Sistemi elettronici distribuiti in...
8
________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica) Sistemi elettronici distribuiti in Automotive Stefano Maggi Politecnico di Milano (Dip. Ingegneria Elettrica) L’ampio incremento dei Sistemi elettronici distribuiti nel settore automobilistico e veicolare, accoppiato con una sempre maggiore richiesta di potenza e comfort, ha creato una serie di nuove opportunità e sfide ingegneristiche. Molti veicoli prodotti in serie sono già dotati di un elevato numero di controlli elettronici. L’aumento della presenza dell’elettronica nei veicoli è dovuto, da un lato, ad una continua crescita di richieste da parte dei clienti che esigono maggiore sicurezza durante la guida e maggiore comfort e dall’altro, alle leggi che mirano a migliorare il comportamento dei gas di scarico ed a ridurre il consumo di combustibile. Le centraline elettroniche che soddisfano a questi requisiti sono da tempo in uso nell’ambito del controllo dei motori, dei cambi, delle valvole e anche come sistema antibloccaggio (ABS) o come sistema antislittamento (ASR). La complessità delle funzioni svolte, a tale proposito, rende necessario lo scambio di dati fra le centraline. In un recente passato, la trasmissione dei dati avveniva in modo convenzionale attraverso conduttori di segnale dedicati: cablaggio di tipo “point-to- point”. A tale proposito è necessario un certo dispendio soprattutto in termini di cavi, terminali e connettori considerando la complessità delle funzioni delle centraline. In particolare capita nel caso di centraline più complesse, di avere sezioni di cablaggio multicavo maggiori di quelle di un braccio umano! (Fig. 1). Fig. 1: Esempio di complessità di un cablaggio tradizionale Prendendo in considerazione le direttive di sviluppo future, che hanno come scopo l’ottimizzazione del veicolo nel suo insieme, si devono superare i limiti dati dall’accoppiamento convenzionale delle centraline e da altri dispositivi elettrici ed elettronici presenti a bordo.
Transcript of Sistemi elettronici distribuiti in...

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
Sistemi elettronici distribuiti in Automotive
Stefano Maggi Politecnico di Milano (Dip. Ingegneria Elettrica)
L’ampio incremento dei Sistemi elettronici distribuiti nel settore automobilistico e veicolare, accoppiato con una sempre maggiore richiesta di potenza e comfort, ha creato una serie di nuove opportunità e sfide ingegneristiche. Molti veicoli prodotti in serie sono già dotati di un elevato numero di controlli elettronici. L’aumento della presenza dell’elettronica nei veicoli è dovuto, da un lato, ad una continua crescita di richieste da parte dei clienti che esigono maggiore sicurezza durante la guida e maggiore comfort e dall’altro, alle leggi che mirano a migliorare il comportamento dei gas di scarico ed a ridurre il consumo di combustibile. Le centraline elettroniche che soddisfano a questi requisiti sono da tempo in uso nell’ambito del controllo dei motori, dei cambi, delle valvole e anche come sistema antibloccaggio (ABS) o come sistema antislittamento (ASR). La complessità delle funzioni svolte, a tale proposito, rende necessario lo scambio di dati fra le centraline. In un recente passato, la trasmissione dei dati avveniva in modo convenzionale attraverso conduttori di segnale dedicati: cablaggio di tipo “point-to-point”. A tale proposito è necessario un certo dispendio soprattutto in termini di cavi, terminali e connettori considerando la complessità delle funzioni delle centraline.
In particolare capita nel caso di centraline più complesse, di avere sezioni di cablaggio multicavo maggiori di quelle di un braccio umano! (Fig. 1).
Fig. 1: Esempio di complessità di un cablaggio
tradizionale Prendendo in considerazione le direttive di sviluppo future, che hanno come scopo l’ottimizzazione del veicolo nel suo insieme, si devono superare i limiti dati dall’accoppiamento convenzionale delle centraline e da altri dispositivi elettrici ed elettronici presenti a bordo.

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
2
Questo è possibile solo se si collegano in rete le componenti del sistema complessivo a bordo del veicolo, mediante una struttura a comunicazione seriale di dati su bus. Come le LANs collegano computers, queste reti seriali di controllo collegano i dispositivi elettrici ed elettronici dei veicoli. La riduzione e la facilità del cablaggio, aumentano le prestazioni e l’affidabilità del veicolo e riducono una sua caratteristica molto importante: il peso. Si è calcolato che in un veicolo per ogni 50Kg di cavi si ha un incremento del consumo di carburante di 0.2 litri per ogni 100Km percorsi. Le reti di controllo e di comunicazione di oggi, basate su protocolli seriali, sono la migliore risposta a questo complesso problema, soprattutto dovuto a un cablaggio tradizionale. La comunicazione seriale nei veicoli ha 4 importanti campi di impiego:
� collegamento in rete di centraline per la regolazione del motore, cambio e freni. La velocità di trasmissione dei dati corrisponde a valori tipici per le applicazioni in tempo reale da 200Kbit/s a 1Mbit/s.
� collegamento in rete di componenti dell’elettronica della carrozzeria e del comfort. Un esempio di queste applicazioni è costituito dal controllo delle luci, dal climatizzatore, dalla chiusura centralizzata e dalla regolazione dei sedili e degli specchi. Particolare attenzione viene data, a questo proposito, ai costi dei componenti utilizzati nei nodi della rete. Le velocità di trasmissione dati corrispondono, in questo caso, a circa 50Kbit/s non avendo la necessità di rapide comunicazioni.
� collegamento in rete di applicazioni multimedia, quali l’autoradio, il telefono, dispositivi di navigazione, lettori CD ecc… con un’unità di comando centrale a struttura ergonomica.
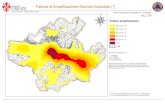
Fig. 2: Un esempio di moderna architettura all’interno del veicolo

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
3
� diagnosi a bordo. E’ necessaria la presenza di una rete di controllo e diagnostica per la sicurezza di buon funzionamento dei sistemi.
Nel settore Automotive, soprattutto per motivi di spazio, i principali requisiti del bus di campo riguardano la miniaturizzazione dei dispositivi e, a causa dell’elevata irradiazione di disturbi, la protezione della trasmissione. Pari importanza riveste inoltre, la robustezza meccanica dei dispositivi di campo. Nella trasmissione di brevi stringhe è richiesto un tempo di ritardo dei messaggi particolarmente ridotto (<1ms). Inoltre, si rende necessario un rapido meccanismo di comunicazione “event-driven”, ad esempio quello utilizzato nei sistemi multi-master. Nelle applicazioni di questo tipo, risulta particolarmente idonea una topologia bus con un’estensione di circa 10-40m. Ogni dispositivo di campo deve essere rapidamente in grado di gestire i messaggi (ad esempio gli allarmi) in maniera indipendente. Determinate parti del veicolo (ad esempio il vano motore) presentano intervalli di temperatura compresi fra -30° e 120°C. Queste severe condizioni ambientali, rendono necessaria per lo meno la classe di protezione IP65. In questo ambito non si possono utilizzare dispositivi di campo a sicurezza intrinseca.
CAN Nella seconda metà degli anni ’80, Bosch ha sviluppato il “Controller Area Network” (CAN) una delle prime, più resistenti e oggi più utilizzate reti di controllo in automotive. La rete ha una struttura del tipo Master/Slave, dove un nodo master della rete assume il controllo dell’accesso al bus interrogando ciclicamente in sequenza gli altri nodi (slave) (Fig. 3). Una tipica struttura all’interno del veicolo, può contenere 2 o 3 separate reti CAN operanti a differenti velocità di trasmissione dati.
Le basse velocità (<125Kbit/s) vengono normalmente utilizzate per gestire i comfort e i dispositivi secondari dell’autovettura, per esempio regolazione sedili, specchi, finestrini ecc… In questo caso è possibile anche un funzionamento in “sleep mode” che permette un arresto degli oscillatori dei rispettivi nodi fino a quando un nuovo messaggio diretto al nodo interrogato lo riattiva. Con questa modalità si ottiene un risparmio energetico della batteria, evitando premature scariche. Le alte velocità (fino a 1Mbit/s) vengono utilizzate per la gestione complessiva dei dispositivi del motore, per il controllo dei freni, per il sistema di guida, ecc…cioè per tutti quei sistemi in cui si richiedono brevissimi tempi di attuazione e/o di acquisizione. Per l’elevata velocità di trasferimento dati è necessaria una schermatura del bus contro le radiazioni elettromagnetiche presenti. Nel CAN il bus non viene occupato secondo uno schema predefinito: l’accesso al bus è di tipo casuale. Tutti i componenti collegati sul bus hanno gli stessi diritti (peer-to-peer), “ascoltano” in parallelo tutti i messaggi, sono sempre pronti a ricevere e, quando necessario, iniziano a trasmettere se nessun altro componente sta inviando messaggi sul bus in quel momento. Si rende quindi necessario, un sistema di controllo che arbitra gli accessi: è il “Carrier Sense Multiple Access”. Il vantaggio è dato dalla possibilità di attuare la comunicazione “event-driven”, ossia la trasmissione viene inizializzata solo quando necessario. Il contenuto di una comunicazione (per esempio il numero di giri o la temperatura del motore, un comando di un attuatore ecc...) viene contrassegnato da un identificatore inequivocabile in tutta la rete. L’identificatore determina anche la priorità del messaggio: questo è molto importante per l’assegnazione del bus, quando esistono più nodi che concorrono per il diritto di accesso al bus. Rispetto ad un accesso al bus di tipo deterministico, questa soluzione comporta un carico medio molto inferiore sul bus ed un tempo di latenza molto breve. Per contro,

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
4
nella comunicazione “event-driven”, i tempi di risposta non sono definibili proprio per la natura del tipo di accesso.
LIN Alla fine degli anni ’90 un gruppo di lavoro, formato da 5 aziende automobilistiche (Audi, BMW, Daimler-Chrysler, Volvo e Volkswagen), da un’azienda di informatica (Volcano Communication Technologies) e da un’azienda di semiconduttori (Motorola), hanno creato un consorzio con l’obiettivo di realizzare un nuovo protocollo di comunicazione seriale a basso costo (soprattutto per veicoli), dove la larghezza di banda e la versatilità del CAN non sono richieste. E’ il LIN (Local Interconnect Network) che fornisce una comunicazione seriale su bus costituito da un singolo filo con una bassa velocità di trasferimento dati (20Kbit/s). Questo protocollo è complementare al CAN, ma non lo sostituisce. Il LIN viene utilizzato come sottorete locale del CAN: per esempio per il controllo degli azionamenti dei finestrini, specchi, sedili, tergicristalli, luci, monitoraggio di temperature, ecc… Le principali caratteristiche di questo protocollo sono le seguenti: • ha una configurazione single-master
multiple-slave, quindi non è direttamente compatibile col CAN e richiede un nodo di interfaccia (Fig. 4)
• come conseguenza del tipo di configurazione, non è necessario un sistema di arbitraggio
• è una rete a basso costo (single-wire) e la sua implementazione è basata su una comune interfaccia hardware UART/SCI
• la mancanza di oscillatori ceramici o al quarzo nei nodi slave, in quanto si utilizza un proprio meccanismo di sincronizzazione (riduzioni costi dei nodi)
• la bassa velocità di trasferimento (fino a 20Kbit/s) limita i problemi di interferenza elettromagnetica (EMI)
• garanzia sui tempi di latenza Un nodo di rete LIN non ha informazioni circa la configurazione del sistema complessivo, eccetto per il nodo master. Questo porta ad una importante conseguenza: i nodi LIN possono essere aggiunti anche in tempi successivi alla configurazione di rete, senza modifiche hardware e/o software in altri nodi slave. Questo è un grande vantaggio che offre questo protocollo di rete dal punto di vista della semplicità e flessibilità.
Fig. 3: Esempio di topologia della rete CAN
Letteratura internazionale, convegni e reports di aziende interessate, confermano il LIN, abbinato al CAN, come standard nel campo della comunicazione seriale via bus in automotive.
Fig. 4: Esempio di topologia della rete LIN

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
5
Continuando la panoramica sui principali protocolli, si può menzionare quello americano del J1850 nella versione –SPC di Ford e nella versione –DLC di GM/Delco. Questo protocollo, a bassa velocità di trasferimento dati, non è uno standard automobilistico e lo si sta abbandonando già da qualche anno. Lo stesso discorso può valere per il protocollo giapponese PalmNet e per quello francese VAN. In particolare quest’ultimo è stato utilizzato da Renault e PSA fino alla metà degli anni ’90, scegliendo successivamente il CAN come protocollo utilizzato.
TTP Progettato per sistemi distribuiti in real-time che sono critici e “tolleranti ai guasti”, il TTP (Time Triggered Protocol) assicura che non ci siano punti di guasto o difetti nel sistema. La tolleranza ai difetti (Fault Tolerance) è la capacità di un sistema di operare anche in presenza di difetti. Questo può essere ottenuto solo con l’uso della “ridondanza”. Questa è ogni sorta di risorsa che non sarebbe necessaria se il sistema fosse senza errori. La ridondanza si presenta sotto forma di circuiti addizionali hardware o come aggiunta di codice in un programma. Il protocollo è nato alla fine degli anni ’90, in ambiente universitario (University of Vienna) e in collaborazione con la TTTech Computertechnik GmbH. Questo protocollo è stato proposto per sistemi alternativi alla frenatura idraulica e/o meccanica tradizionale oppure applicato a sistemi sterzanti. Quindi è adatto per quelle applicazioni dove si ha la necessità di una elevatissima sicurezza e affidabilità. A questo proposito si possono accennare (in quanto da solo l’argomento meriterebbe un approfondimento a parte) i sistemi “X-by-Wire” destinati, da un lato, a ridurre costi e peso del veicolo e dall’altro ad aumentare affidabilità e prestazioni dello stesso. Il concetto generale è quello di sostituire sistemi meccanici o idraulici (con relative
connessioni e collegamenti), con sensori, attuatori ed elettronica distribuita. Nascono così sistemi chiamati “steer-by-wire”, “brake-by-wire”, “throttle-by-wire”, “shift-by-wire”…ecc, che riguardano rispettivamente il sistema di sterzo, il sistema di frenatura, quello di regolazione combustibile e quello del cambio di un’autovettura. Delphi, per esempio, ha realizzato un sistema “steer-by-wire” che elimina la connessione meccanica fra il sistema volante e le ruote (Fig. 5).
Fig. 5: Il sistema “steer-by-wire” di Delphi
Il TTP rimane, per la sua natura, comunque un protocollo ad alto costo e fino ad oggi non completamente utilizzato. Della stessa famiglia esiste il TTP/C, la cui caratteristica saliente è che implementa un indipendente “Bus Guardian” dentro lo stesso controller TTP. Un’ ulteriore variante, chiamata TTC (Time Triggered CAN), che richiama sostanzialmente le caratteristiche del CAN bus, potrebbe essere la più valida alternativa (soprattutto economica) ai protocolli precedenti.

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
6
L’utilizzo del TTP/C porta ad una velocità di trasferimento dati doppia rispetto a quella massima del CAN: si arriva quindi fino a 2Mbit/s. Comunque, allo stato attuale, questo protocollo non viene considerato, dalla gran parte delle aziende automobilistiche, un protocollo “maturo”, ai fini di un reale utilizzo commerciale.
Byteflight Sviluppato principalmente da BMW, Motorola, Elmos e Infineon, viene utilizzato per applicazioni critiche dove si richiedono elevata affidabilità e sicurezza. Per esempio, viene applicato a sistemi come l’air-bag e a dispositivi di pre-tensionamento dei sedili. Fra le caratteristiche principali di questo protocollo efficiente e di elevate prestazioni, ricordiamo: � possibilità di trasmissione asincrona e
sincrona � elevatissima velocità di trasmissione
ottica (fino a 10Mbit/s con transceiver ottico)
� tempi di latenza noti per messaggi di alta priorità
� flessibile larghezza di banda per ogni nodo
Già queste caratteristiche, senza entrare in dettagli tecnici, lo fanno essere un protocollo validissimo per molte applicazioni, con molte specifiche necessarie anche per i sistemi “X-by-wire”. Il più grande svantaggio, di questo protocollo, è sicuramente l’elevato costo! Un protocollo di altrettante elevate capacità e prestazioni, è “FlexRay” ancora in fase di sviluppo e completamente compatibile con Byteflight. E’ un protocollo “Fault Tolerant”, progettato per elevate velocità di trasmissione e per controlli avanzati, quali i sistemi “X-by-wire”. Sarà un sistema a comunicazione “Time Triggered” con una comune Base dei
tempi sincronizzata, una trasmissione effettiva in “real-time” con tempi di latenza limitati. Fra le principali aziende che partecipano allo sviluppo del protocollo (hardware e software), ci sono BMW, DaimlerChrysler, Philips e Motorola. Nel grafico riassuntivo di Fig. 6, sono rappresentati sia i principali protocolli di “embedded control” visti, sia quelli più diffusi nel settore “multimedia”. Il confronto viene fatto tenendo conto sia della velocità di trasmissione dei dati, sia del proprio costo relativo per nodo di rete.
Fig. 6: Principali protocolli di rete nei veicoli
Per completezza, solo un cenno ai principali protocolli utilizzati nel settore “multimedia” in Automotive.
D2B e MOST Nei primi anni ’90 Matsushita e Philips si uniscono per sviluppare il D2B (Domestic Data Bus), quale protocollo di comunicazione utilizzato per sistemi audio-video, per computer portatili e per applicazioni di automotive media. L’architettura è un semplice anello di fibra ottica, formato dai singoli dispositivi (GPS, lettore CD, telefono mobile, speaker, fax, sistemi satellitari…ecc) e dai collegamenti point-to-point (Fig. 7).

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
7
Lo scambio dei dati avviene a velocità di trasmissione di circa 12Mbit/s. Daimler-Chrysler è stata la prima azienda a implementare il sistema ottico D2B su proprie vetture di serie. Il MOST (Media Oriented Systems Transport) è un protocollo con rete a fibra ottica ed una capacità di grandi volumi di dati scambiati. L’architettura è simile a quella del D2B, con la differenza di una maggiore velocità di trasmissione dati (circa 40Mbit/s). MOST è stato sviluppato grazie ad un consorzio di aziende fra le quali Audi, BMW, Daimler-Chrysler ed Oasis Silicon Systems, con l’obiettivo di migliorare il già esistente D2B. Entrambi i sistemi (come avviene anche per i sistemi precedenti) hanno una modalità molto utile in applicazioni automotive (dove l’alimentazione viene solitamente fornita da una batteria): lo “sleep mode”. Questo permette, in mancanza di attività sul bus, il minimo consumo di energia da parte dei chips del sistema, che ovviamente vengono automaticamente riattivati da una nuova attività sul bus.
Fig. 7: Possibili dispositivi in un anello D2B
Bluetooth Questa tecnologia è nata qualche anno fa per merito principalmente di Ericsson, Nokia, IBM, Toshiba e Intel. Il sistema, di tipo “wireless”, fornisce semplici ed istantanee radio connessioni (brevi distanze di circa 10-100m) fra i dispositivi abilitati Bluetooth, senza l’utilizzo di cavi, con una velocità di trasferimento dati
di 1Mbit/s. Bluetooth opera nella banda di frequenza libera ISM a 2.4GHz. La comunicazione via radio rappresenta un grande vantaggio rispetto a una comunicazione via bus seriale. Infatti, si ottengono sistemi più semplici, si riduce ulteriormente il cablaggio interno all’autovettura (riducendo di conseguenza la probabilità di un corto-circuito fra cavi o connettori), si riduce il peso (come visto importante ai fini del consumo) e la potenza in gioco: in pratica viene resa più “snella” l’architettura complessiva. Principalmente oggi Bluetooth viene utilizzato in applicazioni “multimedia” interne all’autovettura ed in abbinamento con il protocollo CAN per controlli a remoto e servizi di diagnostica (Fig. 8).
Fig. 8: Esempio di applicazione CAN-Bluetooth
Il sistema di Fig. 8, già implementato, permette inoltre di programmare o riprogrammare direttamente i microcontrollori dei nodi di rete, senza la necessità di un accesso “fisico” in vettura. Sempre mediante l’interfaccia CAN-Bluetooth, è possibile realizzare un monitoraggio remoto in tempo reale (di controllo e/o di diagnostica) sull’intera struttura di bordo. Ovviamente, solamente questo sviluppo, CAN-Bluetooth, meriterebbe un proprio approfondimento separato.

________________________________________________________Politecnico di Milano (Dip. Ingegneria Elettrica)
8
Concludendo, la riduzione del cablaggio e le nuove potenzialità di affidabilità, comfort e sicurezza, porteranno ad “un’esplosione” di moderne funzionalità e di utili innovazioni. I nostri veicoli diventeranno sempre più somiglianti a veri e propri computers, aumentando inoltre, il vasto mercato mondiale dell’automotive e del proprio indotto. Stefano Maggi Politecnico di Milano [email protected]



![ese03.ppt [modalità compatibilità]docenti.etec.polimi.it/IND32/Didattica/Corso di Modellistica e Impiant… · Dll t tt di tDalla struttura di rotore dipende il tipo di macchina:](https://static.fdocumenti.com/doc/165x107/5fc08040f0a6ba105a0219bf/ese03ppt-modalit-compatibilit-di-modellistica-e-impiant-dll-t-tt-di-tdalla.jpg)