Sistemi di misurazione digitale a basso costo · sistema di riferimento ortonormale secondo la...
54
Sistemi di misurazione digitale a basso costo Relazione sulle potenzialità di strumenti di scansione a basso costo per l’uso in applicazioni body scan Nel presente documento si tratterà l’accuratezza di strumenti di scansione a basso costo per l’applicazione in utilizzo di tipo body scan. In particolare sarà trattato il dispositivo MS Kinect V1. La relazione si compone di 4 capitoli principali in cui verrà descritto e spiegato il funzionamento del dispositivo, fornita una stima matematica del modello di errore proprio, descritto l’algoritmo di misurazione realizzato, spiegato il software MS Fusion, le caratteristiche della scena e degli ausili costruiti per realizzare le scansioni. Verranno inoltre presentati i risultati di una campagna di misurazione e saranno infine tratte conclusioni con tecniche statistiche per la valutazione dell’errore commesso A cura di: Nicola Giardini Federico Papi Alessandro Sorri www.proteomed.it
Transcript of Sistemi di misurazione digitale a basso costo · sistema di riferimento ortonormale secondo la...

Sistemi di misurazione digitale a basso costo
Relazione sulle potenzialità di strumenti di
scansione a basso costo per l’uso in applicazioni
body scan
Nel presente documento si tratterà l’accuratezza di strumenti di scansione a basso costo per
l’applicazione in utilizzo di tipo body scan. In particolare sarà trattato il dispositivo MS Kinect V1.
La relazione si compone di 4 capitoli principali in cui verrà descritto e spiegato il funzionamento
del dispositivo, fornita una stima matematica del modello di errore proprio, descritto l’algoritmo
di misurazione realizzato, spiegato il software MS Fusion, le caratteristiche della scena e degli
ausili costruiti per realizzare le scansioni. Verranno inoltre presentati i risultati di una campagna di
misurazione e saranno infine tratte conclusioni con tecniche statistiche per la valutazione
dell’errore commesso
A cura di:
Nicola Giardini
Federico Papi
Alessandro Sorri
www.proteomed.it

Par
agra
fo:
Intr
od
uzi
on
e
1
Sommario
Introduzione .......................................................................................................................................... 3
Capitolo 1 - Accuratezza dello strumento ................................................................................................ 3
Scopo del capitolo e principio di funzionamento ........................................................................................... 3
Accuratezza e risoluzione di profondità ......................................................................................................... 6
Influenza della calibrazione ........................................................................................................................ 7
Integrazione dati da fotocamera RGB ........................................................................................................ 8
Risoluzione ed accuratezza di profondità ................................................................................................... 8
Modello teorico matematico dell’errore .................................................................................................... 9
Risoluzione di profondità e densità dei punti ............................................................................................. 9
Risultati campagne di misurazioni di terze parti .......................................................................................... 11
Calibrazione e distorsioni delle lenti ......................................................................................................... 11
Risultati del test del “plane fitting” .......................................................................................................... 12
Conclusioni dello studio ............................................................................................................................ 14
Osservazioni sullo studio analizzato ............................................................................................................. 15
Capitolo 2 - Misurazioni ........................................................................................................................ 16
Scopo del capitolo ........................................................................................................................................ 16
Metodo di misurazione manuale ................................................................................................................. 18
Layout della scena di misurazione digitale ................................................................................................... 21
Metodo di misurazione digitale ................................................................................................................... 25
Caratteristiche dell’algoritmo di misurazione digitale ................................................................................. 26
Validazione misura digitale .......................................................................................................................... 27
Capitolo 3 – Scansioni e analisi dei dati ................................................................................................. 29
Scopo del capitolo ........................................................................................................................................ 29
Verifica di ripetibilità ................................................................................................................................ 29
Verifica di precisione ................................................................................................................................ 29
MS Fusion SDK .............................................................................................................................................. 31
Principio di funzionamento ....................................................................................................................... 31
Impostazioni di acquisizione ..................................................................................................................... 32
Risultati delle scansioni ............................................................................................................................ 34
Confronto dei risultati e conclusioni ............................................................................................................ 41
Confronto test di ripetibilità .................................................................................................................... 41
Conclusioni sui test di ripetibilità .............................................................................................................. 43

Par
agra
fo:
Intr
od
uzi
on
e
2
Confronto test di precisione ..................................................................................................................... 44
Conclusioni sui test di precisione .............................................................................................................. 48
Capitolo 4 - Conclusioni ........................................................................................................................ 49
Conclusioni sulla campagna di indagine ....................................................................................................... 49
Caratteristiche proprie del sensore .......................................................................................................... 49
Impostazioni di scena ............................................................................................................................... 49
Risultati dei test sui software di scansione ............................................................................................... 50
Osservazioni sull’algoritmo di misurazione digitale ..................................................................................... 52
Par
agra
fo:
Intr
od
uzi
on
e
3
Introduzione
Il lavoro oggetto della presente trattazione è teso a svolgere un’indagine sull’accuratezza e precisione della
periferica Kinect for Windows nell’utilizzo della stessa come dispositivo di acquisizione dati tridimensionali.
Particolare attenzione verrà posta nell’applicazione relativa all’acquisizione di superfici anatomiche al fine
di estrarne misure utili alla realizzazione di dispositivi per utilizzo in campo medico.
La trattazione si articola in quattro capitoli.
All’interno del primo capitolo si descrive il principio di funzionamento dello strumento di acquisizione e si
definiscono i concetti matematici di errore casuale e risoluzione della misura di profondità. Sono inoltre
presentati i risultati di campagne di misurazioni condotte da terze parti.
Nel secondo capitolo è presentato il metodo di misurazione utilizzato per condurre la sperimentazione sulle
misure rilevate dallo strumento. Sono inoltre descritti il layout di ripresa adottato ed i dispositivi utili
all’automatizzazione della scansione tridimensionale.
Nel terzo capitolo si presenta un confronto tra i risultati ottenuti variando le impostazioni di scansione con
il software presente nell’SDK 1.8 di Microsoft: il Fusion.
Nel quarto capitolo si traggono le conclusioni finali ed i possibili sviluppi relativi alla campagna di
sperimentazione condotta.
Capitolo 1 - Accuratezza dello strumento
Scopo del capitolo e principio di funzionamento Come accennato nell’introduzione lo scopo del presente capitolo è quello di fornire un breve excursus sulla
modalità di funzionamento del sensore MS Kinect for Windows (in un primo tempo noto come “project
nadal”).
Il sensore del MS Kinect for Windows ha un range di utilizzo che varia da 0.5 metri ad un massimo di 5.0
metri. L’angolo di visuale orizzontale è pari a 57° mentre quello verticale è pari a 43°. Il dispositivo è inoltre
dotato di una motorizzazione del corpo, controllabile via software, che consente un angolo di rotazione
sulla verticale del sensore pari a 27°. La dimensione dell’inquadratura ad una distanza di 0.8 m è quindi pari
a circa 87x63 cm (bxh), che associate ad una risoluzione dello stream dei dati di profondità di 640x480 pixel
genera una risoluzione di circa 1.3 mm per pixel.
Lo strumento è dotato di una camera ad infrarossi, una fotocamera RGB ed un emettitore di infrarossi.
In breve, il sensore basa la sua strategia di acquisizione dati sull’approccio del tipo a luce strutturata. Il
concetto che sta alla base di questo sistema è comune a molti sistemi di scansione tridimensionale ed il
processo consta di tre fasi:
1) La proiezione di un pattern1 geometrico predefinito su di un oggetto reale;
2) La rilevazione della geometria deformata del pattern proiettato;
3) L’estrazione delle coordinate tridimensionali, attraverso l’uso della triangolazione geometrica,
mediante il confronto del pattern deformato proiettato sull’oggetto con il pattern indeformato
noto a priori.
1 Il pattern è in questo caso una griglia geometrica regolare, somigliante ad una scacchiera, visibile in Figura 2.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
4
Figura 1 - Sensori MS Kinect
Il proiettore di raggi infrarossi emette un singolo raggio che attraverso un reticolo di diffrazione posto in
fronte al dispositivo crea un pattern costante di spot luminosi.
Il pattern proiettato sugli oggetti, in seguito catturato dal sensore IR, si deforma assumendo curvature e
dimensioni in relazione alla posizione degli oggetti stessi all’interno della scena.
Figura 2 - Pattern proiettore IR
L’immagine catturata dal sensore, contenente il pattern deformato, viene in seguito correlata con un
pattern di riferimento indeformato, memorizzato all’interno del sensore. Il pattern di riferimento non è
altro che il pattern originale, proiettato su una superficie piana di riferimento da una distanza predefinita
(nota), catturato dal sensore.
Quando ciascuno spot luminoso viene proiettato su un oggetto la cui distanza è maggiore o minore rispetto
al piano di riferimento, la posizione dello stesso nell’immagine infrarossa si sposterà lungo la direzione della
baseline tra l’ascissa del proiettore IR ed il centro prospettico della camera IR.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
5
Figura 3 - Rilevazione punto più vicino del piano di riferimento
Figura 4 - Rilevazione punto più lontano del piano di riferimento
Ciascun interasse è misurato per ogni spot luminoso attraverso una semplice procedura di correlazione
d’immagine, che genera una mappa di disparità. La distanza dal sensore di ogni pixel può essere desunta
dalla mappa di disparità. Tale mappa ha le fattezze di una matrice M di interi, di dimensioni WxH, in cui W
ed H sono rispettivamente larghezza ed altezza dell’immagine. Ciascun elemento della matrice M ha la
forma di un intero di 11 bit -cui corrispondono 1024 livelli-, dove uno dei bit è riservato per identificare i
pixel senza disparità.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
6
Accuratezza e risoluzione di profondità2 Le figure 3 e 4 mostrano la relazione tra la distanza di un oggetto (A o B) dal sensore in relazione al piano di
riferimento e la misura “d” della disparità. Per esprimere le coordinate 3D dei punti interessati si considera
un sistema di riferimento con l’origine posta nel centro della camera ad infrarossi. L’asse Z è ortogonale al
piano dell’immagine che attraversa l’oggetto, l’asse X è perpendicolare all’asse Z nella direzione della linea
base b che congiunge la camera IR con il proiettore IR. L’asse Y è ortogonale agli altri due, formando un
sistema di riferimento ortonormale secondo la regola della mano destra.
Ipotizziamo che un punto sia sul piano di riferimento alla distanza Z0 dal sensore e che uno spot luminoso
sia catturato sul piano della linea base. Se l’oggetto viene spostato più vicino (figura 3) o più lontano (figura
4) del piano di riferimento si registra una variazione della distanza “d” misurata tra la congiungente con il
piano dell’oggetto e la camera e la congiungente tra l’intersezione della retta passante per il proiettore e
l’oggetto con il piano di riferimento. Per similitudine di triangoli abbiamo che:
(1)
e
per Zk<Z0;
per Zk>Z0 ; (2)
Dove Zk rappresenta la distanza dell’oggetto dal piano passante per la linea base, b è la linea base (che
rappresenta la distanza tra proiettore e camera IR), f è la lunghezza focale della camera IR, D è lo
spostamento del punto interessato nello spazio e d rappresenta la disparità del punto considerato
nell’immagine.
Sostituendo D dalla prima delle due (2) nella (1), ed esprimendo la formula in funzione di Zk si ottiene:
; (3)
L’equazione (3) è il modello matematico di base per l’estrapolazione della profondità dalla disparità
osservata, assunto che i parametri Z0, f, e b possano essere determinati in fase di calibrazione. La
coordinata Z di un punto, assieme ad f definisce la scala visuale per quel punto. Le coordinate planimetriche
di ciascun punto possono essere calcolate attraverso le sue coordinate e la scala:
;
; (4)
Dove Xa ed Ya sono le coordinate del punto in esame, mentre X0 ed Y0 sono le coordinate dello stesso
punto nel pattern di riferimento. e invece sono le correzioni per la distorsioni delle lenti, di cui
esistono differenti coefficienti a seconda del modello utilizzato. Il sistema di riferimento dell’immagine è
assunto parallelo rispettivamente alla linea base ed all’asse della profondità (Z).
2
Ia trattazione di questo paragrafo è frutto della rielaborazione del paper a cura della rivista “Sensors” www.mdpi.com/journal/sensors; “Sensors 12, no. 2: 1437-1454”

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
7
Influenza della calibrazione I parametri di calibrazione coinvolti nel modello matematico per la determinazione delle coordinate 3D,
attraverso la misurazione dell’immagine raw sono:
1) lunghezza focale della camera IR (f);
2) punti principali di offset (x0, y0);
3) coefficienti di distorsione delle lenti ( e );
4) lunghezza base (b);
5) distanza del pattern di riferimento (Z0).
Bisogna anche considerare l’angolo di disallineamento tra l’asse X, il sistema di riferimento dell’immagine e
la linea base. Tuttavia questo ultimo fattore può essere ignorato se si pone il sistema di riferimento della
profondità coincidente con quello dell’immagine sulla baseline.
Dei parametri di calibrazione sopra elencati i primi tre possono essere determinati attraverso una
procedura standard di calibrazione della fotocamera. Nella pratica comunque i parametri di calibrazione
della camera IR non corrispondono direttamente alla mappa di disparità, questo perché le dimensioni della
mappa memorizzata nel dispositivo sono di 640 x 480 pixel, mentre il sensore infrarossi ha una risoluzione
di 1280 x 1024. Le immagini rilevate dal sensore infrarossi sono in realtà poi ridotte e trasmesse ad una
risoluzione di 640 x 480, corrispondente alle dimensioni della mappa di disparità, a causa della limitazione
sulla larghezza di banda della connessione USB.
Un approccio efficace alla calibrazione è quello di stimare i parametri attraverso le immagini ridotte
catturate dalla camera IR, valutando una corrispondenza pixel to pixel rispetto alla mappa di disparità
contenuta all’interno del sensore.
La determinazione della lunghezza base e della distanza del piano di riferimento sono più complicate.
Questo perché le misurazioni di disparità raw (grezze, non processate) sono normalizzate e trasmesse
sottoforma di interi di 11 bit –come già descritto-.
A questo punto nell’equazione (3) d dovrebbe essere sostituito da md’ + n dove d’ è la disparità
normalizzata, mentre n ed m sono parametri di una -ipotizzata- normalizzazione lineare.
Includendo questi termini nella (3) ed invertendola si ottiene la:
(
) (
) (5)
L’equazione (5) esprime una relazione lineare tra l’inverso della misura di profondità di un punto e la sua
corrispondente disparità normalizzata. Osservando la disparità normalizzata per un numero sufficiente di
punti ad una distanza nota dal sensore si può stimare il coefficiente della relazione lineare in modo
emprico. Comunque l’inclusione dei parametri di normalizzazione non permette di determinare b e Z0
separatamente.
I parametri di calibrazione sopra menzionati definiscono completamente la relazione tra le misure
dell’immagine (x,y, d’) e ciascun componente della mappa di disparità. Ricordiamo che tali parametri non
descrivono la geometria interna della camera IR, dal momento che sono stimati a partire dall’immagine
ridotta dal firmware di 640 x 480 pixel.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
8
Integrazione dati da fotocamera RGB L’integrazione dei dati di profondità con quelli di colore non è argomento fondamentale ai fini della
presente trattazione. Il principio di funzionamento comunque si basa su una calibrazione stereoscopica
delle due camere IR e RGB, in questo modo è possibile associare ad ogni pixel che costituisce l’immagine
anche le informazioni di colore, oltre a quelle di profondità. E’ da notare che anche la fotocamera RGB
produce uno stream a risoluzione ridotta di 640 x 480 pixel.
Risoluzione ed accuratezza di profondità
Accuratezza e densità della nuvola sono due misure importanti per valutare la qualità di una nuvola di
punti. In questo sottoparagrafo si presenteranno i fattori che influenzano l’accuratezza e la densità di punti
garantita dal Kinect. Verrà inoltre riportata una formulazione matematica dell’errore matematico casuale.
Sorgenti d’errore
Errori ed imperfezioni nei dati catturati dal Kinect possono essere generati da tre fattori fondamentali:
1) Caratteristiche proprie del sensore;
2) Il layout della scena rilevata;
3) Le proprietà riflettenti delle superficie acquisite.
Gli errori dovuti al sensore, considerando un dispositivo che funziona correttamente, si riferiscono
principalmente all’inadeguata calibrazione e inadeguata misurazione delle disparità. Tali fattori distorsivi
conducono a errori di tipo sistematico nella determinazione delle coordinate oggetto dei singoli punti.
Questi errori possono essere eliminati grazie ad una corretta calibrazione del sensore sfruttando le relazioni
precedentemente descritte.
Gli errori causati dal layout della scena rilevata si riferiscono principalmente alle condizioni di illuminazione
ed alla geometria delle immagini acquisite. Le condizioni di illuminazione influenzano la correlazione e
quindi la misurazione delle disparità: in condizioni di forte illuminamento gli spot luminosi emessi dal
proiettore IR appaiono in basso contrasto al momento dell’acquisizione dell’immagine infrarossa. La
geometria delle immagini si riferisce alla distanza ed all’orientazione delle geometrie acquisite rispetto allo
strumento. Il range operativo del sensore è da circa 0.5 a 5.0 m e, come si vedrà in seguito, gli errori casuali
delle misurazioni di profondità aumentano all’aumentare della distanza dell’oggetto rilevato dal sensore.
Per quanto riguarda le geometrie acquisite, alcune parti della scena potrebbero essere nascoste oppure in
ombra. Il fenomeno dell’ombra è descritto nella Figura 5 e si verifica quando una zona della scena, benchè
visibile dalla fotocamera IR, non è irraggiata dal fascio IR emesso dal proiettore. Analogamente il caso
inverso (zona illuminata da laser ma nascosta alla fotocamera) genera zone a cui dal Software viene
attribuita disparità uguale a zero (vengono riconosciuti come vuoti nella nuvola di punti).
Figura 5 - Fenomeno dell'ombra

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
9
Le proprietà riflettenti delle superfici influenzano a loro volta la capacità dello strumento di effettuare
misure corrette: spot di luci proiettati su superfici molto riflettenti, che appaiono come sovraesposte,
impediscono la misurazione della disparità. Questo si traduce nella presenza di buchi nella nuvola di punti.
Modello teorico matematico dell’errore Assumendo che nell’equazione (5) i parametri di calibrazione siano determinati accuratamente e che d’ sia
una variabile casuale con una distribuzione normale possiamo sfruttare la varianza della disparità per
ottenere la varianza delle misurazioni di profondità come segue:
; (6)
La quale, semplificata, fornisce della deviazione standard per la misura di profondità:
; (7)
con σd′ e σZ rispettivamente le deviazioni standard della disparità normalizzata e della distanza di
profondità calcolata. L’equazione (7) mostra espressamente come la deviazione della misura sia
proporzionale al quadrato della distanza dall’oggetto di misura. Dal momento che la distanza di profondità
è coinvolta anche nella determinazione delle coordinate X ed Y è lecito aspettarsi che gli errori in tali
riferimenti siano funzioni del secondo ordine rispetto alla distanza di profondità. Attraverso la
propagazione degli errori nell’equazione (4), assumendo che gli errori casuali delle coordinate d’immagine x
ed y siano trascurabili, otteniamo che gli errori lungo X ed Y sono pari a:
;
; (8)
Risoluzione di profondità e densità dei punti La risoluzione della camera IR, o più precisamente la dimensione in pixel della mappa di disparità,
determinano la spaziatura dei punti dei dati di profondità sul piano XY (perpendicolare all’asse della
camera). Dal momento che ciascuna immagine di profondità contiene un numero costante di 640 x 480
pixel la densità dei punti diminuirà all’aumentare della distanza dell’oggetto misurato dal sensore.
Considerando la densità di punti come il numero di punti per unità di area, mentre il numero di punti
rimane costante l’area acquisita è proporzionale al quadrato della distanza dal sensore. Quindi la densità di
punti sul piano XY è inversamente proporzionale al quadrato della distanza dal sensore.
La risoluzione di profondità è rappresentata dalla minima differenza di profondità che può essere misurata
ed è determinata dal numero di bit per pixel usati per memorizzare le misure di disparità. Come già detto le
misure di disparità sono espresse dal Kinect con interi di 11 bits, pari a 1024 livelli di disparità. Dal
momento che la profondità è inversamente proporzionale alla disparità, la risoluzione di profondità è
anch’essa inversamente correlata al numero di livelli di disparità.
Posto Z(d’) come una funzione della profondità rispetto alla disparità normalizzata d’, allora la risoluzione di
profondità è semplicemente la differenza di profondità tra due successivi livelli di disparità. Es. ΔZ(d′) = Z(d′)
– Z(d′+ 1), il che conduce ad esprimere la:

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
10
; (9)
La risoluzione di profondità è inoltre una funzione quadratica della profondità e decresce all’aumentare
della distanza dell’oggetto rilevato dal sensore.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
11
Risultati campagne di misurazioni di terze parti3 Si presentano in questa parte di relazione i risultati ottenuti dalla sperimentazione condotta da Kourosh
Khoshelham e Sander Oude Elberink della facoltà di Scienze della Geoinformazione e di Osservazione della
Terra dell’Università di Twente (Paese Bassi).
Calibrazione e distorsioni delle lenti Il lavoro svolto in prima battuta è stato quello di realizzare una calibrazione delle camere (sia IR che RGB).
La procedura di calibrazione utilizzata è quella standard implementata nel software Photomodeler®. La
procedura si è servita di un totale di otto immagini di un pattern predefinito, acquisite dallo strumento e
riprese da diverse angolazioni. In particolare nell’effettuare la taratura della camera IR l’emittente IR è stata
coperta per evitare disturbi degli spot luminosi proiettati. Le distorsioni sono in seguito state modellate
sfruttando il modello di Brown4, che propone tre parametri di distorsione radiale (K1, K2, K3) e due
parametri di decentramento (P1, P2).
I risultati dell’indagine in questo frangente hanno portato ad osservare che:
1) La camera RGB presenta un elevato offset dei punti principali (y0) pari a 0.327 mm, corrispondenti a 35
pixels;
2) La camera IR presenta un ridotto offset dei punti principali (come si può vedere da immagine in figura
3) Nella camera IR sono stati rilevati dei maggiori effetti di distorsione di decentramento rispetto a quelli
rilevati per la camera RGB;
4) La magnitudine delle distorsioni radiali, tuttavia, è generalmente maggiore nell’immagine RGB che in
quella IR, in particolar modo nell’angolo in alto a sinistra, dove le distorsioni raggiungono i 9 pixel (0.08
mm). Una distorsione di 0.08 mm nell’immagine corrisponde ad un disallineamento della misura pari ad
8 cm, misurando un oggetto posto a 5 m dal sensore.
Figura 6 - Distorsioni delle fotocamere
Per determinare i parametri coinvolti nella relazione tra disparità calcolata e profondità del punto misurato
sono stati rilevati i dati di profondità di 8 punti a distanze diverse predefinite.
Sono stati poi riportati i risultati delle misurazioni su di un piano cartesiano sul cui asse delle ascisse è
presente la misura della disparità mentre su quello delle ordinate è riportato l’inverso della distanza.
Il risultato ottenuto mostra una relazione lineare, come ci si aspettava dal modello matematico elaborato
nei precedenti paragrafi.
3
Ia trattazione di questo paragrafo è frutto della rielaborazione del paper a cura della rivista “Sensors” www.mdpi.com/journal/sensors; “Sensors 12, no. 2: 1437-1454” 4 Brown D.C. Close-range camera calibration. Photogramm. Eng. 1971;37:855–866

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
12
Figura 7 - Relazione disparità/profondità
Risultati del test del “plane fitting” Il test del plane fitting consiste nel misurare una superficie piana più volte, in un intervallo di distanze dalla
stessa compreso entro i limiti del range operativo dello strumento.
In questo caso sono stati svolti dei test di misurazione sulla superficie piana di una porta, misurata in un
range di intervallo tra 0.5 e 5.0 metri, a step di 0.5 metri.
In ciascun rilevamento è stata misurata la stessa porzione di porta, approssimando un piano ai punti
misurati. Per il fitting è stato utilizzato il metodo RANSAC5. Il metodo RANSAC è un algoritmo utilizzato per
stimare la tendenza di una serie di dati che non sia influenzata da rilevamenti di outliers. Per outliers si
intendono generalmente valori all’interno di una distribuzione che sono palesemente errati, fuori dalla
tendenza ricercata, frutto di errori casuali nella rilevazione. Il modello RANSAC è di tipo iterativo e si basa
su cinque fasi:
1) Si ipotizza un modello matematico stimato su alcuni inlier ipotizzati a priori;
2) Vengono testati tutti gli altri dati, confrontati tramite il modello matematico e classificati come
inlier o outlier a seconda della rispondenza al modello;
3) Si considera buono il modello se un numero sufficiente di dati che risultano essere inlier;
4) Si rielabora nuovamente il modello su tutti i dati che sono risultati essere inlier dalla simulazione;
5) Si esegue iterativamente la procedura decretandone la bontà sulla base di una stima dell’errore
atteso.
Dal momento che tutte le misure sulla superficie planare sono state condotte in maniera
approssimativamente perpendicolare all’asse ottico del sensore, gli errori residui della procedura di plane
fitting possono essere visti come una rappresentazione dell’errore casuale di rilevazione.
Per effettuare la valutazione di questo errore random sono stati prelevati un eguale numero di punti
esempio dalle scansioni (4500), selezionati casualmente, su cui sono stati calcolati deviazione standard ed
errori residui.
5 Metodo pubblicato da Fischler e Bolles [1981]

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
13
Figura 8 - Errore (ross) e risoluzione di profondità (blu) rilevati
Ciò che risulta evidente dalla figura 8 è che i risultati estratti dall’esperimento condotto da Khoshelham
mostrano un errore che aumenta in maniera quadratica da pochi millimetri a 0.5 m di distanza a circa 4 cm
a 5 metri di distanza.
Una considerazione interessante da osservare è come le rilevazioni effettuate (i punti) tendano a discostarsi
dai modelli teorici matematici (le linee) tanto più quanto maggiore è la distanza del piano dal sensore.
Figura 9 - spaziatura delle linee di scansione a diverse distanze
Un fattore che molto probabilmente influenza l’accuratezza in relazione alla distanza è la densità di pixel
ottenibile, variando la distanza del piano, a parità di superficie rilevata.
Risulta infatti semplice osservare come, data la dimensione finita ad 11 bit della matrice di disparità
adottata dal sensore, se allontaniamo il piano mantenendo la rilevazione sulla stessa porzione di area
osservata la densità dei dati acquisiti diminuisce.
Ad esempio lo studio evidenzia come rilevando lo stesso piano a distanze di 1 metro, 3 metri e 5 metri ed
osservando una sezione trasversale della nuvola di punti rilevata (osservandola di lato, in parole povere), la
distanza tra due strati di rilevazione consecutivi varia. La media così ottenuta per definire la superficie
d’interesse si basa su un numero minore di dati nel senso della profondità e si ottengono quindi scarti
maggiori nella determinazione della misura. Le distanze tra layer successivi rilevati passano da un minimo di
circa 2 mm per il piano ad un metro ai circa 2.5 cm per il piano posto a 3 metri fino ai quasi 7 cm del piano
posto a 5 metri.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
14
Conclusioni dello studio Le conclusioni tratte al termine dello studio riportato sono riassumibili in:
1) Per eliminare distorsioni della nuvola di punti e disallineamenti tra i dati di profondità e di colore è
necessaria un’accurata calibrazione stereo delle camere IR ed RGB;
2) L’errore casuale delle misurazioni di profondità incrementa secondo una legge quadratica della
distanza del sensore dall’oggetto rilevato, raggiungendo un massimo di circa 4cm alla distanza di 5
metri;
3) Per applicazioni standard di mappaggio i dati dovrebbero essere acquisiti ad una distanza di circa 1-
3 metri dal sensore. A distanze maggiori dal sensore i dati acquisiti sono degradati dal disturbo e
dalla bassa risoluzione delle misure di profondità, generata dalla natura finita della matrice di
disparità del sensore.

Par
agra
fo:
Cap
ito
lo 1
- A
ccu
rate
zza
del
lo s
tru
men
to
15
Osservazioni sullo studio analizzato Si ritiene interessante riportare alcune osservazioni maturate dall’analisi dello studio sopra riportato.
In particolare si ritiene utile porre l’accento su alcuni dettagli:
1) La tecnologia a luce strutturata su cui si basa il Kinect V1 non è particolarmente adatta ad utilizzi
outdoor: data l’esposizione alla luce solare degli oggetti da rilevare il sensore percepisce un
disturbo nell’acquisizione degli spot luminosi proiettati dal proiettore IR, che risultano in basso
contrasto rispetto alla scena;
2) Il sensore del Kinect V1 non riesce a rilevare superfici trasparenti o riflettenti, dal momento che le
proprietà di radiosità di tali superfici rendono inaffidabile (o impossibile) la rilevazione degli spot
luminosi proiettati su di essi. E’ pertanto consigliato evitare di inserire all’interno della scena
superfici di tipo riflettente;
3) L’accuratezza delle misure effettuate varia con il quadrato della distanza dell’oggetto rilevato dal
sensore, è perciò importante costruire la scena di acquisizione in modo da minimizzare tale
distanza;
4) Secondo quanto presentato dai test condotti da terze parti la precisione varia, a seconda della
distanza dell’oggetto rilevato, tra circa 4 cm a 5.0 metri e pochi millimetri a 50 cm;
5) Una opportuna taratura dei sensori del dispositivo contribuisce a diminuire gli errori casuali di
rilevazione;
6) E’ importante prestare cura nella realizzazione della scena di ripresa: tante più sono le superfici di
riferimento, tanto maggiori sono i dati su cui il software di ricostruzione può basare il proprio
lavoro.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
16
Capitolo 2 - Misurazioni
Scopo del capitolo
Lo scopo del presente capitolo è quello di definire il metodo di misurazione sul quale verranno condotti in
seguito test di ripetibilità.
L’ambito di interesse della start-up Proteo s.r.l.s. è quello del settore medicale, in particolar modo
riguardante l’acquisizione di determinati distretti anatomici, al fine di realizzare modelli digitali stampabili
di dispositivi medici su misura, oppure supporti per la realizzazione di dispositivi in FRP.
Ciò che è di primario interesse, quindi, è la determinazione della precisione con cui il dispositivo restituisce
nuvole di punti delle superfici acquisite. Nel corso di una prima fase di sperimentazione è emerso che,
trattandosi di dispositivi di tipo prevalentemente ortopedico, la necessità in termini di scansione non è
tanto correlata ad una restituzione accurata di piccoli dettagli delle superfici scansionate, ma
principalmente alla precisione con cui si riportano le geometrie grezze acquisite.
Studiando il principio di funzionamento del MS Kinect V1 si sono quindi stabiliti:
1) Il soggetto da misurare;
2) Il layout della scena;
3) Le misurazioni da eseguire sul soggetto, in relazione alle necessità di stabilire accuratezza e
ripetibilità delle scansioni per l’uso che se ne intende fare.
Concentrando l’attenzione sul punto 3) emerge la necessità di stabilire un sistema che a partire da una
geometria acquisita restituisca una misurazione determinabile univocamente.
Per le misurazioni da realizzare si è deciso di sfruttare un soggetto che avesse caratteristiche geometriche
affini alle reali superfici anatomiche che dovranno essere scansionate dallo strumento. Si è pensato in un
primo momento di eseguire misurazioni e confronti su una persona, tuttavia la deformabilità dei tessuti
non consente una misurazione delle circonferenze precisa ed univoca, ovvero scollegata dalla pressione
applicata dallo strumento di misura manuale sulla sezione da misurare. Tale ambiguità non consente di
stabilire quale quota parte di errore sia da attribuire allo strumento di rilevazione e quale all’errore
dell’operatore.
La scelta del distretto anatomico su cui condurre le misurazioni è ricaduta sulla zona degli arti inferiori, in
particolare sulla zona di caviglia, malleolo e gamba, fino al ginocchio. Le misurazioni consisteranno nella
rilevazione delle circonferenze delle zone interessate, oltre alle distanze delle stesse rispetto il piano di
appoggio del piede.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
17
Figura 10 - Standard di misurazione degli arti inferiori
Come accennato poco sopra, le misurazioni verranno condotte su di un modello con caratteristiche
geometriche simili a quelle reali, per la campagna di indagine si è sfruttato un manichino antropomorfo, le
cui dimensioni sono rilevabili e misurabili con minore errore rispetto ad un arto umano, dal momento che
le superfici sono rigide e non cedevoli.
Un’ultima precisazione riguarda l’illustrazione dell’algoritmo di misurazione digitale da noi progettato.
Come sarà possibile verificare nel seguito della relazione al fine di fornire uno strumento ottimale della
produzione di dispositivi medici più efficaci il riferimento delle altezze dei punti di repere non viene preso in
riferimento alla verticale, bensì rispetto l’asse longitudinale dell’arto.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
18
Metodo di misurazione manuale Attualmente la misura manuale prevede che l’operatore posizioni il metro in prossimità del punto di repere
di cui si deve misurare la circonferenza prendendo nota di due informazioni:
A) Quota del punto di repere rispetto il piano d’appoggio dell’arto inferiore;
B) Misura della circonferenza dell’arto alla quota di un punto di repere.
Le incertezze sulla misure fornite sono le seguenti:
A. Quota del punto di repere:
a. Metodo di misurazione della quota – A seconda che l’operatore misuri la quota tenendo
come riferimento il contatto con l’arto del paziente o che cerchi di mantenere, più o meno
efficacemente, la verticale, possono verificarsi errori circa la quota reale del punto di
repere. Ad esempio ipotizziamo di dover fare la misura ad un punto di repere collocato ad
un’altezza di 500 mm dalla base di appoggio dell’arto inferiore scansionato (misura verde).
Se la misura viene presa seguendo l’andamento della gamba, ad esempio sul polpaccio, si
commette in questo caso un errore di 3 mm; se la misura viene presa con un inclinazione di
almeno 4 gradi rispetto la verticale si commette un errore di minimo 1 mm rispetto la
misura reale. Si può anche incorrere, a seconda dell’abilità e capacità dell’operatore, in
errori di lettura della misura o altri errori di rilevamento.
b. Condizioni al contorno della misurazione della quota – Un'altra condizione critica è la
valutazione del divaricamento delle gambe. Un punto di repere misurato ad una distanza di
500 mm da terra individuerà un punto più basso o più alto rispetto l’asse longitudinale
della gamba a seconda dell’ampiezza del divaricamento degli arti inferiori.
Figura 11 - Errori di rilevamento della quota del punto di repere
B. Misura della circonferenza dell’arto:

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
19
a. Metodo di misurazione – L’operatore procede alla misurazione andando a porre, in modo
puramente discrezionale, il metro alla quota del punto di repere; molto spesso con un
unico riferimento puntuale si va poi a misurare la circonferenza senza tenere conto del
posizionamento complessivo del metro (vedi immagine sotto) e quindi esponendosi ad
errori relativi alla misura
Figura 12 - Errori nella misura della circonferenza nei punti di repere
Abbiamo ipotizzato che, facendo riferimento ad un punto di repere da cui misurare la
circonferenza, siano state prese tre misure (dall’alto verso il basso): una casuale (410 mm),
una secondo un piano ortogonale all’asse longitudinale della gamba (407 mm), una
secondo un piano orizzontale (405 mm).
Come si vede nella casella gialla dell’immagine le misure discostano fra loro a seconda del
piano cui appartiene la circonferenza misurata.
b. Condizioni al contorno – Vista la natura elastica e deformabile della superficie epidermica
una misura che tenda il metro comporterà una compressione e quindi una riduzione della
dimensione reale della circonferenza, viceversa una misura con lo strumento lente
sovrastima il valore reale. Oltre questi problemi, anche nel caso di idonea tensione del
nastro del metro si incorre in errori dovuti alla eventuale presenza di zone con curvatura
convessa. Nell’immagine successiva una dimostrazione del problema.
Figura 13 - Errori di misura della circonferenza legati allo strumento di misura

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
20
L’aspetto più critico di questi errori è legato al fatto che possono presentarsi contemporaneamente
andando quindi a determinare imprecisioni anche maggiori ad 1 cm rispetto la dimensione reale
corrispondente ad uno specifico punto di repere.
Le maggiori criticità, ai fini dell’efficacia compressiva del dispositivo medico, si legano alla corretta
misurazione dell’altezza del punto di repere, a causa della divaricazione delle gambe del paziente (la
circonferenza misurata viene fatta corrispondere ad un punto di repere diverso da quello realmente
misurato) e all’estensione corretta dello strumento coerentemente al punto di repere prescelto.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
21
Layout della scena di misurazione digitale Grazie alle informazioni desunte dallo studio del sistema di scansione si è provveduto a realizzare un layout
della scena che garantisse una distribuzione ottimale dei componenti, ovvero che presentasse le seguenti
caratteristiche:
1) Posizionamento del soggetto da riprendere ad una distanza ottimale; la minima ottenibile per
disporre di una scansione che comprendesse una porzione sufficiente della gamba del soggetto,
calcolata in base all’angolo di visuale dello strumento. Dai calcoli riportati in prima battuta per
ottenere un’altezza di ripresa pari a 63 cm è necessario porre lo strumento ad una distanza di
almeno 80 cm;
Figura 14 - Misure del layout di scena
La configurazione scelta nello svolgimento delle misurazioni consiste nel sensore posto ad una
distanza D dal centro della piattaforma pari a 100 cm, che genera una distanza minima dall’oggetto
in rotazione pari a 80 cm. L’altezza H del sensore da terra invece è pari a 43 cm. Il campo visivo del
sensore è orientato in modo da inquadrare al suo interno soltanto la parte mobile della
piattaforma, in modo da non creare ambiguità tra oggetti rotanti e fissi per il software di
ricostruzione;
2) Assenza dalla scena di ripresa di oggetti riflettenti che, come spiegato in avvio di trattazione,
disturbano l’acquisizione dello strumento di scansione. A questo scopo è stata riverniciata la
piattaforma del manichino, originariamente cromata, di colore nero opaco;
3) Presenza nella scena di sufficienti geometrie, utili alla referenziazione necessaria al software di
scansione per le integrazioni necessarie alla ricostruzione della geometria da acquisire. In questo
caso le forme del manichino si sono rivelate sufficienti a garantire il tracking durante la scansione.
L’unico accorgimento adottato è stato quello di avviare la scansione -con la pedana che ruota in
senso antiorario- così come mostrato in Figura 14, in modo da garantire al software di acquisizione
di aver già determinato gran parte della geometria dopo una rotazione di 180°;
4) Realizzazione di una scansione a 360°. Per effettuare una scansione di questo tipo ci sono tre
alternative: I) si ruota con lo strumento attorno al soggetto di scansione fermo II) si ottiene una
nuvola di punti che descriva tutta la superficie del soggetto in posizione fissa, effettuando più
acquisizioni da differenti angolazioni grazie a più sensori fissi disposti in posizione strategica III) si fa
ruotare il soggetto di fronte allo strumento di scansione posto in posizione fissa.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
22
I) II) III)
Figura 15 - Layout per scansioni a 360°
Si sono scartate la prima e la seconda opzione rispettivamente perché la prima, data la distanza
minima necessaria del sensore dal soggetto, richiederebbe un automatismo con un ingombro
troppo elevato; mentre la seconda, richiedendo un certo numero di sensori posti a diverse
angolazioni, cozza contro le esigenze di economicità alla base della filosofia con cui ci si propone di
operare. E’ stata quindi perseguita la terza strada, attraverso la progettazione e realizzazione di una
pedana rotante automatizzata.
Figura 16 - Esploso di montaggio della pedana

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
23
La realizzazione geometrica della pedana è molto semplice. Si tratta di due tavole di legno con
dimensioni 600x300x30 mm capaci di rotazione relativa, opportunamente rinforzate con profili
aperti in alluminio. Su ciascuna tavola è stata montata una piastra di rinforzo in acciaio con
dimensioni 180x180x4 mm. Sulla piastra montata sotto la tavola superiore è stato saldato un dado
M20 ed avvitata una barra filettata dello stesso tipo.
Sulla piastra montata sopra la tavola inferiore è stato praticato un foro con D = 22 mm. Tra le due
piastre è interposto un cuscinetto reggispinta a sfere tipo 51204 con dimensioni 20x40x14, con un
coefficiente di carico statico assiale pari a circa 3750 kg.
Figura 17 - Piastra superiore con cuscinetto reggispinta
Al disotto della tavola inferiore sono montati quattro piedini in acciaio, con lo scopo di distanziare il
piano su cui è montato il motore e permetterne il montaggio. Il motore è di tipo automobilistico,
generalmente utilizzato per muovere il meccanismo dei tergicristalli anteriori. Si tratta di un
motore a 12 V DC con assorbimento di circa 6 A.
La trasmissione del moto avviene attraverso cinghia e pulegge dentate. La cinghia scelta è del tipo
T5 con una lunghezza dello sviluppo pari a 620 mm (124 denti). Le pulegge conduttrice e condotta
su cui lavora la cinghia dentata sono state progettate e stampate in proprio, presentano un numero
di denti Z rispettivamente pari a 15 e 60, realizzando un rapporto di riduzione pari a 4.
Figura 18 - Particolari meccanici: pulegge dentate

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
24
Dopo un primo test del sistema assemblato ci si è resi conto che la velocità di rotazione del motore,
ancorché ridotto, era troppo elevata. Si è quindi deciso di intervenire inserendo un regolatore di
velocità PWM (a modulazione di ampiezza d’impulsi), che consente di modulare la velocità del
motore DC 12V senza ridurne la potenza come farebbe un potenziometro. Oltre a questo si è
inserito un interruttore da 16 A per comandare il sistema, montato su un cavo inguainato della
lunghezza di 2 m all’interno di un supporto ergonomico per l’impugnatura -anch’esso progettato e
stampato in proprio-, allo scopo di poter azionare il meccanismo senza entrare all’interno del
campo visivo del sensore.
Figura 19 - Regolatore PWM, motore e collegamento alimentatore DC
Per quanto riguarda il collegamento del telecomando si è utilizzato un connettore di tipo
commerciale, a sgancio rapido. L’alimentazione del motore è garantita da un trasformatore
stabilizzato a 12V dotato di collegamento a spinotto maschio-femmina. E’ interessante notare
come per la realizzazione del prototipo si sia scelta -per ragioni di economia- una tipologia di
comando analogico della rotazione; ma che esistono in commercio interfacce capaci di comandare
senza nessun problema il moto della piattaforma, costituendo così un sistema che potrebbe essere
completamente automatizzato (e comandato) dal PC, sincronizzato con il click di avvio della
scansione.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
25
Metodo di misurazione digitale Il programma di modellazione digitale utilizzato per procedere nell’editing di uno script di misurazione è di
tipo commerciale.
È stato sviluppato un algoritmo parametrico di modellazione che ci ha permesso di ottenere le misure
richieste in modo rapido, efficace e semplice.
Fatte le dovute valutazioni circa le generiche problematiche inerenti la presa misura manuale delle
circonferenze, l’algoritmo di modellazione da noi sviluppato si basa, prima di tutto, sulla ricerca dell’asse
longitudinale della gamba. A fronte delle analisi svolte sui sistemi di misura manuale è infatti emersa una
debolezza del metodo soprattutto proprio in conseguenza della difficile individuazione di un sistema di
riferimento assoluto ed intrinseco all’oggetto da misurare, indipendente dal divaricamento delle gambe e
ad altri elementi di genesi di errori, cui riferirsi al fine della ricerca delle caratteristiche essenziali del
dispositivo medico da produrre.
La ricerca dell’asse longitudinale è ottenuta con una logica sviluppata ad hoc nella scrittura dell’algoritmo.
Nella foto sottostante è indicata in rosso la collocazione dell’asse longitudinale rispetto la parte inferiore di
una gamba scansionata:
Figura 20 - Viste varie dell'asse longitudinale (ed i suoi punti di definizione) dell'arto inferiore scansionato
Una volta individuato l’asse longitudinale si può procedere alla definizione dei punti di repere ed alla
valutazione delle loro misure, ottenuta mediante logiche geometriche definite nell’algoritmo .
Figura 21 - Viste varie delle circonferenze misurate e corrispondenti dimensioni

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
26
Caratteristiche dell’algoritmo di misurazione digitale
Specificate le modalità operative di misurazione descriviamo di seguito gli input utilizzati per l’algoritmo di
misurazione.
Oggetto scansionato: All’interno dell’attuale algoritmo questo passaggio serve ad identificare ed indicare
l’oggetto su cui saranno svolte le operazioni di misura.
Base del dispositivo: Con questo dato di input si fissa la quota a partire della quale deve essere realizzata la
misura.
Altezza del dispositivo: Questo parametro permette di impostare, a partire dalla quota della base, l’altezza
complessiva della zona da misurare.
Precisione verticale: Questo parametro permette di scegliere la precisione con cui viene definito l’asse
longitudinale.
Numero dei punti di misura: Mediante questo parametro si indica il numero dei punti per i quali si richiede
la misura della circonferenza dell’arto.
Di seguito un’immagine esemplificativa dei dati di input su un arto scansionato; in rosso la scansione
dell’arto, in verde la preview della zona di misura, in nero le circonferenze misurate:
Figura 22 - Ipotesi di realizzazione di dispositivo medico (1)
Una caratteristica molto interessante offerta del nostro algoritmo è la flessibilità della modalità di
indicazione del numero di misure richieste.
Stante la natura non nota a priori delle misurazioni da effettuare si sono sviluppati più sistemi di
determinazione, basati su logiche diverse, secondo cui specificare la posizione dei punti di misura.
In breve si possono utilizzare logiche basate sul numero di punti desiderati in un intervallo oppure sulla
differenza di quota tra due punti consecutivi o altrimenti sulla posizione relativa di ciascun punto rispetto
all’altezza misurata.

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
27
Validazione misura digitale Per verificare la correttezza della misura digitale ricavata dal software è stata fatta una verifica molto
semplice. Si è modellato con il programma precedentemente indicato un solido composto da tre cilindri di
diametro diverso ed allineati secondo l’asse longitudinale.
Figura 23 - Solido utilizzato per la verifica
L’oggetto si contraddistingue per un diametro che varia in modo discontinuo in 100 mm, nel cilindro di
base, 50 mm nel cilindro intermedio, 100 mm nel cilindro più in alto. Le circonferenze corrispondenti sono
quindi le seguenti: 628 mm (circa); 314 mm (circa); 628 mm (circa).
Abbiamo quindi utilizzato l’algoritmo precedentemente mostrato per verificare se il riconoscimento
dell’asse longitudinale e la misura delle circonferenze fosse corretta.
Figura 24 - Esito della misurazione con l'algoritmo progettato
Come si vede dall’immagine sopra le misure digitali confermano le circonferenze proprie del solido
modellato. Si considera quindi efficace ed attendibile il sistema di misurazione digitale da noi sviluppato.
Nella successiva foto si porta dimostrazione visiva dell’attendibilità dello script: è possibile vedere oltre al
solido le circonferenze delle quali è stata misurata la lunghezza e l’asse longitudinale che, visto
l’allineamento dei cilindri, corrisponde ad un segmento rettilineo.
L’architettura del nostro algoritmo è infine indipendente dalla modalità di espressione del numero di
misure pertanto, anche se il test è stato condotto solo nel caso di espressione diretta del numero di punti di
repere si considera verificato anche nel caso in cui si fissi la lunghezza dell’intervallo tra due punti di repere

Par
agra
fo:
Cap
ito
lo 2
- M
isu
razi
on
i
28
successivi, sia nel caso che la collocazione dei punti di repere sia identificata inserendo una quota
percentuale rispetto l’altezza complessiva del tratto di misurazione.
Figura 25 - Misure ed asse longitudinali rilevate dall'algoritmo

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
29
Capitolo 3 – Scansioni e analisi dei dati
Scopo del capitolo Scopo del presente capitolo è quello di condurre una campagna di misurazioni, utilizzando come sensore il
MS Kinect e variando le impostazioni di scansione utilizzate per ottenere mesh da analizzare con lo script
realizzato per l’occasione.
Le acquisizioni sono state condotte con le impostazioni di scena così come descritte nel precedente
paragrafo, utilizzando la pedana rotante per l’acquisizione a 360° del soggetto e sfruttando il nostro
manichino come modello. Il software utilizzato per le acquisizioni è il MS Fusion, distribuito gratuitamente
da Microsoft assieme alla versione commerciale del Kinect.
Nel corso dell’esperimento sono state effettuate 6 scansioni per ciascun modello, mantenendo quanto più
possibile inalterati tutti i fattori della scena di ripresa.
Ogni set di 6 scansioni prevede la realizzazione di 3 scansioni in cui il soggetto abbia compiuto 2 rotazioni
complete sulla pedana e 3 in cui ne abbia compiute 4. Sono stati segnati dei riferimenti a quote di diversa
altezza da terra su una delle due gambe del manichino, in modo da poter effettuare misurazioni manuali in
punti prestabiliti. Per questi motivi ci aspettiamo di ottenere dai test condotti due risultati diversi:
1) Una stima della ripetibilità dell’errore su più misure sullo stesso modello acquisito;
2) Una stima dell’errore casuale commesso con lo strumento per le rilevazioni dei diametri;
Si riportano di seguito le modalità operative per le verifiche di precisione e ripetibilità dello strumento:
Verifica di ripetibilità
La verifica di ripetibilità è stata condotta sul manichino che, disposto sulla piattaforma rotante, è stato
scansionato e quindi analizzato con il nostro algoritmo di misurazione digitale. Sono state annotate per
ciascun modello digitale le misure ottenute e confrontate in misura assoluta e percentuale.
La verifica di ripetibilità con questo strumento è stata condotta ipotizzando due modalità di acquisizione dei
dati anatomici. Un primo caso in cui la scansione consisteva nell’esposizione del modello allo scanner per la
durata di due giri completi della piattaforma di scansione; il secondo caso invece ha riguardato
un’esposizione del modello allo scanner per la durata di quattro giri completi della piattaforma. In entrambi
casi sono state ripetute tre scansioni dell’oggetto. Questa verifica serve a valutare quanto le dimensioni in
50 punti prestabiliti del modello variano su più scansioni, a parità di condizioni.
Verifica di precisione
La verifica di precisione è stata condotta mediante il confronto di misure ottenute tramite misurazione
manuale e digitale sul manichino. In questo caso non è stato usato l’algoritmo di misurazione presentato
nella trattazione (che localizza i punti di repere rispetto l’asse longitudinale della gamba) ma una sua
versione modificata, che facendo riferimento a determinate quote stabilite a partire dalla base di appoggio
del manichino calcola la misura della circonferenza rispetto piani ortogonali alla direzione verticale anziché
all’asse longitudinale dell’arto. In pratica lo stesso metodo, in versione digitale, che viene indicato sulle
schede tecniche fornite agli operatori per procedere alla misurazione manuale. Le modalità di acquisizione
sono analoghe alla precedente verifica, con il soggetto che ha effettuato tre scansioni con 2 giri completi
sul supporto rotante e tre scansioni con 4 giri completi. La misurazione manuale di confronto invece è stata

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
30
ottenuta con un metro a rotella secondo il metodo tradizionale di misurazione. Questa verifica, condotta su
otto misurazioni a quote prestabilite sul manichino, serve a valutare quanto le misurazioni effettivamente
rilevate siano aderenti alla realtà.
Proseguiamo quindi nel mostrare i risultati ottenuti .

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
31
MS Fusion SDK
Principio di funzionamento Come già descritto il Fusion è distribuito da Microsoft stessa, ma come funziona? Il sistema Fusion
ricostruisce un modello con una singola superficie densa integrando i dati di profondità nel tempo, da più
punti di vista. La posizione del sensore viene localizzata quando questo si muove (posizione ed
orientazione). Dal momento che sono note la posizione di ogni singolo frame e la relazione dello stesso con
gli altri, questi punti di vista multipli dell’oggetto possono essere fusi assieme (attraverso una media) in un
unico volume di ricostruzione.
Figura 26 - Processo di ricostruzione MS Fusion
6
1) Il primo passo è la conversione della mappa di profondità. In questo step i dati grezzi (raw) sono
presi dal kinect e convertiti in dati espressi in metri in virgola mobile. E’ possibile anche una
conversione opzionale in una nuvola di punti orientata, formata da punti e vertici 3D, nel sistema di
riferimento della camera, completi delle normali delle superfici, per utilizzare la funzione
AlignPointClouds;
2) Il secondo passo consiste nel calcolare la posizione del sensore rispetto alla scena e mantenere
questa informazione quando il sensore si muove, utilizzando un algoritmo iterativo di allineamento.
In questo modo il sistema conosce sempre la posizione rispetto al frame iniziale.
3) Il terzo passo è la fusione (o integrazione) dei dati di profondità dalle posizioni note del sensore in
una singola rappresentazione volumetrica dello spazio intorno al Kinect. Questa integrazione dei
dati di profondità è realizzata continuamente per ogni frame, con una media continua per ridurre le
imperfezioni. Muovendo il sensore attorno all’oggetto della scansione possono essere chiusi fori o
aperture nel modello ricostruito. La ricostruzione delle superfici può essere inoltre affinata
muovendo il sensore verso di esse ed ottenendo un dato di maggior precisione delle stesse.
6 Immagine tratta da http://msdn.microsoft.com/en-us/library/dn188670.aspx

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
32
Il volume di ricostruzione massimo scansionabile è circa 8 m3. La risoluzione massima invece può essere di
circa 1-2 mm per Voxel. Non è possibile ottenere contemporaneamente volume e risoluzione massima
nell’acquisizione.
Impostazioni di acquisizione Come accennato il volume di scansione e la risoluzione sono collegati. Data la mole massima di dati che il
software è in grado di gestire la dimensione del cubo di acquisizione varia in relazione alla densità di voxel
per metro impostata. Ci sono inoltre altri slider ed impostazioni da settare per la regolazione della scena.
Figura 27 - Impostazioni di scansione del Fusion
I parametri di settaggio sono divisi in alcuni menu. Nel menu “Actions” sono raccolti i comandi relativi
all’acquisizione ed all’esportazione del modello ricostruito. Il pulsante “Create Mesh” consente di esportare
il modello nel formato desiderato (STL, OBJ o PLY), il pulsante Reset Reconstruction permette invece di
resettare i dati acquisiti ed avviare una nuova scansione. Nel menu Image Options ci sono delle caselle a
spunta che permettono di selezionare o meno alcune opzioni. La casella Capture color consente di
catturare le informazioni dalla camera RGB, oltre a quelle di profondità. La casella Near Mode attiva la
modalità di acquisizione a distanza ravvicinata. La casella Pause Integration mette in pausa il lavoro di
integrazione del Fusion. La casella Mirror Depth specchia l’immagine ricostruita dal sensore di profondità,
mentre quella Volume Graphics attiva una funzionalità che mostra visivamente il volume di acquisizione a
schermo.
I menu più interessanti ai fini della sperimentazione sono:

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
33
1) Depth Threshold: in cui si settano i limiti spaziali entro i quali il sensore opererà. Lo slider min
definisce la distanza minima di acquisizione, lo slider Max quella massima;
2) Volume Max Integration Weight: questo parametro è molto importante, in quanto definisce il
carico di lavoro del processore responsabile dell’integrazione dei dati di profondità acquisiti. Un
basso valore di questo slider avrà come effetto una alta reattività del modello durante la
ricostruzione, al prezzo di una minore precisione. Un alto valore invece consentirà di generare un
modello più accurato, al prezzo di un tracking più difficoltoso e di una scarsa reattività del modello
ai cambiamenti (oggetti che ruotano all’interno di una scena fissa). Dal momento che nella
presente trattazione la scena è studiata in modo da escludere oggetti fissi dal campo visivo del
sensore in pratica, per il programma, è come se fosse il sensore a muoversi intorno all’oggetto della
scansione. Per questa ragione si è reputato conveniente impostare il valore massimo allo slider
della Integration Wieght;
3) Volume Voxels per Meter: questo parametro consente di settare la risoluzione, ovvero la quantità
per metro dei voxels -il cui numero è definito dallo slider successivo- all’interno della scena. Ciò che
controlla è la scala di un pixel nel mondo reale, è uno dei parametri che influenzano la dimensione
del cubo di acquisizione. E’ infatti ovvio come, a parità di voxel totali massimi gestibili dal sistema,
variarne la densità consenta di definire un volume più o meno grande di acquisizione.
4) Volume Voxels Resolution: parametro che consente di settare il numero di voxel acquisiti lungo
ciascun asse. Data una risoluzione di voxel per metro, il numero di voxel acquisiti lungo un
determinato asse stabilirà le dimensioni (ed i rapporti tra le dimensioni ) del cubo di acquisizione.
Per esempio, con le impostazioni settate nella presente trattazione (768 voxel per meter) è stato
acquisito un cubo con un lato pari a circa 0,94 m (640/768=0,94) ed una dimensione di ciascun voxel
pari a circa 1,4 mm3 (0,94/640=1,468).
Sicuramente la quantità di dati settabili, ancorchè piuttosto indigesti da comprendere per l’operatore in
prima battuta, consentono di definire in modo accurato i parametri della scena di acquisizione in
funzione delle necessità.

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
34
Risultati delle scansioni Si presentano ora i risultati delle scansioni eseguite con il software, cui seguirà un breve commento. Nei
seguenti paragrafi sono riportati dati e tabelle riassuntive. I tabulati completi degli errori e delle differenze
non sono riportati per brevità.
Test di ripetibilità
Di seguito si riportano i risultati dei test di ripetibilità. Sono state effettuate in totale 50 misure su ciascuna
delle 3 scansioni (prima misura, seconda misura, terza misura). Vengono prima presentati i risultati delle
scansioni ottenute con due rotazioni complete del modello ed in seguito quelli delle scansioni ottenute con
quattro rotazioni complete del modello. Le tabelle riepilogative si suddividono in assolute e percentuali. Le
prime in cui si analizzano gli errori delle misure in termini assoluti (mm), la seconda in cui sono valutati gli
errori in termini percentuali rispetto al diametro misurato. Sono presenti varie voci, tra cui:
4) Media Scarto Max: in cui si è calcolata la media tra gli scartii massimi di ciascuna riga di
misurazione. Questo dato è rappresentativo dello scarto massimo ottenuto sulle tre circonferenze
calcolate per ciascuna misurazione;
5) Deviazione Std: in cui si è calcolata la deviazione standard dello scarto massimo commesso rispetto
alla media degli errori;
6) Scarto Max: in cui si riporta lo scarto massimo ottenuto su tutte le misurazioni;
7) Scarto medio: in cui si è calcolato lo scarto medio ottenuto su tutte le misurazioni, non solo sui
massimi rilevati.
Le stesse elaborazioni sono state inoltre eseguite per i dati espressi in percentuale rispetto alle
circonferenze di riferimento, pertanto non si spiegheranno nuovamente.
E’ importante ricordare che in questo paragrafo stiamo presentando un test di ripetibilità, gli scarti sono
cioè rappresentativi delle differenze tra i diametri rilevati nelle tre scansioni, e non riferiti al valore esatto
misurato. Di questo ci occuperemo nel seguente sottoparagrafo.

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
35
MS Fusion – 2 rotazioni complete piattaforma
Numero misura Prima misura Seconda Misura Terza Misura Media
1 239,76 240,51 244,15 241,47
2 236,37 238,13 241,68 238,73
3 234,96 236,5 240,07 237,18
4 238,74 241,15 244,22 241,37
5 244,15 246,39 248,39 246,31
6 250,06 252,26 257,31 253,21
7 259,74 262,21 268,09 263,35
8 269,05 271,82 276,3 272,39
9 280,37 283,29 285,95 283,20
10 291,35 294,36 297,68 294,46
11 303,29 306,62 309,44 306,45
12 316,7 319,47 322,56 319,58
13 329,82 332,47 335,3 332,53
14 345,09 348,01 349,24 347,45
15 359,76 362,88 364,69 362,44
16 374,87 378,03 380,1 377,67
17 388,23 391,48 393,57 391,09
18 398,97 402,24 404,27 401,83
19 408,43 411,73 413,25 411,14
20 414,86 418,25 420,09 417,73
21 417,9 421,66 423,43 421,00
22 417,27 420,7 422,7 420,22
23 414,11 417,09 418,64 416,61
24 408,53 412,05 410,8 410,46
25 401,09 404,34 403,09 402,84
26 392,33 396,05 393,04 393,81
27 383,9 387,58 385,2 385,56
28 375,51 379,34 376,81 377,22
29 368,79 372,17 370,37 370,44
30 366,42 370,25 367,68 368,12
31 367,83 372,06 369,73 369,87
32 372,03 376,03 375,62 374,56
33 380,6 384,45 383,32 382,79
34 391,97 396,19 394,63 394,26
35 402,35 406,73 406,15 405,08
36 413,91 417,96 415,62 415,83
37 421 425,31 424,29 423,53
38 426,39 430,55 430,42 429,12
39 427,78 431,2 432,08 430,35
40 427,47 431,35 432,63 430,48
41 429,52 432,97 434,39 432,29
42 432,06 436,43 437,05 435,18
43 436,82 441,06 441,5 439,79
44 442,13 446,04 446,95 445,04
45 447,41 451,42 452,1 450,31
46 454,79 459,79 459,51 458,03
47 462,47 466,81 466,28 465,19
48 469,72 473,51 473,46 472,23
49 477,53 481,95 481,81 480,43 50 483,07 487,76 488,15 486,33

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
36
Elaborazioni Scarti assoluti (mm) Elaborazioni Scarti relativi (%)
Media Scarto Max (mm)
4,84
Deviazione Std
1,00
Scarto Max (mm)
8,35
Scarto Medio (mm)
3,22
Scarto massimo percentuale, riportato dalla misura più bassa (malleolo) a quella più alta (ginocchio)
Riassunto Scarti massimi assoluti e massimi relativi sul totale delle rilevazioni
0.00%
0.50%
1.00%
1.50%
2.00%
2.50%
3.00%
3.50%
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
% Scarto Massimo
38%
62%
0%
Riassunto Scarti Massimi in mm
>5 mm
2,5-5 mm
<2,5 mm
16%
62%
22%
Riassunto Scarti in % rispetto alla circonferenza
>3%
1%-2-%
<1%
Media Scarto Max %
1,37%
Deviazione Std %
0,55%
Scarto Max %
3,17%
Scarto Medio %
0,91%

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
37
MS Fusion – 4 rotazioni complete piattaforma
Numero misura Prima misura Seconda Misura Terza Misura Media
1 242,92 237,66 246,51 242,36
2 237,72 232,71 240,88 237,10
3 235,28 230,83 239,41 235,17
4 233,12 228,8 237,34 233,09
5 237,47 232,7 241,99 237,39
6 242,86 238,07 246,34 242,42
7 249,36 244,32 255,39 249,69
8 259,15 254,55 266,49 260,06
9 268,32 263,99 274,49 268,93
10 280 275,48 284,95 280,14
11 290,3 285,62 296,07 290,66
12 303,06 298,58 308,25 303,30
13 315,8 311,62 320,82 316,08
14 328,98 324,68 334,03 329,23
15 343,97 339,44 348,59 344,00
16 359,17 354,37 363,58 359,04
17 374,26 369,78 379,3 374,45
18 387,54 382,88 392,3 387,57
19 398,26 394,06 402,29 398,20
20 407,36 403,07 410,48 406,97
21 413,77 409,45 416,93 413,38
22 416,82 412,48 419,69 416,33
23 415,6 411,55 418,64 415,26
24 411,96 407,63 414,51 411,37
25 406,27 401,12 406,91 404,77
26 399,13 394,11 398,81 397,35
27 390,52 385,7 389,2 388,47
28 381,88 376,86 381,07 379,94
29 373,7 368,62 372,96 371,76
30 367,02 361,98 366,92 365,31
31 365,43 359,58 364,74 363,25
32 366,86 361,67 367,65 365,39
33 371,62 366,2 373,49 370,44
34 380,38 375,95 381,88 379,40
35 391,15 386,54 392,8 390,16
36 402,31 398,33 404,98 401,87
37 413,26 410,43 413,6 412,43
38 420,83 417,78 421,73 420,11
39 426,04 422,97 426,78 425,26
40 426,76 423,99 428,41 426,39
41 427,25 424,45 428,64 426,78
42 429,33 427,08 430,65 429,02
43 432,35 430,54 434,05 432,31
44 436,93 434,92 438,28 436,71
45 442,16 439,59 443,29 441,68
46 447,86 444,98 449,09 447,31
47 455,69 452,84 456,43 454,99
48 463,11 460,27 463,07 462,15
49 470,17 467,28 470,67 469,37 50 478,31 474,93 478,29 477,18

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
38
Elaborazioni Scarti assoluti (mm) Elaborazioni Scarti relativi (%)
Media Scarto Max (mm)
6,69
Deviazione Std
2,49
Scarto Max (mm)
11,94
Scarto Medio (mm)
4,46
Scarto massimo percentuale, riportato dalla misura più bassa (malleolo) a quella più alta (ginocchio)
Riassunto Scarti massimi assoluti e massimi relativi sul totale delle rilevazioni
0.00%
0.50%
1.00%
1.50%
2.00%
2.50%
3.00%
3.50%
4.00%
4.50%
5.00%
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
% Scarto Massimo
70%
30%
0%
Riassunto Scarti Massimi in mm
>5 mm
2,5-5 mm
<2,5 mm
38%
36%
26%
Riassunto Scarti in % rispetto alla
circonferenza
>3%
1%-2-%
<1%
Media Scarto Max %
2,03%
Deviazione Std %
1,13%
Scarto Max %
4,59%
Scarto Medio %
1%

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
39
Test di precisione
Di seguito si riportano i risultati dei test di precisione. In questo caso sono state effettuate 8 misure per
ciascuna delle 3 scansioni (prima misura, seconda misura, terza misura). Ancora una volta vengono prima
presentati i risultati delle scansioni ottenute con due rotazioni complete del modello ed in seguito quelli
delle scansioni ottenute con quattro rotazioni complete del modello. Come nel precedente caso le tabelle
riepilogative si suddividono in assolute e percentuali. Le prime in cui si analizzano gli errori delle misure in
termini assoluti (mm), la seconda in cui sono valutati gli errori in termini percentuali rispetto al diametro
misurato.
Questa volta la misura di riferimento per le analisi di deviazione e di errore non è più la differenza tra le
misure o la media delle scansioni, bensì la misura reale del punto in esame. Gli scarti e gli errori si
riferiscono quindi alla differenza tra il valore misurato digitalmente ed il valore misurato manualmente. La
misura manuale è stata presa, come già descritto, con metodo tradizionale e metro a rotella.
Le tabelle riepilogative sono presentate nella stessa forma del caso precedente.
MS Fusion – 2 rotazioni complete piattaforma
Quote Prima misura Seconda Misura Terza Misura Misura Manuale
140 237,19 238,44 242,74 240,00
185 245,81 247,63 250,27 242,00
220 269,98 272,66 276,86 267,00
255 302,95 305,94 309,37 296,00
285 335,63 338,67 340,68 328,00
335 392,37 395,60 398,18 386,00
400 414,04 417,27 419,13 404,00
480 372,06 375,45 373,39 363,00
Elaborazioni Errori assoluti (mm) Elaborazioni Errori relativi (%)
Riassunto errori massimi assoluti e massimi relativi sul totale delle rilevazioni
87%
13%
0%
Riassunto Errori in mm
>5 mm
2,5-5 mm
<2,5 mm
87%
13% 0%
Riassunto Errori in % sullla circonferenza
>3%
1%-2-%
<1%
Media Err. Max (mm)
10,84
Deviaz. Std
3,62
Errore Max (mm)
15,13
Errore Medio (mm)
8,46
Media Errore Max %
3,37%
Deviazione Std %
0,91%
Errore Max %
4,52%
Errore Medio %
2,60%

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
40
MS Fusion – 4 rotazioni complete piattaforma
Quote Prima misura Seconda Misura Terza Misura Misura Manuale
140 235,42 230,97 239,88 240,00
185 245,99 241,41 250,00 242,00
220 273,35 269,48 278,37 267,00
255 306,75 303,29 311,36 296,00
285 340,41 336,73 343,61 328,00
335 395,16 391,65 398,91 386,00
400 410,66 405,84 412,79 404,00
480 370,92 364,92 370,24 363,00
Elaborazioni Errori assoluti (mm) Elaborazioni Errori relativi (%)
Media Err. Max (mm)
11,12
Deviaz. Std
2,98
Errore Max (mm)
15,61
Errore Medio (mm)
7,45
Riassunto errori massimi assoluti e massimi relativi sul totale delle rilevazioni
100%
0% 0%
Riassunto Errori Massimi in mm
>5 mm
2,5-5 mm
<2,5 mm
100%
0% 0%
Riassunto Errori in % rispetto alla
circonferenza
>3%
1%-2-%
<1%
Media Errore Max %
3,62%
Deviazione Std %
1,03%
Errore Max %
5,19%
Errore Medio %
2,38%
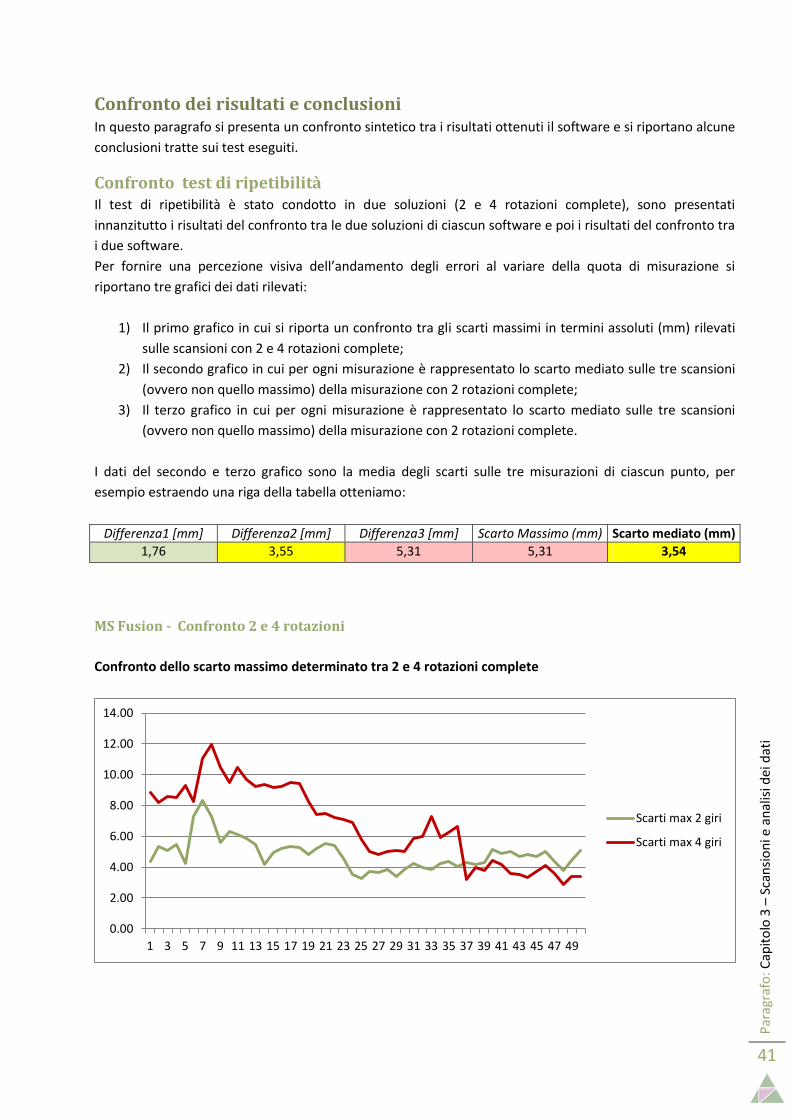
Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
41
Confronto dei risultati e conclusioni In questo paragrafo si presenta un confronto sintetico tra i risultati ottenuti il software e si riportano alcune
conclusioni tratte sui test eseguiti.
Confronto test di ripetibilità Il test di ripetibilità è stato condotto in due soluzioni (2 e 4 rotazioni complete), sono presentati
innanzitutto i risultati del confronto tra le due soluzioni di ciascun software e poi i risultati del confronto tra
i due software.
Per fornire una percezione visiva dell’andamento degli errori al variare della quota di misurazione si
riportano tre grafici dei dati rilevati:
1) Il primo grafico in cui si riporta un confronto tra gli scarti massimi in termini assoluti (mm) rilevati
sulle scansioni con 2 e 4 rotazioni complete;
2) Il secondo grafico in cui per ogni misurazione è rappresentato lo scarto mediato sulle tre scansioni
(ovvero non quello massimo) della misurazione con 2 rotazioni complete;
3) Il terzo grafico in cui per ogni misurazione è rappresentato lo scarto mediato sulle tre scansioni
(ovvero non quello massimo) della misurazione con 2 rotazioni complete.
I dati del secondo e terzo grafico sono la media degli scarti sulle tre misurazioni di ciascun punto, per
esempio estraendo una riga della tabella otteniamo:
Differenza1 [mm] Differenza2 [mm] Differenza3 [mm] Scarto Massimo (mm) Scarto mediato (mm)
1,76 3,55 5,31 5,31 3,54
MS Fusion - Confronto 2 e 4 rotazioni
Confronto dello scarto massimo determinato tra 2 e 4 rotazioni complete
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
Scarti max 2 giri
Scarti max 4 giri

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
42
Grafico dello scarto medio in termini assoluti (mm) – 2 rotazioni
Grafico dello scarto medio in termini assoluti (mm) – 4 rotazioni
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
0 5 10 15 20 25 30 35 40 45 50
>5 2,5-5 <2,5
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
0 5 10 15 20 25 30 35 40 45 50
>5 2,5-5 <2,5

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
43
Conclusioni sui test di ripetibilità
I grafici relativi ai test di ripetibilità ci mostrano innanzitutto gli scarti tendono ad aumentare all’aumentare
del numero di giri completi effettuati.
Il comportamento è piuttosto omogeneo, con una tendenza all’aumento che si manifesta più o meno lungo
tutto l’arco delle misurazioni.
Si ripropone di seguito una tabella relativa alle analisi sugli scarti rilevati (2 rotazioni):
Riepilogo scarti MS Fusion
Media Scarto Max (mm)
4,84
Deviazione Std
1,00
Scarto Max (mm)
8,35
Scarto Medio (mm)
3,22
In valore assoluto la media degli scarti massimi si attesta intorno ai 5 mm, mentre lo scarto massimo si
attesta sugli 8 mm.
In relazione alla maggiore variabilità degli scarti osservata con 4 rotazioni della piattaforma si conclude che
siano sufficienti 2 rotazioni complete per ottenere la maggiore ripetibilità possibile.

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
44
Confronto test di precisione Anche il test di precisione è stato condotto in due soluzioni (2 e 4 rotazioni complete), in questo caso
tuttavia si presentano i risultati con 2 rotazioni. Tale scelta deriva da una valutazione svolta sui test di
ripetibilità, che ci hanno mostrato come i migliori risultati si ottengano con due sole rotazioni. Sono
presentati in seguito i risultati.
I grafici riepilogativi sono di 5 tipi:
1) Grafico riepilogativo in cui sono riportate le misurazioni rilevate sulle tre scansioni e la
misurazione manuale;
2) Grafico rappresentativo dell’errore massimo sulle tre misurazioni;
3) Grafico rappresentativo della stima dell’errore medio ottenuto sulle tre misurazioni, ricavato
facendo la media delle differenze tra i diametri rilevati dalle scansioni e le corrispondenti
misure manuali, secondo lo schema seguente;
Differenza1 [mm] Differenza2 [mm] Differenza3 [mm] Errore Massimo (mm) Errore mediato (mm)
2,81 1,56 2,74 2,81 2,37
4) Grafico riepilogativo in cui sono riportate la misurazione manuale e la media delle misurazioni;
5) Grafici di confronto dell’errore di misurazione, assoluto e percentuale rispetto alla
circonferenza in esame. Le curve sono ottenute analizzando l’errore mediato sulle tre
misurazioni per ciascuna circonferenza, secondo la logica già illustrata;
MS Fusion
Confronto delle misure rilevate tramite scansione con le misure manuali
220.00
240.00
260.00
280.00
300.00
320.00
340.00
360.00
380.00
400.00
420.00
140 190 240 290 340 390
Prima misura
Seconda Misura
Terza Misura
Misura Manuale

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
45
Grafico dell’errore medio in termini assoluti (mm)
Grafico dell’errore massimo in termini assoluti (mm)
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
100 150 200 250 300 350 400
>5 <2,5
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
100 150 200 250 300 350 400
Errore Massimo
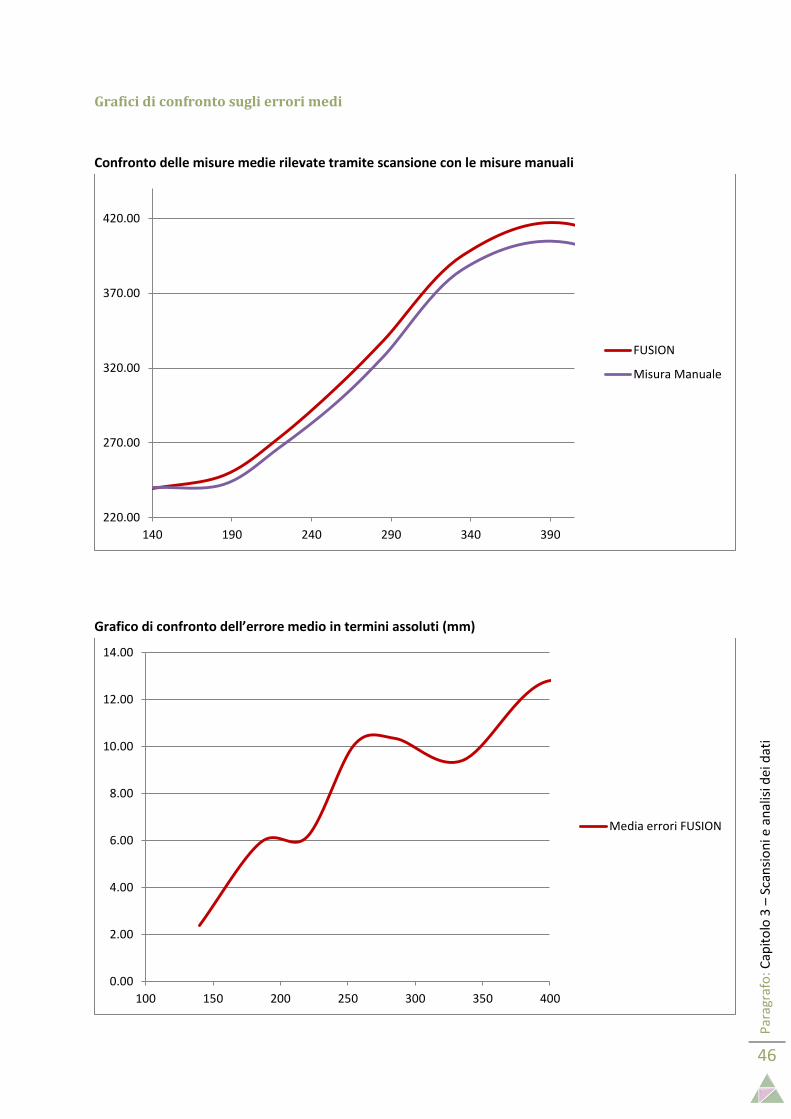
Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
46
Grafici di confronto sugli errori medi
Confronto delle misure medie rilevate tramite scansione con le misure manuali
Grafico di confronto dell’errore medio in termini assoluti (mm)
220.00
270.00
320.00
370.00
420.00
140 190 240 290 340 390
FUSION
Misura Manuale
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
100 150 200 250 300 350 400
Media errori FUSION

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
47
Grafico di confronto dell’errore medio in termini relativi (%)
0.00%
0.50%
1.00%
1.50%
2.00%
2.50%
3.00%
3.50%
4.00%
100 150 200 250 300 350 400
Media errori % FUSION

Par
agra
fo:
Cap
ito
lo 3
– S
can
sio
ni e
an
alis
i dei
dat
i
48
Conclusioni sui test di precisione I dati raccolti nell’ambito dei test di precisione descrivono l’effettiva rispondenza delle misure prese sul
modello tridimensionale rispetto a quelle ottenute con la misurazione manuale. Il dato che subito balza
all’occhio è che gli errori sono tendenzialmente piuttosto indipendenti dall’ampiezza della circonferenza in
esame e generalmente affetti da un errore di sovrastima della misura.
Con la presente campagna d’indagine non si hanno però elementi sufficienti per poter stabilire se si tratti di
un tratto ricorsivo, indipendente dalle condizioni della scena o del soggetto acquisito.
Il comportamento mostrato è piuttosto omogeneo su tutte le misurazioni, con una tendenza all’aumento
dell’errore che si manifesta più marcatamente all’aumentare del diametro.
E’ interessante notare come dai grafici relativi agli errori medi ed assoluti quelli percentuali risultino
generalmente piuttosto lineari.
Si ripropongono di seguito le tabelle delle analisi sugli errori assoluti rilevati (2 rotazioni):
Riepilogo errori MS Fusion
Media Err. Max (mm)
10,84
Deviaz. Std
3,62
Errore Max (mm)
15,13
Errore Medio (mm)
8,46
Leggendo la tabelle riepilogativa la media degli errori massimi è pari a circa un cm, mentre l’errore massimo
è pari a 1,5 cm. La deviazione standard invece si attesta sui 3,62.
Valutando i risultati dei test si osserva come molto probabilmente, al netto di campagne d’indagine più
approfondite, l’errore massimo in cui si può incorrere in una misurazione di questo genere, utilizzando il
software MS Fusion, si aggira intorno ad una stima cautelativa di 2 cm. Il dato di 2 cm peraltro conferma
-per motivi geometrici che si spiegheranno nel seguente capitolo- quanto descritto nella trattazione teorica
esposta in avvio di relazione.

Par
agra
fo:
Cap
ito
lo 4
- C
on
clu
sio
ni
49
Capitolo 4 - Conclusioni
Conclusioni sulla campagna di indagine I risultati ottenuti sulla precisione dello strumento sono piuttosto in linea con le aspettative sullo
strumento.
Riassumendo in maniera generale si possono trarre conclusioni a proposito di:
1) Caratteristiche proprie del sensore
2) Impostazioni di scena
3) Risultati dei test sui software di scansione
Caratteristiche proprie del sensore Con questa definizione si intende indicare tutte quelle variabili connesse al sistema con cui il sensore rileva i
dati di profondità. Si fa quindi principalmente riferimento al sistema a luce strutturata utilizzato ed alle
distorsioni (corrette o meno) indotte dalle lenti. Le conclusioni in proposito ci portano a dire che quello a
luce strutturata è un sistema semplice ma soggetto ad interferenze (possibile effetto di scarso contrasto in
condizioni di forte illuminazione tipiche degli ambienti esterni). Le distorsioni delle lenti, rilevate dallo
studio di terze parti riportato in avvio di trattazione, mostrano come la costruzione del dispositivo sia
orientata principalmente all’utilizzo come periferica di gioco, in cui è importante riconoscere sagome e
distretti anatomici, ma non è importante la precisione assoluta dei dati di profondità. Questo è ovviamente
anche connesso all’economia della costruzione del dispositivo, che ricordiamo avere un costo pari a una
frazione di quello di dispositivi dedicati alla scansione professionale.
Impostazioni di scena Le impostazioni della scena sono molto importanti al fine dell’acquisizione. Realizzare una scena con
caratteristiche adatte allo strumento (condizioni di illuminazione e posizione del sensore rispetto al
soggetto) è molto importante. Altrettanto importante è il sistema con il quale si realizza la rotazione del
sensore intorno all’oggetto, in particolar modo si è potuto osservare che il movimento deve essere quanto
più regolare possibile. La regolarità dello spostamento è connessa al sistema di ricostruzione dei software
di acquisizione, che integrano e mediano i dati acquisiti dai frame acquisiti nel tempo. Questo significa che
se il sensore si sofferma per un tempo prolungato su una inquadratura in particolare si crea uno squilibrio
nella media pesata delle acquisizioni (e quindi degli errori), generando spesso sconnessioni o protuberanze
indesiderate sul modello.
Le tre soluzioni presentate per l’acquisizione a 360° presentano ciascuna vantaggi e svantaggi.
Un soggetto fermo con lo strumento che si muove ruotando attorno ad esso garantisce che il soggetto non
si muova o contragga muscoli durante l’acquisizione, migliorando la precisione, ma richiede maggiori
ingombro dello strumento e complessità costruttiva.
Un soggetto ruotante, con lo strumento fisso che lo inquadra garantisce maggiore economicità e portabilità
del sistema, ma paga lo scotto di eventuali movimenti del soggetto che si trova a dover mantenere
l’equilibrio su di una pedana rotante.
Un soggetto fisso con più strumenti posti strategicamente ad inquadrarlo per ottenere un numero finito di
frame da correlare è la soluzione tecnicamente più accurata, in quanto gli errori di rilevazione si

Par
agra
fo:
Cap
ito
lo 4
- C
on
clu
sio
ni
50
minimizzano con lo scatto simultaneo di tutti i frame, ma presenta una scarsa economicità di realizzazione
ed un elevato ingombro del sistema.
Per quanto riguarda le impostazioni della scena si è stabilito che, in base all’angolo di visuale dello
strumento, una distanza di 80 cm dal soggetto da rilevare sia la minore possibile (che aumenta a 100 cm
circa per le parti più lontane durante la rotazione). Minimizzare la distanza di rilevazione è importante per
minimizzare gli errori casuali di rilevazione. E’ inoltre consigliabile eliminare dalla scena oggetti riflettenti e
garantire un’illuminazione del soggetto più tenue ed uniforme possibile.
Risultati dei test sui software di scansione Le varie misurazioni condotte con il software di acquisizione ci portano a trarre alcune conclusioni:
Premettendo che non ci si è addentrati nel funzionamento matematico del sistema i risultati sui test di
ripetibilità mostrano come gli scarti massimi sulle circonferenze misurate si attestino intorno ai 6-8 mm.
Contrariamente a quanto ci si aspettava aumentare il numero di rotazioni del soggetto rispetto al sensore
non ha portato ad un miglioramento dei dati acquisiti, anzi, li ha generalmente peggiorati.
I risultati del test di precisione, con il confronto delle misure manuali e digitali, mostrano errori massimi
dell’ordine di 16 mm. Gli errori medi si attestano invece sui 10 mm.
Tali misurazioni sembrerebbero contrastare con la precisione teorica mostrata dallo studio riportato in
avvio di pubblicazione, tuttavia non è così.
Le misure di precisione e ripetibilità sono infatti state condotte su perimetri misurati sui modelli sviluppati.
Gli errori del modello matematico si riferiscono però alle misurazioni dei dati di profondità del sensore, in
parole povere alla distanza di ciascun punto misurato in linea retta dal sensore.
Figura 28 - Distanze di misurazione
L’accuratezza della misura ipotizzata in questo caso è quella teorica, influenzata come accennato dalla
distanza di misurazione, ovvero in corrispondenza degli 80-100 cm pari a pochi mm di scarto.
Le misurazioni prese però sono realizzate su un modello tridimensionale ottenuto dall’integrazione e media
di più frame, con il risultato finale di una superficie chiusa, affetta quindi dagli errori casuali commessi

Par
agra
fo:
Cap
ito
lo 4
- C
on
clu
sio
ni
51
sistematicamente in ogni inquadratura e dalle approssimazioni necessarie compiute dal software su misure
affette da inevitabili errori per ricostruire la geometria chiusa.
Da aggiungersi a questi errori fisiologici c’è la caratteristica particolare della misura in esame ovvero, come
accennato in precedenza, un perimetro. In questo caso l’errore di misurazione si amplifica di una misura
proporzionale all’errore teorico. Per spiegare meglio si osservi la figura 37:
Figura 29 - Amplificazione degli errori sui diametri
In questo caso il perimetro della figura geometrica disegnata (spline) è pari a 301, approssimandolo ad una
circonferenza con lo stesso perimetro otteniamo un cerchio di raggio di circa 47,9 mm. Modificando di
soltanto un millimetro il raggio del cerchio otteniamo un perimetro pari a circa 294,6 mm, ovvero con un
errore di 6,4 mm. Questo mostra come, in via approssimativa, sia possibile riscontrare un fattore
amplificativo pari a circa 2π dell’errore sulle circonferenze rispetto all’errore casuale che affligge lo
strumento. Ecco che considerando un errore di circa 15 mm sulla rilevazione del perimetro otteniamo un
errore medio delle misurazioni lineari pari a circa 2 mm, in linea con quanto ci si aspettava di ottenere con il
sensore ad una distanza di 80-100 cm dal soggetto ripreso. Altra conferma di questo fatto risiede
nell’osservare come l’errore rilevato nei vari perimetri sia piuttosto indipendente dalla misura del diametro
rilevato. Ciò induce a pensare che l’errore sia correlato alla distanza del punto rilevato dal sensore, la quale
varia percentualmente in misura modesta, piuttosto che alla dimensione della circonferenza rilevata.
A corollario della valutazione si ipotizza che per ottenere errori dell’ordine dei 4-5 mm sarebbe necessario
utilizzare uno strumento con una precisione pari ad almeno 0,7 mm; precisione propria di strumenti di
scansione dotati di tecnologia più raffinata rispetto a quello in oggetto.
Come conclusione di ordine generale si rileva che il MS Kinect V1 si è rivelato essere uno strumento molto
interessante per scansioni di tipo anatomico. La precisione ottenuta e la trama delle mesh generate dal
software in dotazione permettono di utilizzare proficuamente i modelli ricavati su software commerciali di
modellazione. In base ai dati di precisione ottenuti si ritiene ragionevole affermare che lo strumento si
adatti molto bene a rilevazioni e scansioni utili alla creazione di dispositivi ortopedici di protezione,
immobilizzazione e supporto su distretti specifici di una certa dimensione che debbano essere caratterizzati
da ergonomia ed anatomicità. Sempre in relazione alle indagini di precisione e ripetibilità si ritiene che
sorgano maggiori problemi in caso di necessità dimensionali stringenti ed in particolar modo nella

Par
agra
fo:
Cap
ito
lo 4
- C
on
clu
sio
ni
52
rilevazione di distretti anatomici molto piccoli e dettagliati (es. dita della mano o del piede) che non
vengono acquisite con sufficiente precisione dallo strumento.
Osservazioni sull’algoritmo di misurazione digitale È interessante notare come l’algoritmo sviluppato rimanga funzionale per la misurazione di qualsiasi parte
anatomica. Nonostante lo sviluppo sia pensato per gli arti inferiori diventa utilizzabile indifferentemente
anche per altri distretti anatomici quali arti superiori e torace; al momento è pensato per lavorare andando
ad analizzare un distretto anatomico alla volta, ma potrebbe essere pensabile anche un sistema di misura
contemporaneo di più distretti .
E’ immaginabile utilizzare già oggi questo algoritmo, insieme al suo software di modellazione, per
applicazioni concrete. L’operatore dovrebbe ricevere un minimo di formazione sul suo utilizzo e,
soprattutto, procedere all’acquisto di una licenza software relativamente economica per la categoria di
prodotto ma poco sfruttata e giustificata per il solo utilizzo allo scopo della sola misurazione (mille euro
circa); è comunque immaginabile, come già anticipato, che con l’avvento di strumenti di fabbricazione
economici per tecnologia additiva, quali stampanti 3D, aumenti sempre più la presenza di questo software
e simili all’interno di ortopediche e centri sanitari.
Sistemi di misurazione digitale a basso costo di Proteo s.r.l.s. è distribuito con
Licenza Creative Commons Attribuzione - Non commerciale 4.0 Internazionale.

Par
agra
fo:
Cap
ito
lo 4
- C
on
clu
sio
ni
53
References
MDPI and ACS Style
Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping
Applications. Sensors 2012, 12, 1437-1454.
AMA Style
Khoshelham K, Elberink SO. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications.
Sensors. 2012; 12(2):1437-1454.
Chicago/Turabian Style
Khoshelham, Kourosh; Elberink, Sander Oude. 2012. "Accuracy and Resolution of Kinect Depth Data for
Indoor Mapping Applications." Sensors 12, no. 2: 1437-1454.