GRANDEZZE SCALARI E VETTORIALI GRANDEZZE SCALARI E GRANDEZZE VETTORIALI.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 1
Ing. Cristian SecchiTel. 0522 522234
e-mail: [email protected]://www.ingre.unimore.it/staff/secchi
TEORIA DEI SISTEMILaurea Specialistica in Ingegneria Meccatronica
Laurea Specialistica in Ingegneria Gestionale – Indirizzo Gestione Industriale
TEORIA DEI SISTEMITEORIA DEI SISTEMIINTRODUZIONEINTRODUZIONE
Cristian Secchi Introduzione -- 2Teoria dei Sistemi
Modellistica e Controllo di Sistemi Modellistica e Controllo di Sistemi MultivariabiliMultivariabili
• Testi consigliati:
• Rinaldi S., Teoria dei Sistemi, CLUP 1977
• Marro G., Teoria dei Sistemi e del Controllo, Zanichelli 1989
• Sciavicco L., Siciliano B., Robotica Industriale – Modellistica e Controllo dei manipolatori, Mac Graw-Hill Libri Italia, 2000
• “Utili” nozioni e concetti dei corsi di:• Analisi matematica e geometria• Fisica generale• Controlli Automatici

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 2
Cristian Secchi Introduzione -- 3Teoria dei Sistemi
Modellistica e Controllo di Sistemi Modellistica e Controllo di Sistemi MultivariabiliMultivariabili
• Orario:
Martedì: 14-16 Aula 0.2 via FoglianiGiovedì: 11-13 Aula 0.2 via FoglianiVenerdì: 16-18 Aula 0.2 via Fogliani
• Ricevimento: Venerdì dalle 14 alle 16 durante le lezioni, altrimenti su appuntamento da fissare via mail
• Esami: Scritto con domande di teoria ed esercizi.
• Lucidi: I lucidi proiettati a lezione possono essere scaricati dal sitohttp://www.automazione.ingre.unimore.it/ selezionando, alla voce corsi, il corso di Teoria dei Sistemi.
Cristian Secchi Introduzione -- 4Teoria dei Sistemi
Programma del CorsoProgramma del Corso
• Introduzione ai sistemi• Sistemi lineari
• Analisi dei sistemi lineari• La stabilità secondo Lyapunov
• Teoria generale• Caso dei sistemi lineari
• Proprietà di Controllabilità e di Raggiungibilità• Problema del controllo
• Proprietà di osservabilità• Osservatori dello stato
• Sintesi del controllore mediante retroazione dell’uscita• Controllo di Robot Industriali
• Regolazione e tracking di robot antropomorfi
• Robotica avanzata• Interface haptics, sistemi di telemanipolazione, algoritmi di presa per mani
robotiche.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 3
Cristian Secchi Introduzione -- 5Teoria dei Sistemi
Concetto di SistemaConcetto di Sistema
Cos’è un sistema?
Nell’ambito della modellistica e del controllo, un sistema è un ente la cui caratteristica principale è quella di evolvere nel tempo. Per questa loro caratteristica i sistemi vengono detti anche sistemi dinamici.
Nel caso più generale, si rappresenta un sistema come un ente sul quale agisce un ingresso u, la causa, e dal quale, come reazione a tale causa, viene fornita una certa uscita y, l’effetto.
u y
ingresso uscita
SSistema
Cristian Secchi Introduzione -- 6Teoria dei Sistemi
Concetto di SistemaConcetto di Sistema
Ad ogni sistema è associato un insieme ordinato T, detto insieme dei tempi, tale che per ogni t ∈ T sono definiti un ingresso u(t) e un’uscita y(t) entrambi appartenenti al rispettivo insieme di ingresso U e di uscita Y.
T
u(t)U
Yy(t)
t

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 4
Cristian Secchi Introduzione -- 7Teoria dei Sistemi
Concetto di SistemaConcetto di Sistema
In generale, il modo di evolvere nel tempo delle funzioni u e y non è del tutto libero e, quindi, anche le funzioni di ingresso e di uscita sono costrette ad appartenere a due prefissati insiemi di funzioni, rispettivamente indicati con Ω e Γ
Notazione: Con u(·) indicheremo la funzione di ingresso mentre con u(t) intenderemo il valore che tale funzione assume all’istante t. La stessa cosa vale per y(·) e y(t).
Cristian Secchi Introduzione -- 8Teoria dei Sistemi
Concetto di SistemaConcetto di Sistema
In generale, l’uscita all’istante t NON può essere determinata dal valore assunto dall’ingresso allo stesso istante. L’uscita è frutto dell’intera storia subita dal sistema e non è, quindi, semplicemente legata all’ingresso.
Esiste una grandezza, detta stato, che racchiude sinteticamente in sé l’informazione sul passato e sul presente del sistema. Il valore x(t) assunto dallo stato all’istante t deve essere sufficiente, eventualmente assieme all’ingresso u(t), alla determinazione dell’uscita all’istante t. Inoltre, l’informazione contenuta in x(t) deve essere sufficiente per determinare l’andamento futuro sia della stessa variabile di stato che dell’uscita per istanti successivi a quello considerato. Pertanto, noto x(t1) e u(·) nell’intervallo [t1,t2], deve essere possibile calcolare x(t2) e y(t2) per ogni t2 ≥ t1.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 5
Cristian Secchi Introduzione -- 9Teoria dei Sistemi
Concetto di sistemaConcetto di sistema
Lo stato di un sistema è l’informazione che occorre in ogni istante per poter predire l’effetto della storia passata del sistema sul suo comportamento futuro.
Lo stato può possedere varie componenti, dette variabili di stato. Ogni variabile di stato riassume parte della storia del sistema. L’insieme di tali variabili racchiude tutte le informazioni necessarie per poter determinare il comportamento del sistema e forma lo stato.
Cristian Secchi Introduzione -- 10Teoria dei Sistemi
Scelta delle variabili di statoScelta delle variabili di stato
Quali variabili devono essere scelte come variabili di stato?
Nei sistemi fisici la condizione del sistema è determinata da accumuli di energia, quantità di moto o massa e, quindi, può essere opportuno scegliere come variabili di stato quelle variabili da cui questi accumuli dipendono. Ad esempio:
• Tensioni ai capi del condensatore (Ec=0.5CV2)• Correnti negli induttori (EL=0.5Li2)• Velocità di una massa (Ek=0.5mv2)• Posizione di una massa (Ep=mgx)
Tuttavia esistono infiniti modi di scegliere le variabili di stato. Altre scelte, rispetto a quelle suggerite,potrebbero essere migliori. Il problema va affrontato caso per caso. Spesso la scelta suggerita è un buon punto di partenza per la modellazione di sistemi fisici.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 6
Cristian Secchi Introduzione -- 11Teoria dei Sistemi
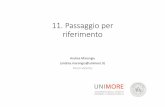
Esempi di Sistemi Esempi di Sistemi –– Semplice Circuito ElettricoSemplice Circuito Elettrico
R1
R2
C
u y
x
L’ingresso è la tensione tra i morsetti A e B e l’uscita è la tensione tra i morsetti C e D. Lo stato x è la tensione ai capi del condensatore C. Si noti che x è associato al fenomeno di accumulo di energia potenziale nel condensatore.
A
B
E
F
Cristian Secchi Introduzione -- 12Teoria dei Sistemi
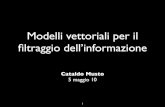
Esempi di Sistemi Esempi di Sistemi –– Sistema MeccanicoSistema Meccanico
km
x1 x2u
y
L’ingresso u è la forza applicata alla massa e l’uscita y è la posizione della massa. Ci sono due variabili di stato: x1 è la sovraelongazione della molla (associata all’immagazzinamento di energia potenziale meccanica) e x2 è la velocità della massa (associata all’immagazzinamento di energia cinetica. E’ presente, inoltre, l’attrito tra la massa e il terreno.
b

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 7
Cristian Secchi Introduzione -- 13Teoria dei Sistemi
Definizione di sistemaDefinizione di sistema
Un sistema dinamico è definito dai seguenti oggetti:
• Un insieme ordinato dei tempi T
• Un insieme di valori di ingresso U
• Un insieme Ω di funzioni di ingresso ammissibili del tipo u(·)∈ Ω | u(·): T → U
• Un insieme di valori di stato X
• Un insieme di valori di uscita Y
• Un insieme Γ di funzioni di uscita ammissibili del tipoY(·) ∈ Γ | y(·):T → Y
E dalle seguenti funzioni:
Cristian Secchi Introduzione -- 14Teoria dei Sistemi
Definizione di sistemaDefinizione di sistema
• Funzione di transizione dello stato:
x(t)=φ(t,t0,x(t0),u(·))Dove
1) t0 ∈ T è l’istante iniziale2) t ∈ T è l’istante attuale3) x(t0) ∈ X è lo stato iniziale4) x(t) ∈ X è lo stato attuale 5) u(·) ∈ Ω è la funzione che definisce la sequenza dei valori di ingresso nell’intervallo [t0,t]
• Funzione di uscita:
y(t)=η(t,x(t),u(t))Dove
1) t ∈ T è l’istante attuale 2) x(t) ∈ X è lo stato attuale3) u(t) ∈ U è l’ingresso attuale

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 8
Cristian Secchi Introduzione -- 15Teoria dei Sistemi
Definizione di sistemaDefinizione di sistema
Se la funzione di uscita non dipende dall’ingresso u(t), cioè se
il sistema viene detto strettamente proprio (o puramente dinamico)
Se T=R il sistema è a tempo continuo,menre se T=Z il sistema è a tempo discreto.
Durante il corso verranno studiati i sistemi a tempo continuo
Cristian Secchi Introduzione -- 16Teoria dei Sistemi
Proprietà della funzione di transizione dello statoProprietà della funzione di transizione dello stato
La funzione di transizione dello stato gode delle seguenti proprietà:
• Consistenza
• Irreversibilità (o orientamento nel tempo)
La funzione φ è definita ∀ t ≥ t0 t,t0 ∈ T

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 9
Cristian Secchi Introduzione -- 17Teoria dei Sistemi
Proprietà della funzione di transizione dello statoProprietà della funzione di transizione dello stato
• Composizione
Dati: x(t3)=φ(t3, t2, x(t2), u(·), x(t2)=φ(t2,t1,x(t1),u(·) allora:
∀ x ∈ X e ∀ u(·) ∈ Ω, ∀ t1<t2<t3
• Causalità
Implica
Cristian Secchi Introduzione -- 18Teoria dei Sistemi
Proprietà di scomposizioneProprietà di scomposizione
E’ possibile scomporre in sistema in due parti distinte:
u(·) x(t)
u(t)
y(t)
Parte dinamica Parte algebrica
• Parte dinamica del sistema: la funzione di transizione permette di riassumere la storia passata del sistema nelle sue variabili di stato ad un certo istante t
• Parte algebrica del sistema: La funzione di uscita esprime l’uscitautilizzando le grandezza note all’istante t

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 10
Cristian Secchi Introduzione -- 19Teoria dei Sistemi
Movimento, traiettoria ed equilibrioMovimento, traiettoria ed equilibrio
• Definiamo evento la coppia tempo-stato:
• Definiamo movimento (o moto), considerato nell’intervallo t ∈ [t0,t1], l’insieme degli eventi definiti dalla funzione di transizione, cioè:
Il movimento è, quindi, definito in T × X
• Definiamo traiettoria l’immagine in X della funzione di transizione nell’intervallo t ∈ [t0,t1], cioè
La traiettoria è, quindi, definita in X
Cristian Secchi Introduzione -- 20Teoria dei Sistemi
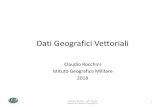
Movimento, traiettoria ed equilibrioMovimento, traiettoria ed equilibrio
x0
(t0,x0)(t1,x1)
x1 x2
(t2,x2)
(t3,x2)
(t4,x2)
X
T
Traiettoria
Movimento

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 11
Cristian Secchi Introduzione -- 21Teoria dei Sistemi
Movimento, traiettoria ed equilibrioMovimento, traiettoria ed equilibrio
Tra i vari movimenti sono di interesse quelli costanti, caratterizzati, quindi, da un unico stato x detto stato di equilibrio. Uno stato x è di equilibrio quando si ha la possibilità di agire sul sistema mediante un ingresso in modo che partendo dallo stato iniziale x(t0)=x si possa rimanere indefinitamente in x. Formalmente, è possibile dare la seguente definizione:
Uno stato x ∈ X si dice di equilibrio se per ogni t0 ∈ T esiste una funzione u(·) ∈ Ω tale che :
Cristian Secchi Introduzione -- 22Teoria dei Sistemi
Sistemi regolariSistemi regolari
Un sistema si dice a dimensioni finite se U, X, e a dimensioni finite seU, X, e Y sono spazi vettoriali a dimensioni finite.
Un sistema si dice regolare se:
• Gli insiemi U, Ω, X, Y e Γ sono spazi vettoriali
• La funzione di transizione φ è continua in tutti i suoi argomenti e la sua derivata rispetto al tempo esiste ed è continua rispetto a t
• La funzione di uscita è continua nei suoi argomenti

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 12
Cristian Secchi Introduzione -- 23Teoria dei Sistemi
Rappresentazione di Sistemi regolariRappresentazione di Sistemi regolari
Il movimento x(t)=φ(t,t0,x(t0),u(·)) è la soluzione di un’equazione differenziale vettoriale del tipo
Consideriamo il caso di un sistema regolare con n variabili di stato, m ingressi e p uscite. Esso è rappresentabile dalle seguenti equazioni:
Cristian Secchi Introduzione -- 24Teoria dei Sistemi
Rappresentazione di Sistemi RegolariRappresentazione di Sistemi Regolari

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 13
Cristian Secchi Introduzione -- 25Teoria dei Sistemi
Rappresentazione di Sistemi RegolariRappresentazione di Sistemi Regolari
I vettori
sono, rispettivamente, i vettori di
• Stato: x(t) ∈ X, X=Rn
• Ingresso: u(t) ∈ U, U=Rm
• Uscita: y(t) ∈ Y, Y=Rp
all’ istante t ∈ T=R
Cristian Secchi Introduzione -- 26Teoria dei Sistemi
Rappresentazione di Sistemi RegolariRappresentazione di Sistemi Regolari
Compattando la notazione, scriveremo le equazioni che rappresentano un sistema regolare come:
dove x(t), u(t) e y(t) sono vettori e f e g sono vettori di funzioni. f è detta funzione di stato mentre g è detta funzione di uscita
Il sistema descritto da queste equazioni è detto di dimensione n con m ingressi e p uscite.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 14
Cristian Secchi Introduzione -- 27Teoria dei Sistemi
Tipologie di sistemi regolariTipologie di sistemi regolari
Si possono distinguere, in base al numero di ingressi e di uscite, i seguenti tipi di sistema:
• MIMO (Multiple Input Multiple Output): sistema con m (>1) ingressi e p (>1) uscite
• MISO (Multiple Input Single Output): sistema con m (>1) ingressi e un’uscita sola (p=1)
• SIMO (Single Input Multiple Output): sistema con un solo ingresso (m=1) e p (>1) uscite
• SISO (Single Input Single Output): sistema con un solo ingresso (m=1) e una sola uscita (p=1)
Ing. Cristian SecchiTel. 0522 522234
e-mail: [email protected]://www.ingre.unimore.it/staff/secchi
TEORIA DEI SISTEMILaurea Specialistica in Ingegneria Meccatronica
Laurea Specialistica in Ingegneria Gestionale – Indirizzo Gestione Industriale
TEORIA DEI SISTEMITEORIA DEI SISTEMIINTRODUZIONEINTRODUZIONE