SISTEMI E MODELLI - · numero di grandezze (variabili) ... grandezze e caratteristiche sono...
26
Ing. Luigi Biagiotti Tel. 051 2093034 / 051 2093068 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale SISTEMI E MODELLI SISTEMI E MODELLI Luigi Biagiotti SisMod -- 2 Controlli Automatici Sistemi Sistemi e e Modelli Modelli - Dal sistema ad un Dal sistema ad un modello modello • Sistema: insieme, isolato artificialmente dal contesto, costituito da più parti tra loro interagenti di cui si vuole indagare il comportamento • Sistema statico/dinamico • modello matematico dei sistemi statici equazioni algebriche (sistemi privi di memoria) l'uscita del sistema dipende solo dal valore assunto dall'ingresso in quell'istante relazione tra tensione e corrente in un resistore • modello dei sistemi dinamici (a parametri concentrati) equazioni differenziali (sistemi con memoria) l'uscita del sistema non dipende solo dal valore assunto dall'ingresso in quell'istante, ma anche da quelli passati relazione tra tensione e corrente in un condensatore
-
Upload
hoangquynh -
Category
Documents
-
view
221 -
download
0
Transcript of SISTEMI E MODELLI - · numero di grandezze (variabili) ... grandezze e caratteristiche sono...

Ing. Luigi BiagiottiTel. 051 2093034 / 051 2093068
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria della Gestione Industriale
SISTEMI E MODELLISISTEMI E MODELLI
Luigi Biagiotti SisMod -- 2Controlli Automatici
SistemiSistemi e e ModelliModelli -- Dal sistema ad un Dal sistema ad un modellomodello
• Sistema:insieme, isolato artificialmente dal contesto, costituito da
più parti tra loro interagenti di cui si vuole indagare il comportamento
• Sistema statico/dinamico• modello matematico dei sistemi statici
equazioni algebriche (sistemi privi di memoria)l'uscita del sistema dipende solo dal valore assunto dall'ingresso in quell'istanterelazione tra tensione e corrente in un resistore
• modello dei sistemi dinamici (a parametri concentrati)equazioni differenziali (sistemi con memoria)
l'uscita del sistema non dipende solo dal valore assunto dall'ingresso in quell'istante, ma anche da quelli passatirelazione tra tensione e corrente in un condensatore

Luigi Biagiotti SisMod -- 3Controlli Automatici
SistemiSistemi e e ModelliModelli
• Sistema statico (algebrico)
• Sistema dinamico
i(t)
v(t) R
i(t)
v(t) R
C
0 50 100 150 200 250 3000
10
20
30
40
50
60
Tempo (s )
V, I
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Luigi Biagiotti SisMod -- 4Controlli Automatici
• Sistemi fisici elementari• meccanici
corpo rigido, ammortizzatore, mollacatena cinematica più complessa
convertitori di moto
SistemiSistemi e e ModelliModelli
Da moto rotativo a moto rotativo
Da moto rotativo a moto traslantec1
c2
ω1ω2
riduttoreω1 v
Vite senza fine
v
ω1
Puleggia/cinghiaω1
v
Biella/manovella
m

Luigi Biagiotti SisMod -- 5Controlli Automatici
SistemiSistemi e e ModelliModelli
• Sistemi fisici elementari• elettrici
resistoreinduttorecondensatoreamplificatoretrasformatore
• termicifluido da riscaldarecontenitoregeneratore di calore
• pneumaticistrozzatura (resistenza pneumatica) soffietto (capacità pneumatica)amplificatore pneumatico
vi(t) vc(t)vR
i(t)
Luigi Biagiotti SisMod -- 6Controlli Automatici
SistemiSistemi e e ModelliModelli
• Sistemi fisici elementari• idraulici
condotta con attrito (resistenza idraulica)massa liquida (inerzia idraulica)serbatoio (capacità idraulica)valvolapistone
• Sistemi fisici complessi• insieme di sistemi elementari variamente interconnessi• lo studio di un sistema complesso si effettua a partire
da quello delle sue parti elementari componenti

Luigi Biagiotti SisMod -- 7Controlli Automatici
SistemiSistemi e e ModelliModelli
• statici/dinamici• modello matematico dei sistemi statici
equazioni algebriche (sistemi privi di memoria)
• modello dei sistemi dinamici (a parametri concentrati)equazioni differenziali (sistemi con memoria)
• monovariabili/multivariabili (SISO – MIMO)• un ingresso-una uscita, più ingressi-più uscite
• lineari/nonlineari• le variabili entrano linearmente/non linearmente
• invarianti/tempo varianti• le loro caratteristiche sono costanti/variano nel tempo
• a parametri concentrati/distribuiti• equazioni differenziali ordinarie/alle derivate parziali
Luigi Biagiotti SisMod -- 8Controlli Automatici
SistemiSistemi e e ModelliModelli
Definizione:• Un modello si dice causale quando l'uscita corrispondente ad una data
sollecitazione si manifesta soltanto in istanti non anteriori a quello iniziale di applicazione della sollecitazione
• Un modello non causale si dice anticipativo. • Un modello anticipativo non può corrispondere ad alcun sistema fisico
non è immaginabile un sistema che reagisce ad una sollecitazione ancor prima che questa sia applicata!
è non causale se consideriamo x come ingresso ed y come uscita (si pensi alla derivata come rapporto incrementale)⇒ occorrono sia il valore passato che quello futuro della variabile
Non si può costruire underivatore
ideale
Il modello
è causale se consideriamo y come ingresso ed x come uscita
Modelli non causali sono utilizzati per comodità di analisi e manipolazione

Luigi Biagiotti SisMod -- 9Controlli Automatici
Sistemi e ModelliSistemi e Modelli
Sistema dinamico:• Insieme di elementi:• oggetti (fisici o concettuali)• dispositivi• fenomeni
che evolvono nel tempo e/o nello spazio.
• La loro evoluzione è rilevabile dalla variazione di un certo numero di grandezze (variabili)
Ovviamente un caso particolare è costituito dai sistemi le cui grandezze e caratteristiche sono costanti (nel tempo).
Luigi Biagiotti SisMod -- 10Controlli Automatici
Sistemi e ModelliSistemi e Modelli
Sistemi:• meccanici• elettrici• elettronici• economici• ...
• naturali• ecologici• biologici• …
Alle variabili vengono associate opportune funzioni che ne rappresentano l'andamento (nel tempo) dette segnali.
strutture realizzate dall'uomo (automobile, motore elettrico, circuito elettronico, ponte, nave, aereo, ...)
realtà non solamente di opera umana (ambiente, sistema cardiaco o nervoso, sistema meteorologico, ...)
Luigi Biagiotti SisMod -- 11Controlli Automatici
SistemiSistemi e e ModelliModelli
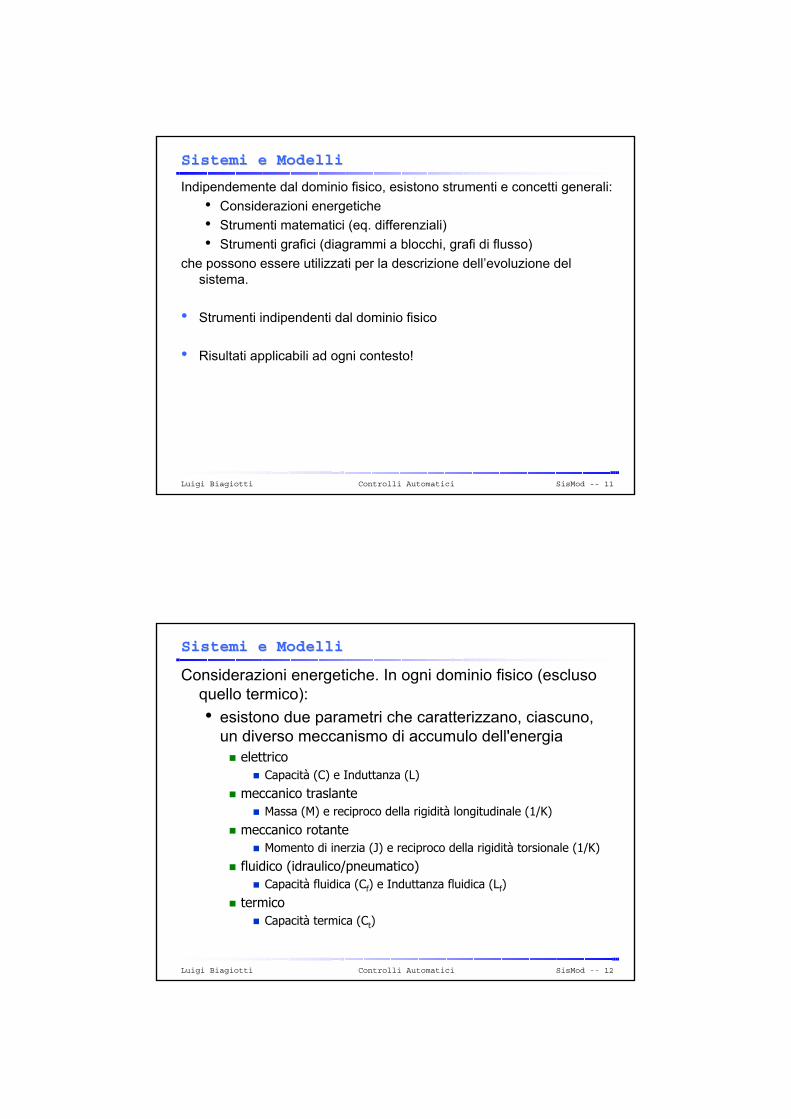
Indipendemente dal dominio fisico, esistono strumenti e concetti generali:• Considerazioni energetiche• Strumenti matematici (eq. differenziali) • Strumenti grafici (diagrammi a blocchi, grafi di flusso)
che possono essere utilizzati per la descrizione dell’evoluzione del sistema.
• Strumenti indipendenti dal dominio fisico
• Risultati applicabili ad ogni contesto!
Luigi Biagiotti SisMod -- 12Controlli Automatici
SistemiSistemi e e ModelliModelli
Considerazioni energetiche. In ogni dominio fisico (escluso quello termico):• esistono due parametri che caratterizzano, ciascuno,
un diverso meccanismo di accumulo dell'energiaelettrico
Capacità (C) e Induttanza (L)
meccanico traslanteMassa (M) e reciproco della rigidità longitudinale (1/K)
meccanico rotanteMomento di inerzia (J) e reciproco della rigidità torsionale (1/K)
fluidico (idraulico/pneumatico)Capacità fluidica (Cf) e Induttanza fluidica (Lf)
termicoCapacità termica (Ct)

Luigi Biagiotti SisMod -- 13Controlli Automatici
• Considerazioni energetiche:• i due meccanismi elementari di accumulo della energia
SistemiSistemi e e ModelliModelli
dominiodominio accumulo capacitivoaccumulo capacitivo accumulo induttivoaccumulo induttivo
E Cv= 12
2 E Li= 12
2elettricoelettrico
meccanicomeccanicotraslantetraslante E Mv= 1
22E
Kf= 1
21 2
meccanicomeccanicorotanterotante E J= 1
22ωE
Kc= 1
21 2
idraulico/pneumaticoidraulico/pneumatico E C pf= 12
2 E L qf= 12
2
termicotermico E C Tt= mancavariabilipassanti
variabiliai morsetti
l'energia accumulatadipende dalle
Le variabili ai morsetti sono in realtà differenze
Luigi Biagiotti SisMod -- 14Controlli Automatici
SchemiSchemi a a blocchiblocchi
• Un sistema viene rappresentato graficamente con un blocco, e le sue variabili mediante collegamenti con l'ambiente esterno o con altri sistemi.
S1 S2
S

Luigi Biagiotti SisMod -- 15Controlli Automatici
SchemiSchemi a a blocchiblocchi
• Un sistema orientato è un sistema in cui le variabili sono suddivise in• Variabili di ingresso (cause)• Variabili di uscita (effetti)
• Non sempre la suddivisione tra ingressi ed uscite (cause ed effetti) è univoca
Su1(t)
u2(t)
u3(t)
y(t)
ingressi
uscita
Ra La c(t), ω(t)
Le
va(t)
ia(t)
ve(t)
ie(t)
Luigi Biagiotti SisMod -- 16Controlli Automatici
SchemiSchemi a a blocchiblocchi
• I sistemi (sottosistemi) possono essere connessi tra loro mediante le variabili di ingresso/uscita.
• Le variabili sono indicate con frecce, e in uno schema oltre ai blocchi che descrivono i sistemi vi possono essere nodi sommatori e punti di diramazione.
++
-
u1(t)
u2(t)
u3(t)
y(t) u(t)
y1(t)
y2(t)
y3(t)

Luigi Biagiotti SisMod -- 17Controlli Automatici
SchemiSchemi a a blocchiblocchi
• Connessione in cascata (serie):l’uscita del primo costituisce l’ingresso del secondo
• Connessione in parallelo:stesso ingresso
S1 S2y2(t) = y(t)u(t) = u1(t) y1(t) = u2(t)
S1
S2y2(t)
u(t)
y1(t)u1(t)
u2(t)
Luigi Biagiotti SisMod -- 18Controlli Automatici
SchemiSchemi a a blocchiblocchi
• Connessione in retroazione: i sistemi sono collegati ad anello e si influenzano reciprocamente
S1
S2u2(t)
y1(t)u1(t)
y2(t)

Luigi Biagiotti SisMod -- 19Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchiblocchi
• Spesso i sistemi complessi vengono rappresentati con schemi a blocchi, i cui elementi hanno ciascuno un solo ingresso e una sola uscita.
• Blocchi elementari per la rappresentazione di sistemi puramente algebricisono
• La seconda rappresentazione verrà estesa anche ai sistemi dinamici lineari stazionari, introducendo, al posto della costante di proporzionalità, la funzione di trasferimento, che comprende ogni informazione relativa al comportamento dinamico ingresso-uscita (a partire da una condizione iniziale di quiete).
K
x y
x y
che rappresenta un elemento nonlineare, la cui caratteristica ingresso-uscita è tracciata schematicamente entro il blocco stesso
che rappresenta un elemento lineare, caratterizzato dalla costante di proporzionalità K che lega l'uscita all'ingresso y(t) = K x(t),specificata di regola entro il blocco stesso
Luigi Biagiotti SisMod -- 20Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchiblocchi -- RegoleRegole
• Riduzione di blocchi in cascata:
• Riduzione di blocchi in parallelo:

Luigi Biagiotti SisMod -- 21Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchiblocchi -- RegoleRegole
• Scambio di giunzioni sommanti
• Spostamento di un punto di prelievo di segnale a monte di un blocco:
Luigi Biagiotti SisMod -- 22Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchi blocchi -- RegoleRegole
• Spostamento di un punto di prelievo a valle di un blocco:
• Spostamento di una giunzione sommante a monte di un blocco:

Luigi Biagiotti SisMod -- 23Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchiblocchi -- RegoleRegole
• Spostamento di una giunzione sommante a valle di un blocco:
• Eliminazione di un anello:
Luigi Biagiotti SisMod -- 24Controlli Automatici
RiduzioneRiduzione didi schemischemi a a blocchiblocchi
• Mediante queste otto regole fondamentali, si possono ridurre schemi a blocchi comunque complessi fino a giungere ad una forma minima, che consiste:
• Per i sistemi con un solo ingresso ed una sola uscita, in un solo blocco
• Per i sistemi con più ingressi e più uscite in un numero di blocchi pari al prodotto del n.o degli ingressi per il n.o delle uscite nb = ni × nu

Luigi Biagiotti SisMod -- 25Controlli Automatici
ClassificazioneClassificazione deidei modellimodelli matematicimatematici
• Una possibile classificazione dei modelli di sistemi dinamici, corretta anche se volutamente non complessa da un punto di vista formale, è data nel seguito.
• Condizione di quiete. Molto spesso, si desidera studiare l'evoluzione di un sistema in risposta all'applicazione di un dato segnale di ingresso. In questo caso si suppone generalmente che il sistema sia inizialmente in quiete (o, equivalentemente, in stato di equilibrio o in riposo)
• Gli ingressi ui e le uscite yj del sistema, per t < t0, hanno un valore costante.
Luigi Biagiotti SisMod -- 26Controlli Automatici
ClassificazioneClassificazione deidei modellimodelli matematicimatematici
• Esempio: Studiare l'evoluzione delle variabili q(t), i(t), vu(t) nel circuito elettrico di figura in seguito all'applicazione di un gradino di tensione vi(t) = V all'istante t = t0, con la condizione qo = q(t0) = 0.
0 1 2 3 4 5 6 7 8
x 10-3
0
0.5
1
v(t)
0 1 2 3 4 5 6 7 8
x 10-3
0
0.005
0.01
i(t)
0 1 2 3 4 5 6 7
x 10-3
02468
x 10-6
q(t)
Te mpo (s e c)

Luigi Biagiotti SisMod -- 27Controlli Automatici
ClassificazioneClassificazione deidei modellimodelli matematicimatematici
• Esempio. Studiare l'andamento della variabile per il sistema meccanico di figura (massa m = 50 kg, attrito b = 1 sec/(N m)) in risposta all'applicazione di una forza costante f(t) = F = 200 N all'istante t = 0 s
• Con la condizione iniziale v0 = 0 m/sec:
fm
x(t)0 5 10 15 20 25 30 35 40
0
50
100
150
200
250
Pos
[m],
Forz
a [N
]
0 5 10 15 20 25 30 35 400
1
2
3
4
5V
el [m
/s]
Te mpo (s )x(t=40) = 156 m
Luigi Biagiotti SisMod -- 28Controlli Automatici
ClassificazioneClassificazione deidei modellimodelli matematicimatematici
• Esempio. Studiare l'andamento della variabile per il sistema meccanico di figura (massa m = 50 kg, attrito b = 1 sec/(N m)) in risposta all'applicazione di una forza costante f(t) = F = 200 N all'istante t = 0 s
• Con la condizione iniziale v0 = 10 m/sec:
fm
x(t)
x(t=40) = 166 m
0 5 10 15 20 25 30 35 400
50
100
150
200
250
Pos
[m],
Forz
a [N
]
0 5 10 15 20 25 30 35 400
2
4
6
8
10
Vel
[m/s
]
Tempo (s )

Luigi Biagiotti SisMod -- 29Controlli Automatici
ModelliModelli a a parametriparametri concentraticoncentrati
• Le caratteristiche fisiche dei sistemi dinamici sono distribuite nel sistema fisico stesso:
• - massa• - elasticità• - resistenza• - ...
• Nella descrizione dei modelli dinamici, se è possibile fare delle approssimazioni che permettono di concentrare in uno (o pochi) punti tali caratteristiche e quindi ottenere notevoli semplificazioni nelle loro espressioni matematiche. Si hanno i cosiddetti modelli a parametri concentrati.
• Nella pratica, anche se è chiaro che tutte le caratteristiche dei sistemi fisici sono distribuite, si cerca ove possibile di avere modelli a parametri concentrati.
Luigi Biagiotti SisMod -- 30Controlli Automatici
ModelliModelli a a parametriparametri concentraticoncentrati
• I modelli a parametri concentrati sono espressi da equazioni differenziali ordinarie(tempo continuo) o equazioni alle differenze (tempo discreto), che sono funzionisolo del tempo:
• Se non è possibile considerare come concentrati alcuni dei parametri del modello, allora si deve ricorrere a equazioni alle differenze parziali. Infatti, la dinamica non dipende solo dal tempo ma anche, per esempio, dallo spazio:

Luigi Biagiotti SisMod -- 31Controlli Automatici
ModelliModelli a a parametriparametri costanticostanti nelnel tempotempo
• Se le proprietà di un dato sistema sono indipendenti dal tempo (costanti), allora i relativi parametri sono costanti. I relativi modelli sono detti stazionari o invarianti.
• Per tali sistemi si ha la ripetibilità degli esperimenti: l'uscita che si ottiene applicando al sistema con un dato stato iniziale x0 un ingresso al tempo t0 è uguale (a parte una traslazione nel tempo) a quella che si ottiene (con lo stesso stato iniziale x0) applicando lo stesso ingresso all'istante t-δ.
0 0.5 1 1.5 2 2.5 3 3.5 4-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Te mpo (s )
x, y
0 0.5 1 1.5 2 2.5 3 3.5 4-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Te mpo (s )
x, y
Luigi Biagiotti SisMod -- 32Controlli Automatici
ModelliModelli a a parametriparametri costanticostanti nelnel tempotempo
• Da un punto di vista pratico, è raro che i parametri di un sistema non cambino nel tempo.
• D'altra parte, è sufficiente che essi non varino in modo apprezzabile in un arco temporale confrontabile alla durata dell'esperimento.
• Nei modelli stazionari, non ha importanza l'istante di inizio dell'osservazione, che viene quindi solitamente considerato uguale a zero: t0 = 0

Luigi Biagiotti SisMod -- 33Controlli Automatici
SistemiSistemi e e modellimodelli causalicausali
• Se la variazione dell'uscita di un sistema si manifesta ad istanti non anteriori a quello dell'applicazione di un dato ingresso, il sistema è detto causale.
• In altre parole, un sistema (modello) si dice causale quando la sua uscita in un dato istante dipende dagli ingressi precedenti (fino a quell'istante) e non dai valori futuri (l'ingresso influenza solo i valori futuri dell'uscita o al massimo il suo valore attuale, non quelli passati).
• Non si ha conoscenza di sistemi fisici non causali o anticipativi, la cui definizione è quindi solo matematica.
• Un importante esempio di modello matematico anticipativo è dato dall'azione derivativa:
• Infatti dalla definizione di derivata si ha:
da cui si vede come per il calcolo sia necessaria la conoscenza del valore futuro della variabile u(t).
Luigi Biagiotti SisMod -- 34Controlli Automatici
SistemiSistemi e e modellimodelli causalicausali
• Esempio (impossibilità fisica):
• L’ampiezza (e quindi l’energia) del segnale di uscita y(t) crescerebbe all’infinito all’aumentaredella pulsazione ω in ingresso!
x(t) y(t)
xi
To Workspa ce 4
yi
To Workspa ce 3
t
To Workspa ce 2
y
To Workspa ce 1
x
To Workspa ce
S ine Wa ve
1s
In te gra tor1
1s
In te gra tor
du/d t
De riva tive
Clock
|u |
Abs1
|u |
Abs0 2 4 6 8 10
-2
0
2
4
6
8
Tempo (s )
x, y
,yi
0 2 4 6 8 10-5
0
5
10
15
Tempo (s )
x, y
,yi
xxiyyi
xxiyyi

Luigi Biagiotti SisMod -- 35Controlli Automatici
RispostaRisposta dada statostato zero, con zero, con ingressoingresso zero, zero, completacompleta
• In generale, l'uscita y(t) di un sistema dinamico per t ≥ t0 dipende:• dall'ingresso u(τ) applicato in [t0, t];• dallo stato iniziale x0 che ha il sistema per t =t0.
• Risposta da stato zero (o risposta forzata)Si dice risposta da stato zero o risposta forzata la risposta yZS(t) di un sistema che è inizialmente in quiete (ingresso ed uscita nulli) e che viene sollecitato da un ingresso non nullo.
• Il sistema, senza l'applicazione dell'ingresso non nullo, rimarrebbe indefinitivamente nella condizione di quiete.
Luigi Biagiotti SisMod -- 36Controlli Automatici
RispostaRisposta dada statostato zero, con zero, con ingressoingresso zero, zero, completacompleta
-2 0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Te mpo [s e c]
Pos
, V
el
Ris pos ta all`impuls o (cas o ide ale )
x(t)
f
Palla inizialmente in quiete (v0 = 0), sollecitata da una forza impulsiva (piano con attrito non nullo).
Risposta da stato zero
Luigi Biagiotti SisMod -- 37Controlli Automatici
RispostaRisposta dada statostato zero, con zero, con ingressoingresso zero, zero, completacompleta
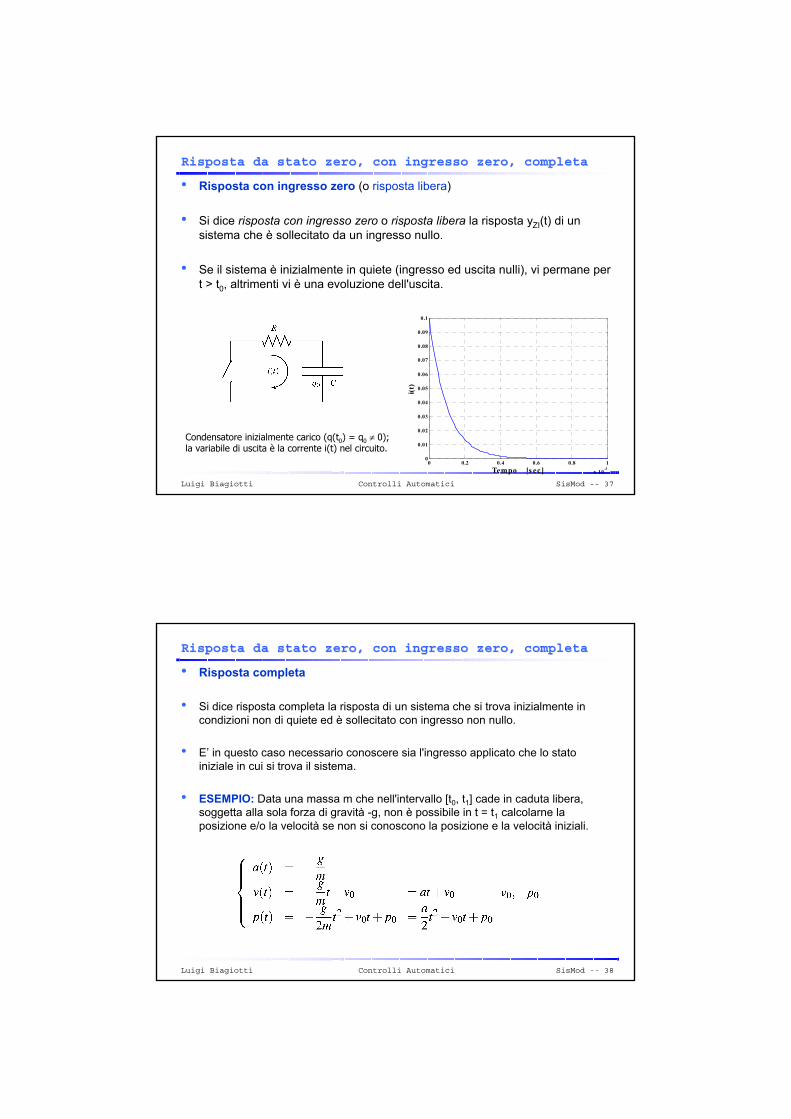
• Risposta con ingresso zero (o risposta libera)
• Si dice risposta con ingresso zero o risposta libera la risposta yZI(t) di un sistema che è sollecitato da un ingresso nullo.
• Se il sistema è inizialmente in quiete (ingresso ed uscita nulli), vi permane per t > t0, altrimenti vi è una evoluzione dell'uscita.
0 0.2 0.4 0.6 0.8 1
x 10-5
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Tempo [s ec]
i(t)
Condensatore inizialmente carico (q(t0) = q0 ≠ 0); la variabile di uscita è la corrente i(t) nel circuito.
Luigi Biagiotti SisMod -- 38Controlli Automatici
RispostaRisposta dada statostato zero, con zero, con ingressoingresso zero, zero, completacompleta
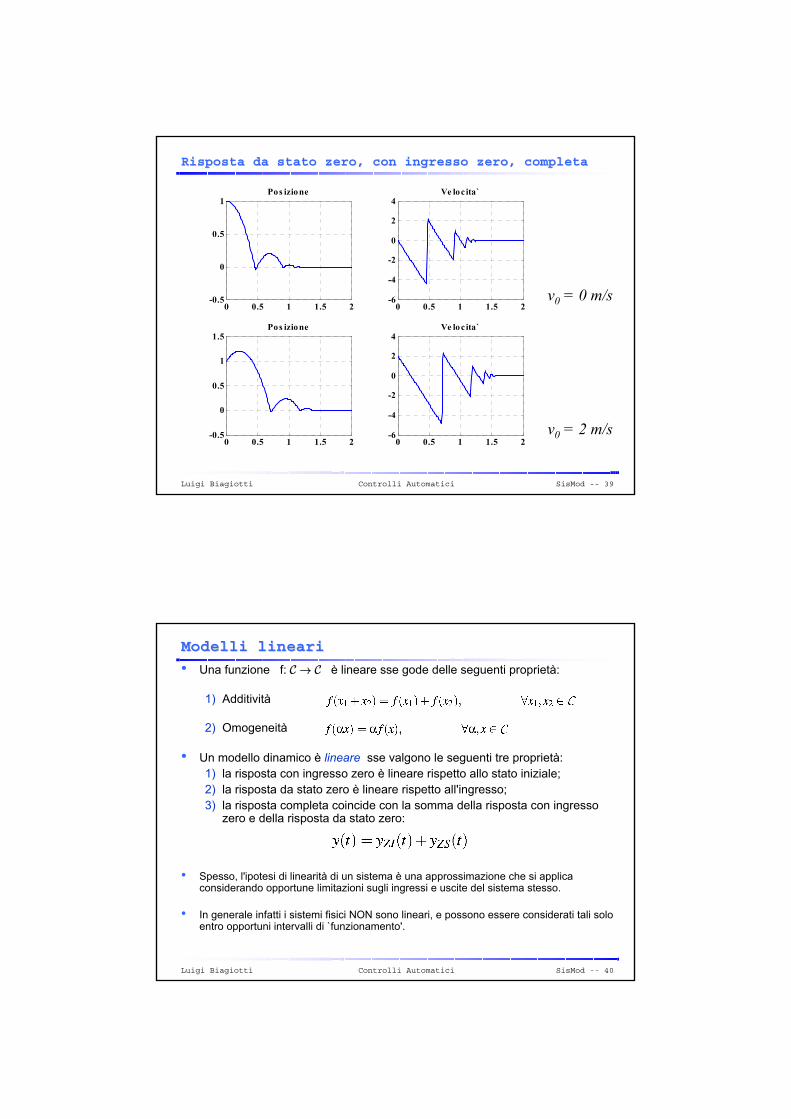
• Risposta completa
• Si dice risposta completa la risposta di un sistema che si trova inizialmente in condizioni non di quiete ed è sollecitato con ingresso non nullo.
• E’ in questo caso necessario conoscere sia l'ingresso applicato che lo stato iniziale in cui si trova il sistema.
• ESEMPIO: Data una massa m che nell'intervallo [t0, t1] cade in caduta libera, soggetta alla sola forza di gravità -g, non è possibile in t = t1 calcolarne la posizione e/o la velocità se non si conoscono la posizione e la velocità iniziali.
Luigi Biagiotti SisMod -- 39Controlli Automatici
RispostaRisposta dada statostato zero, con zero, con ingressoingresso zero, zero, completacompleta
0 0.5 1 1.5 2-0.5
0
0.5
1Pos izione
0 0.5 1 1.5 2-6
-4
-2
0
2
4Ve locita`
0 0.5 1 1.5 2-0.5
0
0.5
1
1.5Pos izione
0 0.5 1 1.5 2-6
-4
-2
0
2
4Ve locita`
v0 = 0 m/s
v0 = 2 m/s
Luigi Biagiotti SisMod -- 40Controlli Automatici
ModelliModelli linearilineari
• Una funzione f: C→ C è lineare sse gode delle seguenti proprietà:
1) Additività
2) Omogeneità
• Un modello dinamico è lineare sse valgono le seguenti tre proprietà:1) la risposta con ingresso zero è lineare rispetto allo stato iniziale;2) la risposta da stato zero è lineare rispetto all'ingresso;3) la risposta completa coincide con la somma della risposta con ingresso
zero e della risposta da stato zero:
• Spesso, l'ipotesi di linearità di un sistema è una approssimazione che si applica considerando opportune limitazioni sugli ingressi e uscite del sistema stesso.
• In generale infatti i sistemi fisici NON sono lineari, e possono essere considerati tali solo entro opportuni intervalli di `funzionamento'.

Luigi Biagiotti SisMod -- 41Controlli Automatici
• ESEMPIO: Si consideri la risposta completa di un sistema dinamico
in cui x0 = x(t0) è lo stato iniziale.
La risposta è somma della risposta con ingresso zero e da stato zero, però il sistema è non lineare poiché la risposta non è lineare né rispetto allo stato iniziale (x0
2) né rispetto all'ingresso (u2).
ModelliModelli linearilineari
Luigi Biagiotti SisMod -- 42Controlli Automatici
ModelliModelli linearilineari
• ESEMPIO: Si consideri la risposta completa del sistema dinamico
Il sistema è non lineare poichè la risposta non è lineare rispetto all'ingresso (u2).
• ESEMPIO: Si consideri la risposta completa del sistema dinamico
Il sistema è lineare poiché:• la risposta è somma della risposta con ingresso zero e da stato zero;• la risposta è lineare rispetto allo stato iniziale;• la risposta è lineare rispetto all'ingresso.

Luigi Biagiotti SisMod -- 43Controlli Automatici
ModelliModelli linearilineari
• Molti sistemi ammettono modelli matematici lineari purché i valori delle variabili non escano da determinati campi.
• Si consideri il sistema di figura, costituito da un serbatoio: la portata entrante q1 è funzione lineare della posizione x dello stelo di una valvola q1= K x si suppone che la portata uscente q2 sia indipendente dal livello z.
zz2
x
q2
q1
Luigi Biagiotti SisMod -- 44Controlli Automatici
ModelliModelli linearilineari
• Il modello matematico del sistema è espresso dall'equazione integrale lineare
o, equivalentemente, dall'equazione differenziale (ottenuta derivando rispetto al tempo ambo i membri)
in cui z indica il livello dell'acqua nel serbatoio (in m), Z0 il livello iniziale, q1 e q2 le portate entrante e uscente (in mc/sec), A l'area della sezione orizzontale del serbatoio (in mq).
• Tale modello è evidentemente valido entro i limiti
in cui X1, X2, Z1 (=0) e Z2 rappresentano rispettivamente i valori minimo e massimo della posizione dello stelo della valvola e del livello nel serbatoio.

Luigi Biagiotti SisMod -- 45Controlli Automatici
ModelliModelli linearilineari –– Proprietà di sovrapposizione Proprietà di sovrapposizione degli effettidegli effetti
• Per i sistemi lineari vale una proprietà molto importante:
La sovrapposizione degli effetti.
• Linearità rispetto allo stato inizialeQuesto caratteristica dei sistemi dinamici risulta evidente (ed utile) nello studio dei sistemi nello spazio degli stati. Viene qui citata solo per completezza, ma non verrà utilizzata nel seguito, in quanto si è maggiormente interessati ad una rappresentazione dei sistemi non basata sul concetto di stato.
Luigi Biagiotti SisMod -- 46Controlli Automatici
ModelliModelli linearilineari –– Proprietà di sovrapposizione Proprietà di sovrapposizione degli effettidegli effetti
• Linearità rispetto all'ingressoSia dato un sistema inizialmente in quiete. Si applichino (singolarmente) i q ingressi ui(t), i=1, …, q, t ≥ 0, ottenendo le corrispondenti risposte forzate yZS,i(t):
• La linearità rispetto all'ingresso implica che se si applica al sistema l'ingresso
allora si ottiene l'uscita
u(t) y(t)Σ

Luigi Biagiotti SisMod -- 47Controlli Automatici
ModelliModelli linearilineari –– Proprietà di sovrapposizione Proprietà di sovrapposizione degli effettidegli effetti
• Esempio:
• Additività delle risposteProprietà di additività della risposta libera e della risposta forzata.
Luigi Biagiotti SisMod -- 48Controlli Automatici
Sistemi e ModelliSistemi e Modelli
Modelli
• Un modello di un sistema è una descrizione delle sue caratteristiche più importanti e della variazione nel tempo e/o nello spazio delle grandezze che lo caratterizzano.
Il modello serve:• per trasmettere informazioni• per definire e risolvere problemi

Luigi Biagiotti SisMod -- 49Controlli Automatici
Sistemi e ModelliSistemi e Modelli
ModelliSi possono avere:• MODELLI FISICI: plastici, modelli ridotti, ...
• MODELLI ASTRATTI: simbolici, schematici, matematici,
i(t)
v(t) Rv = R i
Luigi Biagiotti SisMod -- 50Controlli Automatici
SistemiSistemi e e ModelliModelli
• Modello matematico: Descrizione della struttura e dell'evoluzione del sistema mediante simboli matematici. Le grandezze caratteristiche di un sistema sono classificate come:
• parametri, che descrivono la struttura fisica e sono solitamente costanti: valore di una resistenza, massa di una trave, caratteristiche geometriche di un robot, ...
• variabili, che descrivono il variare di una grandezza del sistema: corrente elettrica, posizione o velocità di un corpo nello spazio, temperatura di un forno, livello di un liquido in un contenitore, ...
• I parametri e le variabili di un modello matematico (sistema) sono espressi da numeri (interi, reali o complessi) con o senza dimensioni. Le loro interdipendenze sono definite da relazioni matematiche.
v(t) = R i(t) R parametro
v(t), i(t) variabili

Luigi Biagiotti SisMod -- 51Controlli Automatici
SistemiSistemi e e ModelliModelli
• Modelli da leggi fisiche: legge di Ohm, legge di Newton, legge di Boyle, ... relazioni matematiche che interpretano determinate relazioni di causa-effetto in sistemi fisici, e che derivano da sintesi di teorie o da congetture;
• Modelli “black-box”: per sistemi particolarmente complessi (economici, sociali, ambientali, ...) non sono definite regole matematiche di comportamento. In questi casi sono definiti modelli matematici basati sull'osservazione dei soli dati sperimentali (scatola nera: si ignora il contenuto della scatola).
Sistema ≠ Modello!
• Ad uno stesso sistema è possibile associare più di un modello, in base sia al particolare problema che si deve risolvere sia al tipo di precisione che si intende raggiungere.
Ogni modello è una descrizione approssimataapprossimata di un dato sistema.
• Comunemente, si intende con il termine sistema sia il sistema fisico vero e proprio, sia il modello matematico con il quale viene descritto.
Ing. Luigi BiagiottiTel. 051 2093034 / 051 2093068
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria della Gestione Industriale
SISTEMI E MODELLISISTEMI E MODELLIFINEFINE