Tesi di Laurea - CORE · Nei Paesi occidentali rappresenta, per incidenza e ... dopo quello della...
114
1 UNIVERSITÀ DEGLI STUDI DI PISA Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Biomedica Tesi di Laurea Sviluppo di metodi per l’analisi in real-time di immagini endoscopiche Relatore: Candidato: Ing. Nicola Vanello Domenico Colella Anno Accademico 2012/2013
Transcript of Tesi di Laurea - CORE · Nei Paesi occidentali rappresenta, per incidenza e ... dopo quello della...

1
UNIVERSITÀ DEGLI STUDI DI PISA
Facoltà di Ingegneria
Corso di Laurea Magistrale in Ingegneria Biomedica
Tesi di Laurea
Sviluppo di metodi per l’analisi in real-time di
immagini endoscopiche
Relatore: Candidato:
Ing. Nicola Vanello Domenico Colella
Anno Accademico 2012/2013

2
INDICE
INDICE ................................................................................................................ 2
INTRODUZIONE .................................................................................................. 5
CAPITOLO 1
Endoscopia e tecniche di image enhancement ................................................... 8
1.1 Cancro del colon-retto .................................................................................. 8
1.2 Endoscopia ................................................................................................. 10
1.2.1 Colonscopia .......................................................................................... 10
1.3 Endoscopia potenziata o image-enhanced endoscopy (IEE) ........................ 12
1.3.1 Cromoendoscopia (CE) ......................................................................... 13
1.3.2 Endoscopia zoom e con magnificazione d’immagine ........................... 14
1.3.3 Cromoendoscopia virtuale (CVC) .......................................................... 15
1.3.3.1 Narrow Band Imaging (NBI) ........................................................... 16
1.3.3.2 Fujinon Intelligent Color Enhancement (FICE) ................................. 18
1.3.3.3 I-Scan.............................................................................................. 20
1.3.4 Endoscopia ad autofluorescenza (AFI) .................................................. 22
1.3.5 Endomicroscopia confocale laser (CLE) ................................................ 23
1.3.6 Endocitoscopia ..................................................................................... 24
CAPITOLO 2
Il sistema di acquisizione .................................................................................. 25
2.1 Sonda ......................................................................................................... 26
2.2 Software ..................................................................................................... 28
2.2.1 Visual Studio ........................................................................................ 28
2.2.2 Librerie ................................................................................................. 28
2.2.2.1 Qt ................................................................................................... 29
2.2.2.1.1 Qt in Visual Studio ..................................................................... 29
2.2.2.1.2 Signals and slots ....................................................................... 30

3
2.2.2.2 OpenCV .......................................................................................... 32
2.2.2.3 Da Qt a OpenCV .............................................................................. 33
CAPITOLO 3
Realizzazione dell’interfaccia grafica ................................................................ 36
3.1 GUI per analisi statica ................................................................................. 36
3.1.1 Label e immagini .................................................................................. 36
3.1.2 Caricamento, pulizia e salvataggio ....................................................... 37
3.1.3 Luminosità ........................................................................................... 38
3.1.4 Sfocatura e affilatura ............................................................................ 40
3.1.5 Rilevamento di bordi ............................................................................ 42
3.1.6 Sogliatura ............................................................................................. 47
3.1.7 Divisione e unione dei canali ................................................................ 49
3.1.8 Istogramma .......................................................................................... 55
3.1.9 Sottocampionamento .......................................................................... 56
3.1.10 Tempo e dimensioni ........................................................................... 56
3.2 GUI per analisi in real-time ......................................................................... 58
3.2.1 Concetto di tempo reale ...................................................................... 58
3.2.2 Struttura della GUI ............................................................................... 60
3.2.3 Pulsanti e operazioni ............................................................................ 61
3.2.3.1 Screenshot ...................................................................................... 62
3.2.3.2 Modalità A e B ................................................................................ 62
CAPITOLO 4
Proprietà ottiche del colon ed enhancement dell’immagine ............................ 64
4.1 Interazione della luce con il colon .............................................................. 64
4.3 Effetto dei parametri del modello sullo spettro riflesso ............................. 67
4.3 Immagine digitale a colori .......................................................................... 70
4.4 Enhancement dell’immagine ...................................................................... 73
4.4.1 Canale R ............................................................................................... 73

4
4.4.2 Canali G e B .......................................................................................... 79
4.5 Contrasto nelle immagini a colori ............................................................... 84
4.5.1 Criterio di ottimizzazione ..................................................................... 85
4.6 Enhancement dei dettagli ........................................................................... 88
CAPITOLO 5
Validazione e risultati ....................................................................................... 90
5.1 Test sperimentale ....................................................................................... 90
5.2 Domande .................................................................................................... 92
5.3 Raccolta dei dati ......................................................................................... 93
5.4 Presentazione dei dati ................................................................................ 93
5.4.1 Anomalie superficiali ............................................................................ 94
5.4.2 Trama vascolare ................................................................................... 96
5.4.3 Aspetto generale .................................................................................. 99
5.5 Analisi statistica ........................................................................................ 101
5.5.1 Test di Kruskal-Wallis ......................................................................... 102
5.5.2 Test dei ranghi con segno di Wilcoxon ............................................... 104
5.6 Discussione ............................................................................................... 105
CONCLUSIONI ................................................................................................ 108
BIBLIOGRAFIA ................................................................................................ 112
RINGRAZIAMENTI .......................................................................................... 114

5
INTRODUZIONE
L’obiettivo del presente lavoro è di sviluppare un sistema per l’elaborazione di
immagini endoscopiche in tempo reale, cioè in contemporanea all’esecuzione
della procedura diagnostica.
La tesi è stata svolta in collaborazione con l’azienda Era Endoscopy S.r.l., con
sede a Peccioli (Pisa), specializzata nella ricerca, lo sviluppo e la
commercializzazione di dispositivi medicali dalle eccellenti performance in
termini di sicurezza e assenza di dolore.
Il cancro del colon-retto è la più frequente neoplasia (tumore maligno)
dell'apparato gastrointestinale e in assoluto una delle principali cause di morte
per cancro. Nei Paesi occidentali rappresenta, per incidenza e mortalità, il
secondo tumore maligno nella donna, dopo quello della mammella, e il terzo
nell'uomo, dopo quello del polmone e della prostata. Si stima che in Italia
colpisca circa 40.000 donne e 70.000 uomini ogni anno.
L'evoluzione del cancro del colon-retto è lenta, per questo motivo lo screening
è uno strumento importante per la diagnosi precoce e per l’organizzazione
della strategia terapeutica. In questo senso l’endoscopia convenzionale svolge
un ruolo decisivo.
Tuttavia, la necessità di una precocità sempre crescente nel rilevamento di
neoplasie, unita al desiderio di un migliore riconoscimento di tali lesioni
maligne, talvolta difficili da distinguere da analoghe manifestazioni cliniche
come infiammazioni o traumi, ha accelerato lo sviluppo di nuove tecnologie
nell’ambito dell’endoscopia digestiva. Ciò ha portato alla nascita della
cosiddetta “endoscopia potenziata” o image-enhanced endoscopy (IEE).
In questo contesto di progresso tecnologico si inserisce il presente lavoro, che
ha come oggetto il sistema Endotics, un rivoluzionario dispositivo endoscopico

6
completamente monouso e dall’esclusivo meccanismo di avanzamento
robotico. In particolare, l’attività di sviluppo si concentra sulla componente
software, cioè sull’elaborazione digitale di immagini allo scopo di creare un
sistema di visione migliorata che possa aiutare il medico nella caratterizzazione
delle lesioni del colon e quindi in una diagnosi differenziale e precoce.
Inizialmente è stata creata un’interfaccia grafica (GUI) che permettesse di
lavorare con immagini “statiche”, cioè con fotogrammi (frame) estratti da un
esame video-endoscopico, allo scopo di consentire un’analisi preliminare del
problema.
In seguito, la collaborazione con medici endoscopisti ha permesso di
individuare alcuni criteri per la realizzazione di un’interfaccia semplice e
funzionale da utilizzare durante la scansione endoscopica sul paziente. Ciò ha
condotto allo sviluppo dell’interfaccia grafica per l’elaborazione in tempo reale.
Prima di intervenire su quest’ultima è stato necessario approfondire la
conoscenza del colon e delle sue proprietà ottiche. A tale scopo è stata svolta
un’accurata ricerca sull’argomento in letteratura, da cui sono emerse le
principali caratteristiche del tessuto dal punto di vista clinico, e si è appreso
come modellizzarlo affinché le sue proprietà ottiche dipendessero da pochi
semplici parametri.
Alla luce di queste conoscenze fisico-anatomiche e dei principi di acquisizione
dell’immagine digitale a colori, è stato proposto un metodo di elaborazione in
real-time basato sull’applicazione di curve di tono ai tre canali dell’immagine
digitale (RGB).
Tale metodo tiene conto sia degli aspetti teorici, legati alle diverse proprietà di
penetrazione e assorbimento nel colon delle varie regioni spettrali della luce,
sia di un criterio sperimentale di ottimizzazione delle suddette curve, basato
sulla massimizzazione di un indice di contrasto.

7
Una volta definito e ottimizzato il sistema di elaborazione, è stato necessario
validarlo, verificando che la soluzione proposta apportasse reali miglioramenti
all’immagine, nella prospettiva di fornire un concreto supporto diagnostico.
Si è imposta quindi la necessità di intervistare un certo numero di medici
endoscopisti, sottoponendoli a un test opportunamente sviluppato. A tal fine,
ci si è recati al 20° Congresso Nazionale delle Malattie Digestive, svoltosi a
Napoli dal 14 al 22 marzo 2014 presso la Mostra d’Oltremare.
Complessivamente sono stati intervistati quattro medici endoscopisti. Le
risposte sono state raccolte e presentate sotto forma di tabelle, grafici e
istogrammi. Infine, i dati sono stati sottoposti a test statistici.
Il Capitolo 1 introduce il problema del cancro del colon-retto, descrive la
procedura endoscopica in ambito digestivo e le tecnologie attualmente
esistenti di endoscopia potenziata (image-enhanced endoscopy).
Nel Capitolo 2 è descritto il sistema di acquisizione, con un accenno alla sonda
endoscopica e particolare attenzione al software, costituito dall’ambiente di
sviluppo e dalle librerie necessarie all’acquisizione ed elaborazione delle
immagini.
Nel Capitolo 3 è esposta la procedura di realizzazione delle due interfacce
grafiche (quella per analisi “statica” e quella in real-time) e sono analizzati in
dettaglio i singoli componenti (widget) e la loro funzione.
Il Capitolo 4 descrive le proprietà ottiche della mucosa colica, i principi di
acquisizione dell’immagine digitale e il problema del contrasto nelle immagini a
colori. Nello stesso capitolo è presentato un metodo di elaborazione in real-
time basato sull’applicazione di curve di tono ai tre canali dell’immagine (RGB)
ed è proposto un criterio sperimentale di ottimizzazione delle suddette curve.
Nel Capitolo 5, infine, è descritto il test sperimentale di validazione sottoposto
ai medici endoscopisti e sono mostrati i dati raccolti e i risultati dei test
statistici, accompagnati da relativa analisi e discussione.

8
CAPITOLO1
Endoscopiaetecnichediimageenhancement
Per affrontare al meglio le sfide che il presente lavoro impone, è importante
conoscere a grandi linee il background medico e tecnologico su cui esso si
innesta. Innanzitutto, è necessario comprendere la patologia di interesse,
ovvero il cancro del colon-retto, con particolare riguardo alla sua formazione,
evoluzione e ai problemi connessi con la sua diagnosi precoce. In secondo
luogo, è essenziale avere un quadro generico completo delle tecnologie
attualmente in uso nelle aziende ospedaliere, e quelle ancora in fase di ricerca
o sviluppo.
1.1Cancrodelcolon-retto
Il carcinoma del colon-retto (CRC) è il tumore maligno più frequente originato
nel colon, nel retto e nell'appendice. Con 610.000 morti all'anno nel mondo, è
la quarta più comune forma di cancro. La malattia, abbastanza rara prima dei
40 anni, è sempre più frequente a partire dai 60 anni, raggiunge il picco
massimo verso gli 80 anni e colpisce in egual misura uomini e donne.
L'incidenza del cancro del colon-retto è più alta nei paesi sviluppati
(occidentali) e più bassa in paesi come Africa e Asia. Secondo l’American Colon
Cancer Society, ciò è dovuto principalmente allo stile di vita, cioè a fattori come
obesità, alto consumo di grassi, fumo e alcool, che ne aumentano
drasticamente il rischio. Tuttavia anche altri elementi, come la storia medica
della famiglia e il patrimonio genetico, possono aumentare le probabilità di
contrarre questa patologia.

9
La quasi totalità dei carcinomi del colon-retto si sviluppa da una lesione
preesistente, inizialmente benigna, chiamata polipo adenomatoso (adenoma).
Esso è una protrusione della mucosa del colon ed è formato dalle stesse sue
cellule che si moltiplicano in maniera incontrollata. Il polipo inizia come
benigno per poi evolvere in maligno quando, oltre la mucosa, questa
proliferazione spontanea comincia a invadere anche gli strati sottostanti
(sottomucosa, muscolare, sierosa) e gli organi vicini. È stato calcolato che
occorre un periodo dai 10 ai 15 anni perché un adenoma si trasformi in cancro
invasivo.
Figura 1 Evoluzione del cancro del colon-retto.
Attualmente, il gold standard per la diagnosi precoce di questo tumore, oltre
che per il trattamento non invasivo (non chirurgico) degli stessi polipi non
ancora degenerati, è costituito da un esame molto diffuso, nonché molto
potente, cioè l’endoscopia.

10
1.2 Endoscopia
L’endoscopia (dal greco èndon, “dentro” e skopê, “osservazione”) è, in
generale, una tecnica di esplorazione che permette al medico di visualizzare
cavità interne del corpo. Essa si serve di uno strumento, chiamato endoscopio,
definibile in prima approssimazione come un tubo, rigido o flessibile, munito di
una telecamera che trasmette le immagini a uno schermo.
L'endoscopia è normalmente impiegata in diagnostica, ma può essere utilizzata
anche per l'esecuzione di piccoli interventi terapeutici (in questo caso
l’endoscopio dovrà essere dotato di attuatori), oppure come strumento di
supporto durante un intervento chirurgico.
In base al particolare organo o apparato d’indagine, l’endoscopia assume un
nome specifico, ad esempio: la laringoscopia permette di visualizzare la laringe
e le corde vocali; la fibroscopia consente di osservare la trachea e i bronchi; la
laparoscopia esplora la membrana che riveste la cavità addominale, la
superficie del fegato e la cistifellea; l’amnioscopia è l’esame del liquido
amniotico nel quale è immerso il feto; l'artroscopia permette di osservare le
articolazioni; infine, l’esofagogastroduodenoscopia e la colonscopia consentono
di osservare il tubo digerente superiore e inferiore.
1.2.1 Colonscopia
La colonscopia (o coloscopia) è una procedura diagnostica finalizzata alla
visione diretta delle pareti interne del colon. A tale scopo si utilizza una piccola
sonda flessibile (chiamata colonscopio) munita di telecamera all'apice, inserita
previa lubrificazione per via anale e poi fatta risalire pian piano nel retto e negli
altri tratti dell'intestino crasso fino all'ultimo tratto dell'intestino tenue,
chiamato ileo, per poi essere ritirata con delicatezza.

11
Figura 2 Strumenti e procedura colonscopica.
Per garantire una migliore visualizzazione della mucosa, durante la colonscopia
si rende necessaria la distensione delle pareti intestinali. Questo effetto è
ottenuto insufflando anidride carbonica attraverso il colonscopio, un
procedimento che può risultare in alcuni casi fastidioso o doloroso.
Il colonscopio, oltre a fungere da videocamera e insufflare aria, può
all’occorrenza pulire le pareti del colon con acqua, aspirare il contenuto
intestinale o fungere da veicolo di strumenti chirurgici con cui eseguire prelievi
di tessuto o asportare polipi. La colonscopia, quindi, non ha fini esclusivamente
diagnostici, ma può essere utilizzata anche per eseguire biopsie e piccoli
interventi terapeutici. Tuttavia, la sua applicazione principale rimane l'indagine
dello stato di salute delle pareti interne della mucosa, al fine di individuare
eventuali lesioni, ulcerazioni, occlusioni o masse tumorali.
Durante l’esame il paziente si mantiene sdraiato sul fianco, ma può essere
invitato dal medico a eseguire piccoli movimenti. Vengono generalmente
somministrati antidolorifici e tranquillanti per rendere più confortevole l'esame
e attenuare le sensazioni spiacevoli. Nel complesso, l'indagine si protrae per
circa 30-40 minuti.

12
La colonscopia è un esame diagnostico a basso rischio, ma possono comunque
verificarsi complicazioni a causa dei sedativi utilizzati durante l'esame,
dell'accidentale perforazione del colon o dell'eventuale sanguinamento in
seguito alla rimozione di polipi o altri tessuti anomali. La complicanza più grave
è la perforazione del colon, che richiede un immediato intervento di chirurgia.
Eventuali perdite di sangue possono invece essere arrestate mediante
cauterizzazione già durante la colonscopia. Le altre complicazioni riguardano
l'effetto dei farmaci sedativi su persone a rischio, come i cardiopatici.
1.3 Endoscopia potenziata o image-enhanced
endoscopy (IEE)
I recenti progressi tecnologici applicati al campo dell’endoscopia digestiva
hanno consentito un notevole potenziamento dell’immagine che ha permesso,
a sua volta, di migliorare lo studio sia di superficie (visione magnificata della
mucosa e delle sue lesioni) che di profondità (valutazione della trama vascolare
sottomucosa e delle sue anomalie), con il fine ultimo di perfezionare
l’identificazione e la caratterizzazione delle lesioni neoplastiche (maligne)
precoci dell’apparato digerente [1] [2].
L’endoscopia potenziata richiede apparecchiature più costose di quelle
ordinarie e una specifica esperienza dell’operatore che tuttavia non possono
prescindere da un’accurata esplorazione endoscopica volta a identificare già
con la visione standard (senza ingrandimento di alcun genere e in luce bianca)
quelle minime alterazioni mucosali come aree di discromia (pallore focale,
eritema), di irregolarità della superficie (rilevate o depresse), convergenze
plicali o aree in cui il pattern vascolare della mucosa appare interrotto. In tali
casi l’operatore può spingersi in uno studio più approfondito mediante
tecniche di imaging avanzato.

13
Sebbene alcune ricerche, su casistiche limitate, suggeriscano un vantaggio
nell’identificazione di lesioni polipoidi di piccole dimensioni, importanti studi
prospettici più recenti hanno dimostrato che con le tecniche di magnificazione
e cromoendoscopia virtuale non c’è un vantaggio nell’identificazione di lesioni
adenomatose rispetto alla colonscopia standard. Pertanto, si può affermare
che il principale campo di applicazione delle tecnologie alla base
dell’endoscopia potenziata, più che l’identificazione delle lesioni precoci del
colon, sia soprattutto la loro caratterizzazione (diagnosi differenziale fra lesioni
neoplastiche e non neoplastiche, presunzione di malignità e infiltrazione
sottomucosa della parete).
Le tecnologie in questione, che consentono di migliorare la visione endoscopica
standard aumentando il contrasto tra una lesione e la mucosa circostante o
enfatizzando la microvascolarizzazione sottomucosa, comprendono l’ormai
consolidata Cromoendoscopia con zoom o magnificazione, la Cromoendoscopia
Virtuale (o Computed Virtual Chromoendoscopy), l’Autofluorescenza,
l’Endomicroscopia Confocale Laser e l’Endocitoscopia [3] [4] [5] [6].
1.3.1 Cromoendoscopia (CE)
La cromoendoscopia (CE) è una tecnica di imaging endoscopico tradizionale
che si serve di coloranti applicati per via topica durante la colonscopia, in modo
da facilitare la caratterizzazione e differenziazione dei tessuti.
Diversi coloranti sono stati utilizzati nei trial clinici, ma quelli più noti sono il blu
di metilene e l'indigo carminio. Il blu di metilene è assorbito dalla mucosa
normale ma non da quella infiammata o neoplastica, e perciò le distingue,
mentre l’indigo carminio non viene assorbito dai colociti ma si distribuisce tra le
cripte del colon mettendo in risalto le alterazioni infiammatorie o neoplastiche
della mucosa.
14
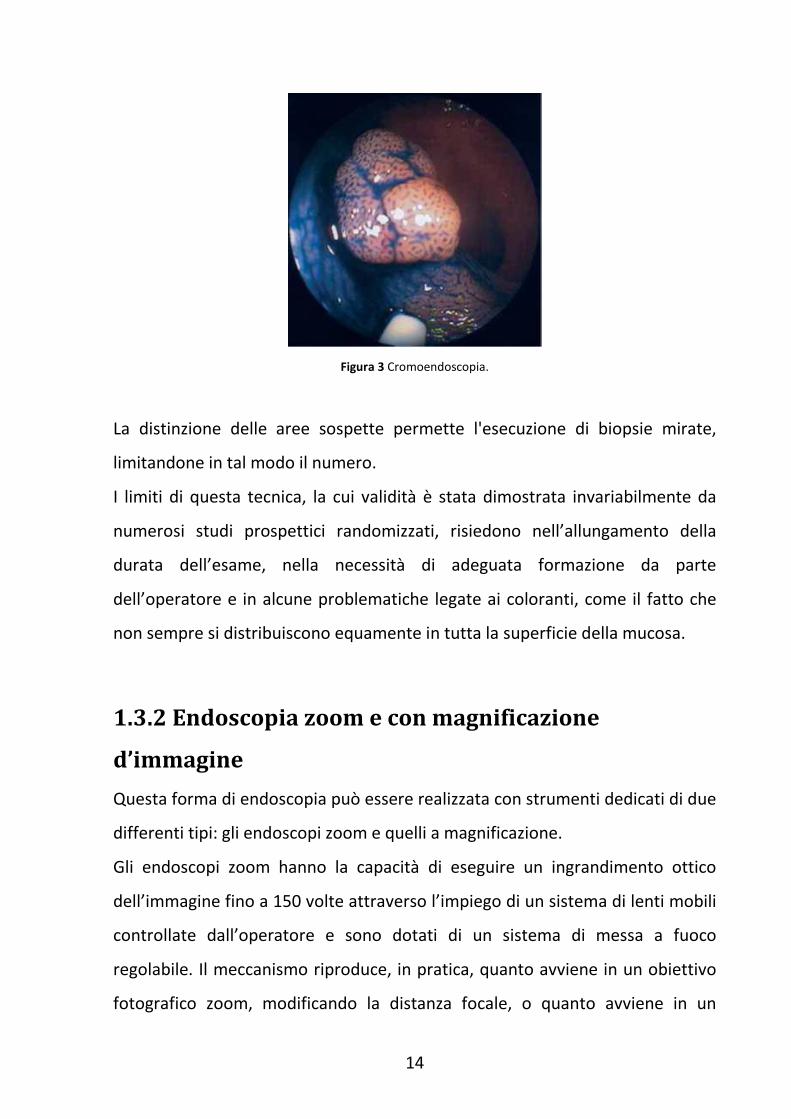
Figura 3 Cromoendoscopia.
La distinzione delle aree sospette permette l'esecuzione di biopsie mirate,
limitandone in tal modo il numero.
I limiti di questa tecnica, la cui validità è stata dimostrata invariabilmente da
numerosi studi prospettici randomizzati, risiedono nell’allungamento della
durata dell’esame, nella necessità di adeguata formazione da parte
dell’operatore e in alcune problematiche legate ai coloranti, come il fatto che
non sempre si distribuiscono equamente in tutta la superficie della mucosa.
1.3.2 Endoscopia zoom e con magnificazione
d’immagine
Questa forma di endoscopia può essere realizzata con strumenti dedicati di due
differenti tipi: gli endoscopi zoom e quelli a magnificazione.
Gli endoscopi zoom hanno la capacità di eseguire un ingrandimento ottico
dell’immagine fino a 150 volte attraverso l’impiego di un sistema di lenti mobili
controllate dall’operatore e sono dotati di un sistema di messa a fuoco
regolabile. Il meccanismo riproduce, in pratica, quanto avviene in un obiettivo
fotografico zoom, modificando la distanza focale, o quanto avviene in un

15
microscopio ottico. L’ingrandimento avviene quindi prima che l’immagine vada
a impressionare i pixel del CCD (Charge Coupled Device) dell’endoscopio.
Gli endoscopi a magnificazione d’immagine, invece, generano un
ingrandimento elettronico, partendo dall’immagine già registrata in precedenza
dal CCD nelle sue dimensioni reali e ingrandendola in seguito.
In conclusione, la tecnologia ottica (zoom) produce immagini a maggior
risoluzione, mentre quella elettronica (magnificazione) ha la tendenza a
generare immagini più sgranate. Ad ogni modo, quale che sia la tecnologia
(ottica o elettronica) che genera le immagini magnificate, queste permettono
una dettagliata visualizzazione della microstruttura superficiale della mucosa,
consentendo lo studio della disposizione spaziale degli orifizi delle cripte
ghiandolari (pit pattern).
Sebbene i risultati diagnostici endoscopici non sostituiscano la valutazione
istologica, sono tuttavia in grado di anticipare la natura istologica della lesione
studiata e quindi di orientare l’approccio terapeutico. Esiste, infatti, un
notevole agreement in mani esperte fra morfologia degli sbocchi delle cripte
ghiandolari e caratteristiche istologiche della lesione studiata.
1.3.3 Cromoendoscopia virtuale (CVC)
Il successo e i limiti della cromoendoscopia classica hanno portato allo sviluppo
della cosiddetta “cromoendoscopia virtuale o digitale”, ovvero di tecnologie
che cercano di ottenere una simile risoluzione e contrasto della mucosa, senza
tuttavia ricorrere all'utilizzo di coloranti topici [7].
La Computed Virtual Chromoendoscopy (CVC) è una metodica di imaging
endoscopico real-time on-demand che, modificando le caratteristiche
spettroscopiche del sistema di video-endoscopia utilizzato, consente di

16
migliorare la visualizzazione del network vascolare sottomucoso e della trama
mucosale superficiale.
Il grosso vantaggio della CVC rispetto alla cromoendoscopia tradizionale
consiste in una più semplice e rapida valutazione, giacché richiede solo la
pressione di un pulsante che attiva o disattiva la funzione. Vengono così
notevolmente ridotti i tempi dell'esame endoscopico mantenendo la stessa
qualità d’immagine e gli stessi risultati in termini di rilevamento delle lesioni.
Diversi studi hanno dimostrato la capacità della CVC nel differenziare una
lesione neoplastica da una non neoplastica, e nel predire il livello di
infiltrazione sottomucosa di lesioni neoplastiche precoci.
Attualmente si hanno a disposizione tre sistemi di CVC: il Narrow Band Imaging
(NBI) della Olympus Corporation (Giappone), il Fujinon Intelligent Color
Enhancement (FICE) della Fujinon (Giappone) e l’I-Scan della Pentax
(Giappone).
1.3.3.1 Narrow Band Imaging (NBI)
Il Narrow Band Imaging (NBI), cioè “imaging a banda ristretta”, è un innovativo
sistema di tecnologia ottica che sfrutta le caratteristiche delle diverse
componenti spettrali della luce [8] [9] [10].
Rispetto a un normale apparato di video-endoscopia, esso possiede un sistema
di illuminazione dotato di filtri ottici che restringono il range frequenziale della
luce emessa nelle bande 400-430 nm (centrata a 415 nm, nel blu) e 525-555 nm
(centrata a 540 nm, nel verde).
Il principio fisico è quello della profondità di penetrazione della luce: a
differenza della banda rossa, la banda blu e quella verde hanno una minore
penetrazione nel tessuto e un minore scattering, determinando un’immagine
con risoluzione migliore. Inoltre, i due filtri sono progettati per corrispondere ai

17
due principali picchi di assorbimento dell’emoglobina (415 e 540 nm), in modo
tale che le strutture ad alto contenuto di questa proteina, come i capillari e le
vene, appaiano più scure rispetto alla mucosa circostante, che riflette la luce.
In particolare la luce blu, che ha una profondità di penetrazione minore,
migliora la visione della rete capillare superficiale, mentre la luce verde, che
penetra più in profondità, evidenzia la trama vascolare sottomucosa.
La luce riflessa è catturata dal charge-coupled device (CCD) e il processore
genera un’immagine a pseudo-colori in cui i capillari dello strato mucosale
superficiale vengono visualizzati in marrone mentre le vene della sottomucosa
vengono visualizzate in ciano.
Figura 4 Principio fisico del Narrow Band Imaging.
Poiché il cancro gastrointestinale si origina nella mucosa, l’utilizzo di luce a
banda ristretta e a corta lunghezza d’onda, che penetra esclusivamente nella
mucosa stessa, può essere di grande aiuto nell’individuazione di lesioni
potenzialmente pericolose. Tuttavia, il principale vantaggio di questa potente
tecnologia è di riuscire a enfatizzare l’architettura vascolare della mucosa.
Infatti, poiché i tumori hanno abbondanti vasi sanguigni e inducono

18
angiogenesi, il riconoscimento di un letto vascolare anormale può fornire
un’assistenza decisiva nella diagnosi precoce.
Figura 5 Immagine potenziata NBI.
1.3.3.2 Fujinon Intelligent Color Enhancement (FICE)
Il sistema FICE, piuttosto che filtri hardware, utilizza la tecnologia SET (Spectral
Extimation Technology), sviluppata dal prof. Yoichi Miyake della Facoltà di
Informatica dell’Università di Chiba, in Giappone [11]. I punti salienti
dell’applicazione endoscopica di tale tecnologia sono i seguenti:
• L’endoscopio produce un’immagine sul monitor dirigendo sul tessuto la luce
bianca proveniente da una lampada allo xeno e catturando la luce riflessa
con un dispositivo CCD.
• L’immagine endoscopica standard (RGB) è inviata allo Spectral Extimation
Matrix Processing Circuit del processore.
• Il processo di stima spettrale produce immagini di una determinata
lunghezza d’onda e le assegna selettivamente a uno dei canali RGB, secondo
la modalità di scansione prescelta.
• La ricostruzione dell’immagine finale dalle sue componenti RGB va a
costituire l’immagine potenziata FICE.
19
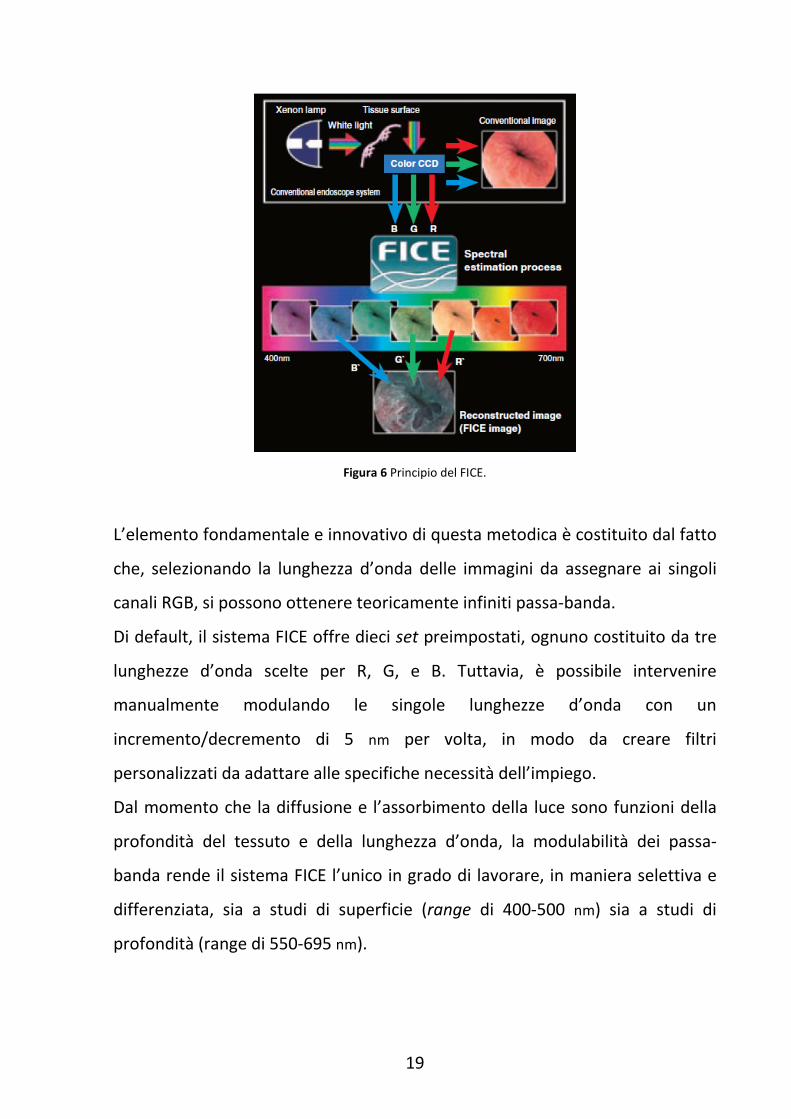
Figura 6 Principio del FICE.
L’elemento fondamentale e innovativo di questa metodica è costituito dal fatto
che, selezionando la lunghezza d’onda delle immagini da assegnare ai singoli
canali RGB, si possono ottenere teoricamente infiniti passa-banda.
Di default, il sistema FICE offre dieci set preimpostati, ognuno costituito da tre
lunghezze d’onda scelte per R, G, e B. Tuttavia, è possibile intervenire
manualmente modulando le singole lunghezze d’onda con un
incremento/decremento di 5 nm per volta, in modo da creare filtri
personalizzati da adattare alle specifiche necessità dell’impiego.
Dal momento che la diffusione e l’assorbimento della luce sono funzioni della
profondità del tessuto e della lunghezza d’onda, la modulabilità dei passa-
banda rende il sistema FICE l’unico in grado di lavorare, in maniera selettiva e
differenziata, sia a studi di superficie (range di 400-500 nm) sia a studi di
profondità (range di 550-695 nm).

20
Figura 7 Immagine potenziata FICE.
1.3.3.3 I-Scan
La tecnologia I-Scan, sviluppata dalla Pentax (Tokyo, Giappone), è una delle più
recenti tecniche di Image Enhancement [12] [13] [14] [15] [16].
Essa combina tre modalità di potenziamento dell’immagine: Surface
Enhancement (SE), Contrast Enhancement (CE), e Tone Enhancement (TE),
ovvero miglioramento di superficie, di contrasto e di tono.
• Con il Surface Enhancement è calcolata la differenza d’intensità tra i pixel
d’interesse e i pixel circostanti, cercando di esaltare le componenti di bordo.
Ciò consente un’osservazione più dettagliata della superficie della mucosa e
facilita l’individuazione di pericolosi cambiamenti strutturali.
• Con il Contrast Enhancement sono identificate le aree a bassa luminosità,
sulla base dell’intensità di alcuni pixel rispetto a quelli circostanti, e in tali
aree la componente B dell’immagine è esaltata tramite la leggera
soppressione delle componenti R e G. Come risultato, queste aree a bassa
luminosità (aree depresse) risultano caratterizzate da un colore bianco-
bluastro, evidenziando lievi irregolarità sulla superficie della mucosa.
• Con il Tone Enhancement l’immagine è scomposta digitalmente nelle sue tre
componenti (R, G e B). Ciascuna componente, così isolata, subisce una
conversione lungo una curva di tono. La re-sintesi delle tre componenti
modificate produce l’immagine finale migliorata. La curva di tono può

21
assumere varie forme, modificabili attraverso la variazione di alcuni
parametri. Attualmente, sono disponibili sei modalità di TE: TE-p (pattern),
TE-v (vascular), TE-b (Barrett), TE-e per l’esofago, TE-g per lo stomaco e TE-c
per gli intestini.
Figura 8 Principio del Tone Enhancement nell’I-Scan.
Grazie a un elaborato software di algoritmi funzionali in real-time, queste tre
modalità possono essere utilizzate singolarmente oppure abbinate tra loro.
Le tre funzioni, attraverso l'enfatizzazione dei bordi, del contrasto e la
colorazione virtuale, permettono una migliore osservazione della superficie
della mucosa (pattern) e della trama vascolare. Ciò facilita l’individuazione di
lievi irregolarità nell’architettura vascolare e mucosale che possono essere
indice di lesioni precancerose, anche di piccole dimensioni.

22
Figura 9 Immagine potenziata I-Scan.
1.3.4 Endoscopia ad autofluorescenza (AFI)
La tecnica di Autofluorescence Imaging (AFI), è basata sul fenomeno
dell’autofluorescenza: quando un tessuto è esposto a una luce a corta
lunghezza d’onda (390-470 nm), questa determina l’eccitazione di determinate
sostanze biologiche endogene (fluorofori), come ad esempio il collagene, con
conseguente emissione di una luce fluorescente di lunghezza d’onda maggiore.
In diversi processi patologici (flogosi, neoplasia) cambiano la concentrazione e
la distribuzione dei fluorofori nei tessuti e, di conseguenza, viene alterata la
fluorescenza endogena.
Sfruttando questo fenomeno in endoscopia digestiva, il sistema riproduce
un’immagine in cui il tessuto normale e i vasi appaiono di colore verde e verde
chiaro, mentre una lesione pre-cancerosa risulta di colore magenta.
Figura 10 Immagine potenziata AFI.

23
L’AFI è una tecnica molto affascinante, ma avendo molte limitazioni tecniche,
economiche e formative, attualmente è disponibile solo in alcuni centri terziari
di riferimento e può essere utilizzata solo all’interno di studi clinici.
1.3.5 Endomicroscopia confocale laser (CLE)
La Confocal Laser Endomicroscopy (CLE) è la più recente tra le tecniche di
imaging endoscopico.
Il termine “confocale” allude all’allineamento di entrambi i sistemi di
illuminazione e acquisizione, che giacciono, per l’appunto, sullo stesso piano
focale. Quindi, emettendo una luce laser monocromatica a bassa potenza è
possibile catturare immagini focalizzate su piani paralleli della mucosa.
La CLE viene anche chiamata “biopsia virtuale” perché permette
l’identificazione in vivo delle microstrutture cellulari e subcellulari e consente,
dunque, una diagnosi istologica in tempo reale.
Figura 11 Immagine potenziata CLE.
La CLE è una tecnica molto promettente per il futuro dei programmi di
screening. Tuttavia, uno dei maggiori limiti di questa metodica è il fatto che
analizza solo una piccola parte della mucosa alla volta, per cui deve essere
sempre associata ad altre tecniche e venire utilizzata in modo mirato su lesioni
sospette. Alcuni degli altri principali fattori che attualmente limitano questa

24
tecnica al solo uso in trial clinici in centri altamente specializzati sono i lunghi
tempi necessari per eseguire gli esami, il costo degli apparecchi, l'alta
esperienza richiesta, sia in endoscopia che in istologia, e gli aspetti medico-
legali legati alla diagnosi istologica fatta da un gastroenterologo non
confermata da un anatomopatologo.
1.3.6 Endocitoscopia
L'endocitoscopia è una nuovissima tecnica endoscopica che permette di
visualizzare strati più superficiali della mucosa, previa colorazione della stessa
con coloranti assorbibili come il blu di metilene o il cristal violetto.
L'endocitoscopo può essere integrato nello strumento endoscopico oppure
essere parte di una sonda che può passare attraverso il canale operativo.
Questa tecnica non è ancora disponibile commercialmente in Europa o negli
Stati Uniti, ma è ancora in fase di valutazione da parte degli endoscopisti
giapponesi.

25
CAPITOLO2
Ilsistemadiacquisizione
Il sistema che consente di ottenere le immagini si compone di tre elementi
fondamentali che costituiscono la catena di acquisizione: una sonda
endoscopica dotata di telecamera, un processore d’immagine e il terminale
finale costituito dal pc.
Tralasciando il processore d’immagine, che non riveste importanza nel
presente lavoro, ci si concentrerà sugli altri due. In particolare, in questo
capitolo è descritta la componente hardware, costituita dalla sonda
endoscopica, e la componente software, costituita dall’ambiente di sviluppo e
dalle librerie necessarie all’acquisizione ed elaborazione delle immagini.
Figura 12 Sistema di acquisizione.

26
2.1 Sonda
Come accade in robotica, dove spesso si trae ispirazione dalla cinematica delle
piante e degli animali, la sonda Endotics è stata ideata osservando i bruchi
geometridi. Essa procede autonomamente all’interno del colon mimando il loro
movimento, cioè adattando dinamicamente la sua forma alle pareti muscolari e
minimizzando le deformazioni violente e innaturali, inevitabili in un esame
endoscopico convenzionale.
Questo particolare tipo di locomozione soddisfa, al contempo, sia le esigenze
del paziente, eliminando il dolore e i rischi d’infezione e perforazione, sia quelle
del medico, limitando lo sforzo e prevenendo le malattie professionali.
Figura 13 Sonda Endotics.
Il dispositivo è monouso, morbido e flessibile. Un sistema elettro-pneumatico,
controllato via software, guida la sonda attraverso le anse intestinali,
eseguendo i comandi impartiti dall’utilizzatore tramite una console di
comando. La parte distale della sonda può essere orientata in ogni direzione ed
è dotata di telecamera CMOS integrata ad alta risoluzione che permette
un’ottima visione frontale e posteriore.
27
Le caratteristiche che rendono il dispositivo Endotics unico e innovativo nel
settore si riassumono in pochi semplici aggettivi:
• Indolore
Esso rende possibile una colonscopia non dolorosa senza ricorrere alla
sedazione. Poiché estremamente flessibile, avanza senza deformare il colon,
senza creare loop o provocare lo stiramento dei mesenteri. Inoltre, utilizza
la quantità minima di aria necessaria alla sola diagnosi.
• Sicuro
Poiché semiautonomo, esso previene i rischi di perforazione strettamente
correlati all’azione di spinta tipica dei colonscopi convenzionali. Giacché
sterile e monouso, garantisce l’eliminazione dei rischi di contaminazione
crociata. Inoltre, il sistema di guida, basato su tecnologia joystick, permette
al medico di assumere una postura corretta durante l’ispezione
endoscopica.
• Facile
Il dispositivo è monouso e pronto da usare grazie ad un connettore a
innesto rapido alla workstation. La curva di apprendimento è veloce poiché
si acquisiscono facilmente la perizia e l'abilità necessarie a un utilizzo
ottimale.
• Efficiente
La procedura endoscopica non richiede assistenza ed elimina i costi relativi
ai casi di perforazione, contaminazione e malattie professionali, oltre a
quelli che concernono la sterilizzazione e la sedazione, aumentando così il
numero di pazienti visitati quotidianamente.

28
2.2 Software
L’ambiente di sviluppo software mediante il quale le immagini fornite dalla
telecamera sono acquisite, elaborate e rese disponibili per l’utente è costituito
dal software Visual Studio (VS), integrato con le librerie necessarie alla
creazione dell’interfaccia grafica e al trattamento delle immagini.
2.2.1 Visual Studio
Visual Studio è un ambiente di sviluppo integrato (IDE) sviluppato da Microsoft,
che supporta attualmente diversi tipi di linguaggio, quali C, C++, C#, F#, Visual
Basic .Net e ASP .Net. Come ogni IDE, esso è costituito da una serie di tool che
aiutano a sviluppare programmi, evitando di aprire un editor di testo, scrivere il
codice e lanciare un compilatore per creare un’applicazione eseguibile.
Figura 14 Logo Visual Studio.
Nel caso specifico del presente lavoro è stato utilizzato il software Visual C++
Professional nella sua versione 2010.
2.2.2 Librerie
L’ambiente di sviluppo Visual C++ Professional 2010 è stato integrato con le
librerie Qt nella loro versione 4.8.4. e con le librerie OpenCV nella loro versione
2.4.2.

29
2.2.2.1 Qt
Originariamente sviluppato dalla norvegese Trolltech (acquistata dalla Nokia
nel 2008), Qt, da pronunciare “cute”, è un insieme di librerie multipiattaforma
e multifunzione, che vanno dalle librerie di gestione delle GUI (Graphical User
Interface) fino a quelle per i database, passando per network, animazioni e
multithread.
Figura 15 Logo Qt.
Nell’ambito del presente lavoro, ci si è serviti delle librerie Qt allo scopo di
creare un’interfaccia grafica che permettesse di elaborare, in modo semplice e
intuitivo, immagini statiche e dinamiche (real-time) relative a un’indagine
endoscopica. Tale interfaccia si serve di widget, cioè di componenti grafici
(come cursori o pulsanti) che facilitano all'utente l'interazione con il
programma.
2.2.2.1.1 Qt in Visual Studio
Per potersi servire efficacemente delle librerie Qt in ambiente Visual C++ è
necessario acquisire alcuni concetti fondamentali.
Previa corretta installazione dell’Add-in Qt, è possibile creare in Visual C++ un
progetto di tipo Qt Application. Rispetto a un normale progetto, come una
Win32 Console Application o un Empty Project, esso possiede un form file.ui
contenente le informazioni circa l’interfaccia grafica che si sta realizzando.

30
Aprendo questo file compare il tool di sviluppo, chiamato Qt Designer, che
permette di creare GUI aggiungendo widget e personalizzandole secondo il
proprio gradimento. In particolare, nella Widget Box sulla sinistra sono
disponibili i vari oggetti grafici (quali pulsanti, label, cursori, check box ecc.)
mentre nella Property Editor sulla destra sono descritte le proprietà di tali
oggetti ed è possibile modificarne dimensione, forma e stile.
Figura 16 Widget Box.
Le widget create con Qt Designer sono strettamente collegate al codice di
programmazione e, utilizzando il meccanismo signals and slots, è possibile
assegnare compiti specifici agli elementi grafici.
2.2.2.1.2 Signals and slots
Il meccanismo signals and slots è un elemento centrale di Qt e forse quello che
maggiormente lo distingue da altri framework.
Quando si progettano GUI, solitamente si desidera che gli elementi grafici
comunichino tra loro, cioè che, se uno di essi cambia stato, un altro sia
modificato di conseguenza. Ad esempio, se l’utente clicca sul pulsante Chiudi,
deve essere chiamata la funzione close(). Alcuni tool di sviluppo realizzano
questo tipo di comunicazione usando le callback.

31
In genere, una callback (“richiamo”) è una funzione, o un blocco di codice, che
viene passata come parametro ad un'altra funzione (detta chiamante). In
questo modo la funzione chiamante può realizzare un compito specifico oppure
gestire particolari eventi.
Le callback, però, hanno due difetti fondamentali: in primo luogo, non sono
type-safe, cioè non si è mai certi che la funzione chiamante chiamerà la
callback con gli argomenti corretti; in secondo luogo, esse sono strettamente
legate alla funzione chiamante, in quanto quest’ultima deve sapere quale
callback chiamare.
Il meccanismo signals and slots di Qt è alternativo alle callback. Quando si
verifica un particolare evento, ad esempio l’oggetto cambia stato in seguito
all’intervento dell’utente, viene emesso un segnale (signal). Uno slot è una
funzione che viene chiamata in risposta ad un particolare segnale.
Figura 17 Rappresentazione schematica del meccanismo signals and slots.

32
Le widget di Qt possiedono numerosi segnali e slot predefiniti, ma è possibile
aggiungerne di propri e gestire il flusso in modo personalizzato.
Il meccanismo signals and slots è type-safe: il tipo del segnale deve
corrispondere al tipo dello slot. Inoltre segnali e slot sono debolmente
associati: una classe che emette un segnale non sa e non si preoccupa di quali
slot riceveranno il segnale. Allo stesso modo, uno slot non sa se ci sono segnali
a esso collegati.
Questo assicura che i componenti grafici creati con Qt siano veramente
indipendenti. Infine, un segnale può essere collegato al numero di slot che si
desidera, così come uno slot può essere chiamato da un numero illimitato di
segnali.
2.2.2.2 OpenCV
OpenCV (Open Source Computer Vision Library) è una libreria orientata alla
Computer Vision, un campo che include metodi per l’acquisizione,
l’elaborazione e l’analisi di dati multidimensionali provenienti dal mondo reale,
allo scopo di tradurli in informazione numerica o simbolica.
Figura 18 Logo OpenCV.

33
Essa è stata originariamente sviluppata da Intel, mentre attualmente è sotto
licenza open source BSD. È scritta in C e C++ ed è costituita da oltre cinquecento
funzioni utili nel campo dell’image processing.
Il fatto di essere liberamente distribuita garantisce sicurezza al codice e la
possibilità di apportare modifiche, assicurandone, così, una continua
evoluzione. OpenCV costituisce, quindi, un’infrastruttura aperta e gratuita,
compatibile con la Intel Image Processing Library (IPL), dalla quale ha ereditato
originariamente alcune strutture dati. Infine, la portabilità della libreria OpenCV
è completa: sono disponibili versioni per i sistemi Windows, Linux, BSD, Unix e
MacOSX.
2.2.2.3 Da Qt a OpenCV
Dovendo lavorare servendosi di due librerie differenti, è necessario poter
convertire l’immagine da un oggetto di un tipo a un oggetto dell’altro. In altre
parole, occorre trovare un modo per trasformare un’istanza della classe
QPixmap, gestibile in Qt, in un’istanza della classe Mat, gestibile in OpenCV.
Naturalmente, al termine dell’elaborazione, è essenziale eseguire la
trasformazione inversa.
In ambito Qt, sono disponibili quattro classi per la gestione di dati-immagine:
Qimage, QPixmap, QBitmap e QPicture. In particolare, limitandosi al presente
lavoro, la classe QImage è progettata per l'I/O e la manipolazione diretta dei
pixel mentre la classe QPixmap è ottimizzata per la visualizzazione di immagini
sullo schermo.
Dal canto suo, la classe Mat, fornita da OpenCV, si compone
fondamentalmente di due parti: l'intestazione della matrice (contenente
informazioni quali le dimensioni, il metodo utilizzato per la memorizzazione,
l’indirizzo in cui è salvata, e così via) e un puntatore alla matrice contenente i

34
valori dei pixel. Di seguito è descritto il metodo adottato nel presente lavoro
per ottenere la conversione desiderata.
Quando un file è caricato, o viene ricevuto da uno streaming di dati, esso
diventa automaticamente un oggetto QPixmap, ma su di esso non si hanno
informazioni dettagliate. La classe QPixmap fornisce un insieme di funzioni che
possono essere utilizzate per ottenere informazioni sull’istanza-immagine,
come dimensioni, profondità, presenza o meno del canale α ecc. Tuttavia, è
preferibile avere un formato costante per far sì che la conversione abbia esito
positivo in ogni caso. Per questo motivo, l’oggetto QPixmap è stato
innanzitutto convertito in QImage, nel formato RGB888, vale a dire RGB a 24
bit (8-8-8).
A questo punto, si è reso necessario un nuovo passaggio, dovuto al fatto che la
classe Mat memorizza le immagini multicanale con un ordine diverso delle sue
componenti, ossia B-G-R invece di R-G-B. A tal proposito, è stata usata la
funzione QImage::rgbSwapped(), la quale restituisce una QImage in cui i valori
delle componenti rossa e blu di tutti i pixel risultano scambiati.
Infine, è stata creata l’istanza della classe Mat, costruendo una matrice 3D a
partire dai valori dei pixel e dalle informazioni estratte dall’oggetto QImage. Il
processo inverso è piuttosto simile, se non per l’ordine delle operazioni.
Poiché è indispensabile eseguire i passaggi appena descritti tutte le volte che
bisogna lavorare su un’immagine, per semplificare il tutto e rendere il codice
più leggibile, sono state implementate due funzioni, QPixmap2Mat e
Mat2QPixmap, che operano automaticamente la conversione quando
necessario:

35
Mat QPixmap2Mat(const QPixmap& pixmap) { QImage image= pixmap.toImage(); QImage image2= image.convertToFormat(QImage::Format_RGB888);
QImage swapped = image2.rgbSwapped(); Mat mat= Mat( swapped.height(), swapped.width(), CV_8UC3, (uchar*)swapped.bits(), swapped.bytesPerLine() ).clone();
return mat; }
QPixmap Mat2QPixmapRGB(const Mat& mat){ QImage image( (uchar*)mat.data, mat.cols, mat.rows, mat.step,
QImage::Format_RGB888 ); QImage newImage= image.rgbSwapped(); QPixmap newPixmap= newPixmap.fromImage(newImage);
return newPixmap; }

36
CAPITOLO3
Realizzazionedell’interfacciagrafica
L’obiettivo del presente lavoro è di sviluppare un sistema per l’elaborazione di
immagini endoscopiche in tempo reale. Inizialmente è stata realizzata
un’interfaccia che permettesse di lavorare con immagini “statiche”, cioè con
fotogrammi (frame) estratti da un esame video-endoscopico. Ciò è stato fatto
per consentire un’analisi preliminare delle immagini, approfondendo le loro
caratteristiche e individuando gli elementi su cui poter agire, anche in real-
time, per migliorarne la visualizzazione e incrementarne le potenzialità
diagnostiche. In seguito, dopo un’intervista al dottor Emanuele Tumino, medico
endoscopista presso l’ospedale di Cisanello (Pisa), che ha suggerito alcuni
criteri per la realizzazione di un’interfaccia utile e semplice da usare, è stata
sviluppata la GUI per l’elaborazione in tempo reale.
3.1GUIperanalisistatica
L’interfaccia grafica per l’analisi dei fotogrammi si compone di una serie di
pulsanti e finestre di dialogo che offrono all’utente la possibilità di caricare
un’immagine ed eseguire svariate elaborazioni, osservando in modo diretto le
modifiche apportate e gli eventuali miglioramenti ottenuti.
3.1.1Labeleimmagini
L’elemento centrale dell’interfaccia è costituito dai due “contenitori” di
immagini. La GUI è progettata per fare in modo che l’immagine originale e
quella elaborata appaiano l’una accanto all’altra, affinché si possano facilmente

37
confrontare. In particolare, l’immagine sulla sinistra resta immutata durante
l’elaborazione mentre quella sulla destra esprime le modifiche cui è sottoposta,
che sono state rese cumulabili.
Figura 19 Label e immagini.
I “contenitori” sono semplicemente due label (oggetto QLabel) in cui è stato
abilitato il campo scaledContents, necessario per scalare l’immagine e fare in
modo che non venga tagliata.
3.1.2 Caricamento, pulizia e salvataggio
Per cominciare con l’elaborazione, l’immagine deve prima essere caricata. A
questo proposito è stato inserito un pulsante (oggetto QPushButton) che
permette di cercare il file tra le cartelle del computer e, una volta selezionato,
di caricare l’immagine nella label.
Figura 20 Pulsanti per caricamento, pulizia e salvataggio.

38
Il suo funzionamento è un tipico esempio del meccanismo signals and slots
descritto nel capitolo precedente.
L’objectName del pulsante creato, che lo identifica nell’ambiente di sviluppo, è
pushButtonLoad. Quando questo pulsante è premuto dall’utente, esso lancia
un segnale che dovrà essere recapitato da qualcosa: lo slot. Affinché tutto
funzioni correttamente, lo slot va prima dichiarato nel file.h del progetto Visual
C++ in questo modo:
public slots: void on_pushButtonLoad_clicked();
Poi va definito nel file.cpp in questo modo:
void provaQtOpenCV::on_pushButtonLoad_clicked() {
(…) }
Tra le parentesi graffe è espresso il codice della funzione scritta per esteso, che
descrive il compito da eseguire a seguito della pressione del pulsante. Il
processo appena descritto è valido per ciascuno dei pulsanti dell’interfaccia
creata; la sua descrizione non sarà quindi ripetuta in futuro.
Il pulsante Clear permette di cancellare tutte le modifiche apportate
all’immagine, facendola tornare com’era quando è stata caricata.
Il pulsante Save, infine, permette di salvare l’immagine al termine delle varie
elaborazioni.
3.1.3 Luminosità
Per consentire all’utente di cambiare la luminosità dell’immagine sono stati
inseriti due pulsanti, identificati con “+” e “-“, dalla funzione evidente.

39
Figura 21 Pulsanti per la regolazione della luminosità.
L’elemento che si vede sulla sinistra in figura 20 è una casella di controllo, o
check box (oggetto QCheckBox), chiamata in questo caso QCheckBoxBrightness.
Anch’esso funziona con lo stesso meccanismo signals and slots descritto per i
pulsanti. In questo caso non va dichiarato nulla nel file.h ma va inserito il
seguente comando all’interno degli slot relativi ai pulsanti che aumentano e
diminuiscono la luminosità (pushButtonMinus e pushButtonPlus):
ui.checkBoxBrightness->setChecked(true);
In questo modo, quando uno dei due pulsanti è premuto dall’utente, la check
box è spuntata automaticamente, ricordandogli che è stata modificata la
luminosità dell’immagine. Anche questo processo è valido per ciascuna delle
check box presenti nell’interfaccia creata.
L’elemento che si vede sulla destra, invece, è un’altra label (chiamata
labelBrightness), del tutto simile a quelle che contengono le immagini con la
differenza che, in questo caso, serve per quantificare l’aumento o la
diminuzione di luminosità. Ancora una volta, con lo stesso meccanismo, si
inserisce il seguente comando all’interno degli slot relativi ai due pulsanti:
ui.labelBrightness->setNum(c);
Così facendo, è possibile conoscere in qualunque momento di quanto è stata
aumentata o diminuita la luminosità dell’immagine.

40
L’effettivo aumento o diminuzione della luminosità è stato invece ottenuto con
la funzione convertTo() di OpenCV, che implementa una duplice operazione di
moltiplicazione e addizione con una costante:
La funzione f(x) rappresenta i valori di intensità dei pixel dell’immagine in
ingresso, g(x) quelli dell’immagine in uscita, mentre i parametri α e β sono
rispettivamente il guadagno e l’offset. Ponendo α costantemente a 1 e β
alternativamente a 1 o -1, a seconda che si stia aumentando o diminuendo la
luminosità, si riesce a ottenere l’effetto desiderato.
3.1.4 Sfocatura e affilatura
Per sfocare o affilare l’immagine (smoothing e sharpening) sono stati inseriti
quattro pulsanti diversi che richiamano un’operazione di filtraggio spaziale.
Figura 22. Pulsanti per smoothing e sharpening.
Un filtro spaziale, detto anche maschera o kernel, è una matrice quadrata che si
sovrappone all’immagine, scorrendo da sinistra verso destra e dall’alto verso il
basso, modificandone i valori. Ciascun pixel dell’immagine è ricalcolato come
somma dei prodotti di ciascun elemento del kernel con il corrispondente pixel
dell’immagine. In termini matematici ciò corrisponde a un’operazione di
convoluzione.

41
I filtri di smoothing si utilizzano generalmente per sfocare le immagini e per
ridurre l’eventuale presenza di rumore. Ne esistono diversi ma per gli scopi del
presente lavoro ne sono stati implementati due:
• Filtro medio
Detto anche Normalized Box Filter, il filtro medio è il più semplice di tutti.
Ciascun pixel risultante è la media dei suoi vicini giacché ogni elemento del
kernel contribuisce con lo stesso peso.
• Filtro Gaussiano
Probabilmente il più utile, esegue la convoluzione tra l’immagine e un kernel di
tipo gaussiano.
Figura 23 Kernel gaussiano.
Le funzioni di OpenCV che implementano i filtraggi appena descritti sono
rispettivamente blur() e GaussianBlur().

42
Al contrario, l’operazione di sharpening produce un’immagine più nitida
dell’originale, evidenziando i dettagli offuscati durante il processo di
acquisizione.
Esistono diversi operatori convolutivi di sharpening ma tutte queste matrici
hanno in comune il valore positivo dell’elemento centrale, corrispondente al
pixel oggetto di calcolo, e i valori negativi degli elementi relativi ai pixel
adiacenti. Per gli scopi del presente lavoro ne sono stati implementati due,
identificati con il nome “Min” e “Max”, a sottolineare la maggiore o minore
incisività del filtraggio. Le maschere corrispondenti sono le due seguenti:
La funzione utilizzata per questo scopo è filter2D() di OpenCV, la quale
semplicemente convolve l’immagine con un kernel definito manualmente
dall’utente.
3.1.5 Rilevamento di bordi
Per permettere all’utente di individuare i bordi dell’immagine, ossia gli insiemi
di pixel connessi tra loro in cui la funzione d’intensità cambia bruscamente,
sono stati inseriti tre pulsanti che richiamano tre diverse operazioni di edge
detection.
Figura 24 Pulsanti per il rilevamento di bordi.

43
Queste funzioni non hanno un’utilità diretta per gli scopi del presente lavoro
(l’aumento della qualità e delle potenzialità diagnostiche dell’immagine), ma
sono utili per fare delle considerazioni generali e probabilmente svolgeranno
un ruolo decisivo per gli sviluppi futuri del sistema di elaborazione. I tre
operatori di edge detection scelti sono i seguenti:
• Derivate di Sobel
Poiché, come si è accennato, nei bordi dell’immagine l’intensità dei pixel
cambia valore bruscamente, un ottimo modo di ottenere un edge detector è
usare le derivate spaziali. Il filtro di Sobel è, quindi, un operatore di
differenziazione discreta, cioè calcola il gradiente della funzione d’intensità
dell'immagine. Un elevato valore di gradiente indica la presenza di un bordo.
Figura 25 Funzione f(t) e derivata di f(t).
In particolare, si calcolano due derivate, una orizzontale e una verticale, con
due kernel diversi:
Poi si approssima il gradiente in ciascun punto combinando i risultati ottenuti
secondo la seguente formula:

44
Per calcolare le due derivate e il gradiente sono state utilizzate le funzioni
Sobel() e addWeighted() di OpenCV.
È importante far notare che tutte le funzioni che lavorano sul rilevamento dei
bordi richiedono in ingresso un’immagine in scala di grigi, cosa che si ottiene
facilmente applicando la funzione cvtColor() all’immagine a colori di partenza.
Figura 26 Immagine originale e bordi rilevati con l’operatore di Sobel.
• Operatore di Laplace
In matematica, il laplaciano della funzione bidimensionale f(x,y) è espresso
dalla seguente formula:
Questa equazione calcola la derivata seconda nelle due dimensioni e
corrisponde alla seguente maschera di convoluzione:

45
Essa è isotropa ma non direzionalmente invariante rispetto all’orientazione
degli edge da rilevare, per cui talvolta si preferisce usare la maschera seguente,
cui sono stati aggiunti due termini diagonali:
L’utilizzo del laplaciano come edge detector è giustificato dal fatto che la
derivata prima e seconda di un profilo sono diverse da zero solo in
corrispondenza delle transizioni. In particolare, la derivata seconda è positiva in
prossimità della parte scura di un bordo, negativa dalla parte chiara e nulla
nelle zone a livello di grigio costante. Essa ammette un passaggio per lo zero
(zero crossing) esattamente in corrispondenza delle transizioni, e ciò consente
la localizzazione degli edge.
Figura 27 Derivata seconda di f(t).

46
Il limite del laplaciano consiste nella sua eccessiva sensibilità al rumore. La
corrispondente funzione in OpenCV è Laplacian().
• Operatore di Canny
È conosciuto anche come “rivelatore ottimale” perché soddisfa tre criteri
principali, cioè basso errore, buona localizzazione e risposta minima. Senza
entrare in dettaglio, quest’algoritmo richiede la definizione di due soglie, una
bassa (TL) e una alta (TH), le quali vengono confrontate con i punti
dell’immagine: se il valore è inferiore alla soglia bassa TL, il punto viene
scartato, se è superiore alla soglia alta TH, il punto viene accettato come edge,
se invece è compreso tra le due soglie, il punto è accettato solo se contiguo ad
un punto precedentemente accettato.
L’uso delle soglie TL e TH permette di ridurre la presenza di falsi edge rispetto a
una soglia singola T. L’algoritmo suggerisce che i risultati migliori si ottengono
scegliendo il valore TH due o tre volte più grande del valore TL, e ciò è stato
implementato nel presente lavoro.
Nell’interfaccia realizzata è offerta all’utente la possibilità di scegliere la soglia
attraverso un cursore (oggetto QSlider) e una label che ne visualizza il valore
lateralmente. A questo proposito è stato inserito il seguente slot nel file.cpp,
previa dichiarazione nel file.h:
void provaQtOpenCV::on_horizontalCanny_valueChanged(){ double sliderValue= ui.horizontalCanny->value(); ui.labelCanny->setNum(sliderValue);
}
La funzione precedente prende il valore attuale dal cursore e lo colloca nella
label affinché possa essere visualizzato. Inoltre, inserendo la seguente riga di
codice nello slot relativo al pulsante che lancia l’edge detector

47
(pushButtonCanny), l’algoritmo di rilevamento dei bordi prende come soglia
proprio quella scelta dall’utente modificando il cursore.
double sliderValue= ui.horizontalCanny->value();
Figura 28 Immagine originale e bordi rilevati con l'operatore di Canny.
La funzione di OpenCV che implementa questo algoritmo è Canny().
3.1.6 Sogliatura
Un discorso simile a quello appena fatto per l’algoritmo di Canny si può fare per
l’operazione di sogliatura (o thresholding).
Figura 29 Pulsante e cursore per la sogliatura.
La sogliatura è il più semplice metodo di segmentazione (slicing), processo
mediante il quale le regioni di un’immagine, corrispondenti agli oggetti che si
vogliono analizzare, sono separate dallo sfondo.

48
La separazione è basata sulla variazione d’intensità dei pixel, per questo si
esegue un confronto tra ciascun valore d’intensità e una data soglia,
determinata secondo il problema da risolvere.
Una volta che i pixel sono stati adeguatamente separati, essi si pongono a un
determinato valore per identificarli, che può essere 0 (nero), 255 (bianco) o
qualsiasi altro valore.
Esistono varie tipologie di sogliatura, ma per gli scopi del presente lavoro è
stata utilizzata la sogliatura binaria (binary thresholding), che consiste
nell’impostare l’intensità del pixel a un valore massimo, se supera la soglia,
altrimenti a zero.
Figura 30 Rappresentazione grafica dell'operazione di sogliatura.
Questa operazione può essere utile per separare dal resto dell’immagine le
zone corrispondenti agli spot di luce, e quindi escluderle dalle varie
elaborazioni, come ad esempio l’equalizzazione, oppure per separare le zone di
assorbimento e riflessione della luce.
Anche in questo caso si è offerta all’utente la possibilità di scegliere la soglia
tramite un cursore e di applicare l’algoritmo di thresholding mediante
l’apposito pulsante.

49
Figura 31 Immagine originale e spot di luce rilevati con la segmentazione.
La funzione di OpenCV utilizzata è threshold().
3.1.7 Divisione e unione dei canali
Per consentire all’utente di agire, oltre che sui valori d’intensità, anche sul
colore, è stata introdotta la possibilità di “spezzare” le immagini nei singoli
canali che le compongono, ossia R, G e B.
Figura 32 Pulsanti per la divisione e unione dei canali.
Come è noto, nelle immagini monocromatiche ciascun elemento della matrice
è un valore intero compreso tra 0 e 255 e rappresenta uno dei 256 livelli di
grigio. Nelle immagini a colori ogni elemento della matrice corrisponde a una
terna ordinata di interi (RGB), dove R, G, e B indicano rispettivamente le
intensità di rosso, verde e blu e assumono valori compresi tra 0 e 255,
corrispondenti ai 256 diversi livelli d’intensità delle tre sorgenti di colore. In tal
caso un’immagine può essere vista come una terna di matrici, dove ognuna
rappresenta uno dei colori fondamentali.

50
Figura 33 Immagine digitale a colori.
Nell’ambito dell’interfaccia realizzata, non solo è possibile separare l’immagine
nei tre canali che la compongono, ma è consentito anche visualizzarli,
modificarli e in seguito rifonderli nuovamente.
Le operazioni possibili su ciascuno di essi sono: la soppressione,
l’equalizzazione dell’istogramma e la conversione secondo curve di tono.
Naturalmente, per ognuna di esse è presente un pulsante, mentre i tre canali
sono collocati e visualizzati in tre diverse label.
Figura 34 Pulsanti e label per la divisione, la modifica e l'unione dei canali.
Le funzioni di OpenCV utilizzate per dividere e unire i canali sono split() e
merge().

51
• Soppressione
La soppressione del canale consiste nella sua totale rimozione, in maniera che
quando l’immagine è ricostruita, essa risulta priva di un componente.
Figura 35 Immagine originale e immagine in cui è stato soppresso il canale rosso.
In OpenCV ciò è stato implementato ponendo a zero la matrice relativa al
canale da sopprimere.
• Equalizzazione
L'istogramma di un'immagine digitale, con livelli di intensità nell'intervallo [0,L-
1], è il grafico di una funzione discreta h(rk)=nk, dove rk è il k-esimo livello di
grigio e nk è il numero di pixel nell'immagine con intensità rk. Essendo le
immagini dei singoli canali bidimensionali, è possibile considerarle formalmente
come matrici di livelli di grigio (in bianco e nero), anche se il loro significato è
diverso.
L'equalizzazione dell'istogramma, o Histogram Equalization (HE), ha come
scopo l'aumento del contrasto dell'immagine di partenza, o equivalentemente
l'aumento del range dinamico dell'immagine. Per contrasto s’intende la
differenza in intensità tra il livello di grigio maggiore e quello minore, mentre si

52
definisce range dinamico il rapporto tra il massimo valore misurabile
d’intensità (detto saturazione) e il minimo livello distinguibile (detto rumore).
Quando un'immagine ha un apprezzabile numero di pixel con grande range
dinamico, ci si può aspettare che essa abbia un elevato contrasto; quando
invece un'immagine ha un piccolo range dinamico, tipicamente presenta un
basso contrasto.
Tralasciando la dimostrazione matematica, l'idea che sta alla base
dell'equalizzazione è operare una trasformazione che, nell'immagine elaborata,
distribuisca uniformemente i livelli di grigio, cioè aumenti il contrasto
appiattendo l'istogramma di partenza e aumentando il range dinamico.
Figura 36 Istogramma prima e dopo l'equalizzazione.
In concreto, ciò viene fatto interpretando il livello di grigio assunto da un
generico punto dell’immagine come una variabile aleatoria discreta x avente
valori 0, 1, ..., (L−1) e convertendo i valori dell’istogramma h(i) nei
corrispondenti valori di probabilità px(i):
La trasformazione discreta che consente di ottenere i livelli di grigio trasformati
(j) è la seguente:
53
Dove la moltiplicazione per (L-1) è necessaria per estendere la dinamica dei
valori trasformati dal range [0,1] al range [0,L-1].
Il vantaggio di questa tecnica è che permette di migliorare il contrasto in modo
semplice, automatico e poco costoso, ottenendo però dei buoni risultati.
Inoltre, essa utilizza solamente informazioni contenute nell'immagine.
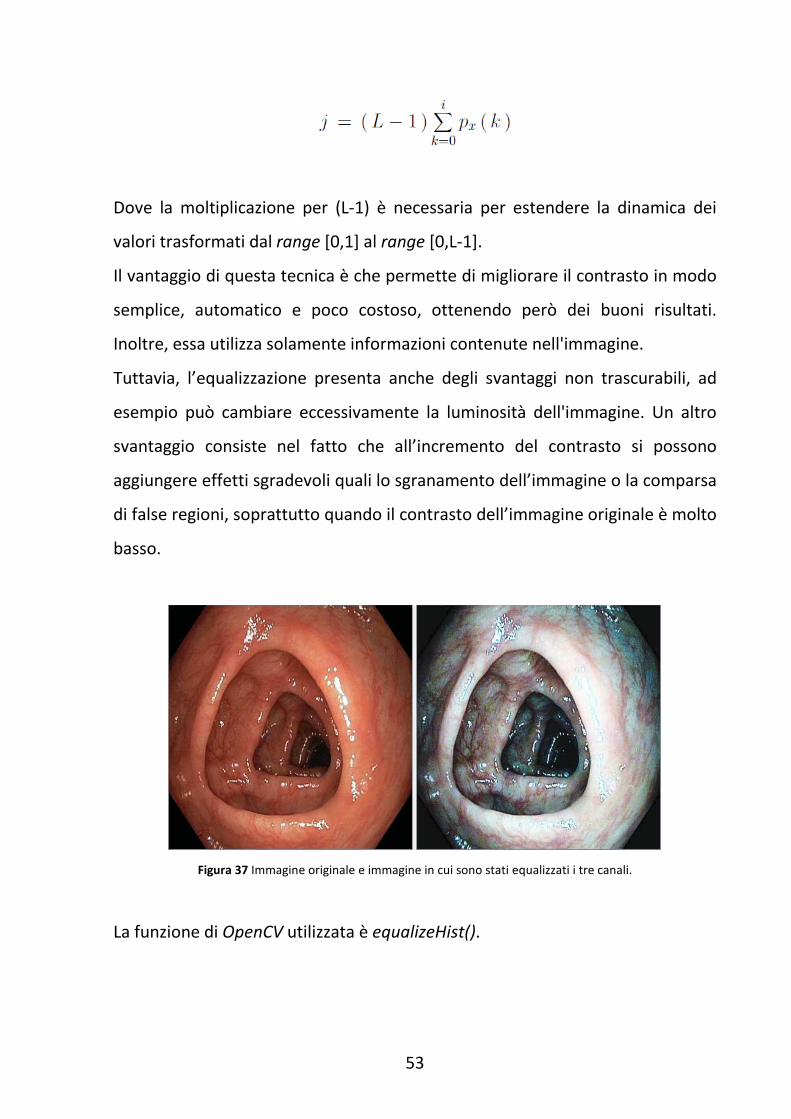
Tuttavia, l’equalizzazione presenta anche degli svantaggi non trascurabili, ad
esempio può cambiare eccessivamente la luminosità dell'immagine. Un altro
svantaggio consiste nel fatto che all’incremento del contrasto si possono
aggiungere effetti sgradevoli quali lo sgranamento dell’immagine o la comparsa
di false regioni, soprattutto quando il contrasto dell’immagine originale è molto
basso.
Figura 37 Immagine originale e immagine in cui sono stati equalizzati i tre canali.
La funzione di OpenCV utilizzata è equalizeHist().

54
• Curve di tono
Le curve di tono sono semplicemente la rappresentazione grafica
dell’andamento dell’output in funzione dell’input, dove in input si hanno le
intensità dei pixel della matrice di ingresso (quella originale) e in output le
intensità dei pixel della matrice di uscita (quella modificata).
Le curve di tono possono assumere varie forme, che è possibile cambiare
modificando alcuni parametri, ma ciò può essere fatto solo dal progettista
dell’interfaccia. Per l’utente, invece, è stata offerta la possibilità di utilizzare
due sole curve, una di tipo cubico e l’altra di tipo sigmoide, quest’ultima
espressa dalla seguente funzione matematica:
Figura 38 Curve di tono.
In OpenCV, queste trasformazioni sono state realizzate convertendo le matrici
dell’immagine, inizialmente in formato CV_8UC1, cioè unsigned char a 8 bit a
singolo canale, nel formato CV_32FC1, cioè float a 32 bit a singolo canale, e

55
modificando i livelli d’intensità dei pixel secondo le funzioni matematiche
scelte, implementate combinando le operazioni algebriche elementari fornite
dalla libreria.
3.1.8 Istogramma
Un’ulteriore possibilità offerta all’utente nell’interfaccia realizzata è quella di
visualizzare l’istogramma dell’immagine, o per meglio dire, gli istogrammi
dell’immagine, poiché, come esposto nel paragrafo precedente, le immagini a
colori sono composte da tre diversi canali.
Figura 39 Pulsante per visualizzare gli istogrammi.
Cliccando sull’apposito pulsante, la seconda immagine cede il posto a un
grafico che mostra tre diverse curve, la cui ampiezza rappresenta il numero di
pixel corrispondente a ciascun valore di intensità. Le curve sono di tre colori
diversi, a sottolineare il rispettivo canale di riferimento.
Figura 40 Immagine originale e istogrammi dei tre canali.

56
L’importanza di conoscere gli istogrammi dell’immagine sarà chiara nel
prossimo capitolo, poiché essi consentiranno di determinare i parametri delle
curve di tono che saranno impiegate nel corso dell’elaborazione in real-time. La
funzione di OpenCV utilizzata è calcHist().
3.1.9 Sottocampionamento
Il sottocampionamento (downsample) è un’operazione che riduce le
dimensioni di un’immagine. Nel caso specifico, agisce prendendo la metà delle
righe e delle colonne della matrice iniziale.
Figura 41 Pulsante per il sottocampionamento.
Generalmente, è sconsigliabile servirsi di questa funzionalità poiché riduce
notevolmente il contenuto informativo dell’immagine. Tuttavia, essa è stata
inserita nell’interfaccia perché, in determinate circostanze, può avere una
precisa utilità. In particolare, può essere utile nell’ambito dell’elaborazione in
real-time, dove è di fondamentale importanza ridurre il costo computazionale e
un’immagine troppo grossa può aumentare severamente i tempi di calcolo. La
funzione di OpenCV utilizzata è pyrDown().
3.1.10 Tempo e dimensioni
Per concludere, sono state inserite due label che danno all’utente la possibilità
di conoscere le dimensioni dell’immagine caricata e i tempi di calcolo impiegati
per eseguire una determinata operazione.

57
Figura 42 Label che visualizzano tempo e dimensioni.
Le dimensioni della matrice sono calcolate e mostrate non appena la matrice è
caricata e da quel momento restano costanti. I tempi delle operazioni, invece,
si riferiscono all’ultima funzione eseguita e si modificano di volta in volta.
Per conoscere il tempo impiegato da una certa elaborazione, sono state usate
le funzioni getTickCount() e getTickFrequency() di OpenCV. La prima restituisce
il numero di cicli di clock da un determinato evento, ad esempio
dall’accensione della macchina; la seconda restituisce la frequenza di clock,
cioè il numero di cicli al secondo della macchina.
Calcolando il numero di cicli di clock, con getTickCount(), prima e dopo
l’esecuzione della funzione, facendone la differenza e dividendo per la
frequenza di clock, calcolata con getTickFrequency(), si ottiene il tempo
impiegato nell’elaborazione.
double freq= getTickFrequency(); double t1= getTickCount();
(…) double t2= getTickCount(); double sec= (t2-t1)/freq;
ui.labelTime->setNum(sec);
L’aspetto finale dell’interfaccia grafica realizzata, comprendente tutte le widget
descritte in questo capitolo, è il seguente.

58
Figura 43 Interfaccia grafica per analisi statica.
3.2 GUI per analisi in real-time
L’interfaccia grafica per l’elaborazione dei frame in tempo reale è del tutto
simile a quella appena descritta per le immagini statiche, ma ha un aspetto più
essenziale, giacché comprende meno strumenti e alcune delle sue operazioni
sono raggruppate in forma più compatta.
Anche in questo caso, i due frame sono presentati affiancati, in modo da
consentire all’utente di fare un confronto tra la scena originale ripresa dalla
telecamera e la scena come risulta in seguito all’elaborazione, con un ritardo
trascurabile.
3.2.1 Concetto di tempo reale
Il concetto di real-time non è da intendersi in senso assoluto, ma relativo
all’applicazione. Non ha senso parlare di real-time vincolandovi un limite di
tempo assoluto (es. dell’ordine dei ns), bensì è ragionevole ritenere che un

59
sistema lavori in tempo reale se i suoi tempi di risposta sono adeguati
all’applicazione corrente.
La definizione rigorosa di elaborazione in tempo reale è la seguente:
“Un’applicazione è in tempo reale se il tempo di elaborazione (processing time)
è inferiore al tempo di campionamento (tempo che intercorre tra il campione n
e quello n+1) e quindi si ha un tempo di attesa (waiting time) maggiore o
uguale a zero”.
Figura 44 Tempo di campionamento, di elaborazione e di attesa.
Nel caso del presente lavoro la considerazione da fare è la seguente: la
telecamera digitale invia al sistema di acquisizione 30 frame al secondo, vale a
dire un frame ogni 0.0333 (periodico) secondi. Ciò significa che, per ciascun
frame, il tempo di elaborazione non deve superare i 3 centesimi di secondo
affinché l’applicazione possa essere considerata in real-time, ovvero non vi sia
un ritardo apprezzabile tra l’immagine originale e quella elaborata.
Questo risultato è stato raggiunto riducendo al minimo il numero di operazioni
necessarie a ottenere una certa elaborazione dell’immagine, cercando di
utilizzare sempre funzioni ottimizzate (di libreria) e computazionalmente non
troppo onerose.
60
3.2.2 Struttura della GUI
Per comprendere al meglio il funzionamento dell’interfaccia, bisogna prima
guardare com’è fatto il rispettivo progetto in Visual C++.
La Solution si compone di due progetti diversi: quello su cui si lavora e il
progetto cameraVideoPlugin, realizzato da dipendenti dell’azienda.
Quest’ultimo implementa la classe cameraVideo, dotata di una serie di funzioni
che permettono di acquisire e visualizzare immagini in tempo reale.
Grazie a queste funzionalità preesistenti, nell’interfaccia realizzata è stato
sufficiente inserire una widget di tipo cameraVideo, per avere a monitor il
flusso di immagini riprese dalla telecamera endoscopica.
Schematizzando il flusso d’istruzioni, quando il progetto è lanciato sono
chiamati i seguenti comandi:
ui.cameraVideo1->initCamera(); ui.cameraVideo1->playCamera();
connect(ui.cameraVideo1,SIGNAL(fillImage(QImage)),this, SLOT(getStream(QImage)));
Questi inizializzano l’oggetto, fanno partire lo streaming di dati e connettono il
segnale associato all’arrivo del frame allo slot chiamato getStream, dove è
concentrata la grande maggioranza delle elaborazioni da eseguire.
All’interno della funzione getStream, l’immagine è prima di tutto convertita da
oggetto QImage a oggetto Mat, secondo un metodo molto simile a quello
descritto nel capitolo precedente. L’unica differenza sta nel fatto che, in questo
caso, l’immagine è disponibile direttamente come oggetto QImage, cioè senza
la necessità di prelevarla all’interno di una label sotto forma di istanza della
classe QPixmap.

61
Questo fatto è di fondamentale importanza perché consente di operare una
conversione in meno rispetto al caso della GUI statica e, dovendo lavorare in
real-time, permette un discreto risparmio di tempo di calcolo.
3.2.3 Pulsanti e operazioni
Una volta che l’immagine è stata convertita, è possibile eseguire quasi tutte le
operazioni viste per il caso dell’analisi statica. Esse sono definite all’esterno
della funzione getStream e vengono chiamate all’interno.
Per permettere all’utente di scegliere quali modifiche apportare all’immagine,
sono state inserite anche qui delle check box. Tuttavia, in questo caso, esse non
hanno semplicemente la funzione di “promemoria”, ma devono essere
spuntate dall’utente qualora esso voglia adoperare la funzione corrispondente.
Figura 45 Pulsanti, cursori e check box per analisi in real-time.
62
Le novità, rispetto alla GUI statica, si limitano all’assenza di alcuni pulsanti e alla
presenza di tre operazioni nuove: A-Mode, B-Mode e Screenshot.
3.2.3.1 Screenshot
Il pulsante screenshot (“schermata”) è stato inserito per permettere all’utente
di catturare un fotogramma (frame) della scena visualizzata, che può essere un
particolare d’interesse o un settore del colon di cui si vuole tenere traccia in
memoria. Il frame catturato è visualizzato in una terza label appositamente
inserita nell’interfaccia.
Quest’operazione è già implementata all’interno della classe cameraVideo, è
stato quindi sufficiente richiamarla all’interno di uno slot.
QPixmap pixmap= ui.cameraVideo1->takeScreenshot();
3.2.3.2 Modalità A e B
I due pulsanti “A Mode” e “B Mode” lanciano operazioni che riguardano il
colore dell’immagine, cioè eseguono un’elaborazione del tono secondo quanto
esposto nei precedenti paragrafi. In particolare, si è scelto di includere nella
modalità A la conversione cubica del canale R e nella modalità B la
combinazione dell’A Mode con l’adattamento sigmoide dei canali verde e blu.
Il “B Mode” è, dal punto di vista computazionale, la funzionalità più onerosa,
per cui si rende necessario approfondirne l’aspetto del real-time, in quanto
potrebbe determinare un ritardo non trascurabile tra le immagini.
Servendosi della GUI per analisi statica, utilizzando le funzioni OpenCV
getTickCount() e getTickFrequency() e lanciando il progetto in modalità Release
(molto più veloce di quella Debug) si sono calcolati i tempi impiegati dal

63
sistema per ciascun passaggio. I valori dei tempi così ottenuti, approssimati
sempre per eccesso, sono qui elencati schematicamente:
� QPixmap → Mat 0.006 sec (conversione)
� Split 0.002 sec (divisione in canali)
� Cubic (x1) 0.003 sec (curva cubica per il canale R)
� Sigmoid (x2) 0.012 sec (curva sigmoide per i canali G e B)
� Merge 0.002 sec (unione dei canali)
� Mat → QPixmap 0.002 sec (riconversione)
� Totale 0.027 sec < 0.0333 sec
Si ricorda che nella GUI real-time i tempi sono ulteriormente ridotti poiché
l’immagine è già in formato QImage, e dunque si necessita di una conversione
in meno.
Si può osservare che il tempo totale impiegato dall’elaborazione è inferiore al
tempo che intercorre tra un frame e l’altro. Inoltre, avanzano ancora 0.006 sec
che possono essere “spesi” per uno o due filtraggi spaziali (0.003 sec ciascuno),
come un filtro di smoothing o di sharpening.
In conclusione, si specifica che l’interfaccia per analisi dinamica appena
descritta non costituisce la GUI finale utilizzata dal sistema Endotics per le
scansioni endoscopiche. Essa rappresenta un prototipo, necessario a verificare
il funzionamento e l’utilità degli algoritmi implementati in real-time.
Negli sviluppi futuri del presente lavoro, vi è la possibilità di integrare gli
elementi di questo prototipo con l’effettiva interfaccia del sistema Endotics.

64
CAPITOLO4
Proprietàottichedelcoloned
enhancementdell’immagine
Per riuscire nel difficile compito di migliorare l’immagine, in maniera che possa
fornire al medico un aiuto concreto nella diagnosi differenziale e nella
caratterizzazione delle lesioni, è necessaria una profonda conoscenza del colon
e delle sue proprietà ottiche. A tale scopo è stata svolta un’accurata ricerca
sull’argomento in letteratura, da cui sono emerse le principali caratteristiche
del tessuto dal punto di vista clinico, e si è appreso come modellizzarlo affinché
le sue proprietà ottiche dipendessero da pochi semplici parametri.
Alla luce di queste conoscenze fisico-anatomiche e dei principi di acquisizione
dell’immagine digitale a colori, è stato proposto un metodo di elaborazione in
real-time basato sull’applicazione di curve di tono ai tre canali dell’immagine
digitale (RGB). Tale metodo tiene conto sia degli aspetti teorici, legati alle
diverse proprietà di penetrazione e assorbimento nel colon delle varie regioni
spettrali della luce, sia di un criterio sperimentale di ottimizzazione delle
suddette curve, basato sulla massimizzazione di un indice di contrasto.
4.1Interazionedellaluceconilcolon
La telecamera digitale illumina la superficie del colon con luce bianca, cioè con
un range frequenziale che comprende tutte le lunghezze d’onda visibili. Lo
spettro elettromagnetico che genera l’immagine, derivante dall’interazione
della luce con il colon, dipende dalla struttura del tessuto, cioè dal suo
spessore, dalla sua forma e dalla quantità di pigmenti in esso presenti [17].
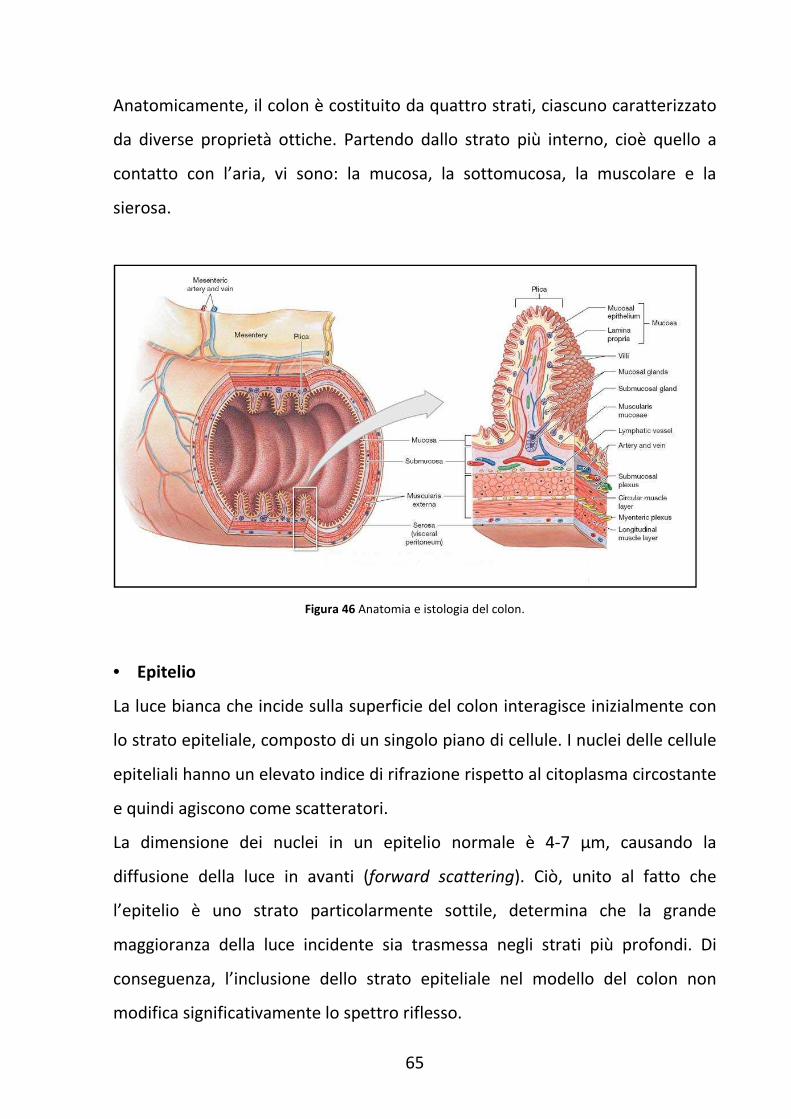
65
Anatomicamente, il colon è costituito da quattro strati, ciascuno caratterizzato
da diverse proprietà ottiche. Partendo dallo strato più interno, cioè quello a
contatto con l’aria, vi sono: la mucosa, la sottomucosa, la muscolare e la
sierosa.
Figura 46 Anatomia e istologia del colon.
• Epitelio
La luce bianca che incide sulla superficie del colon interagisce inizialmente con
lo strato epiteliale, composto di un singolo piano di cellule. I nuclei delle cellule
epiteliali hanno un elevato indice di rifrazione rispetto al citoplasma circostante
e quindi agiscono come scatteratori.
La dimensione dei nuclei in un epitelio normale è 4-7 μm, causando la
diffusione della luce in avanti (forward scattering). Ciò, unito al fatto che
l’epitelio è uno strato particolarmente sottile, determina che la grande
maggioranza della luce incidente sia trasmessa negli strati più profondi. Di
conseguenza, l’inclusione dello strato epiteliale nel modello del colon non
modifica significativamente lo spettro riflesso.

66
• Mucosa
La luce bianca che penetra nella mucosa è diffusa da una larga rete di sottili
fibre di collagene e organelli subcellulari come i mitocondri. Le ridotte
dimensioni di queste strutture (diametro inferiore al μm) determinano che la
luce sia diffusa a piccoli angoli, cioè retrodiffusa (back scattering).
All’interno della mucosa vi è poi una sottile rete di capillari che si sviluppa in un
certo numero di strutture a nido d’ape che avvolgono le ghiandole intestinali. I
capillari trasportano i globuli rossi che contengono emoglobina ossigenata e
non ossigenata. Sia l’ossiemoglobina, sia la deossiemoglobina, assorbono
fortemente la luce nel range visibile.
• Sottomucosa
Al confine tra la mucosa e la sottomucosa, una piccola frazione della luce è
riflessa a causa del brusco cambiamento nell’indice di rifrazione. La maggior
parte di essa penetra nella sottomucosa, la quale è composta quasi
interamente da una fitta rete di larghe fibre di collagene. Il diametro di queste
ultime è tipicamente di pochi micron, rendendo lo strato altamente diffusivo in
avanti (forward scattering).
Vi sono inoltre grossi vasi sanguigni (arterie e vene) che forniscono alla mucosa
emoglobina ossigenata e deossigenata. Il volume totale di sangue che circola
nella sottomucosa è superiore a quello presente nella mucosa, causando un
maggiore assorbimento di luce.
• Muscolare
La frazione di luce non assorbita o diffusa nei primi due livelli del tessuto entra
nello strato muscolare. Il fattore di anisotropia di questo mezzo è molto alto,
facendo sì che lo scattering, ancora una volta, sia fortemente diretto in avanti
(forward scattering).

67
La maggior parte della luce che penetra in questo strato non riemerge sulla
superficie del tessuto, non portando così alcuna informazione all’immagine.
Tuttavia, una discreta quantità di fotoni appartenenti alla banda rossa, che
penetra più profondamente nel tessuto, riesce a riaffiorare in superficie,
incidendo sulla parte finale dello spettro riflesso.
• Sierosa
La luce trasmessa anche attraverso lo strato muscolare, che finisce nella tonaca
sierosa, costituisce una frazione molto piccola di quella incidente. Essa è
principalmente confinata nella regione rossa dello spettro e non influisce
significativamente sulle sue caratteristiche. Ciò significa che lo spettro riflesso
dipende esclusivamente dall’interazione della luce con i primi tre strati.
Pertanto, il modello del colon può ragionevolmente contenere solo la mucosa,
la sottomucosa e lo strato muscolare.
4.3 Effetto dei parametri del modello sullo
spettro riflesso
Variando i parametri caratteristici del modello del colon si modifica la forma
dello spettro riflesso. Ciò fornisce interessanti informazioni sulle sue proprietà
ottiche, che possono essere sfruttate per l’elaborazione. Per esempio, i
parametri specifici della mucosa hanno un’influenza maggiore rispetto a quelli
della sottomucosa. Uno su tutti, che sarà preso in considerazione per gli scopi
del presente lavoro, è la frazione di volume di sangue.
Nelle regioni blu e verde dello spettro, l’assorbimento della luce da parte
dell’emoglobina si traduce in un grafico fatto di “picchi” e “buche”. Queste
ultime, centrate attorno a 420 nm e 540-580 nm, diventano ancora più
accentuate con l’incremento del contenuto di sangue (frazione di volume).

68
Nella parte rossa dello spettro, invece, dove l’assorbimento da parte
dell’emoglobina è trascurabile, sono visibili solo piccoli cambiamenti. Un
maggiore contenuto di sangue si traduce semplicemente in una minore
quantità di luce riflessa poiché ne aumenta la frazione assorbita all’interno del
tessuto. Ciò determina un lieve abbassamento della curva nella parte terminale
del grafico, come è visibile nell’immagine seguente.
Figura 47 Spettro riflesso dal colon per diversi valori di frazione di volume di sangue nella mucosa.
Diversamente dalla mucosa, modificare i parametri della sottomucosa non si
traduce in grossi cambiamenti della riflessione globale, bensì in piccole
variazioni limitate alla regione rossa dello spettro. Ciò è piuttosto ragionevole
in quanto i fotoni di lunghezza d’onda nel blu e nel verde sondano il volume di
tessuto a una profondità minore.
In particolare, mentre la luce blu e quella verde viaggiano per lo più nello strato
della mucosa, la luce rossa penetra ben oltre la sottomucosa. Una sua frazione,
che sopravvive all’assorbimento e alla diffusione, riemerge in superficie,
modificando lievemente lo spettro riflesso nella sua parte terminale, come
evidenzia il grafico seguente.

69
Figura 48 Spettro riflesso dal colon per diversi valori di frazione di volume di sangue nella sottomucosa.
Questo fenomeno è ancora più evidente confrontando lo spettro riflesso solo
dal primo strato con lo spettro ottenuto modellando il colon con due o tre
strati. Negli ultimi due casi si ha un notevole incremento dello spettro totale
riflesso nella regione rossa.
Figura 49 Spettro riflesso dalla sola mucosa (linea punteggiata); spettro riflesso da mucosa e sottomucosa (linea tratteggiata); spettro riflesso da mucosa, sottomucosa e strato muscolare (linea continua).
Sintetizzando quanto appena detto e riportandolo su un piano pratico, si hanno
due elementi su cui focalizzare l’attenzione: il primo è che la luce di lunghezza
d’onda nel rosso ha una profondità di penetrazione maggiore rispetto a quella
nel blu e nel verde, quindi l’informazione che porta all’immagine riguarda
anche gli strati più profondi del colon; il secondo è che i picchi di assorbimento

70
dell’emoglobina, che si traducono nelle “buche” dello spettro riflesso, risiedono
nella banda blu e verde, quindi la maggior parte contrasto tra tessuto perfuso e
non perfuso si ottiene concentrandosi su queste due bande.
4.3 Immagine digitale a colori
Senza entrare in dettaglio, giacché non costituisce argomento del presente
lavoro, è importante accennare al meccanismo di formazione dell’immagine
digitale a colori perché è fondamentale per comprendere i metodi di
elaborazione adottati e rapportarli alla trattazione teorica.
Una telecamera digitale, sia essa a sensori CMOS o CCD, per registrare
un’immagine si serve di una matrice di minuscole cavità di luce o photosite, che
servono per “raccogliere” fotoni. In base alla quantità di fotoni che penetrano
in ciascuna cavità, il sensore produce un segnale di maggiore o minore
intensità, la cui precisione è determinata da un parametro chiamato
“profondità”, espresso in numero di bit (0-255 per un'immagine a 8-bit).
Figura 50 Matrice di photosite.
Tuttavia questo meccanismo, da solo, creerebbe immagini in scala di grigi,
poiché le cavità non sono in grado di distinguere i colori. Per registrare
immagini a colori, su ogni photosite deve essere sistemato un filtro che
permette il passaggio selettivo di luce a una particolare lunghezza d’onda.
Attualmente, la maggior parte delle telecamere digitali è progettata in modo

71
che ogni cavità catturi solo uno dei tre colori primari, scartando circa i 2/3 della
luce in entrata.
Figura 51 Principio di funzionamento dei filtri ottici.
Come risultato, ogni pixel misura solo un colore, mentre l’informazione
mancante relativa agli altri due primari deve essere estrapolata dai pixel vicini.
Il modo più comune di combinare i filtri colorati è disporli in una matrice
chiamata griglia di Bayer o Bayer array:
Figura 52 Griglia di Bayer.
Una griglia di Bayer è costituita da righe alterne di filtri verde-rosso e verde-blu.
Essa contiene il doppio di sensori verdi rispetto a quelli rossi o blu, cioè ogni
colore primario non riceve un'uguale frazione della superficie totale (50%
verde, 25% rosso, 25% blu). Ciò è dovuto al fatto che l'occhio umano è più
sensibile alla luce verde che a quella rossa o blu, per cui la ridondanza dei pixel
verdi produce un'immagine che appare meno rumorosa e dai dettagli più fini

72
rispetto a quella che verrebbe generata se ogni colore fosse trattato
equamente.
Si è detto che ogni pixel cattura solo uno dei tre colori primari, quindi, per
ottenere un’immagine finale che contenga tutte le informazioni a colori per
ogni pixel, si utilizza un particolare processo chiamato "demosaicizzazione". La
demosaicizzazione consiste in un’interpolazione dei colori che può essere
implementata in diversi modi e con svariati algoritmi, ma non sarà
approfondita in questa sede.
Quello che invece interessa, per gli scopi del presente lavoro, è che l’immagine
a colori di cui si dispone è costituita da tre componenti (RGB), ciascuna
acquisita in una banda spettrale diversa, e ciò giustifica pienamente la strada
intrapresa di lavorare separatamente sui tre canali. Allo stesso tempo, però, le
bande in questione, oltre ad essere piuttosto larghe, presentano ampie regioni
di sovrapposizione, e questo fa sì che l’informazione spaziale fornita da ogni
canale non sia particolarmente selettiva. Questo fenomeno è dovuto ai profili
di trasmissione spettrale tipici dei coloranti utilizzati nella costruzione dei filtri
Bayer.
Figura 53 Profili di trasmissione spettrale dei filtri Bayer.

73
Pertanto, per quanto il metodo di elaborazione proposto abbia un valido
fondamento teorico e, ancor più, una sorprendente evidenza pratica, esso si
configura comunque come un metodo semi-empirico, che non pretende di
raggiungere le vette di precisione spaziale tipiche dei sistemi a banda ristretta
come l’NBI.
4.4 Enhancement dell’immagine
Come già detto, le due principali caratteristiche associate alla presenza di
lesioni maligne o pre-maligne del colon sono l’incremento del volume di
sangue, dovuto a neovascolarizzazione o angiogenesi, e l’aumento dello
spessore e della disorganizzazione della rete fibrosa di collagene nella matrice
extracellulare. In aggiunta, si ricorda che le alterazioni precoci del tessuto,
dovute a patologie come il cancro del colon, sono confinate allo strato della
mucosa.
Quanto appena detto, unito a quanto visto nel precedente paragrafo,
suggerisce alcuni criteri per fornire una visione alternativa e migliorata al
medico, in altre parole un possibile enhancement.
4.4.1 Canale R
Risulta ormai abbastanza chiaro, alla luce delle conoscenze acquisite, che la
banda spettrale rossa è quella che fornisce la minore quantità di informazioni
rilevanti. Questo per due motivi principali: il primo è che penetra più in
profondità, e quindi fornisce meno indicazioni sulla mucosa e le sue eventuali
anomalie; il secondo è che presenta meno assorbimento, e quindi non
consente di operare una distinzione tra tessuto perfuso e non perfuso.

74
A conferma di ciò si guardi la seguente immagine, che costituisce un caso molto
indicativo poiché mostra una lesione superficiale piuttosto evidente e ricca di
sangue.
Figura 54 Immagine originale e canale rosso (R).
L’immagine sulla sinistra è quella originale in luce bianca, mentre quella sulla
destra rappresenta il canale rosso, ottenuto sopprimendo gli altri due canali
grazie alle funzionalità dell’interfaccia realizzata. È evidente come l’immagine a
destra fornisca pochissima informazione sia per quanto riguarda la visione di
superficie, sia per quanto concerne la presenza del sangue. Al contrario, le
componenti verde e blu della stessa immagine sono molto più contrastate e
ricche di dettagli, come si può notare nelle immagini seguenti.

75
Figura 55 Immagine originale e canale verde (G).
Figura 56 Immagine originale e canale blu (B).
Analizzando gli istogrammi delle componenti rosse delle immagini si ha
conferma di quanto osservato nel grafico dello spettro riflesso, dove, nella
parte terminale, cioè verso le lunghezze d’onda maggiori, si ha un valore
elevato e pressoché costante. Gli istogrammi, infatti, sono centrati verso livelli
d’intensità alti e le immagini stesse hanno una tonalità complessiva
prevalentemente rosea, cosa che uniforma la visione e riduce il contrasto.

76
Figura 57 Immagine originale e istogramma del canale rosso (R).
Per tutti questi motivi si è deciso di eseguire una trasformazione che riducesse
il peso del canale rosso nell’immagine globale. Inoltre, per ottenere il maggior
beneficio possibile dalla conversione, si è preferito compiere una
trasformazione non uniforme (non lineare), che agisse differentemente sui
livelli di grigio inferiori e superiori. La scelta è caduta quindi su una curva
cubica.
Figura 58 Curva cubica per il canale rosso (R).

77
La retta in nero rappresenta l’equazione y=x (output=input), chiamata anche
bisettrice del quadrante. Ciò significa che nella regione del grafico al di sopra di
essa i livelli di output sono maggiori rispetto a quelli di input, viceversa al di
sotto. È chiaro, quindi, che tutti i valori d’intensità del canale rosso sono in
qualche modo ridotti da questa trasformazione rispetto all’immagine originale.
La modifica dei livelli d’intensità secondo una curva cubica corrisponde
all’applicazione di un operatore di elevazione a potenza.
In genere, se l’immagine è sottoesposta, i particolari interessanti sono poco
evidenti e concentrati nelle zone scure; in tal caso può essere utile espandere la
dinamica associata ai livelli scuri e comprimere quella dei livelli chiari.
Viceversa, se l’immagine è sovraesposta, i particolari interessanti sono poco
evidenti e concentrati nelle zone chiare; in tal caso può essere utile espandere
la dinamica associata ai livelli chiari e comprimere quella dei livelli scuri.
Nel caso in esame, l’immagine è piuttosto sovraesposta, con valori d’intensità
concentrati nella parte alta. Di base, quindi, la conversione espande la dinamica
associata ai livelli alti e comprime i livelli scuri. In aggiunta a questo, è noto che
i valori più bassi d’intensità corrispondono alle zone dove c’è maggiore
assorbimento da parte della luce. La compressione, ovvero l’ulteriore
attenuazione di questi valori, determina un aumento del contrasto tra tessuto
dove c’è perfusione sanguigna e tessuto non irrorato.
L’immagine seguente è la stessa analizzata in precedenza così come appare al
termine della conversione cubica.

78
Figura 59 Immagine originale e immagine sottoposta a conversione cubica per il canale R.
In questo caso i vantaggi della trasformazione non sono lampanti, ma è già
piuttosto evidente come la macchia di sangue appaia più contrastata rispetto al
resto, così come sembrano meglio definiti i suoi margini. Inoltre, è abbastanza
chiaro che il range dinamico dei livelli alti è aumentato; infatti, escludendo la
macchia, su tutta la superficie si spazia da una tonalità rosea al bluastro.
Per apprezzarne maggiormente l’effetto, si guardi il risultato della stessa
trasformazione sull’immagine seguente, scaricata dal sito Gastrolab e di qualità
decisamente superiore alla precedente.
Figura 60 Immagine originale e immagine sottoposta a conversione cubica per il canale R.

79
Si può concludere affermando che la conversione cubica ha un duplice effetto:
migliorare la visione degli strati superficiali del tessuto ed enfatizzare il pattern
vascolare di mucosa e sottomucosa. Tuttavia, si è propensi a ritenere che il suo
principale vantaggio sia proprio il secondo, ossia la trama vascolare, poiché in
questo caso l’effetto di enhancement è diretto, con un’attenuazione maggiore
dei livelli già scuri; il primo, al contrario, è un vantaggio che si ottiene
indirettamente, giacché, diminuendo il peso della componente rossa, si
aumenta indirettamente il peso di quella verde e blu, che provvedono
all’informazione superficiale e ai particolari.
4.4.2 Canali G e B
Le componenti spettrali verde e blu, a differenza della rossa, forniscono
informazioni dettagliate sulla superficie della mucosa e sulla trama vascolare.
Questo accade sostanzialmente per due motivi: il primo è che la lunghezza
d’onda minore fa sì che i fotoni sondino il tessuto più superficialmente, dando
modo all’immagine di arricchirsi di particolari sullo strato di maggiore interesse
clinico, ossia la mucosa.
Figura 61 Profondità di penetrazione al variare della lunghezza d’onda.

80
Il secondo motivo è che all’interno delle bande frequenziali verde e blu vi sono i
due principali picchi di assorbimento dell’emoglobina, ossia 415 nm e 540 nm, e
ciò massimizza il contrasto tra il tessuto dove è presente sangue e dove invece
è assente.
Figura 62 Assorbimento di luce da parte di emoglobina ossigenata e deossigenata al variare della lunghezza d’onda.
Per tali motivi, si è deciso di aumentare il peso di queste due componenti
all’interno dell’immagine. Come nel caso precedente, si è optato per una
trasformazione non lineare che modificasse i valori d’intensità dei pixel sul
canale, ma in questa circostanza è stata scelta una curva sigmoide.

81
Figura 63 Curva sigmoide per i canali verde (G) e blu (B).
Come si vede dal grafico, questo tipo di curva presenta un punto d’intersezione
con la retta y=x, cioè con la bisettrice del quadrante. Ciò significa che tutti i
livelli d’intensità che cadono prima dell’intersezione, sono attenuati dalla
trasformazione, quelli che invece vengono dopo, sono amplificati.
Modificare i valori di intensità dei pixel secondo una curva sigmoide
corrisponde ad applicare un operatore di contrast stretching o histogram
stretching (espansione dell’istogramma). Questo operatore è utilizzato per
migliorare il contrasto dell’immagine, espandendo la dinamica dei livelli di
grigio su un intervallo più ampio. Solitamente l’espansione è realizzata con una
funzione lineare o lineare a tratti, ma nel caso in esame è stata scelta una
funzione non lineare.
L’immagine seguente è la stessa già vista più volte in precedenza, sottoposta
alla conversione cubica per la componente rossa e sigmoide per quella verde e
blu.
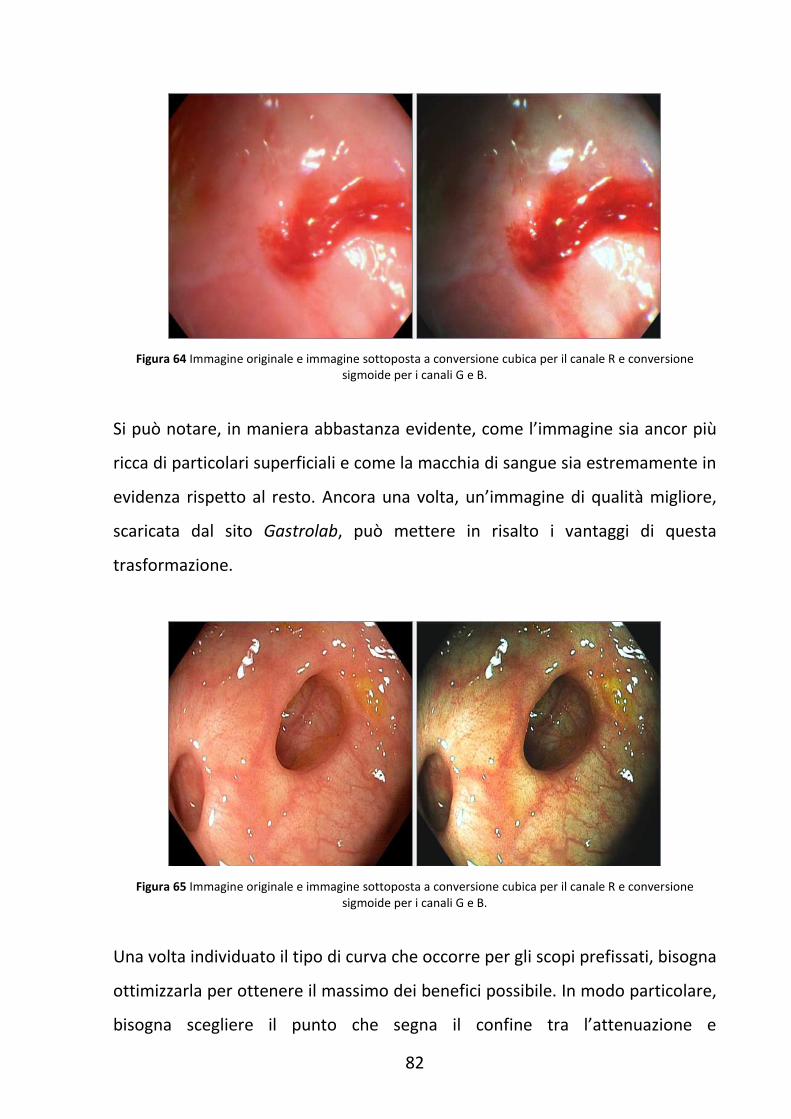
82
Figura 64 Immagine originale e immagine sottoposta a conversione cubica per il canale R e conversione sigmoide per i canali G e B.
Si può notare, in maniera abbastanza evidente, come l’immagine sia ancor più
ricca di particolari superficiali e come la macchia di sangue sia estremamente in
evidenza rispetto al resto. Ancora una volta, un’immagine di qualità migliore,
scaricata dal sito Gastrolab, può mettere in risalto i vantaggi di questa
trasformazione.
Figura 65 Immagine originale e immagine sottoposta a conversione cubica per il canale R e conversione sigmoide per i canali G e B.
Una volta individuato il tipo di curva che occorre per gli scopi prefissati, bisogna
ottimizzarla per ottenere il massimo dei benefici possibile. In modo particolare,
bisogna scegliere il punto che segna il confine tra l’attenuazione e
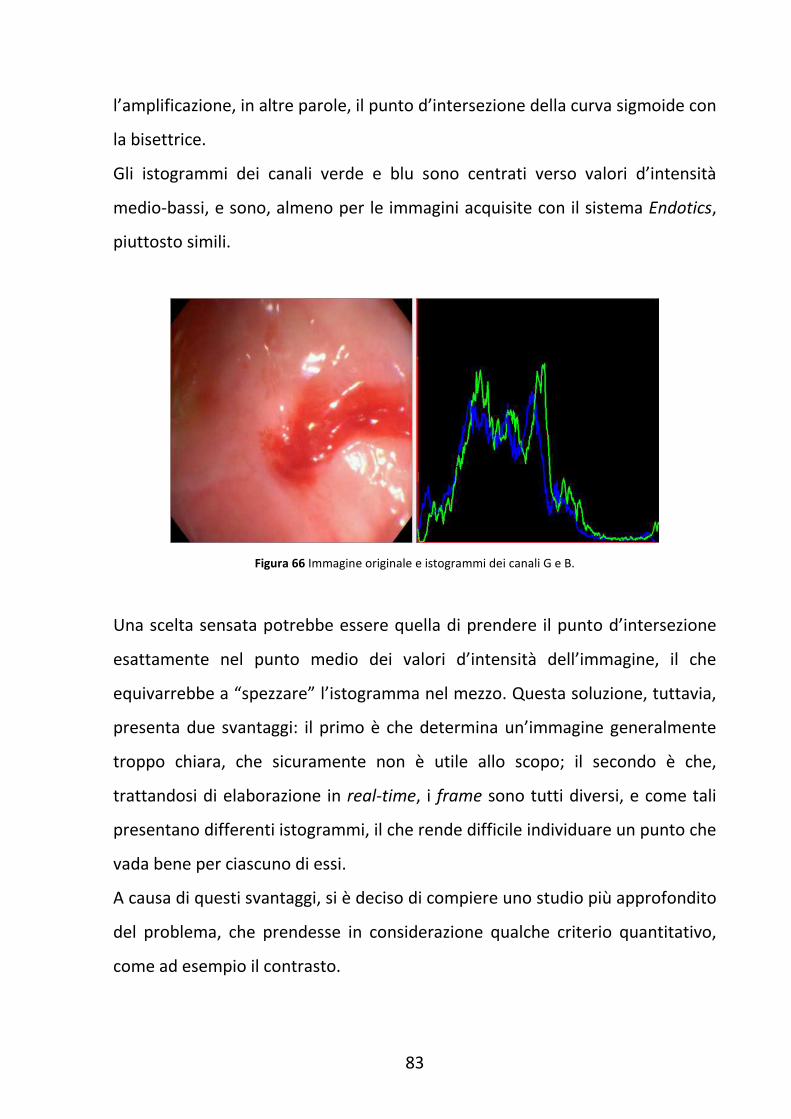
83
l’amplificazione, in altre parole, il punto d’intersezione della curva sigmoide con
la bisettrice.
Gli istogrammi dei canali verde e blu sono centrati verso valori d’intensità
medio-bassi, e sono, almeno per le immagini acquisite con il sistema Endotics,
piuttosto simili.
Figura 66 Immagine originale e istogrammi dei canali G e B.
Una scelta sensata potrebbe essere quella di prendere il punto d’intersezione
esattamente nel punto medio dei valori d’intensità dell’immagine, il che
equivarrebbe a “spezzare” l’istogramma nel mezzo. Questa soluzione, tuttavia,
presenta due svantaggi: il primo è che determina un’immagine generalmente
troppo chiara, che sicuramente non è utile allo scopo; il secondo è che,
trattandosi di elaborazione in real-time, i frame sono tutti diversi, e come tali
presentano differenti istogrammi, il che rende difficile individuare un punto che
vada bene per ciascuno di essi.
A causa di questi svantaggi, si è deciso di compiere uno studio più approfondito
del problema, che prendesse in considerazione qualche criterio quantitativo,
come ad esempio il contrasto.

84
4.5 Contrasto nelle immagini a colori
Nelle immagini in bianco e nero, il contrasto è semplicemente il rapporto o
differenza tra il valore più alto (punto più chiaro) e il valore più basso (punto
più scuro) della luminosità. Nelle immagini a colori, invece, il contrasto è una
caratteristica difficilmente definibile perché è un attributo sia fisico che
percettivo. Una possibile definizione di contrasto potrebbe essere: “Differenza
nelle proprietà visive che rendono un oggetto distinguibile da un altro oggetto
o dallo sfondo”.
Esistono numerosi algoritmi per l'aumento del contrasto delle immagini a livelli
di grigio, come lo stretching dell’istogramma, la segmentazione e
l’equalizzazione dell'istogramma, ma tutte queste tecniche non possono essere
applicate, così come sono, alle immagini a colori. Allo stesso modo, non esiste
un indice quantitativo univoco e universalmente accettato che possa esprimere
il livello di contrasto in un’immagine a colori. Per questo l’enhancement delle
immagini a colori è più difficile e molte questioni sono tuttora oggetto di
ricerca.
Nonostante le difficoltà sopra citate, svolgendo ricerche in letteratura ci si è
imbattuti in una proposta di quantificazione apparsa piuttosto convincente [18].
Tale metodo esige di trasformare l’immagine dallo spazio di colore RGB a
quello HSV (Hue Saturation Value) e di calcolare poi il contrasto, o meglio
l’incremento relativo del contrasto tra l’immagine elaborata e quella originale,
con la seguente formula:

85
Dove σout e σin sono rispettivamente la varianza dei livelli di “V” (valori di
luminosità) dell’immagine di output e la varianza degli stessi livelli
nell’immagine di input.
Il limite di questo indice sta nel fatto che esprime il livello di contrasto
complessivo dell’immagine, mentre per gli scopi del presente lavoro si è
interessati, più che all’immagine nella sua interezza, a specifiche regioni del
colon. L’ideale, per un’ottimizzazione ancora più robusta, sarebbe riuscire a
quantificare il contrasto tra tessuto sano e patologico, selezionando
dall’immagine una ROI che li comprenda entrambi.
4.5.1 Criterio di ottimizzazione
Facendo uso del suddetto indice, è stato individuato un criterio per stabilire in
quale punto fissare l’intersezione delle curve con la bisettrice.
Per il calcolo sono state scelte dieci immagini, estratte dal video di un esame
endoscopico registrato con il sistema di acquisizione Endotics su una cavia
suina presso il MEDDEC (Medical Device Development Center) situato a Kobe
(Giappone), da dipendenti dell’azienda. I fotogrammi sono stati scelti
accuratamente in modo da creare un set quanto più possibile eterogeneo,
comprendendo frame di settori del colon sani e altri caratterizzati dalla
presenza di lesioni, con pattern vascolare a volte più evidente, a volte meno.
Ciascuna di queste immagini è stata trattata nel seguente modo: è stata
applicata la conversione cubica per il canale rosso e la conversione sigmoide
per gli altri due canali, ma mentre la prima trasformazione è identica per tutte
le immagini, la seconda è stata applicata in modo sempre diverso, modificando
ogni volta il punto d’intersezione della curva con la bisettrice. Più
precisamente, il livello di intensità corrispondente al punto d’intersezione della
curva con la retta è stato traslato dal valore 90 al valore 180, con passo 10, in

86
modo da avere intersezione a 90, 100, 110, e così via fino a 180. In totale,
quindi, si sono ottenute, per ogni immagine, 10 sotto-immagini diverse, per un
totale di 100.
Figura 67 Set di immagini utilizzato per l’ottimizzazione delle curve.
Per ciascuna sotto-immagine, è stato poi calcolato l’incremento del contrasto
con il metodo visto. I valori ottenuti sono stati graficati e gli andamenti
analizzati per ogni sotto-immagine al variare del punto d’intersezione.
I grafici rivelano come tutte le immagini presentino un trend abbastanza simile:
in una prima fase i valori del contrasto crescono, poi raggiungono un picco
massimo e infine decrescono.
L’immagine seguente mostra le curve di crescita del contrasto rispetto al valore
minimo, evidenziando con un target il picco massimo raggiunto.

87
I livelli di intensità corrispondenti ai picchi massimi del contrasto sono stati
estrapolati e ne è stata calcolata la media aritmetica. Il valore ottenuto, cioè
141, costituisce il livello di intensità che corrisponde al punto di intersezione
ottimo, per cui in definitiva le curve utilizzate sono le seguenti.
Figura 68 Curva cubica per il canale R e curva sigmoide ottimizzata per i canali G e B.

88
Per eseguire tutte le elaborazioni appena descritte (conversione dallo spazio
RGB a HSV, calcolo del contrasto e grafici degli andamenti) è stato utilizzato il
software Matlab.
4.6 Enhancement dei dettagli
Per quanto concerne l’altro aspetto che caratterizza la presenza di lesioni
neoplastiche, ossia l’incremento del disordine della rete di fibre, la soluzione
proposta è quella di applicare all’immagine un semplice filtro di sharpening, più
o meno incisivo in base al rumore e alle esigenze del momento.
L’affilatura dell’immagine fornisce al medico una visione migliorata dei dettagli,
enfatizzando la conformazione e i margini delle anomalie superficiali, e può
quindi aiutare a caratterizzare e differenziare una lesione. L’immagine
seguente, di qualità elevata, è un chiaro esempio di come agisce un filtro di
sharpening.
Figura 69 Immagine originale e immagine sottoposta al filtro di sharpening.
Si mostra infine un’immagine in cui sono stati applicati tutti e quattro i metodi
di enhancement visti in questo capitolo (cubico R, sigmoide G, sigmoide B e
sharpening) per dare un’idea dell’effetto finale dell’elaborazione proposta.

89
Figura 70 Immagine originale e immagine potenziata.
È evidente come sia il pattern vascolare, sia la configurazione superficiale delle
“macchie”, risentano positivamente del trattamento effettuato sull’immagine
che appare inoltre, anche a uno sguardo superficiale, più nitida, contrastata e
vivace.

90
CAPITOLO5
Validazioneerisultati
Una volta definito e ottimizzato il sistema di elaborazione, è stato necessario
validarlo, verificando che la soluzione proposta apportasse reali miglioramenti
all’immagine, nella prospettiva di fornire un concreto supporto diagnostico.
Si è imposta quindi la necessità di intervistare un certo numero di medici
endoscopisti, sottoponendoli a un test opportunamente sviluppato. A tal fine,
ci si è recati al 20° Congresso Nazionale delle Malattie Digestive, svoltosi a
Napoli dal 14 al 22 marzo 2014 presso la Mostra d’Oltremare.
Complessivamente, sono stati intervistati quattro medici endoscopisti. Le
risposte sono state raccolte e presentate sotto forma di tabelle, grafici e
istogrammi. Infine, i dati sono stati sottoposti a test statistici.
5.1Testsperimentale
L’esperimento di validazione della soluzione proposta consiste in un test
sperimentale in cui un certo numero di immagini, originali ed elaborate,
vengono sottoposte al giudizio del medico endoscopista, il quale è invitato, per
ciascuna di esse, a rispondere a precise domande.
Le immagini scelte per il test sono le medesime utilizzate nel precedente
capitolo per l’ottimizzazione delle curve di tono, con qualche differenza. Ogni
immagine originale è stata sottoposta a sole due elaborazioni diverse: la prima
consistente nell’applicazione della curva cubica al canale R (A Mode); la
seconda nell’applicazione della curva cubica al canale R e della curva sigmoide
ottimizzata ai canali G e B (B Mode).

91
Trattandosi di dieci immagini, ciascuna elaborata in due modi diversi, insieme
all’originale configurano un set finale composto di trenta immagini.
Figura 71 Set di immagini utilizzato per il test di validazione.
Il test è stato concepito per rendere la valutazione da parte del medico quanto
più possibile “assoluta”, vale a dire svincolando il suo giudizio da possibili
termini di paragone tra l’immagine originale e l’immagine elaborata.
Questo aspetto ha fatto sì che la presentazione delle immagini al medico
avvenisse in modo puramente casuale. L’esperimento, quindi, consta di una
fase preliminare in cui le immagini del set sono state randomizzate e dotate di

92
un codice identificativo che permettesse di riconoscerle in sede di analisi dei
risultati.
5.2 Domande
Come già espresso più volte, le due principali caratteristiche associate alla
presenza di lesioni maligne o pre-maligne del colon sono: l’incremento del
volume di sangue e il disordine della rete connettivale. Lo stesso enhancement
proposto si fonda sull’enfatizzazione di questi fattori nell’immagine elaborata.
Anche le domande formulate al medico durante il test di validazione sono
diretta conseguenza di ciò. Esse sono tre:
• Capacità di evidenziare anomalie superficiali della mucosa
Per “anomalie superficiali” si intendono: aree di discromia (pallore focale,
eritema), di irregolarità della superficie (rilevate o depresse), convergenze
plicali o irregolarità marginali.
La risposta richiesta è un indice di gradimento espresso con un voto da 1
(minimo) a 5 (massimo).
• Capacità di evidenziare la trama vascolare
Per “trama vascolare” si intende sia il pattern vascolare della mucosa,
costituito dalla rete di capillari che avvolge le ghiandole della mucosa,
quando visibile, sia l’architettura di arteriole e venule sottomucosa.
Anche in questo caso, la risposta richiesta è un indice di gradimento
espresso con un voto da 1 (minimo) a 5 (massimo).
• Aspetto generale
Si intende un giudizio che racchiuda l’immagine nella sua totalità, che
comprenda cioè diversi fattori, come la cromaticità, la profondità di campo,
la luminosità e ogni altro aspetto che possa attingere a parametri soggettivi
o gusti personali.

93
In questo caso la risposta richiesta è un indice di gradimento espresso con
un aggettivo da scegliere tra: “scarso” (valore 1), “medio” (valore 2),
“buono” (valore 3).
5.3 Raccolta dei dati
Una volta intervistati i quattro medici, i dati sono stati raccolti e organizzati per
la successiva analisi. Innanzitutto, i voti sono stati suddivisi in tre gruppi:
• Anomalie superficiali (Gruppo 1, “AS”)
• Trama vascolare (Gruppo 2, “TV”)
• Aspetto generale (Gruppo 3, “AG”)
Per ciascun gruppo sono state create 4 tabelle, ognuna relativa ad un medico,
identificato come: “Medico 1”, “2”, “3”, o “4”. Le dimensioni delle tabelle sono
3x10, dove 3 corrisponde al numero di voti espressi per ciascuna immagine
(originale, A Mode e B Mode) mentre 10 è il numero di immagini (identificate
con una lettera da A a J). La quantità complessiva di dati da analizzare consiste
in 12 tabelle composte da 30 voti ciascuna, per un totale di 360 dati.
5.4 Presentazione dei dati
Una volta raccolti, i dati sono stati analizzati all’interno dei singoli gruppi in cui
sono stati divisi. Ciò è stato fatto allo scopo di separare gli effetti
dell’enhancement (superficie e trama vascolare), valutando individualmente
quale avesse avuto un riscontro positivo e in che misura.
Per ciascun gruppo, quindi, è stata calcolata la media aritmetica dei voti
espressi dai quattro medici. Ciò significa che da 4 tabelle per gruppo se n’è
ottenuta una sola, per un totale di 3 tabelle. Sintetizzando in questo modo i
dati raccolti è stato possibile introdurre un’analisi di tipo grafico.

94
5.4.1 Anomalie superficiali
Di seguito si riporta la tabella contenente i voti medi relativi all’analisi di
superficie (Gruppo 1) con il rispettivo grafico che mostra gli andamenti della
media-voto nel passaggio dall’immagine originale a quella elaborata con l’A
Mode, fino a quella elaborata con il B Mode.
Figura 72 Gruppo 1 (AS) - Andamenti della media voto, per ciascuna immagine, al variare della modalità di elaborazione.
Analizzando visivamente gli andamenti, è piuttosto evidente come vi sia, in
tutte le immagini, un netto incremento della media-voto nel passaggio
dall’originale al B Mode. La situazione è meno chiara nel passaggio intermedio,
ovvero nell’A Mode. Qui sembra esserci una cospicua variabilità tra le immagini
Originale A Mode B Mode
A 3,5 3,75 5
B 3,75 3,5 4,75
C 3 3,5 4,25
D 4 3,5 4,75
E 3,5 3 4,25
F 4,25 4 4,25
G 1,5 1,75 2
H 3,5 4 4
I 2,75 2,5 3,75
J 4 4,25 4,5
0
1
2
3
4
5
6
Me
dia
vo
to
Anomalie Superficiali

95
che presentano un incremento, altre che lo mantengono costante, altre ancora
che subiscono un decremento.
Per andare oltre un’analisi puramente qualitativa, sono stati calcolati gli
incrementi relativi percentuali della media-voto nel passaggio dall’immagine
originale a quelle elaborate. Il grafico seguente mostra l’incremento nel
passaggio intermedio (A Mode):
Figura 73 Gruppo 1 (AS) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in A Mode.
Come previsto, i dati quantitativi confermano l’analisi visiva degli andamenti.
Circa la metà delle immagini presenta un incremento, l’altra metà un
decremento.
Nel grafico seguente questa variabilità non è presente. Una sola immagine non
presenta incremento, tutte le altre evidenziano una crescita della media-voto.
-15
-10
-5
0
5
10
15
20
7,14
-6,67
16,67
-12,5-14,28
-5,88
16,6714,28
-9,09
6,25
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
A Mode
A
B
C
D
E
F
G
H
I
J

96
Figura 74 Gruppo 1 (AS) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in B Mode.
5.4.2 Trama vascolare
Le stesse considerazioni possono essere fatte per l’analisi della trama vascolare
(Gruppo 2). Si riporta dunque la tabella contenente i voti medi con il rispettivo
grafico che ne mostra gli andamenti.
0
5
10
15
20
25
30
35
40
4542,85
26,67
41,67
18,7521,43
0
33,33
14,29
36,36
12,5
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
B Mode
A
B
C
D
E
F
G
H
I
J

97
Figura 75 Gruppo 2 (TV) - Andamenti della media voto, per ciascuna immagine, al variare della modalità di elaborazione.
Anche in questo caso, a una semplice analisi visiva, la situazione è piuttosto
chiara. In tutte le immagini si rileva un deciso incremento della media-voto nel
passaggio dall’originale al B Mode, anche più evidente rispetto al caso
precedente. Di nuovo, lo stato dell’A Mode è meno definito, anche se stavolta
sembra esserci una maggiore propensione all’incremento.
I grafici seguenti, mostrando gli incrementi relativi percentuali della media-
voto, chiariscono ogni dubbio.
Originale A Mode B Mode
A 3,25 4 4,75
B 2 2 2
C 3,5 4 4,5
D 3 2,75 4,25
E 1,75 1,75 2
F 3,5 3,5 4
G 1,5 1,75 2,25
H 2 2,25 3,25
I 1,75 1,75 2,75
J 2,5 3,25 4
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5M
ed
ia v
oto
Trama Vascolare

98
Figura 76 Gruppo 2 (TV) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in A Mode.
Nel caso dell’A Mode, la metà delle immagini presenta una crescita della media
voto, come nel caso precedente. La differenza, questa volta, sta nel fatto che
solo un’immagine mostra una diminuzione della media-voto, mentre le
rimanenti non presentano alcuna variazione.
Figura 77 Gruppo 2 (TV) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in B Mode.
-10
-5
0
5
10
15
20
25
3023,08
0
14,29
-8,33
0 0
16,67
12,5
0
30
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
A Mode
A
B
C
D
E
F
G
H
I
J
0
10
20
30
40
50
60
70
46,15
0
28,57
41,67
14,2914,29
50
62,557,14
60
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
B Mode
A
B
C
D
E
F
G
H
I
J

99
Nel caso del B Mode, di nuovo, tutte le immagini, tranne una, mostrano una
crescita consistente della media-voto, con livelli percentuali ancora maggiori
rispetto al caso precedente, toccando quote del 50-60%.
5.4.3 Aspetto generale
L’ultimo gruppo in esame (Gruppo 3) contiene i voti riguardanti l’aspetto
generale dell’immagine. Anche in questo caso se ne mostrano le tabelle e i
rispettivi grafici.
Figura 78 Gruppo 3 (AG) - Andamenti della media voto, per ciascuna immagine, al variare della modalità di elaborazione.
Originale A Mode B Mode
A 2,5 2,5 3
B 2,5 2,25 3
C 1,75 1,5 2,75
D 2,75 2 3
E 2,25 2 2,5
F 2,25 1,75 2,75
G 1 1,25 1
H 2,25 2,25 2,25
I 1 1 1,75
J 2,25 2,75 3
0
0,5
1
1,5
2
2,5
3
3,5
Me
dia
vo
to
Aspetto Generale

100
A un’analisi qualitativa la situazione non è di facile interpretazione. Sembra
esserci, come sempre, un aumento della media voto tra l’originale e il B Mode,
mentre per l’A Mode si ripresenta una condizione altalenante, stavolta persino
propensa alla riduzione.
Figura 79 Gruppo 3 (AG) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in A Mode.
L’istogramma non lascia dubbi: 5 immagini su 10 subiscono una diminuzione
della media-voto, 2 sole immagini un aumento, le restanti 3 non risentono
dell’elaborazione.
-30
-20
-10
0
10
20
30
0
-10-14,28
-27,27
-11,11
-22,22
25
0 0
22,22
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
A Mode
A
B
C
D
E
F
G
H
I
J

101
Figura 80 Gruppo 3 (AG) - Incremento relativo percentuale della media voto nel passaggio dall’immagine originale a quella elaborata in B Mode.
5.5 Analisi statistica
Per dare consistenza all’analisi e trarre solide conclusioni sulla validità del
metodo proposto, sono stati applicati metodi di analisi statistica ai dati. In
particolare sono stati scelti test statistici non parametrici basati sui ranghi.
I test parametrici (z-test, t-test e analisi di varianza) sono basati sul presupposto
che le osservazioni siano tratte da popolazioni di valori normalmente distribuiti,
nelle quali le varianze sono approssimativamente uguali. Essi sono detti
parametrici perché si basano sulla stima dei due parametri della popolazione, la
media e la varianza, che definiscono completamente una distribuzione
normale.
Tuttavia, se i dati sperimentali non sono compatibili con queste condizioni
preliminari o se, addirittura, le osservazioni sono misurate su una scala
qualitativa ordinale, i metodi parametrici diventano poco attendibili poiché la
media e la varianza non sono sufficienti per una completa descrizione della
popolazione.
0
10
20
30
40
50
60
70
80
20 20
57,14
9,09 11,11
22,22
0 0
75
33,33
Incr
em
en
to r
ela
tiv
o p
erc
en
tua
le
Immagini
B Mode
A
B
C
D
E
F
G
H
I
J

102
In questi casi è possibile utilizzare, invece delle osservazioni, i ranghi, cioè i
numeri d’ordine delle osservazioni stesse, al fine di calcolare test non
parametrici (ovvero test liberi da distribuzione) nella verifica delle ipotesi.
Per gli scopi del presente lavoro sono stati utilizzati il test dei ranghi con segno
di Wilcoxon e il test di Kruskal-Wallis.
5.5.1 Test di Kruskal-Wallis
Il test di Kruskal-Wallis è utilizzato per analizzare esperimenti nei quali almeno
tre gruppi di soggetti sono esposti a differenti trattamenti, ma le osservazioni
non rispettano le condizioni di applicabilità dell’analisi di varianza a un criterio
di classificazione. Esso è un’immediata generalizzazione del test di Mann-
Whitney¸ in cui si confrontano due campioni indipendenti.
Nel caso in esame i campioni da analizzare sono le tre modalità di
presentazione delle immagini ai medici, ossia originale, A Mode e B Mode, e le
osservazioni sono i voti medi calcolati per ciascun gruppo. Il limite
dell’applicabilità di questo test in tale circostanza risiede nel suo considerare i
dati indipendenti e non appaiati.
Per il calcolo è stato utilizzato il software Matlab. La funzione Kruskalwallis()
restituisce il p-value per l'ipotesi nulla che tutti i campioni siano tratti dalla
stessa popolazione (o, equivalentemente, da diverse popolazioni con la stessa
distribuzione). Se p è vicino allo zero, ciò mette in dubbio la validità dell'ipotesi
nulla e suggerisce che almeno una mediana campionaria è significativamente
diversa dalle altre. La scelta del valore critico di p per giudicare se il risultato è
statisticamente rilevante o meno è lasciata all’utente. È comune dichiarare un
risultato significativo se il p-value è inferiore a 0.05 o 0.01 (5% o 1% di
significatività).
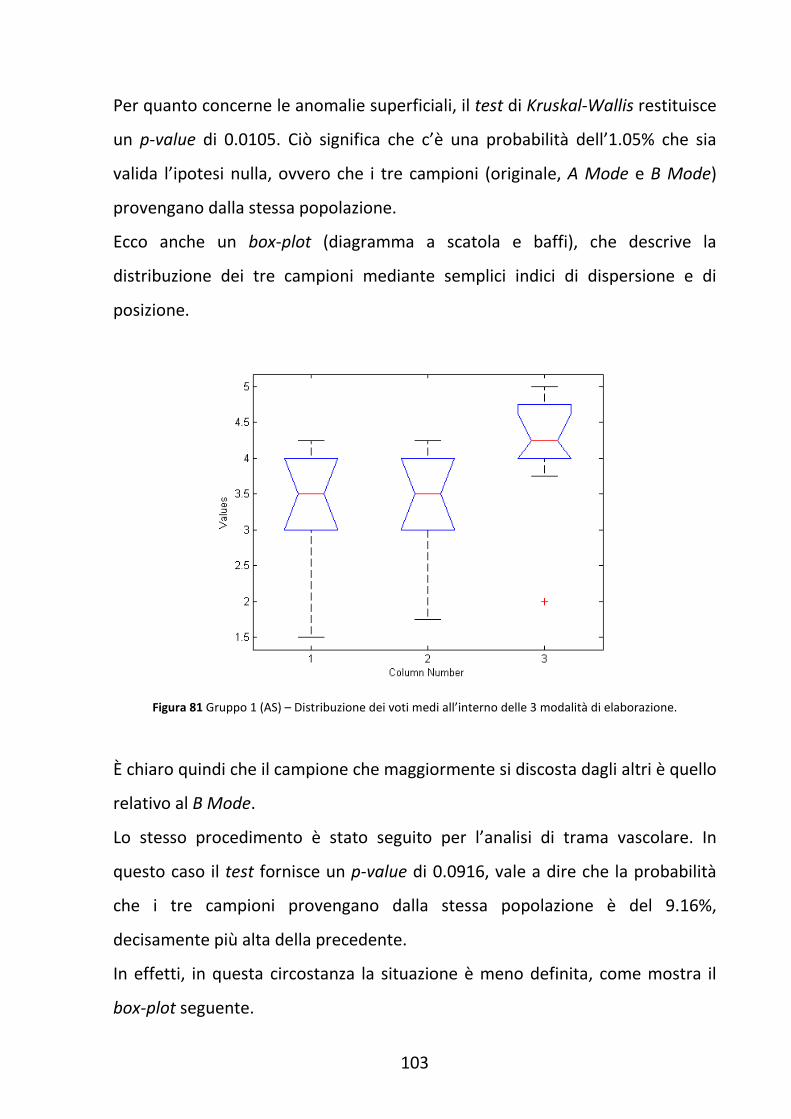
103
Per quanto concerne le anomalie superficiali, il test di Kruskal-Wallis restituisce
un p-value di 0.0105. Ciò significa che c’è una probabilità dell’1.05% che sia
valida l’ipotesi nulla, ovvero che i tre campioni (originale, A Mode e B Mode)
provengano dalla stessa popolazione.
Ecco anche un box-plot (diagramma a scatola e baffi), che descrive la
distribuzione dei tre campioni mediante semplici indici di dispersione e di
posizione.
Figura 81 Gruppo 1 (AS) – Distribuzione dei voti medi all’interno delle 3 modalità di elaborazione.
È chiaro quindi che il campione che maggiormente si discosta dagli altri è quello
relativo al B Mode.
Lo stesso procedimento è stato seguito per l’analisi di trama vascolare. In
questo caso il test fornisce un p-value di 0.0916, vale a dire che la probabilità
che i tre campioni provengano dalla stessa popolazione è del 9.16%,
decisamente più alta della precedente.
In effetti, in questa circostanza la situazione è meno definita, come mostra il
box-plot seguente.

104
Figura 82 Gruppo 2 (TV) – Distribuzione dei voti medi all’interno delle 3 modalità di elaborazione.
5.5.2 Test dei ranghi con segno di Wilcoxon
Dal test di Kruskal-Wallis si è appreso che i tre campioni, con una discreta
probabilità, non appartengono alla stessa popolazione. Tuttavia, per maggiore
chiarezza, giacchè il secondo e il terzo campione (rispettivamente l’A Mode e il
B Mode) hanno una distribuzione molto diversa, si è deciso di applicare anche
un altro test.
Analogamente al t di Student, il test dei ranghi con segno di Wilcoxon (signed
rank test) è utilizzato negli esperimenti in cui i dati sono appaiati (ad esempio
nel caso di esperimenti che prevedono un unico gruppo di soggetti osservati
prima e dopo un certo trattamento) ma in cui non siano rispettate le condizioni
di applicabilità dei test parametrici.
Dati in ingresso i due campioni x e y, la funzione di Matlab signrank() esegue il
test dell'ipotesi nulla che i dati nel vettore x-y provengano da una distribuzione
continua e simmetrica di mediana zero, contro l'ipotesi alternativa che la
distribuzione non abbia mediana nulla.

105
Poiché questo test è utilizzabile al massimo su due misure accoppiate, esso è
stato applicato a coppie, vale a dire: originale/A Mode, originale/B Mode.
Per quanto riguarda le anomalie superficiali, nel confronto tra immagine
originale e A Mode il test ha fornito un p-value di 1, cioè al 100% il trattamento
non ha avuto alcun effetto; nel confronto tra immagine originale e B Mode, al
contrario, il test ha restituito un p-value di 0.0039, ovvero la probabilità che
non si abbia avuto effetto è solo dello 0.39%.
Per quanto concerne il pattern vascolare, nel confronto tra immagine originale
e A Mode il test ha fornito un p-value di 0.125, cioè al 12.5% il trattamento non
ha avuto alcun effetto; invece, nel confronto tra immagine originale e B Mode,
il test ha restituito di nuovo un p-value di 0.0039, ovvero la probabilità che non
si abbia avuto alcun effetto è solo dello 0.39%.
5.6 Discussione
Prima di procedere all’analisi dei risultati è fondamentale soffermarsi su un
punto. Le immagini utilizzate per il test, per quanto eterogenee, non
presentano tutte le caratteristiche necessarie per permettere al medico una
valida risposta a ogni domanda. In altre parole, alcune immagini mostrano un
ricco pattern vascolare, altre un pattern meno evidente, altre ancora ne sono
completamente prive. Lo stesso discorso vale per le lesioni superficiali.
Questo non rappresenta un problema perché ciò che interessa valutare non è
la media-voto in assoluto bensì l’incremento della media-voto.
In fase di analisi dei risultati, bisogna tenere ben presente questo fattore
giacché un’immagine che non mostra miglioramento (0%) non
necessariamente è sintomo di scarsa efficacia dell’elaborazione, ma
probabilmente non contiene elementi per consentire di essere migliorata.

106
Diverso è il caso in cui l’immagine subisce un decremento della media-voto,
perché allora vuol dire che c’è stato un peggioramento.
Chiarito questo punto, alla luce dei risultati ottenuti è possibile trarre qualche
conclusione.
In primo luogo, si può affermare con assoluta certezza che il B Mode ha avuto
un impatto di gradimento eccezionale, persino superiore alle attese, come
dimostrano invariabilmente tutti i grafici e i test statistici.
Gli istogrammi che mostrano l’incremento relativo percentuale della media-
voto dell’immagine elaborata rispetto all’originale presentano tutti valori
positivi, anche quelli che concernono l’aspetto generale dell’immagine, con
picchi, nell’analisi di trama vascolare, del 60-70%. Allo stesso modo, il test di
Wilcoxon, per entrambi i gruppi AS e TV, fornisce una probabilità del solo 0.39%
che possa essere valida l’ipotesi nulla, cioè che i due campioni (media-voto
dell’immagine originale e media-voto dell’immagine in B Mode) appartengano
alla stessa popolazione.
L’A Mode, nonostante qualche miglioramento riscontrato in alcune immagini,
non ha conseguito in genere lo stesso successo, generando un gradimento
piuttosto alterno e incostante.
Nell’ambito delle anomalie superficiali ciò non desta preoccupazione, giacché
non era atteso un miglioramento rilevante. Infatti, il numero di incrementi è
uguale a quello dei decrementi, mentre il test di Wilcoxon rimuove ogni dubbio
con la certezza di validità dell’ipotesi nulla. Per quanto riguarda l’analisi di
trama vascolare, invece, si attendeva qualcosa di più. Di fatto, i risultati sono
più incoraggianti, con 5 immagini che mostrano un miglioramento e 1 soltanto
che mostra un peggioramento. Tuttavia, anche in questo caso l’incremento non
è schiacciante, come evidenzia il test di Wilcoxon che fornisce una probabilità
abbastanza alta (12.5%) che l’ipotesi nulla sia valida.

107
Una possibile spiegazione al mancato successo dell’A Mode può venire dal
terzo gruppo di voti, ossia quello riguardante l’aspetto generale delle immagini.
Qui si vede chiaramente come metà delle immagini subisca una diminuzione
del gradimento, contro 2 sole immagini che aumentano la media-voto. Ciò
significa che un’immagine dal tono verde-bluastro non convince
particolarmente gli endoscopisti, i quali tendono a giudicarla negativamente.
È probabile, dunque, che quando non vi siano miglioramenti macroscopici della
trama vascolare o delle anomalie superficiali i medici, nel giudicare l’immagine,
siano inclini a fare appello al gradimento personale e quindi ad esprimere un
voto di disapprovazione. In altre parole, se non c’è un miglioramento davvero
consistente essi preferiscono l’immagine originale.
C’è poi da aggiungere un’altra considerazione: le immagini “statiche”
forniscono un’informazione solo parziale al medico endoscopista. Egli, per
quanto sia invitato a rispondere a domande precise e limitate a un singolo
aspetto, è sempre mentalmente proiettato alla diagnosi. Perciò, quando
un’immagine non fornisce sufficienti elementi utili alla diagnosi, il medico
endoscopista appare disorientato, e lo è a maggior ragione quando la tonalità
dell’immagine non lo convince pienamente, per cui partorisce un voto
negativo.
Per tutti questi motivi è stato deciso di non accantonare definitivamente l’A
Mode ma di mantenere viva questa funzionalità all’interno dell’interfaccia per
l’analisi in real-time. In futuro sarà possibile studiarlo in modo approfondito,
ricorrendo eventualmente a un test mirato che faccia uso di immagini
specifiche o di spezzoni video con elaborazione in tempo reale.
108
CONCLUSIONI
L’obiettivo del presente lavoro è stato quello di sviluppare un sistema per
l’elaborazione di immagini endoscopiche in tempo reale, cioè
contemporaneamente all’esecuzione dell’esame diagnostico.
Inizialmente è stata realizzata un’interfaccia grafica (GUI) che permettesse di
lavorare con immagini “statiche”, cioè con fotogrammi (frame) estratti da un
esame video-endoscopico. Ciò è stato fatto per consentire un’analisi
preliminare del problema, approfondendo le caratteristiche dei frame e
individuando gli elementi su cui poter agire per migliorarne la visualizzazione e
incrementarne le potenzialità diagnostiche.
Tale interfaccia (definita “GUI statica”) si compone di una serie di pulsanti e
finestre di dialogo che offrono all’utente la possibilità di caricare un’immagine
ed eseguire svariate elaborazioni, osservando in modo diretto le modifiche
apportate e gli eventuali miglioramenti ottenuti.
In seguito, la collaborazione con medici endoscopisti ha permesso di
individuare alcuni criteri per lo sviluppo di un’interfaccia semplice e funzionale
da utilizzare durante la scansione endoscopica sul paziente (definita “GUI in
real-time”).
La sua realizzazione è stata preceduta da uno studio approfondito della
letteratura esistente in materia di colon e sua interazione con la luce. Da qui è
emerso che le due principali caratteristiche associate alla presenza di lesioni
maligne o pre-maligne sono l’incremento del volume di sangue, dovuto ad
angiogenesi, e l’inspessimento e la disorganizzazione della rete fibrosa di
collagene, entrambe confinate allo strato della mucosa.

109
Inoltre, si è appreso come modellizzare il tessuto affinché le sue proprietà
ottiche dipendessero da pochi semplici parametri e come, variandone alcuni, si
modifichi lo spettro riflesso.
Alla luce di queste conoscenze fisico-anatomiche e dei principi di acquisizione
dell’immagine digitale a colori, è stato proposto un metodo di elaborazione in
real-time, finalizzato a enfatizzare le caratteristiche di interesse clinico
sopraccitate. In particolare, la diversa profondità di penetrazione nel tessuto
delle varie regioni spettrali della luce (maggiore per la banda rossa, minore per
quella verde e blu) e il diverso assorbimento da parte dell’emoglobina (i cui
picchi sono a 415 nm, nel blu, e a 540 nm, nel verde) hanno suggerito
l’applicazione di curve di tono ai tre canali dell’immagine digitale a colori (RGB).
Le curve agiscono modificando i livelli di intensità dei pixel e assumono la forma
di una funzione cubica per il canale R (operatore di elevazione a potenza) e di
una sigmoide per i canali G e B (operatore di stretching dell’istogramma).
Infine, la necessità di un criterio quantitativo per la scelta della forma migliore
associata alle ultime due curve (G e B) ha portato allo sviluppo di un metodo
sperimentale di ottimizzazione, basato sulla massimizzazione di un indice di
contrasto.
Una volta definito e ottimizzato il sistema di elaborazione, esso è stato validato
presentando a quattro medici endoscopisti un test sperimentale, consistente
nel sottoporre al loro giudizio un certo numero di immagini, originali ed
elaborate, in ordine casuale, e nella formulazione di precise domande per
ciascuna di esse.
Le immagini scelte sono state estratte dal video di un esame endoscopico
registrato con il sistema di acquisizione Endotics su una cavia suina presso il
MEDDEC (Medical Device Development Center, Kobe, Giappone) da dipendenti
dell’azienda, e sono state selezionate accuratamente in modo da creare un set
quanto più possibile eterogeneo.

110
Le elaborazioni a cui sono state sottoposte le immagini si condensano in due
differenti modalità, la prima consistente nell’applicazione della curva cubica al
canale R (definita “A Mode”), la seconda nell’applicazione della curva cubica al
canale R e della curva sigmoide ottimizzata ai canali G e B (definita “B Mode”).
Le domande formulate al medico riguardano la capacità di ciascuna immagine
di evidenziare le anomalie superficiali della mucosa (“AS”) e la trama vascolare
(“TV”), oltre all’aspetto generale dell’immagine stessa (“AG”). Le risposte,
espresse con un indice di gradimento, sono state raccolte, mediate su ciascun
gruppo (AS, TV e AG) e immagine, e presentate sotto forma di tabelle, grafici e
istogrammi. Infine, i dati sono stati sottoposti ai test non parametrici di Kruskal-
Wallis e dei ranghi con segno di Wilcoxon.
I risultati ottenuti consentono di affermare con decisione che il B Mode ha
avuto un impatto di gradimento eccezionale, persino superiore alle attese,
come evidenziano invariabilmente tutti i grafici e i test statistici. Gli istogrammi
che mostrano l’incremento relativo percentuale della media-voto
dell’immagine elaborata rispetto all’originale presentano tutti valori positivi,
mentre i test statistici confermano, con livelli di significatività dello 0.39%, che i
due campioni (media-voto dell’immagine originale e in B Mode) appartengono
a due popolazioni diverse.
L’A Mode, nonostante qualche miglioramento riscontrato in alcune immagini,
non ha conseguito in genere lo stesso successo, generando un gradimento
piuttosto alterno e incostante. Gli istogrammi presentano una notevole
variabilità mentre i test statistici rivelano che vi è solo una lieve differenza, o
non ve n’è alcuna, tra immagine originale ed elaborata. Le ragioni di ciò
risiedono probabilmente nello scarso apprezzamento del medico verso
un’immagine dal tono verde-bluastro, come dimostrano i dati relativi
all’aspetto generale (AG).

111
Pertanto, è stato deciso di non accantonare definitivamente l’A Mode ma di
mantenere viva questa funzionalità all’interno dell’interfaccia per l’analisi in
real-time, con il proposito di studiarlo approfonditamente in futuro, ricorrendo
eventualmente a un test mirato che faccia uso di immagini specifiche o di
spezzoni video con elaborazione in tempo reale.

112
BIBLIOGRAFIA
[1] Magno, Luca, et al. "Endoscopia potenziata. Classificazione delle lesioni del
colon."
[2] Galloro, Giuseppe. "High technology imaging in digestive endoscopy." World
journal of gastrointestinal endoscopy 4.2 (2012): 22.
[3] Jovani, Manol, and Silvio Danese. "La sorveglianza del cancro colo-rettale
nelle malattie infiammatorie croniche intestinali."
[4] Subramanian, Venkataraman, and Krish Ragunath. "Advanced Endoscopic
Imaging: A Review of Commercially Available Technologies." Clinical
Gastroenterology and Hepatology (2013).
[5] Cho, Won Young, Jae Young Jang, and Don Haeng Lee. "Recent advances in
image-enhanced endoscopy." Clinical endoscopy 44.2 (2011): 65-75.
[6] Neumann, Helmut, Markus F. Neurath, and Jonas Mudter. "New endoscopic
approaches in IBD." World journal of gastroenterology: WJG 17.1 (2011): 63.
[7] Tontini, G. E., et al. "Review article: newer optical and digital
chromoendoscopy techniques vs. dye-based chromoendoscopy for diagnosis
and surveillance in inflammatory bowel disease." Alimentary pharmacology &
therapeutics 38.10 (2013): 1198-1208.
[8] Muto, Manabu, et al. "Narrow band imaging: a new diagnostic approach to
visualize angiogenesis in superficial neoplasia." Clinical Gastroenterology and
Hepatology 3.7 (2005): S16-S20.
[9] Hirata, Mayuko, et al. "Magnifying endoscopy with narrow band imaging for
diagnosis of colorectal tumors." Gastrointestinal endoscopy 65.7 (2007): 988-
995.
[10] Ng, Siew C., and James YW Lau. "Narrow-band imaging in the colon:
Limitations and potentials." Journal of gastroenterology and hepatology 26.11
(2011): 1589-1596.
[11] Coriat, R., et al. "Computed virtual chromoendoscopy system (FICE): A new
tool for upper endoscopy?." Gastroentérologie clinique et biologique 32.4
(2008): 363-369.
[12] Kodashima, Shinya, and Mitsuhiro Fujishiro. "Novel image-enhanced
endoscopy with i-scan technology." World journal of gastroenterology: WJG
16.9 (2010): 1043.

113
[13] Testoni, Pier Alberto, et al. "High-definition colonoscopy with i-Scan:
Better diagnosis for small polyps and flat adenomas." World journal of
gastroenterology: WJG 18.37 (2012): 5231.
[14] Hancock, Shawn, et al. "Use of i-scan Endoscopic Image Enhancement
Technology in Clinical Practice to Assist in Diagnostic and Therapeutic
Endoscopy: A Case Series and Review of the Literature." Diagnostic and
therapeutic endoscopy 2012 (2012).
[15] Masci, Enzo, et al. "Interobserver agreement among endoscopists on
evaluation of polypoid colorectal lesions visualized with the Pentax i-Scan
technique." Digestive and Liver Disease 45.3 (2013): 207-210.
[16] Neumann, Helmut, et al. "Present and future perspectives of virtual
chromoendoscopy with i-scan and optical enhancement technology." Digestive
Endoscopy 26.S1 (2014): 43-51.
[17] Hidović-Rowe, Džena, and Ela Claridge. "Modelling and validation of
spectral reflectance for the colon." Physics in medicine and biology 50.6 (2005):
1071.
[18] Xiao, Ding, and Jun Ohya. "Contrast enhancement of color images based
on wavelet transform and human visual system." Proceedings of the IASTED
International Conference on Graphics and Visualization in Engineering. ACTA
Press, 2007.

114
RINGRAZIAMENTI
Giunto al termine di questo lavoro, desidero dedicare un pensiero alle persone
che mi hanno permesso di realizzarlo: a tutte loro va la mia gratitudine.
Il professor Nicola Vanello, che mi ha offerto l’opportunità di questa tesi e che,
per la seconda volta dopo la laurea triennale, ne è stato il relatore e il punto di
riferimento nei momenti chiave.
Il personale dell’azienda Era Endoscopy S.r.l., che mi ha accolto come uno di
loro e mi ha dato le conoscenze e gli strumenti, oltre che la sede fisica, per
poter svolgere il lavoro al meglio.
Un ringraziamento particolare va all’Ing. Giuseppe Pernorio, ormai un amico
oltre che un tutor, fedele compagno e autista nelle traversate invernali Pisa-
Peccioli, che ha seguito costantemente il mio lavoro, guidandomi e
sostenendomi anche nelle sue fasi più dure e “noiose”.
Proseguo ringraziando Alberto, Giuliano e Tiziana, che mi hanno permesso di
partecipare al Congresso delle Malattie Digestive, lasciandomi alloggiare a
Napoli e accompagnandomi nell’impresa di intervistare un cospicuo numero di
medici endoscopisti.
Un pensiero va anche agli amici e colleghi che mi hanno incoraggiato e sorretto
in questa seconda parte del cammino universitario, soprattutto nei momenti
difficili, e quando il traguardo sembrava distante e intangibile.
Un grazie particolare a Monica, che da storica dell’arte ha dovuto sorbire,
volente o nolente, otto mesi e più di cento pagine di elaborazione digitale e
immagini endoscopiche.
Ringrazio infine la mia famiglia, come sempre con la speranza di riuscire a
ripagare, con una piccola gioia, gli enormi sacrifici profusi.