







Le lingue
Pagine
Legale

Ministero delle Infrastrutture e dei Trasporti DIPARTIMENTO PER IL COORDINAMENTO DELLO SVILUPPO
DEL TERRITORIO, PER LE POLITICHE DEL PERSONALE E GLI AFFARI GENERALI
Direzione Generale per la programmazione
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
Architettura Logica Ambito
5. Provide Advanced Driver Assistance Systems
Rif. V1.3A5
13 Dicembre 2002

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 2 di 80
TITOLO: Architettura Logica Ambito 5. Provide Advanced Driver Assistance Systems
RIFERIMENTO: V1.3A5
DISTRIBUZIONE: Documento pubblico
STORIA DEL DOCUMENTO
Versione Data Autori Verifica Approvazione Contenuti e modifiche Bozza 2 03/07/2002 1∗ 2* 3,4* Architettura Logica - dettaglio
Ambiti Bozza 2 Bozza 3 31/10/2002 1* 2* 3,4* Aggiornamento Architettura Logica
– dettaglio Ambiti Bozza 3 Versione 1 26/11/2002 1* 2* 3,4* Aggiornamento Architettura Logica
– dettaglio Ambiti Versione 1 Versione 1 13/12/2002 1* 2* 3,4* Aggiornamento Architettura Logica
– dettaglio Ambiti Versione 1 conclusiva
∗ Vedi legenda sottostante:
1) Unità Operativa:
ing. Eugenio Morello (coordinatore Unità Operativa) d.ssa Simonetta Manfredi (coordinatore attività CSST) ing. Francesco Iacobazzi, dott. Marco De Palma, ing. Maurizio Conforti, ing. Danilo Tortora
2) Gruppo Tecnico:
prof. Vito Mauro, ing. Gino Franco, ing. Angela Nigro 3) Comitato Guida:
ing. Luciano Marasco, ing. Corrado Loschiavo
4) Responsabile del procedimento: ing. Domenico Di Giesi, sostituito in itinere dall’ing. Marco Benedetti
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 3 di 80
Indice
PREMESSA ......................................................................................................................................................... 6
AMBITO 5. PROVIDE ADVANCED DRIVER ASSISTANCE SYSTEMS................................................. 7 ALBERO FUNZIONALE DEL PROCESSO......................................................................................................... 9 DIAGRAMMA FUNZIONALE DEL PROCESSO ............................................................................................... 10 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE DEL PROCESSO......................................................... 11 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE DEL PROCESSO ....................................................... 11
5.1 PROVIDE VISIBILITY ENHANCEMENT ............................................................................................ 13 DIAGRAMMA FUNZIONALE: DFD 5.1 PROVIDE VISIBILITY ENHANCEMENT ............................................ 13 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 14 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 14
5.2 PROVIDE AUTOMATED VEHICLE OPERATION............................................................................. 15 DIAGRAMMA FUNZIONALE: DFD 5.2 PROVIDE AUTOMATED VEHICLE OPERATION................................ 16 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 16 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 17
5.3 PROVIDE LONGITUDINAL COLLISION AVOIDANCE................................................................... 18 DIAGRAMMA FUNZIONALE: DFD 5.3 PROVIDE LONGITUDINAL COLLISION AVOIDANCE........................ 19 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 19 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 20
5.4 PROVIDE LATERAL COLLISION AVOIDANCE ............................................................................... 21 DIAGRAMMA FUNZIONALE: DFD 5.4 PROVIDE LATERAL COLLISION AVOIDANCE ................................. 21 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 22 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 23
5.5 PROVIDE SAFETY READINESS............................................................................................................ 24 DIAGRAMMA FUNZIONALE: DFD 5.5 PROVIDE SAFETY READINESS ........................................................ 24 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 25 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 25 DATABASE PRESENTI NEL DIAGRAMMA FUNZIONALE............................................................................... 26
5.6 PROVIDE DRIVER-VEHICLE INTERACTION................................................................................... 27
5.7 PROVIDE VEHICLE-TELEMATICS INTEGRATION........................................................................ 28 DIAGRAMMA FUNZIONALE: DFD 5.7 PROVIDE VEHICLE-TELEMATICS INTEGRATION ............................ 29 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 29 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 30
5.8 INTEGRATE VEHICLE IN TRAFFIC SYSTEM .................................................................................. 31 DIAGRAMMA FUNZIONALE: DFD 5.8 INTEGRATE VEHICLE IN TRAFFIC SYSTEM .................................... 31 FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE................................................................................. 32 MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE ............................................................................... 33
5.1.1 MONITOR VISIBILITY RANGE ......................................................................................................... 34
5.1.2 GENERATE ENHANCED VISION OF DRIVING AREA................................................................. 35
5.1.3 PROVIDE ENHANCED LIGHTING .................................................................................................... 36
5.1.4 PROVIDE ANTI-GLARING (CO-OPERATIVE) FACILITIES........................................................ 37
5.2.1 PROVIDE LONGITUDINAL DYNAMIC CONTROL....................................................................... 38
5.2.2 PROVIDE LATERAL DYNAMIC CONTROL ................................................................................... 39
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 4 di 80
5.2.3 PROVIDE DRIVER-(AUTOMATIC CONTROLS) INTERACTIVITY........................................... 40
5.2.4 PROVIDE INFRASTRUCTURE SUPPORT........................................................................................ 41
5.2.5 PROVIDE PRE-CRASH RESTRAINTS DEPLOYMENT ................................................................. 42
5.3.1 PROVIDE DYNAMIC SCENARIO INTELLIGENCE....................................................................... 43
5.3.2 PROVIDE LONGITUDINAL DYNAMIC CONTROL OF THE VEHICLE.................................... 44
5.3.3 PROVIDE FACILITIES FOR PARKING ............................................................................................ 45
5.3.4 PROVIDE FACILITIES FOR INTELLIGENT SPEED ADAPTATION.......................................... 46
5.3.5 PROVIDE FACILITIES FOR STOP & GO ......................................................................................... 47
5.3.6 PROVIDE FACILITIES FOR ADAPTIVE CRUISE CONTROL ..................................................... 48
5.3.7 PROVIDE FACILITIES FOR SPEED ENFORCEMENT.................................................................. 49
5.3.8 PROVIDE FACILITIES FOR ANTI-COLLISION EMERGENCY BRAKING.............................. 50
5.3.9 PROVIDE FACILITIES FOR VEHICLE PLATOONING................................................................. 51
5.4.1 PROVIDE DYNAMIC SCENARIO INTELLIGENCE....................................................................... 52
5.4.2 PROVIDE LATERAL DYNAMIC CONTROL OF THE VEHICLE ................................................ 53
5.4.3 PROVIDE FACILITIES FOR PARKING ............................................................................................ 54
5.4.4 PROVIDE FACILITIES FOR LANE/ROAD KEEPING.................................................................... 55
5.4.5 PROVIDE FACILITIES FOR LANE CHANGE.................................................................................. 56
5.4.6 PROVIDE FACILITIES FOR RESERVED LANES I/O .................................................................... 57
5.4.7 PROVIDE INFRASTRUCTURE SUPPORT FOR LANE FOLLOWING........................................ 58
5.4.8 PROVIDE FACILITIES FOR OVERTAKING ................................................................................... 59
5.4.9 PROVIDE FACILITIES FOR STOP & GO ++.................................................................................... 60
5.5.1 MONITOR DRIVER STATUS............................................................................................................... 61
5.5.2 ENHANCE DRIVER ALERTNESS....................................................................................................... 62
5.5.3 MONITOR VEHICLE STATUS ............................................................................................................ 63
5.5.4 RECORD OPERATIONAL DATA........................................................................................................ 64
5.5.5 PROVIDE AUTOMATIC TAKE-OVER OF CONTROLS ................................................................ 65
5.5.6 PROVIDE WARNINGS TO SURROUNDING TRAFFIC.................................................................. 66
5.5.7 PROVIDE MAYDAY CALL .................................................................................................................. 67
5.7.1 PROVIDE VEHICLE-INFRASTRUCTURE COMMUNICATION.................................................. 68
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 5 di 80
5.7.2 PROVIDE VEHICLE-VEHICLE COMMUNICATION..................................................................... 69
5.7.3 PROVIDE VEHICLE POSITION DETERMINATION...................................................................... 70
5.7.4 PROVIDE VEHICLE TELEMATIC ARCHITECTURE ................................................................... 71
5.8.1 PROVIDE PRE-TRIP INFORMATION............................................................................................... 72
5.8.2 PROVIDE DYNAMIC ROUTE GUIDANCE....................................................................................... 73
5.8.3 PROVIDE TRAVEL INFORMATION ................................................................................................. 74
5.8.4 PROVIDE ROAD ASSISTANCE........................................................................................................... 75
5.8.5 PROVIDE ROAD REGULATIONS ...................................................................................................... 76
5.8.6 COLLECT FLOATING CARS DATA.................................................................................................. 77
5.8.7 PROVIDE STOLEN VEHICLE TRACKING/PROSECUTION........................................................ 78
5.8.8 PROVIDE DETECTION OF LAW VIOLATIONS ............................................................................. 79
5.8.9 PROVIDE (EFT) ELECTRONIC FINANCIAL TRANSACTIONS .................................................. 80
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 6 di 80
Premessa
L'adozione di sistemi intelligenti di assistenza ai conducenti, se opportunamente diffusa, risponde all'esigenza di imporre il rispetto delle leggi e di ridurre le situazioni di pericolo. Per esempio si potrebbe ridurre di circa il 35% gli scontri tra veicoli se ampiamente diffuso.
Tali sistemi potrebbero, sulla base delle informazioni sulla situazione della strada, dei limiti di velocità nonché delle caratteristiche della vettura, indicare la velocità ottimale consigliata o, cosa più utile, trasmettere al veicolo dal margine della strada un limite imperativo.
Ciò significa che non vi dovrebbe essere un'impostazione rigida in cui un unico limite di velocità vale per tutte le situazioni, bensì le velocità consentite sarebbero stabilite in base a criteri specifici per ogni situazione. Le soluzioni tecniche esistono già, infatti su molti mezzi oggi in circolazione sono già presenti sistemi di assistenza al conducente (basti pensare all'ABS, ESP ed altri). I sistemi adottati oggi non tutelano il conducente dal rischio derivante da ostacoli in movimento, o da sue disattenzioni (ovvero non sono sempre in grado di intervenire in automatico sostituendosi al conducente).
L'integrazione con gli altri sistemi ITS, quali il controllo e la gestione del traffico, porteranno ad un forte incremento dei livelli di efficienza contribuendo alla sicurezza del trasporto.

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 7 di 80
Ambito 5. Provide Advanced Driver Assistance Systems
Quest'area fornisce le funzionalità che permettono il controllo dei veicoli mentre stanno usando la rete stradale. Egualmente elaborerà un controllo costante delle apparecchiature a bordo strada e delle apparecchiature a bordo (come i sensori ed i dispositivi di controllo automatico, ecc.) relative all'assistenza del guidatore. Le informazioni saranno fornite dall'area che provvede alla sicurezza ed alle emergenze in modo da garantire una pronta risposta ad una eventuale chiamata di emergenza effettuata da un veicolo. Le identità del veicolo saranno fornite all'area che si occupa dei pagamenti ed a quella per l'identificazione delle frodi. La funzionalità garantisce anche la fornitura di informazioni sul traffico all'area che si occupa della gestione del traffico.
Si riporta a seguire il DFD generale dell'Architettura Telematica al fine di poter individuare l’ambito descritto e verificare gli scambi informativi fra quest'ultimo e gli altri ambiti definiti nell'Architettura.
1. ProvideElectronicPaymentFacilities
2. Provide Safetyand Emergency
Facilities
3. ManageTraff ic
4. ManagePublic
TransportOperations
5. ProvideAdvanced
DriverAssistance
Systems
6. ProvideTravellerJourney
Assistance
7. ProvideSupport for
LawEnforcement
8. ManageFreight and
FleetOperations
From Consignor/Consignee
ToConsignor/Consignee
From Financial Clearinghouse
To Financial Clearinghouse
From Weather Systems
From Transport Planner
To Transport Planner
From Bridge/Tunnel Infrastructure
fo-mffo_inputs
From Load Unit & ITU
To Load Unit & ITU
to-mffo_outputs
f trfc-mt_inputs
f trfc-padas_inputs
From Emergency Systems
To Emergency Systems
ft-mpto_inputs
f t-mt_inputs
f t-pepf_inputs
f t-ptja_inputs
tt-mpto_outputs
tt-pepf_outputs
tt-ptja_outputs
fd-mffo_inputs
fd-mpto_inputs
fd-pepf_inputs
fd-psef_inputs
td-mffo_outputs
td-mpto_outputs
td-mt_outputs
td-pepf_outputs
td-psef_outputs
td-ptja_outputs
frp-mt_inputs
frp-mpto_inputs
fmo-mpto_inputs tmo-mpto_outputs
frrs-mt_inputs
frrs-mpto_inputs
trrs-mpto_outputs
trrs-mt_outputs
fesp-mffo_inputs
fesp-mpto_inputs
fesp-padas_inputs
fesp-pepf_inputs
fesp-psef_inputs
tesp-mffo_outputs
tesp-padas_outputs
tesp-pepf_outputs
tesp-psef_outputs
fv-mffo_inputs
fv-mpto_inputs
fv-mt_inputs
fv-padas_inputs
fv-psle_characteristics
tv-mffo_outputs
tv-mpto_outputs
tv-padas_outputs
f lea-mffo_inputs
f lea-psle_inputs
tlea-mffo_outputs
tlea-psle_outputs
f lds-mffo_inputs
f lds-padas_inputs
fmms-mffo_inputs
fmms-mpto_inputs
tmms-mpto_outputs
tmms-mffo_outputs
pepf.ptja_service_price
padas.ptja_request_and_data
ptja.padas_information_and_guidance
mt.ptja_information
mpto.ptja_service_information
padas.psef_mayday_call_data
psef.padas_vehicle_information
mffo.psef_incident_notif ication
pepf.mffo-payment_receipt
psle.mffo_fraud_notif icationptja.pepf_service_data
padas.pepf_vehicle_data
pepf.padas_vehicle_data
psle.padas_ID_request
padas.psle_vehicle_data
padas.mt_vehicle_data
psef.mt_data_and_priority_requests
pepf.mt_information_and_acceptance
mt.mpto_information_and_requests
mpto.mt_information-and_priority_requests
mt.padas_traff ic_data
mt.psef_incident_notif ication
mpto.psle_fraud_notif ication
mpto.pepf_prices_and_selected_service
mt.pepf_requests_and_conditions
fo-pepf_inputs
fo-mpto_inputs
fo-mt_inputsfo-psef_inputs
fo-ptja_inputsto-ptja_outputs
to-pepf_outputs
to-psef_outputs to-mt_outputs
to-mpto_outputs
f t-psef_inputs
tt-psef_outputs
From Ambient Environment
fd-padas_inputs
td-padas_outputs
frp-padas_inputs
fmo-padas_inputs
fmo-mt_inputstmo-mt_outputs
frrs-padas_inputs
trrs-padas_outputs
fesp.mt_inputs tesp-mt_outputs
fv-pepf_inputs
f lds-psef_location_dataf lds-ptja_location
fmms-mt_inputs
tmms-mt_outputs
trp-padas_outputs
tw s-padas_outputs
mffo.ptja_information_and_requests
psef.ptja_route_computation_requestptja.psef_emergency_route_plan
psef.mffo_incident_notif ication_acknow ledgment
mffo.padas_ffm_specif ic_data
padas.mffo-vehicle_data
mffo.psle_transfer_data
mpto.psef_alarm_notif ication
mt.psle_fraud_data
ptja.mffo_route_and_other_information
ftra-mpto_inputs
ttra-mpto_outputs
psle.mffo_request
ttra-mt_outputs
f tra-ptja_inputs
tt-traf f ic_commands
9. ProvideArchive
To Archive User
To Other ArchivesFrom Archive User
From Other Archives
psle.padas_law _violation_message
psle.mt_w arning_msg_cmd
ttra-travel_info
f tra-politique_transport
fmim-intermodal_place_infos
ptja.mt_info
Messaggi in Ingresso: fd-padas_inputs; fesp-padas_inputs; flds-padas_inputs; fmo-padas_inputs; frp-padas_inputs; frrs-padas_inputs; ftrfc-padas_inputs; fv-padas_inputs; mffo.padas_ffm_specific_data; mt.padas_traffic_data; pepf.padas_vehicle_data; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance;
Messaggi in Uscita: padas.mffo-vehicle_data;padas.mt_vehicle_data;padas.pepf_vehicle_data;padas.psef_mayday_call_data;padas.psle_vehicle_data;padas.ptja_request_and_data;td-padas_outputs;tesp-padas_outputs;trp-padas_outputs;trrs-padas_outputs;tv-padas_outputs;tws-padas_outputs;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 8 di 80
Funzioni esterne collegate:
- 1.3 Perform Electronic Payment Transaction
- 2.1 Manage Emergencies
- 2.1.2.1 Identify and Classify Emergencies
- 7.1 Detect Fraud
- 8.3 Manage Vehicle/Driver/Cargo/Equipment
- 8.3.2 Monitor Resources
- 8.3.2.2 Monitor Vehicle
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 9 di 80
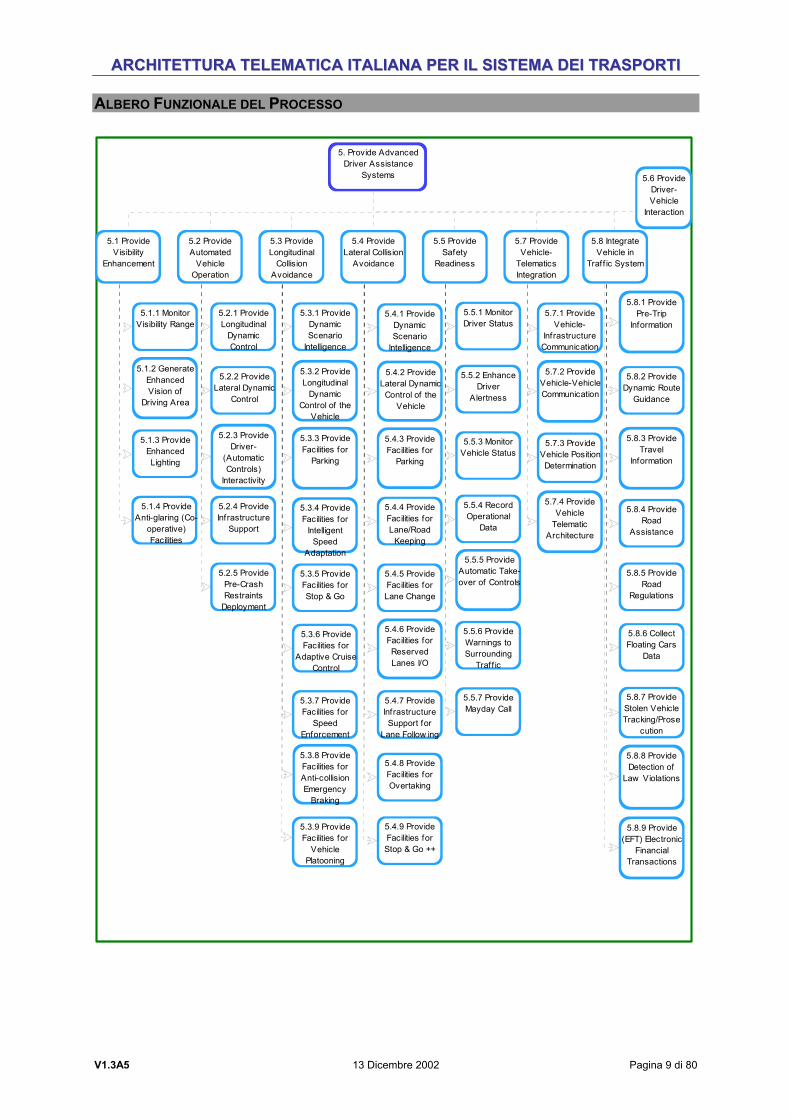
ALBERO FUNZIONALE DEL PROCESSO
5. Provide AdvancedDriver Assistance
Systems
5.1 ProvideVisibility
Enhancement
5.2 ProvideAutomated
VehicleOperation
5.5 ProvideSafety
Readiness
5.6 ProvideDriver-Vehicle
Interaction
5.7 ProvideVehicle-
TelematicsIntegration
5.8 IntegrateVehicle in
Traff ic System
5.3 ProvideLongitudinal
CollisionAvoidance
5.4 ProvideLateral Collision
Avoidance
5.1.1 MonitorVisibility Range
5.1.2 GenerateEnhancedVision of
Driving Area
5.1.3 ProvideEnhancedLighting
5.1.4 ProvideAnti-glaring (Co-
operative)Facilities
5.2.1 ProvideLongitudinal
DynamicControl
5.2.2 ProvideLateral Dynamic
Control
5.2.3 ProvideDriver-
(AutomaticControls)
Interactivity
5.2.4 ProvideInfrastructure
Support
5.2.5 ProvidePre-CrashRestraints
Deployment
5.3.1 ProvideDynamicScenario
Intelligence
5.3.2 ProvideLongitudinal
DynamicControl of the
Vehicle
5.3.3 ProvideFacilities for
Parking
5.3.4 ProvideFacilities for
IntelligentSpeed
Adaptation
5.3.5 ProvideFacilities forStop & Go
5.3.6 ProvideFacilities for
Adaptive CruiseControl
5.3.7 ProvideFacilities for
SpeedEnforcement
5.3.8 ProvideFacilities forAnti-collisionEmergency
Braking
5.3.9 ProvideFacilities for
VehiclePlatooning
5.4.1 ProvideDynamicScenario
Intelligence
5.4.2 ProvideLateral Dynamic
Control of theVehicle
5.4.3 ProvideFacilities for
Parking
5.4.4 ProvideFacilities forLane/Road
Keeping
5.4.5 ProvideFacilities forLane Change
5.4.6 ProvideFacilities forReservedLanes I/O
5.4.7 ProvideInfrastructureSupport for
Lane Follow ing
5.4.8 ProvideFacilities forOvertaking
5.4.9 ProvideFacilities forStop & Go ++
5.5.1 MonitorDriver Status
5.5.2 EnhanceDriver
Alertness
5.5.3 MonitorVehicle Status
5.5.4 RecordOperational
Data
5.5.5 ProvideAutomatic Take-over of Controls
5.5.6 ProvideWarnings toSurrounding
Traff ic
5.5.7 ProvideMayday Call
5.7.1 ProvideVehicle-
InfrastructureCommunication
5.7.2 ProvideVehicle-VehicleCommunication
5.7.3 ProvideVehicle PositionDetermination
5.7.4 ProvideVehicle
TelematicArchitecture
5.8.1 ProvidePre-Trip
Information
5.8.2 ProvideDynamic Route
Guidance
5.8.3 ProvideTravel
Information
5.8.4 ProvideRoad
Assistance
5.8.5 ProvideRoad
Regulations
5.8.6 CollectFloating Cars
Data
5.8.7 ProvideStolen VehicleTracking/Prose
cution
5.8.8 ProvideDetection of
Law Violations
5.8.9 Provide(EFT) Electronic
FinancialTransactions

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 10 di 80
DIAGRAMMA FUNZIONALE DEL PROCESSO
5.1 ProvideVisibility
Enhancement
5.2 ProvideAutomated
Vehicle Operation
5.3 ProvideLongitudinal
CollisionAvoidance
5.4 ProvideLateral
CollisionAvoidance
5.6 ProvideDriver-Vehicle
Interaction
5.7 ProvideVehicle-
TelematicsIntegration
5.8 IntegrateVehicle in
Traff ic System
psle.padas_ID_request
padas.psle_vehicle_data
f lds-vehicle_location
psef.padas_vehicle_information
padas.psef_mayday_call_data
ftrfc-traf f ic_data
ptja.padas_information_and_guidance
padas.ptja_request_and_data
td-data_HMI
fd-auto_control_on/off
fd-data_HMI
tv-data_HMI
tv-light
fv-long_ca
fv-lat_ca
fv-vehicle_data
ftrfc-data_vehicle
fv-data_HMI
fv-data_vision
fv-road
fesp.g-data
tesp.b-data
mffo.padas_ffm_specif ic_data
trp-data
ttrfc-data_vehicle
frp-location_data
frp-lane_follow
frp-lane_follow
pepf.padas_vehicle_data
padas_mayday
padas_w arning
padas_tele_info
padas_vtov_data
padas_driver_control
padas_vision_to_driver
padas_lateral_control
padas_visibility_to_controls
padas_control_take_over
padas_engine_stop
padas_driver_alert
padas_vehicle_status
padas_control_release
padas_antiglare_to_vehicles
padas_visibility_to_vehicles
padas_longit_control
padas_visibility_to_controls
padas_vtov_data
fmo-infrastructure_diagnosis
padas.mffo-vehicle_data
padas_visibility_to_driver
5.5 ProvideSafety
Readiness
tv-autocom_control
fv-autocom_diag
trrs-data
frrs-data
tw s-vr_data
padas.mt_visibility_range
padas.psle_rule_violation
fd-data
fesp.b-data
padas.pepf_vehicle_data
mt.padas_incident_information
padas_rule_violation_information
mt.padas_traff ic_output_data
padas.mt_w arning
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 11 di 80
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE DEL PROCESSO
5.1 Provide Visibility Enhancement
Fornisce, in caso di avverse condizioni di visibilità, una visuale diretta, migliorata tramite strumentazione, delle aree interessate dal conducente. La funzione si articola in sottofunzioni.
5.2 Provide Automated Vehicle Operation
Fornisce tutti i tipi di controlli automatici del veicolo e tutte le procedure necessarie per rendere l'operatività del veicolo stesso completamente automatica. La funzione si articola in sottofunzioni.
5.3 Provide Longitudinal Collision Avoidance
Fornisce tutte le funzionalità per rilevare ed impedire le collisioni longitudinali (asse principale di movimento del veicolo), fornisce messaggi di allerta ai conducenti e/o controlla automaticamente le dinamiche longitudinali del veicolo al fine di evitare tamponamenti. La funzione si articola in sottofunzioni.
5.4 Provide Lateral Collision Avoidance
Fornisce tutte le funzionalità per rilevare ed impedire le collisioni agli incroci (rispetto all'asse principale di movimento del veicolo), fornisce messaggi di allerta al conducente e controlla automaticamente la dinamica laterale del veicolo per evitare urti laterali. La funzione si articola in sottofunzioni.
5.5 Provide Safety Readiness
Fornisce tutte le funzionalità per evitare gli incidenti causati da un malore del conducente. Essa individua le mancanze da parte del guidatore, avverte i veicoli adiacenti e provvede a controllare e fermare il veicolo in condizioni di sicurezza. La funzione si articola in sottofunzioni.
5.6 Provide Driver-Vehicle Interaction
Garantisce tutte le interazioni fra il conducente ed il veicolo sia per funzionalità correnti che per sistemi avanzati di assistenza alla guida. Fornisce tutti i tipi di informazioni visive, acustiche e tattili insieme con la capacità di gestire gli input provenienti dal conducente (manuale, acustico, ecc.). Essa provvede inoltre alla gestione dei sistemi di guida virtuale. La funzione assicura inoltre una comprensione veloce e chiara delle informazioni.
5.7 Provide Vehicle-Telematics Integration
Offre la disponibilità a bordo veicolo e l'utilizzo di tutti i tipi di supporti telematici atti a garantire un utilizzo migliore del veicolo. La funzione si articola in sottofunzioni.
5.8 Integrate Vehicle in Traffic System
Garantisce l'integrazione del veicolo, equipaggiato con sistemi telematici, con l'intero sistema del traffico. La funzione si articola in sottofunzioni.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE DEL PROCESSO
fd-auto_control_on/off; fd-data; fd-data_HMI; fesp.b-data; fesp.g-data; flds-vehicle_location; fmo-infrastructure_diagnosis; frp-lane_follow; frp-location_data; frrs-data; ftrfc-data_vehicle; ftrfc-traffic_data; fv-autocom_diag; fv-data_HMI; fv-data_vision; fv-lat_ca; fv-long_ca; fv-road; fv-vehicle_data; mffo.padas_ffm_specific_data; mt.padas_incident_information; mt.padas_traffic_output_data; padas.mffo-vehicle_data; padas.mt_visibility_range; padas.mt_warning; padas.pepf_vehicle_data;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 12 di 80
padas.psef_mayday_call_data; padas.psle_rule_violation; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_antiglare_to_vehicles; padas_control_release; padas_control_take_over; padas_driver_alert; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_mayday; padas_rule_violation_information; padas_tele_info; padas_vehicle_status; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; padas_vtov_data; padas_warning; pepf.padas_vehicle_data; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance; td-data_HMI; tesp.b-data; trp-data; trrs-data; ttrfc-data_vehicle; tv-autocom_control; tv-data_HMI; tv-light; tws-vr_data;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 13 di 80
5.1 Provide Visibility Enhancement
Fornisce, in caso di avverse condizioni di visibilità, una visuale diretta, migliorata tramite strumentazione, delle aree interessate dal conducente. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: fv-data_vision; fv-road; padas_vtov_data;
Messaggi in uscita: padas.mt_visibility_range; padas_antiglare_to_vehicles; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; tv-light; tws-vr_data;
User Needs: 8 Assistenza al Conducente; 8.1.1; 8.1.2; 8.1.3; 8.1.4; 8.1.5; 8.1.6; 8.1.7; 8.1.8;
DIAGRAMMA FUNZIONALE: DFD 5.1 PROVIDE VISIBILITY ENHANCEMENT
5.1.1 MonitorVisibility Range
5.1.4 Provide Anti-glaring (Co-operative)
Facilities
5.1.2 GenerateEnhanced Vision of
Driving Area
5.1.3 ProvideEnhanced Lighting
padas_visibility_to_driverfv-data_vision
padas_visibility_to_vehicles
padas_visibility_to_controls
fv-data_vision
tw s-vr_data
fv-roadtv-light
padas_vision_to_driver
fv-data_vision
padas_vtov_data padas_antiglare_to_vehicles
padas.mt_visibility_range

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 14 di 80
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.1.1 Monitor Visibility Range
Fornisce la misura, attraverso mezzi strumentali, della distanza di visibilità. La distanza di visibilità è collegata alla distanza a cui gli oggetti sulla strada possono essere rilevati dal guidatore senza sussidi strumentali.
5.1.2 Generate Enhanced Vision of Driving Area
Genera un'immagine migliore della visione umana. Utilizza i mezzi strumentali (macchine fotografiche, visioni fuori dagli spettri visibili, ecc.) per fornire " l'immagine " dell'area di manovra.
5.1.3 Provide Enhanced Lighting
Fornisce un'illuminazione migliore nell'area di manovra utilizzata. Utilizza il sistema intelligente per il controllo della luce (orientamento del fascio, luci UV, ecc.) e garantisce la cooperazione con i veicoli che attraversano il percorso del veicolo al quale si sta fornendo l'illuminazione.
5.1.4 Provide Anti-glaring (Co-operative) Facilities
Fornisce l'assistenza anti-abbagliamento scambiando le informazioni fra i veicoli che incrociano i loro rispettivi percorsi. Fornisce una serie di funzionalità, ad esempio i commutatori di luce (abbaglianti/anabbaglianti), i fasci luminosi sincronizzati pulsanti, ecc.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
fv-data_vision; fv-road; padas_vtov_data; padas.mt_visibility_range; padas_antiglare_to_vehicles; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; tv-light; tws-vr_data; fv-data_vision; fv-road; padas_vtov_data; padas.mt_visibility_range; padas_antiglare_to_vehicles; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; tv-light; tws-vr_data; fv-data_vision; fv-road; padas_vtov_data; padas.mt_visibility_range; padas_antiglare_to_vehicles; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; tv-light; tws-vr_data; fv-data_vision; fv-road; padas_vtov_data; padas.mt_visibility_range; padas_antiglare_to_vehicles; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; padas_vision_to_driver; tv-light; tws-vr_data;
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 15 di 80
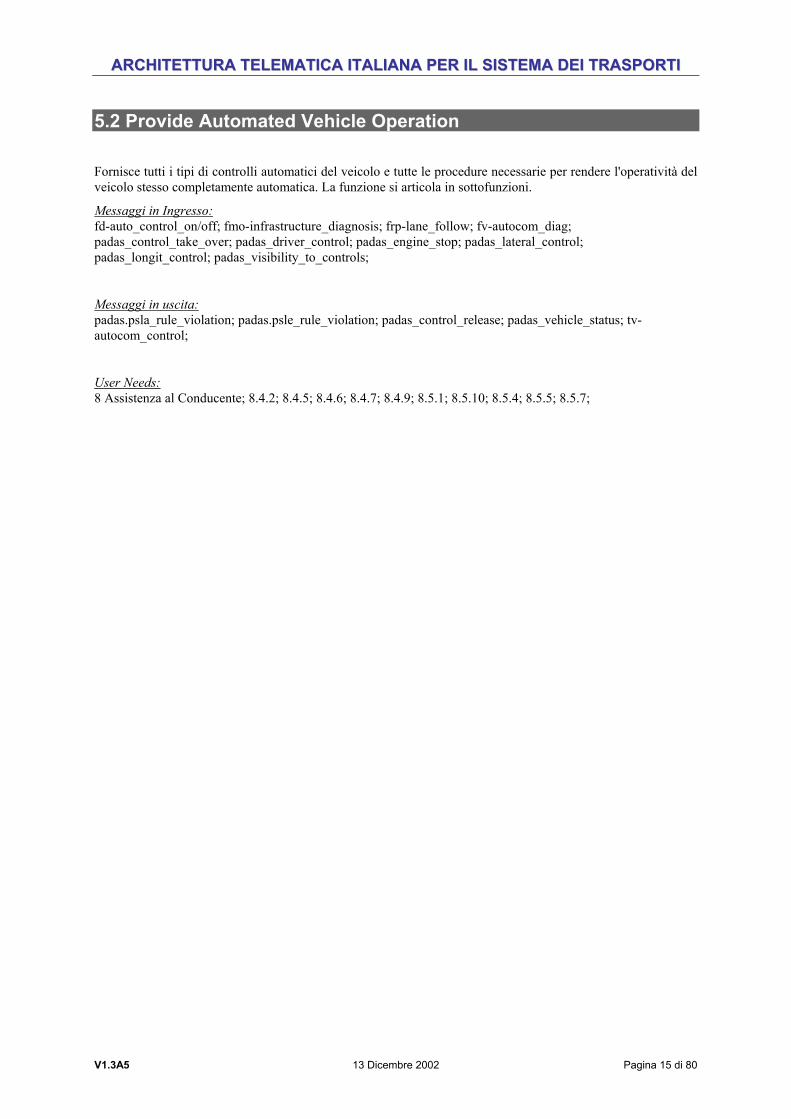
5.2 Provide Automated Vehicle Operation
Fornisce tutti i tipi di controlli automatici del veicolo e tutte le procedure necessarie per rendere l'operatività del veicolo stesso completamente automatica. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; fv-autocom_diag; padas_control_take_over; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls;
Messaggi in uscita: padas.psla_rule_violation; padas.psle_rule_violation; padas_control_release; padas_vehicle_status; tv-autocom_control;
User Needs: 8 Assistenza al Conducente; 8.4.2; 8.4.5; 8.4.6; 8.4.7; 8.4.9; 8.5.1; 8.5.10; 8.5.4; 8.5.5; 8.5.7;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 16 di 80
DIAGRAMMA FUNZIONALE: DFD 5.2 PROVIDE AUTOMATED VEHICLE OPERATION
5.2.1 ProvideLongitudinal
DynamicControl
5.2.5 Provide Pre-Crash Restraints
Deployment
5.2.2 ProvideLateral Dynamic
Control
5.2.4 ProvideInfrastructure
Support
5.2.3 ProvideDriver-
(AutomaticControls)
Interactivity
frp-lane_follow
fmo-infrastructure_diagnosis
padas_visibility_to_controls
padas_control_release
padas_longit_control
padas_driver_control
padas_vehicle_status
padas_engine_stop
padas_lateral_control
padas_control_release
padas_active_safe_long
padas_active_safe_lat
padas_infra_diag
padas_distance
padas_speed_val
padas_infra_data
padas_auto_control
tv-pre_crash
padas.psla_rule_violation
tv-actuation_tracing
tv-auto_dif f_brake
tv-auto_accel
fv-diagnostics_long
fv-diagnostics_lat
fd-auto_control_on/off
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.2.1 Provide Longitudinal Dynamic Control
Fornisce il controllo automatico sia dell'acceleratore che dei freni del veicolo. La funzione offre tali funzionalità insieme a tutte le caratteristiche necessarie per un sicuro funzionamento, un sistema diagnostico, una rete di controllo e una previsione dei guasti dei controlli automatici del veicolo.
5.2.2 Provide Lateral Dynamic Control
Fornisce il controllo automatico dello sterzo del veicolo ed il controllo automatico del freno differenziale. Tali funzionalità vengono fornite insieme a tutte le caratteristiche per un loro sicuro funzionamento, sistema diagnostico, rete di controllo e previsione dei guasti.

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 17 di 80
5.2.3 Provide Driver-(Automatic Controls) Interactivity
Fornisce i servizi per l'interattività fra il guidatore ed i controlli automatici. Include una sicura architettura di bordo, oltre a funzionalità per la traccia continua dei comandi attuati, per il monitoraggio dei comandi provenienti dall'infrastruttura e per le procedure per attivare/abbandonare il controllo automatico.
5.2.4 Provide Infrastructure Support
Fornisce ogni tipo di supporto di guida proveniente dall'infrastruttura, comprese funzionalità per mantenere la strada/corsia, regolare la velocità, mantenere la distanza di sicurezza, controllare immissioni/uscite nella/dalla corsia e proteggere le corsie riservate. La funzione fornisce inoltre la diagnostica per tutte le funzionalità e la possibilità di comunicazione (al conducente o ai controlli automatici). Sono inoltre incluse le funzionalità per l'identificazione del veicolo, la rilevazione di violazioni alla regolamentazione e la generazione delle relative azioni di perseguimento.
5.2.5 Provide Pre-Crash Restraints Deployment
Fornisce funzionalità per l'utilizzo di sistemi attivi di sicurezza a bordo veicolo connessi con i sensori che prevengono le collisioni, installati intorno al veicolo stesso.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; padas_control_take_over; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls; padas.psla_rule_violation; padas_control_release; padas_vehicle_status; fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; padas_control_take_over; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls; padas.psla_rule_violation; padas_control_release; padas_vehicle_status; fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls; padas.psla_rule_violation; padas_control_release; padas_vehicle_status; fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls; padas.psla_rule_violation; padas_control_release; padas_vehicle_status; fd-auto_control_on/off; fmo-infrastructure_diagnosis; frp-lane_follow; padas_driver_control; padas_engine_stop; padas_lateral_control; padas_longit_control; padas_visibility_to_controls; padas.psla_rule_violation; padas_control_release; padas_vehicle_status;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 18 di 80
5.3 Provide Longitudinal Collision Avoidance
Fornisce tutte le funzionalità per rilevare ed impedire le collisioni longitudinali (asse principale di movimento del veicolo), fornisce messaggi di allerta ai conducenti e/o controlla automaticamente le dinamiche longitudinali del veicolo al fine di evitare tamponamenti. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: fv-long_ca; padas_visibility_to_controls; padas_vtov_data;
Messaggi in uscita: padas_longit_control;
User Needs: 8 Assistenza al Conducente; 8.2.4; 8.2.5; 8.2.6; 8.3.5; 8.4.1; 8.4.10; 8.4.2; 8.4.3; 8.4.4; 8.4.6; 8.4.7; 8.4.8; 8.6.1; 8.6.2; 8.6.3; 8.6.4; 8.6.5; 8.6.6; 8.6.7; 8.6.8; 8.6.9;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 19 di 80
DIAGRAMMA FUNZIONALE: DFD 5.3 PROVIDE LONGITUDINAL COLLISION AVOIDANCE
5.3.8 ProvideFacilities for Anti-
collision EmergencyBraking
5.3.2 ProvideLongitudinal
Dynamic Control ofthe Vehicle
5.3.6 ProvideFacilities for
Adaptive CruiseControl
5.3.1 ProvideDynamic Scenario
Intelligence
5.3.3 ProvideFacilities for Parking
5.3.5 ProvideFacilities for Stop &
Go
5.3.4 ProvideFacilities for
Intelligent SpeedAdaptation
5.3.7 ProvideFacilities for Speed
Enforcement
5.3.9 ProvideFacilities for Vehicle
Platooning
fv-long_friction
fv-long_sm
fv-road_sign
fv-long_obj_det
fv-long_lane
padas_visibility_to_controls
padas_longit_control
padas_vtov_data
padas_long_aeb padas_long_acc
padas_long_isa
padas_long_s&g
padas_long_park
padas_long_se
padas_long_vp
padas_driving_scenario
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.3.1 Provide Dynamic Scenario Intelligence
Fornisce un monitoraggio continuo dello scenario di guida per il controllo longitudinale del veicolo. La funzione include le funzionalità per rilevare ed interpretare i confini della strada o della corsia, tutti gli oggetti presenti sulla traiettoria prevista del veicolo, la segnaletica ed i segnali stradali. La funzione fornisce le funzionalità per la valutazione dei limiti di sicurezza per le manovre del veicolo (aree libere, dinamiche del veicolo e aderenza disponibile nel contatto strada-gomma).
5.3.2 Provide Longitudinal Dynamic Control of the Vehicle
Consente il controllo longitudinale del veicolo. La funzione utilizza gli output forniti dalla funzione "5.2.1-Provide Longitudinal Dynamic Control" e la conoscenza dello scenario di guida fornita dalla funzione "5.3.1-

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 20 di 80
Provide Dynamic Scenario Intelligence". La funzione quindi, in base al risultato delle due funzioni, può controllare il veicolo per evitare collisioni.
5.3.3 Provide Facilities for Parking
Fornisce le potenzialità per rilevare oggetti a poca distanza intorno al veicolo. Queste funzionalità sono usate per il controllo longitudinale del veicolo a bassa velocità nelle manovre di parcheggio.
5.3.4 Provide Facilities for Intelligent Speed Adaptation
Fornisce al conducente le funzionalità per tenere, in modo automatico, il veicolo ad una velocità inferiore al limite imposto dalla regolamentazione vigente. La funzione offre le funzionalità per visualizzare in continuo il corrente limite consentito di velocità per impostare manualmente il limite di velocità.
5.3.5 Provide Facilities for Stop & Go
Fornisce le funzionalità per la rilevazione degli oggetti davanti al veicolo, per garantire il controllo automatico a bassa velocità e il controllo longitudinale per il funzionamento del veicolo " in-coda ".
5.3.6 Provide Facilities for Adaptive Cruise Control
Fornisce le funzionalità per la rilevazione degli oggetti a lunga distanza per mantenere costante la velocità e la distanza di sicurezza.
5.3.7 Provide Facilities for Speed Enforcement
Consente di ricevere messaggi con i limiti di velocità, dall'esterno del veicolo, per suggerirli al guidatore. Può gestire automaticamente la velocità del veicolo secondo il valore indicato.
5.3.8 Provide Facilities for Anti-collision Emergency Braking
Fornisce la possibilità di rilevare, con alta affidabilità, tutti i generi di oggetti, dinamici o statici, lungo la traiettoria prevista dal veicolo (altri veicoli, pedone, ecc.). Può avvertire il guidatore e/o attuare una procedura d'emergenza per evitare uno scontro.
5.3.9 Provide Facilities for Vehicle Platooning
Consente di creare un plotone di veicoli. Controlla il sistema automatico a bordo e proibisce ai veicoli non autorizzati di unirsi al convoglio. Consente la sorveglianza dei veicoli del plotone, o trasferisce la gestione al veicolo principale del convoglio. La funzione fornisce i servizi per ogni veicolo per entrare e per lasciare il convoglio, per controllare l'area di manovra intorno ad ogni veicolo in caso di emergenza, per eseguire la diagnosi e comunicare qualsiasi disfunzione nel veicolo, per rimanere a poca distanza dal veicolo che precede, per implementare tutte le procedure obbligatorie per questa modalità automatica di funzionamento.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control; padas_visibility_to_controls; padas_vtov_data; padas_longit_control;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 21 di 80
5.4 Provide Lateral Collision Avoidance
Fornisce tutte le funzionalità per rilevare ed impedire le collisioni agli incroci (rispetto all'asse principale di movimento del veicolo), fornisce messaggi di allerta al conducente e controlla automaticamente la dinamica laterale del veicolo per evitare urti laterali. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: frp-lane_follow; fv-lat_ca; padas_visibility_to_controls;
Messaggi in uscita: padas_lateral_control;
User Needs: 8 Assistenza al Conducente; 8.3.5; 8.4.7; 8.5.10; 8.5.2; 8.5.4; 8.5.5; 8.5.6; 8.5.7; 8.6.2; 8.6.3; 8.6.4;
DIAGRAMMA FUNZIONALE: DFD 5.4 PROVIDE LATERAL COLLISION AVOIDANCE
5.4.2 ProvideLateral Dynamic
Control of theVehicle
5.4.3 ProvideFacilities for Parking
5.4.9 ProvideFacilities for Stop &
Go ++
5.4.1 ProvideDynamic Scenario
Intelligence
5.4.4 ProvideFacilities for
Lane/Road Keeping
5.4.5 ProvideFacilities for Lane
Change
5.4.6 ProvideFacilities for
Reserved Lanes I/O
5.4.7 ProvideInfrastructure
Support for LaneFollow ing
5.4.8 ProvideFacilities forOvertaking
frp-lane_follow
fv-lat_crossing
fv-lat_sm
fv-lat_lane
fv-lat_obj_det
fv-road_sign
fv-lat_friction
padas_visibility_to_controls
padas_lateral_control
padas_lat_park padas_lat_s&g++
padas_lat_rl_io
padas_lat_lc
padas_lat_lk
padas_lat_is
padas_lat_over
padas_area_intelligence
fv-lat_rear
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 22 di 80
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.4.1 Provide Dynamic Scenario Intelligence
Fornisce un monitoraggio continuo dello scenario di guida per il controllo laterale del veicolo. La funzione offre le funzionalità per rilevare ed interpretare i confini fisici della strada o della corsia, tutti gli oggetti sulla traiettoria prevista del veicolo, la segnaletica ed i segnali stradali. La funzione fornisce inoltre le funzionalità per valutare i limiti di sicurezza per le manovre del veicolo (aree libere, dinamiche del veicolo ed aderenza disponibile strada-gomma) oltre al monitoraggio ed interpretazione dell'area dell'incrocio e dell'area posteriore del veicolo.
5.4.2 Provide Lateral Dynamic Control of the Vehicle
Fornisce il controllo laterale del veicolo. Utilizza i dati di output forniti dalla funzione di controllo dinamico laterale (5,2,2) e dalla funzione di intelligenza dinamica (5,4,1). La funzione quindi può gestire il veicolo per evitare gli scontri in base ai risultati delle due funzioni.
5.4.3 Provide Facilities for Parking
Fornisce le funzionalità per la rilevazione di oggetti a poca distanza intorno al veicolo e per il controllo laterale a bassa velocità. Queste funzionalità permettono di effettuare le manovre di parcheggio.
5.4.4 Provide Facilities for Lane/Road Keeping
Fornisce al guidatore la capacità, attraverso le informazioni, di mantenere il veicolo all'interno della relativa corsia della strada o all'interno dei limiti della strada.
5.4.5 Provide Facilities for Lane Change
Fornisce al conducente informazioni o messaggi sensoriali sulla sterzata che segnalano al conducente se è fattibile o meno la manovra di cambio corsia. La funzione utilizza il controllo a lungo raggio dell'area posteriore del veicolo oltre alle funzionalità fornite dalla funzione 5.4.1 "Provide Dynamic Scenario Intelligence".
5.4.6 Provide Facilities for Reserved Lanes I/O
Fornisce tutte le funzionalità per entrare ed uscire dalle corsie riservate (in autostrada). Insieme alle funzionalità per attuare le regole operative per le corsie riservate (distanza, velocità, accelerazione, controllabilità remota, ecc.) la funzione fornisce la diagnostica per garantire la conformità corrente del veicolo prima di entrare nella corsie ed un'individuazione preventiva dei guasti.
5.4.7 Provide Infrastructure Support for Lane Following
Fornisce tutti i generi di supporto per consentire di seguire la traiettoria prefissata. Include le attrezzature che possono usare i tipi differenti di marcature della strada. Fra questi i sistemi attivi e passivi basati su emettitori di onde immersi nel fondo stradale, magneti, nastri magnetici, riflettori laterali della strada, comunicazione di LCC, ecc. La funzione include i controlli diagnostici continui delle funzionalità di questo tipo di attrezzature.
5.4.8 Provide Facilities for Overtaking
Fornisce le funzionalità per il controllo delle zone anteriori e posteriori del veicolo. Attraverso informazioni connesse, la funzione consente al veicolo di effettuare una manovra di sorpasso in sicurezza ed in maniera automatica.

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 23 di 80
5.4.9 Provide Facilities for Stop & Go ++
Fornisce funzionalità di Stop & Go simili a quelle fornite dalla funzione 5.3.5. Sono comprese pertanto le funzionalità per rilevare oggetti di fronte al veicolo (grand'angolo), per mantenere il veicolo a breve distanza a bassa velocità e per il controllo automatico laterale per operazioni di accodamento del veicolo. La funzione include inoltre la funzionalità per il controllo laterale a bassa velocità.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control; frp-lane_follow; padas_visibility_to_controls; padas_lateral_control;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 24 di 80
5.5 Provide Safety Readiness
Fornisce tutte le funzionalità per evitare gli incidenti causati da un malore del conducente. Essa individua le mancanze da parte del guidatore, avverte i veicoli adiacenti e provvede a controllare e fermare il veicolo in condizioni di sicurezza. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: fd-data; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; vt_vtec_location_status;
Messaggi in uscita: padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; vt_vtec_mayday; vt_vtec_mt_warning; vt_vtec_warning;
User Needs: 5.1.1; 5.1.2; 8 Assistenza al Conducente; 8.3.1; 8.3.3; 8.3.4; 8.3.6; 9.4.2;
DIAGRAMMA FUNZIONALE: DFD 5.5 PROVIDE SAFETY READINESS
5.5.1 MonitorDriver Status
5.5.2 EnhanceDriver Alertness
5.5.3 MonitorVehicle Status
5.5.5 ProvideAutomatic Take-over
of Controls
5.5.6 ProvideWarnings to
Surrounding Traff ic
5.5.7 ProvideMayday Call
5.5.4 RecordOperational Data
5.1 Historical_visibility_data
padas_mayday
padas_w arning
ftrfc-traf f ic_data
fv-vehicle_data
fd-driver_data
fv-vehicle_data
padas_control_take_over
padas_driver_alertpadas_driver_status
padas_driver_impairpadas_stor_data
padas_driver_status
padas_vehicle_stat
padas_tvd_scenario
padas_vehicle_stat
padas_auto_w arn
padas_auto_stop
padas_stor_data
padas_engine_stop
fd-driver_behaviour
padas.mt_w arning

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 25 di 80
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.5.1 Monitor Driver Status
Fornisce il controllo della condizione del guidatore. E' in grado di rivelare qualsiasi malore del conducente dovuto a qualunque motivo. Questi motivi possono essere l'abuso di alcol o droghe, problemi di salute improvvisi, disattenzione prolungata, ecc.
5.5.2 Enhance Driver Alertness
Fornisce tutti i metodi per aumentare la vigilanza del conducente. I metodi per l'aumento della vigilanza includono gli avvisatori acustici, ottici, gli stimoli tattili, i cambiamenti ambientali a bordo (temperatura, odore, ecc).
5.5.3 Monitor Vehicle Status
Controlla il veicolo per rilevare i guasti o le perdite imminenti di prestazioni che potrebbero avere un effetto sulla sicurezza del veicolo stesso.
5.5.4 Record Operational Data
Fornisce i dati che sono collegati con la sicurezza del veicolo. I dati includono lo stato del conducente, le prestazioni del veicolo, le immagini della visuale libera, ecc.
5.5.5 Provide Automatic Take-over of Controls
Fornisce la possibilità per il cambio automatico di gestione del controllo del veicolo nel caso di malore del conducente. Include le procedure necessarie per arrestare il veicolo.
5.5.6 Provide Warnings to Surrounding Traffic
Fornisce gli avvisi ai veicoli circostanti, nel caso di malore del conducente, dell'attuazione della procedura di arresto del veicolo.
5.5.7 Provide Mayday Call
Fornisce la possibilità di gestire una chiamata di emergenza. Questa chiamata può essere attuata manualmente dal conducente o automaticamente dal sistema di controllo o dal sensore di arresto.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning; fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas.mt_warning; padas.psef_mayday_call_data; padas_control_take_over; padas_driver_alert; padas_engine_stop; padas_mayday; padas_warning;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 26 di 80
DATABASE PRESENTI NEL DIAGRAMMA FUNZIONALE
5.1 Historical_visibility_data
E' utilizzato nell'area "Provide Advanced Driver Assistance". Contiene i dati richiesti dalle funzioni di tale area. Contiene tutti i dati relativi agli oggetti intorno al veicolo (distanza, velocità, angolazione, ecc.) nell'istante corrente.
Il contenuto di ciascuna delle tre parti del database è il seguente:
- il conducente: i dati sono relativi alla condizione corrente del conducente, ad esempio affaticamento, stato di salute, ecc.;
- il veicolo: i dati sono relativi al suo stato dinamico (velocità, accelerazione, ecc.) ed ai correnti comandi del conducente;
- lo scenario di traffico: i dati sono relativi alla "immagine" dell'area di manovra, inclusi gli altri utenti vicini oltre possibilmente a segnali stradali e illuminazione.

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 27 di 80
5.6 Provide Driver-Vehicle Interaction
Garantisce tutte le interazioni fra il conducente ed il veicolo sia per funzionalità correnti che per sistemi avanzati di assistenza alla guida. Fornisce tutti i tipi di informazioni visive, acustiche e tattili insieme con la capacità di gestire gli input provenienti dal conducente (manuale, acustico, ecc.). Essa provvede inoltre alla gestione dei sistemi di guida virtuale. La funzione assicura inoltre una comprensione veloce e chiara delle informazioni.
Messaggi in Ingresso: fd-data_HMI; fv-data_HMI; padas_control_release; padas_driver_alert; padas_rule_violation_information; padas_tele_info; padas_vehicle_status; padas_visibility_to_driver; padas_vision_to_driver;
Messaggi in uscita: padas_driver_control; td-data_HMI; tv-data_HMI;
User Needs: 5.2.1; 5.2.2; 5.2.3; 8 Assistenza al Conducente; 8.0.1; 8.2.2; 8.2.3; 8.4.4; 9.8.29; 9.8.34;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 28 di 80
5.7 Provide Vehicle-Telematics Integration
Offre la disponibilità a bordo veicolo e l'utilizzo di tutti i tipi di supporti telematici atti a garantire un utilizzo migliore del veicolo. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: fesp.b-data; fesp.g-data; flds-vehicle_location; frp-location_data; frrs-data; frrs-padas_inputs; ftrfc-data_vehicle; mffo.padas_ffm_specific_data; mt.padas_incident_information; padas.psla_rule_violation; padas.psle_rule_violation; pepf.padas_vehicle_data; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance;
Messaggi in uscita: padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psef_mayday_call_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_tele_info; padas_vtov_data; tesp.b-data; trp-data; trp-padas_outputs; trrs-data; ttrfc-data_vehicle;
User Needs: 5.2.1; 5.2.2; 5.2.3; 8 Assistenza al Conducente; 8.6.7; 8.7.1;
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 29 di 80
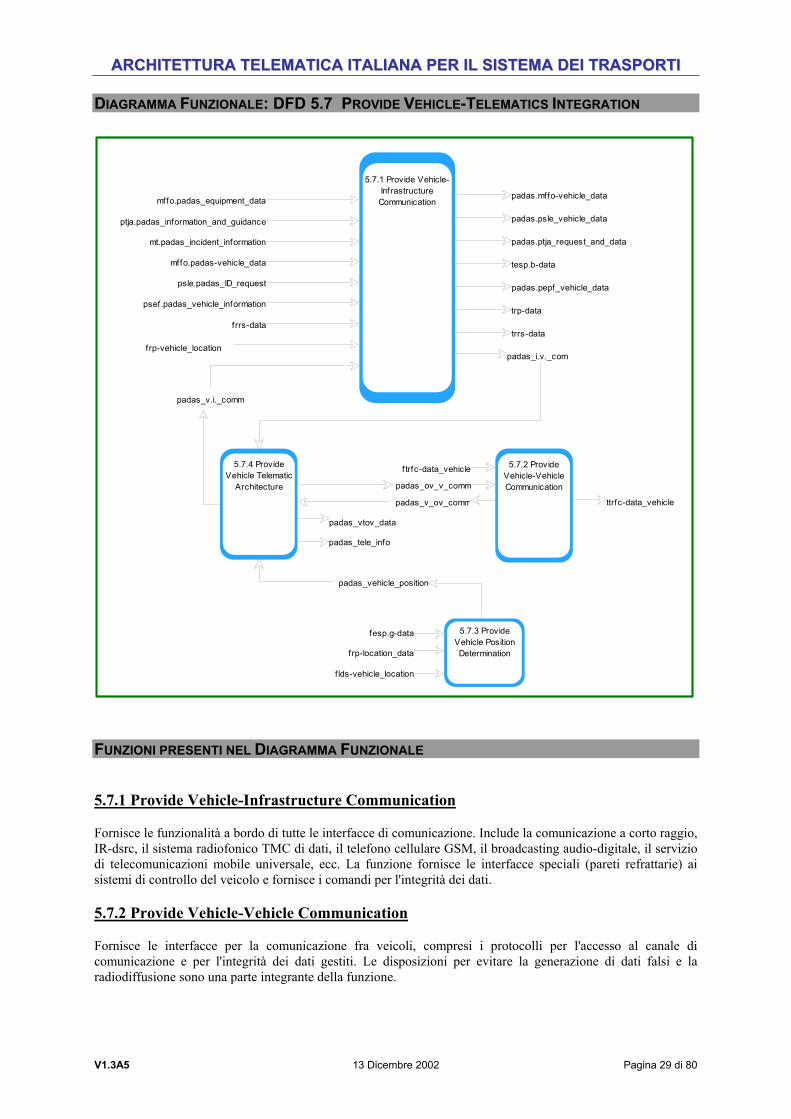
DIAGRAMMA FUNZIONALE: DFD 5.7 PROVIDE VEHICLE-TELEMATICS INTEGRATION
5.7.1 Provide Vehicle-InfrastructureCommunication
5.7.2 ProvideVehicle-VehicleCommunication
5.7.3 ProvideVehicle PositionDetermination
5.7.4 ProvideVehicle Telematic
Architecture
ttrfc-data_vehicle
f trfc-data_vehicle
frp-location_data
f lds-vehicle_location
fesp.g-data
padas_vtov_data
padas_tele_info
tesp.b-data
trp-data
padas.psle_vehicle_data
padas.ptja_request_and_data
psef.padas_vehicle_information
psle.padas_ID_request
ptja.padas_information_and_guidance
padas_ov_v_comm
padas_v_ov_comm
padas_vehicle_position
frrs-datatrrs-data
padas.mffo-vehicle_data
padas_i.v._com
padas.pepf_vehicle_data
mt.padas_incident_information
mffo.padas-vehicle_data
mffo.padas_equipment_data
padas_v.i._comm
frp-vehicle_location
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.7.1 Provide Vehicle-Infrastructure Communication
Fornisce le funzionalità a bordo di tutte le interfacce di comunicazione. Include la comunicazione a corto raggio, IR-dsrc, il sistema radiofonico TMC di dati, il telefono cellulare GSM, il broadcasting audio-digitale, il servizio di telecomunicazioni mobile universale, ecc. La funzione fornisce le interfacce speciali (pareti refrattarie) ai sistemi di controllo del veicolo e fornisce i comandi per l'integrità dei dati.
5.7.2 Provide Vehicle-Vehicle Communication
Fornisce le interfacce per la comunicazione fra veicoli, compresi i protocolli per l'accesso al canale di comunicazione e per l'integrità dei dati gestiti. Le disposizioni per evitare la generazione di dati falsi e la radiodiffusione sono una parte integrante della funzione.

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 30 di 80
5.7.3 Provide Vehicle Position Determination
Fornisce la possibilità per il veicolo di determinare la propria posizione. Questa è determinata con l'esattezza richiesta al fornitore del servizio. La funzione consente anche l'aggiornamento dei servizi disponibili - GPS, DGPS, GNSS, ecc.
5.7.4 Provide Vehicle Telematic Architecture
Fornisce le funzionalità a bordo veicolo adatte (reti e protocolli) per tutti i servizi telematici. Include le disposizioni adatte a differenti servizi e specifiche porte di comunicazione da utilizzarsi per differenti flussi di informazioni da un servizio ad un altro (controllo della velocità, controllo della distanza di sicurezza, ecc.).
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
fesp.b-data; fesp.g-data; flds-vehicle_location; frp-location_data; frrs-data; ftrfc-data_vehicle; mt.padas_incident_information; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance; padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_tele_info; padas_vtov_data; tesp.b-data; trp-data; trrs-data; ttrfc-data_vehicle; fesp.g-data; flds-vehicle_location; frp-location_data; frrs-data; ftrfc-data_vehicle; mt.padas_incident_information; padas_antiglare_to_vehicles; padas_visibility_to_vehicles; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance; padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_tele_info; padas_vtov_data; tesp.b-data; trp-data; trrs-data; ttrfc-data_vehicle; fesp.g-data; flds-vehicle_location; frp-location_data; frrs-data; ftrfc-data_vehicle; mt.padas_incident_information; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance; padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_tele_info; padas_vtov_data; tesp.b-data; trp-data; trrs-data; ttrfc-data_vehicle; fesp.g-data; flds-vehicle_location; frp-location_data; frrs-data; ftrfc-data_vehicle; mt.padas_incident_information; padas.psle_rule_violation; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance; padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_tele_info; padas_vtov_data; tesp.b-data; trp-data; trrs-data; ttrfc-data_vehicle;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 31 di 80
5.8 Integrate Vehicle in Traffic System
Garantisce l'integrazione del veicolo, equipaggiato con sistemi telematici, con l'intero sistema del traffico. La funzione si articola in sottofunzioni.
Messaggi in Ingresso: mt.padas_traffic_output_data; padas_mayday; padas_warning; vt_vtec_driving_regulations; vt_vtec_mayday; vt_vtec_route_guidance; vt_vtec_travel_info; vt_vtec_warning;
Messaggi in uscita: vt_vtec_floating_cars; vt_vtec_stolen_vehicle_notification;
User Needs: 2.1.1; 4.1.1; 5.1.1; 5.1.2; 5.3.2; 8 Assistenza al Conducente;
DIAGRAMMA FUNZIONALE: DFD 5.8 INTEGRATE VEHICLE IN TRAFFIC SYSTEM
5.8.7 Provide StolenVehicle
Tracking/Prosecution
5.8.2 ProvideDynamic Route
Guidance
5.8.8 ProvideDetection of Law
Violations
5.8.5 ProvideRoad
Regulations
5.8.9 Provide(EFT) Electronic
FinancialTransactions
5.8.3 ProvideTravel
Information
5.8.6 CollectFloating Cars
Data
5.8.1 ProvidePre-Trip
Information
5.8.4 Provide RoadAssistance
padas_mayday
padas_w arning
ptja.padas_route_guidance
psef.padas_road_assistance
padas_road_reg
padas_eft
padas_travel_data
padas_f loating_pos
padas_trip_data
padas_stolen_pos
padas_stolen_data
padas_stolen_track padas_assist_pos
padas.ptja_f loating_cars
padas.ptja_travel_planning_request
pepf.padas_service_cost
pepf.padas_vehicle_ID_request
padas.pepf_vehicle_position
padas.psle_vehicle_IDpsle.padas_ID_request
padas.psle_rule_violation
ptja.padas_multimodal_transport_data
ptja.padas_pre_trip_information
psef.padas_road_assistance
psef.padas_call_acknow ledgment
padas.psef_vehicle_position
padas.psef_vehicle_data
padas_road_reg
padas.pepf_vehicle_ID
padas_rule_violation_information
mt.padas_driving_regulations
mt.padas_traff ic_output_data
padas.mt_f loating_cars

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 32 di 80
FUNZIONI PRESENTI NEL DIAGRAMMA FUNZIONALE
5.8.1 Provide Pre-Trip Information
Fornisce la disponibilità a bordo veicolo di tutti i servizi necessari per la pianificazione del viaggio e la selezione di un modo/percorso. Fornisce l'accesso alle funzionalità fornite dalle funzioni dell'area "6-Provide Traveller Journey Assistance".
5.8.2 Provide Dynamic Route Guidance
Fornisce le funzionalità per il calcolo dinamico dell'itinerario a bordo veicolo. Ciò è consentito dai servizi forniti dalla funzione di gestione del traffico e dalla funzione di assistenza al viaggiatore (ambiti 3 e 6) usate all'interno del veicolo.
5.8.3 Provide Travel Information
Fornisce le informazioni su tutti gli eventi che possono influenzare il viaggio. Sono fornite dalla funzione anche le informazioni sulle attrattive turistiche e su altri elementi di interesse per i viaggiatori, quali la sistemazione. Forniscono le funzionalità necessarie per la funzione di assistenza al viaggiatore (ambito 6) a bordo veicolo.
5.8.4 Provide Road Assistance
Fornisce i servizi necessari quando il veicolo si arresta per motivi inattesi, rottura del veicolo, incidente, ecc. Queste funzionalità permettono la connessione e la richiesta di assistenza ai provider. La funzione include i servizi per le chiamata di emergenza e l'accesso alla funzione per la sicurezza e le emergenze (Ambito 2).
5.8.5 Provide Road Regulations
Rende disponibile a bordo veicolo lo stato attuale dei segnali stradali. La funzione fornisce parte delle funzionalità della funzione di gestione del traffico e della funzione per il rispetto della legalità (Ambiti 3 e 7) a bordo veicolo.
5.8.6 Collect Floating Cars Data
Mette a disposizione delle funzioni di gestione del traffico (area 3-Manage Traffic) e/o dei provider i dati rilevati dai veicoli. Questi dati contengono i dettagli relativi allo stato del traffico, alle condizioni atmosferiche e di visibilità. La funzione trasmette periodicamente questi dati in modo che i veicoli siano come delle sonde di rilevamento all'interno della rete stradale.
5.8.7 Provide Stolen Vehicle Tracking/Prosecution
Fornisce i dati alla agenzia per il controllo della legalità, alla funzione di gestione delle merci e della flotta (ambiti 7 e 8) ed ai fornitori di servizi. Questi dati permettono il controllo continuo del veicolo, la rilevazione del furto ed il rintracciamento del veicolo per mezzo di sistemi quali il GPS e GSM. Controlla le funzioni di supporto all'agenzia per il rispetto della legalità (ambito 7).
5.8.8 Provide Detection of Law Violations
Fornisce tutte le funzionalità a bordo veicolo per la rilevazione delle violazioni alla regolamentazione vigente. Tali violazioni possono comprendere, ma non si limitano a, quelle relative ai limiti di velocità, al passaggio col semaforo rosso, ecc. La funzione fornisce inoltre funzionalità per la trasmissione delle informazioni rilevanti alle funzioni dell'area "7-Provide Support for Law Enforcement".

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 33 di 80
5.8.9 Provide (EFT) Electronic Financial Transactions
Fornisce le funzionalità a bordo veicolo per la gestione di tutte le operazioni finanziarie. Fra queste funzionalità ne sono presenti alcune che consentono il controllo dell'integrità dei dati, l'identificazione e la posizione del veicolo, la richiesta del servizio, l'accesso a tutti i servizi a pagamento a bordo veicolo.
MESSAGGI PRESENTI NEL DIAGRAMMA FUNZIONALE
mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas_mayday; padas_warning; mt.padas_traffic_output_data; padas.psle_rule_violation; padas_mayday; padas_warning; psle.padas_ID_request; padas_rule_violation_information; mt.padas_traffic_output_data; padas_mayday; padas_warning;

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 34 di 80
5.1.1 Monitor Visibility Range
Fornisce la misura, attraverso mezzi strumentali, della distanza di visibilità. La distanza di visibilità è collegata alla distanza a cui gli oggetti sulla strada possono essere rilevati dal guidatore senza sussidi strumentali.
Messaggi in Ingresso: fv-data_vision;
Messaggi in uscita: padas.mt_visibility_range; padas_visibility_to_controls; padas_visibility_to_driver; padas_visibility_to_vehicles; tws-vr_data;
User Needs: 8 Assistenza al Conducente, 8.1.2, 8.2.3,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 35 di 80
5.1.2 Generate Enhanced Vision of Driving Area
Genera un'immagine migliore della visione umana. Utilizza i mezzi strumentali (macchine fotografiche, visioni fuori dagli spettri visibili, ecc.) per fornire " l'immagine " dell'area di manovra.
Messaggi in Ingresso: fv-data_vision;
Messaggi in uscita: padas_vision_to_driver;
User Needs: 8 Assistenza al Conducente, 8.1.1, 8.1.3, 8.1.4, 8.1.5, 8.1.6, 8.1.8,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 36 di 80
5.1.3 Provide Enhanced Lighting
Fornisce un'illuminazione migliore nell'area di manovra utilizzata. Utilizza il sistema intelligente per il controllo della luce (orientamento del fascio, luci UV, ecc.) e garantisce la cooperazione con i veicoli che attraversano il percorso del veicolo al quale si sta fornendo l'illuminazione.
Messaggi in Ingresso: fv-data_vision; fv-road;
Messaggi in uscita: tv-light;
User Needs: 8 Assistenza al Conducente, 8.1.1, 8.1.3, 8.1.4, 8.1.5, 8.1.6, 8.1.8,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 37 di 80
5.1.4 Provide Anti-glaring (Co-operative) Facilities
Fornisce l'assistenza anti-abbagliamento scambiando le informazioni fra i veicoli che incrociano i loro rispettivi percorsi. Fornisce una serie di funzionalità, ad esempio i commutatori di luce (abbaglianti/anabbaglianti), i fasci luminosi sincronizzati pulsanti, ecc.
Messaggi in Ingresso: padas_vtov_data;
Messaggi in uscita: padas_antiglare_to_vehicles;
User Needs: 8 Assistenza al Conducente, 8.1.1, 8.1.3, 8.1.4, 8.1.6, 8.1.8,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 38 di 80
5.2.1 Provide Longitudinal Dynamic Control
Fornisce il controllo automatico sia dell'acceleratore che dei freni del veicolo. La funzione offre tali funzionalità insieme a tutte le caratteristiche necessarie per un sicuro funzionamento, un sistema diagnostico, una rete di controllo e una previsione dei guasti dei controlli automatici del veicolo.
Messaggi in Ingresso: fv-diagnostics_long; padas_auto_control; padas_control_take_over; padas_distance; padas_engine_stop; padas_longit_control; padas_speed_val; padas_visibility_to_controls;
Messaggi in uscita: padas_active_safe_long; padas_control_release; tv-auto_accel;
User Needs: 8 Assistenza al Conducente, 8.0.2, 8.4.1, 8.4.5, 8.4.6, 8.4.7, 8.4.9,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 39 di 80
5.2.2 Provide Lateral Dynamic Control
Fornisce il controllo automatico dello sterzo del veicolo ed il controllo automatico del freno differenziale. Tali funzionalità vengono fornite insieme a tutte le caratteristiche per un loro sicuro funzionamento, sistema diagnostico, rete di controllo e previsione dei guasti.
Messaggi in Ingresso: fv-diagnostics_lat; padas_auto_control; padas_control_take_over; padas_infra_data; padas_lateral_control;
Messaggi in uscita: padas_active_safe_lat; padas_control_release; tv-auto_diff_brake;
User Needs: 8 Assistenza al Conducente, 8.0.2, 8.5.10, 8.5.4, 8.5.5, 8.5.6, 8.5.7,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 40 di 80
5.2.3 Provide Driver-(Automatic Controls) Interactivity
Fornisce i servizi per l'interattività fra il guidatore ed i controlli automatici. Include una sicura architettura di bordo, oltre a funzionalità per la traccia continua dei comandi attuati, per il monitoraggio dei comandi provenienti dall'infrastruttura e per le procedure per attivare/abbandonare il controllo automatico.
Messaggi in Ingresso: fd-auto_control_on/off; padas_driver_control; padas_infra_diag;
Messaggi in uscita: padas_auto_control; padas_vehicle_status; tv-actuation_tracing;
User Needs: 8 Assistenza al Conducente, 8.0.2, 9.8.31, 9.8.34,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 41 di 80
5.2.4 Provide Infrastructure Support
Fornisce ogni tipo di supporto di guida proveniente dall'infrastruttura, comprese funzionalità per mantenere la strada/corsia, regolare la velocità, mantenere la distanza di sicurezza, controllare immissioni/uscite nella/dalla corsia e proteggere le corsie riservate. La funzione fornisce inoltre la diagnostica per tutte le funzionalità e la possibilità di comunicazione (al conducente o ai controlli automatici). Sono inoltre incluse le funzionalità per l'identificazione del veicolo, la rilevazione di violazioni alla regolamentazione e la generazione delle relative azioni di perseguimento.
Messaggi in Ingresso: fmo-infrastructure_diagnosis; frp-lane_follow;
Messaggi in uscita: padas.psla_rule_violation; padas_distance; padas_infra_data; padas_infra_diag; padas_speed_val;
User Needs: 8 Assistenza al Conducente, 8.5.3,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 42 di 80
5.2.5 Provide Pre-Crash Restraints Deployment
Fornisce funzionalità per l'utilizzo di sistemi attivi di sicurezza a bordo veicolo connessi con i sensori che prevengono le collisioni, installati intorno al veicolo stesso.
Messaggi in Ingresso: padas_active_safe_lat; padas_active_safe_long;
Messaggi in uscita: tv-pre_crash;
User Needs: 8 Assistenza al Conducente, 8.4.2, 8.5.1,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 43 di 80
5.3.1 Provide Dynamic Scenario Intelligence
Fornisce un monitoraggio continuo dello scenario di guida per il controllo longitudinale del veicolo. La funzione include le funzionalità per rilevare ed interpretare i confini della strada o della corsia, tutti gli oggetti presenti sulla traiettoria prevista del veicolo, la segnaletica ed i segnali stradali. La funzione fornisce le funzionalità per la valutazione dei limiti di sicurezza per le manovre del veicolo (aree libere, dinamiche del veicolo e aderenza disponibile nel contatto strada-gomma).
Messaggi in Ingresso: fv-long_friction; fv-long_lane; fv-long_obj_det; fv-long_sm; fv-road_sign; padas_visibility_to_controls;
Messaggi in uscita: padas_driving_scenario;
User Needs: 8 Assistenza al Conducente, 8.4.2, 8.4.3, 8.4.7,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 44 di 80
5.3.2 Provide Longitudinal Dynamic Control of the Vehicle
Consente il controllo longitudinale del veicolo. La funzione utilizza gli output forniti dalla funzione "5.2.1-Provide Longitudinal Dynamic Control" e la conoscenza dello scenario di guida fornita dalla funzione "5.3.1-Provide Dynamic Scenario Intelligence". La funzione quindi, in base al risultato delle due funzioni, può controllare il veicolo per evitare collisioni.
Messaggi in Ingresso: padas_long_acc; padas_long_aeb; padas_long_isa; padas_long_park; padas_long_s&g; padas_long_se; padas_long_vp;
Messaggi in uscita: padas_longit_control;
User Needs: 8 Assistenza al Conducente, 8.4.10, 8.4.4, 8.4.8, 8.6.2, 8.6.3,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 45 di 80
5.3.3 Provide Facilities for Parking
Fornisce le potenzialità per rilevare oggetti a poca distanza intorno al veicolo. Queste funzionalità sono usate per il controllo longitudinale del veicolo a bassa velocità nelle manovre di parcheggio.
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_park;
User Needs: 8 Assistenza al Conducente, 8.3.5,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 46 di 80
5.3.4 Provide Facilities for Intelligent Speed Adaptation
Fornisce al conducente le funzionalità per tenere, in modo automatico, il veicolo ad una velocità inferiore al limite imposto dalla regolamentazione vigente. La funzione offre le funzionalità per visualizzare in continuo il corrente limite consentito di velocità per impostare manualmente il limite di velocità.
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_isa;
User Needs: 8 Assistenza al Conducente, 8.2.4, 8.2.5, 8.2.6, 8.6.2, 8.6.3,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 47 di 80
5.3.5 Provide Facilities for Stop & Go
Fornisce le funzionalità per la rilevazione degli oggetti davanti al veicolo, per garantire il controllo automatico a bassa velocità e il controllo longitudinale per il funzionamento del veicolo " in-coda ".
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_s&g;
User Needs: 8 Assistenza al Conducente,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 48 di 80
5.3.6 Provide Facilities for Adaptive Cruise Control
Fornisce le funzionalità per la rilevazione degli oggetti a lunga distanza per mantenere costante la velocità e la distanza di sicurezza.
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_acc;
User Needs: 8 Assistenza al Conducente, 8.2.5, 8.2.6, 8.4.10, 8.4.8, 8.6.2, 8.6.3,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 49 di 80
5.3.7 Provide Facilities for Speed Enforcement
Consente di ricevere messaggi con i limiti di velocità, dall'esterno del veicolo, per suggerirli al guidatore. Può gestire automaticamente la velocità del veicolo secondo il valore indicato.
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_se;
User Needs: 8 Assistenza al Conducente, 8.2.5, 8.2.6,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 50 di 80
5.3.8 Provide Facilities for Anti-collision Emergency Braking
Fornisce la possibilità di rilevare, con alta affidabilità, tutti i generi di oggetti, dinamici o statici, lungo la traiettoria prevista dal veicolo (altri veicoli, pedone, ecc.). Può avvertire il guidatore e/o attuare una procedura d'emergenza per evitare uno scontro.
Messaggi in Ingresso: padas_driving_scenario;
Messaggi in uscita: padas_long_aeb;
User Needs: 8 Assistenza al Conducente, 8.4.6, 8.6.2, 8.6.3, 8.6.5,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 51 di 80
5.3.9 Provide Facilities for Vehicle Platooning
Consente di creare un plotone di veicoli. Controlla il sistema automatico a bordo e proibisce ai veicoli non autorizzati di unirsi al convoglio. Consente la sorveglianza dei veicoli del plotone, o trasferisce la gestione al veicolo principale del convoglio. La funzione fornisce i servizi per ogni veicolo per entrare e per lasciare il convoglio, per controllare l'area di manovra intorno ad ogni veicolo in caso di emergenza, per eseguire la diagnosi e comunicare qualsiasi disfunzione nel veicolo, per rimanere a poca distanza dal veicolo che precede, per implementare tutte le procedure obbligatorie per questa modalità automatica di funzionamento.
Messaggi in Ingresso: padas_driving_scenario; padas_vtov_data;
Messaggi in uscita: padas_long_vp;
User Needs: 8 Assistenza al Conducente, 8.4.10, 8.4.8, 8.6.1, 8.6.2, 8.6.3, 8.6.4, 8.6.5, 8.6.6, 8.6.7, 8.6.8, 8.6.9,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 52 di 80
5.4.1 Provide Dynamic Scenario Intelligence
Fornisce un monitoraggio continuo dello scenario di guida per il controllo laterale del veicolo. La funzione offre le funzionalità per rilevare ed interpretare i confini fisici della strada o della corsia, tutti gli oggetti sulla traiettoria prevista del veicolo, la segnaletica ed i segnali stradali. La funzione fornisce inoltre le funzionalità per valutare i limiti di sicurezza per le manovre del veicolo (aree libere, dinamiche del veicolo ed aderenza disponibile strada-gomma) oltre al monitoraggio ed interpretazione dell'area dell'incrocio e dell'area posteriore del veicolo.
Messaggi in Ingresso: fv-lat_crossing; fv-lat_friction; fv-lat_lane; fv-lat_obj_det; fv-lat_rear; fv-lat_sm; fv-road_sign; padas_visibility_to_controls;
Messaggi in uscita: padas_area_intelligence;
User Needs: 8 Assistenza al Conducente, 8.5.2, 8.5.3, 8.5.6, 8.5.7, 8.5.8, 8.5.9,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 53 di 80
5.4.2 Provide Lateral Dynamic Control of the Vehicle
Fornisce il controllo laterale del veicolo. Utilizza i dati di output forniti dalla funzione di controllo dinamico laterale (5,2,2) e dalla funzione di intelligenza dinamica (5,4,1). La funzione quindi può gestire il veicolo per evitare gli scontri in base ai risultati delle due funzioni.
Messaggi in Ingresso: padas_lat_is; padas_lat_lc; padas_lat_lk; padas_lat_over; padas_lat_park; padas_lat_rl_io; padas_lat_s&g++;
Messaggi in uscita: padas_lateral_control;
User Needs: 8 Assistenza al Conducente, 8.5.8, 8.5.9, 8.6.2, 8.6.3, 8.6.4,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 54 di 80
5.4.3 Provide Facilities for Parking
Fornisce le funzionalità per la rilevazione di oggetti a poca distanza intorno al veicolo e per il controllo laterale a bassa velocità. Queste funzionalità permettono di effettuare le manovre di parcheggio.
Messaggi in Ingresso: padas_area_intelligence;
Messaggi in uscita: padas_lat_park;
User Needs: 8 Assistenza al Conducente, 8.3.5,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 55 di 80
5.4.4 Provide Facilities for Lane/Road Keeping
Fornisce al guidatore la capacità, attraverso le informazioni, di mantenere il veicolo all'interno della relativa corsia della strada o all'interno dei limiti della strada.
Messaggi in Ingresso: padas_area_intelligence;
Messaggi in uscita: padas_lat_lk;
User Needs: 8 Assistenza al Conducente, 8.4.7, 8.5.10, 8.5.4, 8.5.5, 8.5.7, 8.6.2, 8.6.3, 8.6.4,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 56 di 80
5.4.5 Provide Facilities for Lane Change
Fornisce al conducente informazioni o messaggi sensoriali sulla sterzata che segnalano al conducente se è fattibile o meno la manovra di cambio corsia. La funzione utilizza il controllo a lungo raggio dell'area posteriore del veicolo oltre alle funzionalità fornite dalla funzione 5.4.1 "Provide Dynamic Scenario Intelligence".
Messaggi in Ingresso: padas_area_intelligence;
Messaggi in uscita: padas_lat_lc;
User Needs: 8 Assistenza al Conducente, 8.4.7, 8.6.2, 8.6.3, 8.6.4,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 57 di 80
5.4.6 Provide Facilities for Reserved Lanes I/O
Fornisce tutte le funzionalità per entrare ed uscire dalle corsie riservate (in autostrada). Insieme alle funzionalità per attuare le regole operative per le corsie riservate (distanza, velocità, accelerazione, controllabilità remota, ecc.) la funzione fornisce la diagnostica per garantire la conformità corrente del veicolo prima di entrare nella corsie ed un'individuazione preventiva dei guasti.
Messaggi in Ingresso: padas_area_intelligence;
Messaggi in uscita: padas_lat_rl_io;
User Needs: 8 Assistenza al Conducente, 8.4.7,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 58 di 80
5.4.7 Provide Infrastructure Support for Lane Following
Fornisce tutti i generi di supporto per consentire di seguire la traiettoria prefissata. Include le attrezzature che possono usare i tipi differenti di marcature della strada. Fra questi i sistemi attivi e passivi basati su emettitori di onde immersi nel fondo stradale, magneti, nastri magnetici, riflettori laterali della strada, comunicazione di LCC, ecc. La funzione include i controlli diagnostici continui delle funzionalità di questo tipo di attrezzature.
Messaggi in Ingresso: frp-lane_follow; padas_area_intelligence;
Messaggi in uscita: padas_lat_is;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 59 di 80
5.4.8 Provide Facilities for Overtaking
Fornisce le funzionalità per il controllo delle zone anteriori e posteriori del veicolo. Attraverso informazioni connesse, la funzione consente al veicolo di effettuare una manovra di sorpasso in sicurezza ed in maniera automatica.
Messaggi in Ingresso: padas_area_intelligence;
Messaggi in uscita: padas_lat_over;
User Needs: 8 Assistenza al Conducente,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 60 di 80
5.4.9 Provide Facilities for Stop & Go ++
Fornisce funzionalità di Stop & Go simili a quelle fornite dalla funzione 5.3.5. Sono comprese pertanto le funzionalità per rilevare oggetti di fronte al veicolo (grand'angolo), per mantenere il veicolo a breve distanza a bassa velocità e per il controllo automatico laterale per operazioni di accodamento del veicolo. La funzione include inoltre la funzionalità per il controllo laterale a bassa velocità.
Messaggi in Ingresso: frp-lane_follow; padas_area_intelligence;
Messaggi in uscita: padas_lat_s&g++;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 61 di 80
5.5.1 Monitor Driver Status
Fornisce il controllo della condizione del guidatore. E' in grado di rivelare qualsiasi malore del conducente dovuto a qualunque motivo. Questi motivi possono essere l'abuso di alcol o droghe, problemi di salute improvvisi, disattenzione prolungata, ecc.
Messaggi in Ingresso: fd-driver_behaviour; padas_stor_data;
Messaggi in uscita: padas_driver_impair; padas_driver_status;
User Needs: 8 Assistenza al Conducente, 8.3.1, 9.3.6, 9.4.1,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 62 di 80
5.5.2 Enhance Driver Alertness
Fornisce tutti i metodi per aumentare la vigilanza del conducente. I metodi per l'aumento della vigilanza includono gli avvisatori acustici, ottici, gli stimoli tattili, i cambiamenti ambientali a bordo (temperatura, odore, ecc).
Messaggi in Ingresso: padas_driver_status;
Messaggi in uscita: padas_driver_alert;
User Needs: 8 Assistenza al Conducente, 8.3.3, 9.4.2,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 63 di 80
5.5.3 Monitor Vehicle Status
Controlla il veicolo per rilevare i guasti o le perdite imminenti di prestazioni che potrebbero avere un effetto sulla sicurezza del veicolo stesso.
Messaggi in Ingresso: fv-vehicle_data; padas_stor_data;
Messaggi in uscita: padas_vehicle_stat;
User Needs: 5.1.2, 8 Assistenza al Conducente, 8.0.2, 9.3.7, 9.4.1,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 64 di 80
5.5.4 Record Operational Data
Fornisce i dati che sono collegati con la sicurezza del veicolo. I dati includono lo stato del conducente, le prestazioni del veicolo, le immagini della visuale libera, ecc.
Messaggi in Ingresso: fd-driver_data; ftrfc-traffic_data; fv-vehicle_data; padas_driver_status; padas_vehicle_stat;
Messaggi in uscita: padas_tvd_scenario;
User Needs: 8 Assistenza al Conducente, 8.3.6, 8.3.7,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 65 di 80
5.5.5 Provide Automatic Take-over of Controls
Fornisce la possibilità per il cambio automatico di gestione del controllo del veicolo nel caso di malore del conducente. Include le procedure necessarie per arrestare il veicolo.
Messaggi in Ingresso: padas_driver_impair; padas_vehicle_stat;
Messaggi in uscita: padas_auto_stop; padas_auto_warn; padas_control_take_over; padas_engine_stop;
User Needs: 5.1.2, 8 Assistenza al Conducente,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 66 di 80
5.5.6 Provide Warnings to Surrounding Traffic
Fornisce gli avvisi ai veicoli circostanti, nel caso di malore del conducente, dell'attuazione della procedura di arresto del veicolo.
Messaggi in Ingresso: padas_auto_warn;
Messaggi in uscita: padas.mt_warning; padas_warning;
User Needs: 8 Assistenza al Conducente, 8.3.4, 9.3.7,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 67 di 80
5.5.7 Provide Mayday Call
Fornisce la possibilità di gestire una chiamata di emergenza. Questa chiamata può essere attuata manualmente dal conducente o automaticamente dal sistema di controllo o dal sensore di arresto.
Messaggi in Ingresso: padas_auto_stop;
Messaggi in uscita: padas.psef_mayday_call_data; padas_mayday;
User Needs: 5.1.1, 5.1.2, 8 Assistenza al Conducente, 9.4.3, 9.4.5,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 68 di 80
5.7.1 Provide Vehicle-Infrastructure Communication
Fornisce le funzionalità a bordo di tutte le interfacce di comunicazione. Include la comunicazione a corto raggio, IR-dsrc, il sistema radiofonico TMC di dati, il telefono cellulare GSM, il broadcasting audio-digitale, il servizio di telecomunicazioni mobile universale, ecc. La funzione fornisce le interfacce speciali (pareti refrattarie) ai sistemi di controllo del veicolo e fornisce i comandi per l'integrità dei dati.
Messaggi in Ingresso: fesp.b-data; frp-vehicle_location; frrs-data; mffo.padas_equipment_data; mffo.padas-cargo_data; mffo.padas-vehicle_data; mt.padas_incident_information; padas_v.i._comm; psef.padas_vehicle_information; psle.padas_ID_request; ptja.padas_information_and_guidance;
Messaggi in uscita: padas.mffo-vehicle_data; padas.pepf_vehicle_data; padas.psle_vehicle_data; padas.ptja_request_and_data; padas_i.v._com; tesp.b-data; trp-data; trrs-data;
User Needs: 5.2.1, 5.2.2, 5.2.3, 8 Assistenza al Conducente, 8.7.1, 9.10.8, 9.10.9, 9.8.15,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 69 di 80
5.7.2 Provide Vehicle-Vehicle Communication
Fornisce le interfacce per la comunicazione fra veicoli, compresi i protocolli per l'accesso al canale di comunicazione e per l'integrità dei dati gestiti. Le disposizioni per evitare la generazione di dati falsi e la radiodiffusione sono una parte integrante della funzione.
Messaggi in Ingresso: ftrfc-data_vehicle; padas_antiglare_to_vehicles; padas_ov_v_comm; padas_visibility_to_vehicles;
Messaggi in uscita: padas_ov_v_comm; padas_v_ov_comm; ttrfc-data_vehicle;
User Needs: 8 Assistenza al Conducente, 8.7.1,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 70 di 80
5.7.3 Provide Vehicle Position Determination
Fornisce la possibilità per il veicolo di determinare la propria posizione. Questa è determinata con l'esattezza richiesta al fornitore del servizio. La funzione consente anche l'aggiornamento dei servizi disponibili - GPS, DGPS, GNSS, ecc.
Messaggi in Ingresso: fesp.g-data; flds-vehicle_location; frp-location_data;
Messaggi in uscita: padas_vehicle_position;
User Needs: 8 Assistenza al Conducente, 9.10.9,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 71 di 80
5.7.4 Provide Vehicle Telematic Architecture
Fornisce le funzionalità a bordo veicolo adatte (reti e protocolli) per tutti i servizi telematici. Include le disposizioni adatte a differenti servizi e specifiche porte di comunicazione da utilizzarsi per differenti flussi di informazioni da un servizio ad un altro (controllo della velocità, controllo della distanza di sicurezza, ecc.).
Messaggi in Ingresso: padas.psle_rule_violation; padas_i.v._com; padas_v_ov_comm; padas_vehicle_position;
Messaggi in uscita: padas_ov_v_comm; padas_tele_info; padas_v.i._comm; padas_vtov_data;
User Needs: 8 Assistenza al Conducente, 8.6.7, 9.10.9,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 72 di 80
5.8.1 Provide Pre-Trip Information
Fornisce la disponibilità a bordo veicolo di tutti i servizi necessari per la pianificazione del viaggio e la selezione di un modo/percorso. Fornisce l'accesso alle funzionalità fornite dalle funzioni dell'area "6-Provide Traveller Journey Assistance".
Messaggi in Ingresso: ptja.padas_multimodal_transport_data; ptja.padas_pre_trip_information;
Messaggi in uscita: padas_trip_data;
User Needs: 2.1.1, 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 73 di 80
5.8.2 Provide Dynamic Route Guidance
Fornisce le funzionalità per il calcolo dinamico dell'itinerario a bordo veicolo. Ciò è consentito dai servizi forniti dalla funzione di gestione del traffico e dalla funzione di assistenza al viaggiatore (ambiti 3 e 6) usate all'interno del veicolo.
Messaggi in Ingresso: padas_travel_data; padas_trip_data; psef.padas_road_assistance; ptja.padas_route_guidance;
Messaggi in uscita: padas_assist_pos; padas_eft; padas_floating_pos; padas_stolen_pos;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 74 di 80
5.8.3 Provide Travel Information
Fornisce le informazioni su tutti gli eventi che possono influenzare il viaggio. Sono fornite dalla funzione anche le informazioni sulle attrattive turistiche e su altri elementi di interesse per i viaggiatori, quali la sistemazione. Forniscono le funzionalità necessarie per la funzione di assistenza al viaggiatore (ambito 6) a bordo veicolo.
Messaggi in Ingresso: mt.padas_network_conditions; mt.padas_speed_settings; mt.padas_traffic_output_data; mt.padas_traffic_predictions; ptja.padas_travel_info;
Messaggi in uscita: padas.ptja_travel_planning_request; padas_travel_data;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 75 di 80
5.8.4 Provide Road Assistance
Fornisce i servizi necessari quando il veicolo si arresta per motivi inattesi, rottura del veicolo, incidente, ecc. Queste funzionalità permettono la connessione e la richiesta di assistenza ai provider. La funzione include i servizi per le chiamata di emergenza e l'accesso alla funzione per la sicurezza e le emergenze (Ambito 2).
Messaggi in Ingresso: padas_assist_pos; padas_mayday; padas_stolen_track; padas_warning; psef.padas_call_acknowledgment; psef.padas_call_full_acknowledgment; psef.padas_road_assistance;
Messaggi in uscita: padas.pepf_vehicle_ID; padas.psef_vehicle_data; padas.psef_vehicle_position;
User Needs: 5.1.1, 5.1.2, 8 Assistenza al Conducente,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 76 di 80
5.8.5 Provide Road Regulations
Rende disponibile a bordo veicolo lo stato attuale dei segnali stradali. La funzione fornisce parte delle funzionalità della funzione di gestione del traffico e della funzione per il rispetto della legalità (Ambiti 3 e 7) a bordo veicolo.
Messaggi in Ingresso: mt.padas_driving_regulations;
Messaggi in uscita: padas_road_reg;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 77 di 80
5.8.6 Collect Floating Cars Data
Mette a disposizione delle funzioni di gestione del traffico (area 3-Manage Traffic) e/o dei provider i dati rilevati dai veicoli. Questi dati contengono i dettagli relativi allo stato del traffico, alle condizioni atmosferiche e di visibilità. La funzione trasmette periodicamente questi dati in modo che i veicoli siano come delle sonde di rilevamento all'interno della rete stradale.
Messaggi in Ingresso: padas_floating_pos;
Messaggi in uscita: padas.mt_floating_cars; padas.ptja_floating_cars;
User Needs: 8 Assistenza al Conducente,

AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 78 di 80
5.8.7 Provide Stolen Vehicle Tracking/Prosecution
Fornisce i dati alla agenzia per il controllo della legalità, alla funzione di gestione delle merci e della flotta (ambiti 7 e 8) ed ai fornitori di servizi. Questi dati permettono il controllo continuo del veicolo, la rilevazione del furto ed il rintracciamento del veicolo per mezzo di sistemi quali il GPS e GSM. Controlla le funzioni di supporto all'agenzia per il rispetto della legalità (ambito 7).
Messaggi in Ingresso: padas_stolen_pos;
Messaggi in uscita: padas.psef_stolen_vehicle_notification; padas_stolen_data; padas_stolen_track;
User Needs: 5.3.1, 5.3.2, 9.8.13, 9.8.18,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 79 di 80
5.8.8 Provide Detection of Law Violations
Fornisce tutte le funzionalità a bordo veicolo per la rilevazione delle violazioni alla regolamentazione vigente. Tali violazioni possono comprendere, ma non si limitano a, quelle relative ai limiti di velocità, al passaggio col semaforo rosso, ecc. La funzione fornisce inoltre funzionalità per la trasmissione delle informazioni rilevanti alle funzioni dell'area "7-Provide Support for Law Enforcement".
Messaggi in Ingresso: padas.psle_rule_violation; padas_road_reg; padas_stolen_data; psle.padas_ID_request; psle.padas_law_violation_message;
Messaggi in uscita: padas.psle_vehicle_ID; padas_rule_violation_information;
User Needs: 8 Assistenza al Conducente,
AARRCCHHIITTEETTTTUURRAA TTEELLEEMMAATTIICCAA IITTAALLIIAANNAA PPEERR IILL SSIISSTTEEMMAA DDEEII TTRRAASSPPOORRTTII
V1.3A5 13 Dicembre 2002 Pagina 80 di 80
5.8.9 Provide (EFT) Electronic Financial Transactions
Fornisce le funzionalità a bordo veicolo per la gestione di tutte le operazioni finanziarie. Fra queste funzionalità ne sono presenti alcune che consentono il controllo dell'integrità dei dati, l'identificazione e la posizione del veicolo, la richiesta del servizio, l'accesso a tutti i servizi a pagamento a bordo veicolo.
Messaggi in Ingresso: padas_eft; padas_road_reg; pepf.padas_service_cost; pepf.padas_vehicle_ID_request;
Messaggi in uscita: padas.pepf_vehicle_position;
User Needs: 4.1.1, 8 Assistenza al Conducente, 9.8.15,
Top Related