Sistemi e Funzione di Trasferimento - LAR-DEIS Home Page · valori dei coefficienti ai e bi se il...
28
Sistemi e FdT - 1 Prof. Carlo Rossi Controlli Automatici L Corso di Laurea in Ingegneria Meccanica Controlli Automatici L Sistemi e Funzione di Trasferimento Prof. Carlo Rossi DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi
-
Upload
hoangkhanh -
Category
Documents
-
view
218 -
download
0
Transcript of Sistemi e Funzione di Trasferimento - LAR-DEIS Home Page · valori dei coefficienti ai e bi se il...

Sistemi e FdT - 1
Prof. Carlo Rossi Controlli Automatici L
Corso di Laurea in Ingegneria MeccanicaControlli Automatici L
Sistemi e Funzione di Trasferimento
Prof. Carlo RossiDEIS-Università di Bologna
Tel. 051 2093020Email: [email protected]
URL: www-lar.deis.unibo.it/~crossi
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 2
Modelli matematici dei sistemi
Sistemi orientatiingressi (cause) e uscite (effetti): schematizzazione non sempre facile e non univoca, dipende dal problemaperché l’interpretazione causa-effetto abbia senso l’uscita non deve dipendere da valori futuri dell’ingresso: sistemi causalil’uscita può però dipendere dai valori passati dell’ingresso
regolazione della temperatura dell’acqua in una doccia!
Sistemi statici: l’uscita al tempo t dipende solamente dal valore dell’ingresso al tempo t
resistenza elettrica
Sistemi dinamici: l’uscita al tempo t dipende anche dai valori passati dell’ingresso
sistema massa mollalegami tra segnali e non tra singoli valori
Per descrivere il sistema si utilizza un modello matematico, cioè un insieme di relazioni matematiche che legano i segnali di uscita a quelli di ingresso
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 3
Modelli matematici dei sistemi
Un modello matematico permette in linea di principio di calcolare l’uscita per ogni possibile segnale di ingresso
il numero di possibili segnali è infinitosi vuole caratterizzare il sistema senza dover analizzare tutte le possibili rispostestudio della struttura del modello matematico
Ci limiteremo a modelli dati da equazioni differenziali ordinarie lineari e stazionarie
ordinarie: non compaiono derivate parziali, l’unica variabile indipendente dei segnali è il tempo
Si: sistemi meccanici rigidi, sistemi elettrici a parametri concentrati, ecc..No: descrizione delle onde, modelli propagatori, ecc… Normalmente in questo caso si riesce a dare una descrizione dei fenomeni principali utilizzando un modello approssimato ai valori medi
lineari: ipotesi forte, cercheremo di giustificarla tra pocoSi: sistema massa mollaNo: pendolo
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 4
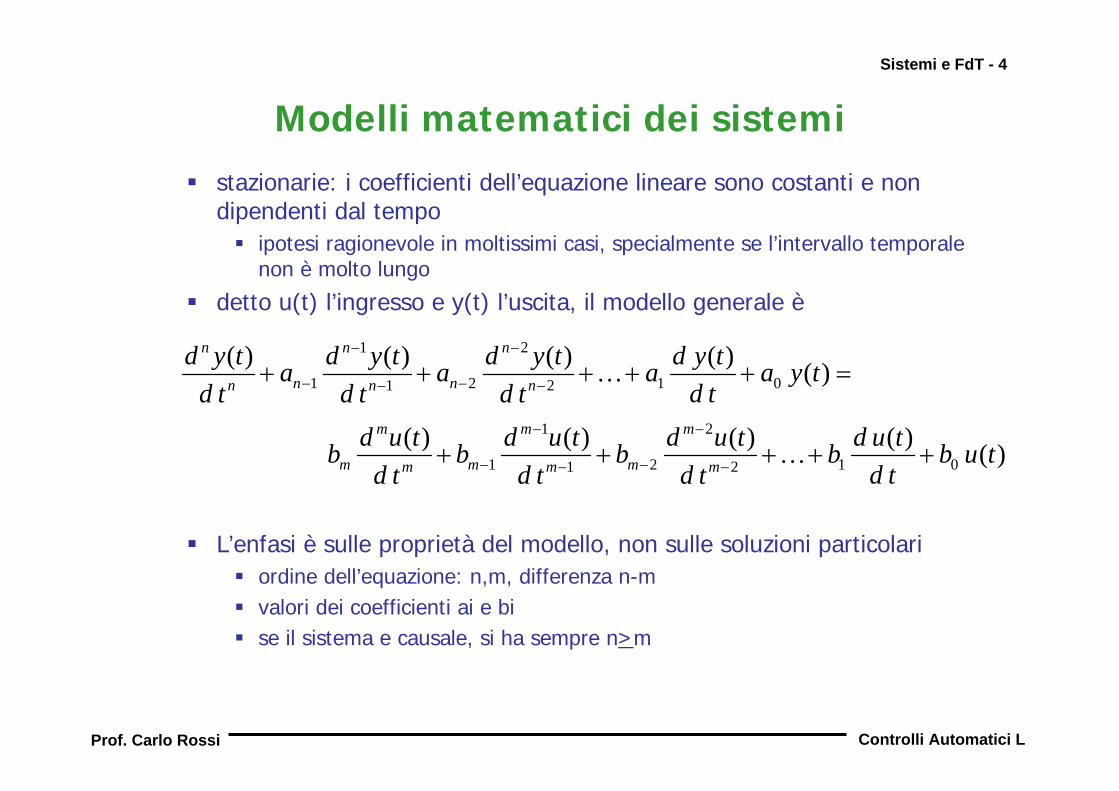
Modelli matematici dei sistemistazionarie: i coefficienti dell’equazione lineare sono costanti e non dipendenti dal tempo
ipotesi ragionevole in moltissimi casi, specialmente se l’intervallo temporale non è molto lungo
detto u(t) l’ingresso e y(t) l’uscita, il modello generale è
L’enfasi è sulle proprietà del modello, non sulle soluzioni particolariordine dell’equazione: n,m, differenza n-mvalori dei coefficienti ai e bise il sistema e causale, si ha sempre n>m
1 2
1 2 1 01 2
1 2
1 2 1 01 2
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
n n n
n nn n n
m m m
m m mm m m
d y t d y t d y t d y ta a a a y td td t d t d t
d u t d u t d u t d u tb b b b b u td td t d t d t
− −
− −− −
− −
− −− −
+ + + + + =
+ + + + +
…
…
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 5
Linearità e principio di sovrapposizione degli effetti
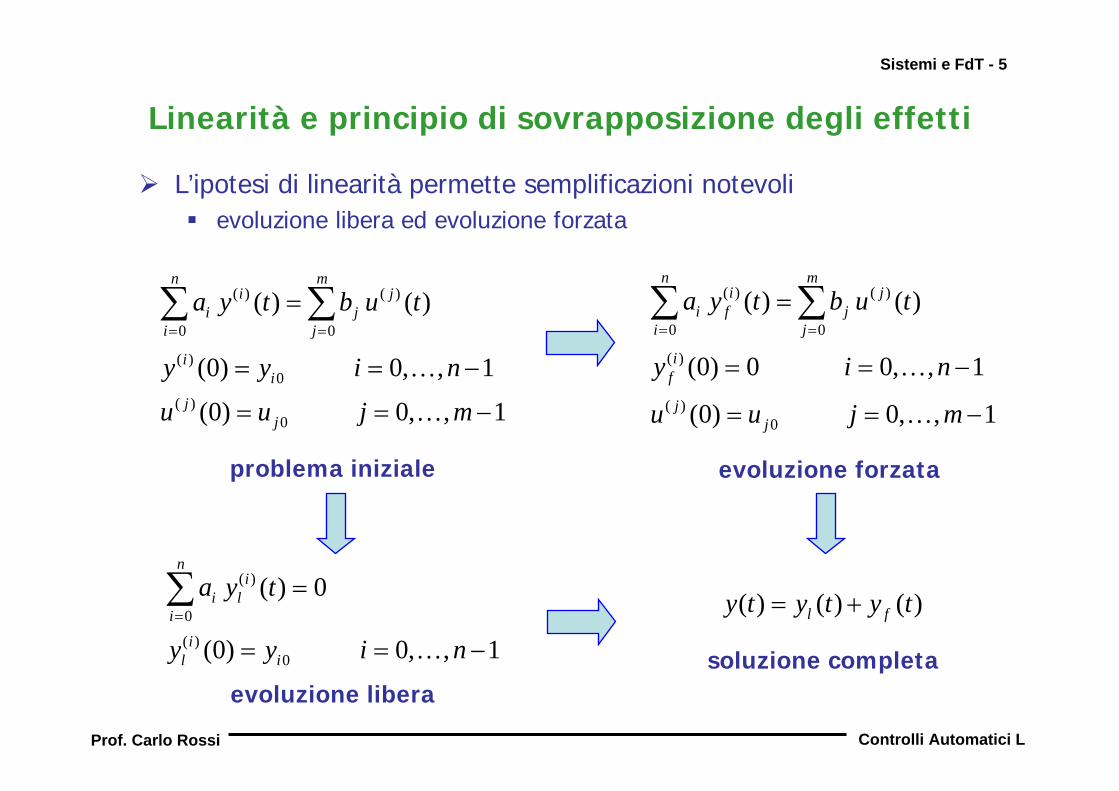
L’ipotesi di linearità permette semplificazioni notevolievoluzione libera ed evoluzione forzata
( ) ( )
0 0
( )
( )0
( ) ( )
(0) 0 0, , 1
(0) 0, , 1
n mi j
i f ji j
if
jj
a y t b u t
y i n
u u j m
= =
=
= = −
= = −
∑ ∑…
…
evoluzione forzata
( )
0
( )0
( ) 0
(0) 0, , 1
ni
i li
il i
a y t
y y i n=
=
= = −
∑…
evoluzione libera
( ) ( ) ( )l fy t y t y t= +
soluzione completa
( ) ( )
0 0
( )0
( )0
( ) ( )
(0) 0, , 1
(0) 0, , 1
n mi j
i ji j
ii
jj
a y t b u t
y y i n
u u j m
= =
=
= = −
= = −
∑ ∑……
problema iniziale
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 6
Linearità e principio di sovrapposizione degli effetti
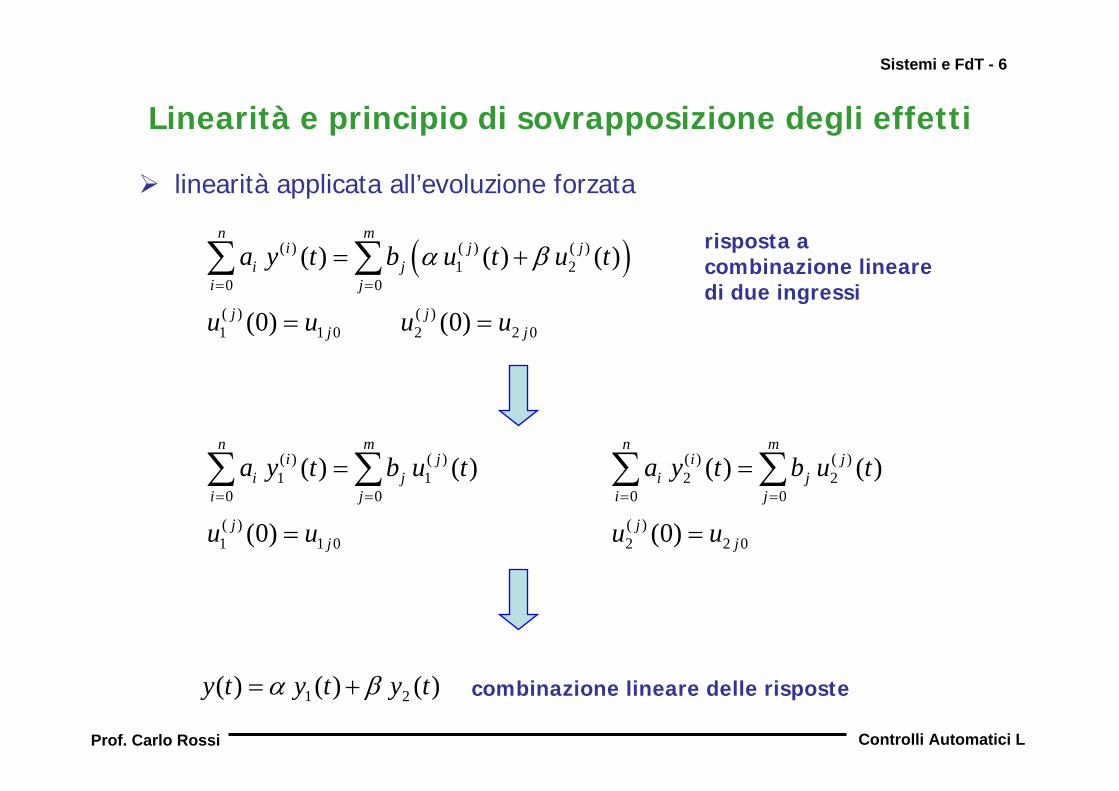
linearità applicata all’evoluzione forzata
1 2( ) ( ) ( )y t y t y tα β= + combinazione lineare delle risposte
( )( ) ( ) ( )1 2
0 0
( ) ( )1 1 0 2 2 0
( ) ( ) ( )
(0) (0)
n mi j j
i ji j
j jj j
a y t b u t u t
u u u u
α β= =
= +
= =
∑ ∑ risposta a combinazione lineare di due ingressi
( ) ( )1 1
0 0
( )1 1 0
( ) ( )
(0)
n mi j
i ji j
jj
a y t b u t
u u= =
=
=
∑ ∑ ( ) ( )2 2
0 0
( )2 2 0
( ) ( )
(0)
n mi j
i ji j
jj
a y t b u t
u u= =
=
=
∑ ∑
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 7
Soluzioni di equilibrio
Data una equazione differenziale ordinaria, anche non lineare, ed un segnale di ingresso costante, una soluzione costante si dice soluzione di equilibrio
segnale di uscita costante, se condizione iniziale dell’uscita pari alla costante e condizioni iniziali su tutte le derivate dell’uscita nullele soluzioni di equilibrio possono non esistere, nel caso esistano possono non essere unichecalcolo semplice in linea di principio: si pongono tutte le derivate nulle nell’equazione differenziale e si risolve l’equazione algebrica risultante
può essere complesso per sistemi non linearibanale per sistemi lineari
Una soluzione di equilibrio si dice isolata se non ne esistono altre arbitrariamente vicine
per sistemi lineari con ingresso nullo, la soluzione y(t)=0 è sempre di equilibrio e può essere l’unica soluzione isolatase l’origine è soluzione isolata del sistema con ingresso nullo, allora con ingresso diverso da zero esiste una sola soluzione di equilibrio
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 8
Soluzioni di equilibrio per sistemi non lineari
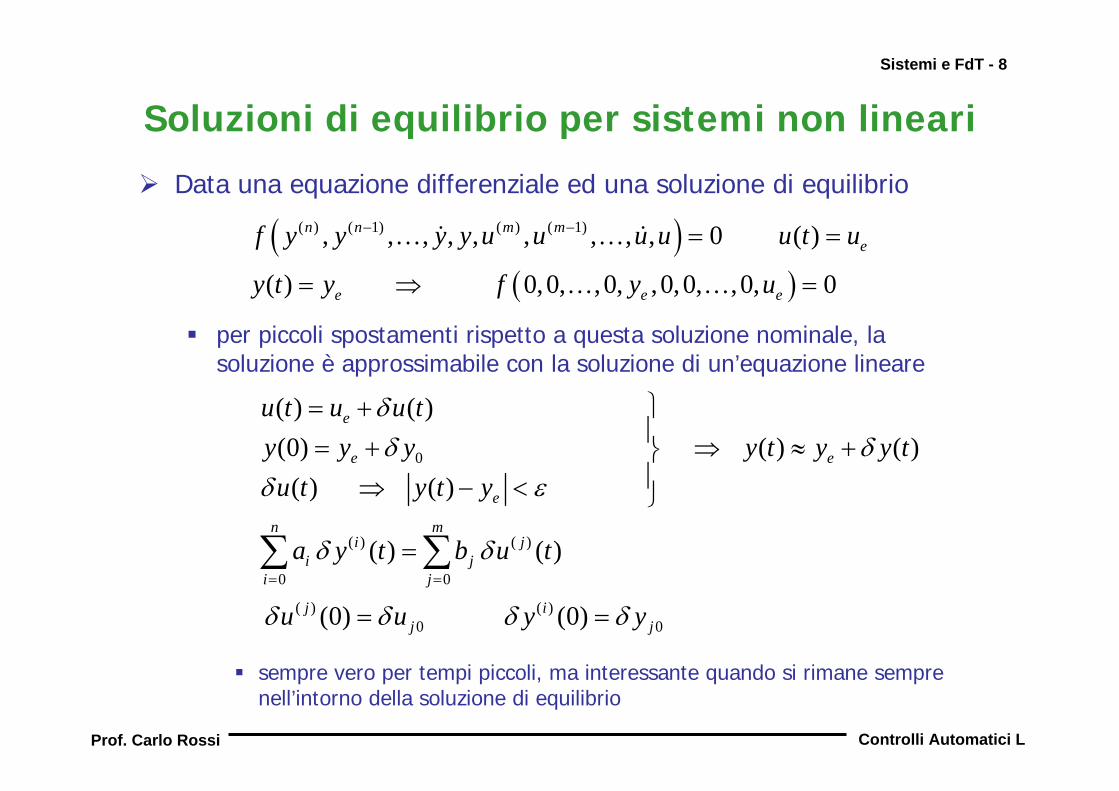
Data una equazione differenziale ed una soluzione di equilibrio
per piccoli spostamenti rispetto a questa soluzione nominale, lasoluzione è approssimabile con la soluzione di un’equazione lineare
sempre vero per tempi piccoli, ma interessante quando si rimane sempre nell’intorno della soluzione di equilibrio
( )( )
( ) ( 1) ( ) ( 1), , , , , , , , , 0 ( )
( ) 0,0, ,0, ,0,0, ,0, 0
n n m me
e e e
f y y y y u u u u u t u
y t y f y u
− − = =
= ⇒ =
… …
… …
0
( ) ( )(0) ( ) ( )( ) ( )
e
e e
e
u t u u ty y y y t y y tu t y t y
δδ δ
δ ε
⎫= +⎪= + ⇒ ≈ +⎬⎪⇒ − < ⎭
( ) ( )
0 0
( ) ( )0 0
( ) ( )
(0) (0)
n mi j
i ji j
j ij j
a y t b u t
u u y y
δ δ
δ δ δ δ= =
=
= =
∑ ∑
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 9
Linearizzazione
Il processo che porta ad approssimare la soluzione nell’intorno dell’equilibrio con la soluzione di un’equazione lineare si chiama linearizzazioneLo studio dei sistemi lineari diviene importante per studiare anche l’evoluzione dei sistemi non lineari nell’intorno di soluzioni di equilibrio
sulla base della linearizzazione si può concludere anche se la soluzione non lineare si manterrà nell’intorno valido per l’approssimazione allo scorrere del tempo
sufficiente che la soluzione lineare non tenda all’infinito, ma rimanga limitatala proprietà precedente non dipende dall’ampiezza dell’ingressoil rimanere sufficientemente piccola dipende invece dall’ampiezza dell’ingresso per la proprietà di linearità, oltre che da quanto è lontana la condizione iniziale da quella di equilibrio
non è necessario risolvere l’equazione non lineareimportante perché non si conoscono metodi di soluzione generale per equazioni non lineari
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 10
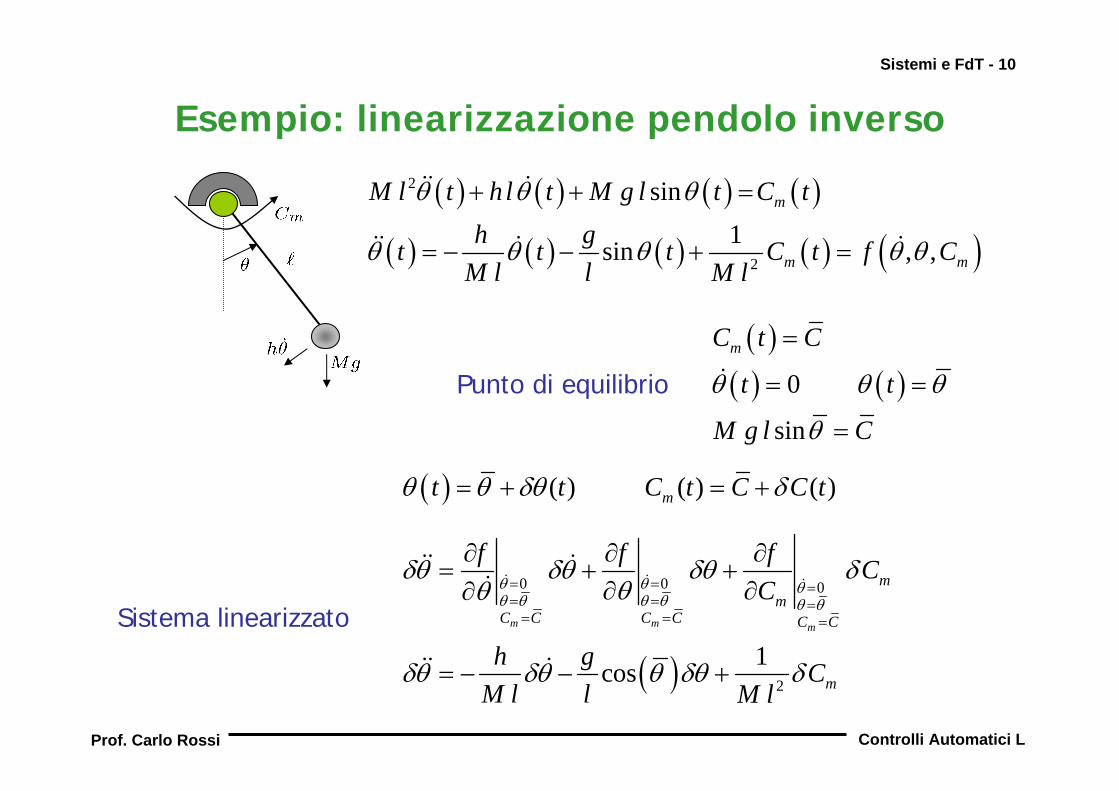
Punto di equilibrio
Esempio: linearizzazione pendolo inverso
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
2
2
sin1sin , ,
m
m m
M l t h l t M g l t C th gt t t C t f C
M l l M l
θ θ θ
θ θ θ θ θ
+ + =
= − − + =
( )( ) ( )0
sin
mC t C
t t
M g l C
θ θ θ
θ
=
= =
=
( ) ( ) ( ) ( )mt t C t C C tθ θ δθ δ= + = +
( )
0 0 0
2
1cos
m m m
mm
C C C C C C
m
f f f CC
h g CM l l M l
θ θ θθ θ θ θ θ θ
δθ δθ δθ δθθ
δθ δθ θ δθ δ
= = == = == = =
∂ ∂ ∂= + +
∂ ∂∂
= − − +
Sistema linearizzato
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 11
Sistemi lineari
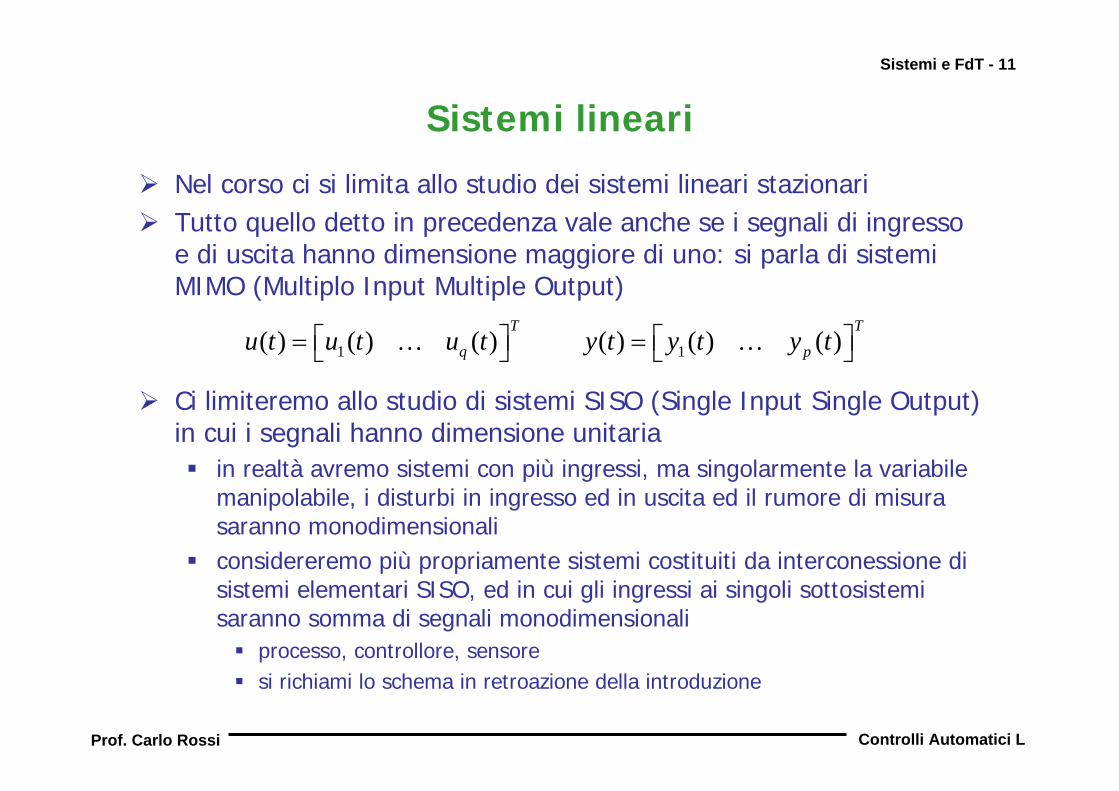
Nel corso ci si limita allo studio dei sistemi lineari stazionariTutto quello detto in precedenza vale anche se i segnali di ingresso e di uscita hanno dimensione maggiore di uno: si parla di sistemi MIMO (Multiplo Input Multiple Output)
Ci limiteremo allo studio di sistemi SISO (Single Input Single Output) in cui i segnali hanno dimensione unitaria
in realtà avremo sistemi con più ingressi, ma singolarmente la variabile manipolabile, i disturbi in ingresso ed in uscita ed il rumore di misura saranno monodimensionaliconsidereremo più propriamente sistemi costituiti da interconessione di sistemi elementari SISO, ed in cui gli ingressi ai singoli sottosistemi saranno somma di segnali monodimensionali
processo, controllore, sensoresi richiami lo schema in retroazione della introduzione
1 1( ) ( ) ( ) ( ) ( ) ( )T T
q pu t u t u t y t y t y t⎡ ⎤ ⎡ ⎤= =⎣ ⎦ ⎣ ⎦… …
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 12
Funzione di trasferimento
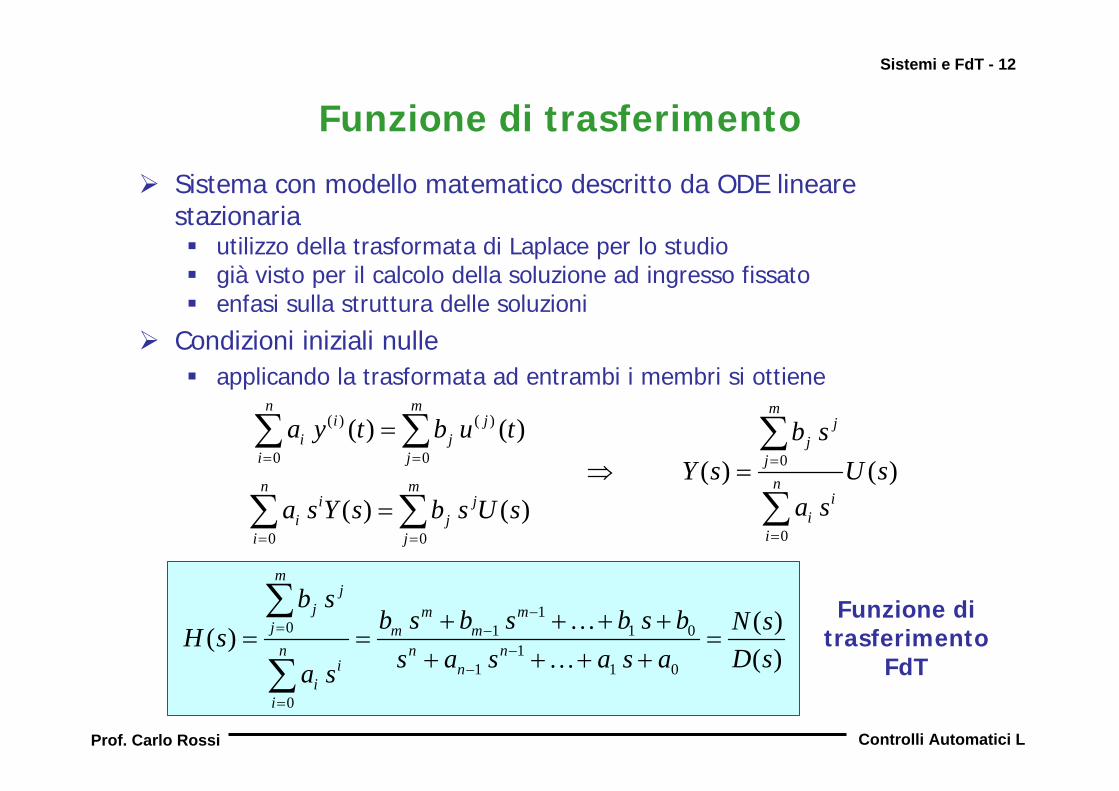
Sistema con modello matematico descritto da ODE lineare stazionaria
utilizzo della trasformata di Laplace per lo studiogià visto per il calcolo della soluzione ad ingresso fissatoenfasi sulla struttura delle soluzioni
Condizioni iniziali nulleapplicando la trasformata ad entrambi i membri si ottiene
( ) ( )
0 0 0
00 0
( ) ( )( ) ( )
( ) ( )
n m mi j j
i j ji j j
nn mii j
ii jii j
a y t b u t b sY s U s
a sa s Y s b s U s
= = =
== =
=
⇒ ==
∑ ∑ ∑
∑∑ ∑
10 1 1 0
11 1 0
0
( )( )( )
mj
j m mj m m
n n ni n
ii
b sb s b s b s b N sH s
D ss a s a s aa s
−= −
−−
=
+ + + += = =
+ + + +
∑
∑…
…
Funzione ditrasferimento
FdT
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 13
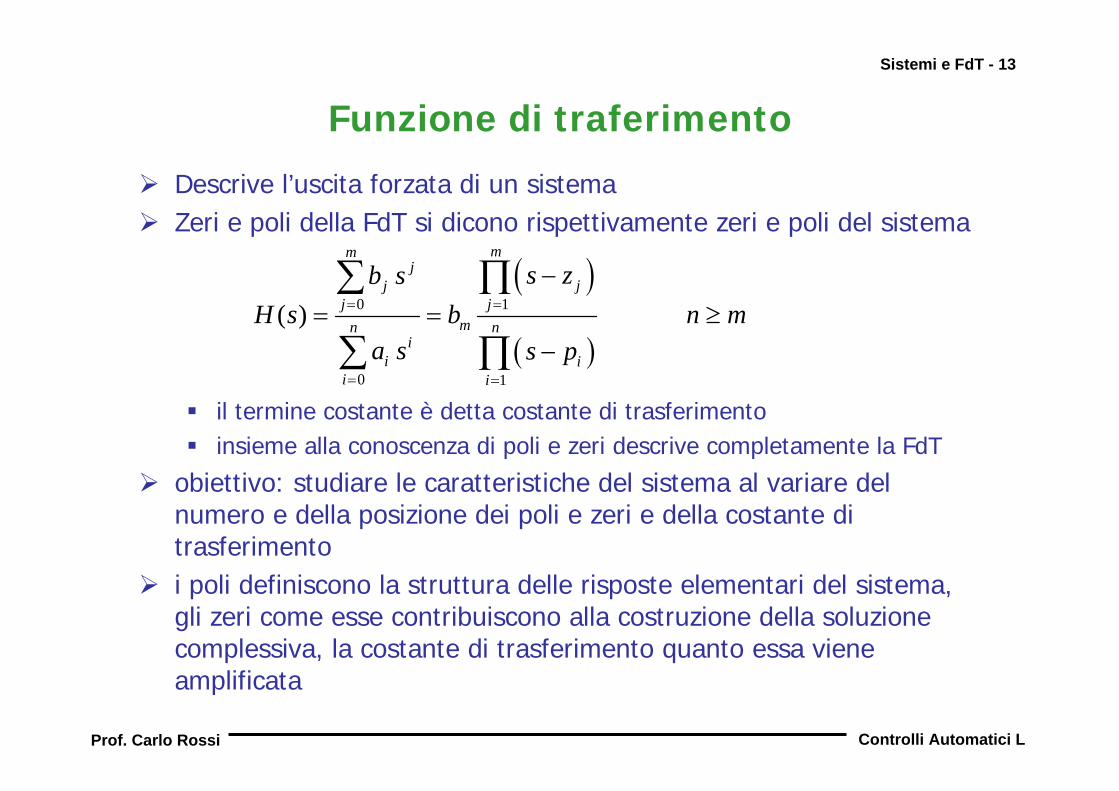
Funzione di traferimento
Descrive l’uscita forzata di un sistemaZeri e poli della FdT si dicono rispettivamente zeri e poli del sistema
il termine costante è detta costante di trasferimentoinsieme alla conoscenza di poli e zeri descrive completamente la FdT
obiettivo: studiare le caratteristiche del sistema al variare del numero e della posizione dei poli e zeri e della costante di trasferimentoi poli definiscono la struttura delle risposte elementari del sistema, gli zeri come esse contribuiscono alla costruzione della soluzione complessiva, la costante di trasferimento quanto essa viene amplificata
( )
( )0 1
0 1
( )
mmj
jjj j
mn ni
i ii i
s zb sH s b n m
a s s p
= =
= =
−= = ≥
−
∑ ∏
∑ ∏
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 14
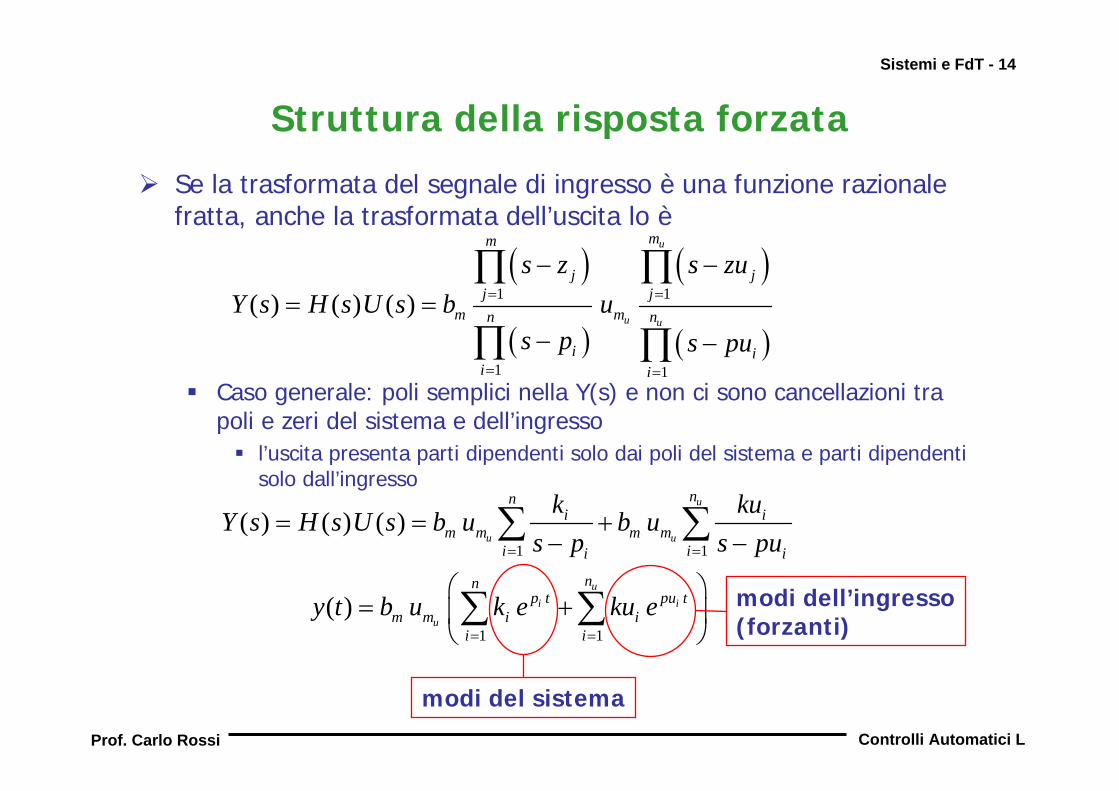
Struttura della risposta forzata
Se la trasformata del segnale di ingresso è una funzione razionale fratta, anche la trasformata dell’uscita lo è
Caso generale: poli semplici nella Y(s) e non ci sono cancellazioni tra poli e zeri del sistema e dell’ingresso
l’uscita presenta parti dipendenti solo dai poli del sistema e parti dipendenti solo dall’ingresso
( )
( )
( )
( )
1 1
1 1
( ) ( ) ( )
u
u u
mm
j jj j
m mn n
i ii i
s z s zuY s H s U s b u
s p s pu
= =
= =
− −= =
− −
∏ ∏
∏ ∏
1 1
1 1
( ) ( ) ( )
( )
u
u u
ui i
u
nni i
m m m mi ii i
nnp t pu t
m m i ii i
k kuY s H s U s b u b u
s p s pu
y t b u k e ku e
= =
= =
= = +− −
⎛ ⎞= +⎜ ⎟
⎝ ⎠
∑ ∑
∑ ∑
modi del sistema
modi dell’ingresso(forzanti)
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 15
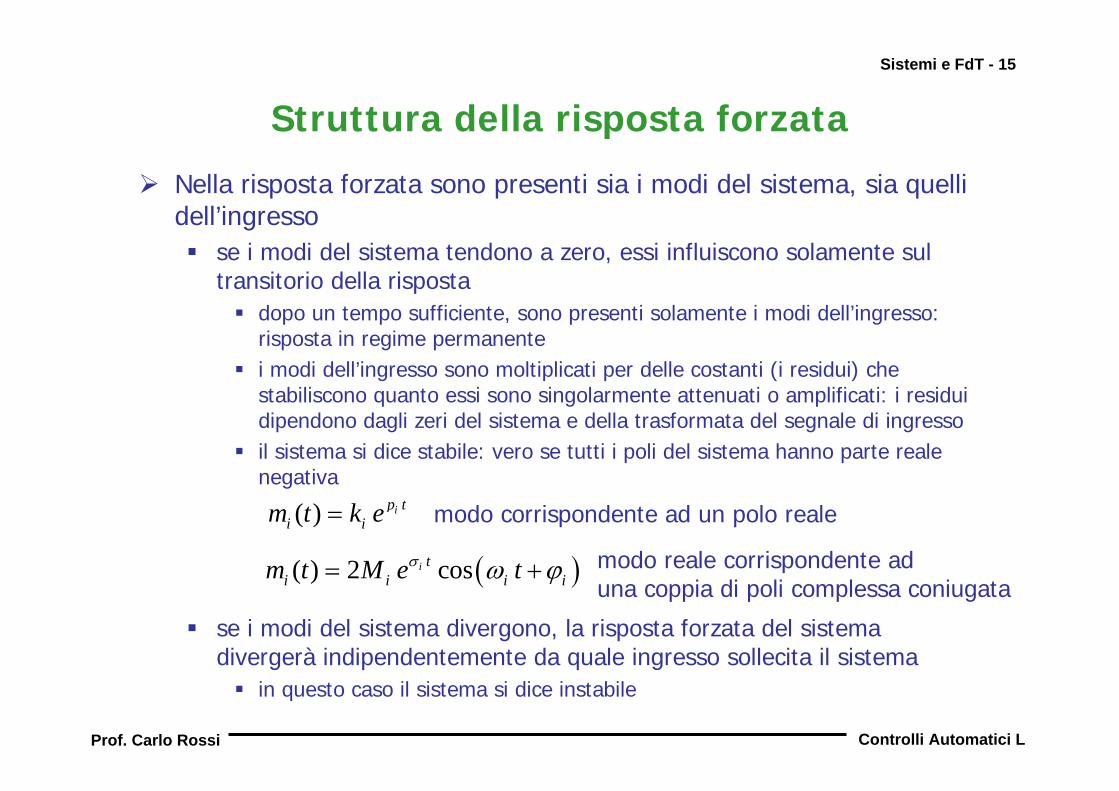
Struttura della risposta forzata
Nella risposta forzata sono presenti sia i modi del sistema, sia quelli dell’ingresso
se i modi del sistema tendono a zero, essi influiscono solamente sul transitorio della risposta
dopo un tempo sufficiente, sono presenti solamente i modi dell’ingresso: risposta in regime permanentei modi dell’ingresso sono moltiplicati per delle costanti (i residui) che stabiliscono quanto essi sono singolarmente attenuati o amplificati: i residui dipendono dagli zeri del sistema e della trasformata del segnale di ingressoil sistema si dice stabile: vero se tutti i poli del sistema hanno parte reale negativa
se i modi del sistema divergono, la risposta forzata del sistemadivergerà indipendentemente da quale ingresso sollecita il sistema
in questo caso il sistema si dice instabile
( ) ip ti im t k e= modo corrispondente ad un polo reale
modo reale corrispondente ad una coppia di poli complessa coniugata
( )( ) 2 cosi ti i i im t M e tσ ω ϕ= +
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 16
Struttura della risposta forzata
Caso particolare: un modo dell’ingresso coincide con un modo del sistema (risonanza)
nello sviluppo in fratti semplici della risposta forzata compaiono poli multiplila risposta diverge anche quando la parte reale del polo è nulla
sistema instabile, nel senso che in presenza di un ingresso limitato la risposta può divergere, anche se la parte reale dei poli è nulla
Caso particolare: uno zero del sistema coincide con un modo dell’ingresso
il modo non è più presente sull’uscita: proprietà bloccante degli zeriin caso di sistema stabile, la risposta a regime permanente può essere nullala risposta in transitorio è comunque diversa da zero, i modi del sistema vengono eccitati e poi decadono naturalmente a zerose il sistema è instabile, l’uscita diverge poiché i modi instabili sono eccitati anche se l’eventuale modo divergente dell’ingresso è bloccato da uno zero del sistema
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 17
Struttura della risposta forzata
Caso particolare: uno zero dell’ingresso coincide con un polo del sistema
il modo instabile del sistema non è più presente sull’uscita forzatavero in linea di principio, ma in realtà esiste sempre una componente di errore che anche se piccolissima porta l’uscita a divergerevedremo in seguito anche altre motivazioni: non è possibile evitare che l’uscita diverga in presenza di un modo instabile cancellando il modo stesso con uno zero dell’ingresso
Caso poli multipli nel sistemavalgono le stesse considerazioni, solamente che ora in presenza di poli multipli con parte reale nulla l’uscita diverge
matematicamente identico al caso della risonanzanon è necessario eccitare il modo del sistema con un modo analogo dell’ingresso
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 18
Introduzione della risposta libera
La trasformata della risposta libera ha esattamente la stessa struttura della risposta forzata
Y0(s) è un polinomio di ordine n-1 i cui coefficienti dipendono dalle condizioni inizialiI poli della risposta libera sono esattamente, con la stessa molteplicità, i poli del sistemala risposta libera è data da una combinazione lineare dei modi del sistema
se i modi sono stabili, la risposta libera tende a zero e l’effetto delle condizioni iniziali non nulle si esauriscono nel transitoriose i modi sono instabili, l’uscita diverge comunque, indipendente dall’ingresso
prima ragione per cui la cancellazione del modo instabile con uno zero dell’ingresso non è fattibile
( ) 0 00
0
0
( ) ( )( ) 0 ( ) ( )
( )
ni
i nii
ii
Y s Y sa y t Y s L s
D sa s=
=
= ⇒ = = =∑∑
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 19
FdT e caratteristiche della risposta
Struttura complessiva della risposta
Caratteristiche di stabilità del sistemaTutti i poli del sistema a parte reale negativa
risposta limitata ad un ingresso limitatodopo l’esaurimento del transitorio risposta a regime permanente
ingresso costante -> uscita costanteingresso sinusoidale -> uscita sinusoidale alla stessa frequenza (ma diversa ampiezza e fase)
Presenza di poli semplici con parte reale nullapossibile risonanza: esistono ingressi limitati che portano ad uscite divergenti
Poli multipli a parte reale nulla o poli a parte reale positival’uscita del sistema diverge indipendentemente dall’ingresso
00
( )( )( ) ( ) ( ) ( ) ( )( ) ( )
Y sN sY s H s U s L s U sD s D s
= + = +
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 20
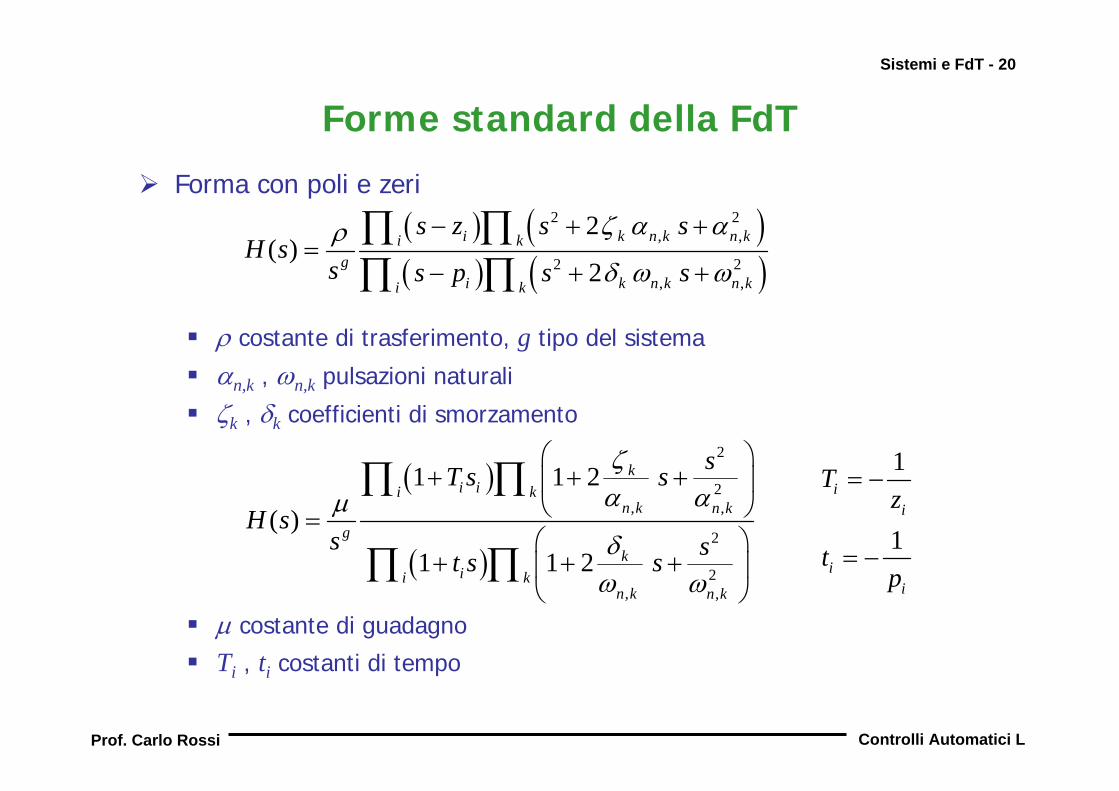
Forme standard della FdT
Forma con poli e zeri
ρ costante di trasferimento, g tipo del sistema
αn,k , ωn,k pulsazioni naturali
ζk , δk coefficienti di smorzamento
µ costante di guadagno
Ti , ti costanti di tempo
( ) ( )( ) ( )
2 2, ,
2 2, ,
2( )
2i k n k n ki k
gi k n k n ki k
s z s sH s
s s p s s
ζ α αρδ ω ω
− + +=
− + +∏ ∏∏ ∏
( )
( )
2
2, ,
2
2, ,
11 1 2( )
11 1 2
ki i ii k
n k n k ig
kiii k
in k n k
sT s s Tz
H ss s tt s s p
ζα αµδω ω
⎛ ⎞+ + + = −⎜ ⎟
⎝ ⎠=⎛ ⎞ = −+ + +⎜ ⎟⎝ ⎠
∏ ∏
∏ ∏
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 21
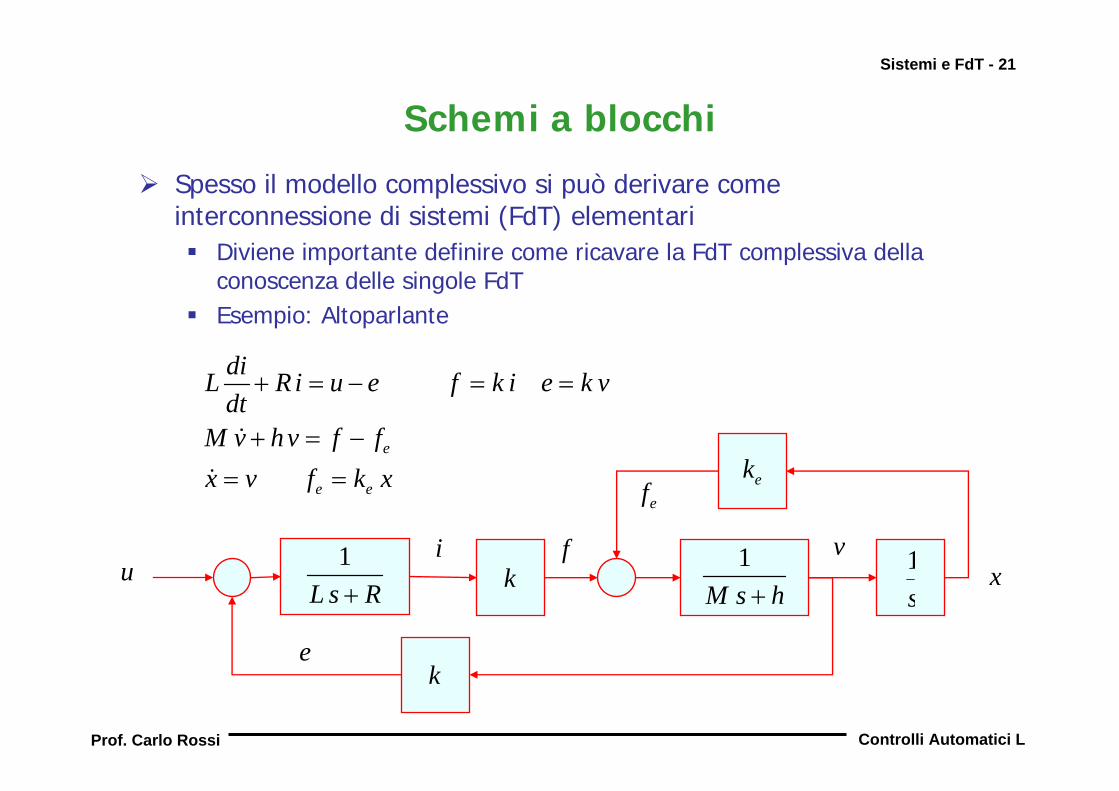
Schemi a blocchi
Spesso il modello complessivo si può derivare come interconnessione di sistemi (FdT) elementari
Diviene importante definire come ricavare la FdT complessiva della conoscenza delle singole FdTEsempio: Altoparlante
e
e e
diL R i u e f k i e k vdt
M v hv f fx v f k x
+ = − = =
+ = −
= =
1L s R+
1M s h+
1s
ek
k
k
u
e
i f
ef
vx
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 22
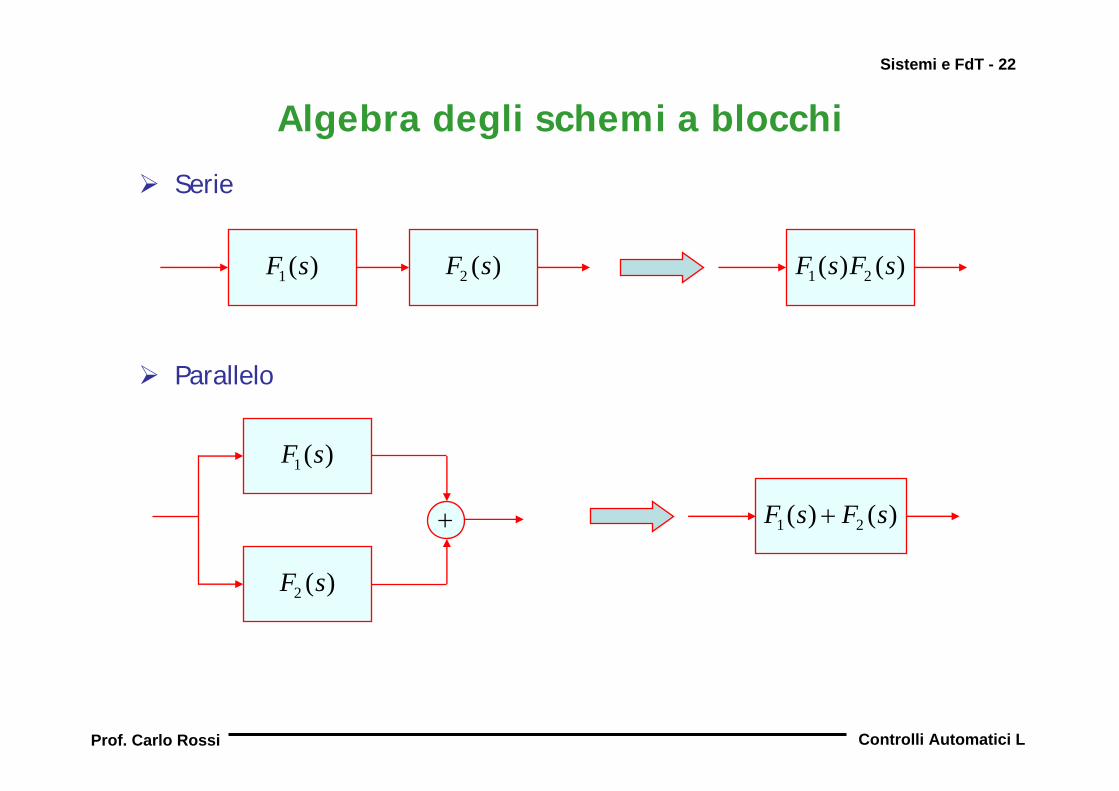
Algebra degli schemi a blocchi
Serie
Parallelo
1( )F s 2 ( )F s 1 2( ) ( )F s F s
1( )F s
2 ( )F s
1 2( ) ( )F s F s++
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 23
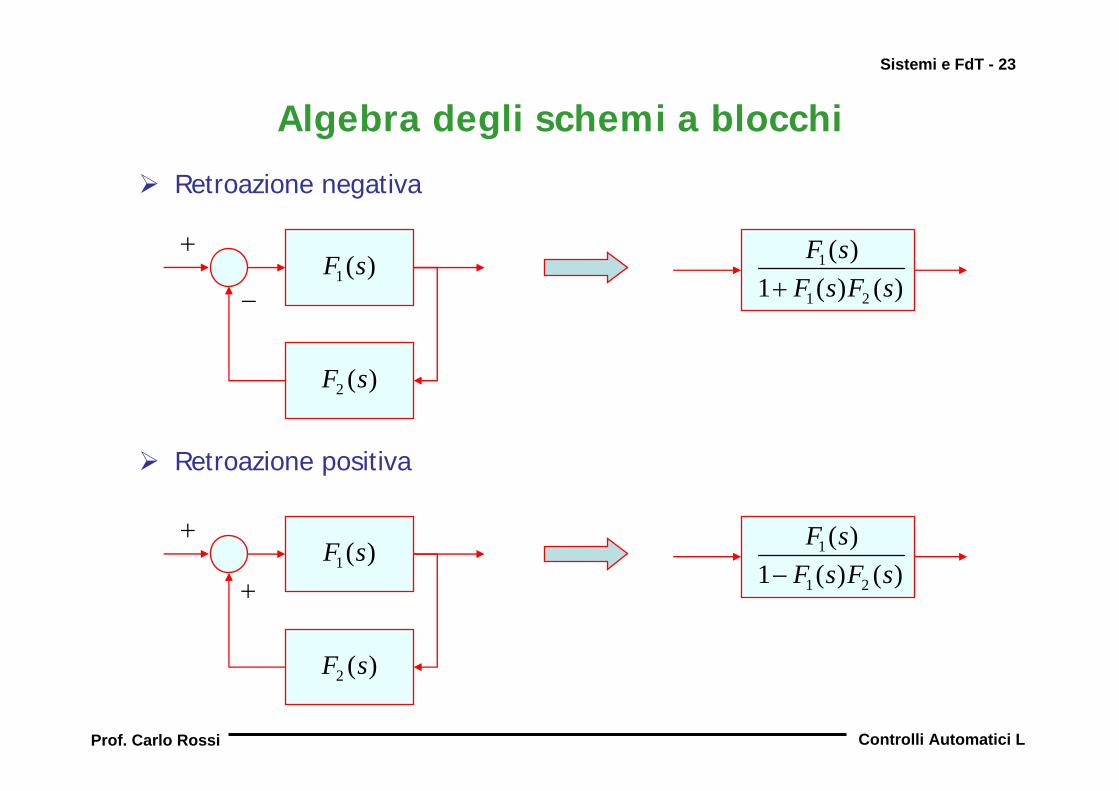
Algebra degli schemi a blocchi
Retroazione negativa
Retroazione positiva
1( )F s
2 ( )F s
1
1 2
( )1 ( ) ( )
F sF s F s+−
+
1( )F s
2 ( )F s
1
1 2
( )1 ( ) ( )
F sF s F s−+
+
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 24
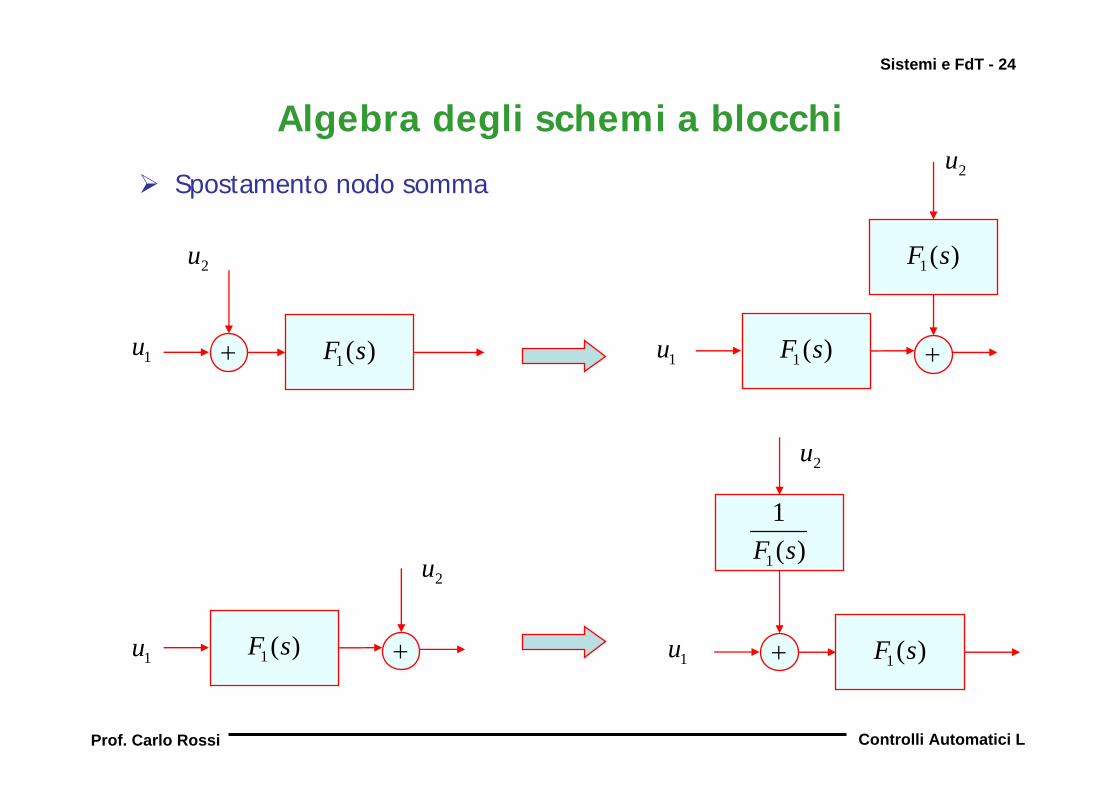
Algebra degli schemi a blocchi
Spostamento nodo somma
1( )F s+ 1( )F s +
1( )F s
1u 1u
2u
2u
1( )F s + 1( )F s+
1
1( )F s
1u 1u
2u
2u
Prof. Carlo Rossi Controlli Automatici L
Sistemi e FdT - 25
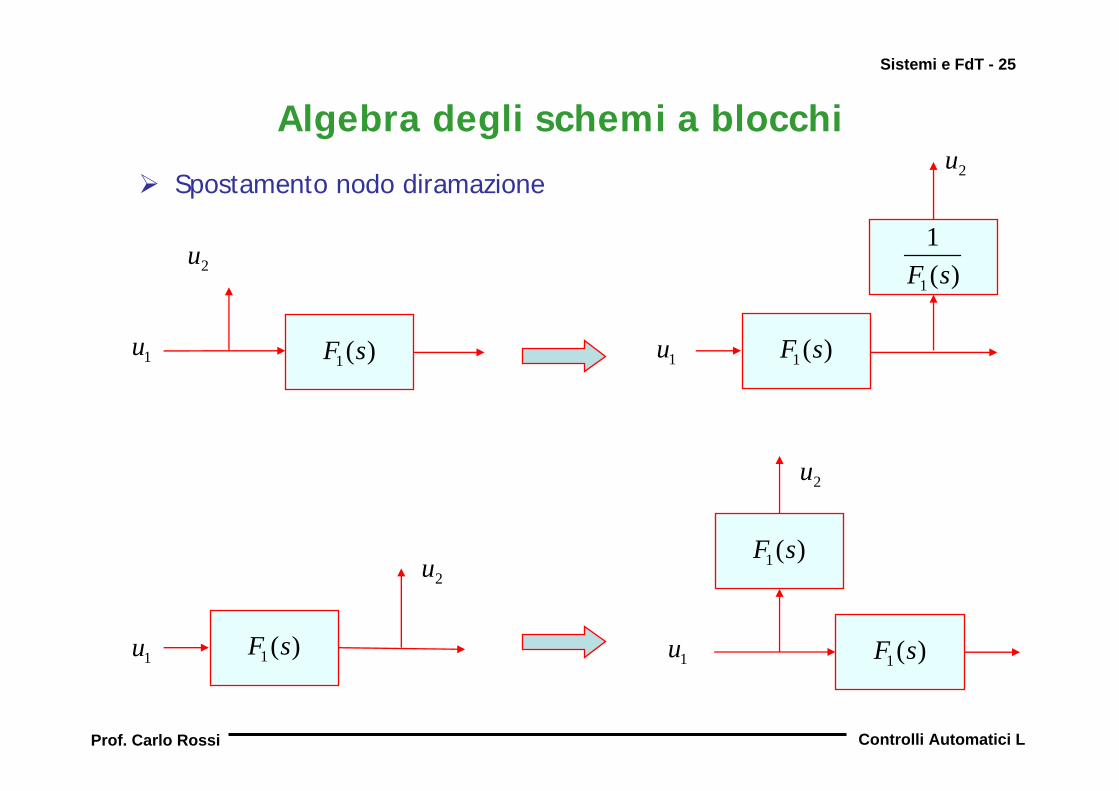
Algebra degli schemi a blocchi
Spostamento nodo diramazione
1( )F s1( )F s
1( )F s
1u 1u
2u
2u
1( )F s 1( )F s
1
1( )F s
1u 1u
2u
2u
Prof. Carlo Rossi Controlli Automatici L
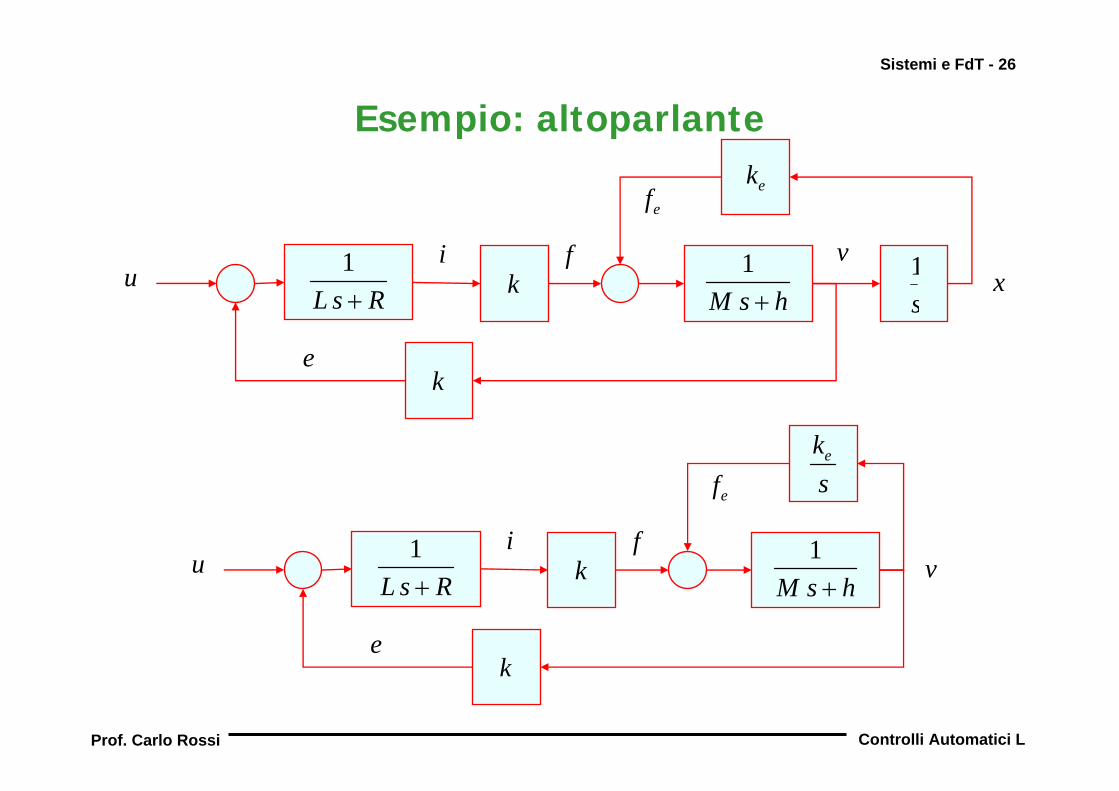
Sistemi e FdT - 26
Esempio: altoparlante
1L s R+
1M s h+
1s
ek
k
k
u
e
i f
ef
vx
1L s R+
1M s h+
eks
k
k
u
e
i f
ef
v
Prof. Carlo Rossi Controlli Automatici L
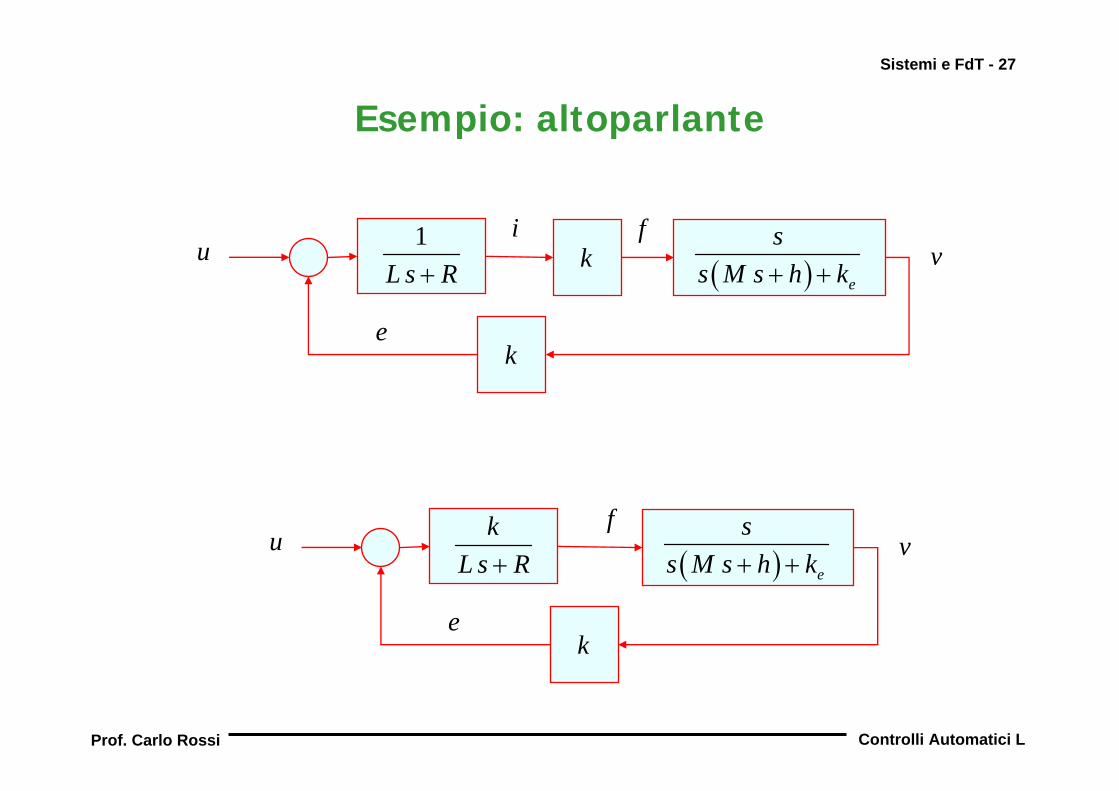
Sistemi e FdT - 27
Esempio: altoparlante
1L s R+ ( ) e
ss M s h k+ +k
k
u
e
i fv
kL s R+ ( ) e
ss M s h k+ +
k
u
e
fv
Prof. Carlo Rossi Controlli Automatici L
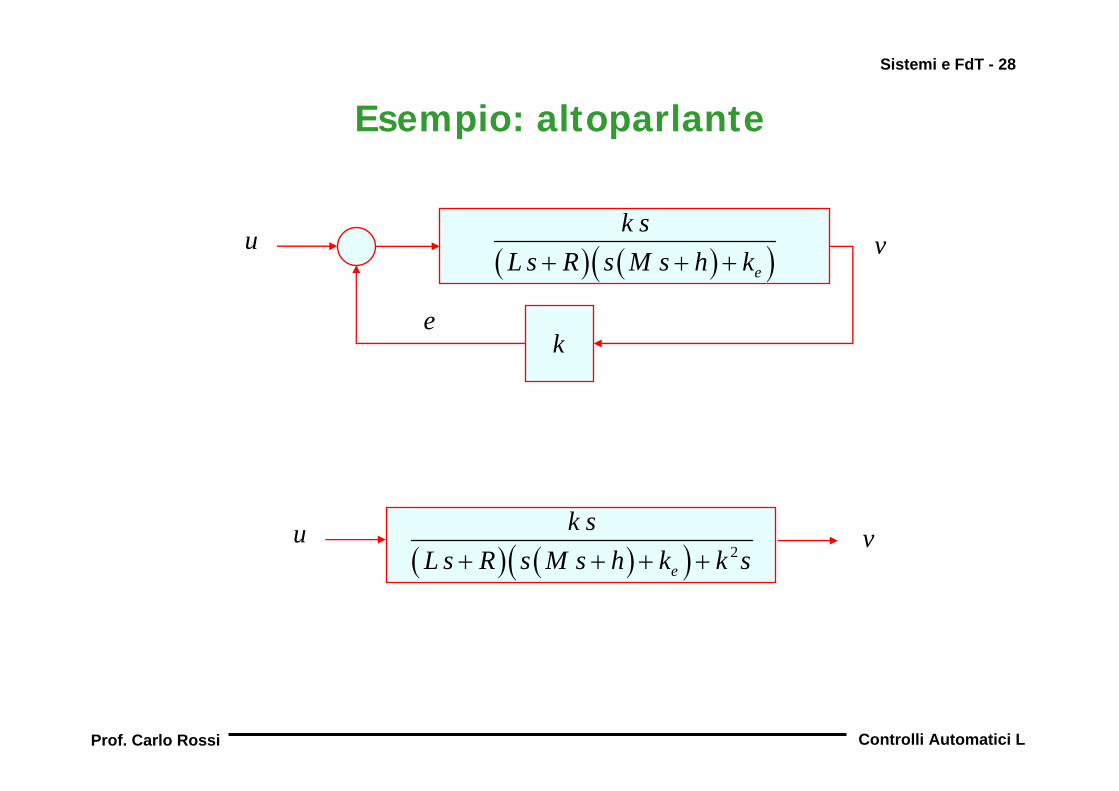
Sistemi e FdT - 28
Esempio: altoparlante
( ) ( )( )e
k sL s R s M s h k+ + +
k
u
e
v
u( ) ( )( ) 2
e
k sL s R s M s h k k s+ + + +
v