
SINTESI OTTIMALE DEL MECCANISMO SOSPENSIVO …tesi.cab.unipd.it/52151/1/Ceranto_Nicolo_tesi.pdf ·...
87
UNIVERSITA’ DEGLI STUDI DI PADOVA Dipartimento di Ingegneria Industriale DII Corso di Laurea in Ingegneria Meccanica SINTESI OTTIMALE DEL MECCANISMO SOSPENSIVO POSTERIORE CON IL METODO DELLE COORDINATE NATURALI Relatore: Ch.mo Prof. Vittore Cossalter Correlatore: Ing. Matteo Massaro Laureando: Nicolò Ceranto Matr. 1078895 Anno Accademico 2015/2016
Transcript of SINTESI OTTIMALE DEL MECCANISMO SOSPENSIVO …tesi.cab.unipd.it/52151/1/Ceranto_Nicolo_tesi.pdf ·...

UNIVERSITA’ DEGLI STUDI DI PADOVA
Dipartimento di Ingegneria Industriale DII
Corso di Laurea in Ingegneria Meccanica
SINTESI OTTIMALE DEL MECCANISMO SOSPENSIVO
POSTERIORE CON IL METODO DELLE COORDINATE
NATURALI
Relatore: Ch.mo Prof. Vittore Cossalter
Correlatore: Ing. Matteo Massaro
Laureando: Nicolò Ceranto Matr. 1078895
Anno Accademico 2015/2016


“Da dove vieni è irrilevante,
è ciò che fai del dono della vita
che stabilisce chi sei”


5
INDICE
Indice ........................................................................................................................................................... 5
Sommario .................................................................................................................................................... 7
1. Sospensione Motociclistica Posteriore ..................................................................................................... 9
1.1 Introduzione ............................................................................................................................................. 9
1.2 Forcellone Oscillante .............................................................................................................................. 10
1.3 Forcellone Cantilever ............................................................................................................................. 12
1.4 Meccanismi ............................................................................................................................................ 13
1.5 Rigidezza ridotta della sospensione ....................................................................................................... 15
1.6 Curva della rigidezza ridotta .................................................................................................................. 17
2. Metodo delle coordinate naturali .......................................................................................................... 19
2.1 Introduzione ........................................................................................................................................... 19
2.2 Modellizzazione generale dei meccanismi ............................................................................................. 20
2.3 Analisi cinematica .................................................................................................................................. 22
3. Analisi del quadrilatero articolato .......................................................................................................... 27
3.1 Equazioni del meccanismo ..................................................................................................................... 27
3.2 Valori iniziali ........................................................................................................................................... 29
3.3 Esempi .................................................................................................................................................... 30
4. Implementazione del modello sospensione ........................................................................................... 37
4.1 Descrizione del sistema .......................................................................................................................... 37
4.2 Dati di input ............................................................................................................................................ 39
4.3 Esecuzione degli algoritmi ...................................................................................................................... 41
4.4 Stampa dei risultati ................................................................................................................................ 44
5. Simulazioni e analisi dei dati .................................................................................................................. 47
5.1 Rapporto di velocità costante 0.5 .......................................................................................................... 48
5.2 Rapporto di velocità crescente 0.5-0.7 .................................................................................................. 54
5.3 Rapporto di velocità decrescente 0.5-0.35 ............................................................................................ 60
Conclusioni ................................................................................................................................................ 67
Appendice A .............................................................................................................................................. 69
Appendice B ............................................................................................................................................... 71
Bibliografia ................................................................................................................................................ 87

6

7
SOMMARIO
Il presente lavoro tratta lo sviluppo di un algoritmo per la descrizione e ottimizzazione
della sospensione posteriore motociclistica. Nella storia si sono sviluppate diverse
tipologie di sistemi sospensivi e in questa sede ci si intende concentrare nello schema a
quadrilatero biella-telaio, data la capacità di generare curve di rigidezza molto variegate. A
partire dallo studio cinematico del quadrilatero articolato si passa in seguito all’analisi
dell’intera sospensione. Il parametro su cui si realizzano le ottimizzazioni è il rapporto tra
la velocità di compressione della molla e la velocità di sollevamento verticale dello
pneumatico posteriore. Le procedure di ottimizzazione avvengono per via numerica: nel
software di calcolo viene implementata l’intera cinematica e i relativi algoritmi di
ottimizzazione: al termine delle iterazioni vengono presentate le dimensioni geometriche
ottimali degli elementi facenti parte del sistema sospensivo. Per esplorare il numero più
elevato possibile di soluzioni si fa riferimento a diversi metodi matematici basati su
altrettanto diverse strutture risolutrici. Vengono infine presentati degli esempi di
ottimizzazione per sospensioni a comportamento lineare, progressivo e regressivo.

8

9
1. SOSPENSIONE MOTOCICLISTICA
POSTERIORE
1.1. INTRODUZIONE
Poiché spesso le strade cittadine risultano avere un manto irregolare, la guida di un
motociclo privo di sospensioni risulta essere particolarmente difficoltosa, a causa del
disagio avvertito dal pilota a seguito della perdita di aderenza sul piano stradale. Gli
pneumatici sono sufficienti per assorbire piccole asperità, ma necessitano di un supporto
per affrontare quelle di maggiore entità: di qui la necessità di ricorrere a sistemi
sospensivi.
Nel dettaglio, le sospensioni devono contemporaneamente pervenire ai seguenti scopi:
garantire la corretta aderenza degli pneumatici al manto stradale, al fine di
trasferire nel modo ottimale le forze di trazione e frenata imposte dal veicolo;
assicurare l’assetto desiderato della motocicletta nelle diverse condizioni di
utilizzo dello stesso;
eseguire un corretto isolamento delle masse sospese dalle vibrazioni risultanti
dall’interazione degli pneumatici con il terreno: in questo senso le sospensioni
devono conseguire il duplice obiettivo di permettere alle ruote di seguire il
profilo della strada e garantire un ottimale comfort di guida al pilota.

10
La soddisfazione contemporanea di questi aspetti risulta essere quasi impossibile: per
massimizzare il comfort sono infatti necessarie delle molle molto soffici, le quali tuttavia
presentano una notevole escursione nelle fasi di accelerazione e frenata con un
conseguente difficile mantenimento di assetto e stabilità desiderati [1]. L’importanza di
queste tre funzioni viene quindi variata in base all’utilizzo del veicolo in questione: le moto
da Gran Premio privilegiano assetto e aderenza, al fine di massimizzare la prestazione in
gara, e riservano al comfort un’importanza secondaria; d’altro canto le moto da turismo
devono assicurare un elevato comfort di guida e quindi relegano la prestazione ad un
ruolo minore.
Un altro aspetto fondamentale è legato al fatto che un particolare assetto è in grado di
soddisfare al meglio una particolare condizione di guida, ad esempio con la strada
asciutta, mentre con terreno bagnato può rispondere in modo totalmente diverso; in
egual misura la variazione dei carichi sul motoveicolo stesso (diversa corporatura dei
piloti, presenza di un passeggero, etc. …) comporta, a parità di condizioni stradali, una
variazione di risposta del sistema-veicolo.
Per soddisfare tutte queste necessità sono state sviluppate diverse tipologie di
sospensione posteriore motociclistica, caratterizzate dal proprio comportamento e da
vantaggi/svantaggi che verranno in seguito esposti.
1.2. FORCELLONE OSCILLANTE
Tradizionalmente la sospensione posteriore classica è composta da un forcellone
composto da due bracci oscillanti ognuno dei quali dotato di una propria unità molla-
smorzatore.

11
Gli angoli particolari con cui vengono realizzati tali schemi consentono di gestire la
risposta del sistema e di ottenere una lieve progressività. La semplicità costruttiva di tale
apparato ne ha permesso una vasta distribuzione ed utilizzo da parte dei principali
costruttori a tal punto da risultare lo schema sospensivo più diffuso; in aggiunta a ciò si
evidenziano una facile dissipazione del calore prodotto dagli ammortizzatori, delle basse
forze reattive trasmesse al telaio attraverso la coppia rotoidale ed una grande ampiezza di
movimento del gruppo molla-smorzatore, la quale costringe gli ammortizzatori a lavorare
ad alte velocità di compressione ed estensione e rende più agevole il controllo dello
smorzamento. Per contro questo sistema presenta una limitata oscillazione verticale della
ruota, un comportamento non molto progressivo e la possibilità di ottenere degli sforzi
torcenti sul forcellone, causati da variazioni nei precarichi delle due molle o nelle
caratteristiche degli ammortizzatori.
Figura 1: schema della sospensione a forcellone oscillante tradizionale e applicazione su Guzzi California

12
1.3. FORCELLONE CANTILEVER
Per contrastare i principali difetti del forcellone classico si ricorre quindi al sistema
“cantilever”: esso è composto da un forcellone a bracci uniti con un’unica unità molla-
ammortizzatore.
Questa soluzione riduce le masse sospese in gioco, realizza elevate rigidezze torsionali e
flessionali, permette una notevole escursione verticale della ruota posteriore, riduce
notevolmente il rischio di sforzi torsionali sul forcellone e consente un facile
aggiustamento o taratura dell’unità, in quanto è presente un singolo ammortizzatore. La
problematica principale è legata alla posizione dell’ammortizzatore stesso che, posto
sopra o dietro al motore, può provocare problemi di dissipazione del calore; oltre a ciò, al
pari del forcellone tradizionale, la sospensione cantilever non consente di ottenere una
caratteristica forza-spostamento progressiva. Una possibile variante del sistema
sospensivo, con caratteristiche di funzionamento simili, può prevedere il posizionamento
laterale del gruppo molla-ammortizzatore.
Figura 2: schema della sospensione “cantilever” e applicazione su Aprilia RSV4 Factory

13
Figura 3: Aprilia SMV 750 Dorsoduro con applicazione del meccanismo sospensivo “Cantilever” laterale
1.4. MECCANISMI
La necessità di ottenere delle particolari curve di rigidezza desiderate (e quindi un
comportamento progressivo) porta all’introduzione di meccanismi nello schema della
sospensione: generalmente essi sono basati sul quadrilatero. Le varie case costruttrici
hanno risposto a queste esigenze ricorrendo a diverse soluzioni che si differenziano
principalmente per il punto di collegamento del gruppo molla-ammortizzatore. Esso si può
quindi realizzare tra il telaio e il bilancere (Kawasaki-Unitrak), tra la biella e il telaio
(ProLink-Honda) o tra il forcellone e il bilancere (Full Floater-Suzuki).

14
Figura 4: principali schemi di sospensioni con meccanismi a quadrilatero
Questi schemi consentono inoltre ottenere elevate escursioni della ruota e ridotte masse
non sospese, ma si registrano anche elevate forze reattive scambiate tra i vari membri. La
presenza del quadrilatero sta alla base anche delle sospensioni utilizzate per la
trasmissione ad albero con giunti cardanici (in sostituzione della tradizionale trasmissione
a catena). In tal caso la ruota è collegata alla biella del quadrilatero e il suo centro di
rotazione è dato dall’intersezione dei due bilanceri (e quindi dipende dagli angoli di
inclinazione degli stessi).
Un ulteriore schema sospensivo è costituito dal sistema ad esalatero realizzato da
Morbidelli: dal punto di visto teorico esso consente di ottenere delle curve di rigidezza
molto particolari ed articolate, ma tale vantaggio non è giustificato dalla notevole
complessità geometrica costruttiva.

15
Figura 5: schema sospensivo a quadrilatero per trasmissione ad albero con giunti cardanici (sx) e sistema ad esalatero Morbidelli (dx)
1.5. RIGIDEZZA RIDOTTA DELLA SOSPENSIONE
Al fine di confrontare le rigidezze delle diverse tipologie di sospensioni sopraelencate
risulta utile ricorrere ad una metodologia particolare: il calcolo della rigidezza ridotta.
Procedendo in tal senso è possibile realizzare un modello semplificato del sistema
Figura 6: rigidezza ridotta della sospensione posteriore

16
sospensivo, a partire dalla molla reale di rigidezza (spring rate).
Il modello scelto per il presente lavoro si basa sulla riduzione della sospensione ad una
molla verticale di rigidezza (wheel rate) collegata direttamente al perno ruota. Da ciò si
deduce che lo spring rate corrisponde alla forza necessaria per ottenere una
compressione unitaria dell’ammortizzatore, mentre il wheel rate è legata alla forza
necessaria per sollevare verticalmente la ruota della stessa quantità [2]. Il legame tra
questi due spostamenti, che dipende dalla tipologia di meccanismo sospensivo, viene
espresso dal rapporto di velocità . Dal punto di vista matematico è possibile
esprimere la rigidezza ridotta a partire dalla forza elastica della molla:
(1)
in cui è la lunghezza iniziale mentre la lunghezza della molla deformata. A
partire dalla definizione del rapporto tra la velocità di deformazione della molla e la
velocità verticale della ruota
(2)
si può ricavare la forza elastica ridotta :
(3)
Derivando quest’ultima espressione rispetto allo spostamento verticale della ruota si
ottiene la rigidezza ridotta
(4)
Dal punto di vista strettamente numerico si evince che il 2° addendo è meno importante
del primo (assume un valore inferiore al 10% rispetto al primo termine), perciò in prima
approssimazione si può trascurare e procedere al troncamento.

17
Per quanto concerne le sospensioni a quadrilatero il rapporto di velocità varia tra
0.25 e 0.5: ciò implica che la rigidezza reale del gruppo molla-ammortizzatore deve essere
4 volte più grande rispetto alla rigidezza ridotta del relativo schema.
1.6. CURVA DELLA RIGIDEZZA RIDOTTA
Per valutare il comportamento della sospensione risulta utile fare riferimento alla curva
di rigidezza: si procede quindi a graficare, in funzione dell’escursione verticale della ruota
, la forza elastica e la rigidezza ridotta.
Figura 7: forza elastica e rigidezza ridotta della sospensione in funzione dell’escursione verticale dello pneumatico posteriore
In tal modo si può evidenziare l’andamento lineare, progressivo o regressivo della
sospensione: è bene ricordare che nella figura nella destra tali termini si riferiscono alla
rigidezza ridotta del sistema, la quale può essere crescente/costante/decrescente mentre
la forza elastica risulta essere sempre crescente ma con pendenza dipendente da .
Storicamente il comportamento lineare della sospensione è stato il primo introdotto, sia
per la semplicità della sua gestione sia per la particolare disposizione del gruppo molla-
ammortizzatore nel sistema a forcellone oscillante. Col progredire dell’evoluzione tuttavia

18
si è passati allo studio di sospensioni progressive, le quali offrono dei particolari vantaggi
di primaria importanza: come già affermato in precedenza, la motocicletta deve assolvere
alle funzioni di aderenza, comfort e assetto. La scelta di molle rigide permette di avere un
assetto costante al variare delle condizioni di utilizzo, ma pregiudica notevolmente gli altri
due aspetti: le vibrazioni dovute alle asperità stradali vengono infatti interamente
trasmesse al veicolo e quindi al pilota, compromettendone il comfort di guida. Oltre a
questo aspetto, ne risulta penalizzata anche la tenuta di strada, poiché le sospensioni non
permettono agli pneumatici di seguire gli avvallamenti del manto. Viceversa, l’utilizzo di
molle molto morbide migliora notevolmente il comfort e l’aderenza ma genera notevoli
escursioni della sospensione, con conseguente variazione dell’assetto specialmente nelle
fasi di sterzata, accelerazione e frenata (quando cioè si evidenzia il trasferimento di
carico). Queste considerazioni portano alla conseguente necessità di adottare uno schema
sospensivo a comportamento progressivo: in tal modo i piccoli disturbi della carreggiata
vengono facilmente assorbiti ma si evitano escursioni elevate della molla (aumentando
appunto progressivamente la rigidezza delle sospensioni), a beneficio del comfort e della
tenuta. Dal punto di vista delle vibrazioni questa soluzione permette inoltre di mantenere
costanti le frequenze dei modi di vibrare del veicolo, al variare della massa sul veicolo
(peso del pilota, presenza di un passeggero o di bagagli, etc…).
L’utilizzo di sospensioni di tipo regressivo invece ricopre una ristretta nicchia di mercato,
per lo più legata a veicoli progettati per il fuoristrada: esse infatti permettono al pilota di
ottimizzare il controllo su fondi stradali caratterizzati da una bassa aderenza.

19
2. METODO DELLE COORDINATE
NATURALI
2.1. INTRODUZIONE
Lo sviluppo delle tecniche multibody e di sofisticati algoritmi di calcolo ha permesso, in
tempi relativamente recenti, lo studio di meccanismi e sistemi sempre più complessi; i
primi metodi utilizzati per analisi e sintesi si basano sulle coordinate angolari per
descrivere posizione e moto dei corpi, al fine di ridurre al minimo il numero di equazioni
[3]. Dal punto di vista numerico tuttavia questo rappresenta un ostacolo importante, in
quanto le grandezze trigonometriche richiedono elevati tempi di calcolo. Si perviene
quindi, nei primi anni ’60, allo sviluppo delle coordinate naturali: questo approccio
permette di determinare la posizione di un meccanismo facendo ricorso esclusivamente
alle coordinate cartesiane, i punti base, ed eventuali coseni direttori di versori solidali al
corpo. Si osserva sin da subito che il numero di variabili richieste per lo studio del sistema
non corrisponde al minimo assoluto: un corpo infatti necessita di 4 coordinate per essere
descritto nel piano (invece di 3) e di 12 nello spazio (anziché 6). Le coordinate naturali
sono quindi ridondanti e l’utilizzo di equazioni di congruenza risulta necessario per
preservare la rigidità del corpo [4]. Questo svantaggio viene tuttavia ampiamente
bilanciato dal fatto che le equazioni in questione sono lineari o quadratiche, consentendo

20
una notevole riduzione in termini di tempi di calcolo per analisi e sintesi. Quando inoltre si
studiano sistemi di corpi, il numero di coordinate naturali viene notevolmente ridotto
tramite i punti condivisi in prossimità delle coppie cinematiche [5]. Una coppia rotoidale
necessita infatti di un singolo punto base per essere descritta, appartenente ad entrambi i
corpi, e per soddisfare implicitamente le condizioni di vincolo; una coppia prismatica
invece fa riferimento a due punti base,uno per ciascuno dei corpi vincolati, ed un versore,
il quale definisce la retta d’azione della coppia stessa. Le relazioni che invece descrivono la
congruenza nel piano possono essere di tre tipi:
La distanza tra due punti solidali ad un corpo deve mantenersi costante, descritta
dalla nota formula della distanza;
L’angolo tra vettori solidali ad un corpo deve mantenersi costante, espresso dal
prodotto scalare/vettoriale dei vettori stessi;
La proiezione di un vettore in una direzione assegnata deve mantenersi costante,
delineata matematicamente come nel caso precedente (condizione utilizzata per
esempio nelle coppie prismatiche).
2.2. MODELLIZZAZIONE GENERALE DEI MECCANISMI
Attraverso alcune considerazioni cinematiche è possibile definire un metodo generale per
la descrizione matematica di meccanismi, al fine di studiarne particolari caratteristiche o
applicazioni [6]. Nel caso presente si faccia riferimento ad un generico meccanismo con un
grado di libertà, coordinate naturali e dimensioni geometriche essenziali
dei corpi. Dalla teoria della meccanica applicata si ricava che devono esistere
equazioni di congruenza derivanti dalle condizioni di rigidità del sistema:
(5)

21
Nelle fasi relative all’ottimizzazione del meccanismo, l’algoritmo impostato cercherà il
valore ottimale delle lunghezze che permettano al meccanismo di seguire una
particolare funzione desiderata. Tipicamente vi sono tre diverse tipologie di sintesi di
meccanismi: generazione di funzione, generazione di traiettorie e guida di corpo rigido,
con o senza correlazione. La tecnica di ottimizzazione in esame permette di trattarle con
lo stesso metodo, imponendo le opportune equazioni e minimizzando l’errore strutturale.
A titolo di esempio, nel caso della sintesi con generazione di traiettorie senza correlazione
si considera un particolare punto appartenente al corpo e le relative posizioni
desiderate parametrizzate nella coordinata continua . È quindi possibile definire
il sistema di funzioni obiettivo associato al meccanismo:
(6)
Nel caso invece si intenda effettuare una sintesi di traiettoria con correlazione è
sufficiente inserire le equazioni relative all’angolo desiderato e ad un’eventuale
parametro addizionale :
(7)
dove , e sono grandezze relative ad al corpo in esame.
Lo studio della sintesi per guida di corpo rigido e generazione di funzione si articola con la
stessa struttura matematica: procedendo in questo modo è possibile inserire tutte le
condizioni desiderate ed ottenere il sistema di funzioni obiettivo:
(8)

22
Oltre alle funzioni obiettivo relative alla movimentazione desiderata del meccanismo, vi
sono altre condizioni di natura geometrica (lunghezza massima di elementi, ostacoli, …),
operativa (angoli di trasmissione, …) e dinamica (forze, deformazioni, …) che possono
essere richieste al sistema: molte di esse possono essere descritte da diseguaglianze e,
sebbene esuli dagli intenti del presente lavoro, è comunque possibile raggiungere tali
obiettivi con specifiche funzioni penalità.
2.3. ANALISI CINEMATICA
Lo studio dell’analisi cinematica del meccanismo in esame svolge un ruolo fondamentale
nel processo di ottimizzazione, in quanto permette di valutarne la prestazione. Nello
sviluppo dell’algoritmo infatti le dimensioni sono temporaneamente fissate e si
valuta la performance facendo riferimento al sistema di funzioni obiettivo (8). Risulta
evidente che in questa fase il numero di equazioni è maggiore del numero
di variabili indipendenti , quindi il problema è sovravincolato: ciò implica che
qualunque combinazione delle coordinate indipendenti non sarà in grado di soddisfare
esattamente tutte le funzioni obiettivo.
Si procede pertanto alla configurazione che soddisfa al meglio le funzioni
obiettivo (8) e che soddisfa esattamente solo le equazioni di congruenza (5) (la mancata
soddisfazione di queste ultime porterebbe infatti alla non assemblabilità del meccanismo);
in tal modo si “muove” il meccanismo il più vicino possibile alle posizioni richieste in input.
Per valutare il grado di ottimizzazione raggiunto è conveniente ricorrere ad un criterio di
performance e quindi si calcola la “distanza” tra le configurazioni attuale e obiettivo
introducendo la norma euclidea, basata sui residui delle eq. (8):
(9)

23
Tale parametro è indicativo della prestazione puntuale del meccanismo, pertanto si
procede all’integrazione numerica in tutto l’intervallo all’interno del quale si
devono soddisfare le funzioni obiettivo:
(10)
Questo indice di performance viene calcolato parallelamente all’esecuzione dell’analisi
cinematica e permette quindi di valutarne il livello di ottimizzazione. Il sistema in esame
quindi rientra nella categoria dei problemi ad ottimizzazione vincolata; è pertanto
conveniente ricorrere ai moltiplicatori di Lagrange per ottenere un problema ad
ottimizzazione non vincolata.
La funzione integranda di (10) viene quindi sostituita dal lagrangiano:
(11)
in cui i valori sono i moltiplicatori di Lagrange.
Applicando la teoria del calcolo delle variazioni è possibile derivare un set di
equazioni per le funzioni incognite :
(12)
Si osserva che le ultime equazioni sono relative alla condizione di congruenza (5)
mentre le prime richiedono il gradiente di e lo Jacobiano delle funzioni . Questo
sistema rappresenta per intero l’analisi cinematica del meccanismo, tuttavia è composto
da equazioni algebriche non lineari che richiedono un costo computazionale elevato per la
ricerca della loro soluzione.
Per ridurre i tempi di calcolo e facilitare il raggiungimento delle soluzioni è opportuno
trasformare le (12) in un sistema ordinario del primo ordine di equazioni differenziali nella
variabile : tale metodo viene utilizzato di frequente per le equazioni algebriche nei

24
sistemi dinamici multi-body [7]. Una generica funzione algebrica può essere
sostituita dall’equazione differenziale
(13)
in cui il parametro è una costante di tempo.
Applicando questa trasformazione al suddetto sistema, sostituendo con e , si
ottiene:
(14)
Attraverso tali sostituzioni le equazioni sviluppano un sistema di ordinario del primo
ordine:
(15)
Si osserva che l’analisi cinematica è stata ricondotta ad un problema ai valori iniziali; nei
capitoli successivi verrà evidenziato il metodo per la scelta dei valori iniziali di e
. Analizzando la forma del lagrangiano (11) è possibile semplificare ulteriormente il
sistema (15) per ottenere una formulazione più vantaggiosa dal punto di vista
computazionale:
(16)
I risultati ottenuti si possono presentare in forma ulteriormente più compatta nella
seguente forma:

25
(17)
A seconda del meccanismo in esame i componenti A, B e C avranno una particolare
descrizione matematica: nel seguente capitolo verrà riportato l’esempio dello studio
dell’analisi cinematica del quadrilatero articolato.

26

27
3. ANALISI DEL QUADRILATERO
ARTICOLATO
3.1. EQUAZIONI DEL MECCANISMO
Per conseguire lo studio delle sospensioni composte da meccanismi è utile, in prima
analisi, procedere allo studio del quadrilatero articolato, per poi implementare la
sospensione completa. In primo luogo è necessario ricavare le equazioni che descrivono il
moto del meccanismo, facendo riferimento a due diverse formule: la distanza tra due
punti viene utilizzata per esprimere la lunghezza dei membri L1, L2 e L3 mentre le
grandezza a e b sono valutate in termini di proiezioni di vettori nelle due direzioni
cartesiane.
Figura 8: schematizzazione base del quadrilatero articolato

28
Si osserva facilmente dalla figura che i punti 0, 1, 2 e 3 sono posti in corrispondenza delle
coppie rotoidali del sistema, mentre il punto 3 è quello che genera la traiettoria che si
intende controllare ed è solidale alla biella [6].
Considerando fisse le coordinate le uniche variabili indipendenti sono
): il sistema che quindi descrive le equazioni di vincolo per il
meccanismo è il seguente:
(18)
Tale sistema corrisponde alle equazioni (5) introdotte in precedenza.
La valutazione della prestazione del meccanismo viene effettuata prendendo a riferimento
il punto rispetto all’andamento imposto , parametrizzato dalla coordinata
curvilinea che viene fatta variare da 0 a 1. Si calcola quindi il criterio di performance
(19)
Per ricavare le altre equazioni si introducono i moltiplicatori di Lagrange (
, si calcola la funzione Lagrangiana e le corrispondenti 6 derivate spaziali. A questo
punto è possibile operare in maniera analoga al capitolo precedente e ricavare le matrici
A, B e C del sistema ordinario (17) che vengono riportate in Appendice A. E’ quindi
possibile realizzare l’analisi cinematica completa dei quadrilateri articolati.
Gli studi dei vari meccanismi sono stati eseguiti con il software e, per realizzare
l’analisi cinematica, si è fatto riferimento al risolutore il quale offre un buon
compromesso tra affidabilità e velocità di esecuzione.

29
3.2. VALORI INIZIALI
Ricordando che l’obiettivo finale è l’esecuzione di un’ottimizzazione in grado di variare le
lunghezze dei membri , è opportuno eseguire alcune valutazioni sui dati di input
da inserire. Una prima opzione riguarda l’inserimento dei valori iniziali delle grandezze
geometriche in esame e le coordinate cartesiane dei punti fissi: si tratterebbe quindi di
una base formata dai nove parametri , ovvero lo spazio delle
lunghezze iniziali. La problematica principale di questa base è legata al fatto che la
posizione iniziale del meccanismo non è nota e ciò richiederebbe la risoluzione di un
sistema non lineare; oltre all’aumento del carico computazionale sono da tenere in
considerazione rischi circa la non assemblabilità del sistema e la possibile esistenza di più
configurazioni per delle date lunghezze. In ultima analisi è da tenere il considerazione la
possibilità che una piccola variazione sul valore iniziale di una lunghezza possa portare ad
una soluzione molto diversa rispetto al caso precedente. Per tutte queste motivazioni è
utile ricorrere allo spazio dei valori iniziali delle coordinate naturali: i parametri in input
sono quindi i dieci valori . E’
necessario pertanto accettare un aumento nelle dimensioni del problema per mitigare gli
svantaggi sopraelencati: la posizione iniziale del meccanismo è infatti nota (eliminando i
problemi di eventuale non assemblabilità), le lunghezze iniziali dei membri possono essere
facilmente calcolate ed una piccola variazione dei valori iniziali porta circa alla stessa
soluzione.
Per la risoluzione analitica del sistema ordinario (17) è necessario introdurre anche i valori
iniziali dei moltiplicatori di Lagrange; poiché le equazioni di congruenza devono essere
soddisfatte in maniera esatta, le restanti in generale non lo sono (poiché, come descritto
in precedenza, il sistema è sovravincolato). Pertanto, per soddisfare al meglio le prime
equazioni del sistema si ricorre al metodo dei minimi quadrati; tale tecnica non è
particolarmente onerosa in quanto le equazioni sono lineari rispetto ai moltiplicatori . Il
sistema di ottimizzazione in seguito provvederà a ridurre quanto possibile il residuo di tali
equazioni minimizzando quindi l’indice di performance.

30
3.3. ESEMPI
Per valutare il funzionamento dell’analisi cinematica in forma differenziale sono stati
riprodotti tre esempi di quadrilatero articolato presenti in letteratura; per un’ulteriore
conferma si è deciso di eseguire anche un’analisi cinematica algebrica, imponendo la
variazione della coordinata e per poter quindi confrontare la risposta dei meccanismi.
Esempio 1
Con riferimento al lavoro svolto in [6] si riporta lo studio di un quadrilatero generatore di
una traiettoria rettilinea senza correlazione dal punto (3,0) al punto (7,0).
Figura 9: Esempio 1 di studio del quadrilatero articolato e parametri iniziali
La traiettoria è descritta dalle equazioni
s = [0, 1] (20)
coordinate iniziali geometria
x0 -0,3824 l1 13,424
y0 11,856 l2 9,980
x1 -1,298 l3 10,130
y1 -1,537 a 4,237
x2 8,675 b 1,697
y2 -1,911 x3 3 y3 0 x4 9,591 y4 -12

31
Di seguito sono riportati due grafici relativi al movimento del meccanismo con i due diversi
sistema di analisi, i quali permettono di verificare che effettivamente la traiettoria
eseguita sia la stessa; più in basso invece si evidenzia l’errore di traiettoria, il quale assume
un valore massimo di ben quattro ordini di grandezza inferiore al millimetro.
Figura 10: Analisi cinematica differenziale e algebrica del quadrilatero 1 ed errore di traiettoria

32
Esempio 2
Il secondo caso di studio si ricava da [4] ed affronta una problematica più complessa: il
punto deve infatti eseguire una traiettoria formata da due segmenti di linea retta.
Figura 11: Esempio 2 di studio del quadrilatero articolato e parametri iniziali
Le equazioni che descrivono il target da seguire sono:
s = [0, 1] (21)
Analogamente al caso precedente si può osservare nella pagina a fianco che il sistema
differenziale e quello algebrico offrono le medesime soluzioni; valutando i due grafici
relativi alla traiettoria è possibile notare che, come prevedibile, il punto più penalizzato
della traiettoria è il valore mediano (5,2) cui è assegnato un errore di 5 centesimi di
millimetro.
coordinate iniziali geometria
x0 2,654 l1 5,081
y0 -5,371 l2 8,738
x1 0,502 l3 13,000
y1 -0,768 a 1,128
x2 -5,423 b 2,358
y2 5,655 x3 3 y3 0,001 x4 7,423 y4 3,656

33
Esempio 3
Il terzo caso è presente in [4] e richiede al sistema di eseguire la medesima traiettoria del
caso precedente, utilizzando comunque un meccanismo meno ingombrante in termini di
spazio di manovra occupato.
Figura 12: Analisi cinematica differenziale e algebrica del quadrilatero 2, traiettoria del tracer point ed errore di traiettoria

34
Con riferimento alle equazioni target (21) si esegue lo studio del quadrilatero; dai grafici
seguenti si può osservare che la compattezza del sistema si paga in termini di errore
maggiore nel punto più critico (6 centesimi di millimetro).
coordinate iniziali geometria
x0 -2,272 l1 10,000
y0 -7,437 l2 1,325
x1 2,001 l3 3,725
y1 1,603 a 0,846
x2 3,321 b 1,704
y2 1,724 x3 3 y3 -0,016 x4 6,716 y4 3,257
Figura 13: Esempio 3 di studio del quadrilatero articolato e parametri iniziali

35
Figura 14: Analisi cinematica differenziale e algebrica del quadrilatero 3, traiettoria del tracer point ed errore di traiettoria.

36

37
4. IMPLEMENTAZIONE DEL
MODELLO SOSPENSIONE
4.1. DESCRIZIONE DEL SISTEMA
Nei capitoli precedenti è stato studiato il comportamento del modello quadrilatero
articolato e se ne sono eseguite diverse prove di analisi cinematica. Nel presente capitolo
invece si intende estendere lo studio del quadrilatero all’intera sospensione per poi
integrare diversi algoritmi di ottimizzazione sulla base degli obiettivi da raggiungere.
Poiché esistono tre diverse tipologie di sospensioni a quadrilatero (bilancere-forcellone,
biella-telaio e bilancere-telaio) si è deciso di restringere il campo ad un singolo caso,
ovvero al meccanismo biella-telaio: come già evidenziato nei capitoli precedenti, questa
soluzione permette di generare delle curve di rigidezza molto varie e quindi si presta
molto al ruolo di “caso generale” di studio. Oltre a ciò, per utilizzare delle dimensioni
compatibili con quelle dell’industria motociclistica, si è fatto riferimento allo schema
sospensivo della moto in fase di progettazione nel gruppo Motostudent Unipd, anch’essa
basata sul meccanismo biella-telaio. Nel caso si volesse far vertere lo studio su un tipo di
sospensione diversa è comunque sufficiente addentrarsi nel codice di calcolo e modificare
le equazioni riportate in Appendice B. Per gentile concessione del gruppo Motostudent,
nel corso di alcune simulazioni, si sono quindi utilizzati i dati relativi alle posizioni fisse dei

38
perni; è stato inoltre possibile eseguire un confronto tra la soluzione originale e quelle
ottimizzate dal presente algoritmo.
Viene riportata di seguito l’immagine che funge da riferimento per la scrittura delle
equazioni che governano il moto della sospensione:
Figura 15: Schema di riferimento per la sospensione posteriore biella - telaio
Il Punto 7 ricopre il ruolo di origine degli assi cartesiani e, a partire da esso, sono descritte
tutte le altre coordinate; è possibile riconoscere lo schema del quadrilatero articolato nei
membri di lunghezza L2, L4 e L5.
I punti 1, 2 e 3 si mantengono fissi nello spazio sia nel moto che durante il processo di
ottimizzazione, mentre gli altri sono liberi di muoversi senza alcun vincolo; la simulazione
prevede un sollevamento verticale del perno di attacco della ruota (punto 7) di una quota
pari a . Da ciò se ne ricava che il sistema ha variabili
( e le equazioni che ne descrivono il moto sono:

39
(22)
Analogamente al caso del quadrilatero sono state utilizzate rispettivamente la formula
della lunghezza tra due punti e la proiezione di un vettore nelle due direzioni cartesiane.
Al fine di perseguire l’ottimizzazione del meccanismo è necessario introdurre un valore
target di una particolare grandezza: nel presente lavoro la scelta è ricaduta sul rapporto di
velocità τ tra la velocità di deformazione della molla e la velocità verticale della ruota,
ovvero lo stesso parametro calcolato per ricavare la rigidezza ridotta delle sospensioni.
Viene quindi calcolata la funzione errore a partire dal confronto tra il valore obiettivo
e il valore attuale :
(22)
Si osserva che per evitare problematiche legate alla compensazione delle aree nella
funzione errore si è scelto di operare l’ottimizzazione sul valore di errore quadratico. Nulla
vieta, in un secondo momento, di variare la grandezza su cui si intende ottimizzare il
sistema: il presente algoritmo infatti calcola anche la forza elastica del forcellone e la
rigidezza ridotta della sospensione.
4.2. DATI DI INPUT
La configurazione di partenza è un requisito di fondamentale importanza per
l’esecuzione dell’ottimizzazione: se infatti la prima iterata ( ) è molto distante dal

40
target i tempi di calcolo aumentano notevolmente ed è da tenere in considerazione il
rischio di non poter arrivare a convergenza. Riguardo a ciò è bene evidenziare che la
problematica principale non è data dalla “distanza” in termini di valore dell’errore ma
piuttosto in termini di andamento del parametro: se infatti si desidera un rapporto di
velocità crescente 0.5-0.7 e il guess è crescente 0.3-0.5 si raggiunge la convergenza in
tempi relativamente ragionevoli; viceversa se il guess equivale ad un valore costante 0.4 o
decrescente, il costo computazionale cresce in modo deciso in quanto l’algoritmo dovrà
necessariamente correggere di molto le posizioni iniziali delle coordinate naturali.
Una volta scelto il meccanismo di partenza è quindi conveniente eseguire una
preliminare analisi cinematica del sistema, per valutare la prestazione guess: in seguito, in
base ad essa si sceglie se inizializzare il processo di ottimizzazione o variare ulteriormente i
parametri iniziali.
Un secondo parametro di input corrisponde a : poiché la simulazione prevede un
sollevamento della ruota posteriore di 100 si è scelto di discretizzare questa
lunghezza in dieci parti e per ognuna di esse si inserisce il rapporto di velocità desiderato.
Ciò richiede anche l’inserimento del grado di regressione che si intende utilizzare per
eseguire il fit della funzione impostata: per valori costanti o linearmente
crescenti/decrescenti è utile selezionare la regressione lineare, mentre per valori
parabolici conviene inserire la regressione con polinomio di secondo grado. Questi
passaggi sono eseguiti nel codice attraverso la funzione : l’equazione
generata è di fondamentale importanza poiché a partire da essa verranno
successivamente calcolati tutti i valori della funzione errore. Anche in questo caso è quindi
consigliabile eseguire l’analisi cinematica preliminare, per verificare di aver inserito il
target desiderato.
Questi dati devono quindi essere inseriti nel file excel
Vi sono notevoli metodologie per eseguire lo stop delle ottimizzazioni, molte delle quali
basate sulla variazione di errore massimo accettabile tra due iterate successive: nel
presente lavoro non è stato possibile inserire questi criteri per i motivi di seguito elencati.
In primo luogo il particolare meccanismo non assicura una decisa diminuzione dell’errore
al variare delle singole coordinate naturali, soprattutto se la configurazione dà una

41
funzione errore in prossimità di un punto di flesso a tangente orizzontale (o punto di sella
nello spazio tridimensionale); inoltre una variazione significativa di una coordinata non
assicura un’altrettanta significativa variazione dell’errore. Un’altra motivazione è data
dalla meccanica degli algoritmi scelti: uno di essi infatti procede con iterate realizzate per
piccoli incrementi/decrementi delle variabili indipendenti e quindi si corre il rischio di
ottenere una diminuzione dell’errore quadratico inferiore alla tolleranza richiesta; un altro
algoritmo invece non fa ricorso alle derivate della funzione obiettivo, e quindi può
alternare delle elevate variazioni nei valori dell’errore quadratico a variazioni molto
piccole. Per tutti questi motivi si è scelto di eseguire lo stop dei processi di ottimizzazione
imponendo il valore massimo di errore accettabile: ad ogni iterata, tramite l’utilizzo di una
, si confronta il valore di errore attuale con quello massimo. Qualora si sia
giunti ad un valore inferiore rispetto al target l’algoritmo esegue lo stop e stampa i
risultati, in caso contrario prosegue l’ottimizzazione del meccanismo.
Per una corretta simulazione delle prestazioni sospensive può risultare utile controllare i
valori di forza elastica sulla molla e di rigidezza ridotta: a tal fine viene richiesto, in input,
anche il valore di rigidezza del forcellone in ; nel caso in cui non sia ancora nota la
scelta della molla, è sufficiente inserire un valore unitario (il quale permette anche di
avere un’idea sulla compressione effettiva che il gruppo molla-smorzatore dovrà subire).
4.3. ESECUZIONE DEGLI ALGORITMI
Completata la fase di inserimento dati si procede all’esecuzione vera e propria
dell’algoritmo; come si può osservare dalla figura 16 è possibile scegliere tra quattro
diverse alternative: analisi cinematica, ottimizzazione fminsearch, ottimizzazione lsqnonlin
e ottimizzazione fminunc.
L’ si limita ad eseguire un singolo sollevamento della ruota
posteriore e a fornire i risultati associati: è quindi possibile avere delle informazioni circa il
comportamento e la risposta di una particolare configurazione del sistema sospensivo.
Poiché l’aumento della coordinata è gestito da un’equazione che non viene soddisfatta

42
in forma esatta (in quanto non è un’equazione di congruenza), talvolta accade che il
sollevamento simulato sia superiore ai desiderati: questa eventualità inoltre può
non presentarsi nelle prime iterate dei cicli di ottimizzazione ma venir fuori in seguito. Per
evitare questa problematica (che potrebbe aumentare notevolmente i tempi di calcolo a
causa del raggiungimento di configurazioni singolari) si fa nuovamente ricorso ad una
: nel processo di analisi cinematica, che richiede la risoluzione di un
sistema di equazioni differenziali, viene costantemente osservato il valore della coordinata
libera . Quando infatti essa raggiunge il valore di 100 l’esecuzione dell’analisi viene
fermata e si procede con la presentazione dei risultati della particolare configurazione
geometrica.
Figura 16: GUI di input per gli algoritmi di analisi e ottimizzazione

43
L’ è legata all’algoritmo di Nelder-Mead e rientra nei
metodi diretti di ricerca, in quanto non fa uso delle derivate della funzione obiettivo.
Questo particolare ottimizzatore euristico fa riferimento al concetto di simplesso [9]:
inizialmente la funzione obiettivo viene valutata in tutti i vertici del simplesso stesso
(ovvero i valori iniziali delle coordinate naturali), dopodiché uno di essi viene sostituito da
un altro punto (generalmente il centroide dei restanti vertici) in cui viene nuovamente
valutata la funzione obiettivo. Se il nuovo punto assume un valore inferiore al precedente
si procede alla sostituzione e si continua a cercare il minimo in questa direzione, altrimenti
si passa ad un altro vertice ripetendo l’iter. La meccanica dell’algoritmo quindi suggerisce
che le iterate immediatamente successive non necessariamente comportando ad una
costante diminuzione del valore della funzione obiettivo, perciò le valutazioni vanno fatte
considerando un numero più ampio di iterazioni. Questo metodo risulta essere ottimo per
problemi a basso numero di variabili, in genere inferiore a 100; poiché il metodo è non
derivativo, superato tale numero compare il cosiddetto “effetto dimensionalità” che di
fatto lo rende poco efficace. Un'altra problematica di rilievo è il punto di partenza, che se
è troppo lontano dal target può richiedere un numero elevatissimo di iterazioni con rischio
di mancanza di convergenza. Tuttavia, qualora il vettore iniziale fosse vicino alla
configurazione ottima, le simulazioni numeriche hanno rivelato che questo algoritmo, pur
essendo il meno “robusto” dei tre, consente di arrivare a convergenza in tempi più rapidi.
L’ fa riferimento alla teoria di Levenberg-Marquardt, noto
anche come metodo dei minimi quadrati “smorzato”. Dal punto di vista matematico esso
risulta essere una combinazione di altri due metodi: il primo di essi è il “gradient
descendt”, il quale ottimizza i parametri in funzione della direzione del gradiente della
funzione obiettivo ed è generalmente utilizzato quando si è molto lontani dal valore
target; il secondo è del tipo “Gauss-Newton” e perciò esegue le ottimizzazioni assumendo
che localmente la funzione obiettivo sia di tipo quadratico e ricerca il minimo attraverso le
derivate direzionali associate. Poiché l’algoritmo necessita del calcolo della matrice
Jacobiana è facile prevedere che richiederà dei tempi computazionali decisamente elevati
e le simulazioni stesse lo confermano; pur essendo il metodo più lento tuttavia risulta

44
essere il più affidabile, in quanto ogni iterata successiva garantisce di minimizzare il valore
della funzione errore e quindi di avvicinarsi al target imposto.
Anche l’ risulta essere di tipo derivativo in quanto è legata ad
un algoritmo “quasi-Newton”: pertanto anche essa prevede l’approssimazione della
funzione obiettivo in una forma quadratica, ma ricorre alle derivate prime e seconde per
ricercare i punti stazionari. Inizialmente questi metodi richiedevano il calcolo di tutta la
matrice Hessiana, mentre al giorno d’oggi necessitano soltanto di un’approssimazione di
una parte di essa, la quale non deve essere nemmeno invertita. Si può quindi affermare
che questo algoritmo sia una via di mezzo tra i due precedentemente esposti, e quindi da
preferire come primo tentativo di ottimizzazione.
4.4. STAMPA DEI RISULTATI
Al termine di ogni analisi cinematica e per ogni passo degli ottimizzatori viene realizzata
una figura rappresentante quattro grafici dai quali si possono ottenere delle importanti
informazioni preliminari (figura 17). Il primo di essi rappresenta, nelle coordinate spaziali,
il moto della sospensione completa: viene generalmente rappresentata una “fotografia”
del meccanismo ogni 5/10 iterate, evidenziando nel colore rosso la traiettoria del punto di
attacco del gruppo molla-smorzatore. Questo grafico permette quindi di avere una
visuale completa sul comportamento e il movimento degli elementi dell’apparato
sospensivo con le grandezze in esame in quella specifica iterata. Il secondo grafico nella
parte alta rappresenta l’andamento del rapporto di velocità al variare della coordinata
: con il colore verde viene riportato il che si intende raggiungere con la presente
ottimizzazione, in blu è rappresentato il valore di partenza da cui l’algoritmo deve
partire per raggiungere l’ottimo mentre la linea rossa è indice di ovvero il valore del
rapporto di velocità dell’attuale configurazione. Ciò permette di avere un controllo visivo
circa il raggiungimento del target previsto per il meccanismo in esame e il relativo
andamento.

45
Nella parte alta del grafico viene inoltre riportato il valore attuale dell’errore quadratico su
che, lo ricordiamo, viene costantemente confrontato con l’errore massimo ammissibile
inserito dall’operatore in fase di input.
Nel terzo riquadro viene rappresentato l’andamento della forza elastica di compressione
nella molla in funzione del sollevamento della ruota posteriore: per ricavare tale dato si è
fatto riferimento allo spostamento del punto di attacco del forcellone e moltiplicato per la
rigidezza della molla inserita all’inizio della GUI. Ciò permette di fare un prima valutazione
circa la progressività della sospensione in esame. (N.B.: qualora si inserisse un valore di
rigidezza unitario è possibile avere un riscontro numerico circa l’ampiezza di compressione
del gruppo molla-ammortizzatore).
Figura 17: Esempio di output per ogni iterata degli algoritmi di ottimizzazione

46
Il quarto grafico riporta infine l’andamento della rigidezza ridotta, anch’essa in funzione
del sollevamento della ruota posteriore. Matematicamente questo valore è dato dal
quadrato del rapporto di velocità moltiplicato dalla rigidezza della molla inserita (in realtà
questo valore non è esattamente veritiero in quanto frutto di un’approssimazione
comunemente accettata in ambito accademico e motociclistico). Queste ultime due curve
di rigidezza, oltre a consentire delle valutazioni circa la progressività della sospensione,
possono essere spunto di ulteriori ottimizzazioni: imponendo infatti un valore target di
una di esse è possibile imporre l’ottimizzazione del meccanismo su di esse anziché sul
rapporto di velocità.
Oltre a queste rappresentazioni, al termine dell’ottimizzazione la GUI genera in
automatico un’altra figura in cui vengono confrontate la configurazione iniziale di input e
la configurazione finale ottimizzata, in modo da poter verificare a colpo d’occhio quali
sono i parametri maggiormente modificati e dove si sono spostate i vari punti di interesse.
Al fine di poter rendere utilizzabili alcuni dati anche dopo la chiusura del codice, si è scelto
di imporre all’algoritmo di salvare tre diverse variabili: due di esse sono necessarie per la
rappresentazione del rapporto di velocità in funzione di mentre la terza contiene le
coordinate iniziali e ottimizzate per poter facilmente riprodurre le rispettive geometrie del
meccanismo.
Infine, così come per i dati di input, per una comodità legata alla visualizzazione i risultati
vengono anche salvati in un apposito foglio excel : a seconda
dell’algoritmo di ottimizzazione scelto essi verranno posizionati nelle rispettive caselle,
evidenziando sia le coordinate cartesiane dei punti che le lunghezze dei membri della
sospensione nelle configurazioni di input e ottimizzata.

47
5. SIMULAZIONI E ANALISI DEI DATI
Con riferimento all’algoritmo descritto nel capitolo precedente sono state eseguite
diverse simulazioni al fine di ottimizzare i meccanismi. Il parametro su cui si è deciso di
incentrare il problema è il rapporto di velocità tra la velocità di compressione della molla
del forcellone e la velocità di sollevamento della ruota posteriore della motocicletta; il
sollevamento imposto è pari a .
Per la scelta dei parametri geometrici di input si è fatto ricorso, nelle prime due
simulazioni, ai dati gentilmente offerti dal gruppo : i punti fissi
corrispondono esattamente alla geometria della motocicletta sperimentale mentre per le
coordinate variabili si è scelto di iniziare con un certo scostamento per valutare gli
algoritmi di ottimizzazione. Nella terza simulazione tali coordinate erano troppo lontane
dal punto ottimo, perciò si è fatto riferimento ai valori presenti nell’elaborato [10] con gli
stessi criteri sopra descritti. Al fine di vagliare tutte le possibilità di input, per la prima e la
terza simulazione si è imposto un rapporto di velocità target con andamento lineare,
mentre nel secondo caso si è fatto ricorso ad una funzione parabolica.
In tutte le tre casistiche sono stati applicati tutti gli algoritmi di ottimizzazione a
disposizione nella GUI i cui risultati vengono di seguito rappresentati singolarmente e poi
confrontati; inoltre si evidenzia che è sempre stata utilizzata una rigidezza della molla pari
a .

48
5.1. RAPPORTO DI VELOCITA’ COSTANTE 0.5
La prima casistica di studio riguarda una sospensione che mantiene il rapporto di velocità
costante al valore 0.5 per l’intera escursione dello pneumatico posteriore: la scelta di tale
valore è da imputare al fatto che la sospensione del gruppo è stata
realizzata con lo stesso criterio, perciò è possibile eseguire un confronto diretto tra la
soluzione reale, quella target e quelle ottimizzate. Per questo primo caso si è scelto un
errore quadratico massimo pari a 0.0005, ovvero un ordine di grandezza più basso rispetto
alle seguenti simulazioni: tale scelta è da imputare al fatto che il meccanismo
essendo già una buona soluzione, fornisce un errore pari a circa
0.002, e quindi si è imposto un errore inferiore di un ordine di grandezza.
Ottimizzazione Fminsearch
Figura 18: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminsearch con τ costante

49
Viene presentato il grafico relativo al primo algoritmo di ottimizzazione: balza subito
all’occhio che questa particolare tecnica di ottimizzazione ha fornito una soluzione con un
errore quadratico di addirittura un ordine di grandezza inferiore a quello massimo; ciò non
deve stupire per quanto già esposto nel paragrafo precedente circa le meccaniche
dell’algoritmo di Nelder-Mead. La durata della simulazione è stata di circa 18 minuti.
Si può osservare che la curva del rapporto di velocità ottenuta si avvicina molto al valore
target e fornisce un comportamento della sospensione prevalentemente lineare: quanto
affermato si può facilmente osservare dalla linearità conclamata della forza elastica.
Anche il quarto grafico conferma un valore prevalentemente costante della rigidezza
ridotta (non tragga in inganno il valore della scala dell’asse delle ordinate, il quale risulta di
due ordini di grandezza inferiore rispetto ai corrispondenti grafici delle casistiche
successive).
Ottimizzazione Lsqnonlin
Figura 19: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Lsqnonlin con τ costante

50
A partire dagli stessi dati di input dell’algoritmo precedente si è realizzata
l’ottimizzazione con “lsqnonlin”; l’errore ottenuto è in linea con quanto atteso in fase di
input per un tempo totale di calcolo di 23 minuti.
La soluzione trovata presenta un andamento del rapporto di velocità prevalentemente
decrescente per poi aumentare di valore nel tratto finale: esso parte da 0.51 per poi finire
a 0.497. Tutto ciò si riflette in una sospensione leggermente regressiva ma facilmente
approssimabile con una a comportamento lineare (anche in questo caso la scala nel
grafico della rigidezza ridotta è diversa rispetto agli studi successivi, in quanto presenta un
ordine di grandezza inferiore al confronto con essi).
Ottimizzazione Fminunc
Figura 20: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminunc con τ costante

51
Anche il terzo algoritmo parte dagli stessi dati e completa l’esecuzione in un tempo
approssimabile a 20 minuti.
Dai grafici riportati nella pagina precedente si può subito notare una marcata analogia con
il precedente ottimizzatore: ciò è da imputare alla metodologia di ottimizzazione che
risulta essere molto più affine a “lsqnonlin” piuttosto che a “fminsearch”, dato che
quest’ultimo algoritmo è non derivativo. Anche in questo caso infatti il rapporto di
velocità è leggermente decrescente, partendo da 0.513 e concludendosi a 0.5. L’errore
quadratico è quindi leggermente inferiore al caso precedente, mentre valgono le stesse
considerazioni circa le curve di rigidezza.
Per poter valutare le diverse soluzioni si è scelto di riportare tutti i risultati nei medesimi
grafici; sono inoltre state incluse anche le elaborazioni relative all’analisi cinematica della
sospensione del gruppo .
Figura 21: confronto dei rapporti di velocità ottenuti dalle soluzioni per τ costante

52
Figura 22: confronto tra i meccanismi ricavati dagli algoritmi (in alto) e Zoom nel punto di attacco del forcellone (in basso) per τ costante

53
coordinate naturali e lunghezze
iniziali motostudent fminunc lsqnonlin fminsearch
x1 -514,98 -514,98 -514,98 -514,98 -514,98
y1 -24,7 -24,7 -24,7 -24,7 -24,7
x3 -474,76 -474,76 -474,76 -474,76 -474,76
y3 227,47 227,47 227,47 227,47 227,47
x2 -512,1 -512,1 -512,1 -512,1 -512,1
y2 90,3 90,3 90,3 90,3 90,3
x7 0 0 -1,4174 -1,6013 0
y7 0 0 0,2011 0,17258 0
x5 -320 -335,44 -321,84 -320,74 -324,883
y5 -45 -37,59 -37,477 -38,037 -44,2776
x4 -365 -356,7 -356,67 -356,35 -350,0554
y4 10 7,67 2,0906 2,2453 9,9282
x6 -400 -412,84 -403,77 -404,3 -426,6044
y6 -70 -77,31 -71,087 -70,892 -73,2847
L1 520,00 520,00 518,57 518,39 520,00
L2 167,59 176,00 178,72 178,92 180,88
L3 365,14 356,78 355,26 354,75 350,20
L4 71,06 50,00 52,71 53,77 59,77
L5 196,03 180,00 193,56 194,70 191,10
L6 83,82 87,00 88,56 89,79 105,78
L7 87,32 101,85 87,03 87,45 113,07
Lm0 306,72 311,01 306,88 306,57 304,59
Il grafico relativo al rapporto di velocità permette di osservare che la soluzione scelta dal
gruppo risulta essere già valida, partendo da 0.495 e crescendo sino
a 0.52; i due algoritmi derivativi hanno fornito una soluzione molto simile sia in termini di
andamento del rapporto di velocità sia in termini di coordinate, portando di fatto ad una
configurazione di sospensione molto simile. L’algoritmo “Fminsearch” ha invece fornito un
risultato marcatamente diverso, pur risultando il migliore in termini di . Questi
risultati confermano che la soluzione ottimale per un dato target non è univoca e ciò
spiega , in parte, anche le notevoli differenze adottate nello schema sospensivo dalle varie
Figura 23: Tabella con le coordinate naturali e lunghezze iniziali, del gruppo Motostudent e ottimizzate dagli algoritmi per τ costante

54
case motociclistiche per giungere agli stessi obiettivi in termini di comfort, assetto e
aderenza.
5.2. RAPPORTO DI VELOCITA’ CRESCENTE 0.5-0.7
Il secondo gruppo di simulazioni numeriche prevede come target un rapporto di velocità
crescente in forma parabolica da 0.5 a 0.7: a tal scopo si sono imposti dei rapporti di
velocità parziali in modo da rispettare l’equazione .
Al fine di ottenere un meccanismo con un grado di ottimizzazione simile alla sospensione
progettata dal gruppo si è scelto di utilizzare un errore quadratico
massimo pari a 0.005. Si ricorda che la rigidezza del gruppo molla-ammortizzatore viene
imposta con valore unitario; le tempistiche di calcolo degli algoritmi sono in linea con
quelle relative al paragrafo precedente. Considerando i valori target del rapporto di
velocità ci si aspetta di ottenere dei meccanismi dal comportamento spiccatamente
progressivo, utile per permettere alle motociclette di assorbire le piccole asperità del
manto stradale e contemporaneamente aumentare la rigidezza in presenza di elevate
escursioni del forcellone.
Ottimizzazione Fminsearch
A differenza del caso precedente, in questa occasione l’algoritmo ha proposto una
soluzione in linea con i valori di errore massimo imposto. Nuovamente esso si dimostra
essere il più rapido in termini di tempi di convergenza; vengono presentate nella pagina
successiva le caratteristiche del meccanismo finale.
Si può facilmente osservare che la soluzione proposta risulta essere piuttosto simile al
target imposto: il valore di partenza è infatti 0.5 e il valore finale circa 0.69, con un errore
massimo che in generale non supera 0.02. E’ da rilevare inoltre che la soluzione
ottimizzata è molto diversa rispetto ai valori di primo tentativo, a dimostrazione
dell’ottima capacità di convergenza del solutore. Dai due grafici in basso (in particolare dal

55
secondo) è possibile notare il previsto comportamento progressivo del gruppo sospensivo;
la scelta di un valore unitario per la rigidezza della molla consente inoltre di valutare che,
in corrispondenza del sollevamento pari a dello pneumatico posteriore, il
gruppo molla-ammortizzatore subirà una compressione di circa .
Ottimizzazione Lsqnonlin
L’analisi con il metodo dei minimi quadrati ha offerto un errore leggermente superiore
rispetto a quella non derivativa dell’algoritmo “Fminsearch” ma comunque dello stesso
ordine di grandezza.
A differenza del caso precedente si può osservare che il rapporto di velocità ottimizzato
assume all’inizio un valore superiore al target (0.57) mentre nella parte finale esso è
inferiore (0.69). Le due curve di rigidezza sono invece molto simili alla prima soluzione e
Figura 24: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminsearch con τ crescente

56
quindi, anche in questo caso, è possibile evidenziare il comportamento prettamente
progressivo del meccanismo in esame.
Ottimizzazione Fminunc
Nella casistica a rapporto di velocità crescente questo algoritmo offre la miglior
soluzione, in quanto si ha un errore a regime che è la metà di quello massimo accettato.
Dal grafico dei vari andamenti di τ si evince già a colpo d’occhio che la soluzione ottimale
si adatta davvero molto bene al target imposto, con scostamenti molto ridotti: i valori
iniziale e finale sono infatti rispettivamente 0.51 e 0.69. Le due curve di rigidezza sono
compatibili con quelle precedenti, simboleggianti ancora una volta la progressività del
sistema.
Figura 25: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Lsqnonlin con τ crescente

57
Figura 26: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminunc con τ crescente
Figura 27: confronto dei rapporti di velocità ottenuti dalle soluzioni per τ crescente

58
Figura 28: confronto tra i meccanismi ricavati dagli algoritmi (in alto) e Zoom nel punto di attacco del forcellone (in basso) per τ crescente

59
Il confronto dei risultati questa volta non si è potuto corredare con un caso realmente
studiato ma, con riferimento alla casistica a rapporto di velocità costante, si può
facilmente prevedere che le soluzioni delle case motociclistiche si avvicinino molto ai
risultati numerici.
Il grafico di confronto tra i risultati del rapporto di velocità mostra che le soluzioni sono
molto simili in termini di prestazioni; la particolarità di questa casistica è che le
configurazioni geometriche associate sono molto diverse.
coordinate naturali e lunghezze
iniziali fminunc lsqnonlin fminsearch
x1 -514,98 -514,98 -514,98 -514,98
y1 -24,7 -24,7 -24,7 -24,7
x3 -474,76 -474,76 -474,76 -474,76
y3 227,47 227,47 227,47 227,47
x2 -512,1 -512,1 -512,1 -512,1
y2 90,3 90,3 90,3 90,3
x7 0 -0,78097 -0,90085 0
y7 0 -5,5899 -5,4774 0
x5 -350 -354,19 -352,41 -356,56
y5 -45 -36,2 -35,67 -45,844
x4 -365 -355 -355,7 -328,5
y4 10 2,3691 1,7079 10,188
x6 -400 -402,85 -403,65 -407,5
y6 -70 -71,226 -71,193 -71,313
L1 520,00 520,23 520,09 520,00
L2 167,59 180,03 179,75 200,32
L3 365,14 354,31 354,87 328,66
L4 57,01 38,58 37,52 62,67
L5 166,22 161,20 162,94 159,82
L6 55,90 59,96 62,35 56,95
L7 87,32 87,78 87,26 113,51
Lm0 306,72 307,23 307,01 306,26
Figura 29: Tabella con le coordinate naturali e lunghezze iniziali e ottimizzate dagli algoritmi per τ crescente

60
I due algoritmi derivativi danno coordinate naturali e lunghezze dei membri molto simili
con biella posta verticalmente nella posizione a riposo e ciò è da imputare principalmente
alla filosofia similare dei solutori; la tecnica di Nelder-Mead invece presenta una
configurazione molto diversa: la biella infatti risulta essere di lunghezza quasi doppia
rispetto al caso precedente e a riposo assume una posizione inclinata. Per contro il punto
di attacco del forcellone rimane circa lo stesso e ciò è in accordo con le curve di forza
elastica dei tre solutori che sono molto simili tra loro.
5.3. RAPPORTO DI VELOCITA’ DECRESCENTE 0.5-0.35
La terza raccolta di simulazioni fa riferimento ad un rapporto di velocità decrescente: si è
scelto di ricorrere ad un’interpolazione lineare per valori decrescenti da 0.5 a 0.35. Le
condizioni iniziali utilizzate nei due precedenti casi risultano essere molto lontane
dall’ottimo e tutti e tre gli algoritmi hanno mostrato grossi problemi circa la convergenza:
come già anticipato in precedenza è infatti necessario che i valori di input non siano
troppo distanti dal target prefissato. Analizzando altri risultati presenti nella letteratura è
stato possibile ricavare una configurazione iniziale soddisfacente, in grado cioè di fornire
dei risultati con tempi computazionali accettabili. Il punto di attacco del forcellone è stato
perciò posizionato molto più in alto rispetto alle due casistiche precedenti. Poiché il range
di variazione del rapporto di velocità è stato ridotto si è scelto di diminuire l’errore
quadratico massimo, fissato a 0.002. Ci si aspetta di ottenere in tutti e tre i casi un
comportamento sospensivo prettamente regressivo.
Ottimizzazione Fminsearch
I tempi di calcolo sono ancora in linea con il primo caso di studio, perciò per giungere alla
soluzione ci si attesta su circa 19 minuti.; l’errore quadratico corrisponde in termini di
ordine di grandezza a quella imposto come target.

61
Si può osservare che il rapporto di velocità ottimizzato si approssima molto bene a quello
imposto come target, salvo poi distanziarsene nel tratto finale ma di una quota pari a 0.01
e quindi accettabile. L’escursione della molla è pari a circa 40 e, analizzando le due
curve di rigidezza, se ne ricava che il meccanismo risponde alle previsioni di regressività
iniziali, passando da una rigidezza ridotta di 0.25 ad un valore pari a 0.13 .
Ottimizzazione Lsqnonlin
L’ottimizzazione con la tecnica “Lsqnonlin” richiede, al pari dei casi precedenti, un tempo
di calcolo superiore: esso infatti corrisponde a circa 25 minuti ed è dovuto alla peculiarità
della ricerca del punto di minimo del metodo stesso. Per quanto concerne l’errore ci si
attesta su 0.0019 e quindi in linea con il target massimo.
Similmente al precedente solutore, anche in questo caso si ottiene un rapporto di velocità
ottimale che fitta molto bene il modello lineare imposto come input. Gli scostamenti
Figura 30: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminsearch con τ decrescente

62
massimi corrispondono ai valori finale e centrale di sollevamento del pneumatico
posteriore ma non sono oltre lo 0.01.
Nonostante le diverse meccaniche di ottimizzazione si riscontra che le curve di rigidezza
sono molto simili a quelle ottenute per l’algoritmo non derivativo; anche quivi infatti si
osserva un comportamento spiccatamente regressivo.
Ottimizzazione Fminunc
Il terzo solutore, basato sul metodo quasi-Newton, realizza l’ottimizzazione in 21 minuti
ed offre l’errore quadratico minore: esso equivale infatti a 0.0014.
Il rapporto di velocità ricalca le due precedenti raccolte di risultati: lo scostamento
massimo si ha infatti nel punto finale in cui raggiunge il valore di 0.36 (anziché 0.35). I
grafici di forza elastica del gruppo molla-ammortizzatore e di rigidezza ridotta evidenziano
l’andamento regressivo del sistema sospensivo.
Figura 31: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Lsqnonlin con τ decrescente

63
Figura 33: Grafici di meccanismo, rapporto di velocità, forza elastica e rigidezza ridotta per l’algoritmo Fminunc con τ decrescente
Figura 32: confronto dei rapporti di velocità ottenuti dalle soluzioni per τ decrescente

64
Figura 34: confronto tra i meccanismi ricavati dagli algoritmi (in alto) e Zoom nel punto di attacco del forcellone (in basso) per τ decrescente

65
Anche in questo caso è utile confrontare i risultati dei vari solutori per effettuare delle
importanti valutazioni sui risultati.
coordinate naturali e lunghezze
iniziali fminunc lsqnonlin fminsearch
x1 -514,98 -514,98 -514,98 -514,98
y1 -24,7 -24,7 -24,7 -24,7
x3 -474,76 -474,76 -474,76 -474,76
y3 227,47 227,47 227,47 227,47
x2 -512,1 -512,1 -512,1 -512,1
y2 90,3 90,3 90,3 90,3
x7 0 -0,61755 -0,61789 0
y7 0 1,2824 1,2872 0
x5 -350 -349,99 -350,03 -325,26
y5 -45 -42,603 -42,771 -42,982
x4 -395 -392,7 -392,61 -395,86
y4 10 4,1732 4,4532 9,6528
x6 -400 -401,43 -401,43 -433,44
y6 80 81,353 81,294 84,389
L1 520,00 519,17 519,17 520,00
L2 141,99 147,22 147,13 141,48
L3 395,13 392,09 392,00 395,98
L4 71,06 63,34 63,59 88,06
L5 166,22 165,96 165,94 190,60
L6 134,63 134,21 134,29 167,11
L7 70,18 77,67 77,35 83,65
Lm0 165,34 163,49 163,54 148,93
Come già anticipato i risultati dell’ottimizzazione offrono circa la stessa soluzione in
termini di rapporto di velocità, con un leggero vantaggio del terzo sistema utilizzato. Ciò
che più colpisce è la marcata differenza nella configurazione dei meccanismi ottimizzati:
come nel caso crescente, anche qui i due algoritmi derivativi offrono due soluzioni
praticamente sovrapponibili. Il primo solutore invece si discosta da molto da tali risultati:
la biella infatti assume una lunghezza nuovamente maggiore delle precedenti e pure il
Figura 35: Tabella con le coordinate naturali e lunghezze iniziali e ottimizzate dagli algoritmi per τ decrescente

66
punto di attacco del forcellone è più a sinistra di ben ; è bene notare che ciò non
impedisce di giungere alle stesse soluzioni in termini di regressività ed escursione della
molla.

67
6. CONCLUSIONI
Nel presente studio si è analizzata la sospensione posteriore motociclistica dotata di
quadrilatero con forcellone fissato alla biella e al telaio. A partire dalla sintesi del
meccanismo è stato realizzato un algoritmo di ottimizzazione basata sul rapporto tra la
velocità di compressione del gruppo molla-ammortizzatore e la velocità di sollevamento
dello pneumatico posteriore. Impostato un range di valori di tale rapporto per l’intero
campo di moto e la configurazione geometrica iniziale, il codice di calcolo permette di
effettuare l’analisi cinematica e tre diverse tipologie di ottimizzazione, in relazione
all’errore quadratico massimo accettabile imposto e alla rigidezza della molla. Si è
evidenziata l’importanza dell’inserimento di valori iniziali prossimi alla soluzione ottima, al
fine di non ottenere tempi di calcolo troppo elevati per i quali non è nemmeno assicurata
la convergenza. Le simulazioni hanno permesso di confrontare tra loro le diverse tecniche
di ottimizzazione e le soluzioni offerte: gli algoritmi derivativi hanno presentato delle
soluzioni affini mentre quello non derivativo ha offerto valori diversi ma comunque
soddisfacenti le condizioni di input; ciò può essere spunto di riflessione per la realizzazione
di schemi sospensivi geometricamente differenti in funzione dei vincoli di spazio della
motocicletta. Infine un confronto con una soluzione in via di realizzazione ha permesso di
verificare l’affidabilità degli algoritmi e ha offerto una soluzione migliorativa della stessa.

68

69
APPENDICE A
Si riporta di seguito la formulazione matematica delle matrici e dei vettori utili per lo
studio dell’analisi cinematica differenziale del quadrilatero articolato.
[B] =
; [C]=

70

71
APPENDICE B
Vengono di seguito riportate alcuni files dell’algoritmo relativo alla GUI Matlab per la
sospensione posteriore. Si omettono i files “Anakin2.mat” e “Anakin3.mat” poiché del
tutto analoghi al codice riportato “Anakin1.mat”. Corrispondentemente si omette anche il
file “StopOptim3.mat” in quanto simile a quello riportato “StopOptim12”.
Codice principale “GUISospBiella.mat”
function varargout = GUIsospBiella(varargin)
% GUISOSPBIELLA MATLAB code for GUIsospBiella.fig
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @GUIsospBiella_OpeningFcn, ...
'gui_OutputFcn', @GUIsospBiella_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
function GUIsospBiella_OpeningFcn(hObject, eventdata, handles, varargin)
handles.output = hObject;
guidata(hObject, handles);
function varargout = GUIsospBiella_OutputFcn(hObject, eventdata, handles)
varargout{1} = handles.output;
function tautarget_Callback(hObject, eventdata, handles)
num1 = str2double(get(hObject,'String'));
if isnan(num1)
num1 = 0;
set(hObject,'String',num1);

72
errordlg('Input must be a number', 'Error')
end
handles.tautarget = num1;
guidata(hObject,handles)
function tautarget_CreateFcn(hObject, eventdata, handles)
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function err_max_Callback(hObject, eventdata, handles)
num2 = str2double(get(hObject,'String'));
if isnan(num2)
num2 = 0;
set(hObject,'String',num2);
errordlg('Input must be a number', 'Error')
end
handles.err_max = num2;
guidata(hObject,handles)
function err_max_CreateFcn(hObject, eventdata, handles)
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function kforc_Callback(hObject, eventdata, handles)
num3 = str2double(get(hObject,'String'));
if isnan(num3)
num3 = 0;
set(hObject,'String',num3);
errordlg('Input must be a number', 'Error')
end
handles.kforc = num3;
guidata(hObject,handles)
function kforc_CreateFcn(hObject, eventdata, handles)
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function AnalisiKinematic_Callback(hObject, eventdata, handles)
%ANALISI CINEMATICA
k_spring = handles.kforc;
% INSERIMENTO VALORI INIZIALI DELLE COORDINATE NATURALI
filename = 'InputDataCoordinates.xlsx';
var = xlsread(filename,'C3:C16');
input_tau=xlsread(filename,'G4:G15');
x70= var(1);
y70= var(2);
x10= var(3);
y10= var(4);
x30= var(5);
y30= var(6);
x20= var(7);
y20= var(8);
x50= var(9);
y50= var(10);
x40= var(11);
y40= var(12);

73
x60= var(13);
y60= var(14);
coordiniziali=[x50,y50,x40,y40,x60,y60,x70,y70];
x2=x20; y2=y20; x1=x10; y1=y10; x5=x50; y5=y50;
x4=x40; y4=y40; x6=x60; y6=y60; x7=x70; y7=y70;
syms s
%point 7 path
xd=0;
yd=200.*s;
s=0; yd=eval(yd);
coordiniz=[x50,y50,x40,y40,x60,y60,x70,y70];
% Calcolo delle lunghezze iniziali
l5=sqrt((x5-x10).^2 + (y5-y10).^2);
l4=sqrt((x5-x4).^2 + (y5-y4).^2);
l2=sqrt((x4-x20).^2 + (y4-y20).^2);
l1=sqrt((x7-x20).^2 + (y7-y20).^2);
l3=sqrt((x4-x7).^2 + (y4-y7).^2);
a0=(l4.*((x5-x4).*(x6-x5)+(y5-y6).*(y4-y5))./((y4-y5).^2.+(x4-x5).^2));
b0=(l4.*((y6-y5).*(x4-x5)-(y4-y5).*(x6-x5))./((y4-y5).^2.+(x4-x5).^2));
a=-a0; b=b0;
%% CALCOLO VALORE INIZIALE DI t0
% equazioni di congruenza
syms x5 y5 x4 y4 x6 y6 x7 y7;
psi1=(x5-x1).^2.+(y5-y1).^2.-l5.^2; %dL/dlambda1
psi2=(x4-x2).^2.+(y4-y2).^2.-l2.^2; %dL/dlambda2
psi3=(x5-x4).^2.+(y5-y4).^2.-l4.^2; %dL/dlambda3
psi4=x6-x5-a.*(x4-x5)./l4+b.*(y4-y5)./l4; %dL/dlambda4
psi5=y6-y5-a.*(y4-y5)./l4-b.*(x4-x5)./l4; %dL/dlambda5
psi6=(x7-x2).^2 + (y7-y2).^2-l1.^2; %dL/dlambda6
psi7=(x4-x7).^2 + (y4-y7).^2-l3.^2; %dL/dlambda7
psi1=-psi1; psi2=-psi2; psi3=-psi3; psi6=-psi6; psi7=-psi7;
% funzione penalità del punto 7
pen=(x7-xd).^2.+(y7-yd).^2;
% lagrangiano
syms lambda1 lambda2 lambda3 lambda4 lambda5 lambda6 lambda7;
lagr=pen+lambda1.*psi1+lambda2.*psi2+lambda3.*psi3+lambda4.*psi4+lambda5.
*psi5+lambda6.*psi6+lambda7.*psi7;
dlx5=diff(lagr, x5); %dL/dx5
dly5=diff(lagr, y5); %dL/dy5
dlx4=diff(lagr, x4); %dL/dx4
dly4=diff(lagr, y4); %dL/dy4
dlx6=diff(lagr, x6); %dL/dx6
dly6=diff(lagr, y6); %dL/dy6
dlx7=diff(lagr, x7); %dL/dx7
dly7=diff(lagr, y7); %dL/dy7
x5=x50; y5=y50; x4=x40; y4=y40; x6=x60; y6=y60; x7=x70; y7=y70;
%valuto le derivate spaziali del lagrangiano
dlx5k=eval(dlx5); dly5k=eval(dly5);
dlx4k=eval(dlx4); dly4k=eval(dly4);
dlx6k=eval(dlx6); dly6k=eval(dly6);
dlx7k=eval(dlx7); dly7k=eval(dly7);
%valuto la funzione indice di performance
t=dlx5k.^2+dly5k.^2+dlx4k.^2+dly4k.^2+dlx6k.^2+dly6k.^2+dlx7k.^2+dly7k.^2
;
%% CALCOLO MOLTIPLICATORI DI LAGRANGE INIZIALI
%ricavo i moltiplicatori di Lagrange iniziali
[H, c]=equationsToMatrix([dlx5k==0, dly5k==0, dlx4k==0, dly4k==0,
dlx6k==0, dly6k==0, dlx7k==0, dly7k==0],...

74
[lambda1, lambda2, lambda3, lambda4, lambda5, lambda6, lambda7]);
mltpliniz=eval(H)\eval(c); %moltiplicatori di lagr.iniziali
mltpliniz=mltpliniz';
valinizivp=[coordiniz,mltpliniz];
lambda1=mltpliniz(1);
lambda2=mltpliniz(2);
lambda3=mltpliniz(3);
lambda4=mltpliniz(4);
lambda5=mltpliniz(5);
lambda6=mltpliniz(6);
lambda7=mltpliniz(7);
t0=eval(t);
valinizivp=[valinizivp,t0];
%% RISOLVO LA ANALISI CINEMATICA CON SIST. EQ. DIFF.
options=odeset('Events',@odeStopEvent);
kk=0:0.02:1; % integration interval of variable s
sistma=@(s,m) systm(s,m,l5,l4,l2,l1,l3,a,b,x10,y10,x20,y20,x60,y60,t0);
[T,Y,te,ye,ie]=ode45(sistma,kk,valinizivp,options);
Ywh=Y(:,8); %consider only mechanism move with y7<100
Ywheelreal=Ywh(2:end);
%% GRAFICI
%mechanism
figure('position', [200, 50, 1000, 600]), clf
if true
subplot(2,2,1)
for is=1:5:size(Y,1)
hold on
line([Y(is,1),Y(is,5)],[Y(is,2),Y(is,6)])
line([Y(is,3),Y(is,5)],[Y(is,4),Y(is,6)])
line([Y(is,1),Y(is,3)],[Y(is,2),Y(is,4)])
line([x10,Y(is,1)],[y10,Y(is,2)])
line([Y(is,3),x20],[Y(is,4),y20])
line([Y(is,3),Y(is,7)],[Y(is,4),Y(is,8)])
line([x20,Y(is,7)],[y20,Y(is,8)])
line([x30,Y(is,5)],[y30,Y(is,6)],'Color','k')
plot(Y(is,5),Y(is,6),'r.') , title(['meccanismo con rigidezza
k = ',num2str(k_spring),' N/mm']) %point out (x6,y6)
axis equal
xlabel('x (mm)')
ylabel('y (mm)')
hold off
end
end
%tau trend in graphic form
XX6=abs(diff(Y(:,5))); YY6=abs(diff(Y(:,6))); YY7=diff(Y(:,8));
XY6=sqrt(XX6.^2+YY6.^2);
Ytau_r=[];
for is=1:1:size(XX6)
tau_r=XY6(is)./YY7(is);
Ytau_r=[Ytau_r;tau_r];
end
Xtau=[0;10;20;30;40;50;60;70;80;90;100];
if input_tau(12)==1
pol=polyfit(Xtau,input_tau(1:11),1);
Ytau_t=pol(1).*Ywheelreal+pol(2);
else
pol=polyfit(Xtau,input_tau(1:11),2);
Ytau_t=pol(1).*(Ywheelreal).^2+pol(2).*Ywheelreal+pol(3);

75
end
error_tau=trapz((Ytau_r-Ytau_t).^2); %calculate error
subplot(2,2,2)
plot(Ywheelreal,Ytau_r,'r'),title(['tau error = ',num2str(error_tau)])
hold on
plot(Ywheelreal,Ytau_t,'color',[0 0.6 0])
hold off
xlabel('escursione verticale della ruota (mm)')
ylabel('rapporto di velocità')
xlim([0 105])
% progressiveness suspension reduced stiffness graphic
subplot(2,2,4)
plot(Ywheelreal,k_spring.*(Ytau_r.^2),'c')
xlabel('escursione verticale della ruota (mm)')
ylabel('rigidezza ridotta (N/mm)')
xlim([0 105])
%progressiveness suspension elastic force graphic
X6i=Y(1,5); X6i=X6i.*ones(size(Y(:,5)));
Y6i=Y(1,6); Y6i=Y6i.*ones(size(Y(:,5)));
XY6=sqrt((Y(:,5)-X6i).^2+(Y(:,6)-Y6i).^2);
subplot(2,2,3)
plot(Y(:,8),XY6.*k_spring,'color',[0.7 0.1 0.8])
xlabel('escursione verticale della ruota (mm)')
ylabel('forza elastica (N)')
xlim([0 105])
function Optimization1_Callback(hObject, eventdata, handles)
%ALGORITMO FMINSEARCH
errmaxtau = handles.err_max;
k_spring = handles.kforc;
% INITIAL VALUES OF NATURAL COORDINATES
filename = 'InputDataCoordinates.xlsx';
var = xlsread(filename,'C3:C16');
input_tau=xlsread(filename,'G4:G15');
x70= var(1);
y70= var(2);
x10= var(3);
y10= var(4);
x30= var(5);
y30= var(6);
x20= var(7);
y20= var(8);
x50= var(9);
y50= var(10);
x40= var(11);
y40= var(12);
x60= var(13);
y60= var(14);
coordiniziali=[x50,y50,x40,y40,x60,y60,x70,y70];
x2=x20; y2=y20; x1=x10; y1=y10; x5=x50; y5=y50;
x4=x40; y4=y40; x6=x60; y6=y60; x7=x70; y7=y70;
%% OPTIMIZATION1
options = optimset('OutputFcn', @(x, optimValues, state) stopoptim12(x,
optimValues, state,errmaxtau));
integr=@(n)
anakin1(n,x10,y10,x20,y20,x30,y30,x60,y60,coordiniziali,input_tau,k_sprin
g);

76
[X,fval,exitflag,output]=fminsearch(integr,coordiniziali,options);
output=output
guess=coordiniziali';
input_coord=[x10;y10;x30;y30;x20;y20;guess];
optim=X';
optim_coord=[x10;y10;x30;y30;x20;y20;optim];
indice={'x5';'y5';'x4';'y4';'x6';'y6';'x7';'y7'};
Tres=table(guess,optim,'RowNames',indice)
%optmized variables
x5=X(1);
y5=X(2);
x4=X(3);
y4=X(4);
x6=X(5);
y6=X(6);
x7=X(7);
y7=X(8);
%input initial lenghts
l50=sqrt((x50-x10).^2 + (y50-y10).^2);
l40=sqrt((x50-x40).^2 + (y50-y40).^2);
l20=sqrt((x40-x20).^2 + (y40-y20).^2);
l10=sqrt((x70-x20).^2 + (y70-y20).^2);
l30=sqrt((x40-x70).^2 + (y40-y70).^2);
l60=sqrt((x50-x60).^2 + (y50-y60).^2);
l70=sqrt((x60-x10).^2 + (y60-y10).^2);
lm00=sqrt((x30-x60).^2 + (y30-y60).^2);
input_lenghts=[l10;l20;l30;l40;l50;l60;l70;lm00];
%optimized final lenghts
l5=sqrt((x5-x10).^2 + (y5-y10).^2);
l4=sqrt((x5-x4).^2 + (y5-y4).^2);
l2=sqrt((x4-x20).^2 + (y4-y20).^2);
l1=sqrt((x7-x20).^2 + (y7-y20).^2);
l3=sqrt((x4-x7).^2 + (y4-y7).^2);
l6=sqrt((x5-x6).^2 + (y5-y6).^2);
l7=sqrt((x6-x10).^2 + (y6-y10).^2);
lm0=sqrt((x30-x6).^2 + (y30-y6).^2);
optim_lenghts=[l1;l2;l3;l4;l5;l6;l7;lm0];
%Save data
xlswrite('OutputData',input_coord,'Output','C6')
xlswrite('OutputData',input_lenghts,'Output','C21')
xlswrite('OutputData',optim_coord,'Output','D6')
xlswrite('OutputData',optim_lenghts,'Output','D21')
%compare initial and optimized mechanism
figure(150),set(gcf,'name','confronto meccanismi'),clf
plot(x60,y60,'b')
hold on
plot(x6,y6,'r')
legend('meccanismo iniziale','meccanismo optim')
line([x10,x5],[y10,y5],'Color','r')
line([x5,x4],[y5,y4],'Color','r')
line([x4,x20],[y4,y20],'Color','r')
line([x5,x6],[y5,y6],'Color','r')
line([x4,x6],[y4,y6],'Color','r')
line([x20,x7],[y20,y7],'Color','r')
line([x4,x7],[y4,y7],'Color','r')
line([x6,x30],[y6,y30],'Color','g')
line([x10,x50],[y10,y50],'Color','b')
line([x50,x40],[y50,y40],'Color','b')

77
line([x40,x20],[y40,y20],'Color','b')
line([x50,x60],[y50,y60],'Color','b')
line([x40,x60],[y40,y60],'Color','b')
line([x20,x70],[y20,y70],'Color','b')
line([x40,x70],[y40,y70],'Color','b')
line([x60,x30],[y60,y30],'Color','g')
axis equal
xlabel('x (mm)')
ylabel('y (mm)')
function optimization2_Callback(hObject, eventdata, handles)
%ALGORITMO FMINUNC
errmaxtau = handles.err_max;
k_spring = handles.kforc;
% INITIAL VALUES OF NATURAL COORDINATES
filename = 'InputDataCoordinates.xlsx';
var = xlsread(filename,'C3:C16');
input_tau=xlsread(filename,'G4:G15');
x70= var(1);
y70= var(2);
x10= var(3);
y10= var(4);
x30= var(5);
y30= var(6);
x20= var(7);
y20= var(8);
x50= var(9);
y50= var(10);
x40= var(11);
y40= var(12);
x60= var(13);
y60= var(14);
coordiniziali=[x50,y50,x40,y40,x60,y60,x70,y70];
x2=x20; y2=y20; x1=x10; y1=y10; x5=x50; y5=y50;
x4=x40; y4=y40; x6=x60; y6=y60; x7=x70; y7=y70;
%% OPTIMIZATION1
options=optimoptions(@fminunc,'Algorithm','quasi-Newton','OutputFcn',
@(x, optimValues, state)stopoptim12(x, optimValues, state,errmaxtau));
integr=@(n)
anakin2(n,x10,y10,x20,y20,x30,y30,x60,y60,coordiniziali,input_tau,k_sprin
g);
[X,fval,exitflag,output]=fminunc(integr,coordiniziali,options);
output=output
guess=coordiniziali';
input_coord=[x10;y10;x30;y30;x20;y20;guess];
optim=X';
optim_coord=[x10;y10;x30;y30;x20;y20;optim];
indice={'x5';'y5';'x4';'y4';'x6';'y6';'x7';'y7'};
Tres=table(guess,optim,'RowNames',indice)
%optmized variables
x5=X(1);
y5=X(2);
x4=X(3);
y4=X(4);
x6=X(5);
y6=X(6);
x7=X(7);
y7=X(8);
%input initial lenghts

78
l50=sqrt((x50-x10).^2 + (y50-y10).^2);
l40=sqrt((x50-x40).^2 + (y50-y40).^2);
l20=sqrt((x40-x20).^2 + (y40-y20).^2);
l10=sqrt((x70-x20).^2 + (y70-y20).^2);
l30=sqrt((x40-x70).^2 + (y40-y70).^2);
l60=sqrt((x50-x60).^2 + (y50-y60).^2);
l70=sqrt((x60-x10).^2 + (y60-y10).^2);
lm00=sqrt((x30-x60).^2 + (y30-y60).^2);
input_lenghts=[l10;l20;l30;l40;l50;l60;l70;lm00];
%optimized final lenghts
l5=sqrt((x5-x10).^2 + (y5-y10).^2);
l4=sqrt((x5-x4).^2 + (y5-y4).^2);
l2=sqrt((x4-x20).^2 + (y4-y20).^2);
l1=sqrt((x7-x20).^2 + (y7-y20).^2);
l3=sqrt((x4-x7).^2 + (y4-y7).^2);
l6=sqrt((x5-x6).^2 + (y5-y6).^2);
l7=sqrt((x6-x10).^2 + (y6-y10).^2);
lm0=sqrt((x30-x6).^2 + (y30-y6).^2);
optim_lenghts=[l1;l2;l3;l4;l5;l6;l7;lm0];
%Save data
xlswrite('OutputData',input_coord,'Output','K6')
xlswrite('OutputData',input_lenghts,'Output','K21')
xlswrite('OutputData',optim_coord,'Output','L6')
xlswrite('OutputData',optim_lenghts,'Output','L21')
%compare initial and optimized mechanism
figure(150),set(gcf,'name','confronto meccanismi'),clf
plot(x60,y60,'b')
hold on
plot(x6,y6,'r')
legend('meccanismo iniziale','meccanismo optim')
line([x10,x5],[y10,y5],'Color','r')
line([x5,x4],[y5,y4],'Color','r')
line([x4,x20],[y4,y20],'Color','r')
line([x5,x6],[y5,y6],'Color','r')
line([x4,x6],[y4,y6],'Color','r')
line([x20,x7],[y20,y7],'Color','r')
line([x4,x7],[y4,y7],'Color','r')
line([x6,x30],[y6,y30],'Color','g')
line([x10,x50],[y10,y50],'Color','b')
line([x50,x40],[y50,y40],'Color','b')
line([x40,x20],[y40,y20],'Color','b')
line([x50,x60],[y50,y60],'Color','b')
line([x40,x60],[y40,y60],'Color','b')
line([x20,x70],[y20,y70],'Color','b')
line([x40,x70],[y40,y70],'Color','b')
line([x60,x30],[y60,y30],'Color','g')
axis equal
xlabel('x (mm)')
ylabel('y (mm)')
function optimization3_Callback(hObject, eventdata, handles)
%ALGORITMO LSQNONLIN
errmaxtau = handles.err_max;
k_spring = handles.kforc;
% INITIAL VALUES OF NATURAL COORDINATES
filename = 'InputDataCoordinates.xlsx';
var = xlsread(filename,'C3:C16');

79
input_tau=xlsread(filename,'G4:G15');
x70= var(1);
y70= var(2);
x10= var(3);
y10= var(4);
x30= var(5);
y30= var(6);
x20= var(7);
y20= var(8);
x50= var(9);
y50= var(10);
x40= var(11);
y40= var(12);
x60= var(13);
y60= var(14);
coordiniziali=[x50,y50,x40,y40,x60,y60,x70,y70];
x2=x20; y2=y20; x1=x10; y1=y10; x5=x50; y5=y50;
x4=x40; y4=y40; x6=x60; y6=y60; x7=x70; y7=y70;
%% OPTIMIZATION1
options=optimoptions(@lsqnonlin,'Algorithm','levenberg-
marquardt','OutputFcn', @(x, optimValues, state)stopoptim3(x,
optimValues, state,errmaxtau));
integr=@(n)
anakin3(n,x10,y10,x20,y20,x30,y30,x60,y60,coordiniziali,input_tau,k_sprin
g);
[X,fval,exitflag,output]=lsqnonlin(integr,coordiniziali,[],[],options);
output=output
guess=coordiniziali';
input_coord=[x10;y10;x30;y30;x20;y20;guess];
optim=X;
optim_coord=[x10;y10;x30;y30;x20;y20;optim];
indice={'x5';'y5';'x4';'y4';'x6';'y6';'x7';'y7'};
Tres=table(guess,optim,'RowNames',indice)
%optmized variables
x5=X(1);
y5=X(2);
x4=X(3);
y4=X(4);
x6=X(5);
y6=X(6);
x7=X(7);
y7=X(8);
%input initial lenghts
l50=sqrt((x50-x10).^2 + (y50-y10).^2);
l40=sqrt((x50-x40).^2 + (y50-y40).^2);
l20=sqrt((x40-x20).^2 + (y40-y20).^2);
l10=sqrt((x70-x20).^2 + (y70-y20).^2);
l30=sqrt((x40-x70).^2 + (y40-y70).^2);
l60=sqrt((x50-x60).^2 + (y50-y60).^2);
l70=sqrt((x60-x10).^2 + (y60-y10).^2);
lm00=sqrt((x30-x60).^2 + (y30-y60).^2);
input_lenghts=[l10;l20;l30;l40;l50;l60;l70;lm00];
%optimized final lenghts
l5=sqrt((x5-x10).^2 + (y5-y10).^2);
l4=sqrt((x5-x4).^2 + (y5-y4).^2);
l2=sqrt((x4-x20).^2 + (y4-y20).^2);
l1=sqrt((x7-x20).^2 + (y7-y20).^2);
l3=sqrt((x4-x7).^2 + (y4-y7).^2);

80
l6=sqrt((x5-x6).^2 + (y5-y6).^2);
l7=sqrt((x6-x10).^2 + (y6-y10).^2);
lm0=sqrt((x30-x6).^2 + (y30-y6).^2);
optim_lenghts=[l1;l2;l3;l4;l5;l6;l7;lm0];
%Save data
xlswrite('OutputData',input_coord,'Output','G6')
xlswrite('OutputData',input_lenghts,'Output','G21')
xlswrite('OutputData',optim_coord,'Output','H6')
xlswrite('OutputData',optim_lenghts,'Output','H21')
%compare initial and optimized mechanism
figure(150),set(gcf,'name','confronto meccanismi'),clf
plot(x60,y60,'b')
hold on
plot(x6,y6,'r')
legend('meccanismo iniziale','meccanismo optim')
line([x10,x5],[y10,y5],'Color','r')
line([x5,x4],[y5,y4],'Color','r')
line([x4,x20],[y4,y20],'Color','r')
line([x5,x6],[y5,y6],'Color','r')
line([x4,x6],[y4,y6],'Color','r')
line([x20,x7],[y20,y7],'Color','r')
line([x4,x7],[y4,y7],'Color','r')
line([x6,x30],[y6,y30],'Color','g')
line([x10,x50],[y10,y50],'Color','b')
line([x50,x40],[y50,y40],'Color','b')
line([x40,x20],[y40,y20],'Color','b')
line([x50,x60],[y50,y60],'Color','b')
line([x40,x60],[y40,y60],'Color','b')
line([x20,x70],[y20,y70],'Color','b')
line([x40,x70],[y40,y70],'Color','b')
line([x60,x30],[y60,y30],'Color','g')
axis equal
xlabel('x (mm)')
ylabel('y (mm)')
Function “Anakin1.mat”
function
f=anakin1(n,x10,y10,x20,y20,x30,y30,x60,y60,coordiniziali,input_tau,k_spr
ing);
x5=n(1); %specific natural coordinates as variables
y5=n(2);
x4=n(3);
y4=n(4);
x6=n(5);
y6=n(6);
x7=n(7);
y7=n(8);
x2=x20; y2=y20; x1=x10; y1=y10; x3=x30; y3=y30;
coordiniz=[x5,y5,x4,y4,x6,y6,x7,y7];
syms s
%point 7 objective path
xd=0;

81
yd=350.*s;
s=0; yd=eval(yd);
% initial lenghts
l5=sqrt((x5-x10).^2 + (y5-y10).^2);
l4=sqrt((x5-x4).^2 + (y5-y4).^2);
l2=sqrt((x4-x20).^2 + (y4-y20).^2);
l1=sqrt((x7-x20).^2 + (y7-y20).^2);
l3=sqrt((x4-x7).^2 + (y4-y7).^2);
a0=(l4.*((x5-x4).*(x6-x5)+(y5-y6).*(y4-y5))./((y4-y5).^2.+(x4-x5).^2));
b0=(l4.*((y6-y5).*(x4-x5)-(y4-y5).*(x6-x5))./((y4-y5).^2.+(x4-x5).^2));
a=-a0; b=b0;
%% CALCULATE INITIAL VALUE OF t0
% constraint equation
syms x5 y5 x4 y4 x6 y6 x7 y7;
psi1=(x5-x1).^2.+(y5-y1).^2.-l5.^2; %dL/dlambda1
psi2=(x4-x2).^2.+(y4-y2).^2.-l2.^2; %dL/dlambda2
psi3=(x5-x4).^2.+(y5-y4).^2.-l4.^2; %dL/dlambda3
psi4=x6-x5-a.*(x4-x5)./l4+b.*(y4-y5)./l4; %dL/dlambda4
psi5=y6-y5-a.*(y4-y5)./l4-b.*(x4-x5)./l4; %dL/dlambda5
psi6=(x7-x2).^2 + (y7-y2).^2-l1.^2; %dL/dlambda6
psi7=(x4-x7).^2 + (y4-y7).^2-l3.^2; %dL/dlambda7
psi1=-psi1; psi2=-psi2; psi3=-psi3; psi6=-psi6; psi7=-psi7;
% point 7 penalty
pen=(x7-xd).^2.+(y7-yd).^2;
% lagrangian
syms lambda1 lambda2 lambda3 lambda4 lambda5 lambda6 lambda7;
lagr=pen+lambda1.*psi1+lambda2.*psi2+lambda3.*psi3+lambda4.*psi4+lambda5.
*psi5+lambda6.*psi6+lambda7.*psi7;
dlx5=diff(lagr, x5); %dL/dx5
dly5=diff(lagr, y5); %dL/dy5
dlx4=diff(lagr, x4); %dL/dx4
dly4=diff(lagr, y4); %dL/dy4
dlx6=diff(lagr, x6); %dL/dx6
dly6=diff(lagr, y6); %dL/dy6
dlx7=diff(lagr, x7); %dL/dx7
dly7=diff(lagr, y7); %dL/dy7
x5=n(1);
y5=n(2);
x4=n(3);
y4=n(4);
x6=n(5);
y6=n(6);
x7=n(7);
y7=n(8);
%spatial derivative lagrangian evaluation
dlx5k=eval(dlx5); dly5k=eval(dly5);
dlx4k=eval(dlx4); dly4k=eval(dly4);
dlx6k=eval(dlx6); dly6k=eval(dly6);
dlx7k=eval(dlx7); dly7k=eval(dly7);
%index of performance evaluation
t=dlx5k.^2+dly5k.^2+dlx4k.^2+dly4k.^2+dlx6k.^2+dly6k.^2+dlx7k.^2+dly7k.^2
;
%% CALCULATE INITIAL LAGRANGE MULTIPLIERS
[H, c]=equationsToMatrix([dlx5k==0, dly5k==0, dlx4k==0, dly4k==0,
dlx6k==0, dly6k==0, dlx7k==0, dly7k==0],...
[lambda1, lambda2, lambda3, lambda4, lambda5, lambda6, lambda7]);
mltpliniz=eval(H)\eval(c);
mltpliniz=mltpliniz';

82
valinizivp=[coordiniz,mltpliniz];
lambda1=mltpliniz(1);
lambda2=mltpliniz(2);
lambda3=mltpliniz(3);
lambda4=mltpliniz(4);
lambda5=mltpliniz(5);
lambda6=mltpliniz(6);
lambda7=mltpliniz(7);
t0=eval(t);
valinizivp=[valinizivp,t0];
%% KINEMATIC ANALYSIS
options=odeset('Events',@odeStopEvent);
kk=0:0.02:1; % integration interval of variable s
sistma=@(s,m) systm(s,m,l5,l4,l2,l1,l3,a,b,x10,y10,x20,y20,x60,y60,t0);
[T,Y,te,ye,ie]=ode45(sistma,kk,valinizivp,options);
Ywh=Y(:,8); %consider only mechanism move with y7<100
Ywheelreal=Ywh(2:end);
%% GRAPHICS
%tau trend in graphic form
XX6=abs(diff(Y(:,5))); YY6=abs(diff(Y(:,6))); YY7=diff(Y(:,8));
XY6=sqrt(XX6.^2+YY6.^2);
Ytau_r=[];
for is=1:1:size(XX6)
tau_r=XY6(is)./YY7(is);
Ytau_r=[Ytau_r;tau_r];
end
Xtau=[0;10;20;30;40;50;60;70;80;90;100];
if coordiniz-coordiniziali==zeros(1,8)
global Ytau_g Ywheelrealg pol
if input_tau(12)==1
pol=polyfit(Xtau,input_tau(1:11),1);
else
pol=polyfit(Xtau,input_tau(1:11),2);
end
Ytau_g=Ytau_r;
Ywheelrealg=Ywheelreal;
end
global Ytau_g Ywheelrealg pol
if input_tau(12)==1
Ytau_t=pol(1).*Ywheelreal+pol(2);
else
Ytau_t=pol(1).*(Ywheelreal).^2+pol(2).*Ywheelreal+pol(3);
end
figure(100)
figure(100), set(100,'position', [200, 50, 1000, 600]), clf
subplot(2,2,2)
error_tau=trapz((Ytau_r-Ytau_t).^2); %calculate error
plot(Ywheelreal,Ytau_r,'r'),title(['tau error =
',num2str(error_tau)])
hold on
plot(Ywheelreal,Ytau_t,'color',[0 0.6 0])
plot(Ywheelrealg,Ytau_g,'b')
hold off
xlabel('escursione verticale della ruota (mm)')
ylabel('rapporto di velocità')
xlim([0 105])
fminsearchtau=Ytau_r;

83
fminsearchYwh=Ywheelreal;
save('fminsearchtau.mat','fminsearchtau');
save('fminsearchYwh.mat','fminsearchYwh');
%mechanism
if true
subplot(2,2,1)
for is=1:5:size(Y,1)
hold on
line([Y(is,1),Y(is,5)],[Y(is,2),Y(is,6)])
line([Y(is,3),Y(is,5)],[Y(is,4),Y(is,6)])
line([Y(is,1),Y(is,3)],[Y(is,2),Y(is,4)])
line([x10,Y(is,1)],[y10,Y(is,2)])
line([Y(is,3),x20],[Y(is,4),y20])
line([Y(is,3),Y(is,7)],[Y(is,4),Y(is,8)])
line([x20,Y(is,7)],[y20,Y(is,8)])
line([x30,Y(is,5)],[y30,Y(is,6)],'Color','k')
plot(Y(is,5),Y(is,6),'r.') ,title(['meccanismo con rigidezza
k = ',num2str(k_spring),' N/mm (ottimizzazione FMINSEARCH)']) %point
out (x6,y6)
axis equal
xlabel('x (mm)')
ylabel('y (mm)')
hold off
end
end
guess=coordiniziali';
optim=n';
indice={'x5';'y5';'x4';'y4';'x6';'y6';'x7';'y7'};
fminsearchRes=table(guess,optim,'RowNames',indice);
save('fminsearchRes.mat','fminsearchRes');
% progressiveness suspension reduced stiffness graphic
subplot(2,2,4)
plot(Ywheelreal,k_spring.*(Ytau_r.^2),'c')
xlabel('escursione verticale della ruota (mm)')
ylabel('rigidezza ridotta (N/mm)')
xlim([0 105])
%progressiveness suspension elastic force graphic
X6i=Y(1,5); X6i=X6i.*ones(size(Y(:,5)));
Y6i=Y(1,6); Y6i=Y6i.*ones(size(Y(:,5)));
XY6=sqrt((Y(:,5)-X6i).^2+(Y(:,6)-Y6i).^2);
subplot(2,2,3)
plot(Y(:,8),XY6.*k_spring,'color',[0.7 0.1 0.8])
xlabel('escursione verticale della ruota (mm)')
ylabel('forza elastica (N)')
xlim([0 105])
f=error_tau
Function “systm.mat”
function dydt=systm(s,m,l5,l4,l2,l1,l3,a,b,x10,y10,x20,y20,x60,y60,t0)
%GENERATION OF ODE SYSTEM FROM MATRIXES
x5=m(1); %specific natural coordinates,lagrange multipliers and t0 as
variables
y5=m(2);

84
x4=m(3);
y4=m(4);
x6=m(5);
y6=m(6);
x7=m(7);
y7=m(8);
lambda1=m(9);
lambda2=m(10);
lambda3=m(11);
lambda4=m(12);
lambda5=m(13);
lambda6=m(14);
lambda7=m(15);
t0=m(16);
[A,B,C]=genmatrix(s,m,l5,l4,l2,l1,l3,a,b,x10,y10,x20,y20,x60,y60,t0);
mun=0.1; %time constant
Ai=inv(A);
syst=Ai*(B+mun*C);
dydt(1)=syst(1); %differential equations vector
dydt(2)=syst(2);
dydt(3)=syst(3);
dydt(4)=syst(4);
dydt(5)=syst(5);
dydt(6)=syst(6);
dydt(7)=syst(7);
dydt(8)=syst(8);
dydt(9)=syst(9);
dydt(10)=syst(10);
dydt(11)=syst(11);
dydt(12)=syst(12);
dydt(13)=syst(13);
dydt(14)=syst(14);
dydt(15)=syst(15);
dydt(16)=syst(16);
dydt=[dydt(1); dydt(2); dydt(3); dydt(4); dydt(5); dydt(6); dydt(7);
dydt(8); dydt(9); dydt(10); dydt(11); dydt(12); dydt(13); dydt(14);
dydt(15); dydt(16)];
Function “genmatrix.mat”
function [A,B,C]=genmatrix(s,m,l5,l4,l2,l1,l3,a,b,x10,y10,x20,y20,x60,y60,t0)
x1=x10; y1=y10; x2=x20; y2=y20;
mun=0.1;
x5=m(1);
y5=m(2);
x4=m(3);
y4=m(4);
x6=m(5);
y6=m(6);
x7=m(7);
y7=m(8);
lambda1=m(9);
lambda2=m(10);

85
lambda3=m(11);
lambda4=m(12);
lambda5=m(13);
lambda6=m(14);
lambda7=m(15);
syms x5 y5 x4 y4 x6 y6 x7 y7 lambda1 lambda2 lambda3 lambda4 lambda5
lambda6 lambda7 k
%point 7 objective path
xd=0;
yd=350.*k;
xd1=0;
yd1=350;
%point 6 objective path
x6d=x60;
y6d=y60+48.*k;
pen2=(x6-x6d).^2.+(y6-y6d).^2;
%% CALCULATE MATRIXES
psi1=(x5-x1).^2.+(y5-y1).^2.-l5.^2; %dL/dlambda1
psi2=(x4-x2).^2.+(y4-y2).^2.-l2.^2; %dL/dlambda2
psi3=(x5-x4).^2.+(y5-y4).^2.-l4.^2; %dL/dlambda3
psi4=x6-x5-a.*(x4-x5)./l4+b.*(y4-y5)./l4; %dL/dlambda4
psi5=y6-y5-a.*(y4-y5)./l4-b.*(x4-x5)./l4; %dL/dlambda5
psi6=(x7-x2).^2 + (y7-y2).^2-l1.^2; %dL/dlambda6
psi7=(x4-x7).^2 + (y4-y7).^2-l3.^2; %dL/dlambda7
psi4=-psi4; psi5=-psi5;
pen=(x7-xd).^2.+(y7-yd).^2;
lagr=pen+lambda1.*psi1+lambda2.*psi2+lambda3.*psi3+lambda4.*psi4+lambda5.
*psi5+lambda6.*psi6+lambda7.*psi7;
dlx5=diff(lagr, x5);
dly5=diff(lagr, y5);
dlx4=diff(lagr, x4);
dly4=diff(lagr, y4);
dlx6=diff(lagr, x6);
dly6=diff(lagr, y6);
dlx7=diff(lagr, x7);
dly7=diff(lagr, y7);
vectvar=[x5; y5; x4; y4; x6; y6; x7; y7; lambda1; lambda2; lambda3;
lambda4; lambda5; lambda6; lambda7];
lagr=-lagr;
A=hessian(lagr,vectvar);
A=[A, zeros(15,1)]; A=[A; 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1];
C=[dlx5;dly5;dlx4;dly4;dlx6;dly6;dlx7;dly7;psi1;psi2;psi3;-psi4;-
psi5;psi6;psi7];
C=[C;0];
C=-C;
B=[0;0;0;0; -2.*xd1; -2.*yd1;0;0;0;0;0;0;0;0;0;pen2];
%%
x5=m(1);
y5=m(2);
x4=m(3);
y4=m(4);
x6=m(5);
y6=m(6);
x7=m(7);
y7=m(8);
lambda1=m(9);
lambda2=m(10);
lambda3=m(11);

86
lambda4=m(12);
lambda5=m(13);
lambda6=m(14);
lambda7=m(15);
x1=x10; y1=y10; x2=x20; y2=y20;
k=s;
A=eval(A); B=eval(B); C=eval(C);
Function “OdeStopEvent.mat”
function [value,isterminal,direction] = odeStopEvent(T,Y)
value=1;
if Y(8)>100
value=0;
end
isterminal = 1; % Halt integration
direction = 0; % The zero can be approached from either direction
Function “StopOptim12.mat”
function stop = stopoptim12(x, optimValues, state,errmaxtau) stop = false;
% Check if objective function is less than errmaxtau.
if optimValues.fval < errmaxtau
stop = true;
end

87
BIBLIOGRAFIA
[1] V. Cossalter, “Motorcycle dynamics”, Ed. italiana, Padova, 2008
[2] W. F. Milliken, D. L. Milliken, “Race Car Veichle Dynamics”, SAE, 1995.
[3] I. Birò, “Synthesis of some mechanisms using natural coordinates”, Interdisciplinary
Description of Complex Systems 12(3), 255-262, 2014
[4] V. Cossalter, M. Da Lio, R. Lot, “Sull’uso delle coordinate naturali nella sintesi di
meccanismi con metodi di ottimizzazione”, XIII Congresso Nazionale Aimeta, Siena,
1997
[5] V. Lorenzi, R. Riva, M. Camposaragna, R. Strada, B. Zappa, “Metodi numerici per lo
studio di sistemi multicorpo”, Bergamo, dispense del corso
[6] V. Cossalter, M. Da Lio, R. Lot, “On the use of natural coordinates in optimal synthesis
of mechanisms”, Mechanism and Machine Theory 35, 1367-1389, 2000.
[7] J.C. de Jalòn, E. Bayo, “Kinematic and dynamic simulation of Multibody Systems”,
Springer-Verlag, New York, 1994
[8] P. Marchand, O. T. Holland, “Graphics and GUIs with Matlab”, Chapman & Hall/CRC,
Washington D.C., 2003
[9] Desmond J. Higham, Nicholas J. Higham, “Matlab Guide”, Second Edition, 2005.
[10] D. Prandin, “Ottimizzazione cinematica di sospensioni motociclistiche”, Tesi di laurea,
Padova, 2013













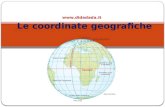
![Sistemi di coordinate[1] Coordinate equatoriali: ascensione retta e declinazione Ascensione retta R.A. ( ); declinazione = distanza angolare di un astro.](https://static.fdocumenti.com/doc/165x107/5542eb58497959361e8c3b1a/sistemi-di-coordinate1-coordinate-equatoriali-ascensione-retta-e-declinazione-ascensione-retta-ra-declinazione-distanza-angolare-di-un-astro.jpg)

