UNIVERSITA DEGLI STUDI DI CAGLIARItex.unica.it/~francesco/loredana.pdfTESI DI LAUREA DI: RELATORE:...
52
UNIVERSIT ` A DEGLI STUDI DI CAGLIARI DIPARTIMENTO DI MATEMATICA E INFORMATICA CORSO DI LAUREA IN MATEMATICA Il problema dei due corpi nell’ambito della meccanica hamiltoniana TESI DI LAUREA DI: RELATORE: Loredana Caddeo Dott. Francesco Demontis Anno Accademico 2013/2014
Transcript of UNIVERSITA DEGLI STUDI DI CAGLIARItex.unica.it/~francesco/loredana.pdfTESI DI LAUREA DI: RELATORE:...

UNIVERSITA DEGLI STUDI DI CAGLIARI
DIPARTIMENTO DI MATEMATICA E INFORMATICA
CORSO DI LAUREA IN MATEMATICA
Il problema dei due corpi nell’ambitodella meccanica hamiltoniana
TESI DI LAUREA DI: RELATORE:
Loredana Caddeo Dott. Francesco Demontis
Anno Accademico 2013/2014


Indice
Introduzione i
1 Orbite in un campo centrale 11 Problema ristretto dei due corpi . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Approccio Lagrangiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 Approccio Algebrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3 Approccio Newtoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Criterio discriminativo per la classificazione dell’orbita . . . . . . . . . . . . . . 123 Analisi qualitativa dell’orbita . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Classificazione qualitativa dell’orbita . . . . . . . . . . . . . . . . . . . . 143.2 Dimostrazione della formula (2.1) . . . . . . . . . . . . . . . . . . . . . . 17
2 Il problema dei due corpi nel formalismo Hamiltoniano 191 Le equazioni di Hamilton e le trasformazioni canoniche . . . . . . . . . . . . . . 19
1.1 Equazioni di Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2 Trasformazioni canoniche . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 L’equazione di Hamilton-Jacobi e separazione delle variabili . . . . . . . . . . . 232.1 L’equazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . 242.2 Separazione delle variabili . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Una nuova impostazione del problema dei due corpi e la sua risoluzione mediantel’equazione di Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.1 Risoluzione del problema mediante l’equazione di Hamilton-Jacobi . . . . 28
4 Elementi ellittici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335 Risoluzione del problema ristretto dei due corpi tramite l’equazione di Hamilton-
Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
A Discussione di Weierstrass 41
Bibliografia 44
i

ii

Introduzione
Lo scopo principale della meccanica e quello di descrivere la totalita dei possibili moti di un datosistema dinamico.In questa tesi considereremo il problema dei due corpi che consiste nello studio del modo dicue corpi, schematizzati mediante due punti materiali isolati1,sottoposti alle sole forze (attrativee repulsive) di interazione tra essi. Tale problema puo considerarsi risolto (o integrabile)2, inquanto le proprieta di tutti i possibili moti sono note, sebbene, come vedremo nel capitolo due, lecoordinate dei corpi non possono essere sempre rappresentate come funzioni esplicite del tempo.
Il problema dei due corpi si presenta, in modo naturale, nella teoria del moto dei sistemi Sole-Pianeta o Pianeta-Satellite3, in quanto il Sole e il Pianeta (o il Pianeta e il Satellite) si possonotrattare come due punti materiali P1 e P2 posti, rispettivamente, nel baricentro del Sole e delPianeta e aventi, rispettivamente, la massa del Sole e del Pianeta. E possibile considerare unsistema come quello Sole-Pianeta come se fosse formato da due punti materiali in virtu di dueclassici teoremi della teoria del potenziale 4. Prima di tutto si puo supporre che ogni Pianeta siadi forma sferica con la massa distribuita in strati concentrici di uguale densita. Sotto tale ipotesi,uno dei teoremi piu importanti della teoria del potenziale afferma che il Pianeta esercita sopraun punto materiale esterno ad esso, una forza uguale a quella che si avrebbe se il punto materialefosse situato nel suo baricentro (dove, per definizione, si suppone concentrata tutta la massa).Se le ipotesi di sfericita e di densita non fossero soddisfatte, basta comunque tener conto che ledistanze reciproche fra i pianeti sono molto grandi rispetto alle loro dimensioni. Allora, per unaltro importante risultato della teoria del potenziale, la forza che un corpo qualunque esercitasu un punto materiale esterno ad esso si manifesta come se la sua massa totale fosse concentratanel baricentro, purche il punto esterno sia molto lontano (come per esempio Terra-Sole, dove laloro distanza e pari a: 1, 49× 108km oppure per esempio Terra-Luna, dove la distanza distanzae pari a: 3, 84× 105km ).I corpi celesti, per quanto detto sopra, possono essere dunque trattati come punti materiali.Il moto di un corpo sara condizionato dalla sola presenza dell’altro attraverso la loro mutua
1Nel senso che si trascurano cioe le forze esercitate (o derivanti da altri corpi.)2Per maggiori dettagli consultare [2],[4],[8]3Un’ottima introduzione del problema dei due corpi in meccanica celeste si puo trovare in [3],[9].4Si veda il capitolo 11 di [2].
iii

attrazione tramite una forza newtoniana (ossia con la forza direttamente proporzionale alle lo-ro masse e inversamente proporzionale al quadrato della loro distanza). Lo studio che faremo,rapprestenta quindi un’approssimazione in base alle giustificazioni appena date della situazionereale.Lo scopo principale di questa tesi e quello di trattare il problema dei due corpi con il formalismohamiltoniano. In particolare otterremo le equazioni del moto in termini di sei costanti di inte-grazione (i cosiddetti elementi canonici). Ovviamente, tutti questi risultati sono ben noti nellaletteratuta, [1],[2],[4],[8].
La tesi e cosı strutturata:
• Capitolo 1: Orbite in un campo centrale.In questo capitolo si studia il problema dei due corpi scegliendo un sistema di riferimento lacui origine coincide con il baricentro dei due corpi in quiete che in base a quanto detto sopra,possono essere schematizzati come fossero due punti materiali. In questo modo il problemae ricondotto a quello di un solo corpo soggetto all’azione di sole forze centrali conservative.Verra quindi studiato il problema mediante tre differenti approcci (lagrangiano, algebrico,newtoniano) e determineremo l’equazione dell’orbita.
• Capitolo 2: Il problema dei due corpi nel formalismo hamiltoniano.In questo capitolo descriveremo il formalismo hamiltoniano e le trasformazioni canonichela cui comprensione e necessaria per una completa padronanza e comprensione dell’equa-zione di Hamilton-Jacobi. Si affrontera il problema in un modo diverso rispetto a quellointrodotto nel capitolo 1. Infatti si affrontera il problema come fosse un problema di motorelativo di un corpo rispetto all’altro.
• Appendice: Discussione di Weierstrass.In questa appendice si e scelto di descrivere come sia possibile studiare qualitativamente([10]) un’equazione del tipo: q2 = f(q). Tale studio verra utilizzato nel capitolo 1.
Supporremo noti, dal lettore, alcuni concetti chiave della meccanica classica quali: le nozionidi vincoli e loro classificazione e il formalismo lagrangiano. Inoltre, come e tipico nei corsi diFisica Matematica, indicheremo con f la derivata prima totale rispetto al tempo della funzione
f = f(xi(t), t) i = 1, ..., n cioe f =df
dt.
Si denota con · il prodotto scalare e con ∧ il prodotto vettoriale.
iv

Capitolo 1
Orbite in un campo centrale
In questo capitolo studieremo il problema dei due corpi scegliendo il sistema di riferimentoinerziale in modo tale che il problema si riduca allo studio di un punto materiale in un campo diforze centrali rispetto ad un polo fisso. Questo consente di determinare esplicitamente l’equazionedell’orbita che sara studiata in dettaglio. L’impostazione di questo capitolo e simile a quella datain [2],[3],[4],[5],[6].
1 Problema ristretto dei due corpi
Il problema dei due corpi consiste nello studio del moto di due corpi che sono sottoposti all’azionedelle sole forze (attrattive o repulsive) di interazione tra essi. Il moto di un corpo sara condi-zionato solamente dalla presenza dell’altro attraverso la loro mutua azione che avra la stessadirezione della retta che congiunge i due corpi. Essa dipendera soltanto dalla distanza r tra idue corpi. Cio premesso, possiamo schematizzare il problema utilizzando, al posto dei due corpi,due punti materiali, di massa m1 e m2, aventi come vettori posizione r1 e r2 rispettivamente1.
Fissato un sistema di riferimento inerziale O, i, j,k indichiamo con (x, y, z) le coordinatedi un generico punto P rispetto al sistema di riferimento.Se il punto materiale di massa m1 agisce su quello di massa m2 con una forza F abbiamo cheper il terzo principio della dinamica 2, il punto materiale di massa m2 agira sul punto materialedi massa m1 con una forza −F . Per cui abbiamo le seguenti equazioni del moto:
F = m2r2, (1.1)
−F = m1r1, (1.2)
e, sommando (1.1) e (1.2), otteniamo:
m1r1 +m2r2 = 0. (1.3)
1I motivi che consentono tale schematizzazione sono stati illustrati nell’introduzione.2Principio di azione reazione: Le forze che due punti materiali esercitano l’uno sull’altro hanno stessa intensita
e direzioni collineari opposte.
1

In questo capitolo assumeremo che la forza di interazione3 tra i due punti (corpi) e data dallalegge della gravitazione universale di Newton ossia :
F = −Gm1m2
r2r, (1.4)
dove G e la costante di gravitazione universale4, r e il modulo del vettore r = r1 − r2 che
determina la distanza tra i due corpi, r =r1 − r2
r.
L’energia cinetica del sistema sara data da:
T =m1r1
2 +m2r22
2, (1.5)
mentre l’energia potenziale del sistema viene ricavata per integrazione della (1.4) ottenendo:
V = −Gm1m2
r. (1.6)
Quindi l’energia totale del sistema si esprime nel seguente modo:
E = T + V =m1r1
2 +m2r22
2− Gm1m2
r. (1.7)
Infine, per definizione, il momento angolare assume la seguente espressione:
L = r1 ∧m1r1 + r2 ∧m2r2. (1.8)
Ci occupiamo, ora, di determinare l’espressione di T, V,E,L nel cosiddetto sistema di riferi-mento baricentrale, ovvero nel sistema di riferimento avente origine nel baricentro individuatodai due punti materiali P1 e P2 e assi paralleli ed equiversi al sistema di riferimento O, i, j,k.5
Per fare cio osserviamo che, indicato con M = m1 + m2 la massa totale e con µ =m1m2
Mla
massa ridotta, la posizione del centro di massa dei due corpi per definizione e:
R =
∑2i=1miri∑2i=1mi
=m1r1 +m2r2
M. (1.9)
E immediato verificare che dalle (1.9) si ottiene:
m1r1 +m2r2 = MR, (1.10)
3Solo nell’ultima sezione faremo alcune considerazioni sul caso piu generale in cui il potenziale sia un funzioneV (r).
4Il suo valore e 6, 67× 10−11Nm2
kg25In realta basta che gli assi abbiano una direzione invariabile rispetto alla terna O, i, j,k .
2

e, eguagliando la (1.3) con la (1.10), si trova:
MR = 0¯. (1.11a)
Integrando (1.11a), si ottiene:
R = α, α vettore costante. (1.11b)
Che consente di affermare che il baricentro si muove con velocita costante.Inoltre, un’ulteriore integrazione della (1.11b) consente di scrivere:
R = αt+ β, (1.11c)
che esprime il fatto che il baricentro si muove di moto rettilineo uniforme (α e β sono vettoricostanti).Esprimendo l’energia cinetica, l’energia potenziale, l’energia totale e il momento angolare in fun-zione delle variabiliR e r (precedentemente sono stati scritti rispetto alle variabili r1 e r2), si ha:
• Energia cinetica:
T =MR
2+ µr2
2, (1.12)
dove il primo termine della (1.12) indica l’energia cinetica del baricentro, mentre l’altrotermine indica l’energia cinetica del moto attorno al baricentro (in accordo con il Teoremadi Koning).
• Energia potenziale:
V = −GMµ
r, (1.13)
dove abbiamo utilizzato l’identita Mµ = (m1 +m2)
(m1m2
m1 +m2
)= m1m2.
• Energia totale del sistema:
E =MR
2+ µr2
2− GMµ
r, (1.14)
• Momento angolare:
L = r ∧ µr +R ∧MR. (1.15)
3

Nello studio del problema dei due corpi supporremo che il baricentro sia fermo ossia:
R = 0¯, (1.16)
e consideriamo ora un sistema di riferimento baricentrale, con il baricentro soddisfacente (1.16)e quindi in quiete.Effettuiamo un passaggio a coordinate cilindriche:
x = r cos θ
y = r sin θ
z = z
e siano er e eθ rispettivamente il versore radiale e quello tangenziale definiti nel seguente modo:
er =x
ri+
y
rj = (cos θ)i+ (sin θ)j,
eθ =−yri+
x
rj = −(sin θ)i+ (cos θ)j.
Si ottengono facilmente le seguenti formule:
x =d
dt(r cos θ) = r cos θ − rθ sin θ,
y =d
dt(r sin θ) = r sin θ + rθ cos θ,
˙er = θeθ,
˙eθ = −θer,
dalle quali, poiche r = rer, si trova:
r = rer + rθeθ, (1.17)
r = [r − rθ2]er + [2rθ + rθ]eθ = arer + aθeθ, (1.18)
dove ar e l’accelerazione radiale e aθ e l’accelerazione tangenziale.Sostituendo la (1.17) e la (1.18) e tenendo conto che R = 0, le espressioni (1.12),(1.13),(1.14),(1.15)assumono la forma:
T =µ(r2 + r2θ2)
2, (1.19)
V = −GµMr
, (1.20)
E =µ(r2 + r2θ2)
2− GµM
r, (1.21)
L = r ∧ µr = µr2θk. (1.22)
4

Osservazione 1: L’energia totale del sistema non dipende esplicitamente dal tempo, ossia essae una grandezza che rimane invariata durante l’evoluzione del sistema, quindi e un integraleprimo6. Dato che le uniche forze agenti sono interne al sistema dei due corpi, il momento delleforze esterne e nullo e quindi il momento angolare si conserva. Poiche il momento angolare ecostante, in particolare rimane invariata la sua direzione che e sempre perpendicolare al pianodi moto. Conseguentemente il piano xy non varia nel tempo e il moto e piano7. E immediatoverificare che, se il momento angolare fosse nullo r sarebbe parallelo a r e il moto avverrebbe suuna retta passante per il centro di forza. Il moto sarebbe quindi rettilineo.
Osservazione 2: Nel cambio di coordinate effettuato, non abbiamo tenuto conto dell’ultimacoordinata z. Infatti, poiche il moto e piano, la coordinata z avra un valore sempre costantee quindi quanto studiato puo prescindere dal suo valore. Avendo provato che il moto e piano,utilizzeremo solo le coordinate polari (r, θ). In conclusione abbiamo due gradi di liberta e duecoordinate generalizzate, r e θ (con r = (r cos θ, r sin θ, 0), r =
√x2 + y2, θ = arctan
(yx
)).
Le espressioni (1.19) e (1.20) ricavate per l’energia cinetica e potenziale nel sistema di riferi-mento baricentrale sono quelle corrispondenti a una singola particella di massa µ soggetta aduna forza centrale conservativa (applicata nel polo fisso R ≡ O). Abbiamo cosı ridotto, sce-gliendo opportunamente il riferimento inerziale, il problema, che all’inizio presentava sei gradi diliberta, ad un problema che presenta due soli gradi di liberta (il cosiddetto problema ridotto oristretto dei due corpi). Il termine ridotto indica proprio il fatto che si e ricondotti, attraversola scelta di un opportuno sistema di riferimento inerziale, allo studio del moto di un solo corpoin un campo di forze centrali conservative rispetto a un polo fisso (il baricentro R).
Osservazione 3: Sotto le ipotesi che il baricentro sia in quiete, rispetto ad esso si muovonoentrambi i punti materiali (con quantita di moto opposta). Se m2 m1 allora il centro di massae vicinissimo al punto materiale di massa m1 che ha una velocita molto piccola, in particolare,si puo supporre il punto P1 coincidente con il baricentro. Questa situazione e quella in cui siricade nel caso in cui si voglia studiare un problema tipo quello Sole-Pianeta. Infatti, l’analisidella tabella (1.1), rende esplicito che in tal caso vale la condizione mP mS (con mP si eindicato la massa del pianeta e con mS la massa del Sole) e quindi in questo tipo di problemi elecito considerare il Sole, rappresentato come un punto materiale, coincidente con il baricentrocon il Pianeta che si muove attorno ad esso.Essendo la massa del Sole pari a: 1, 98×1030kg riportiamo nella tabella (1.1) le masse relative aiPianeti. Analizzando la massa dei Pianeti e quella del Sole notiamo che, la condizione m2 m1
e con ottima approssimazione, soddisfatta.Per la risoluzione del problema ristretto dei due corpi esistono in letteratura (cfr.[2], [8], [4], [7])
6Per integrale primo si intende una quantita che rimane invariata durante l’evoluzione del sistema.7Un moto si dice piano se e possibile trovare un piano solidale al corpo che durante il moto si mantiene
parallelo ad un piano fisso.
5

Pianeta Massa(in kg)
Mercurio 3, 33× 1023
Venere 4, 86× 1024
Terra 5, 97× 1024
Marte 6, 41× 1023
Giove 1, 89× 1027
Saturno 5, 68× 1026
Urano 8, 68× 1025
Nettuno 1, 02× 1026
Tabella 1.1: Tabella nella quale vengono riportate le masse dei Pianeti per il confronto con lamassa del Sole.
vari approcci:
• quello lagrangiano,
• quello basato sull’analisi degli integrali primi (algebrico),
• quello newtoniano,
• quello hamiltoniano.
I primi tre verranno descritti in dettaglio nelle sezioni successive. In particolare il primo e il terzoconducono alla stessa equazione differenziale, che verra (ovviamente) studiata una sola volta. Ilquarto approccio verra analizzato dettagliatamente nel capitolo due.La scelta del riferimento baricentrale sara adottata sistematicamente in tutto il capitolo e sidimostra particolarmente opportuna nel caso un cui si voglia studiare il problema Sole-Pianetain virtu delle considerazioni svolte sopra.
1.1 Approccio Lagrangiano
In questa sezione si arrivera a determinare l’equazione della traiettoria per il problema ristrettodei due corpi introdotto precedentemente. Dedurremo le equazioni di moto utilizzando le equa-zioni di Eulero-Lagrange. Ricordando che, le espressioni di energia cinetica ed energia potenzialesono date da:
V = −GMµ
r, (1.1.1)
T =µ(r2 + r2θ2)
2, (1.1.2)
6

la lagrangiana assume pertanto la forma:
L = T − V =µ(r2 + r2θ2)
2+GMµ
r. (1.1.3)
E ben noto [2] che le equazioni di Eulero-Lagrange sono:
d
dt
∂L
∂θ− ∂L
∂θ= 0, (1.1.4)
d
dt
∂L
∂r− ∂L
∂r= 0. (1.1.5)
La (1.1.4), tenuto conto che∂L
∂θ= 0, fornisce :
d
dt
∂L
∂θ=
d
dt
(µr2θ
). (1.1.6)
Si nota subito che θ e una variabile ciclica8. Integrando (1.1.6) si ottiene il modulo del momento
angolare L = µr2θ, che risulta essere un integrale primo. Da cio discende ched
dt
(1
2r2θ
)= 0
ossia che la velocita areale A e costante e questa e una ben nota proprieta generale del moto inpresenza di forze centrali (si veda per esempio [2], per maggiori dettagli). Abbiamo dimostratola seconda legge di Keplero9.Semplici calcoli permettono di scrivere (1.1.5) nel seguente modo:
µr = µrθ2 − GMµ
r2.
Sostituendo θ =L
µr2nella (1.1.5) ottiene:
µr = −GMµ
r2+
L2
µr3. (1.1.7)
La (1.1.7) e un’equazione differenziale che possiamo risolvere effettuando la sostituzione u =1
r.
Convertendo le derivate rispetto al tempo in derivate rispetto a θ, e sfruttando il fatto cheL
µ= r2θ, si trova la seguente relazione:
d
dt= θ
d
dθ=
L
µr2d
dθ=Lu2
µ
d
dθ,
8Si definisce variabile ciclica una variabile la cui lagrangiana non dipende da essa.9Si rimanda il lettore alla sezione 2 del capitolo 1 nella quale si enunciano le leggi di Keplero.
7

che consente di scrivere:
r = −Lµ
du
dθ, e r = −L
2u2
µ2
d2u
dθ2.
Sostituendo tali espressioni in (1.1.7), quest’ultima assume la forma:
−L2u2
µ
d2u
dθ2= −GµMu2 +
L2
µu3, (1.1.8)
o, equivalentemente, si puo anche scrivere:
u′′(θ) + u(θ) =Gµ2M
L2. (1.1.9)
La (1.1.9) e un equazione differenziale lineare del secondo ordine non omogenea. Si sa, dai corsidi Analisi Matematica, che la sua soluzione generale e:
u(θ) =Gµ2M
L2(1 + ε cos(θ − θ0)),
che rappresenta una conica con uno dei fuochi posto nell’origine del sistema di riferimento, doveε e l’eccentricita della conica, θ0 e una costante arbitraria.Scrivendo tutto nella variabile r, originaria, si trova:
r(θ) =L2
Gµ2M
1
(1 + ε cos(θ − θ0)). (1.1.10)
1.2 Approccio Algebrico
In questa sezione perverremo all’equazione (1.1.10) con un approccio diverso da quello espostonella sezione precedente. Infatti, mentre l’approccio lagrangiano passa attraverso la risoluzionedelle equazioni differenziali di Eulero-Lagrange, l’approccio che presenteremo in questa sezionesfrutta tre integrali primi del moto (che sono quelli dell’energia totale, del momento angolare eil cosiddetto vettore di Laplace-Runge10), risolveremo (1.1.10) senza far intervenire alcuna equa-zione differenziale.Storicamente un simile approccio e stato sviluppato in meccanica celeste e appare quindi natu-rale presentarlo utilizzando le stesse nozioni tipicamente usate in quel contesto. In particolare,occorre premettere che le unita di misura utilizzate in astronomia riscontrano un’importanzarilevante. Infatti in astronomia non si utilizzano le usuali grandezze fisiche del Sistema Inter-nazionale ma si utilizzano le grandezze fisiche del Sistema Solare. Piu precisamente, le unitadi lunghezza si utilizza l’unita astronomica A (l’unita astronomica e la distanza media tra laTerra e il Sole, essa vale circa 1, 496× 1011m), il tempo viene misurato in anni siderali (un anno
10Introdurremo piu avanti tale vettore.
8

siderale e il tempo che il Sole impiega a tornare nella stessa posizione rispetto alle stelle dellasfera celeste) e la massa in termini di unita della massa del Sole (ossia si suppone che la massadel Sole sia pari a 1 e si descrivono tutte le altre masse rispetto a questo). Oltre a queste gran-dezze si utilizza, al posto della costante di gravitazione universale G, la costante gravitazionale
di Gauss k2 (il suo valore e 0.01720209895 A32
S12D
dove con A si indica l’unita astronimica, con D
si indica il tempo e con S la massa del Sole) espressa nelle unita del Sistema Solare sopra descritte.
Riscrivendo le equazioni (1.1), (1.2) e tenendo conto della formula (1.3) e delle unita di misuraappena introdotte si ottiene:
r1 = −k2M r1r3, (1.2.1)
r2 = −k2M r2r3. (1.2.2)
Sottraendo (1.2.1) a (1.2.2) si trova:
r = r2 − r1 = −k2M
r3(r2 − r1) = −k
2Mr
r3, (1.2.3)
e, ponendo τ = k2M , si ha:
r = −τrr3. (1.2.4)
La (1.2.4) e equivalente a 3 equazioni differenziali del secondo ordine il cui integrale generalecontiene sei costanti di integrazione. Trovare ed interpretare queste costanti di integrazionecostituisce il “cuore”del problema dei due corpi. E evidente da (1.2.4) e dal fatto che stiamoconsiderando un campo di forze centrali che:
r ∧ r = 0¯, (1.2.5)
per cui, integrando rispetto al tempo, otteniamo:
d
dt(r ∧ r) = r ∧ r + r ∧ r = 0
¯⇒ r ∧ r = L, (1.2.6)
dove L e il momento angolare che come visto nella sezione precedente, e un vettore costanteche fornisce tre costanti di integrazione. Abbiamo inoltre gia avuto modo di osservare che lacostanza del momento angolare permette di asserire che il moto e piano. In particolare L eperpendicolare sia a r che a r, quindi r ·L = 0.Fissando una semiretta, i valori di r e di r devono essere univocamente determinati, le infor-mazioni che abbiamo trovato fino ad ora (ossia la conservazione dell’energia E e del momentoangolare L) mostrano solamente che una delle due variabili e funzione dell’altra. Esse quindi,per essere univocamente determinate, devono soddisfare un altro vincolo. L’esistenza di un altrovincolo tra posizione e velocita implica che deve esserci un altro integrale primo.
9

Esite quindi un vettore costante P , che giace sul piano del moto, detto vettore di Laplace-Runge,definito da:
P = τ r −L ∧ r, (1.2.7)
dove r =r
rEsso e un vettore utilizzato per descrivere la forma e l’orientazione dell’orbita di un corpo celesteche ruota attorno ad un altro, ha direzione lungo l’asse maggiore dell’orbita ed e rivolto verso ilPerielio (il punto di minima distanza nell’orbita tra il pianeta e il Sole). E interessante osservarecome, storicamente, questo vettore sia stato riscoperto piu volte. In particolare, fu introdottoda Hermann [12] nel (1710) e successivamente fu considerato anche da Bernoulli [13], (1710),Laplace [14], (1799) (che per primo lo studio da un punto di vista analitico e non geometrico),Runge [15], (1919) e Lenz [16], (1924).Il modulo del vettore di Laplace-Runge e:
P 2 = τ 2 +2EL2
µ. (1.2.8)
Dimostriamo ora la costanza del vettore di Laplace-Runge. Abbiamo cioe il seguente
Teorema 1.1 Il vettore P e costante lungo il moto.
Dimostrazione. Partendo dall’analisi dell’evoluzione temporale del versorer
rdiretto verso
il punto mobile, troviamo:
d
dtr =
r
r− rr · r
r3=
(r · r)r − (r · r)r
r3= (r ∧ r) ∧ r
r3;
e, tenendo conto dell’equazione di moto (1.2.4) e dell’espressione del momento della quantita dimoto (L = r ∧ µr), la relazione precedente si scrive come:
d
dtr =
1
τL ∧ r.
Essendo L un integrale primo, otteniamo:
d
dt
(r − 1
τL ∧ r
)= 0
confrontando quest’ultima con (1.2.7) si ha la tesi.
Ora possiamo determinare l’equazione dell’orbita con semplici calcoli algebrici e, in particolare,senza bisogno di eseguire alcuna integrazione. A tal proposito, scriviamo l’equazione (1.2.7) nelseguente modo:
L ∧ r = τ r − P .
10

Considerando il modulo di entrambi i membri al quadrato ed usando l’espressione di r in funzionedell’energia totale si ottiene:
2
µL2(E − τ
r
)= P 2 + τ 2 − 2Cτ cos(θ − θ0), (1.2.9)
dove θ e θ0 sono gli angoli che il vettore r e P formano con la semiretta fissata.Sostituendo il valore di P 2 dato dalla (1.2.8) in (1.2.9) otteniamo:
−τL2
rµ= τ 2
(1− P
τcos(θ − θ0)
), (1.2.10)
che si scrive anche nel seguente modo:
r(θ) =L2
τµ2
1
(1 + ε cos(θ − θ0)).
Ricordando che in questo approccio al posto di G abbiamo utilizzato k2 e che τ = k2M , si vedeche essa coincide con (1.1.10), cioe con l’equazione dell’orbita gia determinata con l’approcciolagrangiano.
1.3 Approccio Newtoniano
Supposto, come nelle sezioni precedenti, di aver adottato il riferimento baricentrale in cui ilbaricentro e in quiete, l’approccio newtoniano per la risoluzione del problema ristretto dei duecorpi, fa uso dei principi della dinamica di Newton che riportiamo per comodita, qua sotto:
1. Primo principio della dinamica (Principio di inerzia): In assenza di forze esterne un puntomateriale (isolato) mantiene il suo stato di quiete o di moto rettilineo uniforme.
2. Secondo principio della dinamica (Principio di proporzionalita): La forza totale agentesulla particella e la derivata della sua quantita di moto.
F =dp
dt=mdv
dt= ma.
3. Terzo principio della dinamica (Principio di azione reazione): Le forze che due puntimateriali esercitano l’uno sull’altro hanno stessa intensita e direzioni collineari opposte.
Per trovare la soluzione del problema applichiamo il secondo principio della dinamica nel sistemadi riferimento baricentrale. La seconda legge della dinamica, proiettata nella direzione radialefornisce:
µ[r − rθ2] = F, (1.3.1)
11

dove µrθ2 e la forza centrifuga e F = −GµMr2
e il modulo dell’attrazione gravitazionale tra i due
corpi. Ricordando che, per definizione, la velocita areale e A =r2θ
2e che il modulo del momento
angolare e L = µr2θ, si verifica immediatamente che:
µrθ2 = µr
(L
µr2
)2
=L2
µr3, (1.3.2)
e, infine, sostituendo la (1.3.2) nella (1.3.1) si perviene all’equazione differenziale:
µr = −GµMr2
+L2
µr3, (1.3.3)
che e proprio l’equazione (1.1.7) trovata nella sezione precedente. Per determinare l’equazio-ne della traiettoria possiamo procedere come illustrato nel paragrafo dedicato all’approcciolagrangiano e si perverra all’espressione (1.1.10).
2 Criterio discriminativo per la classificazione dell’orbita
Lo scopo di questa sezione e quello di studiare l’equazione (1.1.10) ottenuta scegliendo il riferi-mento baricentrale e supponendo il baricentro in quiete come illustrato nella sezione precedente.In particolare giungeremo a introdurre un criterio discriminativo che permette di analizzare l’or-bita al variare dell’energia totale del sistema. Al fine di stabilire tale criterio abbiamo bisognodella seguente importante relazione che lega l’eccentricita all’energia totale:
ε2 = 1 +2EL2
k2µ. (2.1)
La dimostrazione della (2.1) sara data nella sezione 3. L’equazione (2.1) mostra che al variaredell’energia totale del sistema variera l’eccentricita della conica.Si presentano i seguenti quattro casi:
(a) Se E = −k2µ
2L2allora ε = 0.
Dall’equazione (1.1.10) si deduce che r(θ) =L2
Gµ2Me costante, per cui il moto e una
circonferenza attorno al baricentro.
(b) Se −k2µ
2L2< E < 0 allora 0 < ε < 1
L’equazione (1.1.10) puo scriversi nel seguente modo:(x− εL2
Gµ2M(1− ε2)
)2
(L2
Gµ2M(1− ε2)
)2 +y2(L2
Gµ2M√
(1− ε2)
)2 = 1,
12

cioe l’orbita descritta e un ellisse con semiassi
a =L2
Gµ2M(1− ε2), b =
L2
Gµ2M√
(1− ε2),
con il baricentro che occupa uno dei due fuochi. Il periodo del moto e: T =πab
A.
(c) Se E = 0 allora ε = 1In questo caso, l’equazione (1.1.10) dell’orbita assume la forma:
y2 =L2
Gµ2M
(L2
Gµ2M− 2x
),
ossia una parabola con il baricentro che occupa il fuoco.
(d) Se 0 < E ≤ k2µ
2L2allora ε > 1
L’equazione (1.1.10) diventa:(x− εL2
Gµ2M(1− ε2)
)2
(L2
Gµ2M(1− ε2)
)2 − y2(L2
Gµ2M√
(1− ε2)
)2 = 1,
cioe un iperbole con semiassi
a =L2
Gµ2M(1− ε2), b =
L2
Gµ2M√
(1− ε2),
dove il baricentro occupa uno dei due fuochi.Come ripetuto piu volte, siamo pervenuti all’equazione (1.1.10) assumendo un sistema di
riferimento baricentrale, con il baricentro (origine) in quiete. Se assumiamo che sia anche m1 <<m2 (come nel caso Sole-Pianeta vedi tabella (1.1)), si possono enunciare le tre leggi di Keplero:
1. Prima legge di Keplero: le orbite dei pianeti sono ellissi con il Sole che occupa uno dei duefuochi.11
2. Seconda legge di Keplero: la velocita areale A =L
2µe costante.
3. Terza legge di Keplero: il rapporto tra il periodo T e il cubo del semiasse maggiore a e una
costante che non dipende dal pianeta:T 2
a3=
4π2
GM11In realta le orbite dei pianeti sono ellissi e il baricentro del sistema occupa uno dei due fuochi
13

3 Analisi qualitativa dell’orbita
Alcune delle equazioni piu importanti che si incontrano nello studio della meccanica si presentanonella forma
q2 = f(q), (3.1)
essendo q = q(t) una funzione del tempo che permette di descrivere l’evoluzione di un datosistema (con un grado di liberta) e f(q) una funzione assegnata.Spesso la risoluzione analitica di (3.1) non e agevole. In tali casi risulta preferibile ricavare leproprieta della q = q(t) tenendo conto delle proprieta della f(q). Una simile analisi e nota comediscussione di Weierstrass12 (vedi [2], [10]). In questa sezione, deduciamo le caratteristiche delmoto per il problema ristretto dei due corpi (si veda quanto detto su di esso nelle pagine 4 e5) applicando la discussione di Weierstrass all’equazione (1.21) opportunamente riscritta. Lapresentazione riportata in questa sezione segue da vicino quella svolta in [4]. Infine, forniremouna dimostrazione dell’equazione (2.1).
3.1 Classificazione qualitativa dell’orbita
In questa sezione giungeremo a classificare qualitativamente le orbite di un punto soggetto aduna forza attrattiva newtoniana.
Riconsideriamo le equazioni dell’energia totale del sistema:
E =1
2µr2 +
L2
2µr2+K
r, (3.1.1)
dove abbiamo posto K = −GµM . L’energia totale E ha la stessa espressione di quella checompeterebbe a un punto materiale soggetto all’azione di un energia potenziale efficace Veff (r):
Veff (r) =L2
2µr2+K
r. (3.1.2)
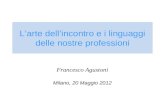
Nella figura sottostante e riportato il grafico di Veff (r) per il caso Kepleriano (cioe con K < 0).L’equazione (3.1.1) puo riscriversi come :
1
2µr2 = E − Veff = E − L2
2µr2− K
r, (3.1.3)
cioe e del tipo (3.1) ed e quindi possibile eseguire su di essa una discussione di Weierstrass.La discussione dell’andamento delle orbite al variare dell’energia totale del sistema sara fattamantenendo costante il valore L del modulo del momento angolare. Variando il valore di Lcambia l’analisi quantitativa ma non i risultati qualitativi che andremo ora a stabilire.Il moto del punto materiale di massa µ avente energia potenziale Veff varia a seconda del valoredell’energia totale E, in particolare distinguiamo i seguenti quattro casi:
12Essa sara descritta in dettaglio nell’Appendice A.
14

Figura 1.1: Grafico del potenziale efficace nel caso in cui K < 0. Il grafico e stato preso dal [6].
a) Sia E > 0. Il punto materiale non puo mai superare la distanza r∗ indicata in figura. Seinfatti fosse r < r∗ allora si avrebbe E < Veff e l’equazione (3.1.3) mostra che l’energiacinetica diventa negativa cosa che non puo mai verificarsi. Non esiste invece un limitesuperiore per i valori assunti da r e l’orbita quindi non e limitata.Osservazione: Un punto materiale proveniente dall’infinito dopo aver raggiunto la posizioner∗ “invertira”il suo moto e tornera all’infinito. Il punto in cui E = Veff e detto punto diinversione.
b) Sia Emin < E < 0 (vedi figura (1.1) per il significato di Emin). In tal caso oltre al liminteinferiore rm e presente anche il limite superiore rM . Il punto materiale dovra restare frarm e rM perche se fosse r < rm oppure r > rM dall’equazione (3.1.3) si dedurrebbe chel’energia cinetica assume valori negativi e questo non puo capitare. I punti rm e rM percui E = Veff sono punti d’inversione per il moto e sono noti come distanze apsidali e ilmoto e confinato a mantenersi fra tali distanze.
c) Sia E = Emin. In tal caso Veff = E e l’equazione (3.1.3) fornisce r = 0 ovvero r = costantecioe l’orbita e una circonferenza in quanto il moto e possibile solo per tale valore costantedi r.
d) Se E < Emin allora Veff < Emin allora l’equazione (3.1.3) afferma che l’energia cineticae (costantemente) negativa e questo non puo capitare quindi in questa situazione non e
15

possibile alcun moto.
Si puo dimostrare che le proprieta che abbiamo appena stabilito nel caso in cui l’energia
potenziale corrispondente a una forza attrattiva newtoniana [V (r) =K
r, K < 0], rimangono
inalterate nel caso di un’energia potenziale (attrattiva) dipendende solo dalla distanza [V=V(r)]e avente le seguenti due caratteristiche:
1. V(r) va a zero meno rapidamente di1
r2per r −→∞,
2. V(r) va all’infinito meno rapidamente di1
r2per r −→ 0.
Tutte le forze attrattive che danno origine a un’energia potenziale soddisfacente le condizioni 1e 2 portano alla classificazione (al variare dell’energia totale) dei moti (che avvengono) in orbiteaperte, confinate e circolari.
Se l’energia potenziale e esattamente quella considerata in tutto questo capitolo, V (r) =K
r(K < 0) allora la classificazione condotta in questa sezione ci riconduce al criterio discriminativostabilito nella sezione precedente, cioe:
(a) per E = Emin, l’orbita (confinata) e una circonferenza (caso (a) sezione 2);
(b) per Emin < E < 0, l’orbita (confinata) e un ellisse (caso (b) sezione 2);
(c) per E = 0, l’orbita (aperta) e una parabola (caso (c) sezione 2);
(d) per E > 0, l’orbita (aperta) e un iperbole (caso (d) sezione 2).
Sottolineiamo che la discussione di Weierstrass per l’equazione (3.1.3) potra eseguirsi ancheper un potenziale V = V (r) non soddisfacente le condizioni 1 e 2 sopra riportate, ma in talcaso il comportamento qualitativo sara ovviamente diverso da quello evidenziato per potenzialisoddisfacenti 1 e 2.
Si e visto come nel caso in cui l’energia potenziale sia V =K
r(energia potenziale new-
toniana), le orbite confinate sono esattamente un ellisse o una circonferenza (corrispondenti,rispettivamente a Emin < E < 0 e E = Emin). Ci si potrebbe chiedere quali sono i potenzialiV = V (r) per cui le orbite confinate sono anche chiuse. A tale domanda risponde il seguenteclassico risultato dovuto a Bertrand13 (cfr. [11]).
Teorema 1.2 Le uniche forze centrali che danno luogo a orbite chiuse per ogni condizione ini-ziale delle particelle interagenti (per ogni combinazione arbitraria di L ed E < 0) sono quelleproporzionali all’inverso del quadrato della distranza e quelle corrispondenti alla legge di Hooke.
13Si rimanda il lettore all’articolo orginale di Bertrand per la dimostrazione di tale teorema.
16

3.2 Dimostrazione della formula (2.1)
Lo scopo di questa sezione e duplice: mostreremo infatti come partendo dall’equazione (3.1.3)sia possibile determinare esplicitamente14 l’equazione dell’orbita, sia come si possa determinarela relazione (2.1) che lega eccentricita e energia totale del sistema. Scriviamo l’equazione (3.1.3)nel seguente modo:
r =L
µ
√2Eµ
L2− 1
r2− 2Kµ
L2r, (3.2.1)
dove si e assunto che le condizioni iniziali siano tali per cui la (3.2.1) valga con il segno positivo.La (3.2.1) e un equazione differenziale a variabili separabili e da essa si ricava:
dt =µ
L
dr√2Eµ
L2− 1
r2− 2Kµ
L2r
. (3.2.2)
D’altro canto, possiamo tener conto dell’integrale primo θ =L
µr2che fornisce dθ =
L
µr2dt
sostituendo cio nella (3.2.2) si perviene alla seguente equazione:
dθ =dr√
2Eµ
L2− 1
r2− 2Kµ
L2r
, (3.2.3)
che integrando fornisce:
θ − θ0 =
∫ r
r0
dr
r2
√2Eµ
L2− 1
r2− 2Kµ
L2r
. (3.2.4)
Effettuando il cambio di variabile u =1
rcon (du = − 1
r2dr) la (3.2.4) si riscrive come:
θ − θ′ = −∫
du√2Eµ
L2− u2 − 2Kµu
L2
, (3.2.5)
dove θ′ e una costante che non necessariamente corrisponde all’angolo iniziale θ0 al tempo t = 0e l’integrale e un integrale indefinito. L’integrale indefinito (vedi [4] per i dettagli) puo esserecalcolato esplicitamente e si ha:
∫du√
2Eµ
L2− u2 − 2Kµu
L2
= arccos
L2u
Kµ− 1√
1 +2EL2
µK2
. (3.2.6)
14Questo e possibile per via della particolare espressione dell’energia potenziale V =K
r, (K < 0).
17

L’equazione (3.2.5) diventa quindi:
θ − θ′ = arccos
L2u
Kµ− 1√
1 +2EL2
µK2
, (3.2.7)
da cui considerando che u =1
rsi ottiene l’equazione dell’orbita:
1
r=µK2
L2
1 +
√1 +
2EL2
µK2cos(θ − θ′)
. (3.2.8)
Sappiamo che questa e l’equazione di una conica avente un fuoco nell’origine. Poiche l’equazionegenerale di una conica con tale caratteristica e:
1
r= C(1 + ε cos(θ − θ′)), (3.2.9)
segue dal confronto di (3.2.8) con (3.2.9) che:
ε =
√1 +
2EL2
K2µ, (3.2.10)
che e proprio la (2.1) e questo completa la dimostrazione.
18

Capitolo 2
Il problema dei due corpi nelformalismo Hamiltoniano
In questo capitolo affronteremo il problema dei due corpi utlizzando il formalismo hamiltonia-no. A tal fine richiamiamo rapidamente i fatti fondamentali necessari per portare a terminetale compito: le equazioni di Hamilton, le trasformazioni canoniche e l’equazione di Hamilton-Jacobi. In particolare, nella seconda sezione ci soffermeremo sulla separazione delle variabili perl’equazione di Hamilton-Jacobi perche applicheremo tale tecnica per risolvere il problema deidue corpi impostato come se si trattasse di un problema di moto relativo (sezione 3).Per semplicita, se non viene detto diversamente, i vincoli si supporranno olonomi e lisci in tuttoil capitolo.
1 Le equazioni di Hamilton e le trasformazioni canoniche
In questa sezione determineremo, tramite le equazioni di Eulero-Lagrange, le equazioni di Ha-milton e successivamente descriveremo le trasformazioni canoniche la cui importanza sara chiaraquando introdurremo l’equazione di Hamilton-Jacobi.
1.1 Equazioni di Hamilton
L’evoluzione di un sistema meccanico con n gradi soggetto a vincoli olonomi e lisci e a unasollecitazione conservativa, di liberta e descritto dalle n equazioni di moto di Eulero-Lagrange:
d
dt
∂L
∂qi− ∂L
∂qi= 0, i = 1, ..., n (1.1.1)
dove qi sono le coordinate generalizzate che individuano, istante per istante, la posizione del siste-ma nello spazio delle configurazioni1 e L e la cosiddetta lagrangiana definita da L = T−V (essen-
1Per spazio delle configurazioni si intende l’insieme delle n coordinate generalizzate.
19

do T l’energia cinetica e V l’energia potenziale). E ben noto dai corsi di Analisi Matematica chese una L e una funzione lipschitziana2 e assegnati 2n valori iniziali q1(0), ..., qn(0), q1(0), ..., qn(0),allora il sistema (1.1.1) possiede un’unica soluzione (teorema di esistenza ed unicita delle equa-zioni differenziali)(cfr. [17]).Si definiscono i momenti generalizzati (o quantita di moto generalizzate) p1, ..., pn come:
pi =∂L
∂qi, i = 1, ..., n
per cui dalle equazioni di Eulero-Lagrange discende immediatamente che:
pi =∂L
∂qi, i = 1, ..., n
Applicando la trasformazione di Legendre (cfr. Capitolo 8 del [1]) alle equazioni di Eulero-Lagrange, le variabili qi verranno sostituite dalle variabili pi e la Lagrangiana dalla sua trasfor-mata di Legendre la quale viene detta funzione di Hamilton o hamiltoniana. L’hamiltonianae una funzione delle variabili pi, qi, t, tali che risulta essere definita nel seguente modo:
H(p1, ..., pn, q1, ..., qn, t) =n∑i=1
qipi − L(q1, ..., qn, q1, ..., qn, t). (1.1.2)
E ben noto che, se i vincoli non dipendono esplicitamente dal tempo, allora l’hamiltoniana edata da:
H = T + V.
Derivando la (1.1.2), rispetto a pi e qi (i=1,...,n) si arriva alle cosiddette equazioni di Hamilton:
qi =∂H∂pi
, (1.1.3a)
pi = −∂H∂qi
, (1.1.3b)
e si verifica facilmente la seguente importante relazione:
−∂L∂t
=∂H∂t
. (1.1.3c)
Le equazioni di Hamilton costituiscono un sistema di 2n equazioni differenziali del primo ordinenelle 2n incognite (pi e qi i=1,...,n). Se la funzione di Hamilton e lipschitziana e si specificano2n condizioni iniziali allora il sistema (1.1.3) ammette un’unica soluzione (teorema di esistenzae unicita delle equazioni differenziali, cfr. [17]).
2Una funzione f : Ω ⊆ Rn → Rm si dice lipschitziana su Ω se ∃K ≥ 0 tale che:‖f(x)− f(y)‖ ≤ K ‖x− y‖ ∀x,y ∈ Ω
20

1.2 Trasformazioni canoniche
Osserviamo che il sistema di equazioni formato dalle (1.1.3)(a e b) si puo presentare in formapiu compatta nel seguente modo:
x = N∇xH(x, t), (1.2.1)
essendo x(p, q) dove q = (q1, ..., qn) e p = (p1, ..., pn), N =
(0 −InIn 0
), H(x, t) la funzione
hamiltoniana e ∇x il gradiente.Supponiamo di eseguire una trasformazione differenziabile ed invertibile che consente di passaredalle variabili (qi, pi) alle nuove variabili (Qi, Pi) con i=1,...,n.
Qi = Qi(p, q, t),
Pi = Pi(p, q, t),(1.2.2)
Supponiamo inoltre che le (qi, pi) soddisfino le equazioni di Hamilton (1.1.3), o equivalentementele (1.2.1). Si vede facilmente che la trasformazione (1.2.2) non trasforma il sistema hamiltoniano(1.2.1) in un sistema che e ancora hamiltoniano. Infatti il sistema che si ottiene eseguendo latrasformazione e:
X = W (X, t), (1.2.3)
essendo W (X, t) = JN∇xH(x, t) +∂X
∂tdove J =
∂Xi
∂xk, i, k = 1, ..., n lo jacobiano della tra-
sformazione, mentre x e N come sono stati introdotti precedentemente.Quindi non e detto che esista una funzione hamiltonianaK(x, t) per cuiW (X, t) = N∇XK(X, t).In particolare, una condizione (cfr.[1]) necessaria affinche un campo vettoriale W sia hamiltonia-no e che la matrice N∇XW (X, t) sia simmetrica. Piu precisamente possiamo dare la seguentedefinizione.
Definizione 1 Una trasformazione differenziabile e invertibile (p, q) −→ (P ,Q) e detta cano-nica se, comunque scelta una funzione hamiltoniana H(p, q, t) tale che:
pi =∂H∂qi
qi =∂H∂pi
esiste una funzione (detta nuova hamiltoniana K(P ,Q, t)) tale che:Pi =
∂K∂Qi
Qi =∂K∂Pi
(1.2.4)
21

il sistema (1.2.3) diventa il sistema di equazioni di Hamilton per K(P ,Q, t) ovvero (1.2.4).
Quelli che seguono sono esempi importanti di trasformazioni canoniche (cfr [1] per maggioridettagli):
• Le traslazioni di R2l;
• Rotazioni X = Rx (R matrice ortogonale), conservano la struttura canonica delle equa-zioni di Hamilton se e solo se R e una matrice simplettica3;
• La trasformazione: P = −qQ = p
e canonica e la nuova hamiltoniana e legata alla vecchia ne seguente modo:H(p, q, t) =K(P ,Q, t). Questa trasformazione evidenzia come nella meccanica hamiltoniana non visia alcuna differenza di ruolo fra le q e le p.
Soffermeremo la nostra attenzione su quelle trasformazioni (differenziabili ed invertibili) percui il sistema trasformato e ancora hamiltoniano, tali trasformazioni si dicono canoniche.Se le coordinate pi e qi sono canoniche, deve valere il principio variazionale4:
δ
∫ t2
t1
(n∑i=1
piqi −H(q,p, t)
)dt = 0.
Allo stesso modo le nuove coordinate Qi e Pi devono soddisfare lo stesso principio:
δ
∫ t2
t1
(n∑i=1
PiQi −K(Q,P , t)
)dt = 0.
Il verificarsi dei due principi variazionali significa che gli integrandi dei due integrali possonoal piu differire per una derivata totale rispetto al tempo, di una funzione arbitraria F delle 4ncoordinate e del tempo. Tale funzione arbitraria si chiama funzione generatrice della trasforma-zione canonica. Poiche nota la F , le (1.2.2) sono completamente determinate. La funzione Fdipende dalle variabili qi, pi, Qi, Pi (cfr [8], [4]).Ci soffermeremo su quattro funzioni generatrici, nelle quali le variabili da cui dipende la funzioneF sono indipendenti:
F1(q,Q, t), F2(q,P , t), F3(p,Q, t), F4(p,P , t).
3Una matrice M si dice simplettica se soddisfa MTNM = N dove con MT abbiamo indicato la matricetrasposta della matrice M .
4Tale principio e adeguatamente illustrato in un qualunque testo di Meccanica, si suggerisce, in particolare,la lettura di [1],[2].
22

1. F1(q,Q, t) viene detta funzione generatrice del primo tipo e si ha:
pi =∂F1
∂qi, Pi = −∂F1
∂Qi
,
da cui:
K = H +∂F1
∂t.
2. F2(q,P , t) viene detta funzione generatrice del secondo tipo e si ha:
pi =∂F2
∂qi, Qi =
∂F2
∂Pi,
da cui:
K = H +∂F2
∂t.
3. F3(Q,p, t) viene detta funzione generatrice del terzo tipo e si ha:
qi = −∂F3
∂pi, Pi = −∂F3
∂Qi
,
da cui:
K = H +∂F3
∂t.
4. F4(p,P , t) viene detta funzione generatrice del quarto tipo e si ha:
qi = −∂F4
∂pi, Qi =
∂F4
∂Pi,
da cui:
K = H +∂F4
∂t.
Riscontreremo la loro elevata importanza nell’equazione di Hamilton-Jacobi.
2 L’equazione di Hamilton-Jacobi e separazione delle va-
riabili
In questa sezione introdurremo l’equazione di Hamilton-Jacobi illustrando, in particolare, latecnica di separazione delle variabili che consente, in alcuni casi, di determinare un integralecompleto dell’equazione di Hamilton-Jacobi. Si seguira la trattazione svolta in [1].
23

2.1 L’equazione di Hamilton-Jacobi
Il problema di integrazione delle equazioni di moto di un sistema hamiltoniano, avente hamilto-niana H(p, q, t), si puo ridurre al problema di cercare una trasformazione canonica dalle variabili(p, q) alle nuove variabili (P ,Q) generate da una funzione generatrice F(q,P , t) in modo chela nuova Hamiltoniana K sia identicamente nulla:
K(P ,Q, t) = 0. (2.1.1)
Se la (2.1.1) fosse soddisfatta le equazioni canoniche sarebbero subito integrate, ∀t ∈ R, e siavrebbe:
Pj(t) = ηj, Qj(t) = ξj, j = 1, ..., n
dove η = (η1, ..., ηn) e ξ = (ξ1, ..., ξn) sono costanti determinate a partire dalle condizioni iniziali.Mediante la trasformazione inversa possiamo risalire agli integrali delle equazioni canoniche nellevariabili originali:
p = p(η, ξ, t), q = q(η, ξ, t).
Sappiamo dalla sezione precedente che per realizzare una trasformazione canonica occorre de-terminare una funzione generatrice:
S = S(q,η, t),
che risolva l’equazione:
H(∇qS, q, t) +∂S
∂t= 0. (2.1.2)
L’equazione (2.1.2) e detta equazione di Hamilton-Jacobi. Essa e un’equazione differenziale allederivate parziali del primo ordine non lineare le cui variabili indipendendi sono q1, ..., qn, t.Per i nostri scopi non riscuote grande importanza trovare un integrale generale delle (2.1.2) (ossiauna soluzione che dipende da una funzione arbitraria) ma ci interessa sapere se essa ammetteun integrale completo, ossia una soluzione che contiene tante costante arbitrarie quante sono levariabili indipendenti (cioe n+1 ). Una soluzione del tipo S(q,η, t) + η0 e un integrale completo.Una delle costanti arbitrarie appare come grandezza additiva, questo perche S appare nella(2.1.2) solo tramite le sue derivate e quindi se S e soluzione anche S + η0 sara soluzione.
Teorema 2.1 Data l’Hamiltoniana H(p, q, t), sia S(q,η, t) un integrale completo dell’equazio-ne di Hamilton-Jacobi (2.1.2), dipendente da n costanti arbitrarie η1, ..., ηn e soddisfacente lacondizione
det
(∂2S
∂qi∂ηj
)6= 0.
Allora le soluzioni del sistema delle equazioni di Hamilton per H si ricavano dal sistema:
pj =∂S
∂qjξj =
∂S
∂ηjj = 1, ..., n
dove le ξ1, ..., ξn sono costanti.
24

Rimandiamo a [1] per la dimostrazione del teorema.
Il teorema (2.1) deve la sua importanza al fatto che, se esiste un integrale completo dell’equa-zione di Hamilton-Jacobi, allora esso assicura l’integrabilita per quadrature delle equazioni diHamilton. La soluzione dell’equazioni di Hamilton si puo determinare mediante un numero finitodi operazioni algebriche o differenziali (tali operazioni comprendono inversioni di funzioni e ilcalcolo di integrali noti).
Se H non dipende esplicitamente dal tempo si puo cercare S nella forma:
S = −E(α)t+W (q, α),
dove α = (α1, ..., αn) e il vettore delle costanti arbitrarie dalle quali dipende la soluzione e E(α)e una funzione arbitraria almeno di classe C2. La (2.1.2) si riduce a:
H(∇qW, q, t) = E(α), (2.1.3)
dove W viene detta funzione caratteristica di Hamilton e si verifica subito che essa soddisfala condizione
(∂2S
∂qi∂αj
)=(
∂2W∂qi∂αj
). Quindi W e la funzione generatrice di una trasformazione
canonica rispetto alle nuove variabili (α, β) nelle quali la nuova Hamiltoniana e E(α). Poicheβ1, ..., βn sono cicliche, abbiamo:
α = 0,
e quindi le nuove quantita di moto generalizzate α1, ..., αn sono integrali primi del moto. Inoltrele equazioni di Hamilton per le βj sono:
βj =∂E(α)
∂αj= γj(α), j = 1, ..., n
che risultano essere immediatamente integrabili:
βj(t) = γj(α)t+ βj(0), j = 1, ..., n. (2.1.4)
Si verifica facilmente che la trasformazione βj − γjt = ξj e αj = ηj e canonica.Il teorema esposto qua sotto e l’analogo del teorema (2.1). Anche in questo caso si rimanda illettore interessato a [1] per la dimostrazione.
Teorema 2.2 Data l’Hamiltoniana H(p, q), sia W (q, α) un integrale completo dell’equazione(2.1.3), dipendente da n costanti arbitrarie α = (α1, ..., αn) e soddisfacente la condizione:
det
(∂2W
∂qi∂αj
)6= 0.
Allora la W e la funzione generatrice di una trasformazione canonica. La nuova HamiltonianaE(α) ha n coordinate cicliche5, e le soluzioni del sistema delle equazioni di Hamilton ad essa as-sociate sono funzioni lineari del tempo date da (2.1.4), mentre i nuovi momenti cinetici α1, ..., αnsono integrali primi del moto.
5Ossia essa non dipende da quelle coordinate.
25

2.2 Separazione delle variabili
Un integrale completo dell’equazione di Hamilton-Jacobi si puo ottenere utilizzando la tecnica diseparazione delle variabili che sara illustrata in questa sezione seguendo l’eccellente trattazioneesposta in [1],[8].Iniziamo considerando un caso semplice in cui l’hamiltoniana H del sistema non dipende daltempo ed e una somma di n funzioni, ciascuna delle quali dipende soltanto da (pj, qj):
H = h1(p1, q1) + ...+ hn(pn, qn). (2.2.1)
L’equazione (2.1.3) ammette una soluzione del tipo:
W =n∑j=1
Wj(qj, αj), (2.2.2)
dove ciascuna Wj si determina risolvendo l’equazione:
hj
(∂W
∂qj, qj
)= ej(αj), (2.2.3)
dove ej e una funzione arbitraria, da cui segue anche:
E(α1, ..., αn) =n∑i=1
ei(αi).
Una generalizzazione della situazione espressa da (2.2.1) e data dalle hamiltoniane del tipo:
H = H(h1(p1, q1), ..., hn(pn, qn)). (2.2.4)
In tal caso la funzione caratteristica W ha la forma (2.2.2) e si determina risolvendo il sistemadi equazioni (2.2.3), mentre l’energia E e data da:
E(α) = H(e1(α1), ..., en(αn)).
Supponiamo che una coordinata, ad esempio q1, e la sua corrispondente derivata∂S
∂q1entrino
nell’equazione (2.1.2) soltanto tramite una combinazione del tipo h1
(∂S
∂q1, q1
), che non dipende
ne dalle altre coordinate o dal tempo ne dalle altre derivate. Questo si verifica se l’hamiltonianaha la forma:
H = H(h1(p1, q1), p2, ..., pn, q2, ..., qn, t)),
e in tal caso l’equazione di Hamilton-Jacobi assume la forma:
H(h1
(∂S
∂q1, q1
),
(∂S
∂q2
), ...,
(∂S
∂qn
), q2, ..., qn, t
)+∂S
∂t= 0. (2.2.5)
26

Si cerca quindi una soluzione della (2.2.5) della forma:
S = S1(q1, α1) + S ′(q2, ..., qn, α2, ..., αn, t),
la (2.2.5) si trasforma nel sistema:
h1
(∂S
∂q1, q1
)= e1(α1), (2.2.6)
H(e1(α1),
(∂S ′
∂q2
), ...,
(∂S ′
∂qn
), q2, ..., qn, t
)+∂S ′
∂t= 0. (2.2.7)
L’equazione (2.2.6) e un’equazione differenziale ordinaria del primo ordine, dalla quale si puoricavare S1 mediante una quadratura. L’equazione (2.2.7) e un’equazione di Hamilton-Jacobi, main n variabili anziche in n+1. Se il procedimento potesse essere iterato n+1 volte (separandosuccessivamente le coordinate e il tempo), il calcolo dell’integrale completo dell’equazione diHamilton-Jacobi si ricondurrebbe ad n+1 quadrature (in questo caso il sistema hamiltonianoconsiderato e detto separabile). Questo richiede che l’hamiltoniana di partenza sia indipendentedal tempo e che S assuma la forma:
S = W1(q1, α1) +W2(q2, α1, α2) + ...+Wn(qn, α1, ..., αn)− E(α1, ..., αn, )t.
Rientrano in questa categoria i sistemi Hamiltoniani per cui :
H = hn(hn−1(...(h2(h1(p1, q1), p2, q2)...), pn−1, qn−1), pn, qn),
e l’equazione di Hamilton-Jacobi diventa:
hn
(hn−1
(...
(h2
(h1
(∂W
∂q1, q1
),∂W
∂q2, q2
)...
),∂W
∂qn−1, qn−1
),∂W
∂qn, qn
)= E(α1, ..., αn).
3 Una nuova impostazione del problema dei due corpi e
la sua risoluzione mediante l’equazione di Hamilton-
Jacobi
In questa sezione dopo aver impostato il problema dei due corpi come un problema in cui il puntoP2 si muove di moto relativo rispetto a P1 (sezione 3.1), scriviamo le equazioni di Hamilton adquella di Hamilton-Jacobi ad esso relative. Inoltre, risolveremo l’equazione di Hamilton-Jacobiper separazione delle variabili e questo consentira di risolvere le equazioni di Hamilton.
27

3.1 Risoluzione del problema mediante l’equazione di Hamilton-Jacobi
Riferiamo i due punti P1 e P2 rispetto a una terna inerziale Ω(ξ, η, ζ).Siano P1 e P2 i due corpi di massa rispettivamente m1 e m2 e sia F 21 = f(r)u (dove u e il versorecongiungente P1P2) la forza reale che P2 esercita su P1. Per il terzo principio della dinamicasara −F 21 la forza che P1 esercita su P2. Le accelerazioni assolute (cioe quelle relative alla ternaΩ(ξ, η, ζ)) sono date da:
r1 = −m2F 21, (3.1)
r2 = −m1F 21, (3.2)
e quindi l’accelerazione relativa di P2 rispetto a P1, cioe rispetto a una terna O(x, y, z) aventeorigine in P1 ≡ O e equiorientata rispetto a Ω(ξ, η, ζ) e:
r = r2 − r1 = (m1 +m2)F 21. (3.3)
L’equazione (3.3) e l’equazione del moto relativo di P2 rispetto a P1 (come se P1 fosse fisso di mas-sa m1 +m2 e P2 avente massa unitaria). L’equazione (3.3) discende dalla legge di composizionedelle accelerazioni:
a(a)P2
= a(r)P2
+ a(c)P2
+ a(τ)P2,
dove a(c)P2
= ω ∧ vP2 e l’accelerazione di Coriolis e a(τ)P2
e l’accelerazione di trascinamento di P2 e
si e tenuto conto che a(c)P2
= 0 (il moto e traslatorio) e a(τ)P2
= r1.La forza interagente fra i due corpi e la forza di Newton. La componente secondo P1P2 dell’at-trazione che l’unita di massa in P2 esercita su quella in P1 e
f(r) = −Gr2, (3.4)
essendo G la costante di gravitazione universale e r la distanza fra P1 e P2. Tale attrazionedipende dall’energia potenziale (per unita di massa):
V = −Gr, (3.5)
e quindi ponendo
K = G(m1 +m2) e V = −Kr
(3.6)
la (3.3) diventa:r = ∇V. (3.7)
Per determinare le equazioni di Hamilton associate al problema dei due corpi impostato comeappena spiegato, occorre scegliere adeguatamente i paramentri lagrangiani. Trattandosi dello
28

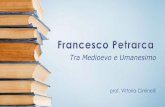
Figura 2.1: Figura rappresentante le coordinate sferiche e il posizionamento dei due puntimateriali nel moto relativo.
studio del moto di un punto in R3 e necessario introdurre tre coordinate lagrangiane. Adottiamo,per comodita, le coordinate sferiche:
x = r cosϕ cosλ
y = r cosϕ sinλ
z = r sinϕ
(3.8)
dove r > 0, 0 ≤ λ ≤ 2π, 0 ≤ ϕ ≤ π. E chiaro che si assumono come coordinatelagrangiane q1 = r, q2 = λ, q3 = ϕ.L’energia cinetica del sistema e data da:
T =1
2(x2 + y2 + z2) =
1
2(r2 + r2ϕ2 + r2 cos2 ϕλ2), (3.9)
mentre la lagrangiana assume la forma:
L = T − V =1
2(r2 + r2ϕ2 + r2 cos2 ϕλ2)− GM
r.
Ricordando che6 :
pr =∂L
∂r= r, pϕ =
∂L
∂ϕ= r2ϕ, pλ =
∂L
∂λ= r2 cos2 ϕλ, (3.11)
6Osservazione: Sotto l’ipotesi che l’energia potenziale e conservativa, essa non dipende da r, ϕ, λ e le relazioni
29

l’energia cinetica puo scriversi come:
T =1
2
(p2r +
p2ϕr2
+p2λ
r2 cos2 ϕ
). (3.12)
Poiche siamo in presenza di un problema dinamico conservativo a vincoli indipendenti dal tempo,H e un integrale primo del moto (cfr. [2], [1]) dato da:
H = T + V =1
2
(p2r +
p2ϕr2
+p2λ
r2 cos2 ϕ
)− GM
r. (3.13)
Le equazioni di Hamilton del moto sono dunque:
pr = −∂H∂r
=p2ϕr3
+p2λ
r3 cos2 ϕ− GM
r2
pϕ = −∂H∂ϕ
=p2λ sinϕ
r2 cos3 ϕ
pλ = −∂H∂λ
= 0
r =∂H∂pr
= pr
ϕ =∂H∂pϕ
=pϕr2
λ =∂H∂λ
=pλ
r2 cos2 ϕ
(3.14)
Osserviamo che l’hamiltoniana non dipende da λ quindi pλ e costante (poiche pλ = 0 come sievince dalla terza delle (3.14)). Poiche r2 cos2 ϕλ = cost (r cosϕ e la proiezione di r sul piano[xy]), la proiezione su [xy] della velocita areale si mantiene costante.
Le equazioni di Hamilton (3.14) costituiscono un sistema differenziale del primo ordine, il cuiintegrale generale dipende da 6 costanti di integrazione.
sopra indicate si riducono a:
pr =∂T
∂r, pϕ =
∂T
∂ϕ, pλ =
∂T
∂λ. (3.10)
30

Come descritto nella sezione precedente il problema di integrare il sistema (3.14) e equiva-lente al problema di trovare un integrale completo S(r, ϕ, λ, αr, αϕ, αλ, t) per l’equazione diHamilton-Jacobi (αr, αϕ, αλ costanti arbitrarie). Tale equazione e (cfr. (2.1.2)):
H(∂S
∂r,∂S
∂ϕ,∂S
∂λ, r, ϕ, λ
)+∂S
∂t= 0, (3.15)
o, in modo piu esplicito:
1
2
((∂S
∂r
)2
+1
r2
(∂S
∂ϕ
)2
+1
r2 cos2 ϕ
(∂S
∂λ
)2)− GM
r+∂S
∂t= 0. (3.16)
A questo punto si procede con la separazione delle variabili descritta nella sezione precedene:
S(r, ϕ, λ, αr, αϕ, αλ, t) = Wλ(λ, αλ) +Wϕ(ϕ, αϕ, αλ) +Wr(r, αr, αϕ, αλ)−E(αr, αϕ, αλ)t, (3.17)
e sostituendo la (3.17) nella (3.16) si ottiene:
1
2
(∂Wr
∂r
)2
+1
2r2
[(∂Wϕ
∂ϕ
)2
+1
cos2 ϕ
(∂Wλ
∂λ
)2]− GM
r= E. (3.18)
La separazione delle variabili conduce quindi alla risoluzione del seguente sistema:
(∂Wλ
∂λ
)2
= e1(αλ)
(∂Wϕ
∂ϕ
)2
+e1(αλ)
cos2 ϕ= e2(αλ, αϕ)
(∂Wr
∂r
)2
− GM
r+e2(αλ, αϕ)
2r2= E(αr, αϕ, αλ)
(3.19)
quadrando si ottiene:
Wλ =∫ √
e1(αλ)dλ
Wϕ =∫ √−e1(αλ)
cos2 ϕ+ e2(αλ, αϕ)dϕ
Wr =∫ √GM
r− e2(αλ, αϕ)
2r2+ E(αr, αϕ, αλ)dr
(3.20)
31

In base al Teorema (2.1) si trova:
pλ =∂Wλ
∂λ=√e1(αλ)
pϕ =∂Wϕ
∂ϕ=
√−e1(αλ)
cos2 ϕ+ e2(αλ, αϕ)
pr =∂Wr
∂r=
√GM
r− e2(αλ, αϕ)
2r2+ E(αr, αϕ, αλ)
(3.21)
Sia W = Wr +Wϕ +Wλ allora:
η1 =∂W
∂e1
η2 =∂W
∂e2
η3 =∂W
∂E
(3.22)
da cui si ricava la trasformazione canonica:pr = pr(η1, η2, η3, e1, e2, E)
pϕ = pϕ(η1, η2, η3, e1, e2, E)
pλ = pλ(η1, η2, η3, e1, e2, E)
r = r(η1, η2, η3, e1, e2, E)
λ = λ(η1, η2, η3, e1, e2, E)
ϕ = ϕ(η1, η2, η3, e1, e2, E)
che fornisce la soluzione del sistema (3.14) con e1, e2, E, η1, η2 costanti arbitrarie e η3 = t − t0.Dal (3.21) si ricava:
p2r =GM
r− e2(αλ, αϕ)
2r2+ E(αr, αϕ, αλ)
p2ϕ = −e1(αλ)cos2 ϕ
+ e2(αλ, αϕ)
p2λ = e1(αλ)
(3.23)
che forniscono le relazioni tra i momenti generalizzati pr, pϕ, pλ e le coordinate r, ϕ, λ in termini
delle costanti e1, e2, E. E immediato riscrivere (3.23) come:e1 = p2λ
e2 = p2ϕ +p2λ
cos2 ϕ
E =1
2p2r −
GM
r+p2ϕr2
+p2λ
r2 cos2 ϕ
(3.24)
32

La prima relazione, in accordo con l’osservazione fatta in precedenza su pλ, ci garantisce che e1 siail quadrato della proiezione della velocita areale sul piano [xy] e tale proiezione e costante (essendocostante pλ). La terza relazione e proprio l’integrale dell’energia. Ci rimane da caratterizzare e2.
Dalle (3.11) segue che e2 = r4(ϕ2 + cos2 ϕλ2) e introducendo la quantita ϑ =
√ϕ2 + cos2 ϕλ2
(chiamata velocita angolare effettiva) si ha e2 = r2ϑ che risulta essere il doppio della velocitaareale effettiva. Quindi, trattandosi di un moto centrale, la velocita areale e costante e talerisulta essere anche e2. Il sistema (3.22) fornisce le equazioni esplicite del moto. Esplicitando
i calcoli di∂W
∂e1,∂W
∂e2,∂W
∂E(eseguendo la derivazione sotto il segno di integrale delle (3.20)), si
trova:
η1 =∫ λ0
1
2√e1dλ−
∫ ϕ0
dϕ
2 cos2 ϕ√e2 − e1
cos2 ϕ
η2 =∫ ϕ0
dϕ
2√e2 − e1
cos2 ϕ
−∫ rr0
dr
4r2√
GMr− e2
2r2+ E
η3 =∫ rr0
dr
2√
GMr− e2
2r2+ E
(3.25)
Nelle (3.25) appaiono integrali non elementari7, detti integrali ellittici. Queste equazioni delmoto dipendono da 6 costanti arbitrarie
η1, η2, η3 = −t0, e1, e2, E.
Chiameremo queste costanti elementi canonici. Abbiamo gia scoperto il significato degli ele-menti canonici e1, e2, E. . Rimangono quindi da caratterizzare η1, η2, η3. A tal fine, introdurremoda un punto di vista elementare, nella prossima sezione, i cosiddetti elementi ellittici (cioe uninsieme di parametri necessari ad individuare la posizione di un certo punto P all’istante t).
4 Elementi ellittici
In questa sezione introduciamo un insieme di sei parametri che individuano l’orbita, i cosiddettielementi ellittici cfr.[2], e forniamo le relazioni che legano tali parametri agli elementi canoniciη1, η2, η3, e1, e2, E. Rinviamo il lettore interessato a [9] per la dimostrazione di tali relazioni.Come abbiamo avuto modo di osservare piu volte si sta analizzando un moto centrale e quindiesso si svolge in un piano. Su tale piano si consideri l’ellisse che ha fuoco in O (O coincide con
7Non sono ellittici il primo integrale a secondo membro nelle prime due equazioni della (3.25).
33

Figura 2.2: Rappresentazione degli elementi ellittici.Figura presa da: http://astrodinamica.altervista.org/abstract/varel.htm
P1 e siamo nel caso E < 0). Evidentemente, l’ellisse e completamente caratterizzata da dueparametri: il suo semiasse maggiore a e la sua eccentricita ε. Per individuare completamentel’orbita occorre specificare la giacitura del piano dell’orbita e, su questo piano, la direzione del-l’asse focale (supposto orientato verso il Perielio). Per individuare il piano dell’orbita servirannodue parametri mentre, per specificare l’asse focale, e sufficiente un solo parametro.Quindi la traiettoria e individuata da cinque parametri. Occorre pero un altro parametro peraffermare di conoscere la posizione del punto P2 sull’orbita al generico istante t. Quindi il motoe completamente individuato qualora si conoscano sei parametri. Facendo riferimento alla figu-ra (2.2)8 presentiamo i sei parametri che solitamente si scelgono per descrivere il moto (cfr.[2]volume 2 parte 1).Gli elementi ellittici sono:
1. il semiasse maggiore a dell’ellisse (che individue la dimensione dell’orbita);
2. l’eccentricita ε dell’ellisse (determina la forma dell’orbita);
8Nella figura (2.2), per semplicita non e stata disegnata la sfera di centro O e raggio 1 mentre, di tale sfera, estata riportata la circonferenza massima corrispondente all’equatore. La linea dei nodi e la retta di intersezionefra il piano dell’orbita e il piano equatoriale mentre, i nodi (ascendente e discendente) sono le intersezioni dellalinea dei nodi con la sfera unitaria.
34

3. l’inclinazione i del piano dell’orbita rispetto al piano Oxy;
4. la longitudine Ω definita come l’anomalia del nodo ascendente rispetto all’asse x;
5. il parametro ω definito come la somma dei due angoli non complanari Ω e NOΠ (cioe
ω = Ω + NOΠ) essendo Π l’intersezione fra l’asse focale e la sfera dalla parte del perieliorispetto a O. Il parametro ω e detto longitudine del perielio.
6. L’istante τ e detto epoca di passaggio al perielio.
Osserivamo che l’angolo θ che il raggio vettore P − O forma con la semiretta OΠ e dettoanomalia vera. Assegnando l’istante τ in cui il punto P2 passa per il perielio, θ e il raggiovettore restano determinati.
Osserviamo che i e Ω determinano la giacitura del piano, ω determina l’inclinazione dell’assefocale, τ la posizione del punto sulla traiettoria.Gli elementi ellittici sono strettamente legati agli elementi canonici. Infatti, dopo aver definitole seguenti quantita H1 = −e1η1,H2 = −e2η2, H3 = η3 e assumendo come elementi ellittici
H1, H2, H3, e1, e2, E
sussistono le seguenti relazioni (cfr. [3],[9]):
a = − K
2E,
ε =
√1 +
2Ee21K2
,
cos i =e2e1,
ω = H1 +H2,
Ω = H2,
τ = −H3.
35

5 Risoluzione del problema ristretto dei due corpi trami-
te l’equazione di Hamilton-Jacobi
In questa sezione, consideriamo nuovamente il problema di un punto materiale soggetto all’azionedi un campo di forze centrali con un polo fisso (nel caso del problema ristretto dei due corpistudiato nel Capitolo 1, tale polo e proprio il baricentro dei due punti materiali). Scopo diquesta sezione e quello di affrontare tale problema adottando il formalismo hamiltoniano. Anchein questo caso, dopo aver scritto le corrispondenti equazioni di Hamilton, si trovera soluzione ditale sistema determinando un’integrale completo dell’equazione di Hamilton-Jacobi. Infine, simostrera come i risultati ottenuti coincidono con quelli trovati nel Capitolo 1
E ben noto (cfr. per esempio [2],[4],[8]) che per il problema ristretto dei due corpi l’energiacinerica e l’energia potenziale sono date da (vedi anche equazioni (1.1.1) e (1.1.2) Capitolo 1)
T =µ(r2 + r2θ2)
2, V= −GMµ
r.
Conseguentemente, la lagrangiana assume la forma:
L = T − V =µ(r2 + r2θ2)
2+GMµ
r,
e, non e superfluo, osservare come essa non dipenda esplicitamente dal tempo. In questo casoabbiamo due coordinate generalizzate q1 = r e q2 = θ. I momenti generalizzati sono dati da:
pr =∂L
∂r= µr, pθ =
∂L
∂θ= µr2θ, (5.1)
e l’energia cinetica puo quindi riscriversi nel seguente modo:
T =1
2µ
(p2r +
p2θr2
). (5.2)
Poiche la lagrangiana non dipende esplicitamente dal tempo, e ben noto (cfr., per esempio, con[1]) che l’hamiltoniana e data da:
H = T + V =1
2µ
(p2r +
p2θr2
)− GMµ
r. (5.3)
36

Le equazioni di Hamilton sono dunque:
pr = −∂H∂r
=p2θµr3− GMµ
r2
pθ = −∂H∂θ
= 0
r =∂H∂pr
=prµ
θ =∂H∂pθ
=pθµr2
(5.4)
Queste costituiscono un sistema differenziale del primo ordine, il cui integrale generale dipendequindi da 4 costanti di integrazione.
Osserviamo che l’hamiltoniana non dipende da θ quindi pθ e costante (come si evince da(5.4)), questo ci dice che la velocita areale e costante.Come gia detto nella sezione 3 trovare la soluzione del sistema (5.4) e equivalente a trovare unintegrale completo S(r, θ, αr, αθ, t) per l’equazione di Hamilton-Jacobi:
H(∂S
∂r,∂S
∂θ, r, θ
)+∂S
∂t= 0, (5.5)
che possiamo scrivere nel seguente modo:
1
2µ
((∂S
∂r
)2
+1
r2
(∂S
∂θ
)2)− GMµ
r+∂S
∂t= 0. (5.6)
A questo punto si procede con la separazione delle variabili:
S(r, θ, αr, αθ, t) = Wθ(θ, αθ) +Wr(r, αr, αθ)− E(αr, αθ)t. (5.7)
Sostituendo (5.7) nella (5.6) si ottiene:
1
2µ
[(∂Wr
∂r
)2
+1
r2
(∂Wθ
∂θ
)2]− GMµ
r= E. (5.8)
La sepazione viene portata a termine risolvendo il seguente sistema:
(∂Wθ
∂θ
)2
= 2µe1(αθ)
(∂Wr
∂r
)2
− 2µ2GM
r+
2µe1(αθ)
r2= 2µE(αr, αθ)
(5.9)
37

da cui, quadrando, si ottiene:Wθ =
∫ √2µe1(αθ)dθ
Wr =∫ √
2µ
(GMµ
r− e1(αθ)
r2+ E(αr, αθ)
)dr
(5.10)
In base al Teorema (2.1) si trova:pθ =
∂Wθ
∂θ=√
2µe1(αθ)
pr =∂Wr
∂r=
√2µ
(GMµ
r− e1(αθ)
r2+ E(αr, αθ)
) (5.11)
Sia W = Wr +Wθ, allora: η1 =
∂W
∂e1
η2 =∂W
∂E
(5.12)
da cui la trasformazione canonica:pr = pr(η1, η2, e1, E)
pθ = pθ(η1, η2, e1, E)e
r = r(η1, η2, e1, E)
θ = θ(η1, η2, e1, E)
che fornisce la soluzione di (5.4) con e1, E, η1, η2 costanti arbitrarie. Dalle (5.11) si ricava:p2r =2GMµ2
r− 2µe1(αθ)
r2+ 2µE(αr, αθ)
p2θ = 2µe1(αθ)(5.13)
che forniscono le relazioni tra i momenti generalizzati pr, pθ e le coordinate r, θ in termini dellecostanti e1, E. E immediato riscrivere (5.13) come:
e1 =p2θ2µ
E =1
2µp2r −
GMµ
r+
p2θ2µr2
(5.14)
38

La prima relazione, in accordo con l’osservazione fatta in precedenza su pθ, ci garantisce che e1sia il quadrato del modulo del momento angolare. Essa e costante essendo costante pθ (in basealla seconda del (5.4)). La seconda relazione e proprio l’integrale dell’energia, che e un integraleprimo del moto.
Il sistema (5.12) fornisce le equazioni esplicite del moto. Le (5.12) possono essere scritteesplicitamente (derivando sotto il segno di integrale le (5.10)) contengono implicitamente r, θ:
η1 =∫ θ0
µ√e1dθ −
∫ rr0
µ
r2dr√
E +GMµ
r− e1r2
η2 =∫ rr0
µdr
2√
GMµr− e1
r2+ E
(5.15)
In particolare, osserviamo che la prima delle (5.15) si puo scrivere nell seguente forma:
θ − θ′ = −∫
du√E +GMµu− e1u2
(5.16)
dove θ′ e una costante d’integrazione determinate dalle condizioni iniziali (non corrispondentenecessariamente all’angolo θ0 calcolato per t = 0). Poiche e1 corrisponde al quadrato del modulodel momento angolare verifica immediatamente che da (5.16) coincide con (3.25). Sostituendoil valore di e1 nella (5.16), dato che esso e corrispondente al quadrato del modulo del momentoangolare, e dividendo per esso si ottiene esattamente l’equazione (3.2.5).Ripetendo quindi gli stessi passaggi della sezione 3.2 del capitolo 1 ci hanno consentito di passaredall’equazione (5.16) all’equazione (3.2.7) si arriva anche in questo caso all’equazione dell’orbita:
1
r=µK2
L2
1 +
√1 +
2EL2
µK2cos(θ − θ′)
.
Abbiamo quindi riottenuto, come era prevedibile i risultati principali, stabiliti nel capitolo 1.
39

40

Appendice A
Discussione di Weierstrass
I problemi di dinamica spesso si riconducono ad un equazione del tipo:
q2 = f(q), (A.1)
con le condizioni iniziali:
q(0) = q0, q(0) = q0, (A.2)
dove la funzione f(q) e una funzione nota, mentre q = q(t) e la funzione incognita che si dovrebbetrovare. Supposto di voler studiare la (A.1) in un sottoinsieme in cui f(q) e positiva, si ottiene:
t =
∫ t
0
dt =
∫ q
q0
dr
±√f(r)
, (A.3)
dove ponendo F (q) =∫ qq0
dr
±√f(r)
si ottiene:
t = F (q). (A.4)
Invertendo la (A.4) otteniamo la funzione cercata q = q(t). Spesso questo non e cosı semplice,perche integrare o invertire una funzione non sono operazioni banali. Percio si studia solitamentel’equazione:
q = ±√f(q), (A.5)
dal punto di vista qualitativo ricostruiremo l’andamento della funzione q = q(t) a partire dalleproprieta note della f(q). Occorre distinguere diversi casi. La seguente trattazione qui sviluppatasegue quella esposta in [10]1.
1Discuteremo solo alcuni casi e non la totalita delle situazioni che si possono presentare.
41

(a) f(q) > 0In questo caso f(q) 6= 0 quindi il segno del radicale della (A.5) rimane sempre lo stesso,ossia quello che abbiamo all’istante iniziale. Si ha:
q =√f(q), se q0 > 0
q = −√f(q), se q0 < 0
Nel caso in cui valga la prima la funzione q = q(t) e monotona crescente, nel caso in cuivalga la seconda la funzione sara monotona decrescente.
(b) f(q) > 0 in q0 ≤ q < q1.Supponiamo che f(q) si annulli in q1 ie che lo zero abbia molteplicitamaggiore o uguale a due. Per fissare le idee sia q0 > 0.Il segno davanti alle (A.5) e (A.3) deve essere positivo per q0 ≤ q < q1. La q non raggiungemai il valore q1 in quanto l’integrale:∫ q1
q0
dq
(q − q1)√
(q − q1)s−2g(q)
diverge per s ≥ 1 e per questo motivo si parla di moto a meta asintotica verso q1.
(c) f(q) > 0 in q0 ≤ q < q1. Supponiamo che f(q) si annulli in q1 e che il corrispondente zeroabbia molteplicita uno (ossia f(q) si annulla in q1 mentre le sue derivate sono diverse dazero se valutate in quel punto). Per semplificare la trattazione, supponiamo q0 > 0. Ilsegno davanti alle (A.5) e (A.3) deve essere positivo per q0 ≤ q < q1. Essendo q1 uno zerodi molteplicita uno, l’integrale: ∫ q1
q0
dq
(q − q1)q(q)
converge. Quindi le ipotesi fatte su, f(q) implicano che f(q1) = 0 e f ′(q1) < 0 poiche laf(q) e decrescente in un intorno sinistro di q1.La q = q(t) valutata in t = t1 e tale che la sua derivata si annulla, mentre la derivataseconda e minore di zero2, quindi essa presenta un punto di massimo per t = t1.Rimane ora da studiare cosa succede se t > t1, poiche la q = q(t) ha un massimo in t = t1abbiamo che per t > t1 essa sara necessariamente decrescente e quindi q < 0.Si presentano i seguenti sottocasi (ricordando che q0 < 0):
1. Per q < q1 la f(q) rimane strettamente positiva allora la q(t) e monotona decrescente.
2. Supponiamo che per q < q1 la f(q) possieda per un certo valore q = q2 uno zero dimolteplicita maggiore o uguale a due. Poiche f(q) > 0 in q0 ≤ q < q1 allora si deveavere che q2 < q0 e si avra un moto a meta asintotica verso q2.
2Per rendersi conto di quest’ultima proprieta basta derivare la (A.1) rispetto al tempo (ottenendo 2q = f ′(q).
42

3. Supponiamo che per q < q1 la f(q) possieda per un certo valore q = q2 uno zero dimolteplicita uno. Ragionando come nel sottocaso precedente si trova che per q2 < q0si ha che f(q) > 0. Inoltre, la posizione di q2 viene raggiunta in un tempo finito, e sipuo dimostrare che per t = t2 la funzione q = q(t) possiede un punto di minimo.Per t > t2 la funzione q = q(t) diventa crescente e, dopo un intervallo di tempo dato
da T = −2∫ q2q1
dr
f(r), riacquista il suo valore iniziale q0, ossia essa riprende le stesse
caratteristiche che aveva al tempo t = 0. Si tratta di un moto periodico di periodo T .
43

44

Bibliografia
[1] A. Fasano e S. Marmi, Meccanica Analitica, Bollati Boringhieri, 1993.
[2] T. Levi-Civita e U. Amaldi, Lezioni di Meccanica Razionale, Volumi 1 e 2, ZanichelliEditore, Bologna (ristampa del 1974).
[3] J.M.A Danby, Fundamentals of Celestial Mechanics, Hardcover, 1988.
[4] H. Goldstein, C. Poole e J. Safko, Meccanica Classica, seconda edizione italiana, ZanichelliEditore.
[5] C.V.M. Van Der Mee, Dispense per un Corso di Meccanica, dispense online.
[6] L. Galgani e A. Carati, Dispense di Meccanica razionale, dispense online.
[7] J.R. Taylor, Meccanica Classica, Zanichelli Editore.
[8] L.D. Landau, E.M. Lifshitz, Fisica Teorica I-Meccanica, Editori riuniti.
[9] D. Boccaletti, G. Pucacco, Theory of Orbits. 1: Integrable System and Non-pertubativeMethods, Springer (1996).
[10] S. Nocilla, Meccanica Razionale, Editore Levrotto&Bella, Torino, ristampa Marzo 1982.
[11] J. Bertrand, Teorema relativo al moto di un punto attratto da un centro fisso, C.R. Acad.Sci, 77, 849-853, 1873.
[12] J. Hermann, Estratto da una lettera da Hermann a Bernoulli, Padova, 12 Luglio 1710,Storia della Reale Accademia delle Scienze, 1732, 519-521, 1710.
[13] J. Bernoulli, Estratto dalla risposta alla lettera da Bernoulli a Hermann, Basilea, 7 Ottobre1710, Storia della Reale Accademia delle Scienze,1732, 521-544, 1710.
[14] Ps. Laplace, Traite de mecanique celeste, Basilea, 7 Ottobre 1710, Storia della RealeAccademia delle Scienze,1, 165, 1799.
[15] C. Runge, Vektoranalysis, Leipzig, Hirzel, 1, 1919.
45

[16] W. Lenz, Uber den Bewegungsverlauf und Quantenzustande der gestorten Keplerbewegung,Zeitschrift fur Physik, 24, 197-207, 1924
[17] C.D. Pagani, S. Salsa, Analisi matematica, Vol. 1 e 2, Masson, 1998.
46