ciascun chip ha in ingresso 128 canali, collegati alle strip del rivelatore di silicio.
A ciascun ingresso sono collegati un amplificatore ed un formatore (che si comportano
Figura 3.2: Schema delle componenti del circuito APV-25.
49
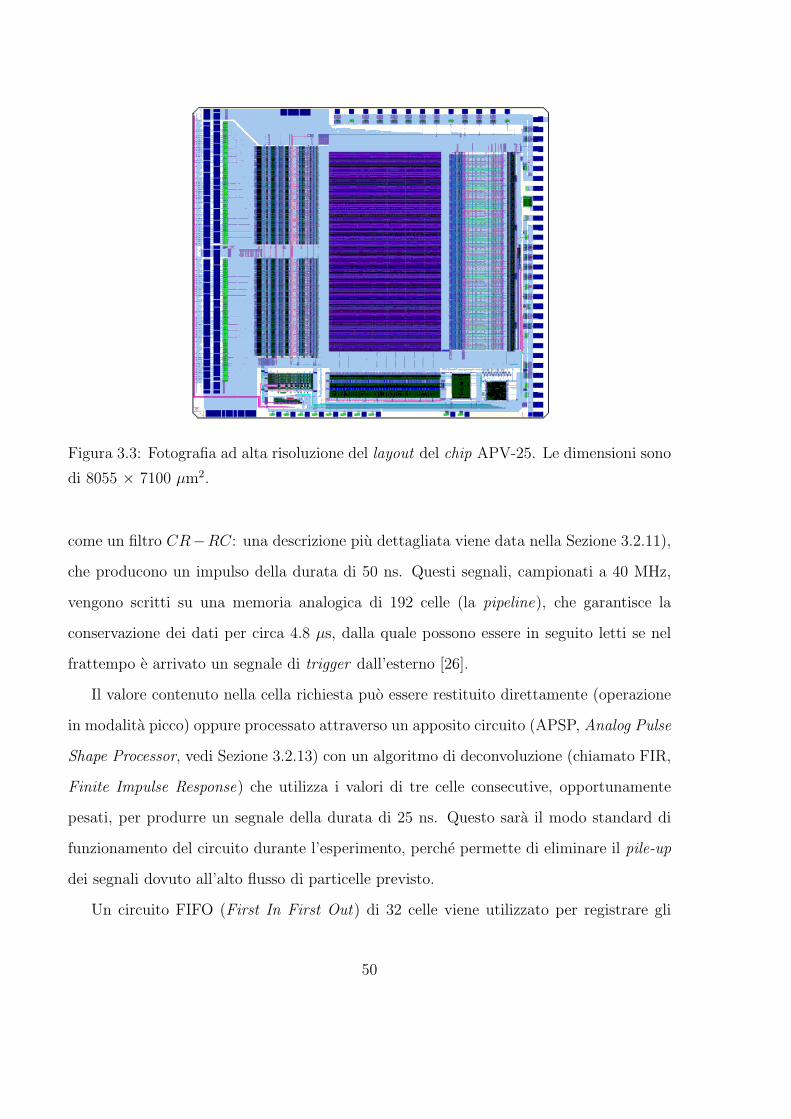
Figura 3.3: Fotografia ad alta risoluzione del layout del chip APV-25. Le dimensioni sono
di 8055 × 7100 µm2.
come un filtro CR−RC: una descrizione piu dettagliata viene data nella Sezione 3.2.11),
che producono un impulso della durata di 50 ns. Questi segnali, campionati a 40 MHz,
vengono scritti su una memoria analogica di 192 celle (la pipeline), che garantisce la
conservazione dei dati per circa 4.8 µs, dalla quale possono essere in seguito letti se nel
frattempo e arrivato un segnale di trigger dall’esterno [26].
Il valore contenuto nella cella richiesta puo essere restituito direttamente (operazione
in modalita picco) oppure processato attraverso un apposito circuito (APSP, Analog Pulse
Shape Processor, vedi Sezione 3.2.13) con un algoritmo di deconvoluzione (chiamato FIR,
Finite Impulse Response) che utilizza i valori di tre celle consecutive, opportunamente
pesati, per produrre un segnale della durata di 25 ns. Questo sara il modo standard di
funzionamento del circuito durante l’esperimento, perche permette di eliminare il pile-up
dei segnali dovuto all’alto flusso di particelle previsto.
Un circuito FIFO (First In First Out) di 32 celle viene utilizzato per registrare gli
50
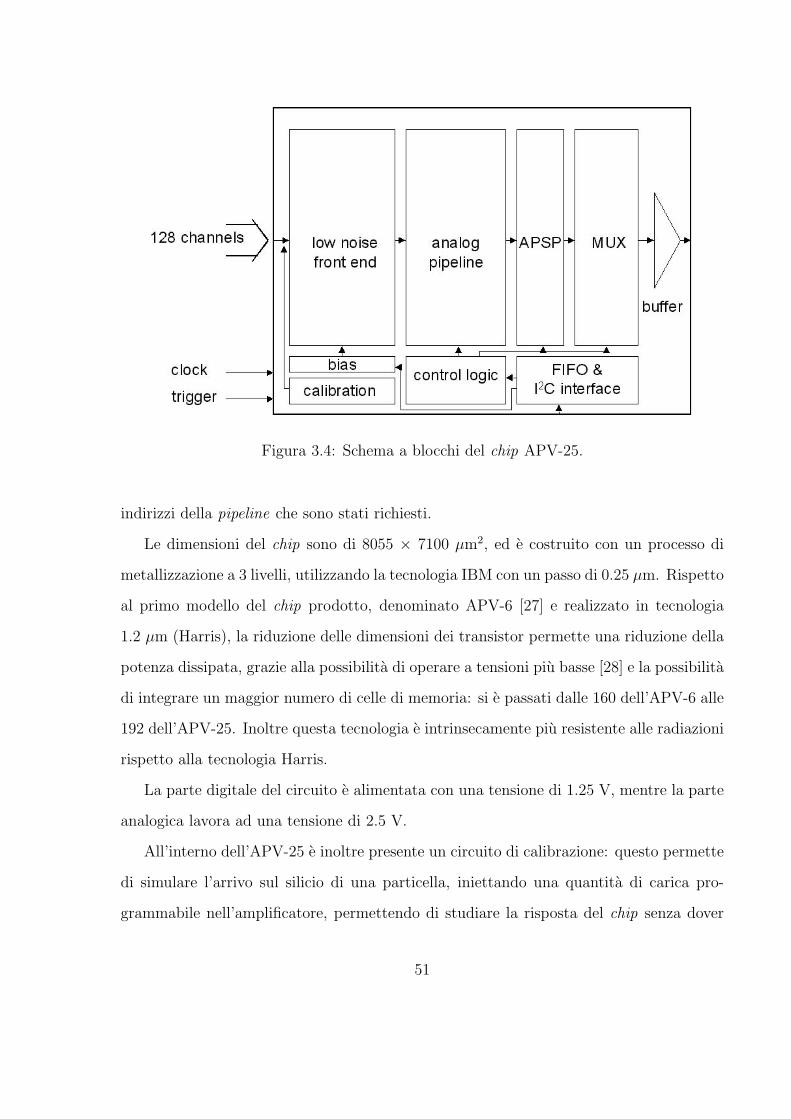
Figura 3.4: Schema a blocchi del chip APV-25.
indirizzi della pipeline che sono stati richiesti.
Le dimensioni del chip sono di 8055 × 7100 µm2, ed e costruito con un processo di
metallizzazione a 3 livelli, utilizzando la tecnologia IBM con un passo di 0.25 µm. Rispetto
al primo modello del chip prodotto, denominato APV-6 [27] e realizzato in tecnologia
1.2 µm (Harris), la riduzione delle dimensioni dei transistor permette una riduzione della
potenza dissipata, grazie alla possibilita di operare a tensioni piu basse [28] e la possibilita
di integrare un maggior numero di celle di memoria: si e passati dalle 160 dell’APV-6 alle
192 dell’APV-25. Inoltre questa tecnologia e intrinsecamente piu resistente alle radiazioni
rispetto alla tecnologia Harris.
La parte digitale del circuito e alimentata con una tensione di 1.25 V, mentre la parte
analogica lavora ad una tensione di 2.5 V.
All’interno dell’APV-25 e inoltre presente un circuito di calibrazione: questo permette
di simulare l’arrivo sul silicio di una particella, iniettando una quantita di carica pro-
grammabile nell’amplificatore, permettendo di studiare la risposta del chip senza dover
51
effettivamente utilizzare un fascio di particelle.
Dall’esterno devono essere forniti un segnale di clock (CLOCK line) ed uno di trigger
(TRIG line). La TRIG line normalmente viene mantenuta a 0; l’invio di un segnale e
rappresentato da un 1.
3.2.1 Il protocollo I2C
Le informazioni di configurazione e gli stati di errore vengono gestiti attraverso una
interfaccia conforme allo standard I2C, ideato dalla Philips nel 1992 [29].
Questo standard prevede una linea di comunicazione a due vie, una che trasporta i dati
(SDA, serial data) ed una che trasporta il clock (SCL, serial clock). A ciascuna periferica
presente sulla linea deve essere assegnato un indirizzo hardware univoco, e tutte possono
operare sia in trasmissione che in ricezione.
Le periferiche presenti nel sistema sono inoltre ulteriormente suddivise in master e
slave: solamente le prime possono iniziare una trasmissione sul cavo, e si devono occupare
di generare i segnali di clock che permettono il passaggio delle informazioni.
Il bus I2C e di tipo multi-master : questo significa che possono essere presenti contem-
poraneamente piu periferiche che controllano la trasmissione. Per questo, e possibile che
due o piu periferiche tentino di iniziare contemporaneamente una trasmissione.
Per evitare i problemi che potrebbero insorgere in casi come questi e stata sviluppata
una procedura di “arbitrazione” che si basa su una connessione di tipo AND di tutte le
interfacce al bus. Se ad esempio due periferiche iniziano una trasmissione, una per scrivere
un 1 logico mentre l’altra uno 0 logico, quest’ultima, grazie al meccanismo di arbitrazione
perde la priorita e la sua trasmissione viene interrotta a favore dell’altra. Anche i segnali
di clock durante l’arbitrazione sono generati come AND logico dei vari segnali prodotti
dai master [30].
L’APV-25 e una periferica di tipo slave. E quindi il software esterno che la controlla
52
che si deve occupare di generare il segnale di clock necessario e che deve effettuare le
richieste.
Sia la SDA che la SCL sono linee bidirezionali, connesse a una tensione di riferimento
positiva. Quando il bus e libero, entrambe le linee sono nello stato logico 1. Poiche le
periferiche che possono essere connesse attraverso questo protocollo sono di diversi tipi
(CMOS, NMOS), gli stati logici 0 (BASSO) e 1 (ALTO) non sono specificati, ma sono
definiti dalla tensione positiva di riferimento.
Il protocollo prevede inoltre tre diverse velocita di trasmissione dei dati: 100 kbit/s
(Standard mode), 400 kbit/s (Fast mode) e 3.4 Mbit/s (High-speed mode). L’APV-25
utilizza lo Standard mode.
Ciascun byte trasmesso sulla linea SDA deve essere lungo 8 bit. Il numero di byte che
puo essere inviato in una singola trasmissione invece e arbitrario.
3.2.2 I registri dell’APV-25
L’APV-25 e indirizzato utilizzando un registro di 7 bit, dove i 2 bit piu significativi
sono fissati rispettivamente a 0 e a 1. Per definire gli altri 5 bit sono presenti delle
piazzole sul circuito (address pads): ciascuna puo rappresentare uno 0 se e connessa a
massa oppure un 1 se non lo e. Inoltre, l’indirizzo 11111 e riservato come indirizzo globale
al quale rispondono tutti gli APV che ricevono la trasmissione (indirizzo di broadcast).
Per prima cosa, per poter trasferire qualunque dato sull’APV-25, e necessario pro-
grammare un registro di comando. Con questo si specifica a quali altri registri si vuole
accedere e la direzione del trasferimento dei dati: se il bit meno significativo (bit di lettu-
ra) e uno 0 si richiede la scrittura di un valore sul registro, se e un 1 la lettura del valore
contenuto nel registro specificato.
Operazione di scrittura su APV-25. I dati sono scritti sul chip utilizzando una
trasmissione sul bus I2C composta da 3 pacchetti di dati:
53
– indirizzo del chip, bit di lettura basso;
– comando, bit di lettura basso;
– valore da impostare nel registro.
Operazione di lettura da APV-25. Per prima cosa si deve scrivere il registro di
comando. Quindi l’operazione di lettura e composta di due trasmissioni, secondo il
protocollo I2C: nella prima viene scritto il registro di comando:
– indirizzo del chip, bit di lettura basso;
– comando, bit di lettura alto.
Soltanto adesso vengono effettivamente letti i dati:
– indirizzo del chip, bit di lettura alto;
– 8 bit col valore contenuto nel registro.
Quando si richiede il valore di un registro utilizzando l’indirizzo di broadcast, quello
che viene trasmesso e l’AND logico del valore restituito da tutti i chip.
3.2.3 Il registro di comando
Nella tabella 3.1 sono riportati i codici di 8 bit del registro di comando. L’ultimo
bit indica la direzione della trasmissione: per la lettura si pone X = 1, per la scrittura
X = 0. Chiaramente non c’e modo di impostare il bit di errore dall’esterno, ma e possibile
soltanto leggerlo.
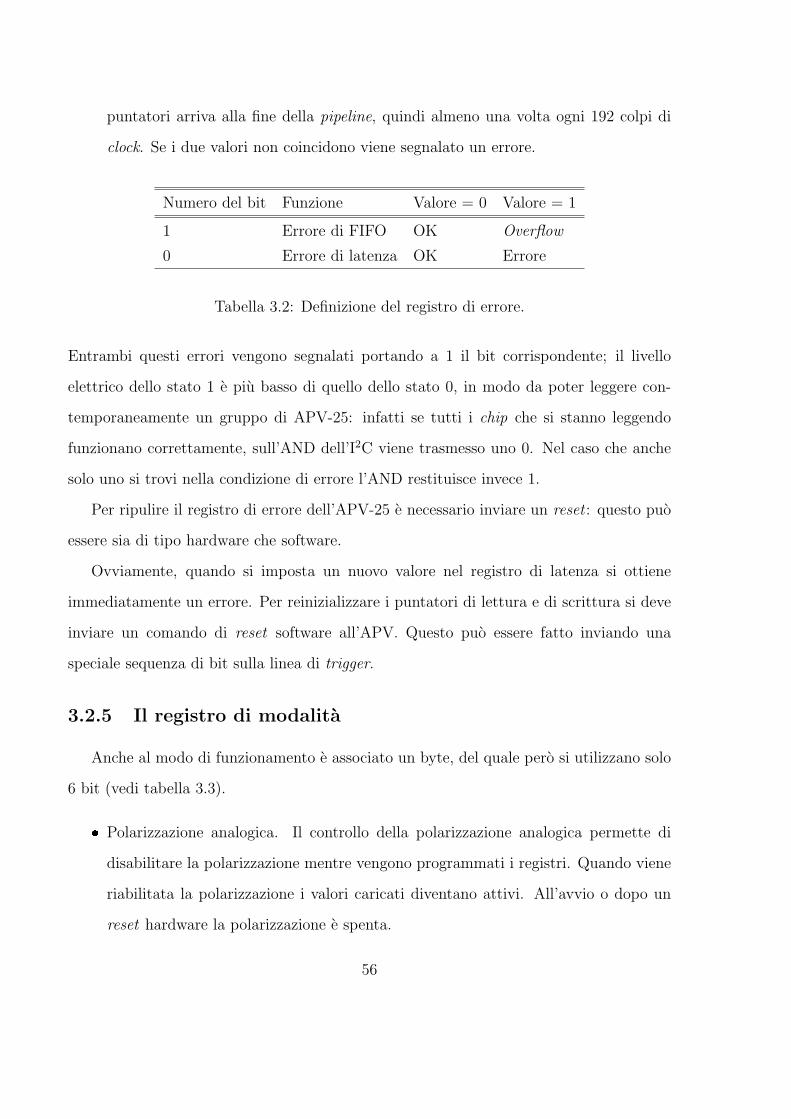
3.2.4 Il registro di errore
Del byte corrispondente al registro di errore si utilizzano in realta soltanto 2 bit (vedi
tabella 3.2).
54
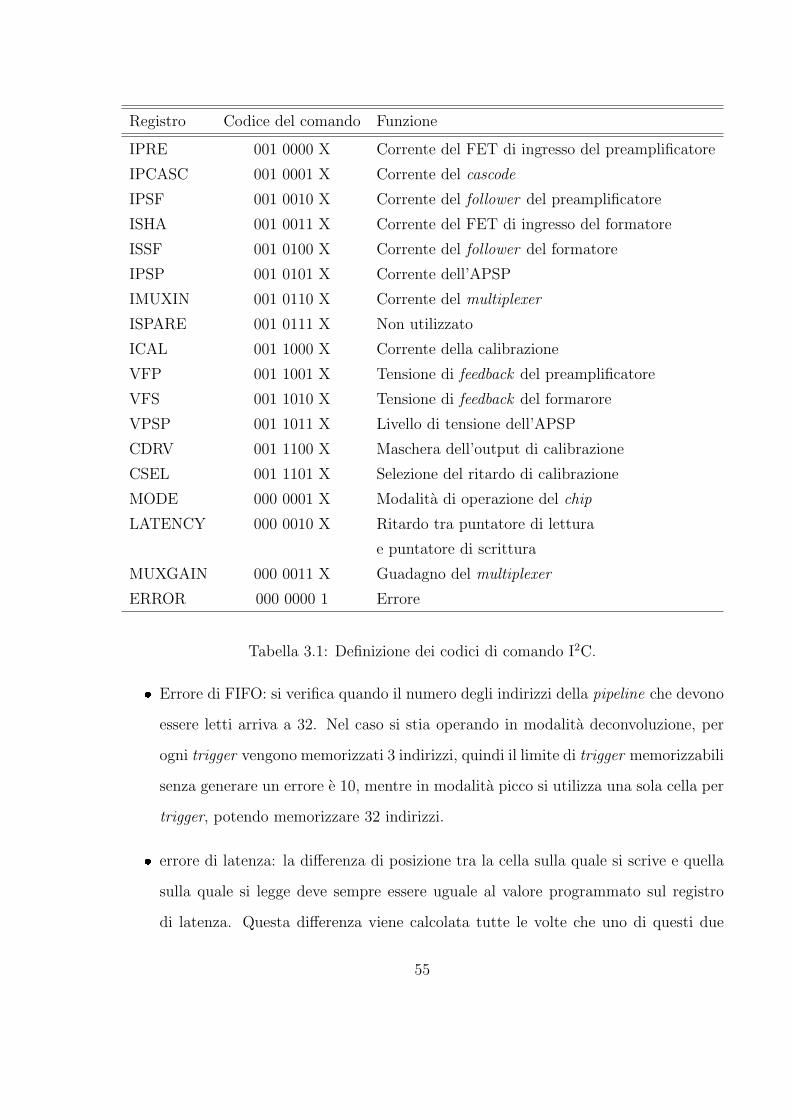
Registro Codice del comando Funzione
IPRE 001 0000 X Corrente del FET di ingresso del preamplificatore
IPCASC 001 0001 X Corrente del cascode
IPSF 001 0010 X Corrente del follower del preamplificatore
ISHA 001 0011 X Corrente del FET di ingresso del formatore
ISSF 001 0100 X Corrente del follower del formatore
IPSP 001 0101 X Corrente dell’APSP
IMUXIN 001 0110 X Corrente del multiplexer
ISPARE 001 0111 X Non utilizzato
ICAL 001 1000 X Corrente della calibrazione
VFP 001 1001 X Tensione di feedback del preamplificatore
VFS 001 1010 X Tensione di feedback del formarore
VPSP 001 1011 X Livello di tensione dell’APSP
CDRV 001 1100 X Maschera dell’output di calibrazione
CSEL 001 1101 X Selezione del ritardo di calibrazione
MODE 000 0001 X Modalita di operazione del chip
LATENCY 000 0010 X Ritardo tra puntatore di lettura
e puntatore di scrittura
MUXGAIN 000 0011 X Guadagno del multiplexer
ERROR 000 0000 1 Errore
Tabella 3.1: Definizione dei codici di comando I2C.
Errore di FIFO: si verifica quando il numero degli indirizzi della pipeline che devono
essere letti arriva a 32. Nel caso si stia operando in modalita deconvoluzione, per
ogni trigger vengono memorizzati 3 indirizzi, quindi il limite di trigger memorizzabili
senza generare un errore e 10, mentre in modalita picco si utilizza una sola cella per
trigger, potendo memorizzare 32 indirizzi.
errore di latenza: la differenza di posizione tra la cella sulla quale si scrive e quella
sulla quale si legge deve sempre essere uguale al valore programmato sul registro
di latenza. Questa differenza viene calcolata tutte le volte che uno di questi due
55
puntatori arriva alla fine della pipeline, quindi almeno una volta ogni 192 colpi di
clock. Se i due valori non coincidono viene segnalato un errore.
Numero del bit Funzione Valore = 0 Valore = 1
1 Errore di FIFO OK Overflow
0 Errore di latenza OK Errore
Tabella 3.2: Definizione del registro di errore.
Entrambi questi errori vengono segnalati portando a 1 il bit corrispondente; il livello
elettrico dello stato 1 e piu basso di quello dello stato 0, in modo da poter leggere con-
temporaneamente un gruppo di APV-25: infatti se tutti i chip che si stanno leggendo
funzionano correttamente, sull’AND dell’I2C viene trasmesso uno 0. Nel caso che anche
solo uno si trovi nella condizione di errore l’AND restituisce invece 1.
Per ripulire il registro di errore dell’APV-25 e necessario inviare un reset : questo puo
essere sia di tipo hardware che software.
Ovviamente, quando si imposta un nuovo valore nel registro di latenza si ottiene
immediatamente un errore. Per reinizializzare i puntatori di lettura e di scrittura si deve
inviare un comando di reset software all’APV. Questo puo essere fatto inviando una
speciale sequenza di bit sulla linea di trigger.
3.2.5 Il registro di modalita
Anche al modo di funzionamento e associato un byte, del quale pero si utilizzano solo
6 bit (vedi tabella 3.3).
Polarizzazione analogica. Il controllo della polarizzazione analogica permette di
disabilitare la polarizzazione mentre vengono programmati i registri. Quando viene
riabilitata la polarizzazione i valori caricati diventano attivi. All’avvio o dopo un
reset hardware la polarizzazione e spenta.
56
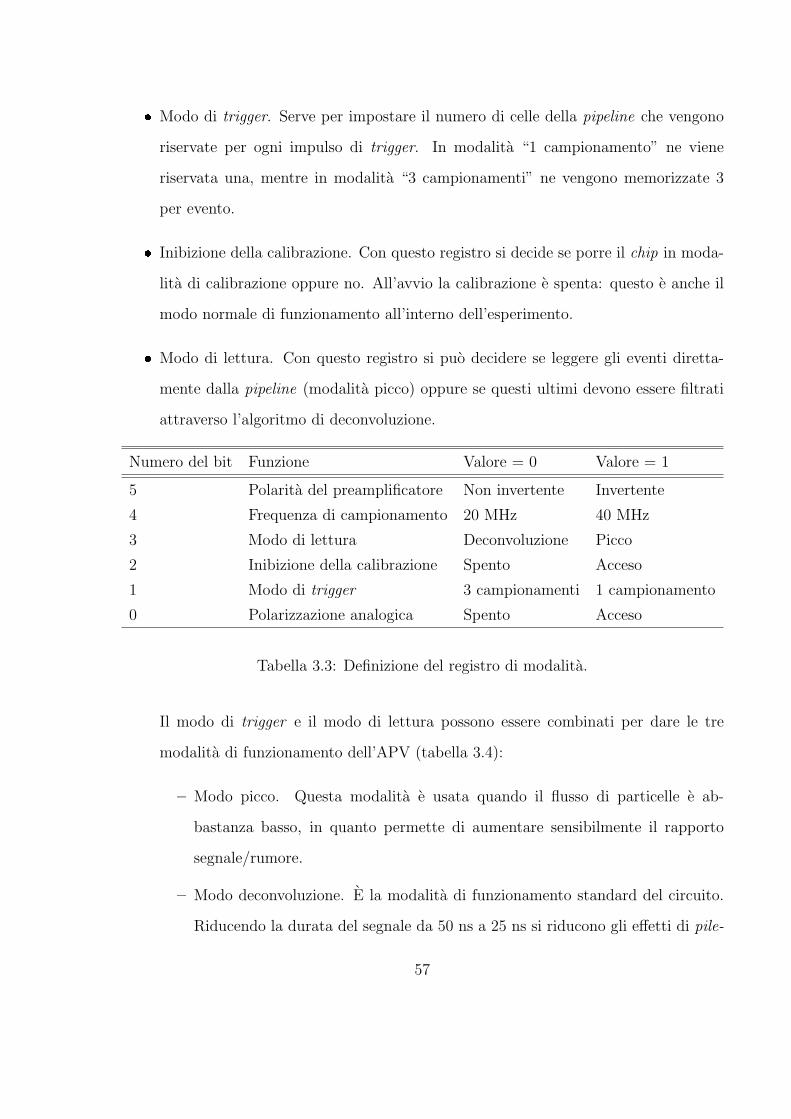
Modo di trigger. Serve per impostare il numero di celle della pipeline che vengono
riservate per ogni impulso di trigger. In modalita “1 campionamento” ne viene
riservata una, mentre in modalita “3 campionamenti” ne vengono memorizzate 3
per evento.
Inibizione della calibrazione. Con questo registro si decide se porre il chip in moda-
lita di calibrazione oppure no. All’avvio la calibrazione e spenta: questo e anche il
modo normale di funzionamento all’interno dell’esperimento.
Modo di lettura. Con questo registro si puo decidere se leggere gli eventi diretta-
mente dalla pipeline (modalita picco) oppure se questi ultimi devono essere filtrati
attraverso l’algoritmo di deconvoluzione.
Numero del bit Funzione Valore = 0 Valore = 1
5 Polarita del preamplificatore Non invertente Invertente
4 Frequenza di campionamento 20 MHz 40 MHz
3 Modo di lettura Deconvoluzione Picco
2 Inibizione della calibrazione Spento Acceso
1 Modo di trigger 3 campionamenti 1 campionamento
0 Polarizzazione analogica Spento Acceso
Tabella 3.3: Definizione del registro di modalita.
Il modo di trigger e il modo di lettura possono essere combinati per dare le tre
modalita di funzionamento dell’APV (tabella 3.4):
– Modo picco. Questa modalita e usata quando il flusso di particelle e ab-
bastanza basso, in quanto permette di aumentare sensibilmente il rapporto
segnale/rumore.
– Modo deconvoluzione. E la modalita di funzionamento standard del circuito.
Riducendo la durata del segnale da 50 ns a 25 ns si riducono gli effetti di pile-
57
up quando il flusso di particelle in ingresso e troppo alto. Rispetto al modo
precedente pero il rapporto segnale/rumore e peggiore.
– Modo multiplo. Permette di operare in modalita picco, cioe senza passare i
dati attraverso l’algoritmo di deconvoluzione, ma restituisce in uscita il valore
di 3 celle di memoria consecutive.
Modo dell’APV-25 Modo di trigger Modo di lettura
Deconvoluzione 3 campionamenti Deconvoluzione
Picco 1 campionamento Picco
Multiplo 3 campionamenti Picco
Tabella 3.4: Definizione dei modi di lettura.
Frequenza di campionamento. Puo essere impostata a 2 valori: 20 MHz oppure 40
MHz.
Polarita del preamplificatore. Un invertitore di guadagno unitario e posto subito
prima dell’amplificatore e del formatore: la posizione di questo bit permette di
decidere se utilizzarlo oppure no. In questo modo si puo far sı che il formatore veda
sempre un segnale con la stessa polarita.
3.2.6 Il registro di latenza
E in questo registro che viene impostata la distanza tra il puntatore di scrittura e
quello di lettura delle celle di memoria della pipeline. All’avvio questo registro si imposta
per default al valore binario 10000100, che corrisponde a 132 celle di distanza tra i due
puntatori. Il valore massimo che puo essere impostato, essendo in totale 192 le celle, e
191.
Non e consigliabile pero impostare in questo registro valori piu alti di 160, soprattutto
58

quando si lavora a frequenze di trigger abbastanza elevate, perche questo provoca una
brusca perdita di efficienza della pipeline [25].
3.2.7 I registri per il controllo della calibrazione
Quando si opera in modo calibrazione, cioe usando il generatore di impulsi interno
dell’APV per simulare il passaggio di una particella nel rivelatore, si utilizzano 3 registri
per definire le caratteristiche dell’impulso stesso: ICAL, CDRV e CSEL.
ICAL
In questo registro si programma la quantita di carica da iniettare nello stadio di
ingresso del chip. Questa puo essere programmata a passi di 625 elettroni, e puo variare tra
0 e 160000 e−. In particolare, nelle situazioni comuni i test vengono effettuati simulando
il passaggio di particelle al minimo di ionizzazione (Minumum Ionization Particle, MIP):
una MIP corrisponde all’iniezione di una carica di circa 25000 e−, in un modulo di silicio
di 300 µm di spessore.
CDRV
Questo registro serve per impostare su quali canali, dei 128 presenti sul chip, si vuole
iniettare la carica. La scelta puo essere effettuata a gruppi di 16: il primo gruppo (corri-
spondente al bit meno significativo del registro) comprende i canali 0, 8, 16,...; il secondo
i canali 1, 9, 17, e cosı via per tutti gli 8 gruppi disponibili.
Per abilitare un gruppo specifico, il bit corrispondente del registro deve essere impo-
stato a 0: quindi ad esempio il valore 11111110 abilitera all’impulso soltanto il primo
gruppo di canali.
59
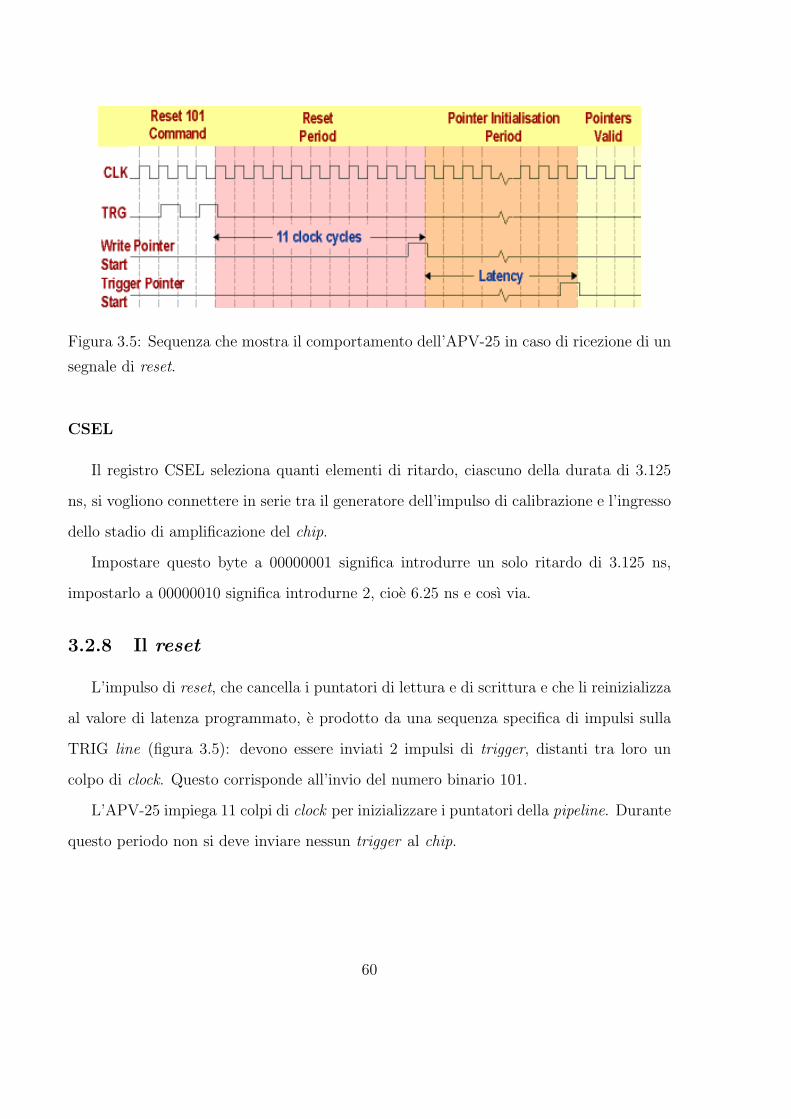
Figura 3.5: Sequenza che mostra il comportamento dell’APV-25 in caso di ricezione di un
segnale di reset.
CSEL
Il registro CSEL seleziona quanti elementi di ritardo, ciascuno della durata di 3.125
ns, si vogliono connettere in serie tra il generatore dell’impulso di calibrazione e l’ingresso
dello stadio di amplificazione del chip.
Impostare questo byte a 00000001 significa introdurre un solo ritardo di 3.125 ns,
impostarlo a 00000010 significa introdurne 2, cioe 6.25 ns e cosı via.
3.2.8 Il reset
L’impulso di reset, che cancella i puntatori di lettura e di scrittura e che li reinizializza
al valore di latenza programmato, e prodotto da una sequenza specifica di impulsi sulla
TRIG line (figura 3.5): devono essere inviati 2 impulsi di trigger, distanti tra loro un
colpo di clock. Questo corrisponde all’invio del numero binario 101.
L’APV-25 impiega 11 colpi di clock per inizializzare i puntatori della pipeline. Durante
questo periodo non si deve inviare nessun trigger al chip.
60
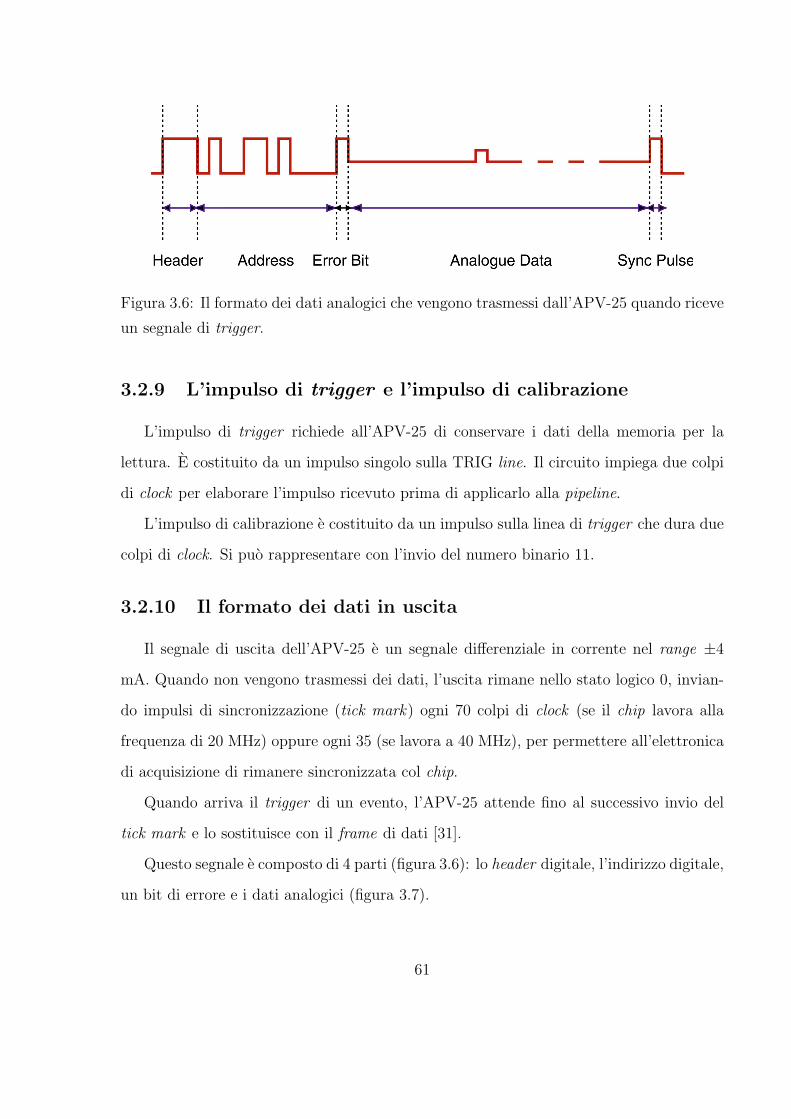
Figura 3.6: Il formato dei dati analogici che vengono trasmessi dall’APV-25 quando riceve
un segnale di trigger.
3.2.9 L’impulso di trigger e l’impulso di calibrazione
L’impulso di trigger richiede all’APV-25 di conservare i dati della memoria per la
lettura. E costituito da un impulso singolo sulla TRIG line. Il circuito impiega due colpi
di clock per elaborare l’impulso ricevuto prima di applicarlo alla pipeline.
L’impulso di calibrazione e costituito da un impulso sulla linea di trigger che dura due
colpi di clock. Si puo rappresentare con l’invio del numero binario 11.
3.2.10 Il formato dei dati in uscita
Il segnale di uscita dell’APV-25 e un segnale differenziale in corrente nel range ±4
mA. Quando non vengono trasmessi dei dati, l’uscita rimane nello stato logico 0, invian-
do impulsi di sincronizzazione (tick mark) ogni 70 colpi di clock (se il chip lavora alla
frequenza di 20 MHz) oppure ogni 35 (se lavora a 40 MHz), per permettere all’elettronica
di acquisizione di rimanere sincronizzata col chip.
Quando arriva il trigger di un evento, l’APV-25 attende fino al successivo invio del
tick mark e lo sostituisce con il frame di dati [31].
Questo segnale e composto di 4 parti (figura 3.6): lo header digitale, l’indirizzo digitale,
un bit di errore e i dati analogici (figura 3.7).
61
Lo header digitale
E composto da tre bit nello stato logico 1, cioe viene inviata la sequenza 111.
Indirizzo
Un numero di 8 bit che identifica da quale colonna delle celle di memoria e stato preso
il dato che sta per essere trasmesso. Questo serve sia per controllare la sincronizzazione
di diversi chip sia per poter scartare il segnale proveniente da locazioni di memoria non
funzionanti.
Bit di errore
Se non ci sono stati errori questo bit viene mantenuto allo stato logico 1. Se l’APV-25
ha rilevato un errore di qualunque tipo viene portato a 0. Il tipo di errore puo essere letto
attraverso l’I2C.
Dati analogici
128 campionamenti di dati, dove ad una particella al minimo di ionizzazione, come
definita in precedenza, e associata una corrente di 1 mA. Il livello della base puo essere
regolato attraverso il registro VPSP.
Ordine dei canali
Per come e costruito il multiplexer analogico, i dati dei 128 canali non escono consecu-
tivamente. In particolare, se si indica con n la posizione nella quale si ottiene un canale,
per ricavare la posizione del canale fisico si utilizza la formula
Numero del canale = 32× (nMOD 4) + 8× INT(n
4
)− 31× INT
( n16
)(3.1)
dove con n MOD 4 si indica il resto della divisione di n per 4, mentre con INT si indica
la parte intera dell’operazione.
62
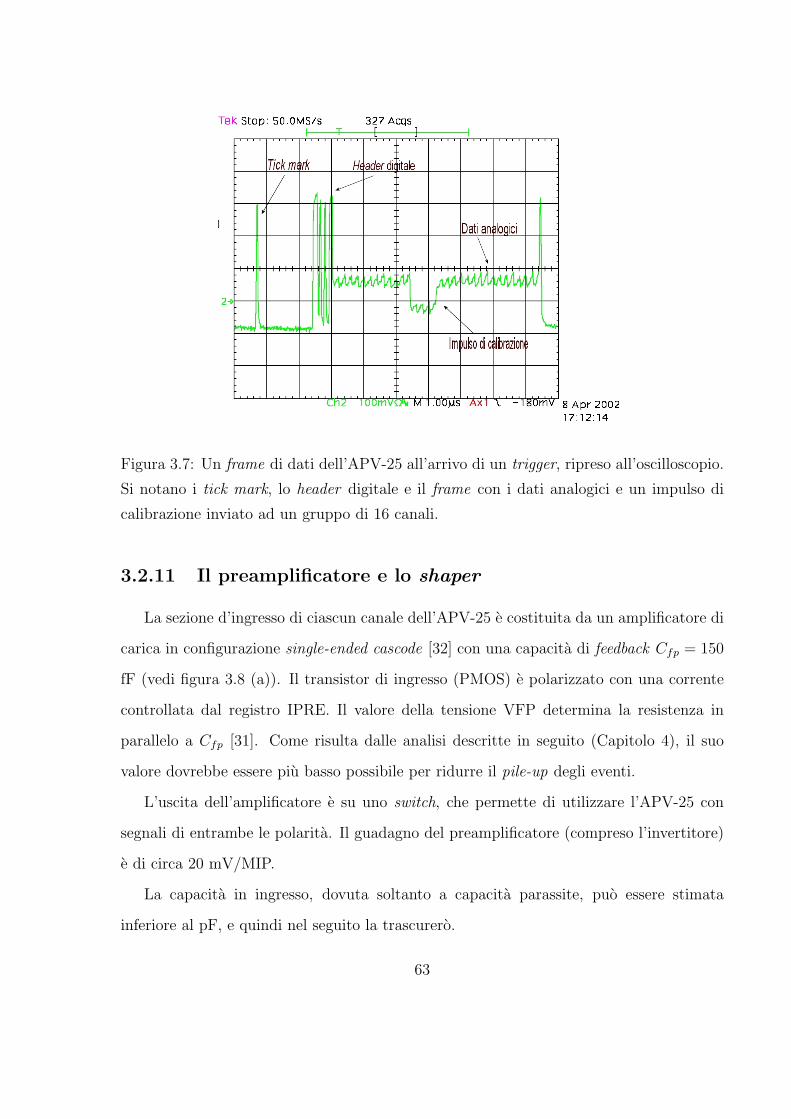
Figura 3.7: Un frame di dati dell’APV-25 all’arrivo di un trigger, ripreso all’oscilloscopio.
Si notano i tick mark, lo header digitale e il frame con i dati analogici e un impulso di
calibrazione inviato ad un gruppo di 16 canali.
3.2.11 Il preamplificatore e lo shaper
La sezione d’ingresso di ciascun canale dell’APV-25 e costituita da un amplificatore di
carica in configurazione single-ended cascode [32] con una capacita di feedback Cfp = 150
fF (vedi figura 3.8 (a)). Il transistor di ingresso (PMOS) e polarizzato con una corrente
controllata dal registro IPRE. Il valore della tensione VFP determina la resistenza in
parallelo a Cfp [31]. Come risulta dalle analisi descritte in seguito (Capitolo 4), il suo
valore dovrebbe essere piu basso possibile per ridurre il pile-up degli eventi.
L’uscita dell’amplificatore e su uno switch, che permette di utilizzare l’APV-25 con
segnali di entrambe le polarita. Il guadagno del preamplificatore (compreso l’invertitore)
e di circa 20 mV/MIP.
La capacita in ingresso, dovuta soltanto a capacita parassite, puo essere stimata
inferiore al pF, e quindi nel seguito la trascurero.
63

Cfp
Cfs
(a) (b)
Figura 3.8: (a) Il circuito di preamplificazione, stadio di ingresso dell’APV-25; (b) Il
circuito di formazione del segnale.
Lo shaper, un filtro CR − RC connesso al preamplificatore tramite un condensatore
di disaccoppiamento con capacita di 1.4 pF, e composto da un amplificatore anch’esso in
configurazione single-ended cascode con capacita di feedback Cfs=150 fF. Il transistor in
ingresso e un PMOS polarizzato con una corrente controllabile col registro ISHA, mentre
il transistor PMOS in parallelo a Cfs (vedi figura 3.8 (b)) determina la resistenza che
regola la scarica del dispositivo tramite VFS.
Dunque si comprende come la forma del segnale possa essere modificata variando
opportunamente i registri che controllano le due tensioni VFS e VFP e le due correnti
IPRE e ISHA.
3.2.12 Valutazione del rumore
Il rumore prodotto dal circuito preamplificatore e formatore puo essere espresso in
“carica equivalente” (ENC, Equivalent Noise Charge). Questa corrisponde alla carica che
deve essere iniettata all’ingresso di un circuito ideale per ottenere in uscita un segnale
pari al valore quadratico medio delle fluttuazioni ottenute in uscita del circuito reale.
64

Quindi la “carica equivalente” corrisponde alla carica che produce un rapporto segna-
le/rumore pari ad 1.
In particolare il rumore dipende, oltre che dalla forma del segnale in uscita, anche dal
modo di lavoro del chip (picco o deconvoluzione): in modalita picco, il segnale in uscita
dal formatore ha la forma di un CR−RC con costante di tempo τ = 50 ns.
In termini della “carica equivalente” per il rumore “serie” si puo scrivere [33]
(ENC)2serie =
e2
8q2C2
tot
1
τe2n, (3.2)
e per quello “parallelo” si ha
(ENC)2parallelo =
e2
8q2τ i2n, (3.3)
dove: q e la carica dell’elettrone, e la costante di Eulero, Ctot e la capacita totale in
ingresso al circuito di preamplificazione e formazione. I termini e2n e i2n rappresentano lo
spettro di potenza del rumore, rispettivamente in serie e in parallelo. Per il primo risulta
e2n ' 4kBTRstrip, (3.4)
dove kB e la costante di Boltzmann, T la temperatura e Rstrip e la resistenza della strip.
Lo spettro di rumore “parallelo” ha due contributi,
i2n ' 2qIb + 4kBT/Rp : (3.5)
il primo e dovuto al rumore introdotto dalla corrente Ib di polarizzazione (rumore shot),
e il secondo alla resistenza di polarizzazione Rp (rumore Johnson, o termico).
Utilizzando queste espressioni si puo scrivere:
(ENC)serie = 24Ctot
√Rstrip
τ(3.6)
65

dove la capacita e espressa in pF, la resistenza in Ω e il tempo in ns; e
(ENC)parallelo = 108√Ibτ + 24
√τ
Rp
(3.7)
con τ di nuovo in ns, Ib in µA e Rp in MΩ.
Se in queste espressioni si sostituiscono dei valori tipici per le quantita presenti, si puo
ricavare una stima del rumore [34]:
Ib ' 1 µA,
Rp ' 1 MΩ, (3.8)
Rstrip ' 200 Ω.
Quindi risulta
ENC = a+ b Ctot (3.9)
con
a ' 660 e−,
b ' 67 e−/pF. (3.10)
Per un valore tipico della capacita, Ctot ' 16 pF, il risultato finale e
ENC ' 1700 e−. (3.11)
Se si considera di operare in modalita deconvoluzione invece che picco, i risultati
precedenti vengono modificati [35]: il rumore “serie” viene moltiplicato per un fattore
∼ 1.45 e quello parallelo per un fattore ∼ 0.45.
66

3.2.13 Il filtro APSP
Quando, per l’alta frequenza degli eventi, si vuole evitare il rischio di pile-up della
carica, si puo applicare al segnale, attraverso questo filtro, un algoritmo che permette di
ridurne la larghezza da 50 ns a 25 ns. E il cosiddetto algoritmo di deconvoluzione [28].
Figura 3.9: Schema del circuito utilizzato per applicare l’algoritmo di deconvoluzione.
Il principio di funzionamento di tale algoritmo si basa sul fatto che, essendo nota
a priori la forma del segnale del filtro CR − RC, e possibile ricompattare il segnale
utilizzando tre campioni consecutivi di dati opportunamente pesati [35]. I pesi utilizzati
nell’APV-25, sui cui valori non e possibile intervenire dall’esterno, sono:
67
w1 =2√e' 1.21,
w2 = −4
e' −1.47, (3.12)
w3 =2
e√e' 0.446.
Il filtro, il cui circuito e schematizzato in figura 3.9, e costituito da un amplificatore
di carica e da una rete di capacita, che vengono selezionate da una serie di interruttori
controllati tramite un segnale esterno.
3.3 Il sequencer
Per pilotare il chip APV-25 e necessaria una ulteriore scheda, detta sequencer, che si
occupa di inviare su due linee il segnale di clock a 40 MHz e il segnale di trigger.
Il cuore della scheda che ho progettato e una FPGA (Field Programmable Gate Ar-
ray) ALTERA MAX 7000 [36], la cui logica interna (basata su celle flip-flop) puo essere
programmata con un apposito software direttamente dal computer, attraverso un’inter-
faccia dedicata. Tramite questo dispositivo si possono generare tutti i tipi di segnale che
e possibile inviare attraverso la linea di trigger : il semplice segnale di trigger, il segnale
di calibrazione e il segnale di reset del chip.
Sulla scheda e inoltre presente un quarzo, che produce il segnale di clock a 40 MHz
utilizzato dalla MAX e un adattatore di livelli elettrici che trasforma il segnale TTL
(Transistor-Transistor Logic) nel segnale LVDS (Low Voltage Differential Signaling, che
lavora tra 0 V e 3.3 V) utilizzato dall’APV-25.
I corretti segnali sulla linea di trigger vengono prodotti a partire da un impulso esterno
(anch’esso TTL), e vengono sincronizzati dalla MAX col segnale di clock.
Su questa ho anche implementato una interfaccia seriale RS-232 che permette di con-
trollarlo dall’esterno, attraverso la porta seriale di un computer, scegliendo opportuna-
mente la sequenza da inviare ai chip. Inoltre, quando si opera con gli APV-25 in modalita
68
di calibrazione interna, si puo controllare (sempre via RS-232) il ritardo tra il segnale di
calibrazione e il trigger che avvia l’acquisizione dei dati, procedendo a passi di 25 ns.
Affinche il sistema funzioni correttamente, il valore di ritardo tra trigger e calibrazione
che si imposta sulla MAX, sommato a tutti i ritardi introdotti dai cavi utilizzati, deve
essere uguale al valore impostato nel registro di latenza dell’APV-25.
3.4 Il software di controllo
Al termine della fase di setup del sistema ho scritto un software che ne permettesse
l’utilizzo, capace di gestire le comunicazioni tra i chip APV-25, attraverso il bus I2C, e
il sequencer, attraverso un protocollo seriale, e di permettere l’acquisizione dei dati per
le analisi successive. Il risultato e stato un programma scritto in linguaggio C++ [37] di
oltre 2000 linee di codice.
Il sistema sul quale questo programma viene eseguito e un processore PowerPC che
equipaggia un controller VME RIO 8062: questo si occupa di interfacciarsi, attraverso
un bus PCI, agli ADC per la digitalizzazione dei dati e attraverso il bus VME alla scheda
optoelettronica per il controllo del bus I2C, come gia mostrato in figura 3.1.
Il sistema operativo utilizzato su questa macchina e il LynxOS 2.5, un sistema ope-
rativo real-time compatibile UNIX. Questo gli permette di sfruttare tutte le potenzialita
dell’ambiente UNIX (ambiente multitasking, gestione accurata della memoria, supporto di
file system di rete) unite con la possibilita di operare in real-time. In una applicazione co-
me quella alla quale ho lavorato questa caratteristica e assolutamente necessaria: infatti,
ad esempio, non e possibile per il processore sapere quando arrivera il trigger successivo
all’APV, ma e fondamentale che, quando questo arriva, il processore sia in grado di inter-
rompere il piu presto possibile quello che sta facendo (mettendolo in coda per completarlo
in seguito) per dedicarsi alla gestione dei dati analogici provenienti dall’APV.
All’avvio il programma inizializza il bus I2C, dopo di che interroga tutti i canali per
69
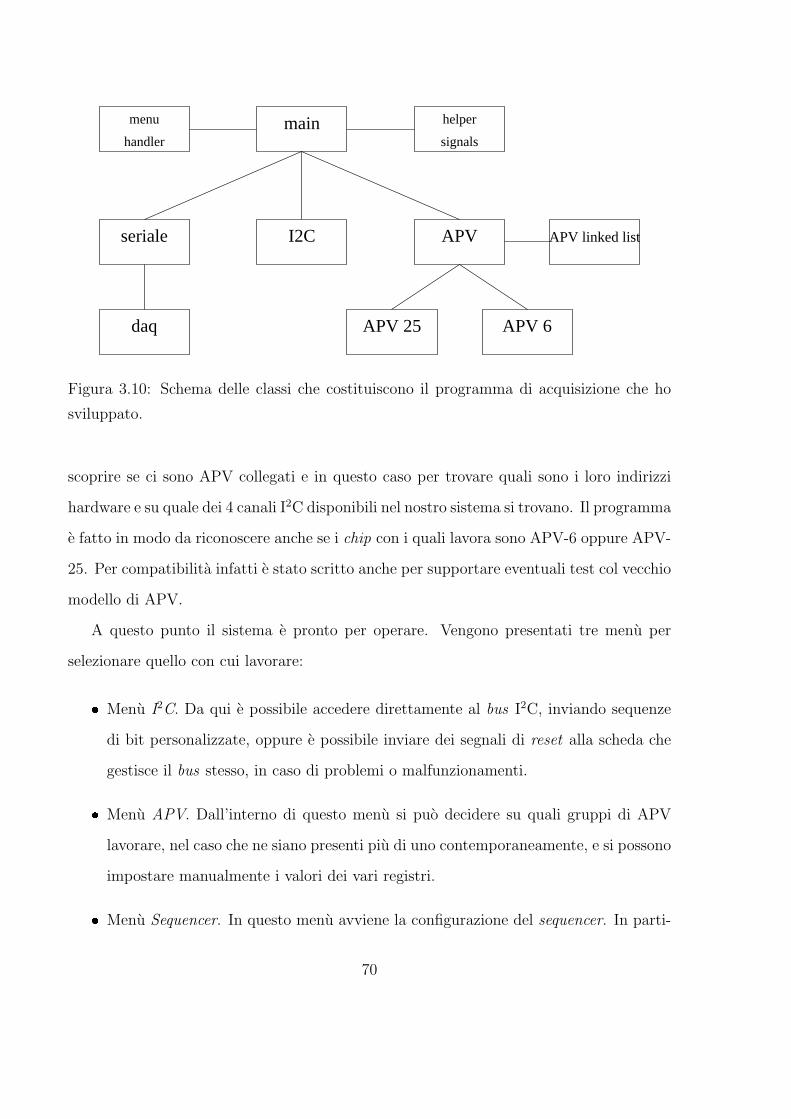
menu
handlermain helper
signals
seriale
daq
I2C APV
APV 25 APV 6
APV linked list
Figura 3.10: Schema delle classi che costituiscono il programma di acquisizione che ho
sviluppato.
scoprire se ci sono APV collegati e in questo caso per trovare quali sono i loro indirizzi
hardware e su quale dei 4 canali I2C disponibili nel nostro sistema si trovano. Il programma
e fatto in modo da riconoscere anche se i chip con i quali lavora sono APV-6 oppure APV-
25. Per compatibilita infatti e stato scritto anche per supportare eventuali test col vecchio
modello di APV.
A questo punto il sistema e pronto per operare. Vengono presentati tre menu per
selezionare quello con cui lavorare:
Menu I2C. Da qui e possibile accedere direttamente al bus I2C, inviando sequenze
di bit personalizzate, oppure e possibile inviare dei segnali di reset alla scheda che
gestisce il bus stesso, in caso di problemi o malfunzionamenti.
Menu APV. Dall’interno di questo menu si puo decidere su quali gruppi di APV
lavorare, nel caso che ne siano presenti piu di uno contemporaneamente, e si possono
impostare manualmente i valori dei vari registri.
Menu Sequencer. In questo menu avviene la configurazione del sequencer. In parti-
70
colare e possibile decidere quale valore di latenza deve essere impostato sulla MAX
attraverso la porta seriale alla quale e connessa.
Sempre da questo menu e possibile effettuare scansioni per vari valori di latenza:
ritardando a passi di 25 ns il segnale di trigger, si puo andare a leggere il valore
contenuto in celle della pipeline consecutive, ricostruendo in questo modo tutta la
forma del segnale prodotto dall’impulso di calibrazione, permettendo (vedi Capitolo
4) di studiare il comportamento dell’APV-25.
In particolare e possibile effettuare questa scansione con un set fissato di valori nei
registri del chip, oppure variando uno o piu valori contemporaneamente.
Durante le acquisizioni, il programma genera una registrazione delle operazioni effet-
tuate (log file), dove scrive, per ogni file di eventi che viene salvato su disco, i valori
utilizzati per i registri, il valore della latenza e il tipo di misura effettuata: sono possibili
due misurazioni diverse, una, detta “piedistallo”, dove vengono raccolti 1000 eventi senza
l’impulso di calibrazione attivato, per misurare l’altezza della baseline; l’altra, di “cali-
brazione”, dove viene attivato l’impulso di calibrazione su un gruppo di canali. In questo
caso per ogni misura vengono raccolti 2000 eventi.
In questo modo nella successiva fase di analisi e possibile associare ad ogni file la
configurazione nella quale sono stati presi i dati.
In figura 3.10 e riportato uno schema delle classi principali del programma che ho
scritto. La routine principale del programma e contenuta in main. A questa si colle-
gano tutte le altre classi disponibili. Le due classi menu e handler si occupano della
gestione dinamica dei menu di scelta proposti all’utente e della gestione di operazioni di
input/output.
Il sistema VME sul quale deve girare il programma utilizza il compilatore GNU gcc 2.7.
Questa e una versione precedente al rilascio definitivo delle specifiche dello standard C++
e pertanto non implementa tutte le potenzialita fornite da tale linguaggio. Per risolvere
71
questo problema ho scritto una apposita classe (helper) nella quale ho implementato alcuni
metodi standard del C++. In particolare alcune funzioni di gestione delle stringhe di testo
e un semplice sistema di gestione delle eccezioni.
Il gestore delle eccezioni permette di intercettare comportamenti anomali del pro-
gramma e di intervenire di conseguenza, risolvendo il problema, per poi tornare al flusso
normale del programma stesso.
Le classi rimanenti (APV, I2C e serial) si occupano della gestione rispettivamente del
chip APV, sia nella versione APV-25 che nella precedente (APV-6), del controllo del bus
I2C e infine della programmazione del sequencer a cui e collegata anche la classe daq che
e quella che effettivamente si occupa delle operazioni di raccolta dei dati.
72
Capitolo 4
L’analisi dei dati
In questa parte illustro le analisi che ho effettuato sul chip APV-25, il cui funziona-
mento ho descritto nel Capitolo 3. Dopo aver completato la costruzione di una stazione di
test ottimizzando la struttura dell’hardware a mia disposizione e preparando un adeguato
software di gestione, mi sono dedicato allo studio delle prestazioni del circuito sia a basso
che ad alto flusso di particelle, per simulare nel modo piu realistico possibile la situazione
nella quale il chip dovra operare all’interno dell’esperimento.
Questo studio ha permesso di comprendere e quindi ottimizzare i valori dei registri
sui quali si deve operare per ottenere il miglior rapporto segnale/rumore, mantenendo
una forma adeguata del segnale, e di conoscere inoltre i problemi che dovranno essere
affrontati durante l’effettivo uso del sistema.
4.1 Acquisizione dei dati
Le prime misure che ho effettuato sono servite per comprendere appieno il funziona-
mento del sistema e degli strumenti di analisi: in questa fase mi sono servito del pro-
gramma PAW [38], un sistema che mette a disposizione varie routine di calcolo, scritte
in Fortran, che semplificano notevolmente alcune operazioni, come ad esempio il fit di
funzioni.
73
Sia qui che nel seguito ho effettuato misure con l’APV-25 in modalita 20 MHz. Poiche
l’ADC campiona a 40 MHz, il valore del segnale su un canale del chip viene digitalizzato
2 volte consecutivamente. A questo punto, la prima cosa da fare e decidere come scegliere
il valore campionato da utilizzare in seguito per l’analisi; questa scelta puo venir fatta in
diversi modi:
primo campionamento
secondo campionamento
media (o media pesata) dei valori dei 2 campionamenti
modificando alcune righe nel programma di analisi.
Effettuando delle prove su segnali noti, ho rilevato che il risultato piu corretto si ottiene
utilizzando semplicemente il secondo campionamento ed ignorando il primo: ho quindi
deciso di utilizzare questo valore per tutto il seguito delle misure.
La differenza tra i due campionamenti, che in linea di principio dovrebbero essere
identici, e dovuta al fatto che i tempi di salita e di discesa dei segnali non sono nulli. Per
questo, spesso il primo campionamento viene effettuato quando ancora il segnale non ha
raggiunto il suo massimo, falsando cosı il valore acquisito.
Ogni acquisizione consiste di due fasi. Nella prima vengono raccolti 1000 eventi, senza
alcun impulso di calibrazione, che vengono utilizzati per il calcolo dei piedistalli. Nella
seconda vengono raccolti i dati della calibrazione, utilizzando 2000 eventi. Quindi i dati
vengono processati e i risultati, cioe i valori del segnale dopo la sottrazione del valore
del piedistallo e del rumore di modo comune1, vengono salvati nel formato comunemente
utilizzato da PAW, detto ntupla.
1Il common mode noise, CMN, e il rumore riferito ad un gruppo di canali che vengono influenzati in
modo coerente [39].
74
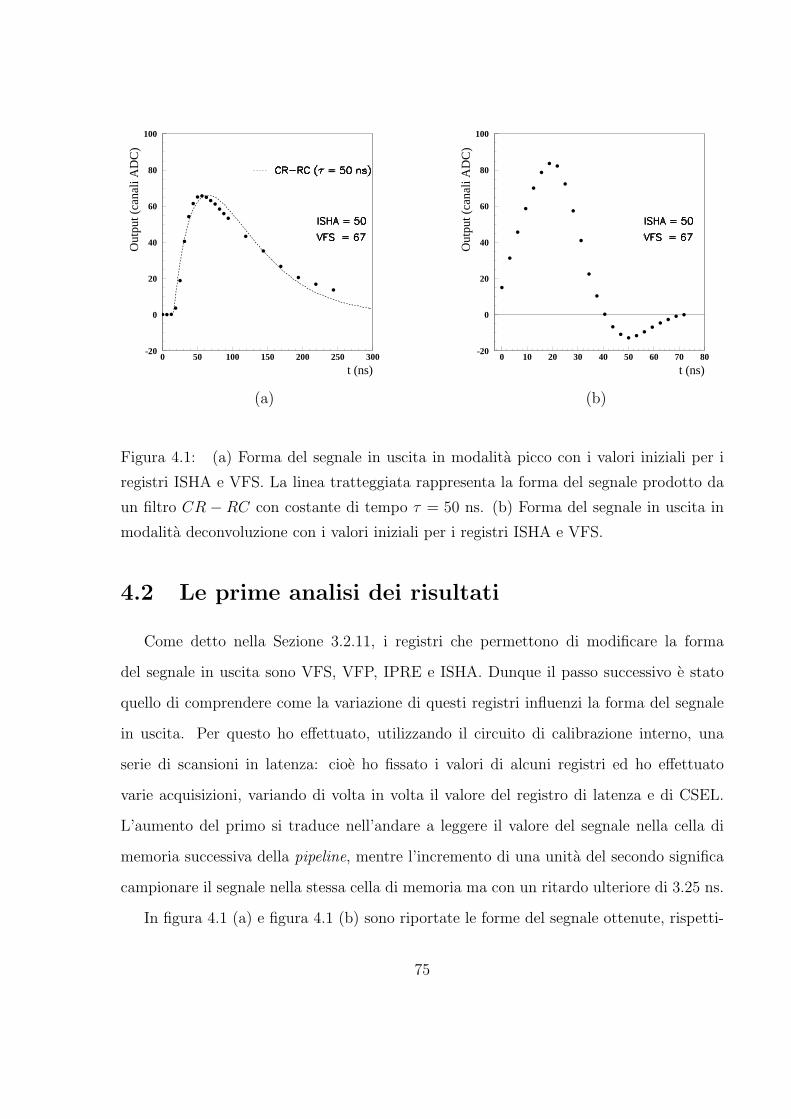
t (ns)
Out
put (
cana
li A
DC
)
-20
0
20
40
60
80
100
0 50 100 150 200 250 300
t (ns)
Out
put (
cana
li A
DC
)
-20
0
20
40
60
80
100
0 10 20 30 40 50 60 70 80
(a) (b)
Figura 4.1: (a) Forma del segnale in uscita in modalita picco con i valori iniziali per i
registri ISHA e VFS. La linea tratteggiata rappresenta la forma del segnale prodotto da
un filtro CR − RC con costante di tempo τ = 50 ns. (b) Forma del segnale in uscita in
modalita deconvoluzione con i valori iniziali per i registri ISHA e VFS.
4.2 Le prime analisi dei risultati
Come detto nella Sezione 3.2.11, i registri che permettono di modificare la forma
del segnale in uscita sono VFS, VFP, IPRE e ISHA. Dunque il passo successivo e stato
quello di comprendere come la variazione di questi registri influenzi la forma del segnale
in uscita. Per questo ho effettuato, utilizzando il circuito di calibrazione interno, una
serie di scansioni in latenza: cioe ho fissato i valori di alcuni registri ed ho effettuato
varie acquisizioni, variando di volta in volta il valore del registro di latenza e di CSEL.
L’aumento del primo si traduce nell’andare a leggere il valore del segnale nella cella di
memoria successiva della pipeline, mentre l’incremento di una unita del secondo significa
campionare il segnale nella stessa cella di memoria ma con un ritardo ulteriore di 3.25 ns.
In figura 4.1 (a) e figura 4.1 (b) sono riportate le forme del segnale ottenute, rispetti-
75
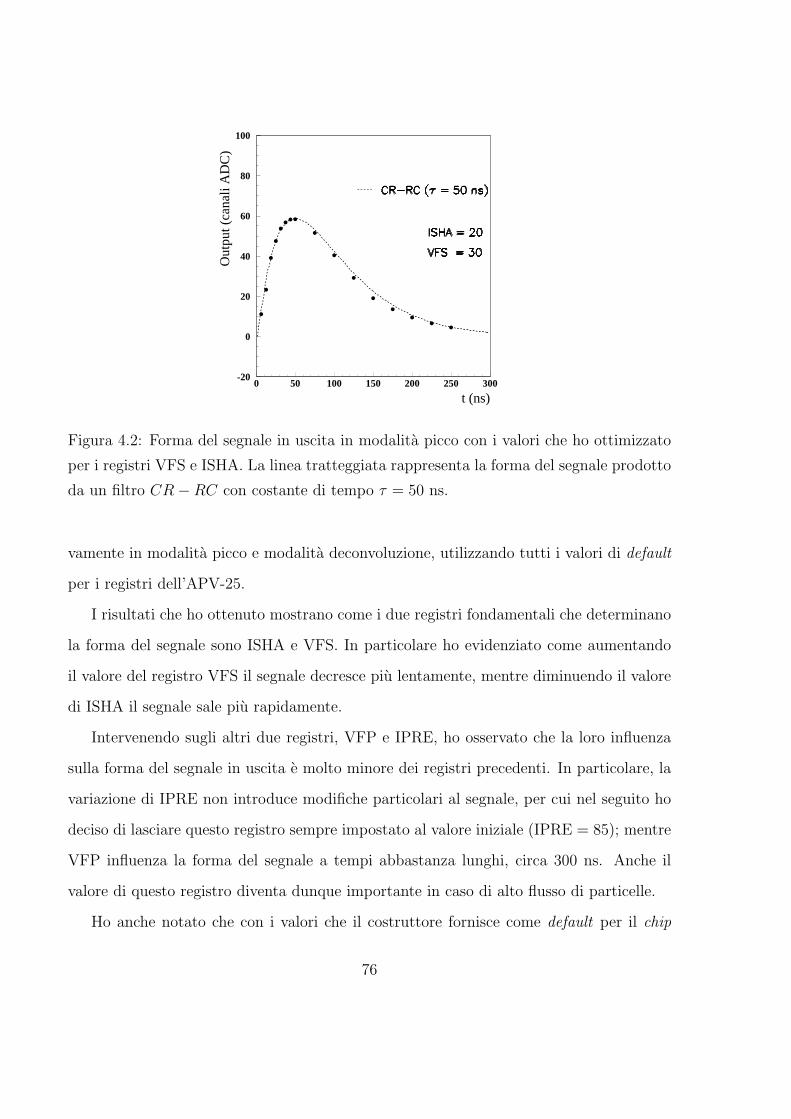
t (ns)
Out
put (
cana
li A
DC
)
-20
0
20
40
60
80
100
0 50 100 150 200 250 300
Figura 4.2: Forma del segnale in uscita in modalita picco con i valori che ho ottimizzato
per i registri VFS e ISHA. La linea tratteggiata rappresenta la forma del segnale prodotto
da un filtro CR−RC con costante di tempo τ = 50 ns.
vamente in modalita picco e modalita deconvoluzione, utilizzando tutti i valori di default
per i registri dell’APV-25.
I risultati che ho ottenuto mostrano come i due registri fondamentali che determinano
la forma del segnale sono ISHA e VFS. In particolare ho evidenziato come aumentando
il valore del registro VFS il segnale decresce piu lentamente, mentre diminuendo il valore
di ISHA il segnale sale piu rapidamente.
Intervenendo sugli altri due registri, VFP e IPRE, ho osservato che la loro influenza
sulla forma del segnale in uscita e molto minore dei registri precedenti. In particolare, la
variazione di IPRE non introduce modifiche particolari al segnale, per cui nel seguito ho
deciso di lasciare questo registro sempre impostato al valore iniziale (IPRE = 85); mentre
VFP influenza la forma del segnale a tempi abbastanza lunghi, circa 300 ns. Anche il
valore di questo registro diventa dunque importante in caso di alto flusso di particelle.
Ho anche notato che con i valori che il costruttore fornisce come default per il chip
76
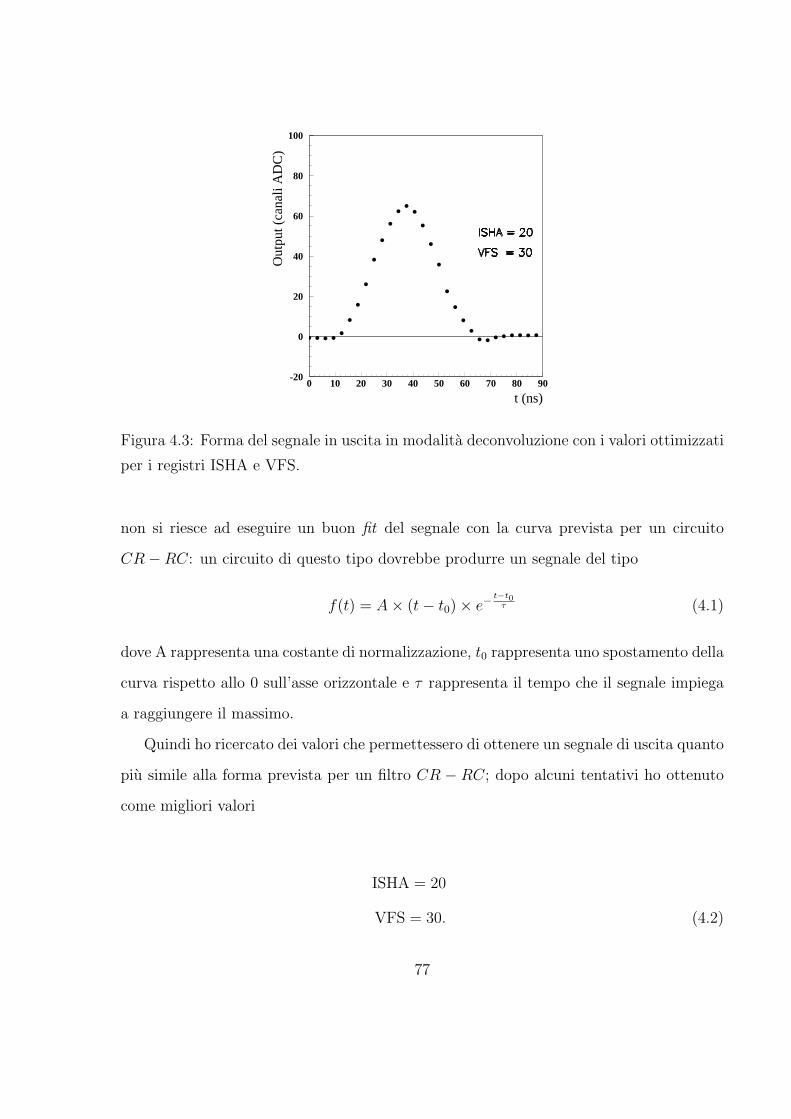
t (ns)
Out
put (
cana
li A
DC
)
-20
0
20
40
60
80
100
0 10 20 30 40 50 60 70 80 90
Figura 4.3: Forma del segnale in uscita in modalita deconvoluzione con i valori ottimizzati
per i registri ISHA e VFS.
non si riesce ad eseguire un buon fit del segnale con la curva prevista per un circuito
CR−RC: un circuito di questo tipo dovrebbe produrre un segnale del tipo
f(t) = A× (t− t0)× e−t−t0
τ (4.1)
dove A rappresenta una costante di normalizzazione, t0 rappresenta uno spostamento della
curva rispetto allo 0 sull’asse orizzontale e τ rappresenta il tempo che il segnale impiega
a raggiungere il massimo.
Quindi ho ricercato dei valori che permettessero di ottenere un segnale di uscita quanto
piu simile alla forma prevista per un filtro CR − RC; dopo alcuni tentativi ho ottenuto
come migliori valori
ISHA = 20
VFS = 30. (4.2)
77
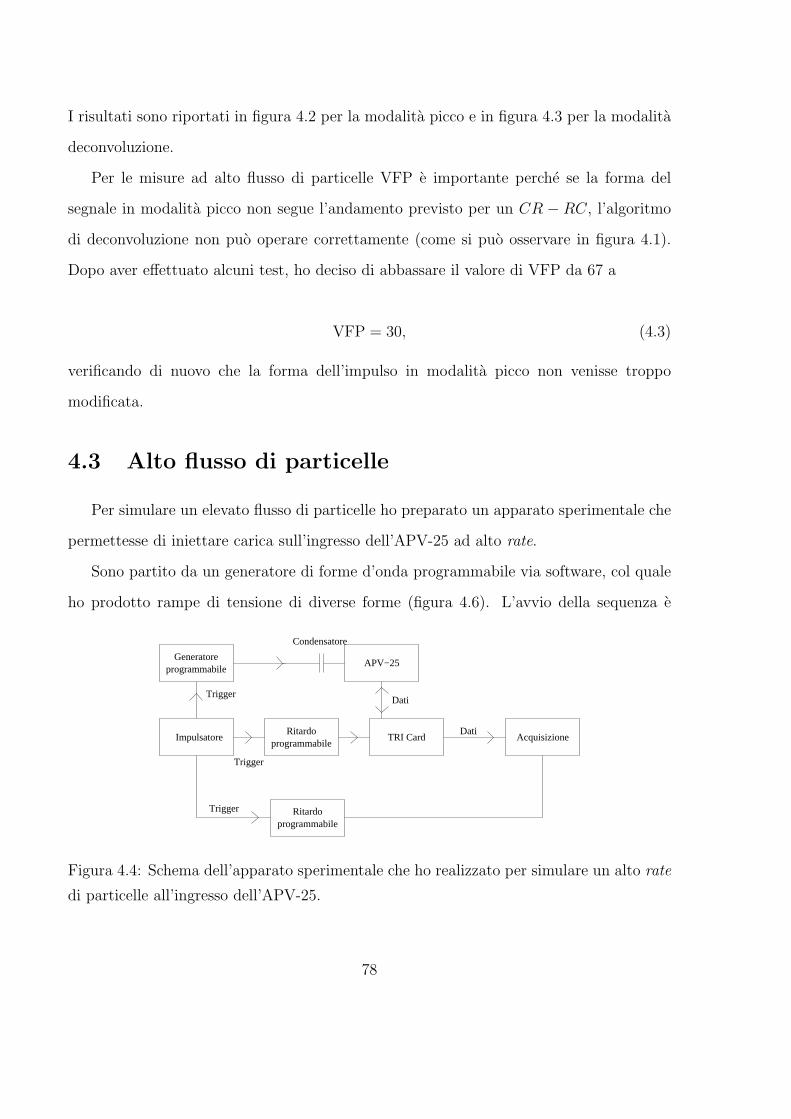
I risultati sono riportati in figura 4.2 per la modalita picco e in figura 4.3 per la modalita
deconvoluzione.
Per le misure ad alto flusso di particelle VFP e importante perche se la forma del
segnale in modalita picco non segue l’andamento previsto per un CR − RC, l’algoritmo
di deconvoluzione non puo operare correttamente (come si puo osservare in figura 4.1).
Dopo aver effettuato alcuni test, ho deciso di abbassare il valore di VFP da 67 a
VFP = 30, (4.3)
verificando di nuovo che la forma dell’impulso in modalita picco non venisse troppo
modificata.
4.3 Alto flusso di particelle
Per simulare un elevato flusso di particelle ho preparato un apparato sperimentale che
permettesse di iniettare carica sull’ingresso dell’APV-25 ad alto rate.
Sono partito da un generatore di forme d’onda programmabile via software, col quale
ho prodotto rampe di tensione di diverse forme (figura 4.6). L’avvio della sequenza e
Condensatore
APV−25Generatore
programmabile
Trigger
Impulsatore
Trigger
TRI Card AcquisizioneDati
Dati
Ritardoprogrammabile
Ritardoprogrammabile
Trigger
Figura 4.4: Schema dell’apparato sperimentale che ho realizzato per simulare un alto rate
di particelle all’ingresso dell’APV-25.
78

Laboratory set-up
condensatori esterni: oro depositato su un supporto
sui condensatori esterni
di kapton (~ 50 m) incollatosu un pitch adapter
(~100 fF)in
APV25-S0
4 canali di ingresso saldati
X1
AWG2020
APV25
VFSVFP
Vin
CextX1
Arbitrary waveform generator
Alessandro Buffini - Firenze 4
µV
Figura 4.5: Fotografia dell’ibrido equipaggiato con 3 APV-25 S0 utilizzati per le misure
ad alto rate.
gestito da un segnale di trigger, che contemporamente viene utilizzato come trigger per
l’APV-25 e l’acquisizione dei dati, opportunamente ritardato (figura 4.4). In questo modo,
variando il ritardo tra il trigger al generatore di forme d’onda e quello al sistema di
acquisizione, e possibile raccogliere i dati relativi a ciascuno scalino della rampa.
La rampa prodotta e portata all’ingresso di 4 canali di uno dei chip a mia disposizione,
attraverso un condensatore di circa 100 fF: questo e realizzato incollando una striscia di
kapton dorato (su una singola faccia), spesso circa 50 µm, sulle piazzole di microsalda-
tura del pitch adapter. La doratura e i pad fungono in questo modo da armature per il
condensatore e il kapton da dielettrico (figura 4.5).
L’altezza di ogni scalino e stata fissata a ∆V = 40 mV: questo corrisponde al rilascio
79
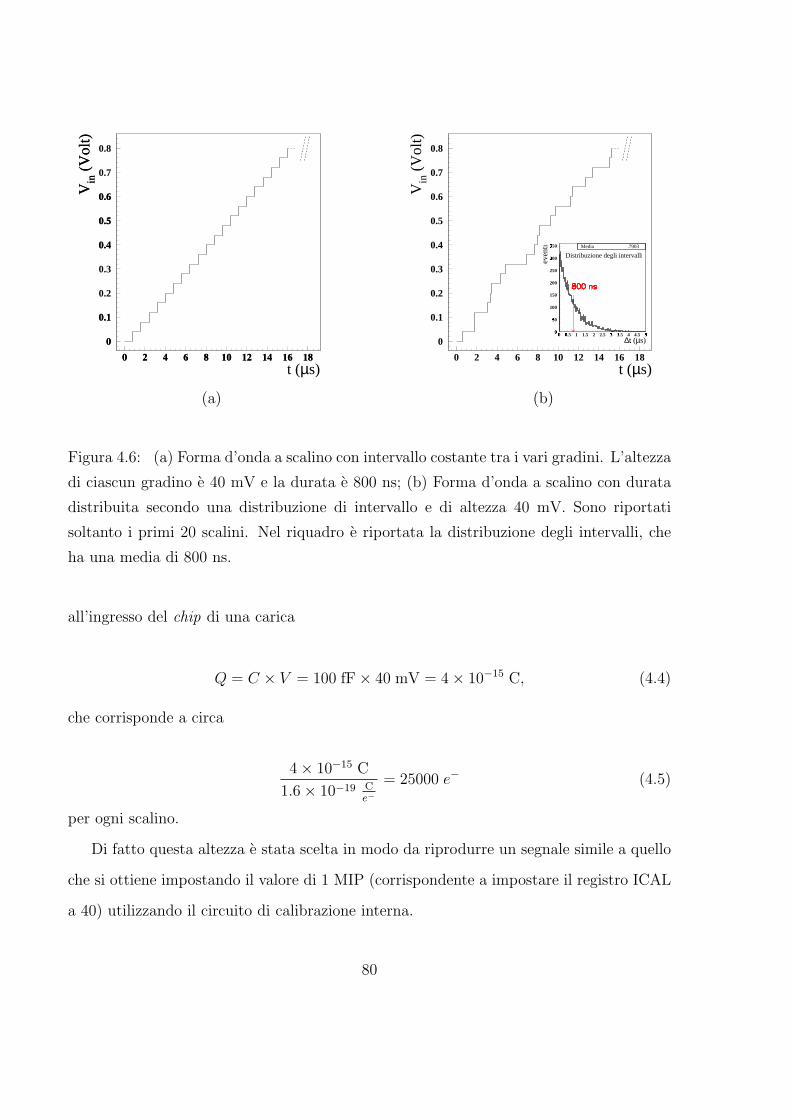
t (µs)
Vin
(V
olt)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 2 4 6 8 10 12 14 16 18t (µs)
Vin
(V
olt)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 2 4 6 8 10 12 14 16 18
Media .7903
∆t ( µs)
even
ti
0
50
100
150
200
250
300
350
0
0.5
1 1.5 2 2.5 3
3.5
4 4.5 5
Distribuzione degli intervalli
(a) (b)
Figura 4.6: (a) Forma d’onda a scalino con intervallo costante tra i vari gradini. L’altezza
di ciascun gradino e 40 mV e la durata e 800 ns; (b) Forma d’onda a scalino con durata
distribuita secondo una distribuzione di intervallo e di altezza 40 mV. Sono riportati
soltanto i primi 20 scalini. Nel riquadro e riportata la distribuzione degli intervalli, che
ha una media di 800 ns.
all’ingresso del chip di una carica
Q = C × V = 100 fF× 40 mV = 4× 10−15 C, (4.4)
che corrisponde a circa
4× 10−15 C
1.6× 10−19 Ce−
= 25000 e− (4.5)
per ogni scalino.
Di fatto questa altezza e stata scelta in modo da riprodurre un segnale simile a quello
che si ottiene impostando il valore di 1 MIP (corrispondente a impostare il registro ICAL
a 40) utilizzando il circuito di calibrazione interna.
80
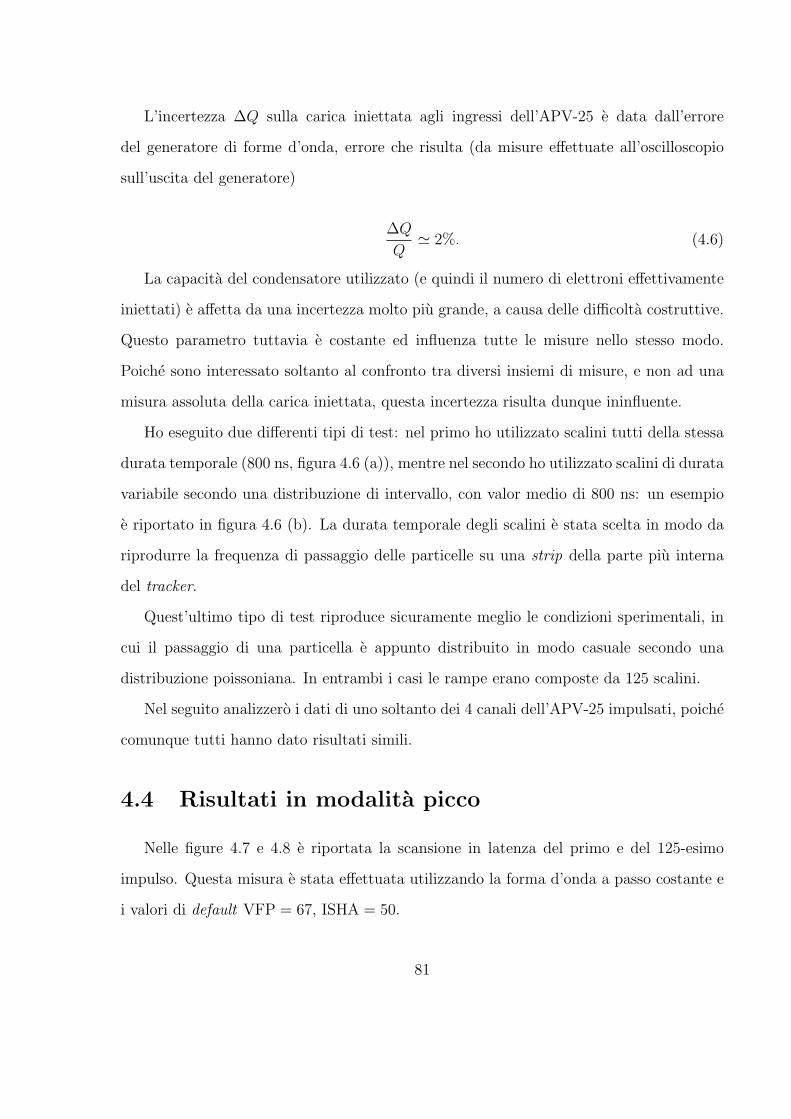
L’incertezza ∆Q sulla carica iniettata agli ingressi dell’APV-25 e data dall’errore
del generatore di forme d’onda, errore che risulta (da misure effettuate all’oscilloscopio
sull’uscita del generatore)
∆Q
Q' 2%. (4.6)
La capacita del condensatore utilizzato (e quindi il numero di elettroni effettivamente
iniettati) e affetta da una incertezza molto piu grande, a causa delle difficolta costruttive.
Questo parametro tuttavia e costante ed influenza tutte le misure nello stesso modo.
Poiche sono interessato soltanto al confronto tra diversi insiemi di misure, e non ad una
misura assoluta della carica iniettata, questa incertezza risulta dunque ininfluente.
Ho eseguito due differenti tipi di test: nel primo ho utilizzato scalini tutti della stessa
durata temporale (800 ns, figura 4.6 (a)), mentre nel secondo ho utilizzato scalini di durata
variabile secondo una distribuzione di intervallo, con valor medio di 800 ns: un esempio
e riportato in figura 4.6 (b). La durata temporale degli scalini e stata scelta in modo da
riprodurre la frequenza di passaggio delle particelle su una strip della parte piu interna
del tracker.
Quest’ultimo tipo di test riproduce sicuramente meglio le condizioni sperimentali, in
cui il passaggio di una particella e appunto distribuito in modo casuale secondo una
distribuzione poissoniana. In entrambi i casi le rampe erano composte da 125 scalini.
Nel seguito analizzero i dati di uno soltanto dei 4 canali dell’APV-25 impulsati, poiche
comunque tutti hanno dato risultati simili.
4.4 Risultati in modalita picco
Nelle figure 4.7 e 4.8 e riportata la scansione in latenza del primo e del 125-esimo
impulso. Questa misura e stata effettuata utilizzando la forma d’onda a passo costante e
i valori di default VFP = 67, ISHA = 50.
81
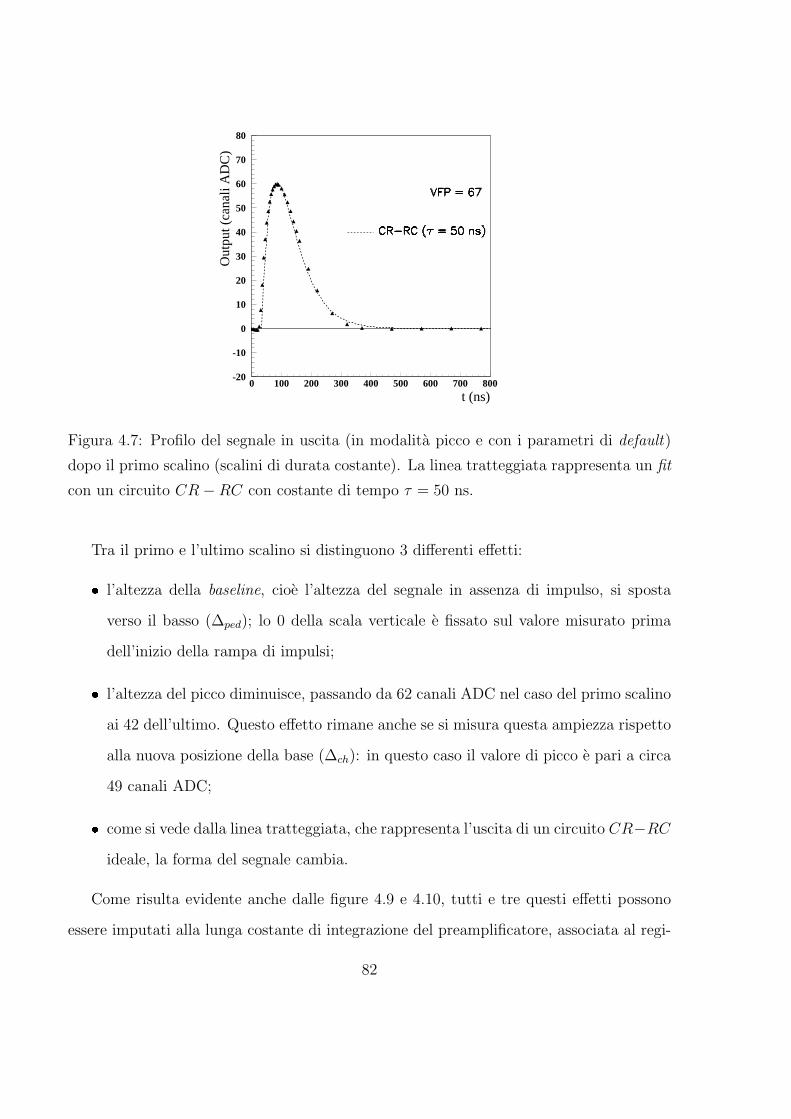
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 100 200 300 400 500 600 700 800
Figura 4.7: Profilo del segnale in uscita (in modalita picco e con i parametri di default)
dopo il primo scalino (scalini di durata costante). La linea tratteggiata rappresenta un fit
con un circuito CR−RC con costante di tempo τ = 50 ns.
Tra il primo e l’ultimo scalino si distinguono 3 differenti effetti:
l’altezza della baseline, cioe l’altezza del segnale in assenza di impulso, si sposta
verso il basso (∆ped); lo 0 della scala verticale e fissato sul valore misurato prima
dell’inizio della rampa di impulsi;
l’altezza del picco diminuisce, passando da 62 canali ADC nel caso del primo scalino
ai 42 dell’ultimo. Questo effetto rimane anche se si misura questa ampiezza rispetto
alla nuova posizione della base (∆ch): in questo caso il valore di picco e pari a circa
49 canali ADC;
come si vede dalla linea tratteggiata, che rappresenta l’uscita di un circuito CR−RC
ideale, la forma del segnale cambia.
Come risulta evidente anche dalle figure 4.9 e 4.10, tutti e tre questi effetti possono
essere imputati alla lunga costante di integrazione del preamplificatore, associata al regi-
82
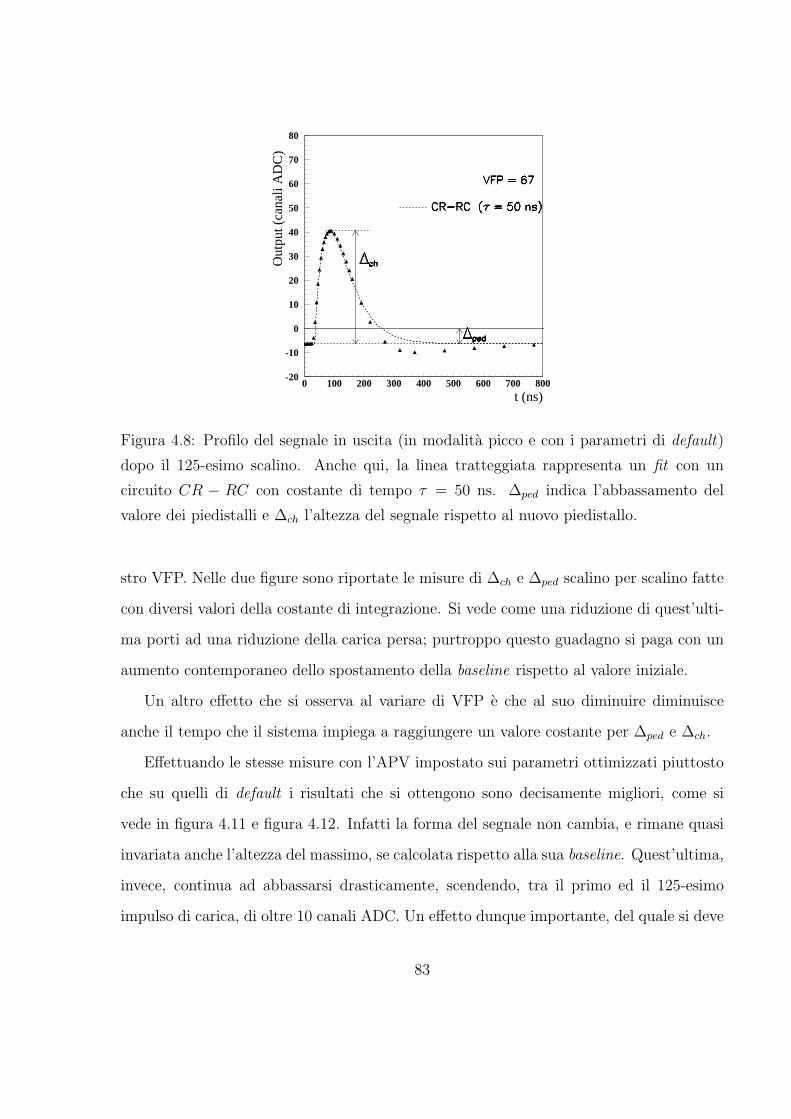
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 100 200 300 400 500 600 700 800
Figura 4.8: Profilo del segnale in uscita (in modalita picco e con i parametri di default)
dopo il 125-esimo scalino. Anche qui, la linea tratteggiata rappresenta un fit con un
circuito CR − RC con costante di tempo τ = 50 ns. ∆ped indica l’abbassamento del
valore dei piedistalli e ∆ch l’altezza del segnale rispetto al nuovo piedistallo.
stro VFP. Nelle due figure sono riportate le misure di ∆ch e ∆ped scalino per scalino fatte
con diversi valori della costante di integrazione. Si vede come una riduzione di quest’ulti-
ma porti ad una riduzione della carica persa; purtroppo questo guadagno si paga con un
aumento contemporaneo dello spostamento della baseline rispetto al valore iniziale.
Un altro effetto che si osserva al variare di VFP e che al suo diminuire diminuisce
anche il tempo che il sistema impiega a raggiungere un valore costante per ∆ped e ∆ch.
Effettuando le stesse misure con l’APV impostato sui parametri ottimizzati piuttosto
che su quelli di default i risultati che si ottengono sono decisamente migliori, come si
vede in figura 4.11 e figura 4.12. Infatti la forma del segnale non cambia, e rimane quasi
invariata anche l’altezza del massimo, se calcolata rispetto alla sua baseline. Quest’ultima,
invece, continua ad abbassarsi drasticamente, scendendo, tra il primo ed il 125-esimo
impulso di carica, di oltre 10 canali ADC. Un effetto dunque importante, del quale si deve
83
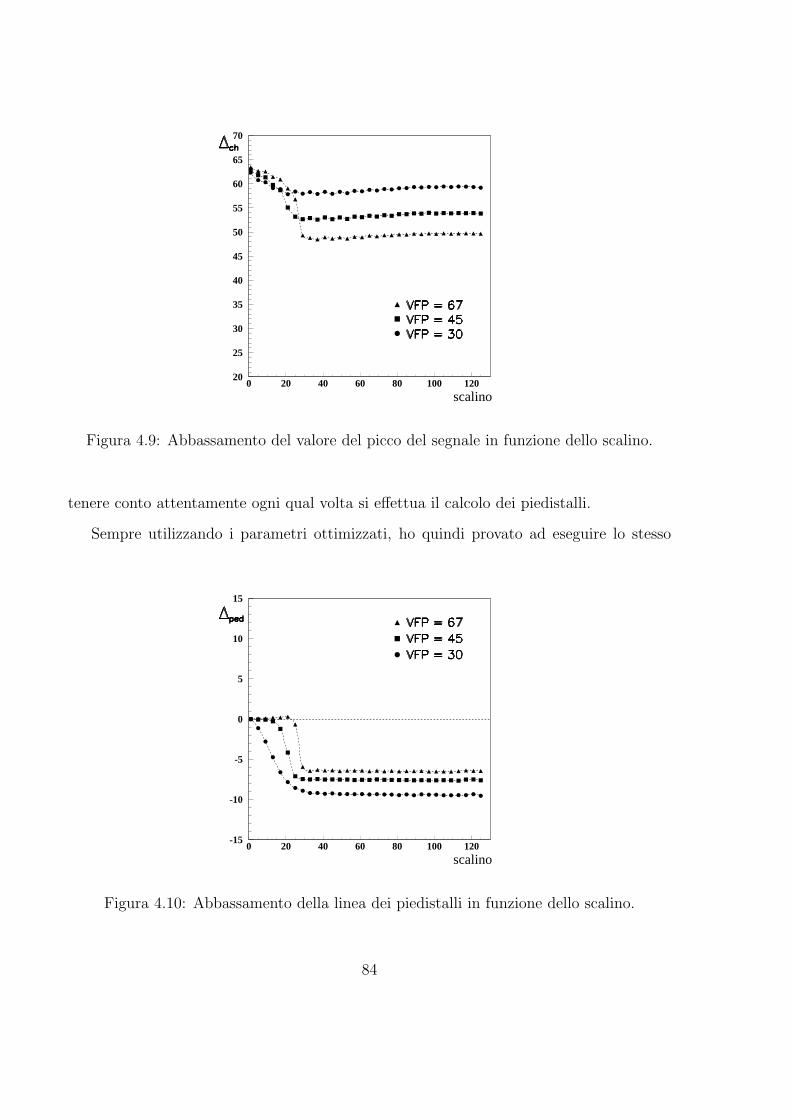
20
25
30
35
40
45
50
55
60
65
70
0 20 40 60 80 100 120scalino
Figura 4.9: Abbassamento del valore del picco del segnale in funzione dello scalino.
tenere conto attentamente ogni qual volta si effettua il calcolo dei piedistalli.
Sempre utilizzando i parametri ottimizzati, ho quindi provato ad eseguire lo stesso
-15
-10
-5
0
5
10
15
0 20 40 60 80 100 120scalino
Figura 4.10: Abbassamento della linea dei piedistalli in funzione dello scalino.
84
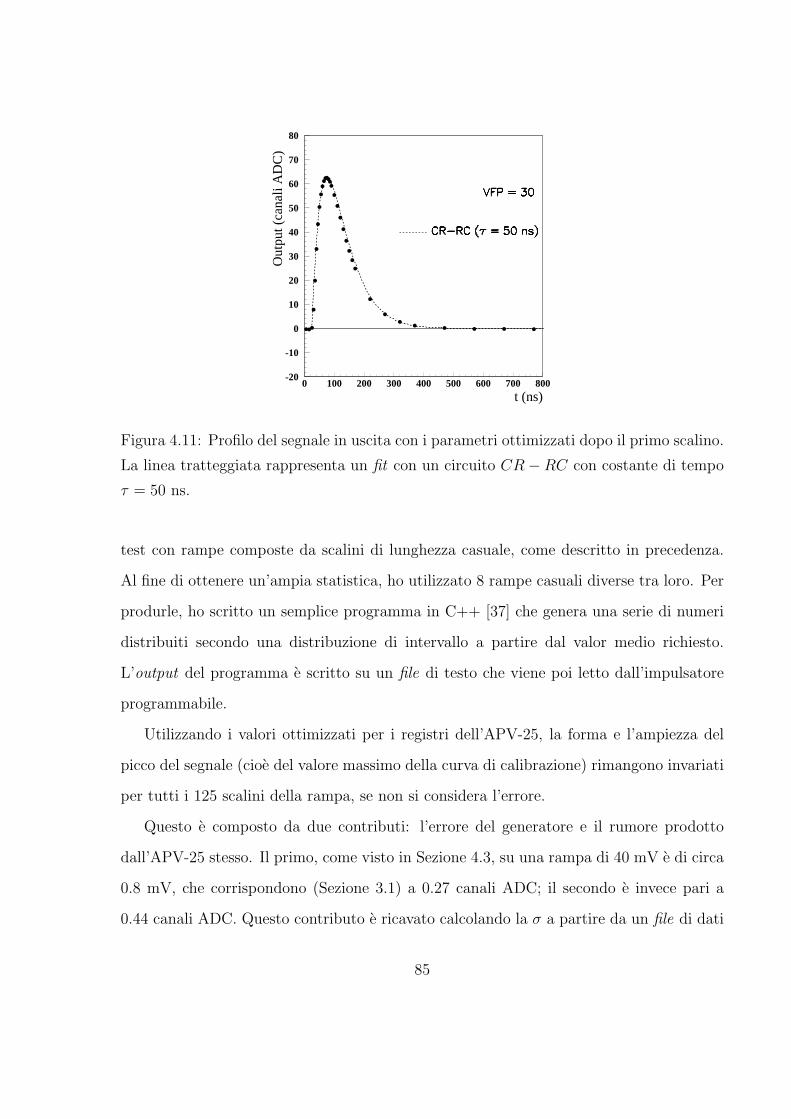
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 100 200 300 400 500 600 700 800
Figura 4.11: Profilo del segnale in uscita con i parametri ottimizzati dopo il primo scalino.
La linea tratteggiata rappresenta un fit con un circuito CR−RC con costante di tempo
τ = 50 ns.
test con rampe composte da scalini di lunghezza casuale, come descritto in precedenza.
Al fine di ottenere un’ampia statistica, ho utilizzato 8 rampe casuali diverse tra loro. Per
produrle, ho scritto un semplice programma in C++ [37] che genera una serie di numeri
distribuiti secondo una distribuzione di intervallo a partire dal valor medio richiesto.
L’output del programma e scritto su un file di testo che viene poi letto dall’impulsatore
programmabile.
Utilizzando i valori ottimizzati per i registri dell’APV-25, la forma e l’ampiezza del
picco del segnale (cioe del valore massimo della curva di calibrazione) rimangono invariati
per tutti i 125 scalini della rampa, se non si considera l’errore.
Questo e composto da due contributi: l’errore del generatore e il rumore prodotto
dall’APV-25 stesso. Il primo, come visto in Sezione 4.3, su una rampa di 40 mV e di circa
0.8 mV, che corrispondono (Sezione 3.1) a 0.27 canali ADC; il secondo e invece pari a
0.44 canali ADC. Questo contributo e ricavato calcolando la σ a partire da un file di dati
85
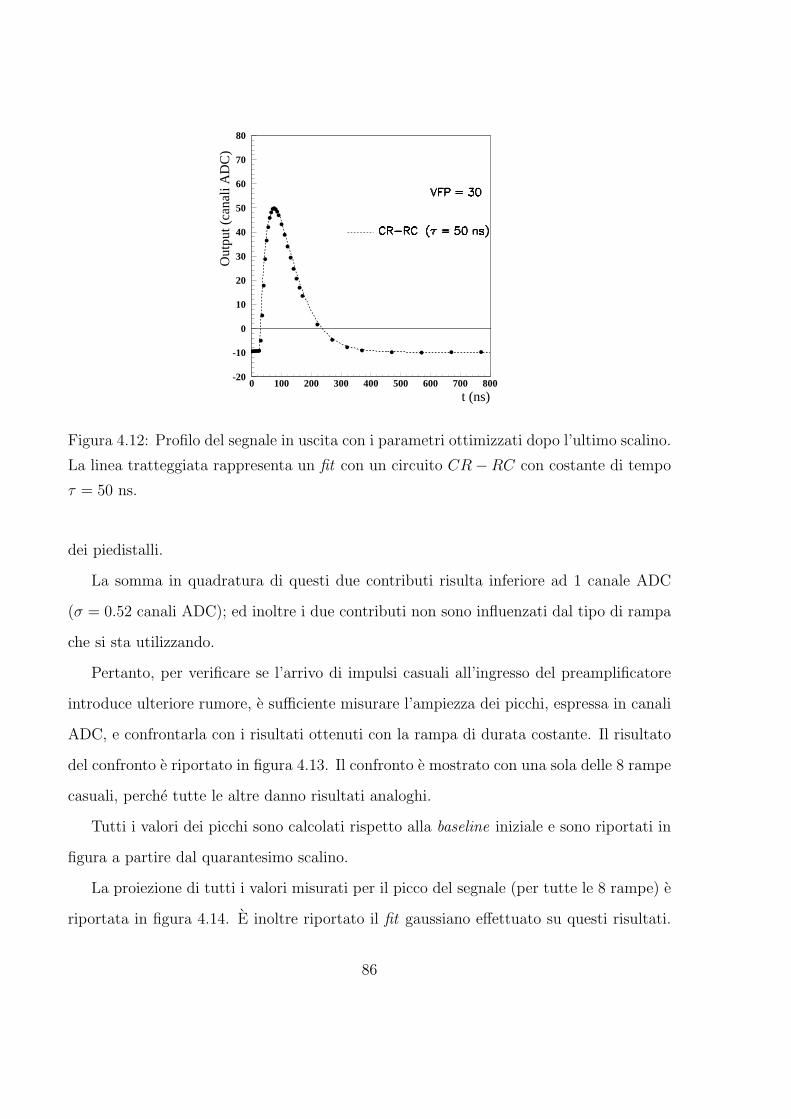
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 100 200 300 400 500 600 700 800
Figura 4.12: Profilo del segnale in uscita con i parametri ottimizzati dopo l’ultimo scalino.
La linea tratteggiata rappresenta un fit con un circuito CR−RC con costante di tempo
τ = 50 ns.
dei piedistalli.
La somma in quadratura di questi due contributi risulta inferiore ad 1 canale ADC
(σ = 0.52 canali ADC); ed inoltre i due contributi non sono influenzati dal tipo di rampa
che si sta utilizzando.
Pertanto, per verificare se l’arrivo di impulsi casuali all’ingresso del preamplificatore
introduce ulteriore rumore, e sufficiente misurare l’ampiezza dei picchi, espressa in canali
ADC, e confrontarla con i risultati ottenuti con la rampa di durata costante. Il risultato
del confronto e riportato in figura 4.13. Il confronto e mostrato con una sola delle 8 rampe
casuali, perche tutte le altre danno risultati analoghi.
Tutti i valori dei picchi sono calcolati rispetto alla baseline iniziale e sono riportati in
figura a partire dal quarantesimo scalino.
La proiezione di tutti i valori misurati per il picco del segnale (per tutte le 8 rampe) e
riportata in figura 4.14. E inoltre riportato il fit gaussiano effettuato su questi risultati.
86
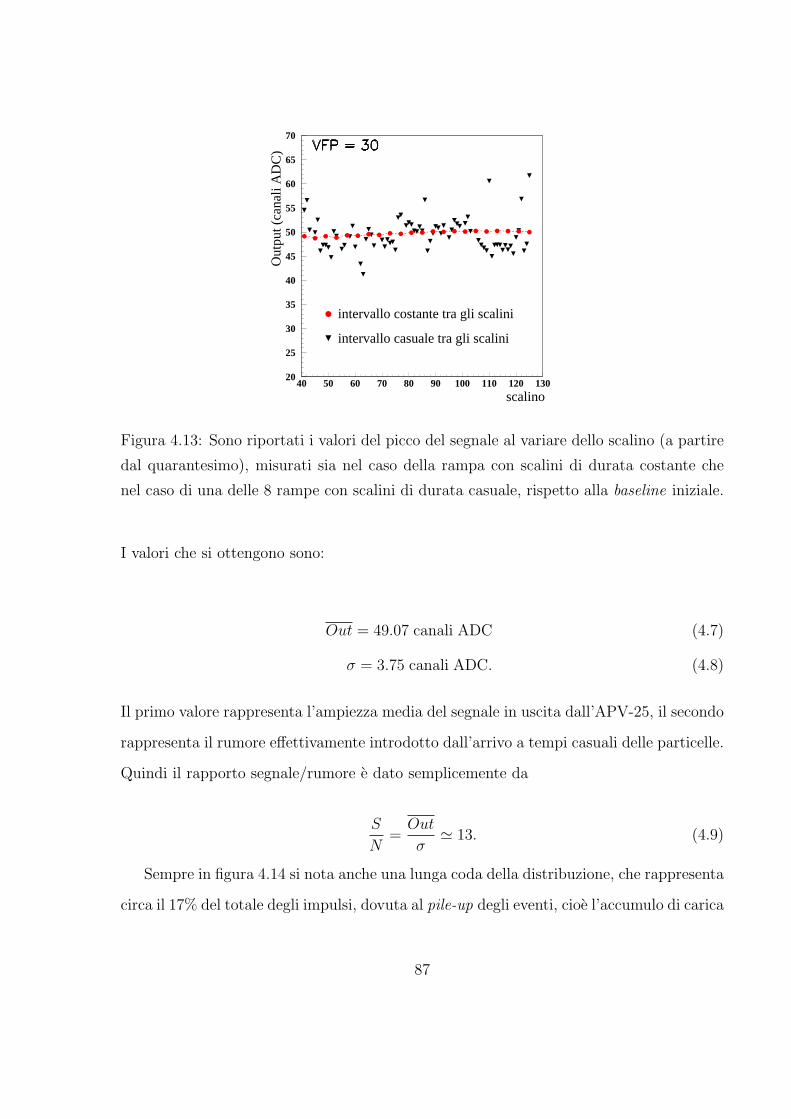
scalino
Out
put (
cana
li A
DC
)
20
25
30
35
40
45
50
55
60
65
70
40 50 60 70 80 90 100 110 120 130
intervallo costante tra gli scalini
intervallo casuale tra gli scalini
Figura 4.13: Sono riportati i valori del picco del segnale al variare dello scalino (a partire
dal quarantesimo), misurati sia nel caso della rampa con scalini di durata costante che
nel caso di una delle 8 rampe con scalini di durata casuale, rispetto alla baseline iniziale.
I valori che si ottengono sono:
Out = 49.07 canali ADC (4.7)
σ = 3.75 canali ADC. (4.8)
Il primo valore rappresenta l’ampiezza media del segnale in uscita dall’APV-25, il secondo
rappresenta il rumore effettivamente introdotto dall’arrivo a tempi casuali delle particelle.
Quindi il rapporto segnale/rumore e dato semplicemente da
S
N=Out
σ' 13. (4.9)
Sempre in figura 4.14 si nota anche una lunga coda della distribuzione, che rappresenta
circa il 17% del totale degli impulsi, dovuta al pile-up degli eventi, cioe l’accumulo di carica
87
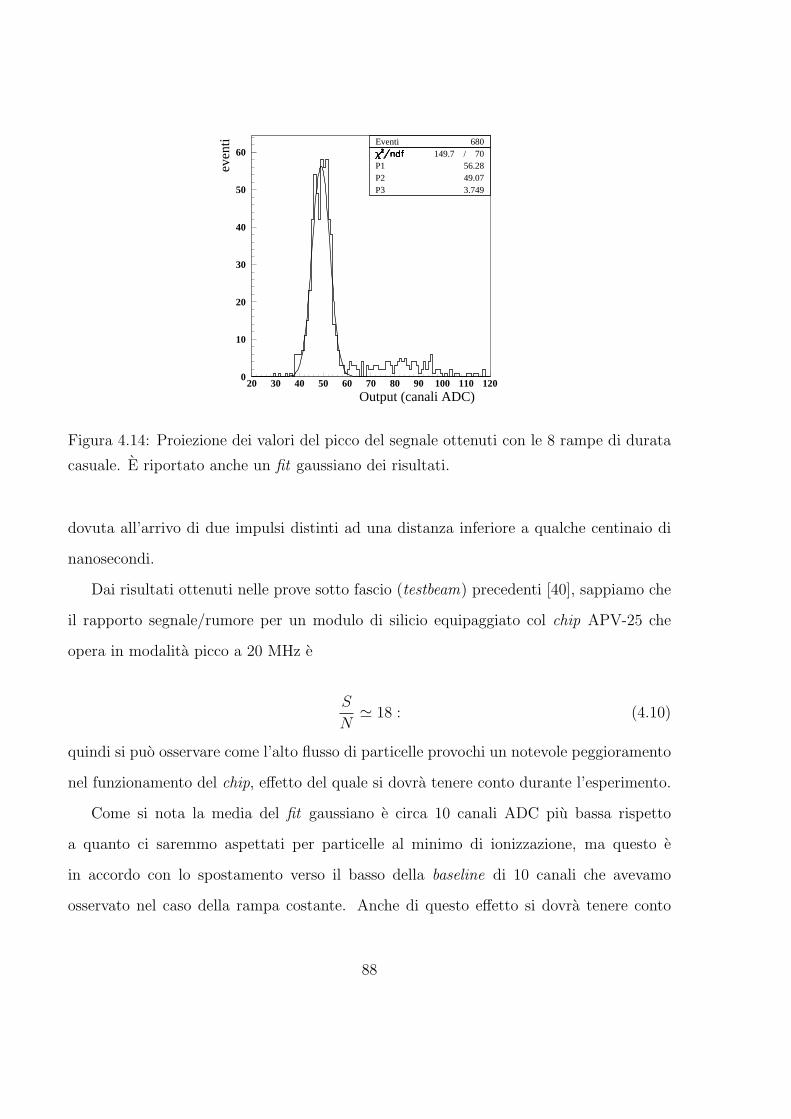
Eventi 680 149.7 / 70
P1 56.28P2 49.07P3 3.749
Output (canali ADC)
even
ti
0
10
20
30
40
50
60
20 30 40 50 60 70 80 90 100 110 120
Figura 4.14: Proiezione dei valori del picco del segnale ottenuti con le 8 rampe di durata
casuale. E riportato anche un fit gaussiano dei risultati.
dovuta all’arrivo di due impulsi distinti ad una distanza inferiore a qualche centinaio di
nanosecondi.
Dai risultati ottenuti nelle prove sotto fascio (testbeam) precedenti [40], sappiamo che
il rapporto segnale/rumore per un modulo di silicio equipaggiato col chip APV-25 che
opera in modalita picco a 20 MHz e
S
N' 18 : (4.10)
quindi si puo osservare come l’alto flusso di particelle provochi un notevole peggioramento
nel funzionamento del chip, effetto del quale si dovra tenere conto durante l’esperimento.
Come si nota la media del fit gaussiano e circa 10 canali ADC piu bassa rispetto
a quanto ci saremmo aspettati per particelle al minimo di ionizzazione, ma questo e
in accordo con lo spostamento verso il basso della baseline di 10 canali che avevamo
osservato nel caso della rampa costante. Anche di questo effetto si dovra tenere conto
88
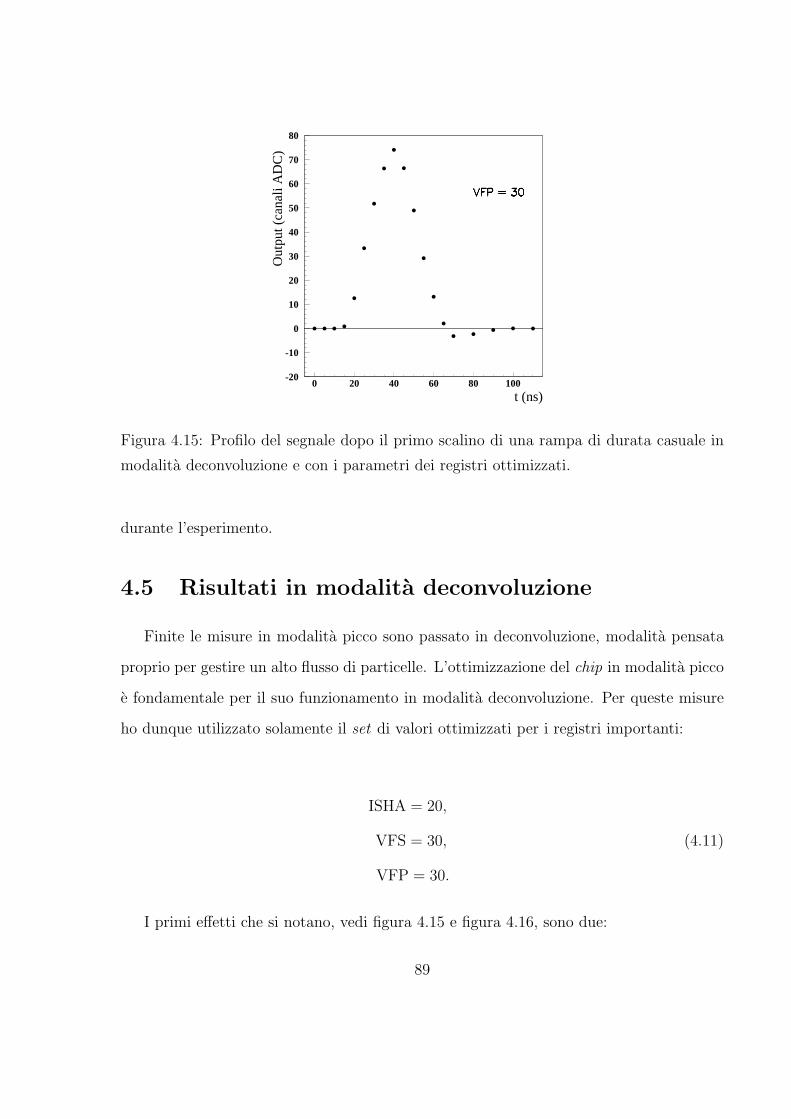
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
Figura 4.15: Profilo del segnale dopo il primo scalino di una rampa di durata casuale in
modalita deconvoluzione e con i parametri dei registri ottimizzati.
durante l’esperimento.
4.5 Risultati in modalita deconvoluzione
Finite le misure in modalita picco sono passato in deconvoluzione, modalita pensata
proprio per gestire un alto flusso di particelle. L’ottimizzazione del chip in modalita picco
e fondamentale per il suo funzionamento in modalita deconvoluzione. Per queste misure
ho dunque utilizzato solamente il set di valori ottimizzati per i registri importanti:
ISHA = 20,
VFS = 30, (4.11)
VFP = 30.
I primi effetti che si notano, vedi figura 4.15 e figura 4.16, sono due:
89
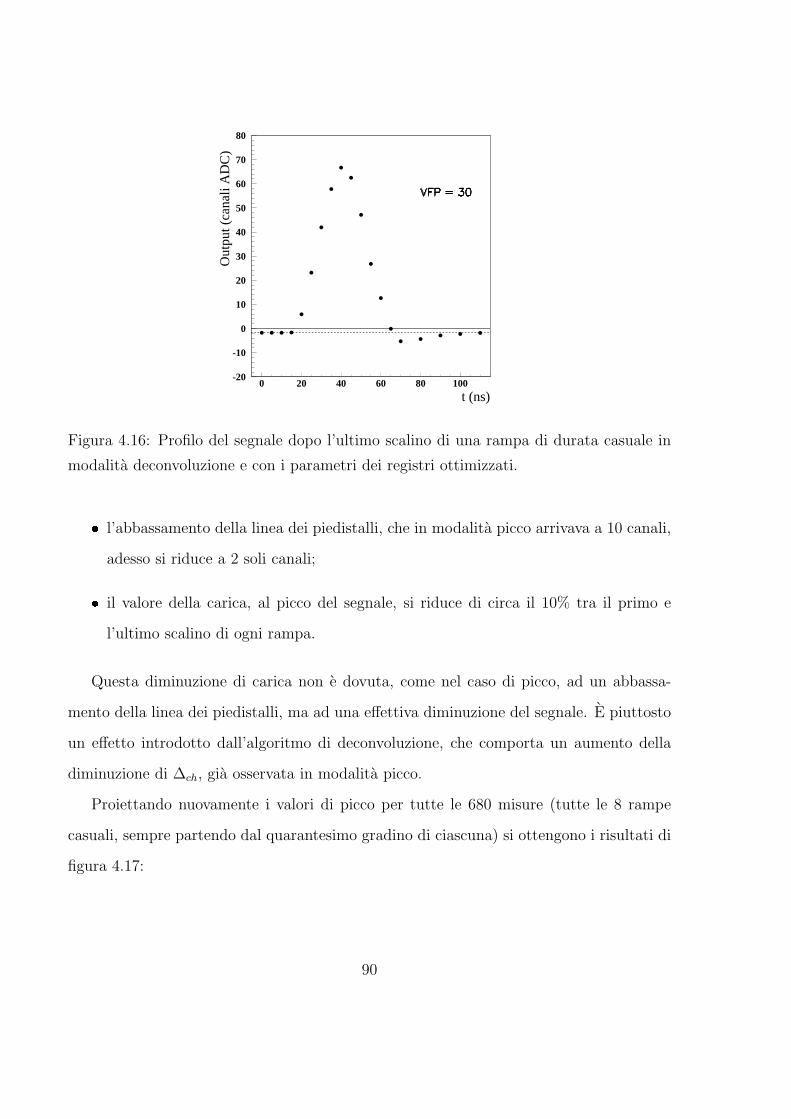
t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
Figura 4.16: Profilo del segnale dopo l’ultimo scalino di una rampa di durata casuale in
modalita deconvoluzione e con i parametri dei registri ottimizzati.
l’abbassamento della linea dei piedistalli, che in modalita picco arrivava a 10 canali,
adesso si riduce a 2 soli canali;
il valore della carica, al picco del segnale, si riduce di circa il 10% tra il primo e
l’ultimo scalino di ogni rampa.
Questa diminuzione di carica non e dovuta, come nel caso di picco, ad un abbassa-
mento della linea dei piedistalli, ma ad una effettiva diminuzione del segnale. E piuttosto
un effetto introdotto dall’algoritmo di deconvoluzione, che comporta un aumento della
diminuzione di ∆ch, gia osservata in modalita picco.
Proiettando nuovamente i valori di picco per tutte le 680 misure (tutte le 8 rampe
casuali, sempre partendo dal quarantesimo gradino di ciascuna) si ottengono i risultati di
figura 4.17:
90
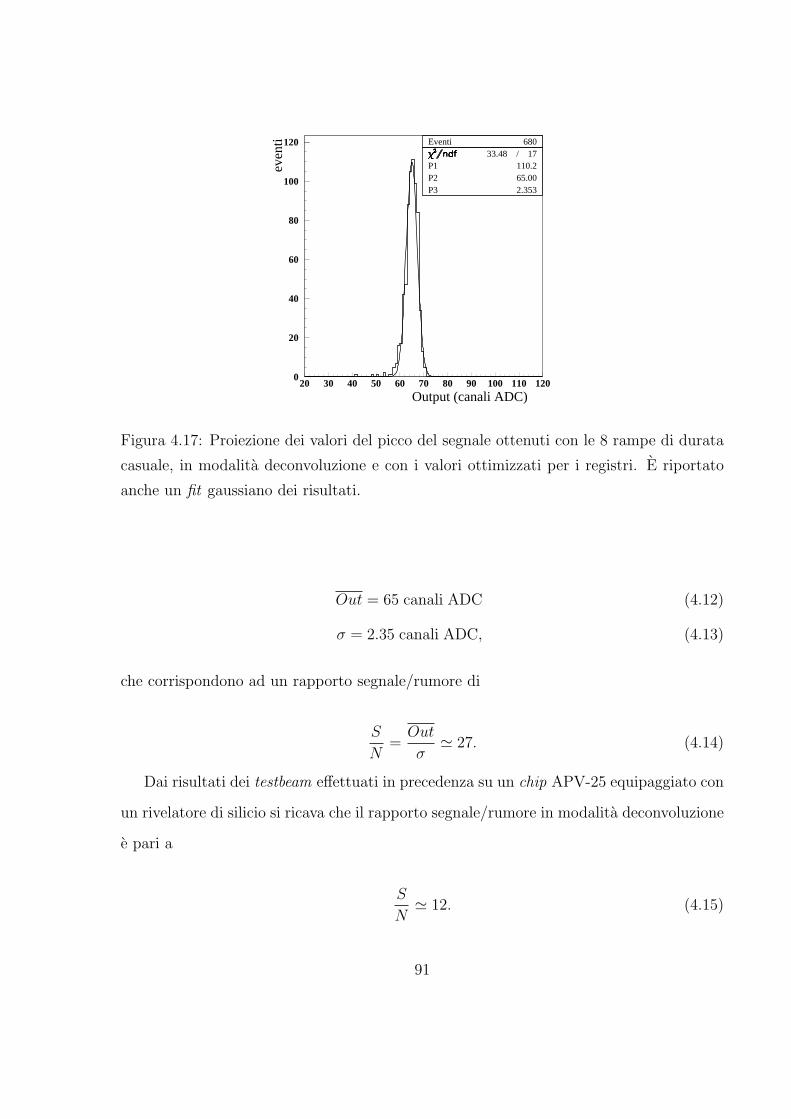
Eventi 680 33.48 / 17
P1 110.2P2 65.00P3 2.353
Output (canali ADC)
even
ti
0
20
40
60
80
100
120
20 30 40 50 60 70 80 90 100 110 120
Figura 4.17: Proiezione dei valori del picco del segnale ottenuti con le 8 rampe di durata
casuale, in modalita deconvoluzione e con i valori ottimizzati per i registri. E riportato
anche un fit gaussiano dei risultati.
Out = 65 canali ADC (4.12)
σ = 2.35 canali ADC, (4.13)
che corrispondono ad un rapporto segnale/rumore di
S
N=Out
σ' 27. (4.14)
Dai risultati dei testbeam effettuati in precedenza su un chip APV-25 equipaggiato con
un rivelatore di silicio si ricava che il rapporto segnale/rumore in modalita deconvoluzione
e pari a
S
N' 12. (4.15)
91
Inoltre, in generale il rumore di un ibrido “nudo” (cioe privo del modulo di silicio) risulta
minore rispetto a quello di un ibrido collegato ad un rivelatore, a causa dell’assenza del
carico capacitivo in ingresso (vedi Sezione 3.2.12).
Quindi da questo si puo affermare che il rumore introdotto dall’alto flusso di particelle
(σ = 2.35, SN
= 27)) risulta trascurabile, a differenza di quanto si verifica in modalita
picco.
Nell’ultima fase dei test ho anche cercato un valore per VFP che annullasse l’effetto
di riduzione di carica in deconvoluzione. Questo risultato si raggiunge, come mostrato in
figura 4.18 (a) e figura 4.18 (b), con
VFP = 10, (4.16)
senza che questo comporti una significativa distorsione della forma del segnale.
4.6 Conclusione
Ho studiato gli effetti che un alto flusso di particelle incidenti sul rivelatore puo avere
sulla risposta del chip APV-25. Per questo ho cercato di simulare al meglio le reali
condizioni alle quali sara sottoposto all’interno del tracciatore di CMS, utilizzando impulsi
inviati all’ingresso del circuito secondo una distribuzione di intervalli casuale.
Ho evidenziato come per un corretto funzionamento del sistema risulti critica la scelta
di alcuni parametri: in particolare, i registri che gestiscono la resistenza di feedback del
preamplificatore e che regolano il formatore devono essere attentamente ottimizzati.
In modalita picco l’effetto dell’alto flusso si traduce in un significativo abbassamento
della baseline e in un aumento del rumore dovuto all’arrivo casuale di particelle.
In modalita deconvoluzione, che sara la condizione normale di funzionamento all’in-
terno di CMS, ho mostrato come l’effetto di abbassamento della linea di piedistalli sia
significativamente ridotto, e contemporaneamente come il rumore introdotto dall’arri-
92

t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100t (ns)
Out
put (
cana
li A
DC
)
-20
-10
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
(a) (b)
Figura 4.18: (a) Profilo del segnale dopo il primo scalino di una rampa di durata casuale
prodotto in deconvoluzione con VFP=10; (b) Profilo del segnale dopo l’ultimo scalino di
una rampa di durata casuale prodotto in deconvoluzione con VFP=10. Come si vede, con
questo valore non si ha piu perdita di carica.
vo degli impulsi a tempi casuali non sia significativo rispetto al rumore intrinseco del
rivelatore.
I risultati ottentuti dal mio studio hanno permesso alla Collaborazione di CMS di
definire ed ottimizzare i parametri da utilizzare nella successiva fase di qualificazione dei
moduli per il sistema tracciante.
93

94
Capitolo 5
Il sistema di qualificazione dei
moduli
In questo capitolo discuto la seconda fase del mio lavoro di tesi, che e consistita nella
preparazione e ottimizzazione di un sistema per il test dei moduli completi per il sistema
tracciante di CMS. In particolare mi sono occupato della messa in funzione del sistema
di test presso la sezione dell’INFN di Firenze, della definizione di procedure standard da
seguire nei test, in modo da rendere confrontabili tra loro i risultati ottenuti in laboratori
diversi e, infine, di un test vero e proprio su due prototipi di rivelatore, composti sia
dall’elettronica di lettura (APV-25) che dal rivelatore a strip di silicio: uno era un modulo
con 512 strip, equipaggiato con 4 chip APV-25, mentre l’altro era un modulo con 1024
strip, delle quali soltanto 768 vengono lette attraverso 6 APV-25.
Questo tipo di test e fondamentale per valutare il comportamento dei moduli che
dovranno essere utilizzati all’interno del tracker di CMS. Infatti permette da una parte
di scartare quelli troppo difettosi per essere utilizzati, e dall’altra di conoscere comunque
i difetti di quelli giudicati utilizzabili.
Tutti i dati raccolti in questo modo confluiranno in un apposito database, di primaria
importanza per l’esperimento: conoscendo la posizione delle strip difettose all’interno del
rivelatore sara infatti possibile scartare direttamente online i segnali raccolti da queste
95
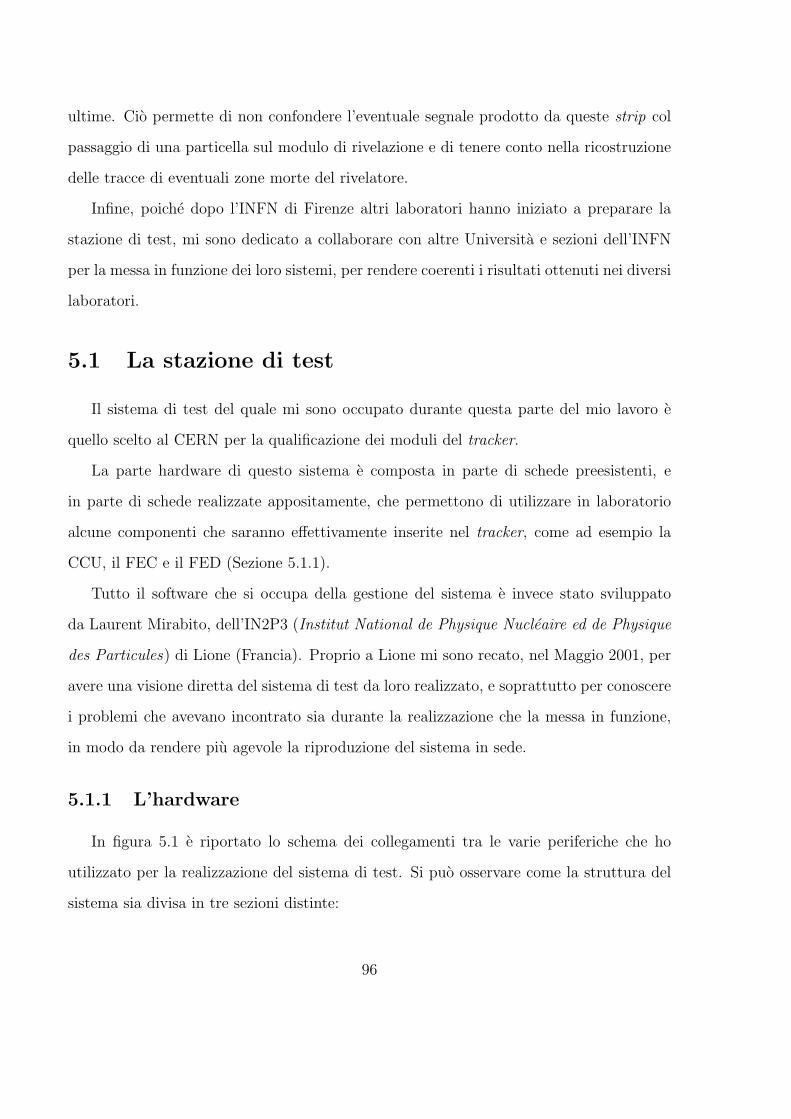
ultime. Cio permette di non confondere l’eventuale segnale prodotto da queste strip col
passaggio di una particella sul modulo di rivelazione e di tenere conto nella ricostruzione
delle tracce di eventuali zone morte del rivelatore.
Infine, poiche dopo l’INFN di Firenze altri laboratori hanno iniziato a preparare la
stazione di test, mi sono dedicato a collaborare con altre Universita e sezioni dell’INFN
per la messa in funzione dei loro sistemi, per rendere coerenti i risultati ottenuti nei diversi
laboratori.
5.1 La stazione di test
Il sistema di test del quale mi sono occupato durante questa parte del mio lavoro e
quello scelto al CERN per la qualificazione dei moduli del tracker.
La parte hardware di questo sistema e composta in parte di schede preesistenti, e
in parte di schede realizzate appositamente, che permettono di utilizzare in laboratorio
alcune componenti che saranno effettivamente inserite nel tracker, come ad esempio la
CCU, il FEC e il FED (Sezione 5.1.1).
Tutto il software che si occupa della gestione del sistema e invece stato sviluppato
da Laurent Mirabito, dell’IN2P3 (Institut National de Physique Nucleaire ed de Physique
des Particules) di Lione (Francia). Proprio a Lione mi sono recato, nel Maggio 2001, per
avere una visione diretta del sistema di test da loro realizzato, e soprattutto per conoscere
i problemi che avevano incontrato sia durante la realizzazione che la messa in funzione,
in modo da rendere piu agevole la riproduzione del sistema in sede.
5.1.1 L’hardware
In figura 5.1 e riportato lo schema dei collegamenti tra le varie periferiche che ho
utilizzato per la realizzazione del sistema di test. Si puo osservare come la struttura del
sistema sia divisa in tre sezioni distinte:
96
Impulsatore
ConverterECL−LVDS FED FEC Controller VME
CCU
UTRI Modulo
Seq
si
TT
Cvi
TT
Cvx
Con
trol
ler
VM
E
VME
PC
Figura 5.1: Lo schema del setup del sistema di qualificazione dei moduli che ho realizzato.
schede VME: alcune schede del sistema sono installate su di un crate VME. Per il
loro controllo e utilizzata una scheda di interfaccia, che permette di comunicare sul
bus VME direttamente dal PC, tramite una ulteriore periferica montata su bus PCI
(Peripheral Component Interconnect). Tutte le schede presenti in questa “sezione”
vengono utilizzate solamente per la fase di test, per generare i segnali necessari per
il test stesso, mentre non saranno presenti durante l’esperimento;
schede PC: un ulteriore gruppo di schede trova posto direttamente all’interno del
PC; in particolare, attraverso delle schede di interfaccia, sono tutte montate sul bus
PCI del PC stesso;
modulo: in questa parte trovano posto, oltre al modulo di silicio vero e proprio,
alcune schede che permettono di interfacciarlo al resto del sistema.
97
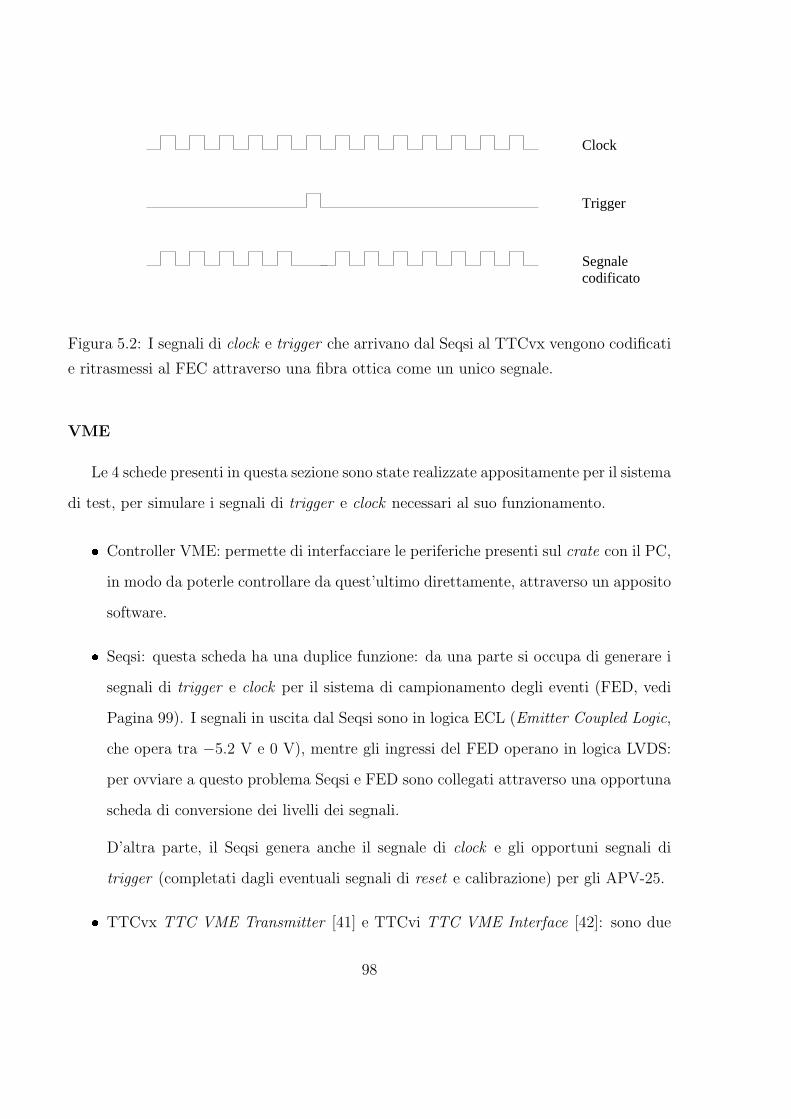
Clock
Trigger
Segnale codificato
Figura 5.2: I segnali di clock e trigger che arrivano dal Seqsi al TTCvx vengono codificati
e ritrasmessi al FEC attraverso una fibra ottica come un unico segnale.
VME
Le 4 schede presenti in questa sezione sono state realizzate appositamente per il sistema
di test, per simulare i segnali di trigger e clock necessari al suo funzionamento.
Controller VME: permette di interfacciare le periferiche presenti sul crate con il PC,
in modo da poterle controllare da quest’ultimo direttamente, attraverso un apposito
software.
Seqsi: questa scheda ha una duplice funzione: da una parte si occupa di generare i
segnali di trigger e clock per il sistema di campionamento degli eventi (FED, vedi
Pagina 99). I segnali in uscita dal Seqsi sono in logica ECL (Emitter Coupled Logic,
che opera tra −5.2 V e 0 V), mentre gli ingressi del FED operano in logica LVDS:
per ovviare a questo problema Seqsi e FED sono collegati attraverso una opportuna
scheda di conversione dei livelli dei segnali.
D’altra parte, il Seqsi genera anche il segnale di clock e gli opportuni segnali di
trigger (completati dagli eventuali segnali di reset e calibrazione) per gli APV-25.
TTCvx TTC VME Transmitter [41] e TTCvi TTC VME Interface [42]: sono due
98
schede che fanno parte del Trigger, Timing and Control System, un piu completo
insieme di componenti realizzate al CERN per il test dei vari componenti di LHC.
In particolare, le due componenti che utilizzo servono per codificare (encoding) i
segnali di clock e trigger in un unico segnale che viene trasmesso attraverso una
fibra ottica al FEC (vedi sotto).
Il segnale codificato e costituito da un normale segnale di clock, e la presenza di
un trigger viene segnalata rimuovendo opportunamente un fronte del clock stesso,
come esemplificato in figura 5.2.
PC
Sul bus PCI del computer sono presenti 3 schede:
Controller VME: questa scheda e la corrispondente di quella presente sul crate VME.
FED Front End Driver : e dotato di 9 ingressi, uno dei quali dedicato ai segnali
di trigger e clock che controllano l’acquisizione, mentre gli altri 8 sono collegati ad
altrettanti ADC a 10 bit. Poiche il bit meno significativo viene ignorato, il range
disponibile e di 512 (29) canali.
A questi 8 ingressi vengono inviati i segnali analogici (differenziali) provenienti dalla
UTRI (vedi Pagina 101). In particolare su ciascun canale arrivano i dati prodotti
da 2 APV-25, serializzati da un multiplexer.
All’interno del FED e presente una scheda FPGA sulla quale e programmata una
sequenza di istruzioni (detta firmware) che permette di riconoscere, nel flusso di
dati che proviene dal modulo, il frame (Sezione 3.2.10) generato dall’APV-25. Solo
il frame stesso viene poi messo a disposizione: in questo modo vengono filtrati
direttamente da questa periferica tutti i dati non interessanti, liberando la CPU del
computer da un pesante carico di lavoro.
99
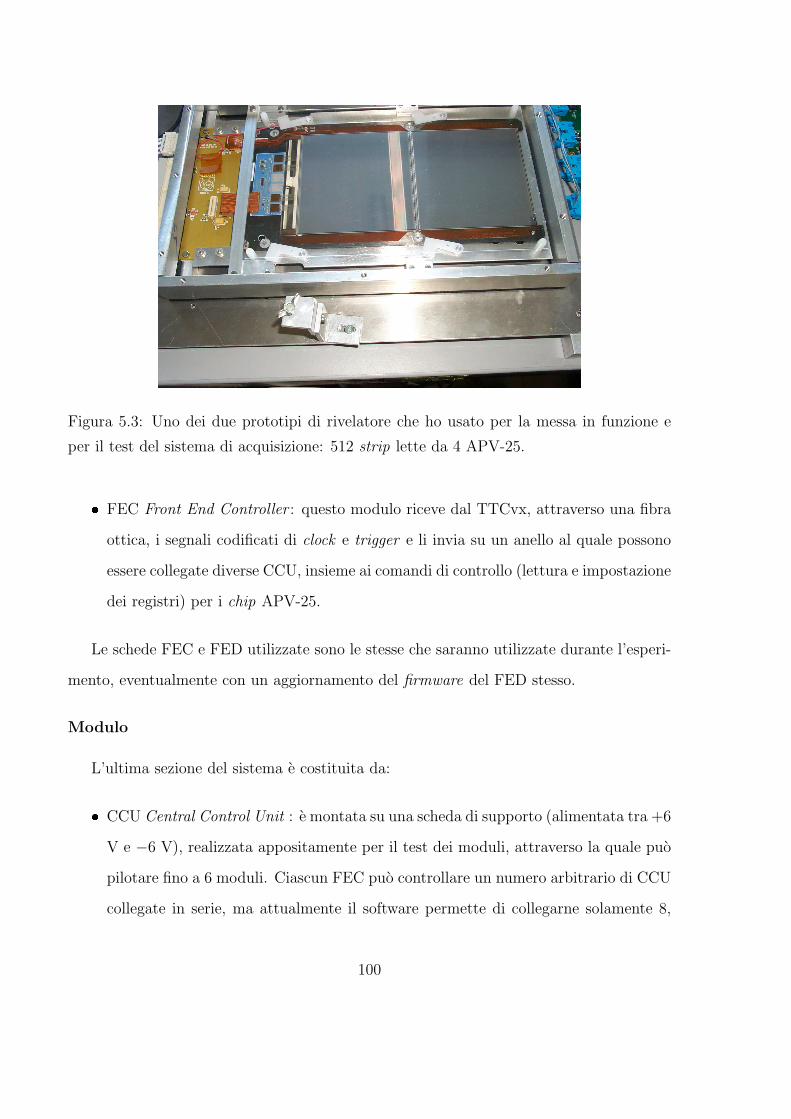
Figura 5.3: Uno dei due prototipi di rivelatore che ho usato per la messa in funzione e
per il test del sistema di acquisizione: 512 strip lette da 4 APV-25.
FEC Front End Controller : questo modulo riceve dal TTCvx, attraverso una fibra
ottica, i segnali codificati di clock e trigger e li invia su un anello al quale possono
essere collegate diverse CCU, insieme ai comandi di controllo (lettura e impostazione
dei registri) per i chip APV-25.
Le schede FEC e FED utilizzate sono le stesse che saranno utilizzate durante l’esperi-
mento, eventualmente con un aggiornamento del firmware del FED stesso.
Modulo
L’ultima sezione del sistema e costituita da:
CCU Central Control Unit : e montata su una scheda di supporto (alimentata tra +6
V e −6 V), realizzata appositamente per il test dei moduli, attraverso la quale puo
pilotare fino a 6 moduli. Ciascun FEC puo controllare un numero arbitrario di CCU
collegate in serie, ma attualmente il software permette di collegarne solamente 8,
100
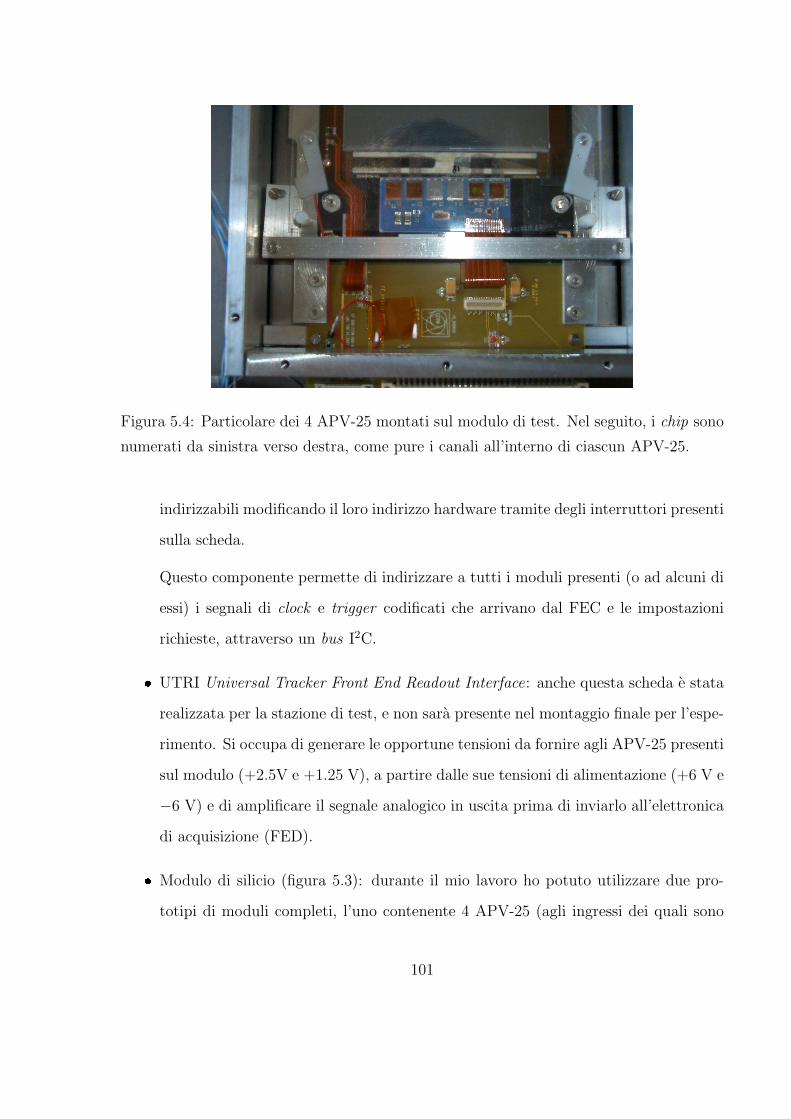
Figura 5.4: Particolare dei 4 APV-25 montati sul modulo di test. Nel seguito, i chip sono
numerati da sinistra verso destra, come pure i canali all’interno di ciascun APV-25.
indirizzabili modificando il loro indirizzo hardware tramite degli interruttori presenti
sulla scheda.
Questo componente permette di indirizzare a tutti i moduli presenti (o ad alcuni di
essi) i segnali di clock e trigger codificati che arrivano dal FEC e le impostazioni
richieste, attraverso un bus I2C.
UTRI Universal Tracker Front End Readout Interface: anche questa scheda e stata
realizzata per la stazione di test, e non sara presente nel montaggio finale per l’espe-
rimento. Si occupa di generare le opportune tensioni da fornire agli APV-25 presenti
sul modulo (+2.5V e +1.25 V), a partire dalle sue tensioni di alimentazione (+6 V e
−6 V) e di amplificare il segnale analogico in uscita prima di inviarlo all’elettronica
di acquisizione (FED).
Modulo di silicio (figura 5.3): durante il mio lavoro ho potuto utilizzare due pro-
totipi di moduli completi, l’uno contenente 4 APV-25 (agli ingressi dei quali sono
101
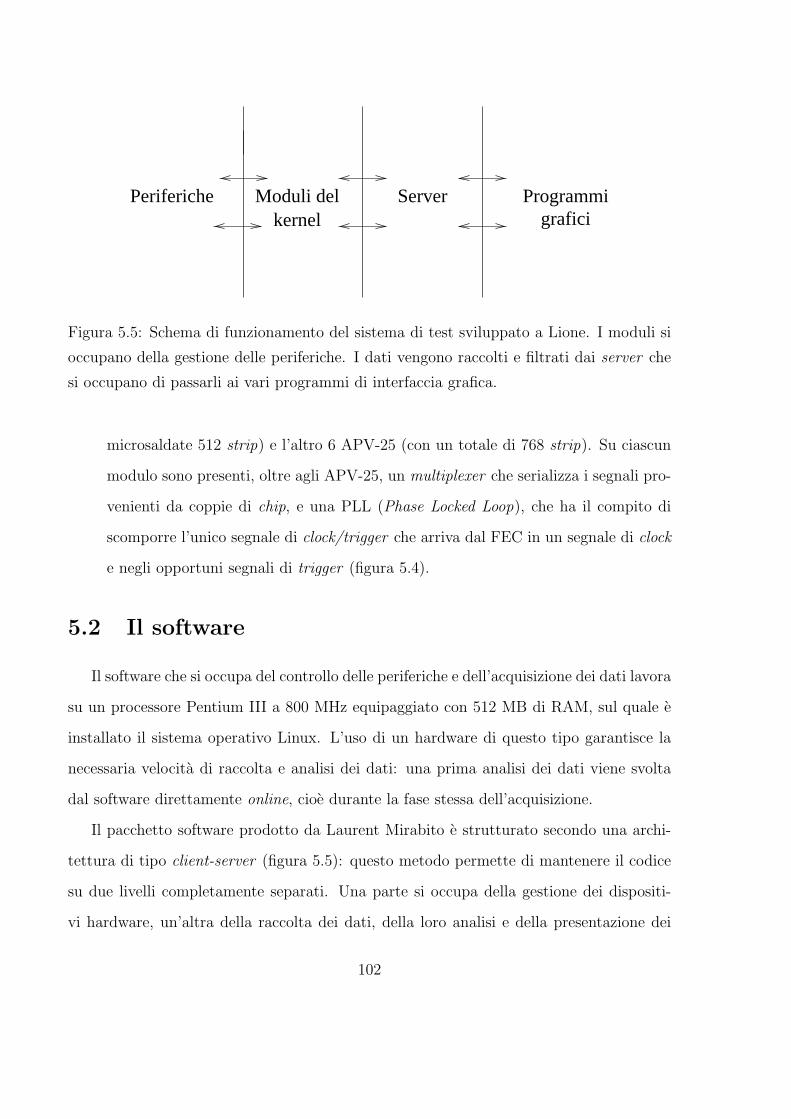
Server Programmigraficikernel
Moduli delPeriferiche
Figura 5.5: Schema di funzionamento del sistema di test sviluppato a Lione. I moduli si
occupano della gestione delle periferiche. I dati vengono raccolti e filtrati dai server che
si occupano di passarli ai vari programmi di interfaccia grafica.
microsaldate 512 strip) e l’altro 6 APV-25 (con un totale di 768 strip). Su ciascun
modulo sono presenti, oltre agli APV-25, un multiplexer che serializza i segnali pro-
venienti da coppie di chip, e una PLL (Phase Locked Loop), che ha il compito di
scomporre l’unico segnale di clock/trigger che arriva dal FEC in un segnale di clock
e negli opportuni segnali di trigger (figura 5.4).
5.2 Il software
Il software che si occupa del controllo delle periferiche e dell’acquisizione dei dati lavora
su un processore Pentium III a 800 MHz equipaggiato con 512 MB di RAM, sul quale e
installato il sistema operativo Linux. L’uso di un hardware di questo tipo garantisce la
necessaria velocita di raccolta e analisi dei dati: una prima analisi dei dati viene svolta
dal software direttamente online, cioe durante la fase stessa dell’acquisizione.
Il pacchetto software prodotto da Laurent Mirabito e strutturato secondo una archi-
tettura di tipo client-server (figura 5.5): questo metodo permette di mantenere il codice
su due livelli completamente separati. Una parte si occupa della gestione dei dispositi-
vi hardware, un’altra della raccolta dei dati, della loro analisi e della presentazione dei
102
risultati.
In questo modo l’acquisizione e l’analisi risultano del tutto indipendenti dal tipo di
hardware utilizzato: esistono infatti diverse versioni del FED, con firmware differenti, e
sistemi nei quali le periferiche VME sono sostituite da una ulteriore scheda PCI, detta Tsc
Card. Proprio della messa in funzione di questa scheda mi sto occupando attualmente.
Il primo livello, quello piu basso, e l’interfaccia delle periferiche con il sistema operativo:
questo e ottenuto utilizzando diversi moduli da caricare nel kernel di Linux.
In un sistema Linux, il kernel rappresenta il cuore del sistema operativo, mentre i
moduli sono delle librerie che lo stesso kernel puo caricare automaticamente e che gli
permettono di controllare i vari dispositivi. In particolare nel mio sistema sono necessari
dei moduli per il controllo delle tre schede PCI presenti: scheda di interfaccia VME, FED
e FEC.
Normalmente a questi moduli non si accede direttamente, ma e lo stesso sistema
operativo che si occupa di farlo. I comandi vengono inviati alle periferiche ad un livello
piu alto, dai programmi server che compongono il pacchetto del software. Per questo, a
ciascuna periferica presente sul sistema e associato un programma in grado di effettuare
la comunicazione. E attraverso questi server che avvengono tutte le comunicazioni con
i dispositivi: scrittura e lettura di registri o dati dall’APV-25, trasferimento del frame
riconosciuto dalla FPGA del FED, caricamento delle sequenze di trigger (impulso di
trigger, eventuali impulsi di calibrazione e di reset e ritardi tra i vari impulsi) sul Seqsi.
I vari server utilizzano poi un’area di memoria comune, detta memoria condivisa
(shared memory) sia per comunicare tra loro che per mettere a disposizione dell’interfaccia
grafica i dati raccolti dalle periferiche. Quest’area di memoria condivisa viene messa a
disposizione da un ulteriore programma.
L’interfaccia grafica (figura 5.6) rappresenta il livello piu alto del software ed e divisa
in vari client che permettono di controllare i parametri delle varie periferche e di effettuare
acquisizioni di dati. Questi possono poi essere salvati in formato ROOT, un pacchetto di
103
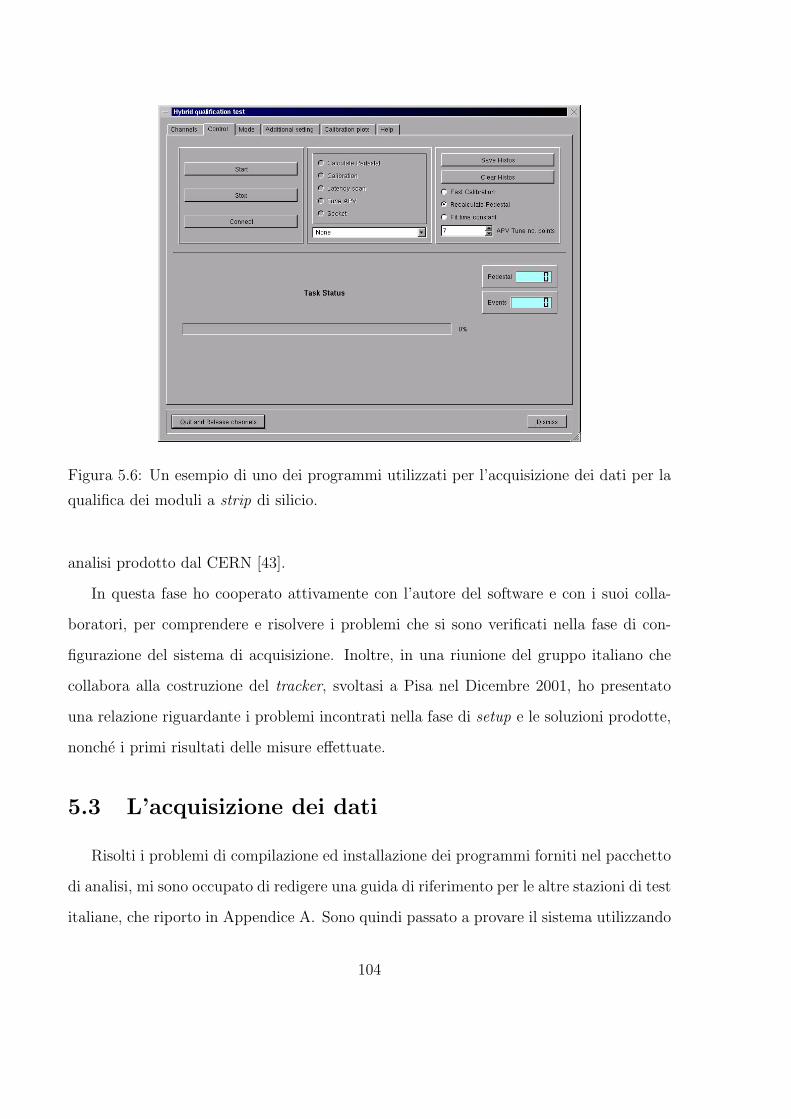
Figura 5.6: Un esempio di uno dei programmi utilizzati per l’acquisizione dei dati per la
qualifica dei moduli a strip di silicio.
analisi prodotto dal CERN [43].
In questa fase ho cooperato attivamente con l’autore del software e con i suoi colla-
boratori, per comprendere e risolvere i problemi che si sono verificati nella fase di con-
figurazione del sistema di acquisizione. Inoltre, in una riunione del gruppo italiano che
collabora alla costruzione del tracker, svoltasi a Pisa nel Dicembre 2001, ho presentato
una relazione riguardante i problemi incontrati nella fase di setup e le soluzioni prodotte,
nonche i primi risultati delle misure effettuate.
5.3 L’acquisizione dei dati
Risolti i problemi di compilazione ed installazione dei programmi forniti nel pacchetto
di analisi, mi sono occupato di redigere una guida di riferimento per le altre stazioni di test
italiane, che riporto in Appendice A. Sono quindi passato a provare il sistema utilizzando
104
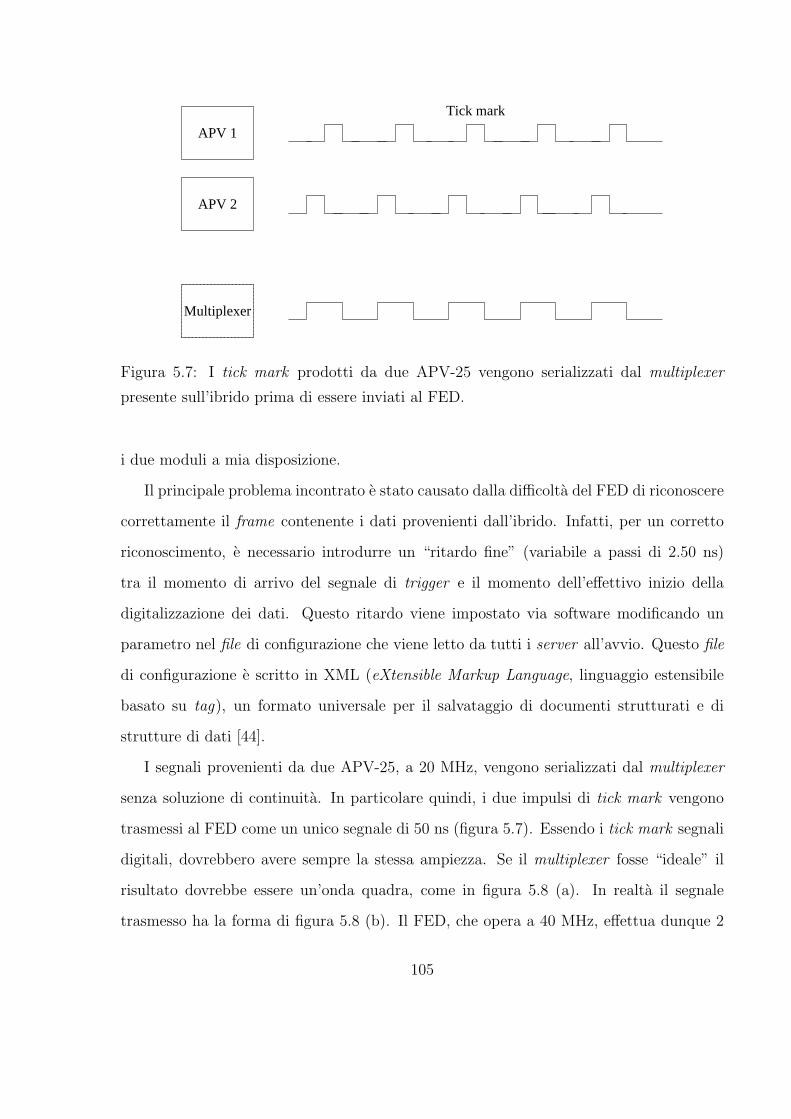
APV 1
APV 2
Multiplexer
Tick mark
Figura 5.7: I tick mark prodotti da due APV-25 vengono serializzati dal multiplexer
presente sull’ibrido prima di essere inviati al FED.
i due moduli a mia disposizione.
Il principale problema incontrato e stato causato dalla difficolta del FED di riconoscere
correttamente il frame contenente i dati provenienti dall’ibrido. Infatti, per un corretto
riconoscimento, e necessario introdurre un “ritardo fine” (variabile a passi di 2.50 ns)
tra il momento di arrivo del segnale di trigger e il momento dell’effettivo inizio della
digitalizzazione dei dati. Questo ritardo viene impostato via software modificando un
parametro nel file di configurazione che viene letto da tutti i server all’avvio. Questo file
di configurazione e scritto in XML (eXtensible Markup Language, linguaggio estensibile
basato su tag), un formato universale per il salvataggio di documenti strutturati e di
strutture di dati [44].
I segnali provenienti da due APV-25, a 20 MHz, vengono serializzati dal multiplexer
senza soluzione di continuita. In particolare quindi, i due impulsi di tick mark vengono
trasmessi al FED come un unico segnale di 50 ns (figura 5.7). Essendo i tick mark segnali
digitali, dovrebbero avere sempre la stessa ampiezza. Se il multiplexer fosse “ideale” il
risultato dovrebbe essere un’onda quadra, come in figura 5.8 (a). In realta il segnale
trasmesso ha la forma di figura 5.8 (b). Il FED, che opera a 40 MHz, effettua dunque 2
105
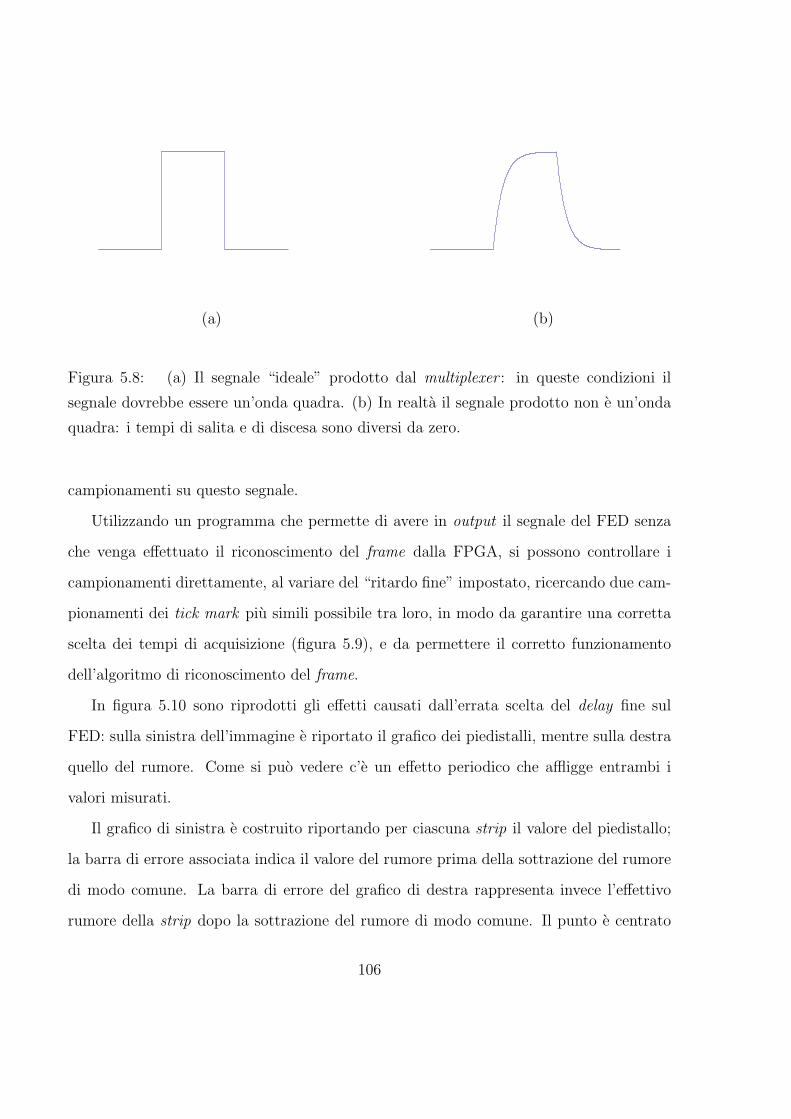
(a) (b)
Figura 5.8: (a) Il segnale “ideale” prodotto dal multiplexer : in queste condizioni il
segnale dovrebbe essere un’onda quadra. (b) In realta il segnale prodotto non e un’onda
quadra: i tempi di salita e di discesa sono diversi da zero.
campionamenti su questo segnale.
Utilizzando un programma che permette di avere in output il segnale del FED senza
che venga effettuato il riconoscimento del frame dalla FPGA, si possono controllare i
campionamenti direttamente, al variare del “ritardo fine” impostato, ricercando due cam-
pionamenti dei tick mark piu simili possibile tra loro, in modo da garantire una corretta
scelta dei tempi di acquisizione (figura 5.9), e da permettere il corretto funzionamento
dell’algoritmo di riconoscimento del frame.
In figura 5.10 sono riprodotti gli effetti causati dall’errata scelta del delay fine sul
FED: sulla sinistra dell’immagine e riportato il grafico dei piedistalli, mentre sulla destra
quello del rumore. Come si puo vedere c’e un effetto periodico che affligge entrambi i
valori misurati.
Il grafico di sinistra e costruito riportando per ciascuna strip il valore del piedistallo;
la barra di errore associata indica il valore del rumore prima della sottrazione del rumore
di modo comune. La barra di errore del grafico di destra rappresenta invece l’effettivo
rumore della strip dopo la sottrazione del rumore di modo comune. Il punto e centrato
106
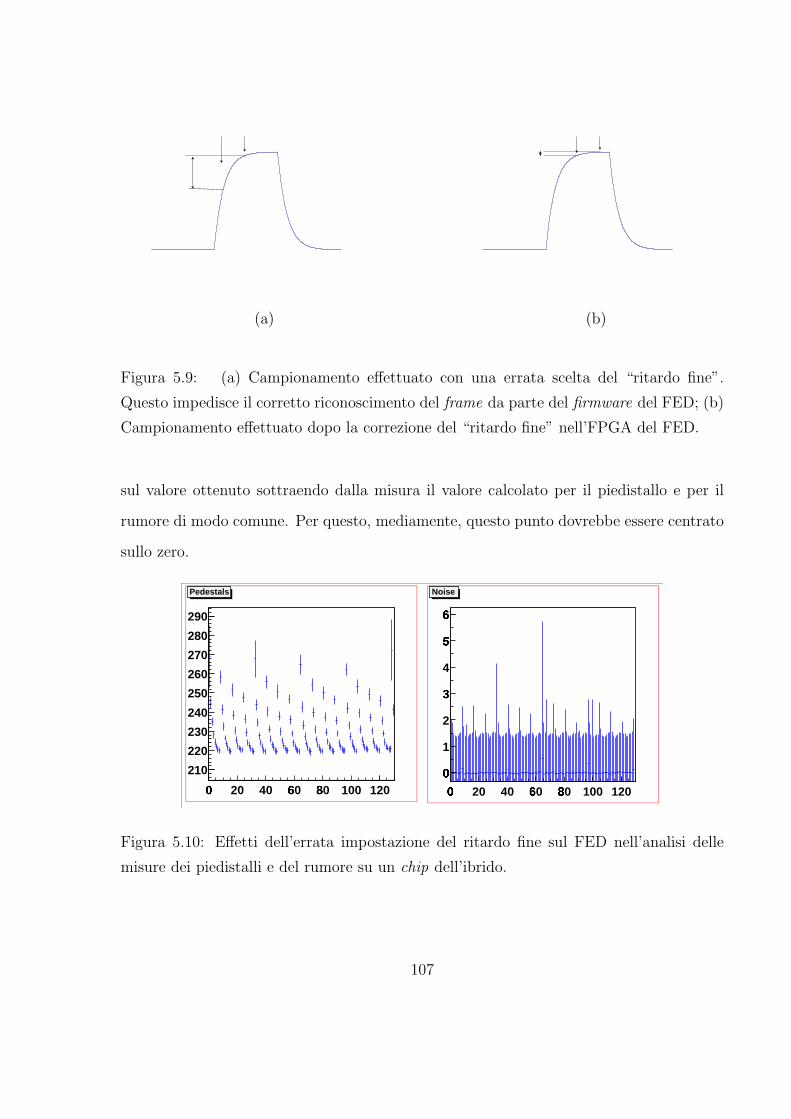
(a) (b)
Figura 5.9: (a) Campionamento effettuato con una errata scelta del “ritardo fine”.
Questo impedisce il corretto riconoscimento del frame da parte del firmware del FED; (b)
Campionamento effettuato dopo la correzione del “ritardo fine” nell’FPGA del FED.
sul valore ottenuto sottraendo dalla misura il valore calcolato per il piedistallo e per il
rumore di modo comune. Per questo, mediamente, questo punto dovrebbe essere centrato
sullo zero.
0
20 40 60
80
100 120
210
220
230
240
250
260
270
280
290
Pedestals
0
20 40 60
80
100 120
0
1
2
3
4
5
6
Noise
Figura 5.10: Effetti dell’errata impostazione del ritardo fine sul FED nell’analisi delle
misure dei piedistalli e del rumore su un chip dell’ibrido.
107
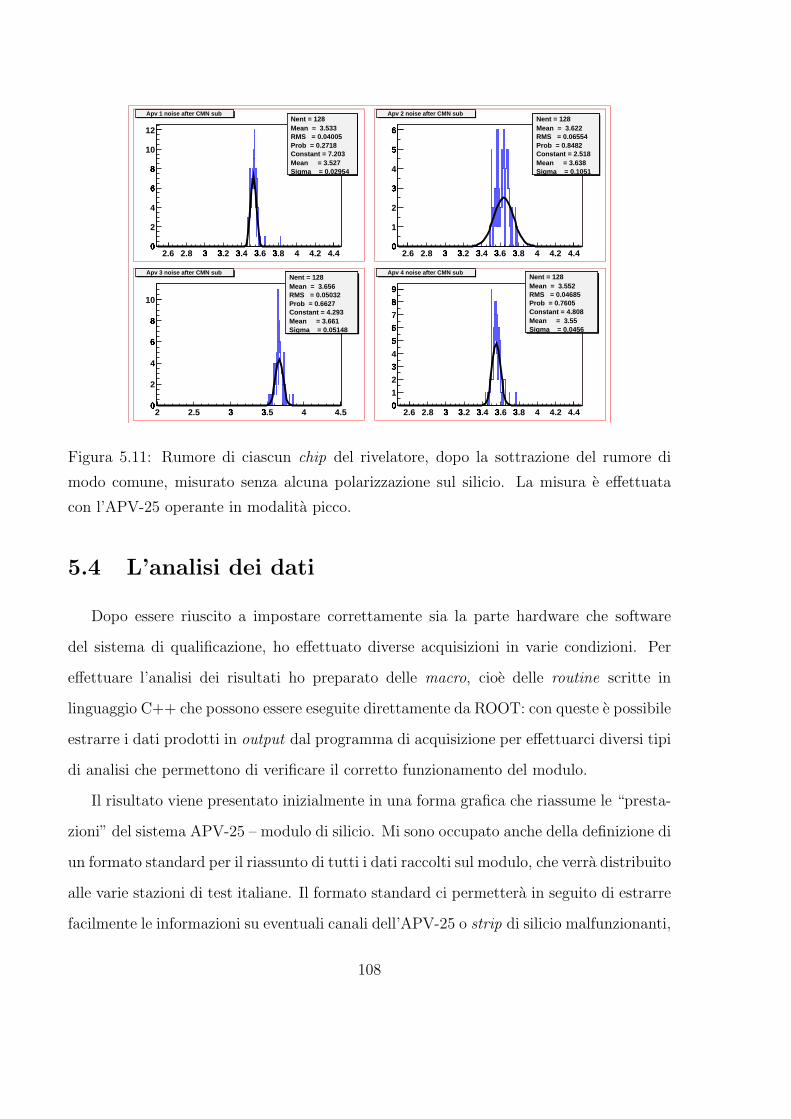
2.6 2.8 3
3.2
3.4
3.6
3.8
4 4.2 4.40
2
4
6
8
10
12Nent = 128 Mean = 3.533RMS = 0.04005Prob = 0.2718Constant = 7.203 Mean = 3.527 Sigma = 0.02954
Apv 1 noise after CMN subNent = 128 Mean = 3.533RMS = 0.04005Prob = 0.2718Constant = 7.203 Mean = 3.527 Sigma = 0.02954
2.6 2.8 3
3.2
3.4
3.6
3.8
4 4.2 4.40
1
2
3
4
5
6
Nent = 128 Mean = 3.622RMS = 0.06554Prob = 0.8482Constant = 2.518 Mean = 3.638 Sigma = 0.1051
Apv 2 noise after CMN subNent = 128 Mean = 3.622RMS = 0.06554Prob = 0.8482Constant = 2.518 Mean = 3.638 Sigma = 0.1051
2 2.5 3
3.5
4 4.50
2
4
6
8
10
Nent = 128 Mean = 3.656RMS = 0.05032Prob = 0.6627Constant = 4.293 Mean = 3.661 Sigma = 0.05148
Apv 3 noise after CMN subNent = 128 Mean = 3.656RMS = 0.05032Prob = 0.6627Constant = 4.293 Mean = 3.661 Sigma = 0.05148
2.6 2.8 3
3.2
3.4
3.6
3.8
4 4.2 4.40
1
2
34
56
7
89
Nent = 128 Mean = 3.552RMS = 0.04685Prob = 0.7605Constant = 4.808 Mean = 3.55 Sigma = 0.0456
Apv 4 noise after CMN subNent = 128 Mean = 3.552RMS = 0.04685Prob = 0.7605Constant = 4.808 Mean = 3.55 Sigma = 0.0456
Figura 5.11: Rumore di ciascun chip del rivelatore, dopo la sottrazione del rumore di
modo comune, misurato senza alcuna polarizzazione sul silicio. La misura e effettuata
con l’APV-25 operante in modalita picco.
5.4 L’analisi dei dati
Dopo essere riuscito a impostare correttamente sia la parte hardware che software
del sistema di qualificazione, ho effettuato diverse acquisizioni in varie condizioni. Per
effettuare l’analisi dei risultati ho preparato delle macro, cioe delle routine scritte in
linguaggio C++ che possono essere eseguite direttamente da ROOT: con queste e possibile
estrarre i dati prodotti in output dal programma di acquisizione per effettuarci diversi tipi
di analisi che permettono di verificare il corretto funzionamento del modulo.
Il risultato viene presentato inizialmente in una forma grafica che riassume le “presta-
zioni” del sistema APV-25 – modulo di silicio. Mi sono occupato anche della definizione di
un formato standard per il riassunto di tutti i dati raccolti sul modulo, che verra distribuito
alle varie stazioni di test italiane. Il formato standard ci permettera in seguito di estrarre
facilmente le informazioni su eventuali canali dell’APV-25 o strip di silicio malfunzionanti,
108
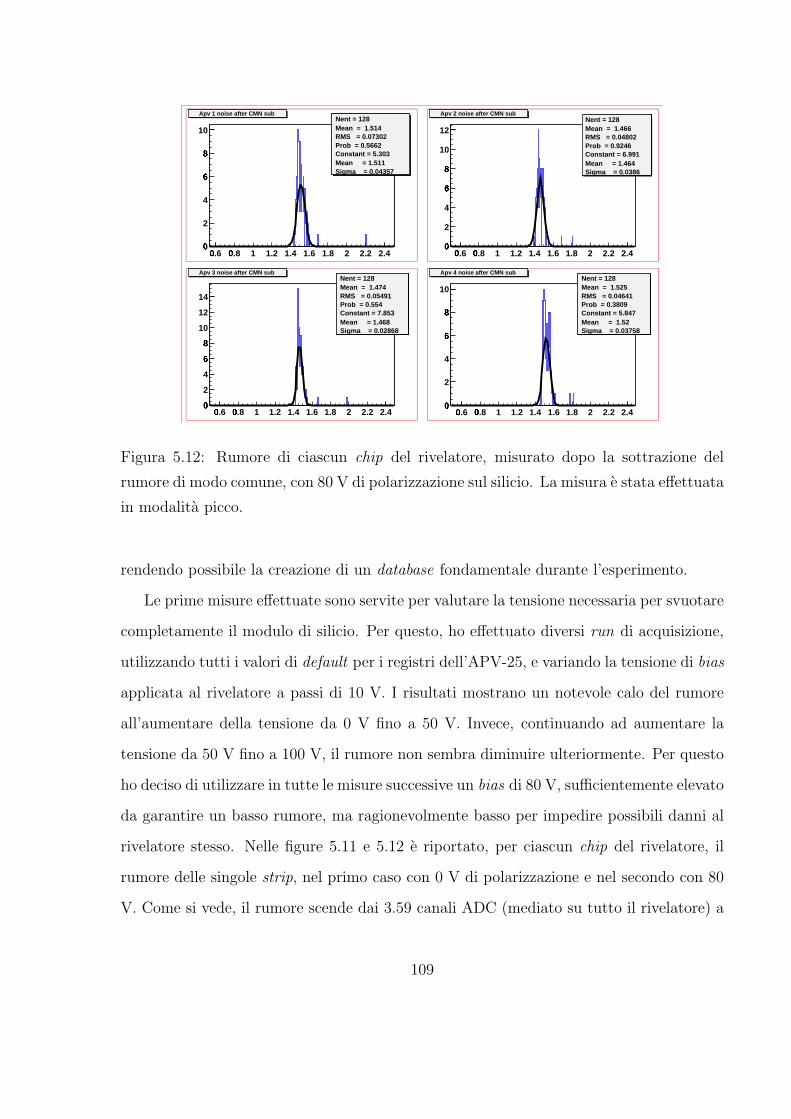
0.6
0.8
1 1.2 1.4 1.6 1.8 2 2.2 2.40
2
4
6
8
10Nent = 128 Mean = 1.514RMS = 0.07302Prob = 0.5662Constant = 5.303 Mean = 1.511 Sigma = 0.04357
Apv 1 noise after CMN subNent = 128 Mean = 1.514RMS = 0.07302Prob = 0.5662Constant = 5.303 Mean = 1.511 Sigma = 0.04357
0.6
0.8
1 1.2 1.4 1.6 1.8 2 2.2 2.40
2
4
6
8
10
12Nent = 128 Mean = 1.466RMS = 0.04802Prob = 0.9246Constant = 6.991 Mean = 1.464 Sigma = 0.0386
Apv 2 noise after CMN subNent = 128 Mean = 1.466RMS = 0.04802Prob = 0.9246Constant = 6.991 Mean = 1.464 Sigma = 0.0386
0.6
0.8
1 1.2 1.4 1.6 1.8 2 2.2 2.40
2
4
6
8
10
12
14
Nent = 128 Mean = 1.474RMS = 0.05491Prob = 0.554Constant = 7.853 Mean = 1.468 Sigma = 0.02868
Apv 3 noise after CMN subNent = 128 Mean = 1.474RMS = 0.05491Prob = 0.554Constant = 7.853 Mean = 1.468 Sigma = 0.02868
0.6
0.8
1 1.2 1.4 1.6 1.8 2 2.2 2.40
2
4
6
8
10Nent = 128 Mean = 1.525RMS = 0.04641Prob = 0.3809Constant = 5.847 Mean = 1.52 Sigma = 0.03758
Apv 4 noise after CMN subNent = 128 Mean = 1.525RMS = 0.04641Prob = 0.3809Constant = 5.847 Mean = 1.52 Sigma = 0.03758
Figura 5.12: Rumore di ciascun chip del rivelatore, misurato dopo la sottrazione del
rumore di modo comune, con 80 V di polarizzazione sul silicio. La misura e stata effettuata
in modalita picco.
rendendo possibile la creazione di un database fondamentale durante l’esperimento.
Le prime misure effettuate sono servite per valutare la tensione necessaria per svuotare
completamente il modulo di silicio. Per questo, ho effettuato diversi run di acquisizione,
utilizzando tutti i valori di default per i registri dell’APV-25, e variando la tensione di bias
applicata al rivelatore a passi di 10 V. I risultati mostrano un notevole calo del rumore
all’aumentare della tensione da 0 V fino a 50 V. Invece, continuando ad aumentare la
tensione da 50 V fino a 100 V, il rumore non sembra diminuire ulteriormente. Per questo
ho deciso di utilizzare in tutte le misure successive un bias di 80 V, sufficientemente elevato
da garantire un basso rumore, ma ragionevolmente basso per impedire possibili danni al
rivelatore stesso. Nelle figure 5.11 e 5.12 e riportato, per ciascun chip del rivelatore, il
rumore delle singole strip, nel primo caso con 0 V di polarizzazione e nel secondo con 80
V. Come si vede, il rumore scende dai 3.59 canali ADC (mediato su tutto il rivelatore) a
109
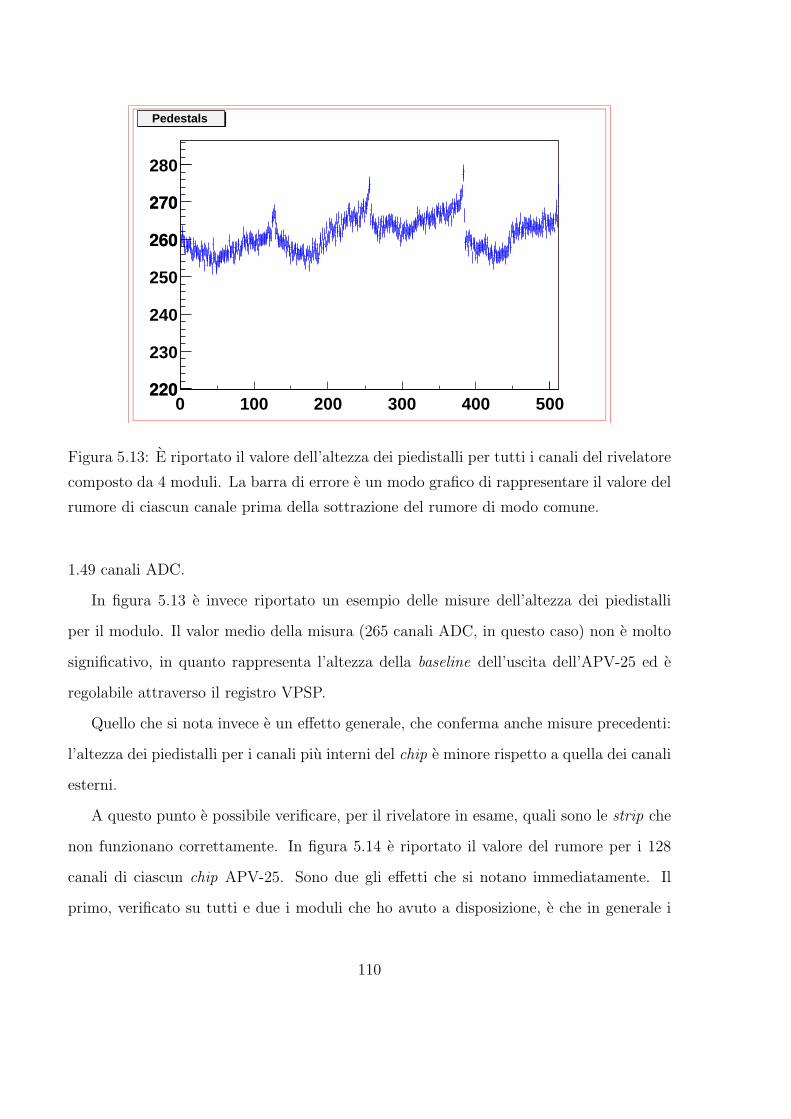
0 100 200 300 400 500220
230
240
250
260
270
280
Pedestals
Figura 5.13: E riportato il valore dell’altezza dei piedistalli per tutti i canali del rivelatore
composto da 4 moduli. La barra di errore e un modo grafico di rappresentare il valore del
rumore di ciascun canale prima della sottrazione del rumore di modo comune.
1.49 canali ADC.
In figura 5.13 e invece riportato un esempio delle misure dell’altezza dei piedistalli
per il modulo. Il valor medio della misura (265 canali ADC, in questo caso) non e molto
significativo, in quanto rappresenta l’altezza della baseline dell’uscita dell’APV-25 ed e
regolabile attraverso il registro VPSP.
Quello che si nota invece e un effetto generale, che conferma anche misure precedenti:
l’altezza dei piedistalli per i canali piu interni del chip e minore rispetto a quella dei canali
esterni.
A questo punto e possibile verificare, per il rivelatore in esame, quali sono le strip che
non funzionano correttamente. In figura 5.14 e riportato il valore del rumore per i 128
canali di ciascun chip APV-25. Sono due gli effetti che si notano immediatamente. Il
primo, verificato su tutti e due i moduli che ho avuto a disposizione, e che in generale i
110
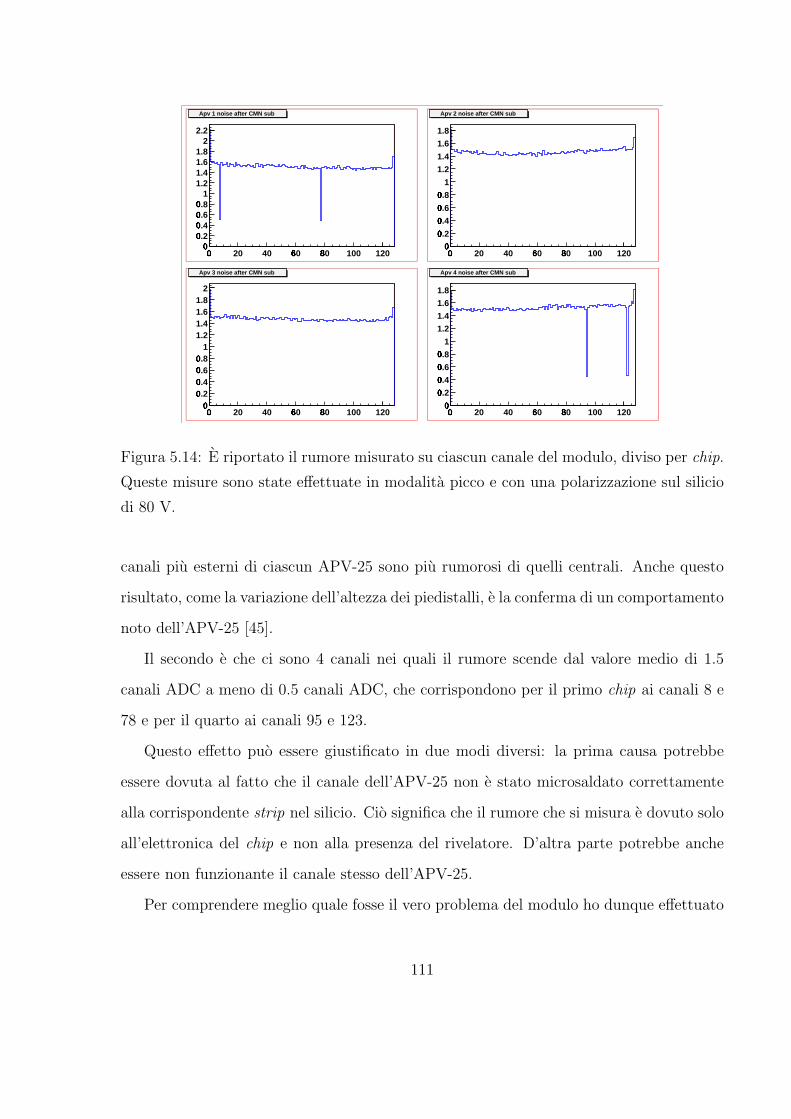
0
20 40 60
80
100 1200
0.2
0.4
0.6
0.8
1
1.21.41.61.8
22.2
Apv 1 noise after CMN sub
0
20 40 60
80
100 1200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Apv 2 noise after CMN sub
0
20 40 60
80
100 1200
0.2
0.4
0.6
0.8
1
1.21.41.61.8
2
Apv 3 noise after CMN sub
0
20 40 60
80
100 1200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Apv 4 noise after CMN sub
Figura 5.14: E riportato il rumore misurato su ciascun canale del modulo, diviso per chip.
Queste misure sono state effettuate in modalita picco e con una polarizzazione sul silicio
di 80 V.
canali piu esterni di ciascun APV-25 sono piu rumorosi di quelli centrali. Anche questo
risultato, come la variazione dell’altezza dei piedistalli, e la conferma di un comportamento
noto dell’APV-25 [45].
Il secondo e che ci sono 4 canali nei quali il rumore scende dal valore medio di 1.5
canali ADC a meno di 0.5 canali ADC, che corrispondono per il primo chip ai canali 8 e
78 e per il quarto ai canali 95 e 123.
Questo effetto puo essere giustificato in due modi diversi: la prima causa potrebbe
essere dovuta al fatto che il canale dell’APV-25 non e stato microsaldato correttamente
alla corrispondente strip nel silicio. Cio significa che il rumore che si misura e dovuto solo
all’elettronica del chip e non alla presenza del rivelatore. D’altra parte potrebbe anche
essere non funzionante il canale stesso dell’APV-25.
Per comprendere meglio quale fosse il vero problema del modulo ho dunque effettuato
111
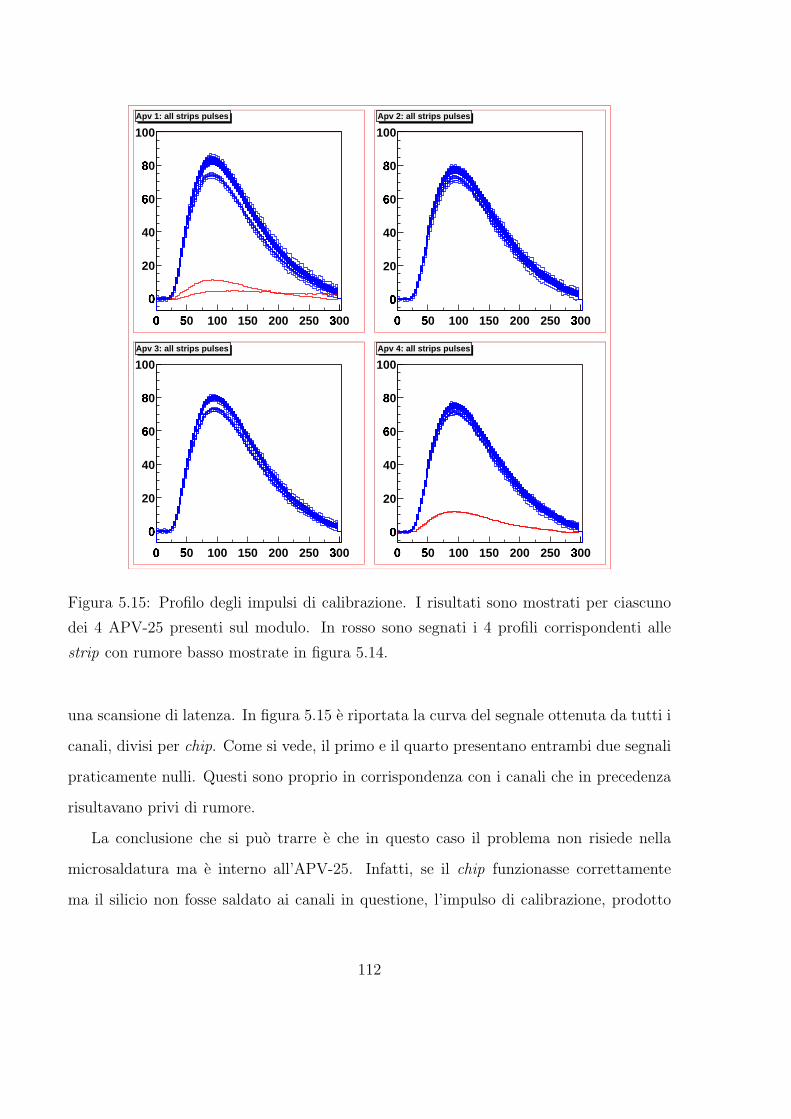
0
50
100 150 200 250 300
0
20
40
60
80
100Apv 1: all strips pulses
0
50
100 150 200 250 300
0
20
40
60
80
100Apv 2: all strips pulses
0
50
100 150 200 250 300
0
20
40
60
80
100Apv 3: all strips pulses
0
50
100 150 200 250 300
0
20
40
60
80
100Apv 4: all strips pulses
Figura 5.15: Profilo degli impulsi di calibrazione. I risultati sono mostrati per ciascuno
dei 4 APV-25 presenti sul modulo. In rosso sono segnati i 4 profili corrispondenti alle
strip con rumore basso mostrate in figura 5.14.
una scansione di latenza. In figura 5.15 e riportata la curva del segnale ottenuta da tutti i
canali, divisi per chip. Come si vede, il primo e il quarto presentano entrambi due segnali
praticamente nulli. Questi sono proprio in corrispondenza con i canali che in precedenza
risultavano privi di rumore.
La conclusione che si puo trarre e che in questo caso il problema non risiede nella
microsaldatura ma e interno all’APV-25. Infatti, se il chip funzionasse correttamente
ma il silicio non fosse saldato ai canali in questione, l’impulso di calibrazione, prodotto
112
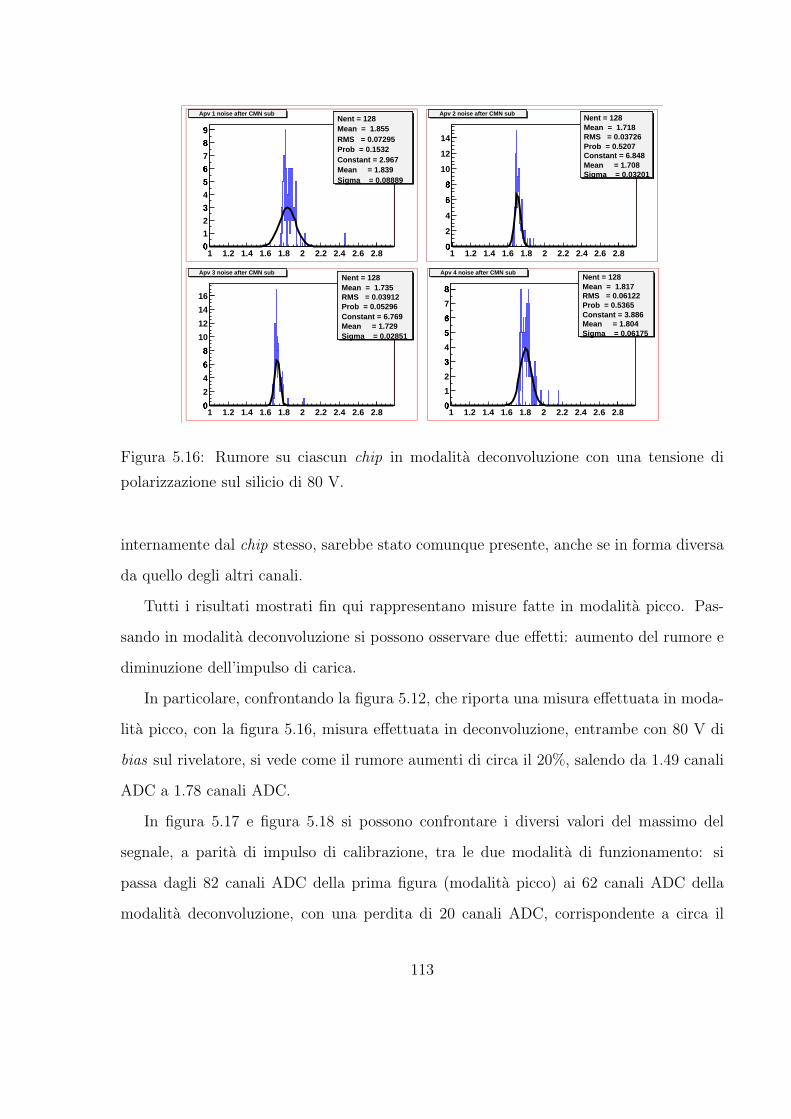
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.80
1
2
34
56
7
89
Nent = 128 Mean = 1.855RMS = 0.07295Prob = 0.1532Constant = 2.967 Mean = 1.839 Sigma = 0.08889
Apv 1 noise after CMN subNent = 128 Mean = 1.855RMS = 0.07295Prob = 0.1532Constant = 2.967 Mean = 1.839 Sigma = 0.08889
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.80
2
4
6
8
10
12
14
Nent = 128 Mean = 1.718RMS = 0.03726Prob = 0.5207Constant = 6.848 Mean = 1.708 Sigma = 0.03201
Apv 2 noise after CMN subNent = 128 Mean = 1.718RMS = 0.03726Prob = 0.5207Constant = 6.848 Mean = 1.708 Sigma = 0.03201
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.80
2
4
68
10
12
14
16
Nent = 128 Mean = 1.735RMS = 0.03912Prob = 0.05296Constant = 6.769 Mean = 1.729 Sigma = 0.02851
Apv 3 noise after CMN subNent = 128 Mean = 1.735RMS = 0.03912Prob = 0.05296Constant = 6.769 Mean = 1.729 Sigma = 0.02851
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.80
1
2
3
4
5
6
7
8
Nent = 128 Mean = 1.817RMS = 0.06122Prob = 0.5365Constant = 3.886 Mean = 1.804 Sigma = 0.06175
Apv 4 noise after CMN subNent = 128 Mean = 1.817RMS = 0.06122Prob = 0.5365Constant = 3.886 Mean = 1.804 Sigma = 0.06175
Figura 5.16: Rumore su ciascun chip in modalita deconvoluzione con una tensione di
polarizzazione sul silicio di 80 V.
internamente dal chip stesso, sarebbe stato comunque presente, anche se in forma diversa
da quello degli altri canali.
Tutti i risultati mostrati fin qui rappresentano misure fatte in modalita picco. Pas-
sando in modalita deconvoluzione si possono osservare due effetti: aumento del rumore e
diminuzione dell’impulso di carica.
In particolare, confrontando la figura 5.12, che riporta una misura effettuata in moda-
lita picco, con la figura 5.16, misura effettuata in deconvoluzione, entrambe con 80 V di
bias sul rivelatore, si vede come il rumore aumenti di circa il 20%, salendo da 1.49 canali
ADC a 1.78 canali ADC.
In figura 5.17 e figura 5.18 si possono confrontare i diversi valori del massimo del
segnale, a parita di impulso di calibrazione, tra le due modalita di funzionamento: si
passa dagli 82 canali ADC della prima figura (modalita picco) ai 62 canali ADC della
modalita deconvoluzione, con una perdita di 20 canali ADC, corrispondente a circa il
113
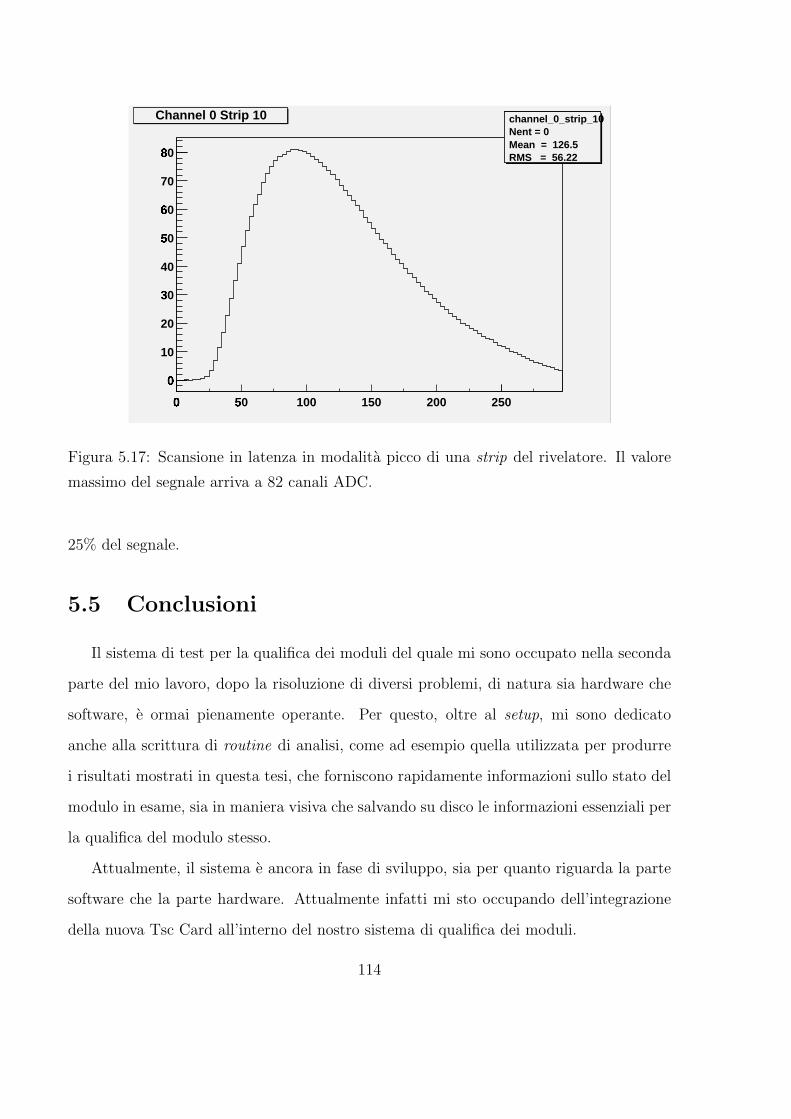
0
50
100 150 200 250
0
10
20
30
40
50
60
70
80
channel_0_strip_10Nent = 0 Mean = 126.5RMS = 56.22
Channel 0 Strip 10 channel_0_strip_10Nent = 0 Mean = 126.5RMS = 56.22
Figura 5.17: Scansione in latenza in modalita picco di una strip del rivelatore. Il valore
massimo del segnale arriva a 82 canali ADC.
25% del segnale.
5.5 Conclusioni
Il sistema di test per la qualifica dei moduli del quale mi sono occupato nella seconda
parte del mio lavoro, dopo la risoluzione di diversi problemi, di natura sia hardware che
software, e ormai pienamente operante. Per questo, oltre al setup, mi sono dedicato
anche alla scrittura di routine di analisi, come ad esempio quella utilizzata per produrre
i risultati mostrati in questa tesi, che forniscono rapidamente informazioni sullo stato del
modulo in esame, sia in maniera visiva che salvando su disco le informazioni essenziali per
la qualifica del modulo stesso.
Attualmente, il sistema e ancora in fase di sviluppo, sia per quanto riguarda la parte
software che la parte hardware. Attualmente infatti mi sto occupando dell’integrazione
della nuova Tsc Card all’interno del nostro sistema di qualifica dei moduli.
114
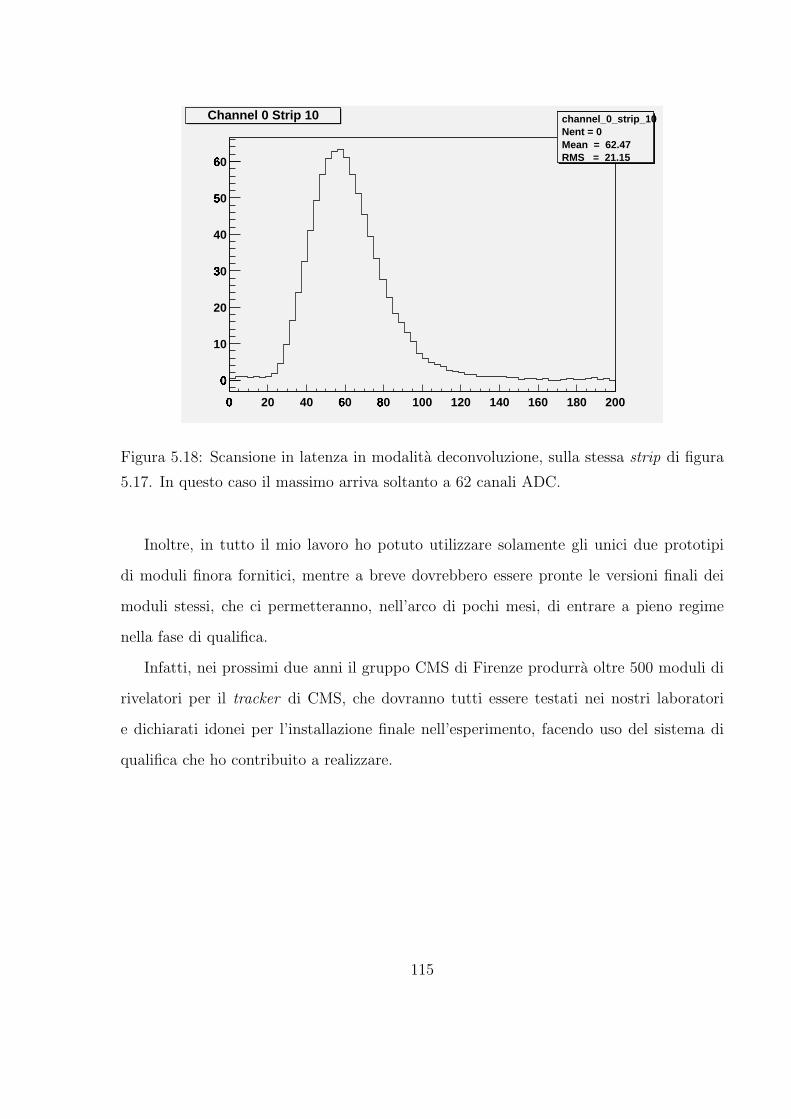
0
20 40 60
80
100 120 140 160 180 200
0
10
20
30
40
50
60
channel_0_strip_10Nent = 0 Mean = 62.47RMS = 21.15
Channel 0 Strip 10 channel_0_strip_10Nent = 0 Mean = 62.47RMS = 21.15
Figura 5.18: Scansione in latenza in modalita deconvoluzione, sulla stessa strip di figura
5.17. In questo caso il massimo arriva soltanto a 62 canali ADC.
Inoltre, in tutto il mio lavoro ho potuto utilizzare solamente gli unici due prototipi
di moduli finora fornitici, mentre a breve dovrebbero essere pronte le versioni finali dei
moduli stessi, che ci permetteranno, nell’arco di pochi mesi, di entrare a pieno regime
nella fase di qualifica.
Infatti, nei prossimi due anni il gruppo CMS di Firenze produrra oltre 500 moduli di
rivelatori per il tracker di CMS, che dovranno tutti essere testati nei nostri laboratori
e dichiarati idonei per l’installazione finale nell’esperimento, facendo uso del sistema di
qualifica che ho contribuito a realizzare.
115

116
Bibliografia
[1] LHC: The Large Hadron Collider Conceptual Design, CERN-AC 95-05, 1995
[2] ALICE Collaboration: Technical Proposal, CERN-LHCC 95-71 LHCC/P3, 1995
[3] LHCb Collaboration: Technical Proposal, CERN-LHCC 98-4 LHCC/P4, 1998
[4] ATLAS Collaboration: Technical Proposal, CERN-LHCC 94-43 LHCC/P2, 1994
[5] CMS Collaboration: Technical Proposal, CERN-LHCC 94-38 LHCC/P1, 1994
[6] CMS Letter of Intent, CERN-LHCC 92-3, 1992
[7] J. J. Sakurai, Modern Quantum Mechanics, Addison-Wesley, Redwood City, 1985
[8] CMS Collaboration: The Magnet Project Technical Design Report, CERN-LHCC
7-10, 1997
[9] CMS Collaboration: The Tracker Project Technical Design Report, CERN-LHCC
98-6, 1998
[10] CMS Collaboration: Addendum to the Tracker TDR, CERN-LHCC 2000-16, 2000
[11] CMS Collaboration: The Electromagnetic Calorimeter Technical Design Report,
CERN-LHCC 97-33, 1997
[12] Review of Particle Physics, The European Physical Journal C, Volume 15, Numeri
1-4, 2000, Pagine 166-167
117
[13] Review of Particle Physics, The European Physical Journal C, Volume 15, Numeri
1-4, 2000, Pagine 170-171
[14] CMS Collaboration: Review of the CMS Hadron Calorimeter Technical Design
Report, CERN-LHCC 97-52, 1997
[15] CMS Collaboration: Review of the CMS Muon Project Technical Design Report,
CERN-LHCC 98-9, 1998
[16] Large Hadron Collider Workshop, CERN 90-10, Volume 1, 1990
[17] J. Gunion, H. E. Haber, G. L. Kane e S. Dawson, The Higgs Hunter’s Guide, Addison-
Wesley, Redwood City, 1990
[18] F. Gianotti, Searches for new particles at colliders, Proceedings of EPS HEP 2001,
Budapest, JHEP Proceedings Section, PrHEP-hep2001/286, 2001
[19] C. Caso et al., The Higgs Boson, The European Physical Journal C3, 1, 1998
[20] D. Charlton, Experimental test of the Standard Model, Proceedings of EPS HEP
2001, Budapest, JHEP Proceedings Section, PrHEP-hep2001/285, 2001
[21] A. Ali e D. Landon, Implications of the Top Quark Mass Measurement on the CKM
Parameters, Cross Sections and CP Asymmetries, CERN-TH 7398-94, 1994
[22] The BaBar Collaboration, Measurement of CP-Violating Asymmetries in B0 Decays
to CP Eigenstates, Phys. Rev. Lett., 86, 2001
[23] Y. Nir e H. Quinn, B Decays, Ann. Rev. Nucl. and Part. Sci., 42, 1992
[24] S. P. Martin, Perspectives on Supersymmetry, World Scientific, Singapore, 1998
[25] L. Jones, The APV-25 User Guide, RAL Microelectronics Design Group, 2001
118
[26] M. Raymond et al., The CMS Tracker APV-25 25 Micron CMOS Readout Chip,
Imperial College Preprints, IC/HEP/00-3, 2000
[27] M. Raymond et al., The APV6 Readout Chip for CMS Microstrip Detectors, Pro-
ceedings of the 3rd Workshop on Electronics for LHC Experiments, CERN-LHCC
97-60, 1997
[28] M. French et al., Probing the Nature of Matter with CMOS 6SF: The APV-25 Readout
Chip for the CMS Tracker, MicroNews, Volume 7, Numero 2, 2001
[29] Philips Semiconductors, The I2C Bus Specification, Philips Semiconductors 9397 750
00954, 2000
[30] D. Paret, The I2C Bus: From Theory to Practice, Wiley & Sons, Chichester, 1997
[31] L. Jones et al., The APV-25 Deep Submicron Readout Chip for CMS Detectors,
Proceedings of the 5th Workshop on Electronics for LHC Experiments, CERN-LHCC
99-09, 1999
[32] R. Jaeger, Microelectronic Circuit Design, Irwin/McGraw-Hill, 1997
[33] C. Bozzi, Signal-to-Noise Evaluations for the CMS Silicon Microstrip Detectors, CMS
Note 1997/026, 1997
[34] A. Holmes-Siedle et al., RD20 Collaboration, Nucl. Instr. and Meths. in Phys. Res.,
A339, 1994
[35] S. Gadomski et al., The Deconvolution Method of Fast Pulse Shaping at Hadrons
Colliders, Nucl. Instr. And. Meths. in Phys. Res., A320, 1992
[36] Altera, Altera MAX 7000 Programmable Logic Device Family Data Sheet, Novembre
2001
119

[37] B. Stroustrup, The C++ Programming Language, Terza Edizione, Addison-Wesley,
1997
[38] O. Couet, Physics Analysis Workstation, http://wwwinfo.cern.ch/asd/paw/
[39] L. Feld, How to Evaluate Common Mode Noise in a Digital Read Out System,
Freiburg University, 2000
[40] M. Friedl, APV-25 S1 SEU measurements and module tests at PSI, CMS Week,
Gennaio 2001
[41] P. Gallno, “TTCvx” Technical Description and users manual, CERN/EP/ATE/dq,
1999
[42] P. Farthouat, P. Gallno, TTC-VMEbus Interface, CERN/RD-12 Project, Maggio
2000
[43] R. Brun, F. Rademakers, ROOT, An Object-Oriented Data Analisys Framework,
http://root.cern.ch
[44] T. Bray, J. Paoli, E. Maler, Extensible Markup Language (XML) 1.0, Seconda
Edizione, W3C Recommendation, Ottobre 2000
[45] M. Raymond, APV-25 Test Results, Imperial College, Dicembre 1999
120
Appendice A
Guida all’installazione e all’uso del
software di qualificazione dei moduli
Le informazioni seguenti si riferiscono all’uso del sistema RedHat Linux 7.0. Se si usano
distribuzioni o versioni differenti da questa alcune delle seguenti istruzioni potrebbero
essere diverse.
A.1 I file necessari
Tutto il software necessario puo essere scaricato utilizzando il sistema CVS dall’indi-
rizzo lyopc134.in2p3.fr:/home/lyopc134/CVS. Per farlo, occorre prima impostare la
variabile di ambiente CVSROOT. In ambiente bash questo puo essere fatto introducendo nel
file di configurazione .bashrc presente nella home la riga
export CVSROOT=:pserver:[email protected]:/home/lyopc134/CVS/.
Quindi, ci si puo collegare attraverso il comando cvs login (la password puo essere
richiesta a Laurent Mirabito, [email protected]) e si puo iniziare il download con il
comando cvs co Daq. Questo creera una directory Daq contenente tutti i file necessari.
Per concludere, scollegarsi da CVS con il comando cvs logout.
E inoltre necessario scaricare delle librerie aggiuntive:
a
qt vers. 2.2.3
qwt vers. 0.3.0
xerces vers. 1.4.0
dim vers. 9.5
oltre al programma di analisi ROOT, dalla versione 3.01 in poi. I sorgenti di questi
programmi possono essere scaricati via FTP anonimo da lyoftp.in2p3.fr/cms/Daq,
tranne le dim che possono essere reperite all’indirizzo
http://dim.web.cern.ch/dim/dim_v9r7.zip e ROOT, reperibile presso
http://root.cern.ch.
E consigliabile eseguire tutte queste operazioni, come pure le successive compila-
zioni, creando ed utilizzando un utente (ad esempio, per il seguito, daq) e non come
amministratore di sistema.
Inolre, prima di procedere, assicurarsi che sul sistema sia presente la versione 2.2
delle librerie glibc. Per farlo, rpm -qa | grep glibc, controllando il numero di versione
accanto al nome del pacchetto glibc-devel. Il pacchetto rpm e reperibile, ad esempio,
presso fr2.rpmfind.net.
La distribuzione RedHat utilizza come compilatore il gcc 2.96, una versione beta non
ufficialmente realizzata dalla GNU ma modificata dalla RedHat stessa. Essendo una beta,
l’uso di questa versione crea molti problemi nella compilazione dei vari programmi. Per
questo e consigliabile sostituirla con la versione precedente (ufficiale) del compilatore,
la 2.95.3, perfettamente funzionante. Il sorgente e reperibile presso qualunque mirror
GNU (http://gcc.gnu.org). Scaricato e scompattato l’archivio si ottiene una directory
gcc-2.95.3 che contiene i sorgenti.
Il compilatore non va compilato all’interno di questa directory, ma ne va creata un’al-
tra, ad esempio build (non come sottodirectory della precedente!). Per compilare entrare
in build, eseguire ../gcc-2.95.3/configure. E possibile personalizzare alcune opzioni
b
di compilazione, in particolare e consigliabile passare a configure le seguenti opzioni:
--with-gnu-as --with-gnu-ld --enable-shared --enable-threads --enable-cpp.
Terminato lo script, per cominciare la compilazione vera e propria eseguire make bootstrap
ancora dentro build. Al termine (la compilazione del compilatore richiede diverso tempo)
installare il compilatore nel sistema col comando make install.
Indipendentemente dalla distribuzione installata si consiglia di utilizzare questa spe-
cifica versione del compilatore.
A questo punto e possibile passare alla compilazione dei pacchetti scaricati:
ROOT Impostare la variabile di ambiente ROOTSYS alla directory nella quale si
trova il programma. Ad esempio in ambiente bash con ROOT in /home/daq/root,
il comando sara export ROOTSYS=/home/daq/root. A questo punto, entrare in
questa directory e compilare con ./configure linux --enable-thread e quindi
make.
Qt In questo caso la variabile da impostare e QTDIR, che deve puntare alla directory
nella quale si trova la libreria. Entrare nella directory e compilare con i comandi
./configure -release -shared -thread (rispondendo yes alla richiesta di ac-
cettare i termini della GNU General Public License) e make. La compilazione di
queste librerie richiede molto tempo.
Qwt In questo caso sono due le variabili da impostare, QWTDIR e QWTLIB: tutte e due
devono puntare alla directory nella quale si trovano le librerie. Per compilare questo
pacchetto e sufficiente entrare in questa directory ed eseguire il comando make nella
directory QWTDIR. La compilazione di questa libreria deve essere effettuata al termine
della compilazione delle Qt.
Xerces Come sempre, si deve per prima cosa impostare una variabile, questa volta
XERCESCROOT, alla directory nella quale si trovano i programmi. Passare poi alla
c
directory $XERCESCROOT/samples ed eseguire ./runConfigure -plinux seguito da
make.
Dim Per la compilazione di questo pacchetto e necessario aver installato le librerie
LessTif, versione 1.2 (sia il pacchetto con le librerie che quello di sviluppo devel),
reperibili sempre sul sito fr2.rpmfind.net.
Decomprimere l’archivio scaricato con il comando unzip -a dim_v9r6.zip. Impo-
stare la variabile DIMDIR alla directory che contiene le librerie e la variabile OS al tipo
di sistema operativo che si sta utilizzando. Nel caso di Linux, export OS=Linux,
con l’iniziale maiuscola. Entrare in $DIMDIR. Per compilare questo pacchetto si deve
passare sotto tc shell. Per farlo e sufficiente il comando tcsh.
Dopo aver eseguito source .setup, aprire il file makefile_did, cercare la riga
ifeq ($(OS), Linux), e, sostituire la riga MOTIFINC=... con MOTIFINC=/usr/X11R6/
LessTif/Motif1.2/include e quella MOTIFLIB=... con MOTIFLIB=/usr/X11R6/
LessTif/Motif1.2/lib. Adesso e possibile compilare con make all.
E possibile eseguire lo script anche in ambiente bash : si deve editare il file .se-
tup, inserendo come prima riga #!/bin/tcsh, quindi questo file va reso eseguibile
col comando chmod a+x .setup e infine eseguito: .setup. Terminato lo script di
configurazione, editare makefile_did e compilare come nel caso precedente.
Poiche le variabili di ambiente qui utilizzate sono necessarie non solo per la compila-
zione ma anche per l’esecuzione successiva dei programmi, e conveniente inserirle nel file
.bashrc (nel caso di shell bash, altrimenti nel file .tcshrc nel caso di tc shell, con una
sintassi leggermente diversa). Ecco un esempio:
export CVSROOT=:pserver:[email protected]:/home/lyopc134/CVS/
export XERCESCROOT=/home/daq/xerces-c1_4_0-linux/
export QWTLIB=/home/daq/qwt-0.3.0/
export QTDIR=/home/daq/qt-2.2.3/
d
export QWTDIR=/home/daq/qwt-0.3.0/
export ROOTSYS=/home/daq/root/
export DIMDIR=/home/daq/dim/
export PATH=$PATH:$ROOTSYS/bin:$QTDIR/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$XERCESCROOT/lib:
$QWTDIR:$QWTLIB:$ROOTSYS/lib:$QTDIR/lib:$DIMDIR
La riga export PATH=$PATH:$ROOTSYS/bin:$QTDIR/bin serve per aggiungere al path
alcuni tool delle Qt e ROOT. La riga export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:
$XERCESCROOT/lib:$QWTDIR:$QWTLIB:$ROOTSYS/lib:$QTDIR/lib:$DIMDIR serve per
aggiungere il path delle librerie dinamiche per il linker. Per questo, al termine della
compilazione di tutte le librerie, e anche necessario eseguire il comando ldconfig.
A questo punto tutto e pronto per passare alla compilazione dei programmi. Entrando
nella directory nella quale si e scaricato il software via CVS si trovera una directory Daq
e qui dentro quattro sottodirectory: Driver, Dim, Acquisition e Gui.
A.2 Driver
Qui si trovano i driver di tutte le periferiche utilizzate. In particolare, riporto qui
le operazioni necessarie per utilizzare il setup con il Seqsi tramite VME e quello con la
scheda Tsc. In entrambi i casi servono comunque i driver FED e FEC:
Fed Driver
Entrare in questa directory e editare il file Makefile. Al termine della riga che
inizia con CKFLAGS = aggiungere -I/usr/src/linux/include. Uscire e compilare con
make clean e poi make.
A questo punto, si potrebbe ottenere questo errore:
make: ***
No rule to make target ‘/usr/include/linux/tasks.h’, needed by ‘feddrv.o’.
Stop.
e
Per risolverlo, e sufficiente copiare il file /usr/src/linux/include/linux/tasks.h in
/usr/include/linux/tasks.h.
Inoltre, poiche nel kernel 2.2.18 c’e un file del sorgente errato, si potrebbe presentare
questo errore (riporto solo le ultime linee):
/usr/src/linux/include/linux/tty.h:79: parse error before ‘lfb_size’
/usr/src/linux/include/linux/tty.h:94: parse error before ‘’
feddrv.c: In function ‘init_module’:
feddrv.c:136: warning: unused variable ‘i’
feddrv.c:131: warning: unused variable ‘rdval’
feddrv.c: In function ‘feddrv_read’:
feddrv.c:336: warning: unused variable ‘strip’
feddrv.c:335: warning: unused variable ‘dma’
feddrv.c:334: warning: unused variable ‘i’
make: *** [feddrv.o] Error 1
Per risolverlo, si deve editare il file /usr/src/include/linux/tty.h, ricercare la parola
l0ng (scritta con lo zero al posto della o) e sostituirla con long.
Creare i giusti files nella directory /dev con il comando make devices. Questo deve
essere fatto da root.
Entrare quindi nella directory OO ed eseguire make clean e make testfed.
Official Fec Driver
In questa directory e sufficiente eseguire i comandi make clean e make. Creare i
devices con make devices, da root.
Seqsi
Se si possiede un sistema con il Seqsi montato su crate VME, servono altri 3 driver:
f
1003
E il driver del controller VME; entrare in 1003/v1.0/sys ed eseguire i soliti make clean
e make. Al termine verra prodotto un errore, poiche lo script tenta anche di installare il
driver appena compilato, ma non si hanno i permessi necessari per farlo. Per l’installazione
dei driver vedere piu avanti.
Per creare i devices utilizzare il comando mkbtp, da root.
Trigger Handler
Anche qui e sufficiente make clean, make e make devices (root).
Tsc Card
In questo caso i due driver precedenti vengono sostituiti da un unico modulo:
Tsc Driver
Per prima cosa, eseguire make clean e make LxTsc9080.o nella sottodirectory qt.
Quindi tornare nella directory superiore e compilare con make clean e make tscdrv.o.
Installare i devices con make devices (root).
A.3 Caricamento dei moduli del kernel
Di seguito riporto un semplice script che serve per caricare i moduli nel kernel. Questo
script deve essere eseguito come amministratore di sistema (root) e non come daq, perche
quest’ultimo non ha i permessi necessari a caricare i moduli nel kernel.
#!/bin/bash
insmod /home/daq/Daq/Driver/Trigger_Handler/trgdrv.o
insmod /home/daq/Daq/Driver/1003/v1.0/sys/btp.o
insmod /home/daq/Daq/Driver/Official_Fec_Driver/tatou.o
insmod /home/daq/Daq/Driver/Fed_Driver/feddrv.o
g
insmod /home/daq/Daq/Driver/Tsc_Driver/tscdrv.o
Per il corretto funzionamento vanno riservati 4 Mb di memoria per il trasferimento
di dati. Per questo, editare (da root) il file /etc/lilo.conf e aggiungere, subito dopo
la riga default=..., la riga append="mem=252M". Questo per un sistema con 256 Mb
di RAM. Altrimenti, sostituire al posto di 252 il valore della propria RAM-4. Quindi
riavviare il sistema.
A.4 Dim
In questa directory, per compilare tutto e sufficiente eseguire make clean seguito da
make all.
A.5 Acquisition
Passare nella directory Acquisition per compilare i server che gestiscono lo scambio
dati tra le periferiche e i programmi grafici di alto livello.
Editare il file Makefile: impostare la variabile DRIVER (riga 2) alla directory nel-
la quale si trovano effettivamente i driver. Nel caso che il sistema sia stato scaricato,
ad esempio, in /home/daq/Daq, impostare DRIVER = $HOME/Daq/Driver o direttamente
DRIVER = /home/daq/Daq/Driver.
Poco sotto, nella linea che comincia con CXXFLAGS (N.B. Ci sono due linee consecu-
tive che iniziano in questo modo, editare la seconda) aggiungere al termine -include
/usr/include/unistd.h -include /usr/include/math.h.
Salvare ed eseguire make clean e make all per compilare.
h
A.6 Gui
L’ultima directory contiene le interfacce grafiche. Editare il file Makefile: modificare
le prime due righe per puntare rispettivamente alla directory Acquisition e alla directory
Driver/Cio6402. Aggiungere -include /usr/include/unistd.h alla linea che inizia
con CXXFLAGS.
Eseguire make clean seguito da make all per compilare i programmi.
Poiche a seconda della versione del programma utilizzata vengono cambiate alcune
impostazioni, per poter confrontare i risultati dei vari laboratori e importante che tutti
utilizzino la stessa versione del software. E consigliabile utilizzare sempre l’ultima versione
stabile rilasciata, visto che questo software e ancora in fase di sviluppo e quindi vengono
spesso trovati e corretti bugs.
A.7 Esecuzione
Terminata la compilazione di tutte le parti necessarie, e adesso possibile iniziare ad
utilizzare il sistema. Per farlo, e necessario per prima cosa controllare di aver caricato i
moduli necessari all’interno del kernel. Lo script per farlo e in Sezione A.3. Quest’ultimo
carica i moduli sia per il VME che per la Tsc: quello effettivamente utilizzato dipende
dal sistema hardware a disposizione; l’altro e semplicemente ignorato e non e necessario
rimuoverlo.
Per prima cosa va aggiustato il delay fine del Fed: passare in Daq/Driver/Fed_Driver
ed eseguire ./fedpmc: scegliere sorgente di clock esterna e test mode disabilitato, partire
da 1 per il delay fine, e scegliere qualche secondo di acquisizione.
Editare il file di output, cercare un tick mark sul canale zero: quello che si deve fare e
far in modo che i due campionamenti del tick mark siano piu simili possibile. Per questo
va eseguito ./fedpmc piu volte variando solo il delay fine, e controllando tutte le volte il
file di output.
i
Trovato il valore migliore, passare nella directory Daq/Acquisition/bin: editare il
file daq.xml e, nella sezione che descrive i parametri del FED,
<Fed device="0"
externalclock="true"
externaltrigger="true"
scopemode="false"
clockdelay="2"
lowthreshold="180"
highthreshold="330"
sample="512"
ttctriggercontrol="true"
/>
sostituire in clockdelay al 2 il valore trovato con fedpmc.
A questo punto, lanciare 3 nuovi terminali (il comando e xterm &, tutti e tre si tro-
veranno anch’essi posizionati in Daq/Acquisition/bin). In questi 4 terminali vanno
eseguiti i comandi (preferibilmente nell’ordine in cui sono riportati):
testControl: prepara la memoria condivisa per gli altri server;
SeqsuServer daq.xml: carica dal file daq.xml i parametri del Seqsi e si occupa di
gestire le comunicazioni con quest’ultimo. Se non si utilizza il Seqsi ma la Tsc, il
server da utilizzare e:
TscServer daq.xml.
FecServer daq.xml: configura e comunica col Fec.
FedServer daq.xml 0: lo 0 indica al server di usare il primo Fed presente sul
sistema: se ne sono installati di piu, sono accedibili in ordine incrementando questo
valore.
Se tutto funziona correttamente, si puo, da un nuovo terminale, passare alla directory
Daq/Gui e qui utilizzare i vari programmi con interfaccia grafica presenti.
j
Top Related