
Train Conformity (TCCS™) - Ansaldo STS | Global Product ... · del rotabile con quelle delle...
12
Components Train Conformity Check System (TCCS™)
Transcript of Train Conformity (TCCS™) - Ansaldo STS | Global Product ... · del rotabile con quelle delle...
ComponentsTrain ConformityCheck System(TCCS™)

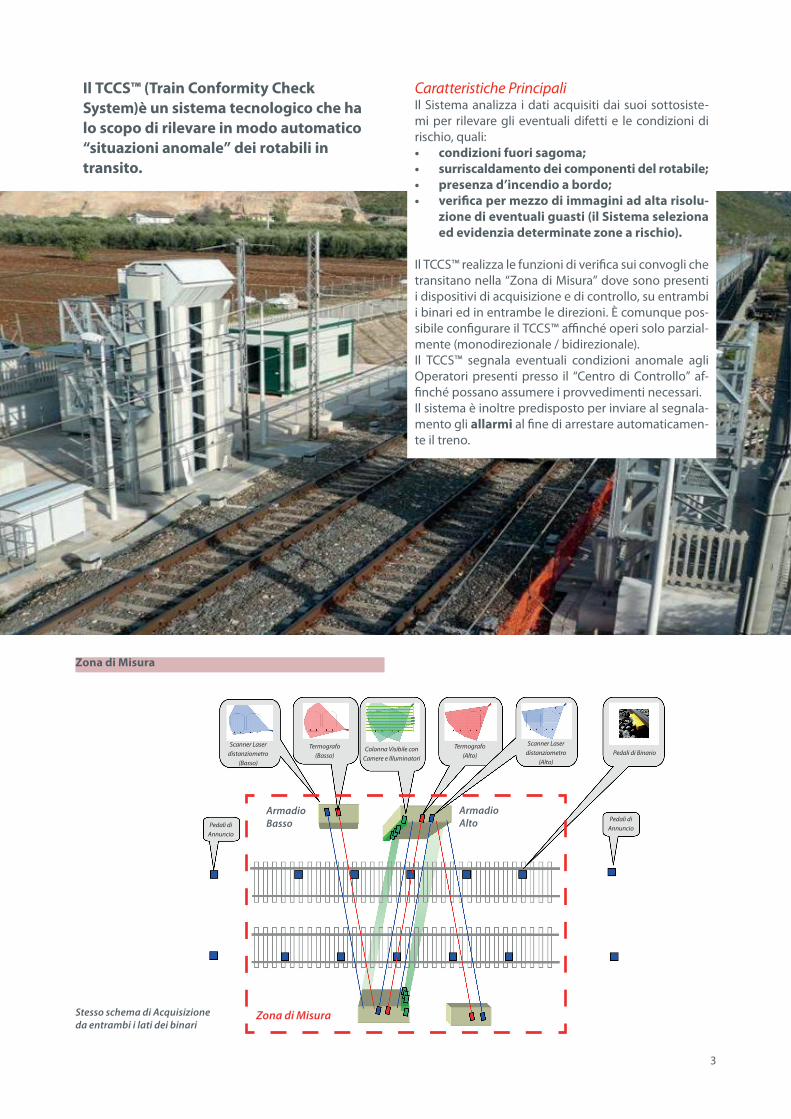
Caratteristiche PrincipaliIl Sistema analizza i dati acquisiti dai suoi sottosiste-mi per rilevare gli eventuali difetti e le condizioni di rischio, quali:• condizioni fuori sagoma; • surriscaldamento dei componenti del rotabile;• presenza d’incendio a bordo;• verifica per mezzo di immagini ad alta risolu-
zione di eventuali guasti (il Sistema seleziona ed evidenzia determinate zone a rischio).
Il TCCS™ realizza le funzioni di verifica sui convogli che transitano nella “Zona di Misura” dove sono presenti i dispositivi di acquisizione e di controllo, su entrambi i binari ed in entrambe le direzioni. È comunque pos-sibile configurare il TCCS™ affinché operi solo parzial-mente (monodirezionale / bidirezionale).Il TCCS™ segnala eventuali condizioni anomale agli Operatori presenti presso il “Centro di Controllo” af-finché possano assumere i provvedimenti necessari.Il sistema è inoltre predisposto per inviare al segnala-mento gli allarmi al fine di arrestare automaticamen-te il treno.
Il TCCS™ (Train Conformity Check System)è un sistema tecnologico che ha lo scopo di rilevare in modo automatico “situazioni anomale” dei rotabili in transito.
Stesso schema di Acquisizione da entrambi i lati dei binari
Armadio Basso
Scanner Laser distanziometro
(Basso)
Zona di Misura
Armadio Alto
Scanner Laser distanziometro
(Alto)
Termografo (Basso)
Termografo (Alto)
Pedali di Annuncio
Pedali di Annuncio
Pedali di BinarioColonna Visibile con Camere e Illuminatori
Zona di Misura
3
Composizione Sistema TCCSTM
Il Sistema TCCSTM può integrare i seguenti sottosistemi:• Sottosistema rilevamento riconoscimento rota-
bili: che realizza la funzionalità di Composizione e Spostamento;
• Sottosistema rilievo sagoma: che realizza la fun-zionalità di Acquisizione ed Analisi dei Profili dei Ro-tabili;
• Sottosistema termografo: che realizza la funzio-nalità di Acquisizione ed Analisi Termografica dei Rotabili;
• Sottosistema visibile con immagini ad alta riso-luzione: che realizza la funzionalità di Acquisizione Immagini ad Alta Risoluzione;
• Acquisizione Tag dei carri e locomotori: che rea-lizza la funzionalità di Identificazione dei carri prov-visti di Tag.
Come opera il Sistema TCCSTM
Il Sistema TCCS™ esegue le seguenti elaborazioni:• Identifica univocamente il convoglio con: ora/data/
binario/direzione di transito. Inoltre il Sistema può associare al transito, se disponibile, il numero del treno inserito dall’Operatore o ricevuto dal Sistema di Circolazione.
• Individua e classifica i singoli rotabili in tipologie standard.
• Produce eventuali allarmi, se confrontando i valori ricavati dalle misure dei sensori con i corrispondenti valori di soglia associati alla classificazione del rota-bili riscontra situazioni anomale. In generale ven-gono configurate più soglie per i diversi allarmi, ad esempio:• Allerta;• Allarmi.
• Memorizza e presenta al Centro di Controllo tutti gli allarmi generati dalle elaborazioni del TCCS™. Tali al-larmi vengono presentati sul terminale del Centro di Controllo per mezzo di una interfaccia Web.
• Sono inoltre disponibili a livello di Interfaccia Opera-tore i dati di transito e le immagini termografiche, di sagoma, e in alta risoluzione di tutti i treni transitati.
• I dati acquisiti, gli allarmi ed i risultati significativi dell’elaborazione sono memorizzati su disco, dove restano disponibili per la consultazione degli Ope-ratori.
• Gli Operatori possono accedere ai dati memorizza-ti, sia dalla postazione del Centro di Controllo, che dalla console di manutenzione posta nello Shelter (Garitta) e da una qualsiasi Postazione Web abilitata ad accedere al sistema TCCS™.
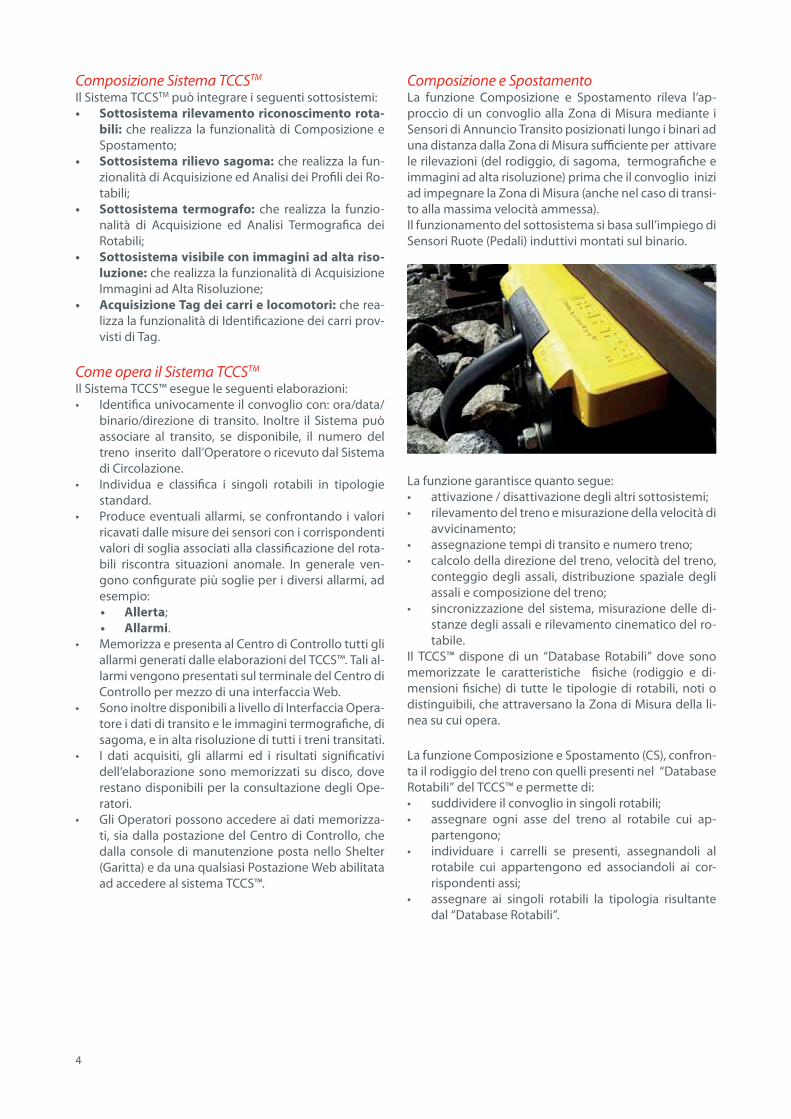
Composizione e SpostamentoLa funzione Composizione e Spostamento rileva l’ap-proccio di un convoglio alla Zona di Misura mediante i Sensori di Annuncio Transito posizionati lungo i binari ad una distanza dalla Zona di Misura sufficiente per attivare le rilevazioni (del rodiggio, di sagoma, termografiche e immagini ad alta risoluzione) prima che il convoglio inizi ad impegnare la Zona di Misura (anche nel caso di transi-to alla massima velocità ammessa).Il funzionamento del sottosistema si basa sull’impiego di Sensori Ruote (Pedali) induttivi montati sul binario.
La funzione garantisce quanto segue:• attivazione / disattivazione degli altri sottosistemi;• rilevamento del treno e misurazione della velocità di
avvicinamento;• assegnazione tempi di transito e numero treno;• calcolo della direzione del treno, velocità del treno,
conteggio degli assali, distribuzione spaziale degli assali e composizione del treno;
• sincronizzazione del sistema, misurazione delle di-stanze degli assali e rilevamento cinematico del ro-tabile.
Il TCCS™ dispone di un “Database Rotabili” dove sono memorizzate le caratteristiche fisiche (rodiggio e di-mensioni fisiche) di tutte le tipologie di rotabili, noti o distinguibili, che attraversano la Zona di Misura della li-nea su cui opera.
La funzione Composizione e Spostamento (CS), confron-ta il rodiggio del treno con quelli presenti nel “Database Rotabili” del TCCS™ e permette di:• suddividere il convoglio in singoli rotabili;• assegnare ogni asse del treno al rotabile cui ap-
partengono;• individuare i carrelli se presenti, assegnandoli al
rotabile cui appartengono ed associandoli ai cor-rispondenti assi;
• assegnare ai singoli rotabili la tipologia risultante dal “Database Rotabili”.
4
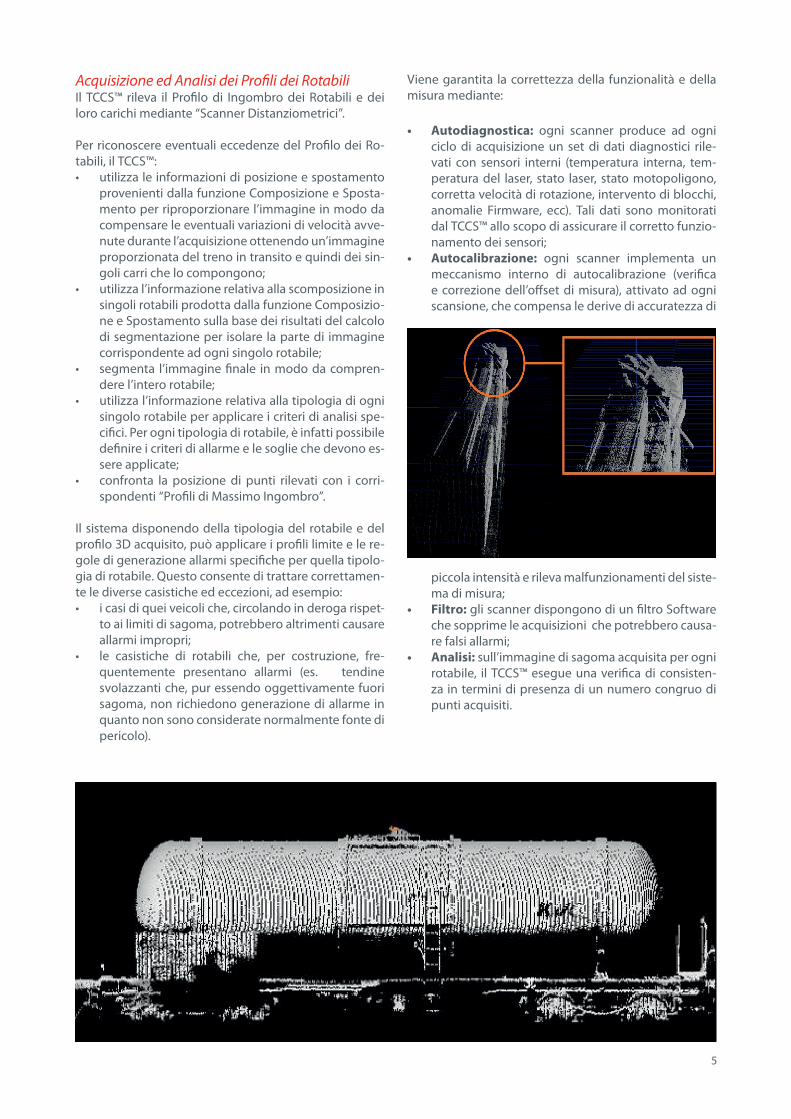
Acquisizione ed Analisi dei Profili dei RotabiliIl TCCS™ rileva il Profilo di Ingombro dei Rotabili e dei loro carichi mediante “Scanner Distanziometrici”.
Per riconoscere eventuali eccedenze del Profilo dei Ro-tabili, il TCCS™: • utilizza le informazioni di posizione e spostamento
provenienti dalla funzione Composizione e Sposta-mento per riproporzionare l’immagine in modo da compensare le eventuali variazioni di velocità avve-nute durante l’acquisizione ottenendo un’immagine proporzionata del treno in transito e quindi dei sin-goli carri che lo compongono;
• utilizza l’informazione relativa alla scomposizione in singoli rotabili prodotta dalla funzione Composizio-ne e Spostamento sulla base dei risultati del calcolo di segmentazione per isolare la parte di immagine corrispondente ad ogni singolo rotabile;
• segmenta l’immagine finale in modo da compren-dere l’intero rotabile;
• utilizza l’informazione relativa alla tipologia di ogni singolo rotabile per applicare i criteri di analisi spe-cifici. Per ogni tipologia di rotabile, è infatti possibile definire i criteri di allarme e le soglie che devono es-sere applicate;
• confronta la posizione di punti rilevati con i corri-spondenti “Profili di Massimo Ingombro”.
Il sistema disponendo della tipologia del rotabile e del profilo 3D acquisito, può applicare i profili limite e le re-gole di generazione allarmi specifiche per quella tipolo-gia di rotabile. Questo consente di trattare correttamen-te le diverse casistiche ed eccezioni, ad esempio:• i casi di quei veicoli che, circolando in deroga rispet-
to ai limiti di sagoma, potrebbero altrimenti causare allarmi impropri;
• le casistiche di rotabili che, per costruzione, fre-quentemente presentano allarmi (es. tendine svolazzanti che, pur essendo oggettivamente fuori sagoma, non richiedono generazione di allarme in quanto non sono considerate normalmente fonte di pericolo).
Viene garantita la correttezza della funzionalità e della misura mediante:
• Autodiagnostica: ogni scanner produce ad ogni ciclo di acquisizione un set di dati diagnostici rile-vati con sensori interni (temperatura interna, tem-peratura del laser, stato laser, stato motopoligono, corretta velocità di rotazione, intervento di blocchi, anomalie Firmware, ecc). Tali dati sono monitorati dal TCCS™ allo scopo di assicurare il corretto funzio-namento dei sensori;
• Autocalibrazione: ogni scanner implementa un meccanismo interno di autocalibrazione (verifica e correzione dell’offset di misura), attivato ad ogni scansione, che compensa le derive di accuratezza di
piccola intensità e rileva malfunzionamenti del siste-ma di misura;
• Filtro: gli scanner dispongono di un filtro Software che sopprime le acquisizioni che potrebbero causa-re falsi allarmi;
• Analisi: sull’immagine di sagoma acquisita per ogni rotabile, il TCCS™ esegue una verifica di consisten-za in termini di presenza di un numero congruo di punti acquisiti.
5
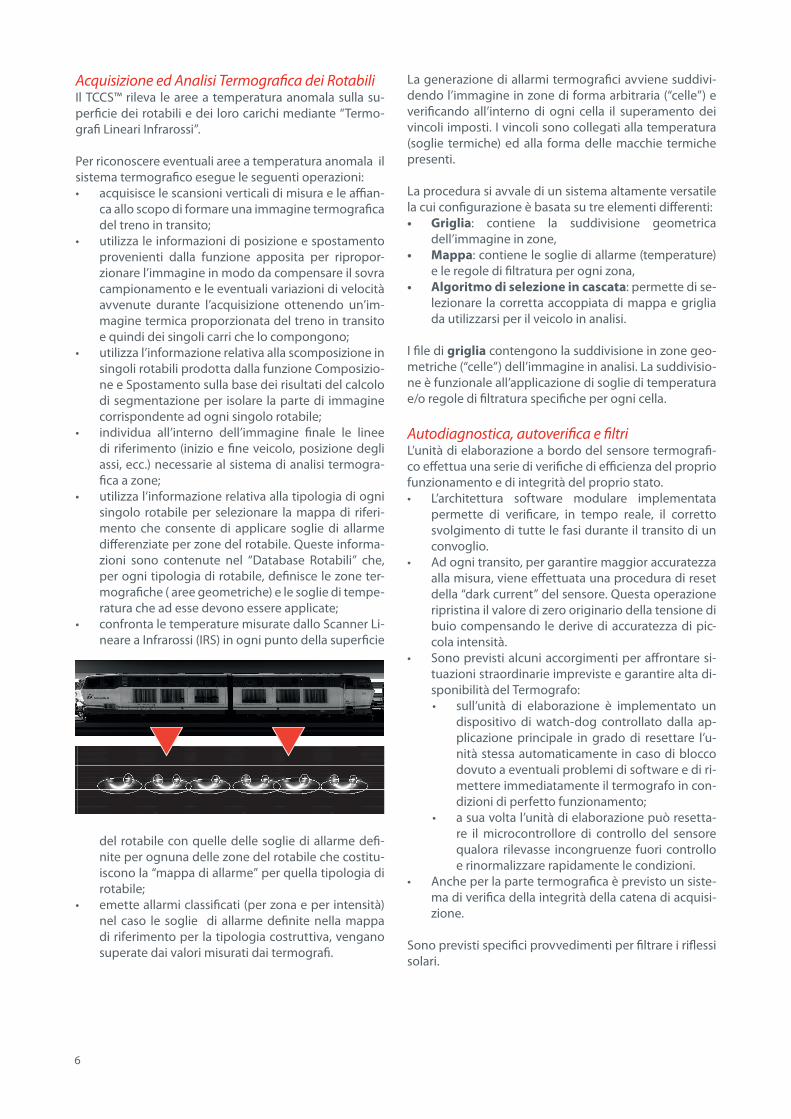
Acquisizione ed Analisi Termografica dei RotabiliIl TCCS™ rileva le aree a temperatura anomala sulla su-perficie dei rotabili e dei loro carichi mediante “Termo-grafi Lineari Infrarossi”.
Per riconoscere eventuali aree a temperatura anomala il sistema termografico esegue le seguenti operazioni:• acquisisce le scansioni verticali di misura e le affian-
ca allo scopo di formare una immagine termografica del treno in transito;
• utilizza le informazioni di posizione e spostamento provenienti dalla funzione apposita per ripropor-zionare l’immagine in modo da compensare il sovra campionamento e le eventuali variazioni di velocità avvenute durante l’acquisizione ottenendo un’im-magine termica proporzionata del treno in transito e quindi dei singoli carri che lo compongono;
• utilizza l’informazione relativa alla scomposizione in singoli rotabili prodotta dalla funzione Composizio-ne e Spostamento sulla base dei risultati del calcolo di segmentazione per isolare la parte di immagine corrispondente ad ogni singolo rotabile;
• individua all’interno dell’immagine finale le linee di riferimento (inizio e fine veicolo, posizione degli assi, ecc.) necessarie al sistema di analisi termogra-fica a zone;
• utilizza l’informazione relativa alla tipologia di ogni singolo rotabile per selezionare la mappa di riferi-mento che consente di applicare soglie di allarme differenziate per zone del rotabile. Queste informa-zioni sono contenute nel “Database Rotabili” che, per ogni tipologia di rotabile, definisce le zone ter-mografiche ( aree geometriche) e le soglie di tempe-ratura che ad esse devono essere applicate;
• confronta le temperature misurate dallo Scanner Li-neare a Infrarossi (IRS) in ogni punto della superficie
del rotabile con quelle delle soglie di allarme defi-nite per ognuna delle zone del rotabile che costitu-iscono la “mappa di allarme” per quella tipologia di rotabile;
• emette allarmi classificati (per zona e per intensità) nel caso le soglie di allarme definite nella mappa di riferimento per la tipologia costruttiva, vengano superate dai valori misurati dai termografi.
La generazione di allarmi termografici avviene suddivi-dendo l’immagine in zone di forma arbitraria (“celle”) e verificando all’interno di ogni cella il superamento dei vincoli imposti. I vincoli sono collegati alla temperatura (soglie termiche) ed alla forma delle macchie termiche presenti.
La procedura si avvale di un sistema altamente versatile la cui configurazione è basata su tre elementi differenti:• Griglia: contiene la suddivisione geometrica
dell’immagine in zone,• Mappa: contiene le soglie di allarme (temperature)
e le regole di filtratura per ogni zona,• Algoritmo di selezione in cascata: permette di se-
lezionare la corretta accoppiata di mappa e griglia da utilizzarsi per il veicolo in analisi.
I file di griglia contengono la suddivisione in zone geo-metriche (“celle”) dell’immagine in analisi. La suddivisio-ne è funzionale all’applicazione di soglie di temperatura e/o regole di filtratura specifiche per ogni cella.
Autodiagnostica, autoverifica e filtriL’unità di elaborazione a bordo del sensore termografi-co effettua una serie di verifiche di efficienza del proprio funzionamento e di integrità del proprio stato.• L’architettura software modulare implementata
permette di verificare, in tempo reale, il corretto svolgimento di tutte le fasi durante il transito di un convoglio.
• Ad ogni transito, per garantire maggior accuratezza alla misura, viene effettuata una procedura di reset della “dark current” del sensore. Questa operazione ripristina il valore di zero originario della tensione di buio compensando le derive di accuratezza di pic-cola intensità.
• Sono previsti alcuni accorgimenti per affrontare si-tuazioni straordinarie impreviste e garantire alta di-sponibilità del Termografo:• sull’unità di elaborazione è implementato un
dispositivo di watch-dog controllato dalla ap-plicazione principale in grado di resettare l’u-nità stessa automaticamente in caso di blocco dovuto a eventuali problemi di software e di ri-mettere immediatamente il termografo in con-dizioni di perfetto funzionamento;
• a sua volta l’unità di elaborazione può resetta-re il microcontrollore di controllo del sensore qualora rilevasse incongruenze fuori controllo e rinormalizzare rapidamente le condizioni.
• Anche per la parte termografica è previsto un siste-ma di verifica della integrità della catena di acquisi-zione.
Sono previsti specifici provvedimenti per filtrare i riflessi solari.
6

Acquisizione Immagini in Alta RisoluzioneIl TCCS™ rileva immagini ad alta risoluzione mediante ca-mere in bianco e nero lineari ad alta definizione.
Per elaborare le immagini ad alta risoluzione il sistema d’acquisizione immagini ad alta risoluzione esegue le se-guenti operazioni:• acquisisce le scansioni verticali di misura e le affian-
ca allo scopo di formare una immagine del treno in transito;
• utilizza le informazioni di posizione e spostamento provenienti dalla funzione apposita per ripropor-zionare l’immagine in modo da compensare il sovra campionamento e le eventuali variazioni di velocità avvenute durante l’acquisizione ottenendo un im-magine proporzionata del treno in transito e quindi dei singoli carri che lo compongono;
• utilizza l’informazione relativa alla scomposizione in singoli rotabili prodotta dalla funzione Composizio-ne e Spostamento sulla base dei risultati del calcolo di segmentazione per isolare la parte di immagine corrispondente ad ogni singolo rotabile;
• individua all’interno dell’immagine finale le linee di riferimento (inizio e fine veicolo, posizione degli assi, ecc.);
• utilizza l’informazione relativa alla tipologia di ogni singolo rotabile per selezionare la mappa di riferi-mento che consente di scegliere le aree d’interesse che si vogliono visualizzare automaticamente per ogni tipo di rotabile. Queste informazioni sono con-tenute nel Database Rotabili che, per ogni tipologia di rotabile, definisce le zone d’interesse che devono essere visualizzate.
Il sistema opera sia di giorno che di notte, utilizzando un’illuminazione NIR (quasi-infrarossa) allo stato solido, la quale evita qualsiasi disturbo ai macchinisti.
Le immagini ad alta risoluzione vengono utilizzate dagli Operatori remoti per verificare gli allarmi generati, senza necessità di arrestare i convogli. Le immagini vengono memorizzate per l’utilizzo on-line e off-line.Il sistema-visibile può essere configurato e può selezio-nare in automatico i più importanti componenti della vettura sulla base dei requisiti specifici del Cliente, ad esempio:• ceppi dei freni;• organi di aggancio;• molle delle sospensioni;• leve di disaccoppiamento;• cunei anti-attrito ed estremità delle aree delle travi
ballerine;• gradini delle soglie;• cappucci terminali dei cuscinetti;• telaio laterale del carrello;• condotta del freno.
Il sottosistema di produzione immagini in alta risoluzio-ne genera un’immagine ad altissima risoluzione di circa 70 MB per ciascuna vettura. A dipendere della banda a disposizione e per ridurre il più possibile i tempi di tra-smissione, tali immagini vengono compresse del 90%, in modo da ottenere immagini di dimensioni medie di 7 MB. Considerando ad esempio una larghezza di banda pari a 20 Mbps, tutto ciò si traduce in un ritardo di circa 3 secondi: è prevista la possibilità di regolazione in base alla larghezza di banda disponibile. Ciò non riguarda le parti evidenziate selezionate che si vogliono vedere au-tomaticamente, le quali verranno messe a disposizione in alta risoluzione.
Per assicurare la correttezza della funzionalità e della mi-sura:• autodiagnostica: ogni camera produce un set di
dati diagnostici. Tali dati sono monitorati dal TCCS™ allo scopo di generare autodiagnostica ed assicura-re il corretto funzionamento delle camere.
7

Acquisizione Tag di Carri e Locomotori (Radio Frequency Identification)Il sistema consente di acquisire il Tag relativo ai Carri e Locomotori che compongono un treno. I dati acquisiti sono successivamente associati dal Sistema agli allarmi presentati ed alla composizione del treno. Sarà così pos-sibile mantenere la storia ed eseguire analisi nel tempo dei vari Carri e Locomotori transitati nella Zona di Misura.
Interfaccia con Sistemi di Comando e Controllo della CircolazioneScopo principale dell’interfacciamento è l’acquisizione del “numero treno” per identificare in automatico i tran-siti sulla Interfaccia Operatore e nell’archivio. Il Sistema di Comando e Controllo, se predisposto, può inviare il “numero treno” dei treni in approccio alle Zone di Misura in cui si trova il portale TCCS™.In caso di indisponibilità di collegamento con il Siste-ma di Comando e Controllo, l’Interfaccia Operatore del TCCS™ consente l’inserimento del “numero treno” da parte dell’Operatore.
Scopo dell’interfacciamento è l’invio degli allarmi per consentire al Sistema di Gestione della Circolazione, l’ar-resto del treno.L’interfacciamento avviene normalmente attraverso la rete, presso il Centro di Controllo.Si può inviare la composizione reale del treno al Centro di Controllo.
Manutenibilità e Sicurezza degli Operatori di Manutenzione
Si sintetizzano in questo capitolo i criteri che guidano il progetto ai fini della manutenibilità del Sistema e della sicurezza degli Operatori di manutenzione:• il TCCS™ è progettato e realizzato in modo da non
ostacolare la normale manutenzione degli impianti ferroviari che gli sono contigui o prossimi. Il TCCS™ è progettato e realizzato in modo tale che le emissioni di radiazione ottica di qualunque componente ra-
diante non risultino pericolose, ai sensi delle vigenti normative, per i passeggeri, per il personale viag-giante, per gli addetti alla manutenzione ferroviaria e per chiunque si trovi sulla sede ferroviaria o al di fuori di essa nei dintorni del sito di installazione;
• le radiazioni luminose prodotte dai laser scanner del TCCS™ risultano invisibili al personale di macchina. Ricordiamo che i termografi, essendo completa-mente passivi, non emettono alcuna radiazione;
• il TCCS™ è progettato in modo da consentire lo start-up anche da remoto;
• il TCCS™ è progettato e realizzato in modo tale che le operazioni di manutenzione ordinaria e la sosti-tuzione dei componenti siano realizzabili in modo agevole e sicuro per il personale addetto agli inter-venti;
• in particolare l’accesso ai sensori per le attività di manutenzione è previsto per mezzo di passerelle fisse in modo da consentire comodamente l’esecu-zione di eventuali operazioni di verifica e sostituzio-ne anche in corso del normale esercizio della linea;
• gli apparati di elaborazione sono ospitati in uno Shelter (Garitta) presso la “Zona di Misura”, sufficien-temente ampia da consentire ai manutentori di ope-rare al riparo dalle intemperie;
• il TCCS™ è progettato e realizzato in modo da evi-tare che qualsiasi suo componente installato in po-sizione elevata possa staccarsi accidentalmente ed arrecare pericolo ai convogli in transito;
• il TCCS™ è progettato in modo tale che i suoi com-ponenti soggetti a calibrazione siano pre-calibrati in fabbrica (prima dell’installazione o a seguito di ripa-razioni in fabbrica) e dotati ove opportuno di sistemi di autocalibrazione. Grazie alle soluzioni sviluppate, la sostituzione di un sensore non richiede alcun suc-cessivo riallineamento geometrico del sensore, gra-zie alla ripetibilità dell’accoppiamento tra la sede del sensore ed il sensore stesso;
• l’allineamento geometrico del TCCS™, ovvero tutto quanto debba essere eseguito in relazione alla re-golazione o alla variazione del puntamento dei di-spositivi ottici di rivelazione in sede di installazione, è realizzato secondo apposite procedure documen-tate ed assistite da appositi tool;
• il TCCS™ dispone di specifiche procedure documen-tate ed assistite da appositi tool per la verifica e l’e-ventuale riconfigurazione geometrica del sistema in relazione agli spostamenti del binario (naturale subsidenza, interventi di manutenzione per rincalzi, livellamenti, risanamenti massicciata);
• tutti i materiali utilizzati nel Sistema sono igni-fughi e non rilascianti gas tossici;
• il TCCS™ non interferisce con i regimi di circolazione, con i sistemi di alimentazione e con i sistemi di con-trollo marcia del treno.
8
Interfaccia Operatore (HMI)
L’Interfaccia Operatore proposta è derivata dall’espe-rienza maturata nell’operatività di diverse installazioni del TCCS™.L’Interfaccia Operatore è basata su tecnologia WEB. L’accesso avviene con un normale PC dotato di browser standard.Il sistema gestisce le identità degli Operatori. L’accesso è protetto da password individuali.
L’Interfaccia Operatore consente anche di accedere ad informazioni di autodiagnostica maggiormente articola-te ed in particolare:• autodiagnostica relativa alla acquisizione ed elabo-
razione del transito di un treno;• autodiagnostica relativa allo stato dei componenti
del TCCS™;• autodiagnostica relativa agli interfacciamenti con i
sistemi esterni;• annotazioni associate agli allarmi, utilizzabili ad esem-
pio per classificarli in base a tipologie di dettaglio.
L’Operatore può inoltre registrare:• annotazioni associate ai treni transitati, per eviden-
ziare eventi notevoli;• annotazioni associate agli allarmi, utilizzabili ad
esempio per classificarli in base alle tipologie di dettaglio (es. sportello aperto, carico spostato ecc.) per i fini statistici.
L’Interfaccia Operatore prevede inoltre una sezione, ri-servata al manutentore, per la configurazione delle so-glie di allarme relative all’analisi termografica e di profilo.
Tutte le operazioni effettuate dall’Operatore con il Lo-gin/logoff, riconoscimento di allarmi, introduzione di note sono registrate su Database in modo permanente per un periodo di tempo concorde con il dimensiona-mento fisico dell’HW. Il sistema dispone di una funzione di Backup che garantisce la non perdita di dati in caso di malfunzionamenti HW ai supporti di memorizzazione.
L’interfaccia consente all’Operatore di:• Visualizzare la lista dei treni transitati nel sito di in-
stallazione;• Evidenziare eventuali allarmi con indicazioni visive
ed acustiche (se necessario);• Visualizzare i dettagli dell’allarme;• Gestire il riconoscimento degli allarmi transiti;• Gestire i dati, le misure e le immagini (immagini ad
alta risoluzione, immagini in 3D a scansione laser, immagini termografiche) del vagone selezionato;
• Tenere traccia delle annotazioni e osservazioni dell’operatore relativamente agli allarmi transiti;
• Visualizzare lo stato diagnostico;• Attivare/disattivare ogni singolo sottosistema.
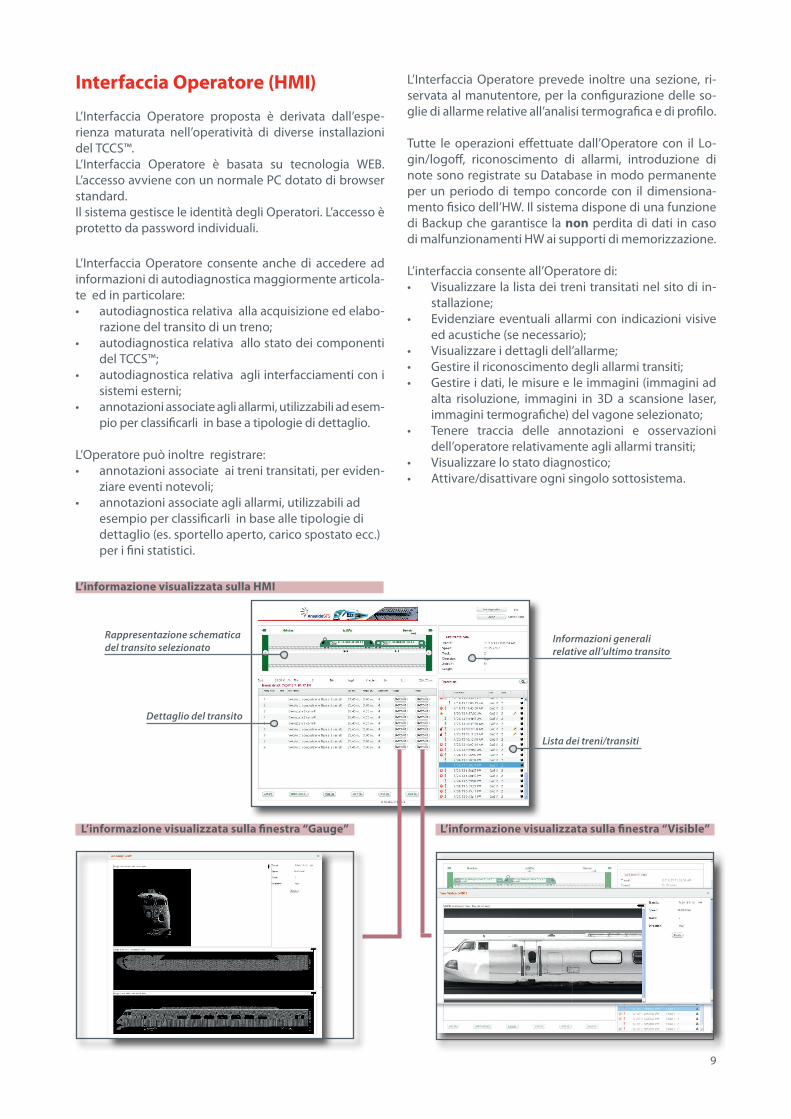
Rappresentazione schematica del transito selezionato
Dettaglio del transito
Lista dei treni/transiti
Informazioni generalirelative all’ultimo transito
L’informazione visualizzata sulla HMI
L’informazione visualizzata sulla finestra “Visible”L’informazione visualizzata sulla finestra “Gauge”
9

Sistema di Rilevamento Temperatura Sottocassa TrenoIl Sistema di Rilevamento Temperatura del Sottocassa del Treno è in grado di rilevare eventuali anomalie termi-che del convoglio in transito e segnalarle in tempo reale all’Operatore.
Il Sistema di Rilevamento Temperatura Sottocassa del Treno è stato realizzato in funzione di specifici requisiti del Cliente, questo è un esempio dell’elevato grado di customizzazione, grazie alla facile configurazione e mo-dularità del TCCS™.
Il Sistema è configurabile per qualsiasi tipo di treno. Il sistema è composto dai seguenti sottosistemi:• sottosistema rilevamento e riconoscimento rotabili;• sottosistema analisi termografica;• acquisizione Tag dei carri e locomotori (Radio Fre-
quency IDentificator).
I Sensori Ruote (Pedali) rilevano il passaggio del treno e attivano l’acquisizione dei dati, inoltre rilevano la distri-buzione temporale del passaggio degli assi, permetten-do di determinare la posizione, il tipo e la velocità del treno, anche qualora la sua velocità vari durante il tran-sito.Lo Scanner Lineare a Infrarossi scannerizza il sottocassa di ogni veicolo rilevando la temperatura acquisendo del-le immagini termografiche lineari.Il server di elaborazione dei dati correla le immagini termografiche lineari con le informazioni ottenute dai sensori di ruota ottenendo una mappa termografica del sottocassa del treno.L’elevato grado di configurabilità del sistema permette di analizzare diversi componenti del sottocassa del tre-no suddividendo la mappa termografica in zone e appli-cando la soglia più adatta sulle zone individuate.
È possibile individuare temperature critiche tramite l’ap-plicazione di soglie di allarme in modo tale da prevenire eventuali incidenti, garantendo così la sicurezza del tre-no in transito.
Il Sistema di Rilevamento della Temperatura del Sotto-cassa del Treno controlla e monitorizza i diversi compo-nenti quali:• Convertitore Statico;• Cassone Chopper;• Dischi Freno;• Riduttore;• Batterie;• Compressore Aria;• Motore.
Componenti Monitorati dal Sistema
Convertitore statico Cassone Chopper
Batterie
Dischi Freno
Compressore aria
Riduttore
Motore
Disco Freno: Temperatura sopra la soglia
10

© Property of Ansaldo STS SpA, 2014, all rights reserved.The copying, reproduction and use of this work in any form whatsoever is forbidden without the written authorization of Ansaldo STS SpA.
Ansaldo STS SpAVia Paolo Mantovani 3 – 516151 Genoa – Italywww.ansaldo-sts.com


















