Tecnica delle costruzioni meccaniche - Ciao Cross Club · Tecnica delle costruzioni meccaniche...
63
Tecnica delle costruzioni meccaniche Alberto Ambrogi sintesi della lezione del 26-02-2007 Cominciamo a studiare la deformazione da questo caso particolare di un alettone da f1 in cui , quando la vettura è a forte velocità, il carico più rilevante risulta essere la forza aerodinamica alettone schema statico È un problema iperstatico che non può essere risolto con i soli metodi della statica visti fino ad ora quindi è necessario introdurre la deformazione. Possiamo ragionevolmente supporre che il carico aerodinamico sia un carico di linea uniformemente distribuito e che il peso sia trascurabile rispetto al carico aerodinamico. Supponendo che sia nota la “funzione spostamento” u(x )=|u1,u2,u3| dove x è l’insieme dei punti del corpo non deformato o meglio nella sua configurazione di riferimento,possiamo calcolarci le frecce dei vari punti che sono ||U(x )|| per ogni x .Se le frecce sono piccole rispetto al diametro della”trave”allora siamo nel campo dei corpi poco deformabili. x U(x ) P p La funzione U(x): Dal punto di vista fisico : se prendiamo un cubetto di materiale di dimensioni finite questo alla fine dello spostamento avrà subito: - una traslazione - una rotazione - una deformazione la questione più rilevante è che “al materiale non interessa” quale spostamento rigido rototraslazionale abbia compiuto il cubetto. Quindi potremmo scindere i due aspetti:spostamento rigido e deformazione che si trovano entrambi mescolati nella funzione U. Dal punto di vista matematico : la “funzione spostamento” deve rispettare certe ipotesi: - Continuità: non si ammette la separazione della materia,cioè non si ammette rottura. - Biunivocità: non si ammette che la materia sparisca. - Differenziabilità: non si ammettono punti angolosi. Da una linea\superficie regolare otterrò una linea\superficie regolare. Se rispetta queste ipotesi la trasformazione si definisce congruente. esempio 0<x1<a e x2=0 b x2, x1 U(x ) = b+(x1^2)/a
Transcript of Tecnica delle costruzioni meccaniche - Ciao Cross Club · Tecnica delle costruzioni meccaniche...
Tecnica delle costruzioni meccaniche Alberto Ambrogi sintesi della lezione del 26-02-2007
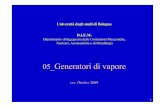
Cominciamo a studiare la deformazione da questo caso particolare di un alettone da f1 in cui , quando la vettura a forte velocit, il carico pi rilevante risulta essere la forza aerodinamica
alettone schema statico
un problema iperstatico che non pu essere risolto con i soli metodi della statica visti fino ad ora quindi necessario introdurre la deformazione. Possiamo ragionevolmente supporre che
il carico aerodinamico sia un carico di linea uniformemente distribuito e che il peso sia trascurabile rispetto al carico aerodinamico.
Supponendo che sia nota la funzione spostamento u(x)=|u1,u2,u3| dove x linsieme dei punti del corpo non deformato o meglio nella sua configurazione di riferimento,possiamo calcolarci le frecce dei vari punti che sono ||U(x)|| per ogni x .Se le frecce sono
piccole rispetto al diametro dellatraveallora siamo nel campo dei corpi poco deformabili.
x
U(x)
P
p
La funzione U(x):
Dal punto di vista fisico: se prendiamo un cubetto di materiale di dimensioni finite questo alla fine dello spostamento avr subito: - una traslazione - una rotazione - una deformazione la questione pi rilevante che al materiale non interessa quale spostamento rigido rototraslazionale abbia compiuto il cubetto. Quindi potremmo scindere i due aspetti:spostamento rigido e deformazione che si trovano entrambi mescolati nella funzione U.
Dal punto di vista matematico: la funzione spostamento deve rispettare certe ipotesi: - Continuit: non si ammette la separazione della materia,cio non si ammette rottura. - Biunivocit: non si ammette che la materia sparisca. - Differenziabilit: non si ammettono punti angolosi. Da una linea\superficie regolare otterr una linea\superficie regolare. Se rispetta queste ipotesi la trasformazione si definisce congruente. esempio
0
x1, Contro esempi
U(x) U(x) U(x)
x x x
non continua non biunivoca non differenziabile
Le trasformazioni congruenti sono affini al limite.
Ricordiamo che una trasformazione affine unapplicazione F:v->W se esistono unapplicazione lineare f:v->W e una traslazione t:W->W tali che F = f o t ossia se Per ogni x appartenente a V F(x)= c + f(x) .
Il significato fisico di questo teorema sta nel fatto che se prendo un pezzo di materia di dimensioni finite questo alla fini dello spostamento sar ruotato, traslato e deformato nmaniera pi strana, ma se prendo un cubetto infinitemateria questo alla fini dello spostamento in un particolare riferimento sar solamente traslato ruotato e allungato o accorciato.
ella simo di
Quindi possiamo dire che al limite cio nellinfinitamente piccolo U(x)= c + Ax.Ma per quanto detto sopra possiamo separare la deformazioni dallo spostamento rigido ossia trascurare il vettore c della funzione u(x) e scrivere che U(x)= Ax.
Simona Muscolino Sintesi della lezione del 27/02/07 (1h)
STUDIO DEL COMPORTAMENTO DI UNA GENERICA TRASFORMAZIONE AFFINE
In una trasformazione affine gli angoli rimangono angoli, gli spigoli spigoli, rette parallele rimangono parallele, un oggetto tridimensionale non diventa bidimensionale per le propriet di congruenza. Invece variano lunghezze, volumi, angoli. A la matrice che contiene informazioni sulla variazione di forma e rotazione b contiene informazioni sulla traslazione MATRICE DI TRASFORMAZIONE
Posso descrivere la variazione di forma depurata della rototraslazione con la matrice simmetrica di trasformazione in cui alla diagonale ci sono i parametri di deformazione estensionale, al di fuori della diagonale quelli di deformazione angolare diviso due definiti nel modo seguente: il rapporto tra l allungamento e la lunghezza iniziale.
>-1 altrimenti avrei un segmento negativo =0 non ho deformazione lungo quella direzione
-1
TecnicadellecostruzionimeccanicheBasilioLenzoSintesidellalezionedel01032007(1h)
Si suppongadatounqualsiasi corpo che subiscaunagenericadistorsione,e si suppongaaltresnoto ilvettorespostamento ( 321 ,, xxxu ):sivistochesottoparticolariipotesi(continuit,biunivocit,differenziabilit)peraltrononforti la trasformazione congruente (compatible) e dunque affine al limite. Si inoltre visto che sotto ipotesisemplificativeunpopifortisipuricavareunastimadelcampodideformazioneconprecisioneaccurata:
Civaleselafunzioneu piccolarispettoalledimensionicaratteristichedelproblema(ad esempio in un problema di travi, rispetto al diametro) e le sue derivate sonopiccolerispettoallunit.Pitalivalorisonopiccoli,migliorelapprossimazione.2
Tuu +
Inquestocorsosartrattatalameccanicadeicorpipocodeformabili,siavrannoquindiproblemidipiccolispostamenti(u piccolo)epiccoledeformazioni( u piccolo),siuser106comeunitdimisuraper ledeformazioni(indicataconmicrostrain),operandoconvalorimassimidicentinaiaomigliaiadi.Perquesteragionisiutilizzerlasuddettaformulaconilsegnodiuguale.Spesso, inpratica,per richiesto ilprocedimentocontrario,ovvero ilcalcolodi u unavoltanoto ilcampodideformazione:bisogner invertire ladefinizioneottenendo integralineiquali lecondizionialcontornosarannodefiniteda come il corpovincolato.Dalledefinizioni sivede che, ingenerale,da sei funzioni scalaribisognarisalireatre:evidentementecipunonesseresemprepossibile.Inaltritermini,sesiimponeunadeformazionequalsiasinondettocheessadia luogoaduna trasformazionecongruente:bisognapresumerecheesistanodeilegami tra le grandezze contenute nella matrice le quali devono essere soddisfatte affinch una certadeformazione sia prodotta da un campo congruente di spostamento.Quelle cercate sono le sei equazioni diBeltramiMitchell(equazionidicongruenzacompatibilityequations):
Altredueequazionisono ricavabiliper rotazionedegli indici; lealtre treequazionisono riportate nella maggior parte dei testi. Di notevole importanza sono leconsiderazionichesipossonotrarre.
21
222
22
112
21
1222
xxxx
+
=
Unadeformazionecostante inundominiosicuramentegeneratadaunatrasformazionecongruente;presauna
ij consideratacomefunzionelinearedellecoordinatecartesiane,adesempio 32111 dxcxbxa +++= con ,b , c ,
costanti,eandandoascrivereleequazionidicongruenzasiottiene0=0,dunquesievincecheungradientelinearedideformazionecongruente;sinotiinoltrecheunadeformazionelinearegeneratadauncampoparabolico.
a d
Sivogliaoravalutarelavariazionedilunghezzadiunagenericacurvalaqualeunavoltasubitaladeformazionediventilacurva,cheperleipotesifattesarregolarediclasseC1.Anchesefossedato u ilcalcolorichiestononsarebbe semplice, dovendo effettuare un integrale su . Si pu usare il seguentemetodo: fissata unascissacurvilinea s epresounsegmentoinfinitesimods,essopotrallungarsioaccorciarsitrasformandosiinds.Essendodsrettilineoelatrasformazionecongruente,sarrettilineoancheds.
dsds nn )1(' += ma allora nnT
nn =
+==)(
0
)1(')'(L
nn dsdsL
Siestenderquantooravistoallevariazionidiarea:anchequibisognerebbeparametrizzarelasuperficiefinaleeperevitare ci, comeprima, si consideraunelemento infinitesimodiarea iniziale che si trasforma in ,andandoquindiaintegraresullasuperficieiniziale,tenutocontoche
dA 'dAdAdA A )1(' += .
Restadacalcolare A ,cipuessereeffettuatoinduemodi:1)Presoun cubettopoggiato suun elemento infinitesimodiarea ,definita con lanormaleuscentedallasuperficie(versoilcubetto),sipuscrivere dacui
dA nAhV = hAV lnlnln += chedifferenziatafornisce
hdh
AdA
VdV
+= eperpiccolevariazionirelative hh
AA
VV
+
=
Ma hh / nn e latracciadellamatricedideformazione,dunqueVV / nnVA = .
2)Presaunaternalocale,con versorenormaleuscentedallasuperficieeiversori e sullasuperficie(pianotangente)bastercalcolare
n p q
p ( )edppT
p = q ( )esiavr,inanalogiaalcasoprecedente,qqT
q = qpA += .
Ovviamenteilrisultatoottenutonondipendedallasceltadi e ,sufficientecheessisianoortogonali.p q
TECNICA DELLE COSTRUZIONI MECCANICHE Alessandro Marazzato Sintesi della lezione del 05/03/2007 (2h)
RELAZIONI TRA STATO DI DEFORMAZIONE E STATO DI SOLLECITAZIONE S. Per capire quale legame esiste tra lo stato di Deformazione e lo stato di Sollecitazione S, cio come un oggetto si deforma data una certa sollecitazione, indispensabile conoscere la natura e le propriet meccaniche del materiale sollecitato e quindi il suo comportamento costitutivo. Sappiamo che il legame che sussiste tra S ed di tipo energetico. Sono energeticamente connessi ad esempio la forza (F) e lo spostamento (u). L = F u Supponiamo di avere una struttura isostatica (Fig. 1, struttura nera), costituita da un materiale qualunque. Per semplicit consideriamo un punto A su cui viene applicata una forza F: la struttura sotto lazione della forza, deve leggermente modificarsi non essendo infinitamente rigida. Per trovare il lavoro effettuato dalla forza F in questa condizione dovremmo conoscere la traiettoria del punto A che non necessariamente nella stessa direzione della forza e calcolare il valore di F istante per istante. Loggetto in equilibrio statico (viene caricato poco alla volta) e perci possiamo prendere in considerazione questa relazione: L = K con K variazione dellenergia cinetica. Se consideriamo il corpo deformabile non possiamo escludere leventualit che le Forze interne eseguano lavoro. Sapendo che il K nullo perch loggetto in equilibrio statico possiamo affermare che il lavoro delle forze interne uguale in modulo ed opposto al lavoro delle forze esterne: Lext + Lint = 0. Il bilancio vale sia per le Forze interne conservative sia per quelle non conservative.
AF
FA
Fig. 1 (struttura nera prima dellapplicazione della forza, struttura rossa dopo applicazione della forza) Consideriamo adesso tre masse M1 M2 M3 (Fig. 2): Le masse M1 e M2 sono collegate con un filo ideale mentre la massa M2 collegata alla massa M3 con una molla ideale. Le forze del filo non producono lavoro, essendo il filo ideale, mentre le forze della molla producono lavoro. Risulta quindi che il lavoro delle forze esterne pari al lavoro fatto dalla molla e poich le forze interne sono conservative, basta calcolare lenergia potenziale della molla stessa per trovare il lavoro delle forze applicate. Questo esempio lo stereotipo della Deformazione Elastica. M3 M1 M2
Fig. 2
Se la massa M2 a contatto con M3 tramite una superficie scabra, cio caratterizzata da un coefficiente dattrito (Fig. 3) si verifica un processo dissipativo: il lavoro viene perso in agitazione termica delle molecole e questo fa aumentare lEntropia. Questo caso invece lo stereotipo della Deformazione Plastica. M3 M1 M2
Fig. 3 Dato un cubetto con la stato di tensione S, vogliamo calcolare il valore del Lavoro virtuale corrispondente ad una variazione virtuale di configurazione u. Prendiamo un cubetto con uno stato di tensione S monoassiale (Fig. 4). Considerando che le modificazioni rigide (traslazione e rotazione) non contribuiscono al Lavoro S = 11 0 0 0 0 0
Fig. 4 applichiamo il Principio di sovrapposizione degli effetti: calcoliamo prima i valori del lavoro virtuale relativi a ciascuna deformazione ij per poi sommarli ed ottenere L. Ad esempio per la deformazione estensionale 11 il lavoro delle forze esterne sar dato L=11 dx2 dx3 11 dx1 con dx2 dx3 area di faccia. Per 12 (Fig. 5) il lavoro fatto da 11 sar nullo perch il lavoro sulle due facce contrapposte si annulla. Quindi se abbiamo solo una sollecitazione monoassiale avremo L=11 dx2 dx3 11 dx1. Nel caso del taglio puro: L=12 dx1 dx3 12 dx2 (Fig. 5) Sapendo che dx1 dx2 dx3= dV
=> (dL/dV) = l = 11 11 + 22 22 + 33 33 + 12 12 + 13 13 + 23 23l = ij ij Supponiamo che venga dato il processo deformativo e lo stato di tensione per ogni punto della traiettoria funzione di un parametro avremo: dl = ij dij => l = ij() dij => L = l dV
Sintesi della lezione del 07/03/07 (2h) Lenzi Guido Bernardelli Alessandro
Caratteristiche legame costitutivo S=S(E) pi semplice (corpo rigido escluso):
Il dominio di S, di E e quindi del legame costitutivo un continuo (di solito 3-D) Il legame costitutivo non pu dipendere dalle coordinate (x,y,z) per lipotesi di
omogeneit del materiale La legge costitutiva non dipende dall orientamento degli assi per lipotesi di
isotropia del materiale Il legame costitutivo 1:1 (biunivoco) per l ipotesi di elasticit del
materiale:
u
P=carico applicato ad un corpo (quasi statico) u=spostamento di un punto del corpo lungo una direzione qualunque
B
A
A-B curva di carico B-A curva di scarico
P
Se il materiale elastico la curva B-A coincide perfettamente con la A-B, quindi il ciclo carico-scarico non produce alcun effetto sul materiale (processo totalmente reversibile). Si pu quindi definire un potenziale (densit di energia elastica), per cui allo scopo di calcolare il lavoro delle forze interne basta conoscere E o S allinizio e alla fine della curva di carico. In realt lelasticit totale non esiste, quindi i processi di carico non sono completamente reversibili, ma per i nostri scopi la perfetta elasticit un ipotesi accettabile. Lelasticit pu non essere lineare essenzialmente per 2 motivi:
1. Ragione di tipo geometrico (problema del II tipo) 2. Non linearit del legame costitutivo 3. Entrambe le precedenti
Nei materiali per noi interessanti, per essere elastiche le deformazioni devono essere piccole quindi si pu assumere un comportamento lineare. Se un solido viene deformato poco la deformazione elastico-lineare.
aijlm = coefficienti costanti del tensore elasticit (IV ordine con 81 coefficienti non
E
S LEGGE COSTITUTIVA ELASTICO LINEARE Supponiamo che il legame tra e sia del tipo:
11=a111111+a111212+ .. ..
non tutti indipendenti). =(): tensore di rigidezza, =(): tensore di deformabilit Ragionamento sperimentale: applichiamo uno stato di tensione monoassiale, poi (data la linearit del sistema), per sovrapposizione degli effetti potremo valutare leffetto di uno stato triassiale generico. S e E dovrebbero essere misurati su un cubetto infinitesimo, ma ci non possibile, quello che possiamo fare prendere un pezzo grosso con S e E uniformi in un
volume macroscopico. Per luniformit di S e E necessario che il materiale del provino sia il pi prossimo possibile alle condizioni di continuit, omogeneit, isotropia ed elasticit.
P
Considerando il provino una trave, per l ipotesi di DE SAINT VENANT , le zone in cui lo stato di tensione complesso (nelle vicinanze dei punti di applicazione di carichi e vincoli) sono dellordine di grandezza del diametro della trave. Quindi la parte centrale del provino si trova in uno stato di tensione monoassiale uniforme. In questo modo posso lavorare su un cubo macroscopico.
x yz
CONSIDERAZIONI SULLA DEFORMAZIONE -La tensione uniforme in direzione assiale ed indipendente da z -
x
y
Lo stato di tensione non dipende da perch il problema assialsimmetrico (x-y ad orientazione arbitraria)
r
-Lo stato di tensione non dipende da r, perch questo comporterebbe una anchessa dipendente da r generando una deformazione non congruente.
-Quindi una S uniforme comporta una E uniforme e una trasformazione affine. DIMOSTRIAMO CHE LO STATO DI TENSIONE UNIASSIALE
zz
xz
y
x
rr
Con considerazioni di equilibrio ed uniformit calcolo le varie : zz=N/A con A area iniziale del provino xz=0, =0, rr=0, r=0
In conclusione lo stato di tensione S della prova di trazione monoassiale
N
S=
0 0 0
0 0
N/A
Se A=area iniziale sezione trasversale del provino S =engeneering stress Se A=area sezione trasversale deformata S=true stress In campo elastico (di nostro interesse) si usa engeneering stress.
Sintesi della lezione del 08/03/07 (1h) Bernardelli Alessandro - Lenzi Guido
z
E=
N
N
x y
S=
0 0 0 0 0 0 0 0 N/A0
Come si deforma il provino? Gli stati di tensione e di deformazione sono uniformi (legge costitutiva 1:1), inoltre mancheranno (nello stesso sist. rif.) tutti i termini angolari per assicurare il mantenimento dellassialsimmetria. Il cilindro rimane tale, ma diventa pi lungo e si contrae trasversalmente in maniera analoga lungo x e y.
xx 0 0 0 yy 0
xx= yy Quindi le quantit effettivamente da misurare sono zze xx. Posso mettere in relazione la E misurata con S. Ad uno stato di tensione monoassiale corrisponde di solito uno stato di deformazione non monoassiale.
0 0 zz
LEGAME COSTITUTIVO (materiale elastico, piccole deformazioni) tg()= E E=modulo di Young o elastico, rapporto tra zz e zz in una prova monoassiale. Rappresenta la rigidezza del materiale (stiff). = - xx/zz v=modulo di Poisson, (rapporto tra contrazione e allungamento in una prova di trazione monoassiale), valore tipico v=0.3 per i materiali di nostro interesse.
zz
zz, xx
Il volume in una prova di trazione aumenta. Infatti facendo la somma della traccia di E si ottiene: zz(1-2v)=V/V>0 Per uno stato di tensione triassiale generico posso utilizzare il principio di sovrapposizione degli effetti:
ii=ii/E-(v/E)(jj+kk) I due tensori S e E sono paralleli. Infatti nello stesso sistema di riferimento hanno le direzioni principali che coincidono.
0 ij 0 0 0 0 0 0 0
S=
0 (ij/E)(1+v) 0 0 0 0 0 0 0
Nel caso di fuori dalla diagonale principale posso diagonalizzare S, trovare E ed infine ritornare nel sistema originario.
1 0 0 0 2 0 0 0 3
1 0 0 0 2 0 0 0 3
S=
LEGGE DI HOOKE: ii=ii/E-(v/E)(jj+kk) ij=(ij/E)(1+v) ij=2(ij/E)(1+v)
Con G=E/(2(1+v)) ij=ij/(2G) ij=ij/G
COSTANTI COSTITUTIVE: E v G Note due di queste si pu ricavare la terza
TECNICA DELLE COSTRUZIONI MECCANICHE JACOPO TILLI Sintesi della lezione del 12/03/2007 (2h)
La legge di Hooke ricavata nella lezione precedente ci dice che la in direzione assiale al carico influenzata anche dalle in direzione traverse al carico per EFFETTO POISSON o ACCOPPIAMENTO (effetto assente per le deformazioni angolari). Inoltre la legge di Hooke per materiali isotropi invariante per rotazione. Adesso abbiamo anche la possibilit di risolvere problemi di tipo iperstatico, potendo utilizzare i seguenti strumenti: equazioni STATICHE, equazioni di CONGRUENZA (legano deformazione e spostamento) e LEGGE DI HOOKE. Se il problema ben posto, dal momento che le relazioni prima elencate sono lineari, la soluzione esiste ed unica. Le relazioni prima elencate sono necessarie per la risoluzione di un problema di corpo poco deformabile, a meno che non sia =0 (corpo infinitamente rigido). Esempio:
Cubo di materiale secondo le ipotesi imposte (omogeneo, isotropo, elastico, lineare), appoggiato su una superficie piana ideale, caricato con una pressione uniformemente distribuita sulla faccia superiore. Utilizziamo il METODO INVERSO: immaginiamo la soluzione, che sappiamo esistere ed essere unica; non sappiamo come distribuita la reazione di contatto con la faccia inferiore, sappiamo solamente che le azioni statiche complessive dovranno essere equilibrate con la
distribuzione sulla faccia superiore. Lo stato di tensione monoassiale per ipotesi, quindi S= SOLUZIONE SICURAMENTE EQUILIBRATA
(non sufficiente, essendo il problema iperstatico)
0 0 0 0 0 0 0 0 -p
z x y
p
Per la congruenza abbiamo che se S uniforme, allora E uniforme,ed il legame tra ed dato dalla legge di Hooke: xx = yy = /E*p zz = -p/E Il campo di applicazione di questo metodo molto ristretto, perch basta un foro allinterno del cubetto perch non si abbia pi lequilibrio punto per punto. Il metodo SEMI INVERSO consiste nellimmaginare parte del risultato ed introdurre dei parametri, che devono soddisfare le equazioni di equilibrio e di congruenza. Devono inoltre essere soddisfatte anche le ipotesi costitutive. Esempio: caso del cubetto visto precedentemente contenuto tra due piani verticali paralleli al piano yz
S=
-p
-q
0 0 0 0 -q 0 0 0 -p
p q
z x y
Dobbiamo rispettare lequazione costitutiva yy = 0, quindi deve essere: yy/E - /E (xx + zz) = -q/E - /E*(0-p) = 0
ENERGIA ELASTICA Studiamo ora i sistemi elastici da un punto di vista energetico, utilizzando quindi il primo principio della termodinamica, facendo attenzione al segno del lavoro (fatto dalle forze esterne). LEXT = U + K + Q LEXT: lavoro fatto dalle forze esterne, cio dalla forza P e dal vincolo (che per la sua idealit non compie lavoro); U: aumento dellenergia interna del sistema (in genere termodinamica); per un solido vale c*m*T; K: aumento dellenergia cinetica macroscopica del sistema, cio delle sue componenti; Q: calore scambiato con lesterno (+ verso lesterno, - verso linterno). SEMPLIFICAZIONI: Sistema adiabatico Q 0 : il tempo in cui avvengono i fenomeni meccanici molto minore del tempo in cui avvengono i fenomeni termodinamici. Caricamento QUASI STATICO K 0 : questo tipo di caricamento fa s che non ci siano fenomeni vibrazionali. Con queste semplificazioni, il primo principio assume la seguente forma:
LEXT = U , con U definita a meno di una costante.
pf
wf
LEXT = P dw (tra 0 e wf) Definiamo ora U da un punto di vista fisico:
componente meccanica (conservativa): lenergia associata a comportamenti elastici, energia accumulata che pu essere restituita);
componente termodinamica (dissipativa): energia persa in attriti, scorrimenti, necessaria per le deformazioni plastiche o viscose. Energia accumulata che pu essere restituita solo attraverso una macchina di Carnot.
wP
Nella teoria dellelasticit il termine termodinamico trascurabile, per cui U coincide con la variazione di ENERGIA INTERNA ELASTICA. Molla ideale: (calcoli fatti con i moduli) LEXT =Pdw Pf (con estremi di integrazione 0 e wf ) = kwdw = *kwf2 = *Pf2 /k = *wf * Pf . Il termine deriva dalla linearit della legge costitutiva, e non dallelasticit; per dimostrare ci basta prendere una molla tale che P = kw + bw2. in questo caso il lavoro svolto dalle forze esterne non ha un coefficiente , ma un coefficiente differente. Alcune considerazioni da fare sono:
assumiamo come U0 la condizione di corpo scarico, x=0; quindi U = kx2 U = kx2 il materiale sar INERTE, quindi k deve essere positivo definiamo DENSITA DI ENERGIA ELASTICA il termine =limV 0(U/V), e questa quantit intensiva mi
dice come si distribuisce lenergia immagazzinata allinterno della molla. Nel caso di una molla di costante elastica k, lo spostamento w vale w = P/k; una barra pu essere vista come una molla di costante elastica equivalente keq = E*A/l dove il termine E*A viene chiamato RIGIDEZZA ESTENSIONALE (AXIAL STIFFNESS); il fatto che compaia A al numeratore ci indica che la keq dipende solo dallarea e non dalla forma.
LEXT = Pdw (tra 0 e wf) = E*A/l * wf2 = Pf2*l / (EA) Nel caso di tensione uniforme monoassiale, = E*A/l * wf2 / (A*l) = E*(wf / l)2 = E*zz = zz2 / E = zzzz . la relazione ora scritta valida senza faree il limite perch lo stato di tensione UNIFORME. Si poteva giungere alla medesima conclusione anche attraverso unaltra strada: l=ijdij (tra 0 e ) = zzdzz = Ezz dzz = Ezz2 Nel caso di materiale elastico lineare, l = = ij ij Dove ij e ij sono i valori finali. Considerazioni:
supponiamo di avere un materiale elastico, omogeneo, isotropo e lineare, e di avere un processo deformativi che provochi piccoli spostamenti: supponiamo che il problema sia ALMENO isostatico, che il caricamento sia QUASI STATICO, e applichiamo una P con direzione costante. Il legame tra u e P proporzionale; si scrive: u2=ku1P2=kP1
Se la forza che applico rimane sempre parallela a se stessa, lo spostamento avviene allora sempre nella stessa direzione (che generalmente non la stessa di P). Langolo formato tra P ed u non pu essere ottuso, perch dal momento che il corpo si carica, lenergia aumenta necessariamente, quindi la forza deve fare un lavoro POSITIVO, ragione per la quale langolo tra P ed u ACUTO.
Direzione costante
P w
k
zz = P/A zz= P/(EA) E,
A, l w = zz*l = P*l/(EA)
wP
A uA
o o
TECNICA DELLE COSTRUZIONI MECCANICHE La Pstina Francesco Lezione del giorno 14/03/07
Abbiamo gi detto che per far s che in un materiale inerte si abbia un aumento di energia interna U bisogna fare del lavoro positivo su di esso, altrimenti si violerebbe il principio di conservazione dellenergia. Abbiamo definito la grandezza come densit di energia elastica e siamo giunti alla conclusione che = i j ijij. pu essere scritta tutta in funzione di , basta usare la legge di Hooke e lespressione che viene fuori di tipo quadratico,ovviamente positiva.Se deve essere positiva,ci sono dei limiti ai valori di cui formata. Considero un CASO MONOASSIALE =1/2zzzz=1/2Ezz2 Sempre per rispettare il primo principio E>0 Considerazione:Non esistono materiali passivi che hanno modulo elastico negativo. TAGLIO PURO
S
0
xy
0
xy
0
0
0
0
0
:=
=1/2xyxy=1/2G(xy)2 G>0 G=E/2(1+) 1+ >0 >-1 Da un punto di vista fisico significa che un provino che si sta allungando pu avere anche una dilatazione ma mai maggiore del suo allungamento. STATO IDROSTATICO
S
0
0
0
0
0
0
0
0
0
:=
0= 0/E-/E(0+ 0)= 0/E(1-2 ) La definizione di volume 3 0v =3 0/E(1-2 ) =1/2 0 v=1/2(E/3(1-2 )) v2 Dove (E/3(1-2 )) definito con K (Bulk Modulus) Come si vede le condizioni sono K>0 e
Essendo max In questo caso la struttura verificata a resistenza. Abbiamo poi definito anche la grandezza = am/ max Verificare una struttura significa >1
Quindi , moltiplicato per la max mi da unidea di quanto i carichi possano aumentare. :coefficiente di sicurezza. Ys am max
ma amx m
TECNICA DELLE COSTRUZIONI MECCANICHE Poli Marco Lezione del giorno 14/03/07 (1h)
Per la soluzione dei problemi iperstatici dobbiamo fare alcune ipotesi semplificative iniziali. Al momento infatti sappiamo eseguire verifiche di resistenza e rigidezza su oggetti caricati in maniera monoassiale uniforme, cio del tipo provino, assimilabili quindi a travi. Dovremo perci studiare le caratteristiche di sollecitazione, trovare le sezioni potenzialmente pi critiche, ed eseguire le verifiche ( MAX1, determinazione di l) Tuttavia siamo costretti, talvolta, ad eseguire semplificazioni anche brutali per poter risolvere questo tipo di problemi.
Es:
In questo caso presente una variazione di sezione, zona nella quale il modello di trave entra in crisi. Nella sezione B abbiamo una perturbazione nelle linee di forza, che tuttavia, per lipotesi di De Saint Venant, influenza una zona paragonabile al diametro della trave (zona di estinzione). Quindi, a parte questo punto, possiamo risolvere il problema considerando loggetto una trave sollecitata monoassialmente. Qualitativamente, non potendo studiare il comportamento della zona di estinzione, possiamo cautelativamente aumentare l
1
2 P
B
A1
A2
a am.
Troviamo la sez. critica (qualsiasi sezione del 2) verifichiamo che >1 e dato che zz=N/(AE) l1=Nl1/(A1E) l2=Nl2/(A2E)
Es:
In questo caso la sezione varia in maniera costante non ci pu essere equilibrio se la sollecitazione monoassiale (vedi figura). Tuttavia linclinazione bassa (altrimenti non sarebbe una trave) e possiamo considerare loggetto come formato da tanti dischetti caricati uniformemente. Verificata la sez. critica ( sez. B in piena zona di estinzione) per trovare il l posso considerare lallungamento di ogni
singolo concio e fare la somma. l0 N/(EA(s)) ds
P B
Es: In questo caso loggetto precedente soggetto al peso proprio quindi
Per trovare la sez. critica si dovr studiare il valore massimo della funzione zz(s)=N(s)/A (s)
Per trovare labbassamento del punto superiore l=l0 N(s)/(A(s)E) ds. In tutti questi casi per trovare lallungamento abbiamo utilizzato una via diretta
considerando lallungamento di ogni concio caricato uniformemente e facendo la somma. Avremmo tuttavia potuto fare un bilancio energetico. Infatti, dato che lenergia elastica immagazzinata pari al lavoro fatto dalle forze esterne, si ha che
U=1/2 zzzz dv = l0 1/2 N2/(EA) ds = (Fs)/2
Tecnica delle costruzioni meccaniche Jacopo Fantoni - Sintesi della lezione del 15/03/07 - 1h
Abbiamo iniziato la lezione risolvendo un problema intrinsecamente isostatico con la teoria dei corpi poco deformabili. La trave BCD incernierata in B e vincolata con un appoggio in C e presenta inoltre un carico assiale concentrato in D del valore di 35KN ; il materiale della trave ha
E=70GPa, A=250mm2, l=400mm e am=300MPa. Il carico applicato a 32 l.
Dai noti procedimenti di statica ricaviamo i diagrammi di sollecitazione della trave che si riducono alla sola forza normale costante. Le sezioni critiche quindi sono tutte quelle interessate dalla forza normale pari a P.
Grazie alle equazioni costitutive poi possiamo verificare la trave e calcolare lallungamento della trave attraverso lo spostamento del punto C che equivalente a quello del punto D visto che le fibre del tratto DC non sono sollecitate e subiscono solo uno spostamento rigido. max=
AP =140MPa =2,1 wD=wC= l
EAP
32 =0,533mm
Complichiamo ora il problema sostituendo lappoggio con una cerniera lasciando inalterata la geometria e le condizioni di carico. Naturalmente il problema una volta iperstatico, dato che come abbiamo visto se togliamo il vincolo orizzontale in C lasta si allunga. Con la statica del corpo rigido troveremmo 1 soluzioni, ma dato che ora siamo in grado di analizzare corpi poco deformabili 1 sola sar quella giusta. Si procede sostituendo 1 vincolo (n vincoli se n il grado di iperstaticit) con la reazione vincolare incognita corrispondente x. Una volta calcolata x il problema torna intrinsecamente isostatico ed quindi risolvibile in maniera equilibrata in ogni condizione di carico. Di tutte le possibili soluzioni equilibrate ce ne sar per una sola che sia anche congruente, e che quindi rispetti le equazioni costitutive. Questo procedimento denominato Metodo della forza. Potrei tentare di trovare una soluzione in maniera euristica. Un metodo pi efficace invece quello di applicare le equazioni di congruenza utilizzando il PSE.
+
Dato che suppongo nulli errori di montaggio e effetti termici wc=0.
032
=
+EA
xlEAPl da cui ricaviamo x =
32 P. A questo punto possibile tracciare il FBD e il
diagramma completo delle caratteristiche di sollecitazione.
Il carico P si ripartisce in questo modo sul telaio. La sua ripartizione dipende dalla natura del materiale ma essa pu essere influenzata, ad esempio con un aumento darea per modificare la rigidezza assiale, solo per i problemi iperstatici. Possiamo inoltre trovare lo spostamento del punto di applicazione del carico considerando lallungamento della parte sinistra o la riduzione di quella destra, oppure facendo una considerazione energetica, cio
eguagliando il lavoro fatto dal carico allaumento di energia elastica: =l
D dsEANPw
0
2
221 .
Per risolvere lo stesso problema possiamo utilizzare anche il Metodo degli spostamenti che prevede di considerare incognita lo spostamento di D e utilizzando le equazioni costitutive trovare infinite soluzioni congruenti fra le quali determinare quella equilibrata imponendo lequilibrio con la statica. Indicando con 1 il tratto BD e con 2 il tratto DC:
(1)zz= lwD2
3 (1)zz= (1)zz*E N(1)= (1)zz*E*A (2)zz= l
wD3 (2)zz= (2)zz*E N(2)= (2)zz*E*A
N(1)+P- N(2)=0
Tecnica delle costruzioni meccaniche Mario Milazzo Sintesi della lezione del 19/03/07 (2h)
Nella precedente lezione avevamo studiato due metodi per affrontare i problemi iperstatici:
Metodo delle forze: Vengono poste incognite le reazioni vincolari (tante quante sono le iperstaticit) e poi andando a trovare tra queste lunica soluzione congruente.
Metodo degli spostamenti: le incognite sono grandezze geometriche che si impongono congruenti e tra queste si cerca quella anche equilibrata.
I due metodi sono equivalenti anche se preferibile usare il primo quando il problema poche volte iperstatico poich pi efficiente. Esempi:
Calcolare per portare il carrello a battuta. Ce la barra gira a 2 calcolare quanto si accorcia la barra. Ris: sapendo che si allunga pi del necessario, si impone una forza X data dal vincolo e si impone lo spostamento uguale a
Il filo per noi parzialmente ideale in quanto privo di massa ma flessibile (non pu trasmettere taglio e flessione), ma si pu allungare e possiede EA(rigidezza estensionale).
Quanto si allunga il filo? Ris: il metodo pi conveniente quello energetico in cui ULext = . (La sbarra considerata infinitamente rigida).
Calcolare quanto ruota la sbarra. Problema 4 volte iperstatico: il metodo pi efficiente quello degli spostamenti poich il bilancio energetico in funzione di un solo parametro essendo la sbarra considerata infinitamente rigida.
COMPORTAMENTO FLESSIONALE DELLE TRAVI
La flessione la caratteristica pi significativa nello studio della resistenza e rigidezza di una struttura poich quasi sempre la responsabile delle crisi strutturali. Se prendiamo una trave ad asse rettilineo e sezione costante con assi principale dinerzia sempre paralleli a s stessi si avr FLESSIONE PURA (PURE BENDING) solo quando il carico riconducibile a due momenti(indipendentemente dal loro asse).
Di solito (specie nello spazio) si avr xM e yM .Se: 0)(0 = yxyx MMMM si ha FLESSIONE RETTA
(asse del momento principale dinerzia).
0yxMM si ha FLESSIONE DEVIATA.
FLESSIONE RETTA Facciamo un esperimento (ideale) ponendoci in una configurazione di flessione su quattro punti ovvero appoggiamo una trave su dei rulli come in figura in modo da avere un tratto di trave di
lunghezza 0l tale per cui in esso sia presente solo momento flettente (siamo nel piano quindi
xM ). In questo tratto ( 0l ) si ha quindi flessione retta. da notare come nei punti di applicazione del carico la soluzione di trave vada in crisi. Queste infatti sono zone di estinzione in cui per, secondo il principio di De Saint Venant, le perturbazioni si estinguono in unarea dellordine di D (diametro della trave). Notiamo inoltre che leffetto principale del carico quello di incurvare la
trave al contrario della forza normale in cui vi era allungamento e strizione. Vediamo per cosa succede allinterno del corpo utilizzando due barre di Plexiglas trasparente incollate tra loro su cui
preventivamente stata ottenuta una griglia. Dopo lapplicazione del carico notiamo che:
Due linee orizzontali qualunque, poste prima a distanza d, nella deformata si sono incurvate, formando archi di circonferenze concentriche, mantenendo per la loro distanza relativa (questo a causa dellisotropia, omogeneit del materiale e della condizione di carico uguale per tutte le sezioni).
Due linee verticali poste a distanza c tra loro rimangono rette ma la distanza cambia (se si incurvassero si avrebbe compenetrazione o mancanza di materiale).
La variazione di altezza anche se misurata accuratamente risulta trascurabile e in un primo momento possiamo dire che le altezze di tutti i rettangolini non variano.
Dallanalisi risultato che vi saranno data la deformazione fibre tese e compresse, ma dato che il processo continuo vi sar certamente una linea
detta NEUTRA che non subisce deformazione posta a 0y . (La fibra baricentrica lorigine della coordinata y).
y
xM 2Pa
+
P
0
y
Queste osservazione sono valide anche per materiali non elastici e lineari poich ancora non abbiamo utilizzato queste ipotesi.
Definiamo 00
0
Rl
= Angolo di flessione
0
0
lll f
zz
= 000 )( yyRl f += ; qmyR
yyRl
lyyRzzzzzz +==
+=
0
0
00
0000 1)(
dove 00
1 kR
m == (Curvatura della fibra neutra)
Notiamo come zz abbia una forma lineare, quindi rispetta sicuramente le equazioni di congruenza. Hp di Eulero Bernoulli: le sezioni della trave si conservano perpendicolari allasse deformato (matematicamente espressa
dalla0
0
0
1Ryy
Rzz= ).
Questa ipotesi perfetta nel caso di flessione pura retta. La trasformazione per NON affine in quanto la cambia e la trasformazione porta rette in curve,per congruente poich sono rispettate le equazioni di Beltrami-Mitchell. Diamo quindi i risultati dellanalisi: la flessione retta allunga (o accorcia) la trave con un effetto di incurvamento.
Cerchiamo ora i valori di m e q imponendo lequilibrio di una qualsiasi sezione ( 0=zR e 2PaM x = ). Lo stato di tensione sicuramente
monoassiale: cambia da punto a punto
=
zz
S00000000
.Vediamo perch mancano xx yy ij .
yy : supponiamo che ci sia,tagliamo una parte della deformata: ci accorgiamo subito che non ci sarebbe equilibrio lungo Y
xx : In A e B vale 0 quindi per continuit sar assente (vedere figura a lato).
ij : se facessimo una sezione della trave e ci fossero, noteremmo come non ci potrebbe essere equilibrio alla rotazione. Applichiamo Hooke:
EqmyEE zz
zzzz +==
.In qualunque punto zz diversa e si annulla nella linea neutra. Avremo quindi una distribuzione a farfalla data proprio dallapplicazione della legge di Hooke, in cui vi sar una zona tesa e una compressa. La figura accanto stata ottenuta con una sezione generica sulla trave. Imponiamo lequilibrio lungo Z ( il dominio della sezione):
0=zR 00)( =+=+=+==
EqAmESdAEqydAmEdAEqmEydAN xzz ma 0=xS poich lasse x
principale dinerzia. Quindi il tutto si riduce a 0=EAq ma E e A sono per definizione positivi e questo vuol dire 0=q . Ne deduciamo che la fibra neutra baricentrica, e da ci possiamo dire che: la flessione retta incurva la fibra baricentrica. Imponiamo ora lequilibrio a rotazione:
2PaM x =
Emyzz =
=====2
22 PaEmJEmJdAyEmdAEmydAyM xxzzx e quindi xEJ
Pakm2
== e pi in generale
x
x
EJMm =
xEJ Si dice RIGIDEZZA FLESSIONALE (in analogia con EA che era la RIGIDEZZA ESTENSIONALE nellanalisi della forza normale) Riassumendo:
yJMEky
x
xzz == yEJ
M
x
xzz =
x
x
EJM
Rk == 1 0=q dove xEJ Si dice RIGIDEZZA FLESSIONALE.
A B
Tecnica delle costruzioni meccaniche Baldi Stefano Sintesi della lezione del 21/03/07 (2h)
Nelle precedenti lezioni avevamo visto che in una trave sottoposta a flessione retta tutti i conci si comportavano nella stessa maniera indipendentemente da s, la trave non subiva una trasformazione affine ma congruente descritta dalla relazione zz =my+q.(1) Mediante lutilizzo delle equazioni di equilibrio e le leggi costitutive, considerando lipotesi di materiale lineare elastico eravamo arrivati a dire che q uguale a 0 (fibra neutra quella baricentrica) e che m=K(centro di curvatura) definito da:
K=EJ
M
x
x (con il termine E che la rigidezza flessionale). xJ
Introduciamo ora la Formula di Navier zz = yJM
x
x la quale valida qualsiasi sia la forma della
trave. Si osserva che dipende dalla forma della sezione mediante il termine a differenza della trazione in cui eravamo interessati solo allarea per calcolare la
xJ nella flessione.
Essendo e quantit positivexJ xM zz sar tanto maggiore quanto maggiore sar la distanza dallasse neutro e sar concorde con y. Nei punti che hanno y >0 le fibre si troveranno in trazione mentre quelli con y
Dobbiamo distribuire larea di sezione il pi lontano possibile dal baricentro per avere il massimo , perci la soluzione ottimale prevederebbe una sezione rettangolare con la massa posta lontano
dallasse. xJ
La soluzione pratica che di solito viene realizzata quella di costruire travi a doppio T con lanima (parte verticale) fine e le piattabande (parti orizzontali) larghe. Bisogna per stare attenti al fatto che le zone baricentriche regolano il taglio per questo motivo bisogna cercare un compromesso tra taglio e flessione. Se andiamo a vedere la farfalla di Navier per una trave a doppio T vediamo che il materiale sollecitato in maniera uniforme. Vediamo ora gli aspetti energetici legati ai processi deformativi. Possiamo dire che il lavoro sar collegato al fatto che le sezioni ruotano una rispetto allaltra e sar
dato da 20 M . (
21 indica che lineare).
Da relazioni geometriche possiamo ricavare che =x
oo
EJMl
la quale molto simile alla formula
lEANl
= gi trovata nella trazione.
Possiamo quindi scrivere che L= ox
o lEJM
21 2
.
Possiamo inoltre ricavare u= ijijv
21 dv =
l
0 21 2
xMxEJ
1 ds (2)
u pu essere definito anche da KM xl
0 21 ds= dsKEJ x
l 2
0 21
. Da queste formule possiamo notare una notevole analogia con lenergia interna trovata nella prova
di trazione che era dsEA
M xl 1
21 2
0 .
Vogliamo ora vedere di quanto si abbassa una trave lunga l incastrata e soggetta a un carico P alla sua estremit. Baster imporre che il lavoro delle forze esterne (in questo caso solo P) sia uguale a u trovato con la (2) con al posto di M lespressione P(l-s).
Ricaviamo quindi lo spostamento =xEJ
Pl3
3
. Osserviamo che:
raddoppiando la lunghezza lo spostamento aumenta di otto volte inversamente proporzionale alla rigidezza raddoppiando la forma della sezione diminuisce di 16 volte perch inversamente
proporzionale al . xJParliamo ora della flessione deviata: essa si ha quando lasse del momento non pi un asse principale di inerzia. Alla base del suo studio c il principio di sovrapposizione degli effetti.
Possiamo trovare xJM
yJM
y
y
x
xzz = e mediante questa possiamo ricavare lequazione dellasse
neutro ricordando che su di esso zz =0.
Lasse neutro avr unespressione del tipo 0= xJM
yJM
y
y
x
x .
Questa una retta che passa per lorigine, che non ha pi la direzione del momento e che risulta spostata rispetto allasse del momento verso lasse che ha momento dinerzia minore.
TECNICA DELLE COSTRUZIONI MECCANICHE Di Russo Marco Sintesi della lezione del 22/03/07- 1h
xMM
JJy
x
y
y
x =
AN
JxM
JyM
yxzz +yx
=
y
y
x
xzz J
xMJ
yM
=
Dopo aver studiato il comportamento di una trave soggetta a flessione retta, possiamo ricondurci al caso pi generale di flessione deviata sfruttando il Pr. Sovrapposizione degli Effetti; scomponiamo infatti il nostro momento Mo secondo gli assi principali dinerzia e usiamo 2 volte la formula di Navier ottenendo :
x
xxK = JE
M y
yy JE
MK
=
AP
JxxP
Jy
yxzz +
+
= 00
yP
dove il segno negativo deriva dal fatto che un My positivo produce compressione per x>0. Da tale formula si pu ricavare lequazione dellasse neutro, che rappresenta una retta passante per il baricentro, non diretta come M0 ma con direzione compresa tra M0 e lasse principale con momento dinerzia minore. Abbiamo quindi trazione o compressione a seconda se ci troviamo da una parte o dallaltra dellasse neutro. Inoltre sappiamo che la zz una funzione lineare di x e y e quindi, da un punto di vista matematico, non pu avere max e min locali ma la loro ricerca deve essere effettuata sul contorno del dominio limitato, cio sul bordo della sezione.
Pertanto i punti critici saranno quelli pi distanti dallasse neutro e i valori della zz corrispondenti si trovano sostituendo le coordinate di tali punti nella formula di Navier. Dal punto di vista della verifica di rigidezza, facendo sempre riferimento al P.S.E., abbiamo nel caso della flessione deviata due curvature nelle due direzioni:
x
Mo
y
e
Analizziamo ora il caso in cui abbiamo sia momento flettente, sia forza normale; in questo caso basta sovrapporre anche questo effetto, per cui la distribuzione di Navier che risulta sempre lineare in x e y ma che non passa pi per lorigine; il termine noto N/A rappresenta la tensione che c nel baricentro e quindi mi sposta lasse neutro non pi passante per lorigine. Il metodo di verifica comunque lo stesso: traccio lasse neutro e poi studio i punti pi lontani da esso.
Un caso pratico in cui abbiamo tali tipi di sollecitazioni quello rappresentato in figura: abbiamo una trave ad asse rettilineo e sezione costante, incastrata ad un estremo, e caricata con una forza normale P in direzione z applicata in un punto C(x0,y0) tramite un braccio ( la condizione di carico normale eccentrico tipica dei pilastri degli edifici).
y
x
C(x0,y0)
P
z P
x x0
y0 y
Sollecitazioni: sulla trave sono applicati N=P e due momenti, un momento Mx prodotto dal braccio x0 e My prodotto dal braccio y0. Quindi su tutta la trave ho N=P e flessione deviata Mx=Py0 e My= -Px0 La distribuzione di Navier in questo caso Si vede come la zz del baricentro ha lo stesso segno del carico P; ci implica che qualitativamente il centro di spinta C e il baricentro si trovano sempre nello stesso semipiano definito dallasse neutro.
Ponendo inoltre zz=0 si nota come lequazione dellasse neutro non dipenda dal valore di P. Propriet di reciprocit: se ho un carico P applicato in un punto C, posso determinare un asse neutro; per la simmetria dellequazione se prendo a sua volta un carico P e lo applico in qualsiasi punto CI appartenente allasse prima trovato, risulta che lasse neutro prodotto da questo nuovo carico passa per il primo punto C. In generale rifacendo tale procedimento per tutti i possibili CI si ottiene un fascio di rette passanti per C.
Vediamo lapplicazione di tale concetto: prendiamo per semplicit una sezione rettangolare e applichiamo un carico ai punti C dellasse x; si pu verificare che per la geometria riportata in figura leq. dellasse sar x=-b^2/(12x0). Ci si pu chiedere a questo punto per quale x0 lasse neutro passa per il lato destro del rettangolo; ponendo appunto x=-b/2 si ottiene x0=b/6. Pertanto quando x0>b/6 lasse neutro passa nella sezione, quando x0
Tecnica delle costruzioni meccaniche Luca Sciurti Sintesi della lezione del 26/03/07 (2h)
TORSIONE (torque)
Il fenomeno della torsione dipende fortemente dalla forma della sezione. Per lanalisi di questo fenomeno esaminiamo un tubo circolare, sottile di materiale omogeneo e isotropo e sollecitiamolo con due momenti contrapposti alle facce estreme in direzione dellasse. Consideriamo la sezione vista dallasse z. Cosa caratterizza questa sezione?
Ri (raggio interno) Re (raggio esterno) t (spessore);
t = (Re-Ri) R = (Re + Ri)/2 Propriet della sezione:
t > R (per lipotesi di trave) A = (Re^2-Ri^2) = 2Rt (teorema di Guldino) Jx = Jy = (Re^4-Ri^4)/8 = R^3t Jo = Jx + Jy = 2R^3t
Am = R^2 (area sottesa alla linea media) Per studiare questo problema conviene utilizzare un sistema di coordinate polari (r, ) che porta con se un sistema di riferimento cartesiano destrogiro locale (Ex, E, Ez).
Le coordinate curvilinee associate ai tre versori sono: Ex r Ez s (coordinata dellasse) E
Introduciamo, anche, una ascissa curvilinea che segue m che chiameremo: = R
se trascuriamo le zone di perturbazione lo stato di tensione S indipendente da s, dalla coordinata circonferenziale o , e anche da r dato che varia in un dominio (Ri r Re) che ha delle dimensioni trascurabili; quindi potremo dire che indipendente anche da r. Possiamo affermare quindi che lo stato di tensione uniforme se scritto nel sistema di riferimento locale. Analisi dello stato di tensione Lo stato di tensione per la torsione uno stato biassiale, pi precisamente di taglio puro, uniformemente distribuito sul tubo. Per questo motivo non possiamo confrontarlo con una amm. Quindi non possiamo fare la verifica di resistenza.
0 0 0 S = 0 0 z
0 0 0 Come sono le isostatiche? Le isostatiche sono due famiglie di eliche e sono a 45 rispetto allasse neutro. Calcoliamo il momento risultante rispetto al baricentro:
[zdAr] = Mz dF = zdA dA = rdrd = drd
Mz = [z r^2drd] = 2R^2t z Da questa relazione possiamo ricavare
z = Mz/(2R^2t) = Mz/(2Amt) = (MzR)/Jo wo = (2R^2t) detto MODULO DI RESISTENZA A TORSIONE Introduciamo il modello costitutivo
0 0 0 0 0 0
S = 0 0 z = 0 0 z 0 0 0 0 0 0 z = 2 z = z/G
zz = 0 il tubo non si accorcia e non si allunga rr = 0 lo spessore del tubo non cambia
= 0 la lunghezza della circonferenza m non cambia, ovvero non c una variazione della lunghezza delle fibre circonferenziali.
Tr() = 0 non si ha una variazione del volume Tutte le sezioni rimangono dove sono, piane e ruotano rigidamente una rispetto allaltra. Calcoliamo la rotazione della sezione di estremit detto ANGOLO DI TORSIONE ed una quantit energeticamente associata al momento.
= (zL)/R detto ATTORCIGLIAMENTO o AVVITAMENTO ed langolo di rotazione diviso per unit di lunghezza.
= /L = d/ds = z/R = z/(GR) = Mz/(2R^3tG) = Mz/(2AmRGt) = Mz/(JoG) la caratteristica deformativa associata alla torsione della trave. (2R^3tG) detta RIGIDEZZA TORSIONALE Tutte queste relazioni valgono solo nel caso di un tubo sottile.
TCM Resoconto della lezione del 28/04/2007 (1h) Chiti Brenda Sappiamo perci come comportarci di fronte ad una sezione tubolare circolare sottile e spessa.,cilindrica, rettangolare sottoposta a torsionema come comportarsi di fronte ad una sezione generica?!?!? Se per esempio,abbiamo di fronte questa sezione,potremo trattarla come un rettangolo(supponendo che ad esempio il suo spessore b sia costante) b
di larghezza pari a b ed altezza pari alla lunghezza della linea media. b Se ho di fronte questa sezione tubolare circolare,potrei Anche in questo caso usare lanalogia del rettangolo,cio considerarla come un rettangolo di larghezza pari allo spessore e h=circonferenza media(se il taglio molto sottile). La presenza del taglio peggiora notevolmente la resistenza a torsione della sez.circolare tubolare e questo evidente se si usa lanalogia della membrana;il momento torcente sopportabile dalla sezione,risulta infatti proporzionale al volume sotteso dalla membrana,che in questo caso
molto piccolo.Considero una sezione a T. In questo caso,in corrispondenza di un profilo spigoloso rientrante di raggio di raccordo nullo,sfruttando lanalogia della membrana,le tensioni tangenziali vanno allinfinito,e perci queste zone,se non opportunamente raccordate,fanno s che la struttura non risulti mai verificata a torsione. Mentre gli spigoli uscenti non rappresentano un problema,in quanto in queste zone le tensioni tangenziali sono nulle e perci si possono anchetoglieresenza influenzare la resistenza a torsione della sezione. Questa sezione pu essere studiata considerandola come composta da due rettangoli,sui quali agiscono rispettivamente i momenti torcenti M1 ed M2,frazioni del momento Mz totale applicato
allintera sezione. Il problema in questo caso ;come si ripartisce Mz nelle due sottosezioni,ovvero,quanto valgono M1 ed M2? Per congruenza Mz si ripartisce in modo che M1 ed M2 diano luogo allo stesso attorcigliamento,e perci (M1/(G J1eq))=(M2/(G J2eq)) e tenendo conto che M1+M2=Mz,ricaviamo i due momenti desiderati. In generale,una qualunque sezione pu essere vista come linsieme di pi rettangoli,dei quali sappiamo valutare le caratteristiche torsionali. Molto spesso,capita di avere di fronte una sezione circolare con cava per linguetta o chiavetta;in questo caso,si tratta la sezione come se fosse circolare,dopo di che la tensione nominale ottenuta va moltiplicata per un fattore disponibile su opportune tabelle che tiene conto della geometria della cava,riuscendo perci a determinare lo stato di tensione nei vari punti della sezione Queste sono le zone dombra dal punto di vista della torsione Queste sono le zone critiche se non opportunamente raccordate Il punto di mezzo di questa zona diviene critico se gli spigoli interni sono opportunamente raccordati. Vediamo adesso una teoria molto utile per sezioni tubolari non circolari,di spessore sottile; Teoria di Bredt
Consideriamo una generica sezione tubolare: individuo la linea di met spessore m e su di essa individuo unascissa curvilinea .
X Per definire la sezione,ho bisogno di t()che mi da lo spessore punto per punto. Per ipotesi ,tmax
Tecnica delle costruzioni meccaniche Andrea Rolla Sintesi della lezione del 02/04/07 (2h)
allestremit destra della
Torniamo al discorso sul taglio iniziato nella lezione precedente. Prendiamo una trave a sezione rettangolare bh incastrata in una parete al cui estremo applicato un carico P verticale,esso produce un taglio uniforme cui associata una flessione poich tra le 2 caratteristiche di sollecitazione esiste una relazione di proporzionalit diretta secondo la relazione Ty=(dMx/ds). Se prendiamo un tratto finito di trave di lunghezza s avremo Ty=(Mx/s); questo concio ha sulle facce perpendicolari allasse uscente z due momenti
flettenti diversi tra loro,uno per faccia,oppure pu averne soltanto uno se ad esempio consideriamo il concio che si trova trave. Cerchiamo quindi di visualizzare gli effetti prodotti dal taglio. Facciamo un taglio in una zona qualsiasi della trave studiandone la corrispondente sezione; leffetto prodotto una flessione con tensioni del tipo zz avente momento risultante rispetto allasse x pari al momento flettente esistente sulla sezione. E presente anche una forza verticale (taglio) che equilibra il carico P e che produce tensioni in direzione y del tipo yz. Esse non sono distribuite uniformemente sulla faccia della sezione poich se prendessimo un cubetto infinitesimo avente la superficie superiore a diretto contatto con laria le zy ,che
dovrebbero esistere per via della simmetria del tensore di Cauchy,non vi sono poich la superficie a contatto solamente con laria; al massimo potremmo dunque avere come valor medio delle yz il rapporto Ty/A,con A area della superficie su cui sono distribuite le rispettive tensioni. Per risolvere questo problema utilizziamo quindi lipotesi di Jouravski che una teoria approssimativa del taglio secondo la quale le tensioni sono uniformi solamente lungo lasse delle x,mentre variano lungo lasse delle y. Sono dunque uniformi lungo ogni corda e sono nulle presso il lato superiore ed inferiore della sezione. A posteriori si pu verificare come questa ipotesi sia corretta soltanto per sezioni rettangolari. Prendiamo adesso un sottoconcio di lunghezza s dalla parte delle y positive e studiamone lequilibrio.
Chiamiamo la sottosezione di dominio * per y>=y* e indichiamo con lapice * tutte le grandezze ad essa riferite. La y*,coordinata della sottosezione,varia da h/2 a h/2, larea uguale a A* = b(h/2-y*). Dallo schema di corpo libero notiamo come le tensioni yz siano costanti lungo z mentre variano lungo y*,in rosso abbiamo la distribuzione a farfalla delle tensioni zz le quali sono rispettivamente uguali a Mx1y/Jx e Mx2 y/Jx con Mx2 = Mx1+Mx. Lunica incognita rimane pertanto y*.Facendo lequilibrio e integrando su * si ha: - Mx1y/Jx dA + Mx2y/Jx dA zy(y*)bs = 0 Sostituendo a Mx2 = Mx1+Mx ci rimane: Mxy/Jx dA zy(y*)bs = 0 Fissato ds, Mxy/Jx costante per cui otteniamo: yz(y*) = (Mx)/(Jxsb)y dA = Ty/(Jxb)y dA = (TyS*)/(Jxb) Questa la formula di Jouravski,se * tende a zero il momento statico S* nullo ragion per cui non vi taglio,come volevasi dimostrare,sul bordo superiore e su quello inferiore della sezione. Nelle zone baricentriche abbiamo dunque il taglio maggiore. Sezione rettangolare
Jx = (bh3)/12 S* = A*y La formula di Jouravski in questo caso sar: yz = (6Ty)/(bh3)[(h/2)2-y*2] Landamento delle tensioni in funzione di y* parabolico,il massimo della tensione yz sulla corda baricentrica ed max = 3/2Ty/A dove A/(3/2) il
modulo di resistenza a taglio w mentre 3/2 il fattore di resistenza a taglio e dipende dalla forma della sezione, il fattore per il quale bisogna moltiplicare la tensione media per ottenere quella massima. Considerazione:nella sezione rettangolare le sollecitazioni maggiori dovute ai tagli sono nella zona baricentrica,le zone pi lontane sono sollecitate da flessioni e non c effetto combinato tra di esse. Generalizziamo adesso i discorsi fatti finora per altri tipi di sezione. Sezione circolare
Lipotesi di Jouravski imit della corda infatti le tensioni non sono equilibrate per cui
eriamo la fibra baricentrica.
lla
zione tubolare circolare
n questo caso non va pi bene specie nelle zone esterne. Alle estrequesta distribuzione risulta essere errata. Lipotesi torna per regionevole se considPer il cerchio =4/3, il che significa che dal punto di vista del taglio la sezione circolare migliore di quella rettangolare perch c pi area nezona baricentrica. Se
ome per la sezione circolare anche per quella tubolare non corretta la distribuzione per tagli orizzontali poich certe
rofilati
Ctensioni non sono equilibrate e lipotesi di Jouravski corretta per la zona baricentrica. Il fattore circa pari a 2, pi lo spessore sottile pi tende a questo valore. E comunque pi ragionevole effettuare dei tagli in senso radiale in modo tale che le tensioni possano essere ritenute uniformi. P
ezione a doppio T S
molto usata nella pratica. Nella rappresentazione se della sezione subisce una brusca riduzione.
ezione a T
Questa una sezionedelle tensioni di figura 1 notiamo un salto netto dovuto al fatto che la baSe utilizziamo la teoria di Jouravski pi corretto considerare la rappresentazione di figura 2. E chiaro come in questotipo di sezione sia lanima a reggere le sollecitazioni dovute al taglio mentre possono essere considerati trascurabili gli effetti prodotti dalle piattabande. I punti critici sono le zone di attacco dellanima alle piattabande dove si combinano siaflessione che taglio. La flessione ha valori estremi sul bordo superiore e inferiore della sezione. Detto questo, pari al rapporto tra la superficie totale della sezione e quella dellanima, la tensione massima sar max = Ty/Aanima. S
e a T i punti evidenziati nella figura possono essere considerati critici.
ezione non simmetrica ( esempio sezione a C )
Per la sezion S
fficiente,il taglio infatti produce un effetto
assiamo ora ad analizzare quali siano gli effetti deformativi.
effetto deformativo in una trave a mensola con carico allestremo dovuto sia alla
leffetto deformativo dovuto al taglio che costante
e pari al
o = Ty/(GA)(A(S*/b)2 dA)/Jx2 dove 1.
ezione
ttangolare 3/2 6/5
a
Per queste sezioni lipotesi di Jouravski non sudeformativo combinato con uno torsionale. P Lflessione che al taglio. Oltre alla flessione,la trave subisce un ulteriore abbassamento come si pu notare nella figura. Nellaltra figura abbiamo invece per tutte le sezioni le quali non si mantengono piane ma si ingobbano e non sono pi perpendicolari allasse della trave (lipotesi di Eulero-Bernoulli non valida). Definiamo t la freccia dovuta al taglio e t la sollecitazione da esso esercitata rapporto t/l con l lunghezza della trave. Dal punto di vista energetico abbiamo: 1/2Pt = zyzy dV da cui ricaviam t(A(S*/b) dA)/J2 x2 definito fattore di rigidezza a taglio il quale deve essere maggiore diAbbiamo quindi in definitiva t = Ty/(GA)/ . S recircolare 4/3 10/9 tubolare 2 2 doppio T A/Aanima A/Aanim
Tecnica delle costruzioni meccaniche
Valerio Rossi
Sintesi della lezione del 03/04/2007 (2 h)
Come si e visto nelle lezioni precedenti, in una trave, scelto un opportuno sistema di riferimento locale, il piugenerale stato di tensione e biassiale. Le caratteristiche di flessione e trazione producevano nel materiale unostato di tensione monoassiale (zz), mentre le caratteristiche di torsione e taglio, uno stato di taglio puro,ossia biassiale. Fino ad adesso sapevamo come comportarci, ai fini della verifica di resistenza, solo nei due casipresi separatamente tra loro; ossia confrontando rispettivamente la massima tensione tensione principale conuna tensione ammissibile am, ricavata dalla prova di trazione, mentre la massima tensione tangenziale venivaconfrontata con una tensione tangenziale ammissibile am, la quale doveva esser ricavata attraverso unappositaprova di torsione. In effetti il bisogno di generalita e lesigenza di diminuire il numero di prove da effettuare equindi anche il costo, hanno portato allintroduzione di alcuni criteri, di cui studieremo i piu importanti per gliacciai ed i materiali dellingegneria meccanica. Questi criteri, pero, hanno per contro di non seguire un rigorematematico forte, ma di basarsi principalmente su criteri fisici. Attraverso questi criteri si riesce sempre adassociare ad un generale stato di tensione uno stato monoassiale equivalente (ai fini della verifica di resistenza),il quale sara poi confrontato con lo stato limite ricavato dalla prova di trazione. In questo modo, anche solo lasingola prova di trazione ci e sufficiente.
Criterio di Tresca
Fig.1: Criterio di Tresca
Il primo criterio si basa su su una constatazione fisica forte, siimputa alle sole tensioni tangenziali lo snervamento del materiale.questo ha anche delle importanti conferme sperimentali, oggi infattisi sa che lo snervamento avviene per lo scorrimento plastico dei pianicristallini di massima densita atomica, ed in effetti le tensioni chepromuovono questi scorrimenti sono proprio le tensioni tangenziali.Come si vede anche dalla figura a lato, attraverso questo criterio, aifini della resistenza, si puo ricavare la eq che come si vede nel casoin esame e il diametro del cerchio massimo di Mohr. In terminimatematici, per uno stato qualsiasi
(eq)Tr = maxi,j|i j |
Non conta quindi la posizione del centro, ma solo il diametro. Questo e abbastanza vero, infatti, e statodimostrato che uno stato di tensione idrostatico, ossia dove il materiale sente in ogni punto solo tensioniprincipali, non porta allo snervamento, ma si passa dal campo elastico alla rottura. Questultima cosa e verase lo stato e di trazione, mentre se e di compressione, si verifica che il materiale non si rompe mai, qualsiasi sialintensita delle azioni che agiscono sul corpo.
Fig.2: Criterio di Tresca per le travi
In una trave il piu generale stato di tensione e cos espresso dallamatrice di Cauchy
S =
0 0 00 0 0
(eq)Tr = 2 + 42Questultima relazione si puo facilmente ricavare imponendo lugua-glianza del diametro del cerchio alla tensione equivalente secondoTresca.
Sempre da considerazioni di questo genere si ricava che (eq)Tr = 2 (eq)Tr. Si nota, come era da aspettarsi,che le tensioni tangenziali sono piu critiche di quella normali, ai fini della resistenza.
Criterio di Von Mises
Questo secondo criterio, si basa invece su considerazioni di tipo energetico. Si suppone, infatti, che il materialepossa immagazzinare energia elastica fino ad un certo limite, oltre il quale esce dalla zona di ammissibilita.Bisogna pero stare attenti che non tutta lenergia contribuisce, ma solo la parte dovuta allo stato di tensione
1
deviatorio.
La condizione limite diventa quindi dev < lim.
S = Sid + Sdev =
m 0 00 m 00 0 m
+ 11 m 12 1321 22 m 23
31 32 33 m
: m = 133
i=1
ii
Ricavando lespressione della densita di energia elastica attraverso la legge di Hooke per uno stato di tensionegenerale ed uguagliandolo alla formula trovata per uno stato monoassiale si ottiene la relazione che lega letensioni alla tensione equivalente
(eq)Mis =
12
[(11 22)2 + (22 33)2 + (33 11) + 6 (212 + 223 + 213)]
Come si vede il luogo dei punti formato dallespressione poco sopra e differenziabile. Tale relazione, si specializzanel caso delle travi in una forma molto simile a quella di Tresca
(eq)Mis =
2 + 32
Si nota che la tensione equivalente calcolata tramite il criterio di Tresca e sempre maggiore di quella calcolatacon Von Mises. In questultimo caso e (eq)Mis =
3 (eq)Mis
Le previsioni del criterio di Tresca sono abbastanza affidabili soprattutto per i materiali, come gli accia dolci,che hanno un plateau orizzontale di snervamento nella curva , mentre il criterio di Von Mises ha miglioriprevisioni per gli acciai ad alto tenore di carbonio, leghe leggere, acciai inossidabili, i quali hanno uno snerva-mento piu regolare.
Si possono ancor meglio confrontare i due criteri rappresentandoli nello spazio delle tensioni. La tensioneequivalente di Von Mises risulta, quindi, un cilindro avente come asse la trisettrice del primo ottante, ossia laretta caratterizzante lo stato idrostatico; per quanto riguarda Tresca si vede che il solido e formato dallunionedi sei piani, formanti un prisma a base esagonale regolare inscritto nel solido descritto precedentemente.
Fig.3: Regione di ammissibilita
Nel caso delle travi, basta visualizzare questi luoghi geometrici suuno dei piani coordinati. Tali proiezioni, indicano la regione diammissibilita, ossia la regione (contenente lorigine) allinterno ditali zone. Dalla figura a fianco si vede come la regione trovata conTresca sia sempre contenuta in quella di Von Mises. Soltanto inalcuni punti le previsioni coincidono, ossia nel caso di stato di ten-sione monoassiale e nel caso di tensione equibiassiale (rappresentatadalla bisettrice del primo quadrante); in questi due casi infatti lalunula di Mohr degenera in una sola circonferenza. La maggiordifferenza percentuale si ha invece proprio per lo stato di tensionedi taglio puro (bisettrice secondo quadrante), dove si ha anche unadifferenza tra i due criteri di circa il 14%.
Bisogna precisare che con questa verifica, siamo in grado di stabilire solo se una struttura e ammissibile ingrande, infatti nella nostra analisi, abbiamo trascurato tutti quei fenomeni che non rientravano nel modello ditrave, ossia tutto cio che accadeva in zone aventi estensione confrontabile con la superficie della sezione. Cieravamo serviti, infatti, dellipotesi di De Saint Venant, considerando le zone di estinzione al massimo di aventiraggio pari al raggio della sezione della trave. Questo significa inevitabilmente che oltre alla verifica in grande,andranno studiate delle particolari soluzioni locali, in modo da assicurare delle ottimali condizioni di lavorodella struttura intera, cosa pero che esula da cio che faremo in questo corso.
Per quanto ci riguarda, per adesso, faremo la verifica di resistenza e potremo dire se la struttura e verifica-ta o meno come trave. Spesso pero le previsioni si mostrano poco precise, per via che la sezione critica cade lamaggior parte delle volte nelle zone di estinzione, o dove e applicato il carico esterno, o nelle zone di vincolo, odove ce un brusco cambiamento di sezione.
2
TECNICA delle COSTRUZIONI MECCANICHE Nicola Arrighi lezione 12/04/2007 (2h)
Finora siamo in grado di verificare la resistenza allo snervamento di un generico problema di trave, isostatico o ad esso riconducibile. Spesso nella pratica, per, ci non sufficiente: occorre anche garantire che linevitabile distorsione del componente strutturale sollecitato sia compatibile con quella ammessa dal corretto funzionamento (verifica di rigidezza).
. In genere, rispetto alla resistenza, le condizioni di rigidezza sono pi restrittive e le modalit di intervento in caso di mancata verifica sono molto pi invasive (non bastano interventi locali, occorre in sostanza rifare il progetto del componente). Operativamente effettuare una verifica di rigidezza significa: essere in grado di calcolare lo spostamento e linclinazione della linea dasse e confrontarli con i corrispondenti valori ammissibili.
DIFFERENZIALE ( f ma= ) pi lungo e sistematico Metodi:
VARIAZIONALE ( L K= ) pi rapido e mirato Condizioni di applicabilit che devono essere verificate:
1) corpi poco deformabili (
Si definiscono tre quantit algebriche legate allo spostamento: My Tx u(s) lungo x con: Mx Ty v(s) lungo y - s : ascissa curvilinea dellasse della trave indeformata N w(s) lungo z - (x,y,z) sistema di riferimento locale della trave indeformata
In presenza di carichi combinati, come per il taglio anche leffetto della forza normale trascurabile. Infatti:
Curvatura
Teoria della flessione ( )1( )( ) ( )
x
x
M sk sR s E J s
=
Geometria differenziale 2 3/ 2''( )( )
[1 '( ) ]f xk xf x
=+
Dove la pendenza nulla ( ) ''( )k x f x=Dove la pendenza piccola il nostro caso (corpi poco deformabili) ( ) ''( )k x f x
Notando che ( ) ( )f x v s otteniamo: ( )''( )( )
x
x
M sv sE J s
=
Il - introdotto deriva essenzialmente dal fatto che un determina una curvatura che nel sistema locale di trave ha concavit
0xM >''( ) 0v s <
TECNICA DELLE COSTRUZIONI MECCANICHE - LEZIONE DEL 16/04/2007 Riassunto di Ferri Andrea Nota la linea elastica possiamo ricostruire la struttura della trave. Avevamo trovato
che xx
MkEJ
= , ma anche che risultava approssimato con lespressione 2
2
d vds
. Mettendo
insieme le 2 relazioni abbiamo trovato che 2
2x
x
Md vds EJ
= . xM e xJ possono dipendere
da s. Integrando 2 volte lespressione sopra ricavata si ottiene v(s) a meno di due costanti di integrazione che si calcolano tramite le condizioni al contorno del problema specifico. In virt della semplificazione fatta relativamente alla curvatura non si ottiene un risultato esatto, ma i vantaggi derivanti dalloperare cos sono molto maggiori dellerrore commesso. Supponendo poi che xJ non dipenda da s o perlomeno a tratti- possiamo calcolare la derivata terza e quarta di v(s) ottenendo:
3
3y
x
Td vds EJ
= e 4
4o
x
pd vds EJ
= indicando con op il carico sulla trave. Le 3 equazioni viste,
opportunamente integrate, portano allo stesso risultato, mentre la scelta di quale equazione usare sar dettata dal tipo di problema. Quindi ricapitolando: v(s)=Freccia; v(s)=Coefficiente angolare della linea dasse,cio la rotazione della sezione della trave rispetto alla posizione scarica; v(s)=Curvatura, legata al momento flettente; v(s)=D informazioni sul taglio;
(s)= Non d indicazioni perch legata al carico. IVvGeneralmente parleremo di travi rettilinee, con rigidezza flessionale pari ad EJ e sufficientemente snelle da poter trascurare gli effetti del taglio. Facciamo lesempio di una trave a mensola con un momento Mo concentrato allestremit. Mo In questo caso Mx(s)= Mo perci partiamo direttamente dalla dalla derivata seconda;
abbiamo che v(s)=- ox
MEJ
. Integrando 2 volte otteniamo v=2
1 22o
x
M sk cEJ
s c= + + . Le due
costanti si ricavano con le condizioni al contorno, cio dai vincoli; in questo caso possiamo dare condizioni solo su v(s) e su v(s), e imponendo v(0)=v(0)=0 si ricavano facilmente = =0. Perci la linea elastica sar un a parabola col vertice nella sezione dincastro. Tutto ci va in contrasto con quanto visto finora, in quanto teoricamente dovrebbe essere una circonferenza,ma ancora una volta lapprossimazione fatta per la k porta ad un piccolo errore. Tuttavia la curvatura esatta nella sezione dincastro e la soluzione trovata la forma polinomialmente pi simile alla soluzione esatta. Inoltre c anche un piccolo spostamento orizzontale che noi trascuriamo.
1c 2c
Unaltra situazione da notare quella di una trave a mensola soggetta al peso proprio. po Avendo po possiamo partire da dove vogliamo,in questo caso dal 4ordine:
IV o
x
pvEJ
= . Il fatto interessante che avremmo potuto scrivere lo stesso anche se la
TECNICA DELLE COSTRUZIONI MECCANICHE - LEZIONE DEL 16/04/2007 Riassunto di Ferri Andrea trave era iperstatica. Integrando 4 volte si trova lespressione
4 3 21 2
3 424 6 2o
x
p s c s c sv cEJ
= + + + +s c . Le condizioni al contorno possono essere,ad esempio,
v(0)=0; v(0)=0; 2 ''1(0) (0)2x o x
M p l EJ v= = '''(0) (0)y o xT p l EJ v= = ; .
Tuttavia non molto comodo perch 2 condizioni necessitano il calcolo di Mo e Ty, quindi si ricavano le condizioni sullestremit opposta della trave in cui il momento e il taglio sono nulli. Otteniamo quindi un sistema 4x4 univocamente determinato. Finora sembra che la teoria della linea elastica possa andar bene sempre, ma va in difetto in caso di carichi concentrati come in figura: p In questo caso non si ha unespressione analitica di v(s) e sue a derivate in modo semplice. Si possono per inserire funzioni discontinue o dividere il dominio, considerare cio la soluzione da 0 ad a e da a ad l, cio una 0
Lezione di Tecnica delle Costruzioni Meccaniche Matteo Trichilo 18/04/07 (1h)
APPLICAZIONI DELL INTEGRALE DI MOHR.
Nel caso di problema piano con una trave soggetta a peso proprio, se volessimo calcolare la rotazione della sezione A intorno allasse x, potremmo utilizzare tre differenti metodi: 1 Modo: Metodo della Linea Elastica (sconsigliato) 2 Modo: Metodo di Castigliano con carico fittizio 3 Modo: Metodo dell Integrale di Mohr, che non altro che la conclusione di Castigliano Se uso Mohr devo trovare le caratteristiche di sollecitazione dovute al carico vero
(Np(s) Mxp(s) Typ(s)) e quelle dovute al carico esploratore unitario,1Nm,( N1(s) Mx1(s) Ty1(s)). Dovr quindi fare lintegrale concio per concio di tutta la struttura. (+) = rotazione oraria; () = rotazione antioraria. Il metodo dellintegrale di Mohr viene anche detto: METODO DEI LAVORI VIRTUALI APPLICATO ALLE STRUTTURE. Vediamo perch:
Oggetto con elasticit concentrata (barra infinitamente rigida collegata al telaio con una cerniera e una molla di torsione ). Voglio calcolare la grandezza energeticamente associata a P, cio di quanto si abbassa la sezione A. Potrei usare la statica, poich sono nel campo dei corpi poco deformabili, oppure il metodo dei lavori virtuali introducendo per il lavoro fatto dalla
molla (energia elastica). Se calcolo il lavoro virtuale di tutte le forze considerando lo spostamento effettivo ( lecito perch piccolo e le forze sono costanti) esso deve esser nullo, poich il sistema in equilibrio. L = 1vA 1l ( Pl / ) = 0 1vA = lavoro virtuale della forza esploratrice unitaria esterna (-) perch la molla si oppone 1l = momento sulla molla prodotto dal carico unitario (M1) 1vA (M1MP/) = 0 Pl = momento effettivo prodotto dal carico vero (MP) = la rigidezza flessionale della molla Pl/ = langolo di rotazione effettivo prodotto dal carico vero vA = M1MP/ -1l (Pl/) = lavoro virtuale delle forze interne
Voglio calcolare labbassamento della sezione estrema A . Applico un carico unitario e poi utilizzo lintegrale di Mohr 1vA = MP(s) M1(s) / EJ ds dove MP(s) / EJ = KP ( curvatura vera )
Lintegrale di Mohr pu essere considerato come applicazione del PLV in cui il carico applicato quello esploratore unitario e lo spostamento quello effettivo dovuto al carico vero. Vediamo i due seguenti casi: A e B sono due punti qualsiasi della struttura. P il carico noto applicato in A.
Voglio sapere di quanto si sposta B lungo la direzione m. Con Mohr B = MP(s) M1(s) / EJ ds Volendo potrei considerare il carico P come il prodotto di una forza unitaria per P, ottenendo cos: B = PM1A(s) M1B(s) / EJ ds B = P M1A(s) M1B(s) / EJ ds
Questa volta vogliamo lo spostamento di A lungo n: A = MP(s) M1(s) / EJ ds Se come prima immagino P scomposto in una forza unitaria per P ottengo: A = PM1B(s) M1A(s) / EJ ds A = P M1A(s) M1B(s) / EJ ds Cio lo stesso risultato di prima per B .
Possiamo quindi enunciare il seguente TEOREMA DI RECIPROCITA (di BETTI), di cui il precedente esempio un caso particolare: Se applico in A una forza in direzione n ottengo uno spostamento di B avente una certa componente in direzione m. Se applico la stessa forza in B in direzione m, A si sposter in direzione n della stessa quantit di cui si era spostato precedentemente il punto B. BETTI GENERALIZZATO
Prese due strutture identiche, almeno isostatiche, caricate in modo differente, il lavoro virtuale dato dal prodotto dei carichi applicati in 1) per gli spostamenti virtuali di 2) uguale al lavoro virtuale ottenuto moltiplicando i carichi applicati in 2) per gli spostamenti virtuali di 1).
Una conseguenza pratica del Teorema di Betti la simmetria delle matrici di compliance e di stiffness. Mi basta quindi calcolare met matrice, cio solo una delle due componenti miste. Lintegrale di Mohr generalmente costituito da sei caratteristiche di sollecitazione, ma il pi delle volte fondamentale solo la flessione. La forza normale deve essere considerata nel caso di strutture reticolari e quando nella struttura ci sono funi elastiche. Nei casi in cui parti di strutture sono considerate rigide, i calcoli sono molto pi semplici, infatti per esse EJ = e quindi lintegrale di Mohr nullo.
Tecnica delle costruzioni meccaniche Gabriele Benigni Sintesi della lezione del 18/04/2007 (2h)
Vogliamo trovare lo spostamento del punto A in direzione del carico P, vA, della struttura in fig.: P Q La difficolt dipende dal secondo carico Q. Come possiamo procedere? A B Partiamo dal calcolare le caratteristiche di sollecitazione e con esse calcoliamo lenergia elastica che sar funzione di P e di Q:
U(P, Q) =
Struttura x
x
EJM
EAN 22
21 ds
Proviamo ad applicare il primo principio della termodinamica e calcoliamo il lavoro fatto dalle forze esterne ipotizzando un processo di caricamento omotetico (gli spostamenti crescono in maniera proporzionale con laumentare dei carichi):
P +dP Q
P +dP Q
L = BA QvPv 2
121
+ = U(P, Q)
Ci rendiamo subito conto che, data lintroduzione del secondo carico, le incognite sono due, vA e vB, e non possiamo applicare il primo principio in maniera elementare.
vA vBB
B
Castigliano (docente del politecnico della fine del 800) propone una soluzione: Le sue ipotesi di partenza sono: lipotesi di linearit, grazie alla quale possiamo applicare il principio della sovrapposizione degli effetti (possiamo pensare un qualsiasi processo di caricamento), e lipotesi di trattare strutture poco deformabili e quindi di avere sempre piccoli spostamenti. Immaginiamo ora di incrementare il carico P con un dP L energia elastica diventa ora: U(P, dP, Q) = U(P, Q) +
PQPU
),( dP
Per la prima ipotesi fatta noi possiamo pensare di caricare lasta prima con dP e poi con i carichi P e Q: il precarico dP causa uno spostamento dvA e dvB che poi si somma agli spostamenti vB A e vBB dovuti a P e Q. Se calcoliamo ora il lavoro compiuto dalle forze esterne avremo: A B
L = ++ AA dPvdPdv21
BA QvPv 21
21
+
Il primo termine essendo un infinitesimo di ordine superiore pu essere trascurato mentre il secondo deriva dal fatto che dp rimane costante lungo tutto vA mentre carichiamo con P e Q, e quindi non occorre dimezzarlo. Applicando ora il primo principio della termodinamica otteniamo:
++ AA dPvdPdv21
BA QvPv 21
21
+ = BA QvPv 21
21
+ + P
QPU
),( dP
E semplificando si arriva alla importante formula del Teorema di Castigliano: vA = PU
Facciamo alcune considerazioni: se al posto di uno dei due carichi avessi avuto un momento col teorema di Castigliano avrei ottenuto la
rotazione della sezione cui applicato il momento; riguardo al segno dello spostamento esso risulter sempre coerente con il verso della grandezza deformativa
cui associato. il teorema di Castigliano mette bene in evidenza che le grandezze deformative sono funzione dellenergia
elastica della struttura e quindi se abbiamo un problema di rigidezza dobbiamo intervenire sullintera struttura. Ci chiediamo ora se per possibile calcolare lo spostamento di un punto D della trave sul quale non agiscono carichi concentrati in una direzione qualsiasi: possiamo trovare tale spostamento immaginando di applicare a quel punto P un carico fittizio di modulo nullo con direzione quella di nostro interesse. D
DD PPU ==
= 0),(),(
dvA P +dP
vA dvBBvBB
Proviamo ora a calcolare lo spostamento complessivo e la rotazione della sez in A della trave in fig: A Serve il termine relativo al doppio prodotto
perch lenergia interna dipendendo da due carichi risulta essere una forma quadratica!
M0 P0
Se ci fosse solo P0 U(P0) = 3
2
61 l
EJPo
Se ci fosse solo M0 U( M0) = lEJM 20
21
Per il teorema di Castigliano dunque:
= 0P
U
=
20
303
22
1 lMlPEJ
e = 0M
U
= ( )200221 lPlMEJ
In termini matriciali potremmo scrivere:
=
oMP
MU
PMU
MPU
PU
0
20
2
00
200
2
20
2
MATRICE DI DEFORMABILITA (COMPLIANCE): matrice simmetrica con autovalori reali positivi; quanto pi grande , tanto pi la struttura deformabile. La sua inversa detta MATRICE DI RIGIDEZZA (STIFFNESS). Studiamo ora il metodo dell Integrale di Mohr che ingloba e sostituisce il metodo di Castigliano.
NP(s) + N(s NP(s) + N1(s) MxP(s) + Mx(s) MxP(s) + Mx1(s) MzP(s) + Mz(s) MzP(s) + Mz1(s)
U(P0, M0) = 3
2
61 l
EJPo + l
EJM 20
21
+ EJ
lMP2
200
Supponiamo di avere una struttura anche complessa, caricata in unmodo qualsiasi, e vogliamo trovare lo spostamento di un suo punto inuna direzione qualunque. Applichiamo un carico fittizio diretto secondo la nostra direzione apunto interessato e calcoliamo le 6 caratteristiche di sollecitazione(siamo nello spazio).
Le caratteristiche con pedice P sono quelle dovute ai carichi reali, quelle con pedice sono le caratteristiche di sollecitazione dovute al carico fittizio. Queste ultime possono anche essere scritte come risultato del prodotto di un carico esplorare unitario 1 per il modulo del carico fittizio .
Le caratteristiche di sollecitazione vere e quelle dovute al carico esploratore unitario posso calcolarle; rimane incognita solo lintensit di questo carico fittizio. Calcoliamo lenergia:
U = [ ]
+
Struttura
P
EAsNsN
2)()( 21 + + [ ]
eq
zzP
GJsMsM
0
21
2)()( +
ds
U = [ ]
+++
Struttura
pP
EAsNsNsNsN
2)()(2)()( 1
21
2
ds
Derivando rispetto a e considerando il fatto che poi lo scalare = 0, i primi due termini nella parentesi si annullano e rimane solo il doppio prodotto proprio come ci si aspettava ricordando il risultato ottenuto con Castigliano.
Lintegrale di Mohr sar dunque: = U
=
++
Struttura x
xxPP
GJsMsM
EAsNsN ......)()()()( 11 ds
TECNICA delle COSTRUZIONI MECCANICHE Ancillotti Paolo lezione 19/04/2007
Vediamo ora come calcolare lo spostamento per il punto B, col metodo di Mohr, in presenza di un carico distribuito p:
Dopo aver inserito un carico esplorativo unitario nel punto in esame nella direzione di cui voglio conoscere lo spostamento, calcolo le funzioni delle caratteristiche di sollecitazione Mp(s) e M1(s).
Essendo il dominio di M1(s) compreso tra 0 e sB avr che:
Associando ora alla posizione di B una variabile , con essa avr la funzione M1(s;), che a seguito dellintegrazione mi dar unintera funzione in , sono cos giunto utilizzando Mohr allequazione della linea elastica:
Problemi iperstatici
Un problema iperstatico, come avevamo gi visto, si dovr sostituire in una sovrapposizione lineare di isostatici:
Utilizzando Mohr in entrambi i casi avr che lo spostamento di A, 1, dato dalla somma degli spostamenti nei due isostatici, dalla configurazione del problema, a meno di errori di