







Le lingue
Pagine
Legale


1
Ubicazione degli impianti Ubicazione degli impianti industrialiindustriali
Tipi di scelta da affrontare
Macroscelta
Microscelta
Determinare l’area geografica nella quale posizionare
l’impianto
Rappresenta l’aspetto topografico, cioè dove installare l’impianto all’interno dell’area geografica
prescelta
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali

2
Fattori che intervengono nella scelta � Pianificazione territoriale
relativa ai piani regolatori provinciali che definiscono le zone di insediamento industriale
� Costi delle aree fabbricabili e costi di realizzazione dei fabbricati
� Struttura del mercatopuò essere diffuso o localizzato; ciò influenza i costi di distribuzione del prodotto
� Materie primesia dal punto di vista del costo che della facilità di reperimento
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali

3
� Costo dei trasportisono tanto più rilevanti quanto più poveri sono i materiali trasportati
� Manodopera
sia dal punto di vista dei costi che della reperimento di operatori con competenze specialistiche
� Energiaoggigiorno non è un fattore molto importante in quanto non vi sono problemi di reperimento
� Impatto ambientaleè il fattore più importante ed è legato a fattori sociali e politici
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
4
Metodi di valutazione delle scelteFattori che influenzano la scelta
Quantitativi: tutti i fattori ai quali è possibile attribuire un valore
Qualitativi: tutti gli altri
� Metodi a punteggio� Metodi che fanno riferimento ai costi totali� Metodi che fanno riferimento ai costi di
trasporto
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
5
Metodo a punteggio
Si determinano i fattori determinanti per la valutazione delle diverse alternative
1) Si assegnano dei pesi normalizzati ad ognuno dei fattori (somma pesi = 100)
2) Per ognuna delle diverse soluzioni, si assegna una valutazione relativamente ad ogni fattore
3) Si moltiplicano i pesi per le valutazioni, e si sommano i risultati per ciascuna soluzione
4) La soluzione preferibile è quella che ottiene il punteggio più elevato
Procedimento
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
6
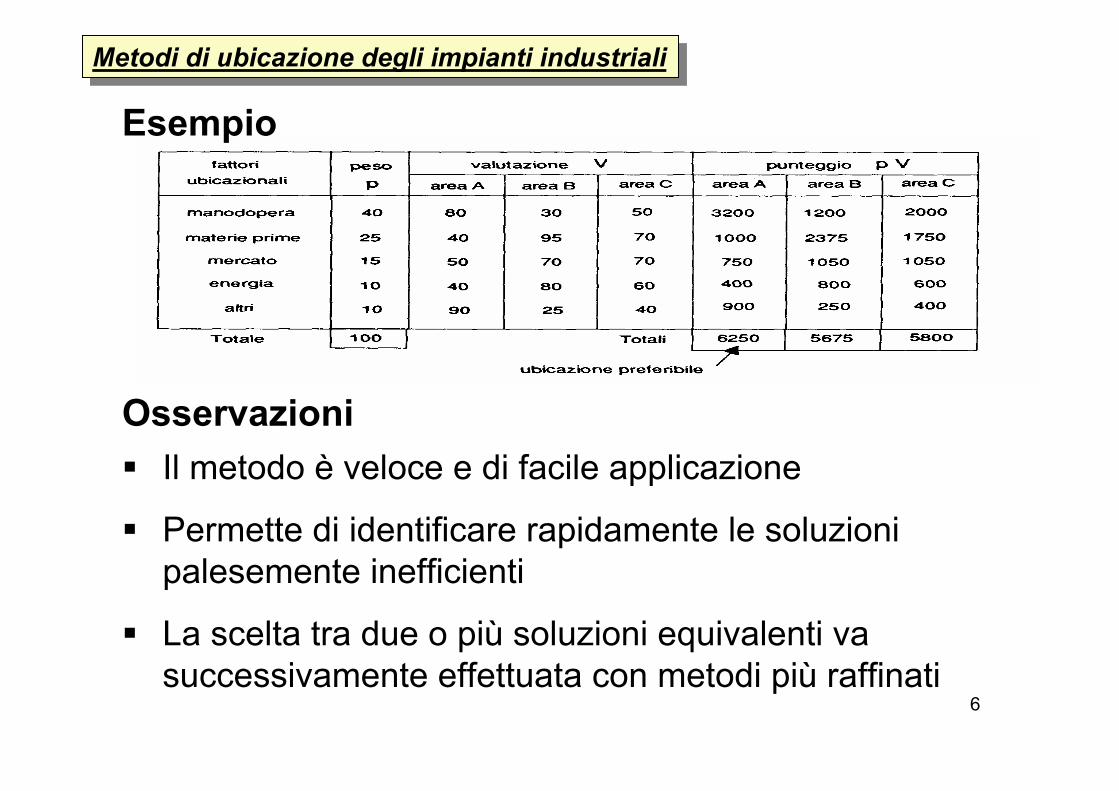
Esempio
Osservazioni� Il metodo è veloce e di facile applicazione
� Permette di identificare rapidamente le soluzioni palesemente inefficienti
� La scelta tra due o più soluzioni equivalenti va successivamente effettuata con metodi più raffinati
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
7
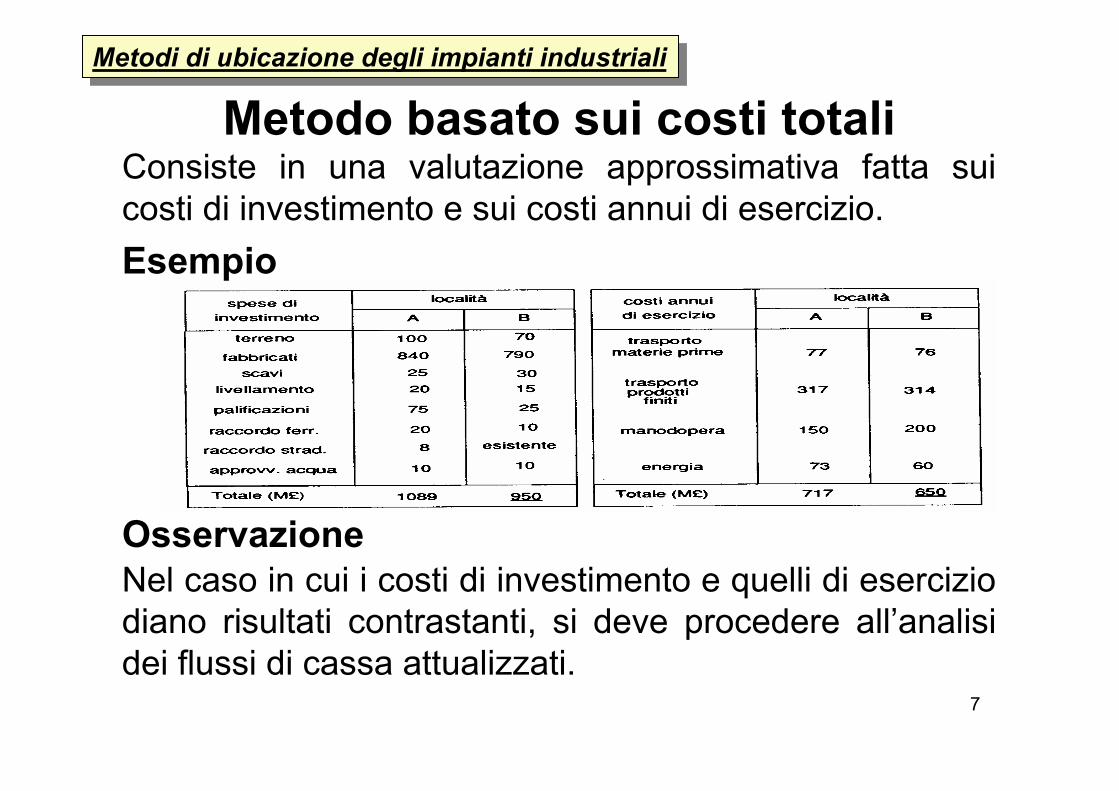
Metodo basato sui costi totaliConsiste in una valutazione approssimativa fatta sui costi di investimento e sui costi annui di esercizio.
Nel caso in cui i costi di investimento e quelli di esercizio diano risultati contrastanti, si deve procedere all’analisi dei flussi di cassa attualizzati.
Esempio
Osservazione
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
8
COSTI PROPORZIONALI ALLE DISTANZECOSTI PROPORZIONALI ALLE DISTANZE• Formulazione generale del problema
dell’allocazione di un impianto– i costi preponderanti sono quelli di trasporto– occorre individuare le distanze tra il punto incognito di
ubicazione e i punti generici da servire o da cui ci si serve
• costi proporzionali alle distanze rettangolari• costi proporzionali alle distanze euclidee• costi proporzionali alle distanze euclidee al quadrato
– il punto di ubicazione risulta dalla minimizzazione di una funzione costo che è la somma dei prodotti di un peso per le distanze percorse
– il peso è il prodotto del numero di viaggi che si prevede debbano essere effettuati in un determinato periodo ed il costo chilometrico.
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
9
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
FORMULAZIONE ANALITICA GENERALE DEL PROBLEMA
• Pi = m punti noti (i=1,…,m);
• X (x,y) = punto incognito di ubicazione del nuovo impianto;
• d (X,Pi) = distanza percorsa per ogni viaggio da X a Pi ;
• ci = costo per unità di percorso;
• ni = numero viaggi all’anno tra X e Pi;iii ncw ⋅=
Pesi: dipendono dal tipo e dalla frequenza dei trasporti
� COSTO TOTALE ANNUO DEI TRASPORTI:
( )i
m
ii PXdwXf ,)(
1⋅=∑
=
10
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
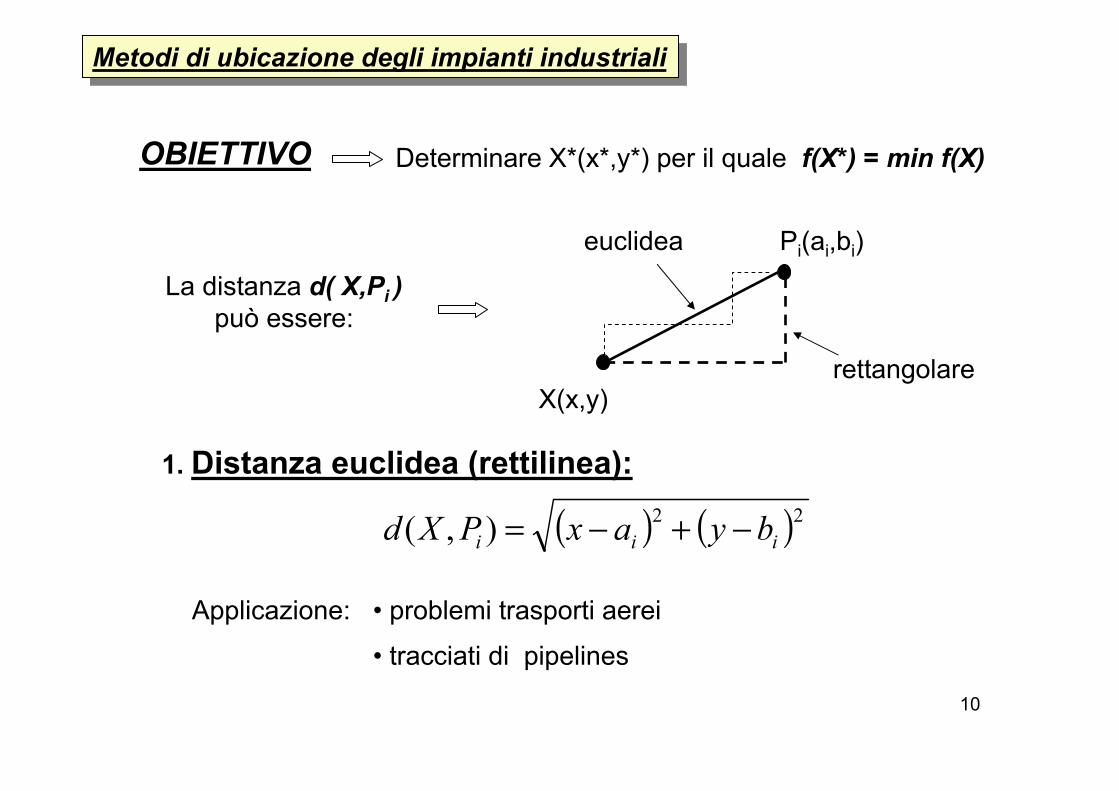
OBIETTIVO Determinare X*(x*,y*) per il quale f(X*) = min f(X)
La distanza d( X,Pi )può essere:
rettangolare
euclidea
X(x,y)
Pi(ai,bi)
1. Distanza euclidea (rettilinea):
( ) ( )22),( iii byaxPXd −+−=
• problemi trasporti aereiApplicazione:
• tracciati di pipelines
11
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
2. Distanza rettangolare
iii byaxPXd −+−=),(
• ubicazione di macchine Applicazione:
• spostamento di personale all’interno di un edificio
• traffico aree urbane
12
( ) ( )[ ]∑=
−+−=m
iiii byaxwXf
1
22)(
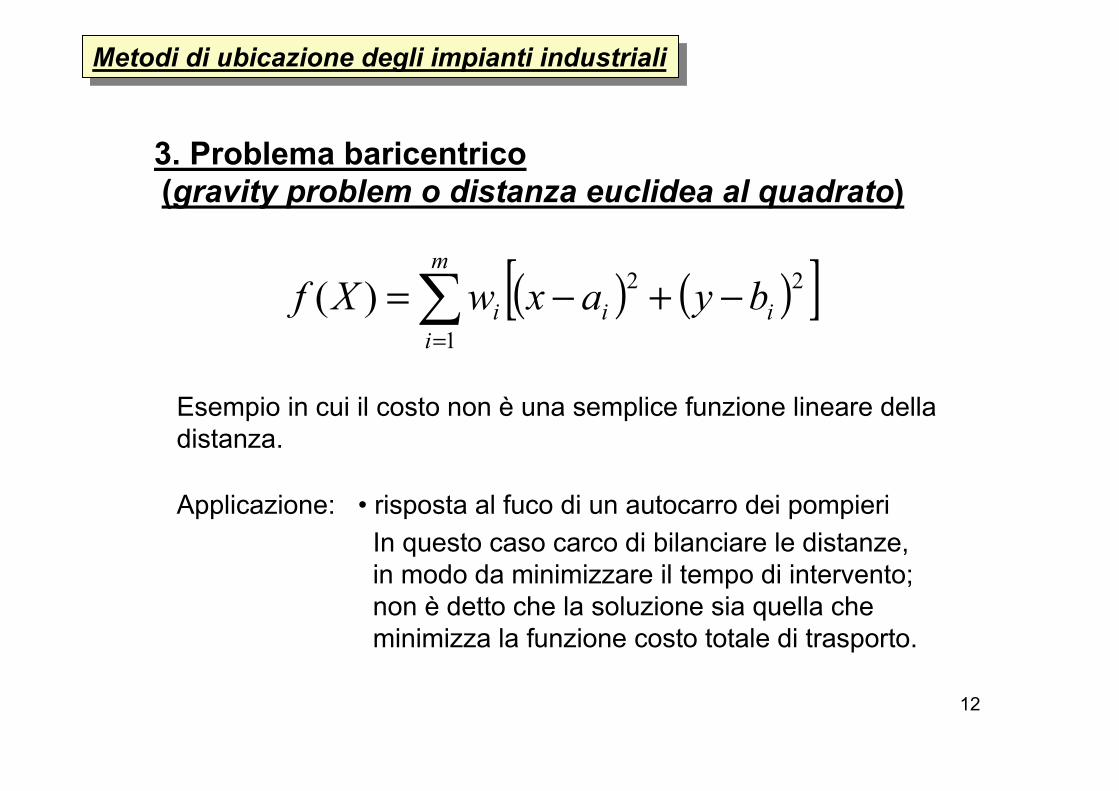
• risposta al fuco di un autocarro dei pompieriApplicazione:
Esempio in cui il costo non è una semplice funzione lineare della distanza.
3. Problema baricentrico (gravity problem o distanza euclidea al quadrato)
In questo caso carco di bilanciare le distanze, in modo da minimizzare il tempo di intervento; non è detto che la soluzione sia quella che minimizza la funzione costo totale di trasporto.
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali

13
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
UBICAZIONE OTTIMALE CON COSTI PROPORZIONALI ALLE DISTANZE RETTANGOLARI
Problema : minimizzare
( ) ( ) ( )yfxfbyaxwyxf ii
m
ii 21
1),( +=−+−=∑
=
Separando le variabili si ha:
∑∑==
=−+−=m
iiii
m
ii bywaxwyxf
11minmin),(min
)(min)(min 21 yfxf +=
14
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
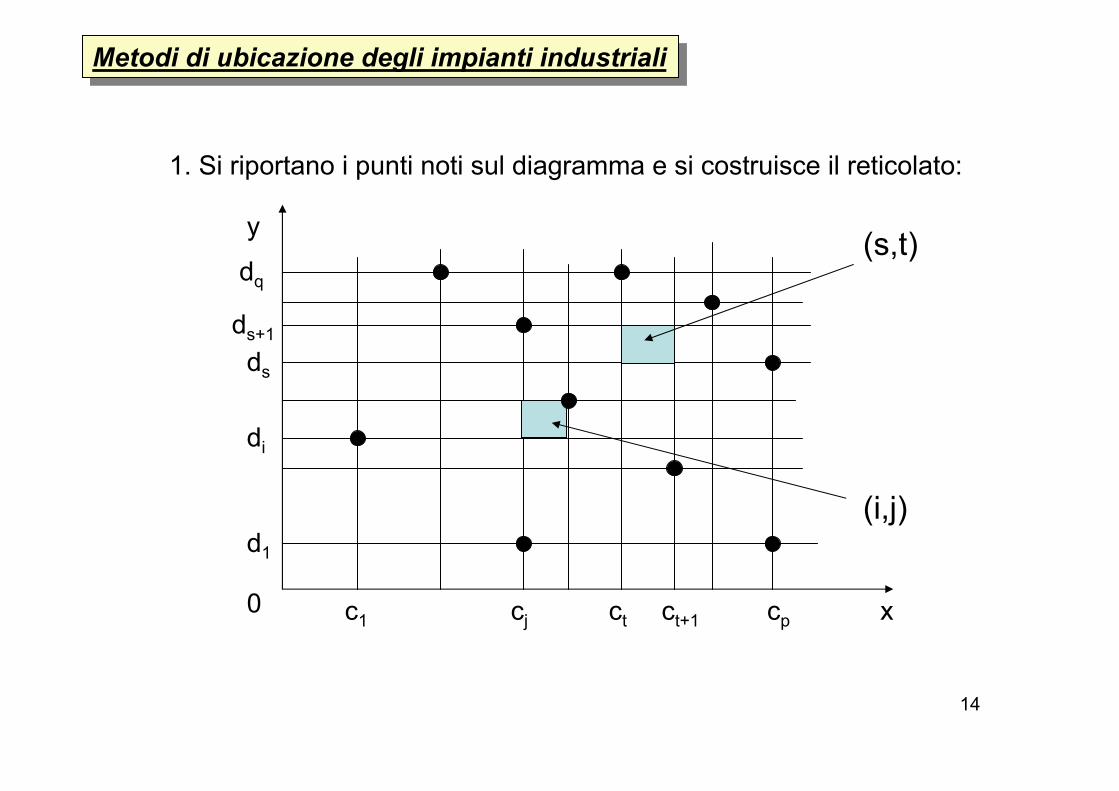
1. Si riportano i punti noti sul diagramma e si costruisce il reticolato:
y
x0 c1 cj ct ct+1 cp
d1
di
ds
ds+1
dq
(s,t)
(i,j)

15
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Siano:cj = coordinata x della verticale j-ima ( j=1,..,p )
( )∑wCj = = somma pesi dei punti sulla j-ima verticaledi = coordinata y della orizzontale i-ima ( i=1,…,q )
( )∑wDi = = somma pesi dei punti sulla i-ima orizzontale
La funzione di costo risulta così espressa:
i
q
iij
p
jj dyDcxCyxf −+−= ∑∑
== 11),(
Con: c1<c2<…<cp
d1<d2<…<dq
16
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
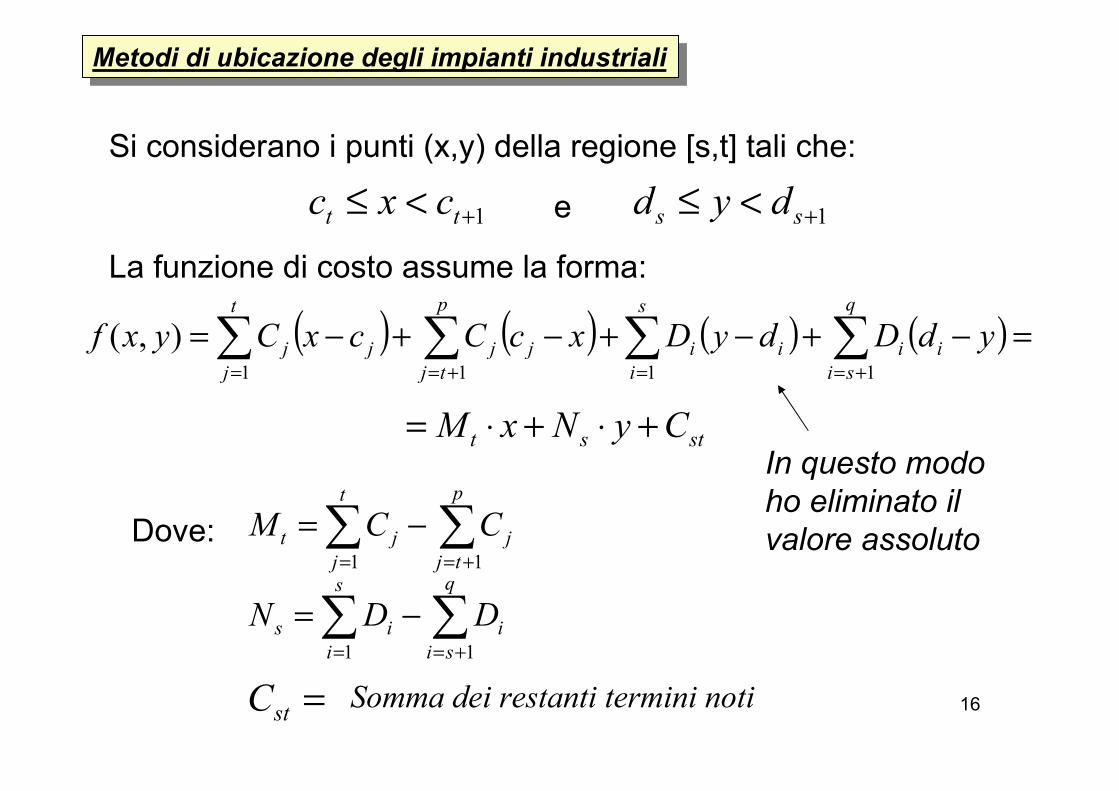
Si considerano i punti (x,y) della regione [s,t] tali che:
1+<≤ tt cxc 1+<≤ ss dyde
La funzione di costo assume la forma:
( ) ( ) ( ) ( ) =−+−+−+−= ∑∑∑∑+==+==
q
siii
s
iii
p
tjjjj
t
jj ydDdyDxcCcxCyxf
1111),(
stst CyNxM +⋅+⋅=
Dove: ∑∑+==
−=p
tjj
t
jjt CCM
11
∑∑+==
−=q
sii
s
iis DDN
11
=stC Somma dei restanti termini noti
In questo modo ho eliminato il valore assoluto

17
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Linea isocosto: Luogo dei punti (x,y) in cui f(x,y) = cost.
KCyNxMyxf stst =+⋅+⋅=),(
s
st
s
t
NCKx
NMy −+⋅−=
La linea isocosto all’interno del rettangolo di analisi è una retta di coefficiente angolare:
s
tst N
MS −=
18
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
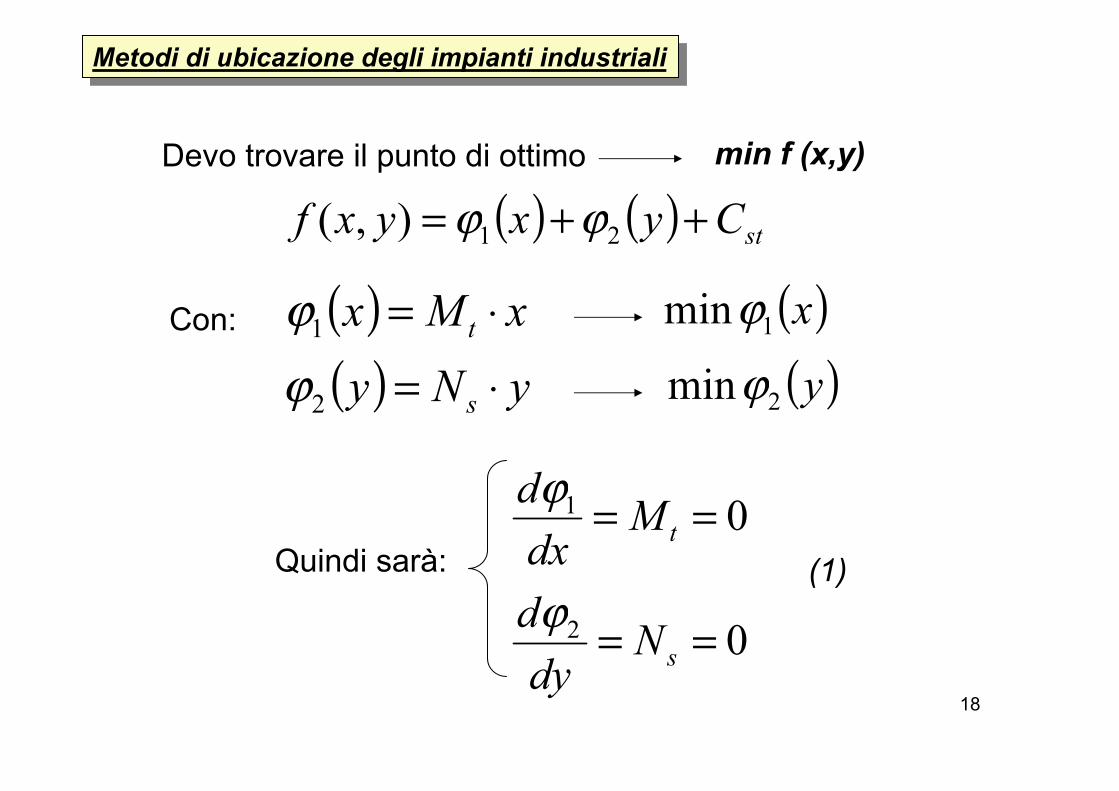
Devo trovare il punto di ottimo min f (x,y)
( ) ( ) stCyxyxf ++= 21),( ϕϕ
Con: ( ) xMx t ⋅=1ϕ( ) yNy s ⋅=2ϕ
( )x1minϕ
( )y2minϕ
Quindi sarà:01 == tM
dxdϕ
02 == sNdy
dϕ(1)

19
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
In realtà Mt e Ns non sono funzioni continue poiché sono la somma dei contributi dei pesi.
N.B:
Non posso utilizzare la condizione (1) ma devo valutare graficamente l’andamento delle funzioni φ1 e φ2 dentro e fuori la porzione considerata.

20
Ns-1 < 0
Ns > 0
Ns = 0
y* = ds
ds < y* <ds+1
Mt-1 < 0
Mt > 0
Mt = 0
ct
x* = ct
ct
ct < x* <ct+1
a)
b)
ds
ds
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali

21
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
In conclusione il punto (xott,yott) di minimo per f(x,y) soddisfa uno dei seguenti uno dei seguenti 4 casi:
1.Mt-1 < 0
Ns-1 < 0
2.Mt-1 < 0
Ns-1 < 0
Mt > 0
Ns > 0
Mt = 0
Ns > 0
x*= ct
y* = ds
ds
ct
y* = ds
ct < x* <ct+1
dsct ct+1
22
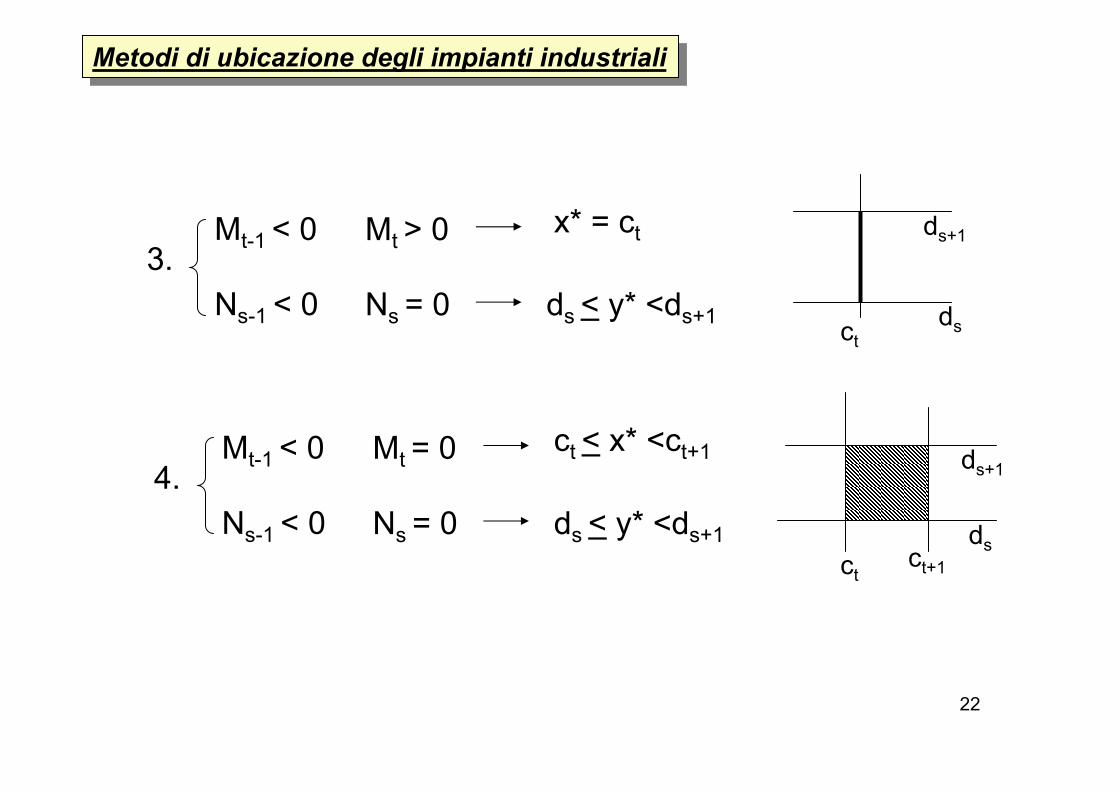
3.Mt-1 < 0
Ns-1 < 0
Mt > 0
Ns = 0
ct < x* <ct+1
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
x* = ct
ds < y* <ds+1
4.Mt-1 < 0
Ns-1 < 0
Mt = 0
Ns = 0 ds < y* <ds+1
ds
ds+1
ct
ds+1
dsct
ct+1

23
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
• CONDIZIONI MEDIANE:
Mt > 0 011
≥− ∑∑+==
p
tjj
t
jj CC ∑∑
+==
≥p
tjj
t
jj CC
11
Sommo mam ∑=
t
jjC
1∑∑∑
===
=≥m
ii
p
jj
t
jj wCC
1112
Da cui si ha: ∑∑==
≥m
ii
p
jj wC
11 21
Analogamente
Ns > 0 ∑∑==
≥m
ii
q
ii wD
11 21
24
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
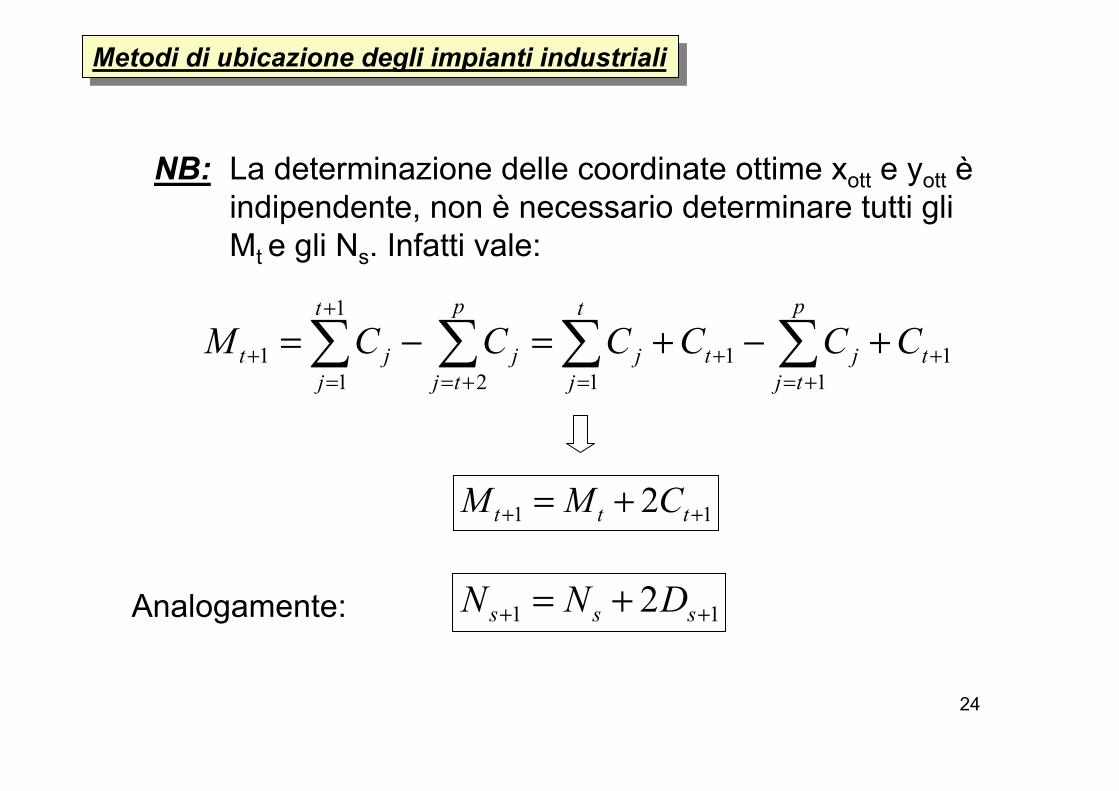
NB: La determinazione delle coordinate ottime xott e yott è indipendente, non è necessario determinare tutti gli Mt e gli Ns. Infatti vale:
111
12
1
11 +
+==+
+=
+
=+ +−+=−= ∑∑∑∑ t
p
tjj
t
jtj
p
tjj
t
jjt CCCCCCM
11 2 ++ += ttt CMM
Analogamente: 11 2 ++ += sss DNN

25
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
UBICAZIONE OTTIMALE CON COSTI PROPORZIONALI ALLA DISTANZA EUCLIDEA AL QUADRATO
Problema : minimizzare
( ) ( )[ ]22
1),( ii
m
ii byaxwyxf −+−=∑
=
Le condizioni da soddisfare sono:
( ) 0,
**
=
∂∂
==
yyxxx
yxf ( ) 0,
**
=
∂∂
==
yyxxy
yxf

26
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Sviluppando le derivate parziali si ottiene:
=⋅−⋅=
∂∂
=⋅−⋅=
∂∂
∑∑
∑∑
===
===
m
iii
m
ii
yy
m
iii
m
ii
xx
bwywyf
awxwxf
1
*
1*
1
*
1*
022
022
Da cui:
∑
∑
=
== m
ii
m
iii
w
awx
1
1*;
∑
∑
=
== m
ii
m
iii
w
bwy
1
1*
(x*,y*) possono essere considerate le medie pesate delle coordinate dei punti Pi, per cui tale soluzione è anche detta baricentro.

27
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
DETERMINAZIONE DELLE LINEE ISOCOSTO
( ) ( )[ ]=−+−=∑=
22
1),( ii
m
ii byaxwyxf costante
Sviluppando si ottiene: ( ) ( ) 22*2* ryyxx =−+−
Equazione di una circonferenza di centro (x*,y*) e di raggio r :
( ) ( ) ∑=
+−++=m
i
iiii
Wbwawyx
Wkr
1
222**
Con: ∑=
=m
iiwW
1
28
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
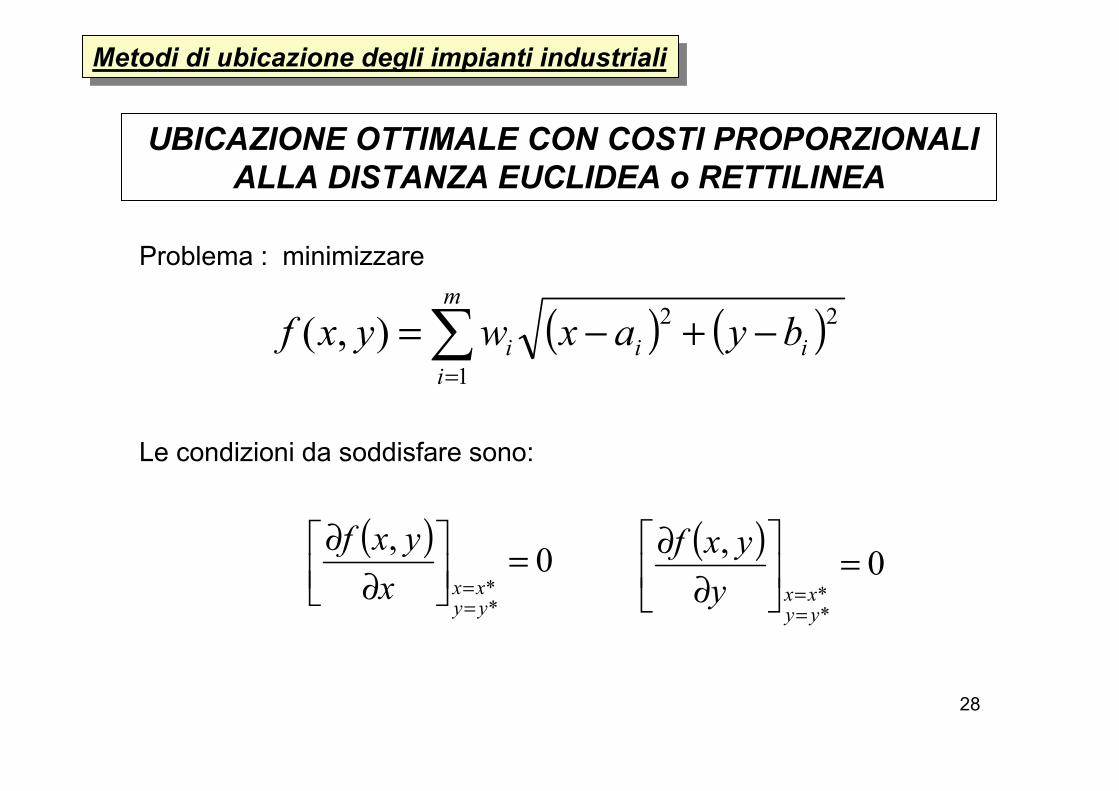
UBICAZIONE OTTIMALE CON COSTI PROPORZIONALI ALLA DISTANZA EUCLIDEA o RETTILINEA
Problema : minimizzare
( ) ( )22
1),( ii
m
ii byaxwyxf −+−=∑
=
Le condizioni da soddisfare sono:
( ) 0,
**
=
∂∂
==
yyxxx
yxf ( ) 0,
**
=
∂∂
==
yyxxy
yxf
29
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
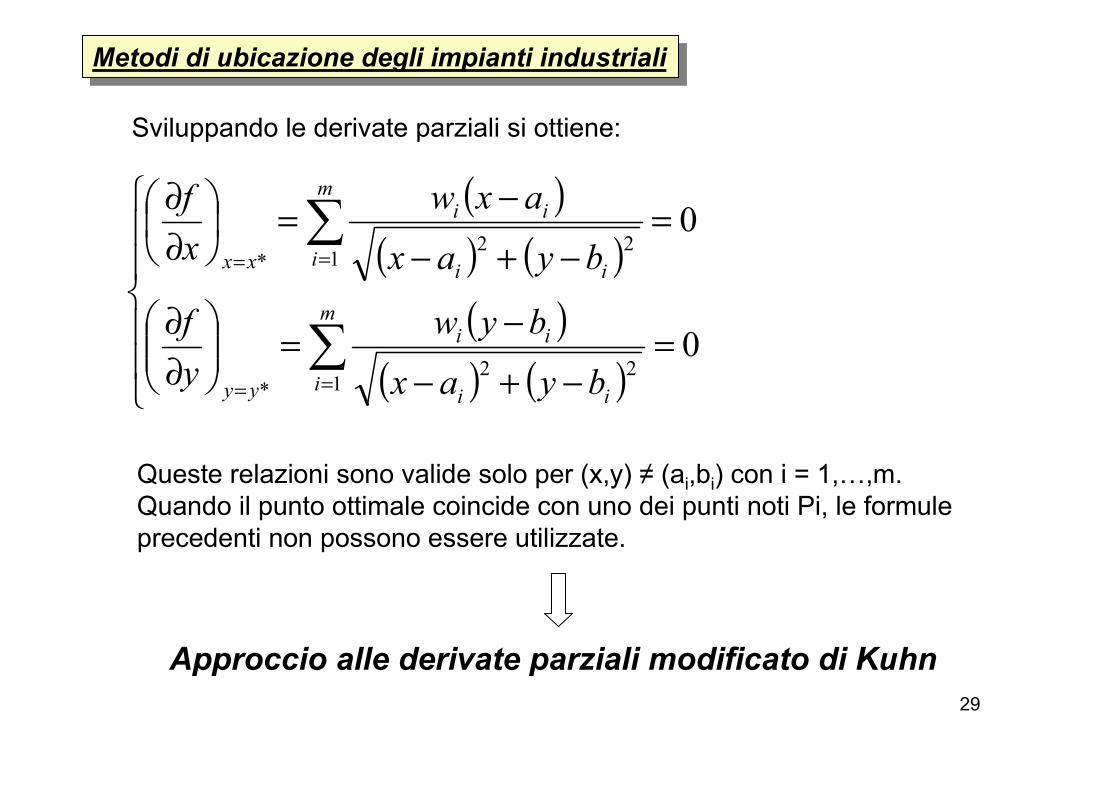
Sviluppando le derivate parziali si ottiene:
( )( ) ( )
( )( ) ( )
=−+−
−=
∂∂
=−+−
−=
∂∂
∑
∑
==
==
m
i ii
ii
yy
m
i ii
ii
xx
byax
bywyf
byax
axwxf
122
*
122
*
0
0
Queste relazioni sono valide solo per (x,y) ≠ (ai,bi) con i = 1,…,m.Quando il punto ottimale coincide con uno dei punti noti Pi, le formule precedenti non possono essere utilizzate.
Approccio alle derivate parziali modificato di Kuhn

30
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Approccio alle Derivate Parziali Modificato di Kuhn
Si utilizza la funzione R(x,y) definita nel piano (x,y)
( ) ( )
∂∂
∂∂=
yyxf
xyxfyxR ,,,),(
1. Se (x,y) ≠ (ai,bi) per i =1,…,m
2. Se (x,y )= (aK,bK) per k =1,…,m con wK peso di PK
( )
⋅−⋅−
==
0,0
,),(),( k
k
kkk
k
kk
kk
tu
wusu
wubaRyxR
se uK > wK
se uK ≤ wK

31
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Con: ( )
( ) ( )∑≠= −+−
−=m
kii ikik
ikik
bbaa
aaws1
22
( )( ) ( )∑
≠= −+−
−=m
kii ikik
ikik
bbaa
bbwt1
22
( )22kkk stu +=
Si dimostra che: CNS affinché f(x,y) assuma il valore minimo e quindi (x*,y*) sia il punto di ottimo è che:
R(x*,y*)=(0,0)
Pk (ak,bk) è l’ubicazione ottimale se e solo se uk ≤ wk

32
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Riassumendo:
Si considerano i punti noti e si fa la verifica secondo kuhn
Se esiste Pk (ak,bk) tale che uK ≤ wKallora Pk è l’ubicazione ottima
Se uK > wK per ogni K allora si procede alla soluzione delle derivate parziali con metodo iterativo
Calcolo uK e wKper ogni Pk
33
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
( ) ( ) ( ) ( )∑∑== −+−
=−+−
m
i ii
iim
i ii
i
byax
aw
byax
wx1
221
22
Dalle derivate parziali:
( )( ) ( )∑
==
=−+−
−=
∂∂ m
i ii
ii
xx byax
axwxf
122
*
0
Analogamente:
( ) ( ) ( ) ( )∑∑== −+−
=−+−
m
i ii
iim
i ii
i
byax
bw
byax
wy1
221
22

34
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Sia: ( ) ( )22),(
ii
ii
byax
wyxg−+−
= i = 1,2,…,m
Segue:
∑
∑
=
== m
ii
m
iii
yxg
yxgax
1
1
),(
),(
∑
∑
=
== m
ii
m
iii
yxg
yxgby
1
1
),(
),(

35
In tutto il campo in cui gi (x, y) risulta definita si può passare alla seguente procedura iterativa:
∑
∑
=
−−
=
−−
= m
i
jji
m
i
jjii
j
yxg
yxgax
1
)1()1(
1
)1()1(
)(
),(
),(
∑
∑
=
−−
=
−−
= m
i
jji
m
i
jjii
j
yxg
yxgby
1
)1()1(
1
)1()1(
)(
),(
),(
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
dove j = denota la j-ima iterazione
La procedura iterativa continua finché:
a. non si verifica un apprezzabile miglioramento nella determinazione delle coordinate della ubicazione del nuovo impianto ,
b. non si delinea una ubicazione che soddisfa la condizione necessaria e sufficiente dell’approccio di Kuhn (ovvero R (x*, y*) = (0, 0)).
Come valore di partenza (x(0), y(0)) della procedura iterativa si può usare la soluzione del “gravity problem”.
36
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Procedura iterativa alternativa per la ricerca della soluzione
Si basa su una gi (x, y) data da:
( ) ( ) ε+−+−=
22),(
ii
ii
byax
wyxg
Con: i = 1, 2, …., m
ε valore positivo piccolo a piacere sufficientemente piccolo da non mascherare la soluzione nel caso questa non coincida con uno dei punti Pi, ma anche sufficientemente grande da evitare instabilità di calcolo nell’approssimarsi alla soluzione se questa coincide con uno dei punti Pi.
è sempre definita
La procedura iterativa può essere iniziata usando sia la soluzione in distanze rettangolari che quella baricentrica (“gravity problem”)

37
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
Può succedere che la soluzione rettangolare sia sufficientemente vicina alla soluzione ottimale euclidea cosicché una ulteriore ricerca non sia giustificata.
N.B :
Per questo prima di iniziare le procedura è opportuno verificare se:
( ) ( ) ( ) )(yfxf,, *22
*21
00** +≥≥ yxEyxE
dove: (x°, y°) soluzione ottimale euclidea;(x*, y*) soluzione ottimale rettangolare;E (x, y) valore fz obiettivo per il problema euclideo
( ) ∑=
−=m
iii axwxf
11 valore fz obiettivo per il problema rettangolare
( ) ∑=
−=m
iii bywyf
12 valore fz obiettivo per il problema rettangolare
38
Metodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industrialiMetodi di ubicazione degli impianti industriali
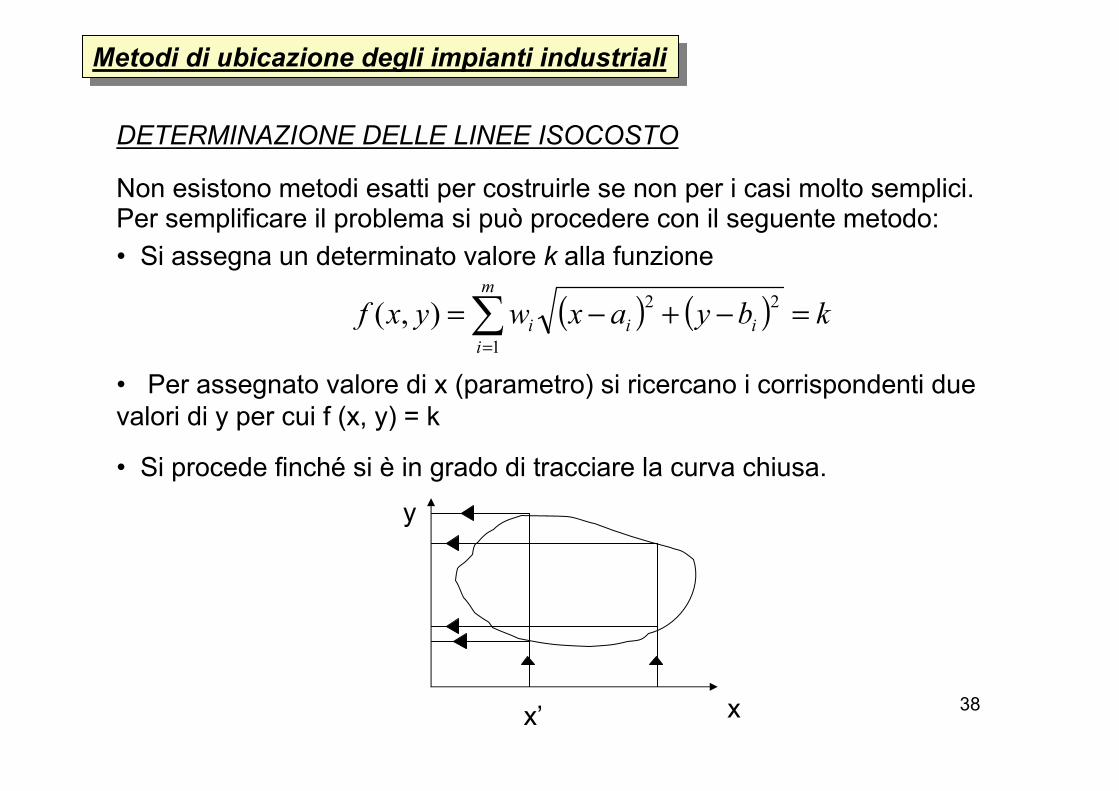
DETERMINAZIONE DELLE LINEE ISOCOSTO
Non esistono metodi esatti per costruirle se non per i casi molto semplici. Per semplificare il problema si può procedere con il seguente metodo: • Si assegna un determinato valore k alla funzione
( ) ( ) kbyaxwyxf ii
m
ii =−+−=∑
=
22
1),(
• Per assegnato valore di x (parametro) si ricercano i corrispondenti due valori di y per cui f (x, y) = k
• Si procede finché si è in grado di tracciare la curva chiusa.
xx’
y
Top Related