GEODESIA = scienza che si occupa della determinazione della forma e delle dimensioni della terra.

Regione Toscana
Università degli studi di Firenze
Prof. Fausto Sacerdote
Topografia
e cartografia digitale
Capitolo 3
Geodesia
dispense del corso
Modulo Professionalizzante
Corso per Tecnico in Cartografia Tematica
per i Sistemi Informativi Territoriali

GEODESIA
1. Il campo della gravita
Molti tipi di misure geodetiche e topografiche con lo scopo di determinare la posizione nello spazio di puntisulla superficie terrestre hanno come riferimento la verticale nel punto di stazione. Tale direzione, che equella delle linee di forza del campo della gravita, e facilmente materializzabile, essendo quella assunta dalfilo a piombo, cioe da un filo vincolato ad un sostegno ad una estremita e recante una massa all’estremitaopposta.
Un primo esempio e la misura astronomica della latitudine, che e il complementare dell’angolo fra la direzionedella verticale e quella del polo celeste (ovvero il punto fisso attorno a cui avviene la rotazione apparentedella volta celeste). Va poi ricordato che per le misure angolari l’asse principale del teodolite e posto nelladirezione della verticale, e che per la livellazione geometrica l’asse di collimazione del livello e posto nel pianoorizzontale, ovvero perpendicolarmente alla verticale.
Il campo della gravita interviene quindi nella maggior parte delle misure, che non hanno quindi una naturapuramente geometrica. Infatti, quando si tratta di definire le relazioni spaziali fra punti diversi, a cuicorrispondono direzioni della verticale diverse, e necessario conoscere come la verticale varia al variare delpunto.
Diversa e la situazione quando il posizionamento si basa su segnali provenienti da satelliti artificiali; in talcaso infatti, per quanto il campo della gravita intervenga ancora nello studio delle orbite dei satelliti, hannoimportanza le caratteristiche globali del campo e non il suo comportamento locale nei punti di cui si vuoledeterminare la posizione.
Occorre quindi investigare brevemente le proprieta del campo gravitazionale g0 . In una prima grossolanaapprossimazione si puo dire che esso e vicino a un campo centrale (quello generato da una massa puntiformeo a simmetria sferica, della forma gs = −kMr/r3 , dove M e la massa, k la costante gravitazionale, r ilvettore congiungente il centro di massa con il punto in cui si valuta il campo). Sulla superficie della terra il suomodulo e approssimativamente costante (dell’ordine di 9.8 m/sec2) e la sua direzione e approssimativamenteradiale (verso il centro di massa della terra); le sue superfici equipotenziali sono approssimativamente sferiche.Un’analisi piu accurata mostra, come si vedra in seguito con maggiori dettagli, che la superficie equipotenzialea livello degli oceani e ben approssimabile con un ellissoide biassiale prolato con schiacciamento di circa 1/300,corrispondente ad un differenza fra i semiassi dell’ordine di 20 Km.
E da ricordare che il potenziale gravitazionale V (definito da ∇V = g0 ) verifica l’equazione di Poisson:
∇2V = −4πkρ (1.1)
( ∇2 = (∂2/∂x2) + (∂2/∂y2) + (∂2/∂z2) operatore di Laplace; ρ densita puntuale); quindi all’esternodella massa che lo genera il potenziale gravitazionale e una funzione armonica, ovvero verifica l’equazione diLaplace: ∇2V = 0 .
Va osservato che, essendo le misure eseguite sulla terra, che e in rotazione rispetto ad un riferimento inerziale,l’accelerazione di gravita non e separabile da quella centrifuga, che e ortogonale all’asse di rotazione eproporzionale alla distanza da esso, e percio massima all’equatore, dove ha anche la stessa direzione dellagravita. Il modulo dell’accelerazione centrifuga all’equatore si calcola immediatamente dalla formula a =ω2r , dove ω 7.29 · 10−5 sec−1 e la velocita angolare della rotazione terrestre e r 6378Km e ilraggio equatoriale; risulta a 3.39 · 10−2 m/sec2 , ovvero circa 1/300 della gravita. D’ora in poi per campodella gravita (indicato con g ) si intende il risultante della gravita e della accelerazione centrifuga; poicheentrambe sono conservative, si puo parlare di potenziale della gravita (indicato con W , che e il risultantedei due: ∇W = g . Poiche il potenziale centrifugo ha l’espressione Vc = (1/2)ω2(x2 + y2) e ∇2Vc = 2ω2 ,si ha anche ∇2W = 2ω2 .
1
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
1

2. Geoide ed ellissoide
Misure accurate mostrano che sulla superficie della terra sia il modulo sia la direzione del campo dellagravita hanno piccole variazioni irregolari, dovute ad una distribuzione irregolare delle masse; anche lesuperfici equipotenziali, che sono in ogni punto ortogonali alla direzione del campo, hanno forma irregolare.Non e quindi possibile stabilire una relazione semplice fra la posizione relativa di due punti e le accelerazionigravitazionali in tali punti.
Fra le infinite superfici equipotenziali del campo della gravita, corrispondenti ai diversi livelli del potenziale,viene scelta come riferimento una particolare approssimativamente coincidente con la superficie degli oceani,che viene detta geoide. In realta, anche mediando rispetto a variazioni rapide nel tempo (moti ondosi, maree),la superficie degli oceani non e esattamente equipotenziale, poiche sono presenti altri campi di forze (legatia rotazione terrestre, situazione climatica globale, temperatura) che determinano deviazioni stazionarie,evidenziate, ad esempio, dalla presenza di correnti oceaniche. Sui continenti il geoide e molto piu regolaredella superficie fisica della terra, nonstante le masse delle montagne influiscano sul suo andamento, e puoessere separata da essa anche di qualche Km.
Come si e gia accennato, la superficie del geoide e ben approssimabile con un ellissoide biassiale: innanzitutto,scegliendo opportunamente i parametri geometrici dell’ellissoide (semiasse maggiore a e schiacciamentof = (a− b)/a , dove b e il semiasse minore) e definendo opportunamente la sua localizzazione (ad esempio,con il centro di simmetria coincidente con il centro di massa della terra e l’asse di simmetria coincidentecon l’asse di rotazione della terra), si puo fare in modo che lo scostamento fra ellissoide e geoide (dettoondulazione del geoide) non superi qualche decina di metri; inoltre la superficie del geoide e abbastanzaregolare, tanto che la direzione della verticale in un punto del geoide, che e ortogonale al geoide stesso, sidiscosta dalla normale all’ellissoide per quel punto di un angolo (detto deviazione della verticale) che ingenerale non supera i 20 arcsec ( 10−4 rad, corrispondente ad una variazione di ondulazione del geoidedi circa 1 m ogni 10 Km. Piu precisamente, in termini degli angoli Φ , Λ che individuano la direzionedi g (latitudine e longitudine astronomica) e degli angoli φ , λ della normale all’ellissoide (latitudine elongitudine geodetica) e possibile esprimere le componenti della deviazione della verticale lungo il meridianoe il parallelo:
ξ = Φ − φ
η = (Λ − λ) cos φ(2.1)
3. Campo normale. Anomalia di gravita
L’introduzione dell’ellissoide e utile, oltre che per ragioni geometriche, anche per lo studio del campo dellagravita. E infatti possibile definire un campo gravitazionale generato da una massa racchiusa entro l’ellissoide,che abbia l’ellissoide stesso come superficie equipotenziale (ellissoide di livello); inoltre, questa determinazionee univoca quando sia fissata la massa totale e, se si vuol tenere conto anche dell’accelerazione centrifuga, lavelocita angolare di rotazione. E quindi naturale fissare massa e velocita angolare uguali a quelle della terra;il campo ottenuto (detto campo normale e denotato con γ ) e il corrispondente potenziale (denotato conU ) differiscono poco dal campo e dal potenziale della gravita terrestre, e le piccole differenze si prestanobene per rappresentare le irregolarita del campo terrestre.
Precisamente, i parametri adottati ufficialmente dall’Assemblea IUGG di Canberra nel 1979 (”Sistema diriferimento geodetico 1980”) sono
a = 6 378 137 m
kM = 3986 005 × 108 m3s−2
f−1 = 298.257222101
ω = 7 292 115 × 10−11 rad s−1
2
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
2

La differenza fra il potenziale della gravita W (P ) e il potenziale normale U(P ) e detta potenziale residuoe viene usualmente denotata T (P ) . Si osservi che in generale il potenziale di un campo vettoriale e definitoa meno di una costante additiva. Tuttavia, per quanto riguarda W e U , la costante e fissata se si richiedeche la parte puramente gravitazionale (ottenuta sottraendo il termine centrifugo) tenda a 0 al tendere ainfinito della distanza dall’origine.
Il potenziale residuo e la grandezza fondamentale alla base delle teorie analitiche del campo gravitazionale;in funzione di essa vengono espresse le diverse grandezze geodetiche.
Se si sceglie l’ellissoide di riferimento in modo che il potenziale normale sulla sua superficie sia uguale alpotenziale della gravita sul geoide, allora, se P e un punto sul geoide e P0 e il punto di incontro dellanormale all’ellissoide per P e l’ellissoide stesso, e valida la seguente formula:
T (P ) = W (P ) − U(P ) = −(U(P ) − U(P0)
) −∂U
∂n|PP0| = γ(P0)N (3.1)
(formula di Bruns). Si stabilisce quindi una relazione di proporzionalita fra l’ondulazione del geoide e ilpotenziale residuo. Proprio facendo uso di questa semplice relazione si giunge alla determinazione del geoideattraverso il calcolo del potenziale residuo.
Partendo dalla definizione del potenziale residuo, si ricava immediatamente che la differenza fra i modulidella gravita effettiva e della gravita normale e data approssimativamente da
g(P ) − γ(P ) −∂T
∂n(3.2)
dove n e la direzione normale all’ellissoide. L’approssimazione e dovuta al fatto che in realta i vettori g eγ non hanno esattamente la stessa direzione.
In realta la differenza in (3.2) non e direttamente calcolabile, dato che in generale la posizione del punto Pnon e conosciuta. E quindi necessario calcolare la gravita normale in un punto le cui coordinate sono note,ad esempio nel punto P0 sopra menzionato, che sta sull’ellissoide. Corrispondentemente, si introduce laanomalia di gravita, data da
∆g(P0) ≡ g(P ) − γ(P0) =(g(P ) − γ(P )
)+
(γ(P ) − γ(P0)
) −∂T
∂n+
∂γ
∂nN = −∂T
∂n+
1γ
∂γ
∂nT
(3.3)
dove nell’ultimo passaggio si e applicata la formula di Bruns.
La (3.3) puo essere semplificata introducendo la approssimazione sferica, per cui la direzione normaleall’ellissoide e sostituita da quella radiale, e il modulo della gravita normale e dato da γ = (kM/r2) ;si ottiene immediatamente γ−1(∂γ/∂n) = −(2/r) , da cui
∆g(P0) = −∂T
∂r− 2
rT (3.4)
NOTA: usare l’approssimazione sferica significa semplicemente adottare le formule approssimate viste sopraper ∆g , che e una quantita piccola; da un punto di vista geometrico, la superficie di riferimento restal’ellissoide, e sui suoi punti vengono calcolate le quantita geodetiche.
Partendo dalla (3.4) e possibile ricavare, mediante integrazione, un’espressione esplicita per T in funzionedi ∆g :
T (P ) =R
4π
∫Σ0
S(ψPP ′)∆g(P ′) dσP ′ (3.5)
3
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
3

dove ψPP ′ e la distanza angolare fra il punto fisso P e il punto variabile P ′ , S e una funzione (nucleodi Stokes) la cui espressione e nota; l’integrazione e eseguita rispetto a tutte le direzioni della normaleall’ellissoide, al variare di P ′ sull’intero ellissoide ( dσP ′ = cos φP ′dφP ′dλP ′ ).
E quindi possibile in linea di principio, conoscendo i valori dell’anomalia di gravita su tutto l’ellissoide,calcolare il potenziale residuo, e quindi, usando la formula di Bruns, l’ondulazione del geoide.
Nella pratica il calcolo del geoide e un’operazione piuttosto complicata su cui non e possibile scendere indettagli in questa sede. Ci si limita qui a due osservazioni:
- la (3.5) richiede di conoscere le anomalie di gravita sull’ellissoide, e quindi di misurare la gravita sul geoide(vedi (3.3)). In realta, invece, le misure di gravita vengono eseguite sulla superficie della terra, che suicontinenti e separata dal geoide da masse di terra emersa. La (3.5) non puo essere quindi usata direttamentee richiede adeguate modifiche;
- il contributo principale all’integrale in (3.5) viene da regioni prossime al punto P . Quindi e possibileutilizzare misure accurate della gravita soltanto in un’area limitata intorno a P , mentre all’esterno ditale area e possibile, senza commettere errori rilevanti, usare valori approssimati dell’anomalia di gravita,che possono essere ottenuti da modelli globali di geopotenziale ricavati prevalentemente da osservazioni dasatellite.
4. Geodesia spaziale
La geodesia moderna si basa in gran parte su dati acquisiti da satelliti artificiali. Ad esempio, lo studiodelle orbite di un gran numero di satelliti ha fornito informazioni importanti sulla struttura del campo dellagravita, che dipende dalla distribuzione delle masse nel corpo della terra. Ad esempio, lo studio delle orbitedi un gran numero di satelliti ha fornito informazioni importanti sulla struttura del campo della gravita, chedipende dalla distribuzione delle masse nel corpo della terra. Se un’irregolarita superficiale nella distribuzionedi massa puo essere evidenziata da misure locali di gravita eseguite sulla superficie, irregolarita piu profondehanno effetti su regioni molto estese, che possono essere ben evidenziati dall’osservazione delle orbite deisatelliti. Grande importanza hanno avuto nell’ultimo decennio i satelliti altimetrici, che sono in grado dimisurare con grande precisione la loro altezza sulla superficie degli oceani, che coprono circa il 70 % dellasuperficie terrestre; la conoscenza delle loro orbite fornisce quindi informazioni sulla forma della terra.
I satelliti artificiali vengono poi usati per il posizionamento terrestre: viene misurata, con tecniche diverse, ladistanza (range) (laser, GPS), o la variazione di distanza (range-rate) (Doppler, ora in disuso) fra il satelliteo la costellazione di satelliti e la stazione. Se la posizione dei satelliti e nota, misure ripetute consentono dideterminare univocamente la posizione della stazione.
E’ quindi di fondamentale importanza la determinazione dell’orbita del satellite (ovvero della sua posizioneistante per istante), e quindi lo studio delle forze a cui e sottoposto.
4.1. Orbite dei satelliti artificiali - In un campo centrale, generato da una massa puntiforme o da unadistribuzione di massa a simmetria sferica, le orbite sono piane ed ellittiche, con un fuoco nel centro di massa;il moto e regolato delle leggi di Keplero. Sono caratterizzate da 6 parametri (elementi kepleriani):
- a (semiasse maggiore), e (eccentricita: e2 = 1− (b2/a2) , b =semiasse minore) descrivono la geometriadell’orbita;
- i (inclinazione sul piano equatoriale), Ω (longitudine del nodo ascendente, cioe dell’intersezione frapiano equatoriale e piano dell’orbita, dal lato in cui il moto orbitale e diretto dall’emisfero sud a quello nord)definiscono l’orientazione del piano orbitale;
- ω (angolo del pericentro - punto dell’orbita piu prossimo al centro di gravita - con la linea del nodoascendente) definisce l’orientazione dell’ellisse nel piano orbitale
- un parametro (ad es. t0 = istante di passaggio al nodo) definisce la posizione dell’oggetto in moto lungo
4
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
4

l’orbita.
I sei parametri, che sono delle costanti per un’orbita esattamente kepleriana, sono in corrispondenza biunivocacon le condizioni iniziali del moto, cioe con i vettori posizione e velocita ad un dato istante. Quindi, anchequando l’orbita non e esattamente kepleriana, e possibile definire istante per istante gli elementi kepleriani(quelli che competerebbero ad un’orbita kepleriana con medesime condizioni iniziali in quell’istante), chepero non sono costanti. Essi variano lentamente per un’orbita quasi kepleriana, secondo equazioni ben note(equazioni di Lagrange).
Dato un modello di forze, utilizzando le equazioni di Lagrange e possibile studiare il moto orbitale. Vicev-ersa, l’osservazione del moto orbitale consente di trarre informazioni sul modello delle forze (perturbazionigravitazionali e non, rispetto ad un campo centrale).
Le perturbazioni che agiscono su un satellite artificiale sono:
- le deviazioni del campo gravitazionale terrestre rispetto a un campo centrale, dovute allo schiacciamentopolare e ad irregolarita della distribuzione di massa;
- il campo gravitazionale della luna e del sole;
- la pressione di radiazione della luce solare e di quella riflessa dalla terra;
- l’azione frenante dell’atmosfera residua (rilevante solo a quote basse - poche centinaia di km);
- altri effetti vari di minore rilievo.
Il problema e trovare modelli adeguati per descrivere questi effetti. Per effetti grandi il modello deve essereaccurato; per effetti piccoli bastano modelli approssimati.
Gli effetti degli errori di modello possono essere periodici oppure secolari. Nel primo caso l’orbita verapresenta deviazioni oscillanti intorno all’orbita predetta, nel secondo gli errori si accumulano nel tempo, cioel’orbita predetta sulla base del modello si discosta sempre di piu dall’orbita vera.
La ricostruzione dell’orbita si basa su un procedimento di predizione-correzione (minimi quadrati): la po-sizione viene osservata in certi istanti e confrontata con i risultati ottenuti applicando un modello contenenteparametri incogniti; i parametri vengono stimati in modo da minimizzare le differenze fra posizioni predettee osservate.
5. Sistemi di riferimento
5.1. Introduzione - Nel rilevamento di una rete topografica o geodetica, l’insieme di misure di angoli edistanze eseguite, anche quando sono sufficienti per fissare rigidamente la struttura geometrica della rete,non bastano tuttavia per stabilire le posizioni dei vertici; in effetti, la rete puo essere sottoposta a traslazionie rotazioni, che non modificano le quantita misurate. I vincoli che vengono imposti per eliminare questi gradidi liberta e fare in modo che le posizioni siano determinate in modo univoco corrispondono alla fissazionedi un sistema di riferimento. Generalmente viene stabilito un sistema di riferimento locale in cui vieneinserita la rete rilevata, ma e quasi sempre necessario inquadrare il rilevamento in un sistema di riferimentoprecedentemente definito (ad esempio quello della cartografia). Per questa operazione e in generale necessarioche fra i vertici della rete siano presenti punti noti nel sistema preesistente.
Come e noto, un punto nello spazio, e quindi in particolare un punto sulla superficie terrestre, e individuatoda una terna di coordinate in un opportuno sistema di riferimento. Quando un tale sistema sia fissato(ad esempio, stabilendo l’origine e l’orientazione di una terna di assi ortogonali e l’unita di misura), diversitipi di coordinate, trasformabili le une nelle altre da ben definite operazioni matematiche, possono essereutilizzati (ad esempio, coordinate cartesiane e coordinate polari); inoltre, e possibile definire trasformazionimatematiche fra coordinate relative a due sistemi di assi diversi, purche per entrambi siano note origine,orientazione e unita di misura.
Ogni volta che un punto viene individuato mediante coordinate (ad esempio, quando per un punto sulla
5
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
5

superficie terrestre vengono usate latitudine, longitudine e altezza sul livello del mare) e ovviamente necessariosapere in quale sistema di riferimento esse sono determinate. Questa affermazione e meno banale di quantopossa apparire, per diversi ordini di motivi.
In primo luogo, quando si afferma che latitudine e longitudine sono riferite ad un sistema di assi con originenel centro di massa della terra, asse z nella direzione dell’asse di rotazione e asse x intersecante il meridianodi Greenwich, bisogna osservare che la posizione del centro di massa non e facilmente determinabile, e ladirezione dell’asse di rotazione nel corpo della terra e, sia pur di poco, variabile nel tempo. Incertezze sutali grandezze si riflettono evidentemente sulla precisione delle coordinate, e il dover tenere conto di una lorovariabilita nel tempo comporterebbe rilevanti difficolta pratiche. Anche per quanto riguarda l’altezza sullivello del mare, e necessario che sia definita tramite operazioni di misura che ne garantiscano un sufficientelivello di precisione e stabilita.
In secondo luogo, la posizione dei punti nella maggior parte dei casi viene determinata relativamente ad altripunti le cui coordinate sono supposte note. Queste operazioni di ”trasporto” delle coordinate richiedonoinformazioni sulla geometria della superficie terrestre. Senza entrare in dettagli che saranno illustrati piuavanti, basta osservare che la direzione della verticale, cioe del campo della gravita, utilizzata in tutte lemisure terrestri, e variabile da punto a punto in maniera irregolare, e la conoscenza del suo andamento eessenziale per una determinazione precisa delle posizioni relative con misure terrestri.
L’acquisizione di una buona conoscenza dei sistemi di riferimento richiede quindi l’uso di raffinati metodigeodetici. Cio e tanto piu vero quanto piu alta e la precisione richiesta. Ai nostri giorni, facendo prevalen-temente uso di tecniche che utilizzano satelliti artificiali, si punta a precisioni centimetriche, almeno nelleposizioni relative in regioni di notevole ampiezza (si pensi al territorio degli Stati Uniti, o dell’Unione Eu-ropea). Nel seguito saranno descritti gli aspetti essenziali sia dell’ambito concettuale, sia delle procedureoperative necessarie per acquisire tale conoscenza.
5.2. Sistemi di riferimento astronomici - Storicamente le osservazioni astronomiche hanno avuto unruolo fondamentale per il posizionamento, specialmente per la navigazione. L’osservazione della rotazioneapparente delle stelle consente di determinare la posizione dell’asse di rotazione (polo) nella volta celeste.L’angolo fra la verticale e la direzione dell’asse di rotazione e la colatitudine, ossia il complementare dellalatitudine (fig.1); inoltre, la proiezione sul piano orizzontale della congiungente l’osservatore con il polo celesteindividua una direzione di riferimento (nord o sud) rispetto a cui viene definita la rotta. Piu complicatae la determinazione della longitudine, definita come l’angolo fra il piano contenente la verticale locale eparallelo all’asse di rotazione e il piano parallelo anch’esso all’asse di rotazione e contenente la verticaleall’osservatorio di Greenwich; essa infatti richiede il confronto di osservazioni astronomiche nel punto conosservazioni fatte in un altro luogo al medesimo istante, e quindi comunicazioni istantanee, oppure precisistrumenti di misurazione del tempo che l’osservatore porta con se nei suoi spostamenti.
Va rilevato che l’osservatore ha interesse a determinare la posizione del punto sulla superficie terrestre,indipendentemente dai movimenti della terra, e quindi a stabilire un sistema di riferimento solidale conla terra; il fatto che utilizzi l’osservazione di oggetti esterni alla terra, come le stelle, significa che occorrestabilire le relazioni fra tale sistema ed un sistema di riferimento solidale con le stelle. Queste relazioni hannoanche una rilevanza dinamica, dato che il sistema solidale con le stelle e con buona approssimazione inerziale,mentre i moti della terra generano forze apparenti nel sistema ad essa solidale.
Vengono qui descritti sommariamente i principali componenti del moto della terra rispetto ad un sistemainerziale: oltre al moto orbitale intorno al sole ed alla rotazione diurna, si ha una precessione dell’asse dirotazione intorno alla direzione normale all’eclittica (che e il piano dell’orbita intorno al sole), rispetto a cuie inclinato di circa 23.5, con una velocita angolare di circa 50′′ all’anno; una nutazione, cioe una piccolarotazione dell’asse intorno alla sua posizione media, con un’ampiezza di 10 − 20′′ e un periodo di circa 18.5anni (fig.2). Si hanno inoltre spostamenti del polo rispetto alla superficie terrestre, con ampiezza dell’ordinedella decina di metri e andamento approssimativamente periodico con periodo di poco piu di 400 giorni(fig.3). Tutti questi moti, che possono essere descritti con buona approssimazione partendo dalla teoria delmoto del corpo rigido e modellando opportunamente la deformabilita della terra legata alla sua struttura
6
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
6

materiale, manifestano notevoli irregolarita, e devono essere sottoposti a continua osservazione se si vuolegiungere alla definizione di un sistema riferimento di elevata precisione (compatibile con la precisione nelposizionamento ottenibile con gli strumenti oggi disponibili).
Alla luce di queste considerazioni, si usa definire un sistema di riferimento inerziale legato alle stelle e unsistema di riferimento solidale con la terra la cui posizione rispetto al sistema inerziale e variabile nel tempoin virtu dei moti sopra descritti. Per una definizione ad elevata precisione del sistema inerziale e necessaria laconoscenza della posizione di un certo numero di corpi celesti e dei loro moti relativi apparenti. A tale scopo,sono disponibili cataloghi stellari basati su un numero molto elevato di osservazioni astronomiche svolte inun certo intervallo di tempo; una missione spaziale denominata HIPPARCOS e stata realizzata alcuni annifa dall’Agenzia Spaziale Europea con questo obiettivo.
In realta, proprio per il fatto che la presenza di moti relativi fra le stelle rende difficile la definizione diun sistema di riferimento basato sulla loro posizione ad elevatissimi livelli di precisione (l’obiettivo e oggiil millesimo di arcsec), in tempi recenti si e scelto di adottare un sistema basato sulla posizione di sorgentiradio extragalattiche. Tale sistema e denominato Sistema Inerziale Convenzionale (CIS).
5.3. Sistemi di riferimento terrestri - Un sistema di riferimento solidale con la terra non puo usare comeasse la direzione dell’asse di rotazione, dato che questo non e fisso rispetto alla terra; e quindi necessarioscegliere una direzione fissa convenzionale, prossima a quella dell’asse di rotazione, i cui spostamenti, comesi e visto, sono molto piccoli. In realta si fa riferimento ad un certo numero di stazioni fiduciarie postein diversi luoghi della superficie terrestre e dotate di sofisticate apparecchiature per un controllo continuoad elevata precisione della loro posizione. Viene cosi definito un Sistema Terrestre Convenzionale (CTS).Senza entrare in dettagli, occorre osservare che le posizioni relative delle stazioni subiscono variazioni neltempo, sia a causa di oscillazioni a breve periodo dovute a deformazioni mareali cui la terra e sottoposta,non essendo un corpo perfettamente rigido, sia per i moti delle placche tettoniche (deriva dei continenti).Tali moti sono molto piccoli, ma bisogna tenerne conto per assicurarsi la stabilita nel tempo del sistemadi riferimento terrestre. Inoltre, i metodi moderni di posizionamento sfruttano la conoscenza delle orbitedi particolari satelliti artificiali, la cui dinamica e studiata in un sistema di riferimento inerziale (oppure,se studiata in un sistema di riferimento terrestre, deve tener conto delle forze apparenti). Errori nelladeterminazione delle orbite portano come conseguenza a errori nel posizionamento. Si capisce quindi come,per valutare l’affidabilita della posizione di un punto, sia necessaria una complessa analisi delle procedureche hanno portato alla sua determinazione. Tale analisi e particolarmente importante se si vogliono studiarele variazioni nel tempo della posizione, dovute ad esempio a deformazioni della crosta terrestre. In questocaso occorre confrontare determinazioni della posizione effettuate in epoche diverse, ed e quindi necessariotener conto delle possibili variazioni nel tempo del sistema di riferimento.
5.4. Sistemi di riferimento e sistemi di coordinate - Si e gia osservato che, quando un sistema diriferimento sia stato individuato mediante una terna di assi, diversi tipi di coordinate, legati tra di loroda ben definite trasformazioni matematiche, possono essere utilizzati. Non e pero possibile stabilire conuna semplice formula la relazione tra la posizione di un punto nel CTS, espressa ad esempio in coordinatecartesiane, e la sua espressione in termini di latitudine e longitudine astronomica e altezza sul livello del mare(indicate rispettivamente con Φ , Λ , H ). Infatti le coordinate astronomiche sono basate sulla direzione dellaverticale, che varia in modo irregolare; la quota sul livello del mare, anche quando la sua definizione sia meglioprecisata come altezza rispetto ad una ben precisa superficie equipotenziale del campo della gravita - il geoide-, e pur sempre riferita ad una superficie il cui andamento e irregolare.
Se invece si considera come superficie di riferimento una figura geometrica descritta da un’espressione matem-atica semplice, ad esempio un ellissoide di rotazione caratterizzato da ben definiti parametri geometrici(semiasse maggiore e schiacciamento polare) e di cui sia fissata la posizione del centro e la direzione dell’assedi simmetria, la direzione della normale a tale ellissoide passante per un dato punto ad esso esterno e l’altezzadi tale punto sulla superficie dell’ellissoide lungo la normale sono esprimibili con formule abbastanza sempliciin termini delle coordinate cartesiane del punto. Piu precisamente, in un sistema di assi con l’origine nelcentro dell’ellissoide, l’asse z nella direzione dell’asse di simmetria e l’asse x in una direzione fissata nel piano
7
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
7

equatoriale, si ha:
x = (N(φ) + h) cos φ cos λ
y = (N(φ) + h) cos φ sin λ
z = (N(φ)(1 − e2) + h) sin φ
(5.4.1)
dove φ e l’angolo della normale all’ellissoide con la sua proiezione sul piano equatoriale; λ e l’angolodella proiezione della normale sul piano equatoriale con l’asse x; h e l’altezza sull’ellissoide (misuratalungo la normale); N(φ) = a(1 − e2 sin2 φ)−
12 , essendo a il semiasse maggiore; e2 = 1 − (b2/a2)
( b =semiasse minore)(fig.4). Spesso, in luogo del parametro e2 sopra introdotto, si fa uso del parametrof = (a−b)/a , detto schiacciamento. E immediato verificare che 1−e2 = (1−f)2 . Si sono visti i parametriche caratterizzano l’ellissoide internazionale GRS80, oggi utilizzato come riferimento; va pero ricordato chele coordinate ellissoidiche del sistema nazionale italiano sono riferite ad un ellissoide diverso, detto ellissoidedi Hayford, adottato a livello internazionale nei decenni passati.
L’inversione della trasformazione (5.4.1) per esprimere φ , λ , h in termini di x , y , z e piuttosto laboriosa,salvo che per λ che e immediatamente esprimibile come λ = arctan(y/x) (a meno di multipli di π ; siricordi che arctan ha valori fra −π/2 e π/2 , mentre la longitudine varia in un intervallo di ampiezza 2π ).Una possibile procedura (ma molte altre sono state proposte) consiste nello scrivere
N(φ) + h =(x2 + y2)1/2
cos φ
(1 − e2)N(φ) + h =z
sin φ
(5.4.2)
per ottenere, eliminando h ,
e2N(φ) sin φ − (x2 + y2)1/2 tan φ + z = 0
ovvero
tan φ =z + e2N(φ) sin φ
(x2 + y2)1/2(5.4.3)
che puo essere risolta iterativamente in φ , partendo dal valore iniziale φ0 con tanφ0 = z/(x2 + y2)−1/2 ;si verifica (vedi fig.5) che la soluzione φ di (5.4.3) e unica in [0, π/2] e che φ > φ0 . h puo poi esserecalcolata usando una delle equazioni (5.4.2).
Esiste anche una formula chiusa:
φ = arctanz + e′2b sin3 θ
(x2 + y2)1/2 − e2a cos3 θ(5.4.4)
dove e′2 = (a2 − b2)/b2 ; θ = arctan[(z/(x2 + y2)1/2)(a/b)] .
E utile esprimere la (5.4.1) in forma vettoriale. Indicato con r il vettore di componenti x , y , z , sidefiniscono i vettori
er =
⎛⎝ cos φ cos λ
cos φ sin λsin φ
⎞⎠ eλ =
⎛⎝− sin λ
cos λ0
⎞⎠ eφ =
⎛⎝− sin φ cos λ
− sin φ sin λcos φ
⎞⎠ (5.4.5)
8
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
8

che costituiscono una terna destrorsa di vettori ortonormali. Allora, indicato con r il vettore di componentix , y , z , si ha
r = (N(φ)(1 − e2 sin2 φ) + h)er − e2N(φ) sin φ cos φeφ (5.4.6)
L’ellissoide cosi definito non e pero dotato di realta fisica e le coordinate φ , λ , h non sono quindi deter-minabili con misure.
In sostanza, le coordinate astronomiche e la quota sul livello del mare sono fisicamente misurabili, ma nonsono adatte a descrivere le posizioni relative di punti diversi, proprio a causa della loro variazione irregolare;d’altra parte, le coordinate cartesiane non consentono di visualizzare facilmente la posizione di un punto sullasuperficie terrestre (ad esempio, non e facile rendersi conto della quota di un punto leggendo le coordinatecartesiane). Le coordinate ellissoidiche (cioe gli angoli di direzione della normale e l’altezza sopra unasuperficie ellissoidica data, prossima alla superficie terrestre, indicati come sopra con φ , λ , h e denominaticoordinate geodetiche) rispondono meglio all’obiettivo di visualizzazione intuitiva.
5.5. Considerazioni sulla determinazione dei sistemi di riferimento e sulle loro trasformazioni -I metodi moderni di posizionamento, basati sull’osservazione di satelliti artificiali, consentono di determinarele coordinate (cartesiane o ellissoidiche) in un sistema di riferimento geocentrico, implicitamente definito dallecoordinate delle stazioni fiduciarie. Si noti che proprio la dinamica dei satelliti orbitanti intorno alla terrafa si che la loro posizione sia descritta in modo naturale rispetto al centro di massa della terra.
Al contrario, i metodi classici basati su reti geodetiche localizzate su un territorio di limitata estensione (ad es-empio, reti nazionali), richiedono, per poter fare uso di coordinate ellissoidiche, che la posizione dell’ellissoidesia definita relativamente ad un punto appartenente alla regione considerata, di cui quindi si conoscono siale coordinate astronomiche e la quota sul livello del mare, sia le coordinate ellissoidiche. La procedurausualmente adottata e la seguente:
. si fissa un punto P di riferimento sul territorio, di cui sono note latitudine e longitudine astronomiche equota sul livello del mare;
. si sceglie un punto Q sull’ellissoide la cui latitudine ellissoidica (ovvero il complementare dell’angolo dellanormale per Q con l’asse di simmetria dell’ellissoide) e uguale alla latitudine astronomica di P ;
. si fa coincidere il punto Q con il punto P ′ sul geoide ottenuto proiettando P lungo la direzione dellaverticale, e si richiede che in tale punto l’ellissoide sia tangente al geoide. In questo modo al punto Pvengono attribuite latitudine e longitudine astronomiche ed ellissoidiche coincidenti; inoltre, l’altezza di Psul livello del mare e uguale all’ altezza sull’ellissoide, ovvero l’altezza del geoide sull’ellissoide in P ′ e nulla.
. ruotando l’ellissoide attorno alla normale per Q si fa coincidere l’azimut astronomico in P di una direzionearbitraria con l’azimut ellissoidico. In questo modo l’asse di simmetria dell’ellissoide e reso parallelo all’asseterrestre convenzionale.
A questo punto, a partire dalle coordinate geodetiche del punto P si possono determinare le coordinatecartesiane in un sistema di assi avente l’origine nel centro dell’ellissoide, l’asse z lungo il suo asse di simmetriae l’asse x fissato nel piano equatoriale; mediante reti geodetiche e possibile in linea di principio determinarenello stesso sistema di assi le coordinate cartesiane dei vettori congiungenti P con altri punti Pi dellasuperficie terrestre nella regione considerata, e quindi, in ultima analisi, le coordinate cartesiane e quellegeodetiche dei punti Pi , riferite ovviamente all’ellissoide posizionato nella maniera sopra descritta.
Procedure di questo tipo sono state adottate in passato per la costruzione delle cartografie nazionali. Ingenerale le coordinate geodetiche utilizzate per sistemi cartografici diversi fanno riferimento ad ellissoididiversi, e le trasformazioni di coordinate fra sistemi diversi richiederebbero la conoscenza delle posizionirelative dei diversi ellissoidi (che, in teoria, sono semplicemente traslati l’uno rispetto all’altro, avendo gliassi z paralleli e gli assi x definiti secondo la stessa convenzione); queste pero non sono in generale note.
La cartografia nazionale italiana e basata sul sistema di riferimento ROMA40, legato all’ellissoide inter-
9
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
9

nazionale (di Hayford) ”orientato” (ossia tangente al geoide) in corrispondenza dell’osservatorio di MonteMario (a Roma). L’ellissoide internazionale, adottato per convenzione nel 1924, ha parametri geometricidiversi da quelli sopra riportati per il GRS80, e precisamente
a = 6 378 388 m
f−1 = 297
Molti paesi europei hanno adottato un sistema di riferimento, detto ED50 (ED=European Datum), legatoanch’esso ad un ellissoide internazionale, che pero ha un ”orientamento medio europeo”, ossia non esatta-mente coincidente con alcun orientamento dei vecchi sistemi di riferimento nazionali. La cartografia italianariporta anche le coordinate geografiche ED50 e le coordinate cartografiche che ne derivano.
Qualora siano disponibili le coordinate di un certo numero di punti in due diversi sistemi, e possibile stimareai minimi quadrati i parametri della trasformazione, e quindi la posizione relativa dei due ellissoidi a cui idue sistemi sono riferiti. In generale, oltre ai tre parametri che definiscono una traslazione, si introduconotre parametri che descrivono una rotazione degli assi ed un parametro di scala, che si giustificano perchenei diversi sistemi l’orientazione dell’ellissoide e la scala delle lunghezze sono definite sulla base di insiemidi misure, e a volte anche di tecniche, diverse; naturalmente, ci si aspetta che la rotazione sia molto piccolae che il fattore di scala sia molto vicino a 1 (fig.6). Si tratta quindi di 7 parametri; in linea di principio equindi sufficiente conoscere nei due sistemi un numero di coordinate maggiore di 7, ad esempio le terne dicoordinate di 3 punti.
Dal punto di vista pratico, va osservato che in generale i punti le cui coordinate sono note nei due sistemi sitrovano al confine fra le due regioni rilevate con riferimento ai due diversi ellissoidi, e coprono soltanto unapiccola parte di tali regioni; ci si aspetta quindi che i parametri determinati abbiano una validita locale enon possano essere accettati come caratterizzanti la trasformazione tra i due sistemi di riferimento a livelloglobale.
In tempi recenti, per il diffondersi del posizionamento GPS, ha acquisito rilevanza il sistema di riferimentolegato al GPS, detto WGS84, che fa uso di un ellissoide geocentrico. La nuova rete geodetica italiana istituitadall’Istituto Geografico Militare, detta IGM95, fa uso di coordinate WGS84; il riferimento assoluto e al Centrodi Geodesia Spaziale di Matera, che dispone anche di una stazione SLR (Satellite Laser Ranging) e di unastazione VLBI (Very Long Baseline Interferometry, basata su osservazioni radioastronomiche). La cartografiaufficiale fa invece ancora uso del sistema nazionale di coordinate detto Roma40, che, come si e accennato, eriferito all’ellissoide di Hayford orientato a Monte Mario. Quindi gli operatori che eseguono rilevamenti conil GPS e nello stesso tempo usano la cartografia devono conoscere i parametri di trasformazione.
ESEMPIO: Trasporto di coordinate
Sia P un punto sulla superficie terrestre di coordinate geodetiche (φP , λP , hP ) riferite ad un ellissoidegeocentrico di parametri geometrici noti, con l’asse di simmetria (asse z) in direzione polare, l’asse x direttoverso il meridiano di Greenwich. E quindi posibile calcolare le coordinate cartesiane (xP , yP , zP ) di Prispetto a questo sistema di assi, usando la formula (5.4.1).
Facendo stazione in P si collima il punto Q e si misurano la distanza d fra P e Q , l’azimut α e l’angolozenitale ζ della direzione PQ (fig.7). Assumendo per semplicita che l’asse dello strumento sia orientatonella direzione normale all’ellissoide (ovvero trascurando la deviazione della verticale), e introducendo unsistema di assi con origine in P , l’asse Z lungo la normale all’ellissoide, l’asse X verso Sud e l’asse Y versoEst, le coordinate cartesiane di Q in questo sistema di assi sono
XQ = −d sin ζ cos α
YQ = d sin ζ sin α
ZQ = d cos ζ
(5.5.1)
Per ottenere le coordinate cartesiane di Q nel sistema di assi xyz occorre applicare una roto-traslazione.
10
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
10

Ponendo r = (x y z)T , R = (X Y Z)T si ha
rQ = rP + RRQ
RQ = R−1(rQ − rP )(5.5.2)
dove R e una matrice di rotazione, per cui R−1 = RT . Piu precisamente
R−1 = Ry(π
2− φP )Rz(λP ) =
⎛⎝ sin φP 0 − cos φP
0 1 0cos φP 0 sin φP
⎞⎠
⎛⎝ cos λP sin λP 0
− sin λP cos λP 00 0 1
⎞⎠ (5.5.3)
. Rz(λP ) porta l’asse x nella direzione del meridiano passante per P , l’asse y parallelo alla direzione Estper P , lascia l’asse z invariato;
. Ry((π/2)−φP ) lascia y invariato, porta z in direzione della normale all’ellissoide per P , x nella direzioneSud per P .
Da rQ si possono poi ottenere φQ, λQ, hQ applicando (5.4.3) o (5.4.4).
NOTA: puo essere conveniente portare l’asse X verso Est e l’asse Y verso Nord, cosa che puo essere ottenutacon un’ulteriore rotazione intorno a Z di π/2 in verso antiorario, la cui matrice e
Rz(π
2) =
⎛⎝ 0 1 0
−1 0 00 0 1
⎞⎠
NOTA: tenendo conto che l’asse dello strumento in realta e orientato secondo la direzione della verticale,occorre misurare gli angoli ΦP , ΛP (latitudine e longitudine astronomica) e introdurli nella rotazione. Epero necessario conoscere le coordinate geodetiche φP , λP , hP per poter determinare le coordinate cartesiane.
5.6. Trasformazioni fra coordinate geodetiche riferite ad ellissoidi diversi. - Si e visto che ad unellissoide di riferimento e associata una terna di assi a cui e riferito un sistema di coordinate cartesiane. Adellissoidi orientati localmente in modi diversi corrispondono quindi sistemi diversi di coordinate cartesiane,che si trasformano l’uno nell’altro per roto-traslazioni. Si osservi che la procedura di orientamento di unellissoide precedentemente illustrata farebbe pensare che tutti gli ellissoidi orientati localmente nelle diverseregioni abbiano gli assi paralleli, e che sia quindi sufficiente una traslazione. Tuttavia, poiche l’orientamentoe eseguito sulla base di una serie di misure affette da errori, indipendenti da regione a regione, e opportunointrodurre anche una rotazione, i cui parametri devono essere molto piccoli. E inoltre opportuno introdurreanche un cambiamento di scala, il cui valore deve risultare molto vicino a 1, dovuto al fatto che le misure dilunghezze utilizzate nella definizione dei diversi sistemi di riferimento locali sono affette da errori indipendenti.
Queste trasformazioni e le loro espressioni linearizzate, utilizzate quando i parametri delle trasformazionisono piccoli, sono descritte dettagliatamente in Appendice. Si tratta ora trovare l’espressione linearizzatadella variazione delle coordinate geodetiche in funzione della variazione delle coordinate cartesiane.
La (5.4.1) e la (5.4.6) hanno la forma generale r = F(Γ,b) , dove
Γ =
⎛⎝φ
λh
⎞⎠ ; b =
(af
)(5.6.1)
I parametri a e f sono contenuti implicitamente in N(φ) , e f anche in e2 . Quindi
∆r = J∆Γ + D∆b (5.6.2)
11
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
11

ovvero
∆Γ = J−1(∆r − D∆b) (5.6.3)
dove
J =∂(x, y, z)∂(φ, λ, h)
; D =∂(x, y, z)∂(a, f)
(5.6.4)
Usando la (5.4.6) e tenendo conto che ∂er/∂φ = eφ ; ∂er/∂λ = eλ cos φ ; ∂eφ/∂φ = −er ; ∂eφ/∂λ =−eλ sin φ si ottiene
J = ((M(φ) + h)eφ (N(φ) + h) cos φeλ er) (5.6.5)
dove M(φ) = N(φ)(1 − e2)/(1 − e2 sin2 φ) .
NOTA: conviene esprimere J come prodotto J = SC della matrice S = (eφ eλ er) con la matricediagonale C = diag(M(φ) + h , (N(φ) + h) cos φ , 1) . S e antiunitaria, cioe verifica S−1 = ST , madetS = −1 , poiche la terna eφeλer e sinistrorsa. In questo modo si ha immediatamente J−1 = C−1ST ,dove C−1 = diag((M(φ) + h)−1 , ((N(φ) + h) cos φ)−1 , 1) .
La matrice S rappresenta una rotazione piu una riflessione (operazioni che non modificano gli elementidi lunghezza); il significato della matrice C si puo capire osservando che i suoi elementi rappresentano ilrapporto fra le variazioni delle componenti del raggio vettore e le variazioni dei parametri. In particolare,ponendo h = 0 (quindi se il punto sta sull’ellissoide) i primi due elementi, i cui parametri corrispondentisono angoli rispettivamente lungo un meridiano e lungo un parallelo, sono i raggi di curvatura dei meridianie dei paralleli. Quest’ultimo e ottenuto moltiplicando per cosφ (che corrisponde ad una proiezione su unpiano parallelo al piano xy) N(φ) , che e il raggio di curvatura della sezione normale per il punto aventetangente parallela a eλ .
Nell’equazione (5.6.3) ∆r puo essere interpretato come l’incremento del vettore le cui componenti sono lecoordinate cartesiane di un punto per una trasformazione del sistema di assi. Quindi la (5.6.3), con ∆respresso dalla (5.A10) (vedi seguito), puo essere utilizzata per determinare i parametri della trasformazione(roto-traslazione piu cambiamento di scala) fra due sistemi di riferimento corrispondenti a due ellissoididiversi e diversamente orientati, usando il metodo dei minimi quadrati, quando siano note le coordinate Γdi un numero sufficiente di punti in entrambi i sistemi. Va pero osservato che nei sistemi nazionali le quoteellissoidiche h rispetto agli ellissoidi orientati localmente non sono in generale note, e si usano invece lequote ortometriche H ; inoltre, l’ondulazione del geoide e calcolata rispetto ad un ellissoide geocentrico enon e quindi possibile il passaggio da H a h .
APPENDICE: rotazioni
Rotazione piana (fig.8)
xB = xA cos α + yA sin α
yB = −xA sin α + yA cos α(5.A1)
ovvero
(xB
yB
)=
(cos α sin α− sin α cos α
)(xA
yA
)(5.A2)
12
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
12

NOTA: La (5.A2) rappresenta una rotazione antioraria degli assi cartesiani o, equivalentemente, una ro-tazione oraria dei punti del piano intorno all’origine, restando fissi gli assi. Per convincersene, basta osservareche il punto (cos α sinα)T viene trasformato nel punto (1 0)T .
Le matrici di rotazione R definiscono trasformazioni lineari nello spazio. Esse sono matrici unitarie:RT R = RRT = I ; det R = 1 .
Matrici di rotazione nello spazio
Rx(α) =
⎛⎝ 1 0 0
0 cos α sin α0 − sin α cos α
⎞⎠ Ry(β) =
⎛⎝ cos β 0 − sin β
0 1 0sin β 0 cos β
⎞⎠ Rz(γ) =
⎛⎝ cos γ sin γ 0
− sin γ cos γ 00 0 1
⎞⎠(5.A3)
NOTA: Le matrici della forma (5.A3) si trasformano l’una nell’altra per permutazioni cicliche simultaneedelle righe e delle colonne.
Rx , Ry , Rz sono rotazioni rispettivamente intorno agli assi x, y, z. Una generica rotazione nello spazio puoessere espressa come prodotto: R = RxRyRz . Infatti, fissata una posizione iniziale degli assi coordinati, siconsideri la sfera unitaria con il centro nell’origine degli assi, e si scelga su di essa un punto arbitrario Ped un altro punto Q tale che l’angolo POQ sia retto. E allora possibile ottenere la rotazione degli assiche porta l’asse x a passare per P e l’asse z per Q con la seguente procedura:
- rotazione intorno a z fino a portare l’asse x nel piano di z e P ;
- rotazione intorno a y fino a far passare l’asse x per P ;
- rotazione intorno a x fino a far passare l’asse z per Q.
NOTA: gli angoli di rotazione non sono univocamente determinati: basti pensare, ad esempio, che per portarel’asse x nel piano di z e P si possono eseguire diverse rotazioni intorno a z, differenti fra di loro per multiplidi π . Inoltre, anche la scelta degli assi delle rotazioni e del loro ordine non e univoca: si pensi, ad esempio,agli angoli di Eulero usati in astronomia e in meccanica razionale. La scelta qui compiuta corrisponde allaprassi usuale in topografia.
Se gli angoli sono piccoli, sono spesso adottate formule approssimate al I ordine rispetto agli angoli, ponendosin θ θ , cos θ 1 . Ad esempio
Rz(γ) =
⎛⎝ 1 γ 0
−γ 1 00 0 1
⎞⎠ (5.A4)
e formule simili per le rotazioni attorno agli altri assi. Sempre al I ordine, trascurando i prodotti di angolipiccoli,
R = RxRyRz = I + ∆R ; ∆R =
⎛⎝ 0 γ −β
−γ 0 αβ −α 0
⎞⎠ (5.A5)
E importante osservare che, mentre le rotazioni in generale non commutano, le rotazioni piccole al I ordine(cioe trascurando prodotti di angoli piccoli) commutano.
Roto-traslazione: rotazione seguita da uno spostamento dell’origine (fig.9):
13
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
13

rB = r0 + RrA (5.A6)
NOTA: la trasformazione inversa e
rA = R−1(rB − r0) (A7)
ovvero una traslazione seguita da una rotazione. L’espressione (5.A7) e simile ad (5.A6), con R−1 in luogodi R e −R−1r0 in luogo di r0 .
In alcuni casi e utile introdurre anche un cambiamento di scala:
rB = r0 + aRrA (5.A8)
dove a e in generale un numero prossimo a 1 : a = 1 + ε .
Quando i parametri della trasformazione sono piccoli, la (5.A8) al I ordine assume la forma
rB = r0 + (1 + ε)(I + ∆R)rA r0 + [(1 + ε)I + ∆R]rA (5.A9)
ovvero
∆r ≡ rB − rA = r0 + (εI + ∆R)rA (5.A10)
L’inversa della (5.A8) e
rA = (aR)−1(rB − r0) = (aR)−1rB − (aR)−1r0 (5.A11)
Ora, (aR)−1 = (1 + ε)−1(I + ∆R)−1 , e al primo ordine 1/a 1 − ε ; (I + ∆R)−1 I − ∆R (perquest’ultima basta pensare che la trasformazione inversa di R in (5.A5) si ottiene sostituendo α, β, γ con−α,−β,−γ ). Quindi (aR)−1 = (1 − ε)(I − ∆R) (1 − ε)I − ∆R (sempre al I ordine). Inoltre, se ancher0 e piccolo, (aR)−1r0 r0 . Di conseguenza
rA = [(1 − ε)I − ∆R]rB − r0 (5.A12)
che si puo ottenere dalla (5.A9) semplicemente cambiando di segno tutti i parametri della trasformazione.E chiaro, per quanto visto, che questa semplice regola vale solamente al I ordine quando i parametri sonopiccoli.
6. Determinazione di quantita geodetiche sulla superficie terrestre
6.1. Trasporto delle coordinate sull’ellissoide - Si e visto come in linea di principio sia possibilecalcolare le coordinate geodetiche di un punto sulla base di misure geodetiche 3-dimensionali. Nella pratica,la geodesia classica fa uso di formule puramente planimetiche che consentono di determinare le coordinatecartesiane di un punto in un sistema di assi locale o le coordinate geodetiche in funzione della lunghezza edell’azimut di una geodetica (vedi Appendice) che collega quel punto ad un punto noto.
6.1.1. Formule di Puiseux-Weingarten (al III ordine) - In un sistema di coordinate cartesiane conl’origine in un punto P0 dell’ellissoide e con gli assi orientati rispettivamente nelle direzioni Est, Nord eNormale, le coordinate di un punto P sull’ellissoide con distanza ellissoidica s da P0 e con azimut αdella geodetica P0P sono
14
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
14

X = s sin α(1 − s2
6NRα+ o(s2))
Y = s cos α(1 − s2
6MRα+ o(s2))
Z = −s(s
2Rα+ o(s2))
(6.1.1)
dove Rα e il raggio di curvatura dell’ellissoide in P0 ad azimut α .
NOTA: un errore nell’azimut di 20 arcsec (10−4 rad) su un lato di 50 km porta ad un errore di 5m in direzionecirca ortogonale al lato. Si osservi che 5 m lungo un meridiano corrispondono ad un errore in latitudine dicirca 0.15 arcsec.
Approssimando l’ellissoide con la sfera locale (campo geodetico), ponendo cioe N , M , Rα R = (MN)1/2
(vedi Appendice), si ottiene
X = s sinα(1 − s2
6R2)
Y = s cos α(1 − s2
6R2)
Z = − s2
2R
(6.1.2)
Gli errori che si commettono sono al massimo 27mm su 100km per X e Y , al massimo 1.3m su 100kmper Z .
NOTA: Le (6.1.2) possono essere ricavate direttamente. Infatti e facile vedere che
X = R sins
Rsin α
Y = R sins
Rcos α
Z = −R(1 − coss
R)
(6.1.3)
Sostituendo le espressioni approssimate sinx x − (x3/6) , 1 − cos x x2/2 si ottengono le (6.1.2).
In approssimazione piana (campo topografico) si ottiene
X = s sin α
Y = s cos α(6.1.4)
con un errore massimo di 4mm su 10km (essendo s2/(6R2) 0.4 · 10−6 ).
Per la coordinata Z l’approssimazione piana non e ammissibile. Basta osservare che un punto sulla sferalocale a 10km di distanza ha Z −7.8m , cioe dista 7.8m dal piano tangente.
6.1.2. Trasporto di coordinate geografiche (lungo una geodetica) - Si parte dagli sviluppi
φ = φ(s) = φ(0) +∂φ
∂s|s=0s + · · ·
e analoghi per λ , α (dove α e l’azimut, s la lunghezza dell’arco di geodetica).
Le uguaglianze
15
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
15

M(φ)dφ = ds cos α , N(φ) cos φdλ = ds sin α
consentono di ricavare ∂φ/∂s , ∂λ/∂s ; inoltre, dalla (A13) si ottiene
∂r
∂ssin α + r cos α
∂α
∂s= 0
dove
∂r
∂s=
∂r
∂φ
∂φ
∂s= −M(φ) sin φ · cos α
M(φ)= − sin φ cos α
da cui si puo ricavare ∂α/∂s .
Riassumendo:
∂φ
∂s=
cos α
M(φ),
∂λ
∂s=
sin α
N(φ) cos φ,
∂α
∂s=
sinα sin φ
r=
sinα tan φ
N(φ)
6.2. Determinazione di distanze sull’ellissoide e di differenze di quota con misure distanzio-metriche e di angoli zenitali.
6.2.1. Lunghezze di archi sull’ellissoide
d : distanza misurata ; z : angolo zenitale misurato
dor = d sin z .
Dalla fig.10 risulta α = arctan[(dor − ∆)/(R + h)] .
D’altra parte ∆ = d cos z tanα = d cos z(dor − ∆)/(R + h) . Risolvendo rispetto a ∆ si ottiene
∆ =d dor cos z
R + h + d cos z
dor − ∆ = dor(1 − d cos z
R + h + d cos z) = dor
R + h
R + h + d cos z
α dor − ∆R + h
=dor
R + h + d cos z=
d sin z
R + h + d cos z
s = Rα =Rd sin z
R + h + d cos z=
d sin z
1 + hR + d
R cos z
NOTA 1: l’approssimazione per α viene da arctanx = x + 0(x3) , dove |0(x3)| < |x|3/3 puo in molticasi essere trascurato. Ad esempio, se x ≡ s/R ≡ 10−2 , 0(x3) < (1/3)10−6 , e il trascurarlo comporta unerrore relativo inferiore a (1/3)10−4 .
NOTA 2: s e la lunghezza di un arco di circonferenza di raggio R e apertura angolare α , che puo esserevisto come approssimazione della lunghezza dell’arco di geodetica sull’ellissoide fra i punti A′ e B′ chesono al piede delle normali all’ellissoide per A e B . Conviene scegliere per R il raggio della sfera locale;per avere un’idea degli errori che si possono commettere, si osservi che la variazione di s con R e moltolenta: si puo verificare che ∂s/∂R , per distanze non superiori a 20 km e per angoli zenitali di pochi gradiinferiori all’angolo retto, e dell’ordine di qualche milionesimo. Poiche a latitudini intermedie la differenza frail raggio della sfera locale e i raggi di curvatura massimo e minimo dell’ellissoide e dell’ordine di 10 km, ci sipuo aspettare che l’errore commesso non sia superiore a qualche cm.
16
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
16

NOTA 3: e necessario conoscere l’altezza del punto, ma non con grande precisione. Infatti l’altezza comparesolo nel rapporto h/R (R = raggio della terra); un errore di 10m nell’altezza porta ad un errore relativo10 m/6000 km 1.5 · 10−6 (cioe 1.5 mm per km). Di fatto, nonostante il problema del trasporto delle coor-dinate sia tipicamente tridimensionale, tradizionalmente la determinazione delle coordinate ”planimetriche”(cioe sull’ellissoide) e separata dalla determinazione delle quote (soprattutto perche le quote che si mis-urano non sono altezze sull’ellissoide, ma sul geoide, determinate con la livellazione geometrica; il passaggioall’altezza sull’ellissoide richiede la conoscenza dell’ondulazione del geoide, raggiunta con buona precisionesolo di recente).
NOTA 4: per archi corti la lunghezza dell’arco e molto vicina a quella della corda: ad esempio, per un arcoα sulla sfera di raggio R , Rα 10 km , R 6000 km ⇒ α 1.7 · 10−3 , la lunghezza della corda e= 2R sin(α/2). sin(α/2) (α/2) + O(α3) , |O(α3)| < (1/6)(α/2)3 ⇒ arco − corda : δ < (1/3)R(α/2)3 (1/3) · 6 · 106 · 0.6 · 10−9 m 1 mm .
6.2.2. Livellazione trigonometrica - Dall’uguaglianza
(R + h) sin(π − z) = (R + h′) sin(π − z′)
(sempre con riferimento alla fig.10) si ottiene
(R + h′) − (R + h)(R + h′) + (R + h)
=sin(π − z) − sin(π − z′)sin(π − z) + sin(π − z′)
=tan 1
2 ((π − z) − (π − z′))tan 1
2 ((π − z) + (π − z′))
ovvero, essendo z + z′ − π = α ,
h′ − h = (2R + h + h′) tanα
2tan
z′ − z
2
Approssimando tan(α/2) con α/2 = s/(2R) (trascurando cosi termini di ordine α3 ), e ponendo z′ =π + α− z (e cosi possibile evitare di fare stazione nel punto B per misurare z′ , se si puo determinare se quindi α ), si puo scrivere
h′ − h s(1 +hm
R) cot(z − s
2R)
dove hm = (h + h′)/2 . Ovviamente hm non e noto; e pero sufficiente una sua conoscenza approssimata.Infatti, ad esempio, un errore δhm dell’ordine di 100 m porta ad un errore relativo δhm/R ≡ 1.5 · 10−5 .
NOTA 1: la superficie di riferimento delle quote e la sfera locale, considerata come un’approssimazionedell’ellissoide. A prima vista si potrebbe quindi pensare che i dislivelli determinati si riferiscono a quoteellissoidiche. Bisogna pero tenere conto che la direzione rispetto a cui viene misurato l’angolo zenitale none la normale all’ellissoide, ma la verticale. Quindi, se lungo il profilo congiungente A con B la deviazionedella verticale e approssimativamente costante, anche l’inclinazione del geoide rispetto all’ellissoide e quasicostante, e il dislivello determinato puo essere riferito alle quote ortometriche. Se invece la deviazione dellaverticale varia, ne consegue un errore nel dislivello, analogo a quello che deriva da un errore nella misura diz .
NOTA 2: l’angolo z e in ogni caso affetto da un errore dovuto al fatto che, a causa della rifrazione, ilcammino ottico da A a B non e rettilineo. Tale errore puo essere modellizzato aggiungendo a z unaquantita ε = ks/(2R) , dove il coefficiente k dipende dalle condizioni atmosferiche. Il valore di k aumentacon la latitudine; nelle nostre regioni k ≡ 0.16 ± 0.03 , con oscillazione abbastanza regolare nel corso dellagiornata, che presenta un minimo nelle ore centrali. In conseguenza di tale effetto, il termine cot(z−(s/2R))va modificato in cot(z + ε − (s/2R)) = cot(z − ((1 − k)/2R)s) ; ad esempio, un errore δk = 0.02 su unadistanza di 12 km comporta un errore nell’angolo δε = 2 · 10−2 · 12/12000 rad = 2 · 10−5 rad ≡ 4 arcsec .
17
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
17

Complessivamente, si puo dire che l’errore nella livellazione trigonometrica e di almeno 1 cm per ogni km didistanza, per distanze inferiori a 10 km.
6.3. L’altezza ortometrica. - Le differenze di quota vengono usualmente determinate con la livellazionegeometrica, la cui operazione elementare, detta battuta di livellazione, consiste nell’individuare su due stadieverticali poste ad una certa distanza fra loro (generalmente dell’ordine di 100 m, o anche inferiore su terrenoaccidentato) due punti connessi da una linea orizzontale (cioe equipotenziale). Viene cosi misurata
H(P2) − H(P1) = P1P ′1 − P2P ′
2
(vedi fig.11).
La collimazione dei punti sulle stadie viene eseguita con uno strumento detto livello, costituito da un can-nocchiale posto su un treppiede in posizione intermedia fra le stadie; l’orizzontalita dell’asse del cannocchialee controllata mediante una livella toroidale. Gli errori dovuti al fatto che il cammino ottico non e rettilineoa causa della rifrazione vengono compensati se il livello e posto a ugual distanza dalle due stadie.
L’accuratezza di una singola battuta puo raggiungere 0.1mm. Poiche l’accuratezza di un profilo di nbattute si ottiene moltiplicando per
√n l’accuratezza della singola battuta, essa e approssimativamente
proporzionale alla radice quadrata della lunghezza del profilo.
In una campagna di livellazione possono cosi essere misurate le quote H di determinati punti di una regionerispetto ad un punto di riferimento. Per poter definire mediante questa procedura le altezze ”sul livello delmare”, occorrerebbe che le differenze di quota rispetto a punti di riferimento posti tutti al livello del marefossero indipendenti dalla scelta del punto di riferimento. Cio in realta non avviene, poiche la livellazionemisura in realta il dislivello fra superficie equipotenziali; pertanto, se queste non sono parallele fra di loro, ledifferenze di quota dipendono dal percorso scelto per congiungere i punti. Ad esempio, con riferimento allafig.12, la differenza di quota misurata lungo il percorso AB e minore di quella misurata lungo il percorsoA′B .
Piu precisamente, essendo il vettore gravita il gradiente del potenziale, la relazione fra il dislivello e ladifferenza di potenziale e, nell’approssimazione lineare, valida per piccoli dislivelli,
∆W −g∆H ;
pertanto due superficie equipotenziali corrispondenti a ben determinati valori di W sono tanto piu dis-tanziate quanto piu piccolo e il modulo della gravita.
Come si e visto, l’”altezza sul livello del mare” e un concetto mal definito. Per introdurre una definizione rig-orosa, si considera la lunghezza dell’arco di verticale, perpendicolare in ogni punto alla superficie equipoten-ziale del campo gravitazionale, congiungente il punto dato con il geoide, detta altezza ortometrica. Larelazione fra altezza ortometrica e altezza sull’ellissoide di riferimento e con buona approssimazione data da
N h − H ;
il piccolo errore dipende dal fatto che la verticale e la normale all’ellissoide non sono esattamente coincidenti(fig.13).
L’altezza ortometrica puo essere espressa dalla formula
H =∫ B
B0
dH = −∫ W
W0
dW
g=
W0 − W
g(6.3.1)
dove g e il valore medio di g lungo la verticale:
18
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
18

g =W0 − W
H=
1H
∫ H
0
gdH .
Per una accurata determinazione dell’altezza ortometrica si pone quindi il problema di stimare g , il cherichiede la conoscenza di g all’interno della terra. Questo problema viene brevemente discusso nella parteconclusiva del presente paragrafo. Per il momento si osservi che un errore δg nella stima di g comportaun errore nell’altezza espresso da
δH −δg
g2(W0 − W ) = −δg
gH
Pertanto un errore relativo su g fra 10−4 e 10−5 comporta un errore su δH fra 1 e 10 cm su 1000 m .
Puo essere utile dare espressione esplicita delle correzioni necessarie per ottenere la differenza di altezzaortometrica fra due punti a partire dalla differenza di quota misurata con la livellazione.
Siano PA e PB due punti lungo un profilo di livellazione (fig.14). Sia vA l’arco di verticale congiungentePA con la superficie equipotenziale di riferimento; in modo analogo si definisce vB . Allora
HA =∫
vA
dH ; W0 − WA =∫
vA
gdH (6.3.2)
(dove dH e l’elemento di lunghezza dell’arco vA e g e il modulo della gravita) sono la quota ortometricadi PA e la sua differenza di geopotenziale rispetto alla superficie di riferimento.
Sia γ0 un valore approssimato della gravita nell’area considerata. Da (6.3.2) si ottiene l’uguaglianza
W0 − WA
γ0= HA +
1γ0
∫vA
(g − γ0)dH = HA +gA − γ0
γ0HA (6.3.3)
dove gA e il valor medio di g su vA . Il secondo addendo negli ultimi due termini e una quantita piccola,poiche g − γ0 << γ0 .
Espressioni analoghe si ottengono per il punto PB . Per differenza si ottiene
HB − HA =WA − WB
γ0+
1γ0
∫vA
(g − γ0)dH − 1γ0
∫vB
(g − γ0)dH (6.3.4)
Gli ultimi due addendi, come risulta dalla (6.3.3), possono essere valutati numericamente conoscendo il valormedio di g lungo la verticale (la cui stima sara discussa piu avanti) e la quota ortometrica (anche soloapprossimativamente, dato che e moltiplicata per un numero piccolo). Quanto al primo addendo,
WA − WB = −∫
sAB
g · ds =∫
sAB
gdH (6.3.5)
dove sAB e il profilo di livellazione, ds e l’elemento di vettore tangente a tale profilo, g e il vettoregravita, dH e la proiezione di ds lungo la direzione di g ; i segni sono dovuti al fatto che g e direttoverso il basso, mentre dH e positivo verso l’alto. La discretizzazione dell’integrale da luogo a
WA − WB
γ0 1
γ0
∑gi∆Hi =
∑∆Hi +
∑ gi − γ0
γ0∆Hi (6.3.6)
dove la somma viene eseguita sulle battute di livellazione; il primo addendo dell’ultimo termine esprime ildislivello misurato con la livellazione geometrica, il secondo addendo e un termine correttivo, che puo esserecalcolato dopo aver misurato g lungo il profilo.
19
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
19

Sostituendo la (6.3.6) nella (6.3.4) si ottiene un’espressione che consente di determinare la differenza di quotaortometrica agli estremi di un profilo di livellazione a partire da quantita misurate.
NOTA: la quantita (WA−WB)/γ0 (detta dislivello dinamico), che ha le dimensioni fisiche di una lunghezza,non ha alcun significato geometrico, ma e fisicamente importante, poiche il segno della differenza di geopoten-ziale indica la direzione di scorrimento dell’acqua, che ha luogo sempre verso il punto con geopotenzialemaggiore.
6.3.1. Stima di g - La stima di g richiede la conoscenza di g lungo l’arco di verticale congiungente ilpunto di osservazione con il geoide; poiche tale arco sta all’interno della terra, una determinazione precisadi g richiederebbe il calcolo dell’effetto delle masse circostanti sul valore della gravita nei punti interni. Inrealta si verifica che, ai fini della determinazione dell’altezza ortometrica, g puo essere stimato con ottimaapprossimazione sotto ipotesi drasticamente semplificatrici. Di seguito viene riportata una procedura perottenere una stima approssimata dell’andamento della gravita all’interno della terra.
Se P ′ e un punto sulla verticale per P (vedi fig.15), si ha
g(P ′) = g(P ) −∫ P
P ′
∂g
∂HdH = g(P ) +
∫ P
P ′
∂2W
∂H2dH (6.3.7)
D’altra parte
∂2W
∂H2= ∇2W −∇2
T W
dove ∇2 e l’operatore di Laplace nello spazio tridimensionale, e ∇2T e lo stesso operatore sul piano normale
alla verticale. All’interno della terra e verificata l’equazione di Poisson:
∇2W = −4πkρ + 2ω2
dove k e la costante gravitazionale, ρ e la densita della terra nel punto e ω e la velocita angolare dirotazione terrestre. Quindi
− ∂g
∂H=
∂2W
∂H2= −4πkρ + 2ω2 −∇2
T W (6.3.8)
Il potenziale normale U verifica l’equazione ∇2U = 2ω2 , da cui
∇2T U = −∂2U
∂h2+ 2ω2 =
∂γ
∂h+ 2ω2
Quindi, se si assume
∇2T W ∇2
T U (6.3.9)
si ottiene
∂g
∂H ∂γ
∂h+ 4πkρ
Il valore di (∂γ/∂h) puo essere calcolato analiticamente e, in prossimita della superficie dell’ellissoide,risulta approssimativamente -0.3086 gal/Km; scegliendo per ρ il valore di 2.67 g/cm3 e ponendo k =
20
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
20

6.67 × 10−8 unita cgs, si ottiene 4πkρ 0.2238 gal/Km. Quindi, nel dominio in esame, (∂g/∂H) assumeil valore costante di −0.0848 gal/Km . Di conseguenza
g(P ′) = g(P ) + 0.0848(HP − HP ′) (6.3.10)
Poiche g varia linearmente con l’altezza, il suo valore medio e dato da
g =12(g(P ) − g(P0)
)(6.3.11).
In realta non e semplice dare una giustificazione dell’assunzione (6.3.9). Piuttosto che tentare una spiegazionediretta, e possibile procedere per una strada completamente diversa, il cui significato fisico e chiaro. Si puoprovare infatti che si perviene allo stesso risultato con i seguenti passi:
- si sottrae da g(P ) il contributo (positivo) di uno strato piano infinito di altezza P ′P ;
- si propaga g da P a P ′ nel vuoto;
- si aggiunge in P ′ il contributo (negativo) dello strato piano fra P e P ′ .
Questa procedura puo apparire a prima vista fisicamente inaccettabile, dato che le masse presenti fra lequote di P e di P ′ non costituiscono certo uno strato infinito, ma sono spesso circoscritte alle dimensionidi una montagna. Va rilevato pero che le masse lontane dal punto danno un contributo trascurabile allagravita. In effetti, e stato verificato con calcoli piu precisi in casi particolari che l’errore sull’altezza dovutoa questa approssimazione e al piu di pochi centimetri, cosi come e molto piccolo l’errore dovuto ad un valorenon buono della densita.
APPENDICE: Geometria dell’ellissoide
. Data una porzione di superficie S ed un punto P (appartenente alla superficie o nelle sue vicinanze),ogni arco di curva intersezione di S con un piano contenente la normale ad S per P si dice sezionenormale.
NOTA: in generale, il piano contenente la normale all’ellissoide per P e il punto Q non contiene anchela normale all’ellissoide per Q . Ne consegue che la sezione normale per P contenente il punto Q e ingenerale diversa dalla sezione normale per Q contenente il punto P . Tuttavia le normali in due puntisullo stesso meridiano o sullo stesso parallelo sono coplanari.
Raggio di curvatura - Sia γ un arco di curva, con ascissa curvilinea s ; sia r = r(s) l’equazioneparametrica di γ in funzione di s . Il vettore τ(s) = dr/ds e un versore ed e tangente a γ nel punto diascissa s . Allora dτ/ds = (1/R(s))n(s) , dove n e un versore normale a γ . Infatti, poiche |τ(s)|2 = 1 ,si ha 0 = d|τ |2/ds = 2τ · (dτ/ds) . Si sceglie il verso di n in modo che R > 0 . n e detto normaleprincipale; se γ e piana, n giace nel piano di γ . R(s) e detto raggio di curvatura di γ nel punto diascissa s . Si verifica che R = |ds/dθ| , dove θ e l’angolo che individua la direzione di n . Da questacaratterizzazione e evidente che per un arco di circonferenza R e proprio il raggio della circonferenza.
Geodetiche - Dati due punti, P1 e P2 sulla superficie di un ellissoide, esiste un arco di curva che licongiunge di lunghezza minima, detto arco di geodetica. La lunghezza dell’arco e detta distanza fra P1 eP2 . Piu precisamente:
- sia data una superficie in R3 di equazione f(x1, x2, x3) = 0 , dove f e continua con le sue derivateparziali prime; il vettore ∇f (gradiente di f ), le cui componenti sono le derivate parziali di f , e in ognipunto ortogonale alla superficie. Una curva sulla superficie, che si puo pensare parametrizzata da un’ascissacurvilinea: x = x(s) , si dice geodetica se la sua normale principale coincide in ogni punto con la normale allasuperficie: d2x/ds2 = c∇f . Si puo provare che, se P e un punto su una superficie descritta come sopra,per ogni direzione uscente da P sulla superficie esiste una e una sola geodetica; inoltre, in una porzione
21
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
21

della superficie sufficientemente piccola intorno a P , ogni punto puo essere congiunto a P da un solo arcodi geodetica, che e l’arco di minima lunghezza.
- se la superficie e di rotazione, si puo provare che le geodetiche verificano l’equazione
r sin α = costante (6.A1)
dove r e la distanza dall’asse di rotazione e α e l’azimut (ovvero l’angolo della direzione della geodeticacon quella del meridiano, ovvero della sezione con il piano contenente il punto e l’asse di rotazione). Su unellissoide r(φ) = N(φ) cos φ .
- Le geodetiche sulla superficie sferica sono cerchi massimi; sull’ellissoide non sono curve piane, ma, almenoper punti non troppo distanti, sono ben approssimabili con sezioni normali:
. differenze nelle lunghezze degli archi: circa 1 cm su 1000 km
. differenza di azimut: al massimo 0.03” su 100 km, 0.26” su 300 km.
. Sia P un punto su un ellissoide. Allora i raggi di curvatura delle sezioni normali per P assumono valoreminimo M e massimo N rispettivamente nella direzione del meridiano e del parallelo per P . Per unadirezione arbitraria con azimut α si ha (1/Rα) = ((cos2 α)/M)+((sin2 α)/N) . Le espressioni di M ed N infunzione della latitudine geodetica φ sono: M(φ) = a(1−e2)(1−e2 sin2 φ)−3/2 ; N(φ) = a(1−e2 sin2 φ)−1/2 .
22
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
22

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
23

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
24

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
25

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
26

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
27

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
28

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
29

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
30

Sistemi di riferimento
Sistema di riferimento solidale con la terra(coordinate dei punti sulla terra non variano nel tempo- a meno di deformazioni - movimenti placche tettoniche)
non inerziale:
i moti della terra rotazione diurna, precessione-nutazione, moto del polo – asse di rotazione non fisso rispetto alla
terra, moto orbitale
danno luogo a forze apparenti
es.: accelerazione centrifuga ra 2
distanza dall’asse di rotazione
km6000maxr (all’equatore) 510*3.7 (1 giro in 86400sec)
22 m/sec10*3a (la gravità è )2m/sec10
Sistema inerziale
definito in base ad osservazioni astronomiche
usato per il calcolo delle orbite dei satelliti artificiali
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
31

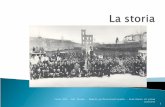
Sistemi di riferimento terrestri
Direzione della verticale
Campo della gravità (+ accelerazione centrifuga)
campo centrale 3rkM
rg 2m/sec8.9||
terraRg
[distribuzione di massa a simmetria sferica] superfici equipotenziali sferiche concentriche
campo di gravità terrestre- distribuzione di massa irregolare
o variazione irregolare del vettore gravità sulla superficie terrestre o irregolarità delle superfici equipotenziali
Misure di latitudine e longitudine astronomica
A causa delle irregolarità, da queste misurenon è possibile ricavare con precisionerelazioni spaziali fra i punti di stazione
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
32

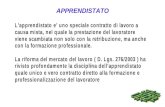
GeoideSuperficie equipotenzialea livello degli oceani (approssimativamente)ortogonale alla verticale
approssimato con ellissoide biassiale(a simmetria rotazionale)
Parametri geometrici
a semiasse maggiore (raggio equatoriale)
a
baf (schiacciamento), oppure 2
222
a
bae
150/1;300/1;km6378 2efa
Ondulazione del geoide:separazione geoide-ellissoide <100m
Deviazione della verticale:angolo fra verticale (normale al geoide)e normale all’ellissoide
dipendono non solo dalla forma geometrica,ma anche dal posizionamento e all’orientazionedell’ellissoide rispetto al geoide
HNh
altezza ondulazione altezza ellissoidica del geoide sul geoide
(livello del mare)
dato un ellissoide, corrispondenza (quasi) biunivoca),,(),,( hzyx
latitudine longitudine
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
33

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
34

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
35

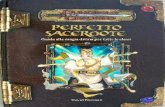
Posizionamento e orientazione dell’ellissoide
coordinate astronomiche di un punto),(
sul geoide 0P
punto sull’ellissoide 0Q
orientazione della normale in :0Q
geoide ed ellissoide tangenti00 QP
(normale=verticale)
asse di simmetria dell’ellissoide paralleloall’asse di rotazione della terra
(si fissa il meridiano di riferimento)
Posizionamento 3-D di un punto
coord.astronomiche + H altezza sul geoide
oppure
coord.geodetiche + altezza sull’ellissoide h
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
36

Sistema di riferimento nazionale
(Roma40)
Ellissoide internazionale (Hayford, 1924) 32 10*722670022.6,m6378388 ea
orientato a Monte MarioEN "4.08'2712,"51.25'5541 00
Longitudini misurate da Monte Mario
Sistema di riferimento europeo
(ED50 – European Datum)
Ellissoide internazionale“con orientamento medio europeo”
coordinate di M.Mario in ED50 :EN "93.10'2712,"49.31'5541 00
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
37

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
38

Ellissoide biassiale
Coordinate cartesiane in un sistema di assicon origine nel centro di simmetria,asse z lungo l’asse di simmetria,asse x nel piano del meridiano di riferimentoper le longitudini (Greenwich)
sin))1)(((
sincos))((
coscos))((
2 heNz
hNy
hNx
),( direzione della normale all’ellissoide
NOTA la normale all’ellissoide incontra l’asse di simmetria,
ma non nel centro
2/122 )sin1()( eaN
)(N
Trasformazioni inverse
0,0arctan
0,0arctan
0arctan
yxx
y
yxx
y
xx
y
formula chiusa complicata, oppuredeterminazione numerica ricorsiva
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
39

Trasporto di coordinate
In linea di principio
collimazione di P da P0
zenitaleangolo
azimut
distanza
coord. Polari componenti del vettore 0PP
P
P
P
P
P
P
P
P
P
P
P
P
hz
y
x
z
y
x
h0
0
0
0
0
0
sistema locale
rototraslazione
sistema globale (ellissoide)
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
40

Trasporto di coordinate
In pratica
reti geodetiche
Trasporto di coord. geodetiche (planimetriche)
misure lunghezze e azimut coord. geodetiche di archi di geodetica
arco sull’ellissoide di lunghezza minima
sfericaappross.70km)-60(
geodeticocampo
pianaappross.10km)(
co topograficampo
per coord. planimetriche
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
41

Rotazioni attorno agli assi cartesiani
x y z
100
0cossin-
0sincos
cos0sin
010
sin0cos
cossin0
sincos0
001
(in verso antiorario visti dal semiasse positivo di rotazione
per 0,, )
rotazioni attorno ad assi diversi non commutano
NOTA: vzyx RRR
l’ordine delle rotazioni è da destra a sinistra
(ossia nell’ordine in cui sono applicate al vettore)
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
42

Rotazioni infinitesime
al I ordine sin1cos
100
01
01
10
010
01
10
10
001
zyx RRR
al I ordine1
1
1
zyx RRR
le rotazioni commutano
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
43

Roto-traslazione con variazione di scala
z
y
x
RRI
w
v
u
z
y
x
R
w
v
u
w
v
u
00
0
0
0
0
0
0
))((
z
y
x
RR
z
y
x
R
z
y
x
R
w
v
u
00000
0
0
0
ord.)I(al
Per semplicità si pone IR00 ,1
z
y
x
z
y
x
w
v
u
z
y
x
w
v
u
0
0
0
0
0
0
0
0
0
0
0
0
100
010
001 w
v
u
z
y
x
xy
xz
yz
z
y
x
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
44

Composizione di rotazioni attorno agli assi
Date 2 terne di assi cartesianidi orientazione relativa arbitraria,per sovrapporre la prima alla seconda
rotazione attorno a in modo che1z 1x
coincida con la proiezione di su2z 11 yx
)(1zR (antioraria se 0 )
rotazione attorno a in modo che1y
si sovrapponga a1z 2z )2
(2 yR
rotazione attorno a 21 zz in modo che 1x
si sovrapponga a , a . 2x 1y2y
)2
(3zR ( = azimut : angolo con la direzione del nord )
20 , in verso orario
La direzione di è individuata da2z
x2y1
z1z2
x1y2
angolo col piano ,11 yx 2/2/
angolo della proiezione ortogonale di su con ,2z 11 yx 1x
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
45

Esempio: roto-traslazione da sistema globale
a sistema locale
z
y
x
nel sistema globale (“geocentrico”)
origine del sistema locale:
0
0
0
0
0
0 :
z
y
x
P
coordinate di P0 nel sistema globale: traslazione
orientazione della normale alla sup. di riferimento
- per la sfera è la direzione radiale
Orientazione del sistema locale
asse z in dir.0
0
asse x verso E piano xy tangente alla sup.di rif.
asse y verso N
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
46

Determinazione di grandezze geodetiche (fig.10)
Si misurano
distanze rettilinee d
angoli zenitali z , z’
Si vogliono ottenere
distanze (curvilinee) sull’ellissoide
dislivelli
Calcoli in approssimazione sferica
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
47

Determinazione di grandezze geodetiche – distanze (fig.10)
Rs
Misurando z e z’
')'()( zzzz
Misurando z e d
)sin(arctan or
or zddhR
d
risulta
zR
d
R
h
zds
cos1
sin
riportaa quota 0
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
48

Determinazione di grandezze geodetiche – dislivelli (fig.10)
)'sin()'()sin()( zhRzhR
z
)2
cot()1('R
sz
R
hshh m
porta piccole in quota correzioni
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
49

Dislivelli
(livellazione geometrica)
'' BBAAhAB
Livello : cannocchiale messo in stazione con asse orizzontale
per mezzo di una livella toroidale
Lettura su stadie graduate
Strumento nel mezzo : si compensano
- errori di rifrazione atmosferica
- difetti costruttivi (asse ottico non parallelo al supporto della livella)
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
50

Altezza ortometrica (sul geoide)
livellazione geometrica
non parallelismo delle superfici equipotenziali
altezza ortometrica
Differenze di potenziale HgW
determinazione delle differenze di potenzialelungo un profilo
livellazione geometrica + misura di g
Correzioni ortometriche della livellazione
tengono conto delle densità di massa fra geoide e superficie terrestre
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
51

Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
52

Raggio di curvatura
)(srr s = ascissa curvilinea
ds
drversore tangente
nRds
d 1raggio di curvatura0R
normale principale n
d
dsR
sin
cos
ds
dr
sds
d
ds
d2
2
cos
sin rr
sds
d
ds
d2
2rr
s
ds
dR
2
2
1
r
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
53

Curve geodetiche
)(srr arco di curva su superficie 0),,( zyxf
fcds
d2
2r
Geodetiche su una sup. di rotazione
costsin distanza dall’asse di rotazione azimut della tangente
raggi di curvatura delle sezioni normali(con azimut )
NMR
22 sincos1
2/122 )sin1( eaN2/3222 )sin1)(1( eeaM
Prof. Fausto Sacerdote - Topografia e cartografia digitale - Capitolo 3 Geodesia
54



![geodesia 2.ppt [modalità compatibilità] - users.unimi.itusers.unimi.it/br1/geodesia2.pdf · 1 GEODESIA 2 PRIMO PROBLEMA: le misure dovrebbero essere eseguite lungo geodetiche in](https://static.fdocumenti.com/doc/165x107/5bc4234609d3f2995e8dcd87/geodesia-2ppt-modalita-compatibilita-usersunimi-1-geodesia-2-primo.jpg)