SPERIMENTAZIONE E MODELLAZIONE DELLA … · 2.3.1 Configurazione della prova ... spostamento tipico...
102
POLITECNICO DI MILANO Facoltà di Ingegneria Industriale Corso di Laurea in Ingegneria Aeronautica SPERIMENTAZIONE E MODELLAZIONE DELLA PROPAGAZIONE DI FRATTURE INTERLAMINARI IN MODO II NEI LAMINATI IN COMPOSITO Relatore: Prof. Giuseppe SALA Co-relatori: Prof. Alessandro AIROLDI Ing. Andrea BALDI Tesi di Laurea di: Mario BLASI Matr. 711569 Anno Accademico 2010 – 2011
Transcript of SPERIMENTAZIONE E MODELLAZIONE DELLA … · 2.3.1 Configurazione della prova ... spostamento tipico...

POLITECNICO DI MILANO
Facoltà di Ingegneria Industriale
Corso di Laurea in
Ingegneria Aeronautica
SPERIMENTAZIONE E MODELLAZIONE DELLA PROPAGAZIONE DI
FRATTURE INTERLAMINARI IN MODO II NEI LAMINATI IN COMPOSITO
Relatore: Prof. Giuseppe SALA
Co-relatori: Prof. Alessandro AIROLDI
Ing. Andrea BALDI
Tesi di Laurea di:
Mario BLASI Matr. 711569
Anno Accademico 2010 – 2011


Ai miei genitori,
per avermi insegnato ad amare la vita
A mio fratello Luca,
il mio sostegno e la mia forza nel lottare
A Francesca,
il mio Amore e la mia vita


Ringraziamenti
Ringrazio i Professori G. Sala ed A. Airoldi per avermi proposto un argomento
di tesi interessante ed attuale, e per essersi dimostrati decisivi nei momenti di
difficoltà incontrati, e gli Ingegneri A. Baldi e P. Bettini per la loro grande
professionalità, per l‟aiuto e l‟infinita pazienza mostrata nei miei confronti.
Ringrazio il Dott. Zioni per la sua disponibilità e professionalità.
Ringrazio con affetto Erika per il suo sostegno e collaborazione instancabile,
ed anche Alessandro, Angelo, Carlo, Elena, Federico, Francesco, Gabriele,
Omar, Matteo, Mauro, Mirco, Riccardo, Tommaso, per essere stati degli ottimi
compagni di questo viaggio.
Un ringraziamento particolare a nonna Mary, ed a Gemma, Franco, Daniela e
Maurizio per avermi accolto come una famiglia, ed anche ai miei zii, i miei
cugini, ai miei amici più cari, perché sono loro ad avermi sostenuto mentre
imparavo a volare alto.

I
Indice
Indice ..................................................................................................................... I Elenco delle figure ..............................................................................................III Elenco delle tabelle ............................................................................................ VI Sommario .......................................................................................................... VII
Abstract ............................................................................................................. VII Introduzione ..........................................................................................................1
Capitolo 1 ..............................................................................................................3 Danneggiamento interlaminare e monitoraggio strutturale ...................................3
1.1 Meccanica della frattura nei materiali compositi ........................................3
1.1.1 Modi di propagazione del danno interlaminare ...................................7
1.2 Il monitoraggio strutturale ..........................................................................8
1.2.1 Tecnica di monitoraggio strutturale tramite utilizzo di fibre ottiche
con sensori a reticolo di Bragg ....................................................................10
Capitolo 2 ............................................................................................................15
Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II ....15
2.1 Procedura per la realizzazione di pannelli in fibra di vetro......................16
2.2 Caratteristiche geometriche dei provini realizzati .....................................20
2.3 Prove Double Cantilever Beam (DCB) .....................................................21
2.3.1 Configurazione della prova ................................................................23
2.3.2 Grafici forza – spostamento delle prove DCB ..................................25
2.3.3 Tecniche di riduzione dati applicate alle prove DCB ........................26
2.4 Prove ENF .................................................................................................32
2.4.1 Configurazione della prova ................................................................33
2.4.2 Grafici forza – spostamento ...............................................................34
2.5 Prove ENF4 ...............................................................................................35
2.5.1 Configurazione della prova ................................................................36
2.5.2 Grafici forza-spostamento .................................................................38
2.5.3 Tecniche di riduzione dati applicate alle prove ENF4 ......................40
Indice
II
Capitolo 3............................................................................................................ 43 Modelli numerici ................................................................................................ 43
3.1 Tecniche di modellazione dell‟interfaccia ................................................ 43
3.1.1 Modellazione del danno interlaminare attraverso elementi coesivi
tradizionali .................................................................................................. 43
3.1.2 Modellazione del danno interlaminare attraverso elementi coesivi
non convenzionali ....................................................................................... 44
3.2 Prove DCB ................................................................................................ 50
3.2.1 Modello di prova implicito per test DCB .......................................... 50
3.2.2 Modello di prova esplicito per test DCB ........................................... 55
3.3 Modello numerico ENF a 3 punti ............................................................. 62
3.4 Modello numerico ENF a 4 punti ............................................................ 69
4. Confronto dei risultati tra le attività numeriche e sperimentali ..................... 75 4.1 Prove ENF ............................................................................................... 75
4.2 Prove ENF4 ............................................................................................. 77
Conclusioni e sviluppi futuri .............................................................................. 83
Bibliografia ......................................................................................................... 85

Elenco delle figure
III
Elenco delle figure
Figura 1.1 Propagazione autosimile di una cricca……………………………...3
Figura 1.2 Carico agente su di un generico corpo in presenza di una cricca…...5
Figura 1.3 Diagramma carico - spostamento…..……………………………….5
Figura 1.4 Modi di propagazione della cricca …………………………………8
Figura 1.5 Struttura di una fibra ottica………………………………………..11
Figura 1.6 Reticolo di Bragg a spaziatura uniforme: struttura e risposte
spettrali ……………………………………………………………12
Figura 1.7 Variazione dello spettro di riflessione di un sensore
FBG sottoposto a sollecitazione uniforme …………………….....13
Figura 2.1 Stampo della serie 1 – 2 …………………………………….…… 17
Figura 2.2 Stampo completo della serie 1 – 2 ……………….………………..17
Figura 2.3 Stampo della serie 6 – 7 …………………… …………………….18
Figura 2.4 „Mezzaluna‟ di protezione, (a) aperta , (b) chiusa ..........................19
Figura 2.5 Configurazione prova DCB con (a) cerniere di carico e (b) blocchi di
carico ………………………………………………………….… 21
Figura 2.6 Diagramma forza – spostamento tipico di una prova DCB ………22
Figura 2.7 MTS 858 Mini Bionix II ……………………………………..…..23
Figura 2.8 Geometria dell‟incollaggio della cerniera .…………………..….. 24
Figura 2.9 Sequenza di immagini prova DCB ………………………………..25
Figura 2.10 Diagramma forza – spostamento prove DCB ………………….. 25 Figura 2.11 Diagramma propagazione cricca – spostamento ………………...26
Figura 2.12 Retta di regressione per il calcolo di Δ nella MBT ……….….… 28
Figura 2.13 Retta di regressione per il calcolo di n nella CC ………..….…..28
Figura 2.14 Retta di regressione per il calcolo di A1 nella MCC ……………..29
Figura 2.15 Andamento delle diverse teorie di riduzione dati per un
provino tipo …………………………………………….…….. 30
Figura 2.16 Curva R-a per la stima della tenacità interlaminare
di Modo I GIc ………………………………………………….. 30
Figura 2.17 Andamento della deformazione in funzione della propagazione
della cricca………………………………………………………..31
Figura 2.18 Schema descrittivo della prova ENF …………………….……...32
Figura 2.19 Prova ENF ………………………………………….…………....34
Figura 2.20 Diagramma forza – spostamento prove ENF ………………..… 35
Figura 2.21 Schema descrittivo della prova ENF4 ………………….…….....35
Figura 2.22 Operazioni di allestimento dell‟attrezzatura …………..…………38
Figura 2.23 Curva forza – spostamento nelle prove ENF4 ………..……….... 39

Elenco delle figure
IV
Figura 2.24 Punto di vista che è stato necessario adottare per monitorare
l'avanzamento della delaminazione nelle prove ENF4 ………… 39
Figura 2.25 Diagramma propagazione della cricca – spostamento trasversale..40
Figura 2.26 Retta di regressione per il calcolo di C1 nella CC ……..…………41
Figura 2.27 Curva R-a per la stima della tenacità interlaminare di
Modo II GIIc ………………………………………………….42
Figura 3.1 (a) Spostamenti relativi dei sub laminati connessi dallo
strato di interfaccia. (b) Accoppiamento tra gli elementi solidi e gli
elementi shell ……………………………………………….…..46
Figura 3.2 legge costitutiva bi-lineare del materiale …………………………47
Figura 3.3 Modifica della legge costitutiva a seguito della definizione del
parametro β ………………………………………………………49
Figura 3.4 Modello implicito DCB completo in configurazione deformata …52
Figura 3.5 Particolare del fronte di danno nell‟interlamina …………………. 52
Figura 3.6 Progressivo danneggiamento dell‟interlamina ……………………53
Figura 3.7 Correlazione numerico sperimentale con una curva forza-
spostamento di una prova DCB eseguita……………………….54
Figura 3.8 Modello esplicito modellato con 48 plies ……………………….55
Figura 3.9 Particolare dei nodi relativi all‟incollaggio delle cerniere di carico e
nodi di riferimento dei corpi rigidi ………………………….…56
Figura 3.10 Nodi di incollaggio delle cerniere di carico ……………………57
Figura 3.11 Set di elementi di interfaccia che riproducono il pre-
danneggiamento ……………………………………………….57
Figura 3.12 Set di elementi pre-danneggiati ………………………………..58
Figura 3.13 Andamento dello sforzo σ33 nell‟apertura del provino ………..59
Figura 3.14 Confronto curva forza-spostamento del modello esplicito con una
prova sperimentale al variare di GI ........................................60
Figura 3.15 Confronto curve forza-spostamento tra i due modelli DCB descritti
ed una prova sperimentale ……………………………………..60
Figura 3.16 Legge bi-lineare risultante dalla sovrapposizione di due elementi
coesivi posti nell‟interlamina …………………………………..61
Figura 3.17 Effetto dell‟impiego di doppio coesivo sul modello DCB descritto,
e su un modello esplicito simile a quello descritto nel paragrafo
3.2.2 ……………………………………………………………..62

Elenco delle figure
V
Figura 3.18 Modello esplicito ENF ………………………………………….63
Figura 3.19 Curva di spostamento del cilindro superiore …………………..64
Figura 3.20 Pre-danneggiamento e interasse tra i cilindri nella prova ENF ..64
Figura 3.21 Andamento della legge di pressione di contatto tra i cilindri e le
superfici di contatto del provino ………………………………66 Figura 3.22 Progressiva propagazione del danno interlaminare ……………67
Figura 3.23 Correlazione tra una curva forza-spostamento del modello ENF con
una sperimentale ……………………………………………….68
Figura 3.24 Andamento dello sforzo di taglio τ13 nell‟interlamina ……….68
Figura 3.25 Particolare dello stato di sforzo a taglio τ13 dell‟apice della cricca.69
Figura 3.26 Modello numerico ENF4 ………………………………………69
Figura 3.27 Curva di spostamento della forcella superiore ………………. 70
Figura 3.28 Progressiva propagazione della delaminazione nella
prova ENF4……………………………………………………..72
Figura 3.29 Andamento dello sforzo di taglio τ13 …………………………..73
Figura 3.30 Sforzo di taglio τ13 all‟apice della cricca……………………….73
Figura 3.31 Curva forza – spostamento del modello ENF4 correlata
con una sperimentale ………………………………………….74
Figura 4.1 Confronto curve forza – spostamento tra serie 6 e
modelli numerici …………………………………………………75
Figura 4.2 Confronto curve forza – spostamento tra serie 7 e
modelli numerici …………………………………………………76
Figura 4.3 Configurazione alternativa di prova ENF4 con cricca inizialmente
fuori dalla forcella di carico ……………………………………..77
Figura 4.4 Confronto numerico – sperimentale sulla configurazione
alternativa ……………………………………………………….78
Figura 4.5 Sensitività della curva forza-spostamento al variare di GII per sforzo
di taglio limite di S = 80 [MPa ] …………………………………79 Figura 4.6 Sensitività della curva forza-spostamento al variare dello sforzo di
taglio limite S per tenacità GII = 1.8 [KJ/m2] …………………..80
Figura 4.7 Correlazione numerico sperimentale al variare di GII …………..81
Elenco delle tabelle
VI
Elenco delle tabelle
Tabella 2.1 Caratteristiche geometriche dei provini ….. ……………………20
Tabella 3.1 Caratteristiche degli elementi solidi modellati ……………………50
Tabella 3.2 Caratteristiche degli elementi modellati …………………………..59
Tabella 3.3 Caratteristiche degli elementi modellati …………………………. 65

Sommario ________________________________________________________________________________________
VII
Sommario
L‟attività del presente lavoro di tesi si è focalizzata sulla messa a punto e sulla
successiva simulazione numerica di prove di caratterizzazione della tenacità
interlaminare in Modo II di laminati in materiale composito condotte secondo
una sollecitazione a flessione a quattro punti (“Four-Point End-Notched
Flexure”). Tutti i provini realizzati con lamine di composito in fibra di vetro e
resina epossidica hanno visto l‟inglobamento di sensori in fibra ottica per il
monitoraggio della propagazione della cricca. La tecnologia produttiva dei
provini compresa quella di inglobamento dei sensori in fibra ottica (“Fiber
Bragg Gratings”) è stata messa a punto durante un‟attività preliminare condotta
per la produzione di provini di caratterizzazione della tenacità interlaminare in
Modo I, attraverso prove DCB. Sia le prove DCB sia quelle ENF a quattro punti
sono state simulate ricorrendo all‟impiego di schemi numerici basati
sull‟impiego di elementi coesivi di interfaccia risolti con schemi di integrazione
di tipo implicito ed esplicito. I buoni livelli di correlazione ottenuti tra i rilievi
sperimentali hanno confermato il buon livello di accuratezza delle tecniche
numeriche impiegate nella descrizione della propagazione del danno
interlaminare lasciando intravedere la possibilità di poterle adottare come un
valido strumento di ausilio alla progettazione preliminare di strutture in grado di
monitorare il proprio stato di salute, grazie all‟opportuna disposizione dei
sensori in fibra ottica (“Structural Health Monitoring”).
Parole chiave: tenacità a frattura interlaminare, DCB, ENF4, SHM
Abstract
This work allowed using a procedure for making laminates in glass fiber/epoxy
resin, with the possibility of including Fiber Bragg Gratings sensors inside. The
laminates produced were used to make experimental tests that brought to
estimate the values of mode I and II interlaminar toughness.
This tests are Double Cantilever Beam (DCB), and Four-Point End-Notched
Flexure (ENF4). The results were been elaborated with analytical technique to
set up the FEM explicit models that a bi-linear cohesive law assigned to solid
elements of interface. It was reached a good correlation between experimental
and numerical results, the FEM model shows a easy fitting capacity of
reproduce experimental results in many configurations and it is a support for
development of an SHM system.
Keywords: interlaminar toughness, DCB, ENF4, SHM

VIII

1
Introduzione
L‟uso sempre maggiore dei compositi nel settore aerospaziale nasce dalla
duplice esigenza di avere materiali molto performanti, con alta resistenza, ma al
contempo molto leggeri.
I compositi avanzati rispondono benissimo a questa duplice richiesta, ma
richiedono un continuo monitoraggio del loro stato di „salute‟ durante la vita
operativa, con conseguente aumento dei costi di gestione e manutenzione dei
velivoli.
Il presente lavoro di tesi si propone di indagare un aspetto della propagazione di
difetti all‟interno di materiali compositi, in particolare la frattura interlaminare.
Il tutto viene inserito in un progetto di più ampio respiro legato allo sviluppo di
un sistema di monitoraggio strutturale: “Structural Health Monitoring” (SHM).
L‟approccio SHM permette di evitare controlli invasivi, si sfrutta infatti la
capacità di inserire sensori di monitoraggio di danni strutturali direttamente
all‟interno dei laminati in composito. Nel lavoro di tesi proposto si indaga, ad
esempio, un materiale unidirezionale in fibra di vetro che costituisce il
longherone delle pale del rotore principale dell‟ Agusta A109.
I sensori più adatti a tale scopo sono gli FBG, ovvero, reticoli di Bragg incisi
nelle fibre ottiche che presentano ridotte dimensioni ed elevata sensibilità.
Disponendo di una rete di fibre ottiche, si possono rilevare le deformazioni
locali all‟interno delle lamine costituenti il laminato, e di conseguenza
monitorare l‟eventuale nucleazione e successiva propagazione delle cricche.
Per studiare le caratteristiche di tenacità interlaminare, si sono effettuate delle
prove sperimentali su provini in UD in fibra di vetro pre-danneggiati, prima
Double Cantilever Beam (DCB) per la caratterizzazione del modo I di rottura
dell‟interlamina, ed in seguito Four Point End Notched Flexure (ENF 4) per la
caratterizzazione del modo II.
Tutte le prove sperimentali sono state riprodotte numericamente, attraverso
l‟impiego di modelli a zona coesiva con elementi di interfaccia di tipo
convenzionale e non convenzionale risolti con schemi ad elementi finiti offerti
dal codice Abaqus®, di tipo implicito (Abaqus Standard) ed esplicito (Abaqus
Explicit).
Il presente elaborato mira quindi ad indagare tramite un approccio sia numerico
che sperimentale la caratterizzazione della tenacità interlaminare di Modo I e
Modo II in un laminato in fibra di vetro. In questa ricerca si cercherà di
sviluppare una tecnologia produttiva che garantisca poca dispersione dei
corrispettivi valori sperimentali di tenacità di Modo II da correlare ad un

Introduzione
2
modello numerico, nel quale, invece, si ricerca una versatilità di impiego a
seconda delle prove reali che riproduce.
Capitolo 1
Danneggiamento interlaminare e monitoraggio strutturale
Si introduce una descrizione della meccanica della frattura applicata ai materiali
compositi, specificando le formulazioni analitiche e la rappresentazione dei
modi di propagazione del danno interlaminare. Segue una descrizione
dell‟approccio SHM con uso di sensori a fibra ottica.
Capitolo 2
Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e
II
Si descrive una procedura tecnologica di produzione di pannelli in materiale
composito in fibra di vetro e resina epossidica sensorizzati attraverso
l‟inglobamento di sensori in fibra ottica, per poi descrivere le prove sperimentali
di tenacità DCB ed ENF4.
Dalle prove effettuate si ricavano, per mezzo di riduzione dei dati, i valori di GI
e GII da introdurre nei modelli numerici.
Capitolo 3
Modelli numerici
In questa sezione si descriveranno i diversi modelli numerici utilizzati per
riprodurre le prove sperimentali descritte. Particolare attenzione sarà posta sulla
tecnica di modellazione degli elementi di interfaccia utilizzati per la
caratterizzazione dell‟interlamina nelle prove ENF4.
Capitolo 4
Confronto dei risultati tra le attività numeriche e sperimentali
Si descriveranno tutti i risultati ottenuti dal confronto delle due attività,
evidenziando la buona correlazione tra essi e dimostrando la versatilità e
capacità della tecnica numerica nel simulare le prove di modo II.

3
Capitolo 1
Danneggiamento interlaminare e
monitoraggio strutturale
1.1 Meccanica della frattura nei materiali compositi
I materiali compositi sono costituiti da almeno due fasi distinte ovvero una
matrice polimerica e delle fibre di rinforzo.
A causa della loro particolare configurazione, essi sono sensibili alla nascita e
conseguente propagazione di danni negli strati di resina tra le lamine.
Questo meccanismo di danneggiamento è la delaminazione, e può essere
descritto utilizzando la meccanica della frattura.
Tale teoria parte dal considerare il fatto che tutti i corpi contengono dei difetti
interni sin dalla fabbricazione, quindi si analizza da un punto di vista
macroscopico la cricca per capirne lo sviluppo.
La crescita del danno si può caratterizzare utilizzando un‟energia per unità di
area necessaria a creare una nuova superficie libera che rappresenta una
proprietà del materiale: la tenacità a frattura R.
Un semplice esempio è descritto dalla propagazione autosimile di una cricca,
ovvero una cricca che ha un fronte di avanzamento di forma arbitraria che però
rimane costante:
Figura 1.1 Propagazione autosimile di una cricca

Capitolo 1
4
Con B in Figura 1.1 si è indicata la lunghezza del bordo della cricca nel caso di
fronti di avanzamento curvi, che per una delaminazione in un composito
coincide con la larghezza della cricca stessa.
Con da si è indicata la variazione della lunghezza della cricca, da cui
l‟incremento di area danneggiata risulta:
dA= Bda (1.1)
Consideriamo una cricca che si propaghi in maniera autosimile [1], con
larghezza B del fronte di avanzamento, in un corpo di volume V.
Con l‟avanzare della stessa durante un intervallo di tempo dt, il bilancio di
energia, per la cricca che si muove a velocità è dato da:
e =
d + s +
k + BR (1.2)
e = lavoro delle forza esterne
d = energia di dissipazione
s = energia elastica immagazzinata
k = energia cinetica
Utilizzando le ipotesi della meccanica della frattura elastico lineare (LEFM),
tutta l‟energia viene raccolta in R trascurando l‟energia cinetica k.
Definiamo quindi il parametro G come l‟energia a disposizione della cricca per
avanzare:
(1.3)
Da cui si ricava insieme alla (1.2) :
BR = e -
s = BG (1.4)
G = R
Se G > R il sistema è instabile in quanto l‟energia Uk aumenta.

Danneggiamento interlaminare e monitoraggio strutturale
5
G può essere ricavato per un corpo generico, vedi Figura 1.2, contenente una
cricca di lunghezza a , sottoposto al carico P con spostamento u.
Figura 1.2 Carico agente su di un generico corpo in presenza di una cricca
Nel diagramma carico-spostamento, riportato in Figura 1.3, durante la fase di
carico (tratto OA) la cricca ha lunghezza a . Il tratto OA non è necessariamente
lineare, anche per materiali elastici lineari, in quanto grandi spostamenti
possono avvenire e introdurre non linearità di tipo geometrico. Dopo il punto A,
la cricca comincia ad avanzare e nel tratto AA‟ la cricca è propagata di da .
Infine la linea di scarico è rappresentata dal tratto OA‟.
Figura 1.3 Diagramma carico-spostamento
Capitolo 1
6
Dall‟equazione (1.3) si ricava:
BGda = dUe - dUs (1.5)
e dal grafico in Figura 1.3 :
dUe = BAA’B’
dUs = OA’B’ - OAB
(1.6)
(1.7)
quindi:
BGda = (OAB + BAA’B’) – OA’B’ (1.8)
dove OA‟B‟ è l‟area tratteggiata in Figura 1.3. Questo è un importante risultato
in quanto G può essere trovato graficamente avendo a disposizione il diagramma
carico-spostamento, a patto che la dissipazione di energia possa essere
imputabile solo alla propagazione della cricca.
Bisogna studiare ora le modalità con cui può avanzare una cricca, in quanto la
severità delle condizioni di danno interlaminare dipende anche dalla possibile
evoluzione dello stesso a seguito dell‟applicazione dei carichi.
Come si è già accennato, il regime di propagazione che insorge quando si
verifica la condizione G > R è detto instabile e tale condizione comporta un
incremento di energia cinetica del sistema.
La condizione di instabilità può anche essere scritta nel seguente modo:
(1.9)
In altri termini, dopo l‟avanzamento della cricca il sistema si trova in una nuova
condizione che può dare origine alle seguenti possibilità:
- la propagazione si arresta a meno che ulteriore lavoro esterno sia
compiuto sul sistema (propagazione stabile);
- la propagazione prosegue senza alcun apporto di lavoro esterno
(propagazione instabile).
Per capire in quale condizione ci si trova è necessario valutare l‟equazione (1.9)
con i valori di G e R dopo l‟incremento di danno da :

Danneggiamento interlaminare e monitoraggio strutturale
7
G (a + da) = G(a) +
da (1.10)
R (a + da) = R(a) +
da (1.11)
Il caso più semplice sarà quindi quello in cui:
(1.12)
quindi la tenacità a frattura R è costante e non è funzione della crescita della
cricca. La condizione di stabilità sarà esprimibile come :
u=cost. ≤ 0
(1.13)
1.1.1 Modi di propagazione del danno interlaminare
La trattazione precedente ha validità generale nell'ambito dei materiali studiabili
con un approccio lineare elastico alla meccanica della frattura.
Per quanto concerne la delaminazione, invece, bisogna indicare nello specifico i
tre possibili tipi di propagazione (Figura 1.4):
Modo I, apertura per distacco (peeling) ;
Modo II, apertura per scorrimento (shearing) ;
Modo III, apertura per lacerazione (tearing ).

Capitolo 1
8
Figura 1.4: Modi di propagazione della cricca: (a) Modo I, (b) Modo II, (c) Modo III
Considerando il sistema di riferimento adottato in Figura 1.4, è la componente di
sforzo ζz a provocare la delaminazione nel Modo I, mentre sono le componenti
ηxz e ηyz a provocare la delaminazione rispettivamente nei modi II e III.
Un generico caso di rottura può essere descritto dalla sovrapposizione dei
tre modi fondamentali, in questo caso parleremo di modo misto, oppure
può succedere che la sollecitazione avvenga in uno dei tre modi puri, in questo
caso parleremo di tenacità critica a frattura in Modo I, II o III puro.
La condizione critica per la quale la cricca può propagare è stata definita in
termini energetici, come il raggiungimento della tenacità a frattura G = [KJ/m2],
quindi ciascun tipo di propagazione è caratterizzata da un distinto valore di
tenacità:
GI = tenacità critica a frattura in Modo I puro
GII = tenacità critica a frattura in Modo II puro
GIII = tenacità critica a frattura in Modo III puro
GMix = tenacità critica a frattura in Modo misto
1.2 Il monitoraggio strutturale
Il monitoraggio di strutture in materiale composito è di fondamentale
importanza in quanto, già in fase di produzione dei laminati, sono presenti
difetti quali microvuoti o eccessivi accumuli di resina, che portano alla
nucleazione di danni. La conseguente delaminazione è inevitabile durante la vita
operativa della struttura dati i continui cicli di carico.
Altrettanto pericolosi sono gli impatti a bassa energia, che provocano aree di
danno scarsamente visibili ad occhio nudo, che rientrano nella categoria Barely
Visible Impact Damage (BVID).
Danneggiamento interlaminare e monitoraggio strutturale
9
Ne consegue che l‟approccio progettuale è integrato in una filosofia damage-
tolerance, che prevede l‟esecuzione di procedure di ispezione a diversi livelli di
complessità durante la vita operativa del velivolo, con notevoli costi.
In un contesto così conservativo si inserisce l‟approccio SHM, ovvero la
possibilità di poter monitorare senza controllo invasivo, anche zone che non
sono facilmente accessibili [15], [16].
Pertanto, l‟elevato interesse per i sistemi SHM è giustificato dalla possibilità di
individuare la nascita, l‟evoluzione del danno e valutarne le conseguenze.
Tramite una rete di sensori, si può così monitorare lo stato di „salute‟ del
componente, permettendo di fare delle stime più precise sulla sua vita a fatica e
organizzarne la manutenzione.
I componenti strutturali in composito, hanno un iter di certificazione con criteri
molto stringenti e conservativi rispetto alle strutture in metallo.
Inoltre essi, si prestano bene all‟utilizzo di sistemi di Healh Monitoring, data la
capacità di poter inglobare sensori tra le lamine durante la fase tecnologica di
produzione dei componenti.
Vi sono inoltre motivazioni economiche che spingono la ricerca verso questa
direzione, inoltre un aspetto importante è sicuramente il passaggio da una
manutenzione programmata a una di tipo on condition. Considerando il numero
esiguo di danneggiamenti rilevati negli interventi di manutenzione, risulta
evidente come una strategia di questo tipo consenta di ridurre i tempi di fermo
macchina. Parallelamente ai sistemi SHM, si possono inoltre pensare di
realizzare dei sistemi Usage Monitoring, ovvero tramite la rete di sensori
ricavare anche i carichi trasmessi alla struttura in modo da modificare da subito
le future scelte di progettazione del componente.
Un limite è, infatti, rappresentato dal fatto che una volta realizzato il pezzo, i
sensori inglobati non sono più sostituibili, quindi il progetto e la realizzazione
tecnologica del componente devono essere di alto livello per garantire una
buona affidabilità.
Fondamentale è anche la durata dei sensori ed il loro corretto posizionamento.
Sono richiesti, inoltre, dei modelli numerici di supporto alla progettazione, che
permettano di scegliere gli Hot-spots prevedendo dove saranno le zone più
sollecitate del componente durante la sua vita operativa.
Capitolo 1
10
1.2.1 Tecnica di monitoraggio strutturale tramite utilizzo di fibre ottiche
con sensori a reticolo di Bragg
La tecnica del monitoraggio strutturale è divisa in più fasi:
un sistema di monitoraggio costituito dai sensori e dal sistema di
acquisizione
un sistema di elaborazione dei dati ricevuti che riconosce i segnali ed
individua i danneggiamenti
un sistema che simula il danno e sceglie l‟approccio migliore per la
risoluzione del problema
La scelta degli Hot-spots non è facile, poiché non basta prevedere che in zone
tipiche, quali i cambi di sezione o giunzioni, si avranno carichi e deformazioni
elevate, ma bisogna anche cercare di minimizzare il numero dei sensori
installati, e allo stesso tempo riuscire a garantire un adeguato monitoraggio della
zona di interesse prevedendo le ridistribuzioni dei carichi a seguito di un
danneggiamento del materiale.
I modelli numerici danno un valido aiuto nello scegliere i punti chiave da
monitorare, per ottenere il massimo delle informazioni possibili col minor
numero di sensori.
Esistono altre tecniche basate sulle vibrazioni che permettono di identificare il
danneggiamento sulla base della variazione di risposta della struttura, oltre che
sistemi attivi e passivi, come riportato in [16]. I sistemi attivi necessitano di
attuatori, i quali devono essere in grado di fornire alla struttura un adeguato
grado di eccitazione, permettendo così di utilizzare i sensori per la misura della
risposta. Tale approccio non è indicato per strutture massicce eccessivamente
smorzate, in quanto gli attuatori possono fornire una quantità limitata di energia,
che potrebbe essere inadeguata al sistema considerato [17]. I sistemi passivi,
invece, rilevano le onde acustiche che si generano in caso di danneggiamento
(delaminazione o rottura della matrice) e vengono esaminate per valutare
posizione ed entità del danno.
Sono presenti anche tecniche basate sulla rottura del sensore, le quali impiegano
particolari sensori che possono subire rotture in caso di danneggiamento della
struttura, in prossimità degli stessi. Tale metodologia risulta essere poco
raffinata ed inadatta per i materiali compositi in quanto, in caso di rottura, per i
sensori inglobati, non vi è la possibilità di sostituzione. (Ad esempio la rottura
della fibra ottica causa un‟interruzione del segnale luminoso che la percorre).
Ulteriore applicazione di tale tecnica è il Comparative Vacuum Monitoring

Danneggiamento interlaminare e monitoraggio strutturale
11
System, che utilizza microtubi pressurizzati la cui rottura porta ad un calo di
pressione rilevata da un manometro.
Da questa esposizione si evince che le fibre ottiche rimangono le più adatte a
strutture di grandi dimensioni, inoltre offrono la possibilità attraverso le tecniche
di multiplexing, di convogliare il segnale di più sensori in un‟unica fibra. La
trasmissione è ottima anche a lunghe distanze senza eccessiva attenuazione del
segnale e grazie alle loro ridotte dimensioni possono essere inglobate all‟interno
della struttura.
La fibra ottica ha una particolare struttura in grado di fornire un‟opportuna guida
d‟onda alla luce, vincolandola a seguire un determinato percorso rappresentato
dalla fibra stessa. Essa possiede una sezione circolare ed è costituita da materiale
vetroso o polimerico. Una fibra ottica base è formata da due strati coassiali detti
core e cladding. Il core, di diametro 9 μm, costituisce la parte centrale, mentre il
cladding lo avvolge ed è caratterizzato da un indice di rifrazione diverso. Essi
costituiscono la guida d‟onda vera e propria del segnale luminoso. A offrire una
maggiore resistenza e protezione alla fibra, vi è un involucro protettivo detto
coating di spessore compreso tra 150 e 250 μm, valore che dipende dal materiale
usato per i rivestimenti, poly-imide o poly-acrilato. Può essere eventualmente
presente un ulteriore strato di protezione chiamato jacket (Figura 1.5).
Figura 1.5 Struttura di una fibra ottica
I sensori a reticolo di Bragg, Fiber Bragg Gratings (FBG), sono ricavati
all‟interno di una fibra ottica opportunamente drogata per renderla fotosensibile,
ovvero in grado di poter modificare il valore locale dell‟indice di rifrazione del
core attraverso l‟esposizione ad un fascio di luce laser. Modulando in maniera
opportuna la sorgente laser è possibile inscrivere nel core un reticolo costituito
da una serie di frange aventi un determinato indice di rifrazione. La luce viene
rifratta da ciascuna frangia, che si comporta come un filtro ottico in trasmissione
e come un riflettore selettivo nella lunghezza d‟onda in riflessione. Dunque si
osserva in figura 1.6 che solo una parte del segnale luminoso attraversa il
reticolo, mentre la restante parte viene riflessa.
Capitolo 1
12
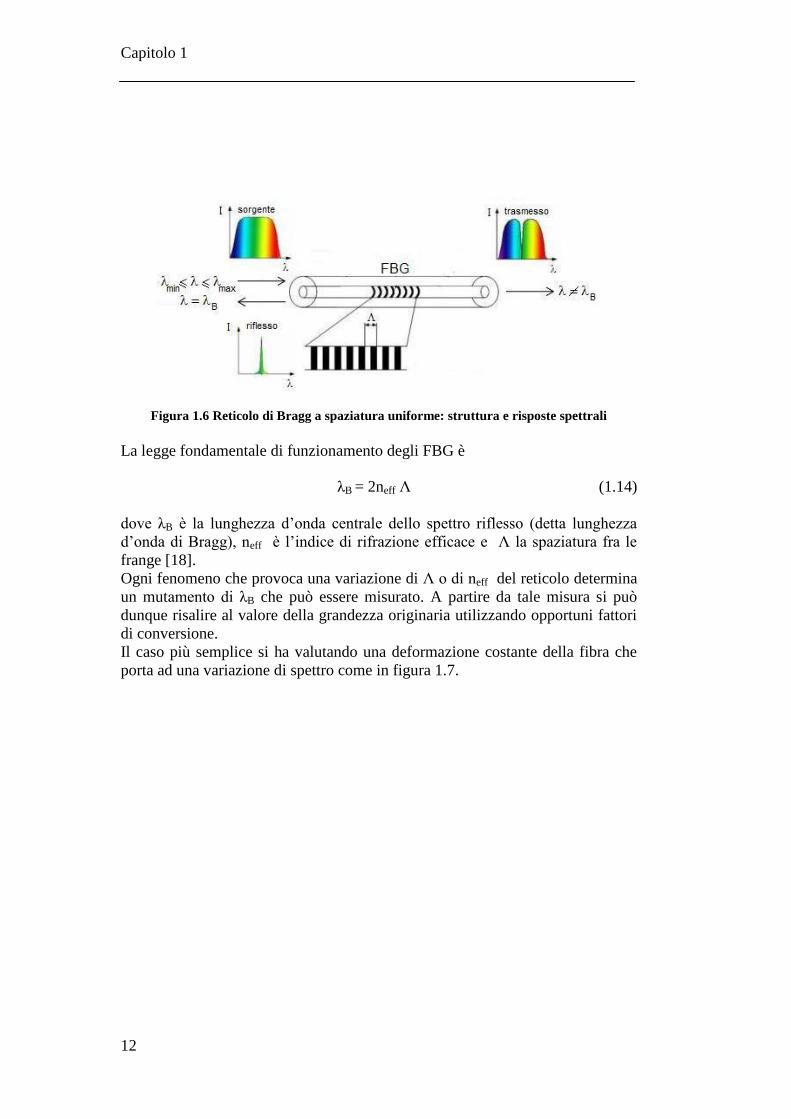
Figura 1.6 Reticolo di Bragg a spaziatura uniforme: struttura e risposte spettrali
La legge fondamentale di funzionamento degli FBG è
λB = 2neff Λ (1.14)
dove λB è la lunghezza d‟onda centrale dello spettro riflesso (detta lunghezza
d‟onda di Bragg), neff è l‟indice di rifrazione efficace e Λ la spaziatura fra le
frange [18].
Ogni fenomeno che provoca una variazione di Λ o di neff del reticolo determina
un mutamento di λB che può essere misurato. A partire da tale misura si può
dunque risalire al valore della grandezza originaria utilizzando opportuni fattori
di conversione.
Il caso più semplice si ha valutando una deformazione costante della fibra che
porta ad una variazione di spettro come in figura 1.7.

Danneggiamento interlaminare e monitoraggio strutturale
13
Figura 1.7 Variazione dello spettro di riflessione di un sensore FBG sottoposto a
sollecitazione uniforme
Al fine di sviluppare un sistema di monitoraggio SHM, oltre all‟aver sviluppato
dei modelli numerici relativi alle prove DCB ed ENF4, nel presente lavoro di
tesi si riportano anche delle tecniche di inglobamento e dei risultati a scopo
descrittivo dell‟uso di sensori FBG, avendo collaborato all‟interno di un lavoro
di tesi parallelo riguardante gli aspetti tecnologici di tali prove sperimentali (rif.
capitolo 2).

15
Capitolo 2
Prove sperimentali per caratterizzare le
tenacità interlaminari di Modo I e II Nel presente capitolo verranno esposte le diverse procedure tecnologiche per la
realizzazione di pannelli in fibra di vetro.
Verranno illustrate le problematiche riscontrate e le differenti soluzioni adottate,
tenendo conto degli effetti sulle caratteristiche finali del laminato in un‟ottica di
sviluppo di un componente adatto all‟approccio SHM.
Si riportano, anche, le caratteristiche geometriche dei provini ricavati per le
successive prove sperimentali di tenacità.
Dal punto di vista normativo, il panorama che si prospetta in tema di stima della
tenacità interlaminare è ristretto a due sole prove: una per la misura di GIc ,
chiamata Double Cantilever Beam (DCB) [2], l'altra per la valutazione del
cosiddetto Modo misto [3].
Sono tuttavia reperibili in letteratura molteplici pubblicazioni riguardanti
differenti tipologie di prove comunemente adottate a livello internazionale; per
la caratterizzazione della tenacità a frattura interlaminare in Modo II, tra questi:
End-Notched Flexure (ENF) e Four-point End-Notched Flexure (ENF4)
[4],[5],[6],[10]. Lo sviluppo di metodi standard per la caratterizzazione della
tenacità interlaminare è essenziale sia per permettere un confronto diretto tra le
caratteristiche meccaniche di materiali differenti, sia per fornire ai progettisti
dati affidabili per l‟implementazione di modelli numerici, al fine di ottenere una
correlazione numerico-sperimentale che permetta la previsione dell'evoluzione
delle delaminazioni indispensabile in un ottica di progettazione di una struttura a
danno tollerabile.
Nei successivi paragrafi verranno esaminate le tipologie di prova utilizzate come
riferimento per l‟attività numerica condotta nell'ambito della presente tesi,
descrivendo l'attrezzatura impiegata, i risultati ottenuti e la relativa analisi.

Capitolo 2
16
2.1 Procedura per la realizzazione di pannelli in fibra di vetro
Nelle prove sperimentali di caratterizzazione della tenacità a frattura
interlaminare in Modo I (DCB) e Modo II (ENF 4 P.ti), che verranno descritte in
seguito, sono stati presi in esame provini costituiti con lamine di materiale
composito in fibra di vetro e resina epossidica ricavati dal taglio di un unico
laminato ottenuto per laminazione e per successiva operazione di formatura in
autoclave. Tutti i pannelli costituiti da 48 lamine di unidirezionale con sequenza
omogenea [0]48 ed alcuni sono stati sensorizzati attraverso l‟inglobamento di
sensori in fibra ottica. Sia la tecnologia produttiva sia quella di inglobamento dei
sensori FBG sono state sviluppate e messe a punto in un altro lavoro di tesi,
attualmente ancora in corso presso il Dipartimento di Ingegneria Aerospaziale.
In particolare, si sono messi a punto uno stampo ed una procedura realizzativa
in grado di garantire allo stesso tempo i seguenti requisiti:
mantenimento dello spessore costante dopo il ciclo in autoclave
(th 10.4 mm) riducendo la perdita di resina dallo stampo
facilità di inserimento di sensori FBG all‟interno del laminato
protezione delle fibre ottiche durante il ciclo di polimerizzazione
buona riproducibilità
riduzione dello scarto, massimizzando il numero di provini per ogni
pannello prodotto
Lo studio delle tecnologie produttive è stato utile per comprendere meglio i
risultati della riduzione dati per la valutazione delle caratteristiche di tenacità
interlaminare in Modo I e Modo II necessarie per la completa definizione dei
successivi modelli numerici. Dal primo tipo di stampo nascono la serie 1 e 2 di
provini che sono stati impiegati per le prove DCB, i quali mostrano uno spessore
medio compreso tra i 9.4 ≤ th ≤ 10 mm .
La tecnologia produttiva ha visto l‟uso dello stampo in Figura 2.1.

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
17
Figura 2.1 Stampo della serie 1 - 2
Come si può notare dalla Figura 2.1, le fibre ottiche sono protette da una guaina
elastomerica bianca in Hytrel.
In questo stampo la resina ha un‟elevata mobilità ai lati, mancando la gomma di
contenimento. Per questo motivo le fibre ottiche, prima del ciclo in autoclave,
vengono protette dal film in teflon come mostrato in Figura 2.2 per evitare di
attaccarsi tra loro a causa della resina.
Un ulteriore film di teflon viene impiegato per tutti i pannelli prodotti al fine di
creare la zona di pre-danneggiamento nei provini da sottoporre alle successive
prove di caratterizzazione interlaminare.
Figura 2.2 Stampo completo della serie 1 – 2

Capitolo 2
18
Le serie 1 e 2 di provini, sono state impiegate per le prove DCB al fine di
ricavare i valori di tenacità interlaminare di Modo I e poterli confrontare con
prove precedenti effettuate sullo stesso materiale, le caratteristiche geometriche
sono riportate in tabella 2.1.
In seguito è stato sviluppato un altro stampo dal quale si sono ricavate le serie 6
e 7 di provini. Questo stampo, mostrato in Figura 2.3 presenta varie migliorie
rispetto al primo sopra descritto.
Figura 2.3 Stampo della serie 6 – 7
Le differenze principali rispetto allo stampo utilizzato per le serie 1 e 2 sono:
Lo stampo è chiuso su tutti i quattro lati
Sui lati dello stampo sono state ricavate delle fessure nell‟Airpad
(gomma nera) per consentire il passaggio delle fibre ottiche
mantenendole allineate alla base dello stampo
Presenza di fori laterali che consentono la fuoriuscita dell‟aria. Da tali
fori esce anche una piccola quantità di resina che però è limitata e non va
ad inficiare quindi la bontà dei provini in termini di spessore e
imperfezioni

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
19
I vantaggi principali che si hanno producendo provini con questo stampo sono:
Si ottengono provini con spessore uniforme avendo uno stampo chiuso
che non permette distorsioni del laminato durante il processo di
polimerizzazione
Si ottengono provini più tenaci dato che il quantitativo di resina
nell‟interlamina è maggiore
Durante il processo di polimerizzazione le fibre ottiche sono molto più
protette dalla resina in quanto racchiuse in “mezzelune” metalliche
realizzate proprio a questo scopo e mostrate in Figura 2.4.
(a) (b)
Figura 2.4 ‘Mezzaluna’ di protezione, (a) aperta , (b) chiusa
Questa nuovo stampo permette di realizzare provini con spessore più uniforme
rispetto a quanto ottenuto per le serie 1 e 2;
Da questa procedura si sono ricavati tutti i provini poi utilizzati per le prove
Four Point End-Notched Flexure.

Capitolo 2
20
2.2 Caratteristiche geometriche dei provini realizzati
Di seguito verranno illustrate nel dettaglio le caratteristiche geometriche dei
provini utilizzati nelle prove sperimentali riprodotte con modelli numerici.
Questi sono tutti realizzati in fibra unidirezionale di vetro con sequenza di
laminazione [0°]48.
Tali caratteristiche sono riportate in tabella 2.1 ed i provini sono identificati
secondo un determinato codice alfanumerico, costituito da tre lettere e due
numeri:
Prima lettera P = provino
Seconda lettera S = senza fibre ottiche
F = con fibre ottiche
Terza lettera D = provino sottoposto a prova DCB
E = provino sottoposto a prova ENF
Primo numero n°= identificativo della serie del provino
Secondo numero n°= identificativo del provino
Provino Spessore
[mm]
Larghezza
[mm]
Lunghezza
[mm]
Lunghezza
inserto
[mm]
Spessore
inserto
[μm]
PSD11 9,34 25,26
280 80 13 PFD11 9,57 25,17
PFD12 9,43 25,13
PSD21 9,71 24,87
280 80 13 PSD22 9,60 24,86
PFD21 9,70 24,83
PFD22 9,76 24,81
PSE61 10,44 25,43
300 80 13
PSE63 10,47 25,66
PSE64 10,46 25,96
PSE65 10,42 26,10
PSE66 10,49 26,00
PFE71 10,46 25,44
300 80 13 PFE72 10,46 25,40
PFE73 10,44 25,23
PFE74 10,43 25,43
Tabella 2.1: Caratteristiche geometriche dei provini [mm].

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
21
2.3 Prove Double Cantilever Beam (DCB)
Il test DCB permette di determinare le caratteristiche di tenacità interlaminare
GIc. I requisiti che i provini devono rispettare sono espressi nella normativa
ASTM D 5528-01. In Figura 2.5 si riporta uno schema delle possibili
configurazioni di prova prescritte dalla normativa.
(a) (b)
Figura 2.5: Configurazione prova DCB con (a) cerniere di carico e (b) blocchi di carico.
La tenacità a frattura è ottenuta dalla curva forza-spostamento attraverso
l‟applicazione di opportune tecniche di riduzione dati.
Come riportato in Figura 2.5 l‟applicazione del carico può avvenire sia
attraverso l‟impiego di cerniere Figura 2.5(a) o blocchi di carico Figura 2.5(b)
che, vincolati alla macchina di prova, permettono di allontanare le due semitravi
a una velocità definita in un intervallo compreso tra 1 e 5 mm/min.
Entrambe le soluzioni permettono la rotazione degli estremi caricati del provino,
evitando l‟introduzione di momenti flettenti concentrati; in modo da mantenere
il provino in posizione orizzontale durante lo svolgimento della prova.
Il provino deve esser costituito da un laminato piano rettangolare di larghezza
compresa tra 20 e 25 mm, che permette di ridurre gli effetti di bordo, e di
lunghezza superiore a 125 mm.
Se gli spessori sono ridotti, grandi spostamenti possono causare non linearità nel
comportamento; in questi casi procedure di correzione vengono applicate nella
riduzione dati, al fine di considerare la diminuzione del braccio del momento
generato dalla forza di carico rispetto all‟apice della cricca.
Spessori inferiori ai 3 mm non sono comunque ammessi.
La delaminazione viene creata artificialmente, prima della polimerizzazione, per
un tratto iniziale di 80 mm , con l‟introduzione di un film di teflon (PTFE) di
spessore non maggiore di 13 μm.
La stabilità della propagazione della cricca dipende dalle condizioni al contorno
e dalla risposta del materiale; in questa configurazione la crescita della cricca

Capitolo 2
22
interlaminare è lenta e stabile, in modo da evitare delaminazioni rapide che
possano introdurre effetti dinamici nella morfologia della frattura.
Facendo riferimento al diagramma in Figura 2.6, si nota che il carico cresce
linearmente rispetto allo spostamento fino al punto A, in cui ha inizio la
propagazione della cricca. L‟avanzamento della delaminazione prosegue fino al
punto B in cui si scarica il provino invertendo lo spostamento delle traverse.
La prova permette la valutazione del rateo di rilascio di energia (energy release
rate) attraverso l‟espressione:
(2.1)
dove dU rappresenta la perdita di energia per unità di larghezza che si verifica a
seguito di un incremento infinitesimo della lunghezza di delaminazione da e B
indica la larghezza del provino.
Figura 2.6: Diagramma forza – spostamento tipico di una prova DCB.
Al crescere della delaminazione si può assistere all‟aumento monotono dei
valori di tenacità, fino a un valore asintotico. Tale fenomeno è dovuto
essenzialmente al fiber bridging fra le lamine adiacenti come mostrato in Figura
2.9. La normativa ASTM D 5528-01 per le prove DCB prescrive l‟utilizzo di
compositi unidirezionali a 0°, in quanto la presenza di lamine con orientazione
differente può provocare due ordini di problemi:
deviazione del percorso di delaminazione dal piano medio con possibili
salti di cricca; [7],[8]

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
23
eventuale perdita di simmetria capace di produrre torsioni e caricamento
in Modo misto.
2.3.1 Configurazione della prova
La macchina di prova usata è una MTS 858 Mini Bionix II, servo idraulica, con
capacita assiale di 15kN. Il provino, a cui sono state incollate le cerniere in
acciaio, è stato vincolato alle traverse tramite blocchetti mobili, posizionati in
modo che il carico venga introdotto in linea con le cerniere.
Figura 2.7: MTS 858 Mini Bionix II.
La prove sono state condotte ad una velocità costante della traversa di 1 mm/min
nella fase di carico e di 5 mm/min in quella di scarico, durante le quali la
macchina MTS ha acquisito dati a circa 10 Hz.
Le cerniere sono state incollate a 35 mm rispetto all‟estremo libero dalla parte
dell‟inserto di teflon. La distanza a0 tra il punto di applicazione del carico e
l‟inizio della cricca è 45 mm (Figura 2.8).

Capitolo 2
24
Figura 2.8: Geometria dell’incollaggio della cerniera
Per individuare l‟andamento della propagazione della cricca in funzione dello
spostamento trasversale delle traverse, su ogni provino è stata incollata una scala
graduata, come riportato in Figura 2.9, che ha permesso di quantificare la
lunghezza della cricca durante la fase di propagazione, attraverso una ripresa
fotografica con frequenza dell‟ordine del minuto.
(a)
(b)
(c)

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
25
(d)
(e)
Figura 2.9: (a),(b),(c),(d),(e) Sequenza di immagini prova DCB.
2.3.2 Grafici forza – spostamento delle prove DCB
Si esegue una pre-apertura del provino allontanando le traverse di circa 2 mm
in modo da aprire un fronte di cricca reale che la striscia in teflon non
garantisce, per poi invertire tale spostamento scaricando il provino.
Solo in seguito si riprende ad allontanare le traverse per completare l‟apertura.
In Figura 2.10 si riportano tutte le curve forza – spostamento dei provini della
serie 1-2.
Figura 2.10: Diagramma forza – spostamento prove DCB.
-5 0 5 10 15 20 25 30 35-20
0
20
40
60
80
100
120
140
160
mm
N
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22

Capitolo 2
26
La Figura 2.10 mostra che le curve ottenute sono molto simili tra loro con un
basso scostamento dei valori di forza misurati durante la propagazione delle
cricche.
Le riprese foto-video continue hanno permesso di monitorare la lunghezza di
propagazione della cricca a senza dover smontare i provini dalla macchina di
prova. Questo ha evitato di riposizionare male i provini, infatti per ogni curva si
sovrappongono perfettamente i tratti lineari di carico e scarico, quindi l‟energia
è stata dissipata esclusivamente dall‟avanzamento della cricca.
Figura 2.11: Diagramma propagazione cricca – spostamento.
2.3.3 Tecniche di riduzione dati applicate alle prove DCB
Partendo dalla lunghezza della cricca e dalle curve forza-spostamento ottenuti
sperimentalmente si può determinare la tenacità interlaminare di Modo I
attraverso i processi di riduzione dati.
Queste metodologie possono essere divise in due famiglie principali:
Compliance methods
Metodi basati su valutazione diretta dell‟energia pari all‟area sottesa dal
grafico forza-spostamento.
0 5 10 15 20 25 3040
60
80
100
120
140
160
180
200
s [mm]
a [
mm
]
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
27
I metodi principali per il calcolo di GIc forniti dalla normativa [2] sono basati
sull‟equazione di Irwin-Kies [1]:
(2.2)
dove PC è il carico critico, b è la larghezza del provino, C è la cedevolezza e a la
lunghezza della cricca. Tali tecniche sono descritte nel seguito assieme alla
Beam Theory (BT).
Beam Theory (BT)
Questa teoria esprime la tenacità interlaminare come:
(2.3)
Dove con Pc si indica il carico e con δ lo spostamento. Questa teoria considera le
due travi che costituiscono il provino DCB come incastrate tra loro in
corrispondenza dell‟apice della cricca; in questo modo però si ottiene un valore
di GIc sovrastimato in quanto nella realtà al vertice della cricca si verifica una
rotazione.
Modified Beam Theory (MBT)
Questa teoria tiene conto del fatto che l‟incastro all‟apice della cricca nel
provino DCB non è perfetto attraverso un parametro Δ che va ad incrementare la
misura della delaminazione:
(2.4)
Il parametro Δ è pari al valore dell‟intercetta sull‟asse delle ascisse della retta di
regressione ottenuta graficando C1/3
(C = cedevolezza calcolata con il rapporto
tra lo spostamento δ e il carico P) rispetto ad a (apertura della cricca) mostrata
in Figura 2.12.

Capitolo 2
28
Figura 2.12: Retta di regressione per il calcolo di Δ nella MBT.
Compliance Calibration (CC)
Si basa sulla seguente equazione, dove con n si indica la pendenza della retta di
regressione del grafico mostrato in figura 2.13:
(2.5)
Figura 2.13: Retta di regressione per il calcolo di n nella CC.
60 80 100 120 140 160 180
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
a
C1/3
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22
Totale
3.8 4 4.2 4.4 4.6 4.8 5 5.2 5.4-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
log(a)
log(C
)
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22
Totale
Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
29
Modified Compliance Calibration (MCC)
La MCC esprime la tenacità interlaminare secondo la seguente formula:
(2.5)
Dove con A1 è indicata la pendenza della retta di regressione mostrata in Figura
2.14 e con h lo spessore del provino.
Figura 2.14: Retta di regressione per il calcolo di A1 nella MCC.
Si riportano di seguito l‟andamento dei quattro metodi di riduzione dati per un
provino tipo.
0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7
6
8
10
12
14
16
18
C1/3
a/h
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22
Totale
Capitolo 2
30
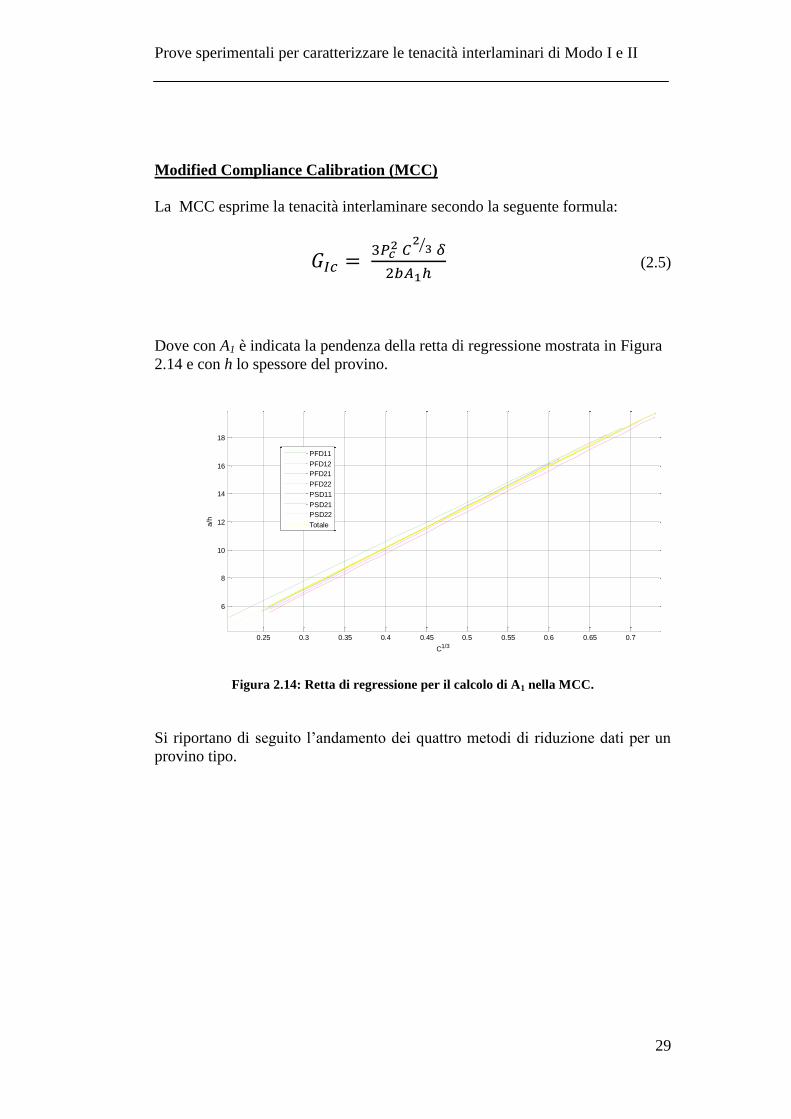
Figura 2.15: Andamento delle diverse teorie di riduzione dati per un provino tipo.
Si può notare che tra tutti i metodi di riduzione dati, la Beam Theory BT è quello
che maggiormente sovrastima la tenacità GIc, a differenza della Compliance
Calibration CC che invece, tra tutti, è quello che la sottostima.
In tutti i provini si è notato che il valore di Modify Beam Theory MBT e di
Modify Compliance Calibration MCC sono praticamente sovrapponibili.
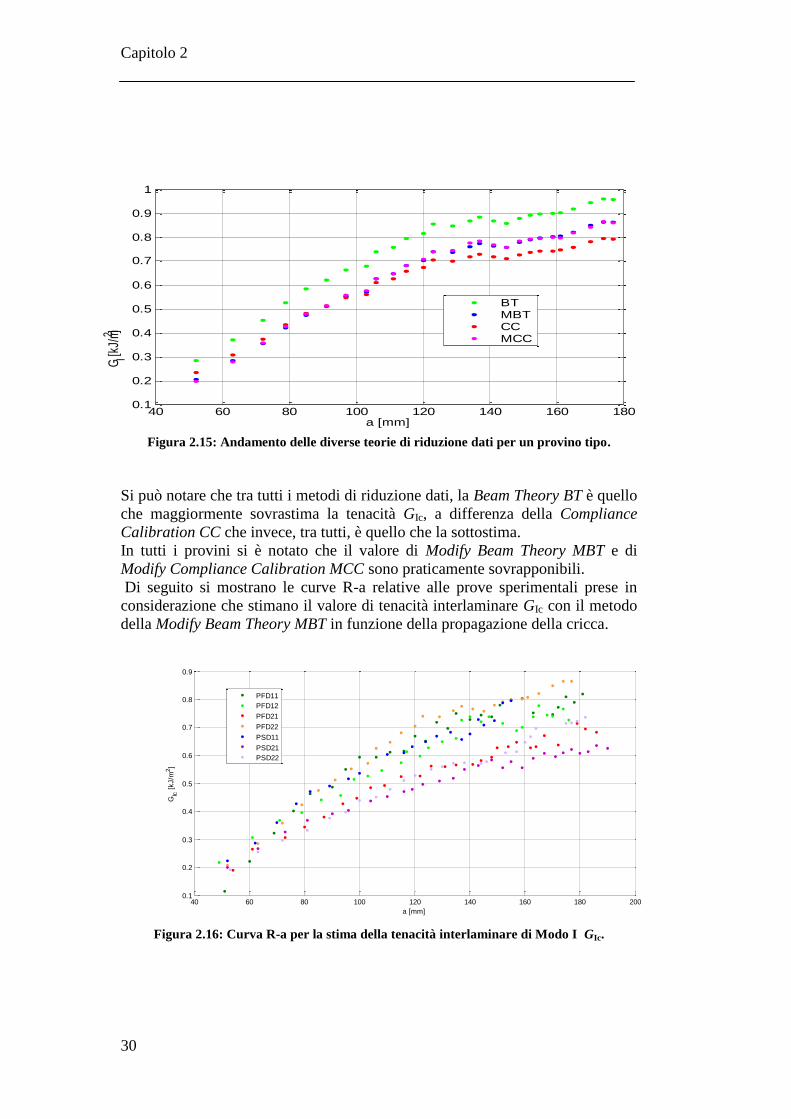
Di seguito si mostrano le curve R-a relative alle prove sperimentali prese in
considerazione che stimano il valore di tenacità interlaminare GIc con il metodo
della Modify Beam Theory MBT in funzione della propagazione della cricca.
Figura 2.16: Curva R-a per la stima della tenacità interlaminare di Modo I GIc.
40 60 80 100 120 140 160 180 2000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
a [mm]
GIc
[kJ/m
2]
PFD11
PFD12
PFD21
PFD22
PSD11
PSD21
PSD22
40 60 80 100 120 140 160 1800.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
a [mm]
G I [kJ/
m2 ]
BTMBTCCMCC

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
31
Dall‟andamento della curva R-a si può notare che il valore di tenacità
interlaminare di Modo I tende a crescere linearmente fino ad un valore di
assestamento che si raggiunge intorno ai 120 mm, per poi mantenersi costante.
Si può quindi supporre che la zona di processo sia compresa tra l‟origine della
cricca e il valore di assestamento per una lunghezza di circa 65 mm.
Questa affermazione viene confermata dalla curva di deformazione in funzione
della delaminazione ottenuta tramite un sensore FBG centrato ad una distanza di
40 mm dall‟origine della delaminazione che mostra il seguente andamento:
Figura 2.17: Andamento della deformazione in funzione della propagazione della cricca
(provino PFD11: curve verde scuro – blu, provino PFD12: curva verde chiaro – azzurra).
In rosso è segnata la posizione del sensore FBG.
Da questo grafico si può notare che i sensori vedono una zona d‟influenza che si
estende fino ad un valore di propagazione della cricca pari a 60 mm, valore
concorde al dato espresso dalle teorie Modify Beam Theory MBT e Modify
Compliance Calibration MCC.
La stima della zona di processo è fondamentale per la successiva modellazione
della stessa attraverso i modelli numerici. Vedremo, infatti, nel paragrafo 3.1
come tale dato influenzi la generazione della mesh per poter simulare al meglio
il valore di inizio e propagazione del danno interlaminare.
Le prove DCB portano ad una sovrastima della zona di processo a causa del
fenomeno del fiber bridging descritto in precedenza, verrà quindi posta
0 20 40 60 80 100 1200
1000
2000
[]
da [mm]
0 20 40 60 80 100 1200
50
100
150
F [
N]
0 20 40 60 80 100 1200
100
200
F [
N]

Capitolo 2
32
attenzione nel descrivere correttamente nel modello FE lo strato interlaminare
affetto dal danneggiamento, effettuando una analisi di sensitività rispetto alla
dimensione in pianta degli elementi ed utilizzando modelli analitici che
permettono di ridefinire la lunghezza della zona coesiva da riprodurre.
2.4 Prove ENF
In Figura 2.18 è mostrato lo schema descrittivo della prova ENF, che costituisce
un test di Modo II attraverso una prova di flessione a tre punti di un provino
parzialmente delaminato. L‟apice della cricca deve trovarsi tra uno dei cilindri
inferiori e il superiore, secondo la configurazione riportata in Figura 2.18.
Figura 2.18: Schema descrittivo della prova ENF
A differenza delle prove DCB l‟avanzamento della delaminazione risulta
instabile. Nonostante non sia ancora stato precisato in una specifica normativa il
rapporto a0/L si consiglia essere inferiore a 0,69.

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
33
I problemi principali relativi a questo tipo di prova sono:
attrito generato tra le superfici dalla forza che si applica nella zona
delaminata (reputabile marginale);
propagazione instabile delaminazione (una sola valutazione di tenacità
per ciascun provino)
campagna di prove precedenti su provini non ancora delaminati per la
calibrazione della cedevolezza necessaria, essendo la propagazione
instabile in questa configurazione
Dato che non sono ancora presenti precise normative che consentano di
determinare la prova, Davidson [20] suggerisce una serie di specifiche sia per
definizione della geometria sia per la riduzione dati.
2.4.1 Configurazione della prova
La procedura descritta da Davidson prevede l‟esecuzione di una pre-apertura
effettuata in Modo II avente come scopo quello di ottenere un fronte di
delaminazione rappresentativo di un danneggiamento reale, ovvero
relativamente rettilineo e perpendicolare alla direzione di avanzamento della
cricca.
Di questa procedura si sono effettuate solo le pre-aperture. Questi provini sono
successivamente stati utilizzati per prove ENF4. Sui dati delle pre-aperture non
è possibile fare analisi di riduzione dati, ma si possono comunque utilizzare al
fine di avere un raffronto qualitativo con la pendenza della curva ottenuta
numericamente con il modello ENF.
La configurazione utilizzata prevede che, riferendosi allo schema mostrato in
Figura 2.17, l‟interasse tra i cilindri inferiori sia 2L= 125 mm e il cilindro
superiore sia equidistante da quelli inferiori.
La fase di posizionamento dei cilindri di carico dell‟attrezzatura permette di
stabilire il valore iniziale di propagazione della cricca a0 e di conseguenza il
corretto posizionamento del provino essendo quest‟ultima, per definizione, la
distanza tra l‟apice della cricca e il cilindro inferiore.
Deve infatti essere rispettata la relazione:
quindi con la configurazione usata è stato ottenuto a0= 37.5 mm.

Capitolo 2
34
Le prove sono state condotte ad una velocità costante della traversa di 1 mm/min
sia nella fase di carico che in quella di scarico, durante le quali la macchina
MTS ha acquisito i valori forza e spostamento con una frequenza di 10 Hz.
Un esempio di installazione della prova descritta è mostrato in Figura 2.19
Figura 2.19: Prova ENF
2.4.2 Grafici forza – spostamento
In Figura 2.20 si riportano tutte le curve forza – spostamento dei provini della
serie 6-7 utilizzati, da cui si può osservare un‟ottima ripetibilità della prova ENF
sui provini prodotti. Essi presentano la medesima rigidezza flessionale e lo
stesso comportamento a rottura. La differenza tra i picchi di carico che comporta
tale rottura è dovuta in parte al fatto che trattandosi di pre-aperture, il fronte di
danno all‟apice della cricca presenta geometria diversa essendo inizialmente
riprodotto artificialmente dal film di teflon.

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
35
Figura 2.20: Diagramma forza – spostamento prove ENF
2.5 Prove ENF4
E‟ una prova di flessione a 4 punti ideata nel 1999 da Martin e Davidson [20]
che induce sul provino una sollecitazione flessionale costante e nulla a taglio
nella zona tra i due cilindri superiori (Figura 2.21).
Figura 2.21: Schema descrittivo della prova ENF4
Capitolo 2
36
Così facendo si ottiene una propagazione di cricca stabile dalla quale è possibile
ricavare una curva R-a per eseguire una compliance calibration durante
l‟avanzamento della cricca.
Sono però presenti numerose problematiche in questa prova:
risultati dipendenti dalla geometria dei provini;
i valori di tenacità interlaminare GIIc sono superiori dell‟8-20% rispetto a
quelli ottenuti con le prove ENF; questa differenza si incrementa con
l‟aumento del rapporto tra la distanza dei cilindri interni e quella dei
cilindri esterni d/2L [23];
gli effetti dell‟attrito tra le due superfici sottoposte a delaminazione sono
superiori rispetto alla prova ENF e, anche in questo caso, la differenza
viene incrementata aumentando il rapporto geometrico d/2L tipico
dell‟attrezzatura. Tuttavia questi effetti possono essere trascurati in
quanto le maggiorazioni della tenacità interlaminare GIIc sono al
massimo del 5% nella prova ENF4 e del 2% nella ENF [24];
cedevolezza e gioco dell‟attrezzatura di prova;
non linearità geometriche: spostamento punti di contatto e rotazione
punto di carico.
Questa metodologia di prova richiede un'attrezzatura decisamente più complessa
rispetto a quella necessaria per una semplice flessione a quattro punti.
Il provino, parzialmente delaminato, presenta una distribuzione di rigidezza
asimmetrica rispetto al punto di applicazione del carico, dunque i cilindri che
trasferiscono il carico al provino devono essere in grado di muoversi
diversamente in direzione verticale: a tal fine è necessario prevedere la libertà di
rotazione dell'attrezzatura di carico.
2.5.1 Configurazione della prova
Prima di procedere con la prova vera e propria è necessario effettuare una pre-
apertura, tramite ENF, in modo da ottenere un fronte di cricca reale, facendo
propagare istantaneamente in modo instabile quello artificiale generato
dall‟inserto in teflon inglobato in fase di produzione.
Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
37
La procedura del test ENF4 [11],[23] prevede, successivamente, di procedere
con la fase di carico imponendo all‟attuatore della macchina MTS uno
spostamento verticale della traversa, e quindi dei cilindri interni dell‟attrezzatura
schematizzata in Figura 2.21, alla velocità Vc = 1 mm/min.
Questa fase continua fino a quando la cricca, inizialmente posizionata tra i due
cilindri interni, avanza al massimo fino a circa 10 mm di distanza dal secondo
cilindro interno, al fine di garantire le stesse condizioni di carico nel tratto
d‟interesse durante tutta la prova.
Infine deve essere effettuata la fase di scarico.
Assumendo che lo spostamento dei cilindri superiori, schematizzati in Figura
2.21, siano uguali a quello della traversa, e quindi trascurando eventuali giochi,
vengono continuamente acquisiti i valori di forza e spostamento applicati
dall‟attuatore collegato alla traversa superiore della MTS con una frequenza di
campionamento di 10 Hz.
Inoltre durante la fase di carico si deve monitorare la propagazione della cricca
su almeno un lato del provino; nel caso in questione l‟operazione è stata
effettuata fotografando periodicamente il lato sinistro del provino con uno step
di 0.1 mm e annotando lo spostamento trasversale ad esso corrispondente.
Ciascun provino può essere riutilizzato per più prove, riposizionandolo
opportunamente dopo ciascun test. L‟attrezzatura è stata configurata in modo
tale per cui la distanza tra i cilindri interni, centrati rispetto a quelli esterni, è
pari a d = 75 mm, mentre quella dei cilindri esterni è pari a 2L = 125 mm.
Affinché l‟origine della cricca sia compresa tra i perni interni e abbastanza
lontana dall‟influenza di ciascuno di essi il provino deve essere posizionato in
modo tale che la lunghezza iniziale della cricca rispetti la seguente relazione
geometrica:
Tenendo conto della configurazione utilizzata il provino deve essere posizionato
in modo tale che la lunghezza iniziale di propagazione della cricca a0 sia pari a
43.75 mm.
In Figura 2.22 sono illustrate le operazioni necessarie al montaggio
dell‟attrezzatura per le prove ENF4: (a) particolare della testa di carico e dei
cilindri superiori, (b) forcella per inserimento della testa di carico e cilindri
inferiori, (c),(d) assemblaggio completo.

Capitolo 2
38
Figura 2.22: Operazioni di allestimento dell’attrezzatura (a) testa e cilindri superiori di
carico; (b) cilindri inferiori e forcella; (c),(d) attrezzatura di carico completa
2.5.2 Grafici forza-spostamento
Si esegue una pre-apertura ENF del provino avvicinando le traverse sino a che
non inizia a propagare la cricca per poi invertire tale spostamento scaricando il
provino. Solo in seguito si riprende ad avvicinare le traverse completando più
prove ENF4 sullo stesso provino.
In Figura 2.23 si riportano tutte le curve forza – spostamento dei provini della
serie 7.

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
39
Figura 2.23: Curva forza – spostamento delle prove ENF4.
La figura 2.22 mostra che le curve ottenute sono molto simili tra loro con un
basso scostamento dei valori di forza misurati durante la propagazione delle
cricche.
Tuttavia nella prova ENF4 il monitoraggio della delaminazione al variare dello
spostamento trasversale delle traverse è più complesso rispetto alle prove DCB e
ENF a causa dell‟ingombro dell‟attrezzatura utilizzata che obbliga a posizionare
la macchina fotografica ad un distanza e con un‟inclinazione che rende
difficoltosa l‟individuazione della propagazione della cricca ed inoltre la messa
a fuoco della stessa.
Figura 2.24: Punto di vista che è stato necessario adottare per monitorare l'avanzamento
della delaminazione nelle prove ENF4.
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-8000
-7000
-6000
-5000
-4000
-3000
-2000
-1000
0
mm
N
PFE712
PFE713
PFE722
PFE732
PFE742

Capitolo 2
40
I punti di inizio e fine propagazione della cricca sono stati letti togliendo il
provino dall‟attrezzatura mentre i punti intermedi sono stati monitorati, anche in
questo caso, sfruttando il più possibile le immagini fotografiche.
Figura 2.25 : Diagramma propagazione della cricca – spostamento trasversale.
Da Figura 2.24 si nota che curve di propagazione delle cricche presentano lo
stesso andamento per tutti i provini e che nonostante le difficoltà nel
monitoraggio si è riusciti a ricostruire correttamente i tratti intermedi.
2.5.3 Tecniche di riduzione dati applicate alle prove ENF4
Per quanto riguarda i metodi di riduzione dati, grazie alla propagazione stabile
della delaminazione, è possibile utilizzare anche in questo caso il metodo di
Compliance Calibration adattato alle prove in esame.
Compliance Calibration (CC)
La tenacità interlaminare critica di Modo II GIIc è stata stimata sfruttando un
metodo di Compliance Calibration sui dati sperimentali.
Questo metodo di riduzione approssima la cedevolezza come funzione lineare
della lunghezza di delaminazione:
(2.6)
-3 -2.8 -2.6 -2.4 -2.2 -2 -1.8 -1.640
50
60
70
80
90
100
110
s [mm]
a [
mm
]
PFE712
PFE713
PFE722
PFE732
PFE742

Prove sperimentali per caratterizzare le tenacità interlaminari di Modo I e II
41
dove C è la cedevolezza del provino e a è la lunghezza della cricca.
La tenacità GIIc definita come:
(2.7)
che può essere riscritta trascurando la cedevolezza statica della macchina C0
come:
(2.8)
dove Pc è il carico critico, C1 è la pendenza della curva di cedevolezza in
funzione della lunghezza di propagazione della cricca e b è la larghezza del
provino.
Figura2.26: Retta di regressione per il calcolo di C1 nella CC.
40 50 60 70 80 90 100 1100.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
a [mm]
C [
m/N
]
PFE712
PFE713
PFE722
PFE732
PFE742
Capitolo 2
42
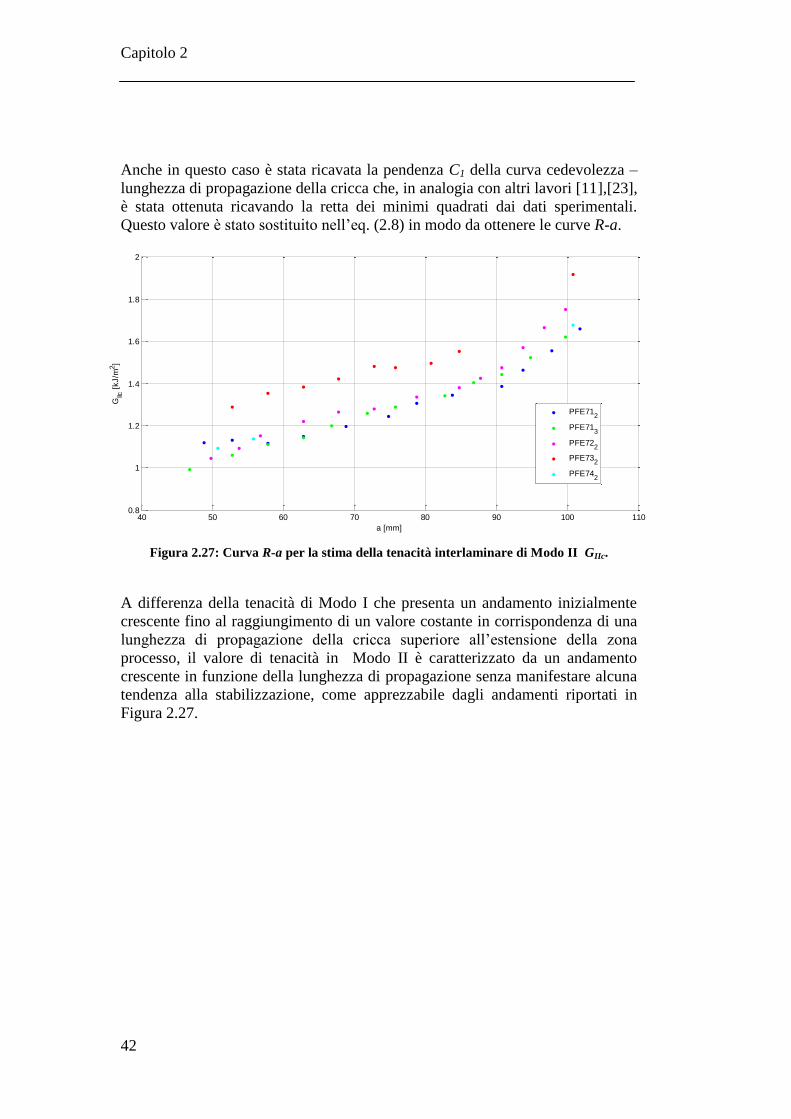
Anche in questo caso è stata ricavata la pendenza C1 della curva cedevolezza –
lunghezza di propagazione della cricca che, in analogia con altri lavori [11],[23],
è stata ottenuta ricavando la retta dei minimi quadrati dai dati sperimentali.
Questo valore è stato sostituito nell‟eq. (2.8) in modo da ottenere le curve R-a.
Figura 2.27: Curva R-a per la stima della tenacità interlaminare di Modo II GIIc.
A differenza della tenacità di Modo I che presenta un andamento inizialmente
crescente fino al raggiungimento di un valore costante in corrispondenza di una
lunghezza di propagazione della cricca superiore all‟estensione della zona
processo, il valore di tenacità in Modo II è caratterizzato da un andamento
crescente in funzione della lunghezza di propagazione senza manifestare alcuna
tendenza alla stabilizzazione, come apprezzabile dagli andamenti riportati in
Figura 2.27.
40 50 60 70 80 90 100 1100.8
1
1.2
1.4
1.6
1.8
2
a [mm]
GIIc
[kJ/m
2]
PFE712
PFE713
PFE722
PFE732
PFE742

43
Capitolo 3
Modelli numerici
Le analisi numeriche hanno come obiettivo quello di riprodurre il più
fedelmente possibile quelle sperimentali.
Un modello ad elementi finiti permette di riprodurre un numero di prove
elevatissimo abbattendo i costi e presentando un‟elevata riproducibilità.
Esso diventa quindi uno strumento molto utile per un‟analisi di sensitività
rispetto a tutti i parametri, quali la tenacità e la resistenza a frattura del laminato,
ed offre la possibilità di individuare le zone migliori dove collocare i sensori a
fibra ottica per il monitoraggio strutturale.
Nel presente capitolo verranno illustrati i modelli di prova DCB, con lo scopo di
un primo confronto con i dati sperimentali, ma soprattutto di messa a punto del
modello numerico esplicito per riprodurre le prove ENF ed ENF4 e giungere ad
avere una stima del valore di tenacità di Modo II.
3.1 Tecniche di modellazione dell’interfaccia
3.1.1 Modellazione del danno interlaminare attraverso elementi coesivi
tradizionali
La prova DCB simula la rottura di Modo I all‟interno del laminato in
corrispondenza del piano di mezzeria, quindi si conosce il punto di origine della
cricca e il piano di propagazione.
Utilizzando una modellazione classica, propria degli studi di meccanica della
frattura, andrebbe discretizzata la zona di processo in maniera molto fitta
soprattutto nelle vicinanze dell‟apice della cricca.
Introducendo l‟uso degli elementi coesivi di interfaccia si riduce notevolmente il
numero di elementi sfruttando una caratteristica propria della delaminazione,
ovvero la propagazione autosimile della cricca.
Questi elementi permettono di modellare in modo specifico il comportamento
del materiale degli strati interlaminari riproducendone le caratteristiche tramite
separazione delle proprietà ad essi associati, da quelle che descrivono il
materiale composito globalmente.

Capitolo 3
44
Un limite però è rappresentato dal fatto che i modelli coesivi convenzionali
hanno spessore molto basso o addirittura nullo. Come riportato in letteratura [9],
questo porta ad assegnare loro un valore di rigidezza fuori dal piano, detta
rigidezza di interfaccia, elevato (fino ad oltre 107 N/mm
3 ).
Tale parametro consente il corretto comportamento degli elementi coesivi nel
riprodurre la rottura interlaminare senza premature fratture e viene indicato di
solito con K [N/mm3]. Il legame che esso ha con lo sforzo di rottura nel caso di
prove DCB è espresso dalla relazione (3.1):
σ33 = E33ε33 = KΔ (3.1)
dove si è indicato con Δ la distanza tra due sub-laminati che costituiscono il
provino, ovvero lo spessore dello strato interlaminare di resina tra i due.
Valori molto alti del parametro K comportano però problemi numerici con
approcci di tipo esplicito, sia in termini di definizione del minimo passo di
integrazione necessario alla stabilizzazione dello schema di integrazione per sua
natura condizionatamente stabile sia in termini di livello di oscillazioni nella
risposta forza-spostamento durante la fase di propagazione della cricca.
Nel paragrafo 3.2.1 viene indicata una relazione analitica tramite la quale si può
stabilire un valore di K che sia sufficiente a garantire un buona risposta del
modello numerico che simula prove di tipo Double Cantilever Beam mediante
un modello implicito che impiega elementi coesivi tradizionali.
Nel seguente paragrafo, invece, verranno specificate le leggi di danneggiamento
proprie degli elementi di interfaccia utilizzati con la particolare tecnica
impiegata nelle simulazioni numeriche di tipo esplicito, la quale porta ad un
netto miglioramento rispetto all‟approccio coesivo tradizionale appena descritto.
3.1.2 Modellazione del danno interlaminare attraverso elementi coesivi non
convenzionali
Nei materiali compositi la nucleazione del danno generalmente non comporta
una rottura completa, quanto piuttosto una riduzione delle prestazioni
difficilmente valutabile. Un supporto a tale indagine viene fornito dai modelli
FE come quelli descritti nel seguito, ed in particolare quelli di tipo esplicito,
molto impiegati nella descrizione di prove di tenacità interlaminare.
Il principale difetto dell‟utilizzo dei codici espliciti è rappresentato dal fatto che
i tempi di calcolo sono molto elevati, a fronte di essere adatti a modellare
fenomeni tipicamente non lineari come i complessi meccanismi di frattura e
contatto di superfici.
Per questi motivi in letteratura si ritrovano differenti tecniche di modellazione in
grado di caratterizzare le zone interlaminari e al contempo abbattere il costo

Modelli numerici
45
computazionale [9]. L‟approccio più usato è quello di utilizzare elementi di
interfaccia di tipo coesivo tradizionale, il quale però richiede ancora un certo
grado di infittimento della mesh nell‟intorno dell‟apice della delaminazione,
come esposto nel paragrafo 3.1.1. In particolare, una tecnica che si è rivelata
molto efficiente nel descrivere i fenomeni di delaminazione è l‟utilizzo
congiunto di elementi di interfaccia e leggi di danno assegnate che ne
descrivono il legame sforzi/deformazioni.
La legge deve descrivere in modo corretto le principali caratteristiche di un
laminato in composito, sapendo riprodurre rigidezza, resistenza e tenacità
dell‟interlamina [12], [13], [14].
Nello specifico, la tecnica di modellazione utilizzata, sviluppata nel corso degli
ultimi anni presso il Dipartimento di Ingegneria Aerospaziale del Politecnico di
Milano ,[4],[5],[6], utilizza un modello costitutivo dell'interfaccia applicato ad
una tecnica di modellazione che include strati interlaminari all'interno di uno
schema ad elementi finiti di laminati in composito.
Questa tecnica permette di ottenere diversi gradi di raffinamento della mesh sia
nello spessore del laminato che in pianta, permettendo di cogliere la nascita e la
propagazione del danneggiamento in tempi di calcolo piuttosto limitati.
Non è richiesto un grado molto elevato di infittimento della griglia di calcolo
nella zona di processo a differenza degli elementi coesivi di solito impiegati, ed
inoltre la cricca può potenzialmente originarsi e propagare in qualsiasi punto del
modello, questo grazie alla modellazione di tutti gli strati interlaminari.
E‟ sufficiente infatti che in tale zona gli elementi solidi di tipo C3D8R, che
rappresentano l'interlamina, rilascino l'intera quota di energia che compete loro,
raggiungendo la deformazione massima consentita dalla legge di
danneggiamento assegnata.
La tecnica impiegata sfrutta una legge costitutiva del materiale implementata in
una subroutine Fortran® richiamata dal codice esplicito Abaqus/Explicit®.
[21],[22],[19].
La tecnica si basa sulla visione del generico laminato in materiale composito
come collezione di sub-laminati modellati nel loro comportamento nel piano
attraverso l‟impiego di elementi bidimensionali posti nel piano medio degli
stessi sub-laminati ed elementi solidi di interfaccia che connettono attraverso lo
spessore gli elementi bidimenionali. Ne consegue uno schema ibrido
caratterizzato dalla presenza di elementi bidimenionali, di tipo membranale o
piastra ed elementi solidi di tipo convenzionale (C3D8R). Gli elementi solidi
sono completati con una legge costitutiva bi-lineare analoga a quelli degli
elementi coesivi tradizionali, ma che per tenere conto dello spessore finito è
definita sulla base di un legame sforzo-deformazione.
In Figura 3.1 si possono notare gli spostamenti riferiti ai piani medi dei
sublaminati connessi da uno strato di interfaccia solido.

Capitolo 3
46
(a) (b) Figura 3.1. (a) Spostamenti relativi dei sub laminati connessi dallo strato di interfaccia. (b)
Accoppiamento tra gli elementi solidi e gli elementi shell
Come si nota in figura, tramite i vettori spostamento rappresentati è possibile
definire gli spostamenti relativi {Δ} e le deformazioni {ε} medie a essi connessi,
nell‟ipotesi di piccole deformazioni:
(3.2)
Da cui attraverso la matrice di rigidezza ricaviamo gli sforzi {σ}:
(3.3)
Il materiale assegnato agli elementi solidi, che modellano l‟interlamina, ha un
comportamento elastico come rappresentato nell‟equazione (3.3) solo fino al
valore σ0
i3, ovvero fino alla componente di sforzo che corrisponde all‟inizio del
danneggiamento. Da questo punto in avanti bisogna simulare la progressiva
riduzione della capacità di sostenere il carico; questo avviene mediante l‟uso di
una legge bi-lineare, in cui il percorso di carico e scarico ha luogo con rigidezza
ridotta e senza deformazioni residue (Figura 3.2)
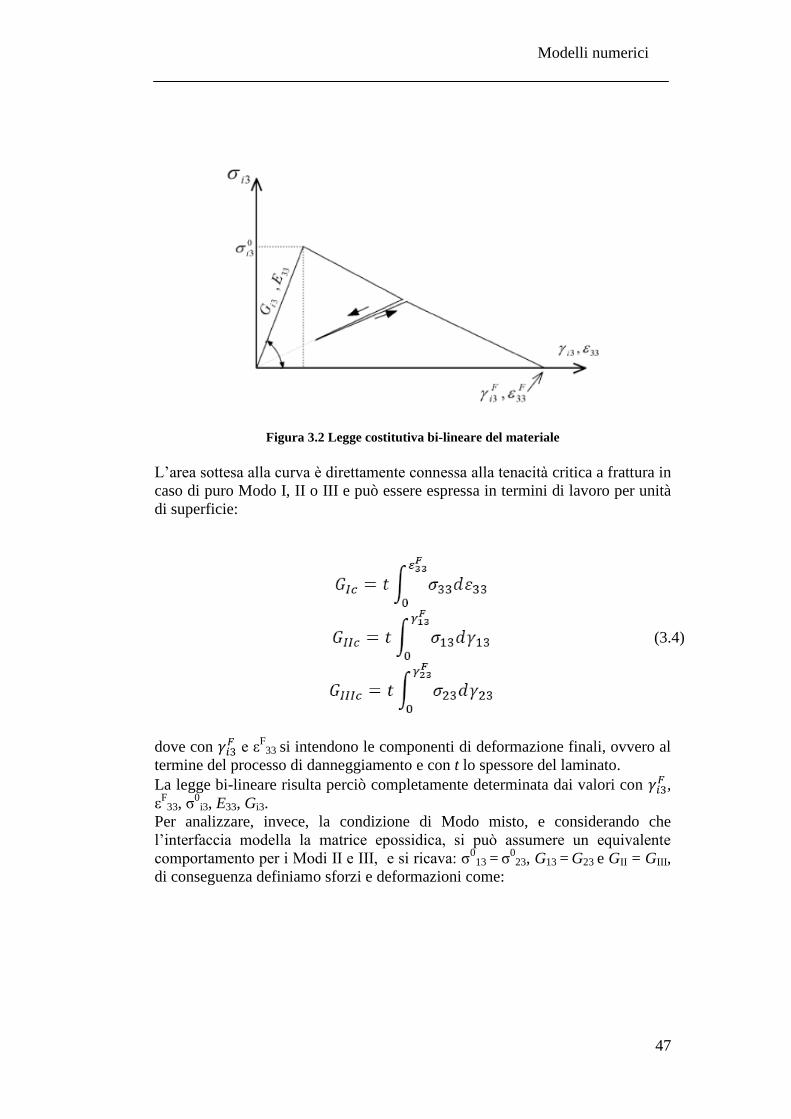
Modelli numerici
47
Figura 3.2 Legge costitutiva bi-lineare del materiale
L‟area sottesa alla curva è direttamente connessa alla tenacità critica a frattura in
caso di puro Modo I, II o III e può essere espressa in termini di lavoro per unità
di superficie:
(3.4)
dove con e ε
F33 si intendono le componenti di deformazione finali, ovvero al
termine del processo di danneggiamento e con t lo spessore del laminato.
La legge bi-lineare risulta perciò completamente determinata dai valori con ,
εF
33, σ0
i3, E33, Gi3.
Per analizzare, invece, la condizione di Modo misto, e considerando che
l‟interfaccia modella la matrice epossidica, si può assumere un equivalente
comportamento per i Modi II e III, e si ricava: σ0
13 = σ023, G13 = G23 e GII = GIII,
di conseguenza definiamo sforzi e deformazioni come:

Capitolo 3
48
(3.5)
Si può notare dalle relazioni (3.5) espresse su σI che nel caso in cui lo sforzo
normale applicato sia negativo, ovvero uno sforzo di compressione, σI risulta
essere nullo. In questo modo viene garantita una corretta modellazione delle
lamine adiacenti, in particolare il contatto definito tra loro che rimane anche nel
caso l‟interlamina tra esse sia completamente danneggiata.
Si introduce, inoltre, un parametro d che permette di esprimere il valore dello
sforzo in seguito all‟inizio della delaminazione (eq. 3.6). Tale parametro di
danno, inizialmente nullo, raggiunge il valore unitario quando il materiale è
completamente danneggiato:
(3.6)
Un criterio quadratico che permette di determinare quando l‟interlamina inizia a
danneggiarsi in modo misto è il seguente:
(3.7)
Quindi la nascita del danno, in Modo misto, può avvenire prima che venga
superata la soglia di sforzo di inizio del danneggiamento σ0
I e σ0
II .
Indicando con GIc e GIIc rispettivamente le tenacità critiche in puro Modo I e II,
si descrive un simile criterio quadratico (eq. 3.8) che una volta soddisfatto indica
completo il danneggiamento dell‟interfaccia:

Modelli numerici
49
(3.8)
dove :
(3.9)
È inoltre possibile introdurre un ulteriore parametro β indicativo della modalità
di sollecitazione dell‟interlamina e la conseguente modifica sulla legge
costitutiva (Figura 3.3):
β = εII / εI
(3.10)
(a) (b)
Figura 3.3 Modifica della legge costitutiva a seguito della definizione del parametro β. (a) Rappresentazione sul piano ε33 γ13. (b) Rappresentazione della legge bi-lineare

Capitolo 3
50
3.2 Prove DCB
3.2.1 Modello di prova implicito per test DCB
Il modello implicito sviluppato riproduce la prova DCB di un provino della serie
1 – 2 prodotta in laboratorio sperimentale.
Il modello, le cui dimensioni totali sono 250 x 25 x 9.8 mm, è costituito da due
semitravi con elementi tridimensionali a 8 nodi C3D8I, aventi dimensione in
pianta di 0.625 x 2.5 mm [19].
Questi sono elementi del prim‟ordine in cui i convenzionali gradi di libertà di
spostamento sono completati da ulteriori modi di deformazione (“incompatibile
modes”) che ne incrementano l‟accuratezza nel descrivere modi di
deformazione che tipicamente richiederebbero un numero elevato di elementi,
come la flessione. Si dimostra infatti come l‟impiego di un numero limitato di
questi elementi nello spessore di una trave sia sufficiente alla descrizione dello
stato di sollecitazione conseguente ad una azione di flessione.
Queste considerazioni giustificano l‟impiego di soli due elementi nello spessore
di ognuno dei due bracci che compongono un provino DCB, come visibile dal
modello riportato in Figura 3.4
Questi elementi C3D8I sono caratterizzati dalle proprietà delle lamine che
costituiscono il provino riportate in tabella 3.1
Caratteristiche degli elementi C3D8I
E1 [MPa] 47790 G12 [MPa] 5896
E2 [MPa] 13600 G23 [MPa] 5896
E3 [MPa] 10000 G13 [MPa] 5896
υ12 0.257 T [MPa] 25
υ23 0.257 GIc [ 2] 0.75
υ13 0.257 th [mm] 9.8
Tabella 3.1 Caratteristiche degli elementi solidi modellati
Come espresso in tabella 3.1 le proprietà di rigidezza modellate concordano con
le caratteristiche proprie di un laminato in composito in fibra di vetro e resina
epossidica.

Modelli numerici
51
Il valore di tenacità interlaminare di modo I è GI = 0.75, ovvero pari al valore di
regime osservato nella riduzione dati riportata al paragrafo 2.3.3.
Questo valore vedremo che garantisce la corretta modellazione con
l‟avanzamento del fronte di danno nel modello numerico impiegato.
Tale valore è stato assegnato per caratterizzare l‟unica interlamina modellata tra
le due semitravi tramite elementi coesivi COH3D8, i quali hanno legge di
danneggiamento come quella descritta al paragrafo 3.1.1 ma già implementati
nel solutore Abaqus/Standard®.
La rigidezza di interfaccia descritta al paragrafo 3.1.1, è stata ricavata secondo la
legge analitica [9]:
K = α E3 / t (3.11)
con E3 modulo di Young trasversale, t lo spessore dei bracci del provino ed
α >>1 parametro scalare fissato a α = 50.
Dalla formula 3.11 si ricava un valore K =102040 [N/mm3] che è perfettamente
in linea con quanto espresso in letteratura, dove si prevede un valore di
K = 1.1x105 [N/mm
3] per laminati con spessore del singolo braccio di 5 mm.
La dimensione in pianta degli elementi coesivi è la medesima degli elementi
solidi C3D8I essendo ad essi legati, scegliendo un valore di 0.625 mm lungo
l‟asse x del provino in modo da avere un numero di 400 elementi.
Tale dimensione in pianta è più che sufficiente secondo Davila [9] per
riprodurre il corretto comportamento della zona coesiva, visto che si ritiene
essere già un buon valore una lunghezza pari ad 1 mm.
La zona di processo viene di solito ricavata per prove numeriche tramite la
formula 3.12 secondo Hillerborg [25]:
lcz = ME3GI / (σ0)2 (3.12)
dove σ0
è lo sforzo nominale di rottura a trazione fissato come da tabella 3.1 ad
un valore T = 25 [MPa] ed M=1.
L‟equazione 3.12 porta ad una stima della zona di processo lcz = 12 mm, quindi
un quinto di quella ricavata dalle prove sperimentali considerando il fenemeno
del fiber bridging. La dimensione in pianta della mesh porta a dire che sono
presenti più di 19 elementi a discretizzare questa zona di processo, e da una
analisi di sensitività effettuata si evince che si può ulteriormente ridurre tale
numero senza alterare i risultati conseguiti in termini di curva forza –
spostamento.
Nelle Figure 3.4, 3.5, si può osservare il modello FE completo in configurazione
deformata, in rosso si nota il danneggiamento dell‟interlamina discretizzata.

Capitolo 3
52
Figura 3.4 Modello implicito DCB completo in configurazione deformata
Figura 3.5 Particolare del fronte di danno nell’interlamina
Il carico viene introdotto attribuendo una legge di spostamento ad una delle due
semi-travi del provino consentendo uno spostamento finale pari al valore
raggiunto durante l‟esecuzione delle prove, mentre l‟altra estremità viene
vincolata alla traslazione verticale in z tramite la card di Abaqus®:
*BOUNDARY, in figura 3.6 si nota il progressivo danneggiamento
dell‟interlamina, come evidenziato dal raggiungimento del valore unitario del
parametro SDEG.

Modelli numerici
53
(a)
(b)
(c)
Figura 3.6 (a),(b),(c) Progressivo danneggiamento dell’interlamina

Capitolo 3
54
Questo modello implicito riesce a cogliere bene la rigidezza flessionale del
provino con soli 4 elementi nello spessore, ma rimane un modello di prova in
quanto una singola legge di danno coesiva non riesce a riprodurre bene il
comportamento della curva forza – spostamento reale.
Questo perché il fenomeno del fiber bridging comporta un aumento della
tenacità di Modo I al crescere della cricca (Figura 3.5), fino al valore di regime
utilizzato per calibrare la legge bi-lineare delle prove numeriche.
Il risultato è una sovrastima della forza di rottura, sino al progressivo
raggiungimento della curva sperimentale come da Figura 3.7.
Figura 3.7 Correlazione numerico sperimentale con una curva forza-spostamento di una
prova DCB eseguita
Come riportato alla fine del paragrafo 3.2.2, per poter riprodurre più fedelmente
la curva sperimentale di una prova DCB, il modello numerico deve impiegare
una legge di danno modificata introducendo un doppio strato di elementi coesivi
ognuno avente legge differente.

Modelli numerici
55
3.2.2 Modello di prova esplicito per test DCB
Il modello esplicito sviluppato per riprodurre le prove DCB, riproduce non solo
la geometria reale, ma anche il numero totale di plies del laminato pari a 48
(Figura 3.8).
Dovendo fornire da supporto per la conseguente modellazione delle prove ENF
ed ENF4 si è scelto inizialmente di infittire la griglia del modello, al fine di
valutare la sensitività rispetto a parametri quali:
il numero di sub-laminati riprodotti sino al limite della singola lamina
la dimensione in pianta degli elementi di interfaccia
i parametri del materiale UD utilizzato
Figura 3.8 Modello esplicito modellato con 48 plies
Il modello è composto da 48 membrane costituite di elementi shell S4R ad
integrazione ridotta, intervallati da strati di elementi brick C3D8R che
modellano l‟interfaccia come secondo l‟approccio descritto nel paragrafo 3.1.2.
Il provino ha le stesse dimensioni geometriche di quello implicito, ma oltre al
tipo di elementi impiegati, si è introdotto il carico in maniera differente.
Sono state riprodotte le cerniere di carico della macchina MTS tramite corpi
rigidi che vincolano tutti gli elementi corrispondenti alla zona di incollaggio.
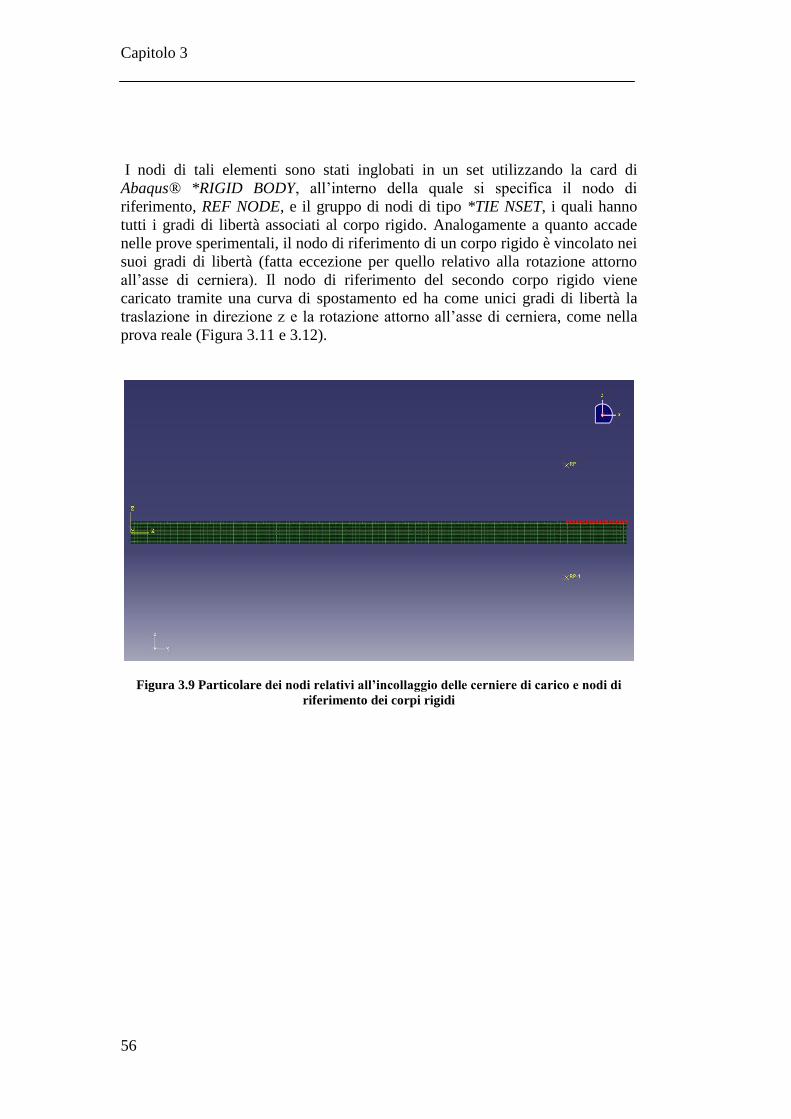
Capitolo 3
56
I nodi di tali elementi sono stati inglobati in un set utilizzando la card di
Abaqus® *RIGID BODY, all‟interno della quale si specifica il nodo di
riferimento, REF NODE, e il gruppo di nodi di tipo *TIE NSET, i quali hanno
tutti i gradi di libertà associati al corpo rigido. Analogamente a quanto accade
nelle prove sperimentali, il nodo di riferimento di un corpo rigido è vincolato nei
suoi gradi di libertà (fatta eccezione per quello relativo alla rotazione attorno
all‟asse di cerniera). Il nodo di riferimento del secondo corpo rigido viene
caricato tramite una curva di spostamento ed ha come unici gradi di libertà la
traslazione in direzione z e la rotazione attorno all‟asse di cerniera, come nella
prova reale (Figura 3.11 e 3.12).
Figura 3.9 Particolare dei nodi relativi all’incollaggio delle cerniere di carico e nodi di
riferimento dei corpi rigidi
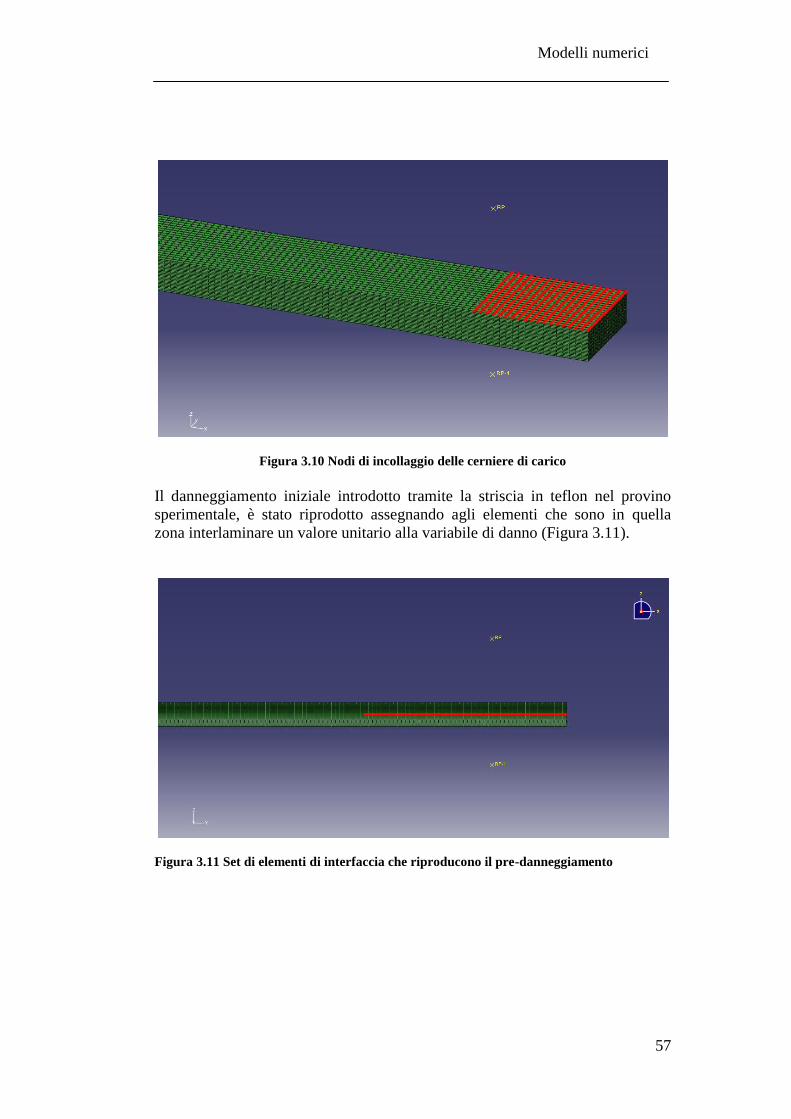
Modelli numerici
57
Figura 3.10 Nodi di incollaggio delle cerniere di carico
Il danneggiamento iniziale introdotto tramite la striscia in teflon nel provino
sperimentale, è stato riprodotto assegnando agli elementi che sono in quella
zona interlaminare un valore unitario alla variabile di danno (Figura 3.11).
Figura 3.11 Set di elementi di interfaccia che riproducono il pre-danneggiamento

Capitolo 3
58
Figura 3.12 Set di elementi pre-danneggiati
Si sono effettuate le analisi di sensitività sopra descritte, in particolare una volta
ottenuto il valore di GI = 0.75 [ 2] dalla riduzione dati, si è ridotto
progressivamente il numero delle lamine modellate, fino al dimezzamento del
valore iniziale, passando quindi a 24.
La sequenza di laminazione omogenea ha permesso la riduzione del numero di
sub-laminati, quindi da un modello inizialmente definito con un grado di
discretizzazione nello spessore a livello della singola lamina (48 lamine) si è
passati ad un modello caratterizzato da 24 sub-laminati definiti
dall‟accoppiamento di due lamine.
Non avendo riscontrato differenze, si è notato che il parametro che influenza
maggiormente la rigidezza flessionale del provino è la lunghezza iniziale della
cricca a0. Quest‟ultima è stata riprodotta fedelmente misurando la pre-apertura
effettuata sui provini sperimentali.
Le caratteristiche dei materiali modellati sono riportate in tabella 3.2..

Modelli numerici
59
Shell Brick
E1 [MPa] 47790 G12 [MPa] 10000
E2 [MPa] 13600 G23 [MPa] 5896
E3 [MPa] 10000 G13 [MPa] 5896
υ12= υ23= υ13 0.257 T [MPa] 25
G12 [MPa] 5896 S [MPa] 60
G23 [MPa] 5896 GIc [ 2] 0.75
G13 [MPa] 5896 th [mm] 0.416
Tabella 3.2 Caratteristiche degli elementi modellati
Nella Figura 3.13 si riporta graficamente il comportamento dell‟interlamina
interessata dal danneggiamento durante il suo sviluppo, si nota che lo sforzo σ33
assume valore pari a quello limite T in corrispondenza dell‟apice della cricca.
Figura 3.13 Andamento dello sforzo σ33 nell’apertura del provino
Questo modello porta ai medesimi risultati dell‟implicito (Figura 3.7 e 3.14), ma
ha permesso di avere una mesh completa e dettagliata di base per la
modellazione delle prove di Modo II descritte successivamente.
I risultati conseguibili con una modellazione a doppio coesivo sono riportati in
Figura 3.17.

Capitolo 3
60
Figura 3.14 Confronto curva forza-spostamento del modello esplicito con una prova
sperimentale al variare di GI
Figura 3.15 Confronto curve forza-spostamento tra i due modelli DCB descritti ed una
prova sperimentale
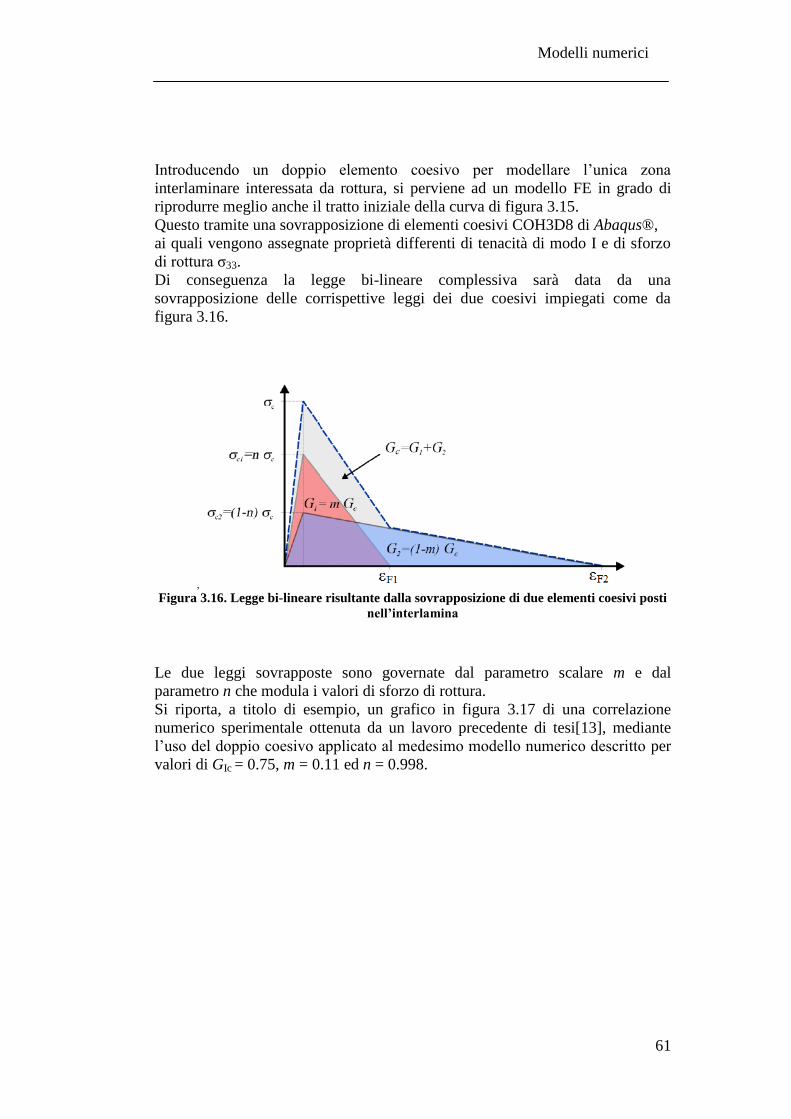
Modelli numerici
61
Introducendo un doppio elemento coesivo per modellare l‟unica zona
interlaminare interessata da rottura, si perviene ad un modello FE in grado di
riprodurre meglio anche il tratto iniziale della curva di figura 3.15.
Questo tramite una sovrapposizione di elementi coesivi COH3D8 di Abaqus®,
ai quali vengono assegnate proprietà differenti di tenacità di modo I e di sforzo
di rottura σ33.
Di conseguenza la legge bi-lineare complessiva sarà data da una
sovrapposizione delle corrispettive leggi dei due coesivi impiegati come da
figura 3.16.
,
Figura 3.16. Legge bi-lineare risultante dalla sovrapposizione di due elementi coesivi posti
nell’interlamina
Le due leggi sovrapposte sono governate dal parametro scalare m e dal
parametro n che modula i valori di sforzo di rottura.
Si riporta, a titolo di esempio, un grafico in figura 3.17 di una correlazione
numerico sperimentale ottenuta da un lavoro precedente di tesi[13], mediante
l‟uso del doppio coesivo applicato al medesimo modello numerico descritto per
valori di GIc = 0.75, m = 0.11 ed n = 0.998.

Capitolo 3
62
Figura 3.17 Effetto dell’impiego di doppio coesivo sui modelli DCB descritti
3.3 Modello numerico ENF a 3 punti
Il modello numerico di base è quello esplicito visto per le analisi DCB del
paragrafo 3.2.2. Si è utilizzata la medesima tecnica per la discretizzazione
dell‟interfaccia, ma i provini rappresentati sono diversi perché appartengono
alla serie 6 – 7, quindi presentano uno spessore più elevato (th = 10.4 mm) e di
conseguenza una rigidezza a flessione differente.
Le dimensioni sono 250 x 26 x 10.4 mm e si sono modellate 24 sub-laminati,
ognuno costituito dall‟accoppiamento di due lamine caratterizzati pertanto da
uno spessore pari a 0.433 mm (Figura 3.18).
Le dimensioni in pianta degli elementi sono 0.625 x 1.25 mm, ma aumentando
il valore in direzione x da 0.625 a 1.6 mm non si sono riscontrate differenze
sostanziali nella risposta del modello.

Modelli numerici
63
Figura 3.18 Modello esplicito ENF
Tutti i cilindri sono stati discretizzati con superfici rigide di rivoluzione legate
ad un nodo di riferimento, tramite la card *SURFACE, TYPE=REVOLUTION.
A tali nodi si impongono le condizioni di vincolo, in particolare i nodi di
rifermento dei cilindri inferiori sono stati vincolati rigidamente, mentre il nodo
di riferimento del cilindro superiore è stato lasciato libero di traslare in direzione
verticale z e di ruotare attorno all‟asse y di figura 3.18.
A quest‟ultimo viene assegnata una curva di velocità in direzione z tramite la
card *BOUNDARY, TYPE=VELOCITY (Figura 3.19).
I cilindri inferiori hanno diametro Φ = 20 mm, mentre quello superiore ha
Φ = 30 mm.
Da notare il progressivo aumento di velocità fino ad un valore costante, questo
permette di garantire l‟applicazione del carico in condizioni quasi statiche senza
eccitare troppo la dinamica del modello evitando in questo modo eventuali
oscillazioni nella risposta flessionale dello stesso.
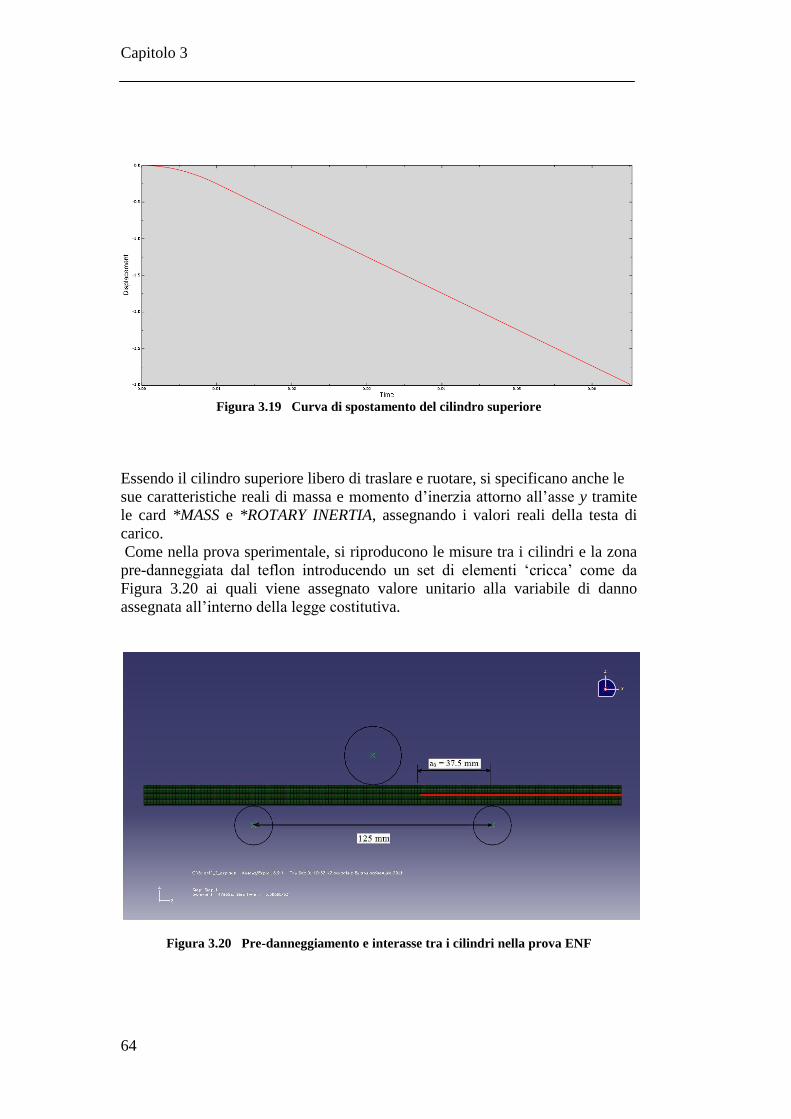
Capitolo 3
64
Figura 3.19 Curva di spostamento del cilindro superiore
Essendo il cilindro superiore libero di traslare e ruotare, si specificano anche le
sue caratteristiche reali di massa e momento d‟inerzia attorno all‟asse y tramite
le card *MASS e *ROTARY INERTIA, assegnando i valori reali della testa di
carico.
Come nella prova sperimentale, si riproducono le misure tra i cilindri e la zona
pre-danneggiata dal teflon introducendo un set di elementi „cricca‟ come da
Figura 3.20 ai quali viene assegnato valore unitario alla variabile di danno
assegnata all‟interno della legge costitutiva.
Figura 3.20 Pre-danneggiamento e interasse tra i cilindri nella prova ENF

Modelli numerici
65
Shell Brick
E1 [MPa] 47790 G12 [MPa] 5896
E2 [MPa] 13600 G23 [MPa] 5896
E3 [MPa] 10000 G13 [MPa] 5896
υ12= υ23= υ13 0.257 T [MPa] 25
G12 [MPa] 5896 S [MPa] 60 - 80
G23 [MPa] 5896 GIc [ 2] 0.75
G13 [MPa] 5896 GIIc [ 2] 1.6 - 2.2
th [mm] 0.433
Tabella 3.3 Caratteristiche dei materiali modellati
Per quanto riguarda il materiale assegnato agli elementi di tipo shell e quello
degli elementi C3D8R assegnato alla legge bi-lineare in Fortran®, rispetto alla
caratteristiche assegnate nel modello DCB esplicito, descritte al paragrafo 3.2.2,
si sono eseguite alcune modifiche quali:
incremento dello spessore assegnato ad ogni elemento di shell
incrementato a th = 0.433 mm per rappresentare due lamine di
composito unidirezionale
sforzo di rottura a taglio S in un intervallo 60 ≤ S ≤ 80 [MPa]
tenacità di modo II in un intervallo 1.6 ≤ GII ≤ 2.2 [KJ/m2]
questo ha permesso di effettuare su tali parametri degli studi di sensitività al
variare degli stessi.
Particolare attenzione è stata data anche alla simulazione dei contatti tra i
cilindri ed il provino. Dopo aver creato due set di elementi rispettivamente
comprendenti la membrana superiore ed inferiore del provino, si è introdotta una
pressione di contatto tramite la card:
*SURFACE BEHAVIOR, PRESSURE-OVERCLOSURE = EXPONENTIAL.
La pressione di contatto viene applicata con legge esponenziale a partire dal
momento in cui la distanza tra membrana e cilindro risulta inferiore ad un valore
di clearance impostato dall‟utente (Figura 3.21).
Tale valore viene assegnato tenendo conto che lo spessore degli elementi shell si
ripartisce metà al di sopra e metà al di sotto del proprio piano medio come da
Figura 3.1.

Capitolo 3
66
Infine si è introdotto un coefficiente di attrito tra membrane di contatto e
cilindri, per limitare le traslazioni longitudinali del provino, ovvero lungo
l‟asse x.
Figura 3.21 Andamento della legge di pressione di contatto tra i cilindri e le superfici di
contatto del provino
Nel seguito si riportano delle Figure (3.22) che mostrano l‟andamento della
delaminazione nella prova ENF simulata ed un esempio di diagramma forza –
spostamento ottenuto (Figura 3.23) correlato ad una prova sperimentale.
(a)

Modelli numerici
67
(b)
(c)
Figura 3.22 (a),(b),(c), Progressiva propagazione del danno interlaminare

Capitolo 3
68
Figura 3.23 Curva forza-spostamento del modello numerico ENF
Gli elementi di interfaccia hanno rigidezza solo fuori dal piano, come esposto in
tabella 3.3, quindi nel caso in esame lo sforzo che porta a rottura l‟interlamina è
il taglio τ13. La Figura 3.24 mostra l‟andamento di tale sforzo nell‟interlamina,
confermando il fatto che il modello numerico riproduce la condizione reale in
cui tale sforzo raggiunge il suo valore massimo all‟apice della cricca, come da
Figura 3.24, 3.25.
Figura 3.24 Andamento dello sforzo di taglio τ13 nell’interlamina

Modelli numerici
69
Figura 3. 25 Particolare dello stato di sforzo a taglio τ13 dell’apice della cricca
3.4 Modello numerico ENF a 4 punti
Il modello numerico della prova ENF4 è lo stesso del paragrafo 3.3 a parte la
modellazione del cilindro di carico superiore essendo una prova a 4 punti.
Quest‟ultimo viene sostituito da due cilindri di carico modellati in Abaqus®
attraverso una superficie rigida collegata ad un nodo di carico sopra di essa
(Figura 3.26) il quale è posizionato alla quota reale dell‟asse di cerniera.
Figura 3.26 Modello numerico ENF4

Capitolo 3
70
Riproducendo i due cilindri superiori come nella prova reale, si sono riscontrati
problemi di connessione al nodo che simula la cerniera di introduzione del
carico. La superficie rigida superiore (forcella) è stata quindi introdotta per
risolvere questo problema, visto che il nodo di carico ha 2 gradi di libertà (la
traslazione in z e la rotazione attorno all‟asse y).
Come per la prova ENF si sono assegnate le reali proprietà inerziali alla forcella
di carico tramite le card di Abaqus® sopraccitate (paragrafo 3.3).
La legge di spostamento imposta è la medesima del modello ENF moltiplicata
per un coefficiente che ne scala il valore rendendo la discesa della forcella
leggermente più lenta, questo perché si sono riscontrate maggiori oscillazioni
dovute alla dinamica del modello (Figura 3.27).
Visti i tempi di calcolo notevoli, si è introdotto un aumento fittizio di massa nel
modello tramite la card *FIXED MASS SCALING.
Questa permette di agire sul passo temporale di integrazione necessario alla
stabilizzazione dello schema esplicito, che può essere leggermente incrementato
rispetto al valore iniziale stimato dal solutore. In questo modo il codice
Abaqus® incrementa in automatico la percentuale totale di massa del modello in
modo da rendere stabile l‟analisi con il passo di integrazione indicato
dall‟utente. L‟introduzione di massa fittizia nel modello giustifica ulteriormente
le modifiche effettuate alla legge di carico della forcella riportata in figura 3.27,
infatti, l‟uso della card *FIXED MASS SCALING porta di default ad un
incremento della risposta vibratoria a flessione del modello.
Figura 3.27 Curva di spostamento della forcella superiore

Modelli numerici
71
Si riportano nelle Figure 3.28 ( a, b, c, d ) le immagini relative all‟avanzamento
del fronte di danneggiamento nel provino:
(a)
(b)

Capitolo 3
72
(c)
(d)
Figura 3.28 (a,b,c,d) Progressiva propagazione della delaminazione nella prova ENF4
Anche in questo caso il modello risponde bene nel simulare lo stato di sforzo
locale nel fronte di danno, infatti, rappresentando lo sforzo di taglio τ13 si
ritrovano i valori massimi nell‟apice della cricca come da Figure 3.29 e 3.30.

Modelli numerici
73
Figura 3.29 Andamento dello sforzo di taglio τ13
Figura 3.30 Sforzo di taglio τ13 all’apice della cricca

Capitolo 3
74
Si riporta in Figura 3.31 un tipico andamento della simulazione di prova Four-
Point End-Notched Flexture:
Figura 3.31 Curva forza – spostamento del modello numerico ENF4
si nota un primo andamento lineare ed un successivo cambio di pendenza
mentre propaga il danno interlaminare. L‟andamento in questo secondo tratto
conferma i dati di una crescita della tenacità durante la prova.

75
4. Confronto dei risultati tra le attività
numeriche e sperimentali
4.1 Prove ENF
Nelle figure successive si riportano le correlazioni numerico - sperimentali in
termini di risposta forza spostamento per le diverse serie di provini adottati nelle
prove End-Notched Flexure a tre punti al variare del valore di tenacità di
Modo II.
Figura 4.1 Confronto curve forza – spostamento tra serie 6 e modelli numerici

Capitolo 4
76
Figura 4.2 Confronto curve forza – spostamento tra serie 7 e modelli numerici
Dalle Figure 4.1 e 4.2 si evince che il modello numerico riproduce perfettamente
la rigidezza flessionale ed è in grado di prevedere il carico limite oltre il quale si
apre il fronte di danneggiamento.
La versatilità del modello numerico permette di avere una buona stima del
comportamento in regime instabile della propagazione del danno reale a patto di
considerare valori di tenacità GII compresi tra 1.8 e 2.0 [KJ/m2]. Tali valori sono
superiori a quelli ottenuti con i modelli analitici riportati nel capitolo 3, ma
come vedremo, sono in linea con i valori di tenacità utilizzati nelle simulazioni
delle ENF4.
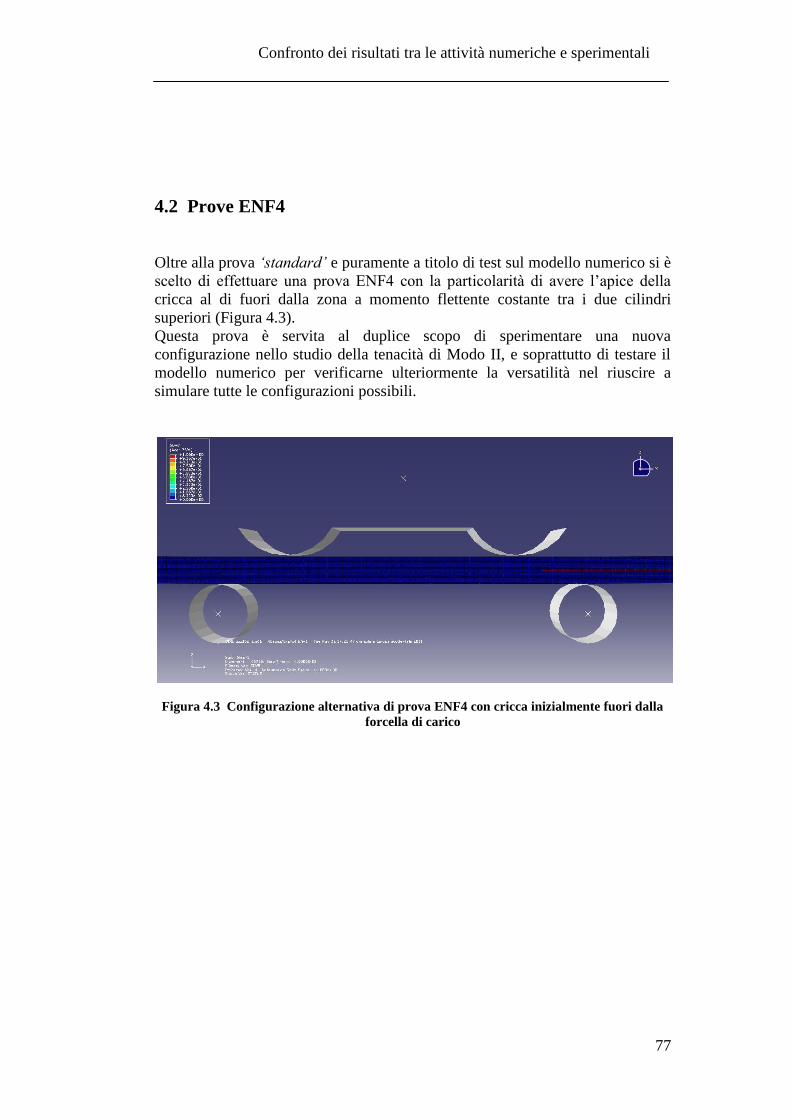
Confronto dei risultati tra le attività numeriche e sperimentali
77
4.2 Prove ENF4
Oltre alla prova ‘standard’ e puramente a titolo di test sul modello numerico si è
scelto di effettuare una prova ENF4 con la particolarità di avere l‟apice della
cricca al di fuori dalla zona a momento flettente costante tra i due cilindri
superiori (Figura 4.3).
Questa prova è servita al duplice scopo di sperimentare una nuova
configurazione nello studio della tenacità di Modo II, e soprattutto di testare il
modello numerico per verificarne ulteriormente la versatilità nel riuscire a
simulare tutte le configurazioni possibili.
Figura 4.3 Configurazione alternativa di prova ENF4 con cricca inizialmente fuori dalla
forcella di carico
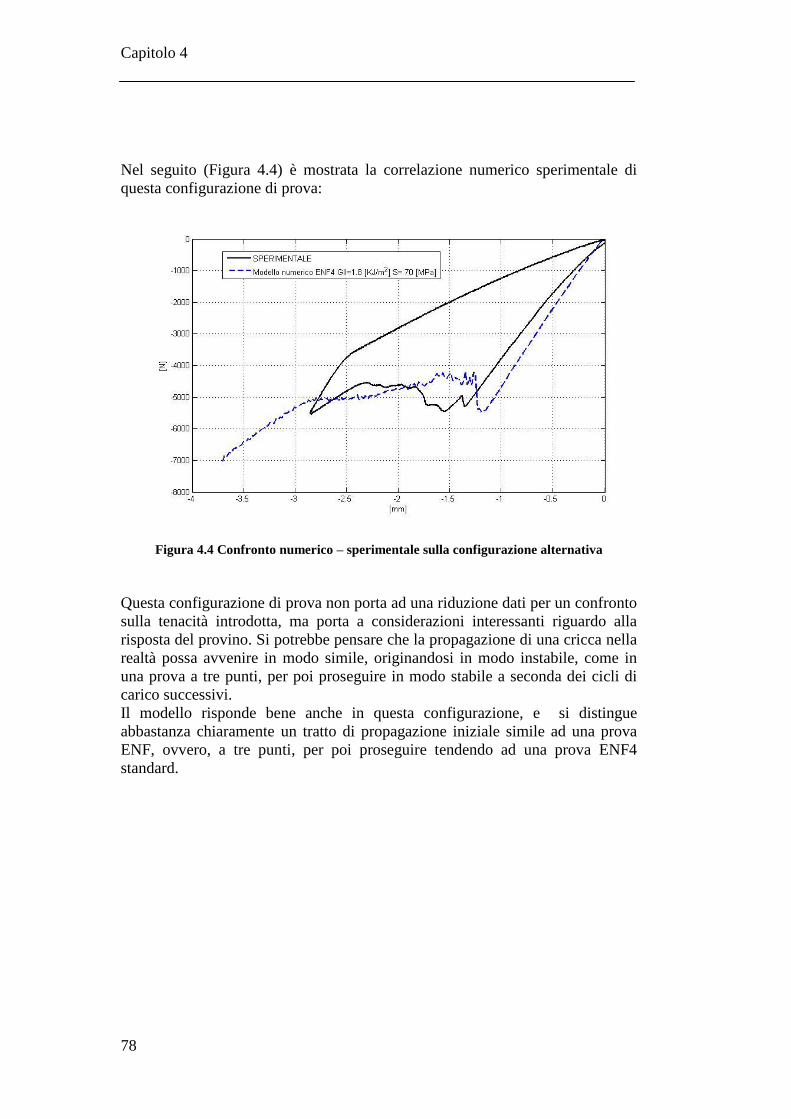
Capitolo 4
78
Nel seguito (Figura 4.4) è mostrata la correlazione numerico sperimentale di
questa configurazione di prova:
Figura 4.4 Confronto numerico – sperimentale sulla configurazione alternativa
Questa configurazione di prova non porta ad una riduzione dati per un confronto
sulla tenacità introdotta, ma porta a considerazioni interessanti riguardo alla
risposta del provino. Si potrebbe pensare che la propagazione di una cricca nella
realtà possa avvenire in modo simile, originandosi in modo instabile, come in
una prova a tre punti, per poi proseguire in modo stabile a seconda dei cicli di
carico successivi.
Il modello risponde bene anche in questa configurazione, e si distingue
abbastanza chiaramente un tratto di propagazione iniziale simile ad una prova
ENF, ovvero, a tre punti, per poi proseguire tendendo ad una prova ENF4
standard.

Confronto dei risultati tra le attività numeriche e sperimentali
79
Il confronto tra modello numerico e curve sperimentali sulle prove Four Point-
End Notched Flexure, è avvenuto effettuando uno studio di sensitività rispetto
alla tenacità interlaminare di Modo II, e rispetto allo sforzo di taglio a rottura.
In Figura 4.5 e successive si riportano i risultati delle simulazioni numeriche al
variare dei parametri indicati:
Figura 4.5 Sensitività della curva forza-spostamento al variare di GII per sforzo di taglio
limite di S = 80 [MPa ]

Capitolo 4
80
Figura 4.6 Sensitività della curva forza-spostamento al variare dello sforzo di taglio limite
S per tenacità GII = 1.8 [KJ/m2]
Dalle Figure 4.5 e 4.6 emerge una scarsa sensitività della curva al valore di
sforzo di rottura S, mentre il valore di tenacità influenza maggiormente il valore
di picco della forza, dopo il quale parte la propagazione del fronte di danno,
zona in cui varia sensibilmente la pendenza della curva.
Da notare inoltre che il valore della forza è sempre crescente, anche durante
l‟inizio del danneggiamento. Questo perché, dopo il tratto iniziale in cui il
provino risponde elasticamente, la cricca propaga e la tenacità di Modo II
continua ad aumentare confermando l‟andamento delle curve analitiche riportate
nella riduzione dati nel capitolo 3.
Si riporta in Figura (4.7) la correlazione tra le prove della serie 6 e 7 con le
corrispettive numeriche al variare di GII, con valore di S = 70 [MPa]:

Confronto dei risultati tra le attività numeriche e sperimentali
81
Figura 4.7 Correlazione numerico sperimentale al variare di GII
Si noti che le curve numeriche riproducono molto bene la prova sperimentale in
tutti i tratti, sia nella zona elastica che durante la propagazione della
delaminazione, ed inoltre ritrovano anche la pendenza finale e del tratto di
scarico del provino.
I valori di tenacità migliori nel generare le curve numeriche si attestano su valori
maggiori di almeno il 12.5% considerando un valore medio espresso dalla
riduzione dati intorno a GII = 1.6 [KJ/m2].
Questo dato porta ad effettuare ulteriori considerazioni importanti.
Da quanto riportato in letteratura[10],[11], ad influenzare considerevolmente il
valore di tenacità di modo II è il contenuto percentuale di fibre di vetro nel
laminato a seguito del trattamento termico di formatura.
Questo dato percentuale è legato strettamente al quantitativo di resina negli strati
interlaminari del pannello finale.
Una percentuale volumetrica bassa di fibre (40 - 45%) porta ad avere un
laminato caratterizzato da strati interlaminari ricchi di resina.
Secondo lo studio riportato diretta conseguenza di questo è un decadimento dei
valori di tenacità a partire da GII = 3.04 [KJ/m2] per un contenuto volumetrico di
fibre del 40-45%, fino ad un valore di GII = 1.64 [KJ/m2] per un contenuto di
fibre maggiore del 55%.
Questi dati dimostrano l‟elevata sensitività dei valori di tenacità in Modo II
rispetto al contenuto di resina negli strati interlaminari, fino ad una variazione
percentuale dell‟ordine del 50%. Diventa utile quindi analizzare il quantitativo

Capitolo 4
82
della resina dopo aver effettuato le prove ENF4 tramite scioglimento della stessa
per ricavare la massa delle fibre presenti, e di conseguenza il rapporto
volumetrico.
Nell‟analizzare il grafico di Figura 4.7, bisogna inoltre considerare che la
attrezzatura di prova ENF4 descritta al capitolo 2, presenta alcune limitazioni
dovute alla presenza di attriti interni e non molto precisa possibilità di effettuare
una corretta lettura dell‟avanzamento del fronte di danno.
Il tutto si potrebbe riflettere nella valutazione della cedevolezza del provino che
potrebbe inficiare leggermente i valori di riduzione dati nel calcolo della
tenacità.

83
Conclusioni e sviluppi futuri
I pannelli in fibra di vetro prodotti presentano spessore costante e si prestano
molto bene allo studio di tenacità attraverso prove sperimentali di
caratterizzazione.
I provini da essi ricavati ed impiegati nell‟attività sperimentale hanno quindi
permesso il conseguimento e la successiva elaborazione di valori utili ai fini
della stima della tenacità interlaminare di Modo I e II per mezzo di specifiche
tecniche di riduzione dati.
Le formulazioni analitiche hanno consentito quindi di ricavare valori di GII per
la messa a punto dei modelli numerici espliciti che simulano le prove
sperimentali ENF4 mediante il codice Abaqus Explicit.
I modelli FE hanno visto l‟impiego di una innovativa tecnica per la simulazione
degli strati interlaminari interessati dal danneggiamento. Tale tecnica, sviluppata
all‟interno del Dipartimento di Ing. Aerospaziale del Politecnico di Milano,
prevede l‟utilizzo di elementi coesivi di interfaccia non convenzionali con legge
costitutiva bi-lineare assegnata. Partendo dai dati iniziali ricavati dalle prove
sperimentali, si è effettuata una successiva analisi di sensitività, riguardo le
caratteristiche del materiale impiegato per simulare l‟interfaccia, arrivando al
conseguimento di un‟ottima correlazione numerico - sperimentale sulle prove
Four-Point End-Notched Flexure, e quindi alla messa a punto di un modello FE
molto versatile. Esso rappresenta quindi un ottimo strumento di indagine per
successive prove di tenacità offrendo un confronto immediato con i valori di
deformazioni locali all‟interno dell‟interlamina rilevati dai sensori ottici
inglobati nei provini testati.
La correlazione numerico sperimentale in termini di deformazioni locali a
livello interlaminare, permetterà l‟interpretazione corretta dei segnali forniti dai
sensori ottici inglobati nel laminato per poter sviluppare un sistema completo di
Health Monitoring su componenti reali.
Per quanto concerne possibili espansioni future della materia, saranno utili
successivi studi sulla relazione intercorrente tra la legge di danno, che regola il
comportamento dell‟interlamina, e il quantitativo di resina nei pannelli prodotti
in termini di densità volumetrica a livello interlaminare.
In una prospettiva di sviluppo di un sistema SHM, sarà altresì opportuno
modificare l‟apparato delle prove sperimentali ENF4 per comprendere il legame
intercorrente tra i risultati ottenuti dalle prove stesse e la geometria dei provini,
verificando, inoltre, possibili effetti non desiderati introdotti dall‟attrezzatura di
carico durante lo svolgimento della prova.

84
Offrendo tale prova sperimentale una propagazione stabile del danneggiamento
interlaminare, sarebbe utile sviluppare un sistema video che consenta il
monitoraggio continuo e di dettaglio del danneggiamento stesso.
La prova ENF4 è un‟ottima prova per lo studio della tenacità di modo II, un
campo di esplorazione potrebbe essere rappresentato inoltre dall‟impiego della
medesima prova in condizioni di carico a fatica finalizzate alla previsione della
vita residua del componente al variare delle sue proprietà, quali: composizione
del laminato, geometria e procedura di realizzazione tecnologica.
Questo permetterebbe insieme al modello FE sviluppato, di avere un sistema
integrato SHM capace di valutare il danneggiamento rilevato dai sensori, con
conseguente stima della vita residua del componente in tempo reale
incrementando i livelli di sicurezza arrivando a livello di Usage Monitoring.

85
Bibliografia
[1] K. Friedrich, editor. Application of Fracture Mechanics to Composite
Materials, volume 6 of Composite Materials Series. Elsevier Science
Publishers, B. V., 1989.
[2] ASTM International. D5528-01 Standard Test Method for Mode I
Inter-laminar Fracture Toughness of Unidirectional Fiber-Reinforced
Polymer Matrix Composites, 2007.
[3] ASTM International. D 6671 Standard Test Method for Mixed Mode I-
Mode II Interlaminar Fracture Toughness of Unidirectional Fiber
Reinforced Polymer Matrix Composites, 2006.
[4] Alessandro Airoldi, Giuseppe Sala, Paolo Bettini. Evaluation of numerical
approaches for the development of interlaminar damage in composite
laminates. Department of Aerospace Engineering, Politecnico di
Milano, Italy, 2009
[5] Alessandro Airoldi, Andrea Baldi, Matteo Daleffe, Giuseppe Sala, Marco
Basaglia. Analyses of delamination in composite laminates in standard
tests and low energy impacts. XX AIDAA Congress Milano - Italy,
2009.
[6] A. Baldi, A. Airoldi, P. Domenichini, M. Crespi, G. Sala.Analysis of
progressive failure of composite T-joints. . Department of Aerospace
Engineering, Politecnico di Milano, Italy, 2010
[7] A. J. Brunner and P. Fl eler. Prospects in fracture mechanics of “en-
gineering" laminates. Engineering Fracture Mechanics, (72):899-908,
2005

86
[8] A.B. de Morais. Double cantilever beam testing of multi-directional
laminates. Composites Part A, (12):1135-1142, 2003.
[9] A. Turon , C.G. Davila , P.P. Camanho , J. Costa. An engineering solution
for mesh size effects in the simulation of delamination using cohesive zone
models. Composites Science and technology,2006
[10] Chengye Fan , P.-Y. Ben Jar , J.-J. Roger Cheng. Revisit the analysis of
end-notched-flexure (ENF) specimen. Composites Science and technology,
2006.
[11] P. Davies a, P. Casari, L.A. Carlsson. Influence of fibre volume fraction
on mode II interlaminar fracture toughness of glass/epoxy using the 4ENF
specime. Composites Science and technology, 2005
[12] D. Riva. Modellazione dei fenomeni di delaminazione in laminati in
composito. Politecnico di Milano, 2003.
[13] M.A. Arienti, Modellazione del danno in pale di elicottero per lo sviluppo
di sistemi di monitoraggio strutturale, Politecnico di Milano, 2010
[14] P. Domenichini, Invasività di attuatori piezoceramici inglobati in laminati
in composito: influenza sulla tenacità interlaminare. Politecnico di
Milano, 2008
[15] D. Roach and K. Rackow, Health Monitoring of Aircraft Structures using
Distribuited Sensor Systems, High-Performance Composites, 2007.
[16] W. J. Staszewski, S. Mahzan and R. Traynor, Health Monitoring of
Aerospace Composite Structures – Active and Passive Approach,
Composites Science and Technology 69, 1678-1685, 2009.

87
[17] D. Betz, G. Thursby, B. Culshaw and W. Staszewski, Structural Damage
Location with Fiber Bragg Grating Rosettes and Lamb Waves, Structural
Health Monitoring 6, 299-308, 2007.
[18] M. Mousumi, T. K. Gangopadhyay, A. K. Chakraborty, K. Dasgupta and
D. K. Bhattacharya, Fibre Bragg Gratings in Structural Health
Monitoring – Present Status and Applications, Sensor and Actuators A
147, 150-164, 2008
[19] Dassault Systèmes Simulia, Abaqus Keywords Reference Manual: Volume
I-II, PDF Documentation - Version 6.8, 2008.
[20] R. H. Martin and B. D. Davidson. Mode II fracture toughness evaluation
using four point bend, end notched flexure test. Plastics, Rubber and
Composites, 28(8):401-406, 1999.
[21] A. Airoldi and G. Sala. Modelling of composite interlaminar damage in
explicit FEM codes. Politecnico di Milano
[22] Y. Mi, M. A. Crisfield, G. A. O. Davies, and H. B. Hellweg. Progressive
delamination using interface elements. Journal of Composite Materials,
32(14):1246-1272, 1998
[23] Clara Schuecker, Barry D. Davidson. Evaluation of the accuracy of the
four-point bend end-notched flexure test for mode II delamination
toughness determination.
[24] Clara Schuecker, Barry D. Davidson . Effect of friction on the perceived
mode II delamination toughness from three- and four-point bend end-
notched flexure tests. In: Grant PE, Rousseau CQ, editors. Composite
structures: Theory and Practice, ASTM STP 1383, American Society for
Testing and Materials, 2000, pp. 334-344

88
[25] Hillerborg A, Mode´er M, Petersson PE. Analysis of crack formation and
crack growth in concrete by means of fracture mechanics and finite
elements. Cement Concr Res 1976;6:773–82