telaio D 90 kW–315 kW Manuale di funzionamento, Coppie di serraggio dei collegamenti 83 Indice 85...
94
MAKING MODERN LIVING POSSIBLE Manuale di funzionamento, telaio D 90 kW–315 kW VLT® AutomationDrive FC 300
Transcript of telaio D 90 kW–315 kW Manuale di funzionamento, Coppie di serraggio dei collegamenti 83 Indice 85...

MAKING MODERN LIVING POSSIBLE
Manuale di funzionamento,telaio D 90 kW–315 kW
VLT® AutomationDrive FC 300

Sicurezza
Sicurezza
AVVISOALTA TENSIONE!I convertitori di frequenza sono soggetti ad alta tensionequando collegati all'alimentazione di ingresso della reteCA. L'installazione, l'avviamento e la manutenzionedovrebbero essere eseguiti solo da personale qualificato.Se l'installazione, l'avvio e la manutenzione non vengonoeseguiti da personale qualificato potrebbero presentarsirischi di lesioni gravi o mortali.
Alta tensioneI convertitori di frequenza sono collegati a tensioni elevatee potenzialmente pericolose. È necessario prestareattenzione per evitare folgorazioni. Queste apparecchiaturedovrebbero essere installate, avviate o manutenute solo dapersonale adeguatamente formato e esperto negliinterventi su apparati elettrici.
AVVISOAVVIO INVOLONTARIO!Quando il convertitore di frequenza è collegato all'alimen-tazione di rete CA, il motore può avviarsi in qualsiasimomento. Il convertitore di frequenza, il motore e ogniapparecchiatura azionata devono essere pronti per ilfunzionamento. In caso contrario quando si collega ilconvertitore di frequenza alla rete CA possono verificarsigravi lesioni, morte o danneggiamenti alle apparecchiatureo alle proprietà.
Avvio involontarioQuando il convertitore di frequenza è collegato all'alimen-tazione di rete CA, il motore può essere avviato con uninterruttore esterno, un bus seriale, un segnale in ingressodi riferimento o una condizione di guasto ripristinata.Adottare sempre le opportune precauzioni per proteggersidagli avvii involontari.
AVVISOTEMPO DI SCARICA!I convertitori di frequenza contengono condensatori delbus CC che rimangono carichi anche quando il conver-titore di frequenza non è alimentato. Per evitare pericolielettrici, scollegare la rete CA, tutti i motori del tipo amagnete permanente e tutti gli alimentatori a bus CCremoto, incluse le batterie di riserva e i collegamenti UPS ebus CC ad altri convertitori di frequenza. Attendere che icondensatori si scarichino completamente prima dieseguire qualsiasi lavoro di manutenzione o di riparazione.Il tempo di attesa è indicato nella tabella Tempo di scarica.Il mancato rispetto del tempo di attesa indicato dopo ildisinserimento dell'alimentazione e prima di effettuarelavori di manutenzione o riparazione, può causare lesionigravi o mortali.
Tensione [V] Gamma di potenza [kW] Tempo di attesaminimo [min]
3x400 90-250 20
3x400 110-315 20
3x500 110-315 20
3x500 132-355 20
3x525 75-250 20
3x525 90-315 20
3x690 90-250 20
3x690 110-315 20
Tempo di scarica
Approvazioni
Tabella 1.2
Sicurezza VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss

Sicurezza VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss
Sommario
1 Introduzione 4
1.1 Panoramica dei prodotti 4
1.1.2 Armadi opzioni estese 5
1.2 Scopo del manuale 6
1.3 Risorse aggiuntive 6
1.4 Panoramica dei prodotti 6
1.5 Funzioni interne del controllore 7
1.6 Dimensioni telaio e potenza nominale 8
2 Installazione 9
2.1 Pianificazione del sito di installazione 9
2.2 Lista di controllo preinstallazione 9
2.3 Installazione meccanica 9
2.3.1 Raffreddamento 9
2.3.2 Sollevamento 10
2.3.3 Montaggio a muro - unità IP21 (NEMA) 1 e IP54 (NEMA 12) 10
2.4 Installazione elettrica 11
2.4.1 Requisiti generali 11
2.4.2 Requisiti di terra (massa) 14
2.4.2.1 Corrente di dispersione (>3,5 mA) 14
2.4.2.2 Messa a terra custodie IP20 15
2.4.2.3 Messa a terra custodie IP21/54 15
2.4.3 Collegamento motore 15
2.4.3.1 Posizioni dei morsetti: D1h-D4h 16
2.4.3.2 Posizioni dei morsetti: D5h-D8h 20
2.4.4 Cavo motore 28
2.4.5 Controllo rotazione motore 28
2.4.6 Collegamento tensione di rete CA 28
2.5 Connessione dei cavi di controllo 29
2.5.1 LON 29
2.5.2 Uso di cavi di controllo schermati 29
2.5.3 Messa a terra (a massa) di cavi di controllo schermati 29
2.5.4 Tipi di morsetto di controllo 30
2.5.5 Collegamento ai morsetti di controllo 31
2.5.6 Funzioni morsetto di controllo 31
2.6 Comunicazione seriale 32
2.7 Apparecchiatura opzionale 32
2.7.1 Morsetti di condivisione del carico 32
2.7.2 Terminali di rigenerazione 32
Sommario VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 1

2.7.3 Riscaldatore anticondensa 32
2.7.4 Chopper di frenatura 32
2.7.5 Schermatura della rete 32
2.7.6 Sezionatore di rete 33
2.7.7 Contattore 33
2.7.8 Interruttore 33
3 Avviamento e messa in funzione 34
3.1 Pre-avvio 34
3.2 Applicazione l'alimentazione 35
3.3 Programmazione funzionale di base 35
3.4 Test di controllo locale 37
3.5 Avvio del sistema 37
4 Interfaccia utente 38
4.1 Pannello di controllo locale 38
4.1.1 Layout LCP 38
4.1.2 Impostazione valori display LCP 39
4.1.3 Visualizzazione 39
4.1.4 Tasti di navigazione 40
4.1.5 Tasti per il funzionamento 40
4.2 Backup e Copia impostazioni parametri 41
4.2.1 Caricamento dei dati nell'LCP 41
4.2.2 Scaricamento dati da LCP 41
4.3 Ripristino delle impostazioni di fabbrica 41
4.3.1 Inizializzazione consigliata 41
4.3.2 Inizializzazione manuale 42
5 Programmazione 43
5.1 Introduzione 43
5.2 Esempio di programmazione 43
5.3 Esempi di programmazione del morsetto di comando 45
5.4 Impostazione dei parametri predefinita Internazionale/Nordamerica 45
5.5 Struttura del menu dei parametri 46
5.6 Programmazione remota con Software di configurazione MCT 10 51
6 Esempi applicativi 52
6.1 Introduzione 52
6.2 Esempi applicativi 52
7 Messaggi di stato 58
7.1 Stato del display 58
Sommario VLT® Automation Drive telaio DManuale di funzionamento
2 MG34U206 - VLT® è un marchio registrato di Danfoss
7.2 Tabella delle definizioni dei messaggi di stato 58
8 Avvisi e allarmi 61
8.1 Monitoraggio del sistema 61
8.2 Tipi di avvisi e allarmi 61
8.2.1 Avvisi 61
8.2.2 Allarme/scatto 61
8.2.3 Allarme scatto bloccato 61
8.3 Visualizzazioni di avvisi e allarmi 61
8.4 Avvisi e allarmi 62
8.5 Messaggi di allarme 64
9 Ricerca guasti elementare 72
9.1 Avviamento e funzionamento 72
10 Specifiche 75
10.1 Specifiche in funzione della potenza 75
10.2 Dati tecnici generali 78
10.3 Tabelle fusibili 82
10.3.1 Protezione 82
10.3.2 Selezione del fusibile 82
10.3.3 Corrente nominale di corto circuito (SCCR) 83
10.3.4 Coppie di serraggio dei collegamenti 83
Indice 85
Sommario VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 3
1 Introduzione
1.1 Panoramica dei prodotti
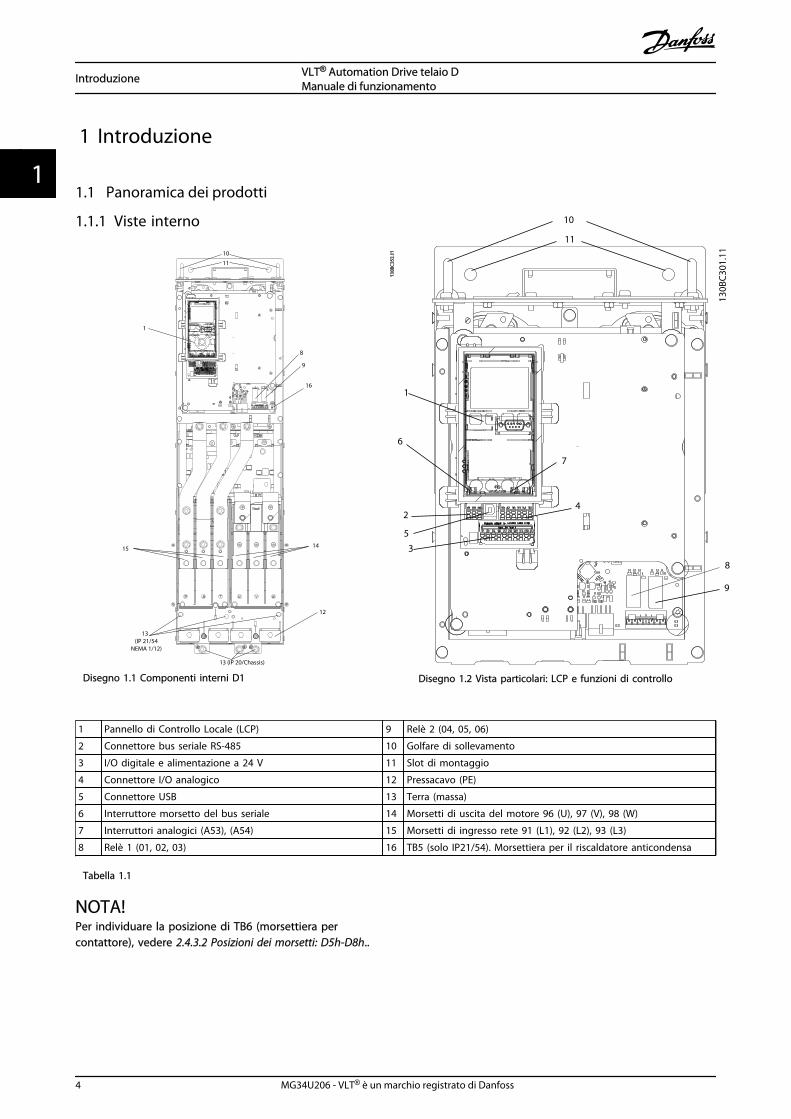
1.1.1 Viste interno
130B
C25
2.11
1
15 14
8
9
12
13 (IP 20/Chassis)
13 (IP 21/54
NEMA 1/12)
11
10
16
Disegno 1.1 Componenti interni D1
130B
C301
.11
1
2
3
4
5
6
7
8
9
10
11
Disegno 1.2 Vista particolari: LCP e funzioni di controllo
1 Pannello di Controllo Locale (LCP) 9 Relè 2 (04, 05, 06)
2 Connettore bus seriale RS-485 10 Golfare di sollevamento
3 I/O digitale e alimentazione a 24 V 11 Slot di montaggio
4 Connettore I/O analogico 12 Pressacavo (PE)
5 Connettore USB 13 Terra (massa)
6 Interruttore morsetto del bus seriale 14 Morsetti di uscita del motore 96 (U), 97 (V), 98 (W)
7 Interruttori analogici (A53), (A54) 15 Morsetti di ingresso rete 91 (L1), 92 (L2), 93 (L3)
8 Relè 1 (01, 02, 03) 16 TB5 (solo IP21/54). Morsettiera per il riscaldatore anticondensa
Tabella 1.1
NOTA!Per individuare la posizione di TB6 (morsettiera percontattore), vedere 2.4.3.2 Posizioni dei morsetti: D5h-D8h..
Introduzione VLT® Automation Drive telaio DManuale di funzionamento
4 MG34U206 - VLT® è un marchio registrato di Danfoss
11
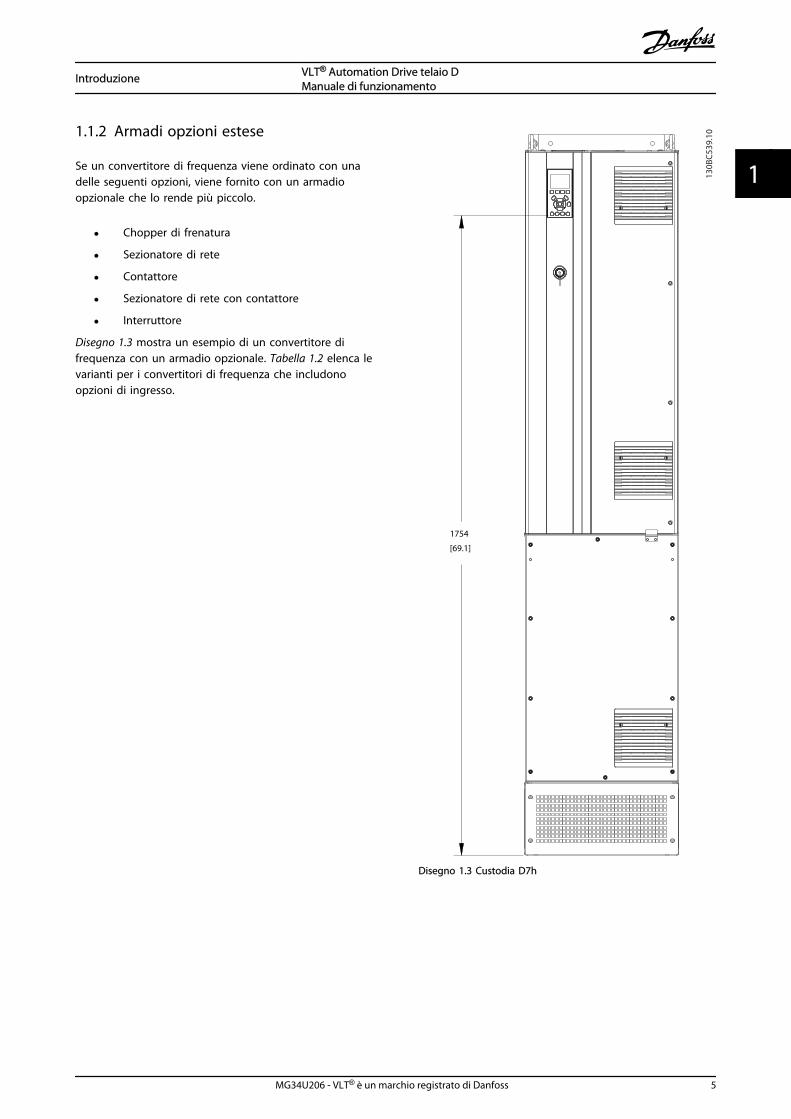
1.1.2 Armadi opzioni estese
Se un convertitore di frequenza viene ordinato con unadelle seguenti opzioni, viene fornito con un armadioopzionale che lo rende più piccolo.
• Chopper di frenatura
• Sezionatore di rete
• Contattore
• Sezionatore di rete con contattore
• Interruttore
Disegno 1.3 mostra un esempio di un convertitore difrequenza con un armadio opzionale. Tabella 1.2 elenca levarianti per i convertitori di frequenza che includonoopzioni di ingresso.
130B
C539
.10
1754
[69.1]
Disegno 1.3 Custodia D7h
Introduzione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 5
1 1
Designazionidell'unitàopzioni
Armadi di estensione Opzioni possibili
D5h Custodia D1h conestensione breve
Freno, sezionatore
D6h Custodia D1h conestensione alta
Contattore,contattore consezionatore,interruttore
D7h Custodia D2h conestensione breve
Freno, sezionatore
D8h Custodia D2h conestensione alta
Contattore,contattore consezionatore,interruttore
Tabella 1.2
I convertitori di frequenza D7h e D8h (D2h più armadioopzionale) includono un piedestallo di 200 mm per ilmontaggio sul pavimento.
Esiste una chiusura di sicurezza sul coperchio anterioredell'armadio opzionale. Se il convertitore di frequenza èdotato di un sezionatore di rete o di un interruttore, lachiusura di sicurezza impedisce l'apertura dello sportellodell'armadio durante l'alimentazione del convertitore difrequenza. Prima di aprire lo sportello del convertitore difrequenza è necessario aprire il sezionatore o l'interruttore(per disalimentare il convertitore di frequenza) e rimuovereil coperchio dell'armadio opzionale.
Per i convertitori di frequenza acquistati con unsezionatore, un contattore o un interruttore, la targhettainclude un codice tipo per una sostituzione che noninclude l'opzione. Se esiste un problema con il convertitoredi frequenza, viene sostituito indipendentemente dalleopzioni.
Fare riferimento a 2.7 Apparecchiatura opzionale perdescrizioni più dettagliate delle opzioni di ingresso e dellealtre opzioni che possono essere aggiunte al convertitoredi frequenza.
1.2 Scopo del manuale
Lo scopo del manuale è fornire informazioni dettagliateper l'installazione e l'avviamento del convertitore difrequenza. fornisce i requisiti per l'installazione meccanicaed elettrica, incluso il cablaggio degli ingressi, del motore,delle comunicazioni seriali e di controllo nonché le funzionidel terminale di controllo. 3 Avviamento e messa in funzionefornisce procedure dettagliate per l'avviamento, laprogrammazione del funzionamento di base e il testfunzionale. Gli altri capitoli riportano informazioniaggiuntive che riguardano l'interfaccia utente, approfon-dimenti sulla programmazione, esempi di applicazioni,
risoluzione dei problemi all'avviamento e specifiche delleapparecchiature.
1.3 Risorse aggiuntive
Sono disponibili altre risorse di supporto alla comprensionedel funzionamento e della programmazione avanzate delconvertitore di frequenza.
• La Guida alla programmazione VLT® forniscemaggiori dettagli sul funzionamento deiparametri e diversi esempi applicativi.
• La Guida alla Progettazione VLT® ha lo scopo diillustrare in dettaglio funzioni e possibilità perprogettare sistemi di controllo motore.
• Ulteriori manuali e pubblicazioni sono disponibilipresso Danfoss.Vedere http://www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.htm per gli elenchi.
• Sono disponibili dispositivi opzionali cherichiedono procedure diverse da quelle descritte.Fare riferimento alle istruzioni fornite con questeopzioni per i requisiti specifici. Contattare ilfornitore locale Danfoss o visitare il sito webDanfoss. http://www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.htm, per download oinformazioni supplementari.
1.4 Panoramica dei prodotti
Un convertitore di frequenza è un controllore elettronicodel motore che converte l'ingresso di rete CA in un'uscita aforma d'onda CA variabile. La frequenza e la tensionedell'uscita sono regolate per controllare la velocità o lacoppia del motore. Il convertitore di frequenza può variarela velocità del motore in funzione della retroazione delsistema, come sensori di posizione su un nastro traspor-tatore. Il convertitore di frequenza può inoltre regolare ilmotore rispondendo ai comandi remoti da controlloriesterni.
Inoltre il convertitore di frequenza monitora il sistema e lostato del motore, genera avvisi o allarmi in presenza dicondizioni di guasto, avvia e arresta il motore, ottimizzal'efficienza energetica, e offre molte altre funzioni dicontrollo, monitoraggio ed efficienza. Le funzioni dimonitoraggio e funzionamento sono disponibili comeindicazioni dello stato a un sistema di controllo esterno ouna rete di comunicazione seriale.
Introduzione VLT® Automation Drive telaio DManuale di funzionamento
6 MG34U206 - VLT® è un marchio registrato di Danfoss
11
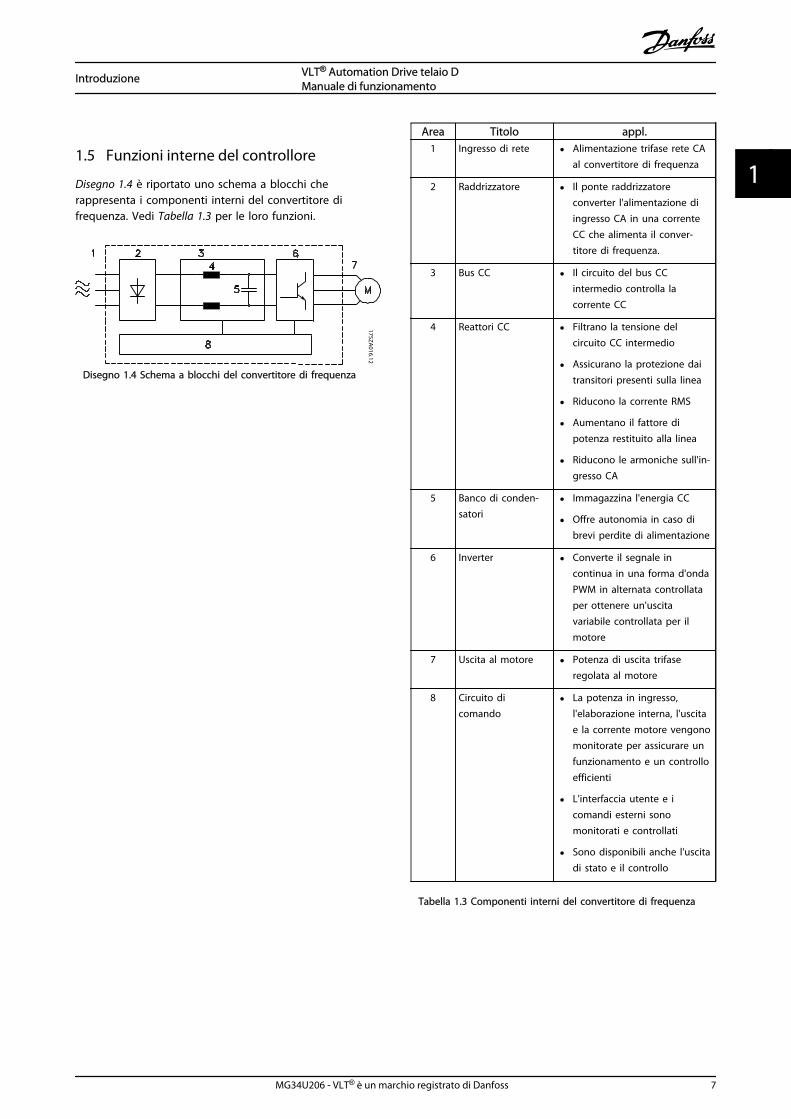
1.5 Funzioni interne del controllore
Disegno 1.4 è riportato uno schema a blocchi cherappresenta i componenti interni del convertitore difrequenza. Vedi Tabella 1.3 per le loro funzioni.
Disegno 1.4 Schema a blocchi del convertitore di frequenza
Area Titolo appl.1 Ingresso di rete • Alimentazione trifase rete CA
al convertitore di frequenza
2 Raddrizzatore • Il ponte raddrizzatoreconverter l'alimentazione diingresso CA in una correnteCC che alimenta il conver-titore di frequenza.
3 Bus CC • Il circuito del bus CCintermedio controlla lacorrente CC
4 Reattori CC • Filtrano la tensione delcircuito CC intermedio
• Assicurano la protezione daitransitori presenti sulla linea
• Riducono la corrente RMS
• Aumentano il fattore dipotenza restituito alla linea
• Riducono le armoniche sull'in-gresso CA
5 Banco di conden-satori
• Immagazzina l'energia CC
• Offre autonomia in caso dibrevi perdite di alimentazione
6 Inverter • Converte il segnale incontinua in una forma d'ondaPWM in alternata controllataper ottenere un'uscitavariabile controllata per ilmotore
7 Uscita al motore • Potenza di uscita trifaseregolata al motore
8 Circuito dicomando
• La potenza in ingresso,l'elaborazione interna, l'uscitae la corrente motore vengonomonitorate per assicurare unfunzionamento e un controlloefficienti
• L'interfaccia utente e icomandi esterni sonomonitorati e controllati
• Sono disponibili anche l'uscitadi stato e il controllo
Tabella 1.3 Componenti interni del convertitore di frequenza
Introduzione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 7
1 1
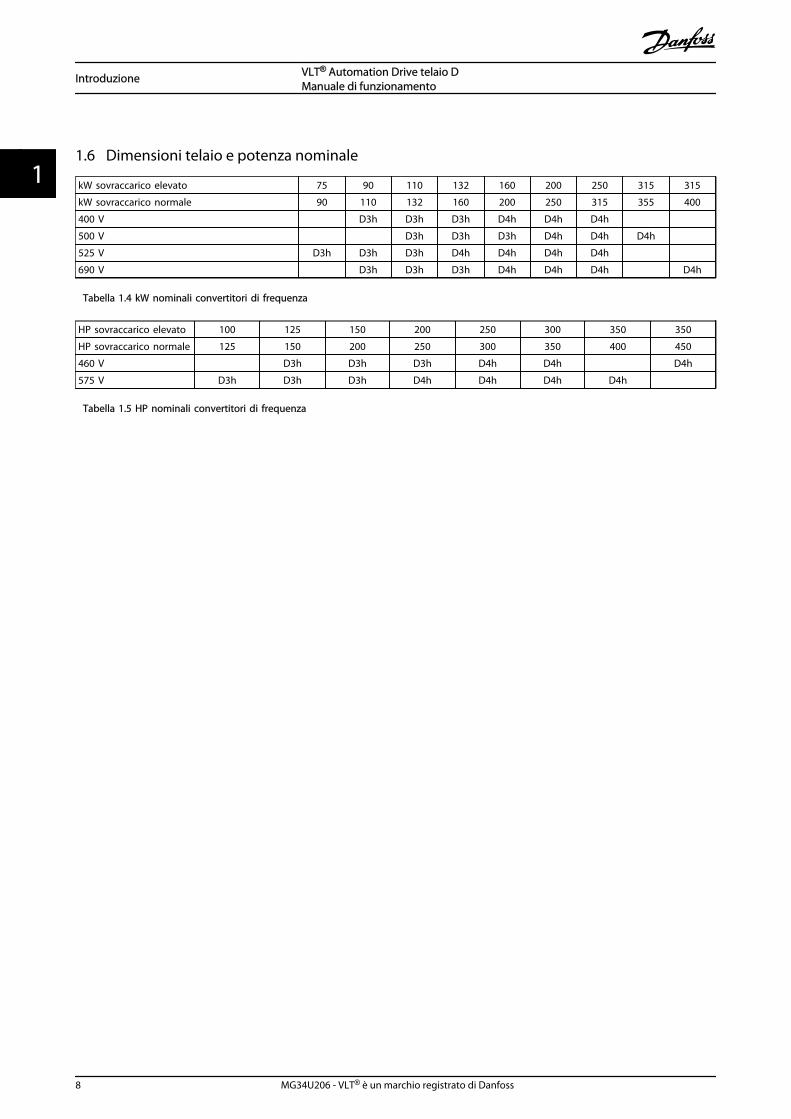
1.6 Dimensioni telaio e potenza nominale
kW sovraccarico elevato 75 90 110 132 160 200 250 315 315
kW sovraccarico normale 90 110 132 160 200 250 315 355 400
400 V D3h D3h D3h D4h D4h D4h
500 V D3h D3h D3h D4h D4h D4h
525 V D3h D3h D3h D4h D4h D4h D4h
690 V D3h D3h D3h D4h D4h D4h D4h
Tabella 1.4 kW nominali convertitori di frequenza
HP sovraccarico elevato 100 125 150 200 250 300 350 350
HP sovraccarico normale 125 150 200 250 300 350 400 450
460 V D3h D3h D3h D4h D4h D4h
575 V D3h D3h D3h D4h D4h D4h D4h
Tabella 1.5 HP nominali convertitori di frequenza
Introduzione VLT® Automation Drive telaio DManuale di funzionamento
8 MG34U206 - VLT® è un marchio registrato di Danfoss
11
2 Installazione
2.1 Pianificazione del sito di installazione
NOTA!Prima di effettuare l'installazione è importante pianificarel'installazione del convertitore di frequenza. Trascurarequesto aspetto potrebbe richiedere ulteriori interventidurante e dopo l'installazione.
Selezionare il miglior sito operativo possibile considerandoi punti riportati di seguito (consultare i dettagli nellepagine seguenti e le rispettive Guide alla Progettazione):
• Temperatura ambiente operativa
• Metodo di installazione
• Metodi di raffreddamento dell'unità
• Posizione del convertitore di frequenza
• Instradamento dei cavi
• Assicurarsi che la sorgente di alimentazione sia ingrado di fornire la tensione corretta e la correntenecessaria
• Assicurarsi che la corrente nominale del motoresia inferiore al limite massimo di corrente delconvertitore di frequenza
• Se convertitore di frequenza non è dotato difusibili incorporati, assicurarsi che i fusibili esternisiano dimensionati correttamente
Tensione [V] Limiti di altitudine
380-500 Per altitudini superiori ai 3 km, contattare Danfossper informazioni sulle caratteristiche PELV.
525-690 Per altitudini superiori ai 2 km, contattare Danfossper informazioni sulle caratteristiche PELV.
Tabella 2.1 Installazione ad altitudini elevate
2.2 Lista di controllo preinstallazione
• Prima del disimballaggio del convertitore difrequenza, assicurarsi che l'imballaggio sia intatto.In presenza di danni, contattare immediatamentelo spedizioniere per denunciare il danno.
• Prima del disimballaggio del convertitore difrequenza, posizionarlo il più vicino possibile alsito di installazione definitivo
• Confrontare il numero di modello sulla targhettadati con l'ordine per verificarne la correttezza
• Accertarsi che abbiano la stessa tensionenominale:
• Rete (alimentazione)
• Convertitore di frequenza
• Motore
• Accertarsi che il valore nominale della corrente diuscita del convertitore di frequenza sia maggioreo uguale alla corrente a pieno carico del motoreper prestazioni di picco del motore.
• Taglia del motore e potenza del conver-titore di frequenza devonocorrispondere per una correttaprotezione da sovraccarico
• Se la taglia del convertitore di frequenzaè inferiore a quella del motore non èpossibile ottenere la potenza massimadel motore
2.3 Installazione meccanica
2.3.1 Raffreddamento
• Assicurare una distanza minima per il raffred-damento dell'aria per la parte superiore einferiore. Generalmente sono richiesti 225 mm (9in).
• Un montaggio non ottimale può causare surriscal-damento e prestazioni ridotte
• Deve essere considerato un declassamento pertemperature tra 45 °C (113 °F) e 50 °C (122 °F) ealtitudine di 1000 m (3300 ft) sopra il livello delmare. Per ulteriori informazioni, vedere la Guidaalla Progettazione VLT® .
I convertitori di frequenza di elevata potenza utilizzano unconcetto di raffreddamento a scanalatura posteriore cherimuove l'aria di raffreddamento del dissipatore, chetrasporta circa il 90% del calore dal canale posteriore delconvertitore di frequenza. L'aria della scanalaturaposteriore può essere diretta all'esterno del pannello odella stanza utilizzando uno dei kit illustrati di seguito.
Raffreddamento dei condottiE' disponibile un kit di raffreddamento per la scanalaturaposteriore che permette di dirigere l'aria di raffreddamentodel dissipatore all'esterno del pannello quando i conver-titori di frequenza con chassis IP20 sono installati in unacustodia Rittal. L'uso di questo kit riduce il calore nelpannello e permette di utilizzare ventole più piccole sullacustodia.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 9
2 2
Raffreddamento della parte posteriore(coperchi superiore einferiore)L'aria di raffreddamento del canale posteriore raffred-damento aria può essere espulsa dalla stanza in modo cheil calore della scanalatura posteriore non venga dissipatonella sala di controllo.
Per rimuovere il calore non smaltito dalla scanalaturaposteriore del convertitore di frequenza ed eliminarequalsiasi perdita supplementare generata da altricomponenti installati all'interno della custodia, è necessariauna ventola a sportello sull'armadio elettrico. È necessariocalcolare il flusso d'aria totale richiesto in modo chepossano essere scelte delle ventole adeguate.
VentilazioneÈ necessario garantire la ventilazione necessaria sopra ildissipatore. La portata è mostrata in Tabella 2.2.
La ventola entra in funzione per le seguenti ragioni:
• AMA
• Tenuta CC
• Pre-Mag
• Freno CC
• È stato superato il 60% della corrente nominale
• Se la temperatura specifica del dissipatore è statasuperata (in funzione della taglia di potenza)
• La temperatura ambiente a specifica della schedadi potenza è stata superata (funzione della tagliadi potenza)
• La temperatura ambiente a specifica della schedadi controllo è stata superata
Telaio Ventola sportello / ventolasuperiore
Ventola dissipatore
D1h/D3h 102 m3/ hr (60 CFM) 420 m3/ hr (250 CFM)
D2h/D4h 204 m3/ hr (120 CFM) 840 m3/ hr (500 CFM)
Tabella 2.2 Ventilazione
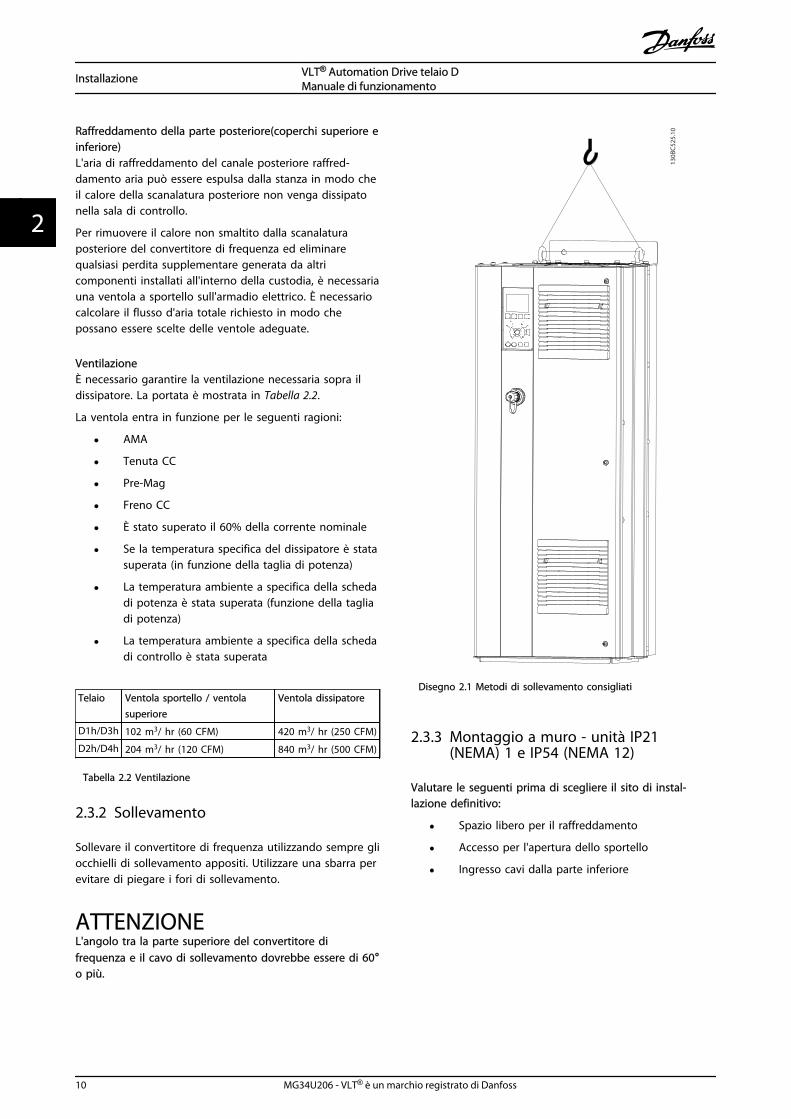
2.3.2 Sollevamento
Sollevare il convertitore di frequenza utilizzando sempre gliocchielli di sollevamento appositi. Utilizzare una sbarra perevitare di piegare i fori di sollevamento.
ATTENZIONEL'angolo tra la parte superiore del convertitore difrequenza e il cavo di sollevamento dovrebbe essere di 60°o più.
130B
C525
.10
Disegno 2.1 Metodi di sollevamento consigliati
2.3.3 Montaggio a muro - unità IP21(NEMA) 1 e IP54 (NEMA 12)
Valutare le seguenti prima di scegliere il sito di instal-lazione definitivo:
• Spazio libero per il raffreddamento
• Accesso per l'apertura dello sportello
• Ingresso cavi dalla parte inferiore
Installazione VLT® Automation Drive telaio DManuale di funzionamento
10 MG34U206 - VLT® è un marchio registrato di Danfoss
22

2.4 Installazione elettrica
2.4.1 Requisiti generali
Questa sezione contiene istruzioni dettagliate per ilcablaggio del convertitore di frequenza. Sono descritte leseguenti operazioni:
• Collegare il motore ai morsetti di uscita delconvertitore di frequenza
• Collegare la rete CA ai morsetti di ingresso delconvertitore di frequenza
• Collegare cablaggio comunicazione seriale econtrollo
• Una volta inserita l'alimentazione, controllarel'ingresso e la potenza motore; programmazionedei morsetti di controllo per le loro funzionipreviste
AVVISOPERICOLO APPARECCHIATURE!Alberi rotanti e apparecchiature elettriche possonodiventare pericolosi. Osservare le norme locali e nazionaliin materia di sicurezza per installazioni elettriche. Èfortemente consigliato far effettuare l'installazione, l'avvio ela manutenzione solo da personale qualificato eaddestrato. L'inosservanza delle linee guida può causarelesioni gravi o mortali.
ATTENZIONEISOLAMENTO DEI CAVI!Posare i cavi dell'alimentazione di ingresso, del motore e dicontrollo in tre canaline metalliche separate o utilizzarecavi schermati separati per un isolamento dai disturbi adalta frequenza. Il mancato isolamento dei cavi di alimen-tazione, motore e controllo potrebbe causare prestazionidel convertitore di frequenza e dell'apparecchiatura nonottimali.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 11
2 2
230 VAC50/60Hz
230 VAC50/60Hz
TB6 Contactor
TB5R1
Regen +
Regen - 83
Regen
1
2
Brake Temp (NC)
Anti-condensation heater (optional)
(optional)
91 (L1)92 (L2)93 (L3)
PE
88 (-)89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24V OUT)
13 (+24V OUT)
18 (D IN)
20 (COM D IN)
15mA 200mA
(U) 96(V) 97
(W) 98(PE) 99
(COM A OUT) 39
(A OUT) 420/4-20 mA
03
+10Vdc
0 VDC - 10VDC
0/4-20 mA
24Vdc
02
01
05
04
06240Vac, 2A
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
19 (D IN)
24V (NPN) 0V (PNP)27
24V
0V
(D IN/OUT)
0V (PNP)24V (NPN)
(D IN/OUT)
0V
24V29
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
33 (D IN)
32 (D IN)
12
ON
A53 U-I (S201)
ON2
1A54 U-I (S202)ON=0-20mAOFF=0-10V
95
400Vac, 2AP 5-00
(R+) 82
(R-) 81+ - + -
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0V
5V
S801
RS-485RS-485
21 O
N
S801/Bus Term.OFF-ON
3 Phasepowerinput
Load Share Switch ModePower Supply
Motor
Analog Output
Interface
Relay1
Relay2
ON=TerminatedOFF=Open
Brakeresistor
(NPN) = Sink(PNP) = Source
==
=
240Vac, 2A
400Vac, 2A0 VDC - 10VDC
10Vdc
37 (D IN) - option
130B
C54
8.11
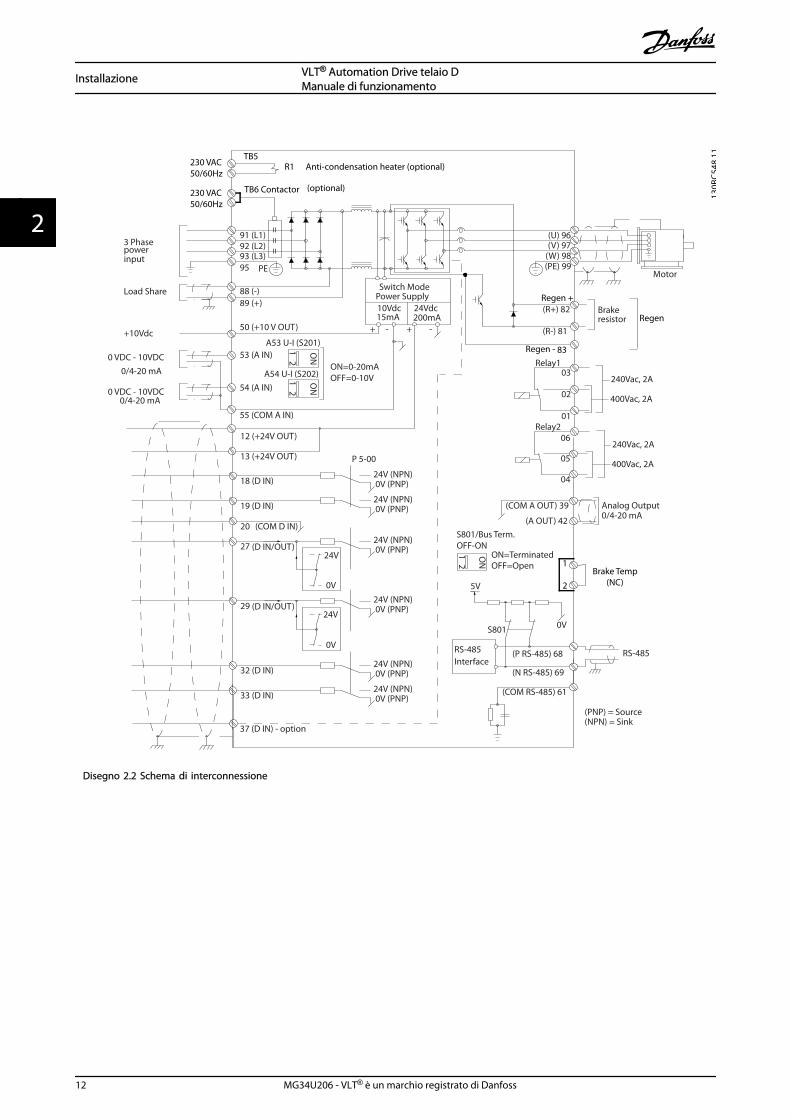
Disegno 2.2 Schema di interconnessione
Installazione VLT® Automation Drive telaio DManuale di funzionamento
12 MG34U206 - VLT® è un marchio registrato di Danfoss
22
Per la sicurezza dell'utilizzatore, rispettare i seguentirequisiti
• I dispositivi di controllo elettronici sono collegatia tensioni di alimentazione pericolose. Ènecessario prestare attenzione per evitarefolgorazioni quando si alimenta l'unità.
• Posare i cavi motore provenienti da convertitoridi frequenza multipli mantenendoli separati.. Latensione indotta da cavi motore in uscita posatiinsieme può caricare i condensatori dell'apparec-chiatura anche quando questa è spenta edisinserita.
• I morsetti di cablaggio sul campo non sono adattia ricevere un conduttore di taglia maggiore.
Protezione apparato e sovraccarico
• Una funzione attivata elettronicamente eintegrata nel convertitore di frequenza offreprotezione da sovraccarico per il motore. Ilsovraccarico calcola il livello di aumento perattivare la temporizzazione della funzione discatto (arresto uscita controllore). Maggiore èl'assorbimento di corrente, più rapida è la rispostadi intervento. La protezione da sovraccarico delmotore fornita è di classe 20. Vedere 8 Avvisi eallarmi per dettagli sulla funzione scatto.
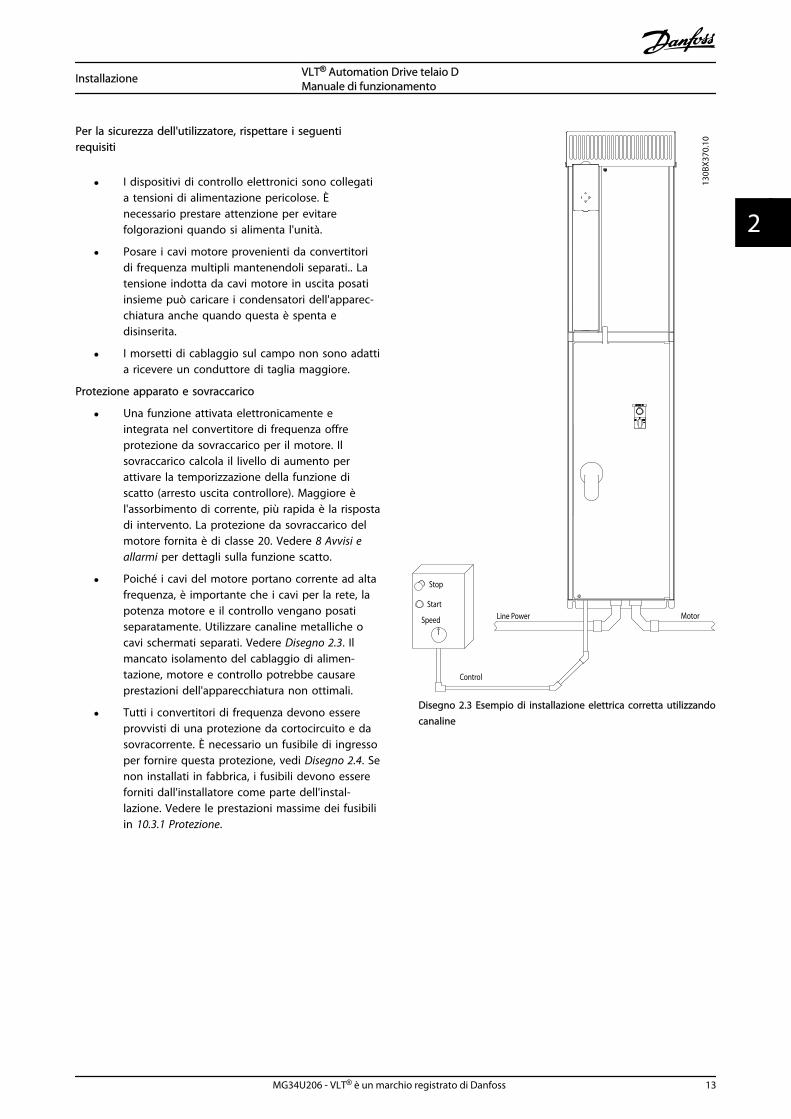
• Poiché i cavi del motore portano corrente ad altafrequenza, è importante che i cavi per la rete, lapotenza motore e il controllo vengano posatiseparatamente. Utilizzare canaline metalliche ocavi schermati separati. Vedere Disegno 2.3. Ilmancato isolamento del cablaggio di alimen-tazione, motore e controllo potrebbe causareprestazioni dell'apparecchiatura non ottimali.
• Tutti i convertitori di frequenza devono essereprovvisti di una protezione da cortocircuito e dasovracorrente. È necessario un fusibile di ingressoper fornire questa protezione, vedi Disegno 2.4. Senon installati in fabbrica, i fusibili devono essereforniti dall'installatore come parte dell'instal-lazione. Vedere le prestazioni massime dei fusibiliin 10.3.1 Protezione.
MotorLine Power
Stop
Start
Speed
Control
130B
X370
.10
Disegno 2.3 Esempio di installazione elettrica corretta utilizzandocanaline
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 13
2 2

• Tutti i convertitori di frequenza devono essereprovvisti di una protezione da cortocircuito e dasovracorrente. È necessario un fusibile di ingressoper fornire questa protezione, vedi Disegno 2.4. Senon installati in fabbrica, i fusibili devono essereforniti dall'installatore come parte dell'instal-lazione. Vedere le prestazioni massime dei fusibiliin 10.3.1 Protezione.
L1
L1
L2
L2
L3
L3
GND
91 92 93Fuses
130B
B460
.10
Disegno 2.4 Fusibili del convertitore di frequenza
Tipi e caratteristiche dei conduttori
• Tutti i cavi devono rispettare sempre le normenazionali e locali relative alle sezioni dei cavi ealla temperatura ambiente.
• Danfoss consiglia che tutti i collegamenti dipotenza siano realizzati con fili di rame adattoper almeno 75 °C.
2.4.2 Requisiti di terra (massa)
AVVISORISCHIO DI MESSA A TERRA (MESSA A MASSA)ERRATA!Per la sicurezza degli operatori, è importante realizzare uncorretta messa a terra (a massa) del convertitore difrequenza in base ai codici elettrici locali e nazionali e alleistruzioni riportate all'interno di questo documento. Nonutilizzare canaline collegate al convertitore di frequenza inalternativa a una corretta messa a terra. Le correnti di terra(massa) sono superiori a 3,5 mA. Una messa a terra (massa)non corretta del convertitore di frequenza può causaremorte o lesioni gravi.
NOTA!È responsabilità dell'utente o dell'installatore certificatoassicurare una corretta messa a terra (messa a massa)dell'apparecchiatura in base ai codici e agli standardelettrici nazionali e locali.
• Seguire tutti i codici elettrici nazionali e locali peruna corretta messa a terra (a massa) dell'apparec-chiatura
• È necessario utilizzare una messa a terra (a massa)di protezione per apparecchiature con correnti diterra superiori a 3,5 mA, vedere 2.4.2.1 Corrente didispersione (>3,5 mA)
• È necessario un cavo di terra (massa) dedicatoper l'alimentazione di ingresso, del motore e peril cablaggio di controllo.
• Utilizzare le fascette in dotazione all'apparec-chiatura per assicurare collegamenti a Terra (amassa) adeguati.
• Non collegare a Terra (massa) un convertitore difrequenza con un altro in una configurazione deltipo "a margherita"
• Tenere i cavi di terra (massa) il più corti possibile.
• Si consiglia di utilizzare un cavo cordato percontenere i disturbi elettrici.
• Rispettare i requisiti del costruttore del motorerelativi al cablaggio
2.4.2.1 Corrente di dispersione (>3,5 mA)
Rispettare le norme locali vigenti relative alla messa a terradi apparati con correnti di dispersioni >3,5 mA. Latecnologia dei convertitori di frequenza implicacommutazione ad alta frequenza e alta potenza. Questogenera correnti di dispersione a terra. Una corrente diguasto nel convertitore di frequenza sui morsetti dipotenza di uscita può contenere una componente CC ingrado di caricare i condensatori filtro causando dellecorrenti transitorie verso terra. La corrente di dispersioneverso terra dipende dalle diverse configurazioni delsistema, inclusi i circuiti di filtraggio RFI, i cavi motoreschermati e la potenza del convertitore di frequenza.
La norma EN/IEC61800-5-1 (Azionamenti elettrici a velocitàvariabile) richiede particolari precauzioni se la corrente didispersione supera i 3,5 mA. La messa a terra (a massa)deve essere potenziata in uno dei modi seguenti:
• Filo di messa a terra di almeno 10 mm2
• Due cavi di terra separati, entrambi di dimensioniadeguate a quanto previsto dalla norma.
Per ulteriori informazioni vedere la norma EN 60364-5-54 §543.7
Utilizzare i RCDQuando si utilizzano dispositivi a corrente residua (RCD),detti anche interruttori per le correnti di dispersione a terra(ELCB), rispettare le seguenti regole: dispositivi a correnteresidua (RCD)
Installazione VLT® Automation Drive telaio DManuale di funzionamento
14 MG34U206 - VLT® è un marchio registrato di Danfoss
22
• Utilizzare solo RCD di tipo B, in grado di rilevarecorrenti CA e CC.
• Utilizzare RCD con ritardo per i picchi in ingressoper evitare guasti dovuti a correnti di terratransitorie
• Dimensionare l'RCD in funzione della configu-razione del sistema e di considerazioni ambientali
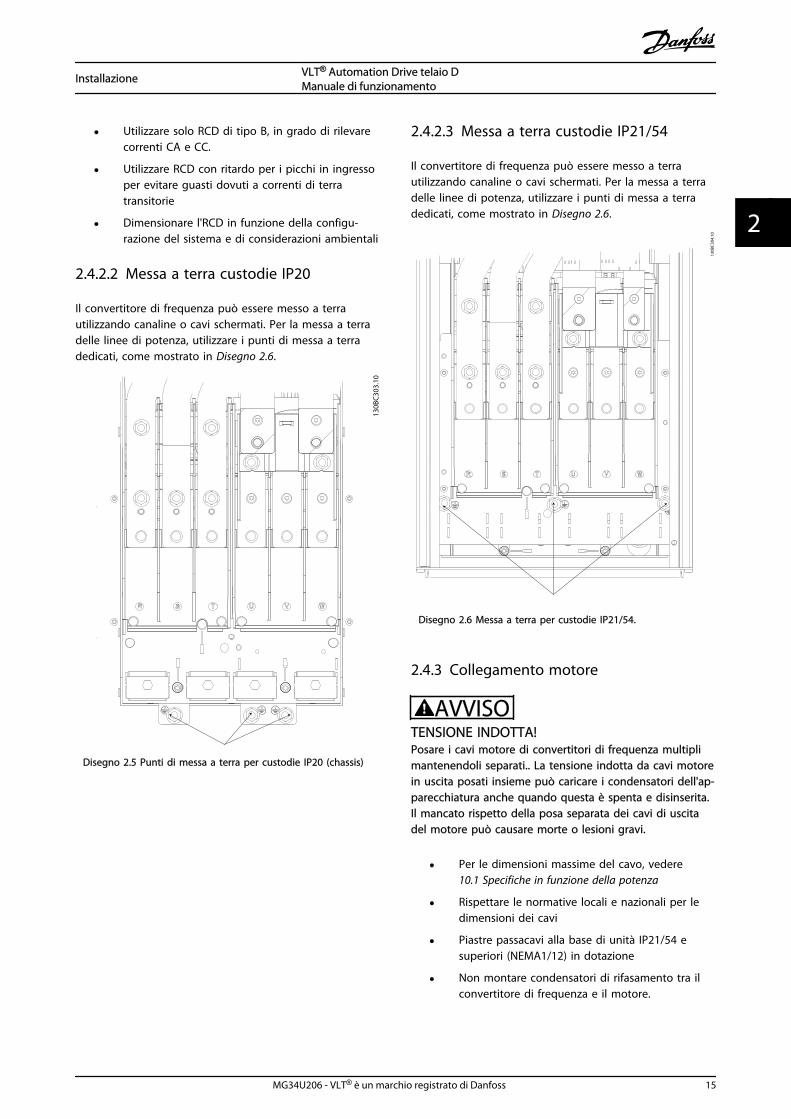
2.4.2.2 Messa a terra custodie IP20
Il convertitore di frequenza può essere messo a terrautilizzando canaline o cavi schermati. Per la messa a terradelle linee di potenza, utilizzare i punti di messa a terradedicati, come mostrato in Disegno 2.6.
130B
C30
3.10
Disegno 2.5 Punti di messa a terra per custodie IP20 (chassis)
2.4.2.3 Messa a terra custodie IP21/54
Il convertitore di frequenza può essere messo a terrautilizzando canaline o cavi schermati. Per la messa a terradelle linee di potenza, utilizzare i punti di messa a terradedicati, come mostrato in Disegno 2.6.
130B
C30
4.10
Disegno 2.6 Messa a terra per custodie IP21/54.
2.4.3 Collegamento motore
AVVISOTENSIONE INDOTTA!Posare i cavi motore di convertitori di frequenza multiplimantenendoli separati.. La tensione indotta da cavi motorein uscita posati insieme può caricare i condensatori dell'ap-parecchiatura anche quando questa è spenta e disinserita.Il mancato rispetto della posa separata dei cavi di uscitadel motore può causare morte o lesioni gravi.
• Per le dimensioni massime del cavo, vedere10.1 Specifiche in funzione della potenza
• Rispettare le normative locali e nazionali per ledimensioni dei cavi
• Piastre passacavi alla base di unità IP21/54 esuperiori (NEMA1/12) in dotazione
• Non montare condensatori di rifasamento tra ilconvertitore di frequenza e il motore.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 15
2 2
• Non collegare un dispositivo di avviamento o acommutazione di polo tra il convertitore difrequenza e il motore
• Collegare il cablaggio trifase del motore aimorsetti 96 (U), 97 (V) e 98 (W)
• Collegare a terra (a massa) il cavo seguendo leistruzioni fornite.
• Serrare i morsetti in base alle informazioni fornitein 10.3.4 Coppie di serraggio dei collegamenti
• Rispettare i requisiti del costruttore del motorerelativi al cablaggio
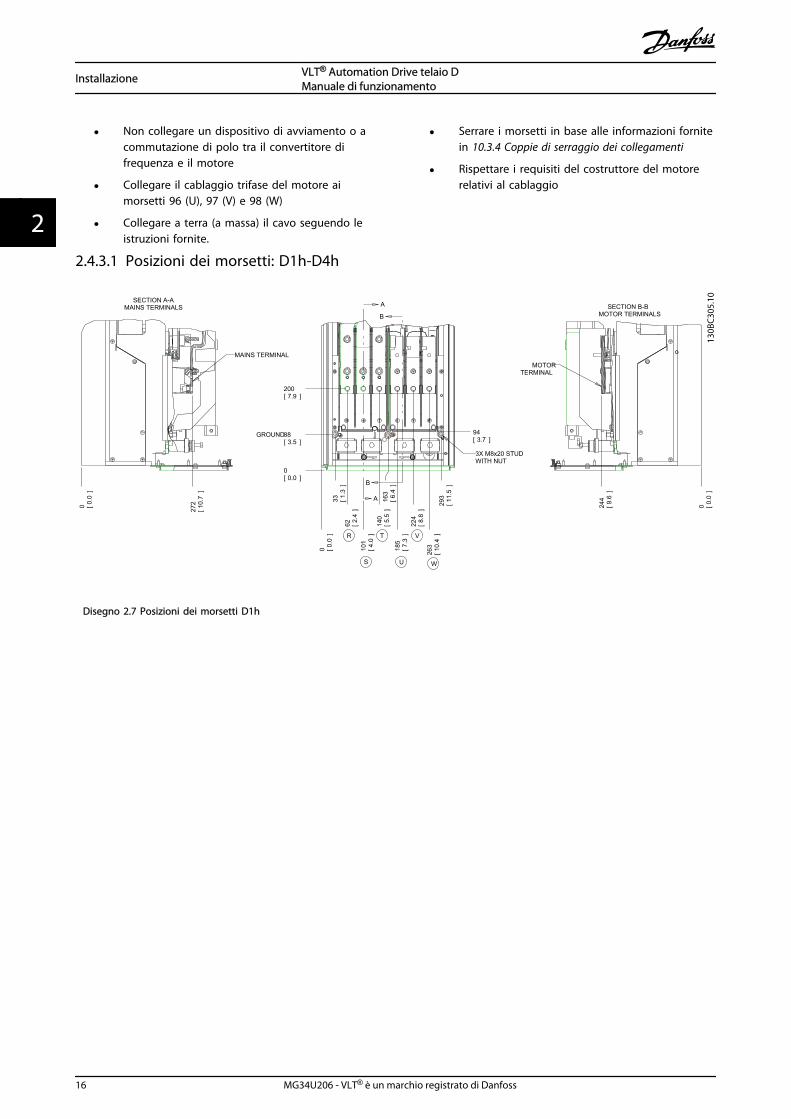
2.4.3.1 Posizioni dei morsetti: D1h-D4h
A
A
B
B
33 1.3
[]
0 0.0
[]
62 2.4
[]
101 4.0
[]
140 5.5
[]
163 6.4
[]
185 7.3
[]
224 8.8
[]
263 10
.4[
]29
3 11.5
[]
GROUND 883.5[ ]
00.0[ ]
2007.9[ ]
943.7[ ]
244 9.6
[]
0 0.0
[]
272 10
.7[
]
0 0.0
[]
S U W
R T V
3X M8x20 STUDWITH NUT
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
SECTION B-BMOTOR TERMINALS
MOTORTERMINAL
130B
C30
5.10
Disegno 2.7 Posizioni dei morsetti D1h
Installazione VLT® Automation Drive telaio DManuale di funzionamento
16 MG34U206 - VLT® è un marchio registrato di Danfoss
22

A
A
B
B
833.3[ ]
00.0[ ]
1887.4[ ]
244 9.6
[]
0 0.0
[]
290 11
.4[
]272 10
.7[
]
0 0.0
[]
22 0.9
[]
0 0.0
[]
62 2.4
[]
101 4.0
[]
145 5.7
[]
184 7.2
[]
223 8.8
[]
152 6.0
[]
217 8.5
[]
29211.5[ ]
R
S
T
U
V
W
BRAKE
SECTION A-AMAINS TERMINALS
MAINSTERMINAL
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
MOTOR TERMINAL
BRAKETERMINAL
130B
C30
2.10
Disegno 2.8 Posizioni dei morsetti D3h
1 2
130B
C533
.10
190[7.5]
75[3.0]
98[3.9]
50[2.0]
Disegno 2.9 Morsetti condivisione del carico e rigenerazione, D3h
1 Vista anteriore
2 Vista laterale
Tabella 2.3
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 17
2 2
B
B
A
A
254.
710[
] 0.0 0[]
GROUND 143.46[ ]
0.00[ ]
GROUND 168.47[ ]
331.213[ ]
211.18[ ]
GROUND168.47[ ]
GROUND143.46[ ]
42.4 2[]
0.0 0[]
68.1 3[]
125.
85[
]18
3.5
7[]
245.
810[
]29
9.8
12[]
353.
814[
]37
7.6
15[]
284.
211[
]0.0 0[]
R
S
T
U
V
W
4X M10x20 STUDWITH NUT
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
MOTOR TERMINAL
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
130B
C33
2.10
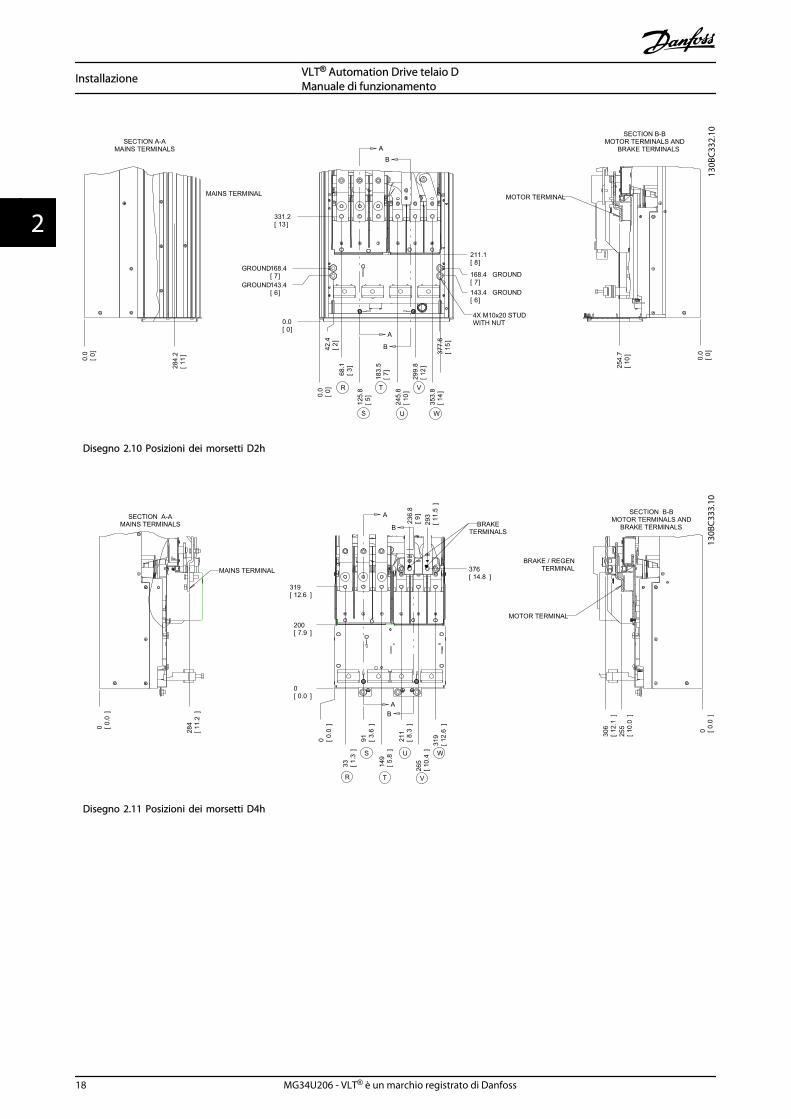
Disegno 2.10 Posizioni dei morsetti D2h
A
A
B
B
33 1.3
[]
0 0.0
[]
91 3.6
[]
149 5.8
[]
211 8.3
[]
265 10
.4[
]31
9 12.6
[]
2007.9[ ]
00.0[ ]
31912.6[ ]
37614.8[ ]
293 11
.5[
]
255 10
.0[
]
0 0.0
[]
306 12
.1[
]
284 11
.2[
]
0 0.0
[]
236.
89[
]
R
S
T
U
V
W
BRAKETERMINALS
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
TERMINALBRAKE / REGEN
MOTOR TERMINAL
130B
C33
3.10
Disegno 2.11 Posizioni dei morsetti D4h
Installazione VLT® Automation Drive telaio DManuale di funzionamento
18 MG34U206 - VLT® è un marchio registrato di Danfoss
22

1
190[7.5]
75[3.0]
126[4.9]
95[3.7]
2
130B
C534
.10
Disegno 2.12 Morsetti condivisione del carico e rigenerazione, D4h
1 Vista anteriore
2 Vista laterale
Tabella 2.4
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 19
2 2
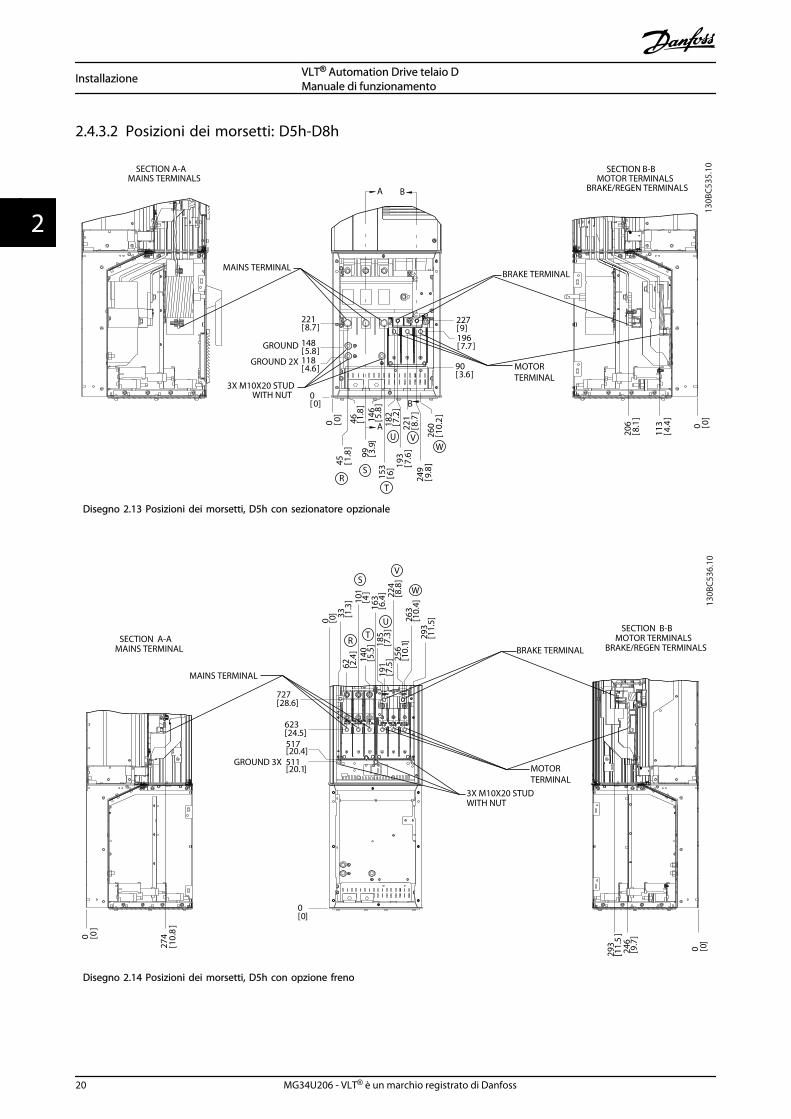
2.4.3.2 Posizioni dei morsetti: D5h-D8h
B
B
A
A
45 1.8
[]
0 0[]
46 1.8
[]
99 3.9
[]
153
6[]
146
5.8
[]
182
7.2
[]
193
7.6
[]
249
9.8
[]
221
8.7
[]
260
10.2
[]
GROUND 2X 1184.6[ ]
00[ ]
GROUND 1485.8[ ]
2218.7[ ]
903.6[ ]
1967.7[ ]
2279[ ]
113
4.4
[]
0 0[]
206
8.1
[]
MAINS TERMINAL
MOTOR TERMINAL
BRAKE TERMINAL
SECTION A-AMAINS TERMINALS
RS
T
U VW
3X M10X20 STUD WITH NUT
SECTION B-BMOTOR TERMINALS
BRAKE/REGEN TERMINALS
130B
C535
.10
Disegno 2.13 Posizioni dei morsetti, D5h con sezionatore opzionale
33 1.3
[]
0 0[]
62 2.4
[]
101
4[]
140
5.5
[]
163
6.4
[]
185
7.3
[]
191
7.5
[]
224
8.8
[]
256
10.1
[]
263
10.4
[]
293
11.5
[]
GROUND 3X 51120.1[ ]
00[ ]
51720.4[ ]
62324.5[ ]
72728.6[ ]
246
9.7
[]
0 0[]
293
11.5
[]
274
10.8
[]
0 0[]
MAINS TERMINAL
MOTOR TERMINAL
BRAKE TERMINALR
S
TU
V
W
3X M10X20 STUDWITH NUT
SECTION B-B MOTOR TERMINALS
BRAKE/REGEN TERMINALSSECTION A-A
MAINS TERMINAL
130B
C536
.10
Disegno 2.14 Posizioni dei morsetti, D5h con opzione freno
Installazione VLT® Automation Drive telaio DManuale di funzionamento
20 MG34U206 - VLT® è un marchio registrato di Danfoss
22
B
B
A
A00.0[ ]
963.8[ ]
1957.7[ ]
2278.9[ ]
GROUND 3X1234.8[ ]
GROUND 1536.0[ ]
45818.0[ ]
0 0.0
[]
46 1.8
[]
50 2.0
[]
99 3.9
[]
147
5.8
[]
182
7.2
[]
193
7.6
[]
221
8.7
[]
249
9.8
[]
260
10.2
[]
146
5.8
[]
0 0.0
[]
286
11.2
[]
0 0.0
[113
4.4
[] ]
206
8.1
[]
BRAKE TERMINAL
MOTOR TERMINAL
MAINS TERMINAL
3X M10X20 STUDWITH NUT
SECTION B-BMOTOR TERMINALS
BRAKE/REGEN TERMINALS
SECTION A-AMAINS TERMINALS
R
S T U V W
130B
C53
7.11
TB6 Terminal block for contactor
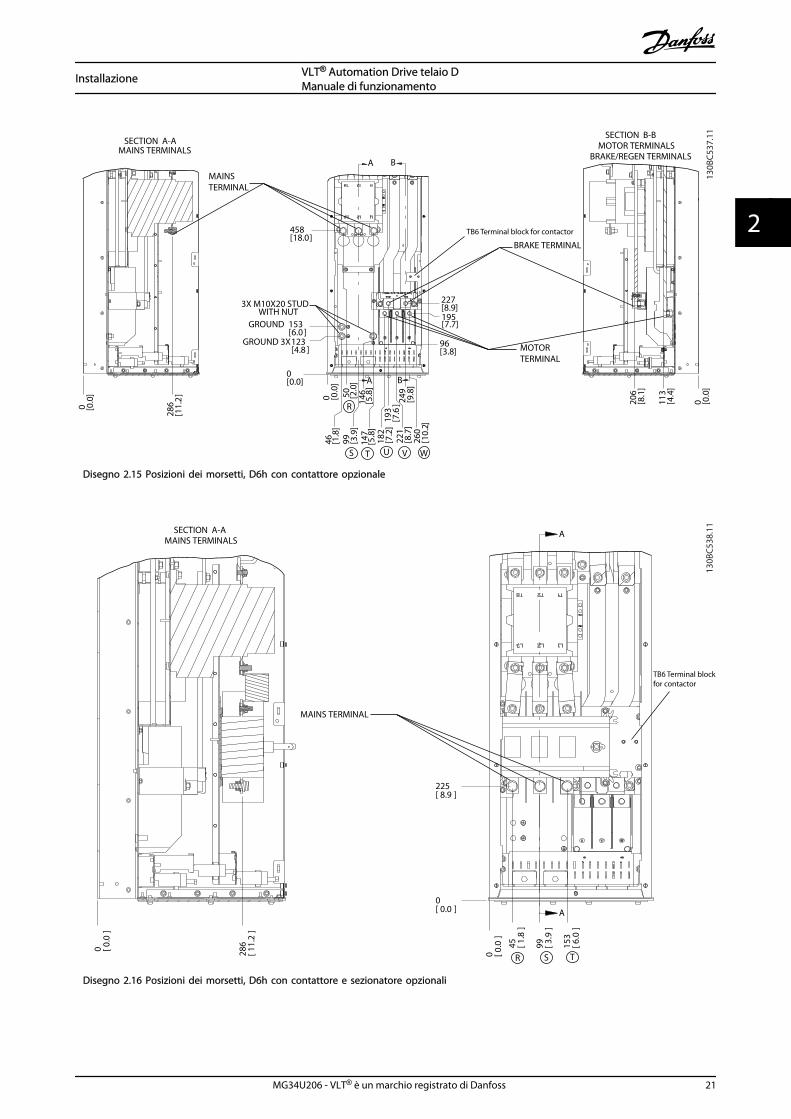
Disegno 2.15 Posizioni dei morsetti, D6h con contattore opzionale
A
A
99 3.9
[]
153 6.0
[]
00.0[ ]
2258.9[ ]
45 1.8
[]
0 0.0
[]
286 11
.2[
]
0 0.0
[]
MAINS TERMINAL
R S T
SECTION A-AMAINS TERMINALS
130B
C53
8.11
TB6 Terminal block for contactor
Disegno 2.16 Posizioni dei morsetti, D6h con contattore e sezionatore opzionali
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 21
2 2

A
A
46718.4[ ]
00.0[ ]
52 2.1
[]
0 0.0
[]
99 3.9
[]
145 5.7
[]
163 6.4
[]
0 0.0
[]
MAINS TERMINAL
SECTION A-AMAINS TERMINALS
R S T
130B
C541
.10
Disegno 2.17 Posizioni dei morsetti, D6h con interruttore opzionale
Installazione VLT® Automation Drive telaio DManuale di funzionamento
22 MG34U206 - VLT® è un marchio registrato di Danfoss
22
130B
C542
.10
B
B
A
A
GROUND 3X 37214.7[ ]
GROUND 41216.2[ ] 395
15.6[ ]
51520.3[ ]
0 0[]
66 2.6
[]
95 3.7
[]
131
5.1
[]
151
5.9
[]
195.
58[
]23
89.
4[
]29
211
.5[
]34
613
.6[
]
49 1.9
[]
198
7.8
[]
368
14.5
[]
54521.4[ ]
0 0[]
119
4.7
[]
276
10.9
[]
00[ ]
MAINS TERMINAL
BRAKE TERMINAL
MOTOR TERMINAL
4X M10X20 STUDWITH NUT
SECTION B-BMOTOR TERMINALS
SECTION A-AMAINS TERMINALS
BRAKE/REGEN TEMINALS
RS
T
U
V
W
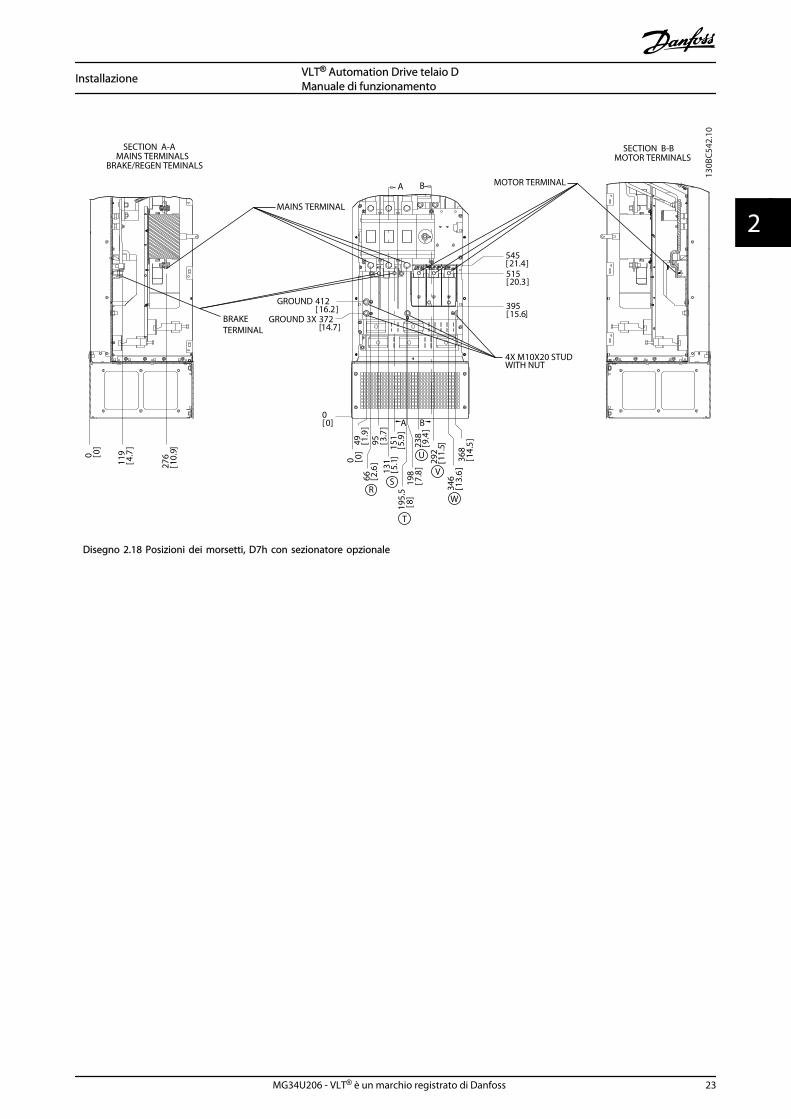
Disegno 2.18 Posizioni dei morsetti, D7h con sezionatore opzionale
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 23
2 2
130B
C543
.10
B
B
A
A
0 0[]
66 2.6
[]
123
4.9
[]
181
7.1
[]
243
9.6
[]
269
10.6
[]
297
11.7
[]
325
12.8
[]
351
13.8
[]
40 1.6
[]
00[ ]
GROUND 2X 100939.7[ ]
GROUND 2X 103440.7[ ]
108242.6[ ]
120247.3[ ]
126049.6[ ]
375
14.8
[]
290
11.4
[]
0 0[]
257
10.1
[]
309
12.1
[]
0 0[]
MOTOR TERMINAL
BRAKE TERMINAL
MAINS TERMINAL
4X M10X20 STUDWITH NUT
SECTION B-BMOTOR TERMINALS
BRAKE/REGEN TERMINALSSECTION A-A
MAINS TERMINALS
R
S
T
U
VW
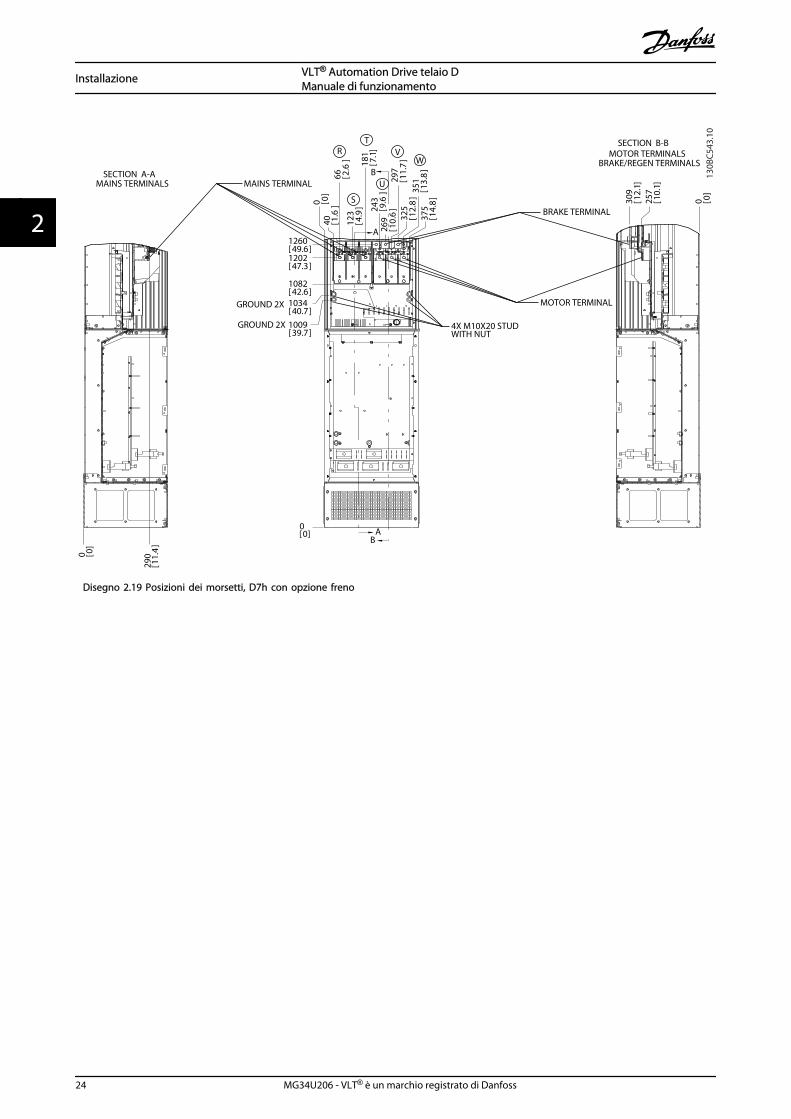
Disegno 2.19 Posizioni dei morsetti, D7h con opzione freno
Installazione VLT® Automation Drive telaio DManuale di funzionamento
24 MG34U206 - VLT® è un marchio registrato di Danfoss
22
A
A B
B
69 2.7
[]
0 0[]
123
4.9
[]
177 7[]
238
9.4
[]
292
11.5
[]
346
13.6
[]
49 1.9
[]
378
14.9
[]
198
7.8
[]
GROUND 3X 37814.9[ ]
00[ ]
GROUND 41816.5[ ]
89835.3[ ]
40115.8[ ]
52120.5[ ]
95 3.7
[]
151
5.9
[]
119
4.7
[]
0 0[]
252
9.9
[]
127
5[]
0 0[]
MAINS TERMINAL
MOTOR TERMINALBRAKE TERMINAL
4X M10X20 STUDWITH NUT
SECTION A-AMAINS TERMINALs
BRAKE/REGEN TERMINALS
SECTION B-BMOTOR TERMINALS
RS
T U
V
W
130B
C54
4.11
TB6 Terminal blockfor contactor
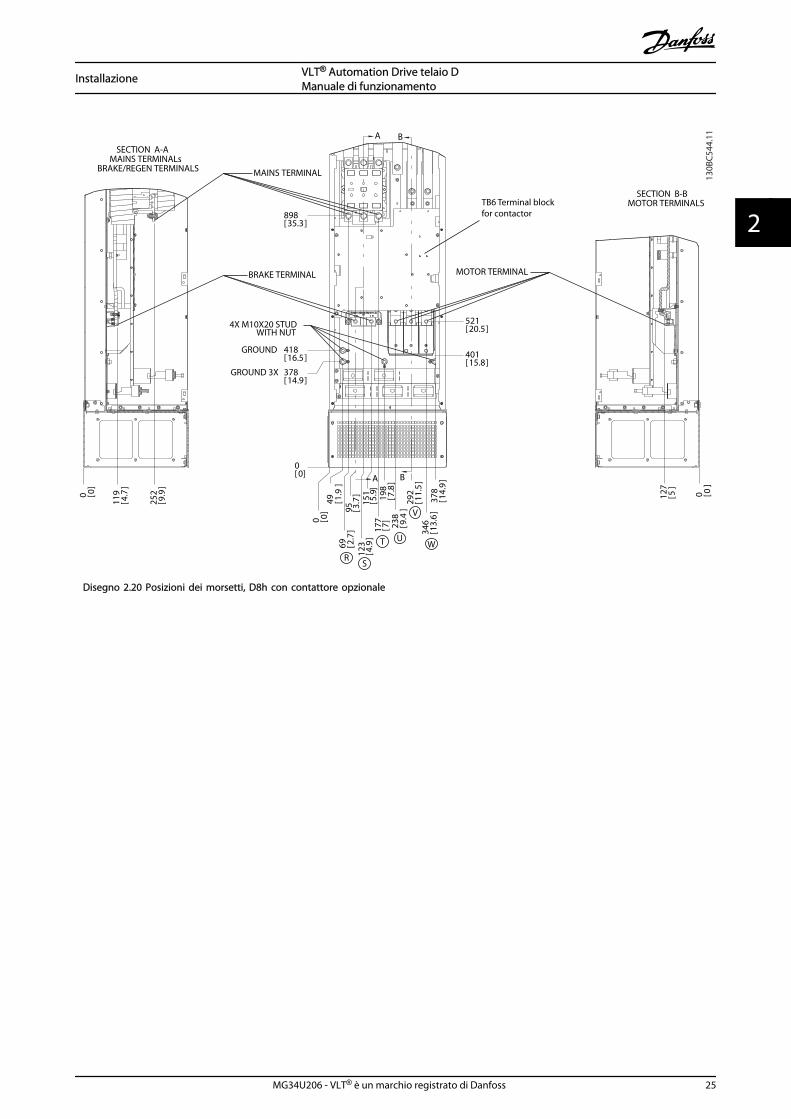
Disegno 2.20 Posizioni dei morsetti, D8h con contattore opzionale
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 25
2 2

C
C
56722.3[ ]
00[ ]
582.
3[
]
00
[]
123 4.9
[]
188 7.4
[]24
6 9.7
[]
00
[]
MAINS TERMINAL
SECTION C-CMAINS TERMINALS
130B
C54
5.11
R
S
T
TB6 Terminal block for contactor
Disegno 2.21 Posizioni dei morsetti, D8h con contattore e sezionatore opzionali
Installazione VLT® Automation Drive telaio DManuale di funzionamento
26 MG34U206 - VLT® è un marchio registrato di Danfoss
22
202 8
[]
00
[]
84.5 3
[]
00
[]
154.
56
[]
224.
59
[]
60523.8[ ]
00[ ]
MAINS TERMINAL
SECTION D-DMAINS TERMINALS
R
S
T
130B
C546
.10
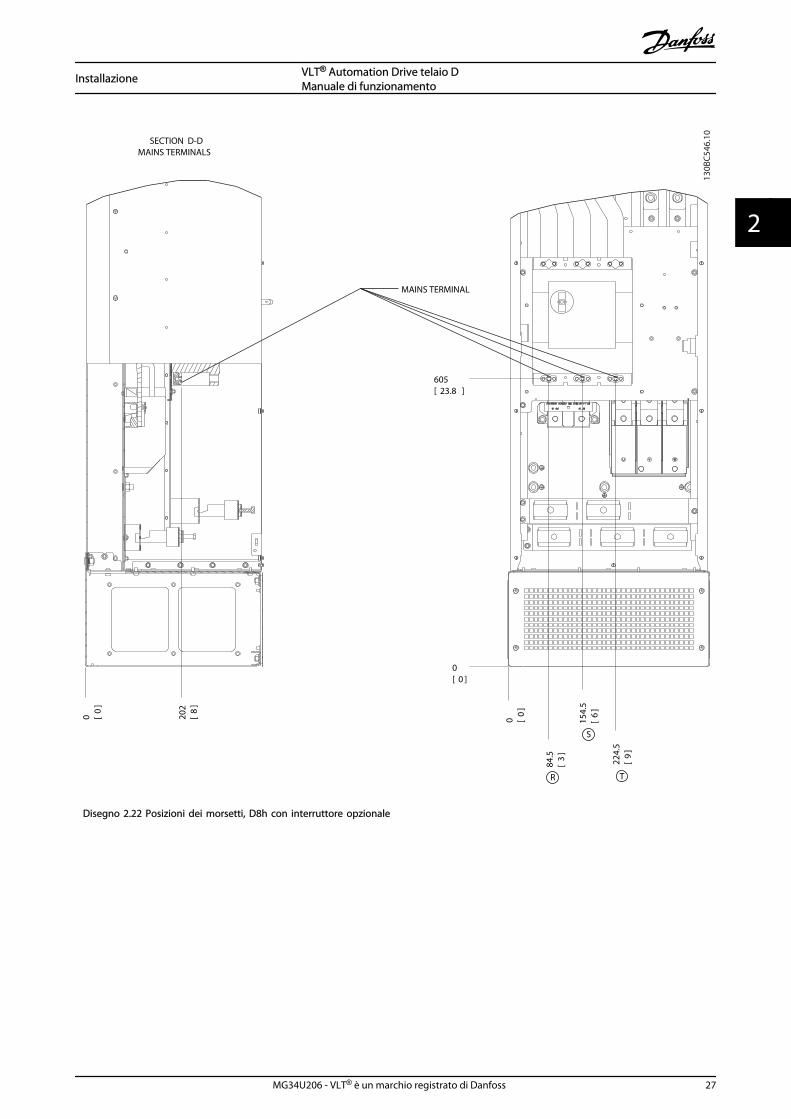
Disegno 2.22 Posizioni dei morsetti, D8h con interruttore opzionale
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 27
2 2
2.4.4 Cavo motore
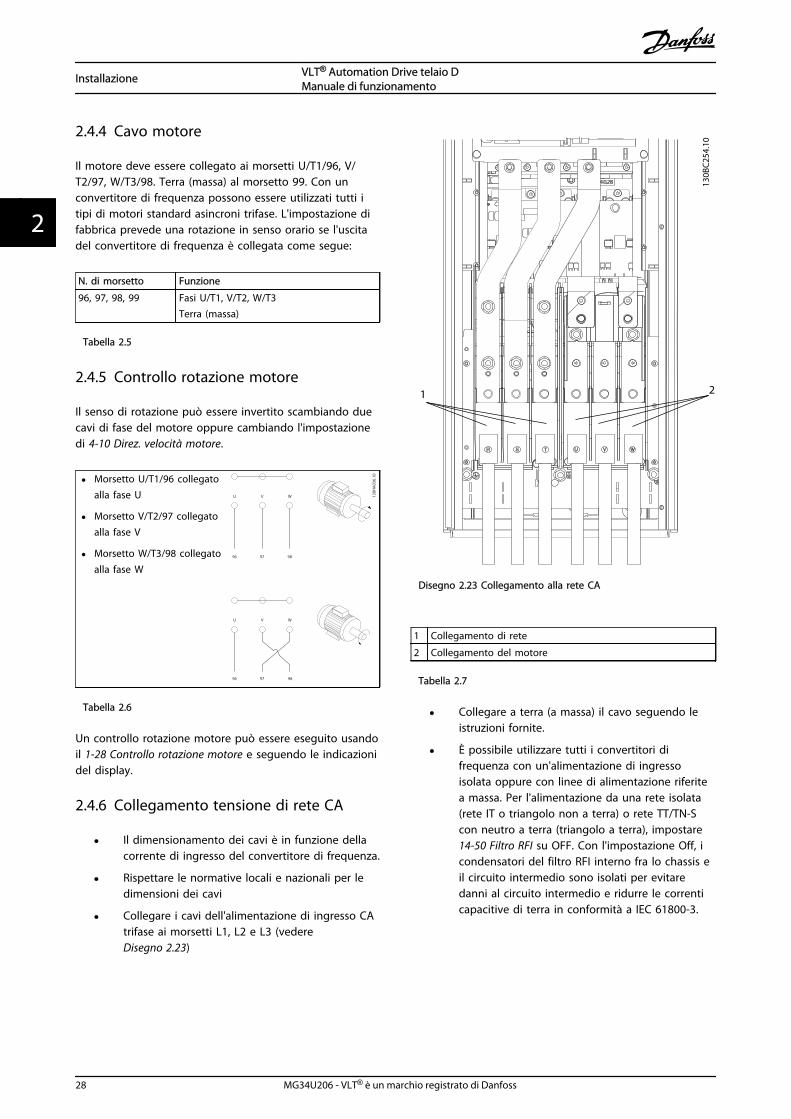
Il motore deve essere collegato ai morsetti U/T1/96, V/T2/97, W/T3/98. Terra (massa) al morsetto 99. Con unconvertitore di frequenza possono essere utilizzati tutti itipi di motori standard asincroni trifase. L'impostazione difabbrica prevede una rotazione in senso orario se l'uscitadel convertitore di frequenza è collegata come segue:
N. di morsetto Funzione
96, 97, 98, 99 Fasi U/T1, V/T2, W/T3Terra (massa)
Tabella 2.5
2.4.5 Controllo rotazione motore
Il senso di rotazione può essere invertito scambiando duecavi di fase del motore oppure cambiando l'impostazionedi 4-10 Direz. velocità motore.
• Morsetto U/T1/96 collegatoalla fase U
• Morsetto V/T2/97 collegatoalla fase V
• Morsetto W/T3/98 collegatoalla fase W
96 97
U V
96 97 98
U V W
98
W 130H
A03
6.10
Tabella 2.6
Un controllo rotazione motore può essere eseguito usandoil 1-28 Controllo rotazione motore e seguendo le indicazionidel display.
2.4.6 Collegamento tensione di rete CA
• Il dimensionamento dei cavi è in funzione dellacorrente di ingresso del convertitore di frequenza.
• Rispettare le normative locali e nazionali per ledimensioni dei cavi
• Collegare i cavi dell'alimentazione di ingresso CAtrifase ai morsetti L1, L2 e L3 (vedereDisegno 2.23)
130B
C25
4.10
21
Disegno 2.23 Collegamento alla rete CA
1 Collegamento di rete
2 Collegamento del motore
Tabella 2.7
• Collegare a terra (a massa) il cavo seguendo leistruzioni fornite.
• È possibile utilizzare tutti i convertitori difrequenza con un'alimentazione di ingressoisolata oppure con linee di alimentazione riferitea massa. Per l'alimentazione da una rete isolata(rete IT o triangolo non a terra) o rete TT/TN-Scon neutro a terra (triangolo a terra), impostare14-50 Filtro RFI su OFF. Con l'impostazione Off, icondensatori del filtro RFI interno fra lo chassis eil circuito intermedio sono isolati per evitaredanni al circuito intermedio e ridurre le correnticapacitive di terra in conformità a IEC 61800-3.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
28 MG34U206 - VLT® è un marchio registrato di Danfoss
22
2.5 Connessione dei cavi di controllo
• Isolare i cavi del controllo dai componenti ad altapotenza nel convertitore di frequenza
• Se il convertitore di frequenza è collegato a untermistore, per l'isolamento PELV, è necessarioutilizzare un cavo opzionale con isolamentorinforzato/doppio per il cavo controllo termistore.Si raccomanda una tensione di alimentazione da24 VCC.
2.5.1 LON
Tutti i morsetti dei cavi di comando sono situati sotto l'LCPall'interno del convertitore di frequenza. Per accedere,aprire lo sportello (IP21/54) o rimuovere il pannelloanteriore (IP20).
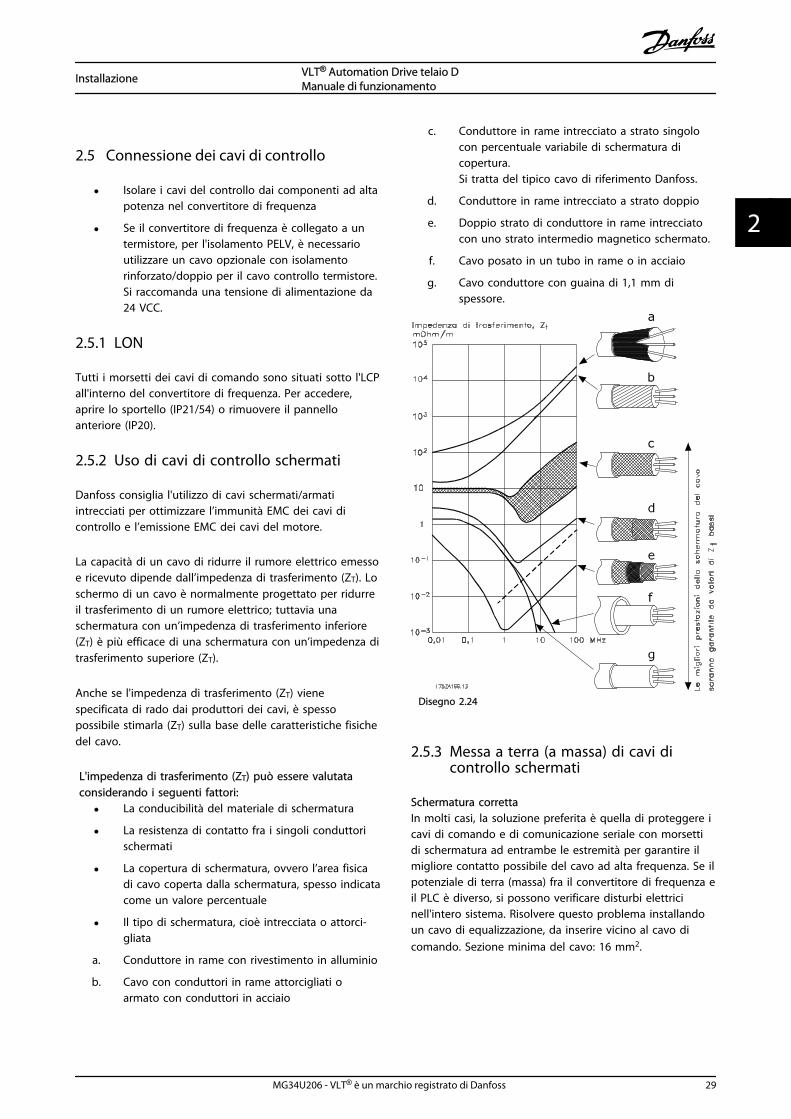
2.5.2 Uso di cavi di controllo schermati
Danfoss consiglia l'utilizzo di cavi schermati/armatiintrecciati per ottimizzare l’immunità EMC dei cavi dicontrollo e l’emissione EMC dei cavi del motore.
La capacità di un cavo di ridurre il rumore elettrico emessoe ricevuto dipende dall’impedenza di trasferimento (ZT). Loschermo di un cavo è normalmente progettato per ridurreil trasferimento di un rumore elettrico; tuttavia unaschermatura con un’impedenza di trasferimento inferiore(ZT) è più efficace di una schermatura con un’impedenza ditrasferimento superiore (ZT).
Anche se l'impedenza di trasferimento (ZT) vienespecificata di rado dai produttori dei cavi, è spessopossibile stimarla (ZT) sulla base delle caratteristiche fisichedel cavo.
L'impedenza di trasferimento (ZT) può essere valutataconsiderando i seguenti fattori:
• La conducibilità del materiale di schermatura
• La resistenza di contatto fra i singoli conduttorischermati
• La copertura di schermatura, ovvero l’area fisicadi cavo coperta dalla schermatura, spesso indicatacome un valore percentuale
• Il tipo di schermatura, cioè intrecciata o attorci-gliata
a. Conduttore in rame con rivestimento in alluminio
b. Cavo con conduttori in rame attorcigliati oarmato con conduttori in acciaio
c. Conduttore in rame intrecciato a strato singolocon percentuale variabile di schermatura dicopertura.Si tratta del tipico cavo di riferimento Danfoss.
d. Conduttore in rame intrecciato a strato doppio
e. Doppio strato di conduttore in rame intrecciatocon uno strato intermedio magnetico schermato.
f. Cavo posato in un tubo in rame o in acciaio
g. Cavo conduttore con guaina di 1,1 mm dispessore.
Disegno 2.24
2.5.3 Messa a terra (a massa) di cavi dicontrollo schermati
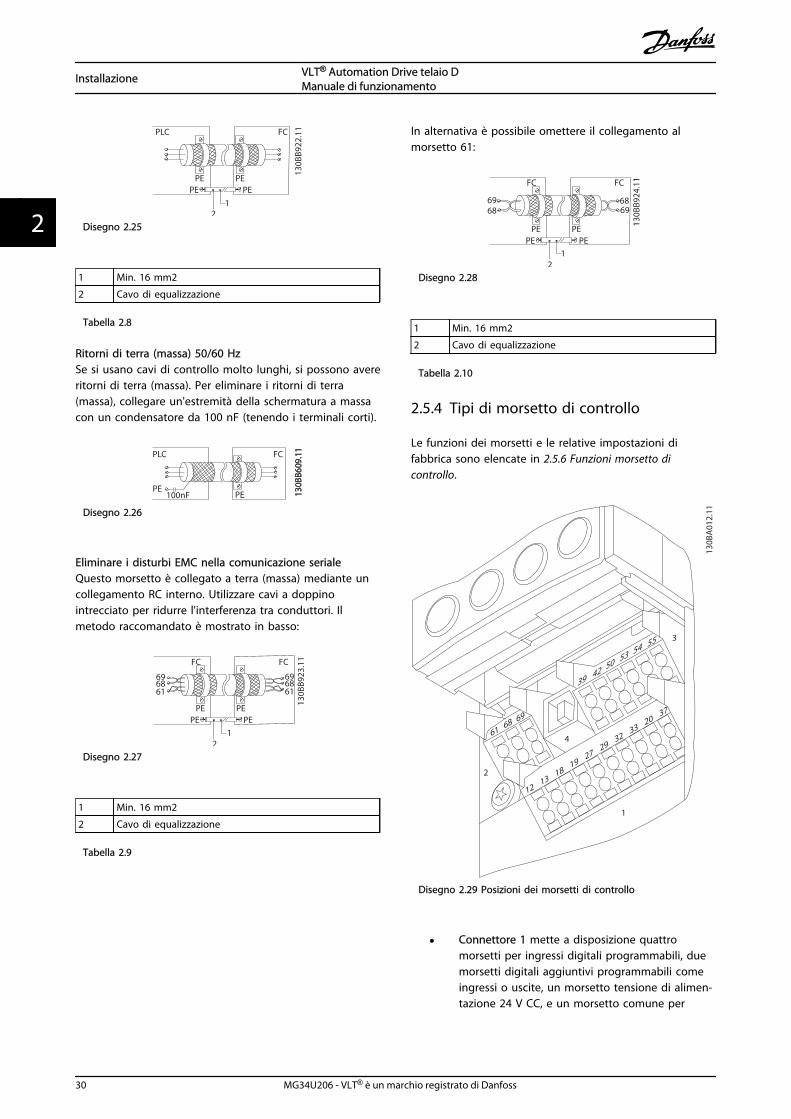
Schermatura correttaIn molti casi, la soluzione preferita è quella di proteggere icavi di comando e di comunicazione seriale con morsettidi schermatura ad entrambe le estremità per garantire ilmigliore contatto possibile del cavo ad alta frequenza. Se ilpotenziale di terra (massa) fra il convertitore di frequenza eil PLC è diverso, si possono verificare disturbi elettricinell'intero sistema. Risolvere questo problema installandoun cavo di equalizzazione, da inserire vicino al cavo dicomando. Sezione minima del cavo: 16 mm2.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 29
2 2
12
PE
FC
PE
PLC
130B
B922
.11
PE PE
Disegno 2.25
1 Min. 16 mm2
2 Cavo di equalizzazione
Tabella 2.8
Ritorni di terra (massa) 50/60 HzSe si usano cavi di controllo molto lunghi, si possono avereritorni di terra (massa). Per eliminare i ritorni di terra(massa), collegare un'estremità della schermatura a massacon un condensatore da 100 nF (tenendo i terminali corti).
100nF
FC
PEPE
PLC
130B
B609
.11
Disegno 2.26
Eliminare i disturbi EMC nella comunicazione serialeQuesto morsetto è collegato a terra (massa) mediante uncollegamento RC interno. Utilizzare cavi a doppinointrecciato per ridurre l'interferenza tra conduttori. Ilmetodo raccomandato è mostrato in basso:
PE
FC
PE
FC
130B
B923
.11
PE PE
696861
696861
12
Disegno 2.27
1 Min. 16 mm2
2 Cavo di equalizzazione
Tabella 2.9
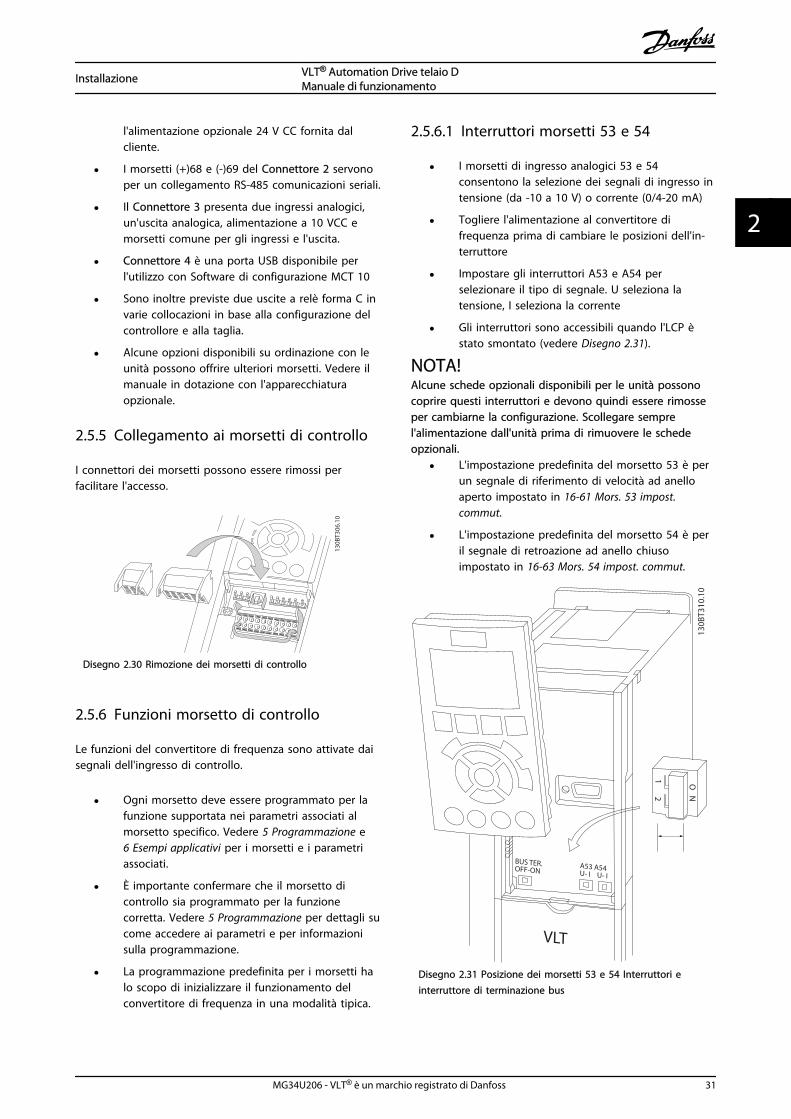
In alternativa è possibile omettere il collegamento almorsetto 61:
PE
FC
PE
FC
130B
B924
.11
PE PE
69696868
12
Disegno 2.28
1 Min. 16 mm2
2 Cavo di equalizzazione
Tabella 2.10
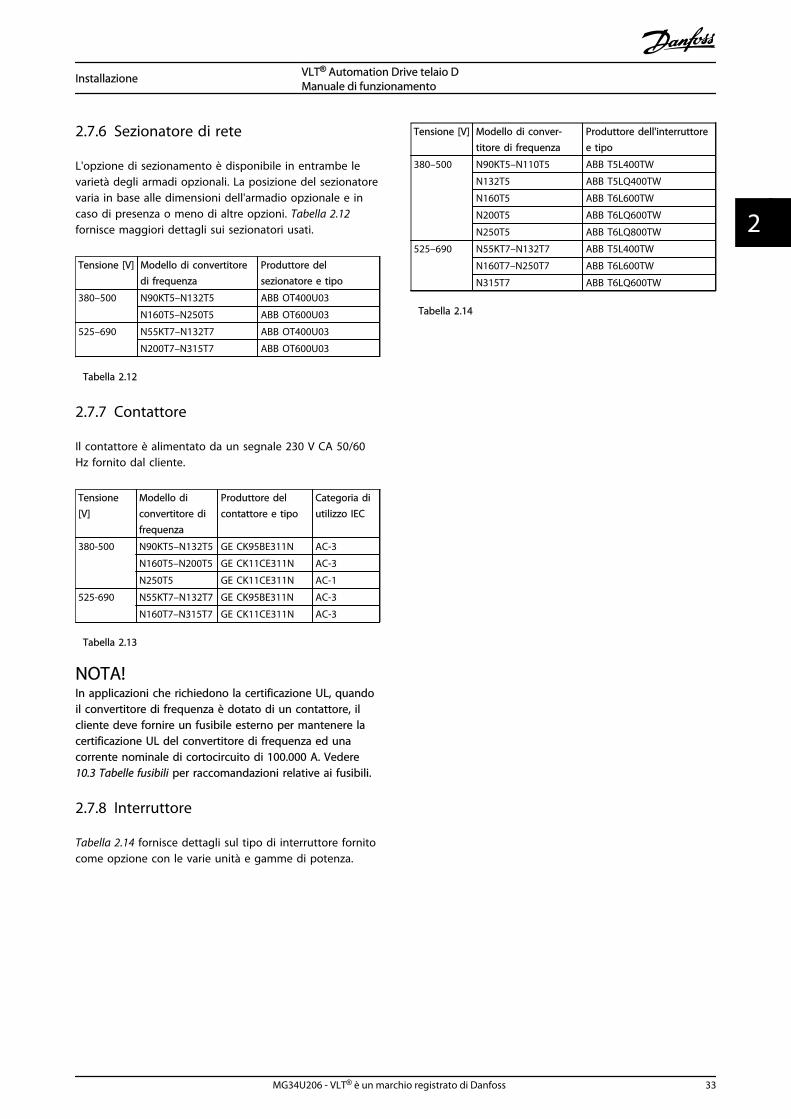
2.5.4 Tipi di morsetto di controllo
Le funzioni dei morsetti e le relative impostazioni difabbrica sono elencate in 2.5.6 Funzioni morsetto dicontrollo.
1
4
2
3
130B
A01
2.11
6168
69
3942
5053
5455
1213
1819
2729
3233
2037
Disegno 2.29 Posizioni dei morsetti di controllo
• Connettore 1 mette a disposizione quattromorsetti per ingressi digitali programmabili, duemorsetti digitali aggiuntivi programmabili comeingressi o uscite, un morsetto tensione di alimen-tazione 24 V CC, e un morsetto comune per
Installazione VLT® Automation Drive telaio DManuale di funzionamento
30 MG34U206 - VLT® è un marchio registrato di Danfoss
22
l'alimentazione opzionale 24 V CC fornita dalcliente.
• I morsetti (+)68 e (-)69 del Connettore 2 servonoper un collegamento RS-485 comunicazioni seriali.
• Il Connettore 3 presenta due ingressi analogici,un'uscita analogica, alimentazione a 10 VCC emorsetti comune per gli ingressi e l'uscita.
• Connettore 4 è una porta USB disponibile perl'utilizzo con Software di configurazione MCT 10
• Sono inoltre previste due uscite a relè forma C invarie collocazioni in base alla configurazione delcontrollore e alla taglia.
• Alcune opzioni disponibili su ordinazione con leunità possono offrire ulteriori morsetti. Vedere ilmanuale in dotazione con l'apparecchiaturaopzionale.
2.5.5 Collegamento ai morsetti di controllo
I connettori dei morsetti possono essere rimossi perfacilitare l'accesso.
130B
T306
.10
Disegno 2.30 Rimozione dei morsetti di controllo
2.5.6 Funzioni morsetto di controllo
Le funzioni del convertitore di frequenza sono attivate daisegnali dell'ingresso di controllo.
• Ogni morsetto deve essere programmato per lafunzione supportata nei parametri associati almorsetto specifico. Vedere 5 Programmazione e6 Esempi applicativi per i morsetti e i parametriassociati.
• È importante confermare che il morsetto dicontrollo sia programmato per la funzionecorretta. Vedere 5 Programmazione per dettagli sucome accedere ai parametri e per informazionisulla programmazione.
• La programmazione predefinita per i morsetti halo scopo di inizializzare il funzionamento delconvertitore di frequenza in una modalità tipica.
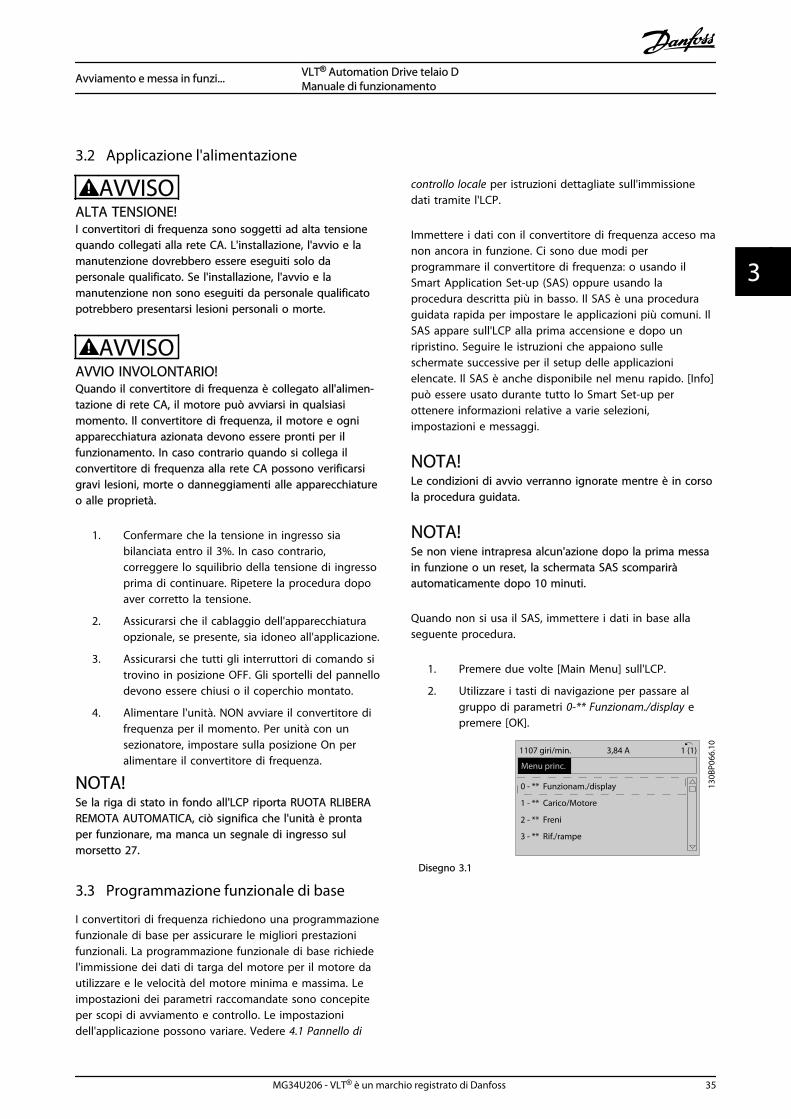
2.5.6.1 Interruttori morsetti 53 e 54
• I morsetti di ingresso analogici 53 e 54consentono la selezione dei segnali di ingresso intensione (da -10 a 10 V) o corrente (0/4-20 mA)
• Togliere l'alimentazione al convertitore difrequenza prima di cambiare le posizioni dell'in-terruttore
• Impostare gli interruttori A53 e A54 perselezionare il tipo di segnale. U seleziona latensione, I seleziona la corrente
• Gli interruttori sono accessibili quando l'LCP èstato smontato (vedere Disegno 2.31).
NOTA!Alcune schede opzionali disponibili per le unità possonocoprire questi interruttori e devono quindi essere rimosseper cambiarne la configurazione. Scollegare semprel'alimentazione dall'unità prima di rimuovere le schedeopzionali.
• L'impostazione predefinita del morsetto 53 è perun segnale di riferimento di velocità ad anelloaperto impostato in 16-61 Mors. 53 impost.commut.
• L'impostazione predefinita del morsetto 54 è peril segnale di retroazione ad anello chiusoimpostato in 16-63 Mors. 54 impost. commut.
130B
T310
.10
12 N
O
VLT
BUS TER.OFF-ON
A53 A54U- I U- I
Disegno 2.31 Posizione dei morsetti 53 e 54 Interruttori einterruttore di terminazione bus
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 31
2 2

2.6 Comunicazione seriale
L'RS-485 è un'interfaccia bus a due fili compatibile contopologia di rete multi-drop, vale a dire che i nodi possonoessere collegati come un bus oppure tramite linee didiscesa da una linea dorsale comune. Un totale di 32 nodipossono essere collegati a un segmento di rete.I ripetitori separano i vari segmenti di rete. Ciascunripetitore funziona come un nodo all'interno del segmentonel quale è installato. Ogni nodo collegato all'interno diuna data rete deve avere un indirizzo di nodo unicoattraverso tutti i segmenti.Terminare entrambe le estremità di ogni segmento,utilizzando lo switch di terminazione (S801) del conver-titore di frequenza oppure una rete resistiva polarizzata diterminazione. Utilizzare sempre un cavo a coppiaintrecciata (STP) per il cablaggio del bus e, nell'effettuarel'installazione, seguire sempre le procedure consigliate.È molto importante assicurare un collegamento a terra(massa) a bassa impedenza della schermatura incorrispondenza di ogni nodo, anche alle alte frequenze.Ciò può essere ottenuto collegando a terra (massa)un'ampia superficie della schermatura, ad esempiomediante un pressacavo o un passacavo conduttivo. Puòessere necessario utilizzare cavi di equalizzazione delpotenziale per mantenere lo stesso potenziale di terra(massa) in tutta la rete, soprattutto nelle installazioni nellequali sono presenti cavi molto lunghi.Per prevenire un disadattamento d'impedenza, utilizzaresempre lo stesso tipo di cavo in tutta la rete. Quando sicollega un motore al convertitore di frequenza, utilizzaresempre un cavo motore schermato.
Lunghezza a coppia intrecciata schermata (STP)
Impedenza 120 ΩLunghezza max cavo 1200 m (incluse le diramazioni)
500 m da stazione a stazione
Tabella 2.11
2.7 Apparecchiatura opzionale
2.7.1 Morsetti di condivisione del carico
I morsetti di condivisione del carico abilitano ilcollegamento del circuiti CC di più convertitori difrequenza. I morsetti di condivisione del carico sonodisponibili nei convertitori di frequenza IP20 e fuoriesconodalla parte superiore del convertitore di frequenza. Uncoprimorsetti, fornito con il convertitore di frequenza, deveessere installato per mantenere il valore IP20 nominaledella custodia. Disegno 2.32 mostra sia morsetti scopertiche coperti.
130B
C547
.10
Disegno 2.32 Morsetti di condivisione del carico o di rigene-razione con copertura (L) e senza (R)
2.7.2 Terminali di rigenerazione
I morsetti di rigenerazione possono essere forniti per leapplicazioni che hanno un carico rigenerativo. Un'unitàrigenerativa, fornita da una terza parte, si collega aimorsetti di rigenerazione in modo che la potenza possaessere ritrasferita alla rete, con risparmio energetico. Imorsetti di rigenerazione sono disponibili sui convertitoridi frequenza IP20 e fuoriescono dalla parte superiore delconvertitore di frequenza. Un coprimorsetti, fornito con ilconvertitore di frequenza, deve essere installato permantenere il valore IP20 nominale della custodia.Disegno 2.32 mostra sia morsetti scoperti che coperti.
2.7.3 Riscaldatore anticondensa
Un riscaldatore anticondensa può essere installatoall'interno del convertitore di frequenza per prevenire laformazione di condensa all'interno della custodia quandol'unità è spenta. Il riscaldatore è comandato in tensione a230 V CA (tensione fornita dal cliente). Per migliori risultati,utilizzare il riscaldatore solo se l'unità non è in funzione espegnerlo quando l'unità è in funzione.
2.7.4 Chopper di frenatura
Per applicazioni con carico rigenerativo può essere fornitoun chopper di frenatura. Il chopper di frenatura è collegatoa una resistenza freno che dissipa l'energia di frenatura,evitando una sovratensione di guasto sul bus CC. Ilchopper di frenatura viene automaticamente attivatoquando la tensione sul bus CC supera un livello specificato,funzione della tensione nominale del convertitore difrequenza.
2.7.5 Schermatura della rete
La schermatura di rete è una copertura di Lexan installataall'interno della custodia a garantire protezione secondo lespecifiche VBG-4.di prevenzione incidenti.
Installazione VLT® Automation Drive telaio DManuale di funzionamento
32 MG34U206 - VLT® è un marchio registrato di Danfoss
22
2.7.6 Sezionatore di rete
L'opzione di sezionamento è disponibile in entrambe levarietà degli armadi opzionali. La posizione del sezionatorevaria in base alle dimensioni dell'armadio opzionale e incaso di presenza o meno di altre opzioni. Tabella 2.12fornisce maggiori dettagli sui sezionatori usati.
Tensione [V] Modello di convertitoredi frequenza
Produttore delsezionatore e tipo
380–500 N90KT5–N132T5 ABB OT400U03
N160T5–N250T5 ABB OT600U03
525–690 N55KT7–N132T7 ABB OT400U03
N200T7–N315T7 ABB OT600U03
Tabella 2.12
2.7.7 Contattore
Il contattore è alimentato da un segnale 230 V CA 50/60Hz fornito dal cliente.
Tensione[V]
Modello diconvertitore difrequenza
Produttore delcontattore e tipo
Categoria diutilizzo IEC
380-500 N90KT5–N132T5 GE CK95BE311N AC-3
N160T5–N200T5 GE CK11CE311N AC-3
N250T5 GE CK11CE311N AC-1
525-690 N55KT7–N132T7 GE CK95BE311N AC-3
N160T7–N315T7 GE CK11CE311N AC-3
Tabella 2.13
NOTA!In applicazioni che richiedono la certificazione UL, quandoil convertitore di frequenza è dotato di un contattore, ilcliente deve fornire un fusibile esterno per mantenere lacertificazione UL del convertitore di frequenza ed unacorrente nominale di cortocircuito di 100.000 A. Vedere10.3 Tabelle fusibili per raccomandazioni relative ai fusibili.
2.7.8 Interruttore
Tabella 2.14 fornisce dettagli sul tipo di interruttore fornitocome opzione con le varie unità e gamme di potenza.
Tensione [V] Modello di conver-titore di frequenza
Produttore dell'interruttoree tipo
380–500 N90KT5–N110T5 ABB T5L400TW
N132T5 ABB T5LQ400TW
N160T5 ABB T6L600TW
N200T5 ABB T6LQ600TW
N250T5 ABB T6LQ800TW
525–690 N55KT7–N132T7 ABB T5L400TW
N160T7–N250T7 ABB T6L600TW
N315T7 ABB T6LQ600TW
Tabella 2.14
Installazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 33
2 2

3 Avviamento e messa in funzione
3.1 Pre-avvio
ATTENZIONEPrima di alimentare l'unità, controllare l'intera installazionein base a quanto riportato in Tabella 3.1. In seguitomarcare quegli elementi.
Controllare Descrizione Apparecchiaturaausiliaria
• Controllare l'apparecchiatura ausiliaria, interruttori, sezionatori o interruttori automatici/fusibili diingresso eventualmente presenti sul lato di alimentazione di ingresso del convertitore di frequenza esul lato di uscita verso il motore. Assicurarsi che sono pronti per il funzionamento a piena velocità.
• Controllare funzione e installazione di qualsiasi sensore usato per la retroazione al convertitore difrequenza
• Rimuovere i condensatori di rifasamento sui motori, se presenti
Instradamento dei cavi • Assicurarsi che l'alimentazione di ingresso, il cablaggio motore e i cavi di controllo siano separati oin tre canaline metalliche separate per l'isolamento dai disturbi ad alta frequenza.
Cavi di controllo • Controllare che non vi siano eventuali fili rotti o danneggiati e collegamenti laschi
• Controllare che i cavi di controlli siano isolati dal cablaggio di alimentazione e dai cavi motore perassicurare l'immunità ai disturbi
• Controllare la sorgente di tensione dei segnali, se necessario
• Si consiglia l'utilizzo di cavi schermati o doppini intrecciati. Assicurarsi che la schermatura siaterminata correttamente
Distanza per il raffred-damento
• Misurare lo spazio superiore e inferiore per assicurare un flusso d'aria sufficiente per il raffred-damento
Considerazioni EMC • Controllare che l'installazione sia conforme ai requisiti di compatibilità elettromagnetica
Considerazioniambientali
• Vedere l'etichetta dell'apparecchiatura per i limiti della temperatura di esercizio ambiente massima
• I livelli di umidità devono essere pari al 5-95% senza condensa
Fusibili e interruttoriautomatici
• Controllare il corretto dimensionamento di fusibili e interruttori automatici
• Controllare che tutti i fusibili siano inseriti saldamente e in condizioni ottimali di funzionamento eche tutti gli interruttori automatici siano in posizione aperta
Messa a terra(Collegamento a massa)
• L'unità richiede un filo di terra (filo di massa) collegato dallo chassis alla terra (massa) dell'edificio.
• Controllare che i collegamenti di terra (collegamenti a massa) siano serrati e non ossidati
• La messa a terra (collegamento a massa) della canalina o il montaggio del pannello posteriore suuna superficie metallica non offre una terra (massa) adeguata
Cavi di alimentazione diingresso e uscita
• Controllare se vi sono collegamenti allentati
• Controllare che il motore e la rete siano in canaline separate o in cavi schermati separati
Pannello interno • Verificare che l'interno dell'unità sia priva di sporcizia, trucioli di metallo, umidità e corrosione
Interruttori • Assicurarsi che tutti gli interruttori e sezionatori siano impostati nelle posizioni corrette
Vibrazioni • Assicurare che l'unità sia montata saldamente o che vengano usati supporti antivibrazioni, senecessario
• Controllare l'eventuale presenza di vibrazioni eccessive
Tabella 3.1 Lista di controllo Avviamento
Avviamento e messa in funzi... VLT® Automation Drive telaio DManuale di funzionamento
34 MG34U206 - VLT® è un marchio registrato di Danfoss
33
3.2 Applicazione l'alimentazione
AVVISOALTA TENSIONE!I convertitori di frequenza sono soggetti ad alta tensionequando collegati alla rete CA. L'installazione, l'avvio e lamanutenzione dovrebbero essere eseguiti solo dapersonale qualificato. Se l'installazione, l'avvio e lamanutenzione non sono eseguiti da personale qualificatopotrebbero presentarsi lesioni personali o morte.
AVVISOAVVIO INVOLONTARIO!Quando il convertitore di frequenza è collegato all'alimen-tazione di rete CA, il motore può avviarsi in qualsiasimomento. Il convertitore di frequenza, il motore e ogniapparecchiatura azionata devono essere pronti per ilfunzionamento. In caso contrario quando si collega ilconvertitore di frequenza alla rete CA possono verificarsigravi lesioni, morte o danneggiamenti alle apparecchiatureo alle proprietà.
1. Confermare che la tensione in ingresso siabilanciata entro il 3%. In caso contrario,correggere lo squilibrio della tensione di ingressoprima di continuare. Ripetere la procedura dopoaver corretto la tensione.
2. Assicurarsi che il cablaggio dell'apparecchiaturaopzionale, se presente, sia idoneo all'applicazione.
3. Assicurarsi che tutti gli interruttori di comando sitrovino in posizione OFF. Gli sportelli del pannellodevono essere chiusi o il coperchio montato.
4. Alimentare l'unità. NON avviare il convertitore difrequenza per il momento. Per unità con unsezionatore, impostare sulla posizione On peralimentare il convertitore di frequenza.
NOTA!Se la riga di stato in fondo all'LCP riporta RUOTA RLIBERAREMOTA AUTOMATICA, ciò significa che l'unità è prontaper funzionare, ma manca un segnale di ingresso sulmorsetto 27.
3.3 Programmazione funzionale di base
I convertitori di frequenza richiedono una programmazionefunzionale di base per assicurare le migliori prestazionifunzionali. La programmazione funzionale di base richiedel'immissione dei dati di targa del motore per il motore dautilizzare e le velocità del motore minima e massima. Leimpostazioni dei parametri raccomandate sono concepiteper scopi di avviamento e controllo. Le impostazionidell'applicazione possono variare. Vedere 4.1 Pannello di
controllo locale per istruzioni dettagliate sull'immissionedati tramite l'LCP.
Immettere i dati con il convertitore di frequenza acceso manon ancora in funzione. Ci sono due modi perprogrammare il convertitore di frequenza: o usando ilSmart Application Set-up (SAS) oppure usando laprocedura descritta più in basso. Il SAS è una proceduraguidata rapida per impostare le applicazioni più comuni. IlSAS appare sull'LCP alla prima accensione e dopo unripristino. Seguire le istruzioni che appaiono sulleschermate successive per il setup delle applicazionielencate. Il SAS è anche disponibile nel menu rapido. [Info]può essere usato durante tutto lo Smart Set-up perottenere informazioni relative a varie selezioni,impostazioni e messaggi.
NOTA!Le condizioni di avvio verranno ignorate mentre è in corsola procedura guidata.
NOTA!Se non viene intrapresa alcun'azione dopo la prima messain funzione o un reset, la schermata SAS scompariràautomaticamente dopo 10 minuti.
Quando non si usa il SAS, immettere i dati in base allaseguente procedura.
1. Premere due volte [Main Menu] sull'LCP.
2. Utilizzare i tasti di navigazione per passare algruppo di parametri 0-** Funzionam./display epremere [OK].
130B
P066
.10
1107 giri/min.
0 - ** Funzionam./display
1 - ** Carico/Motore
2 - ** Freni
3 - ** Rif./rampe
3,84 A 1 (1)
Menu princ.
Disegno 3.1
Avviamento e messa in funzi... VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 35
3 3
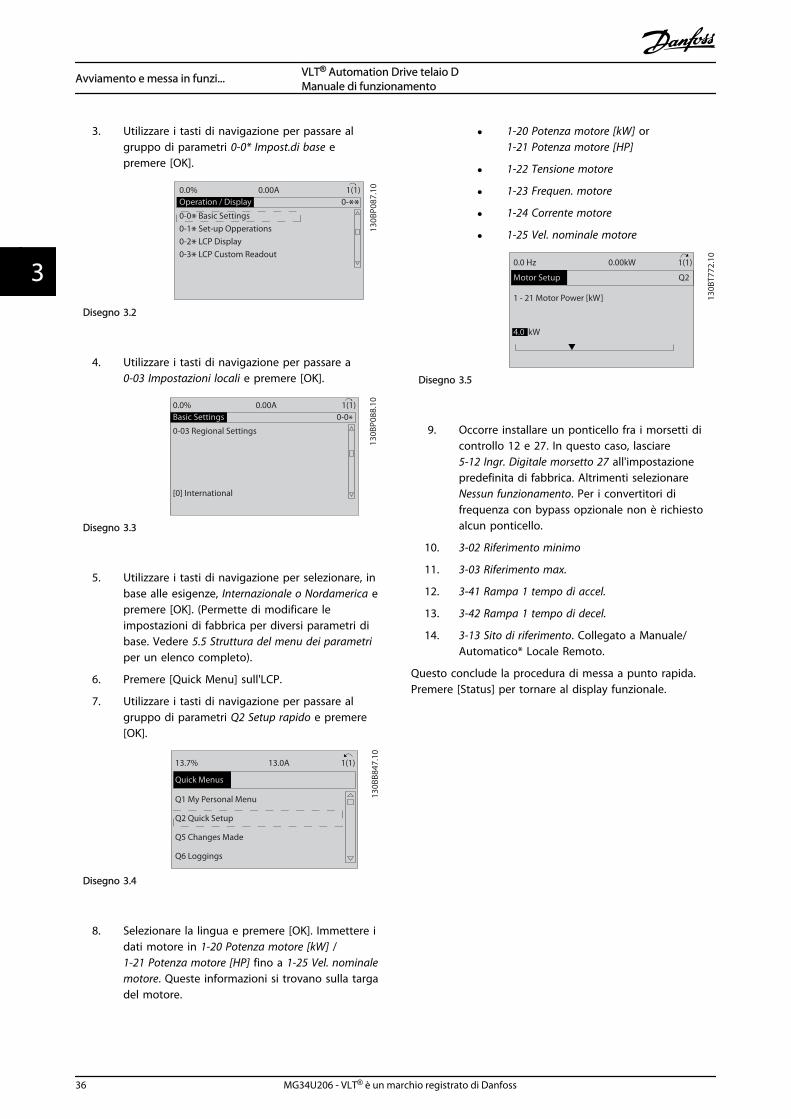
3. Utilizzare i tasti di navigazione per passare algruppo di parametri 0-0* Impost.di base epremere [OK].
0-**Operation / Display0.0%
0-0* Basic Settings
0-1* Set-up Opperations
0-2* LCP Display
0-3* LCP Custom Readout
0.00A 1(1)
130B
P087
.10
Disegno 3.2
4. Utilizzare i tasti di navigazione per passare a0-03 Impostazioni locali e premere [OK].
0-0*Basic Settings0.0%
0-03 Regional Settings
[0] International
0.00A 1(1)
130B
P088
.10
Disegno 3.3
5. Utilizzare i tasti di navigazione per selezionare, inbase alle esigenze, Internazionale o Nordamerica epremere [OK]. (Permette di modificare leimpostazioni di fabbrica per diversi parametri dibase. Vedere 5.5 Struttura del menu dei parametriper un elenco completo).
6. Premere [Quick Menu] sull'LCP.
7. Utilizzare i tasti di navigazione per passare algruppo di parametri Q2 Setup rapido e premere[OK].
130B
B847
.10
Q1 My Personal Menu
Q2 Quick Setup
Q5 Changes Made
Q6 Loggings
13.7% 13.0A 1(1)
Quick Menus
Disegno 3.4
8. Selezionare la lingua e premere [OK]. Immettere idati motore in 1-20 Potenza motore [kW] /1-21 Potenza motore [HP] fino a 1-25 Vel. nominalemotore. Queste informazioni si trovano sulla targadel motore.
• 1-20 Potenza motore [kW] or1-21 Potenza motore [HP]
• 1-22 Tensione motore
• 1-23 Frequen. motore
• 1-24 Corrente motore
• 1-25 Vel. nominale motore
130B
T772
.10
Q2
0.0 Hz 0.00kW 1(1)
Motor Setup
1 - 21 Motor Power [kW]
4.0 kW
Disegno 3.5
9. Occorre installare un ponticello fra i morsetti dicontrollo 12 e 27. In questo caso, lasciare5-12 Ingr. Digitale morsetto 27 all'impostazionepredefinita di fabbrica. Altrimenti selezionareNessun funzionamento. Per i convertitori difrequenza con bypass opzionale non è richiestoalcun ponticello.
10. 3-02 Riferimento minimo
11. 3-03 Riferimento max.
12. 3-41 Rampa 1 tempo di accel.
13. 3-42 Rampa 1 tempo di decel.
14. 3-13 Sito di riferimento. Collegato a Manuale/Automatico* Locale Remoto.
Questo conclude la procedura di messa a punto rapida.Premere [Status] per tornare al display funzionale.
Avviamento e messa in funzi... VLT® Automation Drive telaio DManuale di funzionamento
36 MG34U206 - VLT® è un marchio registrato di Danfoss
33
3.4 Test di controllo locale
ATTENZIONEAVVIAMENTO DEL MOTORE!Assicurarsi che motore, il sistema e ogni apparecchiaturacollegata siano pronti per l'avviamento. È la responsabilitàdell'utente assicurare un funzionamento sicuro in tutte lecondizioni. Se il motore, il sistema e ogni apparecchiaturacollegata non sono pronti per l'avviamento potrebberoverificarsi danneggiamenti alle apparecchiature o lesionipersonali.
NOTA!Il tasto [Hand On] trasmette un comando di avviamentolocale al convertitore di frequenza. Il tasto [Off] fornisce lafunzione di arresto.Nel funzionamento in modalità locale, [] e [] aumentanoe diminuiscono l'uscita di velocità del convertitore difrequenza. I tasti [] e [] consentono di spostare il cursoredel display numerico.
1. Premere [Hand On].
2. Accelerare il convertitore di frequenza alla pienavelocità premendo []. Spostare il cursore asinistra della virgola decimale consente diapportare modifiche più velocemente.
3. Tenere conto di tutti i problemi di accelerazione.
4. Premere [Off].
5. Tenere conto di tutti i problemi di decelerazione.
In presenza di problemi di accelerazione
• In presenza di avvisi o allarmi, vedere 8 Avvisi eallarmi
• Controllare che i dati del motore siano inseriticorrettamente
• Aumentare il tempo rampa di salita tempoaccelerazione in 3-41 Rampa 1 tempo di accel.
• Aumentare il limite di corrente in 4-18 Limite dicorrente
• Aumentare il limite di coppia in 4-16 Lim. dicoppia in modo motore
Se si sono presentati problemi di decelerazione
• In presenza di avvisi o allarmi, vedere 8 Avvisi eallarmi..
• Controllare che i dati del motore siano inseriticorrettamente.
• Aumentare il tempo rampa di discesa tempodecelerazione in 3-42 Rampa 1 tempo di decel..
• Abilitare il controllo sovratensione in2-17 Controllo sovratensione.
NOTA!L'algoritmo OVC non funziona quando si usano motori amagneti permanenti.
Vedere 4.1.1 Pannello di controllo locale per ripristinare ilconvertitore di frequenza dopo uno scatto.
NOTA!3.2 Applicazione l'alimentazione a 3.3 Programmazionefunzionale di base completano le procedure di alimen-tazione del convertitore di frequenza, la programmazionedi base, la messa a punto e il collaudo funzionale.
3.5 Avvio del sistema
La procedura descritta in questa sezione richiede ilcompletamento del cablaggio da parte dell'utente e dellaprogrammazione dell'applicazione. Vedere 6 Esempiapplicativi per il setup dell'applicazione informazioni. Siconsiglia la procedura seguente dopo il completamentodella configurazione dell'applicazione da parte dell'utente.
ATTENZIONEAVVIAMENTO DEL MOTORE!Assicurarsi che motore, sistema e ogni apparecchiaturacollegata siano pronti per l'avviamento. È la responsabilitàdell'utente assicurare un funzionamento sicuro in tutte lecondizioni. Il mancato rispetto di quanto sopra potrebbecausare lesioni personali o danni all'apparecchiatura.
1. Premere [Auto On].
2. Assicura il corretto cablaggio delle funzioni dicontrollo esterno al convertitore di frequenza eche tutta la programmazione sia completata.
3. Applicare un comando di avvio esterno.
4. Regolare il riferimento di velocità nell'intervallo divelocità.
5. Togliere il comando di avvio esterno.
6. Annotare qualsiasi problema.
In presenza di avvisi o allarmi, vedere 8 Avvisi e allarmi.
Avviamento e messa in funzi... VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 37
3 3
4 Interfaccia utente
4.1 Pannello di controllo locale
Il pannello di controllo locale (LCP) è la combinazione didisplay e tastierino sulla parte anteriore dell'unità. L'LCP èl'interfaccia utente per il convertitore di frequenza.
L'LCP possiede diverse funzioni utente.
• Avvio, arresto e regolazione della velocità nellamodalità di comando locale
• Visualizzazione dei dati di funzionamento, stato,avvisi e avvertenze
• Programmazione delle funzioni del convertitore difrequenza
• Ripristinare manualmente il convertitore difrequenza dopo un guasto quando è inattivol'autoripristino
È inoltre disponibile un LCP numerico (NLCP) opzionale.L'NLCP funziona in maniera analoga all'LCP. Consultare laGuida alla Programmazione per informazioni sull'utilizzodell'NLCP.
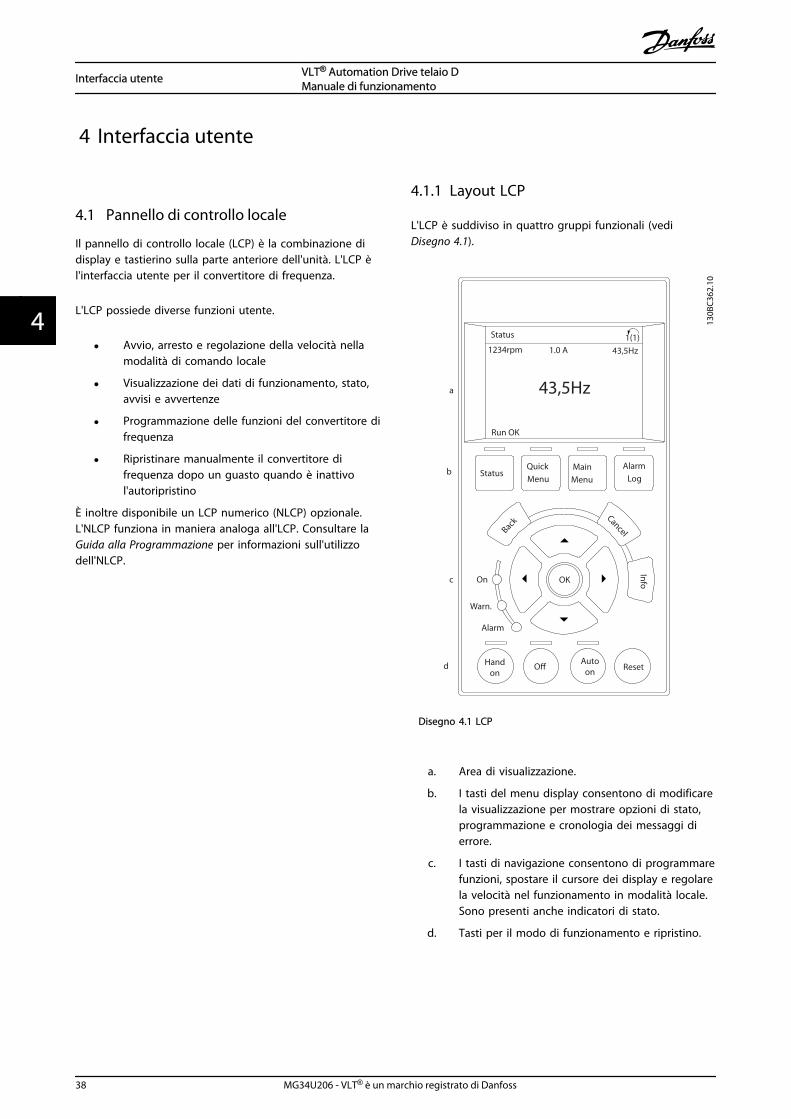
4.1.1 Layout LCP
L'LCP è suddiviso in quattro gruppi funzionali (vediDisegno 4.1).
Autoon ResetHand
onO
StatusQuickMenu
MainMenu
AlarmLog
Cancel
Info
Status 1(1)1234rpm
Back
OK
43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130B
C362
.10
a
b
c
d
1.0 A
Disegno 4.1 LCP
a. Area di visualizzazione.
b. I tasti del menu display consentono di modificarela visualizzazione per mostrare opzioni di stato,programmazione e cronologia dei messaggi dierrore.
c. I tasti di navigazione consentono di programmarefunzioni, spostare il cursore dei display e regolarela velocità nel funzionamento in modalità locale.Sono presenti anche indicatori di stato.
d. Tasti per il modo di funzionamento e ripristino.
Interfaccia utente VLT® Automation Drive telaio DManuale di funzionamento
38 MG34U206 - VLT® è un marchio registrato di Danfoss
44
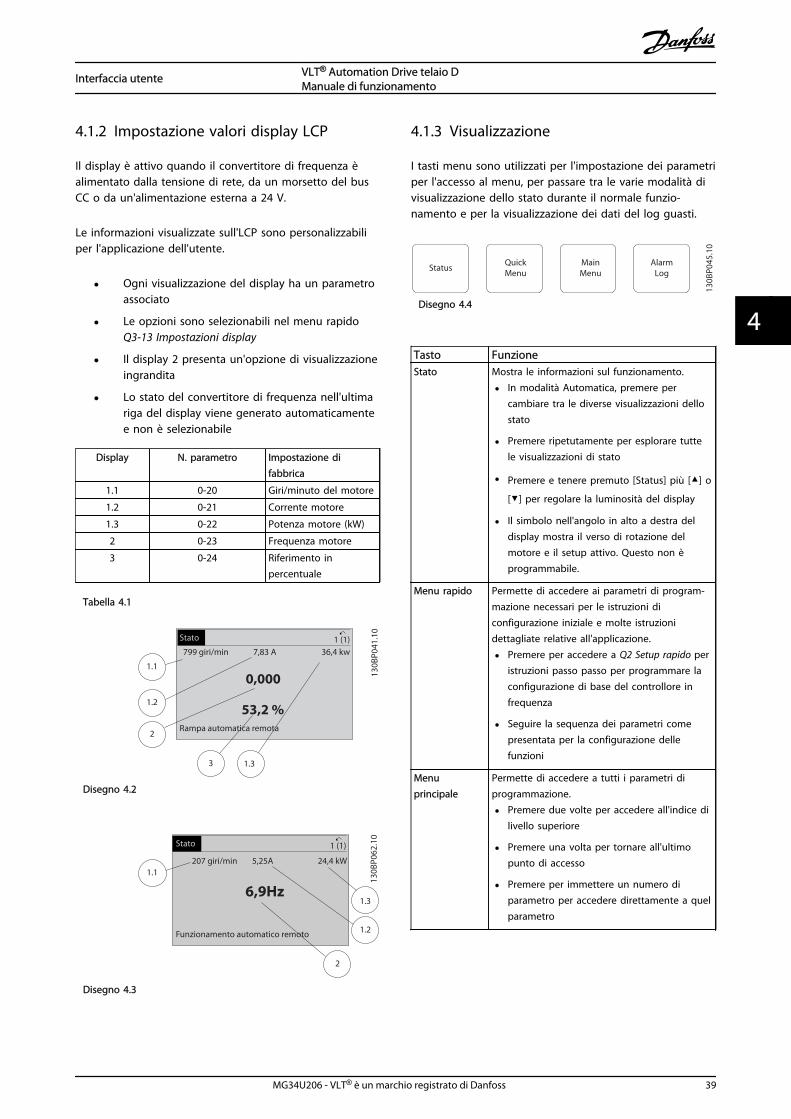
4.1.2 Impostazione valori display LCP
Il display è attivo quando il convertitore di frequenza èalimentato dalla tensione di rete, da un morsetto del busCC o da un'alimentazione esterna a 24 V.
Le informazioni visualizzate sull'LCP sono personalizzabiliper l'applicazione dell'utente.
• Ogni visualizzazione del display ha un parametroassociato
• Le opzioni sono selezionabili nel menu rapidoQ3-13 Impostazioni display
• Il display 2 presenta un'opzione di visualizzazioneingrandita
• Lo stato del convertitore di frequenza nell'ultimariga del display viene generato automaticamentee non è selezionabile
Display N. parametro Impostazione difabbrica
1.1 0-20 Giri/minuto del motore
1.2 0-21 Corrente motore
1.3 0-22 Potenza motore (kW)
2 0-23 Frequenza motore
3 0-24 Riferimento inpercentuale
Tabella 4.1
1.1
2
3 1.3
1.2
130B
P041
.10
799 giri/min
Rampa automatica remota
1 (1)36,4 kw7,83 A
0,000
53,2 %
Stato
Disegno 4.2
1.1
1.2
2
1.3
130B
P062
.10
207 giri/min
Funzionamento automatico remoto
1 (1)
24,4 kW5,25A
6,9Hz
Stato
Disegno 4.3
4.1.3 Visualizzazione
I tasti menu sono utilizzati per l'impostazione dei parametriper l'accesso al menu, per passare tra le varie modalità divisualizzazione dello stato durante il normale funzio-namento e per la visualizzazione dei dati del log guasti.
130B
P045
.10
Status QuickMenu
MainMenu
AlarmLog
Disegno 4.4
Tasto FunzioneStato Mostra le informazioni sul funzionamento.
• In modalità Automatica, premere percambiare tra le diverse visualizzazioni dellostato
• Premere ripetutamente per esplorare tuttele visualizzazioni di stato
• Premere e tenere premuto [Status] più [] o
[] per regolare la luminosità del display
• Il simbolo nell'angolo in alto a destra deldisplay mostra il verso di rotazione delmotore e il setup attivo. Questo non èprogrammabile.
Menu rapido Permette di accedere ai parametri di program-mazione necessari per le istruzioni diconfigurazione iniziale e molte istruzionidettagliate relative all'applicazione.
• Premere per accedere a Q2 Setup rapido peristruzioni passo passo per programmare laconfigurazione di base del controllore infrequenza
• Seguire la sequenza dei parametri comepresentata per la configurazione dellefunzioni
Menuprincipale
Permette di accedere a tutti i parametri diprogrammazione.
• Premere due volte per accedere all'indice dilivello superiore
• Premere una volta per tornare all'ultimopunto di accesso
• Premere per immettere un numero diparametro per accedere direttamente a quelparametro
Interfaccia utente VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 39
4 4
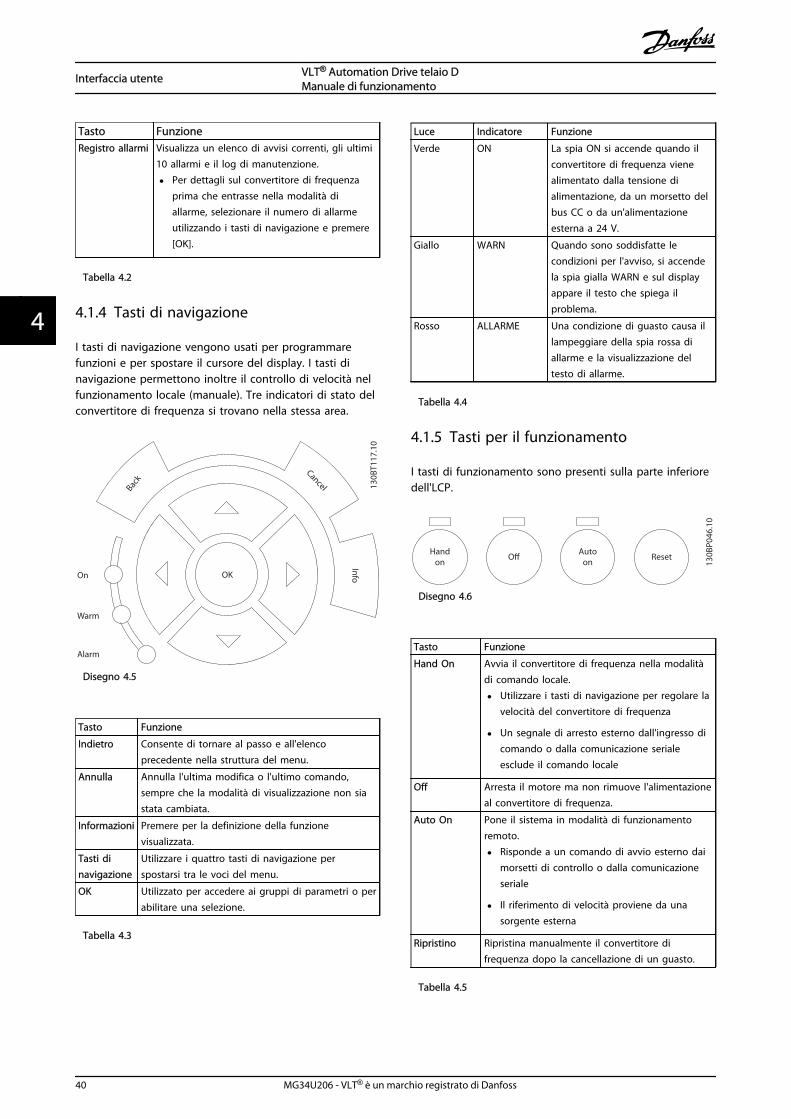
Tasto FunzioneRegistro allarmi Visualizza un elenco di avvisi correnti, gli ultimi
10 allarmi e il log di manutenzione.
• Per dettagli sul convertitore di frequenzaprima che entrasse nella modalità diallarme, selezionare il numero di allarmeutilizzando i tasti di navigazione e premere[OK].
Tabella 4.2
4.1.4 Tasti di navigazione
I tasti di navigazione vengono usati per programmarefunzioni e per spostare il cursore del display. I tasti dinavigazione permettono inoltre il controllo di velocità nelfunzionamento locale (manuale). Tre indicatori di stato delconvertitore di frequenza si trovano nella stessa area.
130B
T117
.10
OK
Back
Info
Warm
Alarm
On
Cancel
Disegno 4.5
Tasto Funzione
Indietro Consente di tornare al passo e all'elencoprecedente nella struttura del menu.
Annulla Annulla l'ultima modifica o l'ultimo comando,sempre che la modalità di visualizzazione non siastata cambiata.
Informazioni Premere per la definizione della funzionevisualizzata.
Tasti dinavigazione
Utilizzare i quattro tasti di navigazione perspostarsi tra le voci del menu.
OK Utilizzato per accedere ai gruppi di parametri o perabilitare una selezione.
Tabella 4.3
Luce Indicatore Funzione
Verde ON La spia ON si accende quando ilconvertitore di frequenza vienealimentato dalla tensione dialimentazione, da un morsetto delbus CC o da un'alimentazioneesterna a 24 V.
Giallo WARN Quando sono soddisfatte lecondizioni per l'avviso, si accendela spia gialla WARN e sul displayappare il testo che spiega ilproblema.
Rosso ALLARME Una condizione di guasto causa illampeggiare della spia rossa diallarme e la visualizzazione deltesto di allarme.
Tabella 4.4
4.1.5 Tasti per il funzionamento
I tasti di funzionamento sono presenti sulla parte inferioredell'LCP.
130B
P046
.10
Handon O Auto
on Reset
Disegno 4.6
Tasto Funzione
Hand On Avvia il convertitore di frequenza nella modalitàdi comando locale.
• Utilizzare i tasti di navigazione per regolare lavelocità del convertitore di frequenza
• Un segnale di arresto esterno dall'ingresso dicomando o dalla comunicazione serialeesclude il comando locale
Off Arresta il motore ma non rimuove l'alimentazioneal convertitore di frequenza.
Auto On Pone il sistema in modalità di funzionamentoremoto.
• Risponde a un comando di avvio esterno daimorsetti di controllo o dalla comunicazioneseriale
• Il riferimento di velocità proviene da unasorgente esterna
Ripristino Ripristina manualmente il convertitore difrequenza dopo la cancellazione di un guasto.
Tabella 4.5
Interfaccia utente VLT® Automation Drive telaio DManuale di funzionamento
40 MG34U206 - VLT® è un marchio registrato di Danfoss
44
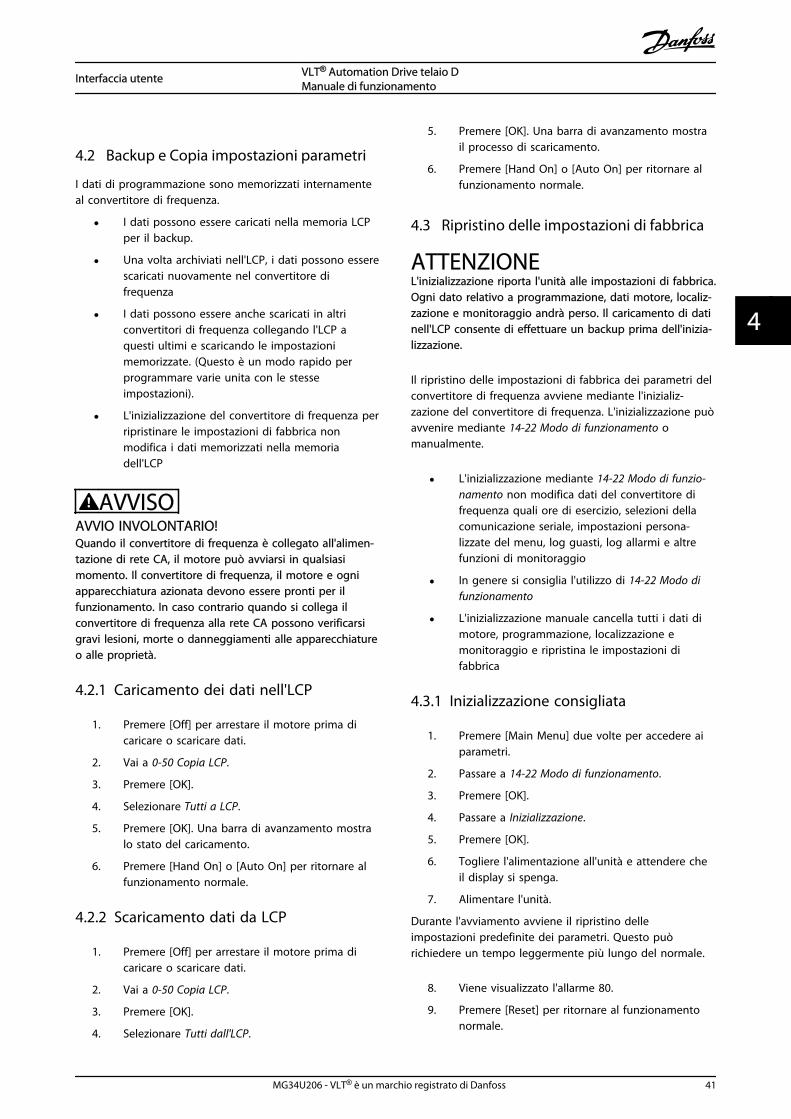
4.2 Backup e Copia impostazioni parametri
I dati di programmazione sono memorizzati internamenteal convertitore di frequenza.
• I dati possono essere caricati nella memoria LCPper il backup.
• Una volta archiviati nell'LCP, i dati possono esserescaricati nuovamente nel convertitore difrequenza
• I dati possono essere anche scaricati in altriconvertitori di frequenza collegando l'LCP aquesti ultimi e scaricando le impostazionimemorizzate. (Questo è un modo rapido perprogrammare varie unita con le stesseimpostazioni).
• L'inizializzazione del convertitore di frequenza perripristinare le impostazioni di fabbrica nonmodifica i dati memorizzati nella memoriadell'LCP
AVVISOAVVIO INVOLONTARIO!Quando il convertitore di frequenza è collegato all'alimen-tazione di rete CA, il motore può avviarsi in qualsiasimomento. Il convertitore di frequenza, il motore e ogniapparecchiatura azionata devono essere pronti per ilfunzionamento. In caso contrario quando si collega ilconvertitore di frequenza alla rete CA possono verificarsigravi lesioni, morte o danneggiamenti alle apparecchiatureo alle proprietà.
4.2.1 Caricamento dei dati nell'LCP
1. Premere [Off] per arrestare il motore prima dicaricare o scaricare dati.
2. Vai a 0-50 Copia LCP.
3. Premere [OK].
4. Selezionare Tutti a LCP.
5. Premere [OK]. Una barra di avanzamento mostralo stato del caricamento.
6. Premere [Hand On] o [Auto On] per ritornare alfunzionamento normale.
4.2.2 Scaricamento dati da LCP
1. Premere [Off] per arrestare il motore prima dicaricare o scaricare dati.
2. Vai a 0-50 Copia LCP.
3. Premere [OK].
4. Selezionare Tutti dall'LCP.
5. Premere [OK]. Una barra di avanzamento mostrail processo di scaricamento.
6. Premere [Hand On] o [Auto On] per ritornare alfunzionamento normale.
4.3 Ripristino delle impostazioni di fabbrica
ATTENZIONEL'inizializzazione riporta l'unità alle impostazioni di fabbrica.Ogni dato relativo a programmazione, dati motore, localiz-zazione e monitoraggio andrà perso. Il caricamento di datinell'LCP consente di effettuare un backup prima dell'inizia-lizzazione.
Il ripristino delle impostazioni di fabbrica dei parametri delconvertitore di frequenza avviene mediante l'inizializ-zazione del convertitore di frequenza. L'inizializzazione puòavvenire mediante 14-22 Modo di funzionamento omanualmente.
• L'inizializzazione mediante 14-22 Modo di funzio-namento non modifica dati del convertitore difrequenza quali ore di esercizio, selezioni dellacomunicazione seriale, impostazioni persona-lizzate del menu, log guasti, log allarmi e altrefunzioni di monitoraggio
• In genere si consiglia l'utilizzo di 14-22 Modo difunzionamento
• L'inizializzazione manuale cancella tutti i dati dimotore, programmazione, localizzazione emonitoraggio e ripristina le impostazioni difabbrica
4.3.1 Inizializzazione consigliata
1. Premere [Main Menu] due volte per accedere aiparametri.
2. Passare a 14-22 Modo di funzionamento.
3. Premere [OK].
4. Passare a Inizializzazione.
5. Premere [OK].
6. Togliere l'alimentazione all'unità e attendere cheil display si spenga.
7. Alimentare l'unità.
Durante l'avviamento avviene il ripristino delleimpostazioni predefinite dei parametri. Questo puòrichiedere un tempo leggermente più lungo del normale.
8. Viene visualizzato l'allarme 80.
9. Premere [Reset] per ritornare al funzionamentonormale.
Interfaccia utente VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 41
4 4

4.3.2 Inizializzazione manuale
1. Togliere l'alimentazione all'unità e attendere cheil display si spenga.
2. Tenere premuti contemporaneamente [Status] -[Main Menu] - [OK] e alimentare l'unità.
All'avvio vengono ripristinate le impostazioni predefinite difabbrica dei parametri. Questo può richiedere un tempoleggermente più lungo del normale.
L'inizializzazione manuale non ripristina le seguentiinformazioni sul convertitore di frequenza
• 15-00 Ore di funzionamento
• 15-03 Accensioni
• 15-04 Sovratemp.
• 15-05 Sovratensioni
Interfaccia utente VLT® Automation Drive telaio DManuale di funzionamento
42 MG34U206 - VLT® è un marchio registrato di Danfoss
44

5 Programmazione
5.1 Introduzione
Il convertitore di frequenza viene programmato per lefunzioni applicative mediante parametri. È possibileaccedere ai parametri premendo [Quick Menu] o [MainMenu] sull'LCP. (Vedere 4.1 Pannello di controllo locale perdettagli sull'utilizzo dei tasti funzione dell'LCP). Aiparametri è possibile accedere anche mediante PCutilizzando il Software di configurazione MCT 10 (vedere lasezione 5.6.1 Programmazione remota con Software diconfigurazione MCT 10).
Il menu rapido serve per l'avvio iniziale (Q2-** Setup rapido)e istruzioni dettagliate per le comuni applicazioni delconvertitore di frequenza (Q3-** Impostazione funzione).Sono fornite istruzioni passo passo. Queste istruzionipermettono all'utente di vedere i parametri utilizzati per laprogrammazione delle applicazioni nella corretta sequenza.I dati immessi in un parametro possono modificare leopzioni disponibili nei parametri successivamente all'im-missione. Il menu rapido presenta linee guida semplificateper la configurazione e la messa in funzione della maggiorparte dei sistemi.
Il menu principale permette di accedere a tutti i parametrie consente applicazioni avanzate con il convertitore difrequenza.
5.2 Esempio di programmazione
Segue un esempio di programmazione del convertitore difrequenza per un'applicazione comune ad anello apertoutilizzando il menu rapido.
• Questa procedura programma il convertitore difrequenza per ricevere un segnale di comandoanalogico 0-10 VCC sul morsetto di ingresso 53
• Il convertitore di frequenza risponde fornendoun'uscita 20-50 Hz al motore proporzionale alsegnale di ingresso (0-10 V CC = 20-50 Hz)
È una tipica applicazione con pompe o ventole.
Premere [Quick Menu] e selezionare i parametri seguentiutilizzando i tasti di navigazione per scorrere i titoli epremere [OK] dopo ogni azione.
1. Q3 Impostaz. funzione
2. Set di dati param.
130B
T112
.10
Q1 Menu personale
Q2 Setup rapido
Q3 Impostaz. funzione
69,3% 5,20A 1(1)
Menu rapidi
Disegno 5.1
3. Q3-2 Impostaz. anello aperto
Q3
130B
T760
.10
Q3-1 General Settings
Q3-2 Open Loop Settings
Q3-3 Closed Loop Settings
Q3-4 Application Settings
28.4% 2.05A 1(1)
Function Setups
Disegno 5.2
4. Q3-21 Riferimento Analogico
Q3-2
130B
T761
.10
Q3-20 Digital Reference
Q3-21 Analog Reference
14.7% 0.00A 1(1)
Open Loop Settings
Disegno 5.3
5. 3-02 Riferimento minimo. Impostare il riferimentominimo interno al convertitore di frequenza su 0Hz. (In questo modo si imposta la velocitàminima del convertitore di frequenza a 0 Hz).
Q3-21
130B
T762
.10
3-02 Minimum Reference
0.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Disegno 5.4
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 43
5 5

6. 3-03 Riferimento max.. Impostare il riferimentomassimo interno al convertitore di frequenza a 60Hz. (In questo modo si imposta la velocitàmassima del convertitore di frequenza a 60 Hz.Notare che 50/60 Hz è un'impostazione locale).
Q3-21
130B
T763
.11
3-03 Maximum Reference
50.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Disegno 5.5
7. 6-10 Tens. bassa morsetto 53. Impostare ilriferimento tensione esterno minimo sul morsetto53 a 0 V. (In questo modo si imposta il segnale diingresso minimo a 0 V)
Q3-21
130B
T764
.10
6-10 Terminal 53 Low
Voltage
0.00 V
14.7% 0.00A 1(1)
Analog Reference
Disegno 5.6
8. 6-11 Tensione alta morsetto 53. Impostare ilriferimento di tensione esterno massimo sulmorsetto 53 a 10 V. (In questo modo il segnaled'ingresso massimo viene impostato a 10V.)
Q3-21
130B
T765
.10
6-11 Terminal 53 High
Voltage
10.00 V
14.7% 0.00A 1(1)
Analog Reference
Disegno 5.7
9. 6-14 Rif.basso/val.retroaz.morsetto 53. Impostare ilriferimento di velocità minimo sul morsetto 53 a20 Hz. (In questo modo si segnala al convertitoredi frequenza che la tensione minima ricevuta sulmorsetto 53 (0 V) corrisponde all'uscita a 20 Hz).
130B
T773
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 14 Terminal 53 Low Ref./Feedb. Value
000020.000
Disegno 5.8
10. 6-15 Rif. alto/valore retroaz. morsetto 53. Impostareil riferimento massimo di velocità sul morsetto 53a 50 Hz. (In questo modo si segnala al conver-titore di frequenza che la tensione massimaricevuta sul morsetto 53 (10 V) corrispondeall'uscita a 50 Hz).
130B
T774
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 15 Terminal 53 High Ref./Feedb. Value
50.000
Disegno 5.9
Con un dispositivo esterno che fornisce un segnale dicomando di 0-10 V, collegato al morsetto 53 del conver-titore di frequenza, il sistema ora è pronto per ilfunzionamento.
NOTA!La barra di scorrimento a destra nell'ultima figura deldisplay si trova in fondo, a indicare che la procedura ècompletata.
Disegno 5.10 mostra le connessioni di cablaggio utilizzateper abilitare questo setup.
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
44 MG34U206 - VLT® è un marchio registrato di Danfoss
55
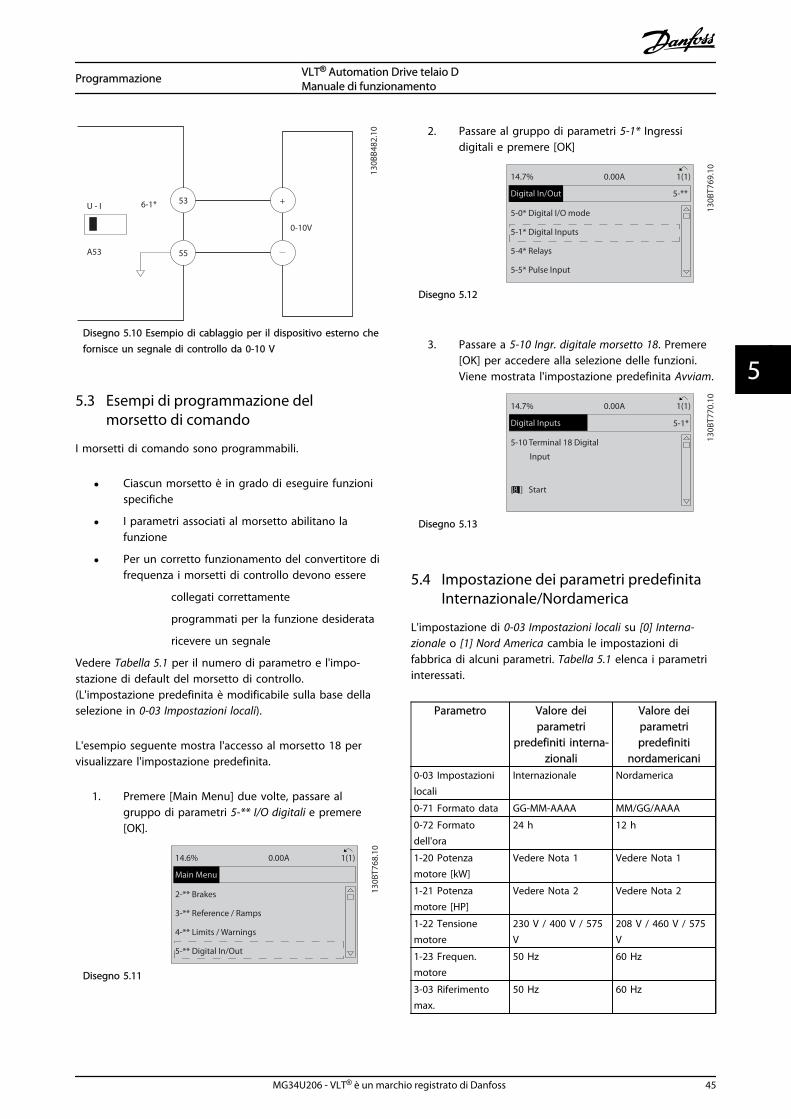
53
55
6-1* +
A53
U - I
130B
B482
.10
0-10V
Disegno 5.10 Esempio di cablaggio per il dispositivo esterno chefornisce un segnale di controllo da 0-10 V
5.3 Esempi di programmazione delmorsetto di comando
I morsetti di comando sono programmabili.
• Ciascun morsetto è in grado di eseguire funzionispecifiche
• I parametri associati al morsetto abilitano lafunzione
• Per un corretto funzionamento del convertitore difrequenza i morsetti di controllo devono essere
collegati correttamente
programmati per la funzione desiderata
ricevere un segnale
Vedere Tabella 5.1 per il numero di parametro e l'impo-stazione di default del morsetto di controllo.(L'impostazione predefinita è modificabile sulla base dellaselezione in 0-03 Impostazioni locali).
L'esempio seguente mostra l'accesso al morsetto 18 pervisualizzare l'impostazione predefinita.
1. Premere [Main Menu] due volte, passare algruppo di parametri 5-** I/O digitali e premere[OK].
130B
T768
.10
2-** Brakes
3-** Reference / Ramps
4-** Limits / Warnings
5-** Digital In/Out
14.6% 0.00A 1(1)
Main Menu
Disegno 5.11
2. Passare al gruppo di parametri 5-1* Ingressidigitali e premere [OK]
130B
T769
.10
5-0* Digital I/O mode
5-1* Digital Inputs
5-4* Relays
5-5* Pulse Input
14.7% 0.00A 1(1)
Digital In/Out 5-**
Disegno 5.12
3. Passare a 5-10 Ingr. digitale morsetto 18. Premere[OK] per accedere alla selezione delle funzioni.Viene mostrata l'impostazione predefinita Avviam.
5-1*
130B
T770
.10
5-10 Terminal 18 Digital
Input
[8]] Start
14.7% 0.00A 1(1)
Digital Inputs
Disegno 5.13
5.4 Impostazione dei parametri predefinitaInternazionale/Nordamerica
L'impostazione di 0-03 Impostazioni locali su [0] Interna-zionale o [1] Nord America cambia le impostazioni difabbrica di alcuni parametri. Tabella 5.1 elenca i parametriinteressati.
Parametro Valore deiparametri
predefiniti interna-zionali
Valore deiparametripredefiniti
nordamericani0-03 Impostazionilocali
Internazionale Nordamerica
0-71 Formato data GG-MM-AAAA MM/GG/AAAA
0-72 Formatodell'ora
24 h 12 h
1-20 Potenzamotore [kW]
Vedere Nota 1 Vedere Nota 1
1-21 Potenzamotore [HP]
Vedere Nota 2 Vedere Nota 2
1-22 Tensionemotore
230 V / 400 V / 575V
208 V / 460 V / 575V
1-23 Frequen.motore
50 Hz 60 Hz
3-03 Riferimentomax.
50 Hz 60 Hz
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 45
5 5
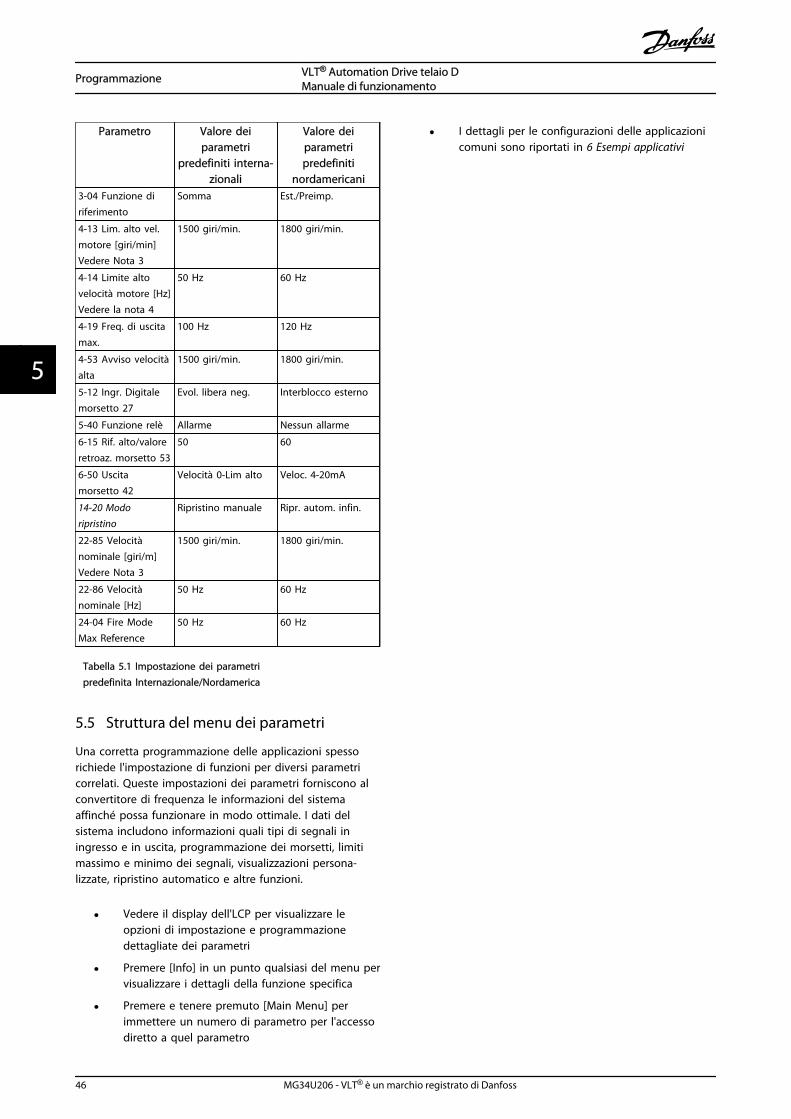
Parametro Valore deiparametri
predefiniti interna-zionali
Valore deiparametripredefiniti
nordamericani3-04 Funzione diriferimento
Somma Est./Preimp.
4-13 Lim. alto vel.motore [giri/min]Vedere Nota 3
1500 giri/min. 1800 giri/min.
4-14 Limite altovelocità motore [Hz]Vedere la nota 4
50 Hz 60 Hz
4-19 Freq. di uscitamax.
100 Hz 120 Hz
4-53 Avviso velocitàalta
1500 giri/min. 1800 giri/min.
5-12 Ingr. Digitalemorsetto 27
Evol. libera neg. Interblocco esterno
5-40 Funzione relè Allarme Nessun allarme
6-15 Rif. alto/valoreretroaz. morsetto 53
50 60
6-50 Uscitamorsetto 42
Velocità 0-Lim alto Veloc. 4-20mA
14-20 Modoripristino
Ripristino manuale Ripr. autom. infin.
22-85 Velocitànominale [giri/m]Vedere Nota 3
1500 giri/min. 1800 giri/min.
22-86 Velocitànominale [Hz]
50 Hz 60 Hz
24-04 Fire ModeMax Reference
50 Hz 60 Hz
Tabella 5.1 Impostazione dei parametripredefinita Internazionale/Nordamerica
5.5 Struttura del menu dei parametri
Una corretta programmazione delle applicazioni spessorichiede l'impostazione di funzioni per diversi parametricorrelati. Queste impostazioni dei parametri forniscono alconvertitore di frequenza le informazioni del sistemaaffinché possa funzionare in modo ottimale. I dati delsistema includono informazioni quali tipi di segnali iningresso e in uscita, programmazione dei morsetti, limitimassimo e minimo dei segnali, visualizzazioni persona-lizzate, ripristino automatico e altre funzioni.
• Vedere il display dell'LCP per visualizzare leopzioni di impostazione e programmazionedettagliate dei parametri
• Premere [Info] in un punto qualsiasi del menu pervisualizzare i dettagli della funzione specifica
• Premere e tenere premuto [Main Menu] perimmettere un numero di parametro per l'accessodiretto a quel parametro
• I dettagli per le configurazioni delle applicazionicomuni sono riportati in 6 Esempi applicativi
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
46 MG34U206 - VLT® è un marchio registrato di Danfoss
55
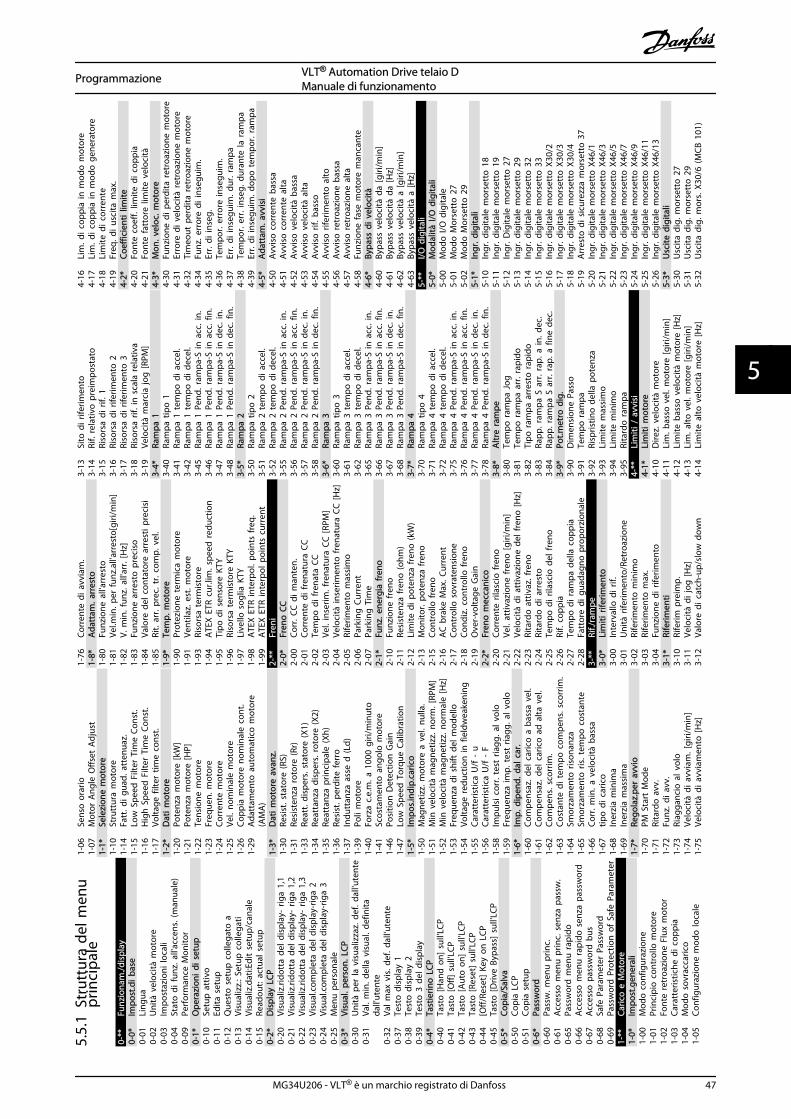
5.5.
1St
rutt
ura
del m
enu
prin
cipa
le
0-**
Funz
iona
m./d
ispl
ay0-
0*Im
post
.di b
ase
0-01
Ling
ua0-
02U
nità
vel
ocità
mot
ore
0-03
Impo
staz
ioni
loca
li0-
04St
ato
di f
unz.
all'
acce
ns. (
man
uale
)0-
09Pe
rfor
man
ce M
onito
r0-
1*O
pera
zion
i di s
etup
0-10
Setu
p a
ttiv
o0-
11Ed
ita s
etup
0-12
Que
sto
set
up c
olle
gato
a0-
13Vi
sual
izz.
: Set
up c
olle
gati
0-14
Visu
aliz
.dat
i:Edi
t se
tup/
cana
le0-
15Re
adou
t: a
ctua
l set
up0-
2*D
ispl
ay L
CP0-
20Vi
sual
iz.ri
dott
a de
l dis
play
- rig
a 1,
10-
21Vi
sual
iz.ri
dott
a de
l dis
play
- rig
a 1,
20-
22Vi
sual
iz.ri
dott
a de
l dis
play
- rig
a 1,
30-
23Vi
sual
.com
plet
a de
l dis
play
-rig
a 2
0-24
Visu
al.c
ompl
eta
del d
ispl
ay-r
iga
30-
25M
enu
per
sona
le0-
3*Vi
sual
. per
son.
LCP
0-30
Uni
tà p
er la
vis
ualiz
zaz.
def
. dal
l'ute
nte
0-31
Val.
min
. del
la v
isua
l. de
finita
dall'
uten
te0-
32Va
l max
vis
. def
. dal
l‘ute
nte
0-37
Test
o d
ispl
ay 1
0-38
Test
o d
ispl
ay 2
0-39
Test
o 3
del
dis
play
0-4*
Tast
ierin
o L
CP0-
40Ta
sto
[Han
d o
n] s
ull'L
CP0-
41Ta
sto
[Off]
sul
l'LCP
0-42
Tast
o [A
uto
on]
sul
l'LCP
0-43
Tast
o [R
eset
] su
ll'LC
P0-
44[O
ff/Re
set]
Key
on
LCP
0-45
Tast
o [D
rive
Bypa
ss]
sull'
LCP
0-5*
Copi
a/Sa
lva
0-50
Copi
a LC
P0-
51Co
pia
setu
p0-
6*Pa
ssw
ord
0-60
Pass
w. m
enu
prin
c.0-
61A
cces
so m
enu
prin
c. s
enza
pas
sw.
0-65
Pass
wor
d m
enu
rap
ido
0-66
Acc
esso
men
u r
apid
o s
enza
pas
swor
d0-
67A
cces
so p
assw
ord
bus
0-68
Safe
Par
amet
er P
assw
ord
0-69
Pass
wor
d P
rote
ctio
n o
f Sa
fe P
aram
eter
1-**
Caric
o e
Mot
ore
1-0*
Impo
st.g
ener
ali
1-00
Mod
o c
onfig
uraz
ione
1-01
Prin
cipi
o c
ontr
ollo
mot
ore
1-02
Font
e re
troa
zion
e Fl
ux m
otor
1-03
Cara
tter
istic
he d
i cop
pia
1-04
Mod
o s
ovra
ccar
ico
1-05
Conf
igur
azio
ne m
odo
loca
le
1-06
Sens
o o
rario
1-07
Mot
or A
ngle
Offs
et A
djus
t1-
1*Se
lezi
one
mot
ore
1-10
Stru
ttur
a m
otor
e1-
14Fa
tt. d
i gua
d. a
tten
uaz.
1-15
Low
Spe
ed F
ilter
Tim
e Co
nst.
1-16
Hig
h S
peed
Filt
er T
ime
Cons
t.1-
17Vo
ltage
filte
r tim
e co
nst.
1-2*
Dat
i mot
ore
1-20
Pote
nza
mot
ore
[kW
]1-
21Po
tenz
a m
otor
e [H
P]1-
22Te
nsio
ne m
otor
e1-
23Fr
eque
n. m
otor
e1-
24Co
rren
te m
otor
e1-
25Ve
l. no
min
ale
mot
ore
1-26
Copp
ia m
otor
e no
min
ale
cont
.1-
29A
datt
amen
to a
utom
atic
o m
otor
e(A
MA
)1-
3*D
ati m
otor
e av
anz.
1-30
Resi
st. s
tato
re (R
S)1-
31Re
sist
enza
rot
ore
(Rr)
1-33
Reat
t. d
ispe
rs. s
tato
re (X
1)1-
34Re
atta
nza
disp
ers.
rot
ore
(X2)
1-35
Reat
tanz
a pr
inci
pale
(Xh)
1-36
Resi
st. p
erdi
te fe
rro
1-37
Indu
ttan
za a
sse
d (L
d)1-
39Po
li m
otor
e1-
40Fo
rza
c.e.
m. a
100
0 gi
ri/m
inut
o1-
41Sc
osta
men
to a
ngol
o m
otor
e1-
46Po
sitio
n D
etec
tion
Gai
n1-
47Lo
w S
peed
Tor
que
Calib
ratio
n1-
5*Im
pos.
indi
p.ca
rico
1-50
Mag
netiz
z. m
otor
e a
vel.
nulla
.1-
51M
in v
eloc
ità m
agne
tizz.
nor
m. [
RPM
]1-
52M
in v
eloc
ità m
agne
tizz.
nor
mal
e [H
z]1-
53Fr
eque
nza
di s
hift
del
mod
ello
1-54
Volta
ge r
educ
tion
in fi
eldw
eake
ning
1-55
Cara
tter
istic
a U
/f -
u1-
56Ca
ratt
eris
tica
U/f
- F
1-58
Impu
lsi c
orr.
tes
t ria
gg. a
l vol
o1-
59Fr
eque
nza
imp.
tes
t ria
gg. a
l vol
o1-
6*Im
p. d
ipen
d. d
al c
ar.
1-60
Com
pens
az. d
el c
aric
o a
bas
sa v
el.
1-61
Com
pens
az. d
el c
aric
o a
d a
lta v
el.
1-62
Com
pens
. sco
rrim
.1-
63Co
stan
te d
i tem
po c
ompe
ns. s
corr
im.
1-64
Smor
zam
ento
ris
onan
za1-
65Sm
orza
men
to r
is. t
empo
cos
tant
e1-
66Co
rr. m
in. a
vel
ocità
bas
sa1-
67tip
o d
i car
ico
1-68
Iner
zia
min
ima
1-69
Iner
zia
mas
sim
a1-
7*Re
gola
z.pe
r av
vio
1-70
PM S
tart
Mod
e1-
71Ri
tard
o a
vv.
1-72
Funz
. di a
vv.
1-73
Riag
ganc
io a
l vol
o1-
74Ve
loci
tà d
i avv
iam
. [gi
ri/m
in]
1-75
Velo
cità
di a
vvia
men
to [H
z]
1-76
Corr
ente
di a
vvia
m.
1-8*
Ada
ttam
. arr
esto
1-80
Funz
ione
all'
arre
sto
1-81
Vel.m
in. p
er fu
nz.a
ll'ar
rest
o[gi
ri/m
in]
1-82
V. m
in. f
unz.
all'
arr.
[Hz]
1-83
Funz
ione
arr
esto
pre
ciso
1-84
Valo
re d
el c
onta
tore
arr
esti
pre
cisi
1-85
Rit.
arr
. pre
c. t
r. c
omp.
vel
.1-
9*Te
mp.
mot
ore
1-90
Prot
ezio
ne t
erm
ica
mot
ore
1-91
Vent
ilaz.
est
. mot
ore
1-93
Riso
rsa
term
isto
re1-
94A
TEX
ETR
cur
.lim
. spe
ed r
educ
tion
1-95
Tipo
di s
enso
re K
TY1-
96Ri
sors
a te
rmis
tore
KTY
1-97
Live
llo s
oglia
KTY
1-98
ATE
X E
TR in
terp
ol. p
oint
s fr
eq.
1-99
ATE
X E
TR in
terp
ol p
oint
s cu
rren
t2-
**Fr
eni
2-0*
Fren
o C
C2-
00Co
rr. C
C d
i man
ten.
2-01
Corr
ente
di f
rena
tura
CC
2-02
Tem
po d
i fre
nata
CC
2-03
Vel.
inse
rim. f
rena
tura
CC
[RPM
]2-
04Ve
loci
tà in
serim
ento
fren
atur
a CC
[Hz]
2-05
Rife
rimen
to m
assi
mo
2-06
Park
ing
Cur
rent
2-07
Park
ing
Tim
e2-
1*Fu
nz. e
nerg
ia fr
eno
2-10
Funz
ione
fren
o2-
11Re
sist
enza
fren
o (o
hm)
2-12
Lim
ite d
i pot
enza
fren
o (k
W)
2-13
Mon
itor.
pot
enza
fren
o2-
15Co
ntro
llo fr
eno
2-16
AC
bra
ke M
ax. C
urre
nt2-
17Co
ntro
llo s
ovra
tens
ione
2-18
Cond
iz. c
ontr
ollo
fren
o2-
19O
ver-
volta
ge G
ain
2-2*
Fren
o m
ecca
nico
2-20
Corr
ente
rila
scio
fren
o2-
21Ve
l. at
tivaz
ione
fren
o [g
iri/m
in]
2-22
Velo
cità
di a
ttiv
azio
ne d
el fr
eno
[Hz]
2-23
Rita
rdo
att
ivaz
. fre
no2-
24Ri
tard
o d
i arr
esto
2-25
Tem
po d
i rila
scio
del
fren
o2-
26Ri
f. co
ppia
2-27
Tem
po d
i ram
pa d
ella
cop
pia
2-28
Fatt
ore
di g
uada
gno
pro
porz
iona
le3-
**Ri
f./ra
mpe
3-0*
Lim
iti r
iferim
ento
3-00
Inte
rval
lo d
i rif.
3-01
Uni
tà r
iferim
ento
/Ret
roaz
ione
3-02
Rife
rimen
to m
inim
o3-
03Ri
ferim
ento
max
.3-
04Fu
nzio
ne d
i rife
rimen
to3-
1*Ri
ferim
enti
3-10
Rife
rim p
reim
p.3-
11Ve
loci
tà d
i jog
[Hz]
3-12
Valo
re d
i cat
ch-u
p/sl
ow d
own
3-13
Sito
di r
iferim
ento
3-14
Rif.
rela
tivo
pre
impo
stat
o3-
15Ri
sors
a di
rif.
13-
16Ri
sors
a di
rife
rimen
to 2
3-17
Riso
rsa
di r
iferim
ento
33-
18Ri
sors
a rif
. in
sca
la r
elat
iva
3-19
Velo
cità
mar
cia
jog
[RPM
]3-
4*Ra
mpa
13-
40Ra
mpa
tip
o 1
3-41
Ram
pa 1
tem
po d
i acc
el.
3-42
Ram
pa 1
tem
po d
i dec
el.
3-45
Ram
pa 1
Pen
d. r
ampa
-S in
acc
. in.
3-46
Ram
pa 1
Pen
d. r
ampa
-S in
acc
. fin
.3-
47Ra
mpa
1 P
end.
ram
pa-S
in d
ec. i
n.3-
48Ra
mpa
1 P
end.
ram
pa-S
in d
ec. f
in.
3-5*
Ram
pa 2
3-50
Ram
pa t
ipo
23-
51Ra
mpa
2 t
empo
di a
ccel
.3-
52Ra
mpa
2 t
empo
di d
ecel
.3-
55Ra
mpa
2 P
end.
ram
pa-S
in a
cc. i
n.3-
56Ra
mpa
2 P
end.
ram
pa-S
in a
cc. f
in.
3-57
Ram
pa 2
Pen
d. r
ampa
-S in
dec
. in.
3-58
Ram
pa 2
Pen
d. r
ampa
-S in
dec
. fin
.3-
6*Ra
mpa
33-
60Ra
mpa
tip
o 3
3-61
Ram
pa 3
tem
po d
i acc
el.
3-62
Ram
pa 3
tem
po d
i dec
el.
3-65
Ram
pa 3
Pen
d. r
ampa
-S in
acc
. in.
3-66
Ram
pa 3
Pen
d. r
ampa
-S in
acc
. fin
.3-
67Ra
mpa
3 P
end.
ram
pa-S
in d
ec. i
n.3-
68Ra
mpa
3 P
end.
ram
pa-S
in d
ec. f
in.
3-7*
Ram
pa 4
3-70
Ram
pa t
ipo
43-
71Ra
mpa
4 t
empo
di a
ccel
.3-
72Ra
mpa
4 t
empo
di d
ecel
.3-
75Ra
mpa
4 P
end.
ram
pa-S
in a
cc. i
n.3-
76Ra
mpa
4 P
end.
ram
pa-S
in a
cc. f
in.
3-77
Ram
pa 4
Pen
d. r
ampa
-S in
dec
. in.
3-78
Ram
pa 4
Pen
d. r
ampa
-S in
dec
. fin
.3-
8*A
ltre
ram
pe3-
80Te
mpo
ram
pa J
og3-
81Te
mpo
ram
pa a
rr. r
apid
o3-
82Ti
po r
ampa
arr
esto
rap
ido
3-83
Rapp
. ram
pa S
arr
. rap
. a in
. dec
.3-
84Ra
pp. r
ampa
S a
rr. r
ap. a
fine
dec
.3-
9*Po
t.met
ro d
ig.
3-90
Dim
ensi
one
Pass
o3-
91Te
mpo
ram
pa3-
92Ri
spris
tino
del
la p
oten
za3-
93Li
mite
mas
sim
o3-
94Li
mite
min
imo
3-95
Rita
rdo
ram
pa4-
**Li
miti
/ a
vvis
i4-
1*Li
miti
mot
ore
4-10
Dire
z. v
eloc
ità m
otor
e4-
11Li
m. b
asso
vel
. mot
ore
[giri
/min
]4-
12Li
mite
bas
so v
eloc
ità m
otor
e [H
z]4-
13Li
m. a
lto v
el. m
otor
e [g
iri/m
in]
4-14
Lim
ite a
lto v
eloc
ità m
otor
e [H
z]
4-16
Lim
. di c
oppi
a in
mod
o m
otor
e4-
17Li
m. d
i cop
pia
in m
odo
gen
erat
ore
4-18
Lim
ite d
i cor
rent
e4-
19Fr
eq. d
i usc
ita m
ax.
4-2*
Coef
ficie
nti l
imite
4-20
Font
e co
eff.
limite
di c
oppi
a4-
21Fo
nte
fatt
ore
limite
vel
ocità
4-3*
Mon
. vel
oc. m
otor
e4-
30Fu
nzio
ne d
i per
dita
ret
roaz
ione
mot
ore
4-31
Erro
re d
i vel
ocità
ret
roaz
ione
mot
ore
4-32
Tim
eout
per
dita
ret
roaz
ione
mot
ore
4-34
Funz
. err
ore
di in
segu
im.
4-35
Err.
di i
nseg
.4-
36Te
mpo
r. e
rror
e in
segu
im.
4-37
Err.
di i
nseg
uim
. dur
. ram
pa4-
38Te
mpo
r. e
rr. i
nseg
. dur
ante
la r
ampa
4-39
Err.
di i
nseg
uim
. dop
o t
empo
r. r
ampa
4-5*
Ada
ttam
. avv
isi
4-50
Avv
iso
cor
rent
e ba
ssa
4-51
Avv
iso
cor
rent
e al
ta4-
52A
vvis
o v
eloc
ità b
assa
4-53
Avv
iso
vel
ocità
alta
4-54
Avv
iso
rif.
bas
so4-
55A
vvis
o r
iferim
ento
alto
4-56
Avv
iso
ret
roaz
ione
bas
sa4-
57A
vvis
o r
etro
azio
ne a
lta4-
58Fu
nzio
ne fa
se m
otor
e m
anca
nte
4-6*
Bypa
ss d
i vel
ocità
4-60
Bypa
ss v
eloc
ità d
a [g
iri/m
in]
4-61
Bypa
ss v
eloc
ità d
a [H
z]4-
62By
pass
vel
ocità
a [g
iri/m
in]
4-63
Bypa
ss v
eloc
ità a
[Hz]
5-**
I/O d
igita
li5-
0*M
odal
ità I/
O d
igita
li5-
00M
odo
I/O
dig
itale
5-01
Mod
o M
orse
tto
27
5-02
Mod
o M
orse
tto
29
5-1*
Ingr
. dig
itali
5-10
Ingr
. dig
itale
mor
sett
o 1
85-
11In
gr. d
igita
le m
orse
tto
19
5-12
Ingr
. Dig
itale
mor
sett
o 2
75-
13In
gr. d
igita
le m
orse
tto
29
5-14
Ingr
. dig
itale
mor
sett
o 3
25-
15In
gr. d
igita
le m
orse
tto
33
5-16
Ingr
. dig
itale
mor
sett
o X
30/2
5-17
Ingr
. dig
itale
mor
sett
o X
30/3
5-18
Ingr
. dig
itale
mor
sett
o X
30/4
5-19
Arr
esto
di s
icur
ezza
mor
sett
o 3
75-
20In
gr. d
igita
le m
orse
tto
X46
/15-
21In
gr. d
igita
le m
orse
tto
X46
/35-
22In
gr. d
igita
le m
orse
tto
X46
/55-
23In
gr. d
igita
le m
orse
tto
X46
/75-
24In
gr. d
igita
le m
orse
tto
X46
/95-
25In
gr. d
igita
le m
orse
tto
X46
/11
5-26
Ingr
. dig
itale
mor
sett
o X
46/1
35-
3*U
scite
dig
itali
5-30
Usc
ita d
ig. m
orse
tto
27
5-31
Usc
ita d
ig. m
orse
tto
29
5-32
Usc
ita d
ig. m
ors.
X30
/6 (M
CB 1
01)
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 47
5 5

5-33
Usc
ita d
ig. m
ors.
X30
/7 (M
CB 1
01)
5-4*
Relè
5-40
Funz
ione
rel
è5-
41Ri
tard
o a
ttiv
., re
lè5-
42Ri
tard
o d
isat
t., r
elè
5-5*
Ingr
. im
puls
i5-
50Fr
eque
nza
bass
a m
orse
tto
29
5-51
Freq
uenz
a al
ta m
ors.
29
5-52
Rif.
bass
o/va
l. re
troa
z. m
orse
tto
29
5-53
Rif.
alto
/val
. ret
roaz
. mor
sett
o 2
95-
54Te
mpo
cos
tant
e de
l filt
ro im
puls
i #29
5-55
Freq
uenz
a ba
ssa
mor
sett
o 3
35-
56Fr
eque
nza
alta
mor
s. 3
35-
57Ri
f. ba
sso/
val.
retr
oaz.
mor
sett
o 3
35-
58Ri
f. al
to/v
al. r
etro
az. m
orse
tto
33
5-59
Tem
po c
osta
nte
del f
itro
impu
lsi #
335-
6*U
scita
impu
lsi
5-60
Usc
ita im
puls
i var
iabi
le m
orse
tto
27
5-62
Freq
. max
. usc
ita im
puls
i #27
5-63
Usc
ita im
puls
i var
iabi
le m
orse
tto
29
5-65
Freq
. max
. usc
ita im
puls
i #29
5-66
Usc
ita im
p. v
aria
bile
mor
s. X
30/6
5-68
Freq
. max
. usc
ita im
puls
i #X3
0/6
5-7*
Ingr
. enc
oder
24V
5-70
Term
32/
33 Im
puls
i per
giro
5-71
Dire
z. e
ncod
er m
ors.
32/
335-
8*U
scita
enc
oder
5-80
AH
F Ca
p R
econ
nect
Del
ay5-
9*Co
ntro
llato
da
bus
5-90
Cont
rollo
bus
dig
itale
e a
rel
è5-
93Co
ntro
llo b
us u
scita
impu
lsi #
275-
94Pr
eim
p. t
imeo
ut u
scita
impu
lsi #
275-
95Co
ntro
llo b
us u
scita
impu
lsi #
295-
96Pr
eim
p. t
imeo
ut u
scita
impu
lsi #
295-
97Co
ntro
llo b
us u
scita
impu
lsi #
X30/
65-
98Pr
eim
p. t
imeo
ut u
scita
impu
lsi #
X30/
66-
**I/O
ana
logi
ci6-
0*M
od. I
/O a
nalo
gici
6-00
Tem
po t
imeo
ut t
ensi
one
zero
6-01
Funz
. tem
poriz
z. t
ensi
one
zero
6-1*
Ingr
. ana
log.
16-
10Te
ns. b
assa
mor
sett
o 5
36-
11Te
nsio
ne a
lta m
orse
tto
53
6-12
Corr
. bas
sa m
orse
tto
53
6-13
Corr
ente
alta
mor
sett
o 5
36-
14Ri
f.bas
so/v
al.re
troa
z.m
orse
tto
53
6-15
Rif.
alto
/val
ore
retr
oaz.
mor
sett
o 5
36-
16Te
mpo
cos
t. fi
ltro
mor
sett
o 5
36-
2*In
gr. a
nalo
g. 2
6-20
Tens
. bas
sa m
orse
tto
54
6-21
Tens
ione
alta
mor
sett
o 5
46-
22Co
rr. b
assa
mor
sett
o 5
46-
23Co
rren
te a
lta m
orse
tto
54
6-24
Rif.b
asso
/val
.retr
oaz.
mor
sett
o 5
46-
25Ri
f. al
to/v
alor
e re
troa
z. m
orse
tto
54
6-26
Tem
po C
ost.
filtr
o m
orse
tto
54
6-3*
Ingr
. ana
log.
36-
30Va
l. di
ten
s. b
assa
mor
s. X
30/1
16-
31Va
l. te
nsio
ne a
lta m
ors.
X30
/11
6-34
M. X
30/1
1 va
l.b. R
if/Re
tr.
6-35
Mor
sett
o X
30/1
1 va
l. al
to R
if/Re
troa
z.6-
36Te
mpo
cos
t. fi
lt. m
ors.
X30
/11
6-4*
Ingr
. ana
log.
46-
40Va
l. te
ns. b
assa
mor
sett
o X
30/1
26-
41Va
l. te
ns. b
assa
mor
sett
o X
30/1
26-
44Va
l. te
ns. a
lta m
orse
tto
X30
/12
6-45
M. X
30/1
2 va
l.b. R
if/Re
tr.
6-46
Tem
po c
ost.
filtr
o m
ors.
X30
/12
6-5*
Usc
ita a
nalo
g.1
6-50
Usc
ita m
orse
tto
42
6-51
Mor
s. 4
2, u
sc. s
cala
min
.6-
52M
ors.
42,
usc
. sca
la m
ax.
6-53
Mor
sett
o 4
2, u
scita
con
trol
lata
via
bus
6-54
Mor
s. 4
2 Pr
eim
p. t
imeo
ut u
scita
6-55
Mor
sett
o 4
2 Fi
ltro
usc
ita6-
6*U
scita
ana
logi
ca 2
6-60
Usc
ita m
orse
tto
X30
/86-
61M
orse
tto
X30
/8, s
cala
min
.6-
62M
orse
tto
X30
/8, s
cala
max
.6-
63M
ors.
X30
/8 c
ontr
olla
to d
a bu
s6-
64Pr
eim
p. t
imeo
ut u
scita
mor
s. X
30/8
6-7*
Usc
ita a
nalo
gica
36-
70U
scita
mor
sett
o X
45/1
6-71
Mor
s. X
45/1
, sca
la m
in.
6-72
Mor
s. X
45/1
, sca
la m
ax.
6-73
Mor
s. X
45/1
, con
trol
lato
via
bus
6-74
Usc
ita m
ors.
X45
/1 T
imeo
ut p
reim
p.6-
8*U
scita
ana
logi
ca 4
6-80
Usc
ita m
orse
tto
X45
/36-
81M
orse
tto
X45
/3, s
cala
min
.6-
82M
ors.
X45
/3, s
cala
max
.6-
83M
ors.
X45
/3, c
ontr
olla
to v
ia b
us6-
84U
scita
mor
s. X
45/3
Tim
eout
pre
imp.
7-**
Rego
lato
ri7-
0*Co
ntr.
vel
. PID
7-00
Font
e re
troa
zion
e PI
D d
i vel
ocità
7-02
Vel.
guad
. pro
porz
. PID
7-03
Vel.
tem
po in
tegr
ale
PID
7-04
Vel.
Tem
po d
iffer
enz.
PID
7-05
Vel.,
lim
ite g
uad.
diff
. PID
7-06
Vel.
tem
po fi
ltro
pas
sa-b
asso
PID
7-07
Retr
oaz.
vel
. PID
Rap
p. t
rasm
iss.
7-08
Fatt
ore
feed
forw
ard
PID
vel
.7-
09Sp
eed
PID
Err
or C
orre
ctio
n w
/ Ra
mp
7-1*
Reg.
cop
pia
PI7-
12G
uada
gno
pro
porz
iona
le P
I di c
oppi
a7-
13Te
mpo
di i
nteg
razi
one
PI d
i cop
pia
7-2*
Retr
oaz.
reg
. pro
c.7-
20Ri
sors
a re
troa
zion
e 1
CL p
roce
sso
7-22
Riso
rsa
retr
oazi
one
1 CL
pro
cess
o7-
3*Re
g. P
ID d
i pro
c.7-
30PI
D p
roc.
, con
tr. n
./inv
.7-
31A
nti s
atur
azio
ne r
egol
ator
e PI
D7-
32PI
D d
i pro
cess
o, v
eloc
. avv
iam
.7-
33G
uada
gno
pro
porz
iona
le P
ID d
ipr
oces
so7-
34Te
mpo
d'in
tegr
azio
ne P
ID d
i pro
cess
o7-
35Te
mpo
di d
eriv
azio
ne P
ID d
i pro
cess
o
7-36
PID
di p
roce
sso,
lim
ite g
uad.
der
iv.
7-38
Fatt
ore
cana
le a
lim. d
el r
egol
. PID
7-39
Am
piez
za d
i ban
da r
iferim
ento
a7-
4*A
dv. P
roce
ss P
ID I
7-40
Ripr
istin
o P
ID p
roc.
par
te I
7-41
Bloc
co u
scita
PID
di p
roc.
neg
.7-
42Bl
occo
usc
ita P
ID d
i pro
c. p
os.
7-43
Scal
a gu
adag
no P
ID d
i pro
c. a
rif.
min
.7-
44Sc
ala
guad
agno
PID
di p
roc.
a r
if. m
ax7-
45Ri
sors
a Fe
ed F
wd
PID
di p
roce
sso
7-46
PID
pro
c. c
om. F
eed
Fw
d n
./inv
.7-
48PC
D F
eed
For
war
d7-
49Co
m. u
scita
PID
di p
roce
sso
n./i
nv.
7-5*
Adv
. Pro
cess
PID
II7-
50PI
D d
i Pro
cess
o P
ID e
stes
o7-
51G
uada
gno
Fee
d F
wd
PID
di p
roc.
7-52
Ram
pa a
ccel
. Fee
d F
wd
PID
di p
roc.
7-53
Ram
pa d
ecel
. Fee
d F
wd
PID
di p
roc.
7-56
Rif.
PID
di P
roc.
, tem
po fi
lt.7-
57PI
D d
i Pro
cess
o, T
empo
filt.
ret
r.8-
**Co
m. e
opz
ioni
8-0*
Impo
st.g
ener
.8-
01Si
to d
i com
ando
8-02
Font
e pa
rola
di c
ontr
ollo
8-03
Tem
poriz
zazi
one
paro
la d
i con
trol
lo8-
04Fu
nzio
ne t
empo
rizz.
par
ola
di c
ontr
ollo
8-05
Funz
. fin
e te
mpo
rizza
zion
e8-
06Ri
pris
t. t
empo
r. p
arol
a di
con
tr.
8-07
Dia
gnos
i Trig
ger
8-08
Filtr
aggi
o le
ttur
a8-
1*Im
p. p
ar. d
i com
.8-
10Pr
ofilo
par
ola
di c
om.
8-13
Paro
la d
i sta
to c
onfig
urab
ile (S
TW)
8-14
Paro
la d
i con
trol
lo c
onfig
urab
ile C
TW8-
3*Im
post
az. p
orta
FC
8-30
Prot
ocol
lo8-
31In
diriz
zo8-
32Ba
ud r
ate
port
a FC
8-33
Parit
à /
bit
di s
top
8-34
Dur
ata
del c
iclo
stim
ata
8-35
Rita
rdo
min
imo
ris
post
a8-
36Ri
tard
o m
ax. r
ispo
sta
8-37
Rita
rdo
max
. int
erca
r.8-
4*Im
p. p
rot.
FC
MC
8-40
Sele
zion
e te
legr
amm
a8-
41Pa
ram
etri
per
seg
nali
8-42
Conf
ig. s
critt
ura
PCD
8-43
Conf
ig. l
ettu
ra P
CD8-
5*D
igita
le/B
us8-
50Se
lezi
one
ruot
a lib
era
8-51
Sele
z. a
rres
to r
apid
o8-
52Se
lez.
fren
o C
C8-
53Se
lez.
avv
io8-
54Se
lez.
inve
rsio
ne8-
55Se
lez.
set
up8-
56Se
lezi
one
rif. p
reim
post
ato
8-57
Prof
idriv
e O
FF2
Sele
ct8-
58Pr
ofid
rive
OFF
3 Se
lect
8-8*
Dia
gnos
t. p
orta
FC
8-80
Cont
eggi
o m
essa
ggi b
us8-
81Co
nteg
gio
err
ori b
us8-
82Co
nteg
gio
mes
sagg
i sla
ve8-
83Co
nteg
gio
err
ori s
lave
8-9*
Bus
Jog
8-90
Bus
Jog
1 v
eloc
ità8-
91Bu
s Jo
g 2
vel
ocità
9-**
PRO
FIdr
ive
9-00
Rife
rimen
to9-
07Va
lore
rea
le9-
15Co
nfig
. scr
ittur
a PC
D9-
16Co
nfig
. let
tura
PCD
9-18
Indi
rizzo
nod
o9-
22Se
lezi
one
tele
gram
ma
9-23
Para
met
ri p
er s
egna
li9-
27Pa
ram
. edi
t.9-
28Co
ntro
llo d
i pro
cess
o9-
44Co
ntat
ore
mes
sagg
i di g
uast
o9-
45Co
dice
di g
uast
o9-
47N
umer
o g
uast
o9-
52Co
ntat
ore
situ
azio
ne g
uast
o9-
53Pa
rola
di a
vvis
o P
rofib
us9-
63Ba
ud r
ate
attu
ale
9-64
Iden
tif. a
ppar
ecch
io9-
65N
umer
o d
i pro
filo
9-67
Paro
la c
ontr
. 19-
68Pa
rola
di s
tatu
s 1
9-71
Salv
a va
lori
di d
ati P
rofib
us9-
72Ri
pr. c
onv.
freq
. Pro
fibus
9-75
DO
Iden
tific
atio
n9-
80Pa
ram
etri
def
initi
(1)
9-81
Para
met
ri d
efin
iti (2
)9-
82Pa
ram
etri
def
initi
(3)
9-83
Para
met
ri d
efin
iti (4
)9-
84Pa
ram
etri
def
initi
(5)
9-90
Para
met
ri c
ambi
ati (
1)9-
91Pa
ram
etri
cam
biat
i (2)
9-92
Para
met
ri c
ambi
ati (
3)9-
93Pa
ram
etri
cam
biat
i (4)
9-94
Para
met
ri c
ambi
ati (
5)9-
99Pr
ofib
us R
evis
ion
Cou
nter
10-*
*Fi
eldb
us C
AN
10-0
*Im
post
az. d
i bas
e10
-00
Prot
ocol
lo C
AN
10-0
1Se
lezi
onar
e ba
udra
te10
-02
MA
C ID
10-0
5Vi
sual
. con
tato
re e
rror
i tra
smis
sion
e10
-06
Visu
al. c
onta
tore
err
ori r
icez
ione
10-0
7Vi
sual
. con
tato
re o
ff b
us10
-1*
Dev
iceN
et10
-10
Sele
z. t
ipo
dat
i di p
roce
sso
10-1
1D
ati p
roce
sso
scr
ittur
a co
nfig
.10
-12
Dat
i pro
cess
o le
ttur
a co
nfig
.10
-13
Para
met
ro d
i avv
iso
10-1
4Ri
ferim
ento
ret
e10
-15
Cont
rollo
ret
e10
-2*
Filtr
i CO
S10
-20
Filtr
o C
OS
110
-21
Filtr
o C
OS
2
10-2
2Fi
ltro
CO
S 3
10-2
3Fi
ltro
CO
S 4
10-3
*A
cces
so p
aram
.10
-30
Ind.
arr
ay10
-31
Mem
oriz
za i
valo
ri d
ei d
ati
10-3
2Re
visi
one
Dev
icen
et10
-33
Mem
oriz
zare
sem
pre
10-3
4Co
dice
pro
dott
o D
evic
eNet
10-3
9Pa
ram
etri
Dev
icen
et F
10-5
*CA
Nop
en10
-50
Dat
i pro
cess
o s
critt
ura
conf
ig.
10-5
1D
ati p
roce
sso
lett
ura
conf
ig.
12-*
*Et
hern
et12
-0*
Impo
staz
ioni
IP12
-00
Ass
egna
zion
e in
diriz
zo IP
12-0
1In
diriz
zo IP
12-0
2Su
bnet
Mas
k12
-03
Gat
eway
def
ault
12-0
4Se
rver
DH
CP12
-05
Rila
scio
sca
de12
-06
Nam
e-se
rver
s12
-07
Nom
e di
dom
inio
12-0
8N
ome
di h
ost
12-0
9In
diriz
zo fi
sico
12-1
*Pa
r. c
olle
g. E
ther
net
12-1
0St
ato
del
col
lega
men
to12
-11
Dur
ata
del l
ink
12-1
2N
egoz
iazi
one
auto
mat
ica
12-1
3Ve
loci
tà d
i col
lega
men
to12
-14
Link
dup
lex
12-2
*D
ati d
i pro
cess
o12
-20
Ista
nza
di c
ontr
ollo
12-2
1D
ati p
roce
sso
scr
ittur
a co
nfig
.12
-22
Dat
i pro
cess
o le
ttur
a co
nfig
.12
-23
Proc
ess
Dat
a Co
nfig
Writ
e Si
ze12
-24
Proc
ess
Dat
a Co
nfig
Rea
d S
ize
12-2
7M
aste
r A
ddre
ss12
-28
Mem
oriz
zare
i va
lori
di d
ati
12-2
9M
emor
izza
re s
empr
e12
-3*
Ethe
rNet
/IP12
-30
Para
met
ro d
i avv
iso
12-3
1Ri
ferim
ento
ret
e12
-32
Cont
rollo
ret
e12
-33
Revi
sion
e CI
P12
-34
Codi
ce p
rodo
tto
CIP
12-3
5Pa
ram
etro
ED
S12
-37
Tim
er c
on in
ibiz
ione
CO
S12
-38
Filtr
o C
OS
12-4
*M
odbu
s TC
P12
-40
Stat
us P
aram
eter
12-4
1Sl
ave
Mes
sage
Cou
nt12
-42
Slav
e Ex
cept
ion
Mes
sage
Cou
nt12
-5*
Ethe
rCA
T12
-50
Conf
igur
ed S
tatio
n A
lias
12-5
1Co
nfig
ured
Sta
tion
Add
ress
12-5
9Et
herC
AT
Stat
us12
-8*
Altr
i ser
v. E
ther
n.12
-80
Serv
er F
TP12
-81
Serv
er H
TTP
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
48 MG34U206 - VLT® è un marchio registrato di Danfoss
55
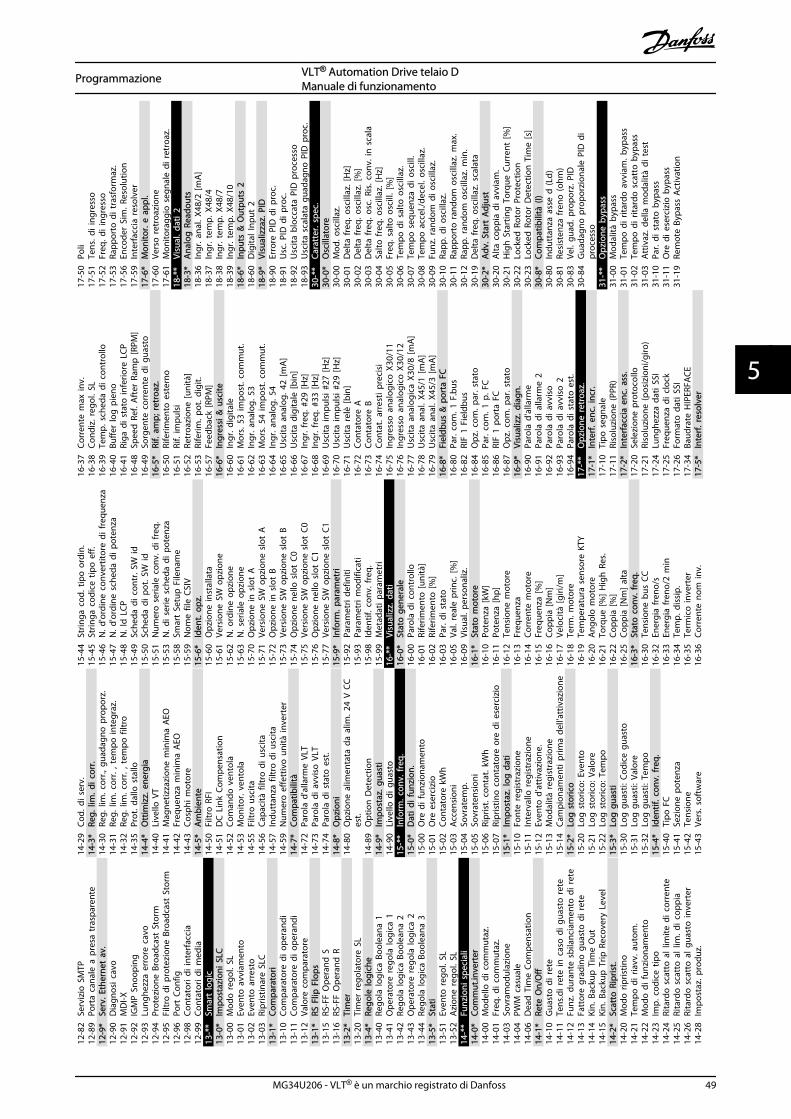
12-8
2Se
rviz
io S
MTP
12-8
9Po
rta
cana
le a
pre
sa t
rasp
aren
te12
-9*
Serv
. Eth
erne
t av
.12
-90
Dia
gnos
i cav
o12
-91
MD
I-X12
-92
IGM
P S
noop
ing
12-9
3Lu
nghe
zza
erro
re c
avo
12-9
4Pr
otez
ione
Bro
adca
st S
torm
12-9
5Fi
ltro
di p
rote
zion
e Br
oadc
ast
Stor
m12
-96
Port
Con
fig12
-98
Cont
ator
i di i
nter
facc
ia12
-99
Cont
ator
i di m
edia
13-*
*Sm
art
logi
c13
-0*
Impo
staz
ioni
SLC
13-0
0M
odo
reg
ol. S
L13
-01
Even
to a
vvia
men
to13
-02
Even
to a
rres
to13
-03
Ripr
istin
are
SLC
13-1
*Co
mpa
rato
ri13
-10
Com
para
tore
di o
pera
ndi
13-1
1Co
mpa
rato
re d
i ope
rand
i13
-12
Valo
re c
ompa
rato
re13
-1*
RS F
lip F
lops
13-1
5RS
-FF
Ope
rand
S13
-16
RS-F
F O
pera
nd R
13-2
*Ti
mer
13-2
0Ti
mer
reg
olat
ore
SL13
-4*
Rego
le lo
gich
e13
-40
Rego
la lo
gica
Boo
lean
a 1
13-4
1O
pera
tore
reg
ola
logi
ca 1
13-4
2Re
gola
logi
ca B
oole
ana
213
-43
Ope
rato
re r
egol
a lo
gica
213
-44
Rego
la lo
gica
Boo
lean
a 3
13-5
*St
ati
13-5
1Ev
ento
reg
ol. S
L13
-52
Azi
one
rego
l. SL
14-*
*Fu
nzio
ni s
peci
ali
14-0
*Co
mm
ut.in
vert
er14
-00
Mod
ello
di c
omm
utaz
.14
-01
Freq
. di c
omm
utaz
.14
-03
Sovr
amod
ulaz
ione
14-0
4PW
M c
asua
le14
-06
Dea
d T
ime
Com
pens
atio
n14
-1*
Rete
On/
Off
14-1
0G
uast
o d
i ret
e14
-11
Tens
.di r
ete
in c
aso
di g
uast
o r
ete
14-1
2Fu
nz. d
uran
te s
bila
ncia
men
to d
i ret
e14
-13
Fatt
ore
grad
ino
gua
sto
di r
ete
14-1
4Ki
n. B
acku
p T
ime
Out
14-1
5Ki
n. B
acku
p T
rip R
ecov
ery
Leve
l14
-2*
Scat
to R
ipris
t.14
-20
Mod
o r
ipris
tino
14-2
1Te
mpo
di r
iavv
. aut
om.
14-2
2M
odo
di f
unzi
onam
ento
14-2
3Im
p. c
odic
e tip
o14
-24
Rita
rdo
sca
tto
al l
imite
di c
orre
nte
14-2
5Ri
tard
o s
catt
o a
l lim
. di c
oppi
a14
-26
Rita
rdo
sca
tto
al g
uast
o in
vert
er14
-28
Impo
staz
. pro
duz.
14-2
9Co
d. d
i ser
v.14
-3*
Reg.
lim
. di c
orr.
14-3
0Re
g. li
m. c
orr.,
gua
dagn
o p
ropo
rz.
14-3
1Re
g. li
m. c
orr.
, te
mpo
inte
graz
.14
-32
Reg.
lim
. cor
r. ,
tem
po fi
ltro
14-3
5Pr
ot. d
allo
sta
llo14
-4*
Ott
imiz
z. e
nerg
ia14
-40
Live
llo V
T14
-41
Mag
netiz
zazi
one
min
ima
AEO
14-4
2Fr
eque
nza
min
ima
AEO
14-4
3Co
sphi
mot
ore
14-5
*A
mbi
ente
14-5
0Fi
ltro
RFI
14-5
1D
C L
ink
Com
pens
atio
n14
-52
Com
ando
ven
tola
14-5
3M
onito
r. v
ento
la14
-55
Filtr
o u
scita
14-5
6Ca
paci
tà fi
ltro
di u
scita
14-5
7In
dutt
anza
filtr
o d
i usc
ita14
-59
Num
ero
effe
ttiv
o u
nità
inve
rter
14-7
*Co
mpa
tibili
tà14
-72
Paro
la d
'alla
rme
VLT
14-7
3Pa
rola
di a
vvis
o V
LT14
-74
Paro
la d
i sta
to e
st.
14-8
*O
pzio
ni14
-80
Opz
ione
alim
enta
ta d
a al
im. 2
4 V
CC
est.
14-8
9O
ptio
n D
etec
tion
14-9
*Im
post
az. g
uast
i14
-90
Live
llo d
i gua
sto
15-*
*In
form
. con
v. fr
eq.
15-0
*D
ati d
i fun
zion
.15
-00
Ore
di f
unzi
onam
ento
15-0
1O
re e
serc
izio
15-0
2Co
ntat
ore
kWh
15-0
3A
ccen
sion
i15
-04
Sovr
atem
p.15
-05
Sovr
aten
sion
i15
-06
Ripr
ist.
con
tat.
kW
h15
-07
Ripr
istin
o c
onta
tore
ore
di e
serc
izio
15-1
*Im
post
az. l
og d
ati
15-1
0Fo
nte
regi
stra
zion
e15
-11
Inte
rval
lo r
egis
traz
ione
15-1
2Ev
ento
d'a
ttiv
azio
ne.
15-1
3M
odal
ità r
egis
traz
ione
15-1
4Ca
mpi
onam
enti
prim
a de
ll'at
tivaz
ione
15-2
*Lo
g s
toric
o15
-20
Log
sto
rico:
Eve
nto
15-2
1Lo
g s
toric
o: V
alor
e15
-22
Log
sto
rico:
Tem
po15
-3*
Log
gua
sti
15-3
0Lo
g g
uast
i: Co
dice
gua
sto
15-3
1Lo
g g
uast
i: Va
lore
15-3
2Lo
g g
uast
i: Te
mpo
15-4
*Id
entif
. con
v. fr
eq.
15-4
0Ti
po F
C15
-41
Sezi
one
pote
nza
15-4
2Te
nsio
ne15
-43
Vers
. sof
twar
e
15-4
4St
ringa
cod
. tip
o o
rdin
.15
-45
Strin
ga c
odic
e tip
o e
ff.15
-46
N. d
'ord
ine
conv
ertit
ore
di fr
eque
nza
15-4
7N
. d'o
rdin
e sc
heda
di p
oten
za15
-48
N. l
d L
CP15
-49
Sche
da d
i con
tr. S
W id
15-5
0Sc
heda
di p
ot. S
W id
15-5
1N
umer
o s
eria
le c
onv.
di f
req.
15-5
3N
. di s
erie
sch
eda
di p
oten
za15
-58
Smar
t Se
tup
File
nam
e15
-59
Nom
e fil
e CS
IV15
-6*
Iden
t. o
pz.
15-6
0O
pzio
ne in
stal
lata
15-6
1Ve
rsio
ne S
W o
pzio
ne15
-62
N. o
rdin
e op
zion
e15
-63
N. s
eria
le o
pzio
ne15
-70
Opz
ione
in s
lot
A15
-71
Vers
ione
SW
opz
ione
slo
t A
15-7
2O
pzio
ne in
slo
t B
15-7
3Ve
rsio
ne S
W o
pzio
ne s
lot
B15
-74
Opz
ione
nel
lo s
lot
C015
-75
Vers
ione
SW
opz
ione
slo
t C0
15-7
6O
pzio
ne n
ello
slo
t C1
15-7
7Ve
rsio
ne S
W o
pzio
ne s
lot
C115
-9*
Info
rm. p
aram
etri
15-9
2Pa
ram
etri
def
initi
15-9
3Pa
ram
etri
mod
ifica
ti15
-98
Iden
tif. c
onv.
freq
.15
-99
Met
adat
i par
amet
ri16
-**
Visu
aliz
z. d
ati
16-0
*St
ato
gen
eral
e16
-00
Paro
la d
i con
trol
lo16
-01
Rife
rimen
to [u
nità
]16
-02
Rife
rimen
to [%
]16
-03
Par.
di s
tato
16-0
5Va
l. re
ale
prin
c. [%
]16
-09
Visu
al. p
erso
naliz
.16
-1*
Stat
o m
otor
e16
-10
Pote
nza
[kW
]16
-11
Pote
nza
[hp]
16-1
2Te
nsio
ne m
otor
e16
-13
Freq
uenz
a16
-14
Corr
ente
mot
ore
16-1
5Fr
eque
nza
[%]
16-1
6Co
ppia
[Nm
]16
-17
Velo
cità
[giri
/m]
16-1
8Te
rm. m
otor
e16
-19
Tem
pera
tura
sen
sore
KTY
16-2
0A
ngol
o m
otor
e16
-21
Torq
ue [%
] H
igh
Res
.16
-22
Copp
ia [%
]16
-25
Copp
ia [N
m]
alta
16-3
*St
ato
con
v. fr
eq.
16-3
0Te
nsio
ne b
us C
C16
-32
Ener
gia
fren
o/s
16-3
3En
ergi
a fr
eno/
2 m
in16
-34
Tem
p. d
issi
p.16
-35
Term
ico
inve
rter
16-3
6Co
rren
te n
om in
v.
16-3
7Co
rren
te m
ax in
v.16
-38
Cond
iz. r
egol
. SL
16-3
9Te
mp.
sch
eda
di c
ontr
ollo
16-4
0Bu
ffer
log
pie
no16
-41
Riga
di s
tato
infe
riore
LCP
16-4
8Sp
eed
Ref
. Aft
er R
amp
[RPM
]16
-49
Sorg
ente
cor
rent
e di
gua
sto
16-5
*Ri
f. am
p; r
etro
az.
16-5
0Ri
ferim
ento
est
erno
16-5
1Ri
f. im
puls
i16
-52
Retr
oazi
one
[uni
tà]
16-5
3Ri
ferim
. pot
. dig
it.16
-57
Feed
back
[RPM
]16
-6*
Ingr
essi
& u
scite
16-6
0In
gr. d
igita
le16
-61
Mor
s. 5
3 im
post
. com
mut
.16
-62
Ingr
. ana
log.
53
16-6
3M
ors.
54
impo
st. c
omm
ut.
16-6
4In
gr. a
nalo
g. 5
416
-65
Usc
ita a
nalo
g. 4
2 [m
A]
16-6
6U
scita
dig
itale
[bin
]16
-67
Ingr
. fre
q. #
29 [H
z]16
-68
Ingr
. fre
q. #
33 [H
z]16
-69
Usc
ita im
puls
i #27
[Hz]
16-7
0U
scita
impu
lsi #
29 [H
z]16
-71
Usc
ita r
elè
[bin
]16
-72
Cont
ator
e A
16-7
3Co
ntat
ore
B16
-74
Cont
at. a
rres
ti p
reci
si16
-75
Ingr
esso
ana
logi
co X
30/1
116
-76
Ingr
esso
ana
logi
co X
30/1
216
-77
Usc
ita a
nalo
gica
X30
/8 [m
A]
16-7
8U
scita
ana
l. X4
5/1
[mA
]16
-79
Usc
ita a
nal.
X45/
3 [m
A]
16-8
*Fi
eldb
us &
por
ta F
C16
-80
Par.
com
. 1 F
.bus
16-8
2RI
F 1
Fiel
dbus
16-8
4O
pz. c
om. p
ar. s
tato
16-8
5Pa
r. c
om. 1
p. F
C16
-86
RIF
1 po
rta
FC16
-87
Opz
. com
. par
. sta
to16
-9*
Visu
aliz
z. d
iagn
.16
-90
Paro
la d
'alla
rme
16-9
1Pa
rola
di a
llarm
e 2
16-9
2Pa
rola
di a
vvis
o16
-93
Paro
la d
i avv
iso
216
-94
Paro
la d
i sta
to e
st.
17-*
*O
pzio
ne r
etro
az.
17-1
*In
terf
. enc
. inc
r.17
-10
Tipo
seg
nale
17-1
1Ri
solu
zion
e (P
PR)
17-2
*In
terf
acci
a en
c. a
ss.
17-2
0Se
lezi
one
prot
ocol
lo17
-21
Riso
luzi
one
(pos
izio
ni/g
iro)
17-2
4Lu
nghe
zza
dati
SSI
17-2
5Fr
eque
nza
di c
lock
17-2
6Fo
rmat
o d
ati S
SI17
-34
Baud
rate
HIP
ERFA
CE17
-5*
Inte
rf. r
esol
ver
17-5
0Po
li17
-51
Tens
. di i
ngre
sso
17-5
2Fr
eq. d
i ing
ress
o17
-53
Rapp
orto
di t
rasf
orm
az.
17-5
6En
code
r Si
m. R
esol
utio
n17
-59
Inte
rfac
cia
reso
lver
17-6
*M
onito
r. e
app
l.17
-60
Vers
o r
etro
azio
ne17
-61
Mon
itora
ggio
seg
nale
di r
etro
az.
18-*
*Vi
sual
. dat
i 218
-3*
Ana
log
Rea
dout
s18
-36
Ingr
. ana
l. X4
8/2
[mA
]18
-37
Ingr
. tem
p. X
48/4
18-3
8In
gr. t
emp.
X48
/718
-39
Ingr
. tem
p. X
48/1
018
-6*
Inpu
ts &
Out
puts
218
-60
Dig
ital I
nput
218
-9*
Visu
aliz
zaz.
PID
18-9
0Er
rore
PID
di p
roc.
18-9
1U
sc. P
ID d
i pro
c.18
-92
Usc
ita b
locc
ata
PID
pro
cess
o18
-93
Usc
ita s
cala
ta g
uada
gno
PID
pro
c.30
-**
Cara
tter
. spe
c.30
-0*
Osc
illat
ore
30-0
0M
od. o
scill
az.
30-0
1D
elta
freq
. osc
illaz
. [H
z]30
-02
Del
ta fr
eq. o
scill
az. [
%]
30-0
3D
elta
freq
. osc
. Ris
. con
v. in
sca
la30
-04
Salto
freq
. osc
illaz
. [H
z]30
-05
Freq
. sal
to o
scill
. [%
]30
-06
Tem
po d
i sal
to o
scill
az.
30-0
7Te
mpo
seq
uenz
a di
osc
ill.
30-0
8Te
mpo
acc
el./d
ecel
. osc
illaz
.30
-09
Funz
. ran
dom
di o
scill
az.
30-1
0Ra
pp. d
i osc
illaz
.30
-11
Rapp
orto
ran
dom
osc
illaz
. max
.30
-12
Rapp
. ran
dom
osc
illaz
. min
.30
-19
Del
ta fr
eq. o
scill
az. s
cala
ta30
-2*
Adv
. Sta
rt A
djus
t30
-20
Alta
cop
pia
di a
vvia
m.
30-2
1H
igh
Sta
rtin
g T
orqu
e Cu
rren
t [%
]30
-22
Lock
ed R
otor
Pro
tect
ion
30-2
3Lo
cked
Rot
or D
etec
tion
Tim
e [s
]30
-8*
Com
patib
ilità
(I)
30-8
0In
dutt
anza
ass
e d
(Ld)
30-8
1Re
sist
enza
fren
o (o
hm)
30-8
3Ve
l. gu
ad. p
ropo
rz. P
ID30
-84
Gua
dagn
o p
ropo
rzio
nale
PID
di
proc
esso
31-*
*O
pzio
ne b
ypas
s31
-00
Mod
alità
byp
ass
31-0
1Te
mpo
di r
itard
o a
vvia
m. b
ypas
s31
-02
Tem
po d
i rita
rdo
sca
tto
byp
ass
31-0
3A
ttiv
az. d
ella
mod
alità
di t
est
31-1
0Pa
r. d
i sta
to b
ypas
s31
-11
Ore
di e
serc
izio
byp
ass
31-1
9Re
mot
e By
pass
Act
ivat
ion
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 49
5 5
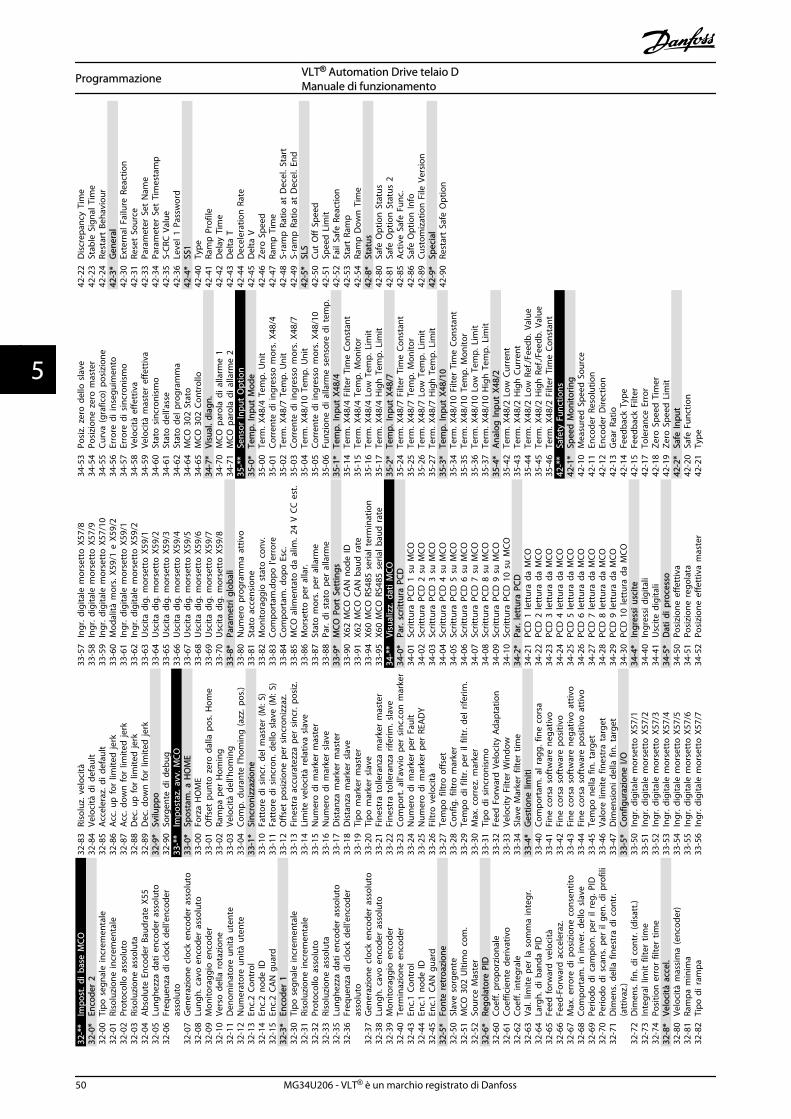
32-*
*Im
post
. di b
ase
MCO
32-0
*En
code
r 2
32-0
0Ti
po s
egna
le in
crem
enta
le32
-01
Riso
luzi
one
incr
emen
tale
32-0
2Pr
otoc
ollo
ass
olut
o32
-03
Riso
luzi
one
asso
luta
32-0
4A
bsol
ute
Enco
der
Baud
rate
X55
32-0
5Lu
nghe
zza
dati
enc
oder
ass
olut
o32
-06
Freq
uenz
a di
clo
ck d
ell'e
ncod
eras
solu
to32
-07
Gen
eraz
ione
clo
ck e
ncod
er a
ssol
uto
32-0
8Lu
ngh.
cav
o e
ncod
er a
ssol
uto
32-0
9M
onito
ragg
io e
ncod
er32
-10
Vers
o d
ella
rot
azio
ne32
-11
Den
omin
ator
e un
ità u
tent
e32
-12
Num
erat
ore
unità
ute
nte
32-1
3En
c.2
Cont
rol
32-1
4En
c.2
node
ID32
-15
Enc.
2 CA
N g
uard
32-3
*En
code
r 1
32-3
0Ti
po s
egna
le in
crem
enta
le32
-31
Riso
luzi
one
incr
emen
tale
32-3
2Pr
otoc
ollo
ass
olut
o32
-33
Riso
luzi
one
asso
luta
32-3
5Lu
nghe
zza
dati
enc
oder
ass
olut
o32
-36
Freq
uenz
a di
clo
ck d
ell'e
ncod
eras
solu
to32
-37
Gen
eraz
ione
clo
ck e
ncod
er a
ssol
uto
32-3
8Lu
ngh.
cav
o e
ncod
er a
ssol
uto
32-3
9M
onito
ragg
io e
ncod
er32
-40
Term
inaz
ione
enc
oder
32-4
3En
c.1
Cont
rol
32-4
4En
c.1
node
ID32
-45
Enc.
1 CA
N g
uard
32-5
*Fo
nte
retr
oazi
one
32-5
0Sl
ave
sorg
ente
32-5
1M
CO 3
02 U
ltim
o c
om.
32-5
2So
urce
Mas
ter
32-6
*Re
gola
tore
PID
32-6
0Co
eff.
prop
orzi
onal
e32
-61
Coef
ficie
nte
deriv
ativ
o32
-62
Coef
f. in
tegr
ale
32-6
3Va
l. lim
ite p
er la
som
ma
inte
gr.
32-6
4La
rgh.
di b
anda
PID
32-6
5Fe
ed fo
rwar
d v
eloc
ità32
-66
Feed
-For
war
d a
ccel
eraz
.32
-67
Max
. err
ore
di p
osiz
ione
con
sent
ito32
-68
Com
port
am. i
n in
ver.
del
lo s
lave
32-6
9Pe
riodo
di c
ampi
on. p
er il
reg
. PID
32-7
0Pe
riodo
di s
cans
. per
il g
en. d
i pro
fili
32-7
1D
imen
s. d
ella
fine
stra
di c
ontr
.(a
ttiv
az.)
32-7
2D
imen
s. fi
n. d
i con
tr. (
disa
tt.)
32-7
3In
tegr
al li
mit
filte
r tim
e32
-74
Posi
tion
err
or fi
lter
time
32-8
*Ve
loci
tà a
ccel
.32
-80
Velo
cità
mas
sim
a (e
ncod
er)
32-8
1Ra
mpa
min
ima
32-8
2Ti
po d
i ram
pa
32-8
3Ri
solu
z. v
eloc
ità32
-84
Velo
cità
di d
efau
lt32
-85
Acc
eler
az. d
i def
ault
32-8
6A
cc. u
p fo
r lim
ited
jerk
32-8
7A
cc. d
own
for
limite
d je
rk32
-88
Dec
. up
for
limite
d je
rk32
-89
Dec
. dow
n fo
r lim
ited
jerk
32-9
*Sv
ilupp
o32
-90
Sorg
ente
di d
ebug
33-*
*Im
post
az. a
vv. M
CO33
-0*
Spos
tam
. a H
OM
E33
-00
Forz
a H
OM
E33
-01
Offs
et p
unto
zer
o d
alla
pos
. Hom
e33
-02
Ram
pa p
er H
omin
g33
-03
Velo
cità
del
l'hom
ing
33-0
4Co
mp.
dur
ante
l'ho
min
g (a
zz. p
os.)
33-1
*Si
ncro
nizz
azio
ne33
-10
Fatt
ore
di s
incr
. del
mas
ter
(M: S
)33
-11
Fatt
ore
di s
incr
on. d
ello
sla
ve (M
: S)
33-1
2O
ffset
pos
izio
ne p
er s
incr
oniz
zaz.
33-1
3Fi
nest
ra a
ccur
atez
za p
er s
incr
. pos
iz.
33-1
4Li
mite
vel
ocità
rel
ativ
a sl
ave
33-1
5N
umer
o d
i mar
ker
mas
ter
33-1
6N
umer
o d
i mar
ker
slav
e33
-17
Dis
tanz
a m
arke
r m
aste
r33
-18
Dis
tanz
a m
arke
r sl
ave
33-1
9Ti
po m
arke
r m
aste
r33
-20
Tipo
mar
ker
slav
e33
-21
Fine
stra
tol
lera
nza
mar
ker
mas
ter
33-2
2Fi
nest
ra t
olle
ranz
a rif
erim
. sla
ve33
-23
Com
port
. all'
avvi
o p
er s
inc.
con
mar
ker
33-2
4N
umer
o d
i mar
ker
per
Faul
t33
-25
Num
ero
di m
arke
r pe
r RE
AD
Y33
-26
Filtr
o v
eloc
ità33
-27
Tem
po fi
ltro
offs
et33
-28
Conf
ig. f
iltro
mar
ker
33-2
9Te
mpo
di f
iltr.
per
il fi
ltr. d
el r
iferim
.33
-30
Max
. cor
rez.
mar
ker
33-3
1Ti
po d
i sin
cron
ism
o33
-32
Feed
For
war
d V
eloc
ity A
dapt
atio
n33
-33
Velo
city
Filt
er W
indo
w33
-34
Slav
e M
arke
r fil
ter
time
33-4
*G
estio
ne li
miti
33-4
0Co
mpo
rtam
. al r
agg.
fine
cor
sa33
-41
Fine
cor
sa s
oftw
are
nega
tivo
33-4
2Fi
ne c
orsa
sof
twar
e po
sitiv
o33
-43
Fine
cor
sa s
oftw
are
nega
tivo
att
ivo
33-4
4Fi
ne c
orsa
sof
twar
e po
sitiv
o a
ttiv
o33
-45
Tem
po n
ella
fin.
tar
get
33-4
6Va
lore
lim
ite fi
nest
ra t
arge
t33
-47
Dim
ensi
oni d
ella
fin.
tar
get
33-5
*Co
nfig
uraz
ione
I/O
33-5
0In
gr. d
igita
le m
orse
tto
X57
/133
-51
Ingr
. dig
itale
mor
sett
o X
57/2
33-5
2In
gr. d
igita
le m
orse
tto
X57
/333
-53
Ingr
. dig
itale
mor
sett
o X
57/4
33-5
4In
gr. d
igita
le m
orse
tto
X57
/533
-55
Ingr
. dig
itale
mor
sett
o X
57/6
33-5
6In
gr. d
igita
le m
orse
tto
X57
/7
33-5
7In
gr. d
igita
le m
orse
tto
X57
/833
-58
Ingr
. dig
itale
mor
sett
o X
57/9
33-5
9In
gr. d
igita
le m
orse
tto
X57
/10
33-6
0M
odal
ità m
ors.
X59
/1 e
X59
/233
-61
Ingr
. dig
itale
mor
sett
o X
59/1
33-6
2In
gr. d
igita
le m
orse
tto
X59
/233
-63
Usc
ita d
ig. m
orse
tto
X59
/133
-64
Usc
ita d
ig. m
orse
tto
X59
/233
-65
Usc
ita d
ig. m
orse
tto
X59
/333
-66
Usc
ita d
ig. m
orse
tto
X59
/433
-67
Usc
ita d
ig. m
orse
tto
X59
/533
-68
Usc
ita d
ig. m
orse
tto
X59
/633
-69
Usc
ita d
ig. m
orse
tto
X59
/733
-70
Usc
ita d
ig. m
orse
tto
X59
/833
-8*
Para
met
ri g
loba
li33
-80
Num
ero
pro
gram
ma
attiv
o33
-81
Stat
o a
ccen
sion
e33
-82
Mon
itora
ggio
sta
to c
onv.
33-8
3Co
mpo
rtam
.dop
o l'
erro
re33
-84
Com
port
am. d
opo
Esc
.33
-85
MCO
alim
enta
to d
a al
im. 2
4 V
CC
est
.33
-86
Mor
sett
o p
er a
llar.
33-8
7St
ato
mor
s. p
er a
llarm
e33
-88
Par.
di s
tato
per
alla
rme
33-9
*M
CO P
ort
Sett
ings
33-9
0X6
2 M
CO C
AN
nod
e ID
33-9
1X6
2 M
CO C
AN
bau
d r
ate
33-9
4X6
0 M
CO R
S485
ser
ial t
erm
inat
ion
33-9
5X6
0 M
CO R
S485
ser
ial b
aud
rat
e34
-**
Visu
aliz
z. d
ati M
CO34
-0*
Par.
scr
ittur
a PC
D34
-01
Scrit
tura
PCD
1 s
u M
CO34
-02
Scrit
tura
PCD
2 s
u M
CO34
-03
Scrit
tura
PCD
3 s
u M
CO34
-04
Scrit
tura
PCD
4 s
u M
CO34
-05
Scrit
tura
PCD
5 s
u M
CO34
-06
Scrit
tura
PCD
6 s
u M
CO34
-07
Scrit
tura
PCD
7 s
u M
CO34
-08
Scrit
tura
PCD
8 s
u M
CO34
-09
Scrit
tura
PCD
9 s
u M
CO34
-10
Scrit
tura
PCD
10
su M
CO34
-2*
Par.
lett
ura
PCD
34-2
1PC
D 1
lett
ura
da M
CO34
-22
PCD
2 le
ttur
a da
MCO
34-2
3PC
D 3
lett
ura
da M
CO34
-24
PCD
4 le
ttur
a da
MCO
34-2
5PC
D 5
lett
ura
da M
CO34
-26
PCD
6 le
ttur
a da
MCO
34-2
7PC
D 7
lett
ura
da M
CO34
-28
PCD
8 le
ttur
a da
MCO
34-2
9PC
D 9
lett
ura
da M
CO34
-30
PCD
10
lett
ura
da M
CO34
-4*
Ingr
essi
usc
ite34
-40
Ingr
essi
dig
itali
34-4
1U
scite
dig
itali
34-5
*D
ati d
i pro
cess
o34
-50
Posi
zion
e ef
fett
iva
34-5
1Po
sizi
one
rego
lata
34-5
2Po
sizi
one
effe
ttiv
a m
aste
r
34-5
3Po
siz.
zer
o d
ello
sla
ve34
-54
Posi
zion
e ze
ro m
aste
r34
-55
Curv
a (g
rafic
o) p
osiz
ione
34-5
6Er
rore
di i
nseg
uim
ento
34-5
7Er
rore
di s
incr
onis
mo
34-5
8Ve
loci
tà e
ffett
iva
34-5
9Ve
loci
tà m
aste
r ef
fett
iva
34-6
0St
ato
sin
cron
ism
o34
-61
Stat
o d
ell'a
sse
34-6
2St
ato
del
pro
gram
ma
34-6
4M
CO 3
02 S
tato
34-6
5M
CO 3
02 C
ontr
ollo
34-7
*Vi
sual
. dia
gn.
34-7
0M
CO p
arol
a di
alla
rme
134
-71
MCO
par
ola
di a
llarm
e 2
35-*
*Se
nsor
Inpu
t O
ptio
n35
-0*
Tem
p. In
put
Mod
e35
-00
Term
. X48
/4 T
emp.
Uni
t35
-01
Corr
ente
di i
ngre
sso
mor
s. X
48/4
35-0
2Te
rm. X
48/7
Tem
p. U
nit
35-0
3Co
rren
te d
i ing
ress
o m
ors.
X48
/735
-04
Term
. X48
/10
Tem
p. U
nit
35-0
5Co
rren
te d
i ing
ress
o m
ors.
X48
/10
35-0
6Fu
nzio
ne d
i alla
rme
sens
ore
di t
emp.
35-1
*Te
mp.
Inpu
t X4
8/4
35-1
4Te
rm. X
48/4
Filt
er T
ime
Cons
tant
35-1
5Te
rm. X
48/4
Tem
p. M
onito
r35
-16
Term
. X48
/4 L
ow T
emp.
Lim
it35
-17
Term
. X48
/4 H
igh
Tem
p. L
imit
35-2
*Te
mp.
Inpu
t X4
8/7
35-2
4Te
rm. X
48/7
Filt
er T
ime
Cons
tant
35-2
5Te
rm. X
48/7
Tem
p. M
onito
r35
-26
Term
. X48
/7 L
ow T
emp.
Lim
it35
-27
Term
. X48
/7 H
igh
Tem
p. L
imit
35-3
*Te
mp.
Inpu
t X4
8/10
35-3
4Te
rm. X
48/1
0 Fi
lter
Tim
e Co
nsta
nt35
-35
Term
. X48
/10
Tem
p. M
onito
r35
-36
Term
. X48
/10
Low
Tem
p. L
imit
35-3
7Te
rm. X
48/1
0 H
igh
Tem
p. L
imit
35-4
*A
nalo
g In
put
X48/
235
-42
Term
. X48
/2 L
ow C
urre
nt35
-43
Term
. X48
/2 H
igh
Cur
rent
35-4
4Te
rm. X
48/2
Low
Ref
./Fee
db. V
alue
35-4
5Te
rm. X
48/2
Hig
h R
ef./F
eedb
. Val
ue35
-46
Term
. X48
/2 F
ilter
Tim
e Co
nsta
nt42
-**
Safe
ty F
unct
ions
42-1
*Sp
eed
Mon
itorin
g42
-10
Mea
sure
d S
peed
Sou
rce
42-1
1En
code
r Re
solu
tion
42-1
2En
code
r D
irect
ion
42-1
3G
ear
Ratio
42-1
4Fe
edba
ck T
ype
42-1
5Fe
edba
ck F
ilter
42-1
7To
lera
nce
Erro
r42
-18
Zero
Spe
ed T
imer
42-1
9Ze
ro S
peed
Lim
it42
-2*
Safe
Inpu
t42
-20
Safe
Fun
ctio
n42
-21
Type
42-2
2D
iscr
epan
cy T
ime
42-2
3St
able
Sig
nal T
ime
42-2
4Re
star
t Be
havi
our
42-3
*G
ener
al42
-30
Exte
rnal
Fai
lure
Rea
ctio
n42
-31
Rese
t So
urce
42-3
3Pa
ram
eter
Set
Nam
e42
-34
Para
met
er S
et T
imes
tam
p42
-35
S-CR
C V
alue
42-3
6Le
vel 1
Pas
swor
d42
-4*
SS1
42-4
0Ty
pe42
-41
Ram
p P
rofil
e42
-42
Del
ay T
ime
42-4
3D
elta
T42
-44
Dec
eler
atio
n R
ate
42-4
5D
elta
V42
-46
Zero
Spe
ed42
-47
Ram
p T
ime
42-4
8S-
ram
p R
atio
at
Dec
el. S
tart
42-4
9S-
ram
p R
atio
at
Dec
el. E
nd42
-5*
SLS
42-5
0Cu
t O
ff S
peed
42-5
1Sp
eed
Lim
it42
-52
Fail
Safe
Rea
ctio
n42
-53
Star
t Ra
mp
42-5
4Ra
mp
Dow
n T
ime
42-8
*St
atus
42-8
0Sa
fe O
ptio
n S
tatu
s42
-81
Safe
Opt
ion
Sta
tus
242
-85
Act
ive
Safe
Fun
c.42
-86
Safe
Opt
ion
Info
42-8
9Cu
stom
izat
ion
File
Ver
sion
42-9
*Sp
ecia
l42
-90
Rest
art
Safe
Opt
ion
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
50 MG34U206 - VLT® è un marchio registrato di Danfoss
55

5.6 Programmazione remota con Softwaredi configurazione MCT 10
Danfoss offre un programma software per lo sviluppo, lamemorizzazione e il trasferimento della programmazionedel convertitore di frequenza. Il Software di configurazioneMCT 10 consente all'utente di collegare un PC al conver-titore di frequenza ed eseguire la programmazione intempo reale invece di utilizzare l'LCP. Inoltre, tutta laprogrammazione del convertitore di frequenza è eseguibileoff-line e scaricabile in modo semplice nel convertitore difrequenza. Oppure è possibile caricare l'intero profilo delconvertitore di frequenza su PC per il backup o l'analisi.
Per la connessione al convertitore di frequenza sonodisponibili il connettore USB o il morsetto RS-485.
Software di configurazione MCT 10 è disponibile per ildownload gratuito all'indirizzo www.VLT-software.com. Surichiesta è disponibile anche un CD con codice articolo130B1000. Il manuale di funzionamento, fornisceinformazioni dettagliate sulla programmazione usando ilSoftware di configurazione MCT 10..
Programmazione VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 51
5 5
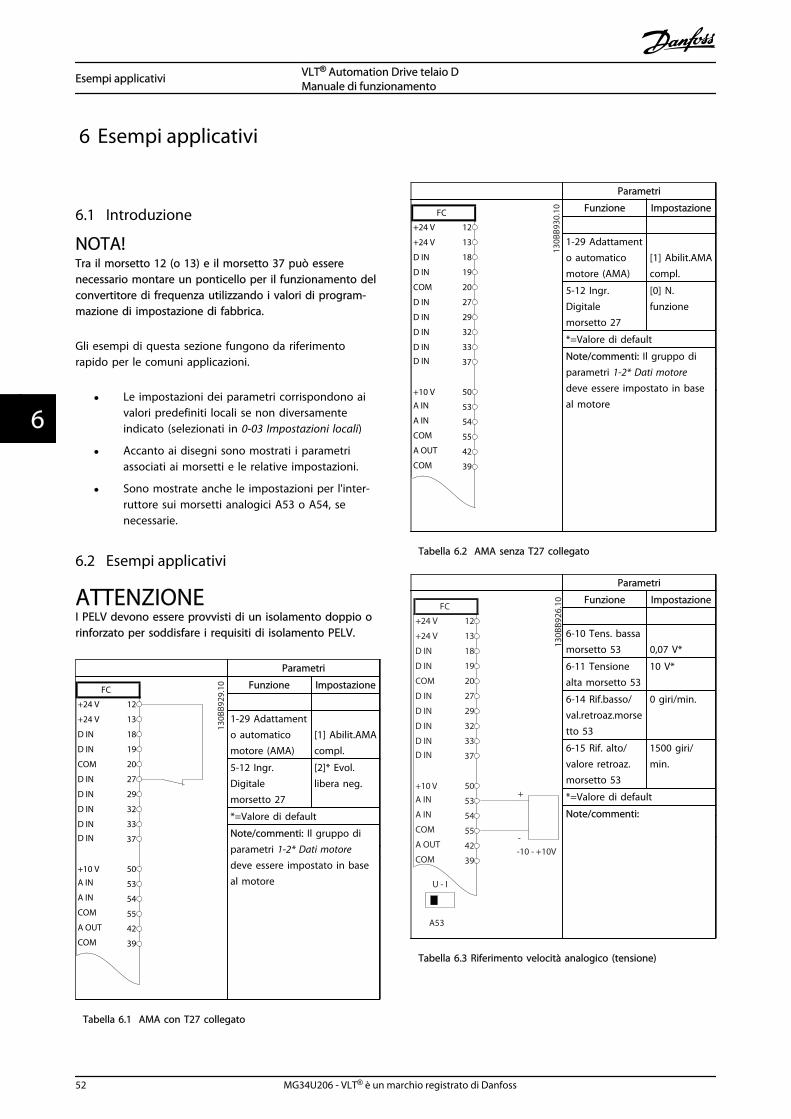
6 Esempi applicativi
6.1 Introduzione
NOTA!Tra il morsetto 12 (o 13) e il morsetto 37 può esserenecessario montare un ponticello per il funzionamento delconvertitore di frequenza utilizzando i valori di program-mazione di impostazione di fabbrica.
Gli esempi di questa sezione fungono da riferimentorapido per le comuni applicazioni.
• Le impostazioni dei parametri corrispondono aivalori predefiniti locali se non diversamenteindicato (selezionati in 0-03 Impostazioni locali)
• Accanto ai disegni sono mostrati i parametriassociati ai morsetti e le relative impostazioni.
• Sono mostrate anche le impostazioni per l'inter-ruttore sui morsetti analogici A53 o A54, senecessarie.
6.2 Esempi applicativi
ATTENZIONEI PELV devono essere provvisti di un isolamento doppio orinforzato per soddisfare i requisiti di isolamento PELV.
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B929
.10 Funzione Impostazione
1-29 Adattamento automaticomotore (AMA)
[1] Abilit.AMAcompl.
5-12 Ingr.Digitalemorsetto 27
[2]* Evol.libera neg.
*=Valore di default
Note/commenti: Il gruppo diparametri 1-2* Dati motoredeve essere impostato in baseal motore
Tabella 6.1 AMA con T27 collegato
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B930
.10 Funzione Impostazione
1-29 Adattamento automaticomotore (AMA)
[1] Abilit.AMAcompl.
5-12 Ingr.Digitalemorsetto 27
[0] N.funzione
*=Valore di default
Note/commenti: Il gruppo diparametri 1-2* Dati motoredeve essere impostato in baseal motore
Tabella 6.2 AMA senza T27 collegato
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130B
B926
.10 Funzione Impostazione
6-10 Tens. bassamorsetto 53 0,07 V*
6-11 Tensionealta morsetto 53
10 V*
6-14 Rif.basso/val.retroaz.morsetto 53
0 giri/min.
6-15 Rif. alto/valore retroaz.morsetto 53
1500 giri/min.
*=Valore di default
Note/commenti:
Tabella 6.3 Riferimento velocità analogico (tensione)
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
52 MG34U206 - VLT® è un marchio registrato di Danfoss
66
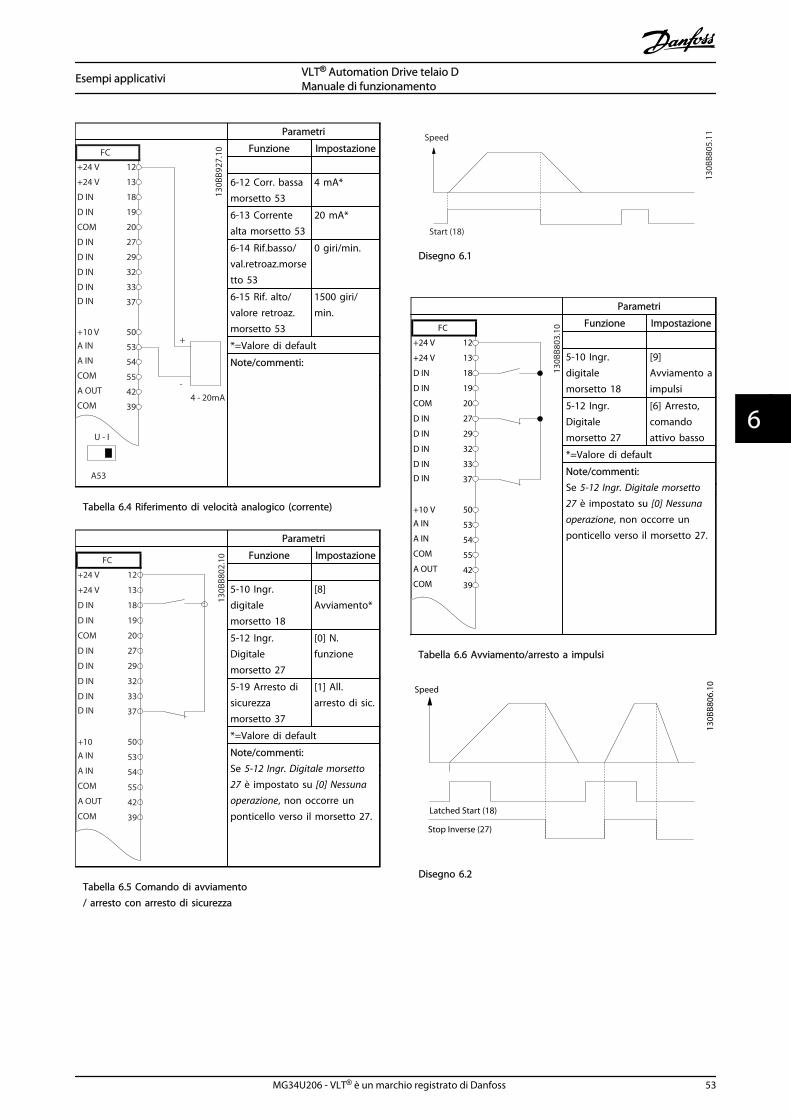
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
130B
B927
.10 Funzione Impostazione
6-12 Corr. bassamorsetto 53
4 mA*
6-13 Correntealta morsetto 53
20 mA*
6-14 Rif.basso/val.retroaz.morsetto 53
0 giri/min.
6-15 Rif. alto/valore retroaz.morsetto 53
1500 giri/min.
*=Valore di default
Note/commenti:
Tabella 6.4 Riferimento di velocità analogico (corrente)
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B802
.10 Funzione Impostazione
5-10 Ingr.digitalemorsetto 18
[8]Avviamento*
5-12 Ingr.Digitalemorsetto 27
[0] N.funzione
5-19 Arresto disicurezzamorsetto 37
[1] All.arresto di sic.
*=Valore di default
Note/commenti:Se 5-12 Ingr. Digitale morsetto27 è impostato su [0] Nessunaoperazione, non occorre unponticello verso il morsetto 27.
Tabella 6.5 Comando di avviamento/ arresto con arresto di sicurezza
130B
B805
.11
Speed
Start (18)
Disegno 6.1
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B803
.10 Funzione Impostazione
5-10 Ingr.digitalemorsetto 18
[9]Avviamento aimpulsi
5-12 Ingr.Digitalemorsetto 27
[6] Arresto,comandoattivo basso
*=Valore di default
Note/commenti:Se 5-12 Ingr. Digitale morsetto27 è impostato su [0] Nessunaoperazione, non occorre unponticello verso il morsetto 27.
Tabella 6.6 Avviamento/arresto a impulsi
Speed
130B
B806
.10
Latched Start (18)
Stop Inverse (27)
Disegno 6.2
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 53
6 6
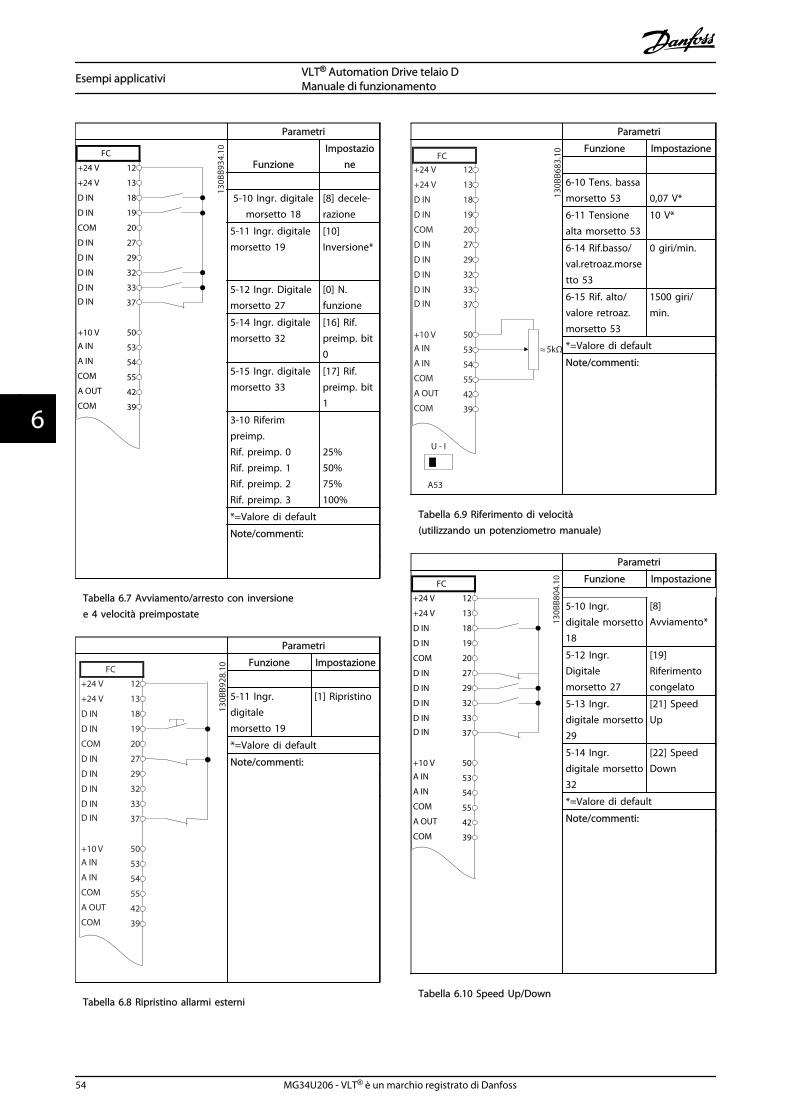
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B934
.10
FunzioneImpostazio
ne
5-10 Ingr. digitalemorsetto 18
[8] decele-razione
5-11 Ingr. digitalemorsetto 19
[10]Inversione*
5-12 Ingr. Digitalemorsetto 27
[0] N.funzione
5-14 Ingr. digitalemorsetto 32
[16] Rif.preimp. bit0
5-15 Ingr. digitalemorsetto 33
[17] Rif.preimp. bit1
3-10 Riferimpreimp.
Rif. preimp. 0Rif. preimp. 1Rif. preimp. 2Rif. preimp. 3
25%50%75%100%
*=Valore di default
Note/commenti:
Tabella 6.7 Avviamento/arresto con inversionee 4 velocità preimpostate
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B928
.10 Funzione Impostazione
5-11 Ingr.digitalemorsetto 19
[1] Ripristino
*=Valore di default
Note/commenti:
Tabella 6.8 Ripristino allarmi esterni
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130B
B683
.10 Funzione Impostazione
6-10 Tens. bassamorsetto 53 0,07 V*
6-11 Tensionealta morsetto 53
10 V*
6-14 Rif.basso/val.retroaz.morsetto 53
0 giri/min.
6-15 Rif. alto/valore retroaz.morsetto 53
1500 giri/min.
*=Valore di default
Note/commenti:
Tabella 6.9 Riferimento di velocità(utilizzando un potenziometro manuale)
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B804
.10 Funzione Impostazione
5-10 Ingr.digitale morsetto18
[8]Avviamento*
5-12 Ingr.Digitalemorsetto 27
[19]Riferimentocongelato
5-13 Ingr.digitale morsetto29
[21] SpeedUp
5-14 Ingr.digitale morsetto32
[22] SpeedDown
*=Valore di default
Note/commenti:
Tabella 6.10 Speed Up/Down
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
54 MG34U206 - VLT® è un marchio registrato di Danfoss
66
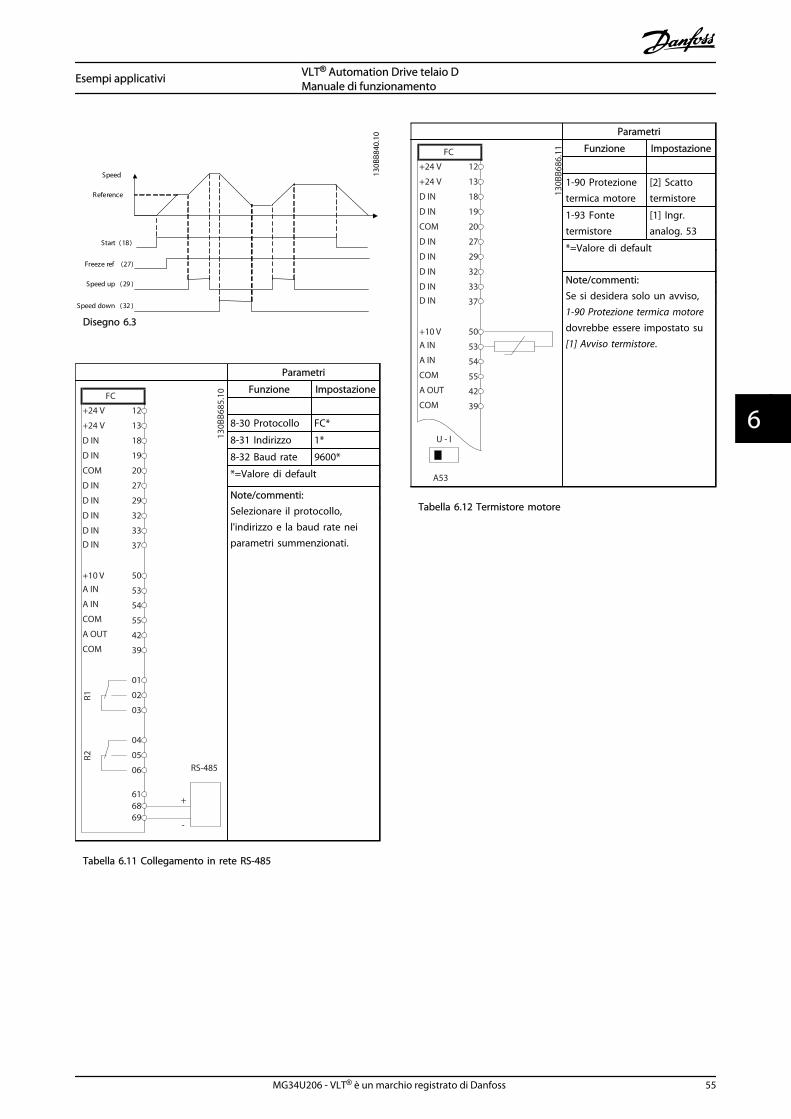
S t a r t ( 1 8 )
F r e e z e r e f ( 2 7 )
S p e e d u p ( 2 9 )
S p e e d d o w n ( 3 2 )
S p e e d
R e f e r e n c e
130B
B840
.10
Disegno 6.3
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
616869
RS-485
+
130B
B685
.10 Funzione Impostazione
8-30 Protocollo FC*
8-31 Indirizzo 1*
8-32 Baud rate 9600*
*=Valore di default
Note/commenti:Selezionare il protocollo,l'indirizzo e la baud rate neiparametri summenzionati.
Tabella 6.11 Collegamento in rete RS-485
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
130B
B686
.11 Funzione Impostazione
1-90 Protezionetermica motore
[2] Scattotermistore
1-93 Fontetermistore
[1] Ingr.analog. 53
*=Valore di default
Note/commenti:Se si desidera solo un avviso,1-90 Protezione termica motoredovrebbe essere impostato su[1] Avviso termistore.
Tabella 6.12 Termistore motore
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 55
6 6

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B839
.10 Parametri
Funzione Impostazione
4-30 Funzione diperditaretroazionemotore [1] Avviso
4-31 Errore divelocitàretroazionemotore
100 giri/min
4-32 Timeoutperditaretroazionemotore
5 s
7-00 Fonteretroazione PIDdi velocità
[2] MCB 102
17-11 Risoluzione (PPR)
1024*
13-00 Modoregol. SL
[1] On
13-01 Eventoavviamento
[19] Avviso
13-02 Eventoarresto
[44] Tasto direset
13-10 Comparatore di operandi
[21] N. avviso
13-11 Comparatore di operandi
[1] ≈*
13-12 Valorecomparatore
90
13-51 Eventoregol. SL
[22]Comparatore0
13-52 Azioneregol. SL
[32] Imp. usc.dig. A bassa
5-40 Funzionerelè
[80] Uscitadigitale SL A
*=Valore di default
Tabella 6.13 Utilizzo di SLC per impostare un relè
Parametri
Note/commenti:Se il limite nel monitor diretroazione viene superato,verrà generato l'Avviso 90.L'SLC monitora l'Avviso 90 e,nel caso in cui l'Avviso 90diventa TRUE, allora vieneattivato il relè 1.L'attrezzatura esterna potrebbein seguito indicare che ènecessaria una manutenzione.Se l'errore di retroazione tornaa scendere al di sotto del limitenuovamente entro 5 sec., allorail convertitore di frequenzacontinua a funzionare e l'avvisoscompare. Tuttavia il relè 1continuerà ad essere attivatofinché viene premuto [Reset]sull'LCP.
Tabella 6.14 Utilizzo di SLC per impostare un relè
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
56 MG34U206 - VLT® è un marchio registrato di Danfoss
66
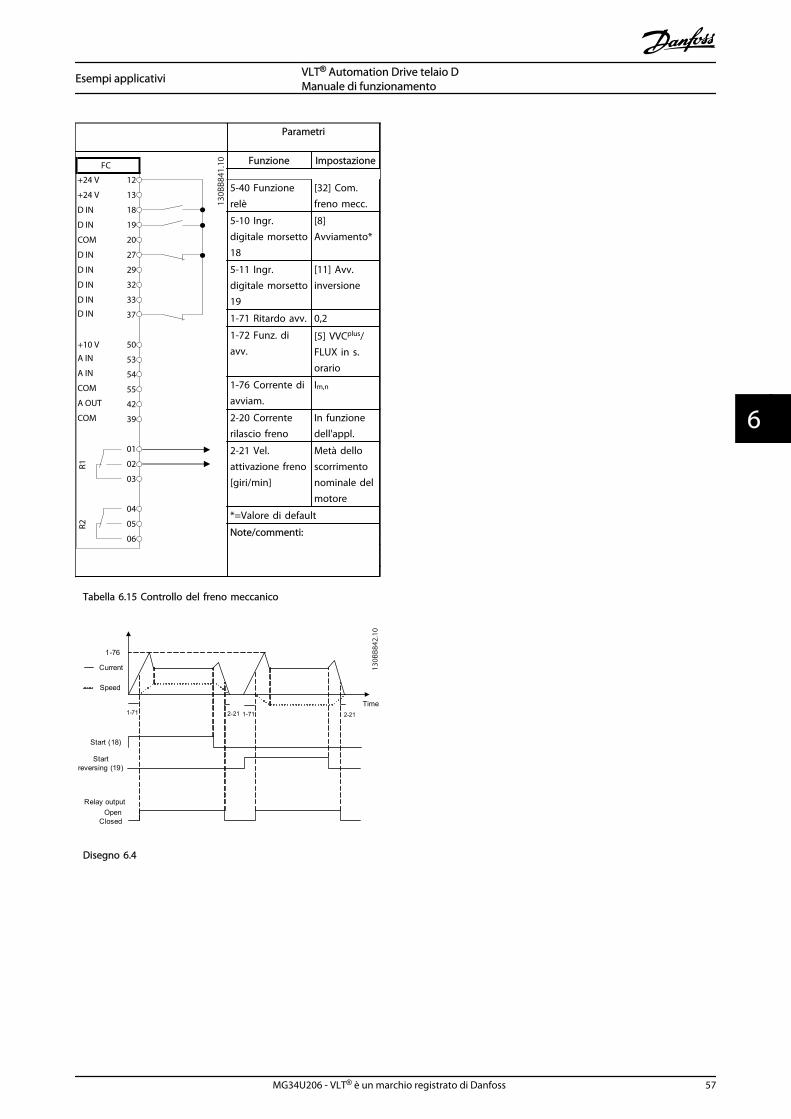
Parametri
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B841
.10 Funzione Impostazione
5-40 Funzionerelè
[32] Com.freno mecc.
5-10 Ingr.digitale morsetto18
[8]Avviamento*
5-11 Ingr.digitale morsetto19
[11] Avv.inversione
1-71 Ritardo avv. 0,2
1-72 Funz. diavv.
[5] VVCplus/FLUX in s.orario
1-76 Corrente diavviam.
Im,n
2-20 Correnterilascio freno
In funzionedell'appl.
2-21 Vel.attivazione freno[giri/min]
Metà delloscorrimentonominale delmotore
*=Valore di default
Note/commenti:
Tabella 6.15 Controllo del freno meccanico
Start (18)
Start reversing (19)
Relay output
Speed
Time
Current
1-71 1-712-21 2-21
1-76
OpenClosed
130B
B842
.10
Disegno 6.4
Esempi applicativi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 57
6 6

7 Messaggi di stato
7.1 Stato del display
Quando il convertitore di frequenza è nella modalità distato, vengono generati automaticamente i messaggi distato internamente al convertitore di frequenza e vengonovisualizzati nell'ultima riga del display (vedere Disegno 7.1).
Status799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
AutoHandOff
RemoteLocal
RampingStopRunningJogging...Stand by
130B
B037
.10
a b c
Disegno 7.1 Stato del display
a. La prima parte della riga di stato indica l'originedel comando di avvio/arresto.
b. La seconda parte della riga di stato indical'origine del controllo di velocità.
c. L'ultima parte della riga di stato fornisce lo statocorrente del convertitore di frequenza.Visualizzano la modalità di funzionamentocorrente del convertitore di frequenza.
NOTA!In modalità automatica/remota il convertitore di frequenzanecessita di comandi esterni per eseguire le funzioni.
7.2 Tabella delle definizioni dei messaggi distato
Le seguenti tre tabelle definiscono il significato delleparole di visualizzazione dei messaggi di stato.
Off Il convertitore di frequenza non risponderà adalcun segnale di controllo fintantoché [AutoOn] o [Hand On] sono premuti.
Auto on Il convertitore di frequenza è controllato daimorsetti di controllo e/o dalla comunicazioneseriale.
Hand on Il convertitore di frequenza può esserecontrollato tramite i tasti di navigazionesull'LCP. I comandi di arresto, ripristino,inversione, frenatura CC e altri segnaliapplicati ai morsetti di controllo possonoescludere il comando locale.
Tabella 7.1 Modalità funzionamento
Remoto Il riferimento di velocità proviene da segnaliesterni, comunicazione seriale o riferimentipreimpostati interni.
Locale Il convertitore di frequenza utilizza il comando[Hand On] o i valori di riferimento dall'LCP.
Tabella 7.2 Posizione riferimento
Freno CA Freno CA è stato selezionato in 2-10 Funzionefreno. Il freno CA magnetizza il motore perottenere un rallentamento controllato.
Final. AMA OK L'adattamento automatico motore (AMA) èstato completato correttamente.
AMA pronto AMA pronto per l'avvio. Premere [Hand On]per avviare.
AMA in funz. Processo AMA in corso.
Frenata Il chopper di frenatura è in funzione. L'energiarigenerativa è assorbita dalla resistenza difrenatura.
Frenata max Il chopper di frenatura è in funzione. Il limitedi potenza per la resistenza di frenaturadefinito in 2-12 Limite di potenza freno (kW) èraggiunto.
Ruota libera • Ruota libera inversa è stata selezionatacome funzione per un ingresso digitale(gruppo di parametri 5-1* Ingressi digitali).Il morsetto corrispondente non è collegato.
• Ruota libera attivata dalla comunicazioneseriale
Messaggi di stato VLT® Automation Drive telaio DManuale di funzionamento
58 MG34U206 - VLT® è un marchio registrato di Danfoss
77

Timeout contr. La rampa di discesa controllata è stataselezionata in 14-10 Guasto di rete.
• La tensione di rete è inferiore alvalore impostato in 14-11 Tensione dialiment. a guasto di rete per guastodi rete
• Il convertitore di frequenza comandala decelerazione del motoreutilizzando una rampa di discesacontrollata
Corrente alta La corrente di uscita del convertitore difrequenza supera il limite impostato in4-51 Avviso corrente alta.
Corr.bassa La corrente di uscita del convertitore difrequenza è inferiore al limite impostato in4-52 Avviso velocità bassa
Tenuta CC Corrente CC è selezionato in 1-80 Funzioneall'arresto ed è attivo un comando di arresto.La corrente CC del motore è impostata in2-00 Corrente CC funzionamento/preriscal-damento.
Arresto CC La corrente CC del motore è (2-01 Corrente difrenatura CC) per un tempo prestabilito(2-02 Tempo di frenata CC).
• Frenatura CC è attivata in 2-03 Vel. inserim.frenatura CC [RPM] ed è attivo un comandodi arresto.
• Frenatura CC (inversa) è selezionata comefunzione per un ingresso digitale (gruppodi parametri 5-1* Ingressi digitali). Ilmorsetto corrispondente non è attivo.
• La frenatura CC viene attivata mediantecomunicazione seriale.
Retroazione alta La somma di tutte le retroazioni attive èsuperiore al limite impostato in 4-57 Avvisoretroazione alta.
Retroazionebassa
La somma di tutte le retroazioni attive èinferiore al limite di retroazione impostato in4-56 Avviso retroazione bassa.
Blocco uscita Il riferimento remoto è attivo e mantiene lavelocità corrente.
• Blocco uscita è stato selezionato comefunzione per un ingresso digitale (gruppodi parametri 5-1* Ingressi digitali). Ilmorsetto corrispondente è attivo. Laregolazione di velocità è possibile solomediante le funzioni di accelerazione edecelerazione dei morsetti.
• La rampa di mantenimento è attivatamediante la comunicazione seriale.
Richiesta Bloccouscita
È stato inviato un comando di blocco uscitama il motore rimarrà arrestato fino alricevimento di un segnale di abilitazioneall'avviamento.
Rif. bloccato Blocco riferimento è stato selezionato comefunzione per un ingresso digitale (gruppo diparametri 5-1* Ingressi digitali). Il morsettocorrispondente è attivo. Il convertitore difrequenza memorizza il riferimento effettivo. Ilriferimento risulta modificabile solo mediantele funzioni dei morsetti di accelerazione edecelerazione.
Richiesta marciajog
È stato inviato un comando jog ma il motorerimarrà arrestato fino al ricevimento di unsegnale di abilitazione all'avviamentomediante un ingresso digitale.
Marcia Jog Il motore sta funzionando come programmatoin 3-19 Velocità marcia jog [RPM].
• Marcia Jog è stato selezionato comefunzione per un ingresso digitale (gruppodi parametri 5-1* Ingressi digitali). Ilmorsetto corrispondente (ad es. morsetto29) è attivo.
• La funzione Marcia Jog è attivata mediantecomunicazione seriale.
• La funzione Jog è stata selezionata comerisposta per una funzione di monitoraggio(ad es. assenza di segnale). La funzione dimonitoraggio è attiva.
Contr. mot. In 1-80 Funzione all'arresto, è stato selezionatoControllo motore. È attivo un comando diarresto. Per assicurare che un motore siacollegato al convertitore di frequenza, siapplica al motore una corrente di testpermanente.
Controllo OVC Il controllo di sovratensione è stato attivato in2-17 Controllo sovratensione. Il motorecollegato alimenta il convertitore di frequenzacon energia rigenerativa. Il controllo disovratensione regola il rapporto V/f per farfunzionare il motore in modo controllato edevitare lo scatto del convertitore di frequenza.
Un. pot. Off (Per convertitori di frequenza con sola alimen-tazione a 24 V esterna). L'alimentazione di reteal convertitore di frequenza è scollegatatuttavia la scheda di controllo è alimentata dai24 V esterni.
Modo prot. La modalità protezione è attiva. L'unità harilevato uno stato critico ( sovracorrente osovratensione).
• Per evitare lo scatto, la frequenza dicommutazione viene ridotta a 4 kHz.
• Se possibile, la modalità di protezionetermina dopo circa 10 s
• La modalità protezione è modificabile in14-26 Ritardo scatto al guasto inverter
Messaggi di stato VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 59
7 7
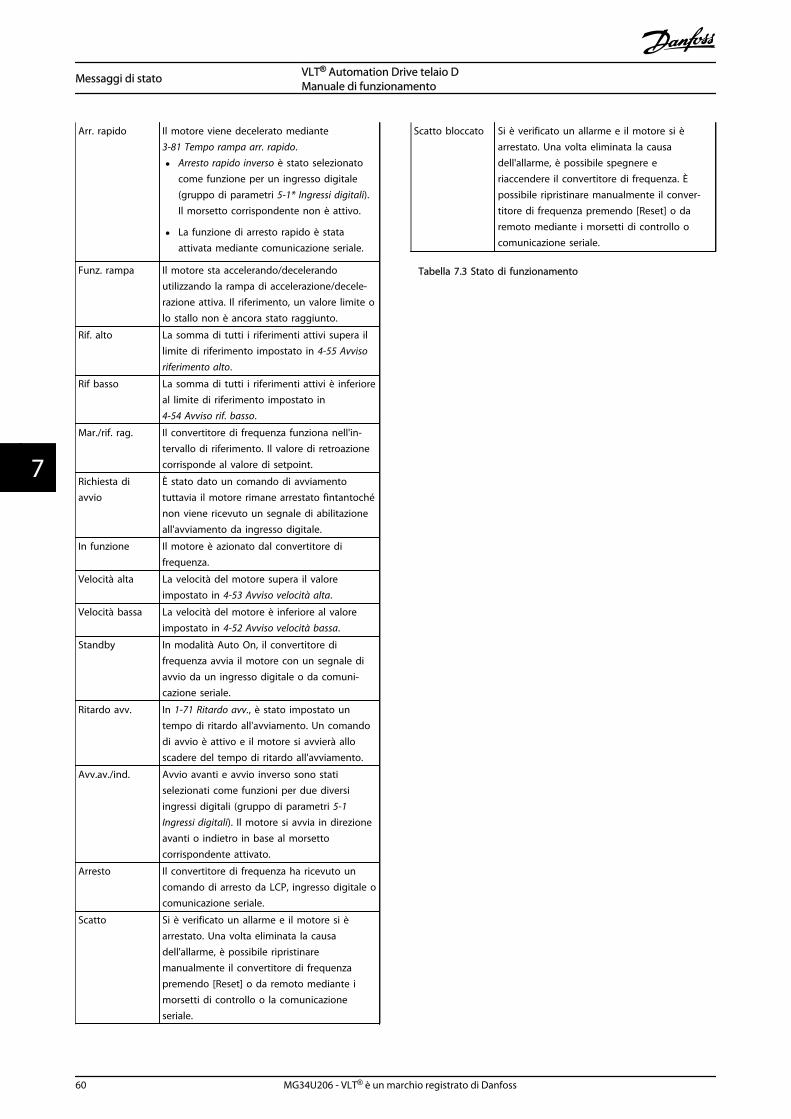
Arr. rapido Il motore viene decelerato mediante3-81 Tempo rampa arr. rapido.
• Arresto rapido inverso è stato selezionatocome funzione per un ingresso digitale(gruppo di parametri 5-1* Ingressi digitali).Il morsetto corrispondente non è attivo.
• La funzione di arresto rapido è stataattivata mediante comunicazione seriale.
Funz. rampa Il motore sta accelerando/decelerandoutilizzando la rampa di accelerazione/decele-razione attiva. Il riferimento, un valore limite olo stallo non è ancora stato raggiunto.
Rif. alto La somma di tutti i riferimenti attivi supera illimite di riferimento impostato in 4-55 Avvisoriferimento alto.
Rif basso La somma di tutti i riferimenti attivi è inferioreal limite di riferimento impostato in4-54 Avviso rif. basso.
Mar./rif. rag. Il convertitore di frequenza funziona nell'in-tervallo di riferimento. Il valore di retroazionecorrisponde al valore di setpoint.
Richiesta diavvio
È stato dato un comando di avviamentotuttavia il motore rimane arrestato fintantochénon viene ricevuto un segnale di abilitazioneall'avviamento da ingresso digitale.
In funzione Il motore è azionato dal convertitore difrequenza.
Velocità alta La velocità del motore supera il valoreimpostato in 4-53 Avviso velocità alta.
Velocità bassa La velocità del motore è inferiore al valoreimpostato in 4-52 Avviso velocità bassa.
Standby In modalità Auto On, il convertitore difrequenza avvia il motore con un segnale diavvio da un ingresso digitale o da comuni-cazione seriale.
Ritardo avv. In 1-71 Ritardo avv., è stato impostato untempo di ritardo all'avviamento. Un comandodi avvio è attivo e il motore si avvierà alloscadere del tempo di ritardo all'avviamento.
Avv.av./ind. Avvio avanti e avvio inverso sono statiselezionati come funzioni per due diversiingressi digitali (gruppo di parametri 5-1Ingressi digitali). Il motore si avvia in direzioneavanti o indietro in base al morsettocorrispondente attivato.
Arresto Il convertitore di frequenza ha ricevuto uncomando di arresto da LCP, ingresso digitale ocomunicazione seriale.
Scatto Si è verificato un allarme e il motore si èarrestato. Una volta eliminata la causadell'allarme, è possibile ripristinaremanualmente il convertitore di frequenzapremendo [Reset] o da remoto mediante imorsetti di controllo o la comunicazioneseriale.
Scatto bloccato Si è verificato un allarme e il motore si èarrestato. Una volta eliminata la causadell'allarme, è possibile spegnere eriaccendere il convertitore di frequenza. Èpossibile ripristinare manualmente il conver-titore di frequenza premendo [Reset] o daremoto mediante i morsetti di controllo ocomunicazione seriale.
Tabella 7.3 Stato di funzionamento
Messaggi di stato VLT® Automation Drive telaio DManuale di funzionamento
60 MG34U206 - VLT® è un marchio registrato di Danfoss
77
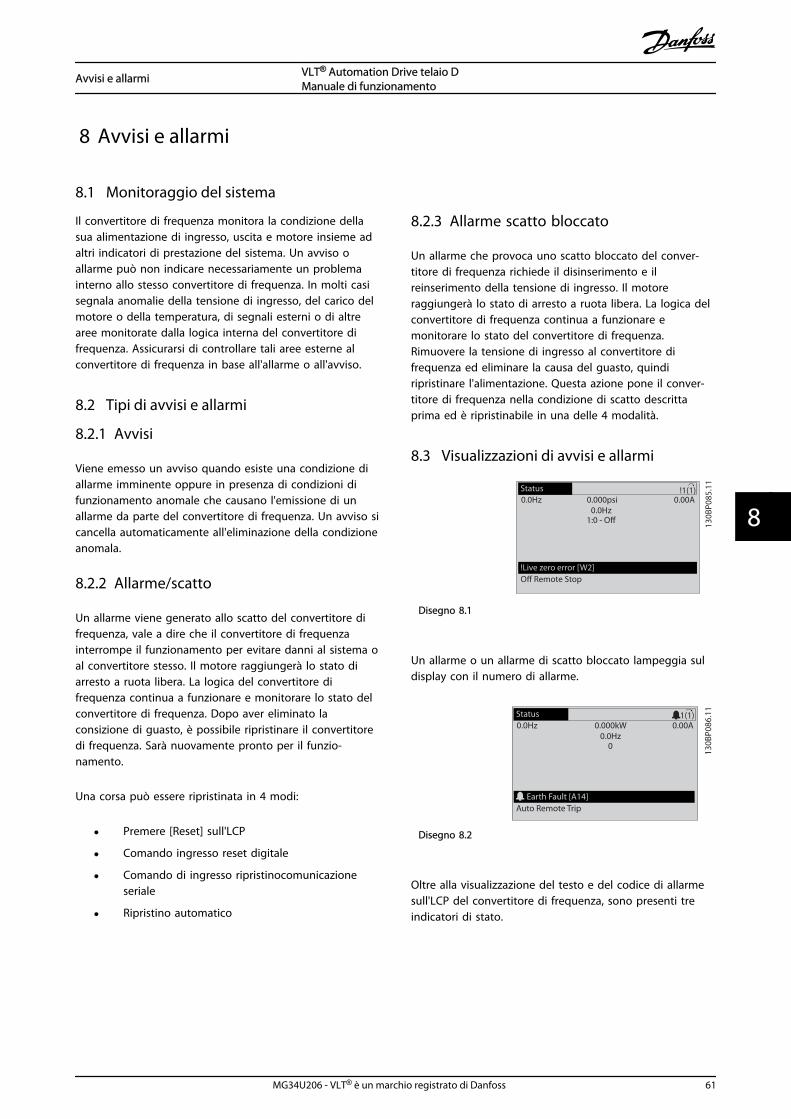
8 Avvisi e allarmi
8.1 Monitoraggio del sistema
Il convertitore di frequenza monitora la condizione dellasua alimentazione di ingresso, uscita e motore insieme adaltri indicatori di prestazione del sistema. Un avviso oallarme può non indicare necessariamente un problemainterno allo stesso convertitore di frequenza. In molti casisegnala anomalie della tensione di ingresso, del carico delmotore o della temperatura, di segnali esterni o di altrearee monitorate dalla logica interna del convertitore difrequenza. Assicurarsi di controllare tali aree esterne alconvertitore di frequenza in base all'allarme o all'avviso.
8.2 Tipi di avvisi e allarmi
8.2.1 Avvisi
Viene emesso un avviso quando esiste una condizione diallarme imminente oppure in presenza di condizioni difunzionamento anomale che causano l'emissione di unallarme da parte del convertitore di frequenza. Un avviso sicancella automaticamente all'eliminazione della condizioneanomala.
8.2.2 Allarme/scatto
Un allarme viene generato allo scatto del convertitore difrequenza, vale a dire che il convertitore di frequenzainterrompe il funzionamento per evitare danni al sistema oal convertitore stesso. Il motore raggiungerà lo stato diarresto a ruota libera. La logica del convertitore difrequenza continua a funzionare e monitorare lo stato delconvertitore di frequenza. Dopo aver eliminato laconsizione di guasto, è possibile ripristinare il convertitoredi frequenza. Sarà nuovamente pronto per il funzio-namento.
Una corsa può essere ripristinata in 4 modi:
• Premere [Reset] sull'LCP
• Comando ingresso reset digitale
• Comando di ingresso ripristinocomunicazioneseriale
• Ripristino automatico
8.2.3 Allarme scatto bloccato
Un allarme che provoca uno scatto bloccato del conver-titore di frequenza richiede il disinserimento e ilreinserimento della tensione di ingresso. Il motoreraggiungerà lo stato di arresto a ruota libera. La logica delconvertitore di frequenza continua a funzionare emonitorare lo stato del convertitore di frequenza.Rimuovere la tensione di ingresso al convertitore difrequenza ed eliminare la causa del guasto, quindiripristinare l'alimentazione. Questa azione pone il conver-titore di frequenza nella condizione di scatto descrittaprima ed è ripristinabile in una delle 4 modalità.
8.3 Visualizzazioni di avvisi e allarmi
130B
P085
.11
Status0.0Hz 0.000psi 0.00A
0.0Hz1:0 - Off
!Live zero error [W2]Off Remote Stop
!1(1)
Disegno 8.1
Un allarme o un allarme di scatto bloccato lampeggia suldisplay con il numero di allarme.
130B
P086
.11
Status0.0Hz 0.000kW 0.00A
0.0Hz0
Earth Fault [A14]Auto Remote Trip
1(1)
Disegno 8.2
Oltre alla visualizzazione del testo e del codice di allarmesull'LCP del convertitore di frequenza, sono presenti treindicatori di stato.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 61
8 8

Autoon Reset
Handon Off
Back
Cancel
InfoOKOn
Alarm
Warn.
130B
B467
.10
Disegno 8.3
LED di avviso LED di allarme
Avviso On Off
Allarme Off On (lampeggiante)
Scattobloccato
On On (lampeggiante)
Tabella 8.1
8.4 Avvisi e allarmi
Tabella 8.2 definisce se un avviso viene emesso prima di unallarme e se l'allarme fa scattare l'unità o blocca l'unità.
N. Descrizione Avviso Allarme/scatto All./scatto blocc. Riferimento parametro1 10V basso X
2 Guasto z. trasl. (X) (X) 6-01 Funz. temporizz. tensionezero
4 Perdita fase di rete (X) (X) (X) 14-12 Funz. durante sbilan-ciamento di rete
5 Tensione bus CC alta X
6 Tensione bus CC bassa X
7 Sovratens. CC X X
8 Sottotens. CC X X
9 Inverter sovracc. X X
10 Sovratemp. ETR motore (X) (X) 1-90 Protezione termica motore
11 Sovratemperatura del termistore motore (X) (X) 1-90 Protezione termica motore
12 Limite di coppia X X
13 Sovracorrente X X X
14 Guasto di terra (massa) X X X
15 Errore hardware X X
16 Cortocircuito X X
17 Temporizz. par. contr. (X) (X) 8-04 Funzione controllotimeout
20 Errore ingresso temp.
21 Errore par.
22 Freno mecc. di sollevamento (X) (X) Gruppo di parametri 2-2*
23 Ventil. interni X
24 Ventil. esterni X 14-53 Monitor. ventola
25 Resistenza freno in cortocircuito X
26 Limite di potenza resistenza freno (X) (X) 2-13 Monitor. potenza freno
27 Chopper di frenatura in cortocircuito X X
28 Controllo freno (X) (X) 2-15 Controllo freno
29 Temperatura dissipatore X X X
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
62 MG34U206 - VLT® è un marchio registrato di Danfoss
88
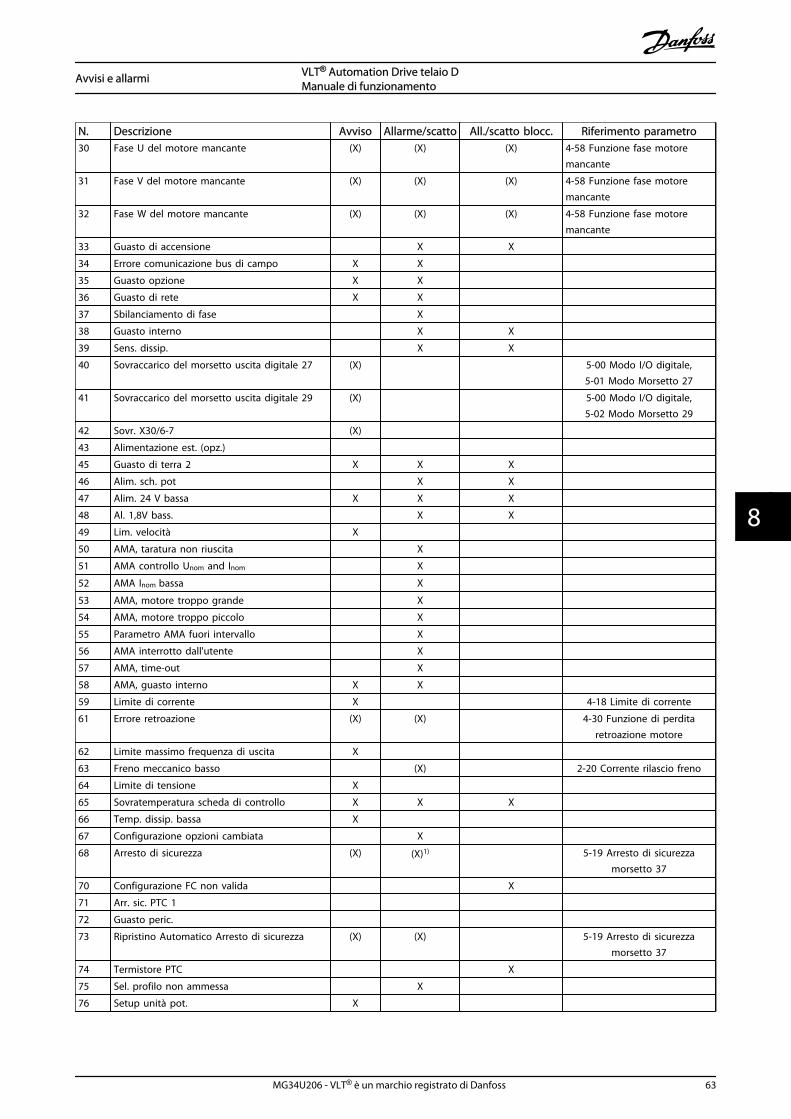
N. Descrizione Avviso Allarme/scatto All./scatto blocc. Riferimento parametro30 Fase U del motore mancante (X) (X) (X) 4-58 Funzione fase motore
mancante
31 Fase V del motore mancante (X) (X) (X) 4-58 Funzione fase motoremancante
32 Fase W del motore mancante (X) (X) (X) 4-58 Funzione fase motoremancante
33 Guasto di accensione X X
34 Errore comunicazione bus di campo X X
35 Guasto opzione X X
36 Guasto di rete X X
37 Sbilanciamento di fase X
38 Guasto interno X X
39 Sens. dissip. X X
40 Sovraccarico del morsetto uscita digitale 27 (X) 5-00 Modo I/O digitale,5-01 Modo Morsetto 27
41 Sovraccarico del morsetto uscita digitale 29 (X) 5-00 Modo I/O digitale,5-02 Modo Morsetto 29
42 Sovr. X30/6-7 (X)
43 Alimentazione est. (opz.)
45 Guasto di terra 2 X X X
46 Alim. sch. pot X X
47 Alim. 24 V bassa X X X
48 Al. 1,8V bass. X X
49 Lim. velocità X
50 AMA, taratura non riuscita X
51 AMA controllo Unom and Inom X
52 AMA Inom bassa X
53 AMA, motore troppo grande X
54 AMA, motore troppo piccolo X
55 Parametro AMA fuori intervallo X
56 AMA interrotto dall'utente X
57 AMA, time-out X
58 AMA, guasto interno X X
59 Limite di corrente X 4-18 Limite di corrente
61 Errore retroazione (X) (X) 4-30 Funzione di perditaretroazione motore
62 Limite massimo frequenza di uscita X
63 Freno meccanico basso (X) 2-20 Corrente rilascio freno
64 Limite di tensione X
65 Sovratemperatura scheda di controllo X X X
66 Temp. dissip. bassa X
67 Configurazione opzioni cambiata X
68 Arresto di sicurezza (X) (X)1) 5-19 Arresto di sicurezzamorsetto 37
70 Configurazione FC non valida X
71 Arr. sic. PTC 1
72 Guasto peric.
73 Ripristino Automatico Arresto di sicurezza (X) (X) 5-19 Arresto di sicurezzamorsetto 37
74 Termistore PTC X
75 Sel. profilo non ammessa X
76 Setup unità pot. X
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 63
8 8

N. Descrizione Avviso Allarme/scatto All./scatto blocc. Riferimento parametro77 Modo pot. rid. X 14-59 Numero effettivo unità
inverter
78 Errore di inseguimento (X) (X) 4-34 Funz. errore di inseguim.
79 Conf. PS n. cons. X X
80 Convertitore di frequenza inizial. al valore didefault
X
81 CSIV dannegg. X
82 Errore par. CSIV X
83 Combinazione opzione non ammessa X
84 Nessuna opzione di sicurezza X
88 Rilevamento opzioni X
89 Freno meccanico sollevamento X
90 Mon. retroaz. (X) (X) 17-61 Monitoraggio segnale diretroaz.
91 Errato setup ingresso analogico 54 X S202
104 Guasto ventola di miscelazione X X 14-53
163 Avviso lim. corr. ETR ATEX X
164 Allarme lim. corr. ETR ATEX X
165 Avviso lim. freq. ETR ATEX X
166 Allarme lim. freq. ETR ATEX X
243 IGBT freno X X X
244 Temperatura dissipatore X X X
245 Sens. dissip. X X Gruppo di parametri 0-7*
246 Alim. sch. pot X
249 T. bassa raddr. X
250 Nuove parti di ric. X
251 Nuovo cod. tipo X X
Tabella 8.2 Lista di codici di allarme/avviso
(X) Dipende dal parametro1) Non è possibile autoripristinare tramite 14-20 Modo ripristino
8.5 Messaggi di allarme
L'informazione di avviso/allarme in baso definisce lacondizione di avviso/allarme, fornisce la causa probabileper la condizione e indica un rimedio o una procedura diricerca ed eliminazione dei guasti.
AVVISO 1, 10V bassoLa tensione della scheda di controllo è inferiore a 10 V almorsetto 50.Rimuovere parte del carico dal morsetto 50, poichél’alimentazione 10 V è sovraccaricata. Max. 15 mA ominimo 590 Ω.
Questa condizione può essere causata da un corto circuitoin un potenziometro collegato o da un errato cablaggiodel potenziometro.
Ricerca ed eliminazione dei guastirimuovere il cavo dal morsetto 50. Se l'avviso non è piùpresente, il problema è correlato al cablaggio del cliente.Se l'allarme è sempre presente, sostituire la scheda dicontrollo.
AVVISO/ALLARME 2, Guasto z. trasl.L'avviso o allarme compare solo se programmatodall'utente in 6-01 Funz. temporizz. tensione zero. Il segnalepresente su uno degli ingressi analogici è inferiore al 50%del valore minimo programmato per quell'ingresso. Questacondizione può essere causata da un cablaggio interrottoo da un dispositivo guasto che invia il segnale.
Ricerca ed eliminazione dei guastiVerificare i collegamenti su tutti i morsetti diingresso analogici. Segnali sui morsetti 53 e 54della scheda di controllo, comune morsetto 55.Morsetti MCB 11 e 12 per segnali, morsetto 10comune. Morsetti MCB 109 1, 3, 5 per segnali,morsetti 2, 4, 6 comune).
Verificare che la programmazione del convertitoredi frequenza e le impostazioni dell'interruttoresiano compatibili con il tipo di segnale analogico.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
64 MG34U206 - VLT® è un marchio registrato di Danfoss
88
Eseguire il test del segnale del morsetto diingresso.
AVVISO/ALLARME 3, Nessun motoreNon è stato collegato alcun motore all’uscita del conv. difrequenza.
AVVISO/ALLARME 4, Perdita fase di reteMancanza di una fase sul lato alimentazione o sbilan-ciamento eccessivo della tensione di rete. Questomessaggio viene visualizzato anche per un guasto nelraddrizzatore di ingresso del convertitore di frequenza. Leopzioni vengono programmate in 14-12 Funz. durantesbilanciamento di rete.
Ricerca ed eliminazione dei guastiControllare la tensione di alimentazione e le correnti dialimentazione al convertitore di frequenza.
AVVISO 5, Tensione bus CC altaLa tensione del circuito intermedio (CC) supera il limite diavviso alta tensione. Il limite dipende dalla tensionenominale del convertitore di frequenza. L'unità è ancoraattiva.
AVVISO 6, Tensione bus CC bassaLa tensione del circuito intermedio (CC) è inferiore al limitedi avviso bassa tensione. Il limite dipende dalla tensionenominale del convertitore di frequenza. L'unità è ancoraattiva.
AVVISO/ALLARME 7, Sovratens. CCSe la tensione del circuito intermedio supera il limite, ilconvertitore di frequenza scatterà dopo un tempopreimpostato.
Ricerca ed eliminazione dei guastiCollegare una resistenza di frenatura
Estendere il tempo di rampa
Cambiare il tipo di rampa
Attivare le funzioni in 2-10 Funzione freno
Aumentare 14-26 Ritardo scatto al guasto inverter
Se l'allarme/avviso si verifica durante unabbassamento di potenza, la soluzione è l'uso delbackup dell'energia cinetica (14-10 Guasto di rete)
AVVISO/ALLARME 8, Sottotens. CCSe la tensione del circuito intermedio (collegamento CC)scende sotto il limite sottotensione, il convertitore difrequenza verifica l’eventuale presenza di un’alimentazionea 24 V CC. Se non è collegata alcuna alimentazioneausiliaria a 24 V CC, il convertitore di frequenza scattadopo un ritardo prefissato. Il ritardo è funzione della tagliadell'unità.
Ricerca ed eliminazione dei guastiControllare se la tensione di rete è compatibilecon i valori nominali del convertitore difrequenza.
Eseguire il test della tensione di ingresso.
Eseguire il test del circuito di soft charge.
AVVISO/ALLARME 9, Sovraccarico inverterIl convertitore di frequenza sta per disinserirsi a causa diun sovraccarico (corrente troppo elevata per un intervallodi tempo troppo lungo). Il contatore della protezionetermica elettronica dell'inverter emette un avviso al 98% escatta al 100%, emettendo un allarme. Il convertitore difrequenza non può essere ripristinato finché il contatorenon mostra un valore inferiore al 90%. Il guasto è dovuto al fatto che il convertitore di frequenzaha funzionato con oltre il 100% di sovraccarico per troppotempo.
Ricerca ed eliminazione dei guastiConfrontare la corrente di uscita visualizzatasull'LCP con la corrente nominale del convertitoredi frequenza.
Confrontare la corrente di uscita visualizzatasull'LCP con la corrente misurata sul motore.
Visualizzare il carico termico del convertitore difrequenza sull'LCP e monitorare il valore. In casodi funzionamento oltre il valore di correntecontinua nominale del convertitore di frequenza ilcontatore aumenta. In caso di funzionamento aldi sotto del valore di corrente continua nominaledel convertitore di frequenza, il contatorediminuisce.
AVVISO/ALLARME 10, Temperatura sovraccarico motoreLa protezione termica elettronica (ETR), rileva un surriscal-damento del motore. Consente all'utente di selezionare seil convertitore di frequenza deve generare un avviso o unallarme quando il contatore raggiunge il 100% in1-90 Protezione termica motore. Il guasto si verifica quandoil motore funziona con oltre il 100% di sovraccarico pertroppo tempo.
Ricerca ed eliminazione dei guastiVerificare un eventuale surriscaldamento delmotore.
Controllare un eventuale sovraccarico meccanicodel motore.
Verificare che la corrente motore impostata in1-24 Corrente motore sia corretta.
Controllare che i dati del motore nei parametri da1-20 a 1-25 siano impostati correttamente.
Se si utilizza una ventola esterna, verificare chesia stata selezionata in 1-91 Ventilaz. est. motore.
Eseguendo l'AMA in 1-29 Adattamento automaticomotore (AMA), si tara il convertitore di frequenzasul motore con maggiore precisione e si riduce ilcarico termico.
AVVISO/ALLARME 11, Sovratemp. term. motoreIl termistore potrebbe essere scollegato. Selezionare se ilconvertitore di frequenza deve generare un avviso o unallarme in 1-90 Protezione termica motore.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 65
8 8

Ricerca ed eliminazione dei guastiVerificare un eventuale surriscaldamento delmotore.
Controllare un eventuale sovraccarico meccanicodel motore.
Controllare che il termistore sia collegato corret-tamente tra il morsetto 53 o 54 (ingresso ditensione analogico) e il morsetto 50 (alimen-tazione +10 V) e che il commutatore del morsetto53 o 54 sia impostato su tensione. Verificare che1-93 Fonte termistore indichi il morsetto 53 o 54.
Quando si utilizzano i morsetti 18 o 19,controllare che il termistore sia collegato corret-tamente tra il morsetto 18 o 19 (ingresso digitalesolo PNP) e il morsetto 50.
Se si utilizza un sensore KTY verificare che ilcollegamento tra i morsetti 54 e 55 sia corretto.
Se si utilizza un termostato o termistore, verificareche la programmazione di 1-93 Risorsa termistorecorrisponda al cablaggio del sensore.
Se si utilizza un sensore KTY, verificare che laprogrammazione di 1-95 Tipo sensore KTY, 1-96Risorsa termistore KTY e 1-97 Livello di soglia KTYcorrisponda al cablaggio del sensore.
AVVISO/ALLARME 12, Limite di coppiaLa coppia è superiore al valore in 4-16 Lim. di coppia inmodo motore oppure a quello in 4-17 Lim. di coppia inmodo generatore. 14-25 Ritardo scatto al lim. di coppiapermette di passare da una condizione di solo avviso auna di avviso seguito da un allarme.
Ricerca ed eliminazione dei guastiSe durante la rampa di accelerazione vienesuperato il limite di coppia del motore,aumentare il valore del tempo di rampa di accele-razione.
Se il limite di coppia del generatore vienesuperato durante la rampa di discesa, aumentareil valore del tempo di rampa di discesa.
Se il limite di coppia viene superato durante ilnormale funzionamento, aumentare, se possibile,il valore del limite. Accertarsi che il sistema possaoperare in condizioni di sicurezza ad un valoremaggiore di coppia.
Controllare l'applicazione per evitare che ilmotore assorba una corrente eccessiva.
AVVISO/ALLARME 13, SovracorrenteÈ stata superata la corrente limite di picco dell'inverter(circa il 200% della corrente nominale). L'avviso permaneper circa 1,5 s., dopodiché il convertitore di frequenzascatta ed emette un allarme. Il guasto può essere causatoda carichi impulsivi o da una rapida accelerazione conelevati carichi inerziali. Può anche apparire dopo unbackup dell'energia cinetica se l'accelerazione durante la
rampa è rapida. Se è stato selezionato il controllo del frenomeccanico esteso, lo scatto può essere ripristinatoesternamente.
Ricerca ed eliminazione dei guasti
Scollegare l'alimentazione e controllare se èpossibile ruotare l'albero motore.
Controllare se la taglia del motore è adatta alconvert. di freq.
Controllare i parametri da 1-20 a 1-25 perassicurare che i dati del motore siano corretti.
ALLARME 14, Guasto di terra (massa)È presente una corrente dalle fasi di uscita verso terra, nelcavo fra il convertitore di frequenza e il motore o nelmotore stesso.
Ricerca ed eliminazione dei guasti:Scollegare l'alimentazione al convertitore difrequenza e rimuovere il guasto di terra.
Verificare la presenza di guasti di terra misurandola resistenza verso terra dei cavi del motore e delmotore con un megaohmetro.
Eseguire il test del sensore di corrente.
ALLARME 15, Errore hardwareUn’opzione installata non può funzionare con l'attualescheda di comando hardware o software.
Registrare il valore dei seguenti parametri e contattare ildistributoreDanfoss:
15-40 Tipo FC
15-41 Sezione potenza
15-42 Tensione
15-43 Vers. software
15-45 Stringa codice tipo eff.
15-49 Scheda di contr. SW id
15-50 Scheda di pot. SW id
15-60 Opzione installata
15-61 Versione SW opzione (per ogni slot opzione)
ALLARME 16, CortocircuitoSi è verificato un cortocircuito nel motore o nei cavi delmotore.
Scollegare l'alimentazione dal convertitore di frequenza edeliminare il corto circuito.
AVVISO/ALLARME 17, Temporizz. par. contr.Nessuna comunicazione con il convertitore di frequenza.L'avviso sarà attivo solo quando 8-04 Funzione temporizz.parola di controllo NON è impostato su [Off].Se 8-04 Funzione temporizz. parola di controllo è impostatosu Arresto e Scatto, viene visualizzato un avviso e il conver-titore di frequenza decelera gradualmente finché scatta equindi visualizza un allarme.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
66 MG34U206 - VLT® è un marchio registrato di Danfoss
88
Ricerca ed eliminazione dei guasti:Verificare i collegamenti del cavo di comuni-cazione seriale.
Aumentare 8-03 Temporizzazione parola dicontrollo
Verificare il funzionamento dei dispositivi dicomunicazione.
Verificare la corretta installazione conformementeai requisiti EMC.
ALLARME 22, Fr. mecc. soll.Il val. di rapporto mostra di che tipo si tratta.0 = Il rif. coppia non è stato raggiunto prima del time out.1 = Nessun segnale di retroazione dal freno prima del timeout.
AVVISO 23, Guasto ventola internaLa funzione di avviso ventola è una protezione aggiuntivache verifica se la ventola è montata e funziona. L'avvisoventola può essere disattivato in 14-53 Monitor. ventola ([0]Disattivato).
Ricerca ed eliminazione dei guastiControllare la resistenza delle ventole.
Controllare i fusibili di soft charge.
AVVISO 24, Guasto ventola esternaLa funzione di avviso ventola è una protezione aggiuntivache verifica se la ventola è montata e funziona. L'avvisoventola può essere disattivato in 14-53 Monitor. ventola ([0]Disattivato).
Ricerca ed eliminazione dei guastiControllare la resistenza delle ventole.
Controllare i fusibili di soft charge.
AVVISO 25, Resistenza freno in cortocircuitoLa resistenza di frenatura viene monitorata durante ilfunzionamento. In caso di corto circuito, la funzione frenoè disattivata e viene visualizzato l'avviso. Il convertitore difrequenza è ancora in grado di funzionare, ma senza lafunzione di frenatura. Scollegare l'alimentazione al conver-titore di frequenza e sostituire la resistenza di frenatura(vedere 2-15 Controllo freno).
AVVISO/ALLARME 26, Limite di potenza resistenza frenoLa potenza trasmessa alla resistenza freno viene calcolatacome valore medio derivante dagli ultimi 120 sec. difunzionamento. Il calcolo è basato sulla tensione delcircuito intermedio e dal valore della resistenza frenoimpostato in 2-16 Corrente max. per freno CA. L'avviso èattivo quando la potenza di frenatura dissipata è superioreal 90% rispetto alla potenza della resistenza freno. Se in2-13 Monitor. potenza freno è stato selezionato [2] Scatto, ilconvertitore di frequenza scatta quando la potenza difrenatura dissipata supera il 100%.
AVVISOSussiste il rischio che venga trasmessa una potenza elevataalla resistenza freno se il transistor è cortocircuitato.
AVVISO/ALLARME 27, Guasto al chopper di fren.Il transistor del freno viene controllato durante il funzio-namento e, se entra in cortocircuito, la funzione frenoviene disattivata e viene visualizzato un avviso. Il conver-titore di frequenza è ancora in grado di funzionare ma,poiché il transistor del freno è entrato in corto circuito, unapotenza elevata viene trasmessa alla resistenza freno,anche se non è attiva.Scollegare l'alimentazione al convertitore di frequenza erimuovere la resistenza freno.
Questo allarme/ avviso potrebbe anche essere emesso incaso di surriscaldamento della resistenza freno. I morsetti104 e 106 sono disponibili come resistenze freno o ingressiKlixon, fare riferimento alla sezione Interruttore ditemperatura della resistenza freno nella Guida alla Proget-tazione.
AVVISO/ALLARME 28, Controllo freno fallitoLa resistenza di frenatura non è collegata o non funziona.Controllare 2-15 Controllo freno.
ALLARME 29, Temp. dissip.La temperatura massima ammessa per il dissipatore è statasuperata. Il guasto dovuto alla temperatura non verràripristinato finché la temperatura non scende al di sotto diuna temperatura del dissipatore prestabilita. I punti discatto e di ripristino sono diversi a seconda della taglia delconvertitore di frequenza.
Ricerca ed eliminazione dei guastiVerificare le seguenti condizioni:
Temperatura ambiente troppo elevata.
Cavo motore troppo lungo.
Mancanza di spazio adeguato sopra e sotto ilconvertitore di frequenza
Circolazione aria assente attorno al convertitoredi frequenza.
Ventola dissipatore danneggiata.
Dissipatore sporco.
Per le dimensioni telaio D, E e F, questo allarme è basatosulla temperatura misurata dal sensore del dissipatoremontato all'interno dei moduli IGBT. Per telai di taglia F,questo allarme può anche essere causato dal sensore ditemperatura nel modulo raddrizzatore.
Ricerca ed eliminazione dei guastiControllare la resistenza delle ventole.
Controllare i fusibili di soft charge.
Sensore temperatura IGBT.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 67
8 8
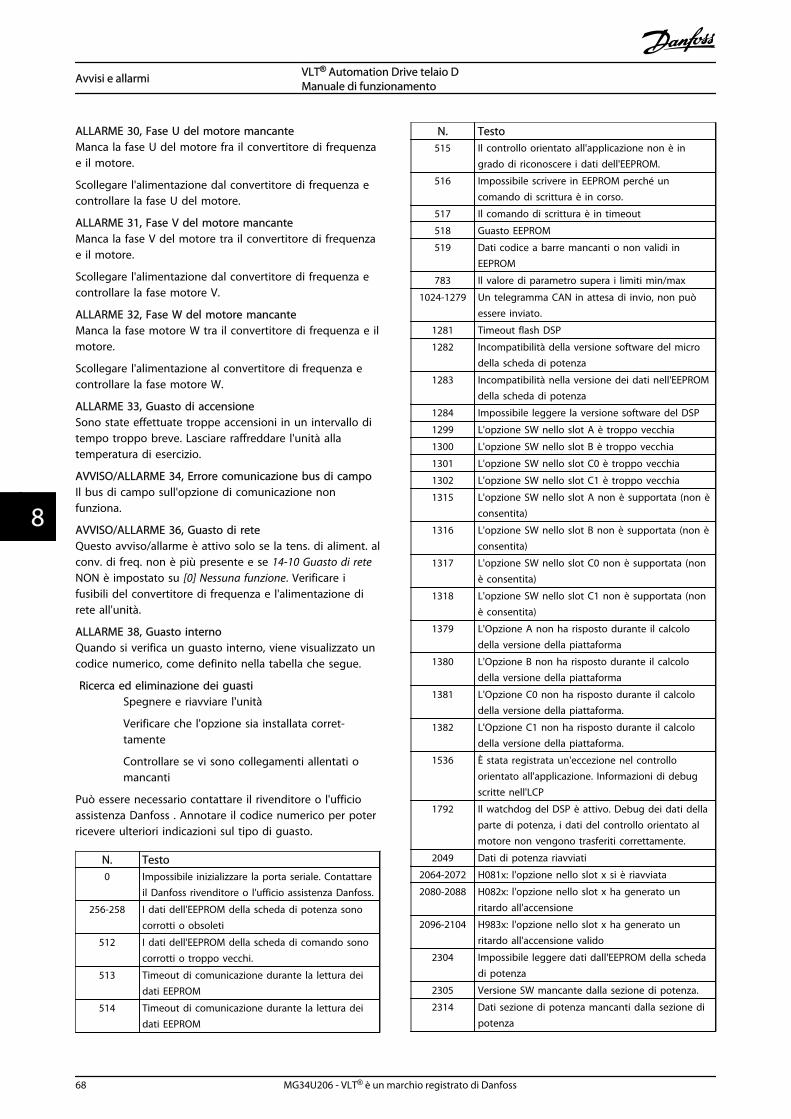
ALLARME 30, Fase U del motore mancanteManca la fase U del motore fra il convertitore di frequenzae il motore.
Scollegare l'alimentazione dal convertitore di frequenza econtrollare la fase U del motore.
ALLARME 31, Fase V del motore mancanteManca la fase V del motore tra il convertitore di frequenzae il motore.
Scollegare l'alimentazione dal convertitore di frequenza econtrollare la fase motore V.
ALLARME 32, Fase W del motore mancanteManca la fase motore W tra il convertitore di frequenza e ilmotore.
Scollegare l'alimentazione al convertitore di frequenza econtrollare la fase motore W.
ALLARME 33, Guasto di accensioneSono state effettuate troppe accensioni in un intervallo ditempo troppo breve. Lasciare raffreddare l'unità allatemperatura di esercizio.
AVVISO/ALLARME 34, Errore comunicazione bus di campoIl bus di campo sull'opzione di comunicazione nonfunziona.
AVVISO/ALLARME 36, Guasto di reteQuesto avviso/allarme è attivo solo se la tens. di aliment. alconv. di freq. non è più presente e se 14-10 Guasto di reteNON è impostato su [0] Nessuna funzione. Verificare ifusibili del convertitore di frequenza e l'alimentazione direte all'unità.
ALLARME 38, Guasto internoQuando si verifica un guasto interno, viene visualizzato uncodice numerico, come definito nella tabella che segue.
Ricerca ed eliminazione dei guastiSpegnere e riavviare l'unità
Verificare che l'opzione sia installata corret-tamente
Controllare se vi sono collegamenti allentati omancanti
Può essere necessario contattare il rivenditore o l'ufficioassistenza Danfoss . Annotare il codice numerico per poterricevere ulteriori indicazioni sul tipo di guasto.
N. Testo0 Impossibile inizializzare la porta seriale. Contattare
il Danfoss rivenditore o l'ufficio assistenza Danfoss.
256-258 I dati dell'EEPROM della scheda di potenza sonocorrotti o obsoleti
512 I dati dell'EEPROM della scheda di comando sonocorrotti o troppo vecchi.
513 Timeout di comunicazione durante la lettura deidati EEPROM
514 Timeout di comunicazione durante la lettura deidati EEPROM
N. Testo515 Il controllo orientato all'applicazione non è in
grado di riconoscere i dati dell'EEPROM.
516 Impossibile scrivere in EEPROM perché uncomando di scrittura è in corso.
517 Il comando di scrittura è in timeout
518 Guasto EEPROM
519 Dati codice a barre mancanti o non validi inEEPROM
783 Il valore di parametro supera i limiti min/max
1024-1279 Un telegramma CAN in attesa di invio, non puòessere inviato.
1281 Timeout flash DSP
1282 Incompatibilità della versione software del microdella scheda di potenza
1283 Incompatibilità nella versione dei dati nell'EEPROMdella scheda di potenza
1284 Impossibile leggere la versione software del DSP
1299 L'opzione SW nello slot A è troppo vecchia
1300 L'opzione SW nello slot B è troppo vecchia
1301 L'opzione SW nello slot C0 è troppo vecchia
1302 L'opzione SW nello slot C1 è troppo vecchia
1315 L'opzione SW nello slot A non è supportata (non èconsentita)
1316 L'opzione SW nello slot B non è supportata (non èconsentita)
1317 L'opzione SW nello slot C0 non è supportata (nonè consentita)
1318 L'opzione SW nello slot C1 non è supportata (nonè consentita)
1379 L'Opzione A non ha risposto durante il calcolodella versione della piattaforma
1380 L'Opzione B non ha risposto durante il calcolodella versione della piattaforma
1381 L'Opzione C0 non ha risposto durante il calcolodella versione della piattaforma.
1382 L'Opzione C1 non ha risposto durante il calcolodella versione della piattaforma.
1536 È stata registrata un'eccezione nel controlloorientato all'applicazione. Informazioni di debugscritte nell'LCP
1792 Il watchdog del DSP è attivo. Debug dei dati dellaparte di potenza, i dati del controllo orientato almotore non vengono trasferiti correttamente.
2049 Dati di potenza riavviati
2064-2072 H081x: l'opzione nello slot x si è riavviata
2080-2088 H082x: l'opzione nello slot x ha generato unritardo all'accensione
2096-2104 H983x: l'opzione nello slot x ha generato unritardo all'accensione valido
2304 Impossibile leggere dati dall'EEPROM della schedadi potenza
2305 Versione SW mancante dalla sezione di potenza.
2314 Dati sezione di potenza mancanti dalla sezione dipotenza
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
68 MG34U206 - VLT® è un marchio registrato di Danfoss
88

N. Testo2315 Versione SW mancante dalla sezione di potenza.
2316 io_statepage mancante dalla sezione di potenza
2324 Configurazione della scheda di potenza noncorretta all'accensione
2325 Una scheda di potenza ha interrotto le comuni-cazioni quando è stata collegata l'alimentazioneprincipale.
2326 Configurazione della scheda di potenza noncorretta al termine del periodo di tempo concessoalla scheda per registrarsi.
2327 Troppe posizioni di schede di potenza si sonoregistrate come presenti.
2330 Le informazioni relative alla potenza scambiate trale schede di potenza non corrispondono.
2561 Nessuna comunicazione da DSP a ATACD
2562 Nessuna comunicazione da ATACD a DSP (statofunzionamento)
2816 Overflow dello stack modulo della scheda dicontrollo
2817 Attività pianificatore lente
2818 Attività rapide
2819 Thread parametro
2820 Overflow dello stack LCP
2821 Overflow della porta seriale
2822 Overflow della porta USB
2836 cfListMempool insufficiente
3072-5122 Il valore del parametro non rientra nei limiti
5123 Opzione nello slot A: hardware incompatibile conl'hardware della scheda di controllo
5124 Opzione nello slot B: hardware incompatibile conl'HW della scheda di controllo.
5125 Opzione nello slot C0: hardware incompatibile conl'hardware della scheda di controllo.
5126 Opzione nello slot C1: hardware incompatibile conl'hardware della scheda di controllo.
5376-6231 Mem. insuff.
Tabella 8.3
ALLARME 39, Sens. dissip.Nessuna retroazione dal sensore di temperatura deldissipatore.
Il segnale dal sensore di temperatura IGBT non èdisponibile sulla scheda di potenza. Il problema potrebbeessere sulla scheda di potenza, sulla scheda di pilotaggiogate, sul cavo a nastro tra la scheda di potenza e la schedadi pilotaggio gate.
AVVISO 40, Sovraccarico dell'uscita dig. mors. 27Verificare il carico collegato al morsetto 27 o rimuovere ilcollegamento in corto circuito. Controllare 5-00 Modo I/Odigitale e 5-01 Modo Morsetto 27.
AVVISO 41, Sovraccarico dell'uscita dig. mors. 29Verificare il carico collegato al morsetto 29 o rimuovere ilcollegamento in corto circuito. Controllare 5-00 Modo I/Odigitale e 5-02 Modo Morsetto 29.
AVVISO 42, Sovraccarico uscita digitale su X30/6 o sovrac-carico uscita digitale su X30/7Per X30/6, verificare il carico collegato al morsetto X30/6 orimuovere il collegamento in corto circuito. Controllare5-32 Uscita dig. mors. X30/6 (MCB 101).
Per X30/7, verificare il carico collegato al morsetto X30/7 orimuovere il collegamento in corto circuito. Controllare5-33 Uscita dig. mors. X30/7 (MCB 101).
ALLARME 46, Alimentazione scheda di potenzaL'alimentaz. sulla scheda di pot. è fuori campo
Sono disponibili tre alimentazioni generate dall'alimen-tatore switching (SMPS) sulla scheda di potenza: 24 V, 5 V,±18 V. Alimentando a 24 V CC mediante l'opzione MCB107, sono monitorate solamente le alimentazioni 24 V e 5V. Alimentando con tensione trifase da rete, sonomonitorate tutte e tre le alimentazioni.
AVVISO 47, Alim. 24 V bassaI 24V CC sono misurati sulla scheda di comando. l'alimen-tazione esterna ausiliaria 24 V CC potrebbe esseresovraccarica; in caso contrario, contattare il rivenditoreDanfoss.
AVVISO 48, Al. 1,8V bass.L'alimentazione a 1,8 V CC utilizzata sulla scheda dicontrollo non rientra nei limiti consentiti. L'alimentazione èmisurata sulla scheda di controllo. Verificare se la scheda dicomando è difettosa. Se è presente una scheda opzionale,verificare una eventuale condizione di sovratensione.
AVVISO 49, Lim. velocitàQuando la velocità non è compresa nell'intervallospecificato in 4-11 Lim. basso vel. motore [giri/min] e4-13 Lim. alto vel. motore [giri/min], il convertitore difrequenza mostra un avviso. Quando la velocità è inferioreal limite specificato in 1-86 Velocità scatto bassa [giri/min](tranne che all'avvio o all'arresto) il convertitore difrequenza scatta.
ALLARME 50, AMA, taratura non riuscitaContattare il Danfoss rivenditore o l'ufficio assistenzaDanfoss.
ALLARME 51, AMA controllo Unom and Inom
Sono errate le impostazioni della tensione motore, dellacorrente motore e della potenza motore. Controllare leimpostazioni dei parametri da 1-20 a 1-25.
ALLARME 52, AMA, Inom bassaLa corrente motore è troppo bassa. Controllare leimpostazioni.
ALLARME 53, AMA, motore troppo grandeIl motore è troppo grande per il funzionamento dell'AMA.
ALLARME 54, AMA, motore troppo piccoloIl motore è troppo piccolo perché l'AMA funzioni.
ALLARME 55, AMA, par. fuori campoI valori dei parametri del motore sono al di fuori delcampo accettabile. AMA non funzionerà.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 69
8 8
ALLARME 56, AMA interrotto dall'utenteL'utente ha interritto l'AMA.
ALLARME 57, AMA, guasto internoTentare più volte di RIavviare l'AMA finché l'esecuzionenon riesce. Cicli ripetuti possono riscaldare il motore edeterminare l'aumento delle resistenze Rs e Rr. Non sitratta comunque di un problema critico.
ALLARME 58, AMA, guasto internoContattare il proprio rivenditore Danfoss.
AVVISO 59, Limite correnteLa corrente è superiore al valore in 4-18 Limite di corrente.Controllare che i dati del motore nei parametri da 1-20 a1-25 siano impostati correttamente. Aumentarepossibilmente il limite di corrente. Accertarsi che il sistemapossa operare in sicurezza a un limite superiore.
AVVISO 60, Interblocco esternoL'interblocco esterno è stato attivato. Per riprendere il funz.normale, applicare 24 V CC al mors. progr. per interbl.esterno e riprist. il conv. di freq. (tramite comunicazioneseriale, I/O digitale o prem. [Reset]).
AVVISO/ALLARME 61, Errore di inseguimentoErrore tra la velocità motore calcolata e la velocità misuratadal dispositivo di retroazione. La funzione Avviso/Allarme/Disabilita viene impostata in 4-30 Funzione di perditaretroazione motore. L'impostazione dell'errore tollerato in4-31 Errore di velocità retroazione motore e l'impostazionedel periodo di tempo accettabile per l'errore in4-32 Timeout perdita retroazione motore. Durante unaprocedura di messa in funzione la funzione può essereattiva.
AVVISO 62, Frequenza di uscita al limite massimoLa frequenza di uscita è superiore al valore impostato in4-19 Freq. di uscita max..
ALLARME 64, Limite tens.La combinaz. di carico e velocità richiede una tensionemotore sup. alla tensione colleg. CC effettiva.
AVVISO/ALLARME 65, Sovratemperatura scheda di controlloLa temperatura di disinserimento della scheda di controlloè di 80 °C.
Ricerca ed eliminazione dei guasti
• Verificare che la temperatura ambiente di funzio-namento sia entro i limiti
• Controllare eventuali filtri intasati
• Controllare il funzionamento della ventola
• Controllare la scheda di comando
AVVISO 66, Temp. dissip. bassaLa temperatura del convertitore di frequenza è troppobassa per il normale funzionamento. L'avviso si basa sulsensore di temperatura nel modulo IGBT.Aumentare la temperatura ambiente dell'unità. Unamodesta quantità di corrente di mantenimento può essereinviata al convertitore di frequenza anche quando il
motore è fermo impostando 2-00 Corrente CC funzio-namento/preriscaldamento al 5% e 1-80 Funzione all'arresto
Ricerca ed eliminazione dei guastiLa temperatura del dissipatore misurata di 0° C potrebbeindicare che il sensore di temp. è guasto e pertanto lavelocità della ventola viene aumentata al massimo. Se ilcavo del sensore tra l'IGBT e la scheda di pilotaggio gatenon è collegato si genera l'avviso. Verificare anche ilsensore di temperatura IGBT.
ALLARME 67, Configurazione modulo opzioni cambiataUna o più opzioni sono state aggiunte o rimossedall'ultimo spegnimento. Verificare che la modifica allaconfigurazione sia voluta e ripristinare l'unità.
ALLARME 68, Arresto di sic. att.È stato attivato l'arresto di sicurezza. Per riprendere ilfunzionamento normale, applicare 24 V CC al morsetto 37,quindi inviare un segnale di reset (tramite bus, I/O digitaleo premendo il tasto reset).
ALLARME 70, Configurazione convertitore di frequenza noncons.La scheda di controllo e la scheda di potenza sonoincompatibili. Contattare il proprio rivenditore, indicando ilcodice dell'unità ricavato dalla targhetta e i codici articolodella scheda per verificare la compatibilità.
ALLARME 71, Arr. sic. PTC 1La funzione di sicurezza è stata attivata dalla schedatermistore PTC MCB 112 (motore troppo caldo). Il normalefunzionamento riprenderà quando MCB 112 applicherànuovamente una tensione di 24 V CC al morsetto T-37(quando la temperatura del motore avrà raggiunto unvalore accettabile) e quando l'ingresso digitale provenienteda MCB 112 sarà disattivato. Inoltre è necessario inviare unsegnale di reset (tramite bus, I/O digitale o premendo[Reset]). Se è abilitato il riavvio automatico, il motore siriavvierà una volta eliminato il guasto.
ALLARME 72, Guasto pericolosoArresto di sicurezza con scatto bloccato. Livelli di segnalenon previsti per l'arresto di sicurezza e l'ingresso digitaledalla scheda termistore PTC MCB 112.
AVVISO 73, Ripristino automatico arresto di sicurezzaIn arresto di sicurezza. Con il riavvio automatico abilitato, ilmotore si riavvierà una volta eliminato il guasto.
AVVISO 76, Setup dell'unità di potenzaIl numero richiesto di unità di potenza non corrisponde alnumero rilevato di unità di potenza attive.
Ricerca ed eliminazione dei guasti:Un modulo di telaio F dovrà essere sostituito se i dati dipotenza nella scheda di potenza del modulo noncorrispondono a quelli del resto del convertitore difrequenza. Confermare che il pezzo di ricambio e la suascheda di potenza rechino il corretto codice articolo.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
70 MG34U206 - VLT® è un marchio registrato di Danfoss
88

AVVISO 77, Modo pot. rid.Questo avviso indica che il convertitore di frequenza stafunzionando a potenza ridotta (cioè con meno sezioniinverter di quante sarebbero possibili). Questo avviso vienegenerato durante il ciclo di accensione (spegnere eriaccendere) quando il convertitore di frequenza èimpostato per funzionare con meno inverter e continuerà arimanere attivo.
ALLARME 79, Configurazione della sezione di potenza nonvalidaLa scheda di conversione in scala non è installata o non èdel tipo corretto. Non è possibile installare anche ilconnettore MK102 sulla scheda di potenza.
ALLARME 80, Inverter inizial. al valore di defaultLe impostazioni dei parametri sono inizializzate alleimpostazioni di defaultriportate alle impostazioni difabbrica dopo un reset manuale. Ripristinare l'unità percancellare un allarme.
ALLARME 81, CSIV dannegg.Errori di sintassi nel file CSIV.
ALLARME 82, Errore parametri CSIVIl CSIV ha fallito nell'inizializzazione di un parametro.
ALLARME 85, Guasto per. PB:Errore Profibus/Profisafe.
AVVISO/ALLARME 104, Guasto ventola di miscelazioneIl monitoraggio della ventola controlla che la ventola giriall'accensione od ogniqualvolta la ventola di miscelazionevenga accesa. Se la ventola non sta funzionando, alloraviene annunciato il guasto. Il guasto della ventola dimiscelazione può essere configurato come un scatto peravviso o uno scatto per allarme tramite 14-53 Monitor.ventola.
Ricerca ed eliminazione dei guasti Spegnere e riaccendereil convertitore di frequenza per determinare se l'avviso/l'allarme ritorna.
AVVISO 250, Nuova parte di ric.È stato sostituito un componente del convertitore difrequenza. Ripristinare il convertitore di frequenza perriprendere il funzionamento normale.
AVVISO 251, Nuovo cod. tipoLa scheda di potenza o altri componenti sono statisostituiti e il codice identificativo è cambiato. Effettuare unreset per rimuovere l'avviso e riprendere il funzionamentonormale.
Avvisi e allarmi VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 71
8 8

9 Ricerca guasti elementare
9.1 Avviamento e funzionamento
Sintomo Possibile causa Prova Soluzione
Display spento / Nessunafunzione
Alimentazione di ingressomancante.
Vedere Tabella 3.1. Controllare la sorgente di alimen-tazione di ingresso.
Fusibili bruciati o mancanti oscatto dell'interruttore automatico
Vedere in questa tabella le causepossibili per fusibili aperti e scattodell'interruttore automatico.
Seguire le raccomandazioni fornite.
Nessuna alimentazione all'LCP. Controllare il corretto collegamentodel cavo e l'assenza di danniall'LCP.
Sostituire l'LCP o il cavo dicollegamento guasto.
Cortocircuito sulla tensione dicontrollo (morsetto 12 o 50) o suimorsetto di controllo.
Controllare l'alimentazione dellatensione 24 V di controllo suimorsetti da 12/13 a 20-39 ol'alimentazione 10 V sui morsetti da50 a 55.
Cablare correttamente i morsetti.
LCP errato (LCP da VLT® 2800 o5000/6000/8000/ FCD o FCM).
Usare solo l'LCP 101 (P/N130B1124) o l'LCP 102 (P/N130B1107).
Impostazione errata del contrasto. Premere [Status] + + []/[] per
regolare il contrasto.
Il display (LCP) è difettoso. Test usando un LCP diverso. Sostituire l'LCP o il cavo dicollegamento guasto.
Guasto all'alimentazione ditensione interna o SMPS guasto.
Contattare il fornitore.
Display intermittente
Alimentatore sovraccarico (SMPS)a causa di cavi di controllo nonadeguati o di un guasto all'internodel convertitore di frequenza.
Per evitare un problema nei cavi dicontrollo, scollegare tutti i cavi dicontrollo rimuovendo lemorsettiere.
Se il display rimane acceso, ilproblema è nei cavi di controllo.Controllare il cablaggio perescludere cortocircuiti ocollegamenti scorretti. Se il displaycontinua a disinserirsi, seguire laprocedura per spegnere il display.
Ricerca guasti elementare VLT® Automation Drive telaio DManuale di funzionamento
72 MG34U206 - VLT® è un marchio registrato di Danfoss
99
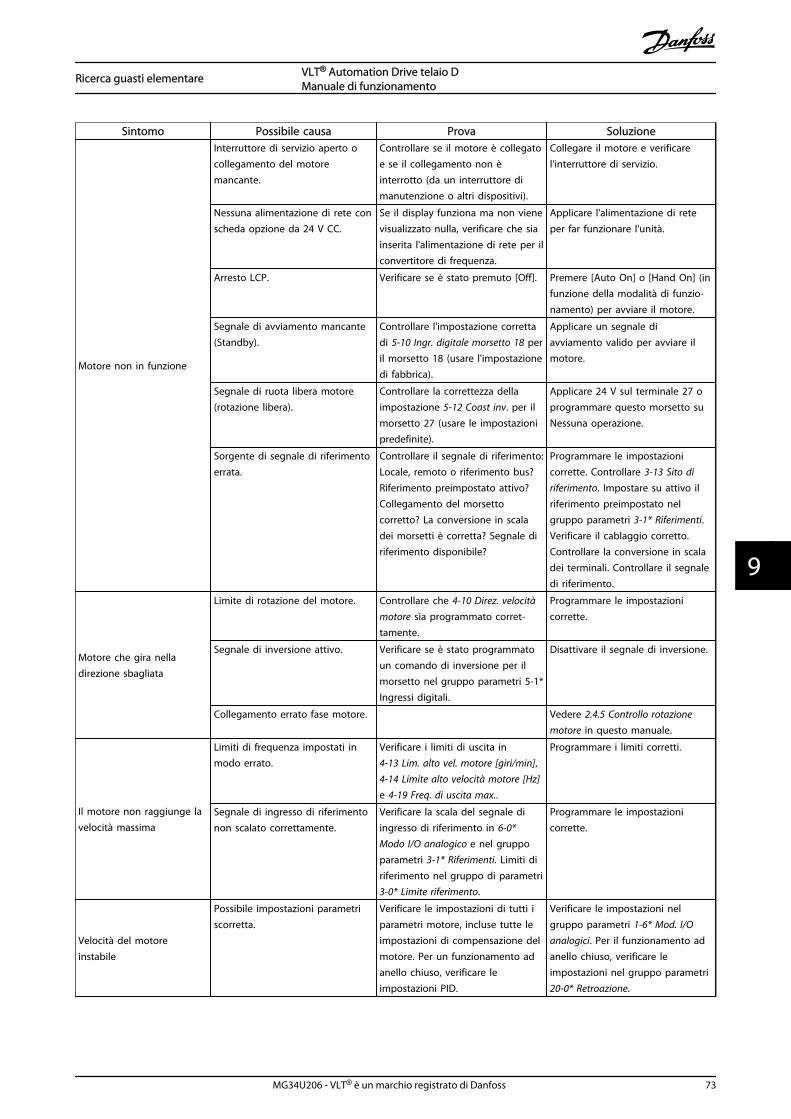
Sintomo Possibile causa Prova Soluzione
Motore non in funzione
Interruttore di servizio aperto ocollegamento del motoremancante.
Controllare se il motore è collegatoe se il collegamento non èinterrotto (da un interruttore dimanutenzione o altri dispositivi).
Collegare il motore e verificarel'interruttore di servizio.
Nessuna alimentazione di rete conscheda opzione da 24 V CC.
Se il display funziona ma non vienevisualizzato nulla, verificare che siainserita l'alimentazione di rete per ilconvertitore di frequenza.
Applicare l'alimentazione di reteper far funzionare l'unità.
Arresto LCP. Verificare se è stato premuto [Off]. Premere [Auto On] o [Hand On] (infunzione della modalità di funzio-namento) per avviare il motore.
Segnale di avviamento mancante(Standby).
Controllare l'impostazione correttadi 5-10 Ingr. digitale morsetto 18 peril morsetto 18 (usare l'impostazionedi fabbrica).
Applicare un segnale diavviamento valido per avviare ilmotore.
Segnale di ruota libera motore(rotazione libera).
Controllare la correttezza dellaimpostazione 5-12 Coast inv. per ilmorsetto 27 (usare le impostazionipredefinite).
Applicare 24 V sul terminale 27 oprogrammare questo morsetto suNessuna operazione.
Sorgente di segnale di riferimentoerrata.
Controllare il segnale di riferimento:Locale, remoto o riferimento bus?Riferimento preimpostato attivo?Collegamento del morsettocorretto? La conversione in scaladei morsetti è corretta? Segnale diriferimento disponibile?
Programmare le impostazionicorrette. Controllare 3-13 Sito diriferimento. Impostare su attivo ilriferimento preimpostato nelgruppo parametri 3-1* Riferimenti.Verificare il cablaggio corretto.Controllare la conversione in scaladei terminali. Controllare il segnaledi riferimento.
Motore che gira nelladirezione sbagliata
Limite di rotazione del motore. Controllare che 4-10 Direz. velocitàmotore sia programmato corret-tamente.
Programmare le impostazionicorrette.
Segnale di inversione attivo. Verificare se è stato programmatoun comando di inversione per ilmorsetto nel gruppo parametri 5-1*Ingressi digitali.
Disattivare il segnale di inversione.
Collegamento errato fase motore. Vedere 2.4.5 Controllo rotazionemotore in questo manuale.
Il motore non raggiunge lavelocità massima
Limiti di frequenza impostati inmodo errato.
Verificare i limiti di uscita in4-13 Lim. alto vel. motore [giri/min],4-14 Limite alto velocità motore [Hz]e 4-19 Freq. di uscita max..
Programmare i limiti corretti.
Segnale di ingresso di riferimentonon scalato correttamente.
Verificare la scala del segnale diingresso di riferimento in 6-0*Modo I/O analogico e nel gruppoparametri 3-1* Riferimenti. Limiti diriferimento nel gruppo di parametri3-0* Limite riferimento.
Programmare le impostazionicorrette.
Velocità del motoreinstabile
Possibile impostazioni parametriscorretta.
Verificare le impostazioni di tutti iparametri motore, incluse tutte leimpostazioni di compensazione delmotore. Per un funzionamento adanello chiuso, verificare leimpostazioni PID.
Verificare le impostazioni nelgruppo parametri 1-6* Mod. I/Oanalogici. Per il funzionamento adanello chiuso, verificare leimpostazioni nel gruppo parametri20-0* Retroazione.
Ricerca guasti elementare VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 73
9 9

Sintomo Possibile causa Prova Soluzione
Il motore funziona in modoirregolare
Possibile sovramagnetizzazione. Controllare impostazioni motorescorrette in tutti i parametri delmotore.
Controllare le impostazioni motorenel gruppo di parametri 1-2* Datimotore, 1-3* Dati motore avanz., e1-5* Impost. indip. dal carico.
Il motore non frenaPossibili impostazioni scorrette neiparametri dei freni. Possibili tempirampa di discesa troppo brevi.
Controllare i parametri del freno.Controllare le impostazioni deltempo di rampa.
Controllare il gruppo parametri2-0* Freno CC e 3-0* Limitiriferimento.
Fusibili aperti o scattointerruttore automaticoalimentazione
Corto tra due fasi. Il motore o il pannello presentanoun cortocircuito tra le fasi.Controllare eventuali corti tra le fasidi motore e pannello.
Eliminare ogni corto rilevato.
Sovraccarico motore. Il motore è in sovraccarico perl'applicazione.
Eseguire il test all'avviamento everificare che la corrente motorerientri nelle specifiche. Se lacorrente motore supera la correntea pieno carico di targa, il motorepotrebbe funzionare solo a caricoridotto. Riesaminare le specificheper l'applicazione.
Collegamenti allentati. Eseguire il controllo di pre-avvioper i collegamenti allentati.
Serrare i collegamenti allentati.
Squilibrio corrente di retesuperiore al 3%
Problemi con l'alimentazione direte (vedere la descrizione Allarme4 Perdita fase di rete)
Ruotare i cavi dell'alimentazione diingresso nel convertitore difrequenza di una posizione: Da A aB, da B a C, da C ad A.
Se lo squilibrio segue il filo, sitratta di un problema di alimen-tazione. Verificare l'alimentazionedi rete.
Problema con il convertitore difrequenza.
Ruotare i cavi dell'alimentazione diingresso nel convertitore difrequenza di una posizione: Da A aB, da B a C, da C ad A.
Se lo squilibrio permane sullostesso morsetto di ingresso, sitratta di un problema dell'unità.Contattare il fornitore.
Squilibrio della correntemotore superiore al 3%.
Problema con il motore o con ilcablaggio del motore.
Ruotare i cavi di uscita motore diuna posizione: Da U a V, da V a W,da W a U.
Se lo squilibrio segue il filo, ilproblema è del motore o delcablaggio del motore. Controllare ilmotore e il cablaggio del motore.
Problema con i convertitori difrequenza.
Ruotare i cavi di uscita motore diuna posizione: Da U a V, da V a W,da W a U.
Se lo squilibrio permane sullostesso morsetto di uscita, si trattadi un problema legato all'unità.Contattare il fornitore.
Rumore acustico ovibrazioni (ad es. la pala diuna ventola genera rumoreo vibrazioni a certefrequenze)
Risonanze, ad es. nel sistemamotore/ventola.
Evitare frequenze critiche usando iparametri nel gruppo di parametri4-6* Bypass velocità.
Controllare se il rumore e/o levibrazioni sono state ridotte a unlimite accettabile.
Spegnere la sovramodulazione in14-03 Sovramodulazione.
Modificare il modello dicommutazione e la frequenza nelgruppo parametri 14-0*Commutazione convertitore.
Aumentare lo smorzamento dellarisonanza in 1-64 Smorzamentorisonanza.
Tabella 9.1
Ricerca guasti elementare VLT® Automation Drive telaio DManuale di funzionamento
74 MG34U206 - VLT® è un marchio registrato di Danfoss
99
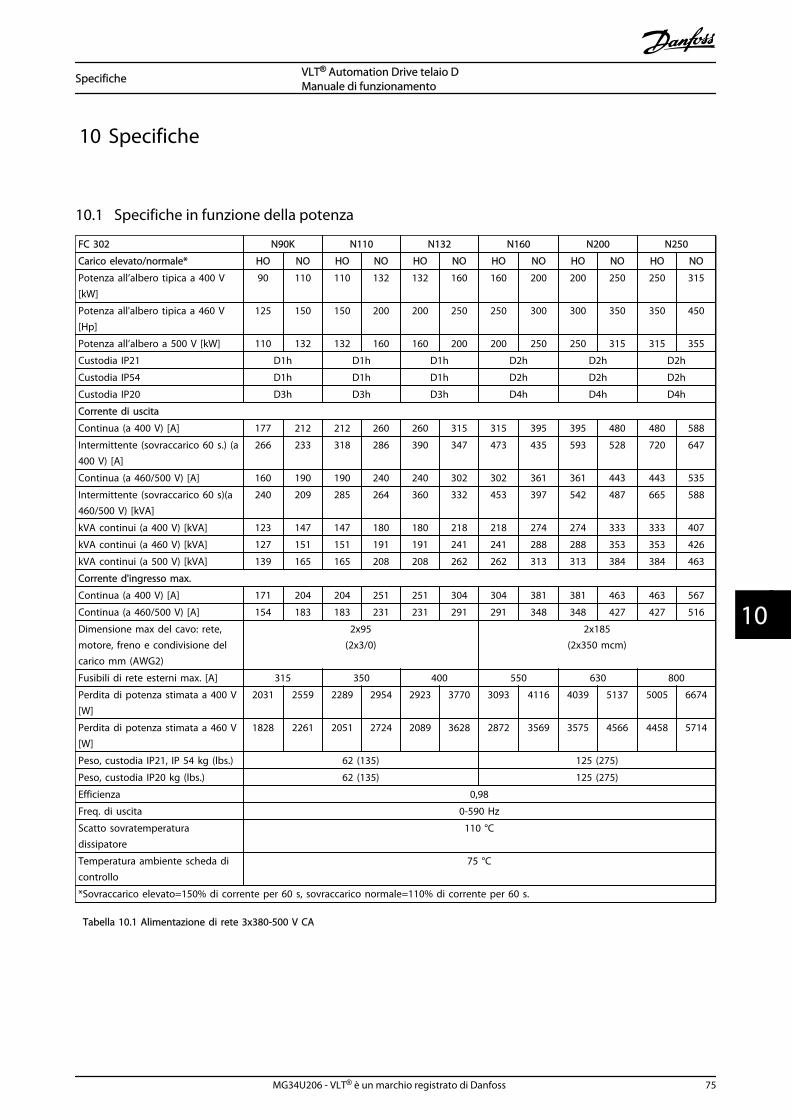
10 Specifiche
10.1 Specifiche in funzione della potenza
FC 302 N90K N110 N132 N160 N200 N250
Carico elevato/normale* HO NO HO NO HO NO HO NO HO NO HO NO
Potenza all’albero tipica a 400 V[kW]
90 110 110 132 132 160 160 200 200 250 250 315
Potenza all'albero tipica a 460 V[Hp]
125 150 150 200 200 250 250 300 300 350 350 450
Potenza all’albero a 500 V [kW] 110 132 132 160 160 200 200 250 250 315 315 355
Custodia IP21 D1h D1h D1h D2h D2h D2h
Custodia IP54 D1h D1h D1h D2h D2h D2h
Custodia IP20 D3h D3h D3h D4h D4h D4h
Corrente di uscita
Continua (a 400 V) [A] 177 212 212 260 260 315 315 395 395 480 480 588
Intermittente (sovraccarico 60 s.) (a400 V) [A]
266 233 318 286 390 347 473 435 593 528 720 647
Continua (a 460/500 V) [A] 160 190 190 240 240 302 302 361 361 443 443 535
Intermittente (sovraccarico 60 s)(a460/500 V) [kVA]
240 209 285 264 360 332 453 397 542 487 665 588
kVA continui (a 400 V) [kVA] 123 147 147 180 180 218 218 274 274 333 333 407
kVA continui (a 460 V) [kVA] 127 151 151 191 191 241 241 288 288 353 353 426
kVA continui (a 500 V) [kVA] 139 165 165 208 208 262 262 313 313 384 384 463
Corrente d'ingresso max.
Continua (a 400 V) [A] 171 204 204 251 251 304 304 381 381 463 463 567
Continua (a 460/500 V) [A] 154 183 183 231 231 291 291 348 348 427 427 516
Dimensione max del cavo: rete,motore, freno e condivisione delcarico mm (AWG2)
2x95(2x3/0)
2x185(2x350 mcm)
Fusibili di rete esterni max. [A] 315 350 400 550 630 800
Perdita di potenza stimata a 400 V[W]
2031 2559 2289 2954 2923 3770 3093 4116 4039 5137 5005 6674
Perdita di potenza stimata a 460 V[W]
1828 2261 2051 2724 2089 3628 2872 3569 3575 4566 4458 5714
Peso, custodia IP21, IP 54 kg (lbs.) 62 (135) 125 (275)
Peso, custodia IP20 kg (lbs.) 62 (135) 125 (275)
Efficienza 0,98
Freq. di uscita 0-590 Hz
Scatto sovratemperaturadissipatore
110 °C
Temperatura ambiente scheda dicontrollo
75 °C
*Sovraccarico elevato=150% di corrente per 60 s, sovraccarico normale=110% di corrente per 60 s.
Tabella 10.1 Alimentazione di rete 3x380-500 V CA
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 75
10 10
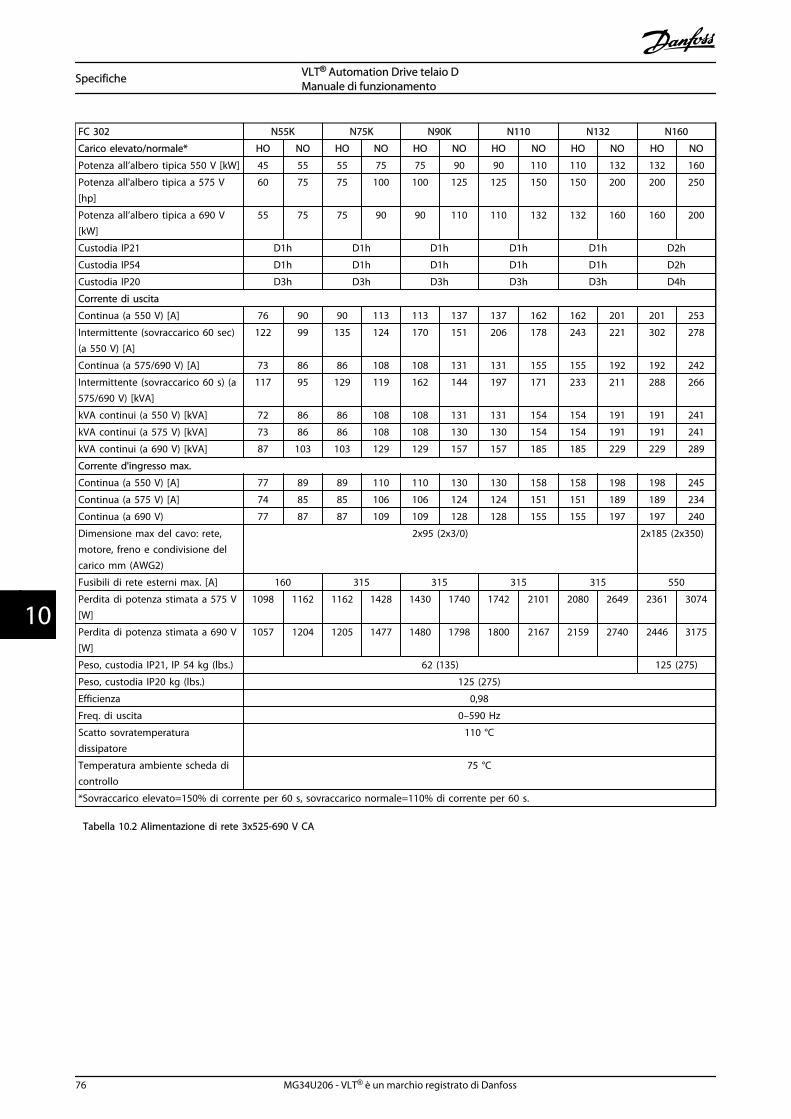
FC 302 N55K N75K N90K N110 N132 N160
Carico elevato/normale* HO NO HO NO HO NO HO NO HO NO HO NO
Potenza all’albero tipica 550 V [kW] 45 55 55 75 75 90 90 110 110 132 132 160
Potenza all'albero tipica a 575 V[hp]
60 75 75 100 100 125 125 150 150 200 200 250
Potenza all’albero tipica a 690 V[kW]
55 75 75 90 90 110 110 132 132 160 160 200
Custodia IP21 D1h D1h D1h D1h D1h D2h
Custodia IP54 D1h D1h D1h D1h D1h D2h
Custodia IP20 D3h D3h D3h D3h D3h D4h
Corrente di uscita
Continua (a 550 V) [A] 76 90 90 113 113 137 137 162 162 201 201 253
Intermittente (sovraccarico 60 sec)(a 550 V) [A]
122 99 135 124 170 151 206 178 243 221 302 278
Continua (a 575/690 V) [A] 73 86 86 108 108 131 131 155 155 192 192 242
Intermittente (sovraccarico 60 s) (a575/690 V) [kVA]
117 95 129 119 162 144 197 171 233 211 288 266
kVA continui (a 550 V) [kVA] 72 86 86 108 108 131 131 154 154 191 191 241
kVA continui (a 575 V) [kVA] 73 86 86 108 108 130 130 154 154 191 191 241
kVA continui (a 690 V) [kVA] 87 103 103 129 129 157 157 185 185 229 229 289
Corrente d'ingresso max.
Continua (a 550 V) [A] 77 89 89 110 110 130 130 158 158 198 198 245
Continua (a 575 V) [A] 74 85 85 106 106 124 124 151 151 189 189 234
Continua (a 690 V) 77 87 87 109 109 128 128 155 155 197 197 240
Dimensione max del cavo: rete,motore, freno e condivisione delcarico mm (AWG2)
2x95 (2x3/0) 2x185 (2x350)
Fusibili di rete esterni max. [A] 160 315 315 315 315 550
Perdita di potenza stimata a 575 V[W]
1098 1162 1162 1428 1430 1740 1742 2101 2080 2649 2361 3074
Perdita di potenza stimata a 690 V[W]
1057 1204 1205 1477 1480 1798 1800 2167 2159 2740 2446 3175
Peso, custodia IP21, IP 54 kg (lbs.) 62 (135) 125 (275)
Peso, custodia IP20 kg (lbs.) 125 (275)
Efficienza 0,98
Freq. di uscita 0–590 Hz
Scatto sovratemperaturadissipatore
110 °C
Temperatura ambiente scheda dicontrollo
75 °C
*Sovraccarico elevato=150% di corrente per 60 s, sovraccarico normale=110% di corrente per 60 s.
Tabella 10.2 Alimentazione di rete 3x525-690 V CA
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
76 MG34U206 - VLT® è un marchio registrato di Danfoss
1010
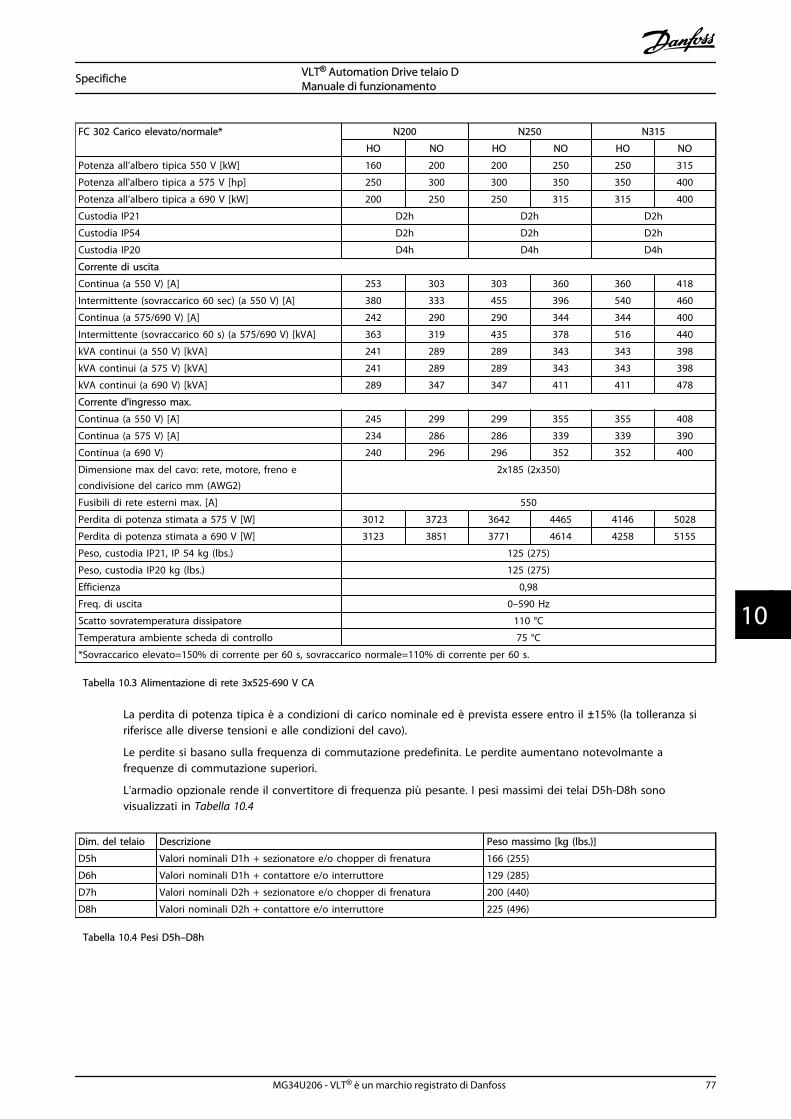
FC 302 Carico elevato/normale* N200 N250 N315
HO NO HO NO HO NO
Potenza all’albero tipica 550 V [kW] 160 200 200 250 250 315
Potenza all'albero tipica a 575 V [hp] 250 300 300 350 350 400
Potenza all’albero tipica a 690 V [kW] 200 250 250 315 315 400
Custodia IP21 D2h D2h D2h
Custodia IP54 D2h D2h D2h
Custodia IP20 D4h D4h D4h
Corrente di uscita
Continua (a 550 V) [A] 253 303 303 360 360 418
Intermittente (sovraccarico 60 sec) (a 550 V) [A] 380 333 455 396 540 460
Continua (a 575/690 V) [A] 242 290 290 344 344 400
Intermittente (sovraccarico 60 s) (a 575/690 V) [kVA] 363 319 435 378 516 440
kVA continui (a 550 V) [kVA] 241 289 289 343 343 398
kVA continui (a 575 V) [kVA] 241 289 289 343 343 398
kVA continui (a 690 V) [kVA] 289 347 347 411 411 478
Corrente d'ingresso max.
Continua (a 550 V) [A] 245 299 299 355 355 408
Continua (a 575 V) [A] 234 286 286 339 339 390
Continua (a 690 V) 240 296 296 352 352 400
Dimensione max del cavo: rete, motore, freno econdivisione del carico mm (AWG2)
2x185 (2x350)
Fusibili di rete esterni max. [A] 550
Perdita di potenza stimata a 575 V [W] 3012 3723 3642 4465 4146 5028
Perdita di potenza stimata a 690 V [W] 3123 3851 3771 4614 4258 5155
Peso, custodia IP21, IP 54 kg (lbs.) 125 (275)
Peso, custodia IP20 kg (lbs.) 125 (275)
Efficienza 0,98
Freq. di uscita 0–590 Hz
Scatto sovratemperatura dissipatore 110 °C
Temperatura ambiente scheda di controllo 75 °C
*Sovraccarico elevato=150% di corrente per 60 s, sovraccarico normale=110% di corrente per 60 s.
Tabella 10.3 Alimentazione di rete 3x525-690 V CA
La perdita di potenza tipica è a condizioni di carico nominale ed è prevista essere entro il ±15% (la tolleranza siriferisce alle diverse tensioni e alle condizioni del cavo).
Le perdite si basano sulla frequenza di commutazione predefinita. Le perdite aumentano notevolmante afrequenze di commutazione superiori.
L'armadio opzionale rende il convertitore di frequenza più pesante. I pesi massimi dei telai D5h-D8h sonovisualizzati in Tabella 10.4
Dim. del telaio Descrizione Peso massimo [kg (lbs.)]
D5h Valori nominali D1h + sezionatore e/o chopper di frenatura 166 (255)
D6h Valori nominali D1h + contattore e/o interruttore 129 (285)
D7h Valori nominali D2h + sezionatore e/o chopper di frenatura 200 (440)
D8h Valori nominali D2h + contattore e/o interruttore 225 (496)
Tabella 10.4 Pesi D5h–D8h
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 77
10 10
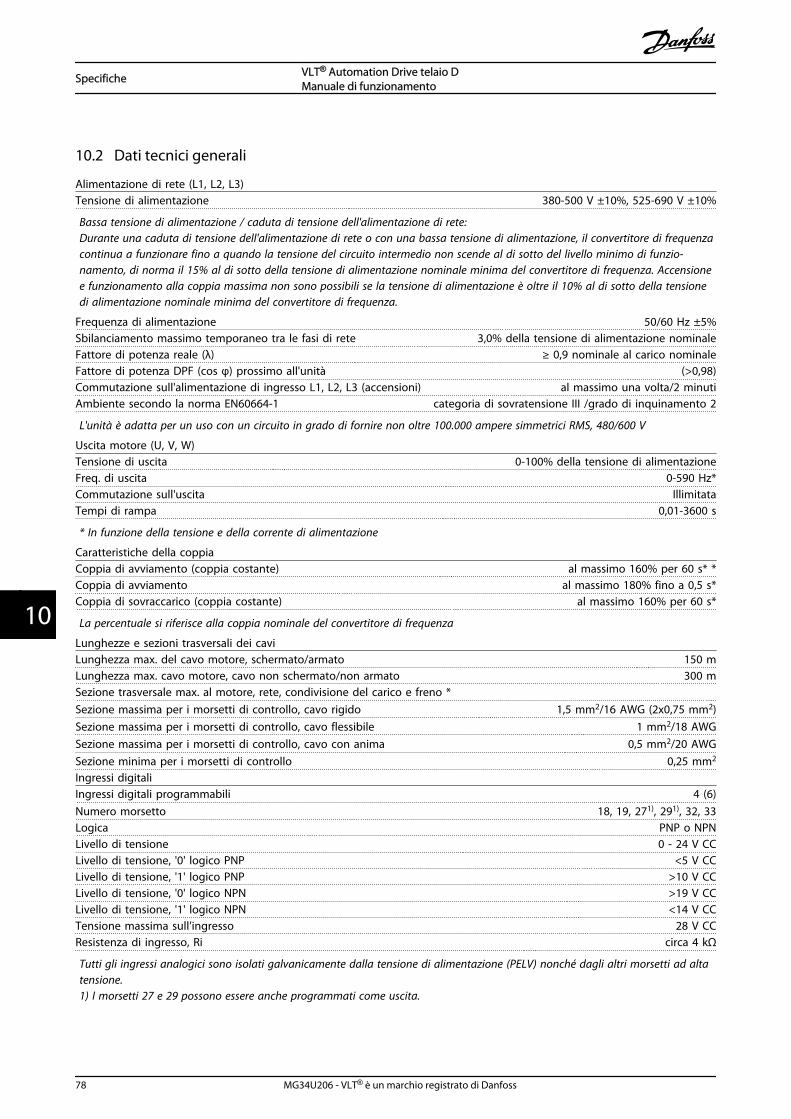
10.2 Dati tecnici generali
Alimentazione di rete (L1, L2, L3)Tensione di alimentazione 380-500 V ±10%, 525-690 V ±10%
Bassa tensione di alimentazione / caduta di tensione dell'alimentazione di rete:Durante una caduta di tensione dell'alimentazione di rete o con una bassa tensione di alimentazione, il convertitore di frequenzacontinua a funzionare fino a quando la tensione del circuito intermedio non scende al di sotto del livello minimo di funzio-namento, di norma il 15% al di sotto della tensione di alimentazione nominale minima del convertitore di frequenza. Accensionee funzionamento alla coppia massima non sono possibili se la tensione di alimentazione è oltre il 10% al di sotto della tensionedi alimentazione nominale minima del convertitore di frequenza.
Frequenza di alimentazione 50/60 Hz ±5%Sbilanciamento massimo temporaneo tra le fasi di rete 3,0% della tensione di alimentazione nominaleFattore di potenza reale (λ) ≥ 0,9 nominale al carico nominaleFattore di potenza DPF (cos φ) prossimo all'unità (>0,98)Commutazione sull'alimentazione di ingresso L1, L2, L3 (accensioni) al massimo una volta/2 minutiAmbiente secondo la norma EN60664-1 categoria di sovratensione III /grado di inquinamento 2
L'unità è adatta per un uso con un circuito in grado di fornire non oltre 100.000 ampere simmetrici RMS, 480/600 V
Uscita motore (U, V, W)Tensione di uscita 0-100% della tensione di alimentazioneFreq. di uscita 0-590 Hz*Commutazione sull'uscita IllimitataTempi di rampa 0,01-3600 s
* In funzione della tensione e della corrente di alimentazione
Caratteristiche della coppiaCoppia di avviamento (coppia costante) al massimo 160% per 60 s* *Coppia di avviamento al massimo 180% fino a 0,5 s*Coppia di sovraccarico (coppia costante) al massimo 160% per 60 s*
La percentuale si riferisce alla coppia nominale del convertitore di frequenza
Lunghezze e sezioni trasversali dei caviLunghezza max. del cavo motore, schermato/armato 150 mLunghezza max. cavo motore, cavo non schermato/non armato 300 mSezione trasversale max. al motore, rete, condivisione del carico e freno *Sezione massima per i morsetti di controllo, cavo rigido 1,5 mm2/16 AWG (2x0,75 mm2)Sezione massima per i morsetti di controllo, cavo flessibile 1 mm2/18 AWGSezione massima per i morsetti di controllo, cavo con anima 0,5 mm2/20 AWGSezione minima per i morsetti di controllo 0,25 mm2
Ingressi digitaliIngressi digitali programmabili 4 (6)Numero morsetto 18, 19, 271), 291), 32, 33Logica PNP o NPNLivello di tensione 0 - 24 V CCLivello di tensione, '0' logico PNP <5 V CCLivello di tensione, '1' logico PNP >10 V CCLivello di tensione, '0' logico NPN >19 V CCLivello di tensione, '1' logico NPN <14 V CCTensione massima sull’ingresso 28 V CCResistenza di ingresso, Ri circa 4 kΩ
Tutti gli ingressi analogici sono isolati galvanicamente dalla tensione di alimentazione (PELV) nonché dagli altri morsetti ad altatensione.1) I morsetti 27 e 29 possono essere anche programmati come uscita.
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
78 MG34U206 - VLT® è un marchio registrato di Danfoss
1010

Ingressi analogiciNumero di ingressi analogici 2Numero morsetto 53, 54Modalità Tensione o correnteSelezione modo Interruttori A53 e A54Modo tensione Interruttore A53/A54=(U)Livello di tensione Da -10 V a +10 V (scalabile)Resistenza di ingresso, Ri circa 10 kΩTensione max. ±20 VModo corrente Interruttore A53/A54=(I)Livello di corrente Da 0/4 a 20 mA (scalabile)Resistenza di ingresso, Ri circa 200 ΩCorrente max. 30 mARisoluzione per gli ingressi analogici 10 bit (+ segno)Precisione degli ingressi analogici Errore max. 0,5% del fondo scalaLarghezza di banda 100 Hz
Gli ingressi analogici sono isolati galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Disegno 10.1
Ingressi a impulsiIngressi a impulsi programmabili 2Morsetti a impulsi, numero 29, 33Frequenza max. al morsetto, 29,33 110 kHz (comando push-pull)Frequenza max. al morsetto, 29,33 5 kHz (collettore aperto)Frequenza min. al morsetto 29, 33 4 HzLivello di tensione vedere 10.2.1 Ingressi digitaliTensione massima sull’ingresso 28 V CCResistenza di ingresso, Ri ca. 4 kΩPrecisione dell'ingresso digitale (0,1-1 kHz) Errore max.: 0,1% del fondo scalaUscita analogicaNumero delle uscite analogiche programmabili 1Numero morsetto 42Intervallo di corrente sull'uscita analogica 0/4-20 mACarico max della resistenza a massa sull'uscita analogica 500 ΩPrecisione sull'uscita analogica Errore max.: 0,8% del fondo scalaRisoluzione sull'uscita analogica 8 bit
L’uscita analogica è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Scheda di controllo, comunicazione seriale RS-485Numero morsetto 68 (P,TX+, RX+), 69 (N,TX-, RX-)Numero morsetto 61 Comune per i morsetti 68 e 69.
Il circuito di comunicazione seriale RS-485 è separato funzionalmente da altri circuiti centrali e isolato galvanicamente dallatensione di alimentazione (PELV).
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 79
10 10
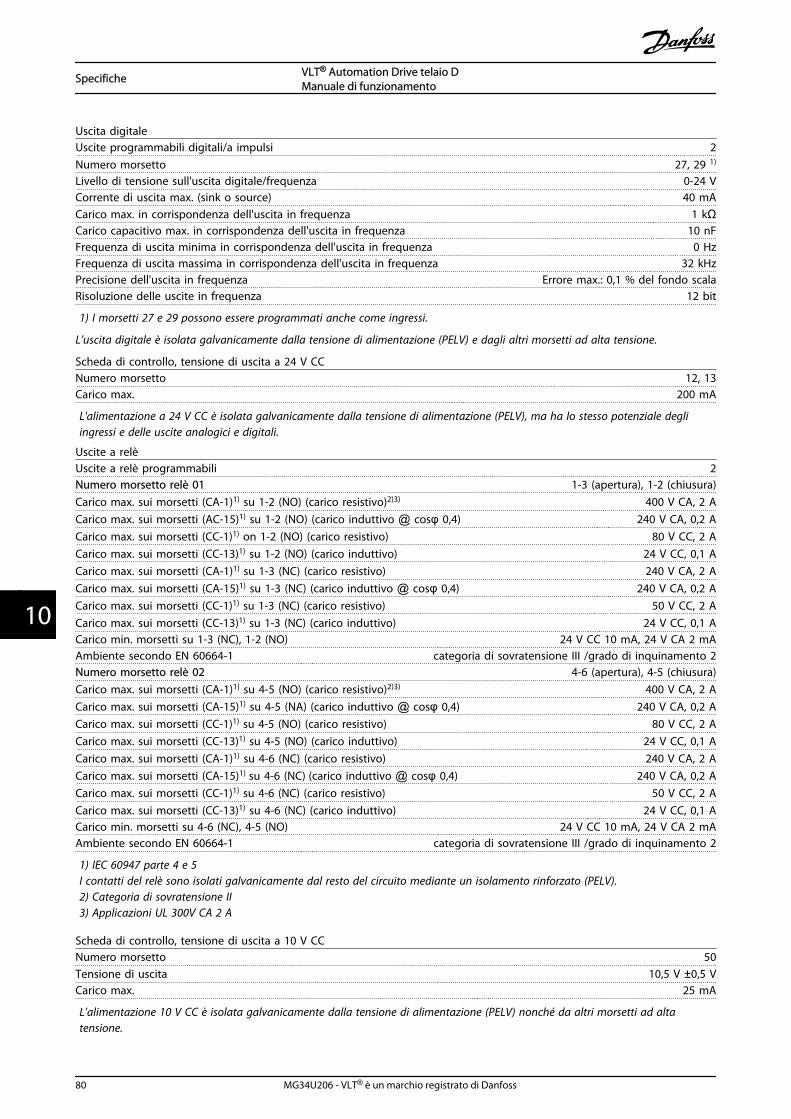
Uscita digitaleUscite programmabili digitali/a impulsi 2Numero morsetto 27, 29 1)
Livello di tensione sull'uscita digitale/frequenza 0-24 VCorrente di uscita max. (sink o source) 40 mACarico max. in corrispondenza dell'uscita in frequenza 1 kΩCarico capacitivo max. in corrispondenza dell'uscita in frequenza 10 nFFrequenza di uscita minima in corrispondenza dell'uscita in frequenza 0 HzFrequenza di uscita massima in corrispondenza dell'uscita in frequenza 32 kHzPrecisione dell'uscita in frequenza Errore max.: 0,1 % del fondo scalaRisoluzione delle uscite in frequenza 12 bit
1) I morsetti 27 e 29 possono essere programmati anche come ingressi.
L’uscita digitale è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Scheda di controllo, tensione di uscita a 24 V CCNumero morsetto 12, 13Carico max. 200 mA
L'alimentazione a 24 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV), ma ha lo stesso potenziale degliingressi e delle uscite analogici e digitali.
Uscite a relèUscite a relè programmabili 2Numero morsetto relè 01 1-3 (apertura), 1-2 (chiusura)Carico max. sui morsetti (CA-1)1) su 1-2 (NO) (carico resistivo)2)3) 400 V CA, 2 ACarico max. sui morsetti (AC-15)1) su 1-2 (NO) (carico induttivo @ cosφ 0,4) 240 V CA, 0,2 ACarico max. sui morsetti (CC-1)1) on 1-2 (NO) (carico resistivo) 80 V CC, 2 ACarico max. sui morsetti (CC-13)1) su 1-2 (NO) (carico induttivo) 24 V CC, 0,1 ACarico max. sui morsetti (CA-1)1) su 1-3 (NC) (carico resistivo) 240 V CA, 2 ACarico max. sui morsetti (CA-15)1) su 1-3 (NC) (carico induttivo @ cosφ 0,4) 240 V CA, 0,2 ACarico max. sui morsetti (CC-1)1) su 1-3 (NC) (carico resistivo) 50 V CC, 2 ACarico max. sui morsetti (CC-13)1) su 1-3 (NC) (carico induttivo) 24 V CC, 0,1 ACarico min. morsetti su 1-3 (NC), 1-2 (NO) 24 V CC 10 mA, 24 V CA 2 mAAmbiente secondo EN 60664-1 categoria di sovratensione III /grado di inquinamento 2Numero morsetto relè 02 4-6 (apertura), 4-5 (chiusura)Carico max. sui morsetti (CA-1)1) su 4-5 (NO) (carico resistivo)2)3) 400 V CA, 2 ACarico max. sui morsetti (CA-15)1) su 4-5 (NA) (carico induttivo @ cosφ 0,4) 240 V CA, 0,2 ACarico max. sui morsetti (CC-1)1) su 4-5 (NO) (carico resistivo) 80 V CC, 2 ACarico max. sui morsetti (CC-13)1) su 4-5 (NO) (carico induttivo) 24 V CC, 0,1 ACarico max. sui morsetti (CA-1)1) su 4-6 (NC) (carico resistivo) 240 V CA, 2 ACarico max. sui morsetti (CA-15)1) su 4-6 (NC) (carico induttivo @ cosφ 0,4) 240 V CA, 0,2 ACarico max. sui morsetti (CC-1)1) su 4-6 (NC) (carico resistivo) 50 V CC, 2 ACarico max. sui morsetti (CC-13)1) su 4-6 (NC) (carico induttivo) 24 V CC, 0,1 ACarico min. morsetti su 4-6 (NC), 4-5 (NO) 24 V CC 10 mA, 24 V CA 2 mAAmbiente secondo EN 60664-1 categoria di sovratensione III /grado di inquinamento 2
1) IEC 60947 parte 4 e 5I contatti del relè sono isolati galvanicamente dal resto del circuito mediante un isolamento rinforzato (PELV).2) Categoria di sovratensione II3) Applicazioni UL 300V CA 2 A
Scheda di controllo, tensione di uscita a 10 V CCNumero morsetto 50Tensione di uscita 10,5 V ±0,5 VCarico max. 25 mA
L’alimentazione 10 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV) nonché da altri morsetti ad altatensione.
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
80 MG34U206 - VLT® è un marchio registrato di Danfoss
1010

Caratteristiche di comandoRisoluzione sulla frequenza d’uscita a 0-1000 Hz ±0,003 HzTempo di risposta del sistema (morsetti 18, 19, 27, 29, 32, 33) ≤2 msIntervallo controllo di velocità (anello aperto) 1:100 della velocità sincronaPrecisione della velocità (anello aperto) 30-4000 giri/min.: errore max di ±8 giri/minuto
Tutte le caratteristiche di comando si basano su un motore asincrono quadripolare
Condizioni ambientaliTipo di custodia D1h/D2h IP 21/ tipo 1, IP 54/ tipo 12Tipo di custodia D3h/D4h IP20/ChassisProva di vibrazione tutti i tipi di custodia 1,0 gUmidità relativa 5%-95% (IEC 721-3-3; classe 3K3 (senza condensa) durante il funzionamentoAmbiente aggressivo (IEC 60068-2-43) Test H2S classe KdMetodo di prova secondo la norma CEI 60068-2-43 H2S (10 giorni)Temperatura ambiente (modalità di commutazione SFAVM)- con declassamento max. 55° C1)
- con la massima potenza di uscita dei motori EFF2 tipici (fino al 90% della corrente di uscita) max. 50° C1)
- a corrente di uscita FC continua massima max. 45° C1)
1) Per maggiori informazioni sul declassamento, vedere la sezione relativa alle Condizioni speciali nella Guida alla Progettazione.
Temperatura ambiente minima durante operazioni a pieno regime 0° CTemperatura ambiente minima con prestazioni ridotte - 10° CTemperatura durante il magazzinaggio/trasporto Da -25 a +65/70° CAltezza massima sopra il livello del mare senza declassamento 1000 mAltezza massima sopra il livello del mare con declassamento 3000 m
1) Per maggiori informazioni sul declassamento, vedere la sezione relativa alle Condizioni speciali nella Guida alla Progettazione.
Norme EMC, emissione EN 61800-3, EN 61000-6-3/4, EN 55011, IEC 61800-3
Norme EMC, immunitàEN 61800-3, EN 61000-6-1/2,
EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Vedere la sezione relativa alle Condizioni speciali nella Guida alla Progettazione.
Prestazione scheda di comandoIntervallo di scansione 5 ms
Scheda di controllo, comunicazione seriale USB:USB standard 1.1 (Full speed)Spina USB Spina USB tipo B
ATTENZIONEIl collegamento al PC viene effettuato mediante un cavo USB standard host/device.Il collegamento USB è isolato galvanicamente dalla tensione di rete (PELV) nonché dagli altri morsetti ad alta tensione.Il collegamento USB non è isolato galvanicamente dalla terra di protezione (massa). Usare solo computer portatili/PC isolaticome collegamento al connettore USB sul convertitore di frequenza oppure un cavo/convertitore USB isolato.
Protezione e caratteristiche
• Protezione termica elettronica del motore contro il sovraccarico.
• Il monitoraggio termico del dissipatore garantisce lo scatto del convertitore di frequenza nel caso in cui latemperatura raggiunga95° C ±5° C. Una sovratemperatura non può essere ripristinata finché la temperatura del dissipatore non scendesotto i 70° C ±5° C (Linee guida - queste temperature dipendono dai valori di potenza nominale, dalle custodieecc.). Il convertitore di frequenza è dotato di una funzione di declassamento automatico al fine di evitare che il suodissipatore raggiunga i 95° C.
• Il convertitore di frequenza è protetto dai cortocircuiti sui morsetti del motore U, V, W.
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 81
10 10
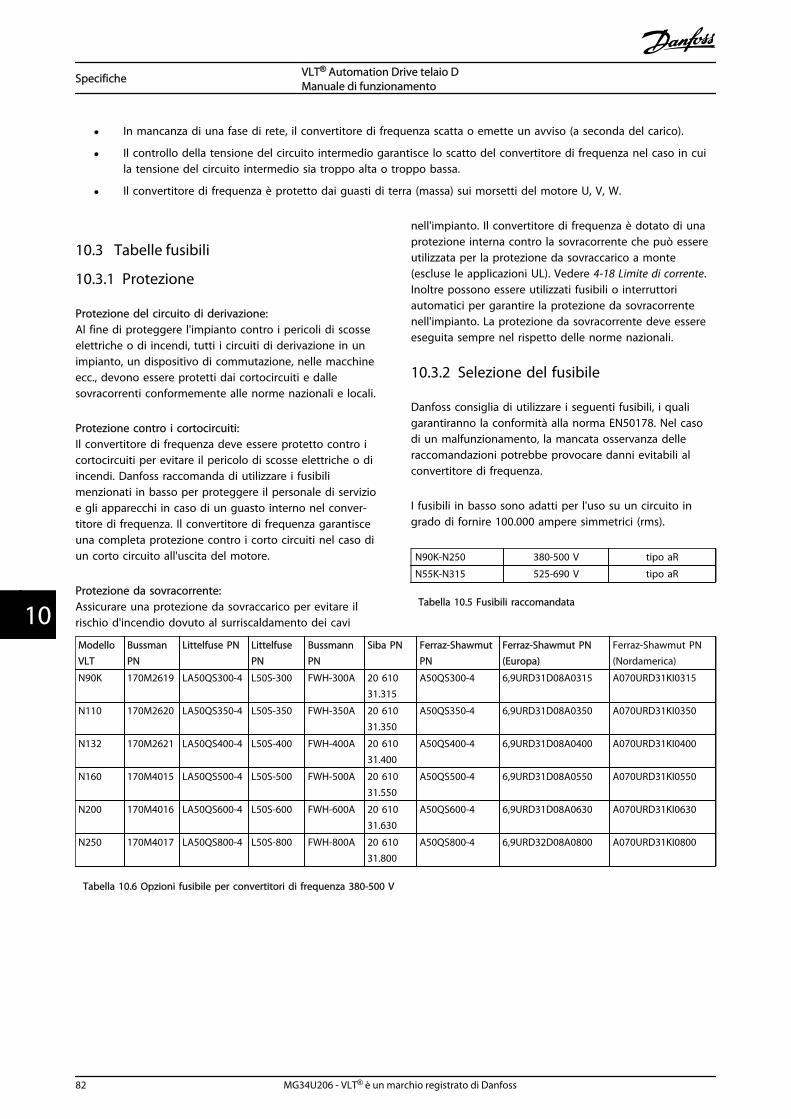
• In mancanza di una fase di rete, il convertitore di frequenza scatta o emette un avviso (a seconda del carico).
• Il controllo della tensione del circuito intermedio garantisce lo scatto del convertitore di frequenza nel caso in cuila tensione del circuito intermedio sia troppo alta o troppo bassa.
• Il convertitore di frequenza è protetto dai guasti di terra (massa) sui morsetti del motore U, V, W.
10.3 Tabelle fusibili
10.3.1 Protezione
Protezione del circuito di derivazione:Al fine di proteggere l'impianto contro i pericoli di scosseelettriche o di incendi, tutti i circuiti di derivazione in unimpianto, un dispositivo di commutazione, nelle macchineecc., devono essere protetti dai cortocircuiti e dallesovracorrenti conformemente alle norme nazionali e locali.
Protezione contro i cortocircuiti:Il convertitore di frequenza deve essere protetto contro icortocircuiti per evitare il pericolo di scosse elettriche o diincendi. Danfoss raccomanda di utilizzare i fusibilimenzionati in basso per proteggere il personale di servizioe gli apparecchi in caso di un guasto interno nel conver-titore di frequenza. Il convertitore di frequenza garantisceuna completa protezione contro i corto circuiti nel caso diun corto circuito all'uscita del motore.
Protezione da sovracorrente:Assicurare una protezione da sovraccarico per evitare ilrischio d'incendio dovuto al surriscaldamento dei cavi
nell'impianto. Il convertitore di frequenza è dotato di unaprotezione interna contro la sovracorrente che può essereutilizzata per la protezione da sovraccarico a monte(escluse le applicazioni UL). Vedere 4-18 Limite di corrente.Inoltre possono essere utilizzati fusibili o interruttoriautomatici per garantire la protezione da sovracorrentenell'impianto. La protezione da sovracorrente deve essereeseguita sempre nel rispetto delle norme nazionali.
10.3.2 Selezione del fusibile
Danfoss consiglia di utilizzare i seguenti fusibili, i qualigarantiranno la conformità alla norma EN50178. Nel casodi un malfunzionamento, la mancata osservanza delleraccomandazioni potrebbe provocare danni evitabili alconvertitore di frequenza.
I fusibili in basso sono adatti per l'uso su un circuito ingrado di fornire 100.000 ampere simmetrici (rms).
N90K-N250 380-500 V tipo aR
N55K-N315 525-690 V tipo aR
Tabella 10.5 Fusibili raccomandata
ModelloVLT
BussmanPN
Littelfuse PN LittelfusePN
BussmannPN
Siba PN Ferraz-ShawmutPN
Ferraz-Shawmut PN(Europa)
Ferraz-Shawmut PN(Nordamerica)
N90K 170M2619 LA50QS300-4 L50S-300 FWH-300A 20 61031.315
A50QS300-4 6,9URD31D08A0315 A070URD31KI0315
N110 170M2620 LA50QS350-4 L50S-350 FWH-350A 20 61031.350
A50QS350-4 6,9URD31D08A0350 A070URD31KI0350
N132 170M2621 LA50QS400-4 L50S-400 FWH-400A 20 61031.400
A50QS400-4 6,9URD31D08A0400 A070URD31KI0400
N160 170M4015 LA50QS500-4 L50S-500 FWH-500A 20 61031.550
A50QS500-4 6,9URD31D08A0550 A070URD31KI0550
N200 170M4016 LA50QS600-4 L50S-600 FWH-600A 20 61031.630
A50QS600-4 6,9URD31D08A0630 A070URD31KI0630
N250 170M4017 LA50QS800-4 L50S-800 FWH-800A 20 61031.800
A50QS800-4 6,9URD32D08A0800 A070URD31KI0800
Tabella 10.6 Opzioni fusibile per convertitori di frequenza 380-500 V
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
82 MG34U206 - VLT® è un marchio registrato di Danfoss
1010
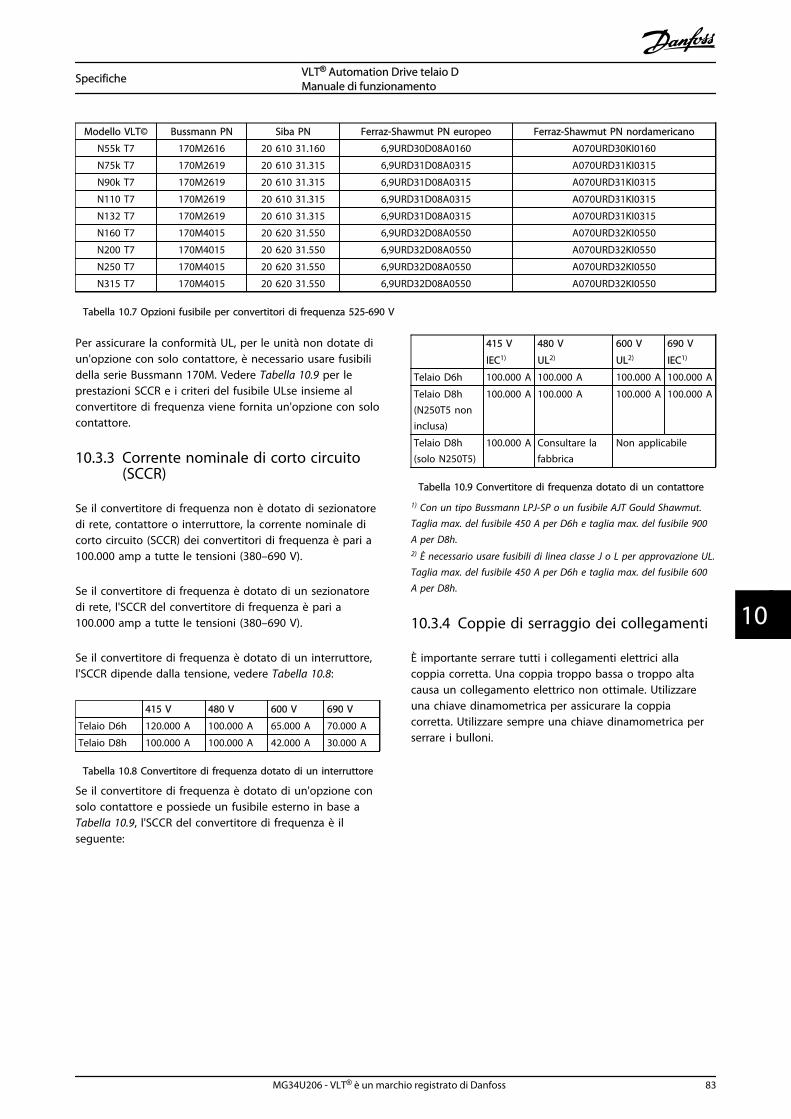
Modello VLT© Bussmann PN Siba PN Ferraz-Shawmut PN europeo Ferraz-Shawmut PN nordamericano
N55k T7 170M2616 20 610 31.160 6,9URD30D08A0160 A070URD30KI0160
N75k T7 170M2619 20 610 31.315 6,9URD31D08A0315 A070URD31KI0315
N90k T7 170M2619 20 610 31.315 6,9URD31D08A0315 A070URD31KI0315
N110 T7 170M2619 20 610 31.315 6,9URD31D08A0315 A070URD31KI0315
N132 T7 170M2619 20 610 31.315 6,9URD31D08A0315 A070URD31KI0315
N160 T7 170M4015 20 620 31.550 6,9URD32D08A0550 A070URD32KI0550
N200 T7 170M4015 20 620 31.550 6,9URD32D08A0550 A070URD32KI0550
N250 T7 170M4015 20 620 31.550 6,9URD32D08A0550 A070URD32KI0550
N315 T7 170M4015 20 620 31.550 6,9URD32D08A0550 A070URD32KI0550
Tabella 10.7 Opzioni fusibile per convertitori di frequenza 525-690 V
Per assicurare la conformità UL, per le unità non dotate diun'opzione con solo contattore, è necessario usare fusibilidella serie Bussmann 170M. Vedere Tabella 10.9 per leprestazioni SCCR e i criteri del fusibile ULse insieme alconvertitore di frequenza viene fornita un'opzione con solocontattore.
10.3.3 Corrente nominale di corto circuito(SCCR)
Se il convertitore di frequenza non è dotato di sezionatoredi rete, contattore o interruttore, la corrente nominale dicorto circuito (SCCR) dei convertitori di frequenza è pari a100.000 amp a tutte le tensioni (380–690 V).
Se il convertitore di frequenza è dotato di un sezionatoredi rete, l'SCCR del convertitore di frequenza è pari a100.000 amp a tutte le tensioni (380–690 V).
Se il convertitore di frequenza è dotato di un interruttore,l'SCCR dipende dalla tensione, vedere Tabella 10.8:
415 V 480 V 600 V 690 V
Telaio D6h 120.000 A 100.000 A 65.000 A 70.000 A
Telaio D8h 100.000 A 100.000 A 42.000 A 30.000 A
Tabella 10.8 Convertitore di frequenza dotato di un interruttore
Se il convertitore di frequenza è dotato di un'opzione consolo contattore e possiede un fusibile esterno in base aTabella 10.9, l'SCCR del convertitore di frequenza è ilseguente:
415 V
IEC1)
480 V
UL2)
600 V
UL2)
690 V
IEC1)
Telaio D6h 100.000 A 100.000 A 100.000 A 100.000 A
Telaio D8h(N250T5 noninclusa)
100.000 A 100.000 A 100.000 A 100.000 A
Telaio D8h(solo N250T5)
100.000 A Consultare lafabbrica
Non applicabile
Tabella 10.9 Convertitore di frequenza dotato di un contattore
1) Con un tipo Bussmann LPJ-SP o un fusibile AJT Gould Shawmut.Taglia max. del fusibile 450 A per D6h e taglia max. del fusibile 900A per D8h.2) È necessario usare fusibili di linea classe J o L per approvazione UL.Taglia max. del fusibile 450 A per D6h e taglia max. del fusibile 600A per D8h.
10.3.4 Coppie di serraggio dei collegamenti
È importante serrare tutti i collegamenti elettrici allacoppia corretta. Una coppia troppo bassa o troppo altacausa un collegamento elettrico non ottimale. Utilizzareuna chiave dinamometrica per assicurare la coppiacorretta. Utilizzare sempre una chiave dinamometrica perserrare i bulloni.
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 83
10 10
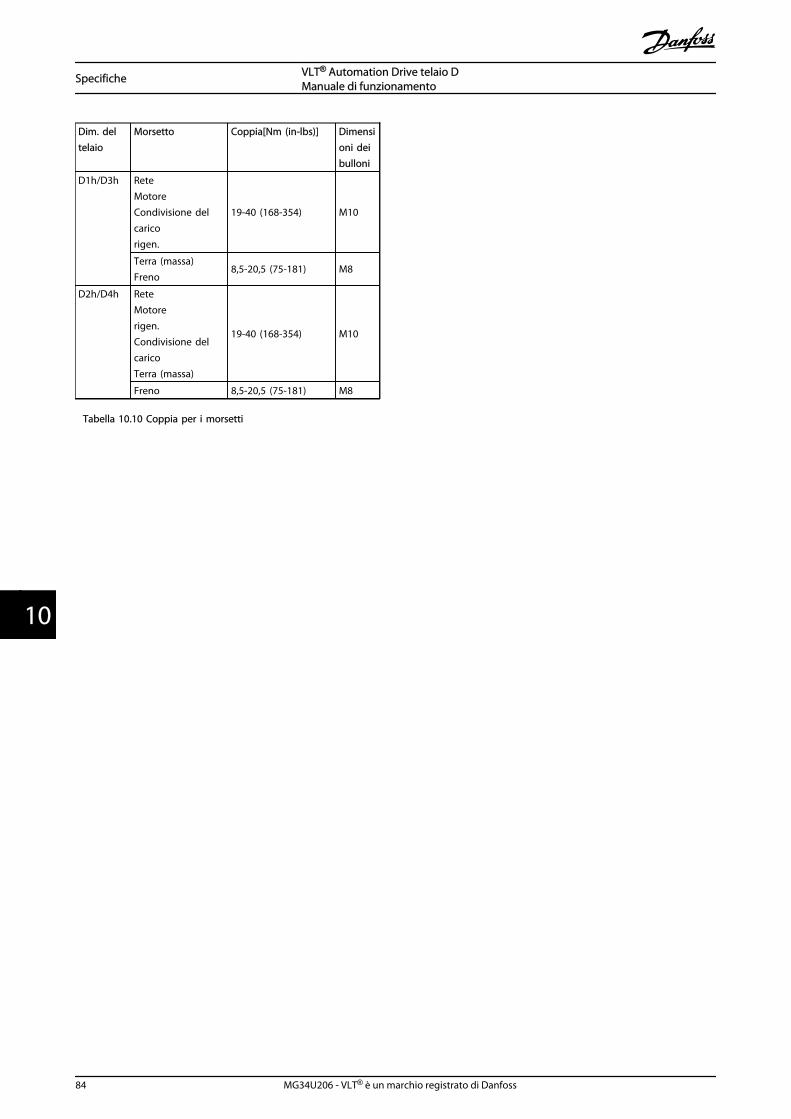
Dim. deltelaio
Morsetto Coppia[Nm (in-lbs)] Dimensioni deibulloni
D1h/D3h ReteMotoreCondivisione delcaricorigen.
19-40 (168-354) M10
Terra (massa)Freno
8,5-20,5 (75-181) M8
D2h/D4h ReteMotorerigen.Condivisione delcaricoTerra (massa)
19-40 (168-354) M10
Freno 8,5-20,5 (75-181) M8
Tabella 10.10 Coppia per i morsetti
Specifiche VLT® Automation Drive telaio DManuale di funzionamento
84 MG34U206 - VLT® è un marchio registrato di Danfoss
1010
Indice
AAlimentazione
Di Ingresso....................................................................... 7, 11, 14, 61Di Rete (L1, L2, L3)............................................................................ 78Ingresso............................................................................................... 34Isolata................................................................................................... 28Motore................................................................................................. 13
Ama........................................................................................................... 58
AMAAMA............................................................................................... 65, 69Con T27 Collegato........................................................................... 52Senza T27 Collegato....................................................................... 52
Ambiente................................................................................................. 81
AnelliDi Massa.............................................................................................. 29Di Terra................................................................................................. 29
AnelloAperto.................................................................................... 31, 43, 81Chiuso.................................................................................................. 31
Apparati Opzionali.................................................................................. 6
Apparato Opzionale............................................................................ 35
Armoniche................................................................................................. 7
AutoAuto............................................................................................... 40, 58On............................................................................................ 58, 40, 58
Auto-reset............................................................................................... 38
AvviamentoAvviamento..................................................................... 6, 41, 43, 72Locale................................................................................................... 37
BBus CC....................................................................................................... 65
CCablaggio
Controllo............................................................................................. 34Di Controllo................................................................................. 11, 13Di Controllo Termistore................................................................. 29Motore................................................................................... 11, 13, 34
Canalina............................................................................................ 13, 34
CaratteristicheDella Coppia....................................................................................... 78Di Comando....................................................................................... 81
Caricamento Dei Dati Nell'LCP........................................................ 41
CaviDi Controllo........................................................................................ 29Di Controllo Schermati................................................................... 29Motore.......................................................................................... 13, 15
CavoDi Equalizzazione............................................................................. 29Motore................................................................................................. 28Schermato................................................................................... 11, 34
CollegamentiA Massa................................................................................................ 14A Terra........................................................................................... 14, 34Alimentazione................................................................................... 14
CollegamentoA Triangolo......................................................................................... 28A Triangolo Con Terra.................................................................... 28Ai Morsetti Di Controllo................................................................. 31Motore................................................................................................. 15Tensione Di Rete CA........................................................................ 28
ComandiEsterni.............................................................................................. 7, 58Remoti.................................................................................................... 6
ComandoDi Arresto............................................................................................ 58Di Avviamento.................................................................................. 37Locale................................................................................................... 40
Comunicazione Seriale................................ 6, 29, 30, 40, 58, 32, 61
Conduttore Schermato....................................................................... 13
Connessione Dei Cavi Di Controllo................................................ 29
ControlloLocale............................................................................................ 38, 58Rotazione Motore............................................................................ 28
Controllori Esterni................................................................................... 6
Convertitori Di Frequenza Multipli.......................................... 13, 15
Copia Impostazioni Parametri......................................................... 41
Coppia Per I Morsetti........................................................................... 84
CorrenteA Pieno Carico...................................................................................... 9CC...................................................................................................... 7, 58Di Dispersione (>3,5 MA)............................................................... 14Di Ingresso.......................................................................................... 28Di Uscita................................................................................. 58, 65, 80Motore........................................................................................ 7, 69, 2Nominale............................................................................................. 65RMS.......................................................................................................... 7
Cortocircuito.......................................................................................... 66
DDati Motore........................................................................ 35, 37, 65, 70
Declassamento................................................................................. 81, 9
Dimensioni Telaio E Potenza Nominale.......................................... 8
Dispositivi A Corrente Residua (RCD)............................................ 14
EEMC.............................................................................................. 30, 34, 81
EsempiApplicativi........................................................................................... 52Di Programmazione Del Morsetto............................................. 45
FFattore Di Potenza.................................................................... 7, 15, 34
Indice VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 85
FiloDi Controllo........................................................................................ 14Di Massa.............................................................................................. 14Di Terra................................................................................................. 34
Filtro RFI................................................................................................... 28
Forma D'onda CA............................................................................... 6, 7
Frenatura.......................................................................................... 67, 58
FrequenzaDi Commutazione............................................................................ 58Motore.................................................................................................... 2
Funzionamento Locale....................................................................... 38
Funzione Di Scatto............................................................................... 13
Funzioni Morsetto Di Controllo....................................................... 31
Fusibili.................................................................................. 13, 34, 68, 72
HHand
Hand..................................................................................................... 58On............................................................................................ 58, 37, 40
IIEC 61800-3............................................................................................. 81
ImpostazioneImpostazione..................................................................................... 39Rapida.................................................................................................. 35
Impostazioni Parametri............................................................... 41, 45
IngressiA Impulsi............................................................................................. 79Analogici...................................................................................... 30, 79Digitali.................................................................................... 58, 45, 78
IngressoAnalogico............................................................................................ 64CA...................................................................................................... 7, 28Digitale................................................................................... 30, 58, 65
InizializzazioneInizializzazione.................................................................................. 42Manuale............................................................................................... 42
InstallazioneInstallazione.................................................................... 6, 13, 34, 35Elettrica................................................................................................ 11Meccanica............................................................................................. 9
Installazionen......................................................................................... 13
Interblocco Esterno.............................................................................. 46
Interruttori............................................................................................... 34
IsolamentoDal Rumore......................................................................................... 34Rumore................................................................................................ 11
LLimite
Di Coppia............................................................................................ 37Di Corrente......................................................................................... 37
Limiti Temperatura.............................................................................. 34
ListaDi Codici Di Allarme/avviso.......................................................... 64Di Controllo Preinstallazione.......................................................... 9
LogAllarmi.................................................................................................. 39Guasti................................................................................................... 39
Lunghezze E Sezioni Trasversali Dei Cavi.................................... 78
MMano......................................................................................................... 40
Manuale................................................................................................... 37
Massa........................................................................................................ 14
MenuPrincipale..................................................................................... 43, 39Rapido....................................................................................... 2, 43, 39
MessaA Terra.................................................................................................. 34A Terra (a Massa) Di Cavi Di Controllo Schermati................. 29A Terra (massa).................................................................................. 34A Terra Custodie IP20..................................................................... 15A Terra Custodie IP21/54............................................................... 15
MessaggiDi Allarme........................................................................................... 64Di Stato................................................................................................ 58
ModalitàAutomatica......................................................................................... 39Di Stato................................................................................................ 58
Modo Locale........................................................................................... 37
Montaggio.............................................................................................. 34
MorsettiDi Controllo............................................................ 35, 40, 58, 31, 45Di Ingresso.......................................................................................... 31
Morsetto53............................................................................................. 43, 31, 4354........................................................................................................... 31Di Ingresso.......................................................................................... 64
OOpzione Di Comunicazione.............................................................. 68
PPannello Di Controllo Locale............................................................ 38
Panoramica Dei Prodotti...................................................................... 4
PELV............................................................................................. 29, 52, 80
Perdita Di Fase....................................................................................... 65
PosizioniDei Morsetti D1h.............................................................................. 16Dei Morsetti D2h.............................................................................. 18
PotenzaPotenza................................................................................................ 14Di Ingresso.......................................................................................... 61Ingresso............................................................................................... 72Motore............................................................................................. 69, 2
Prestazione Scheda Di Controllo.................................................... 81
Indice VLT® Automation Drive telaio DManuale di funzionamento
86 MG34U206 - VLT® è un marchio registrato di Danfoss
ProgrammazioneProgrammazione........................ 6, 37, 39, 46, 51, 65, 35, 38, 41Funzionale Di Base.......................................................................... 35Morsetto.............................................................................................. 31Remota................................................................................................. 51
ProtezioneProtezione.......................................................................................... 82Con Fusibile........................................................................................ 34E Caratteristiche................................................................................ 81Motore.......................................................................................... 13, 81Sovraccarico.................................................................................. 9, 13Transitori................................................................................................ 7
RRaffreddamento
Raffreddamento.................................................................................. 9Dei Condotti......................................................................................... 9
Reset.............................................................................. 38, 42, 58, 65, 40
Rete............................................................................................................ 13
RetroazioneRetroazione................................................................... 31, 34, 58, 69Sistema................................................................................................... 6
Ricerca Guasti......................................................................................... 72
RiferimentoRiferimento................................................................. iii, 52, 58, 2, 43Di Velocità...................................................................... 31, 37, 43, 58Remoto................................................................................................ 58Velocità................................................................................................ 52
RipristinoRipristino............................................................................... 61, 71, 81Delle Impostazioni Di Fabbrica................................................... 41
''Rischio Di Messa A Terra (massa)................................................... 14
RRisoluzione Problemi............................................................................. 6
Ritorni Di Terra (massa) 50/60 Hz.................................................... 30
Rotazione Del Motore......................................................................... 39
RS-485....................................................................................................... 32
Rumore Elettrico................................................................................... 14
Run Permissive...................................................................................... 58
SSbilanciamento Tensione.................................................................. 65
Scaricamento Dati Da LCP................................................................. 41
SchedaDi Controllo........................................................................................ 64Di Controllo, Comunicazione Seriale RS 485:......................... 79Di Controllo, Comunicazione Seriale USB:.............................. 81Di Controllo, Tensione Di Uscita A 10 V CC............................. 80Di Controllo, Uscita 24 V CC......................................................... 80
Schema A Blocchi Del Convertitore Di Frequenza...................... 7
SegnaleAnalogico............................................................................................ 65Di Controllo................................................................................. 43, 58Di Ingresso.......................................................................................... 43Di Uscita............................................................................................... 46
SegnaliDi Ingresso.......................................................................................... 31Ingresso............................................................................................... 31
Setpoint.................................................................................................... 58
Sezionatore............................................................................................. 35
Sistema Di Controllo.............................................................................. 6
Sito Di Installazione................................................................................ 9
Smart Application Set-up (SAS)....................................................... 35
Sollevamento......................................................................................... 10
Sovracorrente........................................................................................ 58
Sovratensione................................................................................. 37, 58
Spazio Libero Per Raffreddamento................................................ 34
Specifiche................................................................................................... 6
Stato Motore............................................................................................. 6
StrutturaDel Menu Dei Parametri................................................................ 46Menu..................................................................................................... 40
TTasti
Di Funzionamento........................................................................... 40Di Navigazione...................................................... 35, 43, 58, 38, 40Menu.............................................................................................. 38, 39Per Il Funzionamento..................................................................... 40
TempoAccelerazione.................................................................................... 37Discesa Rampa.................................................................................. 37Salita Rampa...................................................................................... 37
TensioneDi Alimentazione.................................................. 29, 30, 40, 68, 79Di Ingresso................................................................................... 35, 61Di Rete............................................................................................. 2, 58Di Rete CA......................................................................................... 7, 6Esterna................................................................................................. 43Indotta................................................................................................. 13
Termistore........................................................................................ 29, 65
Termistori................................................................................................ 52
TestDi Controllo Locale.......................................................................... 37Funzionale.......................................................................................... 37Funzionaleg.......................................................................................... 6
TipiDi Morsetto Di Controllo............................................................... 30E Caratteristiche Dei Conduttori................................................. 14
UUscita
Analogica..................................................................................... 30, 79Digitale................................................................................................. 80Motore (U, V, W)................................................................................ 78
Indice VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 87
UsciteA Relè.................................................................................................... 80Relé........................................................................................................ 30
Uso Di Cavi Di Controllo Schermati............................................... 29
VValore Nominale Corrente................................................................... 9
Velocità Motore..................................................................................... 35
Ventilazione............................................................................................ 10
Indice VLT® Automation Drive telaio DManuale di funzionamento
88 MG34U206 - VLT® è un marchio registrato di Danfoss

Indice VLT® Automation Drive telaio DManuale di funzionamento
MG34U206 - VLT® è un marchio registrato di Danfoss 89

www.danfoss.com/drives
*MG34U206*130R0291 MG34U206 Rev. 2012-11-15