tesina elttromeccanica
30
Università degli Studi di Catania Corso di Laurea in Ingegneria dell’Automazione e Controllo dei Sistemi Complessi Modellistica dei sistemi elettromeccanici Anno 2008/2009 Patti Giuseppe Prof. Ing. Scarcella
-
Upload
giuseppe-patti -
Category
Documents
-
view
229 -
download
0
description
relazione prove di laboratorio
Transcript of tesina elttromeccanica

Università degli Studi di Catania Corso di Laurea in Ingegneria dell’Automazione e Controllo dei
Sistemi Complessi
Modellistica dei sistemi
elettromeccanici Anno 2008/2009
Patti Giuseppe
Prof. Ing. Scarcella

Avviamento con resistenze rotoriche
Quando si avvia una macchina nascono essenzialmente due problemi: la
coppia allo spunto, che potrebbe non essere sufficiente a far partire la
macchina e la corrente allo spunto che potrebbe invece essere troppo alta
provocando così in danneggiamento della suddetta.
Da ciò sono state sviluppate diverse tecniche di avviamento che
permettono di risolvere questi problemi una di queste è l’avviamento con
inserzione di resistenze rotoriche.
Il principio da cui deriva tale avviamento si basa su considerazioni fatte
cercando il valore dello scorrimento per cui si ha coppia max che è
eer
as
XV
pCω'2
max 23=
Da quanto si può osservare poiché nell’equazione della coppia max è
sparita la resistenza rotorica ( che è la resistenza su cui si dissipano le i di
avviamento), e quindi la coppia max non dipende da r, possiamo farla
variare a nostro piacimento aggiungendo nel caso specifico delle
resistenze, in modo da far diminuire la corrente allo spunto.
Ciò permette inoltre al motore di avviarsi con la coppia massima

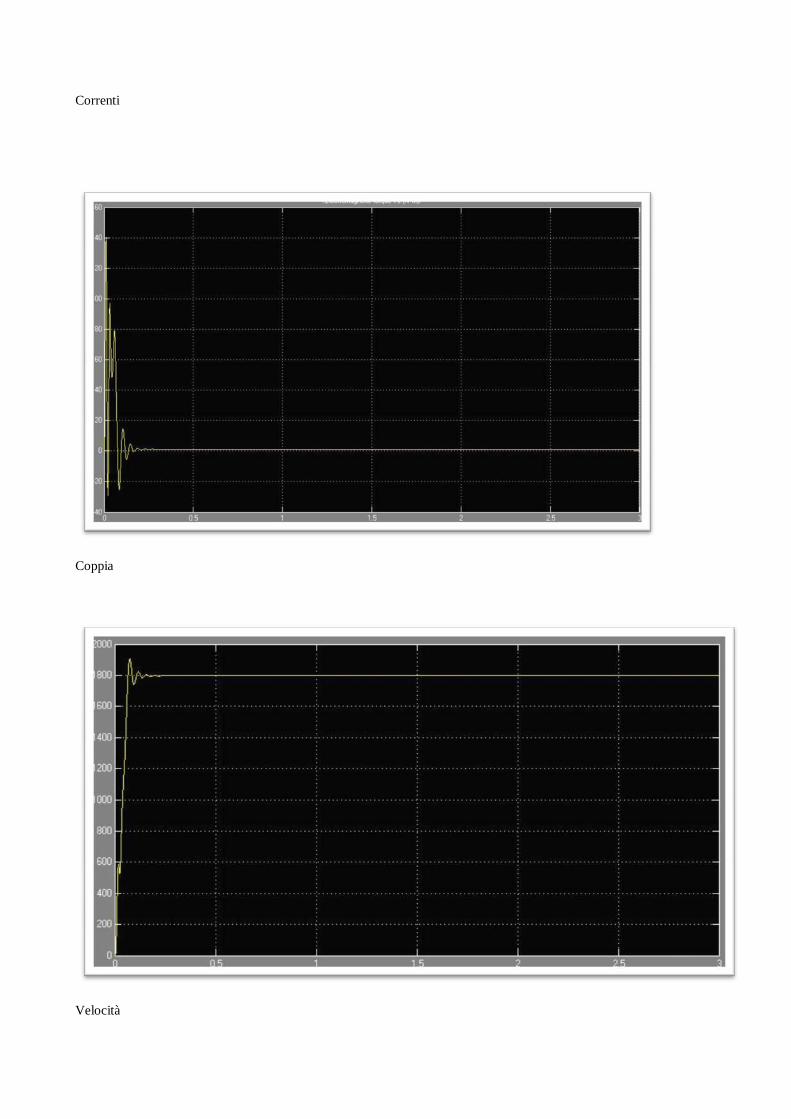
Corrente

Velocità
Coppia

Controllo di scorrimento
Per quanto riguarda il controllo di scorrimento esso può essere visto come
un’ evoluzione diretta del controllo V/f in quanto introduce un feedback di
velocità ed un controllore PI; il confronto va fatto tra wr e la velocità
desiderata poi il risultato va inviato al controllore e l’uscita di
quest’ultimo il quale, a partire dall’errore di velocità genera un segnale di
correzione che è proprio una pulsazione di scorrimento. Infine
quest’ultima, sommata alla wr attuale, fornisce la we di riferimento.
Lo scopo di questo tipo di controllo è di far erogare alla macchina più o
meno coppia, al variare del carico, lasciando il più possibile inalterata la
velocità.
Vediamo lo schema a blocchi in Simulink.
La velocità di riferimento wr* è pari a 100rad/s mentre la coppia passa da
0 a 50 Nm dopo 0.6s.

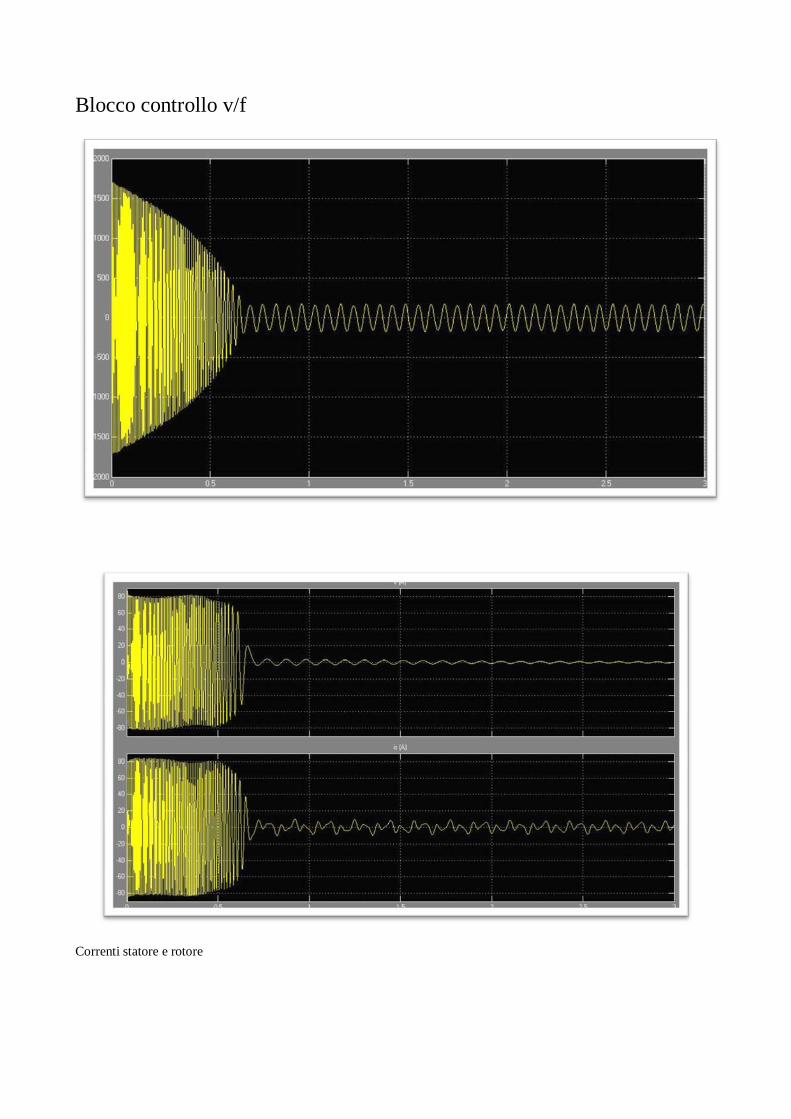
Blocco controllo v/f
Correnti statore e rotore

velocità
Coppia

Macchina asincrona controllo V/f costante
Lo scopo del controllo è quello di ottenere un punto di lavoro in una
regione ampia del piano ω-Ce che è l’intersezione tra la caratteristica
elettromeccanica e quella del carico. Quindi l’obbiettivo del controllo V/f
costante è quello di garantire, scelta una regione della caratteristica
elettromeccanica, un funzionamento a coppia nominale al variare della
velocità.
Considerando l’equazione della coppia Ce:
222
22
3lrser
se
e
asr Lr
VrpCe
′+′
′=
ωω
ω
Notiamo che per mantenere la coppia costante occorre che sia il rapporto
e
asVω che seω devono mantenersi costanti. In questo tipo di schema la seω
viene regolata ad anello aperto quindi non ho il controllo , ciò significa
che per farla mantenere costante devo avere un carico con Cr costante; da
qui si ha l’unica condizione da rispettare affinché il controllo si possa
effettuare e cioè che il rapporto e
asVω sia costante. Volendo scendere nei
particolari il rapporto e
asVω ha un significato fisico, infatti la Vas nel

circuito equivalente è la f.e.m. indotta quindi quindi il rapporto sarebbe il
flusso e quindi in altre parole noi dobbiamo fare rimanere il flusso costante
Schema del controllo (in blu) V/f
Correnti di statore e rotore

velocità
coppia

L’elettromagnete
È caratterizzato da un’ancora fissa e una mobile separate da un traferro,
all’ancora mobile è attaccata ad una molla elastica che conferisce alla
struttura una forza resistente( mF ) mentre la parte fissa è sede di un
avvolgimento. Eccitando l’induttore si tende a far salire l’ancora mobile
perché alimentando con una corrente si stabilisce una forza
magnetomotrice e un flusso.

Per poter simulare il comportamento dell’elettromagnete bisogna prima andare ad analizzare le equazioni che ne reggono il comportamento e cioè
( ) ( )ΨΨΓ−=ΨΨ
−= yRvyL
Rve ,,
Per quanto riguarda la parte elettrica e
dtdyy ='
mFyF
dtdy my −Ψ
=),('
Per quanto riguarda la parte meccanica
Da cui ipotizzando il sistema lineare e considerando le equazioni in funzione del flusso il sistema risolvente diventa:
( )
Ψ=Ψ
Γ=
Ψ−=
Ψ
)()(
21
21
2
22
yLdyydL
dydF
yLRv
dtd
y
A questo punto non resta che scegliere i valori delle grandezze che entreranno in gioco
R = 9Ω ;
V = 6V (tensione d’alimentazione all’avvolgimento);
m = 0,055 kg (massa ancora);
Γ==
− 110*293,6)(5
yyL
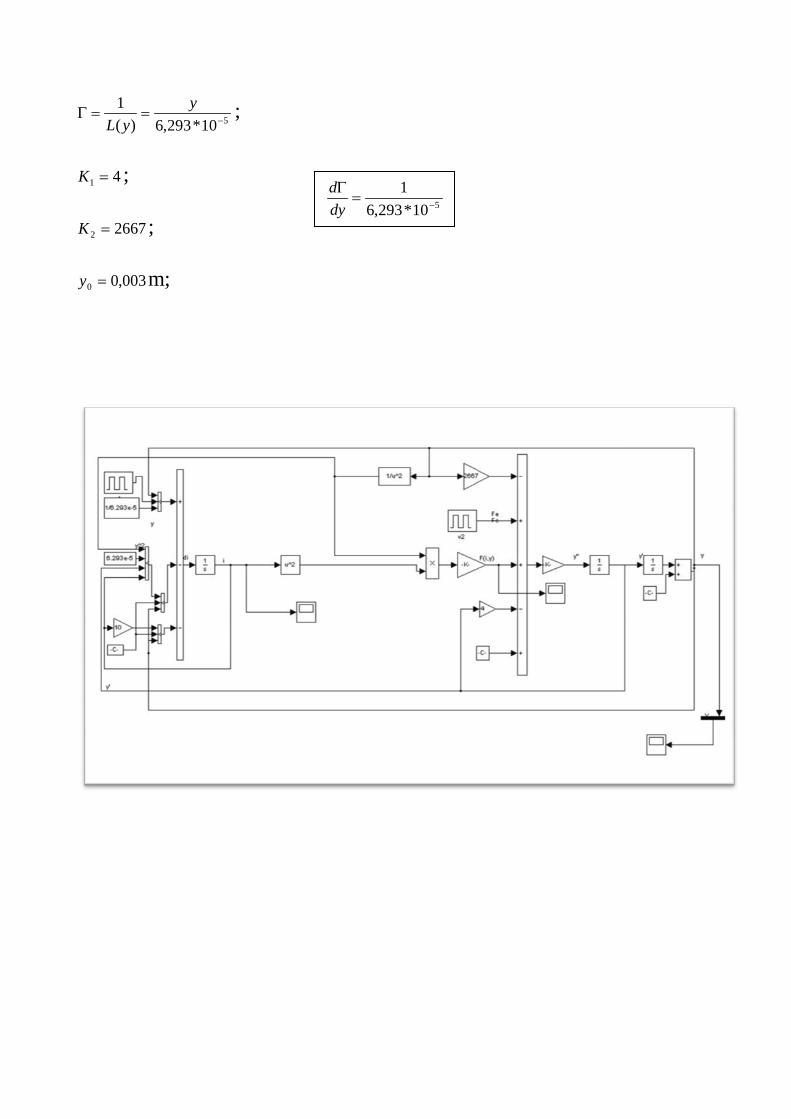
510*293,6)(1
−==Γy
yL;
41 =K ;
26672 =K ;
003,00 =y m;
510*293,61
−=Γ
dyd

F(I,y)
I
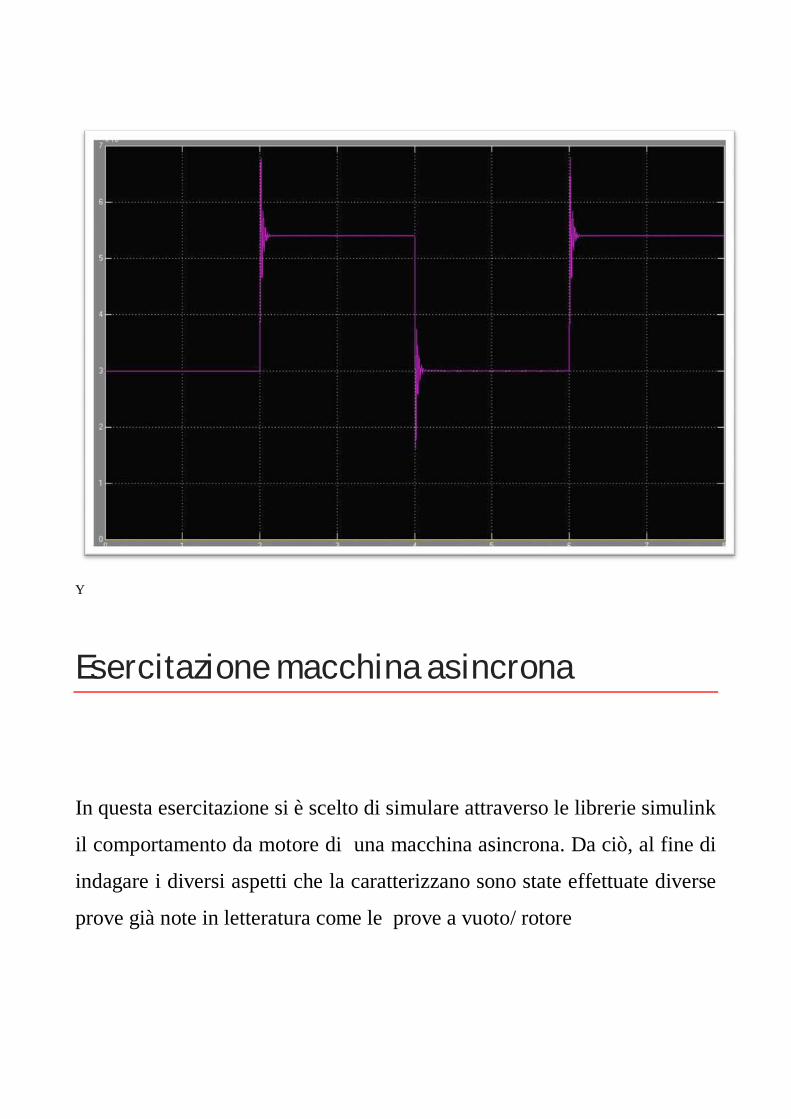
Y
Esercitazione macchina asincrona
In questa esercitazione si è scelto di simulare attraverso le librerie simulink
il comportamento da motore di una macchina asincrona. Da ciò, al fine di
indagare i diversi aspetti che la caratterizzano sono state effettuate diverse
prove già note in letteratura come le prove a vuoto/ rotore

L’alimentazione è a triangolo con tre sinusoidi di valore efficace pari a 460
V e frequenza di 60 Hz,
sfasate tra loro di 120°.
La coppia di carico è uno step che passa da 0 a 50 Nm dopo 0.3 s.
Di seguito lo schema a blocchi simulink che rappresenta la nostra
macchina asincrona e i vari grafici ottenuti plottando la Vab, le correnti di
rotore e statore (ir,is), velocità e coppia
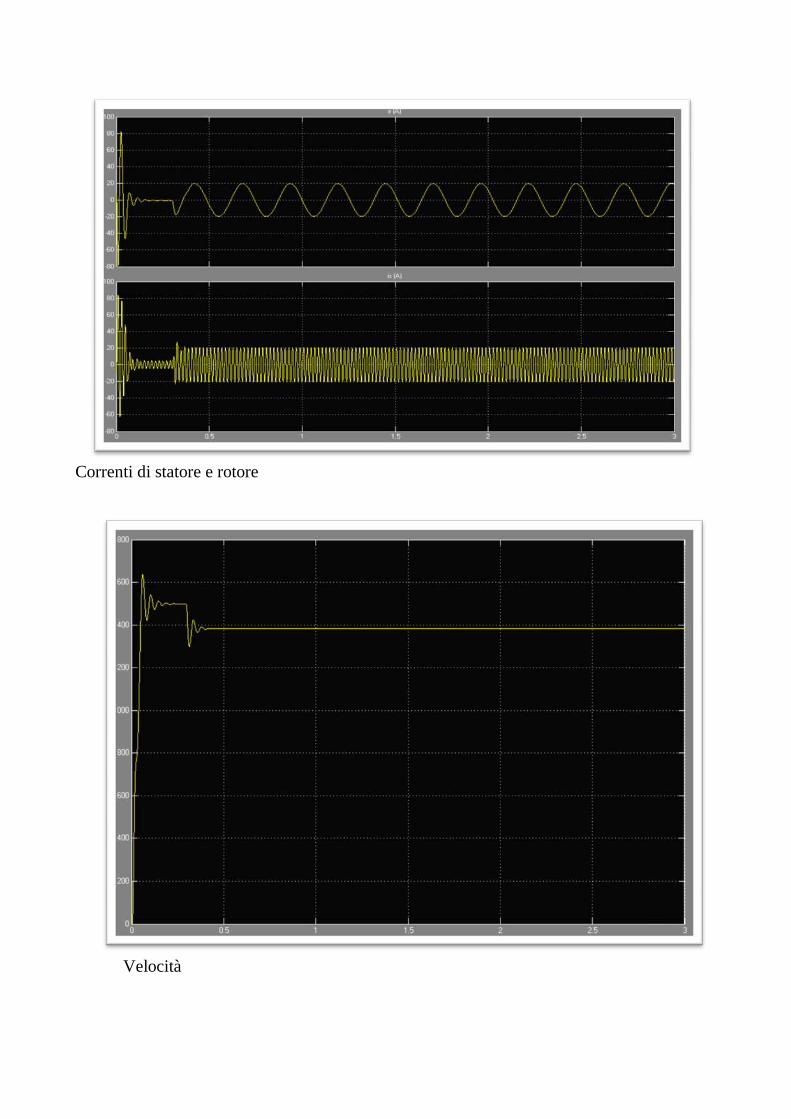
Correnti di statore e rotore
Velocità

Coppia
Si può notare come in avviamento vi sia un’ elevata corrente di spunto e
inoltre all’aumento della coppia di carico, all’istante 0.3 s, la macchina
risponda con una diminuzione della velocità ed un aumento della coppia
elettromagnetica.
Prova a vuoto/rotore bloccato Per poter effettuare la prova a rotore bloccato, dal modello già visto
precedentemente si è intervenuto sull’inezia J del rotore impostandola ad
inf.
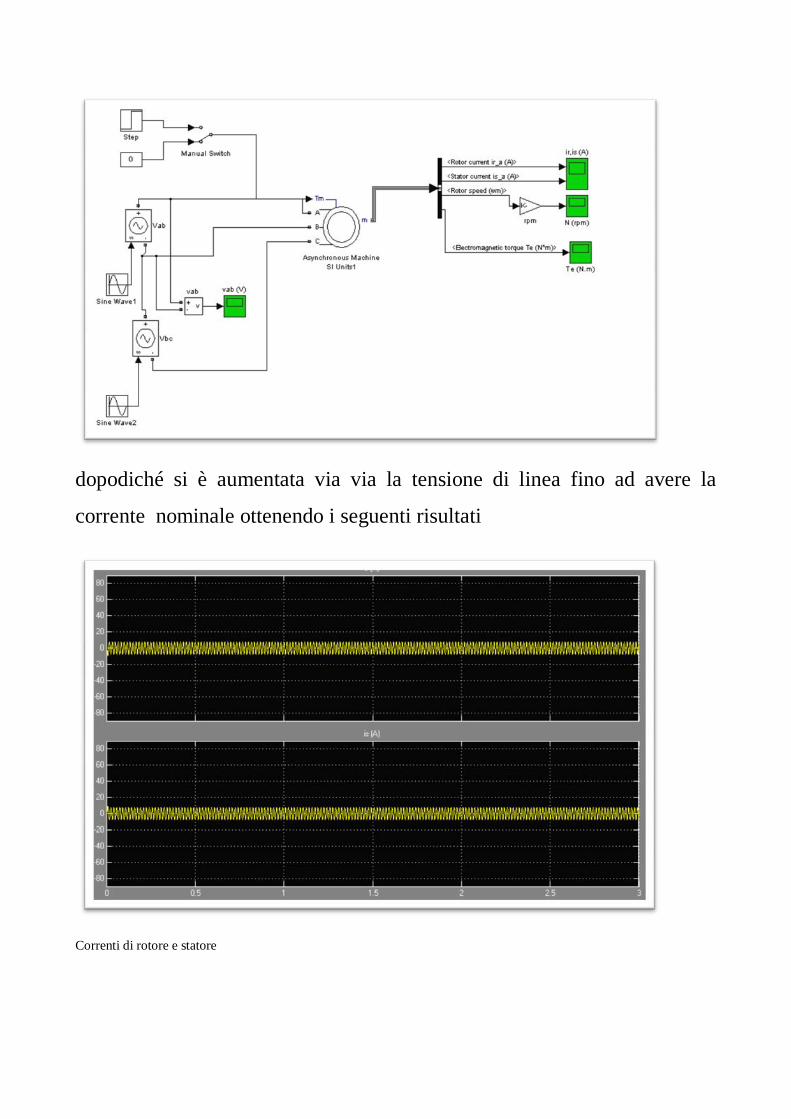
dopodiché si è aumentata via via la tensione di linea fino ad avere la
corrente nominale ottenendo i seguenti risultati
Correnti di rotore e statore

Coppia
Per quanto riguarda invece la prova a vuoto non si è intervenuti sulla
macchina, e si imposta la tensione di linea nominale e si otterrà la corrente
a vuoto
Correnti
Coppia
Velocità

Trasformatore lineare Il trasformatore è una macchina elettrica che consente di innalzare ed abbassare, in
maniera efficiente e senza eccessive perdite, il valore della tensione.
Al fine di analizzare al meglio il suo funzionamento sono state eseguite le due prove
di trasformatore a vuoto e a corto circuito, che permettono tra l’altro di ricavarne i
parametri
Prova a vuoto
Serve per la determinazione delle perdite nel ferro, oltre che della corrente assorbita a
vuoto (col relativo fattore di potenza). Inoltre permette di determinare i parametri
trasversali del circuito equivalente semplificato.
Questa prova, schematicamente mostrata, viene effettuata lasciando aperta la porta
nel circuito secondario ed applicando al primario la tensione nominale V1N.

Flusso

In ordine: flusso, Imagn,Iprim,Isec
Prove a corto circuito
Serve per la determinazione delle perdite negli avvolgimenti, oltre che della tensione
di cortocircuito (col relativo fattore di potenza). Inoltre permette di determinare i
parametri longitudinali del circuito equivalente semplificato.
La prova viene effettuata cortocircuitando i terminali di secondario e applicando una
tensione al primario tale da avere al secondario la corrente nominale
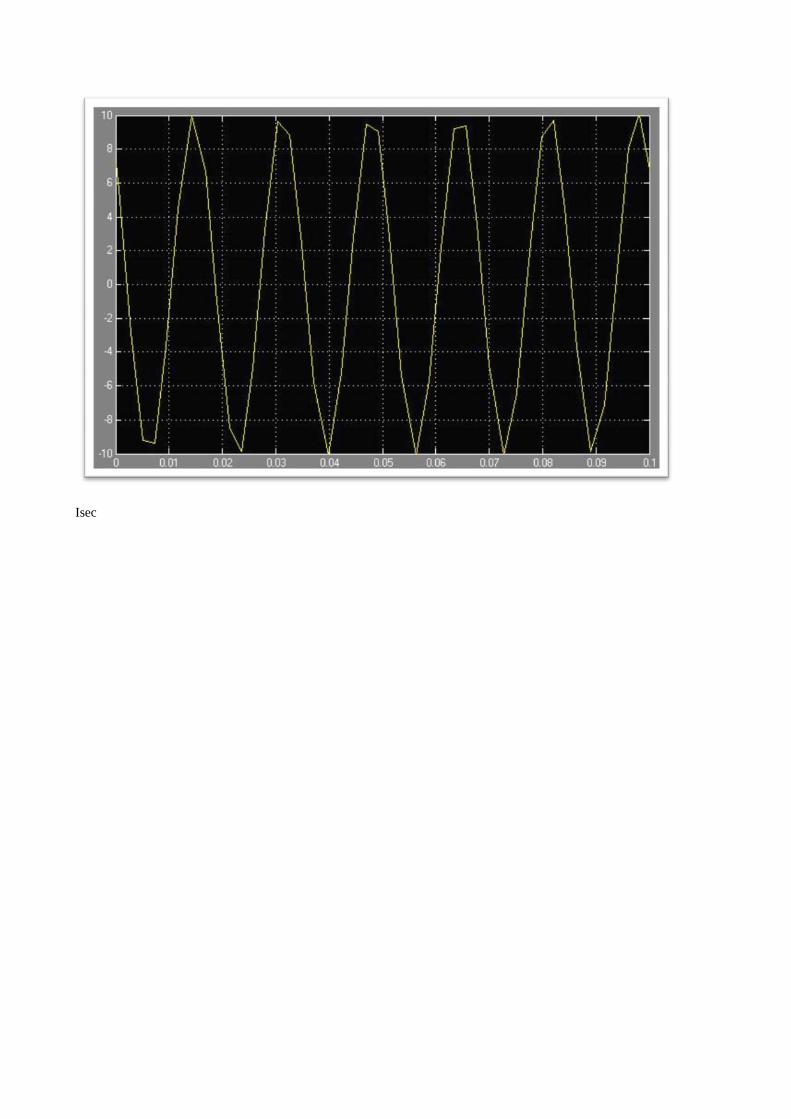
Isec

Esperienza in laboratorio
La prova effettuata in laboratorio, su una macchina asincrona reale,
permette di andare a misurare tramite un voltometro digitale le diverse
grandezze di interesse che sono: tensione (V), corrente (I), fattore di
potenza (φ) e potenza, sviluppate nelle due classiche prove di rotore a
vuoto e bloccato.
La macchina su cui si è operato è come già detto prima una macchina
asincrona trifase che viene alimentata a 50 Hz e riesce a sviluppare 3Kw di
potenza nominale e nel caso (il nostro) di collegamento a stella la tensione
di alimentazione avrà un valore nominale di 380 V e 6,9 A.
La velocità di rotazione che riesce a raggiungere tale macchina è di circa
1430 r/min da ciò intuiamo che è una macchina a 4 poli in quanto la
velocità di rotazione non è poi così molto elevata
Mat 3 50 Hz Modello trifase a 50Hz MT10….. Modello della macchina 380 V Y 6.9 A (220 V 12 A)
alimentazioni conf stella/triangolo
1430 r/min Velocità rotazione Cosφ= 0.81 Fattore di potenza con
alim nominale
Tabella rappresentante i valori della targa della macchina

In entrambe le prove la macchina è stata alimentata tramite un Variac che
permetteva di variare ad arbitrio la tensione che dovevamo dare in ingresso.
ROTORE A VUOTO
Per quanto riguarda la prova a rotore a vuoto il rotore si lascia libero di
ruotare e si alimenta la macchina con tensione via via crescenti fino ad
arrivare alla tensione nominale che è di 220 V.
Come risulta subito evidente osservando la tabella riportata in alto il valore
di tensione nominale dovrebbe essere di 380 V ciò viene giustificato
perché nel collegamento a stella che andiamo a creare andando ad
interporre il nostro voltometro diamo vita ad un centro stella fittizio che ci
permette di dare come tensione nominale 220 V anzichè 380 V ( in
quanto nella macchina arriveranno ugualmente 380 V)
Collegamento a stella

Tensione Corrente Fattore pot Potenza
80.47 1.101 0.1607 0.0142 121 1.74 0.1152 0.0242 160.8 2.35 0.14 0.052 198.76 3.27 0.132 0.0861 221.30 4.15 0.141 0.13 230.36 4.777 0.159 0.175
Dati della prova a vuoto
Inoltre è stato eseguito un controllo sulle armoniche
Armonica Corrente tensione 1 4.1 218.5 3 0.17 0.9 5 0.19 4.06 7 0.08 2.8
ROTORE BLOCCATO
Per quanto riguarda la prova a rotore bloccato si blocca meccanicamente il
rotore e si fornisce una corrente via via decrescente dalla nominale
Tensione corrente Fattore di potenza
Potenza
52.78 6.887 0.468 0.1714 40.9 5.1 0.461 0.096 30.67 3.6 0.445 0.05 Dati della prova a rotore bloccato
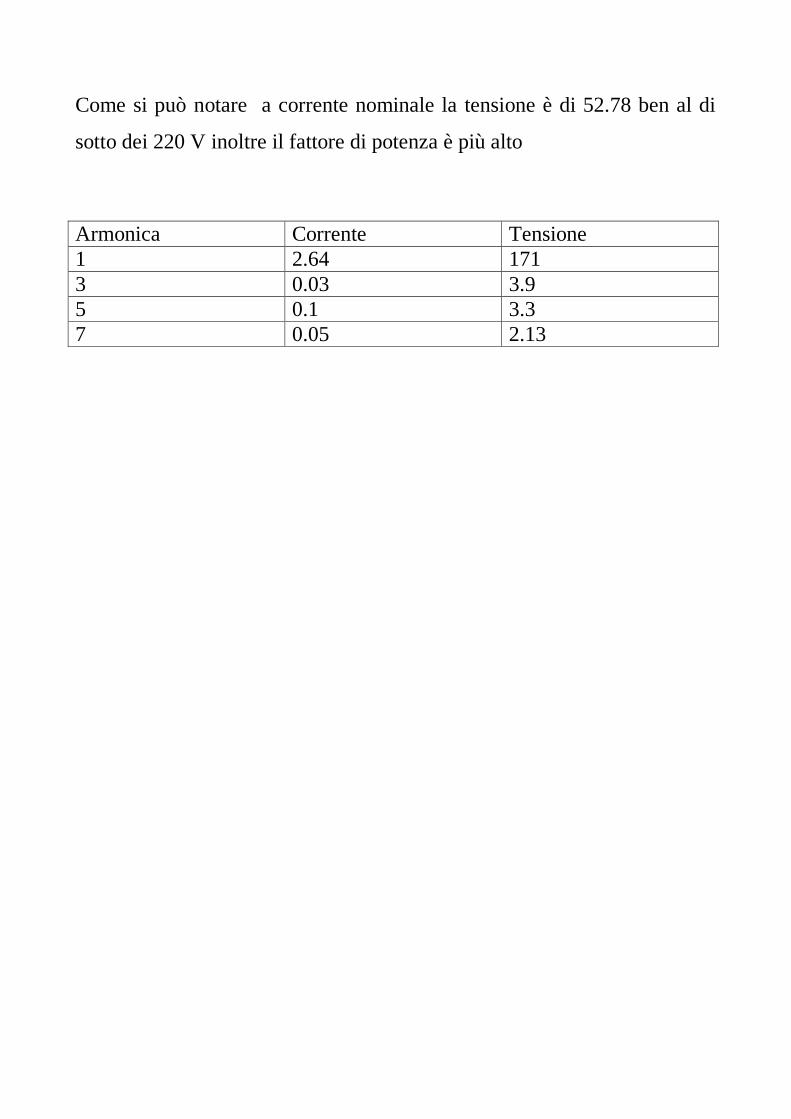
Come si può notare a corrente nominale la tensione è di 52.78 ben al di
sotto dei 220 V inoltre il fattore di potenza è più alto
Armonica Corrente Tensione 1 2.64 171 3 0.03 3.9 5 0.1 3.3 7 0.05 2.13